
ANÁLISIS ITERATIVO COMPARADO, PARA LA OBTENCIÓN DE...
98
ANÁLISIS ITERATIVO COMPARADO, PARA LA OBTENCIÓN DE PARÁMETROS ÓPTIMOS EN LA CLASIFICACIÓN DE NUBES DE PUNTOS LIDAR CON LOS SENSORES RIEGL VQ 580 Y LEICA ALS70. TESIS DE PREGRADO Lusette Karime Escobar Rey Leidy Viviana García Vivas UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS FACULTAD DE MEDIO AMBIENTE Y RECURSOS NATURALES PROYECTO CURRICULAR DE INGENIERÍA TOPOGRÁFICA BOGOTÁ D.C., COLOMBIA 21 DE OCTUBRE DE 2015
Transcript of ANÁLISIS ITERATIVO COMPARADO, PARA LA OBTENCIÓN DE...
ANÁLISIS ITERATIVO COMPARADO, PARA LA OBTENCIÓN DE PARÁMETROS
ÓPTIMOS EN LA CLASIFICACIÓN DE NUBES DE PUNTOS LIDAR CON LOS
SENSORES RIEGL VQ 580 Y LEICA ALS70.
TESIS DE PREGRADO
Lusette Karime Escobar Rey
Leidy Viviana García Vivas
UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS FACULTAD DE MEDIO
AMBIENTE Y RECURSOS NATURALES
PROYECTO CURRICULAR DE INGENIERÍA TOPOGRÁFICA
BOGOTÁ D.C., COLOMBIA
21 DE OCTUBRE DE 2015

ANÁLISIS ITERATIVO COMPARADO, PARA LA OBTENCIÓN DE PARÁMETROS
ÓPTIMOS EN LA CLASIFICACIÓN DE NUBES DE PUNTOS LIDAR CON LOS
SENSORES RIEGL VQ 580 Y LEICA ALS70.
Presentado por:
Lusette Karime Escobar Rey
Leidy Viviana García Vivas
Director:
ING. MSC. WILLIAM BARRAGÁN ZAQUE
UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS FACULTAD DE MEDIO
AMBIENTE Y RECURSOS NATURALES
PROYECTO CURRICULAR DE INGENIERÍA TOPOGRÁFICA
BOGOTÁ D.C., COLOMBIA
21 DE OCTUBRE DE 2015

“Este trabajo hace parte de las investigaciones realizadas por la Facultad de Medio Ambiente y
Recursos Naturales de la Universidad Distrital Francisco José de Caldas. Sin embargo, las ideas
emitidas por los autores son de su exclusiva responsabilidad y no expresan necesariamente
opiniones de la Universidad” (Artículo 117 del acuerdo 029 de 1998)

Agradecimientos
Agradezco a todas las personas que se involucraron en la preparación de este proyecto, el
cual es el fruto de nuestro esfuerzo y dedicación. Reconozco la colaboración y persistencia
durante la ejecución del todo el proyecto al profesor William Barragán, quien con sus consejos y
amplio conocimiento, fomento en nosotras el deseo de realizar un proyecto el cual fuera un
aporte valioso en el campo de la ingeniería topográfica. Gratifico el esfuerzo y el aporte de ideas
valiosas a mi compañera Karime Escobar, por su perseverancia y acompañamiento durante todo
el proyecto.
Agradezco también a la empresa SIGLA por brindarnos su colaboración en todas las
etapas del procesado LiDAR. A David Roche por su apoyo en mi proceso de formación como
profesional, a Juan Gonzalo y a Jayson Fernández por su gran conocimiento en el tema.
Al finalizar una etapa de nuestras vidas en la cual se obtiene un título profesional, quiero
reconocer a la Universidad Distrital, a los docentes de dicha universidad, a nuestros futuros
colegas, amigos, familiares y en especial a Dios como parte fundamental en nuestro proceso de
formación como ingenieras.
“Ama a la sabiduría, no la abandones y ella te dará su
protección. Antes de cualquier cosa, adquiere sabiduría
y buen juicio. Ámala y te enaltecerá; abrázala y te
honrará; ¡te obsequiará con la más bella guirnalda y te
coronará con ella”
Prov 4:5-9
Viviana García
Agradezco a Dios por permitir culminar esta etapa de mi vida, a mis seres queridos por su
apoyo y comprensión ya que son los pilotes y quienes me dan fuerza para dar cada paso con
seguridad y total convencimiento, también agradezco al profesor William Barragán por creer en
nuestro trabajo, por su paciencia y dedicación que fue de gran ayuda tanto en el proceso de
formación académica como en el desarrollo de este trabajo de grado, siendo nuestra mano
derecha y aportando su conocimiento para guiarnos. Sin duda alguna a mi compañera Leidy
Viviana García por ser parte de este gran esfuerzo que hoy es fruto de orgullo y regocijo al
culminar una etapa más de nuestras vidas.
Total agradecimiento a la Universidad Distrital que me formó profesionalmente,
dándome unas bases fuertes de conocimiento, también gracias a cada docente que hizo parte de
mi proceso de formación.
Karime Escobar Rey

Nota de aceptación
El comité de la Universidad Distrital
Francisco José de Caldas aprueba el
Trabajo degrado titulado “ANÁLISIS
ITERATIVO COMPARADO, PARA LA
OBTENCIÓN DE PARÁMETROS
ÓPTIMOS EN LA CLASIFICACIÓN DE
NUBES DE PUNTOS LIDAR CON LOS
SENSORES RIEGL VQ 580 Y LEICA
ALS70”. En cumplimiento de los requisitos
para obtener el título de Ingeniero
Topográfico.
_______________________________
FIRMA DEL DIRECTOR DE
PROYECTO.
_______________________________
FIRMA JURADO
_______________________________
FIRMA JURADO
Bogotá D.C., octubre 2015
Universidad Distrital Francisco José de
Caldas.

Resumen
En el presente documento se realiza una verificación de la información obtenida a partir de los
datos de dos sensores topográficos aerotransportados LiDAR1, Riegl VQ 580 y Leica ALS70,
con los cuales se obtuvo cuatro nubes de puntos de una misma zona, con las que se realizaron
comparaciones de las clasificaciones de terreno en una zona determinada, con condiciones de
alta y baja densidad de vegetación así como altas pendientes, para esto se tomó como referencia
una nube de puntos clasificada manualmente tomada con el sensor Riegl VQ 580, ya que sus
características permiten describir el terreno con mayor detalle. Dicha nube de puntos se comparó
con el resultado de la clasificación aplicada a las tres nubes de puntos restantes, por medio de
cinco macros2 cuyos parámetros fueron cambiados. Se obtuvo como resultado una nube de
puntos con mayor densidad, clasificando las características y métodos de validación que
estadísticamente se muestran en el desarrollo metodológico.
Para analizar el comportamiento de las nubes de puntos, se realizó un control de cotas donde se
muestra la geometría descriptiva de los datos, además se generaron comparaciones de los
modelos digitales de terreno (MDT), en el que se aplicaron métodos de interpolación bicubica
que permitieran ver gráficamente los puntos que se encontraran por encima o por debajo de
1metro en altura. A partir de los resultados obtenidos se estableció técnicamente la mejor
representación del terreno con menor grado de incertidumbre. Para validar los datos se utilizó el
método de validación cruzada, donde se muestra claramente cuál de los modelos digitales es el
más cercano a la realidad.
Palabras claves: Sensores, nube de puntos LiDAR, clasificación, métodos de clasificación,
MDT, métodos de interpolación, validación de datos.
1LIDAR es el acrónimo de light detection and ranging que se utiliza como técnica en teledetección para obtener
una muestra densa de la superficie de la tierra produciendo mediciones exactas de x, y z. 2Es un conjunto de instrucciones que se representa en un formato abreviado, en este trabajo se utilizó para realizar el mejoramiento de cada una de las nubes de puntos.

Abstract
In this document was done a verification of information obtained from the data of two airborne
topographical sensors LiDAR3, Riegl VQ 580 y Leica ALS70,with which were obtained four
point clouds in the same area, with which comparisons were made of land classification in a
determinate area, with low and high density conditions of vegetation as well as steep slopes for
this it was taken as reference a manually classified point cloud taken with Riegl VQ 580 sensor,
as their characteristics let describe the area in more detail. Point cloud that was compared with
the result of classification applied to the three remaining point clouds through five macros whose
parameters were changed respectively, resulting in a point cloud with higher density of points
classified whose characteristics meet the validation methods and statistics that will be displayed
during the methodological development.
To analyze the behavior of clouds of points, it was made a dimension control where descriptive
geometric of data are shown, else digital models comparison of area were made (MDT) doing
use of Global Mapper software in which were applied bicubica interpolation methods that allow
to see graphically the clouds of points whose points were found below or above 1m, from the
results obtained, it can be established technically that the modeling generated represents with less
degree the uncertainty in the area.
Keywords: sensors, LiDAR point cloud, sorting, grading methods, MDT, interpolation
methods, data validation.

Contenido
1. Introducción .......................................................................................................................................... 1
2. Planteamiento del problema .................................................................................................................. 2
3. Importancia y justificación.................................................................................................................... 3
4. Objetivos ............................................................................................................................................... 4
4.1 General ................................................................................................................................................ 4
4.2 Específicos .......................................................................................................................................... 4
5. Marco conceptual .................................................................................................................................. 5
5.1 LiDAR ................................................................................................................................................ 5
5.2 Ecuación LIDAR ............................................................................................................................... 6
5.3 Proceso de datos LiDAR ..................................................................................................................... 6
5.4 Métodos de escaneo LiDAR. ........................................................................................................ 7
5.5 Rango del laser .................................................................................................................................... 9
5.6 Perfil del laser ................................................................................................................................... 10
5.7 Componentes de un sistema LIDAR ................................................................................................. 12
5.8 Funcionamiento LIDAR .................................................................................................................. 13
5.9. Aplicaciones LiDAR. ....................................................................................................................... 14
5.9.1 Aplicaciones forestales. ............................................................................................................. 14
5.9.2 Modelos de ciudades .................................................................................................................. 15
5.9.3 Líneas eléctricas ......................................................................................................................... 15
5.9.4 LiDAR batimétrico. ................................................................................................................... 16
5.10 Precisión geométrica. ...................................................................................................................... 17
5.11 El Formato extensión .LAS ............................................................................................................. 18
5.12 Clasificación y Edición de los datos LIDAR .................................................................................. 18
5.12.1 Filtros Morfológicos .................................................................................................................... 19
5.12.2 Filtros basados en la pendiente .................................................................................................... 19
5.12.3 Filtros de Densificación Progresiva ............................................................................................. 20
5.12.4 Filtros de Segmentación ............................................................................................................... 20
5.12.5Filtros basados en Superficies ....................................................................................................... 20
6. Metodología ........................................................................................................................................ 21
6.1 Etapa I. Obtención y manejo de datos. ............................................................................................. 21
6.1.1 Obtención de nubes de puntos. .................................................................................................. 21
6.1.2 Manejo de información. ............................................................................................................. 22
6.2 Etapa II. Preparación de la información ...................................................................................... 22
6.3 Etapa III. Procesamiento de las nubes de puntos. ....................................................................... 22
6.4 Procedimiento empleado. ............................................................................................................ 22
7. Desarrollo del proyecto ....................................................................................................................... 24
7.1. Etapa I. Obtención y manejo de datos .............................................................................................. 24
7.1.1 Obtención de nubes de puntos. ................................................................................................. 24
7.1.2 Manejo de información. ............................................................................................................. 25
7.2 Etapa II. Preparación de la información. ........................................................................................... 26
7.2.1 Selección de zonas de alta y baja densidad de vegetación así como de altas pendientes......... 26
7.2.2 Aplicación de macros de clasificación a las zonas seleccionadas para cada nube de puntos. . 28
7.3 Etapa III. Procesamiento de las nubes de puntos. ............................................................................. 35
7.3.1 Generación del MDT. ................................................................................................................ 35
7.3.2 Generación de curvas de nivel. .................................................................................................. 36
7.3.3 Generación perfiles que permitan comparar los resultados de las macros. ............................... 37
7.3.4 Realizar análisis estadístico ..................................................................................................... 38
7.3.5 Validación de la información. ................................................................................................... 38
8. Resultados ............................................................................................................................................... 40
8.1 Clasificación nube de puntos 1 ......................................................................................................... 40
8.1.1 Baja vegetación. ......................................................................................................................... 40
8.1.2 Alta vegetación .......................................................................................................................... 41
8.1.3 Altas pendientes ......................................................................................................................... 43
8.2 Clasificación nube de puntos 2 ......................................................................................................... 44
8.2.1 Baja vegetación. ......................................................................................................................... 44
8.2.2 Alta vegetación. ......................................................................................................................... 46
8.2.3 Altas pendientes. ........................................................................................................................ 47
8.3 Análisis de macros de clasificación .................................................................................................. 49
8.4 Análisis con curvas de nivel.............................................................................................................. 52
8.4.1 Baja vegetación .............................................................................................................................. 52

