







Idiomas
Páginas
Jurídico


V Congreso Iberoamericano SOCOTE -Soporte del Conocimiento con la Tecnología
Universidad de San Martin de Porres, 15-16 de Octubre de 2013
Diseño e implementación de sensores para el monitoreo de variables
climatológicas usando un Microcontrolador
Manuel Sánchez Chero1, Jenner Espinoza Roman
2
1Escuela Académica de Ingeniería Industrial. Universidad de San Martín Filial Norte. Lambayeque.
[email protected] 2Escuela Académica de Ingeniería Industrial. Universidad de San Martín Filial Norte. Lambayeque.
Resumen
En el presente artículo se muestra como fue elaborado un sistema de medición de variables
climatológicas usando un Microcontrolador, así como el desarrollo de una interfaz para
monitorear las variables en línea, con el objeto de realizar las lecturas de los sensores de
temperatura, radiación solar, dirección y velocidad del viento y su respectivo almacenamiento,
dicha información es necesaria para los estudiantes de Ingeniería como para los estudiantes de
los programas de Nivel Técnico Operativo del Senati, por que le permitirá disponer de
información para tomar decisiones en la elaboración de equipos de energía renovable.
El estudio es de naturaleza Tecnológica y se desarrolló en 4 etapas, revisión documental referente
a los diferentes sensores, se diseño los sensores para capturar las variables, se desarrollo la
programación para el Microcontrolador 16F876 y por último se desarrollo la interfaz gráfica
para visualizar las variables en línea.
Los resultados obtenidos referentes al diseño de los sensores reflejaron un nivel de confiabilidad
del 99% en el anemómetro y un 100% en la veleta con relación a los equipos comerciales
existentes para estaciones meteorológicas.
Palabras clave: Energía, Microcontrolador, Programación, Sensores.
Abstract
Thisarticle shows howitwasdeveloped a measurementsystemusing a microcontrollerclimatological
variables, and thedevelopment of an interface to monitor online variables, in ordertoperformthe
sensor readings of temperature, solar radiation, winddirection and speed and
theirrespectivestorage, suchinformationisneededforengineeringstudents and
studentprogramsSenatiOperationalTechnicalLevel, byallowing you
tohaveinformationtomakedecisions in thedevelopment of powerequipmentrenewable.
Thestudyis of a Technology and wasdeveloped in fourstages,
documentreviewconcerningthedifferentsensors, sensorsforcapturingdesign variables,
developingprogrammingfor 16F876 Microcontroller and finallydevelopinggraphical interface
todisplaythe variables online.
Theresultsconcerningthedesign of thesensorsshowed a confidencelevel of 99% in theanemometer
and vane 100% in relationtoexistingcommercialequipmentformeteorologicalstations.
Keywords:Energy, Microcontroller, Programming, Sensors.
1. Estudio Preliminar
En esta etapa se efectuó una amplia revisión bibliográfica relacionada a la elaboración de un
Sistema de medición de variables meteorológicas usando un Microcontrolador, la revisión
incluye proyectos desarrollados en este campo, libros publicados referentes al área, así como
en Internet (diferentes direcciones consultadas), catálogos, etc.
Adicionalmente se procedió a la búsqueda de información para el desarrollo de la etapa de
Hardware y Software requerido para el proyecto.
En lo que respecta a la gran cantidad de información que es necesario procesar de una manera
rápida y eficiente, se determinó la utilización de un Microcontrolador con el propósito de leer
señales a través de los sensores y almacenarlos en su memoria y a través del puerto serial
utilizando una interfaz gráfica pasar la información del Microcontrolador a una Base de
Datos.
Para censar la temperatura se revisó las diversas características de distintos dispositivos
semiconductores que se encuentran disponibles comercialmente, siendo seleccionando
finalmente el denominado LM35 dado que este componente cumple con las característica para
este tipo de investigación.
Finalmente se procedió a la recopilación y estudio de la información relacionada con el
software MicroCode Studio para la programación del PIC, así como para el desarrollo de la
interfaz gráfica se usó Microsoft Visual Basic.
2. Diseñar e implementar los sensores para la captura de las variables.
Para sensar la temperatura se revisó las diversas características de distintos dispositivos
semiconductores que se encuentran disponibles comercialmente, y también una tesis
denominada “Diseño e Implementación Metereológica Virtual” de la UMSNH – Facultad de
Ingeniería Eléctrica- México; siendo seleccionando finalmente el denominado LM35 dado
que este componente cumple con las característica para este tipo de investigación.
Por otro lado se revisaron las características de los sensores de la estación meteorológica de la
Universidad Nacional «Pedro Ruiz Gallo», la cual fue utilizada para validar las mediciones
obtenidas por el Sistema de Medición diseñado.
2.1. Medición de Temperatura Ambiente
Para realizar el monitoreo de la temperatura ambiente, se utilizó el sensor LM35.
2.1.1 Funcionamiento del Sensor LM35
El LM35 es un sensor de temperatura con una precisión calibrada de 1ºC y un rango que
abarca desde -55º a +150ºC.
