






Idiomas
Páginas
Jurídico


7/17/2019 Ace-4101_clase Nº2_caracteristicas de Los Motores Electricos
http://slidepdf.com/reader/full/ace-4101clase-no2caracteristicas-de-los-motores-electricos 1/30
CURSO
“ACCIONAMIENTOS ELÉCTRICO”
ACE-4101
Características De LosMotores Eléctricos

7/17/2019 Ace-4101_clase Nº2_caracteristicas de Los Motores Electricos
http://slidepdf.com/reader/full/ace-4101clase-no2caracteristicas-de-los-motores-electricos 2/30
El motor eléctrico es la máquina destinada a transformar energía eléctrica en
energía mecánica. El motor de inducción es el más usado de todos los tipos de
motores, ya que combina las ventajas de la utilización de energía eléctrica - bajo
costo, facilidad de transporte, limpieza, simplicidad de comando - con su
construcción simple y su gran versatilidad de adaptación a las cargas de los más
diversos tipos y mejores rendimientos.
Motores Eléctricos

7/17/2019 Ace-4101_clase Nº2_caracteristicas de Los Motores Electricos
http://slidepdf.com/reader/full/ace-4101clase-no2caracteristicas-de-los-motores-electricos 3/30
Los tipos más comunes de motores eléctricos son:
• Motores de corriente continua.
• Motores de corriente alterna
• Motor síncrono.
• Motor de inducción
Motores Eléctricos

7/17/2019 Ace-4101_clase Nº2_caracteristicas de Los Motores Electricos
http://slidepdf.com/reader/full/ace-4101clase-no2caracteristicas-de-los-motores-electricos 4/30
Motores de corriente continua:
Son motores de costo más elevado y, además de eso, precisan una fuente de
corriente continua, o un dispositivo que convierta la corriente alterna común en
continua. Pueden funcionar con velocidad ajustable, entre amplios límites y se
prestan a controles de gran flexibilidad y precisión. Por eso, su uso es restricto a
casos especiales en que estas exigencias compensan el costo mucho más alto de la
instalación y del mantenimiento.
Motores Eléctricos

7/17/2019 Ace-4101_clase Nº2_caracteristicas de Los Motores Electricos
http://slidepdf.com/reader/full/ace-4101clase-no2caracteristicas-de-los-motores-electricos 5/30
Motores de corriente alterna
Son los más utilizados, porque la distribución de energía eléctrica es hecha
normalmente en corriente alterna. Los principales tipos son:
• Mo to r síncr on o : Funciona con velocidad fija, o sea, sin interferencia del
deslizamiento; utilizado normalmente para grandes potencias ( debido a su altocosto en tamaños menores ).
• Motor de indu cc ión: Funciona normalmente con una velocidad constante, que
varía ligeramente con la carga mecánica aplicada al eje. Debido a su gran
simplicidad, robustez y bajo costo, es el motor más utilizado de todos, siendo
adecuado para casi todos los tipos de máquinas accionadas, encontradas en lapráctica. Actualmente es posible el control de la velocidad de los motores de
inducción con el auxilio de convertidores de frecuencia.
Motores Eléctricos

7/17/2019 Ace-4101_clase Nº2_caracteristicas de Los Motores Electricos
http://slidepdf.com/reader/full/ace-4101clase-no2caracteristicas-de-los-motores-electricos 6/30

7/17/2019 Ace-4101_clase Nº2_caracteristicas de Los Motores Electricos
http://slidepdf.com/reader/full/ace-4101clase-no2caracteristicas-de-los-motores-electricos 7/30
Conceptos Básicos:
• Par o momento
• Energía y Po tenc ia Mecánic a
• Energía y Po tenc ia Eléctr ic a
• Potencias Aparente, Act iva y React iva
• Factor d e Potencia
• Rendimiento
• Relación ent re Par y Potencia
Motores Eléctricos

