






Idiomas
Páginas
Jurídico

ECUACIONES BASICAS DE ELASTICIDAD
U.A.N.C.V.- C.A.P.I.C.
DESARROLLO DEL SOFTWARE
DESARROLLO DEL
SOFTWARE EPEF (ESFUERZOS PLANOS POR ELEMENTOS FINITOS)
El anlisis por el MEF implica tres etapas de actividad: preprocesamiento, procesamiento y postprocesamiento. Un anlisis completo por el MEF es una interaccin lgica de las tres etapas, la preparacin de los datos y su postprocesamiento necesitan de un esfuerzo considerable si todos los datos van a ser manejados manualmente. Razn por la cual solo se har la programacin del la parte del motor numrico o solucin numrica.
Por lo general, los estudiantes que estn aprendiendo un mtodo manual de anlisis se sienten ms confiados y comprenden mejor el tema al trabajar con ejemplos, los cuales son esencialmente casos especiales de la teora general. Este enfoque tradicional trae problemas para aquellos que se esfuerzan por conocer el mtodo del Elemento Finito. Es difcil encontrar ejemplos algebraicos que requieran del estudiante ms que la simple reproduccin del trabajo normal de un libro de texto, y por otra parte, los ejemplos numricos, con frecuencia, requieren exclusivamente de la tediosa manipulacin de matrices, realizada de manera mecnica.
Esta dificultad se debe al hecho de que mtodo del Elemento Finito es una tcnica sistemtica que encuentra su realizacin prctica en los programas de computadora. En consecuencia, la apreciacin balanceada del mtodo como una herramienta prctica de anlisis requiere de la comprensin de la tarea a que se enfrenta el programador, ms que la habilidad para realizar a mano los clculos asociados. No hay duda de que esta comprensin la obtiene ms claramente quin tiene el tiempo y la oportunidad de escribir un programa del Elemento Finito por si sismo.
En la primera parte de este captulo se da una perspectiva general de la organizacin de un programa tpico del Elemento Finito y la forma como se desarroll el programa en MATLAB la cantidad de esfuerzo necesario en las distintas fases de su construccin. Debe notarse que esta visin se refiere primero al desarrollo de un programa personal diseado para mejorar la comprensin del programador o proporcionar una prueba de escritorio para experimentos numricos con un aspecto particular del mtodo.
En este captulo se comentan los detalles del proceso de programacin dentro del contexto de programas del Elemento Finito para el anlisis de esfuerzo. Sin embargo, se aplican los mismos argumentos en otras reas de aplicacin, reemplazando palabras como esfuerzos y desplazamientos por los trminos apropiados de la disciplina en cuestin.
4.1. Base del Mtodo de los Elemento Finitos
Las aplicaciones practicas de la mecnica del slido deformante pueden agruparse en dos grandes familias: La de los problemas asociados con sistemas discretos y la de los problemas asociados a sistemas continuos: En los primeros sistemas se analizar esta dividido de forma natural, en elementos claramente definidos. En el caso, por ejemplo, el anlisis de estructura de un edificio en la que cada viga constituye una entidad aislada bien definida. En los segundos el sistema no puede ser dividido en forma natural en unidades simples, por lo que su anlisis resulta mucho ms complejo.
Por lo que se hace referencia al clculo estructural, el mtodo de elementos finitos (M.E.F.) puede ser entendido como una generalizacin de estructuras al anlisis de sistemas continuos. El principio del mtodo consiste la reduccin del problema con infinitos grados de libertad, en un problema finito en el que intervenga un nmero finito de variables asociadas a ciertos puntos caractersticos (modos). Las incgnitas del problema dejan de ser funciones matemticas del problema cuando, para pasar a ser los valores de dichas funciones en un nmero infinito de puntos. En realidad no se trata de nada nuevo. El clculo de estructuras se efecta tambin restringiendo el anlisis corrimientos de los nudos de unin. La diferencia estriba en que el anlisis del continuo, la segmentacin en elementos y la correcta posicin de los modos es, hasta cierto punto, arbitrario.
As pues en el M.E.F. se supone que el comportamiento mecnico de cada parte o elemento, en los que se subdivide queda definido por un numero finito de parmetros (grados de libertad) asociados al los puntos que en dicho momento se une al resto de los elementos de su entorno (modos). Para definir el comportamiento en el interior de cada elemento se supone que dentro del mismo, todo queda perfectamente definido a partir de lo que sucede en los modos a travs de una adecuada funcin de interpolacin.
Como puede apreciarse lo dicho, en el mtodo de los elementos finitos son casi esenciales los conceptos de "discretizacin" o accin de transformar la realidad de la naturaleza continua en un modelo discreto aproximado y de "interpolacin", o accin de aproximar los valores de una funcin a partir de su conocimiento en un numero discreto de puntos. Por lo tanto el M.E.F. es un mtodo aproximado desde mltiples perspectivas.
a) Discretizacin.b) Interpolacin.c) Utilizacin de mtodos numricos.
Esta presentacin aproximada de la realidad en forma de un modelo numrico permite la resolucin del problema. Los diversos coeficientes del modelo son automticamente calculados por el ordenador a partir de la geometra y propiedades fsicas de cada elemento. Sin embargo queda en manos del usuario decir hasta que punto la discretizacin utilizada en el modelo representa adecuadamente el modelo de la estructura.
La discretizacin correcta depende de diversos factores como son el tipo de informacin que se desea extraer del modelo o tipo de solicitacin aplicada.
Actualmente el mtodo de los elementos finitos ha sido generalizado hasta constituir un potente mtodo de calculo numrico, capas de resolver cualquier problema de la fsica formulable como un sistema de ecuaciones, abarcando los problemas de la mecnica de fluidos, de la transferencia de calor, del magnetismo, etc.
4.2. Estructura y funciones de un PROGRAMA de elementos fnitos
Como pueden imaginarse despus de lo expuesto, un programa de elementos finitos es una pieza compleja de software en la que confluyen numerosas operaciones, Por este motivo suelen estar divididos en subsecciones, cada una de las cuales efectan una operacin determinada. Sin embargo, el tema no se limita al puro clculo. La preparacin de los datos y el anlisis e los resultados numricos que aparecen como producto del calculo, son tareas arduas que actualmente se tienden a integra a su propio software. As pues, un paquete de calculo de elementos finitos consta de un procesador en el cual se incluyen todas la ayudas a
la preparacin de los datos y que generan los archivos de resultados, y un postprocesador que facilita el anlisis e interpretacin de los resultados, generalmente en forma de grafica mediante trazado de curvas, grficos tridimensionales, tablas, etc.
Pueden realizarse, entre otros, los siguientes tipos de anlisis:El anlisis esttico permite la determinacin de los componentes de los modos por efecto de una solicitacin esttica y, en una segunda fase, la determinacin del estado en ciertos puntos caractersticos de cada elemento.
Este tipo de anlisis permite acotar la deformacin del componente de estudio y localizar zonas altamente solicitadas o zonas de solicitacin baja, segn que el inters resida en evaluar la resistencia esttica o en eliminar material.
El anlisis dinmico puede ser de cualquiera de los tres tipos siguientes
Clculo de las frecuencias y modos propios de vibracin la vibracin libre de un cuerpo elstico se realiza en frecuencia y tomando formas que le son caractersticas, denominadas frecuencias y modos propios de vibracin.
El anlisis de modos y frecuencias propias de vibracin se realiza con el objetivo de conocer mejor el comportamiento dinmico del componente o estructura y determinar posibles ares de conflicto, como por ejemplo la generacin de resonancia.
Calculo de la respuesta en funcin del sistema. Este tipo de anlisis tipo de anlisis permite determinar la respuesta vibratoria y tencional de una estructura cuando es excitada mediante una carga senoidal peridica amplitud y frecuencia variable. De este modo es posible explorar la presencia de los diversos modos de vibracin en el rango de frecuencias de inters a fin de determinar su importancia relativa.
Clculo de respuesta a una solicitacin transitoria en este tipo de anlisis se pretende simular el efecto de una secuencia de carga real sobre la estructura, incorporando los efectos dinmicos.
Transferencia de calor: puede abordarse problemas de conduccin, conveccin o radiacin, en rgimen estacionario o estacionario. Los resultados son bsicamente las distribuciones de temperatura y lo fluidos de calor.
Mecnica de fluidos: Pueden ser problemas en el rgimen laminar o turbulento, estacionario, transitorios. Los resultados son bsicamente las distribuciones de presin y velocidad si es preciso, puede incorporarse el efecto de anlisis de fluidos.
