





Idiomas
Páginas
Jurídico


UNIVERSIDAD DE SEVILLA
Espacios Vectoriales
Topologicos y Espacios
Funcionales
Luis Bernal Gonzalez
Tomas Domınguez Benavides
Departamento de Analisis Matematico

Lugar y Ano: Sevilla, 2012
Disponible en: http://personal.us.es/lbernal/

Indice general
Prologo 3
1. Espacios de Banach y de Hilbert 7
1.1. Espacios normados y de Banach . . . . . . . . . . . . . . . . . 7
1.2. Espacios de Hilbert . . . . . . . . . . . . . . . . . . . . . . . . 12
1.3. El teorema de Radon-Nikodym . . . . . . . . . . . . . . . . . 16
1.4. Bases de Schauder . . . . . . . . . . . . . . . . . . . . . . . . 19
Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
2. Espacios vectoriales topologicos 31
2.1. Topologıas compatibles con la estructura lineal . . . . . . . . . 31
2.2. Conjuntos acotados . . . . . . . . . . . . . . . . . . . . . . . . 37
2.3. Ejemplos de espacios vectoriales topologicos . . . . . . . . . . 39
2.4. Aplicaciones lineales . . . . . . . . . . . . . . . . . . . . . . . 45
2.5. Espacios de dimension finita . . . . . . . . . . . . . . . . . . . 47
2.6. Seminormas y convexidad local . . . . . . . . . . . . . . . . . 50
2.7. Espacios normables . . . . . . . . . . . . . . . . . . . . . . . . 54
2.8. Espacios metrizables . . . . . . . . . . . . . . . . . . . . . . . 55
Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
3. Espacios funcionales 63
3.1. Teorema de aproximacion de Weierstrass . . . . . . . . . . . . 63
3.2. Familias relativamente compactas . . . . . . . . . . . . . . . . 66
1

2 Luis Bernal y Tomas Domınguez
3.3. Dual de los espacios de Lebesgue . . . . . . . . . . . . . . . . 69
3.4. Dual de C(S) . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
3.5. Teorema de aproximacion de Runge . . . . . . . . . . . . . . . 72
3.6. Redes en espacios topologicos . . . . . . . . . . . . . . . . . . 74
Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
4. Dualidad y Teoremas de Hahn–Banach 83
4.1. Aplicaciones lineales reales y complejas . . . . . . . . . . . . . 83
4.2. Teoremas de Hahn–Banach . . . . . . . . . . . . . . . . . . . . 84
4.3. Teoremas de Hahn–Banach y convexidad . . . . . . . . . . . . 87
4.4. Forma geometrica del teorema de Hahn–Banach . . . . . . . . 89
4.5. Topologıa debil . . . . . . . . . . . . . . . . . . . . . . . . . . 92
4.6. Topologıa debil-∗ de un espacio dual . . . . . . . . . . . . . . 99
4.7. Bidual de un espacio normado. Reflexividad . . . . . . . . . . 104
4.8. Trasposicion de operadores . . . . . . . . . . . . . . . . . . . . 106
Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
5. Aplicaciones de la completitud y la convexidad 115
5.1. Equicontinuidad. Teorema de Banach-Steinhaus . . . . . . . . 115
5.2. Teorema de la Aplicacion Abierta . . . . . . . . . . . . . . . . 118
5.3. Teorema del Grafo Cerrado . . . . . . . . . . . . . . . . . . . 121
5.4. Teorema de Schauder . . . . . . . . . . . . . . . . . . . . . . . 123
5.5. Puntos extremales . . . . . . . . . . . . . . . . . . . . . . . . . 125
5.6. Teorema de Krein–Milman . . . . . . . . . . . . . . . . . . . . 127
5.7. Teorema de Stone–Weierstrass . . . . . . . . . . . . . . . . . . 130
Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
Bibliografıa 137
Lista de sımbolos y abreviaturas 139
Indice alfabetico 142

Prologo
Bajo el estımulo de la amplia experiencia docente de los autores, estas
notas han sido concebidas para servir de base al estudiante que pretenda pro-
fundizar en los contenidos de analisis funcional que generalmente se imparten
en los estudios del Grado en Matematicas.
Ası pues, como prerrequisito para una lectura provechosa de esta obra,
se presupone al lector cierta familiaridad con nociones y resultados basicos
de analisis funcional, tales como espacios normados, de Banach y de Hilbert,
aplicaciones lineales y continuas entre ellos, espacio dual, teoremas de la
proyeccion y de representacion de Riesz en espacios de Hilbert, y teoremas de
Hahn–Banach, de la acotacion uniforme, de la aplicacion abierta y del grafo
cerrado en el contexto de los espacios normados. Asimismo, se asume que el
estudiante posee conocimientos basicos de algebra lineal, topologıa general,
integracion de Riemann y de Lebesgue, teorıa de la medida, diferenciacion
de funciones de una y varias variables reales, y fundamentos de analisis de
variable compleja. No obstante, y con objeto de hacer estas notas lo mas
autocontenidas posible, se han incorporado, como recordatorio para el lector,
algunos conceptos y resultados adicionales.
El texto se ha dividido en cinco capıtulos. En el Capıtulo 1 se recopilan
los rudimentos de analisis funcional en espacios normados y de Hilbert, que
probablemente seran conocidos por el estudiante. Ademas, se introduce el
3

4 Luis Bernal y Tomas Domınguez
concepto de base de Schauder y se aplica el teorema de Riesz en espacios de
Hilbert para obtener el teorema de Radon–Nikodym.
Los principales objetos a estudiar son los espacios vectoriales topologicos
(y las aplicaciones, en especial las lineales y continuas, entre ellos), los cuales
constituyen una generalizacion de los espacios normados y prehilbertianos,
y a ellos se puede extender gran parte de los mas importantes teoremas
conocidos en estos. Introducimos los espacios vectoriales topologicos y sus
propiedades basicas en el Capıtulo 2.
Los ejemplos mas relevantes en los que se desarrolla la teorıa dada son
los espacios de funciones reales o complejas, incluyendo los espacios de suce-
siones. Un catalogo de estos espacios y algunas de sus propiedades de den-
sidad y dualidad se exponen en el Capıtulo 3. Como apendice, se expone
un resumen de la teorıa de redes en espacios topologicos. Se ha preferido el
concepto de red al concepto paralelo de filtro, por ser aquel mas sugestivo
que este.
En el Capıtulo 4 se desarrolla la teorıa de la dualidad, fundamentalmente
en espacios localmente convexos. Se estudia el teorema de Hahn–Banach en
sus diversas formas, ası como sus consecuencias. Se introducen la topologıa
debil en el espacio original y la ∗-debil en el dual de un espacio normado, y
se presenta la aplicacion traspuesta de una dada.
Algunas aplicaciones de la completitud en F-espacios (como el principio
de la acotacion uniforme y otras consecuencias del teorema de Baire, y el
teorema de Schauder sobre aplicaciones compactas) y de la convexidad (como
los teoremas de Krein–Milman y de Stone–Weierstrass) se desarrollan en el
Capıtulo 5.
La obra contiene ejemplos que ilustran los conceptos y resultados que van
surgiendo. Ademas, al final de cada capıtulo se propone una variada lista de

PROLOGO 5
ejercicios, en los que la teorıa dada o bien se aplica o bien se completa. En
algunos de ellos se adjuntan indicaciones o sugerencias utiles. Recomendamos
al estudiante que intente la resolucion de dichos ejercicios, pues ello constituye
un buen indicador del grado de asimilacion de la materia. Al final del texto
se ofrece una bibliografıa para que el lector interesado efectue consultas y
amplıe conocimientos. Para una mayor comodidad de lectura, se incluye una
lista de abreviaturas y sımbolos. El ındice alfabetico esta organizado de modo
que se indica la pagina o paginas donde aparece por primera vez la definicion
de un concepto o la formulacion de un resultado.
Para concluir, confiamos en que estas notas sean de utilidad y provecho
tanto para el estudiante como para el profesor que imparta los contenidos de
las mismas.
Los autores


Capıtulo 1
Espacios de Banach y de
Hilbert
Comenzamos con una recapitulacion de los teoremas fundamentales del
analisis funcional en espacios normados, en especial en espacios de Banach y
de Hilbert. Dichos teoremas se imparten en cualquier curso elemental sobre
la materia, por lo que probablemente el lector ya tiene conocimiento de ellos.
Estos resultados son, en esencia, los siguientes: teorema de Hahn-Banach,
principio de acotacion uniforme, teorema de la aplicacion abierta, teorema
del grafo cerrado y, ya en el ambito especial de los espacios de Hilbert, teo-
rema de la proyeccion y teorema de representacion de Riesz. De este ultimo
surgira el teorema de Radon-Nikodym, que caracteriza las medidas absolu-
tamente continuas. En la seccion final introduciremos y caracterizaremos el
concepto de base de Schauder de un espacio de Banach.
1.1. Espacios normados y de Banach
Como es usual, denotaremos por N el conjunto 1, 2, . . . de los enteros
positivos, por R el cuerpo de los numeros reales, y por C el cuerpo de los
7

8 Luis Bernal y Tomas Domınguez
numeros complejos. Repasemos el concepto de norma sobre un espacio vec-
torial. Siempre supondremos que el cuerpo base K del espacio vectorial es R
o C. A partir de ahora, abreviaremos las expresiones “espacio vectorial” y
“espacio topologico” mediante sus iniciales EV y ET, respectivamente. Otras
expresiones que vayan apareciendo en estas notas tambien seran abreviadas.
Definicion 1.1.1. Sea X un EV. Decimos que una funcion ∥ · ∥ : X →[0,+∞) es una norma sobre X si verifica, para todos los vectores x, y ∈ X y
todo escalar λ ∈ K, las siguientes propiedades:
(a) ∥x∥ = 0 si y solo si x = 0.
(b) [Homogeneidad] ∥λx∥ = |λ|∥x∥.(c) [Desigualdad triangular] ∥x+ y∥ ≤ ∥x∥+ ∥y∥.Llamaremos espacio normado (EN) a un EV dotado de una norma.
Todo EN es un espacio metrico: en efecto, la aplicacion d : X × X →[0,+∞) dada por d(x, y) = ∥x − y∥ es una distancia o metrica sobre X. Ya
que cada espacio metrico puede ser dotado de estructura de ET, obtenemos
que todo EN es un ET. Una base para su topologıa viene dada por la familia
de bolas abiertas B(a, r) := x ∈ X : ∥x − a∥ < r (a ∈ X, r > 0). Con
respecto a dicha topologıa, es facil ver que las aplicaciones suma (x, y) ∈X×X 7→ x+y ∈ X y producto (λ, x) ∈ K×X 7→ λx ∈ X son continuas. En
X ×X y en K×X se han considerado las topologıas producto respectivas.
Recordemos que un espacio metrico (X, d) es completo cuando cada suce-
sion (xn) ⊂ X de Cauchy converge a algun punto de X.
Definicion 1.1.2. Se llama espacio de Banach a un EN que es completo
para la distancia inducida por su norma.
Por ejemplo, para cada p ∈ [1,+∞) y cada N ∈ N, el EV KN dotado de
la norma ∥x∥p =(∑N
i=1 |xi|p)1/p
[donde x = (x1, . . . , xN)] es un espacio de

ESPACIOS DE BANACH Y DE HILBERT 9
Banach. Lo mismo ocurre si se le dota de la norma ∥x∥∞ = max|xi| : 1 ≤i ≤ N. Asimismo, son espacios de Banach:
• El EV c0 de las sucesiones (xn) ⊂ KN tales que xn → 0, dotado de la
norma ∥(xn)∥∞ = supn≥1 |xn|.
• Los espacios vectoriales c y ℓ∞ de las sucesiones convergentes y de las
sucesiones acotadas, respectivamente, dotados de la misma norma.
• El EV ℓp (1 ≤ p < +∞) de las sucesiones (xn) ⊂ KN tales que∑∞n=1 |xn|p < +∞, dotado de la norma ∥(xn)∥p =
(∑∞n=1 |xn|p
)1/p.
• El EV Lp(µ) = Lp(µ,Ω) (1 ≤ p < +∞) de las funciones medi-
bles f : Ω → K tales que∫Ω|f |p dµ < +∞, dotado de la norma
∥f∥p =( ∫
Ω|f |p dµ
)1/p. Aquı µ es una medida definida sobre un espacio
medible (Ω,M). Identificamos dos funciones medibles, f = g, cuando
son iguales µ-en casi todo Ω, es decir, cuando µ(x ∈ Ω : f(x) =g(x)) = 0.
Sin embargo, el EV c00 := x = (xn) : ∃N = N(x) ∈ N tal que xn = 0 ∀n >N de las sucesiones casi nulas, dotado de la norma del supremo, es un EN
que no es de Banach.
La caracterizacion de la continuidad de una aplicacion lineal entre dos
espacios normados X e Y es bien simple. Mientras no haya confusion, ∥ · ∥denotara por igual la norma de X y la de Y . A veces usaremos la palabra
“operador” como sinonimo de “aplicacion lineal”.
Teorema 1.1.3. Sean X e Y espacios normados y T : X → Y una apli-
cacion lineal. Las siguientes afirmaciones son equivalentes:
(a) T es continua en algun punto x0 ∈ X.
(b) T es continua.
(c) T es uniformemente continua.
(d) Existe M ∈ (0,+∞) tal que ∥Tx∥ ≤M∥x∥ para todo x ∈ X.

10 Luis Bernal y Tomas Domınguez
Simbolizaremos por L(X,Y ) el EV de las aplicaciones lineales y continuas
de X en Y . El siguiente teorema muestra que este espacio puede normarse.
Teorema 1.1.4. Sean X e Y dos espacios normados. Para cada T ∈L(X, Y ), se define ∥T∥ = sup ∥Tx∥/∥x∥ : x ∈ X \ 0 = sup∥Tx∥ :
∥x∥ = 1. Entonces ∥ · ∥ es una norma sobre L(E,F ).
En el caso Y = K, a los elementos de L(X,K) se les denomina “for-
mas” (o “funcionales”) lineales y continuas. Denotaremos X∗ = L(X,K) y
lo llamaremos el espacio dual de X. Por otra parte, si M es un subespacio
vectorial de un EN (X, ∥·∥), entoncesM es tambien un EN cuando es dotado
de la misma norma ∥ · ∥. Enunciamos a continuacion una de las formas del
Teorema de Hahn–Banach.
Teorema 1.1.5. Sean X un EN, M un subespacio de X y f ∈M∗. Entonces
f admite una extension lineal sobre X que conserva la norma, es decir, existe
g ∈ X∗ tal que g|M = f y ∥g∥ = ∥f∥.
Corolario 1.1.6. (a) Sean X un EN, M un subespacio de X y x0 ∈ M .
Entonces x0 ∈M si y solo si toda f ∈M∗ con f |M ≡ 0 cumple f(x0) = 0.
(b) Sean X un EN y x0 ∈ X \ 0. Entonces existe f ∈ X∗ con ∥f∥ = 1 tal
que f(x0) = ∥x0∥.
Si X e Y son dos espacios normados, de modo que Y es de Banach,
entonces L(X,Y ) es un espacio de Banach. En particular, se tiene que X∗
es siempre un espacio de Banach. Por el corolario anterior, X∗ = 0 para
cualquier espacio normado X = 0. De hecho, X∗ separa puntos de X, esto
es, dados x1, x2 ∈ X con x1 = x2, existe Λ ∈ X∗ tales que Λ(x1) = Λ(x2)
[tomar x0 = x1 − x2 en la parte (b) del corolario].
El EN X puede considerarse como un subespacio del bidual X∗∗ := (X∗)∗
de X mediante la inclusion canonica φ : X → X∗∗ dada por φ(x)(Λ) = Λ(x).

ESPACIOS DE BANACH Y DE HILBERT 11
Decimos que X es reflexivo si φ es biyectiva. Una condicion necesaria de
reflexividad es que X sea un espacio de Banach. Si φ es biyectiva, es facil
ver que es una isometrıa, y por tanto X ≈ X∗∗ [≈ denota isomorfismo entre
espacios normados].
Por ejemplo, si 1 < p < +∞ y q es su exponente conjugado, es decir,
1/p+ 1/q = 1, entonces ℓ∗p ≈ ℓq, luego ℓp es reflexivo. Sin embargo, c∗0 ≈ ℓ1 y
ℓ∗1 ≈ ℓ∞; como c0 es separable y ℓ∞ no lo es, se tiene que c0 no es reflexivo.
Recordemos que un subconjunto A de un ET X se dice que es de primera
categorıa cuando es union numerable de subconjuntos cuya clausura tiene in-
terior vacıo, que es de segunda categorıa cuando no es de primera categorıa, y
que es residual cuando su complemento es de primera categorıa. Recordemos
que un ETX se dice que es de Baire cuando la interseccion de una familia nu-
merable de abiertos densos en X es densa en X o, equivalentemente, cuando
todo abierto no vacıo es de segunda categorıa. El Teorema de Baire asegura
que todo espacio metrico completo es de Baire. Es un teorema sumamente
util en analisis funcional, sobre todo para probar resultados de existencia. De
el se deduce el siguiente Teorema de Banach–Steinhaus, conocido tambien
como Principio de acotacion uniforme.
Teorema 1.1.7. Supongamos que X e Y son espacios normados y que A ⊂L(X, Y ). Consideremos las siguientes propiedades:
(a) La familia A es puntualmente acotada, es decir, supΛ∈A ∥Λ(x)∥ < +∞para cada x ∈ X.
(b) El conjunto x ∈ X : supΛ∈A ∥Λ(x)∥ < +∞ es de segunda categorıa.
(c) La familia A esta uniformemente acotada, esto es, supΛ∈A ∥Λ∥ < +∞.
Entonces (b) implica (c), y (c) implica (a). Si, ademas, X es un espacio de
Banach, entonces las tres propiedades (a), (b) y (c) son equivalentes.
Corolario 1.1.8. Sean X e Y dos espacios normados, de modo que X es

12 Luis Bernal y Tomas Domınguez
de Banach. Sea Λn : X → Y (n ∈ N) una sucesion de aplicaciones lineales
y continuas de modo que, para cada x ∈ X, la sucesion (Λn(x)) converge.
Entonces la aplicacion Λ : X → Y dada por Λ(x) := lımn→∞ Λn(x) es lineal
y continua.
A partir del teorema anterior se deducen el Teorema de la Aplicacion
Abierta o del Homomorfismo (Teorema 1.1.9) y el Teorema del Grafo Cerrado
(Teorema 1.1.11).
Teorema 1.1.9. Sean X e Y espacios de Banach y T : X → Y una apli-
cacion lineal, continua y sobreyectiva. Entonces T es abierta, es decir, para
cada abierto U de X, el conjunto T (U) es abierto en Y .
Corolario 1.1.10. Sean X e Y espacios de Banach y T : X → Y lineal,
continua y biyectiva. Entonces T−1 es continua. En otras palabras, T es un
isomorfismo topologico.
Teorema 1.1.11. Supongamos que X e Y son espacios de Banach y que
T : X → Y es una aplicacion lineal cuyo grafo (x, Tx) : x ∈ X es
cerrado en X × Y . Entonces T es continua.
Terminamos esta seccion recordando un importante resultado, debido a
Riesz, que caracteriza los espacios normados de dimension finita.
Teorema 1.1.12. Sea X un EN y B := x : ∥x∥ ≤ 1 su bola unidad
cerrada. Entonces B es compacta si y solo si dim(X) < +∞.
1.2. Espacios de Hilbert
Algunos espacios presentan una estructura geometrica mas rica que los
espacios normados.

ESPACIOS DE BANACH Y DE HILBERT 13
Definicion 1.2.1. Sea H un EV sobre K. Llamamos producto escalar sobre
H a una aplicacion (·|·) : H × H → K que cumple, para todos los vectores
x, y ∈ H y todo escalar α ∈ K, las siguientes propiedades:
(1) (x|y) = (y|x).(2) (x|y + z) = (x|y) + (x|z).(3) (αx|y) = α(x|y).(4) (x|x) ≥ 0.
(5) (x|x) = 0 si y solo si x = 0.
Un EV H dotado de un producto escalar se denomina espacio prehilbertiano
o espacio euclıdeo.
Un producto escalar sobre un EV H induce una norma, a saber, ∥x∥ :=
(x|x)1/2. Se conoce como norma cuadratica. Una propiedad notable es la
desigualdad de Cauchy-Schwarz: |(x|y)| ≤ ∥x∥ ∥y∥ para todo x, y ∈ H. Si X
es un EV y ∥ · ∥ es una norma sobre el, se verifica que ∥ · ∥ es inducida por
un producto escalar si y solo si ∥ · ∥ verifica la identidad del paralelogramo:
∥x+ y∥2 + ∥x− y∥2 = 2(∥x∥2 + ∥y∥2) ∀x, y ∈ X.
Ası que todo espacio prehilbertiano es normado, y por tanto es metrico y
topologico. Se llama espacio de Hilbert a un espacio prehilbertiano tal que la
metrica cuadratica inducida d(x, y) := ∥x−y∥ hace de el un espacio metrico
completo. Por tanto todo espacio de Hilbert es de Banach.
Por ejemplo, el espacio de las sucesiones de cuadrado sumable ℓ2 :=
(xn) ∈ KN :∑∞
n=1 |xn|2 < +∞ y el espacio L2([0, 1]) de las funciones
medibles-Lebesgue f : [0, 1] → K de cuadrado integrable [con la identificacion
f = g si f(x) = g(x) λ–en casi todo, donde λ es la medida de Lebesgue]
son espacios de Hilbert con los productos escalares respectivos ((xn)|(yn)) =∑∞n=1 xnyn, (f |g) =
∫ 1
0f(x)g(x) dx. Con el ultimo producto escalar, el espacio
C([0, 1]) = f : [0, 1] → K continuas es prehilbertiano, pero no es completo.

14 Luis Bernal y Tomas Domınguez
Recordemos que un subconjunto C de un EV es convexo si, para todo par
de puntos x, y ∈ C y todo escalar λ ∈ [0, 1], se tiene que λx+ (1− λ)y ∈ C.
En espacios de Hilbert se tiene el siguiente importante resultado de exis-
tencia y unicidad, conocido como el Teorema del vector minimizante.
Teorema 1.2.2. Sea C un subconjunto convexo y cerrado de un espacio de
Hilbert H. Entonces C contiene un unico elemento de norma mınima. Como
consecuencia, para cada x ∈ H existe un unico y ∈ C que da la distancia
mınima, es decir, tal que ∥x− y∥ ≤ ∥x− z∥ para todo z ∈ C.
Decimos que dos vectores x e y de un espacio prehilbertiano H son or-
togonales si (x|y) = 0. Si A ⊂ H, el conjunto ortogonal de A se define como
A⊥ := y ∈ H : (x|y) = 0 ∀x ∈ A. El conjunto A⊥ es siempre un subespacio
vectorial cerrado de H. Enunciemos el Teorema de la Proyeccion.
Teorema 1.2.3. Sea M un subespacio cerrado de un espacio de Hilbert H.
Entonces existe un unico par de aplicaciones P : H →M, Q : H →M⊥ tales
que x = Px + Qx para todo x ∈ H. Estas aplicaciones tienen las siguientes
propiedades:
(a) Si x ∈M entonces Px = x y Qx = 0. Si x ∈M⊥ entonces Px = 0
y Qx = x.
(b) ∥x− Px∥ = inf∥x− y∥ : y ∈M para todo x ∈ H.
(c) ∥x∥2 = ∥Px∥2 + ∥Qx∥2 para todo x ∈ H.
(d) P y Q son lineales.
Las aplicaciones P y Q son las llamadas proyecciones ortogonales de H sobre
M y M⊥, respectivamente.
El siguiente teorema de representacion de Riesz establece una identifi-
cacion isometrica entre un espacio de Hilbert y su dual. En particular, todo
espacio de Hilbert es reflexivo.

ESPACIOS DE BANACH Y DE HILBERT 15
Teorema 1.2.4. Supongamos que H es un espacio de Hilbert. Entonces para
cada T ∈ H∗ existe un unico vector y ∈ H tal que Tx = (x|y) para todo
x ∈ H.
Notemos que la identificacion H ≈ H∗ dada por y 7→ T en el teorema
anterior es lineal en el caso K = R y conjugada lineal en el caso K = C.
Definicion 1.2.5. Diremos que un conjunto de vectores uαα∈A de un es-
pacio prehilbertiano H constituye un sistema ortogonal cuando (uα|uβ) = 0
para todo par α, β ∈ A con α = β, y que forman un ortonormal (SON) si,
ademas, ∥uα∥ = 1 para todo α ∈ A. Si uαα∈A es un SON y x ∈ H, a los
numeros (x|uα) se les llama coeficientes de Fourier de x respecto del sistema
uαα∈A. Si A = N y unn≥1 es un SON, la serie∑∞
n=1(x|un)un se denomi-
na serie de Fourier asociada a x respecto de dicho SON. Un SON unn≥1
se dice que es completo cuando cada vector es la suma de su serie de Fourier,
es decir,∑∞
n=1(x|un)un = x para todo x ∈ H.
La ultima expresion quiere decir que ∥Sn − x∥ −→ 0 (n → ∞), donde
Sn =∑n
k=1(x|uk)uk. En el caso de un espacio de Hilbert, existen varias
caracterizaciones de la completitud de un SON.
Teorema 1.2.6. Supongamos que unn≥1 es un SON en un espacio de
Hilbert H. Son equivalentes las siguientes propiedades:
(a) El sistema unn≥1 es completo.
(b) El sistema unn≥1, es total, es decir, spanunn≥1 = H.
(c) Se cumple la “identidad de Parseval”:
∥x∥2 =∑∞
n=1 |(x|un)|2 para todo x ∈ H.
(d) un⊥n≥1 = 0.(e) El sistema unn≥1 es maximal, es decir, no esta contenido estrictamente
en ningun otro SON.

16 Luis Bernal y Tomas Domınguez
Un SON numerable unn≥1 en un espacio de Hilbert H se dice que es una
base ortonormal (BON) de H cuando cumple cualquiera de las propiedades
equivalentes (a)–(e) del teorema anterior. Puesto que los vectores de un SON
son linealmente independientes, de (b) se deduce que si un espacio de Hilbert
posee una BON, entonces es separable e infinito-dimensional. El proximo
teorema nos garantiza que el recıproco es tambien cierto.
Teorema 1.2.7. Sea H un espacio de Hilbert separable con dim (H) = ∞.
Entonces H admite una BON y es isometricamente isomorfo a ℓ2. De hecho,
si (un) es una BON en H, entonces la aplicacion
Φ : x ∈ H 7→ (x|un)n≥1 ∈ ℓ2
es lineal, biyectiva y cumple ∥Φ(x)∥ = ∥x∥ para todo x ∈ H.
1.3. El teorema de Radon-Nikodym
Recordemos que, si µ es una medida (positiva) definida sobre un espacio
medible (X,M), decimos que µ es finita si µ(X) < +∞, y que µ es σ-finita
si existen Xn ∈ M (n = 1, 2, . . . ) tales que µ(Xn) < +∞ y X =∪∞
n=1Xn.
Si µ y ν son dos medidas sobre un mismo espacio medible (X,M), se dice
que ν es absolutamente continua respecto de µ cuando:
A ∈ M y µ(A) = 0 =⇒ ν(A) = 0.
El siguiente resultado, de gran importancia en muchas ramas de la Ma-
tematica y conocido como Teorema de Radon-Nikodym, caracteriza las me-
didas absolutamente continuas. Aquı ofrecemos una prueba que es debida a
von Neumann y que resulta ser una bonita aplicacion del teorema de repre-
sentacion de Riesz en espacios de Hilbert.
Teorema 1.3.1. Sean µ y ν dos medidas sobre un mismo espacio medible
(X,M), de modo que µ es σ-finita y ν es finita. Entonces son equivalentes
las siguientes propiedades:

ESPACIOS DE BANACH Y DE HILBERT 17
(a) ν es absolutamente continua respecto de µ.
(b) Existe F ∈ L1(µ) tal que ν(A) =∫AF dµ para todo A ∈ M.
En tal caso ReF e ImF son no negativas µ-en casi todo, y F es unica
como elemento de L1(µ).
Bajo las condiciones del teorema anterior, la funcion F obtenida, que
esta unıvocamente determinada, se denomina la derivada de Radon-Nikodym
(o bien la funcion de densidad ) de ν respecto de µ, y se representa F =
dν/dµ.
Demostracion del Teorema 1.3.1. Un razonamiento directo, considerando
ReF e ImF , muestra que podemos restringirnos al caso K = R. Probe-
mos primero la unicidad de F , suponiendo que exista. Si hubiese un par de
funciones F,G ∈ L1(µ) que satisfacen (b), tendrıamos∫A(F−G) dµ = 0 para
todo A ∈ M. Sustituyendo sucesivamente A por x ∈ X : F (x) ≥ G(x) y
x ∈ X : F (x) < G(x) y restando, obtenemos∫X|F −G| dµ = 0, de donde
|F −G| = 0 µ-ect, ası que F = G como elementos de L1(µ).
La implicacion (b) ⇒ (a) es trivial, ası que se ha de demostrar (a) ⇒(b). Para ello, podemos suponer que µ es finita, ya que podemos escribir
X =∪∞
n=1Xn con µ(Xn) < +∞ (n ≥ 1) y losXn disjuntos entre sı. Tras ello,
se considerarıan los espacios medibles (Xn,M|Xn) y las medidas µ|Xn , ν|Xn ,
y se aplicarıa el resultado probado para el caso en que µ es finita. Al final,
se “pegarıan” las funciones obtenidas Fn en una sola funcion F .
Ası pues, partimos de (a) con µ y ν finitas. Llamemos φ := µ + ν, que
es una medida finita sobre (X,M). Consideremos el espacio de Hilbert H =
L2(φ). Como φ ≥ µ, se obtiene por la desigualdad de Cauchy-Schwarz que
∣∣ ∫X
f dν∣∣ ≤ ∫
X
|f | dν ≤∫X
|f | dφ =
∫X
|f | · 1 dφ
≤( ∫
X
|f |2 dφ)1/2
(φ(X))1/2 < +∞

18 Luis Bernal y Tomas Domınguez
para cada f ∈ L2(φ). Por tanto, la funcion Λ : f ∈ L2(φ) 7→∫Xf dν ∈ R
esta bien definida y Λ ∈ L2(φ)∗. Por el teorema de representacion de Riesz,
existe g ∈ L2(φ) tal que Λ(f) = (f |g) en L2(φ), es decir,∫X
f dν =
∫X
fg dφ (∀f ∈ L2(φ)). (1)
Probemos que 0 ≤ g(x) ≤ 1 φ-ect x ∈ X. Si no fuese ası, existirıa algun
intervalo I = [α− r, α+ r] ⊂ R \ [0, 1] tal que φ(E) > 0, donde E := g−1(I).
Eligiendo f = χE (la funcion caracterıstica de E), resulta ν(E) =∫Eg dφ, y
como 0 ≤ ν ≤ φ, tenemos 1φ(E)
∫Eg dφ ∈ [0, 1]. Pero entonces
∣∣ 1
φ(E)
∫E
g dφ− α∣∣ = 1
φ(E)
∣∣ ∫E
(g − α) dφ∣∣ ≤ 1
φ(E)
∫E
|g − α| dφ ≤ r,
luego 1φ(E)
∫Eg dφ ∈ [α− r, α + r] ⊂ R \ [0, 1], lo que es una contradiccion.
Podemos suponer pues que 0 ≤ g ≤ 1 en todo X sin que esto afecte a (1)
[ya que si φ(A) = 0 entonces ν(A) = 0]. Reescribimos (1) como∫X
(1− g)f dν =
∫X
fg dµ (∀f ∈ L2(φ)). (2)
Llamemos B := x ∈ X : g(x) = 1. Haciendo f = χB en (2) resulta que
µ(B) = 0, ası que g(x) ∈ [0, 1) µ-ect x ∈ X (luego tambien ν-ect x ∈ X).
Llamemos F :=g
1− g, que es una funcion medible no negativa. Fijemos
A ∈ M, n ∈ N y f := (1 + g + · · ·+ gn) · χA. Gracias a (2), obtenemos∫A
(1− gn+1) dν =
∫A
g(1 + g + · · ·+ gn) dµ.
Como 1−gn+1(x)→n1 y g(x)(1+g(x)+ · · ·+gn(x))→
nF (x) en casi todo x ∈
X (con respecto a µ y ν) y en ambos casos de manera creciente, del teorema
de la convergencia monotona se deduce que F ∈ L1(µ) y que ν(A) =∫AF dµ
para todo A ∈ M. Esto prueba el teorema. 2

ESPACIOS DE BANACH Y DE HILBERT 19
1.4. Bases de Schauder
La nocion de BON plantea el problema de si en cada espacio de Banach
separable de dimension infinita se puede encontrar un sistema numerable
unn≥1 de modo que cada vector x tenga una expresion x =∑∞
n=1 αn(x)un,
con αn(x) ∈ K para todo n ∈ N. Esto conduce al concepto de base de
Schauder que estudiaremos a continuacion.
Sabemos que todo EV E tiene una base algebraica, llamada tambien base
de Hamel. Se denomina ası a una familia de vectores uii∈I ⊂ E tal que
cada x ∈ E se puede escribir de manera unica como combinacion lineal finita
x =∑N(x)
k=1 αik(x)uik =∑
i∈I αi(x)ui de modo que, salvo para un numero
finito de ındices i, se tiene que αi(x) = 0. Sin embargo, en el caso de que
E posea alguna topologıa (por ejemplo, si E es un espacio de Banach), esta
base algebraica tiene poco que ver con la topologıa del espacio. En efecto, si
xn→nx en E, con xn =
∑i∈I α
(n)i ui y x =
∑i∈I αiui, no tiene que verificarse
en general α(n)i →
nαi para todo i ∈ I, o sea, la convergencia coordenada a
coordenada como sucede en KN . En el caso de un espacio de Hilbert separable
H con dim(H) = ∞, vimos que existe una familia en∞1 tal que cada x ∈ H
puede expresarse en la forma x =∑∞
n=1(x|en)en. En este caso sı es cierto
que (xk|en)→k(x|en) para todo n ∈ N si xk →
kx, gracias a la continuidad del
producto escalar. Abstraigamos este concepto al ambito de los espacios de
Banach.
Definicion 1.4.1. Sea E un espacio de Banach. Una sucesion xn∞1 se
denomina base de Schauder de E si para cada x ∈ E existe una unica sucesion
αn∞1 de escalares tal que x =∑∞
n=1 αnxn. Los escalares son llamados las
coordenadas de x respecto de la base xn∞1 . Se dice que la base es norma-
lizada si ∥xn∥ = 1 para todo n ∈ N. Una sucesion xn∞1 ⊂ E se denomina
sucesion basica si es base de Schauder de span(xn).

20 Luis Bernal y Tomas Domınguez
Por supuesto, cada BON en un espacio de Hilbert es una base de Schauder,
y cada SON es una sucesion basica. Si p ∈ [1,∞), ℓp es un espacio de Banach
(que no es de Hilbert salvo en el caso p = 2) y en el el sistema enn∈N dado
por en = (0, 0, . . . , 0, 1, 0, 0, . . . ) [con el “1” en el n-esimo lugar] es una base
de Schauder. En efecto, dado x = (ξn) ∈ ℓp se tiene que x =∑∞
n=1 ξnen,
ya que ∥x −∑n
k=1 ξkek∥p =∑∞
k=n+1 |ξk|p→n 0 porque la serie∑∞
n=1 |ξn|p es
convergente. Ademas, la expresion x =∑∞
n=1 ξnen es unica porque si fuese
x =∑∞
n=1 ηnen, existirıa N ∈ N con ξN = ηN y ξk = ηk (k = 1, . . . , N − 1).
Entonces para todo n > N tendrıamos |ξN − ηN |p ≤ ∥x −∑n
k=1 ξkek∥p, quecontradice el hecho de que la ultima expresion −→ 0 cuando n → ∞. Un
razonamiento parecido muestra que (en) es tambien una base de Schauder de
c0.
Es obvio que si (xn) es una base de Schauder de E, entonces (xn) es total,
es decir, E = span(xn). Pero el recıproco es falso: por ejemplo, debido al
teorema de aproximacion de Weierstrass (ver Capıtulo 3), el sistema x 7→xnn≥0 es total en C([0, 1]), pero no es una base de Schauder porque, si
lo fuese, toda funcion continua en [0, 1] serıa analıtica en (0, 1), lo que es
absurdo.
Por otra parte, es facil ver que si E es un espacio de Banach que ad-
mite una base de Schauder (xn) tiene dimension infinita (pues los elementos
de la base son linealmente independientes) y es separable (porque las com-
binaciones lineales finitas de los vectores xn con coeficientes en Q (el con-
junto de los numeros racionales) o en Q + iQ forman un conjunto denso
en E. El problema inverso, mucho mas complicado, de saber si cada espa-
cio de Banach separable infinito-dimensional admite una base de Schauder,
permanecio abierto mucho tiempo, hasta que Enflo dio finalmente un con-
traejemplo en 1974.
Vamos a probar ahora una condicion equivalente a que una sucesion sea

ESPACIOS DE BANACH Y DE HILBERT 21
basica. Necesitaremos el siguiente lema.
Lema 1.4.2. Sea (xn) una sucesion en un espacio de Banach E, de modo
que xn = 0 para todo n ∈ N. Sea F = (an) ∈ KN :∑∞
n=1 anxn convergedotado de la norma
∥(an)∥F = sup∥∑N
n=1 anxn∥ : N ∈ N.Entonces F es un espacio de Banach.
Demostracion. Probemos en primer lugar que ∥ ·∥F es una norma sobre F . Si
(an) = (0), es obvio que ∥(an)∥F = 0. Inversamente, si ∥(an)∥F = 0, entonces
∥a1x1∥ = 0, luego a1x1 = 0; como x1 = 0, resulta a1 = 0. Por induccion, se
llega a que an = 0 para todo n ∈ N. La igualdad ∥(λan)∥F = |λ| · ∥(an)∥Fresulta de la homogeneidad de ∥·∥, mientras que la desigualdad ∥(an+bn)∥F ≤∥(an)∥F+∥(bn)∥F se obtiene de la desigualdad triangular para ∥·∥ y del hecho
de que, para cada par de conjuntos acotados αii∈I , βii∈I ⊂ R, se tiene
que supαi + βi : i ∈ I ≤ supαi : i ∈ I+ supβi : i ∈ I.
Para ver que F es completo, fijemos una sucesion (a(k)n )k≥1 de Cauchy
en F y un ε > 0. Existe k0 ∈ N tal que ∥(a(k)n ) − (a(j)n )∥F < ε si k, j ≥ k0.
Por tanto, para cada N ∈ N, ∥∑N
n=1(a(k)n − a
(j)n )xn∥ < ε. En particular, para
N = 1 obtenemos |a(k)1 − a(j)1 | < ε/∥x1∥, luego (a
(k)1 ) es de Cauchy en K. Y
para m ≥ 2 tenemos que ∥a(k)m xm − a(j)m xm∥ = ∥
∑mn=1 a
(k)n xn −
∑mn=1 a
(j)n xn −
(∑m−1
n=1 a(k)n xn −
∑m−1n=1 a
(j)n xn)∥ < 2ε, de donde |a(k)m − a
(j)m | < 2ε/∥xm∥ si
k, j ≥ k0. Ası que cada sucesion (a(k)m )k≥1 es de Cauchy en K, luego converge
a un escalar am (m ∈ N).
Por otra parte, si en la desigualdad ∥∑N
n=1(a(k)n − a
(j)n )xn∥ < ε tomamos
lımites cuando j → ∞ resulta ∥∑N
n=1(a(k)n − an)xn∥ ≤ ε para todo N ∈ N y
todo k ≥ k0. De aquı obtenemos:
• ∥∑m
i=n aixi∥ ≤ ∥∑m
i=n(a(k0)i − ai)xi∥ + ∥
∑mi=n a
(k0)i xi∥ ≤ 2ε + ε = 3ε
si m ≥ n ≥ N0(ε) para algun N0(ε) ∈ N adecuado. Se ha usado la

22 Luis Bernal y Tomas Domınguez
desigualdad triangular en el primer sumando del segundo miembro,
mientras que en el segundo sumando hemos usado la convergencia de∑∞n=1 a
(k0)n xn.
• Por la condicion de Cauchy de convergencia de series, tenemos que∑∞n=1 anxn converge, luego (an) ∈ F . Para cada k ≥ k0, ∥(a(k)n ) −
(an)∥F ≤ ε. Por tanto, (a(k)n )n≥1 →
k(an)n≥1 en F . Ası que F es completo.
2
Ahora podemos establecer el siguiente Teorema de Nikolski de caracteri-
zacion de sucesiones basicas.
Teorema 1.4.3. Sea E un espacio de Banach. Una sucesion (xn) ⊂ E \ 0es basica si y solo si existe una constante K ∈ (0,+∞) tal que, para cada
par p, q ∈ N con p ≤ q y cada eleccion de escalares a1, a2, . . . , aq, se tiene
∥∑p
n=1 anxn∥ ≤ K · ∥∑q
n=1 anxn∥.
La menor de las constantes K que verifican esta condicion se llama la
constante basica de (xn). Si K = 1, la sucesion basica se dice monotona. Por
ejemplo, la base (en) en ℓp (1 ≤ p < +∞) o c0 es monotona. Observemos
que, en general, la condicion dada en el teorema de Nikolski significa que
las proyecciones Pp,q : span(x1, . . . , xq) → span(x1, . . . , xp) tienen normas
uniformemente acotadas por K.
Demostracion del Teorema 1.4.3. Supongamos que (xn) es una sucesion basica.
Sean E1 := span(xn) y F como en el Lema 1.4.2. Cada vector x ∈ E1 tiene
una expresion unica en la forma x =∑∞
n=1 anxn. Definimos la aplicacion
T : (an) ∈ F 7→∞∑n=1
anxn ∈ E1.
Claramente, T es lineal. Ademas es continua pues
∥∞∑n=1
anxn∥ = lımN→∞
∥N∑
n=1
anxn∥ ≤ supN∈N
∥N∑
n=1
anxn∥ = ∥(an)∥F .

