Análisis de Técnicas de Control por Moldeo de Energía ...
175
Centro Nacional de Investigación y Desarrollo Tecnológico Departamento de Ingeniería Electrónica TESIS DOCTORAL Análisis de Técnicas de Control por Moldeo de Energía Basado en Pasividad Aplicadas en Convertidores Tipo Elevador Entrelazados para su Uso en Sistemas de Alimentación Distribuida Presentada por: JOSÉ ARMANDO OLMOS LÓPEZ Maestro en Ciencias en Ingeniería Electrónica por el CENIDET como requisito para la obtención del grado de: Doctor en Ciencias en Ingeniería Electrónica Director de tesis: Dr. Gerardo Vicente Guerrero Ramírez Co-Director de tesis: Dr. Francisco Venustiano Canales Abarca CUERNAVACA, MORELOS, MÉXICO MARZO DEL 2012
Transcript of Análisis de Técnicas de Control por Moldeo de Energía ...

Centro Nacional de Investigación y Desarrollo Tecnológico Departamento de Ingeniería Electrónica
TESIS DOCTORAL
Análisis de Técnicas de Control por Moldeo de Energía Basado en Pasividad Aplicadas en Convertidores Tipo Elevador Entrelazados
para su Uso en Sistemas de Alimentación Distribuida
Presentada por:
JOSÉ ARMANDO OLMOS LÓPEZ Maestro en Ciencias en Ingeniería Electrónica por el CENIDET
como requisito para la obtención del grado de:
Doctor en Ciencias en Ingeniería Electrónica
Director de tesis:
Dr. Gerardo Vicente Guerrero Ramírez
Co-Director de tesis:
Dr. Francisco Venustiano Canales Abarca
CUERNAVACA, MORELOS, MÉXICO MARZO DEL 2012
Centro Nacional de Investigación y Desarrollo Tecnológico Departamento de Ingeniería Electrónica
TESIS DOCTORAL
Análisis de Técnicas de Control por Moldeo de Energía Basado en Pasividad Aplicadas en Convertidores Tipo Elevador Entrelazados para su
Uso en Sistemas de Alimentación Distribuida
Presentada por:
JOSÉ ARMANDO OLMOS LÓPEZ Maestro en Ciencias en Ingeniería Electrónica por el CENIDET
como requisito para la obtención del grado de:
Doctor en Ciencias en Ingeniería Electrónica
Director de tesis:
Dr. Gerardo Vicente Guerrero Ramírez
Co-Director de tesis:
Dr. Francisco Venustiano Canales Abarca
Jurado: ________________________________
Dr. Carlos Manuel Astorga Zaragoza – Presidente ________________________________ Dr. Carlos Aguilar Castillo – Secretario
________________________________ Dr. Marco Antonio Oliver Salazar – Vocal
________________________________ Dr. Ciro Alberto Núñez Gutiérrez – Vocal
________________________________
Dr. Elías José Juan Rodríguez Segura – Vocal
________________________________
Dr. Gerardo Vicente Guerrero Ramírez – Vocal Suplente
Cuernavaca, Morelos, México. 15 de marzo 2012

A mis padres y hermanos:
Armando, Ernerstina, Pamela e Israel

Abstract
With increasing demand for higher power, modularity, higher efficiency, reduced current
ripples and reduced cost, the need for integrated and parallel converters is on the rise. A
desired feature in these connections is equal current sharing among the converters. However
this is not possible in real systems where factors as aging or heating cause mismatch in the
parameters. This thesis presents a passivity-based controllers which achieves equal current
sharing considering parameters uncertainty, ensures the PFC close to one with regulated DC
output voltage and allows the connection of ‘ n ’ interleaved converters.
The areas of application of DPS (distributed power systems) are numerous. A typical
Distributed Power System (DPS) for a telecommunication power supply evolves around a
primary DC bus regulated at 400 V and a secondary DC bus at 48 V. The power to the
primary dc bus is typically fed by boost converters, which interface to a multi-phase utility. The
high voltage on the primary bus is stepped down using front-end converters and their output
is connected to the secondary dc bus. The secondary bus serves as the source of power for
all the loads. This thesis deals with the primary dc bus built by PFC boost converters, which
have to guarantee 400 V and achieve a PFC equal to one.
To simplify the developments, the results considering first only two boost converts in
interleaved connection and go on presenting the connection of ‘ 4 ’ converters.
In this way, in this work is proved that it is possible to control ‘ n ’ interleaved PFC boost
converters, to guarantee a DC output voltage and this technique can be easily extended to ‘ n ’
converters, achieving equal sharing current among ‘n’ converters and to reduce input ripple ‘ n
’ times, all is based in a passivity-based controllers. These techniques achieve equal current
sharing considering parameters uncertainty. The proof of two boost converters form a passive
systems has been done, moreover, this proof can be extended to ‘ n ’ boost converters in
parallel connection.

Análisis de técnicas de control por moldeo de energía … OLMOS
I
Índice LISTA DE FIGURAS ..................................................................................................................................................... III
LISTA DE TABLAS ....................................................................................................................................................... IV
LISTA DE SÍMBOLOS ................................................................................................................................................... V
CAPÍTULO 1 . . INTRODUCCIÓN ............................................................................................................................................................. 1
1.1. ANTECEDENTES ........................................................................................................................................................ 2 1.2. ESTADO DEL ARTE .................................................................................................................................................... 4
1.2.1. Tipos de conexión entre convertidores ............................................................................................................ 5 1.2.2. Métodos de modelado ...................................................................................................................................... 7 1.2.3. Técnicas de control ........................................................................................................................................ 10
1.2.3.1. Según conexión entre los módulos y el control. ........................................................................................................ 10 1.2.3.2. Según tipo de control ................................................................................................................................................. 13
1.2.4. Conclusiones del estado del arte.................................................................................................................... 21 1.3. PLANTEAMIENTO DEL PROBLEMA A ESTUDIAR ....................................................................................................... 24 1.4. HIPÓTESIS Y OBJETIVOS DE LA TESIS ....................................................................................................................... 29 1.5. ALCANCE, APORTACIONES Y LIMITACIONES ........................................................................................................... 30 1.6. ORGANIZACIÓN DE LA TESIS ................................................................................................................................... 31
CAPÍTULO 2 . . CONTROLADORES PARA EL SISTEMA IDEAL ................................................................................................... 35
2.1. FORMULACIÓN DEL PROBLEMA .............................................................................................................................. 35 2.2. MODELO DEL SISTEMA ............................................................................................................................................ 38 2.3. DISEÑO DE CONTROLADORES.................................................................................................................................. 38
2.3.1. Control Basado en Pasividad ........................................................................................................................ 39 2.3.2. Caso 1: Control Proporcional Basado en Pasividad sensando la corriente ii .............................................. 48 2.3.3. Caso 2: Control Basado en Pasividad sensando la corriente is ..................................................................... 51 2.3.4. Caso 3: Control por Charge-Control ............................................................................................................ 56 2.3.5. Control robusto .............................................................................................................................................. 59
2.4. RESULTADOS NUMÉRICOS ....................................................................................................................................... 69
CAPÍTULO 3 . . CONTROLADOR CONSIDERANDO RESISTENCIAS PARÁSITAS .................................................................... 81
3.1. MODELO DEL SISTEMA CONSIDERANDO R1, R2 Y RC ................................................................................................. 82 3.2. DISEÑO DE CONTROLADORES.................................................................................................................................. 83
3.2.1. Control basado en pasividad ......................................................................................................................... 83 3.2.2. Caso 1: Control Proporcional Basado en Pasividad sensando la corriente ii .............................................. 86 3.2.3. Caso 2: Control Basado en Pasividad sensando la corriente is ..................................................................... 87 3.2.4. Caso 3: Control por Charge-Control ............................................................................................................ 88 3.2.5. Control robusto .............................................................................................................................................. 89
3.3. RESULTADOS NUMÉRICOS ....................................................................................................................................... 91
CAPÍTULO 4 . . CONTROLADOR PARA CUATRO CONVERTIDORES ........................................................................................ 97
4.1. FORMULACIÓN DEL PROBLEMA .............................................................................................................................. 97 4.2. DISEÑO DE CONTROLADORES................................................................................................................................ 100
4.2.1. Control basado en pasividad ....................................................................................................................... 100 4.2.2. Caso 1: Control Proporcional Basado en Pasividad sensando la corriente ii ............................................ 102 4.2.3. Caso 2: Control Basado en Pasividad sensando la corriente is ................................................................... 103 4.2.4. Caso 3: Control por Charge-Control .......................................................................................................... 104 4.2.5. Control robusto ............................................................................................................................................ 105
4.3. RESULTADOS EN SIMULACIÓN .............................................................................................................................. 105

José Armando Olmos López cenidet
II
CAPÍTULO 5 . . CONCLUSIONES ......................................................................................................................................................... 115
APÉNDICE A ............................................................................................................................................................... 123
APÉNDICE B ............................................................................................................................................................... 139
APÉNDICE C ............................................................................................................................................................... 148
BIBLIOGRAFÍA ........................................................................................................................................................... 158
Análisis de técnicas de control por moldeo de energía … OLMOS
III
LISTA DE FIGURAS Fig. 1. Configuración básica de un SAD (Sistema de Alimentación Distribuido). .............................. 2 Fig. 2. Posibles combinaciones entrada-salida: a) Entrada-paralelo y salida-serie; b) Entrada-paralelo y salida-paralelo; c) Entrada-serie y salida-paralelo; d) Entrada-serie y salida-serie. .......................... 6 Fig. 3. Diagrama de la clasificación de los métodos paralelos. .......................................................... 11 Fig. 4. Diagrama de los métodos de control. ...................................................................................... 14 Fig. 5. Diagrama conceptual de los pasos para el diseño de un Controlador Robusto por Rediseño de Lyapunov ............................................................................................................................................ 19 Fig. 6. Diagrama que muestra un Sistema de Alimentación Distribuido: etapa (recuadro de línea punteada) constituida por convertidores correctores del factor de potencia (CFP). ........................... 25 Fig. 7. Esquema de la CFP para dos convertidores elevadores conectados en paralelo. .................... 28 Fig. 8. Conexión en paralelo de dos convertidores elevadores. ......................................................... 36 Fig. 9. Esquema y gráficas de la técnica de Charge-Control. ............................................................. 56 Fig. 10. Voltaje de salida al emplear los controladores diseñados. .................................................... 70 Fig. 11. El voltaje Sv y corriente Si tienen la misma forma y fase. ................................................... 72
Fig. 12. Formas de onda en convertidores entrelazados ..................................................................... 73 Fig. 13. Rizos de corriente ii , 1i y 2i cuando se utiliza un controlador basado en pasividad. ........... 74
Fig. 14. Distribución de corrientes entre los convertidores al emplear diferentes controladores. ...... 75 Fig. 15. Columna izquierda (línea azul) corriente Si , y (línea roja) voltaje Sv : a) control Basado en
Pasividad; b) control por Charge-Control; c) control Robusto........................................................... 76 Fig. 16. Corrientes al emplear el controlador PI reportado por Mike O’Loughlin [71]: a) Corriente de entrada ii ; b) Corrientes en los inductores. ........................................................................................ 79
Fig. 17. Convertidores elevadores considerando parásitos 1r , 2r y Cr . ............................................... 82
Fig. 18. Distribución de corriente ante diversos controladores. ......................................................... 92 Fig. 19. Señales de control para a) Controlador basado en pasividad; b) Controlador del Caso 1; c) Controlador del Caso 2; d) Controlador del Caso 3. .......................................................................... 93 Fig. 20. Comportamiento del sistema ante variaciones en el voltaje Sv empleando un control Basado en Pasividad. ....................................................................................................................................... 94 Fig. 21. Cuatro convertidores tipo elevador conectados en paralelo. ................................................. 98 Fig. 22. Comportamiento del sistema ante variaciones en la carga. ................................................. 107 Fig. 23. Comportamiento del sistema ante perturbaciones en el voltaje de entrada. ........................ 108 Fig. 24. Comportamiento del sistema ante perturbaciones en la frecuencia de entrada. .................. 110 Fig. 25. Rizos en las corrientes cuando existe variación paramétrica. ............................................. 112 Fig. 26. Diagrama del circuito equivalente de un convertidor tipo elevador. .................................. 143 Fig. 27. Conexión en paralelo de dos convertidores elevadores. ..................................................... 148 Fig. 28. Curvas de las corrientes cuando los inductores tienen diferentes características: Empleando el Control Basado en Pasividad; b)Empleando el control por Charge-Control; c) empleando el Control Robusto ................................................................................................................................ 157

José Armando Olmos López cenidet
IV
LISTA DE TABLAS Tabla 1. Especificaciones del sistema ................................................................................................ 26 Tabla 2. Valores de los parámetros utilizados en la simulación. ........................................................ 69 Tabla 3. Errores en las variables controladas por las diferentes propuestas ....................................... 71 Tabla 4. Errores de las variables controladas considerando incertidumbre paramétrica. ................... 78 Tabla 5. Valores de los parámetros utilizados en la simulación. ........................................................ 91 Tabla 6. Errores de las variable controladas considerando incertidumbre paramétrica. .................... 95 Tabla 7. Especificaciones del sistema ................................................................................................ 99 Tabla 8. Errores en las variables controladas considerando variación en la carga. .......................... 109 Tabla 9. Errores de las variables controladas considerando variaciones en el voltaje de entrada. ... 109 Tabla 10. Errores de las variables controladas considerando variaciones en la frecuencia de entrada. .......................................................................................................................................................... 111 Tabla 11. Errores de las variables controladas considerando variaciones en la frecuencia de entrada. .......................................................................................................................................................... 112 Tabla 12. Errores de las variables controladas considerando variación paramétrica: Prueba 1. ...... 113 Tabla 13. Errores de las variables controladas considerando variación paramétrica: Prueba 2. ...... 113 Tabla 14. Errores de las variables controladas considerando variación paramétrica: Prueba 3. ...... 113 Tabla 15. Valores de los parámetros utilizados en la simulación. .................................................... 156

Análisis de técnicas de control por moldeo de energía … OLMOS
V
LISTA DE SÍMBOLOS Símbolos matemáticos utilizados comúnmente
Conjunto de los números reales
n Espacio real Euclidiano de dimensión n
n m Espacio matricial con n filas y m columnas de elementos en
Conjunto de los números reales no negativos
Pertenece a
t Variable tiempo, t
, Producto interno
Valor absoluto
Norma euclidiana
Se define como
Equivalente a
Para todo
Mapeo de un dominio a un rango
Subconjunto de
TM Transpuesta de una matriz M cualquiera
L-1 Transformada inversa de Laplace
Símbolos empleados en el modelado
C Capacitor
CD Corriente directa
Li Corriente del inductor
Ci Corriente del capacitor de salida
L Inductor
R Resistencia de carga
José Armando Olmos López cenidet
VI
r Resistencia parásita
Señal de control del interruptor
H( ) Función de almacenamiento
t Tiempo
Cv Voltaje en el capacitor C
Sv Voltaje de la fuente de voltaje de red
Vector de error de parámetros
x Vector de error de parámetros
ix i-ésima variable de estado deseada
Símbolos empleados en el modelado de los convertidores
D Matriz de elementos que almacenan energía
C Matriz de elementos no trabajadores
R Matriz de elementos disipativos
u Vector de fuentes externas
Vector de enlaces de flujo
q Vector generalizado de posición
q Vector de velocidades generalizadas
T Energía cinética
U Energía potencial
G Energía disipada por los elementos resistivos
H( ) Función de almacenamiento de energía
Símbolos empleados en el diseño de los controladores
amR Matriz de inyección de amortiguamiento
V ( ) Función de Lyapunov

Análisis de técnicas de control por moldeo de energía … OLMOS
VII
Acrónimos frecuentes
SAD Sistema de Alimentación Distribuido
PFC Corrector del Factor de Potencia (del inglés Power Factor Corrector)
CD Corriente Directa
CA Corriente Alterna
PWM Modulación por ancho de pulso
P Controlador Proporcional
PI Controlador Proporcional-Integral
FP Factor de potencia

José Armando Olmos López cenidet
VIII

Análisis de técnicas de control por moldeo de energía … OLMOS
1
CAPÍTULO 1
.
.
INTRODUCCIÓN
En este capítulo se presenta la importancia y la necesidad de este trabajo de tesis, así
como la formulación del problema a resolver, el cual está relacionado con la calidad de
energía eléctrica que se proporciona en un bus de CD para la alimentación de diferentes
tipos de cargas. Las primeras dos secciones de este capítulo ofrecen una descripción de
lo que es un Sistema de Alimentación Distribuido y una revisión del Estado del Arte. En la
sección 1.3 se plantea la problemática que se estudiará en el presente trabajo de tesis. La
última sección presenta el título de tesis, los objetivos y se describen los trabajos que se
presentarán en los siguientes capítulos de la tesis.
Este capítulo establece las bases para comprender el problema a resolver y la
importancia de su solución.

José Armando Olmos López cenidet
2
1.1. Antecedentes
Actualmente, la arquitectura de los sistemas de alimentación modular (o sistemas de
alimentación distribuida) para conversiones de potencia de corriente directa (o alterna) a
corriente directa (CD-CD o CA-CD) necesita conectar bloques de convertidores de baja
potencia y bajo voltaje, en cualquier combinación serie o paralelo.
Esta arquitectura distribuida, para sistemas de alimentación conmutados, está
siendo ampliamente adoptada como una práctica común por la industria, con el fin de
alimentar la siguiente generación de dispositivos utilizados en la era de la tecnología de
información. La fuerza que impulsa esta arquitectura se basa en diferentes aplicaciones
emergentes claves, tales como: telecomunicaciones, servidores, aplicaciones
aeroespaciales y navales (barcos y submarinos), equipos médicos y vehículos eléctricos,
solo por mencionar algunos. La Fig. 1 muestra la configuración básica de un SAD:
Un Sistema de Alimentación Distribuido (SAD) proporciona:
Una arquitectura abierta
Diseño modular
Mejor direccionamiento (lo cual es importante en la tolerancia a fallas)
Mayor confiabilidad sin añadir costos significantes
Debido al gran uso que tienen los SAD se abre la oportunidad de
estandarizar el diseño modular para procesamiento de potencia.
Fig. 1. Configuración básica de un SAD (Sistema de Alimentación Distribuido).

Análisis de técnicas de control por moldeo de energía … OLMOS
3
El análisis convencional para convertidores conmutados de potencia (los cuales se
emplean en los SADs) se basa en modelos promediados, los cuales ignoran dinámicas
que ocurren a frecuencias diferentes de la frecuencia de conmutación y analizan la
estabilidad del convertidor en un sistema de orden reducido. Como resultado, la validez de
los modelos promediados varía dependiendo de la frecuencia de conmutación aún cuando
se trate de la misma estructura topológica.
Si el diseño de los controladores para lograr el seguimiento a la referencia y la
estabilidad de los convertidores conmutados se basa en estos modelos promediados
linealizados, se obtendrá un control que sólo conseguirá el correcto funcionamiento en el
punto específico para el cual fue diseñado. Esto implica que alguna alteración en los
parámetros del sistema o en las señales de entrada, puede producir un funcionamiento
deficiente e inclusive llegar a la inestabilidad.
Algunos trabajos de investigación abordan el diseño de controladores no lineales,
aunque generalmente se han limitado al estudio de un sólo convertidor y emplean un
modelo lineal del sistema.
En general, la operación de los convertidores electrónicos de potencia (CEP) puede
ser descrita como una repetición ordenada de una secuencia fija de topologías de circuitos
producida por la apertura y cierre de interruptores electrónicos estratégicamente
colocados. Así, la operación de los convertidores implica un modelo multi-topológico en el
cual una topología en particular describe el comportamiento del sistema en el intervalo de
tiempo correspondiente. La operación es cíclica, implicando que las topologías resultantes
se repiten periódicamente, por lo que una manera natural para modelar tal operación es
dividir el sistema en varios subsistemas. Si se desea encontrar la solución en un tiempo
futuro se considera un tiempo inicial, se identifica en que subsistema se encuentra el
sistema y se resuelve, y se continúa con la solución de los subsistemas subsecuentes
hasta alcanzar el tiempo deseado. Sin embargo, el tratamiento matemático de la operación
de los CEP no es simple y se han usado diferentes representaciones matemáticas,
dependiendo del objetivo a alcanzar.
Los análisis elementales de los convertidores electrónicos de potencia producen
modelos matemáticos simples que se enfocan en los componentes centrales del
procesamiento de potencia (circuitos de potencia) y funciones de control (funciones de
transferencia), haciendo simplificaciones y aproximaciones razonables para un primer

José Armando Olmos López cenidet
4
análisis, tales como ignorar las dinámicas con frecuencias mayores a la frecuencia de
conmutación o despreciar el efecto de los elementos parásitos, entre otros. Las técnicas
de modelado más utilizadas son las de espacio de estado promediado y la del PWM-
Switch; la obtención del modelo invariablemente pasa por simplificaciones que limitan la
validez del modelo.
Como se puede ver, existe una necesidad para el modelado y el análisis del
comportamiento de los convertidores de potencia desde una perspectiva diferente.
La siguiente sección presenta algunos de los desarrollos más notables sobre
modelado de los convertidores, tipos de conexiones en los SADs y las técnicas de control
empleadas en los convertidores que conforman un SAD.
1.2. Estado del arte
La necesidad de convertidores paralelos y con la capacidad de integrarse a módulos
similares ha aumentado considerablemente debido a la creciente demanda de altas
potencias, confiabilidad, modularidad, alta eficiencia, convertidores de alimentación
reconfigurables, rizos de corriente y voltaje reducidos, bajos costos, respuestas dinámicas
rápidas. Los SADs son una excelente solución a esta necesidad. La composición modular
de un SAD integra módulos: front-end, convertidores de carga (convertidores integrados
en la tarjeta, VRM de alto o bajo voltaje), correctores del factor de potencia, y buses de
distribución.
Una característica deseable de un SAD es que los convertidores individuales
compartan la corriente de carga de forma equitativa y estable: algo que puede lograrse
con conexiones en paralelo de los módulos que funcionan como fuentes. Por esta razón,
la conexión en paralelo de módulos de convertidores estandarizados, ya sea front-end o
convertidores de carga, se emplea ampliamente en los SADs.
Los métodos de conexiones entre los módulos son de vital importancia, ya que
dependiendo de la conexión se podrá proporcionar un voltaje de salida de varias decenas
o centenas de volts, o una corriente elevada.
Análisis de técnicas de control por moldeo de energía … OLMOS
5
La siguiente sección menciona los tipos de conexión y en la sección de
Conclusiones del estado del arte se especifica cual tipo de conexión se trabajará en la
tesis.
1.2.1. Tipos de conexión entre convertidores
Existen diferentes formas de conexión entre los convertidores, las cuales son entrada
paralelo y salida paralelo, entrada paralelo y salida serie, entrada serie y salida paralelo,
entrada serie y salida serie; como se muestra en la Fig. 2, [1, 14, 19].
Las características deseables de los SADs se pueden puntualizar de la siguiente
manera:
El sistema de potencia debe adaptarse adecuadamente a las fuentes y cargas
presentes, en términos de voltaje y frecuencia a la que trabaja la fuente primaria.
También debe de proporcionar un alto grado de controlabilidad de la carga y
fuentes de potencia (convertidores que funcionan como fuentes de
alimentación).
El sistema debe tener la posibilidad de expandirse, es decir, que nuevas cargas
y nuevas fuentes (convertidores que cumplen con la función de fuente de voltaje
y/o corriente) puedan sumarse sin alterar las unidades ya conectadas.
La comunicación entre los convertidores individuales debe de evitarse dado que
añadir nuevas unidades haría complicado al sistema; además, el sistema podría
tener problemas de confiabilidad. Por otra parte, se considera necesaria la
comunicación en un rango de frecuencias bajas para un control de supervisión.
Por lo cual, convertidores independientes tendrían permitido comunicarse a un
bajo ancho de banda pero deben de ser capaces de operar como unidades
aisladas.
Los requerimientos básicos expuestos arriba exigen otros, más técnicos. Por
ejemplo, el ancho de banda de la fuente (convertidor) y los controladores de corrientes del
lado de la carga deben de ser capaces de proporcionar controlabilidad en la carga y en la

José Armando Olmos López cenidet
6
fuente de potencia primaria. Esto significa que existe un serio compromiso entre la
velocidad de respuesta del lazo interno (generalmente el de corriente) y el lazo de voltaje o
externo; el ancho de banda del lazo interno es mucho mayor que el lazo externo [19].
Además, el bus de CD debe de ser robusto ante perturbaciones (o disturbios) provenientes
de la carga o de la fuente de alimentación.
Fig. 2. Posibles combinaciones entrada-salida: a) Entrada-paralelo y salida-serie; b) Entrada-paralelo y salida-paralelo; c) Entrada-serie y salida-paralelo;
d) Entrada-serie y salida-serie.
De las posibles combinaciones de conexiones de entrada, la topología entrada-
paralelo y salida-serie (IPOS) es la más utilizada en aplicaciones que requieren alto voltaje
a la salida. Una conexión entrada paralelo y salida paralelo (IPOP) permite tener bajo
voltaje de salida y corriente de salida muy alta.
Es con este tipo de conexión (IPOP) que se trabajará en la investigación de esta
tesis.
Para lograr las especificaciones de diseño de un SAD con conexión IPOP, es
necesario conocer cuál será el comportamiento de los convertidores conectados en
paralelo. Además, para poder diseñar un control que sea capaz de cumplir con la tarea de

Análisis de técnicas de control por moldeo de energía … OLMOS
7
mantener una correcta distribución de carga entre los módulos y mantener estable el
voltaje de salida, es conveniente tener el modelo matemático del SAD. Por esto es
necesario conocer cuáles son las técnicas de modelado matemático más relevantes que
se han desarrollado en el tema de los convertidores conmutados, lo cual se presenta en la
siguiente sección.
1.2.2. Métodos de modelado
La técnica de modelado más empleada en los convertidores electrónicos de potencia es el
análisis en pequeña señal basado en espacio de estados promediados. Esta consiste en
obtener simples expresiones analíticas basadas en leyes de voltaje y de corriente de
Kirchhoff para caracterizar la respuesta del sistema. Después se expresa el modelo
obtenido en variables de estados promediados, lo cual simplifica la representación del
proceso de conmutación del convertidor [1]. De ésta forma, mediante un espacio de
estados promediados, el sistema de estructura variable no lineal original se simplifica a un
sistema continuo no lineal. La expresión (1.1) es la forma general del modelado por
variables de estado promediadas
1 2 1 2
1 2
(1 ) (1 )
(1 )T T
d d d d
y d d
x A A x B B u
C C x
(1.1)
donde:
x es el vector de variables de estado,
x su derivada y y la salida.
1A y 2A son matrices de coeficientes de las variables de estado durante el
tiempo de encendido y apagado, respectivamente.
d es el ciclo de trabajo y (1 )d su complemento.
1B y 2B son las matrices de coeficientes de las señales de entrada, durante el
tiempo de encendido y apagado, respectivamente.
u es la señal de entrada y corresponde a la fuente primaria de alimentación.
José Armando Olmos López cenidet
8
1TC y 2
TC son las matrices de salida durante el tiempo de encendido y apagado,
respectivamente.
Dado que los convertidores electrónicos de potencia se diseñan para un punto de
operación específico, es posible analizar (1.1) alrededor del punto de interés. Para lograr
esto se realiza una pequeña perturbación alrededor de un punto de operación al sistema
promediado y se simplifica el modelo resultante despreciando los términos cuadráticos que
se obtienen. Así, se logra encontrar lo que se llama el modelo en pequeña señal del
convertidor.
Después de una considerable cantidad de manipulaciones matriciales y una
transformación al dominio de la frecuencia del sistema (1.1), se obtienen algunas
características del sistema tales como: impedancia de salida, impedancia de entrada,
función de transferencia y características de control-salida.
La técnica PWM switch es otra forma de obtener un modelo para el análisis de los
convertidores. Consiste en identificar los dispositivos no lineales de tres terminales
(interruptores pasivos y activos en un convertidor electrónico) a los que se les llama el
PWM switch. Ya determinadas las propiedades del PWM switch, se obtiene un modelo
equivalente del circuito promediado, y posteriormente se obtienen las características de
pequeña señal y de CD del convertidor mediante la sustitución del PWM switch por su
circuito equivalente [39, 41].
Por otra parte, la técnica de modelado en tiempo discreto o modelado discreto no
realiza suposiciones ni simplificaciones como lo hace la técnica de análisis en pequeña
señal. Como ya se mencionó, una manera natural de modelar el comportamiento de los
convertidores conmutados es separar el sistema en diversos subsistemas, cada uno
describiendo al sistema en un subintervalo de tiempo. En el instante de la conmutación se
realiza un proceso de ‘hilvanar’, el cual utiliza el valor final del subintervalo anterior como
valor inicial del subintervalo presente. Así, el sistema conmutado continuo es reemplazado
por un sistema discreto que describe el estado del sistema en la frecuencia de
conmutación. De ahí que esta técnica de modelado puede predecir las dinámicas fast-

Análisis de técnicas de control por moldeo de energía … OLMOS
9
scale (o en frecuencias rápidas, entendiéndose como frecuencias iguales o mayores a la
frecuencia de conmutación), [18, 25, 37, 38].
La expresión general de este modelado tiene la forma
1 _
1 1 _
( ) ( )k k k k in k
k k in k
d d
y
x Φ x Γ v
Cx Dv (1.2)
donde:
x es el vector de estados
y es el vector de las señales de salida
k es el número de muestras realizadas
Φ L-1 -1(s - )I A es matriz de coeficientes constantes
0
( )kd
id Γ Φ B
C es la matriz de los coeficientes de salida
d es el ciclo de trabajo
Algunos de los fenómenos que se presentan en los convertidores electrónicos de
potencia provocados por la variación de los parámetros son los llamados bifurcación y
caos. Este tipo de fenómenos o comportamientos no se puede analizar ni registrar con un
modelo en pequeña señal basado en variables de estado promediado o por el modelado
PWM switch; es necesario otro tipo de modelo matemático [38].
En la práctica, las bifurcaciones y caos se presentan en los convertidores
conmutados, aunque debido a los parásitos no considerados en la placa, estos fenómenos
no suceden en los mismos valores de las variables de estado empleadas en las
simulaciones computacionales [18]. Esta es otra razón importante por la cual es necesario
conocer con mayor precisión la dinámica de los CEP.

José Armando Olmos López cenidet
10
Una vez revisado el análisis de los convertidores conmutados, se aborda el diseño
de los controladores para los SAD a los que se agrupan, en este trabajo, en dos
categorías: según la conexión entre los módulos y el bloque o técnica de control (métodos
de caída, control maestro-esclavo, etc.); y la segunda, de acuerdo al tipo de control
empleado (PID, modos deslizantes, pasividad, entre otros).
1.2.3. Técnicas de control
1.2.3.1. Según conexión entre los módulos y el control.
En 1980, se publica uno de los trabajos sobre convertidores CD-CD conectados en
paralelo donde se propone una topología aislada [3]. Desde entonces los convertidores
CD-CD paralelos han encontrado una extensa aplicación en SADs. Sin embargo, el control
de tales convertidores no es simple ya que los módulos de los convertidores paralelos no
son idénticos, debido a las diferencias de fabricación de los componentes, características
de los conductores eléctricos que se conectan a la carga compartida y a cambios en las
características de los componentes por causas de envejecimiento o por estar sujetos a
diferentes condiciones físicas. Por lo cual, dos sistemas estables aisladamente pueden no
compartir equitativamente la carga cuando son conectados en paralelo. Esta desigualdad
puede incrementar el estrés térmico de una o más unidades, lo cual implica que la
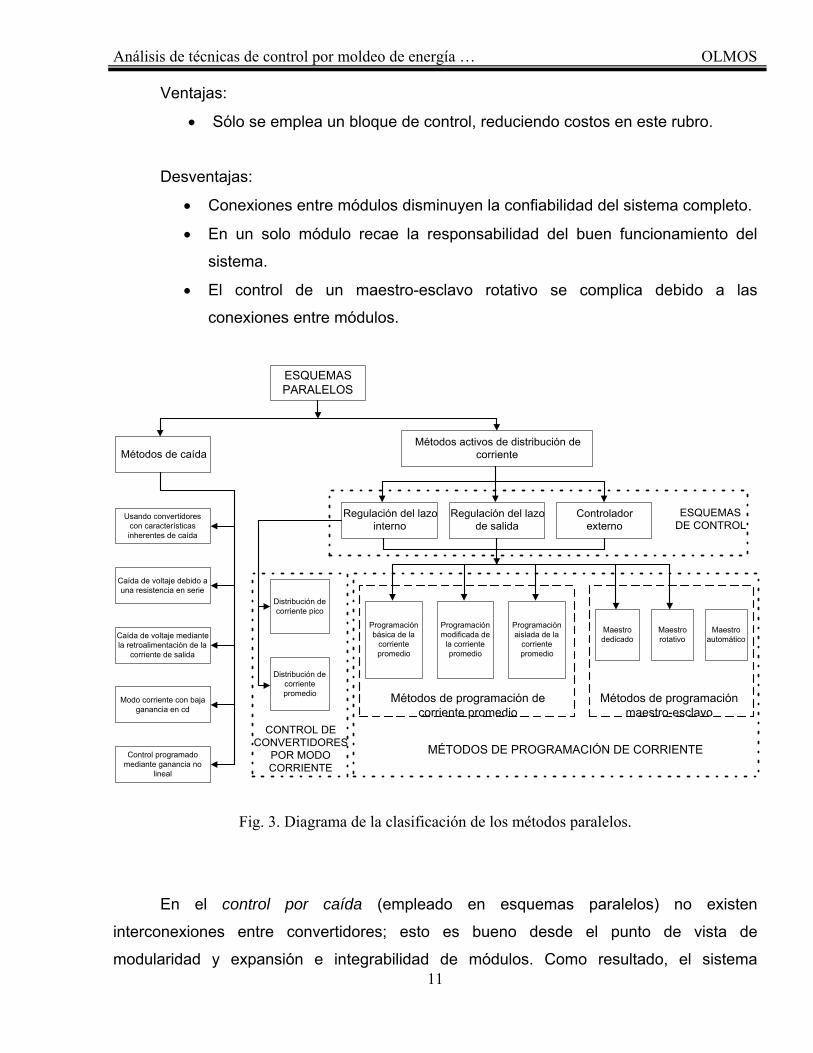
confiabilidad del sistema se reduce. La Fig. 3 muestra un diagrama a bloques de los
esquemas de control que se emplean con las topologías de conexión paralela entre
convertidores. De los esquemas más utilizados son las técnicas de maestro-esclavo y el
“método de caída” (droop method).
En el control maestro-esclavo se realiza una distribución de carga activa y el
maestro genera la referencia de potencia; la cual transmite a los otros controladores que
funcionan como fuentes: los convertidores esclavos. Las principales ventajas y
desventajas de la técnica maestro-esclavo y sus variantes, son las siguientes.
Análisis de técnicas de control por moldeo de energía … OLMOS
11
Ventajas:
Sólo se emplea un bloque de control, reduciendo costos en este rubro.
Desventajas:
Conexiones entre módulos disminuyen la confiabilidad del sistema completo.
En un solo módulo recae la responsabilidad del buen funcionamiento del
sistema.
El control de un maestro-esclavo rotativo se complica debido a las
conexiones entre módulos.
Métodos de caída
Usando convertidorescon característicasinherentes de caída
Caída de voltaje debido auna resistencia en serie
Caída de voltaje mediantela retroalimentación de la
corriente de salida
Modo corriente con bajaganancia en cd
Control programadomediante ganancia no
lineal
Distribución decorriente pico
Distribución decorrientepromedio
Regulación del lazointerno
Regulación del lazode salida
Controladorexterno
Programaciónbásica de la
corrientepromedio
Programaciónmodificada de
la corrientepromedio
Programaciónaislada de la
corrientepromedio
Maestroautomático
Maestrorotativo
Maestrodedicado
Métodos activos de distribución decorriente
ESQUEMASPARALELOS
CONTROL DECONVERTIDORES
POR MODOCORRIENTE
Métodos de programación decorriente promedio
Métodos de programaciónmaestro-esclavo
MÉTODOS DE PROGRAMACIÓN DE CORRIENTE
ESQUEMASDE CONTROL
Fig. 3. Diagrama de la clasificación de los métodos paralelos.
En el control por caída (empleado en esquemas paralelos) no existen
interconexiones entre convertidores; esto es bueno desde el punto de vista de
modularidad y expansión e integrabilidad de módulos. Como resultado, el sistema

