Analis is Tensional
22
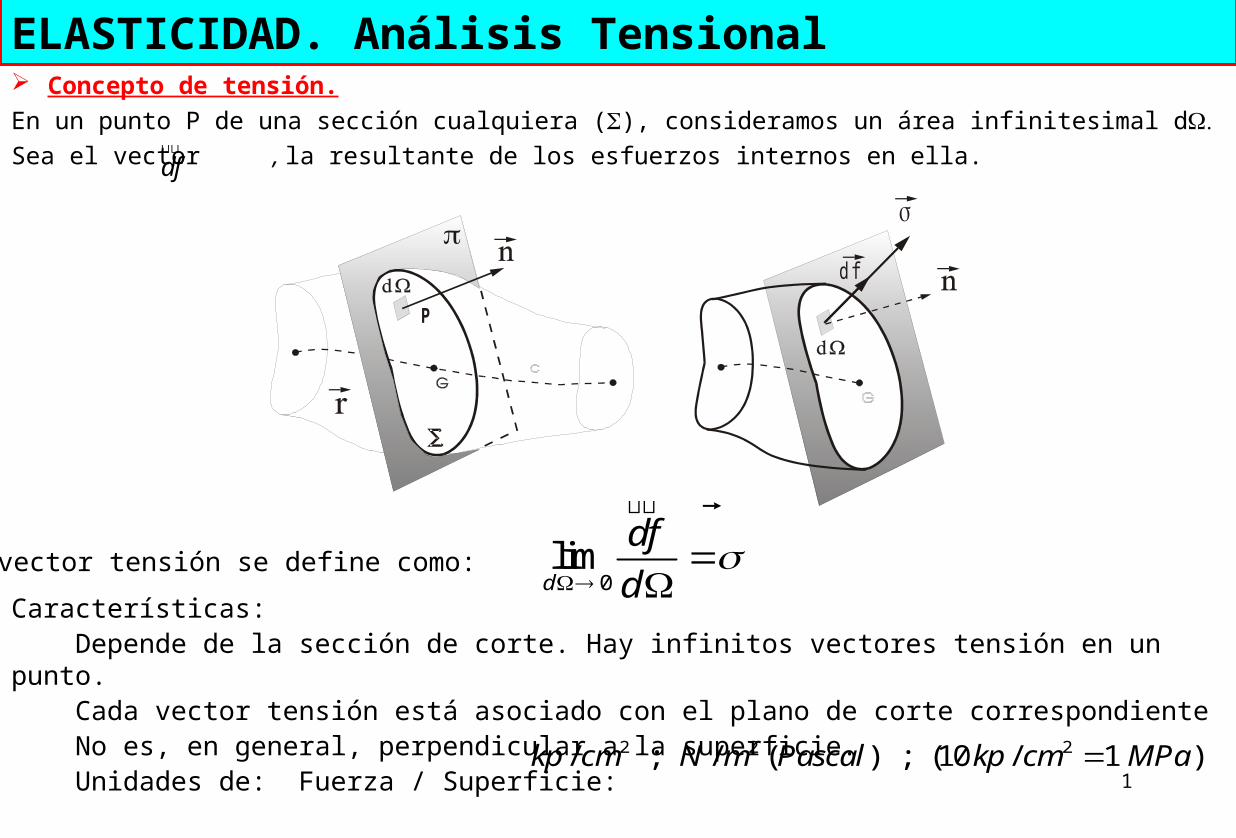
1 ELASTICIDAD. Análisis Tensional Concepto de tensión. En un punto P de una sección cualquiera (), consideramos un área infinitesimal d Sea el vector , la resultante de los esfuerzos internos en ella. df P Características: Depende de la sección de corte. Hay infinitos vectores tensión en un punto. Cada vector tensión está asociado con el plano de corte correspondiente No es, en general, perpendicular a la superficie. Unidades de: Fuerza / Superficie: 2 2 2 / ; / ( );(10 / 1 ) kp cm N m Pascal kp cm MPa df 0 lim d df d vector tensión se define como:
-
Upload
pc-carolina -
Category
Documents
-
view
259 -
download
2
description
analisiis
Transcript of Analis is Tensional
1
ELASTICIDAD. Análisis Tensional Concepto de tensión.
En un punto P de una sección cualquiera (), consideramos un área infinitesimal dSea el vector , la resultante de los esfuerzos internos en ella.
d f
P
Características: Depende de la sección de corte. Hay infinitos vectores tensión en un punto. Cada vector tensión está asociado con el plano de corte correspondiente No es, en general, perpendicular a la superficie. Unidades de: Fuerza / Superficie: 2 2 2/ ; / ( ) ; (10 / 1 )kp cm N m Pascal kp cm MPa
df��������������
0lim
d
df
d
����������������������������
El vector tensión se define como:
2
ELASTICIDAD. Análisis Tensional
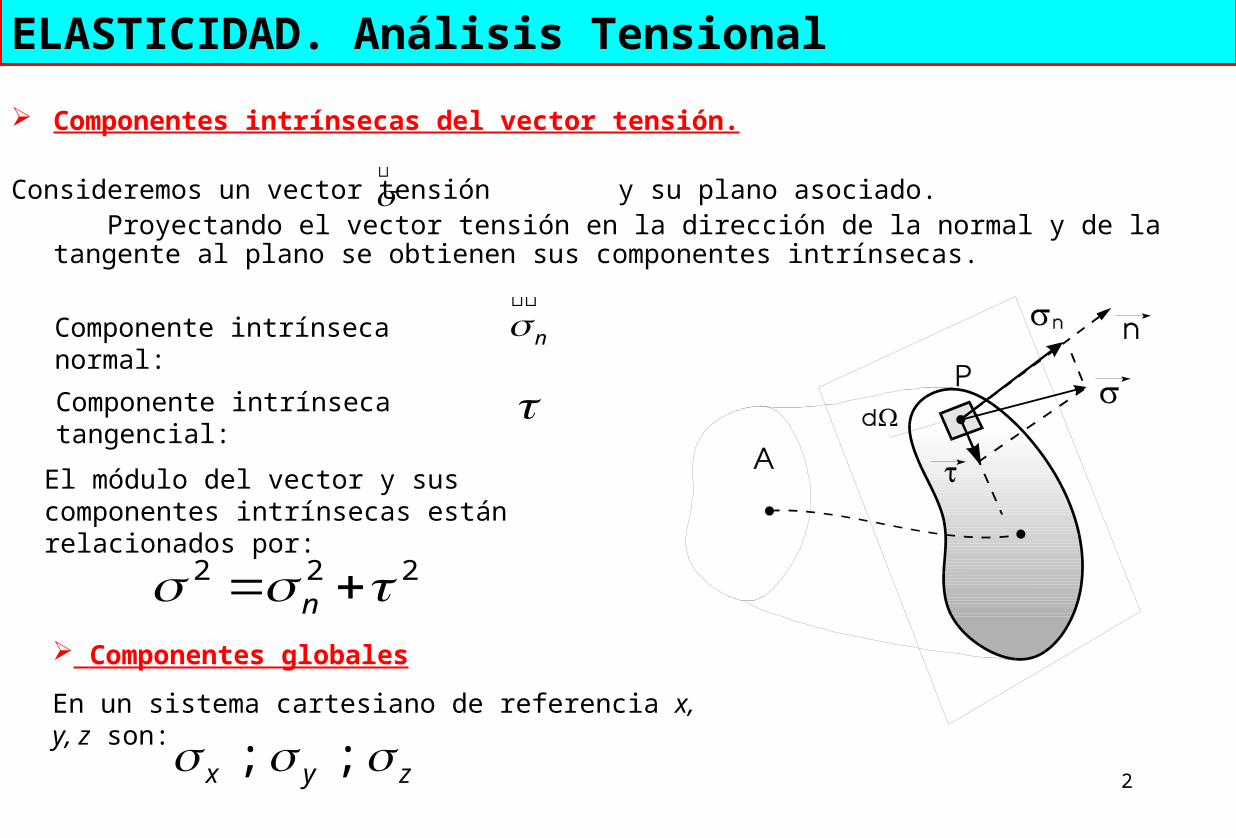
Componentes intrínsecas del vector tensión.
Consideremos un vector tensión y su plano asociado. Proyectando el vector tensión en la dirección de la normal y de la tangente al plano se obtienen sus
componentes intrínsecas.
��������������
El módulo del vector y sus componentes intrínsecas están relacionados por:
2 2 2n
Componentes globales
En un sistema cartesiano de referencia x, y, z son:
; ;x y z
n��������������
Componente intrínseca normal:
Componente intrínseca tangencial:

3
ELASTICIDAD. Análisis Tensional
Análisis de los vectores tensión en un punto. MATRIZ DE TENSIONES (I)
Aislamos un punto interior de un sólido elástico mediante un entorno cúbico diferencial (dx,dy,dz) y consideramos los vectores tensión que actúan en sus caras, proyectándolos en las direcciones x,y,z paralelas a las caras.
Nomenclatura:
Tensiones normales:
i= eje paralelo a la tensión
Tensiones cortantes:
i = dirección normal al plano
j = dirección paralela a la tensión
ni
ij

4
ELASTICIDAD. Análisis Tensional Análisis de los vectores tensión en un punto. MATRIZ DE TENSIONES (II)
El proceso anterior conduce al siguiente esquema de tensiones en el entorno del punto P:
Hipótesis:
Tensiones uniformes en las caras.
No hay, o son infinitésimos de 2º orden, las fuerzas de volumen.
Criterio de signos:
5
ELASTICIDAD. Análisis Tensional
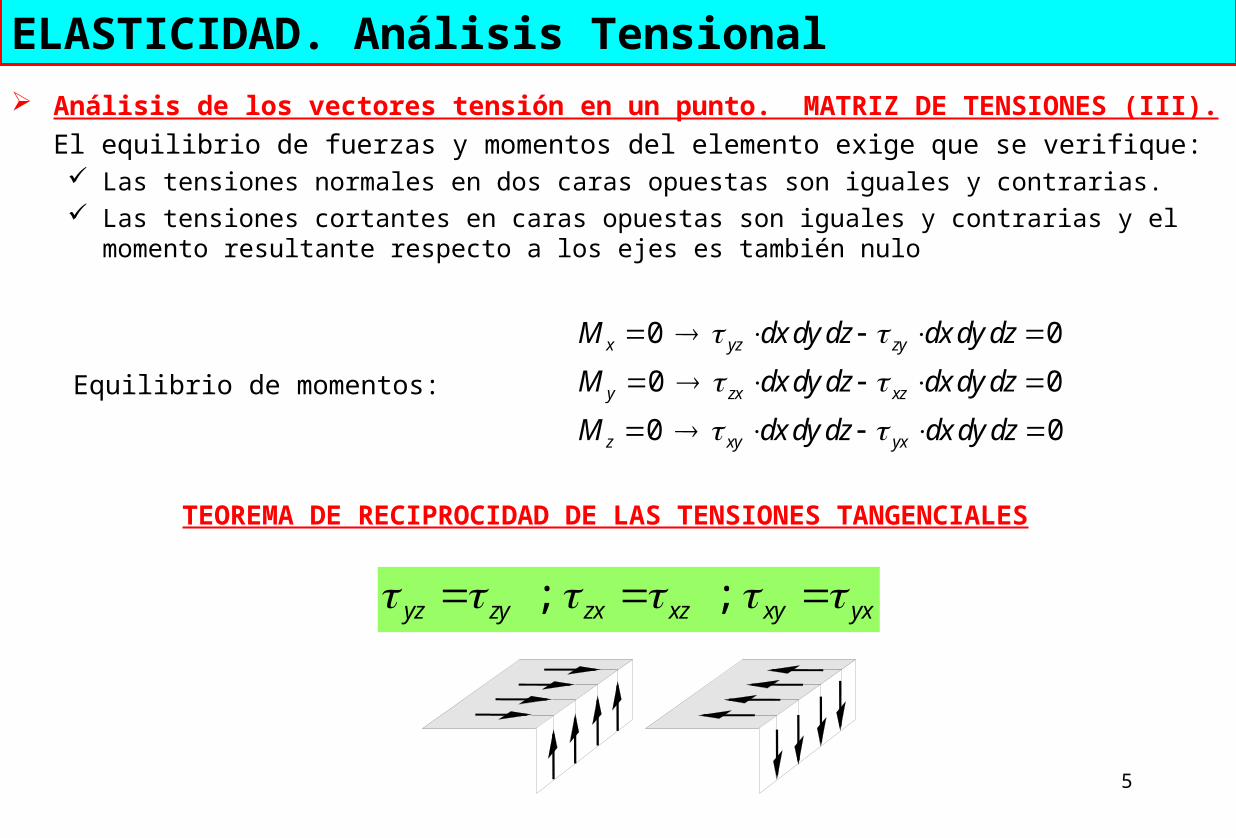
Análisis de los vectores tensión en un punto. MATRIZ DE TENSIONES (III).
El equilibrio de fuerzas y momentos del elemento exige que se verifique: Las tensiones normales en dos caras opuestas son iguales y contrarias. Las tensiones cortantes en caras opuestas son iguales y contrarias y el momento resultante respecto a los ejes
es también nulo
0 0
0 0
0 0
x yz zy
y zx xz
z xy yx
M dx dy dz dx dy dz
M dx dy dz dx dy dz
M dx dy dz dx dy dz
Equilibrio de momentos:
TEOREMA DE RECIPROCIDAD DE LAS TENSIONES TANGENCIALES
; ;yz zy zx xz xy yx
6
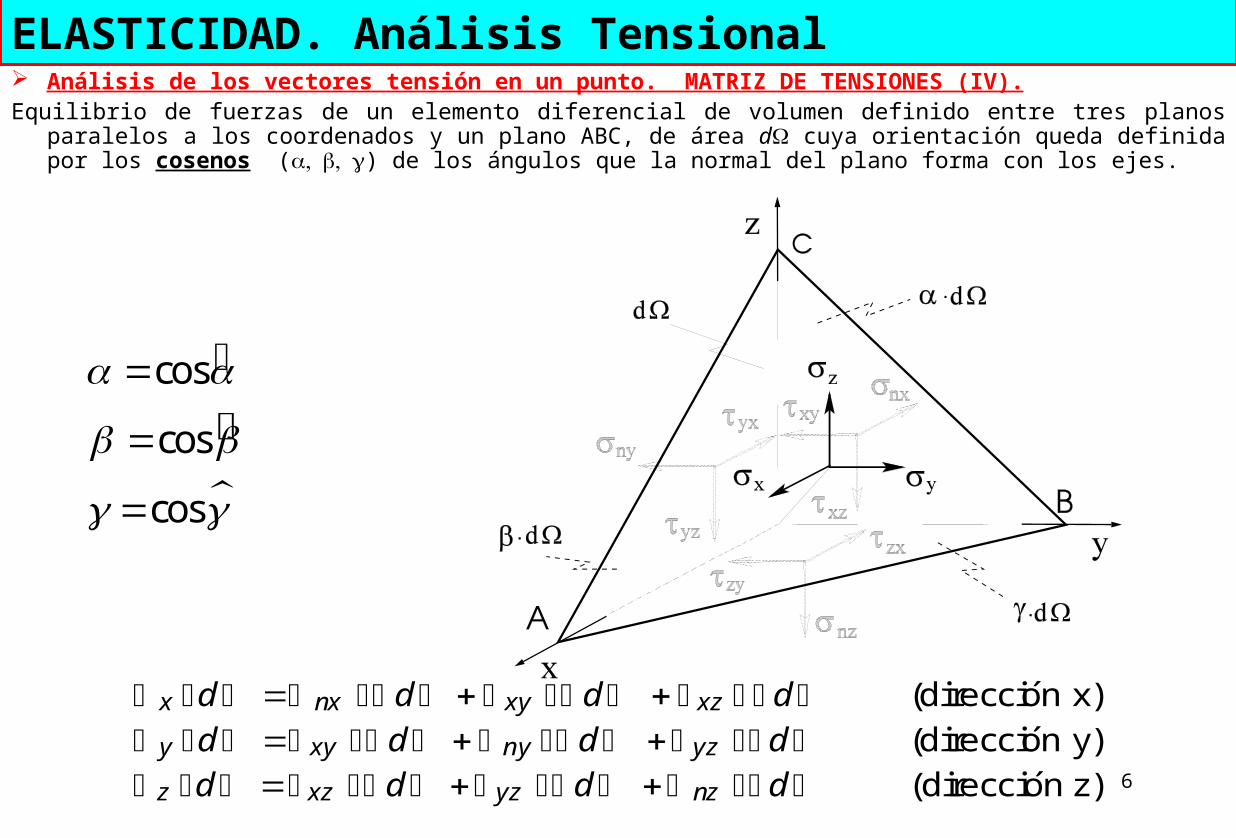
ELASTICIDAD. Análisis Tensional Análisis de los vectores tensión en un punto. MATRIZ DE TENSIONES (IV).Equilibrio de fuerzas de un elemento diferencial de volumen definido entre tres planos paralelos a los
coordenados y un plano ABC, de área d cuya orientación queda definida por los cosenos () de los ángulos que la normal del plano forma con los ejes.
x d nx d xy d xz d (direccion x) y d xy d ny d yz d (direccion y) z d xz d yz d nz d (direccion z)
cos
cos
cos

7
ELASTICIDAD. Análisis Tensional
Análisis de los vectores tensión en un punto. MATRIZ DE TENSIONES (V).
Simplificando y escribiéndolas en forma matricial se obtiene:
x
y
z
n x xy x z
x y n y y z
x z y z n z
En notación matricial:
[ ] [T ]
[ u ]
MATRIZ DE TENSIONES
[T ] n x x y x z
x y n y y z
x z y z n z
Sistema de ecuaciones
Propiedades:
Simétrica
Depende solo de 6 parámetros
Permite calcular el vector tensión, conociendo la orientación del plano ()

8
ELASTICIDAD. Análisis Tensional
Tensiones y Direcciones Principales (I).
Buscamos un plano cuyo vector tensión asociado sea perpendicular a ese plano (= 0).
El vector tensión debe tener la dirección de la normal del plano
0T u u T I u
El desarrollo conduce al sistema lineal homogéneo.
( nx ) xy xz 0 xy ny yz 0 xz yz ( nz ) 0
Condición de compatibilidad:( nx ) xy xz
xy ny yz xz yz ( nz )
0
El desarrollo de este determinante da una ecuación de grado 3 en llamada ECUACIÓN CARACTERÍSTICA, cuyas raíces (1, 2, 3) se denominan TENSIONES PRINCIPALES y representan los módulos de tres vectores tensión que cumplen lo indicado.
9
ELASTICIDAD. Análisis Tensional
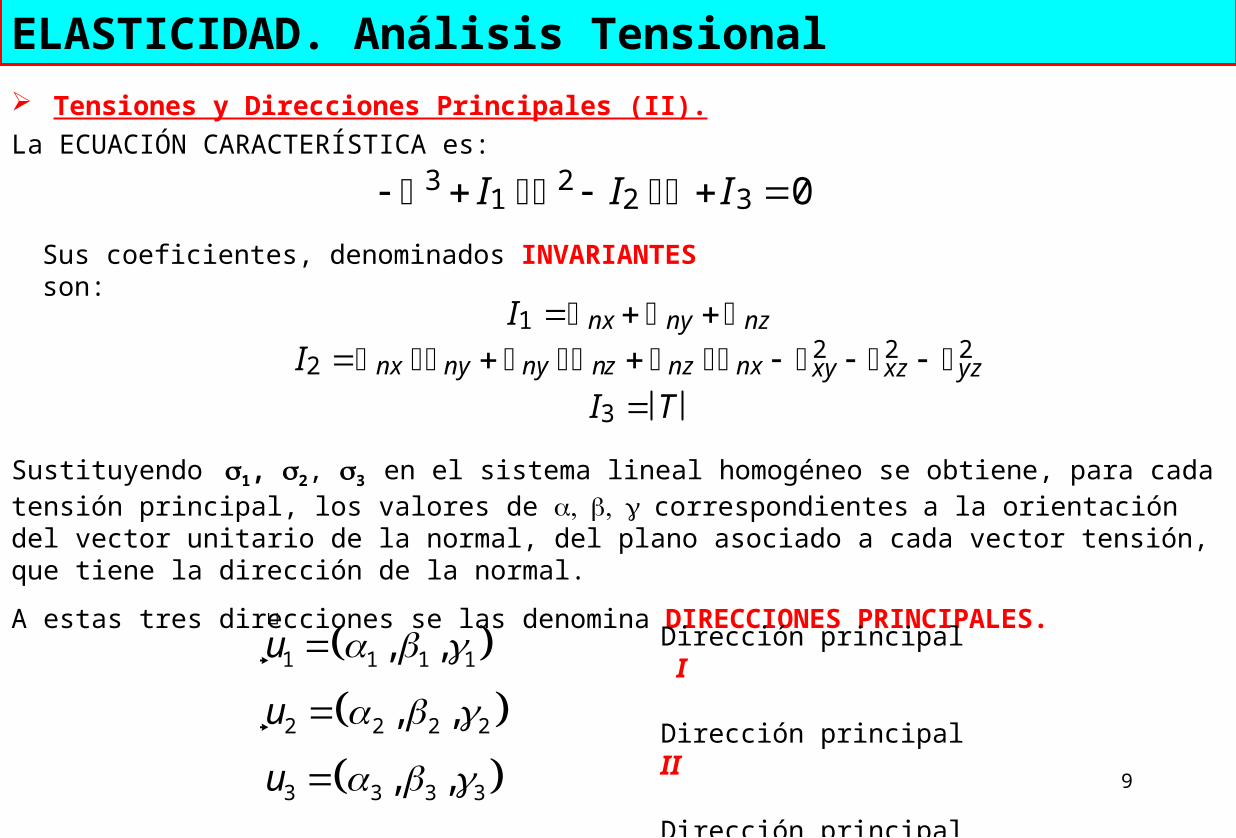
Tensiones y Direcciones Principales (II).
La ECUACIÓN CARACTERÍSTICA es:
3 I1 2 I2 I30
Sus coeficientes, denominados INVARIANTES son:
I1 nx ny nzI2 nx ny ny nz nz nx xy2 xz2 yz2
I3 T
Sustituyendo 1, 2, 3 en el sistema lineal homogéneo se obtiene, para cada tensión principal, los valores de correspondientesa la orientación del vector unitario de la normal, del plano asociado a cada vector tensión, que tiene la dirección de la normal.
A estas tres direcciones se las denomina DIRECCIONES PRINCIPALES.
1 1 1 1
2 2 2 2
3 3 3 3
, ,
, ,
, ,
u
u
u
��������������
��������������
��������������
Dirección principal I
Dirección principal II
Dirección principal III
10
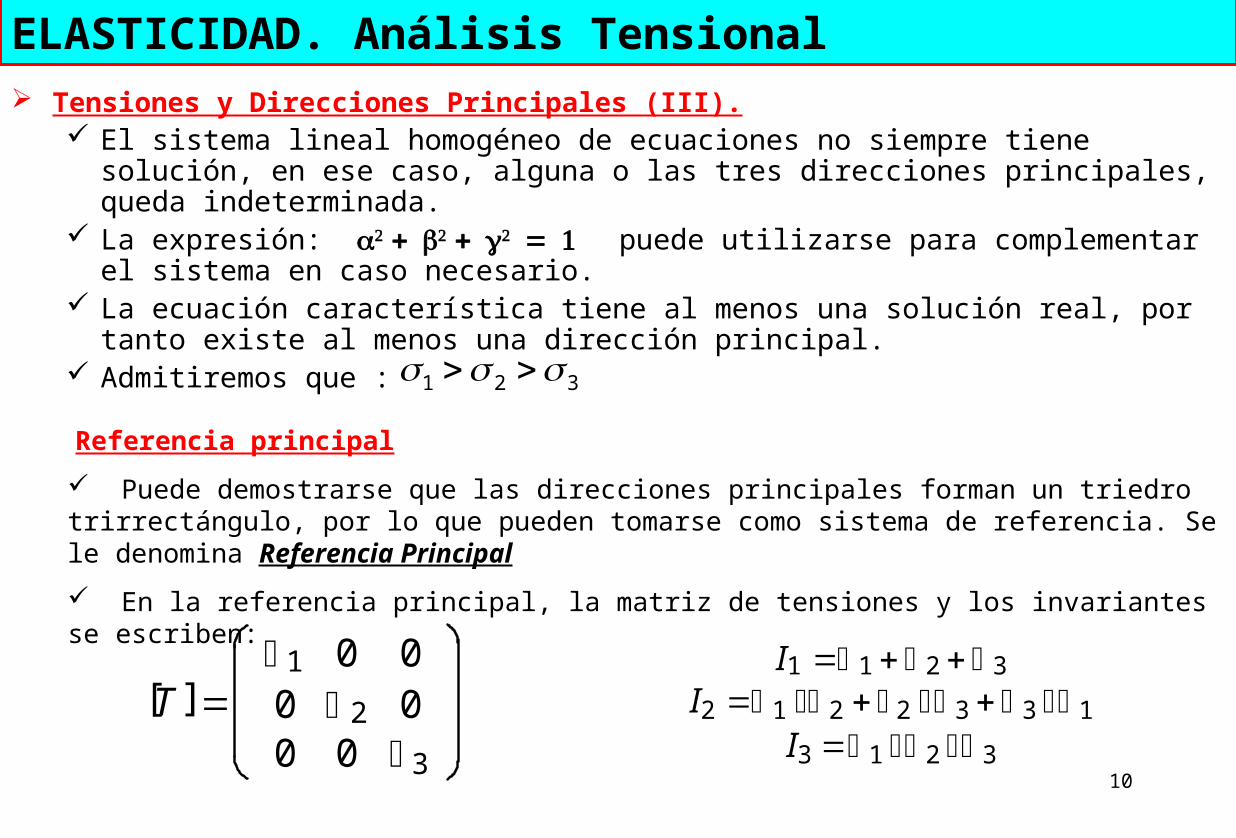
ELASTICIDAD. Análisis Tensional Tensiones y Direcciones Principales (III).
El sistema lineal homogéneo de ecuaciones no siempre tiene solución, en ese caso, alguna o las tres direcciones principales, queda indeterminada.
La expresión: puede utilizarse para complementar el sistema en caso necesario.
La ecuación característica tiene al menos una solución real, por tanto existe al menos una dirección principal.
Admitiremos que :
Referencia principal
Puede demostrarse que las direcciones principales forman un triedro trirrectángulo, por lo que pueden tomarse como sistema de referencia. Se le denomina Referencia Principal
En la referencia principal, la matriz de tensiones y los invariantes se escriben:
[T] 1 0 00 2 00 0 3
I1 1 2 3I2 1 2 2 3 3 1
I3 1 2 3
1 2 3
11
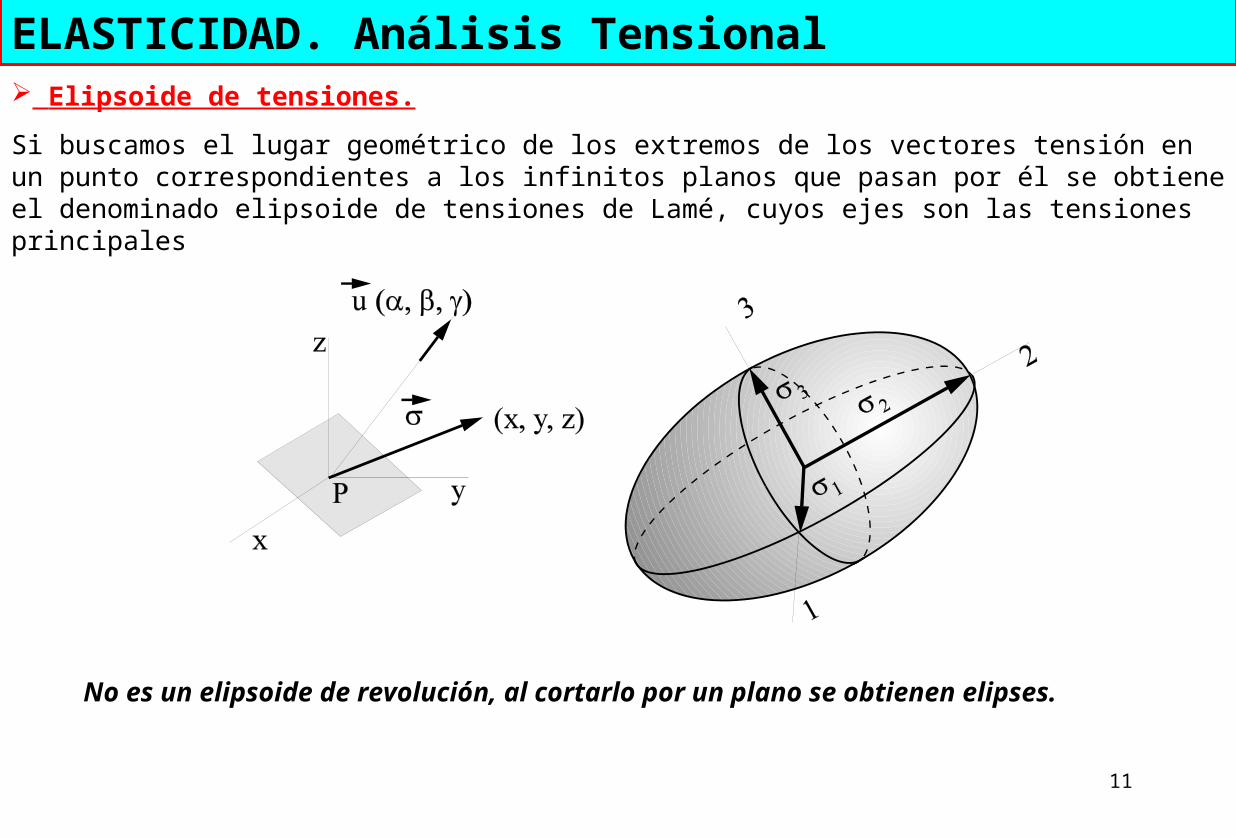
ELASTICIDAD. Análisis Tensional Elipsoide de tensiones.
Si buscamos el lugar geométrico de los extremos de los vectores tensión en un punto correspondientes a los infinitos planos que pasan por él se obtiene el denominado elipsoide de tensiones de Lamé, cuyos ejes son las tensiones principales
No es un elipsoide de revolución, al cortarlo por un plano se obtienen elipses.
12
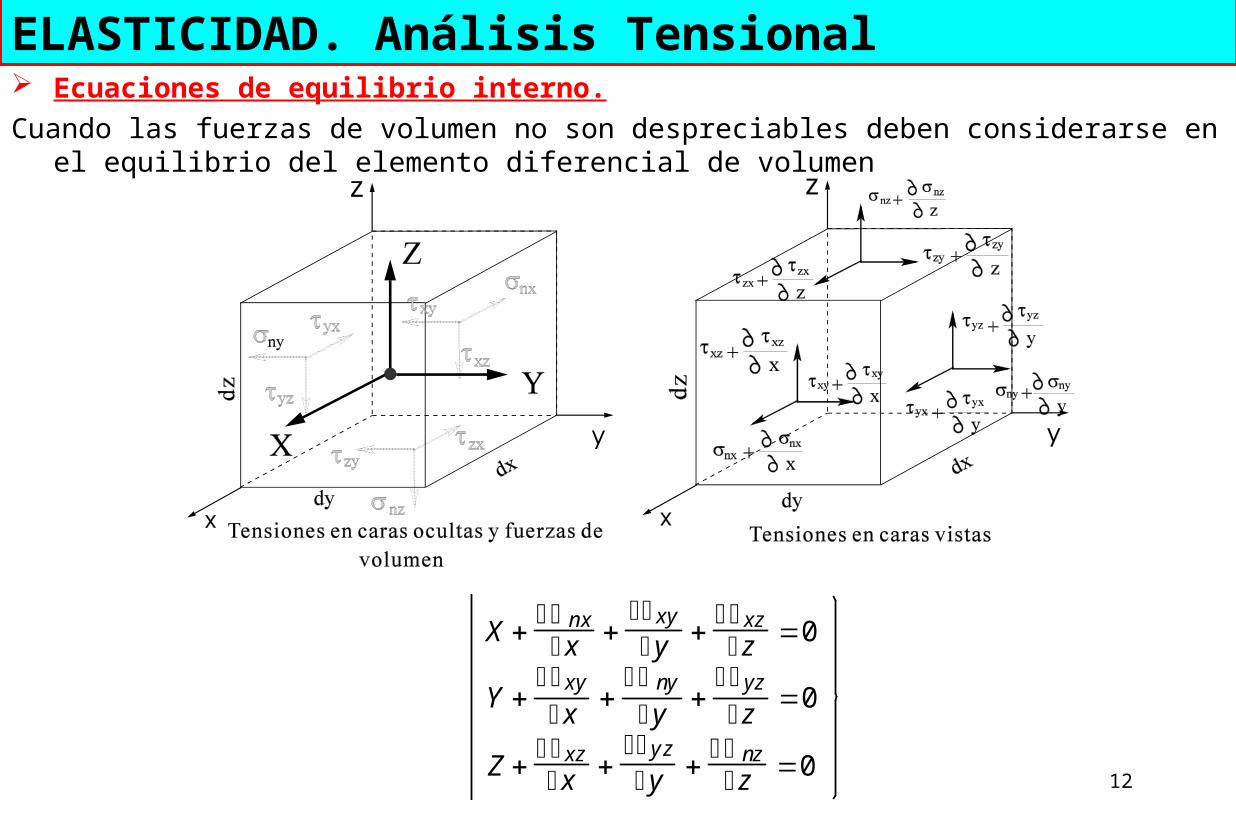
ELASTICIDAD. Análisis Tensional Ecuaciones de equilibrio interno.
Cuando las fuerzas de volumen no son despreciables deben considerarse en el equilibrio del elemento diferencial de volumen
X nxx
xyy
xzz 0
Y xyx
nyy
yzz 0
Z xzx
yzy
nzz 0
13
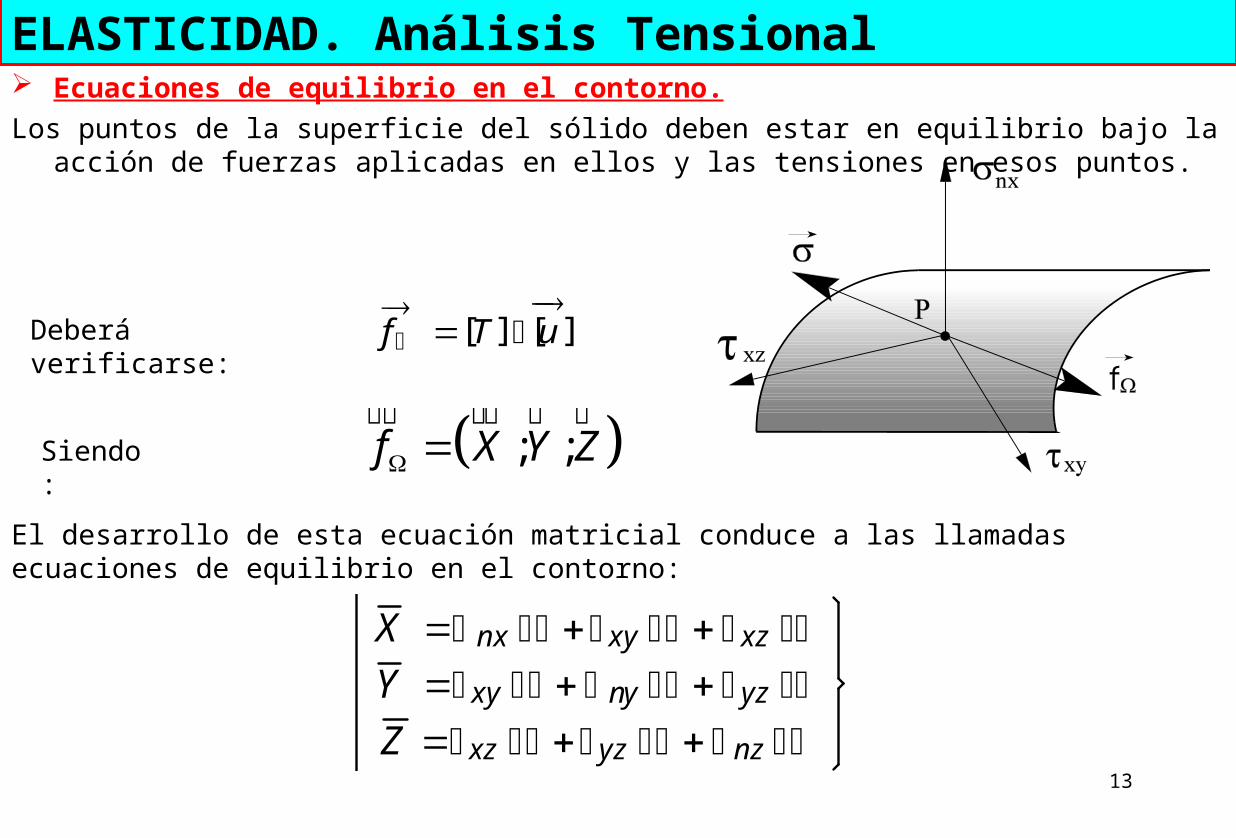
ELASTICIDAD. Análisis Tensional Ecuaciones de equilibrio en el contorno.
Los puntos de la superficie del sólido deben estar en equilibrio bajo la acción de fuerzas aplicadas en ellos y las tensiones en esos puntos.
El desarrollo de esta ecuación matricial conduce a las llamadas ecuaciones de equilibrio en el contorno:
X nx xy xz Y xy ny yz Z xz yz nz
f [T]
[u]Deberá verificarse:
; ;f X Y Z ��������������������������������������������������������
Siendo:

14
ELASTICIDAD. Análisis Tensional Representación de Mohr.Los infinitos vectores tensión en un punto admiten una representación gráfica plana.
Utiliza las componentes intrínsecas, y se la conoce como CIRCULOS DE MOHR.
En la Referencia Principal el vector tensión para un plano definido por: es:
Sistema de ecuaciones 2 1
2 2 22 2 3
2 2 n2 2
1 2 2 2 3 2 n
2 2 2 1
n u 1 , 2 , 3
12 2 2 32
[ ]
1 0 00 2 00 0 3
[ ]( 1 , 2 , 3 )
De donde se puede obtener: 2 12 2 2
2 2 32 2
, ,u

15
ELASTICIDAD. Análisis TensionalEn el sistema anterior hacemos = 0 y eliminamos y entre las
tres ecuaciones.
Hacer = 0 supone considerar solo planos cuya normal es perpendicular al eje I. (Haz Principal I)
Se obtiene la ecuación:
C1 n2 2 n ( 2 3 ) 2 3 0
En un sistema plano de referencia, tomando como variables n y ,es la ecuación de una
circunferencia que tiene:
Centro: 2 3
2 , 0 2 3
2Radio:
Los puntos de esta circunferencia tienen por coordenadas las componentes intrínsecas de los infinitos vectores tensión asociados a los planos que pasan por el punto P y que pertenecen al haz I, o lo que es igual su normal está siempre contenida en el plano II, III.
16
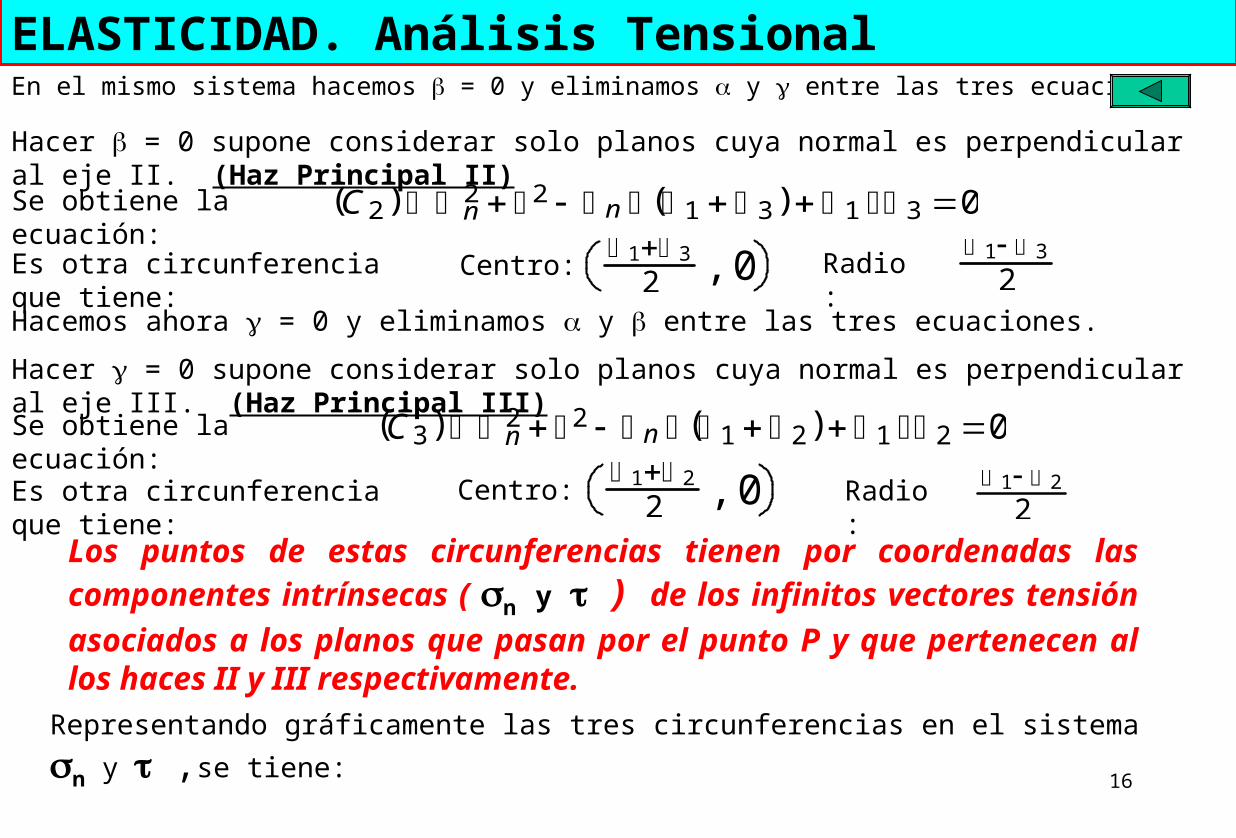
ELASTICIDAD. Análisis TensionalEn el mismo sistema hacemos = 0 y eliminamos y entre las tres ecuaciones.
Hacer = 0 supone considerar solo planos cuya normal es perpendicular al eje II. (Haz Principal II)
Los puntos de estas circunferencias tienen por coordenadas las componentes intrínsecas ( n y ) de los infinitos vectores tensión asociados a los planos que
pasan por el punto P y que pertenecen al los haces II y III respectivamente.
Se obtiene la ecuación: (C2 ) n2 2 n ( 1 3 ) 1 3 0
Centro: Radio:Es otra circunferencia que tiene: 1 3
2 , 0 1 3
2Hacemos ahora = 0 y eliminamos y entre las tres ecuaciones.