8.4.2 Alta vegetación .............................................................................................................................. 53
8.4.3 Alta Pendiente ................................................................................................................................ 54
8.5 Perfiles de comparación .................................................................................................................... 55
8.5.1 Comprobar mediante dicho método, que tipo de macro tiene una mejor clasificación,
respecto a la nube de puntos que se clasifico manualmente. .................................................... 56
8.5.2Analizar el comportamiento de cada uno de los tipos de terreno, en cada una de las nubes de
puntos. ......................................................................................................................................... 58
8.6 Control de cotas ................................................................................................................................ 62
8.7 Método de validación ........................................................................................................................ 63
8.7.1 Comparación de modelos para la zona con baja densidad de vegetación. ................................. 63
8.7.2 Comparación de modelos para la zona con alta densidad de vegetación ................................... 65
8.7.3 Comparación de modelos para la zona con altas pendientes ..................................................... 66
8.8 Método de validación cruzada .......................................................................................................... 68
9. Conclusiones ........................................................................................................................................... 70
10. Recomendaciones ................................................................................................................................. 72
11. Bibliografía ........................................................................................................................................... 73
12. Anexos. ................................................................................................................................................. 76
12.1 Anexo1, Especificaciones técnicas de sensor LiDAR topográficoaerotransportadoRiegl VQ 580.
................................................................................................................................................................ 76
12.2 Anexo2, Especificaciones técnicas de sensor LiDARtopográfico aerotransportadoleicaALS70. .. 77
12.3Anexo3, Metadato de los modelos de terreno usados en las comparaciones ................................... 78

Contenido de figuras
Figura 1. Captura de Datos LiDAR. ............................................................................................................ 5
Figura 2. Método de escaneo por traza lineal. ............................................................................................. 7
Figura 3. Método de escaneo por traza en Zigzag. ...................................................................................... 8
Figura 4. Método de escaneo elíptico. .......................................................................................................... 8
Figura 5. Método de escaneo por fibra óptica. .............................................................................................. 9
Figura 6. Perfil del láser. ............................................................................................................................. 11
Figura 7. Ilustración geométrica para calcular distancias. .......................................................................... 11
Figura 8. Componentes de un sistema LiDAR............................................................................................ 12
Figura 9. Funcionamiento del LiDAR. ....................................................................................................... 13
Figura 10. Inventario forestal, San Francisco Mocoa ................................................................................. 14
Figura 11. Modelación de ciudades, ........................................................................................................... 15
Figura 12. Líneas eléctricas LiDAR, .......................................................................................................... 15
Figura 13. Pasada LiDAR Batimétrico. ...................................................................................................... 17
Figura 14. Diagrama de la metodología empleada...................................................................................... 23
Figura 15. Nube de puntos, 22 puntos por m2. ........................................................................................... 24
Figura 16. Nube de puntos2, 4 puntos por m2 ............................................................................................ 25
Figura 17. Nube de puntos 3, generada y clasificada por métodos fotogramétricos. .................................. 25
Figura 18. Clasificación de las zonas de baja y alta densidad de vegetación. ............................................ 26
Figura 19. Visualización de datos LiDAR en microstation, zona de muestra de alta densidad de
vegetación. ................................................................................................................................ 27
Figura 20. Visualización de datos LiDAR en microstation, zona de muestra de baja densidad de
vegetación. ................................................................................................................................ 27
Figura 21. Visualización de datos LiDAR en microstation, zona de muestra de área de altas pendientes.28
Figura 22. Niveles de clasificación de datos LiDAR. ................................................................................. 28
Figura 23. Explicación grafica de parámetros de clasificación. .................................................................. 29
Figura 24. Clasificación automática de puntos de las clases gruond y default. .......................................... 30
Figura 25. Macro de clasificación, las zonas resaltadas son los parámetros que van a variar. ................... 31
Figura 26. Macro de clasificación 1. ........................................................................................................... 32
Figura 27. Macro de clasificación 2 ............................................................................................................ 32
Figura 28. Macro de clasificación 3 ............................................................................................................ 32
Figura 29. Macro de clasificación 4 ............................................................................................................ 33
Figura 30. Macro de clasificación 5 ............................................................................................................ 33
Figura 31. Resultado Macro de clasificación 1, nube de puntos 1, baja vegetación ................................... 34
Figura 32. Resultado Macro de clasificación 2 nube de puntos 1, baja vegetación .................................... 34
Figura 33. Resultado Macro de clasificación 3, nube de puntos 1, baja vegetación ................................... 34
Figura 34. Resultado Macro de clasificación 4, nube de puntos 1, baja vegetación ................................... 34
Figura 35. Resultado Macro de clasificación 5, nube de puntos 1, baja vegetación ................................... 34
Figura 36. Resultado Clasificación Manual, nube de puntos 1, baja vegetación ........................................ 34
Figura 37. Primeros pasos para generar los modelos de terreno y de superficie. ....................................... 35
Figura 38. Ventana para seleccionar los parámetros de salida de los modelos. .......................................... 35

Figura 39. Visualización del modelo digital de terreno. ............................................................................. 36
Figura 40. Visualización de curvas de nivel. .............................................................................................. 36
Figura 41. Generación de perfiles. .............................................................................................................. 37
Figura 42. Ejemplo de perfil ....................................................................................................................... 37
Figura 43. Zonas de muestra para control de cotas ..................................................................................... 38
Figura 44. Comparación entre dos modelos digitales de terreno. .............................................................. 39
Figura 45. Resultado Macro de clasificación 1 ........................................................................................... 40
Figura 46. Resultado Macro de clasificación 2 ........................................................................................... 40
Figura 47. Resultado Macro de clasificación 3 ........................................................................................... 41
Figura 48. Resultado Macro de clasificación 4 ........................................................................................... 41
Figura 49. Resultado Macro de clasificación 5 ........................................................................................... 41
Figura 50. Resultado clasificación manual ................................................................................................. 41
Figura 51. Resultado Macro de clasificación 1 ........................................................................................... 42
Figura 52. Resultado Macro de clasificación 2 ........................................................................................... 42
Figura 53. Resultado Macro de clasificación 3 ........................................................................................... 42
Figura 54. Resultado Macro de clasificación 4 ........................................................................................... 42
Figura 55. Resultado Macro de clasificación 5 ........................................................................................... 43
Figura 56. Resultado clasificación manual ................................................................................................. 43
Figura 57. Resultado Macro de clasificación 1 ........................................................................................... 43
Figura 58. Resultado Macro de clasificación 2 ........................................................................................... 43
Figura 59. Resultado Macro de clasificación 3 ........................................................................................... 44
Figura 60. Resultado Macro de clasificación 4 ........................................................................................... 44
Figura 61. Resultado Macro de clasificación 5 ........................................................................................... 44
Figura 62. Resultado clasificación manual ................................................................................................. 44
Figura 63. Resultado Macro de clasificación 1 ........................................................................................... 45
Figura 64. Resultado Macro de clasificación 2 ........................................................................................... 45
Figura 65. Resultado Macro de clasificación 3 ........................................................................................... 45
Figura 66. Resultado Macro de clasificación 4 ........................................................................................... 45
Figura 67. Resultado Macro de clasificación 5 ........................................................................................... 46
Figura 68. Resultado Macro de clasificación 1 ........................................................................................... 46
Figura 69. Resultado Macro de clasificación 2 ........................................................................................... 46
Figura 70. Resultado Macro de clasificación 3 ........................................................................................... 47
Figura 71. Resultado Macro de clasificación 4 ........................................................................................... 47
Figura 72. Resultado Macro de clasificación 5 ........................................................................................... 47
Figura 73. Resultado Macro de clasificación 1 ........................................................................................... 48
Figura 74. Resultado Macro de clasificación 2 ........................................................................................... 48
Figura 75. Resultado Macro de clasificación 3 ........................................................................................... 48
Figura 76. Resultado Macro de clasificación 4 ........................................................................................... 48
Figura 77. Resultado Macro de clasificación 5 ........................................................................................... 49
Figura 78. Comparación curvas de nivel Baja vegetación .......................................................................... 53
Figura 79. Comparación curvas de nivel Alta vegetación .......................................................................... 54
Figura 80. Comparación curvas de nivel Altas Pendientes ......................................................................... 55

Figura 81. Comparacion entre perfiles de baja vegetación en la nube 1 ..................................................... 56
Figura 82. Comparacion entre perfiles de alta vegetación en la nube 1.................................................... 57
Figura 83. Comparacion entre perfiles de altas pendientes en la nube 1 .................................................... 58
Figura 84. Comparacion entre perfiles de baja vegetación ......................................................................... 59
Figura 85. Comparacion entre perfiles de alta vegetación .......................................................................... 60
Figura 86. Comparacion entre perfiles de altas pendientes ......................................................................... 61
Figura 87. Resultado control de cotas 01_Nube2_Baja_Vegetacion .......................................................... 62
Figura 88. Resultado control de cotas 02_Nube2_Alta_Vegetacion .......................................................... 62
Figura 89. Resultado control de cotas 03_Nube2_Altas_Pendientes .......................................................... 62
Figura 90. Resultado control de cotas 04_Nube3_Baja_Vegetacion .......................................................... 62
Figura 91. Resultado control de cotas 05_Nube3_Alta_Vegetacion .......................................................... 62
Figura 92. Resultado control de cotas 06_Nube3_Altas_Pendientes .......................................................... 62
Figura 93. Sustracción o diferencia entre la nube de puntos clasificada manualmente y la nube de puntos
1, para zonas con baja densidad de vegetación. ....................................................................... 63
Figura 94. Sustracción o diferencia entre la nube de puntos clasificada manualmente y la nube de puntos
2, para zonas con baja densidad de vegetación. ...................................................................... 64
Figura 95. Sustracción o diferencia entre la nube de puntos clasificada manualmente y la nube de puntos
3, para zonas con baja densidad de vegetación. ....................................................................... 64
Figura 96. Sustracción o diferencia entre la nube de puntos clasificada manualmente y la nube de puntos
1, zona de alta densidad de vegetación. .................................................................................... 65
Figura 97. Sustracción o diferencia entre la nube de puntos clasificada manualmente y la nube de puntos
2, zona de alta densidad de vegetación. ................................................................................... 65
Figura 98. Sustracción o diferencia entre la nube de puntos clasificada manualmente y la nube de puntos
3, zona de alta densidad de vegetación. .................................................................................... 66
Figura 99. Sustracción o diferencia entre la nube de puntos clasificada manualmente y la nube de puntos
1, zona de alta pendiente. .......................................................................................................... 66
Figura 100. Sustracción o diferencia entre la nube de puntos clasificada manualmente y la nube de
puntos2, zona de alta pendiente. ............................................................................................... 67
Figura 101. Sustracción o diferencia entre la nube de puntos clasificada manualmente y la nube de puntos
3, zona de alta pendiente. .......................................................................................................... 67
Figura 102. Sensor LiDAR topográfico aerotransportado Riegl VQ 580. .................................................. 76
Figura 103. Sensor LiDAR topográfico aerotransportado Leica ALS70. ................................................... 77

Contenido de Tablas
Tabla 1. Parámetros de clasificación........................................................................................................... 30
Tabla 2. Parámetros de clasificación........................................................................................................... 31
Tabla 3. Modelos generados para comparación de las macros y los tipos de terreno ................................. 38
Tabla 4. Análisis de densidades de puntos de terreno, por macro de clasificación..................................... 49
Tabla 5. Análisis de densidades de puntos de terreno, por macro de clasificación, nube de puntos 1 ....... 50
Tabla 6. Análisis de densidades de puntos de terreno, por macro de clasificación, nube de puntos 2 ....... 50
Tabla 7. Comportamiento de macros por tipo de terreno y nubes puntos ................................................... 51
Tabla 8. Comportamiento de macros por tipo de terreno, nube de puntos 1 .............................................. 51
Tabla 9. Comportamiento de macros por tipo de terreno, nube de puntos 2 .............................................. 52
Tabla 10. Método de validación cruzada con los datos de la nube de puntos 1 vs la nube de puntos
clasificada .................................................................................................................................... 68
Tabla 11. Método de validación cruzada con los datos de la nube de puntos 2 vs la nube de puntos
clasificada .................................................................................................................................... 68
Tabla 12. Método de validación cruzada con los datos de la nube de puntos 3 vs la nube de puntos
clasificada .................................................................................................................................... 69
Tabla 13. Información estadística de nube de puntos 1, baja vegetación ................................................... 78
Tabla 14. Información estadística de nube de puntos 2, baja vegetación ................................................... 78
Tabla 15. Información estadística de nube de puntos 3, baja vegetación ................................................... 79
Tabla 16. Información estadística de nube de puntos clasificada manualmente, baja vegetación .............. 79
Tabla 17. Información estadística de nube de puntos 1, alta vegetación .................................................... 80
Tabla 18. Información estadística de nube de puntos 2, alta vegetación .................................................... 80
Tabla 19. Información estadística de nube de puntos 3, alta vegetación .................................................... 81
Tabla 20. Información estadística de nube de puntos clasificada manualmente, alta vegetación ............... 81
Tabla 21. Información estadística de nube de puntos 1, altas pendientes ................................................... 82
Tabla 22. Información estadística de nube de puntos 2, altas pendientes ................................................... 82
Tabla 23. Información estadística de nube de puntos 3, altas pendientes ................................................... 83
Tabla 24. Información estadística de nube de puntos clasificada manualmente, altas pendientes ............. 83

Contenido de Ecuaciones
Ecuación 1. Ecuación LiDAR. ...................................................................................................................... 6
Ecuación 2. Rango o distancia inclinada. ..................................................................................................... 9
Ecuación 3. Rango de precisión. ................................................................................................................. 10
Ecuación 4. Validación cruzada. ................................................................................................................. 39

1
1. Introducción
La tecnología Lidar a nivel mundial es una de las principales herramientas para realizar modelos
en 3D del terreno y posteriormente poder ser aplicados a diferentes estudios, por ejemplo,
diseño y mantenimiento vial, diseños arquitectónicos, localización de oleoductos, inventarios
forestales, entro otros.
En medio de la construcción de proyectos de diseño es importante contar con un “SET4” de datos
adecuado, el cual garantice la precisión. Para los diseñadores es elemental que el modelo de
terreno basado en Lidar sobre el cual está plasmando sus diseños vaya acorde con la realidad del
terreno.
Es importante destacar que dependiendo el tipo de terreno sobre el cual se va a trabajar, se pude
garantizar cierta precisión, debido a que en zonas de alta montaña y gran vegetación es difícil
realizar trabajos que brinden datos confiables o que cumplan con precisiones altas.
Para analizar la calidad de los datos, es necesario tener en cuenta varios factores, como la
topografía del terreno, la cobertura del terreno, la finalidad de los datos, entre otros. A
continuación a lo largo del proyecto se plantea una metodología que permita garantizar la
veracidad de los datos obtenidos con Lidar para zonas de alta y baja densidad de vegetación así
como alta pendiente, teniendo en cuenta ciertos parámetros que fueron explicados en el
desarrollo del proyecto.
Para tal fin, se realizaron comparaciones entre cuatro nubes de puntos tomadas con dos tipos de
sensores LiDAR, con diferentes densidades por metro cuadrado en cada una de ellas, se
aplicaron métodos de clasificación para procesar información, esto para validarla, garantizando
el cumplimiento de estándares de calidad para nuestro país.
En Colombia el procesamiento de nube de puntos LiDAR es conocido por algunas empresas, la
utilización de datos LIDAR puede ser poco común, y en algunos casos se desconocen las
precisiones y los altos estándares de calidad de los datos, en comparación a otras metodologías
utilizadas en Colombia para la representación del terreno.
4 Hace referencia a una colección de elementos de datos agrupados de manera organizada que permiten registrar
mayor información.

