







Idiomas
Páginas
Jurídico


Diseño de Fundaciones CI72C
Universidad de ChileFacultad de Ciencias Físicas y MatematicasDepartamento de Ingeniería Civil
Diseño de Fundaciones para Equipos Vibratorios
Roberto Riquelme Herrera 1 de 73 19 de Julio de 2006

Diseño de Fundaciones CI72C
1. Aspectos teóricos El diseño de fundaciones de maquinarias puede seguir dos caminos:
• Si el tamaño de la maquinaria involucrada es pequeña o la excitaciónsolicitante es reducida el análisis se puede realizar por medio de cargasestáticas equivalentes.
• Si la maquinaria es de mayor envergadura o bien el problema reviste
complejidad adicional es necesario efectuar una análisis de vibraciones. A continuación desarrollemos algunos conceptos básicos que se aplican al diseño defundaciones sujetas a vibraciones. Todo sistema de la figura siguiente:
La ecuación de equilibrio del sistema viene dada por
m 2tyd
d
2⋅ C
tyd
d⋅+ k y δst+( )⋅+ W= (1)
m 2tyd
d
2⋅ C
tyd
d⋅+ k y⋅+ 0= (2) Si no hay exitación
m 2tyd
d
2⋅ C
tyd
d⋅+ k y⋅+ F t( )= (3) Si hay exitación
Roberto Riquelme Herrera 2 de 73 19 de Julio de 2006

Diseño de Fundaciones CI72C
Asumiendo la siguiente solución para la ecuación (2):
y es t⋅= (4)
Substituyendo la ecuación (4) en (2) se tiene:
s11
2 m⋅⎛⎜⎝
⎞⎠
C− C2 4 k⋅ m⋅−+( )⋅= (5a)
s21
2 m⋅⎛⎜⎝
⎞⎠
C− C2 4 k⋅ m⋅−+( )⋅= (5b)
Luego la solución completa de la ecuación (2) esta dada por : La solución anterior describe el movimiento llamado transciente, en el que la oscilación desaparece con un rapidez que es función del amortiguamiento. De las ecuaciones (4a), (5a) y (5b) se aprecia que la naturaleza de la oscilación depende del amortiguamiento C. Dependiendo de el valor de C se pueden presentar las 3 situaciones siguientes.
y A es1 t⋅
⋅ B es2 t⋅
⋅+ (4b)
• Caso no amortiguado – C=0 En este caso se tiene: De donde se puede escribir Si suponemos condiciones iniciales de velocidad (vo) y desplazamiento (yo), la ecuación (7c) queda de la siguiente forma:
s1 i ωn⋅ s2 i− ωn⋅
y A ei ωn⋅ t⋅
⋅ B ei− ωn⋅ t⋅
⋅+ C1 ei ωn t⋅ φ−( )⋅
⋅ (7a) y (7b)
o
y B1 cos ωn t⋅( )⋅ B2 cos ωn t⋅( )⋅+ C1 cos ωn t⋅ φ−( )⋅ (7c) y (7d)
Roberto Riquelme Herrera 3 de 73 19 de Julio de 2006

Diseño de Fundaciones CI72C
y yo cos ωn t⋅( )⋅voωn
⎛⎜⎝
⎞
⎠sen ωn t⋅( )⋅+= (8a)
vωn
yo− sen ωn t⋅( )⋅voωn
⎛⎜⎝
⎞
⎠cos ωn t⋅( )⋅+= (8b)
O bien en la ecuación (7b) Donde : En la siguiente figura se muestra una representación grafica de la ecuación (9a), por la proyección del vector C1 rotando en torno de un punto fijo O, con una velocidad constante ωn. La proyeccion en el eje X corresponde al desplazamiento y, mientras que la proyección en el eje Y corresponde al velocidad (v/ ωn).
y C1 cos ωn t⋅ φ−( )⋅ (9a)
vωn
C1− sen ωn t⋅ φ−( )⋅ (9b)
C1 yo2 vo
ωn
⎛⎜⎝
⎞
⎠
2
+ Amplitud de vibración
φ atanvo
ωn yo⋅
⎛⎜⎝
⎞
⎠Angulo de fase
En esta figura la grafica (b) corresponde a el desplazamiento versus el tiempo y (c)corresponde a la velocidad versus el tiempo. En este caso debido a la ausencia de amortiguamiento la oscilación no pierde amplitud.
Roberto Riquelme Herrera 4 de 73 19 de Julio de 2006

Diseño de Fundaciones CI72C
Roberto Riquelme Herrera 5 de 73 19 de Julio de 2006

Diseño de Fundaciones CI72C
• Caso 2 Sub-amortiguado - 0 < C2 < 4km En este caso: Reemplazando las relaciones (10) en (4b) y usando la relación de Euler.
En la siguiente figura se observa la respuesta de un sistema de un grado de libertad subamortiguado.
s1 ωn C− i 1 D2−⋅+( )⋅ (10a)
s2 ωn C− i 1 D2−⋅−( )⋅ (10b)
y eD− ωn⋅ t⋅
B1 sen ωn 1 D2−⋅ t⋅⎛
⎝⎞⎠⋅ B2 cos ωn 1 D2
−⋅ t⋅⎛⎝
⎞⎠⋅+⎛
⎝⎞⎠⋅ (11a)
o
y eD− ωn⋅ t⋅
Y⋅ sen ωd t⋅ φ+( )⋅ (11b)
Con : DCCc
Roberto Riquelme Herrera 6 de 73 19 de Julio de 2006

Diseño de Fundaciones CI72C
El decaimiento de la respuesta es proporcional a:
eD− ωn⋅ t⋅
envolvente de la respuesta
Roberto Riquelme Herrera 7 de 73 19 de Julio de 2006

Diseño de Fundaciones CI72C
• Caso 3 Amortiguamiento Critico C2 = 4km En este caso:
Por lo tanto imponiendo condiciones iniciales: El amortiguamiento crítico representa el límite en el cual la respuesta del sistema deja de ser periódica, así se tiene una solución aperiódica y la respuesta llega al reposo sin producirse oscilación. A continuación se muestra una representación grafica de la respuesta de un sistema de un grado de libertad con amortiguamiento crítico.
s1 s 2C−
2 m⋅(12)
y A e
c
2 m⋅⎛⎜⎝
⎞⎟⎠
− t⋅⋅ B e
c
2 m⋅⎛⎜⎝
⎞⎟⎠
− t⋅⋅+ (13)
y yovoωn
⎛⎜⎝
⎞
⎠yo+
⎡⎢⎣
⎤⎥⎦
ωn⋅ t⋅+⎡⎢⎣
⎤⎥⎦
eωn− t⋅
⋅ (13b)
Roberto Riquelme Herrera 8 de 73 19 de Julio de 2006

Diseño de Fundaciones CI72C
• Caso 4 Sobre amortiguado 4km < C2 En este caso: Y la solución de la ecuación (4a) toma la forma: En este caso la razón de amortiguamiento es menor que uno y cae exponencialmente.No obstante que la solución no es oscilatoria pueden existir cruces por cero dependiendo de las condiciones iniciales. A continuación se muestra una curva típicapara la respuesta de un sistema sobre amortiguado.
s 1 ωn− D⋅ ωn D2 1−⋅+ (14a)
s 2 ωn− D⋅ ωn D2 1−⋅− (14b)
y A eD− D2 1−+( ) ωn⋅ t⋅
⋅ B eD− D2 1−−( ) ωn⋅ t⋅
⋅+ (15)
En rojo se muestra una curva para condiciones iniciales que producen un cruce por cero en una solución aperiódica.
Tipos de excitacion•
Las excitaciones tipicamentes encontradas en el diseno de fundaciones de maquinas son las maquinas de masa excentrica y las maquinas reciprocas.
Roberto Riquelme Herrera 9 de 73 19 de Julio de 2006

Diseño de Fundaciones CI72C
Maquinas reciprocas
Las maquinas de masa excentricas son maquinas en las cuales la excitacion corresponde a una fuerza centrifuga debido a una masa (masa excentrica me) que gira con una excentricidad 'e' y a una velocidad angular'w'.
Asi se tiene que la fza producida esta dada por:
F t( ) me ω2
⋅ e⋅=
La que descompuesta en los ejes coordenados X y Z es:
Fx t( ) me ω2
⋅ e⋅ cos ω t⋅( )⋅= Fz t( ) me ω2
⋅ e⋅ sin ω t⋅( )⋅=
Roberto Riquelme Herrera 10 de 73 19 de Julio de 2006

Diseño de Fundaciones CI72C
Maquinas reciprocas
Estas maquinas son aquellas que transforman un moviemiento rotacional en uno unidireccional o visciversa, como es el caso de un sistema formado por una manivela conectado a un piston por medio de una biela (ver la siguiente figura).
El movimiento del punto P esta definido por:
xp L r+( ) L cos φ( )⋅ r cos ω t⋅( )⋅+( )−=
Usando el teorema del seno: L sin φ( )⋅ r sin ω t⋅( )⋅= y reemplazando en la ecuacion anterior
xp r 1 cos ω t⋅( )−( )⋅ L 1 1rL
⎛⎜⎝
⎞⎠
2sin ω t⋅( )2
⋅−−⎡⎢⎣
⎤⎥⎦
⋅+=
Como : 1rL
⎛⎜⎝
⎞⎠
2sin ω t⋅( )2
⋅− 1r2
2 L2⋅
sin ω t⋅( )2⋅−= aproximadamente
Se tiene :
xp r 1 cos ω t⋅( )−( )⋅r2
2 L⋅sin ω t⋅( )2
⋅+=
Roberto Riquelme Herrera 11 de 73 19 de Julio de 2006

Diseño de Fundaciones CI72C
ayc r− ω2
⋅ sin ω t⋅( )⋅= ==>yc r sin ω t⋅( )⋅=El punto C en el eje Y:
axc r ω2
⋅ cos ω t⋅( )⋅= ==>xc r 1 cos ω t⋅( )−( )⋅=El punto C en el eje X:
axp r ω2
⋅ cos ωt( ) rL
cos 2 ω⋅ t⋅( )⋅+⎛⎜⎝
⎞⎠
⋅=
vxp r ω⋅ sin ωt( ) r2 L⋅
sin 2 ω⋅ t⋅( )⋅+⎛⎜⎝
⎞⎠
⋅=
Por lo tanto:
De la relacion anterior se aprecia que el desplazamiento del piston depende de dos terminos, uno que varia con la frecuencia de excitacion (primario) y el otro con el doble de ella (secundario). El termino secundario es mas preponderante en la medida que la longitud 'L' de la biela es mas pequena.
Termino SecundarioTermino Primario
xp rr2
4 L⋅+
⎛⎜⎝
⎞
⎠r cos ω t⋅( ) r
4 L⋅cos 2 ω⋅ t⋅( )⋅+⎛⎜
⎝⎞⎠
⋅−=
Usando las relaciones para el angulo doble:
Roberto Riquelme Herrera 12 de 73 19 de Julio de 2006

