







Idiomas
Páginas
Jurídico


RAE
1. TIPO DE DOCUMENTO: Trabajo de grado para optar por el título de INGENIERO(A) MECATRÓNICO(A).
2. TÍTULO: DISEÑO Y CONSTRUCCIÓN DE UNA PRÓTESIS MIOELECTRÓNICA
TRANSTIBIAL ACTIVA.
3. AUTORES: Juan Camilo Alzate Delgado, Catalina Maria Bravo Rodriguez, Ivan Camilo
Escobar Paez.
4. LUGAR: Bogotá, D.C.
5. FECHA: Agosto de 2015.
6. PALABRAS CLAVE: Transtibial, mioelectrónica, electromiográficas, Electronic Speed
Control, Compensadores en Adelanto, Función de Transferencia.
7. DESCRIPCIÓN DEL TRABAJO: El principal objetivo de este trabajo es el diseño de una
prótesis transtibial activa que funcione con las señales electromiográficas de la pierna de una persona, y que mediante esto sea capaz de imitar los movimientos del pie para poder ser aplicada en un futuro en pacientes con amputaciones, y así lograr que la persona tenga una caminata más cómoda que con prótesis pasivas.
8. LÍNEAS DE INVESTIGACIÓN: La línea de investigación de la facultad es Análisis y
Procesamiento de Señales. La Sub-Línea de Investigación de la facultad es Automatización y Control.
9. METODOLOGÍA: Este trabajo se rige por el método empírico-analítico, colocando en
práctica los conocimientos adquiridos durante la carrera.
10. CONCLUSIONES: Aunque el resultado final del trabajo está acorde con los parámetros
de diseño, es recomendable en trabajos futuros tener en cuenta el cambio del material para hacer un modelo más liviano, que le facilite al posible paciente la caminata. Realizar pruebas con distintos tipos de controladores para mejorar el tiempo de respuesta del sistema.

DISEÑO Y CONSTRUCCIÓN DE UNA PRÓTESIS MIOELECTRÓNICA
TRANSTIBIAL ACTIVA
JUAN CAMILO ALZATE DELGADO
CATALINA MARIA BRAVO RODRIGUEZ
IVAN CAMILO ESCOBAR PAEZ
UNIVERSIDAD DE SAN BUENAVENTURA
FACULTAD DE CIENCIAS BÁSICAS E INGENIERÍA
PROGRAMA DE INGENIERÍA MECATRÓNICA
BOGOTÁ, COLOMBIA
2015

DISEÑO Y CONSTRUCCIÓN DE UNA PRÓTESIS MIOELECTRÓNICA
TRANSTIBIAL ACTIVA
JUAN CAMILO ALZATE DELGADO
CATALINA MARIA BRAVO RODRIGUEZ
IVAN CAMILO ESCOBAR PAEZ
TESIS DE GRADO PARA OPTAR POR EL TITULO DE INGENIERO (A) MECATRÓNICO (A)
M.SC. ING. LUIS EFRÉN BARRERO PÁEZ
DIRECTOR DE TRABAJO DE GRADO
UNIVERSIDAD DE SAN BUENAVENTURA
FACULTAD DE CIENCIAS BÁSICAS E INGENIERÍA
PROGRAMA DE INGENIERÍA MECATRÓNICA
BOGOTÁ, COLOMBIA
2015

NOTA DE ACEPTACIÓN:
___________________________________
FIRMA DIRECTOR DE TESIS
___________________________________
FIRMA JURADO DE TESIS
___________________________________
FIRMA JURADO DE TESIS
BOGOTÁ, COLOMBIA
31 DE AGOSTO DE 2015
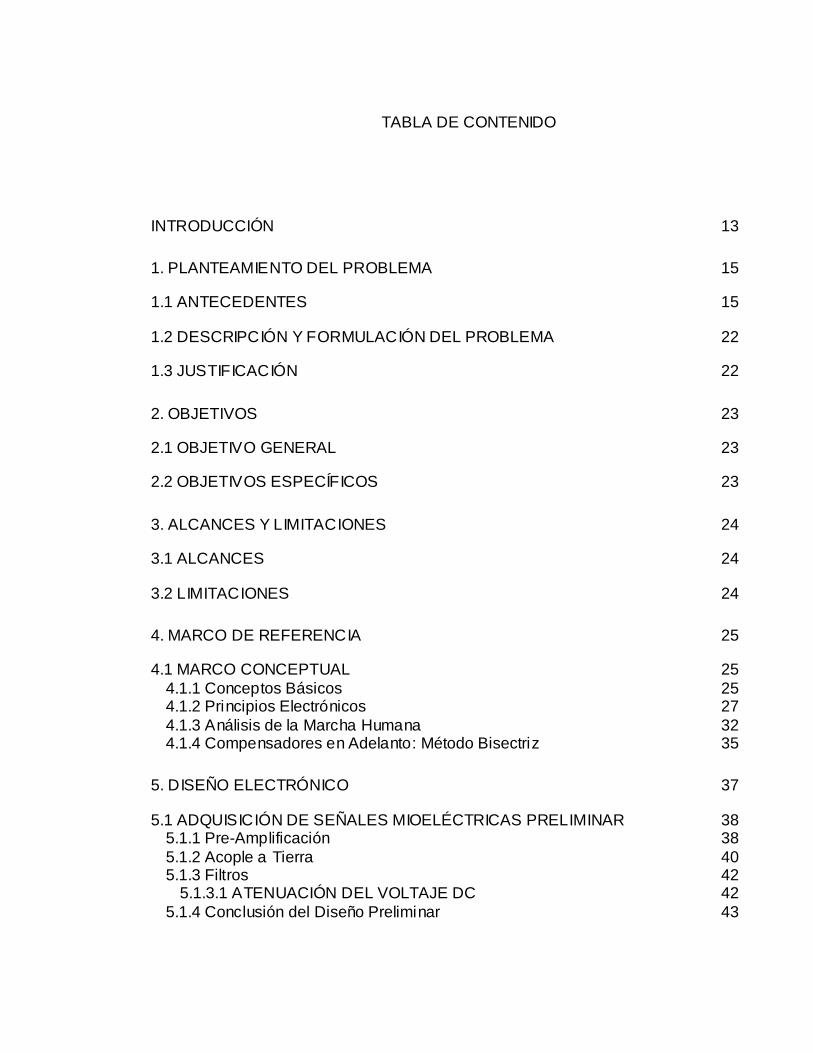
TABLA DE CONTENIDO
INTRODUCCIÓN 13
1. PLANTEAMIENTO DEL PROBLEMA 15
1.1 ANTECEDENTES 15
1.2 DESCRIPCIÓN Y FORMULACIÓN DEL PROBLEMA 22
1.3 JUSTIFICACIÓN 22
2. OBJETIVOS 23
2.1 OBJETIVO GENERAL 23
2.2 OBJETIVOS ESPECÍFICOS 23
3. ALCANCES Y LIMITACIONES 24
3.1 ALCANCES 24
3.2 LIMITACIONES 24
4. MARCO DE REFERENCIA 25
4.1 MARCO CONCEPTUAL 25
4.1.1 Conceptos Básicos 25 4.1.2 Principios Electrónicos 27
4.1.3 Análisis de la Marcha Humana 32 4.1.4 Compensadores en Adelanto: Método Bisectriz 35
5. DISEÑO ELECTRÓNICO 37
5.1 ADQUISICIÓN DE SEÑALES MIOELÉCTRICAS PRELIMINAR 38 5.1.1 Pre-Amplificación 38
5.1.2 Acople a Tierra 40 5.1.3 Filtros 42
5.1.3.1 ATENUACIÓN DEL VOLTAJE DC 42
5.1.4 Conclusión del Diseño Preliminar 43

5.2 ADQUISICIÓN DE SEÑALES MIOELÉCTRICAS FINAL 44
5.2.1 Etapa Pre-Amplificación 44 5.2.2 Amplificación Inicial 44
5.2.3 Filtros 46 5.2.4 Filtro Pasa Altas Butterworth de Orden 1 46 5.2.5 Filtro Pasa Bajas Butterworth de Orden 1 47
5.2.6 Acople a Tierra o Pierna Derecha 48 5.2.7 Amplificación Final 49
5.3 ADVANCER TECHNOLOGIES MUSCLE SENSOR V3 50
5.4 INVERSIÓN DE POLOS DEL MOTOR PARA LA INVERSIÓN DE GIRO 51
5.5 ACELERÓMETRO 51
5.5.1 Filtro Señal Acelerómetro 52
6. DISEÑO MECÁNICO 54
6.1 PARÁMETROS DE DISEÑO 55 6.1.1 Velocidad Angular del Tobillo 55 6.1.2 Torque en el Tobillo 56
6.2 DISEÑO PRELIMINAR 57
6.3 DISEÑO FINAL 58
6.3.1 Mecanismo Biela-Manivela 58 6.3.2 Tornillo de Potencia 59 6.3.3 Caja Reductora 61
6.3.4 Cálculo del Material para los Ejes de los Piñones 63 6.3.5 Cálculo del Eje para la Articulación del Tobillo 66
7. CONTROL 68
7.1 NI-MYDAQ 68
7.2 CONDICIONES REQUERIDAS PARA EL CONTROL 69
7.2.1 Procesamiento de la Señal del Acelerómetro 69 7.2.2 Activación del ESC (Electronic Speed Control) 70
7.2.3 Inversión de Giro del Motor 71
7.3 FUNCIÓN DE TRANSFERENCIA 72 7.3.1 Obtención de Datos 72
7.3.2 Obtención de la Función de Transferencia Mediante Matlab 76
7.4 IMPLEMENTACIÓN DE LA TÉCNICA DE CONTROL 79
7.5 IMPLEMENTACIÓN DE LAS SEÑALES EMG 84
7.5.1 Valor RMS de Señal 84 7.5.2 Acople de la Señal para el Control 85
8. CONCLUSIONES 87
9. RECOMENDACIONES 88
10. RESULTADOS 89
11. ANEXOS 93
11.1 DATASHEET AD620 93
11.2 DATASHEET TL074 97
11.3 ESPECIFICACIONES SENSOR EMG 100
11.4 ESPECIFICACIONES DEL MOTOR 104
11.5 DATASHEET TIP41C 105
11.6 DATASHEET ACELERÓMETRO MMA7361 107
11.7 CÁLCULOS DE LOS PIÑONES 110 11.7.1 Cálculo del Material para los Ejes de los Piñones 111
11.8 DATASHEET NI-MYDAQ 114
11.9 PROGRAMAS PARA LA FUNCIÓN DE TRANSFERENCIA 117
11.10 SEÑAL EMG CON LABVIEW 119
11.11 PCB DE LOS CIRCUITOS IMPRESOS 120
11.12 PLANOS DE LAS PIEZAS MECÁNICAS 121
BIBLIOGRAFÍA 134
LISTA DE ILUSTRACIONES
Ilustración 1. Consumo de Energía Durante la Caminata de un Amputado 15 Ilustración 2. Modelo Propuesto de un Musculo Simulado 17 Ilustración 3. AMP-FOOT 1.0 18
Ilustración 4. Esquema AMP-FOOT 2.0 19 Ilustración 5. ANKLE-FOOT 20
Ilustración 6. Electrodos de Gel 27 Ilustración 7. Seguidor de Voltaje 28 Ilustración 8. Configuración de Amplificador Operacional no Inversor 28
Ilustración 9. Configuración de Filtro Pasa Bajo Pasivo 29 Ilustración 10. Configuración Filtro Pasa Banda Activo 30
Ilustración 11. Configuración del Amplificador de Instrumentación 32 Ilustración 12. Ciclo Completo de la Marcha 32 Ilustración 13. Biomecánica del Tobillo 35
Ilustración 14. Amplitud de la Señal EMG en Miembro Inferior 37 Ilustración 15. Configuración del Amplificador de Instrumentación AD620 39
Ilustración 16. Configuración de AD620 40 Ilustración 17. Acople a Tierra 41 Ilustración 18. Circuito de Acople a Tierra Preliminar 42
Ilustración 19. Eliminación de Señal DC 42 Ilustración 20. Circuito Preliminar Filtro Pasa Altas 43
Ilustración 21. Diagrama Amplificación Inicial 45 Ilustración 22. Configuración Filtro Pasa Altas 47 Ilustración 23. Filtro Pasa Bajos 48
Ilustración 24. Circuito de Acople a Tierra 49 Ilustración 25. Amplificación Final 50
Ilustración 26. Sensor EMG 50 Ilustración 27. Circuito Inversión de Giro para el Motor 51 Ilustración 28. Acelerómetro MMA7361 52
Ilustración 29. Filtro pasa bajas pasivo 53 Ilustración 30. Diagrama de Cuerpo Libre Prótesis de Pie 55
Ilustración 31. Primer Prototipo Diseñado 57 Ilustración 32. Prototipo Final del Diseño Mecánico 58 Ilustración 33. Rosca Tipo ACME 60
Ilustración 34. Mecanismo de Cadena para Reducción 62 Ilustración 35. Modelo del Mecanismo para el Cálculo de Material 63
Ilustración 36. Reacción en los Soportes de Eje de los Piñones 65 Ilustración 37. Medidas Eje del Tobillo 66 Ilustración 38. Análisis de Esfuerzos en ANSYS del Eje del Tobillo 67
Ilustración 39. Tarjeta de adquisición NI-myDAQ 69 Ilustración 40. Diagrama de Flujo para Variación de Velocidad del Motor 70

Ilustración 41. Inversión De Giro del Motor 71
Ilustración 42. Unificación de los Programas 72 Ilustración 43. Inversión de Giro Final 73
Ilustración 44. Variación de Velocidad del Motor Final 74 Ilustración 45. Diagrama para la Toma de Datos 75 Ilustración 46. Identificación de la Planta 76
Ilustración 47. Análisis del Sistema para Encontrar la Función de Transferencia 77 Ilustración 48. Porcentaje de la función de transferencia escogida 78
Ilustración 49. Diagrama de Bloques en Simulink 83 Ilustración 50. Respuesta de la Función de Transferencia al Impulso 84 Ilustración 51. Diagrama de Flujo para Determinar el Valor RMS de la Señal EMG
85 Ilustración 52. Acople de la señal EMG 86
Ilustración 53. Amplitud Señal EMG 89 Ilustración 54. Primera Parte del Control 90 Ilustración 55. Segunda Parte de Control 91
Ilustración 56. Tercera Parte del Control 92 Ilustración 57. Control Prótesis LabVIEW 92
Ilustración 58. Relación de Reducción en los Engranes 110 Ilustración 59. Diagrama de Fuerzas en el Plano XZ 112 Ilustración 60. Diagrama de Fuerzas en el Plano YZ 113
Ilustración 61. Inversión de Giro Programa LabVIEW 117 Ilustración 62. Adquisición Señal Acelerómetro 117
Ilustración 63. Envío de 1 o 0 Lógico para el Transistor. 118 Ilustración 64. Variación de Velocidad para el Motor 118 Ilustración 65. Adquisición de la Señal en LabVIEW 119
Ilustración 66. Circuito de Adquisición de las Señales EMG 120 Ilustración 67. Circuito de Inversión de Giro del Motor 120

LISTA DE TABLAS
Tabla 1. Características de la Prótesis 59 Tabla 2. Cálculo Tornillo de Potencia 60 Tabla 3. Parámetros de Diseño para los Piñones 63
Tabla 4. Parámetros de Diseño Compensador Método Bisectriz 79 Tabla 5. Valores para el Compensador en Adelanto Bisectriz 82
Tabla 6. Parámetros de Diseño para los Piñones 111

LISTA DE ECUACIONES
Ecuación 1. Ecuación Característica de Ganancia Ideal para Amplificador no
Inversor 29
Ecuación 2. Cálculo para un Filtro Pasa Bajos Pasivo 30 Ecuación 3. Cálculo de Resistencia para Filtro Pasa Banda 31
Ecuación 4. Ecuación para la Ganancia del Amplificador de Instrumentación 31 Ecuación 5. Ángulo de Compensación 36 Ecuación 6. Ecuación para el Cálculo de la Resistencia de Ganancia 39
Ecuación 7. Resistencias de Ganancia 41 Ecuación 8. Resistencia para Filtro Pasa Altas 43
Ecuación 9. Ecuación General Amplificador no Inversor 45 Ecuación 10. Resistencias para Amplificación 45 Ecuación 11. Resistencia para Filtro Pasa Altas 46
Ecuación 12. Resistencia para Filtro Pasa Bajas 47 Ecuación 13. Resistencias para Amplificación Final de la Señal 49
Ecuación 14. Cálculo Condensador Filtro Pasa Bajos 52 Ecuación 15. Cálculo de Velocidad Angular del Tobillo 56 Ecuación 16. Regla de Tres para el Cálculo de las RPM en el Tobillo 56
Ecuación 17. Cálculo del Torque en el Tobillo 56 Ecuación 18. Velocidad Angular de Salida 59 Ecuación 19. Torque de Salida 59
Ecuación 20. Fuerza Lineal del Husillo 61 Ecuación 21. Velocidad Lineal del Husillo 61
Ecuación 22. Relación de los Piñones 62 Ecuación 23. Cálculo de la Velocidad del Piñón Secundario 62 Ecuación 24. Cálculo del Torque en el Piñón Secundario 62
Ecuación 25. Tensión Ejercida Sobre la Cadena 64 Ecuación 26. Resultante en Y de la Tensión 64
Ecuación 27. Resultante en X de la Tensión 64 Ecuación 28. Fórmula de Esfuerzo 65 Ecuación 29. Diámetro Mínimo para los Ejes de los Piñones 66
Ecuación 30. Modelo de la Función de Transferencia 79 Ecuación 31. Función de Transferencia 79
Ecuación 32. Ecuación de Zeta 80 Ecuación 33. Cálculo General de 𝜔𝑛 80
Ecuación 34. Cálculo de Polo de Diseño 81 Ecuación 35. Cálculo de 𝞿 81
Ecuación 36. Cálculo de ϴ 81 Ecuación 37. Fórmula de Z0 81
Ecuación 38. Fórmula de P0 81 Ecuación 39. Fórmula del k lead evaluado con el polo de diseño 82

Ecuación 40. Fórmula para el Cálculo del Kc 82
Ecuación 41. Cálculo de la velocidad del piñón secundario 110 Ecuación 42. Cálculo del torque en el piñón secundario 111
Ecuación 43. Fuerza Tangencial sobre B 111 Ecuación 44. Fuerza Radial Sobre B 112 Ecuación 45. Sumatoria de Momentos en el Plano XZ 112
Ecuación 46. Reacción en C en el Plano XZ 112 Ecuación 47. Sumatoria de Momentos en el Plano YZ 113
Ecuación 48. Reacción en C en el Plano YZ 113 Ecuación 49. Diámetro Mínimo para los Ejes de los Piñones 113

13
INTRODUCCIÓN
Durante los últimos años se han desarrollado investigaciones que culminaron en
numerosos inventos y descubrimientos, los cuales sentaron las bases de la actual ciencia médica, como los rayos X, el microscopio, el marcapasos, etc. (Oñate, 2013)1
Estos avances han logrado diversos beneficios en todos los campos de la medicina, teniendo en cuenta la problemática que existe en el mundo frente a las personas con discapacidad física o con limitaciones, mejorando su calidad de vida mediante
la biónica, definida como “la idea general de diseñar apoyándose en las soluciones que se presentan en los procesos naturales que nos rodean, desde el vuelo de un
pájaro hasta la geometría de las colmenas.” (Carratalá, 2009)2.
Hoy en día es frecuente encontrar personas con discapacidades físicas como la ausencia de extremidades superiores o inferiores, como en el caso de Hug Herr,
quien a sus 17 tuvo un accidente de montañismo en el que se congelaron sus piernas y fueron amputadas como consecuencia, a partir de esto dedico su vida al desarrollo de prótesis, logrando avances significativos para el campo de la
bioingeniería (Perez Lopez, s.f.)3.
Dejando de lado las prótesis pasivas mecánicas, que producen problemas clínicos asociados a la falta de una movilidad adecuada, entre los cuales se incluye la
asimetría al caminar, inestabilidad, reducción de la velocidad al caminar y un mayor gasto de energía por las prótesis activas robóticas, como las de rodilla, tobillo – pie, entre otras, las cuales Herr creó junto a su equipo de biomecatrónica (Herr)4.
1 Oñate, G. (20 de Enero de 2013). Obtenido de Avances Tecnológicos: http://avancesegunlatec.blogspot.com/2013/01/avances-tecnologicos-en-la-medicina.html
2 Carratalá, S. (18 de Enero de 2009). Obtenido de Frame and Form: http://web.archive.org/web/20120925064413/http://www.frameandform.com/2009/01/18/biomimetic
a-donde-la-naturaleza-y-el-diseno-convergen/ 3 Perez Lopez, M. (s.f.). Obtenido de Discapacidad Online:
http://www.discapacidadonline.com/discapacidadsuperacion -hugh-herr-protesis-bionicas.html k4 Herr, H. (s.f.). Obtenido de BBVA Open Mind: https://www.bbvaopenmind.com/articulo/innovacion -cambiar-el-rostro-de-la-discapacidad/?fullscreen=true

14
La mayoría de amputados en Colombia son producto de la violencia según datos
arrojados por el programa acción integral contra las minas antipersona (PAICMA), donde entre 1990 y 2015 se registraron 11.127 víctimas, de las cuales 10.19% son
menores de edad (PAICMA, 2015)5.
5 PAICMA. (25 de Mayo de 2015). Obtenido de Acción Contra Minas: http://www.accioncontraminas.gov.co/Prensa/Documents/Situacion%20Victimas%20MAP%20MUSE%20AEI.pdf
15
1. PLANTEAMIENTO DEL PROBLEMA
1.1 ANTECEDENTES
El ser humano siempre ha buscado solucionar los diversos problemas físicos a los
que se enfrenta en su cotidianidad, tales como la perdida de extremidades, un ejemplo claro es el descubrimiento de una prótesis en 1858 que data
aproximadamente del año 300 A.C., perteneció a la civilización egipcia y estaba elaborada con hierro, bronce y su núcleo de madera, aparentemente pertenecía a un amputado por debajo de la rodilla según lo indicado por la revista InMotion
(Norton, 2007)6.
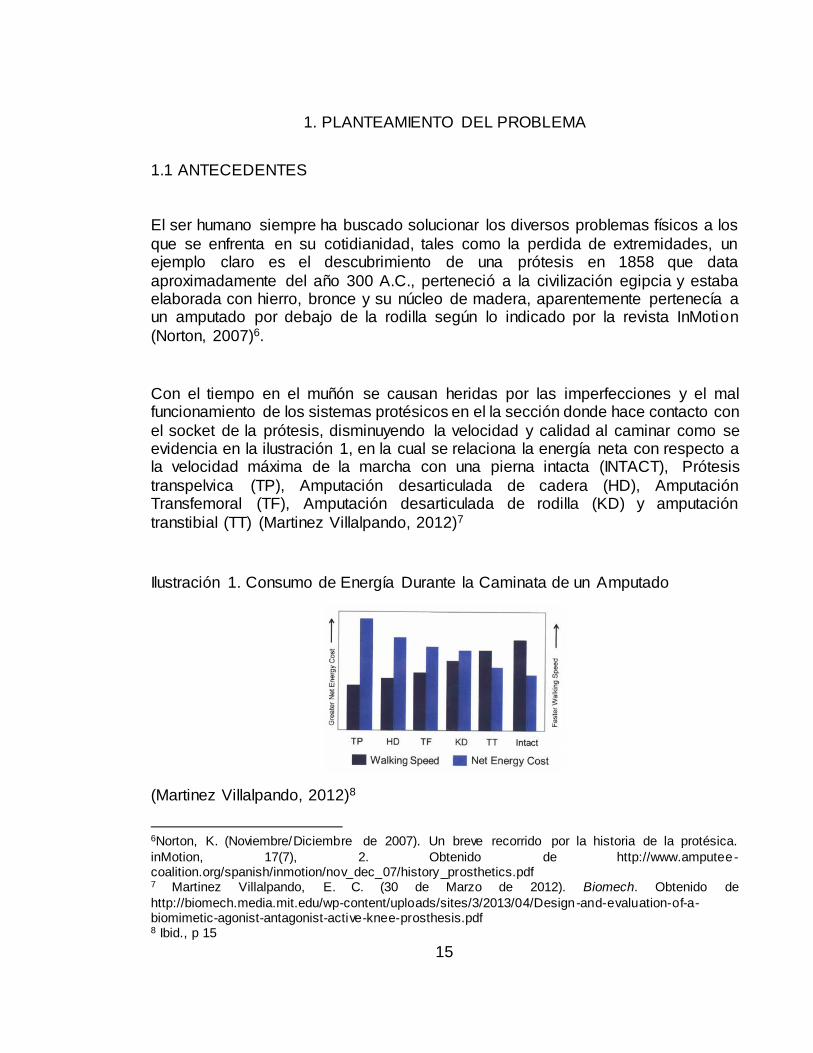
Con el tiempo en el muñón se causan heridas por las imperfecciones y el mal funcionamiento de los sistemas protésicos en el la sección donde hace contacto con
el socket de la prótesis, disminuyendo la velocidad y calidad al caminar como se evidencia en la ilustración 1, en la cual se relaciona la energía neta con respecto a la velocidad máxima de la marcha con una pierna intacta (INTACT), Prótesis
transpelvica (TP), Amputación desarticulada de cadera (HD), Amputación Transfemoral (TF), Amputación desarticulada de rodilla (KD) y amputación
transtibial (TT) (Martinez Villalpando, 2012)7
Ilustración 1. Consumo de Energía Durante la Caminata de un Amputado
(Martinez Villalpando, 2012)8
6Norton, K. (Noviembre/Diciembre de 2007). Un breve recorrido por la historia de la protésica.
inMotion, 17(7), 2. Obtenido de http://www.amputee-coalition.org/spanish/inmotion/nov_dec_07/history_prosthetics.pdf 7 Martinez Villalpando, E. C. (30 de Marzo de 2012). Biomech. Obtenido de
http://biomech.media.mit.edu/wp-content/uploads/sites/3/2013/04/Design-and-evaluation-of-a-biomimetic-agonist-antagonist-active-knee-prosthesis.pdf 8 Ibid., p 15