José Armando Olmos López cenidet
12
completo tiene alta modularidad y confiabilidad. La impedancia de salida de cada
convertidor es suficientemente grande para asegurar que la corriente compartida
desprecia cualquier diferencia pequeña en sus voltajes de salida. Sin embargo, este
método tiene una regulación de la corriente de salida pobre ante variaciones paramétricas
del convertidor (como una variación en las resistencias parásitas del convertidor). Por otra
parte, el análisis de estabilidad sólo se ha enfocado a la región lineal [5, 7, 8, 9, 21, 22]. En
el trabajo [14], se muestra un esquema que emplea la técnica de control por caída; dos
buck conectados en paralelo deben proporcionar a la carga una alimentación de 26 volts.
En ese trabajo se demuestra, de una manera sencilla, que empleando el método de caída
se tiene una buena regulación en el voltaje de salida aun ante variación paramétrica.
Como se ha mencionado, la técnica de caída de voltaje tiene sus ventajas y
desventajas. Estas se resumen en los siguientes puntos
Las ventajas son:
La señal de control para cada módulo es individual para cada convertidor.
No existen interconexiones entre convertidores.
Gran modularidad y expansión al integrar módulos convertidores.
El sistema tiene una gran confiabilidad.
Se tienen un buen seguimiento de voltaje, aun ante variaciones paramétricas
y de la carga.
Las desventajas son:
La adecuada distribución de la corriente se ve afectada cuando los
parámetros internos de algún convertidor presentan variación. Sin embargo,
esto se puede resolver con una técnica de control de corriente adecuada.
Existe una técnica de control, variación del método de caída, que permite que los
convertidores de potencia CD-CD paralelos compartan equitativamente la carga en los
SADs. Esta técnica no requiere de conexiones entre los módulos y automáticamente
compensa la variación de los parámetros del convertidor de potencia e impedancia de
línea [4]. La idea principal del esquema de control es permitir que cada convertidor inyecte
un pequeño voltaje de CA (corriente alterna) al sistema como una señal de control, por lo
Análisis de técnicas de control por moldeo de energía … OLMOS
13
que la señal de control inyectada es dependiente de la corriente de salida de la unidad. La
señal de control de cada unidad es diferente si la carga compartida es desigual. El
inconveniente de la metodología propuesta es la complejidad añadida a los circuitos, pues
ahora es necesario controlar una señal de inyección lo suficientemente pequeña para
poder sensarla. Otro inconveniente son los pequeños rizos introducidos a la salida.
Además el desempeño de los estados del convertidor, sobre todo bajo condiciones
transitorias, está lejos de ser satisfactorio, pues la señal de CA introducida se confunde
con el estado transitorio del voltaje, lo cual repercute en el estado transitorio de la
corriente.
1.2.3.2. Según tipo de control
Se han desarrollado diversas técnicas de control para los CEP y los trabajos que las
abordan son también numerosos. Sin embargo, no está de más recomendar algunas
referencias fundamentales que se consideran útiles en la comprensión del problema y
diseño de controladores para convertidores. El trabajo de Sira-Ramírez [47] es un
excelente libro que muestra varias técnicas de control, tanto lineales como no lineales,
aplicadas a diversos convertidores conmutados, como el convertidor tipo elevador. La
metodología de análisis de estabilidad y diseño de controladores en el dominio de la
frecuencia puede resultar muy comprensible en los trabajos de Erickson [39] y Ang [34],
donde se presenta el diseño en CD del convertidor tipo elevador, el modelado en pequeña
señal y el método PWM switch. El trabajo de Ortega [53] introduce al lector a los sistemas
no lineales y su modelado y diseño de controladores desde un enfoque energético; es en
esta obra donde se podrá encontrar un análisis detallado del diseño del controlador
basado en pasividad aplicado a una diversa cantidad de sistemas electromecánicos,
electrónicos y mecánicos. En esta referencia se estudia un convertidor tipo elevador sin
elementos parásitos y sin perturbaciones al sistema.
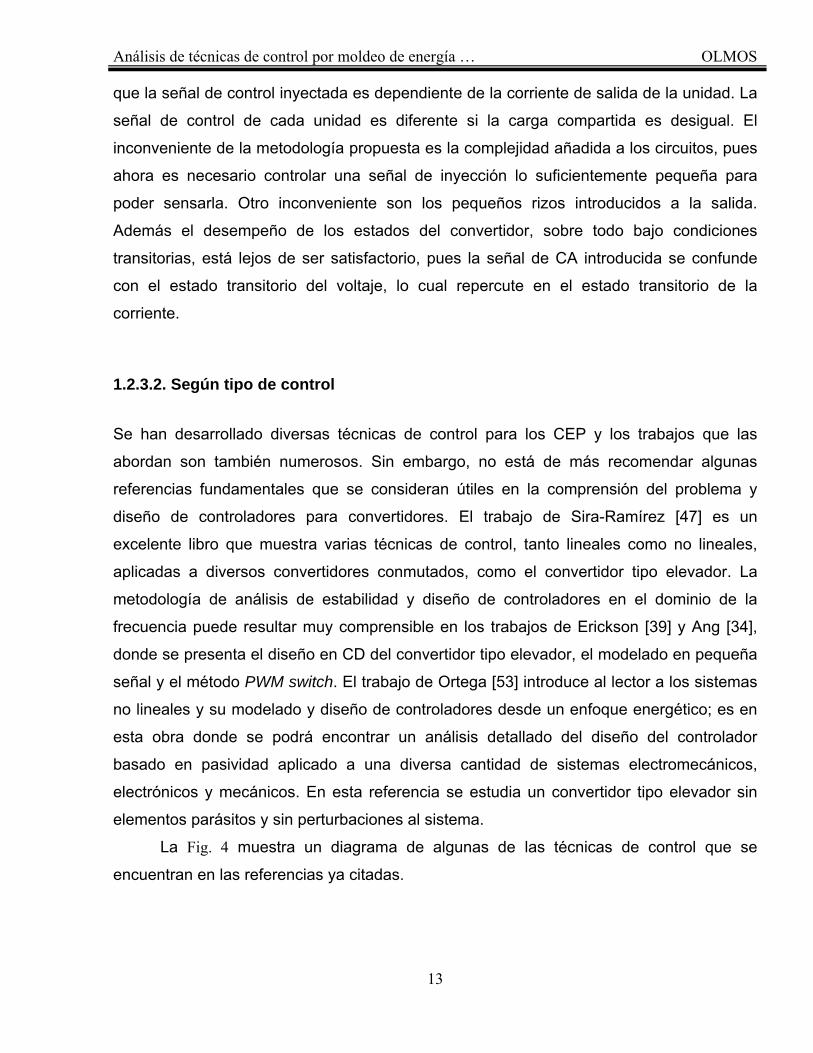
La Fig. 4 muestra un diagrama de algunas de las técnicas de control que se
encuentran en las referencias ya citadas.
José Armando Olmos López cenidet
14
Fig. 4. Diagrama de los métodos de control.
El diseño más simple de controladores empleado en convertidores electrónicos de
potencia es el método por linealización aproximada. Basándose en modelos promediados
de los convertidores y su linealización mediante una aproximación, se han diseñado
técnicas de control lineal como: retroalimentación de estado por colocación de polos,
control PD por realimentación de estados, control basado en pasividad, entre otros [39,
47].
En los trabajos [39, 41, 47] se detalla el procedimiento para el diseño de
controladores PD, PI, PID aplicado a CEP. El más empleado de los tres controladores
mencionados es el PI, debido a que es económico, además el error en estado estacionario
puede hacerse cero y es sencillo de implementar; sin embargo, es lento comparado con el
PID.
Un mejor controlador que el PI y el PID, es el compensador de atraso-adelanto con
un integrador. Este compensador se diseña de tal forma que el integrador provoque que el
sistema en lazo cerrado tenga un polo en el origen del plano complejo, [18, 38, 41]. La
ecuación que representa este tipo de control es
1 2
1 2
1 1
( )1
compensador C
s sT TG s K
s s sT T
(1.3)

Análisis de técnicas de control por moldeo de energía … OLMOS
15
donde: CK es la ganancia del compensador, 1
1T
y 2
1T
son constantes que indican la
ubicación de los ceros, 1T
y 2
1T indican la ubicación de los polos.
Las siguientes características, que se buscan en los convertidores conmutados, son
razones que motivan a emplear un compensador de atraso-adelanto como se muestra en
(1.3):
Tener alta ganancia en bajas frecuencias, lo cual se logra con el cero en el
origen
Aumentar el ancho de banda del convertidor, para ello se emplean los dos
ceros y uno de los polos
Reducir la ganancia en frecuencias mayores a la frecuencia de corte, esto se
alcanza con el tercer polo
Tener un amplio margen de fase para mantener al sistema lejos de la
inestabilidad; logrado con la combinación de fases del compensador
completo.
Por otra parte, cuando se compara este tipo de controladores lineales contra las
técnicas de control no lineal, en general, resulta evidente la mejora que existe en las
propiedades de la ley de control no lineal: mejor seguimiento a la referencia, se logra con
más rapidez la estabilidad, mejor precisión y mayor robustez; no obstante, la complejidad y
costo en la implementación de las técnicas no lineales desanima a muchos diseñadores (o
fabricantes). Si se realiza un balance de todas las ventajas de emplear un control no lineal
contra la desventaja del costo en la implementación, la balanza se inclinará a la utilización
de un control no lineal. La referencia [47] detalla algunas de las técnicas de control no
lineal más sobresalientes aplicadas a convertidores conmutados. Entre ellas están:
linealización por retroalimentación de estados, linealización por retroalimentación de
entrada-salida, control basado en pasividad y modos deslizantes.
La siguiente sección detalla algunas de estas técnicas y propone otras nuevas que
no se reporta haberlas empleado en SADs.

José Armando Olmos López cenidet
16
Modos deslizantes
Los convertidores de potencia son sistemas de estructura variable debido a que admiten
descripciones matemáticas diferentes durante periodos de operación diferentes. Los
cambios de estructura se producen bien por efectos del valor que toma el vector de
estados del sistema en regiones diferentes del espacio de estado, bien por el
accionamiento voluntario de uno o varios conmutadores o gracias a condiciones externas,
exógenas, que dictaminan el valor temporal de uno a varios parámetros en el sistema.
En el caso de los convertidores conmutados, la posición de uno o varios
conmutadores constituyen nuestro único conjunto de variables de control. En estos
circuitos controlados por interruptores, donde la variable de control sólo puede tomar
valores de 0 y 1, considerar la estrategia de control por modos deslizantes resulta ser algo
obvio y natural, desde el punto de vista tecnológico y teórico. Esta técnica de control
pertenece a la categoría de diseño en el dominio del tiempo, por lo que puede emplearse
para caracterizar al sistema bajo condiciones de pequeña y gran señal.
Intuitivamente, la técnica de modos deslizantes se basa en el principio de que es
mucho más fácil de controlar sistemas de primer orden (es decir, sistemas descritos por
ecuaciones diferenciales de primer orden), que controlar sistemas de n-ésimo orden (es
decir, sistemas descritos por ecuaciones diferenciales de n-ésimo orden). La superficie
deslizante (comúnmente denotada por ( )S t , que es una función suave) es la región de un
plano en donde la variable a controlar estará deslizándose, o en otras palabras,
convergerá al punto de equilibrio moviéndose sobre ( )S t . Si alguna perturbación causa
que el sistema salga de ese punto de equilibrio, ( )S t provocará que el sistema se deslice
regresando al equilibrio después de un tiempo. Por esto, la principal característica de este
tipo de control, es la baja sensibilidad a variaciones del sistema [49, 55]. De hecho,
cuando el sistema entra en la superficie deslizante, idealmente, nunca saldrá de ella.
Como una de las características deseables en todo convertidor de potencia es un
amplio rango de operación, los controladores basados en modos deslizantes son mejores
candidatos que los controladores PWM convencionales; debido a su robustez y
propiedades de estabilización ante perturbaciones de gran señal (large-signal) [50]; sin
embargo, esta técnica de control no es del todo satisfactoria en su forma original o pura.

Análisis de técnicas de control por moldeo de energía … OLMOS
17
Por esta causa, existen numerosas investigaciones en las cuales suman los efectos de
otras leyes de control o modifican la forma original del control por modos deslizantes;
como los controladores por modos deslizantes a frecuencia fija, que son particularmente
adecuados para las implementaciones prácticas de convertidores [43, 45-51].
Otro inconveniente del control por modos deslizantes es que la ley de control
siempre está activa debido a que las condiciones para no salir de la superficie deslizante
originan chattering y esto a su vez provoca un gran esfuerzo constante en la ley de control.
En los trabajos [48, 51] se plantea un método generalizado para el diseño de un
control por modos deslizantes para el convertidor tipo reductor y tipo elevador o cualquier
sistema conmutado.
Cuando se conectan varios convertidores en paralelo es necesario saber si
formarán un sistema estable, y las características que tendrá el nuevo sistema. Si se
desea aplicar la técnica de modos deslizantes para controlar dos o más convertidores en
paralelo, el análisis de estabilidad requiere que primero se defina una región de operación,
la cual se ubica en la intersección de ‘n’ superficies deslizantes (donde n es el número de
convertidores conectados); cada superficie representa la solución de un convertidor. Para
garantizar la estabilidad global o del sistema completo en esta región, se necesita mostrar
que todas las trayectorias se aproximan a esta región de intersección, y una vez en esta
hipersuperficie deslizante, no salir de ella. Si estas dos condiciones se cumplen, entonces
el sistema discontinuo tiene una solución superficial o de modo deslizante. Finalmente, se
demuestra que todas las soluciones sobre esta superficie tienden a un punto singular de
equilibrio cuando t [18].
Una de las leyes de control que se añade a la técnica de modos deslizantes y cuyo
resultado ha sido satisfactorio, es el control basado en pasividad [18]. La siguiente sección
describe la metodología de un control basado en pasividad en su forma pura aplicado a un
convertidor tipo elevador.
Control Basado en Pasividad
La metodología para el diseño del control reportada en [23] y [53], puede resumirse en los
siguientes pasos:

José Armando Olmos López cenidet
18
1. Definir el sistema •
Dx+ Cx + Rx = u
2. Definir el sistema deseado •
d d d dDx +Cx + Rx = u
3. Obtener la ecuación de error •
dDe+ Ce + Re = u - u empleando la definición del
error de = x - x
4. Emplear la función (1 2)V( )= Te e De
para hallar los valores de V( )e
que
satisfagan las condiciones de estabilidad de Lyapunov
5. Encontrar el control basado en pasividad •
d d du = Dx +Cx + Rx
Siguiendo estos pasos, se obtiene el control basado en pasividad para cualquier
sistema de pueda representarse en la estructura del punto 1. Este controlador fue el
empleado para el sistema estudiado en esta tesis, por lo cual no se explica más aquí ya
que se describe en el Capítulo 2.
El esfuerzo en la ley de control basada en pasividad es menor que el esfuerzo al
aplicar modos deslizantes; esto debido a que se tiende asintóticamente a la estabilidad y
el esfuerzo en la ley es directamente correspondiente al error en el seguimiento a la
referencia.
Sin embargo, en [23, 24] se demuestra que el control basado en pasividad puede
mejorarse añadiéndole robustez: utilizando el control por pasividad se agrega una ley de
control robusta basada en el método de rediseño de Lyapunov para enfrentar la
incertidumbre paramétrica. Este tópico se aborda en la sección siguiente.
Control Robusto Basado en Pasividad por Rediseño de
Lyapunov
En [23] y [61] se ha demostrado que el control basado en pasividad mejora a un control PI
el cual ha sido ampliamente empleado para controlar sistemas electrónicos. En esta tesis
se plantea una solución al problema que se presenta en el control nominal basado en
pasividad, cuando el valor de algún parámetro cambia. La solución propuesta es el empleo
Análisis de técnicas de control por moldeo de energía … OLMOS
19
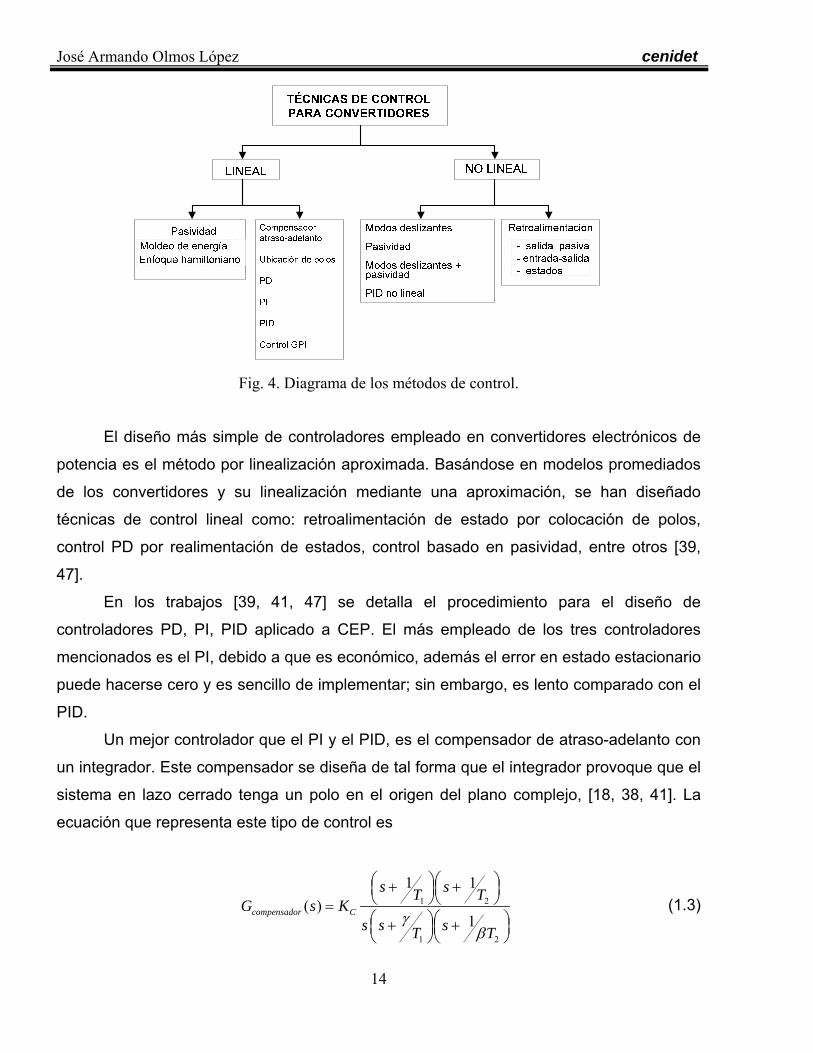
de la técnica de rediseño de Lyapunov, la cual tiene como meta encontrar una señal
adicional que enfrente los efectos de la variación paramétrica, y sumar esta señal a una
ley de control (basada en el método de Lyapunov) previamente diseñada [23], [60]. El
siguiente diagrama a bloques describe la metodología
Fig. 5. Diagrama conceptual de los pasos para el diseño de un Controlador Robusto por Rediseño de Lyapunov
Este controlador se describe con más amplitud en el Capítulo 2, 3 y 4, por lo cual no
se explica el procedimiento de diseño aquí.
Control PID no lineal
El empleo de los controladores PID para lograr estabilizar a los convertidores conmutados
ha sido una técnica ya empleada en [18, 58, 63, 71, 87]. Sin embargo, sólo se han
empleado diseños de PID lineales aplicados a un modelo lineal del convertidor que se esté
estudiando.
En el trabajo de Lyshevsky, [54], se propone el empleo de un controlador PID no
lineal para el control de motores de CD y algunos otros sistemas electromecánicos.
Empleando está metodología se presenta el procedimiento de diseño de un PID no lineal
de segundo orden aplicado al modelo lineal del convertidor buck (tipo reductor). La función

José Armando Olmos López cenidet
20
de transferencia entrada-salida de un convertidor tipo reductor sin considerar resistencias
parásitas en el inductor, ni en el capacitor, se muestra en la expresión (1.4)
2
200
(s)(s)
(s)1
buck
y DG
u s sw Qw
ˆ
(1.4)
donde: 01w LC ,
0
RQ w L , (s) (s)ˆ ˆy v , D es la ganancia y inu s v sˆ ˆ( ) ( ) . Se
desea aplicar un control PID no lineal siguiendo la metodología presentada en [54], la cual
parte de un PID no lineal en su forma general
2 1 2 1 2 1
2 1 2 1 2 1
0 0 0
( ) ( ) ( ) ( )j j j
pj ij djj j j
du t k e t k e t dt k e t
dt
(1.5)
donde:
pjk es la ganancia proporcional
ijk es la ganancia integrativa
djk es la ganancia derivativa
2 1
2 1
j
e ,
2 1
2 1
j
e y
2 1
2 1
j
e es el error para las acciones proporcional, integrativa y derivativa,
respectivamente.
El diseñador debe de escoger los valores de , , , , y , los cuales deben
ser positivos. Si se eligen , , , , y iguales a cero, se obtendría un control PID
lineal. De esta manera, si 1 se obtiene un PID de segundo orden,
resultando la siguiente ley de control no lineal
1/3 1/30 1 0
1/31 0 1
( ) ( ) ( ) ( )
( ) ( ) ( )
p p i
i d d
u t k e t k e t k e t dt
d dk e t dt k e t k e t
dt dt
(1.6)
Análisis de técnicas de control por moldeo de energía … OLMOS
21
El resultado de aplicar este control a la expresión (1.4) es
21/30
0 02 2
11 1
( ) ( )...
( )
ibuck PID p d
ip d
kDwG G s k sk e t
w ss s wQ
kk sk e t
s
(1.7)
Las funciones 1/3( )e t y ( )e t se han dejado expresadas en el dominio del tiempo para
que su transformada de Laplace no complique la visualización del controlador PID de
segundo orden que se aplicó.
Si las constantes 0pk , 1pk , 0ik , 1ik , 0dk y 1dk se sintonizan adecuadamente se tendrá
un controlador que mantiene estable y con un buen desempeño al sistema retroalimentado
[56, 57], aun cuando el funcionamiento del buck salga del punto de operación original para
el que fue diseñado.
De la expresión (1.7) se observa que el resultado de aplicar un PID de segundo
grado no es otra cosa que aplicar dos controladores PID a una señal de error no lineal.
Esto implica que la dificultad matemática para analizar el sistema en lazo cerrado
controlado por un PID no lineal ha aumentado considerablemente. Sin embargo, los
resultados costo/beneficio de emplear esta técnica parecen ser promisorios como se
reporta en [56, 57], donde se aplica un PID no lineal a un convertidor resonante.
El esfuerzo en la ley de control es grande debido a que no se trata de un PID sino
de varios controladores, tantos como el diseñador desee según el orden escogido.
1.2.4. Conclusiones del estado del arte
Con la intención de limitar el trabajo de investigación, se ha escogido la configuración
IPOP, ya que presenta las mejores características para poder conformar un SAD; esto de
acuerdo con los razonamientos expuestos anteriormente.

José Armando Olmos López cenidet
22
El método de pequeña señal basado en estados promediados es sencillo y fácil de
tratar matemáticamente y modelar al circuito. Sin embargo, sólo es útil para caracterizar
fenómenos a baja frecuencia o slow-scale. Por el contrario, los modelos discretos ofrecen
información más completa de la dinámica del sistema en estudio; aunque son más
complejos que los modelos promediados y su tratamiento matemático es laborioso. Dado
que el modelo discreto se basa en muestrear el sistema en tiempo discreto, la información
es limitada por la velocidad de muestreo. En el caso de que la velocidad de muestreo sea
igual a la frecuencia de conmutación, el modelo discreto es capaz de describir la dinámica
que ocurre en la frecuencia de muestreo, pero no proporciona ningún dato de lo que
sucede dentro de un periodo de conmutación; si deseamos conocer que sucede ahí,
debemos de elevar la velocidad de muestreo. La información que puede obtenerse
empleando este modelado es de gran trascendencia ya que muestra las bifurcaciones y
tendencias al caos que ocurren en los CEP y por lo tanto en los SADs. Sin embargo,
trabajar con este modelado sólo para conocer que la tendencia al caos existe, y en qué
punto sucede, no resulta de relevante ni de gran interés; los controladores discretos que
puedan derivarse del modelado presentan más inconvenientes que ventajas [16, 58].
En la Tesis que aquí se presenta se empleó un modelado basado en ecuaciones
diferenciales promediadas, las cuales no se linealizan. Esto permite conocer el
comportamiento del sistema en cualquier instante de tiempo, además del empleo de
controladores no lineales.
Se ha seleccionado el método de caída de voltaje ya que, como es característico de
la técnica de control, existe una buena regulación de voltaje; aunque ante variaciones en
los dispositivos de alguno de los convertidores la corriente no es bien regulada o
distribuida equitativamente entre los dos convertidores. Sin embargo, esto puede
resolverse empleando un control de corriente adecuado. Es en el controlador de corriente
donde se enfoca el trabajo de esta tesis; se proponen cinco diferentes controladores para
el lazo de corriente, mientras que para el lazo de voltaje se utiliza un controlador tipo PI ya
reportado en otro trabajo de investigación, [71].
De la revisión bibliográfica se concluye que muchos de los trabajos ya publicados
basan su análisis y diseño de control en un sistema nominal (con esto se entiende que los
valores de los parámetros del sistema son conocidos y no presentan variaciones por
causas de envejecimiento, desgaste, calentamiento, etc.). Si existe algún cambio en los

Análisis de técnicas de control por moldeo de energía … OLMOS
23
parámetros anteriormente mencionados (variación paramétrica), la respuesta puede ser
diferente a la que se desea, e inclusive llevar al sistema a la inestabilidad.
Se desea mejorar el desempeño de los SADs y una mejora sería diseñar un
controlador que tolerara variaciones en los parámetros.
Existen diversos métodos que puede enfrentar el problema de los efectos de la
incertidumbre paramétrica en los sistemas, entre los cuales están:
Control por modos deslizantes
Control adaptable
Control PID no lineal
Control inteligente
Control Basado en Pasividad
Control Robusto.
El control adaptable, por ser una ley dinámica, aumenta el orden del sistema al
añadir una ecuación dinámica del error [47].
El control inteligente presenta reglas de inferencia que pueden resultar complicadas
de entender. Además, la programación de tal controlador requiere de grandes esfuerzos
computacionales [35].
El control por modos deslizantes tiene un buen desempeño aún ante ligeras
perturbaciones. Esta robustez es inherente al controlador ya que no se diseña la ley de
control basándose en el análisis de las variaciones paramétricas, y por lo tanto no tolera
variaciones paramétricas grandes. Es por esta razón que no es del interés de este trabajo
de tesis analizar su desempeño.
Existen otras metodologías que son estáticas, entre ellas está el control robusto, el
cual se aplicará para mejorar el control basado en pasividad. Aquí se plantea una solución
al problema que se presenta en el control nominal basado en pasividad, cuando el valor de
algún parámetro cambia. La solución que se propone es el empleo de la técnica de
rediseño de Lyapunov, la cual tiene como meta encontrar una señal adicional que enfrente
los efectos de la variación paramétrica, y sumar esta señal a una ley de control (basada en
el método de Lyapunov) previamente diseñada.

José Armando Olmos López cenidet
24
Aunque modos deslizantes y rediseño de Lyapunov son técnicas robustas y ambas
pueden añadirse a un control basado en pasividad, se considera mejor la segunda por
tender a la estabilidad asintóticamente y sólo activarse cuando existe una incertidumbre.
Es decir, el esfuerzo en la ley de control por rediseño de Lyapunov es menor que en el
caso deslizante ya que esta última siempre está activa aunque no haya variación
paramétrica.
El utilizar un control robusto, diseñado por la técnica rediseño de Lyapunov, resulta
de gran interés por lo que ya se ha mencionado y que puede resumirse en las siguientes
características:
El control robusto da solución a los efectos de la incertidumbre en los parámetros.
El sistema de ecuaciones resultante es de orden menor que el obtenido empleando
una técnica dinámica. Es decir, no se incrementa el número de ecuaciones que
representa al sistema.
El error en el seguimiento no es cero pero puede minimizarse tanto como el
diseñador lo desee si elige los factores adecuados.
De las técnicas de control estudiadas la mejor es la que aplica un control basado en
pasividad más una señal que enfrenta incertidumbres. En otras palabras, emplear un
control que enfrente incertidumbres paramétricas en los SAD es de gran utilidad pues
añadir un módulo o sustituirlo por uno nuevo, aun cuando sean módulos estandarizados,
implica diferencias en los dispositivos.
1.3. Planteamiento del problema a estudiar
Como ya se mencionó, existen diversas características que motivan a emplear
convertidores electrónicos de potencia en conexiones paralelo: una creciente demanda de
altas potencias, modularidad, respuestas dinámicas rápidas, alta eficiencia y reducción en
los rizos de corrientes y voltajes. Las áreas de aplicación de tales sistemas son bastante
Análisis de técnicas de control por moldeo de energía … OLMOS
25
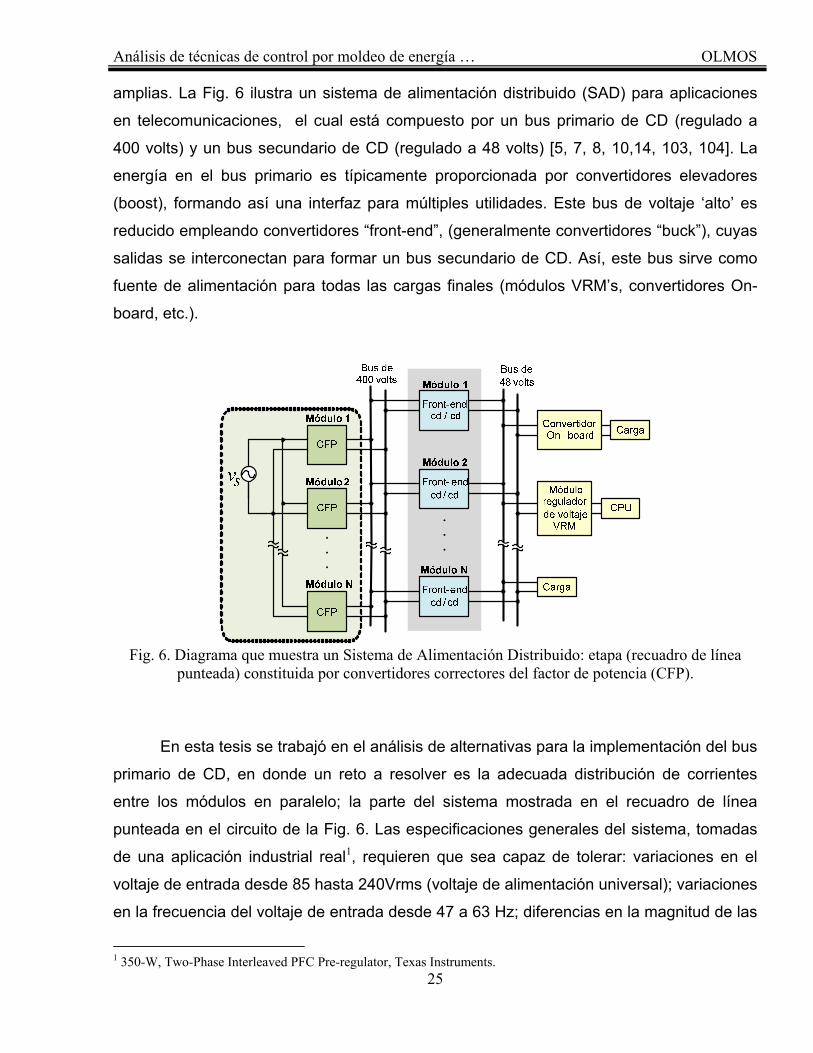
amplias. La Fig. 6 ilustra un sistema de alimentación distribuido (SAD) para aplicaciones
en telecomunicaciones, el cual está compuesto por un bus primario de CD (regulado a
400 volts) y un bus secundario de CD (regulado a 48 volts) [5, 7, 8, 10,14, 103, 104]. La
energía en el bus primario es típicamente proporcionada por convertidores elevadores
(boost), formando así una interfaz para múltiples utilidades. Este bus de voltaje ‘alto’ es
reducido empleando convertidores “front-end”, (generalmente convertidores “buck”), cuyas
salidas se interconectan para formar un bus secundario de CD. Así, este bus sirve como
fuente de alimentación para todas las cargas finales (módulos VRM’s, convertidores On-
board, etc.).
Fig. 6. Diagrama que muestra un Sistema de Alimentación Distribuido: etapa (recuadro de línea
punteada) constituida por convertidores correctores del factor de potencia (CFP).
En esta tesis se trabajó en el análisis de alternativas para la implementación del bus
primario de CD, en donde un reto a resolver es la adecuada distribución de corrientes
entre los módulos en paralelo; la parte del sistema mostrada en el recuadro de línea
punteada en el circuito de la Fig. 6. Las especificaciones generales del sistema, tomadas
de una aplicación industrial real1, requieren que sea capaz de tolerar: variaciones en el
voltaje de entrada desde 85 hasta 240Vrms (voltaje de alimentación universal); variaciones
en la frecuencia del voltaje de entrada desde 47 a 63 Hz; diferencias en la magnitud de las
1 350-W, Two-Phase Interleaved PFC Pre-regulator, Texas Instruments.

José Armando Olmos López cenidet
26
inductancias y en su resistencias parásitas; diferencias del valor nominal del capacitor y de
su resistencia parásita. Se restó 3 Hz a la frecuencia utilizada en Europa y se le sumó la
misma cantidad a la utilizada en América, como límites permitidos en las variaciones,
aunque las normas mundiales (como la IEC61000-3-2 o la IEEE 519-1992) limitan esta
variación máxima a 61Hz.
Considerando sólo dos convertidores en paralelo, el rizo máximo permitido en la
corriente total o corriente de entrada debe de ser de 2.1ii A con una corriente pico
máxima en los diodos de 5.3Dpeaki A . Se requiere que ante estas variaciones y/o
diferencias: el voltaje de salida promedio deberá de mantenerse en 0 400 CDV V , con una
tolerancia de 0 010%V V en el rizo y se espera que ante un transitorio en el voltaje de
entrada Sv , la recuperación del sistema completo no exceda de 200ms. Estas
especificaciones se resumen en la Tabla 1, en donde se ha tomando en cuenta los
inductores para construir cuatro convertidores conectados en paralelo.
Tabla 1. Especificaciones del sistema
Nombre Parámetro Valor mínimo Valor típico Valor máximo Voltaje de entrada Vs 85 Vrms 120 o 230 Vrms 265 Vrms
Voltaje pico de entrada vS 120 Vac 170 o 325 Vac 380 Vac Frecuencia de entrada fs 47 60 o 50 63
Voltaje nominal de salida V0 400 Vdc Rizo de voltaje de salida
0V 10%
Rizo de corriente de entrada ii 2.1A
Inductor de entrada de cada convertidor L1, L2, L3, L4 1.9 mH 2 mH 2.1 mH Resistencias parásitas de los inductores r1, r2, r3 y r4 0.9 Ω 1 Ω 1.1 Ω Capacitor de salida de los convertidores C 210 µF 220 µF 230 µF
Resistencia parásita del capacitor rC 0.5 Ω 0.6 Ω 0.7 Ω Frecuencia de conmutación fswitch 100 kHz Distorción armónica total THD 10%
Aunado a las especificaciones mostradas en la Tabla 1, se busca que un SAD
satisfaga otros objetivos importantes en este tipo de sistemas. Los principales objetivos de
la primera etapa de un SAD son: alcanzar el nivel deseado en el voltaje de salida, lograr
un factor de potencia cercano a uno, eliminar el rizo en la corriente de entrada, distribuir
Análisis de técnicas de control por moldeo de energía … OLMOS
27
equitativamente la corriente de entrada entre los inductores y permitir la integración de ‘n ’
número de convertidores elevadores.
El primer objetivo, alcanzar el nivel deseado en el voltaje de salida, puede
resolverse empleando un controlador PI para alcanzar la señal de referencia del lazo de
voltaje, tal y como se presenta en [69-71, 74,77]. En esta etapa es necesario sensar el
voltaje de salida.
El segundo objetivo, lograr un factor de potencia cercano a la unidad, puede
lograrse siguiendo las propuestas reportadas en [71, 93, 94] donde se utiliza un
controlador PI para el lazo de corriente y un lazo de pre-alimentación para obtener el valor
RMS de Sv . En esas propuestas se requiere sensar la corriente total y el voltaje de
entrada para cubrir el objetivo de control; las señales del lazo de pre-alimentación y del
lazo de voltaje pasan por un módulo multiplicador, el cual proporciona la señal de
referencia refi para el lazo de corriente.
El tercer objetivo, eliminar el rizo en la corriente de entrada, puede alcanzarse
cuando los convertidores elevadores interconectados en paralelo trabajan en modo
‘interleaved’ o entrelazado. El funcionamiento en modo entrelazado proporciona [72 – 73]:
un rizo pequeño en la corriente de entrada para los filtros EMI, una corriente más pequeña
para los capacitores de salida, reduce el estrés en los dispositivos (MOSFEST’s, diodos e
inductores) y es una estructura sencilla.
La Fig. 7 muestra el esquema para lograr el primer, segundo y tercer objetivo; como
se reporta en [69-71, 74,77, 93, 94] en donde sólo se consideran dos convertidores tipo
elevador conectados en paralelo. En esta figura los recuadros “Lazo de corriente”, “Lazo
de voltaje” y “Lazo de pre-alimentación” indican que lazo de control debe de ir en cada
recuadro; aunque no muestran el diagrama interno de cada uno de ellos.
Para el cuarto objetivo, distribuir equitativamente la corriente de entrada entre los
inductores, diversas propuestas se han estudiado: configuración maestro-esclavo, control
modo corriente, técnica de corriente promedio programada, por mencionar algunas [69,

José Armando Olmos López cenidet
28
73, 82, 70 – 72, 81]. Todas estas propuestas consideran sólo dos convertidores y en ellas
se plantea la necesidad de sensar las corrientes de los inductores para asegurar la
distribución de corriente, es decir, requieren dos sensores de corriente. En otros trabajos
ivSv
+
_
1L
2L
1i
2i
ii
1S
2S
C+
_
Cv
2K3K
filtro
ABC
2()d
VA
C
B
refi
1d
2d
Lazo de prealimentación
Lazo de voltaje
Lazo de corriente
1K
Load
Fig. 7. Esquema de la CFP para dos convertidores elevadores conectados en paralelo.
como la propuesta reportada en [70], se evita el sensor en uno de los inductores
reduciéndose la confiabilidad del sistema. En los trabajos [69 – 73, 81, 82], para lograr una
exacta distribución de corriente se requiere que ambos inductores tengan iguales
características; sólo sí se garantiza esto se asegura la distribución equitativa de corriente.
Pero si los inductores no son idénticos o si el mismo uso modifica ligeramente algunas
características de los inductores, la distribución de corriente no se logra [70]. Sin embargo,
este requisito necesario e indispensable (en esas propuestas) sólo nos indica que la
técnica de control no logra la distribución de corriente, sino lo que hace posible la
distribución de corriente es la manufactura de los inductores.
Para satisfacer el quinto objetivo, conectar en paralelo ‘ n ’ número de convertidores,
los esquemas de control, implementados en circuitos analógicos, propuestos en [3-5, 7,
13, 17, 18, 20, 21] pueden modificarse para integrar otros convertidores. Por ejemplo, en
el trabajo [81], donde se tiene originalmente dos convertidores conectados en paralelo, es

Análisis de técnicas de control por moldeo de energía … OLMOS
29
posible extender la conexión a cuatro o seis convertidores; pero como se hace notar, sólo
se pueden añadir módulos ya compuestos por dos convertidores en paralelo, es decir, no
es posible añadir sólo un convertidor. La propuesta [69] permite una conexión más sencilla
de tres convertidores al emplear un controlador programado en un DSP.
Ya se ha dado una breve descripción de algunas propuestas (ya publicadas) que
abordan el mismo problema que trata esta tesis y de esta se pueden mencionar las
ventajas y las desventajas de las mismas propuestas:
Pros
Se logra el nivel del voltaje de salida deseado
Se logra la CFP
Se logra la disminución del rizo de la corriente de entrada
Contras
La mayoría de las propuestas emplean controladores implementados con
circuitos analógicos
El diseño en circuitos analógicos dificulta la adición de nuevos módulos PFC
a un circuito ya diseñado
En ambos casos (tanto con circuitos analógicos como circuitos digitales) no
se logra la distribución de corriente por técnicas de control a menos que los
inductores sean idénticos
No se diseñan controladores que enfrenten la incertidumbre paramétrica
El estudio de los anteriores trabajos motivó la propuesta del trabajo de tesis y hace
posible comparar los resultados obtenidos; los cuales se tratan en los Capítulos
siguientes.
1.4. Hipótesis y objetivos de la tesis
Debido al gran interés por alcanzar los objetivos deseados en los sistemas de
alimentación distribuidos (SAD), se ha desarrollado el presente trabajo de investigación, el
cual tiene como hipótesis:

José Armando Olmos López cenidet
30
Es posible emplear un controlador basado en pasividad para garantizar la
distribución equitativa de corriente en sistemas pasivos acoplados
estructuralmente (caso de aplicación: convertidores elevadores
conectados en paralelo).
El objetivo general es:
Estudio, modelado y control de un sistema conformado por convertidores
elevadores conectados en paralelo, enfocado a distribuir la corriente en los
inductores, además regular el voltaje de salida y garantizar la corrección del factor
de potencia (CFP).
Y los objetivos particulares son:
Desarrollar un modelo del sistema que permita incluir varios convertidores en
paralelo dentro del modelo matemático
Diseñar un control basado en pasividad que simplifique la conexión de más
módulos convertidores al controlador y permita su implementación en un dispositivo
digital de control (como un procesador digital de señales DSP)
Analizar el comportamiento del sistema en lazo cerrado ante la presencia de
variaciones paramétricas y perturbaciones.
1.5. Alcance, aportaciones y limitaciones
Se ha propuesto un lazo de control de corriente, basado en una forma diferente
de diseño, el cual no necesita dos controladores para lograr que una misma
variable (la corriente del sistema) logre dos objetivos de control.
Diseño de una metodología de diseño de un controlador no lineal que:
Logra la distribución equitativa de corriente entre los módulos del sistema
Logra la regulación del voltaje de salida
Logra la corrección del Factor de Potencia

Análisis de técnicas de control por moldeo de energía … OLMOS
31
Facilita la interconexión de más módulos y, derivado de esto
Permite la disminución del rizo de la corriente de entrada.
Además de esto, esta técnica propuesta elimina la necesidad de un sensor de
corriente total.
Se han desarrollado cinco controladores no lineales, novedosos y que logran
los objetivos de control; no se ha encontrado artículos publicados de ninguno de
estos controladores aplicados a la interconexión de sistemas de estructura
variable.
Dentro de las limitaciones del trabajo de investigación se tiene lo siguiente:
Se trabajó únicamente con los modelos monofásicos del sistema
Se consideró que los interruptores son ideales
Se obtuvieron sólo resultados numéricos, en forma digital en la computadora,
empleando software de simulación científica (Matlab®)
No se comprobó que el control funcionara en algún prototipo o modelo
experimental de laboratorio.
1.6. Organización de la tesis
En el presente trabajo de investigación se diseñaron cinco controladores enumerados a
continuación:
1. Un control basado en pasividad, siguiendo una metodología muy similar a la
reportada en [53, 61] y la ley obtenida se probó sin considerar simplificación alguna,
por lo tanto requiere un sensor de corriente para cada convertidor tipo elevador con
el objetivo de lograr el seguimiento a la referencia en corriente.
2. Se propuso una simplificación al controlador anterior (No. 1) no considerando los
efectos de la derivada de la corriente total en los inductores, pues el cálculo de

José Armando Olmos López cenidet
32
dicha derivada representa un par de sensores de corrientes y grandes esfuerzos
computacionales. Esta simplificación elimina la necesidad de un sensor para cada
convertidor requiriendo sólo un sensor para medir la corriente total. Como la
simplificación fue realizada a un controlador (ya diseñado) basado en pasividad se
decidió llamarle Caso 1: Control Proporcional Basado en Pasividad sensando la
corriente i_i (i_i es la corriente total después del puente de diodos, ver Fig. 7)
3. Se propuso sensar la corriente i_s (antes del puente de diodos) para no simplificar
el diseño del controlador No. 1. Este controlador necesita sensar sólo la corriente
total i_s y no la corriente para cada convertidor. Para lograr evitar el cálculo de la
derivada de la corriente i_s se procedió a expresar la misma empleando series de
Fourier. Esto permitió el diseño de un controlador basado en pasividad y no
“despreciar” el efecto de la derivada de la corriente (lo cual se hizo en el caso
anterior). Por lo cual, el controlador se le llamó Caso 2: Control Basado en
pasividad sensando la corriente i_s.
4. Realizando unas consideraciones al diseño de los tres controladores anteriores (No.
1, No. 2 y No. 3) se encontró que al unir la técnica de Charge-Control con un
Control Basado en Pasividad es posible realizar mayores simplificaciones al
controlador pasivo. Lo que se concluyó de este análisis es que las simplificaciones
hechas al controlador pasivo deben de cumplir con las condiciones necesarias para
garantizar la estabilidad en el sentido de Lyapunov, si esto se satisface entonces el
sistema puede ser llevado al punto de equilibrio deseado. Aunque se emplea el
Charge-Control esta técnica emplea una señal de referencia derivada de control
pasivo. El nombre seleccionado para este controlador fue Caso 3: Control por
Charge-Control
5. El control No. 1 fue la base para el diseño de un control robusto, al cual
propiamente se le puede llamar “controlador robusto basado en pasividad
empleando la técnica de rediseño de Lyapunov”. Este control permitió explorar el
comportamiento del sistema empleando un controlador que enfrenta los efectos de
las incertidumbres y/o variaciones paramétricas.
Si bien los controladores diseñados (No.2, No.3 y No. 4) ya no tienen la estructura
de los controladores pasivos reportada en [23, 24, 53], para su deducción se partió de un
Análisis de técnicas de control por moldeo de energía … OLMOS
33
controlador diseñado con base en pasividad. Por lo cual los cinco controladores moldean
la energía del sistema y satisfacen las condiciones de estabilidad del Segundo Método de
Estabilidad de Lyapunov; conducen al sistema al punto de equilibrio.
Así, en el Capítulo 2 se presenta el diseño de los cinco controladores ya
mencionados pero aplicados a un sistema compuesto sólo por dos convertidores sin
considerar resistencias parásitas en los dispositivos. Por lo cual, la sección de resultados
de este capítulo tiene la finalidad de mostrar el desempeño del sistema ideal con los
diferentes controladores.
El Capítulo 3 muestra el diseño de los cinco controladores utilizados en un sistema
compuesto por dos convertidores, pero ahí se consideran resistencias parásitas en los
mismos. La intención es conocer cómo se comporta el sistema cuando esos elementos
parásitos tienen diferentes variaciones en los convertidores.
En el Capítulo 4 se presentan cuatro controladores aplicados a una conexión de
cuatro convertidores operando en modo entrelazado y considerando resistencias parásitas
tanto en las inductancias como en el capacitor de salida.
Finalmente, el Capítulo 5 contiene las conclusiones del trabajo de investigación.
También se mencionan los aportes logrados y se plantean algunas propuestas de trabajos
futuros que se derivan de esta investigación.

José Armando Olmos López cenidet
34

Análisis de técnicas de control por moldeo de energía … OLMOS
35
CAPÍTULO 2
.
.
CONTROLADORES PARA EL
SISTEMA IDEAL
2.1. Formulación del problema
Para facilitar el análisis, el diagrama de la Fig. 8 considera sólo a dos convertidores
elevadores conectados en paralelo, los cuales tienen en común: la fuente de entrada
(2 )S S Sv V sen f t (donde SV es el valor pico de la magnitud del voltaje y Sf es la frecuencia

José Armando Olmos López cenidet
36
de línea: SV puede ser 170 o 325 Vpico con Sf de 60 o 50 Hertz, respectivamente), el
capacitor de salida y la carga. Como se observa en la Fig. 6, el voltaje deseado en la
salida se ha establecido como 400voltsd CDV .
Fig. 8. Conexión en paralelo de dos convertidores elevadores.
Aplicando leyes de Kirchhoff, el modelo matemático del sistema puede escribirse
como
11 1
22 2
1 1 2 2
i C
i C
C C
div v
dt
diL v v
dt
vdvC i i
dt R
L
(2.1)
donde la variable k , 1,2k , es la señal de control que genera la secuencia de
conmutación que enciende y apaga el interruptor kS . De esta manera, si 1k entonces
kS está abierto y esto provoca que se “inyecte” el voltaje Cv en (2.1). Si 0k entonces kS
está cerrado y el voltaje Cv no aparece en (2.1). Un caso análogo sucede para la corriente
ki en la tercera ecuación de (2.1).
El sistema (2.1) tiene la forma
x = F(t, x) + G(t, x)u
(2.2)
Análisis de técnicas de control por moldeo de energía … OLMOS
37
donde nx es el estado y mu es la entrada de control. Las funciones F y G están
definidas por 0 n( t,x ) , Ρ , donde nΡ es un dominio que contiene al origen
x = 0 . Se asume que F y G son continuas a trozos en t y localmente Lipschitz en x y u .
En otras palabras, la conexión en paralelo de dos convertidores elevadores tiene la forma
de un sistema afín al control.
Bajo estas suposiciones, al sistema (2.2) se le puede aplicar un controlador
estabilizante ( , )u t x tal que el sistema en lazo cerrado resulta
= F(t, x) + G(t, x) (t, x)x
(2.3)
donde ( , )u t x logra que el sistema (2.3) alcance los estados deseados ndx en el
sistema. El diseño del control estabilizante ( , )u t x se abordará en las siguientes
secciones.
Los objetivos, o estados deseados, en este circuito pueden establecerse como
0
1 2
;
2 2;
i
d
i i
i i ii gv
v V
i ii
i i
i
(2.4)
donde ii , dV son los valores deseados de ii y 0v , respectivamente. Para garantizar que la
1CFP la corriente de entrada debe de tener la misma forma y ángulo de fase que el
voltaje de entrada iv , por tal motivo i igvi ; donde g , es una ganancia aún no definida,
que se utiliza para modular la amplitud de la corriente de referencia ii , tal que el voltaje de
salida 0v permanezca en el valor deseado dV ante cualquier carga2 final que se conecte al
sistema. Si se logra 1 2 2ii i i entonces 1 2 i ii i i i , es decir, se está garantizando la
distribución equitativa de corriente.
2 La expresión “ante cualquier carga” es en el sentido ideal puesto que si se excede la potencia que es capaz de proporcionar el sistema, entonces no será posible regular las variables a controlar.

José Armando Olmos López cenidet
38
2.2. Modelo del sistema
Realizando un análisis de leyes de Kirchhoff al circuito de la Fig. 8, se obtiene el modelo
de la expresión (2.1), que es repetido aquí por facilidad de referencia
11 1
22 2 2
1 1 2 2
1=i C i
i C i
C C
div v v
dt
diL v v v
dt
vdvC i i
dt R
L
(2.5)
donde se ha definido 1 1 Cv y 2 2 Cv , los cuales son los voltajes ‘inyectados’ a las
mallas y 1k kd , 1,2k , es la señal de control que genera la secuencia de
conmutación que enciende y apaga los interruptores 1S y 2S , respectivamente ( kd es el
ciclo de trabajo del k ésimo modulador PWM).
2.3. Diseño de controladores
De acuerdo con la Fig. 7, el diseño de los controladores requiere de tres lazos de control:
lazo de corriente o lazo interno, lazo de voltaje o lazo externo y un lazo de
prealimentación. El ciclo de trabajo kd provoca que el inductor kL se cargue o descargue,
de esta manera la primera variable afectada es la corriente ki del inductor, la cual debe
seguir a la referencia ii , donde 1,2k . También se desea que el voltaje del capacitor Cv
alcance un valor constante y permanezca en él; es decir, mantenga el valor deseado.
Debido a la gran diferencia de escalas de tiempo entre las dinámicas de la corriente del
inductor y la del voltaje del capacitor, puede asumirse que ambas dinámicas están
desacopladas una de la otra; en este trabajo el periodo en el que los inductores se cargan
y descargan es de 1/ switchf , donde 100KHzswitchf , mientras que el periodo del voltaje de

Análisis de técnicas de control por moldeo de energía … OLMOS
39
línea Sv es 1/ Sf , donde Sf es igual a 50Hz o 60 Hz . Este desacoplo permite trabajar cada
dinámica por separado facilitando enormemente el diseño del controlador.
Por estos motivos es usual diseñar primero el lazo de corriente considerando que el
voltaje C dv V mediante ‘algún’ controlador estabilizante. Posteriormente se diseña el lazo
de voltaje considerando que los objetivos del lazo de corriente ya se han logrado, evitando
así el manejo de armónicos provocados por rizos de corriente. La finalidad del lazo de
prealimentación es que la señal iv aparezca en la corriente de referencia.
Estas consideraciones se utilizan en el diseño de los controladores presentados a
continuación.
2.3.1. Control Basado en Pasividad
Empleando la formulación Euler-Lagrange, el sistema (2.5) puede expresarse como
•
D x+ Cx + Rx = u (2.6)
para el cual las matrices D , C y R están dadas por
11 1 1
2 2 2 2
1 2 33
0 0 0 0 0 0 0
0 0 ; 0 0 ; 0 0 0 ; ; ;
0 0 0 1 00 0
i
i
xL x v
L x x v
C xxR
D C R x x u
(2.7)
donde 1 1 2 2 3; ; Cx i x i x v son los estados del sistema y
x el vector de sus derivadas
respectivas. , 0,n n T D D D D ( D es real, simétrica y definida positiva) y contiene a
los elementos que almacenan energía; ,n n T C C C ( C es antisimétrica y real) y
contiene a los elementos que no aportan ni disipan energía (interruptores); , 0n n R R
José Armando Olmos López cenidet
40
( R es real y semidefinida positiva3) y contiene los elementos que disipan energía en el
sistema; u es un vector de fuerzas externas (en este caso corresponde al voltaje aplicado
iv ).
Para validar la aplicación del control basado en pasividad es necesario mostrar que
la interconexión de dos convertidores elevadores es un sistema pasivo [12, 8], lo cual se
realiza a continuación4.
Sea el sistema de la Fig. 8 formado por los convertidores 1 y 2 cuyos
elementos son kL , kS , C , R , con 1, 2k , respectivamente. De las propiedades de
pasividad de 1 y 2 , [53, 61], se cumple que la función de almacenamiento de
energía, de cada convertidor, es 1
( )2
Tk k k k kH ξ ξ D ξ y corresponde al Hamiltoniano
del sistema, el cual satisface 0
( ( )) ( (0))t
k k k k kH t H y dt , donde: ( ) 0kH , es
decir, ( )kH es definida o semidefinida positiva; iv ; 1 1y i y 2 2y i son el
voltaje de entrada y las corrientes de salida del convertidor respectivo.
La interconexión paralela produce una salida 1 2 1 2y = y + y i i y tiene la función de
almacenamiento 1 1 2 2( ) ( ) ( ) 0H H H . Considerando condiciones iniciales a
cero se tiene
0
0
( ( )) ( (0))
( ( ))
t
t
H t H x ydt
H t ydt
(2.8)
Como el suministro de energía 1 2i iy v i v i nunca es mayor que la energía
almacenada en el sistema, entonces de (2.8) se concluye que conforma un
sistema pasivo.
3 Sin considerar parásitos en el sistema, la matriz cumple 0R . Al considerar parásitos en los inductores se tiene 0R . 4 Para mayor detalle de esta demostración se sugiere revisar el APÉNDICE B.

Análisis de técnicas de control por moldeo de energía … OLMOS
41
La metodología para el diseño del control, [23] y [53], puede resumirse en los
siguientes pasos
1. Representar al sistema real como •
D x+ Cx + Rx = u
2. Definir el sistema deseado d d d d
•
Dx +Cx + Rx = u
3. Obtener la ecuación de error d
•
De+ Ce + Re = u - u empleando la definición del
error de = x - x
4. Emplear el método de Lyapunov con la función 1( )
2TV e e De
5. Encontrar el control basado en pasividad que garantice ( ) 0TV e
e De
De acuerdo a los pasos anteriores, se desea modificar la dinámica del sistema (2.6)
llevándolo a un estado deseado (con subíndice d ) y tener en el sistema un
comportamiento definido por
d d d d
D x Cx Rx u (2.9)
Si los sistemas (2.6) y (2.9) no son iguales, entonces existe un error dado por la
expresión
d
De Ce Re u - u (2.10)
en donde: d
e x x , de = x - x . La ley de control se diseña empleando el método de
Lyapunov, para lo cual se propone la función5
5 Para demostrar que la expresión (2.11) es una función candidata de Lyapunov puede emplearse el Teorema 2.3 y Teorema 2.4 del libro de Rafael Kelly [99] o el Teorema 4.1 del libro de Khalil [60]. Sin pérdida de generalidad esta demostración no se presenta aquí y se pone mayor interés en el Teorema de Estabilidad en el sentido de Lyapunov.

José Armando Olmos López cenidet
42
12( ) TV e e De (2.11)
Para satisfacer el teorema de estabilidad de Lyapunov (2.11) debe cumplir:
(0) 0;V ( ) 0V e ; ( ) 0V e
; lo cual asegura que (2.11) tiene un punto de equilibrio
estable (si ( ) 0V e
) o asintóticamente estable (si ( ) 0V e
), [60]. Empleando las
propiedades de D , es fácil notar que (0) 0V y ( ) 0V e se cumplen, falta verificar
( ) 0V e
. Derivando (2.11) se tiene
( ) TV e
e De (2.12)
Despejando
De de (2.10) y sustituyendo en (2.12) se llega a
( ) T T TdV e
e Ce e Re e u -u (2.13)
El producto 0T e Ce (debido a la propiedad de antisimetría de C ) y dado que
0R , R , se encuentra que
( ) T TdV e
e Re e u - u (2.14)
es semidefinida negativa si ( ) 0Td e u u . Es decir, sólo basta que du u para que el
punto de equilibrio sea estable; por lo que la ley de control resulta
d d d am
u D x Cx Rx R e (2.15)
donde, para aumentar o apresurar la convergencia del sistema al punto de equilibrio, se ha
añadido la matriz de inyección de amortiguamiento amR : n nam
R y además 0am R o al
menos amR . Los vectores y matrices de (2.15) están dados por

Análisis de técnicas de control por moldeo de energía … OLMOS
43
11 1 1 1
2 2 2 2 2
1 2 3 33
1 1 1
2 2 2
3 3 3
0 0 0 0 0 0 0
0 0 0 0 0 0 0
0 0 0 0 10 0
0 0
0 0
0 0 1/
di d d
i d d d
d dd
am d
am d
am d
xv L x x
v L x x x
C x xx R
R x x
R x x
R x x
(2.16)
Los elementos resultantes del producto de amR con los errores k kdx x , 1,2,3k
deben de ser congruentes con las unidades en la ecuación que participan, por tal motivo la
matriz amR se define como aparece en (2.16): los productos 1 1 1( )am dR x x y 2 2 2( )am dR x x
son voltajes, mientras que 3 3 3(1/ )( )am dR x x corresponde a corriente.
Notar que la introducción de amR permite escribir la expresión (2.14) como
( ) T Teq dV e
e R e e u - u , donde eq amR R + R , lo cual implica que ( ) 0V e
si
( ) 0Td e u u , es decir, se tiene un punto de equilibrio asintóticamente estable.
Las ecuaciones (2.16) dan una definición implícita de la señal de control. Para
obtener una expresión explícita es necesario utilizar los grados de libertad que se tienen,
ya que existen cinco variables ( 1 , 2 , 1dx , 2dx y 3dx ) y solo tres ecuaciones a satisfacer.
Sin embargo, 1dx , 2dx y 3dx son variables definidas por el comportamiento deseado dado
en la expresión (2.4); donde el valor deseado de 1x es el mismo que 2x definido por
1 2 2d d ix x i y el valor deseado de 3dx está definido por 3d dx V . Además, como ya se
ha mencionado, para el diseño del controlador de corriente se considera que 3 3dx x
mediante algún6 control estabilizante. Tomando estas consideraciones, ahora se tienen
sólo dos variables libres 1 y 2 las cuales se despejan de la primera y segunda ecuación
de (2.16)
6 El controlador de voltaje está dado por la ecuación (2.28).

José Armando Olmos López cenidet
44
1 1 1 1 1 13
2 2 2 2 2 23
1( )
1( )
i d am dd
i d am dd
v L x R x xx
v L x R x xx
(2.17)
Como la ecuación (2.17) fue diseñada empleando el método de Lyapunov, entonces
el controlador logra que 0kx donde k k kdx x x , 1,2k , es decir, se garantiza la
estabilidad asintótica; lo cual se comprueba fácilmente retroalimentando en (2.5) las
señales de control encontradas
111 3
11
222 3
2
1 1 13
1 1
2 2 23
2 2 2
1
0
1
0
di d
di d
i amd
am
i amd
am
dxdxv
dt dt
dx
dt
dxdxL v
dt dt
dx
dt
L v L R x xx
L R x
v L R x xx
L R x
(2.18)
Las expresiones (2.18) son cero cuando k kdx x , lo cual indica que el controlador
logra la distribución de corriente. Si ahora se define que 1 2L L L y 1 2am am amR R R
entonces de la suma de las ecuaciones (2.17) resulta
1 2 1 2 1 23
12 ( )
12 ( )
12
i d d am d dd
ii am i i
Cd
ii am i
Cd
v L x x R x x x xx
div L R i i
dt v
div L R i
dt v
(2.19)
Para lograr los objetivos, la expresión (2.17) genera dos leyes de control (una para
cada convertidor) sensando las corrientes 1 1x i y 2 2x i . Pero la ecuación (2.19) genera

Análisis de técnicas de control por moldeo de energía … OLMOS
45
una sola ley de control, ya sea sensando ii o sensando 1i y 2i para luego sumarlas
1 2ii i i . De esta manera, si se divide (2.19) entre dos (el número de convertidores
elevadores en paralelo), entonces es posible utilizar la misma señal de control para
generar las secuencias de conmutación de los interruptores kS . Esto se deduce de las
ecuaciones (2.17) y (2.19)
1 2;2 2
(2.20)
Es importante mencionar que esta ley de control basada en pasividad, expresiones
(2.17) o expresión (2.19), se compara con una señal diente de sierra y de esta comparación
se obtienen los ciclos de trabajo kd que encienden o apagan a los interruptores kS ,
1,2k .
Ahora se procede a diseñar el controlador de voltaje. Para propósitos de diseño se
utiliza la ecuación (2.19) la cual se escribe nuevamente
2 iCd i am i
div v L R i
dt
(2.21)
Tanto en (2.17) como (2.19) se supuso que ‘algún’ controlador estabilizante
aseguraba 3 3dx x . Este controlador estabilizante del voltaje se diseña a continuación,
para lo cual se considera que el control de corriente ha logrado 1 2 2ii i i y por lo tanto
0ii . Por facilidad en el diseño del controlador se empleará la notación utilizada en (2.5),
en la cual k k Cv , 1,2k . Multiplicando la tercera ecuación de (2.5) por Cv se tiene
1 1 2 2
2C C
C
dv vv C i i
dt R
(2.22)

José Armando Olmos López cenidet
46
Definiendo 2 2Cv , 2 2dV se tiene que C Cv v
. Empleando este cambio de
variable y como 1 2 2ii i i , la ecuación de error para el voltaje del capacitor resulta
1 1 2 2 1 2
2 2
2 2
2
2 2
i
i ii i i
dC i i
dt R R
R R
i
i diLv i i
dt
(2.23)
donde 1 2 está dada por la expresión (2.21). En este trabajo se utiliza i
i definido por
2,i i i s RMSi gv v G v , donde el valor RMS de Sv ( ,S RMSv ) se utiliza para escalar la magnitud de
G a valores congruentes con la magnitud de la corriente de entrada ii . De esta manera
se puede despreciar el segundo término del lado derecho de (2.23), tomando en cuenta
que introduce armónicos7 de magnitud 12 0iLdi dt , resultando
2,
2
2,
2
2
ii
S RMS
S
S RMS
dC
dt R
Gvv
v
Gv
v R
(2.24)
Aún más, dado que en el diseño del control de voltaje el mayor interés es la
dinámica de los componentes en DC de , se tiene que la componente en CD de 2Sv es el
cuadrado del valor RMS de Sv y por lo tanto (2.24) resulta
2d
Cdt
GR
(2.25)
7 Para el caso del sistema con los parámetros dado por la Tabla 2, 1 1
2 2 (0.002)(11) 0.011iLdi dt . En los
resultados mostrados más adelante se podrá notar que el valor pico de ii es menor de 11 amperes.

Análisis de técnicas de control por moldeo de energía … OLMOS
47
Para calcular el valor de G , en este trabajo se utiliza
int ;p
dG dK K
dt dt
(2.26)
donde: intK y pK son parámetros de diseño. El signo negativo de la expresión (2.26) se
introduce para que la retroalimentación positiva, debida a la definición del error
2 2dV , no provoque inestabilidad en el sistema8. Haciendo un abuso de la
nomenclatura, la expresión (2.26) también puede escribirse en la forma de una función de
transferencia, donde es la entrada y G la salida
intpK s KG
s
(2.27)
Puede notarse fácilmente que (2.27) es un controlador tipo PI, el cual ya se
encuentra ampliamente estudiado y logra que 2 2 0dV , [41, 42, 71, 75].
Expresando (2.27) en el dominio del tiempo se tiene
int
0
t
pG K K d
(2.28)
El controlador tipo PI (2.28) se emplea para el lazo de voltaje y garantiza que se
llegue al valor de referencia dV . La introducción de este filtro pasa-bajas previene los
efectos de armónicos que pueden degradar el factor de potencia. El ancho de banda del
lazo de voltaje (filtro pasabajas) usualmente es menor a 20 KHz; así, los armónicos
generados por el lazo de corriente (con una 100switchf KHz ) son filtrados por el
controlador PI.
En la expresión (2.19) es necesario sumar las corrientes de los inductores para
obtener ii o medir la corriente ii y omitir el sensado de las corrientes en los inductores.
8 Si la variable de error en el voltaje Cv se define como 2 2dV el signo negativo de (2.26) no es necesario.
José Armando Olmos López cenidet
48
Hacer esto último se traduce en confiar que ambos inductores tienen las mismas
características y/o su variación es despreciable. Sin embargo, estrictamente hablando, una
diferencia de inductancia de algún inductor puede deteriorar la distribución equitativa de
corrientes, aunque sí estabiliza la distribución a niveles aceptables9.
En este trabajo se presenta una opción para emplear un sólo sensor de corriente
(midiendo a ii ), lo cual se traduce en utilizar una sola ley de control, y no exigir que los
inductores tengan las mismas características: el empleo de la técnica de Charge-Control.
2.3.2. Caso 1: Control Proporcional Basado en Pasividad sensando la corriente ii
En este Caso 1 se muestra la técnica más usual de diseño de los dos lazos de control, la
cual se basa en el sensado de la corriente ii . No obstante de emplear una técnica ya
conocida, el empleo de un controlador no lineal en el lazo de corriente mejora el
desempeño del sistema y además, en esta sección se propone una simplificación al
controlador.
Con la mira en lograr un factor de potencia FP = 1 en el sistema de la Fig. 8, se
proponen las siguientes leyes de control basadas en pasividad para las dos primeras
ecuaciones de (2.5)
11 1 1
22 2 2
1
2
1
2
ii
C
ii
C
diLv K i
v dt
diLv K i
v dt
(2.29)
donde 1 1 2ii i i , 2 2 2ii i i , 2,i i s RMSi Gv v , i Sv v , G es una variable aún no definida
y 1 2, 0K K son parámetros de diseño. Como puede notarse, las expresiones (2.29) son
las diseñadas en el control basado en pasividad, ecuaciones (2.17), aunque expresadas de 9 Aunque como ya se mencionó líneas arriba, el controlador presenta cierta robustez que será mostrará en los resultados.

Análisis de técnicas de control por moldeo de energía … OLMOS
49
diferente manera. Como se mostró en la sección anterior, el empleo de esta ley de control
garantiza que el sistema es estable lo cual puede verse fácilmente al sustituir (2.29) en
(2.5).
Ahora, si se define 1 2L L L y 1 2K K K entonces la suma de las ecuaciones
(2.29) da como resultado
1 2
1
2 2 2 2
12
i i i ii i
C
ii i
C
di i di iL Lv K i v K i
v dt dt
div L Ki
v dt
(2.30)
donde i i ii i i . En el diseño del control de voltaje para el caso anterior basado en
pasividad, se consideró que 0iLdi dt , donde los parámetros del circuito se tomaron de
la Tabla 2. Aplicando está consideración10 en la expresión (2.30) resulta
1 2
1(2 )
/ 2 ; / 2
i iC
v Kiv
(2.31)
Retroalimentando el control (2.31) en las ecuaciones de corrientes de (2.5), donde
1 1 2ii i i y 2 2 2ii i i se tiene que el sistema es estable en el punto de equilibrio. Esto
puede verse fácilmente al emplear el procedimiento mostrado en la sección del
Controlador Basado en Pasividad:
Sea el sistema deseado dado por •
D x+ Cx + Rx = u , se establece el sistema deseado
d d d d
Dx Cx Rx u . La diferencia de ambos sistemas se expresa como
10 Para este caso, 0.022iL di dt .

José Armando Olmos López cenidet
50
d
De Ce Re u - u , en donde: d
e x x , de = x - x . Nuevamente se propone la
función 12( ) TV e e De , la cual cumple (0) 0V y ( ) 0V e y cuya derivada está dada
por
( ) T T TdV
e e Ce e Re e u -u (2.32)
Continuando el desarrollo sólo para la primera ecuación de (2.32), teniendo
presente que se está analizando el circuito mostrado en Fig. 8, se tiene
3 1 3
23 1
( ) Td
Td
V e e
e
e e u - u
e u - u (2.33)
Para sustituir la señal de control 1 de la expresión (2.31), debe de recordarse que
esta se obtuvo de la consideración de du u , lo cual implica que 0d u u . Así, la
expresión (2.33) resulta
2 23 1( ) / /i C CV e v v e K v
e (2.34)
la cual es definida negativa. Un procedimiento similar se puede seguir para la
segunda ecuación de (2.32). El desarrollo anterior prueba que el controlador (2.31)
logra que 0ki de manera asintótica, donde 1,2k .
Es importante hacer notar que el análisis de estabilidad anterior consideró que se
conoce la medida de las corrientes de los inductores, algo que no se considera en la
expresión (2.31). Por lo cual, para lograr la estabilidad del sistema es necesario sensar las
corrientes de los inductores aunque para el diseño de (2.31) no sean necesarias. Si se
utiliza esta ley simplificada, expresión (2.31), y se compara con una señal diente de sierra
para generar los PWM de los interruptores 1S y 2S , los resultados tienen un error
considerable cuando existe diferencia paramétrica mayor del 20% del valor nominal.

Análisis de técnicas de control por moldeo de energía … OLMOS
51
Para el lazo de voltaje se emplea la ecuación (2.28), la cual se utilizó para el control
basado en pasividad de la sección anterior
0
t
p iG K K d (2.35)
2.3.3. Caso 2: Control Basado en Pasividad sensando la corriente is
En este Caso 2 se emplea la medida de la corriente Si como se propone en [75]; sensar
esta corriente también permite la solución al problema de seguimiento de corriente y, con
mucha facilidad, puede tratarse el problema del contenido armónico11 en el voltaje de
entrada Sv . Además, en este mismo Caso 2, no se desprecia el término iL di dt sino que
se sustituye por un filtro resonante ajustado al segundo armónico [74]. El controlador de
corriente que se propone permite la conexión en paralelo de ‘ n ’ convertidores.
Para diseñar el controlador considerando el contenido armónico de Sv es más
conveniente escribir el modelo del sistema empleando la siguiente transformación de
coordenadas
sgn( )S i Si i i (2.36)
sgn( )i S Sv v i (2.37)
donde se utiliza la función sgn( )Si por conveniencia en el diseño. Considerando a los dos
convertidores con parámetros iguales, es decir 1 2L L L y 1 2K K K , y definiendo
2 2Cv , se escribe el sistema (2.5) de la siguiente manera
11 Aunque este problema no se aborda en este trabajo, el lector puede constatar la sencillez de filtrar el contenido armónico en el voltaje de entrada revisando los trabajos [74, 75].

José Armando Olmos López cenidet
52
2
2ii C C i
di dC i
dt dt RL v v v
(2.38)
donde 1 2 se define en (2.40). Así, considerando conjuntos abiertos excluyendo los
puntos de cruce por cero12, es decir, t , tal que ( ) 0Si t , y utilizado (2.36) y (2.37), el
sistema (2.38) puede escribirse como
sgn(sgn(
sgn( 2 sgn(
2
))
) )
2 sgn( )
S i S
S
S i
S s S C
S S C
C S
di di d ii
dt dt dt
dii i
dt
dC
dt R
i
L v v
v i v
v i
(2.39)
donde i Si i y la corriente deseada se define como S Si gv . Para el sistema (2.39) se
propone el diseño de un control basado en pasividad, cuyo desarrollo se obtiene siguiendo
los pasos 1 – 5 ya mostrados arriba. El controlador basado en pasividad para la ecuación
(2.39) es
sgn( ) 2
sgn( ) 2
SC S S S
SS S S
div i v Ki L
dt
dgvi v Ki L
dt
(2.40)
donde S S Si i i . La expresión (2.40) es la misma ecuación de (2.30) con la diferencia en el
empleo del voltaje y corriente sensados. Se expresa el voltaje de entrada Sv en series de
Fourier como
12 Para el diseño del controlador no se pone mucha atención en los puntos de cruce por cero, es decir 0Si . Aunque,
debido a limitaciones físicas, el controlador no tiene otra opción que tomar el valor cero en esos puntos.

Análisis de técnicas de control por moldeo de energía … OLMOS
53
,T
S h S hh
v
ψ Γ (2.41)
donde: es el conjunto de armónicos considerados; ( ) ( )Th cos h t sen h t ψ ; es
la frecuencia de línea; , , ,
Tr iS h S h S hV V , con , ,,r i
S h S hV V , corresponde a las magnitudes
del h ésimo armónico de la descripción de Sv en series de Fourier, donde los
superíndices ( )r y ( )i se utilizan para distinguir los coeficientes asociados con ( )cos h t y
( )sen h t , respectivamente.
Así, utilizando (2.41) se desarrolla el tercer término del lado derecho de (2.40)
, ,
,
, ,
,
[ ( ) cos( )][ ]
T TSh S h h S h
h h
r i T TS S h S h
h h
T Th S h h S h
h h
Th S h
h
dgv d dgL gL L
dt dt dt
dggL h sen h t h t V V L
dt
dggL h L
dt
dgL gh
dt
ψ Γ ψ Γ
ψ Γ
ψ βΓ ψ Γ
ψ β Γ
(2.42)
donde 0 1 ; 1 0 β . Definiendo ,( )h S hL dg dt h g Φ β Γ la expresión (2.42) se
puede escribir como
,TS Sh h d
h
di dgvL L
dt dt
ψ Φ (2.43)
donde el subíndice d se ha agregado para indicar que ,h dΦ corresponde al valor deseado
de la corriente Si . Escribiendo (2.40) con los desarrollos logrados se tiene
,sgn( ) 2 TC S S S h h d
h
v i v Ki
ψ Φ (2.44)

José Armando Olmos López cenidet
54
Retroalimentando (2.44) y aplicando la igualdad (2.43) en la primera expresión de
(2.39) resulta
,
,
2 sgn( ) sgn( ) 2
0
S
S
TS S S S S h h d
h
TS h h d
h
S
di
dt
di
dt
L v i i v Ki
Ki
L Ki
ψ Φ
ψ Φ
(2.45)
donde S S Si i i . La expresión (2.45) es cero sólo cuando S Si i , es decir, el controlador
(2.44) logra la estabilidad asintótica del sistema. El controlador (2.44) puede simplificarse
dado que ( )S Si I sen h t es una función impar y su derivada es par; se sabe que en una
función par (expresada en series de Fourier) las magnitudes relacionadas con los
términos de seno se hacen cero. Lo cual implica que (2.44) puede escribirse como
,sgn( ) 2
sgn( ) 2
T rC S S S h h d
h
rS S S h
h
v i v Ki
i v Ki
ψ Φ
Ω
(2.46)
de esta manera, dividiendo por 2 a (2.46) se tiene las leyes de control 1 y 2 .
Ya se ha definido ,( )h S hL dg dt h g Φ β Γ , por lo cual
, ,
,
( )
( ) ( )
( )
r T r rh h h d h d
rS h
h
cos h t
cos h t L dg dt h g V
cos h t
Ω ψ Φ Φ
(2.47)
La variación de la ganancia g (la cual está dada por el control del lazo de voltaje)
es lenta en comparación con la dinámica del control del lazo de corriente. Por lo cual, la
variación del valor de h se considera muy lenta o tiene cambios de valor en pasos, esto
Análisis de técnicas de control por moldeo de energía … OLMOS
55
permite que en el diseño del control de corriente se considere a h prácticamente
constante para cada armónico. Expresando (2.47) como una función de transferencia, con
( )Si s como entrada y ( )rh sΩ como salida se tiene
2 2 2( ) ( )r h
h S
ss i s
s h
Ω (2.48)
La expresión (2.48) es una igualdad para cualquier armónico h de Sv . Por lo cual, la
sumatoria de la expresión (2.46) es un cálculo que puede simplificarse considerando
solamente la suma de los armónicos de mayor magnitud. Considerando sólo el segundo
armónico, se realiza la siguiente aproximación
2 2
( )4
SS
di sL i s
dt s
L (2.49)
donde S S Si i i , 2,S S S S RMSi gv Gv v , L indica la transformada de Laplace y es la
magnitud del armónico.
La ecuación (2.46) debe de ser dividida entre dos y emplearse para generar los
ciclos de trabajo para cada interruptor 1S y 2S . Nuevamente, el diseño de (2.46) no
requiere los valores de las corrientes 1i y 2i sino de Si (aun cuando Si se obtenga de la
suma de 1i y 2i ). Sin embargo, si no se miden las corrientes de los inductores se estaría
suponiendo que los parámetros de los inductores son iguales. Una manera de introducir el
sensado de estas corrientes ( 1i y 2i ) y no emplearlas en el diseño del controlador (2.46) es
la técnica de Charge-Control.
Nuevamente, se propone el controlador del lazo de voltaje 2,s RMSg G v , donde G es
calculada de acuerdo a (2.28).

