02 fhwa 1998 velocidad directrizrama
26
https://ctr.utexas.edu/wp-content/uploads/pubs/1732_1.pdf goo.gl/0lCmJM __________________________________________________________________________________________ MATERIAL DIDÁCTICO NO COMERCIAL – CURSOS UNIVERSITARIOS POSGRADO ORIENTACIÓN VIAL Free Online Document Translator beta + + Francisco Justo Sierra [email protected] Ingeniero Civil UBA CPIC 6311 ingenieriadeseguridadvial.blogspot.com.ar Beccar, diciembre 2015 REEVALUACIÓN DE CRITERIOS DE VELOCIDAD DIRECTRIZ DE RAMAS: EXAMEN DE LA PRÁC- TICA Y PLAN DE RECOLECCIÓN DE DATOS Michael Hunter y Randy Machemeh. RESUMEN 1 La bibliografía técnica rastreó durante unos 50 años los criterios de velocidad directriz de rama de autopista expuestos en las políticas de diseño de AASHTO y Texas DOT. Se documentó la evolución de los criterios de velocidad directriz y se incluyeron los cambios periódicos. Esencialmente, los criterios de velocidad directriz de rama de Texas DOT son los de AASHTO. Los orígenes de las tasas de aceleración y desaceleración del conductor de los criterios de AASHTO son estudios experimentales realizados a finales de los años treinta. Varios estudios suscitaron dudas sobre la adecuación de la velocidad directriz mínima admisible de AASHTO, 50% de la velocidad directriz de la autopista. Se plantearon dudas acerca de la adecuación de las longitudes de ramas de alta velocidad proyectadas según los criterios de AASHTO. Se diseñó un plan de recopilación de datos conceptuales para dar información que responda a las dudas respecto de los criterios actuales. Además, una encuesta nacional de agencias de diseño de ramas indica que (1) hay una variedad de diferentes políticas de diseño; (2) la mayoría de los proyectistas se preocupa más por las ramas de entrada que por las salidas; y (3) la seguridad es la medida de evaluación más comúnmente usada. APLICACIÓN Y RECOMENDACIONES Los criterios actuales de velocidad directriz de rama de autopista evolucionaron a través de la práctica, investigación y acciones políticas durante varias décadas. Un primer paso hacia la reevaluación de estos criterios debe incluir un examen de este proceso evolucionario, y ese examen es una parte primaria de este informe. La revisión presente sirve de base para los esfuerzos de investigación que siguen, y las recomendaciones de políticas que se desarrollarán. También se da un plan conceptual de recolección de datos primarios que guíe las futuras investigaciones.
-
Upload
sierra-francisco-justo -
Category
Engineering
-
view
57 -
download
4
Transcript of 02 fhwa 1998 velocidad directrizrama

https://ctr.utexas.edu/wp-content/uploads/pubs/1732_1.pdf goo.gl/0lCmJM
__________________________________________________________________________________________
MATERIAL DIDÁCTICO NO COMERCIAL – CURSOS UNIVERSITARIOS POSGRADO ORIENTACIÓN VIAL Free Online Document Translator beta + + Francisco Justo Sierra [email protected] Ingeniero Civil UBA CPIC 6311 ingenieriadeseguridadvial.blogspot.com.ar Beccar, diciembre 2015
REEVALUACIÓN DE CRITERIOS DE VELOCIDAD DIRECTRIZ DE RAMAS: EXAMEN DE LA PRÁC-TICA Y PLAN DE RECOLECCIÓN DE DATOS
Michael Hunter y Randy Machemeh.
RESUMEN 1
La bibliografía técnica rastreó durante unos 50 años los criterios de velocidad directriz de rama de autopista expuestos en las políticas de diseño de AASHTO y Texas DOT. Se documentó la evolución de los criterios de velocidad directriz y se incluyeron los cambios periódicos. Esencialmente, los criterios de velocidad directriz de rama de Texas DOT son los de AASHTO. Los orígenes de las tasas de aceleración y desaceleración del conductor de los criterios de AASHTO son estudios experimentales realizados a finales de los años treinta. Varios estudios suscitaron dudas sobre la adecuación de la velocidad directriz mínima admisible de AASHTO, 50% de la velocidad directriz de la autopista. Se plantearon dudas acerca de la adecuación de las longitudes de ramas de alta velocidad proyectadas según los criterios de AASHTO. Se diseñó un plan de recopilación de datos conceptuales para dar información que responda a las dudas respecto de los criterios actuales. Además, una encuesta nacional de agencias de diseño de ramas indica que (1) hay una variedad de diferentes políticas de diseño; (2) la mayoría de los proyectistas se preocupa más por las ramas de entrada que por las salidas; y (3) la seguridad es la medida de evaluación más comúnmente usada.
APLICACIÓN Y RECOMENDACIONES
Los criterios actuales de velocidad directriz de rama de autopista evolucionaron a través de la práctica, investigación y acciones políticas durante varias décadas. Un primer paso hacia la reevaluación de estos criterios debe incluir un examen de este proceso evolucionario, y ese examen es una parte primaria de este informe. La revisión presente sirve de base para los esfuerzos de investigación que siguen, y las recomendaciones de políticas que se desarrollarán. También se da un plan conceptual de recolección de datos primarios que guíe las futuras investigaciones.

2/26 REEVALUACIÓN DE CRITERIOS DE VELOCIDAD DIRECTRIZ DE RAMAS ___________________________________________________________________________________
__________________________________________________________________________________________
MATERIAL DIDÁCTICO NO COMERCIAL – CURSOS UNIVERSITARIOS POSGRADO ORIENTACIÓN VIAL Free Online Document Translator beta + + Francisco Justo Sierra [email protected] Ingeniero Civil UBA CPIC 6311 ingenieriadeseguridadvial.blogspot.com.ar Beccar, diciembre 2015
RESUMEN 2
Se evaluaron los criterios actuales de velocidad directriz de rama de entrada a autopista mediante observaciones de veinte ramas en cuatro ciudades de Texas. Las observaciones de campo de las relaciones longitud de rama y velocidad directriz de autopista se realizaron mediante de videograba-ción. Las operaciones de tránsito se describen en términos de velocidades y aceleraciones de carri-les derechos y control de ramas que convergen, tamaños de intervalos aceptados y tiempo head-way de autopista. Los investigadores determinaron que eran comparables las aceleraciones de rama de los conductores observados y los valores de AASHTO. Para casi todas las observaciones, las velocidades de rama de los conductores son mayores que el 50% de la velocidad directriz de la autopista, lo que lleva a la recomendación de que se suprima la disposición de la política de diseño que permite velocidades directrices de rama tan pequeñas como el 50% de la velocidad directriz autopista.
Se halló ser muy importante la capacidad de los conductores de rama de entrada de ver, antes de llegar al gore de rama, la circulación por el carril derecho de la autopista en el que se pretende la fusión. Este hallazgo llevó a la recomendación de modificar el modelo de medición de la longitud del carril de aceleración AASHTO, en ramas de tipo abocinado. Se debe considerar que el carril de aceleración comienza sólo cuando los conductores de rama tienen una vista despejada del tránsito por el carril derecho de la autopista.

UNIVERSIDAD DE TEXAS, AUSTIN - MICHAEL HUNTER Y RANDY MACHEMEH 3/26 ________________________________________________________________________________
__________________________________________________________________________________________
MATERIAL DIDÁCTICO NO COMERCIAL – CURSOS UNIVERSITARIOS POSGRADO ORIENTACIÓN VIAL Free Online Document Translator beta + + Francisco Justo Sierra [email protected] Ingeniero Civil UBA CPIC 6311 ingenieriadeseguridadvial.blogspot.com.ar Beccar, diciembre 2015
CAPÍTULO 1. ANTECEDENTES Y OBJETIVOS
DESCRIPCIÓN DEL PROBLEMA
Las instalaciones de rama dan todas las oportunidades de ingreso y salida de la autopista. Las secciones adyacentes a las ramas son análogas a las de las intersecciones a nivel de calles arteriales en las que se crea fricción en la corriente de tránsito, lo que limita la velocidad de autopista y la capacidad. En las au-topistas, los cuellos de botella se desarrollan con frecuencia en las proximidades de entradas y salidas de intersecciones o ramas. Claramente, el diseño excelente de las ramas de autopistas es una consideración operacional crítica. Actualmente, los procedimientos de diseño de AASHTO y TxDOT indican que las velocidades directrices de la rama deben ser un porcentaje de la velocidad directriz de la autopista. El manual de procedimientos de diseño TxDOT afirma
Todas las ramas y conexiones deben diseñarse para permitir que los vehículos salgan y entren en la calzada en la calzada de la autopista a no menos de 50% (70% habitual, el 85% deseable) de la velocidad directriz de la autopista.
La elección de la velocidad directriz de rama puede afectar significativamente sus radios de curva, las distancias visuales de detención, y las longitudes de cambio de velocidad de carril. Los cambios en las características del vehículo y el comportamiento del conductor pueden influir en el rendimiento del vehículo predicho sobre el cual se basa la política sobre velocidad directriz de rama. Muchos de los di-seños actuales de rama no pueden caer en el ámbito de los estudios originales sobre los que se basan los diseños. Existe la necesidad de evaluar a fondo la política de la velocidad directriz de rama de la autopista actual, y los elementos de las instalaciones de rama relacionados, incluyendo longitudes de los carriles de aceleración y desaceleración.
VISIÓN DE CONJUNTO
El propósito del Capítulo 1 es revisar las actuales normas de diseño de TxDOT y AASHTO y dar una perspectiva histórica de su desarrollo. Esta sección examina primero la evolución del diseño que condujo a las normas vigentes. Los conceptos tratados se aplican al diseño de ramas, pero algunos de los mí-nimos y los supuestos indicados son de "estado de los caminos abiertos." En general, estos mínimos también se aplican al diseño de rama, pero las diferencias se pondrán de relieve.
TERMINOLOGÍA
Al revisar los estándares de diseño actuales y su evolución, este informe usa los siguientes conceptos: velocidad directriz, distancia visual de detención segura, curvaturas horizontal y vertical, terminal de rama, y carriles de cambio de velocidad:
Velocidad directriz
Velocidad directriz es la velocidad máxima segura que puede mantenerse sobre un tramo de-terminado de camino cuando gobiernan las características de diseño del camino. Todas las ins-talaciones deben diseñarse con todos los elementos en equilibrio, en consonancia con una velo-cidad directriz apropiada. Los elementos de diseño, como la distancia de visibilidad, los alinea-mientos horizontal y vertical, anchos de carril, zona-despejada lateral, peraltes, etc. están influidos por la velocidad directriz. Así, es importante seleccionar una velocidad directriz adecuada.
Operaciones y Procedimientos TxDOT Manual [3]
Generalmente la velocidad directriz indica el tipo de operación que se espera en un camino. Típicamente las autopistas tienen velocidades directrices entre 100 y 130 km/h; los caminos de menor categoría, como arteriales y colectores, tienen velocidades directrices más bajas de aproximadamente 50 a 100 km/h.

