Aálii d SiAnálisis de Sistemas Lineales - ie.tec.ac.cr · Teorema 1: Bloques en cascadaTeorema 1:...
29
A áli i d Si Análisis de Sistemas Lineales Lineales Álgebra de bloques
Transcript of Aálii d SiAnálisis de Sistemas Lineales - ie.tec.ac.cr · Teorema 1: Bloques en cascadaTeorema 1:...
A áli i d SiAnálisis de Sistemas LinealesLineales
Álgebra de bloques
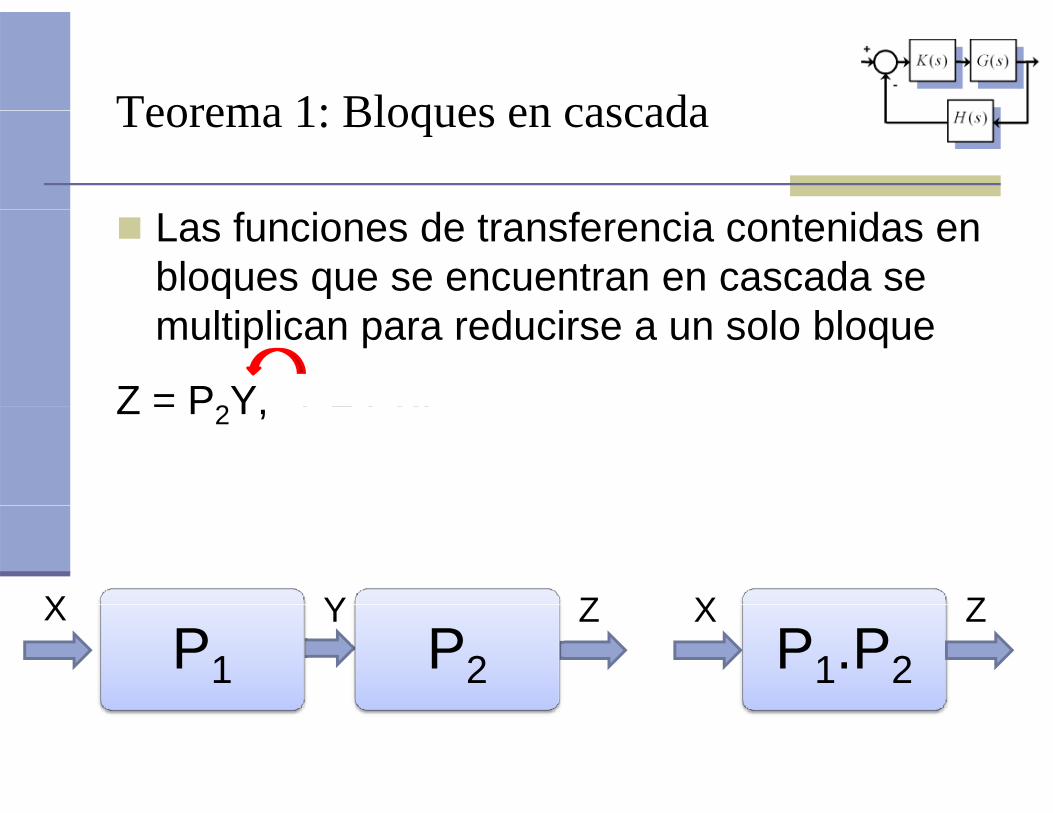
Teorema 1: Bloques en cascadaTeorema 1: Bloques en cascada
Las funciones de transferencia contenidas en bloques que se encuentran en cascada se multiplican para reducirse a un solo bloque
Z = P2Y Y = P1XZ P2Y, Y P1X
Z = P2(P1X) = (P1P2)X
X Y Z X ZX Y Z X ZP1.P2P1 P2
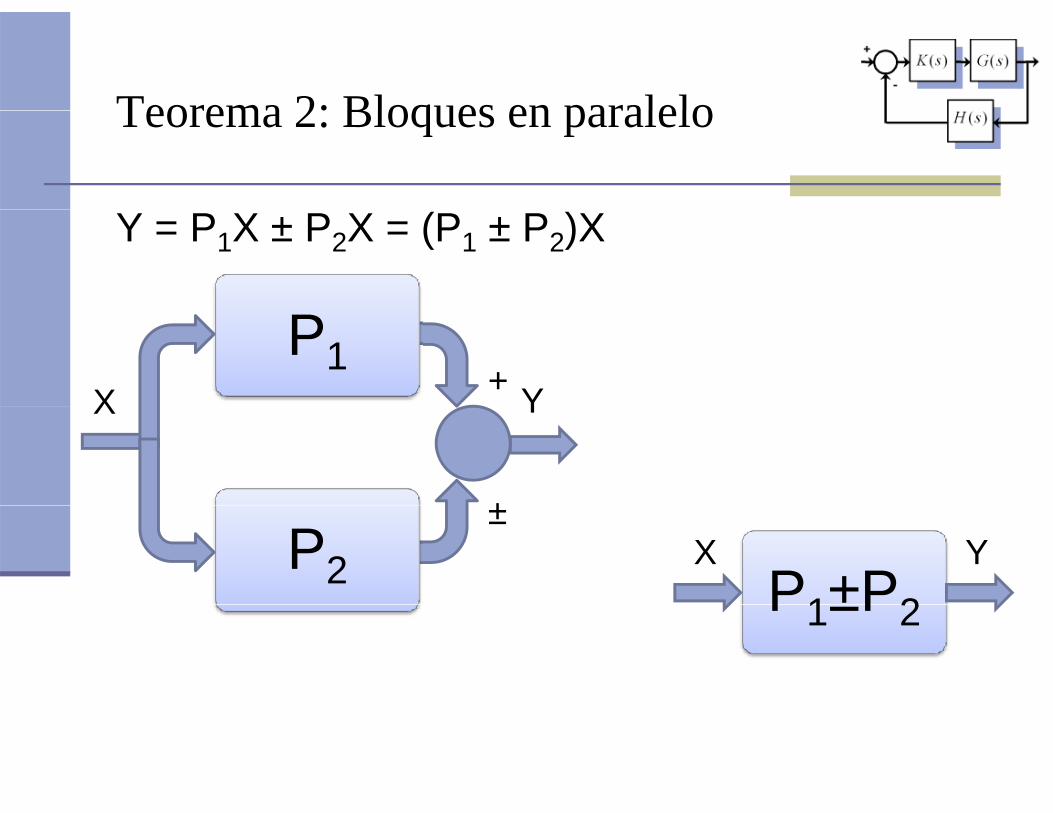
Teorema 2: Bloques en paraleloTeorema 2: Bloques en paralelo
Y = P1X ± P2X = (P1 ± P2)X
YP1
X + YX
±X Y
P1±P2P2
±
P1±P2
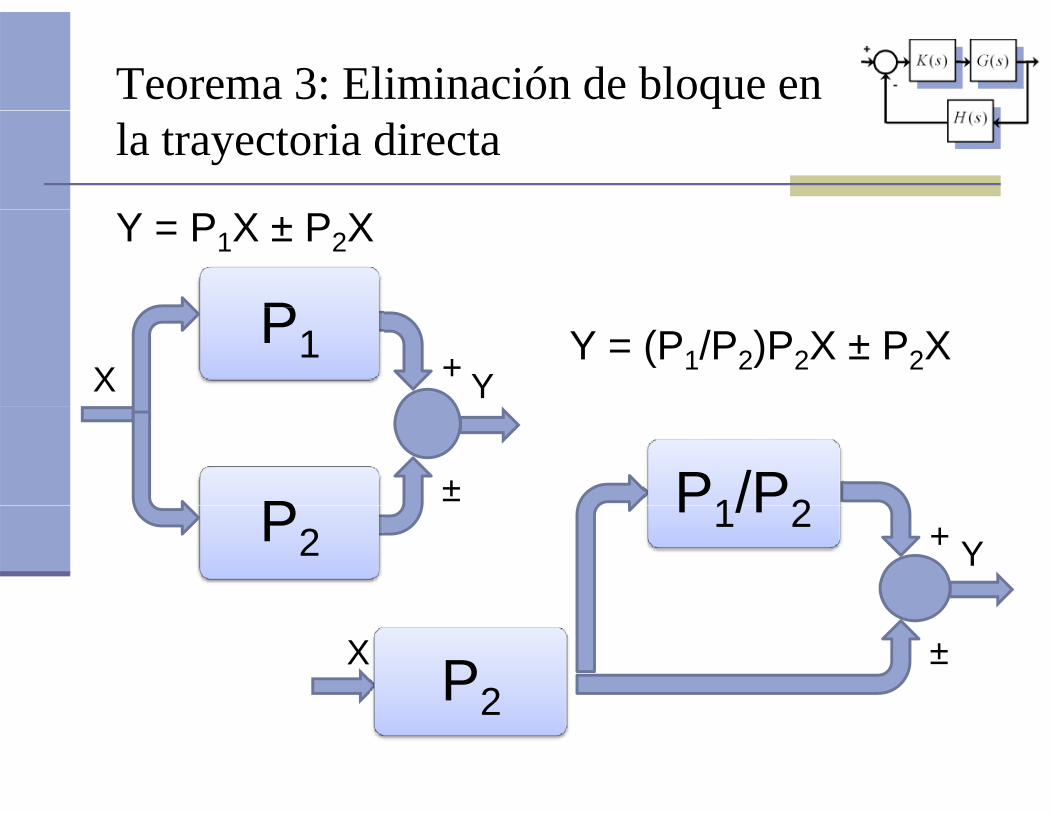
Teorema 3: Eliminación de bloque en la trayectoria directa
