





Idiomas
Páginas
Jurídico


Introducción a la Mecánica Analítica
Mecánica IITema 5
Manuel Ruiz Delgado
Escuela Tecnica Superior de Ingenieros Aeronauticos
Universidad Politecnica de Madrid
Introduccion a la Mecanica Analıtica– p. 1/24

Mecánica analítica
Sistemas materiales
LigadurasSistemas holónomosSistemas no holónomos
Coordenadas generalizadas
Espacio de configuración
Desplazamientos, velocidades y trabajosDesplazamientos virtualesDesplazamientos posiblesDesplazamientos virtuales compatibles con las ligaduras
Fuerzas de ligadura
Trabajo virtual
Ligaduras ideales y fuerzas de ligadura
Introduccion a la Mecanica Analıtica– p. 2/24

Sistemas materiales
Sistema formado porN partículas materiales sujetas a ligaduras3N coordenadas:(x1, y1, z1, . . . , xN , yN , zN )
g ligadurasindependientesn = 3N − g grados de libertad (GDL)
Mecánica Newtoniana:introducirincógnitas/ecuaciones de ligadura
3N + g ecuaciones3N + g incógnitas
Mecánica Analítica:1 ecuación para cada grado delibertad
3N − g ecuaciones3N − g incógnitas
Superficie: proyectar sobre el plano tangenteCurva: proyectar sobre la tangente
3N
−g
3N
+g
3N
g
Introduccion a la Mecanica Analıtica– p. 3/24
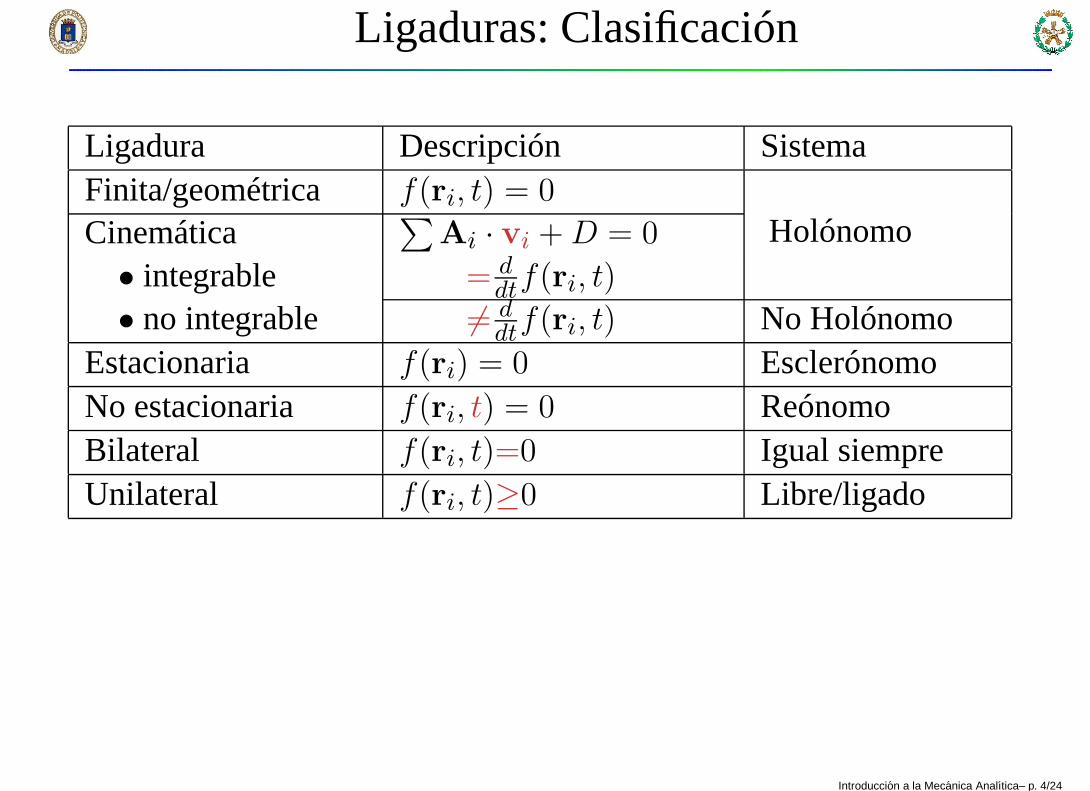
Ligaduras: Clasificación
Ligadura Descripción SistemaFinita/geométrica f(ri, t) = 0
HolónomoCinemática∑
Ai · vi +D = 0
• integrable = ddtf(ri, t)
• no integrable 6= ddtf(ri, t) No Holónomo
Estacionaria f(ri) = 0 EsclerónomoNo estacionaria f(ri, t) = 0 ReónomoBilateral f(ri, t)=0 Igual siempreUnilateral f(ri, t)≥0 Libre/ligado
Introduccion a la Mecanica Analıtica– p. 4/24

