







Idiomas
Páginas
Jurídico


5/12/2018 TRANSMISI N DIGITAL - slidepdf.com
http://slidepdf.com/reader/full/transmision-digital-55a3595a063d0 1/25
TRANSMISIÓN DIGITAL
INTRODUCCIÓN
La transmisión digital es la transmisión de pulsos digitales entre dos puntos distantes medianteun sistema de comunicación. La información de la fuente original puede estar en modo digital
o en modo analógico, en este último caso debe convertirse en pulsos digitales antes de su
transmisión, para ser convertido posteriormente en forma analógica en el lado del receptor.
En el presente tema se tratarán las técnicas empleadas para la conversión de señales
analógicas en señales digitales adecuadas para ser retransmitidas por las líneas telefónicas.
CONTENIDO
6.1. Ventajas de la transmisión digital
6.2. Señales analógicas y señales digitales
6.3. Códigos eléctricos NRZ y RZ
6.4. Códigos eléctricos AMI y HDB3
6.5. Transmisión de señales digitales por línea telefónica de pares trenzados
6.6. Perturbaciones más frecuentes de las señales digitales. Errores producidos en la señal
transmitida
Ejercicios
OBJETIVOS
Conocer las principales ventajas e inconvenientes de las técnicas de transmisión
digital.
Estudiar los diferentes códigos eléctricos utilizados para la transmisión de señales
digitales por líneas de transmisión telefónicas formadas por pares simétricos.
Entender cómo es posible la extracción de las señales de reloj necesarias para lasincronía de los sistemas digitales a partir de las señales transmitidas por las líneas.
Detallar el funcionamiento en su conjunto de un regenerador de señales digitales.
Ver cuáles son las perturbaciones que afectan a las señales digitales en su paso por las
líneas telefónicas y de qué forma puede evaluarse la calidad de las señales
transmitidas.
6.1 VENTAJAS DE LA TRANSMISIÓN DIGITAL
5/12/2018 TRANSMISI N DIGITAL - slidepdf.com
http://slidepdf.com/reader/full/transmision-digital-55a3595a063d0 2/25
Por un lado están las ventajas técnicas, ya que la calidad de la transmisión digital es
independiente de la distancia, al contrario que en la transmisión de señales analógicas.
Las ventajas más importantes son:
Inmunidad al ruido. Las señales digitales no son más que impulsos de tensión eléctrica, es decir
si tenemos tensión hay un uno lógico y si no existe tenemos un cero (puede ser a la inversa si
trabajamos con lógica negativa); los repetidores tan sólo tienen que reconocer y decidir si hay
impulsos o no, aunque éstos lleguen ate¬nuados, deformados o afectados por ruido.
Después de tomar esta decisión, los regeneradores digitales retransmiten una señal
totalmente nueva e idéntica a la original, es decir en cada etapa regeneradora se eli¬minan los
errores y el ruido.
Los sistemas analógicos además de amplificar la señal con su correspondiente ruido, añaden
ruido en las propias etapas regeneradoras, con lo que al final de la línea de transmisión el
ruido acumulado puede ser tal que imposibilite la comuni¬cación telefónica.
Almacenamiento y procesamiento. Las señales digitales pueden ser almacenadas y procesadas
posteriormente más fácilmente que las señales analógicas.
Los sistemas digitales están mejor equipados para evaluar un rendimiento de error (por
ejemplo, detección y corrección de errores) que los analógicos.
Los equipos digitales, por ejemplo centrales de conmutación telefónica, consumen menos
potencia y son más pequeños que sus equivalentes analógicos, lo cual con¬lleva grandesventajas.
Además las técnicas digitales pueden introducir nuevos servicios en la red telefónica, ya que
tratan por igual tanto la voz como los datos, de esta forma se llega al concepto de Red Digital
de Servicios Integrados (RDSI) en la cual todas las señales que circulan por ella son digitales.
Algunos de los inconvenientes que presenta el empleo de técnicas de transmisión digital son:
La transmisión de las señales analógicas codificadas de manera digital requieren de mayor
ancho de banda para transmitir que la señal analógica.
Las señales analógicas deben convertirse en códigos digitales antes de su trans¬misión, para
volver a ser convertidas posteriormente en su equivalente analógico.
La transmisión digital requiere de sincronización precisa, de tiempo, entre los relojes del
transmisor y receptor.
Los sistemas de transmisión digital son incompatibles con las instalaciones ana¬lógicas
existentes, por lo que sus equivalentes analógicos existentes deber ser sus¬tituidos por
equipos digitales.
6.2 SEÑALES ANALÓGICAS Y SEÑALES DIGITALES
5/12/2018 TRANSMISI N DIGITAL - slidepdf.com
http://slidepdf.com/reader/full/transmision-digital-55a3595a063d0 3/25
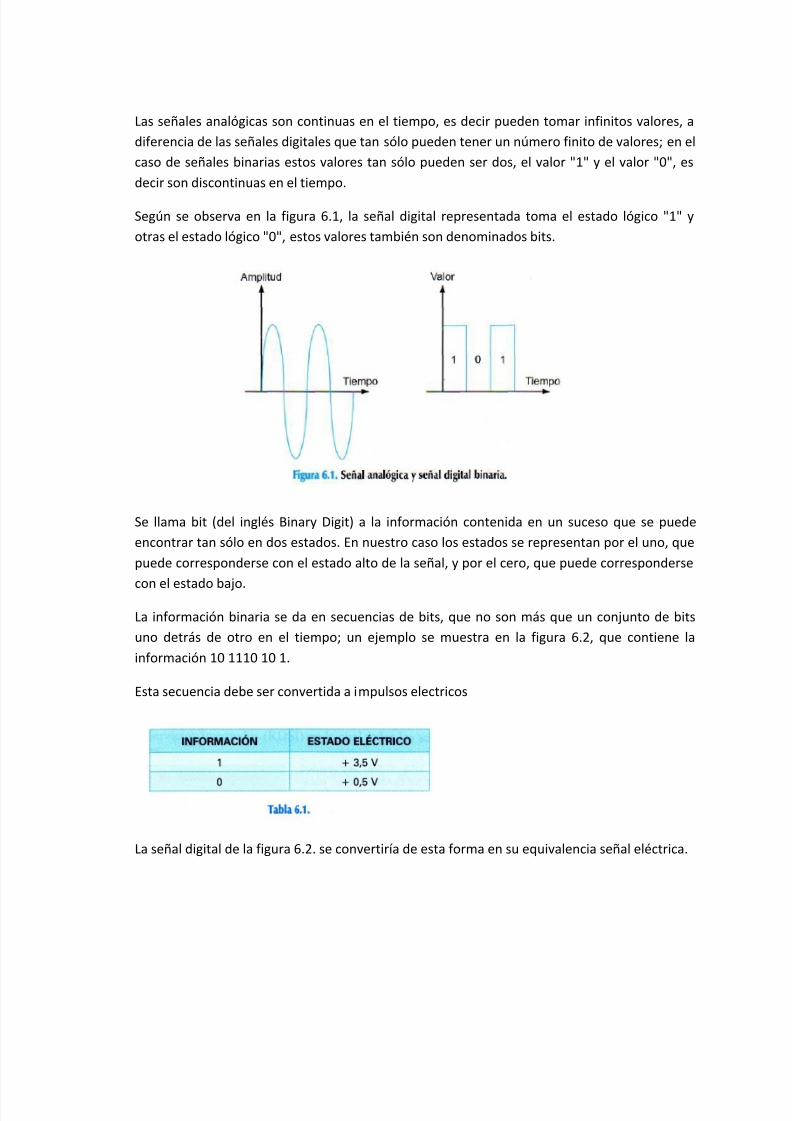
Las señales analógicas son continuas en el tiempo, es decir pueden tomar infinitos valores, a
diferencia de las señales digitales que tan sólo pueden tener un número finito de valores; en el
caso de señales binarias estos valores tan sólo pueden ser dos, el valor "1" y el valor "0", es
decir son discontinuas en el tiempo.
