6. electro digital
16
Electrónica digital 1 IES ASTURES INTRODUCCIÓN A LA ELECTRÓNICA DIGITAL 1. INTRODUCCIÓN. SEÑALES ANALÓGI- CAS Y DIGITALES. Podemos dividir la electrónica en dos grandes campos: la electrónica analógica y la electrónica digital, según el tipo de señales que utilice. Llamamos señal, a la variación de una magnitud que permite transmitir información. Las señales pueden ser de dos tipos: Señales analógicas: son las señales que varían de forma continua en el tiempo entre dos valores extremos, pudiendo adoptar cualesquiera de los infinitos valores intermedios entre los anteriores. Señales digitales: son las señales que pueden adoptar sólo algunos valores concretos. Ejemplo : Supongamos un circuito formado por una LDR, como el de la figura. Consideramos como señal de salida del circuito la tensión en el punto S. LDR S 6 V Vamos a exponer la LDR a dos situaciones dife- rentes: a) Colocamos la LDR al aire libre, expuesta a luz natural. Esta luz irá variando a lo largo del día, y tendrá variaciones debido, por ejemplo, a la ocultación temporal del sol por el paso de alguna nube. Si representamos en un gráfico la variación de la tensión en el punto S (con respecto a masa) a lo largo del tiempo, ob- tendremos una curva similar a la de la figura: VS 6 V 0 V t Se observa que la tensión varía de forma con- tinua y toma todos los valores intermedios en- tre los valores máximo y mínimo. Se trata de una señal analógica. b) Colocamos la LDR en un habitáculo cerrado (sin luz natural) junto a un foco luminoso. A continuación encendemos y apagamos el foco varias veces según nos parezca. La variación de la tensión en el punto S adoptará ahora una forma bien distinta: VS 6 V 0 V t Se observa que la tensión varía de forma dis- continua, adoptando únicamente dos valores concretos, un valor bajo cuando el foco está apagado y un valor alto cuando el foco está encendido. Se trata de una señal digital. Hoy en día, con la creciente complejidad de los procesos industriales y de los elementos necesa- rios para su control, los grandes volúmenes de información que es necesario tratar, la revolución de las comunicaciones, etc, se hacen imprescin- dibles métodos de control electrónico cada vez más sofisticados. En este contexto, las señales digitales presentan importantes ventajas fren- te a las analógicas, como son su mayor inmu- nidad a las interferencias, mayor simplicidad de tratamiento, economía de circuitos, etc. En electrónica digital se utilizan señales que pueden adoptar únicamente dos valores bien diferenciados. Por ello, estas señales se deno- minan señales binarias. Los circuitos digitales estarán compuestos por dispositivos capaces de distinguir y de generar señales binarias; como veremos, los dispositivos electrónicos digitales más básicos, y a partir de los cuales están constituidos todos los demás, se denominan puertas lógicas.
-
Upload
marcos-rdguez -
Category
Technology
-
view
165 -
download
0
Transcript of 6. electro digital

Electrónica digital
1
IES ASTURES
INTRODUCCIÓN A LA ELECTRÓNICA DIGITAL
1. INTRODUCCIÓN. SEÑALES ANALÓGI- CAS Y DIGITALES.
Podemos dividir la electrónica en dos grandes
campos: la electrónica analógica y la electrónica
digital, según el tipo de señales que utilice.
Llamamos señal, a la variación de una magnitud
que permite transmitir información. Las señales
pueden ser de dos tipos:
Señales analógicas: son las señales que varían
de forma continua en el tiempo entre dos valores
extremos, pudiendo adoptar cualesquiera de los
infinitos valores intermedios entre los anteriores.
Señales digitales: son las señales que pueden
adoptar sólo algunos valores concretos.
Ejemplo: Supongamos un circuito formado por
una LDR, como el de la figura. Consideramos
como señal de salida del circuito la tensión en el
punto S.
LDR
S 6 V
Vamos a exponer la LDR a dos situaciones dife-
rentes:
a) Colocamos la LDR al aire libre, expuesta a luz
natural. Esta luz irá variando a lo largo del
día, y tendrá variaciones debido, por ejemplo,
a la ocultación temporal del sol por el paso de
alguna nube. Si representamos en un gráfico
la variación de la tensión en el punto S (con
respecto a masa) a lo largo del tiempo, ob-
tendremos una curva similar a la de la figura:
VS
6 V
0 V t
Se observa que la tensión varía de forma con-
tinua y toma todos los valores intermedios en-
tre los valores máximo y mínimo. Se trata de
una señal analógica.
b) Colocamos la LDR en un habitáculo cerrado
(sin luz natural) junto a un foco luminoso. A
continuación encendemos y apagamos el foco
varias veces según nos parezca. La variación
de la tensión en el punto S adoptará ahora
una forma bien distinta:
VS
6 V
0 V t
Se observa que la tensión varía de forma dis-
continua, adoptando únicamente dos valores
concretos, un valor bajo cuando el foco está
apagado y un valor alto cuando el foco está
encendido. Se trata de una señal digital.
Hoy en día, con la creciente complejidad de los
procesos industriales y de los elementos necesa-
rios para su control, los grandes volúmenes de
información que es necesario tratar, la revolución
de las comunicaciones, etc, se hacen imprescin-
dibles métodos de control electrónico cada vez
más sofisticados. En este contexto, las señales
digitales presentan importantes ventajas fren-
te a las analógicas, como son su mayor inmu-
nidad a las interferencias, mayor simplicidad de
tratamiento, economía de circuitos, etc.
En electrónica digital se utilizan señales que
pueden adoptar únicamente dos valores bien
diferenciados. Por ello, estas señales se deno-
minan señales binarias.
Los circuitos digitales estarán compuestos por
dispositivos capaces de distinguir y de generar
señales binarias; como veremos, los dispositivos
electrónicos digitales más básicos, y a partir de
los cuales están constituidos todos los demás,
se denominan puertas lógicas.

Electrónica digital
2
IES ASTURES
2. SISTEMA DE NUMERACIÓN BINARIO.
El sistema de numeración de la vida cotidiana es
el sistema decimal, que utiliza diez signos (de 0
a 9). Codificando adecuadamente estos diez
signos podemos representar cualquier número,
realizar operaciones con ellos y, en definitiva,
representar y transmitir cualquier tipo de infor-
mación.
Los circuitos digitales utilizan para su trabajo el
sistema de numeración binario, que utiliza úni-
camente dos signos, el 0 y el 1. A cada uno de
estos símbolos se le denomina bit.