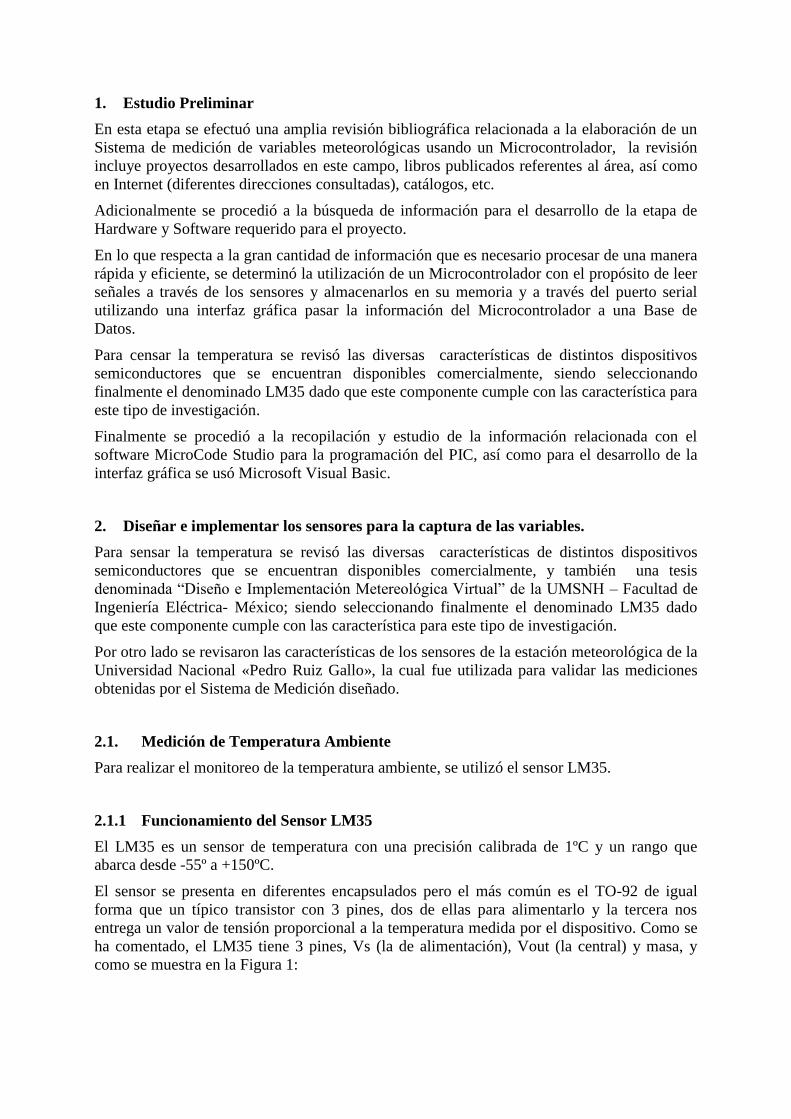
El sensor se presenta en diferentes encapsulados pero el más común es el TO-92 de igual
forma que un típico transistor con 3 pines, dos de ellas para alimentarlo y la tercera nos
entrega un valor de tensión proporcional a la temperatura medida por el dispositivo. Como se
ha comentado, el LM35 tiene 3 pines, Vs (la de alimentación), Vout (la central) y masa, y
como se muestra en la Figura 1:
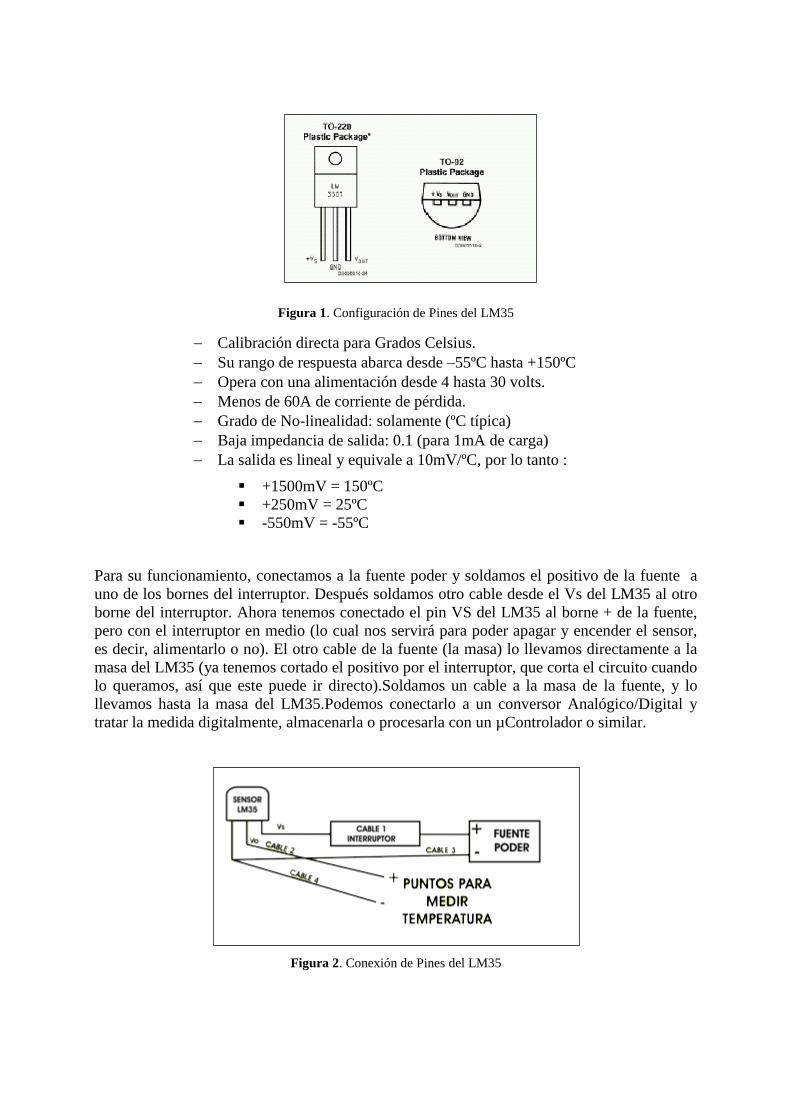
Figura 1. Configuración de Pines del LM35
Calibración directa para Grados Celsius.
Su rango de respuesta abarca desde –55ºC hasta +150ºC
Opera con una alimentación desde 4 hasta 30 volts.
Menos de 60A de corriente de pérdida.