16
Gracias a esto se pudo definir que los sujetos con una amputación tenían una mayor
actividad en el músculo bíceps femoral (con prótesis accionadas o con pasivas-elásticas) en comparación con personas no amputadas (21 vs 8%), especialmente
durante la fase de apoyo (Williams, Grabowski, Herr, & D'Andrea, pág. 1)9.
Durante la fase de oscilación el uso de este musculo por parte de los pacientes con prótesis pasivas-elásticas fue 13%, los que utilizaban la prótesis accionada 5% y a
la de los no amputados 5%10; aun así, este tipo de prótesis tenían diversas fallas por lo que empezaron a introducir la electrónica y hacerla parte del mecanismo por medio de las señales musculares o mioeléctricas (EMG), como punto de referencia
para moverlas. Estas señales se miden por medio de electrodos superficiales que proporcionan una técnica no invasiva (Senthil Kumar, Bharat Kannan,
Sankaranarayanan, & Venkata Krishnan, 2013)11.
Los electrodos de EMG forman un equilibrio químico entre la piel y la superficie por medio de la conducción electrolítica, por lo que la corriente puede fluir hacia el
electrodo; además los electrodos superficiales son ampliamente utilizados para detectar la actividad de los músculos con el fin de controlar el dispositivo para conseguir prótesis para personas con discapacidad y amputación, y para ello es
necesaria una preparación adecuada para la piel en la aplicación de la superficie de los electrodos EMG; igualmente la impedancia de la piel debe ser reducida considerablemente con el fin de obtener una buena señal EMG con calidad12
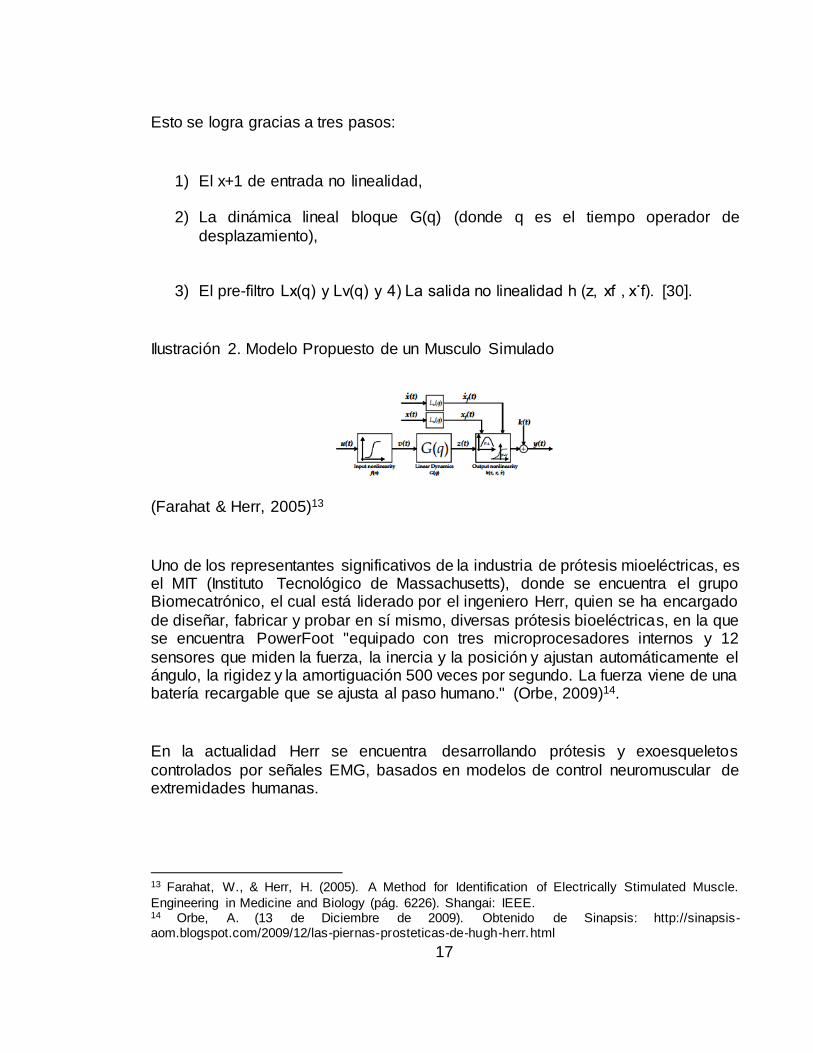
Por consiguiente la recepción de las señales EMG para las prótesis se pueden obtener al ubicarlas bajo la estructura del modelo propuesto (ilustración 2), por Waleed Farahat y Hugh Herr, donde las entradas del modelo de los estímulos
eléctricos u (t) y el músculo en estado mecánico (su cepa x (t) y el grado de deformación (x (t)). La salida y (t) es la fuerza contráctil generada por el músculo
debido a sus componentes activos y pasivos.
9 Williams, M. R., Grabowski, A., Herr, H., & D'Andrea, S. (s.f.). ELECTROMYOGRAPHIC EFFECTS OF USING A POWERED ANKLE-FOOT PROSTHESIS. Obtenido de The American Society of
Biomechanics. 10 Ibíd., p 1 11 Senthil Kumar, J., Bharat Kannan, M., Sankaranarayanan, S., & Venkata Krishnan, A. (2013).
Human Hand Prosthesis Based On Surface EMG Signals for. International Journal of Emerging Technology and Advanced Engineering, 1. 12 Ibíd., p. 2
17
Esto se logra gracias a tres pasos:
1) El x+1 de entrada no linealidad,
2) La dinámica lineal bloque G(q) (donde q es el tiempo operador de
desplazamiento),
3) El pre-filtro Lx(q) y Lv(q) y 4) La salida no linealidad h (z, xf , x˙f). [30].
Ilustración 2. Modelo Propuesto de un Musculo Simulado
(Farahat & Herr, 2005)13
Uno de los representantes significativos de la industria de prótesis mioeléctricas, es el MIT (Instituto Tecnológico de Massachusetts), donde se encuentra el grupo Biomecatrónico, el cual está liderado por el ingeniero Herr, quien se ha encargado
de diseñar, fabricar y probar en sí mismo, diversas prótesis bioeléctricas, en la que se encuentra PowerFoot "equipado con tres microprocesadores internos y 12
sensores que miden la fuerza, la inercia y la posición y ajustan automáticamente el ángulo, la rigidez y la amortiguación 500 veces por segundo. La fuerza viene de una batería recargable que se ajusta al paso humano." (Orbe, 2009)14.
En la actualidad Herr se encuentra desarrollando prótesis y exoesqueletos
controlados por señales EMG, basados en modelos de control neuromuscular de extremidades humanas.
13 Farahat, W., & Herr, H. (2005). A Method for Identification of Electrically Stimulated Muscle.
Engineering in Medicine and Biology (pág. 6226). Shangai: IEEE. 14 Orbe, A. (13 de Diciembre de 2009). Obtenido de Sinapsis: http://sinapsis-aom.blogspot.com/2009/12/las-piernas-prosteticas-de-hugh-herr.html
18
Algunos investigadores han argumentado que esta clase de control podría permitir
al amputado experimentar un control subconsciente sobre la prótesis y por lo tanto, el paciente puede requerir un corto período de tiempo para aprender a utilizarla (Au,
Bonato, & Herr, 2005)15.
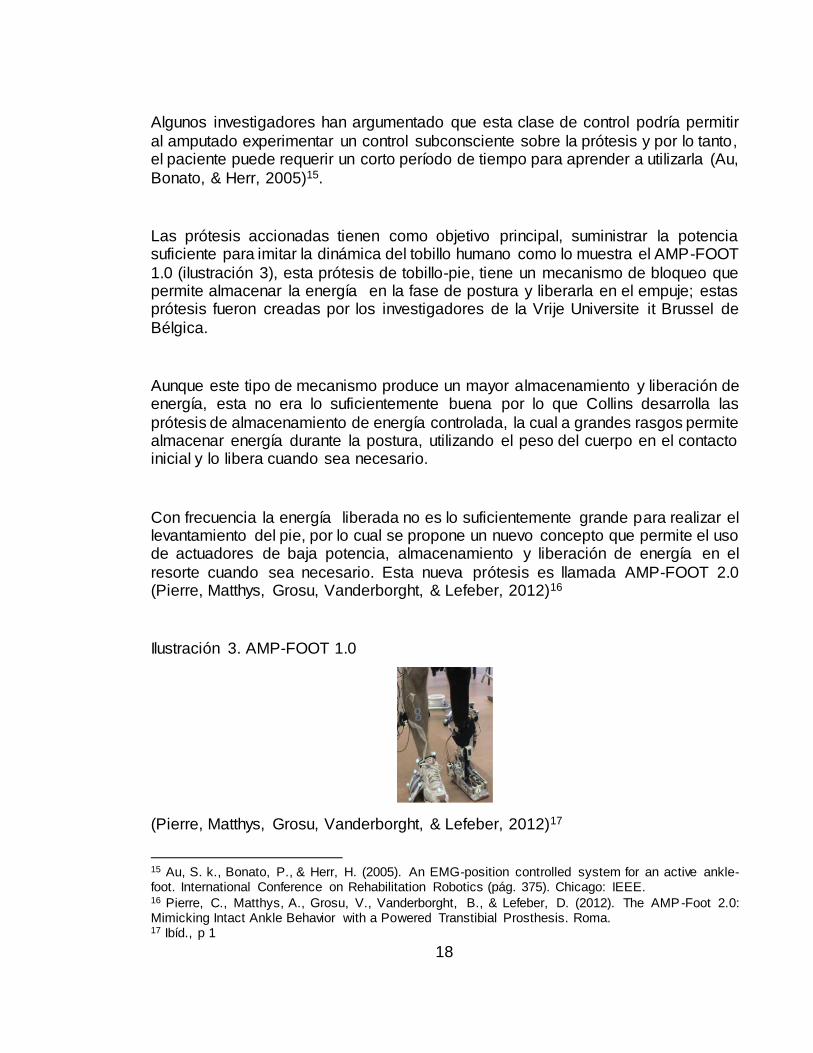
Las prótesis accionadas tienen como objetivo principal, suministrar la potencia suficiente para imitar la dinámica del tobillo humano como lo muestra el AMP-FOOT
1.0 (ilustración 3), esta prótesis de tobillo-pie, tiene un mecanismo de bloqueo que permite almacenar la energía en la fase de postura y liberarla en el empuje; estas prótesis fueron creadas por los investigadores de la Vrije Universite it Brussel de
Bélgica.
Aunque este tipo de mecanismo produce un mayor almacenamiento y liberación de energía, esta no era lo suficientemente buena por lo que Collins desarrolla las
prótesis de almacenamiento de energía controlada, la cual a grandes rasgos permite almacenar energía durante la postura, utilizando el peso del cuerpo en el contacto inicial y lo libera cuando sea necesario.
Con frecuencia la energía liberada no es lo suficientemente grande para realizar el levantamiento del pie, por lo cual se propone un nuevo concepto que permite el uso de actuadores de baja potencia, almacenamiento y liberación de energía en el
resorte cuando sea necesario. Esta nueva prótesis es llamada AMP-FOOT 2.0 (Pierre, Matthys, Grosu, Vanderborght, & Lefeber, 2012)16
Ilustración 3. AMP-FOOT 1.0
(Pierre, Matthys, Grosu, Vanderborght, & Lefeber, 2012)17
15 Au, S. k., Bonato, P., & Herr, H. (2005). An EMG-position controlled system for an active ankle-foot. International Conference on Rehabilitation Robotics (pág. 375). Chicago: IEEE. 16 Pierre, C., Matthys, A., Grosu, V., Vanderborght, B., & Lefeber, D. (2012). The AMP-Foot 2.0: Mimicking Intact Ankle Behavior with a Powered Transtibial Prosthesis. Roma. 17 Ibíd., p 1

19
El AMP-FOOT 2.0 (ilustración 4) utiliza un resorte de flexión plantar (PF), utilizado
para acumular la energía en la fase de dorsiflexión de postura, mientras el actuador suministra la energía necesaria en el momento de levantar el pie, gracias a que el
mecanismo de bloqueo se libera (Pierre, Matthys, Grosu, Vanderborght, & Lefeber, 2012)18.
Ilustración 4. Esquema AMP-FOOT 2.0
(Pierre, Matthys, Grosu, Vanderborght, & Lefeber, 2012)19
Los elementos que utiliza este tipo de prótesis son:
• Actuador de bajo peso
• Control o mecanismo de palanca
• Galgas extensionométricas
• Dos encoders magnéticos
Otro de los proyectos que implementan el tipo de prótesis accionada es el Ankle-
Foot (ilustración 5), la cual es una prótesis de tobillo-pie casi-pasiva.
Esta prótesis utiliza un mecanismo de amortiguación resorte para permitir el ajuste automático del ángulo del tobillo para distintas superficies (Au & Herr, Powered
Ankle-Foot Prosthesis, 2008)20. A medida que va transcurriendo el tiempo, el Ankle-Foot fue estudiado para darle solución a los diversos problemas que se presentaban
18 Ibíd., p 2 19 Ibíd., p 2 20 Au, S. K., & Herr, H. (2008). Powered Ankle-Foot Prosthesis. IEEE Robotics & Automation Magazine, 52.

20
o simplemente para mostrar a fondo un determinado tema (Au & Herr, Powered
Ankle-Foot Prosthesis, 2008)21.
Ilustración 5. ANKLE-FOOT
(Au & Herr, Powered Ankle-Foot Prosthesis, 2008)22
Entre las investigaciones hechas se encuentran los métodos de control que se pueden realizar (Suzuki, Sawada, Kobayashi, & Hofer, 2011)23, es decir la
intervención basada en un modelo neuromuscular (Eilenberg, Geyer, & Herr, 2010)24, el diseño biomecánico que muestra los cambios necesarios para que la prótesis mejore la marcha de la persona discapacitada disminuyendo su peso y
manteniendo la potencia (Au, Weber, & Herr, International Conference on Rehabilitation Robotics, 2007)25.
Se han realizado otro tipo de investigaciones como la efectuada por Martin Grimmer,
quien realizo un experimento con dos personas, a las cuales se les adaptaron sensores 3D para analizar la rigidez y la alimentación requerida de energía con
respecto a determinadas velocidades (Grimmer & Seyfarth, 2011)26.
21 Ibíd., p 53 22 Ibíd., p 57 23 Suzuki, R., Sawada, T., Kobayashi, N., & Hofer, E. P. (2011). Control Method for Powered Ankle Prosthesis via Internal Model Control Design. International Conference on Mechatronics and
Automation (pág. 237). Beijing: IEEE. 24 Eilenberg, M. F., Geyer, H., & Herr, H. (2010). Control of a Powered Ankle-Foot Prosthesis Based on a Neuromuscular Model. IEEE TRANSACTIONS ON NEURAL SYSTEMS AND
REHABILITATION ENGINEERING, 164. 25 Au, S. K., Weber, J., & Herr, H. (2007). International Conference on Rehabilitation Robotics. Biomechanical Design of a Powered Ankle-Foot Prosthesis (pág. 298). Noordwijk: IEEE. 26 Grimmer, M., & Seyfarth, A. (2011). Stiffness Adjustment of a Series Elastic Actuator in an Ankle-Foot Prosthetis for Walking and Running: The Trade-O between Energy and Peak Power Optimization. International Conference on Robotics and Automation. Shangai: IEEE.

21
Entre los resultados obtenidos se encuentra que el pico de la potencia aumenta sin
importar la optimización de la rigidez y esta aumenta con la velocidad. También encontraron que si la rigidez no se optimiza se produce un aumento en la demanda
energética (Grimmer & Seyfarth, 2011)27.
En Colombia se han venido realizando varios estudios con respecto a las prótesis mioeléctricas, ya que los costos son elevados al importar una prótesis de este tipo
de tecnología para su implementación en personas sin alguna de sus extremidades.
Los amputados de miembro inferior ahora cuentan con prótesis equipadas con microprocesadores que permiten a los usuarios adaptar su marcha según el tipo de suelo (Gomez Mendoza, 2007)28.
En la universidad autónoma de Bucaramanga en conjunto con el instituto de investigaciones y desarrollo de tecnologías aplicadas de la universidad de pamplona, se encuentran en desarrollo por medio de control mecatrónico y control
artificial una prótesis bioeléctrica para los discapacitados víctimas de la violencia en Colombia (Araujo Herrera, 2012)29.
En este estudio se desarrolla una de las tres técnicas de inteligencia artificial, en la
cual se generan unos algoritmos para crear una prótesis que replica los movimientos de la pierna sana, según la investigación la pierna realizará movimientos armónicos, no cojeará y podrá realizar diferentes ejercicios (Araujo Herrera, 2012)30.
Con base en estos proyectos e investigaciones ya desarrolladas se ha decidido diseñar y crear una de prótesis mioeléctricas de miembro inferior en Colombia de forma económica y eficaz que permita que los colombianos accedan a ella sin
mucha dificultad y puedan tener los beneficios que esta trae para su comodidad.
27 Ibíd., p 1 28 Gómez Mendoza, A. (22 de Enero de 2007). Obtenido de Universia: http://noticias.universia.net.co/vida-universitaria/noticia/2007/01/22/252857/inteligencia-armonia-mecanica-unidos-protesis.html 29 Araujo Herrera, N. L. (2012). Diseño Conceptual de una Prótesis para Amputación Transfemoral. Santiago de Cali: Universidad Autónoma de Occidente. 30 Ibíd., p 47
22
1.2 DESCRIPCIÓN Y FORMULACIÓN DEL PROBLEMA
Teniendo en cuenta el número de personas discapacitadas (PAICMA, 2015)31 por pérdida parcial o total de una o ambas extremidades inferiores surge la necesidad
de crear un diseño de prótesis mioeléctrica, que pueda estar al alcance de todos y pueda llegar a sustituir las prótesis pasivas, las cuales poseen diversas limitaciones al momento de realizar movimientos naturales del ser humano como caminar, correr
o simplemente mover la extremidad.
Se pretende crear una prótesis mioeléctrica económica que esté al alcance de todas las personas.
1.3 JUSTIFICACIÓN
La falta de miembros es un problema tanto físico como emocional para los seres humanos y lastimosamente común y en Colombia se han reportado entre el año
1990 y 2015 la suma aproximada de 11.127 víctimas de amputación32, por este motivo se ha venido implementado el uso de prótesis, aunque en su gran mayoría
mecánicas debido a que las prótesis eléctricas son demasiado costosas y normalmente los afectados son personas de pocos recursos que no pueden acceder a ellas.
Las prótesis mioeléctrica se han vuelto comunes, por lo que existe infinidad de
proyectos para miembros superiores pero no inferiores, esto se debe a que el desarrollo de esta última tiene una complejidad mayor ya que tiene que ser liviano
y con una gran dureza para soportar el peso de la persona.
Por este motivo se ha decidido investigar y diseñar un prototipo de prótesis mioeléctrica de miembro inferior para las personas, de forma económica y eficaz
teniendo en cuenta los materiales a usar y la imitación del movimiento de un pie normal, teniendo los beneficios que esta trae para su comodidad, esto mediante los proyectos e investigaciones ya desarrolladas.
31 PAICMA.OP.cit., p. 1 32 PAICMA.OP.cit., p. 1

23
2. OBJETIVOS
2.1 OBJETIVO GENERAL
Diseñar y construir una prótesis transtibial de miembro inferior que reciba las
señales mioeléctricas de los músculos y las utilice para lograr facilidad de movimiento a la persona discapacitada.
2.2 OBJETIVOS ESPECÍFICOS
Realizar el diseño mecatrónico de una prótesis, garantizando que el funcionamiento sea adecuado para un paciente con amputación transtibial.
Determinar un sistema electrónico que pueda recibir y transformar las señales
mioeléctricas de los músculos para que logre activar de forma adecuada los dispositivos de la prótesis de miembro inferior.
Diseñar el control del sistema de tal forma que la prótesis reciba la señal mioeléctrica y la reproduzca de forma similar los movimientos del tobillo.
Construir una prótesis transtibial para una persona adulta e implementar el circuito electrónico para el funcionamiento de la prótesis
24
3. ALCANCES Y LIMITACIONES
3.1 ALCANCES
Diseño y construcción de una prótesis transtibial que reciba las señales
mioeléctricas de los músculos logrando su movimiento con la menor limitación posible.
3.2 LIMITACIONES
La prótesis estará diseñada y se construirá para una persona adulta ya que para un niño los huesos no se han terminado de formar y se tendrían complicaciones para
el diseño.
25
4. MARCO DE REFERENCIA
4.1 MARCO CONCEPTUAL
4.1.1 Conceptos Básicos
Órtesis: dispositivos mecánicos que ejercen fuerza sobre un segmento del cuerpo,
ayudan a estabilizar corregir y proteger.
Las prótesis se encuentran en las prótesis de extremidades inferiores, en los zapatos ortopédicos y en plantillas rígidas o flexibles. El término se usa para
denominar dispositivos y soportes usados en ortopedia y fisioterapia que corrigen o facilitan la ejecución de una acción, actividad o desplazamiento con mayor seguridad (Ortopedia 1)33.
Prótesis: una prótesis es una extensión que remplaza una parte del cuerpo que
falta, las prótesis son utilizadas para remplazar partes del cuerpo faltantes (Zamora Becerra)34.
Existen dos clases de prótesis, de miembros superiores y de miembros inferiores.
Para las prótesis de miembro inferior existen diferentes clases:
Desarticulado de cadera
Transfemoral
Desarticulado de rodilla
Transtibial
Desarticulado de tobillo
Parcial de pie
33 Ortopedia 1. (s.f.). Obtenido de Ortopedia 1: http://ortopedia1.com/ortesis 34 Zamora Becerra, D. A. (s.f.). Obtenido de Monografías : http://www.monografias.com/trabajos94/biomecanica-extremidades-del-cuerpo-humano/biomecanica-extremidades-del-cuerpo-humano.shtml

26
Señales Mioeléctricas: en la actualidad se tienen muchos estudios con la finalidad
de analizar electromiogramas, los cuales toman mucho tiempo en la adquisición de la señal al igual que la clasificación del movimiento a realizar con la prótesis de tal
forma que el paciente tiene que tener horas de entrenamiento para poder controlar por totalidad la prótesis.
Estas señales se basan en que el paciente genera contracciones que son
clasificadas por una red neuronal entrenada para saber qué movimiento de la prótesis se quiere realizar (Torres Ríos)35.
Prótesis Mioeléctricas: Las prótesis mioeléctricas son dispositivos que
reemplazan y permiten mover el miembro artificial sin necesidad de pulsar ningún
botón, de una manera más natural.
Hoy en día son el tipo de miembro artificial con más alto grado de rehabilitación; para poder implantar estas prótesis es necesario que se localicen en el miembro
dos músculos antagonistas, uno que realice flexiones y otro, que haga extensiones de ese brazo, mano, pie o pierna; se conectan ambos músculos con la prótesis y
mediante rehabilitación fisioterapéutica se trabajan de manera que se "aprenda" a contraer cada músculo para flexionar o extender según interese.
Dichas prótesis incluyen unos sensores que recogen el movimiento de esos músculos, llevan el impulso a un servomotor, motor que gira en una u otra dirección
según el impulso que le llegue y controla así la prótesis, haciendo que ésta se mueva en uno u otro sentido (Acosta, Burne, Cabrera, & Casenave, 2009)36.
Control Mioeléctrico: se basa en el concepto de que siempre que un musculo en
el cuerpo se contrae, se produce una pequeña señal (EMG), la cual es creada por la interacción química en el cuerpo. Esta señal es muy pequeña (5 a 20 μV) Un
micro-voltio es una millonésima parte de un voltio (Ríos Murillo, Flores Lona, & Juárez Mendoza, 2005)37.
35 Torres Ríos, C. S. (s.f.). Prótesis Mioeléctrica. Cuenca: Universidad Politécnica Salesiana. 36 Acosta, A., Burne, P., Cabrera, S., & Casenave, M. (13 de Noviembre de 2009). Obtenido de Blogger: http://protesismioelectricas.blogspot.com/ 37 Ríos Murillo, P., Flores Lona, I., & Juárez Mendoza, A. (18 de Enero de 2005). Prótesis Mioeléctricas. Revista UNAM, 6(1), 9. Recuperado el 23 de Marzo de 2013, de http://www.revista.unam.mx/vol.6/num1/art01/art01-2d.htm

27
4.1.2 Principios Electrónicos
Electrodo: un electrodo es un conductor eléctrico utilizado para hacer contacto, los
tipos de electrodos utilizados en las prótesis mioeléctricas son los electrodos secos
que se encuentran en contacto directo con la piel (Cifuentes González, 2010)38.
Electrodo Seco: con los electrodos secos es común tener un circuito preamplificador
cerca al electrodo, debido a la gran impedancia entre la piel y el electrodo asociada a los electrodos secos.
Debido a que los electrodos secos son más pesados (típicamente mayores a 20g) que
los electrodos con gel (típicamente menores a 1g), es más difícil mantener la fijación del electrodo a la piel comparado con los electrodos con gel como se muestran en la
ilustración 6 (Betancourt, Giraldo Suárez, & Franco B, 2004)39.
Con este gel se mejora la conductividad y el flujo de corriente característica,
adicionalmente minimiza el ruido generado con el contacto de la piel con respecto al
flujo del corriente.
Estos electrodos están fabricados con oro, plata y cloruro de plata ya que estos
materiales son de alta conductividad son los más utilizados para realizar la adquisición
de las señales EMG, una ventaja importante es que no tienen polaridad, con esto se tiene que la impedancia y la piel es de tipo resistivo y no capacitiva.
Ilustración 6. Electrodos de Gel
(ELECTRAMED)40
38 Cifuentes González, I. A. (2010). Diseño y Construcción de un Sistema para la Detección de
Señales Electromiográficas. Mérida: Universidad Autónoma de Yucatán. 39 Betancourt, G., Giraldo Suárez, E., & Franco B, J. F. (2004). Reconocimiento de patrones de movimiento a partir de señales electromiográficas. Scientia et Technica. 40 ELECTRAMED. (s.f.). Obtenido de ELECTRAMED CORPORATION: https://www.electramed.com/neurology/electrodes/disposable/em12000030 -meditrace-230-adult-electrode-30pk
28
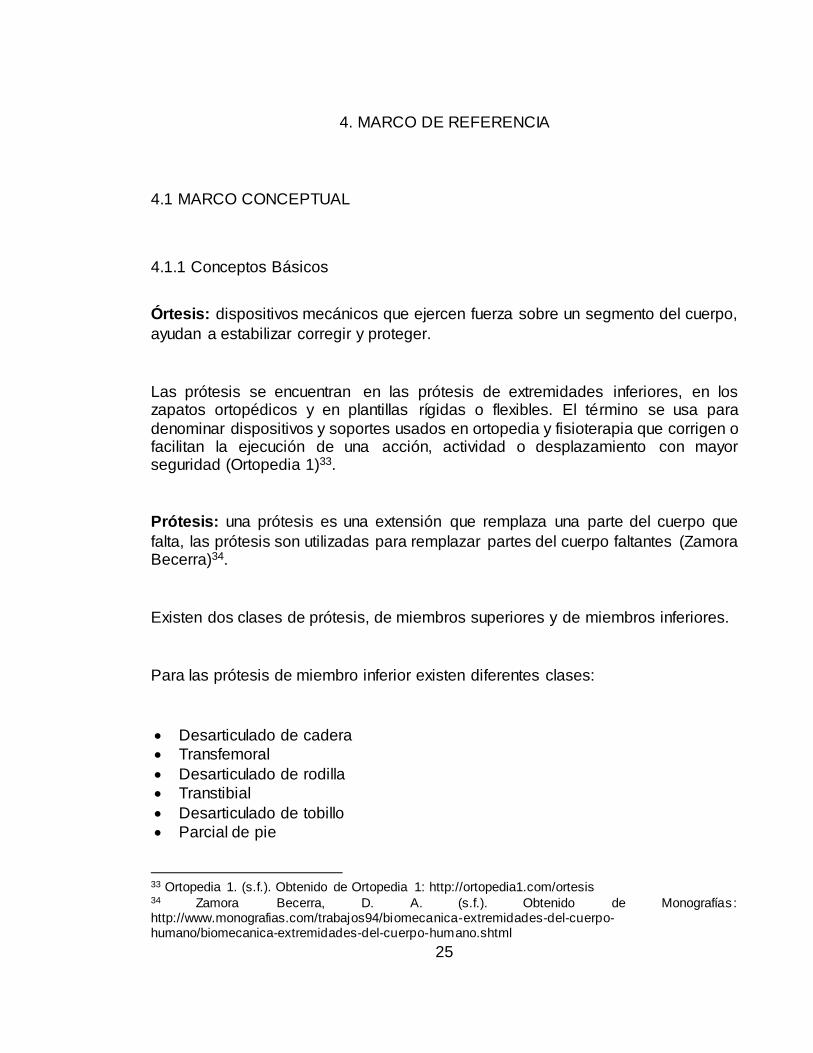
Seguidor de Voltaje: del amplificador no inversor, se puede deducir que la
ganancia mínima es la unidad, si R2 es cero, o si R1 se deja en circuito abierto. La tensión de salida sigue a la entrada (seguidor) como se muestra en la ilustración 7.
Se utiliza principalmente como etapa de adaptación de la entrada, proporcionando una resistencia de entrada elevada (Villalba Madrid & Zamora Izquierdo)41.
Ilustración 7. Seguidor de Voltaje
(Villalba Madrid & Zamora Izquierdo)42
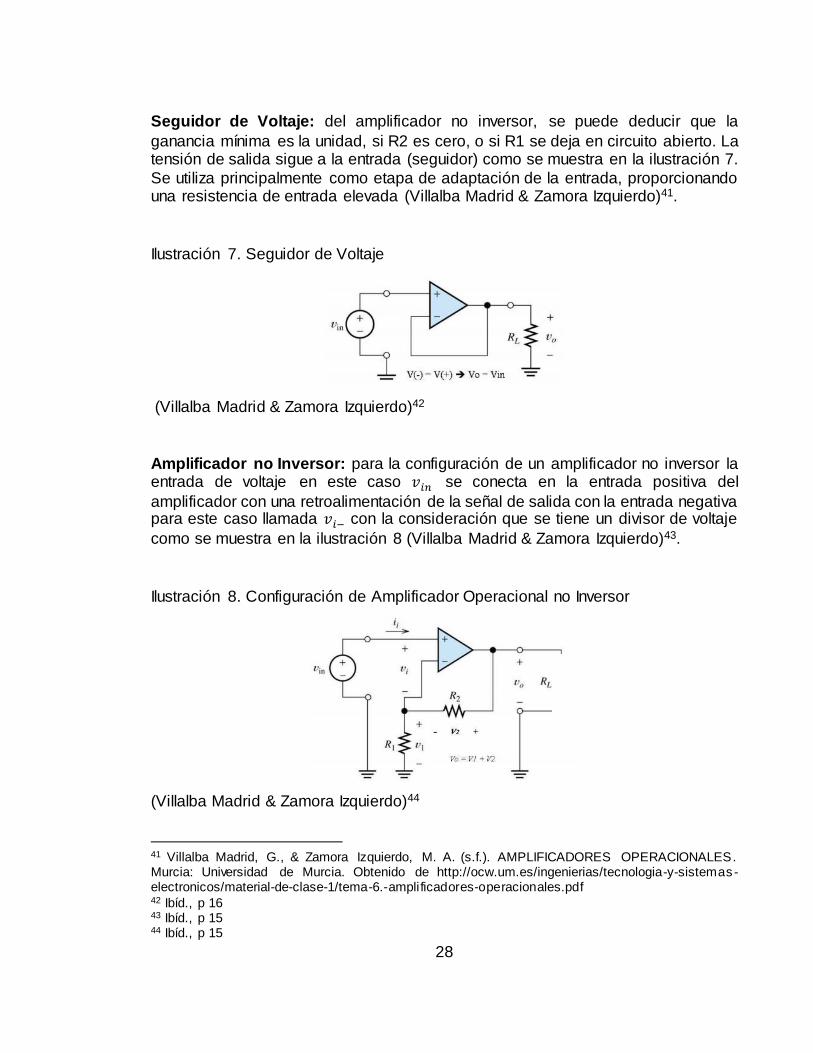
Amplificador no Inversor: para la configuración de un amplificador no inversor la entrada de voltaje en este caso 𝑣𝑖𝑛 se conecta en la entrada positiva del
amplificador con una retroalimentación de la señal de salida con la entrada negativa para este caso llamada 𝑣𝑖− con la consideración que se tiene un divisor de voltaje
como se muestra en la ilustración 8 (Villalba Madrid & Zamora Izquierdo)43.
Ilustración 8. Configuración de Amplificador Operacional no Inversor
(Villalba Madrid & Zamora Izquierdo)44
41 Villalba Madrid, G., & Zamora Izquierdo, M. A. (s.f.). AMPLIFICADORES OPERACIONALES. Murcia: Universidad de Murcia. Obtenido de http://ocw.um.es/ingenierias/tecnologia-y-sistemas-electronicos/material-de-clase-1/tema-6.-amplificadores-operacionales.pdf 42 Ibíd., p 16 43 Ibíd., p 15 44 Ibíd., p 15
29
Para el respectivo cálculo de las resistencias y con ellas poder obtener la ganancia
que se necesite se utiliza la siguiente expresión.
Ecuación 1. Ecuación Característica de Ganancia Ideal para Amplificador no Inversor
𝑣𝑜
𝑣𝑖𝑛
=𝑅1 + 𝑅2
𝑅1
(Villalba Madrid & Zamora Izquierdo)45
Filtros: Para la electrónica se entiende como filtro un elemento donde permite el
paso de una señal con una frecuencia o rangos de frecuencia al mismo tiempo
impidiendo el paso de otras frecuencias que se pueden considerar como ruido (Simbologia Electrónica)46.
Existen una gran variedad de estos mismos la cual se explican los empleados para
el procesamiento de las señales EMG y la señal de salida del acelerómetro usado.
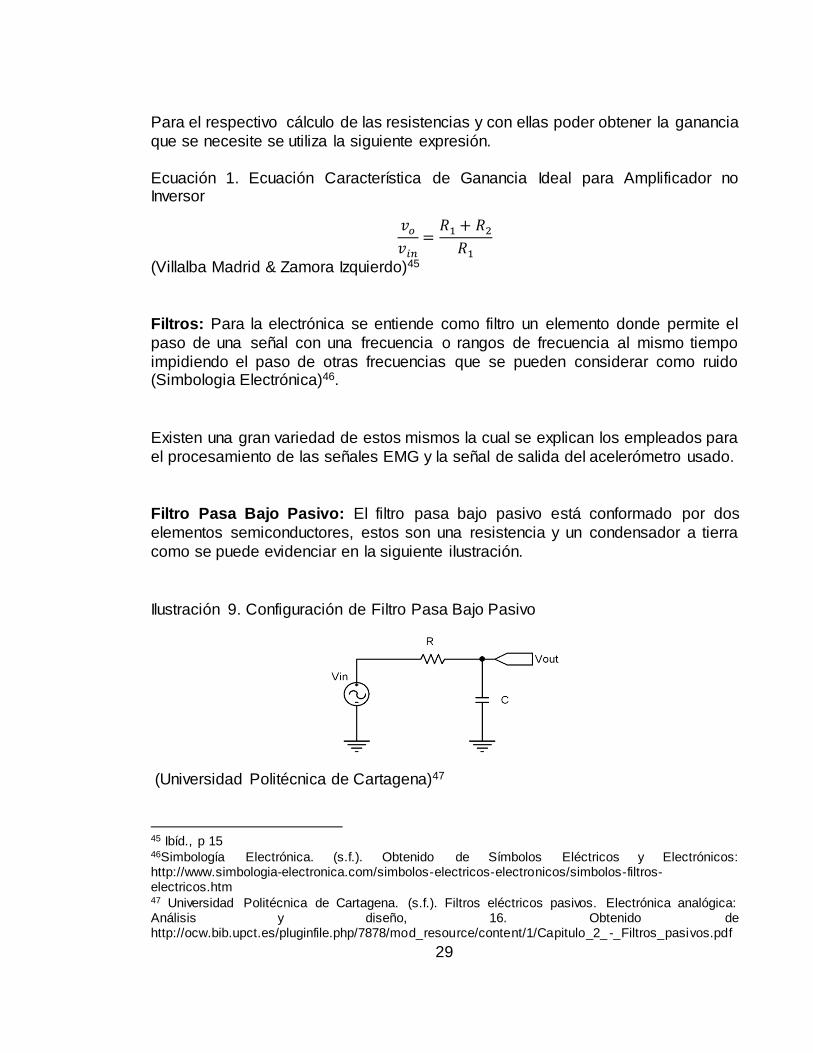
Filtro Pasa Bajo Pasivo: El filtro pasa bajo pasivo está conformado por dos
elementos semiconductores, estos son una resistencia y un condensador a tierra
como se puede evidenciar en la siguiente ilustración.
Ilustración 9. Configuración de Filtro Pasa Bajo Pasivo
(Universidad Politécnica de Cartagena)47
45 Ibíd., p 15 46Simbología Electrónica. (s.f.). Obtenido de Símbolos Eléctricos y Electrónicos: http://www.simbologia-electronica.com/simbolos-electricos-electronicos/simbolos-filtros-electricos.htm 47 Universidad Politécnica de Cartagena. (s.f.). Filtros eléctricos pasivos. Electrónica analógica: Análisis y diseño, 16. Obtenido de http://ocw.bib.upct.es/pluginfile.php/7878/mod_resource/content/1/Capitulo_2_ -_Filtros_pasivos.pdf
30
Para el cálculo respectivo de este filtro, es necesario conocer la frecuencia de corte
deseada, esta se haya mediante a siguiente ecuación:
Ecuación 2. Cálculo para un Filtro Pasa Bajos Pasivo
𝑓𝑐 =1
2𝜋 ∗ 𝑅 ∗ 𝐶
(Universidad Politécnica de Cartagena)48
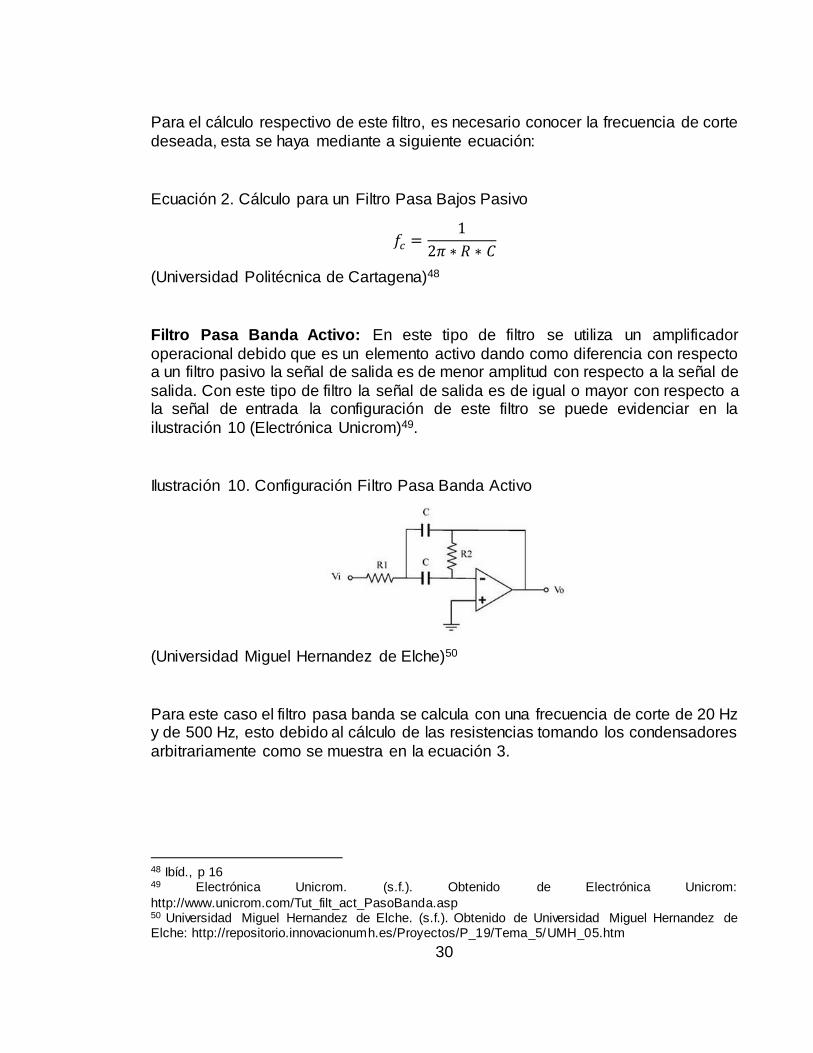
Filtro Pasa Banda Activo: En este tipo de filtro se utiliza un amplificador
operacional debido que es un elemento activo dando como diferencia con respecto a un filtro pasivo la señal de salida es de menor amplitud con respecto a la señal de
salida. Con este tipo de filtro la señal de salida es de igual o mayor con respecto a la señal de entrada la configuración de este filtro se puede evidenciar en la
ilustración 10 (Electrónica Unicrom)49.
Ilustración 10. Configuración Filtro Pasa Banda Activo
(Universidad Miguel Hernandez de Elche)50
Para este caso el filtro pasa banda se calcula con una frecuencia de corte de 20 Hz y de 500 Hz, esto debido al cálculo de las resistencias tomando los condensadores
arbitrariamente como se muestra en la ecuación 3.
48 Ibíd., p 16 49 Electrónica Unicrom. (s.f.). Obtenido de Electrónica Unicrom:
http://www.unicrom.com/Tut_filt_act_PasoBanda.asp 50 Universidad Miguel Hernandez de Elche. (s.f.). Obtenido de Universidad Miguel Hernandez de Elche: http://repositorio.innovacionumh.es/Proyectos/P_19/Tema_5/UMH_05.htm

