1 Principios básicos de robótica - poliformat.upv.es. 1... · Articulaciones Tipos de...
20
Robótica TEMA 1: PRINCIPIOS BÁSICOS DE ROBÓTICA Martin Mellado ([email protected]) Departamento de Ingeniería de Sistemas y Automática (DISA) Facultad de Informática de Valencia (FIV) Universidad Politécnica de Valencia (UPV) Principios básicos de robótica Martin Mellado DISA - UPV 1 Universidad Politécnica de Valencia (UPV)
Transcript of 1 Principios básicos de robótica - poliformat.upv.es. 1... · Articulaciones Tipos de...

Robótica
TEMA 1:PRINCIPIOS BÁSICOS DEROBÓTICAMartin Mellado ([email protected])
Departamento de Ingeniería de Sistemas y Automática (DISA)Facultad de Informática de Valencia (FIV)Universidad Politécnica de Valencia (UPV)
Principios básicos de robótica Martin Mellado DISA - UPV1
Universidad Politécnica de Valencia (UPV)
Tema 1Principios básicos de robótica
OBJETIVOS
• Conocer cómo es la estructura funcional de un robotS b di ti i l t d• Saber distinguir los componentes de un robot
• Comprender el papel de cada componenteComprender el papel de cada componente de un robot
Principios básicos de robótica Martin Mellado DISA - UPV2