Electromagnetismo: Pueden tratarse problemas relacionados con los campos y las Ondas electromagnticas. Los resultados son bsicamente los campos elctrico y magntico, las distribuciones de potencial, las corrientes, los fluidos magnticos, etc.
La mayora de estos casos se analizan antes de la primera elaboracin del producto, con el fin de prevenir problemas futuros, que pudiera hasta manifestarse cuando el producto se encuentre en funcionamiento o en las manos del mismo usuario.
Como mencionaba en el inicio la simulacin no solo se da en el campo de la industria, medicina, entretenimiento. Tambin se da en campos como la arquitectura y el entrenamiento militar.
La simulacin de estructuras otra de las aplicaciones tanto en el diseo, como comercialmente, son los diseos virtuales con simulacin perfecta de estructuras externas e internas que ayudan al arquitecto a crear el edificio, valorando los espacios muertos y las memorias de calculo de su proyecto, as como es igualmente aplicable para fines comerciales, aunque eso si quizs demasiado costoso por el momento para este ultimo, ya que la simulacin virtual requiere potentes maquinas y perifricos para ser tan perfecta para recibir este nombre.
En el entrenamiento militar tctico y militar terrestre, sobre todo en Norteamrica, grupos especializados de asalto, y grupos militares especializados en ese campo, virtualmente usan entrenamientos simulados virtualmente preparados, usan entrenamientos simulados virtualmente ambientados de modo impresionante donde se le obliga al soldado a responder y actuar en situaciones criticas del modo correcto, preparndole a actuar en segundos e incluso en dcimas de segundo en estas situaciones. Estas situaciones son creadas y ambientada de modo diferente a las anteriormente citadas, ya que esta realidad virtual se provee de panormicas y escenarios montados previamente, y con sonido realista dependiendo de la situacin en la que se quiera entrenar al soldado, pero es, como un entrenamiento simulado, un entrenamiento virtual.
Los entrenamientos de los pilotos de guerra. Una de las aplicaciones mas populares, es el entrenamiento de pilotos mediante tcnicas de realidad virtual o simuladas para responder ante situaciones ya sean peligrosas o de pura practica de vuelo que podran costar vidas y materiales muy costosos; se mutilan plataformas enteras de simulacin en la que piloto es envolvi por factores muy importantes de vuelo en los que se el que comanda el aeroplano debe reaccionar segn el entorno que se le presente en la practica virtual, de esta forma se preparan para una misin, o una guerra.
Las aplicaciones del entrenamiento submarino como su nombre lo indica, es un tipo de entrenamiento esencialmente simulado para un mudo en el que la presin es algo mas esencial quizs que en los otros simuladores tratados anteriormente, ya que nos estamos refiriendo a los submarinos de combate, donde el control preciso de presiones, motores, periscopios, y dems componentes es algo realmente vital para la tremenda perdida que supondra efectuar practicas de este tipo en el mar abierto.
La simulacin en todos estos campos, tiene algo en comn, que es la creacin de un mundo irreal, pero muy real para la personas que diariamente dependen de su existencia, en campos como la calidad industrial, la medicina, le entrenamiento, los juegos, etc. Gracias a la simulacin de procesos nuestro mundo real es mejor.
4.3. ESTRATEGIA GLOBAL PARA EL DISEO DEL PROGRAMA
Cuando se toma la decisin de escribir un programa es deseable preparar un bosquejo general del programa antes de comenzar el diseo detallado (realizar el diagrama de flujo del programa). Esto define la funcin del programa como aparece para el usuario, no obstante que en esta etapa no se haya tomado ninguna decisin como la de cmo se realizan las distintas operaciones. En el caso del programa del Elemento Finito, este bosquejo debe incluir las siguientes ideas:
El tipo o tipos de problemas por resolver. Aunque no puede establecerse en trminos fsicos -conduccin de calor, esfuerzo plano, flujo de un fluido, etc., la informacin significativa desde el punto de vista del programador es el nmero de incgnitas escalares asociadas con cada nodo, 1 para la teora potencial, 2 para el esfuerzo plano, 3 para la flexin de una placa, etc. Obviamente es mucho ms fcil disear un programa si se especifica un solo tipo de problema.
Valores mximos para los nmeros de los nodos, elementos, conectividades, etc. Estos nmeros controlan los tamaos de los arreglos que se utilizan en el programa. Tienen un efecto considerable en la organizacin del programa, ya que en la mayora de las computadoras el almacenamiento rpido est limitado y existe, por lo tanto, un tamao crtico del problema mas all del cual se requieren tcnicas especiales para empaquetar datos.
El despliegue de los datos de entrada como: coordenadas, conectividades, propiedades de los materiales, condiciones de frontera, etc.
El despliegue de la salida (para nuestro caso los esfuerzos en los nodos, as como los esfuerzos en los puntos de Gauss), incluyendo la posibilidad del despliegue grfico (que no se ha realizado en la codificacin) de la red del Elemento Finito, los contornos de esfuerzo, las lneas de flujo, etc.
Estas especificaciones que representan mejor los deseos de un cliente externo que las decisiones del programador, por lo que pueden requerir alteracin durante el perodo de construccin del programa. Sin embargo, se establece tomar al menos decisiones tentativas sobre las ideas de la lista anterior. En particular es conveniente escribir el primer proyecto del manual para usuarios del programa antes de comenzar la codificacin detallada, ya que este manual es lo que define la interfase entre el programa y el mundo exterior. Una vez que se ha elaborado el plan del programa, se pueden estimar los recursos requeridos como tiempo y habilidad para la programacin y la documentacin, tiempo de maquina y los requerimientos de almacenaje, tiempo total de terminacin y el costo total. Al estimar el tiempo total es importante permitir el tiempo adecuado para probar el programa. Por supuesto, la confiabilidad de estas estimaciones depender de la experiencia del programador. Si son satisfactorias, entonces puede comenzar el diseo interno detallado.
En las primeras etapas de programacin es bien separada las tres fases de entrada, clculos y salida, aunque despus sea ms eficiente sobreponerlas. El diseo del programa, como el diseo de trabajo en cualquier otro campo, es la exactitud iterativa en la que tanto la estructura bsica del programa como la codificacin detallada pueden ser alteradas a medida que el trabajo progresa.
4.4. PASOS DEL ANALISIS POR ELEMENTOS FINITOS
1. Discretizar o modelar la estructura.
La estructura es dividida en elementos finitos. Este es uno de los pasos mas importantes y cruciales para determinar la exactitud de la solucin del problema.
2. Definicin de las propiedades de los elementos.
En este paso el usuario debe definir las propiedades de los elementos y seleccionar el tipo de elemento que es el mas apropiado para modelar el sistema fsico.
3. Ensamble de la matrices de rigidez
La matriz de rigidez de un elemento consiste de coeficiente que pueden ser derivados a partir del equilibrio, del mtodo de energa o de otro. La matriz de rigidez del elemento relaciona los desplazamientos nodales a las fuerzas aplicadas en los nodos. El ensamble de las matrices de rigidez de los elementos implica la aplicacin de equilibrio para la estructura completa.
4. Aplicacin de cargas.
En este paso se deben suministrar todas las cargas que son aplicadas exteriormente, estas cargas pueden ser concentradas, distribuidas.
5. Definicin de condiciones de frontera.
Deben proveerse las condiciones de soporte, es decir, algunos desplazamientos nodales deben ser colocados en valores conocidos.
6. Solucin del sistema de ecuaciones algebraicas lineales.
La aplicacin secuencial de los pasos mencionados hasta aqu conduce a un sistema simultaneo de ecuaciones algebraicas donde las incgnitas son los desplazamientos.
7. Calculo de los esfuerzos.
Adems de los esfuerzos, el programa puede calcular las reacciones, modos, vibraciones u otra informacin pertinente.
4.5. DIAGRAMA DE FLUJO
4.6. FASE DE ENTRADA: CALCULO DE LAS PROPIEDADES DEL ELEMENTO
La fase de entrada de un programa simple del Elemento Finito consistir de modo caracterstico de las siguientes operaciones:
Secuencia Inicial. El programa lee el ttulo de los datos, cualquier parmetro global tales como los valores de E y , y abre los archivos de notas y de resultados.
Entrada de coordenadas nodales. En su forma ms simple, la seccin asociada de datos consiste en una lista de nmeros nodales seguidos por sus coordenadas en forma cartesiana o polar. Si el programa permite especificar elementos de orden superior, es de mucha utilidad tener la facilidad para interpolar nodos sobre los lados o las caras de los elementos.