4/26 REEVALUACIÓN DE CRITERIOS DE VELOCIDAD DIRECTRIZ DE RAMAS ___________________________________________________________________________________
__________________________________________________________________________________________
MATERIAL DIDÁCTICO NO COMERCIAL – CURSOS UNIVERSITARIOS POSGRADO ORIENTACIÓN VIAL Free Online Document Translator beta + + Francisco Justo Sierra [email protected] Ingeniero Civil UBA CPIC 6311 ingenieriadeseguridadvial.blogspot.com.ar Beccar, diciembre 2015
Distancia visual de detención segura
La distancia visual de detención segura es la distancia es la distancia mínima de calzada visible para el conductor, requerida para dar la distancia adecuada para reaccionar y detener el vehículo. La distancia visual debería dar al conductor el tiempo suficiente como para reunir información, procesarla, realizar las acciones de control necesarias, tiempo de respuesta del vehículo, y evaluar la idoneidad de las posibles respuestas [11]. Típicamente, la distancia visual de detención se considera la una suma de dos distan-cias: la recorrida desde el instante en que el conductor ve el objeto hasta el instante en que el conductor aplica los frenos (PIJR, o percepción, identificación, juicio y reacción), más la distancia recorrida durante el frenado.
Curvas horizontales
Una curva horizontal es uno de los dos tipos principales de curvas (horizontales y verticales). Las normas de la curva horizontales representan el máximo grado de curva o radio mínimo. Diseño de la curva ho-rizontal se basa en una relación general entre peralte (inclinación de la calzada hacia el centro de la curva), el factor de fricción lateral (representa la fuerza radial provocada por el efecto de fricción entre los neumáticos y la calzada), velocidad del vehículo, y el radio de curva.
Curvas Verticales
La curva vertical se usa siempre que sea debe lograrse un cambio en la elevación. Por ejemplo, una curva vertical puede ser usada para conectar dos partes de una calzada en diferentes elevaciones. Esta situa-ción ocurre a menudo en las ramas donde la conexión de la rama en un camino está a una elevación diferente que la conexión rama al otro camino. Los factores predominantes que afectan al diseño seguro de una curva vertical son la distancia adecuada a la vista, la comodidad, el control de drenaje, aspecto general, y la distancia del faro a la vista.
Rama
Para este informe, la rama término se define de acuerdo con la definición que figura en la guía de diseño AASHTO, que establece que "el término 'rama' incluye todos los tipos, arreglos y tamaños de convertir los caminos que conectan dos o más patas en un distribuidor. Los componentes de una rama son un terminal en cada pierna y un camino de conexión, por lo general con cierta curvatura, y en un grado "[1]. La calzada de conexión se refiere a menudo como la correcta rama. Esta definición difiere ligeramente de la que figura en el manual de operaciones y procedimientos TxDOT, que define una rama para ser lo AASHTO se refiere como la terminal de rama y la parte del camino que conecta a los terminales de rama como los caminos que conectan.
Terminal de Rama
El terminal de rama es la porción de la rama adyacente al camino a través de su recorrido.
Carriles de Cambio-de-Velocidad
Este informe adopta la definición AASHTO de la velocidad de cambio de carril, "el pavimento añadido unirse al camino recorrido del camino con la del camino girando y no implica necesariamente un camino definido de anchura uniforme." La velocidad de cambio de carril se conoce comúnmente como la acele-ración o carril de desaceleración.
DESARROLLO DE LAS ACTUALES NORMAS DE DISEÑO DE RAMA
Mediante la revisión de los acontecimientos que conducen a TxDOT y AASHTO estándares de diseño de hoy, se espera para profundizar en la aplicabilidad de las actuales normas de diseño "al tránsito de hoy. Lamentablemente, ni el manual de TxDOT 1988 ni la guía AASHTO 1990 da mucha información sobre el razonamiento detrás de los estándares de diseño de rama recomendados.

UNIVERSIDAD DE TEXAS, AUSTIN - MICHAEL HUNTER Y RANDY MACHEMEH 5/26 ________________________________________________________________________________
__________________________________________________________________________________________
MATERIAL DIDÁCTICO NO COMERCIAL – CURSOS UNIVERSITARIOS POSGRADO ORIENTACIÓN VIAL Free Online Document Translator beta + + Francisco Justo Sierra [email protected] Ingeniero Civil UBA CPIC 6311 ingenieriadeseguridadvial.blogspot.com.ar Beccar, diciembre 2015
Una mejor fuente de información sobre el origen de los estándares de diseño actuales es la política de 1965 sobre Diseño Geométrico de Caminos rurales [4], por la Asociación Americana de Funcionarios de Caminos del Estado (AASHO, que evolucionó hasta convertirse en la actual AASHTO). La guía es parte de una serie de cambios continuos que dieron lugar a la publicación de la más reciente AASHTO y ma-nuales de diseño de TxDOT. Para distinguir entre los manuales de diseño, la guía anterior se conoce como la guía de 1,965 AASHO, mientras que el diseño manual de guía AASHTO 1990 continuará siendo conocida como la guía de diseño AASHTO o 1990 guía AASHTO.
Velocidad Directriz
Uno de los parámetros más fundamentales que afectan a un diseño es la velocidad directriz. El examen de AASHTO y estándares de diseño TxDOT muestra que una vez elegida una velocidad directriz, la velocidad crítica para determinar las características de diseño reales (por ejemplo, longitudes de carril y curva de radios) es la velocidad media de operación de vehículos asumida para esa velocidad directriz. Las velocidades medias de operación usadas en el manual de TxDOT 1988 y el manual AASHTO 1994 se ven por primera vez en la guía AASHTO 1965, donde las estas velocidades aparentemente se basan en estudios realizados 1950 y 1960. La guía AASHO anterior de 1954 sugiere velocidades significativamente más bajas que las de la guía 965.
Existen algunas dudas en cuanto a si estas velocidades de carrera promedio asumidos siguen siendo precisa en las condiciones actuales. Un estudio, las estimaciones de 1992 de velocidad para Caminos Diseño y Control de Tránsito [19], sugiere que las estimaciones de velocidad usados son significativa-mente inferiores a las velocidades reales. Una estimación sugiere que hasta un 90% del tránsito obser-vado excedía los límites de velocidad, a menudo cerca de la velocidad de circulación de bajo volumen asumido. El apoyo adicional para una creencia creciente de que las velocidades de carrera promedio asumidos no son realistas se puede encontrar en la metodología descrita en el informe final de NCHRP 3-35 [7]. En este estudio, la velocidad usada para determinar la longitud requerida de un cambio de carril velocidad- fue la propia velocidad directriz, no la velocidad de operación AASHTO.
Valores orientativos para Velocidad directriz rama
Una de las primeras recomendaciones para la velocidad directriz de ramas se pueden encontrar en las Normas diseño propuesto para caminos interregionales de 1944 [18]. Este documento recomienda que "todas las ramas y las conexiones serían diseñados para permitir a los vehículos a entrar y salir de la autopista en 0,7 de velocidad directriz del camino." Con el tiempo, se hicieron cambios a esta reco-mendación - cambios que se reflejan en la Tabla 1.3. Esta tabla apareció por primera vez en su forma actual en el manual del 1984 AASHTO. Anteriormente, las recomendaciones habían sido ligeramente diferentes; AASHTO solamente había tenido directrices para velocidades directrices rama deseables y mínimos, en lugar de los tres rangos (alta, media y baja) visto hoy. Mientras que la velocidad directriz rama recomendada superior o deseable es aproximadamente la velocidad promedio de ejecución de bajo volumen para la velocidad directriz de la autopista, las gamas medias mínimas y no parecen tener una correlación con alguna característica tránsito o parámetro de diseño. Sin la literatura se encontró que revela la fuente de estas recomendaciones o la razón de los cambios en cada AASHO/AASHTO actua-lización manual posterior diseño.
Diseño de carriles de cambio de velocidad
Las de 1954 y 1965 presentaciones del diseño de los carriles de cambio de velocidad guías AASHO 'dan más información que las guías de diseño posteriores sobre los estándares de diseño de derivación. El manual de 1965 define un carril de cambio de velocidad como "... un carril auxiliar, incluyendo las áreas abocinadas, principalmente para la aceleración o desaceleración de los vehículos que entran o salen del medio de los carriles de tránsito.

6/26 REEVALUACIÓN DE CRITERIOS DE VELOCIDAD DIRECTRIZ DE RAMAS ___________________________________________________________________________________
__________________________________________________________________________________________
MATERIAL DIDÁCTICO NO COMERCIAL – CURSOS UNIVERSITARIOS POSGRADO ORIENTACIÓN VIAL Free Online Document Translator beta + + Francisco Justo Sierra [email protected] Ingeniero Civil UBA CPIC 6311 ingenieriadeseguridadvial.blogspot.com.ar Beccar, diciembre 2015
La velocidad de cambio de carril plazo, carril de desaceleración, o aceleración carril, como se usa aquí, se aplica ampliamente para el pavimento añadido unirse a la vía de circulación del camino con el de la calzada de girar y no implica necesariamente un carril definido de anchura uniforme”.
Un examen de la guía AASHO 1965 conduce a la conclusión de que la mayoría de los valores de diseño son los mismos que los de la guía AASHTO 1 990, con las diferencias que yacen en la implementación. Curiosamente, se verá que muchos de los valores de diseño se encuentran en la guía de diseño TxDOT 1988 también se incluyen en la guía AASHO 1965, mientras que una simple comparación de la guía de diseño 1990 AASHTO y el guía TxDOT 1988 puede llevar a creer que ciertos valores de diseño se desarrollaron por separado. Para demostrar y dar una idea de ambos los actuales estándares de diseño de TxDOT y AASHTO, este informe presentará las razones detrás del diseño de la sección cónica y desaceleración y carril de aceleración longitudes.
Taper Sección. Uno de los primeros aspectos de diseño incluidas en el diseño de carriles de cambio de velocidad es la forma abocinada. Esta es la forma abocinada al final (o principio) del carril de cambio de velocidad, lo que no debe ser confundido con el diseño de la velocidad de cambio de carril de tipo abo-cinado. Aunque el diseño AASHTO actual recomienda longitudes cónicas fijas, la guía 1965 AASHO recomienda longitudes cónicas variables. (Estos se basan en pasar prácticas en dos caminos de carril, según lo determinado en un estudio de 1 941 [6].) Parece que las longitudes actuales abocinadas AASHTO fijos son una simplificación de las 1965 longitudes cónicas variables, usando los valores de la forma abocinada más largos para todo el diseño velocidades. La fuente para la longitud conicidad TxDOT será discutido en la sección de carril de aceleración.
Carriles de desaceleración. Las bases de guía 1965 AASHO la longitud de carril de desaceleración de tres factores: "(a) la velocidad a la que los conductores maniobran en el carril auxiliar, (b) la velocidad a la que los conductores se vuelven después de atravesar el carril de desaceleración, y (c) la forma de desace-leración o los factores de desaceleración ".
El primer factor se basa en la suposición de que, cuando se cambia en el carril de desaceleración, la mayoría de los conductores de viajar a una velocidad no mayor que el de la velocidad de operación de bajo volumen promedio. El segundo factor se supone que la velocidad de operación de la curva de afilado o de control de la rama adecuada. El tercer factor se basa en observaciones generales y varios estudios limitados. Los valores de diseño para muchos de estos factores en las normas de diseño actuales son los mismos que los de la guía de 1,965; Muchos se basan en varios estudios [5, 8, y 9] realizado principal-mente a finales de 1930.
Este diseño se basa en la operación del vehículo de pasajeros. Si bien la guía 1965 AASHO reconoce que los camiones requieren una distancia de desaceleración más largo para el mismo diferencial de velocidad, se supone que "carriles más largos no se justifican porque la velocidad media de los camiones son ge-neralmente inferiores a las de los vehículos de pasajeros."
El uso de los factores mencionados anteriormente, el manual AASHO 1965 desarrolla una tabla de lon-gitudes de los carriles de desaceleración para diversas combinaciones de caminos y ramas velocidades directrices. Una comparación de esta tabla y la tabla de longitud desaceleración en AASHTO revela estas tablas para tener exactamente los mismos valores de diseño. La única diferencia numérica es que la versión de 1965 da los valores de diseño de caminos velocidades directrices de 120 y 130 km/h, mientras que la versión 1990 AASHTO da valores de diseño único de hasta 110 kmph. Sin embargo, existe una diferencia fundamental entre los métodos de aplicación de las longitudes de diseño las dos guías. La guía AASHO 1965 asume la conicidad de ser parte de la velocidad de cambio de carril de longitud total, mientras que la guía AASHTO 1990 trata la conicidad como la longitud adicional. Esto significa que mientras no alterar ninguno de los datos fundamentales sobre los cuales se derivan las longitudes, es decir, la velocidad media de marcha, las tasas de aceleración y desaceleración, etc., los 1990 AASHTO