Ligaduras finitas:f (r1, r2, . . . , rN , t) = 0
Partícula sobre superficie esférica:N = 1; coordenadas:3N ;ligaduras:g = 1; GDL: n = 3N − g = 2
Esfera fija: f(r) ≡ x2 + y2 + z2 − R2 = 0
Globo esférico: f(r, t) ≡ x2 + y2 + z2 − R(t)2 = 0
Dos partículas unidas por una barra:N = 2; coordenadas:3N ;ligaduras:g = 1; GDL: n = 3N − g = 5
f(r1, r2) ≡ (y1 − y2)2 + (z1 − z2)
2 + (x1 − x2)2 − L2 = 0
Si la barra es telescópica:
f(r1, r2, t) ≡ (y1 − y2)2 + (z1 − z2)
2 + (x1 − x2)2 − L(t)2 = 0
Introduccion a la Mecanica Analıtica– p. 5/24

Ligaduras independientes: Jacobiano
g ligadurasindependientes: Jacobiano[∂fi/∂xj ] rango=g
g ligadurasredundantes: Jacobiano[∂fi/∂xj ] rango<g
Ej.: Sistema: partícula sujeta a tres ligaduras:
Esfera de centro el origen:f1 ≡ x2 + y2 + z2 −R2 = 0
Plano horizontal:f2 ≡ z = 0
Cilindro vertical:f3 ≡ x2 + y2 −R2 = 0
La tercera ligadura es redundante:
f =
x2 + y2 + z2 − R2
z
x2 + y2 −R2
JJJ =
2x 2y 2z
0 0 1
2x 2y 0
Rango (JJJ) = 2
Introduccion a la Mecanica Analıtica– p. 6/24

Ligaduras independientes: Jacobiano
Ej.: Dos partículas (N = 2) en el plano (2N en vez de3N ) sujetas a:
f1 ≡ (x2 − x1)2 + (y2 − y1)
2 − 4R2 = 0
f2 ≡ y2 = 0
f3 ≡ x2
1 + (y1 −R)2 − R2 = 0
GDL: n = 2N − g = 4 − 3 = 1. Calculamos el jacobiano:
JJJ =
−2 (x2 − x1) −2 (y2 − y1) 2 (x2 − x1) 2 (y2 − y1)
0 0 0 1
2x1 2 (y1 −R) 0 0
Obviamente, Rango(JJJ) = 3 ⇒ independientes
Introduccion a la Mecanica Analıtica– p. 7/24

Ligaduras independientes: Jacobiano
Son independientes en generalPero pueden hacerse redundantes en algunos puntos:
Si colocamos la varilla vertical,x1 = x2 = 0, y1 = 2R, el jacobianose reduce a:
JJJ =
0 4R 0 −4R
0 0 0 1
0 2R 0 0
Obviamente, Rango(JJJ) = 2 ⇒ redundantes.
2
1
Introduccion a la Mecanica Analıtica– p. 8/24