Diseño de Fundaciones CI72C
Un sistema reciproco posee masa en la biela (mb), como tambien masa en el piston (mp). Una forma idealizada de resolver este tipo de sistemas es considerar que la masa se concentra en los puntos C y P; para ello la masa de la biela se reparte entre ambos puntos con lo que se tiene una masa asociada al punto C, denominada masa rotatoria (mrot) y otra masa reciproca (mrec) asociada al punto P y que incluye la porcion de la biela asociada a este punto mas la masa de piston.
Teniendo en cuenta lo anterior las fuerzas producidas son:
Fx.rec mrec axp⋅= mrec r ω2
⋅ cos ωt( ) rL
cos 2 ω⋅ t⋅( )⋅+⎛⎜⎝
⎞⎠
⋅⎡⎢⎣
⎤⎥⎦
⋅= para la masa reciproca (punto P)
Fx.rot mrot axc⋅= mrot r ω2
⋅ cos ω t⋅( )⋅( )⋅= para la masa rotatoria en X (punto C)
Fx mrec mrot+( ) r⋅ ω2
⋅ cos ω t⋅( )⋅ mrecr2 ω
2⋅
L⋅ cos 2 ω⋅ t⋅( )⋅+= Fuerza total del sistema en X
Fy mrot ayc⋅= mrot r ω2
⋅ sin ω t⋅( )⋅( )⋅= Fuerza total del sistema en Y (solo debida a masarotatoria)
• Factor de Amplificación de la respuesta Consideremos la ecuación de movimiento
Asumiendo la siguiente solución:
Llamando:
m 2tyd
d
2⋅ c
tyd
d⋅+ k y⋅+ Po sin ω t⋅( )⋅ 15( )
yp yo sin ω t⋅ φ−( )⋅ 16a( )
yp yo sin ω t⋅( ) cos φ( )⋅ cos ω t⋅( ) sin φ( )⋅−( )⋅ 16b( )
A yo cos φ( )⋅ 17a( )
17b( ) B yo− sin φ( )⋅
tan φ( ) B−
A 18( )
19( )yo A2 B2+
Roberto Riquelme Herrera 13 de 73 19 de Julio de 2006

Diseño de Fundaciones CI72C
Haciendo (17a)/(17b) y (17a)2 + (17b)2 se tiene: Donde:
tan φ( ) B−
A 18( )
19( ) yo A2 B2+
APok
1ω
ωn
⎛⎜⎝
⎞
⎠
2−
1ω
ωn
⎛⎜⎝
⎞
⎠
2−
⎡⎢⎢⎣
⎤⎥⎥⎦
2
2 D⋅ω
ωn
⎛⎜⎝
⎞
⎠⋅⎡
⎢⎣
⎤⎥⎦
2+
⋅ 20a( )
BPok
2− D⋅ω
ωn
⎛⎜⎝
⎞
⎠
2⋅
1ω
ωn
⎛⎜⎝
⎞
⎠
2−
⎡⎢⎢⎣
⎤⎥⎥⎦
2
2 D⋅ω
ωn
⎛⎜⎝
⎞
⎠⋅⎡
⎢⎣
⎤⎥⎦
2+
⋅ 20b( )
φ atan
2 D⋅ω
ωn
⎛⎜⎝
⎞
⎠⋅
1ω
ωn
⎛⎜⎝
⎞
⎠
2−
⎡⎢⎢⎣
⎤⎥⎥⎦
⎡⎢⎢⎢⎢⎢⎣
⎤⎥⎥⎥⎥⎥⎦
= 18a( )
yo
Pok
⎛⎜⎝
⎞⎠
1ω
ωn
⎛⎜⎝
⎞
⎠
2−
⎡⎢⎢⎣
⎤⎥⎥⎦
2
2 D⋅ω
ωn
⎛⎜⎝
⎞
⎠⋅⎡
⎢⎣
⎤⎥⎦
2+
= 19b( )
Definiendo, el factor de amplificacion dinamica
MyoPok
⎛⎜⎝
⎞⎠
= 1
1ω
ωn
⎛⎜⎝
⎞
⎠
2−
⎡⎢⎢⎣
⎤⎥⎥⎦
2
2 D⋅ω
ωn
⎛⎜⎝
⎞
⎠⋅⎡
⎢⎣
⎤⎥⎦
2+
= 20( )
Roberto Riquelme Herrera 14 de 73 19 de Julio de 2006

Diseño de Fundaciones CI72C
23a( )yo
µ e⋅ω
ωn
⎛⎜⎝
⎞
⎠⋅
1ω
ωn
⎛⎜⎝
⎞
⎠
2−
⎡⎢⎢⎣
⎤⎥⎥⎦
2
2 D⋅ω
ωn
⎛⎜⎝
⎞
⎠⋅⎡
⎢⎣
⎤⎥⎦
2+
=
razon de la masa rotatoria a la masa total del sistemaµmem
=Llamando :
me e⋅ ω2
⋅
kmm
⋅mem
⎛⎜⎝
⎞⎠
ω
ωn
⎛⎜⎝
⎞
⎠
2⋅ e⋅=Pero :
23( )yo
me e⋅ ω2
⋅
k
⎛⎜⎜⎝
⎞
⎠
1ω
ωn
⎛⎜⎝
⎞
⎠
2−
⎡⎢⎢⎣
⎤⎥⎥⎦
2
2 D⋅ω
ωn
⎛⎜⎝
⎞
⎠⋅⎡
⎢⎣
⎤⎥⎦
2+
=
De la ecuacion (19b):
22( )yo me e⋅ ω2
⋅=
Para un sistema excitado por una fuerza de este tipo la solucion de la ecuacion de movimiento es como la mostrada en la ecuacion (16a), donde:
21( )F t( ) me e⋅ ω2
⋅ sin ω t⋅ φ−( )⋅=
Ahora consideremos un sistema en el cual la excitacion posee amplitud dependiente de la frecuencia, esto es:
Roberto Riquelme Herrera 15 de 73 19 de Julio de 2006

Diseño de Fundaciones CI72C
Definiendo, el factor de amplificacion dinamica
Mryoµ e⋅
=
ω
ωn
⎛⎜⎝
⎞
⎠
2
1ω
ωn
⎛⎜⎝
⎞
⎠
2−
⎡⎢⎢⎣
⎤⎥⎥⎦
2
2 D⋅ω
ωn
⎛⎜⎝
⎞
⎠⋅⎡
⎢⎣
⎤⎥⎦
2+
= 24( )
Mrω
ωn
⎛⎜⎝
⎞
⎠
2M⋅= 24( )
Mr : factor de amplificacion dinamica para una excitacion dependiente de la frecuencia
Este ultimo factor de amplificacion es dependiente de la frecuencia de la excitacion, no obstante en la practica de diseno de fundaciones de maquinarias se usa el factor de amplificacion de la expresion (20) pues las maquinarias operan a una frecuencia determinada.
Las siguientes graficas muestran los factores de amplificacion dinamica para excitacion independiente y dependiente de la frecuencia, para distintos valores de la razon de amortiguamiento (D).
Roberto Riquelme Herrera 16 de 73 19 de Julio de 2006

Diseño de Fundaciones CI72C
En el diseno de fundaciones de maquinarias se busca evitar la resonancia, la que se produce para la frecuencia natural amortiguada. Como la resonancia se produce solo en el infinito, lo que se busca para evitar la resonancia es evitar caer el rango de frecuencias en el cual se produce amplificacion de la respuesta (frecuencias en torno a la frecuencia amortiguada). En la grafica esto corresponde a tener una razon de frecuencias tal que el sistema este ubicado o bien a la derecha o bien a la izquierda de la franja central. Lo que se consigue generalemente modificando la masa del sistema.
Para excitacion de amplitud dependiente de la frecuencia
Factor de transmisividad•
Roberto Riquelme Herrera 17 de 73 19 de Julio de 2006

Diseño de Fundaciones CI72C
Definiendo el factor de transmisividad como la razon entre la fuerza transmitida y la maxima fza
Ft
Pok
⎛⎜⎝
⎞⎠
k2 2 D2⋅( ) m⋅ k⋅ ω
2⋅+⋅
1ω
ωn
⎛⎜⎝
⎞
⎠
2−
⎡⎢⎢⎣
⎤⎥⎥⎦
2
2 D⋅ω
ωn
⎛⎜⎝
⎞
⎠⋅⎡
⎢⎣
⎤⎥⎦
2+
=
Ft k y t( )⋅( )2 cty t( )d
d⋅⎛
⎜⎝
⎞⎠
2+=
Donde el maximo de la fza transmitida esta dada por:
Ft t( ) k y t( )⋅ cty t( )d
d⋅+=
La fuerza transmitida a la base esta dada por:
27( )Ro 1ω
ωn
⎛⎜⎝
⎞
⎠
2−
⎡⎢⎢⎣
⎤⎥⎥⎦
2
2 D⋅ω
ωn
⎛⎜⎝
⎞
⎠⋅⎡
⎢⎣
⎤⎥⎦
2+=
19b( )yo
Pok
⎛⎜⎝
⎞⎠
Ro=
18a( )φ atan
2 D⋅ω
ωn
⎛⎜⎝
⎞
⎠⋅
1ω
ωn
⎛⎜⎝
⎞
⎠
2−
⎡⎢⎢⎣
⎤⎥⎥⎦
⎡⎢⎢⎢⎢⎢⎣
⎤⎥⎥⎥⎥⎥⎦
=
26( )ty t( )d
dyo ω⋅ cos ω t⋅ φ−( )⋅=
16a( )yp yo sin ω t⋅ φ−( )⋅=
Considerando la solucion de la ecuacion (15):
Roberto Riquelme Herrera 18 de 73 19 de Julio de 2006