UNIVERSIDAD DE TEXAS, AUSTIN - MICHAEL HUNTER Y RANDY MACHEMEH 7/26 ________________________________________________________________________________
__________________________________________________________________________________________
MATERIAL DIDÁCTICO NO COMERCIAL – CURSOS UNIVERSITARIOS POSGRADO ORIENTACIÓN VIAL Free Online Document Translator beta + + Francisco Justo Sierra [email protected] Ingeniero Civil UBA CPIC 6311 ingenieriadeseguridadvial.blogspot.com.ar Beccar, diciembre 2015
carriles guía de desaceleración son esencialmente 9 m (una longitud típica de abocinamiento) más largo que los 1965 longitudes AASHO. La suposición diferentes primaria entre los dos manuales parece ser que la guía AASHO 1,965 asume que la desaceleración se produce mientras los cambios de vehículos desde el carril de autopista para el carril de desaceleración, mientras que la guía AASHTO 1990 asume des-aceleración no comienza hasta que el vehículo entró por completo la carril de desaceleración. Este cambio en las hipótesis parece haber ocurrido entre la guía de 1965 AASHO (libro azul) y la guía AASHTO 1973 [10] (el libro rojo). Sin la literatura se descubrió que explica la razón de este cambio; el libro rojo en realidad se refiere al lector al libro azul para una explicación de cómo se obtuvieron los valores de cambio de velocidad directriz de carril.
El libro azul 1965 AASHO también incluye una tabla de valores de longitud de desaceleración redon-deadas a los 7,6 m. Estos fueron los valores usados en la determinación de las longitudes de carril de cambio de velocidad para el diseño. Esta versión redondeada de la longitud del carril de desaceleración para el diseño fue omitido en las versiones posteriores de la guía AASHO/AASHTO (1973 y 1984), con las versiones posteriores usando los números crudos como todavía se encuentran en la guía AASHTO ac-tual. Curiosamente, la tabla de longitud de desaceleración en el manual actual TxDOT es exactamente la misma que la versión redondeada de los AASHO 1965 longitudes diseño guía. Esta realización da un vínculo importante entre las guías de TxDOT y AASHTO, un vínculo que no se dio cuenta fácilmente en la comparación de las versiones más recientes de estas guías; es decir, los valores de TxDOT se basan en los mismos estudios y la metodología como los valores actuales AASHTO. No hubo ninguna literatura encontrado para explicar por qué AASHTO cesó usando la tabla redondeada o por qué TxDOT no cambió a las longitudes de diseño primas junto con AASHTO.
Carriles de aceleración. Con respecto a los dos carriles de aceleración y desaceleración, la guía AASHO 1.965 ofrece poca orientación entre el paralelo y carriles de tipo abocinado de cambio de velocidad. Hay un sentido de una suposición tácita de que la mayoría de los carriles de aceleración serán del tipo abo-cinado (en un 50: 1 cono) con sólo una breve mención que algunos proyectistas pueden preferir un carril de aceleración paralelo con una puesta a punto más aguda al final. La recomendado 50: 1 conicidad se ve fácilmente como la realizada en los diseños estándar TxDOT y los diseños 1990 AASHTO tipo aboci-namiento, con la excepción de AASHTO recomendar un intervalo de 50: 1 a 70: 1.
Las bases de guía 1965 AASHO la longitud del carril de aceleración de varios factores; "(a) la velocidad a la que se funden con los conductores a través del tránsito; (b) la velocidad a la que los conductores entran en los carriles de aceleración, y (c) la manera de acelerar o los factores de aceleración... y pueden de-pender de los volúmenes relativos del tránsito a través de morada”. Muchos de los fundamentos y su-puestos usados son similares a los de los carriles de desaceleración. Por ejemplo, al igual que con las tasas de desaceleración, la forma de la aceleración o las tasas de aceleración se determinan a partir de estudios predominantemente completados a finales de 1930, y las longitudes de diseño se basan en las características de turismos. Estos estudios produjeron ambas estimaciones de las tasas máximas y normales de aceleración que subyacen en los valores de longitud todavía en uso hoy en día.
Para los factores (a) y (b), la guía 1965 AASHO afirma que el comportamiento fusión satisfactoria sería alcanzada por un vehículo en el carril de aceleración de entrar en la autopista a través de carriles a una velocidad 5 mph (8 km/h) inferior a la media velocidad de operación de la autopista. Además, este vehículo se asume para entrar en el carril de aceleración a una velocidad igual a la velocidad de control de la rama adecuada. Por lo tanto, el diferencial de velocidad para la determinación de la longitud del carril de aceleración es la diferencia entre la velocidad media de operación de la autopista, menos 5 mph (8 km/h), y la velocidad media de operación de la curva de control en la rama adecuada. Se sugirió que el 5 mph (8 km/h) diferencia incrementales asumido por AASHO no podrán ejercer.

8/26 REEVALUACIÓN DE CRITERIOS DE VELOCIDAD DIRECTRIZ DE RAMAS ___________________________________________________________________________________
__________________________________________________________________________________________
MATERIAL DIDÁCTICO NO COMERCIAL – CURSOS UNIVERSITARIOS POSGRADO ORIENTACIÓN VIAL Free Online Document Translator beta + + Francisco Justo Sierra [email protected] Ingeniero Civil UBA CPIC 6311 ingenieriadeseguridadvial.blogspot.com.ar Beccar, diciembre 2015
Por ejemplo, es posible que los conductores no se funden en respuesta a algún diferencial de velocidad umbral, pero en lugar de que se fusionarán en cualquier diferencial de velocidad, con su fusión depende de algún otro elemento, tal como velocidad angular vehicular [7].
Al igual que en el carril de desaceleración longitudes de mesa, una tabla de longitudes de carril de ace-leración se produjo en la guía de 1965 para diversas combinaciones de autopista y rama velocidades directrices. Esta tabla es exactamente la misma que la mesa para la determinación de los carriles de aceleración en el 1990 guía AASHTO (Tabla 1.2 de este informe). El manual AASHO 1965 también dio un conjunto cabal de los valores de diseño que se dejó caer en los manuales de diseño posteriores. Por último, al igual que con los carriles de desaceleración, el diseño AASHO 1965 considera el cono de ser parte de la longitud de cambio de carril velocidad-. Por lo tanto, mientras que los valores de diseño son iguales numéricamente en los 1965 y 1990 manuales, el método de medición de 1990 dará lugar a lon-gitudes de carril de aceleración más largos.
Una vez más, es posible conectar la guía de 1,965 AASHO directamente tanto a la guía AASHTO 1990 y la guía de TxDOT 1.988. Ya se observó que las longitudes de carril de aceleración de la guía 1965 AASHO se usan en la guía AASHTO 1 990. Es lógico, entonces, asumir que la situación será similar a la de los carriles de desaceleración, y que hay una conexión entre la guía de diseño TxDOT longitud 1.988 carril de aceleración y el trabajo AASHO antes. Un examen de los diseños estándar de TxDOT revela que todos los carriles de aceleración TxDOT, por las ramas de un solo carril, están diseñados de la misma manera general, el uso de un diseño de tipo abocinado. En comparación con la tabla de longitud acele-ración redondeada 1965, los actuales TxDOT satisface diseño todas las longitudes de diseño para velo-cidades directrices de la autopista de 80 km/h y 100 km/h, y que se sitúa entre la rama velocidades di-rectrices de 50 km/h y 56 km/h para un 110 km/h de la autopista velocidad directriz. El hecho de que la velocidad directriz minimalista de una rama es ser el 50% de la velocidad directriz de la autopista, es decir, 56 km/h para un 110 km/h de la autopista, apoya la hipótesis de que el estándar de TxDOT diseño se basa en la metodología de 1.965 AASHO. Parecería que los funcionarios de diseño TxDOT decidieron usar un diseño estándar que satisface todas las combinaciones de velocidad directriz de rama/autopista acepta-bles. En consecuencia, para cualquier situación que no sea el 110 km/h autopista y 56 km/h rama (el caso aceleración máxima longitud del carril), diseño de TxDOT sería conservador, de acuerdo con la meto-dología de 1965, y lo haría usar una longitud mayor que AASHO recomienda.
Una aclaración de la sección cónica puede conectar el diseño estándar TxDOT a la metodología 1965 AASHO aún más. Como se señaló anteriormente, la guía 1965 AASHO usado diferentes longitudes de las secciones cónicas, pero para la aceleración del carril de tipo abocinado diseñar la guía recomienda un 50: 1 cono para la velocidad de cambio de carril. Por lo tanto, al final del carril de aceleración, la sección cónica en la que el carril se reduce de 3,7 a 0 m de ancho sería igual a 3,7 m multiplicada por 15 exac-tamente lo que se usa en el diseño TxDOT. Esto es aproximadamente el doble de la longitud del cono usado en un diseño de tipo paralelo.
Aceleración y desaceleración tarifas. Como se señaló, los valores usados para las tasas de aceleración y desaceleración influyen directamente en la velocidad de cambio de la longitud del carril. Una extensa discusión de los estudios de 1930 en que se basan los valores de TxDOT y AASHTO se puede encontrar en La reevaluación de los criterios de diseño de rama de velocidad: Examen de Práctica y plan de reco-pilación de datos [24]. Este informe demuestra claramente la incertidumbre sobre las tasas de aceleración reales que serían los más adecuados para el diseño. Al parecer, a pesar de que las tarifas de la década de 1930 pueden ser inferiores a los usados por los conductores de hoy, las deficiencias en el modelo de cambio de carril del AASHTO velocidad- (es decir, la aceptación brecha) puede requerir estas tasas conservadoras para asegurar longitudes adecuadas. Es decir, poco realista longitudes de carril de baja velocidad de cambio más probable es que el resultado de la actualización de las tasas de aceleración y desaceleración y el uso de la metodología AASHTO actual. Si bien es posible que las longitudes de

UNIVERSIDAD DE TEXAS, AUSTIN - MICHAEL HUNTER Y RANDY MACHEMEH 9/26 ________________________________________________________________________________
__________________________________________________________________________________________
MATERIAL DIDÁCTICO NO COMERCIAL – CURSOS UNIVERSITARIOS POSGRADO ORIENTACIÓN VIAL Free Online Document Translator beta + + Francisco Justo Sierra [email protected] Ingeniero Civil UBA CPIC 6311 ingenieriadeseguridadvial.blogspot.com.ar Beccar, diciembre 2015
AASHTO y estándares de diseño usados son aceptables, el estudio de las operaciones de rama y de-terminar si los diseños adecuados se están implementando es, sin duda justificada. Hay por lo menos tres posibles resultados de una revisión del diseño de la velocidad de cambio de carril: (1) los diseños son longitudes demasiado conservadoras (las tasas de aceleración/desaceleración 1938 son conservadoras) y más cortos pueden ser justificables; (2) los diseños son aceptables (las tasas de 1938 compensan adecuadamente las deficiencias modelo); y (3) los diseños son inadecuadas (las tasas de 1938 no compensan adecuadamente las deficiencias modelo).
DISEÑO RAMA
Las "prácticas actuales" se analizan en este informe se basan en la camino Diseño de Operaciones y Procedimientos División Manual TxDOT [3] y la A Política AASHTO sobre Diseño Geométrico de Caminos y Calles, 1990 [1]. El efecto de la elección de la velocidad directriz en rama de las diversas características geométricas y características operativas será visto a lo largo de esta sección. También se plantearon algunas preocupaciones sobre posibles dificultades en los estándares de diseño actuales.
Velocidad directriz
El objetivo principal de este estudio es la relación actual entre la velocidad directriz del camino de inter-sección y la elección de la velocidad directriz de rama. Las directrices actuales TxDOT afirman que "Todas las ramas y las conexiones deben estar diseñados para salir y entrar en el camino de circulación de la autopista en no menos del 50% (70% habitual, el 85% deseable) de la velocidad directriz de una autopista." Tabla 1.1 se hace referencia a partir de la guía de diseño AASHTO y refleja los valores guía de diseño para la rama de velocidad directriz y del camino velocidad directriz. Figura 4-54 en la guía de diseño de TxDOT reproduce los valores de diseño para 80, 100, y 110 km/h.
De acuerdo con AASHTO, velocidades directrices de rama deben aproximar las velocidades de carrera bajo volumen en los caminos que se cruzan. Cuando esta velocidad directriz no es práctica, las ramas no deben ser diseñadas a menos de 50% las directrices de diseño. Por la autopista y autopista ramas, so-lamente aquellos valores del camino velocidad directriz de más de 80 km/h se aplican.
Tabla 1.1 Guía de Valores para Velocidad directriz rama en relación con la velocidad directriz
Velocidad directriz (mph) 30 40 50 60 65 70
Velocidad directriz rama (mph)
Rango superior (85%) 25 35 45 50 55 60
Rango Medio (70%) 20 30 35 45 45 50
Inferior del rango (50%) 15 20 25 30 30 35
Correspondiente Radio mínimo (ft), véase la Tabla III-6; Fuente: 1990, AASHTO, la Tabla X-1, Página 960
Estos valores de diseño se consideran para aplicar a la más aguda o la curva de la rama de control. Esta curva por lo general será en la rama adecuada, es decir, en la camino de conexión entre los dos termi-nales de rama. Estas velocidades directrices no se considera que se aplican a los terminales de rama desde los terminales de rama deben contar con instalaciones de cambio de velocidad adecuados para la velocidad del camino en cuestión. Una discusión del diseño de los terminales de rama se da en las sec-ciones subsiguientes.
El siguiente es un breve resumen de AASHTO recomienda directrices para la consideración de la velo-cidad directriz en los distintos tipos de rama.
Las ramas diagonales. Un valor en el rango medio a menudo es práctico.
Bucles. Los valores mínimos por lo general controlan cada diseño, aunque la velocidad directriz de bucle no debe ser menor de 25 mph (40 km/h) para la camino velocidad directriz de más de 80 km/h.

