6 Observadores del estado - DISAM | División de ... · observador U.P.M.-DISAM P. Campoy Control...
10
1 U.P.M.-DISAM P. Campoy Control en el espacio de estado 1 Control en el Espacio de Estado 6. Observadores del estado por Pascual Campoy [email protected] Universidad Politécnica Madrid U.P.M.-DISAM P. Campoy Control en el espacio de estado 2 Observadores del estado • Introducción • Definición, ecuaciones y estructura • Dinámica del sistema con observador • Cálculo de observadores en sistemas monovariables • Cálculo de observadores en sistemas multivariables
Transcript of 6 Observadores del estado - DISAM | División de ... · observador U.P.M.-DISAM P. Campoy Control...

1
U.P.M.-DISAM P. Campoy
Control en el espacio de estado
1
Control en el Espacio de Estado 6. Observadores del estado
por Pascual Campoy
Universidad Politécnica Madrid
U.P.M.-DISAM P. Campoy
Control en el espacio de estado
2
Observadores del estado
• Introducción • Definición, ecuaciones y estructura • Dinámica del sistema con observador • Cálculo de observadores en sistemas
monovariables • Cálculo de observadores en sistemas
multivariables
2
U.P.M.-DISAM P. Campoy
Control en el espacio de estado
3
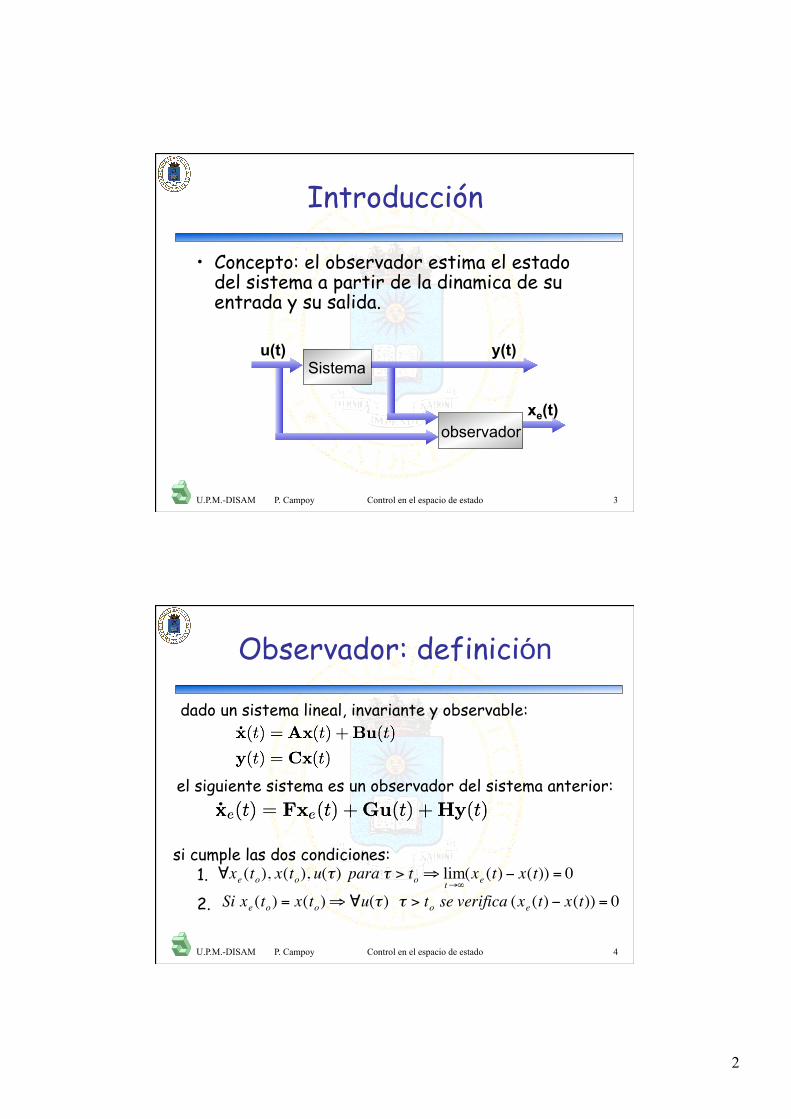
Introducción
• Concepto: el observador estima el estado del sistema a partir de la dinamica de su entrada y su salida.
u(t) y(t)
xe(t)
Sistema
observador
U.P.M.-DISAM P. Campoy
Control en el espacio de estado
4
Observador: definición
dado un sistema lineal, invariante y observable:
el siguiente sistema es un observador del sistema anterior:
si cumple las dos condiciones: 1.