Diseño de Fundaciones CI72C
aplicada en el sistema.
Tr
1 2Dω
ωn
⎛⎜⎝
⎞
⎠
2⋅+
1ω
ωn
⎛⎜⎝
⎞
⎠
2−
⎡⎢⎢⎣
⎤⎥⎥⎦
2
2 D⋅ω
ωn
⎛⎜⎝
⎞
⎠⋅⎡
⎢⎣
⎤⎥⎦
2+
=
Roberto Riquelme Herrera 19 de 73 19 de Julio de 2006

Diseño de Fundaciones CI72C
En muchas ocasiones se desea limitar la fuerza o a la vibracion transmitida por el sistema, ya sea por requerimientos de equipos cercanos o razones de ambientales o de confort.
En tales casos se trata de controlar factor de transmisividad. Cabe mencionar que el factor de transmisividad deducido anteriormente corresponde a la fuerza transmitida para una excitacion dada. No obstante, tambien se puede determinar un factor de transmisividad asociado al desplazamiento transmitido para una excitacion dada, el cual posee la misma forma del factor deducido anteriormente.
Al controlar el factor de transmisividad (al igual que cuando se controla el factor de amplificacion dinamica) se busca ubicar al sistema en una razon de frecuencias tal que no se encuentre en la zona donde el factor de transmisividad se ve incrementado (ver figura).
Cabe mencionar que para controlar tanto el factor de amplificacion como el factor de transmisividad, se hacen exigencias del siguiente tipo sobre la frecuencia del sistema:
ω 1 frac−( )ωd≤ 1 frac+( )ωd ω≤∨
Donde ' frac ' corresponde a que porcentaje interesa alejar la frecuencia amortiguada del sistema (ωn) de la frecuencia de excitacion ω. Dependiendo de lo criterios adoptados estos valores puedenser un 15%, 20% o 25%.
Roberto Riquelme Herrera 20 de 73 19 de Julio de 2006

Diseño de Fundaciones CI72C
2. Modelos de analisis
Dependiendo de la situacion investigada se tienen distintos modelos que representar el sistema analizado. A continuacion se presentan algunos modelos tipicos para fundaciones de maquinarias.
Modelo 1 - Equipo sobre un bloque de fundacion•
La figura una configuracion comun en la que una maquinaria descansa sobre un bloque de fundacion rigido.
A continuacion se muestra el modelo usado para esta situacion y las ecuaciones de equilibrio del sistema.
El sistema consta de grados de vertical, horizontal y giro (cabeceo)
Los valores Cx, Kx, Cψ y Kψ representan los amortiguamientos y constantes del resorte asociados al suelo para los grados de libertad horizontal y cabeceo. Los valores de Cy y Ky son el amortiguamiento y constante del resorte asociado al grado de libertad vertical.
Modelo para grado de libertad vertical:
m 2tyd
d
2⋅ Cy t
ydd
⋅+ ky z⋅+ Fy t( )=
Roberto Riquelme Herrera 21 de 73 19 de Julio de 2006

Diseño de Fundaciones CI72C
F(t)
Im
ψKψ
CψKx
Cx
ho
ψ
X
Modelo para el grado de libertad horizontal acoplado con el grado de libertad de giro (cabeceo).
Las ecuaciones equilibrio son:
m 2txd
d
2⋅ cx t
xdd
⋅+ kx x⋅+ kx ho⋅ ψ⋅− cx ho⋅tψd
d⋅− F t( )= desplazamiento
I 2tψd
d
2⋅ cψ t
ψdd
⋅+ kψ ψ⋅+ cx txd
dho t
ψdd
⎛⎜⎝
⎞⎠
⋅−⎡⎢⎣
⎤⎥⎦
⋅ ho⋅− x ho ψ⋅−( ) ho⋅− F t( ) H⋅= giro
Nota : si la altura ho, del centro de la gravedad del sistema equipo + fundacion con respecto al sello de fundacion es reducido se puede considerar el cabeceo desacoplado del desplazamiento horizontal y las ecuaciones pueden sr resueltas por la siguientes soluciones.
y Ay1 sen ω t⋅( )⋅ Ay2 cos ω t⋅( )⋅+=
ψ Aψ1 sen ω t⋅( )⋅ Aψ2 cos ω t⋅( )⋅+=
Modelo 2 - Mat de fundacion•
Cuando el equipo se descansa sobre un mat o conjunto de fundaciones conectadas (fundacion flexible), la modelacion puede ser la siguiente.
Roberto Riquelme Herrera 22 de 73 19 de Julio de 2006

Diseño de Fundaciones CI72C
m 2tzd
d
2⋅ Cz t
zdd
⋅+ kz z⋅+ Fz t( )=
Modelo 3 - Equipo sobre un bloque de fundacion con aislacion•
Una solucion usada para reducir las vibraciones o fuerzas trasmitidas es usar una aislacion en base a apoyos elastomericos entre el equipo y el bloque de fundacion. Los apoyos son modelados como resortes y no se considera amortiguamiento entre el bloque de inercia y la fundacion pues los apoyos de aislacion proveen muy poco amortiguamiento.
En este tipo de solucion es usual incluir un bloque de inercia (marco de acero) entre el equipo y los apoyos elastomericos, afin de dar una mayor masa al sistema superior (equipo + bloque) y poder modificar su frecuencia natural.
El sistema posee 2 grados de libertad vertical, 2 grados de libertad horizontales y uno de giro.
A continuacion se muestran los modelos usados para representar el sistema.
Roberto Riquelme Herrera 23 de 73 19 de Julio de 2006

Diseño de Fundaciones CI72C
Modelo para grados de libertad vertical
m1 2tz1
d
d
2⋅ kz1 z1 z2−( )⋅+ Fz t( )=
m2 2tz2
d
d
2⋅ Cz2 t
z2dd
⋅+ kz1 z2 z1−( )⋅+ kz2 z2⋅+ 0=
Modelo para desplazamientos horizontales acoplados con el giro (cabeceo).
Fx(t)
I
m
ψ
Kψ
CψKx2
Cx2
ho
ψ
X
2
h
2
2
m1
2
2
2
2
X1
m1 2tx1
d
d
2⋅ kx1 x1 x2− ψ2 h⋅−( )⋅+ Fx t( )= Equilibrio para la masa m1
m2 2tx2
d
d
2⋅ Cx2 t
x2dd
⋅+ kx2 x2⋅+ kx1 x1 x2− ψ2 h⋅−( )⋅− 0= Equilibrio para la masa m2
Roberto Riquelme Herrera 24 de 73 19 de Julio de 2006

Diseño de Fundaciones CI72C
I2 2tψ2
d
d
2⋅ Cψ2 t
ψ2dd
⋅+ m1 2tx1 h⋅d
d
2⋅+ kψ2 ψ2⋅+ Fx t( ) H⋅= Equilibrio para m2 (rotacion)
Las fzas debido a Cx2 y Kx2no generan momento.
Los valores Cx2, Kx2, Cψ2 y Kψ2 representan los amortiguamientos y constantes del resorte asociados al suelo para los grados de libertad horizontal y cabeceo. Los valores de Cz2 y Kz2 son el amortiguamiento y constante del resorte asociado al grado de libertad vertical.
Los valores Cx1, Kx1, Cz1 y Kz1 representan los amortiguamientos y constantes del resorte asociados los apoyos elastomericos que sirven de aislacion para los movimientos horizontal y vertical respectivamente.
Comentarios a la modelacion•
Los amortiguamientos y coeficientes de los resortes para los distintos modos se determinan por medio de la formulacion que se mostrara mas adelante.
Para el modelo 2 el valor de kzi corresponde al resorte que representa el suelo y puede ser obtenido a traves del coeficiente de reaccion del suelo. Una alternativa, es determinar un resorte equivalente para el modo vertical segun la formulacion que se mostrara mas adelante y distribuirlo en el modelo de elementos finitos de modo tal que se repodruzca la respuesta del sistema para el modo de cabeceo.
Solo se han mostrado algunos modelos, pero dependiendo de las configuraciones de los sistemas estudiados se pueden encontrar otras modelaciones.
Roberto Riquelme Herrera 25 de 73 19 de Julio de 2006
Diseño de Fundaciones CI72C
kz kzs Azi⋅=Para movimiento vertical :
Barkan extiende el concepto de reacción del suelo a otros movimientos distintos del vertical, de esta manera tenemos los siguientes coeficientes de resortes para varios modos de vibración, así como aproximaciones de los coeficientes de reacción para esos modos de vibrar.
Donde :
2d = ancho de la sección o menor dimensión de la fundaciónkz = coeficiente de reacción vertical del suelo para una base de dimension de 2d o menoskz1 = coeficiente de reacción vertical del suelo para una base de dimension de 1 ft o menos
para suelos sin cohesionkz kz12d 1+
4d⎛⎜⎝
⎞⎠
2⋅=
para suelos cohesivoskz kz112d
⋅=
Dado que el modulo de reaccion del suelo se determina a partir de ensayos para placas de tamaños estándar, las siguientes aproximaciones para superficies de carga distintas son útilles para suelos cohesivos y no cohesivos (Terzaghi 1955).
Constante del resorte k ks Ai⋅=
Este método permite representar el suelo por medio de resortes cuya constante elástica se determina a partir del modulo de reaccion del suelo. Este metodo no permite incluir la disipasión de energia del suelo por radiación (amortiguamiento). Además este método no provee información de la amplitud de movimiento para frecuencias cercanas a la de resonancia.
Metodo basado en modulo de reaccion del suelo•
A continuacion se hace una breve revision de los metodos usados para modelar el comportamiento del suelo. comportamiento del suelo.
3. Comportamiento del Suelo
Roberto Riquelme Herrera 26 de 73 19 de Julio de 2006

Diseño de Fundaciones CI72C
Para movimiento horizontal : kh khs Ahi⋅=
Para cabeceo : kψ kψs Iψi⋅=
Para torsión: kθ kθs Iθi⋅=
Donde Azi y Ahi representan area de contacto entre fundación y suelo y Iψi y Iθi representan momemto de inercia del area de contacto en torno al eje horizontal normal al plano de cabeceo a través del CG y el momento de inercia del area de contacto en torno a el eje vertical a través del CG respectivamente.
Los coeficientes de reacción del suelo son función del tipo de suelo y forma de la fundación, no obstante, a menudo se supone que son función del tipo de suelo solamente. A continuación se da una aproximación de estos coeficiente propuesta por Barkan (1962).
kh 0.5kz= kψ 2kz= kθ 1.5kz=
Comportamiento del suelo basado en la teoria del semi espacio infinito•
Roberto Riquelme Herrera 27 de 73 19 de Julio de 2006