ESPACIOS DE BANACH Y DE HILBERT 23
Por ser T sobreyectiva, del teorema de la aplicacion abierta se deduce que
T−1 es continua, o sea, existe K ∈ (0,+∞) tal que supN∈N ∥∑N
n=1 anxn∥ ≤K · ∥
∑∞n=1 anxn∥. En particular, aplicandolo para a1, . . . , ap, . . . , aq, 0, 0, . . .
con N = p se obtiene lo que se querıa.
Recıprocamente, supongamos que se verifica la condicion del teorema, con
constante K. Fijemos x ∈ E1. Existe una sucesion (yk) ⊂ span (xn) tal que
yk → x. Cada yk se puede escribir en la forma yk =∑Nk
l=0 α(k)l xl. Si
∑∞n=1 anxn
converge, llamemos Pp a la proyeccion Pp(∑∞
n=1 anxn) =∑p
n=1 anxn. Por la
condicion del teorema, sabemos que ∥Pp∥ ≤ K. Por tanto, para cada p ∈ N
se tiene ∥Pp(yk − yl)∥ ≤ K∥yk − yl∥ (k, l ∈ N). Puesto que (yk) es de Cauchy,
obtenemos que cada sucesion (Pp yk)k≥1 es de Cauchy. Sea Xp el lımite de
(Pp yk)k≥1, el cual existe por ser E completo. Si en la desigualdad anterior
tomamos sucesivamente p = 1, 2, . . . vemos que cada sucesion de coeficientes
(α(k)p )k≥1 es de Cauchy, luego α
(k)p →
kαp para ciertos αp ∈ K. Por tanto
Pp yk =
p∑n=1
α(k)n xn−→
k
p∑n=1
αnxn.
Por la unicidad del lımite, deducimos que Xp =∑p
n=1 αnxn. Por otra parte,
de la continuidad de la norma,
∥Ppyk −Xp∥ = ∥Ppyk − lımj→∞
Ppyj∥ = lımj→∞
∥Pp(yk − yj)∥
≤ K · lımj→∞
∥yk − yj∥ = K · ∥yk − x∥.
Fijemos ε > 0 y elijamos k0 ∈ N tal que ∥yk0 −x∥ < ε. Elijamos ahora p0 ∈ N
de modo que Ppyk0 = yk0 para todo p ≥ p0. Entonces
∥Xp − x∥ ≤ ∥Xp − Ppyk0∥+ ∥yk0 − x∥ < (1 +K)ε
para cada p ≥ p0. Por tanto Xp → x (p → ∞). Pero Xp =∑p
n=1 αnxn,
luego x =∑∞
n=1 αnxn. La unicidad de esta expresion es evidente porque si

24 Luis Bernal y Tomas Domınguez
tambien fuese x =∑∞
n=1 βnxn entonces∑∞
n=1(αn − βn)xn = 0, y debido a la
definicion de Pp resulta∑p
n=1(αn − βn)xn = 0 para cada p ∈ N. Concluimos
que αj − βj = 0 para todo j ∈ N, que era lo deseado. 2
0.2 0.4 0.6 0.8 1.0
-1.0
-0.5
0.0
0.5
1.0
0.2 0.4 0.6 0.8 1.0
-1.0
-0.5
0.0
0.5
1.0
0.2 0.4 0.6 0.8 1.0
-1.0
-0.5
0.0
0.5
1.0
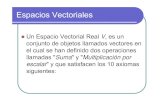
Fig. 1. Sistema de Haar: funciones h2, h3 y h4
Si (xn) es una base de Schauder de E, entonces cada “funcional de coor-
denada”
φn : x =∞∑j=1
αjxj ∈ X 7→ αn ∈ K (n = 1, 2, . . . )
no solo esta bien definida y es lineal, sino que es continua, es decir, se com-
porta bien respecto de la topologıa de E. En otras palabras, φn ∈ E∗ para
todo n ∈ N. En efecto,
∥φn(x)xn∥ = ∥Pnx− Pn−1x∥ ≤ ∥Pnx∥+ ∥Pn−1x∥ ≤ 2K∥x∥,

ESPACIOS DE BANACH Y DE HILBERT 25
luego ∥φn∥ ≤ 2K/∥xn∥.
Como ejemplo vamos a construir una base de Schauder en C([0, 1]). Tal
base va a ser una transformacion del ası denominado “sistema de Haar”
(hn)n≥1 para el espacio L1([0, 1]) de las funciones [0, 1] → R integrables
Lebesgue. Estas funciones hn : [0, 1] → R (ver Fig. 1) se definen como
h1(t) ≡ 1 y, para k = 0, 1, 2, . . . y l = 1, 2, . . . , 2k,
h2k+l = χ[ 2l−2
2k+1 ,2l−1
2k+1 )− χ[ 2l−1
2k+1 ,2l
2k+1 ].
Ası que son funciones que pueden toman los valores 0, 1,−1 en cada subin-
tervalo diadico de [0, 1]. Nuestra base de Schauder va a estar constituida por
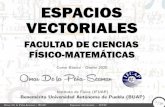
las funciones gn : [0, 1] → R (n ≥ 0) (ver Fig. 2) definidas por g0 ≡ 1 y
gn = un/∥un∥, donde un(x) :=∫ x
0hn(t) dt (n ≥ 1). En cada subintervalo
diadico, estas funciones valen 0 o 1, o bien son lineales afines con valores
extremos en 0, 1. Observese que cada gn es una poligonal y que, si n > m,
entonces gn es nula en todos los extremos de la poligonal correspondiente a
gm. Vamos a probar:
(a) spangn : n ≥ 0 = C([0, 1]).
(b) (gn) es una sucesion basica con constante = 1.
(a) Fijemos ε > 0 y f ∈ C([0, 1]). Debido a la continuidad uniforme,
existe N ∈ N tal que:
|u− v| ≤ 1/2N =⇒ |f(u)− f(v)| < ε.
Por otra parte, cualquier combinacion lineal de las funciones gn es una fun-
cion continua lineal a trozos. Dividamos [0, 1] en 2N partes iguales mediante
los puntos xi = i/2N (i = 0, 1, 2, . . . , 2N). Vamos a encontrar una combi-
nacion lineal g =∑2N
i=0 αigi tal que g(xi) = f(xi) para todo i = 0, 1, . . . , 2N .
Para hacer esto, observemos que g0(0) = 1 y gn(0) = 0 para todo n ≥ 1.
Ası que debe ser α0 = f(0). Ademas g0(1) = 1 = g1(1) y gn(1) = 0 para

26 Luis Bernal y Tomas Domınguez
todo n ≥ 2. Luego debe ser α0 + α1 = f(1), y por tanto α1 = f(1) − f(0).
Ası vamos determinando αi (i = 0, 1, . . . , 2N). En cada punto t del intervalo
diadico [ i2N, i+12N
] se tiene que g(t) esta comprendido entre f( i2N
) y f( i+12N
).
Como |f(t) − f( i2N
)| < ε y |f(t) − f( i+12N
)| < ε, resulta |g(t) − f(t)| < ε en
cada subintervalo. En consecuencia, ∥g − f∥∞ < ε y obtenemos la densidad.
(b) Fijemos numeros p, q ∈ N con p < q y escalares α0, α1, . . . , αq. En-
tonces ∥∑p
i=0 αigi∥∞ es el valor |∑p
i=0 αigi(x0)| para algun x0 diadico que es
el extremo de un intervalo diadico de los que aparecen en la definicion de las
funciones gi (i = 0, 1, . . . , p). Como las gi (i > p) son todas nulas en x0, se
tiene:∥∥ p∑
i=0
αigi∥∥∞ =
∣∣ p∑i=0
αigi(x0)∣∣ = ∣∣ q∑
i=0
αigi(x0)∣∣ ≤ ∥∥ q∑
i=0
αigi∥∥∞, lo cual
demuestra lo que querıamos, sin mas que aplicar el Teorema 1.4.3.
0.2 0.4 0.6 0.8 1.00.0
0.2
0.4
0.6
0.8
1.0
0.2 0.4 0.6 0.8 1.00.0
0.2
0.4
0.6
0.8
1.0
0.2 0.4 0.6 0.8 1.00.0
0.2
0.4
0.6
0.8
1.0
Fig. 2. Funciones g2, g3 y g4
Ejercicios
1.- Sea c el espacio de Banach formado por las sucesiones (ξk) tales que existe
limk→∞ξk =: λ ∈ K, con la norma del supremo. Consideremos la aplicacion

ESPACIOS DE BANACH Y DE HILBERT 27
T : c → c0 dada por
T (ξ1, ξ2, . . . ) = (λ, ξ1 − λ, ξ2 − λ, . . . ).
Probar que T es un isomorfismo entre los espacios de Banach c y c0, y
calcular ∥T∥ y ∥T−1∥.
2.- Denotemos I = [0, 1] y supongamos que (fn) es una sucesion en Lp(I), donde
p ∈ (1,+∞). Probar que se cumplen las siguientes implicaciones, y que las
recıprocas son falsas: fn → f uniformemente =⇒ fn → f en la norma ∥ · ∥p=⇒ fn → f en ∥ · ∥1.
3.- Sea Φ : ℓ2 → R definida por Φ(x) = 2x1 si x = (xn). Calcular la distancia
del vector x = (2−n/2) al nucleo de Φ.
4.- Consideremos el espacio c con la norma ∥ · ∥∞. Para cada n ∈ N, sea en la
sucesion (0, 0, . . . , 0, 1[n], 0, 0, . . . ). Probar que (en) es una sucesion basica en
c, pero no es base de Schauder de este espacio.
5.- Sea X un espacio de Banach de dimension infinita y eii∈I una base alge-
braica de X. Probar que solo puede existir un numero finito de ındices j ∈ I
tales que la aplicacion lineal fj : X → K dada por fj(∑
i∈I αiei) = αj sea
continua.
Indicacion: Proceder por reduccion al absurdo considerando los subconjun-
tos f−1j (0) (j ∈ J) y aplicar el teorema de Baire.
6.- Sea X un EN, Y un subespacio de X y x0 ∈ X.
(a) Si B(x0, δ) ∩ Y = ∅, probar que existe f ∈ X∗ tal que ∥f∥ ≤ 1/δ,
f(x0) = 1 y f(y) = 0 para todo y ∈ Y .
Sugerencia: Aplicar el teorema de Hahn-Banach a una aplicacion ade-
cuada ⟨Y, x0⟩ → K, donde ⟨Y, x0⟩ := span (Y ∪ x0).
(b) Probar que d(x0, Y ) = sup|Λ(x0)| : Λ ∈ X∗, ∥Λ∥ = 1, Λ(y) = 0 para
todo y ∈ Y .

28 Luis Bernal y Tomas Domınguez
(c) Sea Λ ∈ X∗ con ∥Λ∥ = 1 y sea Y = Ker(Λ), el nucleo de Λ. Sea
a ∈ X \ Y . Probar que cada vector x ∈ X puede expresarse de manera
unica en la forma x = y + λa con y ∈ Y y λ ∈ K. Sea Λ′ ∈ X∗ tal que
Λ′(y) = 0 para todo y ∈ Y . Probar que existe c ∈ K tal que Λ′ = cΛ.
(d) Sea Λ ∈ X∗ con ∥Λ∥ = 1 e Y = Ker(Λ). Probar que para cada x ∈ X
se tiene d(x, Y ) = |Λ(x)|.
7.- (a) Sea X un espacio de Banach con base de Schauder (en). Supongamos
que Y es otro espacio de Banach, isomorfo a X, y que T : X → Y es
un isomorfismo. Probar que la sucesion (Ten) es una base de Schauder
de Y .
(b) Utilizar (a) y el Ejercicio 1 para construir una base de Schauder de c
y calcular su constante basica.
8.- (a) Sea X un espacio de Banach y F un subespacio cerrado de X. Decimos
que un subespacio G de X es un complemento topologico de F si X =
F + G, G es cerrado y F ∩ G = 0. Probar que, en un espacio de
Hilbert, todo subespacio cerrado tiene un complemento topologico.
(b) Sea X un espacio de Banach y F, G subespacios cerrados de X, de
modo que F ∩ G = 0 y F + G es cerrado en X. Probar que existe
C ∈ (0,+∞) tales que para cada par de vectores y ∈ F, z ∈ G se tiene
∥y∥ ≤ C∥y + z∥ y ∥z∥ ≤ C∥y + z∥.
Sugerencia: Aplicar el teorema de la aplicacion abierta a una aplicacion
conveniente definida sobre F ×G.
9.- Sea X un espacio de Banach y (en) una base de Schauder de X. Decimos
que (en) es una base incondicional si existe una constante K ∈ [1,+∞) tal
que, si A y B son subconjuntos finitos de N con A ⊂ B, entonces para cada
sucesion de escalares (an) se verifica ∥∑
n∈A anen∥ ≤ K · ∥∑
n∈B anen∥. La
menor constante K que verifica esta propiedad se llama constante basica
incondicional.

ESPACIOS DE BANACH Y DE HILBERT 29
(a) Probar que toda BON en un espacio de Hilbert es una base incondi-
cional y calcular su constante basica.
(b) Sea (un) la base de Schauder de c dada por u1 = (1, 1, 1, 1, . . . ),
un = (0, 0, . . . , 0, 1[n−1]
, 0, 0, . . . ) (n ≥ 2). Probar que es una base in-
condicional y hallar su constante basica.
(c) Sea (en) una base incondicional de X. Probar que si la serie∑∞
n=1 anen
converge, entonces converge incondicionalmente, esto es, para toda per-
mutacion π : N → N, la serie∑∞
n=1 aπ(n)eπ(n) converge al mismo vector
suma.
10.- (a) Sea X el espacio C([0, 1]), dotado de la norma del supremo. Demostrar
que A := f ∈ X :∫ 1/20 f(t) dt −
∫ 11/2 f(t) dt = 1 es un subconjunto
convexo cerrado de X que carece de vectores de norma mınima.
(b) Demostrar que M := f ∈ L1([0, 1]) :∫ 10 f(t) dt = 1 es un subcon-
junto convexo cerrado de L1([0, 1]) que contiene infinitos vectores de
norma mınima.
11.- Sea (Tn) una sucesion de operadores continuos entre dos espacios de Banach
X e Y . Probar que son equivalentes:
(a) (Tn) converge puntualmente a un operador continuo T : X → Y .
(b) La sucesion (∥Tn∥) esta acotada y converge puntualmente en un
subconjunto denso de X.
12.- (a) Probar que si un espacio metrico X contiene una coleccion no numer-
able de bolas disjuntas dos a dos, entonces X no es separable.
(b) Si [a, b] ⊂ R es un intervalo cerrado, se dice que una funcion f : [a, b] →
R es de variacion acotada si V (f) := sup∑N
i=1 |f(ti)− f(ti−1)| : a =
t0 < t1 < · · · < tN = b, N ∈ N < +∞. Es facil ver que la familia X de
las funciones de variacion acotada en [a, b] es un EV y que la aplicacion
∥f∥ := |f(a)| + V (f) es una norma sobre el. Demostrar que X no es
separable.

30 Luis Bernal y Tomas Domınguez
13.- Para cada sucesion a = (an) de numeros reales, se considera la aplicacion
“diagonal” Ta que asigna a cada x = (xn) ∈ ℓ2 la sucesion Ta(x) = (anxn).
(a) ¿Para que sucesiones a la aplicacion Ta define un operador lineal y
continuo ℓ2 → ℓ2?
(b) En tal caso, hallar ∥Ta∥. ¿Se alcanza siempre dicha norma?
(c) En las condiciones de (a), ¿para que sucesiones a es Ta(ℓ2) un subes-
pacio cerrado de ℓ2?
14.- (a) Sea ∥·∥ una norma en ℓ∞ que lo hace completo y tal que las aplicaciones
Λn : ℓ∞ → R dadas por Λn(x) = ξn, donde x = (ξn), son continuas.
Probar que esta norma es equivalente a la norma del supremo.
Sugerencia: Demostrar que la aplicacion identidad (ℓ∞, ∥ · ∥∞) →
(ℓ∞, ∥ · ∥) tiene grafo cerrado.
(b) Sea |∥ · ∥| la norma en ℓ∞ dada por |∥(ξn)∥| = sup |ξn|
n : n ∈ N.
Probar que (ℓ∞, |∥ · ∥|) no es un espacio de Banach.
15.- Sea X un espacio de Banach que admite una base de Schauder (xn), y
supongamos que A es un subconjunto de X. Denotemos por αn : X → K
(n ≥ 1) las funcionales de coordenadas correspondientes a la base (xn).
Probar que son equivalentes:
(a) A es compacto.
(b) A es cerrado, acotado y lımn→∞
sup∥∥ ∞∑
i=n+1
αi(x)xn∥∥ : x ∈ A
= 0.
Indicacion: Deducir del Lema 1.4.2 que la aplicacion
T : (an) ∈ F 7→∞∑n=1
anxn ∈ X
dada en el es un isomorfismo topologico, y usar este hecho para demostrar
a partir de (a) que el lımite de (b) es 0.

Capıtulo 2
Espacios vectoriales topologicos
Hemos visto que en cada EN (X, ∥ · ∥) se puede definir una distancia
d(x, y) = ∥x − y∥, y por lo tanto X es EV y ET. Ademas su topologıa es
compatible con la estructura lineal en el sentido de que la suma (x, y) ∈X ×X 7→ x+ y ∈ X y el producto por escalares (λ, x) ∈ K×X 7→ λx ∈ X
son aplicaciones continuas. En este capıtulo vamos a estudiar otros tipos
de espacios vectoriales y topologicos en las que las operaciones de EV son
continuas para la topologıa.
2.1. Topologıas compatibles con la estructura
lineal
Antes de llevar a cabo el mencionado estudio, vamos a recordar un cono-
cido resultado topologico. En el se establece que podemos definir la topologıa
a traves de una base de entornos de cada punto.
Teorema 2.1.1. Sea X un conjunto no vacıo.
(1) Supongamos que para cada x0 ∈ X existe una familia Fx0 = ∅ de
subconjuntos de X que verifica:
31

32 Luis Bernal y Tomas Domınguez
• x0 ∈ U para todo U ∈ Fx0, y
• Para cada U, V ∈ Fx0 y cada x ∈ U ∩ V , existe W ∈ Fx tal que
W ⊂ U ∩ V .
Sea τ := G ⊂ X : para todo x ∈ G existe U ∈ Fx tal que x ∈ U ⊂ G.Entonces τ es una topologıa en X y, para cada x0 ∈ X, la familia Fx0
es una base de entornos de x0 formada por abiertos de dicha topologıa.
(2) Supongamos que para cada x0 ∈ X existe una familia Sx0 = ∅ de
subconjuntos de X que verifica:
• x0 ∈ U para todo U ∈ Sx0, y
• Para cada U ∈ Sx0 y cada x ∈ U , existe W ∈ Sx tal que W ⊂ U .
Entonces existe una topologıa τ sobre X tal que, para cada x0 ∈ X, la
familia Fx0 := intersecciones finitas de miembros de Sx0 es una base
de entornos de x0 para τ formada por abiertos de dicha topologıa.
Demos un ejemplo de topologizacion de un EV que no da lugar a un EN.
Sea Ω ⊂ C un abierto no vacıo y consideremos el espacio vectorial
H(Ω) := f : Ω → C : f es analıtica en Ω.
Recordemos que una funcion f : Ω → C es analıtica (es decir, desarrollable en
serie de potencias en un entorno de cada punto de Ω) si y solo si es holomorfa
(esto es, C-diferenciable en cada punto de Ω). Para cada compacto K ⊂ Ω,
cada ε > 0 y cada f ∈ H(Ω), consideremos el conjunto V (f, ε,K) := g ∈H(Ω) : |g(z)− f(z)| < ε ∀z ∈ K. Entonces, para cada f ∈ H(Ω), la familia
Ff := V (f, ε,K) : K compacto ⊂ Ω, ε > 0 es una base de entornos de
f para una topologıa τ sobre Ω. En efecto: cada V (f, ε,K) contiene a f
y, dada g ∈ V (f, ε1, K1) ∩ V (f, ε2, K2), entonces, como inmediatamente se
verifica, V (g, ε,K1 ∩K2) ⊂ V (f, ε1, K1) ∩ V (f, ε2, K2), donde ε := mınε1 −maxK1 |g − f |, ε2 −maxK2 |g − f |. Basta aplicar ahora el Teorema 2.1.1.

ESPACIOS VECTORIALES TOPOLOGICOS 33
A τ se le llama la topologıa de la convergencia uniforme en compactos
o, mas sencillamente, la topologıa de la convergencia compacta. El nombre se
justifica porque, como es inmediato comprobar, se tiene que fnτ→nf si y solo
si fn→nf uniformemente en cada compacto K ⊂ Ω.
Veamos que, enH(Ω), la suma y el producto por escalares son aplicaciones
continuas. Para cada par de subconjuntos A, B de un espacio vectorial X,
cada vector x ∈ X, cada escalar λ y cada subconjunto Λ ⊂ K, usamos las
notaciones A+B := x+ y : x ∈ A, y ∈ B, λA := λx : x ∈ A, x+A :=
x + u : u ∈ A y Λ · A := λx : λ ∈ Λ, x ∈ A. La continuidad de las
operaciones mencionadas quedan patentes gracias a las siguientes inclusiones,
faciles de verificar:
V (f, ε/2, K) + V (g, ε/2, K) ⊂ V (f + g, ε,K),
B(λ,ε
2(1 + maxK |f |)) · V (f,
ε
2(1 + |λ|), K) ⊂ V (λf, ε,K).
Ademas H(Ω) es de dimension infinita pues contiene todos los polinomios.
Finalmente, τ no proviene de una norma. En efecto, por reduccion al
absurdo, supongamos que hay una norma ∥ · ∥ que define la topologıa de
H(Ω). Sea B := f ∈ H(Ω) : ∥f∥ ≤ 1 su bola unidad cerrada. Dado un
compacto K ⊂ Ω, consideremos el abierto V (0, 1, K), que es un entorno de la
funcion 0. Entonces debe existir δ > 0 tal que δB ⊂ V (0, 1, K). Esto significa
que |f(z)| ≤ 1/δ para todo z ∈ K y para toda f ∈ B. Ası que la familia
B esta uniformemente acotada en cada subconjunto compacto de Ω. Por el
Teorema de Montel (ver Capıtulo 3), B es compacta, luego, por el Teorema
de Riesz, dim(H(Ω)) < +∞, lo cual es una contradiccion.
Por tanto, necesitamos unas estructuras mas generales que los espacios
normados. Para satisfacer esta laguna de modo satisfactorio se introduce el
concepto de espacio vectorial topologico, que se debe a Kolmogoroff (1934).

34 Luis Bernal y Tomas Domınguez
Definicion 2.1.2. Sea X un EV que es tambien un ET separado. Decimos
que X es un espacio vectorial topologico (EVT) si la suma y el producto por
escalares son aplicaciones continuas.
Observemos que si X es un EVT entonces las traslaciones x ∈ X 7→x + a ∈ X (a ∈ X) y las homotecias x ∈ X 7→ λx ∈ X (λ ∈ X) son
continuas. Considerando x 7→ x− a y x 7→ λ−1x, resulta que las traslaciones
son homeomorfismos, y las homotecias lo son si λ = 0.
Corolario 2.1.3. Sea X un EVT y x0 ∈ X. Entonces un conjunto V ⊂ X
es un entorno de x0 si y solo si V − x0 es un entorno de 0. Por tanto los
entornos de 0 definen la topologıa de un EVT.
Denotaremos por E(x0) la familia de los entornos de un punto x0 ∈ X.
Definicion 2.1.4. Sea X un EV. Decimos que un conjunto A ⊂ X es ab-
sorbente si para cada x ∈ X existe λ = λ(x) ∈ K tal que x ∈ λA.
Proposicion 2.1.5. Sea X un EVT y V ∈ E(0). Se tiene:
(a) V es absorbente.
(b) Existe V1 ∈ E(0) tal que V1 + V1 ⊂ V .
(c) Existe V1 ∈ E(0) tal que V1 ⊂ V .
Demostracion. (a) Fijemos x ∈ V . Puesto que 0 · x = 0 y la multiplicacion
es continua, podemos encontrar δ > 0 tal que λX ∈ V si |λ| < δ. Ası que
x ∈ (2/δ)V .
(b) Como 0 + 0 = 0 y la suma es continua, existen V2, V3 ∈ E(0) tales que
V2 + V3 ⊂ V . Basta tomar V1 := V2 ∩ V3.
(c) Tomemos V1 como en (b), y sea x ∈ V1. Ya que −V1 ∈ E(0), se tiene
que x − V1 ∈ E(x), luego (x − V1) ∩ V1 = ∅. Por tanto existen y, z ∈ V1 con
x− y = z. Ası que x = y + z ∈ V1 + V1 ⊂ V . En resumen, V1 ⊂ V .

ESPACIOS VECTORIALES TOPOLOGICOS 35
Recordemos otro par de conceptos en los que no interviene la topologıa
del espacio.
Definicion 2.1.6. Sea X un EV. Un conjunto C ⊂ X es convexo si tC +
(1 − t)C ⊂ C para todo t ∈ [0, 1]. Se dice que C es equilibrado si αC ⊂ C
para todo α ∈ K con |α| ≤ 1.
Proposicion 2.1.7. Sea X un EVT. Se verifica:
(a) Si G ⊂ X es abierto, entonces G+ A es abierto para todo A ⊂ X.
(b) Si A,B ⊂ X y t ∈ K, entonces A+B ⊂ A+B y tA = tA.
(c) Si C es convexo, tambien lo son C0 y C.
(d) Si B ⊂ X es equilibrado, tambien lo es B; si ademas 0 ∈ B0, entonces
B0 es equilibrado.
(e) Si Y ⊂ X es un EV, tambien lo es Y .
(f) Si A ⊂ X, entonces A =∩
V ∈E(0)(A+ V ).
Demostracion. (a) Tenemos que G + A =∪
x∈A(G + x), que es abierto por
ser union de abiertos.
(b) Sean a ∈ A, b ∈ B y w ∈ E(a+ b). Existen W1 ∈ E(a) y W2 ∈ E(b) talesque W1 +W2 ⊂ W . Ahora bien, podemos tomar x ∈ A ∩W1 e y ∈ B ∩W2.
Entonces x + y ∈ (A + B) ∩ (W1 +W2), luego (A + B) ∩W = ∅, de donde
a+ b ∈ A+B. Ası que A+B ⊂ A+B.
En cuanto a la igualdad tA = tA, es trivialmente cierta si A = ∅. Seapues A = ∅. Si t = 0, hemos de probar que 0 = 0, que es cierto porque
X es separado. Si t = 0, la igualdad se deduce del hecho de que la homotecia
x ∈ X 7→ tx ∈ X es un homeomorfismo.

36 Luis Bernal y Tomas Domınguez
(c) Partimos de que C es convexo. Para cada t ∈ (0, 1) tenemos que
tC + (1− t)C = tC + (1− t)C ⊂ tC + (1− t)C ⊂ C,
donde se ha usado (b) en la igualdad y en la primera inclusion. Por otra
parte, como C0 ⊂ C y C es convexo, se deduce que tC0 + (1 − t)C0 ⊂ C.
Pero por (a) el conjunto tC0 + (1 − t)C0 es abierto, ası que esta contenido
en C0.
(d) Supongamos que B es equilibrado y que |α| ≤ 1. Debido a (b) y a que
αB ⊂ B, tenemos αB = αB ⊂ B. Luego B es equilibrado. Probemos que
B0 tambien lo es si 0 ∈ B0. Sea α ∈ K con |α| ≤ 1. Si α = 0, tenemos que
αB0 es abierto y αB0 ⊂ αB ⊂ B, luego αB0 ⊂ B0. Si α = 0, se tiene para
dicho α que αB0 = 0 ⊂ B0.
(e) Este apartado es similar a (c) considerando el conjunto λY + µY con
λ, µ ∈ K.
(f) Usamos que los entornos de un punto x tienen la forma x+V con V ∈ E(0),y que V ∈ E(0) si y solo si −V ∈ E(0). Tenemos: x ∈ A ⇐⇒ ∀V ∈ E(0),A ∩ (x − V ) = ∅ ⇐⇒ ∀V ∈ E(0) ∃a ∈ A y ∃v ∈ V tal que a = x − v ⇐⇒∀V ∈ E(0) ∃a ∈ A y ∃v ∈ V tal que x = a + v ⇐⇒ ∀V ∈ E(0), x ∈ A + V
⇐⇒ x ∈∩
V ∈E(0)(A+ V ).
Con respecto al apartado (b) anterior, debe observarse que A + B no es
necesariamente cerrado, aunque lo sean A y B. Por ejemplo, sea X = R2 y
consideremos los subconjuntos A = (y, 0) : y ≤ 0 y B = (x, 1/x) : x >0, que son cerrados. Entonces A + B = (x + y, 1/x) : x > 0, y ≤ 0, elcual no es cerrado porque (0, 0) ∈ A+B \ (A+B).
Teorema 2.1.8. Sea X un EVT. Se verifica:
(a) Todo entorno de 0 contiene un entorno equilibrado de 0.
(b) Todo entorno convexo de 0 contiene un entorno equilibrado y convexo
de 0.

ESPACIOS VECTORIALES TOPOLOGICOS 37
Demostracion. (a) Sea U ∈ E(0). Gracias a la continuidad de la multipli-
cacion K × X → X en el origen, existen δ > 0 y V ∈ E(0) que satisfacen
α : |α| < δ · V ⊂ U , o lo que es lo mismo, αV ⊂ U si |α| < δ. Elegir
W :=∪
|α|<δ αV .
(b) Sea U ∈ E(0) convexo y A :=∩
|α|=1 αU . Tomemos un entorno equilibra-
do W del origen tal que W ⊂ U , que existe por (a). Como W es equilibrado,
se tiene que α−1W =W para todo α con |α| = 1. Por tanto W ⊂ αU , luego
W ⊂ A, ası que A ∈ E(0). Es claro que A ⊂ U (tomar α = 1). Ademas A
es convexo por ser interseccion de convexos. Resta ver que A es equilibra-
do: fijemos λ ∈ K con |λ| ≤ 1; entonces λ = rβ con r ∈ [0, 1] y |β| = 1.
Se tiene: λA = rβA =∩
|α|=1 rβαU =∩
|α|=1 rαU ⊂∩
|α|=1 αU = A, luego
λA ⊂ A. Se ha usado que αU es convexo y contiene al 0, lo que implica que
rαU ⊂ αU .
2.2. Conjuntos acotados
La clase de los subconjuntos acotados es sumamente util para estudiar
propiedades de los espacios vectoriales topologicos.
Definicion 2.2.1. Sea X un EVT. Un subconjunto A ⊂ X es acotado si
para cada U ∈ E(0) existe s > 0 tal que A ⊂ tU para todo t > s.
Por ejemplo, en el caso de un espacio normado, es facil ver que un sub-
conjunto es acotado segun la definicion anterior si y solo si es acotado en
norma. No obstante, debe observarse que, en el caso de un EVT metrizable,
con una metrica d, la definicion de ser A acotado no es equivalente en general
a que A este contenido en una d-bola. En efecto, la definicion dada aquı solo
depende de la topologıa mientras que, como es facil probar, toda metrica d
es equivalente a una metrica acotada, como por ejemplo d/(1 + d).

38 Luis Bernal y Tomas Domınguez
Trivialmente, todo subconjunto de un conjunto acotado es acotado. Y es
facil ver que un conjunto finito y una union finita de conjuntos acotados son
asimismo acotados. Veamos que esta propiedad tambien se conserva al tomar
clausuras.
Proposicion 2.2.2. Sea X un EVT. Si A ⊂ X es acotado, entonces A es
tambien acotado.
Demostracion. Sea V ∈ E(0). Por la Proposicion 2.1.5(c), existe W ∈ E(0)tal que W ⊂ V . Como A es acotado, existe r > 0 tal que A ⊂ tW para todo
t > r, luego A ⊂ tW = tW ⊂ tV para todo t > r.
Vamos a ver que en un EVT los conjuntos compactos son “pequenos”. De
hecho, tienen muchas propiedades en comun con los conjuntos finitos. Por
ejemplo, es facil probar que todo conjunto compacto de un ET separado es
cerrado.
Teorema 2.2.3. Todo subconjunto compacto de un EVT es acotado.
Demostracion. Fijemos un compacto K ⊂ X, donde X es un EVT, ası como
un V ∈ E(0). Tomemos W ∈ E(0) equilibrado tal que W ⊂ U . Para cada
x ∈ K existe r(x) > 0 tal que x ∈ tW para todo t ≥ r(x), pues W es
absorbente. Entonces K ⊂∪
x∈K r(x)W . Como W se puede elegir abierto,
resulta que cada r(x)W es abierto. Ya que K es compacto, existe un numero
finito de vectores x1, . . . , xN ∈ K tal que K ⊂∪N
i=1 r(xi)W . Como W es
equilibrado, resulta que αW ⊂ βW si 0 < α < β. En consecuencia, K ⊂ tW
para todo t > r0 := maxr(xi) : 1 ≤ i ≤ N. Por tanto K ⊂ tU para todo
t > r0. Ası que K es acotado.