31
Ecuación 3. Cálculo de Resistencia para Filtro Pasa Banda
𝑅 =1
2𝜋 ∗ 𝑐 ∗ 𝑓𝑐
(Universidad Miguel Hernandez de Elche)51
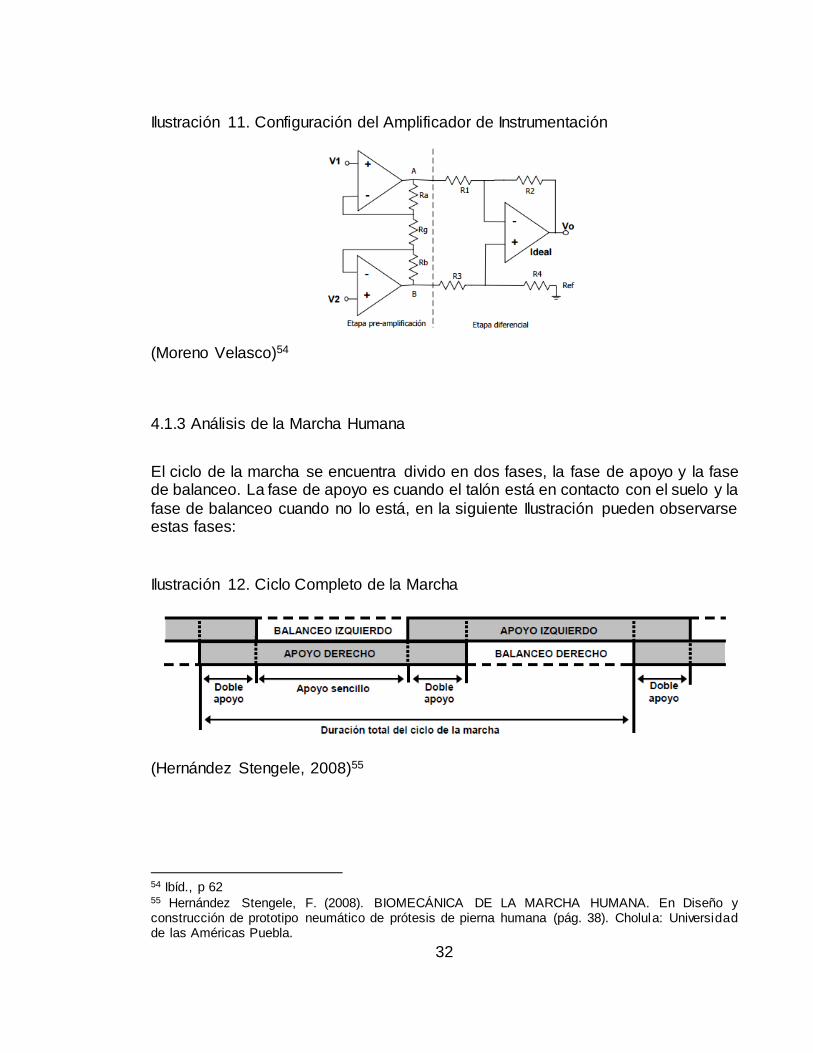
Amplificador de Instrumentación: Esta configuración está compuesta con 3
amplificadores operacionales lo cual está dividida en dos partes que son el amplificador aislador y diferencial básico en esta configuración existen cuatro
resistencias del mismo valor teniendo como resultado una amplificación diferencial con una ganancia unitaria para que exista una ganancia en la salida con respecto a la entrada está dada por la ecuación 4 (Moreno Velasco)52.
Ecuación 4. Ecuación para la Ganancia del Amplificador de Instrumentación
𝑣𝑜𝑢𝑡
𝑣𝑖𝑛2 − 𝑣𝑖𝑛1
=1 +
𝑅𝑅7
𝑅
(Moreno Velasco)53
Con la ecuación anterior la ganancia se determina con la variación de la resistencia R obteniendo así como resultado el voltaje de salida es la diferencia entre los voltajes de entrada con la multiplicación de la ganancia para la configuración de este
circuito se puede evidenciar en la ilustración 11.
51 Ibíd. 52 Moreno Velasco, I. (s.f.). Apuntes de Instrumentación Electrónica. Obtenido de http://www.unet.edu.ve/~ielectro/42-AmplificadorInstrumentacion.pdf 53 Ibíd., p 62
32
Ilustración 11. Configuración del Amplificador de Instrumentación
(Moreno Velasco)54
4.1.3 Análisis de la Marcha Humana
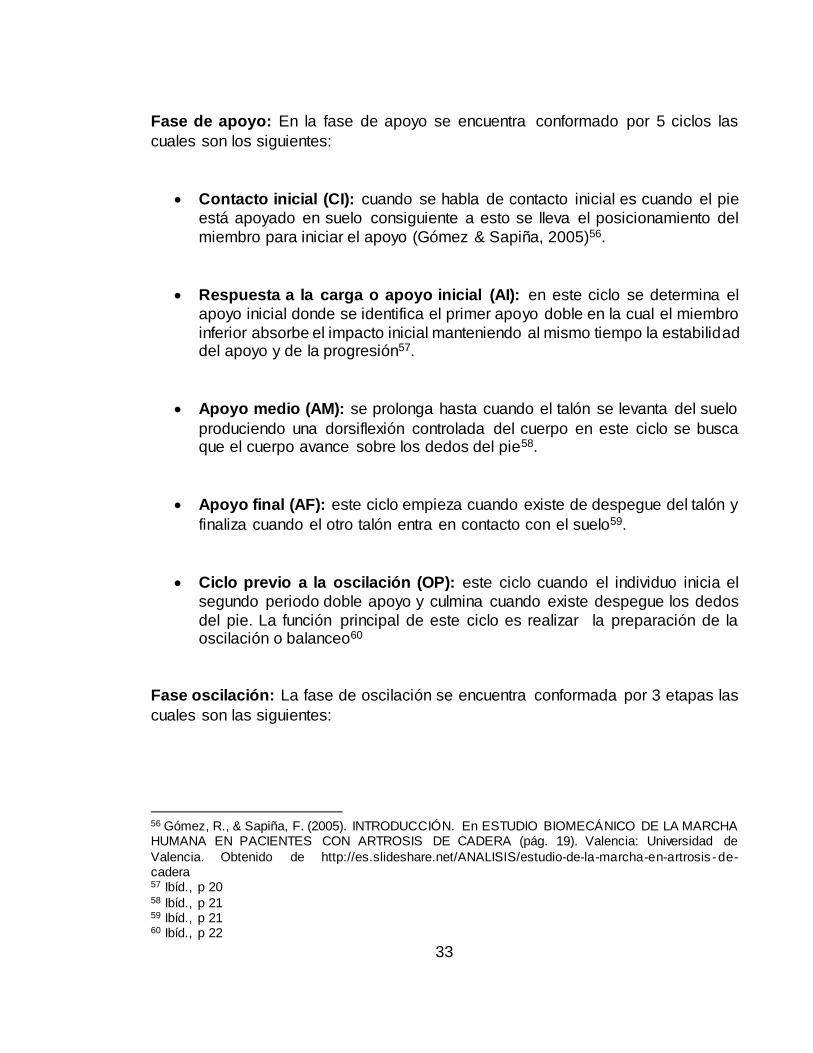
El ciclo de la marcha se encuentra divido en dos fases, la fase de apoyo y la fase de balanceo. La fase de apoyo es cuando el talón está en contacto con el suelo y la
fase de balanceo cuando no lo está, en la siguiente Ilustración pueden observarse estas fases:
Ilustración 12. Ciclo Completo de la Marcha
(Hernández Stengele, 2008)55
54 Ibíd., p 62 55 Hernández Stengele, F. (2008). BIOMECÁNICA DE LA MARCHA HUMANA. En Diseño y construcción de prototipo neumático de prótesis de pierna humana (pág. 38). Cholula: Universidad de las Américas Puebla.
33
Fase de apoyo: En la fase de apoyo se encuentra conformado por 5 ciclos las
cuales son los siguientes:
Contacto inicial (CI): cuando se habla de contacto inicial es cuando el pie
está apoyado en suelo consiguiente a esto se lleva el posicionamiento del
miembro para iniciar el apoyo (Gómez & Sapiña, 2005)56.
Respuesta a la carga o apoyo inicial (AI): en este ciclo se determina el
apoyo inicial donde se identifica el primer apoyo doble en la cual el miembro
inferior absorbe el impacto inicial manteniendo al mismo tiempo la estabilidad del apoyo y de la progresión57.
Apoyo medio (AM): se prolonga hasta cuando el talón se levanta del suelo
produciendo una dorsiflexión controlada del cuerpo en este ciclo se busca que el cuerpo avance sobre los dedos del pie58.
Apoyo final (AF): este ciclo empieza cuando existe de despegue del talón y
finaliza cuando el otro talón entra en contacto con el suelo59.
Ciclo previo a la oscilación (OP): este ciclo cuando el individuo inicia el
segundo periodo doble apoyo y culmina cuando existe despegue los dedos
del pie. La función principal de este ciclo es realizar la preparación de la oscilación o balanceo60
Fase oscilación: La fase de oscilación se encuentra conformada por 3 etapas las
cuales son las siguientes:
56 Gómez, R., & Sapiña, F. (2005). INTRODUCCIÓN. En ESTUDIO BIOMECÁNICO DE LA MARCHA HUMANA EN PACIENTES CON ARTROSIS DE CADERA (pág. 19). Valencia: Universidad de
Valencia. Obtenido de http://es.slideshare.net/ANALISIS/estudio-de-la-marcha-en-artrosis -de-cadera 57 Ibíd., p 20 58 Ibíd., p 21 59 Ibíd., p 21 60 Ibíd., p 22

34
Etapa inicial de oscilación (OI): en esta etapa se determinan los límites
para el despegue del pie y el momento de avance del mismo, esto se da gracias a la flexión de cadera y rodilla que se produce con el fin de asegurar
la separación correcta entre el pie y el suelo61.
Etapa media de oscilación (OM): esta etapa da inicio cuando se cruzan los
pies y termina cuando la tibia oscilante llega a una posición vertical. Para que
se logre el avance del pie a una distancia suficiente para evitar que se estrelle con el suelo esta distancia se logra gracias a la dorsiflexión del tobillo62.
Etapa final de oscilación (OF): se encuentra limitada la etapa debido por el
siguiente contacto del pie con el suelo. con lo anterior se lleva a cabo una zancada. Esta etapa termina con el avance del pie y se prepara para el contacto con esto manteniendo el tobillo a 0° con respecto a la tibia63.
Biomecánica del tobillo: Las articulaciones tibioastragalina y subatragalina la
unción que cumplen de brindar apoyo horizontal entre la tibia el pie soportando las fuerzas verticales del cuerpo. El astrágalo ubicado bajo el eje de la tibia con esto
permitiendo la movilidad en tres dimensiones a través de un mecanismo básico de dos ejes no paralelos, en la siguiente ilustración se representa el ángulo de flexo
tensión del tobillo, del momento articular y de la potencia articular.
61 Ibíd., p 23 62 Ibíd., p 24 63 Ibíd., p 24

35
Ilustración 13. Biomecánica del Tobillo
(Gómez & Sapiña, 2005)64
4.1.4 Compensadores en Adelanto: Método Bisectriz
Este tipo de compensadores están diseñados para generar un adelanto en la fase del sistema para llegar a las especificaciones requeridas por el sistema, por tal
motivo convierte el sistema estable y acelerando el tiempo de estabilización.
64 Ibíd., p 25
36
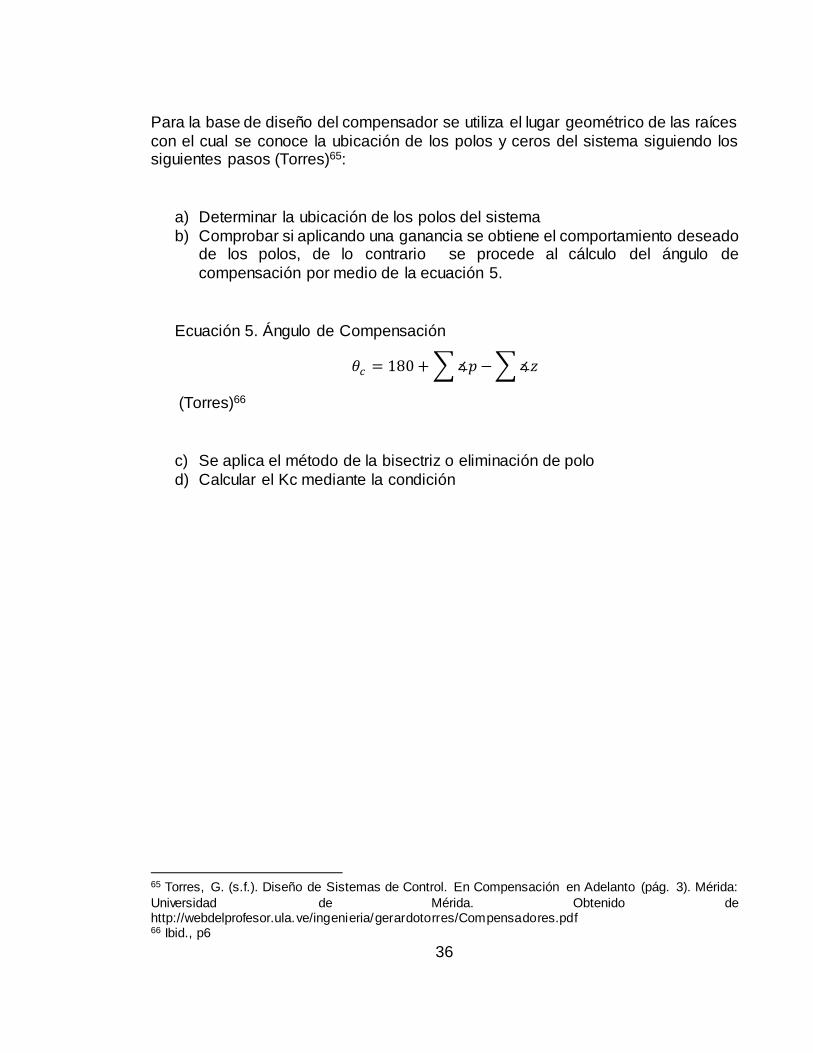
Para la base de diseño del compensador se utiliza el lugar geométrico de las raíces
con el cual se conoce la ubicación de los polos y ceros del sistema siguiendo los siguientes pasos (Torres)65:
a) Determinar la ubicación de los polos del sistema
b) Comprobar si aplicando una ganancia se obtiene el comportamiento deseado de los polos, de lo contrario se procede al cálculo del ángulo de
compensación por medio de la ecuación 5.
Ecuación 5. Ángulo de Compensación
𝜃𝑐 = 180 + ∑ ∡𝑝 − ∑ ∡𝑧
(Torres)66
c) Se aplica el método de la bisectriz o eliminación de polo
d) Calcular el Kc mediante la condición
65 Torres, G. (s.f.). Diseño de Sistemas de Control. En Compensación en Adelanto (pág. 3). Mérida:
Universidad de Mérida. Obtenido de http://webdelprofesor.ula.ve/ingenieria/gerardotorres/Compensadores.pdf 66 Ibid., p6

37
5. DISEÑO ELECTRÓNICO
El diseño electrónico o procesamiento de las señales electromiográficas se genera por la necesidad de utilizar estas señales para el funcionamiento de la prótesis.
Al tener un voltaje en el orden de los milivoltios es necesario amplificar y filtrar la
señal para suprimir el ruido y obtener exclusivamente la parte útil de señal.
Para adquirir la señal EMG se utilizan dos electrodos secos, mencionados en el capítulo anterior, ubicados en los músculos de forma adecuada como se muestra en la ilustración 14, con el fin de captar una mayor amplitud en la señal. La ubicación
de los electrodos de referencia es en tobillos o codos, y los de adquisición se encuentran en el muñón, teniendo en cuenta la SENIAM (Surface
ElectroMyoGraphy for the Non-Invasive Assessment of Muscles). Son normas europeas en materia de superficie electromiografía (Stegeman & Hermens)67.
Tomando en cuenta las señales que se generan en los músculos inferiores como
en la ilustración 6, se lleva a cabo el proceso seguido por (Andrade Maquilón & Paz Ruíz, 2011)68, teniendo como resultado que los puntos en los cuales el músculo tiene una mayor amplitud, son los indicados para la adquisición de la señal.
Ilustración 14. Amplitud de la Señal EMG en Miembro Inferior
(Andrade Maquilón & Paz Ruíz, 2011)69
67 Stegeman, D. F., & Hermens, H. J. (s.f.). Standards for surface electromyography: the European project "Surface EMG for non-invasive assessment of muscles (SENIAM)”. Obtenido de http://www.med.uni-jena.de/motorik/pdf/stegeman.pdf 68 Andrade Maquilón, M. E., & Paz Ruíz, N. E. (2011). Prótesis Transfemoral Electromecánica, Controlada a Base de Señales Mioeléctricas. Popayán: Universidad Antonio Nariño. 69 Ibíd., p 19
38
5.1 ADQUISICIÓN DE SEÑALES MIOELÉCTRICAS PRELIMINAR
Al conocer la ubicación de los electrodos, se lleva a cabo el diseño para el
procesamiento de la señal, obtenido como resultado valores en milivoltios y con una frecuencia oscilatoria en MHz, se realizan las siguientes etapas:
Pre-amplificación
Acople a tierra
Filtros
5.1.1 Pre-Amplificación
La etapa de pre-amplificación se realiza por medio de un amplificador de instrumentación (INA128); su aplicación principal es para realizar
electrocardiogramas, este no se implementa debido a su respuesta con retraso de dos segundos al momento de realizar una amplificación, esto se debe al alto
rechazo en modo común (CMRR) del componente con un valor de 120 dB, lo cual es muy alto y presenta ruido en la escala de los MHz al instante de la lectura de la señal EMG.
Teniendo en cuenta el inconveniente presentado con el INA128, se busca un amplificador de instrumentación con mejores características, tomando el AD620 donde la respuesta y la lectura son muy aproximadas a las de tiempo real,
adicionalmente a lo anterior, este componente funciona en altas frecuencias. El rechazo en modo común (CMRR) es alto, con lo cual permite una mejor
amplificación en la diferencia de tensión con respecto a la referencia para la señal EMG (para conocer más características del AD620 ver anexo 11.1).
Con lo anterior se procede a diseñar la etapa de pre-amplificación para el
procesamiento de la señal EMG, la determinación de la ganancia en la salida del amplificador se logra por medio de la resistencia Rg como se muestra en la ilustración 15, donde se aprecia la configuración del AD620; para conocer el valor
de la resistencia Rg se utiliza la ecuación 6.

