-Tema6-Flexion-Deformaciones.docx
18
Tema 6: Flexión: Deformaciones T ema 6: FLEXIÓN: DEFORMACIONES x + y
-
Upload
edy-quispe -
Category
Documents
-
view
214 -
download
0
Transcript of -Tema6-Flexion-Deformaciones.docx

7/25/2019 -Tema6-Flexion-Deformaciones.docx
http://slidepdf.com/reader/full/-tema6-flexion-deformacionesdocx 1/18
Tema 6: Flexión: Deformaciones
Tema 6: FLEXIÓN:DEFORMACIONES
x
+
y

7/25/2019 -Tema6-Flexion-Deformaciones.docx
http://slidepdf.com/reader/full/-tema6-flexion-deformacionesdocx 2/18
Prof.: Jaime Santo Domingo Santillana
E.P.S.-Zamora – (U.SAL.) - 2008
1

7/25/2019 -Tema6-Flexion-Deformaciones.docx
http://slidepdf.com/reader/full/-tema6-flexion-deformacionesdocx 3/18
Tema 6: Flexión: Deformaciones
6.1.- INTRODUCCIÓN
Las deformaciones hay que limitarlas al igual que las tensiones, bien por razones de
seguridad, de mantenimiento o simplemente de estética.
Así , en numerosos casos, los elementos estructurales se dimensionarán aparte de aResistencia, limitando sus tensiones máximas, (tal y como hemos visto en el tema
anterior), a RIGIDEZ, haciendo que las deformaciones máximas no sobrepases unos
determinados valores admisibles.
En diferentes normativas se fijan los valores admisibles de las deformaciones para
diferentes elementos estructurales.
Con el estudio de las deformaciones de una viga a Flexión, calcularemos los GIROS (θz
, θy ) que sufren las secciones transversales alrededor del eje neutro y las FLECHAS oDESPLAZAMIENTOS (y, z) de sus centros de gravedad.
Flexión en plano xy Flexión en pla no xzθz θy
z
yz
x x
y
y z
Fig.6.1
Los métodos que desarrollaremos para el cálculo delas deformaciones son los
siguientes:
• Método de la Ecuación Diferencial de la Lí nea Elástica
• Método de la Ecuación Universal de la Lí nea Elástica
• Método de los Teoremas de Mohr
• Método energético del Teorema de Castigliano
• Método energético de los Trabajos Virtuales
Observación: Los dos métodos energéticos los estudiaremos másdelante, en el tema 9º,
dado que son métodos de cálculo más generalestieneny su aplicación en el estudio de lasdeformaciones, no sólo a Flexión, sino tambi én en los casos de Tracción, Compresión,
Torsión, etc.

7/25/2019 -Tema6-Flexion-Deformaciones.docx
http://slidepdf.com/reader/full/-tema6-flexion-deformacionesdocx 4/18
2

7/25/2019 -Tema6-Flexion-Deformaciones.docx
http://slidepdf.com/reader/full/-tema6-flexion-deformacionesdocx 5/18
Sección 6.2: Método de la Ecuación Diferencial de l a Elástica
6.2.-MÉTODO DE LA ECUACIÓN DIFERENCIAL DE LA ELÁSTI CA
Consideremos la viga de la figura sometida a Flexió n Simple (Ry, Mz)
x
Lí nea elástica y = y(x)
y x
Fig.6.2
Según vimos en la sección 5.3.3. se denomina lí nea elástica:“al eje x de la viga (el que
pasa por los centros de gravedad de todas las secciones transversales), una vez
deformado”.
Tratemos ahora de calcular su ecuación: y = y(x)
Vimos también en dicha sección, que para el caso de Flexión Pura (sólo momentos
flectores), el radio de curvatura de la lí nea elástica vení a dado por la ecuación (5.20):
1 =
M z
r E . I zpues bien, para el caso de la Flexión Simple (momen tos flectores y fuerzas cortantes),
podremos utilizar la misma f órmula del radio de cur vatura, pues la influencia que
ejercen las fuerzas cortantes es pequeña y la podremos despreciar en la mayorí a de los
casos.
Por otra parte sabemos por Matemáticas que el radiode curvatura de una curva se puede
obtener de la expresión:
d 2 y
1=
dx2
(6.1)dy
3/ 2
r 2
1+
dx
igualando las expresiones del radio de curvatura:
d 2 y
M zdx 2
= (6.2)dy 2
3 / 2
E . I z1 +
dx
expresión obtenida que representa la “ecuación dife rencial de la lí nea elástica”
La integración de esta ecuación diferencial, no lin eal, presenta grandes dificultades y
dado que en la mayorí a de los casos las deformaciones que se van a presentar, son
pequeñas, podremos hacer las siguientes simplificaciones:
3

