




Idiomas
Páginas
Jurídico

Universidad Nacional de Misiones
Ingeniera Electrnica
Control Clsico y Moderno
Informe de Trabajo Prctico N 1
Modelacin de Sistemas. Funcin de Transferencia y
Diagramas de Bloques
Autores:
HOFF Romina A.
KRUJOSKI Matas G.
VIERA Juan R.
Grupo N 4
Profesores Responsables:
Dr. Ing. Fernando Bottern
Ing. Guillermo Fernndez
Ober, Misiones, 21/03/2014
ControlClsico y Moderno FI - UNaM TP N 1
HOFF KRUJOSKI VIERA Pgina 3 de 17
1)
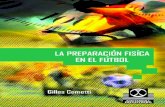
En la Figura 1.1 se muestra un sistema resortemasaamortiguador. Este sistema
consta de una masa m, sujeta a un punto de apoyo superior a travs de un resorte de
coeficiente de elasticidad k y a un apoyo inferior a travs de un amortiguador de
constante de amortiguacin b. Existe adems una fuerza F(t) aplicada a la masa. Se
define una coordenada x a travs de la cual se desplaza la masa, as la distancia entre
el punto de apoyo y la masa queda representada por x(t). La distancia l0 corresponde a
la distancia entre el techo y el centro de m con el resorte en reposo.
a)Hallar la funcin de transferencia entre la entrada u(t) [F(t)] y la salida y(t) [x(t)].
b)Calcular los polos de la funcin de transferencia. M = 15 Kg; k = 225 N/m y los
siguientes valores de b: 350 N x s/m, 116 N x s/m y 14 N x s/m.
c)Trazar la respuesta en frecuencia de magnitud y fase (diagramas de Bode) de este
sistema para cada caso en el punto b.
Figura 1.1: Sistema Mas-Resorte-Amortiguador
Resolucin
a) La funcin de transferencia ser
() = () + () + () (1.1)
() = () (1.2)
() = () (1.3)
() = () + () + () (1.4)
ControlClsico y Moderno FI - UNaM TP N 1
HOFF KRUJOSKI VIERA Pgina 4 de 17
Siendo la ecuacin 1.4 la ecuacin diferencial en el dominio del tiempo que representa
el comportamiento del sistema.
Transformando la ecuacin 1.4 del dominio del tiempo al de Laplace obtenemos la 1.6
= (), = () (1.5)
= (2 + + ) (1.6)
En la ecuacin 1.6 se consideran condiciones iniciales nulas.
Trabajando la 1.6 podemos obtener la funcin de transferencia en el dominio de
Laplace:
=
=
1
2 +
+
(1.7)
b)
Reemplazando los siguientes valores podemos obtener los polos:
= 15 _______
= 225 _____
1 = 350
2 = 116
3 = 14
1 =
1
15
2 +350
15 +
225
15
= 0.066
( + 0,66)( + 22,67)
(1.8)
2 =1/15
2 +116
15 + 15
= 1/15
( + 3,86 + 0,22)( + 3,86 0,22)
(1.9)
3 =1/15
2 +14
15 + 15
= 1/15
( + 0,46 + 3,8)( + 0,46 3,86)
(1.10)
ControlClsico y Moderno FI - UNaM TP N 1
HOFF KRUJOSKI VIERA Pgina 5 de 17
Para el clculo del diagrama de BODE se utiliza el programa MATLAB con el
siguiente cdigo
clc % limpia la pantalla
clear all % borra todas las variables de la memoria
close all % cierra todos los procesos
b_1=70/3;
num_1 = [0, 0, 1/15]; % crea un vector para el numerador
den_1 = [1, b_1, 15]; % crea un vector para el denominador
sist_1 = tf( num_1, den_1) % crea la funcin de transferencia del
% sistema y la muestra en lnea de comandos.
Bode (sist_1,'o') % muestra el diagrama de bode del sistema.
hold on
b_2=116/15;
num_2 = [0, 0, 1/15]; % crea un vector para el numerador
den_2 = [1, b_2, 15]; % crea un vector para el denominador
sist_2 = tf( num_2, den_2) % crea la funcin de transferencia del
% sistema y la muestra en lnea de comandos.
Bode (sist_2,'+') % muestra el diagrama de bode del sistema.
b_3=14/15;
num_3 = [0, 0, 1/15]; % crea un vector para el numerador
den_3 = [1, b_3, 15]; % crea un vector para el denominador
sist_3 = tf( num_3, den_3) % crea la funcin de transferencia del
% sistema y la muestra en lnea de comandos.
