







Idiomas
Páginas
Jurídico

Instituto de Investigaciones EléctricasGerencia de Energías No Convencionales
Taller de Introducción a la Tecnologíade Aerogeneradores
Módulo 4: Tecnología de aerogeneradores
Marco Borja(Julio de 2007)

Concepto danés, tres aspas,eje horizontal
Aerogenerador para interconexiAerogenerador para interconexióón a redn a red

Desarrollo de aerogeneradores para interconexiDesarrollo de aerogeneradores para interconexióón a redn a red

Componentes básicos de un aerogenerador
Transmisión Generador
Cubo
Tolva protectora
Motor de orientación
Flecha principalChasis principal
Torre
Freno de disco
Aspas
Rotor aerodinámicoJuego de aspas
Cubo
Nariz

Rotor aerodinRotor aerodináámicomico

Variables que influyen en el
comportamiento de rotores de
aerogeneradores de eje horizontal
Principio funcional de un rotorPrincipio funcional de un rotor
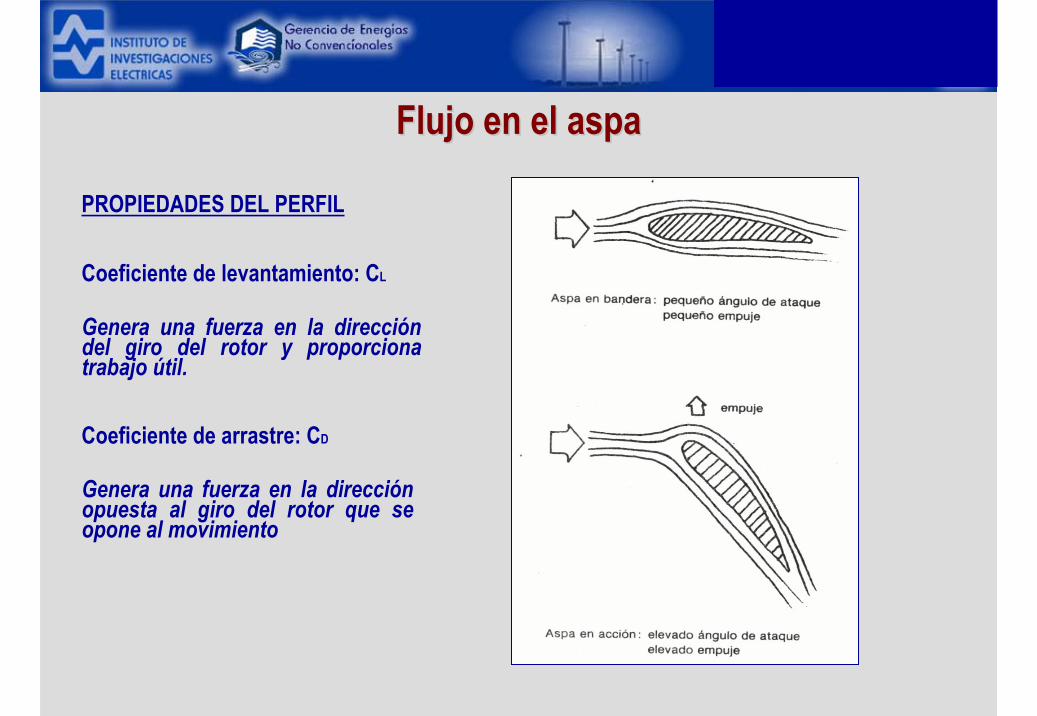
Coeficiente de arrastre: CD
Genera una fuerza en la dirección opuesta al giro del rotor que se opone al movimiento
PROPIEDADES DEL PERFIL
Coeficiente de levantamiento: CL
Genera una fuerza en la dirección del giro del rotor y proporciona trabajo útil.
Flujo en el aspaFlujo en el aspa

cdrvCdL relL2
21 )(ρ=
cdrvCdD relD2
21 )(ρ=
φφ cosdDdLsendFu −=
αθφ +=
Φ= ángulo de entrada de flujo (velocidad relativa con plano de rotación)θ = ángulo de paso (cuerda de la sección de aspa con plano de rotación)α = ángulo de ataque (cuerda de la sección de aspa con la velocidad relativa)

dFrd l=τDonde:
dt = Contribución de torque en la flecha del rotorrl = radio local
Para lograr eficiencia relativamente alta es importante usar un perfil aerodinámico con alto levantamiento (sustentación) y bajo arrastre.