2
2. Planteamiento del problema
Para proyectos de ingeniería, los diseñadores necesitan contar con información precisa, sobre la
cual puedan llevar a cabo los diseños que determinan sus trabajos.
La topografía es uno de los métodos más usados para describir las condiciones del terreno, sin
embargo para proyectos de gran magnitud, es probable que la topografía no sea la mejor
herramienta para llevar a cabo los estudios de diseño. Por tal razón se hace necesaria la
utilización de metodologías alternas para modelar el terreno.
La topografía convencional brinda mayor confiabilidad para proyectos que requieren un nivel de
detalle exigente, sin embargo, es necesario mostrar metodologías con las cuales se compruebe
que un modelo generado con una nube de puntos LiDAR es confiable, y por tanto mostrar otras
alternativas para validar la información.

3
3. Importancia y justificación
En el país la tecnología LiDAR en los últimos años ha tenido gran acogida debido al nivel de
análisis de la superficie que esta ofrece. LiDAR se usa para proyectos de infraestructura, como
diseños viales, construcción de oleoductos, entro otros.
Para proyectos que comprenden grandes magnitudes y de difícil acceso, los productos o
información que se obtienen con los sensores aerotransportados, son de gran utilidad, ya que
ofrecen beneficios en cuanto a tiempo y cubrimiento de cualquier tipo de zona.
Los parámetros de calibración juegan un papel importante en la realización de cualquier
proyecto, aunque las exigencias de cada uno de estos sean diferentes. Para obtener los resultados
esperados se debe garantizar de principio a fin la calidad y precisión de los datos, lo que hace
necesario llevar a cabo paso a paso la aplicación de ciertos parámetros para minimizar posibles
errores que se puede cometer.
Con la gran acogida del sistema LiDAR en el país se hace necesario documentar un proceso
confiable que garantice la calidad y la precisión de la información.
4
4. Objetivos
4.1 General
Realizar un análisis iterativo comparado, para la obtención de parámetros óptimos en la
clasificación de nubes de puntos LiDAR con los sensores Riegl VQ580 y leicaALS70.
4.2 Específicos
Realizar comparaciones de clasificación de terreno, en el procesamiento de una
nube de puntos LiDAR, con zonas de alta densidad de vegetación, baja densidad
de vegetación y altas pendientes.
Generar control de cotas para comparar las discrepancias que hay entre las nubes
de puntos del estudio.
Mediante métodos de validación analizar el comportamiento de los modelos
digitales de terreno.

5
5. Marco conceptual
5.1 LiDAR Su acrónimo en inglés significa Light Detection and Ranging, la cual es una tecnología que con
el uso de ondas electromagnéticas permite determinar la distancia que hay entre el sensor y
cualquier objeto o superficie.
LiDAR está clasificado dentro de los sensores activos, ya que emiten energía sobre el objeto y de
igual forma recibe la señal reflejada por el mismo, con lo anterior se puede determinar la
distancia que hay entre el sensor y el objeto al determinar el tiempo de retraso de la señal, como
se muestra en la figura 1.
Figura 1. Captura de Datos LiDAR. Fuente: Los autores.
Para los sensores LiDAR se conoce varias técnicas de captura de información, las cueles se
describen a continuación:
LiDAR aéreo: Es utilizado para la medición de grandes áreas. El sensor se coloca en un
avión, que normalmente vuela a una altura entre 400 y 2.500 m sobre la superficie. La precisión
suele estar en este caso entre 9,25 cm y 18,5 cm verticalmente, y entre 20 cm y 1 m
horizontalmente.
LiDAR aéreo de baja altitud: Se utiliza normalmente para estudios de vías de
comunicación e infraestructuras lineales (por ejemplo, líneas eléctricas). La altitud de vuelo es
mucho menor (de 50 m a 800 m sobre la superficie), y normalmente el sensor va montado sobre
helicópteros. De esta forma se consiguen densidades que oscilan entre los 20 y los 100 puntos
por metro cuadrado, con precisiones también mayores.
LiDAR móvil: El sistema está montado en la parte trasera de un vehículo, de tal forma
que el láser rota 360 º continuamente durante la operación, mientras que el vehículo avanza. La
precisión en este caso es la mayor en relación con el resto de técnicas. La distancia máxima de
alcance suele ser de unos 200 m desde el sensor, y la densidad de puntos por metro cuadrado
puede llegar a los 4.000 metros.
6
LiDAR terrestre: En este caso, el sistema no se mueve (no se encuentra montado sobre
ningún dispositivo móvil, sino sobre un trípode) y se utiliza para estudiar un área concreta de
interés (por ejemplo un puente). La precisión es muy alta, pero la cantidad de datos a recoger
está limitado puesto que se trata de sistemas estacionarios. (Blog sobre GIS, 2012)
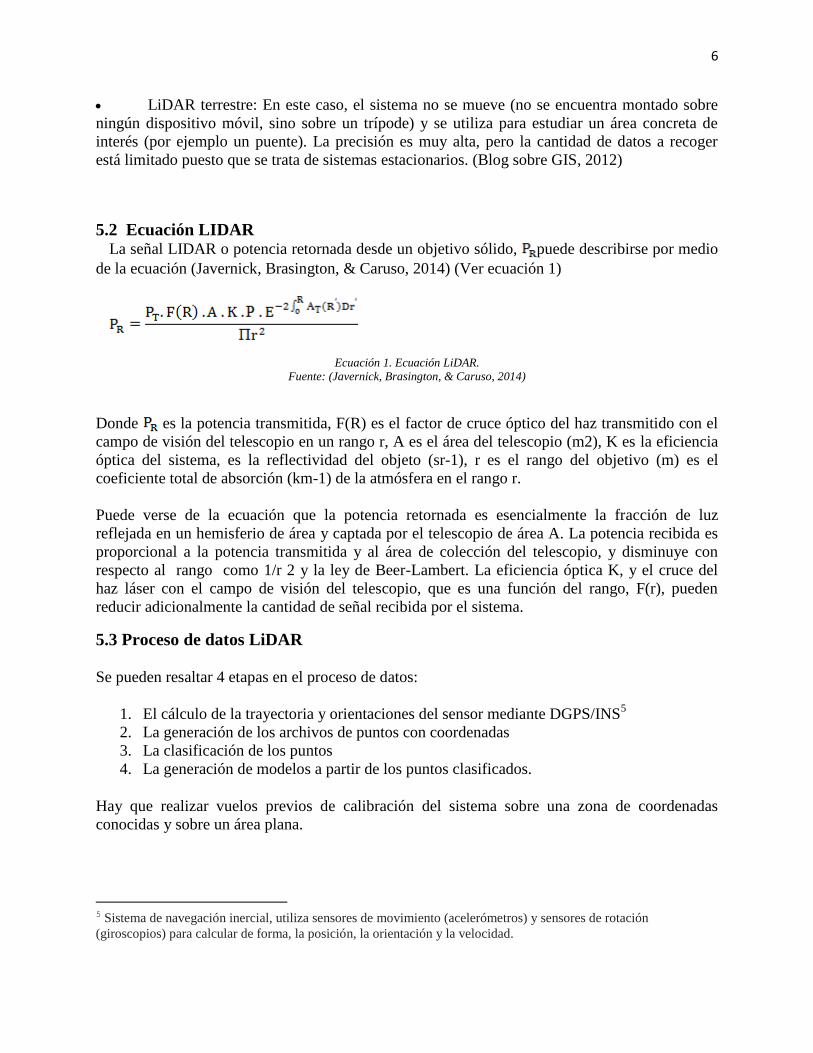
5.2 Ecuación LIDAR La señal LIDAR o potencia retornada desde un objetivo sólido, puede describirse por medio
de la ecuación (Javernick, Brasington, & Caruso, 2014) (Ver ecuación 1)
Ecuación 1. Ecuación LiDAR.
Fuente: (Javernick, Brasington, & Caruso, 2014)
Donde es la potencia transmitida, F(R) es el factor de cruce óptico del haz transmitido con el
campo de visión del telescopio en un rango r, A es el área del telescopio (m2), K es la eficiencia
óptica del sistema, es la reflectividad del objeto (sr-1), r es el rango del objetivo (m) es el
coeficiente total de absorción (km-1) de la atmósfera en el rango r.
Puede verse de la ecuación que la potencia retornada es esencialmente la fracción de luz
reflejada en un hemisferio de área y captada por el telescopio de área A. La potencia recibida es
proporcional a la potencia transmitida y al área de colección del telescopio, y disminuye con
respecto al rango como 1/r 2 y la ley de Beer-Lambert. La eficiencia óptica K, y el cruce del
haz láser con el campo de visión del telescopio, que es una función del rango, F(r), pueden
reducir adicionalmente la cantidad de señal recibida por el sistema.
5.3 Proceso de datos LiDAR
Se pueden resaltar 4 etapas en el proceso de datos:
1. El cálculo de la trayectoria y orientaciones del sensor mediante DGPS/INS5
2. La generación de los archivos de puntos con coordenadas
3. La clasificación de los puntos
4. La generación de modelos a partir de los puntos clasificados.
Hay que realizar vuelos previos de calibración del sistema sobre una zona de coordenadas
conocidas y sobre un área plana.
5 Sistema de navegación inercial, utiliza sensores de movimiento (acelerómetros) y sensores de rotación
(giroscopios) para calcular de forma, la posición, la orientación y la velocidad.