Ligaduras unilaterales/bilaterales
z ≥ 0 z = 0
Ligadas (=)|r1 − r2| = L
Libres (<)|r1 − r2| < L
Integrar las ecuacionesconligaduraComprobar cuándo se separaIntegrar las ecuacionessin ligadura con las condiciones inicialesde la separaciónComprobar si vuelve a cumplirse . . .
Introduccion a la Mecanica Analıtica– p. 9/24

Ligaduras finitas→ cinemáticas
Toda limitación de las coordenadas limita también las posiciones
f(ri, t) = 0 ⇒d
dtf(ri, t) = 0
∂f
∂x1
x1 +∂f
∂y1y1 + · · · +
∂f
∂yN
yN +∂f
∂zNzN +
∂f
∂t=
= ∇1f · r1 + · · · + ∇Nf · rN +∂f
∂t=
N∑
i=1
Ai · vi +B = 0
f ≡ z − h = 0 ⇒ ∇f · v +�
��∂f
∂t= 0 ⇒ z = 0
Ascensor: sistema reónomoz − h(t) = 0
f ≡ z−h = 0 ⇒ ∇f ·v+ft = 0 ⇒ vn = z = −ft/ |∇f |
v
∇f
Introduccion a la Mecanica Analıtica– p. 10/24

Ligaduras finitas→ cinemáticas
Partícula sobre superficie esférica:f ≡ x2 + y2 + z2 − R2 = 0.
∇f · v = 0 ⇒ 2xx+ 2yy + 2zz = 0
∇f = (2x, 2y, 2z) ‖ ur, la velocidad es tan-gente a la superficie.Si la ligadura fuera no estacionaria —porejemplo, un globo que se hincha— la velo-cidad no es tangente:
f(r, t) ≡ x2 + y2 + z2 −R(t)2 = 0
∇f · v + ft = 0 ⇒ vn = −ft
|∇f |= R
v
∇f
Introduccion a la Mecanica Analıtica– p. 11/24

Ligaduras cinemáticas no integrables
Hay ligaduras cinemáticas queno sonla derivada de una finita:
g (ri,vi, t) ≡N∑
i=1
Ai(ri, t) · vi +B(ri, t) = 0
∄ f(ri, t) / g (ri,vi, t) =d
dtf(ri, t)
Todas finitas o cinemáticas integrables→ Sistema holónomoAl menos 1 cinemática no integrable→ Sistema no holónomoLas ligaduras finitas se puede usar para despejar coordenadas ydejar sólo las independientes (n)Las cinemáticas no sirven, pues aparecen las velocidadesSi son integrables, se integran→ reducir coordenadasEn los sistemasno holónomosno es posible reducir el número deecuaciones al mínimo
Introduccion a la Mecanica Analıtica– p. 12/24