7/17/2019 Ace-4101_clase Nº2_caracteristicas de Los Motores Electricos
http://slidepdf.com/reader/full/ace-4101clase-no2caracteristicas-de-los-motores-electricos 8/30
• Torque, Par o mom ento
El torque, par o momento es la medida del esfuerzo necesario para girar un eje.
El torque, par o momento es el nombre que se da a las fuerzas de torsión. Para que
la torsión exista se requieren 2 fuerzas (par), que se ejercen en sentido opuesto.
El valor del par depende del radio de acción de la fuerza (brazo). La mayor o menor torsión
que genera una fuerza, depende de la distancia al punto de pivote. A mayor brazo mayor par.
Motores Eléctricos

7/17/2019 Ace-4101_clase Nº2_caracteristicas de Los Motores Electricos
http://slidepdf.com/reader/full/ace-4101clase-no2caracteristicas-de-los-motores-electricos 9/30
• Torque, Par o mom ento
La fuerza F que es precisa aplicar a la manivela, depende de la longitud E de la
misma.
Donde:
M = Par Motor
r = Radio
F = Fuerza
Motores Eléctricos

7/17/2019 Ace-4101_clase Nº2_caracteristicas de Los Motores Electricos
http://slidepdf.com/reader/full/ace-4101clase-no2caracteristicas-de-los-motores-electricos 10/30
• Torque, Par o momento
Cuanto mayor sea la manivela, menor será
la fuerza necesari a.Si doblamos el tamaño E de la manivela,
la fuerza F necesaria será disminuida
a la mitad. En el ejemplo de la figura, si el
balde pesa 20 N y el diámetro del tambor es
de 0,20 m, la cuerda transmitirá una fuerza
de 20 N en la superficie del tambor, es decir,a 0,10 m del centro del eje.
Para contrabalancear esta fuerza, se precisa
de 10 N en la manivela, si la longitud E es de 0,20 m. Si E es el doble, es decir, 0,40
m, la fuerza F será la mitad, o sea 5 N. Como vemos, para medir el “esfuerzo”
necesario para girar el eje, no basta definir la fuerza empleada: es preciso también
decir a qué distancia del centro eje la fuerza es aplicada. El “esfuerzo” es medido porel conjugado, que es el producto de la fuerza por la distancia, F x E. En el ejemplo
citado, el conjugado vale:
M = 20 N x 0,10 m = 10 N x 0,20 m = 5 N x 0,40 m = 2,0 Nm
M= F x E ( N/m )
Motores Eléctricos

7/17/2019 Ace-4101_clase Nº2_caracteristicas de Los Motores Electricos
http://slidepdf.com/reader/full/ace-4101clase-no2caracteristicas-de-los-motores-electricos 11/30
• Energía y Po tenc ia Eléctr ic a
Aunque la energía sea una sola cosa, la misma puede presentarse de formas
diferentes. Se conectamos una resistencia a una red eléctrica con tensión, pasará
una corriente eléctrica que calentará la resistencia. La resistencia absorbe energía
eléctrica y la transforma en calor, que también es una forma de energía. Un motor
eléctrico absorbe energía eléctrica de la red y la transforma en energía mecánica
disponible en la punta del eje.
La potencia es la fuerza que el motor genera para mover la carga en una
determinada velocidad.
Esta fuerza es medida en HP (horse power), cv (caballo vapor) o en kW (Kilowatt)
Comentario: HP y cv son unidades diferentes de kW.
Motores Eléctricos

7/17/2019 Ace-4101_clase Nº2_caracteristicas de Los Motores Electricos
http://slidepdf.com/reader/full/ace-4101clase-no2caracteristicas-de-los-motores-electricos 12/30
• Energía y Po tenc ia Eléctr ic a
Nota: La potencia especificada en la placa de identificación del motor, indica la
potencia mecánica disponible en el eje de salida.
Para obtener la potencia eléctrica consumida por el motor (kW.h), se divide la
potencia en kW por su eficiencia (η).
Motores Eléctricos