Entradas de descriptores de elementos. Una vez ms, considerando la forma ms simple, los datos asociados proporcionan, para cada elemento, el tipo de elemento (tringulo, cuadriltero, hexaedros de 8, 16 y 20 nodos), el nmero de los nodos, las propiedades del material (si son diferentes de los valores nodales) y los nmeros globales de nodo. El programa de entrada construye las matrices de rigideces nodal Kij para cada elemento y las guarda en un archivo de notas. Ya que Kij=Kji, slo es necesario calcular aquellas matrices para las cuales ji.
Entrada de las cargas externas. El programa calcula loas cargas nodales equivalentes de las fuerzas de cuerpo, pero las fuerzas de traccin y las cargas puntuales tienen que ser ingresadas al programa y despus las guarda en archivos de notas.
Salida de informacin extrada de los datos tal como los nmeros de los elementos, nmeros para las ecuaciones nodales, etc. Con salida opcional de cantidades calculadas durante la fase de entrada. Esta ltima facilidad es muy til si el programa se va a utilizar como herramienta educativa, que es el objetivo principal de la presente Tesis.
En cualquier programa es deseable que se puedan detectar errores e inconsistencias en los datos proporcionados. Algunos de estos errores pueden detectarse tan pronto como se lee el dato un ejemplo obvio es un elemento definido como cuadriltero pero con slo tres nmeros nodales. Otos errores, como saltos en la secuencia de los nmeros nodales o la existencia de elementos desconectados, slo se pueden detectar despus que se leyeron todos los datos. En la prctica, es muy difcil anticipar cualquier tipo de error del que debe protegerse el programa. La mejor forma de desarrollar un sistema satisfactorio de revisin de datos es probar el programa en una serie de problemas, utilizando los datos que prepar un grupo de usuarios inexpertos.
Cuando se considera por primera vez el clculo de las matrices nodales de rigidez Kij, es natural pensar en trminos de una subrutina separada para cada tipo de elemento. Sin embargo el programador que adopta sta tcnica pronto descubrir que la mayora de la codificacin es la misma para todos los tipos de elementos. La frmula de integracin de Gauss para las matrices de rigidez de cualquier elemento bidimensional es:
Donde k, k son los puntos de Gauss y hk son los pesos de Gauss. (Para un tringulo
de esfuerzo constante slo se necesita un punto de Gauss) Las nicas cantidades que varan entre los diferentes tipos de elementos son.
El recorrido de los nmeros de nodo de los elementos, i y j.
El recorrido de k y los valores de k, k, y hk.
Las funciones de Forma Ni cuyas derivadas aparecen en Bi y Det J.
El rea A del elemento generador en el plano ,.
Por lo tanto, es conveniente construir una rutina general con estas cantidades como argumentos para la evaluacin de todas las matrices de rigidez nodal. Es deseable incluir en esta rutina una prueba sobre el valor calculado de Det J. Esto puede utilizarse para detectar elementos con nmeros de nodo que no estn en el orden del sentido inverso de las manecillas del reloj, cuadrilteros re-entrantes y otras formas de elementos que puedan causar un mal condicionamiento. Ntese que en el corazn de la rutina est la evaluacin del producto repetido matricial BiTDBj. Aunque este clculo puede hacerse mediante subrutinas estndar de biblioteca, ahorra tiempo de computadora si se escribe una subrutina especial que aproveche la ventaja de tener ceros en las matrices B y D, los cuales tienen posiciones fijas en cualquier tipo de problema particular.
La generalidad de la carga permitida depende principalmente del criterio del diseador del plan del programa, Al disear el programa es conveniente restringir primero la entrada a pesos nodales concentrados, convirtiendo a mano cualquier carga distribuida a cargas nodales. Despus podrn agregarse al programa rutinas para procesar distribuciones de peso ms generales. Los pesos nodales equivalentes para cualquier elemento bidimensional que soporta una carga distribuida, w, se dan por la frmula de integracin de Gauss:
4.7. EL AGRUPAMIENTO Y LA SOLUCION DE ECUACIONES NODALES: METODOS DE BANDA
La fase etiquetada como clculos incluye la agrupacin y solucin de las ecuaciones nodales para obtener los desplazamientos nodales ui. En esta seccin, la agrupacin y solucin se consideran como operaciones bastante separadas, efectuadas secuencialmente. En la siguiente seccin se describen procedimientos en los cuales las operaciones estn intercaladas. En cada seccin slo se consideran los mtodos basados en la eliminacin de Gauss.
El problema principal en la programacin de la eliminacin de Gauss es el uso eficiente del almacenaje de la computadora. El enfoque ms simple es aquel en que los coeficientes de las ecuaciones nodales se mantienen en un arreglo bidimensional, con ambas dimensiones iguales a (o menores que) el nmero de variables nodales. Tambin es fcil construir la rutina que transfiere las matrices de rigidez del elemento Kij y los pesos nodales wi del archivo de notas a sus lugares correctos en las ecuaciones nodales. Sin embargo, excepto los problemas nodales, este proceso es un verdadero desperdicio del almacenaje de la maquina, ya que se guardan todos los ceros de las ecuaciones.
Existen varias maneras de evitar guardar los ceros. Si las ecuaciones son simtricas, la eliminacin de Gauss siempre puede organizarse de tal manera que los coeficientes que estn involucrados en los clculos se encuentren en y arriba de la diagonal principal.. Para una red del Elemento Finito con M nodos libres, el almacenaje requerido es (2M-B+1)B/2 submatrices, donde B es el ancho de banda, o la mxima longitud de lnea, dada por:
Los enunciados caseros asociados con el proyecto de almacenaje de anchura de banda constante anterior, son mucho ms complicados que los necesarios para el almacenaje del arreglo completo en dos dimensiones. Sin embargo, la construccin de una rutina de eliminacin utilizando el proyecto est bien dentro de la capacidad del programador promedio, la resolucin de ecuaciones en el programa para anlisis de esfuerzo plano mencionado en la ltima seccin.
Al escribir las rutinas de agrupacin y solucin, es conveniente hacer del tamao de las submatrices un parmetro variable. Esto hace una pequea diferencia en la programacin y permite utilizar las subrutinas sin cambio alguno, en otros programas del Elemento Finito, donde el tamao de las submatrices puede ser diferente.
4.8. FASE DE SALIDA: PRUEBA DEL PROGRAMA
Al momento de comenzar la codificacin de la fase de salida, ya se habr hecho mayor parte de la programacin difcil. En efecto, la salida esencial asociada con un programa de anlisis de esfuerzo del Elemento Finito, la impresin de desplazamientos y de esfuerzos, requiere muy poca codificacin nueva. Los desplazamientos nodales ui se obtienen en la fase de clculos, mientras que las rutinas para evaluar las funciones de forma del elemento Ni se encuentran disponibles desde la fase de entrada. Es, por lo tanto, fcil evaluar el desplazamiento u=Niqi en cualquier punto dentro de la regin solucin. Los esfuerzos =DBiqi tambin son fcilmente evaluados, ya que la codificacin para la construccin de las matrices D y Bi se encuentra disponible desde la fase de entrada. Como se mencion antes es una prctica comn evaluar los esfuerzos en los puntos de Gauss ms que en los nodos (donde pueden ocurrir discontinuidades en el esfuerzo).
Con frecuencia, se incluye una revisin de equilibrio en la fase de salida. Esta incluye la comparacin de las fuerzas nodales equivalentes Kijqj derivadas de los desplazamientos nodales calculados qj con las fuerzas nodales equivalentes wi calculados en los datos de carga. Por lo tanto, las matrices Kij ya se encuentran disponibles desde la fase de entrada.
En los primeros das de la computacin, la revisin de equilibrio era un importante seguro contra errores de la mquina. Dichos errores ahora son escasos y se detectan mediante la mayora de los sistemas operativos de las computadoras. En un programa real de computadora del Elemento Finito, la funcin de revisin de equilibrio es slo para dar al usuario informacin acerca de la exactitud total de la solucin. Las fuerzas nodales desbalanceadas deben ser del orden de redondeo en comparacin con los pesos aplicados. Cualquier desbalanceo excesivo indica que las ecuaciones nodales estn mal condicionadas. La causa puede ser un arreglo de la red desatinado o por supuesto, un error en los datos de entrada.
Es importante notar que la revisin de equilibrio slo prueba la exactitud de la solucin de las ecuaciones nodales. Debido a que las matrices Kij se utilizan tanto para establecer las ecuaciones como para aplicar la revisin, un en error alguna de estas matrices no afectar las fuerzas desbalanceadas, a menos que pueda mal condicionar a las ecuaciones. Una revisin de equilibrio tampoco puede indicar la exactitud del proceso de modelado del Elemento Finito por s slo, o detectar los errores que resulten del anlisis de un problema incorrecto (pero fsicamente posible).
