6 El movimiento de los cuerpos - INSTITUTO MARE NOSTRUM
23
El movimiento de los cuerpos 6
Transcript of 6 El movimiento de los cuerpos - INSTITUTO MARE NOSTRUM

El movimiento de los cuerpos6
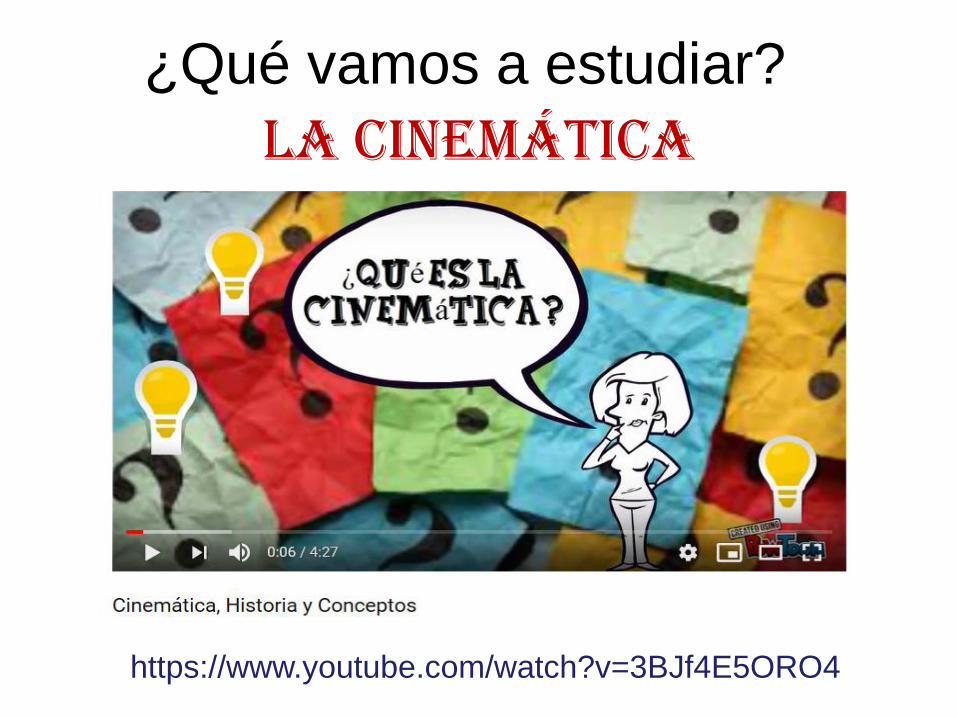
¿Qué vamos a estudiar?
https://www.youtube.com/watch?v=3BJf4E5ORO4
La cinemática
El movimiento
Sistemas de referencia
Posición
Trayectoria y desplazamiento
Velocidad
Velocidad y distancia de seguridad
Velocidad media y velocidad instantánea
Tipos de movimientos
Ecuaciones del movimiento
rectilíneo uniforme
Representación gráfica del MRU
Características de un MRU
a partir de sus gráficas
Movimiento de dos móviles
Movimiento rectilíneo uniforme
Movimiento rectilíneo
uniformemente acelerado
Aceleración
Ecuaciones del movimiento
rectilíneo uniformemente acelerado
Representación gráfica del MRUA
Movimiento de caída libre
Movimiento circular uniforme
Espacio recorrido en un
movimiento circular
Velocidad y aceleración en un MCU
¿Qué vamos a estudiar?
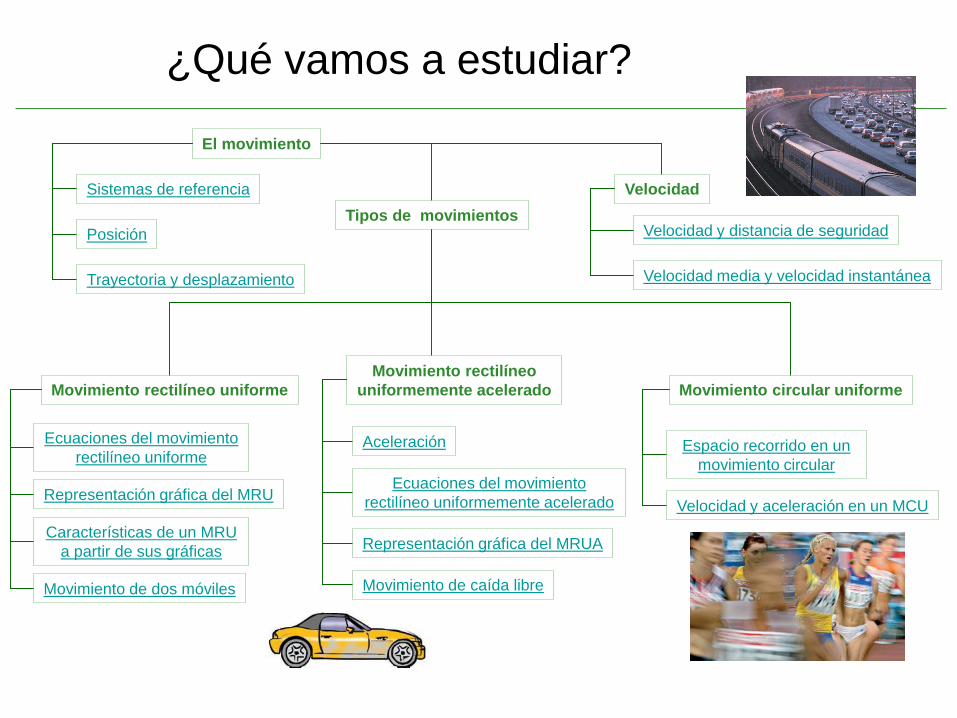
Para empezar, experimenta y piensa
Trayectoria circular Caída libre
La canica gira
por el borde del
plato, pero…
¿En qué dirección
continuará el
movimiento cuando
sale del «circuito»?