7/17/2019 Ace-4101_clase Nº2_caracteristicas de Los Motores Electricos
http://slidepdf.com/reader/full/ace-4101clase-no2caracteristicas-de-los-motores-electricos 13/30
• Rendimiento
El rendimiento define la eficiencia con que es hecha la conversión de la energía
eléctrica absorbida de la red por el motor, en energía mecánica disponible en el eje.
Llamada “Potencia útil” (Pu) a la potencia mecánica disponible en el eje y “Potencia
absorbida” (Pa) a la potencia eléctrica que el motor retira de la red, el rendimiento
será la relación entre las dos, o sea:
Con:
Motores Eléctricos

7/17/2019 Ace-4101_clase Nº2_caracteristicas de Los Motores Electricos
http://slidepdf.com/reader/full/ace-4101clase-no2caracteristicas-de-los-motores-electricos 14/30
Motores Eléctricos

7/17/2019 Ace-4101_clase Nº2_caracteristicas de Los Motores Electricos
http://slidepdf.com/reader/full/ace-4101clase-no2caracteristicas-de-los-motores-electricos 15/30
Demanda de corr iente
Motores Eléctricos

7/17/2019 Ace-4101_clase Nº2_caracteristicas de Los Motores Electricos
http://slidepdf.com/reader/full/ace-4101clase-no2caracteristicas-de-los-motores-electricos 16/30
Motores de inducción
Corr iente subtransito r ia y ajuste de la protección
El valor punta de la corriente subtransitoria puede ser muy alto; el valor típico está
entre 12 y 15 veces el valor eficaz nominal In. A veces este valor puede alcanzar
25 veces In.
Los interruptores automáticos, los contactores y los relés térmicos están diseñados
para resistir arranques de motor con una corriente subtransitoria muy alta (el valor
punta subtransitorio puede ser hasta de 19 veces el valor eficaz nominal In).
Si se produce un disparo inesperado de la protección contra sobreintensidad
durante el arranque, esto significa que la corriente de arranque excede de loslímites normales.
Para evitar tales situacion es, debe co nsid erarse sobredimensionar el aparato.
Motores Eléctricos

7/17/2019 Ace-4101_clase Nº2_caracteristicas de Los Motores Electricos
http://slidepdf.com/reader/full/ace-4101clase-no2caracteristicas-de-los-motores-electricos 17/30
Motores de inducción
Consum o de los mo tores (Corr ientes nom inales para dis t in tas tens iones)
Motores Eléctricos

7/17/2019 Ace-4101_clase Nº2_caracteristicas de Los Motores Electricos
http://slidepdf.com/reader/full/ace-4101clase-no2caracteristicas-de-los-motores-electricos 18/30
Motores de inducción
Consum o de los mo tores (Corr ientes nom inales para dis t in tas tens iones)
Motores Eléctricos