39
Ilustración 15. Configuración del Amplificador de Instrumentación AD620
(ANALOG DEVICES, 2011)70
Ecuación 6. Ecuación para el Cálculo de la Resistencia de Ganancia
𝑅𝑔 =49.4 KΩ
𝐺 − 1
(ANALOG DEVICES, 2011)71
Donde Rg es la resistencia de la ganancia en KΩ y G la ganancia deseada.
Con estos parámetros se quiere obtener una ganancia de 500 para evitar que exista una saturación del amplificador y que el mismo pueda trabajar en óptimas condiciones. Para conocer el valor de Rg se remplazan los valores, quedando de la
forma presentada en la siguiente ecuación:
𝑅𝑔 =49.33 Ω
500 − 1
𝑅𝑔 = 98.79Ω
70 ANALOG DEVICES. (2011). Low Cost, Low Power Instrumentation Amplifier AD620. Norwood. Obtenido de http://www.analog.com/media/en/technical -documentation/data-sheets/AD620.pdf 71 Ibíd., p 3
40
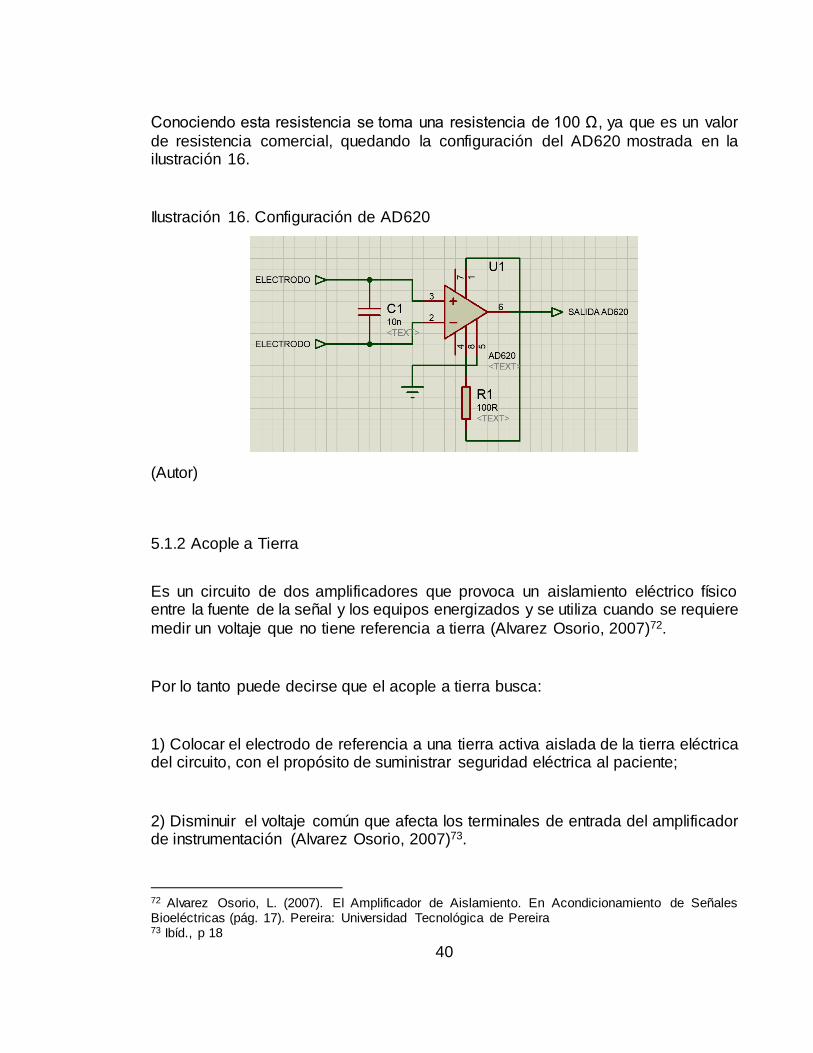
Conociendo esta resistencia se toma una resistencia de 100 Ω, ya que es un valor
de resistencia comercial, quedando la configuración del AD620 mostrada en la ilustración 16.
Ilustración 16. Configuración de AD620
(Autor)
5.1.2 Acople a Tierra
Es un circuito de dos amplificadores que provoca un aislamiento eléctrico físico entre la fuente de la señal y los equipos energizados y se utiliza cuando se requiere
medir un voltaje que no tiene referencia a tierra (Alvarez Osorio, 2007)72.
Por lo tanto puede decirse que el acople a tierra busca:
1) Colocar el electrodo de referencia a una tierra activa aislada de la tierra eléctrica del circuito, con el propósito de suministrar seguridad eléctrica al paciente;
2) Disminuir el voltaje común que afecta los terminales de entrada del amplificador de instrumentación (Alvarez Osorio, 2007)73.
72 Alvarez Osorio, L. (2007). El Amplificador de Aislamiento. En Acondicionamiento de Señales Bioeléctricas (pág. 17). Pereira: Universidad Tecnológica de Pereira 73 Ibíd., p 18

41
Para conseguir lo anterior es utilizada la configuración de la ilustración 17, donde
se evidencia el uso de dos amplificadores operacionales.
Ilustración 17. Acople a Tierra
(Autor)
En el acople a tierra se toma la resistencia R2 por defecto de 20 𝐾Ω, un amplificador
seguidor de voltaje y uno inversor. Los amplificadores tomados son de referencia
UA 741CN.
En el amplificador operacional inversor se toma la ecuación básica para encontrar las resistencias R1 y Rf si se sabe que la ganancia es de 1.
Ecuación 7. Resistencias de Ganancia
𝐺 =𝑅𝑓
𝑅1
1 =𝑅𝑓
𝑅1
1 =2.2 𝐾Ω
2.2 𝐾Ω
Teniendo en cuenta los valores de las resistencias encontrados anteriormente y la configuración mostrada en la ilustración 17, se reemplazan los valores y queda de
la forma presentada a continuación:

42
Ilustración 18. Circuito de Acople a Tierra Preliminar
(Autor)
5.1.3 Filtros
5.1.3.1 ATENUACIÓN DEL VOLTAJE DC
Las señales DC que se generan en la salida del amplificador AD620, aunque son relativamente pequeñas pueden causar una saturación y ruido en el dispositivo, por lo que es necesario eliminar y limpiar la señal desde este punto del circuito. Para
realizar la eliminación se cuenta con un amplificador operacional UA741CN, una resistencia y un condensador como se muestra en la ilustración 19, usando la
configuración de un filtro pasa altas activo.
Ilustración 19. Eliminación de Señal DC
(Autor)
43
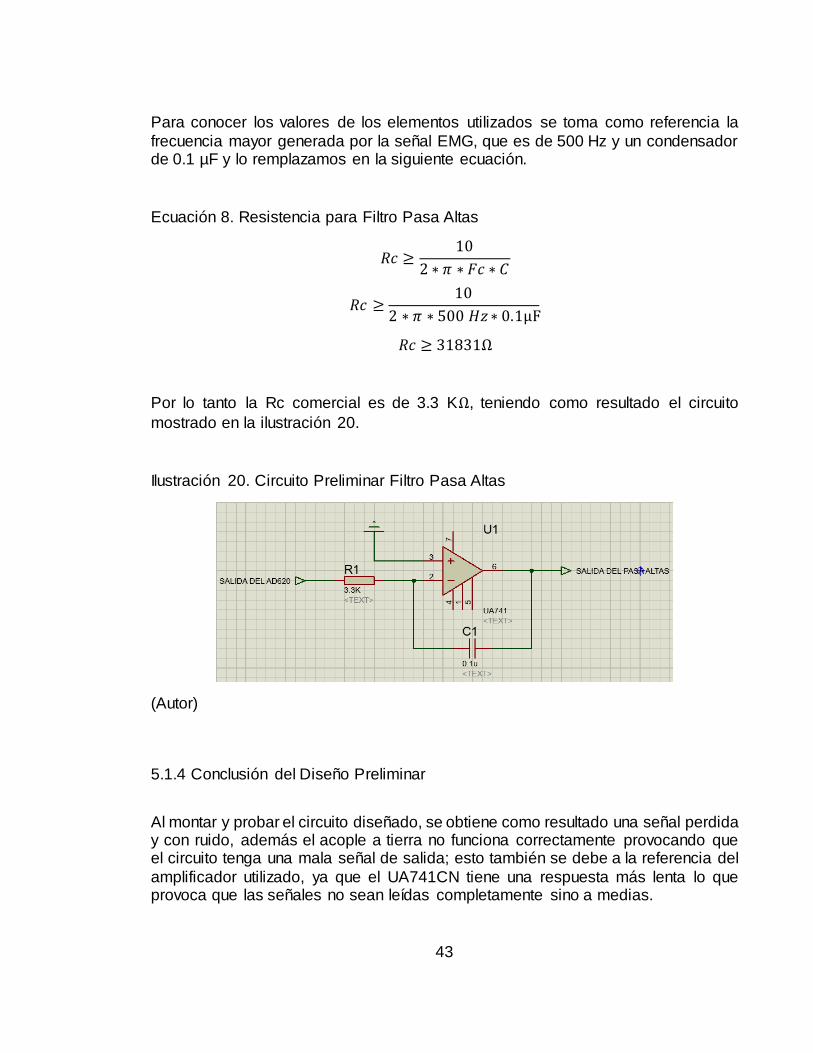
Para conocer los valores de los elementos utilizados se toma como referencia la
frecuencia mayor generada por la señal EMG, que es de 500 Hz y un condensador de 0.1 µF y lo remplazamos en la siguiente ecuación.
Ecuación 8. Resistencia para Filtro Pasa Altas
𝑅𝑐 ≥10
2 ∗ 𝜋 ∗ 𝐹𝑐 ∗ 𝐶
𝑅𝑐 ≥10
2 ∗ 𝜋 ∗ 500 𝐻𝑧 ∗ 0.1µF
𝑅𝑐 ≥ 31831Ω
Por lo tanto la Rc comercial es de 3.3 KΩ, teniendo como resultado el circuito
mostrado en la ilustración 20.
Ilustración 20. Circuito Preliminar Filtro Pasa Altas
(Autor)
5.1.4 Conclusión del Diseño Preliminar
Al montar y probar el circuito diseñado, se obtiene como resultado una señal perdida y con ruido, además el acople a tierra no funciona correctamente provocando que el circuito tenga una mala señal de salida; esto también se debe a la referencia del
amplificador utilizado, ya que el UA741CN tiene una respuesta más lenta lo que provoca que las señales no sean leídas completamente sino a medias.
44
5.2 ADQUISICIÓN DE SEÑALES MIOELÉCTRICAS FINAL
Teniendo en cuenta los resultados obtenidos anteriormente, se busca un amplificador que pueda trabajar con altas frecuencias, para que en el momento de
procesamiento de la señal EMG sea óptimo y no tener problemas al realizar la adquisición que más adelante controlará la prótesis.
Por tal motivo se escoge el amplificador operacional TL074, que en su construcción
interna cuenta con 4 amplificadores independientes y su respuesta a altas frecuencias es muy buena ya que no retrasa la señal, solucionado el problema de pérdidas; para conocer más de las características ver anexo 11.2.
Con la modificación de los amplificadores operacionales cambia las etapas en las que se realiza el procesamiento de la señal, las etapas que se encuentran son las siguientes:
Pre-amplificación
Amplificación inicial
Acople a tierra
Filtros
Amplificación final
5.2.1 Etapa Pre-Amplificación
En la etapa de pre-amplificación se utiliza el mismo amplificador mencionado en la sección 5.1.1, ya que esta configuración no presenta fallas en la adquisición de la
señal EMG.
5.2.2 Amplificación Inicial
Como la señal de salida en la pre-amplificación es demasiado pequeña y no se aprecia en detalle la variación de la señal EMG, la resistencia en la cual se
determina la ganancia para la salida del AD620 permanece igual.
45
Por esta razón se decide realizar una amplificación con una ganancia de 3.2, para
la determinación de las resistencias del amplificador no inversor se usa la siguiente ecuación:
Ecuación 9. Ecuación General Amplificador no Inversor
𝐴𝑉 =𝑅𝑓
𝑅1+ 1
(Villalba Madrid & Zamora Izquierdo)74
Para el conocimiento de los valores de las resistencias se toma una resistencia Rf
de 22K y la ganancia deseada, estos valores son remplazados en la ecuación anterior:
Ecuación 10. Resistencias para Amplificación
3.2 =22 𝐾
𝑅1+ 1
𝑅1 = 22𝐾 ∗ 0.4545
𝑅1 = 10 𝐾
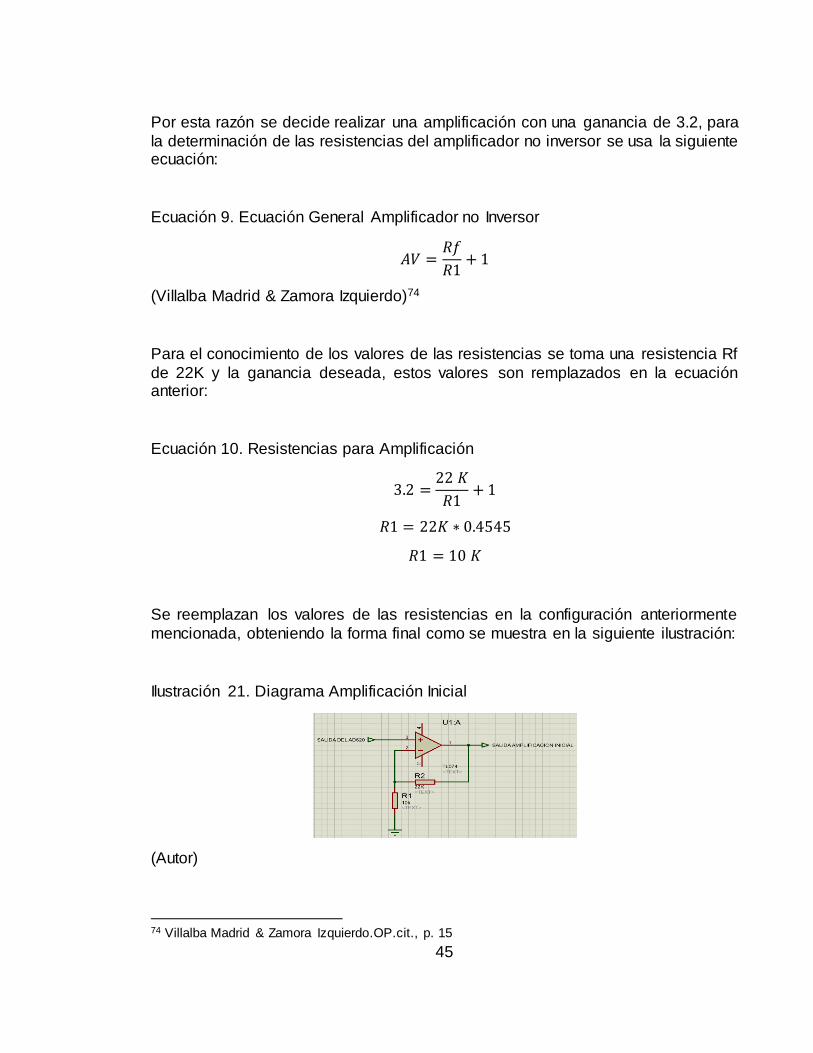
Se reemplazan los valores de las resistencias en la configuración anteriormente
mencionada, obteniendo la forma final como se muestra en la siguiente ilustración:
Ilustración 21. Diagrama Amplificación Inicial
(Autor)
74 Villalba Madrid & Zamora Izquierdo.OP.cit., p. 15

46
5.2.3 Filtros
Debido que el rango de funcionamiento de la señal EMG es de 50 Hz y 150 Hz aunque el canal de información de esta señal oscila entre los 20 Hz y los 500 Hz
(Romo, Realpe, & Jojoa, 2007)75 donde estos valores son los usados para realizar los respectivos cálculos de los filtros.
5.2.4 Filtro Pasa Altas Butterworth de Orden 1
El filtro pasa altas permite eliminar la señal que se encuentra por debajo de los 20 Hz, la señal que se elimina es el ruido ocasionado por el movimiento del cable de
los electrodos, el movimiento que se genera entre la piel y el electrodo, para el respectivo cálculo de este filtro se obtiene por medio de la ecuación 11 donde
tomamos un condensador y la frecuencia de corete para este caso que son los 20Hz.
Ecuación 11. Resistencia para Filtro Pasa Altas
𝑅𝑐 =1
2 ∗ 𝜋 ∗ 𝐹𝑐 ∗ 𝐶
𝑅𝑐 =1
2 ∗ 𝜋 ∗ 20𝐻𝑧 ∗ 0.1 µF
𝑅𝑐 = 79.57𝑘Ω
Ya que el valor de resistencia no es comercial es necesario emplear un trimmer, debido a la variación de resistencia lineal que tiene se puede obtener el valor
deseado, con esta salvedad se obtiene la configuración del filtro como se representa en la ilustración 22.
75 Romo, H. A., Realpe, J. C., & Jojoa, P. E. (2007). Preprocesamiento. En Análisis de Señales EMG Superficiales y su Aplicación en Control de Prótesis de Mano (pág. 2). Medellín: Universidad del Cauca.

47
Ilustración 22. Configuración Filtro Pasa Altas
(Autor)
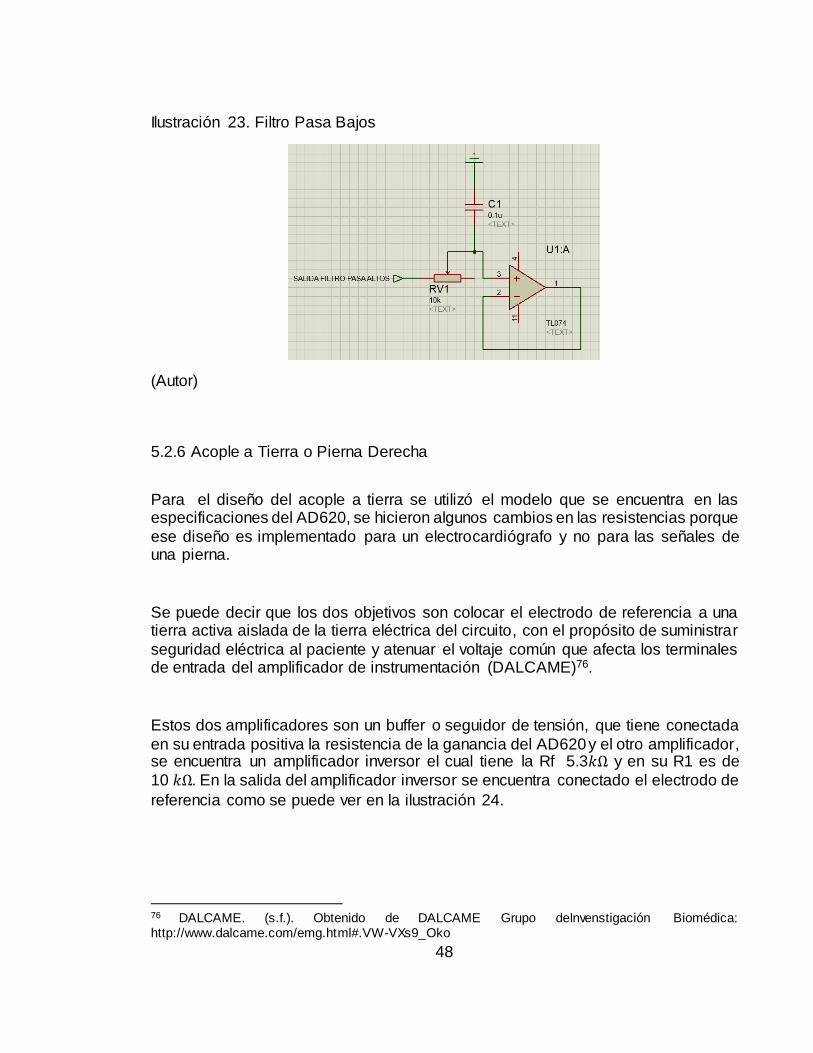
5.2.5 Filtro Pasa Bajas Butterworth de Orden 1
El filtro pasa bajas permite eliminar la señal que se encuentra por encima de los 500Hz, con el fin de obtener una lectura más limpia de la señal y con esto proseguir
en el procesamiento de la señal. Para el cálculo de la resistencia se toma el valor del condensador junto con la frecuencia de corte como puede evidenciarse en la ecuación 12.
Ecuación 12. Resistencia para Filtro Pasa Bajas
𝑅𝑐 =1
2 ∗ 𝜋 ∗ 𝐹𝑐 ∗ 𝐶
𝑅𝑐 =1
2 ∗ 𝜋 ∗ 500𝐻𝑧 ∗ 0.1 µF
𝑅𝑐 = 3.18 𝑘Ω
Ya que los valores de los filtros tienen que ser lo más aproximado posible, para esta
resistencia se emplea un trimmer (en este caso es de 10k). Teniendo como entrada la salida del filtro pasa altas mencionado anteriormente, la configuración de este filtro se muestra en la ilustración 23.
48
Ilustración 23. Filtro Pasa Bajos
(Autor)
5.2.6 Acople a Tierra o Pierna Derecha
Para el diseño del acople a tierra se utilizó el modelo que se encuentra en las especificaciones del AD620, se hicieron algunos cambios en las resistencias porque
ese diseño es implementado para un electrocardiógrafo y no para las señales de una pierna.
Se puede decir que los dos objetivos son colocar el electrodo de referencia a una tierra activa aislada de la tierra eléctrica del circuito, con el propósito de suministrar
seguridad eléctrica al paciente y atenuar el voltaje común que afecta los terminales de entrada del amplificador de instrumentación (DALCAME)76.
Estos dos amplificadores son un buffer o seguidor de tensión, que tiene conectada
en su entrada positiva la resistencia de la ganancia del AD620 y el otro amplificador, se encuentra un amplificador inversor el cual tiene la Rf 5.3𝑘Ω y en su R1 es de
10 𝑘Ω. En la salida del amplificador inversor se encuentra conectado el electrodo de
referencia como se puede ver en la ilustración 24.
76 DALCAME. (s.f.). Obtenido de DALCAME Grupo deInvenstigación Biomédica: http://www.dalcame.com/emg.html#.VW-VXs9_Oko

49
Ilustración 24. Circuito de Acople a Tierra
(Autor)
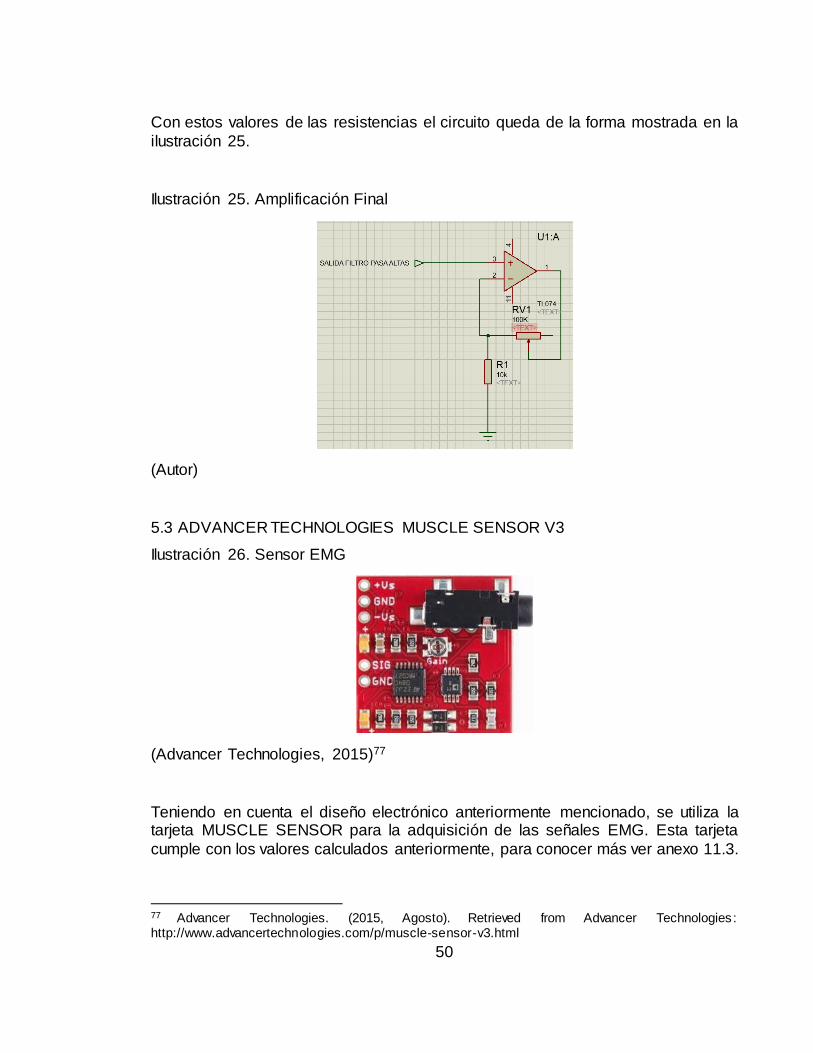
5.2.7 Amplificación Final
Aunque la señal ya se encuentra hasta un punto procesada, sigue siendo mínima, por lo que es necesario amplificarla de nuevo. Para esto, se utilizó un amplificador
no inversor con una ganancia de 5.
Para este caso se maneja una resistencia variable lineal (trimmer) de 100k para la resistencia Rf, se coloca en un valor de 40K, valor con el que se procede a despejar R1, obteniendo lo siguiente:
Ecuación 13. Resistencias para Amplificación Final de la Señal
5 =40 𝐾
𝑅1+ 1
𝑅1 =40 𝐾
4
𝑅1 = 10 𝐾
50
Con estos valores de las resistencias el circuito queda de la forma mostrada en la
ilustración 25.
Ilustración 25. Amplificación Final
(Autor)
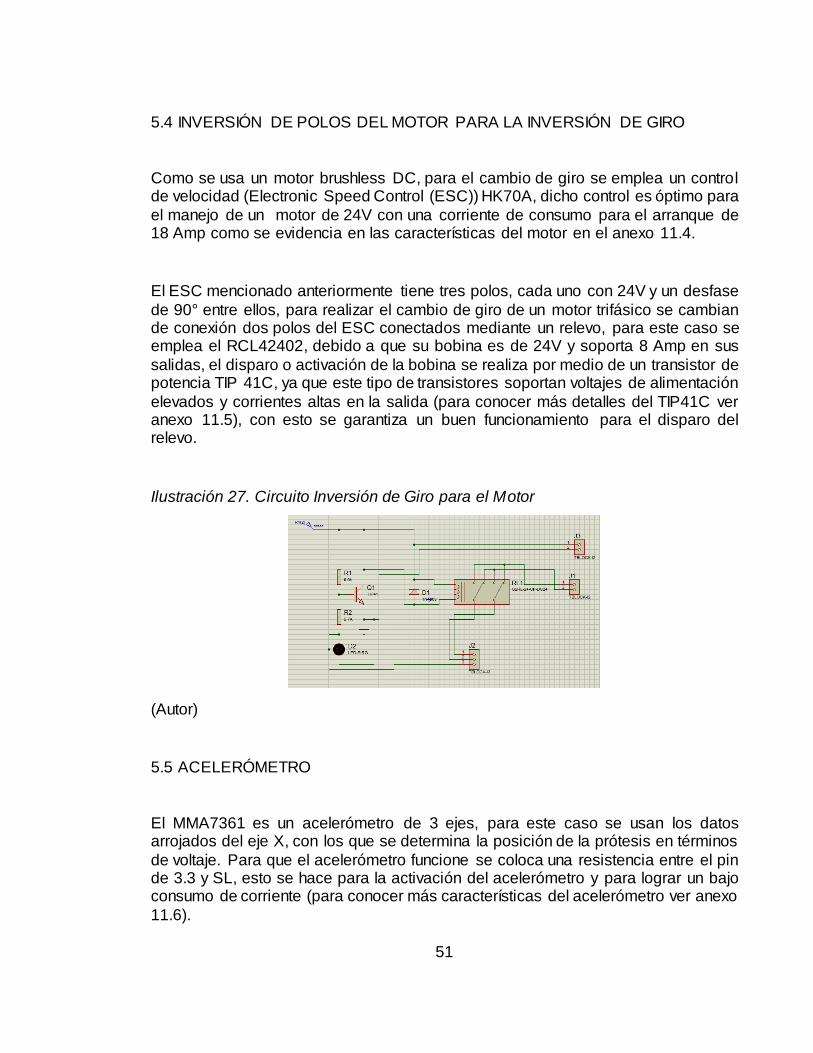
5.3 ADVANCER TECHNOLOGIES MUSCLE SENSOR V3
Ilustración 26. Sensor EMG
(Advancer Technologies, 2015)77
Teniendo en cuenta el diseño electrónico anteriormente mencionado, se utiliza la tarjeta MUSCLE SENSOR para la adquisición de las señales EMG. Esta tarjeta
cumple con los valores calculados anteriormente, para conocer más ver anexo 11.3.
77 Advancer Technologies. (2015, Agosto). Retrieved from Advancer Technologies : http://www.advancertechnologies.com/p/muscle-sensor-v3.html
51
5.4 INVERSIÓN DE POLOS DEL MOTOR PARA LA INVERSIÓN DE GIRO
Como se usa un motor brushless DC, para el cambio de giro se emplea un control de velocidad (Electronic Speed Control (ESC)) HK70A, dicho control es óptimo para
el manejo de un motor de 24V con una corriente de consumo para el arranque de 18 Amp como se evidencia en las características del motor en el anexo 11.4.
El ESC mencionado anteriormente tiene tres polos, cada uno con 24V y un desfase
de 90° entre ellos, para realizar el cambio de giro de un motor trifásico se cambian de conexión dos polos del ESC conectados mediante un relevo, para este caso se emplea el RCL42402, debido a que su bobina es de 24V y soporta 8 Amp en sus
salidas, el disparo o activación de la bobina se realiza por medio de un transistor de potencia TIP 41C, ya que este tipo de transistores soportan voltajes de alimentación
elevados y corrientes altas en la salida (para conocer más detalles del TIP41C ver anexo 11.5), con esto se garantiza un buen funcionamiento para el disparo del relevo.
Ilustración 27. Circuito Inversión de Giro para el Motor
(Autor)
5.5 ACELERÓMETRO
El MMA7361 es un acelerómetro de 3 ejes, para este caso se usan los datos arrojados del eje X, con los que se determina la posición de la prótesis en términos
de voltaje. Para que el acelerómetro funcione se coloca una resistencia entre el pin de 3.3 y SL, esto se hace para la activación del acelerómetro y para lograr un bajo consumo de corriente (para conocer más características del acelerómetro ver anexo
11.6).