Según se observa en la figura 6.1, la señal digital representada toma el estado lógico "1" y
otras el estado lógico "0", estos valores también son denominados bits.
Se llama bit (del inglés Binary Digit) a la información contenida en un suceso que se puede
encontrar tan sólo en dos estados. En nuestro caso los estados se representan por el uno, que
puede corresponderse con el estado alto de la señal, y por el cero, que puede corresponderse
con el estado bajo.
La información binaria se da en secuencias de bits, que no son más que un conjunto de bits
uno detrás de otro en el tiempo; un ejemplo se muestra en la figura 6.2, que contiene la
información 10 1110 10 1.
Esta secuencia debe ser convertida a impulsos electricos
La señal digital de la figura 6.2. se convertiría de esta forma en su equivalencia señal eléctrica.

5/12/2018 TRANSMISI N DIGITAL - slidepdf.com
http://slidepdf.com/reader/full/transmision-digital-55a3595a063d0 4/25
Con la información existente en la señal representada, ésta no puede ser decodifica-da
totalmente, ya que aunque conozcamos el código empleado en su codificación y el momento
en el cual comienzan y terminan los dígitos, no conocemos si se suceden éstos, es decir a la
vista de la figura 6.3 no podemos saber si entre t2 y t3 tenemos un "1" o más.
Por lo tanto, debemos disponer de alguna información "extra" que nos indique exactamente el
comienzo y fin de cada uno de los bits.
Esta información se denomina señal de temporización o señal de reloj, cuyo objetivo es el de
marcar los tiempos de bit, tal y como se muestra en la figura 6.4

5/12/2018 TRANSMISI N DIGITAL - slidepdf.com
http://slidepdf.com/reader/full/transmision-digital-55a3595a063d0 5/25
Puede observarse que la indicación del comienzo del bit es dado por los flancos de subida,
indicados por flechas ascendentes en los impulsos del reloj; también podrían marcarse por los
flancos descendentes, de esta forma queda totalmente claro que entre t2 y t3 existen tres bits
cuyo estado es "1".
6.3 CÓDIGOS ELÉCTRICOS NRZ Y RZ
El código NRZ significa "non return zero", no retorno a cero y hace referencia a los códigos
eléctricos binarios en los cuales el estado eléctrico de la señal se mantiene constante durante
el tiempo que dura cada bit.
La figura 6.5 es un ejemplo de señal codificada mediante el código NRZ.
Este tipo de señales se utiliza en el interior de equipos electrónicos digitales, pero presentagrandes inconvenientes si se utiliza como código para enviar datos.
6.3.1. INCONVENIENTES DEL CÓDIGO NRZ
Una de estas dificultades es que esta señal debe de ir acompañada de sus impulsos de
sincronización, es decir de su señal de reloj, ya que si no es imposible determinar la sincronía
de los bits. Por lo tanto se debería disponer de otro canal exclusivo para la señal de reloj con el
derroche que esto supone.
5/12/2018 TRANSMISI N DIGITAL - slidepdf.com
http://slidepdf.com/reader/full/transmision-digital-55a3595a063d0 6/25
La forma de enviar la señal NRZ y los impulsos de reloj por el mismo canal de comu¬nicación es
encontrar un código que combine ambas, es decir que contenga la señal NRZ además de la
señal de reloj; el código RZ viene a resolver estos inconvenientes.
El acrónimo RZ "return zero" significa retorno a cero; la figura 6.6 muestra este tipo de código.
Según puede verse en la señal anterior, el "1" corresponde con el estado alto de la señal NRZ
durante la mitad del tiempo de bit, retornando a "0" durante la otra mitad del rempo de bit de
la señal original.
La obtención de la señal RZ a partir de la NRZ y los impulsos de reloj es sencilla, sim¬plemente
efectuando la operación lógica AND a las dos señales citadas anteriormente. Este proceso es
mostrado en la figura 6.7.

5/12/2018 TRANSMISI N DIGITAL - slidepdf.com
http://slidepdf.com/reader/full/transmision-digital-55a3595a063d0 7/25
La señal RZ obtenida incorpora la información a transmitir y los impulsos de reloj necesarios
para determinar los tiempos de bit; ahora bien, ¿cómo es posible recuperar la señal de
temporización de nuevo?
El proceso se ilustra en la figura 6.8, donde se utiliza un circuito oscilador sintonizado a unafrecuencia igual a la frecuencia de reloj y un circuito recuadrador.
5/12/2018 TRANSMISI N DIGITAL - slidepdf.com
http://slidepdf.com/reader/full/transmision-digital-55a3595a063d0 8/25
Al recibir la señal RZ, el oscilador se sintoniza con la frecuencia recibida y genera una señal
sinusoidal en el punto B acorde con la señal recibida, posteriormente el recua-drador
transforma la señal a su entrada en una señal cuadrada, punto C, con las mismas
características que la señal de reloj original.
6.3.2. INCONVENIENTES DEL CÓDIGO RZ
Este sistema tiene dos grandes inconvenientes, el primero se presenta cuando exis¬ten
grandes secuencias de ceros seguidos, es decir en ausencia de señal; en este caso el oscilador
no tiene señal piloto de referencia y pasado un cierto tiempo la senoide a su salida está
totalmente desfasada con la señal de reloj.
El segundo inconveniente es que la señal RZ tal y como la conocemos hasta ahora, tiene un
cierto nivel de corriente continua, lo cual no la hace apta para ser transmitida por líneas de
transmisión formadas por conductores paralelos, ya que como se ha visto en temas anteriores,estas líneas son equivalentes a sistemas formados por bobinas y condensadores, y por otro
lado existen multitud de transformadores a lo largo del sistema telefónico, con los
consiguientes problemas que presenta la corriente continua al aplicarse a estos elementos.
6.4. CÓDIGOS ELÉCTRICOS AMI Y HPB3
Los códigos AMI (Altérnate Mark Inversión) y HDB3 (High Density Bipolar) se han desarrollado
para evitar los inconvenientes presentados por los códigos descritos anteriormente.