Tema 1Principios básicos de robótica
CONTENIDOS
1. Estructura de un robot2. Componentes de un robot
Si t d t l• Sistema de control• Accionadores• Articulaciones y transmisionesArticulaciones y transmisiones• Captadores propioceptivos• Captadores extereoceptivos
Principios básicos de robótica Martin Mellado DISA - UPV3
Estructura y componentes de un robot
Comandos e Acción
y p
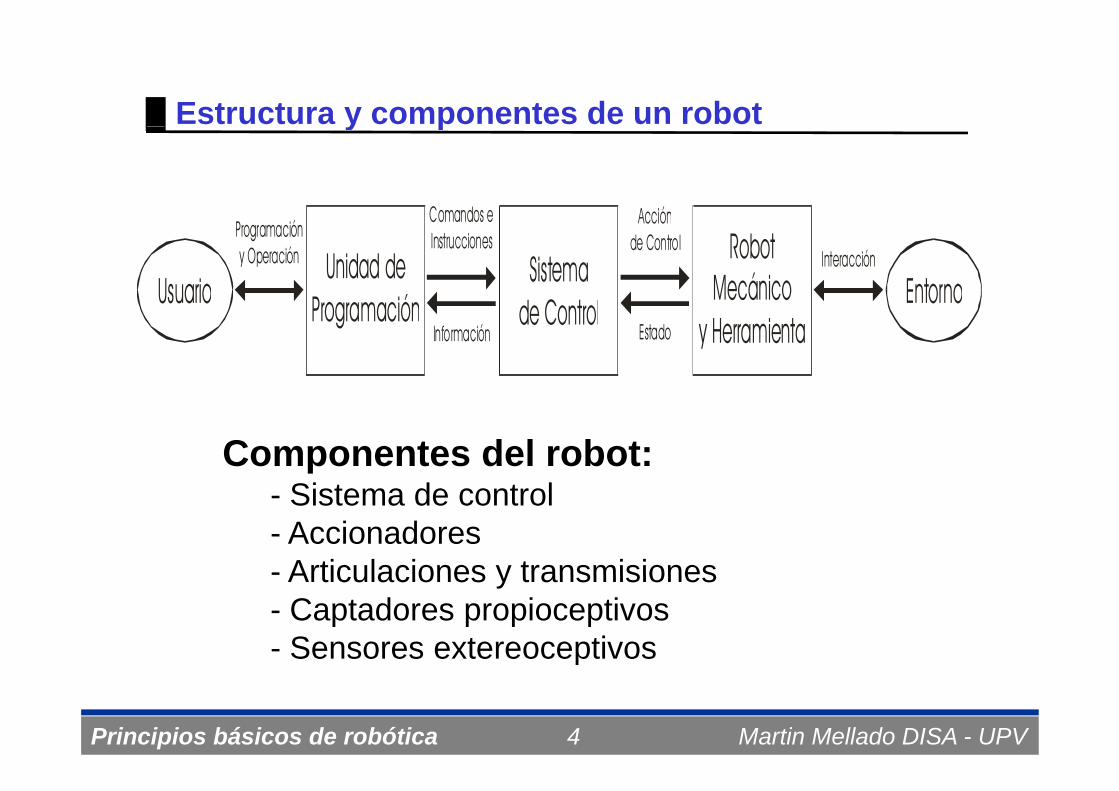
Unidad deProgramaciónUsuario
Comandos eInstrucciones
Acciónde Control
InteracciónProgramacióny Operación
EntornoSistema
de Control
RobotMecánico
ProgramaciónInformación Estado
de Control y Herramienta
Componentes del robot:Si t d t l- Sistema de control
- Accionadores- Articulaciones y transmisiones- Articulaciones y transmisiones- Captadores propioceptivos- Sensores extereoceptivos
Principios básicos de robótica Martin Mellado DISA - UPV4
p
Sistema de control
El sistema de control es un ordenador industrialEl sistema de control es un ordenador industrialcon los siguientes elementos adicionales:– Tarjetas convertidoras D/A para salida de controlj p– Tarjetas de etapa de potencia para alimentación de
los motores del robot– Tarjetas de adquisición de datos para obtener
