04 - Elementos de finitos de flexión de...
112
1 04 - Elementos de finitos de flexión de vigas Diego Andrés Alvarez Marín Profesor Asociado Universidad Nacional de Colombia Sede Manizales
Transcript of 04 - Elementos de finitos de flexión de...

1
04 - Elementos de finitos de flexión de vigas
Diego Andrés Alvarez MarínProfesor Asociado
Universidad Nacional de ColombiaSede Manizales
2
Contenido
● Viga de Euler-Bernoulli● Viga de Timoshenko
– Problema del bloqueo de por cortante (shear locking)
– Integración reducida
– Imposición del campo de deformación por cortante
3
Teoría de Euler-Bernoulli
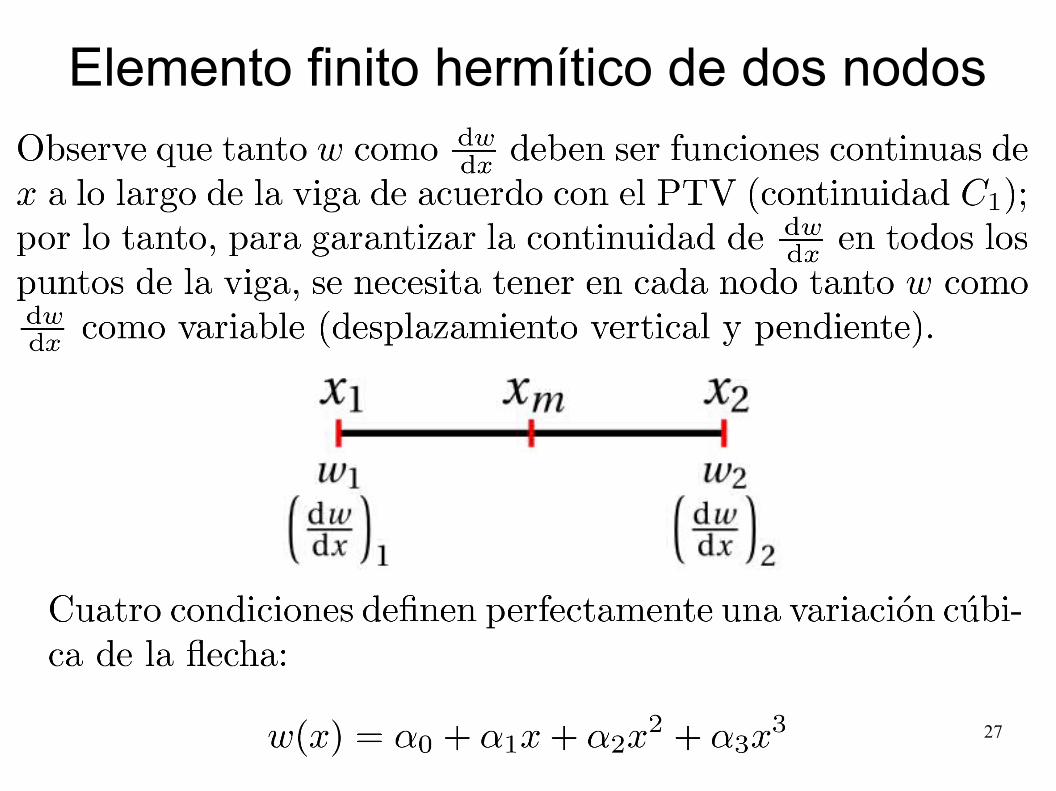
● Los desplazamientos verticales (flechas) de todos los puntos de una sección transversal son pequeños e iguales a los del eje de la viga.
● El desplazamiento lateral es nulo (esto es el coeficiente de Poisson se asume cero).
● Las secciones transversales normales al eje de la viga antes de la deformación, permanecen planas y ortogonales a dicho eje después de la deformación.

4
5
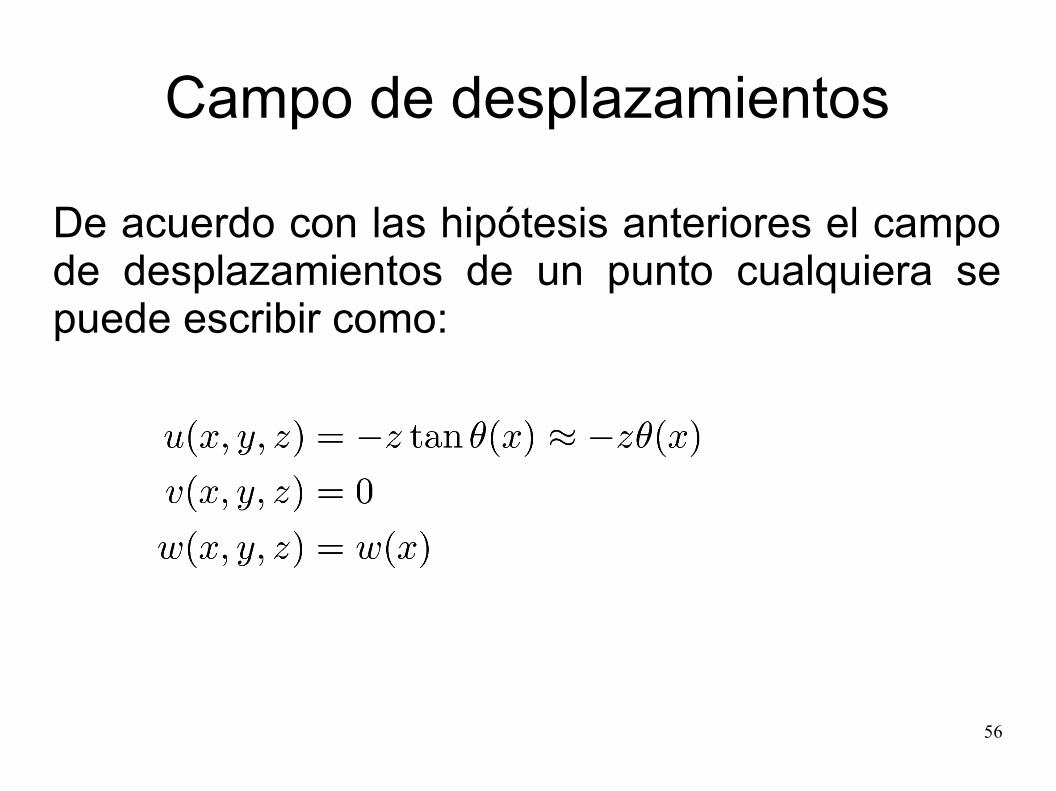
Campo de desplazamientos
De acuerdo con las hipótesis anteriores el campo de desplazamientos de un punto cualquiera se puede escribir como:
6
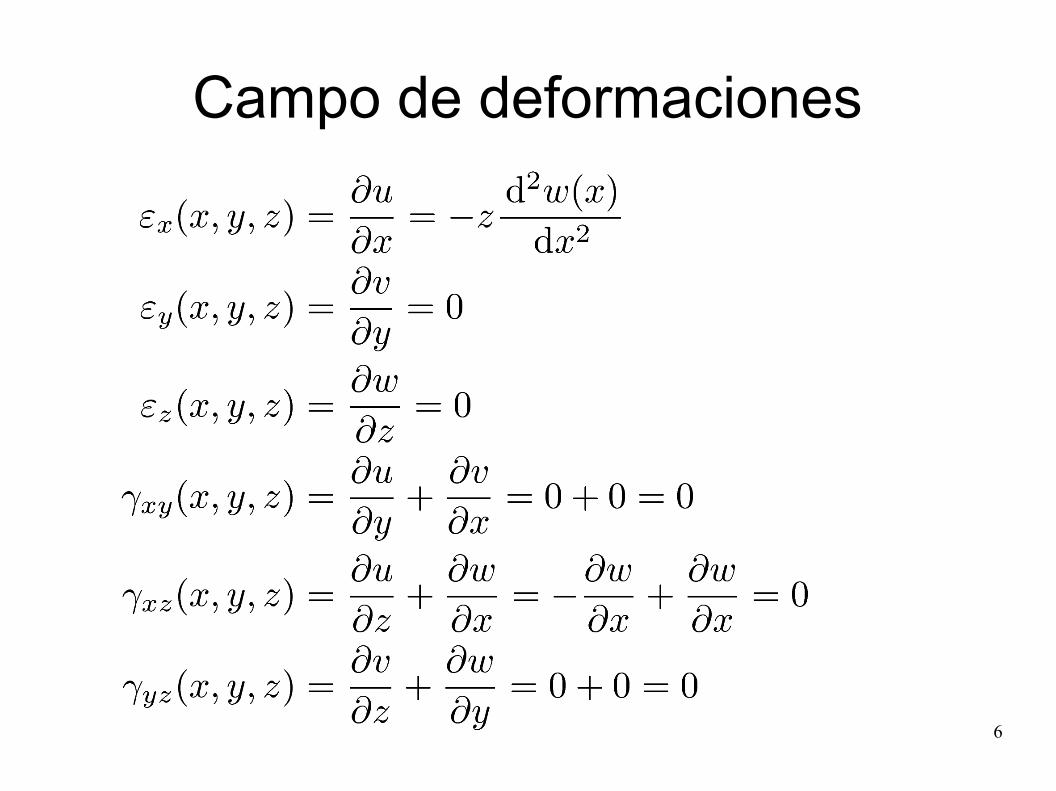
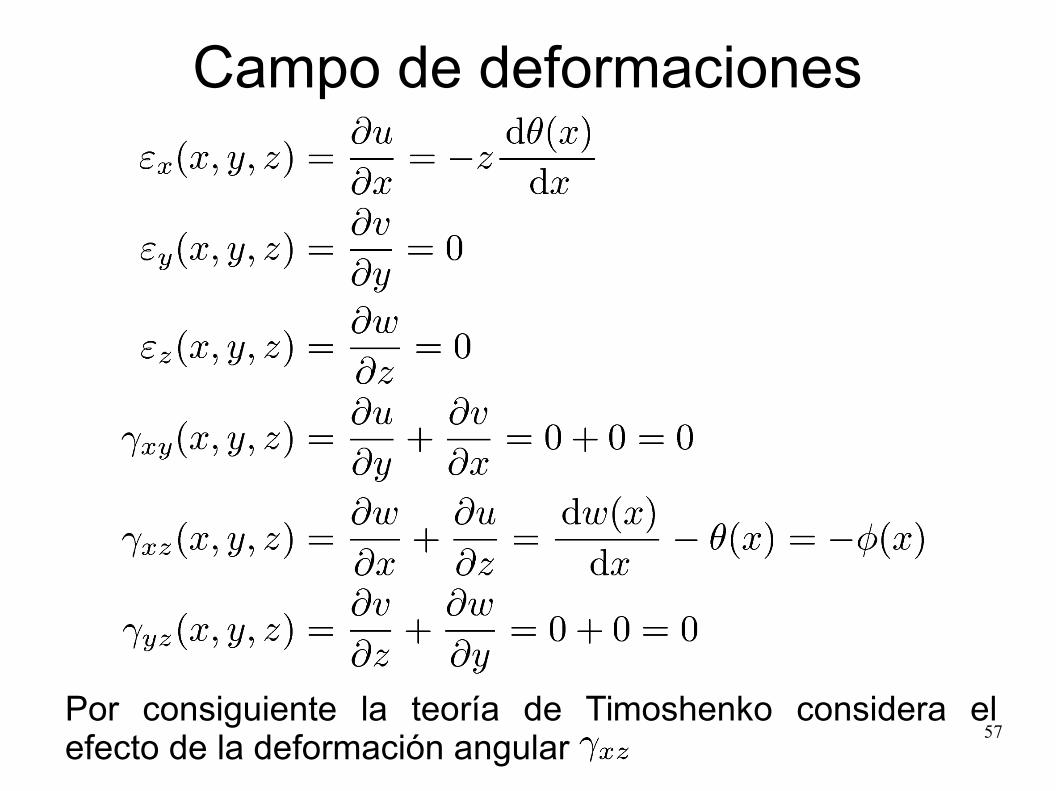
Campo de deformaciones

Campo de esfuerzosAl reemplazar en la ley de Hooke
usando un coeficiente de Poisson igual cero se obtiene:
siendo los otros esfuerzos nulos.
8
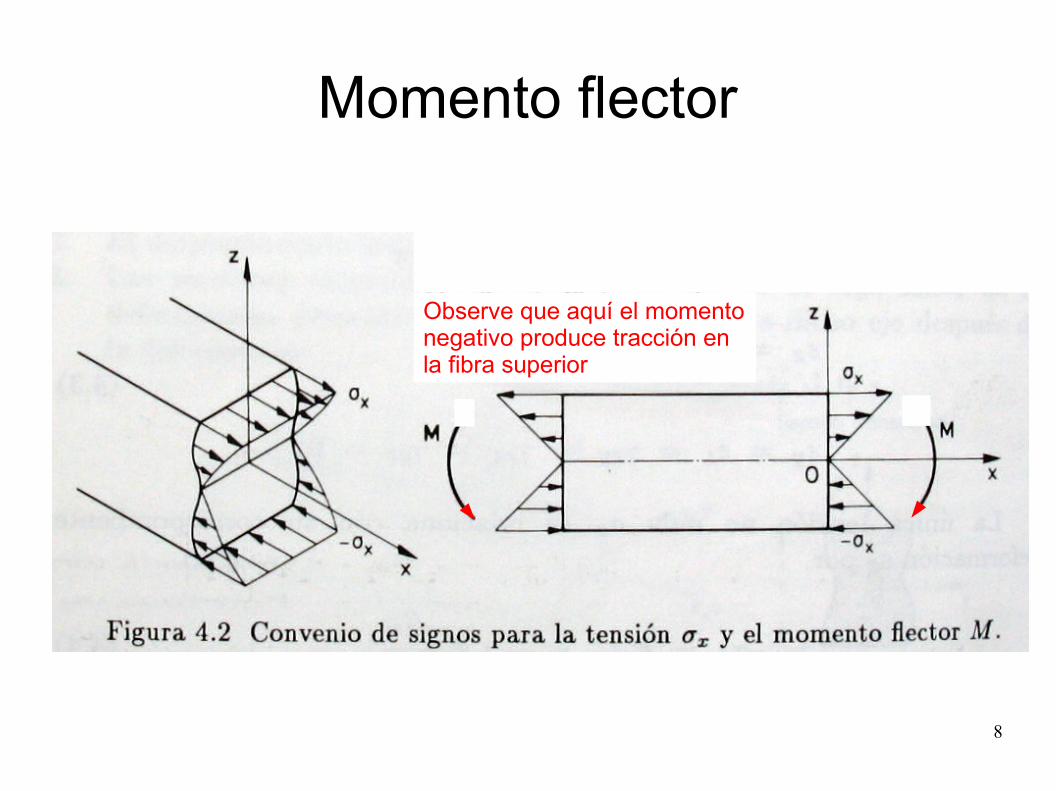
Momento flector
Observe que aquí el momento negativo produce tracción en la fibra superior

9
Momento flector

10
Momento de inercia
Centro de gravedad, área y momento de inercia al rededor del eje y para algunas secciones transversales de viga