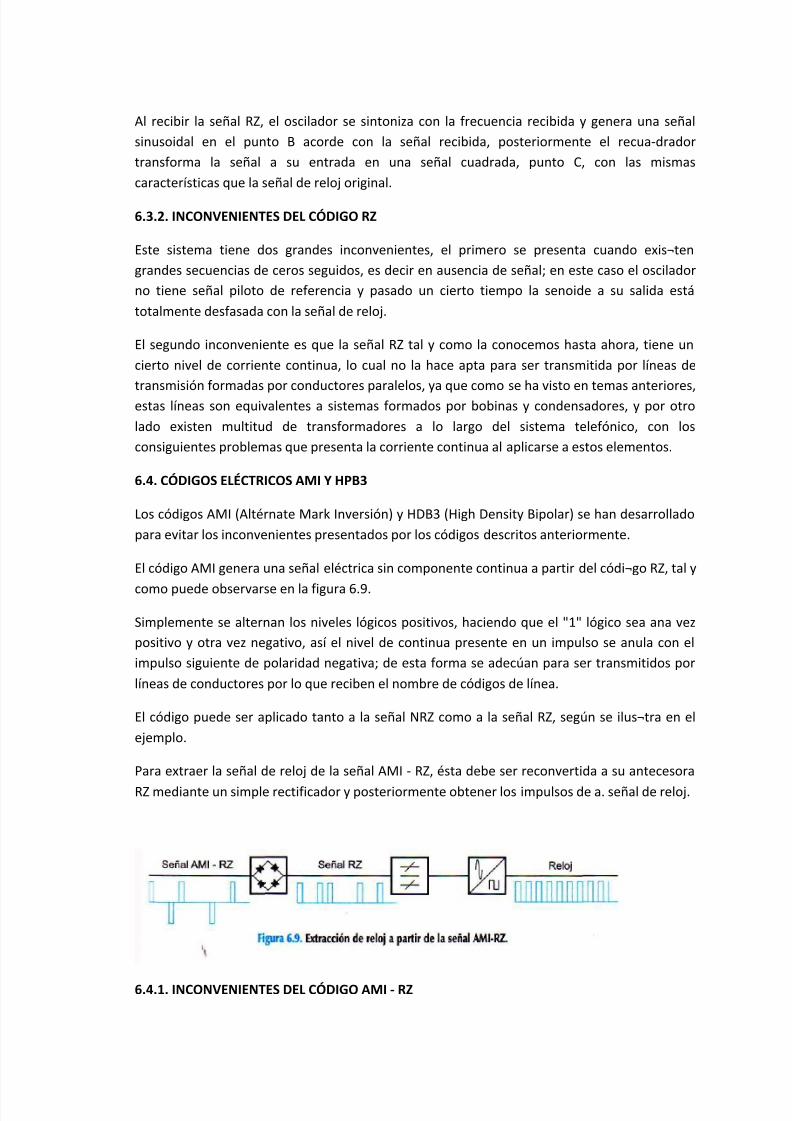
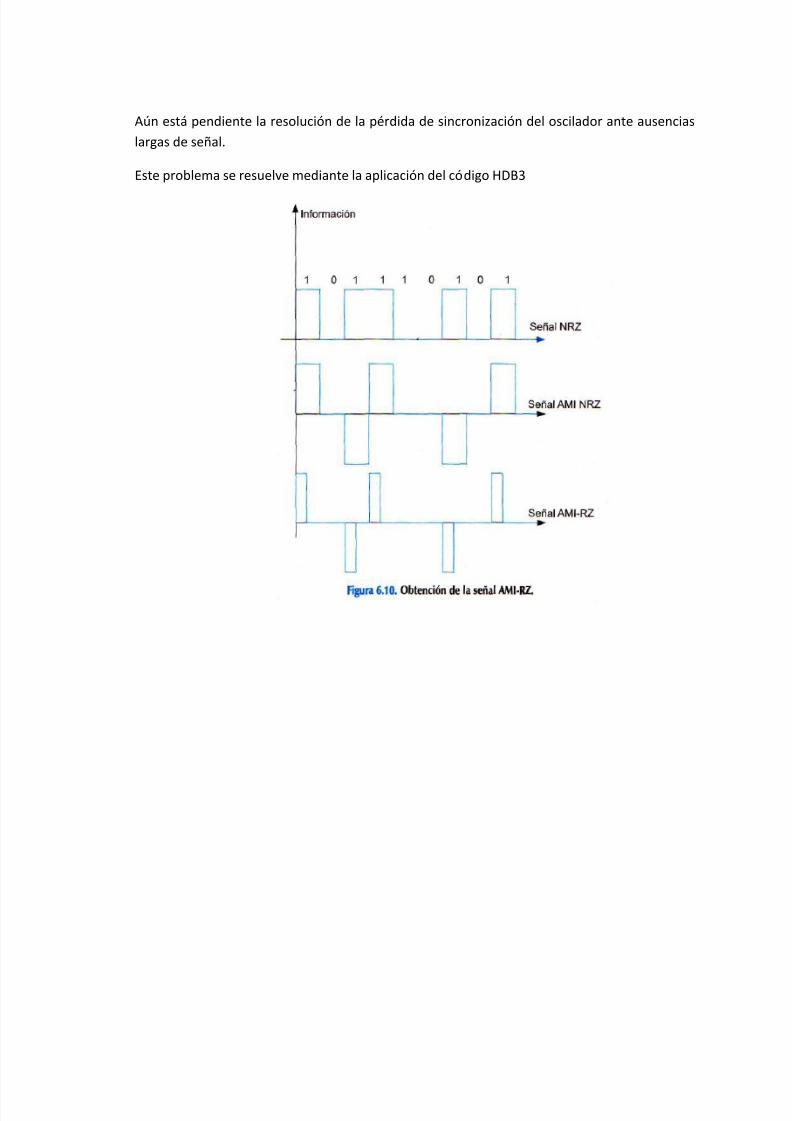
El código AMI genera una señal eléctrica sin componente continua a partir del códi¬go RZ, tal y
como puede observarse en la figura 6.9.
Simplemente se alternan los niveles lógicos positivos, haciendo que el "1" lógico sea ana vez
positivo y otra vez negativo, así el nivel de continua presente en un impulso se anula con el
impulso siguiente de polaridad negativa; de esta forma se adecúan para ser transmitidos por
líneas de conductores por lo que reciben el nombre de códigos de línea.
El código puede ser aplicado tanto a la señal NRZ como a la señal RZ, según se ilus¬tra en el
ejemplo.
Para extraer la señal de reloj de la señal AMI - RZ, ésta debe ser reconvertida a su antecesora
RZ mediante un simple rectificador y posteriormente obtener los impulsos de a. señal de reloj.
6.4.1. INCONVENIENTES DEL CÓDIGO AMI - RZ
5/12/2018 TRANSMISI N DIGITAL - slidepdf.com
http://slidepdf.com/reader/full/transmision-digital-55a3595a063d0 9/25
Aún está pendiente la resolución de la pérdida de sincronización del oscilador ante ausencias
largas de señal.
Este problema se resuelve mediante la aplicación del código HDB3
5/12/2018 TRANSMISI N DIGITAL - slidepdf.com
http://slidepdf.com/reader/full/transmision-digital-55a3595a063d0 10/25
Este código limita a 3 el número máximo de ceros seguidos, sustituyendo esta secuen¬cia de
más de tres ceros consecutivos por grupos de 4 ceros y sustituyéndolos por los códigos BOOV y
000V.
B es un impulso con distinto signo que el impulso anterior, por lo que se sigue aplicando laalternancia del signo de los bits o ley de bipolaridad.
V es un impulso del mismo signo que el impulso anterior.
El grupo 0000 es sustituido por BOOV cuando el número de impulsos entre la violación V
anterior y la que se va a introducir es par.
El grupo 0000 es sustituido por 000V cuando el número de impulsos entre la violación V
anterior y la que se va a introducir es impar.
6.5. TRANSMISIÓN DE SEÑALES DIGITALES POR LÍNEA TELEFÓNICA DE PARES TRENZADOS
Nos referiremos al conjunto de operaciones y dispositivos que son necesarios utilizar para la
transmisión de señales digitales entre dos puntos lejanos a través de la línea tele¬fónica.