El resto de la fase de salida consiste esencialmente en presentar los resultados de manera conveniente. Puede incluir varias salidas grficas, un punto de la red, un punto de desplazamiento, los contornos de esfuerzos principales, etc. Una grfica de la red del Elemento Finito es particularmente til para verificar la precisin de los datos de entrada. El esfuerzo requerido para codificar estas operaciones depende mucho de la cantidad de software para grficos generales de que disponga el programador.
Uno de los principios bsicos para una buena programacin es probar todas las subrutinas cuidadosamente y por separado antes de unirlas. Sin embargo, deben efectuarse pruebas sobre el programa completo. Las siguientes sugerencias pueden ser de gran utilidad para quienes planean probar un nuevo programa del Elemento Finito para el anlisis de esfuerzo elstico: Si es posible, inclyase una varilla articulada en la lista de elementos disponibles. La evaluacin de las principales matrices de rigidez es muy simple de codificar y permite probar la mayora de las partes organizacionales de un programa. A diferencia del anlisis continuo, el esfuerzo de una estructura articulada no incluye aproximaciones discontinuas, y muchos ejemplos de sus soluciones se encuentran disponibles en libros de texto.
Comprobar que la solucin producida por el programa es independiente de la orientacin de los ejes coordenados, de la numeracin de los nodos y de la secuencia en que aparecen los elementos.
Revisar que el programa produce resultados simtricos cuando se maneja con datos que describen un sistema simtrico.
Revisar que el programa produce la solucin exacta en condiciones de esfuerzo constante (considerando que todos los elementos disponibles deben, tericamente, satisfacer esta condicin).
Comprobar los resultados obtenidos con los resultados producidos por otros programas del Elemento Finito. Sin embargo, ntese que inevitablemente habr pequeas discrepancias debido a cambios en la longitud de palabra del computador y a procedimientos numricos. Puede ser difcil decidir cules discrepancias son suficientemente grandes como para indicar un error real de programacin.
Revisar que el programa corra satisfactoriamente con el tamao mximo del problema especificado en la gua de usuario del programa. Los errores en las localizaciones de almacenamiento pueden no aparecer hasta que el programa alcanza cierto tamao.
Finalmente debe enfatizarse que el usuario nunca debe confiar ciegamente en los resultados de cualquier anlisis del Elemento Finito. Los resultados siempre se deben evaluar con base en el sentido comn y un juicio general de ingeniera, y debe efectuarse un arduo anlisis manual para comparar dentro de lo posible.
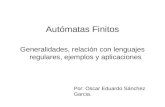
En al figura Fig. 4.81 se muestra la interfaz grafica utilizada y mas abajo se muestra el cdigo fuente del software EPEF.
Fig. 4.81 Interfas Grafica (GUI)
function varargout = EPEF(varargin)
% EPEF M-file for EPEF.fig
% EPEF, by itself, creates a new EPEF or raises the existing
% singleton*.
% H = EPEF returns the handle to a new EPEF or the handle to
% the existing singleton*.
% EPEF('CALLBACK',hObject,eventData,handles,...) calls the local
% function named CALLBACK in EPEF.M with the given input arguments.
% EPEF('Property','Value',...) creates a new EPEF or raises the
% existing singleton*. Starting from the left, property value pairs are
% applied to the GUI before EPEF_OpeningFunction gets called. An
% unrecognized property name or invalid value makes property application
% stop. All inputs are passed to EPEF_OpeningFcn via varargin.
% *See GUI Options on GUIDE's Tools menu. Choose "GUI allows only one
% instance to run (singleton)".
% See also: GUIDE, GUIDATA, GUIHANDLES
% Copyright 2002-2003 The MathWorks, Inc.
% Edit the above text to modify the response to help EPEF
% Last Modified by GUIDE v2.5 07-Oct-2005 11:19:41
% Begin initialization code - DO NOT EDIT
gui_Singleton = 1;
gui_State = struct('gui_Name', mfilename, ...
'gui_Singleton', gui_Singleton, ...
'gui_OpeningFcn', @EPEF_OpeningFcn, ...
'gui_OutputFcn', @EPEF_OutputFcn, ...
'gui_LayoutFcn', [] , ...
'gui_Callback', []);
if nargin && ischar(varargin{1})
gui_State.gui_Callback = str2func(varargin{1});
end
if nargout
[varargout{1:nargout}] = gui_mainfcn(gui_State, varargin{:});
else
gui_mainfcn(gui_State, varargin{:});
end
% End initialization code - DO NOT EDIT
% --- Executes just before EPEF is made visible.
function EPEF_OpeningFcn(hObject, eventdata, handles, varargin)
% This function has no output args, see OutputFcn.
% hObject handle to figure
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% varargin command line arguments to EPEF (see VARARGIN)
% Choose default command line output for EPEF
handles.output = hObject;
% Update handles structure
guidata(hObject, handles);
% UIWAIT makes EPEF wait for user response (see UIRESUME)
% uiwait(handles.figure1);
% --- Outputs from this function are returned to the command line.
function varargout = EPEF_OutputFcn(hObject, eventdata, handles)
% varargout cell array for returning output args (see VARARGOUT);
% hObject handle to figure
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Get default command line output from handles structure
varargout{1} = handles.output;
function e_dat_Callback(hObject, eventdata, handles)
% hObject handle to e_dat (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of e_dat as text
% str2double(get(hObject,'String')) returns contents of e_dat as a double
% --- Executes during object creation, after setting all properties.
function e_dat_CreateFcn(hObject, eventdata, handles)
% hObject handle to e_dat (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc
set(hObject,'BackgroundColor','white');
else
set(hObject,'BackgroundColor',get(0,'defaultUicontrolBackgroundColor'));
end
function poisson_dat_Callback(hObject, eventdata, handles)
% hObject handle to poisson_dat (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of poisson_dat as text
% str2double(get(hObject,'String')) returns contents of poisson_dat as a double
% --- Executes during object creation, after setting all properties.
function poisson_dat_CreateFcn(hObject, eventdata, handles)
% hObject handle to poisson_dat (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc
set(hObject,'BackgroundColor','white');
else
set(hObject,'BackgroundColor',get(0,'defaultUicontrolBackgroundColor'));
end
function espesor_dat_Callback(hObject, eventdata, handles)
% hObject handle to espesor_dat (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of espesor_dat as text
% str2double(get(hObject,'String')) returns contents of espesor_dat as a double
% --- Executes during object creation, after setting all properties.
function espesor_dat_CreateFcn(hObject, eventdata, handles)
% hObject handle to espesor_dat (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc
set(hObject,'BackgroundColor','white');
else
set(hObject,'BackgroundColor',get(0,'defaultUicontrolBackgroundColor'));
end
% --- Executes on button press in pushbutton1.
function pushbutton1_Callback(hObject, eventdata, handles)
% hObject handle to pushbutton1 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% --- Executes on button press in conectividad.
function conectividad_Callback(hObject, eventdata, handles)
% hObject handle to conectividad (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% --- Executes on button press in procesa.