11
Sentidos positivos de la carga

12
PTV para vigas
+
+

13
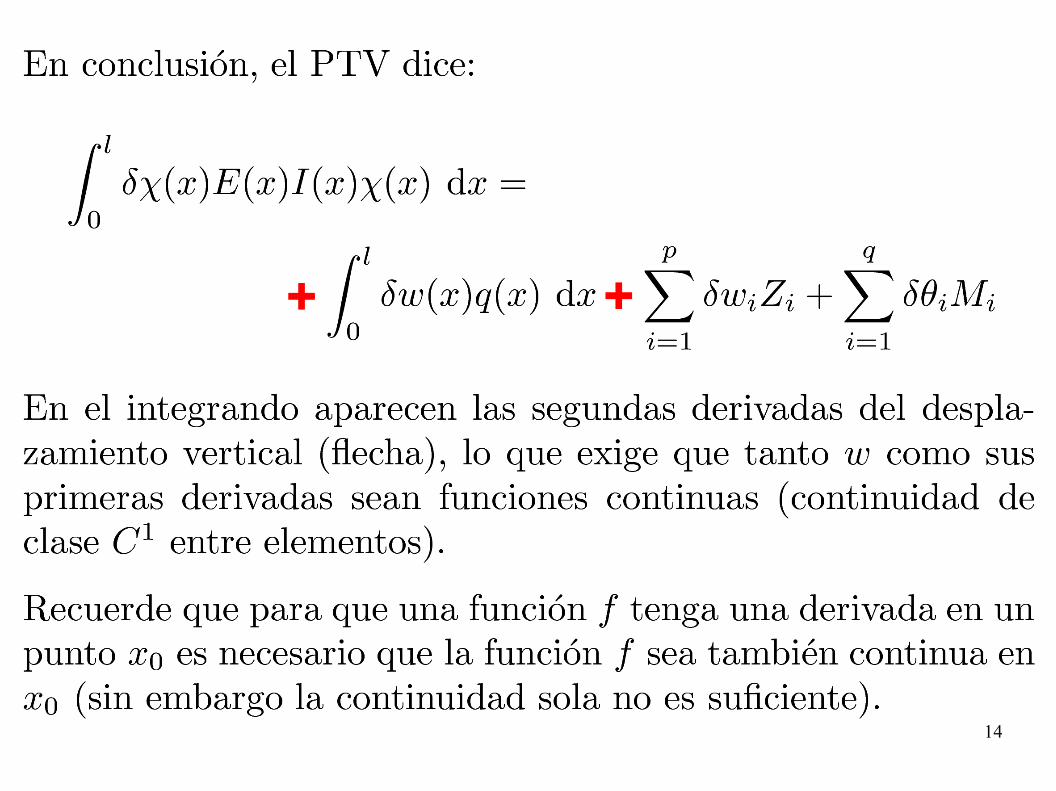
14
+ +
15
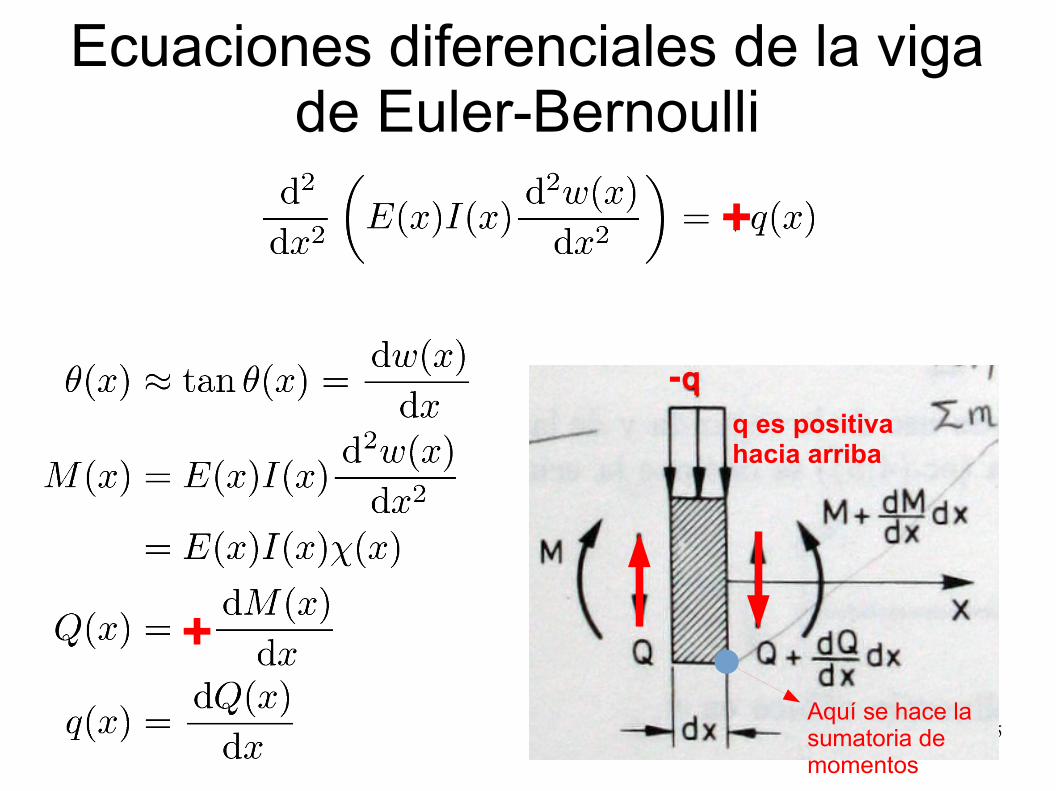
Ecuaciones diferenciales de la viga de Euler-Bernoulli
q es positivahacia arriba
Aquí se hace la sumatoria de momentos
-q
+
+
16
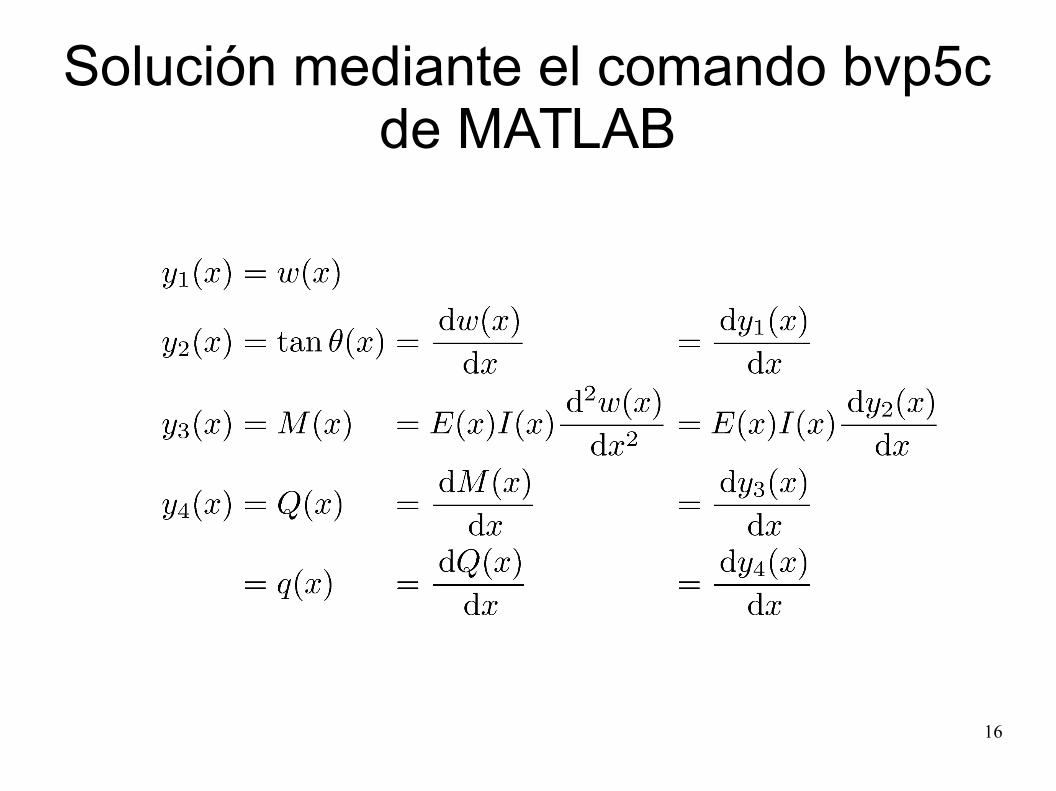
Solución mediante el comando bvp5c de MATLAB
17
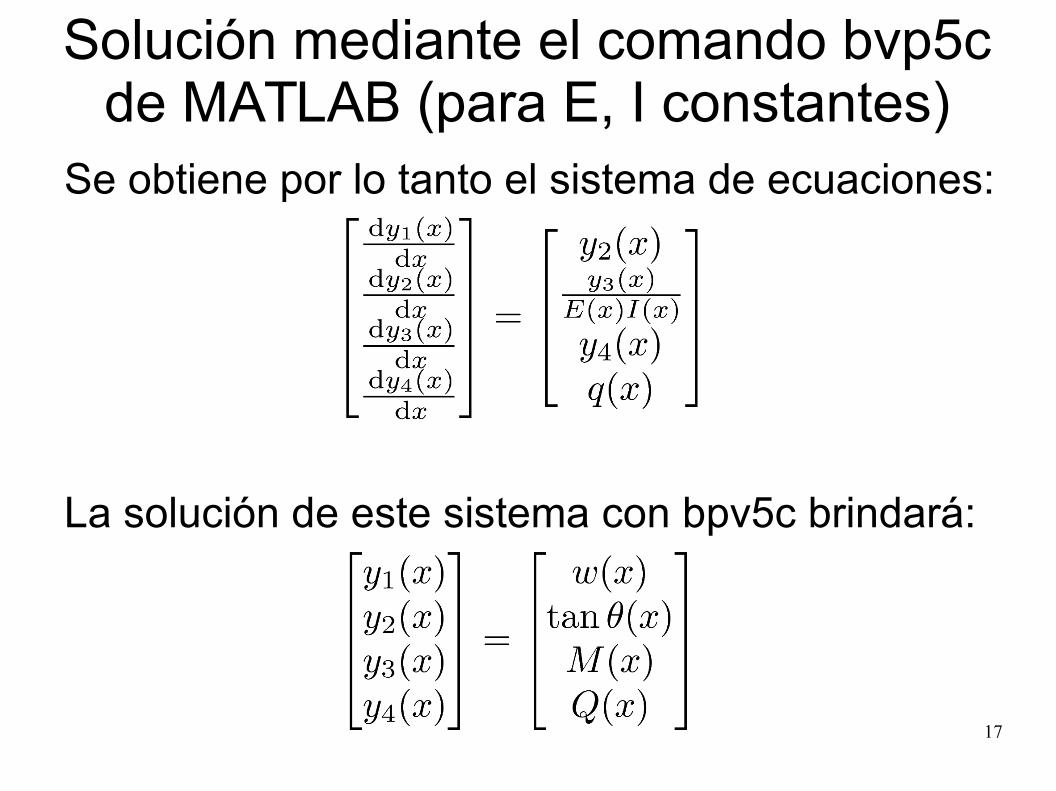
Solución mediante el comando bvp5c de MATLAB (para E, I constantes)
Se obtiene por lo tanto el sistema de ecuaciones:
La solución de este sistema con bpv5c brindará:
18
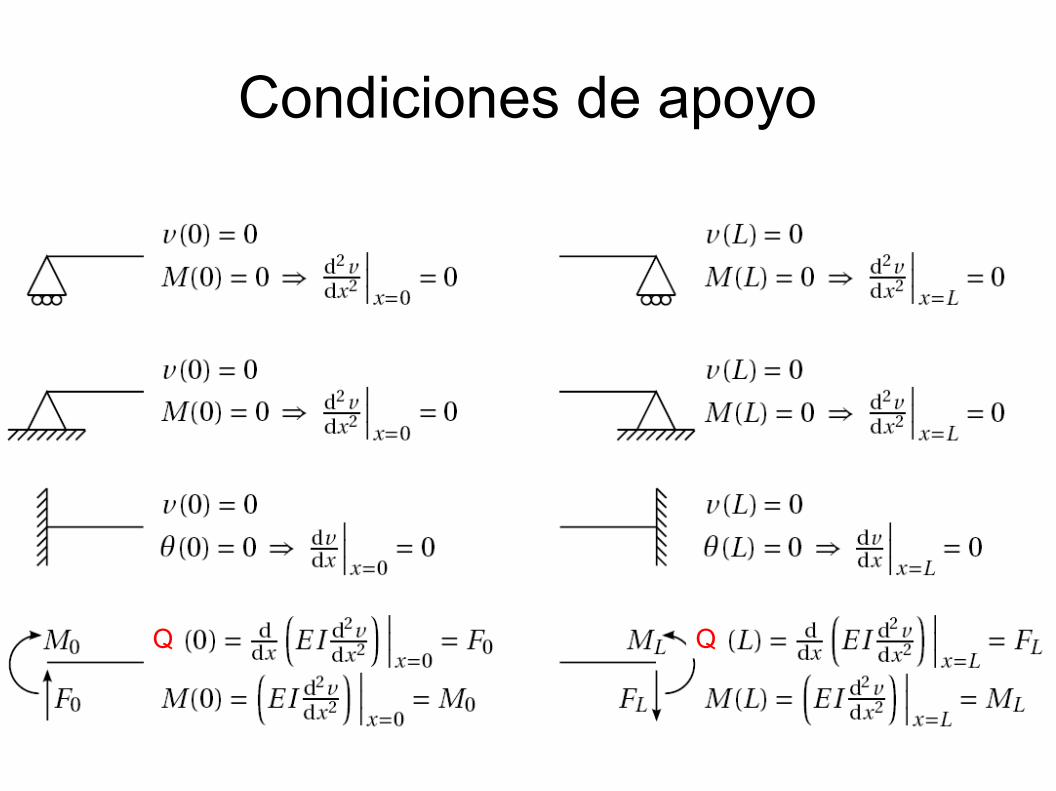
Condiciones de apoyo
Q Q

19
EJEMPLO 1

20
21
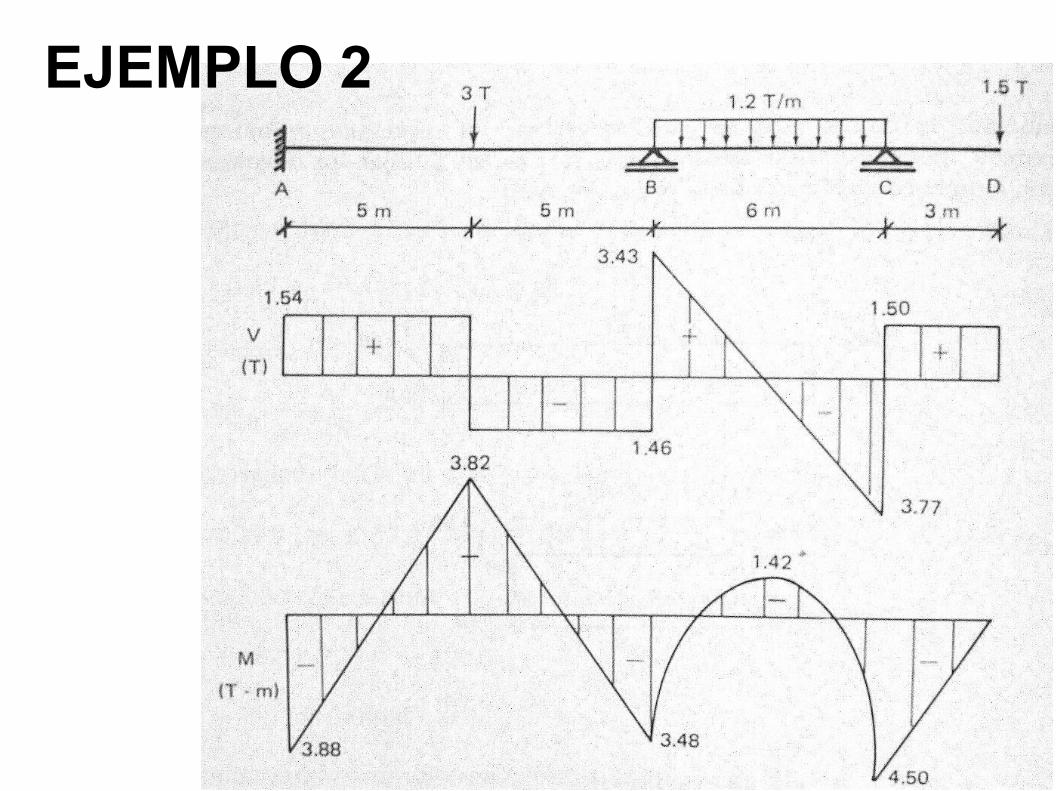
EJEMPLO 2
22
23

24
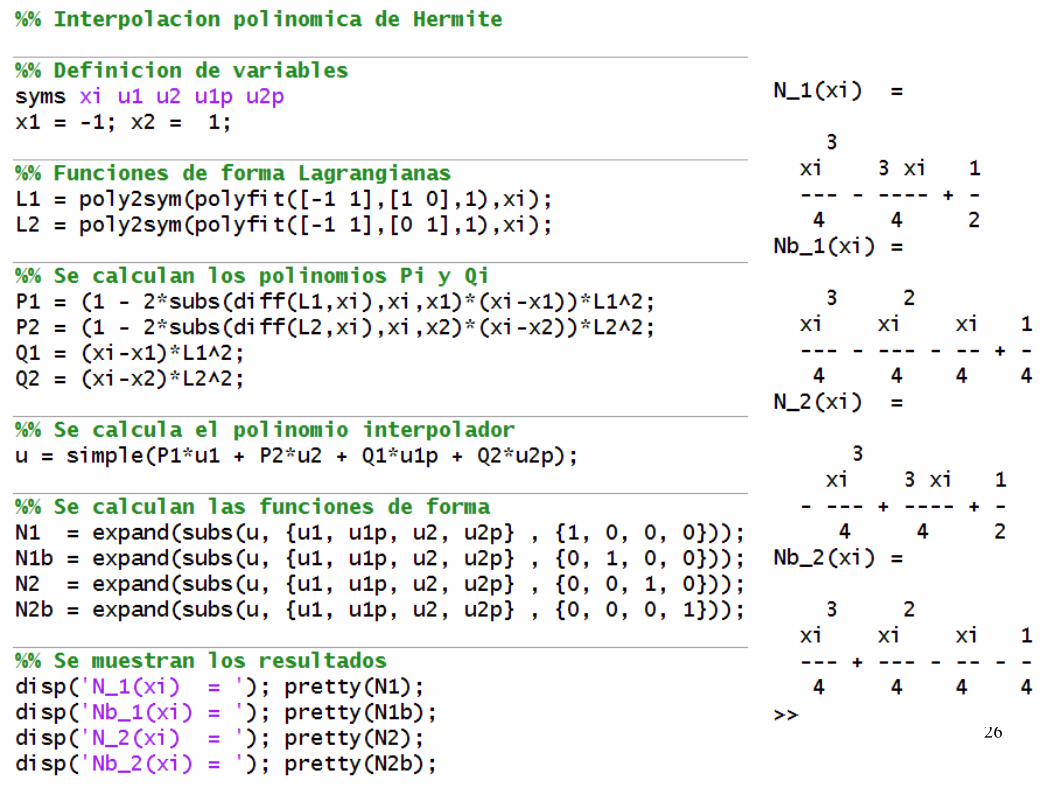
Interpolación polinómica de Hermite
Polinomio interpolador deLagrange

25
Interpolación polinómica de Hermite
26
27
Elemento finito hermítico de dos nodos

28

29
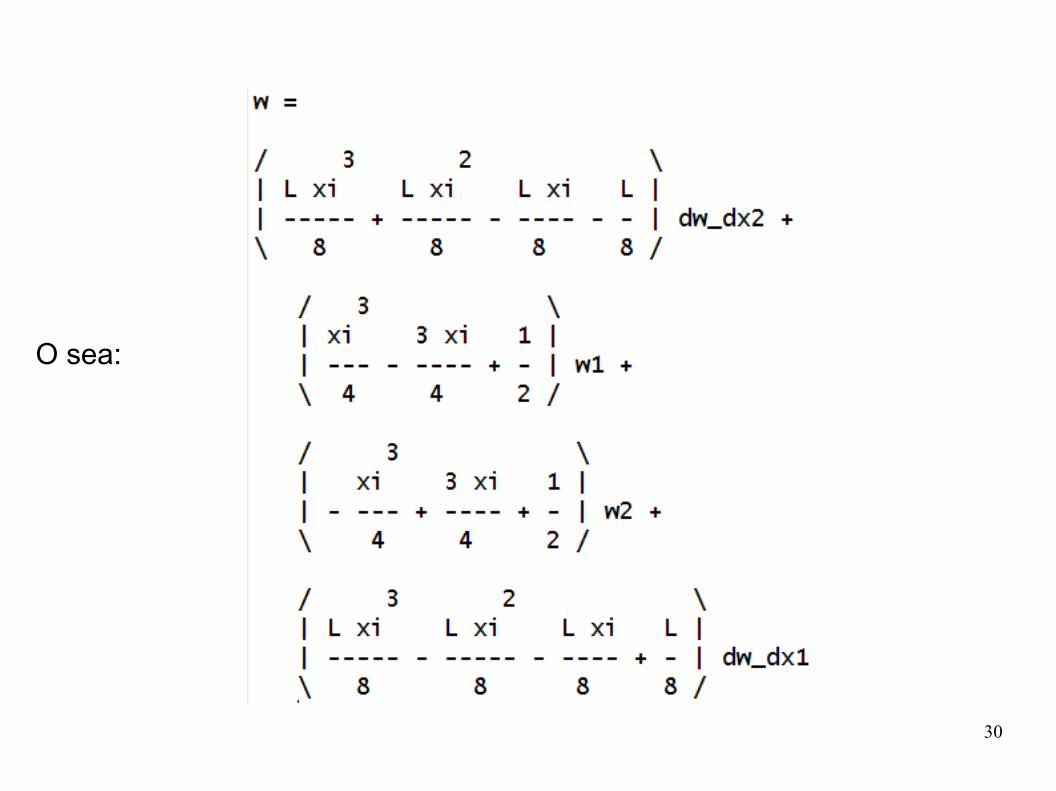
30
O sea:

31

32
Las funciones de forma pertenecen a la familia de los llamados polinomios de Hermite
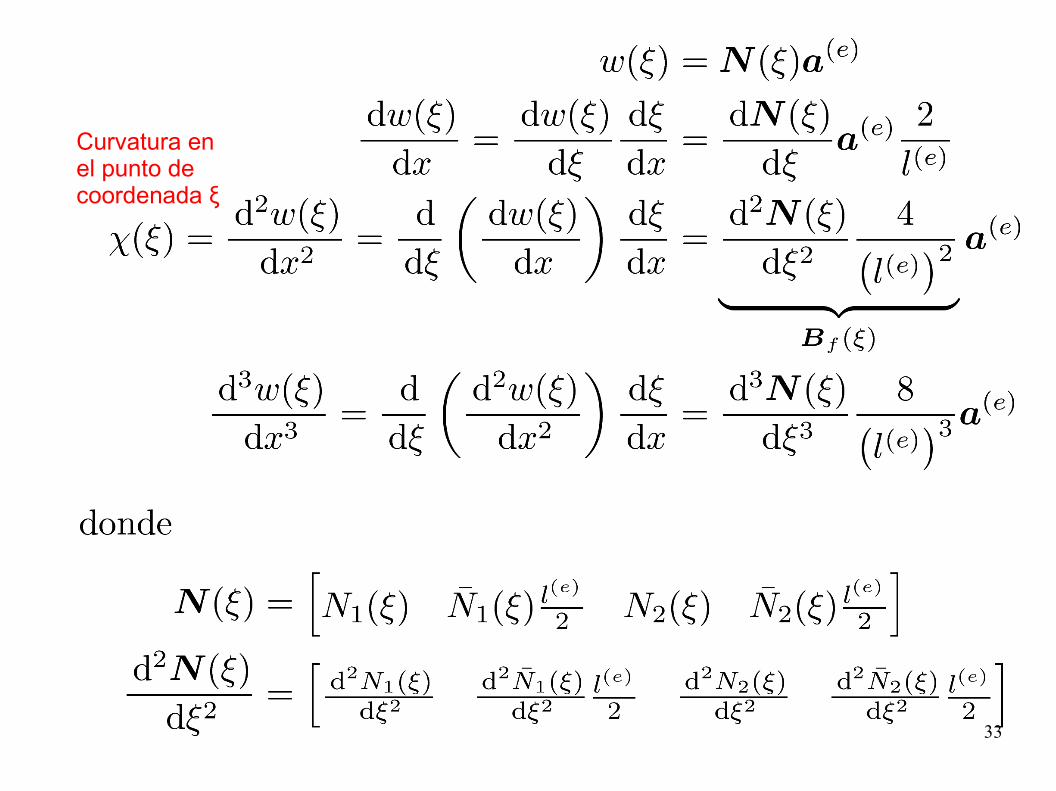
33
Curvatura en el punto de coordenada ξ
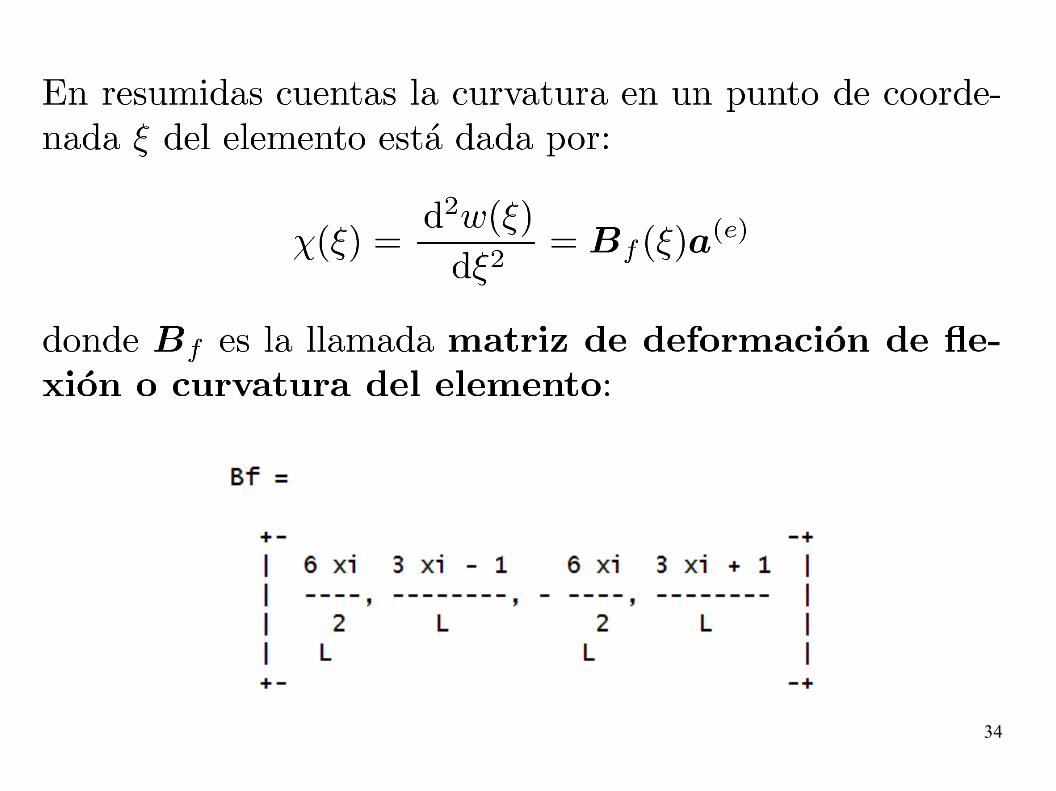
34
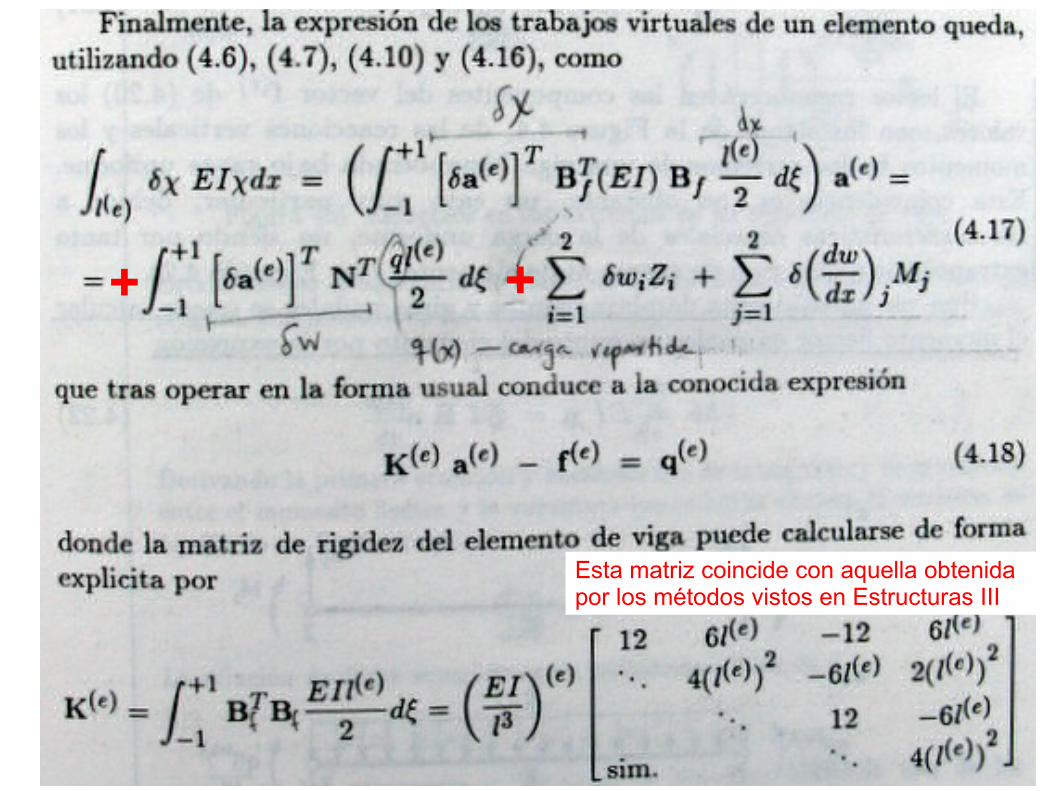
35
Esta matriz coincide con aquella obtenida por los métodos vistos en Estructuras III
+ +

36
+positivo hacia arriba
++
37
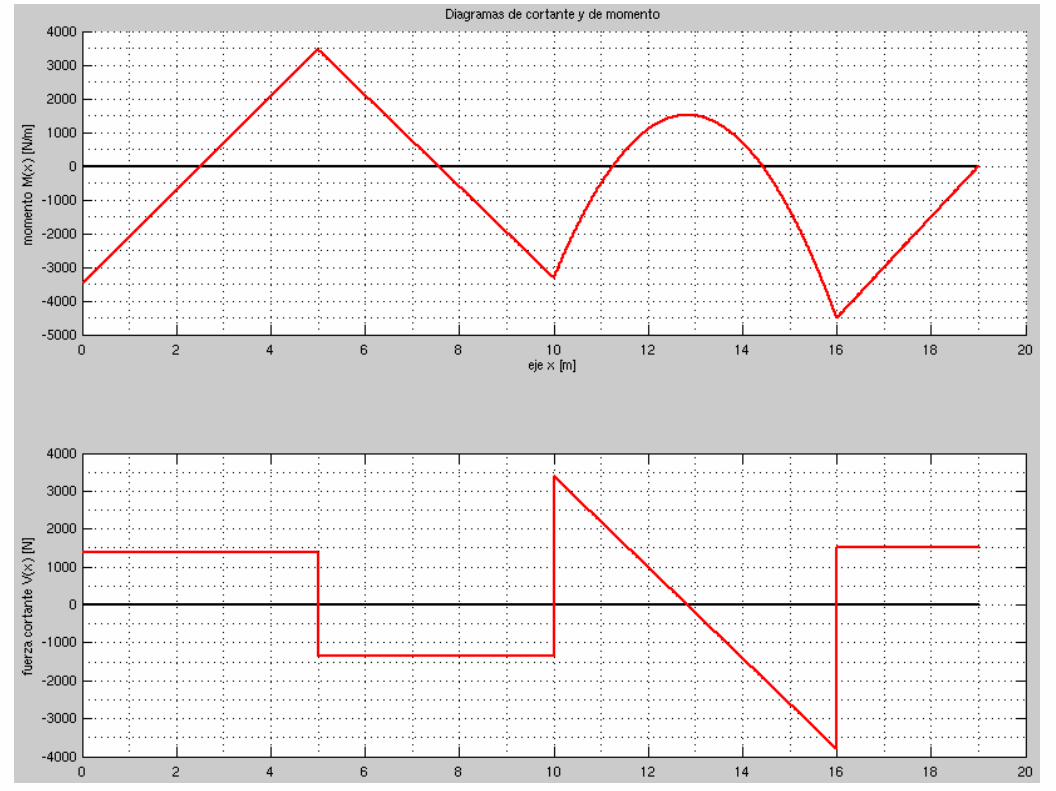
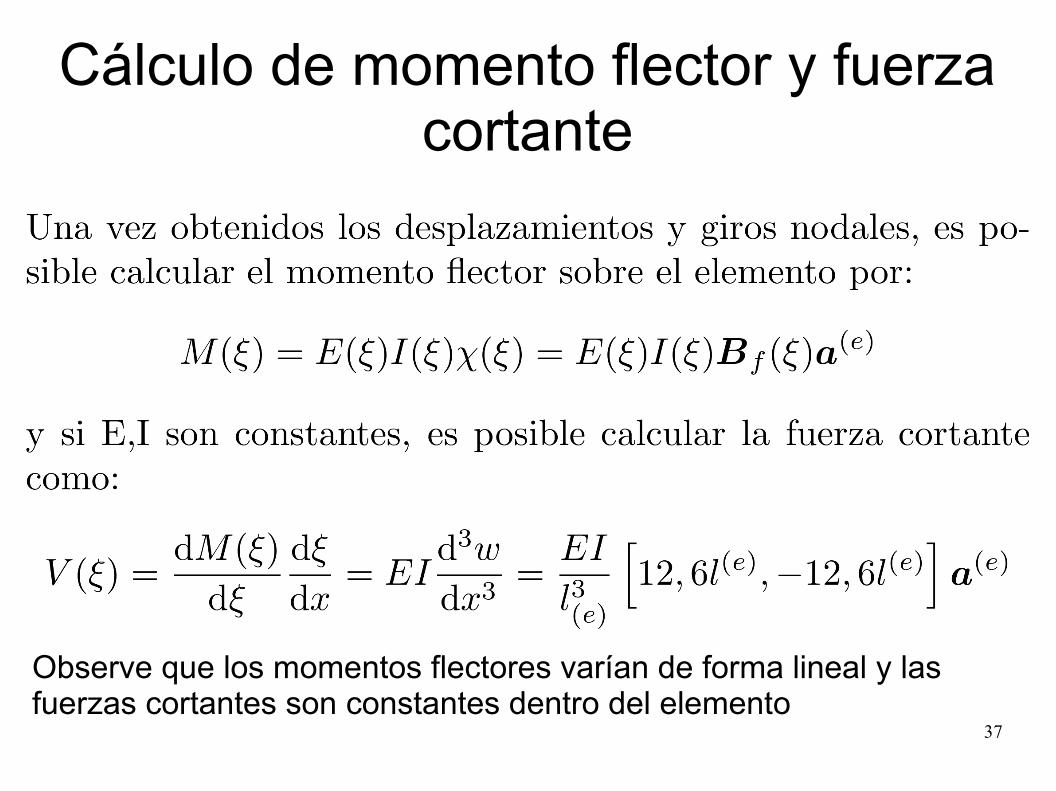
Cálculo de momento flector y fuerza cortante
Observe que los momentos flectores varían de forma lineal y las fuerzas cortantes son constantes dentro del elemento

38
positivo hacia arriba
+

39
EJEMPLO
40
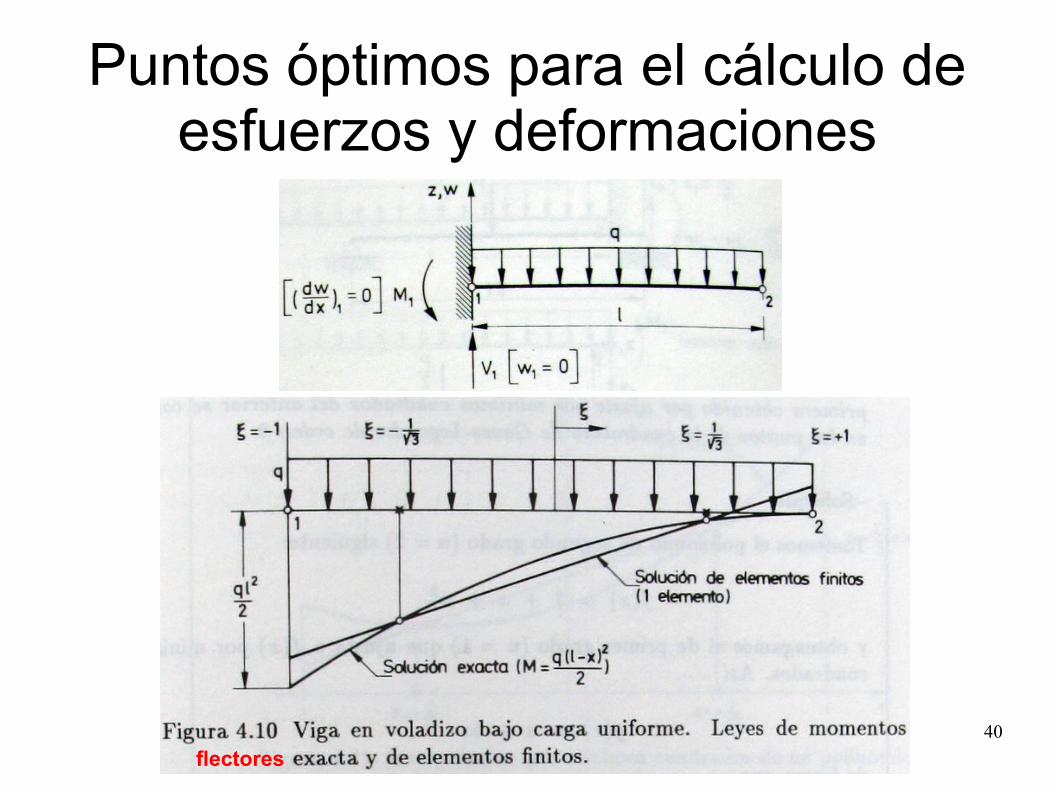
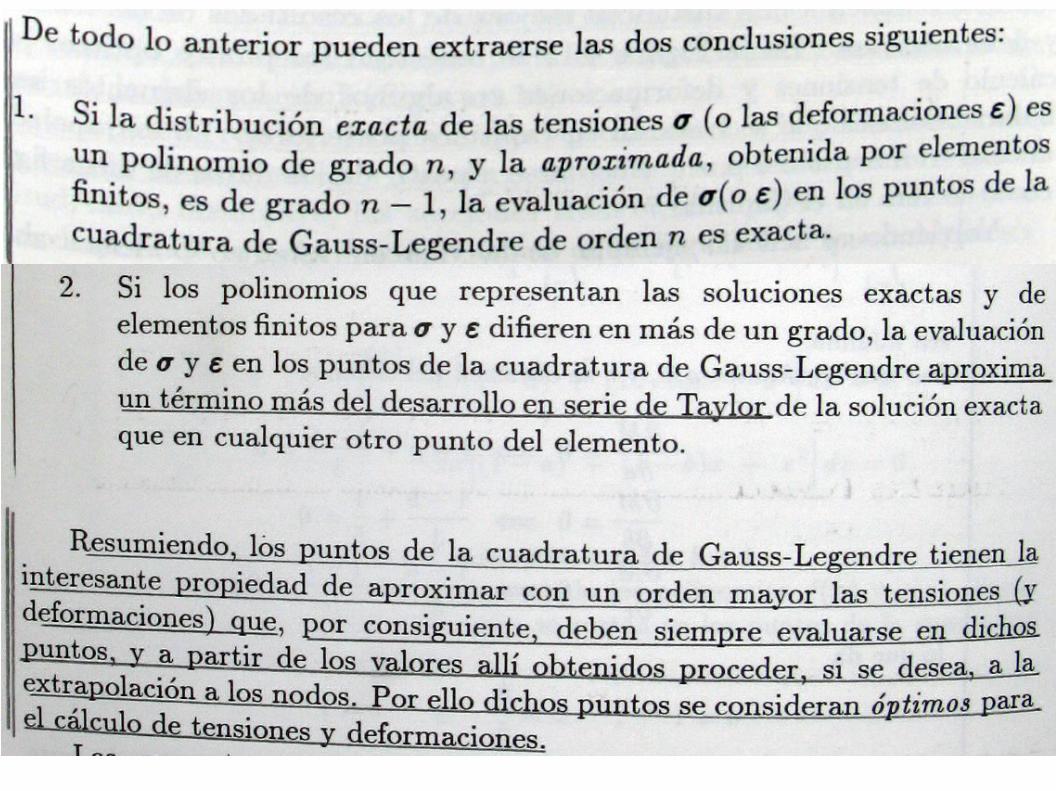
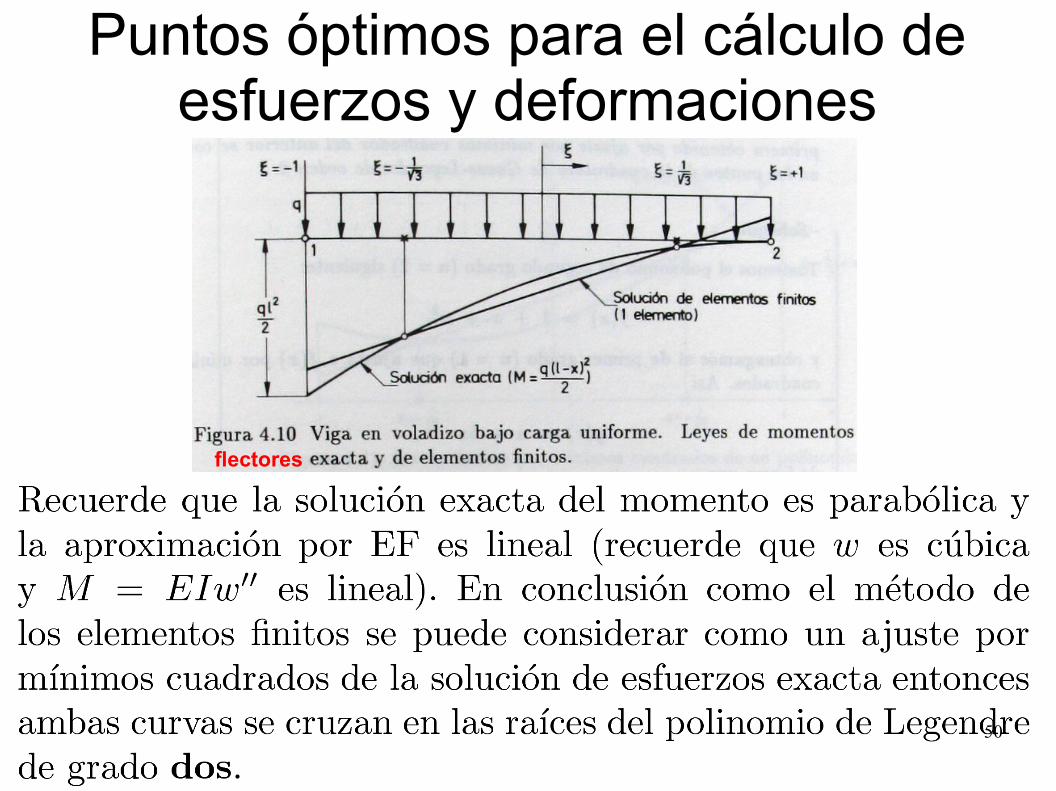
Puntos óptimos para el cálculo de esfuerzos y deformaciones
flectores
41
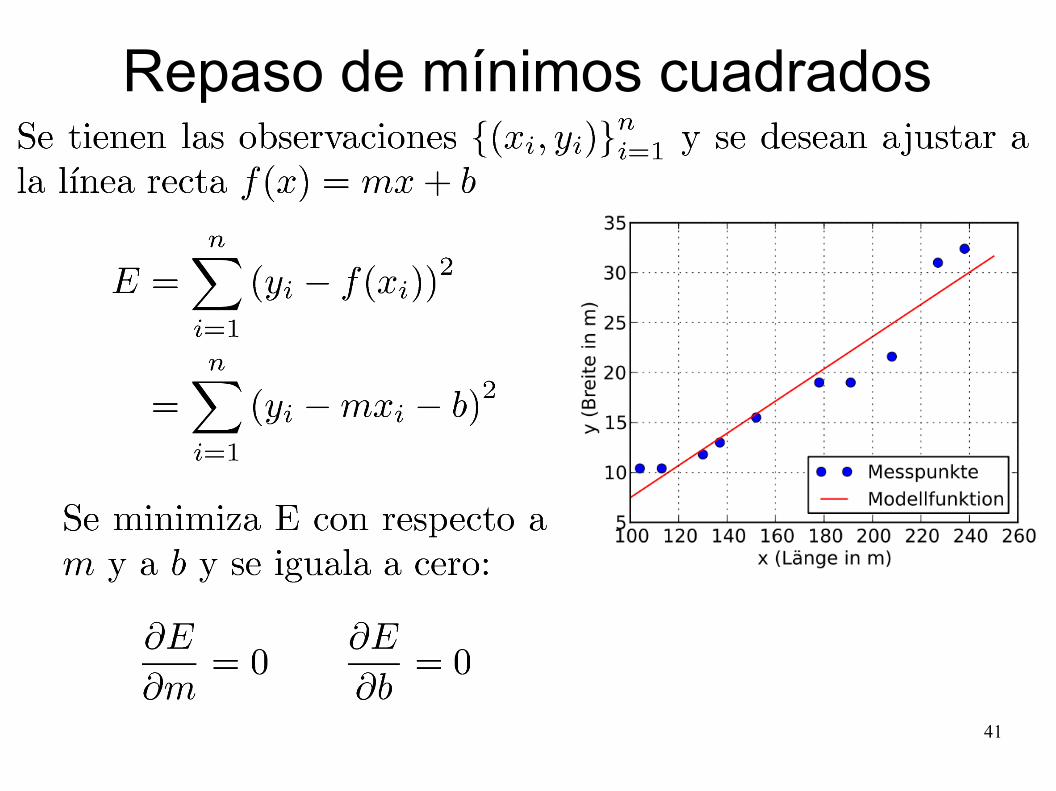
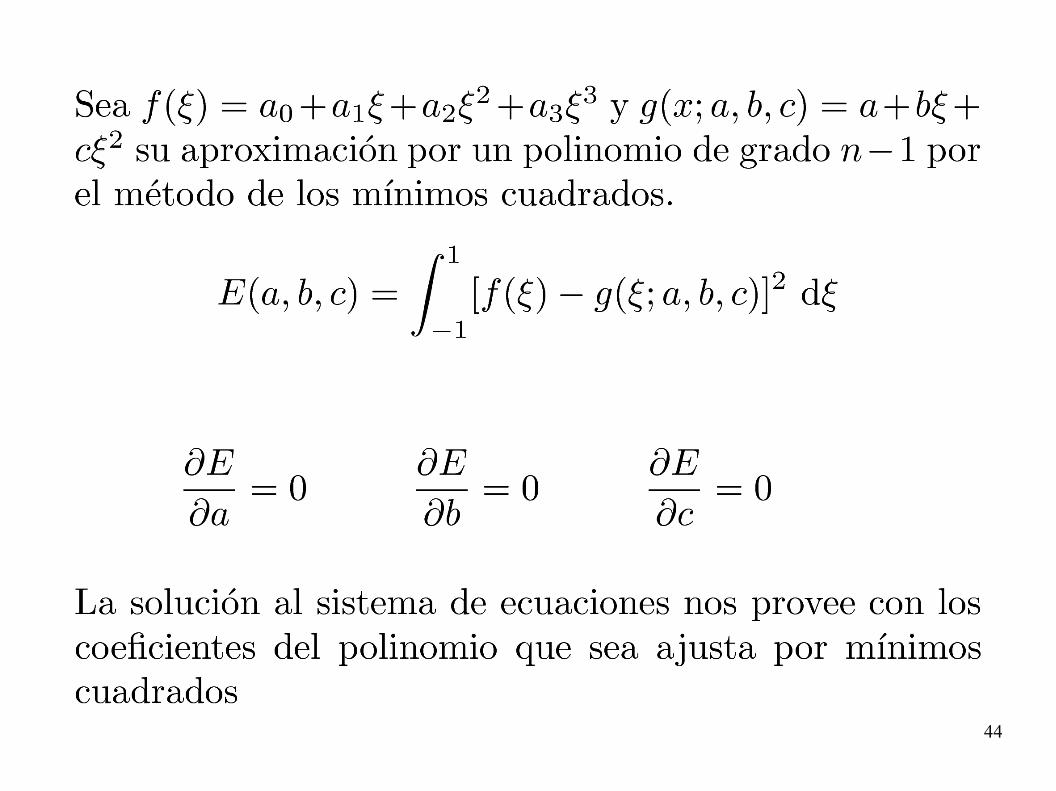
Repaso de mínimos cuadrados
42
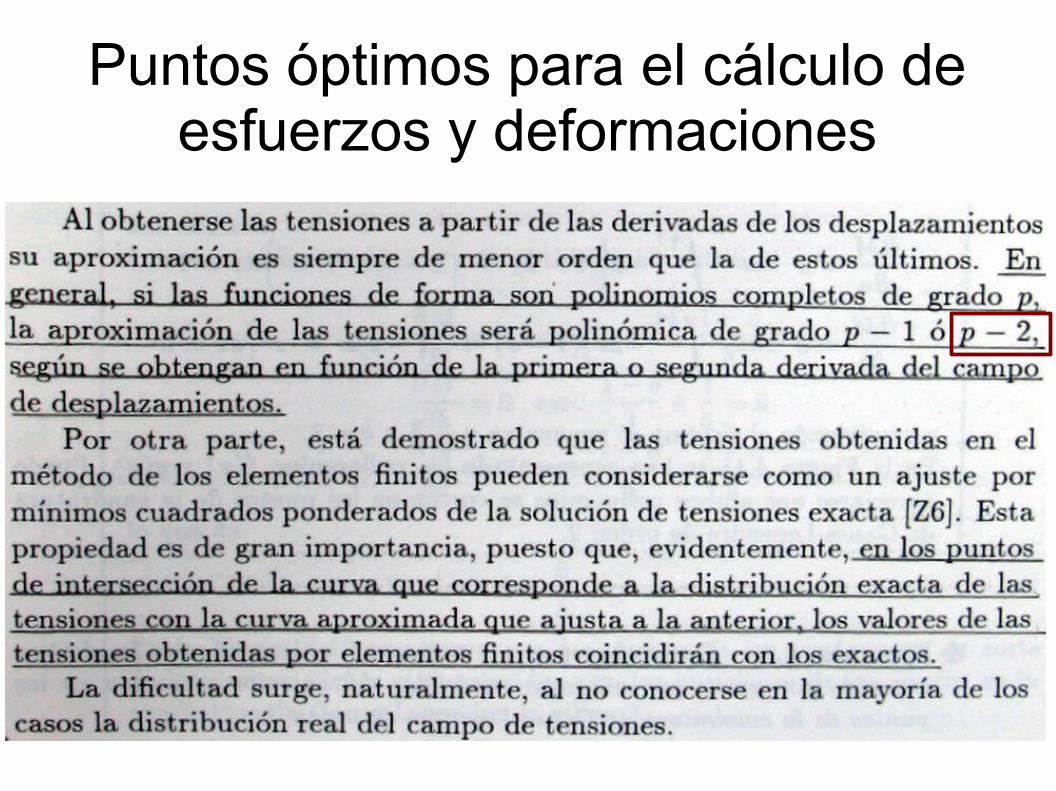
Puntos óptimos para el cálculo de esfuerzos y deformaciones
43
Propiedad de las raíces del polinomio de Legendre
Suponga que tenemos un polinomio de grado n y otro de grado n-1 obtenido por medio de un ajuste por mínimos cuadrados del anterior.
Ambos polinomios se intersectan en la ubicación de las raíces del polinomio de Legendre de orden n
44
45
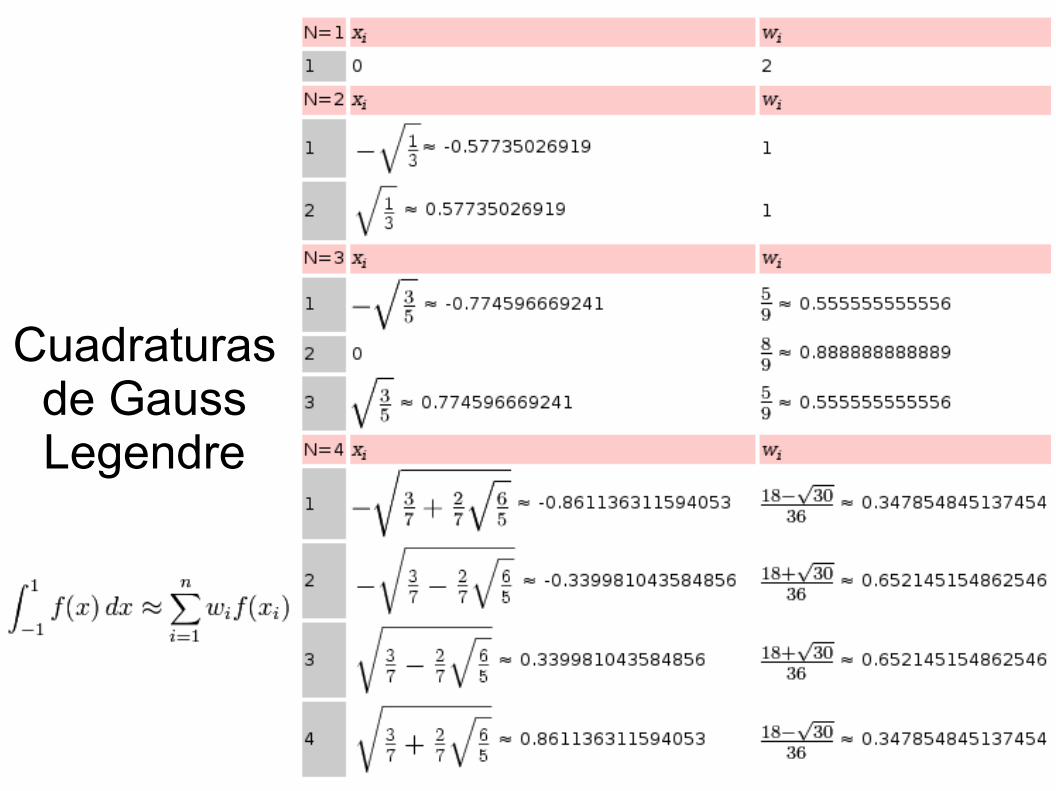
Cuadraturas de Gauss Legendre

46

47
48
49
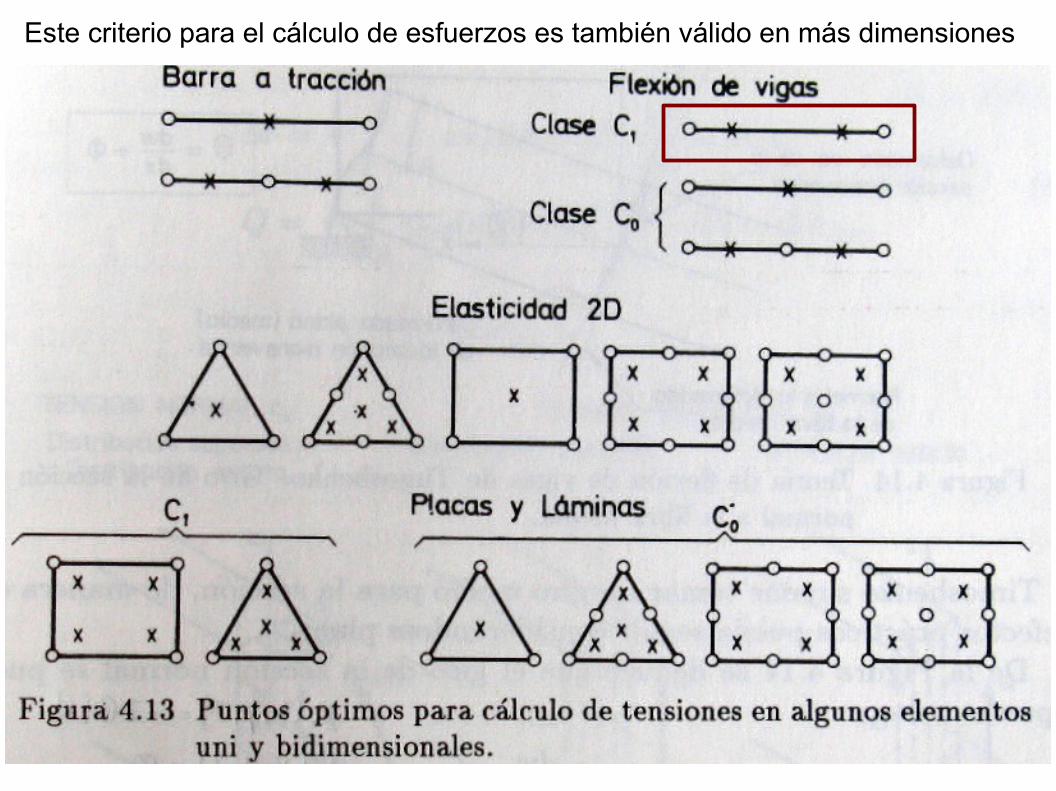
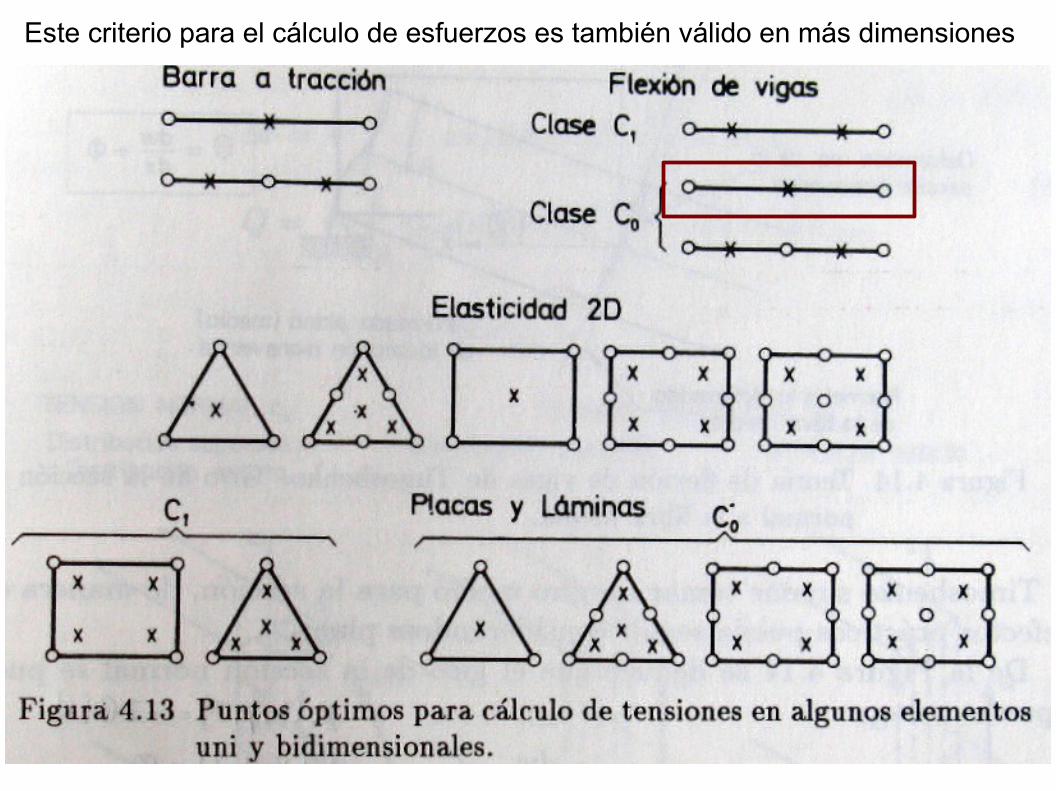
Este criterio para el cálculo de esfuerzos es también válido en más dimensiones
50
Puntos óptimos para el cálculo de esfuerzos y deformaciones
flectores
La viga de Timoshenko
52
La viga de Timoshenko
La viga de Timoshenko aproxima mejor la deformación real de la sección transversal de vigas de gran canto que la teoría de Euler-Bernoulli. A medida que la relación longitud/altura disminuye, las secciones transversales dejan de conservarse planas después de la deformación.