6.5.1. Regeneración de la señal digital
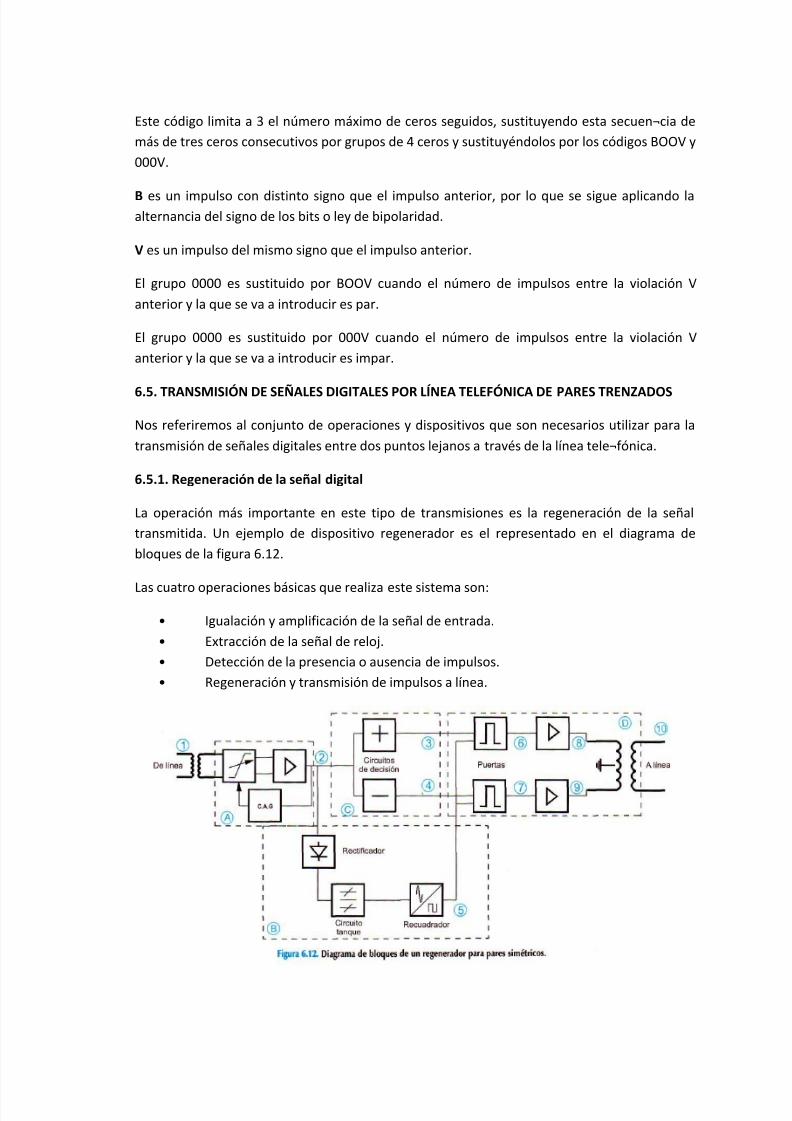
La operación más importante en este tipo de transmisiones es la regeneración de la señal
transmitida. Un ejemplo de dispositivo regenerador es el representado en el diagrama de
bloques de la figura 6.12.
Las cuatro operaciones básicas que realiza este sistema son:
• Igualación y amplificación de la señal de entrada.
• Extracción de la señal de reloj.
• Detección de la presencia o ausencia de impulsos.
• Regeneración y transmisión de impulsos a línea.
5/12/2018 TRANSMISI N DIGITAL - slidepdf.com
http://slidepdf.com/reader/full/transmision-digital-55a3595a063d0 11/25
La señal digital transmitida por la línea telefónica se deforma progresivamente por los efectos
provocados por el medio de transmisión, de tal forma que los impulsos que lle¬gan al
regenerador están totalmente deformados. Por esto es necesario restaurar de nuevo los
impulsos mediante el equipo regenerador mostrado en la figura anterior.
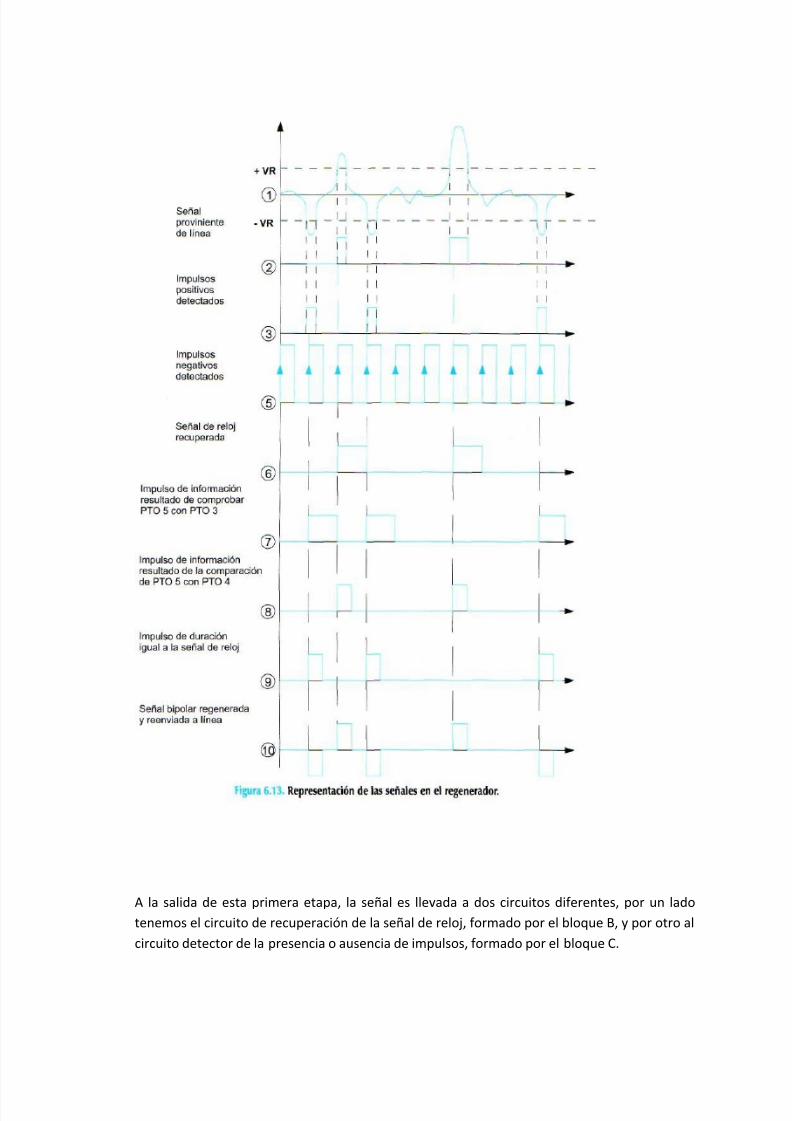
La señal presente a la entrada del dispositivo regenerador está representada en el punto 1 de
la gráfica de la figura 6.13. Puede observarse que estos impulsos no están igualados en
amplitud, por lo tanto el primer paso es la igualación de éstos, que se lleva a cabo mediante el
dispositivo igualador formado por el bloque A (de la figura 6.12), quedando la señal igualada a
la salida de este bloque.
5/12/2018 TRANSMISI N DIGITAL - slidepdf.com
http://slidepdf.com/reader/full/transmision-digital-55a3595a063d0 12/25
A la salida de esta primera etapa, la señal es llevada a dos circuitos diferentes, por un lado
tenemos el circuito de recuperación de la señal de reloj, formado por el bloque B, y por otro al
circuito detector de la presencia o ausencia de impulsos, formado por el bloque C.

5/12/2018 TRANSMISI N DIGITAL - slidepdf.com
http://slidepdf.com/reader/full/transmision-digital-55a3595a063d0 13/25
El bloque B recibe la señal igualada, la rectifica y mediante un circuito oscilador LC sintonizado
a la frecuencia de reloj da a su salida una señal sinusoidal. Este circuito es capaz de seguir
generando señal a su salida aunque no exista señal a su entrada durante un tiempo
determinado, de aquí la importancia de que no existan grandes secuencias de ceros seguidas.