Ligaduras cinemáticas no integrables
No integrable: Patín / Esquí / Rueda /Patín de hielo. Sólo puedemoverse en la dirección de la cuchilla. No impone condiciones a lascoordenadas: puede ponerse en cualquier punto y orientarseencualquier dirección.
A · v = (− sin θ, cos θ) · (x, y) =
= − sin θ x+ cos θ y = 0
• No integrable: 1 ec., 3 v.d.(x, y, θ), 1 v.i. (t).Aunque se tomara laθ como v. i., dividiendopor θ, seguiría sin poderse integrar.
θ
A (x, y)
• Sólido libre en el plano: 3 GDL,x, y, θ. Con ligadura cinemática:n = 3 − 1 = 2 GDL.• Análogo al de un automóvil o una bicicleta: 2 GDL dirección(manillar/volante) y el avance (pedales/motor).
Introduccion a la Mecanica Analıtica– p. 13/24
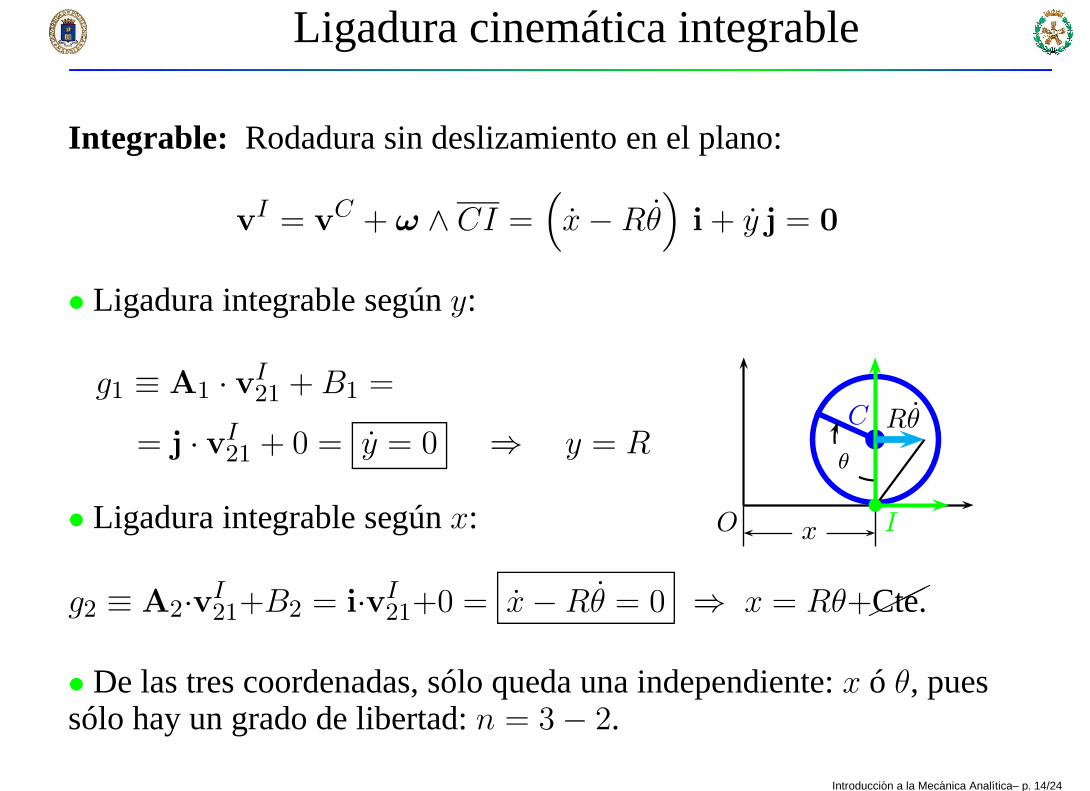
Ligadura cinemática integrable
Integrable: Rodadura sin deslizamiento en el plano:
vI = vC + ω ∧ CI =(
x− Rθ)
i + y j = 0
• Ligadura integrable segúny:
g1 ≡ A1 · vI21 +B1 =
= j · vI21 + 0 = y = 0 ⇒ y = R
• Ligadura integrable segúnx:
g2 ≡ A2·vI21+B2 = i·vI
21+0 = x− Rθ = 0 ⇒ x = Rθ+���Cte.
θ
xO I
C Rθ
• De las tres coordenadas, sólo queda una independiente:x ó θ, puessólo hay un grado de libertad:n = 3 − 2.
Introduccion a la Mecanica Analıtica– p. 14/24

Ligadura cinemática no integrable
No integrable: Disco que ruedasin deslizar sobre un plano⊥.(⊥→ θ = π
2Lig. finita)
vI21 = vC
21 + ω21 ∧ CI = 0 =
=
x
y
z
1
+
∣∣∣∣∣∣
i0 j0 k0
0 ϕ ψ
0 0 −R
∣∣∣∣∣∣
=ψ
ϕ
I
C
x1
y1
z1
x0
y0
z0
=
x− Rϕ cosψ
y − Rϕ sinψ
z
1
=
x cosψ + y sinψ −Rϕ
−x sinψ + y cosψ
z
0
=
0
0
0
g1 ≡ i0 · vI21
g2 ≡ j0 · vI21
g3 ≡ k0 · vI21
g1 ≡ i1 · vI21
g2 ≡ j1 · vI21
g3 ≡ k1 · vI21
g1g2g3
= QQQ10 ·
g1g2g3
Introduccion a la Mecanica Analıtica– p. 15/24