ESPACIOS VECTORIALES TOPOLOGICOS 39
2.3. Ejemplos de espacios vectoriales topo-
logicos
A continuacion, vamos a proporcionar algunos ejemplos de espacios
vectoriales topologicos que no son necesariamente normables, es decir, su
topologıa no esta necesariamente definida por una norma. Comencemos con
el concepto de seminorma.
Definicion 2.3.1. Sea X un EV. Llamamos seminorma sobre X a una apli-
cacion p : X → R que verifica:
(1) es homogenea, es decir, p(λx) = |λ|p(x) para todo par (λ, x) ∈ K×X,
(2) es subaditiva, es decir, cumple la propiedad triangular, esto es,
p(x+ y) ≤ p(x) + p(y) para todo x, y ∈ X.
Dado cualquier x ∈ X, se deduce que p(0) = p(0 · x) = 0 · p(x) = 0
y 0 = p(0) = p(x + (−x)) ≤ p(x) + p(−x) = p(x) + p(x) = 2p(x), luego
p(x) ≥ 0. En particular, toda norma es seminorma, pero no al reves; por
ejemplo, p(x1, x2) := |x1| es una seminorma sobre R2 pero no es norma.
Sea ahora P una familia de seminormas sobre un EV X. Se supone que
• P separa puntos, o es separante, es decir, dado x ∈ X \ 0, existe p = px
∈ P tal que p(x) > 0.
• P es filtrante, esto es, dadas p1, p2 ∈ P , existe p ∈ P tal que pi ≤ p
(i = 1, 2).
Para cada x0 ∈ X, cada ε > 0 y cada p ∈ P , denotamos
V (x0, ε, p) := x ∈ X : p(x− x0) < ε.Entonces las familias Fx0 := V (x0, ε, p) : ε > 0, p ∈ P (x0 ∈ X) definen
una topologıa τ sobre X para la que cada Fx0 es una base de entornos de
x0. En efecto, en primer lugar es evidente que x0 ∈ V (x0, ε, p) para todos los

40 Luis Bernal y Tomas Domınguez
x0, ε, p. Ademas, dados U = V (x0, ε, p) y V = V (x0, δ, q), y dado y0 ∈ U ∩V ,
hemos de encontrar W ∈ Fy0 tal que W ⊂ U ∩V . Por filtrancia, existe r ∈ Ptal que r ≥ p, q. Si α := mınε− p(y0 − x0), δ − q(y0 − x0), se ve usando la
desigualdad triangular que W ⊂ U ∩ V , donde W := V (y0, α, r). De acuerdo
con el Teorema 2.1.1, existe una topologıa τ en las condiciones anteriores.
Esta topologıa es separada. En efecto, supongamos que x = y. Entonces
x− y = 0, luego existe p ∈ P con p(x− y) > 0. Si ε := p(x− y)/2, se obtiene
que los abiertos A := V (x, ε, p), B := V (y, ε, p) cumplen x ∈ A, y ∈ B,
A ∩B = ∅.
Por ultimo, τ hace de X un EVT. Esto se deduce del hecho de que, de
modo parecido al ejemplo de H(Ω) del principio del capıtulo, se tiene que
V (x0, ε/2, p) + V (y0, ε/2, p) ⊂ V (x0 + y0, ε, p), y
B(λ0,ε
2(1 + p(x0))) · V (x0,
ε
2(1 + |λ0|), p) ⊂ V (λ0x0, ε, p),
lo cual da, respectivamente, la continuidad de la suma (x, y) 7→ x + y y del
producto por escalares (λ, x) 7→ λx.
Un caso particular del ejemplo anterior viene dado por el EV C(Ω) de
las funciones continuas f : Ω → K, donde Ω es un abierto no vacıo de RN ,
dotado de la familia de seminormas P = pK : K compacto ⊂ Ω, siendopK(f) := max|f(x)| : x ∈ K. En efecto, es facil ver que cada pK es
una seminorma. Ademas P separa puntos [dada f : Ω → K continua con
f = 0, existe x0 ∈ Ω tal que f(x0) = 0; entonces, si tomamos K = x0,resulta que pK(f) = |f(x0)| > 0] y es filtrante [dadas pK , pL ∈ P, se tiene
pS ≥ pK , pL, donde S = K ∪ L]. La topologıa τ(P) que define P usando el
procedimiento anterior es la de la convergencia uniforme en compactos. Mas
adelante veremos que (C(Ω), τ(P)) es metrizable.
En el caso especial N = 2, K = C obtenemos que la restriccion de τ(P)
al subespacio H(Ω) es la topologıa de la convergencia compacta en dicho

ESPACIOS VECTORIALES TOPOLOGICOS 41
subespacio. Luego H(Ω) es tambien metrizable con esta topologıa.
Sea de nuevo Ω ⊂ RN un abierto no vacıo. Consideremos ahora el EV
C∞(Ω) de las funciones infinitamente diferenciables sobre Ω, es decir,
C∞(Ω) = f : Ω → K : ∀α ∈ NN0 ∃Dαf en Ω y es continua.
Aquı N0 = N ∪ 0 y los elementos α = (α1, α2, . . . , αN) ∈ NN0 se llaman
“multiındices” o “N -tuplas”. A cada multiındice α se le asocia el operador
diferencial Dα := (∂/∂x1)α1 · · · (∂/∂xN)αN , cuyo orden es |α| := α1+· · ·+αN .
Para cada f ∈ C∞(Ω), cada ε > 0, cada compacto K ⊂ Ω y cada k ∈ N0,
definimos V (f, ε,K, k) := g ∈ C∞(Ω) : |Dαf(x) − Dαg(x)| < ε ∀x ∈K y ∀α ∈ NN
0 tal que |α| ≤ k.
Con argumentos similares a los anteriores, se ve que la familia
V (f, ε,K, k) : f ∈ C∞(Ω), ε > 0, K compacto ⊂ Ω, k ∈ N0es una base para una topologıa τ sobre C∞(Ω), que es la de la convergencia
uniforme en compactos de las funciones y sus derivadas. Si fijamos f y hace-
mos variar ε, K y k, obtenemos una base de entornos de f . Como antes, se
observa que dicha topologıa es separada y de EVT.
Un subespacio destacado de C∞(Ω) es D(K0), el EV de las funciones
f ∈ C∞(Ω) con soporte en K0, donde K0 es un subconjunto compacto de Ω.
Esto significa que f(x) = 0 para todo x ∈ Ω \ K0. Se tiene que D(K0) es
un subespacio cerrado de C∞(Ω). En efecto, sea f ∈ D(K0) y x ∈ Ω \ K0;
entonces, para todo ε > 0, D(K0) ∩ V (f, ε, x, 0) = ∅, luego existe g ∈C∞(Ω) tal que g(x) = 0 y |f(x) − g(x)| < ε, ası que |f(x)| < ε para todo
ε > 0; por tanto f(x) = 0 para todo x ∈ Ω \ K0, o lo que es lo mismo,
f ∈ D(K0).
En el Capıtulo 1 recordabamos los espacios de Banach Lp, donde 1 ≤ p <
+∞. Si ahora 0 < p < 1, vamos a considerar el conjunto
Lp = Lp([0, 1]) := f : [0, 1] → K : f es medible y∫ 1
0|f(x)|p dx < +∞,

42 Luis Bernal y Tomas Domınguez
donde se identifican dos funciones si son iguales en casi todo respecto de la
medida de Lebesgue en [0, 1]. Veamos que Lp es un EV. Para ello, hemos de
probar antes que
(a+ b)p ≤ ap + bp para todo a, b ≥ 0. (1)
Si a = 0 es evidente. Si a > 0, (1) es equivalente a probar que (1+x)p ≤ 1+xp
[hacer x = b/a]. Sea φ : [0,+∞) → R la funcion φ(x) = 1 + xp − (1 + x)p.
Entonces φ(0) = 0 y φ′(x) = p(xp−1 − (1 + x)p−1) ≥ 0 [porque 1 + x ≥ x y
la exponencial de exponente negativo es decreciente]. Luego φ es creciente,
ası que φ(x) ≥ φ(0) = 0 para todo x ≥ 0, que es justo lo que queremos.
Entonces, si α ∈ R y f, g ∈ Lp, resulta∫ 1
0|f + g|p ≤
∫ 1
0(|f | + |g|)p ≤∫ 1
0(|f |p + |g|p) =
∫ 1
0|f |p +
∫ 1
0|g|p < +∞ y
∫ 1
0|αf |p = α
∫ 1
0|f |p < +∞. Se
deduce que Lp es un EV. Pero ademas, de la misma desigualdad (1) se deduce
que la expresion
d(f, g) =∫ 1
0|f(t)− g(t)|p dt
define una distancia sobre Lp. Las bolas B(f, ε) = g ∈ Lp : d(f, g) < εgeneran una topologıa τ sobre Lp, que es separada.
Demostremos que τ es una topologıa de EVT. Fijemos f0, g0 ∈ Lp y ε > 0.
Si d(f, f0) < ε/2 y d(g, g0) < ε/2, se tiene que
d(f + g, f0 + g0) =
∫ 1
0
|f + g − f0 − g0|p ≤∫ 1
0
(|f − f0|p + |g − g0|p)
=
∫ 1
0
|f − f0|p +∫ 1
0
|g − g0|p = d(f, f0) + d(g, g0) < ε,
de donde se deduce la continuidad de la suma. Para ver que el producto por
escalares es tambien continuo, usamos sucesiones. Fijemos λ0 ∈ K y f0 ∈ Lp,
ası como dos sucesiones (λn) ⊂ K, (fn) ⊂ Lp tales que λn → λ0 y fn → f0.
Resulta que
d(λnfn, λ0f0) ≤ d(λnfn, λnf0) + d(λnf0, λ0f0)
= |λn|pd(fn, f0) + |λn − λ0|p ·∫ 1
0
|f0|p −→n→∞
0

ESPACIOS VECTORIALES TOPOLOGICOS 43
porque d(fn, f0) → 0 y (λn) esta acotada. Luego λnfn → λ0f0, como se
requerıa.
Vamos a demostrar que, en el caso 0 < p < 1, no existen abiertos convexos
en Lp distintos de ∅ y Lp. En efecto, sea V un abierto convexo no vacıo en
Lp. Por una traslacion, podemos suponer que V ∈ E(0). Luego existe r > 0
tal que B(0, r) ⊂ V . Sea f ∈ Lp arbitraria. Como p < 1, existe n ∈ N tal que
np−1∫ 1
0|f |p < r. Por otra parte, de la continuidad de la funcion x ∈ [0, 1] 7→∫ x
0|f |p se infiere la existencia de puntos x0 = 0 < x1 < x2 < · · · < xn = 1
de modo que∫ xi
xi−1|f |p = 1
n·∫ 1
0|f |p (i = 1, . . . , n). Para cada i, definimos
gi = nf · χ[xi−1,xi]. Entonces∫ 1
0|gi|p = np−1
∫ 1
0|f |p < r, ası que gi ∈ V para
todo i = 1, . . . , n. Como V es convexo, se tiene que f = g1+···+gnn
∈ V . En
consecuencia, V = Lp, como se querıa demostrar.
Ya tenemos un surtido suficiente de ejemplos para justificar la siguiente
definicion.
Definicion 2.3.2. Sea X un EVT con topologıa τ . Decimos que X es:
(1) localmente convexo (ELC) si existe una base de entornos de 0 formada
por conjuntos convexos,
(2) localmente compacto si existe un entorno de 0 compacto,
(3) localmente acotado si existe un entorno de 0 acotado,
(4) metrizable si existe una metrica que induce τ ,
(5) normable si existe una norma que induce τ ,
(6) un F-espacio si existe una metrica d invariante por traslaciones [es
decir, d(x+ z, y + z) = d(x, y) para toda terna de vectores x, y, z ∈ X]
y completa que induce τ ,
(7) un espacio de Frechet si es un F-espacio localmente convexo.

44 Luis Bernal y Tomas Domınguez
Es evidente que todo espacio normable es metrizable, localmente acota-
do y localmente convexo, y que todo espacio de Banach es un espacio de
Frechet. Cada KN (N ∈ N) es localmente compacto. La nocion de ELC fue
introducida por Von Neumann (1935).
Como ejemplo, volvamos al espacio C(Ω), donde Ω ⊂ RN es un abierto
no vacıo. Fijemos una sucesion exhaustiva Kn : n ≥ 1 de subconjuntos
compactos de Ω, es decir, cada Kn es compacto, Kn ⊂ K0n+1 (n = 1, 2, . . . ) y
Ω =∪∞
n=1Kn. Definimos pn(f) := max|f(z)| : z ∈ Kn y
d(f, g) :=∞∑n=1
1
2npn(f − g)
1 + pn(f − g)
para cada par f, g ∈ C(Ω). No es difıcil probar que d es una distancia
completa e invariante por traslaciones que induce la topologıa τ de C(Ω)
[recordar que, en τ , una base de entornos de cada f esta constituida por los
conjuntos V (f, ε,K) = g ∈ C(Ω) : |g(z) − f(z)| < ε ∀z ∈ K, con ε > 0
y K ⊂ Ω compacto]. Por otra parte, C(Ω) es localmente convexo porque
cada V (0, ε,K) es un entorno convexo de 0. Ası que C(Ω) es un espacio de
Frechet. Igual sucede, en el caso N = 2, K = C, con su subespacio cerrado
H(Ω). Por otra parte, como cada conjunto V (0, ε,K, k) es convexo, se tiene
que C∞(Ω) es tambien localmente convexo. Mas adelante hablaremos sobre
su metrizabilidad.
Nota 2.3.3. Ya vimos que Lp([0, 1]) (0 < p < 1) es un EVT metrizable, de
modo que su topologıa se definıa a traves de la metrica d(f, g) =∫ 1
0|f − g|p.
Como en el caso p ≥ 1, se prueba que dicha metrica es completa, por lo cual
Lp es un F-espacio. Sin embargo, Lp (0 < p < 1) no es un ELC (luego no es
un espacio de Frechet) pues vimos que en el no hay mas abiertos convexos
que ∅ y el propio Lp.

ESPACIOS VECTORIALES TOPOLOGICOS 45
2.4. Aplicaciones lineales
Pasemos ahora a estudiar la continuidad de las aplicaciones lineales
entre espacios vectoriales topologicos. Vamos a ver que, analogamente a lo que
sucede entre espacios normados, la continuidad de una de estas aplicaciones
equivale a su continuidad en el origen.
Teorema 2.4.1. Sean X e Y dos espacios vectoriales topologicos y Λ : X →Y una aplicacion lineal, de modo que Λ es continua en el 0. Entonces Λ es
continua en X. De hecho, Λ es uniformemente continua en el sentido de
que, para cada entorno W de 0 en Y existe un entorno V de 0 en X con
la propiedad:
y − x ∈ V =⇒ Λy − Λx ∈ W .
Demostracion. Fijemos W ∈ E(0) en Y . Por continuidad en el 0, existe
W ∈ E(0) (en X) tal que Λ(V ) ⊂ W . Por linealidad, si x ∈ X se tiene que
Λ(x+V ) = Λx+Λ(V ) ⊂ Λx+W , luego Λ(x+V )−Λx ⊂ W . Si ahora x e y
son vectores tales que y−x ∈ V , obtenemos y ∈ x+V , ası que Λy−Λx ∈ W ,
c.q.d. 2
En el caso de ser Y = K, podemos obtener mas analogıas con el compor-
tamiento en los espacios normados de las aplicaciones lineales y continuas.
Si X es un EVT, se llama espacio dual de X, y se denota por X∗, al EV
de las aplicaciones lineales y continuas X → K. Para distinguirlo del dual
algebraico, a veces a X∗ se le llama tambien el dual topologico de X.
Teorema 2.4.2. Sea Λ : X → K una forma lineal, donde X es un EVT.
Las siguientes propiedades son equivalentes:
(a) Λ ∈ X∗.
(b) Ker(Λ) es cerrado.
(c) Λ = 0 o bien Ker(Λ) no es denso en X.
(d) Λ es acotada en algun entorno de 0.

46 Luis Bernal y Tomas Domınguez
Demostracion. Las implicaciones (a) ⇒ (b) ⇒ (c) son obvias, ya que
Ker(Λ) = Λ−1(0), con 0 cerrado, y un subconjunto denso y cerrado
debe ser todo el espacio.
Veamos que (c) ⇒ (d). Si Λ = 0, como Ker(Λ) no es denso, existen x ∈ X
y V ∈ E(0) tales que (x + V ) ∩ Ker(Λ) = ∅. Por el Teorema 2.1.8, podemos
suponer que V es equilibrado. Entonces Λ(V ) es acotado o Λ(V ) = K. En
este ultimo caso existe y ∈ V tal que Λy = −Λx, luego x + y ∈ Ker(Λ), en
contradiccion con ser (x+ V ) ∩Ker(Λ) = ∅. Ası que Λ(V ) es acotado.
En cuanto a la implicacion (d) ⇒ (a), partimos de que existe V ∈ E(0)tal que Λ es acotada en el. Entonces existe M ∈ (0,+∞) con |Λx| < M para
todo x ∈ V . Fijado ε > 0, consideremos W := (ε/M)V ∈ E(0). Resulta que
|Λx| < ε para todo x ∈ W , de donde se infiere la continuidad de Λ en el 0, y
por tanto en todo X.
Por ejemplo, sabemos (ver Capıtulo 3) que (Lα)∗ = Lβ si 1 ≤ α < +∞,
donde β es el exponente conjugado de α. Sin embargo, en el caso 0 < p < 1,
vamos a demostrar que el dual de Lp es trivial, es decir, (Lp)∗ = 0. Enefecto, ya vimos que no existen abiertos convexos en Lp distintos de ∅ y
Lp. Observemos ahora que si Λ : Lp → K es lineal y continua, entonces
Λ−1(B(0, ε)) es un entorno de 0 abierto y convexo en Lp, luego Λ−1(B(0, ε)) =
Lp para todo ε > 0. Ası |Λf | < ε para toda f ∈ Lp y todo ε > 0. Por tanto
Λ ≡ 0, es decir, (Lp)∗ = 0.
Una propiedad de las aplicaciones lineales continuas entre espacios nor-
mados es la de transformar conjuntos acotados en conjuntos acotados. De
hecho, dicha propiedad caracteriza la continuidad en este caso. Veremos que,
en el caso general de los espacios vectoriales topologicos, todavıa existe algu-
na relacion entre la continuidad y la conservacion de la acotacion.
Definicion 2.4.3. Sean X e Y espacios vectoriales topologicos y Λ : X →

ESPACIOS VECTORIALES TOPOLOGICOS 47
Y lineal. Decimos que Λ es acotada si transforma conjuntos acotados en
conjuntos acotados.
Teorema 2.4.4. Sean X e Y espacios vectoriales topologicos y Λ : X → Y
lineal. Si Λ es continua, entonces es acotada.
Demostracion. Sean E acotado y W un entorno de 0 en Y . Por continuidad,
existe un entorno V de 0 en X tal que Λ(V ) ⊂W . Como E es acotado, existe
r > 0 tal que E ⊂ tV para todo t > r, luego Λ(E) ⊂ Λ(tV ) = tΛ(V ) ⊂ tW
para todo t > r, ası que Λ(E) es acotado. 2
Puede probarse que el recıproco no es cierto en general, aunque sı se
verifica cuando X es metrizable.
2.5. Espacios de dimension finita
En las siguientes lıneas vamos a probar que, al igual que sucede en los
espacios normados, dos espacios vectoriales topologicos de dimension finita,
de la misma dimension, son siempre homeomorfos, y que los espacios vectoria-
les topologicos localmente compactos son de dimension finita. Comenzamos
con un lema.
Lema 2.5.1. Sea Y un subespacio vectorial de un EVT X, de modo que Y
es localmente compacto. Entonces Y es un subespacio cerrado de X.
Demostracion. Por hipotesis, existe K ∈ E(0) en Y tal que K es compacto.
Ademas, existe U ∈ E(0) en X tal que U ∩Y ⊂ K. Tomemos V ∈ E(0) en X,
equilibrado, tal que V + V ⊂ U . Veamos que, para cada x ∈ X, el conjunto
(x + V ) ∩ Y es compacto. Para ello, fijemos y0 ∈ (x + V ) ∩ Y . Para cada
y ∈ (x+ V ) ∩ Y se verifica que y − y0 = (y − x) + (x− y0) ∈ V + V ⊂ U y,
por otra parte, y − y0 ∈ Y ; luego (x+ V ) ∩ Y ⊂ y0 +K. Como (x+ V ) ∩ Yes cerrado en Y e y0 +K es compacto, resulta que (x+ V )∩ Y es compacto.

48 Luis Bernal y Tomas Domınguez
Sea ahora x ∈ Y . Para ver que Y es cerrado, se ha de probar que x ∈ Y .
Denotemos B = W ⊂ X : W es abierto, 0 ∈ W ⊂ V y asociemos a
cada W ∈ B el conjunto EW := (x + W ) ∩ Y , que es cerrado en Y . Ya
que EW ⊂ (x + V ) ∩ Y , resulta que cada EW es compacto. Como x ∈ Y ,
tenemos EW = ∅. Si fijamos una familia finita W1, . . . ,Wn ⊂ B, se tiene queW1 ∩ · · · ∩Wn ∈ B, luego
∩ni=1EWi
⊃ EW1∩···∩Wn = ∅. Entonces EWW∈B es
una familia de compactos con la propiedad de la interseccion finita, de donde
inferimos que∩
W∈B EW = ∅. Sea z un vector que pertenezca a la ultima
interseccion. Entonces z ∈ x + W para todo W ∈ B. Pero B es una base
de entornos de 0 en X, luego z ∈ x = x, esto es, x = z. Como z ∈ Y ,
concluimos que x ∈ Y , c.q.d. 2
Teorema 2.5.2. Sea X un EVT e Y un subespacio de dimension n < +∞.
Se verifica:
(a) Todo isomorfismo algebraico de Y en Kn es un homeomorfismo.
(b) Y es cerrado.
Demostracion. El apartado (b) sigue de (a) y del Lemma 2.5.1, ya que Kn
es localmente compacto.
La prueba de (a) se hara por induccion sobre n. Para n = 1, sea Λ : K → Y
lineal y biyectiva. Pongamos Λ(1) =: u ∈ Y . Entonces Λ(α) = αu para todo
α ∈ K. Por la continuidad del producto por escalares, Λ es continua. Ademas,
la inversa Λ−1 : Y → K cumple Ker(Λ−1) = 0, el cual es cerrado, luego
Λ−1 es continua gracias al Teorema 2.4.2.
Por induccion, supongamos que (a) es cierto para n−1, y sea Λ : Kn → Y
un isomorfismo algebraico, es decir, Λ es lineal y biyectiva. Si e1, . . . , en es
una base algebraica de Kn, denotemos uk := Λ(ek) (k = 1, . . . , n). Entonces
Λ(α1, . . . , αn) =∑n
k=1 αkuk debido a la linealidad de Λ. Por la continuidad de
las operaciones de suma y producto por escalares, resulta que Λ es continua.

ESPACIOS VECTORIALES TOPOLOGICOS 49
Ademas, u1, . . . , un es una base de Y . Cada x ∈ Y puede representarse de
manera unica en la forma x = γ1(x)u1+ · · ·+γn(x)un, donde las γi : Y → K
(i = 1, . . . , n) son lineales. Ya que γi = 0, resulta que cada Ker(γi) es un
subespacio de dimension ≤ n − 1. Por la hipotesis de induccion y por el
hecho de que (b) deriva de (a), obtenemos que Ker(γi) es cerrado. De nuevo
por el Teorema 2.4.2, tenemos que cada γi es continua. Ahora bien, Λ−1(x) =
(γ1(x), . . . , γn(x)), luego Λ−1 es continua, c.q.d. 2
Corolario 2.5.3. Si X e Y son dos espacios vectoriales topologicos sobre el
mismo cuerpo K y dim(X) = dim(Y ) < +∞, entonces son homeomorfos.
De hecho, cada isomorfismo algebraico X → Y es un isomorfismo topologico.
El siguiente teorema, debido a Riesz, nos dice que la compacidad local
restringe en gran medida la clase de los espacios vectoriales topologicos.
Teorema 2.5.4. Todo EVT localmente compacto tiene dimension finita.
Demostracion. Partimos de un EVT X localmente compacto, de modo que
existe V ∈ E(0) compacto. Veamos que 2−nV n≥1 es una base de entornos
de 0. Para ello, fijemos W ∈ E(0). Como V es acotado (Teorema 2.2.3),
existe t0 > 0 tal que V ⊂ sW para todo s > t0. Eligiendo n ∈ N con 2n > t0,
obtenemos 2−nV ⊂ W . Ası que (2−nV ) es base de entornos de 0 en X.
Puesto que V es compacto, existen x1, . . . , xm ∈ X tales que V ⊂ (x1 +
12V ) ∪ · · · ∪ (xm + 1
2V ). Sea Y := ⟨x1, . . . , xm⟩, es decir, la variedad lineal
generada por x1, . . . , xm. Como dim(Y ) < +∞, resulta que Y es cerrado
(Teorema 2.5.2). Ya que V ⊂ Y + 12V y λY = Y (si λ = 0), se tiene que
12V ⊂ Y + 1
4V , y por tanto V ⊂ Y + Y + 1
4V = Y + 1
4V . Continuando este
proceso, obtenemos, usando la Proposicion 2.1.7(f) y el hecho de que (2−nV )
es una base de entornos del origen, que
V ⊂∞∩n=1
(Y + 2−nV ) = Y = Y,

50 Luis Bernal y Tomas Domınguez
de donde X =∪∞
n=1 nV ⊂∪∞
n=1 nY = Y . En resumidas cuentas, X = Y . En
consecuencia, dim(X) = dim(Y ) < +∞. 2
Por ejemplo, como dim(H(Ω)) = +∞, tenemos que H(Ω) no es local-
mente compacto. De hecho, ni siquiera es localmente acotado. En efecto, si
fuera localmente acotado, existirıa V ∈ E(0) acotado. Fijado un compacto
K ⊂ Ω, el conjunto U := f ∈ H(Ω) : |f(z)| < 1 ∀z ∈ K es un entorno
del origen, luego existe α > 0 tal que V ⊂ αU . Por tanto |f(z)| < α para
todo z ∈ K y toda f ∈ V , es decir, V esta uniformemente acotado en ca-
da compacto K ⊂ Ω. Por el Teorema de Montel (ver Teorema 3.2.3) V es
relativamente compacto, ası que V es un entorno compacto de 0, lo que es
absurdo debido al Teorema 2.5.4.
2.6. Seminormas y convexidad local
En los siguientes parrafos, vamos a profundizar en el estudio de los
espacios vectoriales topologicos que mas analogıas presentan con los espacios
normados, a saber, los espacios localmente convexos. La estructura de un
ELC esta ıntimamente conectada con el concepto de seminorma. Recordemos
que una seminorma sobre un EV X es una aplicacion p : X → R subaditiva y
homogenea, y que de la definicion se deduce que p(0) = 0 y p(X) ⊂ [0,+∞).
Notemos que si p es una seminorma sobre un EV X entonces cada p-bola
x ∈ X : p(x) < α es convexa, equilibrada y absorbente. Por otra parte,
sea A ⊂ X absorbente. Se define el funcional de Minkowski de A por
µA(x) = ınft > 0 : x ∈ tA (x ∈ X).
Vemos que µA(x) < +∞ para todo x ∈ A por ser A absorbente. Recordemos,
por ultimo, que una familia separante de seminormas sobre un EV define en
el una topologıa de ELC.

ESPACIOS VECTORIALES TOPOLOGICOS 51
Nuestro objetivo en esta seccion es doble, a saber:
– Observar que las seminormas son exactamente los funcionales de Minkows-
ki de los conjuntos convexos, equilibrados y absorbentes.
– Comprobar que, de hecho, en cada ELC puede encontrarse una familia
separante de seminormas que define la topologıa del espacio.
Proposicion 2.6.1. Sea p una seminorma sobre un EV X. Entonces:
(a) El conjunto x ∈ X : p(x) = 0 es un subespacio de X.
(b) El conjunto B := x ∈ X : p(x) < 1 es convexo, equilibrado y
absorbente, y p = µB.
Demostracion. (a) Si p(x) = 0 = p(y) y α, β ∈ K, se tiene que 0 ≤ p(αx +
βy) ≤ |α|p(x) + |β|p(y) = 0, luego p(αx+ βy) = 0.
(b) Sea α ∈ K con |α| ≤ 1. Si x ∈ B, tenemos que p(αx) = |α|p(x) < 1,
luego αx ∈ B. Ası que B es equilibrado. Por otra parte, si x, y ∈ B y
t ∈ (0, 1), se verifica que p(tx + (1 − t)y) ≤ tp(x) + (1 − t)p(y) < 1, luego
tx + (1 − t)y ∈ B. Por tanto, B es convexo. Ademas, si x ∈ X y s > p(x),
resulta que p(x/s) = (1/s)p(x) < 1, luego x/s ∈ B, o bien x ∈ sB. Ası que
B es absorbente.
Por ultimo, observamos que µB(x) = ınft > 0 : x ∈ tB = ınft > 0 :
x/t ∈ B = ınft > 0 : p(x/t) < 1 = ınft > 0 : p(x) < t = p(x) para
todo x ∈ X. 2
Proposicion 2.6.2. Sea A un subconjunto convexo y absorbente de un EV
X. Se verifica:
(a) µA(x+ y) ≤ µA(x) + µA(y) para todo x, y ∈ X.
(b) µA(tx) = tµA(x) para todo x ∈ X y todo t ≥ 0.
(c) Si A es equilibrado, entonces µA es una seminorma.
(d) Si B = x ∈ X : µA(x) < 1 y C = x ∈ X : µA(x) ≤ 1, entoncesB ⊂ A ⊂ C y µA = µB = µC.

52 Luis Bernal y Tomas Domınguez
Demostracion. Hagamos una notacion previa. A cada subconjunto absorbente
D ⊂ X y cada x ∈ X, asociamos el conjunto HD(x) := t > 0 : t−1x ∈ D.Observemos que µD(x) = ınfHD(x) para todo x ∈ X.
(a) Supongamos que s > t ∈ HA(x). Como A es absorbente, tenemos 0 ∈ A,
y puesto que A es convexo, resulta xs
= ts· x
t+ (1 − t
s) · 0 ∈ A, luego
s ∈ HA(x). Por tanto HA(x) es una semirrecta cuyo extremo izquierdo es
µA(x). Supongamos ahora que µA(x) < s y µA(y) < t. Entonces x/s ∈ A e
y/t ∈ A, luego ss+t
· xs+ t
s+t· yt∈ A, ası que x+y
s+t∈ A, de donde µA(x+y) ≤ s+t.
Haciendo s→ µA(x) y t→ µA(y), se obtiene µA(x+ y) ≤ µA(x) + µA(y).
(b) Usando que tx/s ∈ A ⇔ x/(s/t) ∈ A y que s ∈ HA(tx) ⇔ s/t ∈ HA(x),
deducimos que µA(tx) = ınfHA(tx) = ınf(tHA(x)) = t ınfHA(x) = tµA(x).
(c) Supongamos ahora que A es equilibrado, convexo y absorbente. A la vista
de (a) y (b), basta probar que µA(αx) = |α|µA(x) si |α| = 1. Pero esto es
obvio, ya que, para s > 0, se tiene que αx ∈ sA si y solo si x ∈ sA.
(d) Si x ∈ B entonces µA(x) < 1, luego 1 ∈ HA(x) por ser este un intervalo
infinito de extremo izquierdo µA(x). Ası que x ∈ A, luego B ⊂ A. Si x ∈ A,
entonces 1 ∈ HA(x), de donde deducimos que µA(x) = ınfHA(x) ≤ 1, y por
tanto x ∈ C. En resumen, B ⊂ A ⊂ C.
Ahora bien, las anteriores inclusiones implican HB(x) ⊂ HA(x) ⊂ HC(x),
de donde µC ≤ µA ≤ µB. Para probar la igualdad, supongamos µC(x) <
s < t. Entonces x/s ∈ C, luego µA(x/s) ≤ 1, y ası µA(x/t) ≤ s/t < 1. Por
tanto x/t ∈ B, de donde µB(x) ≤ t. Haciendo tender t a µC(x), se obtiene
µB(x) ≤ µC(x), luego µA = µB = µC . 2
Teorema 2.6.3. Sea B una base de entornos del origen en un ELC X, de
modo que B esta formado por conjuntos convexos y equilibrados. Asociemos
a cada V ∈ B su funcional de Minkowski µV . Entonces µV : V ∈ B es
una familia separante de seminormas continuas sobre X.

ESPACIOS VECTORIALES TOPOLOGICOS 53
Demostracion. Como cada V ∈ B es convexo, equilibrado y absorbente, se
tiene por la proposicion anterior que cada µV es una seminorma. Como X
es un ET separado resulta que, dado un vector x = 0, existe V ∈ B tal que
x /∈ V . Luego µV (x) ≥ 1, ası que µV (x) > 0 y nuestra familia separa puntos.
Probemos que µV es continua. Si x ∈ V 0, entonces tx ∈ V 0 ⊂ V para
algun t > 1, porque la aplicacion t 7→ tx es continua en t = 1 y V 0 es abierto.
Ası µV < 1 en V 0. Dado ε > 0, si x− y ∈ εV 0, se tiene que
|µV (x)− µV (y)| ≤ µV (x− y) < ε.
De aquı se infiere la continuidad de µV . 2
Teorema 2.6.4. (A) Sea X un EV y P una familia separante de seminor-
mas sobre el. Entonces P induce sobre X una topologıa de EVT que hace de
X un ELC, de modo que:
(a) Cada p ∈ P es continua en dicha topologıa.
(b) Si E ⊂ X, entonces E es acotado si y solo si cada p ∈ P es acotada
sobre E.
(B) Recıprocamente, si X es un ELC, existe una familia separante y filtrante
P de seminormas sobre X que induce la topologıa de X.
Demostracion. (A) Ya vimos como una familia separante y filtrante P de
seminormas generaba sobre X una estructura de ELC. Recordemos que una
base abierta de entornos de cada punto x0 ∈ X estaba constituida por los
conjuntos V (x0, ε, p) := x ∈ X : p(x − x0) < ε (ε > 0, p ∈ P). Si
de P solo sabemos que es separante, una base abierta de entornos en cada
x0 ∈ X estarıa constituida por las intersecciones finitas V (x0, ε1, pN)∩ · · · ∩V (x0, εN , pN) de conjuntos del tipo anterior, de acuerdo con el Teorema 2.1.1
[de hecho, el cambio anterior es equivalente a sustituir P por la familia Pcuyos elementos son de la forma maxp1, . . . , pN (p1, . . . , pN ∈ P , N ∈ N);
esta P es separante y filtrante, ver Ejercicio 1].

54 Luis Bernal y Tomas Domınguez
Ademas, cada p ∈ P es continua respecto de la topologıa generada, gracias
a la Proposicion 2.6.1 y al Teorema 2.6.3, ya que p = µV donde V = V (0, 1, p).
Finalmente, supongamos que E ⊂ X es acotado. Como V (0, 1, p) es un
entorno del origen, existe α ∈ (0,+∞) tal que E ⊂ αV (0, 1, p), luego p(x) <
α para todo x ∈ E. Recıprocamente, supongamos que E ⊂ X es tal que
cada p ∈ P es acotada en E. Fijemos U ∈ E(0). Entonces existe un abierto
basico V (0, ε, p) con U ⊃ V (0, ε, p). Por hipotesis, existe α ∈ (0,+∞) tal que
p(x) < α para todo x ∈ E. Entonces para todo t > α/ε resulta que
E ⊂ V (0, α, p) =α
εV (0, ε, p) ⊂ tV (0, ε, p) ⊂ tU.
Ası que E es acotado.
(B) Partimos ahora de un ELC X. Consideremos la familia P := µV : V ∈B del enunciado del Teorema 2.6.3. Entonces P es una familia separante
de seminormas que es ademas filtrante [porque si p, q ∈ P , se tiene que
p = µV1 , q = µV2 con V1, V2 ∈ B; como V1 ∩ V2 ∈ E(0), existe V ∈ B tal
que V ⊂ V1 ∩ V2; ası que µV ∈ P y µV ≥ µV1 , µV2 ]. La topologıa generada
por P tiene en cada punto x0 ∈ X una base de entornos constituida por los
conjuntos de la forma V (x0, ε, µV ) = x ∈ X : µV (x−x0) < ε, donde V ∈ By ε > 0. Notemos que V (x0, ε, µV ) = x0 + V (0, ε, µV ). Por la Proposicion
2.6.2(d), resulta que
x0 + V (0, ε, µV ) ⊂ x0 + εV ⊂ x0 + V (0, ε′, µV )
siempre que 0 < ε < ε′. De esta doble inclusion se infiere que la topologıa
generada por P coincide con la topologıa original de X.
2.7. Espacios normables
Si podemos encontrar un entorno acotado y convexo del origen, la
topologıa de un EVT puede definirse mediante una familia unitaria de semi-

ESPACIOS VECTORIALES TOPOLOGICOS 55
normas.
Teorema 2.7.1. Un EVT X es normable si y solo si el origen tiene un
entorno convexo y acotado.
Demostracion. Si X es normable, la bola unidad es un entorno de 0 convexo
y acotado. Recıprocamente, sea V ∈ E(0) convexo y acotado. Por el Teorema
2.1.8, podemos encontrar unW ∈ E(0) convexo y equilibrado tal queW ⊂ V .
Por supuesto, W es tambien acotado. Fijemos un U ∈ E(0). Existe entonces
t > 0 con W ⊂ tU , luego 1tW ⊂ U . Ası la familia rW : r > 0 es base de
entornos de 0. Si x = 0, existe r > 0 tal que x /∈ rW , luego µW (x/r) ≥ 1,
ası que µW (x) ≥ r. Luego µW (x) > 0 y µW es una norma. Por la Proposicion
2.6.2(c) y la prueba del Teorema 2.6.3 (tengase en cuenta que W puede
elegirse abierto) resulta que x ∈ X : µW (x) < 1 = W . Luego la norma µW
genera la topologıa del espacio, es decir, X es normable.
2.8. Espacios metrizables
Ya vimos que el ELC C(Ω) es metrizable, y que su topologıa podıa
definirse a traves de una familia numerable de seminormas, a saber, pn(f) :=
supKn|f |, donde (Kn) es una sucesion exhaustiva de subconjuntos compactos
de Ω.
Tambien vimos que C∞(Ω) es un ELC. Ademas, es facil demostrar que
su topologıa puede generarse, al igual que en el caso anterior, mediante una
familia numerable de seminormas, a saber,
pn(f) := max|Dαf(x)| : x ∈ Kn, |α| ≤ n (n ∈ N),
donde (Kn) es como antes. En efecto, cada conjunto f : pn(f) < ε es
un entorno de 0 y, recıprocamente, dado un entorno basico de 0, de la for-
ma V (0, ε,K, k), basta elegir n ∈ N con n > k y Kn ⊃ K para obtener
V (0, ε,K, k) ⊃ f : pn(f) < ε.

56 Luis Bernal y Tomas Domınguez
Observemos que, en los dos ejemplos anteriores, podemos obtener una
base local numerable de entornos del origen, a saber, B = f : pn(f) <
1/n : n ≥ 1. De hecho, esta propiedad garantiza la metrizabilidad, como
veremos mas adelante.
Vamos a estudiar los espacios vectoriales topologicos en los que existe
una metrica que define su topologıa, esto es, aquellos que son metrizables.
Un resultado muy general, conocido como Teorema de Birkhoff–Kakutani,
el cual tiene una demostracion complicada, asegura que si existe una base
numerable de entornos del origen, entonces existe una metrica, la cual es
incluso invariante por traslaciones, que genera su topologıa. El recıproco es
evidente: basta tomar B = Vnn≥1, donde Vn = x ∈ X : d(x, 0) < 1/n.
Si X es un EVT y d1 es una metrica, invariante por traslaciones, que
genera la topologıa de X, podemos hablar de completitud. Pero este es un
concepto metrico, por lo cual nos podemos plantear si esta propiedad se
mantiene para otra metrica d2, tambien invariante por traslaciones, que
genere la topologıa de X. El siguiente teorema resuelve el problema afir-
mativamente, ya que da una caracterizacion puramente topologica de las
sucesiones de Cauchy.
Teorema 2.8.1. Sea X un EVT y d una metrica invariante por traslaciones
que genera su topologıa. Supongamos que (xn) es una sucesion de vectores de
X. Entonces (xn) es de Cauchy para d si y solo si, para cada V ∈ E(0),existe n0 = n0(V ) ∈ N tal que xm − xn ∈ V para todo m,n ≥ n0.
Demostracion. Supongamos que (xn) es de Cauchy. Fijado V ∈ E(0), existeε > 0 tal que B(0, ε) ⊂ V . Ahora bien, podemos hallar n0 ∈ N tal que
d(xm, xn) < ε para todo m,n ≥ n0. Luego d(xm − xn, 0) < ε para tales m,n,
ası que xm − xn ∈ B(0, ε) ⊂ V para todo m,n ≥ n0. Recıprocamente, si
fijamos ε > 0 y se da la propiedad dada en el enunciado del teorema, podemos

ESPACIOS VECTORIALES TOPOLOGICOS 57
encontrar V ∈ E(0) tal que V ⊂ B(0, ε). Entonces existe n0 ∈ N con xm−xn ∈V ⊂ B(0, ε) para todo m,n ≥ n0, luego d(xm, xn) = d(xm − xn, 0) < ε para
tales m,n, lo que nos dice que (xn) es de Cauchy para d.
Finalmente, vamos a proporcionar una util condicion suficiente de metri-
zabilidad de espacios localmente convexos.
Teorema 2.8.2. Sea X un ELC cuya topologıa viene definida por una fami-
lia numerable de seminormas. Entonces existe una distancia invariante por
traslaciones que define su topologıa.
Demostracion. Sea (pn) una sucesion separante de seminormas que genera la
topologıa de X. Se define
d(x, y) =∞∑n=1
1
2n· pn(x− y)
1 + pn(x− y)(x, y ∈ X).
Usando que (pn) es separante, que cada pn es una seminorma, que la funcion
x ∈ [0,+∞) 7→ x1+x
∈ R es creciente y que a+b1+a+b
= a1+a+b
+ b1+a+b
≤ a1+a
+ b1+b
(a, b ≥ 0), se comprueba con facilidad que d es una metrica. Claramente, d
es invariante por traslaciones. Veamos que d genera la topologıa de X.
En primer lugar, la funcion distancia d : X ×X → R es continua porque
la aplicacion (x, y) 7→ x − y es continua, cada seminorma pn es continua y
la serie que define d converge uniformemente (usar, por ejemplo, el criterio
mayorante de Weierstrass). Si W es un entorno de 0 para la topologıa gene-
rada por d, existe r > 0 tal que W ⊃ B(0, r). Pero B(0, r) = φ−1((−∞, r)),
donde φ(x) := d(x, 0). Como φ : X → R es continua, φ−1((−∞, r)) es
abierto en X (para su topologıa original), de donde W ⊃ B(0, r) ∈ E(0).Recıprocamente, sea V ∈ E(0). Hemos de hallar un r > 0 tal que V ⊃ B(0, r).
Se tiene que existen N ∈ N y ε1, . . . , εN ∈ (0,+∞) de modo que
V (0, ε1, p1) ∩ · · · ∩ V (0, εN , pN) ⊂ V.

58 Luis Bernal y Tomas Domınguez
Elijamos r ∈ (0,mın εi2i(1+εi)
: i = 1, . . . , N). Si x ∈ B(0, r), resulta que
d(x, 0) < r, luego pi(x)(1+pi(x))2i
< r (i = 1, . . . , N), de donde pi(x)1+pi(x)
< εi1+εi
,
ası que pi(x) < εi, es decir, x ∈ V (0, εi, pi) (i = 1, . . . , N). En consecuencia,
B(0, r) ⊂∩N
i=1 V (0, εi, pi) ⊂ V , c.q.d.
Por ejemplo, los espacios C(Ω), H(Ω) y C∞(Ω) son metrizables. No es
difıcil probar que C(Ω) es completo [la prueba se basa en demostrar primero
que una sucesion (fn) ⊂ C(Ω) es de Cauchy si y solo si, para cada compacto
K ⊂ Ω y cada ε > 0, existe n0 = n0(K, ε) ∈ N tal que |fm(x) − fn(x)| < ε
para todo x ∈ K y todo m,n ≥ n0; usar el Teorema 2.8.1, y aplicar des-
pues el criterio de Cauchy de convergencia uniforme]. Ya que, en el caso
N = 2 con K = C, H(Ω) es un subespacio cerrado de C(Ω) [por el teore-
ma de convergencia de Weierstrass, el cual asegura que si (fn) ⊂ H(Ω) y
fn → f uniformemente en cada compacto de Ω entonces f ∈ H(Ω)], resul-
ta que H(Ω) es tambien completo. En cuanto a C∞(Ω), observemos que si
(fn) ⊂ C∞(Ω) es de Cauchy, para cada multiındice α se tiene que (Dαfn) es
uniformemente de Cauchy en cada compacto, luego existe una funcion con-
tinua gα tal que Dαfn → gα uniformemente en compactos. Los teoremas de
convergencia y derivacion nos dicen que g0 ∈ C∞(Ω) y Dαg0 = gα. Por tanto
fn → g0 en C∞(Ω), luego este espacio tambien es completo. Se deduce que
C(Ω), H(Ω) y C∞(Ω) son espacios de Frechet.
Ejercicios
1.- Sea P una familia separante de seminormas sobre un EV X. Para cada
x0 ∈ X, cada ε > 0 y cada p ∈ P, denotamos V (x0, ε, p) := x ∈ X :
p(x−x0) < ε. Demostrar que existe una topologıa T sobre X tal que, para
cada x0 ∈ X, la familia Sx0 de las intersecciones finitas de los conjuntos de
la forma V (x0, ε, p) es una base de entornos de x0 para esta topologıa. Si

ESPACIOS VECTORIALES TOPOLOGICOS 59
P :=maxp1, . . . , pN : pi ∈ P, i ∈ 1, . . . , N, N ∈ N
, demostrar que P
es una familia separante y filtrante de seminormas, y que τ(P) = T , donde
τ(P) es la topologıa de EVT generada por P.
2.- Sea Ω ⊂ RN un abierto no vacıo. Consideremos el EV C(Ω) dotado de la
topologıa de la convergencia compacta, es decir, la generada por las semi-
normas pK(f) := max|f(z)| : z ∈ K (K compacto ⊂ Ω). Demostrar con
detalle que C(Ω) es un espacio de Frechet. Demostrar tambien que C(Ω)
no es normable, y que fn→nf en la mencionada topologıa si y solo si fn→
nf
uniformemente en cada subconjunto compacto de Ω. Este hecho da nombre
a la topologıa.
3.- Consideremos el EV C(R) de las funciones reales continuas de variable real,
con la topologıa de la convergencia compacta.
(a) Construir una sucesion fnn≥1 ⊂ C(R) tal que fn(t) = 0 si t /∈ (n, n+1).
(b) Deducir del apartado anterior que C(R) no es normable.
4.- Sea KN el EV de todas las sucesiones de escalares con la topologıa de la
convergencia componente a componente, es decir, la topologıa producto (ver
Seccion 4.6). Probar que KN es un espacio de Frechet.
5.- Sean X e Y espacios localmente convexos cuyas topologıas vienen respecti-
vamente definidas por las familias filtrantes y separantes de seminormas P
y Q. Probar que una aplicacion lineal Λ : X → Y es continua si y solo si,
para cada q ∈ Q, existen p ∈ P y una constante M = M(p, q) ∈ (0,+∞) tal
que q(Λ(x)) ≤ Mp(x) para todo x ∈ X.
6.- Sea Ω un abierto no vacıo de RN y α un multiındice de orden N .
(a) Probar que la identidad i : C∞(Ω) → C(Ω) es continua y que el
operador derivada parcial Dα : C∞(Ω) → C∞(Ω) es continuo.
Indicacion: utilizar el ejercicio anterior.
(b) Demostrar con detalle que C∞(Ω) es un espacio de Frechet.

60 Luis Bernal y Tomas Domınguez
7.- Sea X el EV de todas las funciones f : [0, 1] → R. Consideremos la fa-
milia de seminormas P = pxx∈[0,1] donde px(f) := |f(x)|. Verificar que
es separante. Por tanto, P define en X una topologıa de ELC, que se llama
topologıa de la convergencia puntual. Probar que cada φ ∈ X∗ es de la forma
φ(f) =∑n
i=1 cif(xi) para ciertos x1, . . . , xn ∈ [0, 1] y c1, . . . , cn ∈ R.
Sugerencia: utilizar el Ejercicio 5 con Y = R.
8.- Sea X un EVT con una metrica d invariante por traslaciones que genera
su topologıa. Probar lo siguiente:
(a) Si (xn) es una sucesion en X que tiende a 0, entonces existe una sucesion
(γn) de escalares positivos tales que γn→n∞ y γnxn→
n0.
Indicacion: Existe una sucesion estrictamente creciente (nk) ⊂ N tal que
d(xn, 0) < 1/k2 para todo n ≥ nk. Ahora, cada γn puede elegirse en N.
(b) Sea Y otro EVT y Λ : X → Y una aplicacion lineal que transforma
acotados en acotados. Entonces Λ es continua.
9.- Sean X un EV y d una distancia en X invariante por traslaciones que
verifica las siguientes propiedades:
(a) lımn→∞ d(x/n, 0) = 0 para cada x ∈ X.
(b) d(αx, 0) ≤ d(x, 0) para cada x ∈ X y cada α ∈ K con |α| < 1.
Probar que d induce una topologıa de EVT en X.
Indicacion: Deducir de la invariancia por traslaciones la continuidad de la
suma. Para la continuidad del producto por escalares, establecer primero
que, para todo α ∈ K y todo x ∈ X, se tiene d(αx, 0) ≤ (1 + E(|α|))d(x, 0),
donde E(t) denota la parte entera de t. Seguidamente, usar (a) para probar
que si cn → 0 entonces d(cnx, 0) → 0.
10.- En el EV X = C([0, 1]) se considera la expresion
d(f, g) =
∫ 1
0
|f(x)− g(x)|1 + |f(x)− g(x)|
dx.
(a) Probar que d define sobre X una distancia invariante por traslaciones.

ESPACIOS VECTORIALES TOPOLOGICOS 61
(b) Sea σ la topologıa generada por d, y llamemos τ a la topologıa de
la convergencia puntual (ver Ejercicio 7). Probar que la identidad i :
(X, τ) → (X,σ) transforma acotados en acotados pero no es continua.
(c) Probar que la aplicacion anterior es secuencialmente continua y que
(X, τ) no es metrizable. Sugerencia: Para la continuidad secuencial,
usar el teorema de la convergencia dominada. Recordemos que una
aplicacion φ : X → Y entre dos espacios topologicos X e Y se dice
secuencialmente continua cuando, para cada punto x0 ∈ X y cada
sucesion (xn) ⊂ X con xn → x0, se tiene que f(xn) → f(x0).
11.- Sea M un subespacio denso de un EVT X, Y un F-espacio y Λ : M → Y
lineal y continua. Probar que Λ admite una extension lineal y continua Λ :
X → Y .
Indicacion: Construir una sucesion Vnn≥1 de entornos equilibrados de 0
tales que Vn+Vn ⊂ Vn−1 y Λ(Vn∩M) ⊂ B(0, 2−n). Sea xn ∈ (x+Vn)∩M .
Demostrar que Λ(xn)n≥1 es de Cauchy y definir Λ(x) = lımn→∞ Λ(xn).
12.- Supongamos que X es un EVT y que A ⊂ X. Demostrar que A es acotado
si y solo si cada subconjunto numerable de A es acotado.
13.- En este ejercicio vamos a estudiar el espacio cociente. Supongamos que X
es un EVT y que N es un subespacio cerrado de X. Se define el espacio
cociente de X relativo a N como X/N := x + N : x ∈ X. Denotamos
por π : X → X/N la aplicacion sobreyectiva x 7→ x + N . Consideremos la
familia τN := G ⊂ X/N : π−1(G) ∈ τ, donde τ es la topologıa de X.
Dotamos a X/N de las operaciones
(x+N) + (y +N) = (x+ y) +N, λ · (x+N) = (λx) +N .
Se pide demostrar:
(a) Las operaciones anteriores estan bien definidas y dotan a X/N de
estructura de espacio vectorial.
(b) τN es una topologıa sobre X/N .
(c) π es continua y abierta.

62 Luis Bernal y Tomas Domınguez
(d) τN es la topologıa mas fina sobre X/N que hace continua a π.
(e) X/N es un EVT.
(f) Si B es una base local de entornos abiertos de 0 para τ , entonces
π(V ) : V ∈ B lo es para τN .
(g) Si X es un ELC, ası es X/N .
(h) Si X es normable, tambien lo es X/N , con la norma
∥x+N∥ = ınf∥y∥ : y ∈ x+N.
(i) Si X es un espacio de Banach, tambien lo es X/N .
14.- Definimos M := x = (xn) ∈ ℓ2 :∑∞
n=1 xn = 0. Demostrar que M es un
subespacio vectorial denso de ℓ2.
Indicacion: considerar la aplicacion lineal Λx :=∑∞
n=1 xn sobre ℓ2.
15.- Sea X un ELC y A un subconjunto acotado. Demostrar que su envolvente
convexa co(A), es decir, la interseccion de todos los subconjuntos convexos
de X que contienen a A (ver Seccion 4.4), es tambien acotada.
16.- Sea S un subconjunto en un EVT. Demostrar que son equivalentes:
(a) S es acotado.
(b) Para toda sucesion (xn) ⊂ S y toda sucesion de escalares (λn)
convergente a 0, la sucesion producto (λnxn) tambien tiende a 0.
(c) Para toda sucesion (xn) ⊂ S se tiene que (n−1xn) tiende a 0.

Capıtulo 3
Espacios funcionales
En este capıtulo vamos a analizar mas de cerca algunos espacios de fun-
ciones basicos. En concreto, se pretende caracterizar la compacidad relativa
de familias de funciones continuas u holomorfas, identificar algunos espacios
duales fundamentales y establecer propiedades de densidad. Como apendice,
introduciremos el concepto de red o sucesion generalizada en un ET, que es
una util herramienta, en especial cuando el espacio que estamos manejando
no es metrizable, en cuyo caso la continuidad no equivale a la continuidad
secuencial.
3.1. Teorema de aproximacion de Weierstrass
El Teorema de aproximacion de Weierstrass es un resultado clasico
que figura entre los mas importantes de la teorıa de funciones y del analisis
funcional. Afirma que toda funcion continua en un intervalo compacto es
aproximable uniformemente por polinomios en dicho intervalo. Se conocen
muchas pruebas de este teorema. Aquı ofrecemos una relativamente corta y
directa, basada en productos de convolucion. Vamos a considerar el espacio
de Banach C([a, b]) de las funciones continuas f : [a, b] → K, dotado de la
63

64 Luis Bernal y Tomas Domınguez
norma del supremo.
Teorema 3.1.1. El conjunto de los polinomios es denso en C([a, b]). Ex-
plıcitamente, dados ε > 0 y una funcion continua f : [a, b] → K, existe un
polinomio P tal que |f(x)− P (x)| < ε para todo x ∈ [a, b].
Demostracion. Es claro que es suficiente considerar el casoK = R. Considere-
mos la funcion “campana de Gauss” φ(u) := 1√πe−u2
, la cual cumple φ(u) > 0
para todo u ∈ R y ∥φ∥1 =∫∞−∞ φ(u) du = 1. Definimos φn(u) := nφ(nu)
(n ∈ N). Fijemos f como en el enunciado, y prolonguemosla de forma con-
tinua a un intervalo [c, d] ⊃ [a, b] de modo que f(c) = 0 = f(d). Despues, la
prolongamos a R definiendo f = 0 en R \ [c, d]. Notemos que f es uniforme-
mente continua en R.
Consideremos la sucesion de productos de convolucion fn := f ∗ φn, es
decir,
fn(x) =
∫ ∞
−∞f(t)φn(x− t) dt (x ∈ R, n ∈ N). (1)
Llamemos M := maxR |f | < +∞ y fijemos n ∈ N. Se verifica lo siguiente:
• Para cada x ∈ R, la funcion t ∈ R 7→ f(t)φn(x− t) es continua, luego
medible.
• Para cada t ∈ R, la funcion x ∈ R 7→ f(t)φn(x − t) es analıtica en R,
con un desarrollo en serie de potencias convergente en todo x ∈ R, ya
que φn admite un tal desarrollo, por tenerlo φ.
• Para cada par t, x ∈ R se tiene |f(t)φn(x− t)| ≤ nMχ[c,d](t), de modo
que la ultima funcion no depende de t y es integrable en R.
Se deduce que cada fn esta bien definida, es analıtica en R y tiene un desa-
rrollo en serie de Taylor en torno al origen que es convergente en todo punto
de R.

ESPACIOS FUNCIONALES 65
Fijado ε > 0, de la continuidad uniforme deducimos la existencia de un
δ > 0 tal que
|f(x+ u)− f(x)| < ε
3para todo x ∈ R y todo u ∈ (−δ, δ). (2)
Busquemos N ∈ N tal que
|fN(x)− f(x)| < 2ε
3para todo x ∈ R. (3)
Para ello, escojamos α > 0 tal que∫|u|>α
φ(u) du <ε
1 + 6M. (4)
Tomemos N ∈ N tal que N > α/δ. Entonces |u/N | < δ siempre que u ∈[−α, α]. Gracias a (1), (2) y (4), se verifica para todo x ∈ R que
|fN(x)− f(x)| =∣∣∣∣∫ ∞
−∞f(t)φN(x− t) dt− f(x)
∣∣∣∣=
∣∣∣∣∫ ∞
−∞f(x− t)φN(t) dt− f(x)
∫ ∞
−∞φ(u) du
∣∣∣∣=
∣∣∣∣∫ ∞
−∞f(x− u
N)φN(
u
N)du
N−∫ ∞
−∞f(x)φ(u) du
∣∣∣∣=
∣∣∣∣∫ ∞
−∞(f(x− u
N)− f(x))φ(u) du
∣∣∣∣≤
∫|u|>α
|f(x− u
N)− f(x)|φ(u) du+
∫ α
−α
|f(x− u
N)− f(x)|φ(u) du
< 2M · ε
1 + 6M+ε
3·∫ ∞
−∞φ(u) du <
ε
3+ε
3=
2ε
3. (5)
Por otra parte, existe un desarrollo fN(x) =∑∞
n=0 anxn convergente uni-
formemente en cada compacto de R. En particular, podemos encontrar un
m ∈ N tal que ∣∣∣∣∣fN(x)−m∑
n=0
anxn
∣∣∣∣∣ < ε
3para todo x ∈ [a, b]. (6)
Llamando P (x) :=∑m
n=0 anxn y usando (5), (6) y la desigualdad triangular,
obtenemos que |f(x)− P (x)| < ε para todo x ∈ [a, b], c.q.d.

66 Luis Bernal y Tomas Domınguez
3.2. Familias relativamente compactas
Recordemos que un subconjunto A de un ET X se llama relativamente
compacto cuando su clausura A es compacta. Si X es un espacio metrizable,
se tiene que A es relativamente compacto si y solo si cada sucesion (xn) ⊂ A
contiene una subsucesion convergente en X.
El siguiente resultado de caracterizacion de familias relativamente com-
pactas en un espacio de funciones continuas, llamado Teorema de Arzela–
Ascoli, es probablemente bien conocido cuando las funciones estan definidas
sobre un intervalo cerrado [a, b] ⊂ R. Aquı lo formulamos cuando lo estan
sobre un subconjunto abierto Ω ⊂ RN . Vamos a considerar el espacio de
Frechet C(Ω) = f : Ω → K : f es continua dotado de la topologıa de la
convergencia compacta, ver Capıtulo 2. Debemos aclarar que, si K ⊂ Ω, una
familia A ⊂ C(Ω) se dice que es equicontinua sobre K cuando, dado ε > 0,
existe δ > 0 tal que, si x, y ∈ K y |x − y| < δ, entonces |f(x) − f(y)| < ε
para toda f ∈ A.
Teorema 3.2.1. Para una familia A ⊂ C(Ω), son equivalentes:
(1) A es relativamente compacta.
(2) A es equicontinua sobre cada compacto de Ω, y uniformemente acotada
sobre cada compacto de Ω.
(3) A es equicontinua sobre cada compacto de Ω, y puntualmente acotada
en el conjunto Ω.
Demostracion. La implicacion (2) =⇒(3) es trivial. Probemos que (1) implica
(2). Por hipotesis, el conjunto B := A es compacto en C(Ω). Sea K un
subconjunto compacto de Ω. Si BK(f, ε) := g ∈ C(Ω) : |g(x) − f(x)| < ε
para todo x ∈ K, entonces B ⊂∪
f∈B BK(f, 1). Por compacidad, existe
un numero finito de funciones f1, . . . , fp ∈ B tales que B ⊂∪p
j=1BK(fj, 1).

ESPACIOS FUNCIONALES 67
Entonces la constante M = M(K) := 1 + max1≤j≤p supK |fj| es una cota
uniforme de la familia A en K. Para la equicontinuidad, dado ε > 0 y K ⊂ Ω
compacto, existen f1, . . . , fp ∈ C(Ω) tales que B ⊂∪p
j=1BK(fj, ε/3). Dada
una funcion f ∈ A, se tiene que f ∈ B, luego existe j0 ∈ 1, . . . , p tal que
|fj0(x) − f(x)| < ε/3 para todo x ∈ K. Como cada fj es uniformemente
continua en K, existe δj > 0 tal que [x, x′ ∈ K y |x − x′| < δj] implica
|fj(x)− fj(x′)| < ε/3. Si δ := mın1≤j≤p δj, entonces [x, x
′ ∈ K y |x− x′| < δ]
implica
|f(x)− f(x′)| ≤ |f(x)− fj0(x)|+ |fj0(x)− fj0(x′)|+ |fj0(x′)− f(x′)|
< ε/3 + ε/3 + ε/3 = ε.
Notemos que el δ hallado no depende de f , ni de x, x′.
Demostremos ahora que (3) implica (1). Fijemos un compacto K ⊂ Ω
y una sucesion xk∞1 densa en K, y sea fn ⊂ A. Usando la acotacion
puntual en cada xk junto con el proceso de diagonalizacion de Cantor, obte-
nemos una subsucesion gj∞1 de fn∞1 convergente en cada xk. Sea ε > 0.
Usamos la equicontinuidad de A en K, y obtenemos de la definicion un δ > 0
correspondiente a ε/3. Cubramos K mediante un numero finito de bolas de
radio δ/2, y seleccionemos un punto xk en cada una de ellas. Entonces existe
i0 ∈ N tal que, si i, j > i0, entonces |gi(xk)−gj(xk)| < ε/3 para este conjunto
finito de puntos xk. Dado x ∈ K, existe uno de estos xk tal que |x− xk| < δ,
luego
|gi(x)− gi(xk)| < ε/3 y |gj(x)− gj(xk)| < ε/3.
Por tanto |gi(x) − gj(x)| < ε para cada x ∈ K y todo par i, j > i0. Del
criterio de Cauchy de convergencia uniforme, deducimos que la sucesion (gj)
converge uniformemente en K a cierta funcion continua en K. Esto puede
efectuarse tomando sucesivamente K = K1, K = K2, . . . , donde (Kn) es una
sucesion exhaustiva de compactos de Ω. Un nuevo proceso de diagonalizacion

68 Luis Bernal y Tomas Domınguez
nos suministra una subsucesion de (fn) uniformemente convergente en cada
compacto Kn a una funcion continua en Ω. Para finalizar, basta tener en
cuenta que cada subconjunto compacto de Ω esta contenido en algun Kn.
Nota 3.2.2. En el caso de un intervalo compacto [a, b] ⊂ R, la prueba se sim-
plifica y el enunciado queda ası: una familia A ⊂ C([a, b]) es relativamente
compacta si y solo es equicontinua y puntualmente acotada en [a, b].
Como consecuencia, obtenemos el Teorema de Montel, que caracteriza la
compacidad relativa de familias de funciones holomorfas.
Teorema 3.2.3. Sea Ω ⊂ C un abierto no vacıo y F ⊂ H(Ω). Entonces Fes relativamente compacta si y solo si F esta uniformemente acotada sobre
cada subconjunto compacto de Ω.
Demostracion. Por el teorema de Ascoli–Arzela, es suficiente demostrar que,
si F esta uniformemente acotada en cada compacto, entonces F es equicon-
tinua en un entorno de cada punto a ∈ Ω. Para ello, sea r > 0 tal que
B(a, 2r) ⊂ Ω y sea γ la circunferencia, positivamente orientada, de centro a
y radio 2r. Al ser la trayectoria γ de γ un compacto, existe M ∈ (0,+∞)
tal que |f(w)| ≤ M para todo punto w ∈ γ y toda funcion f ∈ F . Fijemos
ε > 0 y sea δ := rε/(2M). Aplicando la formula de la integral de Cauchy,
obtenemos
|f(z)− f(z′)| =∣∣∣∣ 1
2πi
∮γ
f(w)
w − zdw − 1
2πi
∮γ
f(w)
w − z′dw
∣∣∣∣=
∣∣∣∣ 1
2πi
∮γ
f(w)(z′ − z)
(w − z)(w − z′)dw
∣∣∣∣ ≤ M · 4πr2πr2
|z − z′|
=2M
r|z − z′| < ε
para cualesquiera z, z′ ∈ B(a, r) con |z − z′| < δ y para cualquier funcion
f ∈ F . Esto prueba la equicontinuidad de F en B(a, r) y concluye la de-
mostracion.

ESPACIOS FUNCIONALES 69
3.3. Dual de los espacios de Lebesgue
En esta seccion suponemos al lector familiarizado con los espacios de
Lebesgue Lp, ası que solo recordaremos algunos conceptos y enunciaremos
el resultado que identifica su dual. Suponemos aquı que µ es una medida
(positiva) definida sobre un espacio medible (X,M). Si p ∈ [1,+∞], de-
notamos por Lp(µ) el EV de las funciones medibles f : X → K tales que∫X|f |p dµ < +∞ (si p < +∞) o existe un conjunto de medida nula fuera
del cual f esta acotada (si p = +∞). Escribiremos simplemente Lp cuan-
do µ se ha fijado. En Lp identificamos dos funciones si son iguales µ-en
casi todo, y por ello se admiten funciones que en algunos puntos tomen
valores ±∞ (si K = R) o ∞ (si K = C). Sabemos que Lp es un es-
pacio de Banach bajo la norma ∥f∥p =( ∫
X|f |p dµ
)1/p(si p < +∞) o
∥f∥∞ = ınfM ∈ [0,+∞) : |f | ≤M µ-ect (si p = +∞).
Sea p ∈ [1,+∞]. Sea q ∈ [1,+∞] el exponente conjugado de p, es decir,
1p+ 1
q= 1. Fijemos g ∈ Lq. Gracias a la desigualdad de Holder, se tiene que
la aplicacion
Λg : f ∈ Lp 7→∫X
fg dµ ∈ K
esta bien definida y, al ser lineal, es continua porque |Λg(f)| ≤ ∥fg∥1 ≤∥f∥p∥g∥q. En otras palabras, Λg ∈ (Lp)∗. El resultado siguiente nos dice que,
si p es finito, las aplicaciones Λg son exactamente los elementos del dual.
Teorema 3.3.1. Con las notaciones anteriores, supongamos que p ∈ [1,+∞).
Entonces para cada Λ ∈ (Lp)∗ existe g ∈ Lq tal que Λg = Λ. Esta funcion g
es unica bajo esas condiciones, y cumple ∥Λg∥ = ∥g∥q.
En el caso especial en que X = N y µ = µc es la medida cardinal sobre
los subconjuntos de N, obtenemos los espacios de sucesiones Lp(µc) = ℓp
(1 ≤ p ≤ +∞). Por tanto ℓ∗p ≈ ℓq, donde p ∈ [1,+∞) y q es el exponente
conjugado de p. Tambien se tiene c∗0 ≈ ℓ1.

70 Luis Bernal y Tomas Domınguez
Finalizamos esta seccion recordando dos resultados de densidad en espa-
cios Lp, uno general y otro particular. Se llama funcion escalonada a cada
funcion medible f : X → K nula fuera de un algun conjunto de medida nula
y tal que f(X) es un subconjunto finito de K. Pues bien, se verifica que el
EV de las funciones escalonadas es denso en cada Lp (1 ≤ p < +∞). En el
caso especial de la medida de Lebesgue N -dimensional λN sobre un abierto
no vacıo Ω ⊂ RN , se tiene que el EV de las funciones continuas f : Ω → K de
soporte compacto es denso en Lp(Ω, λN) para todo p ∈ [1,+∞). Recordemos
que una funcion f : Ω → K se dice que tiene soporte compacto cuando existe
un compacto K ⊂ Ω tal que f(x) = 0 para todo x ∈ Ω \K.
3.4. Dual de C(S)
Supongamos que S es un ET separado y compacto. Queremos iden-
tificar el espacio dual del espacio de Banach C(S) := f : S → K : f es
continua, dotado de la norma del supremo. A veces se usara la siguiente
notacion distintiva: segun que K sea R o C, denotaremos C(S) por C(S,R)
o C(S,C), respectivamente.
Necesitamos cierta preparacion. Sean Ω un conjunto no vacıo, Σ una σ-
algebra sobre Ω y µ : Σ → K. Decimos que µ es una medida real (si K = R)
o medida compleja (si K = C, resp.) sobre el espacio medible (Ω,Σ) cuando
µ(∪∞
k=1Ek
)=
∑∞k=1 µ(Ek) para cualesquiera Ek ∈ Σ (k = 1, 2, ...) dos a
dos a disjuntos [notese que, en particular, µ(∅) = 0]. En tal caso, se denomina
variacion total de µ a la aplicacion
|µ| : A ∈ Σ 7→ sup ∞∑
k=1
|µ(Ek)| : Ek ∈ Σ dos a dos disjuntos, k ∈ N,
E =∞∪k=1
Ek
∈ [0,+∞].

ESPACIOS FUNCIONALES 71
Puede probarse que |µ| es una medida positiva finita sobre (Ω,Σ). Si Ω es
un ET, se llama boreliano o conjunto de Borel de Ω a cada miembro de la
menor σ-algebra B sobre Ω que contiene a los abiertos de Ω. Una medida de
Borel sobre Ω es una medida (real o compleja) definida sobre B. Una medida
de Borel µ sobre Ω se dice que es regular si, para cada A ∈ B, se tiene
|µ|(A) = sup|µ|(K) : K es compacto y K ⊂ A.
Denotaremos por M(Ω,K) el EV de las medidas (reales o complejas segun
que, respectivamente, K = R o K = C) de Borel regulares sobre el ET Ω
[si K esta determinado, escribiremos M(Ω,K) = M(Ω)]. Es facil ver que
∥µ∥ := |µ|(Ω) es una norma sobre M(Ω).
Si S es un ET como al principio de la seccion y µ ∈ M(S), es facil ver
que la aplicacion Λ : f ∈ C(S) 7→∫Sf dµ ∈ K esta en C(S)∗. El siguiente
Teorema de representacion de Riesz establece que cada elemento del dual de
C(S) tiene exactamente la forma anterior. Ya que la demostracion es larga,
solo se daran algunas indicaciones de la misma.
Teorema 3.4.1. Sea S un ET separado y compacto. Entonces los espacios
normados C(S) y M(S) son isometricamente isomorfos. Especıficamente,
la aplicacion Φ : µ ∈ M(S) 7→ Λµ ∈ C(S)∗, donde Λµ(f) :=∫Sf dµ (f ∈
C(S)), es lineal, biyectiva y satisface ∥Λµ∥ = ∥µ∥ para toda µ ∈ M(S).
Demostracion. La parte esencial es la sobreyectividad de la aplicacion. Pode-
mos suponer K = R (considerar partes reales e imaginarias para el caso K =
C). Fijemos Λ ∈ C(S,R)∗. Hemos de encontrar una medida µ ∈ M(S,R) tal
que Λµ = Λ.
Supongamos primero que Λ es positiva, es decir, cumple Λ(f) ≥ 0 si
f ≥ 0. Para V abierto, se define µ(V ) = supΛ(f) : 0 ≤ f ≤ χV y, para
cualquier A ∈ B, se define
µ(A) = ınfµ(V ) : A ⊂ V, V es abierto.

72 Luis Bernal y Tomas Domınguez
Entonces µ es una medida positiva y finita sobre B, la cual es regular y
cumple Λ(f) =∫Sf dµ para cada f ∈ C(S), es decir, Λµ = Λ.
Sea ahora cualquier Λ ∈ C(S)∗. Para f ∈ C(S) con f ≥ 0, se define
φ(f) := sup|Λ(h)| : h ∈ C(S), |h| ≤ f. Y si f ∈ C(S) es cualquiera,
descomponemos f = f+ − f− y definimos φ(f) := φ(f+)− φ(f−). Resulta
que φ es un funcional lineal positivo sobre C(S) tal que |Λ(f)| ≤ φ(|f |) ≤∥Λ∥ · ∥f∥∞ para toda f ∈ C(S).
Por la primera parte, existe una medida de Borel positiva y finita ν tal que
φ(f) =∫Sf dν para cada f ∈ C(S). Por tanto |Λ(f)| ≤
∫S|f | dν = ∥f∥1 en
C(S). Por el teorema de Hahn–Banach, podemos extender Λ a un funcional
lineal y continuo sobre L1(ν), de norma ≤ 1. De acuerdo con el Teorema 3.3.1
(caso p = 1), existe g : S → K medible con |g| ≤ 1 tal que Λ(f) =∫Sfg dν
(f ∈ C(S)). Basta tomar ahora µ := gdν, es decir, µ(A) =∫Ag dν para cada
A ∈ B.
3.5. Teorema de aproximacion de Runge
Vamos a establecer el que historicamente fue el primer teorema de
aproximacion en Variable Compleja, a saber, el Teorema de Runge (1885),
que establece la posibilidad de aproximar una funcion holomorfa en un abier-
to mediante funciones racionales o, en ciertos casos, mediante polinomios
holomorfos.
Nos seran utiles las dos siguientes observaciones:
(A) SiK es un compacto no vacıo contenido en un abierto Ω de C, entonces
existe un ciclo (o sea, una union finita de arcos cerrados rectificables)
Γ ⊂ Ω \ K tal que, para cada f ∈ H(Ω) y cada z ∈ K, se cumple la
formula de la integral de Cauchy f(z) =1
2πi
∮Γ
f(ξ)
ξ − zdξ.

ESPACIOS FUNCIONALES 73
(B) Si Ω ⊂ C es un abierto, existe una sucesion Knn≥1 de compactos tales
que Ω =∪∞
n=1Kn, Kn ⊂ K0n+1 (n ≥ 1), cada subconjunto compacto de
Ω esta contenido en algun Kn y, para todo n ∈ N, cada componente de
C∞ \Kn contiene alguna componente de C∞ \ Ω.
Hemos denotado C∞ = C∪0, el plano complejo completado, que puede
identificarse con la esfera de Riemann S2 = (x1, x2, x3) ∈ R3 : x21 + x22 +
x23 = 1. Recordemos que un abierto de C se dice que es simplemente conexo
cuando “no tiene agujeros”, es decir, cuando C∞ \ Ω es conexo.
Teorema 3.5.1. (a) Sean K un subconjunto compacto de un abierto Ω
de C, ε > 0, f ∈ H(Ω) y A un conjunto constituido por un punto
de cada componente conexa de C∞ \ K. Entonces existe una funcion
racional R tal que polos de R ⊂ A y |f(z) − R(z)| < ε para todo
z ∈ K.
(b) Sean Ω ⊂ C un abierto, f ∈ H(Ω) y A un subconjunto constituido por
un punto de cada componente conexa de C∞ \ Ω. Entonces existe una
sucesion de funciones racionales Rnn≥1 con polos solo en A tal que
Rn−→nf en H(Ω).
(c) Si Ω ⊂ C es un abierto simplemente conexo, entonces el conjunto de
los polinomios es denso en H(Ω).
Demostracion. La parte (c) es consecuencia de (b) tomando A = ∞.Probemos (b) partiendo de (a): elijamos para Ω una sucesion de compactos
como en (B). Fijado un n ∈ N, cada componente conexa de C∞ \ Kn con-
tiene algun punto de A. Por (a), existe Rn funcion racional tal que polosde Rn ⊂ A y |Rn(z)− f(z)| < 1/n para todo z ∈ Kn. Fijado un compacto
K ⊂ Ω, existe n0 ∈ N tal que K ⊂ Kn para todo n ≥ n0. Esto implica
|Rn(z)− f(z)| < 1/n para cada z ∈ K y cada n ≥ n0, de donde Rn−→nf en
H(Ω).