Bode (sist_3,'*') % muestra el diagrama de bode del sistema
legend ('b_1=350 Ns/m','b_2=116 Ns/m','b_3=14 Ns/m')
El resultado se observa en las siguiente figura
Figura 1.2_ Comparacin de los resultados de los tres valores de b
ControlClsico y Moderno FI - UNaM TP N 1
HOFF KRUJOSKI VIERA Pgina 6 de 17
Conclusiones
En este ejercicio podemos ver tres casos de amortiguamiento con solo cambiar el
factor de amortiguacin del dispositivo amortiguador, se muestra perfectamente en la
figura1.2 una disminucin de la amortiguacin hace cambiar la posicin de los polos y
en consecuencia la respuesta de Bode en la que se evidencia la falta de amortiguacin
en el tercer caso, donde deja de ser crtica y existe un sobre impulso en el sistema
completo.
(Resuelto por: Viera Juan)
2)
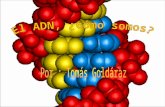
Un motor de corriente continua con excitacin independiente, cuyo circuito elctrico
est representado en la Figura 2.1, es controlado por la corriente de armadura,
mantenindose la corriente de campo. Este motor acciona una carga de momento de
inercia J. En este esquema se tiene: ( ) .f fi t I ctte
Te: par o torque electromagntico producido por el motor
Tc: par antagnico de la carga.
b: coeficiente de rozamiento.
Vb: fuerza contra electromotriz.
Ra: Resistencia de la armadura. La: Inductancia de la armadura.
Kt: constante de proporcionalidad entre el par motor y la corriente de armadura.
Kb: constante de proporcionalidad entre la velocidad angular y la tensin inducida.
ia: corriente en la armadura. va: tensin aplicada a la armadura (accin de control).
: desplazamiento angular del eje del motor
:velocidad angular del eje del motor.
Figura 2.1: circuito eltrico motor de cc-carga
ControlClsico y Moderno FI - UNaM TP N 1
HOFF KRUJOSKI VIERA Pgina 7 de 17
a) Escriba las ecuaciones diferenciales que describen el comportamiento dinmico de
este sistema electromecnico.
b) Halle la descripcin entrada-salida de este sistema (funcin de transferencia) en el
dominio de Laplace suponiendo que la entrada, u(t), es la tensin de armadura va(t) y
la salida, y(t), es el desplazamiento angular (t). Dibuje el diagrama en bloques de
este sistema dinmico identificando los bloques relacionados al motor y a la carga.
c) Siendo Ra=20 , Kt=1 N.m/A, Kb=3 V.s/rad , J=0.5 N.m.s2/rad y b=0.01 N.m.s/rad.
Calcule las constantes de ganancia y de tiempo del motor y obtenga las races del
polinomio caracterstico.
d) Calcular los polos de la funcin de transferencia.
e) Trazar la respuesta en frecuencia de magnitud y fase (diag. de Bode) de este
sistema.
Resolucin
a)
El siguiente sistema de ecuaciones diferenciales describe el comportamiento elctrico
(ecuacin 2.1) y mecnico (ecuacin 2.2) del motor.
2
2
( )( ) ( ) ( )
( ) ( )( ) ( )
aa b a a a
e c
dI tV t V t I t R L
dt
d t d tJ T t T t b
dt dt
(2.1)
(2.2)
b)
En la ecuacin 2.1 reemplazando ( )
( )b bd t
V t Kdt
y aplicando transformada de Laplace
con condiciones iniciales (CIN) nulas, se tiene:
( ) ( ) ( ) ( )a b a a a aV s sK s I s R sL I s (2.3)
Considerando nulo el torque de carga Tc(t), reemplazando ( ) ( ) e t aT t K I t y despejando
la corriente de armadura, la ecuacin 2.2 resulta:
2
2
( ) ( )( ) =a
t t
b d t J d tI t
K dt K dt
(2.4)
Aplicando transformada de Laplace con CIN a la ecuacin 2.4 y reemplazando en la 2.3
se obtiene
ControlClsico y Moderno FI - UNaM TP N 1
HOFF KRUJOSKI VIERA Pgina 8 de 17
2( ) = ( ) ( )at t
b JI s s s s s
K K (2.5)
2 2( ) ( ) ( ) ( ) ( ) ( )a b a at t t t
b J b JV s sK s R s s s s sL s s s s
K K K K
(2.6)
Despejando (s) de la 2.6
2 2
( )( ) a
b a a
t t t t
V ss
b J b JsK R s s sL s s
K K K K
(2.7)
Despreciando la inductancia La debido a que el rgimen transitorio es pequeo, la
funcin transferencia resulta en 2.8.