7/25/2019 -Tema6-Flexion-Deformaciones.docx
http://slidepdf.com/reader/full/-tema6-flexion-deformacionesdocx 6/18
Tema 6: Flexión: Deformaciones
θz
xy = y(x) θz
ytangente
Fig.6.3
dy = tagϑ z ≅ ϑ z (para pequeñas deformaciones)→ Giros de las secciones
dx
si las deformaciones son pequeñas: θz es pequeño → tag θz es pequeño → dy/dx es
dy 2
pequeño → 1 + ≅ 1 y haciendo esta aproximación en la ecuación (6.2) quedará:dx
d 2 y
=
M z
(6.3) o bien:
d dy = M z →
d
ϑ z = M z (6.4)
dx 2
E . I
E .
I z dx dx z dx E . I z
Observación : con el sistema de ejes coordenados adoptado en el tema 5.2 para las vigas
a flexión, resultará que:
si M z > 0 →d 2 y
< 0dx 2
si M z < 0 →d 2 y
> 0
dx 2
En efecto, supongamos: Mz >0
x2
x1
x
θ2
y θ1 tag2tag1
Fig.6.4
si x2 > x1 → dx > 0 y además según se ve en la fig.6.4 : ϑ 2 < ϑ 1 → d ϑ <
dϑ
<d 2 y
< 0con lo cual se cumplirá : 0 o lo que es lo mismo :
dx dx2

7/25/2019 -Tema6-Flexion-Deformaciones.docx
http://slidepdf.com/reader/full/-tema6-flexion-deformacionesdocx 7/18
y lo mismo se comprobarí a para el caso: Mz<0.
4

7/25/2019 -Tema6-Flexion-Deformaciones.docx
http://slidepdf.com/reader/full/-tema6-flexion-deformacionesdocx 8/18
Sección 6.2: Método de la Ecuación Diferencial de l a Elástica
En virtud de ello en las ecuaciones (6.3) y (6.4) deberemos introducir un signo (-)
quedando finalmente como Ecuación diferencial de la lí nea elástica :
d 2 y= −
M z (6.5) o bien:d ϑ z
= − M z (6.6)
dx E . I zdx2
E . I z
OBSERVACIONES:
1.- Integrando una vez la Ecuación diferencial de l a lí nea elástica obtendremos losGiros
θz (ver ecuación 6.6). Si integramos dos veces dicha ecuación obtendremos las Flechasy de los centros de gravedad de cada sección (ver ecu ación 6.5) o lo que es lo mismo laEcuación de la lí nea elástica: y = y(x)
2.- La ecuación de la lí nea elástica: y = y(x), es una función continua (ver figura 6.5.a).
Si fuera discontinua (ver figura 6.5.b), es que se habrí a roto
Fig.6.5.a Fig.6.5.b
3.- La ecuación de los giros: θz = θz (x), es también una función continua. Serí a
discontinua sólo si la elástica presentase un punto anguloso (ver fig.6.5.c)
θ1
θ2
tag 1tag 2
punto anguloso
Fig.6.5.c
En un punto anguloso se ha de verificar:1
= ∞ ,entonces la ecuación (5.20), antes r
mencionada, quedará:1
= M
z = ∞ y para que esto se cumpla → M z = ∞ . Pero r E . I z
éste valor nunca se va a dar.
4.- La ecuación diferencial de la elástica d
2
y será discontinua en los puntos en quedx 2
Mz sea discontinuo.
5
7/25/2019 -Tema6-Flexion-Deformaciones.docx
http://slidepdf.com/reader/full/-tema6-flexion-deformacionesdocx 9/18
Tema 6: Flexión: Deformaciones
5.- Si en una sección de una viga es M z = 0, la elástica presentará un punto de inflexiónen dicho punto
d 2 y = − M z = 0 → d 2 y = 0 → puntos de inflexión de la elástica y = y ( x )
dx 2 E . I z dx2
6.- Si la viga hubiese estado sometida a flexión si mple en el plano xz: Rz, My, lasecuaciones diferenciales (6.5) y (6.6) de la elástica serí an:
d 2 z= −
M y (6.7) d ϑ y= −
M y (6.8)
d
x
2
E . I y dx
E .
I y
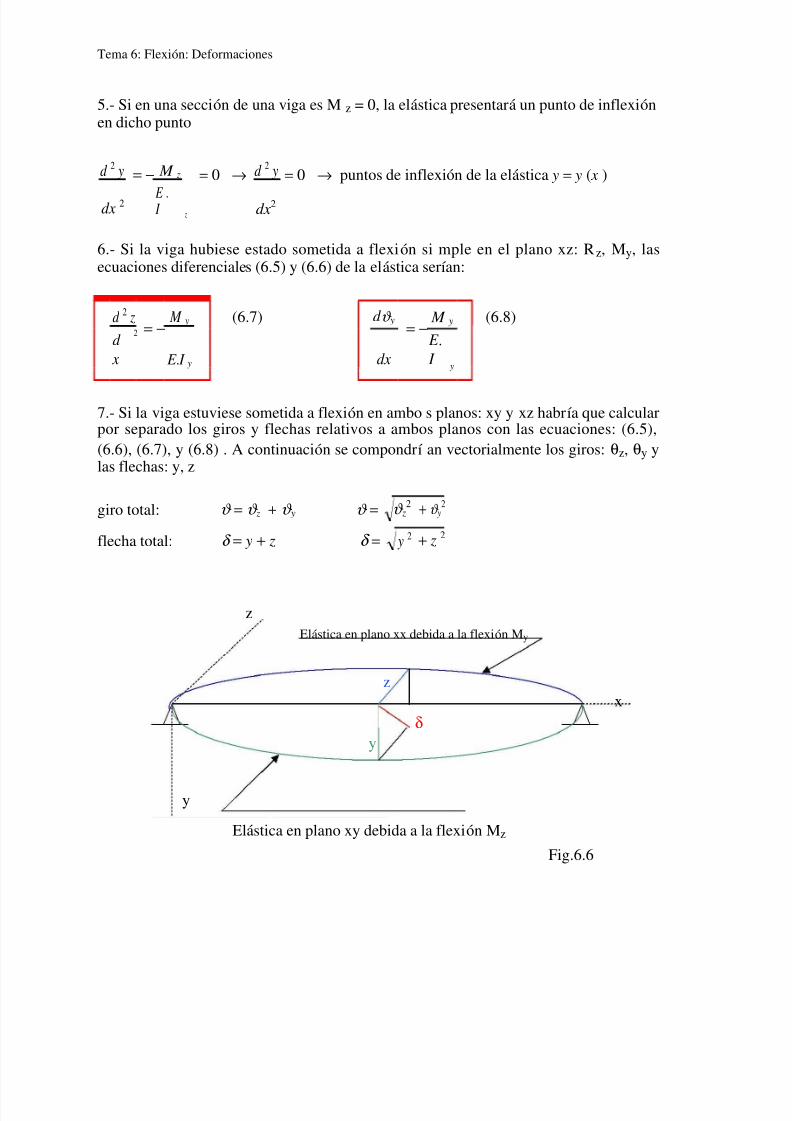
7.- Si la viga estuviese sometida a flexión en ambo s planos: xy y xz habrí a que calcularpor separado los giros y flechas relativos a ambos planos con las ecuaciones: (6.5),
(6.6), (6.7), y (6.8) . A continuación se compondrí an vectorialmente los giros: θz, θy ylas flechas: y, z
giro total: ϑ = ϑ z + ϑ y ϑ = ϑ z2
+ ϑ y2
δ = y + z δ =flecha total: y 2+ z 2
z
Elástica en plano xx debida a la flexión My
z
x
δ
y
y
Elástica en plano xy debida a la flexión Mz
Fig.6.6