El sistema decimal es de base 10, es decir, un
número equivale a un polinomio o suma de tér-
minos formados por potencias de 10, multiplica-
das cada una de ellas por un factor, que es uno
de los signos del sistema de numeración. Por
ejemplo:
4508 = 4 · 103 + 5 · 102 + 0 · 101 + 8 · 100
El sistema binario es de base 2, es decir, un nú-
mero equivale a un polinomio o suma de térmi-
nos formados por potencias de 2, multiplicadas
cada una de ellas por un factor, que es uno de
los signos del sistema (0 ó 1). Por ejemplo:
110101 = 1·25 + 1·24 + 0·23 + 1·22 + 0 ·21 + 1·20
2.1. Paso de sistema binario a decimal y viceversa.
Para pasar un número en sistema binario a su
equivalente en sistema decimal se expresa el
número binario por su polinomio equivalente de
potencias de dos y se suman sus términos.
Ejemplo: Pasar 110101 a decimal
110101 = 1·25 + 1·24 + 0·23 + 1·22 + 0 ·21 + 0·20
= 32 + 16 + 0 + 4 + 0 + 1 = 53
Para pasar un número en sistema decimal a su
equivalente binario se realizan sucesivas divisio-
nes por dos hasta que el último cociente sea 1.
El número binario estará formado por un 1 se-
guido de los restos ordenados de las sucesivas
divisiones. El orden de colocación viene determi-
nado por la siguiente regla: “el resto de la prime-
ra división corresponde al bit menos significativo
(el situado más a la derecha)”.
Ejemplo: Pasar 26 a binario
División
26 : 2
Cociente
13
Resto
0
13 : 2 6 1
6 : 2 3 0
3 : 2 1 1
1 1 0 1 0
2.2. Otros códigos binarios.
El código que hemos visto se denomina código
binario natural, pero existen otros códigos bina-
rios.
Uno de los más utilizados es el código BCD
(Decimal Codificado en Binario). Para represen-
tar un número decimal en BCD, se representa
por separado cada una de sus cifras en código
binario natural. El número de bits necesarios
para representar cada cifra es de cuatro.
Decimal
BCD
0 0000
1 0001
2 0010
3 0011
4 0100
5 0101
6 0110
7 0111
8 1000
9 1001
Ejemplo: Representar 348 en BCD
348 = 0011 0100 1000
El código BCD que hemos descrito se denomina
BCD natural, existen otros códigos BCD pero
que no veremos. 3. EL ÁLGEBRA DE BOOLE.
Como hemos dicho, los circuitos digitales operan
con señales binarias, de forma que sólo distin-
guen entre dos valores de tensión: nivel alto y
nivel bajo. Los niveles de tensión dependerán de
la tecnología utilizada. Por ejemplo, con los dis-
positivos de tecnología TTL, el nivel alto es 5 V y

Electrónica digital
3
IES ASTURES
el nivel bajo 0 V. Para la codificación binaria de
las señales, al nivel alto se le asigna el 1 y al
nivel alto el 0 (aunque puede ser al contrario).
Ahora bien, los circuitos digitales deben realizar
a menudo operaciones de gran complejidad, de
forma que el diseño del circuito no es simple. Es
necesaria una herramienta matemática útil para
abordar el diseño de estos circuitos. Dicha
herramienta es el álgebra de Boole.
El álgebra de Boole es aplicable a variables que
sólo admiten dos valores posibles, que se desig-
nan por 0 y 1. Estos símbolos no representan
números, sino dos estados diferentes de un dis-
positivo. Por ejemplo, una lámpara puede estar
encendida (1) o apagada (0), un interruptor o un
pulsador pueden estar cerrados (1) o abiertos
(0).
3.1. Función lógica y tabla de verdad.
Llamamos función lógica a toda variable binaria
cuyo valor depende de una expresión matemáti-
ca formada por otras variables binarias relacio-
nadas entre sí por las operaciones + (más) y ·
(por). A la función lógica se le denomina variable
dependiente y a las variables que forman la ex-
presión matemática se les denomina variables
independientes.
Ejemplo: la función S = a + b·c
Esta expresión se interpreta como “la variable S
vale 1 cuando la variable a vale 1 o las variables
b y c valen 1”. S es la variable dependiente y a,
b y c son las variables independientes.
Podemos verlo más fácilmente con una analogía
eléctrica. Supongamos el siguiente circuito:
a
S
b c
Definimos la función S como el estado de la lám-
para: encendido (1) o apagado (0). La variable
“a” es el estado del interruptor “a”: abierto (0) o
cerrado (1). Las variables “b” y “c” se definen
igual que la “a”.
En efecto, podemos observar que la lámpara
estará encendida (S = 1) cuando “a” esté cerrado
(a = 1) o bien “b” y “c” estén cerrados simultá-
neamente (b = 1 y c = 1).
Las funciones lógicas se representan mediante
las llamadas tablas de verdad, en las cuales se
indican los valores que adopta la función lógica
ante todas y cada una de las combinaciones de
valores de las variables independientes. Si te-
nemos n variables independientes, tendremos 2n
combinaciones posibles.
La tabla de verdad de la función S = a + b·c es:
a b c S
0 0 0 0
0 0 1 0
0 1 0 0
0 1 1 1
1 0 0 1
1 0 1 1
1 1 0 1
1 1 1 1
La tabla tiene dos partes, las columnas de la
izquierda corresponden a las variables indepen-
dientes o variables de entrada. La columna de la
derecha corresponde a la variable dependiente o
variable de salida.
Cada fila de la tabla representa una combinación
posible de las variables de entrada, y el corres-
pondiente valor que adopta la variable de salida.
Con “n” variables de entrada pueden darse 2n
combinaciones diferentes. 3.2. Las operaciones básicas del álge- bra de Boole.
Se definen tres operaciones básicas: la suma
lógica, el producto lógico y la complementación
(o negación). SUMA LÓGICA
Se representa por el signo +. Si tenemos dos
variables de entrada a y b, su suma lógica se
representa por:
S = a + b

Electrónica digital
4
IES ASTURES
a S
0 1
1 0
a b S
0 0 0
0 1 0
1 0 0
1 1 1
“la suma lógica vale 1 cuando alguna de las va-
riables de entrada vale 1”.
Para dos variables, su tabla de verdad es:
a b S
0 0 0
0 1 1
1 0 1
1 1 1
El circuito eléctrico equivalente es:
a
El circuito eléctrico equivalente es:
a b S
Los circuitos electrónicos que realizan esta ope-
ración lógica se denominan puertas lógicas
AND. El símbolo que se emplea depende de la
norma empleada:
S a Norma ASA
b b
S = a · b
a Norma IEC
b
S = a · b &
Los circuitos electrónicos que realizan esta ope-
ración lógica se denominan puertas lógicas OR.
El símbolo que se emplea puede ser de dos tipos
dependiendo de las normas que se empleen.
COMPLEMENTACIÓN O NEGACIÓN
Se aplica a una sola variable de entrada. Se re-
presenta colocando un guión encima del nombre
de la variable. Si ésta es “a” por ejemplo, su
a Norma ASA
b
a
Norma IEC b
S = a + b
S = a + b 1
complementación se representa por “ a ” (se lee
a negada).