información de los captadores propioceptivosTarjetas de entrada/salida digitales– Tarjetas de entrada/salida digitales
– Tarjetas convertidoras D/A y A/D para las salidas yentradas analógicasg
– Tarjetas de comunicación: serie, paralelo, Ethernet...
Principios básicos de robótica Martin Mellado DISA - UPV5
Sistema de control
L i t d t l d b t dLos sistemas de control de robot puedentrabajar normalmente en dos modos:M d l d ió E l d l• Modo manual o de programación. Es el modo en el que se programa el robot y se introducen comandos para su ejecución inmediata. Normalmente en este p jestado el robot tiene limitada su velocidad.
• Modo automático. Es el modo en el que se ejecutan ( i d i t i ) t tprogramas (secuencia de instrucciones) tanto paso a
paso para depuración como a velocidad de ciclo de trabajo.j
Principios básicos de robótica Martin Mellado DISA - UPV6
Sistema de control
Principales funciones del sistema de control:• Controlar la interfaz de comunicación con el
usuario• Generar y controlar los movimientos del robotGenerar y controlar los movimientos del robot• Controlar la herramienta y otros dispositivos
externosexternos• Controlar las comunicaciones con otros
dispositivosdispositivos
Principios básicos de robótica Martin Mellado DISA - UPV7
Sistema de control
El software de control debe tener una serie demódulos que se encarguen de aspectos:– Control de interfaz y unidad de programación– Gestión de programas robot e interpretación de– Gestión de programas robot e interpretación de
instrucciones y comandos– Gestión de las comunicaciones– Gestión de las entradas/salidas– Gestión de la herramienta– Monitorización y excepciones– Sincronización o puesta a cero del robot– Geometría del robot– Cinemática del robot– Dinámica del robot
G ió i l ió d i– Generación e interpolación de trayectorias– Bucles de control
Principios básicos de robótica Martin Mellado DISA - UPV8
Accionadores
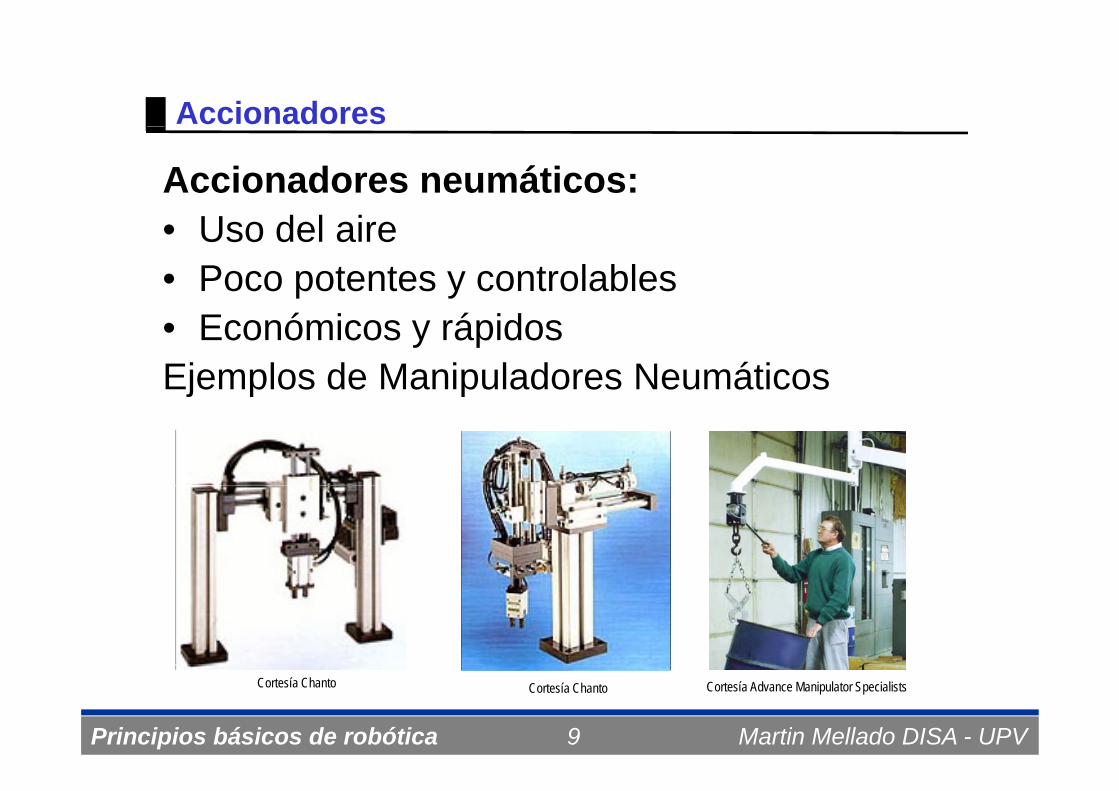
Accionadores neumáticos:U d l i• Uso del aire
• Poco potentes y controlables• Económicos y rápidosEjemplos de Manipuladores Neumáticosj p p
Principios básicos de robótica Martin Mellado DISA - UPV9
Cortesía Chanto Cortesía Chanto Cortesía Advance Manipulator Specialists
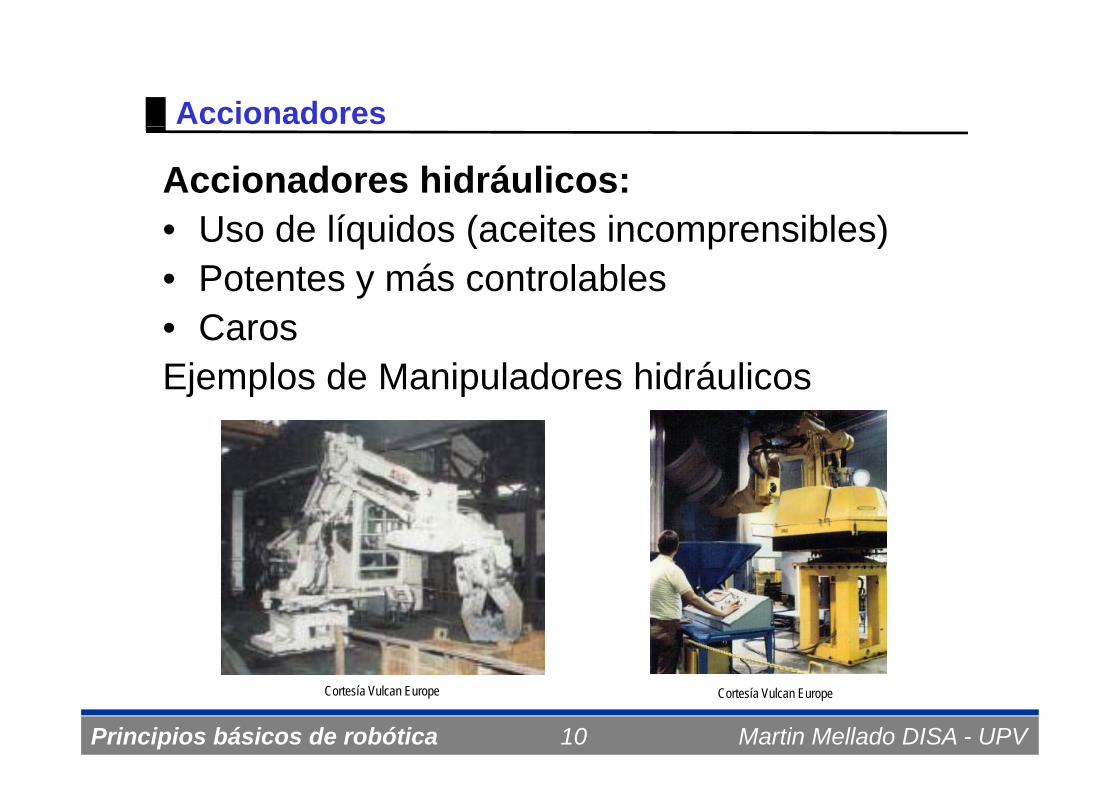
Accionadores