La fuerza de levantamiento y la fuerza de arrastre no sólo tienen componentes en el plano del rotor, sino también en el sentido perpendicular
Al plano del rotor (fuerza axial, “empuje”), es decir:
φφ dDsendLdDax += cos
)1(4221
aaAv
DCr
axDax −==
ρ
CDax = Coeficiente de empuje axiala = Factor de inducción axial
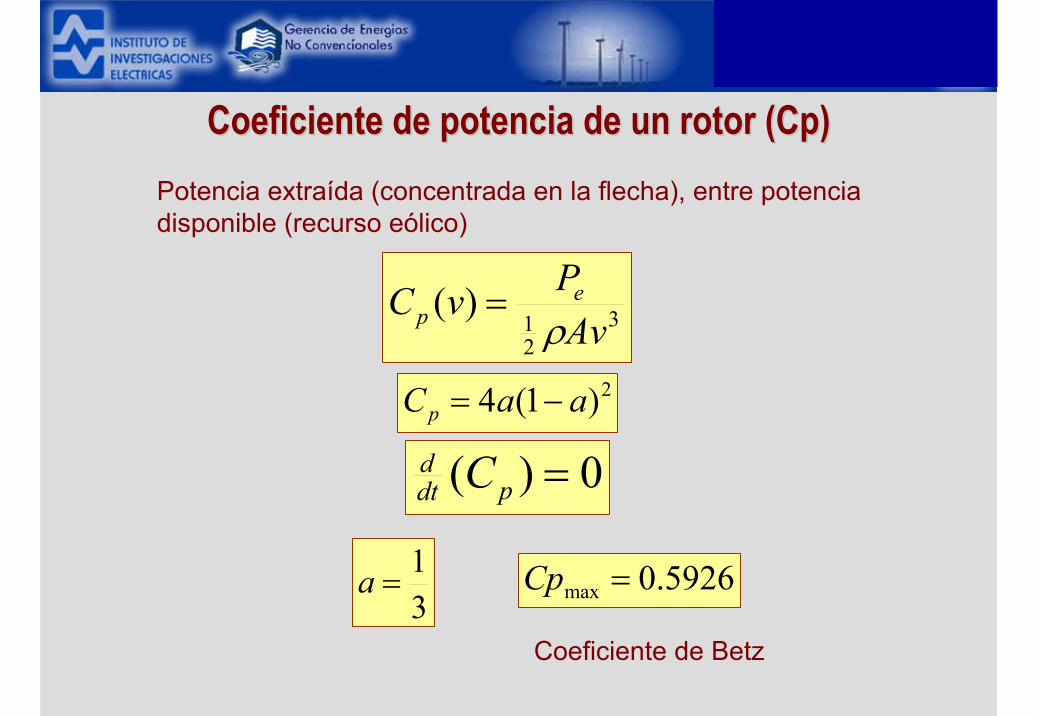
Coeficiente de potencia de un rotor (Coeficiente de potencia de un rotor (CpCp))Potencia extraída (concentrada en la flecha), entre potencia disponible (recurso eólico)
321
)(Av
PvC ep ρ
=
2)1(4 aaCp −=
0)( =pdtd C
31
=a 5926.0max =Cp
Coeficiente de Betz
Para un valor dado de velocidad del viento, un rotor aerodinámico sólo puede extraer el 59.26% de la potencia eólica disponible
En realidad, el Cpmax teórico es menor ya que en sus cálculos Betzdespreció algunos factores (cerca de 55%).
En la práctica, los valores máximos de Cp están entre 45 y 50%.
0
2,000
4,000
6,000
8,000
10,000
12,000
14,000
16,000
18,000
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25
Velocidad del viento (m/s)
Pote
ncia
kW
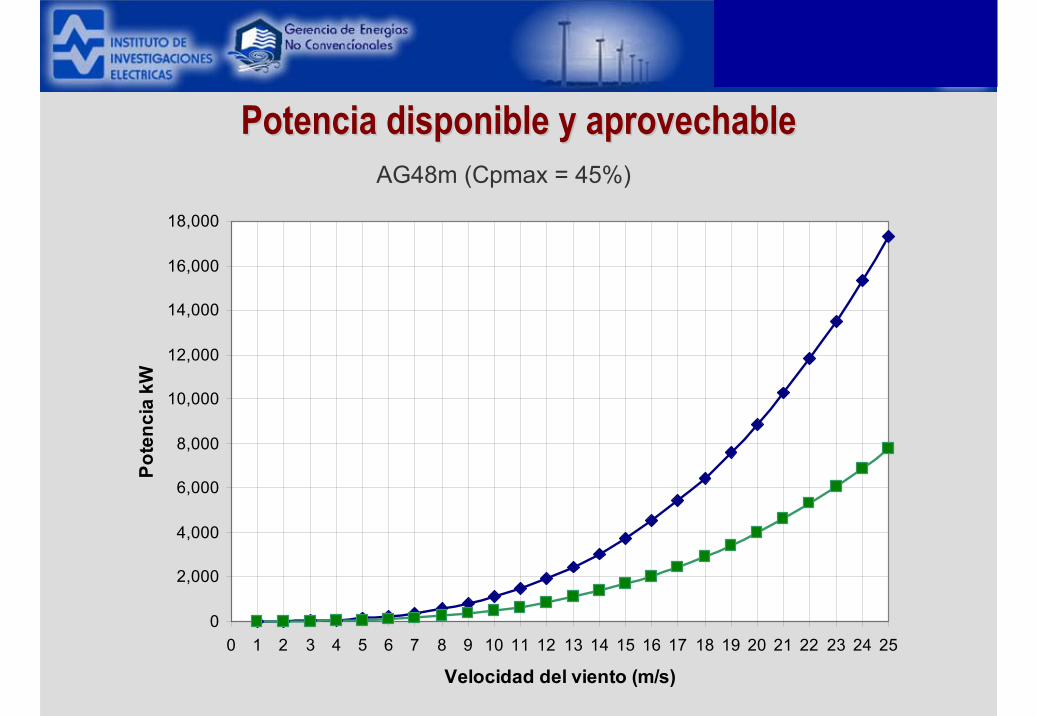
Potencia disponible y aprovechablePotencia disponible y aprovechableAG48m (Cpmax = 45%)

Concepto de solidez de un rotorConcepto de solidez de un rotor
)tan1(cos)()()1(4
2
2
φφασ
l
dCC
lrel Cv
vaa
+
−=
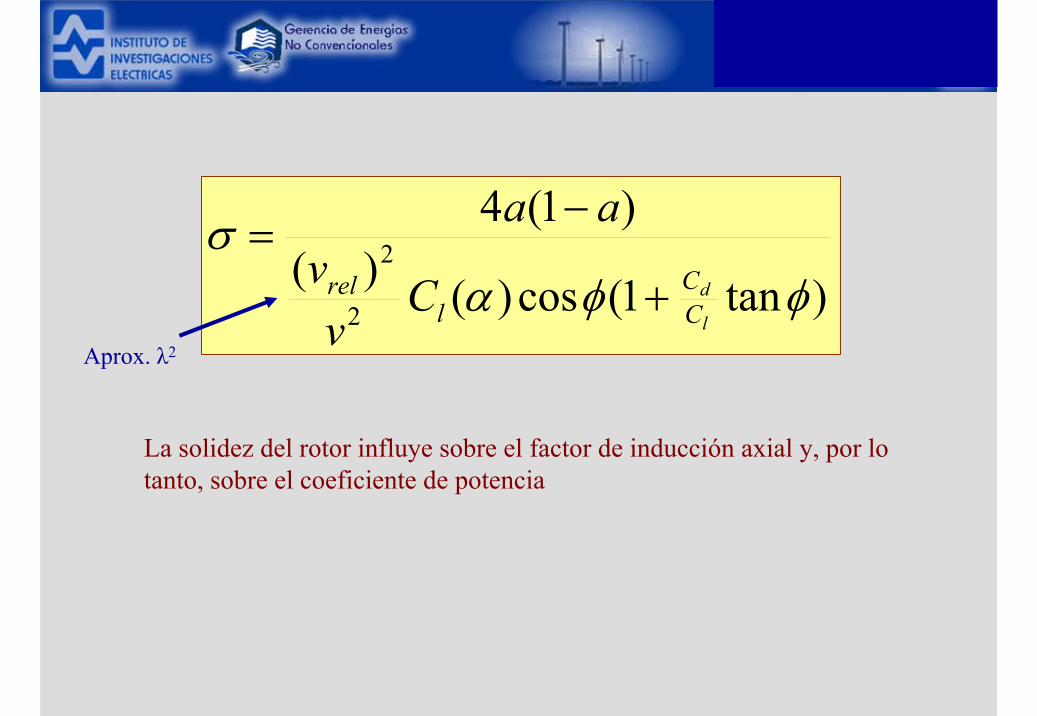
La solidez del rotor influye sobre el factor de inducción axial y, por lotanto, sobre el coeficiente de potencia
Aprox. λ2