10/26 REEVALUACIÓN DE CRITERIOS DE VELOCIDAD DIRECTRIZ DE RAMAS ___________________________________________________________________________________
__________________________________________________________________________________________
MATERIAL DIDÁCTICO NO COMERCIAL – CURSOS UNIVERSITARIOS POSGRADO ORIENTACIÓN VIAL Free Online Document Translator beta + + Francisco Justo Sierra [email protected] Ingeniero Civil UBA CPIC 6311 ingenieriadeseguridadvial.blogspot.com.ar Beccar, diciembre 2015
Conexiones semidirectas. Gamas medias y altas se deben usar con una velocidad aceptable mínimo de 50 km/h. Por lo general, no es práctico usar una velocidad superior a 80 km/h para las ramas cortas, de un solo carril.
Conexiones directas. Gamas media y alta tienen una velocidad mínima deseable de 64 km/h. La velo-cidad mínima de diseño no debe ser menos de 56 km/h en cualquier caso.
Para situaciones en las que una rama conecta dos caminos de intersección, la velocidad directriz rama se basará en la camino con la velocidad directriz superior. Sin embargo, puede ser aceptable para variar la velocidad directriz, con la porción de la rama más cerca del camino velocidad directriz superior basada en la velocidad más alta, y la porción de la rama más cerca del camino velocidad directriz más baja en base a la velocidad más baja. Cuando se usa la rama para conectar una autopista a un cruce importante o la calle, formando una intersección al grado donde la señal o signo de control puede ser, en efecto, el diseño de la parte de la rama en el cruce se basa en controles de diseño intersección.
Peralte (e) y Factor de fricción lateral (f)
AASHTO estableció valores límite de e y f para diferentes velocidades directrices en los caminos abiertas. Los factores máximos de peralte y fricción lateral están restringidos por las limitaciones prácticas. Estos límites se ven afectados por elementos tales como las condiciones climáticas (si un área está sujeta a hielo y nieve), condiciones del pavimento, tipo de pavimento, el aumento potencial de hidroplaneo, tipo de zona (urbana o rural), las condiciones del terreno, el malestar conductor en baja o alta velocidades, y camiones con mayores centros de gravedad. Sobre la base de estudios y experiencia, la tasa máxima de peralte en los caminos es típicamente 0,10, y de vez en 0,12. En áreas sujetas a hielo y nieve 0.08 da un valor límite práctico. Factores de fricción laterales para fines de diseño van de 0,17 a 19 mph (30 km/h) de 0.09 para 120 km/h).
Operaciones y Procedimientos Manual de TxDOT ofrece cuadros relativos al grado de costumbre y ab-soluto máximo de la curva (radio mínimo) para velocidades directrices de 48, 64, 81, 97, y 110 km/h y un peralte de 0,08. Las máximas absolutas se basan directamente en los máximos calculados de AASHTO. La guía de TxDOT se refiere el diseñador a la guía de diseño AASHTO para el máximo grado de curva (radio mínimo) los valores que se aplican a otros tipos de peralte de 0,08. El manual TxDOT también da el peralte para ser usado para diversas velocidades directrices y grados de curvatura en donde no se usan los valores límite. Estos valores también se basan en un peralte máximo de 0,08.
Si bien la metodología para las curvas de rama no cambia de la de abierta curva horizontal de caminos, hay algunos desacuerdos en los valores límite de la e y f.
Se expresaron inquietudes con la guía AASHTO y, posteriormente, el TxDOT guía [13]. Existen diferentes interpretaciones de cómo se debe implementar el diseño mínimo rama. En este informe de estas áreas de interpretaciones contradictorias no se abordan directamente, ya que los diseños existentes solamente se estudian y normas de diseño se supone que siguen los típicos diseños de diseño TxDOT enumerados en una sección posterior de este informe. La idea central de este estudio es una comparación de baja velo-cidad estándares de diseño rama como categoría general con el de mayor velocidad estándares de di-seño rama. Una discusión completa de las diferentes interpretaciones y su impacto en el diseño se puede encontrar en La reevaluación de los criterios de diseño de rama de velocidad: Examen de Práctica y plan de recopilación de datos [24].

UNIVERSIDAD DE TEXAS, AUSTIN - MICHAEL HUNTER Y RANDY MACHEMEH 11/26 ________________________________________________________________________________
__________________________________________________________________________________________
MATERIAL DIDÁCTICO NO COMERCIAL – CURSOS UNIVERSITARIOS POSGRADO ORIENTACIÓN VIAL Free Online Document Translator beta + + Francisco Justo Sierra [email protected] Ingeniero Civil UBA CPIC 6311 ingenieriadeseguridadvial.blogspot.com.ar Beccar, diciembre 2015
Distancia Visual
Distancias de visibilidad a lo largo de las ramas deben ser al menos tan grandes como la distancia de frenado de vista de seguridad. La distancia visual se aborda en las operaciones y procedimientos de TxDOT Guía de diseño de la siguiente [3]:
En todas las ramas y las conexiones directas, las combinaciones de grado, curvas verticales, alineaciones y remoción de obstáculos laterales y de esquina a la visión serán tales como para dar la distancia de visibilidad a lo largo de estas ramas y las conexiones de las salidas de terminales a lo largo de la autopista, en consonancia con las velocidades probables de operación del vehículo.
Dentro de la sección de diseño de rama, la guía TxDOT ofrece una mesa para la distancia visual de detención mínima y deseable distancia de visibilidad de parada para diferentes velocidades directrices. Estas distancias de visibilidad de parada son idénticas a los encontrados en AASHTO. Consideraciones adicionales de AASHTO incluir que la autopista que precede una rama de salida debe tener una distancia de visibilidad para el tránsito de paso que se basa en la velocidad directriz del camino y que supera la distancia mínima visual de detención de al menos 25% [1].
Las preocupaciones sobre los criterios actuales distancia visual de detención se plantearon en diversos estudios [15, 24]. Los temas incluyen el tiempo de reacción descanso insuficiente para el potencial de diseño ancianos, insuficiente para los camiones, y los factores de fricción secundarios que no se dan cuenta de la mayor demanda causada por curvas.
Pendientes
Una rama típicamente consiste en una parte central con un alto grado, mientras que los terminales de rama serán de grados menores. El gradiente limitante de esta parte central de la rama está influido por el efecto de la pendiente y la longitud de la calificación en operaciones de vehículos, y por la necesidad de dar una distancia adecuada a la vista. La velocidad directriz rama será predominante en estos dos fac-tores. Las directrices generales de AASHTO para gradientes de rama siguen una expectativa de que altas velocidades directrices de rama tendrán gradientes más planas. Los criterios generales de AASHTO son los siguientes:
... es deseable que los gradientes ascendentes en ramas con una velocidad directriz de 7.080 kmph se limitarán a 3 a 5%; los 60 km/h Velocidad, a 4 a 6%; los de 40 a 50 km/h de velocidad, de 5 a 7%; y los de 30 a 40 km/h de velocidad, de 6 a 8%. Cuando las condiciones topográficas dictan, se podrán usar grados más pronunciados de lo deseable. De una vía descendente gra-dientes en ramas se celebre a los mismos máximos generales, pero en casos especiales que pueden ser de 2% mayor. [1]
En gran medida, la rasante del camino directo determina las pendientes de los terminales de rama.
Las normas de TxDOT difieren ligeramente de la discusión AASHTO. TxDOT usa las mismas relaciones curva vertical como AASHTO, aunque incorpora una longitud mínima para cresta curva vertical. Esto resulta en curvas verticales mínimo sag cortas a velocidades inferiores a 40 mph (64 km/h) de velocidad directriz y curvas verticales ya sag mínimo a velocidades superiores a 40 mph (64 km/h). La guía TxDOT también afirma que la "tangente o grado de control en las ramas deben ser lo más plana posible, y de preferencia deben ser limitados a 4% o menos." Esto no tiene en cuenta las diferentes velocidades di-rectrices al igual que el manual de AASHTO, la creación de un estándar más conservador.

12/26 REEVALUACIÓN DE CRITERIOS DE VELOCIDAD DIRECTRIZ DE RAMAS ___________________________________________________________________________________
__________________________________________________________________________________________
MATERIAL DIDÁCTICO NO COMERCIAL – CURSOS UNIVERSITARIOS POSGRADO ORIENTACIÓN VIAL Free Online Document Translator beta + + Francisco Justo Sierra [email protected] Ingeniero Civil UBA CPIC 6311 ingenieriadeseguridadvial.blogspot.com.ar Beccar, diciembre 2015
Otras Cuestiones del Diseño de Rama
En general, las ramas deben diseñarse como instalaciones de un solo carril con posibilidad de estacio-namiento de emergencia, a pesar de que la capacidad de una rama de un solo carril, no es suficiente una instalación de dos carriles se puede dar. También, ramas de la mano derecha se consideran superiores a las ramas de la mano izquierda en las características de operación y seguridad.
Si bien no se discute en este informe (ya que no es fundamental para el diseño mínimo aceptable), un diseño de rama probablemente requerirá la escorrentía peralte por una transición de peralte. Si la longitud mínima de la rama no da la longitud adecuada para esta transición de peralte, entonces la rama requerirá alargamiento, o tendrá la velocidad directriz y peralte elegido para ser revisada. Ramas asa son un ejemplo de cómo peralte típicamente debe desarrollarse dentro y fuera de la rama adecuada. Además, no se discute en este informe están rama de diseño y pavimento de gore anchos. Mientras relacionados con caminos y ramas velocidades directrices y afectadas por el tipo de rama y rama diseño, el efecto de diseño de la gore y la rama ancho de pavimento no es crítica a las cuestiones de diseño de rama en estudio. Para una revisión en profundidad de estos temas el lector se dirige al manual de TxDOT y la guía de diseño AASHTO.
Terminales de rama
Hay dos escenarios de operación distintivos para terminales de rama. Un terminal de rama puede ser flujo libre, con el tránsito de la fusión o divergentes en ángulos planos (por ejemplo, ramas adyacentes a una autopista); o la rama podrá terminar a un camino secundaria (por ejemplo, una rama de trébol en el cruce en un distribuidor). El área de interés para este informe y, por lo tanto, para la discusión de diseño que sigue es para las ramas de flujo libre. Se presta atención mínima para salir de ramas en este momento ya que un objetivo principal de este estudio es operaciones de rama de entrada. La discusión de los termi-nales rama flujo y salida de las ramas no libres se puede encontrar en las guías de diseño de TxDOT y AASHTO y Reevaluación de Criterio Velocidad directriz de rama: Examen de Práctica y plan de recopi-lación de datos [24].
General. Terminales de rama deben ser diseñados para tener en cuenta la distancia de visibilidad y de la diseño de la rama adecuada. El manual AASHTO presenta un ejemplo conciso de algunas importantes consideraciones de la siguiente manera:
Perfiles de los terminales de rama deben diseñarse en asociación con curvas horizontales para evitar restricciones a la vista que afectarán negativamente a las operaciones. ... En un terminal de entrada desde una rama en una pendiente ascendente, la porción de la rama y su terminal des-tinado a la aceleración debe paralela de cerca el perfil a través de carriles para permitir entrar a los conductores a tener una visión clara por delante, a un lado, y en la parte trasera en el camino a través. [1]
Deseablemente, terminales de rama se colocan antes de que el distribuidor y en el lado derecho de la autopista. Distancia adecuada de vista debe ser dada en la autopista antes de la terminal de rama para permitir la toma de decisiones y maniobras. Además, se debe prestar atención a la colocación terminal de rama relativa a la distancia entre el terminal de flujo libre y la estructura. Típicamente, la distancia re-querida entre una rama que precede a la estructura de distribuidor y la estructura no es tan grande como la distancia necesaria entre la estructura y una terminal de rama en el lado lejano.
Carriles de Cambio de Velocidad. El cambio de velocidad de carril es una parte crítica de cualquier diseño de la terminal rama. Es en los carriles de cambio de velocidad que los conductores que entran aceleran a una velocidad adecuada para la fusión con el tránsito. La velocidad de cambio de carril debe ser lo sufi-cientemente largo para permitir que un conductor para cambiar la velocidad, de una manera segura y confortable, de la velocidad de la rama a la velocidad del camino.