7/17/2019 Ace-4101_clase Nº2_caracteristicas de Los Motores Electricos
http://slidepdf.com/reader/full/ace-4101clase-no2caracteristicas-de-los-motores-electricos 19/30
• Energía y Po tenc ia Eléctr ic a
Potencia reactiva ( Q )
Es la cantidad de potencia aparente que “no” realiza trabajo.
Solamente es transferida y almacenada en los elementos pasivos ( condensadores e
inductores ) del circuito.
Motores Eléctricos
7/17/2019 Ace-4101_clase Nº2_caracteristicas de Los Motores Electricos
http://slidepdf.com/reader/full/ace-4101clase-no2caracteristicas-de-los-motores-electricos 20/30
• Energía y Po tenc ia Eléctr ic a
Motores Eléctricos
7/17/2019 Ace-4101_clase Nº2_caracteristicas de Los Motores Electricos
http://slidepdf.com/reader/full/ace-4101clase-no2caracteristicas-de-los-motores-electricos 21/30
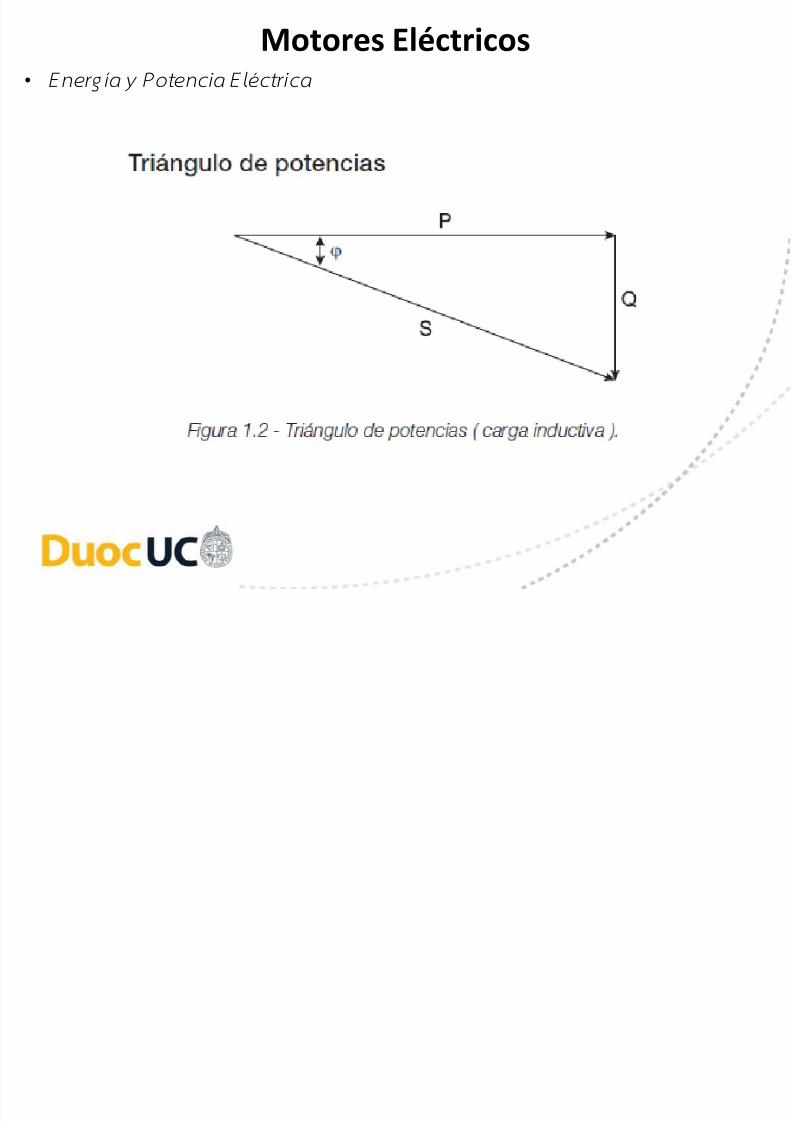
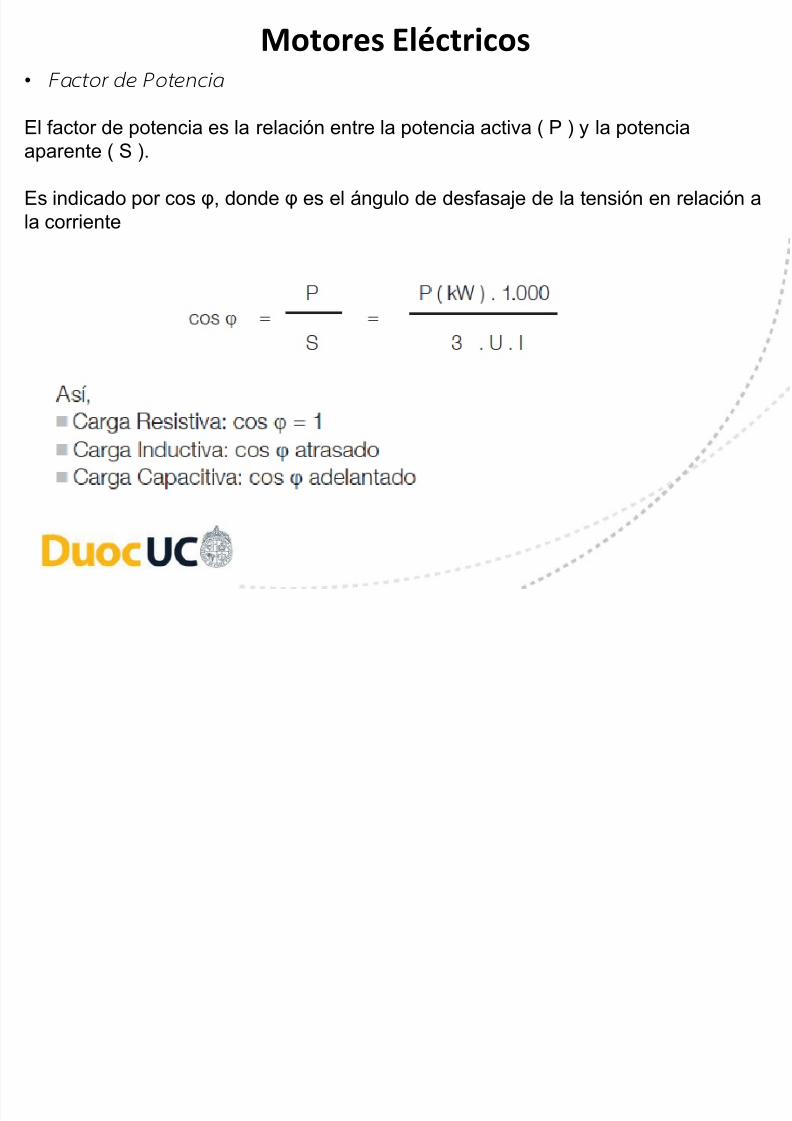
• Factor d e Potencia
El factor de potencia es la relación entre la potencia activa ( P ) y la potencia
aparente ( S ).
Es indicado por cos φ, donde φ es el ángulo de desfasaje de la tensión en relación a
la corriente
Motores Eléctricos