function procesa_Callback(hObject, eventdata, handles)
% hObject handle to procesa (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
%datos de archivo
clear
load gcoord.txt
load nodes.txt
load materiales.txt
load cargas.txt
load cargasc.txt
load restricciones.txt
% Datos fijos
nnel=3; % numero de nodos por elemento
ndof=2; % numero de grados de libertad pro nodo
% Datos leidos
A=size(nodes);
B=size(gcoord);
nel=A(1);
nnode=B(1);
sdof=nnode*ndof; % totaled grados de libertad en el sistema
edof=nnel*ndof; % grado de libertad por elemento
emodule= materiales(1)
poisson= materiales(2)
espesor=materiales(3)
pe=cargasc;
% condiciones de contorno
bcdof=restricciones';
[bc]=size(bcdof);
bcval=zeros(1,bc(1,2));
%Datos calculados
%-----------------------------------------
% inicio de matrices y vectores
%-----------------------------------------
ff=zeros(sdof,1);
fc=zeros(sdof,1);
kk=zeros(sdof,sdof);
disp=zeros(sdof,1);
eldisp=zeros(edof,1);
stress=zeros(nel,3);
strain=zeros(nel,3);
index=zeros(edof,1);
kinmtx2=zeros(3,edof);
matmtx=zeros(3,3);
%-----------------------------------------------------------------
% computo de las matrices y su ensamble
%-----------------------------------------------------------------
matmtx=fematiso(1,emodule,poisson);
area1=zeros(nel,1);
for iel=1:nel
nd(1)=nodes(iel,1);
nd(2)=nodes(iel,2);
nd(3)=nodes(iel,3);
x1=gcoord(nd(1),1); y1=gcoord(nd(1),2);
x2=gcoord(nd(2),1); y2=gcoord(nd(2),2);
x3=gcoord(nd(3),1); y3=gcoord(nd(3),2);
index=feeldof(nd,nnel,ndof);% extract system dofs associated with element
%-------------------------------------------------------
% funciones de forma
%-------------------------------------------------------
area=0.5*(x1*y2+x2*y3+x3*y1-x1*y3-x2*y1-x3*y2);
area1(iel,1)=(area);
area2=area*2;
dhdx=(1/area2)*[(y2-y3) (y3-y1) (y1-y2)];
dhdy=(1/area2)*[(x3-x2) (x1-x3) (x2-x1)];
kinmtx2=fekine2d(nnel,dhdx,dhdy);
k=kinmtx2'*matmtx*kinmtx2*area*espesor;
kk=feasmbl1(kk,k,index);
end
%-------------------------------------
%Sistema de fuerzas
%-------------------------------------
%Fuerzas de cuerpo
for iel=1:nel
nd(1)=nodes(iel,1);
nd(2)=nodes(iel,2);
nd(3)=nodes(iel,3);
index=feeldof(nd,nnel,ndof);
f=espesor*area1(iel)/3*[pe(1) pe(2) pe(1) pe(2) pe(1) pe(2)]';
fc(index)=fc(index)+-f;
end
%----------------------------------
%Fuerzas de traccion
aa=size(cargas);
cargasx = zeros(aa);
cargasy = zeros(aa);
for a=1:aa(1)
cargasx(a,1)=cargas(a)*2-1;
cargasy(a,2)=cargas(a)*2;
ff(cargasx(a))=cargas(a,2);
ff(cargasy(a,2))=cargas(a,3);
end
ff=ff+fc
%-----------------------------
% aplicando las condiciones de contorno
%-----------------------------
[kk,ff]=feaplyc2(kk,ff,bcdof,bcval);
%----------------------------
% resolviendo el sistema de ecuaciones
%----------------------------
disp=kk\ff;
%---------------------------------------
% calculo de esfuerzos e impresin de resultados
%---------------------------------------
for ielp=1:nel
nd(1)=nodes(ielp,1);
nd(2)=nodes(ielp,2);
nd(3)=nodes(ielp,3);
x1=gcoord(nd(1),1); y1=gcoord(nd(1),2);
x2=gcoord(nd(2),1); y2=gcoord(nd(2),2);
x3=gcoord(nd(3),1); y3=gcoord(nd(3),2);
index=feeldof(nd,nnel,ndof);
for i=1:edof
eldisp(i)=disp(index(i));
end
area=0.5*(x1*y2+x2*y3+x3*y1-x1*y3-x2*y1-x3*y2); % area del triangulo
area2=area*2;
dhdx=(1/area2)*[(y2-y3) (y3-y1) (y1-y2)];
dhdy=(1/area2)*[(x3-x2) (x1-x3) (x2-x1)];
kinmtx2=fekine2d(nnel,dhdx,dhdy);
estrain=kinmtx2*eldisp;
estress=matmtx*estrain;
for i=1:3
strain(ielp,i)=estrain(i);
stress(ielp,i)=estress(i);
end
end
de=size(disp);
desplazamientos=zeros ((de(1)/2),1);
a=1;
for i=1:(sdof/2)
dx(i)=disp(a);
a=a+2;
end
a=2;
for i=1:(sdof/2)
dy(i)=disp(a);
a=a+2;
end
%------------------------------------
% impression de resultados
%------------------------------------
num=1:1:(sdof/2);
desplazamientos=[num' dx' dy']
nume=1:1:nel;
esfuerzos=[nume' stress]; % esfuerzos
deformacion=[nume' strain]; %deformadas
%---------------------------------------------------------------
%resultados en un archivo
%---------------------------------------------------------
dlmwrite('desplazamientos.csv', desplazamientos )
dlmwrite('esfuerzos.csv', esfuerzos )
dlmwrite('deformacion.csv', deformacion )
% --- Executes on button press in cerrar.
function cerrar_Callback(hObject, eventdata, handles)
% hObject handle to cerrar (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
CLOSE
function edit5_Callback(hObject, eventdata, handles)
% hObject handle to edit5 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of edit5 as text
% str2double(get(hObject,'String')) returns contents of edit5 as a double
% --- Executes during object creation, after setting all properties.
function edit5_CreateFcn(hObject, eventdata, handles)
% hObject handle to edit5 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc
set(hObject,'BackgroundColor','white');
else
set(hObject,'BackgroundColor',get(0,'defaultUicontrolBackgroundColor'));
end
% --- Executes on button press in coordenadas.
function coordenadas_Callback(hObject, eventdata, handles)
% hObject handle to coordenadas (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
FUNCION FEASMBL1.M
%---------------------------------------------------------------
function [kk]=feasmbl1(kk,k,index)
%----------------------------------------------------------
% propsito:
% ensamblar la matriz de los elementos en la matriz sistema
% Synopsis:
% [kk]=feasmbl1(kk,k,index)
%
% descripcin de variables
% kk matriz sistema
% k - matriz de elemento
% ndice - d.o.f. vector asociado a cada elemento
%-----------------------------------------------------------
edof = length(index);
for i=1:edof
ii=index(i);
for j=1:edof
jj=index(j);
kk(ii,jj)=kk(ii,jj)+k(i,j);
end
end
FUNCTION FEELDOF.M
%-----------------------------------------------------------------------------
function [index]=feeldof(nd,nnel,ndof)
%----------------------------------------------------------
% propsito:
% Calculo del sistema dofs asociado con cada elemento
% Synopsis:
% [index]=feeldof(nd,nnel,ndof)
% descripcin de variables:
% ndice de vectores dof vector asociado con cada elemento "iel"
% iel numero de del sistema de dofs a ser determinado
% nnel numero de nodos por elemento
% ndof numero de dofs por nodo
%-----------------------------------------------------------
edof = nnel*ndof;
k=0;
for i=1:nnel
start = (nd(i)-1)*ndof;
for j=1:ndof
k=k+1;
index(k)=start+j;
end
end
FUNCION FEKINE2D.M%---------------------------------------------------------------------------------
function [kinmtx2]=fekine2d(nnel,dhdx,dhdy)
%------------------------------------------------------------------------
% propsito:
% determinar las ecuaciones cinemticas de deformacin y desplazamientos
% Synopsis:
% [kinmtx2]=fekine2d(nnel,dhdx,dhdy)
% descripcin de variables
% nnel numero de nudos por elemento
% dhdx derivadas de las funciones de forma respecto a x
% dhdy - derivadas de las funciones de forma respecto a y
%------------------------------------------------------------------------
for i=1:nnel
i1=(i-1)*2+1;
i2=i1+1;
kinmtx2(1,i1)=dhdx(i);
kinmtx2(2,i2)=dhdy(i);
kinmtx2(3,i1)=dhdy(i);
kinmtx2(3,i2)=dhdx(i);
end
FUNCION FEMATISO.M
%------------------------------------------------------------------
function [matmtrx]=fematiso(iopt,elastic,poisson)
%------------------------------------------------------------------------
% proposito:
% determinar las ecuaciones constitutivas para materiales isotropicos
% Synopsis:
% [matmtrx]=fematiso(iopt,elastic,poisson)
% descripcin de variables:
% elastic modulo de elasticidad
% poisson relacion de poisson
% iopt=1 analisisi de esfuerzo plano
% iopt=2 analisis de depormacion plana
% iopt=3 analisis axisimetrico
% iopt=4 analisis tridimencional
%------------------------------------------------------------------------
if iopt==1 % esfuerso plano
matmtrx= elastic/(1-poisson*poisson)* ...
[1 poisson 0; ...
poisson 1 0; ...
0 0 (1-poisson)/2];
elseif iopt==2 % deformacion plana
matmtrx= elastic/((1+poisson)*(1-2*poisson))* ...
[(1-poisson) poisson 0;
poisson (1-poisson) 0;
0 0 (1-2*poisson)/2];
elseif iopt==3 % axisimetrico
matmtrx= elastic/((1+poisson)*(1-2*poisson))* ...