2.
!
"xe (to), x(to), u(#) para # > to $ limt%&(xe (t) ' x(t)) = 0
!
Si xe (to) = x(to)"#u($ ) $ > to se verifica (xe (t) % x(t)) = 0
3
U.P.M.-DISAM P. Campoy
Control en el espacio de estado
5
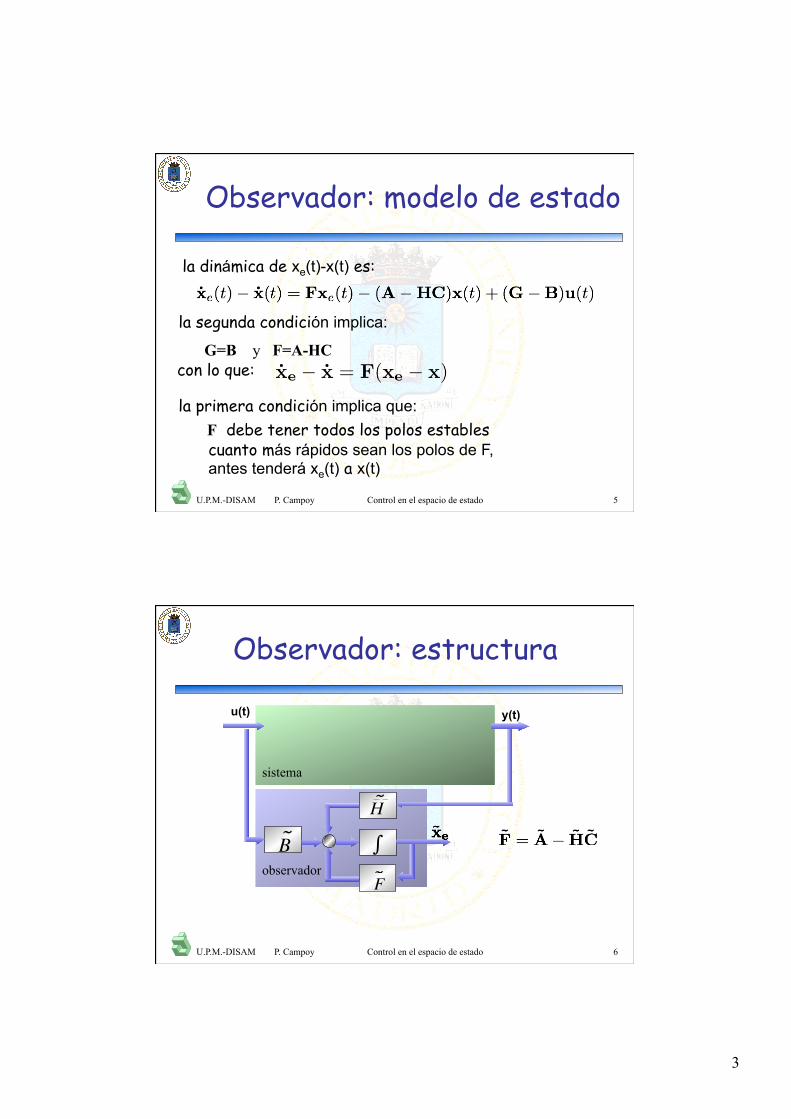
Observador: modelo de estado
la dinámica de xe(t)-x(t) es:
la primera condición implica que: F debe tener todos los polos estables cuanto más rápidos sean los polos de F, antes tenderá xe(t) a x(t)
la segunda condición implica:
G=B y F=A-HC con lo que:
U.P.M.-DISAM P. Campoy
Control en el espacio de estado
6
Observador: estructura
observador
∫
u(t) y(t)
sistema
!
˜ H
!
˜ B
!
˜ F !
H
!
F
!