Accionadores hidráulicos:U d lí id ( it i ibl )• Uso de líquidos (aceites incomprensibles)
• Potentes y más controlables• CarosEjemplos de Manipuladores hidráulicosj p p
Principios básicos de robótica Martin Mellado DISA - UPV10
Cortesía Vulcan Europe Cortesía Vulcan Europe
Accionadores
Accionadores electromagnéticos:M• Motores paso a paso:• No suministran mucha potencia
Sól b li• Sólo robots muy ligeros• Motores corriente continua (DC):
• Han sido muy utilizados, hoy menos• Motores de corriente alterna (AC):
• Hoy en día los más usados• Principalmente motores brushless
Principios básicos de robótica Martin Mellado DISA - UPV11
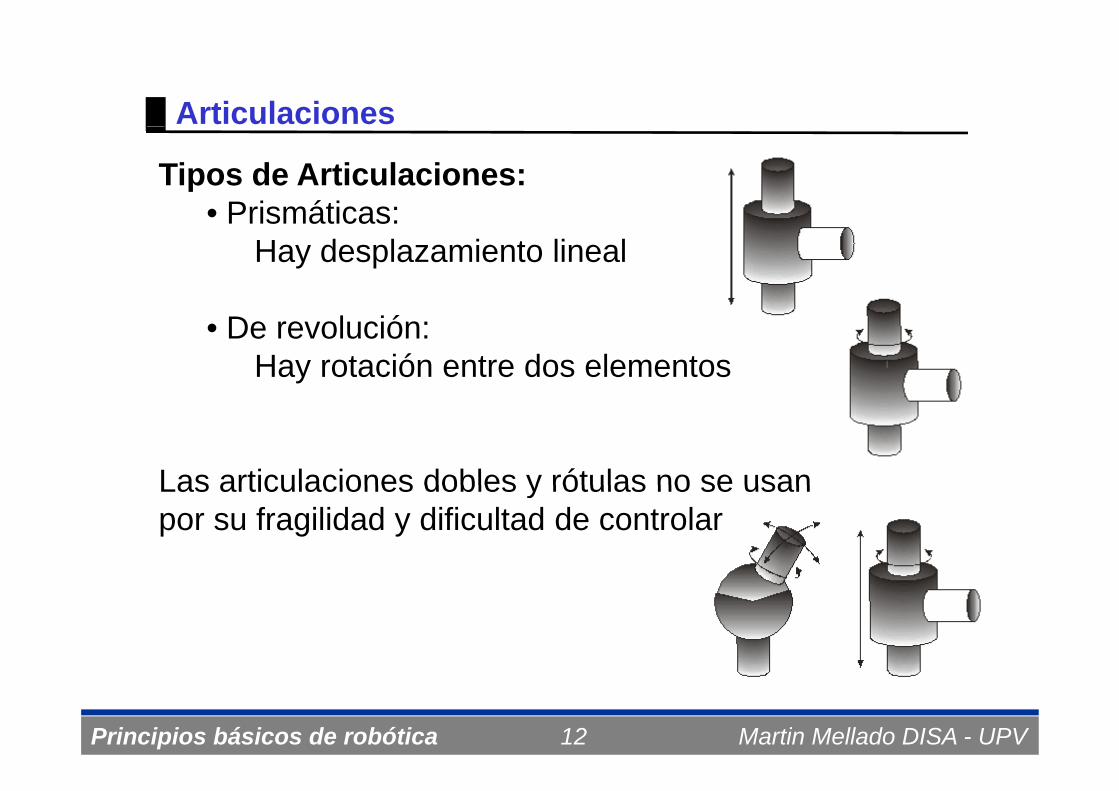
Articulaciones
Tipos de Articulaciones:• Prismáticas:• Prismáticas:
Hay desplazamiento lineal
• De revolución:Hay rotación entre dos elementos
Las articulaciones dobles y rótulas no se usanLas articulaciones dobles y rótulas no se usanpor su fragilidad y dificultad de controlar
Principios básicos de robótica Martin Mellado DISA - UPV12
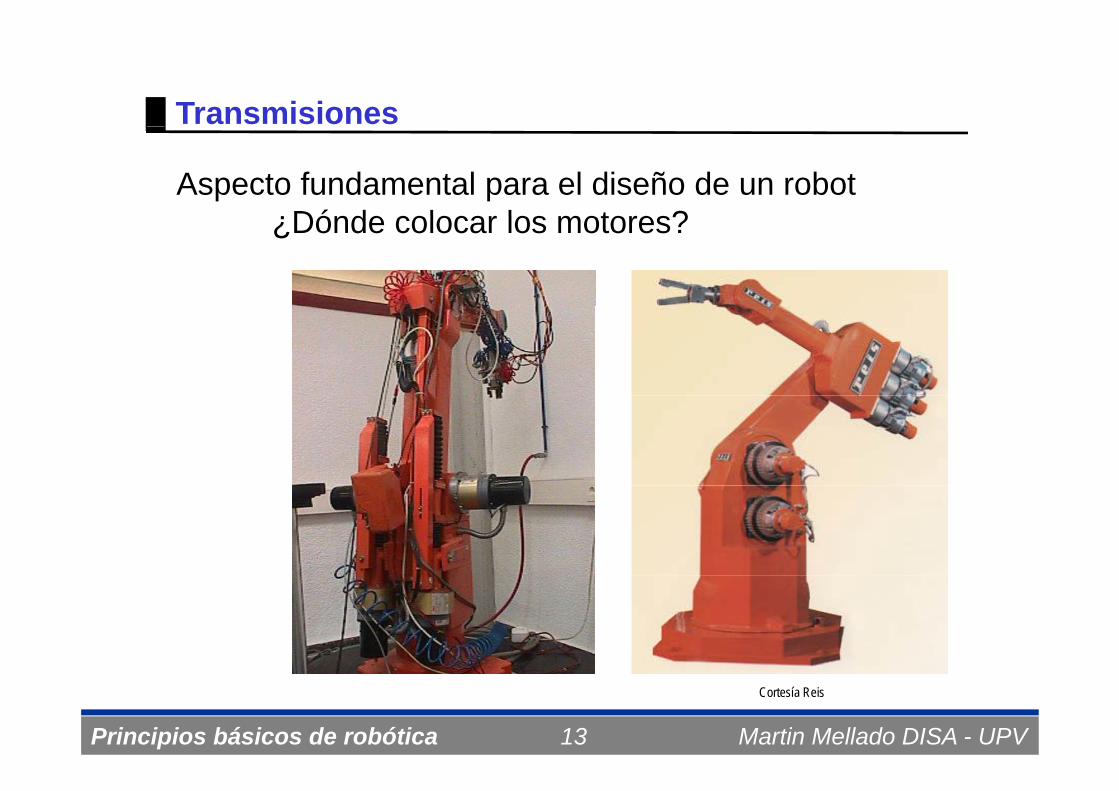
Transmisiones
Aspecto fundamental para el diseño de un robotDónde colocar los motores?¿Dónde colocar los motores?