[(1-poisson) poisson poisson 0;
poisson (1-poisson) poisson 0;
poisson poisson (1-poisson) 0;
0 0 0 (1-2*poisson)/2];
else % tres dimenciones
matmtrx= elastic/((1+poisson)*(1-2*poisson))* ...
[(1-poisson) poisson poisson 0 0 0;
poisson (1-poisson) poisson 0 0 0;
poisson poisson (1-poisson) 0 0 0;
0 0 0 (1-2*poisson)/2 0 0;
0 0 0 0 (1-2*poisson)/2 0;
0 0 0 0 0 (1-2*poisson)/2];
end
FUCNION FEAPLYC2.M
%----------------------------------------------------------------
function [kk,ff]=feaplyc2(kk,ff,bcdof,bcval)
%----------------------------------------------------------
% Propsito:
% aplicar constraints para la ecuacin matricial [kk]{x}={ff}
% Synopsis:
% [kk,ff]=feaplybc(kk,ff,bcdof,bcval)
% descripcion de varialbes:
% kk matris del sistema despues de aplicar las constraints
% ff vector de sistema despues de aplicar constraints
% bcdof un vector conteniendo d.o.f
% bcval - un vector containing contained value
% para el ejemplo, son constraints at d.o.f=2 and 10
% y sus valores constrained son 0.0 and 2.5,
% respectivamente. Entonces, bcdof(1)=2 and bcdof(2)=10; and
% bcval(1)=1.0 and bcval(2)=2.5.
%-----------------------------------------------------------
n=length(bcdof);
sdof=size(kk);
for i=1:n
c=bcdof(i);
for j=1:sdof
kk(c,j)=0;
end
kk(c,c)=1;
ff(c)=bcval(i);
end
%--------------------------------------------------------------------
4.9. PREPROCESAMIENTO - POST PROCESAMIENTO
4.10. PREPROCESAMIENTO
El preprocesamiento implica la preparacin de datos, como las coordenadas nodales, la conectividad, las condiciones de frontera, informacin sobre cargas y material El objetivo principal del preprocesador es conseguir la estructura mallada mediante nodos y elementos, estos, son los puntos de control de la estructura mallada a travs de los cuales se introducen datos y se obtienen resultados.
construccin de la geometra
condiciones de frontera
cargas
4.11. POSTPROCESAMIENTO
Hace nfasis a la presentacin de resultados, e interpretacin
Anlisis de resultados.
Verificacin de la geometra del modelo
Verificacin de las condiciones de contorno
Revisin de cargas
Anlisis de resultados
Esfuerzos desplazamientos temperatura
4.12. SOFTWARES COMERCIALES DE PRE Y POST PROCESO
Existes diferentes programas comerciales de altas prestaciones y rendimiento de elementos finitos para pre y post-procesado para la mayora de SOLVERS de elementos finitos, y que permite a los ingenieros analizar las condiciones de diseo en un entorno de trabajo visual y altamente interactivo entre los cuales tenemos.
HYPERMESH 6.0
GiD 7.2
TEC PLOT 10.0
FEMAP 6.0
ADMESH
GEOMPACK
GRUMMP
IGRID
MESHGEN
Pro/MECHANICA
ANSYS/PrepPost
COSMOS/M GeoStar
MSC/PATRAN
SDRC/I-DEAS
Pro/MESH MGRIDGEN/PARMGRIDGEN,
Etc.
4.13. SOFTWARE COMERCIALES de elementos finitos
El clculo de estructuras mediante elementos finitos es actualmente la metodologa ms habitual para abordar la mayor parte de los problemas de ndole estructural y por ello puede decirse que est firmemente aceptado en la prctica profesional en distintas modalidades: anlisis lineal y no lineal, esttico y dinmico, as como las aplicaciones en clculo ssmico o aeroelstico. A Continuacin se describiera las prestaciones de varios de los cdigos comerciales ms conocidos, a fin de ver cmo llevan a cabo especficamente las posibilidades de los mtodos de elementos finitos que se han comentado previamente
Se ha obligado en los ltimos aos a implantar en las empresas todas aquellas tecnologas que puedan a hacer realidad los tres grandes objetivos del diseo moderno:
Disear para conseguir para una fabricacin a un costo competitivo.
Disear en orden la utilizacin real en servicio.
Disear bien al primer intento.
En este sentido la introduccin del C.A.D. (Computer Aided Design) esta ya representando un grave avance en la etapa del diseo conceptual de nuevos productos. Por contra, el C.A.E. (Computer Aided Engineering )se encuentra en una etapa de mucho mas primaria. sin embargo la verdadera reduccin del bucle diseo-desarrollo se produce cuando ambas tcnicas actan conjuntamente. La primera para definir el producto y la segunda para simular su comportamiento en las condiciones de servicio, Solo la conjuncin de ambas tcnicas hacen posible que hacen alcanzar los tres objetivos antes mencionados.
La gran evolucin de los mtodos informticos tanto en su aspecto de hardware como software, ha permitido afrontar la resolucin de complejos fsicos matemticos cuya resolucin analtica resultara prcticamente imposible. De hecho muchos de dichos problemas hace ya aos que estn planteados, solo falta un medio adecuado para la obtencin de resultados prcticos. As pues la simulacin intenta reproducir la realidad a partir de resolucin numrica mediante ordenador, de las ecuaciones matemticas que describen dicha realidad. Por lo tanto hay que asumir que la simulacin es tan exactas como sea las ecuaciones de partida y la capacidad de los ordenadores para resolverlas, lo cual fija limites a su utilizacin.
Mediante la simulacin numrica es posible generar slidos de aspectos casi real, comprobar su comportamiento bajo diversas condiciones de trabajo, estudiar el movimiento conjunto de grupos de slidos, etc. Esto permite un conocimiento mucho mas profundo de un producto antes de que exista fsicamente, siendo posible detectar muchos de los problemas que de otro modo se hubieran detectado en el servicio real.
El mtodo de los elementos finitos es una de las mas importantes tcnicas de simulacin y seguramente la mas utilizada
A pesar de su aproximado, el M.E.F. (mtodo aproximado desde mltiple perspectivas: Discrecin, Interpolacin, Utilizacin de mtodos numricos.) es una herramienta muy til que permite realizar una gran cantidad de anlisis en componentes y estructuras complejos, difcilmente por los mtodo analticos clsicos.