Diseño de Fundaciones CI72C
Esta teoría o procedimiento analítica efectúa algunas simplificaciones, como por ejemplo asume que las zapatas por lo general son circulares y supone que el semi espacio es elástico, homogéneo e isótropo. Esta teoría provee un método racional para evaluar las constantes de los resortes del suelo y de amortiguamiento. También incluye la disipación de energía por medio de amortiguamiento geométrico, y permite y provee de información de la amplitud de vibración en la frecuencia de resonancia.
El suelo posee dos mecanismos de perdida de energia, uno llamado geometrico y asociado con la emergia perdida por las ondas que se propogan en el semi espacio hacia el infinito (ver figura siguiente). Cabe mencionar que si se considera un estrato de suelo duro (roca) parte de las ondas radiadas se reflejan y no se posee el mismo efecto de amortiguamiento geometrico presente en el semi espacio.
Otra mecansimo de perdida de energia del suelo es a través del amortiguamiento
Roberto Riquelme Herrera 28 de 73 19 de Julio de 2006

Diseño de Fundaciones CI72C
histerético, esto es la perdida de energia debido a los ciclos de histeresis a lo que se ve sometido el suelo cuando es solicitado por cargas dinámicas (ver figura siguiente).
En esta formulación la masa del sistema se asume como la masa de la fundación más la masa del equipo. El suelo participa en la determinación del amortigaumieno geométrico y la constante del resorte para el modo de vibración en estudio.
El metodo determina el amortiguamiento y la constante del resorte para un determinado modo de vibrar, a partir de las propiedades del suelo. A continuación se muestras las expresiones derivadas de la teoria del semi espacio infinito.
Radio equivalente, para fundaciones que rectangulares
roB L⋅π
= Modo de vibración vertical
roB L⋅π
= Modo de vibración horizontal
ro
4B L3
⋅
3 π⋅= Modo de vibración vertical
ro
4B L⋅ B2 L2
+( )⋅
6 π⋅= Mode de vibración torsional
Donde B y L son las dimensiones menor y mayor de la fundación respectivamente
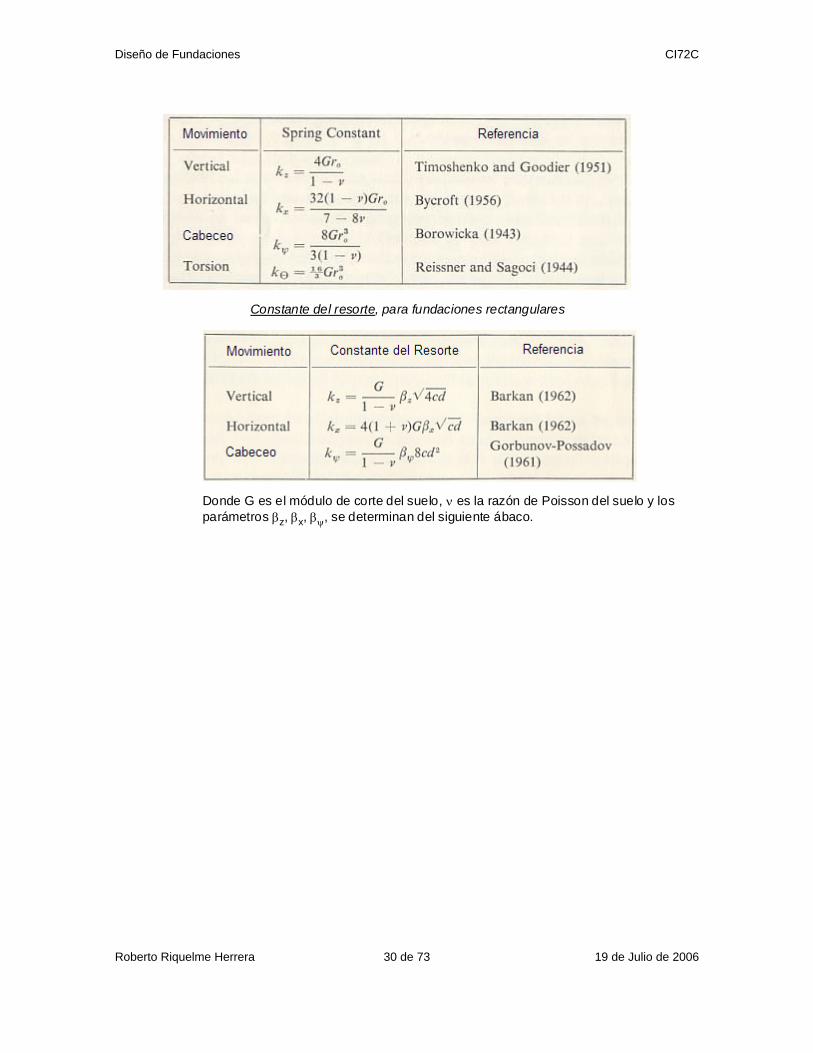
Constante del resorte, para fundaciones circulares
Roberto Riquelme Herrera 29 de 73 19 de Julio de 2006
Diseño de Fundaciones CI72C
Constante del resorte, para fundaciones rectangulares
Donde G es el módulo de corte del suelo, ν es la razón de Poisson del suelo y los parámetros βz, βx, βψ, se determinan del siguiente ábaco.
Roberto Riquelme Herrera 30 de 73 19 de Julio de 2006

Diseño de Fundaciones CI72C
Cabe mencionar que las expresiones para la constante del resorte no incluyen el efecto de la profundidad de enterramiento. Pero esto efecto se puede incluir multiplicando la rigidez por un factor η.
ηz 1 0.6 1 ν−( ) hro
⎛⎜⎝
⎞⎠
+= efecto del enterramiento en la constante del resorte para movimiento vertical
ηx 1 0.55 2 ν−( ) hro
⎛⎜⎝
⎞⎠
+= efecto del enterramiento en la constante del resorte para movimiento horizontal
ηψ 1 1.2 1 ν−( ) hro
⎛⎜⎝
⎞⎠
+ 0.2 2 ν−( ) hro
⎛⎜⎝
⎞⎠
3+= efecto del enterramiento en la
constante del resorte para cabeceo
A continuación se muestra una gráfica que refleja el efecto de considerar el enterramiento en la constante del resorte
Roberto Riquelme Herrera 31 de 73 19 de Julio de 2006

Diseño de Fundaciones CI72C
Amortiguamiento equivalente, para fundaciones circulares y rectangulares
Dz0.425
Bzαz⋅= razón de amortiguamiento para movimiento vertical
Dx0.288
Bxαx⋅= razón de amortiguamiento para movimiento horizontal
Dψ0.15
1 ηψ Bψ⋅+( ) ηψ Bψ⋅⋅αψ⋅= razón de amortiguamiento para cabeceo
Dθ0.50
1 2 Bθ⋅+= razón de amortiguamiento para torsión
Los parametros B y α se determinan como sigue.
Razón de masa o inercia, para fundaciones circulares y rectangulares
Bz1 ν−( )
4W
γ ro3
⋅⋅= razón de masa para movimiento vertical
( )Roberto Riquelme Herrera 32 de 73 19 de Julio de 2006

Diseño de Fundaciones CI72C
Bx7 8ν−( )
32 1 ν−( )⋅
W
γ ro3
⋅⋅= razón de masa para movimiento horizontal
Bψ3 1 ν−( )
8
Iψ
ρ ro5
⋅⋅= razón de inercia para cabeceo
BθIθ4
W
ρ ro5
⋅⋅= razón de inercia para torsión
Efecto del enterramiento en el amortiguamiento, para fundaciones circulares y rectangulares
αz
1 1.9 1 ν−( )⋅hro
⎛⎜⎝
⎞⎠
⋅+
nz= para movimiento vertical
αx
1 1.9 2 ν−( )⋅hro
⎛⎜⎝
⎞⎠
⋅+
nx= para movimiento horizontal
αψ
1 0.7 1 ν−( )⋅hro
⎛⎜⎝
⎞⎠
⋅+ 0.6 2 ν−( )⋅hro
⎛⎜⎝
⎞⎠
3⋅+
nψ= para cabeceo
Otro enfoque para modelar en suelo interactuante con la fundación solicitada por cargas dinamicas corresponde a el entregado por Wolf (ver referencias) pero no se explicita pues por lo general es poco usado.
Roberto Riquelme Herrera 33 de 73 19 de Julio de 2006
Diseño de Fundaciones CI72C
4. Criterios y recomendaciones de diseño
Para predefinir la geometria de una fundación sujeta a vibraciones, existe una serie de recomendaciones, dentro de las cuales encontramos:
No se debe fundar sobre un suelo previamente rellenado1.Recomendaciones del mecanico de suelos son consideradas en especial respecto de la 2.profundidad del sello de fundacionMasa de un bloque de fundacion debe ser 2 a 3 veces la masa del equipo soportado para 3.fuerzas centrifugas y de 3 a 5 veces en el caso de maquinas reciprocas.El borde superior del bloque de fundacion debe mantenerse usualmente a unos 30 cm del 4.nivel de piso terminado o pavimento, a fin de prevenir daños por escurrimiento de las aguas.La altura del bloque de fundacion no menor de 60 cm. El espesor o altura de la fundacion 5.puede quedar definida tambien por el espesor minimo talque pueda ser considerada como un bloque rigido.El espesor por lo general es mayor que 1/5 de de menor dimension o 1/10 de la mayor 6.dimension.El ancho de la fundacion debera ser tal que pueda incrementar el amortiguamiento en el 7.modo de cabeceo.El ancho sera al menos 1.5 veces la distancia vertical desde la base al centerline de la 8.fundacion.La longitud sera tal que pueda cumplirse los requerimientos anteriores y al menos tendra 30 9.cm libres desde el borde la maquina al borde del bloque (mantencion).Las dimensiones deben ser tales que el CG de la maquinaria coincida con el CG de la 10.fundacion. El CG combinado maquinarias mas fundacion debe coincidir con el centro de resistencia del suelo.
Las limitaciones de diseño viene dadas por :
Deformaciones entre puntos de fundaciones•Chequear las resistencia estática•Verificar el comportamiento dinámico incluyendo•
Amplitud máximaVelocidad y aceleración máximaFactor de amplificaciónCondiciones de resonanciaFactor de transmisividadInspección de todos los modos
Consideración de fallas por fatiga•Demandas ambientales (p.e. efecto sobre las personas), entre otras.
Estas limitaciones de diseño por lo general se resumen en abacos que permiten controlar las amplitudes de vibración, velocidades y aceleraciones en función de la frecuencia de excitacion del sistema. Estos ábacos establecen rangos de que permiten controlar el diseño dependiendo de la necesidad o requerimiento, esto es, rangos tales como no perceptibles para las personas, peligroso para la operación de la maquinaria, falla de la maquinaria, etc.
Roberto Riquelme Herrera 34 de 73 19 de Julio de 2006