S = a
Si a = 0 entonces S = 1, si a = 1 entonces S = 0.
Su tabla de verdad es:
PRODUCTO LÓGICO
Se representa por el signo ·. Si tenemos dos
variables de entrada a y b, su producto lógico se
representa por:
S = a · b
“el producto lógico vale 1 cuando todas las va-
riables de entrada valen 1”.
Para dos variables, su tabla de verdad es:
El circuito eléctrico equivalente es:
a S
a
El contacto “ a ” es complementario del “a” de
forma que cuando éste último está abierto el
primero está cerrado y viceversa.

Electrónica digital
5
IES ASTURES
a b S
0 0 1
0 1 1
1 0 1
1 1 0
El circuito electrónico que realiza la operación
lógica de complementación se denomina inver-
sor o puerta NOT. Los símbolos empleados son:
Norma ASA a S = a
a S = a Norma IEC 1
3.3. Propiedades del álgebra de Boole.
Estas propiedades y teoremas son muy impor-
tantes para simplificar las funciones lógicas.
3.4. Otras puertas lógicas. Aparte de las puertas anteriores, que realizan las
operaciones básicas del álgebra de Boole, exis-
ten otras puertas que realizan funciones lógi-
cas especiales porque resultan de la combina-
ción de dos o más funciones simples. Estas
puertas son las siguientes: Puerta NOR
Realiza la suma lógica negada (Función NO OR,
o abreviadamente función NOR).
La expresión matemática para dos variables es:
S a b
La tabla de verdad de la función NOR es:
a 1 1
a 0 a
a a a
a a 1
a a
a ·1 a
a · 0 0
a·a a
a · a 0
a b S
0 0 1
0 1 0
1 0 0
1 1 0
Su símbolo, como antes, depende de la norma:
Propiedad conmutativa:
a + b = b + a a · b = b · a
Propiedad asociativa:
(a+b)+c = a+(b+c) (a·b)·c = a·(b·c)
Propiedad distributiva:
a · (b + c) = a · b + a · c
a + (b · c) = (a + b) · (a + c)
a
Norma ASA b
a
Norma IEC b
Puerta NAND
S = a + b
S = a + b 1
Teoremas de absorción
a + (a · b) = a
a · (a + b) = a
a a · b a b
a · (a b) a · b
Realiza el producto lógico negado (Función NO
AND, o abreviadamente función NAND).
La expresión matemática para dos variables es:
S a · b
La tabla de verdad de la función NAND es:
Teoremas de Morgan
a b ... z a · b ·.....· z
a · b·....· z a b ..... z

Electrónica digital
6
IES ASTURES
a b S
0 0 1
0 1 0
1 0 0
1 1 1
Función C. integrados Nº puertas Nº entradas
OR 74LS32 4 2
AND
74LS08 4 2
74LS11 3 3
74LS21 2 4
NOT 74LS04 6 1
NOR
74LS02 4 2
74LS27 3 3
74LS260 2 4
NAND
74LS00 4 2
74LS10 3 3
74LS20 2 4
74LS30 1 8
EXOR 74LS86 4 2
EXNOR 74LS266 4 2
Su símbolo, como antes, depende de la norma: La tabla de verdad de la función EXNOR es:
a Norma ASA
b
S = a · b
a Norma IEC
b
S = a · b &
Sus símbolos son:
a
S = a b
Puerta OR EXCLUSIVA
También llamada puerta EXOR. Sólo existe para
dos entradas. Presenta a su salida el valor lógico
1 cuando las variables de entrada presentan
valores diferentes, y presenta el valor lógico 0
cuando losl valores de las variables de entrada
Norma ASA Norma IEC
b
a
b = 1
S = a b
coinciden. Se representa por:
S = a b
y equivale a: S = a · b a · b
La tabla de verdad de la función EXOR es:
a b S
0 0 0
0 1 1
1 0 1
1 1 0
Sus símbolos son:
3.5. Circuitos integrados comerciales con puertas lógicas de tecnología TTL.
Los circuitos integrados de puertas lógicas más
populares son los de la serie 74LSXX, fabricados
con tecnología TTL. Son circuitos de 14 patillas
que se alimentan a + 5 V. La patilla 7 es la que
se conecta a masa (0 V) y la patilla 14 la que se
conecta a 5 V. Las restantes patillas son las en-
tradas y salidas de las puertas.
Para algunas funciones lógicas existen puertas
de más de dos entradas (3, 4 e incluso 8 entra-
das).
a Norma ASA
b
S = a b
a Norma IEC
b
S = a b = 1
Puerta NOR EXCLUSIVA
También llamada puerta EXNOR. Sólo existe
para dos variables. Presenta a su salida el valor
lógico 1 cuando los valores de las dos variables
de entrada coinciden, y presenta el valor lógico 0
cuando los valores de las variables de entrada
son diferentes. Se representa por:
S = a b
y equivale a: S = a · b a · b
Existen también circuitos de puertas lógicas de
tecnología CMOS, que son de menor consumo
que los de tecnología TTL y se pueden alimentar
a una tensión de entre 3 y 18 V.

Electrónica digital
7
IES ASTURES
4. DISEÑO DE CIRCUITOS DE PUERTAS LÓGICAS.
El método más simple, cuando el número de
variables de entrada no es grande, consiste en
obtener la tabla de verdad de la función lógica a
partir de las condiciones físicas de funcionamien-
to del circuito que quiero diseñar.
Después obtendremos la función lógica a partir
de dicha tabla de verdad y por último se simplifi-
ca esta función lógica.
Ejemplo 1: Disponemos de tres finales de carre-
ra, “a” “b” y “c” para el gobierno de tres motores,
M1, M2 y M3, según las siguientes condiciones:
– No estando accionado ningún final de carrera,
permanecerán parados los tres motores.
– Estando pulsado sólo “a” debe girar M1.
– Estando pulsado sólo “b” debe girar M2.
– Estando pulsado sólo “c” debe girar M3.
– Accionando dos finales de carrera cualesquie-
ra, girarán los tres motores.
– Mientras se encuentren accionados los tres
finales de carrera, no deberá girar ningún mo-
tor.
La tabla de verdad del circuito de control del sis-
tema es:
a b c M1 M2 M3
0 0 0 0 0 0
0 0 1 0 0 1
0 1 0 0 1 0
0 1 1 1 1 1
1 0 0 1 0 0
1 0 1 1 1 1
1 1 0 1 1 1
1 1 1 0 0 0
Términos de indiferencia
Hasta ahora hemos supuesto que cada combi-
nación de entradas a un circuito lógico ha de dar
una salida o bien 0 o bien 1. Sin embargo, a ve-
ces sucede que algunas de dichas combinacio-
nes de entrada no podrán darse físicamente de-
bido a las características del sistema que se pre-
tende controlar con el circuito lógico.