Se dejan caer a la vez y desde la
misma altura un libro y una hoja de
papel… ¿Qué llega antes al suelo?
Ahora hacemos
una bola con el
papel… ¿Llegan
a la vez al suelo?
Si ponemos la hoja de
papel encima del libro,
llegan a la vez.
¿Qué entendemos por movimiento?
• Los cuerpos se mueven
cuando cambian su
posición con respecto a un
punto que consideramos
en reposo.
• Todo se
mueve, de
hecho el
movimiento
es relativo.
• Podemos decir que algo
está en reposo o en
movimiento dependiendo
del punto elegido para
estudiarlo, a dicho punto
se conoce como sistema
de referencia.
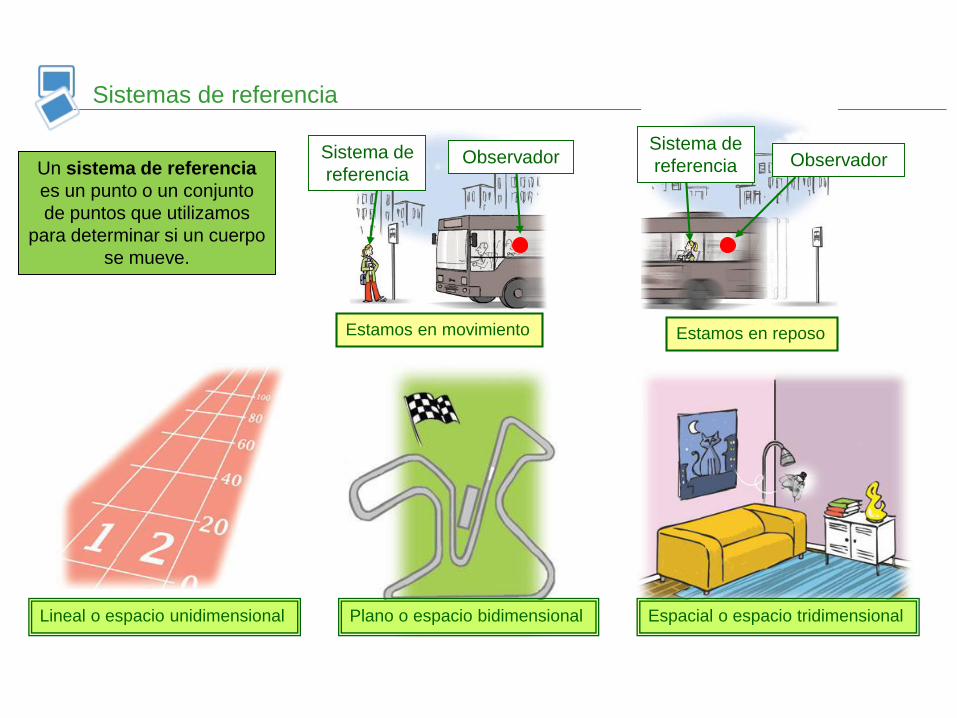
Sistemas de referencia
Lineal o espacio unidimensional Plano o espacio bidimensional Espacial o espacio tridimensional
Un sistema de referencia
es un punto o un conjunto
de puntos que utilizamos
para determinar si un cuerpo
se mueve.
Estamos en movimiento Estamos en reposo
Sistema de
referenciaObservador
Sistema de
referencia Observador
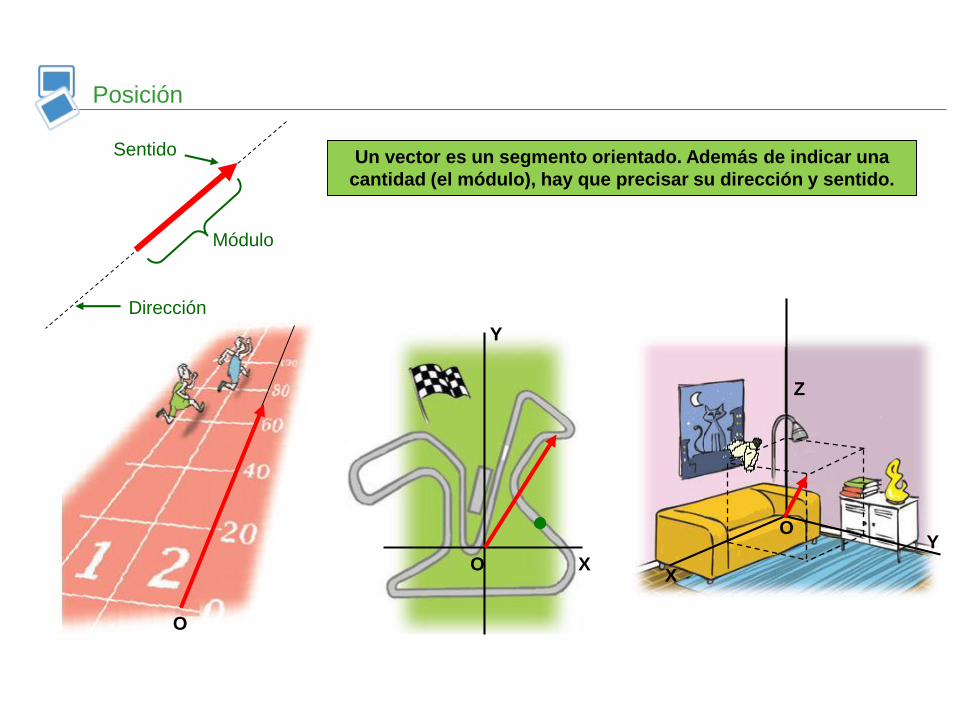
Posición
Un vector es un segmento orientado. Además de indicar una
cantidad (el módulo), hay que precisar su dirección y sentido.