2
( ) ( ) 1
( ) ( ) a aab
t t
u s s
R b R Jy s V ssK s s
K K
(2.8)
Operando algebraicamente la expresin 2.8 de forma de dejar la variable s2
multiplicada por uno, se llega a la ecuacin 2.9
2
/ /( )
( )
t a t a
a b t b t
a a
K R J K R Js
V s K K b K K bs s s s
R J J R J J
(2.9)
En la figura 2.2 se aprecia el diagrama de bloques de la dinmica del sistema.
1
aa
a
RL s
L
tK
1
bJ s
J
1
s
bK
( )aV s
( )bV s
( )aI s ( ) +eT s
( )
cT s
( )s ( )s
Figura 2.2: Diagrama de bloques del sistema
ControlClsico y Moderno FI - UNaM TP N 1
HOFF KRUJOSKI VIERA Pgina 9 de 17
Donde el bloque 1
aa
a
RL s
L
representa el comportamiento del motor y el bloque
1
bJ s
J
describe el comportamiento de la carga.
c)
La funcin de transferencia general para un motor de corriente continua est dada por
la ecuacin 2.10. En ella Km representa la ganancia del sistema y Tm, la constante de
tiempo del motor.
( )
( ) 1
m
a m
Ks
V s s sT
(2.10)
Trabajando la expresin 2.9 para obtener la forma de la 2.10 se llega a la 2.11
/( ) 1
( ) ( )1
t a t
a b t ab t a a
a b t a
K R J Ks
V s K K R bK K R b R Js s s s
R J K K R b
(2.11)
Donde de la comparacin de las ecuaciones 2.10 y 2.11 vemos que la ganancia resulta
0.3125( )
tm
b t a
KK
K K R b
(2.12)
Y la constante de tiempo del motor es
3.125amb t a
R JT
K K R b
(2.13)
Finalmente, la ecuacin de transferencia resulta:
( ) 0.3125
( ) (3.125 1)a
s
V s s s
(2.14)
d)
Reemplazando los valores de las constantes en la ecuacin 2.9 obtenemos
( ) 1/10 1
0.1( ) 0.3 0.3a
s
V s s s s s
(2.15)
De la ecuacin anterior se aprecia que los polos de la funcin transferencia son:
{ = 0____ = 0,3
(2.16)
e)
ControlClsico y Moderno FI - UNaM TP N 1
HOFF KRUJOSKI VIERA Pgina 10 de 17
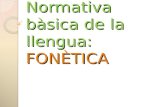
El diagrama de Bode se observa en la figura 2.3
Figura 2.3:Diagrama de Bode
Dado que la funcin de transferencia posee un polo en el origen, este ocasiona la cada
de -20 dB por dcada en la grfica de magnitud, a la cual se le suma una cada de -40
dB debido al polo real negativo.
La grfica de fase resulta de la suma de una fase constante de -90 aportada por el polo
en el origen y una fase negativa que vara entre cero y -90 debida al polo en -0.3.
La grfica resultante es caracterstica de un filtro pasa bajos, esto concuerda con las
caractersticas del motor de corriente continua. En conclusin, el motor de cc acta
como un filtro pasa bajos.
(Resuelto por: Hoff Romina)
3)
Considere el sistema de control de temperatura mostrado en la Figura 3.1. El problema
es controlar la temperatura y dentro de la cmara. Esta cmara es calentada a vapor.
Elflujo de vapor caliente q es proporcional a la apertura de la vlvula x, o sea =
.La apertura x de la vlvula es controlada por un solenoide y se asume que es
proporcionala la corriente en el solenoide i(t), o sea = (). Se asume que la
temperatura de lacmara yy el flujo de vapor q estn relacionados por:
-60
-40
-20
0
20
40
Magnitu
de (
dB
)
10-2
10-1
100
101
-180
-135
-90
Phase (
deg)
Bode Diagram
Frequency (rad/sec)
ControlClsico y Moderno FI - UNaM TP N 1
HOFF KRUJOSKI VIERA Pgina 11 de 17
= + (3.1)
Donde c es uncoeficiente que depende del aislamiento de la cmara y de la diferencia
de temperaturaentre el interior y el exterior de la misma. Para simplificar el anlisis y
proyecto, seasume que c es una constante positiva. Esto significa que s no se
introduce vapor a lacmara la temperatura decrece con una tasa igual a .
a) Dibuje el diagrama de bloques del sistema desde la referencia r a la salida y. Halle
lafuncin de transferencia entre el flujo de calor q y la temperatura y.
b) La tensin de salida del amplificador de la seal de la termocupla es = 2y
laseal de error que ingresa al amplificador de entrada es = . Encuentre la
funcinde transferencia entre la entrada u(t) y la corriente del solenoide i(t).