RelaciRelacióón de velocidad de punta de aspa n de velocidad de punta de aspa
crVRΩ
=λ
Ω = velocidad angular del rotorR = radio del rotorV = velocidad del viento en el centro del rotor (no perturbada)
2
22
)()(
cr
rel
Vv
≅λ

Para lograr una buena eficiencia se requiere que el factor de inducción axial sea cercano a 1/3 sobre toda el área del rotor.
Un buen diseño de rotor aerodinámico se puede lograr con:
1.- λ alto y σ bajo2.- λ bajo y σ alto3.- Valores intermedios para ambos
El caso 1 es un rotor “rápido” con pocas aspas (dos o tres) , de forma esbelta (dos o tres). Este es el diseño que típicamente se usa para aerogeneradores, porque:a) Para una potencia dada, el par en el eje es relativamente pequeño
de manera que el tren de transmisión mecánica puede ser más“liviano”.
b) La relación de velocidades en la caja de engranes necesaria paraalcanzar la velocidad nominal de generadores eléctricos “convencionales” será menor.

El caso 2 corresponde a un rotor lento, multipala. Produce torquealto y típicamente se usa para bombeo de agua con bombas dedesplazamiento positivo.
La opción 1 tiene todas las ventajas para generación de electricidad;Sin embargo, hay dos factores que la limitan:
a) Si la velocidad en el extremo del aspa es mayor que 1/3 de la velocidad del sonido (cerca de 110 m/s), se puede esperar unaumento exagerado de ruido (proporcional con ΩR5)
b) Las pérdidas por arrastre se vuelven más importantes con el aumento de λ, lo que limita su valor entre 8.5 o 9 para rotoresde dos aspas.

Porcentaje de aportaciPorcentaje de aportacióón de potencian de potencia
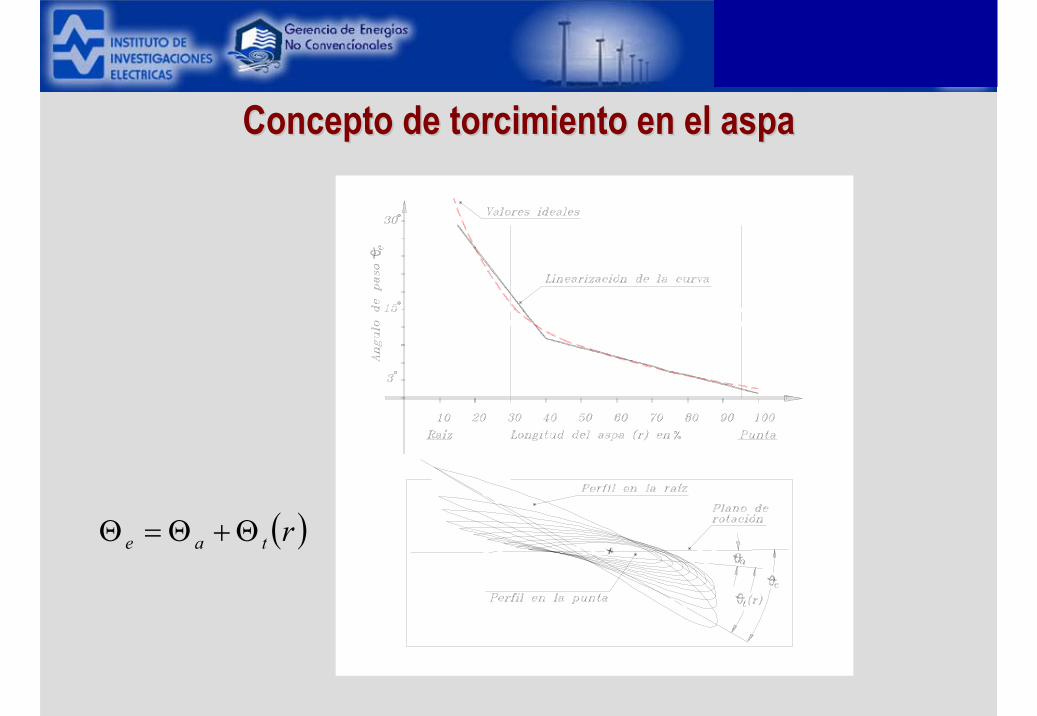
( )rtae Θ+Θ=Θ
Concepto de torcimiento en el aspaConcepto de torcimiento en el aspa
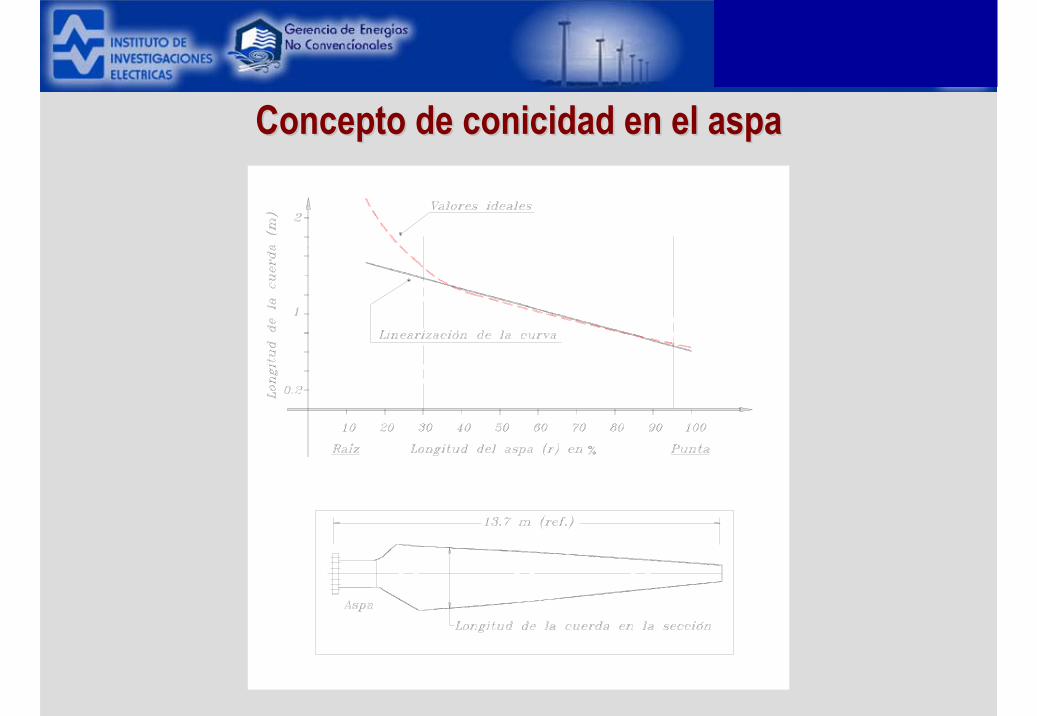
Concepto de conicidad en el aspaConcepto de conicidad en el aspa