52
Ilustración 28. Acelerómetro MMA7361
(4tronix)78
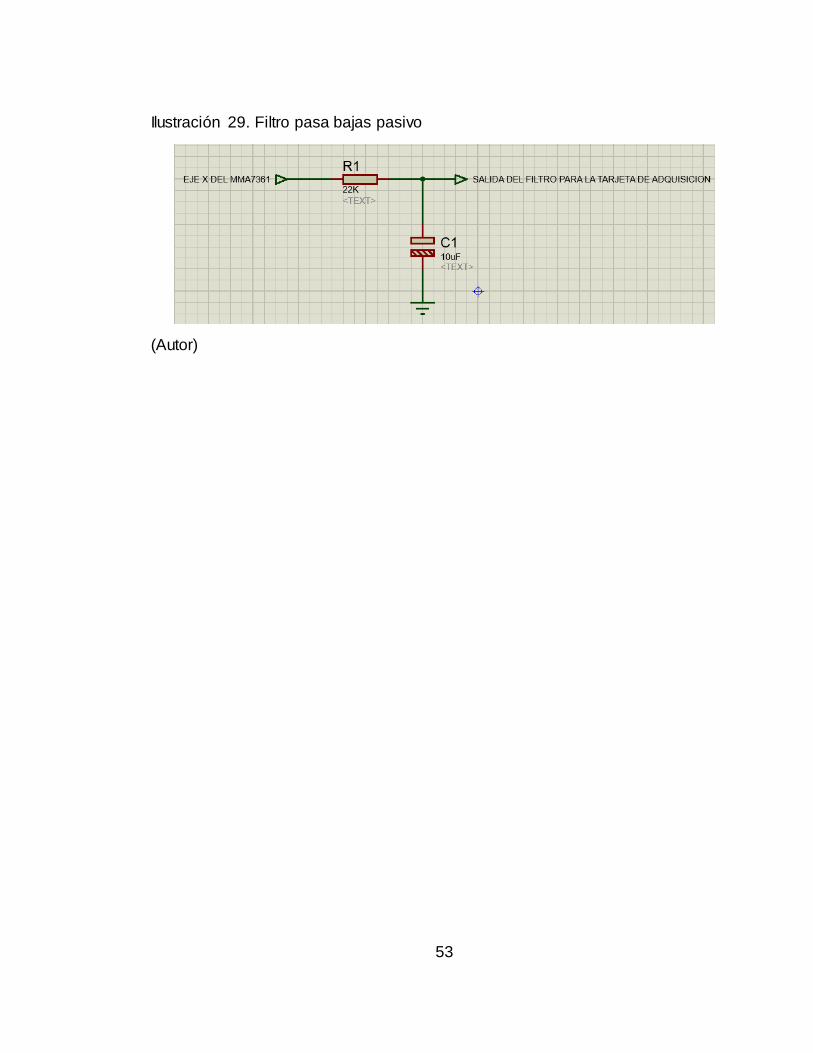
5.5.1 Filtro Señal Acelerómetro
Como se tiene una señal de salida en términos de voltaje, esta señal tiene un ruido generado por vibraciones producidas por el movimiento de la prótesis y activación de las bobinas del motor, para poder contrarrestar lo anterior mencionado y tener
una mejor lectura del sensor se implementa un filtro pasa bajos pasivos con una frecuencia de corte de 5 Hz debido a que no genera pérdidas de esta señal. No se
implementa un filtro pasa bajo digital debido a que no se necesita un filtro robusto.
Para la implementación y cálculo de los elementos del filtro se toma el valor de R en 22K y conociendo la frecuencia de corte de este filtro se despeja C para conocer
el valor del condensador, quedando de la forma mostrada a continuación:
Ecuación 14. Cálculo Condensador Filtro Pasa Bajos
5 𝐻𝑧 =1
2𝜋 ∗ 22𝑘 ∗ 𝐶
𝐶 = 10 𝑢𝐹
Teniendo los valores de los elementos de este filtro, se procede a su implementación quedando de la forma mostrada en la siguiente ilustración:
78 4tronix. (s.f.). Obtenido de 4tronix: http://4tronix.co.uk/store/index.php?rt=product/product&product_id=146
53
Ilustración 29. Filtro pasa bajas pasivo
(Autor)

54
6. DISEÑO MECÁNICO
En este capítulo se explica el procedimiento de diseñó y selección del material, resaltando el alcance de este proyecto que será realizar un prototipo con la
capacidad de imitar la articulación del tobillo, basándose en el torque y velocidad angular, factores que influyen en la comodidad del paciente al momento de
desplazarse.
La prótesis transtibial se considera parte indispensable para la movilidad de una persona debido a que cumple con las tareas mencionadas con anterioridad. Para definir la configuración de la prótesis, inicialmente fue necesario considerar los
diferentes tipos que existen en la industria, teniendo en cuenta los materiales, ventajas, desventajas y uso.
Seguido a esto se planteó un diseño base de acuerdo a la forma geométrica de la
extremidad y la distribución de los puntos críticos como el tobillo nombrado anteriormente, determinada a partir de la investigación de los trabajos realizados
principalmente por Hugh Herr (Au, Weber, & Herr, 2007)79.
Para poder empezar a realizar todo tipo de cálculos, se inicia de una distribución de fuerzas descritas en el diagrama de cuerpo libre de la ilustración 29, donde pueden observarse: la fuerza causada por el peso del paciente y la fuerza del husillo sobre
las barras del mecanismo biela-manivela.
Con este diagrama pueden encontrarse los esfuerzos en el punto crítico del sistema, es decir el tobillo, ya que es el encargado de soportar todas las cargas, por esta
razón el capítulo estará guiado al cálculo del material de este eje mediante los resultados de las fuerzas en las distintas etapas del mecanismo.
79 (Au, Weber, & Herr, International Conference on Rehabilitation Robotics, 2007). OP. cit., p. 1

55
Ilustración 30. Diagrama de Cuerpo Libre Prótesis de Pie
(Autor)
6.1 PARÁMETROS DE DISEÑO
Para diseñar esta prótesis es esencial tener en cuenta el valor del torque y la
velocidad angular del tobillo, también se deben tener presentes términos como dorsiflexión, que es el ángulo formado al flexionar hacia arriba el pie y la flexión
plantar que es el ángulo formado al flexionar hacia abajo el pie.
6.1.1 Velocidad Angular del Tobillo
Para el cálculo de la velocidad angular hay que tener presente que el máximo valor que puede tener la flexión plantar y dorsal respectivamente es de 50° y 30°
(Taboadela, 2007)80, basado en esto se realizó una prueba simple cronometrando el tiempo que demora una persona en pasar de ángulo 0° a 45°, los grados se convirtieron a revoluciones ya que el valor de la velocidad angular esta dado en
revoluciones por minuto (RPM), la conversión se desarrolla de la siguiente manera:
80 Taboadela, C. H. (2007). Goniometría del tobillo. En GONIOMETRÍA UNA HERRAMIENTA PARA LA EVALUACIÓN DE LAS INCAPACIDADES LABORALES (págs. 101-103). Buenos Aires: Alianza.
56
Ecuación 15. Cálculo de Velocidad Angular del Tobillo
REV =Grados ∗ 1 REV
180°
REV =45° ∗ 1 REV
180°
REV = 0.25 REV
(Autor)
Después de realizar esta conversión, es necesario saber cuántas revoluciones por minuto hace, por lo tanto se usó una regla de tres que plantea que: si en 0.28
segundos (tiempo cronometrado) hace 0.25 revoluciones, cuantas haría en un minuto.
Ecuación 16. Regla de Tres para el Cálculo de las RPM en el Tobillo
𝑅𝑃𝑀 =0.25 𝑅𝐸𝑉 ∗ 60 𝑆𝑒𝑔𝑢𝑛𝑑𝑜𝑠
0.28 𝑆𝑒𝑔𝑢𝑛𝑑𝑜𝑠
𝑅𝑃𝑀 = 53.57 𝑅𝑃𝑀 ≈ 50 𝑅𝑃𝑀
(Autor)
6.1.2 Torque en el Tobillo
Para el cálculo del torque que debe ejercer la prótesis, se debe tener en cuenta que el peso promedio de los colombianos es de 60 Kg y que la distancia que hay entre
la mitad del tobillo y la punta del pie para este caso son 0.24 m, con estos datos se puede calcular el valor de esta fuerza de la siguiente manera:
Ecuación 17. Cálculo del Torque en el Tobillo
𝜏𝑇𝑜𝑏𝑖𝑙𝑙𝑜 = 𝑃𝑒𝑠𝑜 ∗ 𝐺𝑟𝑎𝑣𝑒𝑑𝑎𝑑 ∗ 𝐷𝑖𝑠𝑡𝑎𝑛𝑐𝑖𝑎
𝜏𝑇𝑜𝑏𝑖𝑙𝑙𝑜 = 60 𝐾𝑔 ∗ 9,81 𝑚
𝑆 2∗ 0.24 𝑚
𝜏𝑇𝑜𝑏𝑖𝑙𝑙𝑜 = 141.27 𝑁 ∗ 𝑚 ≈ 140 𝑁 ∗ 𝑚

57
6.2 DISEÑO PRELIMINAR
Durante el desarrollo de este trabajo hubo distintos diseños, el más relevante y que más se asemeja al final es el que se observa a continuación:
Ilustración 31. Primer Prototipo Diseñado
(Autor)
Este prototipo básicamente constaba de un tornillo sin-fin corona, el cual transmitiría
el movimiento del motor al tobillo, reduciendo la velocidad de salida a la mitad y aumentando el torque el doble, garantizando los parámetros de salida mencionados anteriormente.
El diseño no fue escogido ya que presentaba varios inconvenientes, entre ellos, los costos elevados de elaboración del mecanismo por las 4 entradas del tornillo, el mecanismo no permitía que hubiese simultáneamente alto torque y alta velocidad,
quitando así la posibilidad de mantener la relación necesaria para obtener un movimiento natural y suave en la prótesis.
58
6.3 DISEÑO FINAL
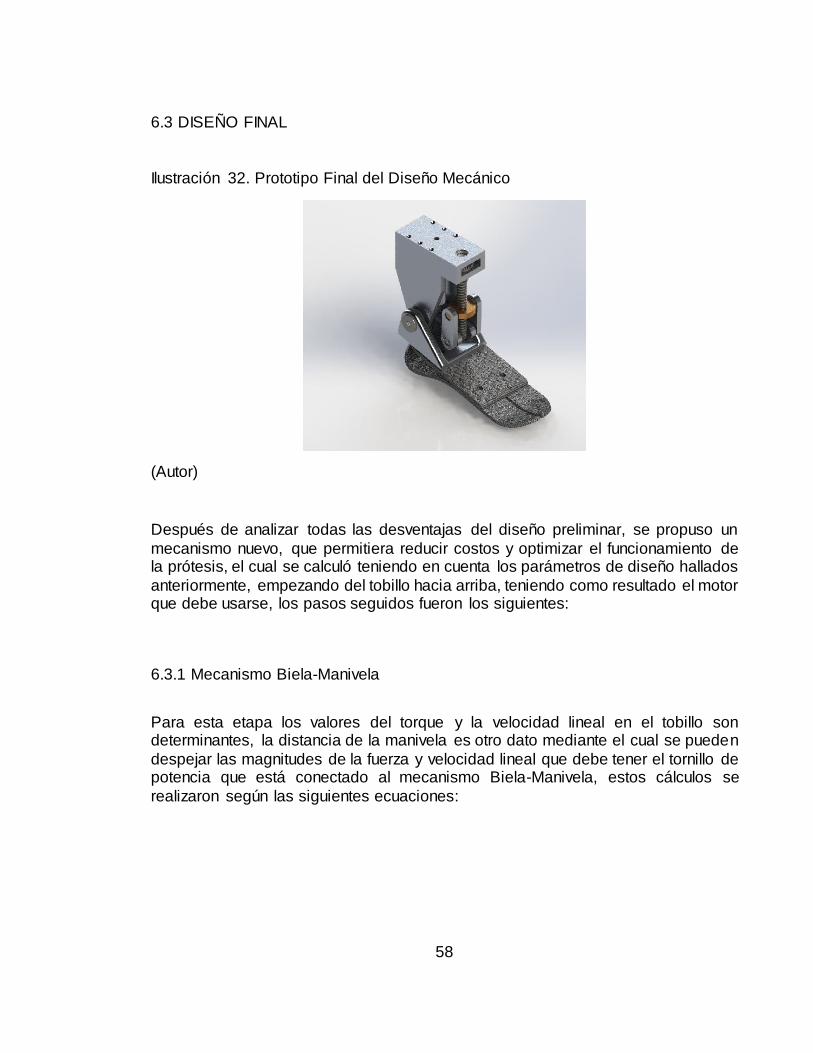
Ilustración 32. Prototipo Final del Diseño Mecánico
(Autor)
Después de analizar todas las desventajas del diseño preliminar, se propuso un
mecanismo nuevo, que permitiera reducir costos y optimizar el funcionamiento de la prótesis, el cual se calculó teniendo en cuenta los parámetros de diseño hallados
anteriormente, empezando del tobillo hacia arriba, teniendo como resultado el motor que debe usarse, los pasos seguidos fueron los siguientes:
6.3.1 Mecanismo Biela-Manivela
Para esta etapa los valores del torque y la velocidad lineal en el tobillo son determinantes, la distancia de la manivela es otro dato mediante el cual se pueden
despejar las magnitudes de la fuerza y velocidad lineal que debe tener el tornillo de potencia que está conectado al mecanismo Biela-Manivela, estos cálculos se
realizaron según las siguientes ecuaciones:

59
Ecuación 18. Velocidad Angular de Salida
𝑅𝑃𝑀2 =𝑉
𝑟∗
60
2 ∗ 𝜋
(Garcia, 2008)81
Donde la segunda parte de la ecuación se realiza para convertir Rad
S a RPM.
Ecuación 19. Torque de Salida
τ2 = F ∗ r
En la tabla 1 se muestra el valor de cada parámetro para despejar la fuerza y velocidad lineal:
Tabla 1. Características de la Prótesis
r= 0,0650 m
RPM2= 50 RPM
τ2= 140 N*m
(Autor)
6.3.2 Tornillo de Potencia
Los tornillos de potencia son usados para levantar cargas muy pesadas, también son llamados husillos, este tornillo se diseñó con la rosca tipo ACME (Universidad
de los Andes, 2010)82:
81 García, A. F. (5 de Mayo de 2008). Obtenido de Universidad del País Vasco:
http://www.sc.ehu.es/sbweb/fisica/cinematica/circular1/circular1.htm 82 Universidad de los Andes. (2010). TORNILLOS DE POTENCIA. Obtenido de http://www2.ula.ve/dsiaportal/dmdocuments/elementos/TORNILLOPOTENCIA.pdf

60
Ilustración 33. Rosca Tipo ACME
(Universidad de los Andes, 2010)83
En el caso de la prótesis el tornillo es alimentado por un a caja reductora, de la cual es necesario saber la velocidad angular y torque para que el tornillo logre producir los valores dados en la sección anterior.
Para este mecanismo se tuvo en cuenta el coeficiente de fricción del bronce con el acero (Jimenez Bascones)84, el avance (L) que tendrá el tornillo y el diámetro medio (Dm), descrito respectivamente en la tabla2:
Tabla 2. Cálculo Tornillo de Potencia
RPM= 4168,89 RPM
τ= 0,88 N*m
𝑓 (Coef Fric)= 0,06
L= 0,01 m
Dm= 0,01 m
α= 29,00 Grados
F= 2153,85 N
V= 0,34 m/s
(Autor)
83 Ibíd., p 4 84 Jimenez Bascones, J. M. (s.f.). ELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINAS. Pamplona, España.
61
Donde las ecuaciones usadas para para hallar la fuerza y velocidad lineal del husillo
son (Koshkin N. I., 1975)85:
Ecuación 20. Fuerza Lineal del Husillo
𝐹 =𝜏 ∗ 2 ∗ (𝜋 ∗ 𝐷𝑚 − 𝑓 ∗ 𝑙 ∗ sec(𝛼))
𝐷𝑚 ∗ (𝑙 + 𝑓 ∗ 𝜋 ∗ 𝐷𝑚 ∗ sec(𝛼))
𝜏 = 4.26 𝑁
Ecuación 21. Velocidad Lineal del Husillo
𝑉 = 𝑅𝑃𝑀 ∗ 𝐿
60
𝑅𝑃𝑀 = 2040
Con los valores hallados en la sección anterior se despeja la magnitud del torque y
la velocidad angular que debe entregar la etapa alimentadora.
6.3.3 Caja Reductora
Inicialmente la caja reductora estaba compuesta por un mecanismo de 3 piñones conductores de igual tamaño y uno reductor, es decir más grande, al integrar esto físicamente, se presentaron varios inconvenientes, tales como ruido, ajuste,
movimiento pausado, entre otros; los cálculos correspondientes de estos piñones pueden encontrarse en anexo 11.7.
Debido a estos problemas se rediseñó el mecanismo, por lo que se propuso uno
compuesto por 2 piñones y una cadena, el primer piñón cumple la función de transmitir la velocidad y el torque del motor por medio de la cadena, esto llega al
segundo piñón de mayor diámetro, garantizando la disminución de la velocidad y el aumento del torque con una relación de 2:1 aproximadamente.
85 Koshkin N. I., S. M. (1975). Manual de Física Elemental. Moscú: Mir.

62
Según la sección anterior debía tenerse en la salida de la caja reductora una
velocidad angular de 2040 RPM y un torque de 4.26 N*m aproximadamente; ya sabiendo la reducción que hay entre piñones es fácil determinar los valores que
debe tener el motor para la prótesis mediante las siguientes fórmulas (Porras & Soriano)86:
Ecuación 22. Relación de los Piñones
𝑍 =𝐷2
𝐷1
Ecuación 23. Cálculo de la Velocidad del Piñón Secundario
𝑅𝑃𝑀2 =𝑅𝑃𝑀1
𝑍
Ecuación 24. Cálculo del Torque en el Piñón Secundario
𝜏2 = 𝜏1 ∗ 𝑍
De donde se obtiene que el torque del motor debe ser de 2.13 N y la velocidad angular de 4080 RPM.
El sistema puede ser simulado de la siguiente manera, donde el piñón 1 es el
conductor y el piñón 2 es el conducido.
Ilustración 34. Mecanismo de Cadena para Reducción
(Autor)
86 Porras, & Soriano. (s.f.). Obtenido de Universidad de Castilla-La Mancha: https://www.uclm.es/profesorado/porrasysoriano/elementos/Tema08.pdf
63
En la tabla 3 se describen los valores anteriormente mencionados:
Tabla 3. Parámetros de Diseño para los Piñones
PARÁMETROS PIÑONES 1 PIÑÓN 2
Diámetro Externo (mm) 14 27
Velocidad Angular (RPM) 4080 2040
Torque (N*m) 2.13 4.26
(Autor)
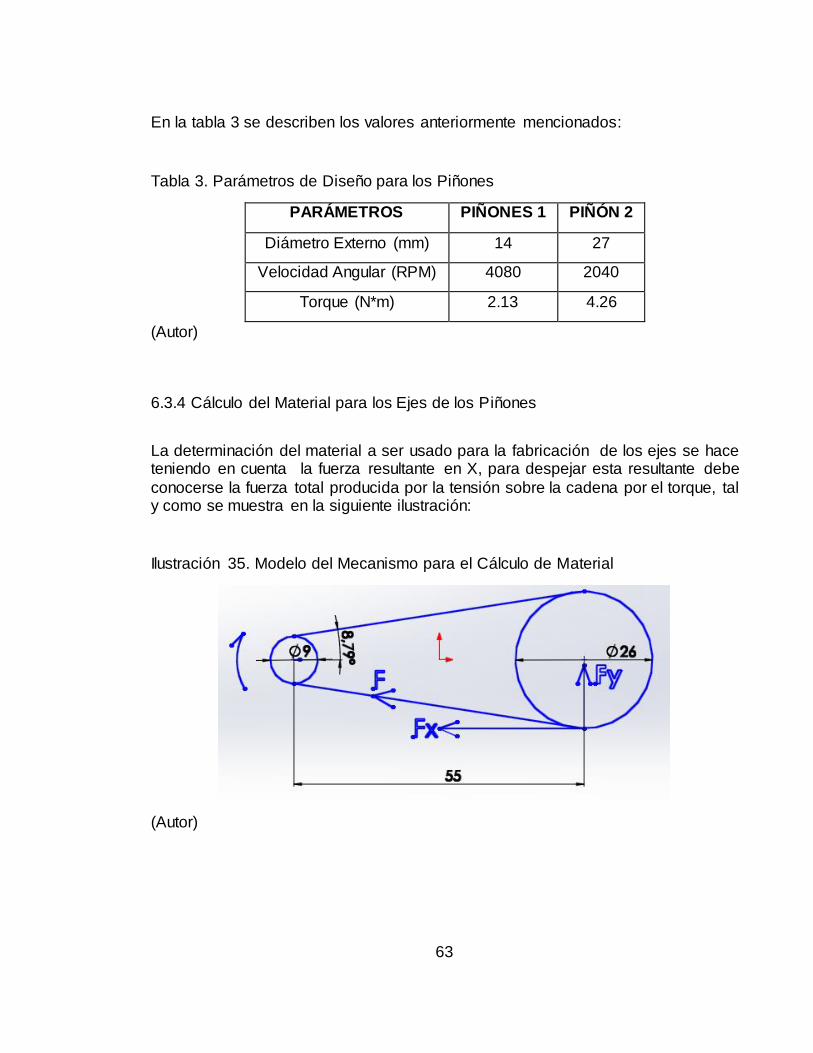
6.3.4 Cálculo del Material para los Ejes de los Piñones
La determinación del material a ser usado para la fabricación de los ejes se hace teniendo en cuenta la fuerza resultante en X, para despejar esta resultante debe
conocerse la fuerza total producida por la tensión sobre la cadena por el torque, tal y como se muestra en la siguiente ilustración:
Ilustración 35. Modelo del Mecanismo para el Cálculo de Material
(Autor)

64
Lo primero que debe realizarse es hallar la tensión, esto se obtiene mediante el
valor del torque, considerando que torque es igual a fuerza por distancia, solo resta despejar la fuerza que va por la cadena:
Ecuación 25. Tensión Ejercida Sobre la Cadena
𝐹 =𝜏1
𝐷1
=0.458 𝑁 ∗ 𝑚
4.5 ∗ 10−3 𝑚= 101.778 𝑁
(Autor)
Después de encontrado el valor de la tensión, se hallan por medio de trigonometría
las componentes de este vector, con la fuerza más grande se procede a calcular el eje ya que es la que impacta críticamente al sistema, teniendo esta información las
resultantes de esta fuerza en Y y X se muestran a continuación:
Ecuación 26. Resultante en Y de la Tensión
𝐹𝑦 = sin 8.79° ∗ 𝐹 = 15.5448 𝑁
(Autor)
Ecuación 27. Resultante en X de la Tensión
𝐹𝑥 = cos 8.79° ∗ 𝐹 = 100.584 𝑁
(Autor)
La resultante que se utiliza es la que hay en X por lo mencionado anteriormente, con la fuerza mencionada se podrá conocer la fuerza ejercida en los soportes. Para
realizar este cálculo se utiliza el programa MDSolids, donde se ingresan los datos de la fuerza y la distancia de los apoyos, en la siguiente ilustración evidencian los
resultados obtenidos.
65
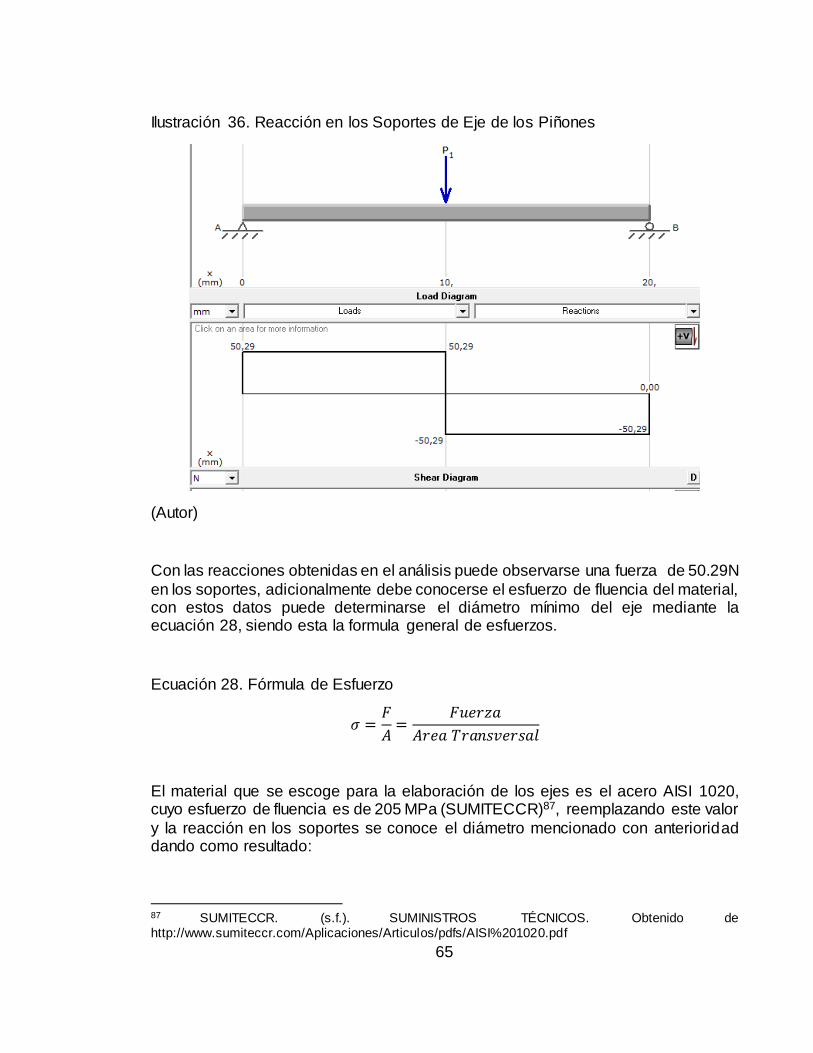
Ilustración 36. Reacción en los Soportes de Eje de los Piñones
(Autor)
Con las reacciones obtenidas en el análisis puede observarse una fuerza de 50.29N
en los soportes, adicionalmente debe conocerse el esfuerzo de fluencia del material, con estos datos puede determinarse el diámetro mínimo del eje mediante la ecuación 28, siendo esta la formula general de esfuerzos.
Ecuación 28. Fórmula de Esfuerzo
𝜎 =𝐹
𝐴=
𝐹𝑢𝑒𝑟𝑧𝑎
𝐴𝑟𝑒𝑎 𝑇𝑟𝑎𝑛𝑠𝑣𝑒𝑟𝑠𝑎𝑙
El material que se escoge para la elaboración de los ejes es el acero AISI 1020, cuyo esfuerzo de fluencia es de 205 MPa (SUMITECCR)87, reemplazando este valor
y la reacción en los soportes se conoce el diámetro mencionado con anterioridad dando como resultado:
87 SUMITECCR. (s.f.). SUMINISTROS TÉCNICOS. Obtenido de http://www.sumiteccr.com/Aplicaciones/Articulos/pdfs/AISI%201020.pdf

66
Ecuación 29. Diámetro Mínimo para los Ejes de los Piñones
𝜙𝐴 =50.29 𝑁
5 ∗ 10−3𝑚 ∗ (205 𝑀𝑃𝑎)= 0.04965 𝑚𝑚
El diámetro A y el diámetro C son del mismo tamaño, esto se debe a que los piñones al ser de dientes rectos no ejercen fuerza axial sobre los ejes.
6.3.5 Cálculo del Eje para la Articulación del Tobillo
Con los datos calculados anteriormente se procedió a estimar el material para el eje
del tobillo, cuyas medidas son las descritas en la ilustración 37:
Ilustración 37. Medidas Eje del Tobillo
(Autor)
Con este modelo en CAD y los valores mencionados atrás, se realiza un análisis en ANSYS R14.5, donde se evidencian los esfuerzos soportados, luego son
comparados con los esfuerzos a la fluencia de distintos materiales y así escoger uno que se encuentre por encima del valor calculado y no existan fallas en el eje, a continuación se muestra la imagen del análisis:

67
Ilustración 38. Análisis de Esfuerzos en ANSYS del Eje del Tobillo
(Autor)
La imagen muestra los puntos exactos donde se están concentrando los esfuerzos y los valores de estos, una vez más se escoge el acero AISI 1020 para la realización
de esta pieza, ya que su esfuerzo de fluencia es más alto del que se está soportando en este punto.

68
7. CONTROL
Al tener la señal mioeléctrica y la prótesis construida, es necesario el análisis y programación del control; el cual permite conseguir la posición deseada.
Para la implementación de técnicas de control se siguen los siguientes pasos:
1. Procesamiento de la señal del acelerómetro 2. Activación del ESC por medio de LabVIEW 2012 3. Cambio de giro del motor
4. Obtener función de transferencia mediante identificación 5. Diseño del control
6. Implementación del control
Para realización de los pasos mencionados anteriormente se emplea la tarjeta de adquisición NI-myDAQ.
7.1 NI-myDAQ
La NI-myDAQ es una tarjeta de adquisición de datos fabricada por National Instruments como se puede ver en la ilustración 38, esta permite procesar y controlar determinada señal mediante el software NI LabVIEW 2012.
Este programa cuenta con diversas funciones como por ejemplo operaciones matemáticas, entrada y salida de señal, generación de señal, etc.
Por medio de la tarjeta y el software mencionados anteriormente, se logra la
ejecución de los pasos mencionados al principio de este capítulo, para conocer más características de la tarjeta mencionada en esta sección ver anexo 11.8.