74 Luis Bernal y Tomas Domınguez
Queda demostrar (a). Para ello fijamos K,Ω, f y A como en la hipotesis.
Denotemos por M el conjunto de todas las funciones racionales con polos
solo en A. Ya que la aproximacion que se pretende es en la norma de C(K),
por los teoremas de representacion de Riesz y de Hahn–Banach es suficiente
probar que, si µ es una medida de Borel compleja sobre K tal que∫K
Rdµ = 0 ∀R ∈M, (7)
entonces∫Kf dµ = 0.
Definamos la funcion h(z) =∫K
dµ(ξ)ξ−z
∈ H(C∞ \ K). Sea α ∈ A y
V la componente conexa de C∞ \ K que contiene a α. Si α es finito,
existe r > 0 tal que B(α, r) ⊂ V . Fijado un z ∈ B(α, r), se tiene que
1ξ−z
= lımn→∞∑n
k=0(z−α)k
(ξ−α)k+1 uniformemente en ξ ∈ K. Pero, gracias a (7),∫K
∑nk=0
(z−α)k
(ξ−α)k+1 dµ(ξ) = 0 para cada n, luego h ≡ 0 en B(α, r), ası que
h ≡ 0 en V . Si α = ∞, entonces existe r > 0 tal que V ⊃ z ∈C∞ : |z| > r y se aplicarıa un razonamiento similar a la expresion 1
ξ−z=
− lımn→∞∑n
k=0 z−k−1ξk. En consecuencia, h ≡ 0 en C∞ \K.
Elijamos ahora un ciclo Γ ⊂ Ω \ K como el dado en la observacion
(A). Podemos usar el Teorema de Fubini, puesto que estamos tratando con
medidas de Borel y funciones continuas sobre conjuntos compactos. Resulta
ası que∫K
f dµ =
∫K
(1
2πi
∮Γ
f(w)
w − zdw
)dµ(z)
= − 1
2πi
∮Γ
(∫K
dµ(z)
z − w
)f(w) dw = − 1
2πi
∮Γ
h(w)f(w) dw = 0,
como querıamos demostrar.
3.6. Redes en espacios topologicos
Un ET X se dice que es primer numerable cuando cada punto admite
una base de entornos numerable. Por ejemplo, cada espacio metrizable es

ESPACIOS FUNCIONALES 75
primer numerable pues, fijado x0 ∈ X, las bolas abiertas B(x0, 1/n) (n ∈ N)
constituyen una base de entornos de x0. Es bien sabido que en un ET primer
numerable, la topologıa queda definida por las sucesiones convergentes, es
decir, si τ1, τ2 son dos topologıas sobre un mismo conjunto X que hacen de
el un ET primer numerable, entonces τ1 = τ2 si y solo si (X, τ1) y (X, τ2)
contienen las mismas sucesiones convergentes. Como consecuencia, si f :
X → Y es una aplicacion entre espacios topologicos conX primer numerable,
entonces f es continua si y solo si es secuencialmente continua. Ası pues,
las sucesiones son un instrumento muy comodo para comparar topologıas y
establecer continuidad en el caso anterior.
El problema es que existen importantes espacios topologicos –y en par-
ticular, importantes espacios vectoriales topologicos– que no disfrutan de la
propiedad anterior de poseer bases numerables de entornos. Las redes, de-
nominadas tambien sucesiones generalizadas o sucesiones de Moore–Smith,
han venido a ser un muy util instrumento sustitutivo de las sucesiones, pues
comparten muchas propiedades de estas y son aplicables a todos los espacios
topologicos. Las demostraciones de buen numero de resultados de topologıa
y de analisis funcional pueden simplificarse bastante con el uso de las re-
des. Tras las definiciones, seleccionaremos las propiedades basicas, y con ello
concluiremos el capıtulo.
Recordemos que un orden parcial en un conjunto no vacıo I es una
relacion binaria ≤ que es reflexiva, antisimetrica y transitiva. Por definicion,
si α, β ∈ I, las notacion α ≥ β significa β ≤ α.
Definicion 3.6.1. (a) Sea I un conjunto no vacıo al que se dota de un
orden parcial ≤. Decimos que I es dirigido cuando, para cada dos
elementos α, β ∈ I, existe γ ∈ I tal que γ ≥ α y γ ≥ β.
(b) Un subconjunto dirigido J de un conjunto dirigido I se llama cofinal

76 Luis Bernal y Tomas Domınguez
cuando, para cada α ∈ I existe β ∈ J tal que β ≥ α.
(c) Sea X un conjunto no vacıo. Una red en X es una familia (xα)α∈I en
la que I es un conjunto dirigido y xα ∈ X para todo α ∈ I.
(d) Si (xα)α∈I es una red en X y J ⊂ I es cofinal, decimos que la familia
(xα)α∈J es una subred de (xα)α∈I .
Nota 3.6.2. Observemos que las sucesiones en un conjuntoX no son mas que
las redes (xn)n∈N donde N esta dotado del orden usual. Notemos tambien que
cada subconjunto cofinal de un conjunto dirigido es tambien dirigido, luego
una subred es tambien una red.
Definicion 3.6.3. Sean X un ET, x0 ∈ X y (xα)α∈I una red en X.
(a) Decimos que (xα)α∈I converge a x0 cuando, para cada entorno U de x0
existe α0 = α0(U) ∈ I tal que xα ∈ U para todo α ≥ α0. Denotaremos
este hecho por xα →α∈I
x0, o simplemente por xα →αx0 cuando no haya
confusion con el conjunto de ındices I.
(b) Decimos que x0 es un punto adherente de (xα)α∈I cuando, para cada
entorno U de x0 y cada α ∈ I, existe β ≥ α con xβ ∈ U . Equivalente-
mente, cuando existe alguna subred convergente a x0.
Es evidente que si una red converge a un punto x0 entonces x0 es un punto
adherente de la red y toda subred converge a x0.
Teorema 3.6.4. (a) Si τ1 y τ2 son dos topologıas sobre un mismo con-
junto X, entonces τ1 < τ2 si y solo si, para cada x0 ∈ X, cada red
τ1-convergente a x0 es tambien τ2-convergente a x0. Por tanto τ1 = τ2
es equivalente a la siguiente propiedad: para cada punto de X, las re-
des que τ1-convergen a el son las mismas que las que τ2-convergen al
mismo.

ESPACIOS FUNCIONALES 77
(b) Si X es un ET y A ⊂ X, entonces x ∈ A si y solo si existe una red
de puntos de A que converge a x. Por tanto, A es cerrado si y solo si
A contiene todos los lımites de redes convergentes formadas por puntos
de A.
(c) Un ET X es separado si y solo cada red convergente converge a un
solo punto de X.
(d) Un ET X es compacto si y solo si cada red admite una subred conver-
gente, y si y solo si cada red tiene un punto adherente.
(e) Si f : X → Y es una aplicacion entre dos espacios topologicos y x0 ∈X, entonces f es continua en x0 si y solo si, para cada red (xα)α∈I ⊂ X
con xα →αx0 en X, se tiene que f(xα)→
αf(x0) en Y .
Demostracion. (a) La necesidad es obvia porque cada τ2-entorno de x0 es
tambien un τ1-entorno de x0. Supongamos ahora que se da esta condicion
para cada x0 ∈ X. Por reduccion al absurdo, partimos de que existe un τ2-
entorno U de algun punto x0 ∈ U que no es τ1-entorno de x0. Consideremos
el conjunto I := τ1-entornos de x0, que es un conjunto dirigido con el orden
V ≤ W ⇔ W ⊂ V . Para cada V ∈ I, debe existir algun punto xV ∈ V \ U(de lo contrario U contendrıa algun τ1-entorno de x0, y por tanto el propio U
serıa un τ1-entorno de x0). Es facil ver ahora que la red (xV )V ∈I τ1-converge
a x0 pero no converge a x0 respecto de τ2. Esta es la contradiccion que se
buscaba.
(b) Supongamos que x ∈ A. Consideremos el conjunto I := entornos de x,que es un conjunto dirigido con el orden V ≤ W ⇔ W ⊂ V . Si para cada
V ∈ I seleccionamos un punto xV ∈ V ∩ A, es evidente que la red (xV )V ∈I
esta formada por puntos de A y converge a x. Recıprocamente, supongamos
que existe una red (xα)α∈I ⊂ A que converge a x. Si U es un entorno de x,

78 Luis Bernal y Tomas Domınguez
existe α ∈ I tal que xα ∈ U . Ası que xα ∈ U ∩A, luego U ∩A = ∅. Por tantox ∈ A.
(c) Sea ahora X un ET separado. Por reduccion al absurdo, sea (xα)α∈I una
red convergente a dos puntos distintos x e y de X. Tomemos dos abiertos U y
V con x ∈ U , y ∈ V y U ∩ V = ∅. Por convergencia, existen α1, α2 ∈ I tales
que xα ∈ U para todo α ≥ α1 y xα ∈ V para todo α ≥ α2. Si elegimos β ∈ I
con β ≥ α1, β ≥ α2, llegamos a que xβ ∈ U ∩ V = ∅, que es la contradiccion
deseada. Para el recıproco, partimos, de nuevo por reduccion al absurdo, de
que las redes convergentes lo hacen a un unico punto y de que existen dos
puntos x = y en X para los que dos entornos respectivos siempre tienen
puntos comunes. Sea I := (U, V ) : U es un entorno de x y V es un entorno
de y, que es un conjunto dirigido con el orden (U, V ) ≤ (U ′, V ′) ⇔ U ′ ⊂ U
y V ′ ⊂ V . Si para cada (U, V ) ∈ I tomamos x(U,V ) ∈ U ∩ V , es evidente que
la red (x(U,V ))(U,V )∈I converge a x e y, y llegamos a un absurdo.
(d) Partimos de que X es compacto y de que, por vıa de la contradiccion,
existe una red (xα)α∈I que carece de puntos adherentes. Entonces para cada
z ∈ X existe un abierto Uz con la siguiente propiedad: z ∈ Uz y existe
α = α(z) ∈ I tal que para todo β ≥ α se tiene xβ /∈ Uz. Consideremos la
familia Uzz∈X , que es un recubrimiento abierto deX. ComoX es compacto,
admite un subrecubrimiento finito, digamos Uz1 , . . . , Uzp . Como I es dirigido,
existe β ∈ I tal que β ≥ α(z1), . . . , α(zp). Entonces xβ /∈ Uzj (j = 1, ..., p),
luego xβ /∈∪p
j=1 Uzj = X, lo que es absurdo. Recıprocamente, supongamos
que toda red en X admite un punto adherente y que, de nuevo por reduccion
al absurdo, X no es compacto. Entonces existirıa un recubrimiento abierto UdeX que no admite subrecubrimiento finito. Llamemos I al conjunto de todas
las uniones finitas de miembros de U . Entonces I es un conjunto dirigido si
se le dota del orden dado por la inclusion: V ≤ W ⇔ V ⊂ W . Gracias a
nuestra suposicion, para cada V ∈ I podemos elegir un punto xV ∈ X \ V .

ESPACIOS FUNCIONALES 79
Consideremos la red (xV )V ∈I . Por hipotesis, admite algun punto adherente,
sea x0 ∈ X. Ahora bien, existe U ∈ U tal que x0 ∈ U . Como U ∈ I, debe
existir V ∈ I con V ≥ U tal que xV ∈ U , lo cual es una contradiccion puesto
que xV ∈ X \ V ⊂ X \ U .
(e) Partimos de que f es continua en x0 y de que xα →αx0. Sea U un entorno
de f(x0) en Y . Entonces f−1(U) es un entorno de x0 en X, de donde existe
α0 ∈ I con xα ∈ f−1(U) si α ≥ α0. Por tanto f(xα) ∈ U para esos mismos α,
y ası f(xα)→αf(x0). Recıprocamente, supongamos, por reduccion al absurdo,
que f transforma redes convergentes a x0 en redes convergentes a f(x0) y
que existe un entorno U de f(x0) tal que f−1(U) no es un entorno de x0.
Consideremos la familia I de los entornos de x0, que es un conjunto dirigido
bajo el orden V ≤ W ⇔ W ⊂ V . Puesto que cualquier superconjunto de un
entorno de x0 sigue siendo un entorno de x0, para cada V ∈ I debe haber al
menos un punto xV ∈ V \ f−1(U). Entonces la red (xV )V ∈I converge a x0,
pero f(xV ) /∈ U para todo V ∈ I, luego la red (f(xV ))V ∈I no converge a
f(x0), y hemos llegado de nuevo a una contradiccion.
Ejercicios
1.- Sea f : [0, 1] → R una funcion continua tal que∫ 10 tnf(t) dt = 0 para todo
n ∈ N0. Demostrar que f ≡ 0. Indicacion: usar el teorema de aproximacion
de Weierstrass.
2.- Demostrar que el conjunto A := f ∈ C([0, 1],R) : f es dos veces diferen-
ciable en [0, 1], f(0) = 0 = f ′(0) y |f ′′(x)| ≤ 1 ∀x ∈ [0, 1] es relativamente
compacto en C([0, 1]).
3.- (a) Sea N ∈ N y consideremos el EV CN ([a, b]) de las funciones f : [a, b] →
K derivables con continuidad en [a, b] hasta orden N inclusive, dotado
de la norma ∥f∥ = max0≤k≤N supa≤x≤b |f (k)(x)|. Demostrar que el

80 Luis Bernal y Tomas Domınguez
conjunto de los polinomios es denso en CN ([a, b]).
(b) Si Ω ⊂ R es un abierto no vacıo, probar que el conjunto de los poli-
nomios es denso en el EVT C∞(Ω) definido en el Capıtulo 2.
4.- Sea φ la campana de Gauss, es decir, la funcion φ(x) = e−x2. Si 1 ≤
p < +∞, demostrar que el conjunto P · φ : P es un polinomio es un
subconjunto denso en Lp(R). Razonar por que no lo es en L∞(R).
5.- Sea Ω un subconjunto abierto no vacıo de C y consideremos la familia
F =
f ∈ H(Ω) :
∫ ∫Ω|f(x+ iy)| dxdy ≤ 1
.
Demostrar que F es relativamente compacta en H(Ω).
Indicacion: Fijar un punto z0 ∈ Ω y probar, utilizando el teorema de la
media para funciones analıticas y usando un cambio a coordenadas polares,
que F esta uniformemente acotada en un entorno de z0.
6.- Hallar el sup ∫ 1
0 xf(x) dx : f : [0, 1] → R es medible y∫ 10 f(x)4 dx ≤ 1
.
7.- Sobre el espacio de Banach C([0, 1],R) se define la aplicacion
Λ : f ∈ C([0, 1],R) 7→∞∑n=1
2−nf(1/n) +
∫ 1/2
0tf(t) dt ∈ R.
(a) Probar que Λ esta bien definida, es lineal y continua, y calcular ∥Λ∥.
(b) Determinar la medida real de Borel µ que corresponde a Λ por
el teorema de representacion de Riesz.
8.- Sea Ω ⊂ C una region simplemente conexa tal que 0 /∈ Ω. Se fija N ∈ N y se
define PN como el conjunto de polinomios que tienen un cero en el origen
de multiplicidad al menos N . Demostrar que PN es denso en H(Ω).
9.- Sea X un EV al que se dota de una topologıa τ . Probar que (X, τ) es un
EVT si y solo si, dados dos vectores x, y ∈ X, dos escalares λ, µ ∈ K, y dos
redes (xα)α∈I , (yα)α∈I con el mismo conjunto de ındices I tales que xα → x
e yα → y (respecto de τ), se tiene que λxα + µyα → λx+ µy.

ESPACIOS FUNCIONALES 81
10.- (a) Si (I,≼) y (J,) son dos conjuntos dirigidos, demostrar que el producto
I × J es un conjunto dirigido bajo el orden ≤ definido ası:
(i1, j1) ≤ (i2, j2) ⇐⇒ i1 ≼ i2 y j1 j2.
(b) Usando redes, demostrar el apartado (b) de la Proposicion 2.1.7.
Indicacion: Aplicar el Teorema 3.6.4(b), el ejercicio anterior y el apartado
(a) de este ejercicio.
11.- Consideremos una familia Yii∈X de conjuntos, cada uno de los cuales es un
ET, y su producto cartesiano∏
i∈X Yi, dotado de la topologıa producto (ir a
la Seccion 4.6 para recordar estos conceptos). Considerando las proyecciones
πj : f ∈∏
i∈X Yi 7→ f(j) ∈ Yj (j ∈ X) y utilizando redes, demostrar
el Teorema de Tychonoff, el cual afirma que las siguientes propiedades son
equivalentes:
(a)∏
i∈X Yi es compacto.
(b) Cada Yi es compacto.
12.- Demostrar que si (xα)α∈I es una red convergente en un EVT entonces el
conjunto xα : α ∈ I es acotado.
13.- Denotemos D = z ∈ C : |z| < 1 y D = z ∈ C : |z| ≤ 1, es decir,
el disco unidad abierto y el disco unidad cerrado, respectivamente, de C.
Consideremos el espacio de Banach C(D) de las funciones continuas f :
D → C dotado de la norma del supremo, ası como el subespacio vectorial
A := f ∈ C(D) : f ∈ H(D), denominado algebra del disco. Demostrar
que, bajo la misma norma, A es un espacio de Banach en el cual el conjunto
de los polinomios es denso.
14.- Sea Ω ⊂ C un abierto no vacıo, y consideremos el operador de derivacion D :
f ∈ H(Ω) 7→ f ′ ∈ H(Ω). Si P es el polinomio P (z) = a0+a1z+ · · ·+aNzN ,
se define el operador P (D) por P (D) = a0I+a1D+ · · ·+aNDN . Demostrar
que cada operador P (D) esta bien definido y es lineal y continuo, y que, si
Ω es simplemente conexo, es sobreyectivo salvo que P = 0.
Indicacion: comenzar con el caso P (D) = D − aI (a ∈ C).

82 Luis Bernal y Tomas Domınguez
15.- (a) Verificar que la funcion φ : R → R dada por φ(x) = e−1/x2(x = 0),
φ(0) = 0, pertenece a C∞(R), y ademas f (n)(0) = 0 para todo n ≥ 0
y no es analıtica en el origen.
(b) Demostrar que el conjunto M := f ∈ C∞(R) : f (n)(0) = 0 para
todo n ≥ 0 es un subespacio vectorial cerrado infinito-dimensional de
C∞(R).
16.- Si f : R → R es una funcion continua, se llama soporte de f a la clausura del
conjunto de puntos donde f no se anula. Si K ⊂ R es compacto, se denota
por DK el EV de las funciones de C∞(R) cuyo soporte esta contenido en
K (ver Capıtulo 2). Y se denota por D el espacio de las funciones test,
es decir, el EV de las funciones de C∞(R) de soporte compacto. Ası que
D =∪DK : K ⊂ R compacto.
(a) Para cada intervalo compacto [a, b] ⊂ R, verificar que la funcion φ : R →
R dada por
φ(x) =
0 si x ≤ a o x ≥ b
e1
x−b− 1
x−a si x ∈ (a, b).
pertenece a D[a,b].
(b) Denotemos por τK la topologıa que DK hereda de C∞(R). Llamemos
τ a la familia de todos los subconjuntos V ⊂ D tales que V ∩ DK ∈ τK
para cada subconjunto compacto K ⊂ Ω. Demostrar que τ es una topologıa
que hace de D un EVT localmente convexo.
(c) Se llama distribucion o funcion generalizada a cada elemento de D∗, el
espacio dual de D. Si Λ : D → R es lineal, demostrar que Λ ∈ D∗ si y solo
si, para cada compacto K ⊂ R, existen M ∈ (0,+∞) y N ∈ N de modo que
|Λ(f)| ≤ M supi=0,1,...,N supx∈K |f (i)(x)| para toda f ∈ DK .
Indicacion: usar el Ejercicio 5 del Capıtulo 2.
(d) Si g es una funcion localmente integrable en R, verificar que la aplicacion
Λ : f ∈ D 7→∞∑n=0
f (n)(n) +
∫ ∞
−∞f(x)g(x) dx ∈ R
es una distribucion.

Capıtulo 4
Dualidad y Teoremas de
Hahn–Banach
En este capıtulo penetraremos en la estructura de los espacios duales
de los espacios topologicos, en especial de los espacios localmente convexos
y, en particular, de los espacios normados. Los teoremas de extension de
Hahn–Banach estan ıntimamente conectados al dual de un EVT. Estudia-
remos la topologıa debil en el espacio original y la topologıa ∗-debil en el
espacio dual, su relacion con las topologıas originales, ası como propiedades
como las de acotacion, compacidad, y convexidad combinada con clausura.
Tambien consideraremos el bidual de un EN y relacionaremos la reflexividad
con la topologıa debil. Finalmente, presentaremos el concepto de aplicacion
traspuesta a una dada y relacionaremos su continuidad a traves del teorema
de Schauder.
4.1. Aplicaciones lineales reales y complejas
Vamos a comenzar estudiando, en el ambito mas general de los espa-
cios vectoriales topologicos, teoremas de tipo Hahn–Banach similares a los
83

84 Luis Bernal y Tomas Domınguez
ya conocidos para espacios normados reales. Habitualmente, sucede que las
demostraciones de los teoremas del analisis funcional son igualmente validas
para K = R y K = C. Sin embargo, en este capıtulo tendremos que diferen-
ciar los dos casos. Debemos notar que todo EV sobre C lo es tambien sobre
R. Por tanto, al hablar de aplicaciones lineales, habra que especificar si son
lineales reales o lineales complejas. El siguiente hecho relaciona ambos tipos
de linealidad.
Proposicion 4.1.1. Sea X un EV complejo y Λ : X → C una aplicacion
lineal compleja. Entonces u := ReΛ es lineal real. Ademas, Λ(x) = u(x) −iu(ix) para todo x ∈ X. Recıprocamente, si u : X → R es lineal real, se tiene
que la aplicacion Λ(x) := u(x)− iu(ix) es lineal compleja.
Demostracion. Dada Λ como en la primera parte del enunciado, es obvio
que u es lineal real. Ahora bien, para cada z ∈ C se tiene que Im z = −Re(iz), luego Λ(x) = ReΛ(x)+ iImΛ(x) = ReΛ(x)− iRe(iΛ(x)) = ReΛ(x)−iRe(Λ(ix)) = u(x)− iu(ix) para todo x ∈ X.
Recıprocamente, supongamos que u es lineal real, y consideremos Λ(x) :=
u(x) − iu(ix). La aditividad de Λ es inmediata. En cuanto a la escalaridad,
fijemos c = a + ib [con a, b ∈ R] y x ∈ X. Resulta que Λ(cx) = u(cx) −iu(icx) = u(ax + ibx)− iu(iax− bx) = au(x) + bu(ix)− iau(ix) + ibu(x) =
(a+ ib)(u(x)− iu(ix)) = cΛ(x), c.q.d.
Vemos por tanto que hay una correspondencia uno a uno entre formas
lineales reales y complejas, y claramente tambien entre formas lineales con-
tinuas reales y complejas.
4.2. Teoremas de Hahn–Banach
El siguiente resultado se conoce de cursos introductorios al analisis fun-
cional, y de hecho es la forma mas abstracta del Teorema de Hahn–Banach.

DUALIDAD Y TEOREMAS DE HAHN–BANACH 85
Teorema 4.2.1. Sean X un EV real y p : X → R una subnorma en X,
es decir, p es subaditiva y homogenea para escalares positivos. Sean M un
subespacio vectorial de X y f : X → R lineal tal que f(x) ≤ p(x) para todo
x ∈ M . Entonces existe una forma lineal Λ : X → R tal que Λ|M = f y
Λ(x) ≤ p(x) para todo x ∈ X.
De lo anterior podemos deducir otra version analıtica del teorema de
Hahn–Banach, la cual se expone a continuacion.
Teorema 4.2.2. Sean M un subespacio de un EV X, p una seminorma en
X y f : X → K lineal tal que |f(x)| ≤ p(x) para todo x ∈ M . Entonces
existe una forma lineal Λ : X → K tal que Λ|M = f y |Λ(x)| ≤ p(x) para
todo x ∈ X.
Demostracion. Si K = R, el resultado se deduce del Teorema 4.2.1, puesto
que, si Λ es la extension obtenida, resulta que −p(−x) ≤ −Λ(−x) = Λ(x) ≤p(x), ası que |Λ(x)| ≤ p(x) para todo x ∈ X. Se ha usado que p(−x) = p(x).
Si K = C, sea u = Ref . Entonces u ≤ p, luego existe U : X → R lineal
tal que U |M = u y U ≤ p en X. Definimos Λ(x) := U(x)− iU(ix) (x ∈ X).
Entonces, por la Proposicion 4.1.1, Λ es lineal compleja X → C y Λ|M = f .
Por ultimo, para cada x ∈ X, sea α ∈ C con |α| = 1 tal que αΛ(x) = |Λ(x)|.Entonces |Λ(x)| = Λ(αx) = U(αx) ≤ p(αx) = p(x), c.q.d.
Como se ve, el resultado anterior vale para espacios vectoriales tanto
reales como complejos. Vamos a dar un par de consecuencias directas. Pero
antes necesitamos un sencillo lema, que es un caso particular del Ejercicio 5
del Capıtulo 2.
Lema 4.2.3. Sea X un ELC y P una familia separante y filtrante de semi-
normas que define la topologıa de X. Supongamos que f : X → K es lineal.
Entonces f es continua si y solo si existen p ∈ P y M ∈ (0,+∞) tales que
|f(x)| ≤Mp(x) para todo x ∈ X.

86 Luis Bernal y Tomas Domınguez
Demostracion. Supongamos primero que existen p,M como en el enunciado.
Como f es lineal, para probar que es continua basta demostrar su continuidad
en el 0. Sea pues ε > 0. Como f(0) = 0, hemos de hallar V ∈ E(0) tal quef(V ) ⊂ (−ε, ε). Basta tomar V := x ∈ X : p(x) < ε/M.
Recıprocamente, supongamos que f es continua. Entonces f−1((−1, 1)) ∈E(0), luego existen p ∈ P y δ > 0 de modo que x ∈ X : p(x) < δ ⊂f−1((−1, 1)). De otra forma, |f(y)| < 1 si p(y) < δ. Sean x ∈ X y α > 0.
Entonces el vector y := δα+p(x)
· x cumple p(y) < δ, luego |f( δxα+p(x)
)| < 1, y
por tanto |f(x)| ≤Mp(x), donde M := 1/δ, tras hacer α→ 0.
Corolario 4.2.4. Sean X un ELC, Y un subespacio de X y f : Y → K una
forma lineal continua. Entonces existe una forma lineal continua Λ : X → K
que extiende a f , es decir, Λ|Y = f .
Demostracion. Sea P una familia de seminormas como en el Lema 4.2.3.
Como f es continua en Y , existen p ∈ P y M > 0 tales que |f(x)| ≤Mp(x)
para todo x ∈ Y . Por el Teorema 4.2.2, existe Λ : X → K lineal tal que
|Λ(x)| ≤ Mp(x) para todo x ∈ X y Λ|Y = f . Finalmente, y de nuevo por el
Lema 4.2.3, Λ es continua.
Corolario 4.2.5. Sean X un EVT, x0 ∈ X, α ∈ K y p una seminorma
continua sobre X tal que p(x0) > 0. Entonces existe una forma lineal continua
Λ : X → K que verifica Λ(x0) = α y |Λ(x)| ≤ |α|p(x0)
· p(x) para todo x ∈ X.
Demostracion. Sea M := ⟨x0⟩. Entonces la aplicacion f : M → K dada
por f(λx0) = λα es lineal y verifica |f(λx0)| = |α|p(x0)
|λp(x0)| = |α|p(x0)
p(λx0),
luego |f(x)| ≤ |α|p(x0)
p(x) para todo x ∈ M . Por el Teorema 4.2.2, existe
una forma lineal Λ : X → K tal que Λ|M = f y |Λ(x)| ≤ |α|p(x0)
p(x) para
todo x ∈ X. En particular, Λ(x0) = f(x0) = α. Por ultimo, Λ es continua
porque p es continua y |Λ(x)| ≤ βp(x), con β := |α|/p(x0). En efecto, basta
probar que Λ es continua en el 0. Fijado ε > 0, se tiene que Λ−1((B(0, ε)) ⊃

DUALIDAD Y TEOREMAS DE HAHN–BANACH 87
p−1(B(0, ε/β)) ∈ E(0) porque p es continua. Luego Λ−1((B(0, ε)) ∈ E(0),c.q.d.
4.3. Teoremas de Hahn–Banach y convexidad
Vamos a dar otra forma mas del teorema de Hahn–Banach, que involu-
cra conjuntos convexos. Una vez mas, necesitamos un sencillo lema.
Lema 4.3.1. Toda forma lineal no constante sobre un EVT es abierta.
Demostracion. Sea φ : X → K una forma lineal no constante, lo que equivale
a decir que φ ≡ 0, donde X es un EVT. Fijemos x0 ∈ X y un abierto U ∋ x0.
Sea α := φ(x0). Como φ ≡ 0, existe x1 ∈ X tal que φ(x1) = 1. Como X
es un EVT, existe δ > 0 de modo que x0 + tx1 ∈ U si |t| < δ. Entonces
B(α, δ) ⊂ φ(U), luego φ(U) es un entorno de α, c.q.d.
Teorema 4.3.2. Sean X un EVT y A,B ⊂ X dos subconjuntos convexos,
disjuntos y no vacıos. Se tiene:
(a) Si A es abierto, existen Λ ∈ X∗ y γ ∈ R tales que ReΛx < γ ≤ ReΛy
para todo x ∈ A y todo y ∈ B.
(b) Si A es compacto, B es cerrado y X es localmente convexo, existen
Λ ∈ X∗ y γ1, γ2 ∈ R tales que ReΛx < γ1 < γ2 < ReΛy para todo
x ∈ A y todo y ∈ B.
Demostracion. Supongamos probado el teorema para el caso real. Entonces
existe u : X → R lineal y continua de modo que (a) y (b) se cumplen.
Tomando Λ(x) = u(x)−iu(ix) se obtiene el caso complejo. Luego es suficiente
demostrar el teorema si K = R.
(a) Sean a0 ∈ A y b0 ∈ B. Pongamos x0 := b0 − a0 y C := A−B+ x0. Como
C es abierto y 0 ∈ C, se tiene que C es un entorno abierto y convexo de 0.

88 Luis Bernal y Tomas Domınguez
Sea p el funcional de Minkowski de C. Entonces p es una subnorma tal que
C = x ∈ X : p(x) < 1. Como A ∩ B = ∅, resulta x0 /∈ C, luego p(x0) ≥ 1.
Definamos f(tx0) = t sobre ⟨x0⟩. Entonces f(tx0) = t ≤ tp(x0) = p(tx0) si
t > 0, y f(tx0) = t < 0 < p(tx0) si t < 0. Ası que f ≤ p. Luego existe
Λ : X → R lineal que extiende f y verifica Λ ≤ p. En particular, Λ ≤ 1 sobre
C, y por tanto Λ ≥ −1 sobre −C. Por tanto |Λ| ≤ 1 sobre C ∩ (−C) ∈ E(0).Del Teorema 2.4.2 se deduce que Λ ∈ X∗.
Sean ahora a ∈ A y b ∈ B. Se tiene Λa − Λb + 1 = Λ(a − b + x0) ≤p(a − b + x0) < 1 porque a − b + x0 ∈ C. Ası Λa < Λb. Resulta que Λ(A)
y Λ(B) son dos subconjuntos convexos de R (luego son intervalos) con Λ(A)
a la izquierda de Λ(B), y Λ(A) es abierto por el Lema 4.3.1. Basta tomar
γ := supΛ(A).
(b) Sean A y B como en la hipotesis. Dado x ∈ A, se tiene que x /∈ B, luego
existe Vx ∈ E(0) abierto tal que (x+Vx)∩B = ∅. Tomamos Ux ∈ E(0) abiertoy convexo tal que Ux +Ux ⊂ Vx. Como A es compacto y A ⊂
∪x∈A(x+Ux),
existe un numero finito de puntos x1, . . . , xn ∈ A de modo que A ⊂ (x1 +
Ux1) ∪ · · · ∪ (xn + Uxn). Sea V :=∩n
i=1 Uxi. Entonces V es abierto, V ∋ 0 y
(A+V )∩B = ∅ [pues si x ∈ A+V , existe i ∈ 1, . . . , n con x ∈ xi+Uxi+V ,
luego x ∈ xi + Uxi+ Uxi
⊂ xi + Vxi, ası que x /∈ B].
Por otra parte, A+V es abierto y convexo. En consecuencia, y de acuerdo
con (a), existe Λ ∈ X∗ tal que Λ(A+V ) y Λ(B) son disjuntos, con Λ(A+V )
intervalo abierto a la izquierda de Λ(B). Como Λ(A) es compacto, obtenemos
que Λ(A) y Λ(B) pueden separarse en el sentido de (b).
Corolario 4.3.3. Si X es un ELC, entonces X∗ separa puntos de X, es
decir, dados x1, x2 ∈ X con x1 = x2, existe Λ ∈ X∗ tal que Λx1 = Λx2.
Por tanto, la convexidad local nos asegura un gran surtido de formas
lineales continuas. No obstante, la condicion de convexidad local no puede
omitirse en el corolario anterior: recordemos, por ejemplo, que (Lp)∗ = 0

DUALIDAD Y TEOREMAS DE HAHN–BANACH 89
si 0 < p < 1. Concluimos esta seccion con otro resultado sobre existencia de
formas lineales continuas para espacios localmente convexos.
Teorema 4.3.4. Sean X un ELC, M un subespacio de X y x0 ∈ X \M .
Entonces existe Λ ∈ X∗ tal que Λ(x0) = 1 y Λ|M ≡ 0.
Demostracion. En el apartado (b) del Teorema 4.3.2, tomese A = x0 y
B = M . Entonces Λ(x0) /∈ Λ(M) y Λ(M) es un subespacio propio de
K, luego Λ(M) = 0 y Λ(x0) = 0. La forma lineal Λ/Λ(x0) cumple las
condiciones requeridas.
4.4. Forma geometrica del teorema de Hahn–
Banach
Profundizaremos ahora en los aspectos geometricos del teorema de
Hahn–Banach.
Supongamos que X es un EV. Si M es un subespacio de X y x0 ∈ X,
entonces el conjunto x0 +M es llamado una “variedad afın” o “subespacio
afın” de X. Un subespacio M de X es “maximal” si M = X y ningun
subespacio propio deX contiene aM , salvo el mismoM . Es obvio que siM es
maximal y a /∈M entonces ⟨M,a⟩ (:= span (M∪a)) = X. Recıprocamente,
si M = X y existe a ∈ X tal que ⟨M,a⟩ = X, entonces M es maximal.
En efecto, si M1 ⊂ X es un subespacio vectorial tal que M1 ) M , sea
x1 = m + λa ∈ M1 \M (con m ∈ M y λ ∈ K); esto implica que a ∈ M1,
luegoM1 = X. Cualquier trasladado x0+M de un subespacio maximalM se
llama “hiperplano afın”. Se llama “hiperplano” a cada subespacio vectorial
maximal M . Entonces x0 +M se dice que es un hiperplano afın “paralelo” a
M .