Sentido
Módulo
Dirección
O
O X
Y
O
Z
Y
X
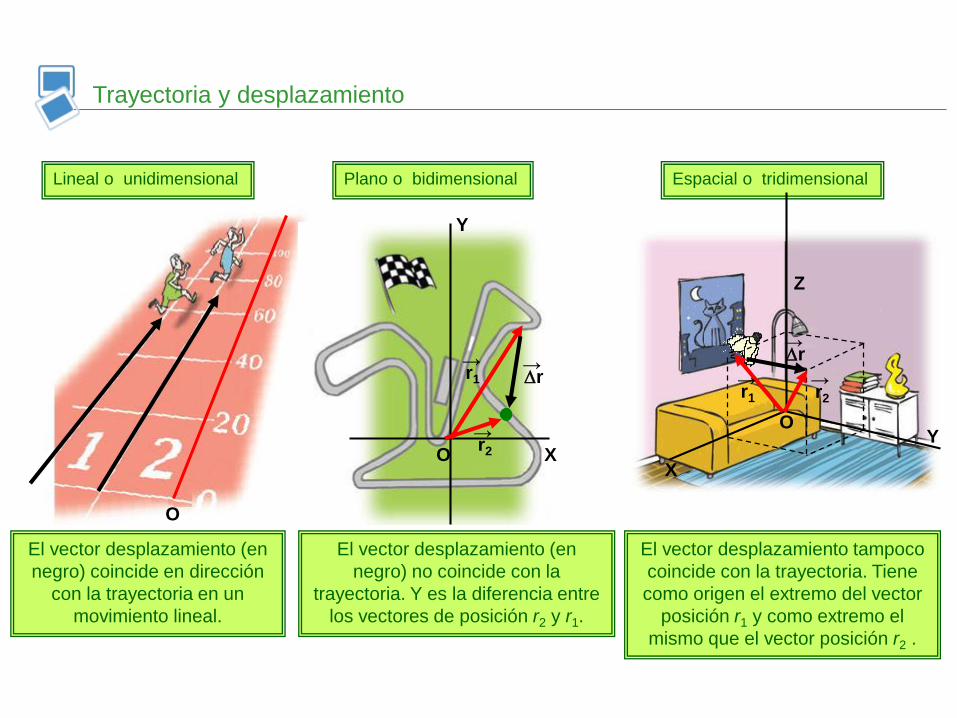
Trayectoria y desplazamiento
O
Lineal o unidimensional
El vector desplazamiento (en
negro) coincide en dirección
con la trayectoria en un
movimiento lineal.
Plano o bidimensional Espacial o tridimensional
O X
Y
El vector desplazamiento (en
negro) no coincide con la
trayectoria. Y es la diferencia entre
los vectores de posición r2 y r1.
r1
→
r2
→
r→
O
Z
Y
X
El vector desplazamiento tampoco
coincide con la trayectoria. Tiene
como origen el extremo del vector
posición r1 y como extremo el
mismo que el vector posición r2 .
r→
r2
→r1
→
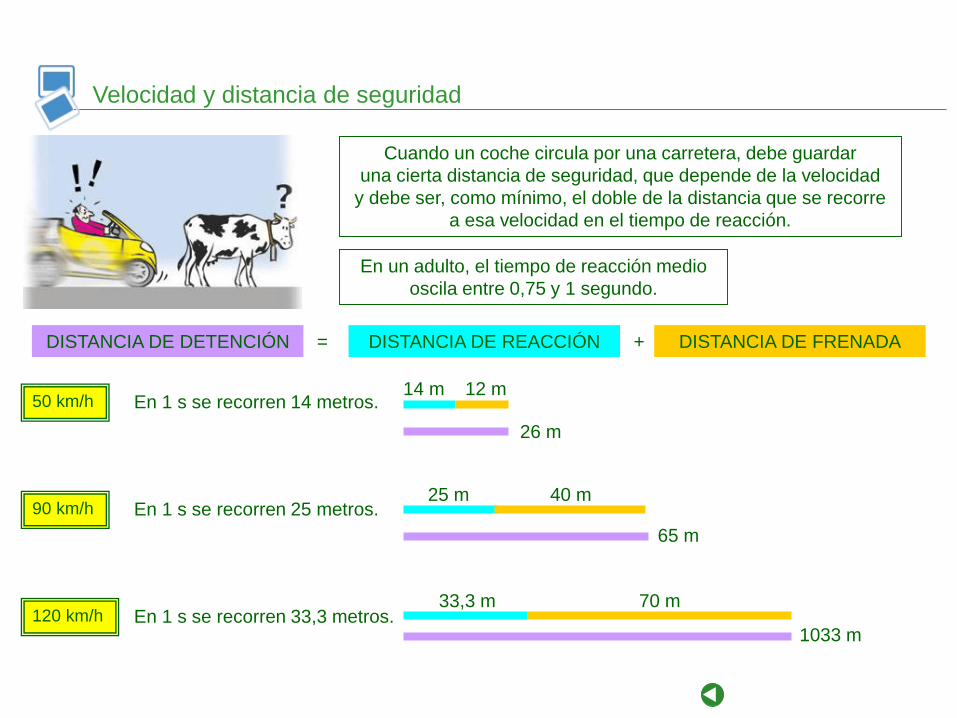
Velocidad y distancia de seguridad
DISTANCIA DE DETENCIÓN DISTANCIA DE REACCIÓN DISTANCIA DE FRENADA= +
En un adulto, el tiempo de reacción medio
oscila entre 0,75 y 1 segundo.
Cuando un coche circula por una carretera, debe guardar
una cierta distancia de seguridad, que depende de la velocidad
y debe ser, como mínimo, el doble de la distancia que se recorre
a esa velocidad en el tiempo de reacción.