A partir de la señal sinusoidal y mediante el recuadrador del bloque se obtiene una señal
cuadrada, mostrada en el punto 5, con la misma frecuencia que la señal de reloj original que se
utiliza como señal de temporización en el dispositivo regenerador. Hacer notar que esta señal
de reloj está ligeramente desfasada con la señal de reloj original debido al tiempo que tarda en
recorrer la línea de transmisión y a las distorsiones que ésta produce.
Los circuitos de decisión que forman el bloque C deciden si hay impulsos o no comparando la
señal presente en su entrada con un nivel de referencia +VR y -VR, entregan¬do a su salida por
un lado los impulsos positivos reflejados en el punto 3 y por otro los negativos representados
en el punto 4.
El bloque D se encarga de determinar si existen impulsos de información o no mediante la
comparación de los impulsos presentes en los puntos 3 y 4 con los impul¬sos de reloj
presentes en el punto 5. Cuando tenemos ambos se generan impulsos cua¬drados de la misma
duración que la señal de reloj, tal y como se muestra en los puntos 8 y 9; éstos forman la señal
bipolar presente en el punto 10 que es reenviada por la línea de transmisión.
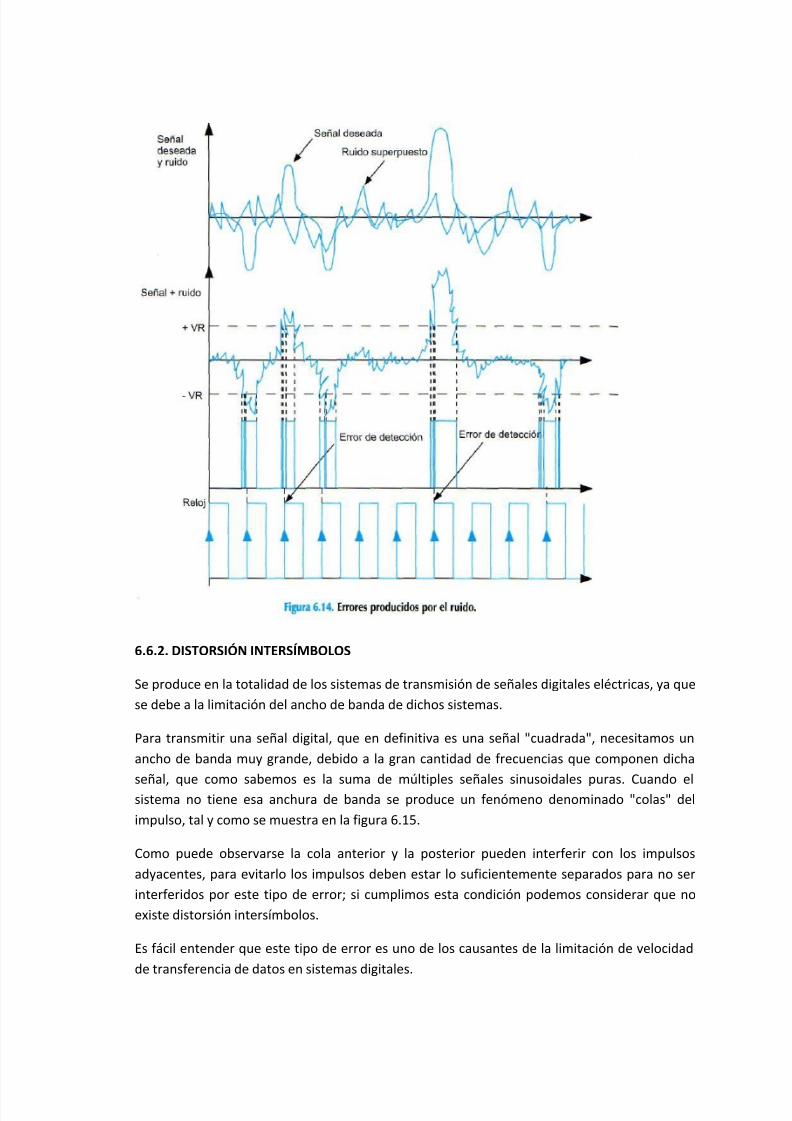
6.6. PERTURBACIONES MÁS FRECUENTES DE LAS SEÑALES DIGITALES. ERRORES PRODUCIDOS
EN LA SEÑAL TRANSMITIDA
Las señales digitales a lo largo de la línea telefónica sufren distintas perturbaciones que
producen errores en la transmisión, los más importantes son el ruido, la distorsión
intersímbolos y la fluctuación de fase o jitter.
6.6.1. El ruido
El ruido está presente en todas las transmisiones de señales. En los sistemas digitales es un
problema que puede eliminarse más fácilmente que en los sistemas analógicos; no obstante
puede provocar que los impulsos no sean detectados correctamente en los rege¬neradores
dando lugar a errores.
5/12/2018 TRANSMISI N DIGITAL - slidepdf.com
http://slidepdf.com/reader/full/transmision-digital-55a3595a063d0 14/25
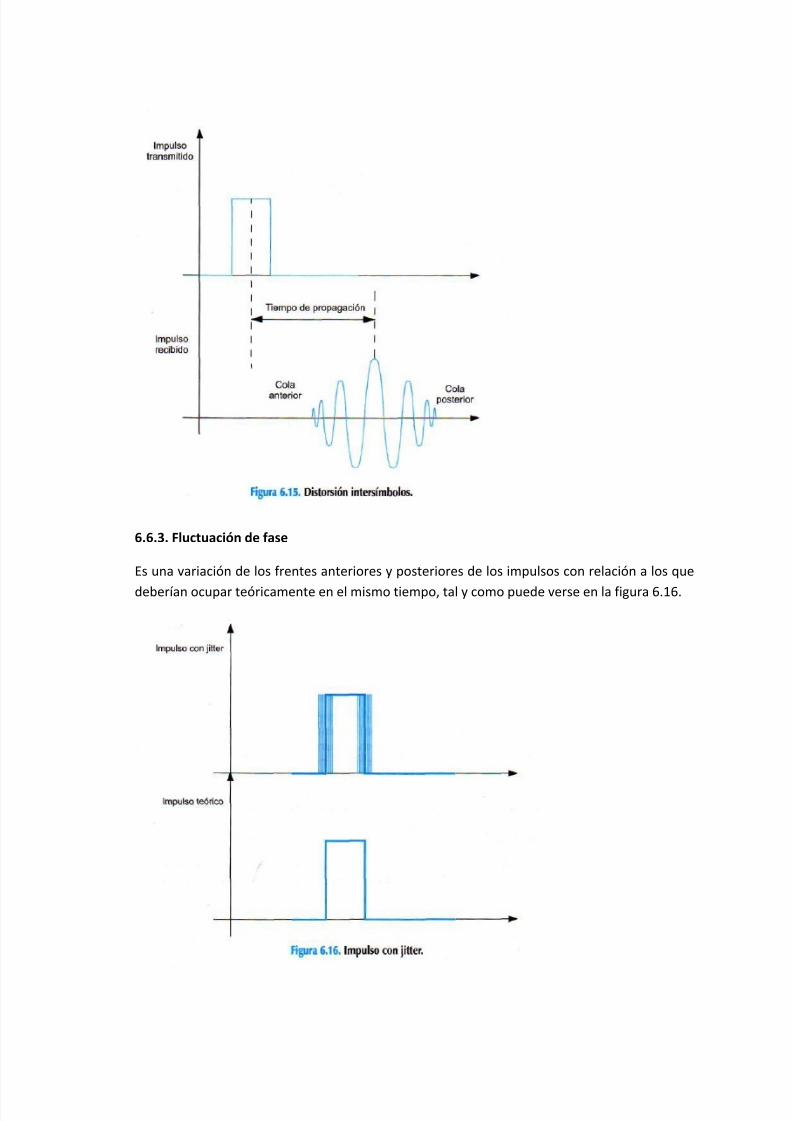
6.6.2. DISTORSIÓN INTERSÍMBOLOS
Se produce en la totalidad de los sistemas de transmisión de señales digitales eléctricas, ya que
se debe a la limitación del ancho de banda de dichos sistemas.
Para transmitir una señal digital, que en definitiva es una señal "cuadrada", necesitamos un
ancho de banda muy grande, debido a la gran cantidad de frecuencias que componen dicha
señal, que como sabemos es la suma de múltiples señales sinusoidales puras. Cuando elsistema no tiene esa anchura de banda se produce un fenómeno denominado "colas" del
impulso, tal y como se muestra en la figura 6.15.
Como puede observarse la cola anterior y la posterior pueden interferir con los impulsos
adyacentes, para evitarlo los impulsos deben estar lo suficientemente separados para no ser
interferidos por este tipo de error; si cumplimos esta condición podemos considerar que no
existe distorsión intersímbolos.
Es fácil entender que este tipo de error es uno de los causantes de la limitación de velocidad
de transferencia de datos en sistemas digitales.
5/12/2018 TRANSMISI N DIGITAL - slidepdf.com
http://slidepdf.com/reader/full/transmision-digital-55a3595a063d0 15/25
6.6.3. Fluctuación de fase
Es una variación de los frentes anteriores y posteriores de los impulsos con relación a los que
deberían ocupar teóricamente en el mismo tiempo, tal y como puede verse en la figura 6.16.

5/12/2018 TRANSMISI N DIGITAL - slidepdf.com
http://slidepdf.com/reader/full/transmision-digital-55a3595a063d0 16/25
6.6.4. Errores de código. Medida de la tasa de error BER
Se da cuando la señal al final del sistema contiene una violación del código que está utilizando.
La siguiente figura representa la señal en el origen y en el final de la línea de trans¬misiónutilizando el código HDB3-RZ
Puede verse que al regenerar la señal se ha cometido un error y no se ha reproducido el
primer bit negativo. Estos errores pueden subsanarse utilizando ciertas reglas o pro¬tocolos en
los códigos, por lo que de esta forma no es necesario conocer totalmente el contenido binario
de la información de la señal original.
Los errores que se producen al retransmitir bits a través de los medios de transmisión, pueden
cuantificarse calculando la tasa de error, o Bit Error Rate (BER) en inglés, que se define como la
relación entre el número de bits erróneos recibidos y el número total de bits transmitidos.
De esta forma un BER de 10'6 significa que existe un bit erróneo por cada millón de bits
transmitidos.
5/12/2018 TRANSMISI N DIGITAL - slidepdf.com
http://slidepdf.com/reader/full/transmision-digital-55a3595a063d0 17/25
TÉCNICAS DE DIGITALIZACIÓN DE LA VOZ Y OBTENCIÓN DEL CANAL MIC
Introducción
Las técnicas MIC se desarrollaron en la década de los cincuenta gracias a la invención deltransistor, aunque los principios teóricos se conocían ya en los años treinta.
Estas técnicas son el procedimiento más utilizado en telefonía para convertir seña¬les
analógicas en señales digitales y viceversa, aunque pueden aplicarse en multitud de procesos,
tales como, procesado de imágenes, grabación digital de sonido, etc.
En cualquier conversión de señales analógicas a digitales se realizan tres ope¬raciones
fundamentales descritas en detalle en apartados sucesivos; éstas son el muestreo, la
cuantificación y la codificación.
CONTENIDO
7.1. El muestreo
7.2. Cuantificación
7.3. Codificación
Ejercicios
OBJETIVOS
• Estudiar los procesos que sufre la señal analógica para ser convertida en digital
apta para el envío a través de las líneas de transmisión telefónicas.
• Entender cómo se producen los errores de cuantificación y de qué forma pueden
minimizarse.
• Entender la filosofía de funcionamiento de la ley de cuantificación A utilizada en
Europa.
• Ver cuáles son los códigos binarios utilizados para codificar las palabras MIC.
5/12/2018 TRANSMISI N DIGITAL - slidepdf.com
http://slidepdf.com/reader/full/transmision-digital-55a3595a063d0 18/25
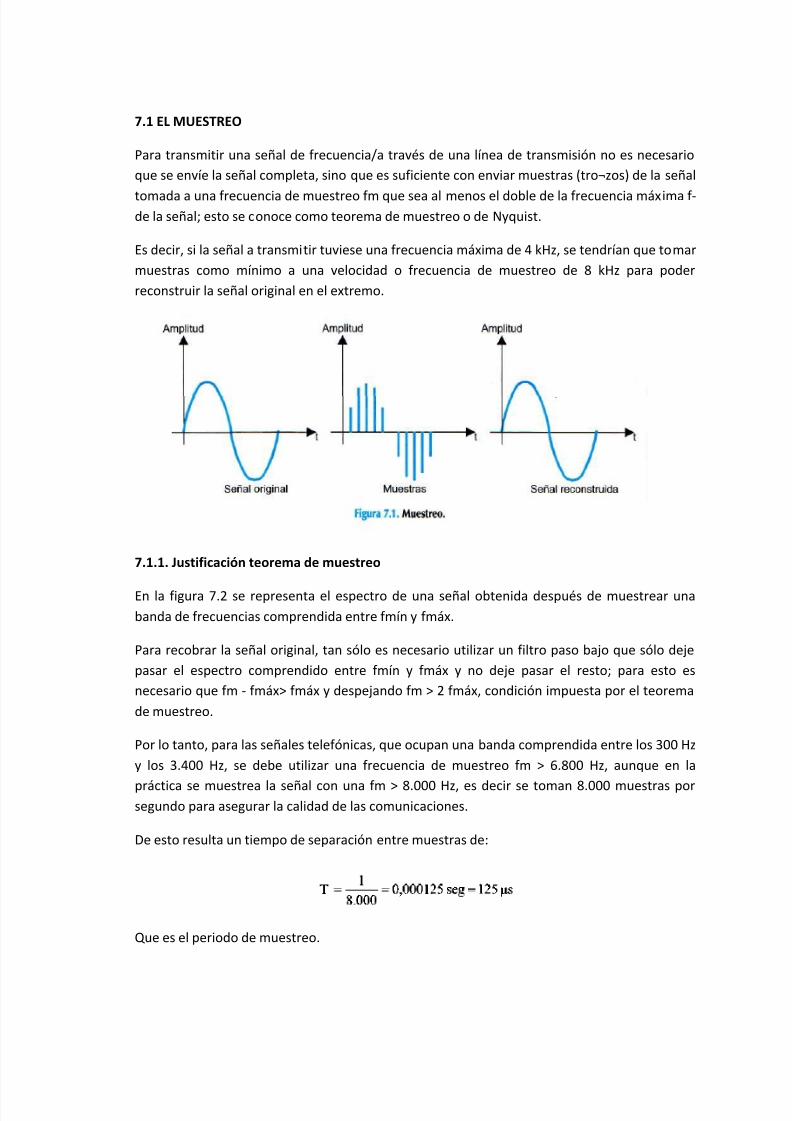
7.1 EL MUESTREO
Para transmitir una señal de frecuencia/a través de una línea de transmisión no es necesario
que se envíe la señal completa, sino que es suficiente con enviar muestras (tro¬zos) de la señal
tomada a una frecuencia de muestreo fm que sea al menos el doble de la frecuencia máxima f-de la señal; esto se conoce como teorema de muestreo o de Nyquist.
