AGC S CENTRALIZADOS Y EN CASCADA - IIT Comillasen Cascada”, X Congreso Luso Español de...
130
Proyecto Fin de Carrera AGCS CENTRALIZADOS Y EN CASCADA Alumno: Álvaro Fernández García-Fraile Director: Luis Rouco Rodríguez
Transcript of AGC S CENTRALIZADOS Y EN CASCADA - IIT Comillasen Cascada”, X Congreso Luso Español de...

Proyecto Fin de Carrera
AGCS CENTRALIZADOS Y EN CASCADA
Alumno: Álvaro Fernández García-Fraile
Director: Luis Rouco Rodríguez

i
RESUMEN
La misión del control frecuencia-potencia en los sistemas interconectados es el
mantenimiento de la frecuencia y de los intercambios con los sistemas vecinos ante
variaciones de la generación o la demanda. El control frecuencia-potencia se realiza
por medio de dos lazos de control anidados que actúan en diferentes escalas de
tiempo: el control primario realizado por los reguladores carga-velocidad de los
grupos generadores y el control secundario realizado por el control automático de
generación (Automatic Generation Control, AGC, en la literatura técnica en inglés).
El control frecuencia-potencia secundario tiene por misión eliminar los errores de
frecuencia y de intercambio que quedan en el sistema tras la actuación del control
frecuencia-potencia primario.
Cuando un sistema está interconectado con varios sistemas, el control frecuencia-
potencia secundario controla el error del intercambio neto con todos los sistemas. Sin
embargo, cuando la conexión de los sistemas es radial y el tamaño es muy diferente,
entonces el control frecuencia-potencia secundario puede controlar sólo el
intercambio con el sistema más grande. Un ejemplo, puede ayudar a comprender
mejor este caso. El sistema peninsular español está conectado con Francia, Portugal y
Marruecos. En la configuración estándar del AGC, que denominaremos centralizado
en este documento, el AGC del sistema español controlaría el intercambio neto con
Francia, Portugal y Marruecos. Sin embargo, debido al tamaño de los sistemas
portugués y marroquí y a que sólo el sistema español está conectado con el sistema
francés, el AGC español sólo controla el intercambio con Francia. Por otra parte, los
AGC portugués y marroquí sólo controlan sus respectivos intercambios con el
sistema español (las desviaciones de los intercambios de los sistemas portugués y
marroquí con el sistema español son perturbaciones en la demanda del sistema
español). Además, el intercambio entre los sistemas español y francés sólo es
controlado por el AGC español (la desviación del intercambio entre el sistema
español y francés es una perturbación en la demanda del sistema francés). Esta
configuración de los AGC se denomina en cascada.

ii
Este proyecto compara el comportamiento de los AGCs centralizados y en cascada
en el caso de la implantación de un AGC en el sistema interconectado del norte de
África formado por Marruecos, Argelia y Túnez conectado a la UCTE a través del
sistema español. Para ello se han desarrollado modelos de simulación que reflejen los
aspectos fundamentales del comportamiento de la respuesta de los controles
frecuencia-potencia primario y secundario y que permita implantar fácilmente AGCs
centralizados y en cascada en sistemas de diferentes tamaño.
Se ha comprobado que tanto los sistemas con AGCs centralizados como con AGCs
en cascada son estables. También se ha analizado las respuestas lineal y no lineal. La
respuesta no-lineal aparece cuando se tiene en cuenta la limitación de reserva en cada
área. Ambos esquemas (AGCs centralizados y en cascada) ofrecen ventajas e
inconvenientes. En caso de que se preste atención a la respuesta lineal, los AGCs
centralizados son superiores. Por el contrario, si presta atención a la respuesta no
lineal, los AGCs en cascada son superiores.
Algunos resultados de este proyecto están recogidos en la ponencia:
A. Fernández y L. Rouco, “Comparación de la Respuesta de AGCs Centralizados y
en Cascada”, X Congreso Luso Español de Ingeniería Eléctrica que se celebrará en
Funchal (Madeira) entre los días 5 y 7 de julio de 2007.

i
ABSTRACT
The mission of the load-frequency control in interconnected systems is to keep
frequency and power interchanges with adjacent systems in their set-point values,
when deviations between production and consumption occur. The load-frequency
control is accomplished by two nested control loops that operate in two different time
scales: the primary control performed by the load-frequency regulators of the
generators groups, and the secondary control performed by the Automatic Generation
Control (AGC). The function of the secondary control is to eliminate frequency and
power interchanges errors that remain in the system after the deployment of the
primary control.
When a system is interconnected with several systems, secondary control handles the
power interchange error with the rest of the systems. However, when there is a radial
connection between systems and the size of the systems is very different, then the
secondary control can only handle the power interchange error with the biggest
system. An example can be used to easily understand this case. The Spanish
peninsular system is connected with France, Portugal and Morocco. In the standard
configuration of the AGC, which will be designated as centralized in this document,
the Spanish system AGC would control the net power interchange with France,
Portugal and Morocco. However, due to the size of the Portuguese and Moroccan
systems and since the Spanish system is only interconnected to the French system,
the Spanish system only controls the power interchange with France. On the other
hand, the Portuguese and Moroccan AGCs only control their own power interchange
with the Spanish system (Portuguese and Moroccan systems power interchange
deviations are considered load perturbations by the Spanish system). In addition, the
power interchange between the Spanish and French systems is only controlled by the
Spanish AGC (the power interchange deviation between the Spanish and French
systems is considered as a load perturbation by the French system). This
configuration of the AGC is designated as cascade.
This project compares the behaviour between centralized and cascade AGCs in the
event of the implantation of an AGC in the interconnected system of northern Africa

ii
(formed by Morocco, Algeria and Tunisia) which is connected with the UCTE
through the Spanish system. To that end, simulation models have been developed in
order to capture the fundamental aspects of the primary and secondary control
response behaviour, and also that allow an easy implantation of centralized and
cascade AGCs in different size systems.
It has been checked that both centralized and cascade AGCs are stable. The linear
and non-lineal responses have been also analyzed. The non-linear response appears
when the power reserve limitation is considered in each area. Both configurations
(centralized and cascade AGCs) offer advantages and disadvantages. If we are
looking at the linear response, centralized AGCs are superior. However, if we are
looking at the non-linear response, cascade AGCs are better than centralized AGCs.
Some of the results of this project are gathered in the paper:
A. Fernández y L. Rouco, “Comparación de la Respuesta de AGCs Centralizados y
en Cascada”, 10th Portuguese-Spanish Congress in Electrical Engineering to be held
in Funchal (Madeira) from 5th-7th July 2007.

iii
ÍNDICE
1 Introducción........................................................................................................................ 1
1.1 El tema del proyecto................................................................................................ 1
1.2 Objetivos del proyecto ........................................................................................... 2
1.3 Organización del proyecto..................................................................................... 2
2 Sistemas dinámicos............................................................................................................ 4
2.1 Representación en función de transferencia ...................................................... 4
2.1.1 Modelos no lineales y lineales....................................................................... 4
2.1.2 Transformada de Laplace............................................................................... 5
2.1.3 Polos, ceros y residuos .................................................................................. 6
2.2 Representación en espacio de estado.................................................................. 8
2.2.1 Modelos no lineales y lineales....................................................................... 8
2.2.2 Autovalores y autovectores.......................................................................... 9
2.2.3 Residuos ..........................................................................................................11
2.2.4 Sensibilidades..................................................................................................13
2.2.5 Factores de participación.............................................................................13
3 Control frecuencia-potencia .........................................................................................15
3.1 Control frecuencia-potencia primario...............................................................17
3.1.1 Modelo del generador..................................................................................17
3.1.2 Modelo de la carga ........................................................................................19
3.1.3 Modelo conjunto del generador y de la carga ........................................20
3.1.4 Regulador de velocidad................................................................................23
3.1.5 Regulador de carga-velocidad.....................................................................24

iv
3.1.6 Modelos y respuesta de turbinas hidráulicas y de vapor y sus
reguladores de velocidad ...............................................................................................31
3.2 Control frecuencia-potencia secundario...........................................................37
3.2.1 Control frecuencia-potencia secundario en un área .............................37
3.2.2 Control frecuencia-potencia secundario en dos áreas interconectadas
...........................................................................................................................40
3.2.3 Control de frecuencia ..................................................................................46
3.2.4 Control de potencia de intercambio con sesgo (bias) de frecuencia 51
3.3 Control frecuencia-potencia terciario ...............................................................56
4 Estabilidad de pequeña perturbación ..........................................................................58
4.1 Modelos no lineales................................................................................................59
4.1.1 Generador conectado a un nudo de potencia infinita ..........................59
4.1.2 Sistema multimáquina ...................................................................................63
4.2 Modelos lineales......................................................................................................66
4.2.1 Generador conectado a un nudo de potencia infinita ..........................66
4.2.2 Sistema multimáquina ...................................................................................68
4.3 Amortiguamiento de oscilaciones electromecánicas de generadores
síncronos................................................................................................................................69
5 Modelos para el estudio de AGCs centralizados y en cascada .............................71
5.1 Modelo de las áreas interconectadas.................................................................71
5.1.1 Dinámica de frecuencia ................................................................................71
5.1.2 Amortiguamiento de la dinámica del rotor de los generadores.........72
5.1.3 Regulación primaria.......................................................................................73
5.1.4 Regulación secundaria ..................................................................................75
5.2 Modelo de la red de interconexión....................................................................76

v
5.3 Modelo completo del sistema..............................................................................77
6 Métodos de estudio de AGCs centralizados y en cascada ....................................78
6.1 Estabilidad.................................................................................................................78
6.1.1 Dinámica de frecuencia ................................................................................78
6.1.2 Amortiguamiento de la dinámica del rotor de los generadores.........78
6.1.3 Regulación primaria.......................................................................................79
6.1.4 Regulación secundaria ..................................................................................80
6.1.5 Modelo completo del área ..........................................................................81
6.1.6 Modelo completo del sistema ....................................................................83
6.2 Régimen permanente.............................................................................................84
6.3 Simulación no lineal................................................................................................85
7 Resultados numéricos.....................................................................................................88
7.1 Sistema de cuatro áreas ........................................................................................88
7.1.1 Descripción del sistema ...............................................................................88
7.1.2 Análisis de estabilidad...................................................................................89
7.1.3 Análisis en régimen permanente ................................................................95
7.1.4 Simulación lineal.............................................................................................97
7.1.5 Simulación no-lineal ....................................................................................102
7.2 Sistema de seis áreas ...........................................................................................104
7.2.1 Simulación lineal...........................................................................................106
7.2.2 Simulación no-lineal ....................................................................................109
8 Conclusiones ..................................................................................................................113
9 Referencias bibliográficas .............................................................................................115
10 Anexo ..........................................................................................................................116

1
1 INTRODUCCIÓN
Este capítulo presenta el tema del proyecto. Detalla sus objetivos y su organización.
1.1 El tema del proyecto
El tema del proyecto es el control frecuencia-potencia de sistemas de energía
eléctrica.
El control frecuencia-potencia en los sistemas interconectados tiene por misión el
mantenimiento de la frecuencia y de los intercambios en sus valores programados. El
control frecuencia-potencia se realiza en tres lazos de control anidados: primario
(automático a nivel de unidad generadora), secundario (automático a nivel de área de
intercambio) y terciario (manual a nivel de área de intercambio). El control primario
es realizado por los reguladores de carga-velocidad de los grupos y el control
secundario es realizado por los reguladores del denominado control automático de
generación (Automatic Generation Control, AGC, en la literatura técnica en inglés).
En los sistemas de control automático de generación AGCs centralizados cada área
controla la frecuencia y el balance de potencia de intercambio con todas las áreas
vecinas.
En los denominados AGCs en cascada, cada área controla la frecuencia y la potencia
de intercambio con ciertas áreas. Típicamente, se trata de controlar el intercambio
con las áreas de mayor tamaño. Las variaciones del intercambio con las áreas de
menor tamaño son tratadas como variaciones de demanda de área.
Un ejemplo, puede ayudar a comprender mejor este caso. El sistema peninsular
español está conectado con Francia, Portugal y Marruecos. En la configuración
centralizada del AGC, el AGC del sistema español controlaría el intercambio neto
con Francia, Portugal y Marruecos. Sin embargo, debido al tamaño de los sistemas
portugués y marroquí y a que sólo el sistema español está conectado con el sistema
francés, el AGC español sólo controla el intercambio con Francia. Por otra parte, los
AGC portugués y marroquí sólo controlan sus respectivos intercambios con el
sistema español (las desviaciones de los intercambios de los sistemas portugués y

2
marroquí con el sistema español son perturbaciones en la demanda del sistema
español). Además, el intercambio entre los sistemas español y francés sólo es
controlado por el AGC español (la desviación del intercambio entre el sistema
español y francés es una perturbación en la demanda del sistema francés). Esta
configuración de los AGC se denomina en cascada.
1.2 Objetivos del proyecto
El objetivo del presente proyecto es el análisis del funcionamiento de AGCs en
cascada. El análisis del funcionamiento de AGCs en cascada requiere el desarrollo de
modelos apropiados y de la comparación de su comportamiento con los AGCs
centralizados.
De forma más precisa, son objeto de estudio los siguientes aspectos:
• Estabilidad.
• Funcionamiento en régimen permanente.
• Funcionamiento en régimen transitorio.
Este proyecto estudiará el comportamiento de los AGCs centralizados y en cascada
en el caso de la implantación de un AGC en el sistema interconectado del norte de
África formado por Marruecos, Argelia y Túnez conectado a la UCTE a través del
sistema español. También estudiará ambas configuraciones en el caso de la conexión
del sistema peninsular español a Francia, Portugal y Marruecos.
1.3 Organización del proyecto
Este proyecto contiene otros seis capítulos:
El capítulo 2 introduce los conceptos fundamentales de los sistemas dinámicos.
El capítulo 3 ofrece una panorámica de la regulación frecuencia-potencia en sistemas
de energía eléctrica.
El capítulo 4 introduce el problema de la estabilidad de pequeña perturbación de
sistemas de energía eléctrica.

3
El capítulo 5 proporciona los modelos para el estudio de los AGCs centralizados y en
cascada.
El capítulo 6 proporciona los métodos para el estudio de los AGCs centralizados y en
cascada.
El capítulo 7 detalla los resultados numéricos.
El capítulo 8 ofrece las conclusiones del proyecto.
El capítulo 9 contiene las referencias bibliográficas.

4
2 SISTEMAS DINÁMICOS
Este capítulo presenta los conceptos fundamentales del análisis de sistemas
dinámicos. Se detallan las representaciones en función de transferencia y la
representación en espacio de estado, también denominadas representaciones externa
e interna respectivamente.
2.1 Representación en función de transferencia
Esta sección explica los conceptos fundamentales de la representación en función de
transferencia de sistemas dinámicos.
2.1.1 Modelos no lineales y lineales
Sea un sistema dinámico descrito por una ecuación diferencial no lineal de orden n
de la forma:
=
−
−
−
−
udt
du
dt
ud
dt
udgy
dt
dy
dt
yd
dt
ydf m
m
m
m
n
n
n
n
,,,,,,,, 1
1
1
1
⋯⋯ (2.1)
donde y es la salida y u es la entrada.
El estudio de la estabilidad de los sistemas dinámicos lineales es un problema muy
difícil. Sin embargo, se han desarrollado técnicas muy potentes para el análisis de la
estabilidad de sistemas dinámicos lineales, y lo que es más importante, para el diseño
de sistemas de control que hagan que el sistema dinámico considerado se comporte
según lo deseado.
La linealización de una función no lineal
( )xfy = (2.2)
alrededor de un punto ( )00 xfy = consiste en aproximarla por el primer término del
desarrollo en serie de Taylor. En efecto el desarrollo en serie de Taylor de la función
( )xfy = alrededor del punto ( )00 xfy = es
( ) ( ) ( ) ( ) …+−+−+= 2
02
2
00 xxdx
xfdxx
dx
xdfyy

5
y su aproximación lineal es
( )
ydx
xdfy ∆=∆ (2.3)
donde:
0
0
y y y
x x x
∆ = −∆ = −
Si el sistema dinámico descrito por la ecuación diferencial no lineal de orden n (2.1)
se linealiza alrededor del punto de funcionamiento se obtiene la ecuación diferencial
lineal de orden n:
ubdt
udb
dt
udb
dt
udb
yadt
yda
dt
yda
dt
yda
m
m
nm
m
n
n
n
nn
n
n
∆+∆++∆+∆
=∆+∆++∆+∆
−
−
−
−
−
−
011
1
1
011
1
1
⋯
⋯
(2.4)
2.1.2 Transformada de Laplace
La solución de ecuaciones diferenciales lineales se realizar por diferentes métodos.
Cuando se considera la denominada representación externa de sistemas dinámicos se
utiliza la transformada de Laplace.
La transformada se define como:
( ) ( )0
stL F t F t e dt−
∞ −= ∫
La transformada de Laplace tiene las siguientes propiedades:
( ) ( ) L KF t KL F t=
( ) ( ) ( ) ( ) 1 2 1 2L F t F t L F t L F t+ = +
( ) ( ) ( )0
dF tL sF s F
dt−
= −
( ) ( ) ( ) ( )
22
20 0
d F tL s F s sF F
dt− − ′= − −

6
( ) ( )0
1t
L F t dt F ss−
= ∫
Los teoremas del valor inicial y del valor final son respectivamente:
( ) ( )0 lims
F sF s+
→∞=
( ) ( )0
lims
F sF s→
∞ =
La transformada de Laplace de algunas funciones elementales es:
( ) 1L tδ =
( ) 11L t
s=
L K K=
1atL es a
− =+
2 2senL t
s
ωωω
=+
2 2cos
sL t
sω
ω=
+
2
22 22
sen 121
ntn nn
n n
L e ts s
ζωω ωω ζζω ωζ
− − = + +−
( )2
2 22
2
sen 121
1arctg
ntnn
n n
sL e t
s sζωω ω ζ φ
ζω ωζ
ζφζ
− − − = + +−
−=
2.1.3 Polos, ceros y residuos
La transformada de Laplace de la ecuación diferencial lineal de orden n (2.4) es:
7
( ) ( ) ( ) ( )( ) ( ) ( ) ( )subsusbsusbsusb
syasysasysasysam
mm
m
nn
nn
∆+∆++∆+∆
=∆+∆++∆+∆−
−
−−
011
1
011
1
⋯
⋯ (2.5)
o también:
( ) ( )( ) ( )subsbsbsb
syasasasam
mm
m
nn
nn
∆++++
=∆++++−
−
−−
011
1
011
1
⋯
⋯
La relación entre la transformada de la variable salida ( )sy∆ y la transformada de la
variable de entrada ( )su∆ se denomina función de transferencia:
( )( )
( )( )sD
sN
asasasa
bsbsbsb
su
syn
nn
n
mm
mm =
++++++++=
∆∆
−−
−−
011
1
011
1
⋯
⋯ (2.6)
Considérese la descomposición en raíces simples de los polinomios numerador ( )sN
y denominador ( )sD de la función de transferencia:
( )( )
( )( )
( ) ( )( ) ( )
( )
( )∏
∏
=
=
−
−=
−−−−==
∆∆
n
ii
m
ii
n
m
ps
zs
psps
zszs
sD
sN
su
sy
1
1
1
1
⋯
⋯ (2.7)
Las raíces del polinomio numerador iz se denominan ceros y las raíces del
polinomio denominador ip se denominan polos.
La solución de la ecuación diferencial (2.4) requiere el cálculo de la antitransformada
de Laplace.
Para ello, es preciso realizar la descomposición en fracciones simples de la función
de transferencia
( )( )
( )
( ) ( )∑∏
∏=
=
=
−=
−
−=
∆∆ n
i i
in
ii
m
ii
ps
R
ps
zs
su
sy
1
1
1 (2.8)
donde iR es el residuo de la función de transferencia correspondiente al polo ip y
que se calcula como:

8
( )( ) ( )i
psi ps
sD
sNR
i
−=→lim
La solución de la ecuación diferencial se obtiene finalmente como:
( ) ( ) ( ) ( )1 1
1
i
np ti
ii i
Ry t L y s L u s R e
s p− −
=
∆ = ∆ = ∆ = − ∑
La estabilidad del sistema está gobernada por los polos de la función de
transferencia:
( )( ) ( )
1 1
1
i
np ti
ii i
y s RL L R e
u s s p− −
=
∆ = = ∆ − ∑
2.2 Representación en espacio de estado
Esta sección explica los conceptos fundamentales de la representación en función de
transferencia de sistemas dinámicos.
2.2.1 Modelos no lineales y lineales
Se considera un sistema dinámico descrito por ecuaciones diferenciales no lineales
escritas de forma explícita (las derivadas de las variables de estado dependen sólo de
las variables de estado x y de la variable de entrada u ):
( )
1
,N
u×
=
∈ℜ
x F x
x
ɺ (2.9)
Si el sistema de ecuaciones diferenciales no lineales (2.9) se linealizan alrededor del
punto de trabajo ,u u= =0 0x x , resulta:
( ) ( )
0 0, ,u u u u
uu
u
∂ ∂∂ ∂
= = = =
∆ = + ∆
= ∆ + ∆0 0x x x x
F x F xx
x
A x b
ɺ (2.10)
donde:
1
0 0
,
,
N N N
u u u
× ×∈ℜ ∈ℜ∆ = − ∆ = −A b
x x x
9
La solución del sistema de ecuaciones diferenciales lineales tiene dos componentes:
la solución homogénea y la solución particular de la completa.
La solución homogénea es la solución que corresponde a entrada nula y condiciones
iniciales no nulas. La solución particular de la completa es la solución que
corresponde a condiciones iniciales nulas y entrada no nula.
La solución del sistema de ecuaciones diferenciales (2.10) se puede expresar en
términos de la exponencial de la matriz de estado A de acuerdo con la expresión:
( ) ( ) ( ) ( ) ( ) ( ) ( )0 0
00
tt t th p t
t t t e t e u dτ τ τ− −∆ = ∆ + ∆ = ∆ + ∆∫A Ax x x x b (2.11)
La exponencial de la matriz de estado A se puede calcular usando el desarrollo en
serie de Taylor:
! !
te t t= + + +A A AI
2
2
1 2⋯
Sin embargo, este método no es siempre numéricamente robusto. Una solución
numéricamente robusta y llena de sentido físico se puede obtener en términos de los
autovalores y autovectores de la matriz de estado.
2.2.2 Autovalores y autovectores
Una alternativa llena de significado físico está basada en los autovalores y
autovectores de la matriz de estado A . Un autovalor iλ de la matriz de estado A y
los correspondientes autovectores derecho iv e izquierdo iw asociados se definen
como:
i i iλ=Av v (2.12)
T Ti i iλ=w A w (2.13)
El estudio de las ecuaciones (2.12) y (2.13) indica que los autovalores derecho e
izquierdo no están determinados de forma única (éstos se calculan como la solución
de un sistema lineal de N ecuaciones y N+1 incógnitas). Una forma de eliminar el
grado de libertad es introducir la normalización:

10
Ti i =w v 1 (2.14)
En el caso de N autovalores distintos, las ecuaciones (2.12)-(2.14) se pueden escribir
juntas para todos los autovalores en forma matricial:
[ ] [ ]
[ ]
1
1 1
1 1 1
1
1
0
0
0
0
1 0
0 1
N N
N
T T
T TN N N
T
NTN
λ
λ
λ
λ
=
=
=
A v v v v
w w
A
w w
w
v v
w
⋯
⋯ ⋯ ⋮ ⋱ ⋮
⋯
⋯
⋮ ⋮ ⋱ ⋮ ⋮
⋯
⋯
⋮ ⋯ ⋮ ⋱ ⋮
⋯
(2.15)
o en forma más compacta como:
===
AV V
WA W
WV I
ΛΛΛΛΛΛΛΛ (2.16)
donde ΛΛΛΛ , V y W son respectivamente las matrices de los autovalores y los
autovectores derechos e izquierdos:
[ ]N
N
T
TN
λ
λ
=
=
V v v
w
W
w
1
1
1
⋱
⋯
⋮
Λ =Λ =Λ =Λ =
Si la exponencial de la matriz de estado teA se expresa en términos de los
autovalores y de los autovectores derechos e izquierdos de la matriz de estados A ,
resulta:
11
! !
! !
t
t
e t t
t t e
= + + +
= + + + =
A V W V WVW
V I W V W
2
2
2
2
1 2
1 2
⋯
⋯ΛΛΛΛ
Λ ΛΛ ΛΛ ΛΛ Λ
Λ ΛΛ ΛΛ ΛΛ Λ (2.17)
La solución (2.11) del sistema de ecuaciones diferenciales (2.10) en términos de los
autovalores y autovectores de una matriz:
( ) ( ) ( ) ( ) ( )0 0
00
tt t t
tt e t e u dτ τ τ− −∆ = ∆ + ∆∫
Λ Λx V W x V Wb (2.18)
Por otra parte, la solución homogénea (2.10) del sistema de ecuaciones diferenciales
lineales (2.10) se puede expresar en términos de los autovalores y de los autovectores
derechos e izquierdos de la matriz de estados A como:
( ) ( ) ( )0 01
i
Ntt T
i ihi
t e t e tλ
=
∆ = ∆ = ∆ ∑x V W x v w xΛΛΛΛ (2.19)
El estudio de la ecuación (2.19) permite obtener las siguientes conclusiones La
respuesta del sistema se expresa como una combinación de la respuesta del sistema
para N modos.
• Los autovalores de la matriz de estado A determinan la estabilidad del
sistema. Un autovalor real negativo (positivo) indica un comportamiento
exponencial decreciente (creciente). Un autovalor complejo con parte real
negativa (positiva) indica un comportamiento oscilatorio decreciente
(creciente).
• Los componentes del autovector derecho iv indican la actividad relativa de
cada variable en el modo i-ésimo.
• Las componentes de autovector izquierdo iw pesa las condiciones iniciales en
el modo i-ésimo.
2.2.3 Residuos
Considérese que se define en el sistema una variable de salida y . Entonces la
descripción del sistema queda en la forma:

12
( ) ( ) ( )( ) ( )t t u t
y t t
∆ = ∆ + ∆
∆ = ∆
x A x b
c x
ɺ (2.20)
La función de transferencia expresada en términos de los polos y los residuos queda:
( )( ) ( ) 1
1
Ni
i i
y s Rs
u s s p
−
=
∆= − =
∆ −∑c I A b (2.21)
La función de transferencia (2.21) también se puede expresar en términos de los
autovalores y autovectores de la matriz de estados como:
( )( ) ( ) 1
1
TNi i
i i
y ss
u s s λ−
=
∆= − =
∆ −∑cv w b
cV I Λ Wb (2.22)
Por tanto los autovalores son los polos de cualquier función de transferencia que se
pueda considerar i ip λ= y los residuos se puedan calcular en términos de los
autovectores derechos e izquierdos como:
Ti i iR = cv w b (2.23)
Los residuos se pueden descomponer en términos de los factores de observabilidad y
controlabilidad modal. En efecto, si se considera la transformación:
=
=cx Vξ
ξ Wx
La ecuación (2.20) resulta:
( ) ( ) ( )( ) ( )t t u t
y t t
∆ = ∆ + ∆
∆ = ∆
ξ Λ ξ bW
cV ξ
ɺ
o también::
( ) ( ) ( )( ) ( ) 1, ,
Ti i i i
i i
t t u ti N
y t t
ξ λ ξξ
∆ = ∆ + ∆ =∆ = ∆
bw
cv
ɺ
… (2.24)
De donde se deducen los factores modales de observabilidad y controlabilidad:
,i y ic ∆ = cv

13
,T
i u ib ∆ = bw
2.2.4 Sensibilidades
La sensibilidad del autovalor iλ con relación a un parámetro q de la matriz de
estados se puede calcular como:
( )Ti
i i
q
q q
λ ∂∂ =∂ ∂
Aw v
Si el parámetro es un elemento diagonal de la matriz de estados jja , la sensibilidad
del autovalor iλ resulta:
iij ji
jj
w va
λ∂ =∂
2.2.5 Factores de participación
El factor de participación de la variable j-ésima en el modo i-ésimo se define como el
producto de las componentes j-ésimas del autovector derecho jiv e izquierdo jiw en
el modo i-ésimo:
ji ji jip w v=
El factor de participación de una variable en un modo es una magnitud adimensional.
En otras palabras, es independiente de las unidades de las variables de estado.
Además, como resultado de la normalización adoptada (1.6), la suma de los factores
de participación de todas las variables en un modo y la suma de los factores de
participación de todos los modos en una variable son igual a la unidad.
N N
ji jij i
p p= =
= =∑ ∑1 1
1
Muchos sistemas dinámicos resultan de la interconexión de subsistemas dinámicos.
La participación del subsistema es una herramienta útil en este entorno. La
participación del subsistema se define como la suma de los factores de participación
de las variables que describen el subsistema dinámico.