53
La viga de Timoshenko
● Los desplazamientos verticales (flechas) de todos los puntos de una sección transversal son pequeños e iguales a los del eje de la viga.
● El desplazamiento lateral es nulo (esto es el coeficiente de Poisson se asume cero en cuanto a la deformación lateral; G puede ser diferente de E/2).
● Las secciones transversales normales al eje de la viga antes de la deformación, permanecen planas pero no necesariamente ortogonales a dicho eje después de la deformación.

54
La hipótesis de Timoshenko supone tomar un giro medio de la sección, de manera que a efectos prácticos pueda seguir considerándose plana.

55
56
Campo de desplazamientos
De acuerdo con las hipótesis anteriores el campo de desplazamientos de un punto cualquiera se puede escribir como:
57
Campo de deformaciones
Por consiguiente la teoría de Timoshenko considera el efecto de la deformación angular
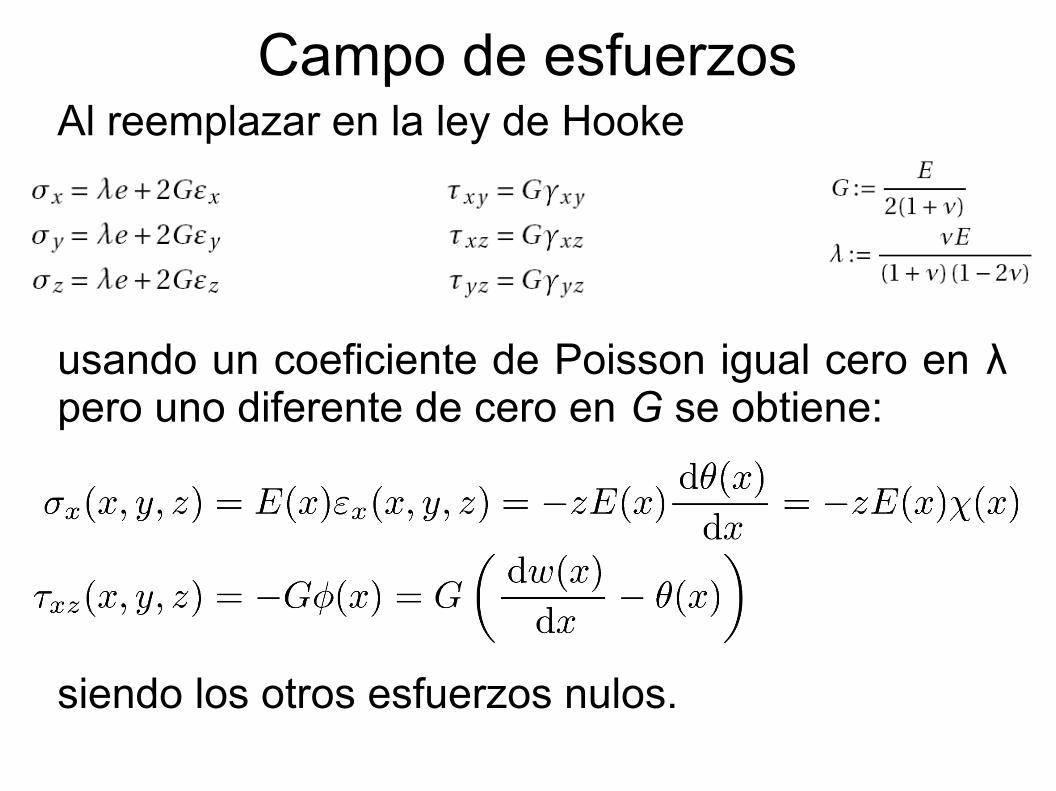
Campo de esfuerzosAl reemplazar en la ley de Hooke
usando un coeficiente de Poisson igual cero en λ pero uno diferente de cero en G se obtiene:
siendo los otros esfuerzos nulos.

Fuerza cortante y momento flector
- - - -
Un momento negativoproduce tracción en la fibra superior

Fuerza cortante y momento
flector
- -


Principio de los trabajos virtuales
+ +

La energía virtual interna se puede expresar como:
Observe que solo se están utilizando las derivadas primeras de la flecha y el giro, lo que permite la utilización de elementos finitos de clase C
0
-

Elementos finitos de dos nodos para la flexión de vigas de Timoshenko

+

+
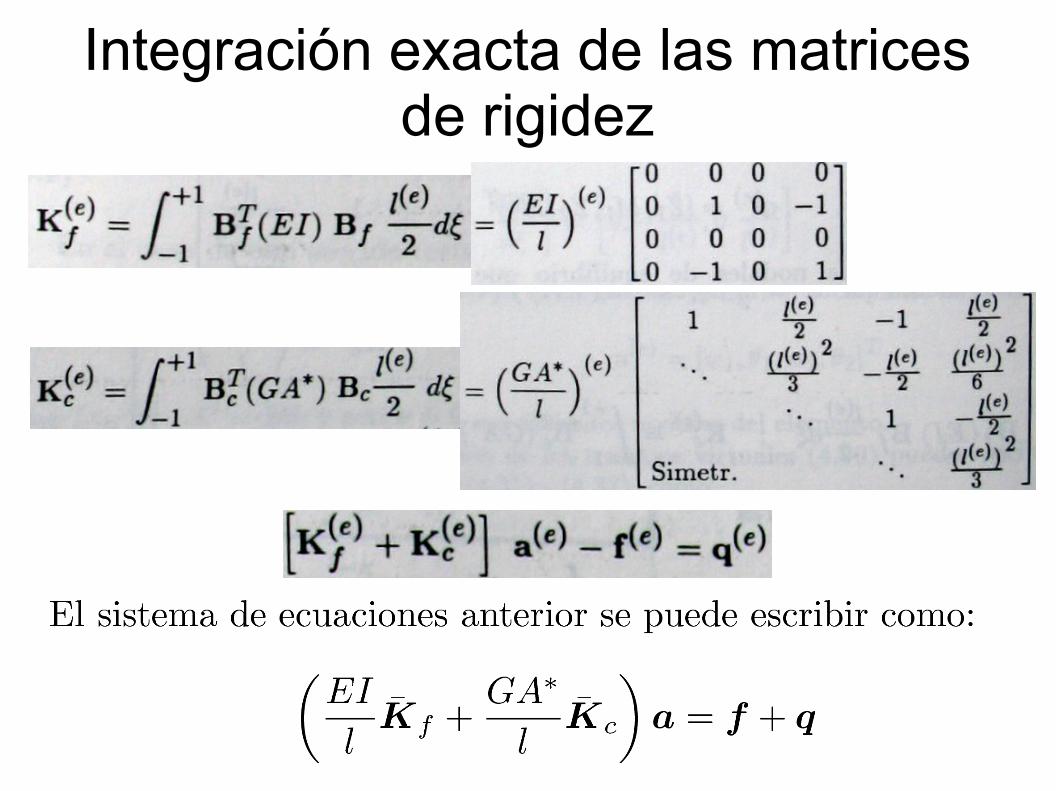
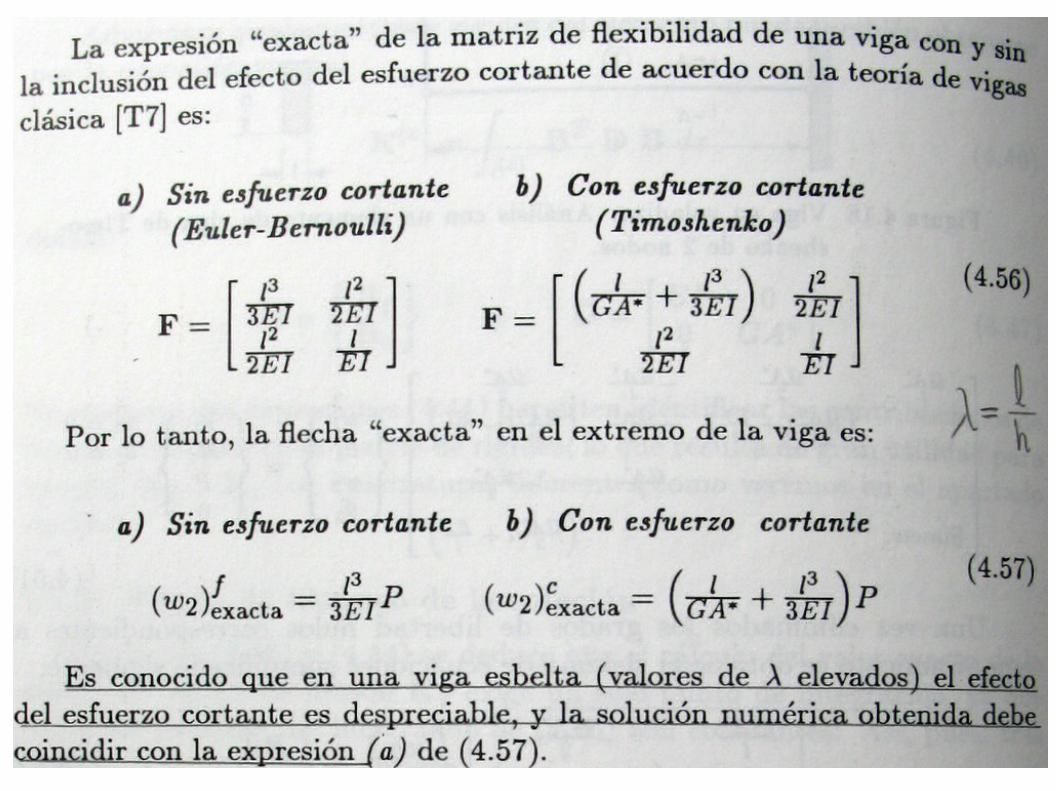
Integración exacta de las matrices de rigidez



