5154 Tema3 Jose Rojas
44
Programación III Programación III Tema 3 El lenguaje ensamblador Decanato de Ciencias U.C.L.A.
-
Upload
jose-rojas -
Category
Technology
-
view
2.556 -
download
2
description
Tema 3
Transcript of 5154 Tema3 Jose Rojas

Programación IIIProgramación III
Tema 3El lenguaje ensamblador
Decanato de CienciasU.C.L.A.

El lenguaje ensambladorEl lenguaje ensamblador• Contenido
– El Lenguaje Ensamblador
o Conceptos Básicos
o Ventajas y Desventajas
– Arquitectura del Procesador Intel 80x86
– Manejo de Memoria: Segmentación

El lenguaje ensambladorEl lenguaje ensamblador
• Conceptos BásicosConceptos Básicos
Al desarrollarse las primeras computadoras electrónicas, se
vio la necesidad de programarlas, es decir, de almacenar en
memoria la información sobre la tarea que iban a ejecutar. Las
primeras se usaban como calculadoras simples; se les indicaban
los pasos de cálculo, uno por uno.

El lenguaje ensambladorEl lenguaje ensamblador
• Conceptos BásicosConceptos BásicosJohn Von Neumann desarrolló el modelo que lleva su nombre,
para describir este concepto de "programa almacenado". En este
modelo, se tiene una abstracción de la memoria como un
conjunto de celdas, que almacenan simplemente números. Estos
números pueden representar dos cosas: los datos, sobre los que
va a trabajar el programa; o bien, el programa en sí.

El lenguaje ensambladorEl lenguaje ensamblador
• Conceptos BásicosConceptos Básicos¿Cómo es que describimos un programa como números? Se tenía el
problema de representar las acciones que iba a realizar la computadora,
y que la memoria, al estar compuesta por switches correspondientes al
concepto de bit, solamente nos permitía almacenar números binarios.
La solución que se tomó fue la siguiente: a cada acción que sea capaz
de realizar nuestra computadora, asociarle un número, que será su
código de operación (opcode) .

El lenguaje ensambladorEl lenguaje ensamblador
• Conceptos BásicosConceptos BásicosLa descripción y uso de los opcodes es lo que llamamos lenguaje de
máquina . Es decir, la lista de códigos que la máquina va a interpretar
como instrucciones, describe las capacidades de programación que
tenemos de ella; es el lenguaje más primitivo, depende directamente del
hardware, y requiere del programador que conozca el funcionamiento de
la máquina al más bajo nivel.
Cuando abstraemos los opcodes y los sustituimos por una palabra que
sea una clave de su significado, a la cual comúnmente se le conoce
como mnemónico , tenemos el concepto de Lenguaje Ensamblador

El lenguaje ensambladorEl lenguaje ensamblador
• Conceptos BásicosConceptos BásicosLenguaje Ensamblador es la primera abstracción del Lenguaje de
Máquina , consistente en asociar a los opcodes palabras clave que
faciliten su uso por parte del programador.
Como se puede ver, el Lenguaje Ensamblador es directamente traducible
al Lenguaje de Máquina, y viceversa; simplemente, es una abstracción
que facilita su uso para los seres humanos. Por otro lado, la computadora
no entiende directamente al Lenguaje Ensamblador; es necesario
traducirle a Lenguaje de Máquina.

El lenguaje ensambladorEl lenguaje ensamblador
• Conceptos BásicosConceptos BásicosUna característica que hay que resaltar, es que al depender estos lenguajes del hardware, hay un distinto Lenguaje de Máquina (y, por consiguiente, un distinto Lenguaje Ensamblador) para cada CPU. Por ejemplo, podemos mencionar tres lenguajes completamente diferentes, que sin embargo vienen de la aplicación de los conceptos anteriores:
1. Lenguaje Ensamblador de la familia Intel 80x86 2. Lenguaje Ensamblador de la familia Motorola 68000 3. Lenguaje Ensamblador del procesador POWER, usado en las IBM RS/6000.
Tenemos 3 fabricantes distintos, compitiendo entre sí y cada uno aplicando conceptos distintos en la manufactura de sus procesadores, su arquitectura y programación; todos estos aspectos, influyen en que el lenguaje de máquina y ensamblador cambie bastante.