Es decir, si la señal a transmitir tuviese una frecuencia máxima de 4 kHz, se tendrían que tomar
muestras como mínimo a una velocidad o frecuencia de muestreo de 8 kHz para poder
reconstruir la señal original en el extremo.
7.1.1. Justificación teorema de muestreo
En la figura 7.2 se representa el espectro de una señal obtenida después de muestrear una
banda de frecuencias comprendida entre fmín y fmáx.
Para recobrar la señal original, tan sólo es necesario utilizar un filtro paso bajo que sólo deje
pasar el espectro comprendido entre fmín y fmáx y no deje pasar el resto; para esto es
necesario que fm - fmáx> fmáx y despejando fm > 2 fmáx, condición impuesta por el teorema
de muestreo.
Por lo tanto, para las señales telefónicas, que ocupan una banda comprendida entre los 300 Hz
y los 3.400 Hz, se debe utilizar una frecuencia de muestreo fm > 6.800 Hz, aunque en la
práctica se muestrea la señal con una fm > 8.000 Hz, es decir se toman 8.000 muestras porsegundo para asegurar la calidad de las comunicaciones.
De esto resulta un tiempo de separación entre muestras de:
Que es el periodo de muestreo.

5/12/2018 TRANSMISI N DIGITAL - slidepdf.com
http://slidepdf.com/reader/full/transmision-digital-55a3595a063d0 19/25
7.1.2. Diferencias entre el muestreo idea! y el muestreo real
El muestreo mostrado en la figura 7.1 se denomina muestreo ideal, ya que las mues-T^5
tomadas tienen una anchura nula.
Como puede suponerse, esta operación no puede ser realizada por la limitación de los quipos
utilizados.
En la práctica las muestras de la señal original son tomadas durante un tiempo muy IOÍIO en
comparación con el tiempo entre dos muestras consecutivas; este tipo de mues-reo se
denomina muestreo real y es mostrado en la figura 7.3
5/12/2018 TRANSMISI N DIGITAL - slidepdf.com
http://slidepdf.com/reader/full/transmision-digital-55a3595a063d0 20/25
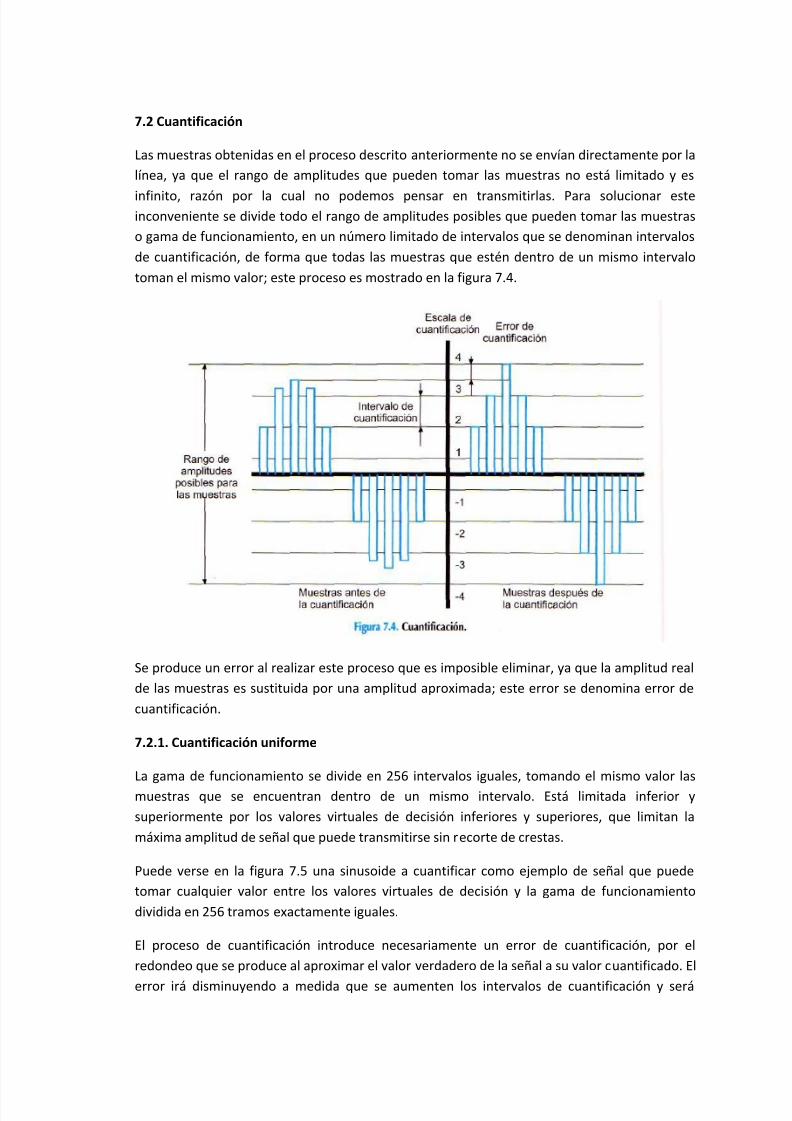
7.2 Cuantificación
Las muestras obtenidas en el proceso descrito anteriormente no se envían directamente por la
línea, ya que el rango de amplitudes que pueden tomar las muestras no está limitado y es
infinito, razón por la cual no podemos pensar en transmitirlas. Para solucionar esteinconveniente se divide todo el rango de amplitudes posibles que pueden tomar las muestras
o gama de funcionamiento, en un número limitado de intervalos que se denominan intervalos
de cuantificación, de forma que todas las muestras que estén dentro de un mismo intervalo
toman el mismo valor; este proceso es mostrado en la figura 7.4.
Se produce un error al realizar este proceso que es imposible eliminar, ya que la amplitud real
de las muestras es sustituida por una amplitud aproximada; este error se denomina error de
cuantificación.
7.2.1. Cuantificación uniforme
La gama de funcionamiento se divide en 256 intervalos iguales, tomando el mismo valor las
muestras que se encuentran dentro de un mismo intervalo. Está limitada inferior y
superiormente por los valores virtuales de decisión inferiores y superiores, que limitan la
máxima amplitud de señal que puede transmitirse sin recorte de crestas.
Puede verse en la figura 7.5 una sinusoide a cuantificar como ejemplo de señal que puede
tomar cualquier valor entre los valores virtuales de decisión y la gama de funcionamiento
dividida en 256 tramos exactamente iguales.
El proceso de cuantificación introduce necesariamente un error de cuantificación, por el
redondeo que se produce al aproximar el valor verdadero de la señal a su valor cuantificado. El
error irá disminuyendo a medida que se aumenten los intervalos de cuantificación y será

5/12/2018 TRANSMISI N DIGITAL - slidepdf.com
http://slidepdf.com/reader/full/transmision-digital-55a3595a063d0 21/25
eliminado totalmente si los intervalos de cuantificación son infinitos, lo cual no es posible por
el siguiente motivo.
Cada uno de los valores tiene su equivalente digital, de esta forma para representarlos todos
son necesarios 8 bits, ya que 28 = 256 posibles combinaciones.
Si aumentamos el número de intervalos de cuantificación de 256 a 4.096, se necesitarían 12
bits, ya que 212 = 4.096, lo que daría lugar a un excesivo ancho de banda en la línea telefónica,
ya que depende directamente del número de bits empleado para representar cada intervalo.