Grado de No-linealidad: solamente (ºC típica)
Baja impedancia de salida: 0.1 (para 1mA de carga)
La salida es lineal y equivale a 10mV/ºC, por lo tanto :
+1500mV = 150ºC
+250mV = 25ºC
-550mV = -55ºC
Para su funcionamiento, conectamos a la fuente poder y soldamos el positivo de la fuente a
uno de los bornes del interruptor. Después soldamos otro cable desde el Vs del LM35 al otro
borne del interruptor. Ahora tenemos conectado el pin VS del LM35 al borne + de la fuente,
pero con el interruptor en medio (lo cual nos servirá para poder apagar y encender el sensor,
es decir, alimentarlo o no). El otro cable de la fuente (la masa) lo llevamos directamente a la
masa del LM35 (ya tenemos cortado el positivo por el interruptor, que corta el circuito cuando
lo queramos, así que este puede ir directo).Soldamos un cable a la masa de la fuente, y lo
llevamos hasta la masa del LM35.Podemos conectarlo a un conversor Analógico/Digital y
tratar la medida digitalmente, almacenarla o procesarla con un µControlador o similar.
Figura 2. Conexión de Pines del LM35
LEYENDA
5
6
7
8
9
10
CAZOLETA1
BARRA HORIZONTAL2
NUEZ3
TUERCA4
EJE VERTICAL5
COJINETES6
TUBO CILINDRICO7
TAPA8
DISCO9
BASE10
1
23
4
2.2. Medición de Velocidad de Viento (anemómetro)
Para conocer cuál es la Dirección del Viento en un cierto lugar, se tuvo que diseñar un
anemómetro, instrumento mecánico que permite determinar la velocidad en m/s.
2.2.1 Funcionamiento del anemómetro
La medida de la velocidad requiere de un proceso de conteo de pulsos provenientes del
sensor.Para calibrar el equipo se registro información por espacio de 4 semanas, en diferentes
horarios utilizando un intervalo de medida de 1 hora.
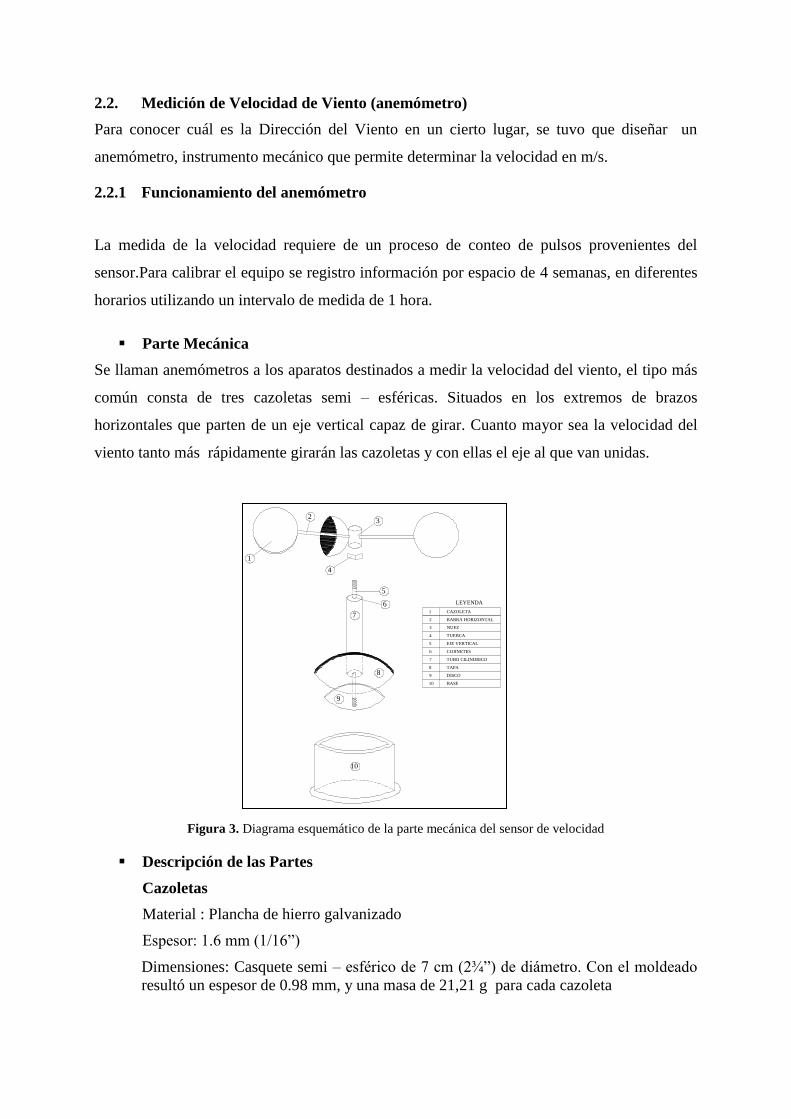
Parte Mecánica
Se llaman anemómetros a los aparatos destinados a medir la velocidad del viento, el tipo más
común consta de tres cazoletas semi – esféricas. Situados en los extremos de brazos
horizontales que parten de un eje vertical capaz de girar. Cuanto mayor sea la velocidad del
viento tanto más rápidamente girarán las cazoletas y con ellas el eje al que van unidas.