UNIVERSIDAD DE TEXAS, AUSTIN - MICHAEL HUNTER Y RANDY MACHEMEH 13/26 ________________________________________________________________________________
__________________________________________________________________________________________
MATERIAL DIDÁCTICO NO COMERCIAL – CURSOS UNIVERSITARIOS POSGRADO ORIENTACIÓN VIAL Free Online Document Translator beta + + Francisco Justo Sierra [email protected] Ingeniero Civil UBA CPIC 6311 ingenieriadeseguridadvial.blogspot.com.ar Beccar, diciembre 2015
Una consideración primordial para la longitud de los carriles de aceleración es la necesidad de una lon-gitud suficiente para permitir ajustes de velocidad de ambos vehículos a través y que entran de manera que los vehículos que entran pueden encontrar y maniobrar en un espacio antes del carril de aceleración.
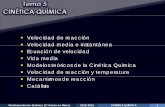
Hay dos diseños básicos de los terminales de rama de autopista y carriles de cambio de velocidad: la forma abocinada y paralelos. El tipo abocinado implica la entrada directa o salida del vehículo en un ángulo plano, y el tipo paralelo usa un carril adicional para los cambios de velocidad. En teoría, el tipo cono encaja bien con trayectorias deseadas conductores y reduce la cantidad de control de la dirección es necesario, a pesar de que obliga al conductor a tiempo compartido entre las tareas de la aceleración, búsqueda de huecos, y la dirección [14]. Figura 1.1, tomada de la guía de diseño AASHTO, ilustra los dos tipos de diseño para las entradas de carril solo o.
Entradas tipo-Bocina. Cuando se diseñan adecuadamente, la entrada cónica se considera capaz de funcionar sin problemas en todos los volúmenes, incluyendo la capacidad de diseño de la zona de fusión. La guía de diseño AASHTO recomienda que la rama de entrada se ponga en la autopista a una velocidad de 50: 1 a 70: 1, entre el borde exterior del carril de aceleración y el borde interior de la autopista. El deseo de las normas AASHTO es la creación de un diseño de tipo abocinado de manera que un vehículo puede alcanzar una velocidad de aproximadamente 5 mph (8 km/h) más baja que la velocidad media camino corriendo por el punto en el que el borde izquierdo de la rama se reúne el borde derecho del camino recorrido. Para mantener la coherencia AASHTO establece este punto para estar donde el borde derecho de la forma de rama y los viajes son de 3,7 m de distancia.
La longitud requerida para un vehículo para lograr una velocidad de 5 mph (8 km/h) por debajo de la velocidad media de operación se conoce como la longitud de la aceleración, La, por AASHTO y se muestra en la Figura 1.1. Esta longitud se mide típicamente desde el extremo de la curva de gobierno en la rama adecuada a donde el borde derecho de la rama adecuada y a través de carril son 3,7 m de dis-tancia. Esta distancia se basa en el diferencial de velocidad entre la velocidad media de operación en la entrada de la curva y la camino. Tabla 1.2 (Tabla AASHTO X-4) da el valor de esta distancia para diversas combinaciones de velocidad directriz de la curva y del camino de velocidad directriz. Además de la lon-gitud mínima de la aceleración, la guía de diseño AASHTO requiere una comprobación para ver que se cumpla una longitud mínima aceptación brecha (ver Figura 1.1). Los ajustes también se dan para la existencia de grados, alargando La en subida y disminuyendo en bajada.
Notas:
1. La aceleración es la longitud requerida, como se muestra en la Tabla X-4 o X-5.
2. Punto (A) controla la velocidad de se-guridad en la rama. La no debe co-menzar de nuevo en la curvatura de la rama a menos que el radio es igual a 300 m o más.
3. Lg se requiere Longitud aceptación claros. Lg debe ser un mínimo de 90 m a 150 m dependiendo de la anchura de la nariz.
4. El valor de La o Lg, lo que produce la mayor distancia aguas abajo de donde el ancho de la nariz es igual a 0,6 m, se sugiere para uso en el diseño.
Figura 1.1. Diseños de ramas de entrada abocinada y paralela [1]

14/26 REEVALUACIÓN DE CRITERIOS DE VELOCIDAD DIRECTRIZ DE RAMAS ___________________________________________________________________________________
__________________________________________________________________________________________
MATERIAL DIDÁCTICO NO COMERCIAL – CURSOS UNIVERSITARIOS POSGRADO ORIENTACIÓN VIAL Free Online Document Translator beta + + Francisco Justo Sierra [email protected] Ingeniero Civil UBA CPIC 6311 ingenieriadeseguridadvial.blogspot.com.ar Beccar, diciembre 2015
Tabla 1.2 Longitudes mínimas de aceleración para terminales de entrada con pendiente ≤ 2%
Aceleración Longitud, L (pies) para la entrada de la curva Diseño Velocidad (mph)
Detener Con-dición
15 20 25 30 35 40 45 50
Velocidad directriz
Velocidad alcanzada, V
y velocidad inicial, V'a (mph)
(mph) (mph) 0 14 18 22 26 30 36 40 44
30 23 190 - ---- ---- ---- ---- ---- ---- -
40 31 380 320 250 220 140 - - ---- ----
50 39 760 700 630 580 500 380 160 ---- ----
60 47 1170 1100 1070 1000 910 800 590 400 170
70 53 1.590 1,540 1500 1410 1330 1230 1010 830 580
Fuente: 1990, AASHTO, la Tabla X-4, página 986.
Entrada Tipo-Paralela. En la rama de tipo paralelo, el vehículo se asume para acelerar a la velocidad cercana a la autopista necesario para la fusión en el carril de aceleración paralelo. Al final del carril de aceleración hay una forma abocinada para guiar un vehículo en la autopista a través de carril. AASHTO recomienda unos 90 m de la forma abocinada para velocidades directrices del camino hasta 70 mph (110 km/h). La diferencia entre los dos tipos de ramas (abocinados y paralelos) no es la longitud de aceleración mínimo requerido, pero el punto desde el que se mide. Para el tipo paralelo, la longitud de entrada del carril de aceleración se mide desde el punto en el borde izquierdo de la rama se encuentra con el borde derecho de la autopista para el comienzo de la conicidad. Es decir, la aceleración en la rama de tipo paralelo se produce en el carril paralelo a la autopista a través de carriles, aguas abajo desde el punto de convergencia de la autopista y rama, mientras que la aceleración en la rama de tipo abocinado se produce en la rama adecuada, aguas arriba de la punto de convergencia de los dos caminos. Una excepción a esto puede ocurrir cuando una rama de tipo paralelo tiene un gran radio de aguas arriba del punto de con-vergencia, y la opinión del motorista de la autopista, mientras que en la rama no está obstruido. Bajo estas condiciones, parte de la propia rama puede usarse como parte de la longitud de aceleración. Dónde se prevé la autopista y rama para llevar a los volúmenes que se aproximan a la capacidad de diseño de la zona de fusión, AASHTO recomienda una longitud mínima de 375 m, además de la forma abocinada. La figura anterior 1.1 ilustra una de tipo paralelo terminal de rama de entrada típica y la distancia mínima de aceleración para cambio de velocidad de tipo paralelo como se indica en la Tabla 1.2.
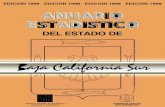
Diseño TxDOT de carril de cambio de velocidad. La discusión anterior de los carriles de cambio de velo-cidad se concentró en el enfoque de AASHTO para el diseño de velocidad de cambio de carril. TxDOT adoptó diseños estándar que difieren de este enfoque. Las figuras 1.2 (página 23) es un ejemplo de un diseño estándar TxDOT de la guía de diseño TxDOT 1988.
Ramas de entrada. Una revisión de los diseños de rama estándar TxDOT revela que TxDOT recomienda un diseño rama de entrada de tipo abocinado estándar para todas las ramas de entrada de un solo carril.

UNIVERSIDAD DE TEXAS, AUSTIN - MICHAEL HUNTER Y RANDY MACHEMEH 15/26 ________________________________________________________________________________
__________________________________________________________________________________________
MATERIAL DIDÁCTICO NO COMERCIAL – CURSOS UNIVERSITARIOS POSGRADO ORIENTACIÓN VIAL Free Online Document Translator beta + + Francisco Justo Sierra [email protected] Ingeniero Civil UBA CPIC 6311 ingenieriadeseguridadvial.blogspot.com.ar Beccar, diciembre 2015
Este diseño consiste en tres secciones: (1) una sección de 75 m aguas arriba de la gore; (2) una sección de 140 m, a una 50: 1 conicidad, aguas abajo de la sangre; y (3) una sección de 187 m, cónica en 50: 1, que sirve para reducir el ancho de carril de aceleración a partir de 3,7 a 0 m. Este diseño se diferencia de la AASHTO en que sólo una longitud de carriles de cambio de velocidad estándar se usa, mientras que AASHTO usa variando la velocidad de cambio de longitudes de carril, de acuerdo con la Tabla 1.2, se discutió previamente.
Una comparación del diseño TxDOT al diseño AASHTO muestra que al diseño inferior acelera el diseño TxDOT puede dar menos longitud que el diseño de la AASHTO. Si la longitud de carril de aceleración TxDOT se mide en base a la metodología AASHTO (es decir, sin incluir [3,7 m] los 10,6 a 0 m sección de cono ancho), la longitud de carril de aceleración dada sería la suma de las dos primeras secciones - 705 pies (215 m). En comparación con AASHTO, esta longitud sería insuficiente para una velocidad de pro-yecto de la autopista de 110 km/h y la rama velocidades directrices de 72 km/h o menos; una velocidad directriz de la autopista de 100 km/h y rama velocidades directrices de 56 km/h, o menos; o con una velocidad de la autopista de 80 km/h y rama velocidades directrices de 32 km/h o menos. Por lo tanto, el diseño TxDOT no dará una longitud suficiente, en comparación con AASHTO, para autopistas 100 y 110 km/h) cuando la rama de velocidad directriz mínimo de 50% se usa la velocidad directriz autopista. Si la mitad de la tercera sección - 93 m de la sección cónica del diseño TxDOT 610 pies (186 m) - está incluido en la longitud de carril de aceleración, y esta longitud total se compara con AASHTO, el diseño TxDOT satisfaría los requisitos mínimos para el 50 y 60 millas por hora (80 y el 96 km/h) velocidades directrices de la autopista, pero no un 110 kmph velocidad directriz de la autopista. La longitud entera de conicidad en el diseño TxDOT tendría que ser incluido para satisfacer la longitud carril de aceleración requerida para un 110 km/h autopista, de acuerdo con AASHTO.
La discusión anterior, especialmente la de la longitud TxDOT carril de aceleración estar a sólo 690 pies (210 m), es un escenario del peor caso. De acuerdo con las normas AASHTO, puede ser posible incluir más de la longitud de rama aguas arriba de los 75 (m) sección como parte de la longitud de carril de aceleración TxDOT 246 ft. La inclusión de más de la longitud aguas arriba sería caso concreto, en función de la capacidad del conductor para ver el camino no está obstaculizado por grados, obstrucciones, y la curvatura. Claramente, algunos de los diseños de TxDOT permitiría la inclusión de la longitud aguas arriba adicional. Puesto que el diseño estándar TxDOT no aborda específicamente el diseño de aguas arriba para todos los casos, no es posible hacer ninguna declaración general en cuanto a cuánto, en su caso, de la longitud de rama aguas arriba deben ser incluidos en la satisfacción de la AASHTO reco-mendada de rama longitudes de carril de aceleración. Más adelante en este informe, tanto los diseños de TxDOT y AASHTO se verá que basarse en el mismo material.
Otros TxDOT operaciones de rama temas. TxDOT usa dos enfoques diferentes para restringir el acceso a un centro de acceso controlado. Uno de los métodos (H.B. 179 Planificación Freeway) de control de acceso está usando Estado del poder de policía de Texas para controlar el acceso calzada, sujeto a ciertas condiciones. Un segundo método (no H.B. 179 Planificación Freeway) controla el acceso única-mente por el suministro de caminos laterales. Se mencionó anteriormente que las ramas tramo de la fachada se pueden usar entre distribuidores o incorporados en los distribuidores. Para evitar problemas de operación, incluyendo posiblemente bloqueo en el punto del camino rama y fachada debido a la cola de almacenamiento de mezcla, TxDOT desarrolló rama de salida de la calle transversal requisitos de distancia de separación.
Esta distancia se basa en entrecruzamiento complaciente, frenado, y el almacenamiento del tránsito.