Y = P1X ± P2X
P Y = (P1/P2)P2X ± P2XY
P1 +X
P1/P2P±
YP1/P2 +P2
X ±P22
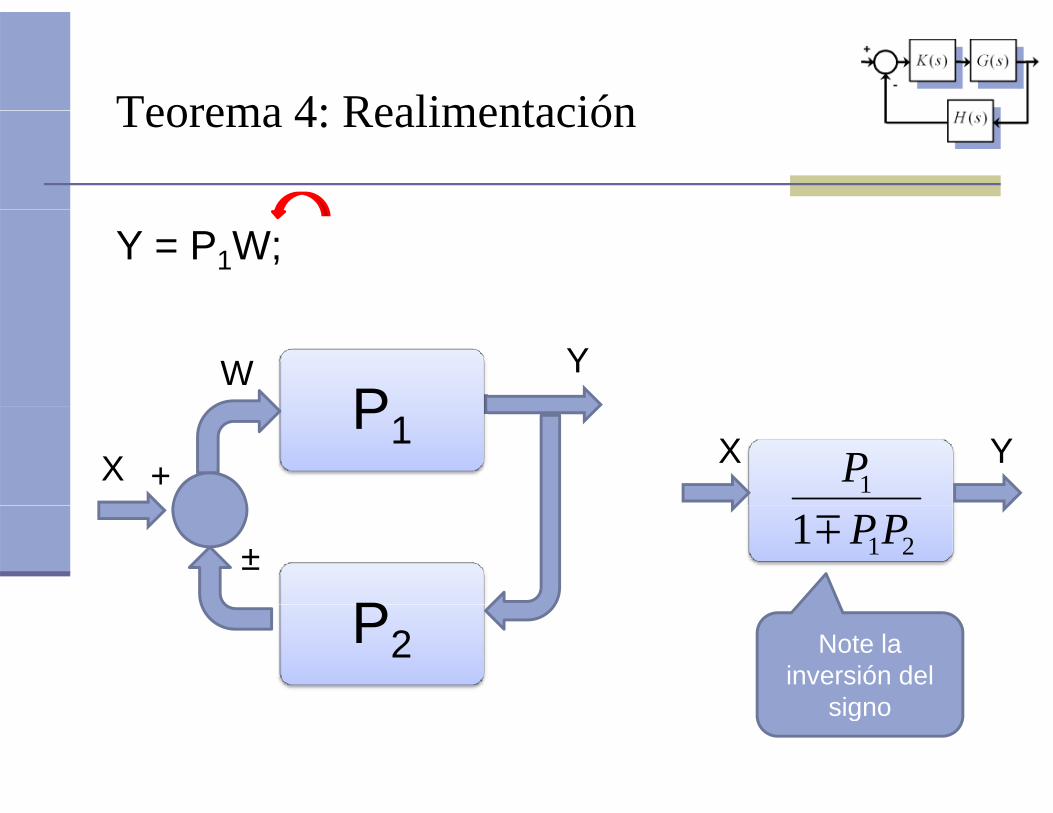
Teorema 4: RealimentaciónTeorema 4: Realimentación
Y = P1W; W = X ± P2Y Y = P (X ± P Y)Y = P1(X ± P2Y)
YP
W
X Y1PX
P1+
211 PP
P±
P2 Note la inversión del
signosigno
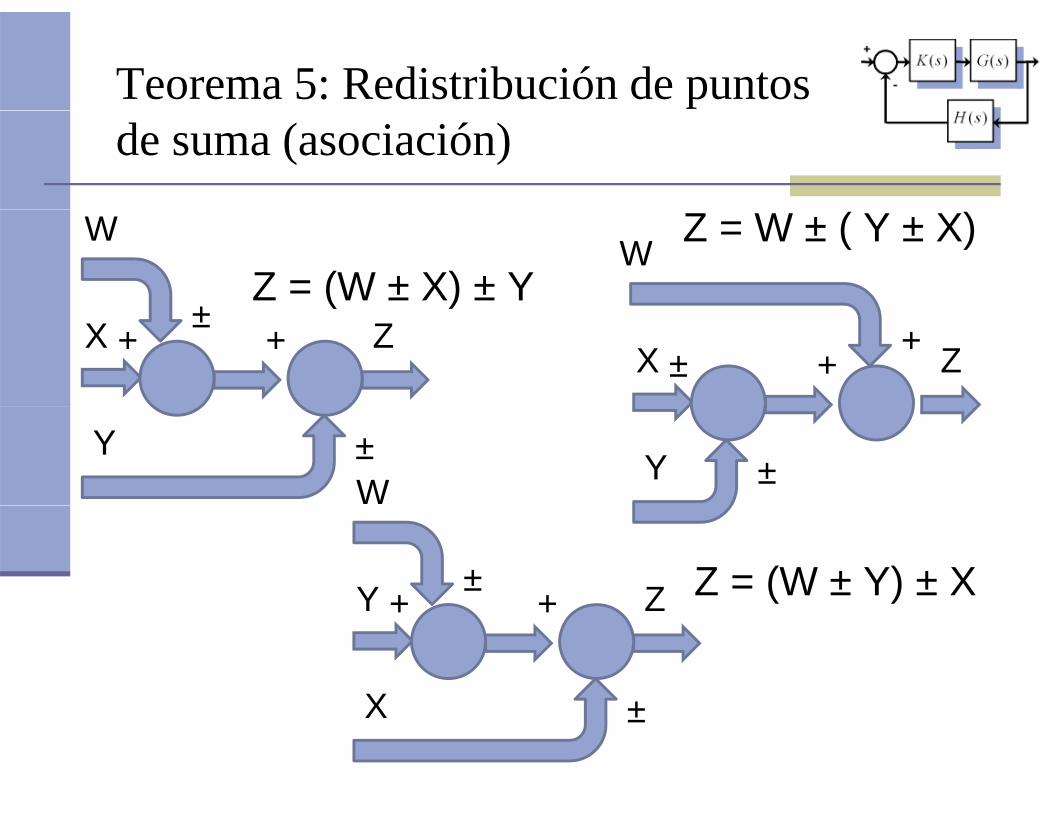
Teorema 5: Redistribución de puntos de suma (asociación)
Z = W ± ( Y ± X)Z = (W ± X) ± Y
±
WW
( )X ± Z++ X Z+
+±
±YW ±Y
Z = (W ± Y) ± XY ± Z++
X
Y Z++
±X ±
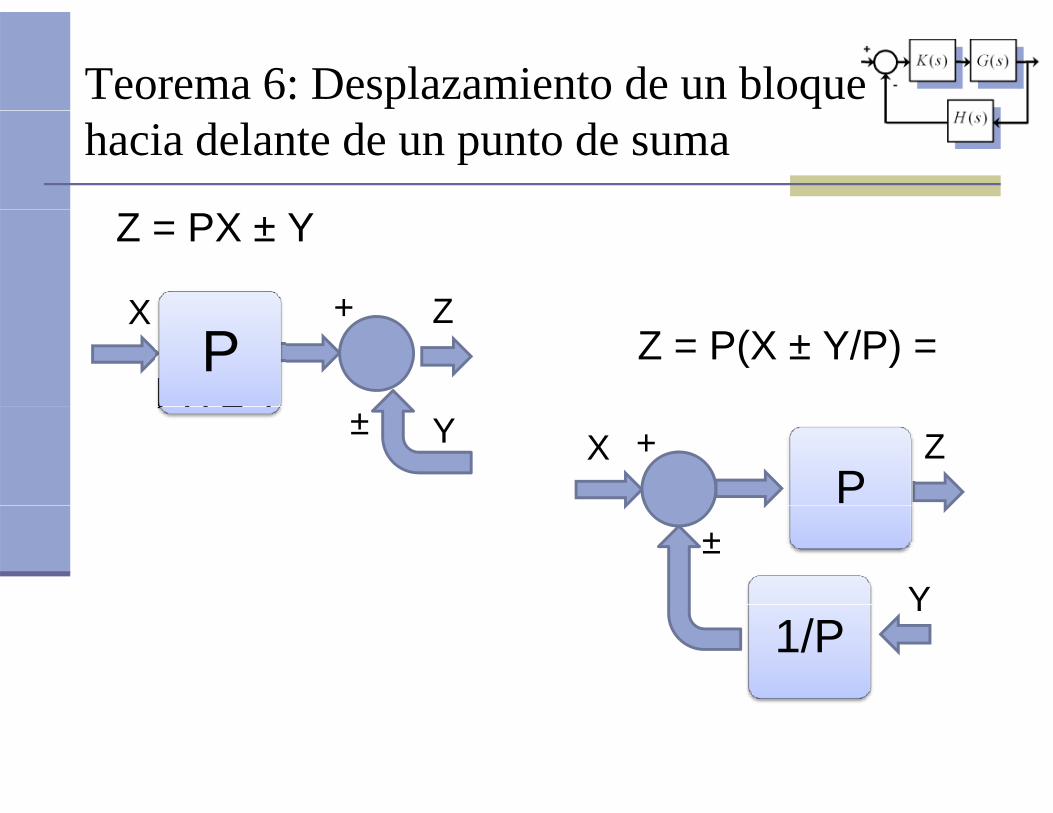
Teorema 6: Desplazamiento de un bloque hacia delante de un punto de suma
Z = PX ± Y
ZX +Z = P(X ± Y/P) =
PX ± Y
ZX +P
PX ± Y± Y ZX +
P±
YY1/P
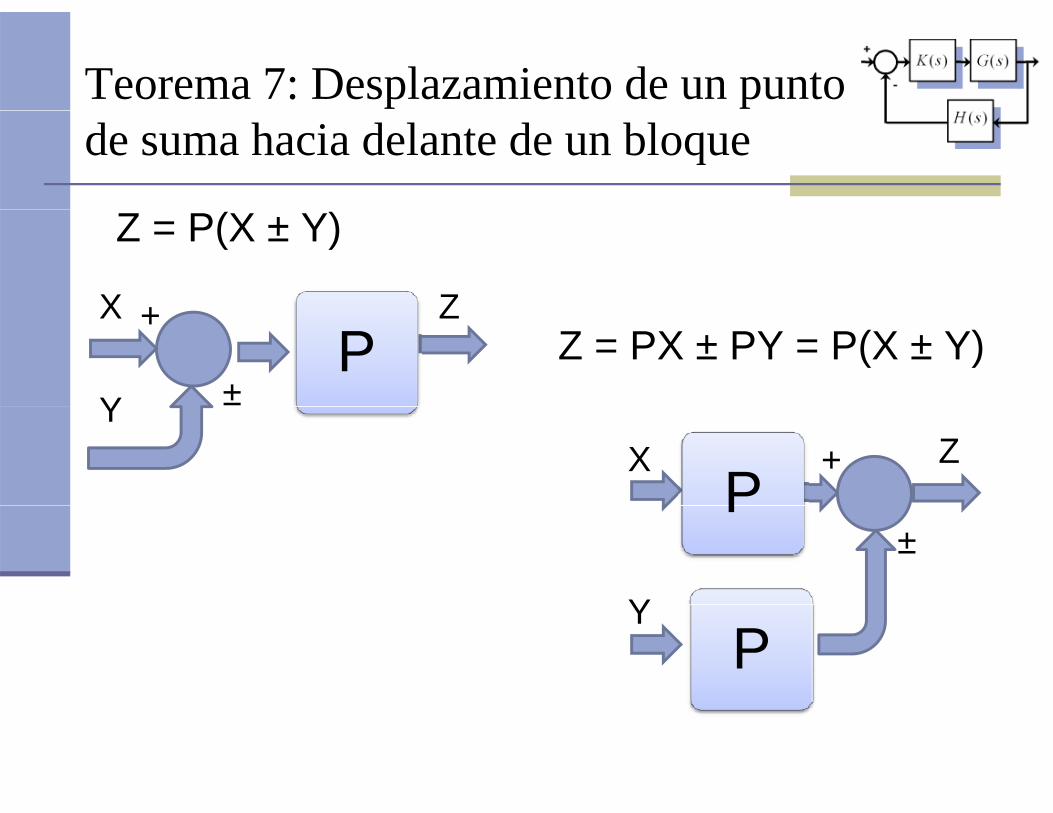
Teorema 7: Desplazamiento de un punto de suma hacia delante de un bloque
Z = P(X ± Y)
Z+XZ = PX ± PY = P(X ± Y)
Z+
±
XP
YYZ+X
P±
Y
P
PY
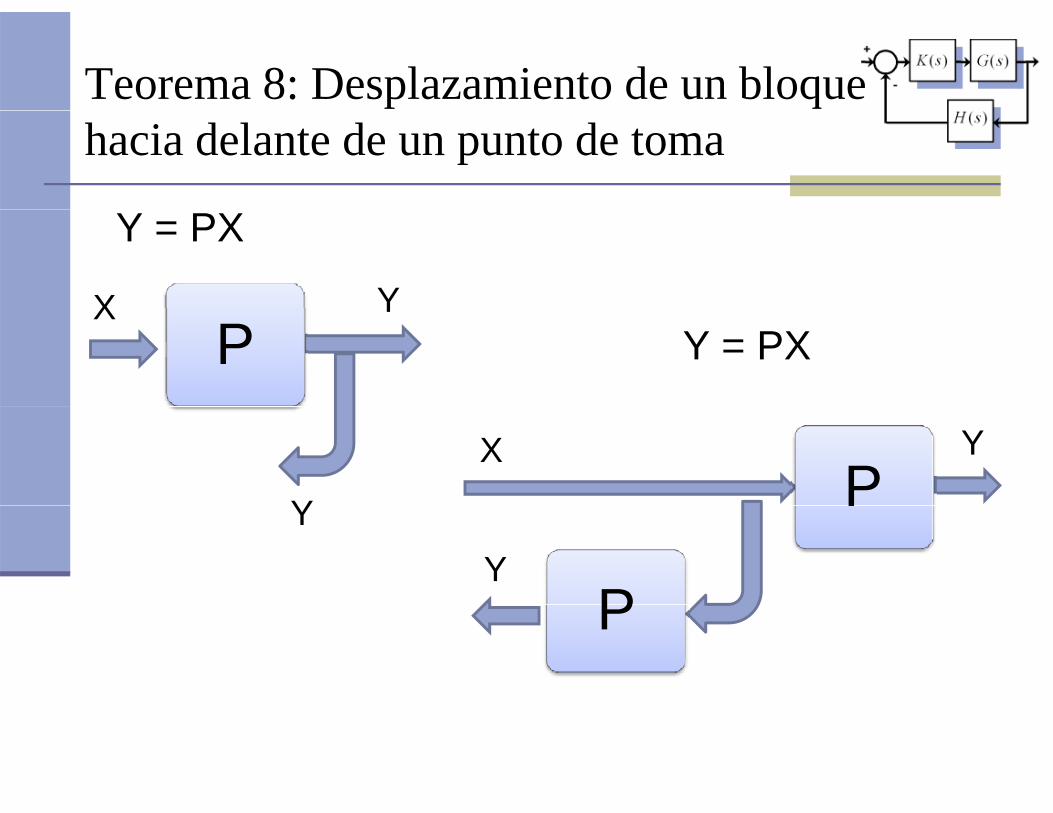