69
Ilustración 39. Tarjeta de adquisición NI-myDAQ
(Futura Shop)88
7.2 CONDICIONES REQUERIDAS PARA EL CONTROL
Las condiciones requeridas para la aplicación de una técnica de control son las siguientes:
1. Procesamiento de la señal del sensor para este caso acelerómetro 2. Activación del actuador con respecto a una señal de referencia
7.2.1 Procesamiento de la Señal del Acelerómetro
Para el procesamiento de la señal del acelerometro mencionado en la seccion 5.4, es necesario realizar una resta para la salida de voltaje nominal, este valor se
encuentra en un rango de 1 V y 2 V, se realiza una division donde se define la sensibilidad del acelerometro (National Instruments, 2010)89, con lo anterior se logra que la tarjeta de adquision y el software puedan tener una lectura apropiada del
acelerometro, dando a conocer la posicion de la protesis con respecto al movimiento del motor.
88 Futura Shop. (s.f.). Obtenido de Futura Shop:
https://www.futurashop.it/index.php?route=product/product&product_id=102 89 National Instruments. (23 de Julio de 2010). Obtenido de National Instruments: http://www.ni.com/example/31407/en/
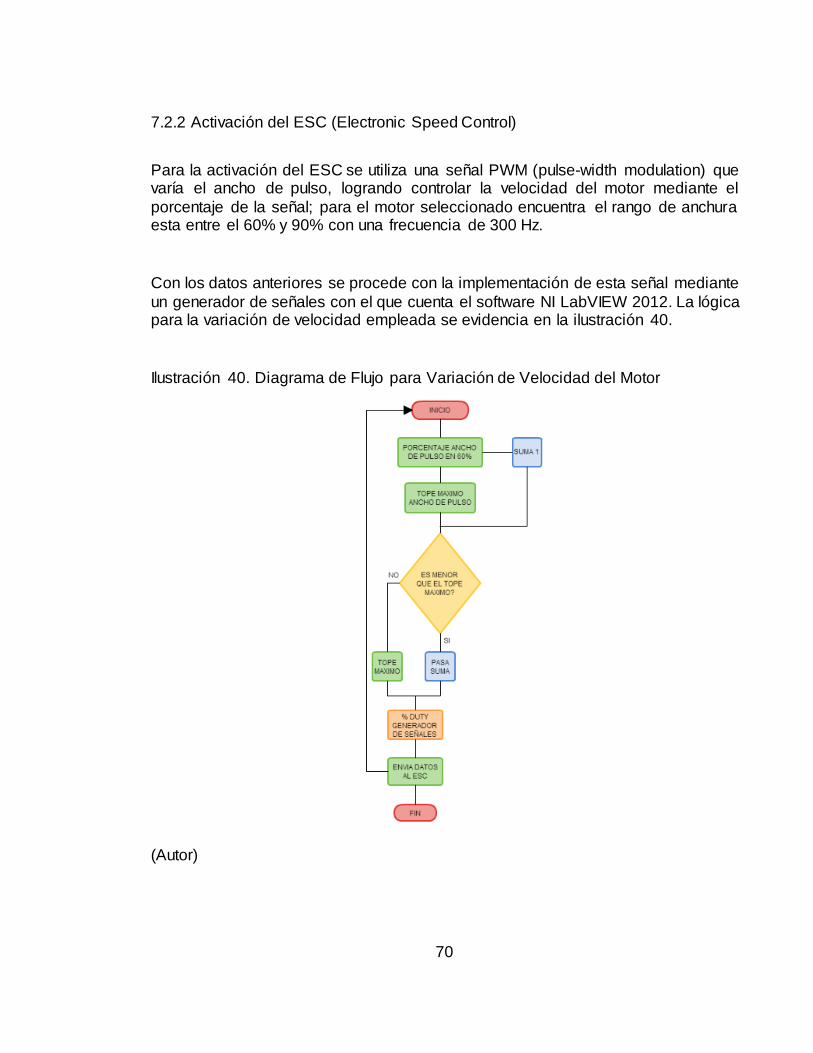
70
7.2.2 Activación del ESC (Electronic Speed Control)
Para la activación del ESC se utiliza una señal PWM (pulse-width modulation) que varía el ancho de pulso, logrando controlar la velocidad del motor mediante el
porcentaje de la señal; para el motor seleccionado encuentra el rango de anchura esta entre el 60% y 90% con una frecuencia de 300 Hz.
Con los datos anteriores se procede con la implementación de esta señal mediante
un generador de señales con el que cuenta el software NI LabVIEW 2012. La lógica para la variación de velocidad empleada se evidencia en la ilustración 40.
Ilustración 40. Diagrama de Flujo para Variación de Velocidad del Motor
(Autor)

71
7.2.3 Inversión de Giro del Motor
Para invertir el sentido de giro del motor se implementa el circuito mencionado en el capítulo de diseño electrónico, que con un 1 o un 0 cero lógicos activa un relé, para
esto se usa una señal cuadrada, la cual se obtiene por medio de un generador suministrado por LabVIEW.
Con la señal generada se realiza la detección de los semiciclos, ya sea positivo o
negativos, comparando si es mayor o menor a cero; para mayor compresión ver la ilustración 41, donde se muestra detalladamente lo anterior junto con la activación del transistor.
Ilustración 41. Inversión De Giro del Motor
(Autor)

72
7.3 FUNCIÓN DE TRANSFERENCIA
Con el objetivo de diseñar el control se requiere un modelo matemático que describa la dinámica del sistema, para la cual se realiza un proceso de identificación del
sistema.
7.3.1 Obtención de Datos
Se requiere los datos de salida del sistema los cuales se toman del acelerómetro, teniendo como referencia una señal de entrada siendo para este caso una señal sinodal usando el generador de señales mencionado en la sección de inversión de
giro.
Ilustración 42. Unificación de los Programas
(Autor)

73
En el programa de cambio de giro se realiza la comparación mencionada en la
sección 7.2.3, esta comparación se realiza tres veces como se muestra en la ilustración 43, donde las variables semiciclo positivo y semiciclo negativo son
generadas como registros o como se llaman en el software “variables locales”.
Ilustración 43. Inversión de Giro Final
(Autor)
Para la variación de velocidad se utilizan las variables locales de los semiciclos con
una adicional de salida digital (1/0), esta salida varía de acuerdo a la posición del semiciclo, es decir positiva o negativa, después de esta activación el programa a
ejecutarse envía la señal a un relé que invierte los terminales de un motor. Estos programas se describen en la ilustración 44.
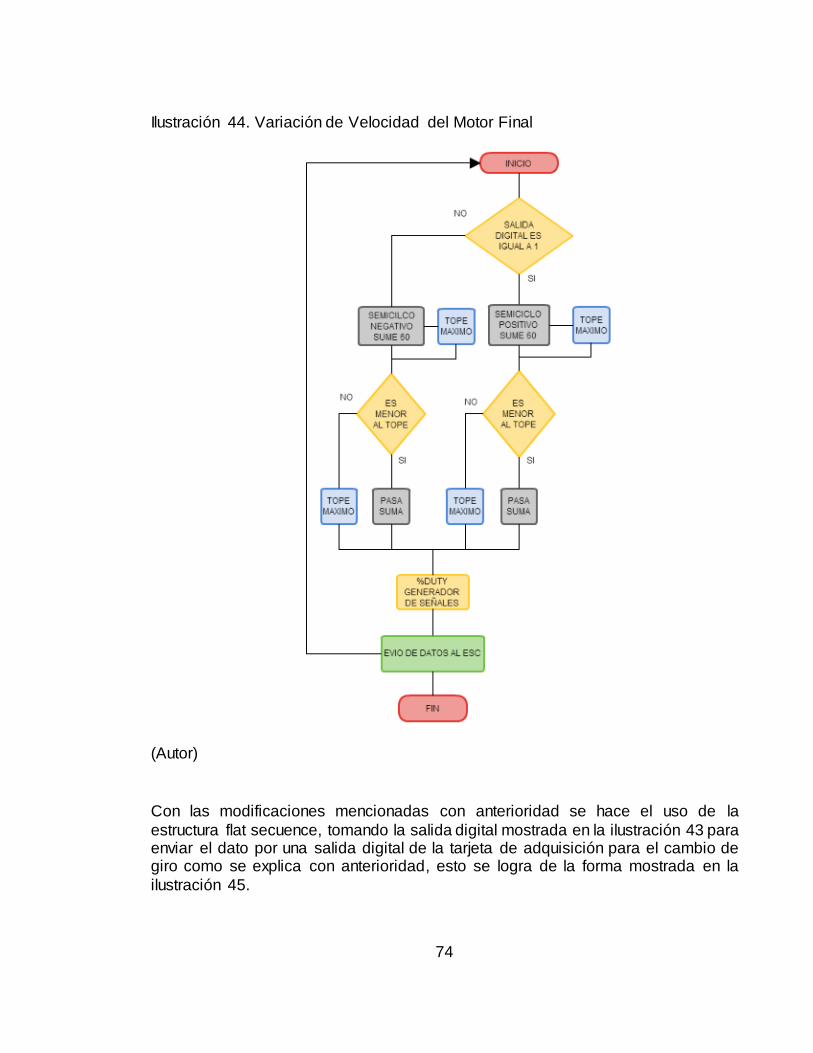
74
Ilustración 44. Variación de Velocidad del Motor Final
(Autor)
Con las modificaciones mencionadas con anterioridad se hace el uso de la
estructura flat secuence, tomando la salida digital mostrada en la ilustración 43 para enviar el dato por una salida digital de la tarjeta de adquisición para el cambio de giro como se explica con anterioridad, esto se logra de la forma mostrada en la
ilustración 45.

75
Ilustración 45. Diagrama para la Toma de Datos
(Autor)
Con el programa definido y en funcionamiento con la prótesis se toman los datos
para la identificación del sistema y posteriormente se aplica la técnica de control . Para profundizar en los programas finales ver anexo 11.9.
Los datos se obtienen por medio de los indicadores gráficos (chart), donde se
exportan los datos graficados, para este caso la señal de referencia es la obtenida por el generador, usada para la comparación de la señal del acelerómetro, con ello se obtiene la función de transferencia con respecto a la posición.

76
7.3.2 Obtención de la Función de Transferencia Mediante Matlab
Para llegar a la función de transferencia se desarrollan los siguientes pasos:
Graficar los Datos Obtenidos
Se grafican los datos obtenidos, la señal del generador sinusoidal mencionada
anteriormente en color negro y la de salida es la señal de acelerómetro en color rojo, como se muestra en la ilustración 46.
Ilustración 46. Identificación de la Planta
(Autor)
Importar los Datos en Matlab
Con la corroboración de los datos obtenidos se procede con la importación de esta
tabla de EXCEL por medio del módulo IMPORT, con el que cuenta Matlab, asignando la columna correspondiente el nombre de los datos, ENTRADA y SALIDA como se menciona anteriormente.
0,00
0,50
1,00
1,50
2,00
2,50
0 4,8
9,6
14
,41
9,2
24
28
,83
3,6
38
,44
3,2
48
52
,85
7,6
62
,46
7,2
72
76
,88
1,6
86
,49
1,2
96
10
0,8
10
5,6
11
0,4
11
5,2
Voltaje (V)
Tiempo (s)
Identificación
Entrada
Salida

77
Importar los Datos en Módulo IDENT en Matlab R2014a
Con los datos cargados en Matlab se utiliza el módulo ident, este importa los datos como se muestra la ilustración 47, con un tiempo de muestreo de 0.01.
Ilustración 47. Análisis del Sistema para Encontrar la Función de Transferencia
(Autor)
Selección del Método para el Cálculo de la Función de Transferencia
Con el sistema ya establecido, en el menú desplegable “estimate” se selecciona la
opción “Transfer Function Models”, la cual dependiendo de las indicaciones dadas selecciona la función de transferencia en tiempo discreto que mejor se adapte al sistema.
Para este caso se establecen 3 polos en “Number of Poles” y en “Number of Zeros” se usa 2 ceros debido que el actuador del sistema es un motor, el orden del modelo matemático es de orden 2 o 3. Por consiguiente es marcada la opción “Discrete-
time (Ts=0.01)”. Al escoger esta variación en los polos, tiene un rango mayor de certeza en la función de transferencia. No se toma valores más grandes para los
polos y los ceros porque ya la implementación de un control se convierte complejo.
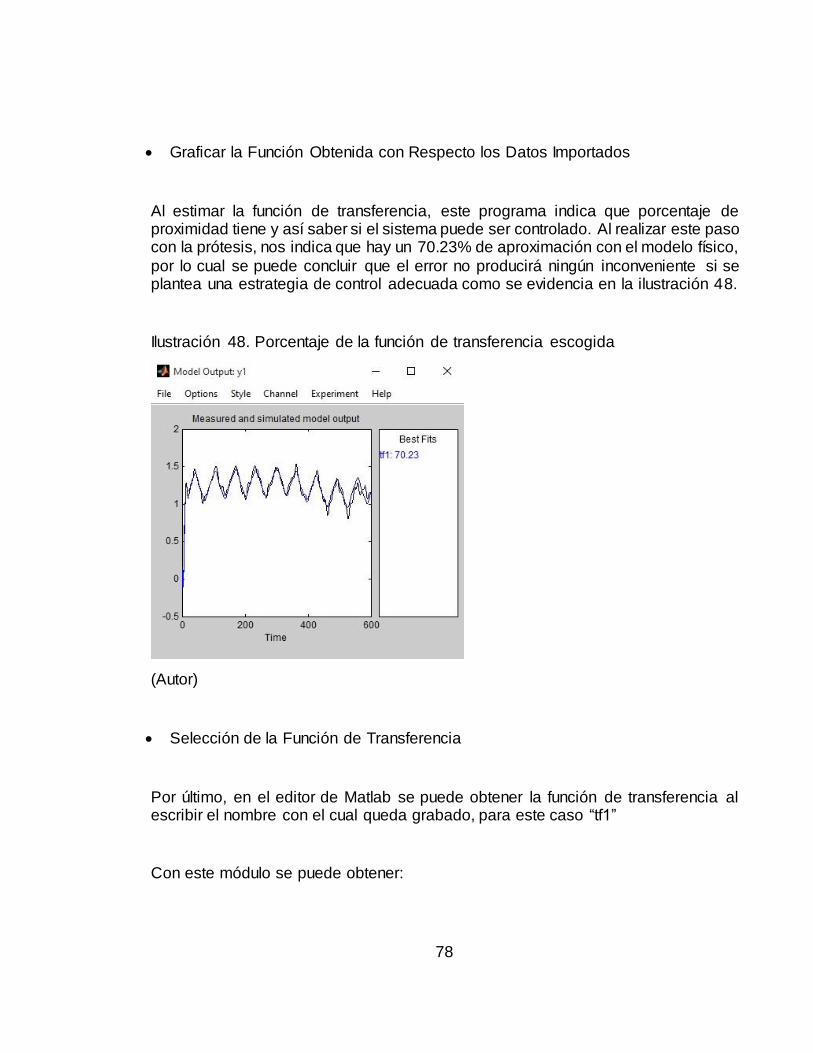
78
Graficar la Función Obtenida con Respecto los Datos Importados
Al estimar la función de transferencia, este programa indica que porcentaje de proximidad tiene y así saber si el sistema puede ser controlado. Al realizar este paso con la prótesis, nos indica que hay un 70.23% de aproximación con el modelo físico,
por lo cual se puede concluir que el error no producirá ningún inconveniente si se plantea una estrategia de control adecuada como se evidencia en la ilustración 48.
Ilustración 48. Porcentaje de la función de transferencia escogida
(Autor)
Selección de la Función de Transferencia
Por último, en el editor de Matlab se puede obtener la función de transferencia al escribir el nombre con el cual queda grabado, para este caso “tf1”
Con este módulo se puede obtener:
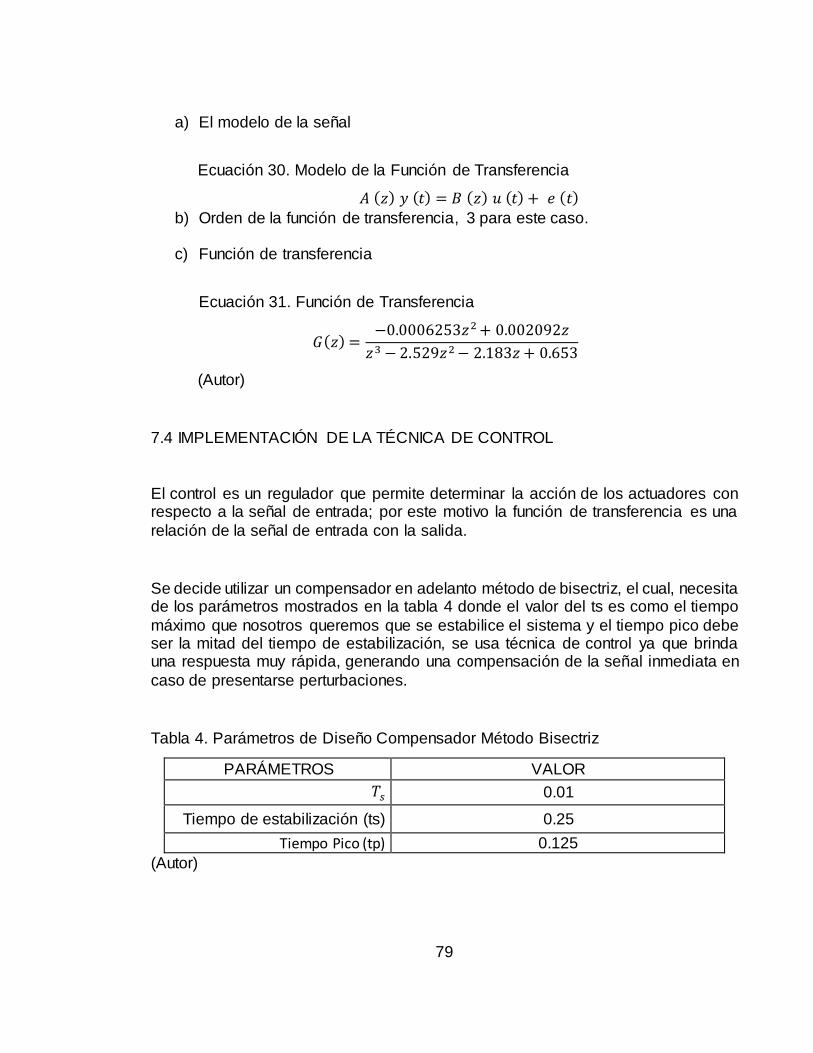
79
a) El modelo de la señal
Ecuación 30. Modelo de la Función de Transferencia
𝐴 (𝑧) 𝑦 (𝑡) = 𝐵 (𝑧) 𝑢 (𝑡) + 𝑒 (𝑡) b) Orden de la función de transferencia, 3 para este caso.
c) Función de transferencia
Ecuación 31. Función de Transferencia
𝐺(𝑧) =−0.0006253𝑧2 + 0.002092𝑧
𝑧3 − 2.529𝑧2 − 2.183𝑧 + 0.653
(Autor)
7.4 IMPLEMENTACIÓN DE LA TÉCNICA DE CONTROL
El control es un regulador que permite determinar la acción de los actuadores con respecto a la señal de entrada; por este motivo la función de transferencia es una
relación de la señal de entrada con la salida.
Se decide utilizar un compensador en adelanto método de bisectriz, el cual, necesita de los parámetros mostrados en la tabla 4 donde el valor del ts es como el tiempo
máximo que nosotros queremos que se estabilice el sistema y el tiempo pico debe ser la mitad del tiempo de estabilización, se usa técnica de control ya que brinda una respuesta muy rápida, generando una compensación de la señal inmediata en
caso de presentarse perturbaciones.
Tabla 4. Parámetros de Diseño Compensador Método Bisectriz
PARÁMETROS VALOR
𝑇𝑠 0.01
Tiempo de estabilización (ts) 0.25
Tiempo Pico (tp) 0.125
(Autor)
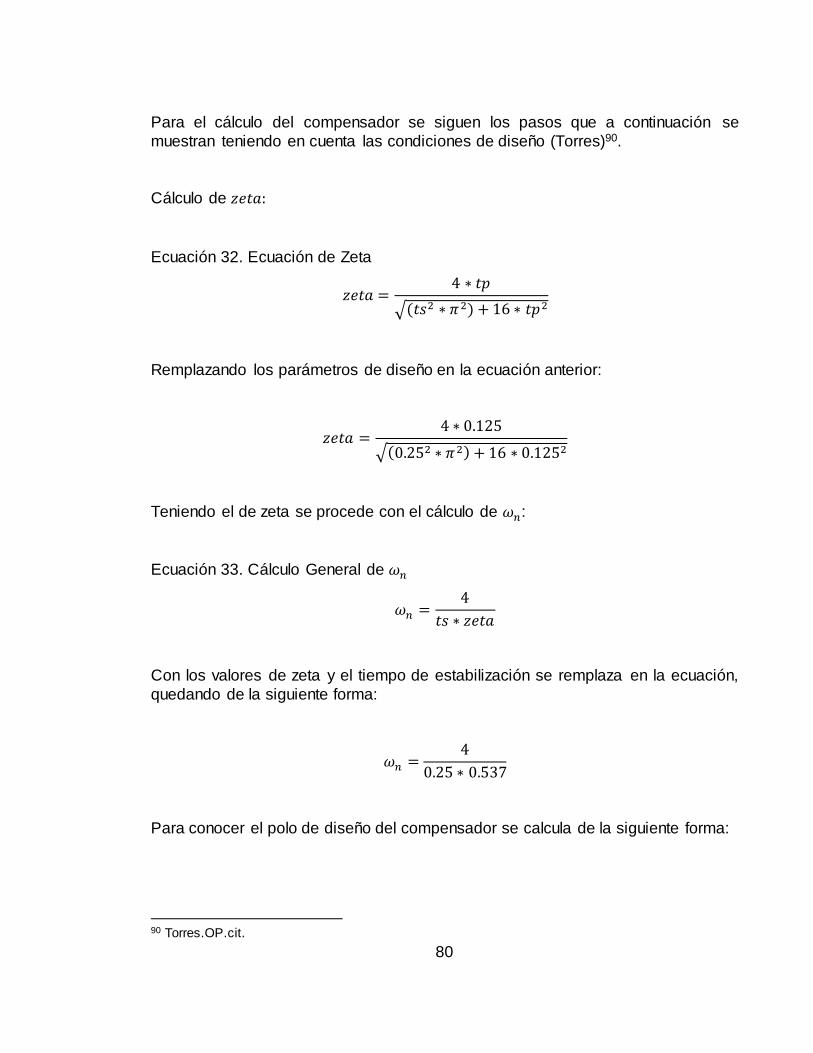
80
Para el cálculo del compensador se siguen los pasos que a continuación se
muestran teniendo en cuenta las condiciones de diseño (Torres)90.
Cálculo de 𝑧𝑒𝑡𝑎:
Ecuación 32. Ecuación de Zeta
𝑧𝑒𝑡𝑎 =4 ∗ 𝑡𝑝
√(𝑡𝑠2 ∗ 𝜋 2) + 16 ∗ 𝑡𝑝2
Remplazando los parámetros de diseño en la ecuación anterior:
𝑧𝑒𝑡𝑎 =4 ∗ 0.125
√(0.252 ∗ 𝜋 2) + 16 ∗ 0.1252
Teniendo el de zeta se procede con el cálculo de 𝜔𝑛:
Ecuación 33. Cálculo General de 𝜔𝑛
𝜔𝑛 =4
𝑡𝑠 ∗ 𝑧𝑒𝑡𝑎
Con los valores de zeta y el tiempo de estabilización se remplaza en la ecuación,
quedando de la siguiente forma:
𝜔𝑛 =4
0.25 ∗ 0.537
Para conocer el polo de diseño del compensador se calcula de la siguiente forma:
90 Torres.OP.cit.

81
Ecuación 34. Cálculo de Polo de Diseño
𝑧1 = 𝑒(−𝑇𝑠∗𝑧𝑒𝑡𝑎∗𝜔𝑛)(cos(𝑤𝑛∗√1−𝑧𝑒𝑡𝑎2 ∗𝑇𝑠 ))+(sin(𝑤𝑛∗√1−𝑧𝑒𝑡𝑎2∗𝑇𝑠))
Con el polo de diseño se procede al cálculo de 𝞿, ϴ, z0 y p0 para conocer el valor
de estas variables se utilizan las siguientes ecuaciones:
Ecuación 35. Cálculo de 𝞿
𝜑 = 𝜋 − ∡𝑧1
Para el cálculo de ϴ se hace por medio de la siguiente formula:
Ecuación 36. Cálculo de ϴ
𝜃 = atan 𝑖𝑚𝑎𝑔 𝑧1
1 − 𝑟𝑒𝑎𝑙 𝑧1
Para el cálculo de z0 se utiliza la siguiente formula:
Ecuación 37. Fórmula de Z0
𝑧0 =1 − 𝑐𝑜𝑠
𝜃 + 𝜑2
|𝑧1 − 1|
𝑐𝑜𝑠𝜃 − 𝜑
2
Para el cálculo de P0 se utiliza la siguiente formula:
Ecuación 38. Fórmula de P0
𝑝0 =1 − 𝑐𝑜𝑠
𝜃 − 𝜑2
|𝑧1 − 1|
𝑐𝑜𝑠𝜃 + 𝜑
2
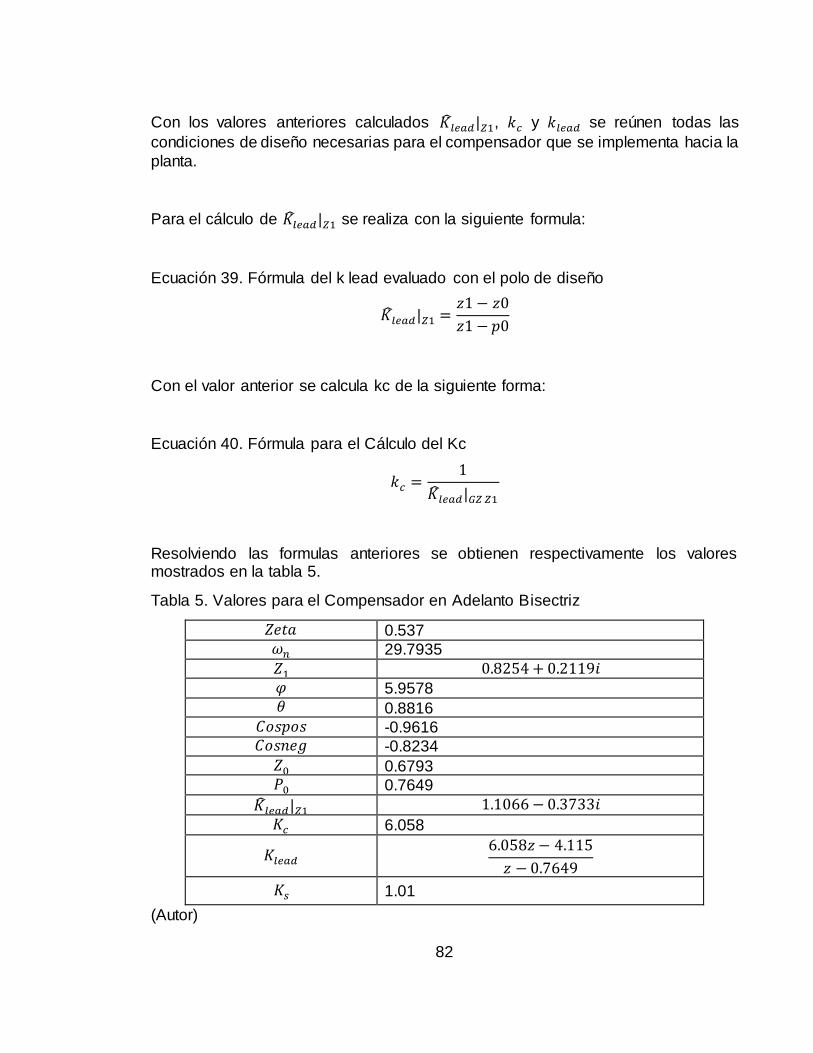
82
Con los valores anteriores calculados 𝐾𝑙𝑒𝑎𝑑|𝑍1, 𝑘𝑐 y 𝑘𝑙𝑒𝑎𝑑 se reúnen todas las
condiciones de diseño necesarias para el compensador que se implementa hacia la
planta.
Para el cálculo de 𝐾𝑙𝑒𝑎𝑑|𝑍1 se realiza con la siguiente formula:
Ecuación 39. Fórmula del k lead evaluado con el polo de diseño
𝐾𝑙𝑒𝑎𝑑|𝑍1 =𝑧1 − 𝑧0
𝑧1 − 𝑝0
Con el valor anterior se calcula kc de la siguiente forma:
Ecuación 40. Fórmula para el Cálculo del Kc
𝑘𝑐 =1
𝐾𝑙𝑒𝑎𝑑|𝐺𝑍 𝑍1
Resolviendo las formulas anteriores se obtienen respectivamente los valores mostrados en la tabla 5.
Tabla 5. Valores para el Compensador en Adelanto Bisectriz
𝑍𝑒𝑡𝑎 0.537 𝜔𝑛 29.7935
𝑍1 0.8254 + 0.2119𝑖 𝜑 5.9578 𝜃 0.8816
𝐶𝑜𝑠𝑝𝑜𝑠 -0.9616 𝐶𝑜𝑠𝑛𝑒𝑔 -0.8234
𝑍0 0.6793 𝑃0 0.7649
𝐾𝑙𝑒𝑎𝑑|𝑍1 1.1066 − 0.3733𝑖
𝐾𝑐 6.058
𝐾𝑙𝑒𝑎𝑑 6.058𝑧 − 4.115
𝑧 − 0.7649
𝐾𝑠 1.01
(Autor)

83
Teniendo estos datos, se diseña el diagrama de bloques en Simulink, ingresando el
compensador correspondiente de grado cuatro (sacado de la función de transferencia) y la función de transferencia en lazo cerrado como puede visualizarse
en la ilustración 49. El sistema se analiza en tiempo discreto.
Ilustración 49. Diagrama de Bloques en Simulink
(Autor)
El diagrama de bloques permite tener una respuesta del sistema, con la cual se observa si el compensador logra tener un tiempo de estabilización, un offset y un overshoot adecuado. Estos resultados se pueden ver en la ilustración 50, donde la
parte superior es la respuesta de la función transferencia en lazo cerrado, la siguiente la respuesta con el compensador calculado anteriormente y la ultima la
respuesta lazo abierto.

84
Ilustración 50. Respuesta de la Función de Transferencia al Impulso
(Autor)
7.5 IMPLEMENTACIÓN DE LAS SEÑALES EMG
Con la técnica de control definida se procede a la implementación de la señal EMG,
que para esta oportunidad es la señal de referencia del sistema, determinando la posición deseada de la prótesis.
Para que esto sea posible se tienen en cuenta los siguientes pasos:
1. Valor RMS de la señal EMG
2. Acople de la señal para el control
7.5.1 Valor RMS de Señal
De la señal EMG procesada por medio del circuito electrónico mencionado en el capítulo 5 se obtiene el valor RMS, con este se logra un valor adecuado a comparación la señal obtenida después del procesamiento. Para este valor se usa

85
un bloque llamado RMS, suministrado por LabVIEW, este es de fácil configuración
para determinar el valor deseado.
Ilustración 51. Diagrama de Flujo para Determinar el Valor RMS de la Señal EMG
(Autor)
7.5.2 Acople de la Señal para el Control
Se desea tener valores de voltaje similares entre la señal EMG y los valores obtenidos por el acelerómetro, ya que la señal EMG entrega valores en términos de milivoltios se multiplica 60 veces, obtenido los valores deseados con una variación
entre 2.5V Y 3V.
Definidos los valores mencionados, son usados como referencia para hacer el control del sistema, en este caso de la prótesis, como lo describe la ilustración 52
donde se muestra el diagrama del programa usado en LabVIEW con la señal EMG.