José Armando Olmos López cenidet
56
2.3.4. Caso 3: Control por Charge-Control
Una manera sencilla y ‘no costosa’ de garantizar 1 2 2ii i i , donde ii es el valor
deseado de la corriente de entrada, es empleando la técnica de Charge-Control [76, 100].
La idea se muestra en la Fig. 9 (para el inductor 1L ), donde 1Si es la corriente en el
interruptor 1S la cual es igual a 1i durante el tiempo de encendido. En Charge-Control el
interruptor 1S se enciende al inicio de cada periodo ST . Un capacitor llamado 1TC es
cargado hasta que su voltaje alcance la señal de referencia refv . Cuando esto ocurre, 1S
se abre y el interruptor 1TS se cierra, por lo cual 1TC se descarga completamente antes de
que el siguiente periodo inicie. De esta manera, se controla la carga total de 1TC en un
ciclo, la cual es proporcional al valor de la corriente promedio de 1i durante un periodo.
Fig. 9. Esquema y gráficas de la técnica de Charge-Control.
Para el sistema de la Fig. 8 necesitamos dos bloques de Charge-Control como el
que se muestra en la Fig. 9. Analizando el circuito para el interruptor 1S , el voltaje 1( )Tv t en
el capacitor 1TC está dado por la expresión
0
1 0 11
1( ) (t)dτ
S
S
kT t
T S ST kT
v kT t iC
(2.50)

Análisis de técnicas de control por moldeo de energía … OLMOS
57
donde SkT es el inicio del k ésimo periodo ST de la frecuencia de conmutación del
interruptor 1S , el cual indica el instante en que 1S se enciende y 0t es el tiempo durante el
cual el mismo interruptor permanece encendido antes de alcanzar el valor de referencia
refv . Cuando el valor de 1( )T refv t v el interruptor 1S es apagado y el interruptor 1TS se
cierra permitiendo que se descargue el capacitor 1TC . Por lo cual la expresión (2.50)
resulta
1
1 1 11
11
1( ) (t)dτ
1
S
S
kT d
T S ref ST kT
T
v kT d v iC
C
(2.51)
donde 1 es la carga en el capacitor 1TC ; 1d es el ciclo de trabajo 1 11d .
Reacomodando términos en (2.51) se tiene
1 11 1 1 1
1 1 1
1( )T S
T
dv kT d
d C d
(2.52)
Se busca que 1 1 1 2ref id v i . Esto se puede expresar en forma de ecuaciones
como
1 11 1
1 1
1 1 1
1
2
2
12
iref
i
i
iv
d d
id
i
(2.53)
donde 1 es el valor deseado de la carga en el capacitor TC . El mismo procedimiento se
puede seguir para el interruptor 2S de donde resulta

José Armando Olmos López cenidet
58
2 2 212ii
(2.54)
Para el cálculo del controlador de corriente ( 1 y 2 ) puede utilizarse cualquiera de
los controladores diseñados en el Caso 1 y Caso 2, dados por las expresiones (2.31) y
(2.46), respectivamente. En este Caso 3 se utilizará nuevamente una ley de control basada
en pasividad sin inyección de amortiguamiento, es decir, los términos k kK i , 1,2k no se
incluyen en el diseño de la ley basada en pasividad. Las ecuaciones resultantes son
11
22
2
2
iC i
iC i
diLv v
dt
diLv v
dt
(2.55)
La magnitud máxima del primer miembro del lado derecho es S picoV (decenas de
volts)13 y la magnitud máxima del segundo miembro del lado derecho es 12 0k iL di dt ,
1,2k . Es fácil deducir que la contribución del segundo miembro no repercute
drásticamente en la señal de control generada. Por lo que (2.55) puede simplificarse a
1
2
C i
C i
v v
v v
(2.56)
Para analizar la estabilidad del controlador (2.56) se emplea el método de Lyapunov
y se utiliza la función 12( ) TV e e De , la cual cumple (0) 0V y ( ) 0V e y cuya derivada está
dada por
( ) T T TdV e
e Ce e Re e u -u (2.57)
13 El valor de 325S picoV volts o 170S picoV volts depende de que voltaje de entrada
Sv se utilice,
170 (2 60 )Sv sen t o 325 (2 50 )Sv sen t .

Análisis de técnicas de control por moldeo de energía … OLMOS
59
El desarrollo sólo se realiza para la primera ecuación de (2.57), teniendo presente
que se está analizando el circuito mostrado en Fig. 8. Bajo estas consideraciones se tiene
3 1 3
23 1
( ) Td
Td
V e e e
e
e u - u
e u - u (2.58)
Dado que la expresión (2.56) se ha obtenido de un control basado en pasividad (en
el cual es suficiente du u ) entonces en (2.58) se tiene 0d u u . De esto resulta
23( ) /i CV e e v v
(2.59)
la cual es definida negativa. Por lo que (2.56) garantiza que 0ki , es decir, la corriente
2k ii i sigue a la referencia, donde 1,2k .
La ecuación (2.55) requieren la medición de la corriente ii mientras que el empleo
de (2.56) no necesita la medición de la corriente total (ni de corriente alguna) para generar
la señal de referencia o señal de control.
Es importante recalcar la utilidad de (2.56) donde no es necesario sensar la
corriente total del sistema; la técnica de Charge-Control logra la distribución de carga y
además, empleando como referencia la ecuación (2.56), se logra la CFP para nuestro
sistema.
Nuevamente, la ley de control de voltaje es la ecuación (2.28).
2.3.5. Control robusto
Aquí se plantea una solución al problema que se presenta en el control nominal
(basado en pasividad) cuando el valor de algún parámetro cambia. La solución propuesta
es el empleo de la técnica de rediseño de Lyapunov, la cual tiene como meta encontrar
una señal adicional que enfrente los efectos de la variación paramétrica y sumar esta
José Armando Olmos López cenidet
60
señal a una ley de control (basada en el método de Lyapunov) previamente diseñada [23],
[60]. El estudio de sistemas perturbados permite tener una visión clara de cómo abordar el
problema de la variación paramétrica14 para conocer qué tipo de perturbaciones, en el
sistema, es capaz de “absorber” el Control Robusto por Rediseño de Lyapunov; si tolera
perturbaciones exógenas al sistema o sólo variaciones paramétricas internas (en
resistencias parásitas o en valores nominales de los dispositivos).
Las expresiones desarrolladas en esta sección emplean el mismo modelo
matemático utilizado en el control basado en pasividad, por motivos de distinción aquí se
utiliza la variable z para representar a los estados del sistema 1 1 2 2 3; ; Cz i z i z v .
Sea el sistema real, denotado por el subíndice r , de la Fig. 8
r r r r r r r
D z C z + R z = u (2.60)
en el cual puede existir incertidumbre paramétrica. Los elementos rD , rC , rR , r
z y rz
están dados por
11 1 1
2 2 2 2
1 2 33
0 0 0 0 0 0 0
0 0 ; 0 0 ; 0 0 0 ; ;
0 0 0 10 0
r
r r r r r r
rr
zL z
L z z
C zzR
D C R z z
(2.61)
1k kd , 1,2k , es la señal de control que genera la secuencia de conmutación.
La ecuación de error entre el sistema (2.60) y el sistema deseado
r d r d r d d
D z C z + R z u es
r r r r d
D e C e + R e = u - u (2.62)
donde r d e z z y su derivada como r d
e z z .
14 Un breve análisis de sistemas perturbados se describe en el APÉNDICE A.

Análisis de técnicas de control por moldeo de energía … OLMOS
61
El diseño del controlador robusto ru requiere el diseño de un controlador para el
sistema nominal n n d n d n d am
u D z C z R z R e más una señal adicional, 0X , que enfrenta
los efectos de las incertidumbres paramétricas. Así se define el control real como
0r n X u u (2.63)
donde nu está dada por la expresión (2.15) y la señal 0X es una señal por definir y está en
función de los parámetros inciertos. Para aplicar la propiedad de matching condition [60],
es necesario expresar a 0X sólo en términos de los parámetros inciertos y representar al
sistema real como la suma de términos que no tienen variación paramétrica más los
términos que contienen parámetros inciertos. Lo anterior se logra mediante una
parametrización lineal a nu
n n d n d n d am
u D z C z R z R e (2.64)
de lo cual resulta
1 3 1 1
2 3 2 2
3 33 1 1 2 2
3
1 1
22
0 0
; 0 0
10 0
0 0( , ) ;
0 0
•
n d d n am
d am
d am am
dn d d d
am
T
d rd d n
rd
(z ,z )
z R e
z R e
z eC z z z
RR
z Lz z
Lz
0
0
u g Y θ R e
g R e
Y θ
(2.65)
en donde
0g agrupa los términos que no tienen variación paramétrica

José Armando Olmos López cenidet
62
( , )d dz z
Y es un regresor que está en función de los estados deseados y sus
derivadas
nθ es el vector de parámetros nominales
amR es la inyección de amortiguamiento que se realizó en el control nominal
e es el error existente entre el estado real rz y el deseado dz
Definiendo 0 ( , )d dX z z
Y W donde W es una variable a encontrar, rθ como el
vector de parámetros reales y n r θ θ θ como el vector de error en los parámetros, el
control real se puede representar como
0
0
0
0
( , )
( , ) ( , )
( , ) ( , )
( , ) ( , ) ( , )
r n
d d n am
d d n am d d r
d d n r am d d r
d d d d am d d r
X
z z e X
z z e X z z
z z X z z
z z z z z z
0
0
0
0
u u
g Y θ R
g Y θ R Y θ
g Y θ θ R e Y θ
g Y θ Y W R e Y θ
(2.66)
Realizando las sustituciones adecuadas se tiene
•
d d
( , ) ( , )
(z , z ) ( , ) ( , )
( , )
r r r r d
d d am d d r r d r d r d
am d d r d d r
d d am
z z e z z
e z z z z
z z e
0
0 0
D e C e R e u u
g Y θ W R Y D z C z R z
g Y θ W R Y g Y θ
Y θ W R
(2.67)
Siguiendo los pasos de la técnica de rediseño de Lyapunov, se debe emplear la
misma función de Lyapunov, utilizada para el diseño del control nominal, para diseñar el

Análisis de técnicas de control por moldeo de energía … OLMOS
63
controlador robusto; encontrar la señal 0X . La función de Lyapunov propuesta para el
control nominal es
12( ) T
rV e e D e (2.68)
donde el subíndice r indica que se trata de la matriz D real. Al igual que en el caso del
control nominal, para satisfacer el teorema de estabilidad de Lyapunov la expresión (2.68)
debe de cumplir con
( ) 0 ( ) 0 , 0
( ) 0 ( ) 0 , 0
V e y V e e
V e y V e e
(2.69)
Es fácil notar que (0) 0V y ( ) 0V e se cumplen. Falta por satisfacer ( ) 0V e
,
para lo cual se deriva (2.68) a lo largo de las trayectorias del error, resultando
( ) TrV e
e D e (2.70)
Despejando y sustituyendo r
D e de la ecuación (2.67) se tiene
( ) ( , )T T T Tdr am dV e z z
e Ce e R e e R e e Y θ W (2.71)
Aplicando la propiedad de la matriz antisimétrica C , (2.71) resulta
( ) ( ) ( , )
( , )
T Tdam d
T Tdeq d
V e z z
z z
re R R e e Y θ W
e R e e Y θ W
(2.72)

José Armando Olmos López cenidet
64
Dadas las propiedades de eq R , 0eq R , para garantizar que ( )V e
sea definida
negativa se analiza
0 θ W (2.73)
Como se observa de (2.73), W es la señal adicional que enfrentará los efectos de
la variación paramétrica. Se define
θ (2.74)
para indicar que la magnitud de la variación paramétrica está acotada por el término , lo
cual implica que no se necesita conocer la magnitud de θ , lo único necesario es que esta
magnitud esté acotada por . Aplicando algunas propiedades de normas de vectores y
empleando la expresión (2.74), se analiza el tercer término del lado derecho de (2.72)
22
2
2
( , ) ( , ) ( , ) ( , )
( , )( , )
( , )
( , ) ( , )( , )
( , )
( , )( , )
( , )
T T T Td d d dd d d d
Tdd
Tdd
Tdd
T Td dd d
Tdd
Tdd
Tdd
Tdd
Tdd
z z z z W z z z z
z zz z
z z
z z z zz z
z z
z zz z
z z
e Y θ e Y e Y θ e Y W
e Y θe Y W
e Y θ
e Y Y ee Y W
e Y
Y ee Y
e Y
W
(2.75)
Si (2.74) se cumple, entonces W enfrentará los efectos de la incertidumbre
paramétrica cuya magnitud sea menor que .
Igualando (2.75) a cero se puede encontrar que

Análisis de técnicas de control por moldeo de energía … OLMOS
65
2( , )
( , )
Td d
Td d
z z
z z
Y eW
e Y (2.76)
donde W garantiza la estabilidad del sistema retroalimentado. La expresión anterior es
una función que presenta discontinuidad al existir la posibilidad de una división por cero.
Además, la implementación práctica de un control empleando la expresión (2.76) provoca
el fenómeno de chattering lo cual puede generar efectos indeseados en el sistema. En
lugar de tratar de trabajar fuera de estos problemas y para efectos de robustez, es común
eliminar la discontinuidad agregando un término ε como se muestra a continuación [60]
2( , )
( , )
Td d
Td d
z z
z z
Y eW
e Y (2.77)
Sustituyendo (2.77) en (2.72) se tiene
( ) T Tr amV e
e R e e R e (2.78)
Si se cumple
T Tr am e R e e R e (2.79)
entonces (2.78) será definida negativa. Como no se puede asegurar que (2.79) se
mantenga para cualquier tiempo t , es común seleccionar de tal forma que el error se
encuentre en una vecindad cercana al cero, logrando así una estabilidad práctica. En un
sistema asintóticamente estable, estrictamente el error nunca será cero aún después de
un tiempo t muy grande. De forma similar, cuando un sistema es exponencialmente
estable, teóricamente el error sí llega a cero en algún tiempo t . Cuando el error en el
sistema es tan pequeño, encontrándose en una región (o vecindad) muy cercana al punto
de equilibrio (o cero), por practicidad se considera que el sistema ya se encuentra en

José Armando Olmos López cenidet
66
estado estable. Por lo cual, el término estabilidad práctica considera que el sistema es
estable aunque estrictamente no se haya alcanzado el punto de equilibrio, evitando así
grandes periodos de espera para que el error sea cero. En sistemas lineales, la estabilidad
práctica es equivalente al concepto de margen de error del 3 o 5 % [13].
Una forma práctica de conocer el valor de es empleando la desigualdad de
Rayleigh en la expresión (2.79)
2
min( )Tr am r am e R R e e R R (2.80)
de la cual se obtiene
2
min r am e R R
(2.81)
De esta manera, la ley de control real (2.66) para el circuito de la Fig. 8, resulta
( , ) ( , )r am d d r d dz z z z
0u g R e Y θ Y θ W (2.82)
donde
1 3 1 1 1
2 3 2 2 2
3 3 33 1 1 2 2 3
1
1 112
2
0 0
; ; 0 0
0 10 0
0
( , ) 0 ; ;
0 0
i d am d
r i d am am d
d dn d d d am
d
n rrd d d r
r
v z R z z
v z R z z
z z zC z z z R
R
zL LL
z z zLL
0u g R e
Y θ θ2 2
2 21 1 2 2[ ] ; ;
n r
T d dT T
L
z e z e
We Y e Y
(2.83)

Análisis de técnicas de control por moldeo de energía … OLMOS
67
Cuando no existe perturbación, es decir r nθ θ , el cuarto término del lado derecho
de la ecuación (2.82) desaparece y el control nominal será el único que funcione; en otro
caso funciona el nominal más el robusto. Es decir, la señal adicional de control generada
por esta técnica sólo se activaría cuando existiera una incertidumbre paramétrica, así el
esfuerzo en la ley de control que provee esta técnica será el mismo que en el control
basado en pasividad, salvo cuando existe una incertidumbre. Esto cumple con la teoría del
método de rediseño de Lyapunov. Para que lo anterior sea posible la expresión (2.82)
debe de utilizar el valor de θ (y no el valor de ) para obtener los valores de W , lo cual
requiere conocer la magnitud de la incertidumbre.
De igual forma que en el control nominal, se asume que se dispone de la medición
de todas las variables del sistema. Así, empleando la expresión (2.82) se puede obtener,
implícitamente, las señales de control robusto de la siguiente manera
1 3 1 1 1 1
2 3 2 2 2 2
3 33 1 1 2 2
3
d am d n
r d am d n
dn d d d
am
z R e z L
z R e z L
z eC z z z
R R
u
(2.84)
Despejando y obteniendo de manera explícita las señales de control 1 y 2 se tiene
1 1 1 1 13
2 2 2 2 23
1
1
i am d nd
i am d nd
v R e z Lz
v R e z Lz
(2.85)
Sumando las expresiones de (2.85) da como resultado una única ecuación de
control dada por
1 2
1 1 2 2 1 1 2 23
12 i am am d n d n
d
v R e R e z L z Lz
(2.86)

José Armando Olmos López cenidet
68
La expresión (2.85) no se ha simplificado pues se considera que la variación
paramétrica en los inductores no es en la misma magnitud en ambos convertidores. Esto
significa que debe de utilizarse una ley de control independiente para cada convertidor. La
expresión (2.86) puede emplearse, sí y sólo sí, la variación paramétrica sucede en la
misma magnitud y al mismo tiempo en ambos inductores. Por estos motivos se utilizará la
expresión (2.85) en el caso del controlador robusto.
La retroalimentación de las expresiones (2.85) en el sistema perturbado (2.5) da
como resultado
11
22
1 1 1 1
2 2 2 2
1
1
r i C
r i C
i am nCd
i am nCd
div v
dt
diL v v
dt
L v R i i Lv
v R i i Lv
(2.87)
donde 1 1 1r nL L L y 2 2 2ˆ
r nL L L indican el valor de las inductancias perturbadas o con
variación paramétrica. Recordando que para el diseño del controlador de corriente se
considera que C Cdv v , de (2.87) se obtiene
11
11
1 1
22
22
2 2
1 1 1 1
11 1 1 1
1 1 1 1
2 2 2 2
22 2 2 2
2 2 2 2
ˆ 0
ˆ 0
ˆ 0
ˆ 0
r
n
r
n
am n
n am
n am
am n
n am
n am
di
dt
di di
dt dt
di di
dt dt
diL
dt
di di
dt dt
di di
dt dt
L R i i L
L L L R i
L L R i
R i i L
L L L R i
L L R i
(2.88)
Análisis de técnicas de control por moldeo de energía … OLMOS
69
De acuerdo al rediseño de Lyapunov, se cumple que el efecto de 1L será
compensado por los efectos que genera la magnitud (un caso similar ocurre para 2L y
). Dicho en otras palabras, , y son constantes, por lo que las ecuaciones (2.88)
son cero si y solo si 0ki . Esto indica que el controlador logra que el sistema alcance el
punto de equilibrio asintóticamente estable. De igual forma que en el control nominal, se
asume que se dispone de la medición de todas las variables del sistema. Las leyes de
control (2.85) se comparan con una señal triangular para generar el PWM que apaga y
enciende los interruptores 1S y 2S . Estás mismas leyes también pueden utilizarse con la
técnica de Charge-Control, sin embargo, como ya se ha demostrado, la ténica Charge-
Control logra conducir a las variables al punto de equilibrio aun cuando la ley de control es
tan sencilla como las expresiones (2.56).
Para el controlador de voltaje se propone emplear la misma ecuación de la
expresión (2.35), la cual corresponde a un control tipo PI dado por la expresión
0
t
p iG K K d
(2.89)
2.4. Resultados numéricos
El circuito mostrado en la Fig. 8 fue simulado en Simulink™ con los valores nominales de
parámetros dados por la Tabla 2.
Tabla 2. Valores de los parámetros utilizados en la simulación.
Nombre Parámetro Valor Voltaje de entrada VS 120 VRMS
Voltaje pico de entrada vS 170 Vac Frecuencia de entrada fs 60 Hz
Frecuencia de conmutación fswitch 100 KHz Voltaje de salida Vo 400 Vdc
Rizo de voltaje de salida 0V 10%
Inductor 1 L1 2 mH Inductor 2 L2 2 mH
Capacitor de salida C 220 µF Resistencia de carga R 200 Ω

José Armando Olmos López cenidet
70
Las siguientes gráficas, en la Fig. 10, muestran el voltaje de salida al emplear los
controladores diseñados: en todos los casos el voltaje de salida es regulado cubriendo las
especificaciones de diseño.
Con la finalidad de comparar los resultados de los controladores diseñados con
algún otro ya reportado en la literatura, se ha seleccionado el controlador PI del trabajo de
Mike O’Loughlin, [71], por ser uno de los que cumplen con los objetivos deseados.
Además, es uno de los trabajos que sirve de base para generar desarrollos tecnológicos
en prototipos industriales. En ese trabajo se emplea un controlador para satisfacer cada
objetivo de control: un PI para regular el voltaje; un controlador PI para la corrección del
factor de potencia; un controlador Charge-Control para la distribución de corriente. Como
puede notarse, este trabajo emplea dos controladores para la misma variable: corriente.
a) Basado en Pasividad b) Caso 1
c) Caso 2 d) Charge-Control
e) Robusto f) PI diseñado en [71] Fig. 10. Voltaje de salida al emplear los controladores diseñados.
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2150
200
250
300
350
400
450
Tiempo (s)
Ma
gnitu
d (v
olts
)
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2150
200
250
300
350
400
450
Tiempo (s)
Ma
gnitu
d (v
olts
)
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2150
200
250
300
350
400
450
Tiempo (s)
Ma
gnitu
d (
volts
)
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2150
200
250
300
350
400
450
Tiempo (s)
Mag
nitu
d (v
olts
)
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2150
200
250
300
350
400
450
Tiempo (s)
Ma
gni
tud
(vo
lts)
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2150
200
250
300
350
400
450
Tiempo (s)
Mag
nitu
d (v
olts
)

Análisis de técnicas de control por moldeo de energía … OLMOS
71
La hipótesis de nuestra investigación es demostrar que con un control basado en
pasividad se logra la distribución equitativa de corriente del sistema en estudio; utilizado
en el lazo de corriente es equivalente a lograr ambos objetivos: la CFP y la distribución de
corriente. Para comparar los resultados obtenidos al emplear nuestros controladores se ha
seleccionado el controlador PI empleado en el lazo de corriente del trabajo de Mike
O’Loughlin [71], la Fig. 10f se muestra el voltaje de salida al emplear este esquema de
control; un PI para el lazo de voltaje y un sólo control PI para el lazo de corriente.
De las gráficas de la Fig. 10 se observa que la regulación del voltaje se logra al
emplear cualquiera de los seis controladores: los cinco diseñados en esta tesis y el
reproducido del trabajo [71]. Debido a que las diferencias que existen entre las curvas de
la Fig. 10 son casi imperceptibles a la vista, en la Tabla 3 se presenta el error que existe en
la regulación del voltaje; se ha empleado como indicador el error cuadrático medio. Como
es notorio, los errores son similares de lo cual se deduce que en cuanto a la regulación de
voltaje los seis controladores presentan un buen desempeño; los peores casos en la
regulación de voltaje son el controlador Caso 3 y el reportado en [71].
La Fig. 11a muestra el voltaje de entrada Sv y la corriente de entrada Si cuando se
utiliza el Control Basado en Pasividad sin ninguna simplificación. Debido a la diferencia en
las magnitudes de ambas curvas, es usual escalar el voltaje Sv a valores similares de la
corriente. La Fig. 11b muestra las mismas curvas sólo que ya adecuadas para su
comparación. En lo posterior, se efectuará el mismo proceso de escalamiento en todas las
gráficas donde se compare la variable Sv con la variable Si , o la variable iv con ii . En esta
gráfica ambas curvas tienen la misma forma y fase.
Tabla 3. Errores en las variables controladas por las diferentes propuestas
Controlador utilizado Error cuadrático medio
Voltaje Corriente 1i Corriente 2i
Pasivo 8.4891 0.1138 0.1138 Caso 1 8.5676 0.1081 0.1081 Caso 2 8.5013 0.1090 0.1090 Caso 3 8.6948 0.1239 0.1239
Robusto 8.5441 0.1073 0.1073 PI diseñado en [71] 8.6840 1.1690 1.1690

José Armando Olmos López cenidet
72
Las gráficas Fig. 11c a Fig. 11g muestran el voltaje de entrada iv , ya escalado, y la
corriente de entrada ii de los controladores simulados. En todas estas gráficas se tienen
resultados similares en estado estable aunque con ligeras diferencias en estado
transitorio.
a) Voltaje Sv y corriente Si en magnitudes originales. b) Voltaje Sv escalado y corriente Si .
c) Caso 1 d) Caso 2
e) Charge-Control f) Robusto
g) PI diseñado en [71] h) Acercamiento a un periodo del inciso g)
Fig. 11. El voltaje Sv y corriente Si tienen la misma forma y fase.
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2
-300
-200
-100
0
100
200
300
Tiempo (s)
Mag
nitu
d
v
is
s
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2-6
-4
-2
0
2
4
6
Tiempo (s)
Mag
nitu
d
vs
is
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.20
2
4
6
8
10
12
Tiempo (s)
Mag
nitu
d
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.20
2
4
6
8
10
12
Tiempo (s)
Mag
nitu
d
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.20
2
4
6
8
10
12
Tiempo (s)
Mag
nitu
d
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.20
2
4
6
8
10
12
Tiempo (s)
Ma
gnitu
d
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.20
2
4
6
8
10
12
Tiempo (s)
Ma
gnitu
d
0.192 0.193 0.194 0.195 0.196 0.197 0.198 0.199 0.20
2
4
6
8
10
12
Tiempo (s)
Mag
nitu
d

Análisis de técnicas de control por moldeo de energía … OLMOS
73
En la curva Fig. 11h se realizó un acercamiento a un periodo de ii y iv de la Fig.
11g, para observar con más detalle que la curva de corriente está en fase con la curva de
voltaje. Lograr que las curvas de voltaje y de corriente estén en fase se logra con
cualquiera de los seis controladores, por esta razón sólo se amplió un periodo de las
curvas obtenidas (del controlador PI).
Disminuir la magnitud del rizo en la corriente de entrada es un objetivo importante
en nuestro sistema. Esto se logra haciendo que los convertidores conectados en paralelo
trabajen de manera “entrelazada” (“interleaved” por sus siglas en inglés), provocando un
desfase entre los ciclos de trabajo kd , 1,2k ; el ángulo de desfasamiento entre cada
ciclo de trabajo está dado por la expresión
360 / n (2.90)
en la cual “ n” es el número de convertidores entrelazados. En el caso de dos
convertidores el desfasamiento es de 0180 y cuando 50%kd del periodo de conmutación
en ambos convertidores, los ciclos de trabajo serían como se muestra en la Fig. 12;
entonces el rizo en la corriente de entrada ii es cero.
1i
2i
ii
1d
2d
2ii
Fig. 12. Formas de onda en convertidores entrelazados
Para analizar los rizos de corriente en las simulaciones, se ha hecho un
acercamiento a los rizos de las corrientes ii , 1i y 2i . La comparación se muestra en la Fig.
13a y b; en donde se nota que ii es menor al rizo de 1i o de 2i . Como ya se mencionó,
será cero sólo cuando 1 2 50%d d del periodo de conmutación. Por lo cual el

José Armando Olmos López cenidet
74
funcionamiento entrelazado de convertidores no cancelará el rizo al 100% pero sí
disminuirá drásticamente el rizo en ii , es decir 0ii conforme 1 2 50%d d . Otra
manera de disminuir ii es incrementando el número de convertidores entrelazados; esto
se abordara en el Capitulo 4.
0.1956 0.1956 0.1956 0.1956 0.1956 0.1956 0.1956 0.19Ti ( )
80ii mA
1,2 480i mA
a) Corriente ii b) Corrientes ii , 1i y 2i
Fig. 13. Rizos de corriente ii , 1i y 2i cuando se utiliza un controlador basado en pasividad.
Como puede notarse en la Fig. 13a, la cresta de las corrientes 1i y 2i no excede a los
5A . Esto significa que la corriente pico en los diodos es 5Dpeaki A , lo cual no excede al
valor de diseño. También, en la misma figura se observa que 1,2 500i mA (en el peor de
los casos) es menor que el valor máximo de diseño 2.1 A ; por lo cual se satisface esta
especificación.
En las gráficas de la Fig. 14 se presenta un periodo de las corrientes 1i y 2i ;
fácilmente se observa que ambas corrientes están una sobre la otra, lo cual indica que la
corriente ii es equitativamente distribuida entre 1i y 2i . En cada gráfica se ha realizado un
acercamiento en los recuadros que aparecen para observar que ambas corrientes tienen
prácticamente las mismas magnitudes, con excepción de la Fig. 14e y Fig. 14f que
corresponden a los casos controlador robusto y control PI reportado en [71],
respectivamente.
En la Tabla 3 (páginas arriba) se calcularon los errores en la distribución de
corriente al emplear los diferentes controladores. De esta Tabla 3 y de las gráficas de la
Fig. 14 se concluye que todos los controladores que emplean la teoría de Pasividad tienen
0.1 0.11 0.12 0.13 0.14 0.15 0.16 0.17 0.18 0.19 0.20
1
2
3
4
5
6
7
8
9
10
Tiempo (s)
Mag
nitu
d (a
mpe
res)

Análisis de técnicas de control por moldeo de energía … OLMOS
75
mejores resultado que el emplear un control PI. Por lo cual es posible (y recomendable)
emplear un control por moldeo de energía para garantizar la distribución equitativa de
corriente en dos convertidores electrónicos de potencia, y no emplear dos controladores:
uno para la CFP y otro para la distribución.
Para que el control robusto basado en pasividad (diseñado en este trabajo) esté en
funcionamiento, es necesario que exista una diferencia paramétrica. Por lo cual para
obtener la Fig. 14e se consideraron los valores 1 1.8L mH y 2 2.5L mH , es decir 10%
menos del valor nominal en 1L y 25% más en 2L . Debido a estas diferencias el rizo de
corriente en cada inductor es diferente aunque su valor “promedio” sea el mismo, lo cual
es evidente en la figura. Sin embargo, en la Fig. 14f para el caso del control PI, las
diferencias no son provocadas por variación paramétrica sino que el controlador no es
capaz de mantener la distribución equitativa.
a) Basado en Pasividad b) Caso 1
c) Caso 2 d) Charge-Control
Tiempo (s) e) Robusto f) PI diseñado en [71]
Fig. 14. Distribución de corrientes entre los convertidores al emplear diferentes controladores.
0.192 0.193 0.194 0.195 0.196 0.197 0.198 0.199 0.20
1
2
3
4
5
Tiempo (s)
Mag
nitu
d (a
mpe
res)
0.192 0.193 0.194 0.195 0.196 0.197 0.198 0.199 0.20
1
2
3
4
5
Tiempo (s)
Ma
gnitu
d (a
mpe
res)
0.192 0.193 0.194 0.195 0.196 0.197 0.198 0.199 0.20
1
2
3
4
5
Tiempo (s)
Ma
gnitu
d (a
mpe
res)
0.192 0.193 0.194 0.195 0.196 0.197 0.198 0.199 0.20
1
2
3
4
5
Tiempo (s)
Mag
nitu
d (
amp
eres
)
0.192 0.193 0.194 0.195 0.196 0.197 0.198 0.199 0.20
1
2
3
4
5
Tiempo (s)
Magn
itud
(am
pere
s)
0.12 0.13 0.14 0.15 0.16 0.17 0.18 0.19 0.20
0.5
1
1.5
2
2.5
3
3.5
4
4.5
Mag
nitu
de
(am
per
es)
i2 i1

José Armando Olmos López cenidet
76
Tanto en la Fig. 10f y como en Fig. 11g, los controladores PI logran tanto la
regulación del voltaje de salida como la corrección del factor de potencia, aunque la
distribución equitativa de la corriente no se garantiza. La diferencia trata de ser
compensada por el controlador (sin lograrlo) provocando que la situación se invierta; este
desbalance persiste en t . Por lo cual es necesario añadir una señal extra para
compensar el desbalance, tal como se describe en [71].
Para probar la robustez de los controladores diseñados, se realizó una variación
paramétrica en el inductor 2 15L L . La Fig. 15 muestra las curvas obtenidas tomando los
valores de la Tabla 2, con la variación ya mencionada. En dicha figura se muestran sólo
tres casos por considerar sus diseños con diferencias relevantes: el control basado en
pasividad (Fig. 15a), el controlador por Charge-Control (Fig. 15b) y el controlador robusto
(Fig. 15c); los resultados del controlador Caso 1 y del controlador Caso 2 son similares a
los resultados aquí presentados para el controlador Caso 3.
a)
b).
c)
Fig. 15. Columna izquierda (línea azul) corriente Si , y (línea roja) voltaje Sv : a) control Basado en
Pasividad; b) control por Charge-Control; c) control Robusto.
0.16 0.165 0.17 0.175 0.18 0.185 0.19 0.195 0.2-6
-4
-2
0
2
4
6
Tiempo (s)
Ma
gnitu
d
0.19 0.191 0.192 0.193 0.194 0.195 0.196 0.197 0.198 0.199 0.20
0.5
1
1.5
2
2.5
3
Tiempo (s)
Ma
gnitu
d (a
mpe
res) i1
i2
0.16 0.165 0.17 0.175 0.18 0.185 0.19 0.195 0.2-6
-4
-2
0
2
4
6
Tiempo (s)
Ma
gnitu
d
0.19 0.191 0.192 0.193 0.194 0.195 0.196 0.197 0.198 0.199 0.20
0.5
1
1.5
2
2.5
3
Tiempo (s)
Ma
gnitu
d (a
mpe
res)
i1
i2
0.16 0.165 0.17 0.175 0.18 0.185 0.19 0.195 0.2-6
-4
-2
0
2
4
6
Tiempo (s)
Ma
gnitu
d
0.19 0.191 0.192 0.193 0.194 0.195 0.196 0.197 0.198 0.199 0.20
0.5
1
1.5
2
2.5
3
Tiempo (s)
Mag
nitu
d (a
mpe
res)
i1
i2
vS
vS
vS 88Si mA
95Si mA
87Si mA
1
2
389
131
i mA
i mA
1
2
388
143
i mA
i mA
1
2
378
125
i mA
i mA

Análisis de técnicas de control por moldeo de energía … OLMOS
77
En todas las curvas de la Fig. 15 se han empleado los controladores de corriente
que generan una ley de control para cada convertidor, es decir, para el controlador basado
en pasividad se utilizan las ecuaciones (2.17), para el controlador Caso 3 (Charge-Control)
se emplean las ecuaciones (2.56), y para el controlador robusto se usaron las ecuaciones
(2.85).
En la Fig. 15, la columna de la izquierda muestra a Sv e Si ; como puede notarse, se
logra la corrección del factor de potencia. En la columna derecha de la misma Fig. 15 se
muestran las corrientes de los inductores para los casos correspondientes; se observa que
la distribución de corriente se logra satisfactoriamente.
La Tabla 4 presenta los errores en las variables controladas: 0v , 1i y 2i . En todas
las gráficas anteriores, el ángulo de desfasamiento entre la corriente de entrada ii y el
voltaje de entrada es pequeño (menor a 2 grados) por lo cual el factor de potencia es
0.99939FP ; salvo en el caso Charge-Control donde en los cruces por cero presenta
problemas en el cálculo numérico provocando que el ángulo sea hasta 4 grados y el
0.99756FP .
Como puede notarse de la misma figura, existe una ligera deformación de la curva
de corriente. Por tal motivo se procedió a realizar un análisis de la Distorsión Armónica
Total (THD por sus siglas del idioma inglés). Para medir las deformaciones en las curvas
de corriente respecto a una onda senoidal pura, se muestra en la Tabla 4 la distorsión
armónica total en cada caso; en todos ellos la distorsión es alrededor del 2%.
Del análisis de estos datos y de las gráficas de la Fig. 15 nuevamente se demuestra
que aún ante una variación paramétrica tan severa, los objetivos de la regulación del
voltaje de salida, corrección del factor de potencia y disminución del rizo de la corriente de
entrada se logran satisfactoriamente con los seis controladores. Al comparar las
magnitudes en los errores de corriente se puede concluir que la distribución de corriente
es equitativa (puesto que tienen exactamente el mismo error).