Pensemos, por ejemplo, en el circuito para con-
trolar el movimiento de un ascensor, y que algu-
nas de las variables de entrada son finales de
carrera que detectan la planta el edificio en la
que se encuentra el ascensor. Resulta evidente
que no podrán estar activados al mismo tiempo
el final de carrera de la 1ª planta y el de la 3ª.
A estos términos se les llama términos de indi-
ferencia, y da lo mismo que la salida del circuito
lógico sea 0 ó 1, ya que de hecho no se va a dar
este caso (evidentemente salvo averías). Estos
términos se representan mediante una “x” o un
guión “-“ en la tabla de verdad, y, como veremos
luego, pueden ser bastante interesantes de cara
a simplificar el circuito lógico.
Ejemplo 2: Sea un sencillo montacargas que se
mueve entre dos plantas, que llamaremos “baja”
y “alta”. Dispone de dos interruptores, “s” y “b”
para ordenarle que suba o baje respectivamente,
que ofrecen un nivel lógico 1 cuando se accio-
nan. Además dispone de dos finales de carrera,
uno en la planta baja, “FCb” y otro en la planta
alta “Fca” que se activan, dando lugar a un nivel
lógico 1, cuando el montacargas se posiciona
justamente en su planta respectiva. El circuito
ofrecerá dos salidas, una, llamada “Ms”que al
activarse con un valor lógico 1 hará que se pon-
ga en marcha un motor que hará que el monta-
cargas suba, y otra, llamada “Mb” que al activar-
se con un valor lógico 1 hará que el motor gire
en sentido contrario y el montacargas baje.
Las condiciones de funcionamiento son:
– Si se activa el interruptor “s” y el montacargas
no está en la planta alta, el montacargas
sube.
– Si se activa el interruptor “b” y el montacargas
no está en la planta baja, el montacargas ba-
ja.
– El montacargas estará parado tanto si no es-
tán activos ni “s” ni “b” como si lo están am-
bos simultáneamente.
Tenemos un sistema con cuatro variables de
entrada (“s”, “b”, “FCb”, “Fca”) y dos variables de
salida (“Ms” y “Mb”), cada una de las cuales ten-
drá su función lógica.
Con cuatro variables de entrada pueden darse 24
= 16 combinaciones diferentes, pero tendremos
en cuenta que, salvo averías, las señales “FCb”
y “Fca” no pueden estar activas simultáneamen-
Electrónica digital
8
IES ASTURES
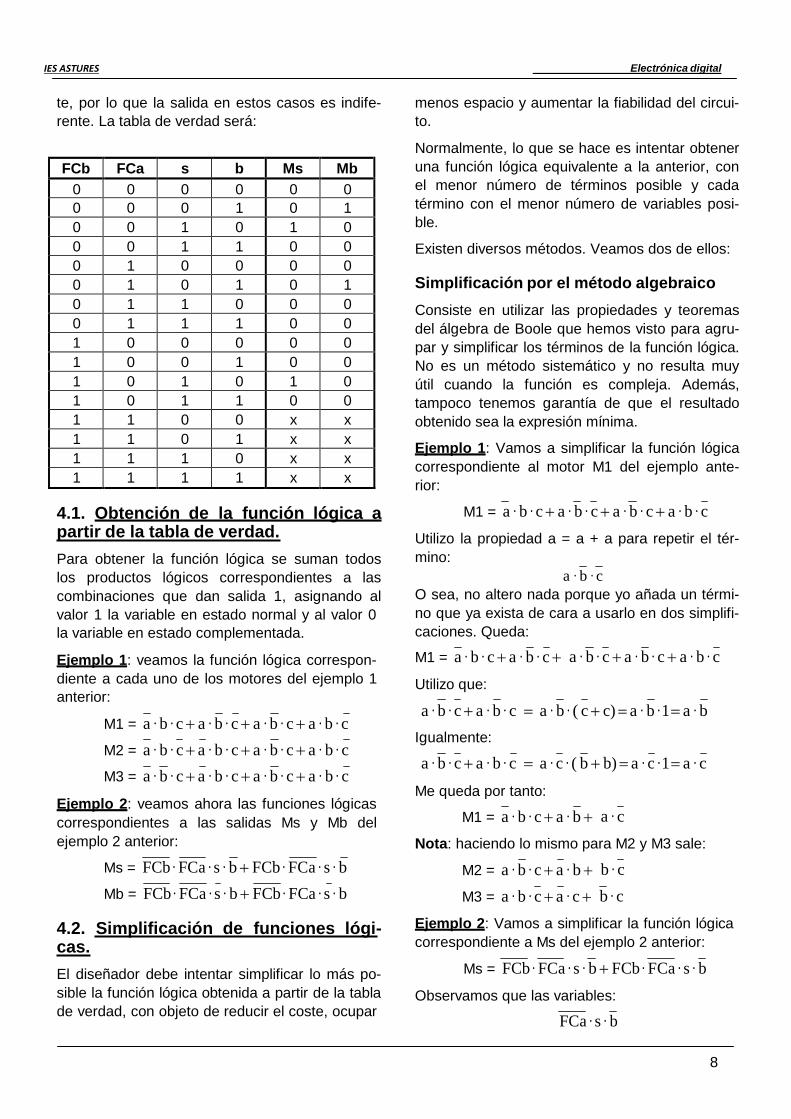
te, por lo que la salida en estos casos es indife-
rente. La tabla de verdad será:
FCb FCa s b Ms Mb
0 0 0 0 0 0
0 0 0 1 0 1
0 0 1 0 1 0
0 0 1 1 0 0
0 1 0 0 0 0
0 1 0 1 0 1
0 1 1 0 0 0
0 1 1 1 0 0
1 0 0 0 0 0
1 0 0 1 0 0
1 0 1 0 1 0
1 0 1 1 0 0
1 1 0 0 x x
1 1 0 1 x x
1 1 1 0 x x
1 1 1 1 x x
4.1. Obtención de la función lógica a partir de la tabla de verdad.
Para obtener la función lógica se suman todos
los productos lógicos correspondientes a las
combinaciones que dan salida 1, asignando al
valor 1 la variable en estado normal y al valor 0
la variable en estado complementada.
menos espacio y aumentar la fiabilidad del circui-
to.
Normalmente, lo que se hace es intentar obtener
una función lógica equivalente a la anterior, con
el menor número de términos posible y cada
término con el menor número de variables posi-
ble.
Existen diversos métodos. Veamos dos de ellos: Simplificación por el método algebraico
Consiste en utilizar las propiedades y teoremas
del álgebra de Boole que hemos visto para agru-
par y simplificar los términos de la función lógica.