El lenguaje ensambladorEl lenguaje ensamblador
• Ventajas y desventajasVentajas y desventajasUna vez que hemos visto la evolución de los lenguajes, cabe preguntarse: ¿En estos tiempos "modernos", para qué quiero el Lenguaje Ensamblador?
El proceso de evolución trajo consigo algunas desventajas, que ahora veremos como las ventajas de usar el Lenguaje Ensamblador, respecto a un lenguaje de alto nivel:
1. Velocidad 2. Eficiencia de tamaño 3. Flexibilidad
Por otro lado, al ser un lenguaje más primitivo, el Ensamblador tiene ciertas desventajas respecto a los lenguajes de alto nivel:
1. Tiempo de programación 2. Programas fuente grandes 3. Peligro de afectar recursos inesperadamente 4. Falta de portabilidad

El lenguaje ensambladorEl lenguaje ensamblador
• Assembler y la arquitectura Assembler y la arquitectura El procesador 8086 original introdujo nuevos conceptos en la arquitectura de los procesadores para microcomputadoras:
* Arquitectura en Pipeline
* Bus de datos de 16 bits.
* Bus de direcciones de 20 bits
Vamos a explorar sus principales componentes, y cómo se
implementaron estos adelantos tecnológicos.

El lenguaje ensambladorEl lenguaje ensamblador
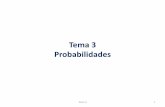
• Arquitectura del procesador 8086 Arquitectura del procesador 8086

El lenguaje ensambladorEl lenguaje ensamblador
• Arquitectura en PipelineArquitectura en PipelineLos procesadores previos al 8086, estaban limitados en su desempeño por la necesidad de realizar los dos pasos principales de ejecución del procesador: Fetch/Execute, en forma secuencial. Es decir, no se puede ejecutar una instrucción hasta que se traiga de memoria (Fetch); y no podían traerse instrucciones de memoria mientras ejecutaba una instrucción, pues el procesador estaba ocupado.
Resumiendo, un alto porcentaje del tiempo, el procesador estaba ocupado
haciendo Fetch, cuando su función debiera ser ejecutar las instrucciones.
La capacidad de ejecutar instrucciones sólo se ocupaba en un bajo
porcentaje.

El lenguaje ensambladorEl lenguaje ensamblador
• Arquitectura en PipelineArquitectura en PipelinePara solucionar esto, Intel desarrolló la arquitectura en pipeline del Fetch/Execute, en la cual simplemente se divide la tarea en dos secciones: una encargada del Fetch (BIU: Bus Interface Unit y otra del Execute (EU: Execute Unit). De esta manera, existen circuitos separados para cada función, los cuales trabajan en paralelo. Si bien el proceso aún es secuencial, solamente al principio se requiere desperdiciar tiempo en el Fetch. A partir de ahí, Fetch va adelante del Execute, y trae instrucciones al procesador mientras este ejecuta las anteriores.

El lenguaje ensambladorEl lenguaje ensamblador
• BIU: Bus Interface UnitBIU: Bus Interface UnitEl BIU es la parte del 8086 que se encarga de hacer el Fetch; es decir, su función es estar continuamente accesando la memoria, trayendo de ella las instrucciones para ser ejecutadas por el procesador.
Contiene los siguientes elementos:
1. Los registros de segmentos 2. La cola de prefetch 3. El generador de direcciones físicas 4. El Bus C

El lenguaje ensambladorEl lenguaje ensamblador
• Los Registros de SegmentosLos Registros de Segmentos Estos registros son localidades de 16 bits dedicados a las funciones de acceso a memoria. Se decidió, como se describirá más adelante al analizar el mecanismo de segmentación, dividir el Megabyte de memoria al que puede accesar un 8086, en 65536 partes (segmentos), iniciadas cada 1 Mb / 65536 = 16 bytes. Así, podemos en general decir que los registros de segmentos nos van a indicar qué sección de memoria seleccionamos.