Figura 3.1: Esquema del sistema
Resolucin
a)
En base al esquemtico del sistema presentado en la figura 3.1 y las ecuaciones
brindadas para la descripcin del mismo; se genera el diagrama de bloques exhibido en
la figura 3.2.
ControlClsico y Moderno FI - UNaM TP N 1
HOFF KRUJOSKI VIERA Pgina 12 de 17
R(s) E(s) U(s) Q(s) Y(s)
V(s)
+-
K2
H (s)2
H (s)1
K1
Controlador Actuador Planta
Sensor
G (s)1
Figura 3.2: Diagrama de Bloques
Segn lo presentado en el diagrama precedente, la Funcin de Transferencia completa
del sistema a Lazo Cerrado, se puede obtener fcilmente mediante la expresin 3.2.
() =()
()=
1()
1 + 1() 2 (3.2)
Partiendo de la ecuacin diferencial presentada en 3.1, que describe la relacin entre la
temperatura de la cmara y el flujo de vapor, transformando la misma a travs de
Laplace se tiene lo exhibido en 3.3.
[ () (0)] = () + () (3.3)
Teniendo en cuenta que la definicin de funcin transferencia exige analizar el sistema
con condiciones iniciales nulas, se elimina el segundo trmino del primer miembro de la
igualdad presentada. As, operando algebraicamente se arriba a la expresin 3.4.
() ( + ) = () (3.4)
Finalmente, operando para obtener la funcin transferencia entre la temperatura de la
cmara y el flujo de calor, respetando la nomenclatura definida en la Figura 3.2, se
obtiene la expresin dada en 3.5.
2() =()
()=
+
(3.5)
ControlClsico y Moderno FI - UNaM TP N 1
HOFF KRUJOSKI VIERA Pgina 13 de 17
b) Planteando la sumatoria de las cadas de potencial elctrico en la malla dada
entre el amplificador de salida y el solenoide que comanda la vlvula, exhibidos en la
Figura 3.1, se obtiene la expresin 3.6.
() () ()
= 0 (3.6)
Transformando por Laplace la ecuacin precedente, y operando se obtiene:
() = () + [ () (0)] (3.7)
Recordando que la funcin transferencia se define con condiciones iniciales nulas, la
ecuacin 3.7 puede ser operada y as arribar a lo presentado en 3.8.
() = () ( + ) (3.8)
As, operando algebraicamente para obtener la transferencia entre la entrada y la
corriente sobre el solenoide, se obtiene la expresin 3.9.
()
()=
1
+ (3.9)
Las expresiones obtenidas, ecuacin 3.5 y 3.9, son pasos intermedios para llegar a la
funcin transferencia global del sistema a lazo cerrado. Para obtener dicho resultado,
debe continuarse operando con las expresiones disponibles y finalmente aplicar la
ecuacin 3.2.
(Resuelto por: Krujoski Matas)
4)
Considere un motor CC alimentado por la armadura como se muestra en la Figura 4.1,
que acciona una carga a travs de un tren de engranajes que permite reducir la
velocidad y aumentar el momento de torsin necesario para impulsar la carga. El
momento de torsin total incluyendo rotor, eje y engranaje primario, est dado por J1 y
el coeficiente de friccin relacionado a este eje es b1; y aquellos correspondientes a la
carga son J2 y b2.
a) Encuentre la funcin de transferencia entre u(t) y 2(t).
b) Cul es la funcin de transferencia entre Va(t) y d 2(t)/dt?
ControlClsico y Moderno FI - UNaM TP N 1
HOFF KRUJOSKI VIERA Pgina 14 de 17
Figura 4.1: Sistema motor CC-carga
Resolucin
a)
Primeramente se procede a plantear las ecuaciones en el dominio del tiempo de la
parte elctrica ms las partes mecnicas.
2
1 11 2 12
2
2 22 2 2 2
( )( ) ( ) ( )
( ) ( )( ) ( ) 2
( ) ( )( )
ab a a a
e
dI tu t V t I t R L
dt
d t d tJ T t T t b
dt dt
d t d tT t b J
dt dt
(4.1)
(4.2)
(4.3)
Adems de estas ecuaciones se plantean las siguientes
1 2
( ) ( )
( ) ( ) ( )
e a t
e
T t I t K
T t T t T t
(4.4)
(4.5)
1( )( )b td t
V t Kdt
(4.6)
Realizando la transformada de Laplace (considerando condiciones iniciales nulas, CIN)
de las ecuaciones 4.1, 4.2, 4.3 y 4.6 y reemplazando T2(s) en la ecuacin 4.2
transformada, se tienen las siguientes ecuaciones.