7
El resultado de una nube de puntos LIDAR es una colección de puntos con coordenadas
conocidas. La cantidad de puntos es grande y los puntos se obtienen mediante un muestreo
aleatorio.
En general, para que estos datos sean útiles, es necesario clasificarlos y construir un modelo a
partir de los puntos clasificados. Como el número de puntos es muy grande es necesario disponer
de herramientas para realizar una clasificación automática de los datos. Para clasificar los puntos
se puede utilizar su altura, la intensidad reflejada o el carácter de rebote múltiple (en nuestro
sistema primer y último eco). Habitualmente sólo se tiene en cuenta la altura de cada punto
comparada con la de sus vecinos. Existen diferentes algoritmos para obtener el modelo digital
del terreno (MDT), pero todos se basan en la selección los puntos más bajos en un entorno.
También se suele considerar la altura absoluta o la altura sobre el terreno una vez que se ha
calculado el MDT. (A. Ruiz, 2012)
5.4 Métodos de escaneo LiDAR.
Actualmente se disponen en de 4 métodos de escaneo LiDAR, cada uno de ellos está en función
del tipo de terreno y de la densidad de puntos.
Líneas: Produce líneas paralelas en el terreno como patrón de escaneado. El
inconveniente de este método es que al girar el espejo en una sola dirección no siempre
hay mediciones. (Ver figura 2)
Figura 2. Método de escaneo por traza lineal.
Fuente: Los autores.
Zigzag: En este caso el espejo es rotatorio en dos sentidos (ida y vuelta). Produce líneas
en zigzag como patrón de escaneado. Tiene la ventaja de que siempre está midiendo pero
las zonas cercanas al límite de escaneado aumenta la densidad de puntos.(Ver figura 3)
8
Figura 3. Método de escaneo por traza en Zigzag.
Fuente: Los autores.
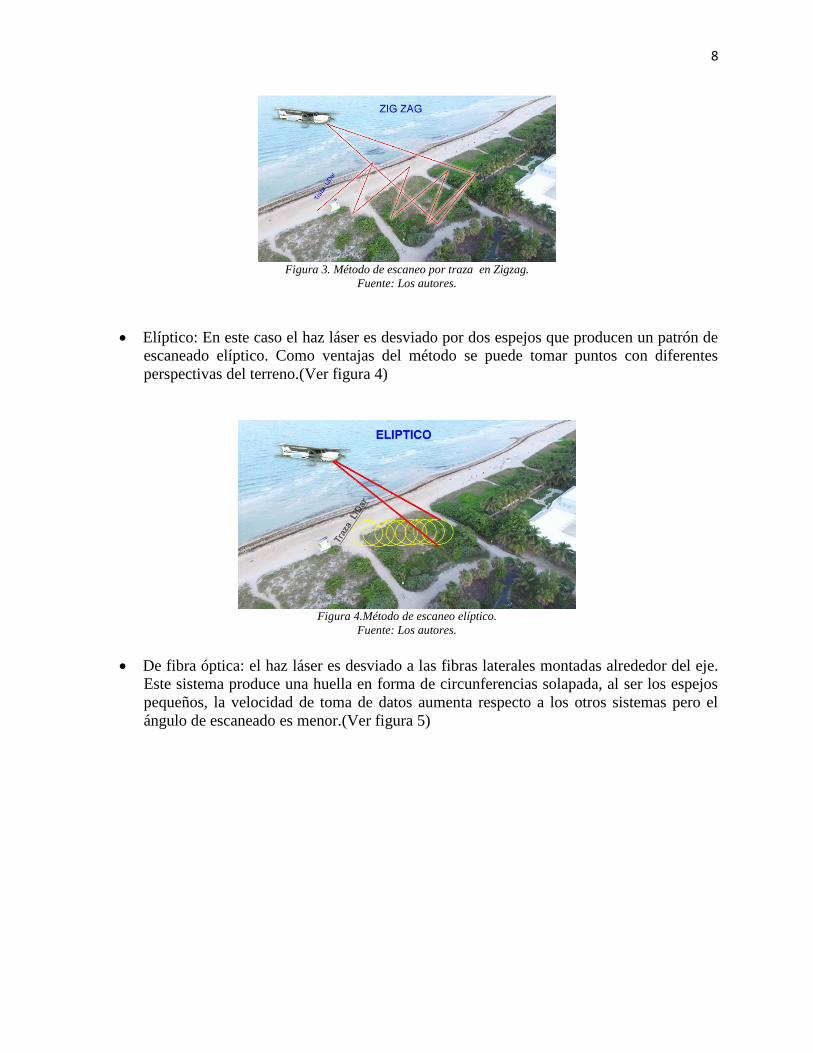
Elíptico: En este caso el haz láser es desviado por dos espejos que producen un patrón de
escaneado elíptico. Como ventajas del método se puede tomar puntos con diferentes
perspectivas del terreno.(Ver figura 4)
Figura 4.Método de escaneo elíptico.
Fuente: Los autores.
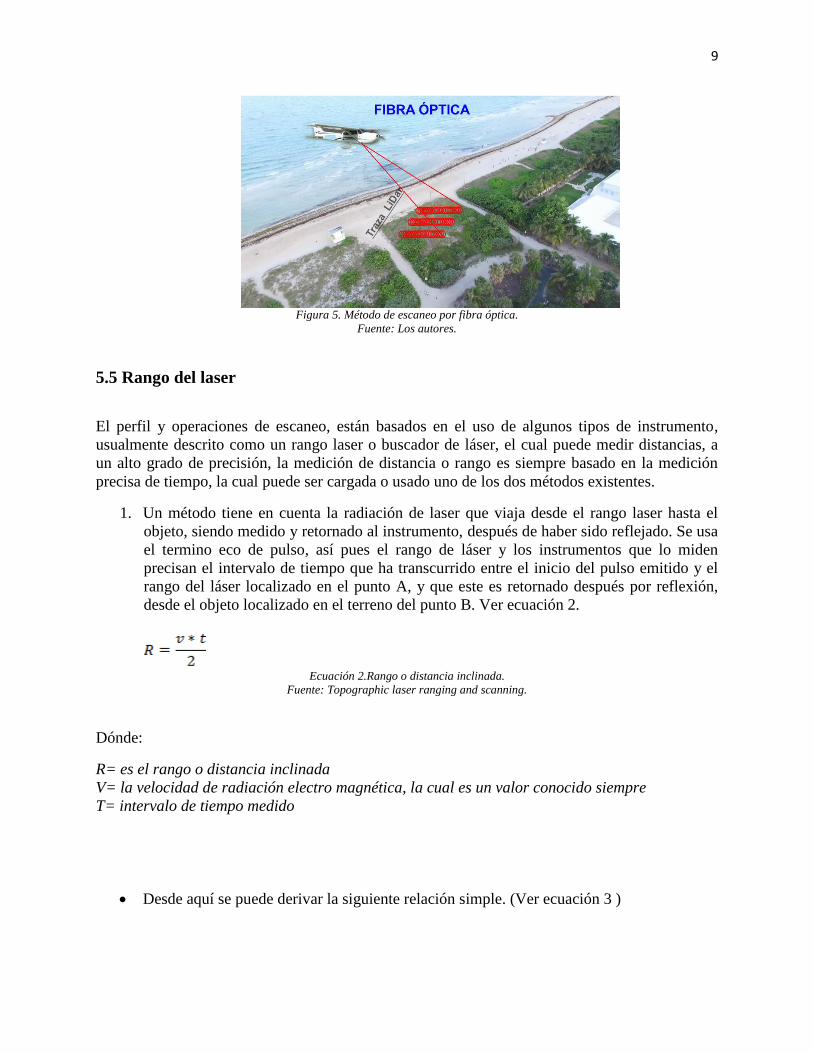
De fibra óptica: el haz láser es desviado a las fibras laterales montadas alrededor del eje.
Este sistema produce una huella en forma de circunferencias solapada, al ser los espejos
pequeños, la velocidad de toma de datos aumenta respecto a los otros sistemas pero el
ángulo de escaneado es menor.(Ver figura 5)
9
Figura 5. Método de escaneo por fibra óptica.
Fuente: Los autores.
5.5 Rango del laser
El perfil y operaciones de escaneo, están basados en el uso de algunos tipos de instrumento,
usualmente descrito como un rango laser o buscador de láser, el cual puede medir distancias, a
un alto grado de precisión, la medición de distancia o rango es siempre basado en la medición
precisa de tiempo, la cual puede ser cargada o usado uno de los dos métodos existentes.
1. Un método tiene en cuenta la radiación de laser que viaja desde el rango laser hasta el
objeto, siendo medido y retornado al instrumento, después de haber sido reflejado. Se usa
el termino eco de pulso, así pues el rango de láser y los instrumentos que lo miden
precisan el intervalo de tiempo que ha transcurrido entre el inicio del pulso emitido y el
rango del láser localizado en el punto A, y que este es retornado después por reflexión,
desde el objeto localizado en el terreno del punto B. Ver ecuación 2.
Ecuación 2.Rango o distancia inclinada.
Fuente: Topographic laser ranging and scanning.
Dónde:
R= es el rango o distancia inclinada
V= la velocidad de radiación electro magnética, la cual es un valor conocido siempre
T= intervalo de tiempo medido
Desde aquí se puede derivar la siguiente relación simple. (Ver ecuación 3 )
10
Ecuación 3. Rango de precisión.
Fuente: Tomado de Topographic laser ranging and scanning.
Dónde:
.
.
Desde la velocidad de la luz es muy conocido, en la práctica el rango de precisión o resolución es
determinado por la medida de precisión de tiempo.
2. En el segundo método (alternativo), el láser transmite un continuo haz de luz de radiación
dentro de un pulso. En este caso el valor del láser es derivado por comparación a lo
trasmitido y las versiones recibidas del patrón de onda sinusoidal es emitido por la
medición de la fase diferencial entre ellos. La señal de modulación en la forma de patrón
de onda de medida es superpuesta en la señal cargada de fase diferencial que puede ser
cargada más precisamente. Con toda la amplitud o intensidad de la redacción de laser
puede ser modulada por la señal sinusoidal, la cual tiene un periodo y una longitud de
onda λ, la medida de la distancia inclinada R es cuando esta es cargada a través de la
medida de precisión de la fase diferencial (o de la fase del ángulo θ), entre la señal
emitida del pulso A y la señal recibida del instrumento después de la reflexión, desde el
terreno mismo o de un objeto que está presente en el terreno del punto B. Esta fase de
medición es usualmente cargada usando una técnica continua de medición digital. Esto da
una parte fraccional del total de la distancia.
5.6 Perfil del laser
El uso del rango del láser sin reflector y una serie de puntos espaciados cercanamente y
localizados uno de otro, es el resultado del terreno en un perfil bidimensional (vertical) o una
sección vertical, mostrando las elevaciones del terreno a lo largo de la línea.
En el caso de un terreno o un rango de línea de terreno base, la medida de perfil del terreno es
ejecutada en una serie de pasos con la medida sucesiva de distancias (rangos inclinados) y
ángulos verticales para cada punto, por ejemplo siendo gravados y guardados digitalmente, como
se observa en la figura 6.

11
Figura 6. Perfil del láser.
Fuente: Los autores.
El perfil del terreno a lo largo de la línea de medida puede y será derivada de la información
medida por las siguientes relaciones geométricas, como se muestra en la figura 7.
Figura 7. Ilustración geométrica para calcular distancias.
Fuente: Los autores.
Dónde:
D=distancia horizontal
R= el rango inclinado de medida
V=el ángulo vertical de medida
Se deduce que:
Y
12
En el caso de un perfil de laser simple que ha sido montando en una plataforma aérea o
plataforma espacial, es frecuentemente llamado como un altímetro laser. Permite una
serie rápida de medidas de distancias del suelo, desde posiciones sucesivas de una
plataforma móvil. Las medidas de distancia vertical desde la plataforma son hechas a
través del movimiento repetitivo, desde la plataforma aérea o la plataforma espacial. Si
las posiciones y las altitudes de la plataforma son posiciones sucesivas en el aire, son
conocidas o pueden ser determinadas, por ejemplo, usando un sistema GPS o IMU, donde
los rangos que corresponde a la medida de estos puntos con sus valores de elevación
determinan el terreno. Consecuentemente, esto permite que el perfil del terreno a lo largo
de la línea de vuelo sea construido.
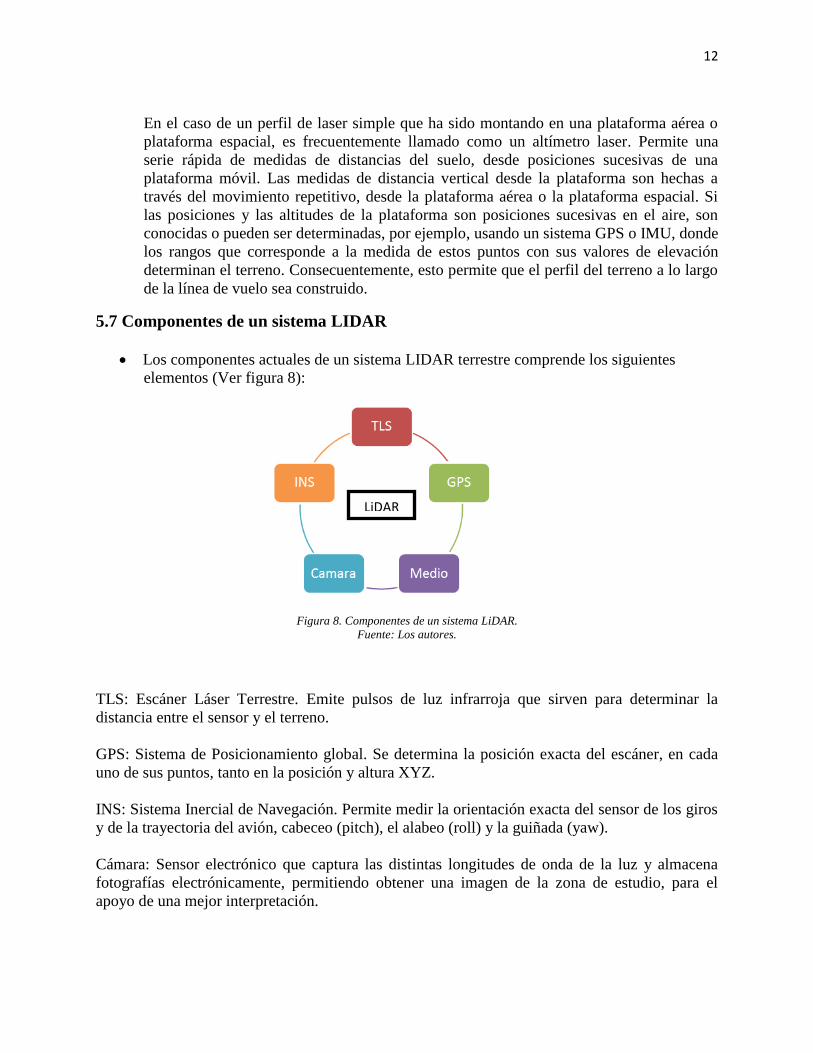
5.7 Componentes de un sistema LIDAR
Los componentes actuales de un sistema LIDAR terrestre comprende los siguientes
elementos (Ver figura 8):
Figura 8. Componentes de un sistema LiDAR.
Fuente: Los autores.
TLS: Escáner Láser Terrestre. Emite pulsos de luz infrarroja que sirven para determinar la
distancia entre el sensor y el terreno.
GPS: Sistema de Posicionamiento global. Se determina la posición exacta del escáner, en cada
uno de sus puntos, tanto en la posición y altura XYZ.
INS: Sistema Inercial de Navegación. Permite medir la orientación exacta del sensor de los giros
y de la trayectoria del avión, cabeceo (pitch), el alabeo (roll) y la guiñada (yaw).
Cámara: Sensor electrónico que captura las distintas longitudes de onda de la luz y almacena
fotografías electrónicamente, permitiendo obtener una imagen de la zona de estudio, para el
apoyo de una mejor interpretación.
LiDAR