B
4
U.P.M.-DISAM P. Campoy
Control en el espacio de estado
7
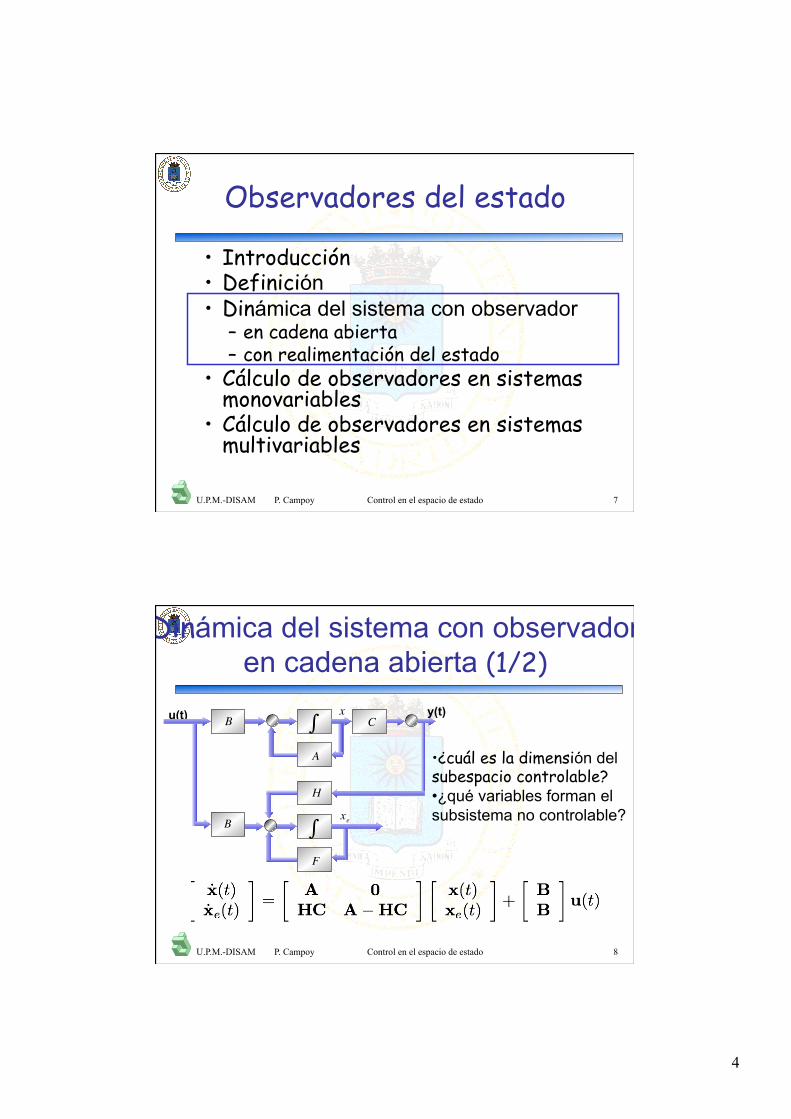
Observadores del estado
• Introducción • Definición • Dinámica del sistema con observador
– en cadena abierta – con realimentación del estado
• Cálculo de observadores en sistemas monovariables
• Cálculo de observadores en sistemas multivariables
U.P.M.-DISAM P. Campoy
Control en el espacio de estado
8
Dinámica del sistema con observador en cadena abierta (1/2)
∫ !
H
!
F!
B
!
B
!
A
∫ u(t)
!
C
!
x y(t)
!
xe
• ¿cuál es la dimensión del subespacio controlable? • ¿qué variables forman el subsistema no controlable?