Ligadura cinemática no integrable
• La ligadura dez es integrable: eldisco no se levanta del suelo:
g3 ≡ k0 · vI21 = g3 ≡ k1 · v
I21 =
= z = 0 ⇒ z = R
• Las dex ey no son integrables:
ψ
ϕ
I
C
x1
y1
z1
x0
y0
z0
g1 ≡ i0 · vI21 = x cosψ + y sinψ − Rϕ = 0;
g2 ≡ j0 · vI21 = −x sinψ + y cosψ = 0
• Proyectadas en ejes 1 2 Ecs, 4 Var. Dep, 1 Var. Indep.
g1 ≡ i1 · vI21 = x− Rϕ cosψ = 0;
g2 ≡ j1 · vI21 = y − Rϕ sinψ = 0
Introduccion a la Mecanica Analıtica– p. 16/24
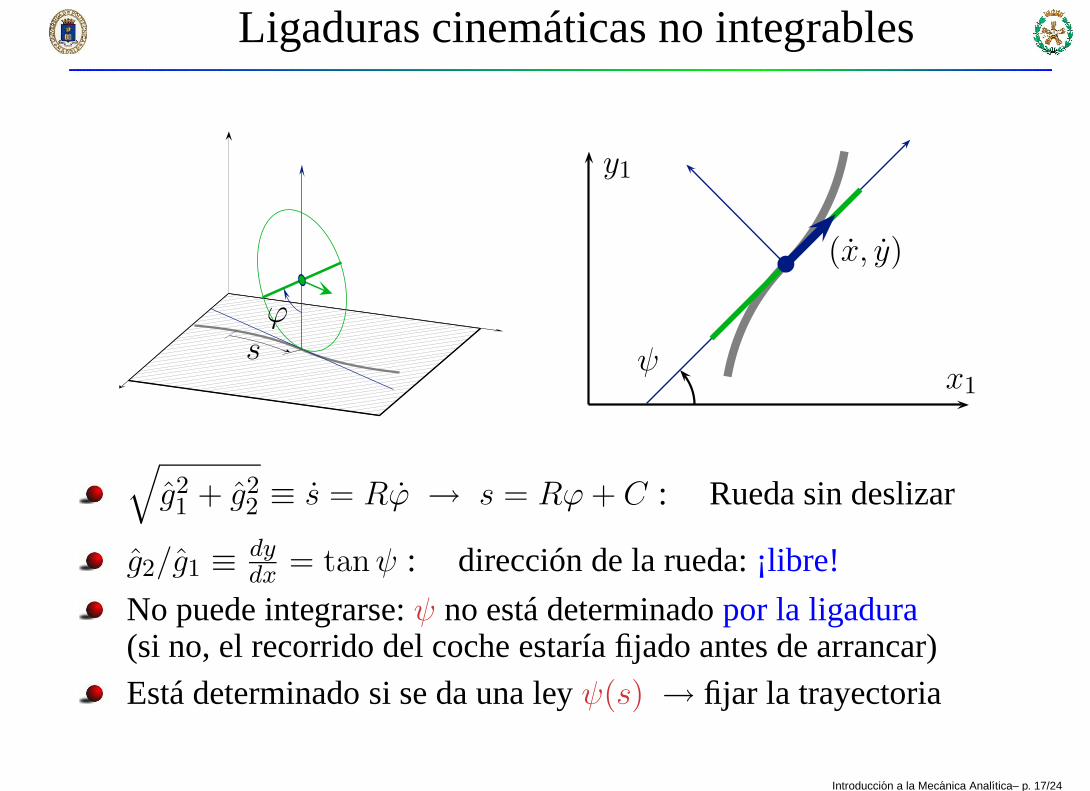
Ligaduras cinemáticas no integrables
sϕ
ψ
(x, y)
x1
y1
√
g21
+ g22≡ s = Rϕ → s = Rϕ+ C : Rueda sin deslizar
g2/g1 ≡ dydx
= tanψ : dirección de la rueda:¡libre!
No puede integrarse:ψ no está determinadopor la ligadura(si no, el recorrido del coche estaría fijado antes de arrancar)
Está determinado si se da una leyψ(s) → fijar la trayectoria
Introduccion a la Mecanica Analıtica– p. 17/24