Aspa de un aerogenerador modernoAspa de un aerogenerador moderno

Cubo del rotorCubo del rotor

Ensamble narizEnsamble nariz--cubo en un rotor aerodincubo en un rotor aerodináámicomico

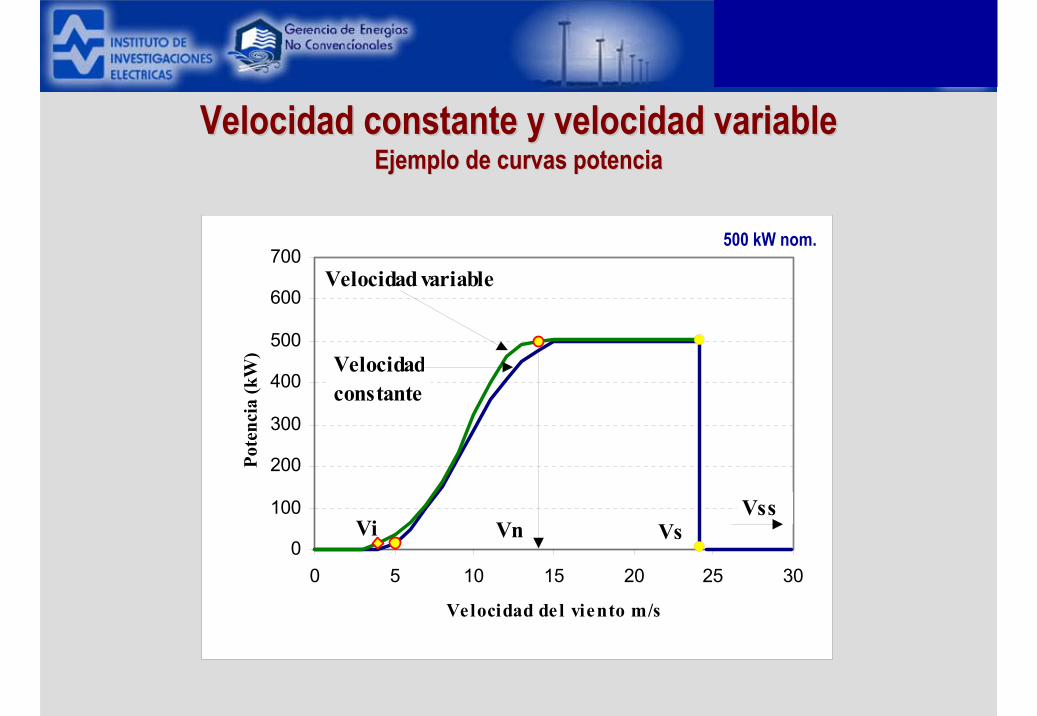
Para una geometría de rotor, existe un valor de velocidad de viento a la cual se logra el Cp máximo (velocidad de diseño). Para estavelocidad, la eficiencia será máxima y, por lo tanto, un factor quese toma muy en cuenta para la selección del valor de la velocidad de diseño es la contribución de energía disponible de las velocidades de viento, de acuerdo con el régimen de viento típico para laaplicación de la máquina. Esto se toma como punto de partida paramaximizar la conversión de la energía eólica disponible.
Sin embargo, si la velocidad angular del rotor se mantiene “constante”(muy cerca de un valor determinado) y, además, el ángulo deataque no se modifica el Cp disminuirá rápidamente, por lo que no seobtiene una buena eficiencia global.
Esta es una de muchas razones que dieron origen a las máquinas deVelocidad Variable.

0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28
Velocidad del viento (m/s)
(%)
Coeficiente de potenciaCoeficiente de potencia

0
1,000
2,000
3,000
4,000
5,000
6,000
7,000
8,000
9,000
0 2 4 6 8 10 12 14 16 18 20 22 24 26
Velocidad del viento (m/s)
Pote
ncia
(kW
) Potencia disponible
Potencia regulada
Duración de velocidades
Potencia disponible y reguladaPotencia disponible y regulada

0
100
200
300
400
500
600
700
800
900
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30
V elo cid ad d el vient o ( m/ s)
Vnominal VsalidaVinicio
Vsupervivencia
(70)
Curva de potenciaCurva de potenciaAG 850 Kw
P o
t e n
c i
a
( K w
)
Regulación por pérdida aerodinámica.(Aspas con montaje fijo al cubo, )
Regulación por cambio del ángulo de paso.(Aspas móviles desde su raíz).
RegulaciRegulacióón de potencia y velocidadn de potencia y velocidad

Rotores de aspas fijasRotores de aspas fijas
Regulación por desprendimiento de flujo sobre un perfil aerodinámico (Stall)

Control de Control de áángulo de pasongulo de paso

Control de Control de áángulo de pasongulo de paso
Actualmente varios modelos de aerogeneradores cuentan con motores eléctricos de actuación independiente para modificar el
ángulo de paso (o de ataque) de las aspas.