5/12/2018 TRANSMISI N DIGITAL - slidepdf.com
http://slidepdf.com/reader/full/transmision-digital-55a3595a063d0 22/25
La figura 7.6 representa la relación entre la señal de entrada Ve y la señal de salida Vs en un
cuantificador uniforme. Se puede observar que la señal a la salida tan sólo cambia cuando la
tensión a la entrada pasa de un intervalo de cuantificación al siguiente, por lo que la señal
original en forma de rampa se transforma a la salida del cuantificador en una rampa
escalonada que se aproxima a la señal real.
La diferencia entre la tensión de salida y la tensión de entrada Vs - Ve representa el error decuantificación.
5/12/2018 TRANSMISI N DIGITAL - slidepdf.com
http://slidepdf.com/reader/full/transmision-digital-55a3595a063d0 23/25
El error de cuantificación deforma la señal reconstruida y da lugar a una distorsión que se
denomina distorsión o ruido de cuantifícación que debe ser inapreciable para el oído humano.
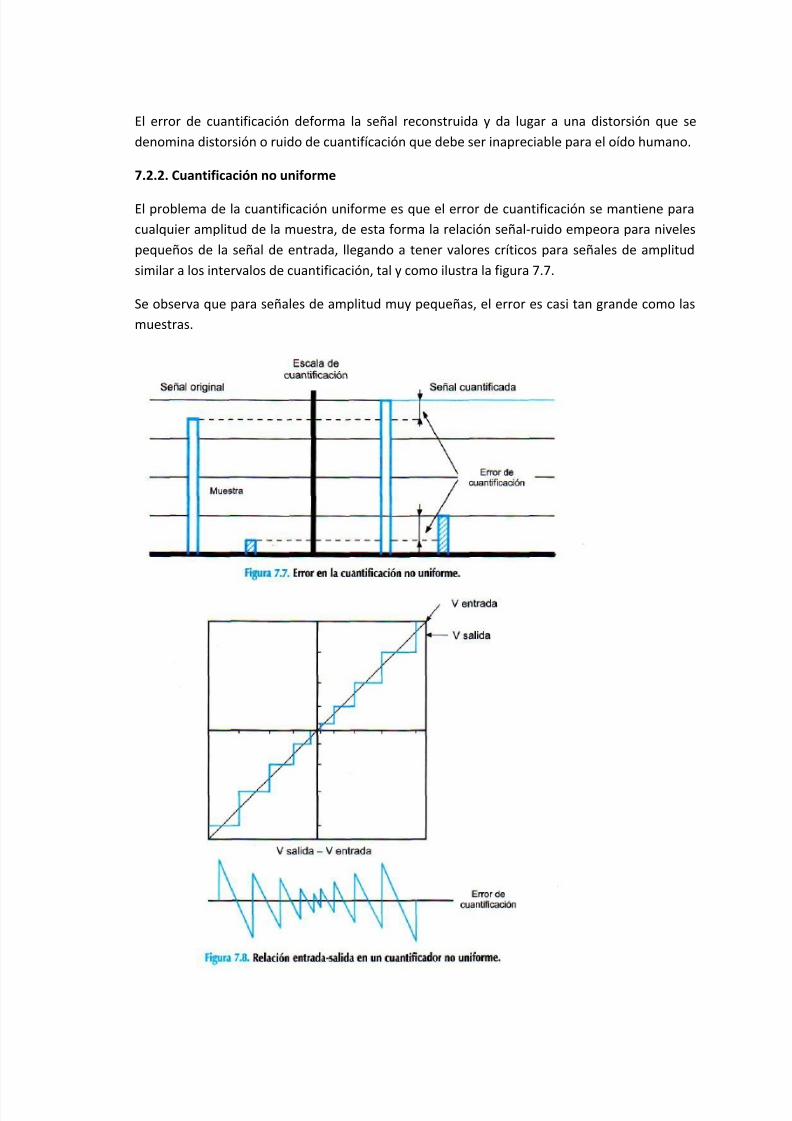
7.2.2. Cuantificación no uniforme
El problema de la cuantificación uniforme es que el error de cuantificación se mantiene para
cualquier amplitud de la muestra, de esta forma la relación señal-ruido empeora para niveles
pequeños de la señal de entrada, llegando a tener valores críticos para señales de amplitud
similar a los intervalos de cuantificación, tal y como ilustra la figura 7.7.
Se observa que para señales de amplitud muy pequeñas, el error es casi tan grande como las
muestras.

5/12/2018 TRANSMISI N DIGITAL - slidepdf.com
http://slidepdf.com/reader/full/transmision-digital-55a3595a063d0 24/25
Para mantener la relación señal-ruido al mismo valor para todos los niveles de las mues-tras
existen dos alternativas, una es la de aumentar el número de intervalos de cuantifica-ción, lo
cual no es viable debido al aumento del ancho de banda necesario para transmitir las señales
por las líneas; otra alternativa es utilizar la cuantificación no uniforme, en la cual se toma un
número determinado de intervalos y se distribuyen de forma no uniforme aproximándolos en
los niveles bajos de señal y separándolos en los niveles altos.
Así, para las señales débiles es como si se utilizase un número muy alto de intervalos de
cuantificación, reduciéndose el ruido de cuantificación en estos casos. Sin embargo, para
señales fuertes el número de intervalos disminuye, aumentando el ruido pero conservando
una calidad suficientemente buena.
En la figura 7.8 tenemos la relación entre la señal de entrada y la señal de salida, pudiendo
apreciar que los intervalos de cuantificación están más próximos para señales de entrada de
nivel bajo.
7.2.3. Ley de cuantificación utilizada en sistemas MIC europeos (ley A) y americanos (ley u)
La cuantificación no uniforme responde siempre a unas características determinadas que se
denominan características de cuantificación o ley de codificación.
Aunque existen diferentes tipos de leyes de codificación, la ley de codificación para señales de
frecuencia vocal utilizada en sistemas MIC europeos es la ley A y en sistemas MIC americanos
es la ley u

5/12/2018 TRANSMISI N DIGITAL - slidepdf.com
http://slidepdf.com/reader/full/transmision-digital-55a3595a063d0 25/25
La ley A utiliza 256 intervalos de cuantificación, 128 intervalos para señales positi¬vas y 128
intervalos para señales negativas.
Según se observa en la figura 7.9, que representa la ley A, ésta se forma por 16 seg¬mentos de
recta, de los cuales los cuatro centrales están alineados, por lo que se consideran uno solo yqueda numerado como intervalo n° 7; de esta manera se reduce de 16 a 13 segmentos.
A su vez, cada uno de estos segmentos está subdividido en otros 16 intervalos de
cuantificación iguales entre sí, pero desiguales de unos segmentos a otros, excepto en los
cuatro segmentos centrales en los que son iguales todos los intervalos de cuantificación.
7.3 CODIFICACIÓN
Mediante la codificación se representan las muestras cuantificadas mediante una secuencia
binaria de unos y ceros.
7.3.1. Estructura y códigos de la palabra MIC
Como en telefonía se utilizan 256 intervalos de cuantifícación necesitamos secuen¬cias
binarias de 8 bits para representar cada una de las posibles muestras cuantificadas, de esta
forma representaremos cada una de las palabras MIC como un grupo de 8 bits de la siguiente
forma:
• El primer grupo, indicado como P, indica la polaridad de la muestra, es decir si es
positiva o negativa, de esta forma puede indicar el estado positivo mediante un
"1" y el estado negativo mediante el "0".
• El grupo A comprende tres bits, mediante los cuales podemos localizar 23 = 8
segmentos de recta para cada polaridad, es decir un total de 16 segmentos.
Top Related