Diseño de Fundaciones CI72C
A continuación se muestran algunos de estos ábacos, extraidos de libros de texto, aunque las normas ISO y DIN, establecen criterio o limitaciones de diseño más actualizados.
Abaco que permite establecer el limite de la amplitud de deformación para cierta o ciertas frecuencia de operación, dependiendo del rango en que se desea estar.
Roberto Riquelme Herrera 35 de 73 19 de Julio de 2006

Diseño de Fundaciones CI72C
Abaco que permite establecer el limite de la amplitud de deformación horizontal para cierta o ciertas frecuencia de operación, dependiendo del rango en que se desea estar.
(Tabla 1)
Limitaciones para amplitud de desplazamiento versus velicidad de operacion para maquinas de alta velocidad.
Roberto Riquelme Herrera 36 de 73 19 de Julio de 2006

Diseño de Fundaciones CI72C
Abaco que permite establecer el limite de la amplitud de deformación horizontal para cierta o ciertas frecuencia de operación, en turbo maquinas dependiendo del rango en que se desea estar.
Limitación de la velocidad de operacion en función de la condición de operación de la maquina.
(Tabla 5)
Roberto Riquelme Herrera 37 de 73 19 de Julio de 2006

Diseño de Fundaciones CI72C
Adicionalmente a las limitaciones establecidas por los abacos dependiendo de los requerimientos de equipos cercanos puede ser necesario establecer limitaciones al factor de transmisividad u otras establecidas por el fabricante o el proyecto.
En las siguientes tablas se muestran limitaciones tipicas al diseño de fundaciones solicitadas a excitaciones dinamicas.
Condiciones Estaticas Procedimiento
Capacidad de carga estática Area tal que se desarrollen persiones en el suelo de 50% las permitidas
Asentamiento estático Uniforme. CG de fundación y maquina dentro del 5% de cualquier dimensión
Capacidad de carga estática mas dinámica
La suma de carga estática y dinámica no debe generar presiones en le suelo mayores a un 75% de las admisibles
Asentamiento estático más carga dinámica repetida
CG de de carga estática y dinámica dentro del 5% de cualquier dimensión desde el CG la fundación. En el caso de cabeceo el eje de giro debe coincidir con el eje principal de la fundación.Asentamiento rsultante menor que el permitido por mecanica de suelos
Condiciones Dinámicas ProcediemientoAmpliud de vibración en frecuencia de operación
La maxima amplitud de desplazamiento debe quedar en la zona A o B para la tabla 1 para una frecuencia dada.Donde la maquina opera en diferentes frecuencias, la amplitud total de desplazamiento se compara con la menor frecuencia antuant
Velocidad (2◊ /cps) x Amptiud de desplazamientose evalua en las tabla 1 y se busca que al menos este en el condicion "good" de la tabla 5Donde dos maquinas operan con con diferents frecuuencias la velocidad se determinar por promedio geometrico
Aceleracion se evalua en las tabla 1. No necesario si se cumplen las dos condiciones anteriores
Factor de amplificaciónSi la maquina genera fuerzas desbalanceadas el factor M o Mr debe ser menor que 1,5 para la frecuencia de resonancia
Resonancia La frecuencia en operación no estar en el rango de + 20% de la frecuencia de resonancia
Factor de Transmisibilidad Debe ser menor que un 3%
Roberto Riquelme Herrera 38 de 73 19 de Julio de 2006

Diseño de Fundaciones CI72C
Así también se deben verificar los modos posibles de vibración:
Modos de Vibración CondicionOscilación vertical Posible si actua una fza en verticalOscilación horizontal Posible si actua una fza en vertical
Cabeceo Posible si el punto de apliación de la fza horizontal esta sobre el centro de masa de la fundación
Oscilación torsional Posible si las fzas horizontales están acopladas
Cabe mencionar que el cabeceo y oscilación horizontal usualmente están acoplados perosi:
f nx2 f nψ
2+
f nx f nψ⋅2
3 f⋅≤
con : fnx frecuencia del modo horizontalfnψ frecuencia del modo de cabeceof frecuencia de excitacion
Se las puede considerar desacoplada y combinar sus resultados.
Roberto Riquelme Herrera 39 de 73 19 de Julio de 2006

Diseño de Fundaciones CI72C
5. DISEÑO DE LA FUNDACION PARA UN TURBOGENERADOR
A continuación se muestra esquemas y la información correspondiente al equipo a diseñar.
Roberto Riquelme Herrera 40 de 73 19 de Julio de 2006

Diseño de Fundaciones CI72C
Cargas en los apoyos
Roberto Riquelme Herrera 41 de 73 19 de Julio de 2006
Diseño de Fundaciones CI72C
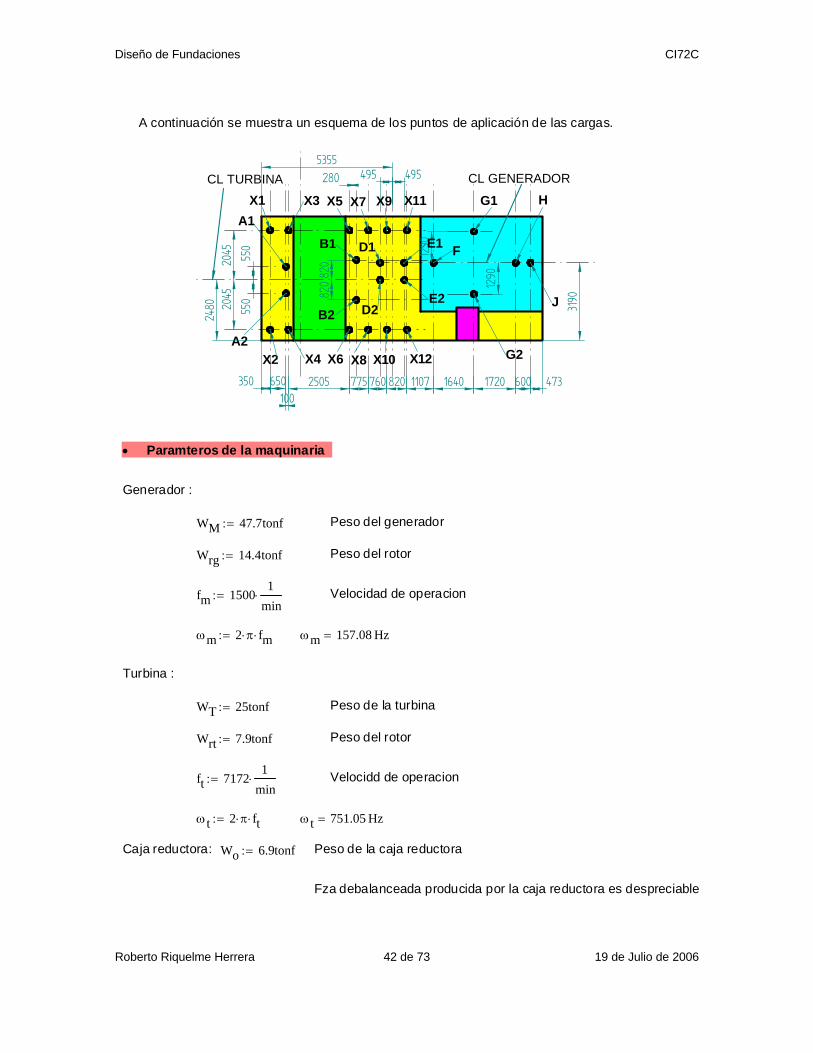
Fza debalanceada producida por la caja reductora es despreciable
Peso de la caja reductoraWo 6.9tonf:=Caja reductora:
ωt 751.05 Hz=ωt 2 π⋅ ft⋅:=
Velocidd de operacionft 71721
min⋅:=
Peso del rotorWrt 7.9tonf:=
Peso de la turbinaWT 25tonf:=
Turbina :
ωm 157.08 Hz=ωm 2 π⋅ fm⋅:=
Velocidad de operacionfm 15001
min⋅:=
Peso del rotorWrg 14.4tonf:=
Peso del generadorWM 47.7tonf:=
Generador :
Paramteros de la maquinaria•
CL GENERADORCL TURBINA
2045
2045
5355495 495
1290
1290
X1
X2
X3
X4
X5
X6
X7
X8
X9
X10
X11
X12
D1
D2
E1
E2
F
G1
G2
H
J
550
550
A1
A2
2480 31
90
350 650100
2505 775 760 820 1107 1640 1720 600 473
280
820
820
B1
B2
A continuación se muestra un esquema de los puntos de aplicación de las cargas.
Roberto Riquelme Herrera 42 de 73 19 de Julio de 2006

Diseño de Fundaciones CI72C
A
Z
C.L.GENERADORC.L.
TURBINA
11500
5100
bz (a
ncho
zar
pa)
bz
1300 2125 3075 5000
21439001957
1910
2000
1340
2620
2480
1190
XgsfZgsf
5750
2550
A
B
B
PLANTA FUNDACIONTURBOGENERADOR
X
Esquema de la fundacion propuesta tal que la configuracion cumple con las recomendaciones del punto 4.
Módulo de corte para cargas cíclicas (deformación tangencial)Gs 10000tonf
m2:=
Razón de Poisson υ 0.3:=
Peso unitario compactadoγc 1.75tonf:=
Propiedades del Suelo de Fundación
Sísmicaσadmsismica 2.8kgf
cm2:=
Estática σadmestatica 2.0kgf
cm2:=
Capacidad de Soporte del Suelo de Fundación
Los parametros del suelo son los siguientes:
W 79.6 tonf=W WM WT+ Wo+:=Peso total :
Roberto Riquelme Herrera 43 de 73 19 de Julio de 2006