7/17/2019 Ace-4101_clase Nº2_caracteristicas de Los Motores Electricos
http://slidepdf.com/reader/full/ace-4101clase-no2caracteristicas-de-los-motores-electricos 22/30
• El factor de potencia designa el coseno φ de la apertura angular o desfase, entre los
vectores representando la tensión y la corriente.
φ = 0° para una carga puramente resistiva (V e I en
fase)
φ = + 90° para una carga puramente inductiva (I en
retraso sobre V)
φ =- 90°
para una carga puramente capacitiva (I enadelanto sobre V)
El coseno φ varía de 1 (φ = 0
) a 0 (φ = + 90
o φ = - 90
)
Motores Eléctricos

7/17/2019 Ace-4101_clase Nº2_caracteristicas de Los Motores Electricos
http://slidepdf.com/reader/full/ace-4101clase-no2caracteristicas-de-los-motores-electricos 23/30
Un motor n o c onsume so lamente potenc ia act iva, que luego es con ver tida en
trab ajo mecánico y c alo r ( pérd idas ), sin o qu e tamb ién co nsume po tencia
reactiva, necesaria para la magnetización que no p rod uc e trabajo. En el
diag rama de la figura, el vecto r P representa la po tenci a activa y el Q la
po tencia react iva, que sum adas resultan en la po tencia aparente S.
Motores Eléctricos

7/17/2019 Ace-4101_clase Nº2_caracteristicas de Los Motores Electricos
http://slidepdf.com/reader/full/ace-4101clase-no2caracteristicas-de-los-motores-electricos 24/30
Corrección del factor de potencia
El aumento del factor de potencia es realizado con la conexión de una carga
capacitiva, en general, un condensador o motor síncrono súper excitado, en
paralelo con la carga.
Por ejemplo:
Un motor eléctrico, trifásico de 100 cv ( 75 kW ), 4 polos, operando a 100% de la
potencia nominal, con factor de potencia original de 0,87 y rendimiento de 93,5%.
Se desea calcular la potencia reactiva necesaria para elevar el factor de
potencia a 0,95.
Motores Eléctricos