16/26 REEVALUACIÓN DE CRITERIOS DE VELOCIDAD DIRECTRIZ DE RAMAS ___________________________________________________________________________________
__________________________________________________________________________________________
MATERIAL DIDÁCTICO NO COMERCIAL – CURSOS UNIVERSITARIOS POSGRADO ORIENTACIÓN VIAL Free Online Document Translator beta + + Francisco Justo Sierra [email protected] Ingeniero Civil UBA CPIC 6311 ingenieriadeseguridadvial.blogspot.com.ar Beccar, diciembre 2015
Figura 1.2 TxDOT Ramas de Camino Frentista de Un Sentido [3] CHOQUE S
Un aspecto de diseño de rama, y el diseño geométrico en general, que se estudió de forma esporádica en las últimas décadas, es el efecto de las características geométricas de las tasas de choque s. Uno de los informes más completos y con frecuencia se hace referencia a la relación entre los choque s y el diseño es de Análisis y Modelado de las relaciones entre los choque s y las características geométricas y de tránsito del sistema interestatal [16]. Este estudio, basado en datos de los veinte estados, considerados ele-mentos tales como número de carriles, velocidad directriz, ancho de carril, curvatura máxima, tipo de pavimento, grado, distancia visual de detención, el número de información y publicidad signos, la ilumi-nación, el volumen, y el porcentaje de comerciales vehículos. Este estudio presenta varias conclusiones de interés, incluyendo (1) el aumento de los volúmenes de tránsito resultó en un aumento del número de choque s; (2) variables de tránsito orientado a (por ejemplo, el volumen y el porcentaje de camiones) que más contribuyeron a la variación en los choque s en el sistema de un estado a otro; (3) que geometrías solos representaron sólo una pequeña parte de la variación en los choque s; y (4) que ninguna relación se pudo determinar entre las geometrías estudiadas y muertes.
El tercer y cuarto puntos, con la participación geometría, se aclaran en el informe. Los sitios elegidos para el estudio por cada estado contribuyendo eran lugares supuestamente "representativos" en vez de lu-gares de alto de choque s. Este proceso de selección, probablemente eliminado de estudio los distri-buidores y ramas donde bajo-diseñadas características geométricas provocaría choque s excesivos, aunque una pequeña fracción de los datos presentados parecía tener frecuencias excepcionalmente altos de choque s. Para estos distribuidores se llevó a cabo un "análisis de fallos" separado. Este análisis pone de relieve mejor los efectos de características inusuales diseño, geometría, y no las características del tránsito observados en las muestras "representativas". Mientras altos volúmenes de tránsito siguen siendo considerados como la principal causa de choque s, información adicional relacionada con geo-metría se puede obtener a través de análisis de fallas.

UNIVERSIDAD DE TEXAS, AUSTIN - MICHAEL HUNTER Y RANDY MACHEMEH 17/26 ________________________________________________________________________________
__________________________________________________________________________________________
MATERIAL DIDÁCTICO NO COMERCIAL – CURSOS UNIVERSITARIOS POSGRADO ORIENTACIÓN VIAL Free Online Document Translator beta + + Francisco Justo Sierra [email protected] Ingeniero Civil UBA CPIC 6311 ingenieriadeseguridadvial.blogspot.com.ar Beccar, diciembre 2015
Esta información incluye: (1) que las velocidades directrices demasiado bajos pueden, en un grado con-siderable, causar choque s, y (2) que en la mayoría de los tipos de rama, pobres características geomé-tricas (cambio de carril de velocidad corta, la curvatura aguda, y demasiado corta distancia de para-da-vista) puede, en un grado considerable, causar choque s.
Más recientemente, los resultados de la experiencia de choque s adicionales fueron publicados en Choque s y Asociados de seguridad con distribuidores, lo que dio una revisión de los datos y la expe-riencia de otros esfuerzos de investigación [12]. Un breve resumen de algunas de las conclusiones de interés para este estudio fueron (1) un aumento en las tasas de choque s con el aumento de la curvatura máxima; (2) el aumento de las tasas de choque s con el aumento de intensidad media diaria; (3) la cur-vatura horizontal es un factor más significativo en la tasa de choque s que los grados; (4), tanto en caso de vuelco y el potencial derrape deben comprobarse en el diseño de ramas curvas horizontales para dar cabida a los camiones; y (5) se mejoró la seguridad relativa de un distribuidor urbano donde se dan 800 pies (244 m) o más largo de aceleración o carriles auxiliares [12, 20, 21, 22, 23].
Otros puntos se plantearon en otro estudio [13] en el que la conclusión general fue que las normas ac-tuales de diseño AASHTO (específicamente abiertas camino parámetros de diseño de curvas horizon-tales) prevén una operación segura, tanto para turismos y camiones. Se observaron choque s (vuelco y de arrastre) que se produzca en los niveles indeseables cuando se usaron velocidades directrices poco realistas. Cuando los supuestos de diseño AASHTO (es decir, la velocidad del vehículo) no hayan sido violados, se dan márgenes adecuados de seguridad; pero donde los vehículos superan velocidades directrices, condiciones inseguras que posiblemente pueden conducir a choque s pueden ocurrir. Esta conclusión de este estudio pone de relieve la necesidad de una cuidadosa selección de velocidad directriz y sin duda uno conduce a al menos cuestión de si la asignación AASHTO de velocidades directrices de rama mínimo al 50% de la velocidad directriz autopista es razonable.
RESULTADOS DE OTROS MODELOS
Los investigadores y organismos trataron de perfeccionar el enfoque AASHTO o desarrollar nuevas metodologías para la modelación de la rama a/de maniobra de la autopista. Algunos de los resultados y conclusiones de los estudios de la AASHTO y otros modelos se presentan en la siguiente sección.
Un modelo de fusión de la autopista fue desarrollado con base en el comportamiento del conductor en el comportamiento del conductor Modelo de Fusión por Michaels y Fazio [17]. En general, el modelo divide el proceso de fusión en el seguimiento de la curva de rama inicial y de transición en el carril de cambio de velocidad, un proceso repetitivo de la aceleración y la brecha de búsqueda, y la dirección final para el carril de la autopista o abortar la fusión. Una desviación importante de este modelo a partir de la meto-dología AASHTO es el concepto de un proceso iterativo entre la aceleración y la búsqueda de huecos; es decir, que los dos eventos no ocurren simultáneamente y se realizan en un proceso repetitivo, uno des-pués del otro. Con base en el modelado de este comportamiento y los demás aspectos del modelo, lon-gitudes de cambio de carril velocidad- se desarrollaron para rama de velocidad directriz frente a los vo-lúmenes de carril autopista.
Hay varias conclusiones notables que pueden extraerse de este estudio. La primera consiste en la velo-cidad a la que la longitud recomendada de la velocidad de cambio de carril-disminuye a medida que aumenta la velocidad de rama de diseño, en comparación con AASHTO. La metodología AASHTO conduce a la disminución de las longitudes de carril de cambio de velocidad como de diseño de rama que aumenta la velocidad a una velocidad sustancialmente mayor que la del modelo Michaels y Fazio. La ironía de este estudio es que conduce al lector a la conclusión de que la guía AASHTO puede dar un mejor operación a bajas velocidades directrices rama que en los altos.

18/26 REEVALUACIÓN DE CRITERIOS DE VELOCIDAD DIRECTRIZ DE RAMAS ___________________________________________________________________________________
__________________________________________________________________________________________
MATERIAL DIDÁCTICO NO COMERCIAL – CURSOS UNIVERSITARIOS POSGRADO ORIENTACIÓN VIAL Free Online Document Translator beta + + Francisco Justo Sierra [email protected] Ingeniero Civil UBA CPIC 6311 ingenieriadeseguridadvial.blogspot.com.ar Beccar, diciembre 2015
Aunque se debe tener cuidado al comparar directamente este estudio con AASHTO (debido al tamaño limitado de la muestra y las posibles diferencias en la medición de la longitud de cambio de velocidad), la tendencia de reducción de la velocidad de cambio de la longitud del carril a una velocidad menor que la usada por AASHTO está claro. Esta conclusión se apoya en el análisis de choque s en el apartado an-terior, en longitudes de carriles de cambio de velocidad mínima recomendadas son más altas que las recomendadas por AASHTO para las velocidades directrices de ramas superiores. Un segundo punto de interés en este estudio es que la longitud requerida de un carril de cambio de velocidad disminuye a medida que el volumen de rama aumenta. Este punto implica que la hora de estudiar la operación de los carriles de cambio de velocidad, la operación crítica para determinar la aceptabilidad del diseño en realidad puede ocurrir durante fuera de horas punta, los períodos de menor volumen.
Un estudio más detallado con el que estaba conectado el estudio anterior es los inéditos NCHRP 3-35 de carriles de cambio de velocidad, Informe final de 1989 [7]. Este estudio amplio evalúa directrices de di-seño actuales de los carriles de cambio de velocidad, desarrolló un modelo de operación de cambio de carril velocidad-, y desarrolló nuevas directrices para el diseño de la velocidad de cambio de carril. Al igual que el modelo en el estudio anterior, este modelo intentó capturar la influencia de las características de flujo de tránsito y el comportamiento del conductor con más precisión. Los modelos desarrollados inten-taron integrar el factor humano con características operacionales de la geometría y del vehículo. Además de los requisitos de AASHTO para la velocidad de cambio de diseño del carril, este estudio también consideró que minimiza la interrupción de flujo autopista, cumplir con las expectativas del conductor, y evitar la superposición de requisitos de control para el conductor. Por ejemplo, este estudio define diseño rama de entrada ideales como "uno que minimiza la probabilidad de sobrecarga y está adaptado a los requisitos de comportamiento del proceso de entrada." Además, el objetivo de diseño debe ser "dar un entorno estático y dinámico que tiene la máxima previsibilidad para el conductor." Para este estudio, el diseño se basó en el percentil 85o conductor, lo que significa que el 85% de los conductores debe ser capaz de completar la maniobra requerida (es decir, la maniobra de entrada) en una longitud más corta de lo recomendado.
Algunas diferencias entre las hipótesis de este estudio y el estudio AASHTO incluyen que las bases modelo longitudes AASHTO de cambio de velocidad en las velocidades de operación, más bajas que las velocidades directrices, mientras que NCHRP 3-35 asume que las velocidades de operación velocidades iguales diseño. Además, la guía AASHTO 1990 define el carril de cambio de velocidad como principio o el final en el cono 10,6 m (3,7 m); NCHRP 3-35 usa los 6 pies (1,8 m) punto. Además, el modelo NCHRP usa varias velocidades a lo largo de la longitud de la rama y no usa el 5 mph (8 km/h) de velocidad diferencial entre el vehículo y el operación de la autopista rama como un umbral fusión; En su lugar, usa un umbral de velocidad angular. Estas diferencias ponen de relieve el enfoque cambia hacia los carriles de modelado de cambio de velocidad. Cuando se compara con los valores de diseño de longitud AASHTO velocidad de cambio de carril, los modelos desarrollados en este estudio producido longitudes ligeramente más cortos a altas velocidades de autopista y longitudes significativamente más largos de moderado a bajas velo-cidades de autopista para longitudes de carril de aceleración. También se ve una vez más que AASHTO puede ser demasiado rápida reducción de la longitud del carril de cambio de velocidad como los dife-renciales de velocidad disminuyen.
Estos estudios plantearon claramente las dudas sobre la aplicabilidad de diseño AASHTO y por lo tanto sobre las normas de diseño de TxDOT basado en AASHTO. Es posible no sólo que la aceptación por AASHTO de una rama de velocidad directriz mínimo de 50% de la velocidad directriz autopista es inadecuada, sino también que la AASHTO recomendado longitudes puede ser demasiado corto a altas velocidades. En cuanto al problema potencial para los estándares de diseño TxDOT rama de entrada, algunos de la velocidad de rama superior preocupaciones de diseño se alivian desde TxDOT usa un solo diseño que da mayor que las longitudes de AASHTO-recomendados para velocidades directrices más