90 Luis Bernal y Tomas Domınguez
En el proximo teorema, de caracter puramente algebraico, establecere-
mos la estructura de los hiperplanos y su relacion con las formas lineales.
Denotaremos por X ′ el dual algebraico de X, es decir, X ′ = formas lineales
φ : X → K.
Teorema 4.4.1. Sea X un EV. Se tiene:
(a) Para cada φ ∈ X ′ \ 0, el conjunto Kerφ es un hiperplano. Cada
hiperplano afın paralelo a Kerφ es de la forma x ∈ X : φ(x) = αpara algun α ∈ K.
(b) Dado un hiperplano H de X, existe φ ∈ X ′ tal que H = Kerφ. Ademas,
si ψ ∈ X ′ cumple Kerφ = Kerψ, entonces ψ = cφ para algun c ∈K \ 0.
(c) Para cada hiperplano afın M con M ∋ 0, existe un unico φ ∈ X ′ tal
que M = x ∈ X : φ(x) = 1.
Demostracion. (a) Sea H = Kerφ. Como φ = 0, H es un subespacio de
X con H = X. Tomemos a ∈ X \ H. Entonces x − φ(x)φ(a)
a ∈ H, de donde
x ∈ ⟨a⟩ + H. Se deduce que ⟨H, a⟩ = X, ası que H es un hiperplano. Sea
ahora M un hiperplano afın paralelo a H, de modo que M = H + b con
b ∈ X. Si b ∈ H, basta tomar α = 0. Si b /∈ H, tomese α = φ(b).
(b) Sea H un hiperplano de X. Tomemos a ∈ X \H. Entonces X = ⟨H, a⟩,luego cada x ∈ X tiene una unica representacion x = h + λa (con h ∈ H
y λ ∈ K). Definimos φ : X → K por φ(x) = λ. Entonces Kerφ = H. Por
otra parte, si ψ ∈ X ′ es tal que Kerψ = H, resulta que, para cada x ∈ X,
ψ(x) = ψ(h+ λa) = λψ(a) = ψ(a)φ(x).
(c) Sea M un hiperplano afın con M ∋ 0. Entonces M = a +H con a /∈ H.
Por (b) existe φ ∈ X ′ tal que H = Kerφ. Sea ψ := φφ(a)
. Entonces ψ(a) = 1 y
M = x ∈ X : ψ(x) = 1. Si hubiese otro Λ ∈ X ′ tal que M = x : Λ(x) =

DUALIDAD Y TEOREMAS DE HAHN–BANACH 91
1, tendrıamos KerΛ = Kerψ y Λ(a) = 1 = ψ(a). De acuerdo con (b), esto
implica que Λ = ψ.
En el caso de un EVT, sabemos que la clausura de un subespacio vectorial
es tambien un subespacio vectorial. En consecuencia, por maximalidad, se
tiene que un hiperplano en un EVT es cerrado o denso. Si φ : X → K es
una forma lineal sobre X, sabemos que Kerφ es cerrado si y solo si φ es
continua. En consecuencia, para un hiperplano H = Kerφ, se verifica: H es
cerrado ⇐⇒ φ es continua; H es denso ⇐⇒ φ no es continua. Por otra
parte, si K = R y M = x ∈ X : φ(x) = α es un hiperplano afın, entonces
M divide a X en dos semiespacios x : φ(x) < α y x : φ(x) > α, obien x : φ(x) ≤ α y x : φ(x) ≥ α. Si φ es continua, entonces los dos
primeros son abiertos y los otros dos son cerrados; el recıproco es cierto.
A continuacion enunciamos la forma geometrica del Teorema de Hahn–
Banach.
Teorema 4.4.2. Sean X un EVT, Ω un abierto convexo no vacıo ⊂ X y M
un subespacio afın disjunto con Ω. Entonces existe un hiperplano afın cerrado
H tal que H ∩ Ω = ∅ y H ⊃M .
Demostracion. Apliquemos el Teorema 4.3.2 para A = Ω y B =M . Entonces
existen Λ ∈ X∗ y γ ∈ R tales que ReΛx < γ ≤ ReΛy para todo x ∈ Ω y
todo y ∈M . Ası Λ(M) es un subespacio afın propio de K, luego se reduce a
un punto, digamos Λ(M) = α. Consideremos H := Λ−1(α) = x ∈ X :
Λx = α. Entonces H es un hiperplano afın cerrado y H ⊃ M . Finalmente,
para cada x ∈ Ω, se tiene ReΛx < γ ≤ Reα, luego H ∩ Ω = ∅.
Si X es un EV y A ⊂ X, se define la envolvente convexa de A, co(A),
como la interseccion de todos los conjuntos convexos que contienen a A. Ya
que la interseccion de cualquier familia de conjuntos convexos es convexa,

92 Luis Bernal y Tomas Domınguez
deducimos que co(A) es el menor conjunto convexo que contiene a A. No es
difıcil ver que
co(A) = N∑
i=1
cixi : x1, ..., xN ∈ A; c1, ..., cN ∈ [0, 1] conN∑i=1
ci = 1; N ∈ N.
Si ahora X es un EVT, la envolvente cerrada convexa de A es co(A) := co(A).
Puede probarse que si B es convexo, entonces B es convexo, y que co(A)
es la interseccion de todos los subconjuntos cerrados y convexos de X que
contienen a A, siendo pues el menor de estos. Como veremos en el resultado
siguiente, podemos obtener co(A) como interseccion de semiespacios afines.
Teorema 4.4.3. Sean X un ELC real. Entonces la envolvente cerrada con-
vexa de un subconjunto no vacıo S es la interseccion de todos los semiespacios
cerrados que lo contienen.
Demostracion. Llamemos K = co(S) y L a la interseccion de todos los
semiespacios cerrados que contienen a S. Se tiene que L es cerrado y convexo
porque la interseccion de cerrados (de convexos) es cerrada (convexa, resp.)
y L ⊃ S, luego L ⊃ K. Probemos que L ⊂ K, o lo que es lo mismo, que
X \K ⊂ X \L. Fijemos un punto a ∈ X \K. Apliquemos el Teorema 4.3.2(b)
con A = a y B = K. Se deduce que existen Λ ∈ X∗ y γ1, γ2 ∈ R tales que
Λ(a) < γ1 < γ2 < Λ(y) para todo y ∈ K. Sea H := x ∈ X : Λ(x) ≥ γ2.Se tiene: H es un semiespacio cerrado, H ⊃ K (luego H ⊃ S) y a /∈ H. Pero
H ⊃ L, ası que a ∈ X \ L.
4.5. Topologıa debil
Nuestro siguiente objetivo es estudiar la ası llamada “topologıa debil”
de un EVT. Para ello, comenzamos considerando topologıas generadas por
familias de funciones. Sea X un conjunto e Y una familia de aplicaciones

DUALIDAD Y TEOREMAS DE HAHN–BANACH 93
X → Z, donde Z es un ET. Consideremos la topologıa inicial inducida por
Y en X, es decir, la topologıa menos fina (esto es, la mas debil, es decir,
la que contiene menos abiertos) que hace continua cada aplicacion de Y .
Esta topologıa debe contener f−1(G) : G abierto de Z, f ∈ Y , ası queesta familia es una subbase para la topologıa inicial (esto significa que las
intersecciones finitas de miembros de dicha familia constituyen una base para
la topologıa inicial). Llamemos τ a esta topologıa. Notese que si Z es separado
e Y separa puntos de X, entonces τ es separada. En efecto, si a, b ∈ X con
a = b, existe f ∈ Y tal que f(a) = f(b); entonces existen V1 ∈ E(f(a)) y
V2 ∈ E(f(b)) tales que V1 ∩ V2 = ∅; resulta pues que f−1(V1) y f−1(V2) son
entornos de a y b respectivamente, y son disjuntos.
En el proximo teorema, X va a ser un EV, Z = K e Y va a ser un
subconjunto del dual algebraico X ′ de X. Pero antes necesitamos un lema.
Lema 4.5.1. Sean X un EV y φ, φ1, . . . , φn ∈ X ′. Son equivalentes:
(a) φ es una combinacion lineal de φ1, . . . , φn.
(b) Kerφ ⊃∩n
i=1 Kerφi.
Demostracion. La implicacion “(a) =⇒(b)” es obvia. Para el recıproco, pode-
mos suponer que φ1, . . . , φn son linealmente independientes, pues si alguna
φj depende linealmente de las anteriores, podemos eliminar Kerφi de la in-
terseccion.
Procedemos por induccion. Si n = 1, tenemos que Kerφ ⊃ Kerφ1, luego
Kerφ = Kerφ1 porque son hiperplanos. Por el Teorema 4.4.1(b), se tiene
que existe c ∈ K tales que φ = cφ1 , ası que φ ∈ ⟨φ1⟩. La hipotesis de
induccion es que la implicacion “(b) =⇒(a)” es cierta para n − 1 elementos
de X ′. Sean ahora φ, φ1, . . . , φn ∈ X ′ tales que Kerφ ⊃∩n
i=1 Kerφi. Como
se comento anteriormente, podemos suponer que, para cada k ∈ 1, . . . , n,φk /∈ ⟨φ1, . . . , φk−1, φk+1, . . . , φn⟩, luego existe xk ∈ X de modo que φk(xk) =

94 Luis Bernal y Tomas Domınguez
1 y φj(xk) = 0 si j = k; aquı se ha usado la hipotesis de induccion. Fijemos
x ∈ X y consideremos el vector
y := x−∑n
k=1 φk(x)xk.
Entonces φj(y) = φj(x) −∑n
k=1 φk(x)φj(xk) = φj(x) − φj(x) · 1 = 0 para
cada j = 1, . . . , n, luego y ∈∩n
j=1 Kerφj, ası que φ(y) = 0. Pero φ(y) =
φ(x)−∑n
k=1 φk(x)φ(xk). Se deduce que φ =∑n
k=1 ckφk [donde ck = φ(xk)],
luego tenemos (a).
Teorema 4.5.2. Sea X un EV, y sea Y un EV de formas lineales de X que
separa puntos. Dotemos a X de la topologıa inicial σ(X,Y ) generada por la
familia Y . Entonces X es un ELC cuyo dual es Y .
Demostracion. Para cada φ ∈ Y , sea pφ(x) := |φ(x)|. Entonces pφ es una
seminorma sobre X y la familia P = pφ : φ ∈ Y separa puntos de X. Por
tanto esta familia define una topologıa τ de ELC sobre X. Ademas, cada φ ∈Y es τ -continua pues existen p ∈ P y una constante C ∈ (0,+∞) tales que
|φ(x)| ≤ C · |p(x)| para todo x ∈ X (tomar p = pφ y C = 1). Por otra parte,
para cada φ y cada ε > 0 se tiene x ∈ X : pφ(x) < ε = φ−1(B(0, ε)), luego
los τ -entornos de 0 son σ(X, Y )-entornos de 0. Ya que, segun se ve facilmente,
σ(X, Y ) es una topologıa de EVT sobre X, se tiene que τ ⊂ σ(X, Y ). Pero
σ(X, Y ) es la topologıa inicial para Y , luego τ = σ(X,Y ). Por tanto X es
un ELC.
De nuevo por ser σ(X,Y ) topologıa inicial, obtenemos que (X, σ(X,Y ))∗ ⊃Y . Recıprocamente, sea φ : (X, σ(X,Y )) → K lineal y continua. Ya que Pgenera σ(X,Y ), existen φ1, . . . , φn ∈ Y y una constante M ∈ (0,+∞) de
modo que
|φ(x)| ≤M · maxi=1,...,n
pφi(x) =M · max
i=1,...,n|φi(x)| (x ∈ X).
De aquı se infiere que Kerφ ⊃∩n
i=1 Kerφi. Gracias al Lema 4.5.1, φ es
combinacion lineal de φ1, . . . , φn, luego φ ∈ Y .

DUALIDAD Y TEOREMAS DE HAHN–BANACH 95
Definicion 4.5.3. Sea X un EVT cuyo dual topologico X∗ separa puntos.
Se llama topologıa debil de X a σ(X,X∗), es decir, a la topologıa menos fina
sobre X que hace continua cada funcional φ ∈ X∗.
Por tanto, σ(X,X∗) es una topologıa de ELC sobre X, y es mas debil
que la original de X. Notemos que, si xnn≥1 ⊂ X, se verifica: xnσ(X,X∗)−→
n0
⇐⇒ φ(xn)−→n
0 ∀φ ∈ X∗. Notemos tambien que (X, σ(X,X∗))∗ = X∗.
Por ejemplo, si X = ℓ2 entonces X∗ = ℓ2, ya que ℓ2 es un espacio de
Hilbert. Consideremos la sucesion (en) ⊂ ℓ2 dada por
en = (0, 0, . . . , 0, 1[n], 0, 0, 0, . . . ) (n ∈ N).
Entonces en→n0 debilmente porque, para cada y = (y1, y2, . . . ) ∈ ℓ2, se tiene
(en|y) = yn→n0, ya que
∑n y
2n < +∞. Pero en →
n0 en la topologıa de la
norma, ya que ∥en∥ = 1 para todo n ∈ N. Lo mismo sucede en (c0, σ(c0, ℓ1)).
A veces escribiremos xnw→ x con el mismo significado que xn
σ(X,X∗)−→ x.
Notemos que xnw→ 0 si para todo ε > 0 y toda familia finita Λ1, . . . ,Λm de
X∗ existe n0 ∈ N tal que |Λk(xn)| < ε si k = 1, . . . ,m y n ≥ n0. Esto
es equivalente a decir Λ(xn)→n0 para toda φ ∈ X∗. Algo similar ocurre al
caracterizar los subconjuntos debilmente acotados, es decir, acotados en la
topologıa debil.
Teorema 4.5.4. Sea X un EVT cuyo dual separa puntos, y E ⊂ X. Se
verifica:
(a) E es debilmente acotado si y solo si φ(E) es acotado en K para cada
φ ∈ X∗.
(b) Si dim (X) = +∞, entonces (X, σ(X,X∗)) no es localmente acotado
y, en particular, no es normable.

96 Luis Bernal y Tomas Domınguez
Demostracion. (a) Supongamos que E es debilmente acotado y que φ ∈ X∗.
Entonces x ∈ X : |φ(x)| < 1 es un entorno debil de 0, luego existe α > 0
tal que E ⊂ α · x : |φ(x)| < 1. Pero el ultimo conjunto es x ∈ X :
|φ(x)| < α, ası que |φ(x)| < α para todo x ∈ E. En otras palabras, φ(E) es
acotado.
Recıprocamente, supongamos que φ(E) es acotado en K para cada φ ∈X∗, y fijemos un entorno debil V de 0. Entonces existen φ1, . . . , φn ∈ X∗ y
ε > 0 tales que
V ⊃ x : |φ1(x)| < ε ∩ · · · ∩ x : |φn(x)| < ε.
Por hipotesis, existen α1, . . . , αn > 0 tales que |φi(x)| < αi para todo x ∈ E
y todo i = 1, . . . , n. Luego |φi(x)| < ε para todo x ∈ εαE y todo i = 1, . . . , n,
donde α := maxα1, . . . , αn. Por tanto εαE ⊂ V . Como V puede tomarse
equilibrado, resulta de hecho que E ⊂ tV para todo t > αε, ası que E es
debilmente acotado.
(b) Supongamos que dim (X) = +∞ y que V es un entorno debil del origen.
Usamos el resultado de (a). Nuestro objetivo es probar que existe Λ ∈ X∗
tal que Λ(V ) no es acotado en K. Fijemos φ1, . . . , φn ∈ X∗ tales que V ⊃x ∈ X : |φi(x)| < ε∀i = 1, . . . , n. Entonces V ⊃
∩ni=1 Ker(φi) = Ker(φ),
donde φ : X → Kn viene dada por φ(x) = (φ1(x), . . . , φn(x)), que es una
aplicacion lineal. Como dim (X) = +∞, φ no puede ser inyectiva, ası que
existe x0 ∈ X \ 0 con φ(x0) = 0. Ya que X∗ separa puntos, existe Λ ∈ X∗
tal que Λ(x0) = 0. Pero entonces los vectores nx0 (n ≥ 1) estan en Ker(φ)
(luego en V ) y Λ(nx0) = nΛ(x0)→n∞ en K, de donde deducimos que Λ(V )
no es acotado.
El resultado anterior implica que si X es un EN de dimension infinita,
entonces la topologıa de la norma y la debil son distintas. En cambio, si X es
cualquier EVT de dimension finita, entonces todas las topologıas que hacen

DUALIDAD Y TEOREMAS DE HAHN–BANACH 97
de el un EVT coinciden; en particular, son iguales a la topologıa debil.
Denotaremos por Awla clausura en la topologıa debil de un subconjunto
A de un EVT X. El siguiente teorema es debido a Mazur.
Teorema 4.5.5. Sea X un ELC y A ⊂ X. Se verifica:
(a) co(A) = co(A)w.
(b) Si A es convexo, entonces A = Aw.
(c) Los subconjuntos cerrados convexos son los mismos para las topologıas
original y debil.
(d) Si Y es un subespacio vectorial de X, entonces Y = Yw.
Demostracion. Los apartados (b) y (c) se deducen de (a) y del hecho de que la
clausura de un conjunto convexo es convexa. El apartado (d) se deduce de (b).
Probemos (a). Es obvio que co(A) ⊂ co(A)w. Para probar la inclusion inversa,
consideremos XR, el ELC X considerado como EV real. Por el Teorema
4.4.3, co(A) es la interseccion de los semiespacios cerrados que contienen a
A. Pero, por su propia definicion, estos son debilmente cerrados, luego co(A)
es debilmente cerrado, ası que co(A) ⊃ co(A)w.
Corolario 4.5.6. Sea X un ELC metrizable. Si xnw→ x, existe una sucesion
(yn) ⊂ X tal que:
(a) cada yn es una combinacion lineal convexa de una coleccion finita de
vectores xm, y
(b) yn → x.
Demostracion. Por hipotesis, x ∈ xn∞1w, luego x ∈ coxn∞1
w. Pero, por el
teorema anterior, x ∈ coxn∞1 . De ser X metrizable se deduce la existencia
de la sucesion (yn) deseada.

98 Luis Bernal y Tomas Domınguez
Ilustremos lo anterior con un ejemplo. Sea S un ET separado y compacto,
y consideremos el EV C(S) de las funciones continuas S → C dotado de la
norma del supremo, con lo que C(S) es un espacio de Banach. Supongamos
que (fn) ⊂ C(S) es una sucesion uniformemente acotada tal que fn → f
puntualmente en S, donde f ∈ C(S). Entonces existe una sucesion (gn) ⊂cofnn≥1 de modo que gn → f uniformemente en S. En efecto, existe M ∈(0,+∞) tal que |fn(x)| ≤ M para todo x ∈ S y todo n ∈ N. Gracias a la
convergencia puntual y al teorema de la convergencia dominada de Lebesgue,
se deduce que∫Sfn dµ→
∫Sf dµ (n→ ∞) para toda medida compleja µ de
Borel regular en S (notemos que la funcion constante M es integrable para
cada una de estas µ). Debido al teorema de representacion de Riesz (Teorema
3.4.1), se tiene que φ(fn) → φ(f) para toda φ ∈ C(S)∗, es decir, fnw→ f . Del
corolario anterior se deduce el resultado.
A continuacion, estableceremos en el contexto de los espacios normados
un resultado, debido a Mackey, que nos dice que la familia de los conjuntos
acotados no aumenta cuando pasamos a la topologıa debil.
Teorema 4.5.7. Sea X un EN. Entonces un subconjunto A de X es aco-
tado si y solo si es debilmente acotado.
Demostracion. Si A es acotado enX, es debilmente acotado porque σ(X,X∗)
tiene menos abiertos que la topologıa original. Recıprocamente, supongamos
que A es w-acotado. Cada elemento x ∈ X puede ser entendido como un
elemento de X∗∗, sin mas que definir x(x∗) := x∗(x) para todo x∗ ∈ X∗.
Para cada x∗ ∈ X∗, el conjunto x∗(x) : x ∈ A es acotado. Pero x∗(x) :x ∈ A = x(x∗) : x ∈ A. Esto nos dice que la familia A, considerada
como subconjunto de X∗∗, es puntualmente acotada. Como X∗ es un espa-
cio de Banach [pues X∗ = L(X,K) y K es completo], por el teorema de
Banach–Steinhaus resulta que A es uniformemente acotada en X∗∗, es decir,
sup∥x∥X∗∗ : x ∈ A < +∞. Pero la identificacion de X como subespacio de

DUALIDAD Y TEOREMAS DE HAHN–BANACH 99
X∗∗ es isometrica, es decir, ∥x∥X∗∗ = ∥x∥. En consecuencia, A es acotado en
X.
Puede demostrarse (ver Ejercicio 3 del Capıtulo 5) que el resultado ante-
rior se mantiene en espacios localmente convexos.
Las topologıas debiles pueden usarse para obtener un nuevo teorema de
separacion, similar al Teorema 4.3.2, pero que no requiere la convexidad local
del espacio. A cambio, a los conjuntos A y B que aparecen se les exige ahora
compacidad.
Teorema 4.5.8. Sea X un EVT cuyo dual X∗ separa puntos. Sean A,B ⊂ X
no vacıos, disjuntos, convexos y compactos. Entonces existe Λ ∈ X∗ tal que
supx∈A
ReΛx < ınfy∈B
ReΛy.
Demostracion. Para el ELC Xw := (X, σ(X,X∗)), los conjuntos A y B son
cerrados ya que siguen siendo compactos, porque la topologıa deXw es menos
fina que la original de X. Por el Teorema 4.3.2, existe Λ ∈ (Xw)∗ que cumple
la propiedad del enunciado. Finalmente, por el Teorema 4.5.2, (Xw)∗ = X∗,
ası que Λ ∈ X∗.
4.6. Topologıa debil-∗ de un espacio dual
Consideremos un EVT X cuyo dual X∗ separe puntos. Cada vector
x ∈ X induce un elemento del dual algebraico de X∗, es decir, una forma
lineal φx : X∗ → K, la cual viene dada por φx(Λ) = Λ(x) para cada Λ ∈X∗. Notemos que X se identifica con φx : x ∈ X, pues la aplicacion
x 7→ φx es biyectiva. Ademas, es obvio que la familia φx : x ∈ X separa
puntos de X∗. De acuerdo con el Teorema 4.5.2, podemos considerar en X∗ la
topologıa inicial correspondiente a dicha familia, o sea, la topologıa generada
por las seminormas px (x ∈ X) dadas por px(Λ) = |Λ(x)|. Designaremos esta

100 Luis Bernal y Tomas Domınguez
topologıa por σ(X∗, X), la cual sera denominada la topologıa debil-∗ sobre
X∗. Obtenemos ası un ELC (X∗, σ(X∗, X)) cuyo dual es X. La convergencia
en la topologıa debil-∗ sera denotada por “w∗−→”.
Por ejemplo, si X = c0 sabemos que podemos identificar X∗ = ℓ1.
Ası que la topologıa debil-∗ sobre ℓ1 es σ(ℓ1, c0). Segun el Teorema 4.5.2,
(ℓ1, σ(ℓ1, c0))∗ = c0. Notese la diferencia con la topologıa de la norma en
ℓ1, pues ℓ∗1 = ℓ∞. Por ejemplo, para la sucesion e1 = (1, 0, 0, ...), e2 =
(0, 1, 0, 0, ...), . . . ⊂ ℓ1 no es difıcil ver que enw∗−→n
0 (ver Ejercicio 9 para
un resultado mas general). Sin embargo, enw
−→n
0. En efecto, si conside-
ramos el funcional asociado al vector 1 = (1, 1, 1, ...) ∈ ℓ∞, resulta que
1(en) = 0 · 1 + · · ·+ 0 · 1 + 1 · 1︸︷︷︸[n]
+0 · 1 + 0 · 1 + · · · = 1 −→n
0.
A continuacion, vamos a ver que la topologıa debil-∗ posee propiedades de
compacidad muy importantes. Pero antes debemos recordar algunos concep-
tos y resultados sobre topologıas producto. La nocion de producto cartesiano
Y1 × · · · × YN de un numero finito de conjuntos Y1, . . . , YN es bien conocida.
Asimismo, es bien conocida la topologıa producto τ sobre dicho producto
cartesiano, donde esta vez Y1, . . . , YN son espacios topologicos. Baste decir
que un subconjunto A ⊂ Y1 × · · · × YN es abierto para τ si y solo si A es
union de conjuntos de la forma A1 × · · · × AN , donde cada Ai es abierto en
Yi (i = 1, ..., n). Vamos a generalizar estos conceptos al caso de cualquier
numero de factores. Sea X un conjunto no vacıo cualquiera e Yii∈X una
familia de conjuntos, con ındices en X. Se llama producto cartesiano de la
familia Yii∈X al conjunto∏
i∈X Yi definido por
∏i∈X
Yi =aplicacionesX
f→∪i∈X
Yi : f(i) ∈ Yi ∀i ∈ X.
Si j ∈ X, se llama proyeccion j-esima a la aplicacion πj : f ∈∏
i∈X Yi 7→f(j) ∈ Yj. Si cada Yi es un ET (con topologıa τi), se llama topologıa producto

DUALIDAD Y TEOREMAS DE HAHN–BANACH 101
sobre el espacio producto∏
i∈X Yi a la topologıa inicial τ generada por la
familia de proyecciones πii∈X , es decir, τ esta constituida por las uniones
de conjuntos de la forma π−1i1(U1) ∩ · · · ∩ π−1
iN(UN) = f ∈
∏i∈X Yi : f(ij) ∈
Uj ∀j = 1, . . . , N (U1 ∈ τi1 , . . . , UN ∈ τiN ; i1, . . . , iN ∈ X; N ∈ N). Es facil
ver que se genera la misma topologıa si U1 ∈ Bi1 , . . . , UN ∈ BiN , donde Bi es
una base de abiertos en cada Yi. Con la topologıa producto sobre∏
i∈X Yi,
cada proyeccion πj :∏
i∈X Yi → Yj es continua. Un resultado de gran impor-
tancia en topologıa general es el Teorema de Tychonoff, que afirma que si
Yii∈X es una familia de espacios topologicos y, para cada i ∈ X, Ki es un
subconjunto compacto de Yi, entonces∏
i∈X Ki es un subconjunto compacto
de∏
i∈X Yi (ver Ejercicio 11 del Capıtulo 3). En otras palabras, el producto
de espacios compactos es compacto.
Nota 4.6.1. En nuestro presente contexto, nos interesa el caso especial en
que todos los Yi coinciden con un mismo ET Y . En tal caso se denota∏i∈X Yi = Y X . Observemos que Y X = aplicaciones X f→Y , y las proyec-
ciones son las aplicaciones πx : f ∈ Y X 7→ f(x) ∈ Y . En el caso particular
Y = K, obtenemos KX , el espacio producto de K, “X veces”. Habida cuenta
de la topologıa que lleva K, una base de entornos en KX de un elemento
f0 ∈ KX esta formada por las intersecciones finitas de los conjuntos de la
forma
U(f0, x, ε) := f ∈ KX : |f(x)− f0(x)| < ε (x ∈ X, ε > 0).
Definicion 4.6.2. Sean X un EVT y A ⊂ X. Se define la polar de A como
el conjunto
A = φ ∈ X∗ : |φ(x)| ≤ 1 ∀x ∈ A.
Notemos que A es convexo, equilibrado y ∗-debilmente cerrado. Las tres
propiedades se deducen de la igualdad A =∩
x∈A ψ−1x (B(0, 1)), donde ψx
es la aplicacion lineal asociada a x, es decir, ψx : φ ∈ X∗ 7→ φ(x) ∈ K.

102 Luis Bernal y Tomas Domınguez
Como ejemplo de polar, tenemos que si BX denota la bola cerrada unidad
de un EN X, entonces BX = BX∗ . Establecemos seguidamente el Teorema
de Alaoglu–Bourbaki.
Teorema 4.6.3. Si X es un EVT y V ∈ E(0), entonces su polar V es
∗-debilmente compacta. En particular, la bola unidad cerrada BX∗ del dual
de un EN X es ∗-debilmente compacta.
Demostracion. Sabemos que, para cada x ∈ X, existe r(x) ∈ (0,+∞) tal
que x ∈ r(x)V . Ası, si Λ ∈ V se tiene |Λ( xr(x)
)| ≤ 1, luego |Λ(x)| ≤ r(x)
para todo x ∈ X y todo Λ ∈ V . Denotemos por Dx la bola cerrada en K de
centro 0 y radio r(x). Consideremos el espacio KX con la topologıa producto,
y sea P :=∏
x∈X Dx ⊂ KX . Como cada Dx es compacto, se tiene en virtud
del Teorema de Tychonoff que P es compacto en KX . Si Λ ∈ V entonces
Λ ∈ X∗ y |Λ(x)| ≤ r(x) para todo x ∈ X, luego V ⊂ X∗ ∩ P .
Por tanto, en V podemos considerar la topologıa heredada de X∗ [es
decir, σ(X∗, X)] y la heredada de P . Si Λ0 ∈ V , una base de σ(X∗, X)-
entornos de Λ0 esta formada por los conjuntos de la forma
W1 = Λ ∈ X∗ : |Λ(xi)− Λ0(xi)| < ε, 1 ≤ i ≤ N,
mientras que una base de entornos de Λ0 para la topologıa producto esta cons-
tituida por los conjuntos de la forma
W2 = φ ∈ P : |φ(xi)− Λ0(xi)| < ε, 1 ≤ i ≤ N
(ε > 0; x1, ..., xN ∈ X; N ∈ N). ClaramenteW1∩V =W2∩V , luego ambas
topologıas coinciden en V . Supongamos probado que V es cerrado en P .
Como P es compacto, V sera compacto para la topologıa producto, y por
tanto sera ∗-debilmente compacto. Ası pues, basta probar que V es cerrado
en P .

DUALIDAD Y TEOREMAS DE HAHN–BANACH 103
Para ello, fijemos f0 ∈ V ⊂ P . Sean x, y ∈ X, α, β ∈ K y ε > 0
arbitrarios. Sea U el entorno en P de f0 dado por U = g ∈ P : |g(xi) −f0(xi)| < ε/(1 + |α|+ |β|); i = 1, 2, 3, donde x1 = x, x2 = y, x3 = αx+ βy.
Entonces existe f ∈ U ∩V . Para tal f se tiene que |f0(αx+βy)− (αf0(x)+
βf0(y))| = |(f0 − f)(αx + βy) − α(f0 − f)(x) − β(f0 − f)(y)| < ε. Como
esto es cierto para cada ε > 0, resulta que f0 es lineal. Por otra parte, si
x ∈ V y ε > 0, razonando como antes se tiene que existe f ∈ V tal que
|f0(x) − f(x)| < ε, luego |f0(x)| < 1 + ε; pero esto vale para todo ε > 0,
ası que |f0(x)| ≤ 1. Finalmente, f0 es acotada en un entorno de 0 (en V ),
luego es continua. En resumen, f0 ∈ X∗ y |f0(x)| ≤ 1 para todo x ∈ V , lo
que prueba que f0 ∈ V , y por tanto V es cerrado en P .
A pesar de lo que afirma el teorema anterior, no es cierto que BX sea
siempre debilmente compacta si X es un EN. Por ejemplo, si X = c0,
su bola unidad cerrada B = x = (ξk) : ξk →k0, |ξk| ≤ 1 ∀k ∈ N no
es w-compacta. En efecto, se tiene que la sucesion unn≥1, donde un =
(1, 1, ..., 1, 1[n], 0, 0, 0, ...) =
∑nk=1 ek, esta contenida en B, pero carece de pun-
tos de w-acumulacion en B (luego B no es debilmente compacta). En efec-
to, razonando por reduccion al absurdo, supongamos que x = (ξk) ∈ c0
es un punto de w-acumulacion de unn≥1. Como x ∈ c0, existe k0 ∈ N
tal que |ξk| < 1/2 para todo k > k0. Ya que ek0 ∈ ℓ1 y c∗0 = ℓ1, se
tiene que para cada ε > 0 el vector ek0 genera el w-entorno de 0 dado por
V = y = (ηk) ∈ c0 : |ηk0 | < 1/2. Pero para todo n > k0 la componente
k0-esima de un − x tiene modulo |1 − ξk0 | > 1/2, luego un − x /∈ V , o bien
un /∈ x + V . Por otra parte, como la topologıa debil es separada, para ca-
da k ∈ 1, ..., k0 con x = uk existe Vk ∈ E(x) tal que uk /∈ Vk. Por tanto
U := (x+V )∩∩k0
k=1 Vk es un entorno de x tal que un : n ∈ N∩(U\x) = ∅,lo cual contradice la suposicion de que x era un punto de w-acumulacion de
la sucesion.

104 Luis Bernal y Tomas Domınguez
Se puede probar que si X es un EVT separable, entonces la polar V de
cualquier entorno V de 0 es w∗-metrizable (ver Ejercicio 8); por tanto, gra-
cias al teorema de Alaoglu–Bourbaki, V serıa w∗-secuencialmente compacta,
pues compacidad y compacidad secuencial coinciden en espacios metrizables.
Recordemos que un subconjunto A de un ET X se dice secuencialmente
compacto cuando cada sucesion (xn) ⊂ A contiene alguna subsucesion con-
vergente a algun punto de A. En particular, si X es un EN separable, la bola
BX∗ es ∗-debilmente secuencialmente compacta.
Para finalizar esta seccion, comentamos que se puede hablar de otras
topologıas en X∗, aparte de la debil-∗. Por ejemplo, tenemos la “topologıa
fuerte” o topologıa de la convergencia uniforme en subconjuntos acotados. Si
X es un EVT, denotemos por A la familia de sus subconjuntos acotados. Por
definicion, la topologıa fuerte sobre X∗ es la topologıa localmente convexa
generada por la familia de seminormas P = pA : A ∈ A, donde pA(Λ) :=sup|Λ(x)| : x ∈ A. En el caso de un EN, la topologıa fuerte en X∗ coincide
con la topologıa de la norma dual.
4.7. Bidual de un espacio normado. Reflexi-
vidad
Sabemos que si X es un EN, su dual X∗ puede ser normado mediante
∥Λ∥ = sup|Λ(x)| : ∥x∥ = 1, obteniendose un espacio de Banach (X∗, ∥ · ∥)cuyo dual X∗∗ := (X∗)∗ es llamado el bidual de X. Tambien sabemos que
la aplicacion i : X → X∗∗ dada por i(x)(Λ) = Λ(x) es una inyeccion
isometrica de X en X∗∗. Si i es biyectiva, entonces X se llama reflexivo.
Denotemos por BX la bola unidad cerrada de X. Por ser i una isometrıa, se
tiene que i(BX) ⊂ BX∗∗ , de modo que i(BX) = BX∗∗ si y solo si X es refle-
xivo. Identificaremos a partir de ahora i(x) con x, con lo cual entendemos

DUALIDAD Y TEOREMAS DE HAHN–BANACH 105
que X ⊂ X∗∗ y BX ⊂ BX∗∗ . Establecemos a continuacion una importante
propiedad de densidad, conocida como Teorema de Goldstine.
Teorema 4.7.1. Sea X un EN. Entonces BXσ(X∗∗,X∗)
= BX∗∗.
Para demostrarlo, necesitamos el siguiente resultado.
Lema 4.7.2. Sea A un subconjunto cerrado, convexo y equilibrado de un
ELC X. Si x0 /∈ A, existe Λ ∈ X∗ tal que |Λ(x0)| > 1 y |Λ(x)| < 1 para
todo x ∈ A.
Demostracion. Por el Teorema 4.3.2, existe φ ∈ X∗, ası como γ1, γ2 ∈ R,
tales que Reφ(x) < γ1 < γ2 < Reφ(x0) para todo x ∈ A. ComoA es convexo
y equilibrado, ası lo es φ(A). Por tanto φ(A) ⊂ B(0, γ1) y |φ(x0)| > γ2. Basta
tomar ahora Λ := φ/γ1.
Demostracion del Teorema 4.7.1. Sea A := BXσ(X∗∗,X∗)
. Entonces A es ce-
rrado, convexo y equilibrado en el ELC (X∗∗, σ(X∗∗, X∗)). Supongamos que
f0 /∈ A. Por el lema anterior, existe una funcional Λ en el dual del espacio
anterior (es decir, Λ ∈ X∗) tal que |Λ(f0)| > 1 y |Λ(x)| < 1 para todo
x ∈ A. En particular, |Λ(x)| < 1 para todo x ∈ BX , ası que ∥Λ∥ ≤ 1.
Pero |f0(Λ)| > 1, luego ∥f0∥ > 1, es decir, f0 /∈ BX∗∗ . Hemos probado que
BX∗∗ ⊂ A. Por otra parte, BX ⊂ BX∗∗ . Pero si Y es un EN, BY ∗ es w∗-
cerrado, por ser la polar de BY . Aplicado a Y = X∗, se tiene que BX∗∗ es
σ(X∗∗, X∗)-cerrado, de donde, al tomar clausuras, obtenemos A ⊂ BX∗∗ . 2
Combinando el teorema de Goldstine con el de Alaoglu–Bourbaki, obte-
nemos la siguiente caracterizacion de la reflexividad a traves de topologıas
debiles.
Teorema 4.7.3. Sea X un EN. Entonces X es reflexivo si y solo si BX
es debilmente compacta.

106 Luis Bernal y Tomas Domınguez
Demostracion. Supongamos que X es reflexivo. Con la identificacion via la
isometrıa, se tiene X = X∗∗, luego el ET (X, σ(X,X∗)) se identifica con
el ET (X∗∗, σ(X∗∗, X∗)), habida cuenta de la definicion de estas topologıas
iniciales. Por el Teorema 4.6.3, BX∗∗ es w∗-compacta, luego BX (= BX∗∗) es
w-compacta. Recıprocamente, supongamos que BX es w-compacta. Entonces
BX es σ(X∗∗, X∗)-compacta, ya que BX ⊂ X∗∗. Por tanto BX es σ(X∗∗, X∗)-
cerrada. Gracias al Teorema 4.7.1 se infiere que BX = BX∗∗ , de donde X =
X∗∗, c.q.d.
Corolario 4.7.4. Si X es un EN reflexivo e Y es un subespacio cerrado
de X, entonces Y es reflexivo.
Demostracion. Tenemos que BY es un subconjunto cerrado y convexo de
BX . Por el Teorema 4.5.5, BY es debilmente cerrado. Pero BX es debilmente
compacto, ası que BY es tambien debilmente compacto. Del teorema anterior
se deduce la reflexividad de Y .
4.8. Trasposicion de operadores
Supongamos ahora que X e Y son dos espacios vectoriales topologi-
cos. Recordemos que L(X,Y ) denotaba el EV de las aplicaciones lineales
y continuas T : X → Y . El nombre de “operador” se suele reservar para
el caso Y = X, y L(X) denota el EV de los operadores sobre X, es decir,
L(X) = L(X,X). A partir de ahora, asumiremos en esta seccion que X e Y
son espacios localmente convexos, con el fin de asegurar que X∗ e Y ∗ no son
triviales.
Definicion 4.8.1. Sean X e Y dos espacios localmente convexos y T ∈L(X, Y ). Se define la aplicacion traspuesta de T como la aplicacion
T ∗ : y∗ ∈ Y ∗ 7→ y∗ T ∈ X∗.

DUALIDAD Y TEOREMAS DE HAHN–BANACH 107
De la linealidad y continuidad de T y de cada y∗ ∈ Y ∗ se deduce que, en
efecto, cada y∗T es lineal y continua, lo que confirma que T ∗ esta bien defini-
da. Nuestro objetivo es obtener propiedades de T ∗ a partir de propiedades
de T , y viceversa.
Antes necesitamos el concepto de anulador. Sean X un ELC, E un su-
bespacio vectorial de X y F un subespacio vectorial de X∗. Los anuladores
E⊥ de E y ⊥F se definen respectivamente por E⊥ = x∗ ∈ X∗ : x∗(x) =
0 ∀x ∈ E y ⊥F = x ∈ X : x∗(x) = 0 ∀x∗ ∈ F.
Notemos que son subespacios vectoriales de X∗ y X respectivamente.
Notemos tambien que, por el Teorema de Hahn–Banach, E⊥ = 0 si E no
es denso en X. Por el mismo motivo ⊥F = 0 si F no es w∗-denso, pues
(X∗, σ(X∗, X))∗ = X. Por otra parte, si para cada x ∈ X denotamos por φx
la aplicacion φx : x∗ ∈ X∗ 7→ x∗(x) ∈ K, se verifica por definicion de E⊥ que
E⊥ =∩
x∈E Ker(φx). Ya que cada φx es w∗-continua, se deduce que E⊥ es
un subespacio w∗-cerrado de X∗. Analogamente, ⊥F =∩
x∗∈F Ker(x∗), luego
⊥F es un subespacio cerrado de X.
Nota 4.8.2. Notese que tenemos que diferenciar entre ⊥F y F⊥; por ejemplo,
si X es normado, podrıa haber confusion entre ⊥F ⊂ X y F⊥ ⊂ X∗∗, pues
X ⊂ X∗∗.
Pasemos ya al estudio de propiedades algebraicas y topologicas de las
aplicaciones traspuestas. La primera propiedad a estudiar es la continuidad.
No es difıcil probar, sin mas que usar las familias de seminormas que definen
las respectivas topologıas debiles, que cada T ∈ L(X, Y ) es debil-continua, es
decir, continua como aplicacion (X, σ(X,X∗)) → (Y, σ(Y, Y ∗)). Resulta que
la propiedad dual para T ∗ es asimismo cierta. Es usual denotar la imagen
T (X) de cada T por Im(T ).

108 Luis Bernal y Tomas Domınguez
Teorema 4.8.3. Sean X e Y dos espacios localmente convexos y T ∈L(X, Y ). Se tiene:
(a) T ∗ : (Y ∗, σ(Y ∗, Y )) → (X∗, σ(X∗, X)) es continua.
(b) Si X e Y son espacios normados, entonces T ∗ : Y ∗ → X∗ (con X∗ e
Y ∗ dotados de las normas duales) es continua y ∥T ∗∥ = ∥T∥.
(c) Ker(T ∗) = Im(T )⊥. Por tanto T ∗ es inyectiva si y solo si T tiene
imagen densa.
(d) Ker(T ) = ⊥Im(T ∗). Por tanto T es inyectiva si y solo si T ∗ tiene
imagen σ(X∗, X)-densa.
Demostracion. (a) Una familia de seminormas que define la topologıa de
(X∗, σ(X∗, X)) esta constituida por las aplicaciones q : X∗ → [0,+∞) de la
forma q(x∗) = max1≤i≤n |x∗(xi)|, donde n ∈ N y x1, . . . , xn ∈ X. Fijada q,
hemos de encontrar una seminorma p : Y ∗ → [0,+∞) de la correspondiente
familia que define la topologıa de (Y ∗, σ(Y ∗, Y )), ası como una constante
M ∈ (0,+∞) tales que q(T ∗y∗) ≤M · p(y∗) para todo y∗ ∈ Y ∗ [ver Ejercicio
5 del Capıtulo 2]. Observando que y∗ T ∈ X∗ para todo y∗ ∈ Y ∗, basta
escoger p(y∗) := max1≤i≤n |y∗(Txi)| y M = 1.
(b) Para cada y∗ ∈ Y ∗, ∥T ∗y∗∥ = sup∥x∥≤1 |T ∗y∗(x)| = sup∥x∥≤1 |y∗(Tx)| ≤∥y∗∥ · ∥T∥, ası que T ∗ es continua y ∥T ∗∥ ≤ ∥T∥. Por otra parte, sea ε > 0.
Escojamos x ∈ X con ∥x∥ = 1 tal que ∥Tx∥ ≥ ∥T∥ − ε. Por el teorema
de Hahn–Banach, existe y∗ ∈ Y ∗ tal que ∥y∗∥ = 1 de modo que y∗(Tx) =
∥Tx∥. Ası ∥T ∗y∗∥ ≥ |T ∗y∗(x)| = |y∗(Tx)| = ∥Tx∥ ≥ ∥T∥ − ε. Por tanto
∥T ∗∥ ≥ ∥T∥ − ε para todo ε > 0. Haciendo ε → 0, resulta ∥T ∗∥ ≥ ∥T∥. Enconsecuencia, ∥T ∗∥ = ∥T∥.
(c) Tenemos: y∗ ∈ Ker(T ∗) ⇐⇒ T ∗y∗ = 0 ⇐⇒ T ∗y∗(x) = 0 ∀x ∈ X ⇐⇒y∗(Tx) = 0 ∀x ∈ X ⇐⇒ y∗ ∈ Im(T )⊥.