El lenguaje ensambladorEl lenguaje ensamblador
• Los Registros de SegmentosLos Registros de SegmentosExisten 4 registros de segmentos:
DS: Data Segment (Segmento de Datos)Este registro selecciona una sección de 64 Kb. que se dedica generalmente a colocar
en ella nuestras variables, por lo cual toma su nombre: sección de memoria dedicada
a datos.
CS: Code Segment (Segmento de Código)Este registro selecciona el área de 64 Kb. que generalmente dedicamos al
código. En este caso, el CPU (específicamente, el BIU), siempre toma las
instrucciones de esta región de memoria; por lo que cuando requerimos
más de 64 Kb. de código (instrucciones), este registro tendrá que moverse,
tomando distintos valores según recorremos distintas regiones de memoria.

El lenguaje ensambladorEl lenguaje ensamblador
• Los Registros de SegmentosLos Registros de Segmentos
SS: Stack Segment (Segmento de Pila)Este registro selecciona la región de 64 Kb. que va a contener la pila
del sistema. Como su nombre lo indica, tendremos una estructura de datos,
con política LIFO (Last In, First Out = El último elemento en entrar, es el
primero en salir), con instrucciones básicas PUSH y POP para su manejo.
Esta estructura es usada por los programas de aplicación, pero también por
el procesador para el control de instrucciones que lo requieren, tales como
las llamadas a subrutinas yla atención de interrupciones.

El lenguaje ensambladorEl lenguaje ensamblador
• Los Registros de SegmentosLos Registros de Segmentos
ES: Extra Segment (Segmento Extra)
Este registro nos permite seleccionar una sección de 64 Kb., que no está
destinada a ningún uso específico; por lo que el programador puede
aplicarla como comodín, generalmente como un segundo segmento de
datos; o bien, para el acceso a regiones de memoria del sistema, tales
como la memoria de video o las variables del BIOS

El lenguaje ensambladorEl lenguaje ensamblador
• Cola de PrefetchCola de PrefetchYa que el BIU trabaja en paralelo con el EU, requieren de un mecanismo para comunicarse. Esto se logra con una cola, estructura de datos que permite que el EU obtenga instrucciones para ejecutar en el mismo orden en que el BIU las colocó en la misma. Así, el EU puede solicitar instrucciones en cuanto esté listo para ejecutar la siguiente, sin importar en qué paso está el BIU en la obtención de instrucciones; y viceversa, el BIU puede continuar su búsqueda de instrucciones, depositando la que acaba de obtener en la cola, sin importar si el EU en este momento está ocupado ejecutando.

El lenguaje ensambladorEl lenguaje ensamblador
• Generador de Direcciones FisicasGenerador de Direcciones FisicasComo las direcciones son de 20 bits, y los registros que nos permiten
accesarlas son de 16, se requiere de 2 registros para que en combinación formen la dirección.
Esta combinación está basada en la arquitectura segmentada que
veremos más adelante. La función del generador de direcciones físicas
consiste en realizar esa combinación, para lo cual contiene la circuitería
necesaria para calcular la fórmula:
Dirección Fisica = Segmento * 0010h + Desplazamiento

El lenguaje ensambladorEl lenguaje ensamblador
• Bus CBus CEste bus interno del procesador permite que la información fluya entre la interfaz con la memoria y los distintos elementos del BIU. Se requiere un bus independiente, para que la información que usa el EU no se interfiera con la que está procesando el BIU.

El lenguaje ensambladorEl lenguaje ensamblador
• EU: Execution UnitEU: Execution UnitEl EU es la parte del 8086 que
Contiene los siguientes elementos:
1. Unidad de control 2. Registros de propósito general 3. Registros de índice 4. ALU 5. Registro de Banderas 6. Bus A

El lenguaje ensambladorEl lenguaje ensamblador
• Registros de Propósito generalRegistros de Propósito generalSon 4 registros de 16 bits, que el programador usará para una diversidad de funciones. Tienen varias características en común:
* Pueden ejecutar la mayoría de las operaciones del procesador, incluyendo la generalidad de las instrucciones aritméticas y lógicas, salvo la multiplicación y división.
* Se dividen lógicamente en 2 registros de 8 bits cada uno, llamados parte alta y parte baja; refiriéndose el registro de parte baja a los bits 0-7 (menos significativos) y la parte alta a los bits 8-15 (más significativos). Se conocen como el registro L (parte baja) y H (parte baja), precedidos por la letra que identifica al registro. Por ejemplo, AX se divide en AH y AL.
* Pueden conectarse a los registros de segmentos; de hecho, siempre se hará acceso a los registros de segmento a través de un registro de propósito general, o de la pila.