Góndola del AerogeneradorTren de potencia
Generador eléctrico
Subsistema de orientación
Subsistema de regulación de potencia
Subsistema de seguridad
Chasis principal

GGóóndola ensamblada en torrendola ensamblada en torre
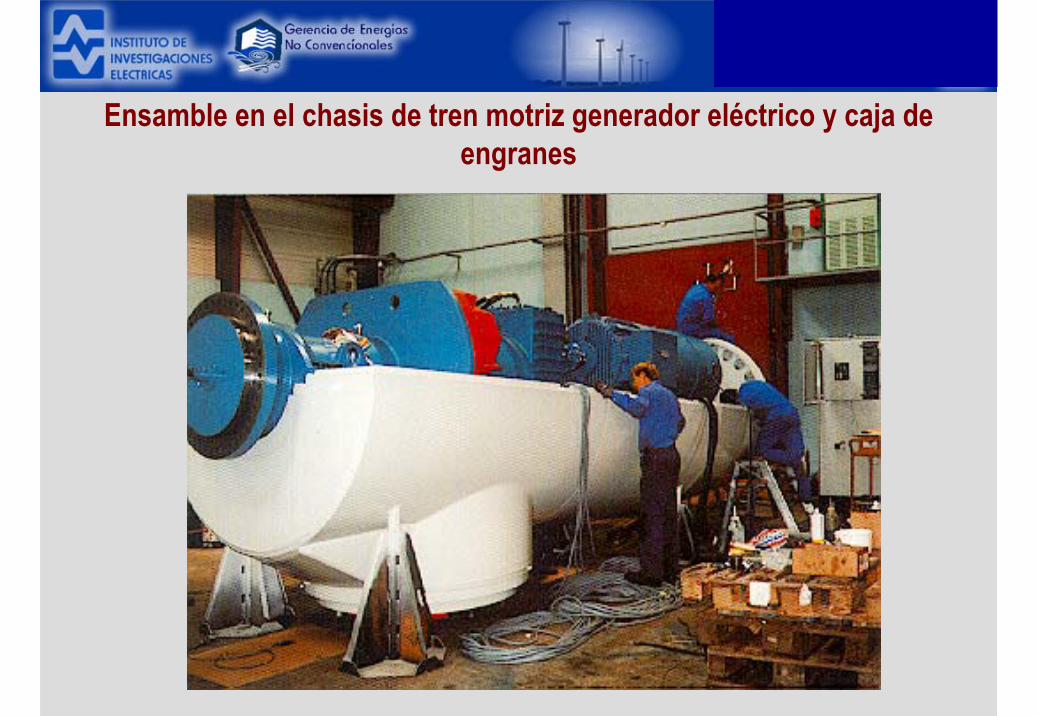
Ensamble en el chasis de tren motriz generador eléctrico y caja de engranes
SSííncronos:ncronos:
MultipoloMultipoloImanes permanentesImanes permanentes
AsAsííncronos:ncronos:
Tipo jaula de ardilla Tipo jaula de ardilla Polos conmutablesPolos conmutablesTipo rotor devanadoTipo rotor devanado
Generadores elGeneradores elééctricos utilizadosctricos utilizados
Generadores asGeneradores asííncronosncronos
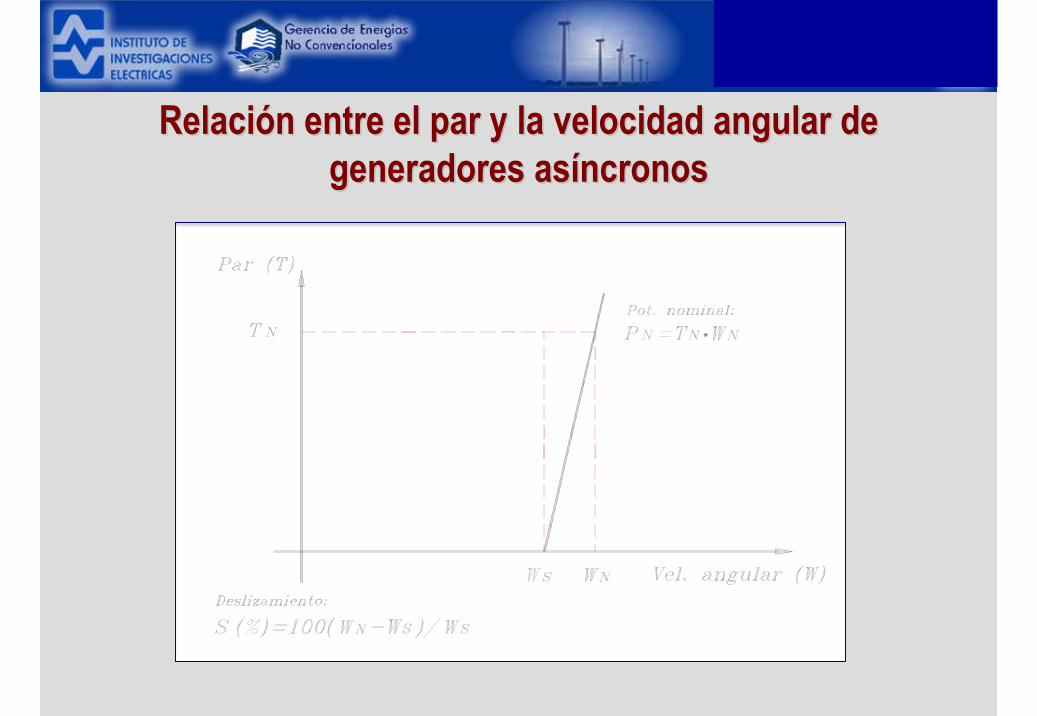
RelaciRelacióón entre el par y la velocidad angular de n entre el par y la velocidad angular de generadores asgeneradores asííncronosncronos

El deslizamiento requerido para alcanzar la velocidad nominal (potencia nomina) de un aerogenerador de inducción es muy pequeño. Esto corresponde a un cambio en la velocidad angular del rotor aerodinámico cercano a ½ revolución por minuto. Por lo que los aerogeneradores que usaban este tipo de generadores eléctricos se conocen como generadores de Velocidad Constante.
Tienen muchas desventajas, entre ellas:
a) Baja eficiencia (ya que no permiten optimizar el Cp).b) Rigidez, lo que implica muchas cargas dinámicas en rotor y
en el tren de potenciaa) Fluctuaciones en la potencia eléctrica de salidab) Variaciones de voltaje (flicker)