5
U.P.M.-DISAM P. Campoy
Control en el espacio de estado
9
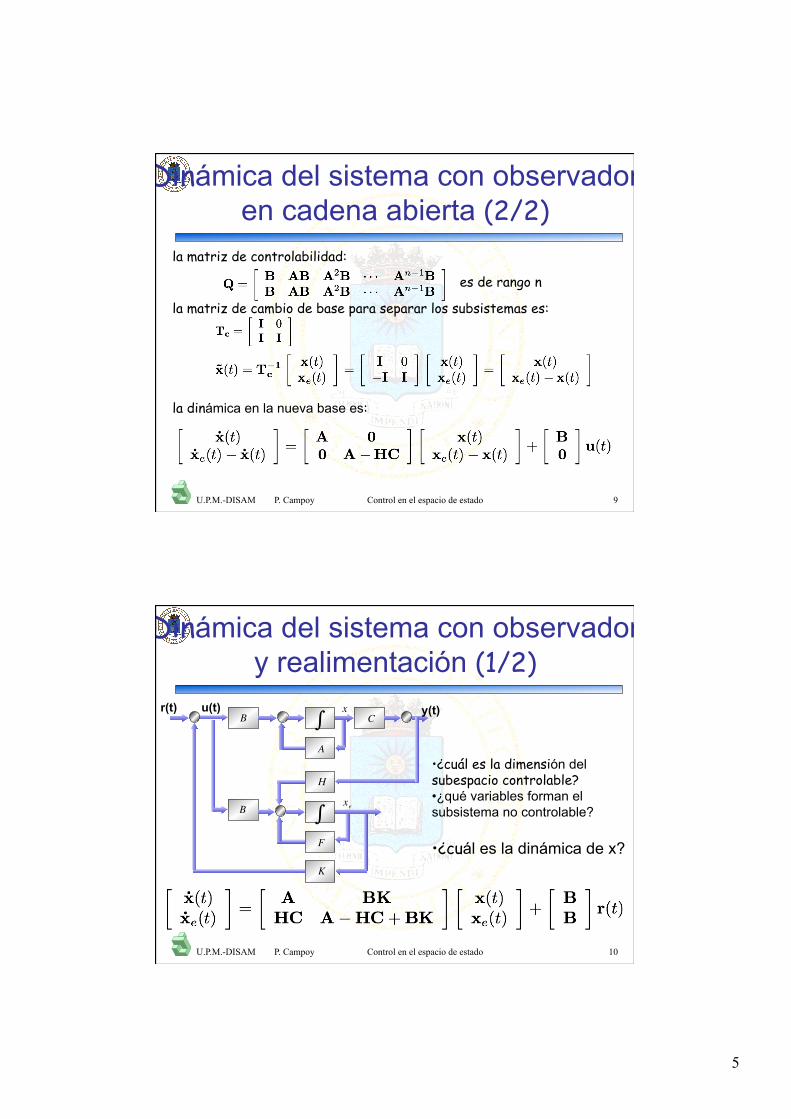
Dinámica del sistema con observador en cadena abierta (2/2)
la matriz de controlabilidad:
es de rango n
la matriz de cambio de base para separar los subsistemas es:
la dinámica en la nueva base es:
U.P.M.-DISAM P. Campoy
Control en el espacio de estado
10
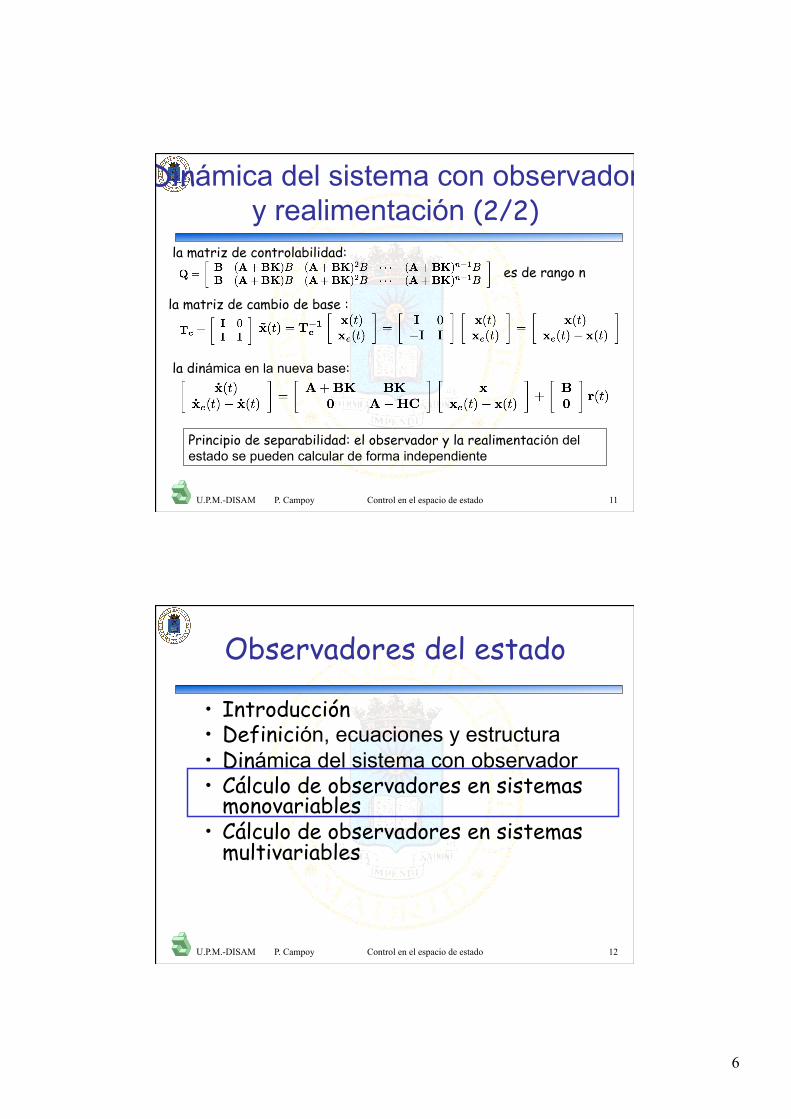
Dinámica del sistema con observador y realimentación (1/2)
• ¿cuál es la dimensión del subespacio controlable? • ¿qué variables forman el subsistema no controlable?
• ¿cuál es la dinámica de x?
∫ !
H
!
F!
B
!
B
!
A
∫ u(t)
!
C
!
x y(t)
!
xe
r(t)
!
K
6