Coordenadas generalizadas
N partículas,g ligaduras→ sólon = 3N − g coordenadasindependientesSistema holónomo:las ligaduras se usan para eliminar lasdependientesSistema no holónomo:no se pueden usar las ligaduras nointegrables para eliminar las dependientes
Partícula sobre esfera lisa:f(r) ≡ x2 + y2 + z2 −R2 = 0Sistema holónomo,GDL = n = 3 · 1 − 1 = 2.Eliminar una:z = ±
√
R2 − x2 − y2; (x, y) independientesCompleja e incómoda: raíz, no uniforme.Mejor coordenadas esféricas:
ligadura︷ ︸︸ ︷
ρ =√
x2 + y2 + z2 = R
independientes︷ ︸︸ ︷
tan θ =y
xsinϕ =
z
R
Introduccion a la Mecanica Analıtica– p. 18/24

Coordenadas generalizadas: sist. holónomos
N partículas,g ligaduras finitas:n = 3N − g independientes.Sin pérdida de generalidad, se puede suponer que lasindependientes son lasn primeras,
n︷ ︸︸ ︷
x1, y1, z1, x2, . . . , xk,
g︷ ︸︸ ︷
yk, zk, . . . , xN , yN , zN︸ ︷︷ ︸
3N
La configuración del sistema se puede expresar como:
ri = ri (x1, y1, z1 . . . xk, t) , i = 1 . . . N
yk, zk, . . . xN , yN , zN salen de las ecuaciones de las ligaduras.Olvidamos las ligaduras: ya están contadas
Introduccion a la Mecanica Analıtica– p. 19/24