ConfiguraciConfiguracióón tn tíípica del tren de potencia en un pica del tren de potencia en un aerogenerador con caja de engranesaerogenerador con caja de engranes

Conexión de un aerogenerador develocidad constante, con generador asíncrono
tipo jaula de ardilla
Fuente: J.G. Slootweg* et al. Simulation of Electrical Power Systems with a High Wind Energy Penetration; * Electrical Power Systems Laboratory. Delf University of Technology. The Neatherlands

El concepto de Velocidad Variable, elimina muchos problemas ymejora la eficiencia global.
Por inicio, algunos diseñadores usaron dos generadores eléctricos,uno para baja velocidades y otro para altas. Esto resultó en mejorasmuy limitadas.
También usaron (y algunos aún usan) generadores eléctricos depolos conmutables. Esto implementa sistemas de velocidad constantepor etapas. Las mejoras también fueron limitadas.
El concepto de velocidad variable se implementó de tres formas:
a) Generadores multipolo de baja velocidadb) Generadores de imanes permanentesc) Generadores de rotor devanado

Rotor
Estator
Generador Generador ssííncrononcrono de baja velocidadde baja velocidad

Conexión de aerogeneradoresde velocidad variable.
Con generador asíncronotipo rotor devanado
Con generador síncronotipo polos salientes
Fuente: J.G. Slootweg* et al. Simulation of ElectricalPower Systems with a High Wind Energy Penetration; •Electrical Power Systems Laboratory. Delf University
of Technology. The Neatherlands
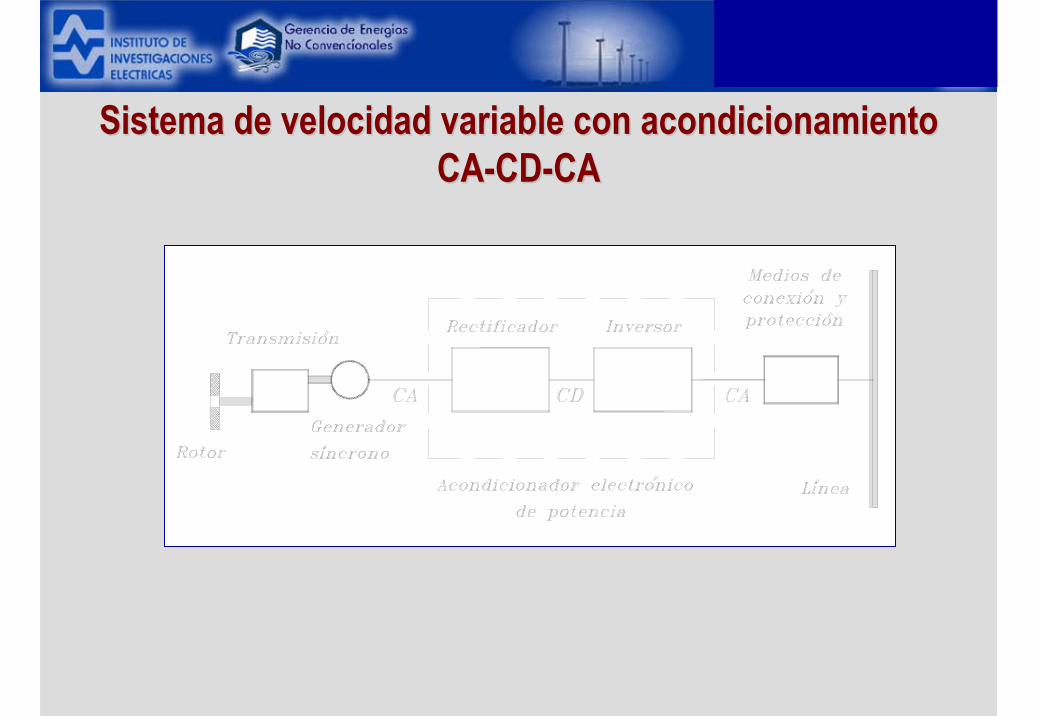
Sistema de velocidad variable con acondicionamiento Sistema de velocidad variable con acondicionamiento CACA--CDCD--CACA

Generador eléctrico
Sin caja de engranes
Con caja de engranes
Aspecto tAspecto tíípico comparativopico comparativo
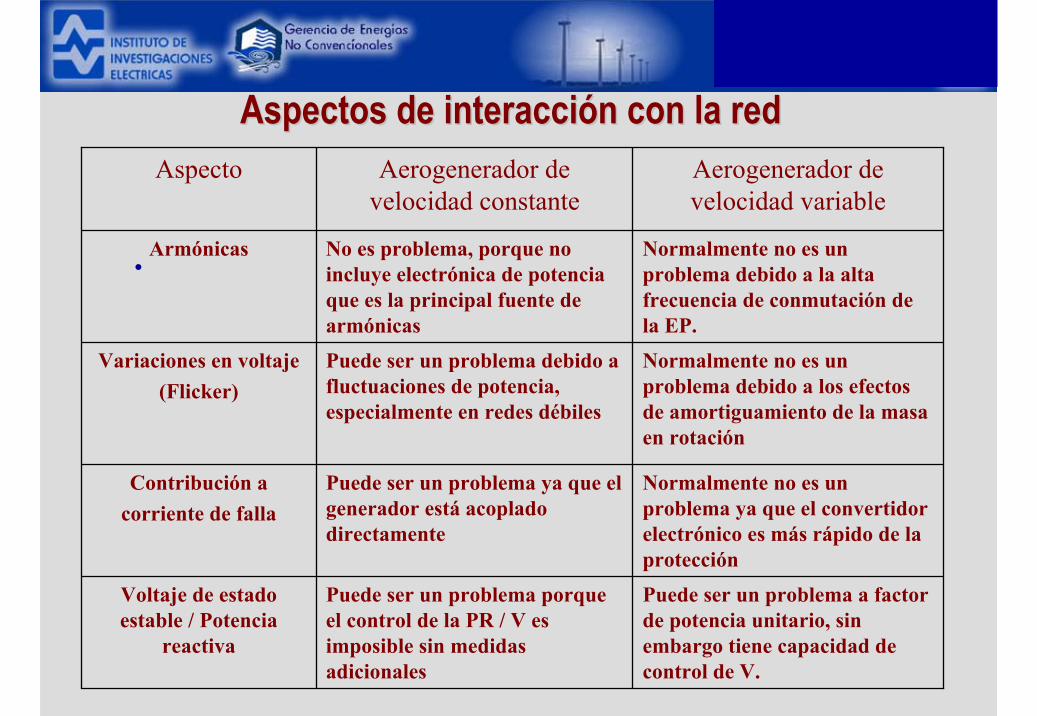
Aspectos de interacciAspectos de interaccióón con la redn con la red
•
Puede ser un problema a factor de potencia unitario, sin embargo tiene capacidad de control de V.
Puede ser un problema porque el control de la PR / V es imposible sin medidas adicionales
Voltaje de estado estable / Potencia
reactiva
Normalmente no es un problema ya que el convertidor electrónico es más rápido de la protección
Puede ser un problema ya que el generador está acoplado directamente
Contribución a corriente de falla
Normalmente no es un problema debido a los efectos de amortiguamiento de la masa en rotación
Puede ser un problema debido a fluctuaciones de potencia, especialmente en redes débiles
Variaciones en voltaje(Flicker)
Normalmente no es un problema debido a la alta frecuencia de conmutación de la EP.
No es problema, porque no incluye electrónica de potencia que es la principal fuente de armónicas
Armónicas
Aerogenerador de velocidad variable
Aerogenerador de velocidad constante
Aspecto