El lenguaje ensambladorEl lenguaje ensamblador
• Registros de Propósito generalRegistros de Propósito generalLos 4 registros tienen su nombre propio y ciertas especializaciones:
AX: Registro de acumulador
Este registro es el más usado, siendo de propósito general; y tiene ciertas especializaciones, de ahí su nombre:
* Es el único que puede ser usado como multiplicando en la multiplicación * Es el único que puede ser usado como dividendo en la división * Es el parámetro que selecciona los distintos servicios del Sistema Operativo, usados mediante el mecanismo de Interrupciones.
BX: Registro de Base
Este registro, además de las características generales de los registros de propósito general, se especializa en el acceso a memoria en combinación con los registros de índice, especialmente para el manejo de arreglos.

El lenguaje ensambladorEl lenguaje ensamblador
• Registros de Propósito generalRegistros de Propósito generalCX: Registro de Contador
Este registro, como su nombre indica, será ampliamente usado como contador. Puede ser usado como cualquier registro de propósito general, pero tiene capacidades especiales para ser usado en instrucciones:
* de manejo de ciclos * como contador en los corrimientos * de manejo de memoria y strings
DX: Registro de Datos
Este registro de propósito general tiene como especializaciones:
* Formar con AX números de 32 bits, siendo en este caso la parte más significativa. * El acceso a puertos. Las instrucciones IN y OUT, que permiten dicho acceso, requerirán en ciertos casos que el número de puerto esté en DX.

El lenguaje ensambladorEl lenguaje ensamblador
• Registros de ÍndiceRegistros de ÍndiceEstos registros, de 16 bits, son muy similares a los de propósito general, pero no tienen todas las capacidades de los mismos; en particular:
* No pueden conectarse directamente con los registros de segmentos.
* No pueden verse como dos registros de 8 bits (parte alta y parte baja).
Ahora bien, tienen sus propias habilidades. Específicamente, están
diseñados para combinarse con los registros de segmento, ser usados
como desplazamientos y así intervenir en el acceso a memoria. Se les usa,
por ello, para el acceso a arreglos o como apuntadores.

El lenguaje ensambladorEl lenguaje ensamblador
• Registros de ÍndiceRegistros de ÍndiceLos 4 registros que se consideran en este grupo son:
SI: Source Index, o Apuntador a la FuenteEste registro se especializa en el acceso a bytes o words dentro del
segmento de datos; existen instrucciones que lo toman por defecto como el
registro que apunta a una localidad de memoria que se va a leer, por lo cual
toma su nombre.
DI: Destination Index, Apuntador al DestinoEste registro se especializa en el acceso a bytes o words dentro del
segmento de datos o el extra; existen instrucciones que lo toman por
defecto como el registro que en combinación con el ES apunta a una
localidad de memoria que se va a escribir, por lo cual toma su nombre.

El lenguaje ensambladorEl lenguaje ensamblador
• Registros de ÍndiceRegistros de ÍndiceBP: Base Pointer, o apuntador a la Base de la Pila.
Este registro es usado para accesar, dentro del segmento de pila, la
información. Principalmente nos permite determinar cuando hay un underflow, es
decir, cuando se quiere sacar más información de la pila que la que se ha colocado
en ella; y el acceso a variables locales y parámetros.
SP: Stack Pointer, o apuntador al tope de la Pila.Este registro también está siempre asociado al manejo de la pila. Su función
especial es marcar el tope de la pila, y por tanto, indica en qué localidad de memoria
se localiza la información de la pila; se incrementa cuando se hace un POP, con lo
que apunta al siguiente elemento en la pila; y se decrementa al hacer un PUSH, con
lo que controla el acceso a la memoria de la pila.