86
Ilustración 52. Acople de la señal EMG
(Autor)
87
8. CONCLUSIONES
En el proceso del diseño y construcción de la prótesis mioeléctrica, se obtuvieron diversos resultados durante la solución a cada problema encontrado.
Con base a las ventajas ofrecidas por el AD620 para la adquisición de las señales
EMG, se demuestra que es la mejor opción para la realización de este tipo de aplicaciones comparando diferentes referencias de amplificadores de
instrumentación.
Con la realización de los filtros requeridos para obtener una seña EMG en buenas condiciones, es necesario que la implementación de estos se hagan con elementos
electrónicos activos, con una excelente respuesta a frecuencias altas concluyendo que la mejor opción son los amplificadores TL074.
La implementación de los mecanismos de transmisión de potencia y junto con ello
transmitir el movimiento del motor al tobillo, son las convenientes debido que la transmisión de potencia por medio de una cadena las perdidas por fricción son muy bajas con relación a una transmisión por piñones, el mecanismo escogido para la
transmisión del movimiento del motor es óptima adicionalmente que no es de alto costo para la fabricación y de fácil mantenimiento.
La tarjeta NI-myDAQ brinda seguridad para recibir y enviar datos con el tiempo de
muestreo de 0.01, otorgando una gran fiabilidad en el momento de realizar un control mediante el software NI-LabVIEW.
Con la implementación de diferentes técnicas de control se concluye que la mejor
técnica de control para este caso, es un compensador en adelanto por bisectriz brindando una buena velocidad de respuesta.
88
9. RECOMENDACIONES
En el desarrollo del proyecto se encontró que este puede tener algunas mejoras en diferentes aspectos, tales como:
A nivel mecánico, se recomienda la búsqueda de un material que sea más liviano,
pero lo suficientemente resistente para soportar el peso y los esfuerzos que la persona le generan a la prótesis, dejando claro que las piezas que tienen que
conservar su material son el eje principal, el tornillo, la tuerca, el eje de los piñones y la cadena; ya que estos son los que transmiten la fuerza del motor.
De igual manera en la parte mecánica, también se recomienda realizar la planta de
la prótesis en fibra de carbono. Este material es lo suficientemente resistente para que la persona pueda utilizarla y caminar sobre cualquier tipo de superficie, para este proyecto no se hizo con este material ya que decidió hacer un prototipo con el
objeto de realizar pruebas de laboratorio, donde únicamente se vean reflejados los movimientos, además realizar esta pieza en este material es bastante costoso.
En la parte electrónica, se recomienda diseñar el circuito de adquisición y
procesamiento de la señal en un espacio más reducido, para que el tamaño de esta tarjeta sea un poco más pequeño y así la estética de la prótesis sea mejor, dándole mayor confort al paciente.
Por otro lado también se recomienda acoplar una batería, pues esta contiene dos entradas de alimentación, la del motor que tiene una entrada de 24v y la de los amplificadores que es de +12v y -12v, por lo tanto se tiene que hacer una
amplificación o reducción de voltaje, dejando la decisión a los futuros investigadores.
La batería a acoplar tiene que tener suficiente corriente para el arranque del motor
y para que los amplificadores funcionen correctamente, teniendo en cuenta que todo circuito contiene corrientes parasitas que afectan el objetivo.
Con estas recomendaciones se espera que este proyecto algún día pueda utilizarse
y así darle una mejor calidad de vida a una persona con amputación transtibial.
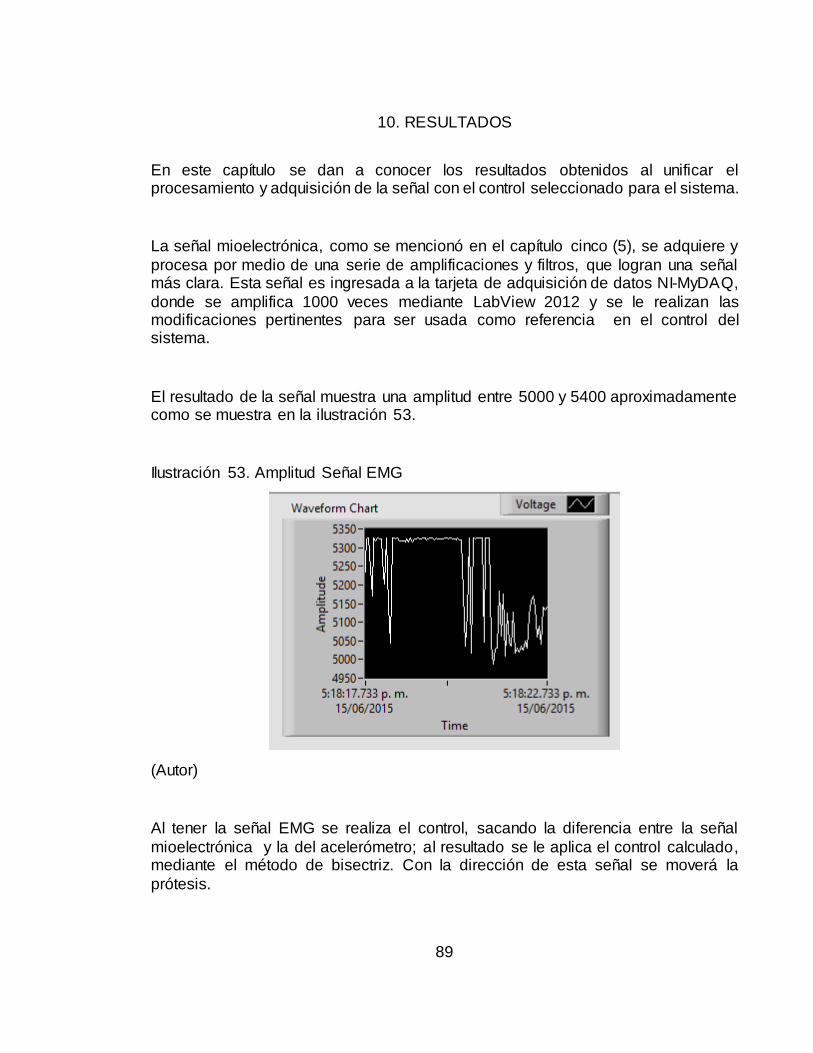
89
10. RESULTADOS
En este capítulo se dan a conocer los resultados obtenidos al unificar el procesamiento y adquisición de la señal con el control seleccionado para el sistema.
La señal mioelectrónica, como se mencionó en el capítulo cinco (5), se adquiere y
procesa por medio de una serie de amplificaciones y filtros, que logran una señal más clara. Esta señal es ingresada a la tarjeta de adquisición de datos NI-MyDAQ,
donde se amplifica 1000 veces mediante LabView 2012 y se le realizan las modificaciones pertinentes para ser usada como referencia en el control del sistema.
El resultado de la señal muestra una amplitud entre 5000 y 5400 aproximadamente como se muestra en la ilustración 53.
Ilustración 53. Amplitud Señal EMG
(Autor)
Al tener la señal EMG se realiza el control, sacando la diferencia entre la señal
mioelectrónica y la del acelerómetro; al resultado se le aplica el control calculado, mediante el método de bisectriz. Con la dirección de esta señal se moverá la
prótesis.

90
Para el cambio de giro del motor se definió que en el semi-ciclo positivo tiene una
amplitud de 2.5 y el semi-ciclo negativo tiene una amplitud de 3.5, por este motivo, para la adquisición de la señal por medio de la Ni-myDAQ se necesita realizar el
procesamiento, para que la amplitud de la señal del semi-ciclo positivo pase de 5000 a 2.5 y la del semi-ciclo negativo de 5400 a 3.5.
El programa de control en LabVIEW se explicara en tres partes:
1. En esta primera parte del control, se tiene la adquisición de la señal EMG con su
respectivo procesamiento para la amplitud. La señal se observa con un indicador numérico con nombre Square 2.
También se puede ver la señal del acelerómetro con su respectivo procesamiento, mencionado en el capítulo 5.4. La salida de este se muestra en
un indicador numérico con nombre Numeric. Por último se muestra la diferencia de las señales y el control aplicado en ellas
con un indicador numérico en la salida llamado output, como se muestra en la ilustración 54.
Ilustración 54. Primera Parte del Control
(Autor)
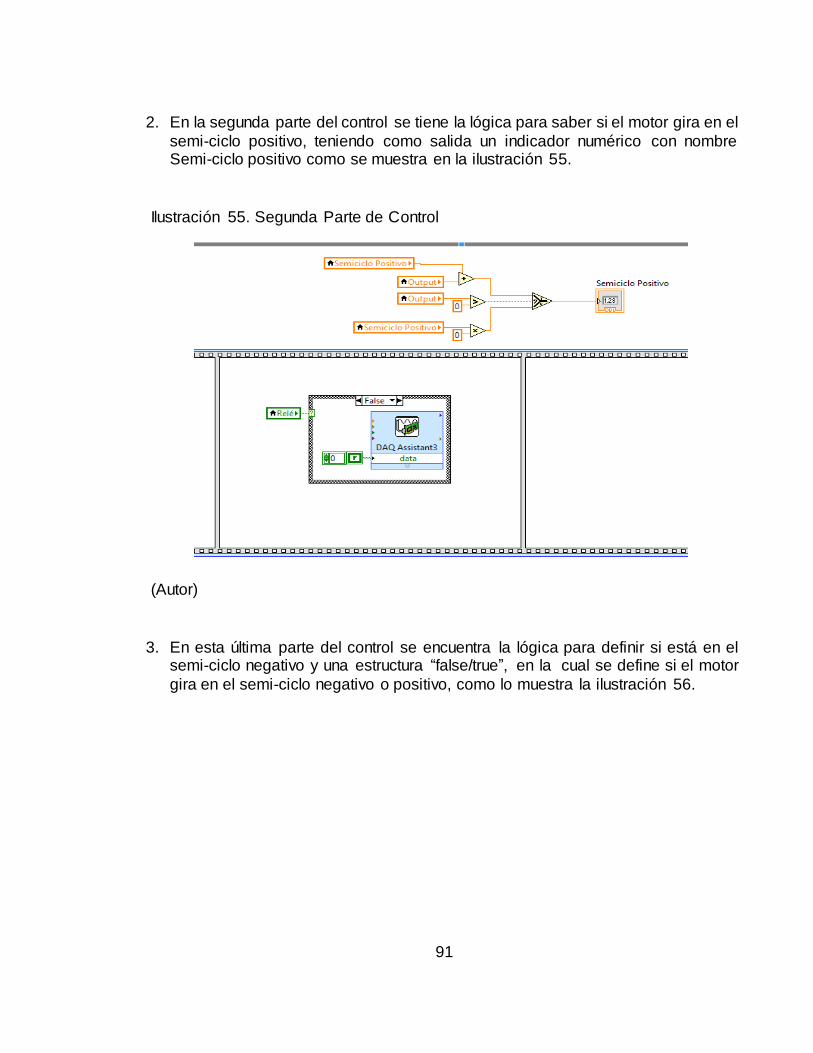
91
2. En la segunda parte del control se tiene la lógica para saber si el motor gira en el
semi-ciclo positivo, teniendo como salida un indicador numérico con nombre Semi-ciclo positivo como se muestra en la ilustración 55.
Ilustración 55. Segunda Parte de Control
(Autor)
3. En esta última parte del control se encuentra la lógica para definir si está en el semi-ciclo negativo y una estructura “false/true”, en la cual se define si el motor
gira en el semi-ciclo negativo o positivo, como lo muestra la ilustración 56.

92
Ilustración 56. Tercera Parte del Control
(Autor)
Al unir las tres partes del programa del control en LabVIEW se obtiene lo ilustrado a continuación:
Ilustración 57. Control Prótesis LabVIEW
(Autor)

93
11. ANEXOS
11.1 DATASHEET AD620

94

95
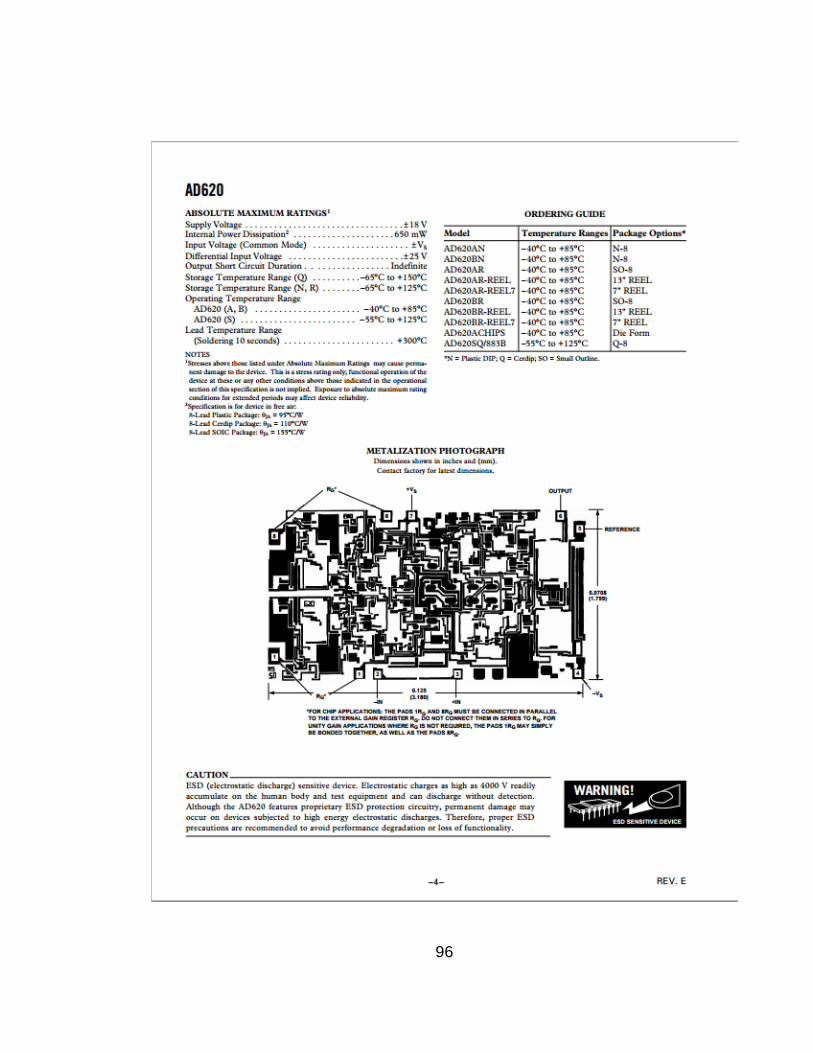
96
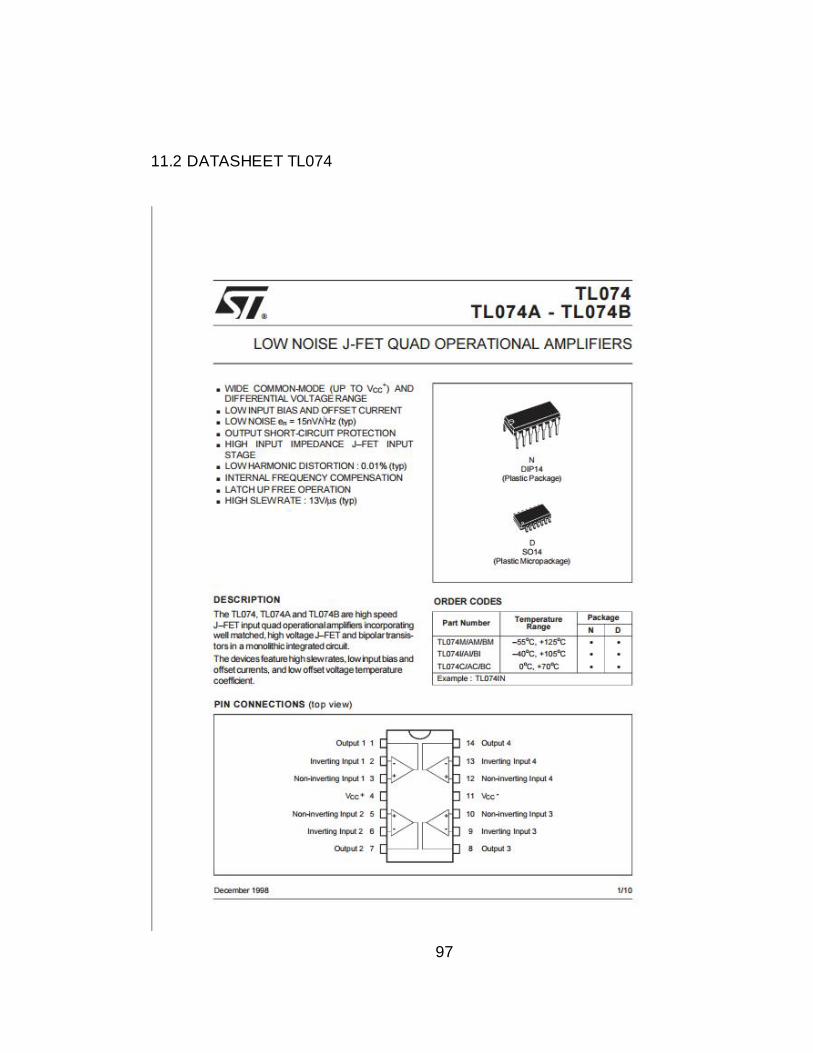
97
11.2 DATASHEET TL074

98

99
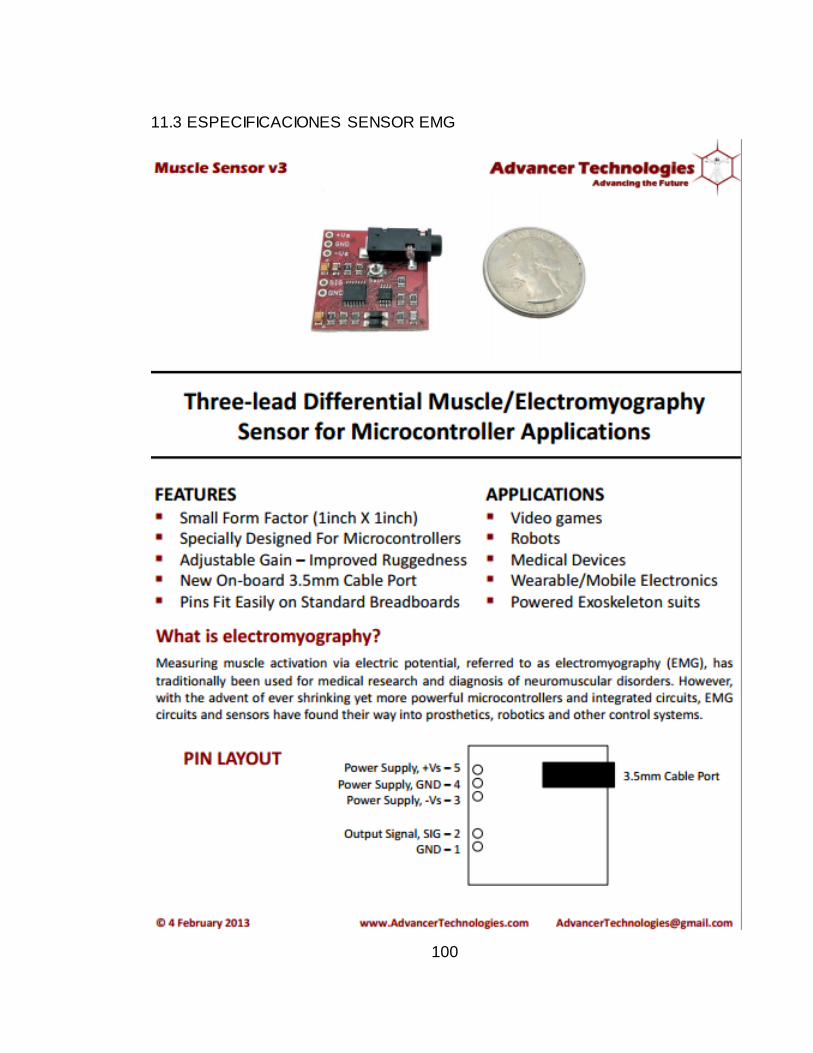
100
11.3 ESPECIFICACIONES SENSOR EMG

101
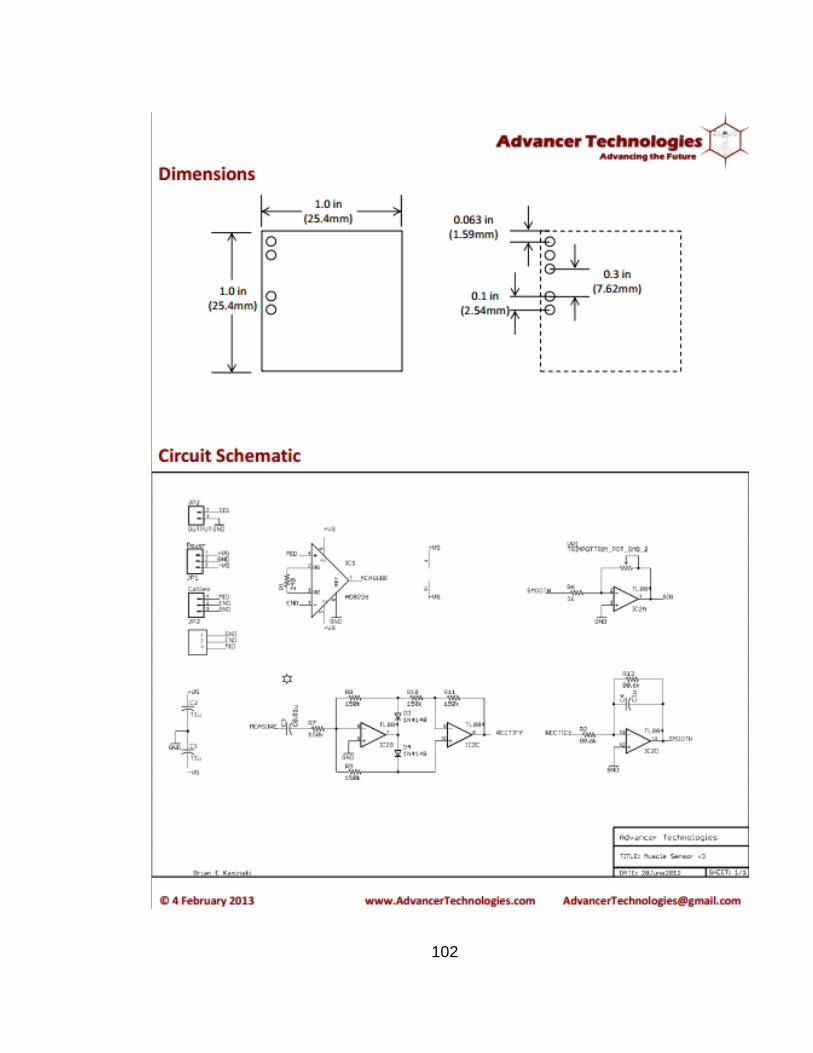
102

103

104
11.4 ESPECIFICACIONES DEL MOTOR
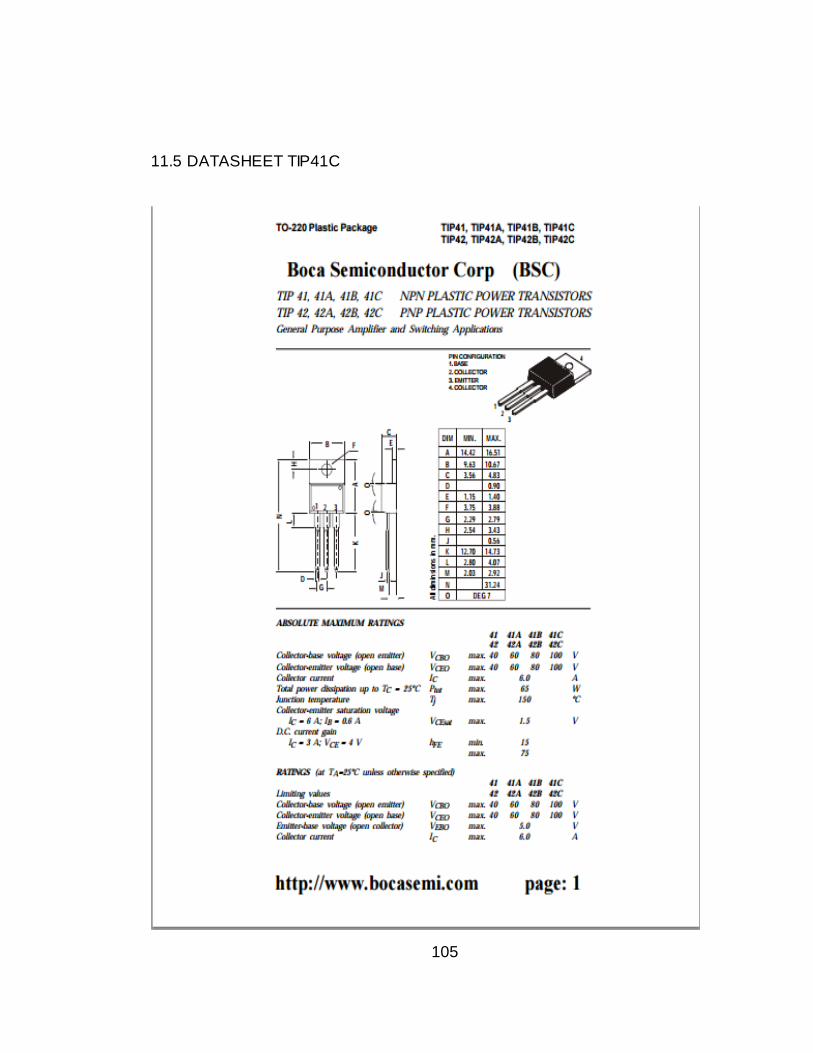
105
11.5 DATASHEET TIP41C

106

107
11.6 DATASHEET ACELERÓMETRO MMA7361
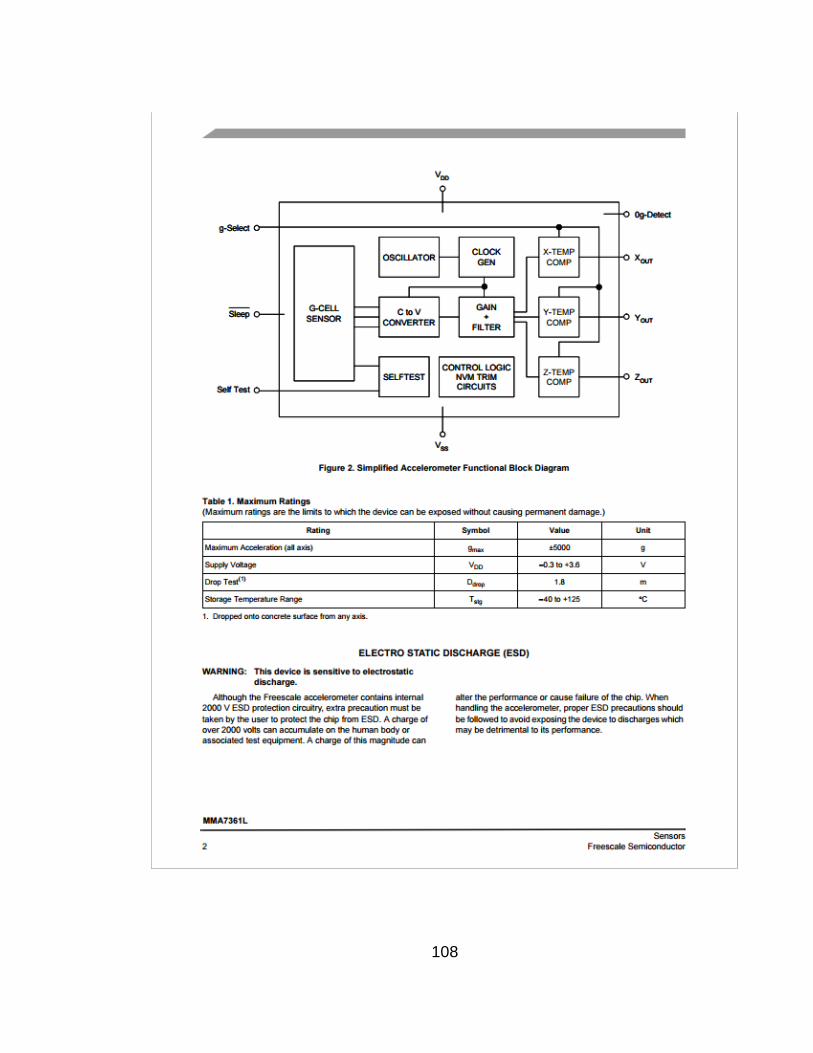
108