13
Medio: Puede ser aéreo o terrestre, dependiendo del volumen de información a levantar, a la
densidad de puntos por unidad de área.
5.8 Funcionamiento LIDAR
El escáner funciona en la región del infrarrojo cercano, el ultravioleta y el visible del espectro
electromagnético. Este genera y emite un pulso de hasta 300.000 pulsos láser por segundo (300
KHz). El tiempo que tarda dicho pulso en llegar a la superficie topográfica y volver al sensor es
multiplicado por la velocidad del láser, obteniendo la distancia del punto que se ha medido en el
terreno.
Los sistemas LIDAR por cada pulso emitido puede captar 2 o más ecos, lo que permite recoger
información a diferentes alturas, ya que puede pasar por espacios libres generando un nuevo eco.
Todos estos pulsos emitidos retornos capturados son grabados en tiempo real lo que permite
pronosticar el comportamiento de los datos en su almacenamiento y potencia así como se puede
apreciar en la figura 9.
Figura 9. Funcionamiento del LiDAR.
Fuente: Los autores.
14
5.9. Aplicaciones LiDAR.
5.9.1 Aplicaciones forestales.
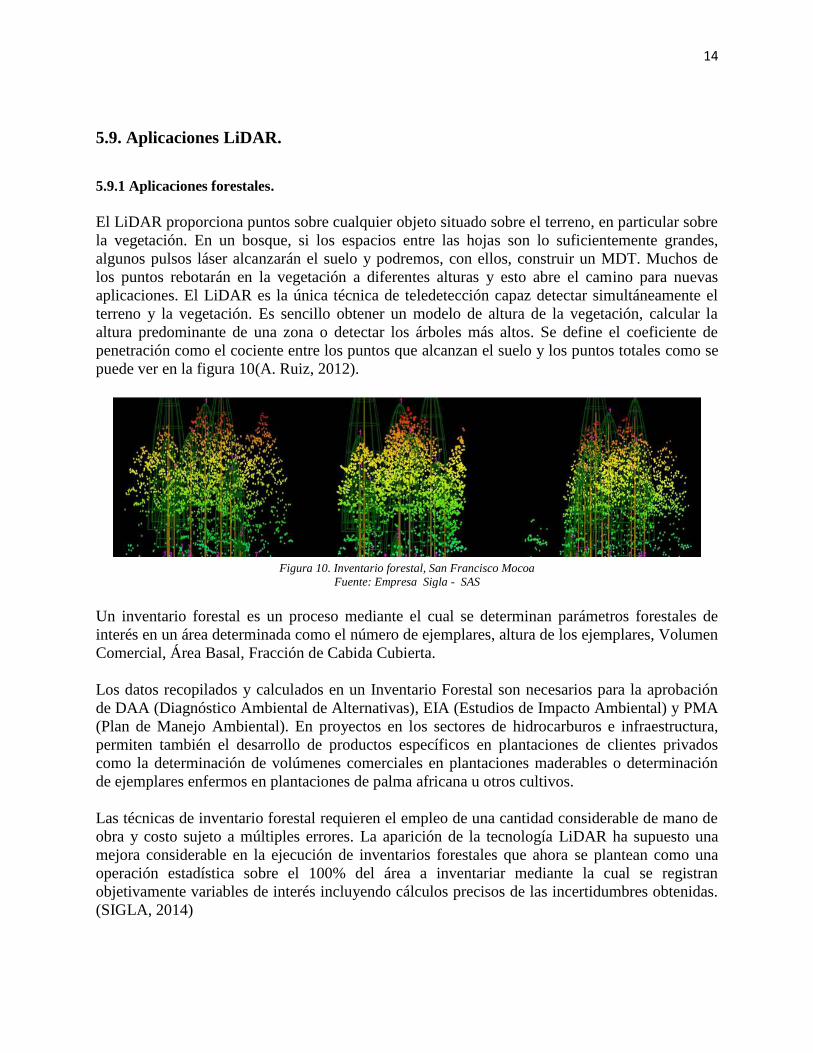
El LiDAR proporciona puntos sobre cualquier objeto situado sobre el terreno, en particular sobre
la vegetación. En un bosque, si los espacios entre las hojas son lo suficientemente grandes,
algunos pulsos láser alcanzarán el suelo y podremos, con ellos, construir un MDT. Muchos de
los puntos rebotarán en la vegetación a diferentes alturas y esto abre el camino para nuevas
aplicaciones. El LiDAR es la única técnica de teledetección capaz detectar simultáneamente el
terreno y la vegetación. Es sencillo obtener un modelo de altura de la vegetación, calcular la
altura predominante de una zona o detectar los árboles más altos. Se define el coeficiente de
penetración como el cociente entre los puntos que alcanzan el suelo y los puntos totales como se
puede ver en la figura 10(A. Ruiz, 2012).
Figura 10. Inventario forestal, San Francisco Mocoa
Fuente: Empresa Sigla - SAS
Un inventario forestal es un proceso mediante el cual se determinan parámetros forestales de
interés en un área determinada como el número de ejemplares, altura de los ejemplares, Volumen
Comercial, Área Basal, Fracción de Cabida Cubierta.
Los datos recopilados y calculados en un Inventario Forestal son necesarios para la aprobación
de DAA (Diagnóstico Ambiental de Alternativas), EIA (Estudios de Impacto Ambiental) y PMA
(Plan de Manejo Ambiental). En proyectos en los sectores de hidrocarburos e infraestructura,
permiten también el desarrollo de productos específicos en plantaciones de clientes privados
como la determinación de volúmenes comerciales en plantaciones maderables o determinación
de ejemplares enfermos en plantaciones de palma africana u otros cultivos.
Las técnicas de inventario forestal requieren el empleo de una cantidad considerable de mano de
obra y costo sujeto a múltiples errores. La aparición de la tecnología LiDAR ha supuesto una
mejora considerable en la ejecución de inventarios forestales que ahora se plantean como una
operación estadística sobre el 100% del área a inventariar mediante la cual se registran
objetivamente variables de interés incluyendo cálculos precisos de las incertidumbres obtenidas.
(SIGLA, 2014)

15
5.9.2 Modelos de ciudades
En la actualidad se está avanzando rápidamente en la detección automática de edificios, pero el
software disponible necesita ayuda por parte de un operador para obtener modelos vectoriales de
ciudades. Estos modelos son necesarios para la generación de ortofotos y de modelos de realidad
virtual, en la figura 11 se muestra un ejemplo de nube de puntos de un modelo de ciudad.(A.
Ruiz, 2012)
Figura 11. Modelación de ciudades,
Tomado de www.sigla-sas.com
5.9.3 Líneas eléctricas
Las líneas eléctricas son un campo de aplicación en la que no existe otras técnicas que
compitan con el LIDAR. Interesa obtener la distancia de los cables al terreno, a la
vegetación y a los edificios. Empleando configuraciones específicas del equipo es posible
obtener muchos puntos sobre los cables. Se genera un modelo del terreno y a
continuación se ajusta un modelo de catenaria para cada cable. Los puntos restantes
pertenecen a la vegetación o a los edificios y podemos calcular su distancia a los cables.
Los puntos demasiado próximos son considerados y se puede generar un listado de
puntos peligrosos con sus distancias a los cables y un mapa con las distancias mínimas de
los cables a la vegetación y al suelo, Ver figura 12.(A. Ruiz, 2012)
Figura 12. Líneas eléctricas LiDAR,
Tomado de www.sigla-sas.com
En proyectos de líneas eléctricas las soluciones aéreas son mucho más eficientes que las visitas
sobre el terreno, permitiendo una rápida localización de aquellas zonas críticas hacia donde los

16
equipos de tierra necesitarían movilizarse para tener una aproximación más precisa. Los diseños
de líneas nuevas también se optimizan mucho en tiempos y costes. (SIGLA, 2014)
5.9.4 LiDAR batimétrico.
El LiDAR (ALB) batimétrico es la técnica de medida de profundidades de aguas poco profundas
o próximas a la costa utilizando escaneado láser. También se denomina LiDAR hidrográfico
cuando su propósito es la elaboración de cartas náuticas. A partir de estas medidas, es posible
realizar mapas de zonas batimétricas en ríos, canales, lagos, puertos, zonas costeras, playas,
espigones, rompeolas, barreras de coral, ubicación de yacimientos arqueológicos submarinos
como pecios o hundimientos, etc. Además, se puede realizar simultáneamente registro de
superficies emergidas.(Laurie & Ellsworth, 2006)
Las ventajas de ALB sobre otras tecnologías de registro subacuático residen en la rapidez de
registro, tanto para pequeños como grandes proyectos, que permite calcular con celeridad daños
producidos por tormentas o desastres ecológicos, la posibilidad de registro a zonas de acceso
complicado con sensores transportados en barco y la posibilidad de registrar simultáneamente el
fondo marino, la costa o playa y resto de obras de ingeniería de puerto. Además, se ha
demostrado que los costos en la adquisición de datos pueden ser de un quinto o la mitad de los
invertidos con un sensor transportado en barco, sin contar que se pueden entregar más
documentos además de los datos de profundidad.
La técnica de registro se basa en la utilización de dos longitudes de onda diferentes. Una,
próxima al verde (532 nm), para el registro del fondo marino y otra, próxima al infrarrojo
cercano (1064 nm), para el registro de la superficie del agua. Teniendo en cuenta la velocidad de
la luz en el aire y en el agua, es posible calcular la profundidad del fondo como la diferencia de
los valores de altitud generados con ambas ondas. Las alturas de vuelo habituales oscilan entre
200 y 500 m y se utilizan FOV6 estrechos, entre 15º y 20º, para evitar errores en el cálculo del
tiempo de vuelo de la onda con geometrías extremas. De esta forma, los anchos de barrido son
estrechos comparados con ALS topográficos, como se muestra en la figura 13.(Arranz Justel,
2013)
6Es el acrónimo de field of view que significa Campo de visión. En LiDAR se trata de un ángulo sólido a través del
cual un detector es sensible a la radiación electromagnética.

17
Figura 13. Pasada LiDAR Batimétrico.
Fuente: (Arranz Justel, 2013)
5.10 Precisión geométrica.
Como cualquier sistema de medida, se producen errores sistemáticos que son visibles en las
zonas de solape entre diferentes tomas. Su cuantificación puede llevarse a cabo mediante
técnicas de medida de coordenadas, pero no existe una fácil solución para su eliminación, se
puede tener la percepción de que los errores se producen en mayor medida en la altimetría de los
objetos. Sin embargo, suelen ser mayores en la posición planimétrica de los puntos medidos. Por
ello, la eliminación de los errores debe realizarse en tercera dimensión. Aunque sea sencillo
definir el origen de los errores, no es fácil su eliminación debido a la multiplicidad de orígenes.
A pesar de ello, algunos autores han expuesto diferentes propuestas para abordarlo.(Durgham,
Habit, Kersting , & Quackenbush, 2008)
La precisión en el registro de la altitud de los puntos depende de la precisión del escáner y de la
determinación de la altitud GNSS (Gruen A. W., 1985). Ninguno de los efectos depende en gran
medida de la altura de vuelo. De hecho, la dependencia de la altura de vuelo en la precisión de
altitud de los puntos procede de la trayectoria que atraviesa el rayo a través de la atmósfera
(fuente de error), del aumento de la huella del haz láser con la distancia y de la disminución de la
energía reflejada por los objetos interceptados por el láser. Esto caracteriza a esta tecnología, ya
que la precisión altimétrica es de 2 a 5 veces mejor que la planimétrica, al contrario del resto de
tecnologías. La precisión planimétrica está influenciada por la propia precisión planimétrica del
GNSS, la precisión del IMU y, en menor medida, de la precisión en el registro del ángulo de
reflexión en el escáner. Las dos últimas fuentes de error están muy influenciadas por la altura de
vuelo, viéndose reducida la precisión cuando aumenta ésta. Por estas razones, junto a la potencia
de los equipos, las alturas de vuelo en ALS se limitan al intervalo de 500 m a 3000 m.
A partir de la ecuación general del láser se deriva su influencia, que puede ser muy variada. Por
un lado, destacan los errores instrumentales propios de los componentes que conforman el
sistema. El sistema láser tendrá una cierta precisión en la medida de la distancia y en la
desviación del ángulo (debido a la precisión del elemento que desvía el rayo y a la refracción
atmosférica), así como errores en su electrónica. El sistema GNSS tendrá imprecisiones en el
18
receptor y en la red de referencia en tierra. Además su precisión dependerá de la configuración
de la constelación de satélites y de la geometría con respecto a la antena montada sobre el avión.
Por último, el sistema inercial también tiene indeterminaciones en la frecuencia así como derivas
que deben corregirse.
Por otra parte, pueden existir errores debido a la falta de calibración del montaje conjunto
formado por la antena GNSS, el sistema inercial y el propio láser. A esto habría que añadirle la
necesidad de sincronización e interpolación entre los datos generados por cada uno de los
sistemas ya que, cada uno de ellos, tienen su origen en la medida del tiempo y su propia
frecuencia de registro.(Arranz Justel, 2013).
5.11 El Formato extensión .LAS
“El archivo LAS está configurado para almacenar registros de datos LIDAR u otros tipos de
nubes de puntos. Esta información generalmente será estructurada en este formato a partir del
software dotado por el proveedor del hardware LIDAR, el cual combina información GPS, IMU
y distancias de pulso láser para producir puntos (X, Y, Z). El propósito del formato LAS es dotar
de un formato genérico que permita a diferentes herramientas LIDAR de hardware y software
trabajar en un formato común” (Dueñas Ramirez & Soto Trujillo, 2014).
La estructura interna del formato LAS, está definida por cuatro componentes que lo caracterizan:
Bloque Público de Cabecera: Contiene la información descriptiva del archivo LAS, esta
comprende la información, por ejemplo, usuario, extensión espacial, software de
procesamiento, número de puntos, valores máximos, medios y mínimos, etc.
Registros de Longitud Variable (Variable Length Records): Corresponde a información
adicional que describa los contenidos del archivo LAS, entre estos se incluye, proyección
cartográfica, descripción de rango espectral utilizado, aplicaciones del usuario,
metadatos, etc. Su capacidad máxima de almacenamiento corresponde a 65.535 bytes.
Registros Extendidos de Longitud Variable (Extended Variable Length Records): Permite
incluir información descriptiva adicional en los archivos LAS que superen los 65.535
bytes; incluso como ventaja al respecto, este componente puede vincularse al final del
archivo LAS.
Registros de Puntos (Point Data Records): Es el cuerpo propiamente dicho del archivo
LAS, en este se almacenan todos los puntos captados por el sensor LIDAR, es decir se
configuran todos los registros bajo una misma estructura o formato.
El archivo LAS soporta once (11) diferentes formatos de registros de puntos, para este
análisis particular se describirá el formato “0” u original, adoptado para el
almacenamiento de puntos tridimensionales.(Duque Martinez, 2015)
5.12 Clasificación y Edición de los datos LIDAR
En el campo correspondiente a la Clasificación presente en el formato LAS, originalmente para
aquellos datos netamente crudos, el valor por defecto asignado en este campo es siempre de cero
(0, creado – nunca clasificado), de tal forma que los datos LIDAR crudos constituyen insumos