Teorema 8: Desplazamiento de un bloque hacia delante de un punto de toma
Y = PX
YXY = PX
YXP
YP
X
YY
P
PY
P
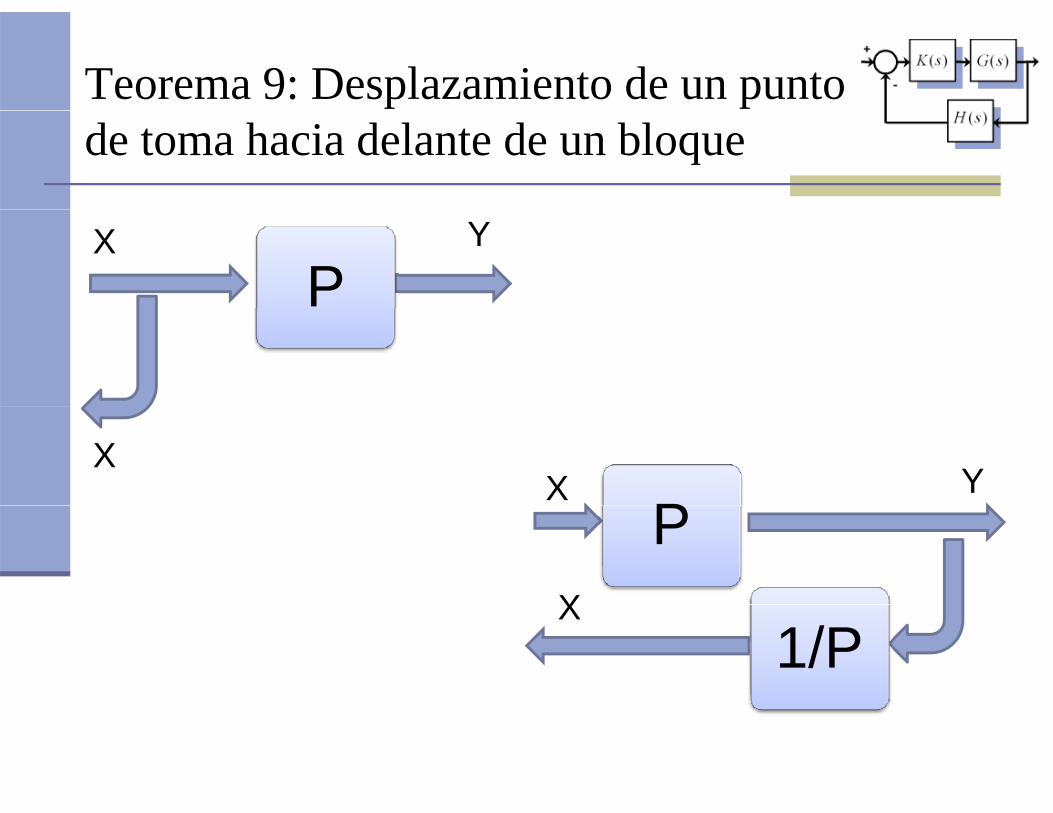
Teorema 9: Desplazamiento de un punto de toma hacia delante de un bloque
YXP
YXP
X
X
PX
1/P
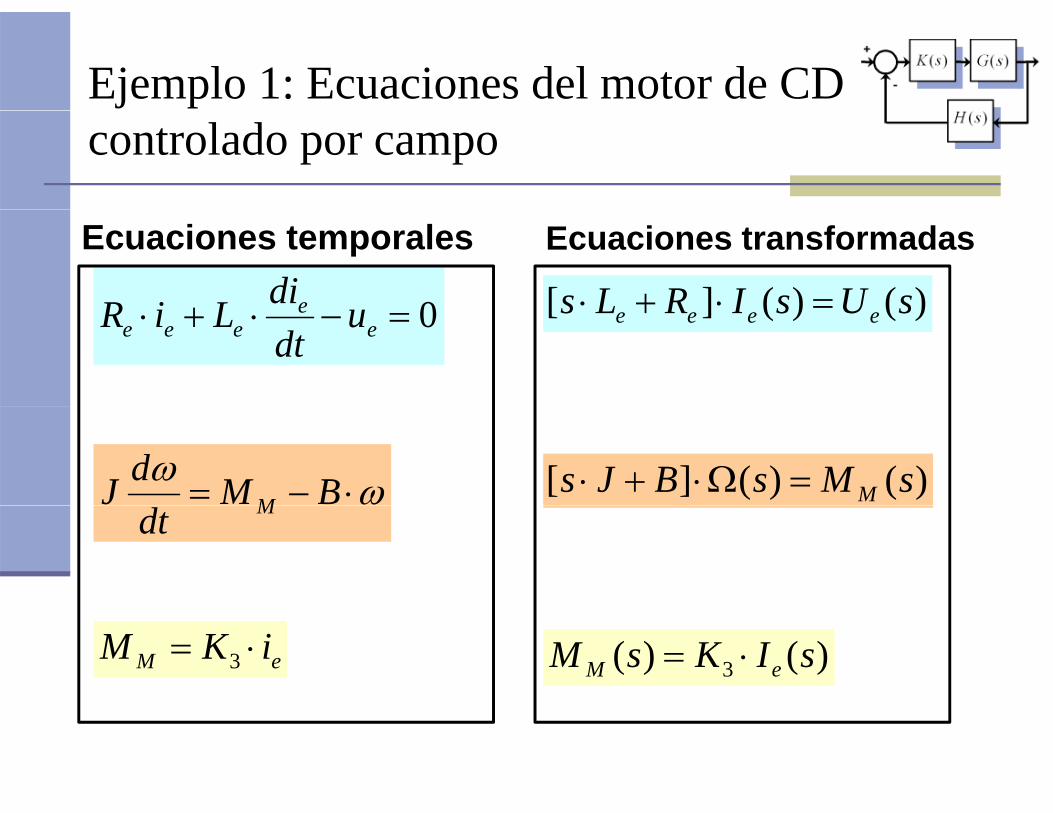
Ejemplo 1: Ecuaciones del motor de CD controlado por campo
Ecuaciones temporales Ecuaciones transformadas
)()(][ sUsIRLs 0 ediLiR )()(][ sUsIRLs eeee 0 ee
eee udt
LiR
)()(][ sMsBJs M BMdJ Mdt M
)()( 3 sIKsM eM eM iKM 3
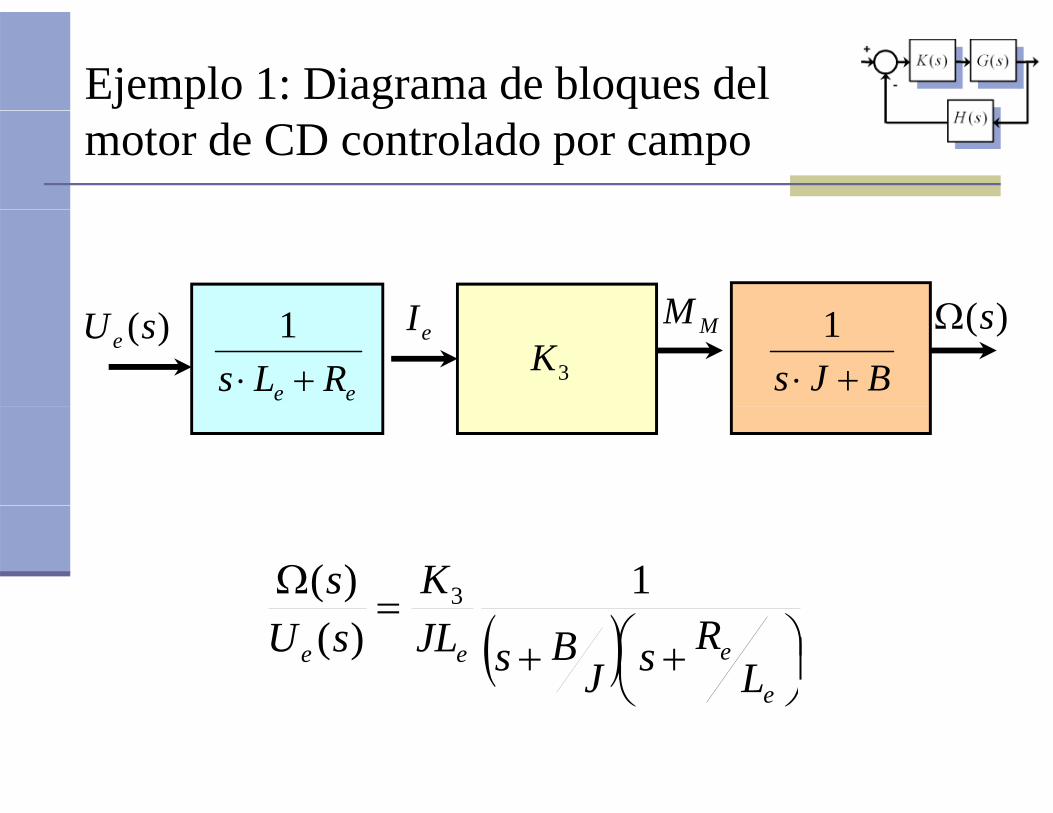
Ejemplo 1: Diagrama de bloques del motor de CD controlado por campo
MI )(3K
MM
ee RLs 1 eI)(sUe
BJs 1 )(s
Ks 1)( 3
e
eeeL
RsJBsJLsU )(
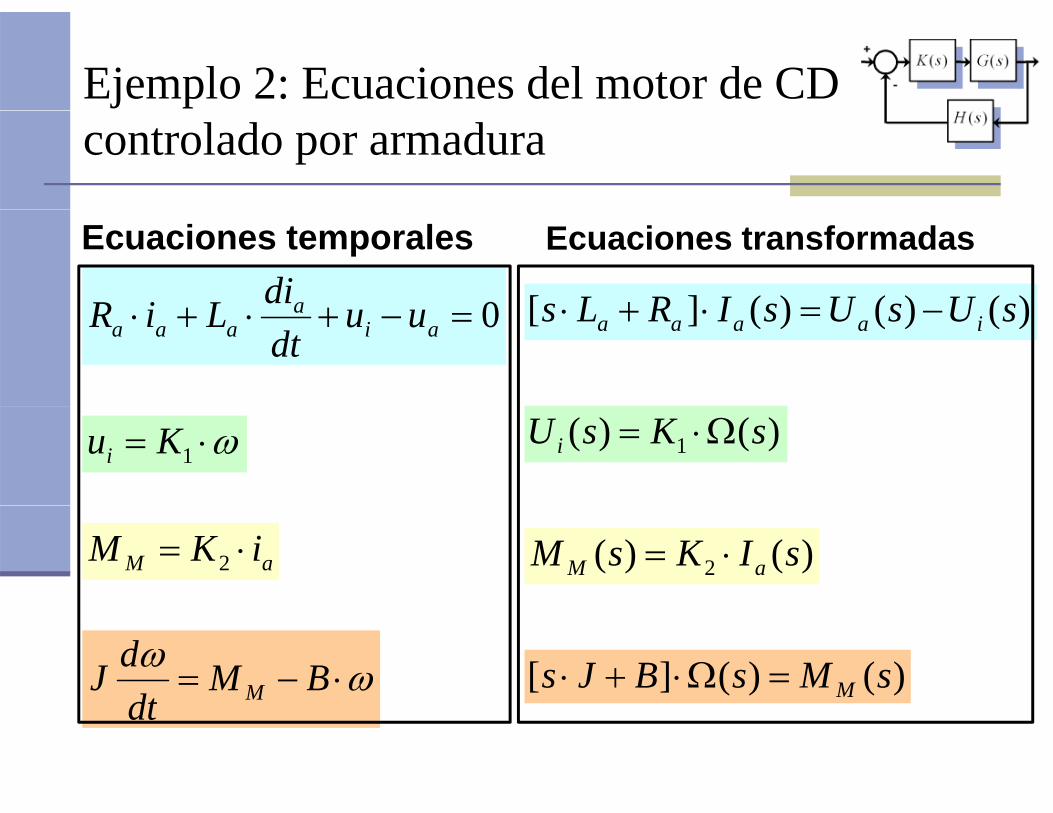
Ejemplo 2: Ecuaciones del motor de CD controlado por armadura
Ecuaciones temporales Ecuaciones transformadas
0 adiLiR )()()(][ sUsUsIRLs 0 aia
aaa uudt
LiR )()()(][ sUsUsIRLs iaaaa