CUADRO COMPARATIVO ENTRE PRE-PROCESADORES Hyper MeshFEMAPPro/MESHSDRC/I-DEASMSC/PATRANCOSMOS/M GeoStarANSYS/PrepPostPro/MECHANICA
HERRAMIENTAS GENERALES
Utilidades
Botn deshacer YYNYNNY
Botn RehacerNYNNNNY
Registro de un archivo logYNYYYN
Gravar / Ejecutar MacrosYYYYYY
Macros programables por el usuarioYYYYYY
Interfase personalizablesYYYNYY
Interfase de iconosYYYYNN
Interfase seleccin de menYYYYYY
Interfase lnea de comandosYYYYYN
Administrador de unidadesNNNNNY
Utilidades de conversin de unidadesNYYNNN
Base de datos autnoma (Archivo simple)YYNYNYN
Gravar como nuevo archivoYYYNYYY
Gravar cdigo para una versin anteriorYYNNNNN
Calculadora de funciones para entradas numricas YYYNYNN
Seleccin
Elementos / nodos por geometra asociada YYNYYYN
Tipos de ElementosYYNYYYY
ColorNYNNNYN
Grupos / CapasYYYYYYY
PropiedadesYYNYYYN
Verificacin
Cargas ResultantesYYYYYYY
Integridad y modelamiento de erroresYNNYYYY
Calcular masa / propiedades de inerciaYYYYYYY
Resumen del modeloYYYYYYY
Creacin del sistema de coordenadas
CartesianoYYYYYYY
CilndricoYYYYYYY
EsfricoYYYYYYY
Leer / escribir mallas para varios formatos
ANSYSYYYYYN
MSC/NASTRANYYYYYN
COSMOS/MYYYYYN
MSC/PATRANYYYYYN
SDRC I-DEASYNYYNN
ABAQUSYYYYYN
Pro/MECHANICANNYNNNNY
Procesamiento por lotes
EncajarYNYNYY
Sistema operativo habilitadoYYYYYYYN
Ajustes de visualizacin
Ver lneasYYYYYYYY
Esconder LneasYYYYYYYY
Sombrear Geometras YYYYYYYY
Sombrear mallasYYYYYYYY
Acortar elementosYYNYYYY
Manipulacin
Dinmico rotacin/translacin/escalarYYYYYYYY
Representacin dinmica para grficos mas dbiles del sistemaYYYYYY
Preguntas dinmicas de las entidades del modeloYYYNYN
Acercamiento en ventana / RectnguloNYYYYY
Acercamiento en ventana / Formas generalesYNYNNN
Visibilidad
Grupos /capas definidos por el usuarioYYYYNYY
Categoras de visibilidad / tipos de geometrasYYNYYYY
Categoras de visibilidad / Tipos de elementosYYNYYYY
Asignacin general de coloresYYNYYYY
Opcin general Ocultar /Mostrar YNNYYYY
Vector de cargas escalables, mostrar por magnitud relativa YYNYNYN
Posicin dinmica, seguimiento del cursosNYNYNNY
Representacin
Seccin transversal de vigasYYNYY
Vector de OrientacionesYYNYY
Espesor de elementos YNNNYN
Impresin
A la ImpresoraYYYYYY
A un Archivo YYYYYYY
A un archivo BMPYYNYYN
A un archivo GIFNNNNNY
A un archivo TIFNNNYYY
A un archivo, VRMLYYNNYN
A un archivo AVIYYNYYN
Cambio de color vs escala de grisesYYYYYN
Encabezado / pie de paginaNYYYNY
Colocacin de texto en cualquier parte de la pantallaYYYYNN
TRANSFERENCIA DE GEOMETRAS
Importacin estndar
IGESYYYYYYY
DXFYYNNYNY
STEPNNYYNNN
VDAYNNNNNY
ACISYYNYNYN
PARASOLIDSNYNYNYN
STLYYNNNNN
Importar, Cad-especifico
Pro/ENNYNYYYY
UGYNNNYNYY
SolidWorksNNNNNYNN
SDRC/I-DEASYNNYNNNN
CATIAYNNYNNYY
AutoCADYNNYNYNN
CadkeyNNNYNYNN
Exportar
IGESYNYYYYY
DXFNNNNYNY
STEPNNYYNNN
VDANNNNNNN
ACISNYNNNNN
PARASOLIDSNYNNNNN
STLNYYNNNN
CAPACIDADES DE GEOMETRAS
CREAR
Slidos CADNYYYYYYN
SuperficiesYYYYYYYY
WireframeYYYYYYYY
Modificar
Slidos CADNYYYYYYN
SuperficiesYYYYYYYY
WireframeYYYYYYYY
Herramientas
Parche de Superficies mltiples YNNYYYN
Parches para superficies de aplicaciones BC YYYYYY4N
Regiones volumtricas para diferenciar propiedadesYLLYNNYN
Relaciones de geometras parametricasNNYYYYYY
Superficies puntuales para definicin de volmenesYYYYYYY
Extraccin de planos mediosYNYYNNNY
Borrar geometraYYYYYYYY
Trasladar geometraYYYYYYYY
Rotar geometraYYYYYYYY
Escalar geometraYYYYYYYY
Reflejar geometraYYYYYYYY
Tipos de modelos
VigasYYYYYYYY
3D shellYYYYYYYY
3D solidYYYYYYYY
Esfuerzo PlanoYYNYYYYY
Deformacin planaYYNYYYYY
AxisimetricoYYNYYYYY
Simetria ciclicaYNNYNYYN
Simetra planaYYYYYYYY
Elementos mixtos, transitoriosYYYYYYYY
TIPOS DE ELEMENTOS
Lnea
VigaYYYYYYYY
Rod
YYYYYYYN
BarraYYNYYYYN
RgidosYYYYYYYN
Punto-para- resortesYYYYYYYY
DOF ResortesYYNYYYN
1D shell, axisimetricoYNNNYYY
Solido-para-shell traslacionesYYNYYYYY
Shell
QuadYYYYYYYY
TriYYYYYYYY
2D solid, Esfuerzo planoYYNYYYYY
2D solid, Deformacin planaYYNYYYYY
2D solid, axisimetricoYYNYYYYY
Solido
HexYYNYYYYY
CuaYYNYYYYY
TetYYYYYYYY
Contactos
GapYYYYYYYN
SlidelineYYNYYNYN
Superficies / superficieYYNYYYYY
Otros
Masa/inerciaYYYYYYYY
Propiedades de elementos
Generales
Asignacin de geometrasNNYYYNYY
ModificableYYYYYYYY
Cdigo de coloresYYNYYYY
AutoagruparYYNYYNY
Material
Leer desde CADNNYYYYNY
Librera interna / base de datosNYYYYYYY
Agregar / borrar base de datosYYYYYYY
ASCII ingreso a la base de datosYYYYYY
Control de OrientacinYYYYYYY
Definicin OrtropicaYYYYYYY
Definicin AnisotropicaYYYYYYN
Lnea
Desplazamientos de ejes neutralesYYYYYYY
Desplazamientos de centros de corteYYNYYYN
Bordes YYNYYYN
Seccion transversal interna librera / base de datosNYYYYY
Agregar / borrar base de datosYYNYYY
Seccion transversal YNYYYYN
Calculo de las propiedades de JYNNYYYY
Control de liberacin de los extremosYYNYYYYY
Control de esfuerzos recuperacin de puntosYYYYYY
Control y orientacin de vigasYYYYYYYY
Shell
Desplazamientos neutrales en la superficieYYNYNNY
Espesores variablesYYNYNYN
LaminasYYNYYYY
Espesores internos librera /base datosNYNNYN
Agregar / borrar de la base de datosNYNYYY
Control de normalesYYNYYYY
MALLAS
Automallas en general
Mallas errneas identificacin del rea del problemaYYNYYYY
Mallas errneas sugerencias para la correccinYNNYNYY
Automallas slidos
TetYYYYYYYY
Tet/wedgeNNNNNNNY
HexNNNNNNNN
Hex/wedgeNNNNNNNN
Automallas/shells
TriYYYYYYYY
Quad/triYYYYYYYY
Automallas/lineas
BeamsYYYYYYYY
Control de automallas
Creacin de elementos especficos limites de formaYYYYNYY
Tamao de elementos por defectoYYYYYYN
Tamao de elementos locales /superficieYYYYYYN
Tamao de elementos locales /curvaYYYYYYY
Tamao de elementos locales / puntoYYYYYYY
Curves en mallas duras YYYYYYY
Puntos de mallas durasYYYYYYY
Manual de creacin de mallas
Seleccin de geometras , referencias para la creacin de elementosYNNYYNY
Elevar curvas para elementos shells YYNYYYYY
Girar curvas para elementos shellsYYNYYYYY
Elevar superficies hex/wedge slidosYYNYYYYY
Verificacin de la calidad de elementos
Creacin automtica NNYYNYY
Manual de respuestasYYYYYYY
Escribir para la solucinNNNYNYY
Otras herramientas de mallas
Mixto / auto y manual de mallas en el mismo modeloYYNYYYYY
Mixto / auto y manual de mallas de algunas geometrasNNNYNYY13
Convertir elementos lineales a cuadrticos y viceversaYYNYYYYNA
Suavizar mallas existentes / slidosYYYYNNN
Suavizar mallas existentes / shellsYYYYNNN
Refinar mallas existentes / slidosYNNYYYN
Refinar mallas existentes / shellsYYNYYYN
Refinar mallas existentes / vigasYYNYYNN
Contorno/ ejes libre en el bordeYYNYYY
Contorno /Caras libres en el bordeYYNYYY