José Armando Olmos López cenidet
78
Tabla 4. Errores de las variables controladas considerando incertidumbre paramétrica.
Controlador utilizado Error cuadrático medio
Factor de Potencia THD(x100) Voltaje 0v Corriente 1i Corriente 2i
Pasivo 8.5400 0.0962 0.0962 0.99939 0.0220
Caso 1 8.5837 0.0847 0.0847 0.99939 0.0211
Caso 2 8.5823 0.0854 0.0854 0.99939 0.0207
Caso 3 8.5816 0.0844 0.0844 0.99756 0.0204
Robusto 8.6206 0.0756 0.0756 0.99939 0.0209
PI diseñado en [71] 8.7312 1.9603 1.9603 0.99939 0.0267
En los tres casos mostrados, los controladores son capaces de distribuir
equitativamente la corriente entre los convertidores y lograr la corrección del factor de
potencia; además de satisfacer los otros objetivos de control: regular el voltaje de salida,
disminuir el rizo en la corriente de entrada. La única diferencia notable en las curvas de
corriente mostradas en la Fig. 15 es la magnitud en los rizos de las corrientes 1i y 2i , lo
cual es provocado por las diferencias en la inductancia. Sin embargo, para el controlador
basado en pasividad como en el controlador robusto, el empleo de un controlador de
corriente para cada uno de los convertidores no facilita la conexión de más convertidores.
Es importante hacer notar que el controlador del Caso 3 (Charge-Control) logra la
distribución equitativa de la corriente aun cuando las leyes de control (2.56) son bastante
sencillas, e inclusive es la mima señal de referencia generada. Esto implica que sólo se
genera una ley de control la cual es enviada a ambos convertidores y la técnica de
Charge-Control logra la distribución de la corriente y genera los pulsos para encender o
apagar los interruptores 1S y 2S .
La Tabla 4 permite conocer los errores en el seguimiento a la referencia. Como
puede notarse, el error en la regulación del voltaje es prácticamente el mismo en todos los
casos. Por otro lado, el error en la distribución de corriente es cercano a cero al utilizar los
controladores basados en pasividad, no así al usar el controlador PI reportado en [71].
Además, en este controlador PI la curva de corriente está en fase con la de voltaje, como
se observa en la Fig. 16a, pero la distribución equitativa de corriente no es aceptable, Fig.
16b.
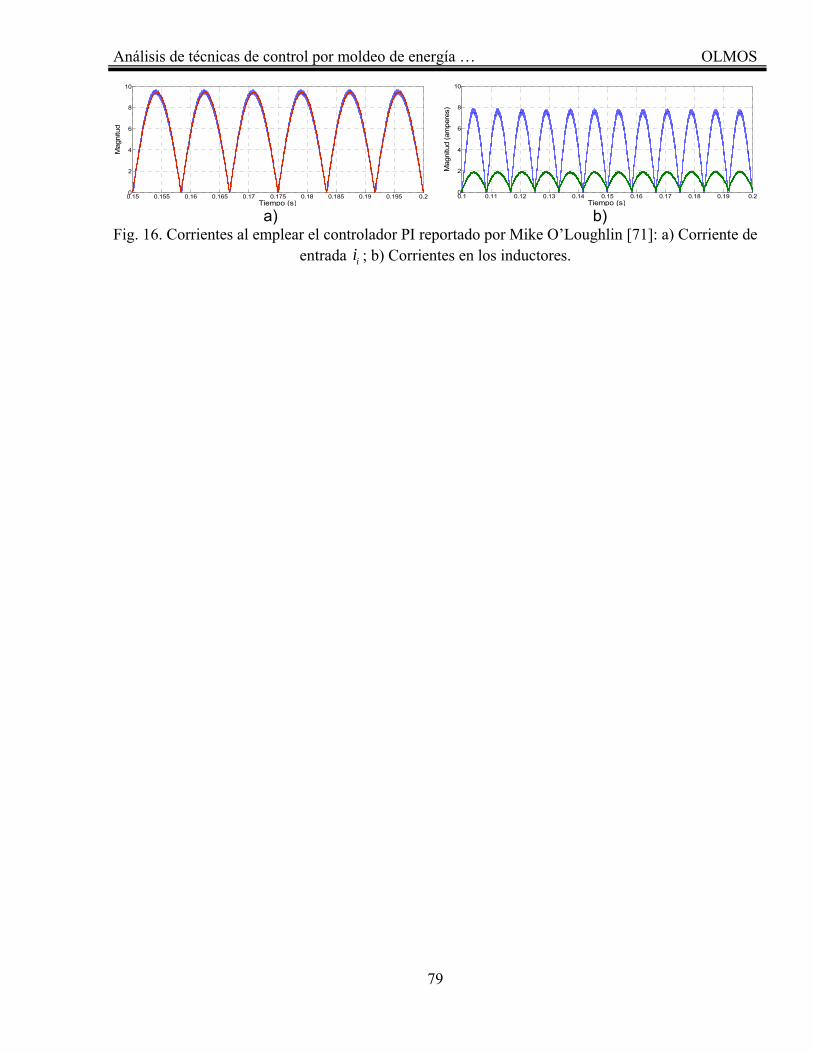
Análisis de técnicas de control por moldeo de energía … OLMOS
79
a) b) Fig. 16. Corrientes al emplear el controlador PI reportado por Mike O’Loughlin [71]: a) Corriente de
entrada ii ; b) Corrientes en los inductores.
0.15 0.155 0.16 0.165 0.17 0.175 0.18 0.185 0.19 0.195 0.20
2
4
6
8
10
Tiempo (s)
Mag
nitu
d
0.1 0.11 0.12 0.13 0.14 0.15 0.16 0.17 0.18 0.19 0.20
2
4
6
8
10
Tiempo (s)
Mag
nitu
d (a
mper
es)

José Armando Olmos López cenidet
80
Análisis de técnicas de control por moldeo de energía … OLMOS
81
CAPÍTULO 3
.
.
CONTROLADOR
CONSIDERANDO
RESISTENCIAS PARÁSITAS
Al considerar resistencias parásitas la complejidad de las expresiones aumenta debido a
que las variables de interés (corrientes de inductores y voltaje de capacitor) aparecen en
términos que no siempre es fácil despejar y así obtener expresiones matemáticas
sencillas. Por tal motivo es usual considerar paulatinamente las resistencias parásitas y
así tener una mayor comprensión de sus efectos dentro del sistema. De esta manera, se

José Armando Olmos López cenidet
82
han considerando dos casos: un caso es analizando los efectos de las resistencias de los
inductores y el otro caso es considerando tanto las de los inductores como la del capacitor
de salida. El caso más sencillo (resistencias sólo en los inductores) se describe en el
APÉNDICE C y en este Capítulo 3 se analiza el más complejo.
3.1. Modelo del sistema considerando r1, r2 y rC
Nuevamente el diagrama de la Fig. 17 presenta a dos convertidores elevadores
conectados en paralelo en los cuales se han dibujado las resistencias parásitas 1r , 2r y Cr
de los inductores y del capacitor, respectivamente.
Fig. 17. Convertidores elevadores considerando parásitos 1r , 2r y Cr .
Realizando un análisis de leyes de Kirchhoff al circuito se obtienen las siguientes
ecuaciones
11 1 0
22 2 0
1 1 2 2
1 1 1 1 1
2 2 2 2 2
0
i i
i i
C
div v
dt
diL v v
dt
vdvC i i
dt R
L i r v i r
i r v i r
(3.1)
donde, en este caso, 1 1 0v y 2 2 0v son los voltajes ‘inyectados’ a las mallas.

Análisis de técnicas de control por moldeo de energía … OLMOS
83
3.2. Diseño de controladores
Al igual que la sección anterior, se inicia con el diseño del Control Basado en Pasividad ya
que es el controlador base para el diseño de los siguientes controladores. El diseño del
Controlador Robusto Basado en Pasividad por Rediseño de Lyapunov presenta un caso
especial al considerar la resistencia parásita del capacitor de salida; esto se analiza en la
sección del controlador. En la sección final de este Capítulo se presentan y discuten los
resultados numéricos al emplear los controladores diseñados.
3.2.1. Control basado en pasividad
El sistema (3.1) puede expresarse como
x x u
D R (3.2)
donde las matrices D y R están dadas por
1 1 1
11 1
2 2 2 2 2 2
33
1 2
0
0 0
0 0 ; 0 ; ; ;
0 01
C
C C
C
C C
C C C
r R Rr
R r R r xL x
r R RL r x x
R r R rC x
xR R
R r R r R r
D R x x
(3.3)
Siguiendo la metodología empleada anteriormente se obtiene el control basado en
pasividad para dos convertidores elevadores, donde las variables de control 1 y 2 son

José Armando Olmos López cenidet
84
1 1 1 1 1 1 11
1 3
2 2 2 2 2 2 22
2 3
( )
( )
i d d am d
Cd d
C C
i d d am d
Cd d
C C
v L x r x R x xr R R
x xR r R r
v L x r x R x xr R R
x xR r R r
(3.4)
Sumando ambas expresiones de (3.4), con las consideraciones 1 2L L L ,
1 2am am amR R R , 1 2r r r y 1 2d dx x , se obtiene
1 2 1 2 1 2
1 3
0
2 ( )
2
2
2
i d d d d am
Cd d
C C
ii i am i
i CCd
C C
ii i am
v L x x r x x R e e
r R Rx x
R r R r
div L ri R i
dti r R R
vR r R r
div v L ri R i
dt
(3.5)
La expresión anterior puede dividirse por dos (el número de convertidores
conectados) y utilizarse como la señal de control para cada convertidor. Como puede
advertirse, (3.5) necesita el sensado de la corriente de entrada ii o de las corrientes 1i y 2i
las cuales sumadas dan como resultado ii . No obstante, aún sensando 1i y 2i , la
expresión (3.5) calcula una única ley de control para los dos convertidores y no se
obtienen dos leyes de control como en (3.4).
A continuación se presenta el diseño del lazo de voltaje.
Multiplicando la tercera ecuación de (3.1) por 0v y considerando que / 2k ii i ,
1,2k , resulta

Análisis de técnicas de control por moldeo de energía … OLMOS
85
1 1 2 2
20
0 0 0
20
0
2 20
2
2 2 2
C
i
i ii i i i i
dvv C i i
dt R
v
R
R
vv v
iv
i di vL Kv i r i i i
dt
(3.6)
donde 0v se tomó de la expresión (3.5).
Es posible simplificar (3.6) siguiendo el mismo proceso del Capítulo 2, considerando
que la magnitud máxima del segundo y tercer miembro del lado derecho es
1 12 2 6i ii r L di dt . También se considera que la ley de control de corriente ha logrado
que i ii i por lo que 0ii . Aún más, para el diseño del controlador de voltaje el mayor
interés es analizar las componentes en CD y la componente15 en CD de 2Sv es 2
,S RMSv . Así,
bajo estas consideraciones se obtiene
2 20 0
0 2,
20
C ii i i
S RMS
dv vC
dt R
Gv vv v i v
v R
vG
R
(3.7)
Para no manipular términos de alto orden se considera que 0 Cv v . Lo cual permite
que (3.7) se pueda escribir como
2C C
C
dvC
dt
vv G
R (3.8)
Nuevamente, se utiliza la variable 2 2Cv , para definir el error 2 2dV . Así,
empleando este cambio de variable la expresión del error en el voltaje de salida es
15 Recordar que i Sv v , por lo cual 2 2
i Sv v .

José Armando Olmos López cenidet
86
2d
C Gdt R
(3.9)
Para obtener el valor de G , en este trabajo se sugiere un controlador PI, el cual
esta dado por la expresión
0
t
p iG K K d (3.10)
que es la misma expresión (2.28) encontrada en el diseño del Controlador Basado en
Pasividad del Capítulo 2.
3.2.2. Caso 1: Control Proporcional Basado en Pasividad sensando la corriente ii
De manera similar al desarrollo mostrado para el Caso 1 del Capítulo 2 anterior, se
proponen las mismas leyes de Control Basado en Pasividad mostradas en (3.4), pero aquí
se escriben de diferente manera
*1
1 0 1 1 1
*2
2 0 2 2 2
2 2
2 2
i ii
i ii
i diLv v r K i
dt
i diLv v r K i
dt
(3.11)
Considerando 1 2L L L , 1 2r r r y 1 2K K K , entonces la suma de las
ecuaciones (3.11) es
*
0 2 ii i i
div v ri L Ki
dt
(3.12)
Análisis de técnicas de control por moldeo de energía … OLMOS
87
donde i i ii i i . Dado que 0iLdi dt es posible aproximar (3.12) a una forma más
simplificada dada por
*
0 2 i i iv v ri Ki (3.13)
Para el controlador del lazo de voltaje se propone emplear el controlador dado por
la expresión (3.10).
3.2.3. Caso 2: Control Basado en Pasividad sensando la corriente is
La ley de control (3.12) puede desarrollarse, donde se hace un abuso en la nomenclatura
para facilitar la comparación, como sigue
*0
2 2, ,
2 2, ,
2 2 2, 0
2
2 sgn( ) sgn( ) sgn( ) sgn( )
sgn( ) 2
sgn( ) 2
ii i i
S SS s S S s s s
S RMS S RMS
S Ss S S S
S RMS S RMS
Ss S S S
S RMS
div v Ki ri L
dtGv dvLG
v i K i i i r i iv v dt
Gv dvLGi v K i i r
v v dt
Gv si v Ki r i
v s
(3.14)
donde 2 2 2
, 0
SS
S RMS
dvLG si
v dt s
, S S Si i i , 2,S S S RMSi Gv v . Es decir, no se desprecian los
efectos de la derivada de la corriente deseada Si , sino que se expresan empleando series
de Fourier. La variable G es calculada de acuerdo a (3.10).

José Armando Olmos López cenidet
88
3.2.4. Caso 3: Control por Charge-Control
Nuevamente, como en el Caso 3 del Capítulo 2, la integral de la corriente 1Si durante la
duración del ciclo de trabajo 1d , no es alterada por los efectos de la resistencia parásita 1r .
Lo mismo sucede en la corriente 2Si . Es decir, los valores deseados k en el capacitor
, 1,2TkC k , están dados por
1 1 1
2 2 2
12
12
i
i
i
i
(3.15)
Las señales de control 1 y 2 pueden tomarse de (3.13) o (3.14). Sin embargo,
como se ha hecho en las secciones anteriores, es posible seguir el siguiente desarrollo
para simplificar las expresiones sin perder controlabilidad.
La técnica de Charge-Control no se ve afectada por la inclusión de resistencias
parásitas en las inductancias, por lo cual es posible emplear la siguiente aproximación
(sólo si las características de los inductores son iguales)
1 0 2 0 iv v v (3.16)
en la cual los términos *k kL di dt , k kr i y k kK i , 1,2k se han despreciado debido a su
magnitud *k k k k iL di dt r i v y a que 0k kK i conforme 0ki .
Para el controlador de voltaje se emplea el controlador de la expresión (3.10).

Análisis de técnicas de control por moldeo de energía … OLMOS
89
3.2.5. Control robusto
Nuevamente, se inicia del modelo del sistema real de la Fig. 17
r r r r r
•
D z + R z = u (3.17)
con las matrices rD , rR , r
z y rz dadas por
11 1
2 2 2
33
1 1 1
2 2 2
1 2
0 0
0 0 ; ;
0 0
0
0
1
r
r r r r
r
Cr r rr
r Cr r Cr
Cr r rr r
r Cr r Cr
r r
r Cr r Cr r Cr
zL z
L z z
C zz
r R Rr
R r R r
r R Rr
R r R r
R R
R r R r R r
•
D z z
R (3.18)
1k kd , 1,2k , es la señal de control que genera la secuencia de conmutación.
Para el diseño del controlador empleando este método es necesario representar al
sistema de la siguiente manera
•
(z, z)r r0u = g + Y θ (3.19)
donde 0g agrupa los términos que no tienen variación paramétrica, •
(z, z)Y es un regresor
que está en función de los estados y sus derivadas, y rθ es el vector de parámetros
nominales. Una manera de expresar (3.17) como (3.19) es la siguiente

José Armando Olmos López cenidet
90
1 1 3 1
1
2 2 3 2
2
1 1 2 2 3
1 1
1 1
3
;
1
0 0 0
0 0 0
0 0 0 0
Cr r r
rr Cr r Cr
r
Cr r rr
r Cr r Crr
r rr
r Cr r Cr r Cr
r R Rz z LR r R r
rr R R
z z LR r R r
rR R
Cz z zR r R r R r
z z
z z
z
0 rg θ
Y
(3.20)
Sin embargo, como se observa, no es posible separar las señales 1 y 2 del
parámetro Crr , lo cual significa que si el valor de este parámetro cambia entonces la ley de
control robusto no podrá hacer frente a esta variación.
Otra manera de expresar a (3.17) de la forma (3.19) es la siguiente
1
1
2
2
1 1 1 1 1 3
2 2 1 3 2 2
1 1 2 2 3 3
0 ;
1
0 0 0 0
0 0 0 0
0 0 0 0 0
r
r
Cr r r Cr
r r Cr
r
r
r
r Cr
L
r
r R R r
R R r
L
r
C
R r
z z z z
z z z z
z z z z
0 rg θ
Y
(3.21)

Análisis de técnicas de control por moldeo de energía … OLMOS
91
En la expresión (3.21) la matriz 0g no existe, esto implica que deben de incluirse las
variables de control 1 y 2 dentro del regresor (o en el vector de parámetros). Al hacer
esto no es posible obtener una expresión para encontrar los valores de tales variables; en
otras palabras, no es posible despejar dichas variables.
Por estas razones el diseño de un control robusto basado en el rediseño de
Lyapunov no es posible cuando se considera que el sistema tiene una resistencia parásita
Cr .
Lo anterior muestra que es necesario tener una representación del sistema que
cumpla la condición relacional (matching condition) para aplicar el rediseño de Lyapunov.
3.3. Resultados numéricos
El circuito mostrado en la Fig. 17 fue simulado en Simulink® con los valores nominales de
parámetros dados por la Tabla 5. Al implementar una ley de control a un sistema real, no
es posible asegurar que los valores de los dispositivos serán los mismos que se utilizaron
para diseñar la ley de control; aun cuando en el diseño del controlador se hayan tomado
en cuenta elementos parásitos. Factores como la temperatura o el envejecimiento, por
mencionar algunos, provocan una variación paramétrica que no es viable medir ni predecir
con exactitud. Por esta razón es importante conocer cuál es el desempeño del controlador
ante tales incertidumbres paramétricas.
Tabla 5. Valores de los parámetros utilizados en la simulación. Nombre Parámetro Valor
Voltaje de entrada vS 230 Vrms Frecuencia de conmutación fswitch 100 KHz
Voltaje de salida Vo 400 Vdc Inductor 1 L1 2 mH Inductor 2 L2 2 mH
Resistencia del inductor 1 r1 1 Ω Resistencia del inductor 2 r2 1 Ω
Capacitor de salida C 220 µF Resistencia del capacitor rC 0.6 Ω
Resistencia de carga R 200 Ω

José Armando Olmos López cenidet
92
Las siguientes gráficas muestran el desempeño de los controladores diseñados
ante incertidumbres paramétricas. Los parámetros nominales de los convertidores se han
tomado de la Tabla 5 y los reales tienen las siguientes variaciones: 1L y 1r son 10% veces
mayor que su valor nominal y 2L y 2r son 30% veces menor que su valor nominal. Estas
diferencias paramétricas son mayores que las que pueden existir en módulos de
convertidores estandarizados, donde las diferencias oscilan entre el 5% .
Si se utilizan las leyes de control que generan una ley de control para cada
convertidor, la distribución equitativa de corriente se logra de manera satisfactoria en todos
los casos. Sin embargo, lo más interesante es emplear una sola ley de control, dividirla
entre el número de convertidores y generar los pulsos que encienden y apagan los
interruptores de los convertidores. Emplear una sola ley de control permite una mayor
facilidad la integración de nuevos módulos CFP.
La Fig. 18 muestra las corrientes de los inductores al utilizar los controladores: a)
Basado en Pasividad, sin simplificaciones, ecuación (3.5); b) Caso 1; c) Caso 2; d) Caso 3,
control solamente por Charge-Control, ecuación (3.16). El caso del controlador robusto no
se presenta por razones ya comentadas.
( a ) ( b )
( c ) ( d )
Fig. 18. Distribución de corriente ante diversos controladores.
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.20
5
10
15
20
25
30
Tiempo (s)
Ma
gnitu
d (
amp
ere
s)
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.20
5
10
15
20
25
30
Tiempo (s)
Mag
nitu
d (a
mpe
res)
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.20
5
10
15
20
25
30
Tiempo (s)
Ma
gnitu
d (a
mpe
res)
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.20
5
10
15
20
25
30
Tiempo (s)
Mag
nitu
d (a
mpe
res)
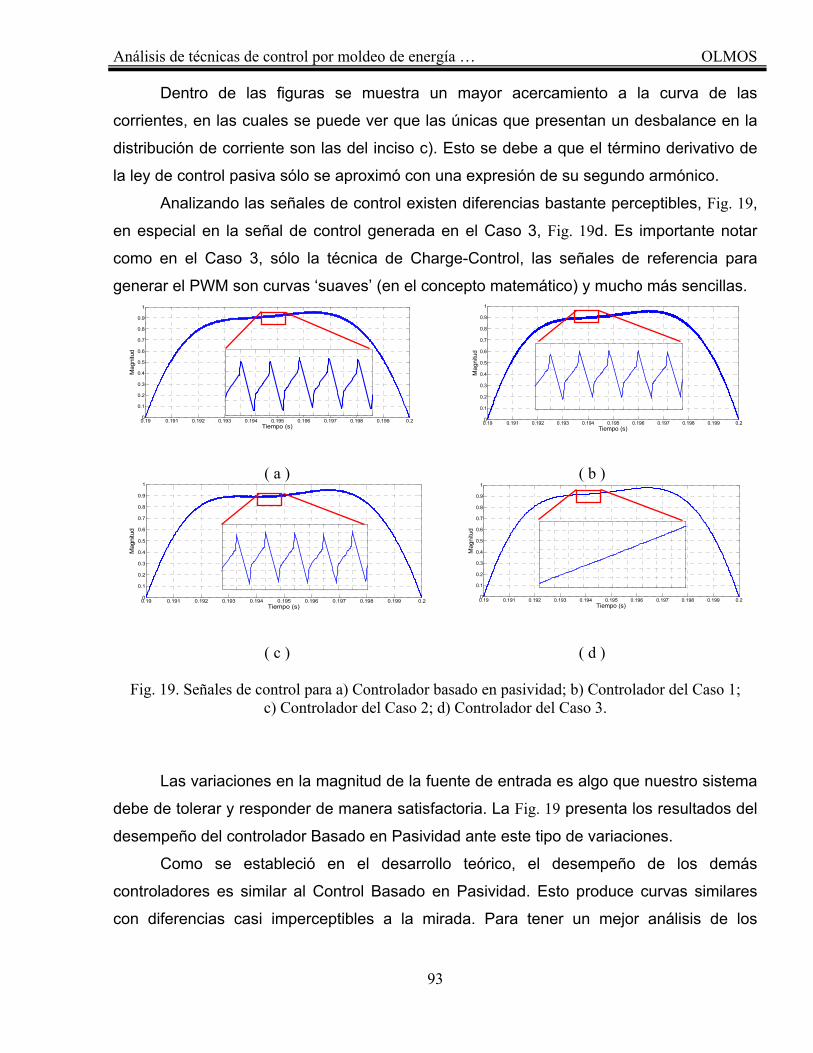
Análisis de técnicas de control por moldeo de energía … OLMOS
93
Dentro de las figuras se muestra un mayor acercamiento a la curva de las
corrientes, en las cuales se puede ver que las únicas que presentan un desbalance en la
distribución de corriente son las del inciso c). Esto se debe a que el término derivativo de
la ley de control pasiva sólo se aproximó con una expresión de su segundo armónico.
Analizando las señales de control existen diferencias bastante perceptibles, Fig. 19,
en especial en la señal de control generada en el Caso 3, Fig. 19d. Es importante notar
como en el Caso 3, sólo la técnica de Charge-Control, las señales de referencia para
generar el PWM son curvas ‘suaves’ (en el concepto matemático) y mucho más sencillas.
( a ) ( b )
( c ) ( d )
Fig. 19. Señales de control para a) Controlador basado en pasividad; b) Controlador del Caso 1; c) Controlador del Caso 2; d) Controlador del Caso 3.
Las variaciones en la magnitud de la fuente de entrada es algo que nuestro sistema
debe de tolerar y responder de manera satisfactoria. La Fig. 19 presenta los resultados del
desempeño del controlador Basado en Pasividad ante este tipo de variaciones.
Como se estableció en el desarrollo teórico, el desempeño de los demás
controladores es similar al Control Basado en Pasividad. Esto produce curvas similares
con diferencias casi imperceptibles a la mirada. Para tener un mejor análisis de los
0.19 0.191 0.192 0.193 0.194 0.195 0.196 0.197 0.198 0.199 0.20
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Tiempo (s)
Magn
itud
0.19 0.191 0.192 0.193 0.194 0.195 0.196 0.197 0.198 0.199 0.20
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Tiempo (s)
Ma
gn
itud
0.19 0.191 0.192 0.193 0.194 0.195 0.196 0.197 0.198 0.199 0.20
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Tiempo (s)
Mag
nitu
d
0.19 0.191 0.192 0.193 0.194 0.195 0.196 0.197 0.198 0.199 0.20
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Tiempo (s)
Mag
nitu
d
5
9
5
5
2
0 1946 0 1946 0 1946 0 1946 0 1946 0 1946 0 1946 0 1946 0 1946 0 194
6
8
9
2
4
6
8
9
2

José Armando Olmos López cenidet
94
resultados, la Tabla 6 presenta los errores en las variables controladas, así como el factor
de potencia en cada caso y la THD.
a)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
10
20
30
40
50
Tiempo (s)
Mag
nitu
d (v
olts
)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1100
150
200
250
300
350
400
450
500
Tiempo (s)
Mag
nitu
d (v
olts
)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
2
4
6
8
10
Tiempo (s)
Mag
nitu
d (a
mpe
res)
0 9956 0 9956 0 9956 0 9956 0 9956 0 9
b)
c)
Fig. 20. Comportamiento del sistema ante variaciones en el voltaje Sv empleando un control Basado en Pasividad.
85 120 215 265 120
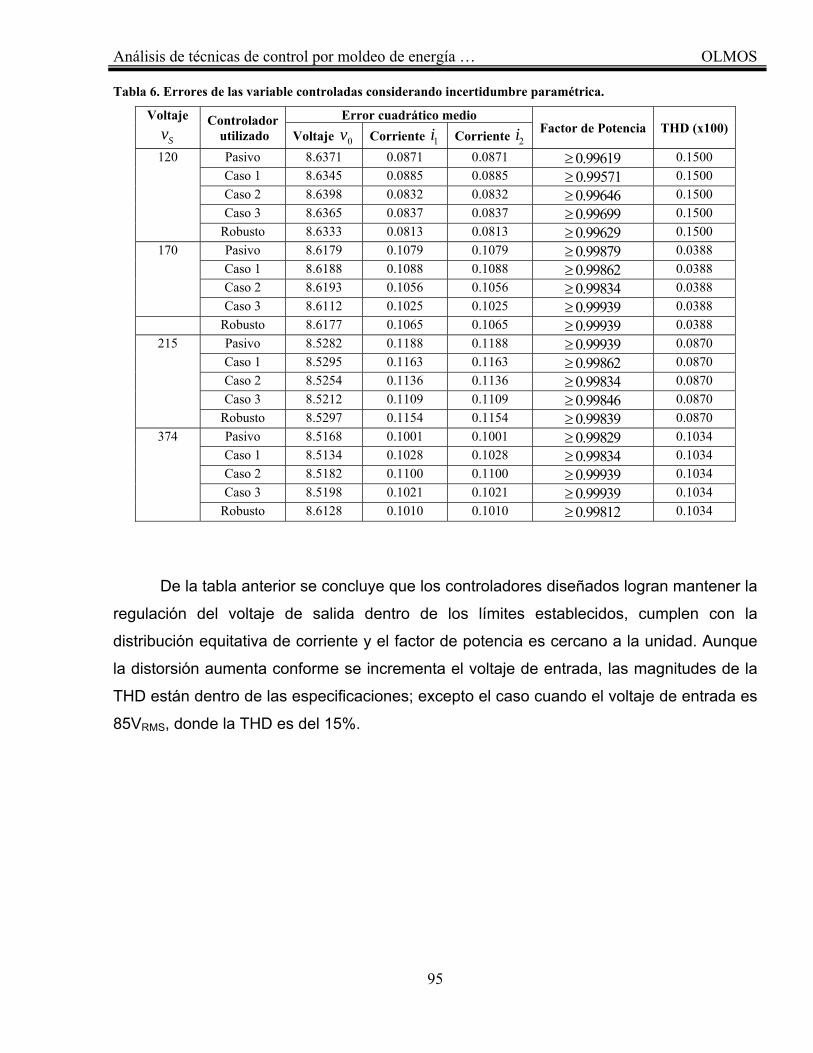
Análisis de técnicas de control por moldeo de energía … OLMOS
95
Tabla 6. Errores de las variable controladas considerando incertidumbre paramétrica.
Voltaje
Sv Controlador
utilizado
Error cuadrático medio Factor de Potencia THD (x100)
Voltaje 0v Corriente 1i Corriente 2i
120 Pasivo 8.6371 0.0871 0.0871 0.99619 0.1500
Caso 1 8.6345 0.0885 0.0885 0.99571 0.1500
Caso 2 8.6398 0.0832 0.0832 0.99646 0.1500
Caso 3 8.6365 0.0837 0.0837 0.99699 0.1500
Robusto 8.6333 0.0813 0.0813 0.99629 0.1500
170 Pasivo 8.6179 0.1079 0.1079 0.99879 0.0388
Caso 1 8.6188 0.1088 0.1088 0.99862 0.0388
Caso 2 8.6193 0.1056 0.1056 0.99834 0.0388
Caso 3 8.6112 0.1025 0.1025 0.99939 0.0388
Robusto 8.6177 0.1065 0.1065 0.99939 0.0388
215 Pasivo 8.5282 0.1188 0.1188 0.99939 0.0870
Caso 1 8.5295 0.1163 0.1163 0.99862 0.0870
Caso 2 8.5254 0.1136 0.1136 0.99834 0.0870
Caso 3 8.5212 0.1109 0.1109 0.99846 0.0870
Robusto 8.5297 0.1154 0.1154 0.99839 0.0870
374 Pasivo 8.5168 0.1001 0.1001 0.99829 0.1034
Caso 1 8.5134 0.1028 0.1028 0.99834 0.1034
Caso 2 8.5182 0.1100 0.1100 0.99939 0.1034
Caso 3 8.5198 0.1021 0.1021 0.99939 0.1034
Robusto 8.6128 0.1010 0.1010 0.99812 0.1034
De la tabla anterior se concluye que los controladores diseñados logran mantener la
regulación del voltaje de salida dentro de los límites establecidos, cumplen con la
distribución equitativa de corriente y el factor de potencia es cercano a la unidad. Aunque
la distorsión aumenta conforme se incrementa el voltaje de entrada, las magnitudes de la
THD están dentro de las especificaciones; excepto el caso cuando el voltaje de entrada es
85VRMS, donde la THD es del 15%.

José Armando Olmos López cenidet
96

Análisis de técnicas de control por moldeo de energía … OLMOS
97
CAPÍTULO 4
.
.
CONTROLADOR PARA
CUATRO CONVERTIDORES
4.1. Formulación del problema
El diagrama de la Fig. 21 muestra a cuatro convertidores elevadores conectados en
paralelo y al igual que los dos circuitos ya estudiados, tienen en común: la fuente de
entrada (2 )S S Sv V sen f t , el capacitor de salida y la carga. Las especificaciones de este
circuito se muestran en la Tabla 7.
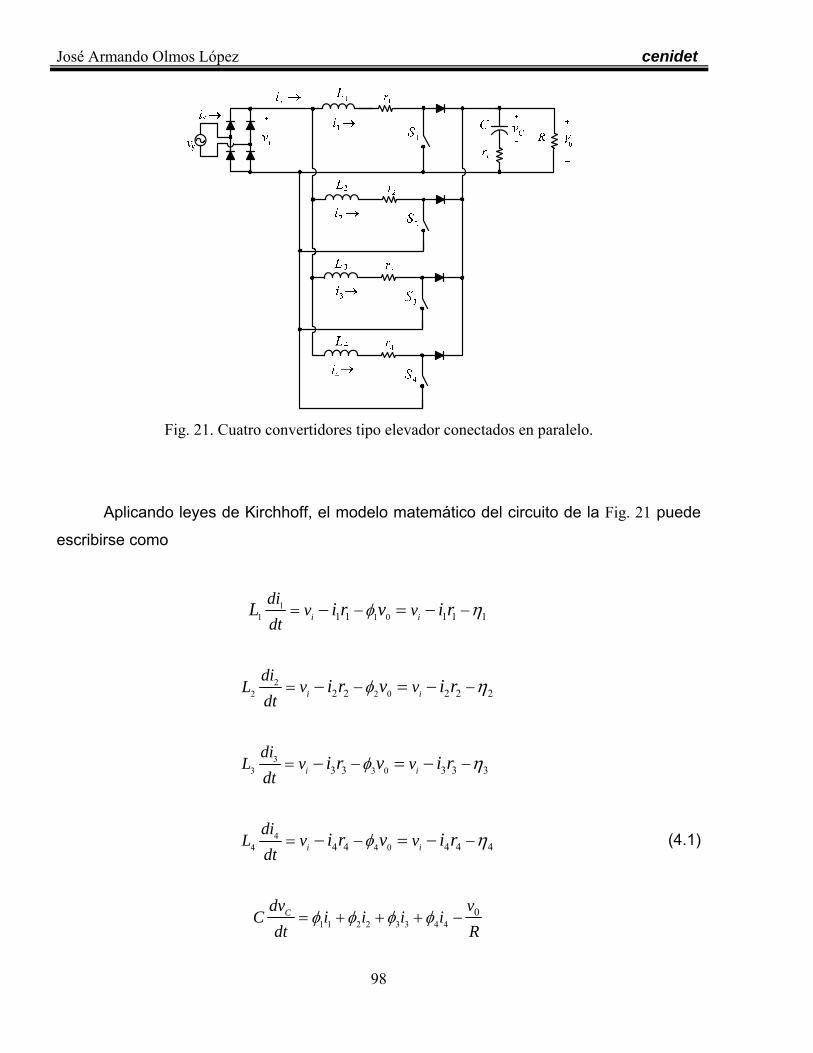
José Armando Olmos López cenidet
98
Fig. 21. Cuatro convertidores tipo elevador conectados en paralelo.
Aplicando leyes de Kirchhoff, el modelo matemático del circuito de la Fig. 21 puede
escribirse como
11 1 0
22 2 0
33 3 0
44 4 0
1 1 2 2 3 3 4 4
1 1 1 1 1
2 2 2 2 2
3 3 3 3 3
4 4 4 4 4
0
i i
i i
i i
i i
C
div v
dt
diL v v
dt
diL v v
dt
diL v v
dt
vdvC i i i i
dt R
L i r v i r
i r v i r
i r v i r
i r v i r
(4.1)

Análisis de técnicas de control por moldeo de energía … OLMOS
99
donde la variable k , 1,2,3,4k , es la señal de control que genera la secuencia de
conmutación que enciende y apaga el interruptor kS . De esta manera, si 1k entonces
kS está abierto y esto provoca que se “inyecte” el voltaje 0v en (4.1). Si 0k entonces kS
está cerrado y el voltaje 0v no aparece en la ecuación. Un caso análogo sucede para las
corrientes ki en la quinta ecuación de (4.1).
Tabla 7. Especificaciones del sistema
Nombre Parámetro Valor mínimo Valor típico Valor máximo Voltaje de entrada Vs 85 Vrms 120 Vrms 240 Vrms
Voltaje pico de entrada 120 Vac 170 Vac 380 Vac Frecuencia de entrada fs 47 60 63
Voltaje nominal de salida V0 400 Vdc Inductor de entrada de cada convertidor L1, L2, L3, L4 1.9 mH 2 mH 2.1 mH Resistencias parásitas de los inductores r1, r2, r3 y r4 0.9Ω 1 Ω 1.1 Ω
Capacitor de salida C 210 µF 220 µF 230 µF Resistencia parásita del capacitor rC 0.5Ω 0.6Ω 0.7Ω
Los objetivos, o estados deseados, en este circuito pueden establecerse como
0
1 2 3 4
;
4 4 4 4; ; ;
i
i i i i
i i i
d
i gv
v V
i i i ii i i i
i i
(4.2)
donde ii , dV son los valores deseados de ii y 0v , respectivamente. Si se logra
1 2 3 4 4ii i i i i entonces 1 2 3 4 i ii i i i i i , es decir, se está garantizando la
distribución equitativa de corriente.

José Armando Olmos López cenidet
100
4.2. Diseño de controladores
4.2.1. Control basado en pasividad
El sistema (4.1) puede expresarse como
x x u
D R (4.3)
donde las matrices D y R están dadas por
1
11
2 22
33 3
41
45
5
1 1 1
2 2 2
3 3 3
4 4
0 0 0 0
0 0 0 0
; ; ;0 0 0 0
0 0 0 0
0 0 0 0
0 0 0
0 0 0
0 0 0
0 0 0
C
C C
C
C C
C
C C
C
xxL
x xL
xL xxL
xxC
x
r R Rr
R r R r
r R Rr
R r R r
r R Rr
R r R r
r Rr
R r
D x x
R
4
1 2 3 4
1C C
C C C C C
R
R r
R R R R
R r R r R r R r R r
(4.4)
Siguiendo la metodología empleada anteriormente, Capítulo 2, se obtiene el control
basado en pasividad para las corrientes en los convertidores elevadores, donde las
variables de control 1 , 2 , 3 y 4 son

Análisis de técnicas de control por moldeo de energía … OLMOS
101
1 1 1 1 1 1 11
1 5
2 2 2 2 2 2 22
2 5
3 3 3 3 3 3 33
3 5
4 4 4 4 4 4 44
4 5
( )
( )
( )
( )
i d d am d
Cd d
C C
i d d am d
Cd d
C C
i d d am d
Cd d
C C
i d d am d
Cd d
C C
v L x r x R x xr R R
x xR r R r
v L x r x R x xr R R
x xR r R r
v L x r x R x xr R R
x xR r R r
v L x r x R x xr R R
x xR r R r
(4.5)
Sumando las expresiones de (4.5), con las consideraciones 1 2 3 4L L L L L ,
1 2 3 4am am am am amR R R R R , 1 2 3 4r r r r r y 1 2 3 4d d d dx x x x , se obtiene
1 2 3 4 1 2 3 4 1 2 3 4
1 3
0
4 ( )
4
4
4
i d d d d d d d d am
Cd d
C C
ii i am i
i CCd
C C
ii i am
v L x x x x r x x x x R e e e e
r R Rx x
R r R r
div L ri R i
dti r R R
vR r R r
div v L ri R i
dt
(4.6)
La expresión anterior puede dividirse por el número de convertidores conectados y
utilizarse como la señal de control para cada convertidor. Como puede advertirse, la
expresión (4.6) calcula una única ley de control para los cuatro convertidores.

José Armando Olmos López cenidet
102
A continuación se presenta el diseño del lazo de voltaje. Multiplicando la tercera
ecuación de (3.1) por 0v y considerando que / 4k ii i , 1,2,3,4k , resulta
1 1 2 2 3 3 4 4
20
0 0 0 0 0
20
0
2 20
4
4 4 4
C
i
i ii i i i i
dvv C i i i i
dt R
v
R
R
vv v v v
iv
i di vL Kv i r i i i
dt
(4.7)
donde 0v se tomó de la expresión (4.6). Es posible simplificar esta última expresión
(realizando las consideraciones del Capítulo 2), de lo cual se obtiene
2 20 0
0 2,
20
C ii i i
S RMS
dv vC
dt R
Gv vv v i v
v R
vG
R
(4.8)
De esta manera se sugiere un controlador PI para el cálculo de G , el cual está
dado por la expresión
0
t
p iG K K d (4.9)
4.2.2. Caso 1: Control Proporcional Basado en Pasividad sensando la corriente ii
De manera similar al desarrollo mostrado para el Caso 1 del Capítulo 2 y 3, escribimos las
leyes de control (4.5) como punto de partida

Análisis de técnicas de control por moldeo de energía … OLMOS
103
*1
1 0 1 1 1
*2
2 0 2 2 2
*3
3 0 3 3 3
*4
4 0 4 4 4
4 4
4 4
4 4
4 4
i ii
i ii
i ii
i ii
i diLv v r K i
dt
i diLv v r K i
dt
i L div v r K i
dt
i diLv v r K i
dt
(4.10)
Considerando 1 2 3 4L L L L L , 1 2 3 4r r r r r y 1 2 3 4K K K K K ,
entonces la suma de las ecuaciones (4.10) es
*
0 4 ii i i
div v ri L Ki
dt
(4.11)
donde i i ii i i . Dado que 0iLdi dt es posible aproximar (4.11) a una forma más
simplificada dada por
*
0 4 i i iv v ri Ki (4.12)
la cual es nuestra ley de control para los cuatro convertidores. Para el controlador del lazo
de voltaje se propone emplear el controlador dado por la expresión (4.9).
4.2.3. Caso 2: Control Basado en Pasividad sensando la corriente is
La ley de control (4.6) puede desarrollarse como sigue
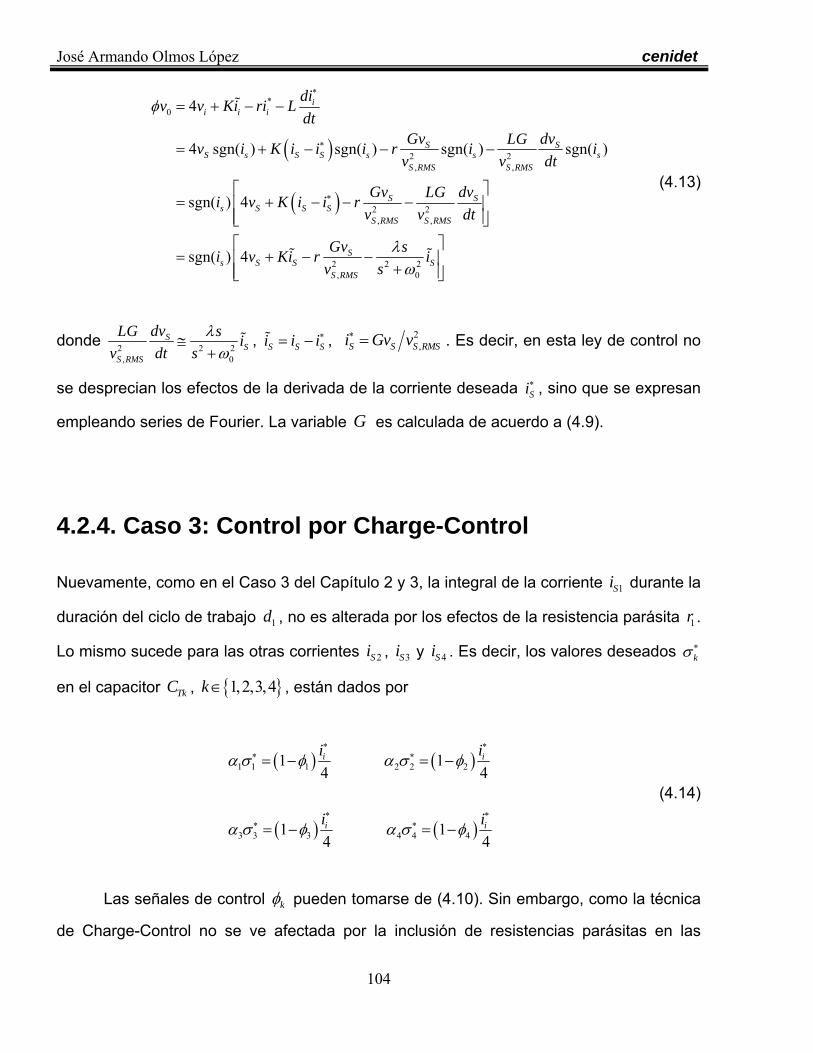
José Armando Olmos López cenidet
104
*0
2 2, ,
2 2, ,
2 2 2, 0
4
4 sgn( ) sgn( ) sgn( ) sgn( )
sgn( ) 4
sgn( ) 4
ii i i
S SS s S S s s s
S RMS S RMS
S Ss S S S
S RMS S RMS
Ss S S S
S RMS
div v Ki ri L
dtGv dvLG
v i K i i i r i iv v dt
Gv dvLGi v K i i r
v v dt
Gv si v Ki r i
v s
(4.13)
donde 2 2 2
, 0
SS
S RMS
dvLG si
v dt s
, S S Si i i , 2,S S S RMSi Gv v . Es decir, en esta ley de control no
se desprecian los efectos de la derivada de la corriente deseada Si , sino que se expresan
empleando series de Fourier. La variable G es calculada de acuerdo a (4.9).
4.2.4. Caso 3: Control por Charge-Control
Nuevamente, como en el Caso 3 del Capítulo 2 y 3, la integral de la corriente 1Si durante la
duración del ciclo de trabajo 1d , no es alterada por los efectos de la resistencia parásita 1r .
Lo mismo sucede para las otras corrientes 2Si , 3Si y 4Si . Es decir, los valores deseados k
en el capacitor TkC , 1,2,3,4k , están dados por
1 1 1 2 2 2
3 3 3 4 4 4
1 14 4
1 14 4
i i
i i
i i
i i
(4.14)
Las señales de control k pueden tomarse de (4.10). Sin embargo, como la técnica
de Charge-Control no se ve afectada por la inclusión de resistencias parásitas en las

Análisis de técnicas de control por moldeo de energía … OLMOS
105
inductancias y el término k kK i sólo fue introducido para que la trayectoria al punto de
equilibrio del sistema fuese más rápida; por lo cual es posible emplear la siguiente
aproximación (sólo si las características de los inductores son iguales)
1 0 2 0 3 0 4 0 iv v v v v (4.15)
en la cual los términos *k kL di dt , k kr i y k kK i , 1,2,3,4k se han despreciado debido a su
magnitud *k k k k iL di dt r i v y a que 0k kK i conforme 0ki .
Para el controlador de voltaje se emplea el controlador de la expresión (4.9).
4.2.5. Control robusto
Nuevamente, el diseño de un control robusto basado por el método de rediseño de
Lyapunov no es posible debido a la resistencia parásita Cr ; es necesario tener una
representación del sistema que cumpla la condición relacional (matching condition) para
aplicar el rediseño de Lyapunov.
Por tal motivo no se presenta ningún desarrollo en esta sección puesto que no se
llegará a ningún resultado que no haya sido ya presentado.
4.3. Resultados en simulación
En las secciones anteriores se ha demostrado que la operación entrelazada (o en
interleaved) de los convertidores permite disminuir el rizo de la corriente de entrada ii y a
mayor cantidad de módulos entrelazados se produce una mayor disminución; siempre y
cuando los convertidores operen en modo entrelazado y la distribución equitativa de la
corriente se logre [70, 73]. Además se probó, para el caso de dos convertidores trabajando

José Armando Olmos López cenidet
106
en modo entrelazado, que la regulación del voltaje de salida 0v y la CFP se alcanza con
facilidad con los controladores diseñados en esta investigación; por lo cual se espera que,
de acuerdo a la teoría, al integrar más módulos estos objetivos también se garanticen.
Con el propósito de mostrar que los desarrollos teóricos de esta sección son
válidos, se presentan resultados numéricos para conocer el desempeño del sistema.
También es interesante probar el comportamiento del sistema ante diferentes
perturbaciones y/o variaciones paramétricas.
Los resultados mostrados en esta sección muestran el desempeño del sistema
considerando perturbaciones en la carga y fuente de alimentación conectadas al sistema
nominal; sin variaciones paramétricas. Posteriormente se presentan resultados
considerando variaciones paramétricas.
Las primeras perturbaciones provocadas al sistema son variaciones en la carga.
Los resultados numéricos del presente Capítulo 4 sólo utilizan como carga una resistencia
de valor 200R . Sin embargo, las cargas que se conectan a la primera etapa de un
SAD son, por lo general, sistemas integrados en tarjetas; las cuales se añaden al sistema
sin apagar al SAD. Estas tarjetas generalmente tienen una capacitancia en la entrada para
filtrado (o parásita) y una resistencia de protección (o parásita); inclusive, algunas
conexiones además presentan una inductancia. Una manera de simular los efectos
producidos por la entrada o salida de tarjetas a la etapa pre-reguladora es conmutar entre
diferentes tipos de cargas [10].
La Fig. 22 presenta los resultados obtenidos en el sistema al emplear el control por
Charge-Control y provocar una variación en la carga del sistema; de 0 a 0.33 segundo la
carga es sólo resistiva con R; de 0.33 a 0.66 segundos la carga es una conexión serie
RLC; de 0.66 a 0.99 la carga es una conexión serie RC.
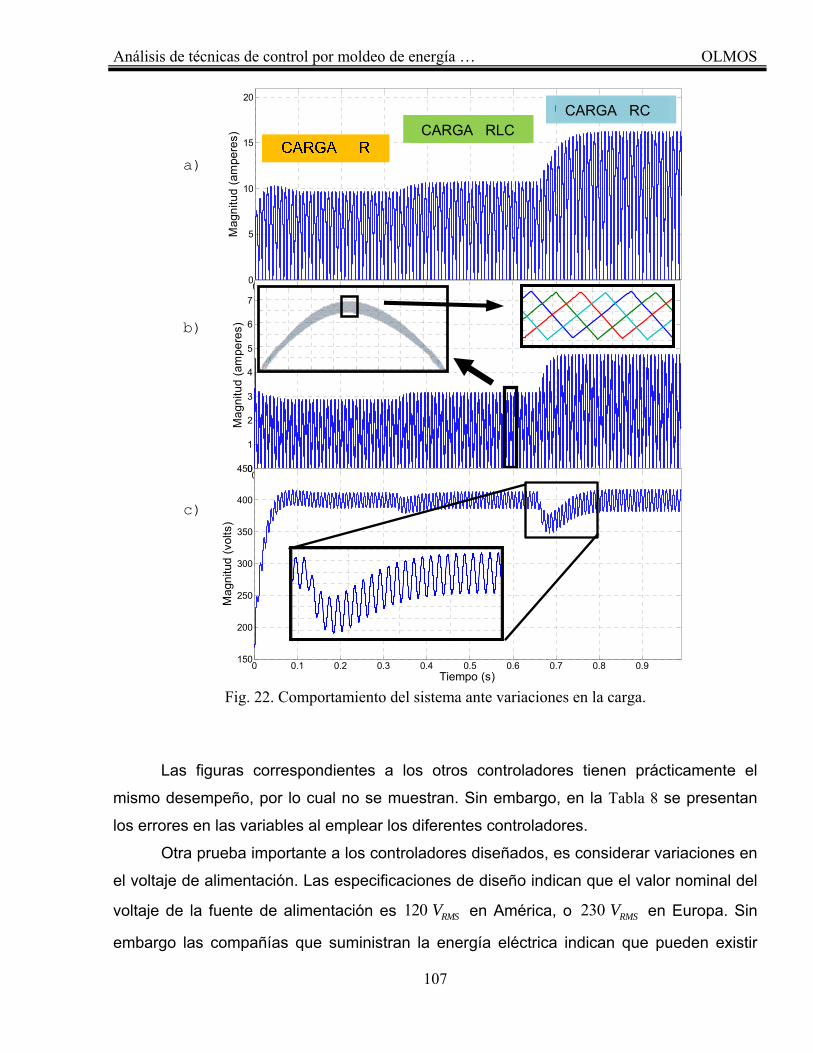
Análisis de técnicas de control por moldeo de energía … OLMOS
107
a)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.90
5
10
15
20
Tiempo (s)
Mag
nitu
d (a
mpe
res)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.90
1
2
3
4
5
6
7
Tiempo (s)
Ma
gnitu
d (
ampe
res)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9150
200
250
300
350
400
450
Tiempo (s)
Mag
nitu
d (v
olts
)
b)
c)
Fig. 22. Comportamiento del sistema ante variaciones en la carga.
Las figuras correspondientes a los otros controladores tienen prácticamente el
mismo desempeño, por lo cual no se muestran. Sin embargo, en la Tabla 8 se presentan
los errores en las variables al emplear los diferentes controladores.
Otra prueba importante a los controladores diseñados, es considerar variaciones en
el voltaje de alimentación. Las especificaciones de diseño indican que el valor nominal del
voltaje de la fuente de alimentación es 120 RMSV en América, o 230 RMSV en Europa. Sin
embargo las compañías que suministran la energía eléctrica indican que pueden existir
CARGA RC CARGA RLC
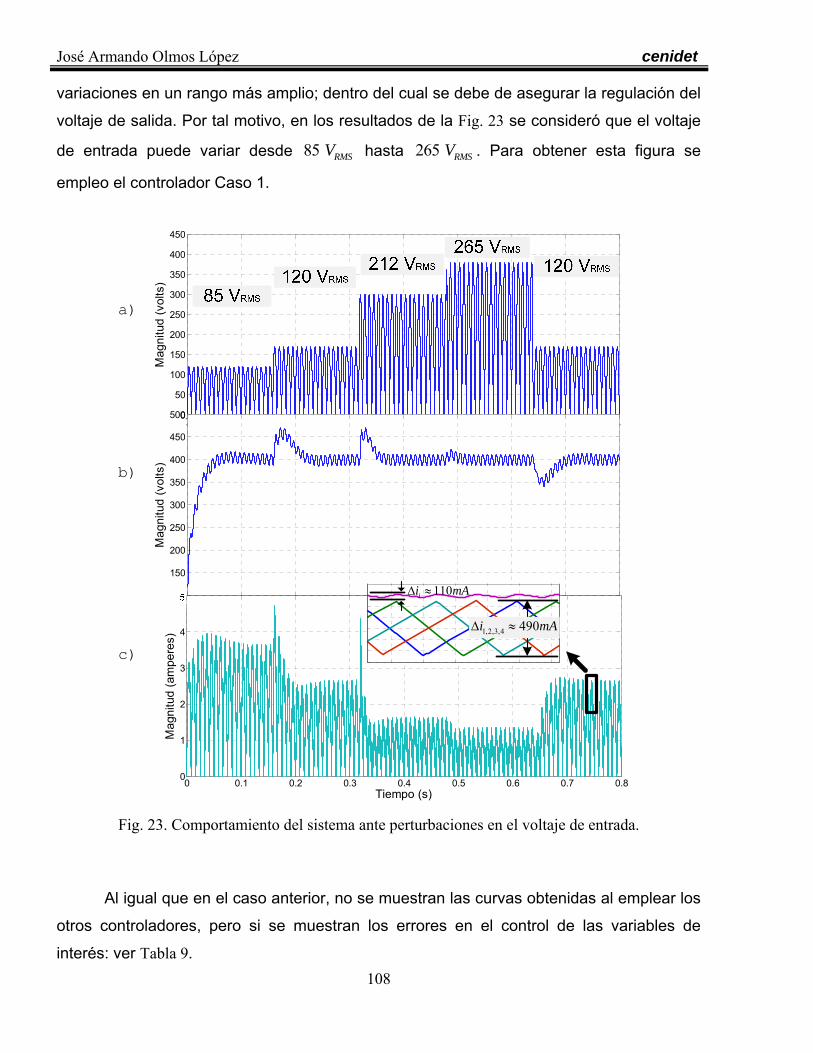
José Armando Olmos López cenidet
108
variaciones en un rango más amplio; dentro del cual se debe de asegurar la regulación del
voltaje de salida. Por tal motivo, en los resultados de la Fig. 23 se consideró que el voltaje
de entrada puede variar desde 85 RMSV hasta 265 RMSV . Para obtener esta figura se
empleo el controlador Caso 1.
a)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.
0
50
100
150
200
250
300
350
400
450
Tiempo (s)
Mag
nitu
d (v
olts
)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.100
150
200
250
300
350
400
450
500
Tiempo (s)
Mag
nitu
d (v
olts
)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.80
1
2
3
4
5
Tiempo (s)
Mag
nitu
d (a
mpe
res)
110ii mA
1,2,3,4 490i mA
b)
c)
Fig. 23. Comportamiento del sistema ante perturbaciones en el voltaje de entrada.
Al igual que en el caso anterior, no se muestran las curvas obtenidas al emplear los
otros controladores, pero si se muestran los errores en el control de las variables de
interés: ver Tabla 9.

Análisis de técnicas de control por moldeo de energía … OLMOS
109
Tabla 8. Errores en las variables controladas considerando variación en la carga.
Tipo de
Carga
Controlador utilizado
Error cuadrático medio Factor de Potencia
THD(x100) Voltaje
0v
Corriente
1i
Corriente
2i
Corriente
3i
Corriente
4i
R
Pasivo 8.5391 0.1154 0.1150 0.1148 0.1152 0.99939 0.0251
Caso 1 8.5391 0.1150 0.1148 0.1152 0.1155 0.99939 0.0245
Caso 2 8.5386 0.1154 0.1150 0.1150 0.1151 0.99939 0.0245
Caso 3 8.5361 0.1152 0.1147 0.1148 0.1150 0.99756 0.0241
RLC
Pasivo 9.4834 0.1143 0.1143 0.1142 0.1143 0.99813 0.0233
Caso 1 9.4827 0.1141 0.1139 0.1142 0.1141 0.99756 0.0222
Caso 2 9.4802 0.1144 0.1143 0.1140 0.1141 0.99904 0.0218
Caso 3 9.4775 0.1143 0.1145 0.1142 0.1139 0.99897 0.0219
RC
Pasivo 12.3907 0.1120 0.1125 0.1124 0.1121 0.99812 0.0170
Caso 1 12.3755 0.1123 0.1122 0.1119 0.1118 0.99691 0.0152
Caso 2 12.3718 0.1120 0.1122 0.1122 0.1121 0.99862 0.0154
Caso 3 12.3618 0.1117 0.1116 0.1118 0.1119 0.99834 0.0144
Tabla 9. Errores de las variables controladas considerando variaciones en el voltaje de entrada. Voltaje
de entrada
Sv
(RMS)
Controlador utilizado
Error cuadrático medio
Factor de Potencia
THD(x100) Voltaje
0v
Corriente
1i
Corriente
2i
Corriente
3i
Corriente
4i
85
Pasivo 8.6256 0.0909 0.0911 0.0916 0.0910 0.99939 0.1300
Caso 1 8.5874 0.0922 0.0919 0.0930 0.0925 0.99939 0.1400
Caso 2 8.5909 0.0916 0.0919 0.0914 0.0919 0.99939 0.1500
Caso 3 8.5925 0.0913 0.0920 0.0915 0.0914 0.99866 0.1500
120
Pasivo 8.6528 0.1153 0.1155 0.1155 0.1151 0.99691 0.0406
Caso 1 8.5686 0.1142 0.1146 0.1147 0.1146 0.99688 0.0493
Caso 2 8.5975 0.1153 0.1151 0.1151 0.1154 0.99899 0.0394
Caso 3 8.5965 0.1151 0.1151 0.1150 0.1149 0.99808 0.0387
212
Pasivo 8.5369 0.1279 0.1300 0.1296 0.1283 0.99656 0.1211
Caso 1 8.6641 0.1284 0.1292 0.1289 0.1276 0.99710 0.1215
Caso 2 8.6222 0.1288 0.1285 0.1281 0.1278 0.99897 0.1209
Caso 3 8.6219 0.1285 0.1269 0.1270 0.1288 0.99821 0.1208
265
Pasivo 8.6222 0.1110 0.1103 0.1075 0.1085 0.99686 0.1858
Caso 1 8.6401 0.1095 0.1089 0.1072 0.1084 0.99651 0.1873
Caso 2 8.6094 0.1083 0.1066 0.1079 0.1097 0.99687 0.1855
Caso 3 8.6243 0.1096 0.1086 0.1086 0.1095 0.99711 0.1838
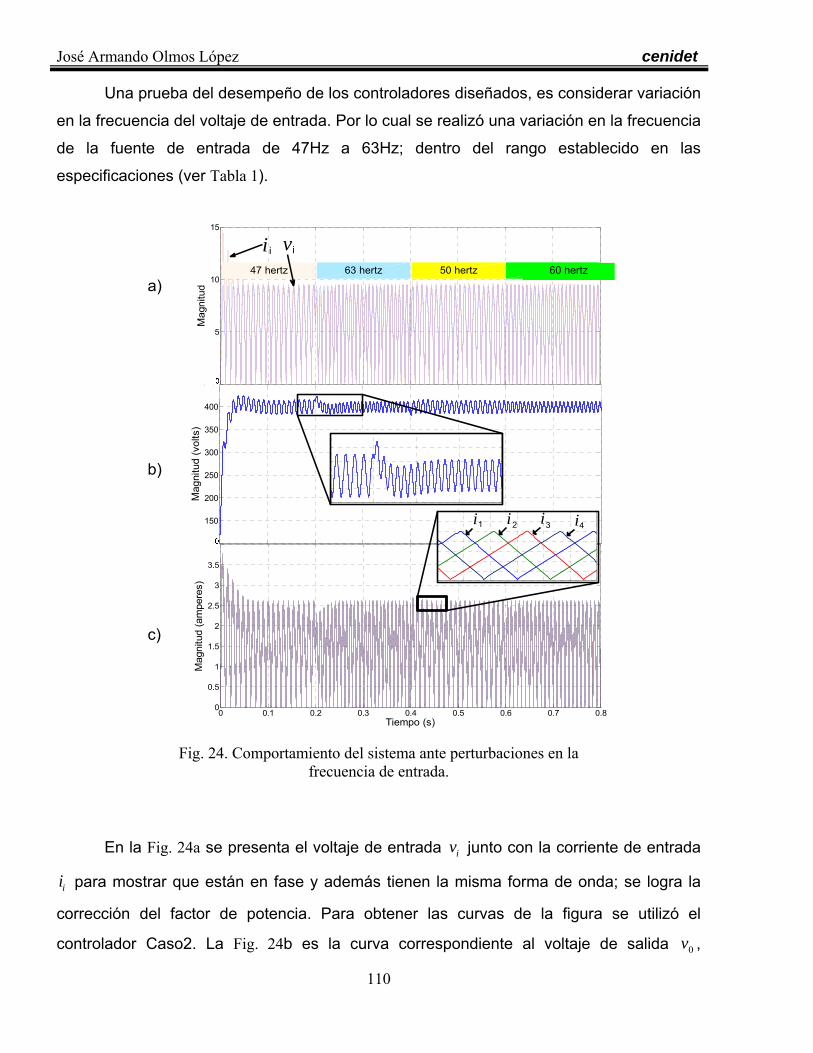
José Armando Olmos López cenidet
110
Una prueba del desempeño de los controladores diseñados, es considerar variación
en la frecuencia del voltaje de entrada. Por lo cual se realizó una variación en la frecuencia
de la fuente de entrada de 47Hz a 63Hz; dentro del rango establecido en las
especificaciones (ver Tabla 1).
a)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.80
5
10
15
Ti ( )
Mag
nitu
d
i i
63 hertz47 hertz
v50 hertz 50 hertz
i
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8100
150
200
250
300
350
400
450
Mag
nitu
d (
volts
)
Ti ( )
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.80
0.5
1
1.5
2
2.5
3
3.5
4
Tiempo (s)
Magn
itud (
am
per
es)
i i ii 421 3
b) c)
Fig. 24. Comportamiento del sistema ante perturbaciones en la frecuencia de entrada.
En la Fig. 24a se presenta el voltaje de entrada iv junto con la corriente de entrada
ii para mostrar que están en fase y además tienen la misma forma de onda; se logra la
corrección del factor de potencia. Para obtener las curvas de la figura se utilizó el
controlador Caso2. La Fig. 24b es la curva correspondiente al voltaje de salida 0v ,
60 hertz

Análisis de técnicas de control por moldeo de energía … OLMOS
111
permitiendo ver que ante perturbaciones en la frecuencia se logra la regulación en el valor
deseado; se realizó una ampliación (mostrada en un recuadro) a la perturbación de mayor
magnitud provocada por variaciones en la frecuencia. Posteriormente, en la Fig. 24c se
presenta la distribución de corriente en 1i y 2i y se realiza un acercamiento para verificar el
desfasamiento de 0180 entre ambas corrientes; los disturbios en la frecuencia de la fuente
de voltaje provocan transitorios en el sistema pero la distribución de corriente se mantiene.
Los resultados de aplicar los otros controladores no se graficaron, pero en la Tabla
10 se muestran lo errores en las variables controladas con los controladores diseñados.
Tabla 10. Errores de las variables controladas considerando variaciones en la frecuencia de entrada.
Frecuencia
Sf Controlador
utilizado
Error cuadrático medio Factor de Potencia
THD (x100)
Voltaje
0v
Corriente
1i
Corriente
2i
Corriente
3i
Corriente
4i
47
Pasivo 11.0346 0.1161 0.1162 0.1163 0.1162 0.99691 0.1500
Caso 1 11.0233 0.1164 0.1162 0.1161 0.1162 0.99688 0.1502
Caso 2 11.0069 0.1163 0.1162 0.1162 0.1163 0.99899 0.1500
Caso 3 11.0420 0.1161 0.1161 0.1164 0.1162 0.99808 0.1500
50
Pasivo 10.2375 0.1147 0.1151 0.1147 0.1151 0.99656 0.0282
Caso 1 10.3008 0.1164 0.1162 0.1152 0.1150 0.99656 0.0246
Caso 2 10.2100 0.1154 0.1151 0.1147 0.1151 0.99862 0.0220
Caso 3 10.2346 0.1152 0.1150 0.1150 0.1151 0.99834 0.0267
60
Pasivo 8.5372 0.1150 0.1150 0.1152 0.1152 0.99939 0.0252
Caso 1 8.7441 0.1150 0.1150 0.1152 0.1150 0.99939 0.0250
Caso 2 8.3989 0.1152 0.1152 0.1150 0.1150 0.99939 0.0232
Caso 3 8.5343 0.1148 0.1149 0.1148 0.1146 0.99866 0.0248
63
Pasivo 8.1523 0.1144 0.1145 0.1147 0.1146 0.99904 0.0248
Caso 1 8.1589 0.1147 0.1146 0.1145 0.1145 0.99897 0.0254
Caso 2 8.1226 0.1145 0.1147 0.1144 0.1145 0.99812 0.0248
Caso 3 8.1491 0.1143 0.1145 0.1145 0.1146 0.99691 0.0235
Los tres casos de perturbaciones ya mostrados prueban que es posible con
cualquiera de los controladores diseñados satisfacer las especificaciones de diseño y
lograr los objetivos del sistema; estas perturbaciones provienen de la fuente de
alimentación o de la carga.
Otro caso de gran interés es estudiar el desempeño de los controladores cuando
existe incertidumbre paramétrica: variaciones en los valores de los inductores y de sus
resistencias parásitas.

José Armando Olmos López cenidet
112
Las variaciones paramétricas consideradas fueron las mostradas en la Tabla 11.
Algunos de los valores seleccionados son ligeramente mayores a los especificados en
hojas de datos de módulos CFP estándar: 10% del valor nominal [71].
Tabla 11. Errores de las variables controladas considerando variaciones en la frecuencia de entrada.
Parámetro Valor
nominal Valor utilizado
Prueba 1 Prueba 2 Prueba 3 L1 2 mH 2 mH 2 2 L2 2 mH 2.2 mH 3 4 L3 2 mH 1.6 mH 1.4 1.8 L4 2 mH 2.5 mH 3.6 8 r1 1 Ω 1 Ω 1 1 r2 1 Ω 1.1 Ω 1.5 2 r3 1 Ω 0.8 Ω 0.7 0.9 r4 1 Ω 1.25 Ω 1.8 4
La Fig. 25a muestra la corriente de entrada ii en la magnitud real y las corrientes
1,2,3,4i , también en su magnitud real, cuando se utiliza el controlador Basado en Pasividad.
En la Fig. 25b se ha realizado un acercamiento a las secciones de los recuadros para
visualizar las diferencias en magnitud de los rizos y cómo el funcionamiento entrelazado
permite la disminución del rizo.
70ii mA
600ii mA
a) b) Fig. 25. Rizos en las corrientes cuando existe variación paramétrica.
El desempeño de los otros tres controladores es similar, por lo cual no se muestran
las gráficas de sus curvas. No obstante, las tablas Tabla 12, Tabla 13 y Tabla 14 permiten
estudiar el desempeño de los controladores.
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.20
2
4
6
8
10
12
Tiempo (s)
Mag
nitu
d (a
mpe
res)
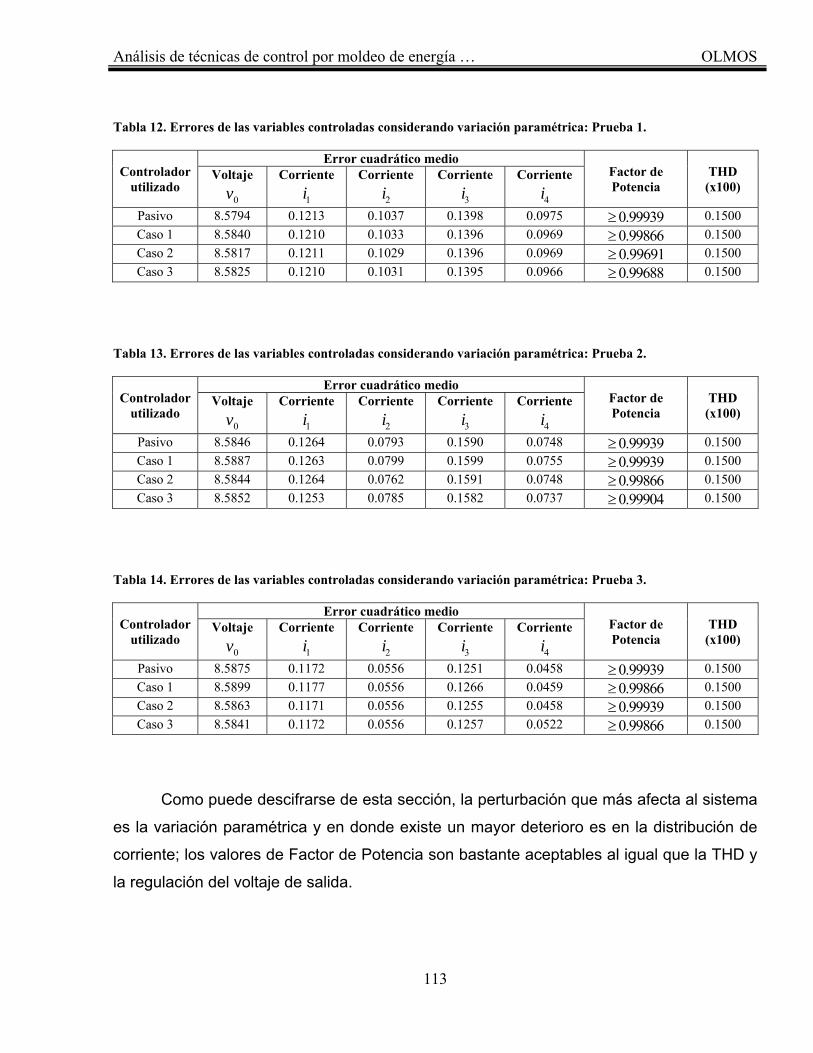
Análisis de técnicas de control por moldeo de energía … OLMOS
113
Tabla 12. Errores de las variables controladas considerando variación paramétrica: Prueba 1.
Controlador utilizado
Error cuadrático medio Factor de Potencia
THD (x100)
Voltaje
0v
Corriente
1i
Corriente
2i
Corriente
3i
Corriente
4i
Pasivo 8.5794 0.1213 0.1037 0.1398 0.0975 0.99939 0.1500
Caso 1 8.5840 0.1210 0.1033 0.1396 0.0969 0.99866 0.1500
Caso 2 8.5817 0.1211 0.1029 0.1396 0.0969 0.99691 0.1500
Caso 3 8.5825 0.1210 0.1031 0.1395 0.0966 0.99688 0.1500
Tabla 13. Errores de las variables controladas considerando variación paramétrica: Prueba 2.
Controlador utilizado
Error cuadrático medio Factor de Potencia
THD (x100)
Voltaje
0v
Corriente
1i
Corriente
2i
Corriente
3i
Corriente
4i
Pasivo 8.5846 0.1264 0.0793 0.1590 0.0748 0.99939 0.1500
Caso 1 8.5887 0.1263 0.0799 0.1599 0.0755 0.99939 0.1500
Caso 2 8.5844 0.1264 0.0762 0.1591 0.0748 0.99866 0.1500
Caso 3 8.5852 0.1253 0.0785 0.1582 0.0737 0.99904 0.1500
Tabla 14. Errores de las variables controladas considerando variación paramétrica: Prueba 3.
Controlador utilizado
Error cuadrático medio Factor de Potencia
THD (x100)
Voltaje
0v
Corriente
1i
Corriente
2i
Corriente
3i
Corriente
4i
Pasivo 8.5875 0.1172 0.0556 0.1251 0.0458 0.99939 0.1500
Caso 1 8.5899 0.1177 0.0556 0.1266 0.0459 0.99866 0.1500
Caso 2 8.5863 0.1171 0.0556 0.1255 0.0458 0.99939 0.1500
Caso 3 8.5841 0.1172 0.0556 0.1257 0.0522 0.99866 0.1500
Como puede descifrarse de esta sección, la perturbación que más afecta al sistema
es la variación paramétrica y en donde existe un mayor deterioro es en la distribución de
corriente; los valores de Factor de Potencia son bastante aceptables al igual que la THD y
la regulación del voltaje de salida.

José Armando Olmos López cenidet
114
Análisis de técnicas de control por moldeo de energía … OLMOS
115
CAPÍTULO 5
.
.
CONCLUSIONES
La corrección del factor de potencia y la regulación de voltaje de salida pueden lograrse
empleando controladores de tipo PI (o compensadores de atraso adelanto); es decir, no se
requiere un control no lineal para garantizar estos objetivos. Sin embargo, de acuerdo con
los resultados obtenidos en esta investigación y los resultados ya reportados por otros
investigadores, este tipo de controladores no garantizan una distribución equitativa de la
corriente. Por lo cual, se ha propuesto el empleo de un control no lineal basado en
pasividad para el sistema en estudio y a este mismo control se le sumaron las
características de otras leyes de control.
José Armando Olmos López cenidet
116
Se han empleado cinco técnicas de control al sistema en estudio: Controlador
Basado en Pasividad, Controlador Proporcional Basado en Pasividad sensando ii (Caso
1), Controlador basado en pasividad sensando Si (Caso 2), Controlador Charge-Control
(Caso 3), Controlador Robusto. Se han realizado las consideraciones necesarias en las
leyes de control de tal manera que se estudiaron los efectos de las mismas en un sistema
que presenta parásitos en sus componentes.
Se ha demostrado que la interconexión paralela de dos convertidores elevadores
conforma un sistema pasivo. Esta demostración es trascendental para justificar el uso de
un control basado en pasividad.
Al aplicar sólo el control basado en pasividad (es decir, sin añadirle otra ley de
control) se obtuvieron excelentes resultados cuando se genera una señal para cada
convertidor. Sin embargo, cuando sólo se utiliza una señal para ambos convertidores no
es posible lograr la distribución equitativa de corriente de manera satisfactoria ante las
mismas perturbaciones, ya que no puede evitarse un ligero desbalance.
Se propuso el empleo del controlador basado en pasividad despreciando los efectos
que produce la derivada de la corriente (dentro de la ley de control). Esta propuesta
permitió la simplificación de la ley Basada en Pasividad y tal simplificación no deterioró la
distribución de equitativa de corriente ni repercutió en el buen desempeño del sistema. Lo
que si provocó fue una reducción en la magnitud de variaciones paramétricas que tolera el
controlador; pasó de tolerar más del 50% a tan solo un 25% en los valores de las
inductancias.
Para no simplificar la ley de Control Basado en Pasividad, se utilizó análisis de
Fourier y la medición de la corriente de línea Si . Esta ley de control obtenida tiene los
mismos efectos que el Control Basado en Pasividad sin simplificaciones, solo que no
resuelve derivada alguna al emplear series de Fourier. Esta ley obtenida logra excelentes
resultados permitiendo que la magnitud de variación paramétrica tolerada volviera a ser de
más de 50% en los valores de las inductancias.

Análisis de técnicas de control por moldeo de energía … OLMOS
117
Se ha presentado la aplicación de la técnica Charge-Control más Control Basado en
Pasividad. La utilización de la técnica Basada en Pasividad se introdujo para generar una
señal de referencia para el controlador Charge-Control el cual se encarga de conmutar los
interruptores de los convertidores elevadores. La señal generada empleando Pasividad
satisface las condiciones de estabilidad del Segundo Método de Estabilidad de Lyapunov y
por lo tanto garantiza que el sistema llegará al punto de equilibrio. Afortunadamente la
señal encontrada es bastante sencilla ya que coincide sólo con el voltaje rectificado iv
como señal de referencia; por lo cual el controlador propuesto facilita la integración de más
módulos CFP al sistema ya construido.
Resumiendo las características del controlador propuesto por Charge-Control más
Control Basado en Pasividad es posible:
Emplear una sóla ley de control para ‘n’ convertidores en interleaved; sólo
debe de dividirse entre ‘n’ número de convertidores
Lograr la distribución equitativa de corriente entre ‘n’ convertidores
Reducir el rizo de la corriente de entrada ‘n’ veces
En la técnica del Charge-Control se ha demostrado matemáticamente que no es
necesaria la medición de la corriente total ( 1 2ii i i ) ni de las corrientes 1i y 2i para el
diseño del control de corriente, ya que resulta redundante. De la ecuación (2.5) se puede
notar que hay tres ecuaciones diferenciales y que existen sólo tres variables a ser
controladas ( 1i , 2i y Cv , donde 1 2ii i i ); por lo que no está clara la necesidad de sensar
una cuarta variable ( ii ) como se sugiere en [47, 69 – 73]. Por lo cual, en la propuesta de
esta tesis no se necesita incluir las mediciones de corriente en la generación de la
referencia ii y la conmutación se realiza sólo en la etapa de Charge-Control. Estas
características significan mayores ventajas en la implementación y diseño del sistema y de
los controladores.
Para la implementación de esta técnica se propone emplear transformadores de
corriente como sensores, los cuales permiten:
José Armando Olmos López cenidet
118
El sensor mide la corriente del interruptor, mientras que la técnica de
corriente promedio mide la corriente del inductor
El sensor es más barato que el sensor de efecto Hall
El sensor está referido a tierra, a diferencia del sensor de efecto Hall
Sencillo de implementar
Uno de los controladores propuestos plantea una solución al problema que surge
cuando el valor de algún parámetro cambia. La propuesta es el empleo de un Control
Robusto basado en la Técnica de Rediseño de Lyapunov, la cual tiene como meta
encontrar una señal adicional que enfrente los efectos de la variación paramétrica, y
sumar esta señal a una ley de control (basada en el método de Lyapunov) previamente
diseñada.
Se ha demostrado que el empleo de la técnica de rediseño de Lyapunov no puede
aplicarse al sistema cuando se considera la resistencia parásita en el capacitor de salida,
debido a que no se cumple con la condición relacional (matching condition).
De las cinco técnicas de control estudiadas esta técnica (Control Robusto) presenta
mayor versatilidad al añadir un módulo o sustituirlo por uno nuevo; ya que inclusive
tratándose de módulos estandarizados existen ligeras diferencias en los dispositivos.
Hacerle saber al controlador que dichos parámetros han sufrido un cambio e indicarle la
magnitud del cambio no es viable en la práctica, además de que el algoritmo para
implementar dicho controlador en un DSP (de los que se fabrican actualmente) es
prácticamente imposible. Por esta razón, la propuesta del Controlador Robusto presenta
una opción en la cual no se requiere saber cuál parámetro sufrió un cambio ni la magnitud
de la variación; lo único necesario es conocer el límite de variación que deberá de
permitirse en el sistema.
En los Capítulos 2, 3 y 4, el vector de parámetros sólo incluye variaciones en
inductores, capacitor y resistencias parásitas de estos elementos. Esto significa que la ley
de control se diseña para enfrentar los efectos de perturbaciones en estos dispositivos y
no perturbaciones exógenas. Sin embargo, como se muestra en los Capítulos 3 y 4, el

Análisis de técnicas de control por moldeo de energía … OLMOS
119
Control Robusto Basado en Pasividad por Rediseño de Lyapunov “absorbe” ciertas
perturbaciones exógenas; variaciones en frecuencia y magnitud en el voltaje de entrada, y
variaciones en magnitud y tipo de la carga final del sistema (carga resistiva, de tipo RLC y
RC).
Se ha mostrado que el empleo de la medición de la corriente total en la generación
de la señal de referencia para la corriente ( ii ) provoca mayores esfuerzos de cómputo en
los dispositivos de control. Además, debido a que la misma señal se utiliza para generar
los PWM de cada interruptor se generarían mayores errores en la distribución equitativa
de corriente.
Se presentan resultados del desempeño del sistema, con diferentes controladores,
cuando se entrega la energía a una carga que no es puramente resistiva, es decir, una
carga no lineal. Como carga no lineal se provocó la conmutación entre diferentes cargas;
una puramente resistiva; otra con elementos capacitivos y resistivos; y una tercera, con
inductancias, capacitancias y resistencias. La intención de estos cambios en las cargas es
simular el efecto de entrada y salida de tarjetas al bus de CD generado por los
convertidores tipo elevador.
Se concluye que el diseño del controlador “Caso 3: Charge-Control más Control
Basado en Pasividad”, dada su versatilidad y desempeño, es la mejor técnica para
implementarse en un prototipo práctico.
Se ha demostrado con resultados numéricos, que el empleo de un control no lineal
Basado en Pasividad logra la distribución equitativa de la corriente entre los convertidores,
además de asegurar la CFP y la regulación del voltaje en la salida. Como puede
concluirse, la hipótesis propuesta al inicio del trabajo se ha comprobado.
En la siguiente tabla, columna izquierda, se listan los objetivos particulares del
trabajo de tesis. La columna de en medio aparecen las actividades realizadas para lograr
alcanzar los objetivos.

José Armando Olmos López cenidet
120
Objetivos particulares Actividades realizadas
Aplicar una técnica de
modelado que permita el
empleo de técnicas de
control no lineal
Modelado continuo
Modelo de estados promediado empleando
ecuaciones diferenciales
o Considerando parásitos en las inductancias
o Considerando parásitos en las inductancias y
en el capacitor
Diseñar un controlador no
lineal y compararlo con
algunos controladores ya
utilizados en otros
trabajos
Controlador Basado en Pasividad
Considerando parásitos en las inductancias
Considerando parásitos en las inductancias y en
el capacitor
Controlador Proporcional Basado en Pasividad
Considerando parásitos en las inductancias
Considerando parásitos en las inductancias y en
el capacitor
Controlador Proporcional+filtro resonante
Considerando parásitos en las inductancias
Considerando parásitos en las inductancias y en
el capacitor
Controlador por Charge-Control
Considerando parásitos en las inductancias
Considerando parásitos en las inductancias y en
el capacitor
Controlador Robusto por rediseño de Lyapunov
Considerando parásitos en las inductancias
No es posible aplicarlo en las demás opciones
Analizar el
comportamiento del
sistema en lazo cerrado
ante la presencia de
variaciones paramétricas
Para cada uno de los controladores (excepto el
robusto) se consideraron variaciones paramétricas
en:
Los inductores 1L y
2L
Resistencias parásitas 1r ,
2r y Cr
El capacitor C
Y también se consideraron perturbaciones en el
voltaje de entrada y en la carga final del sistema

Análisis de técnicas de control por moldeo de energía … OLMOS
121
Resumen de aportaciones y alcances de la investigación
Se ha propuesto un lazo de control de corriente, basado en una forma diferente
de diseño, el cual no necesita dos controladores para lograr que una misma
variable (la corriente del sistema) logre dos objetivos de control.
Diseño de una metodología de diseño (Charge-control + Pasividad) de un
controlador no lineal que:
Logra la distribución equitativa de corriente entre los módulos del sistema
Logra la regulación del voltaje de salida
Logra la corrección del Factor de Potencia
Facilita la interconexión de más módulos y, derivado de esto
Permite la disminución del rizo de la corriente de entrada.
Además, esta técnica propuesta elimina la necesidad de un sensor de corriente
total.
Se han desarrollado cinco controladores no lineales, novedosos y que logran
los objetivos de control; no se ha encontrado artículos publicados de ninguno de
estos controladores aplicados a la interconexión de sistemas de estructura
variable.
o Controlador Basado en Pasividad
o Controlador Proporcional basado en Pasividad (Caso 1)
o Controlador Basado en Pasividad sensando Si (Caso 2)
o Controlador por Charge-Control (Caso 3)
o Controlador Robusto Basado en Pasividad por rediseño de Lyapunov
Limitaciones del trabajo de investigación:
Se trabajó únicamente con los modelos monofásicos del sistema
Se consideró que los interruptores son ideales

José Armando Olmos López cenidet
122
Se obtuvieron sólo resultados numéricos, en forma digital en la computadora,
empleando software de simulación científica (Matlab®)
No se comprobó que el control funcionara en algún prototipo o modelo
experimental de laboratorio.
Originalidad
El trabajo presenta el diseño de controladores que no se han empleado (hasta el
momento no se ha encontrado referencia alguna) para lograr los objetivos en
convertidores elevadores conectados en paralelo.
Se presentó un artículo en el congreso APEC 2011:
“Passivity-based control to sharing current in PFC interleaved boost converters”.
IEEE Applied Power Electronics Conference and Exposition, APEC 2011, Fort
Worth, USA.
Se presentó un artículo en el congreso ISIE 2010:
“Charge control technique to sharing current in PFC interleaved boost converters”.
IEEE International Symposium on Industrial Electronics, ISIE 2010, Bari, Italia.
Se presentó un artículo en el congreso AMCA 2010:
“Diseño de un control basado en pasividad para convertidores elevadores CFP en
paralelo”. Asociación de México de Control Automático, AMCA 2010, Puerto
Vallarta, Jalisco, México.
Análisis de técnicas de control por moldeo de energía … OLMOS
123
APÉNDICE A
ANÁLISIS DE SISTEMAS PERTURBADOS
Considerar el sistema
( , ) ( , )x f t x g t x
(A.1)
donde 0 nf : [ , ) D y 0 ng : [ , ) D son funciones diferenciables a trozos en
el tiempo t , localmente Lipschitz en x sobre 0 n, D , nD es un dominio que
contiene al origen 0x .
Se supone que el sistema (A.1) es una perturbación del sistema nominal
( , )x f t x
(A.2)
en donde el término g( t ,x ) corresponde a la perturbación16. Esta perturbación podría ser
el resultado de:
Errores de modelado
Envejecimiento
Incertidumbres
Disturbios
problemas que existen en cualquier sistema real [60].
En la mayoría de los casos g( t ,x ) es desconocida, sin embargo se conoce las
cotas que limitan la magnitud de g( t ,x ) y es de especial interés conocer la cota superior
16 Todas las perturbaciones que no modifican el orden del sistema pueden representarse de esta forma.

José Armando Olmos López cenidet
124
( , )g t x (A.3)
Un enfoque natural para analizar la estabilidad del sistema perturbado es utilizar la
función de Lyapunov, para el sistema nominal, como una función candidata para el
sistema perturbado.
Si 0x es un punto de equilibrio exponencialmente estable del sistema (A.2) y
V( t ,x ) es una función de Lyapunov que satisface
1 2( , )x V t x x (A.4)
3( , )V V
f t x xt x
(A.5)
4
Vx
x
(A.6)
para todo 0( t,x ) , D , donde 1 , 2 , 3 y 4 son funciones clase K . Además, se
supone que la perturbación g( t ,x ) satisface
( , ) ; 0,g t x x t x D (A.7)
donde es una constante no negativa.
Utilizando la función de Lyapunov V( t ,x ) del sistema (A.2) como una función de
Lyapunov candidata para el sistema perturbado, la derivada de V( t ,x ) está dada por
( , ) ( , ) ( , )V V V
V t x f t x g t xt x x
(A.8)
Los primeros dos términos de la derecha de la expresión (A.8) corresponden a la
derivada de V( t ,x ) en las trayectorias del sistema nominal. El tercer término ( , )V g t xx
es
el efecto de la perturbación.

Análisis de técnicas de control por moldeo de energía … OLMOS
125
Puesto que no se conoce exactamente la función g( t ,x ) , no es posible afirmar que
este término mejora o empeora las causas que provocan que ( , )V t x
sea definida negativa;
pero sÍ se conoce (al menos) la cota superior de g( t ,x ) . Con esta información se puede
analizar el peor caso, es decir, si ( , )V g t xx
está acotada superiormente por un término
no negativo. Utilizando las expresiones (A.5), (A.6) y (A.7) se obtiene
3 3 4( , ) ( , )V
V t x x g t x x xx
(A.9)
y si se escoge
3
4
x
x
(A.10)
entonces
3 4( , )V t x x x
(A.11)
es definida negativa.
Lo anterior se resume en el siguiente lema:
Lema 1. Sea 0x un punto de equilibrio exponencialmente estable del sistema
(A.2). Sea V( t ,x ) una función de Lyapunov del sistema nominal (A.2), que satisface
(A.4) a (A.6) en el dominio 0, D . Además la perturbación g( t ,x ) satisface (A.7)
y (A.10). Entonces el origen es un punto de equilibrio del sistema perturbado (A.1).
Aun más, si todas las suposiciones se cumplen globalmente, entonces el origen es
global y asintóticamente estable.

José Armando Olmos López cenidet
126
Este lema es conceptualmente importante, ya que demuestra que la estabilidad
exponencial del origen es robusta para una clase de perturbaciones que satisfacen (A.7) y
(A.10).
De esta manera, se considera que el siguiente sistema cumple con las propiedades
del Lema 1
x f ( t,x ) G( t,x ) u ( t,x,u )
(A.12)
al cual se aplica el control
u ( t ,x ) v (A.13)
Se demostrará que (A.12) es estable siempre que se retroalimente con un
controlador del tipo (A.13), donde u puede agruparse como la suma del control nominal
( t ,x ) y una función v por definir. El sistema (A.12) en lazo cerrado resulta
x f ( t ,x ) G( t,x ) ( t ,x ) G( t,x ) v ( t ,x,u )
(A.14)
El cual es una perturbación del sistema nominal en lazo cerrado
x f ( t ,x ) G( t ,x ) ( t ,x )
(A.15)
al que se le ha aplicado el control u ( t ,x ) . Calculando la derivada de V( t ,x ) sobre las
trayectorias de (A.14) se obtiene la expresión (A.16). Por conveniencia no se escriben los
argumentos de las funciones variables.
3
V V V VV f G G( v ) x G( v )
t x x x
(A.16)
Definiendo

Análisis de técnicas de control por moldeo de energía … OLMOS
127
T Vw G
x
(A.17)
se escribe la desigualdad (A.16) como
3T TV x w v w
(A.18)
El primer término del lado derecho se debe al sistema nominal en lazo cerrado. El
segundo y el tercero representan los efectos del control v y el término incierto sobre V
,
respectivamente. Debido a la matching condition, el término incierto aparece en el lado
derecho exactamente en el mismo punto donde v aparece. Por consiguiente, es posible
seleccionar v para cancelar el efecto (desestabilizante) de sobre V
. Aplicando la norma
euclidiana o norma dos, es posible encontrar la ley de control v .
Así, suponiendo que
0 00 1t ,x, ( t ,x ) v t ,x k v , k (A.19)
se podrá satisfacer si se emplea 2 .
De esta manera, del segundo y tercer miembros del lado derecho de la ecuación
(A.18) se tiene
0T T T Tw v w w v w w v w ( t ,x ) k v (A.20)
Definiendo
w
v n( t ,x )w
(A.21)
y sustituyendo en la expresión (A.20), se llega a

José Armando Olmos López cenidet
128
2
0
2 2
0
2
0
01
T T T ww v w w n w
w
n wwn w w k
w w
w wn w k n
w w
wn w w k n
w
n w k w
(A.22)
Si se establece que
0
01
( t ,x )n( t ,x ) , ( t ,x ) , D
k
(A.23)
se encuentra la siguiente expresión
0T Tw v w w w (A.24)
Por lo tanto, el control (A.21) logra que la derivada de V( t ,x ) , durante las
trayectorias del sistema en lazo cerrado, sea definida negativa.
La teoría de Lyapunov dice que si se encuentra una función de Lyapunov para un
sistema dado, entonces el sistema en lazo cerrado será estable.
La ley de control dada por (A.21) es una función discontinua del estado x . Esta
discontinuidad causa problemas tanto teóricos como prácticos.
En teoría se debe de cambiar la ley de control para evitar la división por cero.
También se debe verificar la cuestión de la existencia y unicidad de las soluciones, de una
manera mucho más cuidadosa, ya que las funciones retroalimentadas no son localmente
Lipschitz en x .
En la práctica, la implementación de tales controles discontinuos se caracteriza por
el fenómeno de “chattering” o “castañeo” donde, debido a las imperfecciones de los

Análisis de técnicas de control por moldeo de energía … OLMOS
129
conmutadores o retardos computacionales, el control tiene fluctuaciones conmutadas
rápidas a través de la superficie de conmutación17. En lugar de tratar de trabajar fuera de
esos problemas, es común elegir la fácil y práctica ruta de aproximar la ley de control
discontinua a una continua.
La expresión (A.21) es una ley discontinua, por lo que ahora se considera la ley de
control retroalimentado
2
wn si n w
wv
wn si n w
(A.25)
El sistema en lazo cerrado es
x f ( t ,x ) G( t,x ) ( t ,x ) G( t,x ) v ( t ,x, ( t ,x ) v )
(A.26)
así que sustituyendo (A.25), es decir, cuando n w se tiene
3
2
3
2
3 0
2
03
3 0
3 0 1
TTw nw
V x ww
n wx w
w
n wx w w k v
w
n w w k n wx w
w w
x n w w k n w
x k n w w
(A.27)
Si ahora se escoge
17 Ver la sección 14.1 del libro de Khalil para una discusión más amplia sobre el castañeo.

José Armando Olmos López cenidet
130
0
01
p( t ,x )n( t ,x ) , ( t ,x ) , D
k
(A.28)
se puede llegar a la expresión
3 0
03
0
3
1
1
1
V x k n w w
k p wx w
k
x
(A.29)
por lo tanto, 0V
siempre que n w .
Sólo se necesita verificar V
cuando n W . En este caso
2
3
22 2
3 0
22 22
3 0
T Tn wV x w w
n w n wx w w k
n w n wx w k w
(A.30)
como ya se ha seleccionado que
0
01
p( t ,x )n( t ,x ) , ( t ,x ) , D
k
entonces
01( t,x ) n( t,x ) k (A.31)
sustituyendo ( t ,x ) en (A.30) se tiene

Análisis de técnicas de control por moldeo de energía … OLMOS
131
22 22
3 0 0
22
3 0 0
22
3 0
1
1 1
1
n w nV x w n k k w
n wx k n k w
n wx k n w
(A.32)
el término
22n w
n w
(A.33)
alcanza un máximo valor de
4 (A.34)
en
2
n w
(A.35)
lo cual se comprueba derivando (A.33)
22 22n w n wd
n w nd w
(A.36)
igualando a cero la expresión (A.36) se encuentran las raíces de la derivada, las cuales
indican el máximo y/o el mínimo
2
2
20
2 2
n wn
nw
n n
(A.37)

José Armando Olmos López cenidet
132
la expresión (A.37) indica que hay un máximo cuando 2w n , por lo que la expresión
(A.33) está acotada por el valor máximo que alcanza en el punto en el punto 2w n , el
valor es
22 2
4 2
4
n wn w
(A.38)
Por lo tanto
03
1
4
kV x
(A.39)
siempre que
n w (A.40)
Por otro lado, cuando n w se tiene que V
cumple
03 3
1
4
kV x x
(A.41)
por lo que la desigualdad
03
1
4
kV x
(A.42)
se cumple, independientemente del valor de n w . Tomando 0r tal que rB D , además
de escoger

Análisis de técnicas de control por moldeo de energía … OLMOS
133
13 2 1
0
2
1
( r )
k
(A.43)
y ajustando
1 13 0 2 11 2k / ( r ) (A.44)
entonces se tiene
3
1
2V x , x r
(A.45)
De lo anterior se puede obtener el siguiente teorema 1, el cual muestra que las
soluciones del sistema en lazo cerrado están acotadas finalmente y uniformemente por
una función clase K de .
Teorema 1. Considerar el sistema
x f ( t,x ) G( t,x ) u ( t,x,u )
(A.46)
Sea nD un dominio que contiene al origen y rB x r D . Sea ( t ,x ) una
ley de control retroalimentada estabilizante para el sistema nominal
x f ( t ,x ) G( t ,x )u
(A.47)
con una función de Lyapunov V( t ,x ) que satisface
1 2
3
x V( t,x ) x
V Vf ( t ,x ) G( t,x ) ( t ,x ) x
t x
(A.48)

José Armando Olmos López cenidet
134
con la norma dos para todo 0t y toda x D , con algunas funciones clase K 1 ,
2 y 3 . Se asume que el término incierto satisface
0 00 1t ,x, ( t ,x ) v t ,x k v , k (A.49)
en la norma dos para todo 0t y toda x D . Sea v dada por
2
wn si n w
wv
wn si n w
(A.50)
en donde se emplea que sea
13 2 1
0
2
1
( r )
k
(A.51)
Entonces, para cualquier
10 2 1x( t ) ( r ) (A.52)
existe un tiempo finito 1t tal que la solución del sistema en lazo cerrado
x f G G v
(A.53)
satisface
0 0 0 1x( t ) x( t ) ,t t , t t t (A.54)
1x( t ) b , t t (A.55)

Análisis de técnicas de control por moldeo de energía … OLMOS
135
en donde es una función clase KL y b es de clase K definida por
1 1 11 2 1 2 3 01 2b ( ) k / (A.56)
Si todas las suposiciones se cumplen de forma global y además 1 pertenece a la
clase K , entonces (A.54) y (A.55) se cumplen para cualquier estado inicial 0x( t ) .
Por lo que, en general, el rediseño de Lyapunov en forma continua dado por (A.50)
no estabiliza el origen como su contraparte discontinua lo hace
w
v nw
(A.57)
Sin embargo, garantiza acotamiento último uniforme de las soluciones. Dado que la
cota última b es una función clase K de , puede hacerse arbitrariamente pequeña
mediante la selección de un suficientemente pequeño. En el límite, cuando 0 , se
recupera el desempeño del controlador discontinuo. Notar que no existe razón analítica
para exigir que sea muy pequeño. La única restricción analítica sobre es que se
cumpla (A.51). Este requisito se satisface para cualquier cuando las suposiciones se
cumplen globalmente y i 1 2 3i , , son funciones clase K . Por supuesto, desde un
punto de vista práctico, es favorable hacer tan pequeño como sea posible, ya que se
desea conducir a los estados del sistema a una vecindad del origen tan pequeña como se
pueda. Sacando provecho de la pequeñez de dentro del análisis, se puede llegar a un
resultado abrupto cuando la incertidumbre desaparece en el origen. Suponer que hay
una bola aB x a , a r tal que las siguientes desigualdades se cumplen para toda
ax B
23
0
1
0
x ( x )
n( t ,x ) n
( t ,x ) ( x )
(A.58)

José Armando Olmos López cenidet
136
Aquí, n: es una función definida positiva de x . Seleccionando 1b ( a ) se
asegura que las trayectorias del sistema en lazo cerrado será restringidas a aB después
de un tiempo finito. Cuando n w la derivada V
satisface
3
2
3
2 2 2
3 0
22 20
3
2 22 20
3
220
3
220
3 3
1
11 1
2 2
T T
T T
T
TT
V x w v w
n wx w v w
n w n wx w k
w k n wn wx w
n w w k nx w
n k wx w
n k wx x w
(A.59)
aplicando las desigualdades (A.58) en (A.59) se obtiene
220 02
3 1
1
23 0 0
1
11 1
2 21
1 12 1
2 2
T
n k wV x ( x ) w ( x )
( x ) ( x )x n kw w
(A.60)
La matriz de la forma cuadrática será definida positiva si
2
0 0
21
2 1n k
(A.61)
por lo que, si se selecciona tal que se cumpla (A.61) se tendrá

Análisis de técnicas de control por moldeo de energía … OLMOS
137
3
1
2V x
(A.62)
Dado que 3 3 2V x x /
cuando n w se concluye que (A.62) se
cumple, lo cual demuestra que el origen es asintóticamente y uniformemente estable.
Corolario 1. Suponer que las desigualdades (A.58) se cumplen, además de todas
las suposiciones del Teorema 1. Entonces, para toda que cumpla
2
0 0 121
2 1n kmin ,b ( a )
(A.63)
el origen del sistema en lazo cerrado
x f ( t ,x ) G( t,x ) ( t ,x ) G( t,x ) v ( t ,x,u )
(A.64)
es asintóticamente y uniformemente estable. Si Ci i( r ) k r entonces el origen es
exponencialmente estable.
El corolario 1 es particularmente útil cuando el origen del sistema nominal en lazo
cerrado
x f ( t ,x ) G( t ,x ) ( t ,x )
(A.65)
es exponencialmente estable y la perturbación ( t ,x,u ) es Lipschitz en x y u , y
desaparece para 0 0x , u . En este caso ( x ) es proporcional a x y el término incierto
satisface
0 00 1t ,x, ( t ,x ) v t ,x k v , k (A.66)
José Armando Olmos López cenidet
138
con ( x ) que cumple
1( t,x ) ( x ) (A.67)
En general, la condición (A.67) puede requerir más que sólo perturbaciones que
desaparezcan en el origen. Por ejemplo, si en un caso escalar 3
( x ) x , entonces un
término de perturbación x no puede estar acotado por 1 ( x ) .
El resultado de la estabilización del corolario 1 depende de la elección de n tal que
satisfaga
0 0n( t,x ) n (A.68)
Puede mostrarse que si n no satisface (A.68) el control retroalimentado puede fallar al
estabilizar el origen. Cuando n satisface (A.68) la ley de control retroalimentado (A.50)
actúa en la región n w como un control retroalimentado de gran ganancia
v Kw (A.69)
con 20K n / . Tal control de gran ganancia puede estabilizar el origen cuando se cumplen
23 x ( x ) , (A.68) y (A.67).

Análisis de técnicas de control por moldeo de energía … OLMOS
139
APÉNDICE B
MODELADO EULER-LAGRANGE
El modelado Euler-Lagrange de un sistema permite representarlo por medio de una
estructura que posee cualidades que facilitan el diseño del control. Esta estructura es
( ) ( , ) ( )D q q C q q q R q q u
(B.1)
y sus cualidades son: D es simétrica y definida positiva, que contiene a los elementos que
almacenan energía; C es antisimétrica y contiene a los elementos no aportan ni disipan
energía (interruptores); R es una matriz definida positiva y simétrica, que contiene los
elementos que disipan energía en el sistema; u es un vector de fuerzas externas; q es la
coordenada generalizada;
q es la velocidad generalizada y
q la aceleración generalizada.
El método Euler-Lagrange consiste en los siguientes pasos:
1. Determinar las coordenadas generalizadas del sistema. Es decir, el sistema se
especifica en función de las variables de esfuerzo y flujo generalizadas (estas
variables indican las energías almacenadas y disipadas en los elementos que
participan en el sistema).
2. Determinar las variables variacionales, para ello es necesario conocer si
existen restricciones en el sistema. Para un análisis nodal en donde la variable
de interés es el esfuerzo, una restricción es cualquier fuente de flujo que exista
en el sistema. Para un análisis de mallas, la variable de interés es el flujo, y las
restricciones equivalen a una fuente de esfuerzo. El número de variables
variacionales es igual a la diferencia entre las coordenadas generalizadas y las
restricciones.
3. Conocer cuántos grados de libertad tiene el sistema (el número de grados de
libertad es igual al número de variables variacionales). El número de grados de
José Armando Olmos López cenidet
140
libertad toma en cuenta las restricciones del sistema e indica que la ecuación
de Euler-Lagrange se debe evaluar tantas veces como grados de libertad
existan. Esto significa que se obtendrán tantas ecuaciones de Euler-Lagrange
como grados de libertad tenga el sistema.
4. Formar la ecuación Lagrangiana la cual, por definición, es la diferencia entre la
energía cinética y la energía potencial. Para esto, es necesario tener
expresiones de la energía que almacenan los elementos que forman el sistema
y se debe conocer la relación constitutiva de cada elemento que participa en el
sistema18. Cuando el análisis es nodal se emplea el Lagrangiano, el cual es
U T L (B.2)
en donde
U es la coenergía en los elementos que almacenan flujo. Esta función
corresponde a la energía cinética.
T es la energía en los elementos que almacenan esfuerzo. Esta función
corresponde a la energía potencial.
En este caso, tanto U* (energía cinética) como T (energía potencial) deben de
expresarse en términos del esfuerzo.
Si el análisis fuera por mallas deberá emplearse el Lagrangiano
complementario. Para el Lagrangiano complementario todas las expresiones
deben de estar en términos de la variable de flujo
(B.3)
en donde
18 Para tener una mejor comprensión de las relaciones constitutivas se sugiere revisar la referencia [53].
* *T U .L
Análisis de técnicas de control por moldeo de energía … OLMOS
141
T es la coenergía en los elementos que almacenan esfuerzo. Esta función
corresponde a la energía cinética.
U es la energía en los elementos que almacenan flujo. Esta función
corresponde a la energía potencial.
5. Evaluar la ecuación de Euler-Lagrange
(B.4)
la primera corresponde a un análisis nodal, en donde se emplea el
Lagrangiano y la segunda corresponde a un análisis de mallas en donde se
emplea el Lagrangiano complementario. En (B.4) J y G son funciones de
disipación de Rayleigh, donde J es la coenergía disipada y G es la energía
disipada. Las expresiones (B.4) están igualadas a fuentes de flujo F y a
fuentes de esfuerzo E , respectivamente. El subíndice i indica que debe de
evaluarse la ecuación para cada grado de libertad.
En estos cinco pasos se resume la metodología Euler-Lagrange basada en [53]. En
el análisis de sistemas eléctricos, esta metodología consiste en establecer los parámetros
Euler-Lagrange del circuito, asociado con cada una de las topologías correspondientes a
las dos posibles posiciones del interruptor regulador. Esta consideración inmediatamente
permite encontrar que algunos elementos modelados por parámetros Euler-Lagrange
permanecen invariantes bajo la acción del interruptor, mientras que otros se modifican
debido a la suma o cancelación de ciertas cantidades de energía. Éste mismo enfoque es
adecuado para aplicarse a una gran clase de convertidores de potencia DC-DC, AC-DC o
DC-AC existentes físicamente.
La técnica de modelado Euler-Lagrange se basa en una adecuada parametrización,
en términos de la posición del interruptor, de las funciones Euler-Lagrange que describen
ii i
ii i
d JF
dt qq q
d GE
dt qq q
L L
L L
José Armando Olmos López cenidet
142
cada uno de los sistemas participantes y la aplicación subsecuente del formalismo
Lagrangiano.
En la metodología Euler-Lagrange, para una gran variedad de sistemas, la matriz
de los elementos que almacenan energía es la misma matriz empleada en la función de
almacenamiento energético. Esta última función se puede emplear en el diseño de un
control basado en pasividad. De ahí que el control basado en pasividad se proponga como
una técnica natural de control para los convertidores tipo elevador [53, 101, 102].
Es importante recalcar que, al emplear la función de almacenamiento de energía
como función candidata de Lyapunov, se busca garantizar que esta función energética sea
conducida a un estado de equilibrio. Esto se logra modificando la energía del sistema para
satisfacer el Segundo Método de Estabilidad de Lyapunov; de ahí que a esta técnica se le
conozca como Moldeo de Energía.
Las variables (corrientes de los inductores y voltaje del capacitor) empleadas como
medición de la dinámica del sistema, también se han seleccionado como salidas del
sistema. Es decir, mediante el moldeo de la energía del sistema completo es posible
producir los efectos deseados en las variables de interés. Existen otras técnicas de control
(como control PID o compensadores de atraso-adelanto) para producir el comportamiento
deseado en las corrientes y voltajes del sistema; sin embargo en esta tesis se seleccionó
el moldeo de energía debido a las ventajas que ofrece, las cuales son mencionadas en las
Conclusiones del trabajo.
MODELO DE LA CONEXIÓN EN PARALELO DE DOS
CONVERTIDORES TIPO ELEVADOR
La Fig. 26 corresponde al sistema de dos convertidores elevadores en una de sus
representaciones más simples; considerando al sistema ideal. Este mismo esquema es
utilizado en el Capítulo 2 para obtener el modelo matemático por el método de leyes de
Kirchhoff.
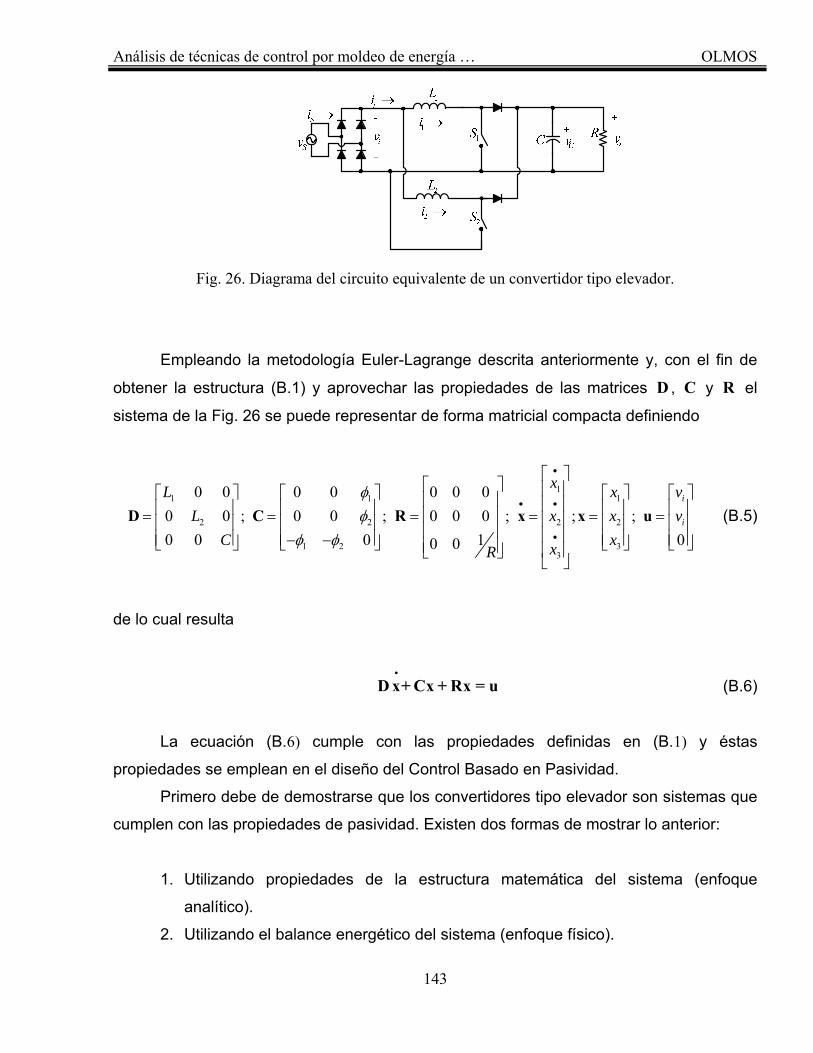
Análisis de técnicas de control por moldeo de energía … OLMOS
143
Fig. 26. Diagrama del circuito equivalente de un convertidor tipo elevador.
Empleando la metodología Euler-Lagrange descrita anteriormente y, con el fin de
obtener la estructura (B.1) y aprovechar las propiedades de las matrices D , C y R el
sistema de la Fig. 26 se puede representar de forma matricial compacta definiendo
11 1 1
2 2 2 2
1 2 33
0 0 0 0 0 0 0
0 0 ; 0 0 ; 0 0 0 ; ; ;
0 0 0 1 00 0
i
i
xL x v
L x x v
C xxR
D C R x x u (B.5)
de lo cual resulta
•
D x+ Cx + Rx = u (B.6)
La ecuación (B.6) cumple con las propiedades definidas en (B.1) y éstas
propiedades se emplean en el diseño del Control Basado en Pasividad.
Primero debe de demostrarse que los convertidores tipo elevador son sistemas que
cumplen con las propiedades de pasividad. Existen dos formas de mostrar lo anterior:
1. Utilizando propiedades de la estructura matemática del sistema (enfoque
analítico).
2. Utilizando el balance energético del sistema (enfoque físico).

José Armando Olmos López cenidet
144
En [53] se demostró que los convertidores son sistemas pasivos (que cumplen con
las propiedades de pasividad), empleando las propiedades de dinámica cero y grado
relativo del sistema. En este trabajo se demuestra pasividad en los convertidores tipo
elevador partiendo de un análisis del balance energético del sistema. Este análisis permite
ligar fácilmente el balance energético con el modelado Euler-Lagrange. Además, el diseño
de un control nominal basado en pasividad emplea la función de almacenamiento
energético del sistema como función de Lyapunov (empleando el método de Lyapunov
para el diseño del control nominal). Esta es una característica de primacía en la técnica de
rediseño de Lyapunov.
Una forma de demostrar la propiedad de pasividad en los convertidores tipo
elevador es partir del hecho de que pueden representarse por una estructura (B.6).
Despejando ( )t•
Dx , la cual es la energía almacenada en el sistema
( ) ( ) ( ) ( )t t t t •
Dx Rx Cx u (B.7)
Multiplicando (B.7) por ( )T tx e integrando de 0 a t, se tiene
0 0 0 0
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )t t t t
T T T Td d d d •
x D x x Rx x Cx x u (B.8)
Dado que la matriz D es diagonal, cuadrada y constante, la integración del término de la
izquierda resulta
00 0 0
1( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
2
tt t t
T T T Td d d x Dx x Rx x Cx x u (B.9)
y evaluando de 0 a t
0 0 0
1( ) ( ) (0) (0) ( ) ( ) ( ) ( ) ( ) ( )
2
t t tT T T T Tt t d d d x Dx x Dx x Rx x Cx x u (B.10)
Análisis de técnicas de control por moldeo de energía … OLMOS
145
Como la matriz C es antisimétrica, el producto
( ) ( ) 0T x Cx (B.11)
por lo cual (B.10) queda de la siguiente manera
0 0
1 1( ) ( ) (0) (0) ( ) ( ) ( ) ( )
2 2
t tT T T Tt t d d x Dx x Dx x Rx x u (B.12)
Sea la función
1
( ( )) ( ) ( )2
TH x x Dx (B.13)
la cual se sustituye en (B.12) resultando
0 0
( ( )) ( (0)) ( ) ( ) ( ) ( )t t
T TH t H d d x x x u x Rx (B.14)
y ordenando
0 0
( ( )) ( (0)) ( ) ( ) ( ) ( )t t
T TH t H d d x x x Rx x u (B.15)
la expresión anterior corresponde al balance energético del sistema dado por (B.6).
El primer término del lado izquierdo de (B.15) corresponde a la energía total
almacenada en el sistema en un intervalo de tiempo 0,t . El segundo término del lado
izquierdo corresponde a la energía disipada en el sistema durante el mismo intervalo de
tiempo. El término del lado derecho corresponde a la energía suministrada durante 0,t .
Dado que la función definida en (B.13) indica la energía almacenada en el sistema,
se le conoce como función de almacenamiento y es la suma de la energía cinética más la

José Armando Olmos López cenidet
146
energía potencial. Para el caso del sistema estudiado en la tesis esta función corresponde
al Hamiltoniano.
El balance energético, expresión (B.15), del sistema indica que existe disipación de
energía y según la definición de disipatividad el sistema es disipativo.
Para demostrar que el sistema es pasivo, se analiza el miembro derecho de la
expresión (B.15)
0
( ) ( )t
T d x u (B.16)
Como ya se dijo, ( t )u es un vector definido por ( ) ( ) ( ) 0T
i it v t v tu para el caso
de los convertidores tipo elevador. De lo cual
1 2 3
0 0
1 2
0
( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
t tT
t
i i
d x x x d
x v x v d
x u u
(B.17)
Además, del modelo del sistema, se tiene que 1 2( )y t x x corresponde a la salida
del sistema, entonces
1 2
0 0
( ) ( ) ( ) ( ) ( ) ( )t t
i i ix v x v d y v d (B.18)
sustituyendo (B.18) en (B.15) se tiene
0 0
( ( )) ( (0)) ( ) ( ) ( ) ( )t t
TiH t H d y v d x x x Rx (B.19)
y de acuerdo con la definición de pasividad, el sistema es pasivo ya que la energía
suministrada es producto de la entrada y la salida del sistema. Por lo cual, la función de

Análisis de técnicas de control por moldeo de energía … OLMOS
147
almacenamiento de energía total (de ambos convertidores) se puede moldear para lograr
la energía deseada.
De acuerdo al procedimiento anterior, la interconexión paralela produce una salida
1 2 1 2y = y + y i i y la función de almacenamiento de energía total es la suma de las
funciones de almacenamiento de cada convertidor, esto es 1 1 2 2( ) ( ) ( ) 0H H H .
Se hace notar que la expresión (B.19) fue desarrollada para dos convertidores tipo
elevador en paralelo y aplica tanto para uno como para tres o más convertidores. Esto
implica que la metodología Euler-Lagrange de las expresiones (B.1) a (B.4) se puede
desarrollar para obtener las respectivas funciones de almacenamiento de energía. Aún
más, esto significa que la técnica de control por moldeo de energía también aplica a uno,
dos o más convertidores en paralelo.
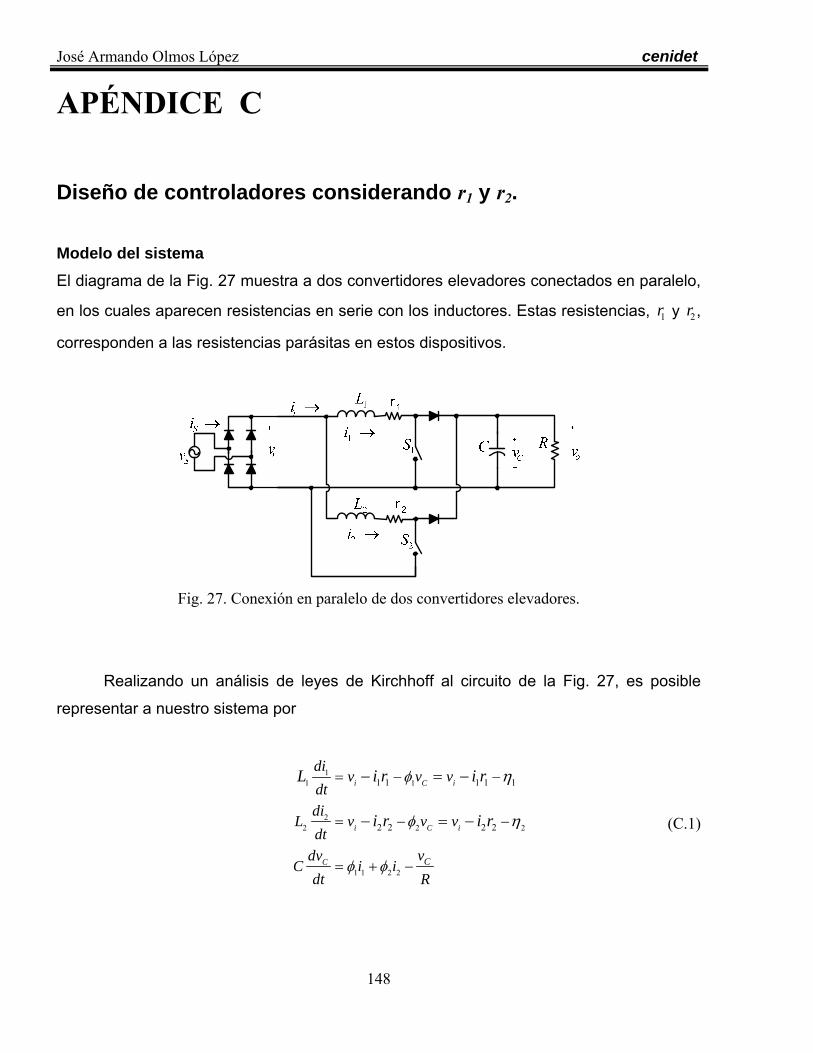
José Armando Olmos López cenidet
148
APÉNDICE C
Diseño de controladores considerando r1 y r2.
Modelo del sistema
El diagrama de la Fig. 27 muestra a dos convertidores elevadores conectados en paralelo,
en los cuales aparecen resistencias en serie con los inductores. Estas resistencias, 1r y 2r ,
corresponden a las resistencias parásitas en estos dispositivos.
Fig. 27. Conexión en paralelo de dos convertidores elevadores.
Realizando un análisis de leyes de Kirchhoff al circuito de la Fig. 27, es posible
representar a nuestro sistema por
11 1
22 2 2
1 1 2 2
1 1 1 1 1
2 2 2 2
i C i
i C i
C C
div v v
dt
diL v v v
dt
vdvC i i
dt R
L i r i r
i r i r
(C.1)

Análisis de técnicas de control por moldeo de energía … OLMOS
149
Diseño de controladores
Control basado en pasividad
Para el diseño del controlador basado en pasividad se expresa el sistema (C.1) como
x x x u
D C R (C.2)
donde las matrices D , C y R están dadas por
11 1 1 1
2 2 2 2 2
1 2 33
0 0 0 0 0 0
0 0 ; 0 0 ; 0 0 ; ; ;
0 0 0 10 0
xL r x
L r x x x x
C xxR
D C R (C.3)
donde , 0, T D D D D , , T C C C , , 0 R R , 1 1 2 2 3; ; Cx i x i x v . Como
puede notarse, el sistema (C.2) difiere del analizado en (2.6) sólo en la matriz R .
Siguiendo la metodología empleada anteriormente se obtiene el control basado en
pasividad para dos convertidores elevadores, donde las variables de control 1 y 2 están
dadas por
1 1 1 1 1 1 1 13
2 2 2 2 2 2 2 23
1( )
1( )
i d d am dd
i d d am dd
v L x r x R x xx
v L x r x R x xx
(C.4)
Sumando ambas expresiones de (C.4), con las consideraciones 1 2L L L ,
1 2r r r y 1 2am am amR R R , se obtiene

José Armando Olmos López cenidet
150
3 1 2 1 2 1 22 ( )d i d d d d amx v L x x r x x R e e
(C.5)
donde 1 1 1de x x , 2 2 2de x x . El diseño del lazo de voltaje es similar al obtenido en la el
Capítulo 2. Se multiplica la tercera ecuación de (C.1) por Cv resultando
1 1 2 2
2
2
22
2
2
C CC C C
i C
i Ci i i i i
dv vv C i i
dt R
v
R
v
R
v v
i
diLv i i r i Ki
dt
(C.6)
donde está dada por (C.5), 1 2i i ii i i e e y amK R . Es posible simplificar la expresión
anterior (como se realizó en el Capítulo 2.) ya que el término 0iLdi dt y se considera
que el control de corriente ha logrado 0ii . Empleando 2 2Cv se tiene que C Cv v
,
así la ecuación (C.6) puede escribirse
2i i i
dC
dt Rv i r i
(C.7)
El mayor interés en el diseño del control de voltaje es regular las componentes en
CD de , la componente en CD de , ,i CD s RMSv v y la componente en CD de
,( ) /i CD S RMSi r Gr v . Comparando las magnitudes de estos dos términos19 se tiene que
,i CD i CDv i r , por lo cual la contribución del término ii r puede despreciarse. Así (C.7)
resulta
19 En esta tesis el valor de 0.5r y el máximo valor de 11ii
.

Análisis de técnicas de control por moldeo de energía … OLMOS
151
2
i i
dC v
dt Ri
(C.8)
De esta ecuación se obtiene, el control de voltaje
0
t
p iG K K d (C.9)
donde 2 2Cv y 2 2dV . Como puede notarse, el control de voltaje de la expresión
(C.9) es el mismo controlador tipo PI de la expresión (2.28).
Caso 1: Control Proporcional Basado en Pasividad sensando la corriente ii
De manera similar al desarrollo mostrado para el Caso 1 de esta sección, se proponen las
siguientes leyes de control basadas en pasividad para las expresiones (C.1)
*1
1 1 1 1
*2
2 2 2 2
1
2 2
1
2 2
i ii
C
i ii
C
i diLv r K i
v dt
i diLv r K i
v dt
(C.10)
donde, como ya se definió anteriormente, 1 1 2ii i i , 2 2 2ii i i , 2,i i s RMSi Gv v , i Sv v ,
G es una variable aún no definida, 1K y 2K son valores escalares positivos.
Si se establece 1 2L L L , 1 2r r r y 1 2K K K entonces la suma de las ecuaciones
(C.10) resulta ser
*1
2 ii i i
C
div ri L Ki
v dt
(C.11)

José Armando Olmos López cenidet
152
donde i i ii i i . La expresión (C.11) puede simplificarse considerando que 0iLdi dt ,
de esta manera resulta
*12 i i i
C
v ri Kiv
(C.12)
El controlador de voltaje de la expresión (C.9) es el que se utiliza para regular el
voltaje en la salida.
Caso 2: Control Proporcional+Filtro resonante sensando la corriente Si
Considerando que Sv y Si tienen el mismo ángulo de fase, el sistema puede expresarse en
términos de las variables Sv y Si , realizando la transformación de coordenadas
sgn( )S i Si i i y sgn( )i S Sv v i donde se utiliza la función sgn( )Si por conveniencia en el
diseño. De esta manera la ley de control (C.11) puede desarrollarse como sigue
*
2 2, ,
2 2, ,
2
2 sgn( ) sgn( ) sgn( ) sgn( )
sgn( ) 2
iC i i i
S SS s S S s s s
S RMS S RMS
S Ss S S S
S RMS S RMS
div v Ki ri L
dtGv dGvL
v i K i i i r i iv v dt
Gv dGvLi v K i i r
v v dt
(C.13)
Empleando un abuso en la notación se realiza una transformación al dominio de la
frecuencia, de lo cual se tiene
2 2 2, 0
sgn( ) 2 SC s S S S
S RMS
Gv sv i v Ki r i
v s
(C.14)

Análisis de técnicas de control por moldeo de energía … OLMOS
153
donde 2,( )S RMS SL v dGv dt de la expresión (C.13) se ha reconstruido empleando la
aproximación 2 2 2, 0( ) ( )S RMS S SL v dGv dt i s s con S S Si i i , 2
,S S S RMSi Gv v , como se
realizó en el Capítulo 2. El proceso desarrollado en (C.13) para aproximar la derivada de ii
es el mismo utilizado en la expresión (2.49), pero expresado de manera diferente.
El controlador de voltaje G se calcula empleando (C.9).
Caso 3: Control por Charge-Control
La integral de la corriente 1Si durante la duración del ciclo de trabajo 1d , no es alterada por
los efectos de la resistencia parásita 1r . Lo mismo sucede en la corriente 2Si . Es decir, los
valores deseados 1 y 2
en el capacitor TC están dados por
1 1 1 2 2 21 12 2i ii i
(C.15)
En la expresión (C.15) pueden emplearse 1 y 2 obtenidos en el Caso 1 y Caso 2
de esta sección o puede emplearse el controlador de corriente diseñado a continuación.
Para el cálculo del controlador de corriente, 1 y 2 , se utilizará nuevamente una ley de
control basada en pasividad sin inyección de amortiguamiento, es decir, los términos k kK i ,
1,2k no se incluyen en el diseño de la ley basada en pasividad. Las ecuaciones
resultantes son
*1
1 1
*2
2 2
2 2
2 2
i iC i
i iC i
i diLv v r
dt
i diLv v r
dt
(C.16)
Recordando que la magnitud máxima del primer miembro del lado derecho es SV
(cientos de volts) y la magnitud máxima del segundo y tercer miembro del lado derecho es

José Armando Olmos López cenidet
154
1 12 2 5.5i k k ii r L di dt , 1,2k , se deduce que la contribución del segundo y tercer
miembro no repercute drásticamente en la señal de control generada. Por lo que (C.16)
puede aproximarse a
1 2C C iv v v (C.17)
La técnica de Charge-Control dada por (C.17) no se ve afectada por la inclusión de
resistencias parásitas en la inductancias. Para el análisis de estabilidad de (C.17) se
emplea el método de Lyapunov, el cual ya se ha presentado en el diseño del controlador
Caso 3 de esta sección.
El cálculo del control de voltaje se hace mediante la expresión (C.9).
Control robusto
Nuevamente, partimos del sistema real de la Fig. 27
r r r r r r rz z z u
D C R (C.18)
con las matrices y vectores rD , rC , rR , rz
y rz dados por
11 1 1 1
2 2 2 2 2
1 2 33
0 0 0 0 0 0
0 0 ; 0 0 ; 0 0 ; ; ;
0 0 0 10 0
r r
r r r r r r r
rr
zL r z
L r z z
C zzR
D C R z z
(C.19)
1k kd , 1,2k , es la señal de control que genera la secuencia de conmutación.
Realizando las sustituciones adecuadas, se obtiene la ley de control robusto Fig. 8

Análisis de técnicas de control por moldeo de energía … OLMOS
155
•
d d(z , z ) ( , )r am r d de z z 0u g R Y θ Y θ W (C.20)
donde
1 3 1 1 1
2 3 2 2 2
3 3 33 1 1 1 2 3
11 1
22 2
1
2
0 0
; ; 0 0
0 10 0
0 0
( , ) 0 0 ;
0 0 0 0
i d am d
r i d am d
d dn d d d am
rd d
rd d d d r
r
r
v z R z z
v z e R z z
z z zC z z z R
R
Lz zL
z z z zr
r
0 amu g R
Y θ
1 1
2 2
1 1
2 2
;
n r
n r
n r
n r
T
L L
L L
r r
r r
θ
W
(C.21)
donde , , y están definidas por
2 21 1 1 1
2 22 2 2 2
d dT T
d dT T
z e z e
z e z e
e Y e Y
e Y e Y
(C.22)
Así, empleando la expresión (C.20) se puede escribir la ley de control robusto de la
siguiente manera
1 3 1 1 1 1 1 1
2 3 2 2 2 2 2 2
3 33 1 1 2 2
3
d am d n d n
r d am d n d n
dn d d d
am
z R e z L z r
z R e z L z r
z eC z z z
R R
u (C.23)

José Armando Olmos López cenidet
156
Despejando las señales de control 1 y 2 se tiene
1 1 1 1 1 1 13
2 2 2 2 2 2 23
1
1
i am d n d nd
i am d n d nd
v R e z L z rz
v R e z L z rz
(C.24)
De igual forma que en el control nominal, se asume que se dispone de la medición
de todas las variables del sistema. Nuevamente, el control de voltaje se calcula empleando
(C.9).
Resultados en simulación
El circuito mostrado en la Fig. 27 fue simulado en Simulink™ con los valores nominales de
parámetros dados por la Tabla 15.
Tabla 15. Valores de los parámetros utilizados en la simulación. Nombre Parámetro Valor
Voltaje de entrada vS 230 Vrms Frecuencia de conmutación fswitch 100 KHz
Voltaje de salida Vo 400 Vdc Inductor 1 L1 2 mH Inductor 2 L2 2 mH
Resistencia del inductor 1 r1 0.5 Ω Resistencia del inductor 2 r2 0.5 Ω
Capacitor de salida C 220 µF Resistencia de carga R 200 Ω
Realizando una prueba de la robustez de los controladores, se realizó una
simulación con una variación 2 15r r y 2 15L L . La Fig. 28 muestra los desbalances en la
distribución de corriente con las diferentes características en 1L y 2L .

Análisis de técnicas de control por moldeo de energía … OLMOS
157
a) b)
Tiempo (s)
c) Fig. 28. Curvas de las corrientes cuando los inductores tienen diferentes características: Empleando
el Control Basado en Pasividad; b)Empleando el control por Charge-Control; c) empleando el Control Robusto
En el inciso a) se empleó un Controlador Basado en Pasividad; en el inciso b) se
aplicó un control por Charge-Control; el inciso c) muestra el caso para el control robusto.
Aquí, al igual que la sección anterior, sólo se muestran los resultados obtenidos al utilizar
sólo estos tres casos ya que son los casos donde las leyes de control presentan mayor
diferencia en su diseño. La ventaja de la ley de control basada en pasividad y del control
robusto es bastante notable ya las curvas de corriente están una sobre la otra, aunque
presentan un desbalance.
Es importante notar, que aun ante tal diferencia en los parámetros ( 2 15L L y
2 15r r ) el controlador por Charge-Control mantiene al sistema en un estado estable
aunque no el deseado; distribución equitativa de corriente. Para esa diferencia en
parámetros, tanto el control pasivo como el robusto logran un desempeño excelente.
0 0.02 0.04 0.06 0.08 0.1 0.12 0.140
0.5
1
1.5
2
2.5
3
Tiempo (s)
Ma
gnitu
d (
am
per
es)
2i
i1
0 0.02 0.04 0.06 0.08 0.1 0.12 0.140
0.5
1
1.5
2
2.5
3
Tiempo (s)
Mag
nitu
d (a
mpe
res)
2i
i1
0 0.05 0.1 0.150
0.5
1
1.5
2
2.5
3
3.5
4
Mag
nit
ud
e (a
mp
eres
)
i2
i1

José Armando Olmos López cenidet
158
Bibliografía [1] Raja Ayyanar; Armes Giri; Ned Mohan. “Active input-voltage and load-current sharing in input-series and
output-parallel connected modular DC-DC converters using dynamic input-voltage reference scheme”. IEEE Transactions on Power Electronics, Vol. 19, No 6, November 2004, pp 1462-1473.
[2] Frede Blaabjerg; Alfio Consoli; Jan A. Ferreira; Jacobus D. van Wyk. “The future of electronic power processing and conversion”. IEEE Transactions on Industry Applications, Vol. 41, No 1, January/February 2005, pp 3-7.
[3] Brown, A. R; Middlebrook, R. D. “Sampled-data nonlinear switching regulators”. IEEE Power Electronics Specialists Conference 1981, pp. 346-369.
[4] Hedel, K. “High-density avionic power supply”. IEEE Transactions on Aerospace and Electronic Systems, 1980, pp. 615-619.
[5] Fred C. Lee; Peter Barbosa; Peng Xu; Jindong Zhang; Bo Yang; Francisco Canales. “Topologies and design considerations for distributed power system applications”. Proceedings of the IEEE, Vol. 89, No. 6. June 2001. Pp. 939-950.
[6] Middlebrook, R. D.; Cuk, S. “A general unified approach to nonlinear switching converter power stages”. IEEE Power Electronics Specialists Conference, 1977, pp. 521-550.
[7] Yang Qiu; Fred C. Lee. “Investigation of current sharing in front-end distributed power system with input current sensing”. ERC Program of the National Science Foundation, award number EEC-9731677. Pp 287-292.
[8] Juanjuan Sun; Yang Qiu; Ming Xu; Fred C. Lee. “Dynamic analysis of outer loop current sharing control for paralleled DC/DC converters”. ERC Program of the National Science Foundation, award number EEC-9731677. 2002. Pp 293-298.
[9] Tuladhar, A.; Jin, H.; Unger, T.; Mauch, K. “Control of parallel inverters in distributed ac power systems with consideration of line impedance effect”. IEEE Transactions on Industrial Applications”, vol. 36, no. 1., 2000, pp. 131-138.
[10] Carl M. Wildrick; Fred C. Lee. “A method of defining the load impedance specification for a stable distributed power system”. IEEE Transactions on power electronics, Vol 10, No 3, May 1995. pp 280-285.
[11] Ray Ridley. “Designers’ series part XVII: transient response and loop gains of power supplies”. Switching Power Magazine, Vol. 5 Issue 4, 2004.
[12] Mohamed E. El-Hawary. “Control System Engineering”. Reston Publishing Company, Inc. a Prentice Hall Company. USA, 1984, pp. 449-518.
[13] Katsuhiko Ogata. “Ingeniería de control moderna”. Prentice Hall. Mexico. 1988. pp. 268-269; 427-439; 630-639.
[14] Shiguo Luo; Zhihong Ye; Ray-Lee Lin; Fred C. Lee. “A classification and evaluation of paralleling methods for power supply modules”. IEEE Transactions on power electronics, 1999, pp 901-908.
[15] Nogueiras Melendez Andrés Augusto. “Nueva metodología de modelado y simulación no lineal. Aplicación a convertidores PWM continua/continua en paralelo de alto rendimiento”. Tesis de la Universidad de Vigo, Departamento de Tecnología Electrónica, Vigo, España, 2003.
[16] Sudip K. Mazumder; Ali H. Nayefh; Dushan Boroyevich. “An investigation into the fast- and slow-scale instabilities of a single phase bidirectional boost converter”. IEEE Transactions on power electronics, Vol. 18, No. 4. Julio 2003.
[17] Kun Xing; Jinghong Guo; Wekang Huang; Dengming Peng; Fred C. Lee; Dushan Borojevich. “An active bus conditioner for a distributed power system”. IEEE Transactions on Power Electronics 1999. Pp 895-900.
[18] Sudip K. Mazumder. “Nonlinear analysis and control of standalone, parallel DC-DC, and parallel multi-phase PWM converters”. Thesis of Virginia Polytechnic Institute and State University Blacksburg Virginia. USA. July 2001.
[19] Per Karlsson. “DC distributed power systems, analysis, design and control for a renewable energy system”. Department of Industrial Electrical Engineering and Automation, Lund University, Sweden. Editorial Media-

Análisis de técnicas de control por moldeo de energía … OLMOS
159
Tryck, Lund University. Printed in Sweden, 2002.
[20] Abraham Cortés Dorantes. “Control digital aplicado a un tipo de convertidor corrector del factor de potencia monofásico”. Tesis del CENIDET. Agosto del 2006. Cuernavaca, Morelos, México.
[21] Z. Moussaoui; I. Batarseh; Henry Lee; Chester Kennedy. “An overview of the control scheme for distributed power systems”. This works is sponsored by a research grant from NASA Florida Space Grant Consortium-Research Program, 1995. pp 584-591.
[22] Jinjun Liu; Wei Xu; Yang Qiu; Jeong-Hwan Park; Abdollah Homaifar; Frec C. Lee. “A comparative evaluation for current-sharing methods for paralleled power modules”. pp 361-366.
[23] Olmos López, José Armando. “Control no lineal robusto basado en pasividad de los filtros activos paralelo y serie”. Tesis del CENIDET. México. 2004.
[24] Olmos López, José Armando; Guerrero Ramirez, Gerardo V.; Vela Valdéz, Luis Gerardo. “Control no lineal robusto basado en pasividad para el filtro activo paralelo”. Memorias del Congreso anual de la AMCA 2004. México DF. Pp 80-85.
[25] Mohammed Al-Fayyoumi. “Nonlinear dynamics and interactions in power 159lectronics systems”. Tesis de Virginia Polytechnic Intitute and Satete University Blacksburg Virginia. USA. 1998.
[26] Francisco Venustiano Canales Abarca. “Novel DC/DC converters for high-power distributed power systems”. Tesis de Virginia Polytechnic Intitute and Satete University Blacksburg Virginia. USA. 2003.
[27] Manjing Xie. “Digital control for power factor correction”. Tesis de Virginia Polytechnic Institute and State University Blacksburg Virginia. USA. 2003.
[28] Stanley M. Shinners. “Advanced modern control system theory and design”. Editorial John Wiley & Sons, Inc. USA. 1998.
[29] Yuehui Huang; Chi K. Tse. “Circuit theoretic classification of parallel connected DC-DC converters”, IEEE Transactions on circuits and systems – 1:Regular papers, Vol. 54, No. 5. Mayo del 2007.
[30] Brian T. Irving; Milan M. Jovanovic. “Análisis, design and performance evaluation of droop curren-sharing method”. 2000. pp 235-241.
[31] R. D. Middlebrook. “Small-signal modeling of pulse-width modulated switched-mode power converters”. Proceedings of the IEEE, Vol. 76, No. 4. 1988.
[32] Fakhralden a. Huliehel; Fred C. Lee; Bo H. Cho. “Small-signal modeling of the single-phase boost high power factor converter with constant frequency control”. Virginia Power Electronics Center of the Virginia Polytechnic Intitute and Satete University Blacksburg Virginia. Editorial IEEE. 1992.
[33] Jinjun Liu; Xiaogang Feng; Fred C. Lee; Dushan Borojevich. “Stability margin monitoring for DC distributed power systems via current/voltage perturbation”. IEEE Applied Power Electronics Conference, march 4-8 Anaheim, California, 2001. pp 371-377.
[34] Simon Ang; Alejandro Oliva. “Power-switchig converters”. Editorial Taylor & Francis. Segunda edición. USA. 2005.
[35] Jyh-Shing Roger Jang. “Neuro-fuzzy and soft computing. A computational approach to learning and machine intelligence”. Editorial Prentice Hall. 1997.
[36] Arnoldo Pacheco Álamos. “Análisis de pérdidas del convertidor buck síncrono para aplicaciones móviles”. Tesis del CENIDET. 2007.
[37] Soumitro Banerjee; George C. Verghese. “Nonlinear phenomena in power electronics. Attractors, bifurcations, chaos, and nonlinear control”. IEEE press. USA. 2001.
[38] Chi Kong Tse. “Complex behavior of switching power converters”. CRC PRESS LLC. USA. 2004.
[39] Robert W. Erickson; Dragan Maksimovic. “Fundamentals of power electronics”. Klumer Academic Publishers. Second Edition USA. 2001.
[40] Karl J. Astrom; Bjorn Wittenmark. “Computer-controlled systems. Theory and design”. Prentice Hall. 1997.

José Armando Olmos López cenidet
160
[41] Cuk, Slobodan; Middlebrook, R. D. “Advances in switched-mode power conversion Part I”. IEEE Transactions on Industrial Electronics, Feb. 1983, vol. IE-30, pp 10-19
[42] Cuk, Slobodan; Middlebrook, R. D. “Advances in switched-mode power conversion Part II.” IEEE Transactions on Industrial Electronics, Feb. 1983, vol. IE-30, pp 19-29
[43] R. Orosco; N. Vázquez. “Discrete sliding mode control for DC/DC converters”. Proceedings of the CIEP 2000. Acapulco, México. Octubre 15-19.
[44] Hebertt Sira-Ramírez; Romeo Ortega; Gerardo Escobar. “Lagrangian modeling of switch regulated DC-to-DC power converters”. Proceedings of the 35th Conference on Decision and Control. Kobe, Japan, 1996.
[45] Mariano López; Luis García de Vicuña; Miguel Castilla; Pedro Gaya; Oscar López. “Current distribution control design for paralleled DC/DC converters using sliding-mode control”. IEEE Transactions on Industrial Electronics, Vol. 51, No. 2, April 2004.
[46] M. Ahmed; M. Kuisma; K. Tolsa; P. Silventoinen. “Implementing sliding mode control for buck converter”. IEEE Power Electronics Specialist Conference, PESC’03, Vol. 2, June 15-19, 2003, pp 634-637.
[47] Hebertt Sira-Ramírez; Ramón Silva-Ortigoza. “Control design techniques in power electronics devices”. Editorial Spirnger-Verlag London. Impreso en Alemania. 2006.
[48] Vitor Feonlinires; José Fernando A. Silva. “Teaching nonlinear modeling, simulation, and control of electronic power converters Using MATLAB/SIMULINK”. IEEE Transactions on Educations, Vol. 45, No. 3. August 2002.
[49] Vadim Utkin; Jurgen Guldner; Jingxin Shi. “Sliding mode control in electromechanical systems”. Editorial CRC Press LLC. United Kingdom. 1999.
[50]
Siew-Chong Tan; Y. M. Lai; Chi K. Tse. “An analog implementation of pulse-width-modulation based sliding mode controller for DC-DC boost converters”. Department of Electronic and Information Engineering, Hong Kong Polytechnic University, Hong Kong, China.
[51] Siew-Chong Tan; Y. M. Lai; Chi K. Tse. “A family of PWM based sliding mode voltage controllers for basic DC-DC converters”. Department of electronic and information engineering. Hong Kong Polytechnic University, Hong Kong, China.
[52] Anasraj, R; Thomas, S. “Design of initial conditions based sliding mode controller for buck converter”. IEEE Region 10 Conference TENCON 2008, Nov. 19-21 2008, pp 1-6.
[53] Romeo Ortega; Antonio Loría; Per Johan Nicklasson; Hebertt Sira-Ramírez. “Passivity-based control of Euler-Lagrange systems. Mechanical, electrical and electromechanical applications”. Editorial Springer-Verlag. Great Britain. 1998.
[54] Sergey Edward Lyshevski. “Control systems theory with engineering applications”. Editorial Birkhauser Boston. United States of America. 2001.
[55] Jean-Jacques E. Slotine; Weiping Li. “Applied Nonlinear Control”. Editorial Prentice Hall. USA. 1991.
[56] Sergey Edward Lyshevski. “Resonant converters: nonlinear analysis and control”. IEEE Transactions on Industrial Electronics, Vol. 47, No. 4. August 2000.
[57] Sergey Edward Lyshevski. “Sliding modes and soft switching control in dynamic systems”. Proceedings of the American Control Conference, Chicago, Illinois. June 2000. AACC. June 2000.
[58] Sudip K. Mazumder; Ali H. Nayefh; Dushan Boroyevich. “Theoretical and Experimental Investigation of the Fast- and Slow-Scale of a DC-DC Converter”. IEEE Transactions on Power Electronics, Vol. 16, No. 2. March 2001.
[59] Mariano López; Luis García de Vicuña; Miguel Castilla; Pedro Gayá; Oscar López. “Current distribution control design for paralleled DC/DC converters using sliding-mode control”. IEEE Transactions on Industrial Electronics, Vol. 51, No. 2. Abril 2004.
[60] H. K. Khalil. “Nonlinear Systems”. Editorial MacMillan Publishing Co. Tercera edición. 1992.
[61] H. Sira-Ramírez. “Passivity-based controllers for the stabilization of DC-to-Dc power converters”. Publicación

Análisis de técnicas de control por moldeo de energía … OLMOS
161
de IFAC. Great Britain. 1997. pp 499-512.
[62] S. Ramírez. “Harmonic compesation in the AC mains by the use of current and voltage active filters controlled by a passivity-based law”. Congreso del CIEP en Acapulco, México. Publicación de IEEE 2000. pp 87-92.
[63] Sudip K. Mazumder. “Stability analysis of parallel DC-DC converters”. IEEE Transactions on aerospace and electronics systems, Vol. 42, No. 1. Enero del 2006.
[64] Biel, D.; Guinjoan, F.; Fossas, E.; Chavarria, J. “Sliding-mode control design of a boost-buck switching converter for AC signal generation”. Transactions on Circuits and Systems I, IEEE. Aug 2004, Vol. 51, pp 1539-1551.
[65] A. J. Forsyth; S. V. Mollov. “Modelling and control of DC-DC converters”. Power Engineering Journal, Tutorial. School of Electronic & Electrical Engineering, University of Birmingham, Edgbaston, Birmingham, United Kindom. Ocubre 1998.
[66] Ned Mohan; Tore M. Undeland; William P. Robbins. “Power electronics. Converters, applications, and Design”. Editorial John Wiley & Sons, Inc. Segunda edición. Impreso en USA. 1995.
[67] Gustavo Pérez-Ladrón; Víctor Cárdenas; Gerardo Espinosa. “Analysis and implementation of a master-slave control based on a passivity approach for parallel inverters operation”. CIEP. Puebla, México. Oct 16-18, 2006.
[68] R, Sepulchre; M. Jankovic; P. Kootovic. “Constructive nonlinear control”. Editorial Springer-Verlag London Limited. England 1997.
[69] Jiang Zhihong ; Li Hui ; Huang Lipei. “Parallel-connected interleaving CCM PFC converter based on duty-cycle dynamic distribution controller”. Applied Power Electronics Conference and Exposition APEC 2009, Twenty-fourth Annual IEEE, 15-19 Feb. 2009, pp. 780-785.
[70] Bing Lu. “A novel control method for interleaved transition mode PFC”. Twenty-third annual IEEE Applied Power Electronics Conference and Exposition, 2008, APEC February 2008, Volume, Issue, pp 697-701.
[71] Mike O’Loughlin. “350-W, two-Phase interleaved PFC Pre-regulator design. Review”. Texas Instrument, Application Report SLUA369B-February 2005-Revised March 2007.
[72] Shamim Choudhury ; James P. Noon. “A DSP based digitally controlled interleaved PFC Converter”. Applied Power Electronics Conference and Exposition APEC 2005, Twentieth Annual IEEE, Vol. 1, 6-10 March 2005, pp. 648-654.
[73] Jong C. Wang; Hon-Ji. Chen. “Design and analysis of AC/DC converters with interleaved power factor correction”. IEEE, Proceedings of the 7th World Congress on Intelligent and Automation, June 25-27, 2008, Chongqing, China, pp. 9385-9387.
[74] G. Escobar; M. Hernández-Gómez; P. R. Martinez; M. F. Martínez-Montejano. “A repetitive-based controller for a power factor precompensator”. IEEE Transactions on Circuits and Systems, Vol. 54, No. 9, September 2007.
[75] G. Escobar ; A. M. Stankovic ; D. Perrault. “Regulation and compensation of source harmonics for the boost-converters based power factor precompensator”. IEEE Power Electronics Specialist Conference, Vancouver, Canada, June 2001, Vol. 2, pp. 539-544.
[76] W. Tang; F. C. Lee; R. B. Ridley; I. Cohen, “Charge Control: modeling, analysis and design,” in Proceedings of the Power Electronics Specialist Conferences, Toledo, Spain; June 29-July 3, 1992; pp. 503-511.
[77] Paolo Mattavelli; Giorgio Spiazzi; Paolo Tenti. “Predictive digital control of power factor preregulators with input voltage estimation using disturbance observers”. IEEE Transactions on Power Electronics, vol. 20, No. 1, pp140-147, January 2005.
[78] Paolo Mattavelli; W. Stefanutti; Giorgio Spiazzi; P. “Digital control of single-phase power factor preregulators suitable for smart-power integration”. 35th Annual IEEE Power Electronics Specialists Conference, pp 3195-3201. Aachen, Germany, 2004.
[79] Sangsun Kim; P. N. Enjeti. “Control of multiple single-phase PFC modules with a single low-cost DSP”. IEEE Transactions on Industry Applications, Volume 39, Issue 5, Sept.-Oct. 2003, pp 1379 – 1385.
[80] Jerry Francis; Dushan Boroyevich. “Design of a universal controller for distributed control and power electronics applications”. Virginia Polytechnic Institute and State University, February 2001.

José Armando Olmos López cenidet
162
[81] Lichan Meng; Yu Fang; Yan Xing. “Current sharing control for boost PFC converters in parallel operation”. IEEE International Conference on Industrial Technology, ICIT 2005, Hong Kong, December 2005, pp 502-507.
[82] Roberto Giral; Luis Martínez-Salamero; Ramon Leyva; Javier Maixé. “Sliding-mode control of interleaved boost converters”. IEEE Transactions on circuits and systems: Fundamental theory and applications, Vol. 47, No. 9, September 2000, pp 1330-1339.
[83] Xiaojun Xu; Alex Q. Huang. “A novel closed loop interleaving strategy of multiphase critical mode boost PFC converters”. Twenty-third Annual IEEE Applied Power Electronics Conference and Exposition, 2008, APEC February 2008, Volume, Issue, pp 1033-1038.
[84] Paolo Mattavelli. “Synchronous-frame harmonic control for high-performance AC power supplies”. IEEE Transactions on industry applications, Vol. 37, No. 3, May/June 2001, pp 864-872.
[85] Tang, W.; Jiang, Y.; Hua, G. C.; Lee, F. C.; Cohen, I. “Power factor correction with flyback converter employing Charge Control”. Applied Power Electronics Conference and Exposition, Conference Proceedings APEC 1993, 7-11 March 1993, pp293-298.
[86] UCC28528. “Advanced PFC/PWM combination controller with trailing-edge/trailing-edge modulation”. Texas Instruments SLUS608D. January 2005 – revised November 2005.
[87] Bill Andreycak. “Optimizing performance in UC3854, power factor correction applications”. Unitrode, Design notes DN-39E.
[88] M. A. P. Andrade; L. Schuch; J. R. Pinheiro. “Generalized switching logic scheme for CCM-PFC interleaved boost converters”. 35th Annual IEEE Power Electronics Specialists Conference. Aachen, Germany 2004.
[89] Yungtaek Jang; Milan M. Jovanovic. “Interleaved PFC boost converter with intrinsic voltage-doubler characteristic”. 37th IEEE Power Electronics Specialists Conference. June 18-22, 2006. Jeju Korea.
[90] Laszlo Huber; Brian T. Irving; Milan M. Jovanovic. “Closed-loop control methods for interleaved DCM/CCM boundary boost PFC converters”. IEEE 2009.
[91] Byung-Sun Min; Nam-Ju Park; Dong-Seok Hyun. “A novel current sharing technique for interleaved boost converter”. IEEE 2007
[92] Roberto Giral; Luis Martínez-Salamero; Sigmond Singer. “Interleaved converters operation based on CMC”. IEEE Transaction on power electronics, Vol. 14, No. 4, July 1999.
[93] James P. Noon; Dhaval Dalal. “Practical design issues for PFC circuits”. IEEE 1997.
[94] Jian Zhihong; Li Hui. “DSP control of interleaving critical PFC module for high power application”. IEEE 2008.
[95] Haiping Xu; Xuhui Wen; Thomas A. Lipo. “Digital charge control of boost converter with constant power machine load”. IEEE.
[96] Jose M. Guerrero; Luis Garcia de Vicuña; Jaume Miret; José Matas; Oscar López. “Parallel operation of charge controlled DC-DC converters”. IEEE 2002.
[97] José R. Pinheiro; Hilton A. Gründling, Dalton L. R. Vidor; José E. Baggio. “Control strategy of an interleaved boost power factor correction converter”. IEEE 1999.
[98] Ovando Domínguez Roberto II. “Emulador de turbina eólica para el banco de pruebas de generación eoloeléctrica”. Tesis del CENIDET. México. 2007.
[99] Rafael Kelly; Victor Santibáñez. “Control de Movimiento de Robots Manipuladores”. Editorial Prentice Hall. 2003.
[100] Canales, F.; Escobar, G.; Olmos, A.; Guerrero, G.; Hernandez-Gomez, M. “A charge control for interleaved operation of a PFC boost converter”. ISIE 2010, 2987-2992.
[101] Olmos-López, José Armando; Guerrero-Ramirez, Gerardo; Canales A., F. V.; Oliver-Salazar Marco. “Control basado en pasividad para convertidores elevadores CFP en paralelo”. Congreso de la Asociación de México de Control Automático, AMCA 2010.
[102] Armando Olmos-López; Gerardo Guerrero; Jaime Arau; Carlos Aguilar; Juan C. Yris. “Passivity-based control for current sharing in PFC interleaved boost converters”. IEEE Applied Power Electronics Conference and

Análisis de técnicas de control por moldeo de energía … OLMOS
163
Exposition, APEC 2011, pp 475-480.
[103] M. Ye, P. Xu, B. Yang and F.C. Lee. “Investigation of topology candidates for 48 V VRM”. IEEE Applied Power Electronics Conference and Exposition (APEC), 2002, Vol. 2, pp. 699-705.
[104] P. Xu, Y.C. Ren, M. Ye and F.C. Lee. “A family of novel interleaved DC/DC converters for low-voltage high-current voltage regulator module applications”. IEEE Power Electronics Specialists Conference (PESC), 2001, Vol. 3, pp. 1507-1511.