Control en el Espacio de Estado 5. Observabilidad...4 U.P.M.-DISAM P. Campoy Control en el Espacio...
13
1 U.P.M.-DISAM P. Campoy Control en el Espacio de Estado 1 Control en el Espacio de Estado 5. Observabilidad por Pascual Campoy [email protected] Universidad Politécnica Madrid U.P.M.-DISAM P. Campoy Control en el Espacio de Estado 2 Observabilidad del estado: necesidad u(t) y(t) r(t) sistema ˜ K T c "1 B A ∫ C x observador x e realimentación
Transcript of Control en el Espacio de Estado 5. Observabilidad...4 U.P.M.-DISAM P. Campoy Control en el Espacio...

1
U.P.M.-DISAM P. Campoy
Control en el Espacio de Estado
1
Control en el Espacio de Estado 5. Observabilidad
por Pascual Campoy
Universidad Politécnica Madrid
U.P.M.-DISAM P. Campoy
Control en el Espacio de Estado
2
!
x
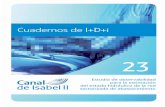
Observabilidad del estado: necesidad
u(t) y(t) r(t)
sistema
!
˜ K
!
Tc"1
!
B
!
A
∫
!
C
!
x
observador
!
xe
realimentación

2
U.P.M.-DISAM P. Campoy
Control en el Espacio de Estado
3
Observabilidad
• Introducción • Definiciones • Observabilidad en sistemas lineales • Observabilidad en sistemas lineales e
invariantes. – Subespacio no-observable – Subsistema observable – Separación del subsistema
controlable y observable
U.P.M.-DISAM P. Campoy
Control en el Espacio de Estado
4
Introducción
• Concepto: "observar" el estado del sistema a partir de su relación entrada-salida.
u(t) y(t)
xe(t)
Sistema

3
U.P.M.-DISAM P. Campoy
Control en el Espacio de Estado
5
Ejemplo 4.1
a) ¿se puede conocer x(t) conocido y(t)=x1(t)-x2(t) ? b) en el supuesto R1C1≠R2C2: ¿se puede conocer x(t0) conocido
y(τ)=x1(τ)-x2(τ) para t0<τ≤t? o bien ¿cada estado inicial distinto genera una salida distinta?
c) ¿y si y(t)=3x1(t)-5x2(t)? d) ¿y para R1C1=R2C2? ¿existen estados en los que y(t)=0?
uc1
uc2
y=x1-x2
x(t)
u C2
R2
C1
R1
R1C1 R2C2
U.P.M.-DISAM P. Campoy
Control en el Espacio de Estado
6
Observabilidad
• Introducción • Definiciones • Observabilidad en sistemas lineales • Observabilidad en sistemas lineales e
invariantes. – Subespacio no-observable – Subsistema observable – Separación del subsistema
controlable y observable

4
U.P.M.-DISAM P. Campoy
Control en el Espacio de Estado
7
Definiciones: (1/1) observabilidad de un punto del estado
• x0 es observalable en [to,t1], si y sólo si partiendo de x(t0)=x0, el conocimiento de la entrada u(τ) y la salida y(τ) en el intervalo to ≤ τ ≤t1, permite asegurar que x(t0)=x0
• x0 es observalable, si y sólo si para todo instante inicial t0 existe un intervalo finito [to,t1], tal que x0 es observable en [to,t1].
U.P.M.-DISAM P. Campoy
Control en el Espacio de Estado
8
Definiciones: (1/2) observabilidad de un sistema
• Un sistema es observalable en [to,t1], si y sólo si todos los puntos del espacio de estado son observalables en [to,t1],
• Un sistema es observalable si y sólo si todos los puntos del espacio de estado son observalables

5
U.P.M.-DISAM P. Campoy
Control en el Espacio de Estado
9
Observabilidad
• Introducción • Definiciones • Observabilidad en sistemas lineales • Observabilidad en sistemas lineales e
invariantes. – Subespacio no-observable – Subsistema observable – Separación del subsistema
controlable y observable
U.P.M.-DISAM P. Campoy
Control en el Espacio de Estado
10
Observabilidad de sistemas lineales: introducción
• En un sistema lineal:
)t(u)t(Dd)(u)(B),t()t(Cx)t,t()t(C)t(u)t(D)t(x)t(C)t(yt
t00
0
+!+!=+= " ####
agrupando términos que no dependen de x0:
!
( y (t) " y(t) # C(t)$(t,% )B(% )u(% )d%t0
t
& #D(t)u(t) = C(t)$(t, t0)x0
con lo que el objetivo de la observabilidad es el cálculo de x0 a partir de o salida del sistema ante entrada nula )t(y(
!
( y (t) " y(t) # C(t)$(t,% )B(% )u(% )d%t0
t
& #D(t)u(t) = C(t)$(t, t0)x0