14
Si jij S
p p∈
=∑
Uno de los valores de la participación del subsistema viene del hecho de que es
independiente de la selección de las variables de estado para modelar el subsistema.
En otras palabras, es invariante con respecto a las transformaciones que sólo afectan
a las variables del sistema.
15
3 CONTROL FRECUENCIA-POTENCIA
La misión fundamental del control frecuencia-potencia es mantener constante la
frecuencia del sistema. La frecuencia del sistema es resultado de la velocidad de los
generadores: si la velocidad de los generadores es constante entonces la frecuencia
del sistema será constante. La frecuencia del sistema es una medida del equilibrio
entre potencia generada y potencia consumida.
La frecuencia es una magnitud de la tensión de cada nudo de la red. Es la velocidad
de giro del fasor. Sin embargo, como las velocidades de giro de los fasores de las
tensiones de nudo en una red fuertemente interconectada son similares se suele
hablar de la frecuencia del sistema. También se habla de la frecuencia del sistema
como la velocidad de giro del centro de masas del sistema.
El control frecuencia-potencia tiene tres lazos que actúan en tres escalas de tiempo:
• Primario.
• Secundario.
• Terciario.
Cuando se produce una variación de la frecuencia, consecuencia de una variación de
la generación o de la carga, el primer lazo en actuar (en segundos) es el control
primario por medio de los reguladores de carga-velocidad de los generadores. El
objetivo de este lazo de control es conseguir, tras una perturbación, la igualdad
generación-demanda minimizando el desvío de frecuencia. Dicha igualdad se
recupera gracias a la existencia de una reserva primaria (a subir y a bajar),
movilizada por el sistema de control. La actuación del control primario deja un error
en la frecuencia que es corregido por la actuación de la regulación secundaria (en
decenas de segundos).
Cuando el sistema eléctrico está interconectado con otros sistemas vecinos, el control
secundario no sólo tiene por misión eliminar el error de frecuencia dejado por la
regulación primaria sino también el error de las potencias de intercambio con los
sistemas vecinos. Ello se logra con un regulador integral que tiene por misión anular
el denominado error de control de área (Area Control Error, ACE, en la literatura

16
técnica en inglés). Cada uno de los sistemas interconectados cuyos intercambios se
quieren mantener se denominan áreas. Por tanto, la función del control secundario es,
tras la actuación del control primario, recuperar de forma automática la frecuencia
nominal del sistema y los intercambios movilizando la reserva secundaria del
sistema, lo que conduce a recuperar la reserva primaria. La regulación secundaria
también se conoce como Control Automático de la Generación (Automatic
Generation Control, AGC, también en la literatura técnica en inglés).
El control terciario tiene dos misiones: actualizar el reparto del esfuerzo de
regulación secundaria atendiendo a criterios económicos y recuperar la reserva
secundaria, manteniendo los márgenes de regulación secundaria de las unidades e
incorporando, en caso necesario, nuevas unidades conforme se agotan los márgenes
de las unidades en regulación. En general, la actuación de la regulación terciaria es lo
suficientemente lenta (10 - 15 minutos) como para permitir que sea un lazo de
regulación de actuación manual.
La regulación secundaria dentro de un área se puede implantar según múltiples
modelos, siendo posible distinguir tres formas básicas:
• Centralizada: el área se constituye como una única zona de regulación. Existe
un solo regulador en el área que realiza las acciones necesarias y que controla
todas las unidades de forma centralizada.
• Pluralista: existen varias zonas de regulación en el área, cada una de ellas con
su regulador y sus unidades. Una de estas zonas es la encargada del
cumplimiento de los objetivos del AGC correspondientes al área, mientras
que las otras zonas realizan su propia regulación de forma descentralizada.
• Jerárquica: existen varias zonas de regulación en el área. El AGC se organiza
de forma jerárquica, con un regulador central encargado del cumplimiento de
los objetivos del AGC correspondientes al área y un regulador independiente
en cada una de las zonas. El regulador central envía señales de control a los
reguladores de zona, mientras que cada uno de ellos controla sus propias
unidades. Los reguladores de zona deberán incluir en el cálculo de su ACE la
señal de control recibida del operador central.
17
El sistema eléctrico español se encuentra integrado dentro del sistema interconectado
de la UCTE (que incluye a la práctica totalidad de los países de Europa occidental),
conectado a los sistemas de Francia, Portugal y Marruecos, siendo el responsable de
mantener la potencia de intercambio con Francia y la frecuencia en sus valores
programados (Portugal y Marruecos son los encargados de mantener la potencia de
intercambio entre España y cada uno de ellos) y constituyendo así un área. La
operación del AGC en el sistema eléctrico español se puede considerar que se realiza
de forma jerárquica, con un operador central (Red Eléctrica de España, REE) que
identifica el desvío de potencia del área y varias zonas de regulación, que son las que
controlan la frecuencia y envían las señales de ajuste a las unidades de generación.
Este capítulo revisa los principios del control frecuencia-potencia. Se comienza con
el control primario y sigue con los controles secundario y terciario.
3.1 Control frecuencia-potencia primario
3.1.1 Modelo del generador
El movimiento del rotor de un generador síncrono está descrito por la ecuación de la
dinámica de rotación de un sólido rígido:
m e
dJ M M
dt
Ω = − (3.1)
donde:
J es el momento de inercia 2kg m⋅ ,
Ω es la velocidad angular en rad s ,
mM es el par mecánico aplicado por la turbina en N m⋅ y
eM es el par eléctrico aplicado por el generador N m⋅ .
Si la ecuación de la dinámica del rotor (3.1) se expresa en magnitudes unitarias
resulta:

18
0
20
0
20
0
1
1
m e
B B B
m e
B B B
m eB
M MdJ
S dt M M
J M Md
S dt M M
J dm m
S dt
Ω Ω = −
Ω Ω = −Ω
Ω Ω = −Ω
(3.2)
donde el par base es:
0
BB
SM =
Ω
y mm es el par mecánico aplicado por la turbina en magnitudes unitarias y
em es el par eléctrico aplicado por el generador en magnitudes unitarias.
Definiendo la inercia como la energía cinética de rotación expresada en magnitudes
unitarias de la potencia base:
20
12
B
JH
S
Ω= (3.3)
Resulta que la inercia está expresada en segundos:
[ ] MWsH s
MVA= =
La inercia toma valores típicos dependiendo del tipo de generador síncrono (rotor
liso o polos salientes) y del motor primario:
• Generadores accionados por turbinas de vapor o de gas:
( )5 6H s= ÷
• Generadores accionados por turbinas hidráulicas:
( )3 4H s= ÷
• Generadores accionados por motores diesel:
( )1 2H s= ÷

19
Introduciendo la expresión de la inercia (3.3) en la ecuación de la dinámica del rotor
del generador síncrono (3.2) resulta:
0
2m e
H dm m
dt
Ω = −Ω
Si la velocidad angular se expresa en magnitudes unitarias, la ecuación de la
dinámica del rotor queda:
2 m e
dH m m
dt
ω = − (3.4)
La potencia y el par están relacionados por la ecuación:
p mω= (3.5)
El modelo linealizado alrededor del punto de funcionamiento se obtiene linealizando
las ecuaciones (3.4) y (3.5):
2 m e
dH m m
dt
ω∆ = ∆ − ∆ (3.6)
0 0p m mω ω∆ = ∆ + ∆ (3.7)
La diferencia entre las variaciones de las potencias mecánica y eléctrica resulta ser
precisamente la diferencia de las variaciones de los pares mecánico y eléctrico:
( ) ( )( )
0 0 0
0
m e m e m e
m e m e
p p m m m m
m m m m
ω ωω
∆ − ∆ = ∆ − ∆ + − ∆
= ∆ − ∆ = ∆ − ∆ (3.8)
Substituyendo (3.8) en (3.6), la ecuación (3.6) resulta:
2 m e
dH p p
dt
ω∆ = ∆ − ∆
3.1.2 Modelo de la carga
Se supone que la carga tiene dos componentes una independiente y otra dependiente
de la frecuencia:
( )0e Dp p D ω ω= + − (3.9)

20
Un valor típico de D es que la potencia demandada varía un 2% cuando la frecuencia
varía un 1%.
El modelo linealizado de la carga se obtiene linealizando alrededor del punto de
funcionamiento la ecuación (3.9):
e Dp p D ω∆ = ∆ + ∆ (3.10)
3.1.3 Modelo conjunto del generador y de la carga
La ecuación diferencial del modelo conjunto del generador y de la carga es:
2 m D
dH p p D
dt
ω ω∆ = ∆ − ∆ − ∆ (3.11)
La transformada de Laplace de la ecuación diferencial lineal (3.11) es:
( ) ( ) ( ) ( )2 m DHs s p s p s D sω ω∆ = ∆ − ∆ − ∆
o también:
( ) ( ) ( ) ( )( )1
2 m Ds p s p s D sHs
ω ω∆ = ∆ − ∆ − ∆ (3.12)
La Figura 3-1 muestra el diagrama de bloques del sistema descrito por la ecuación
(3.12).
Figura 3-1: Diagrama de bloques del modelo conjunto del generador y la carga.
La función de transferencia entre la potencia demanda y la velocidad es:
( ) ( ) ( ) ( )1 1
2 2 1D D
Ds p s p s
Hs D H D sω − −∆ = ∆ = ∆
+ +
Resulta un sistema de primer orden cuya constante de tiempo y cuya ganancia es:

21
2H
Dτ =
1
Dκ −=
El valor final de la frecuencia ante un escalón de potencia demandada se calcula
como:
( )0
1 1 1lim
2 D Ds
s s p s pHs D s D
ω→
− −∆ = ∆ = ∆+
Es decir ante un aumento de potencia demandada se produce una disminución de la
frecuencia. La disminución de frecuencia es directamente proporcional a la magnitud
del aumento de la potencia demandada e inversamente proporcional al factor de
variación de la carga con la frecuencia.
La evolución en el tiempo de la variación de la frecuencia ante un escalón de
potencia demandada se calcula como:
( ) ( ) ( )
( )( )
1 1
2
1
2 1
11
L
t H DL
pDt L s L
H D s s
e pD
ω ω− −
−
∆− ∆ = ∆ = +
−= − ∆
Debe observarse que si la carga no dependiera de la frecuencia la función de
transferencia entre la potencia demandada y la frecuencia sería:
( ) ( )1
2 Ds p sHs
ω −∆ = ∆
y la evolución en el tiempo sería:
( ) 1
2 Dt t pH
ω −∆ = ∆
que quiere decir que cuando si se produce un aumento de demanda la frecuencia cae
con una pendiente constante.
Considerar un sistema eléctrico a 50 Hz formado por unidades cuya potencia total es
500 MW, cuya inercia es 3 segundos en la citada base, cuya carga varía un 2%

22
cuando la frecuencia varía un 1% y que está suministrado una carga de 400 MW,
cuando se desconecta una carga de 100 MW:
La variación de frecuencia es:
1 1 100
0.1667 8.330.02 300 5000.01 500
Dp pu HzD
ω − − −∆ = ∆ = ⋅ = =⋅
La constante de tiempo de la respuesta temporal es:
2 2 3
50.02 300
0.01 500
Hs
Dτ ⋅= = =
⋅
La velocidad de variación de la frecuencia es:
( )
100500 0.033 1.667
2 2 3D
d t p pu Hz
dt H s s
ω−−∆ −∆= = = =
⋅
La respuesta en el tiempo se muestra en la Figura 3-2.
0 2 4 6 8 10 12 14 16 18 200
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18
Tiempo (segundos)
Var
iaci
ón d
e fr
ecue
ncia
(pu
)
Figura 3-2: Respuesta en el tiempo de la frecuencia de un sistema ante una disminución de
potencia demandada.

23
3.1.4 Regulador de velocidad
Para eliminar el error de frecuencia que se produce cuando varía la demanda se
plantea la incorporación al generador de un control integral de la velocidad. El
control integral de velocidad determinará el error de velocidad y actuará sobre la
potencia mecánica suministrada por el motor primario al generador. La
Figura 3-3: Modelo de generador con control integral de velocidad.
La función de transferencia entre la potencia demandada y la frecuencia es:
( ) ( )1
2Ds p s
KHs D
s
ω −∆ = ∆+ +
El valor final de la frecuencia ante un escalón de potencia demandada resulta ser
nulo:
( )0
1 1lim 0
2D
ss s p s
K sHs Ds
ω→
− ∆ = ∆ = + +
La Figura 3-4 muestra el modelo de simulación de la respuesta a un escalón de
potencia demandada de un generador equipado con control integral. Se ha supuesto
H =3 s, D = 2 pu. La Figura 3-5 muestra la respuesta a un escalón de potencia
demandada de un generador equipado con control integral en función de la constante
de control integral.

24
2
Apertura de válvulas
1
Variaciónde velocidad
Sum2
Sum1 Sum
k
s
Integrador
1
2*hs
Inercia
Escalón devariación
de velocidad
Escalón de potencia
demandada
d
Amortiguamiento de la carga
Figura 3-4: Modelo de simulación de un regulador de velocidad con control integral.
0 5 10 15 20 25 30 35 40 45 50−0.4
−0.35
−0.3
−0.25
−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
Tiempo (segundos)
Var
iaci
ón d
e ve
loci
dad
(pu)
Regulador con regulador integral: (−) k=0.1 (−−) k=1 (−.) k=10
Figura 3-5: Simulación de un regulador de velocidad con control integral en función de la
constante de control integral.
Cuando el sistema tiene más de un generador, los generadores no pueden estar
equipados con reguladores de velocidad (con control integral) ya que todos los
generadores intentarían suministrar las variaciones de potencia demandada.
3.1.5 Regulador de carga-velocidad
Para lograr la división de la potencia demandada entre los generadores se introduce
una característica de carga-velocidad. La característica de carga-velocidad se
consigue introduciendo una realimentación estática alrededor del integrador del
regulador de velocidad. La Figura 3-6 muestra el regulador de carga-velocidad. La

25
ganancia de la citada realimentación estática R se denomina estatismo del regulador
de carga-velocidad. Valores típicos del estatismo son el 4% y el 5%
Figura 3-6: Regulador de carga-velocidad.
La función de transferencia entre la potencia demandada y la frecuencia es:
( )( )
( )11
21 1
Ds p sR
Hs DKR s
ω −∆ = ∆+ +
+
El valor final de la frecuencia ante un escalón de potencia demandada es:
( )( )
0
1 1 1lim
1 12
1 1
D Ds
s s p s pR sHs D D
KR s R
ω→
− −∆ = ∆ = ∆+ + +
+
Si en ejemplo anteriormente considerado se considera que las unidades están
equipadas con reguladores carga-velocidad cuyo estatismo es del 4%, cuando se
desconecta una carga de 100 MW la variación de frecuencia es:
1 1 100
0.0075 0.3761 0.02 300 1 500
0.01 500 0.04
Dp pu HzD
R
ω − − −∆ = ∆ = ⋅ = =−+ ⋅ +
Si la variación de la potencia demandada con la frecuencia es nula, entonces el
estatismo del regulador es la variación de frecuencia si la variación de potencia
demandada es igual a la unidad:
LR pω∆ = − ∆
26
Si en ejemplo anteriormente considerado se desprecia el efector de la variación de la
carga con la frecuencia, cuando se desconecta una carga de 100 MW la variación de
frecuencia es:
100
0.04 0.008 0.4500DR p pu Hzω −∆ = − ∆ = − ⋅ = =
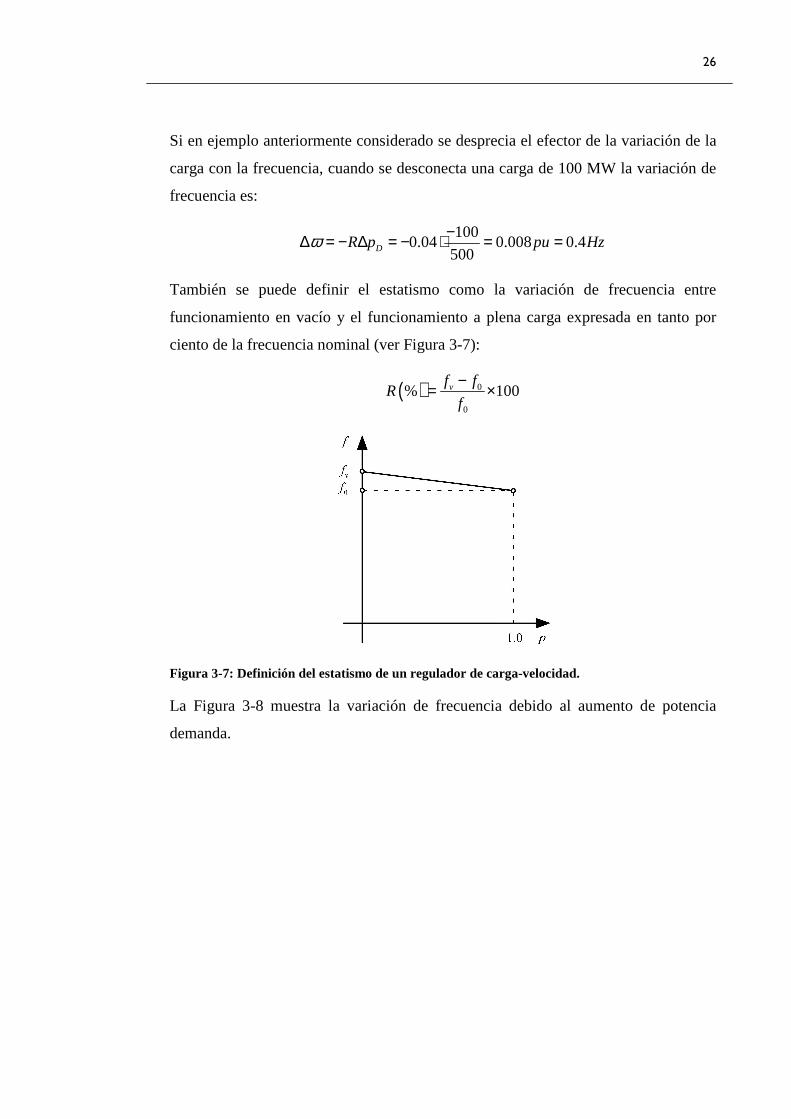
También se puede definir el estatismo como la variación de frecuencia entre
funcionamiento en vacío y el funcionamiento a plena carga expresada en tanto por
ciento de la frecuencia nominal (ver Figura 3-7):
( ) 0
0
% 100vf fR
f
−= ×
Figura 3-7: Definición del estatismo de un regulador de carga-velocidad.
La Figura 3-8 muestra la variación de frecuencia debido al aumento de potencia
demanda.

27
Figura 3-8: Variación de frecuencia por variación de la potencia demandada.
La Figura 3-9 muestra el diagrama de bloques de un regulador carga-velocidad con el
mecanismo de restablecimiento de la frecuencia del sistema por variación de la
consigna de carga. La Figura 3-10 muestra el restablecimiento de la frecuencia por
variación de la consigna de carga.
Figura 3-9: Regulador de carga-velocidad con mecanismo de restablecimiento de la frecuencia.

28
Figura 3-10: Restablecimiento de frecuencia por variación de la consigna de carga.
La Figura 3-11 muestra el modelo de simulación de la respuesta a un escalón de
potencia demandada y restablecimiento de la frecuencia del sistema por variación de
la consigna de carga del regulador de carga-velocidad. Se ha supuesto H =3 s,
D = 2 pu, K = 1 pu, R = 0.05pu.
2
Apertura de válvulas
1
Variaciónde velocidad
Sum3
Sum2
Sum1 Sum
k
s
Integrador
1
2*hs
Inercia
r
Estatismo
Escalón devariación
de velocidad
Escalón depotencia
de consigna
Escalón de potencia
demandada
d
Amortiguamiento de la carga
Figura 3-11: Modelo de simulación de la respuesta a un escalón de potencia demandada y
restablecimiento de la frecuencia del sistema por variación de la consigna de carga del
regulador de carga-velocidad.

29
0 10 20 30 40 50 60 70 80 90 100−0.25
−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
Tiempo (segundos)
Var
iaci
ón d
e ve
loci
dad
(pu)
Regulador con regulador integral, estatismo y escalon en consigna
Figura 3-12: Simulación de la respuesta a un escalón de potencia demandada y restablecimiento
de la frecuencia del sistema por variación de la consigna de carga del regulador de carga-
velocidad.
Si los generadores están equipados con reguladores carga-velocidad se logra el
reparto de variaciones de potencia demanda entre generadores. Considérese un
sistema con dos generadores en el que se produce un aumento de potencia
demandada. Se determina a continuación el reparto de dicho aumento entre los dos
generadores:
1 2p p p∆ = ∆ + ∆ (3.13)
Como cada generador está equipado con reguladores de carga-velocidad se cumple
que:
1
1
22
fp
R
fp
R
∆∆ = −
∆∆ = − (3.14)
por tanto:
1 2
2 1
p R
p R
∆ =∆
(3.15)
Substituyendo la relación (3.15) en la ecuación (3.13) resulta:

30
11
1
2 12
22
2
2 11
11
1 11
11
1 11
Rp p p
R
R RR
Rp p p
R
R RR
∆ = ∆ = ∆++
∆ = ∆ = ∆++
(3.16)
La nueva frecuencia se obtiene si más que sustituir cualesquiera de las relaciones
(3.16) en las ecuaciones (3.14):
11
1 22
22
1 21
1 11 1
1
1 11 1
1
f R p pR
R RR
f R p pR
R RR
−∆ = − ∆ = ∆++
−∆ = − ∆ = ∆++
La Figura 3-13 muestra la representación gráfica del reparto de variaciones de
potencia demanda entre generadores.
Figura 3-13: Representación gráfica del reparto de variaciones de potencia demanda entre
generadores.
La Figura 3-14 muestra el mecanismo de restablecimiento de la frecuencia del
sistema por variación de las consignas de carga de los reguladores de carga-
velocidad de dos generadores en paralelo que alimentan una carga.

31
Figura 3-14: Regulador de carga-velocidad con mecanismo de restablecimiento de la frecuencia.
Una aplicación del reparto de variaciones de potencia demanda entre generadores
llena de interés es el caso cuando se tienen dos generadores en paralelo de con
estatismo casi nulo pero algo diferentes: uno un 0.1% y el otro el 0.01%.
1
2
0.1% 0.001
0.01% 0.0001
R pu
R pu
= == =
11
2
22
1
1 10.0909
0.00111
0.0001
1 10.9090
0.000111
0.001
p p p pR
R
p p p pR
R
∆ = ∆ = ∆ = ∆++
∆ = ∆ = ∆ = ∆++
Los resultados obtenidos ponen de manifiesto que uno de los generadores toma el 9%
de la carga y el otro el 91%. Si los valores de los estatismos cambiaran pasaran a ser
0.01% y 0.1% entonces el generador que toma 9% pasaría a tomar el 91% de la carga
y el que toma el 91% pasaría a tomas el 9% de la carga. Es decir, se producirían
oscilaciones de la generación de los grupos inadmisibles.
3.1.6 Modelos y respuesta de turbinas hidráulicas y de vapor y sus
reguladores de velocidad
Hasta ahora se ha considerado que el comportamiento del generador viene
únicamente determinado por la dinámica de las masas giratorias. Se analiza a

32
continuación el efecto del modelado de la turbina. Se considerarán turbinas
hidráulicas y de vapor.
La Figura 3-15 muestra el modelo de un generador accionado por una turbina
hidráulica. Los componentes del modelo de la turbina y su regulador son la
compensación, el servomotor y la turbina. Nótese que el modelo de la turbina
hidráulica presenta un cero en el semiplano de parte real positiva. Se ha supuesto
H =3 s, D = 2 pu, Rp = 0.05 pu, Tg = 0.2 s, Rt = 0.38 s^-1, Tr = 5 s, Tw = 1 s.
3
Potenciasuministradapor la turbina
2
Apertura deldistribuidor
1
Variaciónde velocidad
−tws+1
0.5*tws+1
Turbina Suma3
Suma2Suma1
1
tg.s+1
Sevomotor
−K− Inverso delestatismo
1
2*hs
Inercia
rp
Estatismo
Escalón devariación
de velocidad
Escalón depotencia
de consigna
Escalón de potencia
demandada
tr.s+1
(rt/rp)*trs+1
Compensación
d
Amortiguamiento de la carga
Figura 3-15: Modelo de un generador accionado por una turbina hidráulica.
3
Potenciasuministradapor la turbina
2
Apertura delas válvulas
1
Variaciónde velocidad
fhp*trh.s+1
trh.s+1
Turbina Suma3
Suma2Suma1
1
tg.s+1
Servomotor
−K− Inverso delestatismo
1
2*hs
Inercia
rp
Estatismo
Escalón devariación
de velocidad
Escalón depotencia
de consigna
Escalón de potencia
demandada
tch.s+1
1
Cámara de válvulas
d
Amortiguamiento de la carga
Figura 3-16: Modelo de un generador accionado por una turbina de vapor.
La Figura 3-16 muestra el modelo de un generador accionado por una turbina de
vapor. Los componentes del modelo de la turbina y su regulador son el servomotor,

33
la cámara de válvulas y la propia turbina. La turbina tiene dos cuerpos alta y baja
presión. Se ha supuesto H =3 s, D = 2 pu, Rp = 0.05 pu, Tg = 0.2 s, Fhp = 0.3 s,
Tch = 0.3 s, Trh = 7 s.
La Figura 3-17, la Figura 3-18 y la Figura 3-19 comparan las respuesta de
generadores accionados por una turbina hidráulica y una turbina de vapor. Comparan
respectivamente la variación de velocidad, la apertura de válvulas o del distribuidor y
la potencia mecánica.
La comparación pone de manifiesto que un generador accionado por una turbina de
vapor es más rápido a la hora de atender un escalón de potencia demandada que un
generador accionado por una turbina hidráulica en contra de la creencia más
extendida. Es preciso que la rapidez de la respuesta depende del ajuste del regulador.
Supuesto que ambos reguladores están correctamente ajustados, el generador
accionado por la turbina hidráulica seguiría siendo más es más lenta debido a la
dinámica de la turbina que presenta un cero en el semiplano de parte real positiva.
0 2 4 6 8 10 12 14 16 18 20−0.35
−0.3
−0.25
−0.2
−0.15
−0.1
−0.05
0
Tiempo (segundos)
Var
iaci
ón d
e ve
loci
dad
(pu)
Respuesta a un escalón de carga: (−) t.v. (−−) t.h.
Figura 3-17: Comparación de la respuesta de generadores accionados por una turbina
hidráulica o por una turbina de vapor ante un escalón de potencia demandada: variación de
velocidad.

34
0 2 4 6 8 10 12 14 16 18 200
0.5
1
1.5
2
2.5
Tiempo (segundos)
Ape
rtur
a de
vál
vula
s/di
strib
uido
r
Respuesta a un escalón de carga: (−) t.v. (−−) t.h.
Figura 3-18: Comparación de la respuesta de generadores accionados por una turbina
hidráulica o por una turbina de vapor ante un escalón de potencia demandada: apertura del
válvulas o servomotor.
0 2 4 6 8 10 12 14 16 18 20−0.2
0
0.2
0.4
0.6
0.8
1
1.2
Tiempo (segundos)
Pot
enci
a m
ecán
ica
Respuesta a un escalón de carga: (−) t.v. (−−) t.h.
Figura 3-19: Comparación de la respuesta de generadores accionados por una turbina
hidráulica o por una turbina de vapor ante un escalón de potencia demandada: potencia
mecánica.
La Figura 3-20 muestra un modelo de simulación del reparto de potencia entre
generadores y restablecimiento de la frecuencia del sistema por variación de las
consignas de carga del regulador de carga-velocidad. Un generador está equipado
con una turbina hidráulica y el otro con una turbina de vapor. Los dos generadores

35
son de igual potencia y tienen igual estatismo y los parámetros de las turbinas son los
considerados en apartados precedentes.
3
Potencia turbina
de vapor
2
Potenciaturbina
hidráulica
1
Variaciónde velocidad
−tws+1
0.5*tws+1
Turbinahidráulica
fhp*trh.s+1
trh.s+1
Turbinade vapor
Suma4
Suma3
Suma2Suma1
tr.s+1
tr*(rt/rp).s+1
Reguladorturbina
hidráulica
1
tch.s+1
Reguladorturbina
de vapor
1
2*hs
Inercia
−K− Estatismoturbinahidráulica
1/rp
Estatismoturbinade vapor
Escalón depotencia
de consignaturbina
hidráulica
Escalón depotencia
de consignaturbina
de vapor
Escalón de potencia
demandada
d
Amortiguamiento de la carga
1
tg.s+1
Actuadorturbina
hidráulica
1
tg.s+1
Actuadorturbina
de vapor
Figura 3-20: Modelo del reparto de potencia entre generadores y del restablecimiento de la
frecuencia por variación de las consignas de los reguladores de carga-velocidad.
La Figura 3-22 y la Figura 3-24 muestran el reparto de potencia entre generadores.
La Figura 3-21 y la Figura 3-23 muestran el restablecimiento de la frecuencia por
variación de las consignas de los reguladores de carga-velocidad.
0 2 4 6 8 10 12 14 16 18 20−0.14
−0.12
−0.1
−0.08
−0.06
−0.04
−0.02
0
Tiempo (segundos)
Var
iaci
ón d
e ve
loci
dad
(pu)
Respuesta a un escalón de carga
Figura 3-21: Simulación (20 segundos) del reparto de potencia entre generadores: variación de
velocidad.

36
0 2 4 6 8 10 12 14 16 18 20−0.2
0
0.2
0.4
0.6
0.8
1
1.2
Tiempo (segundos)
Pot
enci
a m
ecán
ica
(pu)
Respuesta a un escalón de carga: (−) t.h. (−−) t.v.
Figura 3-22: Simulación (20 segundos) del reparto de potencia entre generadores: potencia
mecánica.
0 20 40 60 80 100 120 140 160 180 200−0.14
−0.12
−0.1
−0.08
−0.06
−0.04
−0.02
0
0.02
Tiempo (segundos)
Var
iaci
ón d
e ve
loci
dad
(pu)
Respuesta a un escalón de carga
Figura 3-23: Simulación (200 segundos) del reparto de potencia entre generadores y del
restablecimiento de la frecuencia por variación de las consignas de los reguladores de carga-
velocidad: variación de velocidad.

37
0 20 40 60 80 100 120 140 160 180 200−0.2
0
0.2
0.4
0.6
0.8
1
1.2
Tiempo (segundos)
Pot
enci
a m
ecán
ica
(pu)
Respuesta a un escalón de carga: (−) t.h. (−−) t.v.
Figura 3-24: Simulación (200 segundos) del reparto de potencia entre generadores y del
restablecimiento de la frecuencia por variación de las consignas de los reguladores de carga-
velocidad: potencia mecánica.
3.2 Control frecuencia-potencia secundario
El control frecuencia-potencia secundario tiene por misión eliminar de forma
automática (se ha visto que manualmente se puede lograr) el error de frecuencia
debido a una variación de la potencia demandada. Se pueden plantear dos
situaciones:
• Los generadores alimentan un única área.
• Los generadores alimentar áreas unidas a través de líneas de interconexión.
3.2.1 Control frecuencia-potencia secundario en un área
Considérese en primer término el caso que los generadores alimentan un área. El
restablecimiento de la frecuencia se puede lograr mandando la consigna de carga del
regulador de carga-velocidad por un integrador cuya entrada es la variación de
frecuencia. La Figura 3-25 muestra el control frecuencia-potencia secundario en un
área con dos generadores.

38
Figura 3-25: Control frecuencia-potencia secundario en un área.
La Figura 3-26 muestra el modelo de simulación de un escalón de potencia
demandada y del restablecimiento de la frecuencia del sistema por variación de la
consigna de carga de los reguladores de carga-velocidad mandadas por un integrador
cuya entrada es la variación de frecuencia.
3
Potencia turbina
de vapor
2
Potenciaturbina
hidráulica
1
Variaciónde velocidad
−tws+1
0.5*tws+1
Turbinahidráulica
fhp*trh.s+1
trh.s+1
Turbinade vapor
Suma4
Suma3
Suma2Suma1
tr.s+1
tr*(rt/rp).s+1
Reguladorturbina
hidráulica
1
tch.s+1
Reguladorturbina
de vapor
−k1
s
Integradorturbina
hidráulica
−k2
s
Integradorturbina
de vapor
1
2*hs
Inercia
−K− Estatismoturbinahidráulica
1/rp
Estatismoturbinade vapor
Escalón de potencia
demandada
d
Amortiguamiento de la carga
1
tg.s+1
Actuadorturbina
hidráulica
1
tg.s+1
Actuadorturbina
de vapor
Figura 3-26: Modelo de simulación del control frecuencia-potencia secundario en un área.
La Figura 3-27 y la Figura 3-28 muestran los resultados de la simulación de un
escalón de potencia demandada y del restablecimiento de la frecuencia del sistema
por variación de la consigna de carga del regulador de carga-velocidad mandada por
un integrador cuya entrada es la variación de frecuencia y cuyos valores de k1 y k2

39
corresponden a la expresión (D+(1/Rp))/100, de forma que se ajusta la constante de
tiempo del lazo de control secundario a 100 s. Los parámetros de las turbinas son los
considerados en apartados precedentes. Se comprueba que el error de frecuencia es
nulo y el reparto del escalón de potencia demandada.
0 50 100 150 200 250 300 350 400−0.14
−0.12
−0.1
−0.08
−0.06
−0.04
−0.02
0
Tiempo (segundos)
Var
iaci
ón d
e ve
loci
dad
(pu)
Respuesta a un escalón de carga
Figura 3-27: Simulación de la respuesta ante un escalón de potencia demandada en un área con
control frecuencia-potencia secundaria: variación de frecuencia.
0 50 100 150 200 250 300 350 400−0.2
0
0.2
0.4
0.6
0.8
1
1.2
Tiempo (segundos)
Pot
enci
a m
ecán
ica
(pu)
Respuesta a un escalón de carga: (−) t.h. (−−) t.v.
Figura 3-28: Simulación de la respuesta ante un escalón de potencia demandada en un área con
control frecuencia-potencia secundaria: potencia de los generadores.

40
3.2.2 Control frecuencia-potencia secundario en dos áreas
interconectadas
Se va a considerar en segundo término el caso que dos generadores alimentan áreas
interconectadas a través de una línea. Cada generador se va a representar como una
fuente de tensión de módulo constante detrás de una reactancia equivalente. El
ángulo de las citadas fuentes será el ángulo del rotor de los generadores. La Figura
3-29 muestra el circuito equivalente de dos áreas interconectadas a través de una
línea de interconexión
Figura 3-29: Circuito equivalente de dos áreas interconectadas.
La potencia activa transmitida del área 1 al área 2 es:
( )1 212 1 2sen
T
e ep
xδ δ= − (3.17)
donde:
1 2Tx x x x= + +ℓ
El ángulo de cada uno de los generadores está relacionado con la velocidad del rotor
(frecuencia de cada generador o de cada área) a través de las expresiones:
( )
( )
10 1
20 2
1
1
d
dtd
dt
δ ω ω
δ ω ω
= −
= − (3.18)
Las expresiones (3.18) ponen de manifiesto que transitoriamente cada generador
tendrá una frecuencia (velocidad).
41
La expresión de la potencia activa transmitida del área 1 al área 2 linealizada
alrededor del punto de funcionamiento se obtiene linealizando la ecuación (3.17):
( ) ( )
( )
1 212 10 20 1 2
1 2
cosT
e ep
x
K
δ δ δ δ
δ δ
∆ = − ∆ − ∆
= ∆ − ∆ (3.19)
Las ecuaciones de cada generador linealizadas alrededor del punto de
funcionamiento son:
10 1
20 2
d
dtd
dt
δω ω
δω ω
∆∆ =
∆∆ = (3.20)
11 1 1 1 1 12
22 2 2 2 1 12
2
2
m D
m D
dH p p D p
dtd
H p p D pdt
ω ω
ω ω
∆ = ∆ − ∆ − ∆ − ∆
∆ = ∆ − ∆ − ∆ + ∆ (3.21)
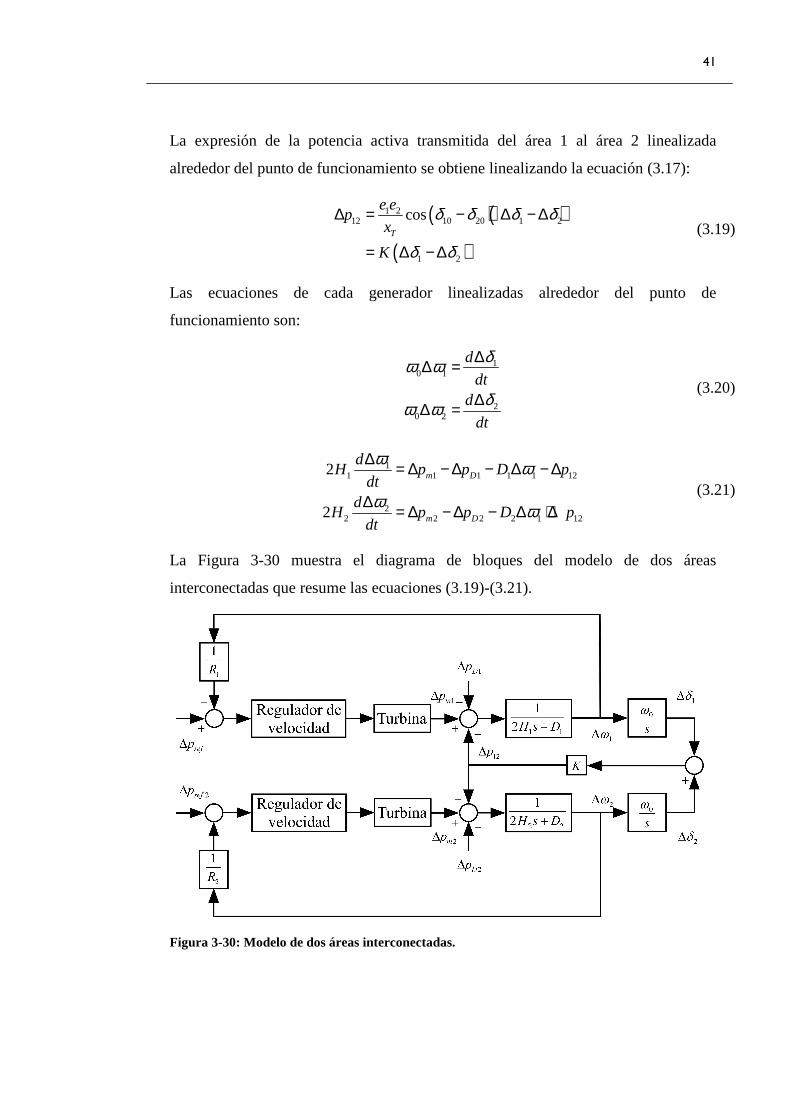
La Figura 3-30 muestra el diagrama de bloques del modelo de dos áreas
interconectadas que resume las ecuaciones (3.19)-(3.21).
Figura 3-30: Modelo de dos áreas interconectadas.

42
En régimen permanente, la variación frecuencia y de la potencia de intercambio
cuando se produce una variación de potencia demandada en el área 1 se calculan
resolviendo las ecuaciones:
1 12 1 1m Dp p p D f∆ − ∆ − ∆ = ∆ (3.22)
2 12 2mp p D f∆ + ∆ = ∆ (3.23)
11
fp
R
∆∆ = − (3.24)
22
fp
R
∆∆ = − (3.25)
Introduciendo las ecuaciones (3.24) y (3.25) en las ecuaciones (3.22) y (3.23)
quedan:
1 12 11
1DD f p p
R
+ ∆ = −∆ − ∆
(3.26)
2 122
1D f p
R
+ ∆ = ∆
(3.27)
Resolviendo el sistema de dos ecuaciones con dos incógnitas (3.26) y (3.27), la
variación de frecuencia y de potencia de intercambio resultan:
( ) ( )1 1
1 1 2 2 1 21 1D Dp p
fR D R D β β
−∆ −∆∆ = =+ + + +
( )
( ) ( )1 2 2 1 2
121 1 2 2 1 2
1
1 1D D
p R D pp
R D R D
ββ β
−∆ + −∆∆ = =+ + + +
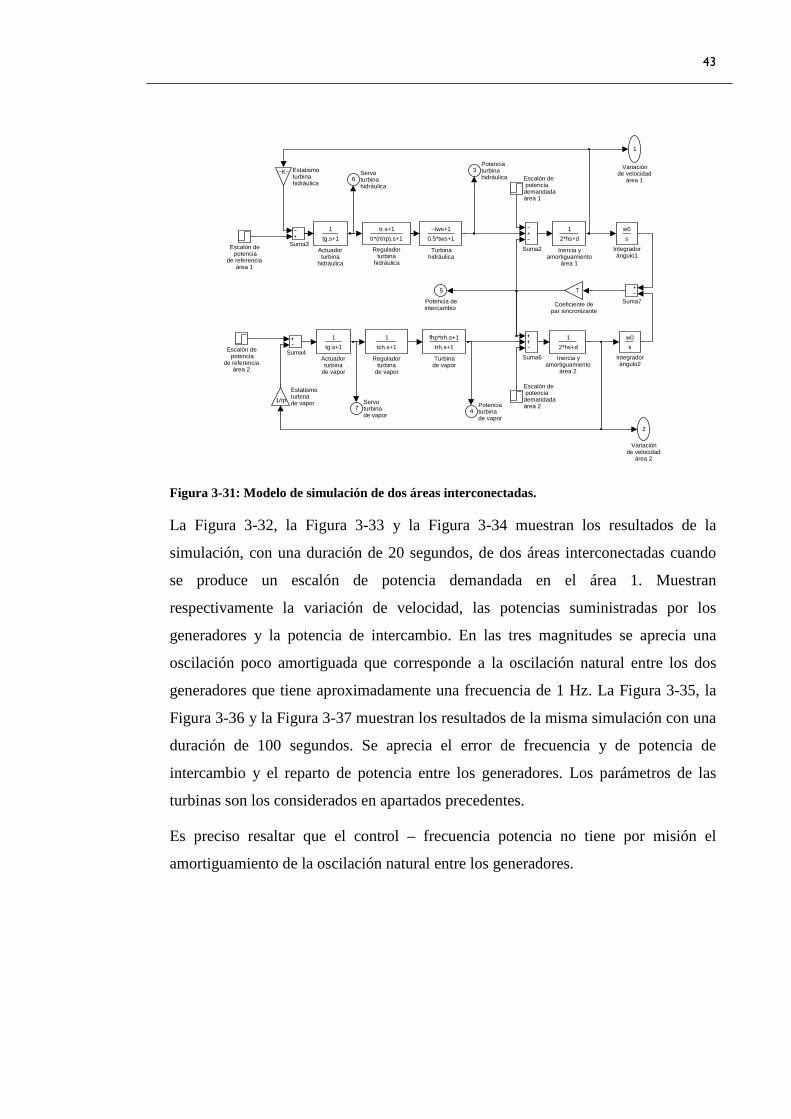
La Figura 3-31 muestra el modelo de simulación de dos áreas interconectadas.
43
7Servoturbinade vapor
6Servoturbinahidráulica
5
Potencia deintercambio
4Potencia turbinade vapor
3Potenciaturbinahidráulica
2
Variaciónde velocidad
área 2
1
Variaciónde velocidad
área 1
−tws+1
0.5*tws+1
Turbinahidráulica
fhp*trh.s+1
trh.s+1
Turbinade vapor
Suma7
Suma6Suma4
Suma3Suma2
tr.s+1
tr*(rt/rp).s+1
Reguladorturbina
hidráulica
1
tch.s+1
Reguladorturbina
de vapor
w0
s
Integradorángulo2
w0
s
Integradorángulo1
1
2*hs+d
Inercia yamortiguamiento
área 2
1
2*hs+d
Inercia yamortiguamiento
área 1
−K− Estatismoturbinahidráulica
1/rp
Estatismoturbinade vapor
Escalón de potenciademandadaárea 2
Escalón de potenciademandadaárea 1
Escalón de potencia
de referenciaárea 2
Escalón de potencia
de referenciaárea 1
T
Coeficiente depar sincronizante
1
tg.s+1
Actuadorturbina
hidráulica
1
tg.s+1
Actuadorturbina
de vapor
Figura 3-31: Modelo de simulación de dos áreas interconectadas.
La Figura 3-32, la Figura 3-33 y la Figura 3-34 muestran los resultados de la
simulación, con una duración de 20 segundos, de dos áreas interconectadas cuando
se produce un escalón de potencia demandada en el área 1. Muestran
respectivamente la variación de velocidad, las potencias suministradas por los
generadores y la potencia de intercambio. En las tres magnitudes se aprecia una
oscilación poco amortiguada que corresponde a la oscilación natural entre los dos
generadores que tiene aproximadamente una frecuencia de 1 Hz. La Figura 3-35, la
Figura 3-36 y la Figura 3-37 muestran los resultados de la misma simulación con una
duración de 100 segundos. Se aprecia el error de frecuencia y de potencia de
intercambio y el reparto de potencia entre los generadores. Los parámetros de las
turbinas son los considerados en apartados precedentes.
Es preciso resaltar que el control – frecuencia potencia no tiene por misión el
amortiguamiento de la oscilación natural entre los generadores.

44
0 2 4 6 8 10 12 14 16 18 20−0.1
−0.09
−0.08
−0.07
−0.06
−0.05
−0.04
−0.03
−0.02
−0.01
0
Tiempo (segundos)
Var
iaci
ón d
e ve
loci
dad
del á
rea
1 (p
u)
Respuesta a un escalón de carga en el área 1
Figura 3-32: Simulación (20 segundos) de dos áreas interconectadas ante un escalón de potencia
demandada en el área 1: variación de frecuencia del área 1.
0 2 4 6 8 10 12 14 16 18 20−0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
Tiempo (segundos)
Pot
enci
a m
ecán
ica
(pu)
Respuesta a un escalón de carga en el área 1: (−) t.h. (−−) t.v.
Figura 3-33: Simulación (20 segundos) de dos áreas interconectadas ante un escalón de potencia
demandada en el área 1: potencias de los generadores.
45
0 2 4 6 8 10 12 14 16 18 20−1.4
−1.2
−1
−0.8
−0.6
−0.4
−0.2
0
Tiempo (segundos)
Pot
enci
a de
inte
rcam
bio
(pu)
Respuesta a un escalón de carga en el área 1
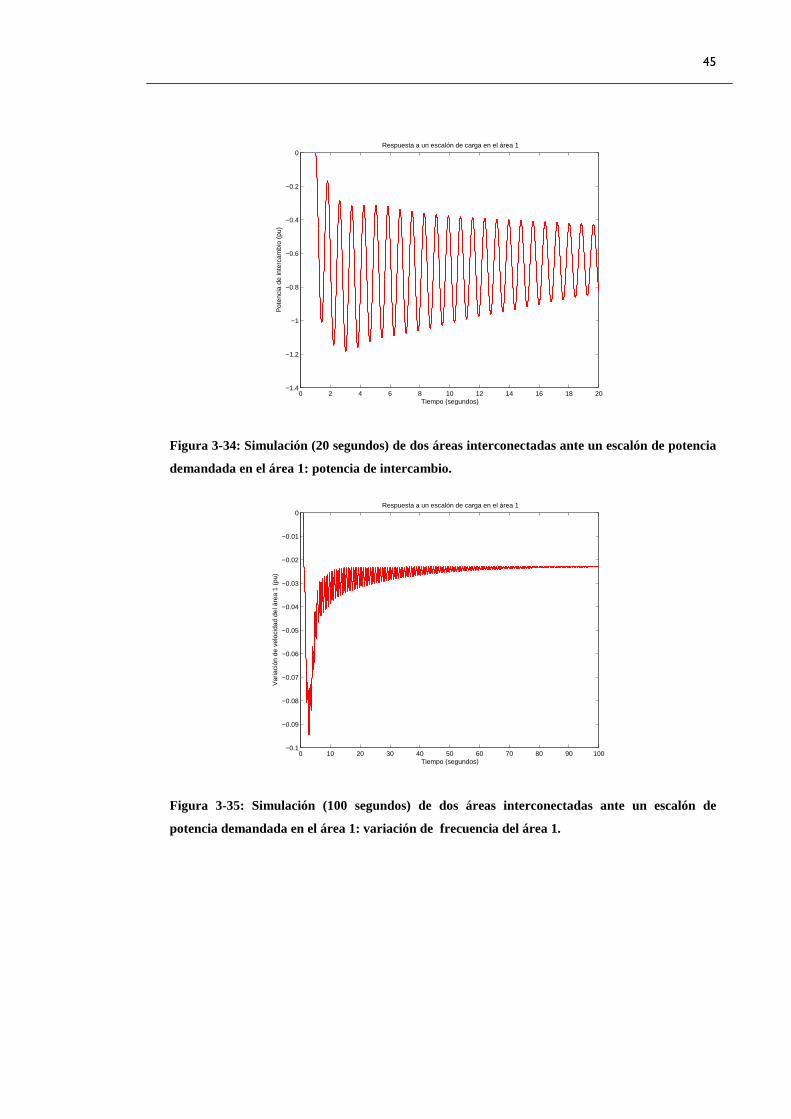
Figura 3-34: Simulación (20 segundos) de dos áreas interconectadas ante un escalón de potencia
demandada en el área 1: potencia de intercambio.
0 10 20 30 40 50 60 70 80 90 100−0.1
−0.09
−0.08
−0.07
−0.06
−0.05
−0.04
−0.03
−0.02
−0.01
0
Tiempo (segundos)
Var
iaci
ón d
e ve
loci
dad
del á
rea
1 (p
u)
Respuesta a un escalón de carga en el área 1
Figura 3-35: Simulación (100 segundos) de dos áreas interconectadas ante un escalón de
potencia demandada en el área 1: variación de frecuencia del área 1.
46
0 10 20 30 40 50 60 70 80 90 100−0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
Tiempo (segundos)
Pot
enci
a m
ecán
ica
(pu)
Respuesta a un escalón de carga en el área 1: (−) t.h. (−−) t.v.
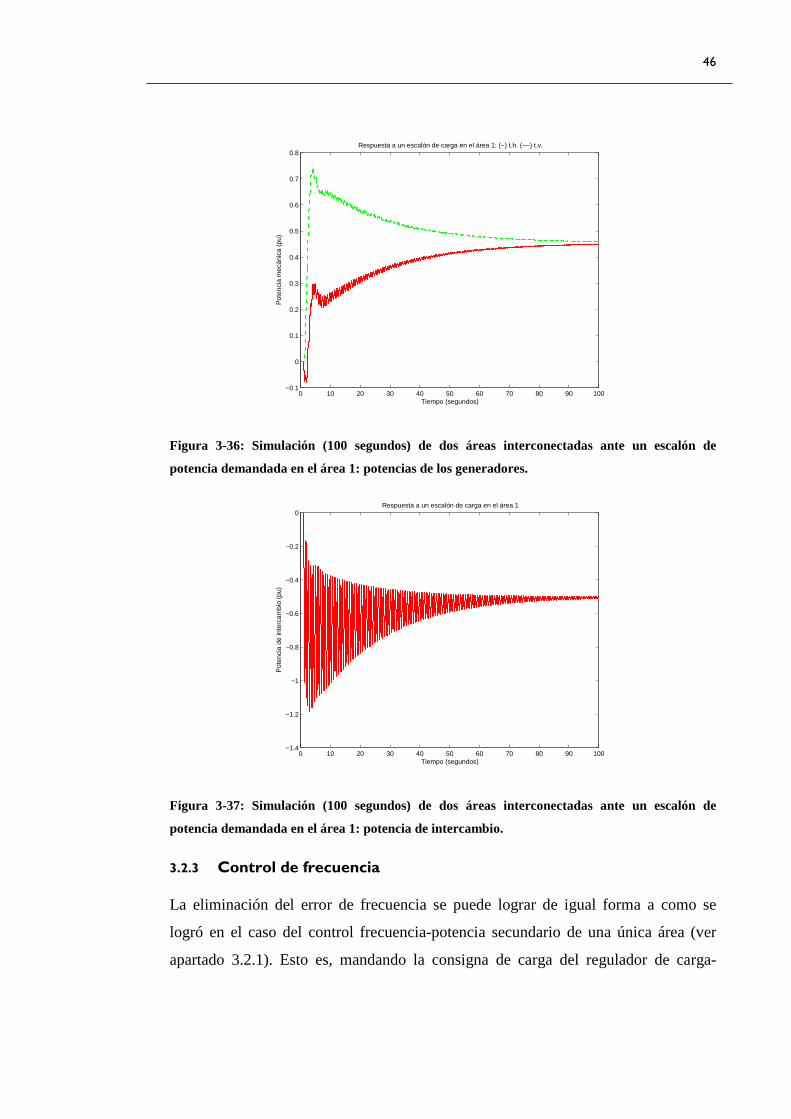
Figura 3-36: Simulación (100 segundos) de dos áreas interconectadas ante un escalón de
potencia demandada en el área 1: potencias de los generadores.
0 10 20 30 40 50 60 70 80 90 100−1.4
−1.2
−1
−0.8
−0.6
−0.4
−0.2
0
Tiempo (segundos)
Pot
enci
a de
inte
rcam
bio
(pu)
Respuesta a un escalón de carga en el área 1
Figura 3-37: Simulación (100 segundos) de dos áreas interconectadas ante un escalón de
potencia demandada en el área 1: potencia de intercambio.
3.2.3 Control de frecuencia
La eliminación del error de frecuencia se puede lograr de igual forma a como se
logró en el caso del control frecuencia-potencia secundario de una única área (ver
apartado 3.2.1). Esto es, mandando la consigna de carga del regulador de carga-
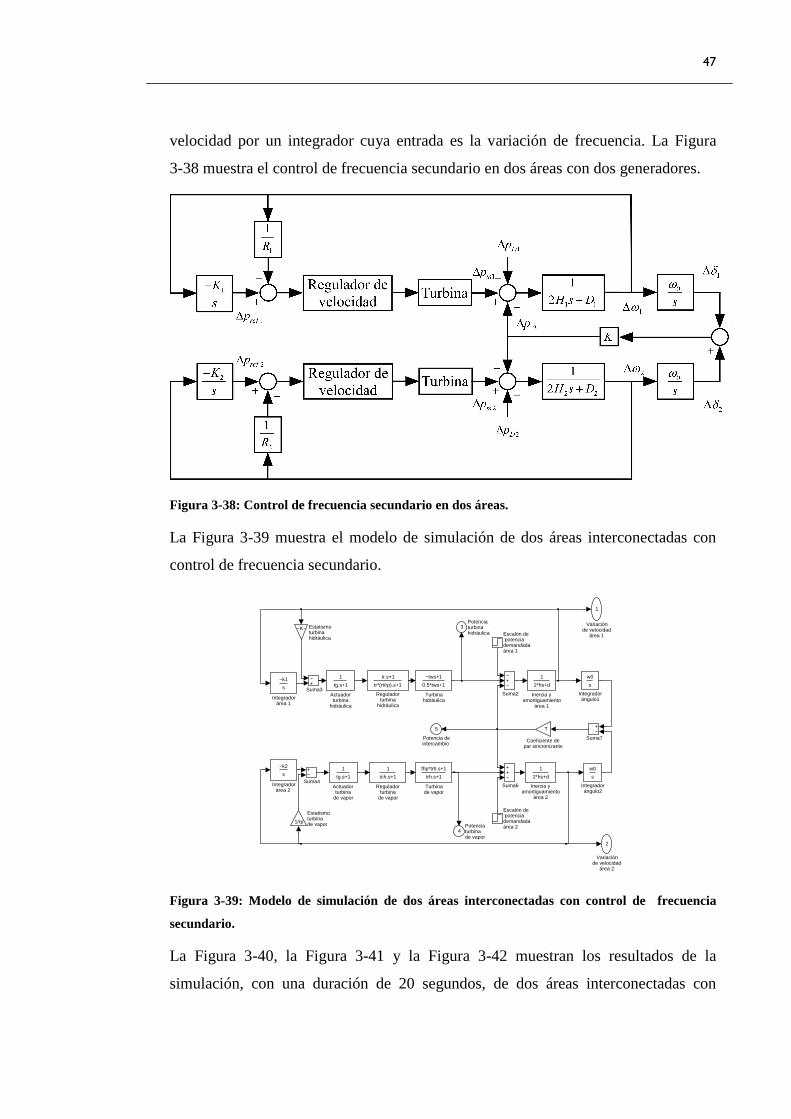
47
velocidad por un integrador cuya entrada es la variación de frecuencia. La Figura
3-38 muestra el control de frecuencia secundario en dos áreas con dos generadores.
Figura 3-38: Control de frecuencia secundario en dos áreas.
La Figura 3-39 muestra el modelo de simulación de dos áreas interconectadas con
control de frecuencia secundario.
5
Potencia deintercambio
4Potencia turbinade vapor
3Potenciaturbinahidráulica
2
Variaciónde velocidad
área 2
1
Variaciónde velocidad
área 1
−tws+1
0.5*tws+1
Turbinahidráulica
fhp*trh.s+1
trh.s+1
Turbinade vapor
Suma7
Suma6Suma4
Suma3Suma2
tr.s+1
tr*(rt/rp).s+1
Reguladorturbina
hidráulica
1
tch.s+1
Reguladorturbina
de vapor
−k2
s
Integradorárea 2
−k1
s
Integradorárea 1
w0
s
Integradorángulo2
w0
s
Integradorángulo1
1
2*hs+d
Inercia yamortiguamiento
área 2
1
2*hs+d
Inercia yamortiguamiento
área 1
−K− Estatismoturbinahidráulica
1/rp
Estatismoturbinade vapor
Escalón de potenciademandadaárea 2
Escalón de potenciademandadaárea 1
T
Coeficiente depar sincronizante
1
tg.s+1
Actuadorturbina
hidráulica
1
tg.s+1
Actuadorturbina
de vapor
Figura 3-39: Modelo de simulación de dos áreas interconectadas con control de frecuencia
secundario.
La Figura 3-40, la Figura 3-41 y la Figura 3-42 muestran los resultados de la
simulación, con una duración de 20 segundos, de dos áreas interconectadas con

48
control de frecuencia secundario cuando se produce un escalón de potencia
demandada en el área 1. Muestran respectivamente la variación de velocidad, las
potencias suministradas por los generadores y la potencia de intercambio. En las tres
magnitudes se aprecia de nuevo una oscilación poco amortiguada que corresponde a
la oscilación natural entre los dos generadores que tiene aproximadamente una
frecuencia de 1 Hz. La Figura 3-43, la Figura 3-44 y la Figura 3-45 muestran los
resultados de la misma simulación con una duración de 400 segundos. Los valores de
k1 y k2 de los integradores corresponden a la expresión (D+(1/Rp))/100, de forma
que se ajusta la constante de tiempo del lazo de control secundario a 100 s. Los
parámetros de las turbinas son los considerados en apartados precedentes. Se aprecia
la eliminación del error de frecuencia debido a la actuación de los controles
integrales. Sin embargo, persiste el error en la potencia de intercambio.
0 2 4 6 8 10 12 14 16 18 20−0.1
−0.09
−0.08
−0.07
−0.06
−0.05
−0.04
−0.03
−0.02
−0.01
0
Tiempo (segundos)
Var
iaci
ón d
e ve
loci
dad
del á
rea
1 (p
u)
Respuesta a un escalón de carga en el área 1
Figura 3-40: Simulación (20 segundos) de dos áreas interconectadas con control secundario de
frecuencia ante un escalón de potencia demandada en el área 1: variación de frecuencia del
área 1.
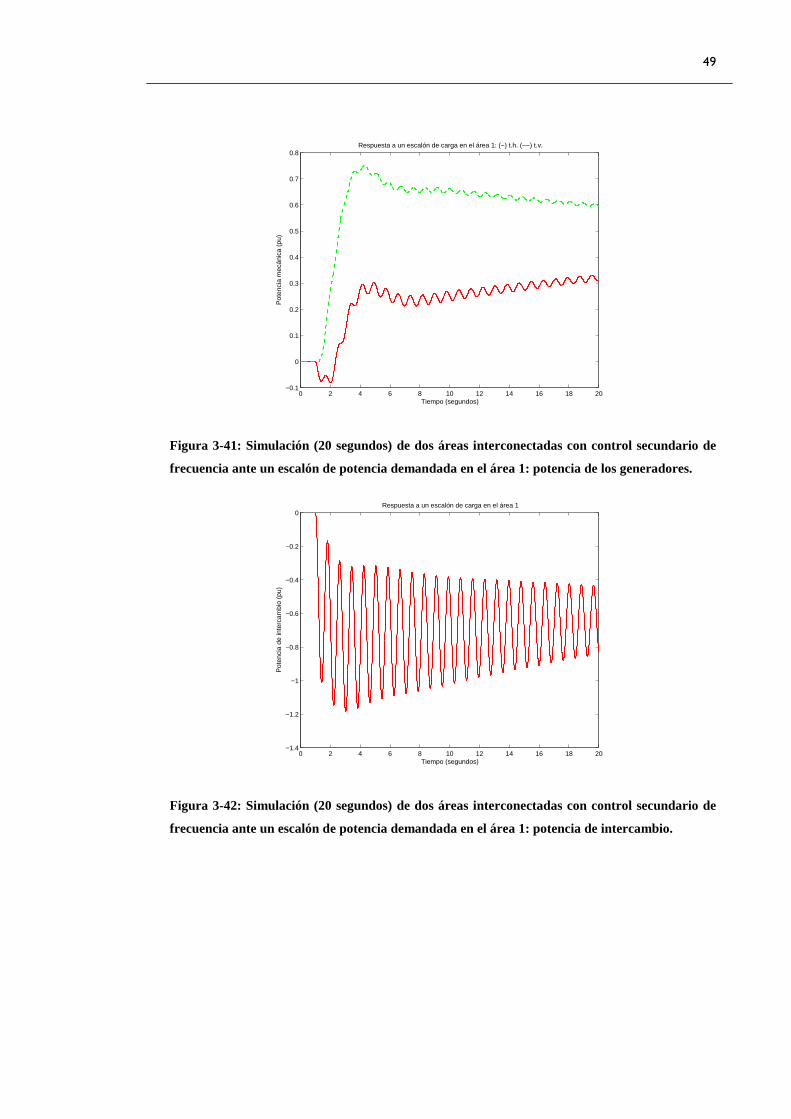
49
0 2 4 6 8 10 12 14 16 18 20−0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
Tiempo (segundos)
Pot
enci
a m
ecán
ica
(pu)
Respuesta a un escalón de carga en el área 1: (−) t.h. (−−) t.v.
Figura 3-41: Simulación (20 segundos) de dos áreas interconectadas con control secundario de
frecuencia ante un escalón de potencia demandada en el área 1: potencia de los generadores.
0 2 4 6 8 10 12 14 16 18 20−1.4
−1.2
−1
−0.8
−0.6
−0.4
−0.2
0
Tiempo (segundos)
Pot
enci
a de
inte
rcam
bio
(pu)
Respuesta a un escalón de carga en el área 1
Figura 3-42: Simulación (20 segundos) de dos áreas interconectadas con control secundario de
frecuencia ante un escalón de potencia demandada en el área 1: potencia de intercambio.

50
0 50 100 150 200 250 300 350 400−0.1
−0.09
−0.08
−0.07
−0.06
−0.05
−0.04
−0.03
−0.02
−0.01
0
Tiempo (segundos)
Var
iaci
ón d
e ve
loci
dad
del á
rea
1 (p
u)
Respuesta a un escalón de carga en el área 1
Figura 3-43: Simulación (400 segundos) de dos áreas interconectadas con control secundario de
frecuencia ante un escalón de potencia demandada en el área 1: variación de frecuencia del
área 1.
0 50 100 150 200 250 300 350 400−0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
Tiempo (segundos)
Pot
enci
a m
ecán
ica
(pu)
Respuesta a un escalón de carga en el área 1: (−) t.h. (−−) t.v.
Figura 3-44: Simulación (400 segundos) de dos áreas interconectadas con control secundario de
frecuencia ante un escalón de potencia demandada en el área 1: potencia de los generadores.

51
0 50 100 150 200 250 300 350 400−1.4
−1.2
−1
−0.8
−0.6
−0.4
−0.2
0
Tiempo (segundos)
Pot
enci
a de
inte
rcam
bio
(pu)
Respuesta a un escalón de carga en el área 1
Figura 3-45: Simulación (400 segundos) de dos áreas interconectadas con control secundario de
frecuencia ante un escalón de potencia demandada en el área 1: potencia de intercambio.
3.2.4 Control de potencia de intercambio con sesgo (bias) de frecuencia
En sistemas interconectados no sólo es preciso eliminar el error de frecuencia sino
que es preciso que el programa de intercambio se mantenga ante variaciones de la
demanda en las áreas. En otras palabras, es preciso eliminar no sólo el error de
frecuencia sino también el de la potencia de intercambio. Ello se logra con un control
integral de la potencia de consigna de cada área que realimenta una combinación de
la frecuencia y de la potencia de intercambio denominado error de control de área. El
error que alimenta al control integral se denomina error de control de área o “Area
Control Error (ACE)” en la literatura técnica en inglés.
1 12 1ACE p B f= ∆ + ∆
2 21 2ACE p B f= ∆ + ∆
donde los coeficientes 1B y 2B se denominan sesgo o “Bias” de frecuencia.
Una elección natural del “Bias” de frecuencia de cada área es (implica que ante una
variación de demanda en el área 1 el error de control de área de área 1 es
precisamente la variación de demanda y el error de control de área 2 es nulo):

52
1 1 11
1B D
Rβ= = +
2 2 22
1B D
Rβ= = +
La Figura 3-46 muestra el control frecuencia-potencia secundario en dos áreas con
dos generadores.
Figura 3-46: Control frecuencia-potencia secundario en dos áreas.
La Figura 3-47 muestra el modelo de simulación de dos áreas interconectadas con
control frecuencia-potencia secundario.

53
5
Potencia deintercambio
4Potencia turbinade vapor
3Potenciaturbinahidráulica
2
Variaciónde velocidad
área 2
1
Variaciónde velocidad
área 1
−tws+1
0.5*tws+1
Turbinahidráulica
fhp*trh.s+1
trh.s+1
Turbinade vapor
Suma8
Suma7
Suma6Suma5 Suma4
Suma3Suma2
tr.s+1
tr*(rt/rp).s+1
Reguladorturbina
hidráulica
1
tch.s+1
Reguladorturbina
de vapor
w0
s
Integradorángulo2
w0
s
Integradorángulo1
−k1
s
Integradorturbina
hidráulica
−k2
s
Integradorturbina
de vapor
1
2*hs+d
Inercia yamortiguamiento
área 2
1
2*hs+d
Inercia yamortiguamiento
área 1
−K− Estatismoturbinahidráulica
1/rp
Estatismoturbinade vapor
Escalón de potenciademandadaárea 2
Escalón de potenciademandadaárea 1
T
Coeficiente depar sincronizante
b2Biasárea 2
b1 Biasárea 1
1
tg.s+1
Actuadorturbina
hidráulica
1
tg.s+1
Actuadorturbina
de vapor
Figura 3-47: Modelo de simulación de dos áreas interconectadas con control frecuencia -
potencia secundario.
La Figura 3-48, la Figura 3-49 y la Figura 3-50 muestran los resultados de la
simulación, con una duración de 20 segundos, de dos áreas interconectadas con
control frecuencia-potencia secundario cuando se produce un escalón de potencia
demandada en el área 1. Muestran respectivamente la variación de velocidad, las
potencias suministradas por los generadores y la potencia de intercambio. En las tres
magnitudes se aprecia de nuevo una oscilación poco amortiguada que corresponde a
la oscilación natural entre los dos generadores que tiene aproximadamente una
frecuencia de 1 Hz. La Figura 3-51, la Figura 3-52 y la Figura 3-53, muestran los
resultados de la misma simulación con una duración de 100 segundos. Los valores de
k1 y k2 de los integradores corresponden a la expresión (D+(1/Rp))/100, de forma
que se ajusta la constante de tiempo del lazo de control secundario a 100 s. El valor
de los “Bias” corresponde a D+(1/Rp). Los parámetros de las turbinas son los
considerados en apartados precedentes. Se aprecia la eliminación del error tanto de
frecuencia como de potencia de intercambio. También se aprecia que el escalón de
demanda en el área 1 es atendido únicamente por el generador 1.

54
0 2 4 6 8 10 12 14 16 18 20−0.1
−0.08
−0.06
−0.04
−0.02
0
0.02
Tiempo (segundos)
Var
iaci
ón d
e ve
loci
dad
del á
rea
1 (p
u)
Respuesta a un escalón de carga en el área 1
Figura 3-48: Simulación (20 segundos) de dos áreas interconectadas con control secundario de
frecuencia ante un escalón de potencia demandada en el área 1: variación de frecuencia del
área 1.
0 2 4 6 8 10 12 14 16 18 20−0.2
0
0.2
0.4
0.6
0.8
1
1.2
Tiempo (segundos)
Pot
enci
a m
ecán
ica
(pu)
Respuesta a un escalón de carga en el área 1: (−) t.h. (−−) t.v.
Figura 3-49: Simulación (20 segundos) de dos áreas interconectadas con control secundario de
frecuencia ante un escalón de potencia demandada en el área 1: potencia de los generadores.

55
0 2 4 6 8 10 12 14 16 18 20−1.4
−1.2
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
Tiempo (segundos)
Pot
enci
a de
inte
rcam
bio
(pu)
Respuesta a un escalón de carga en el área 1
Figura 3-50: Simulación (20 segundos) de dos áreas interconectadas con control secundario de
frecuencia ante un escalón de potencia demandada en el área 1: potencia de intercambio.
0 10 20 30 40 50 60 70 80 90 100−0.1
−0.08
−0.06
−0.04
−0.02
0
0.02
Tiempo (segundos)
Var
iaci
ón d
e ve
loci
dad
del á
rea
1 (p
u)
Respuesta a un escalón de carga en el área 1
Figura 3-51: Simulación (100 segundos) de dos áreas interconectadas con control secundario de
frecuencia ante un escalón de potencia demandada en el área 1: variación de frecuencia del
área 1.

56
0 10 20 30 40 50 60 70 80 90 100−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
Tiempo (segundos)
Pot
enci
a m
ecán
ica
(pu)
Respuesta a un escalón de carga en el área 1: (−) t.h. (−−) t.v.
Figura 3-52: Simulación (100 segundos) de dos áreas interconectadas con control secundario de
frecuencia ante un escalón de potencia demandada en el área 1: potencia de los generadores.
0 10 20 30 40 50 60 70 80 90 100−1.4
−1.2
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
Tiempo (segundos)
Pot
enci
a de
inte
rcam
bio
(pu)
Respuesta a un escalón de carga en el área 1
Figura 3-53: Simulación (100 segundos) de dos áreas interconectadas con control secundario de
frecuencia ante un escalón de potencia demandada en el área 1: potencia de intercambio.
3.3 Control frecuencia-potencia terciario
La presentación anterior ha supuesto un único generador en cada área. En el caso de
un área con más de un generador es preciso el reparto del error de control de área
entre los generadores.

57
El reparto del error de control de área entre los generadores se realiza por medio de
los factores de participación.
El programa de despacho económico determina los factores de participación.
ii
L
pfp
p
∆=∆
Los factores de participación se actualizan en una escala de tiempo superior a la del
control secundario.
58
4 ESTABILIDAD DE PEQUEÑA PERTURBACIÓN
La estabilidad de sistemas de energía eléctrica está interesada en la capacidad del
sistema eléctrico de alcanzar un punto de equilibrio estable tras la ocurrencia de una
perturbación. La estabilidad aborda un aspecto del comportamiento dinámico de los
sistemas de energía eléctrica.
Los sistemas eléctricos son, probablemente uno de los sistemas dinámicos más
grandes y complejos creados por el hombre. La escala de tiempo de los fenómenos
dinámicos y transitorios presentes en los sistemas eléctricos es muy amplia: desde los
microsegundos de las sobretensiones debidas a la caída de un rayo hasta los minutos
de la variación de la demanda a lo largo del día. La estabilidad aborda los fenómenos
que se encuentran en la escala de segundos.
El problema de la estabilidad de sistemas de energía eléctrica es muy complejo. Por
ello se han establecido clasificaciones para poder caracterizar de forma precisa los
diferentes fenómenos que pueden encontrarse en la realidad (ver [4]).
Los problemas de estabilidad se clasifican en:
• estabilidad de ángulo y estabilidad de tensiones
• estabilidad de gran perturbación y estabilidad de pequeña perturbación
• estabilidad de corto plazo y estabilidad de largo plazo
La estabilidad de ángulo está interesada en la capacidad de los generadores de
funcionar en sincronismo. La estabilidad de tensiones está preocupada, por el
contrario, en la capacidad de los generadores de alimentar las cargas a niveles de
tensión aceptables. Se dice que una perturbación es grande cuando las ecuaciones
diferenciales que describen el comportamiento dinámico del sistema no se pueden
linealizar. Por el contrario, una perturbación es pequeña cuando las ecuaciones se
pueden linealizar alrededor de un punto de funcionamiento. La estabilidad de corto
plazo presta atención a aquellas dinámicas dominadas por los generadores y sus
sistemas de control primario (reguladores de tensión y de carga/velocidad). La
estabilidad de largo plazo considera que las dinámicas dominantes son las de las
fuentes de energía primaria de los generadores (calderas, reactores nucleares,
59
circuitos hidráulicos de las centrales hidroeléctricas etc.) y de los controles
automáticos de generación y el control de tensiones.
Cuando en estudios de estabilidad de sistemas eléctricos se habla de estabilidad de
pequeña perturbación se refiere al problema de oscilaciones poco amortiguadas de
los rotores de los generadores en el margen de frecuencias comprendido entre 0,1 y
2 Hz. Las oscilaciones de los rotores se traducen en oscilaciones de las potencias por
líneas y transformadores y de las tensiones de los nudos. El problema de estabilidad
de pequeña perturbación, es, de forma precisa, un problema de estabilidad de ángulo,
de corto plazo y de pequeña perturbación.
Este capítulo presenta los modelos y métodos de análisis del problema de estabilidad
de pequeña perturbación para comprender el fenómeno de las oscilaciones entre
áreas que aparecen cuando se estudia el control frecuencia-potencia.
De forma más precisa se presentan los modelos no lineales y lineales de un
generador conectado a un nudo de potencia infinita y de un sistema multimáquina.
4.1 Modelos no lineales
4.1.1 Generador conectado a un nudo de potencia infinita
El movimiento del rotor de un generador síncrono está descrito por la ecuación de la
dinámica de rotación de un sólido rígido:
( )0m e a m e D
dJ M M M M M K
dt
Ω = − − = − − Ω − Ω (4.1)
donde:
J es el momento de inercia del rotor expresado en Nms kgms= 2
Ω es la velocidad angular del rotor rad s mecánicos
Ω0 es la velocidad angular de sincronismo del rotor rad s mecánicos, es decir
f pπΩ =0 0
2 siendo f0 la frecuencia de sincronismo y p el número de par de
polos de la máquina síncrona
mM es el par mecánico aplicado por la turbina expresado en Nm

60
eM es el par eléctrico aplicado por el generador ee
PT =
Ω0
aM es el par amortiguador ( )0a DM K= Ω − Ω
DK es el coeficiente de par amortiguador
Es preciso resaltar que el par amortiguador refleja el efecto de los devanados
amortiguadores del generador síncrono que crean un par que se opone a la variación
de velocidad cuando el rotor gira a velocidad distinta de la síncronismo.
Si la ecuación (4.1) se expresa en magnitudes unitarias resulta:
( )
( )
0 00
2 20 0
00 0
1 1
m eD
B B B B
m eD
B B B B
M MdJ K
S dt M M S
J M MdK
S dt M M S
Ω ΩΩ = − − Ω − Ω
Ω ΩΩ = − − Ω − ΩΩ Ω
(4.2)
siendo:
0
B BB
B
S SM = =
Ω Ω el par base y BS la potencia base
Definiendo la inercia y el coeficiente de amortiguamiento como:
B
DB
JH
S
D KS
Ω=
Ω=
2
0
2
0
1
2
la ecuación (4.2) resulta:
( )00 0
2m e
H d Dm m
dt
Ω = − − Ω − ΩΩ Ω
(4.3)
Expresando la velocidad angular en radianes eléctricos por segundo por unidad
pω ω= Ω0, la ecuación (4.3) queda finalmente:
( )2 1m e
dH m m D
dt
ω ω= − − − (4.4)

61
En estudios de estabilidad, la velocidad del rotor cambia poco, por tanto se puede
considerar que el par y la potencia son iguales en magnitudes unitarias:
0
0
BB
PM
PM p
m pSM ω
=Ω
Ω= = = =
Ω
Entonces la ecuación (4.4) resulta:
( )m e
dH p p D
dt
ω ω= − − −2 1 (4.5)
El generador síncrono se representa como una fuente de tensión constante detrás de
la reactancia transitoria.
Figura 4-1: Circuito equivalente de un generador síncrono para estudios de estabilidad.
Si el generador está conectado a un nudo de potencia infinita a través de un
transformador y una línea, la potencia eléctrica entregada por el generador viene
dada por la expresión:
seneT
e up
xδ∞′
= (4.6)
donde:
e′ es el módulo de la excitación
δ es el ángulo de la excitación con relación a la tensión del nudo de potencia infinita
u∞ es el módulo de la tensión del nudo de potencia infinita

62
T tx x x x′= + +ℓ es la reactancia total
x′ es la reactancia transitoria del generador
tx es la reactancia del transformador
xℓ es la reactancia de la línea
Figura 4-2: Diagrama unifilar de un generador síncrono conectado a un nudo de potencia
infinita.
Figura 4-3: Circuito equivalente de un generador síncrono conectado a un nudo de potencia
infinita.
La conexión de los modelos mecánico y eléctrico viene determinada por el hecho que
el ángulo de excitación es precisamente el ángulo del rotor.
En efecto, el ángulo del rotor con relación a una referencia fija, expresado en
radianes eléctricos por segundo, viene dado por:
tp
δα = Ω +0
La velocidad angular del rotor resulta ser:
d d
dt p dt
α δ= Ω = Ω +0
1 (4.7)
Si se expresa la velocidad en radianes eléctricos por segundo por unidad en la
ecuación (4.7), resulta:

63
d
dt
δωω
= +0
11 (4.8)
Las ecuaciones (4.5), (4.6) y (4.8) se pueden escribir en forma compacta comos
sigue. Se presenta el sistema de ecuaciones diferenciales no lineales que describe el
comportamiento del generador síncrono conectado a un nudo de potencia infinita:
( )
( )
senm
e u Dp
H H x Hδ ωω
δ ω ω
′ − − − = −
ɺ
ɺ
0
1 11
2 2 2
1
(4.9)
o en forma compacta:
( ),u=x F xɺ (4.10)
donde:
ωδ
=
x
mu p=
( ) ( )( )
senm
e u Dp
H H x Hδ ω
ω ω
′ − − − =
−
F x
0
1 11
2 2 2
1
4.1.2 Sistema multimáquina
El modelo para de un sistema multimáquina para estudio de la estabilidad de ángulo
considera:
El modelo “clásico” de los generadores síncronos:
• Fuente de tensión constante de la reactancia transitoria.
• El ángulo de la fuente de tensión es el ángulo del rotor.
• El par mecánico es constante.
y modela las cargas como impedancias constantes.

64
Considérese la representación de la red por medio de la matriz de admitancias
nodales agrupando los nudos de los generadores y de las cargas:
gg g g g
g
=
y y v iy y v i
ℓ
ℓ ℓℓ ℓ ℓ
(4.11)
siendo v las tensiones de los nudos e i las corrientes inyectadas.
En primer término se incorporan las cargas como admitancias constantes:
gg g g g
g L
= −
y y v iy y v y v
ℓ
ℓ ℓℓ ℓ ℓ
(4.12)
y a continuación se incluyen los nudos internos de los generadores:
g
gg g g
g L
′ ′ − ′ ′− + = +
y y 0 e i
y y y y v 0
0 y y y v 0ℓ
ℓ ℓℓ ℓ
(4.13)
donde:
1
10
1
10
i
N
jx
jx
jx
′ ′ = ′ ′
y
⋯
⋱
⋮ ⋮
⋱
⋯
Se reduce la matriz de admitancias nodales a los nudos internos de los generadores
aplicando la reducción de Kron a la ecuación matricial (4.13):
[ ]1
gg g Sg
g L
− ′ + ′− ′ ′− − = = +
y y y yy y 0 e ye i
y y y 0ℓ
ℓ ℓℓ
(4.14)
A partir de la ecuación (4.14), se obtiene la expresión de la potencia activa
suministrada por el generador i-ésimo es:

65
( ) ( ) ( )
( ) ( )
1
2
1 1
2
1
Re Re
Re Re
cos sen
g
g g
g
N
ei i i i ij jj
N N
i ij ij j ii ii i ij ij i j jj j
j i
N
ii i i j ij i j ij i jjj i
p
g jb g jb e g jb
g e e e g b
δ
δ δ δ δ
∗ ∗ ∗
=
∗ ∗
= =≠
=≠
= =
= − = − + −
= + − + −
∑
∑ ∑
∑
e i e y e
e e e e (4.15)
Las ecuaciones que gobiernan la dinámica del rotor de cada generador son:
( )2 1ii mi ei i i
dH p p D
dt
ω ω= − − − (4.16)
( )0 1ii
d
dt
δ ω ω= − (4.17)
Escribiendo en forma compacta del sistema de ecuaciones diferenciales no lineales
que describe el comportamiento del sistema (4.15)-(4.17), resulta:
( ),=x F x uɺ
donde:
[ ][ ]
1
1
Ti N
Ti N
ω ω ω
δ δ δ
=
=
=
ωx
δ
ω
δ
⋯ ⋯
⋯ ⋯
[ ]1
m
Tm m mi mNp p p
= ∆
∆ = ∆ ∆ ∆
u p
p ⋯ ⋯

66
( )
( ) ( )
( ) ( )
( ) ( )
21 11 1 1 1 1 1 1
11 11
2
1
2
1
1 1cos sen
2 2
1 1cos sen
2 2
1 1cos sen
2 2
g
g
N
m j j j j jjj
N
mi ii i i j ij i j ij i jji ij i
N
mN NN N N j Nj N j Nj N jjN Nj N
p g e e e g bH H
p g e e e g bH H
p g e e e g bH H
δ δ δ δ
δ δ δ δ
δ δ δ δ
=≠
=≠
=≠
− + − + −
− + − + −
=
− + − + −
∑
∑
F x
⋮
⋮
( )
( )
( )
0 1
0
0
1
1
1
g
i
N
ω ω
ω ω
ω ω
− − −
∑
⋮
⋮
4.2 Modelos lineales
Una perturbación es pequeña cuando las ecuaciones del generador síncrono
linealizadas alrededor del punto de funcionamiento caracterizan satisfactoriamente su
comportamiento dinámico.
4.2.1 Generador conectado a un nudo de potencia infinita
La linealización de las ecuaciones del generador síncrono conectado a un nudo de
potencia infinita (4.5), (4.6) y (4.8) quedan en la forma:
m e
dH p p D
dt
ω ω∆ = ∆ − ∆ − ∆2 (4.18)
cose
e up K
xδ δ δ
′∆ = ∆ = ∆
0 (4.19)
d
dt
δωω
∆∆ =0
1 (4.20)
que escritas como una ecuación diferencial de segundo orden resultan:

67
m
H d D dK p
dt dt
δ δ δω ω
∆ ∆+ + ∆ = ∆2
2
0 0
2 (4.21)
y como un sistema de ecuaciones diferenciales lineales resultan:
m
d
dt pK Dd
H H Hdt
δ ω δω ω
∆ ∆ = + ∆ − ∆ ∆
00 0
1
2 2 2
(4.22)
La ecuación característica correspondiente a la ecuación diferencial lineal de
segundo orden o al sistema de dos ecuaciones diferenciales lineales de primer orden
es:
H D
s s Kω ω
+ + =2
0 0
20 (4.23)
o también:
KD
s sH H
ω+ + =2 00
2 2 (4.24)
Las raíces de la ecuación característica (4.24) son:
KD Dj
H H Hs
ω− ± − =
2
0
12
42 2 2
2
Las raíces de la ecuación característica cuando D=0 son:
K
s jH
ω= ± 0
12
2
La solución de la ecuación diferencial lineal de segundo orden se puede obtener por
medio de la transformada de Laplace:
( ) ( ) ( ) ( )mp sH Ds s s s K s
sδ δ δ
ω ω∆
∆ + ∆ + ∆ =2
0 0
2
( ) ( )ms p sKD H ss s
H H
ωδ ω∆ = ∆+ +
0
2 0
1 1
2
2 2

68
( ) ( ) ( )nm
n n
s p sK s s s
ωδςω ω
∆ = ∆+ +
2
2 2
1
2
Realizando la antitransformada de Lapace resulta:
( ) ( ) ( )sentn mt e t p t
Kςωδ ω ς φ
ς−
∆ = − − + ∆ −
2
2
1 11 1
1
donde:
arctgςφ
ς−
=2
1
4.2.2 Sistema multimáquina
Las ecuaciones de cada generador linealizadas alrededor de cada punto de
funcionamiento se obtienen finalizando las ecuaciones (4.15)-(4.17):
1 1
2
g g
ii mi ei i i
N Nei
mi j i i ij j i ij jj
dH p p D
dt
pp D K D
ω ω
∂ δ ω δ ω∂δ= =
∆ = ∆ − ∆ − ∆
= ∆ − ∆ − ∆ = − ∆ − ∆∑ ∑ (4.25)
0i
i
d
dt
δ ω ω∆ = ∆
siendo:
( ) ( )0 0 0 0coseiij i j ij i j ij i j
i j j
pK e e g sen b
∂ δ δ δ δ∂δ≠
= = − − −
y cumpliéndose que:
1
gN
ii ijjj i
K K=≠
= −∑
Cuando se escriben las ecuaciones de todos los generadores (4.25) en forma matricial
resulta:

69
1 1 1
0
1 1 12 2 2 m
d
dtd
dtω
− − −∆
∆− − − = + ∆ ∆ ∆
ω
ωH D H K Hp
δ δI 0 0
donde:
1
1
1 1
1 11 1
1
1
0
0
0
0
g
g
g g
g g g g g
g
N
N
e e
N N
eN eN N N N
N
H
H
D
D
p p
K K
p p K K
∂ ∂∂δ ∂δ
∂ ∂∂δ ∂δ
=
=
= =
H
D
K
⋯
⋮ ⋱ ⋮
⋯
⋯
⋮ ⋱ ⋮
⋯
⋯⋯
⋮ ⋱ ⋮ ⋮ ⋱ ⋮
⋯⋯
4.3 Amortiguamiento de oscilaciones electromecánicas de
generadores síncronos
El amortiguamiento de las oscilaciones electromecánicas de un generador síncrono
se puede lograr modulando la excitación del generador utilizando la variación de
velocidad como entrada.
La excitación del generador síncrono se modifica por medio del sistema de
excitación del generador.
La linealización de las ecuaciones del generador síncrono conectado a un nudo de
potencia infinita (4.5), (4.6) y (4.8) cuando se considera que la excitación no es
constante quedan en la forma:
2 m e
dH p p
dt
ω∆ = ∆ − ∆ (4.26)

70
0 0 00 0
0 0
cos sine ee e
e u up e K K e
x xδ δ δ δ
′ ′ ′∆ = ∆ + ∆ = ∆ + ∆ (4.27)
0
1 d
dt
δωω
∆∆ = (4.28)
Si la excitación del generador se modula usando la variación de velocidad como
entrada:
,ee K ω ω′∆ = ∆ (4.29)
La ecuación diferencial de segundo orden que describe el comportamiento dinámico
del generador resulta:
2
,2
0 0
2 e em
K KH d dK p
dt dtωδ δ δ
ω ω∆ ∆+ + ∆ = ∆ (4.30)
La ecuación (4.30) muestra como el control de la excitación proporciona un
amortiguamiento equivalente ,e e eD K K ω= de la oscilación natural del generador.
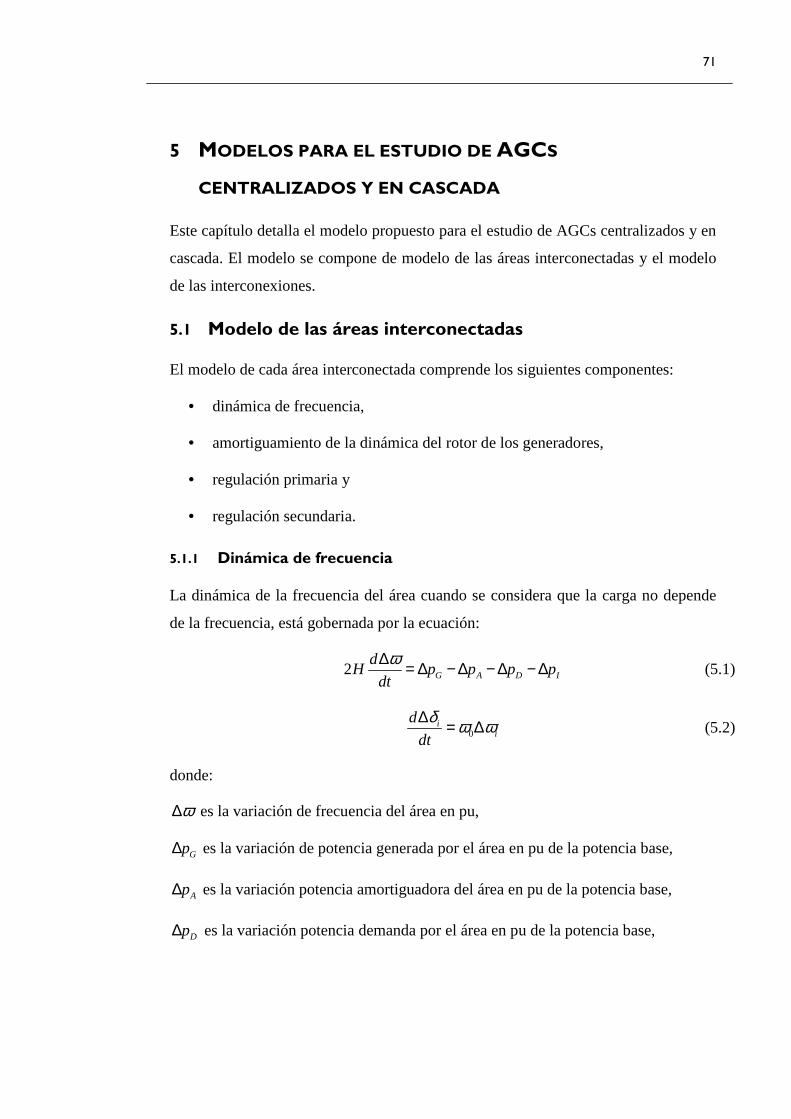
71
5 MODELOS PARA EL ESTUDIO DE AGCS
CENTRALIZADOS Y EN CASCADA
Este capítulo detalla el modelo propuesto para el estudio de AGCs centralizados y en
cascada. El modelo se compone de modelo de las áreas interconectadas y el modelo
de las interconexiones.
5.1 Modelo de las áreas interconectadas
El modelo de cada área interconectada comprende los siguientes componentes:
• dinámica de frecuencia,
• amortiguamiento de la dinámica del rotor de los generadores,
• regulación primaria y
• regulación secundaria.
5.1.1 Dinámica de frecuencia
La dinámica de la frecuencia del área cuando se considera que la carga no depende
de la frecuencia, está gobernada por la ecuación:
2 G A D I
dH p p p p
dt
ω∆ = ∆ − ∆ − ∆ − ∆ (5.1)
0i
i
d
dt
δ ω ω∆ = ∆ (5.2)
donde:
ω∆ es la variación de frecuencia del área en pu,
Gp∆ es la variación de potencia generada por el área en pu de la potencia base,
Ap∆ es la variación potencia amortiguadora del área en pu de la potencia base,
Dp∆ es la variación potencia demanda por el área en pu de la potencia base,
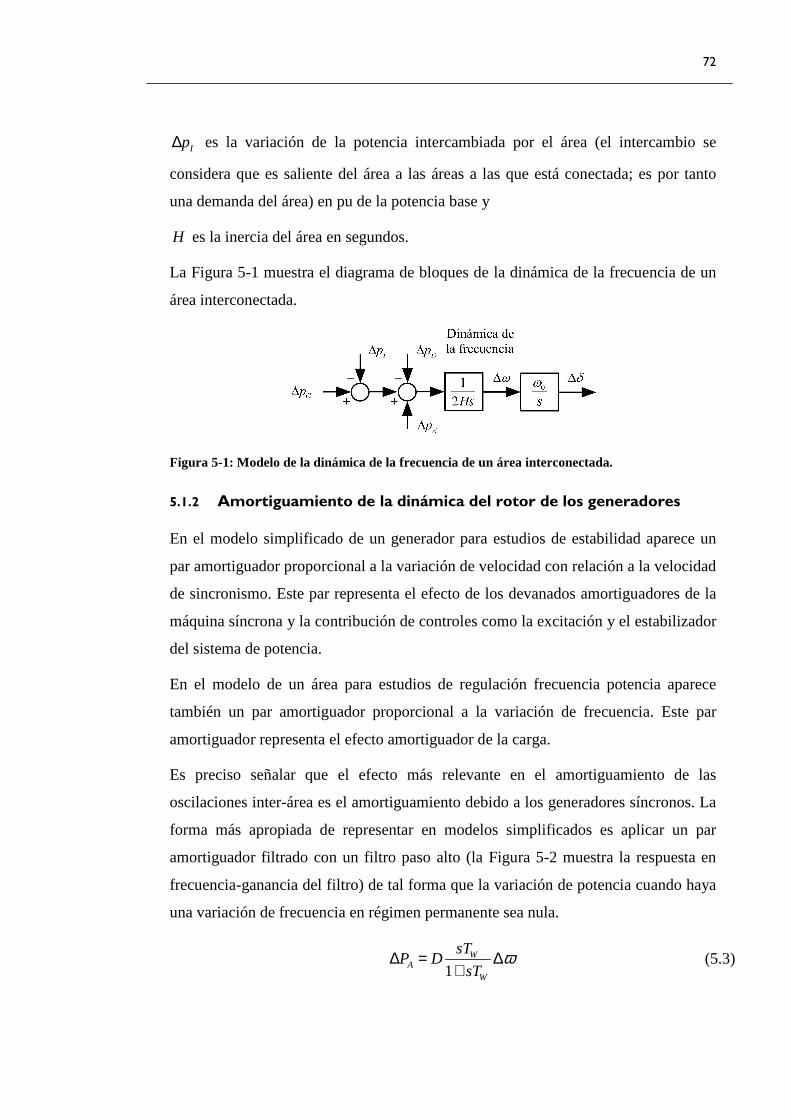
72
Ip∆ es la variación de la potencia intercambiada por el área (el intercambio se
considera que es saliente del área a las áreas a las que está conectada; es por tanto
una demanda del área) en pu de la potencia base y
H es la inercia del área en segundos.
La Figura 5-1 muestra el diagrama de bloques de la dinámica de la frecuencia de un
área interconectada.
Figura 5-1: Modelo de la dinámica de la frecuencia de un área interconectada.
5.1.2 Amortiguamiento de la dinámica del rotor de los generadores
En el modelo simplificado de un generador para estudios de estabilidad aparece un
par amortiguador proporcional a la variación de velocidad con relación a la velocidad
de sincronismo. Este par representa el efecto de los devanados amortiguadores de la
máquina síncrona y la contribución de controles como la excitación y el estabilizador
del sistema de potencia.
En el modelo de un área para estudios de regulación frecuencia potencia aparece
también un par amortiguador proporcional a la variación de frecuencia. Este par
amortiguador representa el efecto amortiguador de la carga.
Es preciso señalar que el efecto más relevante en el amortiguamiento de las
oscilaciones inter-área es el amortiguamiento debido a los generadores síncronos. La
forma más apropiada de representar en modelos simplificados es aplicar un par
amortiguador filtrado con un filtro paso alto (la Figura 5-2 muestra la respuesta en
frecuencia-ganancia del filtro) de tal forma que la variación de potencia cuando haya
una variación de frecuencia en régimen permanente sea nula.
1
WA
W
sTP D
sTω∆ = ∆
+ (5.3)

73
Figura 5-2: Respuesta en frecuencia (ganancia) del filtro paso alto del amortiguamiento de
oscilaciones.
La Figura 5-3 muestra el diagrama de bloques de la dinámica de la frecuencia de un
área interconectada con amortiguamiento de oscilaciones.
Figura 5-3: Modelo de la dinámica de la frecuencia de un área interconectada con
amortiguamiento de oscilaciones.
5.1.3 Regulación primaria
La variación de generación tiene dos componentes: la debida a la regulación primaria
y la debida a la regulación secundaria. La Figura 5-4 muestra dicha separación. Se
incluyen además los límites
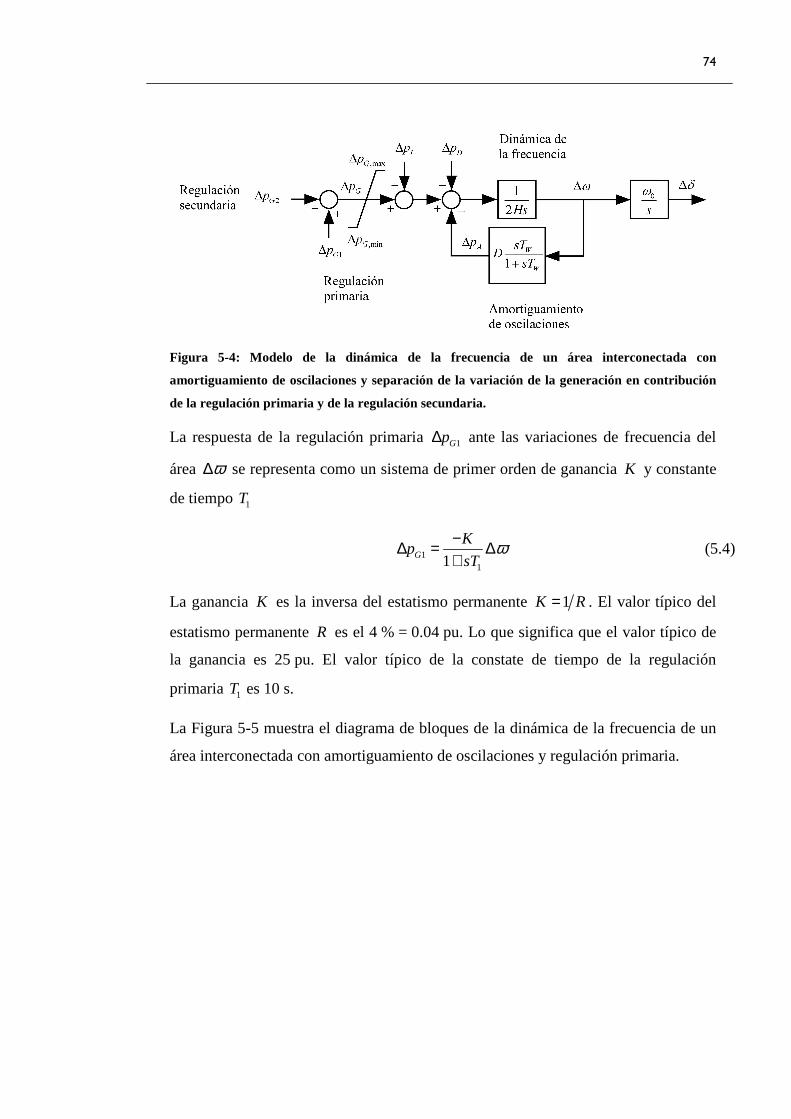
74
Figura 5-4: Modelo de la dinámica de la frecuencia de un área interconectada con
amortiguamiento de oscilaciones y separación de la variación de la generación en contribución
de la regulación primaria y de la regulación secundaria.
La respuesta de la regulación primaria 1Gp∆ ante las variaciones de frecuencia del
área ω∆ se representa como un sistema de primer orden de ganancia K y constante
de tiempo 1T
111G
Kp
sTω−∆ = ∆
+ (5.4)
La ganancia K es la inversa del estatismo permanente 1K R= . El valor típico del
estatismo permanente R es el 4 % = 0.04 pu. Lo que significa que el valor típico de
la ganancia es 25 pu. El valor típico de la constate de tiempo de la regulación
primaria 1T es 10 s.
La Figura 5-5 muestra el diagrama de bloques de la dinámica de la frecuencia de un
área interconectada con amortiguamiento de oscilaciones y regulación primaria.

75
Figura 5-5: Modelo de la dinámica de la frecuencia de un área interconectada con
amortiguamiento de oscilaciones y regulación primaria.
5.1.4 Regulación secundaria
La respuesta de la regulación secundaria 2Gp∆ se representa como un integrador de
la consigna de potencia del área REFp∆ con una constante tiempo 2T .
22
1G REFp p
sT
−∆ = ∆ (5.5)
El valor típico de la constante de tiempo del integrador de la consigna de potencia 2T
es 100 s. Dada la separación de escalas de tiempo de la regulación primaria y de la
regulación secundaria, la regulación secundaria en lazo cerrado se comportaría como
un sistema de primer orden de constante de tiempo 100 s.
La consigna de potencia del área REFp∆ es en realidad del error de control de área:
REF ICp B pω∆ = ∆ + ∆ (5.6)
donde B es el “bias” de frecuencia del área y ICp∆ es la potencia de intercambio
bajo control. La diferencia entre AGCs centralizados y en cascada vendrá por el
valor de la potencia de intercambio en control. Mientras que en AGCs centralizados
la potencia de intercambio en control es la suma de todas las potencias de
intercambio de cada área, en los AGCs en cascada la potencia de intercambio en
control es la potencia de una determinada interconexión.

76
La Figura 5-6 muestra el diagrama de bloques de la dinámica de la frecuencia de un
área interconectada con amortiguamiento de oscilaciones y regulación primaria y
secundaria.
Figura 5-6: Modelo de la dinámica de la frecuencia de un área interconectada con
amortiguamiento de oscilaciones y regulación primaria y secundaria.
5.2 Modelo de la red de interconexión
Se supone que cada área se representa como una fuente de tensión ideal. Si se
considera la representación de la red por medio del flujo de cargas en corriente
continua, la potencia total por las interconexiones de un área viene dada por la
ecuación:
,
i
i jI i
j A ij
px
δ δ∈
∆ − ∆∆ = ∑ (5.7)
Si la ecuación (5.7) se expresa en forma matricial resulta:
,1 1
,
,
I
I i i
I N B
p
p
p
δ
δ
δ
∆ ∆ ∆ = ∆ ∆ ∆
F
⋮ ⋮
⋮ ⋮
(5.8)
77
5.3 Modelo completo del sistema
El modelo completo del sistema comprende el modelo de las áreas y el modelo de la
red de interconexión.
Las entradas de cada área son la potencia de intercambio Ip∆ y la potencia de
intercambio en control ICp∆ y la salida es el ángulo de las fuentes de tensión que
representan eléctricamente las áreas δ∆ . Las entradas a la red de interconexión son
los ángulos de las fuentes de tensión que representan eléctricamente las áreas y las
salidas las potencias de intercambio según la ecuación (5.8).
Las potencias de intercambio en control se obtienen de las potencias de intercambio
de cada área según la expresión:
,1 ,1
, ,
, ,
IC I
IC i I iC
IC N I N
p p
p p
p p
∆ ∆ ∆ ∆= ∆ ∆
F
⋮ ⋮
⋮ ⋮
(5.9)
La Figura 5-7 muestra del diagrama de bloques del modelo completo del sistema.
Figura 5-7: Modelo completo del sistema.
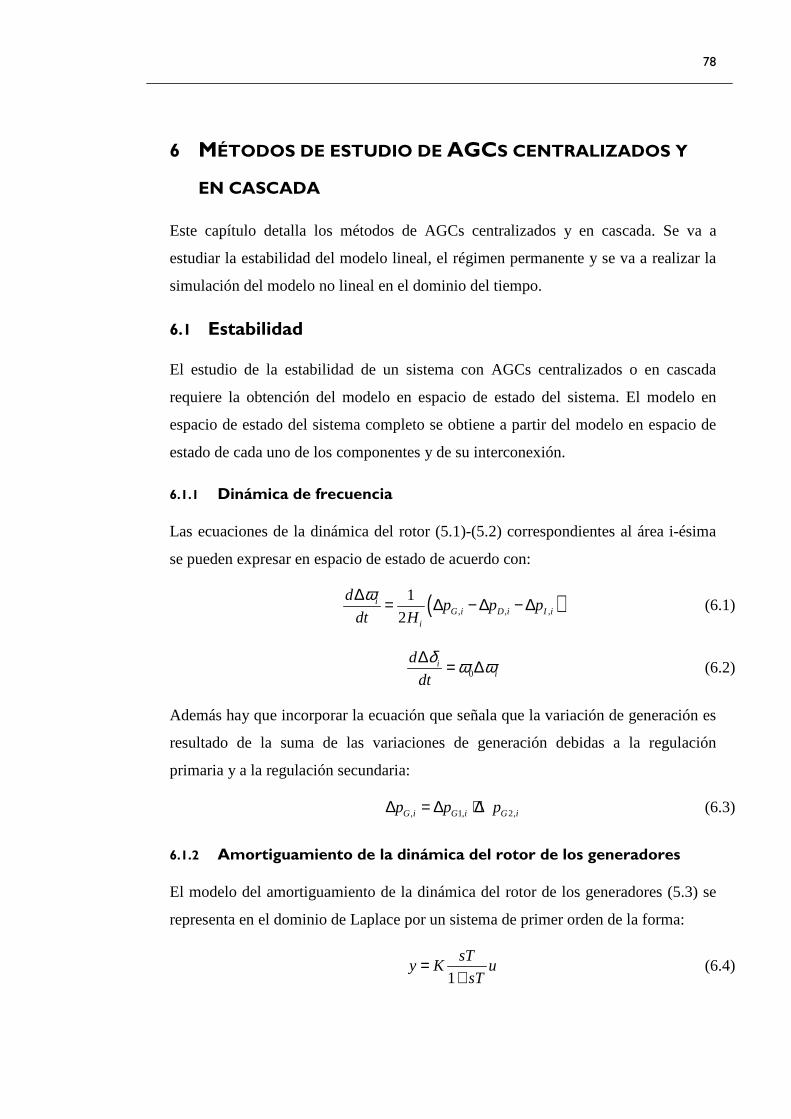
78
6 MÉTODOS DE ESTUDIO DE AGCS CENTRALIZADOS Y
EN CASCADA
Este capítulo detalla los métodos de AGCs centralizados y en cascada. Se va a
estudiar la estabilidad del modelo lineal, el régimen permanente y se va a realizar la
simulación del modelo no lineal en el dominio del tiempo.
6.1 Estabilidad
El estudio de la estabilidad de un sistema con AGCs centralizados o en cascada
requiere la obtención del modelo en espacio de estado del sistema. El modelo en
espacio de estado del sistema completo se obtiene a partir del modelo en espacio de
estado de cada uno de los componentes y de su interconexión.
6.1.1 Dinámica de frecuencia
Las ecuaciones de la dinámica del rotor (5.1)-(5.2) correspondientes al área i-ésima
se pueden expresar en espacio de estado de acuerdo con:
( ), , ,
1
2i
G i D i I ii
dp p p
dt H
ω∆ = ∆ − ∆ − ∆ (6.1)
0i
i
d
dt
δ ω ω∆ = ∆ (6.2)
Además hay que incorporar la ecuación que señala que la variación de generación es
resultado de la suma de las variaciones de generación debidas a la regulación
primaria y a la regulación secundaria:
, 1, 2,G i G i G ip p p∆ = ∆ + ∆ (6.3)
6.1.2 Amortiguamiento de la dinámica del rotor de los generadores
El modelo del amortiguamiento de la dinámica del rotor de los generadores (5.3) se
representa en el dominio de Laplace por un sistema de primer orden de la forma:
1
sTy K u
sT=
+ (6.4)

79
El sistema descrito en el dominio de Laplace por la ecuación (6.4) se puede
representar en espacio de estado como:
( )( )
1x x u
Ty K x u
= − +
= − +
ɺ (6.5)
La Figura 6-1 muestra la elección de la variable de estado en el sistema representado
en el dominio de Laplace por la ecuación (5.3).
Figura 6-1: Representaciones en el dominio de Laplace y de espacio de estado del
amortiguamiento de la dinámica del rotor de los generadores.
Por tanto el modelo en espacio de estado del modelo del amortiguamiento de la
dinámica del rotor de los generadores (5.3) queda:
( ), ,
,
, ,
1A i A i i
W i
A i i A i i i
x xT
P D x D
ω
ω
∆ = −∆ + ∆
∆ = − ∆ + ∆
ɺ
(6.6)
6.1.3 Regulación primaria
El modelo de la regulación primaria (5.4) se representa en el dominio de Laplace por
un sistema de primer orden de la forma:
1
Ky u
sT=
+ (6.7)
El sistema descrito en el dominio de Laplace por la ecuación (6.7) se puede
representar en espacio de estado como:

80
( )1
x x uT
y Kx
= − +
=
ɺ (6.8)
La Figura 6-2 muestra la elección de la variable de estado en el sistema representado
en el dominio de Laplace por la ecuación (6.7).
Figura 6-2: Representaciones en el dominio de Laplace y de espacio de estado del sistema de la
regulación primaria.
Por tanto el modelo en espacio de estado del modelo de la regulación primaria (5.4)
correspondiente al área i-ésima queda:
( )1, 1,
1,
1, 1,
1i i i
i
G i i i
x xT
p K x
ω∆ = −∆ + ∆
∆ = − ∆
ɺ
(6.9)
6.1.4 Regulación secundaria
El modelo de la regulación primaria (5.5)-(5.6) se representa en el dominio de
Laplace por un sistema de primer orden de la forma:
1
y usT
= (6.10)
El sistema descrito en el dominio de Laplace por la ecuación (6.10) se puede
representar en espacio de estado como:
1
x uT
y x
=
=
ɺ (6.11)
La Figura 6-3 muestra la elección de la variable de estado en el sistema representado
en el dominio de Laplace por la ecuación (6.10).

81
Figura 6-3: Representaciones en el dominio de Laplace y de espacio de estado del sistema de la
regulación secundaria.
Por tanto el modelo en espacio de estado del modelo de la regulación secundaria
(5.5)-(5.6) correspondiente al área i-ésima queda:
2, ,2
2, 2,
, ,
1i REF i
G i i
REF i i i IC i
x pT
p x
p B pω
−∆ = ∆
∆ = ∆
∆ = ∆ + ∆
ɺ
(6.12)
6.1.5 Modelo completo del área
Las ecuaciones (6.1),(6.2),(6.6),(6.9) y (6.12) se puede escribir en forma compacta
como un sistema de ecuaciones algebraico diferencial:
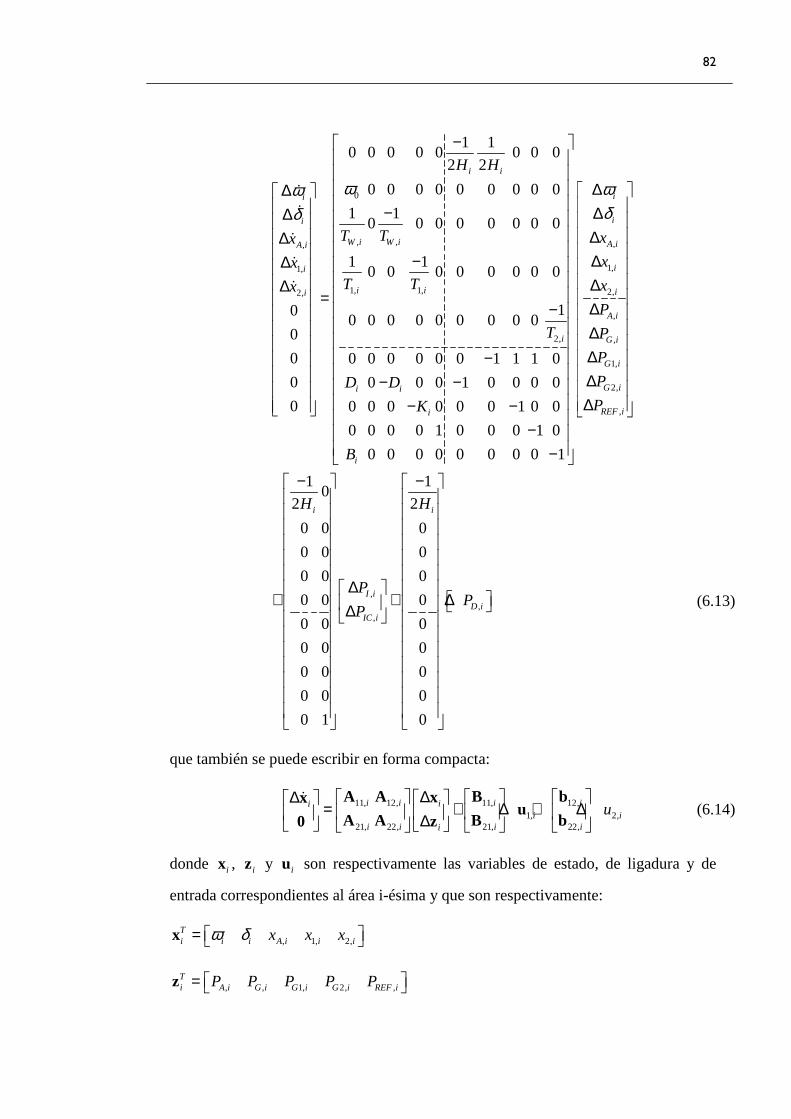
82
0
, ,,
1,
1, 1,2,
2,
1 10 0 0 0 0 0 0 0
2 2
0 0 0 0 0 0 0 0 0
1 10 0 0 0 0 0 0 0
1 10 0 0 0 0 0 0 0
100 0 0 0 0 0 0 0 0
0
0 0 0 0 0 0 0 1 1 1 0
0 0 0 0 1 0 0 0 0
0 0 0 0 0 0 0 1 0 0
0 0 0 0 1 0 0 0 1 0
0 0 0 0
i i
i
i
W i W iA i
i
i ii
i
i i
i
i
H H
T Tx
xT Tx
T
D D
K
B
ωωδ
−
∆ −∆ ∆ −∆ ∆
= −
− − − − −
−
ɺ
ɺ
ɺ
ɺ
ɺ
,
1,
2,
,
,
1,
2,
,
,
0 0 0 0 1
10
2
0 0
0 0
0 0
0 0
0 0
0 0
0 0
0 0
0 1
i
i
A i
i
i
A i
G i
G i
G i
REF i
i
I i
IC
x
x
x
P
P
P
P
P
H
P
P
ωδ
∆ ∆ ∆ ∆ ∆
∆ ∆
∆ ∆ ∆ −
−
∆ + ∆
,,
1
2
0
0
0
0
0
0
0
0
0
i
D ii
H
P
−
+ ∆
(6.13)
que también se puede escribir en forma compacta:
11, 12, 11, 12,1, 2,
21, 22, 21, 22,
i i i iiii i
i i i ii
u∆∆
= + ∆ + ∆ ∆
A A B bxxu
A A B bz0
ɺ (6.14)
donde ix , iz y iu son respectivamente las variables de estado, de ligadura y de
entrada correspondientes al área i-ésima y que son respectivamente:
, 1, 2,Ti i i A i i ix x xω δ = x
, , 1, 2, ,Ti A i G i G i G i REF iP P P P P = z
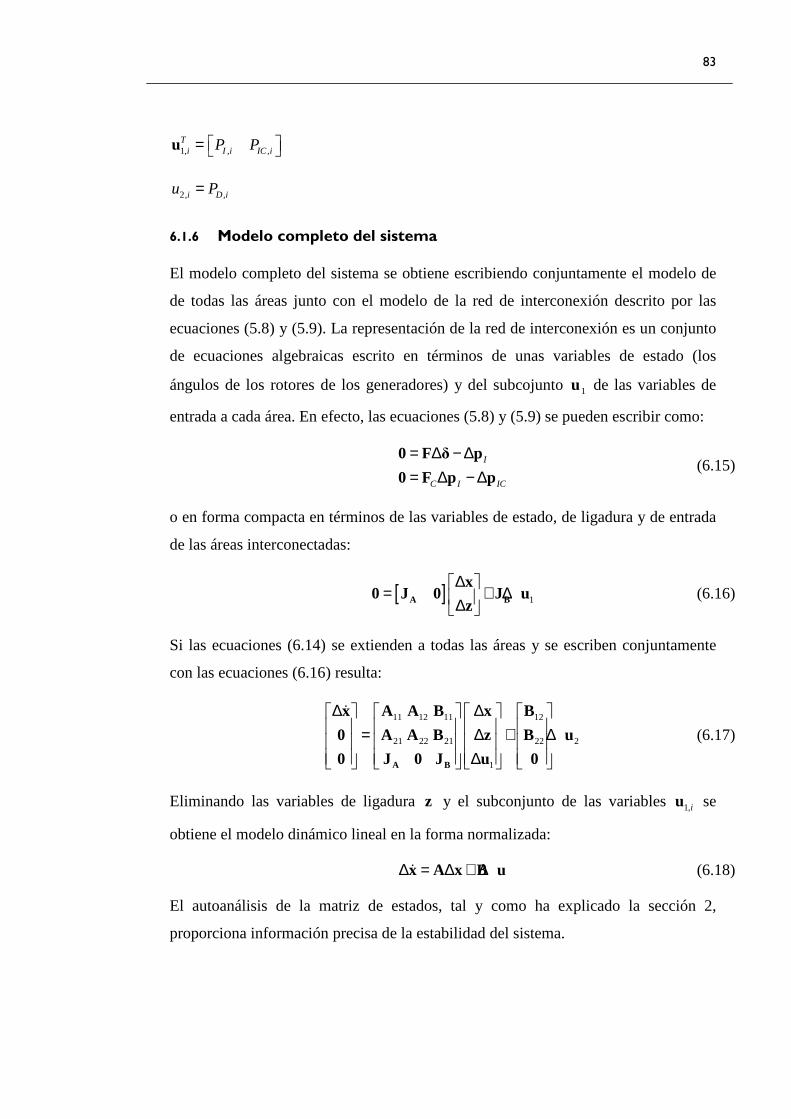
83
1, , ,T
i I i IC iP P = u
2, ,i D iu P=
6.1.6 Modelo completo del sistema
El modelo completo del sistema se obtiene escribiendo conjuntamente el modelo de
de todas las áreas junto con el modelo de la red de interconexión descrito por las
ecuaciones (5.8) y (5.9). La representación de la red de interconexión es un conjunto
de ecuaciones algebraicas escrito en términos de unas variables de estado (los
ángulos de los rotores de los generadores) y del subcojunto 1u de las variables de
entrada a cada área. En efecto, las ecuaciones (5.8) y (5.9) se pueden escribir como:
I
C I IC
= ∆ − ∆= ∆ − ∆
0 F δ p
0 F p p (6.15)
o en forma compacta en términos de las variables de estado, de ligadura y de entrada
de las áreas interconectadas:
[ ] 1
∆ = + ∆ ∆
A B
x0 J 0 J u
z (6.16)
Si las ecuaciones (6.14) se extienden a todas las áreas y se escriben conjuntamente
con las ecuaciones (6.16) resulta:
11 12 11 12
21 22 21 22 2
1
∆ ∆ = ∆ + ∆ ∆ A B
x A A B x B
0 A A B z B u
0 J 0 J u 0
ɺ
(6.17)
Eliminando las variables de ligadura z y el subconjunto de las variables 1,iu se
obtiene el modelo dinámico lineal en la forma normalizada:
∆ = ∆ + ∆x A x B uɺ (6.18)
El autoanálisis de la matriz de estados, tal y como ha explicado la sección 2,
proporciona información precisa de la estabilidad del sistema.

84
6.2 Régimen permanente
El cálculo del punto de funcionamiento en régimen permanente se puede realizar
teniendo presente que en un punto de equilibrio estable se cumple que:
0∆ =x 0ɺ (6.19)
como:
10 0
−∆ = − ∆x A B u (6.20)
Sin embargo, la presencia de integradores en el modelo del sistema aconseja realizar
el cálculo prescindiendo de algunas ecuaciones.
En una primera instancia se obtiene:
, , , ,
, 1, 2,
,
,
1,
1, 1,
2, 2,
,
, ,
0
0
0
0 1, ,
0
G i A i D i I i
G i G i G i
A i
A i
i
G i i i
G i i
REF i
REF i i IC i
p p p p
p p p
x
p
x i N
p K x
p x
p
p B p
ω
ω
ω
∆ − ∆ − ∆ − ∆ =
∆ = ∆ + ∆ −∆ + ∆ =∆ =
−∆ + ∆ = =∆ = − ∆ ∆ = ∆
∆ = ∆ = ∆ + ∆
… (6.21)
que se puede separar en dos subconjuntos:
, , ,
, 1, 2,
,
1,
, ,
0
0 1, ,
0
0
G i I i D i
G i G i G i
i IC i
G i i
REF i i IC i
p p p
p p p
B p i N
p K
p B p
ωωω
∆ − ∆ = ∆
−∆ + ∆ + ∆ = ∆ + ∆ = =−∆ + ∆ = −∆ + ∆ + ∆ =
… (6.22)
,
,
1,
2, 2,
0
1, ,
A i
A i
i
i G i
p
xi N
x
x p
ωω
∆ = ∆ = ∆ =∆ = ∆ ∆ = ∆
… (6.23)

85
La solución de las ecuaciones (6.22) para cada todas las áreas junto con las
ecuaciones (6.15) proporciona el régimen permanente del sistema. Debe notarse que
las ecuaciones (6.15) en régimen permanente consideran la variación del ángulo de
un área nula al tomarse como referencia. En efecto, las ecuaciones (6.15) quedan:
,1 2
,
,
,1 ,1
, ,
, ,
0
0
0
0
0
0
I
I i i
I N B
IC I
IC i I iC
IC N I N
p
p
p
p p
p p
p p
δ
δ
δ
∆ ∆ ∆ − =∆ ∆ ∆
∆ ∆ ∆ ∆ − = ∆ ∆
F
F
⋮ ⋮ ⋮
⋮ ⋮ ⋮
⋮ ⋮ ⋮
⋮ ⋮ ⋮
(6.24)
El sistema tiene las siguientes incógnitas 7 x N incógnitas:
, , 1, 2, , ,
, 2, ,
, , , , , , 1, ,i
G i I i G i G i IC i REF i
i N
p p p p p p i N
ωδ
∆∆ =∆ ∆ ∆ ∆ ∆ ∆ =
…
…
Las ecuaciones (6.22) y (6.24) constituyen un sistema de 7x N ecuaciones con lo que
resulta un sistema compatible determinado de la forma:
=Ax b (6.25)
cuya solución es:
1−=x A b (6.26)
Una vez resuelto el sistema se pueden obtener de forma inmediata las variables de la
ecuación (6.23).
6.3 Simulación no lineal
Se ha desarrollado un modelo de simulación no lineal en Simulink de Matlab. Este
modelo de simulación tiene dos componentes fundamentales: el modelo de

86
simulación de un área y el modelo que integra el los modelos de las áreas y de la red
de interconexión.
La Figura 6-4 muestra el modelo de cada área. El parámetro de entrada a cada área es
su índice. Los datos de entrada están contenidos en un fichero .m y están
almacenados en vectores cuya dimensión es el número de áreas H, D, TW, T1, T2, B,
etc.
3
Pot_gen
2
Incr_w
1
Incr_dSuma5 Suma4 Suma1Límites Incr. de generación
K(n)
s
Integrador RS
w0
s
Integradorángulo2
1
2*H(n)s
Inercia
TD(n).s
TD(n).s+1
Fil tro
1/R(n)
Estatismo
Escalón de demanda
1
TR(n).s+1
Cte. TiempoB(n)
Bias
D(n)
Amortiguación
2
P_I
1
P_IC
Figura 6-4: Modelo de simulación de un área.

87
4
Variac. frec. área 4
3
Variac. frec. área 3
2
Variac. frec. área 2
1
Variac. frec. área 1
P_IC
P_I
Incr_d
Incr_w
Pot_gen
Área 4
P_IC
P_I
Incr_d
Incr_w
Pot_gen
Área 3
P_IC
P_I
Incr_d
Incr_w
Pot_gen
Área 2
P_IC
P_I
Incr_d
Incr_w
Pot_gen
Área 1
PGINTGR2
To Workspace9
delta
To Workspace8
PGINTGR1
To Workspace7
PG4
To Workspace6
PG3
To Workspace5
PG2
To Workspace4
PG1
To Workspace3
PGINTGR4
To Workspace11
PGINTGR3
To Workspace10
PI
To Workspace1
PIC
To Workspace
delta Pot. Interc.
Interconexiones[Bdc]
P. Interc. P. I. Control
Intercambios de Control [F]
1s
Integrator4
1s
Integrator3
1s
Integrator2
1s
Integrator1
[P_I]
Goto2
[P_IC]
Goto1
[P_IC]
From4
[P_I]
From3
Figura 6-5: Modelo de simulación de un sistema de cuatro áreas.
La Figura 6-5 muestra el modelo de un sistema de cuatro áreas. El modelo de las
interconexiones y de los flujos de interconexión es simplemente el producto de dos
matrices.
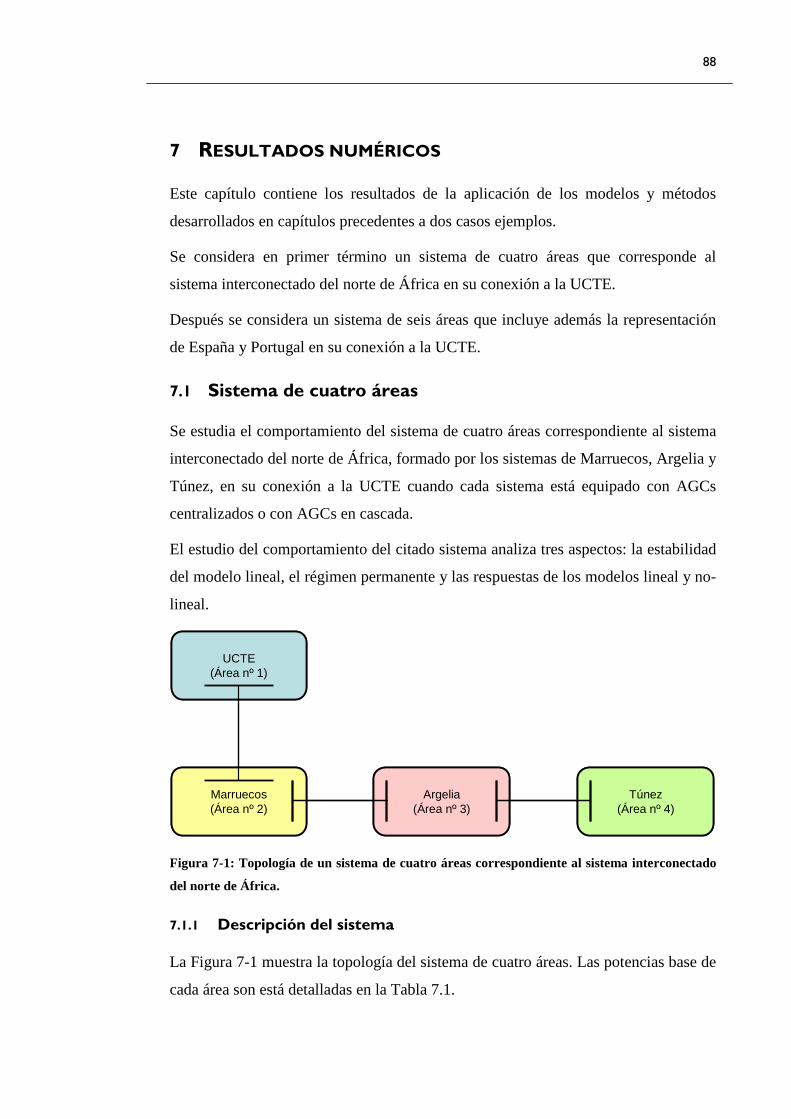
88
7 RESULTADOS NUMÉRICOS
Este capítulo contiene los resultados de la aplicación de los modelos y métodos
desarrollados en capítulos precedentes a dos casos ejemplos.
Se considera en primer término un sistema de cuatro áreas que corresponde al
sistema interconectado del norte de África en su conexión a la UCTE.
Después se considera un sistema de seis áreas que incluye además la representación
de España y Portugal en su conexión a la UCTE.
7.1 Sistema de cuatro áreas
Se estudia el comportamiento del sistema de cuatro áreas correspondiente al sistema
interconectado del norte de África, formado por los sistemas de Marruecos, Argelia y
Túnez, en su conexión a la UCTE cuando cada sistema está equipado con AGCs
centralizados o con AGCs en cascada.
El estudio del comportamiento del citado sistema analiza tres aspectos: la estabilidad
del modelo lineal, el régimen permanente y las respuestas de los modelos lineal y no-
lineal.
UCTE(Área nº 1)
Marruecos(Área nº 2)
Argelia(Área nº 3)
Túnez(Área nº 4)
UCTE(Área nº 1)
Marruecos(Área nº 2)
Argelia(Área nº 3)
Túnez(Área nº 4)
Figura 7-1: Topología de un sistema de cuatro áreas correspondiente al sistema interconectado
del norte de África.
7.1.1 Descripción del sistema
La Figura 7-1 muestra la topología del sistema de cuatro áreas. Las potencias base de
cada área son está detalladas en la Tabla 7.1.
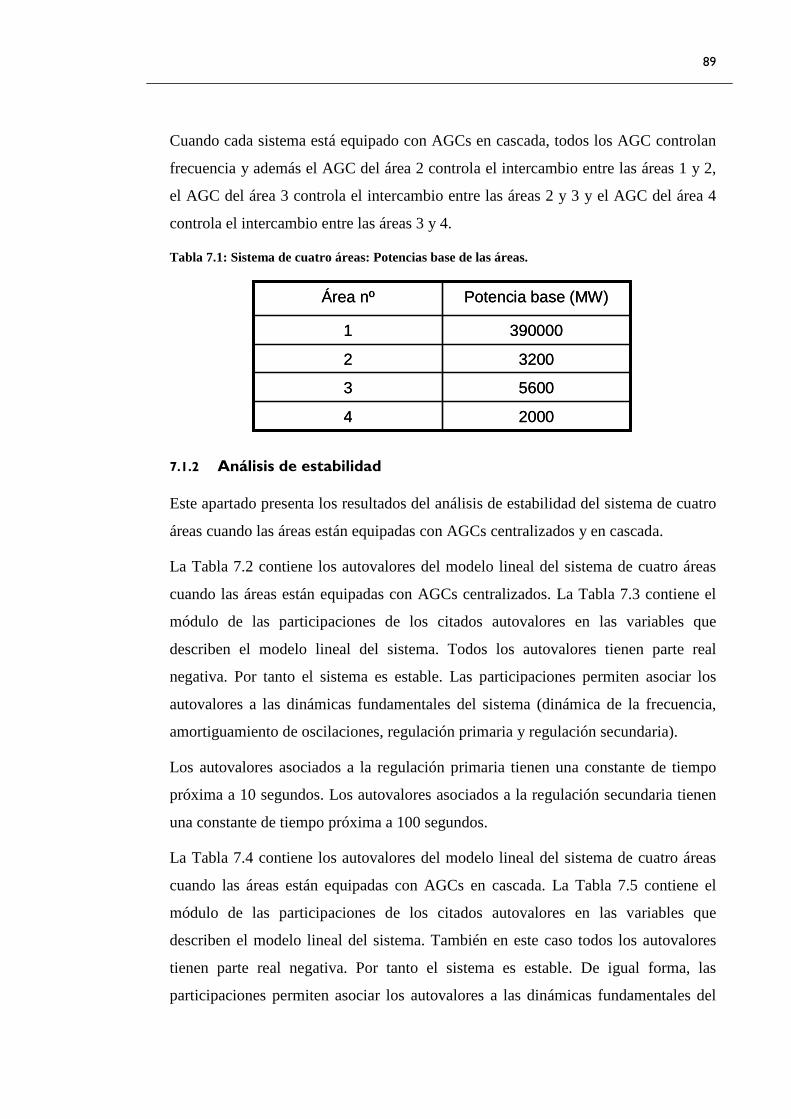
89
Cuando cada sistema está equipado con AGCs en cascada, todos los AGC controlan
frecuencia y además el AGC del área 2 controla el intercambio entre las áreas 1 y 2,
el AGC del área 3 controla el intercambio entre las áreas 2 y 3 y el AGC del área 4
controla el intercambio entre las áreas 3 y 4.
Tabla 7.1: Sistema de cuatro áreas: Potencias base de las áreas.
56003
20004
32002
3900001
Potencia base (MW)Área nº
56003
20004
32002
3900001
Potencia base (MW)Área nº
7.1.2 Análisis de estabilidad
Este apartado presenta los resultados del análisis de estabilidad del sistema de cuatro
áreas cuando las áreas están equipadas con AGCs centralizados y en cascada.
La Tabla 7.2 contiene los autovalores del modelo lineal del sistema de cuatro áreas
cuando las áreas están equipadas con AGCs centralizados. La Tabla 7.3 contiene el
módulo de las participaciones de los citados autovalores en las variables que
describen el modelo lineal del sistema. Todos los autovalores tienen parte real
negativa. Por tanto el sistema es estable. Las participaciones permiten asociar los
autovalores a las dinámicas fundamentales del sistema (dinámica de la frecuencia,
amortiguamiento de oscilaciones, regulación primaria y regulación secundaria).
Los autovalores asociados a la regulación primaria tienen una constante de tiempo
próxima a 10 segundos. Los autovalores asociados a la regulación secundaria tienen
una constante de tiempo próxima a 100 segundos.
La Tabla 7.4 contiene los autovalores del modelo lineal del sistema de cuatro áreas
cuando las áreas están equipadas con AGCs en cascada. La Tabla 7.5 contiene el
módulo de las participaciones de los citados autovalores en las variables que
describen el modelo lineal del sistema. También en este caso todos los autovalores
tienen parte real negativa. Por tanto el sistema es estable. De igual forma, las
participaciones permiten asociar los autovalores a las dinámicas fundamentales del

90
sistema (dinámica de la frecuencia, amortiguamiento de oscilaciones, regulación
primaria y regulación secundaria).
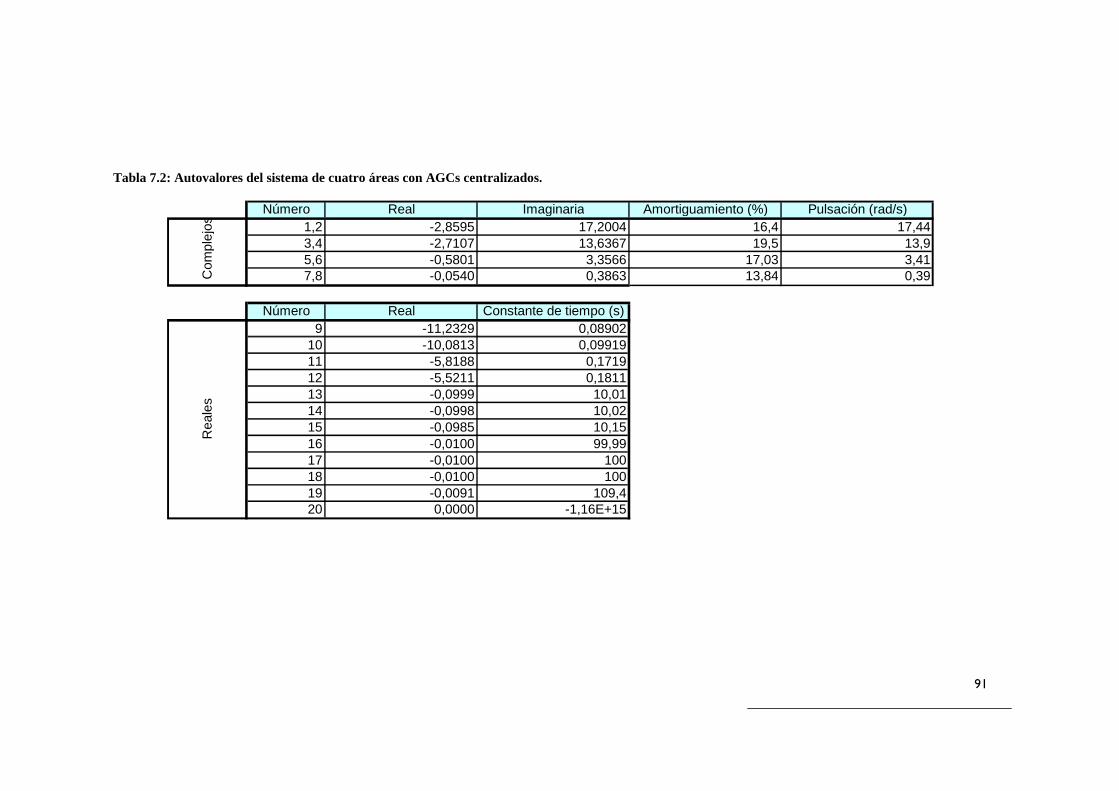
91
Tabla 7.2: Autovalores del sistema de cuatro áreas con AGCs centralizados.
Número Real Imaginaria Amortiguamiento (%) Pulsación (rad/s)1,2 -2,8595 17,2004 16,4 17,443,4 -2,7107 13,6367 19,5 13,95,6 -0,5801 3,3566 17,03 3,417,8 -0,0540 0,3863 13,84 0,39
Número Real Constante de tiempo (s)9 -11,2329 0,08902
10 -10,0813 0,0991911 -5,8188 0,171912 -5,5211 0,181113 -0,0999 10,0114 -0,0998 10,0215 -0,0985 10,1516 -0,0100 99,9917 -0,0100 10018 -0,0100 10019 -0,0091 109,420 0,0000 -1,16E+15
Com
plej
osR
eale
s

92
Tabla 7.3: Participaciones de los autovalores del sistema de cuatro áreas con AGCs centralizados.
1,2 3,4 5,6 7,8 9 10 11 12 13 14 15 16 17 18 19 20δ1 0.0002 0.0007 0.0140 0.0000 0.0000 0,0029 0,0002 0 0 0 0,0004 0 0 0 0 0,9731δ2 0.2144 0.2973 0.0552 0.0000 0.0000 0,0114 0,082 0,0402 0,0004 0,0008 0,0015 0 0 0 0 0,008δ3 0.1998 0.0158 0.3332 0.0000 0.0000 0,0687 0,0044 0,0375 0,0004 0 0,0089 0,0001 0 0 0 0,014δ4 0.1424 0.2718 0.1528 0.0000 0.0000 0,0315 0,075 0,0267 0,0003 0,0007 0,0041 0 0 0 0 0,005ω1 0.0002 0.0006 0.0071 0.2180 0.5401 0,0128 0 0 0 0 0 0 0 0 0,0024 0ω2 0.1944 0.2559 0.0278 0.0018 0.0044 0,0502 0,0124 0,0037 0 0 0 0 0 0 0 0ω3 0.1812 0.0136 0.1678 0.0031 0.0078 0,303 0,0007 0,0034 0 0 0 0 0 0 0 0ω4 0.1291 0.2340 0.0769 0.0011 0.0028 0,1389 0,0113 0,0024 0 0 0 0 0 0 0 0xA,1 0.0000 0.0001 0.0072 0.2767 0.4345 0,0154 0,0014 0,0005 0 0 0 0 0 0 0,003 0xA,2 0.0202 0.0418 0.0282 0.0023 0.0036 0,0607 0,5773 0,4215 0 0 0 0 0 0 0 0xA,3 0.0188 0.0022 0.1702 0.0040 0.0062 0,3668 0,0306 0,393 0 0 0 0 0 0 0 0xA,4 0.0134 0.0382 0.0781 0.0014 0.0022 0,1682 0,5278 0,2799 0 0 0 0 0 0 0 0xR1,1 0.0000 0.0000 0.0002 0.4499 0.0014 0 0 0 0,0004 0,0013 0,0249 0 0 0 0,0899 0xR1,2 0.0002 0.0004 0.0008 0.0037 0.0000 0,0002 0,0001 0 0,3846 0,507 0,0981 0 0 0 0,0007 0xR1,3 0.0002 0.0000 0.0046 0.0065 0.0000 0,001 0 0 0,3586 0,0269 0,5923 0,0001 0 0 0,0013 0xR1,4 0.0001 0.0004 0.0021 0.0023 0.0000 0,0004 0,0001 0 0,2554 0,4635 0,2716 0 0 0 0,0005 0xR2,1 0.0000 0.0000 0.0000 0.0448 0.0001 0 0 0 0 0 0 0,0253 0,0013 0,0004 0,8885 0xR2,2 0.0001 0.0002 0.0002 0.0004 0.0000 0 0,0001 0,0001 0 0,0001 0,0002 0,0994 0,5077 0,385 0,0073 0xR2,3 0.0001 0.0000 0.0010 0.0006 0.0000 0 0 0,0001 0 0 0,001 0,6004 0,0269 0,3589 0,0128 0xR2,4 0.0001 0.0002 0.0005 0.0002 0.0000 0 0,0001 0 0 0,0001 0,0005 0,2753 0,4642 0,2557 0,0046 0
Var
iab
les
de
esta
do
Autovalores

93
Tabla 7.4: Autovalores del sistema de cuatro áreas con AGCs en cascada.
Número Real Imaginaria Amortiguamiento (%) Pulsación (rad/s)1,2 -2,8618 17,2007 16,41 17,443,4 -2,7124 13,6369 19,51 13,95,6 -0,5764 3,3571 16,92 3,417,8 -0,0540 0,3863 13,84 0,399,1 -0,0104 0,0019 98,32 0,01
Número Real Constante de tiempo (s)11 -11,2329 0,0890212 -10,0821 0,0991913 -5,8183 0,171914 -5,5207 0,181115 -0,0999 10,0116 -0,0999 10,0117 -0,0984 10,1618 -0,0091 109,419 -0,0087 114,720 0,0000 -1,42E+14
Com
plej
osR
eale
s

94
Tabla 7.5: Participaciones de los autovalores del sistema de cuatro áreas con AGCs en cascada.
1,2 3,4 5,6 7,8 9,10 11 12 13 14 15 16 17 18 19 20δ1 0,0002 0,0007 0,014 0 0,0718 0 0,0029 0,0002 0 0 0 0,0005 0 0,0361 1δ2 0,2144 0,2973 0,0552 0 0,0031 0 0,0114 0,0819 0,0402 0,0004 0,0007 0,0015 0 0,002 0δ3 0,1998 0,0158 0,3332 0 0,0294 0 0,0686 0,0044 0,0375 0,0004 0,0001 0,0093 0 0,024 0δ4 0,1423 0,2718 0,1528 0 0,0564 0 0,0315 0,075 0,0266 0,0002 0,0007 0,0047 0 0,0582 0ω1 0,0002 0,0006 0,0071 0,2179 0,0009 0,5401 0,0128 0 0 0 0 0 0,0007 0,0017 0ω2 0,1944 0,2559 0,0278 0,0018 0 0,0044 0,0501 0,0124 0,0037 0 0 0 0,0001 0,0001 0ω3 0,1812 0,0136 0,1678 0,0031 0,0004 0,0078 0,303 0,0007 0,0034 0 0 0 0,0011 0,0012 0ω4 0,1291 0,234 0,077 0,0011 0,0007 0,0028 0,139 0,0113 0,0024 0 0 0 0,0041 0,0028 0xA,1 0 0,0001 0,0072 0,2767 0,0012 0,4344 0,0155 0,0014 0,0005 0 0 0 0,0008 0,0022 0xA,2 0,0202 0,0418 0,0282 0,0023 0,0001 0,0036 0,0607 0,5769 0,422 0 0 0 0,0001 0,0001 0xA,3 0,0188 0,0022 0,1701 0,004 0,0005 0,0062 0,3666 0,0308 0,393 0 0 0 0,0014 0,0014 0xA,4 0,0134 0,0382 0,078 0,0014 0,0009 0,0022 0,1682 0,528 0,2794 0 0 0 0,0052 0,0035 0xR1,1 0 0 0,0002 0,4499 0,0358 0,0014 0 0 0 0,4499 0,4499 0,4499 0,0254 0,0651 0xR1,2 0,0002 0,0004 0,0008 0,0037 0,0016 0 0,0002 0,0001 0 0,4499 0,4499 0,4499 0,0022 0,0036 0xR1,3 0,0002 0 0,0046 0,0065 0,0147 0 0,001 0 0 0,4499 0,4499 0,4499 0,0413 0,0432 0xR1,4 0,0001 0,0004 0,0021 0,0023 0,0281 0 0,0004 0,0001 0 0,4499 0,4499 0,4499 0,1569 0,1047 0xR2,1 0 0 0 0,0448 0,2569 0,0001 0 0 0 0 0 0 0,2569 0,2569 0xR2,2 0 0,0001 0,0009 0,0004 0,3702 0 0 0,0001 0 0 0 0,001 0,3702 0,3702 0xR2,3 0,0001 0 0,0014 0,0006 0,3405 0 0 0 0 0 0 0,0015 0,3405 0,3405 0xR2,4 0,0001 0,0002 0,0005 0,0002 0,1194 0 0 0,0001 0 0 0,0001 0,0005 1,5506 0,6955 0
Autovalores
Var
iab
les
de
esta
do

95
La Tabla 7.6 compara los autovalores de los modelos lineales del sistema de cuatro
áreas con AGCs centralizados y en cascada. Se aprecia que de una configuración a
otra los autovalores asociados a la regulación secundaria experimentan una
modificación: se pasa de cuatro autovalores reales en el caso de AGCs centralizados
a dos autovalores reales y una pareja de autovalores complejos conjugados en el caso
de AGCs en cascada. El resto de los autovalores no está afectado por la
configuración del AGC.
Tabla 7.6: Comparación de los autovalores del modelo lineal del sistema de cuatro áreas con
AGCs centralizados y en cascada.
Real Imaginaria Real Imaginaria-2,8595 17,2000 -2,8618 17,2010-2,7107 13,6370 -2,7124 13,6370-0,5801 3,3566 -0,5764 3,3571-0,0540 0,3864 -0,0540 0,3864
-0,0104 0,0019-11,2330 -11,2330-10,0810 -10,0820-5,8188 -5,8183-5,5211 -5,5207-0,0999 -0,0999-0,0998 -0,0999-0,0985 -0,0984-0,0100 -0,0091-0,0100 -0,0087-0,0100 0,0000-0,00910,0000
AGC en cascadaAGCs centralizados
Com
plej
os
Amortiguadores de oscilaciones
RotoresRegulación primariaRegulación secundaria
Rea
les
Variables de mayor participación
7.1.3 Análisis en régimen permanente
Considerando que se produce una variación de potencia demandada de 100 MW en
el área 4 suponiendo que no hay límites de la capacidad de regulación de las áreas los
valores en régimen permanente con AGCs centralizados y en cascada coinciden.
Además la variación de potencia generada por el área 4 es igual a la variación de
potencia demandada por el área 4.

96
Se considera la misma perturbación pero suponiendo ahora que cada área tiene una
reserva a subir y a bajar del 1.5% de su potencia (5850, 48, 84 y 30 MW). Esto
quiere decir que la potencia generada por el área 4 alcanzará su límite. El déficit de
generación del área 4 es atendido por el área adyacente. Con AGCs centralizados
queda un error de frecuencia mientras que con AGCs en cascada se corrige el error
de frecuencia.
Tabla 7.7: Valor final de las variables cuando las áreas están equipadas con AGCs centralizados
tras una variación de demanda de 100 MW en el área 4, considerando que cada área tiene una
reserva a subir y a bajar del 1.5% de su potencia.
Variable Valor finalω -7,0211E-06xA1 -7,0211E-06xA2 -7,0211E-06xA3 -7,0211E-06xA4 -7,0211E-06xR1,1 -7,0211E-06xR1,2 -7,0211E-06xR1,3 -7,0211E-06xR1,4 -7,0211E-06xR2,1 0xR2,2 -9,7145E-17xR2,3 -3,1225E-17xR2,4 -0,29649PG1 0,68455PG2 0,0056169PG3 0,0098295PG4 0,3PI1 0,68455PI2 0,0056169PI3 0,0098295PI4 -0,7PIC1 0,68455PIC2 0,0056169PIC3 0,0098295PIC4 -0,7

97
Tabla 7.8: Valor final de las variables cuando las áreas están equipadas con AGCs en cascada
tras una variación de demanda de 100 MW en el área 4, considerando que cada área tiene una
reserva a subir y a bajar del 1.5% de su potencia.
Variable Valor finalω 0xA1 0xA2 0xA3 0xA4 0xR1,1 0xR1,2 0xR1,3 0xR1,4 0xR2,1 0xR2,2 0xR2,3 -0,7xR2,4 -0,3PG1 0PG2 0PG3 0,7PG4 0,3PI1 0PI2 0PI3 0,7PI4 -0,7PIC1 0PIC2 0PIC3 0PIC4 -0,7
7.1.4 Simulación lineal
A continuación se considera la respuesta tras perturbación consistente en una
variación de potencia demandada de 100 MW en el área 4 suponiendo que no hay
límites de la capacidad de regulación de las áreas.
La Figura 7-2 y la Figura 7-3 muestra la variación de frecuencia en cada área cuando
las áreas están equipadas con AGCs centralizados y en cascada respectivamente. Los
AGCs eliminan el error de frecuencia en régimen permanente.
La Figura 7-4 muestra un detalle de la Figura 7-2 en los 7 primeros segundos tras la
perturbación. Se aprecian las oscilaciones de las áreas 2, 3 y 4 contra el área 1. Es la
oscilación inter-área. También se aprecian las oscilaciones locales en la variación de
frecuencia de cada área. La Figura 7-5 muestra un detalle de la Figura 7-2 en los 35

98
primeros segundos tras la perturbación. En este detalle se aprecia la oscilación lenta
de la de la frecuencia del área 1.
La Figura 7-6 y la Figura 7-7 muestran la variación de potencia generada y energía
en cada área cuando los sistemas están equipados con AGCs centralizados.
La Figura 7-8 y la Figura 7-9 muestran la variación de potencia generada y energía
en cada área cuando los sistemas están equipados con AGCs en cascada.
En un sistema equipado con AGCs centralizados, ante una variación de demanda en
el sistema más alejado (área 4) del gran sistema que sirve de apoyo (área 1) sólo
experimentan variación en su potencia generada el sistema donde se experimenta la
variación de demanda y en el gran sistema. Lógicamente esa potencia de apoyo del
gran sistema al sistema que experimenta la variación de demanda pasa por todas las
interconexiones. En un sistema con AGC en cascada, ante la misma perturbación,
todos los sistemas experimentan variaciones en su potencia generada. Sin embargo,
en este caso sólo entrega una energía neta el sistema adyacente a aquel que
experimenta la variación de potencia demandada.
0 100 200 300 400 500 600 700−4
−3
−2
−1
0
1
2x 10
−4 AGCS centralizados
Tiempo (s)
Fre
cuen
cia
(pu)
área 1área 2área 3área 4
Figura 7-2: Variación de frecuencia en cada área ante una variación de potencia demandada en
el área nº 4 cuando los sistemas están equipados con AGCs centralizados.
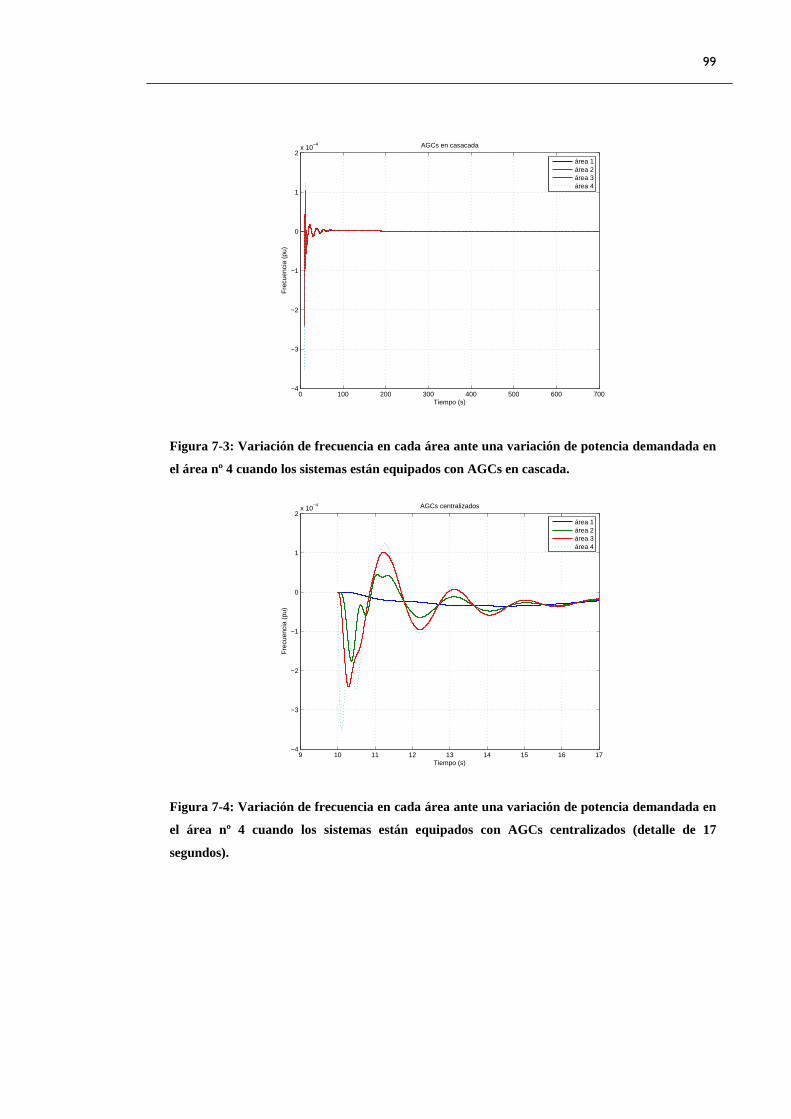
99
0 100 200 300 400 500 600 700−4
−3
−2
−1
0
1
2x 10
−4 AGCs en casacada
Tiempo (s)
Fre
cuen
cia
(pu)
área 1área 2área 3área 4
Figura 7-3: Variación de frecuencia en cada área ante una variación de potencia demandada en
el área nº 4 cuando los sistemas están equipados con AGCs en cascada.
9 10 11 12 13 14 15 16 17−4
−3
−2
−1
0
1
2x 10
−4 AGCs centralizados
Tiempo (s)
Fre
cuen
cia
(pu)
área 1área 2área 3área 4
Figura 7-4: Variación de frecuencia en cada área ante una variación de potencia demandada en
el área nº 4 cuando los sistemas están equipados con AGCs centralizados (detalle de 17
segundos).

100
0 5 10 15 20 25 30 35 40 45−4
−3
−2
−1
0
1
2x 10
−4 AGCs centralizados
Tiempo (s)
Fre
cuen
cia
(pu)
área 1área 2área 3área 4
Figura 7-5: Variación de frecuencia en cada área ante una variación de potencia demandada en
el área nº 4 cuando los sistemas están equipados con AGCs centralizados (deltalle de 45
segundos).
0 100 200 300 400 500 600 700−0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6AGCs centralizados
Tiempo (s)
Pot
enci
a ge
nera
da (
pu)
área 1área 2área 3área 4
Figura 7-6: Variación de potencia generada en cada área ante una variación de potencia
demandada en el área nº 4 cuando los sistemas están equipados con AGCs centralizados.
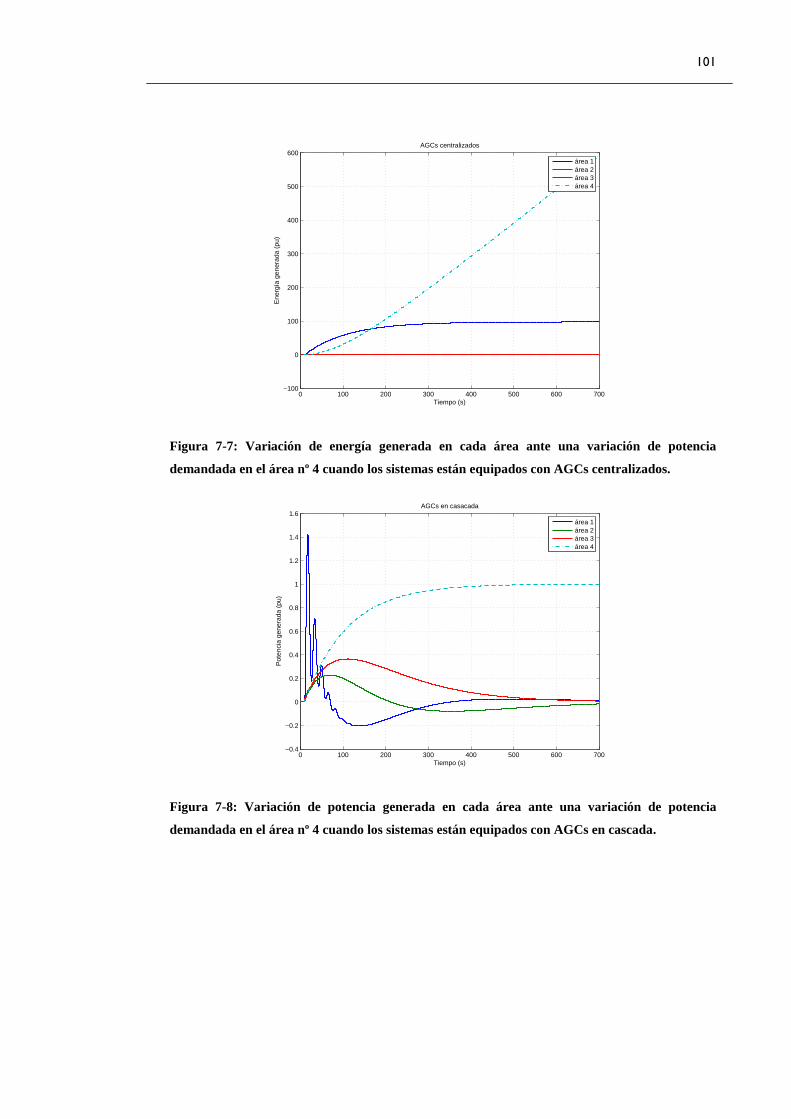
101
0 100 200 300 400 500 600 700−100
0
100
200
300
400
500
600AGCs centralizados
Tiempo (s)
Ene
rgía
gen
erad
a (p
u)
área 1área 2área 3área 4
Figura 7-7: Variación de energía generada en cada área ante una variación de potencia
demandada en el área nº 4 cuando los sistemas están equipados con AGCs centralizados.
0 100 200 300 400 500 600 700−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6AGCs en casacada
Tiempo (s)
Pot
enci
a ge
nera
da (
pu)
área 1área 2área 3área 4
Figura 7-8: Variación de potencia generada en cada área ante una variación de potencia
demandada en el área nº 4 cuando los sistemas están equipados con AGCs en cascada.

102
0 100 200 300 400 500 600 700−100
0
100
200
300
400
500
600AGCs en casacada
Tiempo (s)
Ene
rgía
gen
erad
a (p
u)
área 1área 2área 3área 4
Figura 7-9: Variación de energía generada en cada área ante una variación de potencia
demandada en el área nº 4 cuando los sistemas están equipados con AGCs en cascada.
7.1.5 Simulación no-lineal
Finalmente se simula la misma perturbación considerando que cada área tiene una
reserva a subir y a bajar del 1.5% de su potencia (5850, 48, 84 y 30 MW).
La Figura 7-10 y la Figura 7-11 muestran la variación de frecuencia y la variación de
potencia generada en cada área ante una variación de potencia demandada de 100
MW en el área nº 4 cuando los sistemas están equipados con AGCs centralizados.
La Figura 7-12 y la Figura 7-13 muestran la variación de frecuencia y la variación de
potencia generada en cada área ante una variación de potencia demandada de 100
MW en el área nº 4 cuando los sistemas están equipados con AGCs en cascada.
Cuando los sistemas están equipados con AGCs centralizados queda un error de
frecuencia en régimen permanente mientras que cuando están equipados con AGCs
en cascada ese error de frecuencia en régimen permanente es nulo. En relación a la
distribución de las potencias generadas, se aprecia que cuando los sistemas están
equipados con AGCs centralizados es el área mayor la que suple la potencia
demandada por el área nº 4 no aportada por ella misma. Por el contrario, cuando los
sistemas están equipados con AGCs en cascada es el área vecina la que suple la
potencia demandada por el área nº 4.
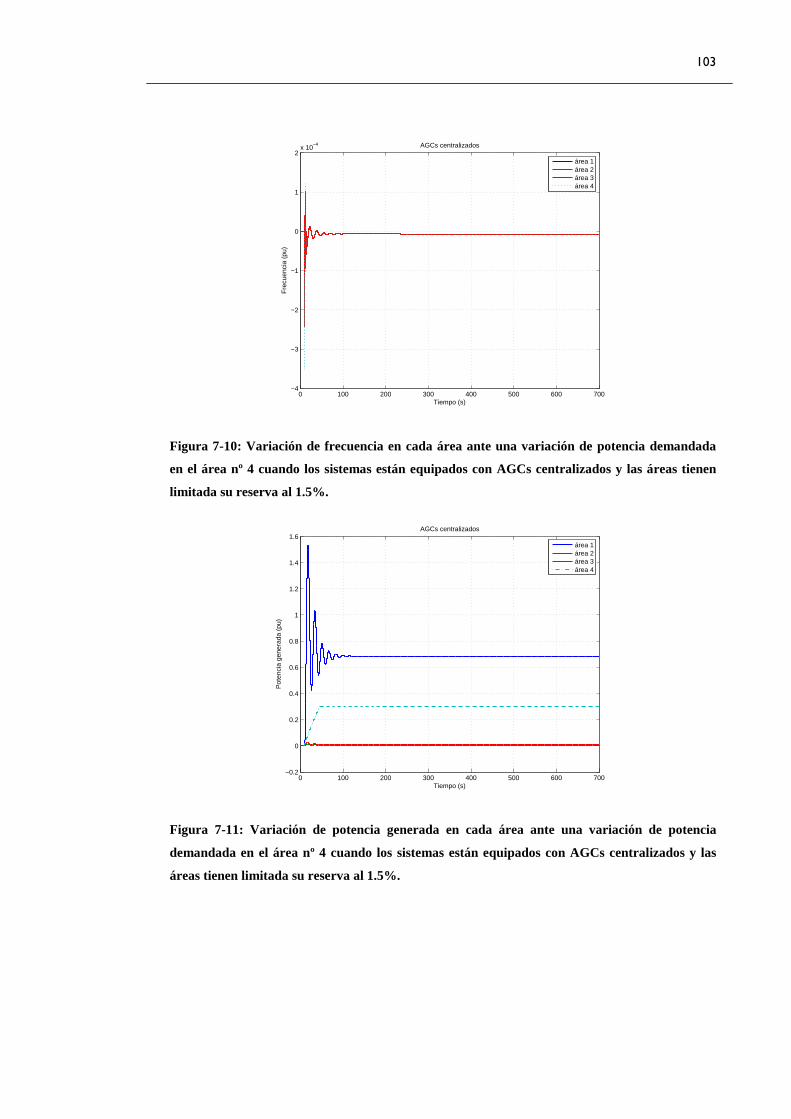
103
0 100 200 300 400 500 600 700−4
−3
−2
−1
0
1
2x 10
−4 AGCs centralizados
Tiempo (s)
Fre
cuen
cia
(pu)
área 1área 2área 3área 4
Figura 7-10: Variación de frecuencia en cada área ante una variación de potencia demandada
en el área nº 4 cuando los sistemas están equipados con AGCs centralizados y las áreas tienen
limitada su reserva al 1.5%.
0 100 200 300 400 500 600 700−0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6AGCs centralizados
Tiempo (s)
Pot
enci
a ge
nera
da (
pu)
área 1área 2área 3área 4
Figura 7-11: Variación de potencia generada en cada área ante una variación de potencia
demandada en el área nº 4 cuando los sistemas están equipados con AGCs centralizados y las
áreas tienen limitada su reserva al 1.5%.

104
0 100 200 300 400 500 600 700−4
−3
−2
−1
0
1
2x 10
−4 AGCs en cascada
Tiempo (s)
Fre
cuen
cia
(pu)
área 1área 2área 3área 4
Figura 7-12: Variación de frecuencia en cada área ante una variación de potencia demandada
en el área nº 4 cuando los sistemas están equipados con AGCs en cascada y las áreas tienen
limitada su reserva al 1.5%.
0 100 200 300 400 500 600 700−0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6AGCs en cascada
Tiempo (s)
Pot
enci
a ge
nera
da (
pu)
área 1área 2área 3área 4
Figura 7-13: Variación de potencia generada en cada área ante una variación de potencia
demandada en el área nº 4 cuando los sistemas están equipados con AGCs en cascada y las áreas
tienen limitada su reserva al 1.5%.
7.2 Sistema de seis áreas
Se estudia el comportamiento del sistema de seis áreas correspondiente al sistema
interconectado del norte de África incluyendo la representación de España y Portugal

105
en su conexión a la UCTE cuando cada sistema está equipado con AGCs
centralizados o con AGCs en cascada.
El estudio del comportamiento del citado sistema sólo contempla un aspecto: las
respuestas de los modelos lineal y no-lineal.
La Figura 7-14 muestra la topología del sistema de seis áreas. Las potencias base de
cada área son las detalladas en la Tabla 7.9.
Portugal(Área nº 3)
UCTE(Área nº 1)
España(Área nº 2)
Marruecos(Área nº 4)
Argelia(Área nº 5)
Túnez(Área nº 6)
Portugal(Área nº 3)
UCTE(Área nº 1)
España(Área nº 2)
Marruecos(Área nº 4)
Argelia(Área nº 5)
Túnez(Área nº 6)
Figura 7-14: Topología de un sistema de cuatro áreas correspondiente al sistema interconectado
del norte de África en su conexión a la UCTE.
Tabla 7.9: Sistema de cuatro áreas: Potencias base de las áreas.
405002
80003
56005
20006
32004
3415001
Potencia base (MW)Área nº
405002
80003
56005
20006
32004
3415001
Potencia base (MW)Área nº
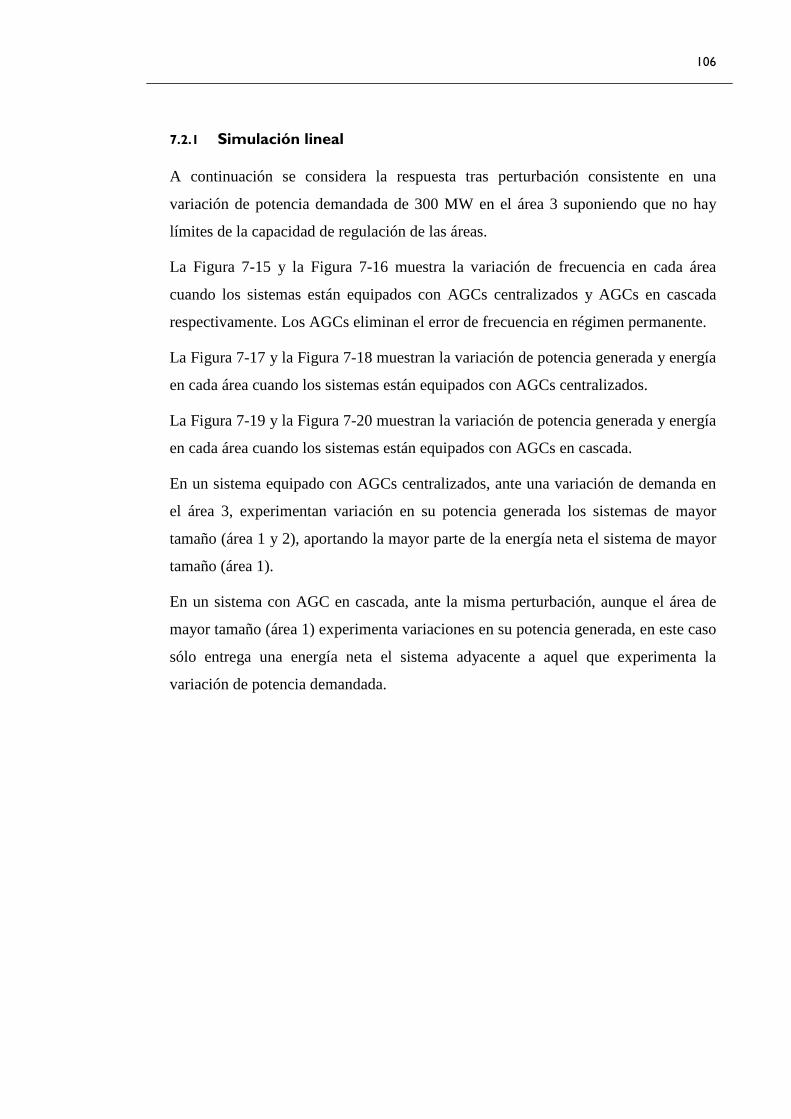
106
7.2.1 Simulación lineal
A continuación se considera la respuesta tras perturbación consistente en una
variación de potencia demandada de 300 MW en el área 3 suponiendo que no hay
límites de la capacidad de regulación de las áreas.
La Figura 7-15 y la Figura 7-16 muestra la variación de frecuencia en cada área
cuando los sistemas están equipados con AGCs centralizados y AGCs en cascada
respectivamente. Los AGCs eliminan el error de frecuencia en régimen permanente.
La Figura 7-17 y la Figura 7-18 muestran la variación de potencia generada y energía
en cada área cuando los sistemas están equipados con AGCs centralizados.
La Figura 7-19 y la Figura 7-20 muestran la variación de potencia generada y energía
en cada área cuando los sistemas están equipados con AGCs en cascada.
En un sistema equipado con AGCs centralizados, ante una variación de demanda en
el área 3, experimentan variación en su potencia generada los sistemas de mayor
tamaño (área 1 y 2), aportando la mayor parte de la energía neta el sistema de mayor
tamaño (área 1).
En un sistema con AGC en cascada, ante la misma perturbación, aunque el área de
mayor tamaño (área 1) experimenta variaciones en su potencia generada, en este caso
sólo entrega una energía neta el sistema adyacente a aquel que experimenta la
variación de potencia demandada.

107
0 100 200 300 400 500 600 700−5
−4
−3
−2
−1
0
1
2x 10
−4 AGCs centralizados
Tiempo (s)
Fre
cuen
cia
(pu)
área1 UCTEárea2 ESárea3 PTárea4 MAárea5 DZárea6 TN
Figura 7-15: Variación de frecuencia en cada área ante una variación de potencia demandada
en el área nº 3 cuando los sistemas están equipados con AGCs centralizados.
0 100 200 300 400 500 600 700−5
−4
−3
−2
−1
0
1
2x 10
−4 AGCs en cascada
Tiempo (s)
Fre
cuen
cia
(pu)
área1 UCTEárea2 ESárea3 PTárea4 MAárea5 DZárea6 TN
Figura 7-16: Variación de frecuencia en cada área ante una variación de potencia demandada
en el área nº 3 cuando los sistemas están equipados con AGCs en cascada.

108
0 100 200 300 400 500 600 700−0.5
0
0.5
1
1.5
2
2.5
3
3.5
4AGCs centralizados
Tiempo (s)
Pot
enci
a ge
nera
da (
pu)
área1 UCTEárea2 ESárea3 PTárea4 MAárea5 DZárea6 TN
Figura 7-17: Variación de potencia generada en cada área ante una variación de potencia
demandada en el área nº 3 cuando los sistemas están equipados con AGCs centralizados.
0 100 200 300 400 500 600 700−200
0
200
400
600
800
1000
1200
1400
1600
1800AGCs centralizados
Tiempo (s)
Ene
rgía
gen
erad
a (p
u)
área1 UCTEárea2 ESárea3 PTárea4 MAárea5 DZárea6 TN
Figura 7-18: Variación de energía en cada área ante una variación de potencia demandada en el
área nº 3 cuando los sistemas están equipados con AGCs centralizado.

109
0 100 200 300 400 500 600 700−0.5
0
0.5
1
1.5
2
2.5
3
3.5
4AGCs en cascada
Tiempo (s)
Pot
enci
a ge
nera
dore
s (p
u)
área1 UCTEárea2 ESárea3 PTárea4 MAárea5 DZárea6 TN
Figura 7-19: Variación de potencia generada en cada área ante una variación de potencia
demandada en el área nº 3 cuando los sistemas están equipados con AGCs en cascada.
0 100 200 300 400 500 600 700−200
0
200
400
600
800
1000
1200
1400
1600
1800AGCs en cascada
Tiempo (s)
Ene
rgía
gen
erad
ores
(pu
)
área1 UCTEárea2 ESárea3 PTárea4 MAárea5 DZárea6 TN
Figura 7-20: Variación de energía en cada área ante una variación de potencia demandada en el
área nº 3 cuando los sistemas están equipados con AGCs en cascada.
7.2.2 Simulación no-lineal
Finalmente se simula la misma perturbación considerando que cada área tiene una
reserva a subir y a bajar del 1.5% de su potencia (5122.50, 600, 127.5, 48, 84 y 30
MW).
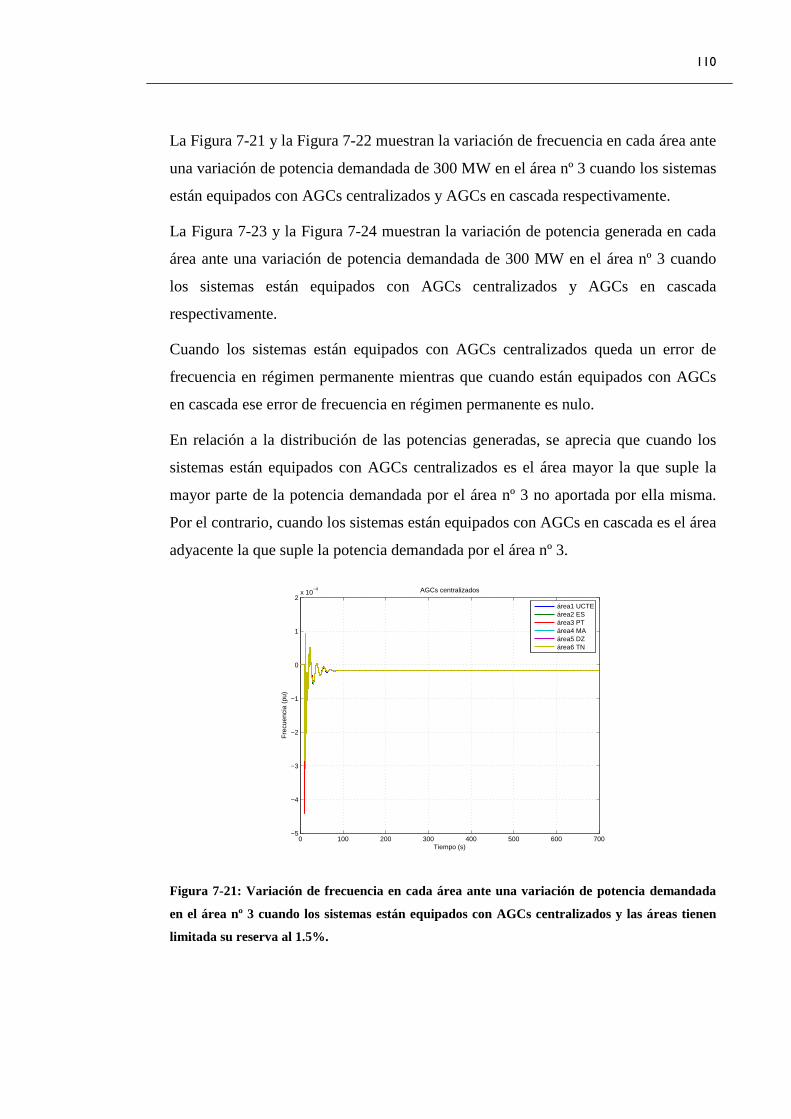
110
La Figura 7-21 y la Figura 7-22 muestran la variación de frecuencia en cada área ante
una variación de potencia demandada de 300 MW en el área nº 3 cuando los sistemas
están equipados con AGCs centralizados y AGCs en cascada respectivamente.
La Figura 7-23 y la Figura 7-24 muestran la variación de potencia generada en cada
área ante una variación de potencia demandada de 300 MW en el área nº 3 cuando
los sistemas están equipados con AGCs centralizados y AGCs en cascada
respectivamente.
Cuando los sistemas están equipados con AGCs centralizados queda un error de
frecuencia en régimen permanente mientras que cuando están equipados con AGCs
en cascada ese error de frecuencia en régimen permanente es nulo.
En relación a la distribución de las potencias generadas, se aprecia que cuando los
sistemas están equipados con AGCs centralizados es el área mayor la que suple la
mayor parte de la potencia demandada por el área nº 3 no aportada por ella misma.
Por el contrario, cuando los sistemas están equipados con AGCs en cascada es el área
adyacente la que suple la potencia demandada por el área nº 3.
0 100 200 300 400 500 600 700−5
−4
−3
−2
−1
0
1
2x 10
−4 AGCs centralizados
Tiempo (s)
Fre
cuen
cia
(pu)
área1 UCTEárea2 ESárea3 PTárea4 MAárea5 DZárea6 TN
Figura 7-21: Variación de frecuencia en cada área ante una variación de potencia demandada
en el área nº 3 cuando los sistemas están equipados con AGCs centralizados y las áreas tienen
limitada su reserva al 1.5%.

111
0 100 200 300 400 500 600 700−5
−4
−3
−2
−1
0
1
2x 10
−4 AGCs en cascada
Tiempo (s)
Fre
cuen
cia
(pu)
área1 UCTEárea2 ESárea3 PTárea4 MAárea5 DZárea6 TN
Figura 7-22: Variación de frecuencia en cada área ante una variación de potencia demandada
en el área nº 3 cuando los sistemas están equipados con AGCs en cascada y las áreas tienen
limitada su reserva al 1.5%.
0 100 200 300 400 500 600 700−0.5
0
0.5
1
1.5
2
2.5
3
3.5
4AGCs centralizados
Tiempo (s)
Pot
enci
a ge
nera
da (
pu)
área1 UCTEárea2 ESárea3 PTárea4 MAárea5 DZárea6 TN
Figura 7-23: Variación de potencia generada en cada área ante una variación de potencia
demandada en el área nº 3 cuando los sistemas están equipados con AGCs centralizados y las
áreas tienen limitada su reserva al 1.5%.
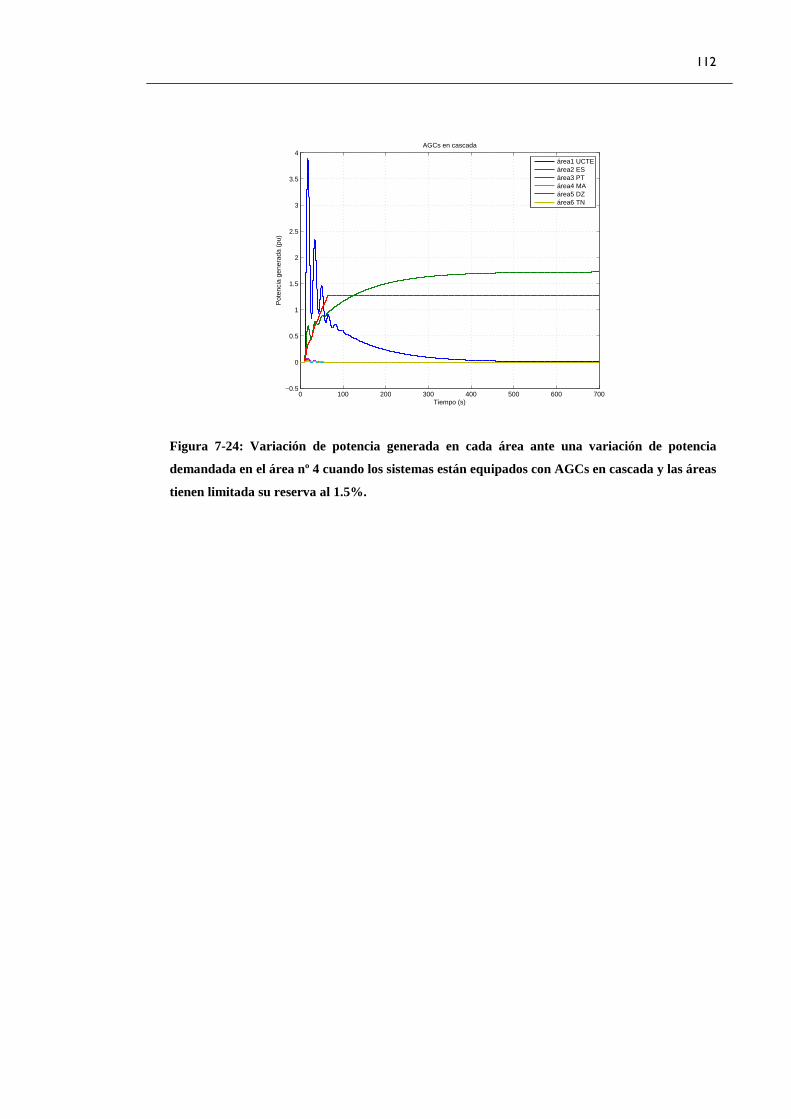
112
0 100 200 300 400 500 600 700−0.5
0
0.5
1
1.5
2
2.5
3
3.5
4AGCs en cascada
Tiempo (s)
Pot
enci
a ge
nera
da (
pu)
área1 UCTEárea2 ESárea3 PTárea4 MAárea5 DZárea6 TN
Figura 7-24: Variación de potencia generada en cada área ante una variación de potencia
demandada en el área nº 4 cuando los sistemas están equipados con AGCs en cascada y las áreas
tienen limitada su reserva al 1.5%.

113
8 CONCLUSIONES
Este proyecto ha estudiado dos configuraciones de los AGCs: centralizados y en
cascada.
En los AGCs centralizados se controla la frecuencia y el intercambio neto con todas
las áreas vecinas. En los AGCs en cascada se controla la frecuencia y el intercambio
con uno de los sistemas vecinos, típicamente el más grande. El AGC del sistema
español está en cascada con el sistema francés: sólo se controla el intercambio con
Francia; Portugal y Marruecos controlan el intercambio con España.
El estudio de los AGCs centralizados ha estado motivado por el plan de instalar un
AGC en los países del norte de África y en el interés por reevaluar la configuración
del AGC del sistema español.
El estudio de los AGCs centralizados y en cascada ha atendido a una triple vertiente:
1. Estudio de la estabilidad.
2. Estudio del régimen permanente tras una perturbación.
3. Estudio de la respuesta transitoria tras grandes y pequeñas perturbaciones.
Para realizar dichos estudios se han desarrollado modelos y aplicado métodos
apropiados.
Las conclusiones que se derivan del estudio son:
• Los AGCs centralizados y en cascada son sistemas estables.
• Los AGCs centralizados y en cascada corrigen el error de frecuencia y de la
potencia de intercambio en régimen permanente.
• En sistemas equipados con AGCs centralizados y con suficiente reserva en
todas las áreas, ante una variación de demanda en el sistema más alejado del
gran sistema que sirve de apoyo, sólo experimentan variación en su potencia
generada el sistema donde se experimenta la variación de demanda y en el
gran sistema.

114
• En sistemas equipados con AGC en cascada y con suficiente reserva, ante la
misma perturbación, todos los sistemas experimentan variaciones en su
potencia generada. Sin embargo, en este caso sólo entrega una energía neta el
sistema adyacente a aquel que experimenta la variación de potencia
demandada.
• En sistemas equipados con AGCs centralizados y con reserva limitada queda
un error de frecuencia en régimen permanente mientras que cuando están
equipados con AGCs en cascada ese error de frecuencia en régimen
permanente es nulo. En relación a la distribución de las potencias generadas,
se aprecia que cuando los sistemas están equipados con AGCs centralizados es
el área mayor la que suple la potencia demandada por el área donde se
experimenta la perturbación no aportada por ella misma. Por el contrario,
cuando los sistemas están equipados con AGCs en cascada es el área vecina la
que suple la potencia demandada por el área donde se experimenta la
perturbación.
Algunos resultados de este proyecto están recogidos en la ponencia:
A. Fernández y L. Rouco, “Comparación de la Respuesta de AGCs Centralizados y
en Cascada”, X Congreso Luso Español de Ingeniería Eléctrica que se celebrará en
Funchal (Madeira) entre los días 5 y 7 de julio de 2007.

115
9 REFERENCIAS BIBLIOGRÁFICAS
[1] “Arab Union of Producers, Transporters and Distributors of Electricity”,
http://www.auptde.org.
[2] V. García-Echave, L. Paradinas, J.M. Ferrer, F. Las Heras y J.J. Gonzales,
"Regulation System for the Coordination of the Multiple AGC's of the Spanish
Peninsular Utilities as a Unique Control Area. Description and Field
Experiences" Cigré Session, Paris, 1984.
[3] A. Gómez Expósito (Editor), “Análisis y operación de sistemas de energía
eléctrica”, Mc Graw Hill, Madrid, 2002.
[4] P. Kundur, “Power System Stability and Control”, Mc Graw Hill, New York
1994.
[5] I. J. Pérez-Arriaga, G. C. Verghese, F. C. Schweppe, ``Selective Modal
Analysis with Applications to Electric Power Systems. Part I: Heuristic
Introduction. Part II: The Dynamic Stability Problem''. IEEE Transactions on
Power Apparatus and Systems, Vol. PAS-101, No. 9, September 1982, pp.
3117-3134.
[6] J. M. Rodríguez, C. Puentes, V. González, L. Ballester y G. de Montravel, “La
Extensión de la Zona Síncrona de la UCTE. El Caso Interconexión Túnez-
Libia”, XI Encuentro Regional Iberoamericano de Cigré, Hernandarias,
Paragüay, 22-26 mayo 2005.
[7] G.J. Rogers, “Power System Oscillations”, Kluwer Academia Publishers.
[8] “Union for the Co-ordination of Transmission of Electricity (UCTE)”,
www.ucte.org.
[9] Union for the Co-ordination of Transmission of Electricity UCTE, UCTE
Operational Handbook, disponible en www.ucte.org, 2004.

116
10 ANEXO

1
Comparación de la Respuesta de AGCs Centralizados y en Cascada
A. Fernández(1) y L. Rouco(1)
(1) Universidad Pontificia Comillas
E.T.S. de Ingeniería (ICAI) Calle de Alberto Aguilera nº 23, 28015 Madrid, España, [email protected]
Resumen En los AGCs centralizados el control frecuencia-potencia secundario controla la frecuencia y el intercambio neto con todos los sistemas vecinos. En sistemas eléctricos de configuración radial, los denominados AGCs en cascada controlan la frecuencia y el intercambio con el sistema que lo conecta al sistema de mayor tamaño. Este artículo compara la respuesta de los AGCs centralizados y en cascada.
Palabras clave: AGCs centralizados, AGCs en cascada, estabilidad, simulación. 1 Introducción La misión del control frecuencia-potencia en los sistemas interconectados es el mantenimiento de la frecuencia y de los intercambios con los sistemas vecinos ante variaciones de la generación o la demanda [1]. El control frecuencia-potencia se realiza por medio de dos lazos de control anidados que actúan en diferentes escalas de tiempo: el control primario realizado por los reguladores carga-velocidad de los grupos generadores y el control secundario realizado por el control automático de generación (Automatic Generation Control, AGC, en la literatura técnica en inglés). El control frecuencia-potencia secundario tiene por misión eliminar los errores de frecuencia y de intercambio que quedan en el sistema tras la actuación del control frecuencia-potencia primario. Cuando un sistema está interconectado con varios sistemas, el control frecuencia-potencia secundario controla el error del intercambio neto con todos los sistemas. Sin embargo, cuando la conexión de los sistemas es radial y el tamaño es muy diferente, entonces el control frecuencia-potencia secundario puede controlar sólo el intercambio con el sistema más grande. Un ejemplo, puede ayudar a comprender mejor este caso. El sistema peninsular español está conectado con Francia, Portugal y Marruecos. En la configuración estándar del AGC, que denominaremos centralizado en este artículo, el AGC del sistema español controlaría el intercambio neto con Francia, Portugal y Marruecos [2]. Sin embargo, debido al tamaño de los sistemas portugués y marroquí y a que sólo el sistema español está conectado con el sistema francés, el AGC español sólo controla el intercambio con Francia. Por otra parte, los AGC portugués y marroquí sólo controlan sus respectivos intercambios con el sistema español (las desviaciones de los intercambios de los sistemas portugués y marroquí con el sistema español son perturbaciones en la demanda del sistema español). Además, el intercambio entre los sistemas español y francés sólo es controlado por el AGC español (la desviación del intercambio entre el sistema español y francés es una perturbación en la demanda del sistema francés). Esta configuración de los AGC se denomina en cascada.
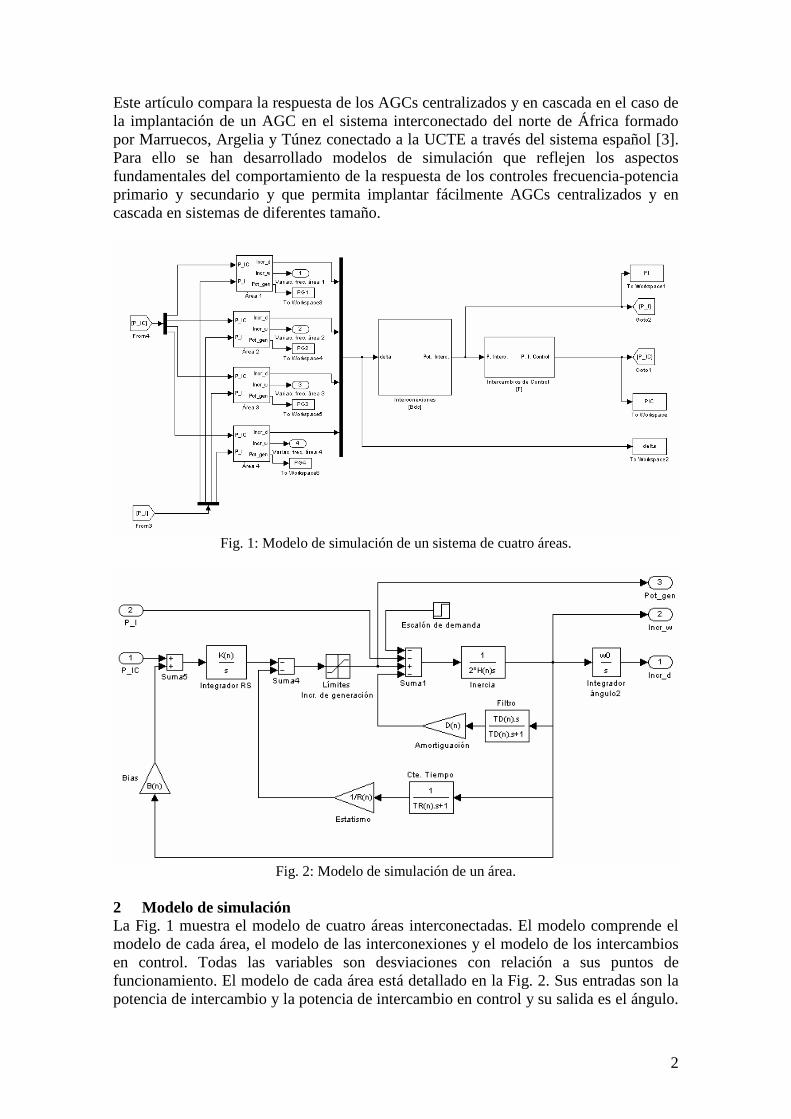
2
Este artículo compara la respuesta de los AGCs centralizados y en cascada en el caso de la implantación de un AGC en el sistema interconectado del norte de África formado por Marruecos, Argelia y Túnez conectado a la UCTE a través del sistema español [3]. Para ello se han desarrollado modelos de simulación que reflejen los aspectos fundamentales del comportamiento de la respuesta de los controles frecuencia-potencia primario y secundario y que permita implantar fácilmente AGCs centralizados y en cascada en sistemas de diferentes tamaño.
Fig. 1: Modelo de simulación de un sistema de cuatro áreas.
Fig. 2: Modelo de simulación de un área.
2 Modelo de simulación La Fig. 1 muestra el modelo de cuatro áreas interconectadas. El modelo comprende el modelo de cada área, el modelo de las interconexiones y el modelo de los intercambios en control. Todas las variables son desviaciones con relación a sus puntos de funcionamiento. El modelo de cada área está detallado en la Fig. 2. Sus entradas son la potencia de intercambio y la potencia de intercambio en control y su salida es el ángulo.

3
Debe notarse que cuando se considera un AGC centralizado las potencias de intercambio y de intercambio en control coinciden. Sin embargo, cuando se considera un AGC en cascada las potencias de intercambio y de intercambio en control pueden no coincidir. El modelo de cada área comprende: el modelo de la dinámica del rotor de los generadores del área (supone frecuencia uniforme en cada área), el modelo del amortiguamiento de las oscilaciones mecánicas entre áreas (no confundir con la variación de la demanda con la frecuencia), el modelo de la regulación primaria (caracterizado por un sistema de primer orden cuya ganancia es el inverso del estatismo permanente y cuya constante de tiempo es de 10 segundos) y el modelo de la regulación secundaria (cuya entrada es el error de control de área, Area Control Error, ACE, en la literatura técnica en inglés, gobernada por un integrador que en lazo cerrado dé lugar a un sistema de primer orden de constante de tiempo 100 segundos). El modelo de amortiguamiento de las oscilaciones mecánicas entre las áreas representa de forma aproximada la contribución de los controles de la excitación de los generadores (estabilizadores del sistema de potencia) al amortiguamiento de las citadas oscilaciones. Se ha representado el filtro paso alto de los estabilizadores del sistema de potencia que logra que estos dispositivos no actúen en caso de un error en régimen permanente de la frecuencia del área (velocidad de los generadores del área). El modelo de las interconexiones está dado por las ecuaciones linealizadas de la red eléctrica que relaciona las variaciones de los ángulos internos de los generadores con las potencias activas suministradas por los generadores. Estas ecuaciones se pueden aproximar a su vez a las del flujo de cargas en corriente continua de la red eléctrica reducido a los nudos internos de los generadores.
UCTE(Área nº 1)
Marruecos(Área nº 2)
Argelia(Área nº 3)
Túnez(Área nº 4)
UCTE(Área nº 1)
Marruecos(Área nº 2)
Argelia(Área nº 3)
Túnez(Área nº 4)
Fig. 3: Topología de un sistema de cuatro áreas correspondiente al sistema interconectado del
norte de África. 3 Resultados Se estudia el comportamiento del sistema de cuatro áreas correspondiente al sistema interconectado del norte de África en su conexión a la UCTE (la Fig. 3 muestra su topología) cuando cada sistema está equipado con AGCs centralizados o con AGCs en cascada. Cuando cada sistema está equipado con AGCs en cascada, todos los AGC controlan frecuencia y además el AGC del área 2 controla el intercambio entre las áreas 1 y 2, el AGC del área 3 controla el intercambio entre las áreas 2 y 3 y el AGC del área 4 controla el intercambio entre las áreas 3 y 4. Las potencias base de cada área son respectivamente 390000, 3200, 5600 y 2000 MW (ver [2] y [4]).

4
El estudio del comportamiento del citado sistema analiza tres aspectos: la estabilidad del modelo lineal y las respuestas de los modelos lineal y no-lineal. La Tabla I compara los autovalores de los modelos lineales del sistema de cuatro áreas con AGCs centralizados y en cascada. Se comprueba en primer término que tanto los AGCs centralizados como los AGCs en cascada son sistemas estables. Mediante los factores de participación se han obtenido las relaciones entre los autovalores y los componentes del modelo descritos por sus variables de estado. Se aprecian autovalores que corresponden a la dinámica de los rotores (oscilaciones electromecánicas), a la regulación primaria, a la regulación secundaria y a los filtros de los amortiguadores de oscilaciones. Se aprecia que de una configuración a otra los autovalores asociados a la regulación secundaria experimentan una modificación: se pasa de cuatro autovalores reales en el caso de AGCs centralizados a dos autovalores reales y una pareja de autovalores complejos conjugados en el caso de AGCs en cascada. TABLA I: COMPARACIÓN DE LOS AUTOVALORES DEL MODELO LINEAL DEL SISTEMA DE CUATRO
ÁREAS CON AGCS CENTRALIZADOS Y EN CASCADA.
Real Imaginaria Real Imaginaria-2,8595 17,2000 -2,8618 17,2010-2,7107 13,6370 -2,7124 13,6370-0,5801 3,3566 -0,5764 3,3571-0,0540 0,3864 -0,0540 0,3864
-0,0104 0,0019-11,2330 -11,2330-10,0810 -10,0820-5,8188 -5,8183-5,5211 -5,5207-0,0999 -0,0999-0,0998 -0,0999-0,0985 -0,0984-0,0100 -0,0091-0,0100 -0,0087-0,0100 0,0000-0,00910,0000
AGC en cascadaAGCs centralizados
Com
plej
os
Amortiguadores de oscilaciones
RotoresRegulación primariaRegulación secundaria
Rea
les
Variables de mayor participación
A continuación se considera la respuesta tras perturbación consistente en una variación de potencia demandada de 100 MW en el área 4 suponiendo que no hay límites de la capacidad de regulación de las áreas. La Fig. 4 y la Fig. 5 muestran la variación de potencia generada y energía en cada área cuando los sistemas están equipados con AGCs centralizados y AGCs en cascada respectivamente. En un sistema equipado con AGCs centralizados, ante una variación de demanda en el sistema más alejado (área 4) del gran sistema que sirve de apoyo (área 1) sólo experimentan variación en su potencia generada el sistema donde se experimenta la variación de demanda y en el gran sistema. Lógicamente esa potencia de apoyo del gran sistema al sistema que experimenta la variación de demanda pasa por todas las

5
interconexiones. En un sistema con AGC en cascada, ante la misma perturbación, todos los sistemas experimentan variaciones en su potencia generada. Sin embargo, en este caso sólo entrega una energía neta el sistema adyacente a aquel que experimenta la variación de potencia demandada.
0 100 200 300 400 500 600 700-0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6Potencia generadores vs. tiempo
Tiempo (s)
Pot
enci
a ge
nera
dore
s (p
u)
área 1
área 2área 3
área 4
0 100 200 300 400 500 600 700-100
0
100
200
300
400
500
600Energía generadores vs. tiempo
Tiempo (s)
Ene
rgía
gen
erad
ores
(pu
)
área 1
área 2área 3
área 4
Fig. 4: Variación de potencia generada y energía en cada área ante una variación de potencia
demandada en el área nº 4 cuando los sistemas están equipados con AGCs centralizados.
0 100 200 300 400 500 600 700-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6Potencia generadores vs. tiempo
Tiempo (s)
Pot
enci
a ge
nera
dore
s (p
u)
área 1
área 2área 3
área 4
0 100 200 300 400 500 600 700-100
0
100
200
300
400
500
600Energía generadores vs. tiempo
Tiempo (s)
Ene
rgía
gen
erad
ores
(pu
)
área 1
área 2área 3
área 4
Fig. 5: Variación de potencia generada y energía en cada área ante una variación de potencia
demandada en el área nº 4 cuando los sistemas están equipados con AGCs en cascada. Finalmente se simula la misma perturbación considerando que cada área tiene una reserva a subir y a bajar del 1.5% de su potencia (5850, 48, 84 y 30 MW). La Fig. 6 y la Fig. 7 muestran la variación de frecuencia y la variación de potencia generada en cada área ante una variación de potencia demandada de 100 MW en el área nº 4 cuando los sistemas están equipados con AGCs centralizados y AGCs en cascada respectivamente. Cuando los sistemas están equipados con AGCs centralizados queda un error de frecuencia en régimen permanente mientras que cuando están equipados con AGCs en cascada ese error de frecuencia en régimen permanente es nulo. En relación a la distribución de las potencias generadas, se aprecia que cuando los sistemas están equipados con AGCs centralizados es el área mayor la que suple la potencia demandada por el área nº 4 no aportada por ella misma. Por el contrario, cuando los sistemas están equipados con AGCs en cascada es el área vecina la que suple la potencia demandada por el área nº 4. 4 Conclusiones Este artículo compara el comportamiento de sistemas eléctricos con AGCs centralizados y en cascada. Para ello se ha desarrollado un modelo apropiado de simulación que

6
refleja los aspectos fundamentales de su comportamiento. Se ha comprobado que tanto los sistemas con AGCs centralizados como con AGCs en cascada son estables. También se ha analizado las respuestas lineal y no lineal. La respuesta no-lineal aparece cuando se tiene en cuenta la limitación de reserva en cada área. Ambos esquemas (AGCs centralizados y en cascada) ofrecen ventajas e inconvenientes. En caso de que se preste atención a la respuesta lineal, los AGCs centralizados son superiores. Por el contrario, si presta atención a la respuesta no lineal, los AGCs en cascada son superiores.
0 100 200 300 400 500 600-4
-3
-2
-1
0
1
2x 10
-4 Frecuencia vs. tiempo
Tiempo (s)
Fre
cuen
cia
(pu)
área 1
área 2área 3
área 4
0 100 200 300 400 500 600-0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6Potencia generadores vs. tiempo
Tiempo (s)
Pot
enci
a ge
nera
dore
s (p
u)
área 1
área 2área 3
área 4
Fig. 6: Variación de frecuencia y potencia generada en cada área ante una variación de potencia demandada en el área nº 4 cuando los sistemas están equipados con AGCs centralizados y las
áreas tienen limitada su reserva al 1.5%.
0 100 200 300 400 500 600-4
-3
-2
-1
0
1
2x 10
-4 Frecuencia vs. tiempo
Tiempo (s)
Fre
cuen
cia
(pu)
área 1
área 2área 3
área 4
0 100 200 300 400 500 600-0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6Potencia generadores vs. tiempo
Tiempo (s)
Pot
enci
a ge
nera
dore
s (p
u)
área 1
área 2área 3
área 4
Fig. 7: Variación de frecuencia y potencia generada en cada área ante una variación de potencia
demandada en el área nº 4 cuando los sistemas están equipados con AGCs en cascada y las áreas tienen limitada su reserva al 1.5%.
Referencias [1] P. Kundur, “Power System Stability and Control”, Mc Graw Hill, 1994. [2] “Union for the Co-ordination of Transmission of Electricity (UCTE)”,
www.ucte.org. [3] J. M. Rodríguez, C. Puentes, V. González, L. Ballester y G. de Montravel, “La
Extensión de la Zona Síncrona de la UCTE. El Caso Interconexión Túnez-Libia”, XI Encuentro Regional Iberoamericano de Cigré, Hernandarias, Paragüay, 22-26 mayo 2005.
[4] “Arab Union of Producers, Transporters and Distributors of Electricity”, http://www.auptde.org.