El lenguaje ensambladorEl lenguaje ensamblador
• Registros de ÍndiceRegistros de ÍndiceEste es un registro de 16 bits, usados como banderas. Esto quiere decir que cada uno de los bits señala un evento dentro del procesador; cuando el bit tiene un valor de 0, el evento no ocurrió (falso); y cuando tiene un valor de 1, el evento ocurrió (verdadero). Entre las banderas más importantes mencionaremos:
ZF: Bandera de resultado 0Se prende cuando el resultado de la última operación realizada en el ALU fue un 0.
CF: Bandera de carrySe prende cuando el resultado de la última operación realizada en el ALU
(necesariamente, una suma o resta) generó un carry o un borrow.

El lenguaje ensambladorEl lenguaje ensamblador
• Registros de ÍndiceRegistros de ÍndiceOF: Bandera de overflowSe prende cuando el resultado de la última operación realizada en el ALU excedió la
capacidad del registro donde se almacena (overflow).
SF: Bandera de signoSe prende cuando el resultado de la última operación realizada en el ALU fue
negativo, según la representación de complemento a 2 que mencionamos en clases
anteriores.
AF: Bandera de carry auxiliarSe prende cuando el resultado de la última operación realizada en el ALU generó un
carry cuando estaba a la mitad.

El lenguaje ensambladorEl lenguaje ensamblador
• Registros de ÍndiceRegistros de ÍndiceDF: Bandera de direcciónA diferencia de las anteriores, esta bandera no se prende como resultado del ALU,
sino que el programador la usa para controlar la dirección del acceso mediante
apuntadores, especialmente en las instrucciones de strings.
IF: Bandera de interrupciónSe prende cuando el procesador es interrumpido, y está ejecutando una rutina de
atención de interrupción. Esto evita que el procesador acepte interrupciones mientras
está procesando interrupciones previas, de manera que no se pierda el control del
procesador.

El lenguaje ensambladorEl lenguaje ensamblador
• Manejo de Memoria: SegmentaciónManejo de Memoria: SegmentaciónCuando Intel extendió el bus de direcciones, de 16 a 20 bits, se encontró con el problema de cómo asociar los registros con las direcciones de memoria. Para lograrlo, aplicó un concepto ya usado antes en mainframes, conocido como segmentación; en este modelo, se usan dos registros para seleccionar una localidad de memoria:
* Registro de Segmento: indica en qué segmento (región o sección) de
la memoria se encontrará la localidad deseada.
* Registro de Desplazamiento: indica en qué desplazamiento, es decir,
dirección relativa respecto al inicio de la sección, se encontrará la localidad
deseada.

El lenguaje ensambladorEl lenguaje ensamblador
• Manejo de Memoria: SegmentaciónManejo de Memoria: SegmentaciónEn el caso del 8086, los registros son de 16 bits, con lo que un registro de segmento puede tomar 65536 valores distintos; además, un registro de desplazamiento puede tomar los mismos valores. De ahí las siguientes propiedades:
* Un segmento inicia cada 16 bytes de memoria; de esta manera, a cada
sección de 16 bytes de la memoria se le llama "párrafo".
* Dos segmentos de memoria llegan a tener sobreposición; de manera
que una misma localidad de memoria puede accesarse en distintas formas.
Exactamente, en ¡4096 formas distintas!

El lenguaje ensambladorEl lenguaje ensamblador• Mapa de Memoria RAMMapa de Memoria RAM
0 0000:0000 - 0000:FFFF RAM Usuario
1 1000:0000 - 1000:FFFF RAM Usuario
2 2000:0000 - 2000:FFFF RAM Usuario
3 3000:0000 - 3000:FFFF RAM Usuario
4 4000:0000 - 4000:FFFF RAM Usuario
5 5000:0000 - 5000:FFFF RAM Usuario
6 6000:0000 - 6000:FFFF RAM Usuario
7 7000:0000 - 7000:FFFF RAM Usuario
8 8000:0000 - 8000:FFFF RAM Usuario
9 9000:0000 - 9000:FFFF RAM Usuario
A A000:0000 - A000:FFFF RAM Video
B B000:0000 - B000:FFFF RAM Video
C C000:0000 - C000:FFFF BIOS extra
D D000:0000 - D000:FFFF Libre ROM
E E000:0000 - E000:FFFF Libre ROM
F F000:0000 - F000:FFFF ROM BIOS