No es un método sistemático y no resulta muy
útil cuando la función es compleja. Además,
tampoco tenemos garantía de que el resultado
obtenido sea la expresión mínima.
Ejemplo 1: Vamos a simplificar la función lógica
correspondiente al motor M1 del ejemplo ante-
rior:
M1 = a · b · c a · b · c a · b · c a · b · c
Utilizo la propiedad a = a + a para repetir el tér-
mino:
a · b · c
O sea, no altero nada porque yo añada un térmi-
no que ya exista de cara a usarlo en dos simplifi-
caciones. Queda:
Ejemplo 1: veamos la función lógica correspon-
diente a cada uno de los motores del ejemplo 1
anterior:
M1 = a · b · c a · b · c
Utilizo que:
a · b · c a · b · c a · b · c
M1 = a · b · c a · b · c a · b · c a · b · c
M2 = a · b · c a · b · c a · b · c a · b · c
M3 = a · b · c a · b · c a · b · c a · b · c
a · b · c a · b · c
Igualmente:
a · b · c a · b · c
a · b · ( c c) a · b ·1 a · b
a · c · ( b b) a · c ·1 a · c
Ejemplo 2: veamos ahora las funciones lógicas
correspondientes a las salidas Ms y Mb del
Me queda por tanto:
M1 = a · b · c a · b
a · c
ejemplo 2 anterior: Nota: haciendo lo mismo para M2 y M3 sale:
Ms = FCb · FCa · s · b FCb · FCa · s · b
Mb = FCb · FCa · s · b FCb · FCa · s · b
M2 = a · b · c a · b
M3 = a · b · c a · c
b · c
b · c
4.2. Simplificación de funciones lógi- cas.
El diseñador debe intentar simplificar lo más po-
sible la función lógica obtenida a partir de la tabla
de verdad, con objeto de reducir el coste, ocupar
Ejemplo 2: Vamos a simplificar la función lógica
correspondiente a Ms del ejemplo 2 anterior:
Ms = FCb · FCa · s · b FCb · FCa · s · b
Observamos que las variables:
FCa · s · b

Electrónica digital
9
IES ASTURES
c d
son comunes a los dos términos, por lo que po-
demos sacar factor común; nos queda:
a b 00 01 11 10
Ms = FCa · s · b · (FCb FCb) 00
Ahora aplico la propiedad de que una
sumada con su complementaria es igual
variable
a 1.
01
(FCb FCb) 1
Luego me queda, definitivamente:
Ms = FCa · s · b ·1 FCa · s · b
Método gráfico de Karnaugh
A diferencia del método anterior, el método de
Karnaugh asegura obtener la expresión irreduci-
ble mínima de una función lógica.
Antes de exponer el método, recordemos la pro-
piedad distributiva aplicada a términos que sean
adyacentes, entendiendo por términos adya-
centes aquellos que sólo difieren en el estado de
una de sus variables, como, por ejemplo:
11
10 Es importante establecer correctamente el orden
de numeración de las casillas. Obsérvese que
están numeradas de forma que dos casillas con-
tiguas corresponden a términos adyacentes, es
decir, entre dos casillas contiguas, sólo una de
las variables cambia de valor.
Las relaciones de adyacencia en las tablas de
Karnaugh son las siguientes:
– En la tabla de dos variables son adyacentes
a · b · c · d y a · b · c · d o bien las casillas contiguas (un lado común).
a · b · c
y a · b · c
– En la tabla de tres variables son adyacentes
Por aplicación de dicha propiedad, observamos
que la suma de dos términos adyacentes queda
reducida a un único término al que le falta la va-
riable cuyo estado difería en ambos términos
originales. Así, en los ejemplos anteriores:
tanto las casillas contiguas como las casillas
de la primera y última columna (es como si la
tabla fuera el desarrollo de un cilindro).
– En la tabla de cuatro variables son adyacen-
tes, además de las anteriores, las de la fila
a · b · c · d
a · b · c · d a · b · (c c) · d a · b · d superior con las de la fila inferior (siendo de la
misma columna). a · b · c a · b · c a · b · (c c) a · b
Veamos el procedimiento del método de Kar- El fundamento del método de Karnaugh consiste
en reducir a un solo término grupos de 2, 4, 8,
....términos adyacentes.
Para aplicar el método, a partir de la tabla de
verdad se construye otra tabla llamada tabla de
karnaugh, cuyo número de casillas es el mismo
que tiene la tabla de verdad, que como sabemos
depende del número de variables de entrada que
tenga la función que se quiere simplificar. Así,
para n variables tendrá 2n casillas.
La forma de las tablas para 2, 3 y 4 variables es:
naugh:
1.- Desde la tabla de verdad, se trasladan a la
tabla de Karnaugh los valores que adopta la va-
riable de salida cuya función lógica se quiere
simplificar.
2.- Agrupamientos de “1”. Para que la función
lógica quede lo más reducida posible nos con-
viene realizar el mínimo de agrupamientos de “1”
y con el mayor número de casillas posible. Pro-
cedemos de la siguiente forma:
– Se toman todos los “1” que no se pueden
a 0 1 b
0
1
a b 00 01 11 10
c
0
1
agrupar con ningún otro.
– Se forman los grupos de dos “1” que no pue-
den formar un grupo de cuatro.
– Se forman los grupos de cuatro “1” que no
pueden formar un grupo de ocho.