50 km/h
90 km/h
120 km/h
En 1 s se recorren 14 metros.
En 1 s se recorren 25 metros.
En 1 s se recorren 33,3 metros.
25 m 40 m
65 m
70 m33,3 m
1033 m
14 m 12 m
26 m
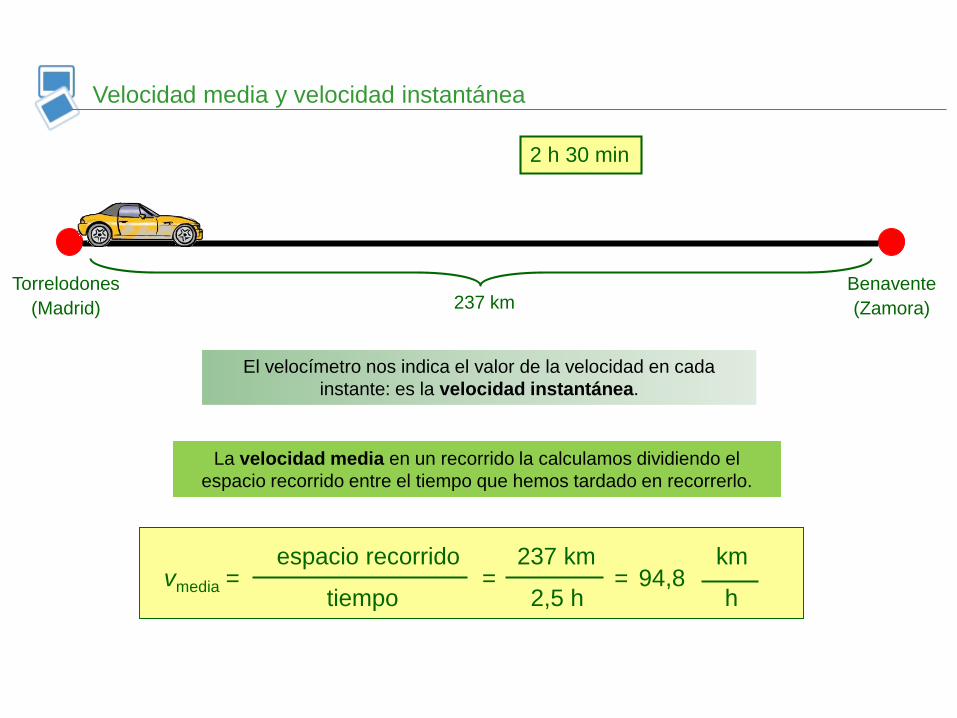
Velocidad media y velocidad instantánea
Torrelodones
(Madrid)
Benavente
(Zamora)237 km
2 h 30 min
El velocímetro nos indica el valor de la velocidad en cada
instante: es la velocidad instantánea.
La velocidad media en un recorrido la calculamos dividiendo el
espacio recorrido entre el tiempo que hemos tardado en recorrerlo.
vmedia = 94,8km
h2,5 h
237 kmespacio recorrido
tiempo= =
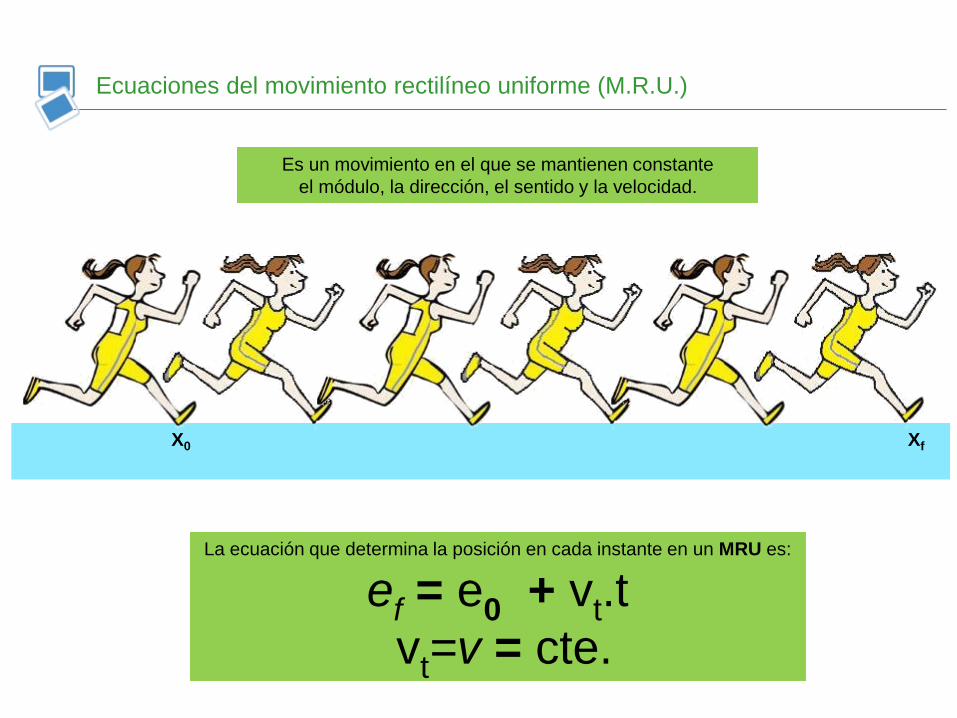
Ecuaciones del movimiento rectilíneo uniforme (M.R.U.)
X0 Xf
La ecuación que determina la posición en cada instante en un MRU es:
ef = e0 + vt.t
vt=v = cte.
Es un movimiento en el que se mantienen constante
el módulo, la dirección, el sentido y la velocidad.