7/25/2019 -Tema6-Flexion-Deformaciones.docx
http://slidepdf.com/reader/full/-tema6-flexion-deformacionesdocx 10/18
6

7/25/2019 -Tema6-Flexion-Deformaciones.docx
http://slidepdf.com/reader/full/-tema6-flexion-deformacionesdocx 11/18
Sección 6.3: Método de los Teoremas de Mohr
6.3.-MÉTODO DE LOS TEOREMAS DE MOHR
Primer Teorema de Mohr:
El primer teorema de Mohr nos permite calcular el ángulo θAB que forman entre sí dos
secciones A y B de una viga flexionada. Éste ángulo será el mismo que el que formanlas tangentes a la elástica en los puntos A y B
θAB
x
θB
Atag en B
B
y
θAB θAx dxtag en A
A B x
Mz
Mz Fig.6.9
La ecuación diferencial de la elástica es, según ecuación 6.6:
d ϑ z
= −
M z
→ d ϑ z = −
M z .dx
E . I zdxE . I z
e integrando esta ecuación entre los puntos A y B :
B
d ϑ z = −
B M z.dx
→ ϑ z ( B ) − ϑ z ( A) = −
B M .dx z
o bien :∫ ∫ E . I ∫E . I
z z A A A
ϑ z ( AB) = ϑ z ( A) − ϑ z ( B) =
B
M z .dx (6.15)∫ E . I z A

7/25/2019 -Tema6-Flexion-Deformaciones.docx
http://slidepdf.com/reader/full/-tema6-flexion-deformacionesdocx 12/18
7

7/25/2019 -Tema6-Flexion-Deformaciones.docx
http://slidepdf.com/reader/full/-tema6-flexion-deformacionesdocx 13/18
Tema 6: Flexión-Deformaciones
Caso particular:
En el caso de que el módulo de rigidez de la viga s ea constante: E.Iz = cte, laecuación 6.15. se podrá expresar también de la siguiente manera:
B
B M z .dx
∫ M z .dxS
M AB (6.16)
ϑ z ( AB ) = ϑ z ( A ) − ϑ z ( B ) =
∫= (E . I z = cte) =
A=
E . I
E . I E . I
z z z A
ecuación que nos dice: “el ángulo θz (AB) que forman entre sí dos secciones de la vigaflexionada, es igual al área del diagrama de momentos flectores comprendida entre A y
B: (S M AB ) , dividido por el módulo de rigidez de la viga: E.I z”
Observaciones:
1º.- En las expresiones del primer teorema de Mohr se consideran positivos los ángulos
θz que vayan en sentido horario, siempre que la sección A esté situada a la izquierda dela sección B.
2º.- En el caso de una viga en la que conozcamos una sección que no gire (por ejemplo
casos de empotramientos), podremos conocer mediante este teorema, de forma directa,
el giro de cualquier otra sección de la misma
θB
A
θA=0 B
Fig.6.10
ϑ AB = ϑ A − ϑ B = (como ϑ A = 0) = −ϑ B

7/25/2019 -Tema6-Flexion-Deformaciones.docx
http://slidepdf.com/reader/full/-tema6-flexion-deformacionesdocx 14/18
8