DUALIDAD Y TEOREMAS DE HAHN–BANACH 109
(d) Recordando que, por el teorema de Hahn–Banach, Y ∗ es separante, se
tiene, analogamente: x ∈ Ker(T ) ⇐⇒ Tx = 0 ⇐⇒ y∗(Tx) = 0 ∀y∗ ∈Y ∗ ⇐⇒ (T ∗y∗)(x) = 0 ∀y∗ ∈ Y ∗ ⇐⇒ φ(x) = 0 ∀φ ∈ T ∗(Y ∗) ⇐⇒ x ∈⊥Im(T ∗).
En el proximo capıtulo estudiaremos las ası llamadas aplicaciones com-
pactas, ası como sus traspuestas. Ambas aparecen con frecuencia en cues-
tiones de analisis funcional aplicado.
Ejercicios
1.- Sean X e Y dos espacios localmente convexos y T : X → Y una apli-
cacion lineal y continua. Probar que T es continua de (X,σ(X,X∗)) en
(Y, σ(Y, Y ∗)). Indicacion: puede hacerse directamente, o bien usando el Ejer-
cicio 5 del Capıtulo 2.
2.- Probar que una sucesion (xn) ⊂ ℓp (1 < p < +∞) converge debilmente a x
si y solo si se verifican las siguientes condiciones:
(a) (xn) es acotada en la topologıa original, es decir, existe una
constante M ∈ (0,+∞) tal que ∥xn∥p ≤ M para todo n ∈ N.
(b) Para cada k ∈ N, xn(k) −→n→∞
x(k).
Hemos usado la notacion x(k) = componente k-esima de x.
Indicacion: Para la necesidad, aplicar el Ejercicio 12 del Capıtulo 3, el Teo-
rema 4.5.7 y la identificacion ℓ∗p ≈ ℓq, donde q es el conjugado de p. Para la
suficiencia, usar esta identificacion y la desigualdad de Holder.
3.- (a) Sea X un EVT cuyo dual separa puntos. Probar que (X∗, σ(X∗, X))
es metrizable si y solo si X posee una base de Hamel numerable.
Indicacion: Para la suficiencia, fijar una base numerable (Un) de en-
tornos de 0, y encontrar, para cada n, un εn > 0 y un conjunto fini-
to Fn ⊂ X tales que x∗ : |x∗(x)| < εn ∀x ∈ Fn ⊂ Un. Verificar

110 Luis Bernal y Tomas Domınguez
que la familia de seminormas px : x ∈ Y , donde Y :=∪
n≥1 Fn y
px(x∗) := |x∗(x)|, define σ(X∗, X). Ahora, demostrar que Y es un
sistema de generadores del EV X∗. Para ello, fijar x0 ∈ X y us-
ar la caracterizacion de la continuidad por seminormas de la apli-
cacion x∗ ∈ X∗ x07→x∗(x0) ∈ K (Lema 4.2.3) para deducir que existen
y1, ..., yp ∈ Y con∩p
i=1Ker yi ⊂ Kerx0, y aplicar el Lema 4.5.1.
(b) Como aplicacion, probar que en ℓ1 las topologıas σ(ℓ1, c0) y σ(ℓ1, c00)
son diferentes, a pesar de que c∗0 = ℓ1 = c∗00 [Ejercicio 5(b)].
4.- Sea X un ELC y denotemos por P una familia separante y filtrante de
seminormas que define la topologıa de X. Para cada α ∈ (0,+∞) y cada
p ∈ P, definimos Aα,p := x∗ ∈ X∗ : |x∗(x)| ≤ αp(x) ∀x ∈ X.
(a) Demostrar que cada Aα,p es ∗-debilmente cerrado.
(b) Probar que X∗ =∪Aα,p : α > 0, p ∈ P.
(c) Si X tiene dimension infinita, probar que cada Aα,p tiene interior
vacıo.
Indicacion: Por reduccion al absurdo, supongamos que su interior no
es ∅. Entonces existen y∗ ∈ X∗ y un entorno ∗-debil de 0, sea V , tales
que y∗ + V ⊂ Aα,p, luego existen x1, ..., xN ∈ X y ε > 0 tales que
x∗ : |x∗(xi)| < ε ∀i ∈ 1, ..., N ⊂ V . Tomar M := ⟨x1, . . . , xM ⟩
y x0 ∈ X \ M (¿por que existe x0?). Definir Λ : ⟨M,x0⟩ → K por
Λ(m+λx0) = y∗(m)+λ(αp(x0)+1). Probar que Λ es lineal y continua
en ⟨M,x0⟩ y aplicar el teorema de extension de Hahn–Banach.
(d) Si X es un ELC metrizable, probar que su topologıa esta definida por
una familia separante, filtrante y numerable de seminormas.
Indicacion: considerar las funcionales de Minkowski de una sucesion
adecuada de entornos del origen.
(e) Deducir que si X es un ELC metrizable de dimension infinita, entonces
el espacio (X∗, σ(X∗, X)) es de primera categorıa.

DUALIDAD Y TEOREMAS DE HAHN–BANACH 111
5.- Sea X un espacio de Banach con dual X∗.
(a) Probar que un subconjunto A de X∗ es acotado en norma si y solo si
es σ(X∗, X)-acotado.
(b) Probar que c∗00 = ℓ1 y que existen subconjuntos σ(ℓ1, c00)-acotados de
ℓ1 que no son acotados en la norma de ℓ1 [por tanto (a) puede no ser
cierto si X es un EN que no es completo].
(c) Probar que en ℓ1 existen sucesiones σ(ℓ1, c00)-convergentes que no son
acotadas en la norma de ℓ1.
6.- (a) Sea p ∈ (0, 1). Demostrar que ℓp dotado de la metrica d(x, y) :=∑∞n=1 |x(n) − y(n)|p [donde x(n) denota la componente n-esima del
vector x] es un F-espacio no localmente convexo.
Indicacion: Para la ultima propiedad, suponer que V es un entorno con-
vexo del origen con V ⊂ Bd(0, 1). Tomar s > 0 tal que Bd(0, sp) ⊂ V
y considerar, para cada n ∈ N, el vector xn =∑∞
n=1snek.
(b) Probar que la aplicacion Φ : x ∈ ℓ∞ 7→ Λx ∈ ℓ∗p, donde Λx(y) :=∑∞n=1 x(n)y(n) para todo y ∈ ℓp, es lineal y biyectiva.
(c) Demostrar que el conjunto B := x ∈ ℓp :∑∞
n=1 |x(n)| ≤ 1 es debil-
mente acotado pero no es acotado en la topologıa original.
7.- Probar que en ℓ1 una sucesion converge debilmente si y solo si converge en
norma. ¿Significa esto que ambas topologıas coinciden? ¿Puede obtenerse
alguna conclusion respecto de la metrizabilidad de σ(ℓ1, ℓ∞)?
Indicacion: Para la primera parte, suponer, por reduccion al absurdo, que
xnw→ 0 pero que xn → 0 en la norma ∥·∥1. Entonces existen una subsucesion
(yn) de (xn) y un d > 0 tales que ∥yn∥1 > d para todo n. Elegir n1 = 1
y proceder por induccion para obtener numeros naturales n1 < n2 < · · · y
k1 < k2 < · · · tales que∑km−1
k=1 |y(k)nm | < d/2m y∑∞
k=km+1 |y(k)nm | < d/2m
para todo m [con la notacion x = (x(1), x(2), . . . ) para cada x ∈ ℓ1]. Tomar

112 Luis Bernal y Tomas Domınguez
ahora u ∈ ℓ∞ tal que u(k) = signo (y(k)nm) si km−1 < k ≤ km, y probar que
|u(ynm)| ≥ d− d/2m−2 para todo m.
8.- (a) Si τ1, τ2 son dos topologıas sobre un mismo conjunto S, de modo que
τ1 es separada y τ2 es compacta, y τ1 ≼ τ2, entonces τ1 = τ2.
Indicacion: Probar primero que un subconjunto compacto de un ET
separado es cerrado, y demostrar despues que la aplicacion identidad
i : (S, τ2) → (S, τ1) es un homeomorfismo.
(b) Aquı y en el apartado siguiente, X es un EVT separable y K ⊂ X∗
un subconjunto w∗-compacto. Sea (xn) una sucesion densa en X y sea
fn : X∗ → K dada por fn(Λ) = Λ(xn)1+supφ∈K |φ(xn)| (n ∈ N). Probar que
cada fn es w∗-continua y que la aplicacion
d : (Λ,Λ′) ∈ X∗ ×X∗ 7→∞∑n=1
1
2n|fn(Λ)− fn(Λ
′)| ∈ [0,+∞)
define una distancia.
(c) Demostrar que d es continua en K×K, con K dotado de la topologıa
inducida por σ(X∗, X), y deducir que la topologıa generada por d en
K es menos fina que σ(X∗, X).
(d) Concluir de (a) que cada subconjunto w∗-compacto del dual de un
EVT separable X es w∗-metrizable. Deducir que la polar de cualquier
entorno de 0 en X es secuencialmente compacta para la topologıa
∗-debil.
9.- Demostrar que una sucesion (xn) ⊂ ℓ1 acotada en norma cumple xnw∗−→n
0
si y solo si ξn,k →n0 para todo k ∈ N, donde ξn,k denota la componente
k-esima de xn.
Indicacion: Recordar que cada x = (ξ1, ξ2, . . . ) ∈ ℓ1 se identifica con un
elemento de c∗0 vıa la expresion x(y) =∑∞
k=1 ξkηk, donde y = (η1, η2, . . . ) ∈
c0. Para probar la suficiencia, fijar y = (ηk) ∈ c0, ε > 0 y M ∈ (0,+∞) tal
que ∥xn∥ ≤ M (n ≥ 1). Se ha de probar que xn(y) → 0. Usar que ηk → 0

DUALIDAD Y TEOREMAS DE HAHN–BANACH 113
junto con la hipotesis para dividir la serie que define x(y) en dos sumandos
pequenos.
10.- Un subconjunto de un EV X se dice absolutamente convexo si es equili-
brado y convexo. Si A ⊂ X, se define su envolvente absolutamente convexa
absco(A) como la interseccion de todos los subconjuntos absolutamente con-
vexos que contienen a A. Si X es un EVT, se define la envolvente cerrada ab-
solutamente convexa absco(A) como la interseccion de todos los subconjun-
tos cerrados y absolutamente convexos que contienen a A. Por ultimo, se de-
fine la bipolar de A como el conjunto A = x ∈ X : |φ(x)| ≤ 1 ∀φ ∈ A.
(a) Demostrar que absco(A) es el menor subconjunto equilibrado y abso-
lutamente convexo de X que contiene a A.
(b) Establecer la identidad absco(A) = ∑N
i=1 λixi :∑N
i=1 |λi| ≤ 1, xi ∈
A, i ∈ 1, ..., N, N ∈ N.
(c) Probar que absco(A) es el menor subconjunto cerrado, equilibrado y
absolutamente convexo de X que contiene a A.
(d) Verificar que absco(A) = absco(A).
(e) Demostrar el Teorema de las bipolares: si X es un ELC, entonces
A = absco(A).
11.- Utilizando redes (ver Capıtulo 3), probar que si V es un entorno del origen
en un EVT, entonces su polar V es cerrado en el espacio producto P que
aparece en la demostracion del teorema de Alaoglu–Bourbaki. Esto simplifica
la prueba de dicho teorema.
12.- Usando la identificacion ℓ∗1 ≈ ℓ∞, describir la traspuesta de la aplicacion
T : x = (xn) ∈ ℓ1 7→ (xn/n) ∈ ℓ1.
13.- Sean X un EN con dual X∗ y M un subespacio de X. Probar que M⊥ es
un subespacio cerrado de X∗ y que existe una biyeccion isometrica entre
M∗ y X∗/M⊥.

114 Luis Bernal y Tomas Domınguez
14.- (a) Sea M un subconjunto de un EN X. Supongamos que (xn)n∈N es una
sucesion en M tal que ∥xn∥ → α y sea x un punto adherente [para
este concepto, remitimos a la Seccion 3.6] de (xn) para la topologıa
debil. Probar que ∥x∥ ≤ α.
(b) SeaX un espacio de Banach reflexivo y C un conjunto convexo, cerrado
y acotado deX. Probar que existe un elemento en C de norma mınima.
Indicacion: usar (a), el Teorema 3.6.4(d) y algunos resultados de este
capıtulo.
(c) Sea A el subconjunto de c0 definido de la siguiente forma: x = (ξk) ∈
A si x ∈ c00, ∥x∥ ≤ 2, n = n(x) := maxk ∈ N : ξk = 0 > 1 y
ξk ≥ (n + 1)/n para k ∈ 1, ..., n. Probar que A es un subconjunto
convexo, cerrado y acotado de c0 y que no existe ningun elemento en
A de norma mınima.
15.- (a) Probar directamente el siguiente hecho: dados ε > 0, una sucesion
(xk) ⊂ R con |xk| ≤ 1 para todo k ∈ N y un numero finito de se-
ries absolutamente convergentes∑∞
k=1 yk,i (i = 1, . . . , N) de numeros
reales, existe una sucesion (zk) ⊂ R tal que zk → 0, |zk| ≤ 1 para
todo k ∈ N y∣∣∑∞
k=1 yk,i(zk − xk)∣∣ < ε (i = 1, . . . , N).
(b) Demostrarlo aplicando el teorema de Goldstine.
16.- Consideremos el subconjunto S = em+men : 0 ≤ m < n, n ∈ N del espa-
cio de Hilbert ℓ2, donde (en)n≥0 es la base canonica usual. Demostrar que
0 es un punto de acumulacion debil de S pero no existe ninguna sucesion
de puntos de S que tienda debilmente a 0.

Capıtulo 5
Aplicaciones de la completitud
y la convexidad
Nuestro objetivo en este capıtulo es obtener una serie de resultados
que se derivan o bien de la completitud del EVT subyacente –supuesto
metrizable– o bien de la estructura convexa local del mismo, si es el caso. En
la base del primer tipo de resultados se encuentra el teorema de Baire (ver
Capıtulo 1), el cual es de naturaleza puramente topologica. Para el segun-
do tipo de resultados, nos apoyaremos en las distintas versiones del teorema
de Hahn–Banach. El teorema de Banach–Steinhaus y el teorema de Krein–
Milman son los puntos de partida respectivos de las dos lıneas de aplicaciones
que estudiaremos aquı.
5.1. Equicontinuidad. Teorema de Banach--
Steinhaus
Supongamos que M1 y M2 son espacios metricos, con metricas respec-
tivas d1 y d2. Sea F una familia de aplicaciones de M1 en M2. Decimos que
115

116 Luis Bernal y Tomas Domınguez
F es equicontinua cuando, para cada ε > 0, existe δ = δ(ε) > 0 de modo
que, si x, y ∈ M1 cumplen d1(x, y) < δ, entonces d2(f(x), f(y)) < ε para
toda f ∈ F (observar que este concepto generaliza el dado en el Capıtu-
lo 3). Recordemos que, en el contexto de los espacios normados, el teorema
de Banach–Steinhaus afirmaba que si Λα : α ∈ I es una familia de apli-
caciones lineales y continuas de un espacio de Banach X en un EN Y , y
para cada x ∈ X se tiene que Λα(x) : α ∈ I es acotado en Y , entonces
M := sup∥Λα∥ : α ∈ I < +∞. Esto, en particular, implica que la familia
es equicontinua, pues ∥Λα(x1) − Λα(x2)∥ = ∥Λα(x1 − x2)∥ ≤ M · ∥x1 − x2∥para todo x1, x2 ∈ X y todo α ∈ I. Vamos a estudiar un resultado analogo
para espacios vectoriales topologicos.
Definicion 5.1.1. Sean X e Y espacios vectoriales topologicos y Γ una
familia de aplicaciones lineales de X en Y . Decimos que Γ es equicontinua
si, para cada entorno W del origen en Y , existe un entorno V del origen en
X tal que Λ(V ) ⊂ W para todo Λ ∈ Γ.
Es evidente que cada miembro de una familia equicontinua Γ es conti-
nua, es decir, Γ ⊂ L(X, Y ). Es facil probar que, entre espacios normados,
la equicontinuidad de Γ es de hecho equivalente a sup∥Λ∥ : Λ ∈ Γ <
+∞, lo cual significa que si E es acotado entonces∪
Λ∈Γ Λ(E) es tambien
acotado. Veamos que este resultado es tambien cierto en espacios vectoriales
topologicos.
Proposicion 5.1.2. Sean X e Y espacios vectoriales topologicos, Γ ⊂ L(X, Y )
una familia equicontinua y E ⊂ X acotado. Entonces existe F ⊂ Y acota-
do tal que Λ(E) ⊂ F para todo Λ ∈ Γ o, equivalentemente,∪
Λ∈Γ Λ(E) es
un subconjunto acotado de Y . En particular, toda familia equicontinua de
aplicaciones lineales es puntualmente acotada.
Demostracion. Llamemos F :=∪
Λ∈Γ Λ(E) y fijemos W ∈ E(0) en Y . Por
equicontinuidad, existe V ∈ E(0) en X tal que Λ(V ) ⊂ W para todo Λ ∈ Γ.

APLICACIONES DE LA COMPLETITUD Y LA CONVEXIDAD 117
Como E es acotado, existe t > 0 tal que E ⊂ tV . Por tanto Λ(E) ⊂ tΛ(V ) ⊂tW para todo Λ ∈ Γ, de donde deducimos que F ⊂ tW . Ası que F es
acotado.
A continuacion, enunciamos el Teorema de Banach–Steinhaus para espa-
cios vectoriales topologicos.
Teorema 5.1.3. Sean X e Y dos espacios vectoriales topologicos y Γ ⊂L(X, Y ). Sea B = x ∈ X : Γ(x) es acotado en Y , donde Γ(x) es la orbita
de x bajo Γ, es decir, Γ(x) = Λ(x) : x ∈ Γ. Si B es de segunda categorıa
en X, entonces B = X y Γ es equicontinua.
Demostracion. SeaW ∈ E(0) en Y . Podemos escoger un entorno U ∈ E(0) enY , cerrado y equilibrado, tal que U −U ⊂ W . Pongamos E :=
∩Λ∈Γ Λ
−1(U).
Entonces E es cerrado. Ademas, si x ∈ B existe algun n ∈ N tal que Γ(x) ⊂nU ya que Γ(x) es acotado. Por tanto Λ(x) ∈ nU para todo Λ ∈ Γ, de donde
x ∈ nΛ−1(U) para todo Λ ∈ Γ, ası que B ⊂∪∞
n=1 nE. Como B es de segunda
categorıa y cada nE es cerrado, existe n ∈ N tal que (nE)0 = ∅, donde A0
denota el interior de A. Pero (nE)0 = nE0, luego E0 = ∅. Por tanto podemos
seleccionar un punto x0 ∈ E0. Entonces V := x0−E es un entorno del origen
en X que satisface: Λ(V ) = Λ(x0) − Λ(E) ⊂ U − U ⊂ W para cada Λ ∈ Γ.
De aquı deducimos que Γ es equicontinua. Pero ademas, por la Proposicion
5.1.2, Γ es puntualmente acotada, y por tanto B = X.
Corolario 5.1.4. Sea Γ una familia de aplicaciones lineales y continuas de
un F-espacio X en un EVT Y . Si Γ es puntualmente acotada, entonces Γ
es equicontinua.
Demostracion. Con la notacion del Teorema 5.1.3, se tiene que B = X. Como
X es un espacio metrico completo, es de segunda categorıa en sı mismo por
el teorema de Baire. Por tanto Γ es equicontinua.

118 Luis Bernal y Tomas Domınguez
Corolario 5.1.5. Sea (Λn) una sucesion de aplicaciones lineales y continuas
de un F-espacio X en un EVT Y . Si para cada x ∈ X existe lımn→∞ Λn(x) =
Λ(x) ∈ Y , entonces Λ es continua.
Demostracion. En cualquier ET Z, si (zn) ⊂ Z y zn→nz0 ∈ Z, es facil ver
que el conjunto z0 ∪ zn : n ≥ 1 es compacto. Por el Teorema 2.2.3,
z0∪zn : n ≥ 1 es acotado, luego la sucesion (zn) esta acotada, si Z es un
EVT. Ası que cada sucesion (Λn(x)) esta acotada. Por el Teorema 5.1.3, la
familia Γ := Λn : n ∈ N es equicontinua. En consecuencia, dado V ∈ E(0)en Y , existe U ∈ E(0) en X tal que Λn(U) ⊂ V para todo n ∈ N. Fijemos
W ∈ E(0) en Y . Existe V ∈ E(0) cerrado con V ⊂ W . Tomamos el U ∈ E(0)que corresponde a este V . Como Λ(x) ∈ Λn(x) : n ≥ 1 para cada x ∈ X,
resulta que Λ(U) ⊂ V = V ⊂ W . Ya que Λ es lineal, se tiene que Λ es
continua en X.
5.2. Teorema de la Aplicacion Abierta
A continuacion obtenemos resultados basicos para espacios vectoriales
topologicos metrizables completos, que extienden teoremas ya conocidos en
el contexto de espacios de Banach. Comenzamos por el Teorema de la Apli-
cacion Abierta, llamado tambien Teorema del Homomorfismo de Banach.
Teorema 5.2.1. Sean X un F-espacio, Y un EVT y Λ ∈ L(X, Y ) tal que
Λ(X) es de segunda categorıa en Y . Entonces Λ(X) = Y y Λ es abierta, es
decir, transforma abiertos de X en abiertos de Y .
Notemos que cualquier Λ ∈ L(X, Y ) abierta entre dos espacios vectoriales
topologicos cualesquiera X e Y es sobreyectiva. En efecto, Λ(X) serıa un EV
y un entorno del origen, luego serıa absorbente. Ası, dado y ∈ Y , existe t > 0
tal que y ∈ t · Λ(X) = Λ(X).

APLICACIONES DE LA COMPLETITUD Y LA CONVEXIDAD 119
Demostracion del Teorema 5.2.1. De acuerdo con el parrafo anterior, basta
probar que Λ es abierta. Como Λ es lineal, es suficiente demostrar que la
imagen por Λ de un entorno de 0 en X es un entorno de 0 en Y .
Fijemos pues un V ∈ E(0) en X. Sea r > 0 tal que B(0, r) ⊂ V , donde
B(a, ε) := x ∈ X : d(x, a) < ε y d es una distancia en X que define
su topologıa. Llamemos Vn = B(0, r/2n) (n ≥ 1). Vamos a ver que existe
W ∈ E(0) en Y tal que
W ⊂ Λ(V1) ⊂ Λ(V ). (1)
Como V1 ⊃ V2 − V2, tenemos
Λ(V1) ⊃ Λ(V2)− Λ(V2) ⊃ Λ(V2)− Λ(V2),
donde se ha usado la linealidad de Λ y el hecho de que A − B ⊂ A−B
para cualesquiera subconjuntos A y B de un EVT [Proposicion 2.1.7(b)]. Si
probamos que (Λ(V2))0 = ∅, obtendrıamos la existencia de un punto x0 ∈ X
y un entorno W de 0 con x0 +W ⊂ Λ(V2), luego
W ⊂ W −W = (x0 +W )− (x0 +W ) ⊂ Λ(V2)− Λ(V2) ⊂ Λ(V1),
y tendrıamos la primera inclusion de (1). Pues bien, tenemos que X =∪∞n=1 nV2, ya que V es absorbente. Por tanto Λ(X) =
∪∞n=1 nΛ(V2). Co-
mo Λ(X) es de segunda categorıa, existe n ∈ N tal que (nΛ(V2))0 = ∅. Pero
(nΛ(V2))0 = n(Λ(V2))
0 = ∅, ası que (Λ(V2))0 = ∅, como se requerıa.
Resta probar la segunda inclusion de (1). Para ello, tomemos y1 ∈ Λ(V1)
y elijamos inductivamente yn ∈ Λ(Vn) (n ≥ 2). Supongamos que yn ya ha
sido seleccionado. Igual que para el caso de V1, se tiene que Λ(Vn) contiene
un entorno del origen. Por tanto Λ(Vn) ∩ (yn − Λ(Vn+1)) = ∅, luego existe
xn ∈ Vn tal que Λxn ∈ yn −Λ(Vn+1). Pongamos yn+1 := yn −Λxn ∈ Λ(Vn+1),
con lo cual (yn) queda bien definida. Consideremos la sucesion (Sn) dada por
Sn = x1 + x2 + · · · + xn. Entonces (Sn) es una sucesion de Cauchy en X.

120 Luis Bernal y Tomas Domınguez
En efecto, como d puede elegirse invariante por traslaciones (y completa),
se tiene, para todo m > n, que
d(Sm, Sn) = d(Sm − Sn, 0) = d( m∑k=n
xk, 0)
≤ d(0, xn) + d(xn, xn+1) + · · ·+ d(xm−1, xm)
< r2−n + r2−n+1 + r2−n + · · ·+ r2−m+2 < 5r · 2−n < ε
siempre que n ≥ n0 = n0(ε) con n0 ∈ N suficientemente grande. Como d es
completa, resulta que existe x ∈ X tal que Sn→nx. Ademas d(Sn, 0) ≤∑n
k=1 d(xk, 0) ≤∑∞
k=1 d(xk, 0) <∑∞
k=1r2k
= r para todo n ∈ N, luego
d(x, 0) = d(lımn→∞ Sn, 0) = lımn→∞ d(Sn, 0) ≤ r, ası que x ∈ B(0, r) ⊂ V .
Por tanto x ∈ V .
Nos queda ver que Λx = y1. Para ello, recordemos que Λxn = yn − yn+1.
Como Λ es continua, obtenemos:
Λx = lımn→∞
ΛSn = lımn→∞
n∑k=1
Λxk = lımn→∞
n∑k=1
(yk − yk+1)
= lımn→∞
(y1 − yn+1) = y1 − lımn→∞
yn.
Por ultimo, dado U ∈ E(0) en Y , existe W ∈ E(0) cerrado con W ⊂ U . Para
ese W , existe por continuidad de Λ un n0 ∈ N tal que Λ(Vn0) ⊂ W , ası que
Λ(Vn) ⊂ W para todo n ≥ n0. Se deduce que yn ∈ Λ(Vn) ⊂ W ⊂ U para
todo n ≥ n0, y por tanto yn→n0. En consecuencia, Λx = y1− lımn→∞ yn = y1,
c.q.d. 2
Corolario 5.2.2. Si X e Y son F-espacios y Λ ∈ L(X, Y ), de modo que Λ
es sobreyectiva, entonces Λ es abierta. En particular, si Λ es un isomorfismo
algebraico entre dos F-espacios, de modo que Λ es continua, entonces Λ es
un isomorfismo topologico.
Corolario 5.2.3. Si X es un EV y τ1, τ2 son dos topologıas que hacen de
X un F -espacio, de modo que τ1 4 τ2, entonces τ1 = τ2.

APLICACIONES DE LA COMPLETITUD Y LA CONVEXIDAD 121
Demostracion. Considerar la identidad (X, τ2)i−→(X, τ1) y aplicar el coro-
lario anterior.
5.3. Teorema del Grafo Cerrado
Sabemos que si X e Y son espacios topologicos, con Y separado, y
f : X → Y es una aplicacion continua, entonces el grafo de f , definido como
G(f) = (x, f(x)) ∈ X × Y : x ∈ X, es cerrado. Tambien sabemos que el
recıproco es cierto si f es lineal y X e Y son espacios de Banach, lo cual
constituye el Teorema del Grafo Cerrado. Vamos a ver ahora una extension
de este resultado a F-espacios.
Teorema 5.3.1. Sean X e Y dos F-espacios, y sea Λ : X → Y lineal tal
que G(f) es cerrado en X × Y . Entonces Λ es continua.
Demostracion. Sean dX , dY distancias completas e invariantes por trasla-
ciones, respectivamente, sobre X e Y . Entonces es facil ver que la aplicacion
d : (X × Y )× (X × Y ) → R dada por
d((x1, y1), (x2, y2)) = dX(x1, x2) + dY (y1, y2)
define una distancia invariante y completa en X × Y , y que d genera la
topologıa producto. Como Λ es lineal, se tiene que G := G(Λ) es un su-
bespacio de X × Y . Ya que G es cerrado en X × Y y este es completo,
resulta que G es un F-espacio. Sean π1, π2 las proyecciones de X × Y sobre
X e Y , respectivamente. Sabemos que π1 y π2 son continuas. Pero ademas,
al restringirnos a G, la aplicacion π1 : G → X es inyectiva; en efecto, si
π1(x1,Λx1) = π1(x2,Λx2) entonces x1 = x2, ası que (x1,Λx1) = (x2,Λx2).
Como ademas es sobreyectiva, se deduce que π1|G es biyectiva. Por el Coro-
lario 5.2.2, inferimos que su inversa (π1|G)−1 : x ∈ X 7→ (x,Λx) ∈ G es
continua. Ahora bien, Λ = π2 (π1|G)−1. Ası que Λ es continua.

122 Luis Bernal y Tomas Domınguez
Es facil ver que, al igual que ocurrıa en el caso de los espacios de Banach,
el hecho de que G(Λ) es cerrado (con Λ : X → Y lineal y X e Y F-espacios)
es equivalente a: si xn → 0 en X y Λxn → y en Y , entonces y = 0. Por tanto
Λ es continua si se cumple la condicion anterior.
Nota 5.3.2. Notemos que la tesis del teorema del grafo cerrado no se cumple
en general sin la completitud de ambos espacios. Por ejemplo, consideremos
los espacios vectoriales X = C1([0, 1]) e Y = C([0, 1]), ambos dotados de la
norma ∥f∥ = max0≤t≤1 |f(t)|, ası como la aplicacion lineal Λ : f ∈ X 7→ f ′ ∈Y . Observemos que Y no es completo. Entonces Λ tiene grafo cerrado pues, si
fn→nf y f ′
n→ng uniformemente en [0, 1] (con fn ∈ C1 para todo n ∈ N), del
teorema fundamental de calculo y de la regla de Barrow se deduce facilmente
que f ∈ C1 y f ′ = g, luego g = Λf . Sin embargo, Λ no es continua. En
efecto, si elegimos por ejemplo fn(t) = tn, se tiene ∥fn∥ = 1 para todo n,
pero ∥Λfn∥ = ∥t 7→ ntn−1∥ = n→n+∞.
En conexion con la dualidad, no es difıcil ver que si X e Y son espacios
localmente convexos y T : X → Y es lineal y continua, entonces T es
debilmente continua, es decir, es continua como aplicacion (X, σ(X,X∗)T−→
(Y, σ(Y, Y ∗)) (Ejercicio 1 del Capıtulo 4). Vamos a ver que entre espacios de
Frechet el recıproco es tambien cierto.
Teorema 5.3.3. Sean X e Y espacios de Frechet. Si T : X → Y es lineal
y debilmente continua, entonces es continua.
Demostracion. Basta aplicar el teorema del grafo cerrado. Si xn → 0 en X y
Txn → y en Y , se tiene que xnw→ 0 y Txn
w→ y. Pero, por continuidad debil,
Txnw→ 0. Por la unicidad del lımite en espacios separados, resulta que y = 0.
Como consecuencia, G(T ) es cerrado, y por tanto T es continua.

APLICACIONES DE LA COMPLETITUD Y LA CONVEXIDAD 123
5.4. Teorema de Schauder
A continuacion, vamos a establecer otra consecuencia de la completitud,
donde esta vez intervienen los espacios duales. Por BX denotaremos la bola
unidad cerrada de un EN X.
Definicion 5.4.1. SeanX e Y dos espacios normados y T : X → Y lineal. Se
dice que T es compacta cuando se cumple cualquiera de las tres condiciones
equivalentes siguientes:
(a) T (BX) es un subconjunto relativamente compacto de Y .
(b) Para cada subconjunto acotado A ⊂ X, T (A) es compacto.
(c) Si (xn) ⊂ X es una sucesion acotada, (Txn) posee alguna subsucesion
convergente en Y .
Ya que BX es acotado y cada conjunto A ⊂ X acotado esta incluido en
αBX para algun α > 0, y ya que en un espacio metrico la compacidad y
la compacidad secuencial coinciden, resulta evidente la equivalencia de (a),
(b) y (c) en la definicion anterior. Es claro que toda aplicacion compacta es
continua.
Queremos establecer la equivalencia de la compacidad de T y T ∗ en espa-
cios de Banach. Este el contenido del Teorema de Schauder (Teorema 5.4.3).
Antes necesitamos la siguiente caracterizacion de la compacidad relativa, que
es una version del Teorema de Arzela–Ascoli. Su prueba se omite por ser muy
similar a la del Teorema 3.2.1.
Teorema 5.4.2. Sea K un ET compacto. Consideremos el espacio de Ba-
nach C(K) de las funciones continuas K → C dotado de la norma del supre-
mo ∥f∥∞ = supx∈K |f(x)|. Sea A un subconjunto puntualmente acotado y
equicontinuo, es decir:

124 Luis Bernal y Tomas Domınguez
• Para cada x ∈ K, sup|f(x)| : f ∈ A < +∞.
• Dados x ∈ K y ε > 0, existe un entorno V de x tal que |f(y)−f(x)| <ε para todo y ∈ V y toda f ∈ A.
Entonces A es relativamente compacto en C(K).
Teorema 5.4.3. Sean X e Y dos espacios normados, y T ∈ L(X,Y ). Con-
sideremos la aplicacion traspuesta T ∗. Se verifica:
(a) Si T es compacta, entonces T ∗ es compacta.
(b) Si Y es de Banach y T ∗ es compacta, entonces T es compacta.
Demostracion. (a) Se supone que T es compacta. Sea (φn) ⊂ BY ∗ , la bola
unidad cerrada de Y ∗. Entonces |φn(y)−φn(y′)| ≤ ∥y− y′∥ para todo y, y′ ∈
Y , luego (φn) es una sucesion equicontinua de funciones. Como T (BX) es
compacto en Y , es acotado, luego existe M ∈ (0,+∞) tal que ∥y∥ ≤M para
todo y ∈ T (BX), ası que |φn(y)| ≤M para todo n ≥ 1 y todo y ∈ T (BX). Por
tanto (φn) es equicontinua y puntualmente acotada en el compacto T (BX).
Por el Teorema 5.4.2, existe una subsucesion (φnk) de (φn) uniformemente
convergente en T (BX). En particular, (φnk) es uniformemente de Cauchy en
T (BX), es decir, dado ε > 0 existe k0 = k0(ε) ∈ N tal que
sup|φnk(Tx)− φnl
(Tx)| : x ∈ BX < ε para todo k, l ≥ k0.
Pero el supremo anterior coincide con ∥T ∗φnk− T ∗φnl
∥, luego (T ∗φnk) es de
Cauchy en X∗. Ahora bien, el dual X∗ es completo, ası que (T ∗φn) tiene una
subsucesion convergente. En consecuencia, T ∗(BY ∗) es relativamente com-
pacto en X∗, es decir, T ∗ es compacta.
(b) Se supone ahora que Y es de Banach y que T ∗ es compacta. Sean i :
X → X∗∗ y j : Y → Y ∗∗ las inmersiones canonicas, dadas por
(i(x))(φ) = φ(x), (j(y))(ψ) = ψ(y) ∀x ∈ X, ∀y ∈ Y, ∀φ ∈ X∗ y ∀ψ ∈ Y ∗.