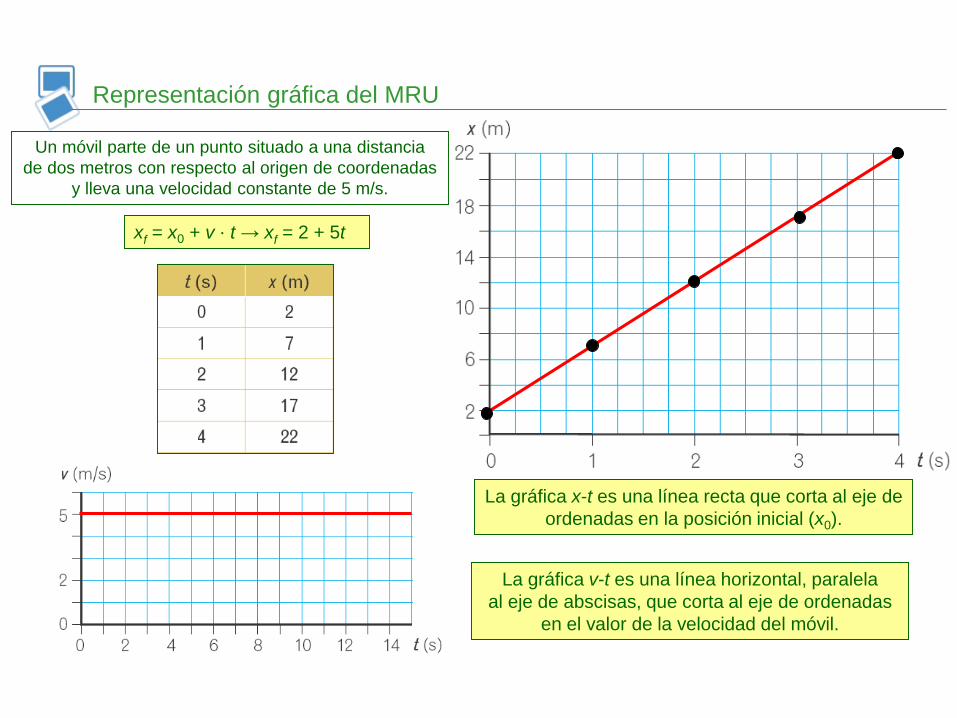
Representación gráfica del MRU
Un móvil parte de un punto situado a una distancia
de dos metros con respecto al origen de coordenadas
y lleva una velocidad constante de 5 m/s.
xf = x0 + v ⋅ t → xf = 2 + 5t
La gráfica x-t es una línea recta que corta al eje de
ordenadas en la posición inicial (x0).
La gráfica v-t es una línea horizontal, paralela
al eje de abscisas, que corta al eje de ordenadas
en el valor de la velocidad del móvil.
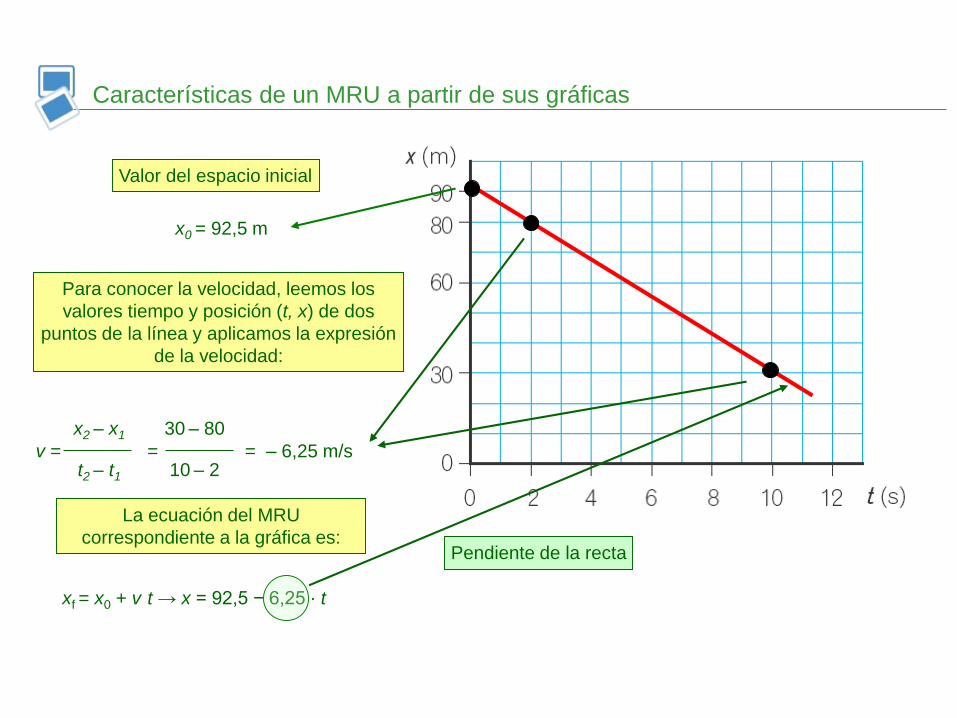
Características de un MRU a partir de sus gráficas
Valor del espacio inicial
x0 = 92,5 m
Para conocer la velocidad, leemos los
valores tiempo y posición (t, x) de dos
puntos de la línea y aplicamos la expresión
de la velocidad:
x2 – x1
t2 – t1 10 – 2
30 – 80
= – 6,25 m/s= v =
La ecuación del MRU
correspondiente a la gráfica es:
xf = x0 + v·t → x = 92,5 − 6,25 ⋅ t
Pendiente de la recta
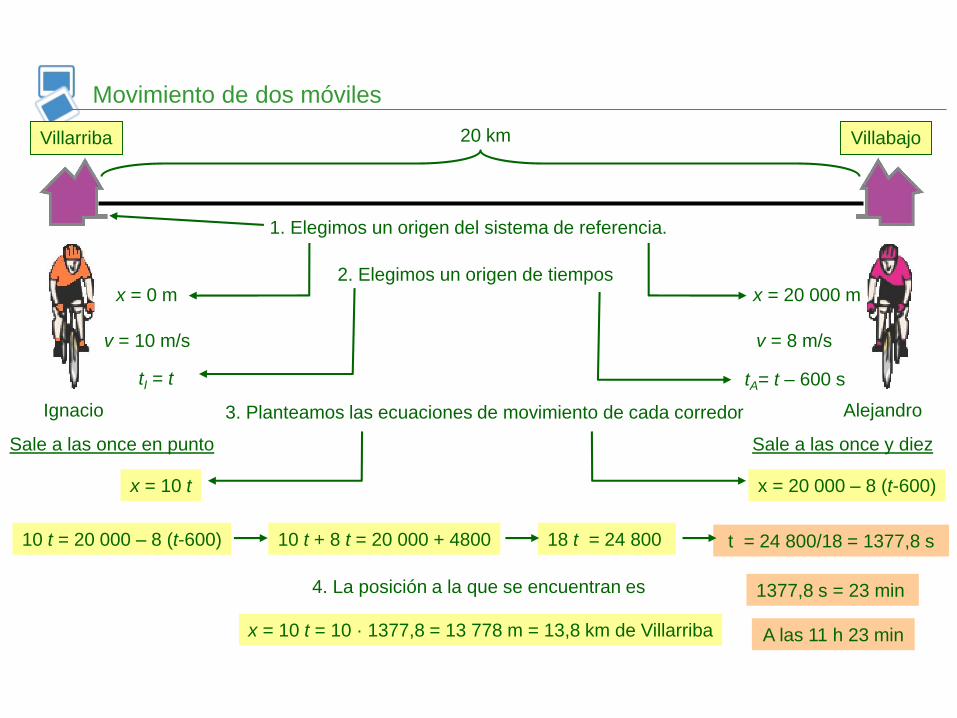
Movimiento de dos móviles
Villarriba Villabajo20 km
Ignacio Alejandro
v = 10 m/s v = 8 m/s
1. Elegimos un origen del sistema de referencia.