Electrónica digital
10
IES ASTURES
a b c M1 M2 M3
0 0 0 0 0 0
0 0 1 0 0 1
0 1 0 0 1 0
0 1 1 1 1 1
1 0 0 1 0 0
1 0 1 1 1 1
1 1 0 1 1 1
1 1 1 0 0 0
a b c S
0 0 0 1
0 0 1 0
0 1 0 1
0 1 1 1
1 0 0 0
1 0 1 0
1 1 0 x
1 1 1 x
c
0 0 1 1 0
1
0
1
0
1
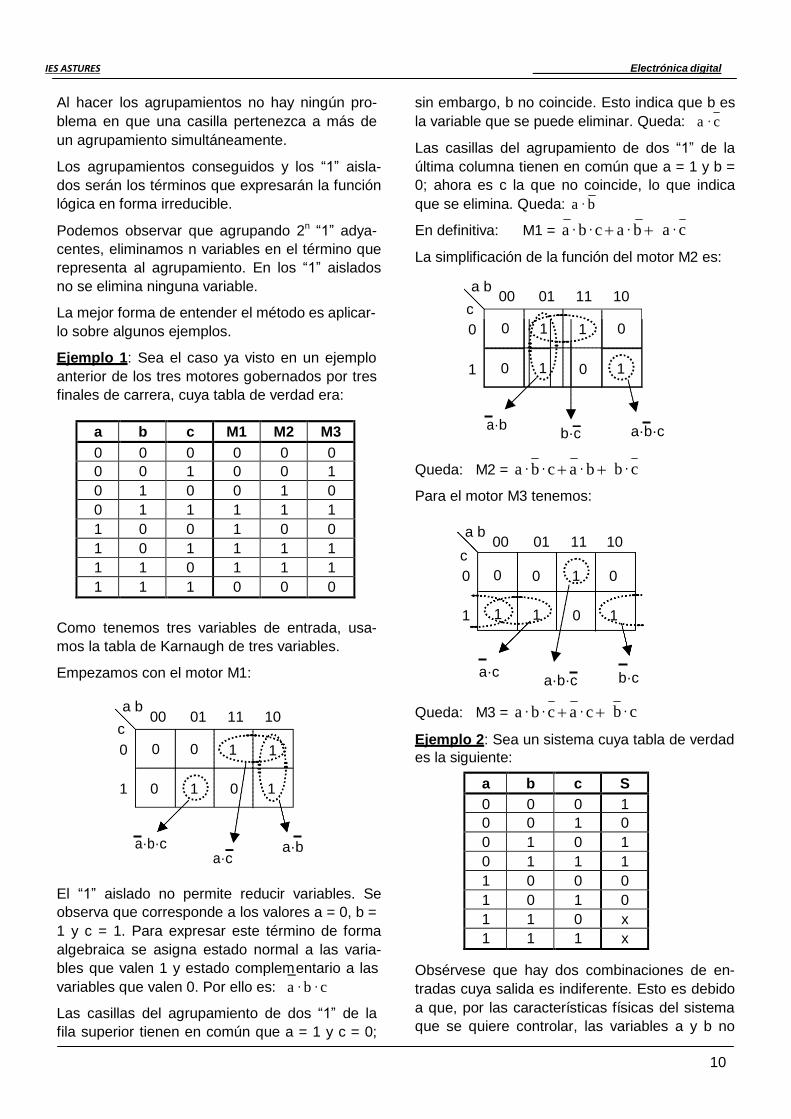
Al hacer los agrupamientos no hay ningún pro- sin embargo, b no coincide. Esto indica que b es
blema en que una casilla pertenezca a más de la variable que se puede eliminar. Queda: a · c
un agrupamiento simultáneamente.
Los agrupamientos conseguidos y los “1” aisla-
dos serán los términos que expresarán la función
lógica en forma irreducible.
Las casillas del agrupamiento de dos “1” de la
última columna tienen en común que a = 1 y b =
0; ahora es c la que no coincide, lo que indica
que se elimina. Queda: a · b
Podemos observar que agrupando 2n “1” adya- En definitiva: M1 = a · b · c a · b a · c
centes, eliminamos n variables en el término que
representa al agrupamiento. En los “1” aislados
no se elimina ninguna variable.
La simplificación de la función del motor M2 es:
a b
La mejor forma de entender el método es aplicar-
lo sobre algunos ejemplos.
Ejemplo 1: Sea el caso ya visto en un ejemplo
anterior de los tres motores gobernados por tres
finales de carrera, cuya tabla de verdad era:
00 01 11 10
a·b
b·c
a·b·c
Queda: M2 = a · b · c a · b
Para el motor M3 tenemos:
b · c
a b 00 01 11 10
c
0 0 0 1 0
Como tenemos tres variables de entrada, usa-
mos la tabla de Karnaugh de tres variables.
1 1 1 0 1
Empezamos con el motor M1:
a·c
a·b·c b·c
a b 00 01 11 10
c
Queda: M3 = a · b · c a · c
b · c
0 0 0 1 1 Ejemplo 2: Sea un sistema cuya tabla de verdad
es la siguiente:
1 0 1 0 1
a·b·c a·c
a·b
El “1” aislado no permite reducir variables. Se
observa que corresponde a los valores a = 0, b =
1 y c = 1. Para expresar este término de forma
algebraica se asigna estado normal a las varia-
bles que valen 1 y estado complem entario a las
Obsérvese que hay dos combinaciones de en-
variables que valen 0. Por ello es: a · b · c tradas cuya salida es indiferente. Esto es debido
Las casillas del agrupamiento de dos “1” de la
fila superior tienen en común que a = 1 y c = 0;
a que, por las características físicas del sistema
que se quiere controlar, las variables a y b no

Electrónica digital
11
IES ASTURES
a b c d S
0 0 0 0 1
0 0 0 1 0
0 0 1 0 0
0 0 1 1 0
0 1 0 0 1
0 1 0 1 1
0 1 1 0 1
0 1 1 1 0
1 0 0 0 0
1 0 0 1 0
1 0 1 0 0
1 0 1 1 0
1 1 0 0 x
1 1 0 1 x
1 1 1 0 x
1 1 1 1 x
00 01 11 10
1 1 x 0
pueden estar activas simultáneamente (recordar a b
el ejemplo del montacargas que no puede estar c d
en dos plantas al mismo tiempo).
Vamos a simplificar la función lógica por el mé-
todo de Karnaugh.
a b 00 01 11 10
00
01 0 1 x 0 a·c·d
11 0 0 x 0
b·c
c
0 1 1 x 0
1 0 1 x 0
10 0
1 x 0
b·d
a·c b
4.3. Realización del esquema del cir- cuito a partir de su función lógica.
Hemos tomado las dos casillas de términos indi-
ferentes como “1” ya que de esta forma puedo
formar un agrupamiento de cuatro casillas, que
es más conveniente que uno de dos casillas.
Me queda, por tanto: S = a · c b
Ejemplo 3: Sea el sistema cuya tabla de verdad
se da a continuación:
Una vez que tenemos la función lógica ya simpli-
ficada, procedemos a implementarla con puertas
lógicas. Veamos algunos ejemplos:
Ejemplo: S = a · c b (del ejemplo 2 anterior)
a
1
b
c
1
S 1
&
Sin embargo, podemos tener en cuenta que se-
gún uno de los teoremas de Morgan
a · c a c
con lo que queda mucho más simple usando una
puerta NOR.
a
b
c
Vamos a simplificar por el método de Karnaugh:
Tras realizar los agrupamientos que se indican
en la tabla de karnaugh siguiente, nos queda:
S = (a c) b
S 1
S = a · c · d b · c
b · d 1

Electrónica digital
12
IES ASTURES
1 1
1
Ejemplo: (función del ejemplo 3 anterior) 5. LA CONEXIÓN DE LA SALIDA DEL CIRCUITO LÓGICO A OTROS CIRCUITOS.
S = a · c · d b · c
a b c d
b · d
&
&
&
Por los circuitos constituidos por componentes
electrónicos digitales circulan intensidades de
corriente muy pequeñas. De hecho, aunque de-
pende del tipo de tecnología, la salida de una
puerta lógica no puede dar más de allá de unos
pocos mA de corriente. Concretamente, con la
tecnología LS TTL, que es una de las más habi-
tuales, la corriente de salida es de 8 mA, y en
S tecnología CMOS, también bastante utilizada, es 1 aún menor, de unos 2 mA.