7/17/2019 Ace-4101_clase Nº2_caracteristicas de Los Motores Electricos
http://slidepdf.com/reader/full/ace-4101clase-no2caracteristicas-de-los-motores-electricos 25/30
Corrección del factor de potencia
Solución:
Valiéndose de la tabla 1.2, en la intersección de la línea 0,87 con la columna de
0,95, se obtiene el valor de 0,238, que multiplicado por la potencia absorbida de la
red por el motor en kW, resulta en el valor de la potencia reactiva necesaria para
elevarse el factor de potencia de 0,87 a 0,95.
Motores Eléctricos

7/17/2019 Ace-4101_clase Nº2_caracteristicas de Los Motores Electricos
http://slidepdf.com/reader/full/ace-4101clase-no2caracteristicas-de-los-motores-electricos 26/30
Compensación de potencia react iva (kVAr) proporcio nada a moto res de
inducc ión
La reducción de los kVA de entrada trae consigo la reducción correspondiente de la
intensidad de entrada (dado que la tensión permanece constante).
La compensación de potencia reactiva se recomienda principalmente para motores
que funcionan durante largos períodos con potencia reducida.
Una reducción de kVA de entrada aumenta (es decir, mejora) el valor de cos ϕ.
Motores Eléctricos

7/17/2019 Ace-4101_clase Nº2_caracteristicas de Los Motores Electricos
http://slidepdf.com/reader/full/ace-4101clase-no2caracteristicas-de-los-motores-electricos 27/30
• Deslizam iento (s)
Si el motor gira a una velocidad diferente de la velocidad síncrona, o sea, diferente
de la velocidad del campo girante, el devanado del rotor “corta” las líneas de fuerza
magnética del campo y, por las leyes del electromagnetismo, circularán por el mismo
corrientes inducidas. Cuanto mayor sea la carga, mayor tendrá que ser el torque
necesario para accionarla.
Para obtener un mayor torque, tendrá que ser mayor la diferencia de velocidad, para
que las corrientes inducidas y los campos producidos sean mayores. Por lo tanto, a
medida que la carga aumenta, la rotación del motor disminuye. Cuando la carga es
cero, motor en vacío, el rotor girará prácticamente con la rotación síncrona.
La diferencia entre la velocidad del motor ( n ) y la velocidad síncrona ( ns ) se
llama deslizamiento ( s ), que puede ser expresado en rotaciones por minuto (rpm ), como fracción de la velocidad síncrona, o incluso como porcentaje de
ésta:
Motores Eléctricos

7/17/2019 Ace-4101_clase Nº2_caracteristicas de Los Motores Electricos
http://slidepdf.com/reader/full/ace-4101clase-no2caracteristicas-de-los-motores-electricos 28/30
• Deslizam iento (s)
Por lo tanto, para un deslizamiento dado s ( % ), la velocidad del motor será:
Motores Eléctricos

7/17/2019 Ace-4101_clase Nº2_caracteristicas de Los Motores Electricos
http://slidepdf.com/reader/full/ace-4101clase-no2caracteristicas-de-los-motores-electricos 29/30
• Deslizam iento (s)
Ejemplo:¿Cuál es el deslizamiento de un motor de 6 polos, 50 Hz, si su velocidad es de 960
rpm?
Motores Eléctricos

7/17/2019 Ace-4101_clase Nº2_caracteristicas de Los Motores Electricos
http://slidepdf.com/reader/full/ace-4101clase-no2caracteristicas-de-los-motores-electricos 30/30
• Deslizam iento (s)
Ejemplo:¿Cuál es el deslizamiento de un motor de 6 polos, 50 Hz, si su velocidad es de 960
rpm?
Motores Eléctricos