x = 0 m x = 20 000 m2. Elegimos un origen de tiempos
Sale a las once en punto Sale a las once y diez
tI = t tA= t – 600 s
3. Planteamos las ecuaciones de movimiento de cada corredor
x = 10 t x = 20 000 – 8 (t-600)
10 t = 20 000 – 8 (t-600) 10 t + 8 t = 20 000 + 4800 18 t = 24 800 t = 24 800/18 = 1377,8 s
1377,8 s = 23 min 4. La posición a la que se encuentran es
x = 10 t = 10 · 1377,8 = 13 778 m = 13,8 km de Villarriba A las 11 h 23 min
http://jcabello.es/documentos/docfisyqui4/gmovrectuniforme.swf
http://jcabello.es/documentos/docfisyqui4/3particulasmru.swf
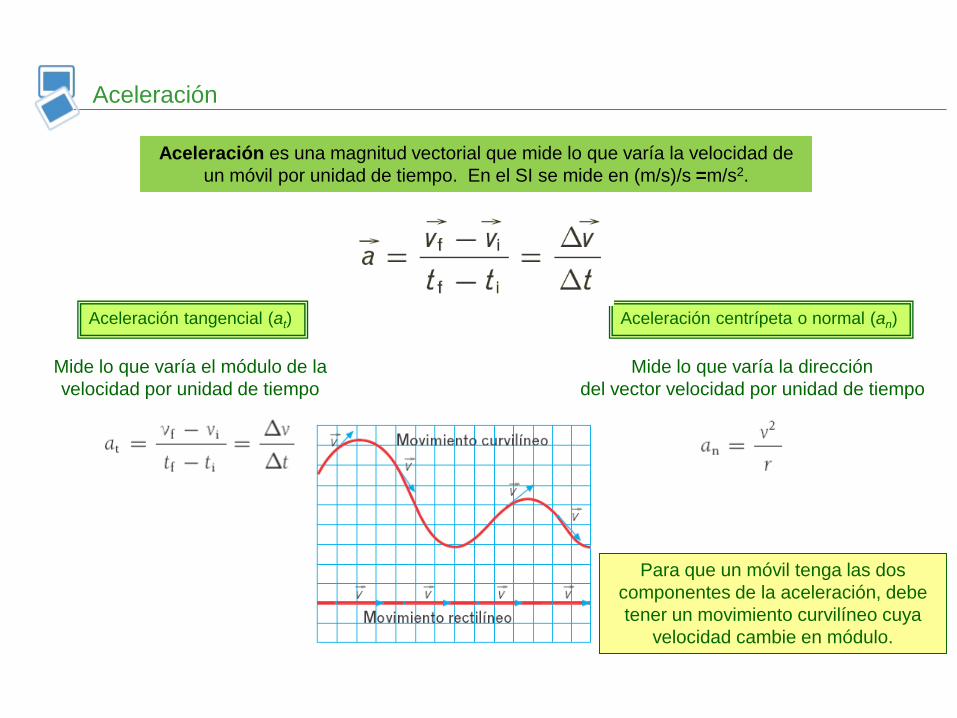
Aceleración
Aceleración es una magnitud vectorial que mide lo que varía la velocidad de
un móvil por unidad de tiempo. En el SI se mide en (m/s)/s =m/s2.
Aceleración tangencial (at) Aceleración centrípeta o normal (an)
Mide lo que varía el módulo de la
velocidad por unidad de tiempo
Mide lo que varía la dirección
del vector velocidad por unidad de tiempo
Para que un móvil tenga las dos
componentes de la aceleración, debe
tener un movimiento curvilíneo cuya
velocidad cambie en módulo.