1Kui)()( 1 sKsUi
aM iKM 2 )()( 2 sIKsM aM
BM
dtdJ M )()(][ sMsBJs Mdt
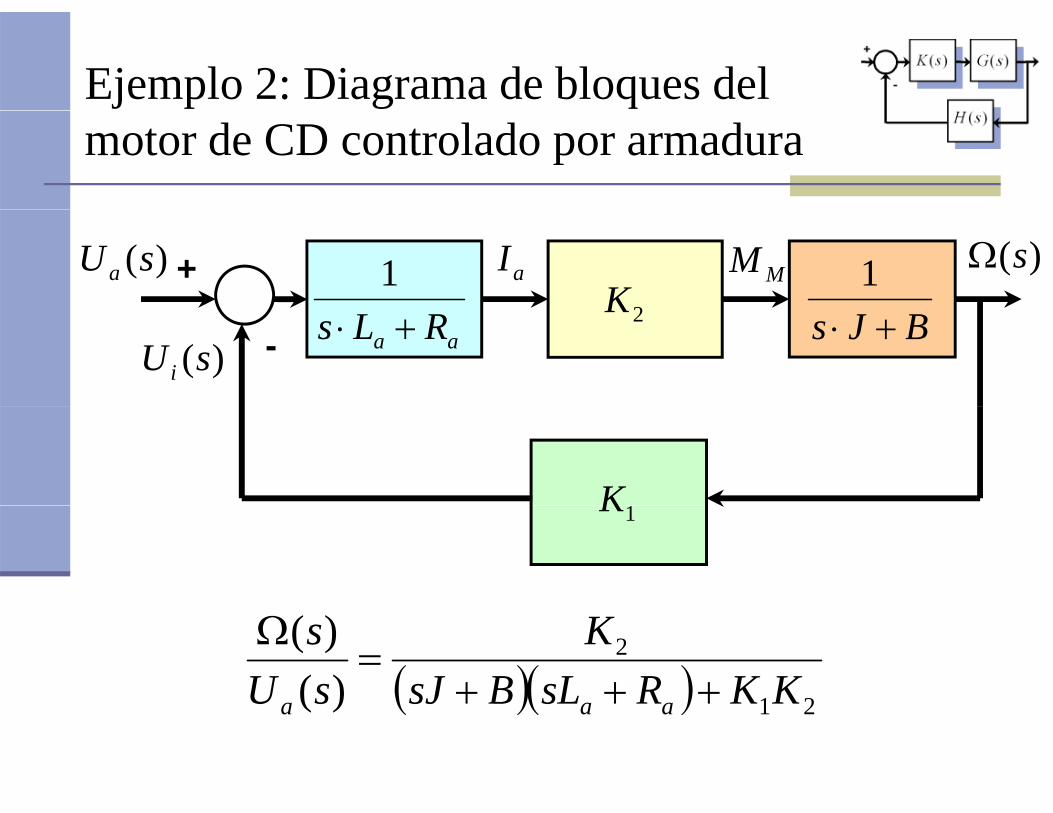
Ejemplo 2: Diagrama de bloques del motor de CD controlado por armadura
1 )(s1 aI)(sUa +2K
MM
BJs aa RLs )(sUi
-2K
K1K
21
2
)()(
KKRsLBsJK
sUs
21)( KKRsLBsJsU aaa
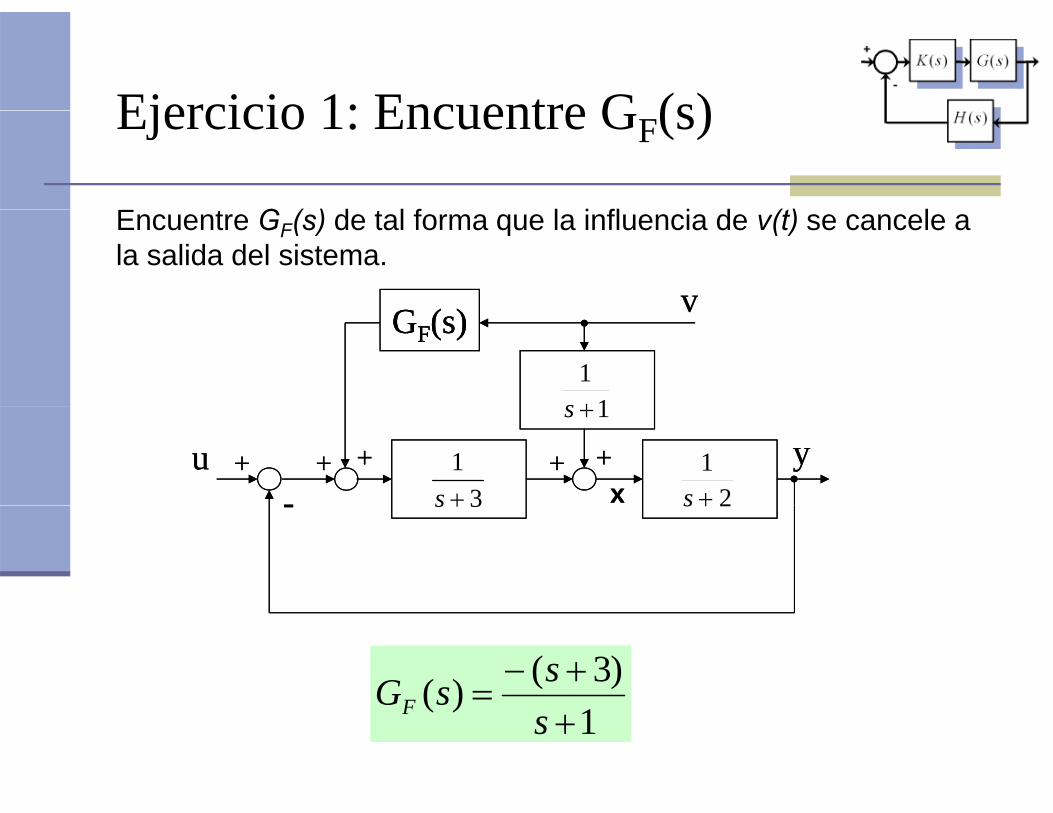
Ejercicio 1: Encuentre G (s)Ejercicio 1: Encuentre GF(s)
E G ( ) d l f l i fl i d (t) lEncuentre GF(s) de tal forma que la influencia de v(t) se cancele a la salida del sistema.
vv
11s
GF(s)GF(s)GF(s) vv
xx++ ++ ++ ++uu yy
31s--
++
1s
21s3s-- 2s
)3()(
ssGF 1)(
ssGF
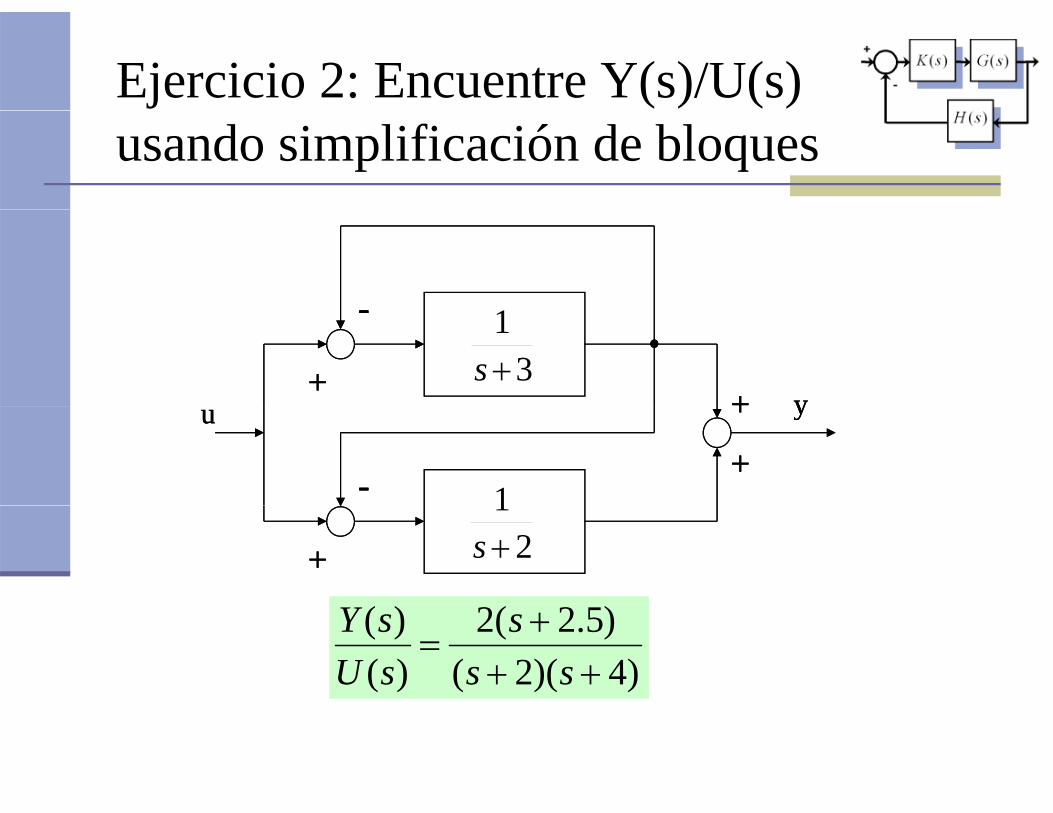
Ejercicio 2: Encuentre Y(s)/U(s) usando simplificación de bloques
++
--
++ yy+
-
+ y3
1s
-- ++
++uu yy
- +
+u y
1
+++ 21s
)4)(2()5.2(2
)()(
ss
ssUsY
Regla de Masón: DefinicionesRegla de Masón: DefinicionesT R id di d lí l id d Trayecto: Recorrido directo entre dos líneas en el sentido de las flechas, pasando solo una vez por cada bloque o línea.
Lazo: Trayecto que se cierra sobre si mismo, partiendo de una y q , plínea y regresando a la misma línea.
Lazo adjunto: son aquellos lazos que comparten algún tramo del diagramadel diagrama.
Lazo NO adjunto: Aquellos lazos que no poseen ninguna línea en común; esto es no se tocan.
Ganancia del trayecto: Producto de las transmitancias de los bloques de un trayecto, tomando en cuenta los signos de los sumadoressumadores.
Ganancia de lazo: Producto de las transmitancias de los bloques de un lazo, tomando en cuenta los signos de los
dsumadores.
Regla de Masón: EcuacionesRegla de Masón: EcuacionesL l d M ó i l i i G La regla de Masón permite encontrar la transmitancia G entre cualquier par de variables (líneas) de un sistema.
n1
Donde:
i
iiTG1
1
Ti = Ganancia del i-ésimo trayecto de los n posibles entre las dos líneas.