ComparaciComparacióón de aerogeneradores de velocidad variablen de aerogeneradores de velocidad variable
•
No se requiere, pero el costo del generador eléctrico es considerablemente mayor que el de rotor devanado
Se requiere.Caja de engranes
Debe ser igual o mayor que la capacidad nominal delGenerador.
Su capacidad puede ser de 1/3 o aún menor que la capacidad nominal del generador eléctrico.
Electrónica de Potencia
Polos salientesRotor devanadoAspecto
0
100
200
300
400
500
600
700
0 5 10 15 20 25 30
Velocidad del viento m/s
Pote
ncia
(kW
)
VsVnVi
Velocidad variable
Velocidadconstante
Vss
500 kW nom.
Velocidad constante y velocidad variableVelocidad constante y velocidad variableEjemplo de curvas potenciaEjemplo de curvas potencia

Zapata de fijación
Servomecanismo para OrientaciServomecanismo para Orientacióónn
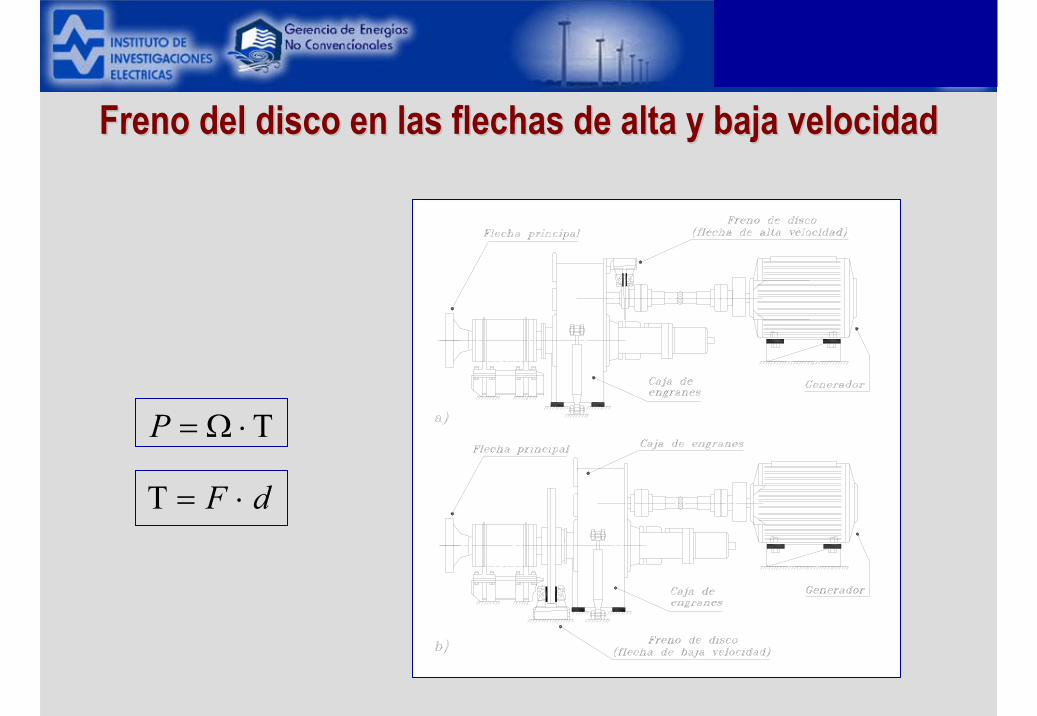
Τ⋅Ω=P
dF ⋅=Τ
Freno del disco en las flechas de alta y baja velocidadFreno del disco en las flechas de alta y baja velocidad

Flecha de alta velocidad
Flecha de baja velocidad
Frenos del discoFrenos del disco

Tipo de tableros de control usados en aerogeneradoresTipo de tableros de control usados en aerogeneradores

Elementos de protecciElementos de proteccióón contra rayosn contra rayos

Cumplimiento de códigos de Red
• Rampas de entrada y salida• Variaciones de potencia• Variaciones de voltaje• Variaciones de frecuencia• Factor de potencia• Regulación primaria• Regulación secundaria• Tolerancia a fallas• Operación en isla
Controversias y diferencias a nivel internacional¿Necesario? ¿Posible? ¿Económicamente viable?