6
U.P.M.-DISAM P. Campoy
Control en el Espacio de Estado
11
Observabilidad de sistemas lineales: teorema
• Dado el sistema:
! ""=1
0
t
t0
T0
T01 d)t,()(C)(C)t,()t,t(V #####
es observalable en [to,t1] si y solo si el gramiano de observabilidad V(to,t1) es invertible, definido como:
)t(u)t(D)t(x)t(C)t(y)t(u)t(B)t(x)t(A)t(x
+=
+=&
U.P.M.-DISAM P. Campoy
Control en el Espacio de Estado
12
Observabilidad de sistemas lineales: demostración
∃ V-1(t1,t0) ⇔ sistema observalable en [t0,t1]
por tanto se puede calcular el estado inicial x0
0)t(y 1 =(
• necesaria (⇐): si no existe V-1(t1,t0) entonces partiendo de x(t0) igual al
vector propio de V asociado al valor propio 0, se obtiene:
por tanto existen estados cuya salida es indistinguible con la salida desde el origen
• suficiente (⇒) : !"= #1
0
t
t
T0
T01
10 d)(y)(C)t,()t,t(Vx $$$$ (
!"= #1
0
t
t
T0
T01
10 d)(y)(C)t,()t,t(Vx $$$$ (

7
U.P.M.-DISAM P. Campoy
Control en el Espacio de Estado
13
Observabilidad de sistemas lineales: estados no-observables • definición: estados no-observables son aquellos a
partir de los cuales su salida es permanentemente nula ante entrada nula
0tt0)t(y >!=(
• si existen estados no-observables, ningún estado del sistema es observable
• si el sistema no es observable, existen estados no-observables
U.P.M.-DISAM P. Campoy
Control en el Espacio de Estado
14
Observabilidad
• Introducción • Definiciones • Observabilidad en sistemas lineales • Observabilidad en sistemas lineales e invariantes.
– Subespacio no-observable – Subsistema observable – Separación del subsistema controlable y
observable

8
U.P.M.-DISAM P. Campoy
Control en el Espacio de Estado
15
Observabilidad de sistemas lineales e invariantes: teorema
• Dado el sistema:
es observable si y solo si la matriz P es de rango máximo (n).
)t(Du)t(Cx)t(y)t(Bu)t(Ax)t(x
+=
+=&
!!!!!!
"
#
$$$$$$
%
&
=
'1n
2
CA
CACAC
PM
U.P.M.-DISAM P. Campoy
Control en el Espacio de Estado
16
Observabilidad de sistemas lineales e invariantes: demostración
• necesario (⇐):
rango (P) = n ⇔ sistema es observable
por tanto si el rango(P)<n, existen estados iniciales x0, tales que
!
( y (t) = "0(t)C +"1(t)CA + ...+"n#1(t)CAn#1[ ] x0
0)t(y =(
• suficiente (⇒):
por tanto si no es observable el rango(P) < n si no es observable existen vectores ⊥ a P

9
U.P.M.-DISAM P. Campoy
Control en el Espacio de Estado
17
Sistemas lineales invariantes: Suespacio no-observable
• Todos los puntos no-observables forman un subespacio, denominado subespacio no-observable
• El subespacio no-observable esta generado por el nucleo de P (vectores x/ Px=0) de dimensión n-rP, siendo rP=rango(P)
U.P.M.-DISAM P. Campoy
Control en el Espacio de Estado
18
Observabilidad
• Introducción • Definiciones • Observabilidad en sistemas lineales • Observabilidad en sistemas lineales e invariantes.
– Subespacio no-observable – Subsistema observable – Separación del subsistema controlable y
observable