Figura 3. Diagrama esquemático de la parte mecánica del sensor de velocidad
Descripción de las Partes
Cazoletas
Material : Plancha de hierro galvanizado
Espesor: 1.6 mm (1/16”)
Dimensiones: Casquete semi – esférico de 7 cm (2¾”) de diámetro. Con el moldeado
resultó un espesor de 0.98 mm, y una masa de 21,21 g para cada cazoleta
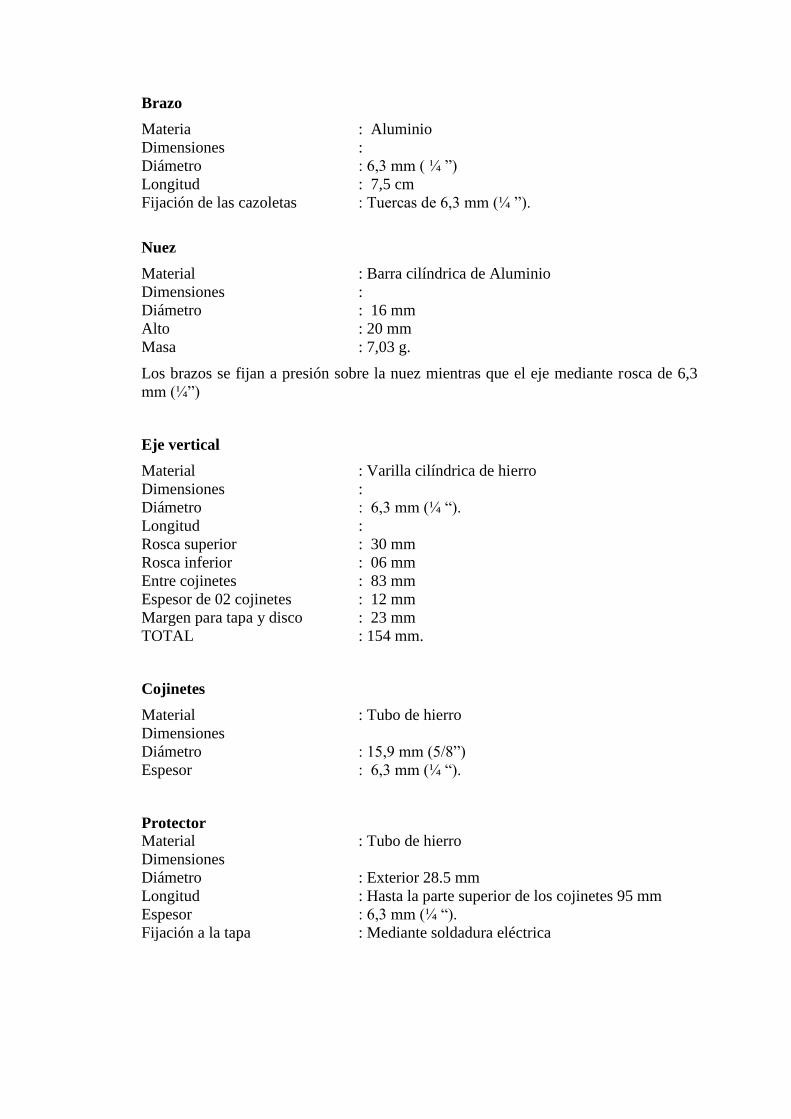
Brazo
Materia : Aluminio
Dimensiones :
Diámetro : 6,3 mm ( ¼ ”)
Longitud : 7,5 cm
Fijación de las cazoletas : Tuercas de 6,3 mm (¼ ”).
Nuez
Material : Barra cilíndrica de Aluminio
Dimensiones :
Diámetro : 16 mm
Alto : 20 mm
Masa : 7,03 g.
Los brazos se fijan a presión sobre la nuez mientras que el eje mediante rosca de 6,3
mm (¼”)
Eje vertical
Material : Varilla cilíndrica de hierro
Dimensiones :
Diámetro : 6,3 mm (¼ “).
Longitud :
Rosca superior : 30 mm
Rosca inferior : 06 mm
Entre cojinetes : 83 mm
Espesor de 02 cojinetes : 12 mm
Margen para tapa y disco : 23 mm
TOTAL : 154 mm.
Cojinetes
Material : Tubo de hierro
Dimensiones
Diámetro : 15,9 mm (5/8”)
Espesor : 6,3 mm (¼ “).
Protector
Material : Tubo de hierro
Dimensiones
Diámetro : Exterior 28.5 mm
Longitud : Hasta la parte superior de los cojinetes 95 mm
Espesor : 6,3 mm (¼ “).
Fijación a la tapa : Mediante soldadura eléctrica
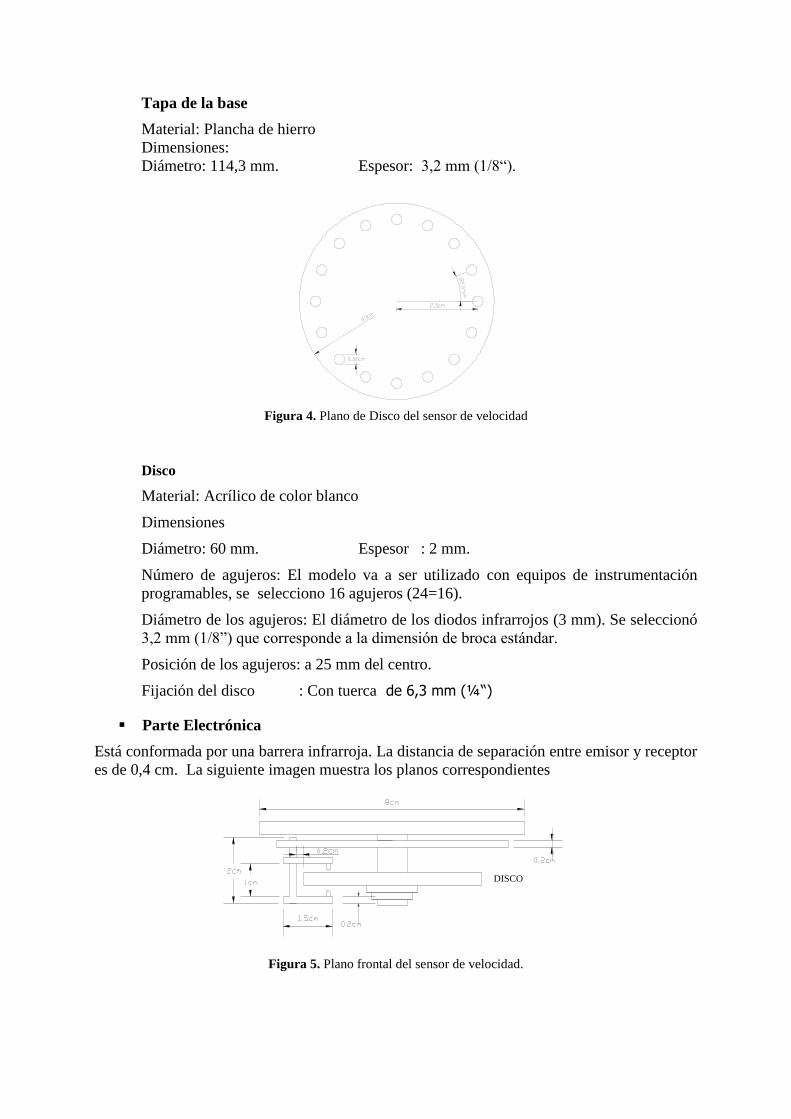
Tapa de la base
Material: Plancha de hierro
Dimensiones:
Diámetro: 114,3 mm. Espesor: 3,2 mm (1/8“).