Ecuaciones del movimiento rectilíneo uniformemente acelerado
El movimiento rectilíneo uniformemente acelerado (MRUA) es un movimiento
cuya trayectoria es una línea recta y cuya aceleración es constante.
Ecuación de posición Ecuación de velocidad
Aceleración tangencial
Durante los primeros
segundos de una carrera de
caballos, podemos
considerar que el
movimiento es MRUA.
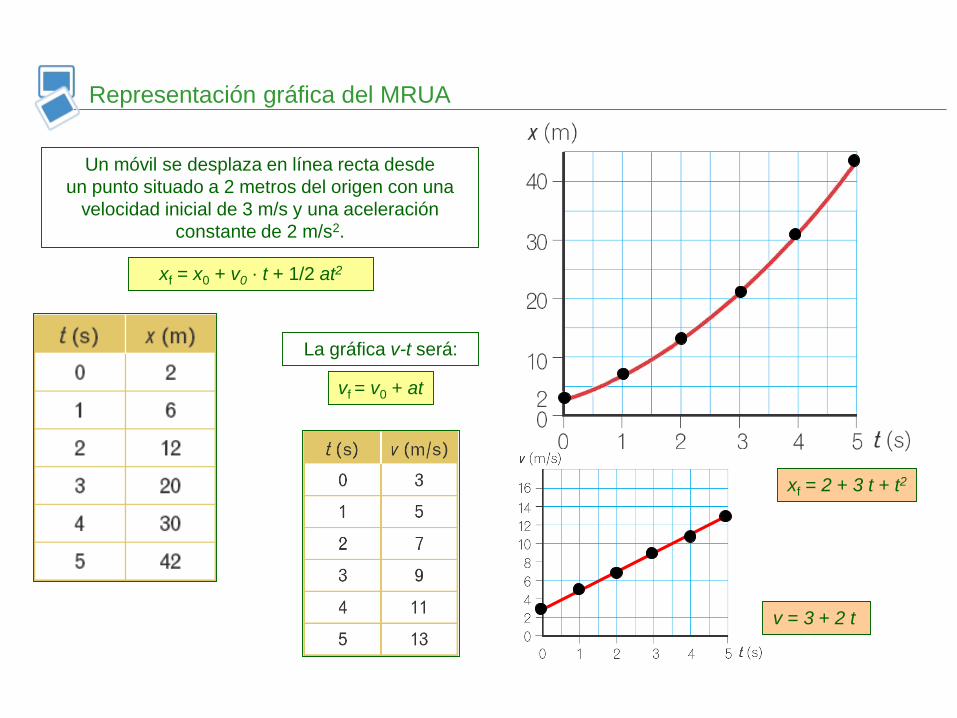
Representación gráfica del MRUA
Un móvil se desplaza en línea recta desde
un punto situado a 2 metros del origen con una
velocidad inicial de 3 m/s y una aceleración
constante de 2 m/s2.
xf = x0 + v0 ⋅ t + 1/2 at2
La gráfica v-t será:
xf = 2 + 3 t + t2
v = 3 + 2 t
vf = v0 + at
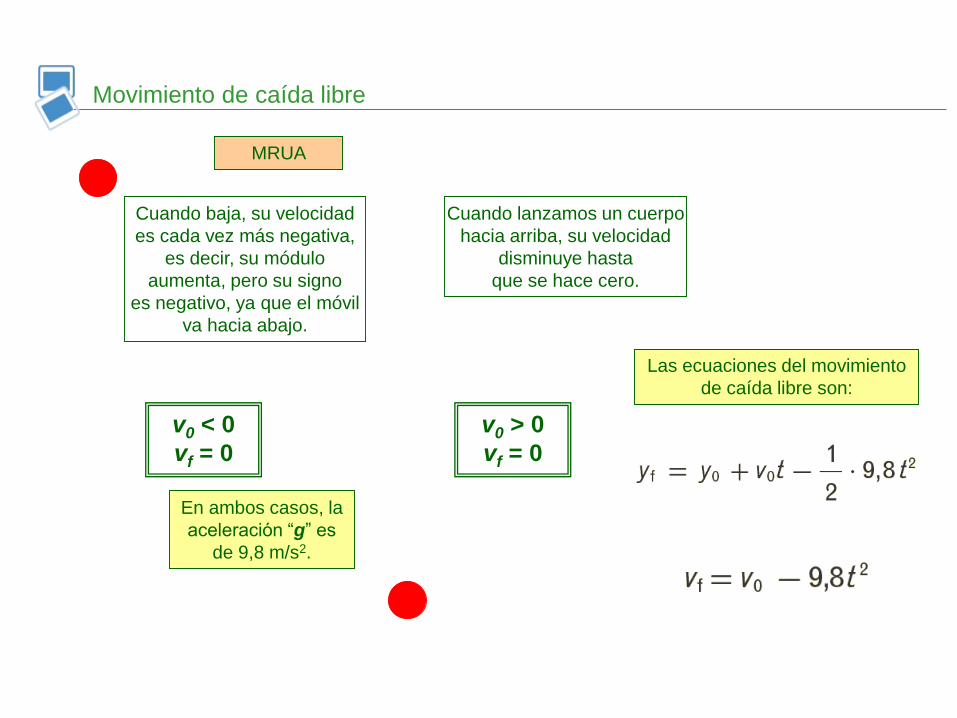
Movimiento de caída libre
En ambos casos, la
aceleración “g” es
de 9,8 m/s2.
MRUA
Cuando baja, su velocidad
es cada vez más negativa,
es decir, su módulo
aumenta, pero su signo
es negativo, ya que el móvil
va hacia abajo.
v0 < 0
vf = 0
v0 > 0
vf = 0
Cuando lanzamos un cuerpo
hacia arriba, su velocidad
disminuye hasta
que se hace cero.