U.P.M.-DISAM P. Campoy
Control en el espacio de estado
11
Dinámica del sistema con observador y realimentación (2/2)
la matriz de controlabilidad: es de rango n
la matriz de cambio de base :
la dinámica en la nueva base:
Principio de separabilidad: el observador y la realimentación del estado se pueden calcular de forma independiente
U.P.M.-DISAM P. Campoy
Control en el espacio de estado
12
Observadores del estado
• Introducción • Definición, ecuaciones y estructura • Dinámica del sistema con observador • Cálculo de observadores en sistemas
monovariables • Cálculo de observadores en sistemas
multivariables
7
U.P.M.-DISAM P. Campoy
Control en el espacio de estado
13
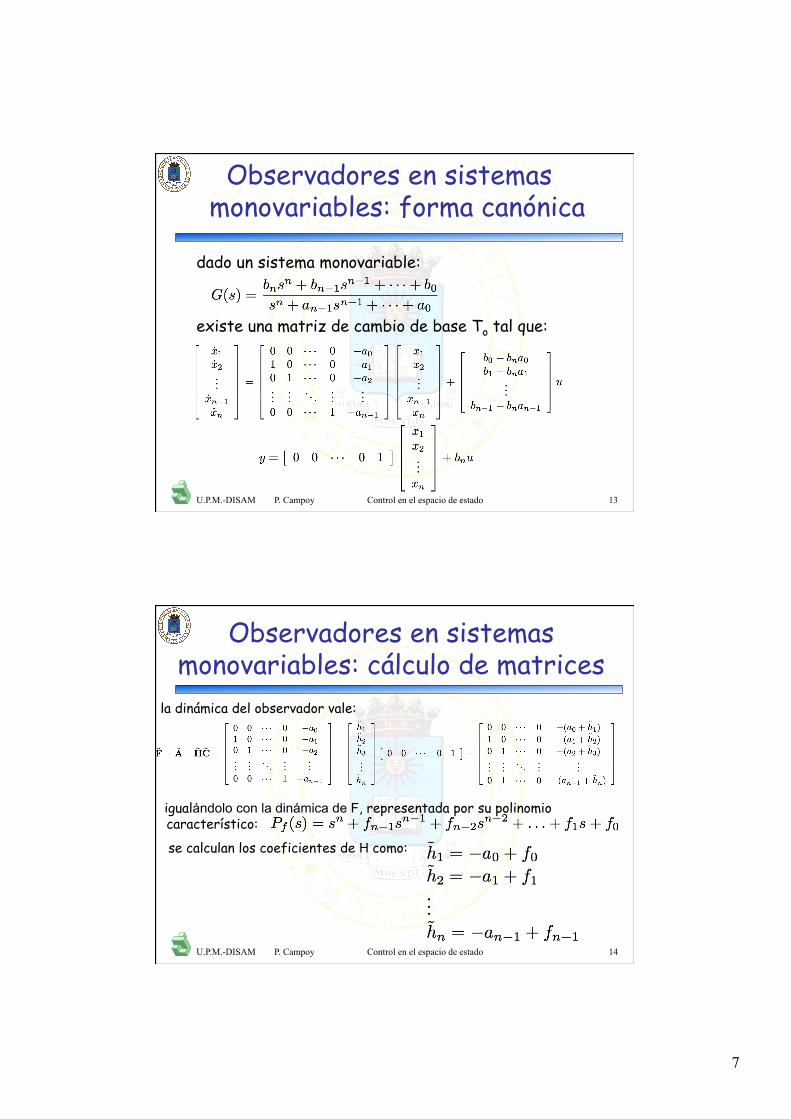
Observadores en sistemas monovariables: forma canónica
dado un sistema monovariable:
existe una matriz de cambio de base To tal que:
U.P.M.-DISAM P. Campoy
Control en el espacio de estado
14
Observadores en sistemas monovariables: cálculo de matrices
la dinámica del observador vale:
igualándolo con la dinámica de F, representada por su polinomio característico:
se calculan los coeficientes de H como:
8
U.P.M.-DISAM P. Campoy
Control en el espacio de estado
15
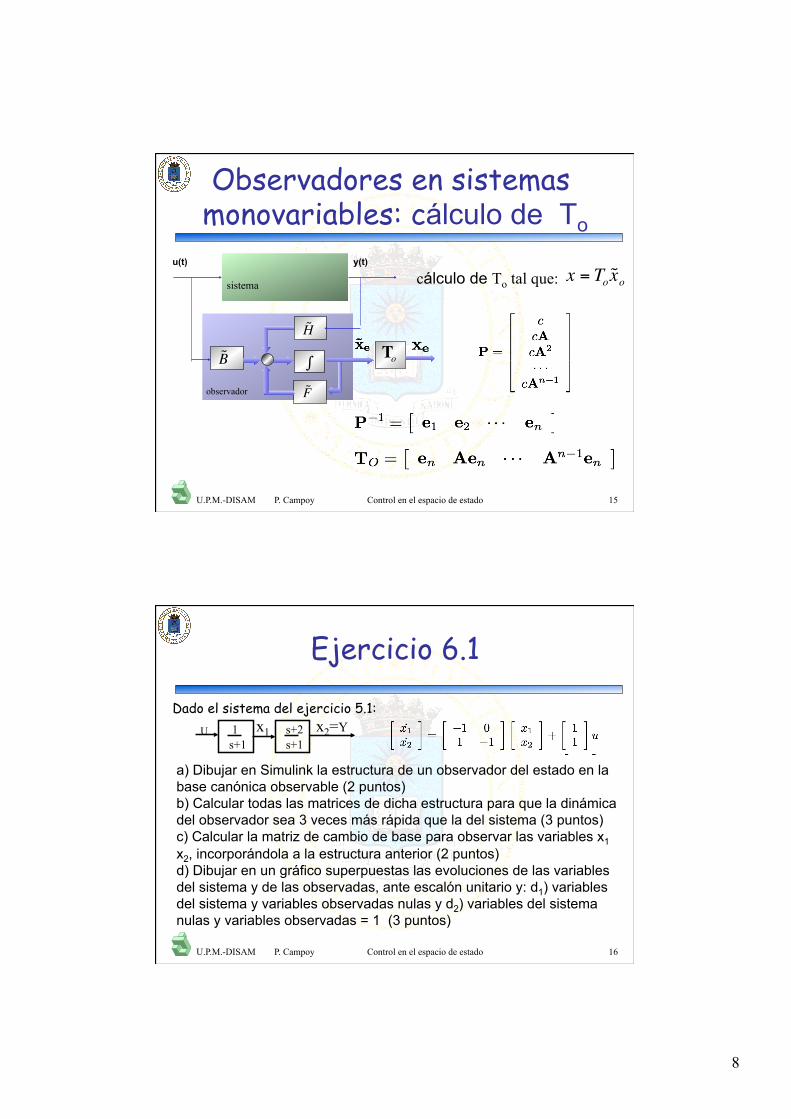
Observadores en sistemas monovariables: cálculo de To
u(t) y(t)
sistema
observador
∫
!