Diseño de Fundaciones CI72C
2000
Radier depiso (Típ.)
2170
415
1415
4585
11500
ez (e
spes
or z
arpa
)
VISTA A - A
X, Xgsf
Y
Ygsf13
00
5100
1340 3760
4585
ez
1415
2000
SECCION B - B
Roberto Riquelme Herrera 44 de 73 19 de Julio de 2006

Diseño de Fundaciones CI72C
La fundacion es analizada por como un bloque rigido de fundacion y por medio de un modelo en SAP2000 como el mostrado en la figura.
Del modelo de SAP 2000 se obtiene que la máxima presión de contacto es de 8.50 ton / m2 mientras que la admisible 75% de σest es decir 15 ton / m2. Y, en todas las combinaciones analizadas se tiene 100% superficie comprimida.
A continuacion se muestran algunas de las verificaciones de las recomendaciones del punto 4.
Cálculo de Pesos, Centro de Gravedad y Momentos de Inercia de Masa del Sistema:Fundación + Turbogenerador
Roberto Riquelme Herrera 45 de 73 19 de Julio de 2006

Diseño de Fundaciones CI72C
Profundidad sello fundación desde el nivel terreno h1 = 2.000 m
Item Tipo de L H, 2R B 2r xg yg zg VVolumen
m m m m m m m m31 R 11.500 1.070 5.100 0.000 5.750 0.535 2.550 62.762 R 11.500 1.300 5.100 0.000 5.750 1.720 2.550 76.253 R 5.000 0.415 3.910 0.000 9.000 2.578 1.955 8.115 R 2.125 -1.300 5.100 0.000 2.363 1.720 2.550 -14.096 R 0.900 -1.415 1.340 0.000 8.907 2.078 4.430 -1.718 R 4.300 2.400 2.000 0.000 3.016 4.210 2.620 0.0010 R 2.800 3.000 2.000 0.000 8.729 4.510 1.910 0.0012 R 11.500 0.600 0.550 0.000 5.750 0.300 -0.275 3.8013 R 11.500 0.600 0.550 0.000 5.750 0.300 5.375 3.80
138.91
Item Momentos Estáticos Momentos de Masa PropiosW m W xg W yg W zg I xm I ym I zmTf Tf seg^2/m Tf m Tf m Tf m Tf m seg^2 Tf m seg^2 Tf m seg^2
1 156.89 16.01 902 84 400 36.2 211 178.02 190.61 19.45 1,096 328 486 44.9 256.5 217.13 20.28 2.07 183 52 40 2.7 6.9 4.35 -35.22 -3.59 -83 -61 -90 -8.3 -9.1 -1.96 -4.27 -0.44 -38 -9 -19 -0.1 -0.1 -0.18 25.00 2.55 75 105 66 2.1 4.8 5.210 47.70 4.87 416 215 91 5.3 4.8 6.812 9.49 0.97 55 3 -3 0.1 10.7 10.713 9.49 0.97 55 3 51 0.1 10.7 10.7
419.97 42.85 2,660 721 1,022
Coordenadas de Ubicación y Momentos de Masa respecto al Centro de Gravedad del Sistema:
xgs = 6.335 m I xs = I xm + m (dys^2+dzs^2)ygs = 1.716 m I ys = I ym + m (dxs^2+dzs^2) zgs = 2.434 m I zs = I zm + m (dxs^2+dys^2)
Item dxs dys dzs Mmtos de Masa c/r al C.G. Sist. Descripción = xg - xgs = yg - ygs = zg - zgs I xs I ys I zs
m m m Tf m seg^2 Tf m seg^2 Tf m seg^21 -0.58 -1.18 0.12 58.77 216.82 205.76 Sector fundación bajo el NT 2 -0.58 0.00 0.12 45.16 263.43 223.74 Sector 1 fundación sobre el NT 3 2.67 0.86 -0.48 4.68 22.13 20.58 Sector 2 fundación sobre el NT 5 -3.97 0.00 0.12 -8.35 -65.90 -58.56 Dscto. 1 fundación sobre NT6 2.57 0.36 2.00 -1.93 -4.71 -3.04 Dscto. 2 fundación sobre NT8 -3.32 2.49 0.19 18.03 32.97 49.12 Turbina10 2.39 2.79 -0.52 44.60 34.04 72.73 Generador12 -0.58 -1.42 -2.71 9.10 18.13 12.97 Zarpa lado poniente13 -0.58 -1.42 2.94 10.37 19.40 12.97 Zarpa lado oriente
180 536 536
Momentos de Masa del Sistema con respecto al centro de gravedad de la Base:
dxb = xgb - xgs = -0.58 mdyb = ygb - ygs = -1.72 mdzb = zgb - zgs = 0.12 m
I xb = I xs + (dyb^2+dzb^2) m = 307 Tf m seg^2I yb = I ys + (dxb^2+dzb^2) m = 552 Tf m seg^2I zb = I zs + (dxb^2+dyb^2) m = 677 Tf m seg^2
Roberto Riquelme Herrera 46 de 73 19 de Julio de 2006
Diseño de Fundaciones CI72C
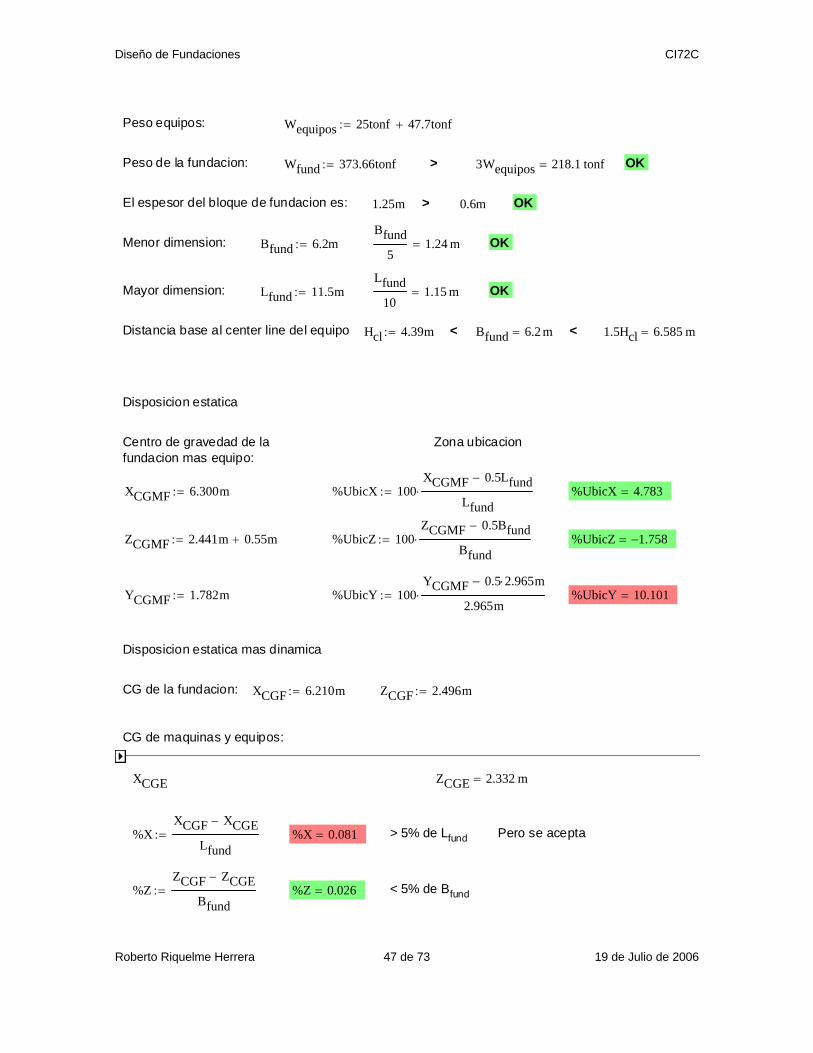
Centro de gravedad de la fundacion mas equipo:
Zona ubicacion
XCGMF 6.300m:= %UbicX 100XCGMF 0.5Lfund−
Lfund⋅:= %UbicX 4.783=
ZCGMF 2.441m 0.55m+:= %UbicZ 100ZCGMF 0.5Bfund−
Bfund⋅:= %UbicZ 1.758−=
YCGMF 1.782m:= %UbicY 100YCGMF 0.5 2.965⋅ m−
2.965m⋅:= %UbicY 10.101=
Disposicion estatica mas dinamica
CG de la fundacion: XCGF 6.210m:= ZCGF 2.496m:=
CG de maquinas y equipos:
XCGE ZCGE 2.332 m=
%XXCGF XCGE−
Lfund:= %X 0.081= > 5% de Lfund Pero se acepta
%ZZCGF ZCGE−
Bfund:= %Z 0.026= < 5% de Bfund
Peso equipos: Wequipos 25tonf 47.7tonf+:=
Peso de la fundacion: Wfund 373.66tonf:= > 3Wequipos 218.1 tonf= OK
El espesor del bloque de fundacion es: 1.25m > 0.6m OK
Menor dimension: Bfund 6.2m:=Bfund
51.24 m= OK
Mayor dimension: Lfund 11.5m:=Lfund
101.15 m= OK
Distancia base al center line del equipo Hcl 4.39m:= < Bfund 6.2 m= < 1.5Hcl 6.585 m=
Disposicion estatica
Roberto Riquelme Herrera 47 de 73 19 de Julio de 2006

Diseño de Fundaciones CI72C
El sistema puede vibrar verticalmente, horizontalmente en el sentido perpendicular al eje del equipo (pues el equipo es dl tipo a excentrica rotatoria) y en torsion ya que al tener el generador y la turbina frecuencias de excitacion distintas, en algunos instantes las componentes horizontales de las cargas desbalancedas de uno y otro equipo se opondran en sentido de acción generando torsion en planta. Ademas puede cabecear en torno al eje del equipo debido a que el punto de aplicación de las cargas horizontales no corresponde al CG del sistema y en torno al eje perpendicular al eje del equipo (en planta) pues la distribucion de cargas verticales no es simetrica.
Se analizan todos los modos de vibracion por separado y luego dependiendo de si se cumplen las recomendaciones expuestas en el punto 4 se analizan superponen se analizan modos acoplados.
Las siguientes figuras muestran las dos posibles situaciones de cabeceo
(Cabeceo en torno a X)
Centroide Area de ContactoZg
Rotación
Equipo
Fundación
Eje axial del Equipo
X
Y
Z
L
zg = 0.5 L
B
xg = 0.5 B
Xg
Yg
(Cabeceo en torno a Z)
Roberto Riquelme Herrera 48 de 73 19 de Julio de 2006