UNIVERSIDAD DE TEXAS, AUSTIN - MICHAEL HUNTER Y RANDY MACHEMEH 19/26 ________________________________________________________________________________
__________________________________________________________________________________________
MATERIAL DIDÁCTICO NO COMERCIAL – CURSOS UNIVERSITARIOS POSGRADO ORIENTACIÓN VIAL Free Online Document Translator beta + + Francisco Justo Sierra [email protected] Ingeniero Civil UBA CPIC 6311 ingenieriadeseguridadvial.blogspot.com.ar Beccar, diciembre 2015
alta de rama, aunque el diseño TxDOT se demostró que posiblemente ser más corto que el recomendado en la guía de 1990 para velocidades directrices bajo la rama. Con respecto a la desaceleración, diseño estándar de TxDOT se enfrenta a los mismos problemas que AASHTO, ya que las longitudes que usa son simplemente una versión redondeada de las longitudes de AASHTO.
En la discusión de las tasas de aceleración y desaceleración AASHTO, se mencionaron varias explica-ciones posibles de su aplicabilidad en el diseño de hoy. Una posibilidad es que las tasas de aceleración y desaceleración 1938 pueden no compensar adecuadamente las deficiencias en el modelo AASHTO. Estos estudios podrían conducir a la conclusión de que esta es la situación probable.
ENCUESTA DE PRÁCTICAS DE DISEÑO
Durante la revisión de la literatura, los investigadores obtuvieron una encuesta que aún no publicado de agencias de diseño. A pesar de que la encuesta no trata explícitamente con velocidad directriz de rama, el tema de la velocidad directriz rama núcleo es realmente el de cambio de velocidad, y las ofertas de la encuesta directamente con este elemento. Hallazgos significativos desarrollados a través de la encuesta fueron los siguientes: (1) las operaciones de aceleración son vistos como más problemática que la des-aceleración; (2) el comportamiento del conductor durante los cambios de velocidad no está bien carac-terizado; (3) virtualmente todas las agencias se basan en la experiencia de choque s como la medida de evaluación del desempeño primaria; (4) muy pocos datos operacionales que describen operaciones de cambio de velocidad o de rama se recoge; y (5) todos los organismos no usan los mismos criterios de diseño. Además, los efectos de los dispositivos de control, rama de concreto de medición, no se conocen bien.
Aunque esta encuesta se realizó hace casi diez años, cambios importantes en estos resultados no son muy probables de ocurrir. La revisión de la literatura confirmó que pocos datos operacionales se reco-gieron ya sea por las actividades de la agencia o los esfuerzos de investigación. Los resultados de esta encuesta tienden a confirmar los conceptos y problemas discutidos en este capítulo.
OBJETIVOS DEL ESTUDIO E INFORME
En este esfuerzo de investigación, el equipo de estudio trazó autopista criterios de velocidad directriz rama contenidas en AASHTO actual y diseñar políticas de TxDOT través de aproximadamente 50 años de literatura técnica. Además, la evolución de los criterios de velocidad directriz se documentó. En este capítulo se demostró que los criterios de velocidad directriz rama TxDOT son, en esencia, los criterios de AASHTO. El origen de las tasas de desaceleración del conductor, que se construyen en criterios AASHTO, son los estudios experimentales realizados durante la década de 1930. Varios estudios sus-citaron dudas sobre la adecuación de la velocidad directriz AASHTO rama mínimo permitido, de 50% de la velocidad directriz autopista. Las preguntas también se plantearon acerca de la adecuación de los tramos de rama de alta velocidad diseñado usando los criterios de AASHTO. Claramente, un examen exhaustivo de los procedimientos de diseño de rama de corriente está en orden. En pocas palabras, este examen es el objetivo principal de este estudio e informe. Si bien este tipo de estudio puede o no producir reco-mendaciones para el cambio de los criterios actuales de velocidad directriz de rama, la cuestión relativa a la adecuación de los criterios actuales se responderá en ningún caso. Además, los datos de análisis y primarios recogidos a través del estudio conducirán a una mejor comprensión de las operaciones de rama de la autopista. Como se señaló anteriormente, las secciones de autopista con ramas suelen ser lugares de cuello de botella autopista principal y, por tanto, operacionalmente crítico. Una mejor comprensión de las operaciones en estas secciones de autopista críticos constituirá un beneficio secundario, pero signi-ficativo.
Este objetivo incluye tanto un estudio histórico-teórico y un punto de vista experimental, lo que conduce a tres pasos implícitos.

20/26 REEVALUACIÓN DE CRITERIOS DE VELOCIDAD DIRECTRIZ DE RAMAS ___________________________________________________________________________________
__________________________________________________________________________________________
MATERIAL DIDÁCTICO NO COMERCIAL – CURSOS UNIVERSITARIOS POSGRADO ORIENTACIÓN VIAL Free Online Document Translator beta + + Francisco Justo Sierra [email protected] Ingeniero Civil UBA CPIC 6311 ingenieriadeseguridadvial.blogspot.com.ar Beccar, diciembre 2015
1. Evaluar, a través de revisión de la literatura y el análisis, los criterios actuales de velocidad directriz de rama.
2. Evaluar los criterios actuales de velocidad directriz de rama a través de una muestra cuidadosamente diseñada de los datos operativos de rama.
3. Dar pruebas suficientes para validar rama diseño de políticas o recomendaciones que modifican los procedimientos actuales velocidad actual.
El primer paso se dio en este capítulo. Los dos pasos siguientes son cuidadosamente diseñados y rea-lizados en el resto de este informe.

UNIVERSIDAD DE TEXAS, AUSTIN - MICHAEL HUNTER Y RANDY MACHEMEH 21/26 ________________________________________________________________________________
__________________________________________________________________________________________
MATERIAL DIDÁCTICO NO COMERCIAL – CURSOS UNIVERSITARIOS POSGRADO ORIENTACIÓN VIAL Free Online Document Translator beta + + Francisco Justo Sierra [email protected] Ingeniero Civil UBA CPIC 6311 ingenieriadeseguridadvial.blogspot.com.ar Beccar, diciembre 2015
CAPÍTULO 2. RECOPILACIÓN DE DATOS DE CAMPO
La evaluación de los criterios de velocidad directriz de la rama de entrada de la autopista requiere un examen de supuestos relativos a la aceleración del vehículo y la rama de desaceleración, así como de la brecha de la búsqueda y el comportamiento de aceptación. Tal examen debe incluir la actividad del conductor de la autopista y la rama acciones del conductor. Este examen implica esencialmente la gra-bación de la posición y velocidad en tiempo historias de entrada y autopistas principales vehículos de carril, ya que operan a través de las secciones de autopista con ramas de entrada.
Aunque se considera una variedad de técnicas de medición y registro, el equipo de estudio determinó que filmar fue la técnica más práctica. Dado que las imágenes de vídeo de captura estándar cámaras a una velocidad de treinta cuadros por segundo, un registro de vídeo daría una resolución de tiempo adecuado; es decir, un vehículo que viaja 100 km/h viajaría a menos de 3 pies (10 m) en 1/30 de segundo. Sin embargo, la grabación de vídeo introduce una serie de preguntas con respecto a los ángulos de cámara, campos de visión, distancias de los objetos vistos, y la ubicación y distancia entre las marcas de refe-rencia que definen resolución de medición de velocidad. Antes de seleccionar los sitios y comenzar de datos de recopilación, experimentos y análisis se realizaron para verificar la idoneidad de la recopilación de datos de vídeo.
RESUMEN
La recopilación de datos de vídeo se implementó en veinte sitios de campo en Houston, San Antonio, Dallas y en Austin, Texas. Características geométricas en lugares seleccionados variaron ampliamente de excelente a pobre.
CAPÍTULO 3. DATOS PROCESO DE REDUCCIÓN Y PROCEDIMIENTO DE ANÁLISIS
Capítulo 2 describe el esfuerzo de recolección de datos de campo. En este capítulo se concentra en el procedimiento de reducción y análisis de datos aplicado a los datos de campo recogidos. Este procedi-miento implica un esfuerzo de recopilación de datos muy detallada vehículo time-posición, un esfuerzo que subyace en las características operativas calculado y posterior análisis estadístico. Capítulo 4 pre-sentará entonces una discusión de los resultados del análisis.
RESUMEN
En este capítulo se describieron los procedimientos de reducción y análisis de datos de campo. Capítulo 4 presenta hallazgos desarrolla a través de la implementación de estos procedimientos.
CAPÍTULO 4. ANÁLISIS DE LA HISTORIA DE VELOCIDAD-DISTANCIA ANÁLISIS
Las historias de velocidad-distancia que resulten de vehículos en pista y autopistas contienen grandes cantidades de información significativa. Se desarrollaron representaciones gráficas de los datos para abordar específicamente pregunta de investigación fundamental de este estudio: ¿Deben modificarse los criterios actuales de velocidad directriz de la rama de entrada? Responder a esta pregunta requiere una investigación no sólo de las relaciones entre las características de diseño geométrico de rama de entrada y la velocidad, sino de otras características de operación también. Una forma de estudiar estas relaciones fue la comparación de las características de operación de las ramas tienen "buenas" geometría frente a los que tienen geometrías pobres.

22/26 REEVALUACIÓN DE CRITERIOS DE VELOCIDAD DIRECTRIZ DE RAMAS ___________________________________________________________________________________
__________________________________________________________________________________________
MATERIAL DIDÁCTICO NO COMERCIAL – CURSOS UNIVERSITARIOS POSGRADO ORIENTACIÓN VIAL Free Online Document Translator beta + + Francisco Justo Sierra [email protected] Ingeniero Civil UBA CPIC 6311 ingenieriadeseguridadvial.blogspot.com.ar Beccar, diciembre 2015
En general, las ramas caracterizan por tener "buenos" geometría son los que superan la AASHTO y criterios de TxDOT, mientras que aquellos caracterizados como pobres sólo marginalmente cumplir o no cumplir con los criterios actuales.
INTRODUCCIÓN A LAS OBSERVACIONES
Las siguientes discusiones ofrecen comparaciones características operacionales de seis ramas de en-trada de la autopista diferentes. Las características de operación en comparación son la velocidad, la aceleración/desaceleración, avanzar (sólo vehículos autopista derecha carriles), la ubicación fusión (sólo vehículos de rama), y la brecha aceptado (sólo vehículos de rama). Características de operación se consideran para cada rama en su totalidad y en dos secciones, aguas arriba y abajo de la rama del gore. El hecho de que algunas características de operación comportan de manera diferente en estas dos re-giones tiene importantes implicaciones de diseño.
Tipos de observación
Tres tipos principales de observaciones se pueden hacer para cada característica de operación. La pri-mera comparación se refiere a los cambios característicos observados que ocurren a lo largo de la rama de volumen bajo condiciones particulares. Por ejemplo, un área de estudio puede tener 1.000 y 500 vehículos por hora en la autopista justo carriles y rama, respectivamente. Para esta condición, las ob-servaciones de velocidad se hacen como uno atraviesa la instalación de rama, con tales observaciones destinadas a identificar cómo los cambios de velocidad (o no cambia) como vehículos viajan río abajo. Este tipo de comparación típicamente se refiere como "a lo largo de la rama."
El segundo tipo de comparación consiste en la comparación de las características operativas de una rama individual bajo diferentes combinaciones de volumen (es decir, el volumen de rama y pares de volumen derecho carriles). Los datos se recopilaron de tres a seis combinaciones de volumen para cada uno de los seis ramas. En este tipo de comparación, el foco estará típicamente en las tendencias aparentes, la ausencia de previsibilidad o similitudes entre las combinaciones de volumen. Este tipo de comparación se denomina típicamente como "entre las combinaciones de volumen."
El tercer tipo de comparación compara diferentes ramas. Las observaciones se realizaron operaciones con respecto a las diferentes ramas en condiciones de volumen similares. Observaciones importantes incluyen diferencias en el operación de las características y el operación de la variabilidad de magnitudes características.
Además, se usarán dos términos descriptivos diferentes. La primera es "suave", que tiene por objeto describir una rama donde se producen cambios característicos que operan solamente mínimos como uno viaja desde el punto de datos de punto de datos. La figura 4.1 es un excelente ejemplo de las operaciones de velocidad "suaves". La velocidad varía poco de medición de la velocidad de medición de la velocidad, sino una tendencia general, como la velocidad disminuye puede existir.
El segundo término que se usa es "forma de onda". Una característica de operación que presenta una forma de onda plantea diferencias más radicales entre puntos de datos consecutivos, es decir, gráfica-mente tiene la apariencia de una "onda". La figura 4.2 es un excelente ejemplo de este tipo de compor-tamiento de forma de onda.