El lenguaje ensambladorEl lenguaje ensamblador• Grupos de instruccionesGrupos de instruccionesInstrucción Operandos Función equivalente en "C"MOV destino, fuente destino = fuentePUSH fuente [SS:SP] = fuente; SP += sizeof(destino)POP destino SP -= sizeof(destino) ; destino = [SS:SP]XCHG op1, op2 temp = op1; op1 = op2; op2 = temp
MOV acepta distintos modos de direccionamiento; las principales limitantes que tiene son:
- Destino y fuente no pueden ser, ambos, referencias a memoria; al menos uno de ellos debe ser un registro o una constante.- El destino no puede ser una constante, debe ser un registro o una referencia a memoria.- Los registros de segmento solamente pueden usarse junto con un registro de uso general.- Destino y fuente deben tener el mismo "tipo" (ambos referencias a bytes, o a word, pero no uno a byte y otro a word).
PUSH y POP requieren operandos de tamano Word. En 8086/88 tiene que ser un registro o una localidad de memoria; en 80286 y superiores, la mejora principal es que PUSH ya se puede hacer sobre una constante.XCHG tiene las mismas características que MOV, con la única excepción de que no acepta constantes de ninguno de los dos lados.

El lenguaje ensambladorEl lenguaje ensamblador• Instrucciones AritméticasInstrucciones AritméticasInstrucción Operandos Función equivalente en "C" ResultadosADD op1, op2 op1 = op1 + op2 SUB op1, op2 op1 = op1 - op2ADC op1, op2 op1 = op1 + op2 + CarrySBB op1, op2 op1 = op1 - op2 - Carry INC op1 op1 ++; DEC op1 op1 --; MUL op1 Si op1 es tipo byte: AX = AL * op1 Si op1 es tipo word: (DX:AX) = AX * op1DIV op1 Si op1 es tipo byte: AL = AX / op1 AH = AX % op1 Si op1 es tipo word: AX = (DX : AX) / op1 DX = (DX : AX) % op1NEG op1 op1 = - op1

El lenguaje ensambladorEl lenguaje ensamblador• Manejo de Bits (Rotaciones y Desplazamientos)Manejo de Bits (Rotaciones y Desplazamientos)Instrucción Operandos Función equivalente en "C"SHL op1, cuenta op1 <<= cuentaSHR op1, cuenta op1 >>= cuentaSAR op1, cuenta (no hay equivalente)ROL op1, cuenta (no hay equivalente)ROR op1, cuenta (no hay equivalente)
En todas las instrucciones de rotación/desplazamiento de bits, cuenta puede ser 1 o bien CX.
Instrucción Operandos Función equivalente en "C"AND op1, op2 op1 = op1 & op2OR op1, op2 op1 = op1 | op2XOR op1, op2 op1 = op1 ^ op2NOT op1 op1 = ~op1.
• Operaciones Lógicas (Booleanas)Operaciones Lógicas (Booleanas)

El lenguaje ensambladorEl lenguaje ensamblador• Evaluación de condiciones y saltosEvaluación de condiciones y saltosInstrucción Operandos Función equivalente en "C"JMP etiqueta goto <etiqueta>CMP op1, op2 (no hay equivalente)
Instrucción Operandos Función equivalente en "C"CALL etiqueta Llamada a función PUSH IP
PUSH CS ; Sólo si es llamada larga (CALL FAR) JMP etiqueta
RET (ninguno) return POP IP-temp
POP CS-temp ; Sólo si es llamada larga (RETF) JMP CS-temp:IP-temp
• Uso de procedimientos/subrutinasUso de procedimientos/subrutinas