Figura 4. Plano de Disco del sensor de velocidad
Disco
Material: Acrílico de color blanco
Dimensiones
Diámetro: 60 mm. Espesor : 2 mm.
Número de agujeros: El modelo va a ser utilizado con equipos de instrumentación
programables, se selecciono 16 agujeros (24=16).
Diámetro de los agujeros: El diámetro de los diodos infrarrojos (3 mm). Se seleccionó
3,2 mm (1/8”) que corresponde a la dimensión de broca estándar.
Posición de los agujeros: a 25 mm del centro.
Fijación del disco : Con tuerca de 6,3 mm (¼“)
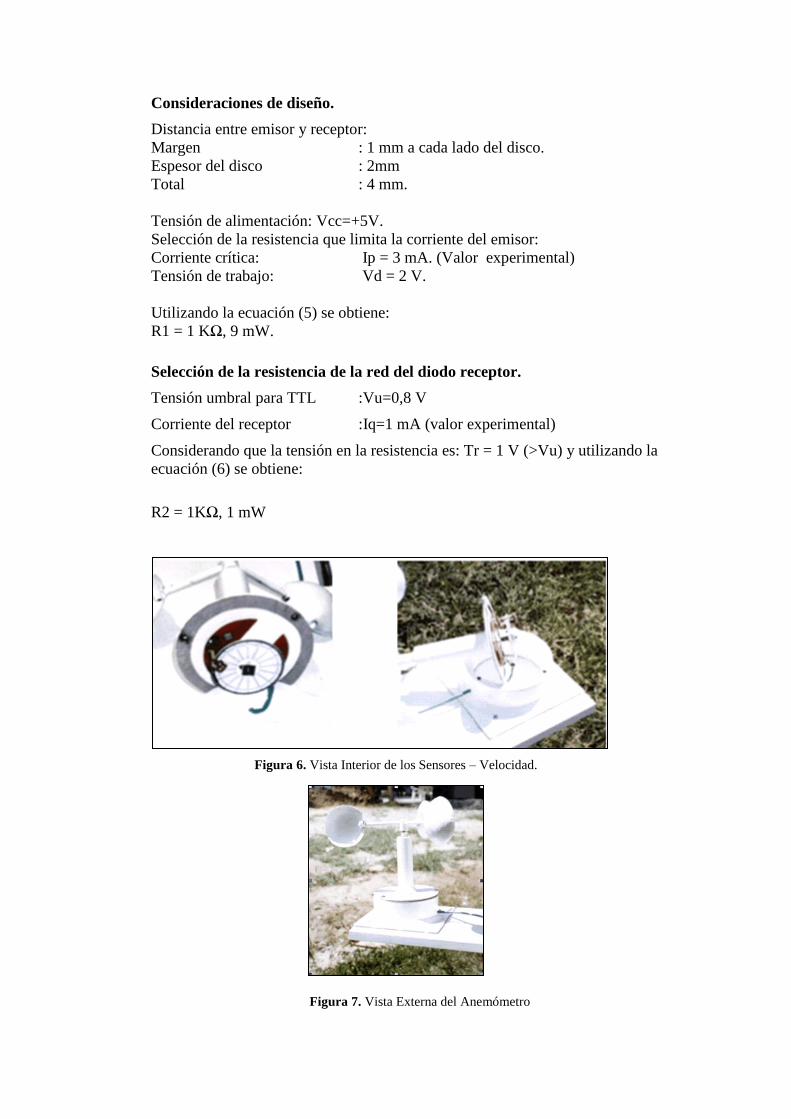
Parte Electrónica
Está conformada por una barrera infrarroja. La distancia de separación entre emisor y receptor
es de 0,4 cm. La siguiente imagen muestra los planos correspondientes
Figura 5. Plano frontal del sensor de velocidad.
DISCO
Consideraciones de diseño.
Distancia entre emisor y receptor:
Margen : 1 mm a cada lado del disco.
Espesor del disco : 2mm
Total : 4 mm.
Tensión de alimentación: Vcc=+5V.
Selección de la resistencia que limita la corriente del emisor:
Corriente crítica: Ip = 3 mA. (Valor experimental)
Tensión de trabajo: Vd = 2 V.
Utilizando la ecuación (5) se obtiene:
R1 = 1 KΩ, 9 mW.
Selección de la resistencia de la red del diodo receptor.
Tensión umbral para TTL :Vu=0,8 V
Corriente del receptor :Iq=1 mA (valor experimental)
Considerando que la tensión en la resistencia es: Tr = 1 V (>Vu) y utilizando la
ecuación (6) se obtiene:
R2 = 1KΩ, 1 mW
Figura 6. Vista Interior de los Sensores – Velocidad.