∆ = Determinante del diagrama = ∆ Determinante del diagrama 1 – (suma de todas las ganancias de lazo distintos posibles) +
(suma de los productos de las ganancias de todas las combinaciones posibles de dos lazos no adjuntos) (suma de loscombinaciones posibles de dos lazos no adjuntos) – (suma de los productos de todas las ganancias de todas las combinaciones posibles de tres lazos no adjuntos) + ...- =
∆ = Cofactor de T ∆i = Cofactor de Ti
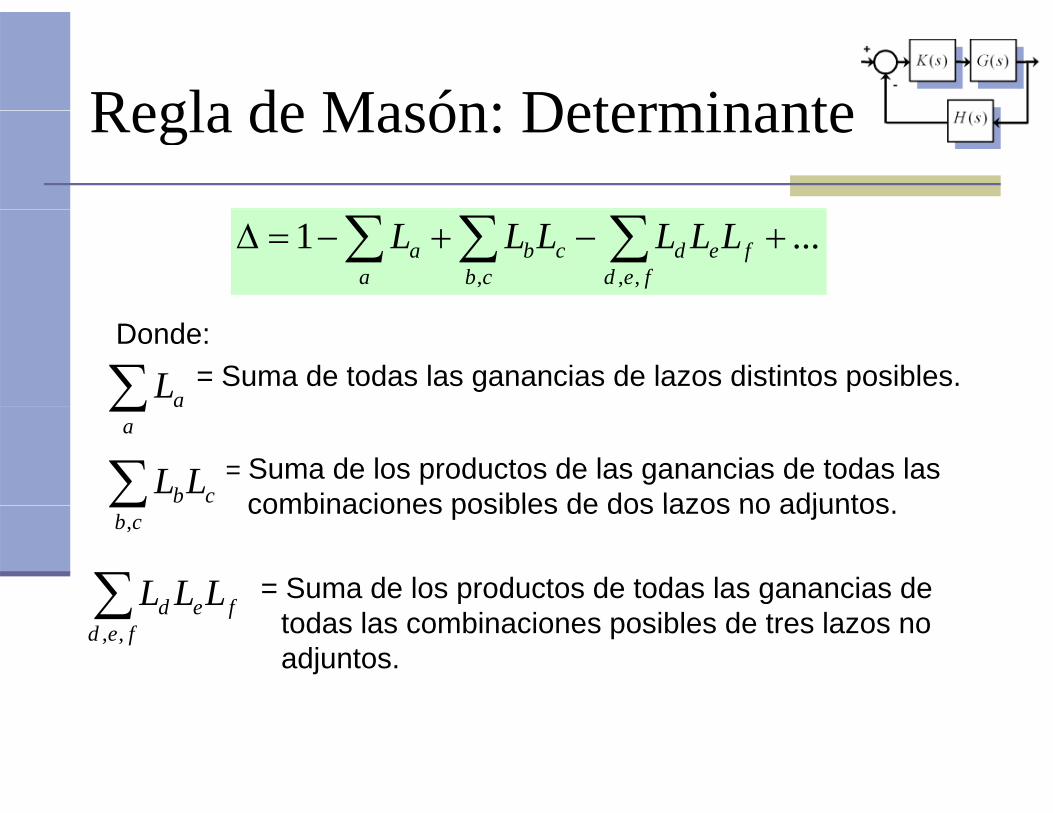
Regla de Masón: DeterminanteRegla de Masón: Determinante
...1,,,
fed
fedccb
ba
a LLLLLL
Donde: = Suma de todas las ganancias de lazos distintos posibles. aL
= Suma de los productos de las ganancias de todas las combinaciones posibles de dos lazos no adjuntos
a
a
cbLLcombinaciones posibles de dos lazos no adjuntos.
= Suma de los productos de todas las ganancias de
cb,
fd LLLtodas las combinaciones posibles de tres lazos no adjuntos.
ffed
ed LLL,,
Regla de Masón: CofactoresRegla de Masón: Cofactores∆ C f d T ∆i = Cofactor de Ti
Es el determinante del resto del diagrama que queda cuando seEs el determinante del resto del diagrama que queda cuando se suprime el trayecto que produce Ti.
∆i podrá obtenerse de ∆, eliminando aquellos términos o productos que contengan algún lazo adjunto al trayecto Ti.