Todo lo anterior nos indica que nosotros, en nin-
gún caso podemos conectar a la salida de un
circuito lógico sin más, el receptor que queramos
controlar, como puede ser un motor, una lámpa-
ra o un relé, ya que todos estos elementos con-
4.4. Implementación de puertas lógi- cas con puertas NAND y NOR.
De cara a la realización física del circuito elec-
trónico con puertas lógicas, puede resultar inte-
resante tener en cuenta que cualquier puerta
lógica se puede construir con puertas NAND o
con puertas NOR. Por ello a estas puertas, se
les llama puertas universales.
Esto es interesante, primero porque el coste de
los circuitos con puertas NAND es más bajo que
con otras puertas, y segundo, porque si necesi-
tamos para completar el diseño una sola puerta
de cualquier tipo, no merece la pena colocar un
sumen una corriente muy superior a la que el
circuito lógico puede dar.
La forma más sencilla de resolver este problema
es que la salida del circuito lógico se conecte a
la base de un transistor o de un par Darlington,
interponiendo una resistencia adecuada para
limitar la salida de corriente. Para la conexión del
receptor que queramos controlar tenemos dos
posibilidades:
a) Si el receptor re- Vcc
quiere una pequeña
tensión continua y su
consumo de corriente
nuevo circuito integrado, desperdiciando el resto
de puertas que contenga, cuando puede que nos
sobren puertas NAND o NOR en otro integrado.
En la tabla se muestra la forma de realizar las
funciones básicas con puertas NAND y NOR.
es bajo, se puede
conectar directamen-
te al colector del tran-
sistor (por ejemplo,
un led o un zumbador).
Circuito
lógico
5K6
Función Con puertas NAND Con puertas NOR
b) Si el receptor requiere una tensión elevada o
tiene mayor consumo, como pueden ser lámpa-
ras de incandescencia, motores, etc, es conve-
1 &
& & &
1 niente conectar la bobina de excitación de un
relé al colector del transistor y que sean los con-
tactos del relé los que activen el receptor.
1 Vcc V
1
1 &
&
1 1
Circuito
lógico
5K6

Electrónica digital
13
IES ASTURES
ACTIVIDADES
A.1. Transformar los siguientes números dados
en código binario natural a sistema decimal.
a) 1100110 b) 010001 c) 1101 d) 1001101
A.2. Transformar los siguientes números decima-
les a código binario natural.
a) 125 b) 121 c) 88 d) 33 e) 63 f) 65 g) 110
A.3. Expresar los siguientes números decimales
en código BCD.
a) 312 b) 401 c) 290 d) 1029 e) 17 f) 82
A.4. Expresar los siguientes números en código
BCD en sistema decimal.
a) 1000 0110 0001 b) 0011 1001 c) 0110 0101
B. Elaborar la tabla de verdad y la función lógica
de los siguientes circuitos.
B.1. a b
L
c
B.2. a b
L
B.4. a b
L
c d B.5. a b
L1
a
a
L2
b
C. Elaborar la tabla de verdad correspondiente a
las siguientes funciones lógicas.
C.1 S1 = a b
C.2 S2 = a · b c
C.3 S3 = a b·c · c
a b C.4 S4 = (a ·b c) · ( d c)
C.5 S5 = [(a 1) · b ] c
B.3. a b
c L
d
D. Elaborar un esquema eléctrico a base de pul-
sadores y lámparas que se corresponda con
cada una de las funciones lógicas siguientes
D.1 L1 = (a b) · c
D.2 L2 = a · b c
D.3 L3 = [(a 1) · b ] c
D.4 L4 = (a ·b c) · (d c)
E.1. Elaborar la tabla de verdad del sistema de
control de un motor controlado por tres pulsado-

Electrónica digital
14
IES ASTURES
a b c S1
0 0 0 0
0 0 1 0
0 1 0 0
0 1 1 1
1 0 0 0
1 0 1 1
1 1 0 1
1 1 1 1
a b c S2
0 0 0 1
0 0 1 1
0 1 0 0
0 1 1 0
1 0 0 1
1 0 1 1
1 1 0 0
1 1 1 0
a b c S3
0 0 0 0
0 0 1 0
0 1 0 1
0 1 1 1
1 0 0 1
1 0 1 1
1 1 0 1
1 1 1 1
a b c d S4
0 0 0 0 0
0 0 0 1 0
0 0 1 0 0
0 0 1 1 1
0 1 0 0 0
0 1 0 1 1
0 1 1 0 1
0 1 1 1 1
1 0 0 0 0
1 0 0 1 1
1 0 1 0 1
1 0 1 1 1
1 1 0 0 1
1 1 0 1 1
1 1 1 0 1
1 1 1 1 1
res a, b y c que cumpla las siguientes condicio-
nes de funcionamiento:
– Si se pulsan los tres pulsadores el motor se
activa.
– Si se pulsan dos pulsadores cualesquiera, el
motor se activa pero además se enciende una
lámpara indicadora de peligro.
– Si sólo se pulsa un pulsador cualquiera, el
motor no se activa, pero sí se enciende la
lámpara indicadora de peligro.
– Si no se pulsa ningún pulsador, ni el motor ni
la lámpara se activan.
E.2. Elaborar la tabla de verdad de un circuito
constituido por tres pulsadores, a, b y c, y una
lámpara L que se encienda bien cuando se pul-
san los tres pulsadores a la vez, o bien cuando
se pulse uno solo de ellos.
E.3. Elaborar la tabla de verdad de un circuito
constituido por cuatro pulsadores, a, b, c y d, y
dos lámparas L1 y L2, que cumpla las siguientes
condiciones de funcionamiento:
– L1 se encenderá si se pulsan tres pulsadores
cualesquiera.
– L2 se encenderá si se pulsan los cuatro
pulsadores.
– Si se pulsa un solo pulsador, sea el que sea,
se encenderán tanto L1 como L2
E.4. Elaborar la tabla de verdad de un sistema
de alarma está constituido por cuatro detectores
denominados a, b, c y d. el sistema debe activar-
se cuando se activen tres o cuatro detectores. Si
sólo se activan dos detectores, es indiferente
que la alarma se active o no: Por último, la alar-
ma nunca debe activarse si se dispara uno o
ningún detector. Por razones de seguridad, el
sistema debe activarse si a = 0, b = 0, c = 0 y d
= 1.
F. Para cada una de las siguientes tablas de
verdad, se pide:
a) Hallar una función lógica que se corres-
ponda con ella.
b) Simplificar la función utilizando el método
algebraico.
c) Simplificar la función utilizando el método
de Karnaugh.