Figura 7. Vista Externa del Anemómetro

Funcionamiento
La siguiente tabla muestra las velocidades en función al número de pulsos.
Tabla 1.Velocidades en función al número de pulsos
N V (m/s) 1 1,4003
2 1,5102
3 1,6201
4 1,7300
5 1,8399
6 1,9498
7 2,0597
8 2,1696
9 2,2795
10 2,3894
11 2,4993
12 2,6092
13 2,7191
14 2,8290
15 2,9389
Aplicando el método de los mínimos cuadrados, se obtiene para un modelo lineal la siguiente
ecuación (1).
2904,11099,0 nv (1)
Donde:
n = numero de pulsos registrados
2.3. Medición de la Dirección del Viento (Veleta)
La forma más estándar de observar la dirección del viento es por medio de la veleta, en la cual
las paletas son ligeramente quebradas, y debe estar perfectamente equilibrada, para lo cual se
suspende sobre su centro de masa, para conseguirlo lleva un contrapeso en la flecha. Cuya
posición se regula hasta conseguir el deseado equilibrio. Cuando sopla el viento el aparato
tiende a colocarse en la posición de mínima resistencia y la punta de la flecha señala la
dirección de donde sopla el viento.

12 6
13
14
7
1516
8
1
2
1
3
42
5
3
6
7
4
89
5
10
11
NNW NNE
ENE
SSE
ESE
SSW
WSW
WNW
N
E
S
W
NE
SW
NW
SE
Figura 8. Diagrama esquemático de la parte mecánica del sensor de Dirección
2.3.1 Funcionamiento de la veleta
La medida de la dirección requiere del registro del código digital (4 bits) que proporciona el
sensor de dirección, para determinar la dirección se comparo el código digital con la siguiente
tabla la cual muestra la asignación de las direcciones (16 en total), de la roseta de vientos.
Figura 9. Roseta de los Vientos.
1
NUEZ FIJA2
BARRA HORIZONTAL3
NUEZ CORREDIZA4
CONTRAPESO5
EJE VERTICAL6
COJINETES7
TUBO CILINDRICO8
TAPA9
DISCO10
BASE11
1
2
3 4 5
LEYENDA
6
7
8
9
10
11
LAMINA

Tabla 2.Asignación de Direcciones
3. Desarrollar las instrucciones en MicroCode Studio para Microntrolador PIC16F876
Para está etapa se realizó la grabación respectiva del microcontrolador, apoyado en el
Software MicroCode Studio, que consta de los módulos para el monitoreo de las variables,
que serán capturados a través de los sensores.
Figura 10.Esquema general entre la PC y el Microcontrolador.
DIRECCION BINARIO DECIMAL
N 0010 2
N – NE 0110 6
NE 0111 7
E – NE 0101 5
E 0100 4
E – SE 1100 12
SE 1101 13
S – SE 1111 15
S 1110 14
S – SW 1010 10
SW 1011 11
W – SW 1001 9
W 1000 8
W – NW 0000 0
NW 0001 1
N – NW 0011 3

)(º ST 1STe
10HZ
2STe )(1 sy1K
4. Desarrollo de la interfaz gráfica.
La interfaz gráfica fue diseñada usando Microsoft Visual Basic (Figura 7), de tal manera que
se realizar la programación en forma gráfica. Una de las ventajas que se tienen al utilizar
Visual Basic es que da la posibilidad de almacenar los datos en una Base de Datos, se
obtienen soluciones en forma rápida sin profundizar mucho en lo que es la programación.
Además, cuenta con un gran número de funciones para los requerimientos de manejo de
Puerto Serial puede llegar a trabajar con rutinas realizadas en “C” y en algunos otros
lenguajes de programación.
Figura 11. Pantalla Principal de la Interfaz Gráfica.
5. Modelo Matemático
De acuerdo a la Teoría de Sistemas el Modelo Matemático de un sistema de adquisición de
datos para las siguientes variables será:
Temperatura
Figura 12. Modelo Pantalla Principal de la Interfaz Gráfica
Tabla 3. Descripción del Modelo para la Variable Temperatura
Variable Descripción
1K Representa la constante de lineabilidad del sensor de Tº ( p.e :20 mv/ºC )
1STe
Representa el retardo que toma el sensor de temperatura por convertir ese
valor siendo 1T el tiempo de demora, puede ser ms, s , etc.