˜ H
!
˜ B
!
˜ F
!
To !
x = To ˜ x ocálculo de To tal que:
U.P.M.-DISAM P. Campoy
Control en el espacio de estado
16
Ejercicio 6.1
a) Dibujar en Simulink la estructura de un observador del estado en la base canónica observable (2 puntos) b) Calcular todas las matrices de dicha estructura para que la dinámica del observador sea 3 veces más rápida que la del sistema (3 puntos) c) Calcular la matriz de cambio de base para observar las variables x1 x2, incorporándola a la estructura anterior (2 puntos) d) Dibujar en un gráfico superpuestas las evoluciones de las variables del sistema y de las observadas, ante escalón unitario y: d1) variables del sistema y variables observadas nulas y d2) variables del sistema nulas y variables observadas = 1 (3 puntos)
Dado el sistema del ejercicio 5.1: U s+2
s+1 1 s+1
x2=Y x1
9
U.P.M.-DISAM P. Campoy
Control en el espacio de estado
17
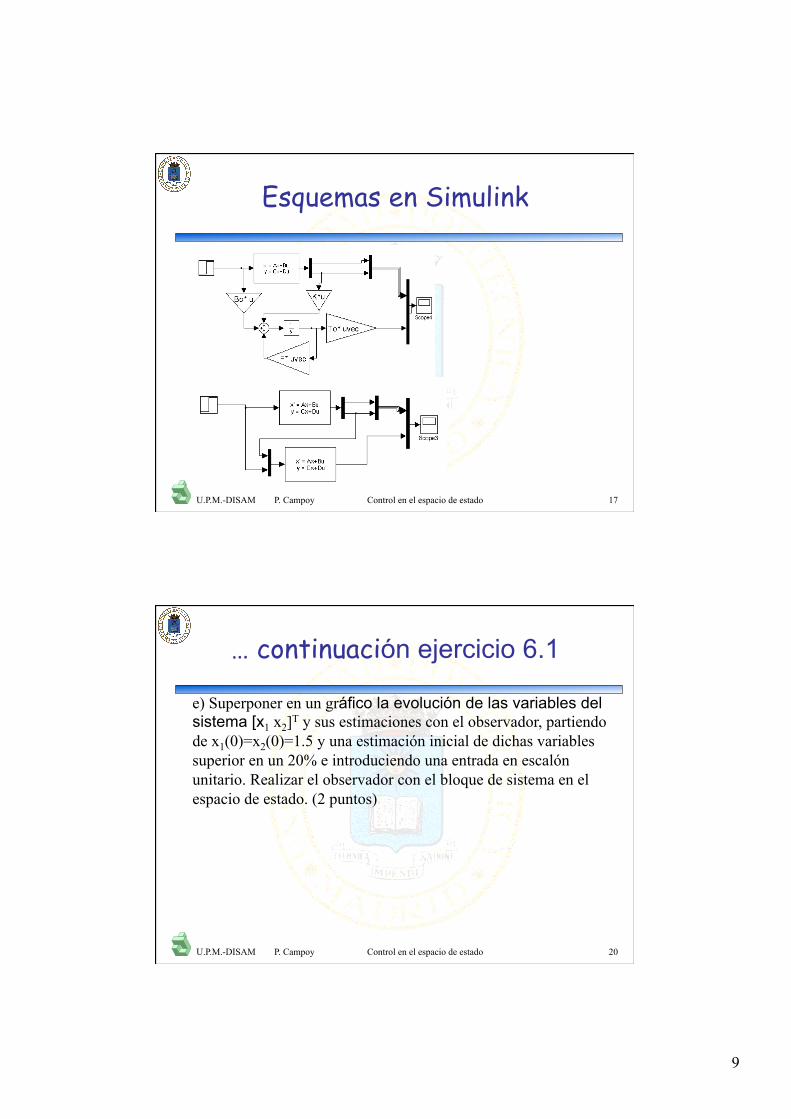
Esquemas en Simulink
U.P.M.-DISAM P. Campoy
Control en el espacio de estado
20
… continuación ejercicio 6.1