El lenguaje ensambladorEl lenguaje ensamblador
• Principales Directivas (TASM)Principales Directivas (TASM)¿Qué es una directiva?
Cuando un mnemónico o palabra reservada de ensamblador se va a traducir a lenguaje máquina (código de operación del procesador), para su posterior ejecución por parte del CPU, se le llama instrucción.
Pero también existen mnemónicos o palabras reservadas del Lenguaje Ensamblador, que no se convierten a lenguaje de máquina, es decir, no son instrucciones propias del lenguaje de máquina del procesador. Sin embargo, son necesarias para controlar el proceso de Ensamblado; le dicen al Ensamblador cuáles son las secciones del programa, cómo definir las variables, y cómo estructurar el programa, entre otras aplicaciones. A estas palabras, que el Ensamblador reconocerá pero no son instrucciones, les llamamos "Directivas".

El lenguaje ensambladorEl lenguaje ensamblador
• Principales Directivas (TASM)Principales Directivas (TASM)De segmentos (simplificadas):
Se les considera simplificadas, pues antiguamente se usaban directivas
mucho más complejas para realizar la misma función. Aún se requieren
esas directivas, pero sólo en los casos donde se accesarán múltiples
segmentos; inclusive en Turbo Assembler, solamente cuando hay más de
dos segmentos de datos. Por ello, no las veremos en el curso, pues es muy
rara su aplicación, y estas son más sencillas de entender y usar.

El lenguaje ensambladorEl lenguaje ensamblador• Principales Directivas (TASM)Principales Directivas (TASM)De segmentos (simplificadas): .model <modelo de memoria> Nos indica qué modelo de memoria se usará para ensamblar este programa.
Para las aplicaciones comunes, usaremos siempre el modelo small. De esta manera,
un programa fuente iniciará con la directiva ".model small"
.stack <tamaño en bytes> Le indica al ensamblador cuánto espacio deberá reservar para la pila del sistema.
Como hay funciones básicas que usan la pila, aunque nosotros no la usemos
explícitamente, debe dejarse un espacio razonable. Para la generalidad de las
aplicaciones, basta reservar unos 256 bytes (100h). Por ello, generalmente veremos
a los programas fuentes tener la directiva ".stack 100h"

El lenguaje ensambladorEl lenguaje ensamblador• Principales Directivas (TASM)Principales Directivas (TASM)De segmentos (simplificadas):.dataEsta directiva indica dónde inicia la definición de las variables.
Generalmente, esta zona de memoria se asociará al registro DS; de hecho,
se considera que es la definición del contenido y espacio reservado para el
segmento de datos por defecto.
.codeEsta directiva indicará al ensamblador dónde inicia el código. A partir de
ella, se encontrarán las instrucciones propiamente dichas.

El lenguaje ensambladorEl lenguaje ensamblador• Principales Directivas (TASM)Principales Directivas (TASM)Para uso de procedimientos:
<etiqueta> PROC Asocia una etiqueta a un procedimiento. Por ejemplo, si ponemos: Principal PROC esto definirá el punto de inicio del procedimiento
llamado "Principal". <etiqueta> ENDP Cierra un procedimiento, debe estar balanceado con un PROC para
abrirlo.
END {etiqueta}Cierra un módulo de programa. Esta directiva le indica al Ensamblador que ignore cualquier cosa que venga después; es como decirle que ahí acabó el archivo con el código fuente.El parámetro (opcional) "etiqueta" indica en qué procedimiento iniciará la ejecución del programa. En caso de omitirse el parámetro opcional, la ejecución se inicia en la primera instrucción después de la directiva .code.

El lenguaje ensambladorEl lenguaje ensamblador• Principales Directivas (TASM)Principales Directivas (TASM)Definición de constantes
<identificador> EQU <expresión>
Define una constante llamada como el identificador, en una forma similar al #define de C. Es decir, cada vez que se encuentre el identificador en el programa fuente, se sustituirá (como texto) por la expresión indicada en el EQU.
<identificador> = <expresión>
Es similar al EQU, solamente que en este caso podrá variarse (redefinirse) la sustitución que corresponde al identificador.