Hacer = 0 supone considerar solo planos cuya normal es perpendicular al eje III. (Haz Principal III)
Se obtiene la ecuación: (C3 ) n2 2 n ( 1 2 ) 1 2 0
Es otra circunferencia que tiene: Centro: Radio: 1 2
2 , 0 1 2
2
Representando gráficamente las tres circunferencias en el sistema n y ,se tiene:
17
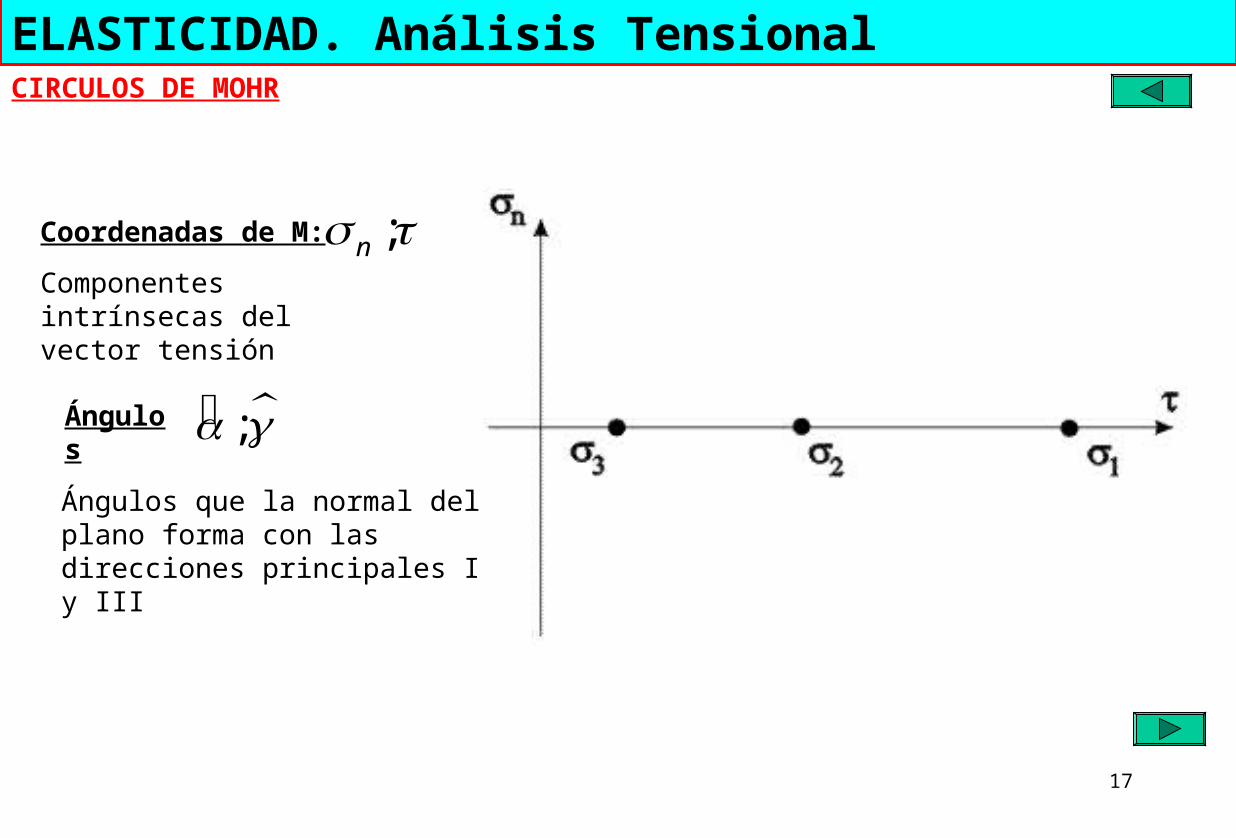
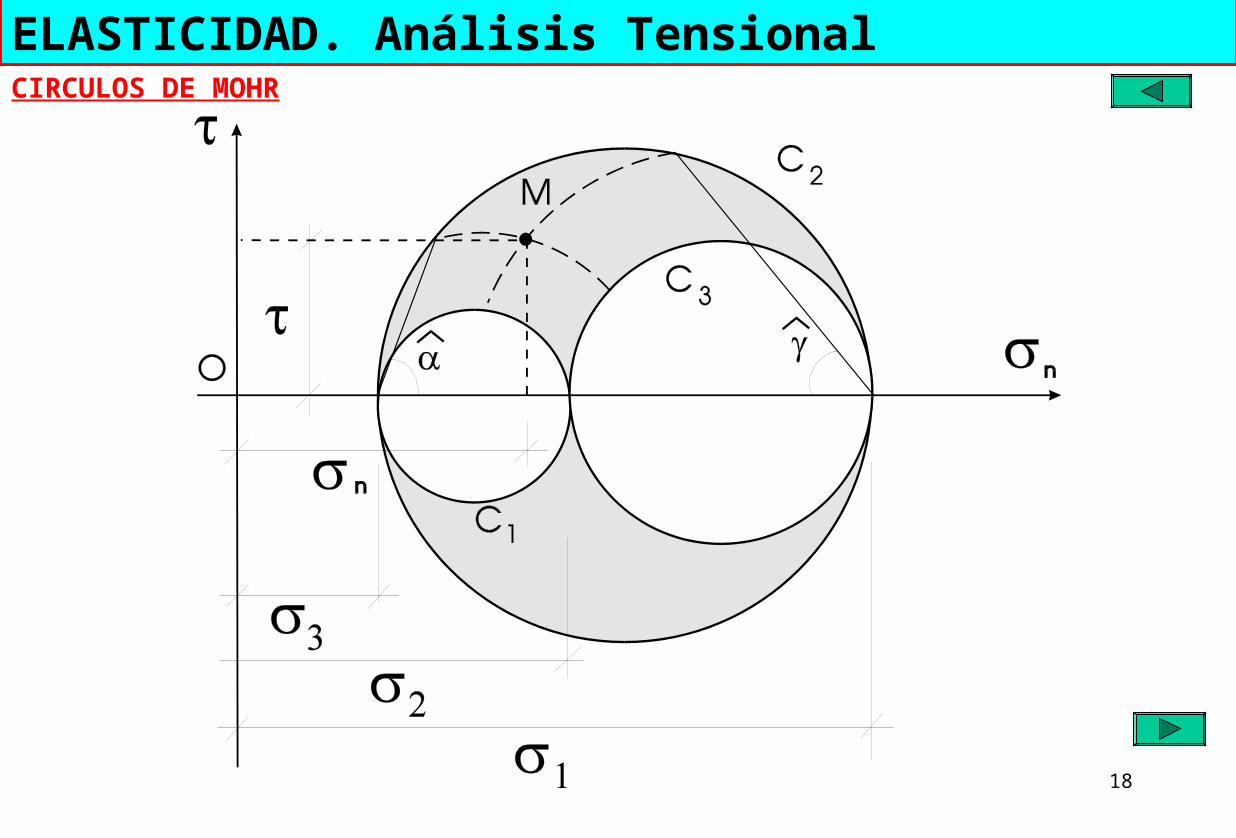
ELASTICIDAD. Análisis TensionalCIRCULOS DE MOHR
Ángulos que la normal del plano forma con las direcciones principales I y III
; Ángulos
Coordenadas de M:
Componentes intrínsecas del vector tensión
;n
18
ELASTICIDAD. Análisis TensionalCIRCULOS DE MOHR
19
ELASTICIDAD. Análisis TensionalPROPIEDADES DE LOS CIRCULOS DE MOHR
Puede demostrarse que:
Las coordenadas de un punto M, situado en las áreas comprendidas entre los tres círculos, representan las componentes intrínsecas del vector tensión asociado a un plano que no pertenece a ninguno de los tres haces principales (I, II, III).
Los ángulos que definen la orientación de la normal del plano se pueden obtener también de la representación de Mohr. Se trazan las circunferencias concentricas a las C1 y C3 que pasan por M, hasta que corten a la C2. Uniendo estos puntos con los extremos del diámetro de C2 quedan determinados los ángulos que la normal del plano forma con las direcciones principales I y III . El ángulo se determina por la ecuación
2 2 2 1
Los puntos sobre los tres círculos y los puntos en las áreas comprendidas entre los tres representan unívocamente, mediante las componentes intrínsecas, los vectores tensión asociados a los infinitos planos que pasan por un punto de un sólido elástico.
20
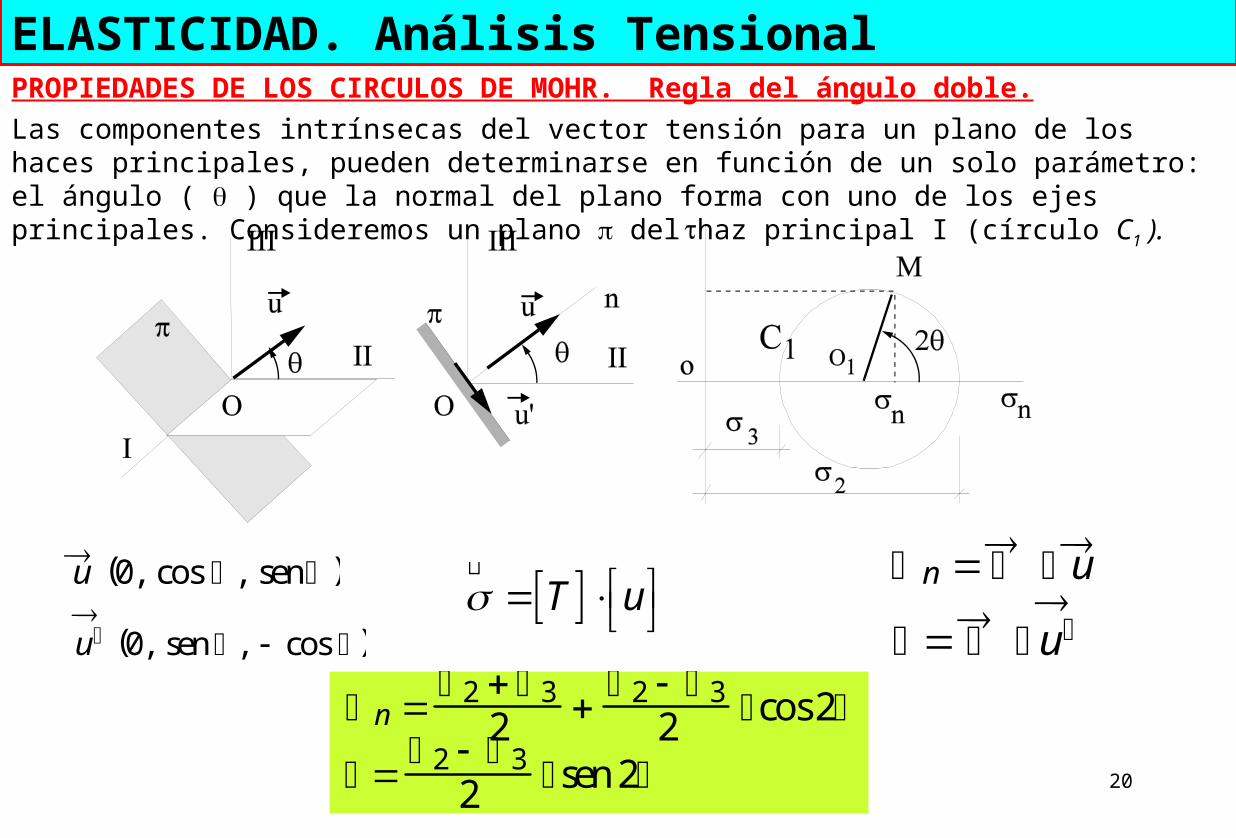
ELASTICIDAD. Análisis TensionalPROPIEDADES DE LOS CIRCULOS DE MOHR. Regla del ángulo doble.
Las componentes intrínsecas del vector tensión para un plano de los haces principales, pueden determinarse en función de un solo parámetro: el ángulo ( ) que la normal del plano forma con uno de los ejes principales. Consideremos un plano del haz principal I (círculo C1 ).
u (0, cos , sen )u (0, sen , cos )
n u
u
n 2 3
2 2 3
2 cos 2
2 3
2 sen 2
T u ����������������������������
21
ELASTICIDAD. Análisis TensionalA este mismo resultado puede llegarse razonando geométricamente sobre el círculo . Consideramos un punto “M” tal que el radio forme un ángulo 2 con 2 . Las coordenadas del punto “M” son:
n 3 RR cos 2 R sen 2
R 2 3
2Sustituyendo en ellas el valor del radio que es:
Se obtienen las mismas expresiones de antes, lo que permite afirmar que:
Regla del ángulo doble
Si el radio del punto M en el círculo C1 forma un ángulo 2 con 2 , la normal del plano cuyo estado tensional corresponde al punto M, forma un ángulo mitad () con la dirección principal II, contados ambos en el mismo sentido de giro.
22
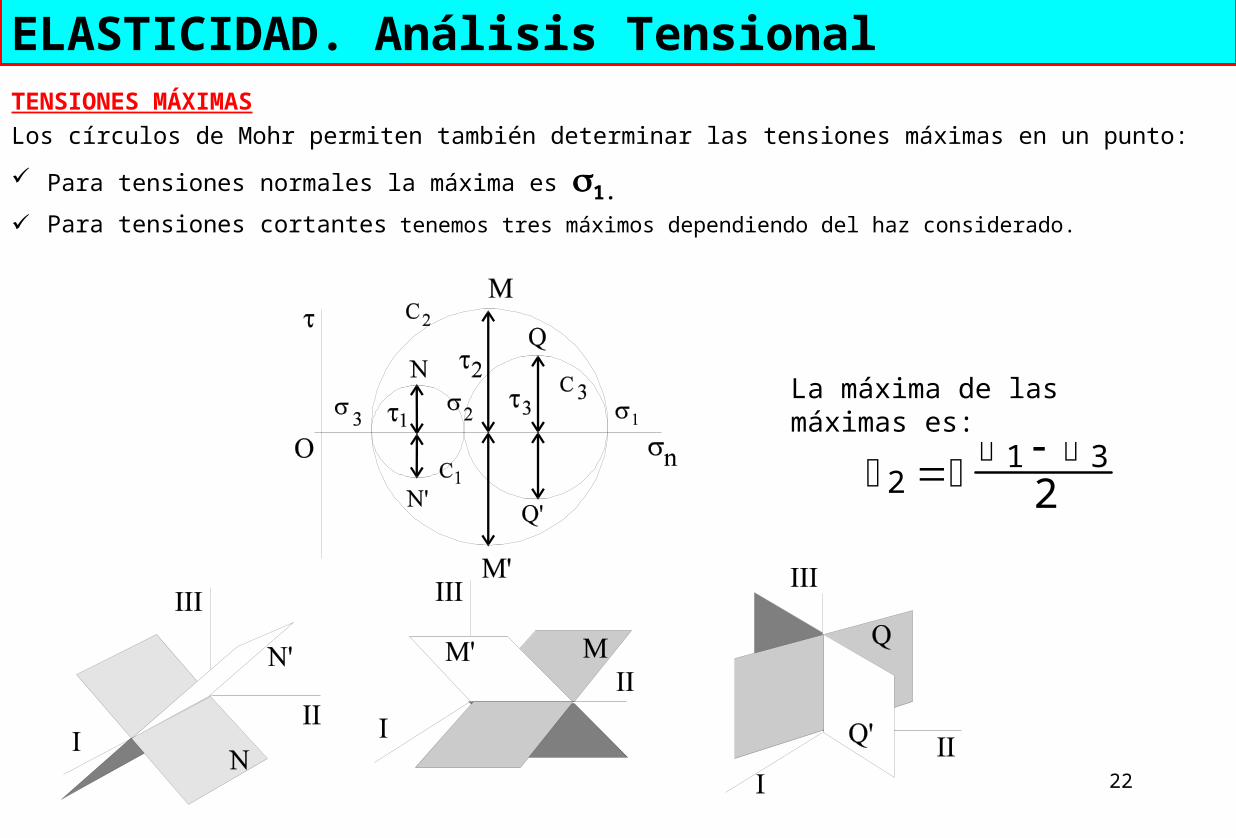
ELASTICIDAD. Análisis TensionalTENSIONES MÁXIMAS
Los círculos de Mohr permiten también determinar las tensiones máximas en un punto:
Para tensiones normales la máxima es 1.
Para tensiones cortantes tenemos tres máximos dependiendo del haz considerado.
La máxima de las máximas es:
2 1 3
2

![ANALIS DE ESPESORESZ]](https://static.fdocuments.es/doc/165x107/5571f95949795991698f5e18/analis-de-espesoresz.jpg)