e) Superponer en un gráfico la evolución de las variables del sistema [x1 x2]T y sus estimaciones con el observador, partiendo de x1(0)=x2(0)=1.5 y una estimación inicial de dichas variables superior en un 20% e introduciendo una entrada en escalón unitario. Realizar el observador con el bloque de sistema en el espacio de estado. (2 puntos)
10
U.P.M.-DISAM P. Campoy
Control en el espacio de estado
22
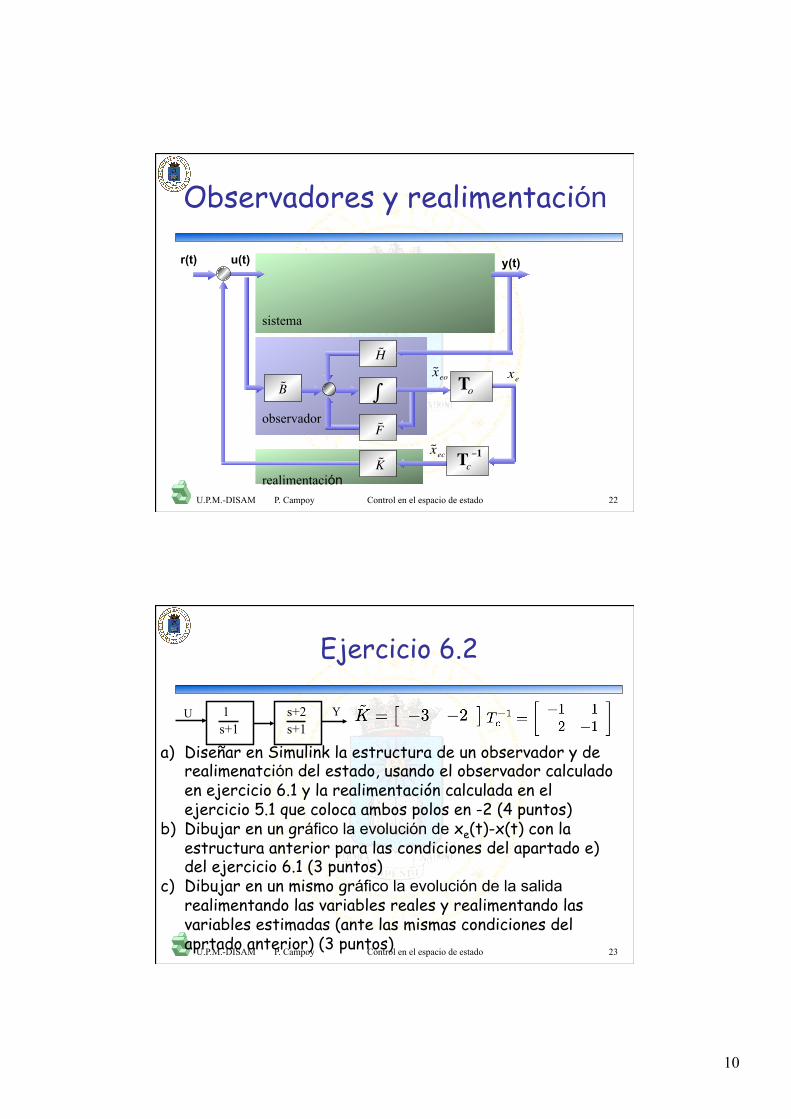
Observadores y realimentación
observador
∫ !
˜ H
!
˜ F !
˜ B
u(t) y(t) r(t)
!
˜ K
sistema
realimentación
!
˜ x eo
!
To
!
Tc"1
!
xe
!
˜ x ec
U.P.M.-DISAM P. Campoy
Control en el espacio de estado
23
Ejercicio 6.2
U s+2 s+1
1 s+1
Y
a) Diseñar en Simulink la estructura de un observador y de realimenatción del estado, usando el observador calculado en ejercicio 6.1 y la realimentación calculada en el ejercicio 5.1 que coloca ambos polos en -2 (4 puntos)
b) Dibujar en un gráfico la evolución de xe(t)-x(t) con la estructura anterior para las condiciones del apartado e) del ejercicio 6.1 (3 puntos)
c) Dibujar en un mismo gráfico la evolución de la salida realimentando las variables reales y realimentando las variables estimadas (ante las mismas condiciones del aprtado anterior) (3 puntos)