19
para la generación de un Modelo Digital de Superficies (MDS). Sin embargo, dentro de este
campo se almacenan los valores correspondientes a las superficies sobre la cual el pulso láser
retornó al receptor, por ejemplo, terreno desnudo, vegetación, infraestructura, construcciones,
nubes, etc., de tal forma que una vez efectuado el proceso de clasificación sea factible filtrar
aquellos datos que únicamente correspondan a suelo desnudo y consecutivamente generar un
Modelo Digital del Terreno.(Maune, 2011)
Con este antecedente, existen algoritmos y métodos de clasificación y filtrado de información
LIDAR, que en cierta manera, ayudan a discernir automáticamente la categoría del punto
editado. En todo caso, es importante acotar que durante el proceso de clasificación y filtrado de
información LIDAR, siempre habrá la necesidad de evaluar manualmente todos los algoritmos
automáticos ejecutados, más aún cuando la orografía del relieve sea abrupta y la densidad de la
cobertura vegetal sea amplia.
Con el tratamiento de la información detallada, es posible aplicar varios filtros de clasificación
LIDAR existentes, dependerá del editor para utilizar un método específico o un conjunto de
métodos, sin embargo, es necesaria la revisión manual de los resultados, como proceso integrado
de Control de Calidad.(Zhou, Sun, & Chen, 2014)
5.12.1 Filtros Morfológicos
A través de la morfología matemática, permite extraer formas concretas de regiones, los filtros
morfológicos se dividen en:
Filtro de Erosión: Implica disminuir o reducir el carácter continuo de un conjunto de
puntos, eliminando todos aquellos puntos de estructuras “pequeñas”.
Filtro de Dilatación: Implica aumentar o ampliar el carácter continuo de un conjunto de
puntos, generalizando su estructura macro.
Filtro de Apertura: (Erosión + Dilatación), elimina objetos menores y consecutivamente
amplía las grandes estructuras, se puede considerar un efecto de suavizado.
Filtro de Cierre: (Dilatación + Erosión), amplia la continuidad de las estructuras,
seguidamente realza las formas particulares de cada uno de sus componentes.(Blog sobre
GIS, 2012)
5.12.2 Filtros basados en la pendiente
Este tipo de filtro, puede catalogarse como un filtro focal de los puntos crudos del MDS, ya que
aplica un análisis similar al Vecino más cercano (Nearestneighbor). En este algoritmo, para cada
punto analizado se calcula la pendiente existente entre sus vecinos y para aquella pendiente
parcial que supere el valor del umbral predefinido, se excluye al punto vecino analizado de la
discriminación del terreno y se lo categoriza como otro objeto. Para aplicar este método
dependerá que la pendiente promedio del terreno sea constante y no sufra alteraciones
persistentes.(A. Ruiz, 2012)
20
5.12.3 Filtros de Densificación Progresiva
En este método se crea una red temporal de triángulos (TIN), lo más homogénea posible; para
aquellos puntos internos de cada triángulo se efectúa un análisis específico de discriminación con
parámetros como ángulos máximos de elevación o depresión y distancias máximas de
proyección, clasificando así los puntos del terreno como aquellos que no superen estas
tolerancias.
5.12.4 Filtros de Segmentación
Los filtros de segmentación se basan en la idea de agrupar la nube de puntos en segmentos
comunes. Cada segmento ampliará su extensión en la medida que los residuos de cada punto con
respecto el plano común ajustado del segmento se encuentre dentro de las tolerancias
establecidas. Además, inicialmente los segmentos que se generan son resultado de la
interpretación de información complementaria presente en el formato LAS como la intensidad y
el retorno.
5.12.5Filtros basados en Superficies
En este método se debe plantear modelos de tendencia de superficies matemáticas predefinidas,
para el cual es necesario analizar los residuos existentes para cada punto filtrado y clasificarlo en
función de su dispersión respecto a los estadísticos máximos.(A. Ruiz, 2012)
21
6. Metodología
A continuación se presenta una breve definición de las tareas que se llevaron a cabo en el
desarrollo del proyecto. Este fue dividido en tres etapas, en donde inicialmente se realiza una
obtención y manejo de los datos; etapa que permitió diferenciar datos correspondientes a la
misma zona, obtenidos con sensores LiDAR de diferentes condiciones técnicas. En segundo
término, se realiza una etapa de preparación de la información para procesarla y posteriormente
obtener productos cartográficos. Aquí se consideró los tipos de vegetación y la pendiente del
terreno, en donde se aplicaron rutinas de programación denominadas macros, con el fin de
realizar la clasificación de la información. Finalmente, se obtienen los modelos digitales de
terreno (MDT), curvas de nivel, se establecen las comparaciones entre los diferentes modelos
obtenidos y se realiza un análisis de los resultados y utilizando métodos de validación cruzada.
6.1 Etapa I. Obtención y manejo de datos.
6.1.1 Obtención de nubes de puntos.
A continuación se realiza la descripción técnica de las cuatro diferentes nubes de puntos
utilizadas en el desarrollo del trabajo:
Nube de puntos 1, tomada con un sensor topográfico aerotransportado Riegl VQ 580
(ver anexo 1, especificaciones técnicas) con una densidad de 22 puntos por m2 que cubre
75 ha, con un total de 22´944.284 puntos.
Nube de puntos 2, tomada con un sensor topográfico aerotransportado Leica ALS70 (ver
anexo 2, especificaciones técnicas) con una densidad de 4 puntos por m2 que cubre 75 ha
con un total de 6´520.310 puntos.
Nube de puntos 3, obtenida por métodos fotogramétricos a partir de los datos
adquiridos con el sensor Riegl VQ 580 con una densidad de 22 puntos por m2 que cubre
75 ha con un total de 9´196.347 puntos.
Nube de puntos 4 clasificada manualmente, obtenida un sensor topográfico
aerotransportado Riegl VQ 580 con una densidad de 22 puntos por m2 que cubre 75 ha
con un total de 22´944.284 puntos.

22
6.1.2 Manejo de información.
Para el desarrollo del proyecto, fue necesaria la utilización de distintos software. En la
clasificación, se utilizó la plataforma MicroStation, con el complemento para el procesamiento
de datos LiDAR (Terra solid), que de acuerdo a los estándares emanados por ISPRS, es el
software que brinda la mayor capacidad para el manejo de una alta densidad de puntos y a su
vez, es el que presenta de manera organizada y estructurada las rutinas de macros que ayudan a
la categorización del terreno. Posteriormente se utilizó el software Global Mapper, para realizar
la comparación de los diferentes modelos digitales del terreno, teniendo la alternativa de
presentar de manera gráfica el producto de dicha comparación. Finalmente, se utilizó el software
Surfer para el análisis de los datos estadísticos de cada uno de los modelos digitales.
6.2 Etapa II. Preparación de la información
En esta parte del trabajo, se realizó la selección de tres zonas de trabajo, la primera con una
densidad de vegetación alta, otra con baja y finalmente una con altas pendientes. A cada una de
estas zonas se ejecutó un procedimiento diferente a través de una macro, teniendo en cuenta
variaciones, ángulo de iteración, distancia de iteración, ángulo del terreno.
6.3 Etapa III. Procesamiento de las nubes de puntos
Básicamente en esta fase del trabajo se realiza la generación de:
Modelos digitales de terreno (MDT).
Curvas de nivel.
Perfiles que permitan comparar los resultados de las macros.
Análisis estadístico.
Validación de la información.
6.4 Procedimiento empleado
Para dar claridad a la estructura de la ejecución en las etapas y poder observar los procedimientos
realizados, la figura 14 muestra el procedimiento empleado en el proyecto.

23
DIAGRAMA METODOLÓGICO
Figura 14. Diagrama de la metodología empleada.
Fuente: los autores

24
7. Desarrollo del proyecto
A continuación se muestra en detalle el procedimiento que se realizó para llevar a cabo las etapas
propuestas en la metodología.
7.1. Etapa I. Obtención y manejo de datos
7.1.1 Obtención de nubes de puntos.
A continuación se presenta una imagen por cada nube de puntos, en las que se puede observar el
nivel de detalle que tiene cada una.
Nube de puntos 1 tomada de un sensor topográfico aerotransportado Riegl VQ 580 con
una densidad de 22 puntos por m2. (ver figura 15)
Figura 15.Nube de puntos, 22 puntos por m2.
Fuente: los autores
Nube de puntos 2 tomada de un sensor topográfico aerotransportado Leica ALS70 con
una densidad de 4 puntos por m2. (ver figura 16)

25
Figura 16. Nube de puntos2, densidad 4 puntos por m2
Fuente: los autores
Nube de puntos obtenida por métodos fotogramétricos a partir de los datos adquiridos
con el sensor Riegl VQ 580 con una densidad de 22 puntos por m2. (ver figura 17)
Figura 17. Nube de puntos 3, generada y clasificada por métodos fotogramétricos.
Fuente: los autores.
7.1.2 Manejo de información.
En la actualidad el uso de datos LiDAR es cada vez más utilizado, por tanto existe gran cantidad
de información la cual explica los mecanismos de uso, las utilidades y la manera con la cual se
puede aprovechar la información. Como primera instancia, es necesario documentarse acerca del
uso de esta tecnología.
Así mismo, es necesario conocer que para el manejo de datos existen diferentes tipos de
software, como se explicó en el capítulo anterior.