Cuando el trayecto toca a todos los lazos del diagrama, o cuando este no contiene ningún lazo, ∆i es igual a la unidad.
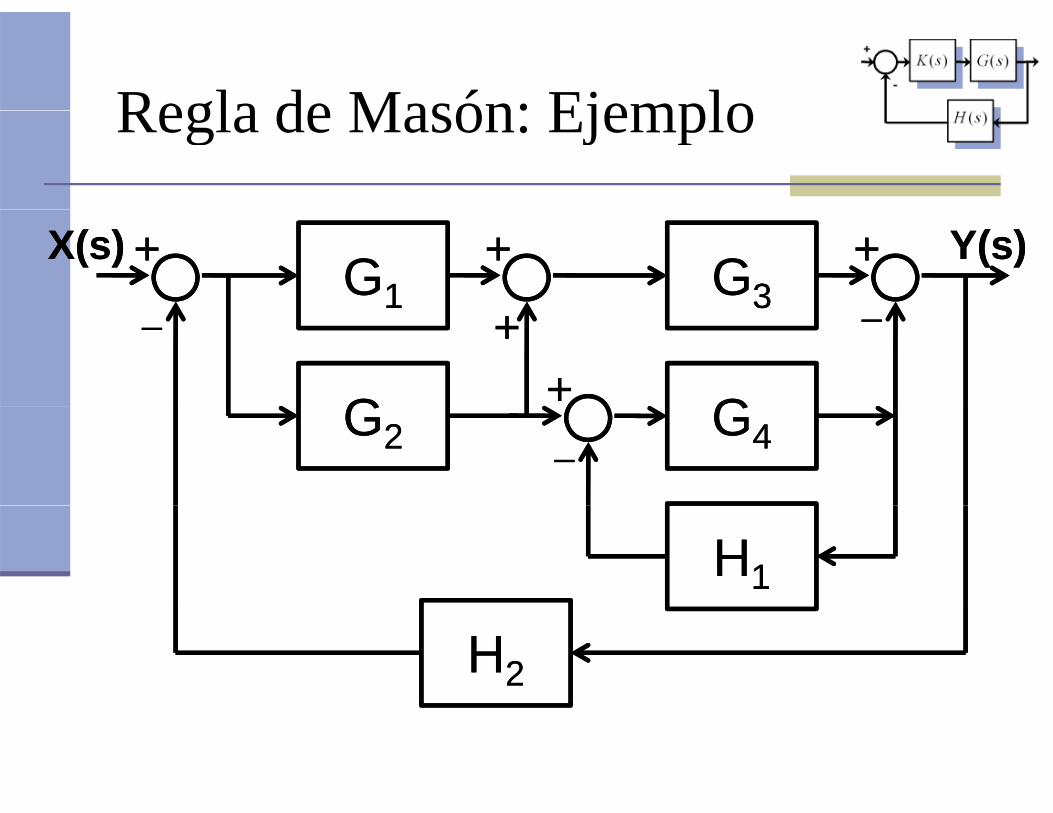
Regla de Masón: EjemploRegla de Masón: Ejemplo
++ ++++ G1G1 G3G3X(s)X(s) Y(s)Y(s)
GG
++++
____
GG
3
G4G4__G2G2
H1H1
H2H2
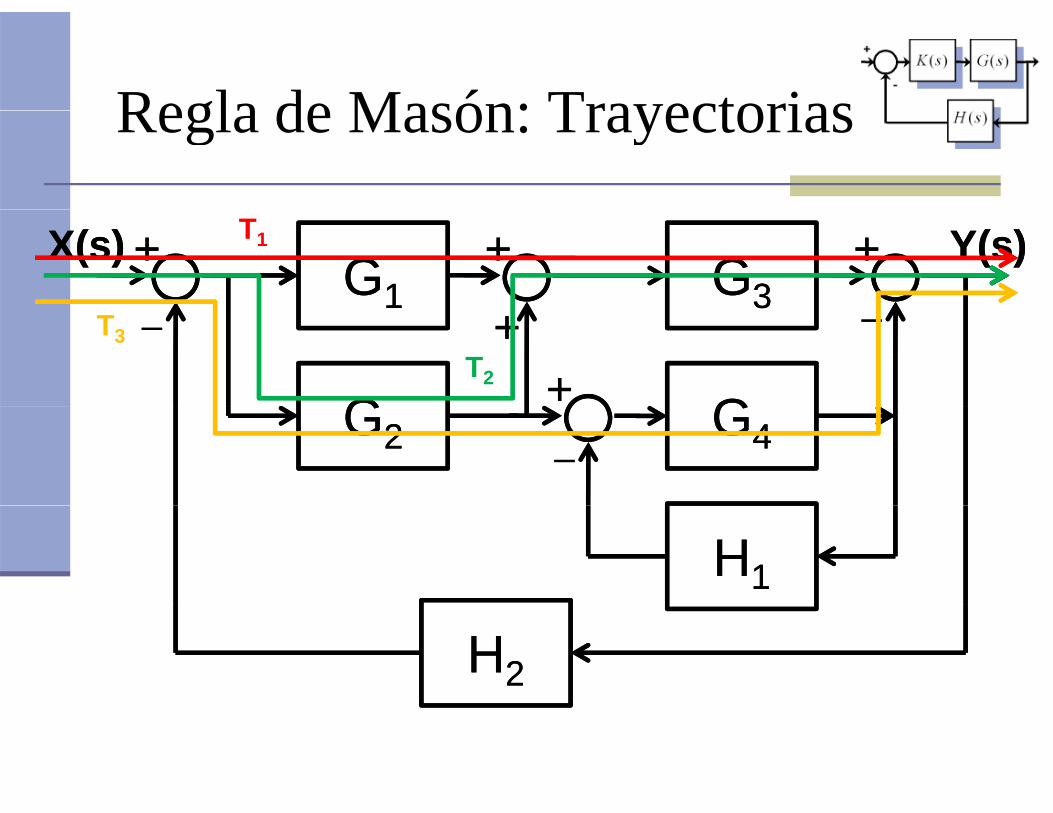
Regla de Masón: TrayectoriasRegla de Masón: Trayectorias
++ ++++ G1G1 G3G3X(s)X(s) Y(s)Y(s)T1
GG
++++
____
GG
3T3
T2
G4G4__G2G2
H1H1
H2H2
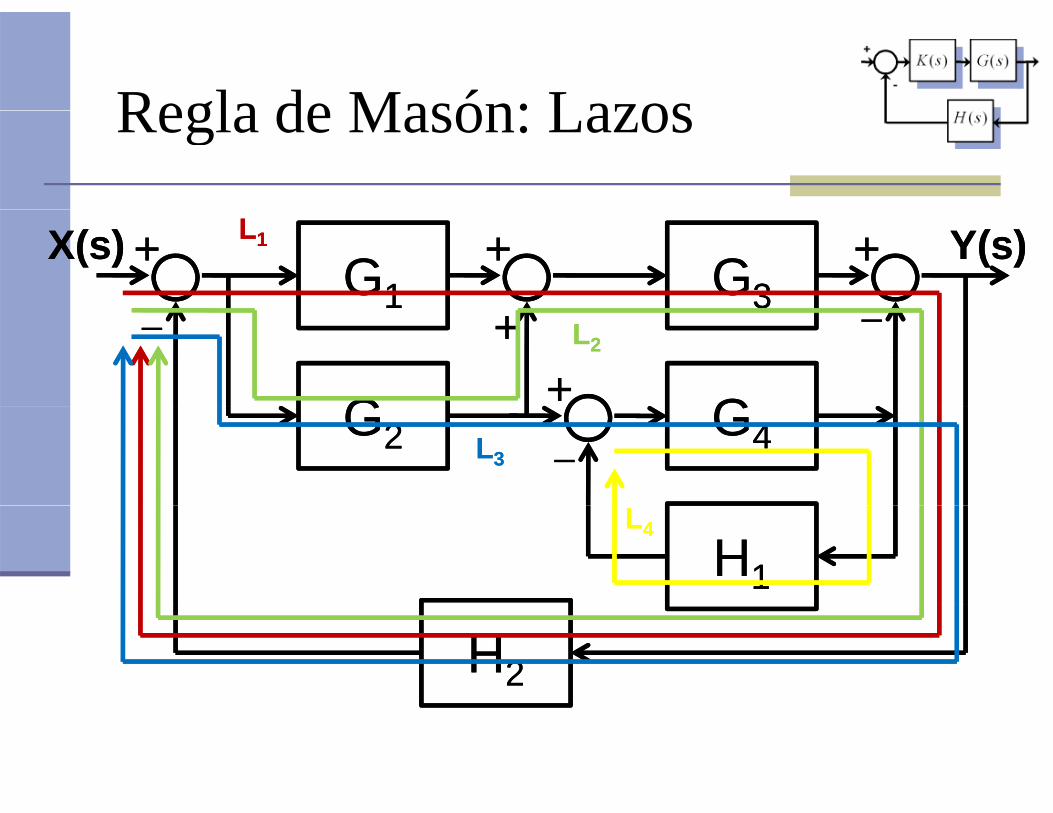
Regla de Masón: LazosRegla de Masón: Lazos
++ ++++ G1G1 G3G3X(s)X(s) Y(s)Y(s)LL11
GG
++++
____
GG
3LL22
G4G4__G2G2 LL33
H1H1
LL44
H2H2
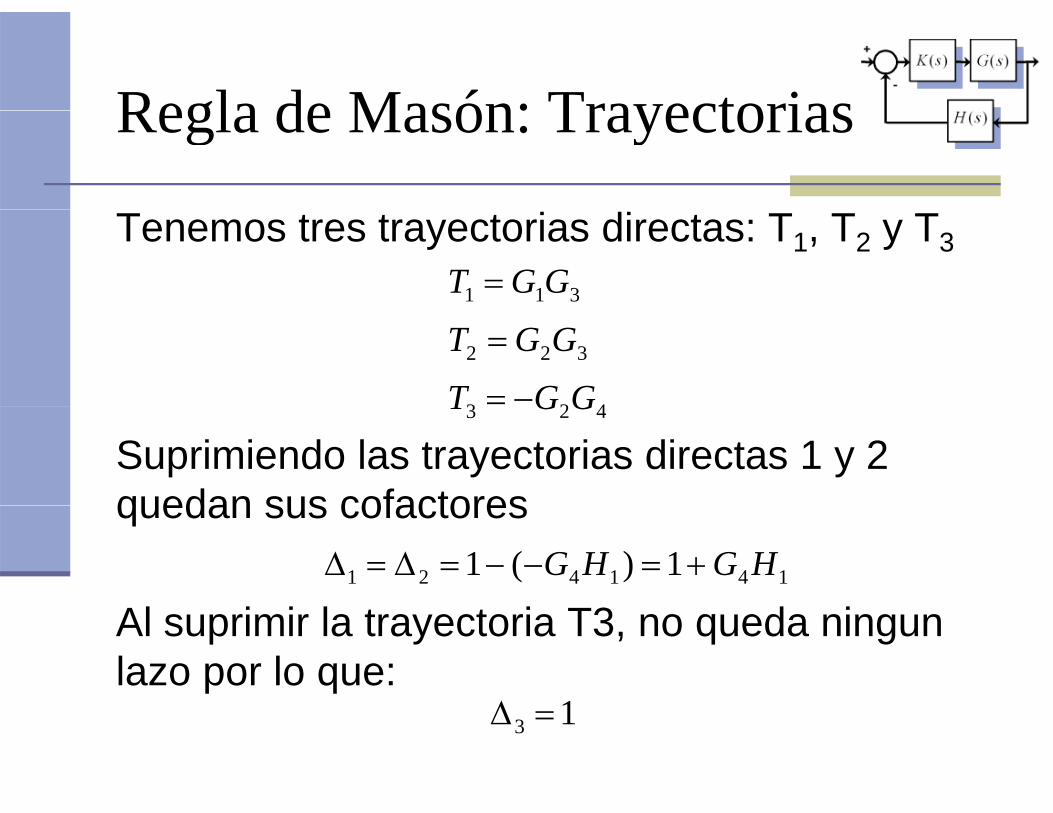
Regla de Masón: TrayectoriasRegla de Masón: Trayectorias
Tenemos tres trayectorias directas: T1, T2 y T3
311 GGT
322 GGT
423 GGT
Suprimiendo las trayectorias directas 1 y 2 quedan sus cofactores
423 GGT
quedan sus cofactores141421 1)(1 HGHG
Al suprimir la trayectoria T3, no queda ningunlazo por lo que:
1 13
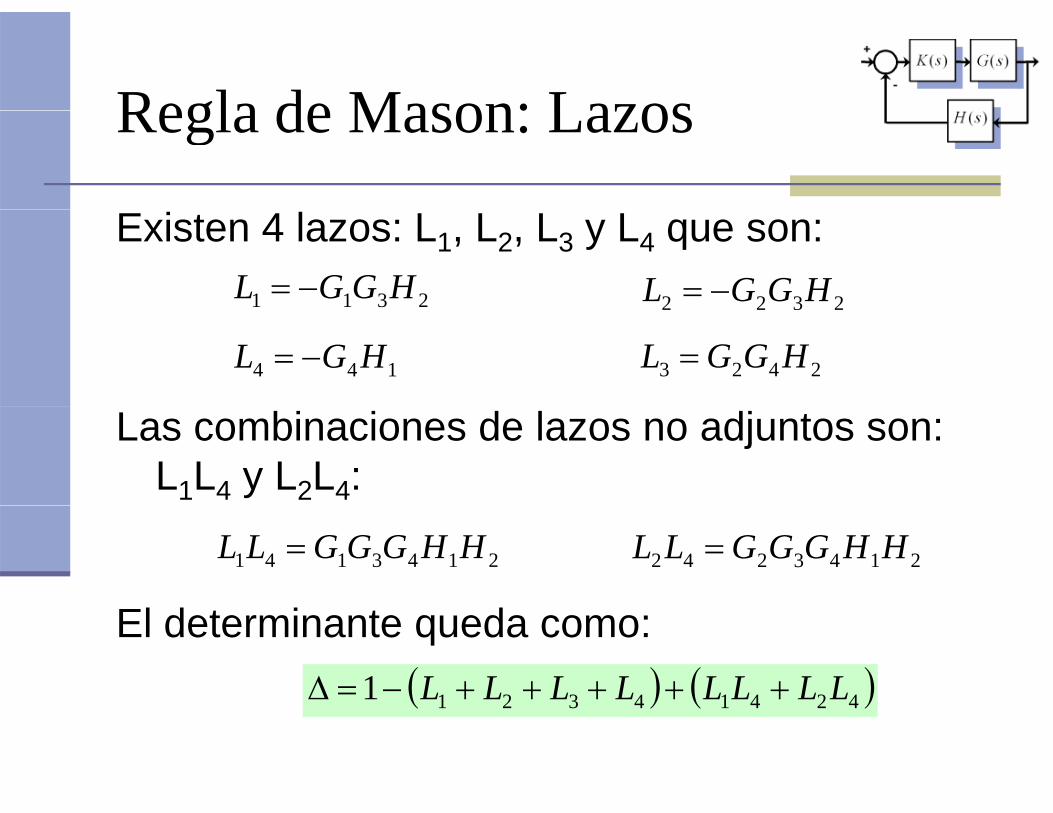
Regla de Mason: LazosRegla de Mason: Lazos
Existen 4 lazos: L1, L2, L3 y L4 que son:2311 HGGL 2322 HGGL 2322
2423 HGGL 144 HGL
Las combinaciones de lazos no adjuntos son: L1L4 y L2L4:
2143141 HHGGGLL 2143242 HHGGGLL
El determinante queda como: 424143211 LLLLLLLL 42414321
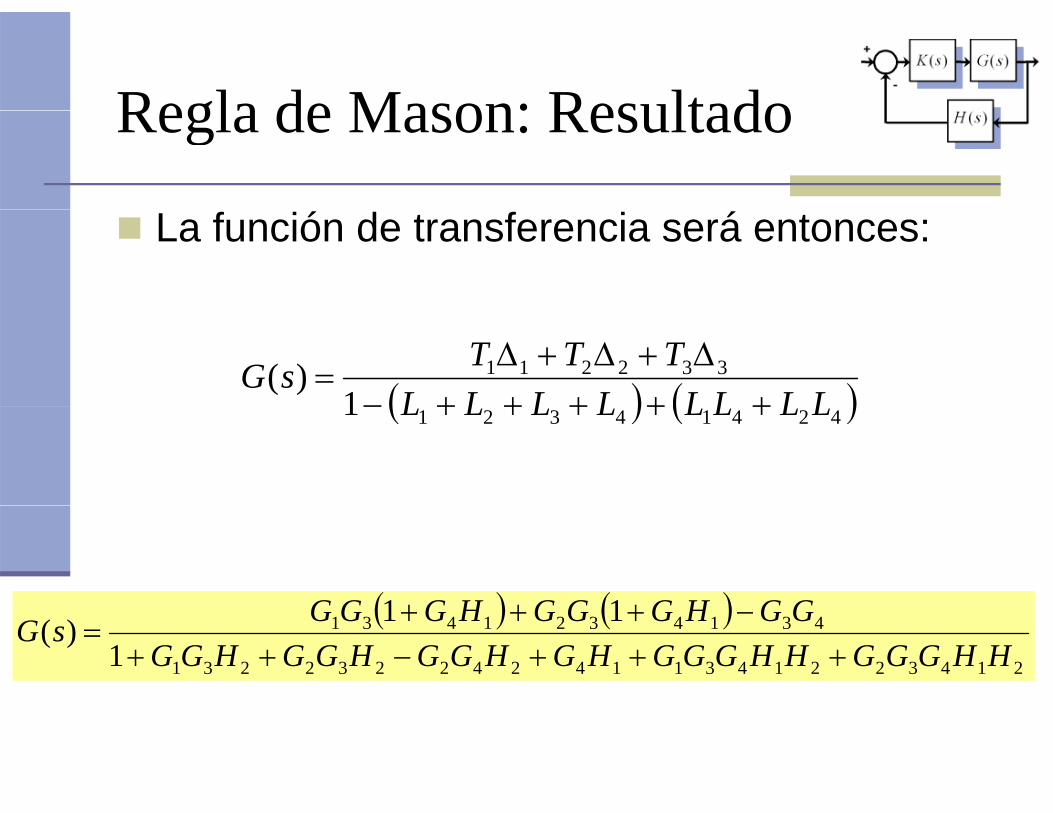
Regla de Mason: ResultadoRegla de Mason: Resultado
La función de transferencia será entonces:
332211
1)(
LLLLLLLLTTTsG
424143211 LLLLLLLL
11 GGHGGGHGGG 214322143114242232231
4314321431
111)(
HHGGGHHGGGHGHGGHGGHGGGGHGGGHGGGsG
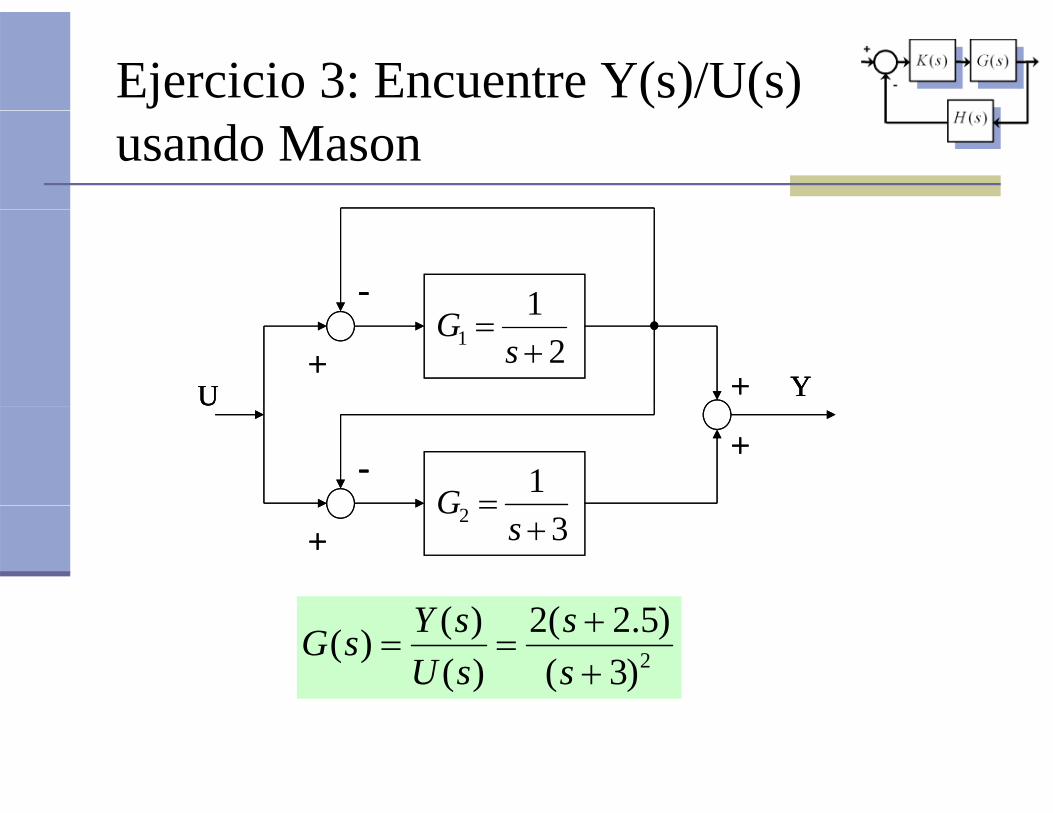
Ejercicio 3: Encuentre Y(s)/U(s) usando Mason
--- 1
++ ++UU YY+ +U Y
21
1
sG
-- ++- +1
G+++ 32
s
G
2)3()5.2(2
)()()(
ss
sUsYsG
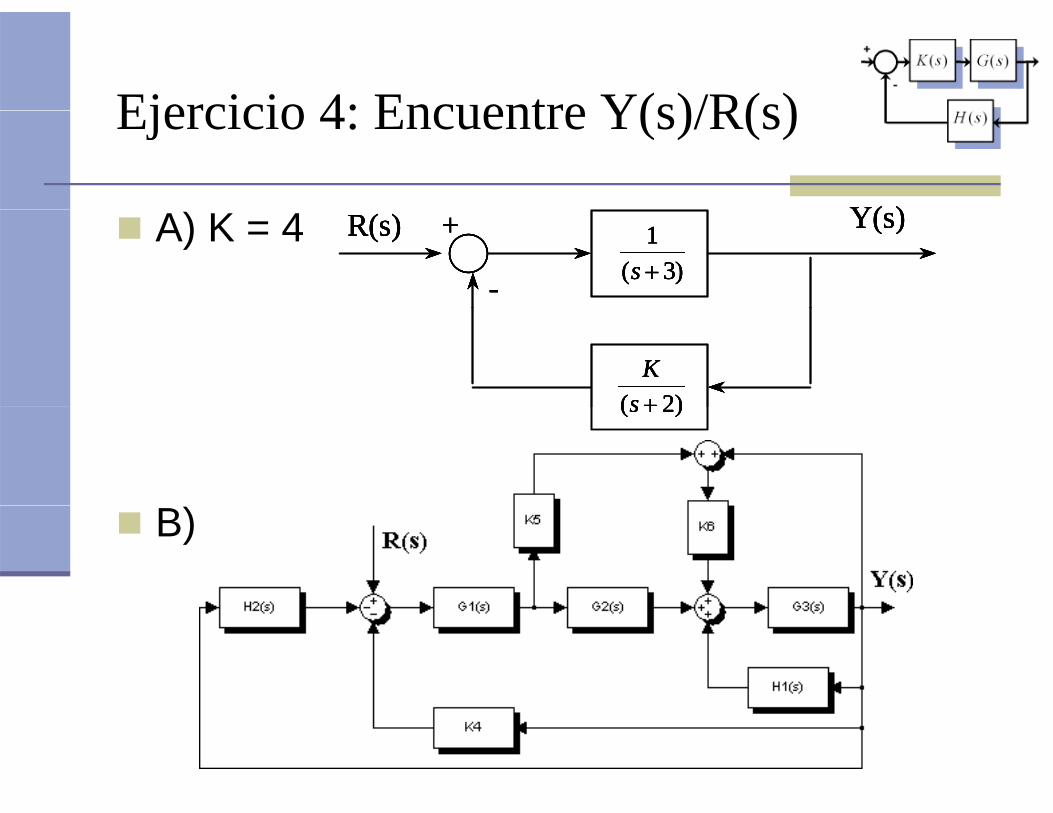
Ejercicio 4: Encuentre Y(s)/R(s)Ejercicio 4: Encuentre Y(s)/R(s)
Y( )Y( )Y( )Y( ) A) K = 4 R(s) Y(s))3(
1s-
+R(s) Y(s))3(
1s-
+R(s) Y(s))3(
1s-
+R(s) Y(s))3(
1s-
+
)2( sK
)2( sK
)2( sK
)2( sK
)2( s )2( s )2( s )2( s
B)
ReferenciasReferencias
R d í Á il J ú E I t d ió l Rodríguez Ávila, Jesús E.. „Introducción a la Ingeniería del Control Automático“, McGraw Hill 1998 MéxicoMcGraw-Hill, 1998, México.
K B j i C Si t d C t l Kuo, Benjamin C.. „Sistemas de Control Automático“, Ed. 7, Prentice Hall, 1996, MéxicoMéxico.
O t K t hik I i í d C t l Ogata, Katsuhiko. „Ingeniería de Control Moderna“, Pearson, Prentice Hall, 2003, 4ª Ed MadridEd., Madrid.