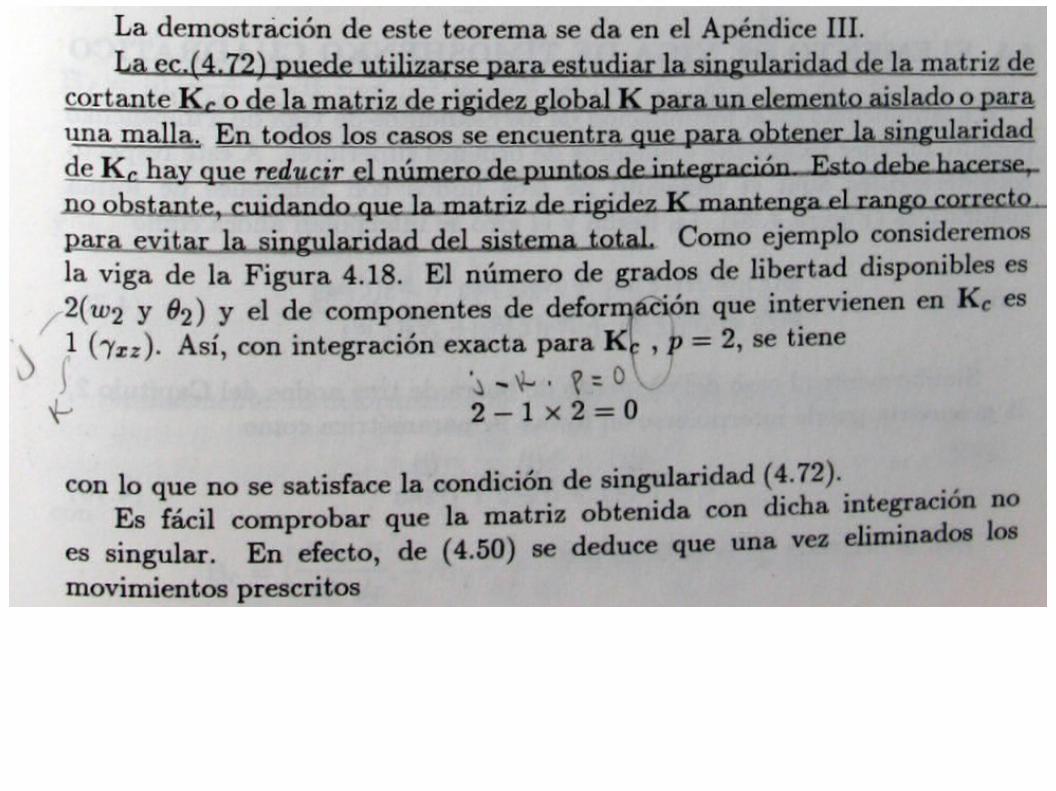
Integración con cuadraturas de Gauss-Legendre y singularidad de la matriz K
Singularidad de la matriz de rigidez
Cuando K es singular se tiene que j-kp>0. Esta es una condición necesaria pero no suficiente.
Si j-kp>0, muy probablemente K es singularSi j-kp≤0, K es invertible
El criterio j-kp>0 es aplicable a cualquier tipo de elemento finito y también es aplicable a la estructura en su totalidad. Es aplicable individualmente a la matriz K, a la matriz K
f o a la
matriz Kc.
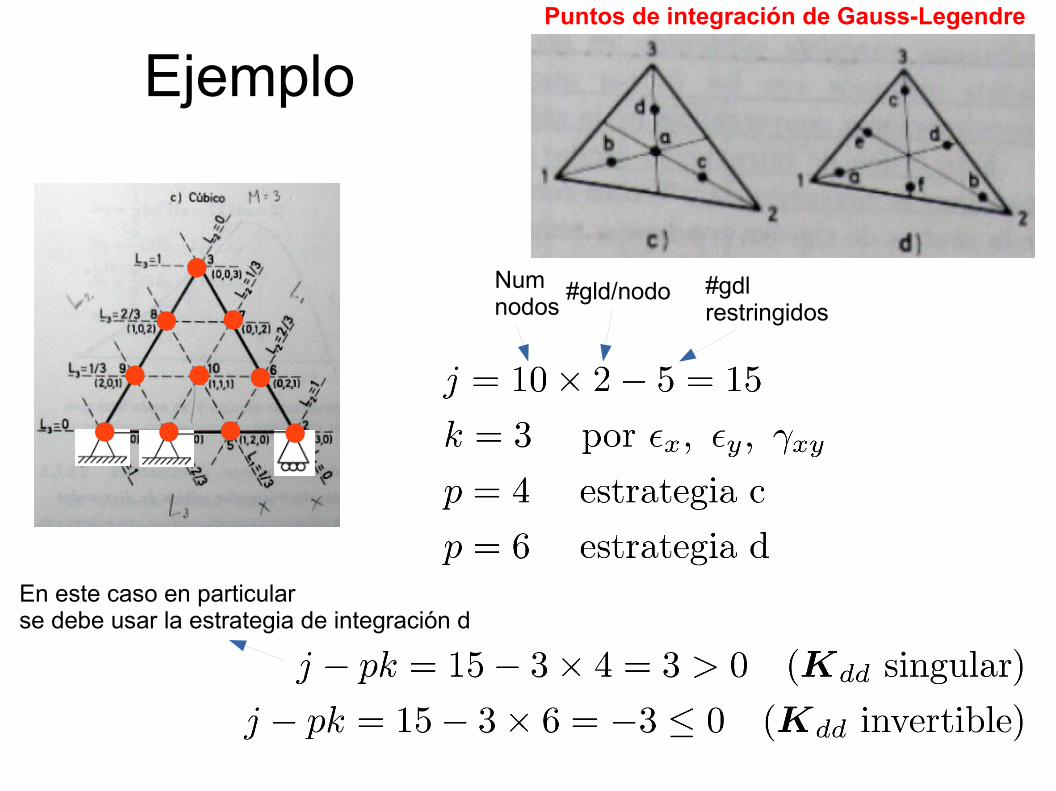
Ejemplo
Numnodos
#gld/nodo #gdlrestringidos
Puntos de integración de Gauss-Legendre
En este caso en particular se debe usar la estrategia de integración d
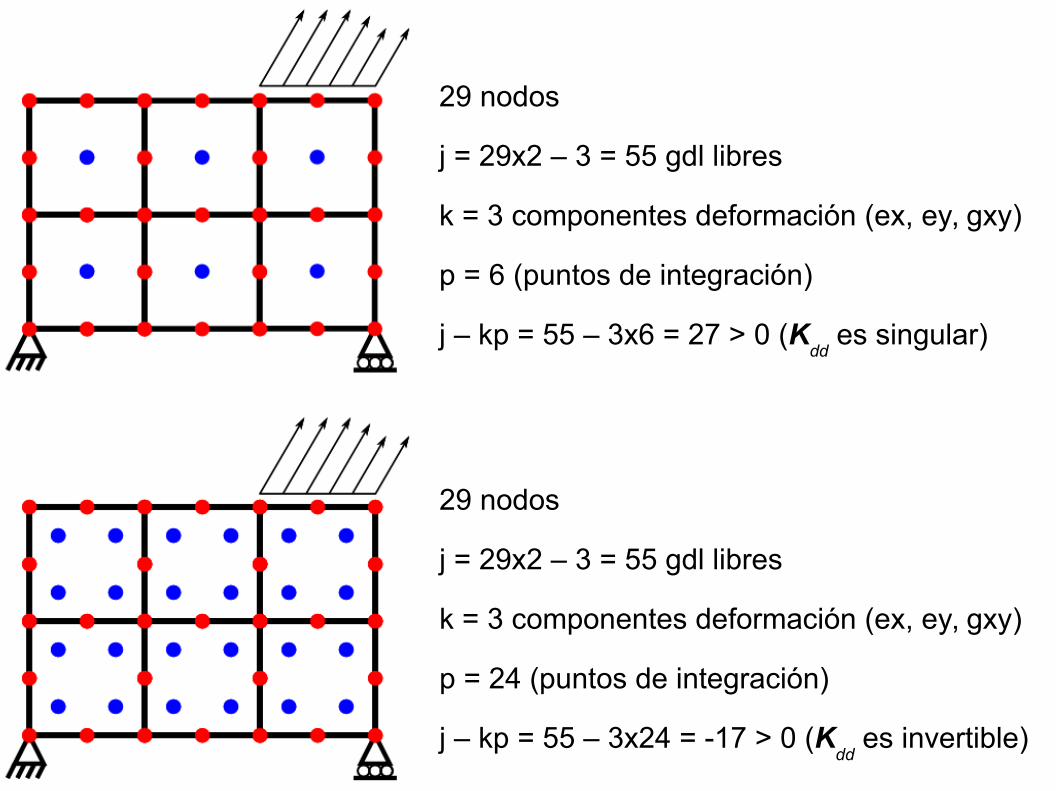
29 nodos
j = 29x2 – 3 = 55 gdl libres
k = 3 componentes deformación (ex, ey, gxy)
p = 6 (puntos de integración)
j – kp = 55 – 3x6 = 27 > 0 (Kdd
es singular)
29 nodos
j = 29x2 – 3 = 55 gdl libres
k = 3 componentes deformación (ex, ey, gxy)
p = 24 (puntos de integración)
j – kp = 55 – 3x24 = -17 > 0 (Kdd
es invertible)
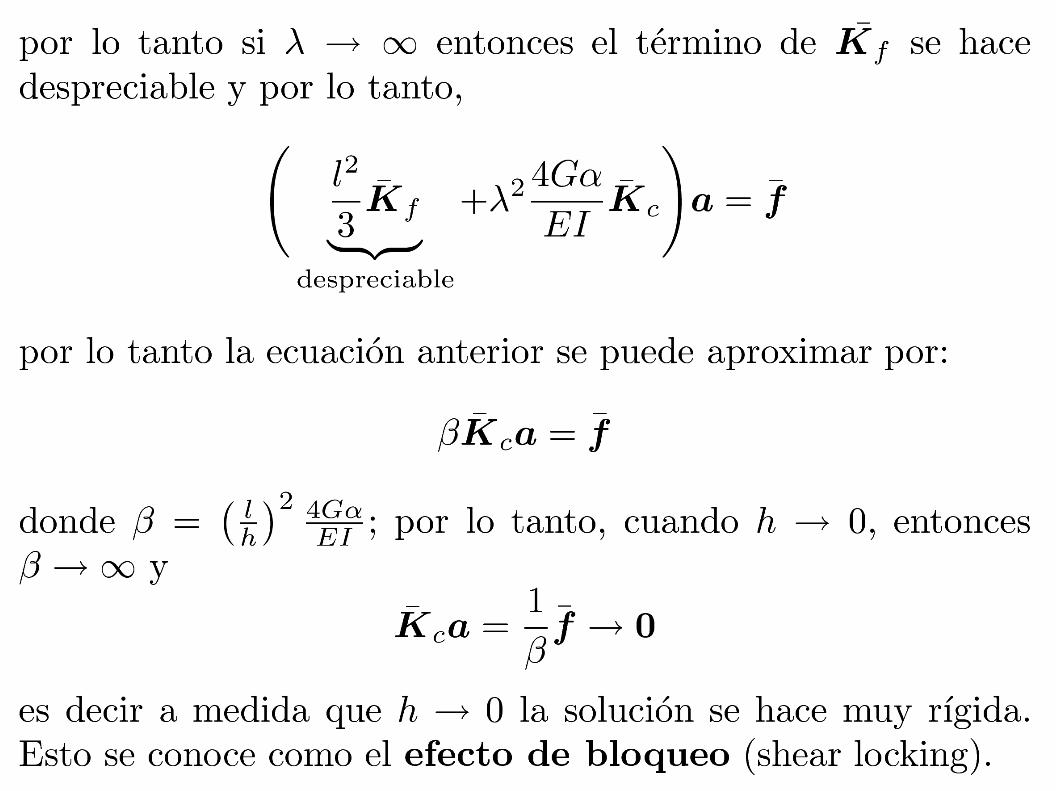
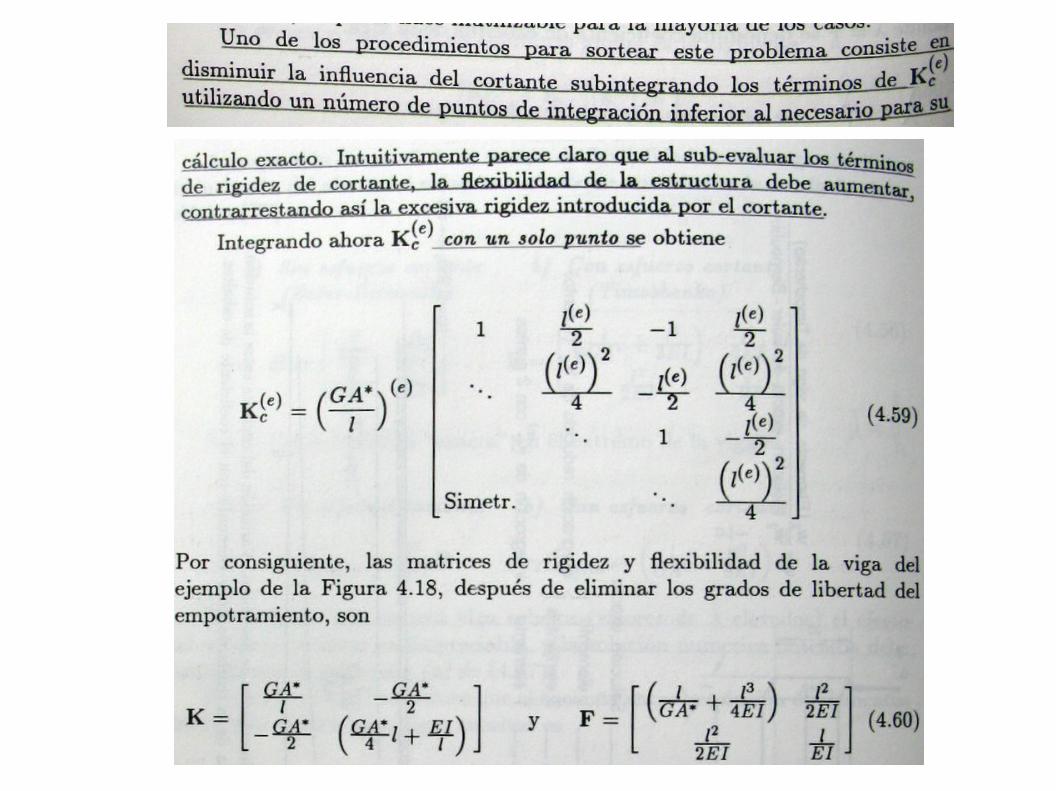
La técnica de integración reducida
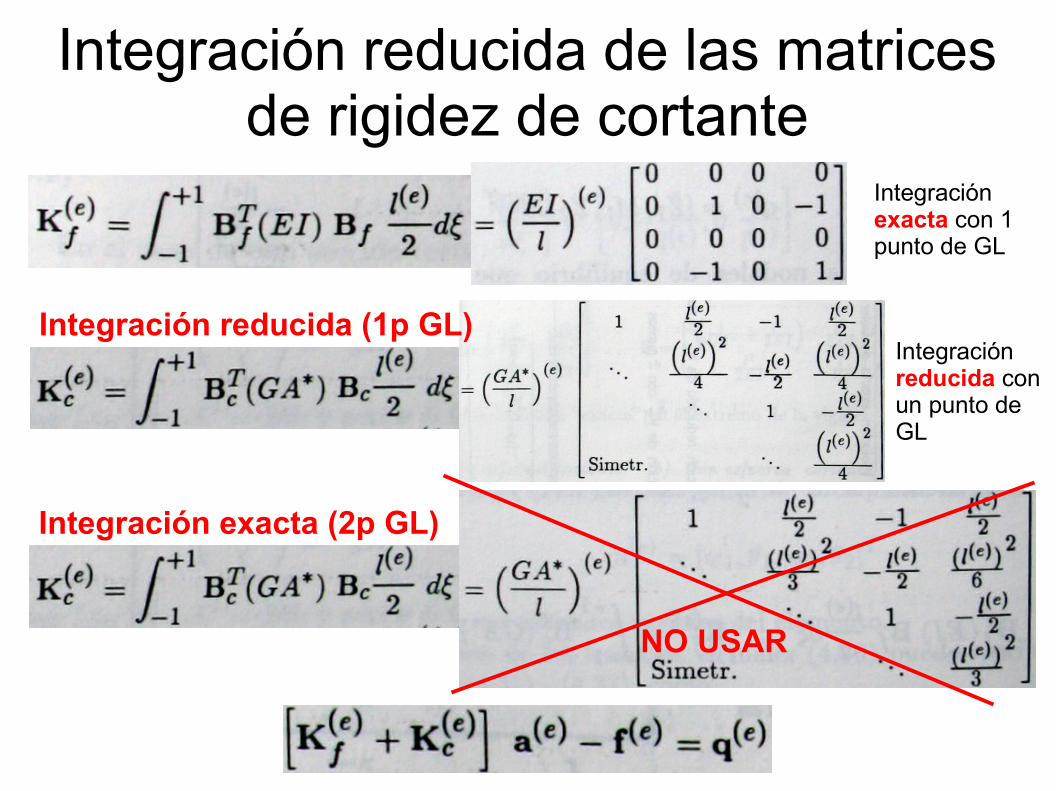
Integración reducida de las matrices de rigidez de cortante
Integraciónexacta con 1 punto de GL
Integraciónreducida conun punto deGL
NO USAR
Integración exacta (2p GL)
Integración reducida (1p GL)
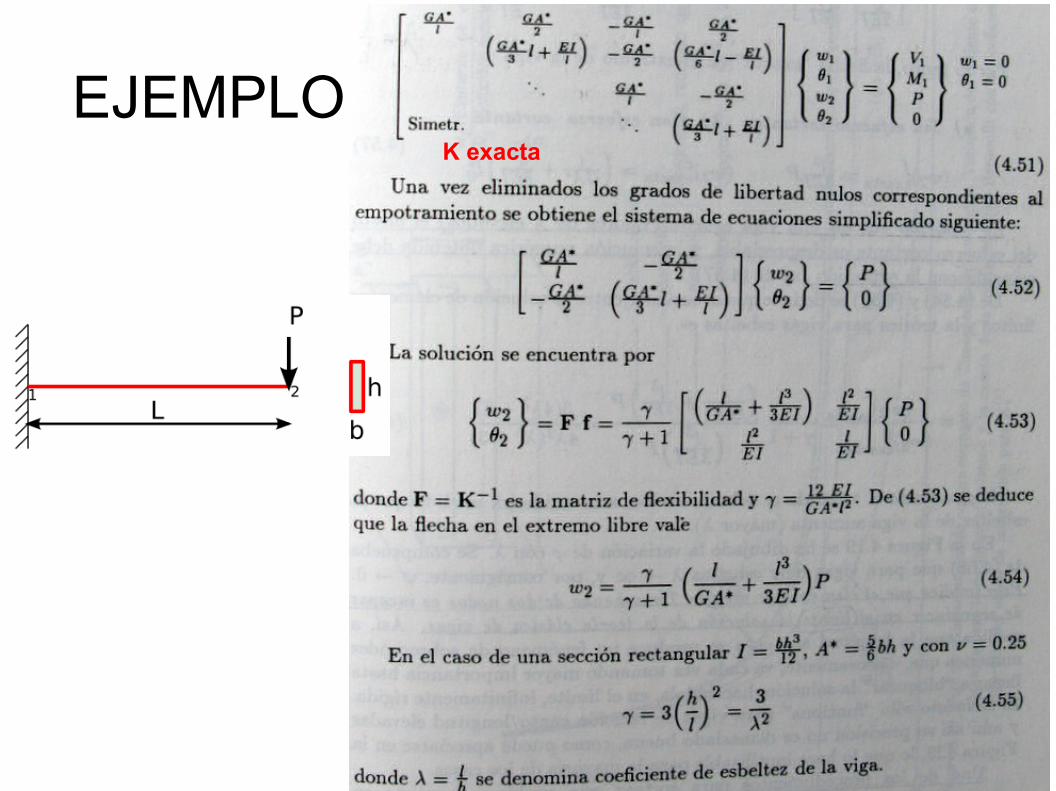
EJEMPLOK exacta




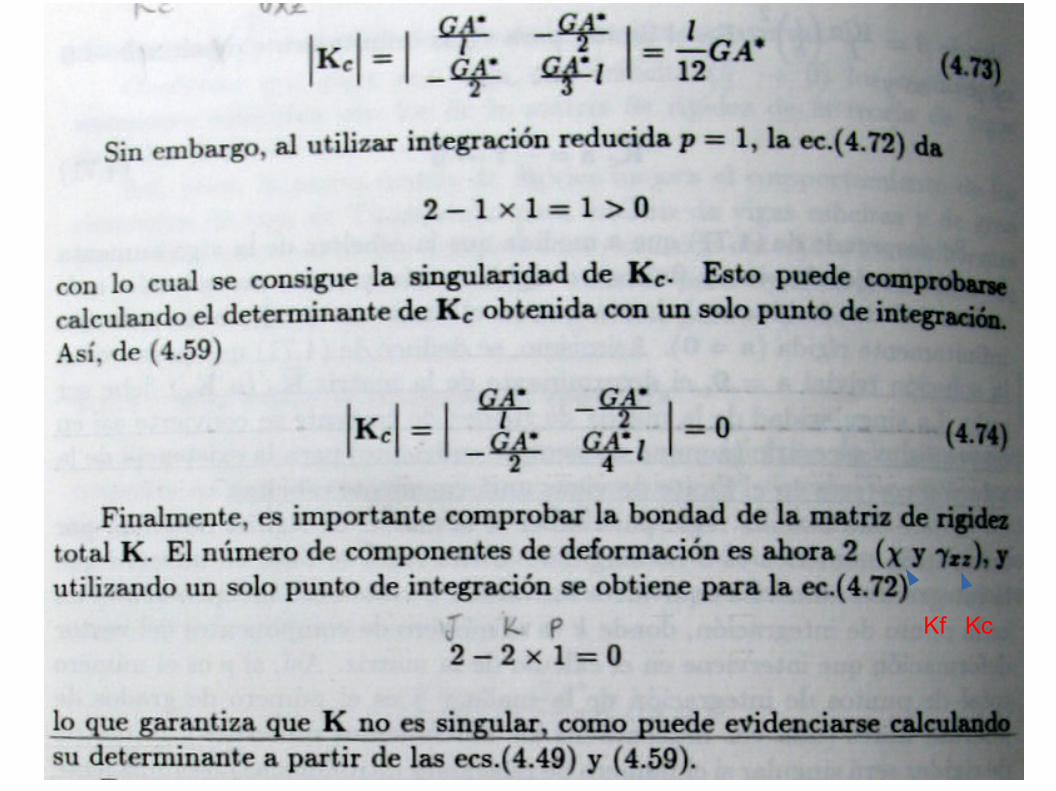
Kf Kc

Viga modelada con un solo elementofinito de Timoshenko lineal
2 – 1x1 = 1 2 – 1x2 = 0Kc 2 – 1x1 = 1 2 – 1x2 = 0K 2 – 2x1 = 0 2 – 2x2 = -2
Integraciónreducida p=1
Integraciónexacta p=2
j-kp j-kpKf
j=2
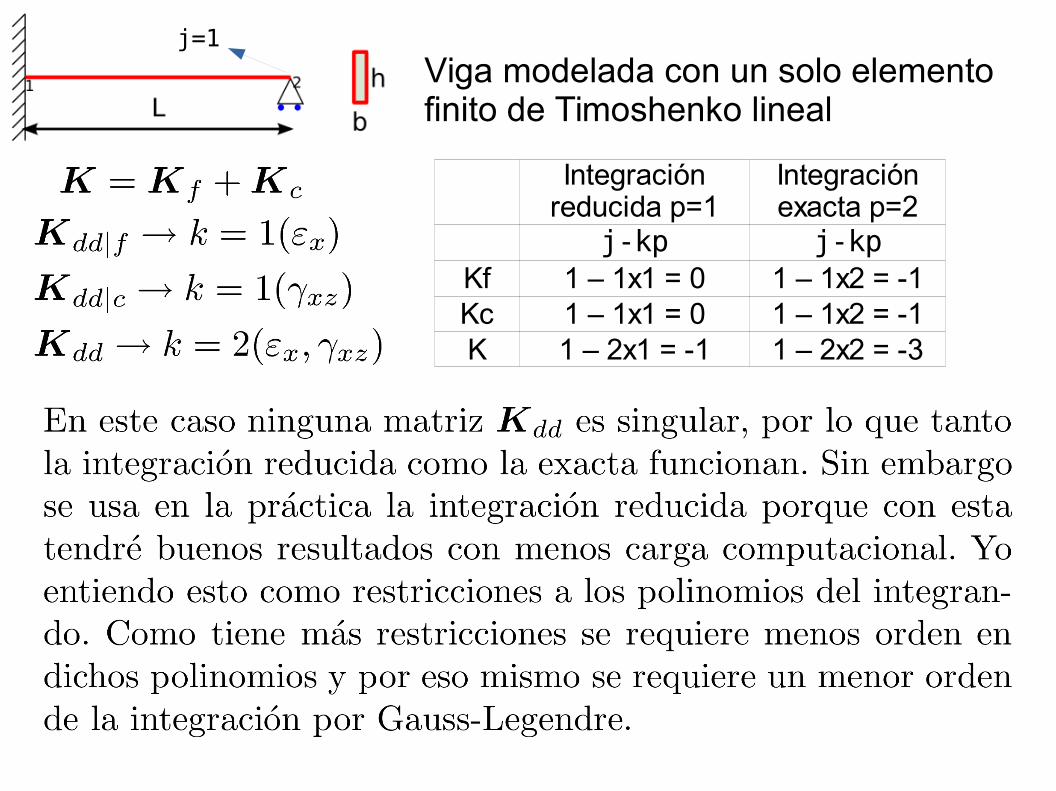
Viga modelada con un solo elementofinito de Timoshenko lineal
1 – 1x1 = 0 1 – 1x2 = -1Kc 1 – 1x1 = 0 1 – 1x2 = -1K 1 – 2x1 = -1 1 – 2x2 = -3
Integraciónreducida p=1
Integraciónexacta p=2
j-kp j-kpKf
j=1

Evaluación de los momentos flectores y las fuerzas cortantes
para el elemento de Timoshenko de dos nodos
94
Este criterio para el cálculo de esfuerzos es también válido en más dimensiones