10HZ Retenedor de orden cero. Modela el tiempo de adquisición de los datos por
parte del operador (programador)
2STe
Modela el retardo del microprocesador. Es el tiempo en que demora el
procesador en convertir la señal desde el conversor AD hasta la entrega del
dato al PC mediante el puerto RS232
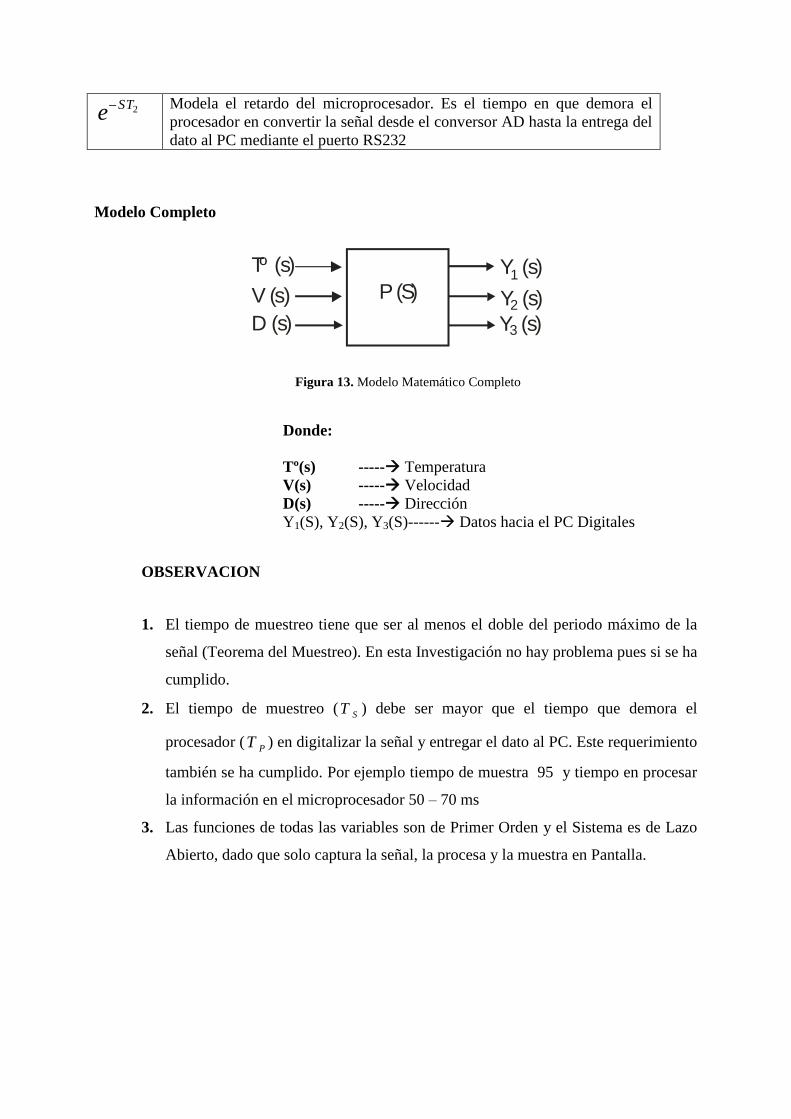
Modelo Completo
Figura 13. Modelo Matemático Completo
Donde:
Tº(s) ----- Temperatura
V(s) ----- Velocidad
D(s) ----- Dirección
Y1(S), Y2(S), Y3(S)------ Datos hacia el PC Digitales
OBSERVACION
1. El tiempo de muestreo tiene que ser al menos el doble del periodo máximo de la
señal (Teorema del Muestreo). En esta Investigación no hay problema pues si se ha
cumplido.
2. El tiempo de muestreo ( ST ) debe ser mayor que el tiempo que demora el
procesador (PT ) en digitalizar la señal y entregar el dato al PC. Este requerimiento
también se ha cumplido. Por ejemplo tiempo de muestra 95 y tiempo en procesar
la información en el microprocesador 50 – 70 ms
3. Las funciones de todas las variables son de Primer Orden y el Sistema es de Lazo
Abierto, dado que solo captura la señal, la procesa y la muestra en Pantalla.
P (S)
Tº (s)
V (s)
Y (s)
Y (s)
Y (s)D (s)
1
2
3
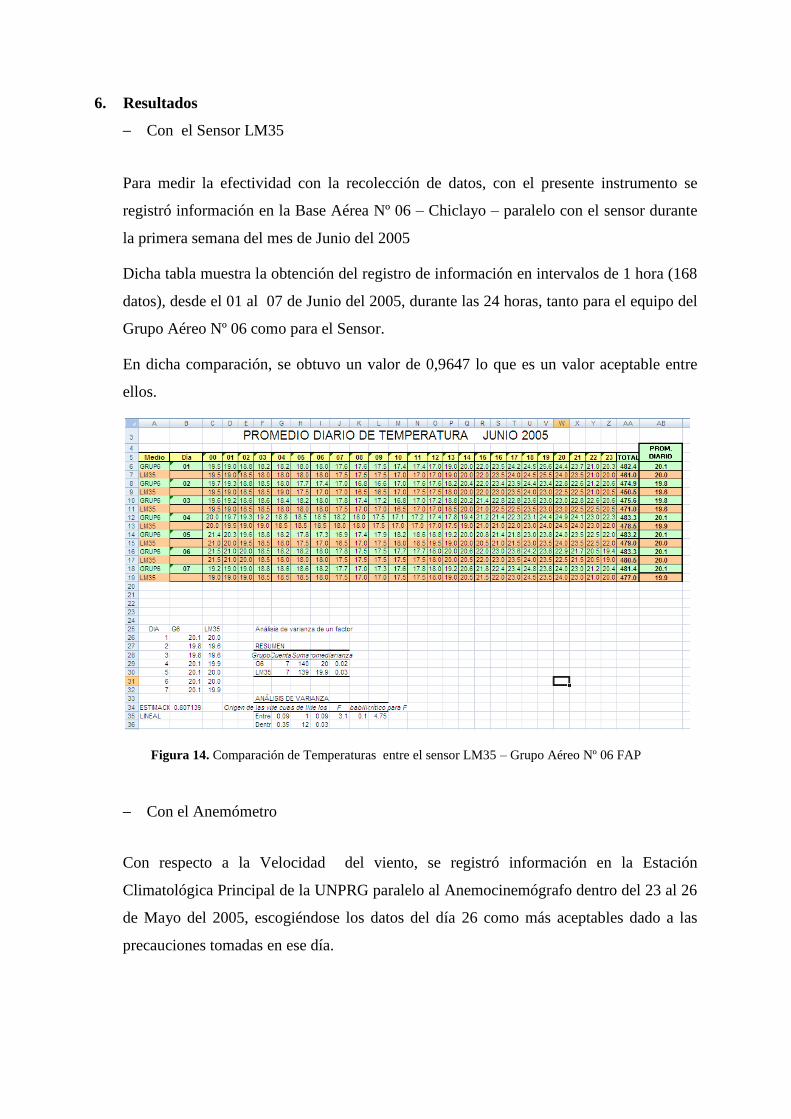
6. Resultados
Con el Sensor LM35
Para medir la efectividad con la recolección de datos, con el presente instrumento se
registró información en la Base Aérea Nº 06 – Chiclayo – paralelo con el sensor durante
la primera semana del mes de Junio del 2005
Dicha tabla muestra la obtención del registro de información en intervalos de 1 hora (168
datos), desde el 01 al 07 de Junio del 2005, durante las 24 horas, tanto para el equipo del
Grupo Aéreo Nº 06 como para el Sensor.