APLICACIONES DE LA COMPLETITUD Y LA CONVEXIDAD 125
De aquı y de la definicion de T ∗∗ : X∗∗ → Y ∗∗ se deduce que j T = T ∗∗ i.Ahora bien, puesto que i es una isometrıa, si x ∈ BX entonces i(x) ∈ BX∗∗ .
Por tanto
(j T )(BX) ⊂ T ∗∗(BX∗∗).
Por el apartado (a), T ∗∗ es compacta, luego T ∗∗(BX∗∗) es relativamente com-
pacto en Y ∗∗, ası que (j T )(BX) tambien lo es. Sea ahora (xn) ⊂ BX .
Entonces existe una subsucesion (xnk) tal que (j T )(xnk
)k≥1) converge
en Y ∗∗, y por tanto es de Cauchy. Como j es una isometrıa, (T (xnk)) es de
Cauchy en Y y, puesto que Y es completo, (T (xnk)) converge en Y . Hemos
demostrado que T (BX) es relativamente compacto en Y . En otras palabras,
la aplicacion T es compacta.
5.5. Puntos extremales
Pasamos ahora a estudiar consecuencias de la estructura convexa del
espacio. Antes de ello, necesitamos la importante nocion de punto extremal.
Recordemos que, si E es un EV y a, b ∈ E, el segmento cerrado y el
segmento abierto de extremos a y b se definen respectivamente por [a, b] =
ta + (1 − t)b : 0 ≤ t ≤ 1 y (a, b) = ta + (1 − t)b : 0 < t < 1. Notemos
en particular que [a, a] = a = (a, a).
Definicion 5.5.1. Sea K un subconjunto de un EV X, y sea S ⊂ K. Se dice
que S es un subconjunto extremal de K si cumple la siguiente propiedad:
a, b ∈ K y (a, b) ∩ S = ∅ =⇒ a, b ∈ S.
Un punto x0 ∈ K es un punto extremal de K si x0 es un subconjunto
extremal de K.
Denotaremos por Ext(K) el conjunto de los puntos extremales de K. Por
ejemplo, si X = R2, y K1 y K2 denotan respectivamente el cuadrado unidad

126 Luis Bernal y Tomas Domınguez
cerrado [0, 1] × [0, 1] y el disco unidad cerrado (x, y) ∈ R2 : x2 + y2 ≤ 1,entonces cada lado [0, 1] × 0, [0, 1] × 1, 0 × [0, 1] y 1 × [0, 1] es un
subconjunto extremal de K1, y cada arco de la circunferencia unidad es un
subconjunto extremal de K2. Ademas Ext(K1) = (0, 0), (0, 1), (1, 0), (1, 1)y Ext(K2) = (x, y) ∈ R2 : x2 + y2 = 1.
Demos un ejemplo mas sofisticado. Sea S un ET separado y compacto, y
consideremos la σ-algebra B de los subconjuntos borelianos de S, ası como el
EV M(S) de todas las medidas reales regulares borelianas en S. Una medida
µ ∈ M(S) es de probabilidad si es positiva y µ(S) = 1. Denotemos por
MP el subconjunto de M(S) de las medidas de probabilidad. Consideremos
las medidas de Dirac δx (x ∈ S), definidas como δx(A) = 1 o 0 segun que,
respectivamente, x ∈ A o x /∈ A (A ∈ B). Nuestro objetivo es mostrar que
Ext(MP ) = δx : x ∈ S.
Para ello, probaremos primero que Ext(MP ) = µ ∈ MP : µ es 0, 1–valuada=: E y despues demostraremos que E = δx : x ∈ S.
Para el primer paso, sea µ = tν+(1− t)η ∈ E con 0 < t < 1 y ν, η ∈ MP .
Fijemos A ∈ B. Como ν(A), η(A) ∈ [0, 1], resulta:
µ(A) = 1 ⇒ ν(A) = 1 = η(A) y µ(A) = 0 ⇒ ν(A) = 0 = η(A).
Por tanto µ ∈ Ext(MP ) y E ⊂ Ext(MP ). Recıprocamente, sea µ ∈ Ext(MP ).
Por reduccion al absurdo, supongamos que µ /∈ E. Entonces existe A ∈ B tal
que 0 < t := µ(A) < 1. Definamos ν ∈ M(S) por
ν(B) = (1− t)µ(B ∩ A)− tµ(B ∩ Ac).
Entonces ν = 0 porque ν(A) = (1− t)t > 0. Veamos que µ+ ν, µ− ν ∈ MP :
• ν(S) = (1−t)µ(A)−tµ(Ac) = (1−t)t−t(1−t) = 0, de donde (µ+ν)(S) =
1 = (µ− ν)(S).
• µ+ν y µ−ν son positivas. En efecto, dadoB ∈ B, tenemos que (µ+ν)(B) =
µ(B ∩A)+µ(B ∩Ac)+µ(B ∩A)(1− t)−µ(B ∩Ac)t = µ(B ∩A)(2− t)+

APLICACIONES DE LA COMPLETITUD Y LA CONVEXIDAD 127
µ(B ∩ Ac)(1− t) ≥ 0 y (µ− ν)(B) = µ(B ∩ A) + µ(B ∩ Ac)−µ(B ∩ A)(1− t) + µ(B ∩ Ac)t = µ(B ∩ A)t+ µ(B ∩ Ac)(1 + t) ≥ 0.
En consecuencia, µ ± ν ∈ MP , µ + ν = µ = µ − ν y µ = (1/2)(µ + ν) +
(1/2)(µ− ν), de donde µ /∈ Ext(MP ) y llegamos a contradiccion.
En cuanto al segundo paso, es claro que cada δx ∈ E. Finalmente, fijemos
µ ∈ E. Denotemos Γ := V ⊂ S : V es abierto y µ(V ) = 0. Como ∅ ∈ Γ
se tiene que Γ = ∅. Sea Q :=∪
V ∈Γ V , que es un abierto por ser union de
abiertos. Veamos que µ(Q) = 0. En efecto, si F ⊂ Q es compacto, podemos
encontrar un numero finito de abiertos V1, . . . , VN ∈ Γ tales que F ⊂∪N
i=1 Vi,
luego µ(F ) ≤∑N
i=1 µ(Vi) = 0, ası que µ(F ) = 0. Por regularidad de µ,
tenemos µ(Q) = supµ(F ) : F compacto ⊂ Q = 0. Sea A0 := S \ Q.Es evidente que A0 es cerrado, µ(A0) = 1 y A0 es minimal con estas dos
condiciones. Si probamos que A0 es unitario, tendrıamos que A0 = x0 para
algun x0 ∈ S y µ = δx0 , con lo que concluirıa la prueba. Ası pues, por
reduccion al absurdo, supongamos que existen x1, x2 ∈ A0 con x1 = x2. Por
ser S separado, podemos encontrar dos abiertos U1, U2 en S con U1∩U2 = ∅,x1 ∈ U1 y x2 ∈ U2. Luego x2 /∈ U1. Denotemos A1 := A0 ∩U1, A2 := A0 ∩U c
1 .
Entonces A1 y A2 son cerrados, A0 = A1 ∪A2, x1 /∈ A1 y x2 /∈ A2. Por tanto
1 = µ(A0) ≤ µ(A1) + µ(A2), luego µ(A1) o µ(A2) es 1, siendo A1, A2 ( A0,
lo que contradice la minimalidad de A0.
5.6. Teorema de Krein–Milman
Enunciemos seguidamente el Teorema de Krein–Milman, el cual nos
indica como reconstruir un conjunto compacto convexo a partir de sus puntos
extremales.
Teorema 5.6.1. Sea K un subconjunto compacto de un ELC X. Entonces
K esta contenido en la envolvente convexa y cerrada de sus puntos ex-

128 Luis Bernal y Tomas Domınguez
tremales. En particular, si K es compacto y convexo, entonces K = co (Ext(K)).
Demostracion. Sea P la coleccion de todos los subconjuntos compactos ex-
tremales de K. Como trivialmente K es un subconjunto extremal de K, se
tiene P = ∅. Por otra parte, si S es una coleccion no vacıa de elementos de P ,
entonces L :=∩
S∈S S pertenece a P o es ∅. En efecto, L es un subconjunto
cerrado de un compacto, luego es compacto. Y si a, b ∈ K son tales que a
o b /∈ L, debe existir S ∈ S tal que a o b /∈ S, con lo cual (a, b) ∩ S = ∅,luego (a, b) ∩ L = ∅, ası que L es ∅ o extremal. Vamos a probar la siguiente
propiedad:
(A) Sean S ∈ P , Λ ∈ X∗, µ = maxReΛ(x) : x ∈ S y SΛ = x ∈ S :
ReΛ(x) = µ. Entonces SΛ ∈ P.
En efecto, sea z = tx + (1− t)y ∈ SΛ con 0 < t < 1, x, y ∈ K. Como z ∈ S
y S es extremal, se tiene que x, y ∈ S. Por tanto ReΛx ≤ µ, ReΛy ≤ µ
y, como µ = ReΛz = (ReΛx)t + (ReΛy)(1 − t), se deduce ReΛx = µ =
ReΛy, de donde x, y ∈ SΛ. Luego SΛ es extremal, y es compacto porque es
un subconjunto cerrado de un compacto, ya que SΛ = S ∩ (ReΛ)−1(µ).Ası que SΛ ∈ P.
Tomemos ahora S ∈ P y sea P ′ = T ∈ P : T ⊂ S. Como S ∈ P ′, se
tiene P ′ = ∅. Ordenemos P ′ por inclusion y veamos que P ′ es inductivo. En
efecto, si Ω es una cadena en P ′ y N =∩
T∈Ω T , entonces N es compacto y
no ∅, ya que cada interseccion finita es no ∅ (al ser un miembro de la cadena)
y ser los T conjuntos compactos. Luego N ∈ P ′ es un elemento minimal de
la cadena, ası que P ′ es inductivo. Por el Lema de Zorn, existe un elemento
M ∈ P ′ minimal para la inclusion. Por tanto, ningun subconjunto propio de
M pertenece a P , de donde, por (A) [aplicado a M ] se deduce que ReΛ es
constante en M , para todo Λ ∈ X∗. Por el Teorema 4.5.8, M consta de un
solo punto, que es por tanto extremal de K. Por tanto hemos probado que
cada subconjunto compacto extremal de K contiene algun punto extremal.

APLICACIONES DE LA COMPLETITUD Y LA CONVEXIDAD 129
Sea ahora H la envolvente convexa de Ext (K). Queremos probar que
K ⊂ H. Por reduccion al absurdo, supongamos que existe x0 ∈ K \H. Por
el Teorema 4.3.2 existen Λ ∈ X∗ y γ1, γ2 ∈ R tales que
ReΛx < γ1 < γ2 < ReΛx0 ∀x ∈ H,
ya que x0 y H son subconjuntos no vacıos, cerrados y convexos y x0es compacto. Sea
KΛ := y ∈ K : ReΛy = maxx∈K ReΛx.De acuerdo con (A), KΛ es extremal. Como ReΛy ≥ ReΛx0 para todo
y ∈ KΛ, se tiene que KΛ ∩H = ∅, lo que contradice la afirmacion del final
del parrafo anterior, pues Ext (K) ⊂ H ⊂ H. Esta es la contradiccion que
buscabamos.
Por ejemplo, si X es un EN reflexivo, como BX es debilmente compacto,
podemos aplicar el Teorema 5.6.1 a (X, σ(X,X∗)). Esto sucede, por ejemplo,
en un espacio de Hilbert H, donde es facil probar que Ext(BH) = SH . Se
tiene que BH = coσ(H,H∗) (Ext(BH)) = coσ(H,H∗) (SH) = co (SH), como ya
sabıamos. En el Ejercicio 14 de este capıtulo se da una aplicacion mas.
Volvamos al ejemplo de M(S) y MP dado en la Seccion 5.5. Si C(S) =
f : S → R : f es continua, sabemos que C(S)∗ puede identificarse con
M(S), dotado este de la norma ∥µ∥ = |µ|(S) = la variacion total de µ en
S. Observemos que MP = µ ∈ M(S) : ∥µ∥ = 1 y µ(S) = 1. En efecto,
la inclusion “⊂” es evidente. En cuanto a la recıproca, supongamos, por
reduccion al absurdo, que µ esta en el conjunto de la derecha pero no esta en
MP . Como µ(S) = 1, debe ocurrir que µ no es positiva, es decir, existe un
boreliano A ⊂ S tal que µ(A) < 0. Entonces 1 = µ(S) = µ(A) + µ(S \ A),de donde µ(S \ A) > 1, que es una contradiccion porque ∥µ∥ = 1. Por
tanto MP = BM(S) ∩ H, donde H = µ ∈ M(S) : µ(S) = 1 = µ ∈M(S) :
∫S1 dµ = 1 = φ ∈ C(S)∗ : φ(f0) = 1 (donde f0 es la funcion

130 Luis Bernal y Tomas Domınguez
constante 1), habida cuenta de la identificacion M(S) ≈ C(S)∗. Luego H
es un hiperplano w∗-cerrado. Por el teorema de Alaoglu–Bourbaki, la bola
BM(S) es w∗-compacta, luego MP es w∗-compacto. Es facil ver que MP es
convexo. En consecuencia, por el Teorema 5.6.1, MP = cow∗(Ext (MP )), y
por tanto
MP = cow∗(δx : x ∈ S).
5.7. Teorema de Stone–Weierstrass
El conocido teorema de aproximacion deWeierstrass (Capıtulo 3) garan-
tiza que toda funcion continua real o compleja en un intervalo compacto
[a, b] puede aproximarse uniformemente por polinomios. En otras palabras,
el conjunto de los polinomios es denso en C([a, b]) con la norma del supremo.
Utilizando los teoremas de Krein–Milman, de Hahn–Banach y de Alaoglu–
Bourbaki, se puede probar la siguiente version del teorema de aproximacion
deWeierstrass, la cual se conoce como Teorema de Stone–Weierstrass. Recorde-
mos antes que una familia F de funciones sobre un conjunto S se dice que
es un algebra si es un EV y cumple: f, g ∈ F ⇒ f · g ∈ F .
Teorema 5.7.1. Sea S un ET separado y compacto, y consideremos el es-
pacio de Banach C(S) = f : S → C : f es continua dotado de la norma
del supremo. Sea A un subconjunto de C(S) tal que:
• A es cerrado,
• A es un algebra,
• A contiene las funciones constantes,
• A separa puntos, es decir, dados x, y ∈ S con x = y, existe φ ∈ A con
φ(x) = φ(y), y

APLICACIONES DE LA COMPLETITUD Y LA CONVEXIDAD 131
• A es autoadjunto, esto es, si f ∈ A entonces f ∈ A, donde f(x) := f(x)
(x ∈ S).
Entonces A = C(S).
Demostracion. Ya que A es autoadjunto y tambien un EV, se deduce que
Re f e Im f estan en A si f lo esta. Ası, las funciones reales de A separan
puntos de S. Recordemos que, si M(S) denota el EV de las medidas com-
plejas regulares sobre los borelianos de S, dotado de la norma ∥µ∥ = |µ|(S),entonces C(S)∗ = M(S). Consideremos el anulador de A, es decir, A⊥ =
µ ∈ C(S)∗ :∫Sf dµ = 0 ∀f ∈ A. Procedamos por reduccion al absurdo.
Si fuese A = C(S), existirıa Λ ∈ C(S)∗ tal que Λ|A ≡ 0 y Λ = 0, luego
A⊥ = 0.
Consideremos el subconjunto K de C(S)∗ dado por K := µ ∈ A⊥ :
∥µ∥ ≤ 1 = A⊥ ∩ BC(S)∗ . Como A⊥ y BC(S)∗ son w∗-cerrados, ası es K.
Por el teorema de Alaoglu–Bourbaki, BC(S)∗ es w∗-compacta, luego K es un
subconjunto convexo, no vacıo y w∗-compacto de C(S)∗. Por el teorema de
Krein–Milman, Ext (K) = ∅. Escojamos un elemento µ ∈ Ext (K). Entonces
µ ∈ A⊥ y ∥µ∥ ≤ 1. Pero debe ser ∥µ∥ = 1: en efecto, en otro caso existirıa ε ∈(0, 1) tal que (1−ε)µ, (1+ε)µ ∈ K, de donde µ = (1/2)(1−ε)µ+(1/2)(1+ε)µ
y µ no serıa extremal.
Sea E el soporte de µ, definido como
E = sop (µ) = S \∪
G ⊂ S : G es abierto y |µ|(G) = 0.
Se tiene que |µ|(E) = ∥µ∥ = 1. Sea f ∈ A con 0 < f(x) < 1 para todo
x ∈ S. Definamos las medidas σ, τ ∈ M(S) por dσ = fdµ, dτ = (1 − f)dµ.
Por ser A un algebra se tiene que σ, τ ∈ A⊥. Si α = mın f y β = max f ,
se tiene ∥σ∥ =∫S1 d|σ| =
∫Sf d|µ| ≥ α · |µ|(S) = α > 0, y analogamente
∥τ∥ > 0 (se ha usado que 0 < α ≤ β < 1). Ademas ∥σ∥+ ∥τ∥ =∫Ef d|µ|+∫
E(1− f) d|µ| = |µ|(E) = 1.

132 Luis Bernal y Tomas Domınguez
Por tanto µ = t · σ∥σ∥ + (1 − t) · τ
∥τ∥ , donde 0 < t := ∥σ∥ < 1. Ası pues
µ es una combinacion lineal convexa de σ1 := σ/∥σ∥ τ1 := τ/∥τ∥. Como
σ1, τ1 ∈ K y µ es extremal, resulta σ1 = µ, luego f dµ = ∥σ∥ dµ, es decir,∫L(f −∥σ∥) dµ = 0 para todo subconjunto medible L ⊂ sop (µ), de donde se
deduce (usar la continuidad de f − ∥σ∥) que f − ∥σ∥ = 0 en E. Por tanto
f es constante en E. Si ahora g ∈ A es real, y tomamos m < mınS g y
M > maxS g, resulta que 1M−m+1
< g−m+1M−m+1
< 1 en S. Pero f := g−m+1M−m+1
∈ A
debido a las hipotesis del teorema. Se deduce del razonamiento anterior que
f es constante en E, luego tambien g es constante en E. Como las funciones
reales de A separan puntos de S, E contiene un solo punto. Pero µ ∈ A⊥.
Como A ⊃ constantes, resulta 0 =∫S1 dµ =
∫E1 dµ = µ(E). Al constar
de un solo punto, |µ|(E) = |µ(E)| = 0, lo que contradice |µ|(E) = 1.
Ejercicios
1.- Sea X un ET separado y localmente compacto. Probar que X es un espacio
de Baire.
Indicacion: Fijar una sucesion Unn≥1 de abiertos densos y un abierto
no vacıo W . Por induccion, construir una sucesion Bnn≥1 de abiertos no
vacıos de modo que cada Bn es compacto y esta contenido en W ∩Bn−1∩Un,
donde B0 := X.
2.- Se pide probar la siguiente version del teorema de Banach–Steinhaus. Sean
X e Y espacios vectoriales topologicos, K ⊂ X compacto y convexo y Γ
una familia de aplicaciones lineales y continuas de X en Y . Si para todo
x ∈ K la orbita Γ(x) = Λ(x) : Λ ∈ Γ es acotada, probar que el conjunto
Λ(x) : Λ ∈ Γ, x ∈ K es acotado.
Indicacion: Sea B el conjunto anterior. Fijar un entorno equilibrado W de
0, y otro U ∈ E(0) equilibrado con U+U ⊂ W . Denotar E :=∩
Λ∈Γ Λ−1(U)
y probar que K =∪∞
n=1(K ∩nE). Aplicar el ejercicio anterior para deducir

APLICACIONES DE LA COMPLETITUD Y LA CONVEXIDAD 133
que existe algun n tal que K ∩ nE posee algun punto interior relativo
a K, sea x0. Deducir que existe un entorno equilibrado V de 0 tal que
K ∩ (x0 + V ) ⊂ nE. Verificar que existe p > 1 tal que K ⊂ x0 + pV .
Si x ∈ K, probar que z := (1 − p−1)x0 + p−1x ∈ K y que z − x0 ∈ V .
Expresar x = pz − (p − 1)x0 y usar la linealidad de cada Λ para deducir
que B ⊂ pnW .
3.- Se pretende generalizar el Teorema 4.5.7. En concreto, se pide probar que
en un ELC X un conjunto es acotado si y solo si es debilmente acotado.
Indicacion: Para la suficiencia, sea E un conjunto debilmente acotado, U
un entorno original de 0 en X, y V un entorno original de 0, convexo,
cerrado y equilibrado, con V ⊂ U . Sea K = V , el conjunto polar de
V . Deducir del teorema de las bipolares (Ejercicio 10 del Capıtulo 4) que
V = x ∈ X : |Λ(x)| ≤ 1 para toda Λ ∈ K. Asignar a cada Λ ∈ X∗ un
numero γ(Λ) ∈ (0,+∞) tal que |Λ(x)| ≤ γ(Λ) para todo x ∈ E. Aplicar
el teorema de Alaoglu–Bourbaki y el ejercicio anterior (con X∗ en lugar de
X y K en lugar de Y ) para deducir que existe una constante γ ∈ (0,+∞)
tal que |Λ(x)| ≤ γ (x ∈ E, Λ ∈ K). Demostrar que γ−1E ⊂ V .
4.- SeanX un F-espacio, Y y Z espacios vectoriales topologicos, y B : X×Y →
Z una aplicacion bilineal, es decir, lineal separadamente en cada componente.
Probar que si B es continua separadamente en cada componente, entonces
B es continua.
5.- Demostrar el ası denominado Principio de condensacion de singularidades:
Sean E y F espacios vectoriales topologicos, de modo que E es de Baire.
Sea Hn : n ∈ N una sucesion de subconjuntos no puntualmente acotados
de L(E,F ). Probar que el conjunto x ∈ E : para todo n ∈ N, h(x) ∈ F :
h ∈ Hn no es acotado es de segunda categorıa. Indicacion: demostrar que
dicho conjunto es residual.
6.- Sea X un EVT con dual X∗. Probar que todo subconjunto equicontinuo de
X∗ es relativamente compacto en la topologıa σ(X∗, X). Indicacion: usar el

134 Luis Bernal y Tomas Domınguez
teorema de Alaoglu–Bourbaki.
7.- (a) Sea X un F-espacio e Y un espacio de Frechet. Supongamos que T :
X → Y es lineal y que, cuando xn → 0, la sucesion (Txn) tiende debilmente
a 0. Probar que la aplicacion T es continua.
(b) Deducir el Teorema de Hellinger–Toeplitz : Sean H un espacio de Hilbert
y T : H → H una aplicacion lineal. Se supone que T es simetrica, es decir,
(Tx|y) = (x|Ty) para todo x, y ∈ H. Entonces T es continua.
8.- Sea E un ELC. Decimos que A ⊂ E es un tonel si A es convexo, cerrado,
equilibrado y absorbente. Y se dice que E es tonelado si cada tonel es un
entorno del origen. Se pide:
(a) Probar que todo ELC de Baire es tonelado.
(b) Sea X el EV C([0, 1]) dotado de la norma |||f ||| =∫ 10 |f(t)| dt. Probar
que (X, ||| · |||) no es tonelado.
(c) Sean E y F espacios localmente convexos, con E tonelado. Sea F ⊂
L(E,F ) una familia tal que, para todo x ∈ E, el conjunto Λ(x) : Λ ∈
F es acotado. Probar que F es equicontinua.
9.- Sea X un ELC con dual X∗. Sea A = A ⊂ X∗ : A es una familia
equicontinua. Para cada A ∈ A, sea pA(x) = sup|Λ(x)| : Λ ∈ A (x ∈ X).
(a) Probar que cada pA es una seminorma en X.
(b) Sea P = pA : A ∈ A. Demostrar que P es una familia filtrante y
separante.
(c) Probar que la topologıa definida por P coincide con la topologıa ori-
ginal de X.
10.- Supongamos que X es un EN, y consideremos el EN L(X) = L(X,X) de los
operadores lineales y continuos sobre X, dotado de la norma de operadores.
(a) Demostrar que el operador identidad I : X → X es compacto si y solo
si dim(X) < +∞.

APLICACIONES DE LA COMPLETITUD Y LA CONVEXIDAD 135
(b) Denotemos por K(X) el subconjunto de L(X) formado por los opera-
dores compactos. Probar que K(X) es un subespacio vectorial de X.
Probar tambien que es un ideal, es decir, si T ∈ K(X) y S ∈ L(X),
entonces las composiciones TS y ST pertenecen a K(X).
(c) Si T ∈ L(X) tiene rango finito, es decir, si dim(T (X)) < +∞, entonces
T ∈ K(X).
(d) Si X es un espacio de Banach, probar que K(X) es cerrado en L(X).
11.- Consideremos el espacio X = C([0, 1]), dotado de la norma del supremo.
Demostrar que el operador de Volterra T : X → X, dado por
(Tf)(x) =
∫ x
0f(t) dt (x ∈ [0, 1]),
es compacto.
12.- Sea X un EN. Se dice que X es uniformemente convexo si, para cada ε > 0,
existe un δ > 0 tal que las relaciones ∥x∥ = ∥y∥ = 1, ∥x+y2 ∥ ≥ 1− δ implican
∥x−y∥ ≤ ε. Decimos que X es estrictamente convexo cuando, para cada par
de vectores distintos x e y con ∥x∥ = 1 = ∥y∥, se tiene ∥x+y2 ∥ < 1. Ası pues,
todo EN uniformemente convexo es estrictamente convexo. Denotemos por
SX la superficie esferica unidad de X, es decir, SX := x ∈ X : ∥x∥ = 1.
(a) Demostrar que, en cualquier EN X, se tiene Ext (BX) ⊂ SX .
(b) Probar que X es estrictamente normado si y solo si Ext (BX) = SX .
(c) Demostrar que si X es uniformemente convexo, entonces Ext (BX) =
SX .
(d) Probar que todo espacio de Hilbert es uniformemente convexo.
(e) Demostrar que ℓ1 y c0 no son uniformemente convexos.
13.- (a) Sea X un EN uniformemente convexo, x0 ∈ X con ∥x0∥ = 1, y Λ ∈ X∗
tal que ∥Λ∥ = Λ(x0) = 1. Probar que para cada ε > 0 existe δ > 0 tal que,
si ∥x∥ = 1 y |Λ(x− x0)| < δ, entonces ∥x− x0∥ < ε.

136 Luis Bernal y Tomas Domınguez
(b) Decimos que un EN X satisface la propiedad de Kadec si la topologıa
debil y la de la norma coinciden si se restringen a la superficie esferica
unidad. Probar que todo EN uniformemente convexo satisface la propiedad
de Kadec.
14.- (a) Sea X un EN dual, es decir, existe un EN Y tal que X ≈ Y ∗. Aplicar
los teoremas de Krein–Milman, de Banach–Alaoglu y de Mazur (Teorema
4.5.5) para dar una expresion de la bola unidad cerrada BX en funcion de
Ext (BX).
(b) Demostrar que la bola unidad cerrada de (L1([0, 1]), ∥ · ∥1) carece de
puntos extremales.
(c) Probar que la bola unidad cerrada de (c0, ∥ · ∥∞) carece asimismo de
puntos extremales.
(d) Demostrar que los unicos puntos extremales de bola unidad cerrada de
((C([0, 1]),R), ∥ · ∥∞) son las constantes 1,−1.
(e) Deducir que los tres espacios normados anteriores no son duales.
15.- Si N ∈ N es fijo, probar que el conjunto de los polinomios P : R → C
tales que P (j)(0) = 0 (j = 1, . . . , N) es denso en el espacio C([0, 1]) = f :
[0, 1] → C continuas dotado de la norma del supremo.
16.- Sea X = (c, ∥ ·∥∞) el EN de las sucesiones convergentes, dotado de la norma
del supremo. Probar que, si B es su bola unidad cerrada, se verifica Ext(B) =
x = (x(n))n≥1 : ∃n0 = n0(x) ∈ N tal que x(n) : n ≥ n0 ⊂ 1,−1. ¿Es
B = co (Ext (B))? ¿Se contradice el teorema de Krein–Milman?
17.- Supongamos que X es un EN de dimension infinita, y que T ∈ L(X) es
un operador para el que existe una constante C ∈ (0,+∞) que goza de la
siguiente propiedad: dados φ ∈ X∗ y x ∈ SX , existe y = y(φ, x) ∈ SX tal
que |φ(T (y))| ≥ C|φ(x)| (por SX entendemos la superficie esferica unidad
de X). Demostrar que T no es un operador compacto si T ∗ tiene rango
cerrado.

Bibliografıa
Existe una abundante bibliografıa acerca de espacios vectoriales topologicos
y espacios funcionales. Los libros que a continuacion se enumeran constituyen solo
una pequena parte. Cada uno de ellos ha sido usado en la elaboracion de alguna o
algunas secciones de estas notas, pero hay que tener en cuenta que el enfoque de los
temas a tratar puede variar de libro a libro. Por supuesto, todos contienen mucho
mas material adicional, que puede ayudar al lector interesado tanto a profundizar
en la teorıa dada aquı como a introducirse en temas nuevos. Ademas, la mayorıa de
los textos sugeridos contienen listados de ejercicios y problemas sobre las materias
tratadas, y en algunos casos se dan sugerencias para resolverlos. Los libros de
Marrero y de Trenoguin et al. citados abajo estan completamente dedicados a la
resolucion de ejercicios.
• G. Bachman y L. Narice, Analisis funcional, Tecnos, Madrid, 1981.
• B. Beauzamy, Introduction to Banach spaces and their geometry, North Hol-
land, Amsterdam, 1985.
• S.K. Berberian, Introduccion al espacio de Hilbert, Teide, Barcelona, 1977.
• H. Brezis, Analisis funcional, Alianza, Madrid, 1984.
• J.B. Conway, A course in functional analysis, Springer, New York, 1990.
• J. Diestel, Sequences and series in Banach spaces, Springer-Verlag, New
York, 1984.
137

138 Luis Bernal y Tomas Domınguez
• Y. Eidelman, V. Milmann and A. Tsolomitis, Functional analysis. An intro-
duction, Graduated Studies in Mathematics, Vol. 66, American Mathemati-
cal Society, Providence, 2004.
• J. Horvath, Topological vector spaces and distributions, Addison-Wesley,
Reading, Massachusetts, 1966.
• A.N.K. Kolmogorov y S.V. Fomin, Elementos de la teorıa de funciones y del
analisis funcional, Mir, Moscu, 1975.
• L. Lusternik et V. Sobolev, Precis d’analyse fonctionelle, Mir, Moscou, 1989.
• M.I. Marrero, Problemas de analisis real y funcional, Secretariado de Publi-
caciones de la Universidad de La Laguna, 1991.
• R. Meise and D. Vogt, Introduction to functional analysis, Oxford Science
Publications, 1997.
• W. Rudin, Analisis funcional, Reverte, 1979.
• W. Rudin, Analisis real y complejo, Alhambra, Madrid, 1987.
• K. Saxe, Beginning functional analysis, Springer, New York, 2002.
• M. Schehter, Principles of functional analysis, Graduated Studies in Mathe-
matics, Vol. 36, American Mathematical Society, Providence, 2002.
• C. Swartz, Elementary functional analysis, World Scientific, New Jersey,
2009.
• A.E. Taylor and D.C. Lay, Introduction to functional analysis, John Wiley,
1980.
• V.A. Trenoguin, B.M. Pisarievski y T.S. Soboleva, Problemas y ejercicios de
analisis funcional, Mir, Moscu, 1987.
• F. Treves, Topological vector spaces, distributions and kernels, Academic
Press, New York, 1973.

Lista de sımbolos y
abreviaturas
BON = base ortonormal
ELC = espacio localmente convexo
EN = espacio normado
ET = espacio topologico
EV = espacio vectorial
EVT = espacio vectorial topologico
SON = sistema ortornormalw→ ≡ convergencia en la topologıa debilw∗→ ≡ convergencia en la topologıa debil-∗τ→ ≡ convergencia en la topologıa τ
(x|y) = producto escalar de x e y
d(x, y) = distancia entre x e y
∥x∥ = norma de x
∥ · ∥p = norma en el espacio ℓp o Lp(µ)
∥ · ∥∞ = norma del supremo
C = conjunto de los numeros complejos
K = el conjunto R o el conjunto C, indistintamente
N = conjunto de los numeros naturales
N0 = N ∪ 0
139

140 Luis Bernal y Tomas Domınguez
Q = conjunto de los numeros racionales
R = conjunto de los numeros reales
A0 = interior del conjunto A
A = conjunto polar del conjunto A
A = bipolar del conjunto A
A = clausura del conjunto A
A⊥ = conjunto ortogonal de A, o anulador de A
⊥A = anulador de A, donde A ⊂ X∗
⟨A⟩ = span (A) = variedad lineal generada por A
A+B = x+ y : x ∈ A, y ∈ B
x+ A = x+ u : u ∈ A
λA = λx : x ∈ A
Λ · A = λx : λ ∈ Λ, x ∈ A
absco (A) = envolvente absolutamente convexa de A
absco (A) = envolvente absolutamente convexa cerrada de A
B(a, δ) = bola abierta de centro a y radio δ
B(a, δ) = bola cerrada de centro a y radio δ
BX = bola unidad cerrada del espacio normado X
c = espacio de las sucesiones convergentes
c0 = espacio de las sucesiones nulas
c00 = espacio de las sucesiones casi nulas
co (A) = envolvente convexa de A
co (A) = envolvente convexa cerrada de A
C(S) = espacio de las funciones continuas S → K
C(S,R) = espacio de las funciones continuas S → R
C(S,C) = espacio de las funciones continuas S → C
CN(Ω) = espacio de las funciones diferenciables con continuidad
hasta orden N en Ω

Lista de sımbolos y abreviaturas 141
C∞(Ω) = espacio de las funciones infinitamente diferenciables en Ω
D = espacio de las funciones infinitamente diferenciables de soporte
compacto
Dα = derivada de orden α
D∗ = espacio de las distribuciones
D(K) = espacio de las funciones infinitamente diferenciables con soporte
contenido en el compacto K
dim (X) = dimension algebraica de X
E(x0) = familia de los entornos del punto x0
Ext (A) = conjunto de puntos extremales del conjunto A
f ∗ g = producto de convolucion de f y g
H(Ω) = espacio de las funciones holomorfas en Ω
Im (T ) = imagen de T
Ker (Λ) = nucleo de la aplicacion lineal Λ
K(X) = espacio de los operadores compactos sobre X
L(X) = espacio de los operadores sobre X
L(X, Y ) = espacio de las aplicaciones lineales y continuas de X en Y
ℓp = espacio de las sucesiones sumables de orden p
ℓ∞ = espacio de las sucesiones acotadas
Lp(µ) = espacio de las funciones medibles que son integrables de orden
p respecto de la medida µ
L∞(µ) = espacio de las funciones medibles esencialmente acotadas
respecto de la medida µ
M(S) = espacio de las medidas de Borel regulares reales o complejas
sobre S
M(S,C) = espacio de las medidas complejas de Borel regulares sobre S
M(S,R) = espacio de las medidas reales de Borel regulares sobre S
|µ| = variacion total de la medida µ

142 Luis Bernal y Tomas Domınguez
µA = funcional de Minkowski de A
µ-ect = en casi todo respecto de la medida µ
sop f = soporte de la funcion f
sop (µ) = soporte de la medida µ
SX = superficie esferica unidad del espacio normado X
σ(X,X∗) = topologıa debil sobre X
σ(X,X∗) = topologıa debil-∗ sobre X∗
T ∗ = aplicacion traspuesta de T
τ1 4 τ2 ≡ la topologıa τ1 es menos fina que τ2
τ(P) = topologıa generada por la familia de seminormas PV (f) = variacion de la funcion f
xα →α∈I
x0 ≡ la red (xα)α∈I converge a x0
X∗ = dual topologico del EVT X
X∗∗ = bidual del EN X
X ′ = dual algebraico de X
X ≈ Y ≡ X es topologicamente isomorfo a Y
X/N = espacio cociente de X respecto del subespacio Y

Indice alfabetico
Algebra de funciones, 130
Algebra del disco, 81
Anulador, 107
Aplicacion
homogenea, 39
lineal continua, 9, 45
lineal uniformemente continua, 9, 45
secuencialmente continua, 61
subaditiva, 39
Base
algebraica, 19
de entornos, 31
de Hamel, 19
de Schauder, 19
normalizada, 19
incondicional, 28
ortonormal, 16
Bidual de un espacio normado, 10, 104
Bipolar de un conjunto, 113
Boreliano, 71
Coeficientes de Fourier, 15
Complemento topologico, 28
Conjunto
cofinal, 75
de Borel, 71
dirigido, 75
ortogonal, 14
Constante basica, 22
incondicional, 28
Derivada de Radon-Nikodym, 17
Desigualdad
de Cauchy-Schwarz, 13
triangular, 8
Distribucion, 82
Dual
algebraico, 45, 90
de ℓp, 11
de Lp, 46
topologico, 45
Envolvente
absolutamente convexa, 113
cerrada absolutamente convexa, 113
cerrada convexa, 92
convexa, 62, 91
Esfera de Riemann, 73
Espacio
cociente, 61
de Baire, 11
de Banach, 8
de Frechet, 43
de funciones infinitamente diferenciables
con soporte compacto, 41
de Hilbert, 13
de las funciones analıticas, 32
de las funciones infinitamente diferenciables,
41
dual, 10, 45
euclıdeo, 13
normado, 8
de dimension finita, 12
estrictamente convexo, 135
reflexivo, 11, 104
uniformemente convexo, 135
prehilbertiano, 13
primer numerable, 74
vectorial topologico, 34
143

144 Luis Bernal y Tomas Domınguez
localmente acotado, 43
localmente compacto, 43
localmente convexo, 43
metrizable, 43
normable, 43
tonelado, 134
F-espacio, 43
Familia
de seminormas, 39
filtrante, 39
separante, 39
equicontinua, 66, 116
puntualmente acotada, 11
uniformente acotada, 11
Forma lineal, 10
Formula de la integral de Cauchy, 68, 72
Funcion
de densidad, 17
de soporte compacto, 70
de variacion acotada, 29
escalonada, 70
generalizada, 82
test, 82
Funcional, 10
de coordenada, 24
de Minkowski, 50
Grafo, 12
Hiperplano, 89
afın, 89
Hiperplanos paralelos, 89
Homogeneidad, 8
Homotecia, 34
Identidad
de Parseval, 15
del paralelogramo, 13
Medida
σ-finita, 16
absolutamente continua, 16
compleja, 70
de Borel, 71
de Dirac, 126
finita, 16
real, 70
regular, 71
Norma, 8
de un operador lineal, 10
Operador, 9, 106
de derivacion, 81
de Volterra, 135
Orden parcial, 75
Plano complejo completado, 73
Polar de un conjunto, 101
Principio
de acotacion uniforme, 11
de condensacion de singularidades, 133
Producto
cartesiano, 81, 100
de convolucion, 64
escalar, 13
Propiedad de Kadec, 136
Proyeccion ortogonal, 14
Punto
adherente de una red, 76
extremal, 125
Red, 76
convergente, 76
Segmento
abierto, 125
cerrado, 125
Seminorma, 39
Serie de Fourier, 15
Sistema
de Haar, 25
ortogonal, 15
ortonormal, 15
ortonormal completo, 15
ortonormal maximal, 15
total, 15
Soporte
de una funcion, 82

Indice alfabetico 145
de una medida, 131
Subconjunto
absolutamente convexo, 113
absorbente, 34
acotado, 37
compacto, 38
convexo, 14, 35
debilmente acotado, 95
de primera categorıa, 11
de segunda categorıa, 11
equilibrado, 35
extremal, 125
relativamente compacto, 66
residual, 11
secuencialmente compacto, 104
Subespacio afın, 89
Subred, 76
Sucesion basica, 19
monotona, 22
Teorema
de Alaoglu–Bourbaki, 102
de aproximacion de Weierstrass, 20, 63
de Arzela–Ascoli, 66, 123
de Baire, 11
de Banach–Steinhaus, 11, 117
de Birkhoff–Kakutani, 56
de convergencia de Weierstrass, 58
de Goldstine, 105
de Hahn–Banach, 10, 84
forma geometrica, 91
de Hellinger–Toeplitz, 134
de la Aplicacion Abierta o del Homomorfismo,
12, 118
de la Proyeccion, 14
de las bipolares, 113
de Mackey, 98
de Mazur, 97
de Montel, 33, 50, 68
de Nikolski, 22
de Radon-Nikodym, 16
de representacion de Riesz, 14, 71
de Riesz, 49
de Runge, 72
de Schauder, 123
de Stone–Weierstrass, 130
de Tychonoff, 81, 101
del Grafo Cerrado, 12, 121
del vector minimizante, 14
Tonel, 134
Topologıa
debil, 95
debil-∗, 100de la convergencia compacta, 33
de la convergencia puntual, 60
fuerte, 104
producto, 81, 100
Traslacion, 34
Traspuesta de una aplicacion lineal, 106
Variacion total de una medida, 70
Variedad afın, 89
Vectores ortogonales, 14