EjemploEuler-
Bernoulli vs Timoshenko
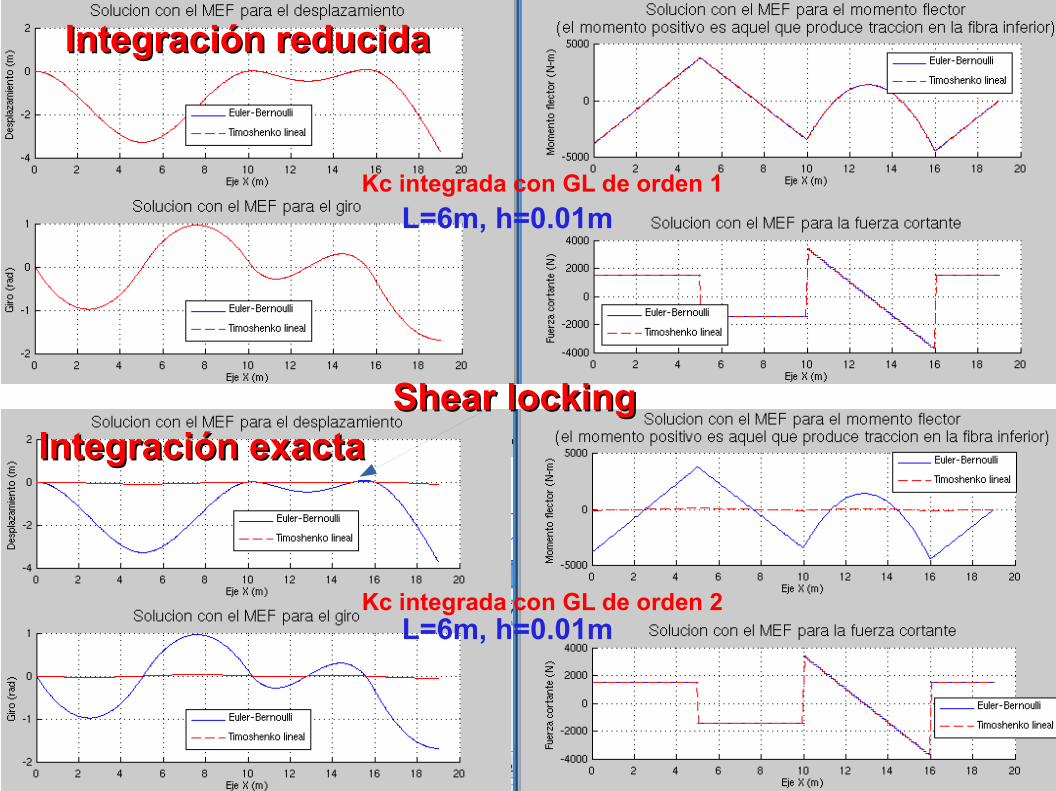
Kc integrada con GL de orden 1
Kc integrada con GL de orden 2
L=6m, h=0.01m
L=6m, h=0.01m
Shear lockingShear locking
Integración reducidaIntegración reducida
Integración exactaIntegración exacta
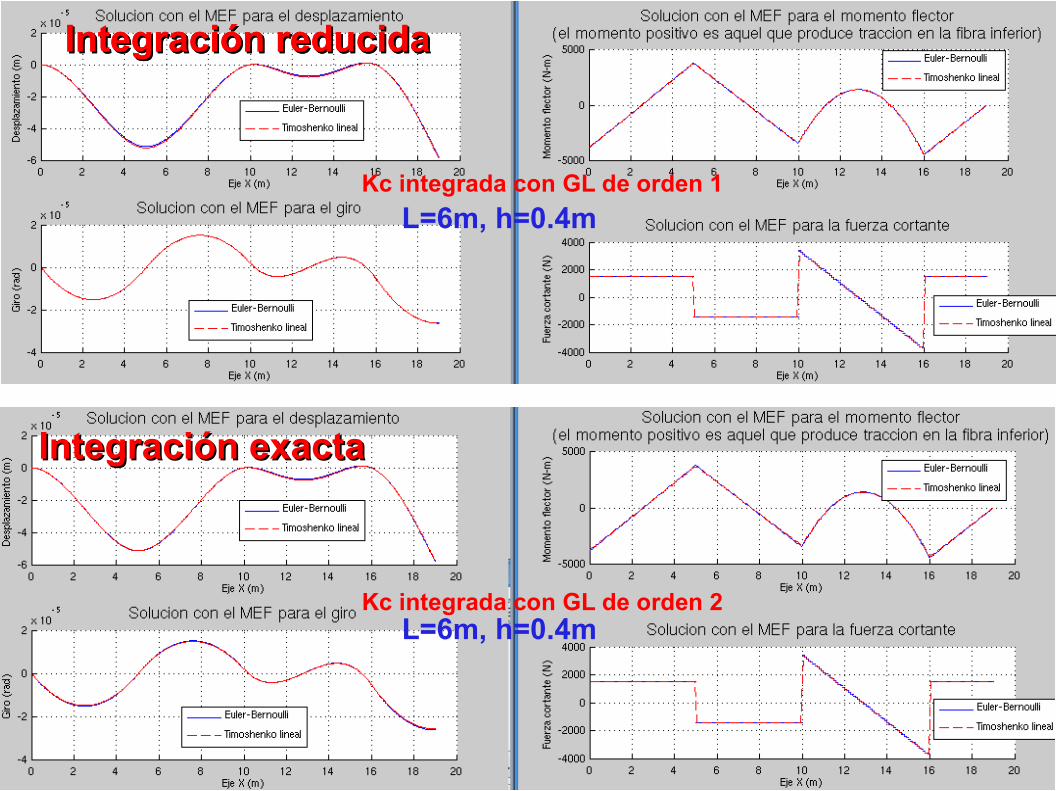
Kc integrada con GL de orden 1
Kc integrada con GL de orden 2
L=6m, h=0.4m
L=6m, h=0.4m
Integración reducidaIntegración reducidaIntegración reducidaIntegración reducida
Integración exactaIntegración exacta
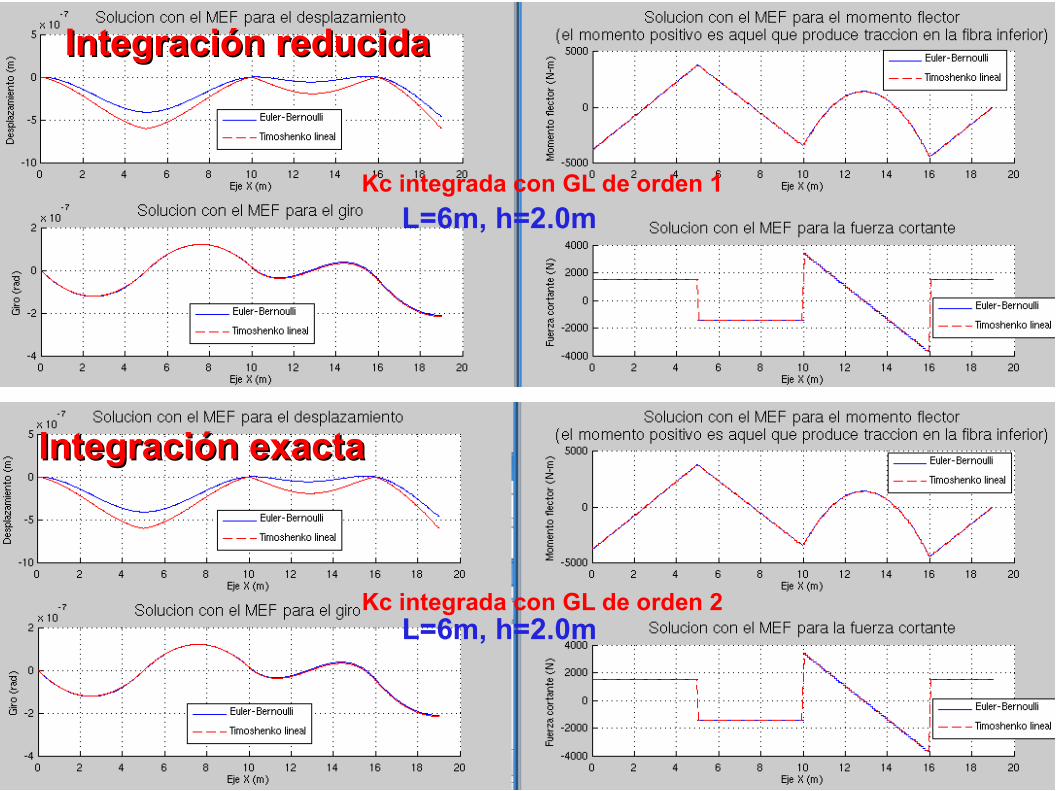
Kc integrada con GL de orden 1
Kc integrada con GL de orden 2
L=6m, h=2.0m
L=6m, h=2.0m
Integración reducidaIntegración reducida
Integración exactaIntegración exacta
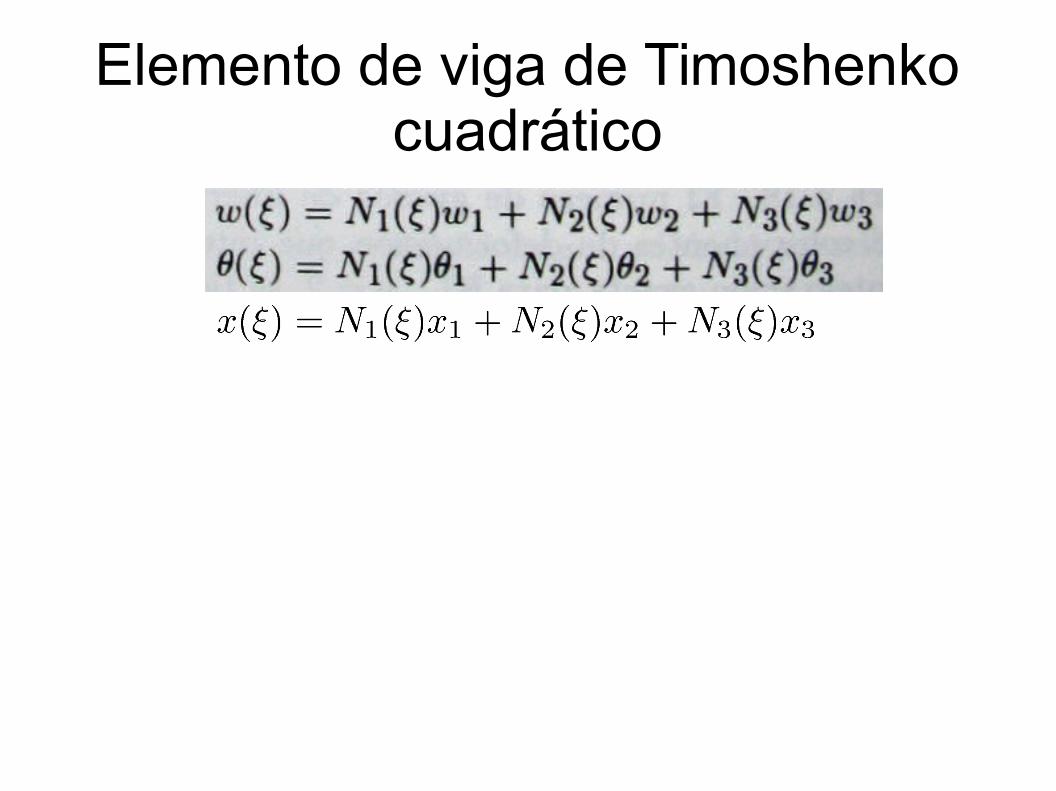
Elemento de viga de Timoshenko cuadrático
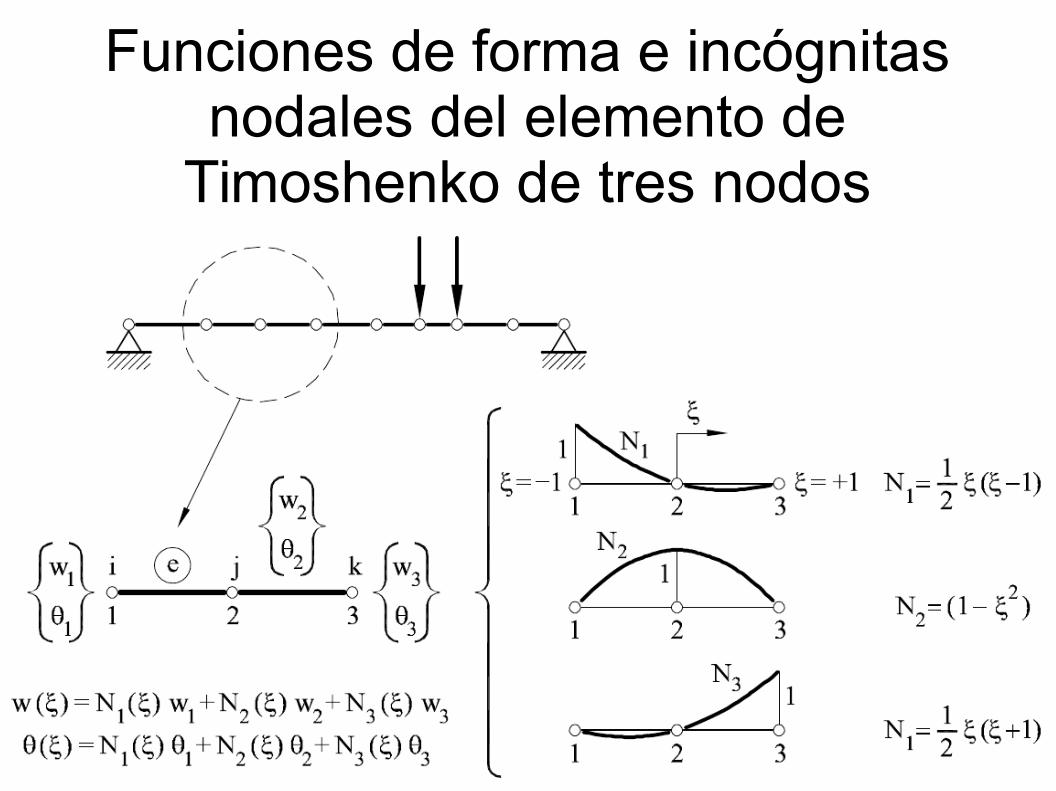
Funciones de forma e incógnitas nodales del elemento de
Timoshenko de tres nodos
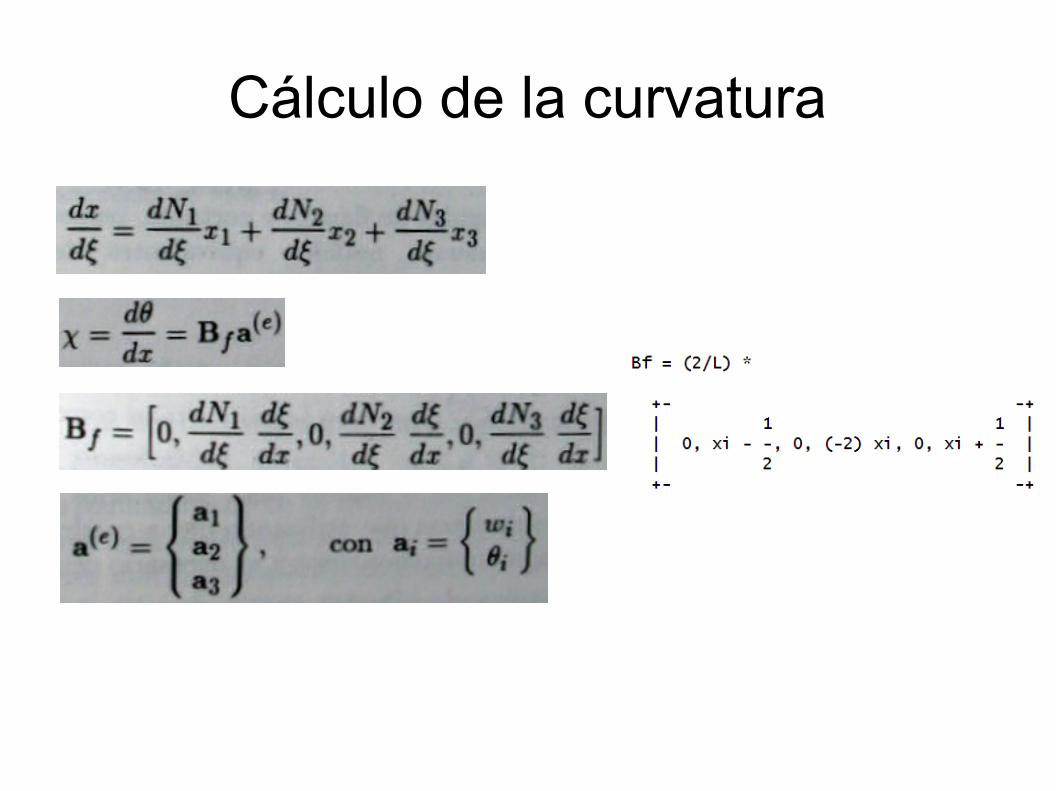
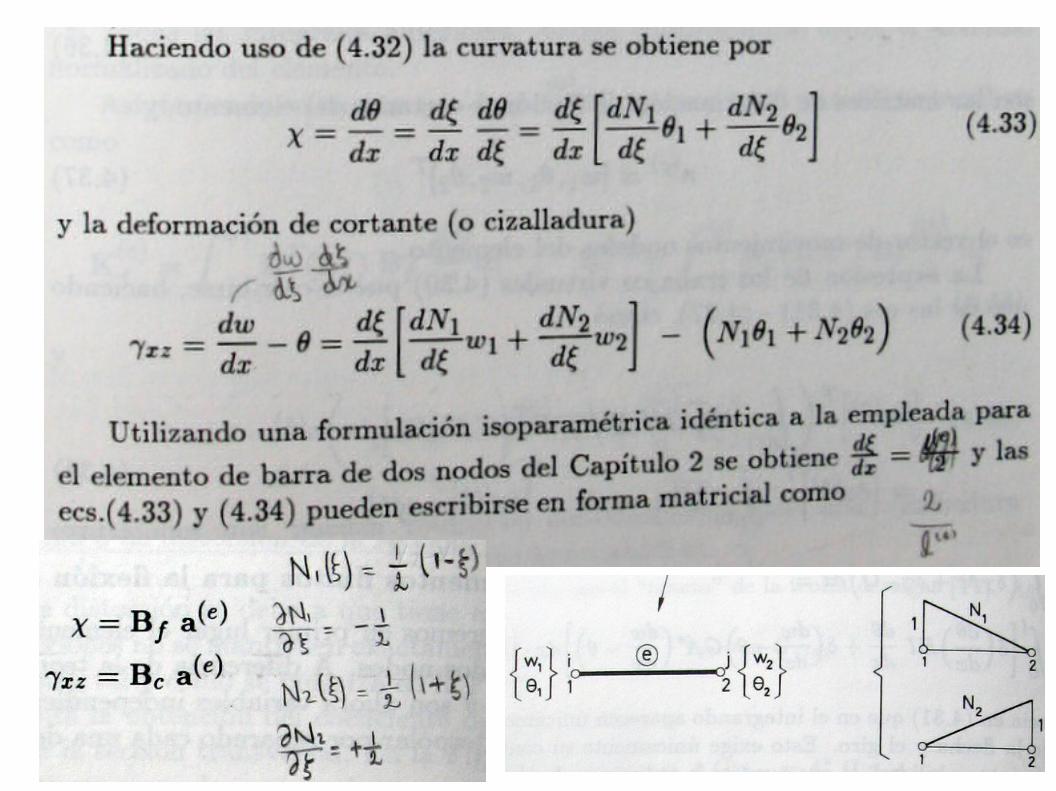
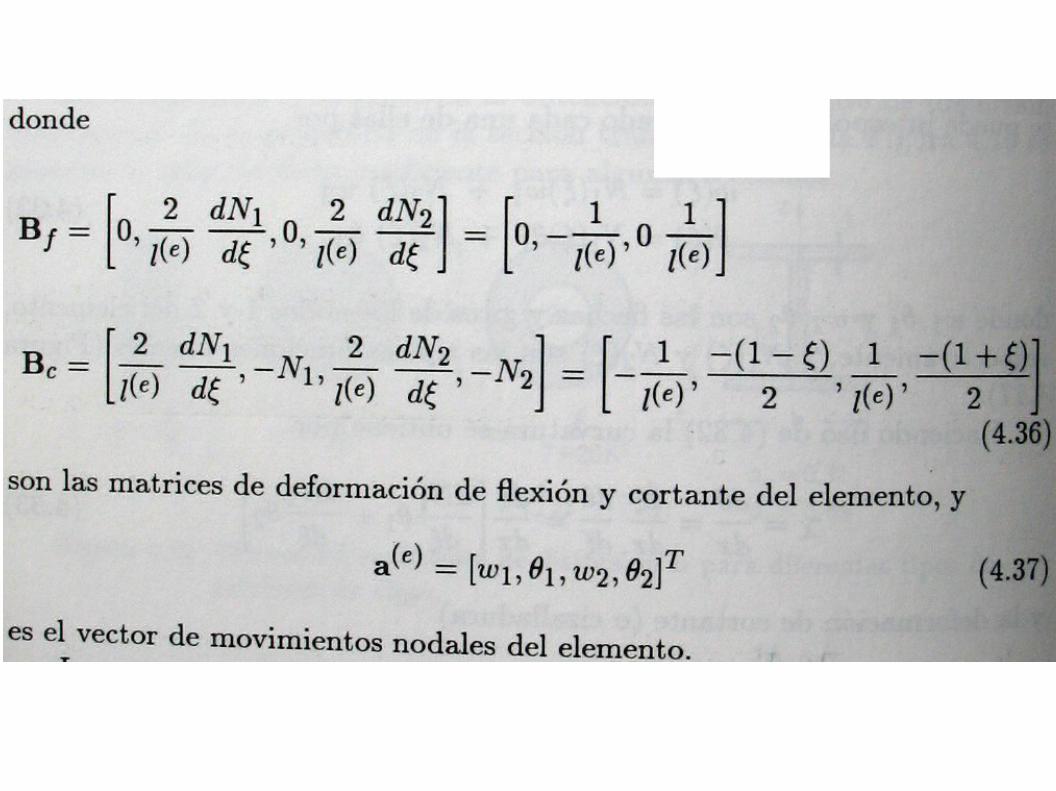
Cálculo de la curvatura
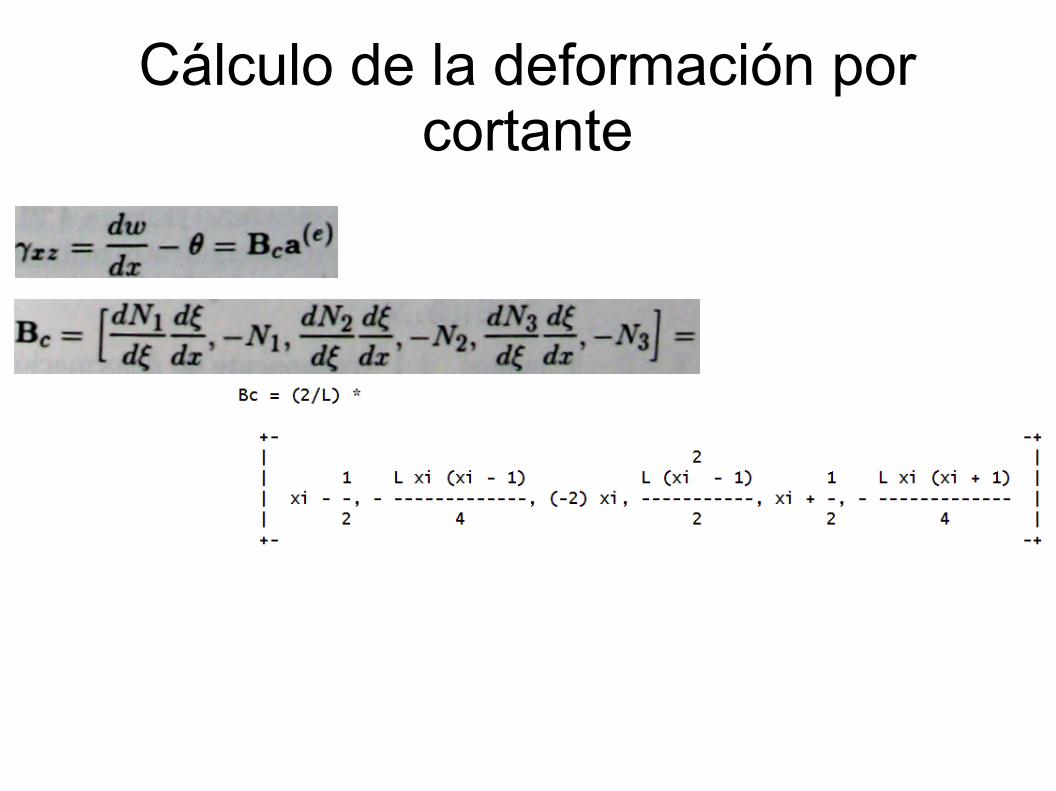
Cálculo de la deformación por cortante
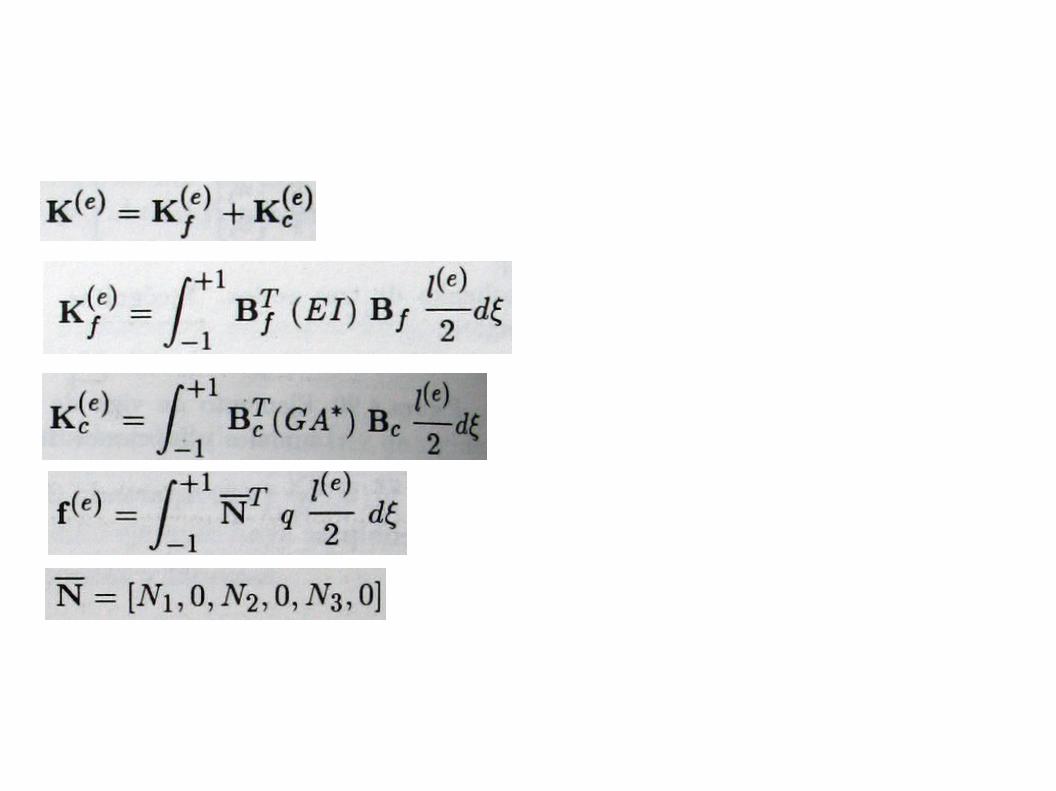
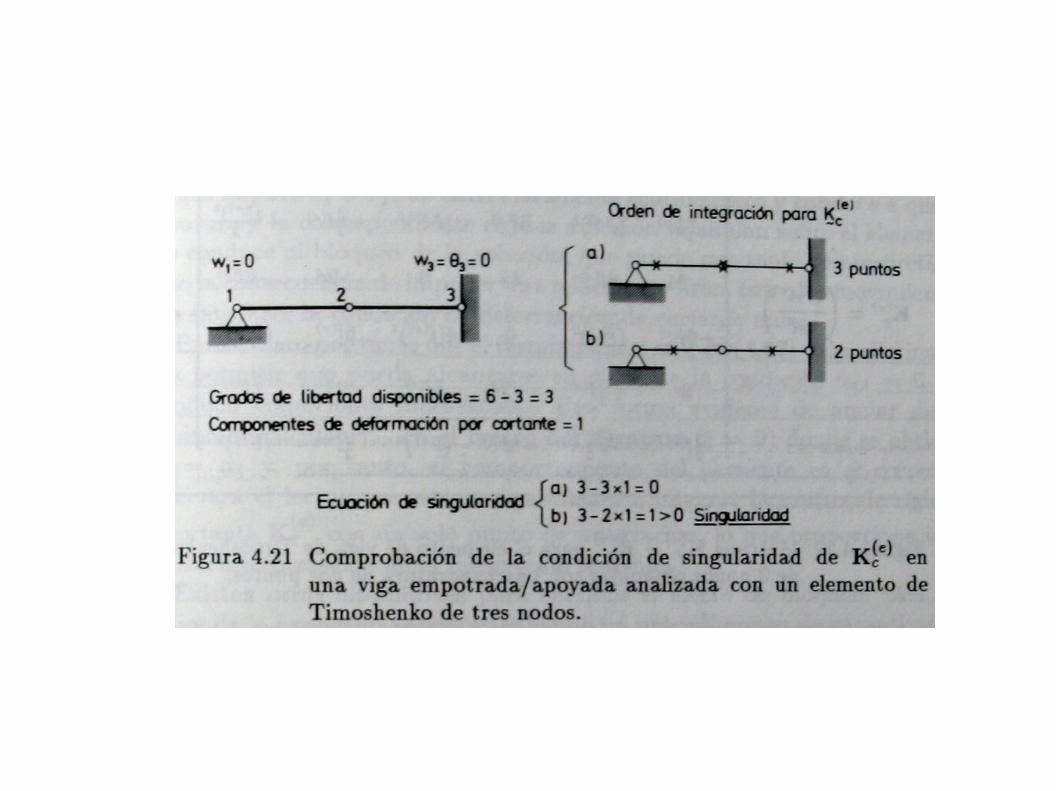