Verificar continuidad del tipo de transicin de elementosYNYYY
Verificar coincidencia entre elementosYYNYYNY
Verificar coincidencia entre nodosYYNYYLY
CONDICIONES DE CONTORNO
General
A ser aplicados en la geometraNYYYYYYY
Notificacin de soportesYNNNNYN
TIPOS DE CARGAS
FuerzasYYYYYYY
MomentosYYYYYYY
PresinYYYYYYY
Diferencial de la temperatura local vr ambienteYYYYYYY
Aceleracin / gravedadYYYYYYY
CentrfugaYYYYYYY
BearingNNNYNNY
Cargas totales aplicadas al puntoNNNNNNNN
Distribucin de cargas
UniformesYYYYYYY
Sobre todas las entidades seleccionadasNNNNNY
Por unidad de longitudYYYYYY
Por unidad de reaYYYYYYY
Interpolar sobre los puntos seleccionadosNNNYNY
Funcin de coordenadasyYYYNYY
Cargas en trminos del usuario definicin del sistema de coordenadas
CartesianoYYYYYYY
CilndricoYYYYYYY
EsfricoYYYYYYY
Tipos de Constraint
Desplazamientos forzadosYYYYYYY
Multiples constraintsYYLYYYN
Ecuaciones constraintYYNYYYN
Constraint en trminos del usuario sistema de coordenadas definido
CartesianoYYYYYYY
CylindricalYYYYYYY
SphericalYYYYYYY
Tipos de soluciones
Esttico linealYYYYYYY
ModalYYYYYYY
BucklingYYYYYYY
Dinmico, transitorioYYYYYYY
Dinmico, respuesta de frecuenciaYYYYYYY
Dinmico, aleatorioYYYYYYY
Nolineal, MaterialesYYYYYYN
Nolineal, deformaciones largasYYYYYYN
Nolineal, contactosYYYYYYY
Respuestas de soluciones adicionales
Pista del sistema usuario-cantidad escalar de inters definidaYYNNYYY
Pista de usuario-cantidad escalar de inters definida NNNNNYY
Optimizacin diseo de variables sensitivas
GeometraYNYNYLY
Propiedades del material NNNYYY
Propiedades de elemento YNYYYY
Tipos de solucin
Sensibilidad localYNYYY
Parmetros globalesYNNYYY
SOLUCIONADORES QUE SOPORTAN OPTIMIZACION
ANSYSYNYNNYN
MSC/NASTRANYLYYNYN
COSMOS/MNNYYNYN
SDRC I-DEASNNNNNNN
ABAQUSYNNNNNN
Pro/MECHANICANNNNNNNY
CUADRO COMPARATIVO ENTRE SOLVER MSC/NASTRANANSYSCOSMOS/MSDRC I-DEASPro/MECHANICA
REQUERIMIENTROS DE HADWARE Y SISTEMAS OPERATICVOS
Recursos de uso
Asignacin dinmica para recursos de memoriaYYYYN
Asignacin manual de recursos de memoriaYYNYY
Nodos limitadosNNY1NN
Resumen de Ejecucin log YYYYY
Tecnologa de elementos soportados
Soporte de Elemento-H YYYYN
Soporte de elemento-PLLYLY
Definicin de la geometra de elementos-PLNNNY
Incremento-P orden de existencia Malla de elemento-hNYYYN
Tipos de solucin
Estatico lineal YYYYY
ModalYYYYY
BuckingYYYYY
Dinmico
TransitorioYYYYY
FrecuenciasYYYYY
Respuestas aleatoriasYYYYY
Mtodo de solucin modalYYYYY
Mtodo de solucin directaYYYYN
Nolineal
MaterialYYYYY
Deformaciones largasYYYYY
ContactosYYYYL
BucklingYYYYN
Refinamiento adaptativo de mallasYYYYY
Suporte de superelementos YYYN
Soporte de supermodelosNYYN
Cargas asimetricas modelos axisimetricosNYYN
Mejora de opciones de diseo
Optimizacin de la geometraYYYY
Tamao de optimizacin de propiedades de viga o placaYYYYY
Estudios sensibleYYYYY
Parmetros globales de sweepNYYYY
General
Grupo de usuarios localesLLLYY
Grupo de usuarios nacionalesYYNYY
Manual de verificacin proporcionadoYYYY
CUADRO COMPARATIVO ENTRE POSTPROCESADORES
Hyper MeshFEMAPPro/MESHSDRC/I-DEASMSC/PATRANCOSMOS/M GeoStarANSYS/PrepPostPro/MECHANICA
OPCIONES DE VISUALIZACION DE RESULTADOS
Ploteo de franjas a coloresYYYYYYYY
Ploteo a colores de isosuperficiesYYYYYYYY
Ploteo a colores de isolineasYYYYYYYY
Visualizacin de resultados del promedio de esfuerzosYYYYYYYY
Visualizacin de resultados de esfuerzosYYYYYYYY
Visualizacin de franjas en tonos continuosYYYYYYYY
Ploteo de esfuerzos en el elemento centroidalLYYYYYYNA
Magnitud de escala en la leyenda a coloresYYYYYYYY
Numero especifico de colores en la leyendaYYYYYY
Visualizacin de resultados solamente de grupos especficosLYYYYY
Ploteo de vectores en elementos solidosLYNYYYYL
Ploteo de vectores en elementos shellLLNYYYY
Mostrar el resultado de las superficies shell mximos y mnimosLNYYNY
Representacin grafica de la salida de datos
Representacin grafica a lo largo de lneas ejes y nodosYYYYYYYY
Representacin grafica a travs de sistemas mltiples de salidaNYNYYYN
Deformation y animation
Animation de deformationsNYYYYYYY
Escala de deformacionesNYYYYYY
Animacin de contornos dentro las deformacionesNYYYYYY
Animacin de resultados a travs de mltiples sistemas de salidasNYNYYYYN
Trabajo de mltiples sistemas de salida
Combinacin mltiple de sistemas de salida con escala linealNYNYYYYL
Escala de salida con sistemas linealesNYNYYYYL
Calculo de datos de salidaLYNYYNYN
Visualizacin de secciones transversales
Creacin general de resultados de secciones generalesLYYYYYYY
Visualizacin de la posicin de la Friccin dinmica en al seccin transversalYYYNNY
Opciones
Estimacin de error en los resultados NYYYYYY
Pregunta de seleccin en la pantalla para la visualizacin de resultadosYYYNYY
Pregunta dinmica de resultados por friccin del cursorNYYNNY
Opcin de salidas tabuladasYYNYLYYY
feasmbl1
[kk]
jj=index(j);
kk(ii,jj)=kk(ii,jj)+k(i,j);
j=edof
ii=index(i)
j=1
i=edof
edof = length(index)
i=1
feasmbl1
(kk,k,index)
retorna[kk,ff]
kk(c,c)=1;
ff(c)=bcval(i)
kk(c,j)=0
j=sdof
c=bcdof(i);
j=1
i=1
n=length(bcdof);
sdof=size(kk)
i=1
feaplyc2 (kk,ff,bcdof,bcval)
i=1
retorna
[kinmtx2]
i1=(i-1)*2+1;
i2=i1+1;
kinmtx2(1,i1)=dhdx(i);
kinmtx2(2,i2)=dhdy(i);
kinmtx2(3,i1)=dhdy(i);
kinmtx2(3,i2)=dhdx(i);
i=nnel
fekine2d
(nnel,dhdx,dhdy)
retorna
[index]
k=k+1;
index(k)=start+j
i=nnel
edof = nnel*ndof
k=0
i=1
feeldof
(nd,nnel,ndof)
start = (nd(i)-1)*ndof
j=1
j=ndof
iopt==2
Retorna
[matmtrx]
matmtrx= elastic/((1+poisson)*(1-2*poisson))* ...
[(1-poisson) poisson 0;
poisson (1-poisson) 0;
0 0 (1-2*poisson)/2];
matmtrx= elastic/(1-poisson*poisson)* ...
[1 poisson 0; ...
poisson 1 0; ...
0 0 (1-poisson)/2]
iopt==1
Fematiso
(iopt, elastic, poisson)
B
FIN
stresses=[i stress(i,:)]
i=1
displace=[num' disp]
num=1:1:sdof;
A
strain(ielp,i)=estrain(i);
stress(ielp,i)=estress(i);
i=3
area=0.5*(x1*y2+x2*y3+x3*y1-x1*y3-x2*y1-x3*y2);
area2=area*2; dhdx=(1/area2)*[(y2-y3) (y3-y1) (y1-y2)];
dhdy=(1/area2)*[(x3-x2) (x1-x3) (x2-x1)];
kinmtx2=fekine2d(nnel,dhdx,dhdy);
estrain=kinmtx2*eldisp; stress=matmtx*estrain;
i=0
eldisp(i)=disp(index(i));
i=edof
i=nel
A
B
nd(1)=nodes(iel,1); nd(2)=nodes(iel,2);
nd(3)=nodes(iel,3); x1=gcoord(nd(1),1);
y1=gcoord(nd(1),2); x2=gcoord(nd(2),1);
y2=gcoord(nd(2),2); x3=gcoord(nd(3),1);
y3=gcoord(nd(3),2); index=feeldof(nd,nnel,ndof);
area =0.5*(x1*y2+x2*y3+x3*y1-x1*y3-x2*y1-x3*y2);
area2= area*2; dhdx=(1/area2)*[(y2-y3) (y3-y1) (y1-y2)];
dhdy=(1/area2)*[(x3-x2) (x1-x3) (x2-x1)];
kinmtx2=fekine2d(nnel,dhdx,dhdy);
k=kinmtx2'*matmtx*kinmtx2*area; kk=feasmbl1(kk,k,index);
iel
Top Related