UNIVERSIDAD DE TEXAS, AUSTIN - MICHAEL HUNTER Y RANDY MACHEMEH 23/26 ________________________________________________________________________________
__________________________________________________________________________________________
MATERIAL DIDÁCTICO NO COMERCIAL – CURSOS UNIVERSITARIOS POSGRADO ORIENTACIÓN VIAL Free Online Document Translator beta + + Francisco Justo Sierra [email protected] Ingeniero Civil UBA CPIC 6311 ingenieriadeseguridadvial.blogspot.com.ar Beccar, diciembre 2015
CONCLUSIONES
Los análisis de este capítulo llevan a las siguientes conclusiones: 1. Velocidades de conductores de rama en todas las ramas de entrada observados son consistente-
mente mayor que 50% de la velocidad directriz autopista. Por lo tanto, un criterio de diseño que es-pecifica una velocidad directriz en pista de 50% de la velocidad directriz autopista es cuestionable.
2. Conductor Rama historias velocidad-distancia en ramas con geometrías "buenas" (es decir, la dis-tancia visual adecuada y la velocidad de cambio de longitudes de carril) exhiben suave
3. apariencias y no hay cambios de velocidad bruscos. Historias velocidad-distancia para las instala-ciones de la autopista sin peaje de rama con perfiles verticales que limitan la distancia de visibilidad del conductor rama y longitudes de carriles de cambio de velocidad marginales exhibir formas de onda ondulantes, indicando rama cambios significativos de velocidad del conductor.
4. Historias Aceleración tasa/desaceleración para ramas con "buenos" y "malos" geometrías tienen patrones similares para acelerar historias. Geometría "Good" típicamente producen pequeñas ace-leraciones positivas (0 a 2 mphps), mientras geometría "malos" producen mayores valores de ace-leración positiva y negativa (-4 a 4 mphps).
5. Freeway velocidades carril derecho no están en gran medida afectados por los vehículos de rama si la rama tiene "buenas" geometría (como se caracteriza aquí). Geometría "Bad" tienden a causar una reducción significativa de la autopista velocidades derecha de carril, especialmente a alta autopista y rama volúmenes de tránsito.
6. Freeway derecho carriles headways tiempo tienden a ser no influida por rama de la complejidad del diseño, sino más bien por el volumen de tránsito.
7. El factor que parece influir sobre todo el tamaño de la brecha de tiempo aceptable mediante la fusión de los conductores de rama es autopista volumen correcto carriles, no rama diseño.
8. En condiciones de alto tránsito de volumen, la mayoría de los conductores de rama en una rama que tiene "buenas" geometría viajan hasta el final antes de la fusión. Si geometrías son pobres, esta tendencia es mucho menos pronunciada, ya que los conductores agresivamente fusionan desde cualquier lugar para evitar ser atrapado en el extremo del carril de cambio de velocidad.

24/26 REEVALUACIÓN DE CRITERIOS DE VELOCIDAD DIRECTRIZ DE RAMAS ___________________________________________________________________________________
__________________________________________________________________________________________
MATERIAL DIDÁCTICO NO COMERCIAL – CURSOS UNIVERSITARIOS POSGRADO ORIENTACIÓN VIAL Free Online Document Translator beta + + Francisco Justo Sierra [email protected] Ingeniero Civil UBA CPIC 6311 ingenieriadeseguridadvial.blogspot.com.ar Beccar, diciembre 2015
CAPÍTULO 5. MODELADO ANALÍTICO
Los análisis de los datos experimentales descritos en el capítulo anterior dan elementos de una entrada de la autopista conductor rama caracterización del comportamiento. Los esfuerzos de este capítulo están diseñados para desarrollar modelos conceptuales. Presenta varios enfoques para conductor modelado de comportamiento rama de aceleración/desaceleración. La importancia de la capacidad del conductor rama para ver tránsito de la autopista antes de llegar a la rama se discute el gore y, por último, se sugiere un cambio en el modelo de longitud de aceleración AASHTO.
RESUMEN
Se examinaron los modelos de aceleración que representan los cambios de velocidad de rama de entrada desde ambos puntos teóricos y empíricos de vista. Las observaciones de las operaciones de tránsito en las ramas que cumplen los criterios de diseño actuales indican que los conductores usan tasas de ace-leración similares a los usados por la política AASHTO actual. Las diferencias entre las tasas observadas y AASHTO no eran lo suficientemente grande para justificar un cambio recomendado.
Longitudes de aceleración para las ramas de entrada de tipo abocinado deben incluir sólo las porciones de carril de la que la rama conductores pueden ver claramente la autopista circulación por la derecha del carril

UNIVERSIDAD DE TEXAS, AUSTIN - MICHAEL HUNTER Y RANDY MACHEMEH 25/26 ________________________________________________________________________________
__________________________________________________________________________________________
MATERIAL DIDÁCTICO NO COMERCIAL – CURSOS UNIVERSITARIOS POSGRADO ORIENTACIÓN VIAL Free Online Document Translator beta + + Francisco Justo Sierra [email protected] Ingeniero Civil UBA CPIC 6311 ingenieriadeseguridadvial.blogspot.com.ar Beccar, diciembre 2015
CAPÍTULO 6. CONCLUSIONES Y RECOMENDACIONES
Las observaciones y los análisis descritos en los cinco capítulos anteriores dieron lugar a la siguiente serie de conclusiones y recomendaciones: 1. Velocidades medias conductor rama en todas las ramas de entrada observados fueron consisten-
temente más del 50% de la velocidad directriz de la autopista, incluso cuando la velocidad directriz de la autopista fue de 70 mph. Por lo tanto, el diseño de ramas de entrada para velocidades más bajas que las velocidades a las que los conductores típicamente operan es inapropiado. Recomendación: El criterio de diseño permitiendo una rama de velocidad directriz de entrada sea 50% de la velocidad directriz de la autopista debe suprimirse de AASHTO y política de TxDOT.
2. Conductor Rama parcelas historia velocidad-distancia para ramas con distancia de visibilidad ade-cuada y de cambio de velocidad longitudes carriles exhibieron apariencias lisas y no indicaron cam-bios de velocidad bruscos. Parcelas velocidad-distancia de los vehículos que operan en las instala-ciones de la autopista sin peaje de rama con perfiles verticales que limitan la distancia conductor rama de vista y tenían longitudes de carriles de cambio de velocidad marginales expuestas ondas ondu-ladas, con indicación de rama cambios significativos de velocidad del conductor.
3. Aceleración tasa/desaceleración frente a la distancia a lo largo de las parcelas de rama para ramas con "buenos" y "malos" geometría tenía patrones similares a las parcelas distancia velocidad. Las ramas tienen la distancia visual adecuada y de cambio de velocidad longitudes de carril normalmente producen pequeñas aceleraciones positivas (0 a 2 mphps). Los valores observados fueron compa-rables a las tasas implícitas contenidas en AASHTO Tabla X-4 (longitudes de aceleración). Ramas con distancia de visibilidad inadecuada y/o longitudes de carril de aceleración inadecuadas produjeron mayores valores de aceleración positiva y negativa (-4 a 4 mphps).
Recomendación: El modelo de aceleración AASHTO usado para estimar longitudes de carril de aceleración no debe cambiarse.
4. Freeway velocidades carril de la derecha no fueron en gran medida afectados por los vehícu-los de rama donde la rama tenía la distancia de visibilidad y el cambio de carril de velocidad longitudes adecuadas. Distancia de visibilidad inadecuada y/o inadecuados longitudes de carril de aceleración tendían a causar una reducción significativa de las velocidades de carril de la autopista del lado derecho, especialmente a alta autopista y los volúmenes de tránsito rama.
5. Freeway mano derecha headways tiempo carril parecían estar no influida por las características del diseño de rama complejos, sino más bien por el volumen de tránsito.
6. Autopista volumen carril de la derecha que parecía ser el principal factor que influye en el tamaño del intervalo de tiempo que fue aceptada por la fusión de los conductores de rama.
7. Bajo condiciones de alto tránsito de volumen, la mayoría de los conductores de rama viajaban casi hasta el final de la rama con la distancia de visibilidad adecuada y de cambio de velocidad longitud carril antes de fusionarse suavemente hacia el carril de la autopista. Si una rama tenía la distancia de visibilidad insuficiente y/o inadecuada longitud carril de aceleración, los conductores más agresiva-mente fusionado inmediatamente más allá de la rama de entrada Gore para evitar ser atrapado en el extremo del carril de cambio de velocidad.
8. Los conductores tienden a iniciar el proceso de fusión/aceleración concurrente sólo después de ob-tener una visión clara de la autopista derecho de tránsito de carril. Si las calificaciones, estructuras o barricadas obstruyan la visión del conductor rama de la autopista carril de la derecha, la aceleración no comenzó hasta cerca de la rama de gore donde la vista se hizo sin obstáculos. El modelo de lon-gitud de aceleración AASHTO para terminales de rama de entrada abocinados cuenta con una gran fracción de la longitud de aceleración antes del gore de la rama.

26/26 REEVALUACIÓN DE CRITERIOS DE VELOCIDAD DIRECTRIZ DE RAMAS ___________________________________________________________________________________
__________________________________________________________________________________________
MATERIAL DIDÁCTICO NO COMERCIAL – CURSOS UNIVERSITARIOS POSGRADO ORIENTACIÓN VIAL Free Online Document Translator beta + + Francisco Justo Sierra [email protected] Ingeniero Civil UBA CPIC 6311 ingenieriadeseguridadvial.blogspot.com.ar Beccar, diciembre 2015
9. Si la visión del conductor está obstruido antes de la rama de gore, el modelo AASHTO puede re-presentar incorrectamente longitud aceleración disponible. Recomendación: longitudes de acelera-ción para las ramas de entrada de tipo abocinado deben incluir sólo las porciones de carril de la que los conductores de rama pueden ver claramente los vehículos en el carril de la autopista de la dere-cha. El modelo de longitud de aceleración AASHTO debe aclararse para incluir esta disposición adi-cional.
10. En el diseño de baja velocidad de la norma de diseño TxDOT puede prever una longitud de aboci-namiento más corta que en la norma AASHTO. Esta diferencia se debe a la forma de inclusión de la longitud de la forma abocinada de la anchura de carril completo a la eliminación del carril.
Por último, el comportamiento del conductor aguas arriba y abajo de la rama de Gore puede presentar características diferentes. Un procedimiento de diseño que permite flexibilidad en la elección de veloci-dades directrices separados aguas arriba y aguas abajo de la sangre puede dar para diseños superiores generales. Por ejemplo, los criterios actuales 50% produce una muy deseable carril de aceleración largo, pero permite elementos de alineación horizontal y vertical de limitación de velocidad aguas arriba de la rama de Gore. Provisión de una velocidad alta para las características de aguas arriba y una velocidad baja para las características posteriores puede establecer una norma de diseño óptimo. Si bien este artículo no aparece como una recomendación, ya que supera un poco el alcance de esta investigación, parece que este esfuerzo conduce a la creencia de que un cambio tan amplio en la filosofía de diseño se debe considerar, estudió, y potencialmente implementado.