Diseño de Fundaciones CI72C
Rotación
EquipoFundación
Eje axial del Equipo
X
Y
Z
B
zg = 0.5 B
L
xg = 0.5 L
Centroide Area de Contacto
Yg
Xg
Zg
Ademàs se usa el modelo de SAP 2000 para determinar los maximos desplazamiemtos para distintas configuraciones de carga. La rigidez de los resortes verticales del suelo introducidos en el modelo de SAP 2000 se ha derivado del resorte obtenido para el modo de vibración vertical, entendiendose que éste actua sobre toda la superficie de la fundación y se lo ha de dividir de manera proporcional a las areas asociadas a cada pequeño resorte asignado a cada nodo del modelo.
A continuación se muestra sólo a modo de ejemplo la determinación de las constantes del resorte vertical que representa el suelo, el coeficiente de amortiguamiento debido a la radiacion geometrica del suelo y frecuencias propias del sistema para el modo de vibracion vertical del suelo.
Cálculo de Frecuencias Propias de Vibración del Sistema: Fundación + TurbogeneradorTodos los Modos Desacoplados (Cabeceo en torno a X)
Roberto Riquelme Herrera 49 de 73 19 de Julio de 2006

Diseño de Fundaciones CI72C
ηy 1.068=ηy 1 0.6 1 ν−( )⋅h
roy
⎛⎜⎝
⎞⎠
⋅+:=Coeficiente de resorte
roy 4.764 m=royB L⋅π
:=Radio equivalente
βy 2.15:=Vertical
Iψ 341tonf m⋅ s2⋅:=Inercia del sistema
W 446tonf:=Peso del sistema
ρ 1.75tonne
m3=ρ
γsg
:=γs 1.75tonf
m3:=ν 0.3:=G 2500
tonf
m2:=
Propiedades del suelo
h 0.77m:=Profundidad enterrada de la fundacion
Largo de la fundacion B 11.5m:=
L 6.2m:=Ancho de la fundacion
Roberto Riquelme Herrera 50 de 73 19 de Julio de 2006

Diseño de Fundaciones CI72C
"No Satisface" 0.8 fny⋅ ft≤ 1.2 fny⋅≤if
"Satisface" otherwise
2 Dy2
⋅ 1>if
"No Satisface" 0.8 fndy⋅ ft≤ 1.2 fndy⋅≤if
"Satisface" otherwise
otherwise
"Satisface"=
"No Satisface" 0.8 fny⋅ fm≤ 1.2 fny⋅≤if
"Satisface" otherwise
2 Dy2
⋅ 1>if
"No Satisface" 0.8 fndy⋅ fm≤ 1.2 fndy⋅≤if
"Satisface" otherwise
otherwise
"Satisface"=Control de la frecuenciapara evitar condicion deresonancia, en caso deno ser posible tener lafrecuencia de resonancia se evalua c/r a la frecuencianatural del sistema para el modo en cuestion, pues estafrecuencia es la que mas amplifica la respuesta
fndy "No posible"=fndy "No posible" 2 Dy2
⋅ 1>if
fny
1 2 Dy2
⋅−
otherwise
:=Frecuencia de resonanciadependiendo del amortiguamientono es posible.
fny 6.21 Hz=fny1
2 π⋅
ky g⋅
W⋅:=Frecuencia natural
Dy 0.778=Dy0.425
Byαy⋅:=Razon de amortiguamiento
ky 6.924 104×
tonfm
=kyG
1 ν−( ) βy⋅ B L⋅⋅ ηy⋅:=Constante del resorte
By 0.413=By1 ν−( )
4W
γs roy3
⋅⋅:=Razon de masa
αy 1.176=αy
1 1.9 1 ν−( )⋅h
roy⋅+
ηy:=Efecto de enterramiento
Roberto Riquelme Herrera 51 de 73 19 de Julio de 2006
Diseño de Fundaciones CI72C
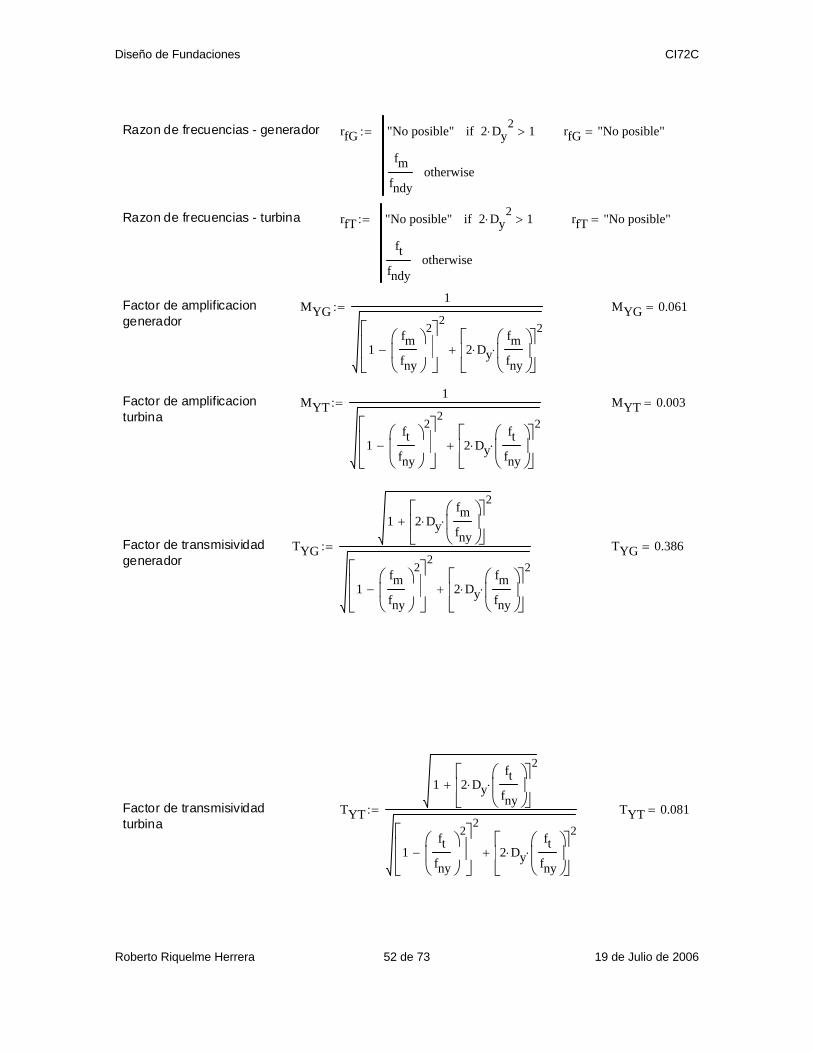
TYT 0.081=TYT
1 2 Dy⋅ft
fny
⎛⎜⎝
⎞
⎠⋅
⎡⎢⎣
⎤⎥⎦
2
+
1ft
fny
⎛⎜⎝
⎞
⎠
2
−⎡⎢⎢⎣
⎤⎥⎥⎦
2
2 Dy⋅ft
fny
⎛⎜⎝
⎞
⎠⋅
⎡⎢⎣
⎤⎥⎦
2
+
:=Factor de transmisividadturbina
TYG 0.386=TYG
1 2 Dy⋅fmfny
⎛⎜⎝
⎞
⎠⋅
⎡⎢⎣
⎤⎥⎦
2
+
1fmfny
⎛⎜⎝
⎞
⎠
2
−⎡⎢⎢⎣
⎤⎥⎥⎦
2
2 Dy⋅fmfny
⎛⎜⎝
⎞
⎠⋅
⎡⎢⎣
⎤⎥⎦
2
+
:=Factor de transmisividadgenerador
MYT 0.003=MYT1
1ft
fny
⎛⎜⎝
⎞
⎠
2
−⎡⎢⎢⎣
⎤⎥⎥⎦
2
2 Dy⋅ft
fny
⎛⎜⎝
⎞
⎠⋅
⎡⎢⎣
⎤⎥⎦
2
+
:=Factor de amplificacionturbina
MYG 0.061=MYG1
1fmfny
⎛⎜⎝
⎞
⎠
2
−⎡⎢⎢⎣
⎤⎥⎥⎦
2
2 Dy⋅fmfny
⎛⎜⎝
⎞
⎠⋅
⎡⎢⎣
⎤⎥⎦
2
+
:=Factor de amplificaciongenerador
rfT "No posible"=rfT "No posible" 2 Dy2
⋅ 1>if
ftfndy
otherwise
:=Razon de frecuencias - turbina
rfG "No posible"=rfG "No posible" 2 Dy2
⋅ 1>if
fmfndy
otherwise
:=Razon de frecuencias - generador
Roberto Riquelme Herrera 52 de 73 19 de Julio de 2006

Diseño de Fundaciones CI72C
A continuacion se muestra un resumen de los parametros obtenidos para cada modo de vibración
Las amplitudes de desplazamientos mostradas, son determinadas en los puntos los puntos mas alejados de los ejes de rotacion del sistema, tanto para el sistema excitado por la turbina y el generador por separado.
El gráfico siguiente muestra la excitacion debida al generador y la turbina por separado, como tambien la total en términos del tiempo.
Roberto Riquelme Herrera 53 de 73 19 de Julio de 2006

Diseño de Fundaciones CI72C
Al observar el grafico se aprecia que la excitacion debido al generador y a la turbina no estan en fase, razón por la cual las cargas desbalanceadas generadas por cada una de los dos componentes no siempre poseen igual dirección y sentido de acción. Es este desfase en la excitación el que posibilita el desarrollo de los modos de torsión. El modo de cabeceo en torno al eje perpendicular al eje de rotación de los equipos se debe a la disposicion no simetrica de las cargas dinamicas, pero se ve acentuado por este desfase de las excitaciones, que provoca diposiciones de la excitación como la que se muestra en la siguiente figura.
Por esta razón se debe analizar las amplitudes de desplazamiento para distintos orientaciones de las cargas desbalanceadas. En el resumen de valores anterior se muestra las amplitudes de desplazamiento solo para la condición que tanto cargas debido al generador como a la turbina actuan o en vertical ambas o en horizontal ambas.
A continuación se muestra la determinación de la amplitud de desplazamiento y velocidad de operación solicitante para la condición en que cargas desbalanceadas de ambos equipos actuan envertical con igual sentido.
Roberto Riquelme Herrera 54 de 73 19 de Julio de 2006