Coordenadas generalizadas: sist. holónomos
Se puede trabajar con las coordenadas cartesianas independientes(para sólidos, también ángulos de Euler)
ri = ri (x1, y1, z1 . . . xk, t) , i = 1 . . . N
Con frecuencia es más cómodo usar otrosn parámetrosindependientes, lascoordenadas generalizadas:
ri = ri (q1, . . . , qn, t) , i = 1 . . . N
Tienen que estar relacionadas como cambio de variable:∣∣∣∣
∂ (x1, y1, . . . , xk)
∂ (q1, q2, . . . , qn)
∣∣∣∣6= 0
El movimiento del sistema estará perfectamente determinadocuando se conozcanq1(t), . . . , qn(t).
Introduccion a la Mecanica Analıtica– p. 20/24
Coordenadas generalizadas: sist. holónomos
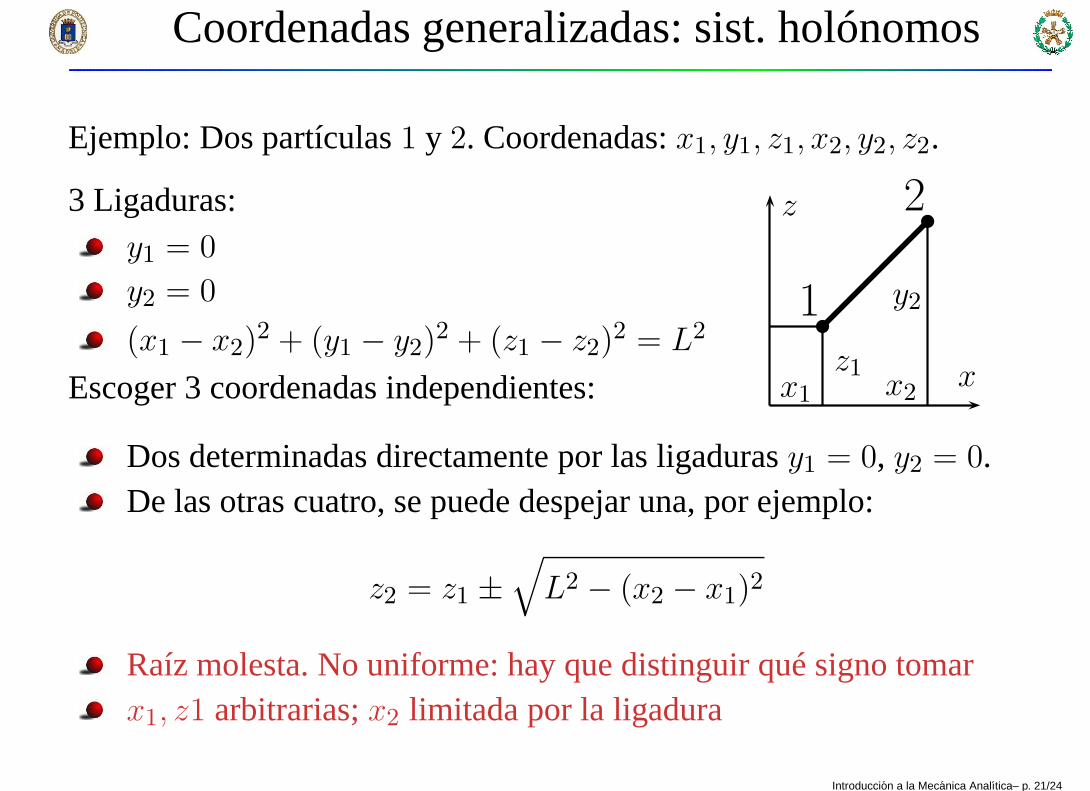
Ejemplo: Dos partículas1 y 2. Coordenadas:x1, y1, z1, x2, y2, z2.
3 Ligaduras:y1 = 0
y2 = 0
(x1 − x2)2 + (y1 − y2)
2 + (z1 − z2)2 = L2
Escoger 3 coordenadas independientes: x
z
1
2
x2
y2
z1x1
Dos determinadas directamente por las ligadurasy1 = 0, y2 = 0.De las otras cuatro, se puede despejar una, por ejemplo:
z2 = z1 ±√
L2 − (x2 − x1)2
Raíz molesta. No uniforme: hay que distinguir qué signo tomarx1, z1 arbitrarias;x2 limitada por la ligadura
Introduccion a la Mecanica Analıtica– p. 21/24
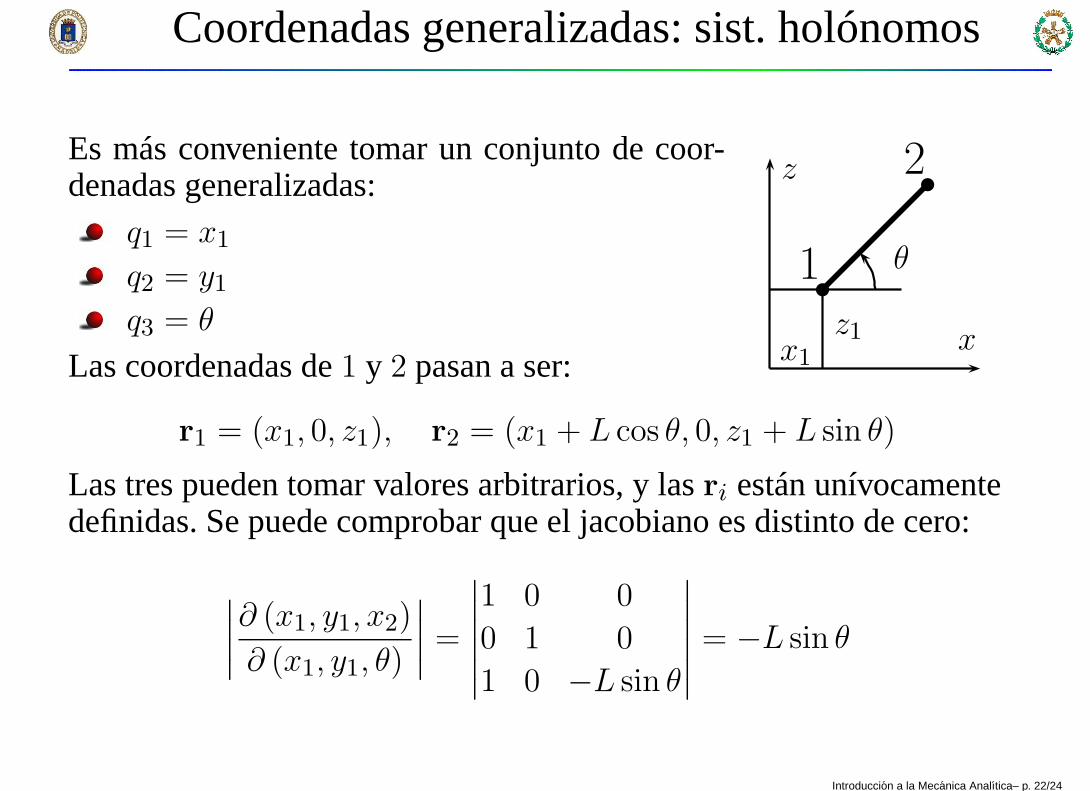
Coordenadas generalizadas: sist. holónomos
Es más conveniente tomar un conjunto de coor-denadas generalizadas:
q1 = x1
q2 = y1q3 = θ
Las coordenadas de1 y 2 pasan a ser:x
z
1
2
θ
z1x1
r1 = (x1, 0, z1), r2 = (x1 + L cos θ, 0, z1 + L sin θ)
Las tres pueden tomar valores arbitrarios, y lasri están unívocamentedefinidas. Se puede comprobar que el jacobiano es distinto decero:
∣∣∣∣
∂ (x1, y1, x2)
∂ (x1, y1, θ)
∣∣∣∣=
∣∣∣∣∣∣
1 0 0
0 1 0
1 0 −L sin θ
∣∣∣∣∣∣
= −L sin θ
Introduccion a la Mecanica Analıtica– p. 22/24