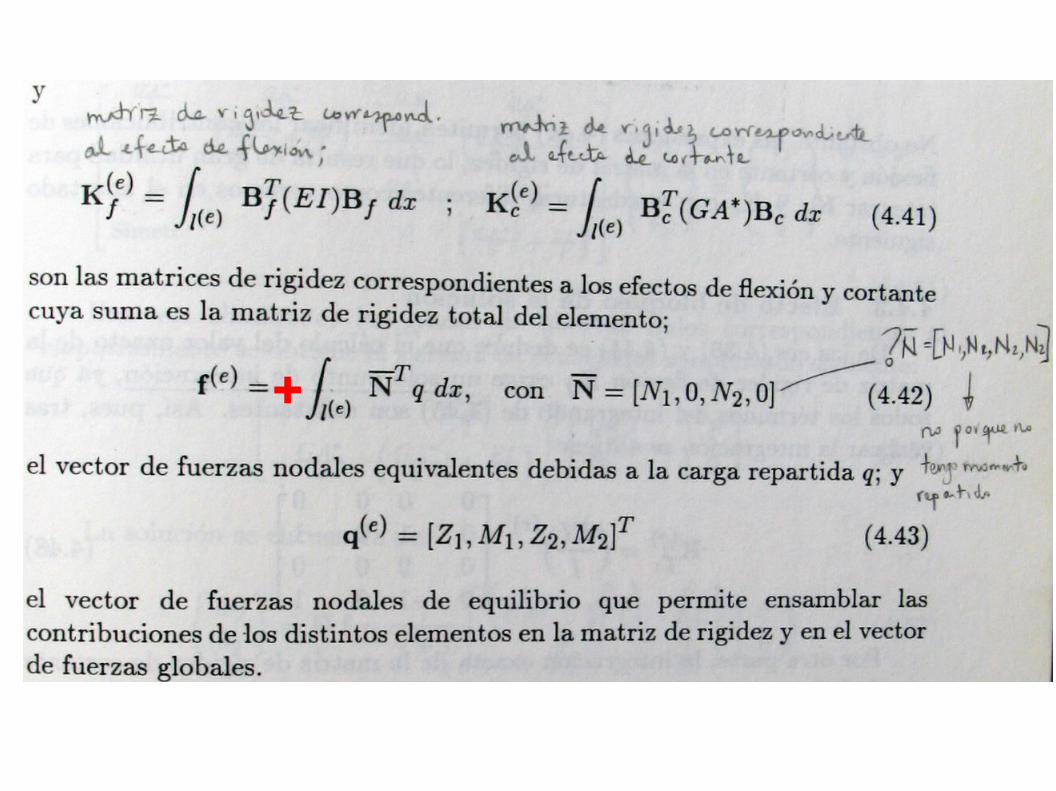
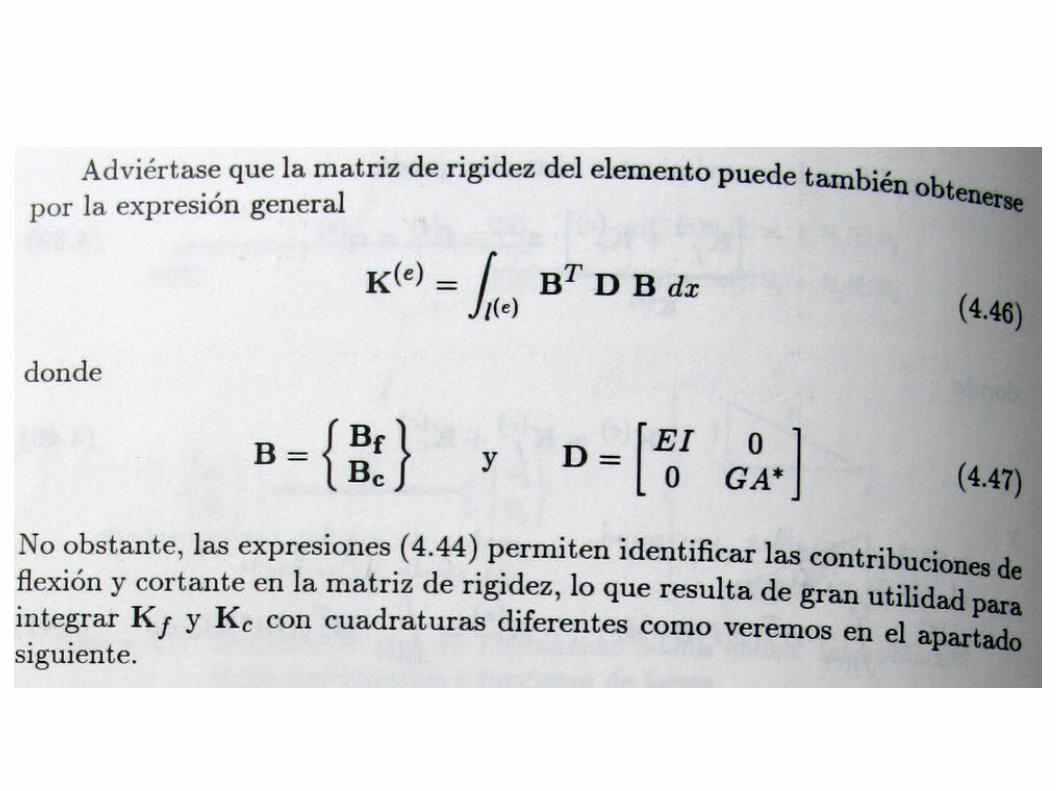
Matrices de rigidez para el elemento de viga de Timoshenko de tres nodos obtenidas con una cuadratura de Gauss-Legendre de dos puntos
Con Kc, tres puntos produce la matriz exacta, pero sufre esta de shear locking
Evaluación de los momentos flectores y las fuerzas cortantes
para el elemento de Timoshenko de tres nodos

107
Este criterio para el cálculo de esfuerzos es también válido en más dimensiones

Alternativas para desarrollar elementos de viga de Timoshenko
sin bloqueo por cortante
● Integración reducida● Uso de interpolaciones para los
desplazamientos verticales y para la rotación de diferentes grados
● Interpolación acoplada● Asumir el campo de deformaciones angulares γxz
Uso de interpolaciones para los desplazamientos verticales y para la
rotación de diferentes grados
Ejemplos:grado w = 1/ grado t = 0 (const)grado w = 2/ grado t = 1grado w = 3/ grado t = 2
En el libro de Oñate se discuten algunos problemas de este elemento con respecto a la convergencia de los esfuerzos cortantes. Toca programarlo para verificar que es lo que pasa.
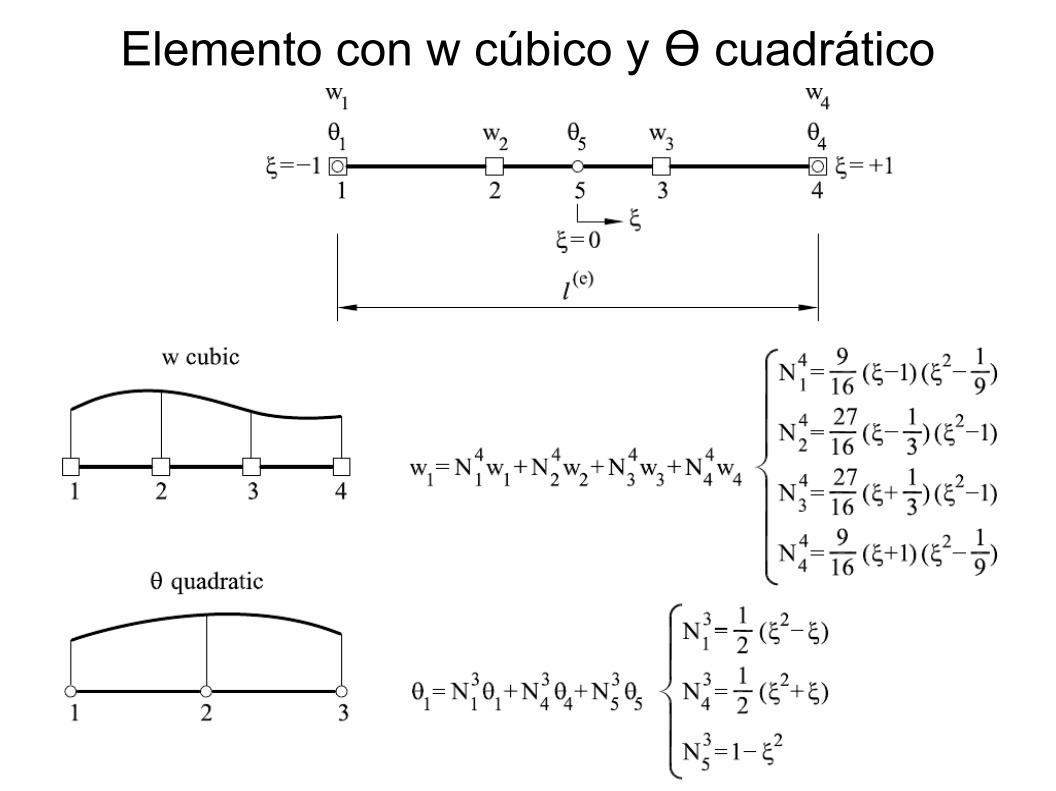
Elemento con w cúbico y Ɵ cuadrático

Interpolación acoplada
Asumiendo el campo de deformaciones angulares γ
xz









![LAGUNTZA K FONEMA LANTZEKO MATERIALA k K kK k K k K k k [Seleccionar fecha] [ Piktogramen egilea: Sergio Palao Jatorria: ARASAAC](https://static.fdocuments.es/doc/165x107/5e4c0c71b16d897c3a5b2849/laguntza-k-fonema-lantzeko-materiala-k-k-k-k-k-k-k-k-k-k-seleccionar-fecha-piktogramen.jpg)