Diseño de Fundaciones CI72C
Si bien se asume que todas las cargas desbalanceadas actuan en vertical (Eje Y) y con igual sentido debido a la disposición no simetrica de las cargas se puede desarrollar otros modos y por ello son incluidos tambien en el calculo de la amplitud de desplazamiento.
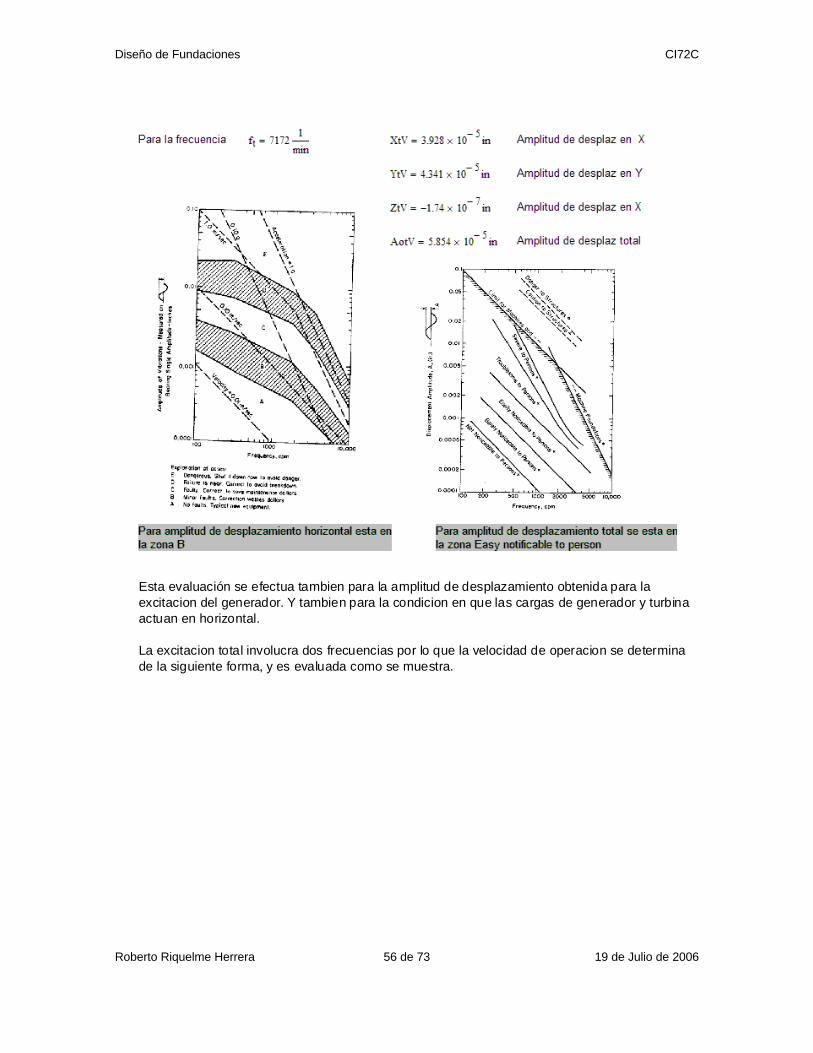
La amplitud de desplazamiento se obtenida para la excitacion de la turbina se evalua en las graficas indicadas en le punto 4. Obteniendose lo siguiente:
Roberto Riquelme Herrera 55 de 73 19 de Julio de 2006
Diseño de Fundaciones CI72C
Esta evaluación se efectua tambien para la amplitud de desplazamiento obtenida para la excitacion del generador. Y tambien para la condicion en que las cargas de generador y turbina actuan en horizontal.
La excitacion total involucra dos frecuencias por lo que la velocidad de operacion se determina de la siguiente forma, y es evaluada como se muestra.
Roberto Riquelme Herrera 56 de 73 19 de Julio de 2006

Diseño de Fundaciones CI72C
En el punto 4 se mostro una condicion que permite discriminar si los modos de cabeceo y horizontal pueden ser considerados desacopladas, a seguir se muestra la evaluacion de dicha condicion.
Roberto Riquelme Herrera 57 de 73 19 de Julio de 2006

Diseño de Fundaciones CI72C
Dado que la condicion no se cumple los modos estan acoplados. Debido al acoplamiento de los modos se evalua la combinacion de los maximos horizontal y vertical de la forma mostrada a continuacion
Alternativamente se evalua la respuesta acoplada del cabeceo en torno a X y exitacion horizontal en Z. Las ecuaciones usadas en la determiacion de la respuesta acoplada se explicitan en el punto 7.
Roberto Riquelme Herrera 58 de 73 19 de Julio de 2006

Diseño de Fundaciones CI72C
Roberto Riquelme Herrera 59 de 73 19 de Julio de 2006

Diseño de Fundaciones CI72C
Evaluando acoplado
Para el generador
Roberto Riquelme Herrera 60 de 73 19 de Julio de 2006

Diseño de Fundaciones CI72C
Si bien el cabeceo en torno a X y movimiento vertical estan acoplados no han sido evaluados y solo se ha evaluado la respuesta acoplada para movimiento en Z y cabeceo en torno a X de manera ilustrativa.
Adicionalmente se determina analiza la fundacion por medio de SAP 2000 obteniendose los siguinetes resultados.
Roberto Riquelme Herrera 61 de 73 19 de Julio de 2006

Diseño de Fundaciones CI72C
Roberto Riquelme Herrera 62 de 73 19 de Julio de 2006

Diseño de Fundaciones CI72C
Roberto Riquelme Herrera 63 de 73 19 de Julio de 2006

Diseño de Fundaciones CI72C
Cabe señalar que el diseño de maquinarias siguiendo las recomendaciones habituales permite obtener diseños conservadores en general. En general el diseño no considera la respuesta transciente del sistema.
EL uso de modelos de elementos finitos, permite obtener resultados mas precisos de la respuesta no obstante, la gran limitante es conocer los parámetros del suelo. Si bien se puede estimar las rigideces de los resortes equivalentes la distribucion de estos no es un problema de trivial solución pues deben ser capaces de reproducir la rigidez de otros modos. Asi, se usa la constante de los resortes verticales y se los distribuye de manera tal que reproduzcan la rigidez asocida al cabeceo.
Dependiendo de la configuracion del sistema se puede considerar modelos mas o menos simplificados.
Si bien la teoria permite obtener buenos resultados en muchas ocasiones un analisis muy acabado no se justifica, pues por lo general se tiene grandes incertezas respecto de la excitacion (informacion que deberia ser entregada por el proveedor).
Si bien existen teorias para predecir y/o estimar el comportamiento del suelo sujeto a excitaciones dinámicas, estas son muy limitadas, lo que tambien no justifica analisis muy sofisticados.
Roberto Riquelme Herrera 64 de 73 19 de Julio de 2006

Diseño de Fundaciones CI72C
6. REFERENCIAS
1. Dinamica de Estructuras. Anil Chopra2. Dinamica de Estructuras. Cough and Penzien3. Vibraciones de fundaciones y suelo. F.E. Richart4. Diseño de fundacion para maquinarias vibratorias Suresh - Mill5. Analisis de vibraciones de fundaciones usando modelos fisicos simples. John Wolf6. Guia de diseño 3DG C13 003 02
Roberto Riquelme Herrera 65 de 73 19 de Julio de 2006

Diseño de Fundaciones CI72C
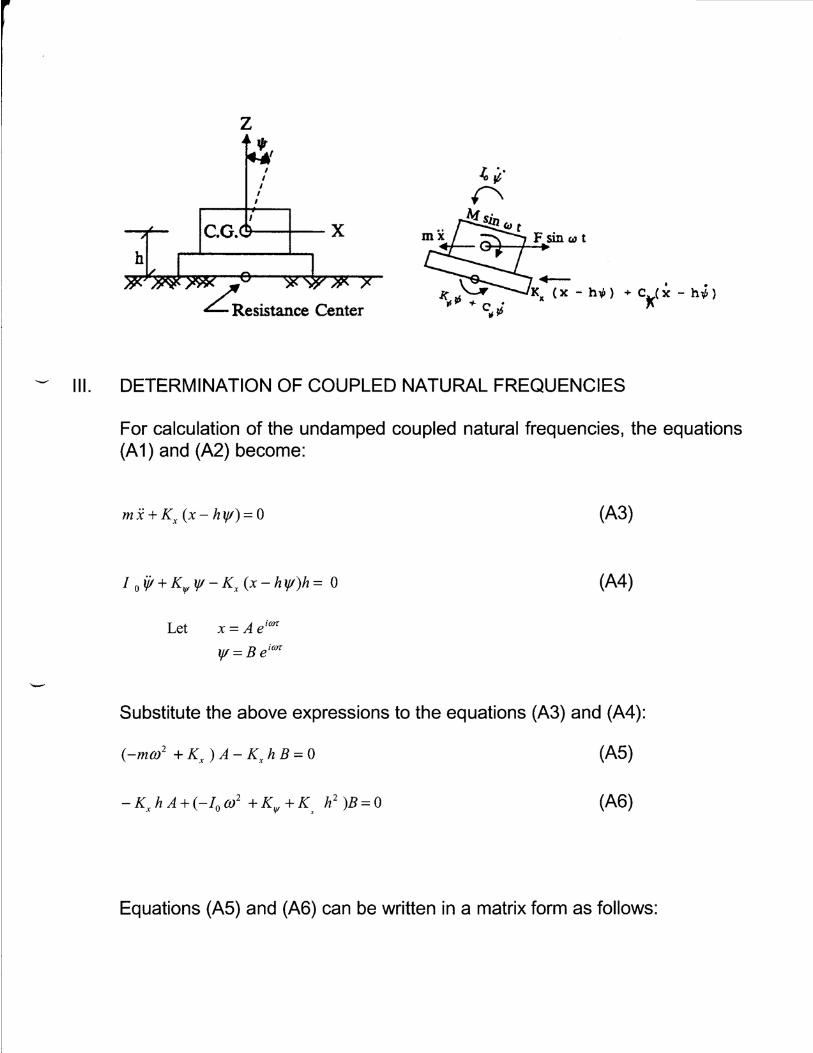
7. SOLUCION PARA CABECEO Y MOVIMIENTO HORIZONTAL ACOPLADOS
Roberto Riquelme Herrera 66 de 73 19 de Julio de 2006






Top Related