Coordenadas generalizadas: No holónomos
Sistema conN partículasSujeto ag ligaduras finitas o cinemáticas integrables (integradas)
fj(ri, t) = 0, j = 1 . . . g
Sujeto ah ligaduras cinemáticas no integrables
N∑
i=1
Aik · vi +B = 0, k = 1 . . . h
n grados de libertadGDL = 3N − g − h = n
Pero no se pueden obtenern coordenadas generalizadas: lashligaduras cinemáticasno sirvenpara reducir coordenadasHay que usarm = 3N − g > GDL coordenadas generalizadasno independientes
Introduccion a la Mecanica Analıtica– p. 23/24

Espacio de configuración
Espacio euclídeoR3: N partículas libresri ∈ R3, i = 1 . . . N
Espacio de configuraciónR3N : Punto representativo del sistema:
R = (x1, y1, z1 . . . , xN , yN , zN ) ∈ R3N
Variedad de configuración: Sistema sujeto ag ligaduras finitas
fj(ri, t) = 0, j = 1, . . . , g
Ecuacionesimplícitas de una variedad (dimn) inmersa enR3N
Espacio de configuración(otra acepción)Rn: n = 3N − gcoordenadas generalizadas. Punto representativo del sistema:
R = (q1, . . . , qn) ∈ Rn
Ecuacionesparamétricas de lavariedad de configuración
Introduccion a la Mecanica Analıtica– p. 24/24
Top Related