26
7.2 Etapa II. Preparación de la información.
7.2.1 Selección de zonas con alta y baja densidad de vegetación, así como de altas pendientes.
Con el fin de realizar los análisis a los tipos de terreno descritos desde el inicio de proyecto, con
ayuda de la Ortofoto del área de estudio se seleccionaron las áreas de alta y baja densidad de
vegetación. Se eligieron zonas de 25 hectáreas. El análisis se llevó a cabo de la siguiente
manera:
a) Se realizó la selección visual de las zonas que presentan alta y baja densidad de vegetación,
como se puede observar en la figura 18.
Figura 18. Clasificación de las zonas con baja y alta densidad de vegetación.
Fuente: los autores.
b) Luego se eligen 5 zonas que cumplan las características indicadas anteriormente. Se hace un
segundo filtro, visualizando en el software MicroStation las áreas de trabajo seleccionadas
(figuras 19 y 20). Verificando de esta manera que cumplan con la condición de vegetación
deseada para desarrollar el proyecto.
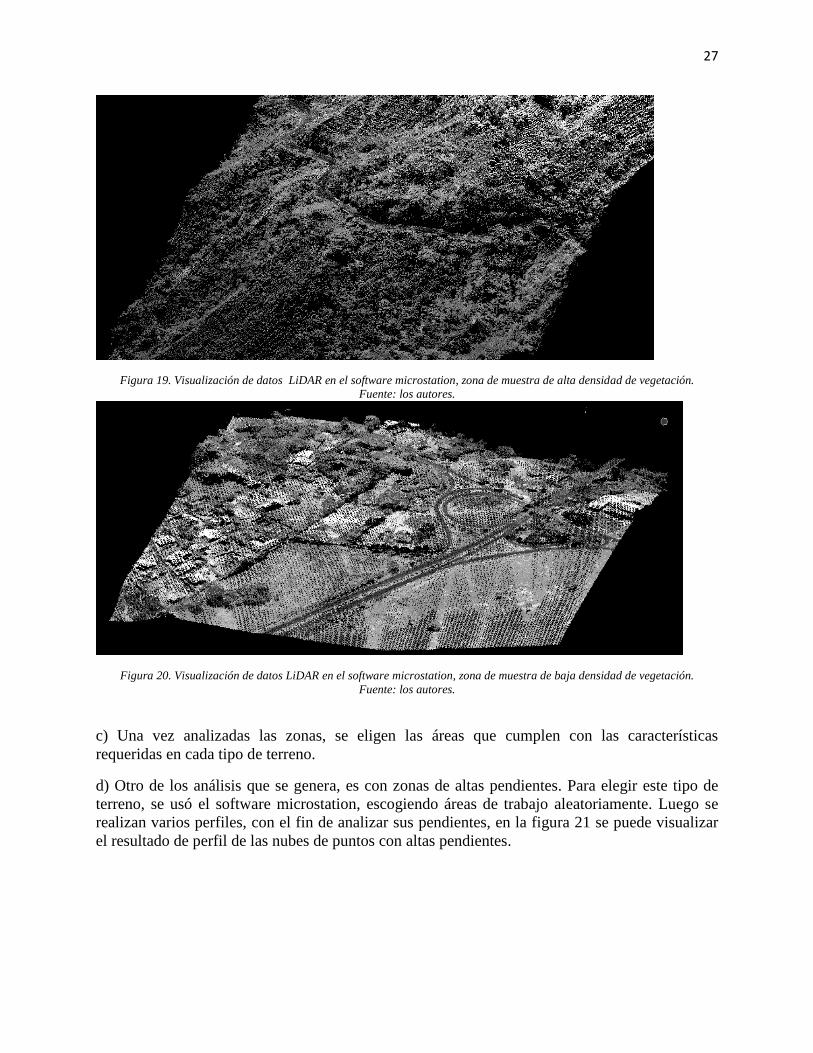
27
Figura 19. Visualización de datos LiDAR en el software microstation, zona de muestra de alta densidad de vegetación.
Fuente: los autores.
Figura 20. Visualización de datos LiDAR en el software microstation, zona de muestra de baja densidad de vegetación.
Fuente: los autores.
c) Una vez analizadas las zonas, se eligen las áreas que cumplen con las características
requeridas en cada tipo de terreno.
d) Otro de los análisis que se genera, es con zonas de altas pendientes. Para elegir este tipo de
terreno, se usó el software microstation, escogiendo áreas de trabajo aleatoriamente. Luego se
realizan varios perfiles, con el fin de analizar sus pendientes, en la figura 21 se puede visualizar
el resultado de perfil de las nubes de puntos con altas pendientes.
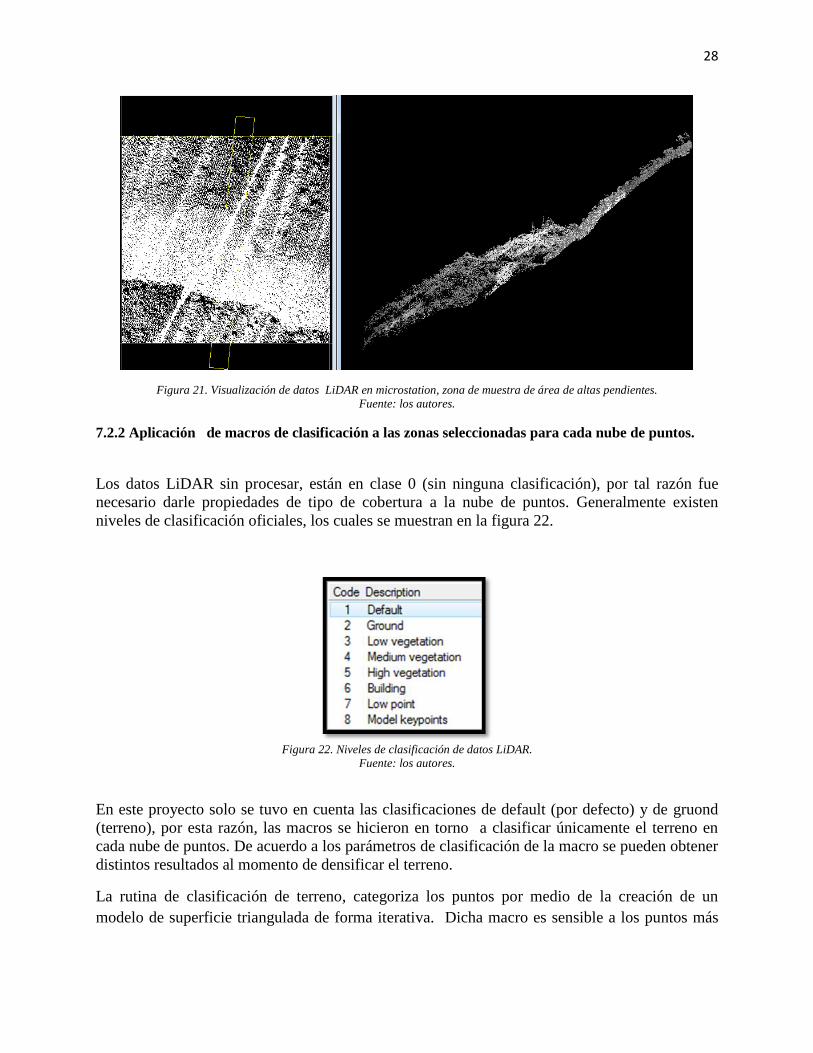
28
Figura 21. Visualización de datos LiDAR en microstation, zona de muestra de área de altas pendientes.
Fuente: los autores.
7.2.2 Aplicación de macros de clasificación a las zonas seleccionadas para cada nube de puntos.
Los datos LiDAR sin procesar, están en clase 0 (sin ninguna clasificación), por tal razón fue
necesario darle propiedades de tipo de cobertura a la nube de puntos. Generalmente existen
niveles de clasificación oficiales, los cuales se muestran en la figura 22.
Figura 22. Niveles de clasificación de datos LiDAR.
Fuente: los autores.
En este proyecto solo se tuvo en cuenta las clasificaciones de default (por defecto) y de gruond
(terreno), por esta razón, las macros se hicieron en torno a clasificar únicamente el terreno en
cada nube de puntos. De acuerdo a los parámetros de clasificación de la macro se pueden obtener
distintos resultados al momento de densificar el terreno.
La rutina de clasificación de terreno, categoriza los puntos por medio de la creación de un
modelo de superficie triangulada de forma iterativa. Dicha macro es sensible a los puntos más

29
bajos del set de datos, por lo tanto, antes de ejecutarlo, se debe realizar una o más etapas de
clasificación utilizando la rutina de puntos bajos.
El procedimiento comienza seleccionando puntos localizados en las zonas más bajas, ya que
estos pertenecen con seguridad al terreno. La selección del punto inicial se controla con el
parámetro “Max building size”. Por ejemplo, si el tamaño máximo edificio mide 40 m, la rutina
asume que cualquier área 40 x 40 m tiene al menos un punto sobre el nivel del suelo y que el
punto más bajo está en el nivel del terreno.
A continuación, la rutina construye un modelo de superficie (TIN) de los puntos iníciales en la
tierra. Los triángulos en este modelo inicial están en su mayoría por debajo del nivel de la
superficie y sólo los vértices están tocando el suelo. En el siguiente paso, la macro utiliza
iteraciones para añadir cada vez más puntos de terreno.
El parámetro de ángulo de iteración, se entiende como el ángulo máximo entre un punto, su
proyección entre el plano del triángulo y el vértice del triángulo más cercano. Este es el
parámetro que controla la cantidad de puntos que se clasifican como terreno. Cuanto menor sea
en ángulo de iteración, la macro es menos sensible a las variaciones del terreno. Por lo general,
para terrenos planos se usa un ángulo pequeño y para zonas montañosas se aplica un valor más
grande. (survey, 2015)
La distancia de iteración por su parte, asegura que los valores no den grandes saltos hacia arriba,
si los triángulos son grandes; esto evita clasificar puntos de terreno que son demasiado altos, que
por ende no corresponden a la categoría de suelo. (Ver figura 23)
Figura 23. Explicación grafica de parámetros de clasificación.
Fuente: Los autores
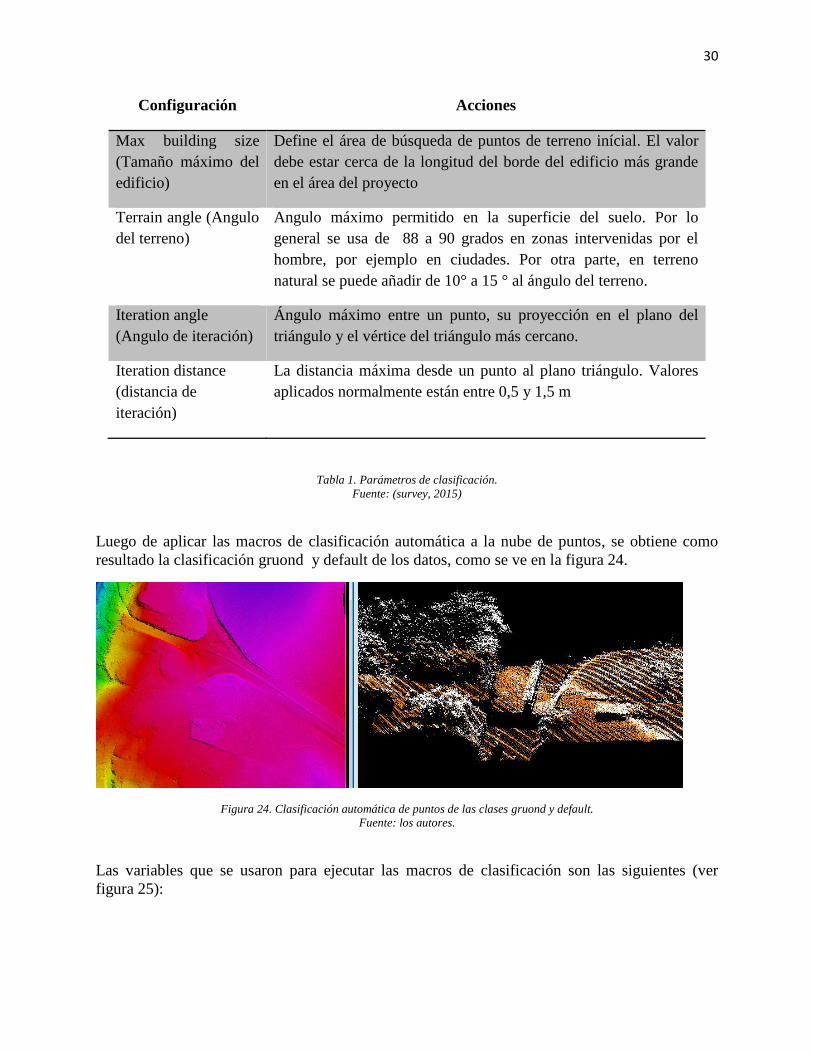
30
Configuración Acciones
Max building size
(Tamaño máximo del
edificio)
Define el área de búsqueda de puntos de terreno inícial. El valor
debe estar cerca de la longitud del borde del edificio más grande
en el área del proyecto
Terrain angle (Angulo
del terreno)
Angulo máximo permitido en la superficie del suelo. Por lo
general se usa de 88 a 90 grados en zonas intervenidas por el
hombre, por ejemplo en ciudades. Por otra parte, en terreno
natural se puede añadir de 10° a 15 ° al ángulo del terreno.
Iteration angle
(Angulo de iteración)
Ángulo máximo entre un punto, su proyección en el plano del
triángulo y el vértice del triángulo más cercano.
Iteration distance
(distancia de
iteración)
La distancia máxima desde un punto al plano triángulo. Valores
aplicados normalmente están entre 0,5 y 1,5 m
Tabla 1. Parámetros de clasificación.
Fuente: (survey, 2015)
Luego de aplicar las macros de clasificación automática a la nube de puntos, se obtiene como
resultado la clasificación gruond y default de los datos, como se ve en la figura 24.
Figura 24. Clasificación automática de puntos de las clases gruond y default.
Fuente: los autores.
Las variables que se usaron para ejecutar las macros de clasificación son las siguientes (ver
figura 25):
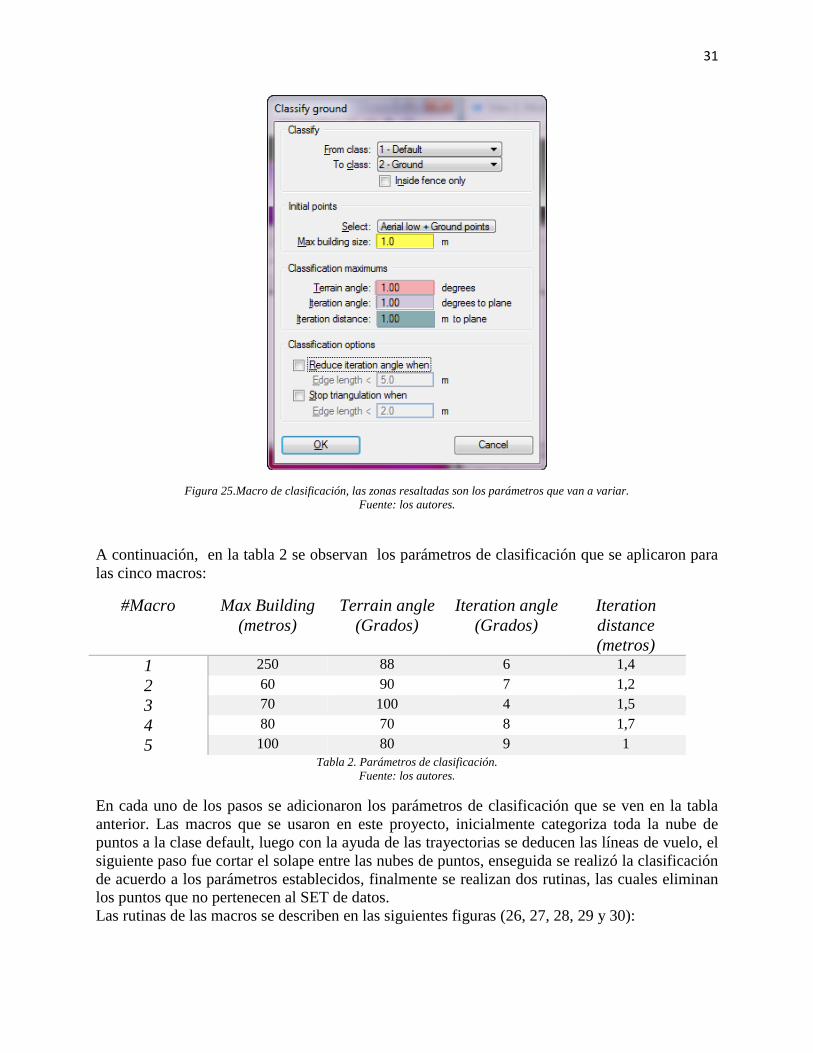
31
Figura 25.Macro de clasificación, las zonas resaltadas son los parámetros que van a variar.
Fuente: los autores.
A continuación, en la tabla 2 se observan los parámetros de clasificación que se aplicaron para
las cinco macros:
#Macro Max Building
(metros)
Terrain angle
(Grados)
Iteration angle
(Grados)
Iteration
distance
(metros)
1 250 88 6 1,4
2 60 90 7 1,2
3 70 100 4 1,5
4 80 70 8 1,7
5 100 80 9 1
Tabla 2. Parámetros de clasificación.
Fuente: los autores.
En cada uno de los pasos se adicionaron los parámetros de clasificación que se ven en la tabla
anterior. Las macros que se usaron en este proyecto, inicialmente categoriza toda la nube de
puntos a la clase default, luego con la ayuda de las trayectorias se deducen las líneas de vuelo, el
siguiente paso fue cortar el solape entre las nubes de puntos, enseguida se realizó la clasificación
de acuerdo a los parámetros establecidos, finalmente se realizan dos rutinas, las cuales eliminan
los puntos que no pertenecen al SET de datos.
Las rutinas de las macros se describen en las siguientes figuras (26, 27, 28, 29 y 30):