10
U.P.M.-DISAM P. Campoy
Control en el Espacio de Estado
19
Subsistema no-observable: lema
Dado un sistema lineal e invariante con dimensión del subespacio no-observable n-rP<n, existe una matriz de cambio de base T tal que:
!"
#$%
&== '
bbba
aa1
A~A~0A~
ATTA~
!
˜ C = CT = ˜ C a 0[ ]
en el que el subsistema de dimensión rPxrP es observable siendo T=[TaTb], donde Tb es una base del subespacio no-observable del sistema
( )aaaC~A~
U.P.M.-DISAM P. Campoy
Control en el Espacio de Estado
20
Subsistema observable: representación gráfica
∫
bbA~
Observable
bB~
aB~
aaA~
∫ u(t)
aC~ax
~D
y(t)
bx~
No observable !"
#$%
&=
bbba
aa
A~A~0A~
A~
!
˜ C = ˜ C a 0[ ]
!"
#$%
&=
bbba
aa
A~A~0A~
A~

11
U.P.M.-DISAM P. Campoy
Control en el Espacio de Estado
21
Ejercicio 4.1
a) Si y(t)=x1(t)-x2(t), calcular la dimensión del espacio no-observable y una base de éste en función de R1C1 y R2C2 (3 puntos)
b) Idem si y(t)=3x1(t)-5x2(t) (1 puntos) c) Si y(t)=x1(t)-x2(t), obtener un subsistema observable,
relacionando sus variables con las originales (2 puntos), obtener su modelo de estado (2 puntos) y dibujar el gráfico de su modelo de estado junto con el del subsistema no-observable (2 puntos).
u C2
R2
C1
R1
R1C1 R2C2
U.P.M.-DISAM P. Campoy
Control en el Espacio de Estado
24
Observabilidad
• Introducción • Definiciones • Observabilidad en sistemas lineales • Observabilidad en sistemas lineales e invariantes.
– Subespacio no-observable – Subsistema observable – Separación del subsistema controlable y
observable

12
U.P.M.-DISAM P. Campoy
Control en el Espacio de Estado
25
Separación del subsistema controlable y observable: lema
Dado un sistema lineal e invariante con rango(Q)=rQ y rango(P)=rP, existe una matriz de cambio de base T tal que:
!!!!
"
#
$$$$
%
&
== '
dddc
cc
bdbcbbba
acaa
1
A~A~000A~00A~A~A~A~0A~0A~
ATTA~
!
˜ C = CT = ˜ C a 0 ˜ C c 0[ ]
• el subsistema de dimensión rQxrQ es controlable
• el subsistema de dimensión rPxrP es observable
• el subsistema es controlable y observable
!!!!
"
#
$$$$
%
&
== '
00B~B~
BTB~ b
a
1
donde:
[ ]aaaa C~,B~,A~
[ ]!"
#$%
&!"
#$%
&!"
#$%
&0C~,
B~B~,
A~A~0A~
ab
a
bbba
aa
[ ]!"
#$%
&!"
#$%
&!"
#$%
&ca
a
cc
acaa C~C~,0B~,
A~0A~A~
U.P.M.-DISAM P. Campoy
Control en el Espacio de Estado
26
Separación del subsistema controlable y observable: matriz T
siendo la matriz del cambio de base: T=[TaTb Tc Td] donde: Ta Tb es una base del subespacio controlable Tb Td es una base del subespacio no-observable

13
U.P.M.-DISAM P. Campoy
Control en el Espacio de Estado
27
Separación del subsistema controlable y observable: gráfica
aB~
u(t) aB~ ∫ aC
~
∫ cC~
aaA~
ccA~
acA~
baA~
bcA~
bB~ ∫
bbA~
dcA~
∫
ddA~
bdA~
aB~ ax
~
bx~
cx~
dx~
y(t) Observable Controlable y observable
Con
trol
able
!!!!
"
#
$$$$
%
&
=
dddc
cc
bdbcbbba
acaa
A~A~000A~00A~A~A~A~0A~0A~
A~
!!!!
"
#
$$$$
%
&
=
00B~B~
B~ b
a
[ ]0C~0C~CTC~ ca==
U.P.M.-DISAM P. Campoy
Control en el Espacio de Estado
28
Ejercicio 4.2
u1 s+1 s+2
1 s+1
x3
+ +
2 s+1
x1
x2
a) Obtener los distintos subespacios atendiendo a la controlabilidad y observabilidad (3,5 puntos)
b) Obtener los distintos subsistemas atendiendo a la controlabilidad y observabilidad, indicando el modelo de estado de cada uno de ellos (3,5 puntos)
c) Dibujar la gráfica del modelo de estado global con la variables de los mencionados subsistemas (1,5 puntos)
d) Indicar la relación de estas variables con las originales (1,5 puntos)
dado el sistema: