ANÁLISIS Y COMPENSACIÓ DNE SISTEMA POS R MUESTREO DE...
254
ESCUELA POLITÉCNICA NACIONAL "ANÁLISIS Y COMPENSACIÓN DE SISTEMAS POR MUESTREO DE DATOS UTILIZANDO TÉCNICAS CONVENCIONALES" TESIS PREVIA A LA OBTENCIÓN DEL TITULO DE INGENIERO EN ELECTRÓNICA Y CONTROL PETER EDUARDO SYLVA FUSEAU 'H ~-". i, 00270% QUITO, ABRIL 1985
Transcript of ANÁLISIS Y COMPENSACIÓ DNE SISTEMA POS R MUESTREO DE...

ESCUELA POLITÉCNICA NACIONAL
"ANÁLISIS Y COMPENSACIÓN DE SISTEMAS POR MUESTREO
DE DATOS UTILIZANDO TÉCNICAS CONVENCIONALES"
TESIS PREVIA A LA OBTENCIÓN DEL TITULO
DE INGENIERO EN ELECTRÓNICA Y CONTROL
PETER EDUARDO SYLVA FUSEAU 'H ~-".i, 00270%
QUITO, ABRIL 1985

CERTIFICACIÓN
Certifico que la presente tesis
ha sido desarrollada por el Sr.
Peter Eduardo Sylva Fuseau bajo
mi dirección.
ING. PATRICIO BURBANO R.
Director de Tesis

AGRADECIMIENTO
Al Ing. Patricio Burbano, por haber
trabajado con gran responsabilidad
en la dirección de la Tesis, brin-
dando siempre su colaboración y sus
consejos., al Ing. Efráin del Pino,
por su valiosa ayuda en la elabora-
ción de los programas, y a todos las
personas que hicieron posible la cul_
minación de la oresente Tesis.

DEDICATORIA
A mis Padres

CONTENIDO
Pról ogo
I INTRODUCCIÓN
1.1 Introducción!
1.2 Sistemas Discretos|
1.3 Sistemas de Control de Datos Maestreadosí
1.4 Sistemas de Control Digitalj
1.5 Función de Transferencia Discreta
1.6 Ventajas e Importancia de Sistemas de|
Control Digitales
II ANÁLISIS DE SISTEMAS POR MUESTREO DE DATOS
!\ Análisis de Sistemas de Control Digital
2.2 Ingreso de Datos
2.3 Anal isls de Sistemas por Muestreo de Datos
en el dominio del tiempo
2A Obtención de la Respuesta en el tiempo
por
2.5 Anal
medio de un computador
Isls de Sistemas por Muestreo de Datos
en el dominio de la frecuencia
III COMPENSADORES DISCRETOS EN CASCADA
Pag,
1
2
4
7
12
19
21
24
27
33
38
3.1 Equivalentes discretos de filtros continuos 51

Pag.
3.2 Controlador discreto P.I.D. 63
3.3 Método Directo de Diseño 70
3.4 Cálculo de la salida con compensación 79
IV SIMULACIÓN DE CONTROL DIGITAL
4.1 Control en tiempo real. Limitaciones 98
4.2 Simulación de Control ON LINE 102
V RESULTADOS Y CONCLUSIONES
5.1 Resultados 104
5.2 Concl usiones- General es . 183
5.3 Recomendaciones 185
APÉNDICES
1. Listados de los programas
2. Manual del usuario
3. Ejemplo de modelación en función del período
de muestreo T y Variables importantes.
BIBLIOGRAFÍA
REFERENCIAS

PROLOGO
La presente Tesis tiene por objeto el desarrollo de progra-
mas de apoyo para el análisis y el diseño de Sistemas Discretos de
Control .
La Tesis está compuesta de una parte teórica, y una parte
relacionada con el desarrollo de los programas, y se ha dividido en
cinco capítul on.
En el Capitulo I se realiza una introducción al Control Di-
gital , y se dan conceptos básicos, los cuales serán aplicados en ca-
pítulos posteriores.
En el Capitulo IT se realiza un estudio de Sistemas de Con-
trol Discreto en el dominio del tiempo y de 1 a frecuencia, y se desa_
rrollan los programas de cálculo de la respuesta en el tiempo, y de
obtención de los diagramas de frecuencia.
En el Capitulo III se realiza un estudio sobre el diseño del
compensador, el cual puede obtenerse a partir de la discretización de
compensadores continuos, trasladándolos al plano discreto, a partir
de un control ador proporcional integral derivativo discreto, y a par-
tir de criterios de respuesta de frecuencia.
En el Capitulo IV se realiza un estudio del control directo,
llamado también CONTROL ON-LINE; en el cual el computador forma parte
del 1azo de control.
II
En el Capítulo V se presentan resultados de los programas de
sarrollados, las conclusiones obtenidas del estudio realizado, y se
dan algunas recomendaciones para futuros trabajos.
La Tesis contiene también tres Apéndices. En el Apéndice 1,
se encuentran los listados de los programas desarrollados, el Apéndi_
ce 2 contiene el Manual del Usuario, y el Apéndice 3, las variables
más importantes de los programas, y un ejemplo de entrada de datos.

C A P I T U L O I
INTRODUCCIÓN AL CONTROL DIGITAL
1.1 Introducción
1.2 Sistemas Discretos
1.3 Sistemas de Control de Datos Maestreados
1.4 Sistemas de Control Digital
1.5 Función de Transferencia Discreta
1.6 Ventajas e importancia de Sistemas de Control
Digitales.

1.1 INTRODUCCIÓN
A partir de la década de los 60, la utilización de computa
doras digitales para el control de procesos físicos ha tenido un nota
ble incremento; y, en años recientes los sistemas de control digital
y por muestreo de datos han ganado en importancia en la industria, d_e_
bido al avance que ha tenido la computación digital, y recientemente
por la introducción de los microprocesadores en el campo del control,
así como las ventajas encontradas en el trabajo con señales digitales.
Las computadoras digitales se utilizan en Ingeniería del Con_
trol para 2 propósitos:
1. Para simulación y computación de la dinámica del sistema de con-
trol. Debido a que muchos sistemas físicos contipnen elementos no
lineales, y son de un orden alto, se utiliza la simulación para
realizar el análisis y diseño de sistemas complejos, que no pueden
ser tratados por métodos analíticos establecidos para ello. f\áe_
más las simulaciones digitales se utilizan para chequear o verifj_
car resultados obtenidos analíticamente.
2. Un computador digital puede ser utilizado en un sistema de control
como un procesador o control ador. Ya que muchos de los sistemas co_n_
trolados contienen elementos análogos, las señales encontradas en
muchos sistemas de control digital son tanto análogos como digita_
les; entonces el proceso de conversión debe ser tal que se pueda
realizar una interface entre componentes análogos y digitales dej
tro del mismo sistema.
- 2 -
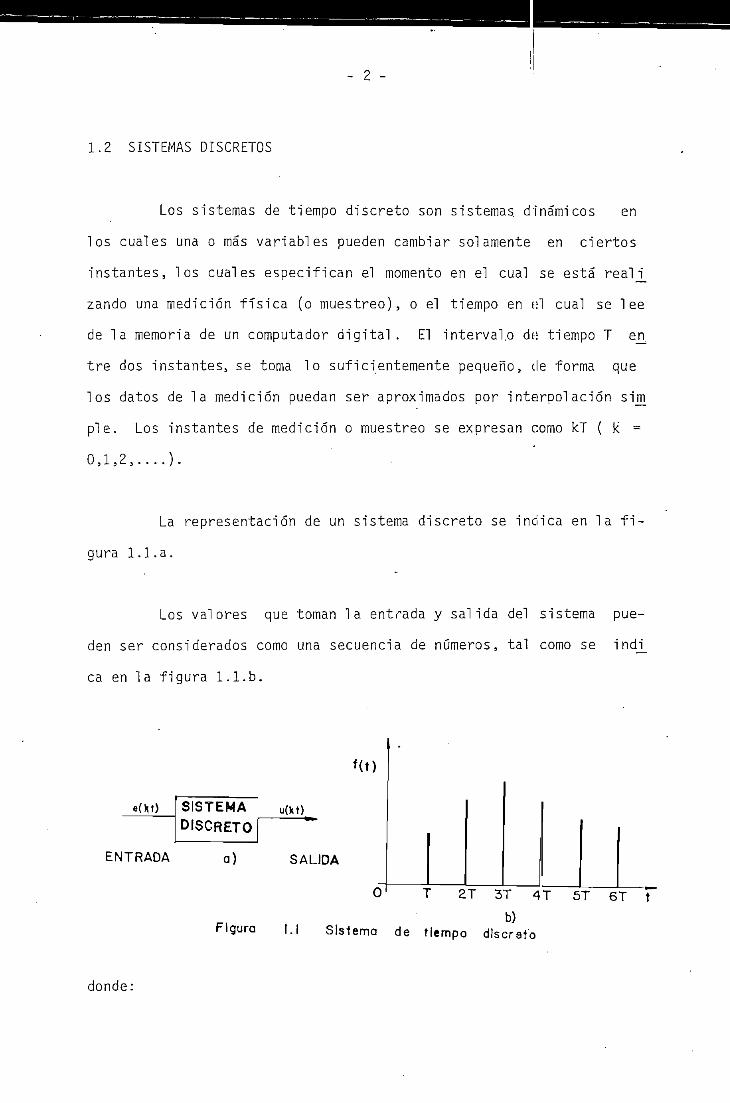
1.2 SISTEMAS DISCRETOS
Los sistemas de tiempo discreto son sistemas dinámicos en
los cuales una o más variables pueden cambiar solamente en ciertos
Instantes, los cuales especifican el momento en el cual se está realj_
zando una medición física (o muestreo), o el tiempo en til cual se lee
de la memoria de un computador digital. El Intervalo de tiempo T ea
tre dos instantes, se toma lo suficientemente pequeño, de forma que
los datos de la medición puedan ser aproximados por interpolación si ni
pie. Los instantes de medición o muestreo se expresan como kT ( k =
0,1,2,....).
La representación de un sistema discreto se indica en la fi-
gura 1.1.a.
Los valores que toman la entrada y salida del sistema pue-
den ser considerados como una secuencia de números, tal como se indi
ca en la figura 1.1.b.
e(*1) u(kt)
ENTRADA a) SALIDA
O
b)Figura 1.1 Slslema de tiempo discreto
donde:

- 3 -
e = { e0, ei, ez, .... ek } es una secuencia de valores de entrada
u = { u m , u2) .... Ur, } es una sencuencia de valores de salida,
El valor de la salida en el instante kT, u, se puede expre-
sar como:
k - í u0, Ui, u 2 5 uk_i; e0, elsu = Ecu. 1.1
entonces u, es una función de los valores previos de la salida u, yK
de la entrada e. En 1 a práctica u, es función de los últimos valores
de entrada y sal ida.
La ecuación 1.1 representa una ecuación de diferencias. Re_
laciona la salida a un tiempo kT con los últimos valores de entrada y
sal ida.
La ecuación 1.1 puede ser escrita asi:
uk « a1uk_i + a2uk_2 ••• un ck-n
Ecu. 1.2
donde m, n son enteros.
Esta ecuación se llama lineal recurrente o de diferencias.
Como se puede ver, la ecuación 1.2 tiene gran similitud con una ecua_
ción diferencial. Si los coeficientes a y b son constantes, el com
- 4 -
putador está resolviendo una ecuación de diferencias con coeficientes
constantes.
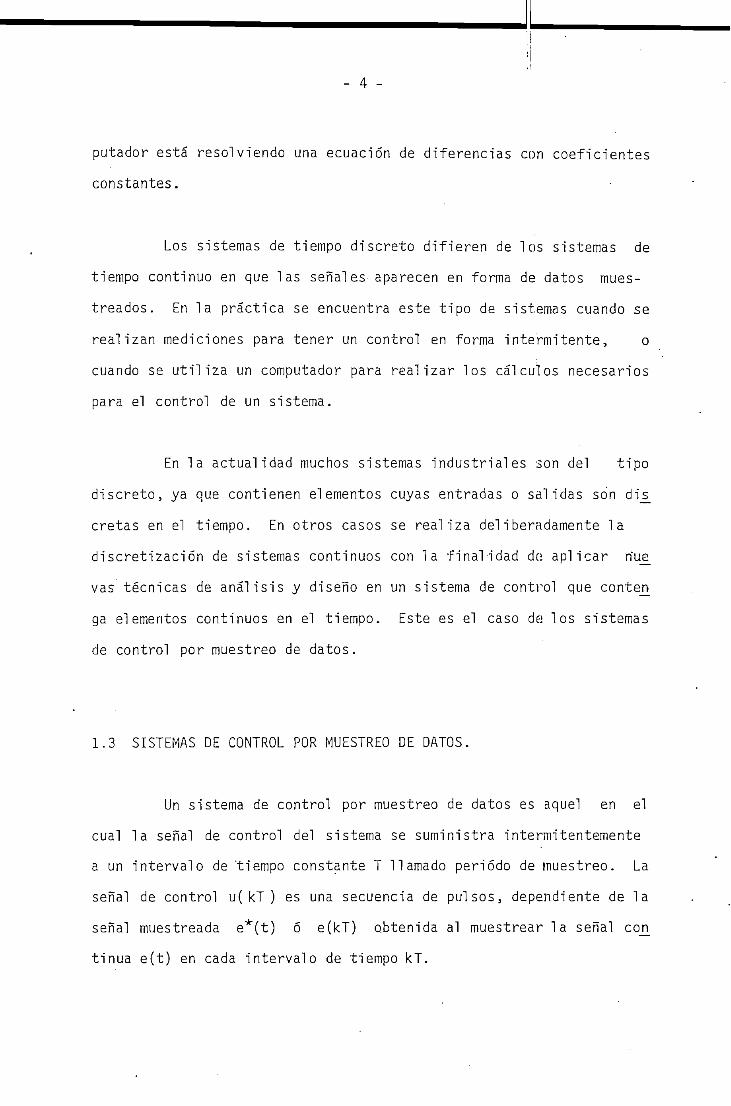
Los sistemas de tiempo discreto difieren de los sistemas de
tiempo continuo en que las señales aparecen en forma de datos mués-
treados. En la práctica se encuentra este tipo de sistemas cuando se
realizan mediciones para tener un control en forma intermitente, o
cuando se utiliza un computador para realizar los cálculos necesarios
para el control de un sistema.
En la actualidad muchos sistemas industriales son del tipo
discreto, ya que contienen elementos cuyas entradas o salidas son dis_
cretas en el tiempo. En otros casos se realiza deliberadamente la
discretización de sistemas continuos con la final-i dad do. aplicar ríue
vas técnicas de análisis y diseño en un sistema de control que conten
ga elementos continuos en el tiempo. Este es el caso de los sistemas
de control por muestreo de datos.
1.3 SISTEMAS DE CONTROL POR MUESTREO DE DATOS.
Un sistema de control por muestreo de datos es aquel en el
cual la señal de control del sistema se suministra intermitentemente
a un intervalo de 'tiempo constante T llamado periodo de muestreo. La
señal de control u( kT ) es una secuencia de pulsos, dependiente de la
señal muestreada e*(t) 6 e(kT) obtenida al muestrear la señal cojí
tinua e(t) en cada intervalo de tiempo kT.

- 5 -
Este tipo de control Implica la utilización de un muestrea-
dor de señal (para obtener e(kT) ), y de un retenedor de señal para
obtener u(t), a partir de u(k.T). Mayor Información sobre estos ele-
mentos se da más adelante.
En resumen, a los sistemas que contienen señales tanto conti_
nuas como discretas en el tiempo se los denomina sistemas de datos
muestreados o por muestreo de datos.
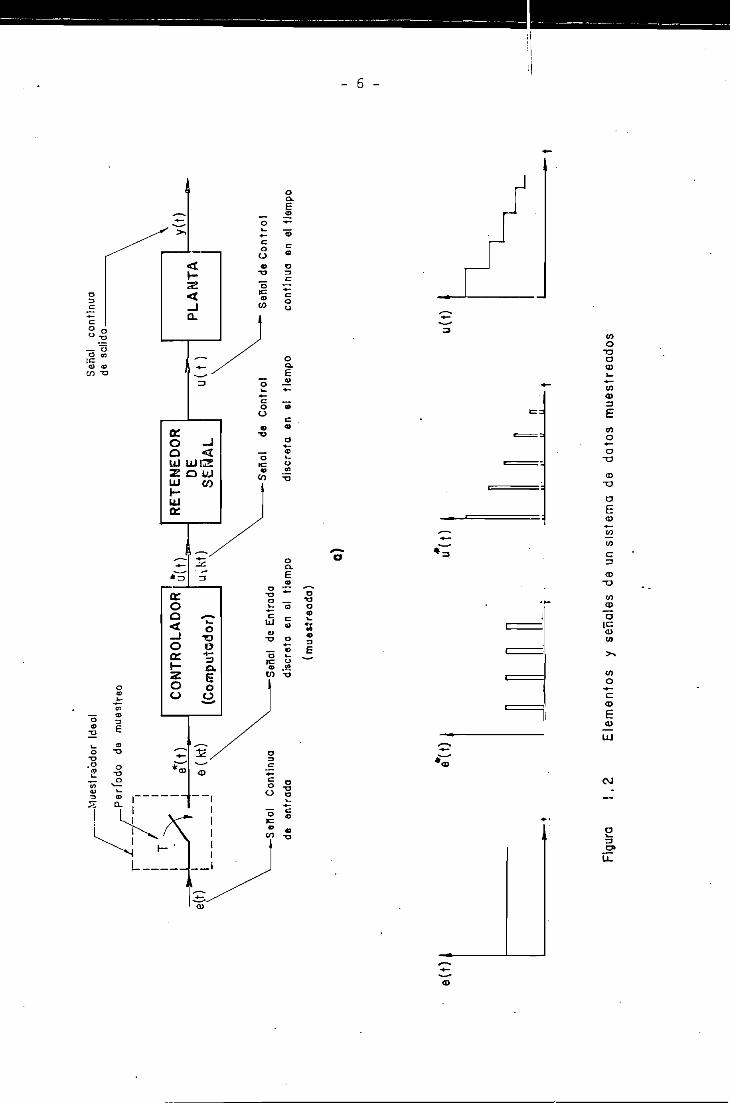
La figura 1.2 muestra esquemáticamente los elementos y las
señales que Intervienen en un sistema de control de datos muestreados.
Los controles por muestreo de datos tienen variedad de conf1_
guraciones. A continuación se describen 4 tipos de muestreo, conslde
rados como los más Importantes.
1. Muestreo Periódico (Convencional): Los Instantes de muestreo kT
son equlespaclados { k = O, 1, 2,. . . , }
2. Muestreo de Orden Múltiple: El esquema de kT se repite periódica-
mente; es decir tk+r - tk =- CONSTANTE, para todo k.
3. Muestreo de Tipo Múltiple: Concuardan simultáneamente 2 operacio-
nes de muestreo en kT = pTx y qT2 ; TI, T2 son constantes, y p, q
son enteros.
4. Muestreo al azar: Los Instantes de muestreo son casuales; es decir
kT es una variable aleatoria.
Mue
sjra
odor
Id
eal
Pe
río
do
de
mue
stre
o
Señ
al
con
tin
ua
de s
alid
a.
1- J "
í \.
e(t
)'
¡ !
e(kt
)
CO
NT
RO
LA
DO
R
fCo
mo
uta
do
r}
*( uxkt
)
RE
TE
ME
DO
RD
ES
EÑ
AL
u(t
)P
LA
WT
A
\l
Co
nti
nu
a
de
entr
ado
Ser
ial
de E
ntra
da
dis
cre
ta
en
oí
tiem
po
(rn
ue
síre
ad
a)
o)
-Se
ña
l da
C
on
tro
l
dis
cre
to
en
el
tiem
po
Sef
lol
de C
on
tro
l
con
tin
ua
en e
l tie
mpo
i CTi I
e(t
)elt)
*(t)
u(t)
nj
II
Figu
ra
1.2
E
lem
ento
s y
seña
les
de u
n si
stem
a de
da
tos
mae
stre
ados

En este trabajo se considerará sistemas de control por mues-
treo de datos en los que la señal es muestreada a intervalos igualme_n
te espaciados.
La figura 1.3 muestra esquemáticamente estos tipos de mue_s_
treo.
tK ik+r tk+r
a) Mueotreo convencional b) Muestreo de orden Múltiple
c) Muestreo de tipoMuliiplf d) Maestreo al azar
Figura 1.3 Tipos de muestreo
1.4 SISTEMAS DE CONTROL DIGITAL. '
Un sistema de control digital se define como aquel en el
cual la señal de control en una o más secciones del sistema, se expre.
sa en un código numérico (como el código binario).
Un sistema de control digital puede ser aplicado a un siste
ma de control de datos muestreados, si la señal de entrada es codif_i_
cada en señales de pulsos de amplitud modulada, esto es una secuencia
de números, y si la operación del computador digital se representa co_

mo una ecuación de diferencias a partir de la cual se calcula la se_
cuencia de valores de la señal de control.
La figura 1.4 muestra el esquema básico de un control digi-
tal de una planta continua.
MuestroodorIdeal
Controla dor Retenedor de señal
u(t)A/D
l a i I/ ti .c \X 1 / _[_
i ICOMPUTADOR
D1G!TAL
Re oíCK
l
ll
J L_
D/A
Fígv.'a 1.4 Cont ro l d i g i t a l de un s is tema d« d a t o s m a e s t r e a d o s
donde:
r(t) = referencia, entrada, o señal continua de comando.
u(t) = señal continua de entrada al actuador o señal de control
y(t) = señal continua de salida o controlada.
e(t) = r(t) - y(t) = error del sistema.
e(kT) = señal discreta de error obtenida por muestreo de e(t).-
u(kT) = señal discreta de control calculada por el computador.
A/D = conversor análogo - digital (muestreador) .
D/A = conversor digital -análogo (retenedor de señal)
CK = reloj de sincronismo para el muestreo de datos.
En un sistema de control digital de plantas continuas exis-

- 9 -
ten tres operaciones:
1. Proceso de codificación, a la entrada del computador;
2. Programación o procesamiento de datos de 1 a Información digital en
el computador, y,
3. Proceso de decodificación a la salida del computador.
Analicemos con detalle el proceso de codificación.
El proceso a ser controlado se denomina PLANTA., y puede cons_
tituir cualquier proceso físico cuya dinámica se quiere controlar, es
decir se forza a que la salida de la planta y(t) siga a la entrada de
referencia r(t)3 sin importar la presencia de perturbaciones a 1 a en_
trada ae la planta y a pesar de los errores en el sensor.
Los conversores D/A y A/D se utilizan como interface para ma_
nejar las variables digitales y análogas para instrumentación y coji_
trol. Ambos están sincronizados por una señal de control Ck, la cual
sincroniza las señales discretas e(kT) y u(kT) hacia y desde el comp_i¿
tador respectivamente para realizar la codificación y decodificación
correspondientes.
El conversor analogo - digital (A/D) actúa sobre una variable
física (comunmente un voltaje eléctrico) y la convierte en un conjim
to de números, esto es realiza el proceso de codificación previo a la
entrada del computador. Para este caso y como se indica en la figura
1.4 el conversor A/D actúa como un muestreador ideal sobre la señal
de error e(t) y suministra e(kT) al computador digital.

- 10 -
Es también común que la salida y(t) del sensor sea muestrea-
da, y que se tenga el error en forma discreta evaluado en el computa_
dor. Se asumirá que los números que llegan al computador, lo hacen
con el mismo período T, que se denotará como periodo de muestreo.
Existe un reloj Ck como parte del computador, que es el que
suministra pulsos cada T segundos, para comandar al conversor A/D p_a_
ra que envíe un número al computador, cada vez que el pulso llega.
La secuencia de números que llega al computador se denota co__
mo e(kT) si el muestreo se considera como ideal.
La conversión de la señal análoga a la correspondiente señal
digital a través de la discretización es una aproximación, ya que la
señal análoga es capaz de tomar infinita cantidad de valores, mien-
tras que la secuencia de números que se pueda formar con un número fi_
nito de dígitos (palabra digital con la cual trabaja el computador)
es limitada. Este proceso de aproximación se llama cuantificación, y
se ilustra en la figura 1.5.
e(kt)O.4
03T0.2
0.1
n-QI-
-0.2-
-0.3.
-0.4.
e(t)
Rgura 1.5 Proceso de Cuanííficación

- 11 -
El proceso de cuantif icación consiste en dividir el rango de
magnitudes de entrada en un número infinito de intervalos ni (no nece
sanamente iguales). A todos los valores que quedan dentro de cada
intervalo se les asigna un único valor dentro del intervalo. Este va
lor es la aproximación digital.
Una señal que es discreta y cuantificada se llama señal digj_
tal. En la figura 1.6 se muestra señales: a) discreta en el tiempo
sin cuantificación; b) continua en el tiempo cuantificada, ys c) se-
ñal digital. El control digital manipula señales digitales, esto es
señales cuantificadas de tiempo discreto.
rtt)o)
r(t)
h
r(t)b)
o.V0.3
— 1 0 ?
— 0.1 .
1c)
O T 2T 3T 4T 3T «T
Figura
O T 2T 3T OT «T T 2T 3T 4T BT flT
I .6 Cuantíficccion de señales
Analicemos ahora con detalle la operación presente en un cojí
trol digital que es la decodificación a la salida del 'computador, o
proceso de retención o reconstrucción de la señal.
El conversor digital análogo (D/A) , transforma la informa-
ción numérica en forma de una palabra codificada digitalmente u(kT) a
la señal análoga correspondiente u(t) que ingresa a la planta.
La reconstrucción de las señales digitales se logra a través
- 12 -
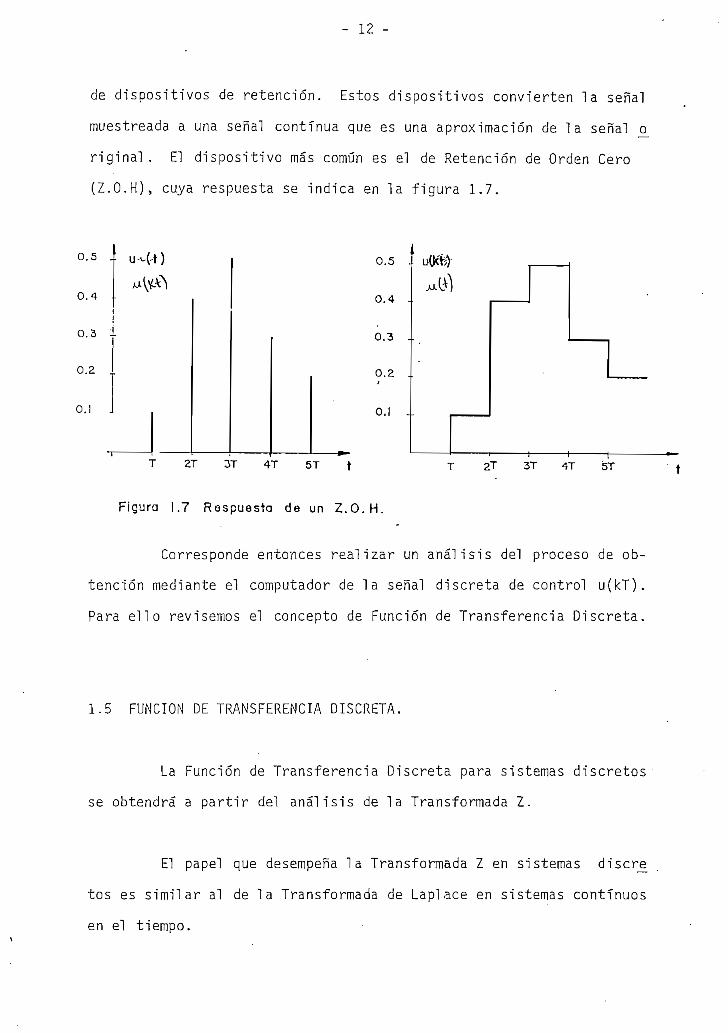
de dispositivos de retención. Estos dispositivos convierten la señal
muestreada a una señal continua que es una aproximación de la señal _o_
riginal . El dispositivo más común es el de Retención de Orden Cero
(Z.O.H), cuya respuesta se indica en la figura 1.7.
0.5
0.4 •-
0,3 ÍI
0.2 ..
0.1
0.5
0.4 -
0.3 ..
0.2 ..
T 2T 4T 5T 2T 3T 4T 5T
Figura 1.7 Respuesta de un Z.O.H.
Corresponde entonces realizar un análisis del proceso de ob-
tención mediante el computador de la señal discreta de control u(kT).
Para ello revisemos el concepto de Función de Transferencia Discreta.
1.5 FUNCIÓN DE TRANSFERENCIA DISCRETA.
La Función de Transferencia Discreta para sistemas discretos
se obtendrá a partir del análisis de la Transformada Z.
El papel que desempeña la Transformada Z en sistemas di seré
tos es similar al de 1 a Transformada de Laplace en sistemas continuos
en el tiempo.

- 13 -
Si una función tiene valores discretos r0, rls rz, . ... r, ,K
se define la Transformada Z de 1 a señal, como la función:
R(z) £ Z ir, Ecu. 1.3
R(z) a r0 <_ z\<_ R0 Ecu. 1.4
y se asume que se puede encontrar un rango de valores de magnitud de
la variable compleja Z, para los cuales Ta serie dada por la Ecu. 1.4
converge.
Para sistemas de datos muestreados se debe tomar primero la
Transformada de Laplace de la función muestreada, y luego racionali-
zarla utilizando la Transformada Z-.
Si se considera que la salida de un muestreadors es un tren
de impulsos ponderado, la señal continua, se puede relacionar con la
señal discreta mediante la ecuación 1.5,
r*(t) = 6T(t) r ( t ) Ecu. 1.5
ó-t-(t) representa un tren de pulsos un-itario, como se indica en la fi-
gura 1.8.
-4T -3T -2T -T O T ZJ TT 4T 5T t
Figura 1.8 Tren di Impulsos unltoriot
- 14 -
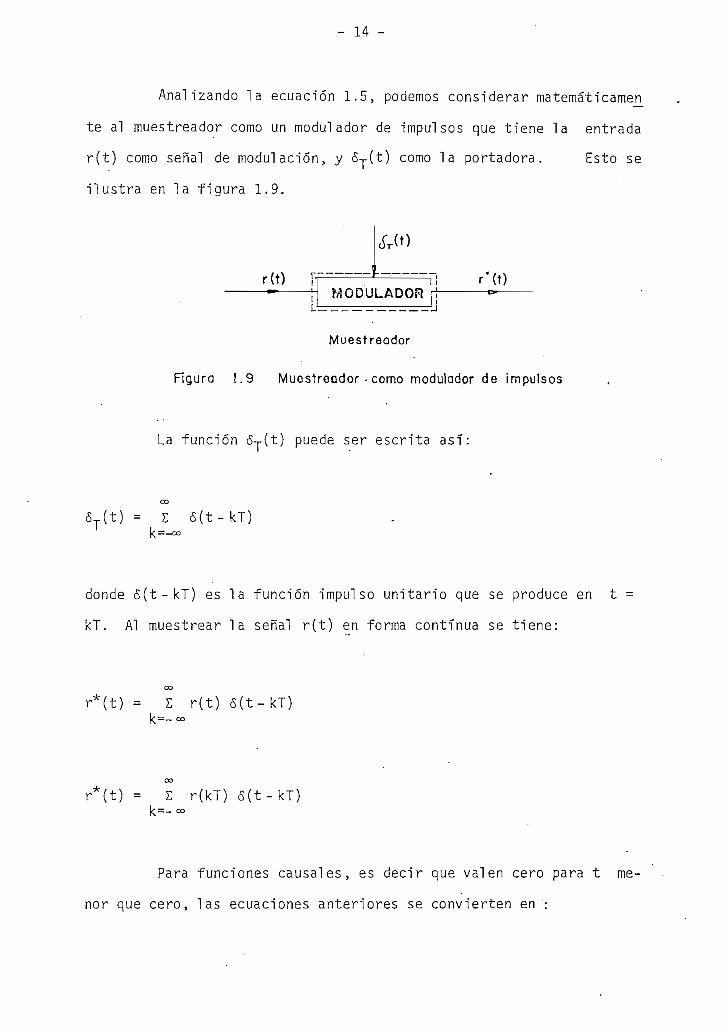
Analizando la ecuación 1.5, podemos considerar matemát1camen_
te al muestreador como un modulador de Impulsos que tiene la entrada
r(t) como señal de modulación, y 6j(t) como la portadora. Esto se
Ilustra en la figura 1.9.
r(t)1L.
MODULADORr'(t)
Muestreador
Figura !.9 Muestreador . como modulador de impulsos
La f u n c i ó n 6T(t) puede ser escrita así:
6 T ( t ) = £ 6 ( t - kT)1
donde ó(t-kT) es la función Impulso unitario que se produce en t
kT. Al muestrear la señal r(t) en forma continua se tiene:
co
r*(t) = E r(t) <S(t-kT)
r (t) = Z r(kT) 6(t- kT)k=- °°
Para funciones causales, es decir que valen cero para t me-
nor que cero, las ecuaciones anteriores se convierten en :

15 -
r*(t) = £ r(t) ó(t- kT)
r*(t) = £ r(kT) <5(t~kT) Ecu. 1.6k=o
Al tomar la Transformada de Laplace de la ecuación 1.6, se
obtiene:
L {r (t)} = R (S) = S r(kT) e Ecu. 1.7k=o
•*•La función R (s) es Irracional, por lo que no se pueden aplj_
car métodos convencionales de diseño. Si se define:
TsZ = e
-k*y se reescribe R(z) = R(s) = R ( - lr\ ^ E r(kT) z
1 k=o
donde R(z) se denota como la Transformada Z de r(t);
R(Z) = Z{r
Al tomar la transformada Z, solo se considera los valores de
la señal en los instantes de muestreo; esto es se considera r(kT).
Esto es:
- 16 -
1X3 \s
Z.{r( t )} = Z{r*( t )} = R ( z ) = Z r (kT) zk=o
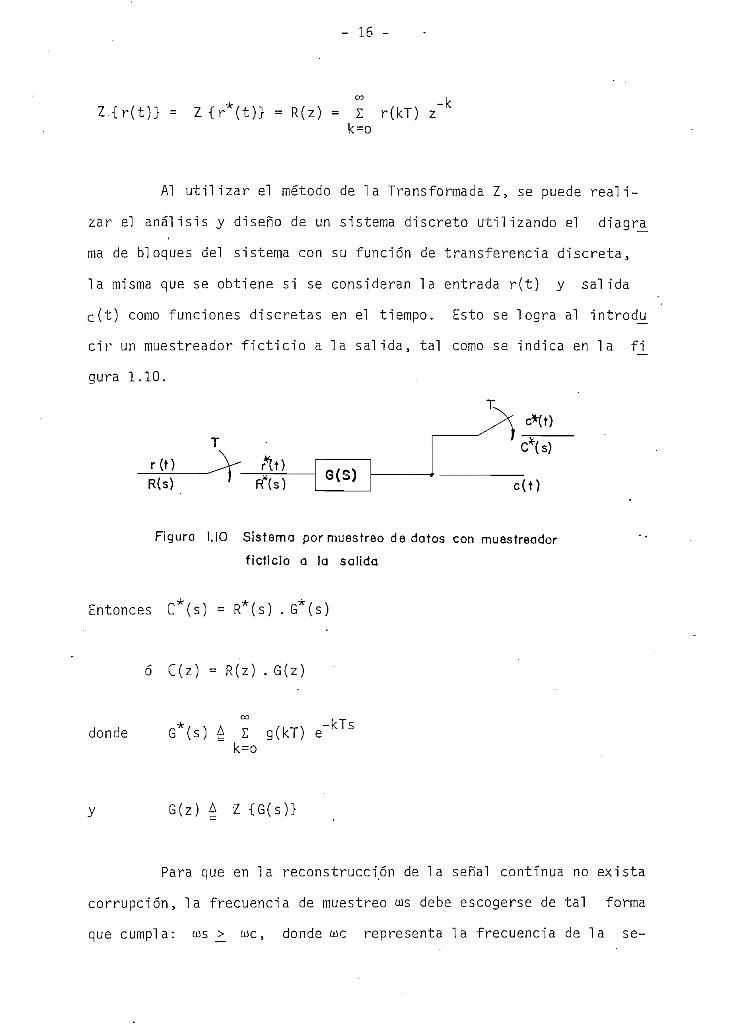
Al utilizar el método de la Transformada Z, se puede reali-
zar el análisis y diseño de un sistema discreto utilizando el diagra_
ma de bloques del sistema con su función de transferencia discreta,
la misma que se obtiene si se consideran la entrada r(t) y salida
c(t) como funciones discretas en el tiempo. Esto se logra al introdu_
cir un muestreador ficticio a la salida, tal como se indica en 1 a f1_
gura 1.10.
c*(t)
r(t)R{s)
> rtt)' Ff(s)
OÍS)
' C*(s)
c(t)
Figura 1.10 Sistema por muestreo de datos con muestreador
ficticio a la salida
Entonces C*(s) = R*(s) . 6*(s)
ó C(z ) = R(z ) . G(z)
donde G*(s) A s g(kT) e"kTs
k=o
G ( Z ) A Z { G ( s ) }
Para que en la reconstrucción de la señal continua no exista
corrupción, la frecuencia de muestreo ws debe escogerse de tal forma
que cumpla: ws _> toe, donde toe representa la frecuencia de la se-

- 17 -
nal muestreada.
La función de transferencia discreta del compensador puede
ser programada en el computador por medio de la ecuación de diferen-
cias que relaciona la señal de control u con la señal de control e.
El esquema de control se Indica en la figura 1.11.
r -f-^-L-\ >r ej \
P* < .U \3)
{f.O.H.
u _PLANTA
1
Figura: U! Sistema de control digital de lazo cerrado
Si la forma del compensador D(z) = es: ; se
puede escribir:E(z) cz + d
D(z) =U(z) a + bz-i Ecu. 1,E(z) c + dz"
donde z 1 representa un retardo unitario, y produce una demora de un
período.
A partir de la ecuación 1.8 se obtiene u(kT) así:
u(kT) = - d u ( ( k - l ) T ) + ae(kT) + be( ( k - 1) T )
El diagrama de bloques de la figura 1.11 puede reducirse al

- 18 -
de la figura 1.13 si G (z ) se expresa como la función de transferencia
de la planta con el Z . O . H . en cascada.
La función de transferencia del Z . O . H . esta dada por:
r*(t) r(t)
r(t)
EntradoT t
Salida
Rgura 1.12 Respuesta da un Z.O.H. a un impulso unitario
Del gráfico de 1 a figura 1.12 se desprende que:
r(t) = u(t) - u(t-T)
L{ r(t)} = Gz Q H(s) = L{u(t) - u(t-T)} = 1 - e-Ts
donde G-, ,-, u(s) = Función de Transferencia del Z.O.H.L. U. n
De esta forma se obtiene G(z.) como:
SU) = - G(s)}
"1Entonces G(z) = (1 - z") Z { - } ; luego:

J^ D (7) G(z) Y
Figura'- 1.13 Diagrama de bloques equivalente
1.6 VENTAJAS E IMPORTANCIA DE SISTEMAS DE CONTROL DIGITALES.
El control mediante técnicas digitales tiene gran aplicación
en procesos industriales, debido a que provee alta precisión, así c£
mo flexibilidad y versatilidad en la programación que los métodos de
trabajo con señales análogas no son capaces de proveer.
Al utilizar el muestreo en sistemas de control, se pueden
construir dispositivos más simples y sensibles, para realizar con ma_
yor eficiencia.
Al utilizar componentes digitales o por muestreo de datos se
puede controlar alta potencia, mediante elementos de control sensi-
bles, sin una excesiva amplificación de potencia, además de minimizar
el efecto de carga de los elementos sensibles.
Una ventaja significativa de este tipo de sistemas5 es que
la utilización de elementos digitales o por muestreo de datos, permi_
te una mejor distribución en partes importantes del sistema; esto da

- 20 -
como resultado una economía en la utilización del equipo, de manera
que un componente puede tener varias funciones.
Ya que los datos muestreados pueden ser codificados, las SJB
nales de datos en sistemas de control digital pueden ser recibidas y
transmitidas en forma de código de pulsos, y se puede tener canales
casi libres de error para transmisión a través de medios ruidosos; el
único error que se tiene es el de cuantización.
Los control adores digitales tienen mayor versatilidad que
los correspondientes análogos. El programa que caracteriza a un cojí
trolador digital puede ser modificado para adaptar ciertas condicio-
nes de diseño, sin ningún cambio en la circuiterfa.
Elementos de control digitales son más confiables, más com-
pactos y livianos, tienen mayor confiabil idad y menos costo que los
correspondientes análogos.

C A P I T U L O I I
ANÁLISIS DE SISTEMAS POR MUESTREO DE DATOS
2.1 Análisis de Sistemas de Control Digital
2.2 Ingreso de Datos
2.3 Análisis de Sistemas por Muestreo de Datos en el
dominio del tiempo
2.4 Obtención de la Respuesta en el tiempo por medio
de un computador
2.5 Análisis de Sistemas por Muestreo de Datos en el
dominio de la frecuencia

- 91 -C- J.
2.1. ANÁLISIS DE SISTEMAS DE CONTROL DIGITAL.
El análisis de sistemas de control digital puede ser realiza-
do en el dominio del tiempo o en el dominio de la! frecuencia. En el
presente trabajo se desarrollan programas de apoyo para análisis y dj_
seño de sistemas de control de acuerdo a especificaciones de respuesta
transitoria en el tiempo (máximo sobreimpul so, tiempo de estabiliza-
ción, etc.) o en la frecuencia (margen de fase, margen de ganancia,
etc.).
Para realizar este estudio se ha creado un programa principal,
el cual inicial iza ciertos parámetros, y permite l'a selección de pro-
gramas de biblioteca., los cuales pueden ser cargados a la memoria del¡
computador por medio de teclas definibles, dependiendo del tipo de aná_
lisis que se escoja. Su diagrama de flujo se indica en la figura 2.1..
iLa creación de un programa principal proporciona ciertas ve_n_
tajas:
1. En 1 a memoria del computador estará presente solamente el programa
escogido, teniéndose por consiguiente un ahorro considerable de me
moria.
2. Cada programa puede ser desarrollado independientemente para luego
ser acoplado al programa principal.
La biblioteca de programas se indica en la ffigura 2.2, la cual,
muestra las diferentes posibilidades de trabajo, descritas en cada bl_o
que. Los círculos con numeración corresponden a las funciones de cada

Iniciolizacion de variables
de cada programa
Inicializar el trabajo en
la unidad donde so
encuentra el disco
1En pantalla
tójnú de programasEscoja tecla
APPEND del programa
deseado
Ejecución del progama
deseado
Figura 2.1 Diagrama de Flujo de! progama maestro

DA
TOS
E
N F
OR
MA
NU
MÉ
RIC
A
ING
RES
O
DE
DA
TOS
LEC
TU
RA
DE
DA
TOS
(4)
(8)
(12)
(4
) (6
) (1
2)
MO
DE
LAC
IÓN
E
NF
UN
CIÓ
N
DE
LP
ER
IOD
O
T
P R
OG
RA
MA
PR
INC
IPA
L
1INGRESO
DE DATOS
LECTURA
DE DATOS
4)
(6)
(12)
(4
) (5
) (1
2)
RE
SP
UE
STA
EN
E
L
TIE
MP
O
Hl AN
ÁL
ISIS
DE
FR
EC
UE
NC
IA
©
@
DIS
CR
ET
IZA
CIO
ND
E
FIL
TR
OS
CO
NT
INU
OS
izr CO
NT
RO
LAD
OR
P.I
.D.
ro co
AN
ÁLI
SIS
D
EFR
EC
UE
NC
IA
CO
N-C
OM
PE
NS
AC
IÓN
—
10 MÉ
TO
DO
D
IRE
CTO
DE
D
ISE
ÑO
SIM
ULA
CIÓ
N
DE
CO
NT
RO
L O
N
LIN
E
13IN
FO
RM
AC
IÓN
GE
NE
RA
L
Figu
ra
2.2
Esq
uem
a de
la
e
stru
ctu
ra
de
la
Bib
liote
ca
de
Pro
gram
as

- 24 -
tecla definibl e.
El índice de programas y la asignación de teclas es la siguien_
te:
TECLA 1 :
TECLA 2 :
TECLA 3 :
TECLA 4 :
TECLA 5 :
TECLA 6 :
TECLA 7 :
TECLA 8 :
TECLA 9 :
TECLA 10:
TECLA 11:
TECLA 12:
TECLA 13:
ÍNDICE DE PROGRAMAS
ENTRADA DE DATOS EN FORMA NUMÉRICA
MODELACIÓN EN FUNCIÓN DEL PERIODO DE MÜESTREO T
RESPUESTA EN EL TIEMPO
ANÁLISIS MEDIANTE LA TRANSFORMACIÓN BILINEAL
DISCRETIZACION DE FILTROS CONTINUOS
CONTROLADOR DISCRETO P.I.D.
RESPUESTA CON COMPENSACIÓN
ANÁLISIS DE FRECUENCIA CON COMPENSACIÓN
MÉTODO DIRECTO DE DISEÑO
SIMULACIÓN DE CONTROL DIGITAL DIRECTO
JMPRESION DE RESULTADOS
INFORMACIÓN GENERAL
2.2. INGRESO DE DATOS.
iLos datos pueden ser Ingresados de 2 formas
1. En forma numérica
2. En función del periodo de muestreo.
En cualquiera de las dos formas, la entrada de datos contieneii
la función de transferencia de lazo abierto del sjistema 6(2) en el dp_
minio z3 donde los coeficientes o números se introducen en orden des-

- 25
En pantalla:OPCIONES1> Ingreso de datos2. Lecíura de datos
En pantallaINGRESO DE DATOS »
-Grado del Numerador-Grado del Denominador-Coeficientes del Numerador
-Coeficientes del Denominador
6 Almacenar datos
NO
ingresar ••Nombre del archivo
Creación delarchivo de datos
Lectura do datos
Rgura 2.3 Diagrama de flujo de! prclgrama ingresode datos en forma nume'rica
002706

- 26 -
cendente de potencias.
Ingreso de datos en forma numérica.- Se lleva a cabo presionando 1 a te
cía 2. Se tiene la posibilidad de almacenar o leer datos de un archi-
vo. El diagrama de flujo se Indica en 1 a figura 2.3.
Ingreso de datos en función del período de muestr^o T.~ Se lleva a ca_i
bo presionando la tecla 3, y al Igual que en el programa anterior seii
tiene la posibilidad de almacenar o leer datos.
En este programa se tiene la posibilidad
cientes de la forma: k ? k 4 k sTy k3T e . Se dimensiona una matriz
de introducir coefi
(Q) dependiendo del número máximo pi de coeficientes de la forma
kiT 2 y del número máximo p2 de coeficientes de la forma k3T 4 e 5 . *
Luego se inicial iza la matriz Q con cero a todos los coeficientes; se
introducen las constantes k^ ,k2>k3Sk4)k5, las cuales son asignadas a
localidades de la matriz Q, dependiendo del coeficiente de la función
de transferencia. De esta forma puede evaluarse luego cada coeficien-
te, teniendo la posibilidad de poder variar el período de muestreo,
sin necesidad de introducir nuevamente las constantes k-,....ks de ca
da coeficiente.
El diagrama de flujo del
1 a figura 2.4. -
programa de modelación se indica en
2.3. ANÁLISIS DE SISTEMAS POR MUESTREO DE DATOS EN EL DOMINIO DEL
TIEMPO.