Torre tubular del aerogeneradorTorre tubular del aerogenerador

Diseño de aerogeneradores
(Eje horizontal)
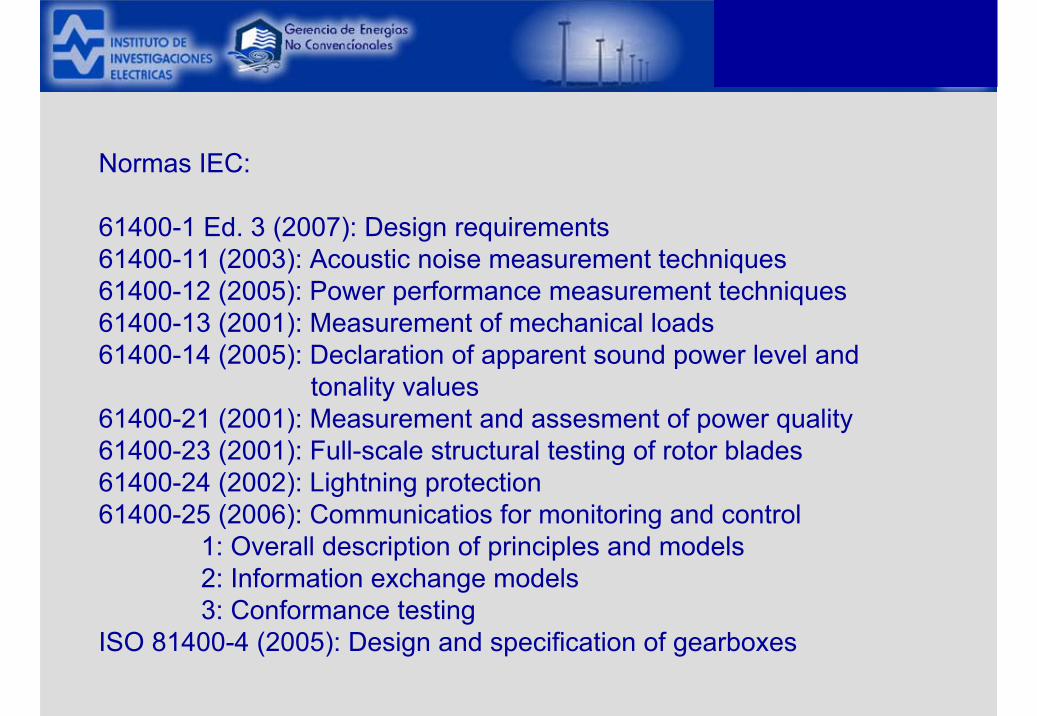
Normas IEC:
61400-1 Ed. 3 (2007): Design requirements61400-11 (2003): Acoustic noise measurement techniques61400-12 (2005): Power performance measurement techniques61400-13 (2001): Measurement of mechanical loads61400-14 (2005): Declaration of apparent sound power level and
tonality values61400-21 (2001): Measurement and assesment of power quality61400-23 (2001): Full-scale structural testing of rotor blades61400-24 (2002): Lightning protection61400-25 (2006): Communicatios for monitoring and control
1: Overall description of principles and models2: Information exchange models3: Conformance testing
ISO 81400-4 (2005): Design and specification of gearboxes

Normas IEC:
61400-1: Design requirements
Requiere el uso de un modelo de dinámica estructural para predecirlas cargas de diseño.

ClasificaciClasificacióón de aerogeneradores por tipos de rn de aerogeneradores por tipos de réégimen de gimen de viento de aplicaciviento de aplicacióón (IECn (IEC--14001400--1)1)
0.170.170.170.17σv/V
67.58.510V anual (m/s)
3037.542.550V ref (m/s)
Clase IVClase IIIClase IIClase IParámetros
A: Turbulencia característica = 0.18 (15 m/s)B: Turbulencia característica = 0.16 (15 m/s)

Vref = Velocidad estacionaria máxima con periodo de retorno de 50 años
Ve50 = Velocidad máxima en tres segundos con período de retorno de 50 años (Ve50 = 1.4*Vref)
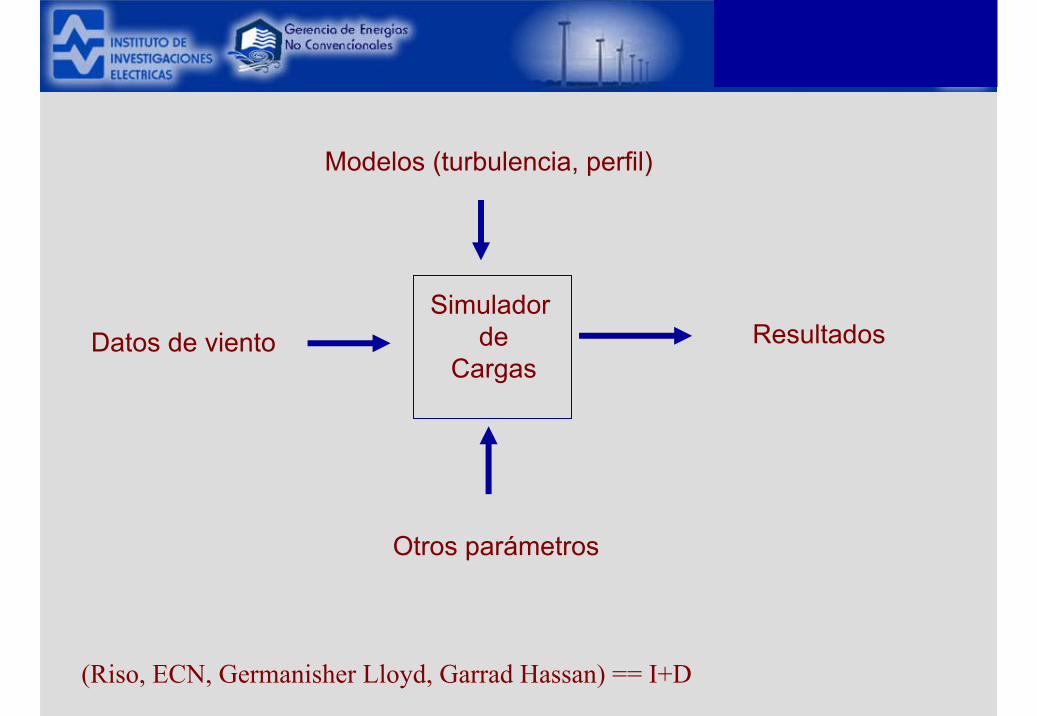
Datos de vientoSimulador
deCargas
Modelos (turbulencia, perfil)
Otros parámetros
Resultados
(Riso, ECN, Germanisher Lloyd, Garrad Hassan) == I+D

Top Related