7/25/2019 -Tema6-Flexion-Deformaciones.docx
http://slidepdf.com/reader/full/-tema6-flexion-deformacionesdocx 15/18
Sección 6.3: Método de los Teoremas de Mohr
Segundo Teorema de Mohr:
El segundo teorema de Mohr nos da la distancia en vertical, δBA, que hay desdeun punto B de la elástica a la tangente en otro puntoA de la elástica.
xB
x dx
xA
x
B
A CD B2 B0
θ tag en Dy
B1
dθ
δBA
tag en C
B´
x dxxB - x
tag en A
A B x
Mz
Mz
Fig.6.11
Para calcular δBA haremos lo siguiente: por dos puntos C y D de la elástica, muypróximos, situados a una distancia: x y x+dx res pectivamente, trazamos las tangentes,
las cuales interceptan al segmento BB´= δBA en el segmento diferencial B1B2, cuyalongitud será:
B1 B2 = B1 B0 − B2 B0 = ( x B − x ).tagϑ − ( x B − x ).tag (ϑ
− d ϑ ) y para el caso de pequeñas deformaciones
B1 B2 ≅ ( x B − x ).ϑ − ( x B − x ).(ϑ − d ϑ ) = ( x B − x ).d ϑ
sumando las longitudes de los segmentos diferenciales B1B2 al mover los puntos C y D
desde A hasta B, tendremos la longitud total δBA que queremos calcular. Así :
B
δ BA = BB´ = ∫( x B − x).d ϑ
A
y si finalmente se sustituye el valor absoluto de dθ obtenido en el primer teorema de
Mohr: B M z .( x B − x).dxδ
BA
= ∫ (6.17)

7/25/2019 -Tema6-Flexion-Deformaciones.docx
http://slidepdf.com/reader/full/-tema6-flexion-deformacionesdocx 16/18
E . I z A 9

7/25/2019 -Tema6-Flexion-Deformaciones.docx
http://slidepdf.com/reader/full/-tema6-flexion-deformacionesdocx 17/18
Tema 6: Flexión: Deformaciones
Caso particular:
En el caso de que el módulo de rigidez de la viga s ea constante: E.Iz = cte, la ecuación6.17. se podrá expresar también de la siguiente manera:
B
B M z .( x B − x ).dx
∫ M z .( x B − x ).dx M
AB (6.18)δ BA
= ∫ = ( E . I z = cte) =
A=
Q B
E . I z E . I z A E . I z
ecuación que nos dice: “la distancia en vertical: δBA que hay desde un punto B de la
elástica a la tangente en otro punto A de la misma,es igual al momento estático respecto
del primer punto B del área del diagrama de momentos flectores comprendida entre
ambos puntos: Q B M AB , dividido por el módulo de rigidez a flexión de la viga: E.Iz”
Observaciones:
1º.- En las expresiones del segundo teorema de Mohr, cuando δBA>0, indicará que el
punto B está situado por encima de la tangente en A, independientemente, en este caso,del orden en que estén situados los puntos A y B.
2º.- En el caso de una viga en la que conozcamos una sección que no gire (por ejemplo
casos de empotramientos), podremos conocer mediante este teorema, de forma directa,
la flecha en un punto cualquiera de la misma.
tag en A
A
x
δBA = yB
B
y Fig.6.12
3º.- Si la flexión de la viga fuera debida a un mom ento flector My y por tanto la elásticaestuviera en el plano xz las expresiones de los teoremas de Mohr: (6.15), (6.16), (6.17) y(6.18), serí an las mismas, sin más que cambiar:
Mz → My E.Iz → E.Iy
y los giros y flechas obtenidos serí an:
θz → θy y → z
4º.- Si la flexión de la viga fuese debida a Mz y M
y conjuntamente se procederí a
de forma análoga a lo indicado para los otros dos métodos expuestos.
10

7/25/2019 -Tema6-Flexion-Deformaciones.docx
http://slidepdf.com/reader/full/-tema6-flexion-deformacionesdocx 18/18