1
1
2
2 2 2 2 2
2 2
1 1 2 2 2 2 1 1
( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( ) ( ) 2 ( )
b t
t a a a a
e
V s K s s
u s K s s I s R L sI s
T s b s s J s s
J s s T s b s s J s s b s s
(4.7)
(4.8)
ControlClsico y Moderno FI - UNaM TP N 1
HOFF KRUJOSKI VIERA Pgina 15 de 17
(4.9)
(4.10)
Los pares T1 y T2 se relacionan por medio de los desplazamientos angulares 1y 2 y
por el nmero de dientes de los engranajes reductores, N1 y N2. Esta relacin se
expone a continuacin.
1 2 1 21 2
2 1 2 1
( ) ( )( ) ( )
( ) ( )
T t t N Ns s
T t t N N
(4.11)
Y transformando por Laplace la 4.4 tenemos
( ) ( )e a tT s I s K (4.12)
Reemplazando las ecuaciones 4.11 y 4.12 en la 4.10, obtenemos la relacin entre la
corriente de armadura y el desplazamiento angular de la carga, como se ve en la 4.13
2 22 21 2 2 1
1 1
2
2
1 2 1 2 2 1 1 2
2
1
2
( ) ( )
( ) ( 2 ) ( )
a
t
t
N NJ s b s J s b s
N NI s s
K
J N N J s b N b N ss
K N
(4.13)
Finalmente reemplazando las ecuaciones 4.11 y 4.13 en la 4.8 se encuentra la funcin
de transferencia entre u(s) y 2(s)
21 2 1 2 2 1 1 222 2
1 1
( ) ( 2 )( ) ( ) ( ) ( )t a a
t
J N N J s b N b N sNu s K s s R L s s
N K N
(4.14)
2
2
1 2 1 2 2 1 1 22
1 1
( ) 1
( ) ( ) ( 2 )( )t a a
t
s
u s J N N J s b N b N sNK s R L s
N K N
(4.15)
En la ecuacin 4.15, se multiplica al numerador y al denominador por KtR1 llegando a la
4.16
ControlClsico y Moderno FI - UNaM TP N 1
HOFF KRUJOSKI VIERA Pgina 16 de 17
12
2
2 1 2 1 2 2 1 1 2
( )
( ) ( ) ( ) ( 2 )
t
t t a a
K Ns
u s K K N s R L s J N N J s b N b N s
(4.16)
Despreciando la inductancia La dado que el transitorio en el que acta el inductor es
pequeo, la funcin transferencia resulta
12
2
1 2 1 2 2 1 1 2 2
( )
( ) ( ) ( 2 )
t
a a t t
K Ns
u s s R J N N J s R b N b N K K N
(4.17)
Se observa de la ecuacin 4.17 que la funcin transferencia entre la entrada u(s) y la
posicin angular 2(s) es de segundo orden. Adems, posee un polo en el origen y un
polo real simple.
b)
Para hallar la funcin de transferencia entre la tensin de entrada Va(t)=u(t) y la
velocidad angular (t)=d(t)/dt. Por propiedades de la transformada de Laplace de la
derivada, considerando CIN, se tiene que:
22
( )( )TL
d ts s
dt
(4.18)
Por lo que la funcin transferencia resulta
12
1 2 1 2 2 1 1 2 2
( ) ( )
( ) ( ) ( ) ( 2 )
t
a a t t
K Ns s ss
u s u s s s R J N N J R b N b N K K N
(4.19)
1
1 2 1 2 2 1 1 2 2
( )
( ) ( ) ( 2 )
t
a a t t
K Ns
u s s R J N N J R b N b N K K N
(4.20)
En la ecuacin 4.20 se observa la funcin de transferencia final entre u(t) y d2(t)/dt,
esta funcin presenta un nico polo real simple.
Comparando con la funcin de transferencia del punto a, ecuacin 4.17 con la obtenida
en la 4.20 vemos que se ha reducido un grado el polinomio del denominador. Por lo
que esta ltima resulta de menor orden que la primera.
ControlClsico y Moderno FI - UNaM TP N 1
HOFF KRUJOSKI VIERA Pgina 17 de 17
Para realizar un anlisis de la estabilidad del sistema, conociendo los valores de las
constantes, se tendr que recurrir al diagrama de Bode o criterios de estabilidad de
Nyquist
(Resuelto por: Hoff Romina)
Top Related