- 27 -
EN PANTALLA
INGRESO DE COEFICIENTESEN FUNCIÓN DEL PERIODODE MUESTREO
OPCIONES
I. INGRESO DE DATOS -Z. LECTURA DE DATOS
EN PANTALLA:-INGRESAR NUMERO MÁXIMO DE
TÉRMINOS DE LA FORMA K,Tk2
-INGRESA NUMERO MÁXIMO DETÉRMINOS DE LA FORMA K3 T* «
-INGRESAR GRADO DEL.NUMERADOR
-INGRESAR GRADO DEL DENOMINADOR
CREACIÓN DE LA MATRIZDE COEFICIENTES
EN PANTALLAINGRESO DE COEFICIENTES ENFORMA DESCENDENTE
INGRESAR CONSTANTES DELNUMERADOR Y DENOMINADOR:KI, K a t K 3 , K 4 , K3 DE CADACOEFICIENTE
NOMBRE DE ARCHIVODE DATOS
SI
NO
CREACIÓNARCHIVO DE
¿< '•1
DELDATOS
LECTURA DE DATOSDE ARCHIVO
Figuro 2.4 D logrom o da flujo del p r o g r a m a do e n t r a d a de d a t o * en
f u n c i ó n del p e r i o d o de m u e s t r e o T
- 28 -
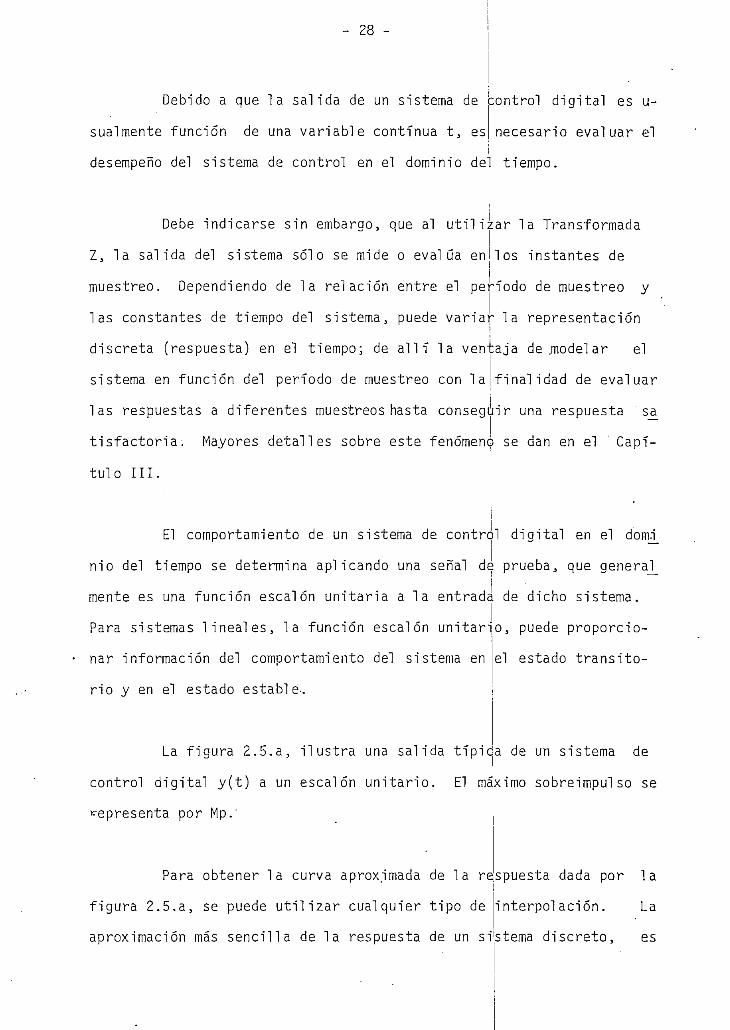
Debido a que la salida de un sistema de bontrol digital es u-
sualmente función de una variable continua t, es necesario evaluar el
desempeño del sistema de control en el dominio del tiempo.
Debe Indicarse sin embargo, que al utilizar la Transformada
Z, la salida del sistema sólo se mide o evalúa en los Instantes de
muestreo. Dependiendo de la relación entre el período de muestreo y
las constantes de tiempo del sistema, puede variar la representacióniidiscreta (respuesta) en el tiempo; de allí la ventaja de.modelar el
sistema en función del período de muestreo con la finalidad de evaluar
las respuestas a diferentes muéstreos hasta conseguir una respuesta sa_
tlsfactorla. Mayores detalles sobre este fenómeno se dan en el ' Capí-
tulo III.
El comportamiento de un sistema de control digital en el domó,
nio del tiempo se determina aplicando una señal de prueba, que general^
mente es una función escalón unitaria a l a entrada de dicho sistema.
Para sistemas lineales, la función escalón unitario, puede proporcio-
nar Información del comportamiento del sistema en
rio y en el estado estable-.
el estado transitó-
la figura 2.5,a, Ilustra una salida típltía de un sistema de
control digital y(t) a un escalón unitario. El máximo sobreimpulso se
representa por Mp.'
Para obtener la curva aproximada de la respuesta dada por la
figura 2.5.a, se puede utilizar cualquier tipo de Interpolación. La
aproximación más sencilla de la respuesta de un s1;stema discreto, es

- 29 -
colocar a la salida un dispositivo de retención de orden cero. De es-
ta forma el valor de la salida será el mismo hasta que ocurra un nuevoí
muestreo en la señal. Esto se ilustra en la figura 2.5.b.
y(t)
Mp
yít>
n
r3T 4T 8T 6T TT 6T 9T 10T 1IT O T 2T 3T 4T 3T ÍT 7T QT 9T IOT I I T
Figura 2.5 Respuesta ene! tiempo de un sistema por muestreo de datos.
Debe indicarse que la selección del periodo de muestreo de un
sistema de control digital, no se basa, sol amenté e'n la precisión de la
representación del sistema en los instantes de muestreo, sino también
en el comportamiento del sistema, su estabilidad, en consideraciones
de circuiterfa. Aunque el propósito de este trabajo no es el de hacer
un estudio sobre la selección del período de muestreo, en el Capítulo
III, se describirá un método para escoger el período de muestreo de un
sistema de control por muestreo de datos.
El objetivo del análisis en el tiempo es jel de obtener las ca
racterísticas de la respuesta, y para ello es nece'sario realizar un es_\
tudio de la transformada Z (inversa, con la finalidad de obtener la
respuesta en el tiempo.
Para un sistema continuo, si- tomamos la transformada inversa
de Laplace. ésta es única; pero al tomar la transformada I inversa de

30 -
-iun sistema discreto, no es única; es decir z {f(z)} no es necesa-
riamente Igual a f(t).
-iUna mayor Interpretación de z {F(z)> es f(kT)3 la cual es
|Igual a f(t) solo en los Instantes de muestreo. La transformada Z " i_n
versa se denota así:
-if (kT) = 2 íF(z)} = TRANSFORMADA INVERSA DE F'(zl). ,
A continuación se resumen los métodos para obtener la trans-
formada Z Inversa.
a) Desarrollo en fracciones parciales.
Este método es similar al que se útil Iza i para sistemas cont-f-
nuoss con la transformada de Laplace. Para un sistema continuo si
F(s) es la transformada de Laplace de f(t) ; F(t) puede ser obtenida
expandiendo F(s) así:
uf \) = B • C
s + a s + b s + c
donde a , b 3 c 3 son los polos cambiados de signo de F(s) . (Se asume
polos simples) f(t) se obtiene así:
r - / _ L \ ~aL , n ~DL , ^F(t) = A e + B e + C e~ C L
En el caso discreto, F(z) no se expande al igual que para elA
caso continuo, ya que yn término descompuesto e'n la formaz + a

- 31 -
no se encuentra en una tabla de transformadas.
F(z) _ A
z z + a z + b
A 7 flü "7•*• r— I \ . fj! L.asi : F(z) = - + —z + a z + b
Las transformadas inversas de - y
Entonces se expande:
z + a a - bpueden hallarse
fácilmente en una tabla.
Si F(z) no puede ser dividido por z, se
Fi(z) = z F(z)
Br- ' r- 1 \ .Si F(z) = - + - +IEE + a z + b
Fl(z) =
z + a z + b
F(z) =
f(kT) = fx ((k-l)T)
b) Expansión en series,
iSea F(z) = Z f(kT) z"K = f(o) + f(T) z"1 + f(2T)
k=o
puede definir:
Ecu. 2.1

- 32 -
Si F(z) está definida como:
FU) =b 2 + bn n-i
A(z)
B(z)m < n
Al dividir A(z) para B(z) se tiene una serie infinita
F(z) = c (n-m) zm~n + c (n-m+i) z
f(kT) = { f0, fls f2, .... fk}
donde;
f(n-m) = c (n-m)
f(n-m+l) = c (n-m+i)
c) Método de la Integral de Inversión.
Si en la ecuación 2.1., se toma la integral en un contorno ce
k-irrado, y se multiplica por z , se tiene:
k-i k-i -i k .dzF(z) zN"idz = áf(o) z""1 .dz + d) f(T) z .z
f(kT) z k zk"" dz
Entonces todas las integrales son nulas (teorema de Cauchy),
-i

•f-- 33 -
excepto:
<$ f (kT) z~ z " 1 dz = $ f(kT) z'1 .dz
entonces:
0 F(z) ZK" dz = ó f(kT) z .dz = 2 7 r j f (kT)
luego: f(kT) = -^L- § F (z) z^-1 dz
2ir j
= E (residuos de F(z) z evaluados en los polos de
k-iDe esta forma f(kT) = I (residuos de F(z) z evaluados en
1 os polos de F(z) .
En este desarrollo se ha considerado polos simples.
2.4. OBTENCIÓN DE LA RESPUESTA EN EL TIEMPO POR MEDIO DE UN COMPUTA-
- DOR.
Para obtener la respuesta en el tiempo de un sistema di seré
to, se ha escogido el método de expansión en series, ya que como se ha
dicho F(z) es un cociente de dos polinomios en z; 'sólo debemos dividir
-kel numerador para el denominador, y asf el coeficiente de z es auto-
máticamente la secuencia de valores f(k). Se obtiene de esta forma los

- 34 -
valores de f(kT) en los instantes de muestreo.
Sea G(z) =A ( z ) axz + az "
B(z )< d Ecu. 2.2
la función de transferencia directa de un sistema de control digital .
La función de transferencia de lazo cerrado (para realimenta-
ción unitaria es:
Gt(z) =R(z)
C(z) = Gt(z) . R(z)
Gt(z) =G(z)
1 +G(z)
Utilizando la ecuación 2.2
Gt(r) =
A(z)
B(z) A(z)
1 + A(z) A(z) + B(z)B(z)
Se distinguen tres tipos de entrada:
1) Función impulso: r(t) = 6(t)
R(z) = 1

- 35 -
2) Función escalón: r(t) = k u(t)
R(z) = k .z- 1
3) Función rampa : r(t) = k Ui(t)
R(z) = k T z
Entonces C(z) = A(z)
A(z) + B(z). R(z)
donde R(z) es cualquiera de las tres funciones definidas anteriormente.
Dividiendo el numerador (n) de C(z) para
se obtiene:
C ( z ) = ciZ 1 + c2z~2 + c3z 3 + si n < d
su denominador (d),
C(kT) = O + GÍ 6(t-T) + c2 6(t-2T) + c3 6(T- 3T)
A con t inuac ión se presenta un ejemplo para I lus t rar las ventja
jas de este método.
Sea G ( z ) = 1.264 z
z2 -1.368z + 0.368 '; G t ( z ) = 1,264 z
z2 - 0.104 z + 0.368
(para real Imantación u n i t a r i a )
Si r ( t ) = u ( t ) ; R ( z ) = ^— ; T = O.lsz- 1

- 36 -
C ( z ) =1.264 z2
(z-i)(z2 - 0.104 z + 0.368)
Consideremos pr imeramente el método de expansión en fraccio-
nes parc ia les :
C ( z ) = Z [1 0.5 + j 0.265 0.5 - j 0.265
haciendo
z-1 z - (0.052 + j 0.605) z - (0.052 + j 0.605)
= 0.052 + j 0.605
e~Tx eos (Ty) = 0.052
resol v iendo : T . X = 0.5
T . Y = 1-487
entonces: z - (0,052 - j 0 .605) = z - e
e~Tx sin (Ty) = 0.605
-0.1(5+jl4.87)
z - (0.052 + j 0 .605) =z - e"0-K5-J14.87)
reemplazando en C ( z ) :
C ( z ) =-J. ¿. ti
( 0 .5 + J0 .265)z _ 0.5 - J0 .265)z-0.1(5+jl4.87)-0.K5-jl4.87)
así: c(t) = 1 - ( 0 . 5 + J 0 . 2 6 5 ) e"(s " J14'87)t - (0.
-5t
5 - J 0 . 2 6 5 ) e-(5+J1487) t
c(t) ~ I ~ & (eos 14.87t - 0.53 sin 14.87t).

- 37 -
Evaluar C(t) de esta forma sería un proceso muy largo, y en
algunos casos difícil. Utilizando el método de expansión en series,
se tiene:
-i -2 — 3C(z) = 1.2642 + 1.3962 + 0.945z + 0.851z + 1.0082 + 1.052
-6
-7+ l .OOz + 0.976z +
entonces: C ( k T ) = 1.264 ó ( t - T ) + 1.396 6 ( t - 2 T ) + 0.945 5(t- 3T) +
+ 0.851 < 5 ( t - 4T) + 1.008 6 ( t - 5' ) + 1.05 S ( t - 6) +
+ 1.00 6 ( t - 7 ) + 0.976 5 ( t ~ 8 ) + . . . .
Estos resultados se ilustran en la figura.2,6
1.4.
c,c
.o • •
0.8
o.e.
0.4
0.2;
C(t)
T ZT 3T 4T 3 T «T 7T 8T 9T t
Figura 2.6 Respuesta en el tiempo

- 38 -
Con ayuda de un computador C(kT) puede ser evaluada fácilmen-
te, expandiendo C(z) en serles, dando lugar a
complicaclones.
un
El diagrama de flujo del programare respuesta en el tiempo
se Ilustra en la figura 2.7.
2.5. ANÁLISIS DE SISTEMAS POR MUESTREO DE DATOS
FRECUENCIA.
proceso rápido y sin
EN EL DOMINIO DE LA
El análisis en frecuencia se basa en la respuesta de frecuen-
cia de un sistema, la misma que se define como la respuesta en régimen
estacionario de un sistema a una entrada sinusoidal. Si se varía _ la
frecuencia de entrada, se pueden obtener las curvas de amplitud y fase
de la respuesta en función de la frecuencia, y a Dartir de 1 as carac-
terísticas en el dominio de la frecuencia, se puede preveer el compo_r
tamiento del sistema en el dominio del tiempo.
Existen tres métodos de análisis en el dominio de la frecuen-
cia, los cuales se basan en los siguientes diagramas de respuesta de
frecuencia.
1. Diagrama de Nyquist
2. Diagrama de Bode
3. Diagrama de Nichols
En este trabajo se utilizará el segundo método, ya que tiene
algunas ventajas, entre las que encontramos:

- 39
¿RESPUESTA CONCOMPENSACIÓN ?
¿DATOS EN FUNCIÓNE T
SI
I EVALUACIÓN DE LOSiI COEFICIENTES DE G(z)
Y CALCULO DE Gt(*)
EN PANTALLA- INGRESARr
-Nl'MERO DE TÉRMINOS DE LA SERIE
-PERIODO DE MUESTREO T •
EN PANTALLA «
-OPCIONESI.-FUNCIÓN IMPULSO2.-FUNCIÓN ESCALÓN3.-FUNCIO RAMPA
CALCULO DE LA FUNÓ10N
DE TRANSFERENCIA DE LAZO
CERRADO Qt(Z)
¿OPCIÓN 1 7
——.NO.—-
¿OPCIÓN Z 1
SI
SI
NO
'
MULTIPLICAR tít (2) POR
T Z
(Z-i)2
MULTIPLICAR G! (Z) POR
( Z - l )
J
'• f
CALCULO DE LOS VALORES DE LA SAUDA
EN LOS INSTANÍES DE MUESTREO

- 40 -
¿COMPENSADORp.r. o.
SI
MULTIPLICAR G(Z) POR
EL COMPENSADOR DIRECTO -D(z)
MULTIPLICAR G ( Z ) POR
EL COMPENSADOR D(Z)
I - {OBTENER G1{Z) -
MULT1 RUCAR G (Z) POR '
EL COMPENSADOR DIRECTO P. Í.O.
GRÁFICO DE LA RESPUESTA
EN EL TIEMPO
I N G R E S A R •--EL NUEVO VALOR DE T-EL NUEVO VALOR DEL NUMERODEYERMINOS
CALCULO DE LOS NUEVOS VALORESDE LOS COEFICIENTES
OBTENCIÓN DE Gt (Z)
¿DATOS EN FUNCIÓN DE T?
¿CAMBIO DEL PERIODODE MUESTREO T ?
Figuro 2.7 Diagrama de Flujo del programa de calculo de la respuesta en ei tiempo

- 41 -
1. La adición de polos y/o ceros de un sistema dado, no requiere de
nuevos cálculos, ya que los productos de la expresión de la función
de transferencia pasan a ser sumas, puesto que
ritmos, introduciéndose el principio de superposición.
2. Indica al diseñador el efecto de polos y ceros
se trabaja con loga
individual es.
3. Puesto que el eje horizontal está en forma logarítmica, la magnitud
y 1.a fase pueden ser grafizadas en un amplio rango de frecuencia.
4. Si se trabaja en forma manual , se puede representar el gráfico a-
proximado de la función por medio de asíntotas
Para aplicar el método de respuesta de frecuencia al análisis
de sistemas discretos, se requiere la utilización de la Transformación
Bilineal. En un sister.3 continuo, la respuesta de frecuencia se defi_
ne como el valor de la salida C(s) para s = jw. ff\r la trans_
formación z = ejw - eos toT + j sen wT, se tiene:
a. El eje imaginario jw se mapea en un círculo
b. Al aplicar el método de respuesta de frecuenci
z = j sen wT, la cual es una función irracional
de radio unitario,
, se debe hacer
Entonces la llamada Transformación Bilineal pasa del plano z
al plano w = p + Jn- Con esto se consigue:
1. Se restituye el plano z a un plano parecido al
2. Se puede hacer w = jn> definiendo a TI como la
obviando el problema de la irracionalidad.
plano s.
frecuencia ficticia,

- 42 -
La transformación que se realiza es z =-¡ donde a,b,c,c u + d
d, son constantes.
Se llama bilineal ya que existen 2 transformaciones lineales,
una en el numerador y otra en el denominador.
La figura 2.8 ilustra el proceso de transformación del plano.
s al plano w, a través del plano z. .
ImZ
PLANO Z
Rez
o) b)
Figura 2 .8 Relación entre los planos S , Z , W
Como se puede ver en la figura 2.8, la franja izquierda del
plano s (Fig. 2.8.a), se mapea al plano z en uri circulo unitario
(Fig. 2.8.b). Ya que para respuesta de frecuencia se debe tomar el Ijf
mi te s = jtü, y en el plano z el límite es un círculo de radio 1, no se
puede aplicar directamente el método de respuesta de frecuencia. Al
realizar la transformación bilineal, el círculo unitario, se mapea en
la franja izquierda en el plano w. (Fig. 2.8.c), el cual es similar ali
plano s, y de esta manera podemos aplicar a los sistemas discretos los
métodos de respuesta de frecuencia para sistemas continuos.
Veamos en detalle la Transformación Bilineal w.

43 -
Consideremos primeramente el plano complejo s dividido en un
número Infinito de franjas periódicas como se Indica en la figura 2.9.
FRANJAS
COMPLEMENTARIAS
FRANJA
PRINCIPAL
FRANJAS
COMPLEMENTARIAS
Cw«/2
Figura 2.9 Franjas periódicas en el plano S
donde ws es 1 a frecuencia de muestreo; tos = 2TT
Debido a que la configuración de polos y
-Owi/2
ceros de 1 a función.
muestreada es periódica, se puede hacer el anális s en 1 a franja prlji
cipal. De esta forma se obtiene el esquema de la figura 2.10.
PLANO 3
Figura 2.IO a)Mitad izquierda de la franja principal en el plano Sb)Mapeo ae la mitad izquierda de la franja:'principal del
plano S mediante la trasformada Z
Tomemos la transformación z =1 + w1 - w

- 44 -
de donde se obtiene w = z - 1z + 1
La reglón comprendida dentro del círculo un i ta r io se proyecta
en el semiplano Izquierdo en el plano w, tal caso se Indica en la figj¿
ra 2.11.
PLANO Z
R e z
Figura 2.11 Mapeo entre el plano Z y e!
De esta forma la f u n c i ó n trascendente en
na función racional en w.
s se transforma en u-
Para cua lqu i e r punto en el p l a n o w se cumple
a + jcú - 1
°
(az - I)2
I)
Además se cumple:
W = tg" - tg'a +1
- 45 -
tg w =az-l
(az-l)(az
(a 2 + u 2) -z z '
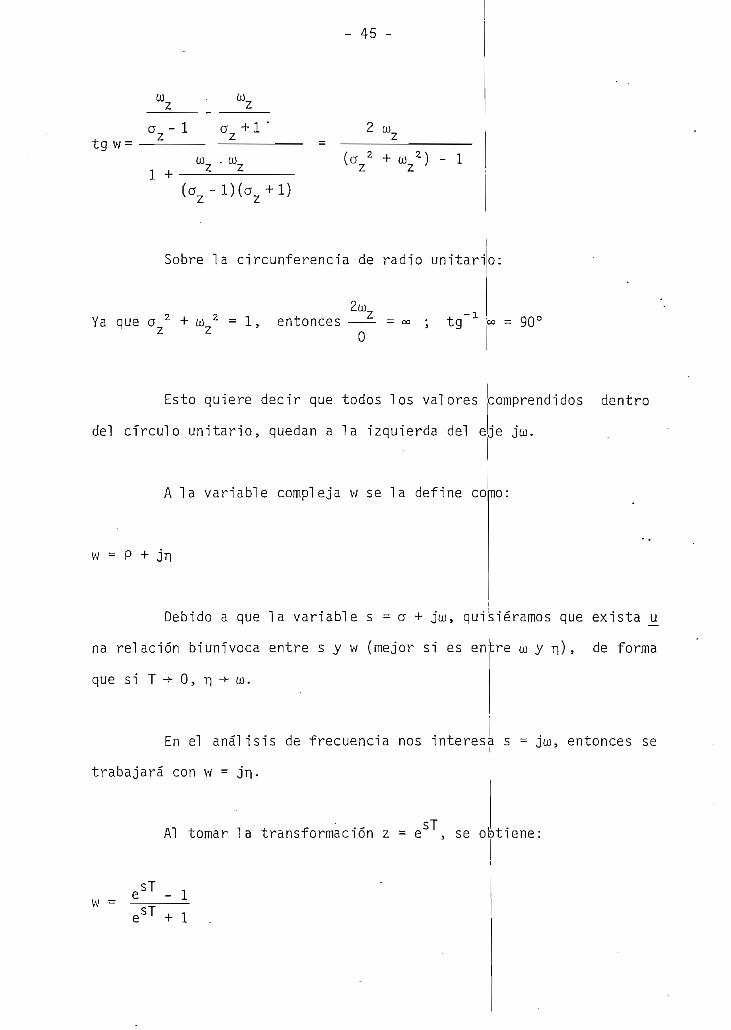
Sobre la circunferencia de radio unltari
Ya que a 2 + w 2 = 1, entonces = °° ; tgZ Z ri
- 90°
Esto quiere decir que todos los valores comprendidos dentro
del círculo unitario, quedan a la izquierda del eje jai.
A la variable compleja w se la define como:
w = P + jn
Debido a que la variable s = a + jio, quisiéramos que exista _u_
na relación biunívoca entre s y w (mejor si es entre oí y TI) , de forma
que si T - ^ 0 , n - » - ü ) .
En el análisis de frecuencia nos interesa s - jw, entonces se
trabajará con w = jn-
sTAl tomar la transformación z = e , se obtiene:
e s T - l
sT

46 -
Multiplicando numerador y denominador por e
esT/2 _ e-sT/2
esT/2 + e-sT/2
Si s = jai y w = jn :dü)T/2
-jwT/2
entonces n = tg(~) y w = j tg ( — ')2 2
Se suele escoger también la transformación
w A 1 z "vv =T z + 1
Reemplazando z = e en 1 a ecuación 2.3, se obtiene:
T e s T + l
w =- th (T 2
Ecu. 2.3
Si s = jtd y z = e (en el círculo unitario)
w = A j tg = JT
de donde: 4. /= tg ^ "

- 47 -
Se puede ver que si z varía alrededor del circulo unitario en
el plano de frecuencia compleja w3 ri permanece real y varía de cero a
infinito. Si se toma el factor de escala •= para asegurar que las fun
ciones de transferencia en el plano w se aproximarán a aquellas en el
plano s cuando T -*- 0. Despejando z de 2.3 y haciendo w = jr], se ob-
tiene:
1 + 3
1 - i JÜ1 J 2
La transformación w tiene las siguientes características:
1. Al utilizar la transformación w = — ( -. ) , a ganancia del siste_
ma se mantiene inalterable.
2. Los polos en el plano w son muy próximos a los
y la aproximación es mayor, mientras menor sea
treo.
3. Existe una correspondencia biunívoca entre los
w, más no entre los ceros, y esto se debe a la
pol os en el pl ano s,
el período de mues-
polos del pl ano s y
acción del Z.O.H.
El cero introducido tiene relación directa con el período de
muestreo. A mayor frecuencia será el cero mayor.
4. Los sistemas por muestreo de datos dan lugar a funciones de transfe
rencia de fase no mínima; esto es, pueden existir ceros y/o polos
fuera del círculo unitario.
1
- 48 -
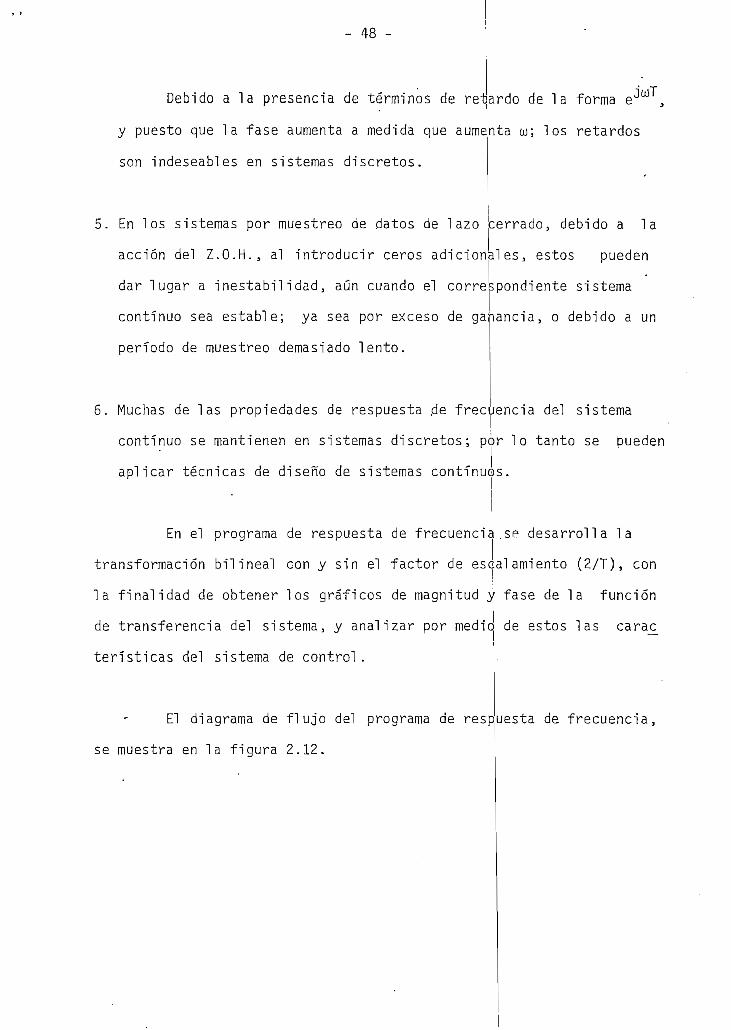
Debido a la presencia de términos de retardo
y puesto que la fase aumenta a medida que aumenta
son indeseables en sistemas discretos.
de 1 a forma e
w; los retardos
jwT
5. En los sistemas por muestreo de datos de lazo terrado, debido a la
acción del Z.O.H., al introducir ceros adicionales, estos pueden
dar lugar a inestabilidad, aún cuando el correspondiente sistema
continuo sea estable; ya sea por exceso de gajiancia, o debido a un
periodo de muestreo demasiado lento.
6. Muchas de las propiedades de respuesta .de frecuencia del sistema
continuo se mantienen en sistemas discretos; por lo tanto se pueden
aplicar técnicas de diseño de sistemas continuos.
En el programa de respuesta de frecuencia.se desarrolla la
transformación bilineal con y sin el factor de escalamiento (2/T), con
la finalidad de obtener los gráficos de magnitud y fase de la función
de transferencia del sistema, y analizar por medie
teristicas del sistema de control.
de estos las carac
El diagrama de flujo del programa de respuesta de frecuencia,
se muestra en la figura 2.12.

- 49 -EN PANTALLAOPCIONES
I.-TRANSFORMACIÓN'. Z = -( I - TV/)
2
í.-TRANSFORMACIÓN':
INICIALIZACION DE PARÁMETROS
INGRESAR:
FRECUENCIA INICIAL
FRECUENCIA FINAL
NUMERO DE PUNTOS
CALCULO DEL MARGEN DE FASE .F.
EVALUAR LA MAGNITUD M y FA$EP DE G { W }
REDUCIR EL INTERVALO DEBÚSQUEDA DEL CAMBIO DESIGNO
SI
NO
¿CAMBO DE SIGNODE M
EVALUAR M.EN TODO ELINTERVALO
'AVALUAR LA MAGNITUD Y FASEDEL COMPENSADOR D ( w ) Y
MULTIPLICAR POR G(w)
SI NO EXÍSTE CAMBIO DESIGNOIMPRIMIR MF= INDERNlOO
CALCULO DEL MARGEN DE GANANCIA MG
EVALUAR M , y P DE G (w)
SI
EVALUAR M y P DE D ( w)
Y MUTIPLICAR POR G ( w)

- 50 -
REDUCIR EL INTERVALO DEBÚSQUEDA DEL CRUCEDE FASE POR (-180)
CRUCE DE FASEPCR'(-I80 ¿ (P+180) < C ?
EVALUAR P EN TODOEL INTERVALO
IMPRIMIR' M , P
SI NO HAY CRUCE POR(-180°) IMPRIMIR
MG-INDEFINIDOGRÁFICO DE MAGNITUD Y FASE
¿ DATOS EN FUNCIÓN DE T
CAMBIO DEL PERIODO DEMUESTREO T
INGRESAR EL NUEVO VALOR DE
T y CALCULAR COERCIENTESDE G (Z)
REPETIR EL-CALCULO DE MG y MF
Figura 2.12 DIAGRAMA DE FLUJO DEL PROGRAMA DE RESPUESTA DE FRECUENCIA

C A P I T U L O I I I
COMPENSADORES DISCRETOS EN CASCADA
3.1 Eauivalentes discretos de filtros continuos
3.2 Controlador discreto P.I.D.
3.3 Método Directo de Diseño
3.4 Cálculo de la salida con compensación

- 51 -
3.1. EQUIVALENTES DISCRETOS DE FILTROS CONTINUOS
En este capítulo se describirá la compensad
por muestreo de datos, ya sea partiendo del compensador
cretizándolo y aplicando el compensador discreto
trol digital , corno también a partir de compensado
ón de sistemas
continuo, di_s
al sistema de con-
res en el plano z...
El equivalente discreto de un filtro continuo, consiste en
encontrar el compensador discreto equivalente. Él compensador cor\tí_
nuo puede ser una red de adelanto, atraso, adelanto atraso.
Dado el compensador D(s) =E(s)
Se quiere encontrar el compensador D(z)
D(s).
a cabo de 3 formas:La discretización de D(s) puede llevarse
1. Integración Numérica
2. Acoplamiento de polos y ceros
3. Equivalente de retención utilizando Z.O.H.
Para la discretización mediante integración numérica se pue
den aplicar los siguientes métodos:
a) regla rectangular hacia adelante
b) regla rectangular hacia atrás
c) regla trapezoidal o regla de Tustin
_ U(z)
•E^z)equivalente a

- 52
Consideremos un compensador continuo de
_ U(s) _ a
la forma:
Ecu. 3.1
del cual se quiere encontrar su equivalente discreto.
La regla rectangular hacia adelante proporciona en el plano
z, filtros que son inestables; por lo tanto no será utilizada,.
La equivalente ecuación de diferencias de 3.1 es:
u + au = ae
entonces: u(t) =r
- au(t) + ae(t)
u(kT) =
'kT-T
[ -au + ae ] dt +
kT
kT-Tau + ae ]
= u(kT-T) + '
ÁREA DE -au + ae
SOBRE kT-T < T <
La aproximación que realiza la regla rectanaul
consiste en tomar la amolitud del rectángulo aproximado
y kT; es decir:
- au(kT) + ae(kT), tal como se indica en la figura 3.1.
La ecuación aproximada es:
kT Ecu. 3.2
ar hacia atrás
entre (k-l)T

f- 53 -
kT
Figuro 3.1 Aproximación de un filtro continuo mediante laregla rectangular nació atrás
u(kT) = u(kT-T) + T [ -au(kT) + ae(kT) ]
= u(kT-T) ., aT
aT 1 + aTe(kT)
Tomando la transformada Z se obtiene:
D(z) _ U(z) _ aT Tz
E(z)
D(z) =
aT 1-2 aT) a T ) - l
z- 1
Tz+ a
donde se puede realizar la substitución S _ z- 1Tz
Otro método consiste en tomar el área aproximada en 3.2, co-
mo el trapezoide formado por el promedio de dos rectángulos previamen
te seleccionados, tal como se Indica en la figura
De esta forma se obtiene:
3.2.

(k-l)T
Figura 3.2 Aproximación de un filtro continuo medíanle la
u(kT) = u(kT~T) + -M- au(kT-T) +ae(kT~T) - au(kT)
aT
regio de Tustin
ae(kT)
u(kT~T)+— [e ( kT -T )+e (kT ) ] Ecu . 3.3
D(z) =
Tomando la transformada Z de la ecuación
aT(z
(2 + aT) z + (aT-2) Z ( z - 1
T z+1
3.3, se obtiene:
donde se puede realizar la sustitución: s — 'T z+1
Cualquiera de las 2 aproximaciones puede ser vista como un
mapeo desde el plano s al plano z, haciendo s = jco, para realizar la
proyección del eje jw en el plano s hacia el plano
Si s = (regla rectangular hacia atrás)Tz

- 55 -
z =1-Ts
1-Ts 2
2 2 1-Ts
ya que 1 + Ts
1-Ts= 1; la proyección es una circunferencia cuyo cen
tro está en ( — , 0) y el radio es — ,2 2
Si s = - ( •?— ) (regla de Tustin)T z + 1
z =
ya que
.Ts_
2 = 1; la proyección es una circunferencia cuyo
centro está en (O, 0) y el radio es 1.
En la figura 3.3 se ilustra el mapeo de 1
descritos anteriormente al plano z como se puede
transformaciones proporcionan métodos estables.
os filtros continuos
apreciar, estas
El segundo método de discretización basado en el acoplamien-
to de polos y ceros consiste en reemplazar los polos y ceros de D(s)

- 56 -
JImz
PLANO 2
i Rez Rez
a) b)
Figura 3,3 Mapeo de la mitad izquierda dei plano S al plano
a) Regla rectangular hacia atrás
b) Regla trapezoidal o regla de Tustin
por los correspondientes polos y ceros discretos,
formación z = e
Z por integraaon numeVica
útil izando la trans
Se debe tomar en cuenta los siguientes aspectos:
1. Todos los polos de D(s) se mapean de acuerdo a la expresión z =
e . Si D(s) tiene un polo en s = -a; D(z) tendrá un polo en
-aTz = e
2. Todos los ceros finitos se mapean también de acuerdo a la expre_
sión z = e .
Si D(s) tiene un cero en s = -b, entonces D(z)
z = e-bT
3. Todos los ceros de D(s) en s = °°, se mapean en
-1.
tendrá un cero en
D(z) el punto z =
Si se necesita un retardo unitario en 1 a respuesta del filtro tfi_
gital , por ejemplo si se necesita tiempo para computar cada mues_

- 57 -
treo, un cero de D(s) en s = °° puede ser eliminado, entonces D(z)
se mantiene con un numero de ceros en una unidad menor que el núme
ro de polos, en el plano z. De esta forma la
potencias de z , no tendrá término constante
expansión de D(z) en
» y 1 a respuesta a un
pulso unitario,, tendrá un retardo unitario ( Ver ejemplo) .
4. La ganancia del filtro digital debe seleccionarse para mantener la
ganancia de D(s) en la banda central, o en un
1 ar.
Para muchas aplicaciones de control la fr
para s = O (régimen permanente), y de aquí que se
cía de forma que:
punto critico simi-
ecuencia critica es
sel ecciona 1 a ganan
D(s) = D(z)
2 = 1
Este método se ilustra con el siguiente ejemplo:
Consideremos el compensador continuo D(s) =
El cero discreto para s = » se mapea como z = -1.
El cero discreto está en z = e~ ; el -polo discret'p está en z = e
Así: D(z) =
•aT
(z- e~aT) (z- 1)
En estado estacionario lim s D(s) = 1 im (z-1) D(z)
s-* O 2 -*•!

- 58 -
lim s D (s ) =-X lim (z - 1) D (z ) =n 'b, <^~ -; + 0 z-i-1
2k '( 1 -
Igualando los 2 límites, se obtiene k; k = - e"aT
-i1 - e
El filtro digital es entonces D(z) =—•a ( 1 - e-aT -bT
~bT2b ( l - - e ~ ) (2- e " ) (z-
Si se expresa D(z) como ——- , se obtiE(z)
ene:
U(z) _ k(z-e"bT)(z _ k (z2 +z(l-e"bT)-e"bT)
E(z ) C z - e - a T ) ( z - l )
U(z) [ z 2 + z ( - i ~ e ~ a T } - f
U(z) z 2 = -z U(z) (-1-
+ k E(z) ( - e
z2 +z (-1- ,~aT +e-aT
= E(z) [ k ( z2 + z ( 1 - e"bT) - e~bT
e"aT U(z) +k E(z) z
Dividiendo ambos miembros para z:
kz E(z)
U(z) e"ai +k E ( z ) + k z E(z)U ( z )
i -z r-i \ k z E(z) - e
lo cual da lugar a la siguiente ecuación de diferencias:
-bT,

•aT
- 59 -
-aTu(kT) = (1 + e Q 1) u( (k-l)T) -e ai u( (k - 2) T)
k(l-e~bT) e( (k-l)T) - k e'bT e((k-2
k e (kT)
Si se requiere un retardo de tiempo de 1
a la entrada e del compensador, se debe eliminar
Se tiene entonces:
a salida con respecto
el cero en z = -1.
(z-e-aT)(z-l)
1 - edonde k = — ( ~aT
b 1 - e"
Siguiendo el proceso anterior se obtiene:
u(kT) = (l + e"aT) u( (k - 1) T) - e"aT u( (k - 2) T) + k e( (k - 1) T )
k e~bT e ((k-2)T )
Finalmente hagamos el análisis del métodc
que involucra el equivalente de retención del Z.O.
de discretización
H.
El propósito de este método es el de diseñar un sistema, con
una entrada que consiste de muestras- de e(t), y que tenga una salida,
que se aproxime a la salida de D(s), cuya entrada es la función contT_
nua e(t).