En dicha comparación, se obtuvo un valor de 0,9647 lo que es un valor aceptable entre
ellos.
Figura 14. Comparación de Temperaturas entre el sensor LM35 – Grupo Aéreo Nº 06 FAP
Con el Anemómetro
Con respecto a la Velocidad del viento, se registró información en la Estación
Climatológica Principal de la UNPRG paralelo al Anemocinemógrafo dentro del 23 al 26
de Mayo del 2005, escogiéndose los datos del día 26 como más aceptables dado a las
precauciones tomadas en ese día.
Estableciéndose la correlación entre los valores medidos con el anemocinemógrafo y el
anemómetro, se obtuvo un valor de: R=0,99908798; lo que es un valor aceptable dada la
alta correlación entre ellos.
Con la Veleta
Al igual de la Velocidad del Viento, se realizó una comparación con el
anemocinemógrafo de la UNPRG y medidos con el equipo construido, coinciden
plenamente. Esto permite afirmar que la información que proporciona el modelo de veleta
digital construido es confiable.
7. Conclusiones
Se logro elaborar un Sistema de Medición de variables usando un
Microcontrolador portátil, utilizando sensores, el cual sirve para medir
temperatura, velocidad y dirección de viento.
Se logro diseñar y construir un Anemómetro utilizando sensores infrarrojos el
cual permitirá medir la velocidad, con un coeficiente de correlación de
0,99908798
Se logro diseñar una veleta utilizando sensores infrarrojos para medir la dirección
del viento, con una confiabilidad del 100% con respecto a los equipos comerciales
existentes para estaciones meteorológicas.
Se elaboró una interfaz gráfica utilizando Microsoft Visual Basic, para transferir
la información del Microcontrolador a una Base de Datos, por intermedio del
puerto serial RS232.
Se elaboro el Modelo Matemático completo para el sistema de adquisición de
datos.
Agradecimientos
Deseo expresar mi más profundo agradecimiento al equipo de profesores del Programa del
Nivel Técnico Operativo del Senati zonal Cajamarca Norteque han contribuido al desarrollo
del trabajo de Investigación.
Mi especial reconocimiento a mi amigo Luis Ángeles García por la generosidad y dedicación
en la transmisión de sus conocimientos y experiencias y, fundamentalmente por el apoyo y
aliento que me facilitó en todo momento.
Mi gratitud a todas las personas que han colaborado en la realización de este trabajo de
investigación, especialmente al jefe de personal del Grupo Aéreo N°6 de la ciudad de
Chiclayo por su apoyo en el permiso para hacer comparaciones con los equipos comerciales
de la estación meteorológica sin cuya colaboración y ayuda esta investigación no hubiera
sido posible.
Referencias
Angulo J. & Angulo I. (2000), Microcontroladores PIC: Diseño Práctico de Aplicaciones.
Editorial Mc Graw Hill Interamericana.
Carr J. (2000). Sensores y Circuitos. Ediciones Prentice Hall. Segunda Edición.
Ehowenespanol. (2013). Cómo recibir bytes a partir de un puerto serial con Visual Basic.
Recuperado de http://www.ehowenespanol.com/recibir-bytes-partir-puerto-serie-visual-
basic-como_115162/
Gaspar C. (2004). Diseño e Implementación de una Estación Meteorológica Virtual (Tesis
inédita de maestría). Universidad Michoacana de San Nicolás de Hidalgo, México.
González. J. (2004). Herramientas hardware y software para el desarrollo de aplicaciones con
Microcontroladores PIC bajo plataformas GNU/Linux", III Jornadas de Software Libre,
Universidad Pontificia de Salamanca en Madrid.
Howard M. (1999), Fundamentos de Señales Amplificadas.M. Berlin, Maxwell Macmillan
International Editions.
Johnson G. (1999), Sistemas Eólicos. Editorial Mc Graw Hill.
Mahesh L. (1998). Programación en Microcontroladores. Ediciones Prentice Hall
Internacional. Tercera Edición.
Mecanique. (2013). Componentes electrónicos. Recuperado de
http://www.mecanique.co.uk/shop/index.php?route=product/category&path=79
Messenger R. (2000). Sistemas de Ingeniera Fotovoltaicos. Ediciones Maxwell.
Micmaster. (2013). Manejo de Puerto serial con Visual Basic. Recuperado de
http://raulalejandroql.webcindario.com/puertos/puerto_serial.htm
Microchip. (2001). PIC16F87X Data Sheet. Recuperado de
http://ww1.microchip.com/downloads/en/devicedoc/30292c.pdf

Pascual, J. (2002). Conexión de una pantalla LCD a un Microcontrolador. Recuperado de
http://server-die.alc.upv.es/asignaturas/lsed/2002-03/Pantallas_LCD/LCD.pdf
Sanchez J. (1976), Apuntes de Instrumentos Meteorológicos.Madrid.
Siler B. &Spotts J. (1999). Edición Especial Visual Basic 6. Prentice Hall. Edición Especial.
Tocci R. (1996). Sistema Digitales: Principios y Aplicaciones. Editorial Prentice Hall
Hispanoamericana SA México.
Texas Instrumental. (2013). LM35 Precision Centigrade Temperature Sensors. Recuperado de
http://www.ti.com/lit/ds/symlink/lm35.pdf
Top Related