109
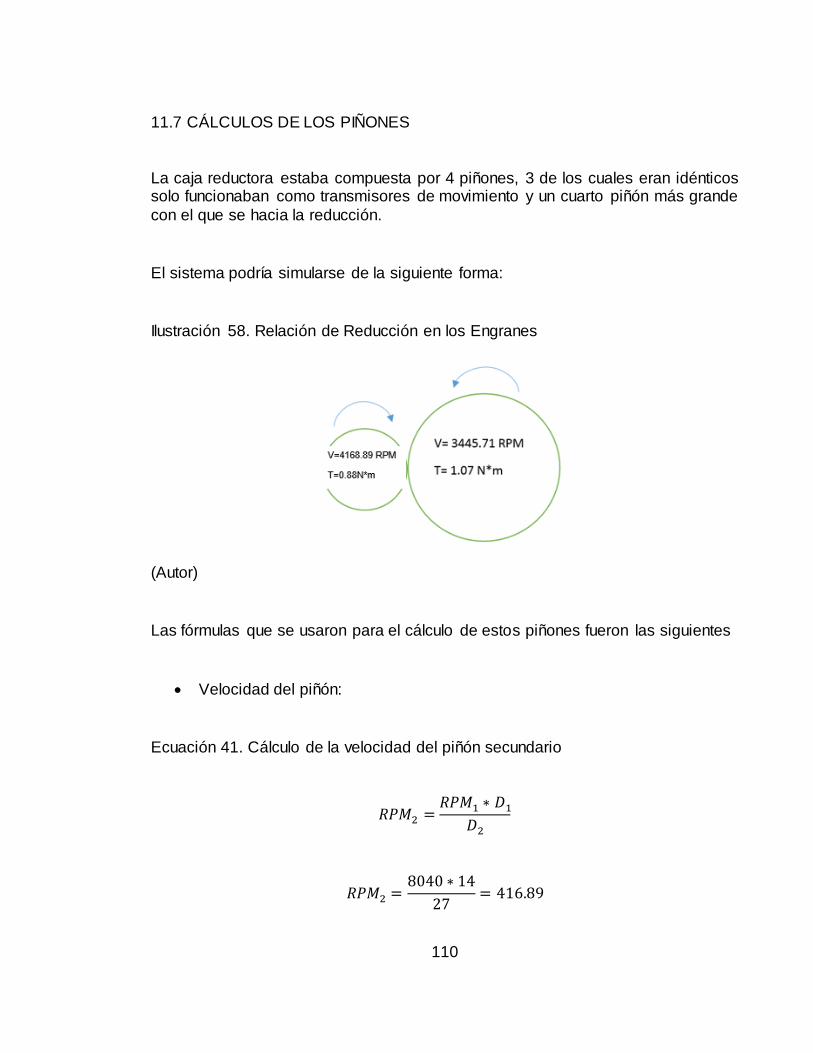
110
11.7 CÁLCULOS DE LOS PIÑONES
La caja reductora estaba compuesta por 4 piñones, 3 de los cuales eran idénticos solo funcionaban como transmisores de movimiento y un cuarto piñón más grande
con el que se hacia la reducción.
El sistema podría simularse de la siguiente forma:
Ilustración 58. Relación de Reducción en los Engranes
(Autor)
Las fórmulas que se usaron para el cálculo de estos piñones fueron las siguientes
Velocidad del piñón:
Ecuación 41. Cálculo de la velocidad del piñón secundario
𝑅𝑃𝑀2 =𝑅𝑃𝑀1 ∗ 𝐷1
𝐷2
𝑅𝑃𝑀2 =8040 ∗ 14
27= 416.89
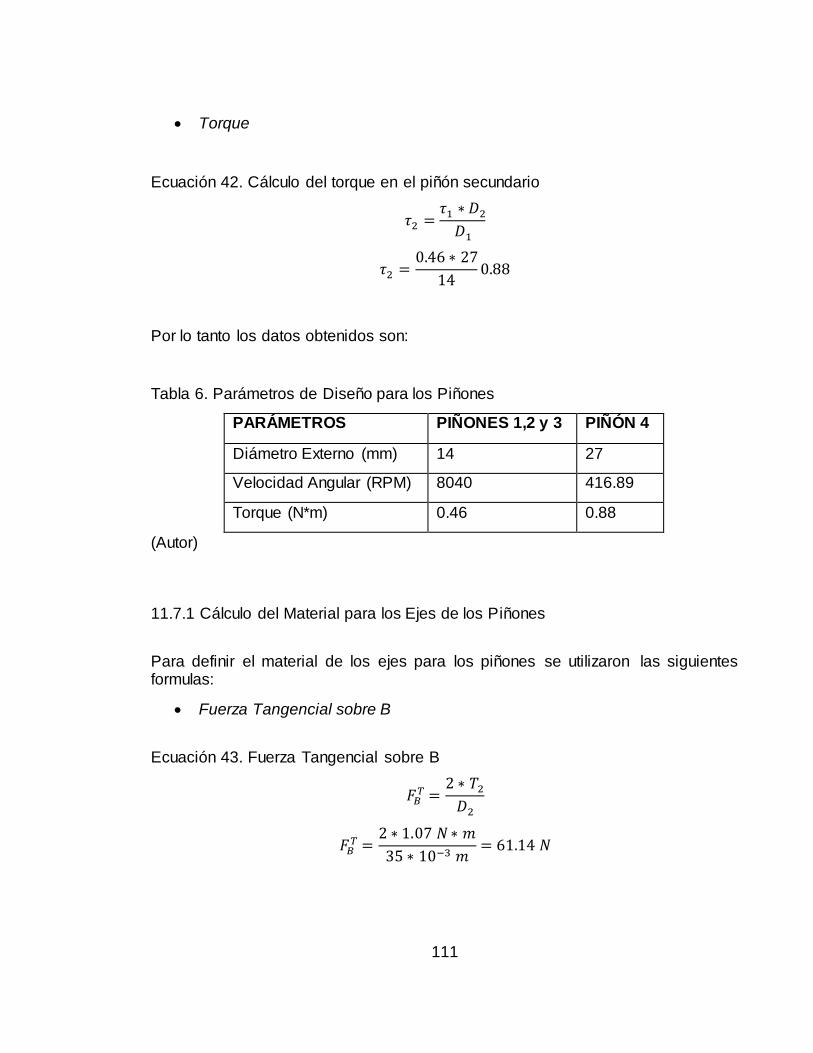
111
Torque
Ecuación 42. Cálculo del torque en el piñón secundario
𝜏2 =𝜏1 ∗ 𝐷2
𝐷1
𝜏2 =0.46 ∗ 27
140.88
Por lo tanto los datos obtenidos son:
Tabla 6. Parámetros de Diseño para los Piñones
PARÁMETROS PIÑONES 1,2 y 3 PIÑÓN 4
Diámetro Externo (mm) 14 27
Velocidad Angular (RPM) 8040 416.89
Torque (N*m) 0.46 0.88
(Autor)
11.7.1 Cálculo del Material para los Ejes de los Piñones
Para definir el material de los ejes para los piñones se utilizaron las siguientes formulas:
Fuerza Tangencial sobre B
Ecuación 43. Fuerza Tangencial sobre B
𝐹𝐵𝑇 =
2 ∗ 𝑇2
𝐷2
𝐹𝐵𝑇 =
2 ∗ 1.07 𝑁 ∗ 𝑚
35 ∗ 10−3 𝑚= 61.14 𝑁

112
Fuerza radial sobre B
Ecuación 44. Fuerza Radial Sobre B
𝐹𝐵𝑅 = 𝐹𝐵
𝑇 ∗ (𝑇𝐴𝑁(20°))
𝐹𝐵𝑅 = 61.14 𝑁 ∗ (𝑇𝐴𝑁(20°)) = 22.25 𝑁
Ilustración 59. Diagrama de Fuerzas en el Plano XZ
(Autor)
Sumatoria de momentos en el plano XZ
Ecuación 45. Sumatoria de Momentos en el Plano XZ
Σ𝑀𝐴 = 0 = (−𝐹𝐵𝑇 ∗ 10 ∗ 10−3𝑚) + (𝑅𝐶𝑋 ∗ 20 ∗ 10−3𝑚)
Reacción en C en el plano XZ
Ecuación 46. Reacción en C en el Plano XZ
𝑅𝐶𝑋 =𝐹𝐵
𝑇 ∗ (10 ∗ 10−3𝑚)
20 ∗ 10−3𝑚=
𝐹𝐵𝑇
2= 30.57 𝑁
Al hacer sumatoria de fuerzas para despejar 𝑅𝐴𝑋 se encuentra que es igual a 𝑅𝐶𝑋 .

113
Ilustración 60. Diagrama de Fuerzas en el Plano YZ
(Autor)
Sumatoria de momentos en el plano YZ
Ecuación 47. Sumatoria de Momentos en el Plano YZ
Σ𝑀𝐴 = 0 = (−𝐹𝐵𝑅 ∗ 10 ∗ 10−3𝑚) + (𝑅𝐶𝑌 ∗ 20 ∗ 10−3𝑚)
Reacción en C en el plano YZ
Ecuación 48. Reacción en C en el Plano YZ
𝑅𝐶𝑌 =𝐹𝐵
𝑅 ∗ (10 ∗ 10−3𝑚)
20 ∗ 10−3𝑚=
𝐹𝐵𝑅
2= 11.25 𝑁
Al hacer sumatoria de fuerzas para despejar 𝑅𝐴𝑌 se encuentra que es igual a 𝑅𝐶𝑌.
El material que se usó para la elaboración de los ejes es acero AISI 1020, cuyo esfuerzo de fluencia del es de 205 MPa.
Ecuación 49. Diámetro Mínimo para los Ejes de los Piñones
𝜙𝐴 =(32) ∗ (1.8) ∗ √(𝑅𝐴𝑋)2 + (𝑅𝐴𝑦)
2
𝜋 ∗ 3 ∗ (205 𝑀𝑃𝑎)= 0.97𝜇𝑚
El diámetro A y el diámetro C son del mismo tamaño, esto se debe a que los piñones al ser de dientes rectos no ejercen fuerza axial sobre los ejes.
114
11.8 DATASHEET NI-MYDAQ

115
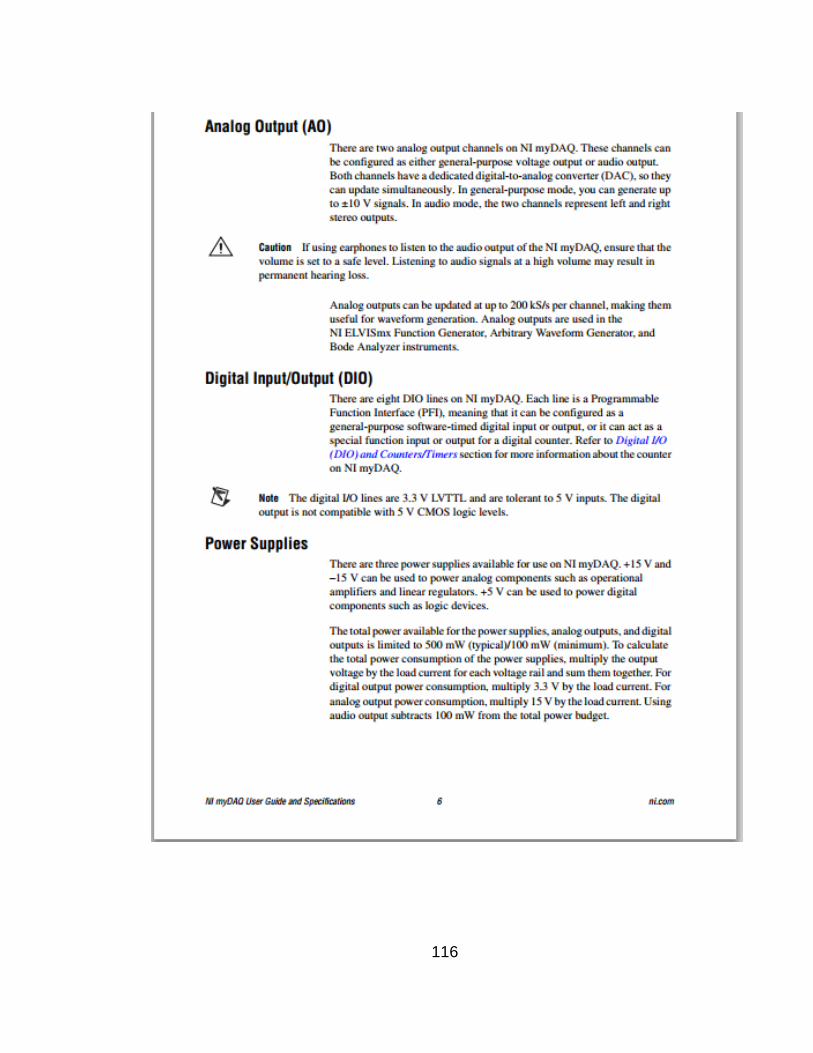
116
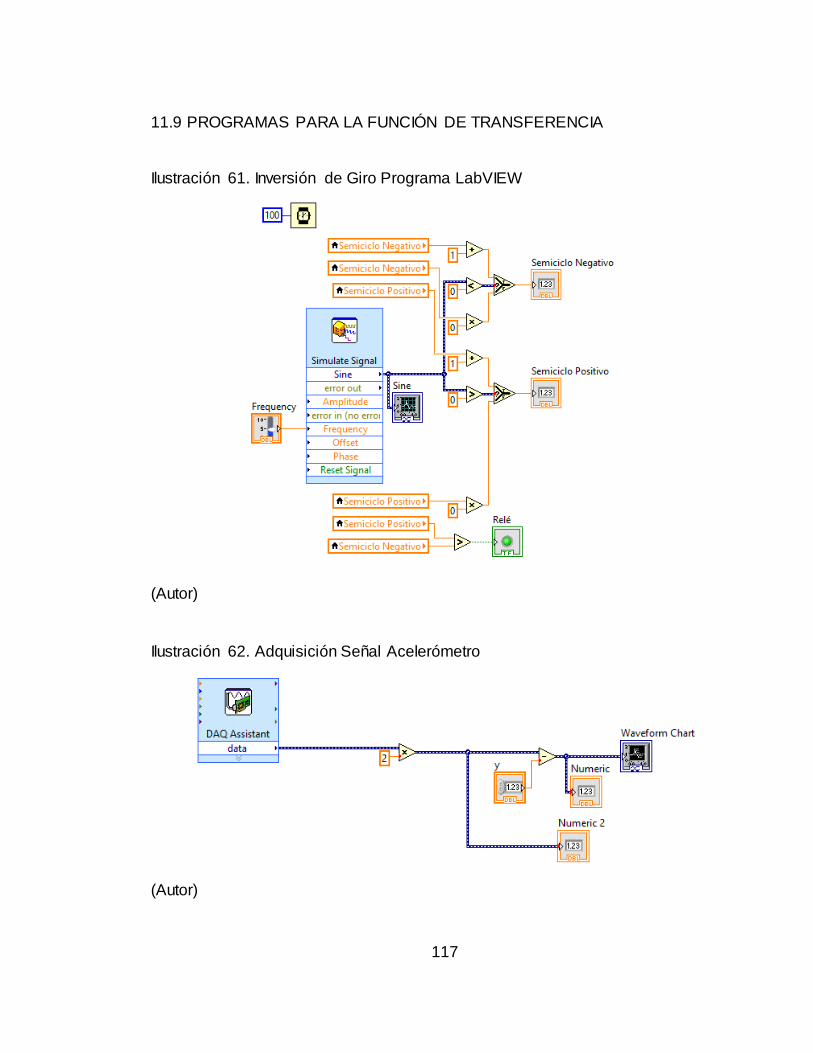
117
11.9 PROGRAMAS PARA LA FUNCIÓN DE TRANSFERENCIA
Ilustración 61. Inversión de Giro Programa LabVIEW
(Autor)
Ilustración 62. Adquisición Señal Acelerómetro
(Autor)
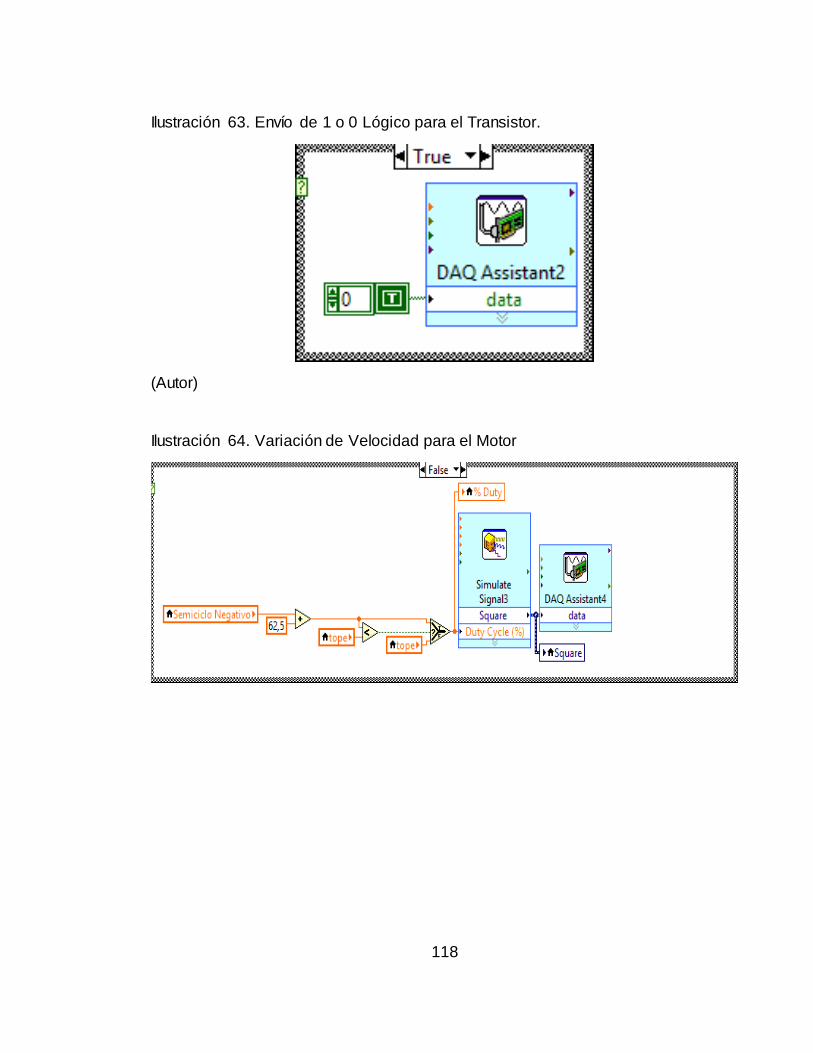
118
Ilustración 63. Envío de 1 o 0 Lógico para el Transistor.
(Autor)
Ilustración 64. Variación de Velocidad para el Motor
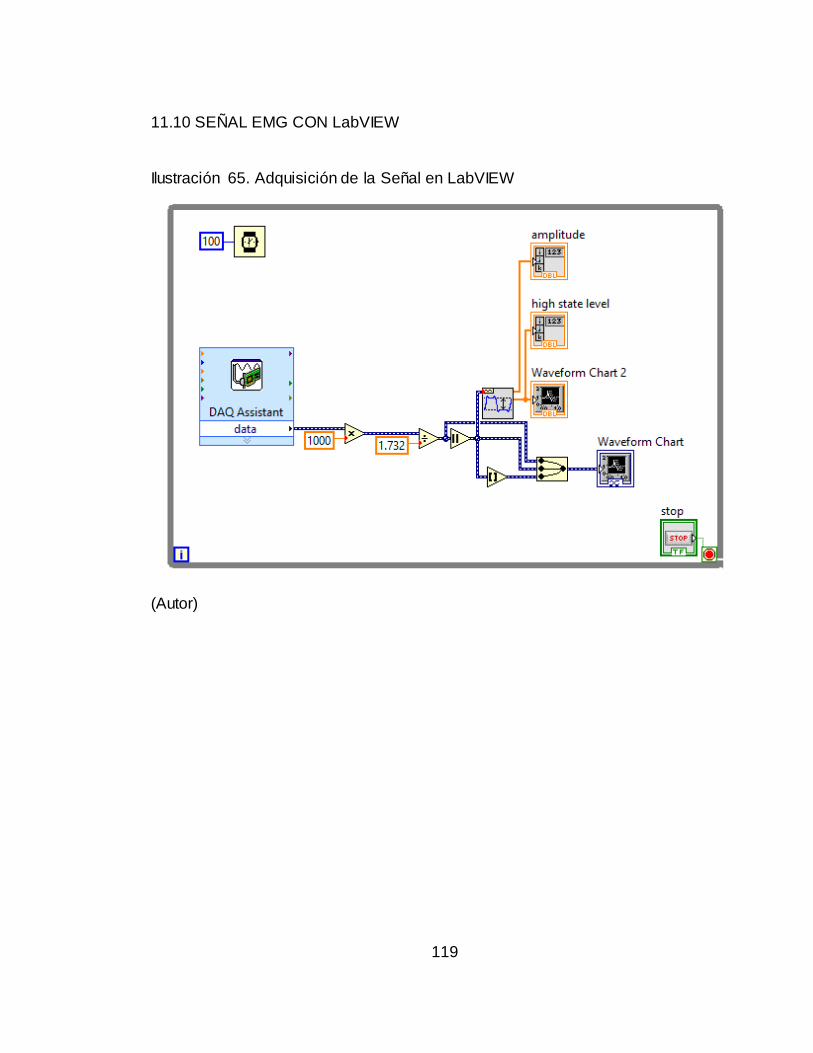
119
11.10 SEÑAL EMG CON LabVIEW
Ilustración 65. Adquisición de la Señal en LabVIEW
(Autor)

120
11.11 PCB DE LOS CIRCUITOS IMPRESOS
Ilustración 66. Circuito de Adquisición de las Señales EMG
(Advancer Technologies, 2015)
Ilustración 67. Circuito de Inversión de Giro del Motor
(Autor)

121
11.12 PLANOS DE LAS PIEZAS MECÁNICAS

134
BIBLIOGRAFÍA
4tronix. (s.f.). Obtenido de 4tronix:
http://4tronix.co.uk/store/index.php?rt=product/product&product_id=146
Acosta, A., Burne, P., Cabrera, S., & Casenave, M. (13 de Noviembre de 2009). Obtenido de Blogger: http://protesismioelectricas.blogspot.com/
Advancer Technologies. (2015, Agosto). Retrieved from Advancer Technologies:
http://www.advancertechnologies.com/p/muscle-sensor-v3.html
Alvarez Osorio, L. (2007). El Amplificador de Aislamiento. En Acondicionamiento de Señales Bioeléctricas (pág. 17). Pereira: Universidad Tecnológica de Pereira.
ANALOG DEVICES. (2011). Low Cost, Low Power Instrumentation Amplifier
AD620. Norwood. Obtenido de http://www.analog.com/media/en/technical-documentation/data-sheets/AD620.pdf
Andrade Maquilón, M. E., & Paz Ruíz, N. E. (2011). Prótesis Transfemoral Electromecánica, Controlada a Base de Señales Mioeléctricas. Popayán:
Universidad Antonio Nariño.
Araujo Herrera, N. L. (2012). Diseño Conceptual de una Prótesis para Amputación Transfemoral. Santiago de Cali: Universidad Autonoma de Occidente.
Au, S. K., & Herr, H. (2008). Powered Ankle-Foot Prosthesis. IEEE Robotics &
Automation Magazine, 52.
Au, S. k., Bonato, P., & Herr, H. (2005). An EMG-position controlled system for an active ankle-foot. International Conference on Rehabilitation Robotics (pág.
375). Chicago: IEEE.
Au, S. K., Weber, J., & Herr, H. (2007). International Conference on Rehabilitation Robotics. Biomechanical Design of a Powered Ankle-Foot Prosthesis (pág. 298). Noordwijk: IEEE.
Betancourt, G., Giraldo Suárez, E., & Franco B, J. F. (2004). Reconocimiento de
patrones de movimiento a partir de señales electromiográficas. Scientia et Technica.
Carratalá, S. (18 de Enero de 2009). Obtenido de Frame and Form:
http://web.archive.org/web/20120925064413/http://www.frameandform.com/2009/01/18/biomimetica-donde-la-naturaleza-y-el-diseno-convergen/
Cifuentes González, I. A. (2010). Diseño y Construcción de un Sistema para la
Detección de Señales Electromiográficas. Mérida: Universidad Autónoma de Yucatán.
135
DALCAME. (s.f.). Obtenido de DALCAME Grupo deInvenstigación Biomédica:
http://www.dalcame.com/emg.html#.VW-VXs9_Oko
Eilenberg, M. F., Geyer, H., & Herr, H. (2010). Control of a Powered Ankle-Foot Prosthesis Based on a Neuromuscular Model. IEEE TRANSACTIONS ON
NEURAL SYSTEMS AND REHABILITATION ENGINEERING, 164.
ELECTRAMED. (s.f.). Obtenido de ELECTRAMED CORPORATION: https://www.electramed.com/neurology/electrodes/disposable/em12000030-
meditrace-230-adult-electrode-30pk
Electrónica Unicrom. (s.f.). Obtenido de Electrónica Unicrom: http://www.unicrom.com/Tut_filt_act_PasoBanda.asp
Farahat, W., & Herr, H. (2005). A Method for Identification of Electrically Stimulated Muscle. Engineering in Medicine and Biology (pág. 6226). Shangai: IEEE.
Futura Shop. (s.f.). Obtenido de Futura Shop: https://www.futurashop.it/index.php?route=product/product&product_id=102
Garcia, A. F. (5 de Mayo de 2008). Obtenido de Universidad del Pais Vasco: http://www.sc.ehu.es/sbweb/fisica/cinematica/circular1/circular1.htm
Gomez Mendoza, A. (22 de Enero de 2007). Obtenido de Universia:
http://noticias.universia.net.co/vida-universitaria/noticia/2007/01/22/252857/inteligencia-armonia-mecanica-
unidos-protesis.html
Gómez, R., & Sapiña, F. (2005). INTRODUCCIÓN. En ESTUDIO BIOMECÁNICO DE LA MARCHA HUMANA EN PACIENTES CON ARTROSIS DE CADERA (pág. 19). Valencia: Universidad de Valencia. Obtenido de
http://es.slideshare.net/ANALISIS/estudio-de-la-marcha-en-artrosis-de-cadera
Grimmer, M., & Seyfarth, A. (2011). Stiffness Adjustment of a Series Elastic Actuator
in an Ankle-Foot Prosthetis for Walking and Running: The Trade-O Between Energy and Peak Power Optimization. International Conference on Robotics
And Automation. Shangai: IEEE.
Hernández Stengele, F. (2008). BIOMECÁNICA DE LA MARCHA HUMANA. En Diseño y construcción de prototipo neumático de prótesis de pierna humana (pág. 38). Cholula: Universidad de las Américas Puebla.
Herr, H. (s.f.). Obtenido de BBVA Open Mind:
https://www.bbvaopenmind.com/articulo/innovacion-cambiar-el-rostro-de-la-discapacidad/?fullscreen=true
Jimenez Bascones, J. M. (s.f.). ELEMENTOS DE MÁQUINAS Y VIBRACIONES.
Parte 1: ELEMENTOS DE MÁQUINAS. Pamplona, España.

136
Koshkin N. I., S. M. (1975). Manual de Física Elemental. Moscú: Mir.
Martinez Villalpando, E. C. (30 de Marzo de 2012). Biomech. Obtenido de
http://biomech.media.mit.edu/wp-content/uploads/sites/3/2013/04/Design-and-evaluation-of-a-biomimetic-agonist-antagonist-active-knee-
prosthesis.pdf
Moreno Velasco, I. (s.f.). Apuntes de Instrumentación Electrónica. Obtenido de http://www.unet.edu.ve/~ielectro/42-AmplificadorInstrumentacion.pdf
National Instruments. (23 de Julio de 2010). Obtenido de National Instruments:
http://www.ni.com/example/31407/en/
Norton, K. (Noviembre/Diciembre de 2007). Un breve recorrido por la historia de la prótesica. inMotion, 17(7), 2. Obtenido de http://www.amputee-coalition.org/spanish/inmotion/nov_dec_07/history_prosthetics.pdf
Oñate, G. (20 de Enero de 2013). Obtenido de Avances Tecnológicos: http://avancesegunlatec.blogspot.com/2013/01/avances-tecnologicos-en-la-medicina.html
Orbe, A. (13 de Diciembre de 2009). Obtenido de Sinapsis: http://sinapsis-
aom.blogspot.com/2009/12/las-piernas-prosteticas-de-hugh-herr.html
Ortopedia 1. (s.f.). Obtenido de Ortopedia 1: http://ortopedia1.com/ortesis
PAICMA. (25 de Mayo de 2015). Obtenido de Acción Contra Minas: http://www.accioncontraminas.gov.co/Prensa/Documents/Situacion%20Victi
mas%20MAP%20MUSE%20AEI.pdf
Perez Lopez, M. (s.f.). Obtenido de Discapacidad Online: http://www.discapacidadonline.com/discapacidadsuperacion-hugh-herr-
protesis-bionicas.html
Pierre, C., Matthys, A., Grosu, V., Vanderborght, B., & Lefeber, D. (2012). The AMP-Foot 2.0: Mimicking Intact Ankle Behavior with a Powered Transtibial Prosthesis. Roma.
Porras, & Soriano. (s.f.). Obtenido de Universidad de Castilla-La Mancha:
https://www.uclm.es/profesorado/porrasysoriano/elementos/Tema08.pdf
Ríos Murillo, P., Flores Lona, I., & Juárez Mendoza, A. (18 de Enero de 2005). Prótesis Mioeléctricas. Revista UNAM, 6(1), 9. Recuperado el 23 de Marzo
de 2013, de http://www.revista.unam.mx/vol.6/num1/art01/art01 -2d.htm
Romo, H. A., Realpe, J. C., & Jojoa, P. E. (2007). Preprocesamiento. En Análisis de Señales EMG Superficiales y su Aplicación en Control de Prótesis de Mano
(pág. 2). Medellín: Universidad del Cauca.
137
Senthil Kumar, J., Bharat Kannan, M., Sankaranarayanan, S., & Venkata Krishnan,
A. (2013). Human Hand Prosthesis Based On Surface EMG Signals for. International Journal of Emerging Technology and Advanced Engineering, 1.
Simbologia Electrónica. (s.f.). Obtenido de Simbolos Eléctricos y Electónicos:
http://www.simbologia-electronica.com/simbolos-electricos-electronicos/simbolos-filtros-electricos.htm
Stegeman, D. F., & Hermens, H. J. (s.f.). Standards for surface electromyography:
the European project "Surface EMG for non-invasive assessment of muscles (SENIAM)”. Obtenido de http://www.med.uni -jena.de/motorik/pdf/stegeman.pdf
SUMITECCR. (s.f.). SUMINISTROS TÉCNICOS. Obtenido de
http://www.sumiteccr.com/Aplicaciones/Articulos/pdfs/AISI%201020.pdf
Suzuki, R., Sawada, T., Kobayashi, N., & Hofer, E. P. (2011). Control Method for Powered Ankle Prosthesis via Internal Model Control Design. International
Conference on Mechatronics and Automation (pág. 237). Beijing: IEEE.
Taboadela, C. H. (2007). Goniometría del tobillo. En GONIOMETRÍA UNA HERRAMIENTA PARA LA EVALUACIÓN DE LAS INCAPACIDADES
LABORALES (págs. 101-103). Buenos Aires: Alianza.
Torres Ríos, C. S. (s.f.). Prótesis Mioeléctrica. Cuenca: Universidad Politécnica Salesiana.
Torres, G. (s.f.). Diseño de Sistemas de Control. En Compensación en Adelanto (pág. 3). Mérida: Universidad de Mérida. Obtenido de
http://webdelprofesor.ula.ve/ingenieria/gerardotorres/Compensadores.pdf
Universidad de los Andes. (2010). TORNILLOS DE POTENCIA. Obtenido de http://www2.ula.ve/dsiaportal/dmdocuments/elementos/TORNILLOPOTENC
IA.pdf
Universidad Miguel Hernandez de Elche. (s.f.). Obtenido de Universidad Miguel Hernandez de Elche:
http://repositorio.innovacionumh.es/Proyectos/P_19/Tema_5/UMH_05.htm
Universidad Politécnica de Cartagena. (s.f.). Filtros eléctricos pasivos. Electrónica analógica: Análisis y diseño , 16. Obtenido de http://ocw.bib.upct.es/pluginfile.php/7878/mod_resource/content/1/Capitulo_
2_-_Filtros_pasivos.pdf
Villalba Madrid, G., & Zamora Izquierdo, M. A. (s.f.). AMPLIFICADORES OPERACIONALES. Murcia: Universidad de Murcia. Obtenido de
http://ocw.um.es/ingenierias/tecnologia-y-sistemas-electronicos/material-de-clase-1/tema-6.-amplificadores-operacionales.pdf
138
Vogel, S. (2000). En ANCAS Y PALANCAS, MECANICA NATURAL Y MECANICA
HUMANA (pág. 278). Barcelona: Tusquets.
Williams, M. R., Grabowski, A., Herr, H., & D'Andrea, S. (s.f.). ELECTROMYOGRAPHIC EFFECTS OF USING A POWERED ANKLE-
FOOT PROSTHESIS. Obtenido de The American Society of Biomechanics.
Zamora Becerra, D. A. (s.f.). Obtenido de Monografias: http://www.monografias.com/trabajos94/biomecanica-extremidades-del-
cuerpo-humano/biomecanica-extremidades-del-cuerpo-humano.shtml
Top Related