60
Primeramente se genera el equivalente
mandólo por medio de las muestras de e(kT).
es continuo, la entrada a éste debe ser también
Mediante un Z.O.H. obtenemos e(t)3 señal
a D(s). La respuesta de D(s) a la secuencia de pulsos e(t) es u(t) ,
discreto de e(t)5 aproxi
Puesfto que el filtro D(s)
continua.
continua de entrada
la cual puede ser muestreada nuevamente para teñe
ra 3.4 se muestra el proceso completo.
r u(kT). En la figu.
e(t)0(5)
u(t)
e(t)l e(kt)
Figura 3.4 Equivalente discreto de D(s) a través de un Z
ü(t)MUcSTREADOS
u(kt)
O.H.
Si solo se tiene e(0), entonces e(t) será un paso de tamaño
e(0), seguido T segundos más tarde por un paso negativo del mismo ta-
maño. ( ¥(t) = e(0) u(t) - e(0) u(t-T) ) . Las nuestras de u(t) como
respuesta a e(0) en "e~(t) se obtienen tomando la transformada de La-
pl ace de D(s) Se puede simbolizar la transformada Z de estas mue_s_
tras como:
Las muestras retrasadas un período tiene i la forma:

- 61 -
La contribución total de e(0) a la transformada de las mues-
tras es:
Si ahora e(lT) se aplica, los efectos di
mos de aquellos de e(0)9 pero ya que están retrasados
la contribución:
lámicos serán los mi_s_
un período dan
e(lT) z'1
Sumando todas las componentes, se tiene
U(z) = 2 e(kT)k=0
-k
= E(z) . (1-z-1
El equivalente de retención está dado por:
go:
D(z) =
El proceso de reconstrucción de la señal
E(z)i; lúe-
se indica en 1 a fi-

- 62 -
gura 3.5.
Figura 3.5 Una señal, sus muestras y la ap^ximocion
mediante un Z.O.H.
El proceso de discretización se lo real i
ma que puede ser seleccionado del menú.
A este programa debe Ingresarse una vez
la respuesta en el tiempo., o se ha analizado el si
diante la transformación bilineal W.
Este programa consta de cuatro opciones
1. Regla rectangular hacia atrás
2. Regla de Tustin
3. Mapeo de polos y ceros
4. Compensador discreto en el dominio Z.
Se han escogido estas cuatro opciones,
más importantes3 y las que más se utilizan en la
Se ha creído conveniente crear la opción
za mediante un progra
que se haya calculado
istema de control me-
debido a que son las
práctica.
número 4, debido a

- 63
que se puede diseñar un sistema de control, no sSl o partiendo del si_s_
tema continuo, sino directamente del sistema muestreado,, y de esta
forma calcular el compensador en el dominio z (compensador discreto).
Se ha previsto para el programa redes de compensación de pri
mer grado y cuadráticas, que son los más utilizadas (a excepción del
método de mapeo de polos y ceros, el cual considera redes de primer
grado, debido a la complejidad en el trabajo con
El diagrama de flujo del programa de di^cretización de fil-
tros continuos se muestra en la figura 3.6.
CONTROLADOR DISCRETO P.I.D.
En el diseno de sistemas de control contí
P.I.D. (Proporcional - Integral - Derivativo), se
aplicaciones, en los cuales se necesita mejorar 1
ria y además reducir el error en estado estable.
ques de un control ador P.I.D. continuo actuando
rror e(t) se muestra en la. figura 3.7,
•(t)E(S)
redes cuadráticas).
nuo, el control ador.
útil iza en muchas
a respuesta transito_
El diagrama de bljD_
sobre 1 a señal de e
u(t)
Figura 3.7 Controlador P.l. Du conlmuo
Uls)

INICIO 64 -
EM PANTALLAOPCIONES^
1. REGLA RECTANGULAR HACIA ATRÁS
2. REGLA DE TUSTIN
3. MAPEO DE POLOS Y CEROS
4.COMPENSADOR DISCRETO
SUB. DE INGRESO DE DATOS
SUBR
}
' 1
JTINA DE INGRESO DE DATOS
i
REALIZAR LA TRANSFORUAC.'
S = ( Z - I ) / T Z
1 ,
6U8RUTINADE INGRE-SO DE DATOS
REALIZAR LA TRANSFORMACIÓN
3)SUBR'JTINA DE INGRESO DE DATOS
REALIZAR LA TRANSFOR. INGLESAR COEFICIENTES DE4.
COWPENoADOR DISCRETO
. r
ALMACENAR
' •'
iCOEFJCIENTES
SUBRUT1NA DE INGRESO. DE DATOS
OPCIONES:I.COMPENSADOR DE PRIMER GRADO
2.COMPENSADOR DE SESUNDO GRADO
FORMA DEL COMPENSADOR » g«% bs 4- e
dINGRESAR' o, b.c.d.^f
4-f
'
FORMA DEL COMPENSADOR"
INORESÁR a ,b ,c ,d
t fCALCULO DEL COMPEN3ADOA
Figura 3 .6 Diagrama de flujo del programa do cálculo del compensador discreto D( Z)

- 65 -
El control ador proporcional da un ajuste
trolador integral reduce el error en estado estaci
que el control ador derivativo provee una acción
cir el error los sobretiros en la respuesta transí
Este mismo principio puede ser aplicado
el control ador puede representarse mediante una e
de ganancia; el COJT_
ionario; mientras
anticipada para redu_
itoria.
al control digital ;
cuación de diferen-i
cias o como un polinomio en términos de la variable z.
Para obtener el equivalente discreto del
se puede discretizar cada una de sus partes. La
mentiene inalterable por ser una constante.
controlador P.I.D.3
parte proporcional se
La parte integral puede ser aproximada mediante la regla de
Tustin.
•Así: GjCz) =2 (z-1)
La derivada de e(t) para t=T puede ser aproximada mediante
la siguiente ecuación:
e(t)
dt t=T
e(kT) - e( (k-l)T)
T
entonces la parte derivativa del P.I.D. se puede expresar como:
Gd(z) =

- 66
1uego:
D(z) , i , kp kd
E(z) 2 (z-1) Tz
_ 2kpT (z-1) z + kizT2 (z + 1) + 2 kd (z - 1)A2 Tz (z-1)
[2 kpT + kiT2 + 2 kd ] + z [ kiT2 - 2 kpT - 4 kd ] + 2 kd2 T (z2 - z)
Def in iendo :
a = 2 kpT + kiT2 + 2 kd2T
, kiT2 - 2 kpT - 4 kdb = ;.21
y c = 2 kd
2T
entonces:
U(z)' = a z2 + bz + cz - z
u "I , -2bz + cz
1 - z'1
en forma de ecuación de diferencias:
u(kT) = u (k - 1)T ) + a e(kT) + b e ( ( k - l ) T ) + c e ( ( k - 2 ) T )
- 67 -
ucra la determinación
stema controlado tra-
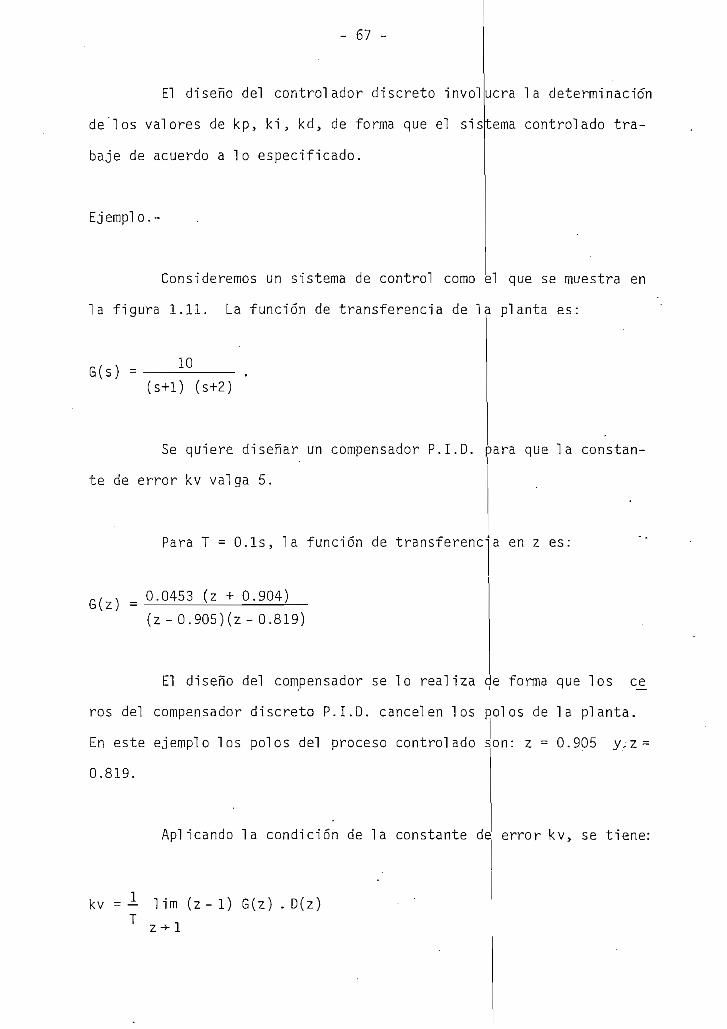
El diseño del control ador discreto invol
de 1 os valores de kp, ki > kds de forma que el si
baje de acuerdo a lo especificado.
Ejemplo.-
Consideremos un sistema de control como el que se muestra en
la figura 1.11. La función de transferencia de la planta es:
6(s) =10
(s+1) (s+2)
Se quiere diseñar un compensador P.I.D. para que la constan-
te de error kv valga 5.
G(z) =
Para T = O.ls, la función de transferenc
_ 0.0453 (z + 0.904)
(z- 0 .905) (z - 0.819)
a en z es:
El diseno del compensador se lo realiza de forma que los ce_
ros del compensador discreto P. I .D. cancelen los polos de la planta.
En este ejemplo los polos del proceso controlado son: z = 0.905 y;z =
0.819.
Aplicando la condición de la constante de error kv, se tiene
kv = - lim (z- 1) G(z) . D(z)
T

- 68
k V - 1
T (z- 0.905)(z- 0.819)
(kiT + 2 kd + 2 kpT) z + (kiT¿ - 2 kpT - 4 kd) z + 2 kd
2 Tz (z- 1)
n ' T n i i c c 0.0453 (1 + 0.0904) / .. .\a T = O.ls y kv = 5 5 = ^ p-^.iki )
(1- 0.905)(1 -0.819)
entonces: ki = 1.
Colocando los polos del compensador para
del proceso, se tiene:
,2 , ki i '4- kd -2 kpT 2 kd = z2
2 kd 2 kd
cancelar los polos
- l . 724z - i -0 .741
n -r n i i • i 2 j. 0.01-'4 kd - ,.0.2 kp. „ ,Para T = O . l s y ki = 1: z+ *- z +' 0.2 kp + 0.01 + 2 kd
2 kd- 1 .7242+ 0.741
.0.2 kp + 0.01 + 2 kd
Resol viendo: kp = 1.45
kd = 0.43.
La figura 3.8 muestra el diagrama de fl
plementado para encontrar el control ador P.I.D. di
jjo del programa im-
iscreto.

- 69 -
EN PANTALLA^INGRESAR GANANCIAS^
PROPORCIONAL (Kp)INTEGRAL ( K ¡ )
DERIVATIVA (Kd)
INGRESAR AJUSTE DE GANANCIA
CALCULO DE LOS COEFICIENTESCONTROLADOS DISCRETO P.I.D.
ALMACENAMIENTO DE LOS COETES DEL CONTROLADOR
ÍK)
DEL
FICIE^
©Figura 3.8 Diagrama de flujo dei programa que calcula el controlador
discreto P.I.D.

- 70 -
3.3. MÉTODO DIRECTO DE DISEÑO.
Las técnicas de diseño que se han descrito anteriormente, pro
vienen de la discretización de filtros continuos en los cual es se con
sideran las limitaciones tecnológicas que se disponen para asegurar la
realización y funcionamiento de las redes de compensación. Para dise
ñar el compensador se han impuesto restricciones
son irrelevantes.
Un método de diseno que elimina las restricciones impuestas
se describe a continuación.
Consideremos el sistema de lazo real irnentado de la figura
3.9, en el que se ha incluido una red de compensación en cascada.
Ría)*sJ¿ D(s)
ff(s)
A> Z.O.H. PLANTA
CXs)
Figura: 3.9 Sistema de control digital con realimentacton unitaria
Dado el sistema de la figura, se quiere
H(z) entre R y C; .esto es de lazo cerrado:
t-1. \ H(z)
encontrar una función
R(z)
C(z) = H(z) . R(z)

- 71 -
1uego:
H(z) = D(z) . G(zlD(z) . G(z)
H(z) [1+ D(z) G(z)] = D(z) G(z)
H(z) = D(z) [G(z) - G(z) H(z)]
entonces:
D(z) = H(z)
G(z) l-H(z)Ecu. 3.4
Consideremos algunos criterios para el diseño del compensa-
dor:
1. Causalidad.-
De la teoría de la transformada Z, se sabe que si el compen-
sador D(z) es causal , a medida que z -+• ™, la función de transfereji_
cía debe ser bien comportada; esto es no debe tener un polo en el
Infinito.
SI en la ecuación 3.4 G(z) tuviera un cero en el Infinito, ej]_
tonces D(z) tendría allí un polo, a menos que se pida un H(z)9 el
cual sea tal de cancelarlo. De esta forma se tiene el criterio de
causal i dad:
- H(z) debe tener un cero en el infinito del mismo orden de G(z)

- 72 -
en el infinito.
La interpretación de este criterio en el
es 1 a siguiente:
Si G(z) tiene un cero en el infinito, la
planta tiene un retardo de al menos un tiempo
consideramos retardos de transporte).
dominio del tiempo
respuesta de. la
de muestreo ( si no
Por causalidad se requiere que el sistema de lazo cerrado, e_s_
to es que H(z) tenga por lo menos el mismo retardo que la planta.
2. Estabilidad.-
Las raíces de la ecuación característica
cerrado son las rafees de la ecuación:
1 -f D(z) G(z) = O
del sistema de 1 azo
Ecu. 3.5
La ecuación 3.5 puede ser escrita como un polinomio si:
D(z) = y G(z) =d(z) a(z)
donde a su vez a, b, c, d, son polinomios.
La ecuación 3.5 se convierte- en:
c(z) b(z) =
d(z) " a(z)
- 73 -
luego: a(z) . d(z) + b(z) . c (z) = O
Si D(z) debe ser tal de cancelar un pol o o cero de G(z), exis
tiría un factor común en D(z) 6(z). Si a este factor se lo denota co-
mo (z - a)a entonces se puede reescribir:
a(z) = (z -a) I(z)
y para cancelar el polo:
c(z ) = (z -o t ) "c(z)
reemplazando estas nuevas definiciones se tiene;
(z -a) ¥(z) d(z) + b(z) (z -a) c"(z) = O
(z-a) [ ád + be ] = O
En otras palabras, este factor común mantiene un factor del
polinomio característico. Si este factor está fuera del círculo unita_
rio/ el sistema es inestable; por lo tanto se debe evitar la cancela-
ción del factor común en DG.
En la ecuación 3.5, se advierte que si D(z) no cancela un po-
lo de G(z), el factor de a(z) debe ser también factor de l-H(z).
Además si D(z) no cancela un cero de G(z)
ser factores de H(z).
3 éstos ceros deben

- 74 -
Resumiendo se tiene:
a. 1 - H(z) debe contener tantos ceros como polos de G(z), que es-
tén fuera del círculo unitario.
b. H(z) debe contener tantos ceros como todos
estén fuera del círculo unitario.
1 os ceros de G(z) que
3. Precisión en estado estable.
La ecuación del error del sistema de la
da por:
E(z) = R(z) [l-H(z) ]
Si el sistema es de tipo I3 con constante de velocidad kv > el
figura 3.93 está da
error en estado estable para una función paso
una entrada rampa. Asi":
e ( o o ) = 11m ( z - 1 ) . -i- [ l - H ( z ) ] = OZ - + - 1 Z - l
esto implica que H(l) = 1.
Para la constante de velocidad se tiene:
es cero y 1/kv para
e (») = 11m (z-1) Tz .„ [1- H(z)] =kv
Si l - H ( z ) es cero en z = 13 se debe ap l i ca r l a regla de L

- 75 -
Hospital ; obteniéndose;
T .dz z=l kv
Ejemplo.-
Consideremos nuevamente el sistema de control de la figura
1.11, en la cual G(s) es ahora: G(s) = 1
s(10 s + 1)
Se requiere diseñar un compensador para
y sea T = 0.5 s.
obtener un máximo so
ts <_ lOs y kv =• l.
lOs+1
bre Impulso Mp <_ 20%, un tiempo de estabilización
El diseño se realizará a partir del compensador continuo D(s)=
el cual elimina el polo de la planta en s = -0.1.
Se tiene entonces D(s) . G(s) =s(sterístlca de lazo cerrado es 1 + D(s)-G(s) = 1 +
Las raíces de la ecuación característica son:
s = - 0.5 + j 0.866
s+1
La ecuación carac-
sTRealizando el mapeo para T = 0.5s con z e
(-0.5 + J0.866)T -0.5T / o O C C - r \ • -0.5T / n o , r , r T - \ e v — ü ' = e eos ( 0 . 8 6 6 T ) + j e sen (0 .866T)
z = 0.707 + JO.327
La ecuación característica es:

- 76 -
( z - 0 . 7 0 7 ) 2 + (0 .327) 2 = z2 - 1.414 z + 0.607
La forma de H(z) es:
z + b2 z"2
1 - 1.414'z + 0.697 z 2
Aplicando la condición de causalidad: H(z) 7=00= 0; enton-
ces bn = 0.
Aplicando la condición de estado estable
entonces: o bx + b2 +1- 1.414 + 0.607
y - T_dH
dz
1 d H(z)
2=1Kv d z-i
Kv
z=l
: H(l) = 1.
b, + = 0.193
...) (0.193) - (0.193) (-1.414+2(0.0 7)) Kv
T(0.193)(0/193)
...).T- (-1.414 + 2(0.607)).! = 0.193 Kv
Debido a que sólo deben satisfacerse 2 ecuaciones, se puede
truncar la serie de H(z) en b2.Reemplazando ! = O,
ne:
0.5 (bx + 2b2) = 0.193 + (2 (0.607) - 1.414) 0.5
0.5 bx + b2 = 0.093
5s y kv = 1, se tie

- 77 -
2 = 0.193
Las ecuaciones a resolver son:
0.5 b
Resolviendo las 2 ecuaciones , se obtiene
entonces: H ( z ) = 0 .2z - O .QQ7
z2 - 1.414 z + 0.607y l - H ( z )
y D(z) = ( Q . 2 Z - 0 . 0 0 7 )
z2 - 1.41Z + 0.607
z 2 - 1.9512z +0.9512
0.0123Z +0.0121
b2 = 0.093
bo. = 0.2
b2 = -0.007
z 2 - 1 . 6 1 4 z - 0 . 6 1 4
z 2 - 1.41z+ 0.607
z 2 - 1.41Z + 0.607
z 2 - 1.614z + 0.614
(0.2z-Q.007)(z- l)(z- 0.951) = (0.2z- O.Q07)(z- 0.951).
(0.0123z + 0 .012l ) (z - l ) ( z - 0.614) (0 .013z + 0.0121) (z - 0.614)
(Ver Ejemplo N- 2 Capítulos)
A continuación se describe el programa para este método de
compensación.
El programa debe tener como entrada la ecuación característi-
ca en el dominio s:de la planta continua multiplicada por el compensa-
dor continuo D(s). También debe introducirse como entrada el valor de
la constante de velocidad Kv.
ores
Con estos datos el programa realiza el
la ecuación característica, y encuentra los val
del compensador directo. Se ha restringido la ecuací
a una de segundo grado, y una función de transferenci
los y ceros dentro del circulo unitario, debido a
mapeo de los polos de
de las constantes
ón característica
ia que contenga p_o
que para funciones-
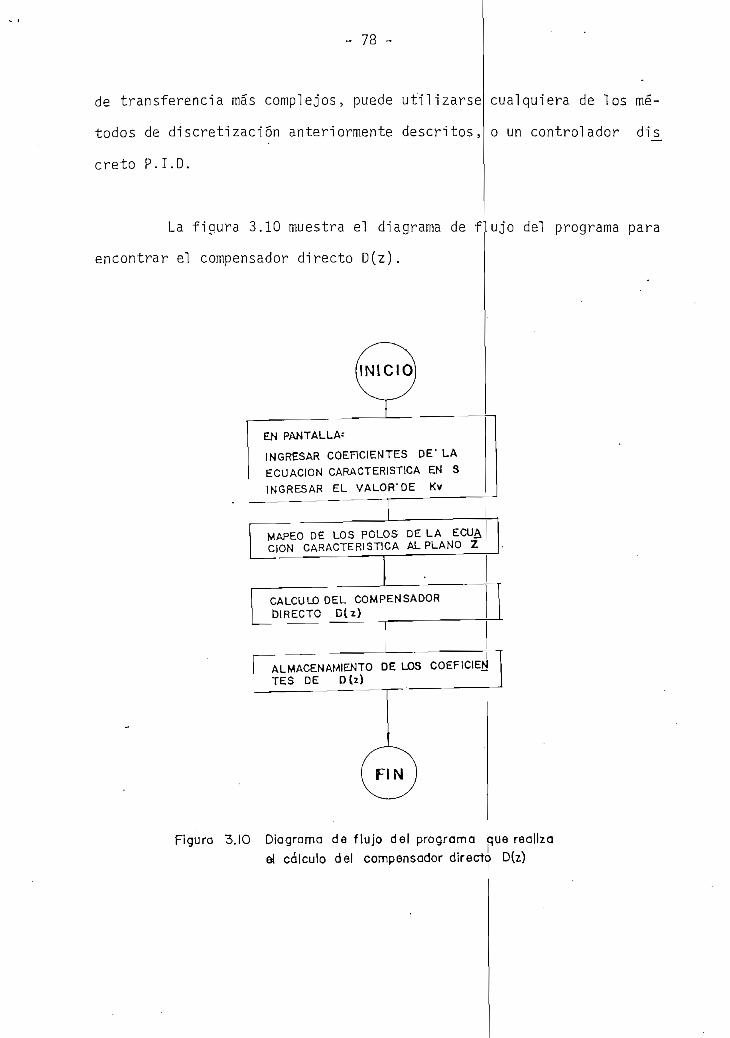
- 78 -
de transferencia más complejos, puede utilizarse
todos de discretización anteriormente descritos,
creto P.I.D.
cualquiera de los mé-
o un control ador dis
La figura 3.10 muestra el diagrama de fjlujo del programa para
encontrar el compensador directo D(z).
EN PANTALLA--
INGRESAR COEFICIENTES DE' LA
ECUACIÓN CARACTERÍSTICA EN S
INGRESAR EL VALOR'DE Kv
MAPEO DE LOS POLOS DE LA EOJ£CION CARACTERÍSTICA AL PLANO Z
CALCULO DEL COMPENSADORblRECTO D(z)
ALMACENAMIENTO DE LOS COEFICIEhTES DE DU)
•i Figura 3.10 Diagrama de f l u j o del programa que realizael cálculo del compensador directo D(z)

- 79 -
3.4. CALCULO DE LA SALIDA CON COMPENSACIÓN.
Para calcular la salida con compensación, es necesario la in-
troducción del compensador discreto D(z) en cascada con la planta. El
compensador D(z) debe calcularse de acuerdo a los requerimientos de la
planta, de manera de obtener un sistema de control que trabaje sati_s_
faetón" amenté.
El mecanismo de obtención de la salida con el compensador en
cascada en el dominio del tiempo se halla incluido en la Figura 2.7;
la obtención de la función de transferencia con el compensador en el
dominio de la frecuencia se halla incluida en la figura 2.12.
Al trabajar con sistemas por muestreo de datos, y al discreti
zar la función de transferencia del sistema, se debe hacer el mapeo de
los polos del plano s al plano z. Al realizar esta proyección se debe
considerar también el mapeo de las especificaciones del plano continuo
s al plano discreto z.
Veamos en detalle los aspectos que deben ser considerados pa
ra e'l diseño de sistemas por muestreo de datos. Estos son los siguien^
tes:
1.- Calidad de trabajo en régimen permanente.
a) Máximo sobreimpulso
b) Tiempo de subida
c) Tiempo de establecimiento
2.- Error en estado estable.

- 80 -
3.- Limitaciones de la señal de control u
a) Valor máximo de u
b) Energía proporcional a J k u2 dt
4.- Rechazo a perturbaciones.
a) Estado transitorio
b) Estado estable
5.- Sensibilidad.
La respuesta dinámica del sistema presenta características de
estabilidad relativa y rapidez de respuesta en cuanto a transitorio se
refiere y el error en régimen permanente en cuanto a precisión.
Las especificaciones del comportamiento
presadas en el dominio del tiempo, y luego trasladadas al dominio de
la frecuencia; esto es, en términos de las 1 ocal i
transitorio, son ex-
zaciones de polos ¿n
el plano s, o en términos de parámetros de respuesta de frecuencia (an_
cho de banda, máximo de resonancia).
1.- Cal idad de trabajo en régimen permanente.
Primeramente es necesario transferir las especificaciones
transitorias de una descripción en el tiempo a una localización de p_o_
los en el plano s. En la figura 3.11.a, se indican las respuestas a
un escalón unitario de un sistema de segundo orden, para distintos va
lores de relación de amortiguamiento (£)• En 1 a
gráfica el máximo sobreimpulso en función de £•
figura S.ll.b, se

- 81 -
0.2 0.4 O.6 0.8 1ÍO
FACTOR DE AMORTIGUAMIENTO §
Figura 3.| 1 a) Respuestas típicas de un sistemab) Relación entre el máximo sobre
El porcentaje de sobreimpulso puede ser aproximado mediante
la fórmula:
de segundo gradompulso y §
% sobreimpulso = (1 - £ / 0.6 ) . 100
entonces 0.6 ( 1 - % sobrelmpul so100

- 82 -
Otro parámetro Importante es el tiempo de subida. Este es
función de wn (la distancia de los polos desde el origen en el plano
s).
A mayor tiempo de subida será menor. SI se toma como
referencia la curva de la figura 3.11.a, para
blda tr, puede ser aproximado por la fórmula:
tr =
entonces wn debe satisfacer ton 2l
2.5
tur
2.5
tr
0.5, el tiempo de
Un parámetro de análisis dentro de sistemas de control es el
tiempo de establecimiento (ts). Se define el tiempo de establecimien-
to como el tiempo requerido por la respuesta para alcanzar un valor
muy cercano al valor en estado estable, y mantenerse dentro de ese va_
lor, digamos por ejemplo dentro de un margen del 1 %.
Para un sistema de segundo orden, la solución es de 1 a forma:
y(t) - 1 - e
donde oíd = wr
raíces).
eos ( codt + cj> )
1 - £2 y ?wn = o (parte real de la
La relación entre wn y wd se Ilustra en
1 ocalIzaclón de 1 as
la figura 3.12.

- 83 -
V/n
Wn Y ]- f PLANO S
Figura = 3.!2 Relación ent re Wn y Wd
Para un criterio de un margen de error del l%3 el tiempo de
establecimiento debe cumplir: ts - 4-6/üjn
entonces: &un ts j> 4.6
Para un criterio del 5%, se debe cumplir
entonces: £wn ts _> 3.
En base a estos resultados, se restringe
ts =
la ubicación de 1 os
polos de lazo cerrado en el plano s, a la región dada por Ta figura
3.13.
Zona Vaüda
Jws2
PLANO S
Figura: 3J3 Restricción de los polos de lazo cerrado en el plano S

- 84 -
Las especificaciones en el plano s deben ser proyectadas al
plano z, de manera de poder diseñar un sistema de control digital. E_s_
to puede hacerse mediante un mapeo de polos y ceros, a través de 1-a J_
gual dad z = e
Veamos la proyección de cada una de las líneas de la figura
3.13 al plano z.
Líneas de % constante. -
Para un coeficiente de amortiguamiento £j constante, un punto
del plano s, se puede expresar como:
s = - oí tg g + jai
reemplazando z = e , se obtiene:
z = e 0 , ZTTW/WS
3 = sin x £ = CONSTANTE
Para un á n g u l o 3 dado la l ínea de £ = CTE (F igura 3 .14.a) , se
transforma en una espiral logar í tmica en el p lano z ( F i g u r a 3 .14.b) .
Cada media revolución de la espiral logar]ítmica corresponde a
un cambio en cos/2 de la l ínea £ = CTE en el p l a n o
Debido a que el a n á l i s i s de los sistemas
s.
de control digitales

85 -
puede realizarse solamente en la franja principal
O < w <
5 es decir para:
< _ w <_ —- , Entonces la espiral logarítmica variará de O a n. La re
gión comprendida entre - tus/2 y O es simétrica
zonavalida
I*
.3jws
-2ÍW3
JW3
(Figura 3.14.c).
PLANO Z
a)
Figura 3.14 Mapeo de la línea de 7 =constante al píano
Líneas de a constante.
Consideremos la l inea de a = CTE como la de 1 a figura 3.15.a
JW
PLANO 2PLANO S
Figura 3.15 Mapeo de la línea de (3" = constante al plano Z
Al tomar la transformada z de s = - a + jL , se tiene:
Raz
= e -crT
entonces, al trasladar al plano z la línea de a = cte, la proyecci n

- 86 -
es un círculo de radio e . Ya que la línea a está a la izquierda
del eje jws la proyección estará dentro del círcu.lo unitario, tal como
se indica en la figura 3.15.b.
Líneas de ton constante.
Retirémonos a la figura 3.16.a. Un punto en el plano s se ex_
presa como;
s = -
I J W
PLANO S
o)
Rez
Figura 3.16 Mapeo de la línea <^n = Constarrte al plano Z
Al tomar la transformada z se obtiene:
z =
Esto da lugar a la curva de la figura 3.16.b
Para que el sistema sea estable se debe restringir el ángulo
de la figura 3.13, lo que implica restringir el
amortiguamiento £.
val or del factor de
Si £ = 0.5 se obtiene la curva de la figura 3.17.

- 87 -
Reglón Valida
Rez
''Reglón Prohibido
Figura 3.17 Curva de £f =0.5 en el plano Z
La restricción para el tiempo de subida
la frecuencia natural debe superar un determinado
de un = CTES son lineas que cruzan las espirales de £ = CTE.
( t r ) 5 se basa en que
valor . Las curvas
SI se restringe el va lor de t a un valor
se tiene:
> UÍ z JL_ ; si T = Is, üjn 1
menor o igual a 8s,
8 10 T
Para un = ^ > se obt iene l a curva dé la f igura 3.18.
JlniZ
Rez
ZOKA PROHIBIDA
Rgura 3.18 Curva de ^J^O.I^/T en el plano Z
Para el tiempo de establecimiento (ts), dsbe considerarse que
las raíces en el plano z tienen un radio de e ^ n

Considerando un criterio del 1%, los polos en el plano z d_e
ben estar dentro de un círculo de radio: r0 = e-4 .6T/ts
dera £ >_ O .5 (máximo sobreimpul so <_ 15 % ), se debe cumpl ir tr £ 8s y
wn > — . Además ts < 20s y r < 0.8.
La restricción para el tiempo de establecimiento se ilustra
en 1 a figura 3.19.
ImZ
Si se consi
ReZ
Rgura: 3.)9 Curva de"r=<XQ en el plano Z
En la figura 3.20 se resumen las restricciones de las especi-
ficaciones en el plano z.
En la figura 3.21 se muestra una carta que contiene curvas p_a_
ra £, wn y r constantes en el plano z; ésta pueda ser útil como ayuda
para el diseño del sistema de control digitales.
2.- Error en estado estable.
Para calcular el valor del error, se asurr
control es estable, y se aplica el Teorema del Val
Consideremos el sistema de control con realimentación unita-
e que el sistema de
or Final .

- 89 -
-«.( - í .Z l.l 1.2 1.1 l . t t . l 1 .1 |.2 1 . 1 l . t
• i .5 -H - l . l -1.1 -i.i -i.Z -í.l -Í.2 ¡.a 1.1 1.1 I .E U l . S . 1.2 1.1
Figura 3.20 Región i aceptable para localizacíon de polosde unsistemade segundo grado (-PL'AN-0- '^)~ "
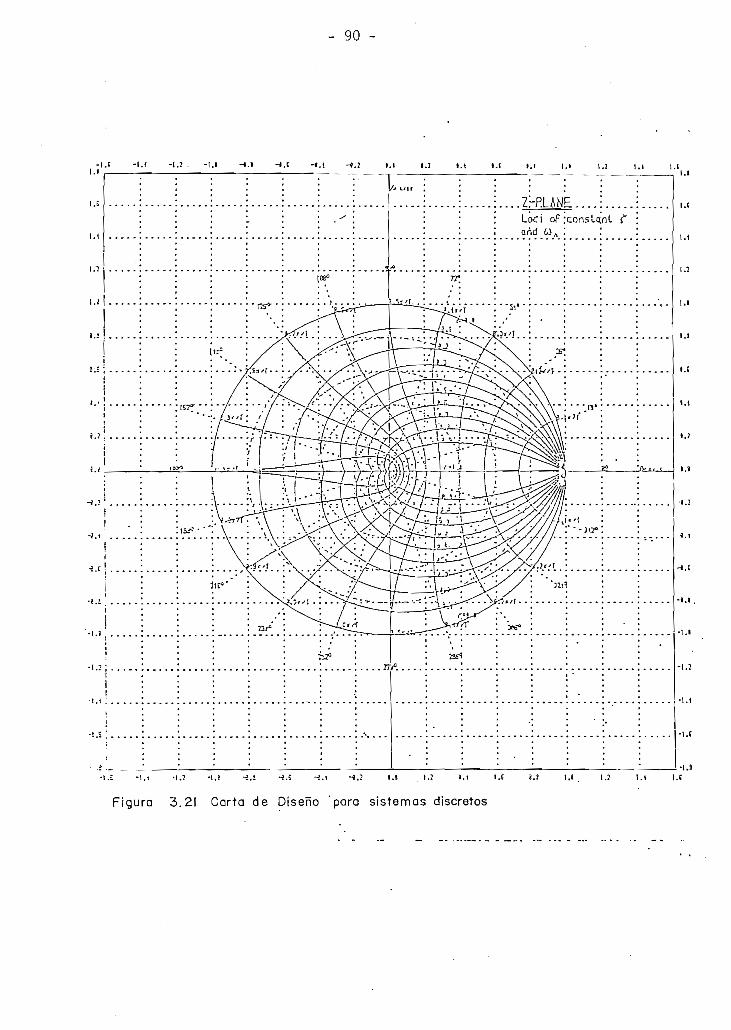
- 90 -
- t . f -1.1 -1.2 -I.I H.1 H.C H.t -J.2 l.l I.I 1.1 l.f |.| |.|
u 1.1 !.¡
Figura 3.2! Carta de Diseño 'para sistemas discretos

- 91 -
ría, como el que se Indica en la figura 3.22, y asumamos que la entra-
da r es un escalón unitario, y que la perturbación w vale cero.
Figuro: 3.22 Sistema discreto regimentado
El error del sistema está dado por;
E(z) =R(z )
D(z) G(z )
E(z) =1
z - 1 1 + D(z) G(z )
SI todas las raices de 1 + D . G = O están dentro del circulo
unitario, el valor final de e(k) es:
1
(z- 1) 1 + D(z) G(z)
1 + D(l) 6(1)
donde D(1)G(1) es la constante de posición para un sistema tipo O,

- 92 -
Si DG tiene un polo en z = 1, el error vale cero.
Para un sistema tipo I, el error con una señal de entrada ram
pa unitaria es:
E(2) =_Jz . - 1
;z-i)2 i + D(Z) G(Z)
El valor final de e(k) es:
lim Tz i
(z- I)2 1 + D(z) G(z)
lim Tz
z-9-1 (z - 1) D(z) G(z)
kv
Consideremos un sistema tipo I, y que la función de transfe-
rencia salida - entrada de.l sistema de la figura 3.22 es G,(z), y que
G+(z) tiene pi polos y zi ceros.
(z - zO (z- z2) (z - zp)G+(z) = K
(z - PÍ) (z -p2) (z - pn)
ya que el sistema es tipo I, el error a un escalón es cero; esto quie-
re decir que G.t(l) = 1.
El error para una entrada rampa es:

- 93
E(z) = R(z) [ 1 - G t (z ) ]
— [1 - G t ( z ) ]( z - 1 ) 2 t
el valor final es por lo tanto:
eH = 11m (z - 1) !?— [ 1 - G,(z) ] = iz + 1 (z- I)2 T kv
, 1 lim 1 "luego : =
T kv z -1 z - 1
debido a G±(z) = 1, al tomar el limite se tiene una indeterminación.
Aplicando la regla de L'Hospital:
- (1- 6 t (z) )1 1 im dz 1 im d.—__. = —•
T kv z -> 1 _d_ / _ - x z -*• 1 dz
dz
pero — £nG(z ) = —~ — G , ( z )dz- Gt(z) dz r
luego si z = 1 — £n Gt (z) = — G,(z)dz dz r
reemplazando = ( - —•T kv z -*• 1 dz

- 94 -
entonces:T kv
T kv
1 im
Z -*• 1
1 im
Z -í-1
1 im
z ->!
n
Z
1=1
• d 11 - ¿-,-y( /n K }\n i\
dz n ( z - p i )
- — ( Z £n (z -z i ) - Zdz
. 1 , 1 1° , „ íz - pi z - z - j J
n1 v 1
1 - Pi 1=1 1 - z-¡
(z-p-j) K)
De estos'resultados se desprende que kv puede ser Incrementa^
da ( -r— reducido), si los ceros de lazo cerrado están cercanos a
z = 1. De la misma forma si los polos de lazo cerrado están cercanos
a z = 1, el valor de kv será menor (para un mismo valor de T);
3.- Señal de control u.
En el diseño de sistemas de control digitales, debe tomarse
en cuenta el valor de la señal de control u, debido a que si ésta es
grande, se necesitarán actuadores de gran potencia, lo que dará lugar
a un diseño costoso. Además se debe tratar que la señal de control no
sea muy oscil atona, porque puede provocar Inestabilidad en el sistema.
De distintas posibilidades de diseño, se debe escoger aquella
que tenga una menor señal de control u.

- 95 -
4-.- Rechazo a perturbaciones.
Un sistema cuya salida c(t) sigue a la entrada r(t), aún en
el caso que r(t) valga cero, es un sistema con buena regulación. SI
un sistema de control tiene buena regulación en presencia de perturba-
ciones3 el sistema tiene buen rechazo a perturbaciones.
Consideremos nuevamente el sistema de control de 1 a figura
3.22.
1 w(z) B o , C(zl. a D(z) G(z)R(z) 1 + D(z) G(z)
si se considera la perturbación W(z):
C(z) _ 6(z)
luego: C(z) =
W(z) 1 + D(z) G(z)
G(z) W(z)
D(z) G(z)
si D(z) G(z) » 1 entonces C(z) =•D(z)
De la última ecuación se deduce'que la perturbación se puede
disminuir notablemente con la introducción del compensador D(z).
Así mismo, si D(z) G(z) » 1, luego - z 1 ó C(z) =R(z)R(z)

- 96 -
Concluímos entonces, que e] sistema de control tendrá buen re
chazo a perturbaciones si el compensador D(z) tiene alta ganancia.
5.- Sensibilidad.
Cualquier sistema físico, siempre está sujeto a un sinnúmero
de factores que pueden afectar el proceso de control . Cuando se tiene
un sistema de lazo abierto, los errores y cambios en el proceso dan cp_
mo consecuencia una salida totalmente inexacta; pero al tener un siste_
ma de lazo cerrado, éste es menos sensible a los cambios en la salida,
debido a los cambios del proceso y al intento de corregir la salida.
La sensibilidad de un sistema de control a las variaciones de
los parámetros es muy importante. Una ventaja que tienen los sistemas
de control de lazo cerrado, es la capacidad para reducir la sensibil-i—
dad del sistema. Si se cumple la condición GH(z) » 1 (donde H(z) re_
presenta la función de realimentación del sistema), la ecuación de l_a_
zo cerrado se reduce a C(z) = -¡-¡7—r . R(z) ; es decir la salida se veMÍ zj
afectada solamente por la función H(z) . Si H(z) es unitaria, la salj_
da es igual a la entrada. •
Ya que se trabaja con redes de lazo cerrado, se está reduciej]_
do la sensibilidad del sistema, como es el caso de la presente tesis.
Selección del periodo de muestreo T.
El valor del periodo de muestreo puede determinarse a partir
de la frecuencia natural del sistema tün- Conocida wn puede determina^
- 97 -
se la frecuencia natural con amortiguamiento wd mediante la formula
ojpi 1 - ?2 , y a partir de ella puede determinarse el periodo de osci-
1 ación To de lazo cerrado:
T =oíd
El valor máximo del período T, se escoge de forma que se pue-"
da muestrear de 6 a 10 veces por ciclo, para obtener una buena respue_s_
ta dinámica del sistema.
Cuando se realiza el control en tiempo real, el tiempo-de con_
versión de un convertidor A/D juega un papel muy importante en el de-
sempeño del sistema de control. El tiempo de control no puede ser .si_g_
nificantemente reducido a no ser que se utilice convertidores muy rá
pidos; sin embargo, la máxima frecuencia de entrada puede ser aumenta-
da utilizando un dispositivo muestreador - retenedor. Este dispositi-
vo tiene la función de muestrear la señal de entrada y mantener el va_
lor de la misma durante el proceso de conversión. El mínimo tiempo de
muestreo está determinado por el tiempo de conversión del A/D y el re_
tardo de tiempo que está presente en el muestreador - retenedor; en-
tonces el mínimo período de muestreo debe ser mayor que la suma del
tiempo de conversión y del retardo del muestreador - retenedor.
En general, tomando como base el Teorema del Muestreo, dada
una señal de entrada, cuya componente de frecuencia más grande es wh
(rad/s), para no perder información, y para que no haya una distorsión
en la señal, la mínima frecuencia de muestreo debe ser mayor a 2tüh.

£
C A P I T U L O IV
SIMULACIÓN DE CONTROL DIGITAL
4.1 Control en tiempo real. Limitaciones
4.2 Simulación de CONTROL ON - LINE
*

4.1- CONTROL EN TIEMPO REAL. LIMITACIONES.
En el presente capítulo se va a describir la programación del
controlador en un sistema de control digital. Debido a que el computa_
dor TEKTRONIX en el cual se ha realizado este trabajo, no dispone de £
na Interface adecuada, no se puede realizar un control en tiempo real,,
y por lo tanto se hará una simulación del proceso de programación del-
controlador.
La programación del controlador en el computador conectado en
el lazo de control , se llama también programación en tiempo real .
Para realizar este tipo de control se necesitan los siguien-
tes elementos en el proceso:
1. Un conversor A/D para acción de muestreo.
2. Un conversor D/A para reconstrucción de .1 a señal.
3. Un reloj para programar el período de muestreo T.
4. El proceso a controlarse a planta.
5. Un sensor para medir la variable de salida o controlada.
En capítulos anteriores se describió la función de cada uno
de los elementos, por lo que ahora simplemente se los menciona.
La figura 4.1, muestra un diagrama de control digital direc-
to, llamado también Control ON-LINE.

- 99 -
COMPUTADOR
Figura 4.1 Control digital ON-LINE
El nombre de control digital directo o CONTROL ON-LINE, pro-
viene del hecho de que en este tipo de control es el computador el
que ejecuta el algoritmo o la acción de control , y forma parte del si_s_
tema de control, es decir está conectado al mismo en todo momento.
Este tipo de control requiere la utilización de subrutinas,
para manejar los conversores anal ogo - digital y digital -análogo, _a_
sí como también el reloj de sincronización.
El algoritmo de control se indica en la figura 4.2.
Veamos en detalle cada uno de los procesos:
a) Inicialización. El compensador discreto D(z) que relaciona U(z) y
E(z) debe ser desarrollado como una ecuación de diferencias y los
valores de las constantes de la ecuación obtenida deben ser ingre_
sados. También debe inicial izarse los valores de la señal de COJT^
trol u, y la señal de error e, y seleccionar el periodo de mues-
treo T.
Para muestrear la señal de error, se'debe inicial izar un'reloj que

- 100 -
pone en marcha una subrutina de interrupción, y tiene la más alta
prioridad.
INICIAL1ZACION
de e(t)
Esperar una nuevainterrupción de reloj
Algoritmo para tcclculo de u(t)
Enviar u(l) a laPLANTA
Figura 4,2 Algoritmo do control digital directo
b) Muestreo de e(t). La interrupción de reloj envía una señal de co-
mando aT conversor A/D para que comience el proceso de conversión,
Para comandar el conversor A/D se utiliza una subrutina, la cual :
1. Selecciona el canal de la variable controlada.
2. Almacena en una localidad de memoria el valor de u(kT).
c) Cálculo de u(k). El valor de u(kT) se lleva a cabo resolviendo u-
na ecuación de diferencias.
d) Aplicación de u(t)_a la planta. Inmediatamente que se ha realiza-

* - 101 -
do el cálculo de u(k), se llama a una subrutlna de conversión para
manejar el conversor D/A, la misma que:
1. Determina la localidad de memoria en la que se encuentra u(t) .
2. Selecciona el canal de salida.
e) Actualización. Se almacena los nuevos valores de u^, e¡,3 hasta
que llegue una nueva interrupción de reloj.
Además de calcular la señal de control con el computador, hay que
poner un 1 imitador.
Los requerimientos del control On - l i ne son entre otros los
siguientes:
- El control implica que el tiempo que se requiere para calcular me-
diante el computador u(k) y e(k)3 sea despreciable en relación a la
menor constante de tiempo del sistema.
- Se debe tener acceso a la memoria del computador y se debe tener la
capacidad de manejar interrupciones para realizar transferencias de
la acción de control.
- En muchos casos-se requiere la ejecución de procesos simultáneos, y
se debe utilizar lenguajes especiales para la programación del COJT^
trolador.
Estos lenguajes se llaman concurrentes, y por medio de ellos
102 -
se puede realizar un control en forma paralela, lo que proporciona un
ahorro en el tiempo de ejecución, además se puede hacer un control mul_
tivariabl e.
4.2. SIMULACIÓN DE CONTROL ON-LINE.
La simulación del Control ON-LINE se la realiza mediante un
programa que evalúa el control ador digital por medio del computador.
Esto se logra programando la ecuación de diferencias de la expresión
que relaciona la señal de control u y el error e; y evaluando luego
el valor de la salida y, puede obtenerse la respuesta en el tiempo
del sistema controlado.
En el programa se introducen como datos los coeficientes de
la función de transferencia-de lazo abierto G(z) y del control ador
U(z)3 que puede ser de primer grado o cuadrático, con el objeto de u-
tilizar este programa para obtener las características de la señal de
control U, y escoger la más adecuada.
El diagrama de flujo del programa se indica en la figura 4.3.

- 103 -
EN PANTAL
FORMA DE
6(2) =
-LA'
LA FUNCIÓN DE TRANFERENCIA--
AIZ -}-A2 Z~ + A3 ~L~~ + A4 Z~4
Bl + B 2 Z -> ^
INGRESAR'-
• B3 Z~ -j- D 'I Z~^-f^ B3 Z~d
- NUMERO DE TÉRMINOS- COEFICIENTES DEL NUMERADOR
COEFICIENTES DEL DENOMINADOR
OPCIONES:
I.- CONTROLADOR DE PRiMER GRADO
•¿.- CONTROLADOR DE SEGUNDO GRADO
INGRESAR OPCIONES»
MO
FORMA DELCONTROLADOR'
Ci f C2Z" '
Di
FORMA DEL CONTROLADOR»
CaZ-a
CALCULO DE LOS VALORES DE¡ Y ( k ) , e(k), U(k)
GRÁFICOS DE: -SALIDA ^ -
-REFERENCIA R
-SEÑAL DE CONTROL U
SI ¿DESEA CAMBIARELCONTROLADOR
FítpJTd .3 Diagrama Je Flujo de Control
C A P I T U L O V
RESULTADOS Y CONCLUSIONES
5.1 Resultados
5.2 Conclusiones Generales
5.3 Recomendaciones

- 104 -
5.1. RESULTADOS.
En el presente capítulo se presentan algunos ejemplos con el
objeto de aplicar criterios de diseño vertidos en capítulos anterio-
res .
Ejemplo N- 1.
El diagrama de bloques simplificado de un sistema de control
de un vehículo espacial se muestra en la figura 5.1.. El objetivo de
este sistema es controlar la posición del vehículo en una dimensión^
En este ejemplo se analizarán las características del sistema en el
dominio del tiempo y de 1 a frecuencia.
r + f~
^—
•^ 9
j Kp-V*N ^ \\• | ¿.u.ri
"í1Kr
iJv3
C 13
C
Figura 5.1 Sistema de control digital de un vehículo espacia! .
Los parámetros del sistema son los siguientes:
kp = sensor de ganancia-= 1.65 . 106 '
kr = sensor de ganancia de relación = 3.17 . 105
Jv = momento de inercia del vehículo = 41822
Se asume para este análisis que todas las unidades son consi_s_
tentes, por lo que no se los especifica.

- 105 -
La función de transferencia de lazo abierto en el dominio z
es:
6h(s) .G( Z ) = £M = J v " s:
E(z) i + kr z [ Gh(s) .Jv •
donde se ha representado Gh(s) como la función de transferencia del
Z.O.H. luego:
2 [ G h ( s ) lJv . s2 Jv . s 3 2 Jv (z -
Z [ Gh(s) —^-] - (1-z"1) Z [ — ^ — ] = T
6 ( 2 ) =
Jv . s Jv . s2 Jv (z - 1)
Sustituyendo y simplificando:
T2 kp (z + 1)
2 Jv z2 + (2 krT - 4 Jv) z + 2 Jv - 2 krT
Sustituyendo los parámetros se tiene:
G ( z ) = T2 . 1.65.106 (z + 1)83644z2 + (6.34.105! - 167288)z + 83644 - 6.34.105T
Ecu. 5.1
El sistema se analiza en el dominio del tiempo y de 1 a fre-

- 106 -
cuencia. Se presentan resultados para T = 0.25s con entradas escalón
Impulso y rampa, y para T = O.ls con una entrada escalón, y diagra-
mas de respuesta de frecuencia para T = 0,ls y T = 0,25s.
Los gráficos se indican en las figuras a, b, c, e, f, y se
adjuntan resultados impresos por el computador.
Observaciones al Ejemplo N- 1.-
El efecto de reducir el periodo de muestreo es el de mía
jorar la rapidez de respuesta del sistema, y además se consigue redjj_
cir el máximo sobreimpul so. (Fig. a y b).
Debido a que el grado del numerador es menor al del denomina_
dor en una unidad, se tiene un retardo en la salida (Fig. a,b,c). Pa_
ra una entrada rampa se introduce un nuevo retardo debido a la fun-
ción de transferencia de la rampa (Fig. d).
En cuanto a respuesta de frecuencia se refiere, un período
de muestreo menor incrementa los valores de margen de fase y margen
de ganancia, tanto la frecuencia de cruce de fase como la de ganancia
disminuyen (se desplazan a la izquierda).
Ejemplo NS 2.
Para antenas de recepción vfa satélite es deseabl e control ar(3)
el ángulo de elevación. Las ecuaciones que describen el movimiento
de una antena como la de la figura 5.2, son:

- 107
RESPUESTA EN EL TIEHPO CSIN COMPENSACIÓN!)
, niNCTQ
T= 9.2SQ SEG EJE X» 1.00 SEG/DIV EJE Y- Q.1QU/DIVARCHIVO. SSYLVA/EJ1
Fiaura a,- Respuesta a una función paso (T = 0.25s)
RESPUESTA EN EL TIEMPO CSIN COMPENSACIÓN)
ARCHIVO •T- Q.1QQ SEG EJE X= I . 00 SEG/DIV EJE Y: 0. 1QU/DIV
Figura b.- Respuesta a una función paso (T = 0.1s)

- 108 -
RESPUESTA EN EL TIEMPO CSTN COMPENSACIÓN}
,_E1IHCIQN .IMPULSO
1
T= Q.25 SEG EJE X: 1.0a SEG/DIV EJEARCHIVO i SSYLVA/EJ 1
Q.IQU/DIV
Figura c.- Respuesta a una función Impulso (T = 0.25s)
RESPUESTA EN EL TIEMPO CS3ÍI
T= 8.25 SEG E J E X - ! .ARCHT/O. ÍSYLVA/EJI
EJE
Figura d.- Resouesta a una función Impulso (T = 0.25s)

40 20
_
0.02:0
-20
_
JIAGRAMA
DE BODE DE MAGNITUD CSIN COMPENSACIÓN)
. ....
.10.200
DIAGRAMA DE BODE DE ÁNGULO CSIN COMPENSACIÓN)
20.000
FRECUENCIA
CRAD/S)
ARCHIVO: @SYLVA/EJ1
SEG
I >_!o
Figu
ra e
.- D
iagr
amas d
e fr
ecue
ncia
(T
= 0,25s)

efe
.IAGRAMA
DE BODE DE MAGNITUD CSIN COMPENSACIÓN)
DIAGRAMA
DE BODE DE ÁNGULO CSIN COMPENSACIÓN)
. i
2.000
o
FRECUENCIA
CRAD/S)
ARCHIVO: QSYLVA/EJt
=Q.100 SEG
Figu
ra f.-
Dia
gram
as d
e fr
ecue
ncia (T =
O-.ls)
20.000

- 111 '-ESCUELA POLITÉCNICA NACIONAL
FACULTAD DE INGENIERÍA ELÉCTRICA
DEPARTAMENTO DE CONTROL
ÁREA DE CONTROL Y SISTEMAS
TESIS DE GRADOí PETER EDUARDO 3YLVA FUSEAU
FECHA í 18-JAN-85 22:37 í 16
ANÁLISIS EN EL DOMINIO DEL TIEMPO
MATRIZ DE COEFICIENTES-
COEFICIENTES DE LA FORMA; Ki*T~K2 :1650000 »000 2 * 000 O*000 O * 0001650000 * 000 2 » 000 O *000 O»00083644t000 O * 000 O * 000 O * 000634000*000 1*000 -167283,000 0,00083644,000 0*000 -034000.000 1*000
COEFICIENTES DE LA FORMAÍK3£T"K4#EXPÍK5#T> í
0.000Of 0000,0000,0000,000
ARCHIVOí eSYLVA/EJl
FUNCIÓN DE TRANSFERENCIA DE LAZO ABIERTO
GRADO DEL NUMERADOR í 1
~ COEFICIENTE DE 1T 1= 103125.0000
COEFICIENTE DE Z" 0= 103125.0000
GRADO DEL DENOMINADOR í 2
COEFICIENTE HE Z" 2- 83644,0000
COEFICIENTE DE Z" 1= -8783,0000
COEFICIENTE DE Z" 0= -74856,0000
INTERVALO DE ANÁLISIS 0,000 < t < 5,000 SEG
VALOR DEL PERIODO DE MUESTREO I 0,250 SEG
ANÁLISIS PARA UNA FUNCIÓN PASO
AMPLITUD DE LA FUNCIÓN .1,00.

- 112 -ANÁLISIS EN EL DOMINIO DE LA FRECUENCIA
MATRIZ HE COEFICIENTES I
COEFICIENTES DE LA FORMA? K1#T~K2 í1050000*000 2,000 0,000 0,0001050000*000 2,000 0,000 0*00033644,000 0,000 0,000 0,000634000*000 1*000 -167288*000 0,00083644,000 0*000 -634000,000 1,000
COEFICIENTES DE LA FORMAíK3*T~K4*EXPCK5KT) t
0*0000,0000*0000,0000,000
ARCHIVO* @SYLVA/EJ1
FUNCIÓN DE TRANSFERENCIA DE LAZO ABIERTO
GRADO DEL NUMERADOR t 1
COEFICIENTE DE Z~ 1= 16500,0000
COEFICIENTE DE Z" 0= 16500*0000
GRADO DEL DENOMINADOR í 2
COEFICIENTE DE Z" 2'-= 83644,0000
COEFICIENTE DE Z" 1= -103888*0000
COEFICIENTE DE Z" 0= 20244,0000
FRECUENCIA INICIAL f 0,0200 RAD/S
FRECUENCIA FINAL: 20*000 RAD/S
NUMERO DE PUNTOSí 40,000
MARGEN DE FASE I 54,723 GRADOS
FRECUENCIA DE CRUCE DE GANANCIA FICTICIAí0*242 RAD/S
FRECUENCIA DE CRUCE DE GANANCIA REAL Í4*755 RAD/S
MARGEN DE GANANCIA í 11,536 DECIBELIOS
FRECUENCIA DE CRUCE DE FASE FICTICIAíO,770 RAD/S
FRECUENCIA DE CRUCE DE FASE REAL í13,123 RAD/S
OPCIÓN ESCOGIDA t Z= (14-w ) / (l~w )
PERIODO DE MUESTREO = 0,100 SEG.

- 113 -jfc A (v ALIBIS EN EL DOMINIO DE LA FRECUENCIA»
HAVRIZ DE COEFICIENTES í
COEFICIENTES DE LA FORMAS Ki#T~K2 :.;. •:> oOOOO * 000 2*000 0,000 O » 000; 650000 ,000 2 y 000 0*000' 0*00083644 •> 000 O , 000 O » 000 O * 000
ó ¿4ÜOO»000 1,000 -167288 1 000 0*00083644*000 0,000 -634000,000 1*000
ICIENTES DE LA FORMA í K3#T~K4#EXF' (K5*T) i
0,0000:000
3*0000*0000,000
HIVOÍ OSYLVA/EJ1
FUNCIÓN DE TRANSFERENCIA DE LAZO ABIERTO
GRADO DEL NUMERADOR ; 1
COEFICIENTE DE Z" 1= 103125,0000 •
COEFICIENTE DE Zrt O™ 103125*0000i
ORADO DEL DENOMINADOR í 2
COEFICIENTE DE Z" 2= 83644,0000
COEFICIENTE DE Z" 1= -8783*0000
COEFICIENTE DE Z" O- -74856,0000
FRECUENCIA INICIAL t 0,0200 RAD/S
FRECUENCIA FINAL t 20,000 RAD/S
NUMERO DE PUNTOS í 40,000
MARGEN DE FASE í -47*861 GRADOS
FRECUENCIA DE CRUCE DE GANANCIA FICTICIA í O + 825 RAD/S
FRECUENCIA DE CRUCE DE GANANCIA REAL t5*518 RAD/S
MARGEN DE GANANCIA I 3,702 DECIBELIOS
FRECUENCIA DE CRUCE DE FASE FICTICIA í 4 , 102 RAD/S
FRECUENCIA DE CRUCE DE FASE REAL i 10 ,654 RAD/S
OPCIÓN ESCOGIDA í Z« ( 1+ w ) / ( 1-u )
PERIODO DE MUESTREO « 0,250 SEG
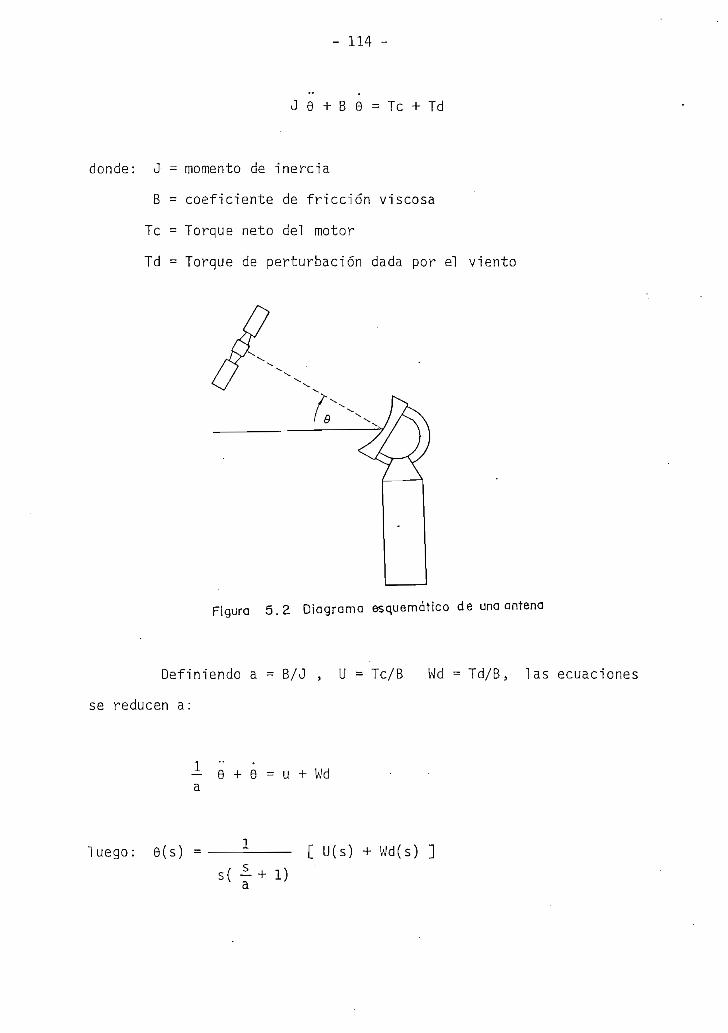
donde: J
B
Te
Td
- 114 -
J 9 + B 0 = T c + T d
momento de inercia
coeficiente de fricción viscosa
Torque neto del motor
Torque de perturbación dada por el viento
Figura 5,2 Diagrama esquemático de una antena
Definiendo a - B/J , U = Tc/B Wd = Td/B, las ecuaciones
se reducen a:
- 8 + 6 = u + Wd
luego: 8 (s ) = U(s) + W d ( s )
+ 1)

- 115 -
e(s) = = 6(s) ; si Wd(s) = O
Hagamos B/J = 10s, entonces: G(s) =s (lOs + 1)
El diagrama de b loques normal i zado es el que se muestra en la
f igura 5.3.
u 4-
V1
IOS1s
0
Figura 5-.3 Diagrama simplificado de un control de azimulh de antena
A n a l i z a n d o el caso discreto, a través de un Z . O . H . se tiene:
6(2) =
_o . iT -o.iT -o.i Trf , _ (10 e + T- 10)z - T e = + 10 - 10 eh ( Z ) — =p ~ "
v ' -o.iT -o . iTz2 - (e + 1) z + e
Ecu. 5.2
En base a la función descrita en el dominio z, se analiza las
características del sistema para diferentes períodos de muestreo, con
el objeto de obtener uno adecuado, para luego diseñar un compensador,
que mejore las características del sistema.
Los resultados se indican en las figuras a, bs c, d.

- 116
T« 1.88 SEG EJE X. 10.00 SEG/DIV EJE Y- 0.18U/DIVARCHIVO * 8SYLVA/EJZ
Figura a.- Respuesta a una función paso (T = Is)
RESPUESTA EN EL TXEMPO CSIN COMPENSACIÓN)
T= 0.20 SEG EJE X. I8.0Q SEG/DIV EJE Y< 0. IOU/DIV»SYLVA/EJ2
Figura b.- Respuesta a una función paso (T = 0.2s)

- 117 -
RESPUESTA EN EL TIEMPO CSIN COMPENSACIÓN)
T= 9.5Q SEG EJE XARCHIVO i eSYLVA/EJZ
10.00 SEG/DIV EJE Y- 8.I0U/DIV
Figura c.- Respuesta a una función paso (T = 0.5s)
RESPUESTA EN EL TIEMPO CSIN COMPENSACIÓN)
rí L
T= 2.Q0 SEG EJE X> IQ.0B SEG/DIV EJE Y' 0.1QU/DIVARCHIVO > 6SYLVA/EJ2
Figura d.- Respuesta a una función paso (T = 2s)

- 118 -
Para T = 0,5s, se tiene una representación adecuada de 1 a dj_
dámica del sistema, y el sobreimpulso no es muy alto, por lo que se
ha _escogido este período de muestreo como el más adecuado.
Consideremos nuevamente la función de transferencia:
G(s) = • , y el compensador D(s) = 10s + l ,s(10s+l) s + 1
que cancela el polo en s = -0.1.
Discretizando este compensador por varios métodos, e introdj¿
ciendo en cascada con la planta dada por G(z), se obtienen las res-
puestas dadas por las figuras e, f, g, h.
Si se considera ahora G(z) dada por 5.2 y para T = 0,5s, se
tiene:
„/ x 0.0123 z + 0.0121
(z-0.9512)(z- 1)
Considérese el compensador discreto D(z) = •, \ ''' , que( Z + U .o )
se ha obtenido cancelando el pol o en z = 1 y desplazando el cero del
compensador hacia la izquierda.
La respuesta del sistema se indica en la figura i.

- 119 -
RESPUESTA EN EL TIEMPO CCON COMPENSACIÓN)
-RJWCION .ESCALOM . JV= .1. QQÜ
ARCHIVO.T= 0.50 SEG EJE X' 5.QQ SEG/DXV EJE Y. 3.1BU/DIV
Figura e.- Respuesta con compensador dlscretlzado por mapeo.
RESPUESTA EN EL TIEMPO CCON COMPENSACIÓN)
T=- 0.50 SEG EJE X: S.OO SEG/DIV EJE Y: Q.10U/DIV
Figura f.- Respuesta con compensador dlscretlzado con
equivalente Z.O.H.

- 120 -
RESPUESTA EN EL TIEtíPO CCON COMPENSACIÓN?
T= 0.59 SEG EJE X< 5.08 SEG/DIV EJE Y* 0.Í0U/DIVARCHIVO. &SYLVA/EJZ
Figura g.- Respuesta con compensador discretizado
oor regla rectangular hacia atrás.
RESPUESTA EN EL TIEMPO CCOTI COMPENSACIÓN)
T» 0.59 SEG EJE X: 5.09 SEG/DIV EJE YÍ Q.1QU/DIVSSYLVA/EJZ
Figura h.- Respuesta con compensador discretizado por Tustin,

- 121 -
RESPUESTA EN EL TIEMPO CCON COMPENSACIÓN)
ARCHIVO, SEG/DIV EJE Y: 8.10U/DIV
Figura i.- Respuesta con compe'nsador discreto.
Si se diseña un compensador P.I.D. que cancele los polos de
G(z) y colocando una ganancia de 20 al compensador, se obtiene la re_s_
puesta de la figura j.
Al considerar el mismo compensador continuo D(s) =
1
lOs + 1
se obtiene: D(s) . G(s) =
s2 + s + 1. Si se útil iza
respuesta de la figura k.
s + 1 'y la ecuación característica es:
s(s + 1)s + l. Si se utiliza el método directo de diseño, se obtiene la
Se presentan también los gráficos de respuesta de frecuencia
para T = 0.2s y T = 0.5s. sin compensación (figs. 1 , m) y para

- 122 -
RESPUESTA EN EL TIEMPO CCON COMPENSACIÓN!)
FSCALON, ._Á=__U000 . . , .
r- 0.S0 SEG EJE X - 5.00 SEG/DIV EJE Y . 0 . ÍOU/DIVARCHIVO- PSYLVA/EJZ
Figura j.- Respuesta con compensador P.I.D.
RESPUESTA EN EL TIEMPO CCON COMPENSACIÓN?
FUNCIÓN ESCALÓN A= I -BQQ .
T= 8.50 SEG EJE X= S.B0 SEG/DXV EJE-RCHTVO • PSYLVA/EJZ
0.10U/DIV
Figura k.- Respuesta con compensador directo.

40 20
0.0Í
-2Q
-40
DIAGRAMA
DE BODE DE MAGNITUD CSIN COMPENSACIÓN)
00.000
DIAGRAMA
DE BODE DE ÁNGULO CSIN COMPENSACIÓN)
ro co
000
FRECUENCIA
CRAD/S)
ARCHIVO: @SYLVA/EJ2
T-0.200 SEG
Figu
ra 1.
- Di
agra
mas
de F
recu
enci
a(T
= 0.2s)
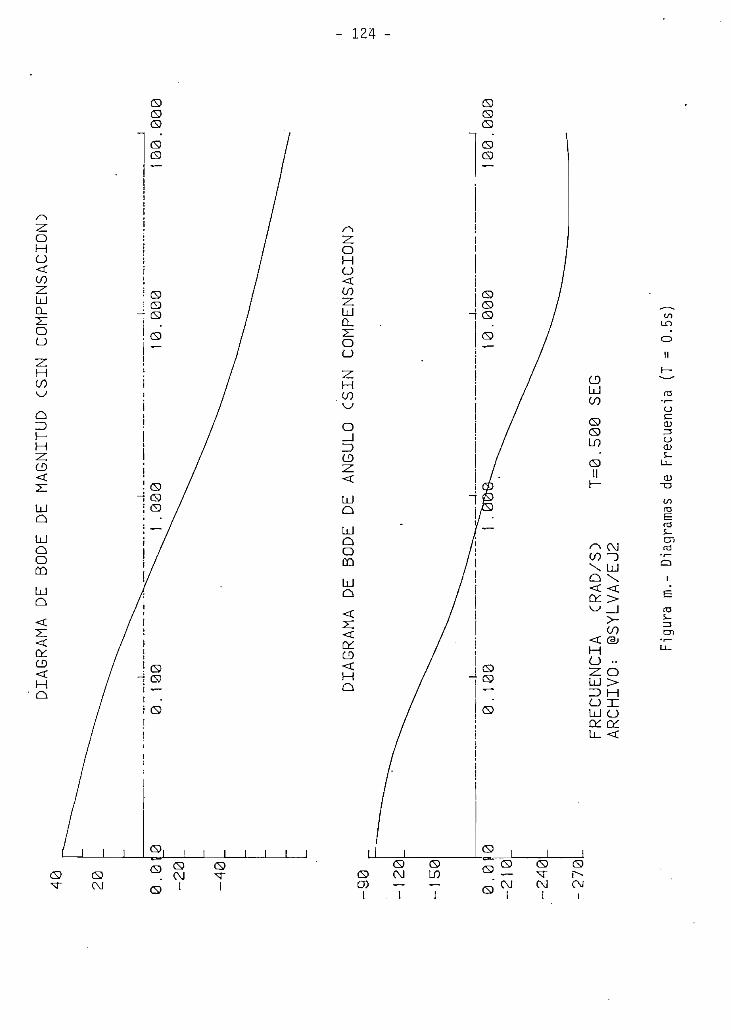
DIAGRAMA
DE BODE DE MAGNITUD CSIN COMPENSACIÓN)
000
DIAGRAMA
DE BODE DE ÁNGULO CSIN COMPENSACIÓN)
ro i
10.000
00.000
FRECUENCIA
CRAD/S)
ARCHIVO: @SYLVA/EJ2
T=0.500 SEG
Figu
ra m
.- D
iagr
amas d
e Fr
ecue
ncia
(T = 0.5s)

m
DIAGRAMA
DE BODE DE MAGNITUD CCOM
COMPENSACIÓN)
00.000
DIAGRAMA
DE BODE DE ÁNGULO
CCON
COMPENSACIÓN)
ro ui
FRECUENCIA
CRAD/S)
ARCHIVO: @SYLVA/EJ2
SEG
Figu
ra n
.- D
iagr
amas
de
frec
uenc
ia c
on c
ompe
nsad
or
disc
reti
zado
por T
usti
n.

40 20
0.01
-40
DIAGRAMA
DE BODE DE MAGNITUD CCON
COMPENSACIÓN)
00
.00
0
-90
-120
.
-150
.
0.01
-210
.
-240.
-270.
DIAGRAMA
DE BODE DE ÁNGULO CCON
COMPENSACIÓN)
.10. 100
.000
0.000
FRE
CU
EN
CIA
C
RA
D/S
)A
RC
HIV
O:
(SS
YLV
A/E
J21
=0
.50
0 S
EG
ro CT
í
00
.00
0
Figu
ra o.-
Diag
rama
s de
Fre
cuen
cia
con
comp
ensa
dor
P.J.D,

SEÑALES DE ENTRADA Y SALIDA
Ejo
x
: 1 d
i v
=
1Q
V
alo
re
s:
de
y
E
JQ
y '•
1 d
i v
= £
) . 2
SEÑAL DE CONTROL U
E j ex
=
1 d i v™
1 0 va I ores de
u
E j Q y
•
1 d i
v-™ 1.0 U
I J—'
PO I
Finu
ra p
.- S
alid
a y
Seña
l de
con
trol co
n co
mpen
sado
r di
scre
tiza
do
po m
apeo
de
polo
s y
ceros.

<:#>'
ts»
SEÑALES DE ENTRADA Y SALIDA
E j o x
i
I d i v = 1 0
va I ores; de y
E j Q y : 1 d i v==Q . 2
SEÑAL DE CONTROL U
d i v™I 0 valores de u
Ejo y=
1d i v—1 .0 u
co I
Figu
ra q.-
Sali
da y
Señal de
control con
compensador
disc
feti
zado
con
reg
la r
ecta
ngul
ar h
acia
atr
ás,

SEÑALES DE ENTRADA Y SALIDA
Ej«
a
x
> 1 d
i v
=
10
va
l o
re
e
de
y
E ja
y :
1
d i
v=
E3 .
2
u
SE
ÑA
L D
E
CO
NT
RO
L U
ro i
x
¡ 1 d i v
— 1
0
va I o
re
s
de
u
Eje
y ¡
1 d
i v
1 . 0
U
Fig
ura
r.-
Sal
ida
y S
eñal
de
co
ntr
ol
con
com
pens
ador
d
iscr
eto
.

'*>'
r J
SEÑALES DE ENTRADA Y SALIDA
EjQ x : 1d¡v =10 valoree de y
Ejo y: 1div=0.2 u
r
SEÑAL DE CONTROL U
EjQ x :
1 div=i 0 valoree de u
Ejo y:
1 d¡v=1 .0 u
co o
Figu
ra s
.- S
alid
a y
Señal
de c
ontrol
co
n co
mpen
sado
r P.
I.D.

- 131 -
T = 0.5s, con el compensador D(s) discretizado por Tustln (Flg. n) y
para el compensador P.I.D. discreto D(z) (Flg. o).
Por último se presentan gráficos de la salida, entrada y se-
ñal de control, utilizando el programa de simulación de control ON-
LINE (Figs. p, q, r, s).
Se adjuntan también resultados Impresos por el computador.
Observaciones al Ejemplo N2 2.
Se presentan curvas para diferentes períodos de muestreo, de
ellas se observa que al disminuir el período de muestreo, se mejora la
rapidez de respuesta, y se disminuye el sobrelmpulso. Para un período
de muestreo alto (T = 2s Flg. d), el sobrelmpulso es casi el 100% y el
sistema tiende a estabilizarse en un tiempo demaslaJo largo.
Añadiendo un polo que cancele un polo de la planta continua
D(s) =—:p¡— 3 y a^ discretizarlo, se logra mejorar las característi-
cas en el dominio del tiempo y de la frecuencia. El compensador fue
discretizado por los métodos discretos en el Capítulo III (Tustln, ma-
peo, r. rectangular hacia atrás). Los resultados que se obtienen son
similares. Al utilizar un compensador P.I.D. se obtienen los mejores
resultados, (el P.I.D. se ha diseñado cancelando los polos de la plan_
ta discreta: z = l; z = 0.9512. para este caso k-¡ = o). Utilizando el
método directo de diseño, se logra obtener una respuesta satisfactoria
(eliminando el polo de la planta continua, para T = 0.5s y kv = 1). Se-, __ r\
utiliza también el compensador discreto :9( —" ' ) que mejora la parz + U. o '

ESCUELA POLITÉCNICA NACIONAL. ~ 132 ".. _.
FACULTAD DE INGENIERÍA ELÉCTRICA
DEPARTAMENTO HE CONTROL
ÁREA DE CONTROL Y SISTEMAS
TESIS DE' GRADO: PETER EDUARDO SYLUA FUSEAU
1» ECHA * 05-FEB-S5 23 MI : 03
ANÁLISIS EN EL DOMINIO DEL TIEMPO
MATRIZ DE COEFICIENTES
COEFICIENTES DE LA FORMAí K1#T"K2 íi > 000 1* 000 »10 ,000 O ,.000
0*000 0*000 0*0000*000 '0*000 OtQQOO * 000 O * 000 O * 0000*000 0*000 0*000
COEFICIENTES DE LA FORMAíK3#T~K4#EXPCK5*T)
10,000"5 :000
0,000-l.C'ÜQi ; 000
0*0001 + 0000 + 0000 + 000,000
-0,100-0* 1000 * 000
--0 + 100-0+ 100
0*000-10*0000*0000*0000 + 0 0 0
0 + 0000 + 0000*0000,0000*000
0*000-O* 1000*0000*0000»000
A R C HI'- ; O \ 3 Y L M A / E J 2
FUNCIÓN DE TRANSFERENCIA DE LAZO ABIERTO
GRADO DEL NUMERADOR' í 1
COEFICIENTE DE 2^-1= 0*0123
COEFICIENTE DE 2T' 0= 0*0121
GRADO DEL DENOMINADOR í 2
COEFICIENTE DE 2~ 2= 1*0000
. COEFICIENTE DE 1T 1= -1+9512
COEFICIENTE DE 2~ 0= 0+9512
INTERVALO DE ANÁLISIS 0*000 < t < 50+000 SEG
UALOR DEL PERIODO DE MUESTREO í 0+500 SEG
ANÁLISIS PARA UNA FUNCIÓN PASO '
. AMPLITUD DE LA FUNCIÓN :'1*00

- 133 -ANÁLISIS EN EL DOMINIO DE LA FRECUENCIA
MATRIZ DE COEFICIENTES I
COEFICIENTES DE LA FORMA! K1*T~K2 *1*000 1*000 -10.000 0*000
10,0001*000
-1 ,0000*000
0*0000*0000*0000*000
0.0000*0000*0000*000
0*0000*000.0*0000*000
COEFICIENTES DE LA FORMAíK3*T"K4#EXP<K5*T>
10,000 0*000 -0*100 0*000 0*000 0*000-1*000 1*000 -0*100 -10*000 0*000 -0*1000*000 0*000 0*000 0*000 0*000 0*000
-1*000 0*000 -0*100 0*000 0*000 0*0001 * 000 0*000 -O*100 0*000 0*000 0*000
ARCHIVO! GSYLVA/EJ2
FUNCIÓN HE TRANSFERENCIA HE LAZO ABIERTO
GRADO DEL NUMERADOR t 1
COEFICIENTE DE Z~ 1= 0*0123
COEFICIENTE DE Z" 0= 0*0121
GRADO DEL DENOMINADOR í 2
COEFICIENTE DE Z" 2= 1*0000
COEFICIENTE DE Z" 1= -1*9512
COEFICIENTE DE Z~ 0= 0*9512
FRECUENCIA INICIAL í 0*0100 RAD/S
FRECUENCIA FINAL* 100*000 RAD/S
NUMERO DE PUNTOS: 50*000
MARGEN DE FASE I 13*849 GRADOS
FRECUENCIA DE CRUCE DE GANANCIA FICTICIAíO * 305 RAD/S
FRECUENCIA DE CRUCE DE GANANCIA REAL *0*304 RAD/S
MARGEN DE GANANCIA t 11*343 DECIBELIOS
FRECUENCIA DE CRUCE DE FASE FICTICIA:O * 625 RAD/S
FRECUENCIA DE CRUCE DE FASE REAL :0,Ó20 RAD/S
OPCIÓN ESCOGIDA t Z=(l+Tw/2)/(l-Tw/2)
PERIODO DE MUESTREO = 0*500 3EG

- 134 -ANÁLISIS EN EL DOMINIO DE LA FRECUENCIA
MATRIZ DE" COEFICIENTES I
COEFICIENTES DE LA FORMA i KlHcT"K2 í1,000 1,000 -10,000 0*000
10,0001*000
-1,0000,000
0*0000,0000,0000,000
0,0000,0000,0000,000
0,0000,0000,0000,000
COEFICIENTES DE LA FORMA,K3*T"K4#EXP(K5*T> ,
10*000-1,000
0,000"-•1,000
1 + 0 0 0
0,0001,0000,0000,0000,000
-0,100-0,100
0,000-0,100-0,100
0,000-10,000
0,0000*0000,000
0*0000*0000*0000,0000*000
0,000-0,100
0,0000,0000,000
ARCHIVO* SSYLVA/EJ2
FUNCIÓN DE TRANSFERENCIA DE LAZO ABIERTO
GRADO DEL NUMERADOR í 1
COEFICIENTE DE Z~ 1= 0*0123
COEFICIENTE DE Z" 0= 0,0121
GRADO DEL DENOMINADOR , 2
COEFICIENTE DE Z" 2= 1,0000
COEFICIENTE DE Z" 1- -1.9512
COEFICIENTE DE Z" 0= 0*9512
FRECUENCIA INICIAL í 0,0100 RAD/S
-FRECUENCIA FINAL: 100,000 RAD/S
NUMERO DE PUNTOS! 50*000
- MARGEN DE FASE t 40*957 GRADOS
FRECUENCIA DE CRUCE DE GANANCIA FICTICIA;O,783 RAD/S
FRECUENCIA DE CRUCE DE GANANCIA REAL Í0,773 RAD/S
MARGEN DE GANANCIA * 11,343 DECIBELIOS
FRECUENCIA DE CRUCE DE FASE FICTICIA11 * 971 RAD/S
FRECUENCIA DE CRUCE DE FASE REAL 11 * 832 RAD/S
OPCIÓN ESCOGIDA 1 Z~ (l+Tw/2)/Cl-Tw/2)
• PERIODO DE MUESTREO = 0*500 SEG
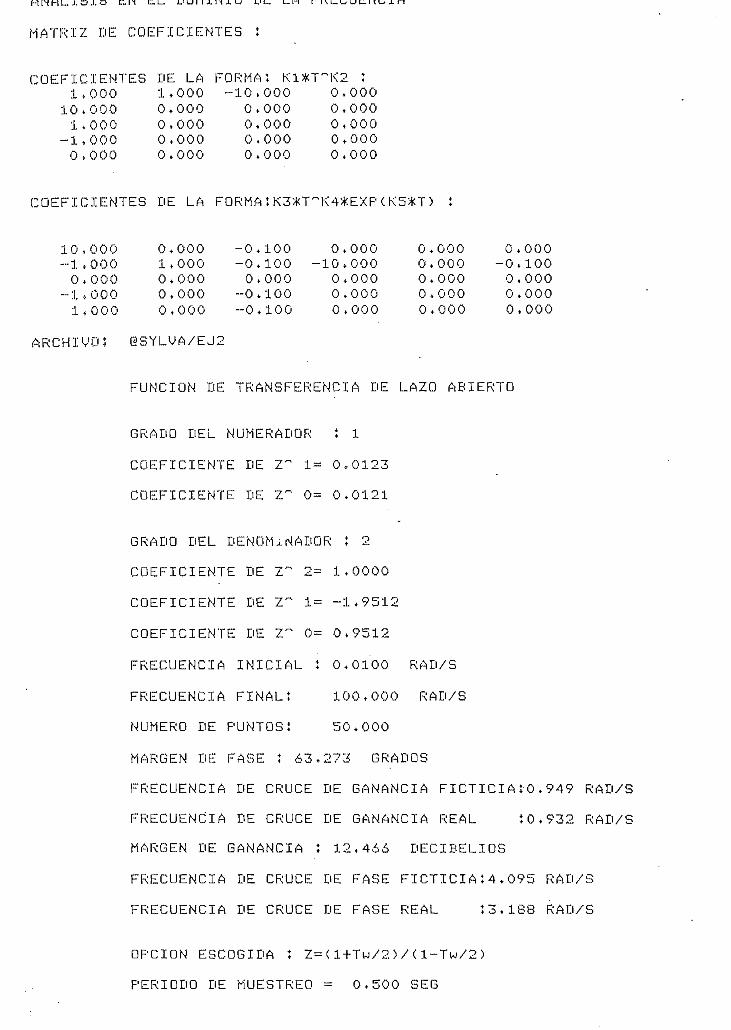
~ • 135 -ANÁLISIS EN EL DOMINIO DE LA FRECUENCIA
MATRIZ DE COEFICIENTES :
COEFICIENTES HE LA FORMA; K1#T"K2 \0 1*000 -10,000 0*000
10*000 0+000 0*000 0*0001*000 0*000 0*000 0*000
-1 * 000 0*000 0*000 0*0000.000 0*000 0*000 0*000
COEFICIENTES DE LA FORMA:K3*T"K4#EXP(K5*T) í
10*000 0*000 -0*100 0*000 0*000 0*000-1,000
0*000-1,000
1*000
1*0000*0000*0000*000
-0*1000*000
-0*100-0*100
-10*0000*0000*0000*000
0*0000*0000*0000*000
-0*1000*0000*0000*000
ARCHIVO; @SYLVA/EJ2
FUNCIÓN DE TRANSFERENCIA DE LAZO ABIERTO
GRADO DEL NUMERADOR i 1
COEFICIENTE DE Z~ 1= 0,0123
COEFICIENTE DE Z" 0= 0*0121
GRADO DEL DENOMINADOR í 2
COEFICIENTE DE Z" 2= 1*0000
COEFICIENTE DE Z~ 1= -1*9512
COEFICIENTE DE Z~ 0= 0*9512
FRECUENCIA INICIAL * 0*0100 RAD/S
FRECUENCIA FINAL! 100*000 RAD/S
NUMERO DE PUNTOS: 50*000
MARGEN DE FASE í 03*273 GRADOS
FRECUENCIA DE CRUCE DE GANANCIA FICTICIA;O * 949 RAD/S
FRECUENCIA DE CRUCE DE GANANCIA REAL Í0*?32 RAD/S
MARGEN DE GANANCIA í 12*466 DECIBELIOS
FRECUENCIA DE CRUCE DE FASE FICTICIA;4 * 095 RAD/S
FRECUENCIA DE CRUCE DE FASE REAL +*3*188 RAD/S
OPCIÓN ESCOGIDA ; Z=Ci+Tw/2)/(l-Tw/2)
PERIODO DE MUESTREO = 0*500 SEG

- 136 -
DISCRETI2ACION DE FILTROS CONTINUOS
COMPENSACIÓN: REGLA RECTANGULAR HACIA ATRÁS
COMPENSADOR HE PRIMER GRADO
COMPENSADOR CONTINUO tCOEFICIENTE DE S" 1 = 10*000COEFICIENTE DE S" O = 1.000
DENOMINADOR íCOEFICIENTE DE S" 1 = 1*000COEFICIENTE DE S~ O = 1.000
COMPENSADOR DISCRETOí
NUMERADOR;COEFICIENTE DE 2" 1 = 10.500COEFICIENTE DE Z~ O = -10*000
DENOMINADOR:COEFICIENTE DE Z" 1 = 1*500COEFICIENTE DE 7T O = -1*000
DISCRETIZACION DE FILTROS CONTINUOS
COMPENSACIÓN: REGLA DE TUSTIN
COMPENSADOR DE PRIMER GRADO
COMPENSADOR CONTINUO i
'NUMERADORCOEFICIENTE. DE S" 1 = 10*000C O E F I C I E N T E DE S" O = 1*000
DENOMINADOR íCOEFICIENTE DE S" 1 = 1*000COEFICIENTE DE S" O = 1*000
COMPENSADOR DISCRETO:
NUMERADOR:COEFICIENTE DE 2" 1'= 20*500COEFICIENTE DE Z~ O = -19*500
DENOMINADOR:COEFICIENTE DE Z" 1 = 2.500COEFICIENTE DE 7T O = -1*500

- 137 -
DISCRETIZACIQN DE FILTROS CONTINUOS
COMPENSACIÓN: MAREO DE POLOS Y CEROS
COMPENSADOR DE PRIMER GRADO
COMPENSADOR CONTINUO í
NUMERADORCOEFICIENTE DE S" 1 = 10*000COEFICIENTE DE S~ O = 1,000
DENOMINADOR íCOEFICIENTE DE S" 1 = 1.000COEFICIENTE DE S~ O = 1\000
COMPENSADOR DISCRETO:
NUMERADOR:COEFICIENTE DE 2" 1 = 8*068COEFICIENTE DE Z~ O = -7*674
DENOMINADOR:COEFICIENTE DE Z~ 1 = 1*000COEFICIENTE DE Z~ O = ~0*Ó07
COMPENSADOR DISCRETO P*I'*D.
VALOR DE KP: 0*050
VALOR DE Ki: 0*000
VALOR DE Kdí 0*475
VALOR DE K : 20*000
NUMERADOR:
COEFICIENTE DE Z" 2 = 20*000
COEFICIENTE DE Z" 1 = -39.000
COEFICIENTE DE Z" O = 19,000
DENOMINADOR:
COEFICIENTE DE 7" 2 = 1*000
COEFICIENTE DE 1T 1 = -1*000
COEFICIENTE DE 7T O = 0*000
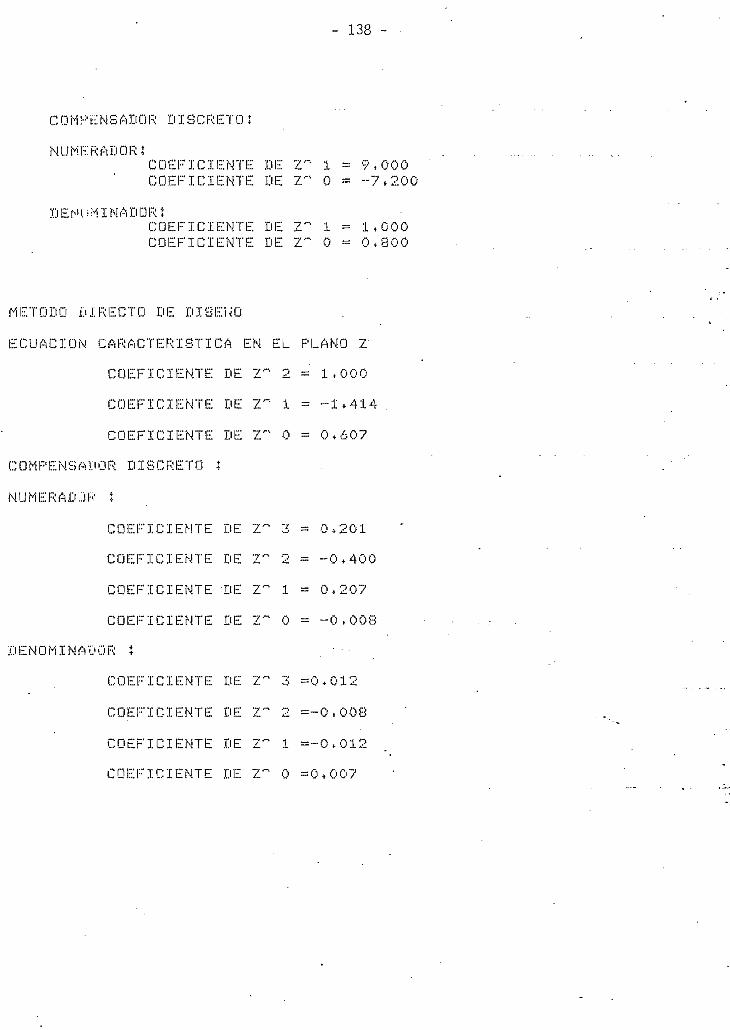
- 138 -
COMPENSADOR DISCRETO í
NUMERADOR*COEFICIENTE DE Z" 1 = 9,000COEFICIENTE HE Z" O = -7,200
DENOMINADORÍCOEFICIENTE DE 1T 1 = 1,000COEFICIENTE DE Z" O = 0,800
MÉTODO DIRECTO DE DISEÑO
ECUACIÓN CARACTERÍSTICA EN EL PLANO Z
COEFICIENTE: DE z~ 2 = 1,000
COEFICIENTE DE Z" 1 = -1*414
COEFICIENTE DE Z" O = 0,007
COMPENSfiViüR DISCRETO i
NUMERADOR ?
COEFICIENTE DE 7T 3 = 0,201
COEFICIENTE DE Z" 2 = -0,400
COEFICIENTE DE Z" 1 = 0,207
COEFICIENTE DE Z" O = -0.008
COEFICIENTE DE Z" 3 0,012
COEFICIENTE DE Z" 2 =-0,008
COEFICIENTE DE Z~ 1 =-0,012
COEFICIENTE DE Z" O =0*007

139 -
te transitoria, sin embargo el tiempo de establecimiento es muy largo
comparado con los otros compensadores.
La introducción de un compensador mejora el margen "de ganan-
cia y el margen de fase del sistema, (Fig. n,o).
En las figuras p, q, r, sv se observa las características* de-
la señal de control para algunos compensadores,. Utilizando dlscreti-
zación (Fig. p, q), la señal de control es adecuada. Con el cornpens_a_
dor discreto utilizado (Fig. r), la señal de control es decreciente,
pero el tiempo en el cual el sistema se estabiliza es largo. Con el
controlador P.I.D. la señal de control actúa rápidamente hasta estabi_
lizar al sistema. El valor de la señal de control es alto al inicio,
lo cual puede corregirse ajustando 1 as'constantes del compensador. '
Ejemplo N'2 3.
Este ejemplo ilustra la aplicación de la teoría de control dj_
gital en el control electrónico de la relación estequiométrica aire-(4)
combustible de un automóvil. El sistema de control se indica en "la
figura 5.4.
Perturbación
Comando ^^-^ «
. T 'CONTROLADOR
INTERFACEELECTRÓNICA
SENSOR
1_4yJ
-t-k U
MOTORc
CATALIZADOREmisión
Figura 5.4 Conlrol e lec t rón i co de la relacío'n aire-combustible para un automóvil

- 140 -
El sensor Indica la composición de la mezcla de gas que ingre_
sa en el convertidor catalítico. El controlador digital detecta la dj_
ferencia entre la señal de comando y las señales que envía el sensor
y calcula la señal de control necesaria para conseguir una composición
de gas deseada. La señal de perturbación se utiliza para representar
cambios en condiciones de operación desconocidas como son: variaciones
en la temperatura, presión, humedad y composición de combustible. La
variable de salida c denota la relación efectiva de aire/combustible-.
Un modelo de este control se indica en la figura 5.5.
Figuro 5.5 Modelo discroto del sistema de la figura 5.4
La función de transferencia del motor está dada por:
-TdsEcu. 5.3
donde Td es un tiempo de retardo .
Hagamos T = 0.25s, Td = Is y T = O.ls; d(t) = O y analice-
mos las características del sistema en el dominio del tiempo y de 1 a
frecuencia.
Reemplazando las constantes en 5.3, se tiene:

- 141 -
G p(s ) " 1 + 0.25s (s + 4)
La transformada Z de 1 a planta con el Z . O . H . es
Z 4 es ( s + 4 )
entonces G7. ( z - e
--4T
Las características del sistema sin compensación se indican
en las figuras as d.
O 3247Si T = O.ls ; G, \ :
pu; z (z-0.6703)
Utilizando un P.I.D. que cancele los polos de la planta, se
obtienen las características mostradas en las figuras b. (kd = 0);
c (kd = 0.1). En las figuras e, f, g, se indican los diagramas de fre_
cuencia con compensación y los gráficos de la señal de control u.
Observaciones al Ejemplo N2 3.
La función de transferencia G / \e un retardo de trans-
porte dado por e~s, el cual hace que el sistema no presente caracterís
ticas adecuadas. El sistema es tipo O y tiene un error de posición.
Obsérvese la respuesta de la figura a., en la cual el valor final de
la salida no es 1, sino 0.5.
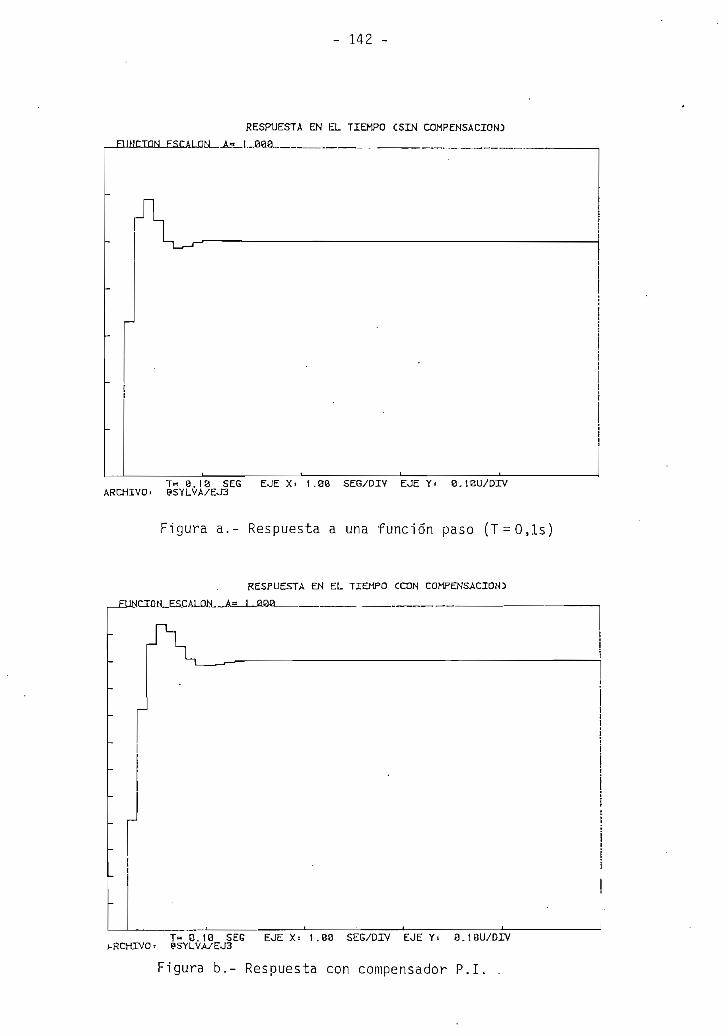
- 142 -
RESPUESTA EN EL TIEMPO CSIN COMPENSACIÓN}
FSHA1 HN A» 1 . Rflfl , „ .
T«=8.18 SEG EJE X« 1.08 SEG/DIV EJEARCHIVO. SSYLVA/EJ3
8.10U/DIV
Figura a.- Respuesta a una función paso (T = 0,ls)
RESPUESTA EN EL TIEMPO CCON COMPENSACJON3
T»0.10 SEG EJE X: 1.89 SES/DIV EJE Y» 0.1QU/DIVARCHIVOt eSYLVA/EJ3
Figura b.- Respuesta con compensador P.I. .
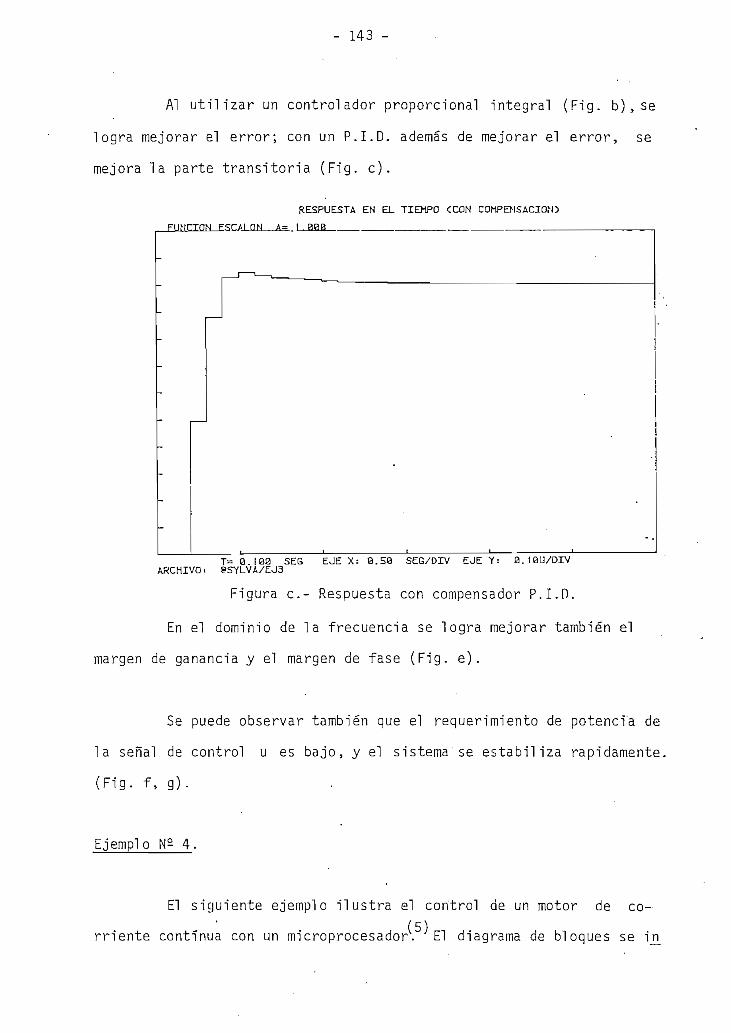
- 143 -
Al utilizar un control ador proporcional integral (Fig. b), se
logra mejorar el error; con un P.I.D. además de mejorar el error, se
mejora la parte transitoria (Fig. c).
RESPUESTA EN EL TIEMPO CCON COMPENSACIÓN)
FUNCIÓN ESCALÓN As.. 1_BQQ . .
T^Q.IQQ SES EJE X: B.50 SEG/DIV EJE Y = 0.1QU/DIVARCHIVO. SSYLVA/EJ3
Figura c.- Respuesta con compensador P.I.f).
En el dominio de la frecuencia se logra mejorar también el
margen de ganancia y el margen de fase (Fig. e).
Se puede observar también que el requerimiento de potencia de
la señal de control u es bajo, y el sistema se estabiliza rápidamente.
(Fig. f, g).
Ejemplo N- 4.
El siguiente ejemplo ilustra el control de un motor de co-
rriente continua con un microprocesador. El diagrama de bloques se in
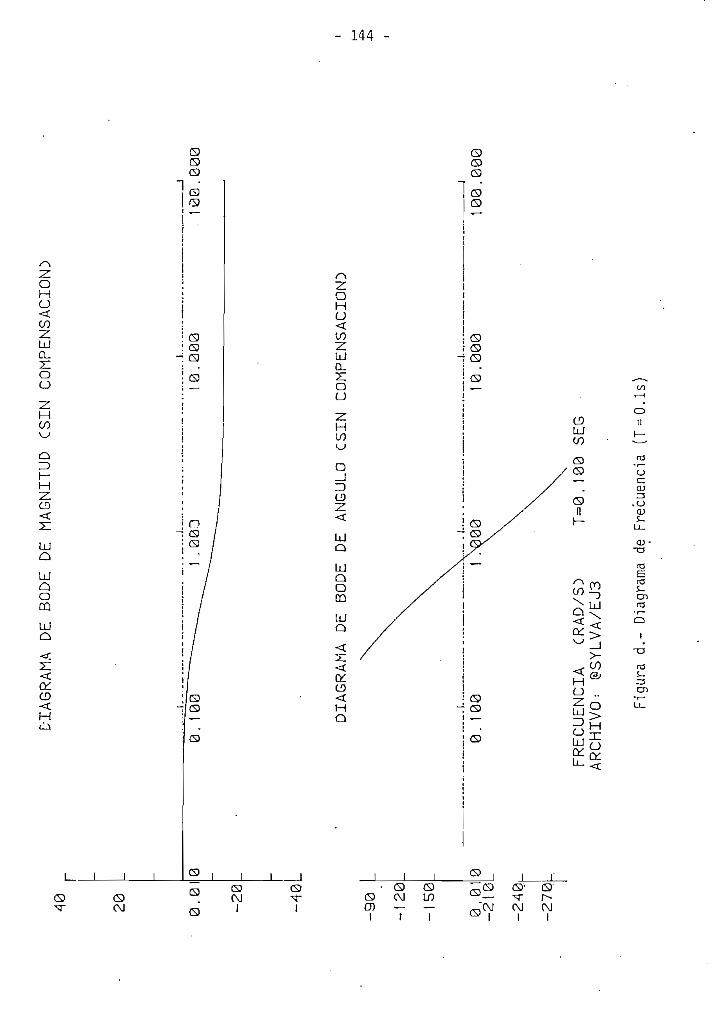
40r
DIAGRAMA DE BODE DE MAGNITUD CSIN COMPENSACIÓN)
0.0 -20
.i.0. 100
.000
0 .000
30.000
-40
DIA
GR
AM
A
DE
B
OD
E
DE
Á
NG
ULO
C
SIN
C
OM
PE
NS
AC
IÓN
)
FR
EC
UE
NC
IA
CR
AD
/S)
AR
CH
IVO
: E
PS
YLV
A/E
J3T
=0
.10
0 S
EG
Fig
ura
d.
- D
iagr
ama
de F
recu
enci
a (T
= 0
.1s
)
10
0.0
00
i i—• -p»
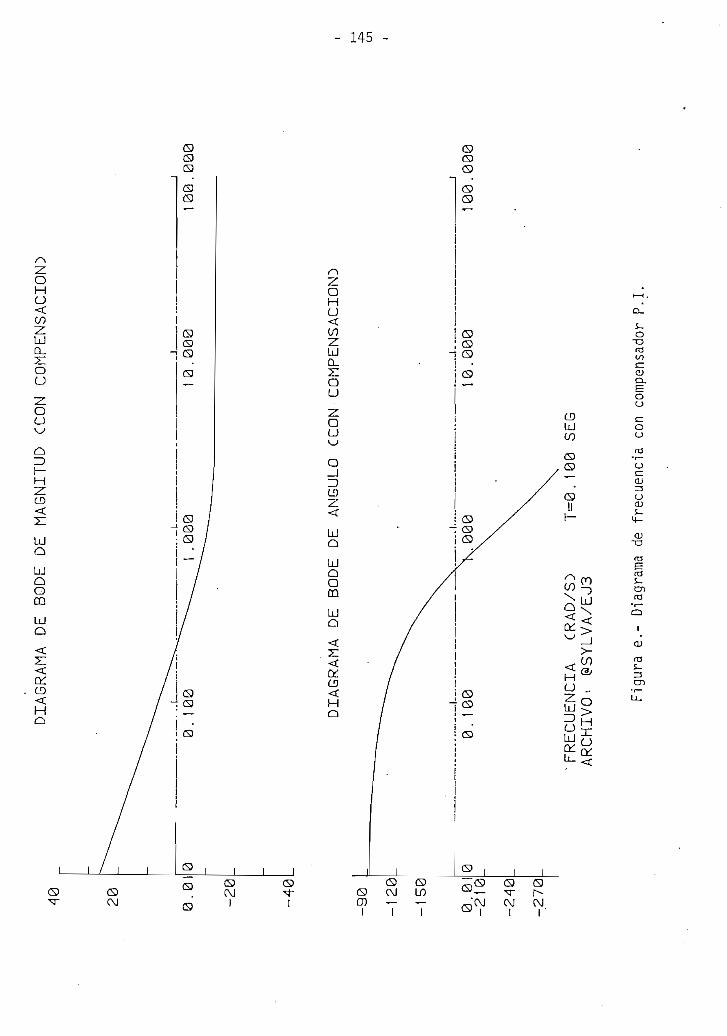
0.0
-20
0. 100
1 .000
l0 .0013
130.000
-40L
DIAGRAMA DE BODE DE ÁNGULO CCON COMPENSACIÓN}
0.080
100.000
1 FRECUENCIA
CRAD/S)
ARCHIVO: @SYLVA/EJ3
T=0.100 SEG
en i
Figu
ra e
.- D
iagr
ama de f
recu
enci
a co
n co
mpen
sado
r P.
I,

SEÑALES DE ENTRADA Y SALIDA
Ejo x : Idív
«10 valores de y
EJQ y- 1div=0,2 u
SEÑAL DE CONTROL U
Ej© x :
1 d i v-
1 0 valores de u
Eje y:
1div-1.0
Figu
ra f
.- S
alid
a y
Señal
de C
ontrol co
n co
mpen
sado
r P.I
CT)
I

SEÑALES DE ENTRADA Y SALIDA
x '
Idi
va oree
de y
E JQ y
¡.
1 d i v^Q . 2 u
SEÑAL DE CONTROL U
Ej Q x : 1 d
Í v-10 va
I ores de u
Ej Q y:
1d iv"1 .0 u
Figu
ra g
.- S
alid
a y
Señal
de c
ontr
ol co
n co
mpen
sado
r P.
I.D.

- 148 -ANÁLISIS EN EL DOMINIO DE LA FRECUENCIA
eMATRIZ DE COEFICIENTES í
COEFICIENTES DE LA FORMAí Kl#T"K2 *1*000 0 ,0001,000 0*000
. 0 ,000 0*0000.000 0,000
COEFICIENTES DE LA FORMAíK3#T"K4*EXP<K5*T> t
-1 ,0000*000-1,000C< 000
0,0000,0000,0000,000
-4*0000,000-4*0000*000
ARCHIVO t @SYI_yA/EJ3
FUNCIÓN DE TRANSFERENCIA DE LAZO ABIERTO
GRADO DEL NUMERADOR ; O
COEFICIENTE DE Z" 0= 0*3297
GRADO DEL DENOMINADOR í 2
COEFICIENTE DE Z~ 2= 1,0000
COEFICIENTE DE Z" 1= -0,6703
COEFICIENTE DE 1T 0= 0,0000
FRECUENCIA INICIAL t 0*0100 RAD/S
FRECUENCIA FINALt 100,000 RAD/S
NUMERO DE PUNTOSí 40*000
MARGEN DE FASE í 53*807 GRADOS
FRECUENCIA DE CRUCE DE GANANCIA FICTICIA\ * 215 RAD/S
FRECUENCIA DE CRUCE DE GANANCIA REAL Í4,244 RAD/S
MARGEN DE'GANANCIA * 7*043 DECIBELIOS
FRECUENCIA DE CRUCE DE FASE FICTICIA IO * 573 RAD/S
FRECUENCIA DE CRUCE DE FASE REAL * 10,407 RAD/S
OPCIÓN ESCOGIDA * Z= (1-fw ) / (l~w )

ESCUELA POLITÉCNICA NACIONAL - 149 -
tFACULTAD DE INGENIERÍA ELÉCTRICA
DEPARTAMENTO DE CONTROL'
ÁREA ÜE CONTROL Y SISTEMAS
TESIS DE' GRADO i PETER EDUARDO SYLVA FUSEAU
£ I-ECHA t 22-JAN-85 19 t32130
ANÁLISIS EN EL DOMINIO DEL TIEMPO
MATRIZ DE COEFICIENTES
COEFICIENTES DE LA FORMAÍ K1#T~K2 íi. ,000 0*000L ,000 0*0000*000 O» 0000,000 0*000
COEFICIENTES DE LA FORMAíK3#T~K4*EXP(K5*T) t
1*0000,0001 .0000 ,000
0*0000*0000*0000 ,000
-4*0000*000
-4*0000 * 0 0 0
Qi QSYLVA/EJ3
FUNCIÓN DE TRANSFERENCIA DE LAZO ABIERTO
GRADO DEL NUMERADOR í O
COEFICIENTE DE 2" 0= 0*3297
GRADO DEL DENOMINADOR t 2
COEFICIENTE DE Z" 2= 1*0000
COEFICIENTE DE Z" 1= -0*0703
COEFICIENTE DE Z" 0= 0*0000
m INTERVALO DE ANÁLISIS O»000 < t < 5*000 SE6
VALOR DEL PERIODO DE MUESTREO : 0*100 SEG
ANÁLISIS PARA UNA FUNCIÓN PASO
AMPLITUD DE LA FUNCIÓN U,00

- 150 -ANÁLISIS EN EL DOMINIO BE LA FRECUENCIA
^MATRIZ DE COEFICIENTES í
COEFICIENTES" DE LA FORMAt K1*T~K2 \'1+000 0,0001*000 0,000 l-'0*000 ' 0*000o; ooo 0,000
COEFICIENTES DE LA FORMAíK3#T"K4#EXP(K5*T) í
-1*000 0*000 -4*000O * 000 O * 000 O*000
"1 * 000 O*000 -4 * 0000»00ü 0*000 0,000
ARCHIVOS S8YLVA/EJ3
FUNCIÓN DE TRANSFERENCIA DE LAZO ABIERTO
t:]RADO DEL NUMERADOR l O
COEFICIENTE DE Z~ 0= 0*3297
ríRADQ DEL DENOMINADOR í 2
COEFICIENTE DE 2."" 2= 1*0000
COEFICIENTE DE 7." 1= -0*6703
COEFICIENTE DE Z~ 0= 0*0000
-RECUENCIA INICIAL { 0*0100 RAD/S
FRECUENCIA FINALí 100*000 RAD/S
NUMERO DE PUNTOS: 40,000
MARGEN DE FASE INDEFINIDO
í-'ARGEN DE GANANCIA í 9*609 DECIBELIOS
.-•SECUENCIA DE CRUCE DE FASE . FICTICIA SO + 702 RAD/S
FRECUENCIA DE CRUCE DE FASE REAL í12*237 RAD/S
OPCIÓN ESCOGIDA í Z=C1+w)/C1-w)
PERIODO DE MUESTREQ - 0*100 SEG

$>
- 151 - -
COMPENSADOR DISCRETO P*I*D*
VALOR HE KP: 4*183_ [_\R DE Ki: 16*350 _
VALOR DE Kd: 0*000
VALOR DE K : 0*250"
NUMERADOR:
COEFICIENTE DE Z" 2 = 0*250
& COEFICIENTE DE Z" 1 = -0*163
COEFICIENTE DE Z" O = 0.000
DENOMINADOR:
COEFICIENTE DE Z" 2 = 0*200
COEFICIENTE DE 7T 1 = -0*200
COEFICIENTE DE Z" O = 0*000
COMPENSADOR DISCRETO P * I * D >
VALOR DE KPÍ "4,180"
VALOR DE Kit 16*350
"^ VALOR D E _ K d t 0*100..
VALOR DE K í 0*250
NUMERADORt
COEFICIENTE DE Z" 2 = 0*300
CQ.EF I CÍENTE DE 7T 1 = -0*208
% COEFICIENTE DE Z" O = 0*050
ÜENOMINADORt ...
COEFICIENTE DE Z" 2 = 0.200
COEFICIENTE DE Z" 1 ='-0*200'
COEFICIENTE DE Z" O = 0*000
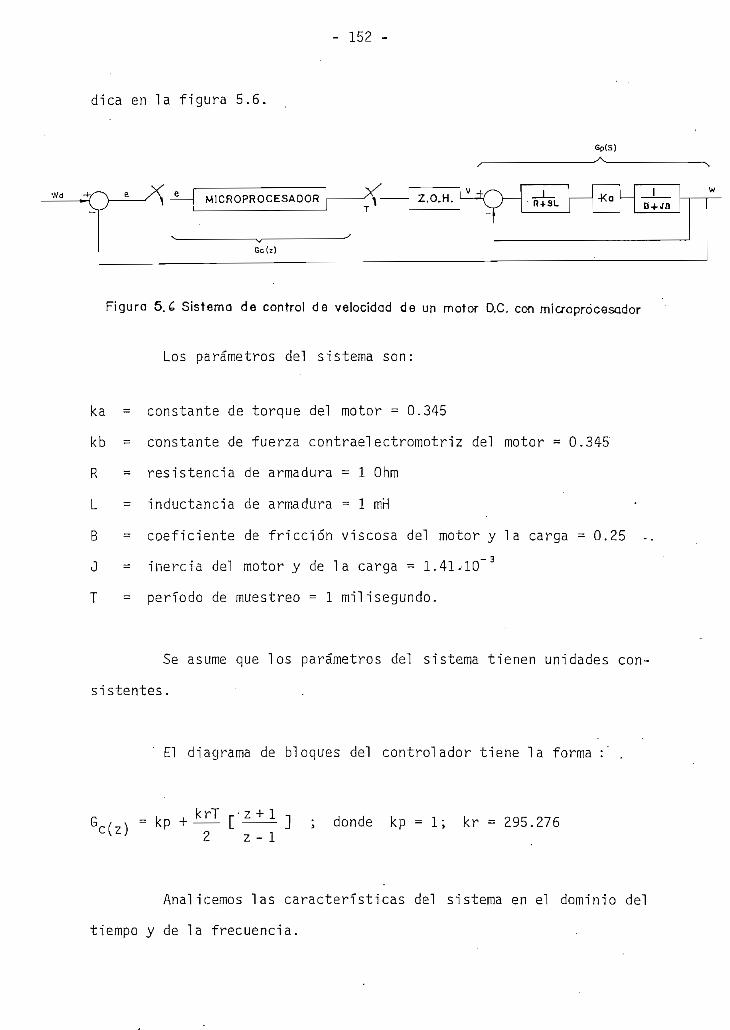
- 152 -
dica en la figura 5.6.
Gp(S)
MICROPROCESADOR
Ge U)
Figura 5.C Sistema de control de velocidad de un motor D.C. con microprócesador
Los parámetros del sistema son:
ka = constante de torque del motor = 0.345
kb = constante de fuerza contrael ectromotriz del motor = 0.345'
R = resistencia de armadura = 1 Ohm
L = inductancia de armadura = 1 mH
B = coeficiente de fricción viscosa del motor y la carga = 0.25 -
J = inercia del motor y de 1 a carga = 1.41.-10"3
T = período de muestreo = 1 milisegundo.
Se asume que los parámetros del sistema tienen unidades con-
sistentes.
El diagrama de bloques del control ador tiene la forma
kp
k rT • z
z - 1donde kr = 295.276
Analicemos las características del sistema en el dominio del
tiempo y de la frecuencia.

- 153 -
La función de transferencia G / x es:
ka
(R + s L ) ( B + Js) _ ka
ka kb (R + sL ) (B + Js) + ka kb
s L ) ( B + J s )
ka
p .JLantonces: G p(s) =
+ s ( L B + J R j + ( R B + ka kb
J L " J L
Reemplazando valores:
_ 244680.851 _ 244680.851p( s ) s2 + 1177.305s + 261719.858 - (s - 879.844)(s - 297.462)
Tomando la transformada Z de la planta y el Z . O . H . se tiene:
Q-935 1.412 . 0.478- --
s s -879.844 s -297.462
z [ 0.478 e"879'844 - 1.412 e"297'462 + 0.935]G P ( Z ) = ¡ :
[Q.935 e"1177'3057-1.412 e"879'844 + 0.478 e"297'462]
A = Z ^ z C - e " - - e-297.462] + [ e-1177.305]

- 154 -
Si se considera en primer lugar el sistema de control sin
pensador se obtienen los gráficos de las figuras a, c.
n A r „<- 2 kp (z- 1) + krT (z + 1)El compensador G / \: — '- * '-ciz; 2 z- 2
-, , , P 2.295z - 1.705reemplazando valores: G t \ • -cu; 2 z- 2
Los gráficos del sistema compensado, se muestran en las figu-
ras b, d.
En la figura e, se muestra el gráfico de la señal de control
u.
Observaciones al Ejemplo Ns 4.
El sistema sin compensación presenta un error en estado esta-
ble de 0.5 (Fig. a). Añadiendo el compensador se elimina el error
(Fig. b). En el dominio de la frecuencia, el margen de fase es indefi-
nido (sin compensación Fig. c) ; y tiene un valor positivo y alto ( con
compensación Fig. d). La señal de control es aproximadamente constan_
te, y los requerimientos de potencia son bajos (Fig. e).
Se adjuntan además resultados impresos en el computador.

- 155 -
RESPUESTA EN EL TIEMPO CSIN COMPENSACIÓN:?FUNCIÓN ESCALÓN A- 1.000 . ..„ .. . ..
LLTB 0.S81 SEG EJE X-
ARCHIVOt SSYLVA/EJllí.Bl SEG/DIV EJE Y- e.lQU/PXV
Figura a.- Respuesta a una función paso (T = 0.001s)
RESPUESTA EN EL TIEMPO CCON COMPENSACIÓN)
JES.CALON A?....V.0Q.0..
T= 0.001 SEG EJE Xi 3.01 SEG/DIV EJE Y' 0.1QU/DIVARCHIVO. SSYLVA/EJl1
Figura b.- Respuesta con compensador discreto.

ffi;
40
AG
RA
MA
D
E
BO
DE
D
E M
AG
NIT
UD
(SIN
C
OM
PE
NS
AC
IÓN
)
20 -20
-90
-120
-150
0.Í
-2 i
-240.
-270.
DIAGRAMA
DE BODE DE ÁNGULO
(SIN COMPENSACIÓN)
FRECUENCIA
CRAD/S)
ARCHIVO: PSYLVA/EJ11
SEG
Finu
ra b.-
Resp
uest
a de
fre
cuen
cia
(T = O.OOls)
00.000
00.000
en CTÍ

fe,
-JAG
RAMA DE BODE DE MAGNITUD CCON COMPENSACIÓN)
-40L
DIAGRAMA
DE BODE DE ÁNGULO CCON COMPENSACIÓN)
00.2)130
FRECUENCIA
CRAD/S3
ARCHIVO: @SYLVA/EJÍ
SEG
on i
Finu
ra c.
- Re
snue
sta
de f
recu
enci
a co
n co
moen
sado
r di
scre
to,
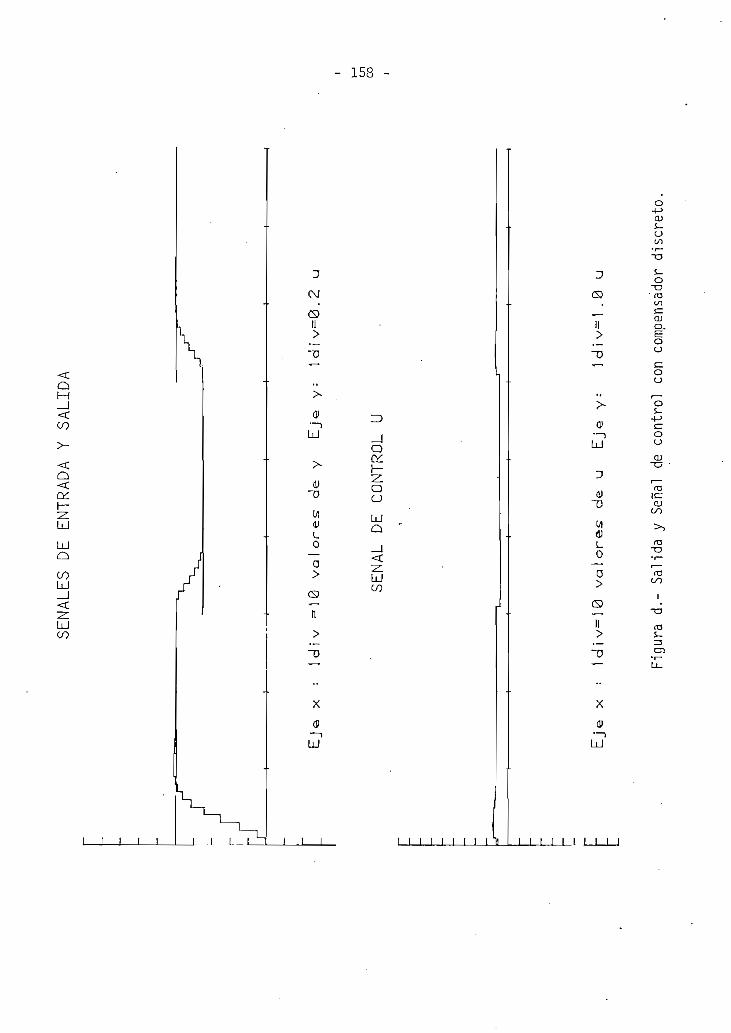
tte
SEÑA
LES
DE EN
TRAD
A Y
SALIDA
Eje x : Idiv
=10 Valores de y
Ejo y: 1div=0.2 u
SEÑAL DE CONTROL U
ai co
Eje x ¡ ld¡v=Í0 valores de u
Eje
y-*
1 d i v-1 . 0 u
Figu
ra d
.- S
alid
a y
Señal
de c
ontrol co
n co
mpen
sado
r di
scre
to.

- 159-- - . . . .HALIBIB Eiv EL DOMINIO DEL TIEMPO
ATTíIZ DE COEFICIENTES . . • '
DEFICIENTES DE LA FORMA? K1#T""K2 ? ;.0*9"--*: 0,000 '. . > - '0,000 0*0001+OOv 0,0000,000 0,000 "
- OfOcK1 0,000
ÜEFICIEN •;.::: DE LA FORMAÍK3*TrtK4#EXF1(K5*T5 J " -
0,478 0,000 -879*844 -1*412 0,000 -297,462 0*000 0,000 OO *93b O.000-1177 * 305 ™1* 412 O , 000 -879,844 O * 478 O,000 -297 * 46:0 * 000 O,000 O,000 O * 000 O,000 O,000 O * 000 O * 000 O , 00<
-1*000 0*000 --879*844 -1*000 0,000 -297,462 0,000 0*000 • 0»00<1 * 000 O »000-i 177 * 305 O * 000 O * 000 O,000 O > 000 O * 000 O , 00<
;••. C M IM O t ....:: : L M A / E j 11
::--CIÜN HÍ- TRANSFERENCIA DE LAZO -ABIERTO
--00 DEL NUMERADOR t 1
. í CIS i r i ' fE DE T"' 1- 0*0846
. „ • • ' . r C í b i . N ' V K DE Z'" '-0~ 0,0573^fcít—
•»:JO DEL. DENOMINADOR t 2
-.er.ir_rjrv:: DE ?."2=i*üooo
-.:-"ICIENTE DE 'ir 1» -1*1575
. ..'.-ICIENTE DE Z"' 0~ 0,3081
:::KVALO DE ANÁLISIS 0,000 -=;. -t < o,oso SEG
'.- ...OR DEL PERIODO DE ML'ESTREO I 0,001 SEG
• •• -...ISIS PARA UNA FUNCIÓN PASO
. ITL'D K LA FUNCIÓN íl ,00
-ICIENTE DE 7T 1 « 2,295-'ICIENTE DE ir O = -1*705
C: EFICIENTE DE 7."" 1 = 2,000C':¡:-!r ICIENTE DE Z" O = -2*000

. - 160 -.fe' . . . . ........ ..._ - . . . .
AL.ISIS EN E:... DOMINIO DE LA FRECUENCIA ' " " ''
TKIZ HE COEFICIENTES .i
EFICIENTES ÍHi-'LA FORMA? K1*T"K2 ? " - , ' . "Oi-93£ 0,000 . • " "
^ 0.000 0,000* 1,000 OtOOO
0,000 0*0000,000 0,000 . .
!=- í.CIEMT-- •••. LA FORMA JK3#T"%K4#EXF'(K5im t
0,478 000 -879*844 -1*412 -0,000 -297,462 0->000 0,000- O^O'J>935 . ÍJOO~1177*301:/ -1*412 0,000 --979,844 0,478 0,000- -297,462
<$j.--» 000 - , 000 O * 000 O , 000 O , 000 O t 000 O * 000 O * 000 O * 000"- :. >000 000 -879*844 -1,000 0,000 -297,462 0,000 0,000 0,000
:. * 000 : -.'OO-l177 4 30S O , 000 O -, 000 O , 000 O * 000 ü , 000 O * 000
CHIVO í O'.: ,'A/EJ11
! » • • - • OH DE TRANSFERENCIA DE LAZO ABIERTO
e-- • ,:• DEL NUMERADOR \
* i...- = .: ;i: E N T E D E z"% i = o, o s 4 0
L ..-' -. : C IE N T E DE Z ~ O - O » O 5 73
i:'..- • DEL DENOMINADOR í 2
C'.'-.. -CÍENTE DE 2"" 2= 1.0000
C«:•::: 'CÍENTE DE Z" 1= -1,1573 "
%> . LO:! 'CÍENTE DE Z" 0=^ Ü>3081
!:::; ;.. ..ENCÍA INICIAL i 0,0100 RftD/3
Ffcr••••„'ENCÍA FINALt 100*000 RAD/S
:.:- : -O DE PUNTOS t 40.000"
r;:-- '..,LN DE FASE INDEFINIDO . \i¿. . . .I"" MM--JKN DE GANANCIA í 21,449 DECIBELIOS
¡ F .'.:UENCIA DE CRUCE DE FASE FICTIpIA í O , 919 RAD/SíI FRECUENCIA DE CRUCE DE FASE REAL í1486,397 RAD/SiiII __ OPCIÓN ESCOGIDA í Z«< l + w)/< 1-w > .. . . . . . .i
L PEi-'.'ÜDO DE tMUESTREO = 0,001 SE03

- 161 -•ALISIS EN EL DOMINIO DE LA FRECUENCIA •
*TfflZ DE COEFICIENTES í
EFICIENTES DE LA FORMAS K1#T~K20,93^ 0,0000,00ú . 0,0001,000 0,0000*000 0,000
« 0.000 0,000
'EFICIENTE'::: ¡.t£ LA FORMA t K3#T"K4#EXP ( K5*T )
0,478 0,000 -879,8440,935 0,000-1177*305o + ooo •:"' > ooo o , ooo•1*000 ,',000 -879.844j. > 000 •,' • 000-1 177 * 30';;
-1*412-I *4120>000- 1 , 0 0 00 * 0 0 0
0,0000,0000*000.
' 0,0000,000
-297,462-879,844
0*000-297,462
0.000
0,0000,4780*0000,0000,000
0,0000 >-0000,0000,0000*000'
0 ,000-297 ,-462
0,0000,0000*000
CHIVO í i-*1:: ?:
--••--MON DE TRANSFERENCIA DE LAZO ABIERTO
• :-• --.:>yü DEL NUMERADOR í 1
</ ..- [CÍENTE DE 2r 1= 0*0846
^ .:'. .-.:»ÍCIÉ:NTE DE "ir o= 0,0573
<-."••. •• :;ü DEL DENOMINADOR í 2
= . ; . : ' • ICIENTE DE 2r 2= 1.0000
:.:••:•.'-ICIENTE DE Z~ 1= -I ,1375
í,-.•::"'.¡;CÍENTE DE z-v o= 0,3081
^ - = • . ;UENCIA INICIAL 1 0,0100 RAD/SIr
! • ; - : : ;-UENCIA FINAL í 100/000 RAD/S
••-,'• ::.KO DE PUNTOS? 40*000
:• -: .-EN DE FASE * 65"«éól GlÍADOS ""
í-:--. ;::UENCIA.DE CRUCE DE GANANCIA FICTICIA í O * 134 RAD/S
Fh:.-.CUENCIA DE CRUCE DE GANANCIA RE'AL í 267* 081 RAD/SÍ
M^ixúEN DE GANANCIA í 18*764 DECIBELIOS
! FRECUENCIA DE CRUCE DE FASE FICTICIA?O * 740 RAD/S
1 FRECUENCIA DE CRUCE DE FASE REAL í1274,201 RAD/S
OK;J:ÜN ESCOGIDA í z=ci+w)/ci-w)

- 162 -
jjemplo N? 5.
Este ejemplo Ilustra el control de temperatura en un tanque
de fluido utilizando técnicas digitales.
Se controla la temperatura del fluido que Ingresa al tanque'
con una válvula mezcladora que ajusta la relativa cantidad de- calor y
frío del fluido (Fig. 5.7)(6)
CoIJentoTec
iTel
Válvulamezcladora
Tanque de fluido(Te)
Te
Figura 5.7 Control de. temperatura de un tanque
Debido a la distancia entre la válvula y el punto de descar-
ga en el tanque, existe un tiempo de retardo (retardo de transporte)
entre la aplicación de un cambio en la válvula mezcladora y la desca_r
ga del líquido en el tanque.
Las ecuaciones que describen el modelo son:
Te = ,,cM(qvy
Ecu. 5.5our'
donde: Te = temperatura del tanque
c = calor específico del fluido

- 163 -
M = masa de fluido contenida en el tanque
qiN = c IN Tei
OUT " ° OUT G
m = re lac ión de f l u j o de masa ( fr = mOUT )
Tel = temperatura de f lu ido en el tanque
La temperatura a la entrada del tanque al tiempo t es la teñí
oeratura de control retrasada un tiempo rd segundos, y se puede expre_
sar asf:
Tei(t) = Tec (t - rd) Ecu. 5.6
donde: rd = tiempo de retardo
Tec = temperatura de control inmediatamente después de la válv^
la de control, y directamente controlada por la válvula.
Relacionando 5.5 y 5.6:
Te(t) + -Ü.Te(t) = Tec (t-rd)M M
, 0 / x T e ( s ) e T S , , mentonces: G(s) = —-—'— = donde: a = —Tec(s) s/a + 1 M
Obteniendo el modelo discreto mediante la transformada Z3 se
tiene:
-tds6(2) = (l-z~ ) Z[ - ]
•s/a + 1

- 164 -
Asumamos: rd = £T - mT ; 0 < m < l 3 y rd = 1.5 ;T = ls ; a = 1
De esta forma: L = 2 ; m = -
La función de transferencia es entonces:
ni \c z + 0.6065G(z) = 0.3935Z2(z - 0.3679)
Analicemos las características del sistema cuya planta es
G(z) en el dominio del tiempo y de 1 a frecuencia.
Las figuras as c, muestran la respuesta en el tiempo (a) y
los diagramas de frecuencia (c), sin compensación.
SI se añade un compensador cuadrátlco., el cual está formado
por el producto de un control Integral por una red de adelanto, se ob_
tienen los gráficos de las figuras b, d.
La figura e muestra las características de la señal de con-
trol u.
Se adjuntan también resultados Impresos por el computador.
Observaciones al ejemplo N2 5.
El sistema de control posee un retardo de transporte dado
por e ST. El error en estado estable no es cero (Flg. a), y las ca-

165 -
racterísticas en el dominio de la frecuencia no son adecuados (Fig.c)
ya que el margen de fase es indefinido. Se compensa el sistema con el
compensador discreto Diz) = —— . - ——: , el cual tiene una parz - 1 z+ 0.6065 ~
te integral, y una red de adelanto que cancela el polo de 1 a planta
en z = 0.3679, con lo que se logra eliminar el error y reducir el so-
breimpulso (Fig. b); en el dominio de la frecuencia, se logra un mar-
gen de fase y de ganancia positivos'(Fig. d)-, lo que indica que el; s3&
tema es estable.
La señal de control u es aproximadamente constante, y los re-
querimientos de potencia son bajos. (Fig. e).
Ejemplo N^ 6.
Este ejemplo ilustra el control de la altitud de un satélite.
A menudo los satélites requieren de un control de su altitud para una
correcta orientación de las antenas y sensores colocados en la Tierra
Se considera únicamente el control del satélite sobre un eje, tal CID
mo se muestra en la figura 5.8.
REFERENCIAINERC1AL
Figura 5.8 Esquema de control de un satélite

- 166 -
RESPUESTA EN EL TIEMPO CSIN COMPENSACIÓN)
T= 1.090 SEG EJE X: 10.0Q SEG/DIV EJE Y. 0.10U/DIVARCHIVO: eSYLVA/EJS
Figura a.- Respuesta a una función paso (T=ls)
RESPUESTA EN EL TIEMPO CCON COMPENSACIÓN)
FUMCTON ESC¿
T» I.Q00 SEG EJE X: 10.00 SEG/DIV EJE Y¡ 0.10U/DIVARCHIVO• »SYLVA/EJ5
Figura b.- Respuesta con compensador cuadrático discreto.

IAGRAMA DE BODE DE MAGNITUD CSIN COMPENSACIÓN)
-20
-48
_L
0. 100
000
0 .000
00.000
DIAGRAMA DE BODE DE ÁNGULO CSIN COMPENSACIÓN)
-90
-120
-150
0.01
-210
-240
-270
00. 100
1\000 .
10.000
FRECUENCIA
CRAD/S)
ARCHIVO: QSYLVA/EJS
T«
1.0
00
SE
G
00
.00
0
Fig
ura
c.-
Dia
gram
as
de f
recu
en
cia
(T =
Is)
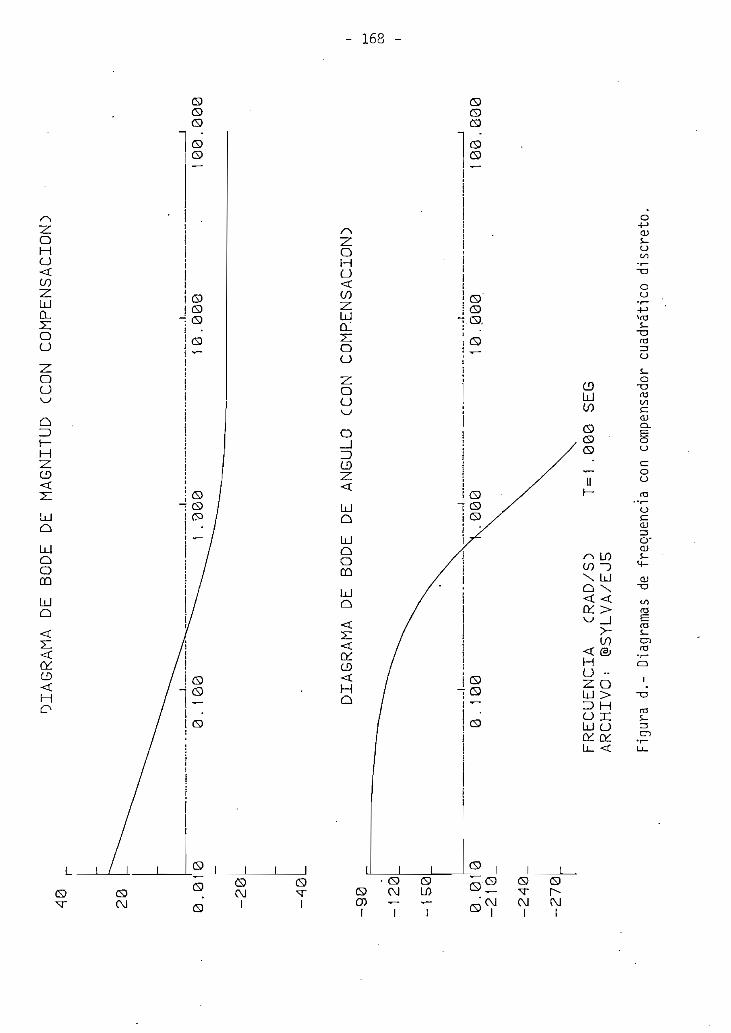
ría*Ufe
-40 r
20
0.0'
-20
-40L
DIAGRAMA DE BODE DE MAGNITUD CCON COMPENSACIÓN)
DIAGRAMA DE BODE DE ÁNGULO CCON
COMPENSACIÓN)
FRECUENCIA
CRAD/S)
ARCHIVO: @SYLVA/EJ5
7=1.000 SEG
00.000
co I
00.000
Figu
ra d
.- D
iagr
amas
de
frec
uenc
ia c
on c
ompe
nsad
or c
uadr
átic
o di
scre
to.

SEÑALES DE ENTRADA Y SALIDA
Ejo x : Idív
=10 val oree de y
Ej Q y : 1 d ¡ v==
Q . 2 u
SE
ÑA
L D
E
CO
NT
RO
L U
' i—
jen I
EJQ x : 1 d ¡ v= 1 0 valoree de u
E j o y:
1 d i v= 1 . 0. U
Fig
ura
e
.-
Sa
lida
y S
eñal
de
co
ntr
ol
con
com
pens
ador
cua
drá
tico
d
isc
reto
.

- 170 -ESCUELA POLITÉCNICA NACIONAL
FACULTAD HE INGENIERÍA ELÉCTRICA
DEPARTAMENTO DE CONTROL
ÁREA DE CONTROL Y SISTEMAS
TESIS DE GRADO t . PETER EDUARDO SYLVA FUSEAU
i" ECHA ? 20-FEB--B5 02 t24 i 17
.ALISIS EN EL DOMINIO DEL TIEMPO
FUNCIÓN DE TRANSFERENCIA DE LAZO ABIERTO
ORADO DEL NUMERADOR t 1
COEFICIENTE HE Z" 1- 0.3935
COEFICIENTE DE Z~ 0= 0*2380
ORADO DEL DENOMINADOR i 3
COEFICIENTE DE Z" 3= 1*0000
COEFICIENTE DE Z" 2- -0,3079
COEFICIENTE DE Z" 1= 0,0000
COEFICIENTE DE Z~ 0 0*0000
INTERVALO DE ANÁLISIS 0*000 < t < 00,000 SEG
VALOR DEL PERIODO DE MUESTREO i 1,000 SEG
ANÁLISIS PARA UNA FUNCIÓN PASO
AMPLITUD DE LA FUNCIÓN 51,00
hPENBñDOR DISCRETO*
COEFICIENTE DE Z~ 2 =1,000COEFICIENTE DE Z~ 1 =-0COEFICIENTE DE Z" O 0,000
.L.NOMINADORCOEFICIENTE DE Z~ 2 ^1*000'COEFICIENTE DE Z" 1 =-0*394COEFICIENTE DE Z" O =-0*607

- 171 -ESCUELA POLITÉCNICA NACIONAL
FACULTAD DE INGENIERÍA ELÉCTRICA . -
.U 11 PARTA MENTÓ HE CONTROL
BREA DE CONTROL Y SISTEMAS
;;:;BIS DE GRADO? RETER EDUARDO SYLVA FUSEAU
i~ ¿CHA t 20-FEB--8S 02 S 32 í 50
EN EL DOMINIO DE LA FRECUENCIA
FUNCIÓN HE TRANSFERENCIA DE LAZO ABIERTO
GRADO DEL NUMERADOR' í 1
COEFICIENTE DE Z~ 1 = 0,3935
COEFICIENTE DE 7T 0= 0,2386
GRADO DEL DENOMINADOR í 3
COEFICIENTE DE 1T 3= 1*0000
COEFICIENTE DE Z" 2= -0*3679
COEFICIENTE DE Z" 1= O+0000
COEFICIENTE DE Z~ 0 0,0000
FRECUENCIA INICIAL í 0,0100 RAD/S
FR EO U E N CIA FIN AL\0 O R A D/S
NUMERO DE PUNTOSí 50*000
MARGEN DE FASE INDEFINIDO
MARGEN DE GANANCIA \1 DECIBELI08
FRECUENCIA DE CRUCE DE FASE' FICTICIAtO * 059 RAD/S
FRECUENCIA DE CRUCE DE FASE REAL i 1.166 RAD/S
OPCIÓN ESCOGIDA í 2=C1+w)/C1-w)
PERIODO DE MUESTREQ « 1.000 SEG

- 172-ANÁLISIS EN EL DOMINIO DE LA FRECUENCIA
FUNCIÓN DE TRANSFERENCIA DE LAZO ABIERTO
GRADO DEL NUMERADOR i 1
COEFICIENTE DE ir 1= 0*3935
COEFICIENTE DE ir 0 0,2380
GRADO DEL DENOMINADOR ? 3
COEFICIENTE DE ir 3« 1,0000
COEFICIENTE DE 1T 2= -0,3679
COEFICIENTE DE 1T 1= 0.0000
COEFICIENTE DE Z~ 0 = 0.0000
FRECUENCIA INICIAL i 0*0100 RAD/S
FRECUENCIA FINAL! 100,000 RAD/S
NUMERO DE PUNTOS; 50.000
H A R G E N D E F A S E í 5 5 t 6 O O G R A D U 3
FRECUENCIA DE CRUCE DE GANANCIA FICTICIA t Q ,202 RAD/S
FRECUENCIA DE CRUCE DE GANANCIA REAL t 0,399 RAD/S
MARGEN DE HANANCIA \6 DECIBELI03
FRECUENCIA DE CRUCE DE FASE FICTICIA t O »570 RAD/S
FRECUENCIA DE CRUCE DE FASE REAL í i * 037 RAD/S
OPCIÓN ESCOGIDA i Z= C 1 + w ) / í l--w )
. •/^PENSADOR DISCRETOS
-... ME RAH O RCOEFICIENTE DE 1T 2 '-"-1,000COEFICIENTE DE 2" 1 =™0f368COEFICIENTE DE Z~ O ==0,000
:•./'•: N oh i N ADORCOEFICIENTE DE 1T 2 =1,000COEFICIENTE DE Z" 1 «-0*394 - .......... .....COEFICIENTE DE 1T O «-0,607

- 173 -
Las ecuaciones del sistema son:
i e = MC + MD
donde:
I = momento de Inercia del satélite, alrededor de su centro de masa
MC = torque de control
MD = torque de perturbación
6 = ángulo del eje del satélite con respecto a su referencia iner-
clal .
La referencia inercia! no tiene aceleración angular. Normalj
zando, se puede definir:
u = MC/I ; wd = MD/I
entonces: 9 = u + wd
Tomando la transformada de Laplace:
6(s) = - - [ u(s) + wd(s)]2
sin perturbación: —-—- = — = G(s)u(s) s2
UConsideremos el caso general en que G(s) =—• , y analicemos
s2

- 174 -
las características del sistema en el dominio del tiempo y de 1 a fre-
cuencia, utilizando el modelo discreto equivalente.
"1Entonces 6 (z ) - ( 1 - z " ) . Z { } =
s3 2 (z-1)2
Hagamos T = 1 ; k = 0.5.
'tentonces: G(z) =— xO.25
Las características del sistema sin compensación se indican
en las figuras a, c. Utilizando un compensador discreto que elimine
un polo de la planta: D(z) = z , se obtienen las curvas de la fi-
v> gura b, d,
La señal de control u se indica en la figura e.
Se ajustan también resultados impresos en el computador.
Observaciones al Ejemplo N2 6.
El sistema sin compensación es totalmente inestable (Fig. a).
Con el compensador discreto se elimina el error en estado estable, y
el máximo sobreimpulso es menor que el 20% (Fig. b). El margen de fa_
'& se y de ganancia (sin compensación), son negativos. Añadiendo el cojfl
pensador discreto, tanto el margen de fase como el de ganancia son po-
sitivos, lo cual indica que el sistema es estable.
Con el compensador discreto, los requerimientos de potencia
•f

* - 175 -
de la señal de control son mínimos (Fig. e).
Los datos de entrada de estos ejemplos han sido guardados en
archivos3 y estos están indicados en los gráficos. Los ejemplos 1, 2,
33 4, contienen datos en función del período de muestreo (Tecla 3),, y
los ejemplos 5, 65 contienen datos en forma numérica (Tecla 2).
«fe

- 176 -
RESPUESTA EN EL TIEMPO CSIN COMPENSACIÓN)
T« 1.889 SEG EJE X: 20.80 SEG/DIV EJE Y = 20.G9U/DIVARCHIVO: @SYLVA/EJ9
Figura a.- Respuesta a una función escalón (T = Is)
RESPUESTA EN EL TIEMPO CCON COMPENSACIÓN)
FUNCIÓN ESCALÓN A» 1.Q8Q
T- l.eOñ SEG EJE X = S.QQ SEG/DIV EJE Y: Q.IQU/DIVARCHIVO * eSYLVA/EJ9
Figura b.- Respuesta con compensación discreta.

DIAGRAMA
DE BODE DE MAGNITUD CSIN COMPENSACIÓN)
10.000
00.000
-90
-120
-150
0.01
-210
-240
-270
DIAGRAMA
DE BODE DE ÁNGULO
CSIN COMPENSACIÓN)
0. 100
00.000
FRECUENCIA
CRAD/S)
ARCHIVO: @SYLVA/EJ9
T=1.000 SEG
Figu
ra c
.- D
iagr
amas d
e fr
ecue
ncia (T = I
s)

IAGRAMA DE BODE DE MAGNITUD CCON COMPENSACIÓN)
-90
-120
-150
0.01
-210
.
-240.
-270.
DIAGRAMA DE BODE DE ÁNGULO CCON COMPENSACIÓN)
0. 100
FRE
CU
EN
CIA
C
RA
D/S
)A
RC
HIV
O ¡
(3
SY
LVA
/EJ9
T=1.Q0Q SEG
co I
Figu
ra d
.- D
iagr
amas
de
frec
uenc
ia c
on c
ompe
nsac
ión
disc
reta
,
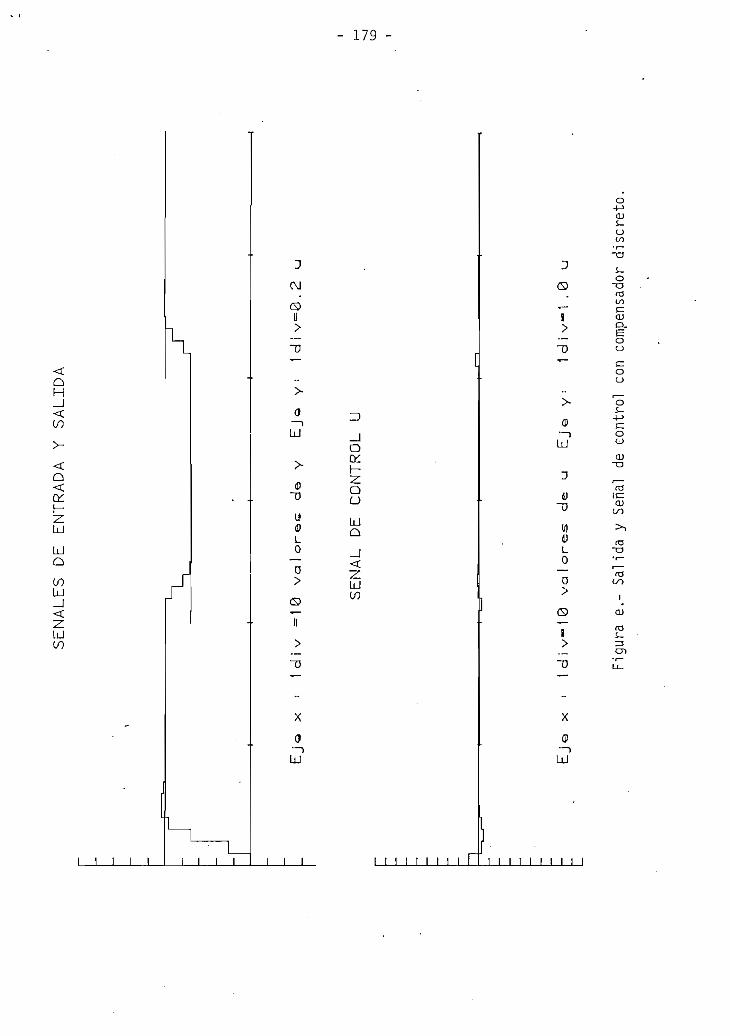
«P»
SEÑALES DE ENTRADA Y SALIDA
J_
EJ
Q
x
: 1 d
i v
=
10
va
lore
e
de
y
EJ
Q
y:
1 d
i v
=0
. 2
Eje
x
: 1 d
i v
™ 1
0
va
lore
s
de
u
Eje
y:
1d
¡v
1 .
0
u
Figu
ra e
.- S
alid
a y
Seña
l de
control co
n co
mpen
sado
r di
scre
to.

ESCUELrt POLITÉCNICA NACIONAL 18° " '
FACULfHD DE INGENIERÍA ELÉCTRICA
D E P A R l rt rí E N T O D E C O N T R O L
ÁREA i.ii::: CONTROL Y SISTEMAS-
TESIS OE GRABO 5 PETER EDUARDO SYLVA FUSEAU
FECHA, 12-FEB-85 23 i 14í36
EN EL DOMINIO HE LA FRECUENCIA
FUNCIÓN DE TRANSFERENCIA DE LAZO ABIERTO
GRADO DFL NUMERADOR í 1
COEFICIENTE DE Z~ 1= 0*2500
COEFICIENTE DE Z" 0= 0,2SOO
GRABO DEL DENOMINADOR S 2
COEFICIENTE DE 2n 2 1*0000
COEFICIENTE DE Z~ 1= ~2*0000'
COEFICIENTE DE Z" O- 1,0000
F R E C U E N CIA INICIA L I O * 010 O R A D / S
FRECUENCIA FINAL; 100,000 RAD/S
NUMERO DE PUNTOS í 50,0.00
MARGEN DE FASE l -19«799 GRADOS
FRECUENCIA DE CRUCE DE GANANCIA FICTICIAíO,720 RAD/S'
FRECUENCIA DE CRUCE DE GANANCIA REAL ÍO,Ó91"RAD/S
MARGEN DE GANANCIA í -73*980 DECIBELIOS
FRECUENCIA DE CRUCE DE FASE FICTICIAíO * 010 RAD/S
FRECUENCIA DE CRUCE DE FASE REAL Í0*010 RAD/S
OPCIÓN ESCOGIDA í Z= U-fTw/2 )/ C l-Tw/2)"
PERIOBO DE MUESTREO = 1,000 SEG
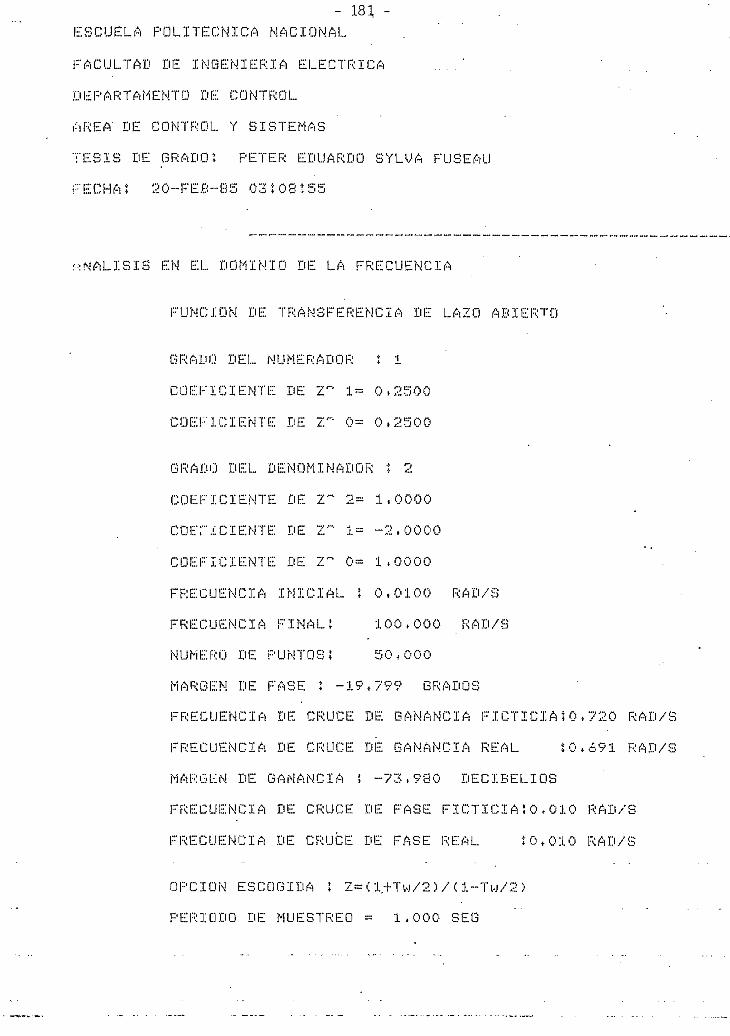
- 181 -- . ; .
ESCUELA POLITÉCNICA NACIONAL
FACULTAD HE INGENIERÍA ELÉCTRICA . _ . '
DEPARTAMENTO DE CONTROL
ÁREA' DE CONTROL Y SISTEMAS
TESIS HE GRADO: PETER EDUARDO SYLVA FUSEAU
FECHA? 20-FEB--85 03\5
ANÁLISIS EN EL DOMINIO DE LA FRECUENCIA
FUNCIÓN DE TRANSFERENCIA DE LAZO ABIERTO
5%
GRADO DEL NUMERADOR i 1
COEFICIENTE DE Z" 1= 0,2500
COEFICIENTE DE Z" Q= 0,2500
GRADO DEL DENOMINADOR t 2
COEFICIENTE DE Z~ 2= 1*0000§•
CDETXCIENTE DE Z" i= -2,0000
COEFICIENTE DE Z" 0= 1,0000
FRECUENCIA INICIAL í 0,0100 RAD/3
FRECUENCIA FINAL; 100,000 RAD/S
NUMERO DE PUNTOSí 50*000
lf MARGEN DE FASE t -19,799 GRADOS
FRECUENCIA DE CRUCE DE GANANCIA FICTICIAtO>720 RAD/S
FRECUENCIA DE CRUCE DE GANANCIA REAL t0*691 RAD/S
M A i;¡: G i: M D E G A N A N CIA í -73.980 D E C1B E L10 S
FRECUENCIA DE CRUCE DE FASE FICTICIAíO * 010 RAD/S
.» FRECUENCIA DE CRUCE DE FASE REAL Í0*010 RAD/S
OPCIÓN ESCOGIDA í Z= (l.+Tw/2 ) / C l-Tw/2 )
PERIODO DE MUESTREO = 1,000 SEG

- 182 -b'JÜELA POLITÉCNICA NACIONAL
-ÍÜ..ULTAD DE INGENIERÍA ELÉCTRICA
'iü-'ARTAMENTO DE CONTROL
•..u-i DE CONTROL Y SISTEMAS
u:.:;l£ DE GRADO? PETER EDUARDO SYLVA FU3EAU
-:/.-.;Hñí 20-FEB-85 03 í 24 i 17
;S.i:S EN EL DOMINIO 'DE LA FRECUENCIA
FUNCIÓN DE TRANSFERENCIA DE LAZO ABIERTO
GRABO DEL NUMERADOR i 1
COEFICIENTE DE Z" 1 = 0*2500
COEFICIENTE HE Z" 0= 0,2500
GRADO DEL DENOMINADOR 5 2
OÜEFICIENTE DE Z" 2~ 1»O000
COEFICIENTE DE Z" 1= -2*0000
COEFICIENTE DE Z~ O- 1*0000
FRECUENCIA INICIAL i 0,0100 RAD/S
FRECUENCIA FINAL í 100 * 000 RAD/S
NUMERO DE PUNTOSt 50*000
MARGEN DE FASE t 62*621 GRADOS
FRECUENCIA DE CRUCE DE GANANCIA FICTICIA¡O»487 RAD/S
FRECUENCIA DE CRUCE DE GANANCIA REAL Í0*478 RAD/S
MARGEN DE GANANCIA t 11*910 DECIBELIQS
FRECUENCIA DE CRUCE DE FASE FICTICIAí1 * 971 RAD/S
FRECUENCIA DE CRUCE DE FASE REAL í1 * 550 RAD/3
OPCIÓN ESCOGIDA í Z=<l+Tw/2)/<l-Tw/2>
PERIODO DE MUESTREO - 1,000 SEG
- 183 -
5.2. CONCLUSIONES GENERALES.
De los ejemplos presentados en esta Tesis, se pueden obtener
algunas conclusiones importantes:
- Al reducir el período de muestreo T, se obtiene una mayor rapidez
de respuesta del sistema de control, como se desprende del análisis
de los ejemplos.
- El período de muestreo no puede ser incrementado a voluntad, debido
a que si T es demasiado grande, el sistema tiende a la inestabili-
dad, puesto que la teoría de la discretización es más aproximada
mientras más pequeño es el período de muestreo. • En cambio si T es
muy pequeño, la inestabilidad aparece por imprecisión numérica de
1 os algoritmos.
- Al diseñar un compensador por diferentes métodos de discretización,
los resultados que se obtienen son muy parecidos, puesto que todos
tienen el mismo fundamento teórico; sólo difieren en el algoritmo.
Las características del sistema compensado dependerá de la forma co_
mo se ha diseñado el compensador. Los mejores resultados se obti_e_
nen al utilizar un compensador discreto P.I.D., ya que corrige tan_
to la respuesta transitoria, como el error en estado estable.
- Cuando se diseña un compensador, no sólo es importante que este sa-
tisfaga los requerimientos del sistema de control, sino debe tomar-
se en cuenta también la señal de control, el mejor compensador de
todos los que se ajusten a las condiciones del sistema será el que

J? "- 184 -
tenga mejor señal de control, y en consecuencia el menor requeri-
miento de potencia.
- Al diseñar cualquier tipo de compensador, ya sea en el dominio del
tiempo o en el dominio de la frecuencia, se debe reajustar los val_o
res de éste; y esto puede realizarse mediante un método de ensayo y
error. Con la ayuda de un computador, y los programas desarrolla-
dos, este procedimiento se convierte en un proceso repetitivo, pu-
diéndose reajustar 1-os parámetros del compensador con un mínimo tra_
bajo del usuario, poniéndose énfasis en los objetivos del diseño.
Se ha presentado un grupo de ejemplos que garantizan resulta-
dos satisfactorios de los programas desarrollados. Los ejemplos res-
ponden a procesos Industriales reales, y se observa que los programas
pueden ser aplicados a sistemas complejos. Se puede ver la versátilJ_
dad del control discreto, ya que para el análisis y el diseño, solo se
programan coeficientes, sin preocuparse de los aspectos tecnológicos
que se podrían tener al trabajar con sistemas continuos. Las únicas
restricciones son a nivel de software (supuesto el caso de tener un
hardv/are adecuado para control en tiempo real). Para estas técnicas
de control discreto convencional, las exigencias de software son míni_
mas.
Los programas aquí desarrollados, se pueden implementar en un
computador personal a bajo costo, y pueden ser perfectamente utiliza-
dos para el control de sistemas físicos, vehículos que se mueven en aj_
re, tierra, agua, espacio, y también en procesos industriales. Se es_
pera que el software desarrollado sirva como soporte para el análisis

135 -
y diseno de sistemas discretos de control .
5.3. RECOMENDACIONES.
El campo del control discreto es muy amplio, y por lo tanto
un trabajo de tesis no puede abarcar todos los. tópicos en dicho campo,
por lo tanto es necesario realizar otros estudios dé forma dé comple-
mentar el trabajo realizado en esta Tesis.
Los estudios que se recomiendan hacer son:
1. Trabajos en tiempo real sin las limitaciones que se han tenido en
este estudio (sin contar con la interface en tiempo real).
2. Realizar un estudio más profundo sobre la selección del período de
muestreo T, que incide sobre la estabilidad del sistema, diseño
del compensador, sobre los resultados que se obtienen, y sobre el
costo del interface.
3. Continuar el estudio de sistemas discretos mediante otras técnicas
como son: análisis en el espacio de estado, mediante control adap-
tivo, mediante control distribuido, que son técnicas que permiten
estudios más profundos sobre modelos de sistemas estocásticos, mul_
tivariables, de parámetros variables y parámetros distribuidos, y
permiten realizar estudios con perturbaciones con diferentes esque_
mas de control con supervisión, etc. Esto permitiría junto con
las técnicas clásicas aquí estudiadas, tener alternativas de dis_e_
ño para el Ingeniero de Control, para el caso de sistemas complejos.

A P É N D I C E S
1.. Listado de Programas
2. Manual del Usuario
3. Variables importantes y ejemplo de Modelación
en función del período de Muestreo T.

APÉNDICE 1 PAG, 1
234a91.012131.416L71.820
"["0=: —1 -GD TO 100GO TO 25001 = 1
TOo
GOOÍ05=2GO TO01=3
242527282930313233343037394041A'~3
4445434952153100110120130140150100170180190191195200210220230235
TO'•7=3TO
= 4
=7= 4
2000
2000
ÍOOO0106GO0103 = 4GO TO01=503=517 = 0GO TO01=304 = 2GO TO0106GO TO01 = 607 = 1GO TO01=8GO TO01=9GO TO01 = 10GO TOREMREMREMREMREMIF T0=0
ÍOOO
ÍOOO
2000
2000
2000
2000
2000
2000
2000programaP e t e r
to ---oí ---o
0SYLVA/TESISEduardo S y 1 v a Fu sea uIndicador de la unidad de discoNumero del proa rama deseadoNumero del proa rama aue esta en
THEN 200el computador
PRINTINPUTCALL 'T0 = 0PAGEPRINT1MAGEPRINTPRINTPRINTPRINT
1 J U n i d a dDOuriit' f DO
en la cual estaH' el disco ? <0>1>
USING 200Í8/y-IESCUELA POLITÉCNICA NACIONAL1
"JJIFACULTAD DE INGENIERÍA ELÉCTRICAJJIDEPARTAMENTO DE ELECTRÓNICAJJIAREA DE CONTROL Y SISTEMAS'JJJICRET PARA CONTINUAR)'
Y CONTROL'

APÉNDICE 1 PAG. 2
2402502552562602703003103203303403SO351352353354355356357360370800801810815810817820830840850860865880900200020102020
INPUT X*PAGEP5 = 0PS^OPRINT 'lANALISIS DE SPRINT 'JIMEDIANTE TECPRINT "JJITECLA 1 —IPRINT "JITECLA 2 — ENPRINT "JITECLA 3 — MCPRINT " JITECLA 4 — REPRINT ' JITECLA 5 — ANPRINT ' JITECLA ó — DIPRINT " JITECLA 7 — COPRINT "JITECLA 8 — CAPRINT 'JITECLA 9 — ANPRINT "JITECLA 10 — MEPRINT 'JITECLA 11 — SIPRINT " JITECLA 12 — IMPRINT "JITECLA 13 — INPRINT " JJJIENDREM ******IF 01=02 TREN 2020DATA ' 0SYLVA/DATANUM 'DATA n 6SYLVA/COMPENS "DATA "OSYLVA/FRECUENCDATA -eSYLVA/IGEN1
RESTORE 810FOR J=l TO 01READ 0*NEXT JDELETE 2010730000J=MEMORYAPPEND 0*Í2000GO TO 200002=0IF 01O02 THEN 800END
SISTEMAS MUESTREADOS"CAS CONVENCIONALES'
ÍNDICE DE PROGRAMAS'ENTRADA DE DATOS EN FORMA NUMÉRICA'MODELACIÓN '
UESTA EN EL TIEMPO'ISIS MEDIANTE LA TRANSFORMACIÓN BILINEAL'
DISCRETIZACION DE FILTROS CONTINUOS'ROLADOR DISCRETO P* I *D*"
CALCULO DE LA RESPUESTA CON COMPENSACIÓN"ISIS DE FRECUENCIA CON COMPENSACIÓN"DO DIRECTO DE DISEÑO"
-SIMULACIÓN DE CONTROL ON LINEm
-IMPRESIÓN"-INFORMACIÓN GENERAL"
EscoJs IB
800
0SYLVA/MODEL'?"eSYLVA/TIEMPO"eSYLVA/PID"*"OSYLVA/DIRECTO"1,'@SYL^A/LINE'>•eSYLVA/IMPRESION'

APÉNDICE 1 PAG* 3
2000201020202030204020502060207020802090210021102120213 O2140215021602170218021902200221022202230224022502260227022SO22902300231023202330234023502360237023802390240024102 4 2 O2430244024502460247024802490250025102520
02=1GO TOREMP8 = lPAGE08=1J <~í™ -L
PRINTPRINTF'RIHTPRINTINPUTDO TO1F 00<PAGEPRINTPRINTPRINTPRINTPRINTPRINTPRINTPRINTINPUTPAGEPRINTPRINTINPUTPRINTINPUT
8000SYLVA/DATANUM"
"JIIOPCIONES-"JJI1 — INGRESO DE DATOS"•JI2 — LECTURA DE DATOS DEnJI ESCOJA UNA ALTERNATIVA0000 OF 2140 > 27.00:>2 OR OOO1 THEN. 2070
UN ARCHIVO*< 1 o )GG
JJIENTRADAJJJJJ NJ ACJ) íJJJ D t
B(J) í
DE
' J" J" JJJKX*
N
DATOS"t GRADO DEL NUMERADOR"
í COEFICIENTES DEL NUMERADOR*DE LA FUNCIÓN DE TRANSFERENCIA
t GRADO DEL DENOMINADOR'í COEFICIENTES DEL DENOMINADOR'DE LA FUNCIÓN DE TRANSFERENCIA
DEBE SER MENOR O IGUAL A D )'
DE LAZO ABIERTO
DE LAZO ABIERTO'
1 JJICQEFICIENTES EN FORMAJIGRADO DEL NUMERADOR: *
iJIGRADO DEL DENOMINADOR
NUMÉRICA'
DIF N>D THEN 2460REM**#coeficientesDELETE ArBDIM ACN+1),B
en forma n u m e
"JINGRESE LOS COEFICIENTES EN ORDEN DESCENDENTE DE POTENCIAS"' JJCOEFICIENTES DEL NUMERADOR'l TO N+l"COEFICIENTE DE Z~ " í N+1~JÍ ' » ?A( J)
DEL DENOMINADOR1
PRINTPRINTFOR JPRINTINPUTNEXT JPRINT "JJJCOEFICIENTESFQR J=l TO D+lPRINT "COEFICIENTE DE ZrtlINPUT B(J)NEXT JGO TO 2480
"J INGRESE EL VALOR2260"JDESEA GUARDAR LOSX*'"S" OR X*=*SIE THEN
IF NQTCX^'NQ" > THEN 2480ENDREM*#CREACION DEL ARCHIVO
PRINTGO TOPRINTINPUTIF X$=
CORRECTOGG-
DATOS
2530
PARA GUARDAR DATOS"

APÉNDICE 1 PAG, 4
25402550256025702580259026002610262020302640265026002670268026902700271027202730274027502700277027802790280028102820283028402850
PRINT MNOMBRE DEL ARCHIVO PARA GUAINPUT 1$I$="eSYLVA/'XI$CALL "FILE" ,BOfI*>X$IF X*-' B THEN 2650 'PRINT "JYA EXISTE EL ARCHIVO : ' í 1$PRINT MDESEA DESTRUIR SU CONTENIDOINPUT X$IF X$^US* OR X*=*SI- THEN 2640IF NOT(X$='NOa) THEN 2600KILL 1$CRÉATE I$55000rOOPEN I$51> "FV,X*WRITE #líN*B»AíBCLOSE 1ENDREM «LECTURA BE DATOS*PRINT "NOMBRE DEL ARCHIVO DE DATOS 'INPUT 1$I$=BGSYLVA/a &I$CALL "FILE" fBOf!*»X*IF X$=" • THEN 2770GO TO 2790PRINT "JNO EXISTE EL ARCHIVO BÍI*GO TO 2710OPEN I$?lr -R- tX$READ *l?NíDDELETE A r BBIM A(N-Vl) fB(D+l)READ *1ÍA?BCLOSE 1ENB
DATOS
(SI O NO)

APÉNDICE 1 PAG, 5
20002010202020302040205020602070208020902100211021202130214021502160217021802190220022102220223022402250226022702280229023002310232023302340235023602370238023902400241024202430244024502460247024802490250025102520
02 .2GO TOPAGEREM @SP8-1PRINTIMAGE1PRINTPRINTPRINTPRINTPRINTIMAGEINPUTPAGE08=2J5=2PRINTPRINTPRINTPRINTINPUTGO TOIF 00<PRINTINPUTPRINTINPUTIF N>DPRINTPRINTINPUTPRINTPRINTINPUTIF P2=PAGEDELETEDIM Q(Q-0P3 = lP4=N+1PRINTPRINTGOSUBGO TOREM ##FOR I = !IF Pl="PRINTPRINTPRINTINPUT 1
800
eSYLVA/MODEL
USING 206010/>30Xr"MODELACIÓN""JJJIn^reso de coeficientes en funcioH'n del periH'oda '?" de maestreo'"JDe la formst *"I pl(k.l#Tl¿K2J> 4- p2(K3#TfcCK4J#eKK5J#T>'USING 2120'í5/i ' IKRET PARA CONTINUAR)'
X*
•JJIIOPCIONES""JJI1—INGRESO DE DATOS1'JI2---LECTURA DE DATOS DE UN ARCHIVO'•JIESCOJA UNA ALTERNATIVA (1 o 2)GG "í0000 OF 2240,33301 OR OOO2 THEN 2170JINGRESE EL GRADO DEL NUMERADOR ÍMOD)
N"JINGRESE EL GRADO DEL DENOMINADOR a ?DTHEN 2240"JINGRESE EL NUMERO MÁXIMO DE TÉRMINOS '5"DE LA FORMA í Kl#Tt¿K2J —> 'íPl"JJJINGRESE EL NUMERO MÁXIMO DE TÉRMINOS'DE LA FORMA I K3#TtCK4J#el\T > J —> '?P2O AND Pl=0 THEN 3140
Q
JJXNGRESE LOS COEFICIENTES EN FORMA DESCENDENTEJJCOEFICIENTES DEL NUMERADOR"2470060UB DE INGRESO DE DATOS
P3 TO P4THEN 2750
JCQEFICIENTE DE Z~ •fP4-Ir'JJINGRESE EL NUMERO DE TÉRMINOS DE LA FORMA í "JJK*1*TKK2J DEL COEFICIENTE DE Z^'ÍP4-Iím —".P5
IF P5=0 THEN 2740

APÉNDICE 1 PAG» ó
25402550250025702580259026002010202020302040265026ÓQ20702080209027002710272027302740275027002770278027902800281028202830284028502800287028802890290029102920293029402950296029702980299030003010302030303040305030003070
IF P5>P1 OR P5<0 THEN 2560GO TO 2580PRINT "JINCORRECTO (REPITA)GO TO 2520FOR J=l TO 2&P5 STEP 2PRINT MINÓRESE Kl (COEFICIENTE)INPUT KlPRINT MINÓRESE K2 ( POTENCIA )INPUT K2
MESTAN CORRECTOS LOS COEFICIENTES (SI O NO ) "í
"SI" OR X$="S ' THEN 2720<X$="NO ' ) THEN 2650
MJ## REPITA **'2590
O THEN 3040
O THEN 3040MJINGRESE EL NUMERO DE TÉRMINOS DE LA FORMA: *MJJK3*TKK4J#et\(K5#T) J DEL COEFICIENTE DE Z"'ÍP4-IÍ
PRINTINPUTIF X*=IF NOTPAGEPRINTGO TONEXT JIF P2 =PAGEIF P2=*PRINTPRINTPRINTINPUTIF P6=IF P6>GO TOPRINTGO TOFOR J=PRINTINPUTPRINTINPUTPRINTINPUT
O THEN 3040P2 OR P6<0 THEN'28302850MINCORRECTO (REPITA) '27502*P1+1 TO 3#PÓ+2*P1 STEP 3MINÓRESE K3 (COEFICIENTE)K3MINÓRESE K4 (POTENCIA)K4MINÓRESE K5 (POTENCIA) "?K5
Q(IrJ)«K3
PRINT MJESTAN CORRECTOS LOS COEFICIENTES (SI O NO )INPUT X$IF X*="SI" OR X*="S" THEN 3020IF NGT(X*='NOm> THEN 2950PAGEPRINT MJ ** REPITA ** •GO TO 2800NEXT JPAGENEXT IRETURNP3=N+2

APÉNDICE 1 PAG, 7
30803090310031103120313031403150310031703180319032003210322032303240325032603270323032903300331033203330334033503360337033803390340034103420343034403450346034703480
PRINT ' JJCOEFICIENTES DEL DENOMINADOR'GOSUB 2470PRINT "JJDESEA GUARDAR LOS DATOS (SI 0INPUT X*IF Xfc^S1 OR X*='SI" THEN 3150IF NOT(X*="NOm> THEN 3100ENDPAGEREM ** CREACIÓN DE ARCHIVO DE DATOS #*PRINT 'JNQMBRE DEL ARCHIVO DE DATOS '5INPUT L*L$="@SYLVA/"&L$CALL 'FILE' ?DO*L$rX$-IF X*=" ' THEN 3280PRINT "JYA EXISTE EL ARCHIVO t «?L*PRINT "JDESEA DESTRUIR SU CONTENIDO (SIINPUT X*IF X$="S' OR X$='SI' THEN 3270IF NOT(X$=aNOa ) THEN 3230KILL L#CRÉATE L$Í5000?0OPEN L*?l» "F" ?X$WRITE *líNíDyF'lfP2jQCLOSE 1ENDREM LECTURA DE DATOSPRINT 'J JNQMBRE DEL ARCHIVO DE DATOSINPUT L$L$="@SYLVA/"&L$CALL 'FILE' rD07L*>X*IF X*=" ' THEN 3400GO TO 3420PRINT nJNO EXISTE EL ARCHIVO í " 5 L$GO TO 3340OPEN L*?lf "R" »X*READ *líNyD7PlrP2DELETE QDIM Q(N+n+2r2#Pl+3*P2+l)READ *1IQCLOSE 1END
N O )
O NO)

APÉNDICE 1 PAG* 8
20002010202020302040205020602070208020902100211021202130214021502160217021802190220022102220
224022502260227022802290230023102320233023402350236023702380239024002410242024302440245024602470248024902500251025202530
02=3GO TOREMIF P8 =08=3PASEPRINTIMAGE1D2-DN3=NIF 04GO TOPRINTINPUTIF J5=IF P5 =PRINTINPUTIF T<0IF 05=GO TOPRINTGQ TOCÉLETEDIM AlA 1 = 0
800GSYLVA/TIEMPOO THEN 5870
USING 2070Í2/f"IRESPUESTA EN EL TIEMPO"
2 THEN 475005 OF 5770?2120MINÓRESE EL NUMERO DE TÉRMINOS DE LA SERIEZ1 THEN 21601 THEN 2290MINÓRESE EL VALOR DEL PERIODO DE MUESTREOTTHEN 22102 THEN 45702230MEL VALOR DE T DEBE SER MAYOR QUE CERQGG"2380AlrBlrB2rB3?C?ECD+3) íBKD+3) ,B2CD+3) rB3CD+3) ,C<Z>
GO TOPRINTGO TORAGEPRINTPRINTPRINTPRINTPRINTINPUTGO TO
2310MPERIODO4600
DE MUESTREO T
MJJOPCIONES t 'Mil—FUNCIÓN IMPULSO'MI2—FUNCIÓN ESCALÓN"MI3 — FUNCIÓN RAMPA"MJJICESCOJA UNA OPCION3QG1616 OF 2400.2630.2880
IF 1601 OR I6O2 OR I6O3 THEN 2320REM *****funcion impulso*****FOR J=l TO N+lAl(J)=T6(J)NEXT JFOR J=l TO D-flBl(J)=L6(J)NEXT JIF N=D THEN 2490GO TO 10
GO TO 2560REM ***** calculo*****PAGEPRINT USING 40Í

APÉNDICE 1 PAG» 9
254025502560257025802590260026102020263026402650260026702680269027002710272027302740275027602770278027902800281028202830284028502860287028802890290029102920293029402 9 5 0296029702980299030003010302030303040305030603070
IMAGE15/r 'I «CALCULO**1N2=D1~N1FOR L-l TO ZCCL)=A1(1)/B1(1)FOR J-l TO BA1(J)=-CC(L>*B1< J+l) )+Al(J+l)NEXT JNEXT LGO TO 3180REM #tt#f unción P3sa####PRINT " JJAmplitud de ls Función PBSOINF'UT A9'FOR J=l TO N+lAl C J)=T6C J)#A9NEXT JFOR J = l TO II +1B1(J)=L6(J)NEXT JBl (D+2)=0B2( 1 )=0FOR J=2 TQ B+2B2CJ)=-BKJ-1>NEXT JFOR J=l TO B+2Bl(J)«RKJ)+B2(ü)NEXT JIF N=D THEN 2860N1-N1+1ni=Di+iIi^D+100 TO 2510REM ##*#func-ion paso***í< n-dN2 = 0GO TO 2560REM 5K##*f unción rsmps**^*PRINT 'JAmplitud de la funcioH'nINPUT A9FOR J=l TO N+lAl ( J_)-T&Tó C J)*A9NEXT" jFOR J=l TO B+lBl ( J ) ~L6( J )NEXT JBÍ<EÍ+2)=0B1(B+3)=0B2( 1 )-0FOR J=2 TO D+3B2( J)=~2*B1< J-l)NEXT JB3CD-0B3(2)-0FOR J=3 TO B+3B3(J)=B1(J~2)NEXT J

APÉNDICE 1 PAG* 11
362030303040305036603670368036903700371037203730374037503760377037803790380038103820383038403850386038703SBO389039003910392039303940395039607597039803990-1000-401040204030404040504060407040804090410041104120413041404150
PRINT "KINPUT X9PRINT USING 3650:M1IMAGE///aEl menor valor aue toma y tPRINT ' Escoja el valor de Y minINPUT Y8PRINT USING 3690ÍM2IMAGE/B EL mayor valor aue toma y esPRINT " Escoja el valor de Y maxINPUT Y9GOSUB 3740GO TO 3770WINDQW X8?X9>Y8?Y9VIEWPORT 0>W2>5í90RETURN
Valor final de t=
íCaFD*3D BDY min = '
Y m a x
"JJ Marcas en eJe XX78 KIIX6
PRINTINPUTPRINTINPUTPAGE£\ T Q fi)PQ*Y7.YA.O»f>rl A J. O U: r 7 + A / r A O ? W 7 W
IF N=D THEN 3860MQVE @P9ÍX(N2)fOGO TO 3920MOVE féP9ÍO?C(l)FOR J=l TO Z-lDRAW @P9*XCJ)?C(J)DRAW SP9ÍXCJ)?C(J+1)NEXT JGO TO 3970DRAW @P9ÍX(N2>>E(N2)FOR J=N2+1 TO Z+N2-1DRAW @P9ÍX(J)F£<J-l>
J@P95X8rY9BP9tX9rY9
Marcas en eJe Y =
DRAWNEXTMOVEDRAW
J)
DRAW eP9iX8fY8DRAW @P9;X8>Y9GOSUB 3740MOVE SP9t CX8-fX9)/2íY98CALE IrlIF 04=2 THEN 4080X$='RESPUESTA EN EL TIEMPO (SIN COMPENSACIÓN)GO TO 4090Xili^" RESPUESTA EN EL TIEMPO (CON COMPENSACIÓN)RMOVE BP9:-LEN(X*)/2*XO»0*2#YO+4PRINT @P9;X*GOSUB 3740
PRINT GP9Í USINGIMAGE/10X'T= '
@P9:X8>Y9
4140ÍT.' SEGFD*3r i fFAíFD*2D'
EJE X: "fX7?X6SEG/BIV EJE Y!

APÉNDICE 1 PAG. 12
416041704180419042004210422042304240425042604270428042904300431043204330434043504360437043804390440044104420443044404450446044704480449045004510452045304540455045604570458045904600461040204630464046504060407046804690
GO TO 16 OF 4170?4200r4230PRINT GP9Í USING 4180 iIMAGE2X-FUNCION IMPULSO»GO TO 4250PRINT @P9t USING 4210ÍA9IMAGE2X-FUNCION ESCALÓN AGO TO 4250PRINT GP9Í USING 4240ÍA9IMAGE2X"FUNCION RAMPA A=IF P9=32 THEN 4320IF 00=1 THEN 4320MOVE £P9?X8?Y8
J5 OF 4290?4310@P9I"JJARCHIVQÍ4320GP9Í "JJARCHIVQÍ'JJDesea repetir
'FD.3D
GO TOPRINTGO TOPRINTPRINTINPUTIF X$IFPAGEIF 05=2
1FD»3D
•ÍI*
" 5L$el ársfico (si o no)
OR•no > THEN
THEN4320
3430
AND 04=0 THEN 4400
ENDPRINT 'JDESEA ANALIZAR PARA OTRO PERIODO DE MUESTREOINPUT X*IF X*="S' OR X*='SI" THEN 4490IF NOT(X$="NO°) THEN 4400FOR J=l TO N+D+2QCJf2*P1+3*P2+1)=0NEXT J
ENIiPRINTINPUTPRINTINPUTFORQ ( J
INGRESE EL NUEVO PERIODO DE MUESTREOT"JINGRESE EL NUEVO VALOR DEL NUMERO DE TÉRMINOSZ
J=i TO N+D+22*P1+ 3#P2+ 1 ) =0
THEN 4600LOS VALORES
NEXT JIF 05-2 AND 04=0REM * CALCULO DEJ=MEMORYAPPEND "©SYLVA/CALCULOS" í 4600REMPRINT "VECTOR Aí "FOR J=l TO N+lPRINT USING 4640IMAGE'Z" "D"NEXT JPRINT -JVECTOR Bt 'FOR J=l TO D+lPRINT USING 4690:D+1-J,B(J)IMAGE'Z" 'Dm = 'FD*4D
DE LOS COEFICIENTES *
l N + 1 - J f A C J )'FIU4D .

APÉNDICE 1 PAG» 13
470047104720473047404750476047704780479048004810482048304840485048604870483048904900491049204930494049504960497049804990500050105020503050405050506050705080509051005110512051305140515051005170518051905200521052205230
NEXT JPRINT 'JJJKRET PARA CONTINUAR)"INPUT Xí>GO TO 5770PAGEPRINT " JJIRESPUESTA CON COMPENSACIÓN'IF 07=1 THEN 5180N=N3D = D2N9 = NIF 03=5 OR 17=2 THEN 4830N8=lGO TO 4840N8=2DELETE C2?C4DIM C2CN8+1) ?C4(N-fl)IF 03=4 THEN 4890C2=GOGO TO 4900C2=F4C4=AGOSUB 5490N5=C5DELETE T6DIM TÓ<C5+1)T6=CÓN9 = DDELETE C2rC4DIM C2<N8+1) íC4(N9+l>IF 03=4 THEN 5020C2 = G1GO TO 5030C2=F5C4=BGOSUB 5490N6=C5DELETE T8DIM T8(C54-1)T8=C6GOSUB 5600IF 03=4 AND 17=1 THEN 5140N=N-f2D=D+2GO TO 5160N=N-HD=D+1GO TO 2230REM **METODO DIRECTO DE DISEÑO**'NS^CSN9=NDELETE C2*C4DIM C2CN8+1) >C4(N+1)C2=H1C4=A
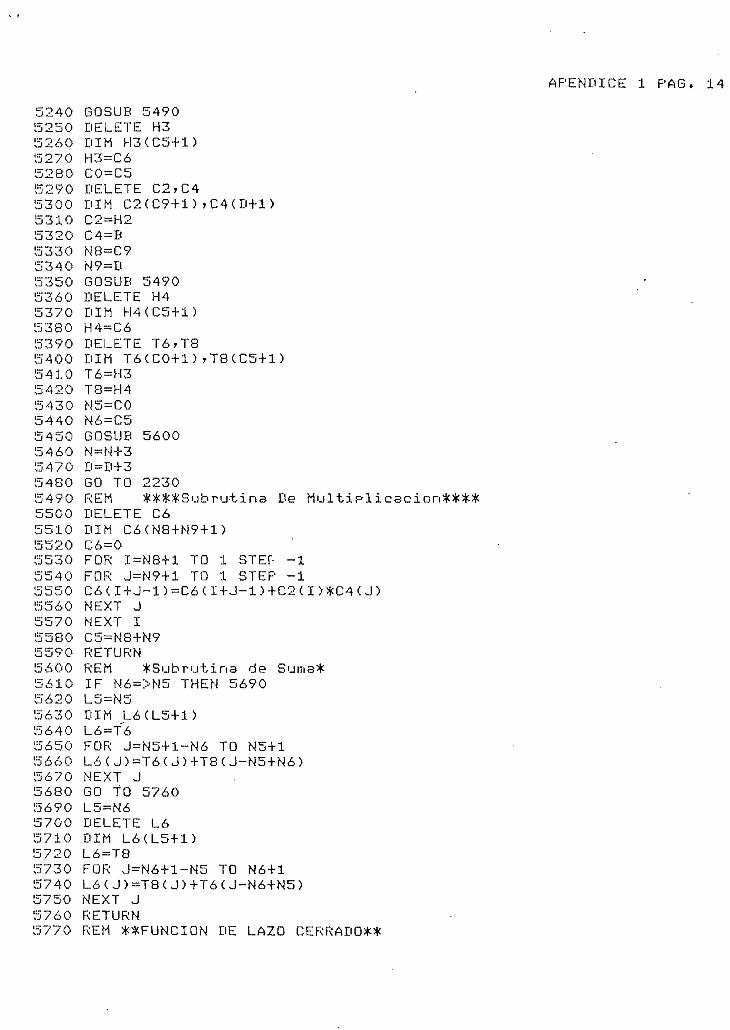
APÉNDICE 1 PAG, 14
524052505260527052805290530053105320533053405350536053705380539054005410542054305440545054605470548054905500551055205530554055505560557055805590560056105620563056405650566056705680569057005710572057305740575057605770
GOSUB 5490DELETE H3DIM H3<C5+1)
DELETE C2rC4DIM C2CC9+1)7C4CD+1)C2=H2
N8=C9
GOSUB 5490DELETE H4DIM H4<C5+1)H4=C6DELETE T6,T8DIM T6CCO+1)fT8(C5+l)T6-H3
N6=C5GOSUB 5600
GO TO 2230REM ****SubrutinaDELETE C6DIM C6(N8+N9+Í>
De Multiplicación****
FOR I=N8+1 TO 1 STEP -1FOR J=N9+1 TO 1 STEP -1C6(I+J-1)=C6(I+J-1)+C2(I)*C4<J)NEXT JNEXT I
N5+1-N5+N6)
RETURNREM *Subrutina de Suma*IF N6=>N5 TREN 5690L5-N5DIM L6CL5-M)L6—T6FOR J=N5+1~NÓ TOL6CJ)«T6(J)+T8(J-NEXT JGO TO 5760
DELETE L6DIM L6CL5+1)L6=T8FOR J^N6+1~N5 TOLÓCJ)=T8(J)+T6(J-NEXT JRETURNREM **FUNCION DE
N6 + 1•NÓ+N5)
LAZO CERRADO**

APÉNDICE 1 PAG. 15
5780 N5=N5790 N6=D5800 DELETE TórTS5810 DIM T6<N5+1)?T8(N6+1)5820 Tó=A5830 T8=B5840 GOSUB 56005350 IE 05=2 THEN 22305800 GO TO 21205870 PAGE5880 PRINT "JERRQR INGRESE PRIMERO LOS HATOS1
5890 ENH

APÉNDICE 1 PAG, 16
200020102020
& 2030204020502060207020802090210021102120
¿, 2130^ 2140
2150216021702180219022002210222022302240
£ 22502260227022SO2290230023102320233023402350
¿ 23602370238023902400241024202430244024502460
'§' 2470248024902500251025202530
02=4GO TO 800PAGEIF P8=0 THEN 345008=407=0REM SSYLVA/COMPENSPRINT tt JJDISCRETIZACION DE FILTROS CONTINUOS"PRINT 'JJPERIODO DE MUESTREO " 5TPRINT "JIOPCIONESÍ 'PRINT -I — 1 REGLA RECTANGULAR HACIA ATRÁS"PRINT '1—2 REGLA DE TUSTIN1PRINT "1—3 MAPEO DE POLOS Y CEROS"PRINT BI — 4 COMPENSADOR EN EL DOMINIO Z m
PRINT "IICINGRESE LA OPCIÓN DESEADAUGGG "íINPUT 15GO TO 15 OF 218072350*2520*3100IF 1 5 <>1 OR I5O2 OR I5O3 OR I5O4 THEN 2090PAGEPRINT "JJREGLA RECTANGULAR HACIA ATRÁS"PRINT 'IS=(Z-1)/TZ'GOSUB 2640IF 17=2 THEN 2280F4<1)=FK1)+FÍ<2>*TF4(2)=~F1(1)F5<1>=F2(1)+F2('2)#TF5(2)=--F2íl)ENDF4C1 )=F1 (D+F1 <2>*T-fFl (3)#T#TF4(2)=-2*F1 (l)-Fl (2)#TF4(3)=F1(1)F5(1)=F2<1M-F2<2)#T+F2<3)#T#TC"cry f~f \ __ 4f P O f "1 *) . .. p" O f O^ JCT
F5(3)=F2(1)ENDPAGEPRINT -JJREGLA DE TUSTIN1PRINT " IS=(2*T)* (Z-fl )/<Z~l ) *GOSUB 2640IF 1-7=2 THEN 2450F4<1>=2*FK1)+F1(2>#TF4(2)=F1(2>#T~2#F1(1)F5(1)=2*F2(1)+F2(2)*TF5<2>=F2(2)*T-2#F2C1)ENDF4< 1 )=2*F1 ( 1 )+2*Fl (2)*T+F1 (3)*T*TF4(2)=-4*F1 (1>+2*F1 (3) *TF4(3)=2*F1 (1 )™2*F1 C 2) *T+F1 ( 3 ) #T#TF5( 1 )=2>|íF2(l )+2*F2(2)*T-|-F2(3)*T*TF5(2)=-4#F2<1 )+2*F2(3)*TF5 (3)=2*F2( 1 )-2*F2(2)*T-fF2(3)*T#TENDPAGEPRINT 'JMAPEO DE POLOS Y CEROS"

APÉNDICE 1 PAG* 17
25402550256025702580259026002610262026302640265026602670268026902700271027202730274027502760277027802790280028102820283028402850286028702880289029002910292029302940295029602970298029903000301030203030304030503060.3070
<sS+b)/(cS+d)
17 — 1GOSUB 2730PRINT "JJCERO DISCRETO EN Z=eK-CB&T/A)J'PRINT 'JPOLO DISCRETO EN Z=eK~CCKT/D)J'FO=F1(2>/F2<2>*(1~EXP<-F2<2>#T/F2<1»)F4(1)=FO/(1-EXP(-FÍ<2>*T/F1<1)))F4<2)=FO*-EXP<-F1(2>#T/FK1)>/(1-EXP(-F1(2)#T/F1(1)))
F5(2)=-EXP<-F2<2)*T/F2(D)ENDREM SUBRUTINAPRINT •JIOPCIQNES: •PRINT 'Jl—COMPENSADOR DE PRIMER ORDEN'PRINT *J2-—COMPENSADOR DE SEGUNDO ORDEN1PRINT "JIINGRESE LA OPCIÓN DESEADAQBQ *5INPUT 17GO TO 17 OF 2730^2900IF I7O1 OR I7O2 THEN 2650PAGEPRINT 'JJCOMPENSADOR DE PRIMER GRADO'PRINT 'JFORMA DEL COMPENSADOR CONTINUODELETE F1?F2DIM F1C2),F2(2>PRINT °JJINGRESE LOS VALORES DE LOS COEFICIENTESFOR J=l TO 2PRINT ^COEFICIENTE DE S"il?2-J?' '?INPUT FKJ)NEXT JPRINT 'JCOEFICIENTES DEL DENOMINADOR*FOR J=l TO 2PRINT 'JCOEFICIENTE DE S"*Í2-J?" *iINPUT F2(J)NEXT JDELETE F4>F5DIM F4(2)?F5<2>RETURNPAGEPRINTPRINTPRIN-TDELETE FlrF2DIM FK3) fF2(3)PRINT 'JINGRESE LOS VALORES DE LOS COEFICIENTES1PRINT 'JCOEFICIENTES DEL NUMERADOR"FOR J=l TO 3PRINT 'JCOEFICIENTE DE S~"?3-JJ*= * »INPUT FKJ)NEXT JPRINT 'JCOEFICIENTES DEL DENOMINADOR"FOR J=l TO 3PRINT 'JCOEFICIENTE DE S~*?3-Jía= '?INPUT F2(J)NEXT JDELETE F4rF5
JCOMPENSADOR DE SEGUNDO GRADO"JFORMA DEL COMPENSADOR CONTINUO í <aSK2J+bS-fc )/"

APÉNDICE 1 PAG, 18
3080309031003110312031303140315031603170318031903200321032203230324032503260327032803290330033103320333033403350336033703380339034003410342034303440345034603470
PRIMER GRADO'SEGUNDO GRADO'DESEADAG.G ' ?
*
DIM F4C3)TF5C3)RETURNPAGEPRINT "JIOPCIONESÍ-PRINT "JI1—COMPENSADGR DEPRINT "JI2—COMPENSADOR DEPRINT "JIINGRESE LA OPCIÓNINPUT 17GO TO 17 OF 3180?3320IF I7O1 QR I7O2 THEN 3110DELETE F4?F5DIM F4(2>7F5(2)PRINT •JINUMERADOR:•FOR J=:L TO 2PRINT 'JICOEFICIENTE DE Z~B?2-J;INPUT F4CJ)NEXT JPRINT 'JIDENOMINABORÍ'FOR J=l TO 2PRINT "JICOEFICIENTE DE Z~"?2-J:INPUT F5CJ)NEXT JENDREM COMPENSADOR CUADRATICO EN ZDELETE F4>F5DIM F4''l3) r F5(3)'PRINT "JINUMERADORÍ1
FOR J=l TO 3PRINT * JICOEFICIENTE DE Z^íS-J?" = 'íINPUT F4(J)NEXT JPRINT -JIDENOMINADOR:•FOR J=l TO 3PRINT 'JICOEFICIENTE DE Z~'?3-JÍ* = "?INPUT F5(J)NEXT JENDPAGEPRINT -JJJJERROR INGRESE PRIMERO LOS DATOS1
END ..

APÉNDICE 1 PAG* 19
200020102020203020402050206020702080209021002110212021302140215021602170218021902200221022202230224022502260227022802290230023102320233023402350236023702380239024002410
02=5GO TO 8REM @SYIF P8=008-507-0PAGEPRINT "PRINT UIHAGE8/PRINT "PRINT "PRINT "PRINT *PRINT "PRINT "PRINT "INPUT XPAGEPRINT "INPUT FPRINT 'INPUT FPRINT "INPUT FPRINT 'DELETEDIM GQCPRINT "INPUT GGOC 1 )=2GO(2)=FG0(3)=2GO=G2#GGl (1)=1r*" -i / o \l C Z }——
Gl (3)=0G1=2^T^ENDPAG&PRINT •END
THEN 2390
JICOMPENSADORUSING 2090tí°IFORMA DEL COMPENSADOR:JJID(Z)=Kp +(Ki*T#(Z+l))/JIDKZ)=K*D(Z>"Jldonde I KPJI KiJI kdJI kJJJKRET PARA
PROPORCIONAL INTEGRAL DERIVATIVO1
-fKd*(Z-l)/(Z*T)
= Ganancia= Ganancia= Ganancia
= GananciaCONTINUAR)'
proporcional"intedr-al *derivativa"de aJus*te del co ni pensador1
EL VAKOR DE KP G'?JJINGRESE7JJINGRESE8JJINGRESE EL VALOR DE Kd9JVALOR DELGO?G13)>G1(3)"JJINGRESE EL
EL VALOR DE Ki G"?
G
PERIODO DE MUESTREO
VALOR DE K:
"JJJJERROR INGRESE PRIMERO LOS DATOS'

APÉNDICE 1 PAG, 20
20002010202020302040205020602070208020902100211021202130214021502160217021802190220022102220223022402250226022702280229023002310232023302340235023002370238023902400241024202 4 3 02440245024602470248024902500251025202530
02 6GO TO 800PAGEREM eSYLVA/BIRECTQIF P8=0 THEN 2750PRINT "JJJJMETQDQ BIRECTO BE DISEÑO'08 = 6SET BEGREESDELETE K8BIM K8(3)PRINT 'JINGRESE LA ECUACIÓN CARACTERÍSTICAFOR J-l TO 3PRINT "JCOEFICIENTE BE S~'?3-J?' ='íINPUT K8(J)NEXT JB7=EXP<-K8(2>/2#T>#CQS(SQR(ABSC (K8(2>/2)"2B8=EXP(-K8(2>/2#T)#SIN(SQRCABS( (K8(2)/2)"2BELETE RlDIM Rl(3)RKD-1R1(2)=-2#B7R1(3>=B7#&7+B8*B8PRINT 'VALOR BEL PERIODO DE MUESTREO *ÍTPRINT " JJIÍ-4GRESE EL VALOR BE KV " íINPUT KOBELETE R2*R3DIM R2(2r3> yR3(2r3)R2C1» 1)=1R2( 1 ?2)~1R2(lI3)=Rl(l)+Rl(2)-rRl(3>R2(2?1)=1*TR2(2r2)~2#TR2(2f3)=(+Rl(2)+2*Rl<3) ) *T+R2 ( 1 , 3 ) *KOR3-INV CR2)DELETE R4fR5DIM R4<2) ?R5(3)R4(l)=R3(lf3)R4 (2>™R3(2r 3)R5CL>=R1U>R5C2^=R1(2)~R4(1)riCTj'~ii\, 4 /T"*! C'Aí'ONr\vJ\v-í/~*r\j.\O^ r\T'\.iL./
N8 = DN9-1BELETE C2.C4BIM C2(B+l)?C4(N9-fl>C2~BC4-R4GOSUB 2640BELETE HlBIM HKC5+1)H1=C6C8-C5N8=NN9~2
EN EL PLANO S
C3 #T# ( 180/PI2-K8 ( 3 ) » #T# ( 180/PI »

APÉNDICE 1 PAG, 21
2540 DELETE C2>C42550 DIM C2CN-H) ,C4(N9+1>2560 C2=A2570 C4=R52580 GQSUB 26402590 DELETE H22600 DIM H2<C5+1)2610 H2-C62020 C9=C52630 EHD2640 REM SUB DE MULTIPLICACIÓN2650 HELETE C62660 DIM C6CN8-fN9+l>2670 C6=02680 FÜR I=N8+1 TO 1 STEP -12690 FOR J=N9+1 TO 1 STEP -12700 CÓ<I + J-l>=C6(I + J~-l)-fC2<I2710 NEXT J2720 NEXT I2730 C5=N8+N92740 RETURN2750 PAGE2760 PRINT 'JJJJERROR INGRESE PRIMERO LOS DATOS2770 ENIi

APÉNDICE 1 PAG* 22
200020102020203020402050200020702080209021002110212021302140215021602170218021902200221022202230224022502260227022802290230023102320233023402350236023702380239024002410242024302440245024602470248024902500251025202530
02=7Gü TO 800REM 0SYLVA/FRECUENCIAIF PS=0 THEN 680008=7IF 06=4 THEN 6330REM»TRANSFÜRMACIÓN BILINEALfc*PAGE
•JJJJ1TRANSFORMACION BILINEAL'"JJJJI1* Z=Cl+T#W/2>/(l~T#U/2>'n IT'") ~7 —- ( "1 i 1 1 \ t "\ II *i m
"JJdondBÍ'?11 JJT = PERIODO DE MUESTREO""J W=J#n'J"JJ w =frecuencia natural""JJ n = frecuencia ficticia' * TANCWKT/2)'MJII2» n=TANlx~lJ(W*T/2)""JJJIKRET PARA CONTINUAR)'X*
PRINTPRINTPRINTPRINTPRINTPRINTPRINTPRINTPRINTPRINTPRINTINPUTPAGEIF P5-2
/T
THEN 2300PRINTPRINTPRINTPRINTINPUTPRINTINPUTGO TOPRINTPRINTGO TOIF 05=PAGEPRINTINPUT
*JJIIOPCIONES'"JJI1—TRANSFORMACIÓN : Z= C1 -f T*W/2)/(l -"JI2—TRANSFORMACIÓN í Z=(l +W)/C1-W>'BJJINGRESE LA OPCIÓN DESEADA BGG " íG7"JINGRESE EL VALOR DEL PERIODO DE MUESTREOT2330"JJVALOR DEL PERIODO DE MUESTREO "?T•JJOPCIGN ESCOGIDA "ÍG76390=2 THEN 6360
T*W/2)
'JJJINGRESEUO
IF U0=0 THEN 2390GO TO 2410
•JINGRESE2350•JINGRESEU9•JINGRESEUl
PRINTGO TOPRINTINPUTPRINTINPUTPAGEPRINT USINGIMAGE12/f'IV2=1/CU1~1)
EL VALOR DE n INICIAL ( n inic <>0>
EL VALOR CORRECTO
EL VALOR DE n FINAL
EL VALOR DEL * DE PUNTOS (SUG, 40 A 60 )
24705CALCULO DEL MARGEN DE FASE"
V.U3=UO/U2DELETE U4^l
U4CU1) .M3CU1) rU7(Ul) 7VOCU1) TM9(U1)
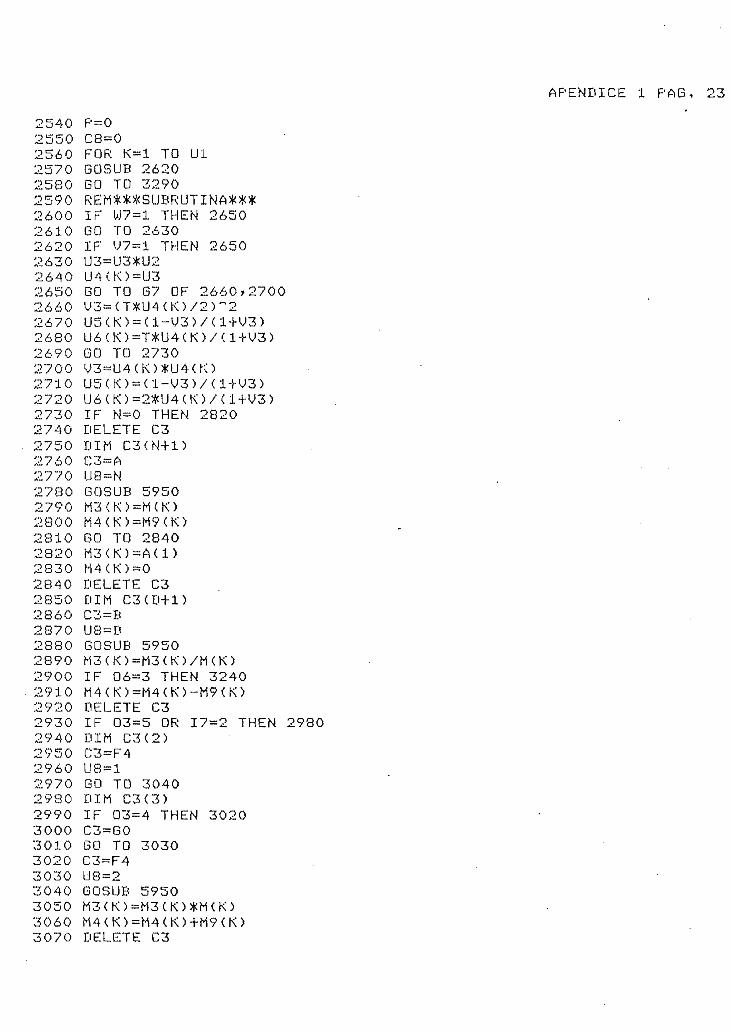
APÉNDICE 1 PAG* 23
25402550256025702580259026002610262026302640265026602670268026902700271027202730274027502760277027802.7902800281028202830284028502860287028802890290029102920293029402950296029702980299030003010302030303040305030603070
P=0C8=0FOR K=l TO UlGOSUB 2620GO TO 3290REM***SUBRUTINA*#*IF W7=l THEN 2650GO TO 2630IF U7=l THEN 2650U3=U3*U2U4<K)=U3GO TO G7 OF 2660,2700V3=(T#U4(K>/2>"2U5(K) = Cl~V3)/Cl-fV3>U6(K)=T*U4CK)/(1+V3>GO TO 2730V3=U4(K)*U4(K)U5(K) = (l~lv)3)/<l-l-U3)Uó(K>=2#U4(K>/( 1-W3)IF N=0 THEN 2820DELETE C3DIM C3(N+1)C3-AU8=NGOSUB 5750M3(K)=M(K)M4(K)=M9(K>GO TO 2840M3(K)=A(1)^4 (K) =0DELETE C3DIM C3(D+1)C3=BU8 = DGOSUB 5950M3(K)=H3(K)/M(K)IF 06=3 THEN 3240M4(K)=M4(K)-M9(K)DELETE C3IF 03=5 OR 17=2 THEN 2930DIM C3(2)C3=F4U 8 = 1GO TO 3040DIM C3<3)IF 03=4 THEN 3020C3-GOGO TO 3030C3-F4U8=;2GOSUB 5950M3<K)=M3CK)#M<K)M4(K)=M4CK)+M9(K)DELETE C3

APÉNDICE 1 PAG» 24
308030903100311031203130314031503160317031803190320032103220323032403250326032703280329033003310332033303340335033003370338033903400341034203430344034503460347034803490350035103520353035403550356035703580359036003610
IF 03=5 OR 17=2 THEN 31:DIM C3C2)C3 = F5GO TO 3180DIM C3<3)IF 03=4 THEN 3160C3 = G1GO TO 3170C3—F508=2GOSUB 5950M3(K)=20#LGT<M3(K>/M(K>M4(K)=H4(K)-M9CK)IF M4CKXO THEN 3230M4(K)=M4(K)-3ÓOGO TO 3280M3<K>=20*LGT<M3<K>)M4(K)=M4(K)-M9(K)IF M4ÍKXG THEN 3280M4(K)=M4<K)-360RETURNIF C8=l THEN 3330IF K=l THEN 3350IF ABS(M3(K) X0*25 THENIF M3CKXO THEN 3430NEXT KGO TO 3510IF M3(l»0 THEN 3490P = l *OE-f20C8 = lGO TO 3330P=180+M4(K)W9=U4(K)IF Y7 = G THEN 3330GO TO 3710C4=M3(K-1>C5=U4(K-1)C6=M3(K)C7=U4(K)C8 = l'GO TO 3330IF M3(1X0.25 THEN 3390GO TO 3330DELETE M6fM7?U8 'DIM MÓ(U1) yM7(Ul> >V.8(U1M6=M3M7=M4U8-U4IF P=1»OE+20 THEN 3850U7 = lIF M3CU1XO THEN 3610P=1*OE+21GO TO 3850U3=(C7-C5)/(U1-1)
3390

APÉNDICE 1 PAG* 25
3620303036403650360036703680369037003710372037303740375037603770378037903800381038203830384038503860387038803890390039103920393039403950396039703980399040004010-40204030404040504060407040804090410041104120413041404150
FOR K=l TO UlU4(K)=C5+<K-1>*U3GQSUB 2620IF ABS(M3<K»<0.25 THEN 3390IF M3CKXO THEN 3680NEXT KC5=U4CK)~U3U3=U3/5GO TO 3620IF P=1,OE+21 THEN 3850PAGEPRINT USING 3740ÍPIMAGE////10X3MARGEN HE FASE \" GRADOSPRINT "JJJJFRECUENCIA DE CRUCE BE GANANCIA!PRINT USING 3770ÍU9IMAGE///10X"FICTICIA í "FD+3D" RAD/S"IF G7=l THEN 3810A8«2#PI/<T#180)*ATN<W9>GO TO 3820A8=2/(T#180)*ATN(T#W9/2>#PIPRINT USING 3830 i ASIMAGE//10X"NATURAL í "FD*3D' RAD/S»GO TO 3890PAGEPRINT USING 3870ÍIMAGE15/T"IMARGEN DE FASE: INDEFINIDO •REM CALCULO DEL MARGEN DE GANANCIAPRINT -JJICRET PARA CONTINUAR)GG"INPUT X*PAGEPRINT USINGIMAGE12/r "L
3930;CALCULO DEL MARGEN DE GANANCIA"
U3=UO/U2DELETE M4fU5íUóyM3?M9.U7DIM M4(Ul)yU5(Ul) ? U6 ( Ul )D8=0
Ul
M3 ( Ul ) T M9 CU1 ) U7 ( Ul ) y VO ( Ul )
FOR K=l TOGOSUB 2590IF K=l THEN 4070IF ABSCM4(K)+180)<1 THEN 4090IF (M4(K>+180)*(M4(K-1)+180)<0NEXT KGO TO 4190IF ABSCM4CK)+180X1 THEN 4090GO TO 4050
THEN 4140
GOIFGOD4
TO 4380W7=0 THENTO 4380M4(K-1>
4050
D5=U4(K-1>
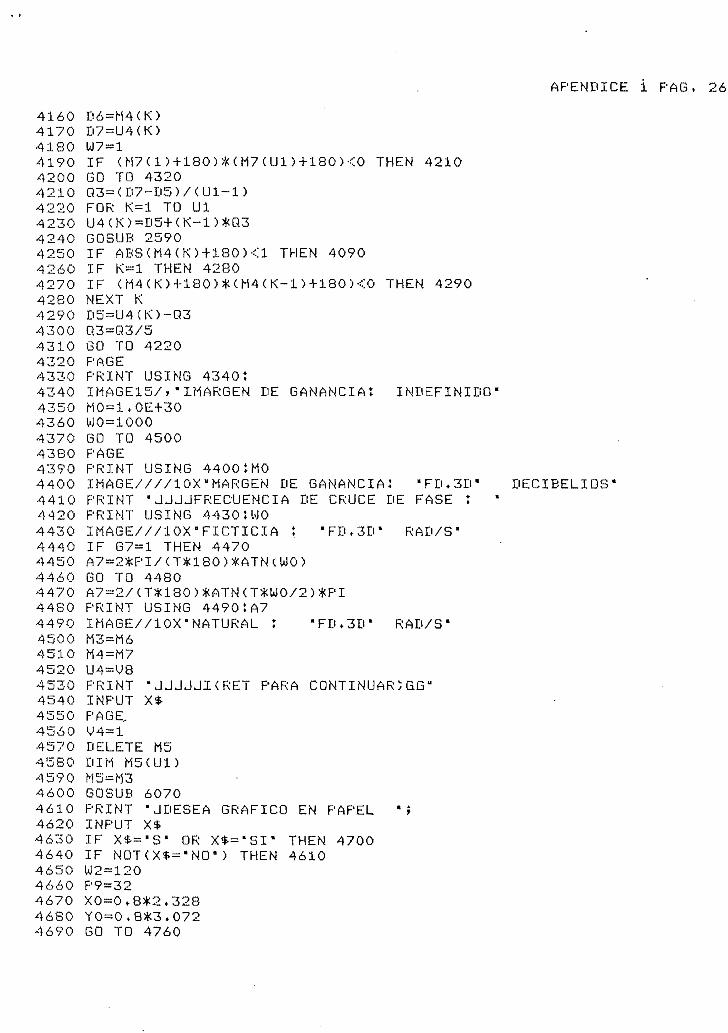
APÉNDICE 1 PAG» 26
416041704180419042004210422042304240425042604270428042904300431043204330434043504360437043804390440044104420443044404450446044704480449045004510452045304540455045604570458045904600461046204630464046504660467046804690
DÓ=M4(K>D7=U4(K)107 = 1IF <M7(1)+180)*(M7(U1)+180)<0 THEN 4210GO TO 4320Q3=(D7-D5)/(U1-1)FOR K=l TO UlU4(K)=D5+<K-1)#Q3GOSUB 2590IF ABS(H4(K) + 180X1 THEN 4090IF K=l THEN 4280IF (M4(K>+180>*(M4<K-1> + 180XG THEN 4290NEXT KD5=U4(K)-Q3Q3=Q3/5GO TO 4220PAGEPRINT USING 4340:IMAGE15/S -IMARGEN DE GANANCIA: INDEFINIDOM0=l * OE+30WO^IOOOGO TO 4500PAGEPRINT USING 4400ÍMOIHAGE////10XUMARGEN DE GANANCIA: "FD+3D'PRINT ' JJJJFRECUENCIA DE CRUCE DE FASE JPRINT USING 4430 i WOIMAGE///10X"FICTICIA í aFD*3Dm RAD/S"IF 67=1 THEN 4470A7=2*PI/(T#180>*ATN(WO>GO TO 4480A7=2/CT*180)*ATN(T*WO/2)#PIPRINT USING 4490ÍA7IMAGE//10XBNATURAL í "FIU3D* RAD/S'M3=M6M4 = M7U4:=lvJ8
PRINT -JJJJJKRET PARA CONTINUAR / GGUINPUT X*PAGE.V4~lDELETE M5DIM H5CU1)M5=M3GOSUB 6070PRINT "JDESEA GRÁFICO EN PAPEL "íINPUT X$IF X*="S' OR X*="SIm THEN 4700IF NOT(X$='NO") THEN 4610U2-120P9=32XO-0 »8*2.328Y0=0 * 8*3.072GO TO 4760
DECIBELIDS"

APÉNDICE 1 PAG, 27
470047104720473047404750476047704780479048004810482048304840485048604870488048904900491049204930494049504960<V?7049804990500050105020503050405050506050705080509051005110512051305140515051605170518051905200521052205230
PRINT "JALISTE EL GRAFIZADOR (RET PARA CONTINUAR)INPUT X$W2=140X0=0*8*l,792YO^O,8*2*816PAGEPRINT "JJDIAGRAMA DE BODE DE MAGNITUD"GOSUB 4800GO TO 4860PRINT "JIPsraH'metros del ársH'fico'PRINT USING 4820íM2I M A G E / 1 0 X - V A L O R M Á X I M O t «FIU3DPRINT USING 4840ÍM1IMAGE/10X"VALOR MÍNIMO : "FD+3DRETURN
EL VALOR DE LA MAGNITUD MÁXIMA'JJINGRESEY9"JJINGRESEY849204950
EL VALOR DE LA MAGNITUD MÍNIMA
LA LOCALIZACION DEL EJE VERTICAL (DB)
PRINTINPUTPRINTINPUTGOSUBGO TOWINHOW 1:VIEWPORTRETURNPRINT BJINGRESEINPUT X8DELETE M5DIM M5CU1)M5=M4PAGEPRINT "JJJDIAGRAMA DE BODE DEL ÁNGULO 'GOSUB 6070
4800•JINGRESE EL VALOR DE LA FASE MÁXIMA 'íY5"JINGRESE EL VALOR DE LA FASE MÍNIMA '5Y4BJINGRESE LA LOCALIZACION DEL EJE VERTICAL(GRADOS)Y3
GOSUBPRINTINPUTPRINTINPUTPRINTINPUTPAGEGOSUB 4920MOVE @P9:U1/2,Y9SCALE 1,1IF 06=4 THEN 5170X*="DIAGRAMA DE "BODEGO TO 5180X*="DIAGRAMA DE BODE DE MAGNITUDRMOVE @P9Í-LEN(X*>/2*XO,0,2#YO+2PRINT @P9:X*GOSUB 4920AXIS GP9ÍO,10,1,X8FOR 05 -40 TO 40 STEP 20MOVE @P9Í1r05
DE MAGNITUD (SIN COMPENSACIÓN)
(CON COMPENSACIÓN)

APÉNDICE 1 PAG» 28
524052505260527052805290530053105320533053405350530053705380539054005410542054305440545054605470¡5480549055005510552055305540555055005570558055905000501056205630504056505ÓÓO50705680569057005710572057305740575057605770
SCALE 1»!RMOVE @P9:-2-3#1.792»0IF QS^O THEN 5280PRINT 0P9ÍQ5GOSUB 4920NEXT Q5GOSUB 6540MOVE 0P9Í 1 » M 3 < 1 >FOR J=2 TO UlGOSUB 5350GO TO 5370Z7=Z3#LGTCU4( J) >+Z6RETURNDRAW GP9ÍZ7fM3<J>NEXT JGOSUB 5510MDVE eP9ÍUÍ/2>Y5SCALE IflIF 06=4 THEN 5450Y*="HIAGRAMA DE BODE DE ÁNGULO (SINGO TO 5460Y$="DIAGRAMA HE BODE DE ÁNGULO (CONRMOYE @P9í-LEN(Y*)/2*XO?0*2*YO+2PRINT 6P9ÍY*U4^2GOBUB 5510GO TO 5540WIMDOW lrUl7Y4yY5MIEWPORT 15»W2FlO»45RETURNAXIS @P9ÍOr30?l?Y3FQR Q5=™270 TO -90 STEP 30MOYE @P9tl»Q5SCALE 1»!RMOUE GP9í-3»5-3*l*792fOIF Q5=~180 THEN 5610PRINT OP9ÍQ5GOSUB 5510NEXT 05GOSUB 6570MQYE @P9tl>M4<l>FOR J=2 TO UlGOSUB 5680GO TO 5700Z7=Z5#LGT(U4< J) )+Z6RETURNDRAW @P9tZ7>M4(J>NEXT JMOVE @P9:UO>Y4PRINT OP9t USING 5740 ÍTIHAGE/20X' FRECUENCIA (RAD/S) T^IF 00=1 THEN 5810MOVE @P9;UOfY4IF J5=2 THEN 5800
COMPENSACIÓN)
COMPENSACIÓN)
='FD.3D" SEG"

APÉNDICE 1 PAG. 29
*
-
5780579058005810582058305840585058605870588058905900591059205930594059505960597059305990600060106020603060406050606060706080609061006110612061306140615061606170ó 1806190620062106220623062406250626062706280629063006310
•5L*í
PRINT @P9;-JJ ARCHIVO;GO TO 5810PRINT @P9:aJJ ARCHIVO;PRINT "JDESEA REPETIR EL GRÁFICOINPUT X*IF X*-"SI' OR X$^'Sa THEN 5880IF NOT(X$-"NO"> THEN 5810IF 06=4 THEN 5870GO TO 6150ENDPRINT "JQUIERE CAMBIAR LOS PARÁMETROS (SI O NO)INPUT X*IF X*="SI* OR X^'S1 THEN 4550IF NOT(X*=»NO'> THEN 5880GOSUB 4920
GO TO 5100REM«SUBRUTINA**U7(K)=C3(Í)VO(K)=0FOR J=2 TO U8+1V1=U7(K)#U5<K)-VO(K>#U6(K>+C3(J>VO(K>=VO(K)#U5(K)+U7(K)*U6(K)U7(K)=V1NEXT JM ( K ) =SGR ( U7 ( K ) #'U7 (K > +VO(K)#VO í K »3ET DEGREESM9(K)=SGNCVO(K)>#ACS(U7(K)/M(K))RETURNREM CALCULO DE LOS VALORES MÁXIMOS Y MÍNIMOSMÍ=1*OE+100
1 TO UlMIN M5CJ)MAX M5(J)
1 THEN 6230•JDESEA ANALIZAR PARA OTRO PERIODO DE MUESTREO (SI O NO)X*"S" OR X*='SI' THEN 6250(X$="NO") THEN 61601 TO N+D+2
FOR J =M1=M1M2=M2NEXT JRETURNIF 05=PRINTINPUT
IF NOTFOR J=QC J?2)ííNEXT J
ENDPAGEPRINT "JINGRESEINPUT TFOR J = l TO N+D-f:
NEXT JGO TO 6390
EL VALOR DEL NUEVO PERIODO DE MUESTREO

APÉNDICE 1 PAG, 30
6320633063406350636063700380639004006410042064300440645064606470648064906500651065206530654065506560657065806590660066106620663066406650666066706680669067006710672067306740675067606770678067906800.68106820
D-fl-JíB(J)FEU4D
ENDPAGEPRINT 'JJXANALISISGO TO 2460REM ## CALCULO DE LOSJ-MEMORYAPPEND '(¿SYLVA/CALCULQSREMPRINT "VECTOR AtFOR J—l TO N-f 1PRINT USING 6430ÍN+1-J»A<J>IMAGE-Z" "ü* = 'FIU4DNEXT JPRINT "JJVECTOR B t•FOR J=l TO n+1PRINT USING 6480IMAGE-Z" "D" =NEXT JPRINT "JI <RET PARAINPUT X^PAGEGO TO 2350REM SUBRUTINA PARAZ5=1/LGT(U2>Z6==1--25*LGT(UO>
GOSUB 6610GOSUB 6630GO TO 6760Z7=Z5*LBT(C45>+Z6RETURNIF V4=2 THEN 6660MOVE GP9ÍZ7TX8GO TO 6670i_tr"iiir~ rar*in»~T~> \s~yn U v h. Isr-VÍZ/TioSCALE 1,1RMOVE 0P9RDRAW @P9RDRAW f?P9RMOVE @P9
@P9
DE FRECUENCIA CON COMPENSACIÓN
COEFICIENTES *#
6390
CONTINUAR)
PONER VALORES HORIZONTALES
PRINT792^-1*26730ÍQ5
~3 »ij* 1USING
IMAGEFD*3DGOSUB V4 OFRETURNQ5=Q5*10IF Q5>U9 THEN 6790GO TO 6580RETURNPAGEPRINT "JJJERROR INGRESEEND
816
PRIMERO LOS HATOS1

APÉNDICE 1 PAG 4 31
200020102020203020402050200020702080209021002110212021302140215021602170218021902200221022202230224022502200227022802290230023102320233023402350236023702380239024002410242024302440245024602470248024902500251025202530
DE CONTROL ON LINE
•U + B3ZK~2J-i-B4K-3J-t-B5ZLs;-4J
EL NUMERO DE TÉRMINOS
02 — 8GO TO 800REM SIMULACIÓNPAGEPRINT "JJJJISIMULACION DE CONTROL ON LINE"PRINT ' JJFÜRMA DE LA FUNCIÓN DE TRANSFERENCIA*.PRINT "JJJIAPRINT USING 2080:IMAGE/18X25C a-')PRINT "JIB1+B2ZK-Q0 = lPRINT »JJINGRESEINPUT SODE'LETE S4>S5DIM S4C4),S5(5>PRINT "JINGRESE LOS COEFICIENTES DEL NUMERADOR"FOR J«l TO 4PRINT a J A " ? J ? a = a íINPUT S4CJ)NEXT JPRINT 'JINGRESE LOS COEFICIENTES DEL DENOMINADOR"FOR J=l TO 5PRINT 'JB"?JÍ' = - rINPUT S5(J>NEXT J
"JJOPCIONES:"•Jl. CONTROLADOR•J2» CONTROLADOR
PRINTPRINTPRINTPRINTINPUTGO TOIF Ll<PRINTPRINTPRINT
DEDE
LA OPCIÓN-JINGRESELlLl OF 2320f247Q:>1 OR L102 THÉN 2250•LJIFORMA DEL CONTROLADORÍ"JJI C1+C2ZK-1J"USING 2350Í
PRIMER .ORDEN"SEGUNDO ORDEN1
DESEADA ' 5
I.MAGE/18X1PRINTPRINTPRINTINPUTPRINTINPUTPRINTINPUTPRINTINPUTGO TOPRINTPRINTPRINT
JI D1+D2ZK-1J"JINGRESE LOS COEFICIENTES
EL VALOR DE Cl a iDEL CONTROLADOR"
EL VALOR DE C2
EL VALOR DE DI
-JINGRESEB7•JINGRESEB81JINGRESEB9•JINGRESE EL VALOR DE D2BO2650•LJFORMA DEL CONTROLADORí"JJI C1+C2ZK-1J+C3ZK-2JUSING 2500Í
IMAGE/18X20Í'-")PRINT "JJI D1+D2ZK-1J+D3ZK-2JDELETE L2?L3DIM L2(3)*L3C3>

APÉNDICE 1 PAG. 32
254025502560
25802590260026102620263026402650266026702680269027002710272027302740275027602770278027902800281028202830284028502860287028802890290029102920293029402950296029702980299030003010302030303040305030603070
DEL DENOMINADOR'
PRINT "JINGRESE LOS COEFICIENTES DEL CONTROLADOR'PRINT "JCOEFICIENTES DEL NUMERADOR:'FOR J=l TO 3PRINT "JC'5JrB: '.INPUT L2CJ)NEXT JPRINT •JCOEFICIENTESFOR J=i TO 3PRINT "JIi"íJ?": " FINPUT L3CJ)NEXT JREM CONDICIONES INICIALES
GO TO Ll OF 2690.2710S3=B7/B9*S2GO TO 2720S3=L2<1)/L3(1)REM CALCULODELETE S6.S7.S8DIM S6(3#SO)?S7(3*SO>fS8S6(1)=S4C1)/S5(1)*S3
GO TO Ll OF 27807280038 < 1) =B7/B9*S7 (1) i-B8/B9#S2~BO/B9*S3GO TO 2810S8 (1) =-'L3 ( 2 ) /L3 (1) *S3-fL2 (1) /L3 (1 > #57 (1) +L2 ( 2 > /L3 (1 )T9-S4(2)/S5(1)#S3SÓ(2)=-S5<2>/S5(l)#S6(l)-S5(3)/S5(l)#Sl-fS4<i;/S5(l)#SB(l)+T957<2)=QO-S6<2)GO TO Ll OF 2850?2870S8<2)=B7/B9#S7<2)+B8/B9*S7(1>-BO/B9#S8<1)GO TO 2890T9=-L3<2)/L3(1)*S8(1)-L3(3)/L3C1)*S3+L2(1)/L3<1)*S7(2)S8<2>=T9+L2C2)/L3(1)#S7C1)+L2(3)/L3<1)T9=S4<2)/S5(1)*S8(1)+S4(3)/S5(1>*S3-S5(4)/S5C1>*S1S6<3)=-S5(2)/S5C1)*S6(2)-S5(3)/S5(1)*S6(1)+S4C1)/S5C1>#S8(2)+T9S7(3)=QO-SÓ(3)GO TO Ll OF 2930?2950S8(30=-BO/B9*S8(2)+B7/B9*S7<3)+B8/B9*S7(2)GO TO 2970T9=»L3(2)/L3(l)#S8(2>-L3(3)/L3(l))ScS8<l)+L2(l)/L3(l)*S7<3>S8(3)=T9+L2<2)/L3<1>#S7<2)+L2(3)/L3C1)*S7(1)T9=S4(3)/S5(1)*S8C1)+S4C4)/S5<1)*S3T9=S4(1)/S5C1)*S8(3)-S5<4)/S5(1>#S1+S4(2)/S5<1>#S8(2>+T9SÓ(4)=-S5(2)/S5(1>*SÓ(3)-S5(3)/S5(1»KSÓ(2)-S5(4)/S5(1)#S6(1)+T9
GO TO Ll OF 3020.3040S8(4)=~BO/B9*S8(3)+B7/B9*S7(4)+B8/B9#S7(3>GO TO 3060T9=-L3(2)/L3(1>*S8(3)-L3(3)/L3(1)#S8<2)+L2<1)/L3(1)#S7<4^S8(4)=L2<2)/L3(l)*S7(3)+L2(3)/L3(l)>lcS7(2>+T9FOR K=5 TO SO 'GOSUB 3110

APÉNDICE 1 PAG. 33
308030903100311031203130314031503160317031803190320032103220323032403250326032703280329033003310332033303340335033603370338033903400341034203430344034503460347034803490350035103520353035403550356035703580359036003010
NEXT KGO TO 3210REM SUBRUTINAT9==~S5<5)/S5(l)*S6(K-4)+S4<3)/S5<l)#S8<K-3>+S4<4>/S5(l>#S8(K-4>T9=S4(l>/85(l)*S8(K~l)+S4(2)/S5(l)*S8(K-2)~S5(4)/S5<l)*S6(K-3)+T9S6<K)=~S5(2)/S5(1>*S6(K-1>-S5(3)/S5(1>*S6(K-2H-T9
GO TO Ll OF 3160?3180S8(K)=B7/B9#S7<K>+B8/B9#S7(K-1>-BO/B9#S8(K-1)GO TO 3200T9-~L3<2)/L3<l)*S8(K-l)-L3(3)/L3(l)*S8(K-2>-fL2(l>/L3<l)*S7<K)S8 < K > =L2(2)/L3C1)*S7<K-l)+L2(3 > *S7(K-2)/L3 C1)+T9RETURNPAGEDELETE XDIM X(3*SO)
POR J=2 TO 3*SOX(J>=X(!) + (J-i)NEXT JPRINT MJDESEA GRÁFICO EN PAPEL (SI O NO) "fINPUT X*IF XÍ>=USI' OR X*="S" THEN 3360P9=32
Y0 =GOP9:W2=X0 = 792
816•JJALISTE
3480
=0.8*3*072TO 3420
= 1'140= 0*8*1
Y0=0.8*2PRINTINPUT X*GOSUB 3450PAGEGO TOWINDOW OU1EWPORTRETURNAXIS GP9HOYEDRAWMC)'v>EDRAWDRAWGOSUBAXIS @P9ílOrlHOYE GP9ÍO*S3DRAW 0P9:X<1)DRAW GP9:X(1)FOR J=2 TO SOGOSUB 3450MOUE GP9ÍXCJ-
EL GRAFIZADOR (RET PARA CONTINUAR)'
@P9ílOjO»2yO,0GP9JOrQO
@P9:OíOGP9:X<1)70GP9:X(1)936(1)4850
l>

APÉNDICE 1 PAG* 34
362036303640365036603670368036903700371037203730374037503760377037803790380038103820383038403850386038703880389039003910392039303940395039603970398039904000401040204030404040504060407040804090410041104120413041404150
DRAWMOVEDRAWDRAWGOSUBGOSUBGO TOFOR K
@P9tX0P9ÍX@P9:X0P9ÍX485036903730= 1 TO
( J)(J-(J)(J)
1
9
1
9
7
GO) y S6( J-l )S6( J-l)S6(J)
H9=K*KNEXT KRETURNMOVEDRAWDRAWGOSUBGO TOFOR KH9-K*NEXT
SP9ÍX0P9ÍX@P9tX37803820= 1 TO
K
(J-( J)(J)
2
1?7
) íSSÍJ-l)SB(J-l)58 <J)
RETURNNEXTS1=S6S2=S7Q0=0*S3=S8FOR KGOSUBNEXTGOSUBGO TOGOSUBHOYEDRAWDRAWMOVEDRAWGOSUBMQVEDRAWDRAWFOR JGOSUBMOVEDRAWMQVEDRAWDRAWGOSUBGOSUBMQYEDRAWDRAWGOSUBNEXT
J(SO)(SO)7(SO)"SO+13110
K3920417034500P9ÍXGP9ÍXSP9ÍXSP9ÍX0P9ÍX4P50
TO
(SO(SO)
+
2 30
751
1 ) ?S1(SO+1) ?S6(SO+1)(SO)T QO(SO+1)?QO
@P9:X(SO)@P9tX@P9«X=SO+23450@P9 + XGP9ÍX@P9ÍXSP9ÍXEP95X48503690
QP9tX@P9tX@P9:X3780
J
»S3(SO+1) rS3(SOTO
( J~(J)( J(J)(J)
-fl)?S8(SO+l)
1y
1
ry
(J-l(J)(J)
7
?
2#SO
) r QOQO) y S6( J-l )SÓ(J-l)S6( J)
) rS8( J-l)S8 ( J— 1 )S8(J)

A P É N D I C E i P A G , 35
41604170
^ 4180«-' 4190
420042104220423042404250426042704280
fc. 4290^ 4300
4310432043304340435043604370438043904400
'jtft 4410^ 4420
4430444044504460447044804490-45004510
£ 45204530454045504560457045SO-459046004610
, 4620•1» 4630
464046504660467046804690
RETURNS1~S6(2#SO)S2=S7(2#SO)Q0 = l33=S8(2#SO)FOR K~2XíSO + l TOGOSUB 3110NEXT KGOSUB 3450HOYE @P9í2*SOfQODRAW @P9* 2*50+1 >MOVE @P9Í2*SO>31DRAW SP9Í 2*30+1 >DRAW @P9Í 2*30+1 íGOSUB 4850MQVE 6P9Í 2*SOr 33DRAW SP9Í 2*30+1»DRAW @P9 5 2*50+1 7FOR J=2*SO+1 TOGOSUB 3450MOUe GP9ÍXCJ-1) tDRAW 6P9ÍX(J) ?QOMOUE @P9ÍX( J-l) ?DRAW SP9ÍXCJ) tS6DRAW @P9ÍX(J) ?S6GOSUB 3690GOSUB 4850MOVE @P9ÍX< J-l) rDRAW @P9ÍX(J) ?S8DRAW @P9tX< J) >SBGOSUB 3780NEXT J
3#SO
QO
31S6(2*SO+1)
S3S8C2*SO+1)3*SO
QO
S6C J-l)(J-l)(J)
S8C J-l)(J-l)(J)
X*='SENALES DE ENTRADA Y SALIDA'XO=0+8*2»328Y0=0 »8*3 + 072GOSUB 3450MOVE eP9Í3*SO/27SCALE 1,1RHOUE @P9t-LENCXPRINT 0P9ÍX*
2
$)/2#XO?0*2#YO+2
Y$=' SEÑAL DE CONTROL U'GOSUB 4850MOVE GP9t3#SO/2?SCALE IrlRMOUE eP9í~LEN(YPRINT OP9tY*GOSUB 3450MQVE @P9:3*SO/2fP*="EJe x í IdivSCALE Irl
10
$)/2#XO? 0* 2>KYO+2
-0*75=10 valores de
RMOME eP9:-LEN(P*)/2*XOfO»2*YO+2PRINT GP9 + P$GOSUB 4850MOvE @P9t3*SO/2,-10
EJe ld iv=0*2 u1

1div = 10 valores de u EJe y t4700 R$="EJe x4710 SCALE Irl4720 RMGVE @P9 í -LEN ( R* ) /2#XO » O * 2#YO+24730 PRINT SP9ÍR*4740 PRIHT MKRET PARA CONTINUAR)'4750 INPUT X*4760 PRIHT "LJDESEA CAMBIAR LOS PARÁMETROS DEL CONTROLADOR4770 INPUT X$4780 IF X$="SI" OR X$=°S' THEN 48104790 IF NOTCXÜ^NQ1 ) THEN 47604800 END4810 PRIMT "JJINGRESE EL NUEVO VALOR DEL NUMERO DE TÉRMINOS4820 INPUT SO4830 GO TO 22504840 EHD4850 WIMDOW O>3*SO,-10>104800 VIEWPORT 15jW2t10?454870 RETURN
APÉNDICE 1 PAG» 36
ldiv=l»0 u"

APÉNDICE 1 PAG, 37
200020102020203020402050206020702080209021002110212021302140215021002170219021902200•
2210222022302240o o soA- *Í. V.Í \J
2260227022802290230023102320233023402350230023702380239024002410242024302440245024602470248024902500251025202530
02-9GO TOGOSUBGO TOPRINTGOSUBENDPRINTGOSUBGO TO
800462008 OF 2040?2070>3G70r3580?3610>372073750@P9t'JIDATOS EN FORMA NUMÉRICA"4470
JIMOtiELACION*@P921102340
REM SUBRUTINAPRINT G?P9Í "JJ1MATRIZ DE COEFICIENTES í "PRINT (¿P9Í* JJCOEFICIENTES DE LA FORMAtFOR 1=1 TOFOR J=l TOPRINT 0P9ÍIMAGE (5D,;NEXT JPRINT @P9tNEXT IPRINT £P9; '
K1#T"K2
2*P1USING 2160ÍQCI?J)
JJCOEFICIENTES DE LA FORMA¡K3#T"K4#EXP<K5#T> *J
FOR 1 = 1 TO N-KD+2FOR J=2#P1+1 TO 3#P2+2>KP1PRINT @P9í USING 2240 ÍQ( I *J>IMAGECSD^D) ?SNEXT JPRINT £P9íNEXT IT.F 00 = 1 THEN 2330GO TO J5 OF 2300^2320
GP9:•jiARCHIVO: •?i*2330@P9:BJ1ARCHIVOÍ '?L$
PRINTGO TOPRINTRETURNPRINTINPUT ;IF X*='ENDPRINT íPRINTPRINTPRINTPRINT
JJDESEA UN EJEMPLOGG
SI" OR X*="S" THEN 2380
'LJEJEMPLO@P9:"JJ@P9Í"JJSP9ÍaJ@P9I USING 2430:
IMAGE/10X'PRINT SP9Í USING 2450ÍIMAGE10X" <30T -3 -f3ePRINT SP9t USING 2470ÍIMAGE10X50C-' )PRINT @P9Í USING 24905IMAGE15X' 2PRINT GP9Í USING 2510ÍIMAGEISX'Z + <-DELETE 19DIM I9(5>10>
GRADO DEL NUMERADOR = 1GRADO DEL DENOMINADOR=2FUNCIÓN DE TRANSFERENCIA
(0=2>•DEL SISTEMA
-10T -10T •10T O'
)Z +(3-3e
-10T
-30Te
-10T
)Z )Z

APÉNDICE 1 PAG, 38
254025502560257025802590260026102620263026402650266026702680269027002710272027302740275027602770278027902800
19 = 019(119(119(119(119(119(219(219(219(219(219(219(319(41 9 ( 419(419(519(5
tt7
J
t
t
f
?
f
f
1235715789
>==> =) => =) =) =\
) =
301-3_
3__
-
3
10
310
>=-30> =1
>1Q> =tf
y7
jr
115757
PRINTFOR 'FORPRIN
IJT
==
) =) => => =) =) =GP11
1--_
1-9
-10
1110
10i • J
TO 5T
GP9IMAGE(NEXT JPRINTNEXT I
5D t
GP9
PRINT @P9
0 4í USING3D> 7$
*
+ H 1
JCOEFICIENTES DE LA FORMA; K1#T~K2"
2760119(17J)
ÍCOEFICIENTES DE LA FORMAíK3&T"K4*EXP(K5#T> ÍJ
NEXT JPRINT @P9tNEXT IPRINT GP9tIMAGE/10X'PRINT GP9;IMAGE/8X'*#LQS COEFICIENTES ESTÁN EN ORDEN DESCENDENTEPRIMT @P9; USING
2810 FOR 1=1 TO2820 FOR J=5 TO2830 PRINT 6P9t284028502360287028802890290029102920293029402950296029702980299030003010302030303040305030603070
D10USINGD ?S
2840íI9(l7Ü)
USING 2890;OBSERVACIONES*'USING 2910Í
1MAGE/8X"*#LAS 2PRINT @P9: USINGXMAGE/8X"##LAS 3PRINT GP9i USING
2930 íPRIMERAS2950ÍULTIMAS FILAS2970 t
FILA CORRESPONDEPRINT GP9Í USING 2990ÍIMAGE10X*K1*T"K2 Y K3*T"K4*EXP(K5*T)PRINT GP9; USING 3010:IMAGE/8Xm**LAS CONSTANTES DEPRINT GP9: USING 3030ÍIMAGE/8XB^*LAS CONSTANTES DEPRINT @P9í USING 3050tIMAGE10X"OCUPAN 3 COLUMNAS'ENDPRINT GP9J'JIANALISIS EN EL DOMINIO DEL TIEMPO"
FILAS CORRESPONDEN AL NUMERADOR
CORRESPONDEN AL DENOMINADOR (B+l)
A LAS CONSTANTES DE LA FORMA
DE CADA COEFICIENTE"
LA FORMA; K1T"K2 OCUPAN 2 COLUMNAS"
LA FORMA (K3HcT"K4*(EXP'CK5#T>)-"

APÉNDICE 1 PAG*
3080309031003110312031303140315031603.1703180319032003210322032303240325032603270328032903300331033203330334033503360337033803390340034103420343034403450346034703480349035003 5 i.O3520353035403550356035703580359036003610
J5 OF44703140GP95 "21204470•DESEA
JIMATRIZ DE COEFICIENTES'
IMPRESIÓN HE VALORES HE LA SALIDA CCt) (SI Ü NO)
GO TO J5 OF 3090*3110GOSUBGO TOPRINTGOSUBGOSUBPRINTINPUT Xí>IF X*^"SIn OR X*='S' THEN 3190IF NOT(Xí>='NO') THEN 3140GO TO 3380IF N2OO THEN 3260PRINT GP9Í USING 3210;C(1>IMAGE/10X"C(0,OOOSEG> = "FD*3DFOR J=l TO Z-lPRINT GP9Í USING 3240 í J*T , C C J-f 1 )IMAGElOXr"C("FD»3D°SEG) = "FD*3DNEXT JPRINT GP9Í USING 3270ÍIMAGE/10X"CCO.OOOSEG) = 0*000"IF N2O1 THEN 3340FOR J=l TO ZPRINT @P9: USING 3310 iJ#TrE(J)IMAGE10X?ftCC*FD,3D'SEG> = "FD*3DNEXT JGO TO 3380FOR J=l TO N2+Z-1
USING 3360ÍJ#T>E(J>11 C( "FEUSD'SEG) = 'FEU
PRINT GP9:IMAGE 10X?NEXT JPRINT @P9tIHAGE/10X?°PRINT GP9ÍIMAGE/10X
USING 3390ÍX8,Z^T"INTERVALO DE ANÁLISIS "FD.3D1USING 34lOtT
VALOR DEL PERIODO DE MUESTREO :
•FD.3D
FD(3D' SEG
SEG
GO TO 16 OF 3430,346073510PRINT @P9t USING 3440}IMAGE/10X"ANÁLISIS PARA UNAGO TO 3550
FUNCIÓN IMPULSO
PRINT GP9IMAGE/10XPRINT GP9ÍIMAGE/10X"GO TO 355,0PRINT GP9:IMAGE/10XPRINT GP9IMAGE/10XIF 04=GO TOENDPRINTGOSUBENDPRINT
USING 34701ANÁLISIS PARA UNA FUNCIÓN PASO"USINP 3490JA9
AMPLITUD DE LA FUNCIÓN Í'FIU2D
O THEN4860
USING 3520tANÁLISIS PARA UNAUSING 3540JA9
AMPLITUD DE LA RAMPA3570
FUNCIÓN RAMPA
FIU2D
JIDISCRETIZACION DE FILTROS CONTINUOS1
4900
@P9t•JICOMPENSADOR DISCRETO P»I,D*

APÉNDICE 1 PAG. 41
416041704180419042004210422042304240425042¿>04270428042904300431043204330434043504300437043804390440044104420443044404450440044704480449045004510452045304540455045004570458045904000461046204630464040504660407040804090
USING 4170tTPERIODO DE MUESTREO FEU3D' SEG"
1 JIECUACION3USING 422013-JrRlCJ>
COEFICIENTE DE Z"B2D"
CARACTERÍSTICA EN EL PLANO Z "
= "FD +
1 JICQMPENSAIiQR DISCRETO'JINUMERADOR í'4USING 4280I4-JTHK J)
DE Z ~ B 2 D " =
PRINT GP9IMAGE/10XENDPRINT 'GP9ÍFOR J=l TOPRINT GP9tIMAGE/10XNEXT JPRINT GP9ÍPRINT GP9:FOR J=l TOPRINT GP9tIMAGE/10X"COEFICIENTENEXT JPRINT 0P9Í"JIDENGMINADOR J B
FOR J«l TO 4PRINT GP9Í USING 4330M-JrH2(J) •IMAGE/10X"COEFICIENTE DE Z"K2D= =KFD*3DNEXT JRETURNPRINT GP9Í"JINUMERADORt'FOR J=l TO 3PRINT GP9t USING 4390:3-J,GO(J>IMAGE/IOX'COEFICIENTE DE Zrt"2D' - "FD*3DNEXT JPRINT GP9: " JIDENOMI'NADORÍ °FOR J=l TO 3PRINT GP9: USING 4440IMAGE/10X"COEFICIENTENEXT JRETURNPRINT GP9tIMAGE//10XPRINT @P9:IMAGE//10XFOR J=l TOPRINT GP9Í
3-JfGK J)DE Z"D2D' = " F D + 3 D
USING 4480'FUNCIÓN DEUSING 4500GRADO DELN+lUSING 4530ÍN-fl-JrAC J)
TRANSFERENCIAN
NUMERADOR t'21
DE LAZO ABIERTO1
IMAGE/IOX1NEXT JPRINT GP9ÍIMAGE//10XFOR J«l TOPRINT -0P9Í
COEFICIENTE DE Z"B2D FIU4D
USING'GRADOD-flUSING
4560tDDEL DENOMINADOR
FD+4D4590;D-fl-J?B(J)
IMAGE/IOX'COEFICIENTE DE Z"H2D -=NEXT JRETURNPAGEPRINT USING 4ó40tIHAGE10/? "IIMPRESION DE RESULTADOS"PRINT "JJJJKRET PARA CONTINUAR)"INPUT X$PRINT "JDESEA IMPRESIÓN EN PAPEL (SI O NO)INPUT X$IF X*="SI' OR X*="S» THEN 4730

APÉNDICE 1 PAG* 42
470047104720473047-4047504760477047804790480048104820H
48304840485048604870488048904900491049204930494049504960497049804990500050105020503050405050506050705080509051005110512051305140515051605170518051905200521052205230
IF NOT(X$="NQ")P9=32GO TO 4760
THEN 4670
PR.INT "JALISTE EL IMPRESOR (RET PARA CONTINUAR) 'INPUTPRINTPRINTPRINTPRINTPRINTCALL 'PRINT
X$GP9:GP9:GP9:GP9:GP9.
LIESCUELA POLITÉCNICA NACIONAL"'JIFACULTAD DE INGENIERÍA ELÉCTRICA"1 JIDEPARTAMENTO DE CONTROL"'JIAREA DE CONTROL Y SISTEMAS"•JITESIS DE GRADO: PETER EDUARDO SYLVA FUSEAU
£P9; 'JIFECHAí
PRINT @P9t USING 4840IMAGE18X50C'RETURNIF 07=1 THENIF 17=0 THENGOSUB 4900ENDGO TOPRINT
-" )
37203610
15 OF 4910r4950r4990r5030GP9t USING 4920:
IMAGE/10X"COMPENSACIÓNGOSUB 5060RETURNPRINT GP9Í USING 4960ÍJMAGE/10X"COMPENSACIÓNGOSUB 5060RETURNPRINT GP9ÍIMAGE/10X*GOSUB 5070RETURNGOSUB 17ENDREM SUBRUTINA00 TO 17 OF 5070f5310PRINT GP9t USING 5080ÍIMAGE/10X"COMPENSADOR DEPRINT GP9tBJICOMPENSADORFOR J=l TO 2PRINT GP9Í USING 5120t2~J,Fl(J)
REGLA RECTANGULAR" HACIA ATRÁS
REGLA DE TUSTIN
USING 50001COMPENSACIÓN:
OF 5190r5430
MAPEO DE POLOS Y CEROS
PRIMER GRADO1
CONTINUO í u
COEFICIENTE DE S
JIDENOMINADOR
F2< J)1 "2Dm
1MAGE10XNEXT JPRINT GP9ÍFOR J=l TO 2PRINT GP9: USING 5170t2-JIMAGE10X"COEFICIENTE DE S'NEXT JPRINT GP9t"JICOMPENSAHOR DISCRETOPRINT GP9t"JINUMERADORI"FOR J«l TO 2PRINT 6P9I USING 5230í2~J,F4(J)IMAGEIOX'COEFICIENTE DE Z~'2DQ -
2D B = *FD*3D
FD+3D
FD.3D
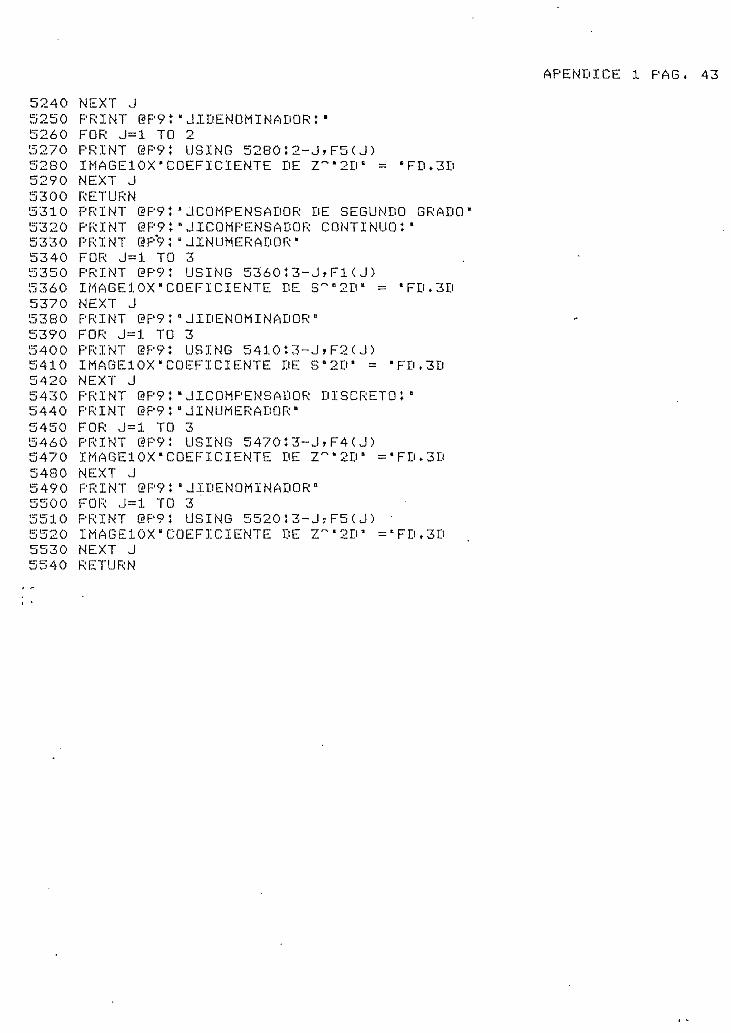
APÉNDICE 1 PAG* 43
5240525052605270528052905300531053205330534053505300537053805390540054105420543054405450540054705480549055005510552055305540
NEXT JPRINT GPFOR J=lPRINT GPIMAGE10XNEXT JRETURNPRINT GPPRINT GPPRINT GPFOR J~lPRINT GPIHAGE10XNEXT JPRINT GPFOR J=lPRINT GPIMAGE10XNEXT JPRINT GPPRINT GPFOR J«lPRINT GPIMAGE10XNEXT JPRINT GPFOR J~lPRINT GPIMAGE10XNEXT JRETURN
9íBJIDENOHINADOR:•TO 29t USING 5280í2~J,F5(J>"COEFICIENTE DE Z~'2DB = •FD*3D
9 i'^COMPENSADOR DE SEGUNDO GRADO'9ÍHJICOMPENSADOR CONTINUOf9!BJINUMERADQR'TO 39Í USING 53ÓOÍ3-J.FK J)COEFICIENTE DE S~"2DE = *FD,3D
9:°JIDENOMINADOR"TO 39Í USING 5410Í3-JJF2<J)"COEFICIENTE DE S'2D' = "FDt3D
9t"JICOMPENSADOR DISCRETO;ft9t'JINUMERADOR"TO 39: USING 5470t3~JyF4(J>•COEFICIENTE DE Zrth2DB ="Fru3D
9Í"JIDENOMINADOR0
ÍO 391 USING 5520Í3-J7F5(J)COEFICIENTE DE Z"*2D" =eFD»3D

APÉNDICE 1 PAG, 44
2000201020202030204020502000207020802090210021102120213021402150216021702180219022002210o*? 2022302240225022óO22702280229023002310232023302340235023002370'2380239024002410242024302440245024602470248024902500251025202530
02=10GO TOPAGEPRINTPRINTPRINTPRINTPRINTPRINTPRINTPRI u
PRI "PRI "t"i r- T Hr rv .1.PRI "PRI "PRI "pro uPR:I nPRINTPRI "PRI NTPRINTPRINTPRINTPRINTPRINTINPUTPAGEPRINTINPUT
800
•JJIINFORMACION GENERAL'"JTITULOÍ ANÁLISIS Y COMPENSACIÓN DE SISTEMAS POR MUÉS-"
TREO DE DATOS MEDIANTE TÉCNICAS CONVENCIONALES""JJQBJETIVOÍ CREACIÓN DE PROGRAMAS DE APOYO PARA ANÁLISIS Y
DISEÑO DE SISTEMAS DE CONTROL DIGITAL EN EL DOMINIO DEL TIEMPO Y EN EL DOMINIO DE LA FRECUENCIA0
n J INFORMACIÓN-.-1
JEN LA PRESENTE TESIS SE DESARROLLAN PROGRAMAS DE APOYO PARA
_.
B
EL DISEÑO DE SISTEMAS MUESTREADOS * LA SELECCIÓN DE LOS PROGRA-MAS SE REALIZA EN BASE A UN MENÚ, POR MEDIO DE TECLAS HEFI -NIBLES QUE CARGA A LA MEMORIA DEL COMPUTADOR EL PROGRAMA DE-SEADO * PRIMERAMENTE DEBE INGRESARSE COMO DATOS LOS COEFICIEN-TES DE LA FUNCIÓN DE TRANSFERENCIA DE LAZO ABIERTO+LQS COE -FICIENTEñ PUEDEN SER NÚMEROS 0 -CONSTANTES EN FUNCIÓN BEL PERIODO DE MUESTREO T, UNA VEZ INTRODUCIDOS LOS DATOS? SE PUEDE OBTENER LA RESPUESTA EN EL TIEMPO DEL SISTEMA» Y LOS DÍA"GRAMAS DE MAGNITUD Y ÁNGULO EN EL DOMINIO DE LA FRECUENCIA
ANALIZANDO LAS CURVAS OBTENIDAS r PUEDE DISEÑARSE EL COMPENSA"DOR NECESARIO PARA QUE EL SISTEMA TRABAJE DE ACUERDO A LO•ESPECIFICADO* ""JSE REALIZA TAMBIÉN UNA SIMULACIÓN DE CONTROL EN TIEMPO-11 REAL CON EL OBJETO DE OBTENER LAS CARACTERÍSTICAS BE LA -•"SEÑAL DE CONTROL Y ESCOGER LA MAS ADECUADA''J (RET PARA CONTINUAR)'X$
•JJDESEA IMPRESIÓN EN PAPEL (SI 0 NO) 'íX*
«
•
X
•
-
-_
*
1
B
IF X*=*Sa OR X$='SI' THEN 2350IF NOT(X*="NO"> THEN 2290P9=32Gü TOP9-51PRINTINPUTPRINTPRINTPRINTPRINTPRINTPRINTPRINTPRINTPRINTPRINTPRINTPRINTPRINTPRINTPRINTPRINT
2380
•JJALISTE EL IMPRESOR (RETURN PARA CONTINUAR)1
X*@P9¡ ' JILISTADO DE VARIABLES IMPORTANTES'6P9i " JTOÍINDICADOR DE LA UNIDAD DE DISCO'GP9Í"JQ1 NUMERO DEL PROGRAMA DESEADO"GP95 " J02ÍNUMERO DEL PROGRAMA QUE ESTA EN EL COMPUTADOR"@P9: ' JDOÍUNIDAD EN LA QUE ESTA EL DISCO1OP9Í-J NJGRADO DEL NUMERADOR"GP9i"J II i GRADO DEL DENOMINADOR*GP9Í" JAíNUMERADQR DE G(z>"GP9:1 JBtDENOMINADOR DE G(s>"@P9S m JI$:ARCHIVO PARA GUARDAR DATOS EN FORMA NUMÉRICA-@p9i u JL$:ARCHIVO PARA GUARDAR DATOS EN FORMA DE COEFICIENTESGP9i"J QÍMATRIZ DE COEFICIENTES •ep9i"J CIVALOR DE LA SALIDA EN LOS INSTANTES DE MUESTREOnGP9i'J TíPERIODO DE MUESTREO1
GP9;'J Z1VALOR DEL NUMERO DE TÉRMINOS PARA LA RESPUESTA EN'0P9Í ' EL TIEMPO"

APÉNDICE 1 PAG* 45
25402550256025702580259026002610262026302640265026602670268026902700271027202730274027502760277027802790'?800
PRINTPRINTPRINTPRINTPRINTPRINTPRINTPRINTPRINTPRINTPRINTPRINTPRINTPRINTPRINTPRINTPRINTPRINTPRINTPRINTPRINTPRINTPRINTPRINTPRINTPRINTPRINT
0P9ÍSP9?GP9ÍGP9JGP9ÍGP9Í0P9J(?P9¡GP9ÍGP9JGP9ÍGP9ÍGP9Í@P9ÍGP9ÍGP9ÍQP9ÍGP9ÍGP9ÍGP9ÍGP9Í@P9íGP9ÍGP9Í@P9ÍGP9tGP9Í
UJT6a JL6UJU1" JUO0 JU9"J P* JW9HJMO"JUO"JF1n JF2'JF4n JF5" JGOa JG1aJHl" JH28 JS4" JS5"JS61 JS7•JQO
tNUMERADOR DE Gt(z> "{DENOMINADOR DE GtCz)"ÍNUMERO DE PUNTOS PARA EL ANÁLISIS DE FRECUENCIA"ÍVALOR DE LA FRECUENCIA INICIAL "¡VALOR DE LA FRECUENCIA FINAL'¡VALOR DEL MARGEN DE FASE"¡VALOR DE LA FRECUENCIA DE CRUCE DE GANANCIA"ÍVALOR DEL MARGEN DE GANANCIA"¡VALOR DE LA FRECUENCIA DE CRUCE DE FASE"¡NUMERADOR DE D<s) 9¡DENOMINADOR DE DCs) '¡NUMERADOR DE Diz) "¡DENOMINADOR DE D C z > *¡NUMERADOR DEL COMPENSADOR DISCRETO P¡DENOMINADOR DEL COMPENSADOR DISCRETO¡NUMERADOR DEL COMPENSADOR DIRECTO'¡DENOMINADOR DEL COMPENSADOR DIRECTO"¡NUMERADOR DE GCz) PARA LA SIMULACIÓN
* T * D BP * I * D *
ON LINE"¡DENOMINADOR DE G(z>PARA LA SIMULACIÓN ON LINE"¡VALOR DE LA SALIDA EN LA SIMULACIÓN"¡VALOR DEL ERROR EN LA SIMULACIÓN"¡VALOR DE LA SEÑAL DE REFERENCIA EN LA SIMULACIÓN
11 JJJIdonde: ""J G1 JGt"J D'J D
(z) ¡FUNCIÓN DE TRANSFERENCIA DE LAZO(z) ¡FUNCIÓN DE TRANSFERENCIA DE LAZO(s) ¡COMPENSADOR CONTINUO"(z) ¡COMPENSADOR DISCRETO"
ABIERTO"CERRADO'
APÉNDICE 1 PAG, 46
2000201020202030204020502060207020802090210021102:1.2021302140215021002170218021902200221022202230224022502200227022SO229023002310
REM CALCULO SSYLYA/CALCULOSP3-1p/^N-fiDELETE A?B7G5D1M ACN-fl) 7B(D-M) 7G5(N+1>GOSUB 2090A._ t"' i-*— buGO TO 2220REM **SUB BE EVALUACIÓN**FOR :¡>P3 TO P4:I:F PI=O THEN 2140FOR J=l TO 2#P1 STEP 2Q ( I ? 2>KPl-f3#P2-f 1 > =Q ( I ?2#Pl-f3#P2+l ) -i-T"Q< 1 7 JNEXT J1F P2=0 THEN 2190FOR J=2#P1+1 TO 3*P2+2*P1 STEP 3G6=EXP C Q C I f J + 2 ) *T )Q (Ir 2%-F l-f3^F2Tl )~Q( I ?2íKF l-f3^F2-fl )-fT Q(I ?JNEXT JG5 C I > -Q < I » 2#P1+3*P2 + 1 )NEXT IRETURNP3-N+2P4-N+D+2DELETE G5D:I:M G5<N+n+2)G5=0GOSUB 2090FOR J=l TO D+lB< J)=G5<N+1+J)NEXT JPRINT ' JCOEFICIENTES EN LOS VECTORES A?B
J)
J)#G6

APÉNDICE 2.
MANUAL DEL USUARIO.
1. Si el equipo se encuentra encendido pase directamente al numeral 3;
si se encuentra apagado encendido de acuerdo a la siguiente secuen_
cia:
1.1 Unidad de disco superior (1 y 2)
1.2 Unidad de disco inferior (0)
1.3 Computador.
2. Debe inicial izarse el sistema de reloj desde el teclado con la si-
guiente instrucción:
CALL"SETTIM", "DD-MMM - AA )5 HH:MM:SS"
Presione la Tecla RETURN
donde: DD : día
MMM: mes (tres primeras letras en inglés.
AA : año
0 : espacio en blanco
HH : horas
MM : minutos
ss : segundas (opcional)
3. Colocar el disco de tesis en cualquiera de las unidades libres y
cargúelo con las siguientes instrucciones:

CALL"MOUNTII)#ÍX$
Presione la tecla RETURN
Donde: # = número de la unidad donde se coloca el disco
X$ = o cualquier otra variable literal (una letra seguida del
signo $)
4. Cargar a la memoria del computador el programa maestro, con la si-
guiente instrucción:
OLDn@SYLVA/TESIS" (*)
Presione la tecla RETURN.
5. Ejecutar la instrucción RUN. Presione la tecla RETURN.
6. Seleccione una de las teclas de acuerdo al siguiente menú:
TECLA 1 : ÍNDICE DE PROGRAMAS
TECLA 2 : INGRESO DE DATOS EN FORMA NUMÉRICA
TECLA 3 : MODELACIÓN EN FUNCIÓN DEL PERIODO DE MUESTREO T
TECLA 4 : RESPUESTA EN EL TIEMPO
TECLA 5 : ANÁLISIS MEDIANTE LA TRANSFORMACIÓN BILINEAL
TECLA 6 : DISCRETIZACION DE FILTROS CONTINUOS
TECLA 7 : CONTROLADOR DISCRETO P.I.D.
TECLA 8 : RESPUESTA CON COMPENSACIÓN
TECLA 9 : ANÁLISIS DE FRECUENCIA CON COMPENSACIÓN
TECLA 10: MÉTODO DIRECTO DE DISEÑO
TECLA 11: SIMULACIÓN DE CONTROL DIGITAL DIRECTO
TECLA 12: IMPRESIÓN DE RESULTADOS

TECLA 13: INFORMACIÓN GENERAL
La selección de programas debe realizarse de acuerdo a la se-
cuencia que se Indica en la figura 2.2.
7. Siga las Instrucciones que los programas le Indican en la pantalla.
8. A continuación se dan algunas recomendaciones para una utilización
correcta de los programas.
- Los datos pueden ser Ingresados en forma numérica (pulsando la tecla
2) y en función del periodo de muestreo T. (pulsando la tecla 3).
En forma numérica sólo existe la posibilidad de hacer el análisis
para un período de muestreo fijo. Utilizando el programa de mod'e-
lación, puede variarse tanto T como el intervalo de análisis. Para
este programa puede obtenerse un ejemplo, presionando la Tecla 3 y
luego la tecla 12 para Impresión en papel. Si se desea mayor info£
mación puede verse el Apéndice 3, el cual contiene en detalle los
pasos completos para el ingreso de datos en función de T.
- Para el análisis en el dominio del tiempo, el número de términos de
la serie, se selecciona dependiendo del intervalo de análisis (que
se encuentra multiplicando T por el número de términos de la serie)
que se escoja.
- Una vez que se haya finalizado el análisis en el dominio del tiempo
y se desee obtener la respuesta en el tiempo (con los mismos datos)
de otras opciones (por ejemplo analizar para una función paso, y
luego para una función rampa), presione directamente la Tecla 43

sin presionar la Tecla 1; de esta forma se mantendrán los mismos" da_
tos de la función de transferencia.
- Para el análisis en el dominio de la frecuencia, normalmente se e_s_
coje un intervalo que abarque 4 a 5 décadas (ejemplo: frecuencia i-
nicial 0.01; frecuencia final = 100), y el número de puntos para el
gráfico se escoje de 40 a 60.
- Una vez que se haya finalizado el análisis en el dominio de la fre_
cuencia y se desee obtener los diagramas de frecuencia (con los mi_s_
tnos datos) en otro intervalo (por ejemplo si en el intervalo anali-
zado el margen de fase y de ganancia sean indefinidos), presione di_
rectamente la Tecla 5, sin presionar la Tecla 1; de esta forma se
mantendrán los mismos datos de la función de transferencia.
Los gráficos pueden realizarse en pantalla o en papel. Si se
desea un gráfico en papel , siga el siguiente proceso:
1. Encienda el grafizador
2. Colocar papel y pluma
3. Fijar los límites del gráfico con las teclas SET
4. Presionar la tecla RETURN (cuando en la pantalla aparezca la frase:
ALISTE EL GRAFIZADOR (RETURN PARA CONTINUAR).
- Tanto en el dominio del tiempo como en el dominio de la frecuencia,
se indica un cuadro con los parámetros del gráfico, de forma de es-
coger los límites del mismo. En el dominio del tiempo, el tiempo
inicial se escoge normalmente cero, y el tiempo final dependiendo
del intervalo de análisis escogido.

En el dominio de 1 a frecuencia, para un gráfico adecuado, se-
lecciona un rango mayor o Igual a 80 dB (-40; +40) y 180°(-9CP; ~270°j.
Si se realizó el gráfico en pantalla, y se quiere obtener en papel,
inicialice nuevamente los parámetros del mismo.
- Para el programa de simulación de CONTROL ON-LINE, introduzca como
datos los coeficientes de la función de transferencia, el número de
términos para el cálculo de la salida y(k)s señal de control u(k),
y error e(k), y los coeficientes del control ador.
- Presionando la Tecla 13 se obtiene una información general sobre la
Tesis, y un listado de las variables más importantes de los progra_
mas, que se hallan también en el Apéndice 3.
- Se desea realizar un análisis con otros datos de entrada, pulse la
Tecla 13 y luego introduzca los datos (presionando la Tecla 263).
- Una información completa de como se han realizado los programas, pue_
de obtenerse analizando los listados (Ver Apéndice 1).
(*) Si el disco se encuentra en una unidad diferente de la cero, eje-
cutar la instrucción:
UNIT % Presionar la Tecla RETURN
donde # indica la unidad donde se colocó el disco.

APÉNDICE 3.
a) Ejemplo de modelación en función del período de muestreo T.
Consideremos la función de transferencia en el dominio Z.
(Z) - (30T - 3 + 3 e " ) z * (3 - 3 e - T - 30T e'T ) zZ2 + (_!_ e-10T)2+(e~10T)z°
A continuación se describe la forma de Ingresar los datos:
- GRADO DEL NUMERADOR (N) : 1
- GRADO DEL DENOMINADOR (D) : 2
- Número máximo de términos de la forma: kiT (PI) : 2^ 'k4 ksT- Numero máximo de términos de la forma: k3T e (PZ): 2
- Ingrese los coeficientes en forma descendente -
Numerador : Coeficiente de z1
Número de términos, de la forma k].T = 2.
k2 - 1 k2 = O
ka ksTNúmero de términos de la forma k3T e = 1.

k3 = 3
k4 = O*^ ks = -10
Numerador : Coeficiente de z
Número de términos de la forma kjj = 1
k z= ^1
k2 = O
k4 ksTNumero de términos de la forma k3T e = 2
k3 = -3 k3 = -30
k^ = O k^ = l
ks = -10 k5 = -10
Denominador: Coeficiente de z2
k2Numero de términos de la forma kxT = 1
k2 = O
k4 ksTNúmero de términos de la forma k3T e = O
Coeficiente de z1.
Número de términos de la forma kxT = 1

k2 = O
k4 ksTNúmero de términos de la forma k3T e = 1
k3 = -1
k4 = O
k5 = -10
Coeficiente de z°
kaNúmero de términos de la forma kiT = O
Número de términos de la forma k3T 4e 5 = 1
k3 = 1
k4 = O
ks = -10
Los coeficientes se almacenan en una matriz (Q) , de la si-
™ guíente manera:
Coeficientes de la forma kiT 2 Coeficientes de la forma k3T 4e
30 1 -3 O
3 0 O' O
1 0 0 0
- 1 0 0 0
0 0 0 0
(*) pi y p2 se escogen como el. número máximo de términos de la forma
3
-3
0
-.1
1
0
0
0
0
0
-10
-10
0
-10
-10
0
-30
0
0
0
0
10
0
0
0
-10
0
0
0

kj.1 y kaT 4 e^5 respectivamente analizando cada coeficiente de
G(z).
b) A continuación se Incluye un listado de las variables más importar^
tes de cada programa, el cual puede ser útil, para analizar con ma
yor detalle los listados.
LISTADO DE VARIABLES IMPORTANTES
TOÍINDICADOR DE LA UNIDAD DE DISCO
01 NUMERO DEL PROGRAMA DESEADO
02ÍNUMERO DEL PROGRAMA QUE ESTA EN EL COMPUTADOR
DOíUNIDAD EN LA QUE ESTA EL DISCO
NíGRADO DEL NUMERADOR
DíGRADO DEL DENOMINADOR
AINUMERADOR DE GCz1)
BíDENOMINADOR DE GCz)
'HUÍ ARCHIVO' PARA GUARDAR DATOS EN FORMA NUMÉRICA
L$íARCHIVO PARA GUARDAR DATOS EN FORMA DE COEFICIENTES
Q: MATRIZ DE COEFICIENTES
CíVALOR DE LA SALIDA EN LOS INSTANTES DE MUESTREO
TÍPERIODO DE MUESTREO
ZíVALOR DEL NUMERO DE TÉRMINOS PARA LA RESPUESTA ENEL TIEMPO
TÓ:NUMERADOR DE Gt(z>
LÓÍDENOMINADOR DE Gt(z)
ü;LÍ NUMERO DE PUNTOS PARA EL ANÁLISIS DE FRECUENCIA
UOÍVALOR DE LA FRECUENCIA INICIAL
U9i VALOR DE LA FRECUENCIA FINAL
PíVALOR DEL MARGEN HE FASE
W9:VALOR HE LA FRECUENCIA DE CRUCE DE GANANCIA

MOi VALOR DEL MARGEN DE GANANCIA
WOÍVALOR DE LA FRECUENCIA DE CRUCE DE FASE
FlíNUMERADOR DE D(s)
F2ÍDENOMINADOR DE D(s)
FAíNUMERADOR DE D(z)
F5ÍDENOMINADOR DE D(z>
OJO I NUMERADOR DEL COMPENSADOR DISCRETO P*I»D
tai:DENOMINADOR DEL COMPENSADOR DISCRETO P.I*D
1-11 i NUMERADOR DEL COMPENSADOR DIRECTO
H2tDENOMINADOR DEL COMPENSADOR DIRECTO
S4ÍNUMERADOR DE G(z) PARA LA SIMULACIÓN.ON LINE
S5ÍDENOMINADOR DE G<z)PARA LA SIMULACIÓN ON LINE
S6ÍVALOR DE LA SALIDA EN LA SIMULACIÓN
S7ÍVALOR DEL ERROR EN LA SIMULACIÓN
QOIVALQR DE LA SEÑAL DE REFERENCIA EN LA SIMULACIÓN
donde*
G<Z>:FUNCIQN DE TRANSFERENCIA DE LAZO ABIERTO
Gt(z)ÍFUNCION DE TRANSFERENCIA DE LAZO CERRADO
D<s>íCOMPENSADOR CONTINUO
D(z)íCOMPENSADOR DISCRETO

BIBLIOGRAFÍA
1.- OGATA, KatsuhlkO; Ingeniería de Control Moderna, Editorial
Prentice-Hall Internacional. 1976.
2.- ALVAREZ, Joaquín; ALVAREZ, Jaime, Control Digital, Centro de Inves_
tigación y Estudios Avanzados del I.P.N., Departamento de Ingenie-
ría Eléctrica.
3.- KUO, Benjamín, Digital Control Systems, Mol t-Saunders Internatio-
nal Editions, 1981.
4.- FRANKLIN, Gene; POWELL, David, Digital Control of Dynamics Systems,
Addisson Wesl ey Publishing Company, 1981.
5.- ESQUETINI, César, Técnicas de Análisis de Sistemas de Control,
Tesis de Grado, E.P.N., 1981.
6.- Apuntes de Sistemas Discretos de Control, Ing. Patricio Burbano,
E.P.N., 1984.