F.1
F.2
F.3
F.4

Electrónica digital
15
IES ASTURES
a b c S3
0 0 0 1
0 0 1 1
0 1 0 0
0 1 1 x
1 0 0 0
1 0 1 1
1 1 0 x
1 1 1 1
a b c d S4
0 0 0 0 0
0 0 0 1 1
0 0 1 0 0
0 0 1 1 x
0 1 0 0 0
0 1 0 1 x
0 1 1 0 x
0 1 1 1 1
1 0 0 0 0
1 0 0 1 x
1 0 1 0 x
1 0 1 1 1
1 1 0 0 x
1 1 0 1 1
1 1 1 0 1
1 1 1 1 1
F.5 H.2 a
b 1 &
S2 c
1 1
F.6
G. Representar circuitos con puertas lógicas pa-
ra cada una de las funciones lógicas siguientes:
G.1 S1 = a b
G.2 S2 = a · b c
G.3 S3 = a b·c · c
H.3 a
b &
S3
c & 1
1 &
I.1. Una habitación con dos puertas está protegi-
da por un sistema de alarma que recibe tres se-
ñales, una de cada puerta que se activan cuando
éstas se abren, que llamaremos “b” y “c” y una
señal, que llamaremos “a”, que se activa cuando
ponemos la alarma en estado de alerta. Elaborar
la tabla de verdad, diseñar la función lógica e
implementar el circuito con puertas lógicas.
I.2. El motor M del limpiaparabrisas de un coche
se pone en marcha cuando está cerrada la llave
de contacto C y se cierra el interruptor del lim-
piaparabrisas L. Sin embargo, al abrir el interrup-
tor L, el motor del limpiaparabrisas sigue funcio-
nando hasta que la escobilla llega a su punto de
reposo (para que no se quede en mitad del pa-
rabrisas), lo que es detectado por el acciona-
miento de un final de carrera, F. Determinar la
tabla de verdad y la función lógica del sistema.
Dibujar un circuito con elementos de maniobra
convencionales y otro con puertas lógicas.
G.4 S4 = (a ·b c) · ( d c) I.3. Se quiere un circuito que controle el monta-
G.5 S5 = [(a 1) · b ] c
H. Determinar la función lógica de los siguientes
circuitos y simplifícala cuanto puedas.
H.1
a
b &
1
c S1
1 d
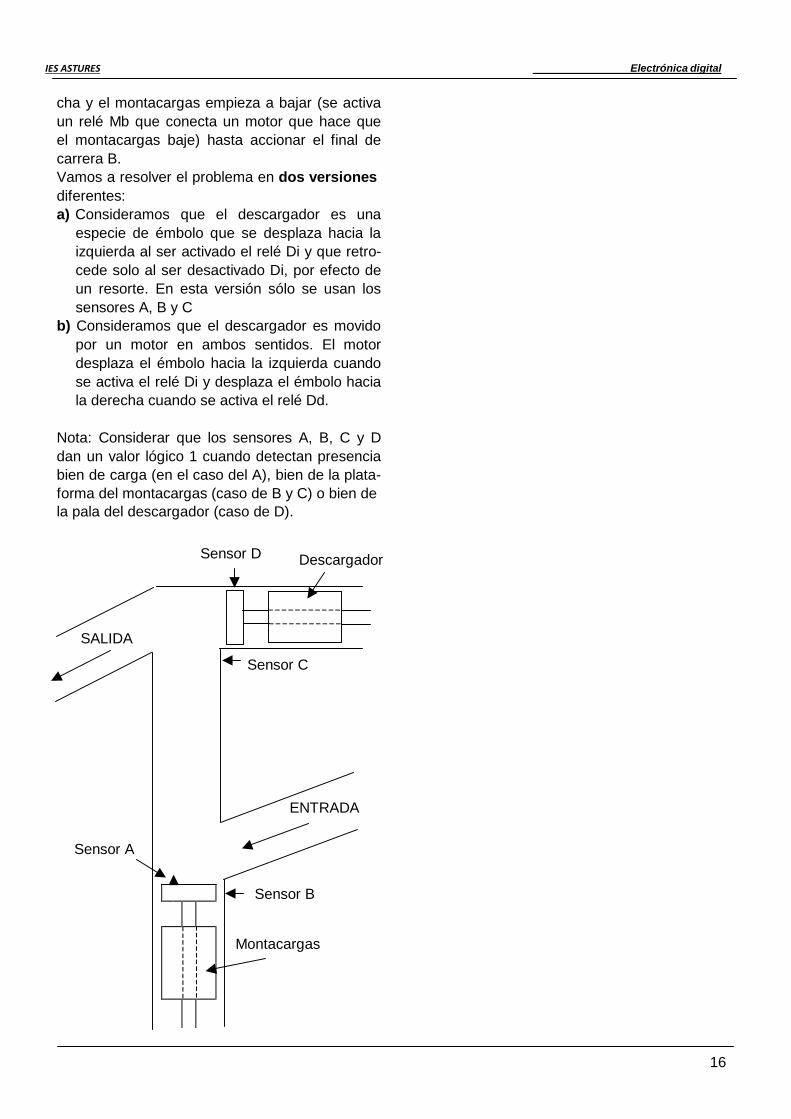
cargas de la figura y que accione el dispositivo
de descarga. El orden de funcionamiento es:
Cuando se introduce la carga por la entrada (lo
cual es detectado por el sensor A, que está colo-
cado sobre la plataforma), el montacargas co-
mienza a subir (se activa un relé Ms que conecta
un motor que hace que el montacargas suba)
hasta que se acciona el final de carrera C; a con-
tinuación se acciona el descargador (se activa
un relé Di que hace desplazarse el descargador
hacia la izquierda) y la carga sale por la salida.
Seguidamente, el émbolo se retira hacia la dere-
Electrónica digital
16
IES ASTURES
cha y el montacargas empieza a bajar (se activa
un relé Mb que conecta un motor que hace que
el montacargas baje) hasta accionar el final de
carrera B.
Vamos a resolver el problema en dos versiones
diferentes:
a) Consideramos que el descargador es una
especie de émbolo que se desplaza hacia la
izquierda al ser activado el relé Di y que retro-
cede solo al ser desactivado Di, por efecto de
un resorte. En esta versión sólo se usan los
sensores A, B y C
b) Consideramos que el descargador es movido
por un motor en ambos sentidos. El motor
desplaza el émbolo hacia la izquierda cuando
se activa el relé Di y desplaza el émbolo hacia
la derecha cuando se activa el relé Dd.
Nota: Considerar que los sensores A, B, C y D
dan un valor lógico 1 cuando detectan presencia
bien de carga (en el caso del A), bien de la plata-
forma del montacargas (caso de B y C) o bien de
la pala del descargador (caso de D).
Sensor D
Descargador
SALIDA
Sensor C
ENTRADA
Sensor A
Sensor B
Montacargas