Principios básicos de robótica Martin Mellado DISA - UPV13
Cortesía Reis

Tipos de transmisionesTransmisiones por:cadena correa dentada tornillo sin fin
p
cadena correa dentada tornillo sin fin
Principios básicos de robótica Martin Mellado DISA - UPV14
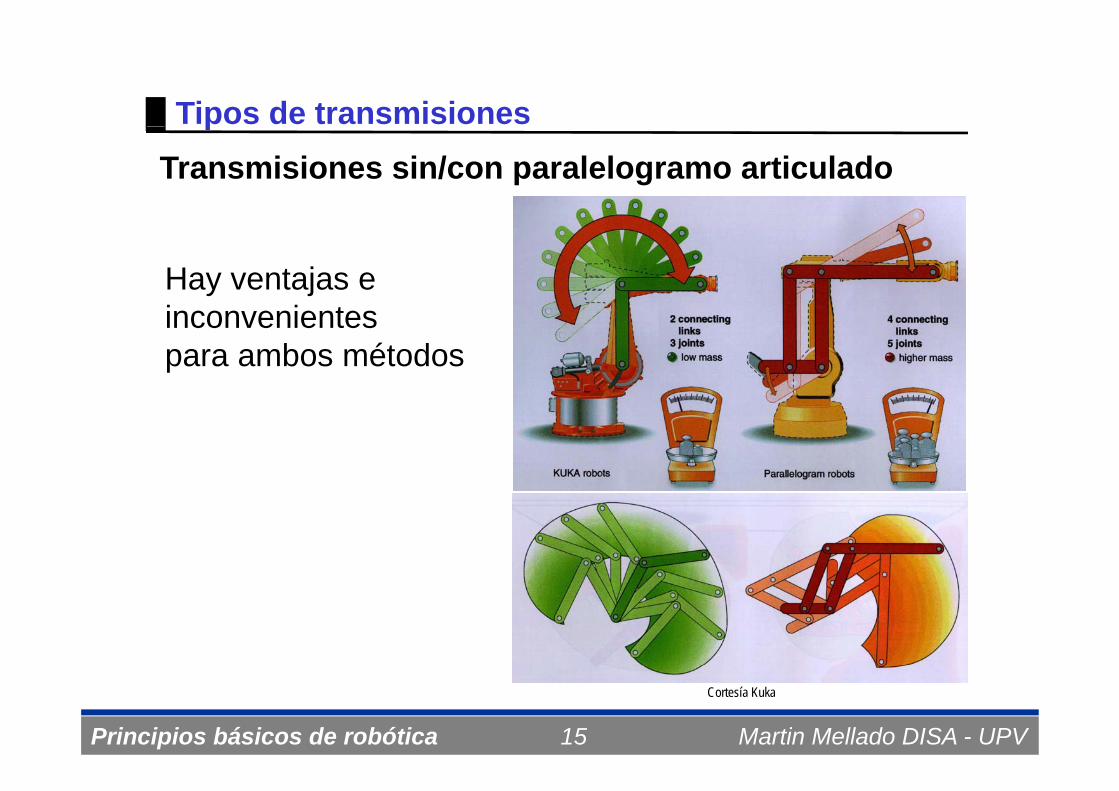
Tipos de transmisionesTransmisiones sin/con paralelogramo articulado
p
Hay ventajas ei i tinconvenientespara ambos métodos
Principios básicos de robótica Martin Mellado DISA - UPV15
Cortesía Kuka
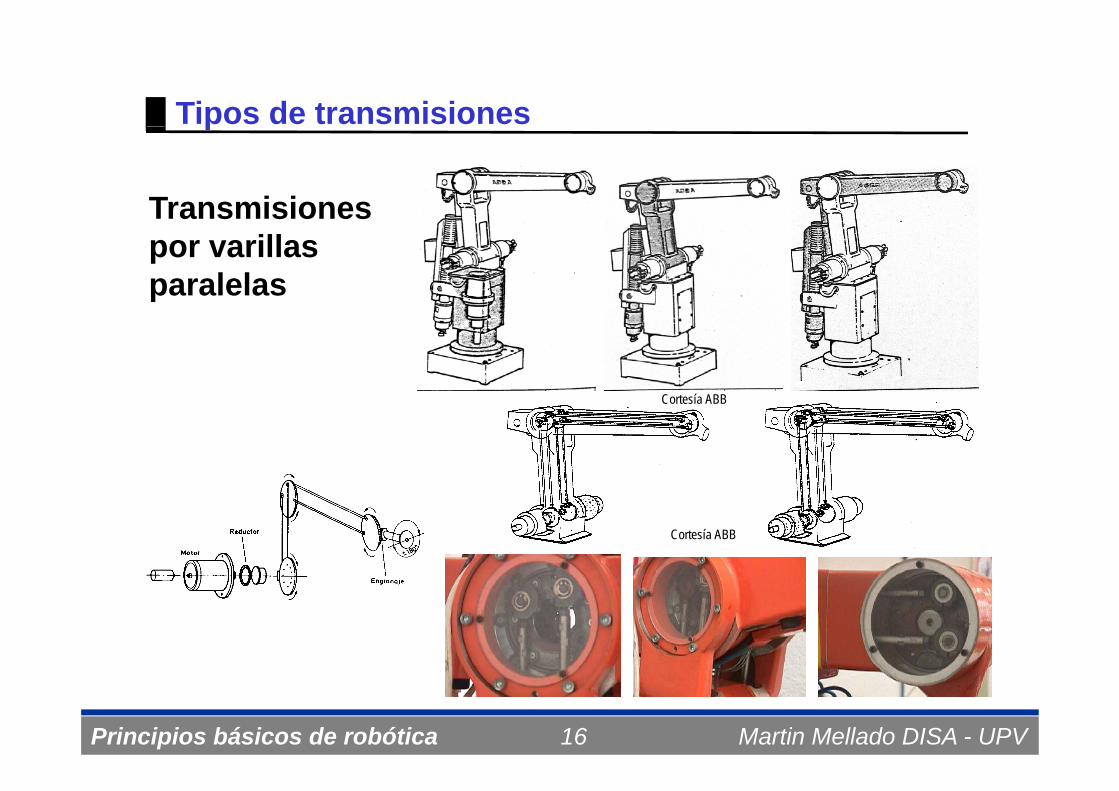
Tipos de transmisiones
Transmisiones
p
Transmisiones por varillas paralelas
C t í ABBCortesía ABB
Cortesía ABB
Principios básicos de robótica Martin Mellado DISA - UPV16
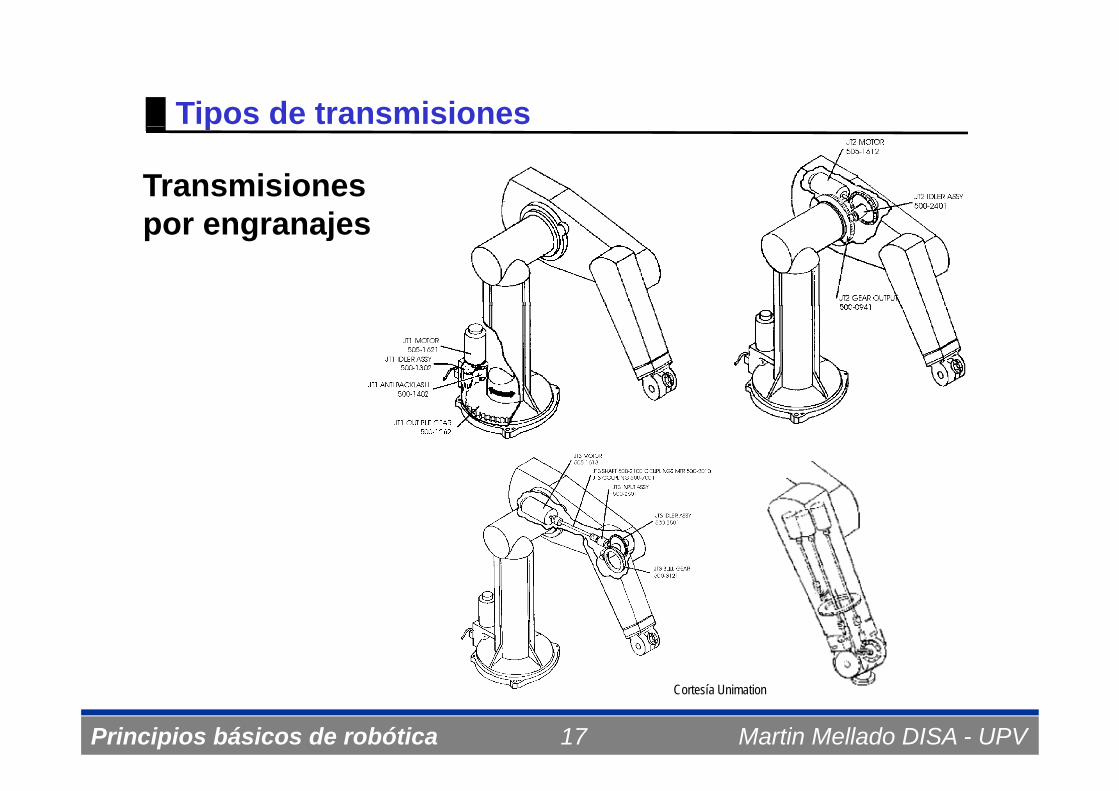
Tipos de transmisiones
Transmisiones j
p
por engranajes
Principios básicos de robótica Martin Mellado DISA - UPV17
Cortesía Unimation
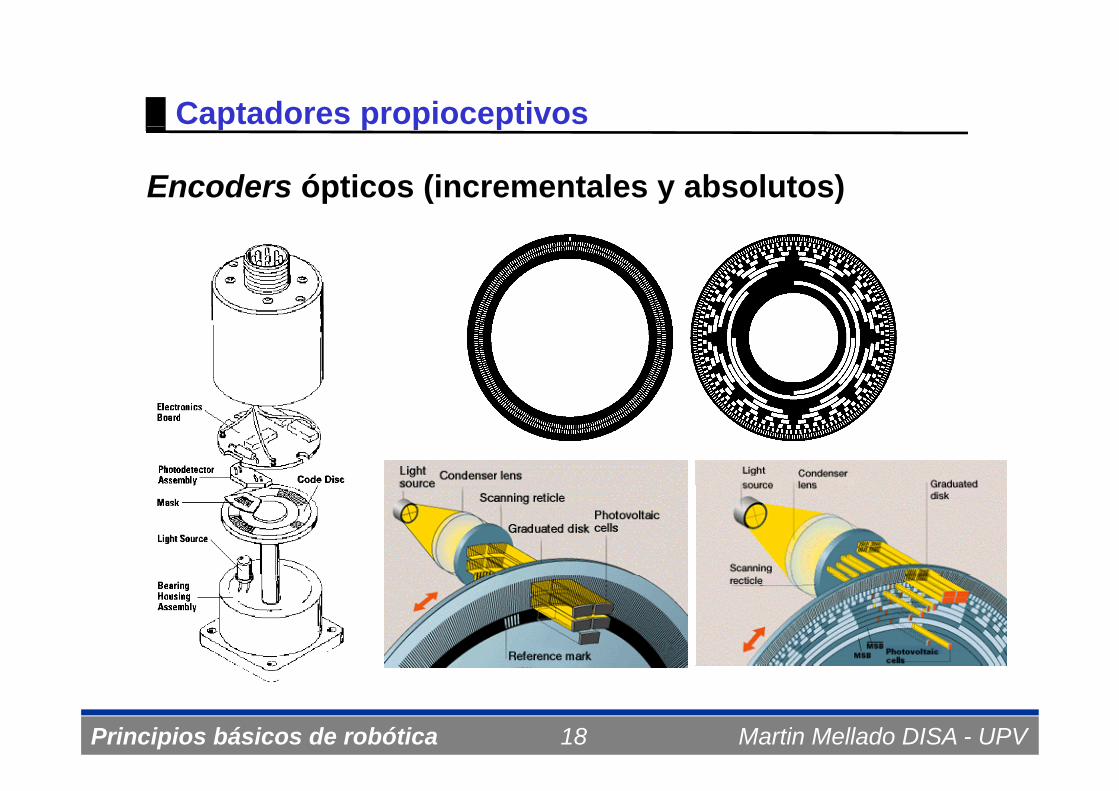
Captadores propioceptivos
Encoders ópticos (incrementales y absolutos)
p p p p
Principios básicos de robótica Martin Mellado DISA - UPV18
Captadores extereoceptivos
Sensores que obtienen:
p p
Sensores que obtienen:– Información lógica o binaria:
• Sensor de presencia, de contacto, barrera óptica, …– Información analógica:
• Sensor de distancia, ángulo, temperatura, brújula, …I f ió ltidi i l– Información multidimensional:
• Sensor de fuerza (3D y 6D), pieles de contacto, …
– Cámaras de visión:• 2D, 3D, térmica,…
Principios básicos de robótica Martin Mellado DISA - UPV19
Tema 1Principio básicos de robótica
CONCLUSIONES
• Se ha presentado la estructura de los sistemas robotizadosS h di ti id l dif t• Se han distinguido los diferentes componentes de los robots y sus principales característicascaracterísticas
Principios básicos de robótica Martin Mellado DISA - UPV20