Las ecuaciones del movimiento
de caída libre son:
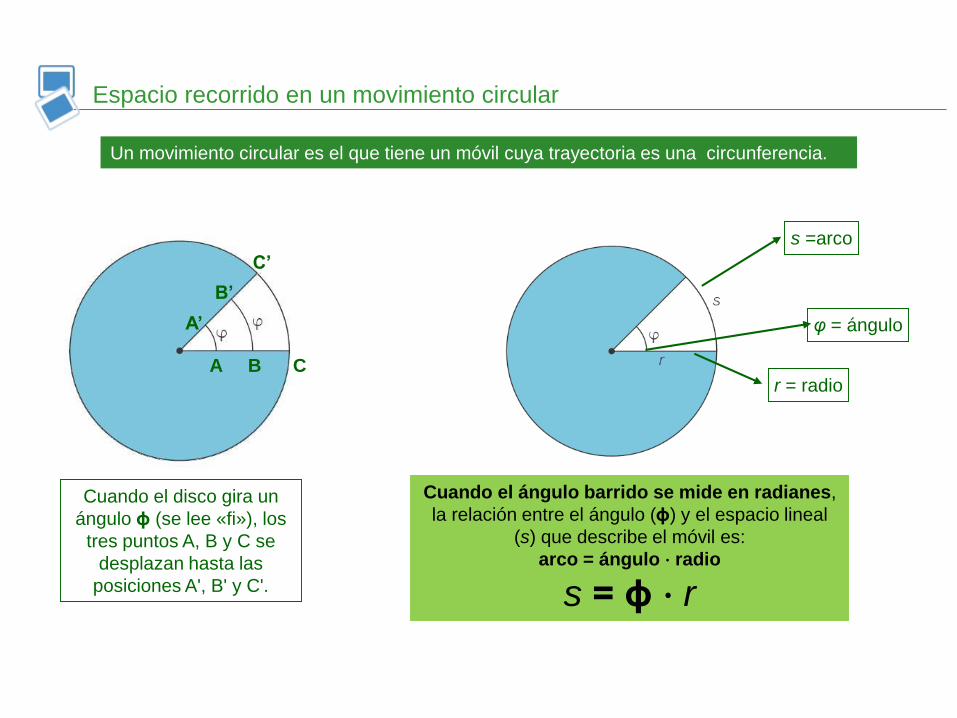
Espacio recorrido en un movimiento circular
Un movimiento circular es el que tiene un móvil cuya trayectoria es una circunferencia.
Cuando el disco gira un
ángulo ϕ (se lee «fi»), los
tres puntos A, B y C se
desplazan hasta las
posiciones A', B' y C'.
A B C
A’
B’
C’
r = radio
φ = ángulo
s =arco
Cuando el ángulo barrido se mide en radianes,
la relación entre el ángulo (ϕ) y el espacio lineal
(s) que describe el móvil es:
arco = ángulo ⋅ radio
s = ϕ ⋅ r
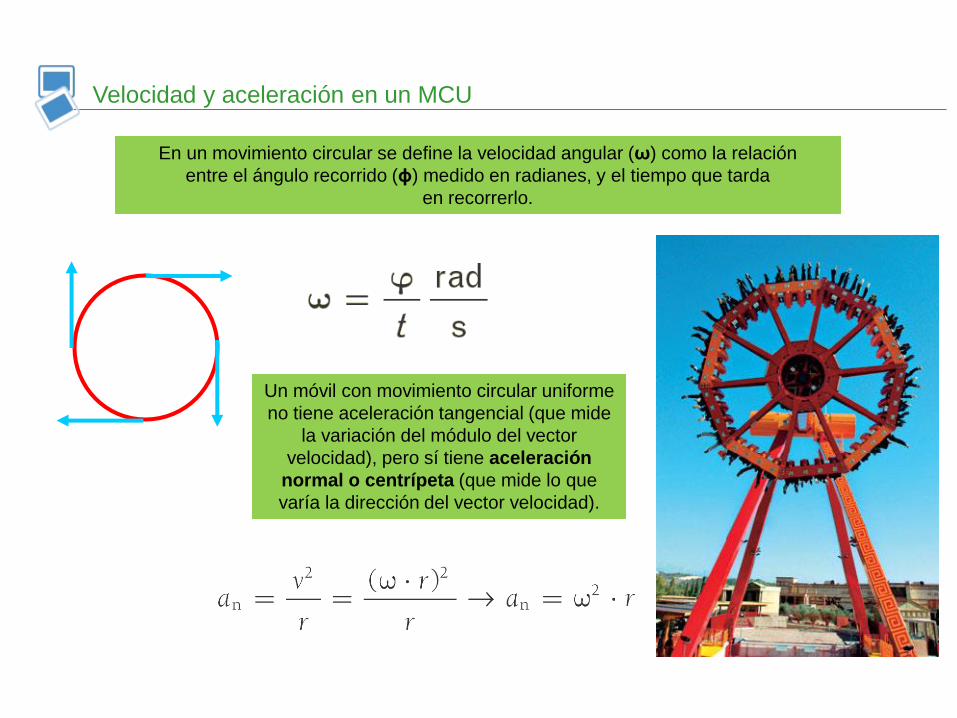
Velocidad y aceleración en un MCU
En un movimiento circular se define la velocidad angular (ω) como la relación
entre el ángulo recorrido (ϕ) medido en radianes, y el tiempo que tarda
en recorrerlo.
Un móvil con movimiento circular uniforme
no tiene aceleración tangencial (que mide
la variación del módulo del vector
velocidad), pero sí tiene aceleración
normal o centrípeta (que mide lo que
varía la dirección del vector velocidad).

Enlaces de interés
Estudio de los movimientos
IR A ESTA WEB
Itinerarios
IR A ESTA WEB


