32
Figura 26. Macro de clasificación 1.
Fuente: Los autores.
Figura 27.Macro de clasificación 2
Fuente: los autores.
Figura 28.Macro de clasificación 3
Fuente: los autores.

33
Figura 29.Macro de clasificación 4
Fuente: los autores.
Figura 30.Macro de clasificación 5
Fuente: los autores.
Para obtener la nube de puntos 4, luego de haber clasificado el SET de datos con cada una de las
macros, se hizo una clasificación manual, con el fin, de mejorar la información del terreno, esta
nube de puntos clasificada sirvió de referencia para comparar el nivel de clasificación que tiene
cada una de las macros.
Como se puede observar en las figuras (31, 32, 33, 34, 35 y 36), las macros que se aplicaron a la
nube de puntos no clasifican la totalidad de la información.

34
Figura 31.Resultado Macro de clasificación 1, nube de
puntos 1, baja vegetación
Fuente: los autores.
Figura 32.Resultado Macro de clasificación 2 nube de
puntos 1, baja vegetación
Fuente: los autores.
Figura 33.Resultado Macro de clasificación 3, nube de
puntos 1, baja vegetación
Fuente: los autores.
Figura 34.Resultado Macro de clasificación 4, nube de
puntos 1, baja vegetación
Fuente: los autores.
Figura 35. Resultado Macro de clasificación 5, nube de
puntos 1, baja vegetación
Fuente: los autores.
Figura 36. Resultado Clasificación Manual, nube de
puntos 1, baja vegetación
Fuente: los autores.
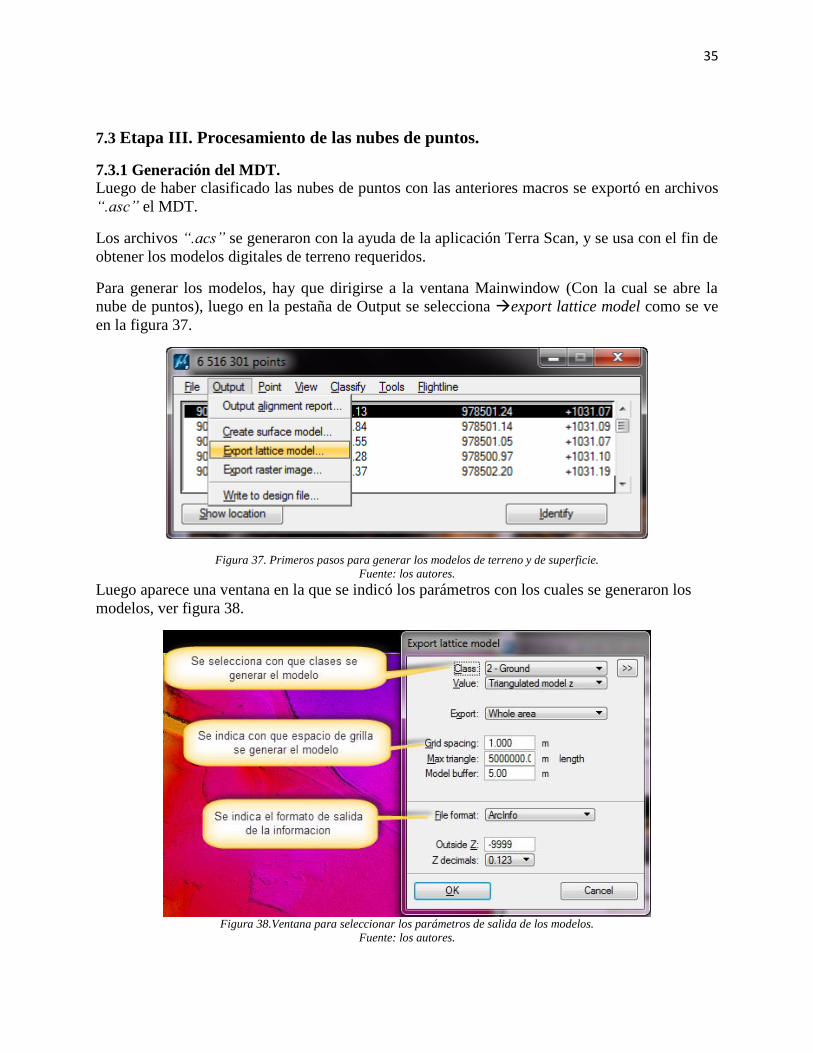
35
7.3 Etapa III. Procesamiento de las nubes de puntos.
7.3.1 Generación del MDT.
Luego de haber clasificado las nubes de puntos con las anteriores macros se exportó en archivos
“.asc” el MDT.
Los archivos “.acs” se generaron con la ayuda de la aplicación Terra Scan, y se usa con el fin de
obtener los modelos digitales de terreno requeridos.
Para generar los modelos, hay que dirigirse a la ventana Mainwindow (Con la cual se abre la
nube de puntos), luego en la pestaña de Output se selecciona export lattice model como se ve
en la figura 37.
Figura 37. Primeros pasos para generar los modelos de terreno y de superficie.
Fuente: los autores.
Luego aparece una ventana en la que se indicó los parámetros con los cuales se generaron los
modelos, ver figura 38.
Figura 38.Ventana para seleccionar los parámetros de salida de los modelos.
Fuente: los autores.
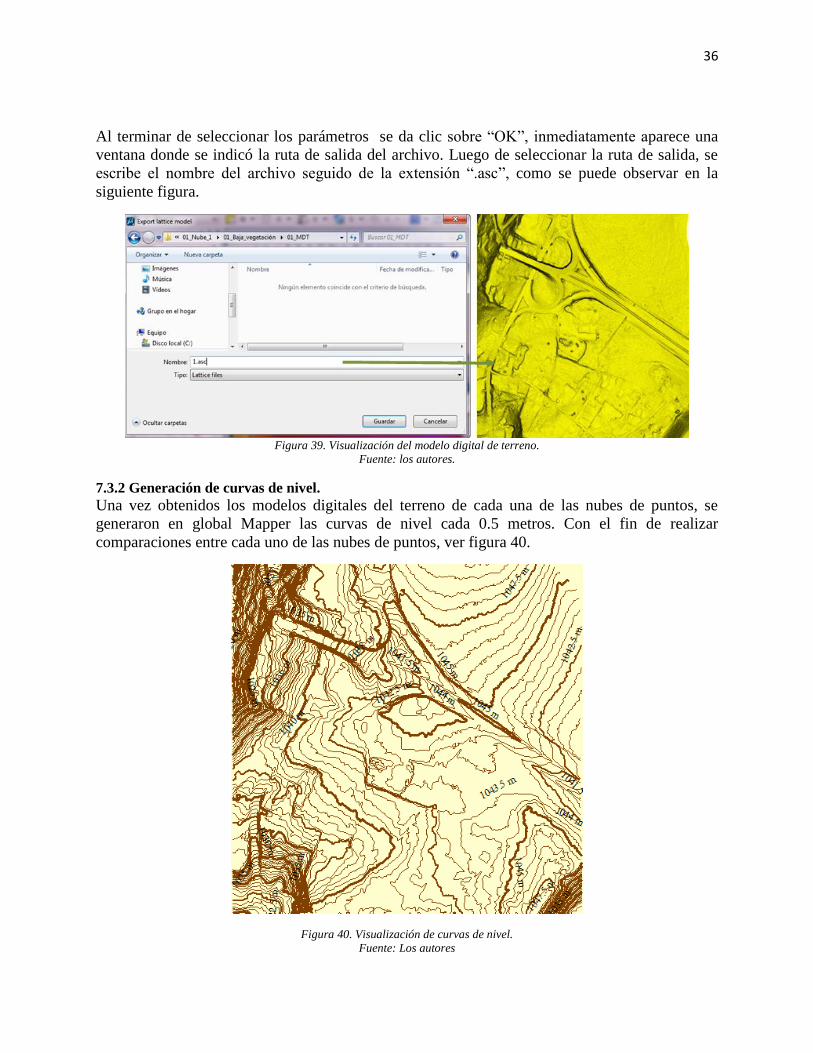
36
Al terminar de seleccionar los parámetros se da clic sobre “OK”, inmediatamente aparece una
ventana donde se indicó la ruta de salida del archivo. Luego de seleccionar la ruta de salida, se
escribe el nombre del archivo seguido de la extensión “.asc”, como se puede observar en la
siguiente figura.
Figura 39. Visualización del modelo digital de terreno.
Fuente: los autores.
7.3.2 Generación de curvas de nivel.
Una vez obtenidos los modelos digitales del terreno de cada una de las nubes de puntos, se
generaron en global Mapper las curvas de nivel cada 0.5 metros. Con el fin de realizar
comparaciones entre cada uno de las nubes de puntos, ver figura 40.
Figura 40. Visualización de curvas de nivel. Fuente: Los autores

37
7.3.3 Generación perfiles que permitan comparar los resultados de las macros.
Para generar la comparación entre modelos, en el software microstation se cargaron las nubes de
puntos que se obtuvieron a partir de cada una de las macros y posteriormente visualizarlos.
Se realizaron los perfiles de comparación trazando dos transversales a lo lago de los modelos
como se ve en la figura 41.
Figura 41. Generación de perfiles.
Fuente: Los autores
A continuación con la ayuda de Terra model se generaron los perfiles. Para ello se selecciona
una de las líneas de perfil y se dirige a la opción “Drawprofile”. En esta opción se elige cada uno
de los modelos y se generan los perfiles sobre los modelos seleccionados, ver figura 42.
Figura 42. Ejemplo de perfil Fuente: Los autores

38
7.3.4 Realizar análisis estadístico
Con el fin de generar un soporte visual y estadístico de la información, se generaron en
microstation MDT de cada una de las nubes de puntos, como se ve en la tabla 3.
Tabla 3. Modelos generados para comparación de las macros y los tipos de terreno
Fuente: los autores
Como parte de los métodos de validación de la información entre las diferentes nubes de puntos,
se realizó un control de cotas, donde se encuentra la diferencia de elevación entre la nube de
puntos 1, que es la nube que tiene mejor densidad de puntos, contra la nube de puntos 2 (4
puntos x m2) y la nube de puntos 3 (obtenida por métodos fotogramétricos).
Para llevar a cabo el control de cotas, se realizó una cuadricula de 100 x 100 a lo largo del área
de estudio, posteriormente se tomaron pequeñas zonas de muestras, con las cuales se comparó la
información entre cotas, como se puede apreciar en la figura 43.
Figura 43. Zonas de muestra para control de cotas Fuente: Los autores
7.3.5 Validación de la información.
Para realizar la validación de los datos se realizó una comparación de modelos digitales de
terreno, haciendo uso del programa Global Mapper, en la figura 44 se puede visualizar la
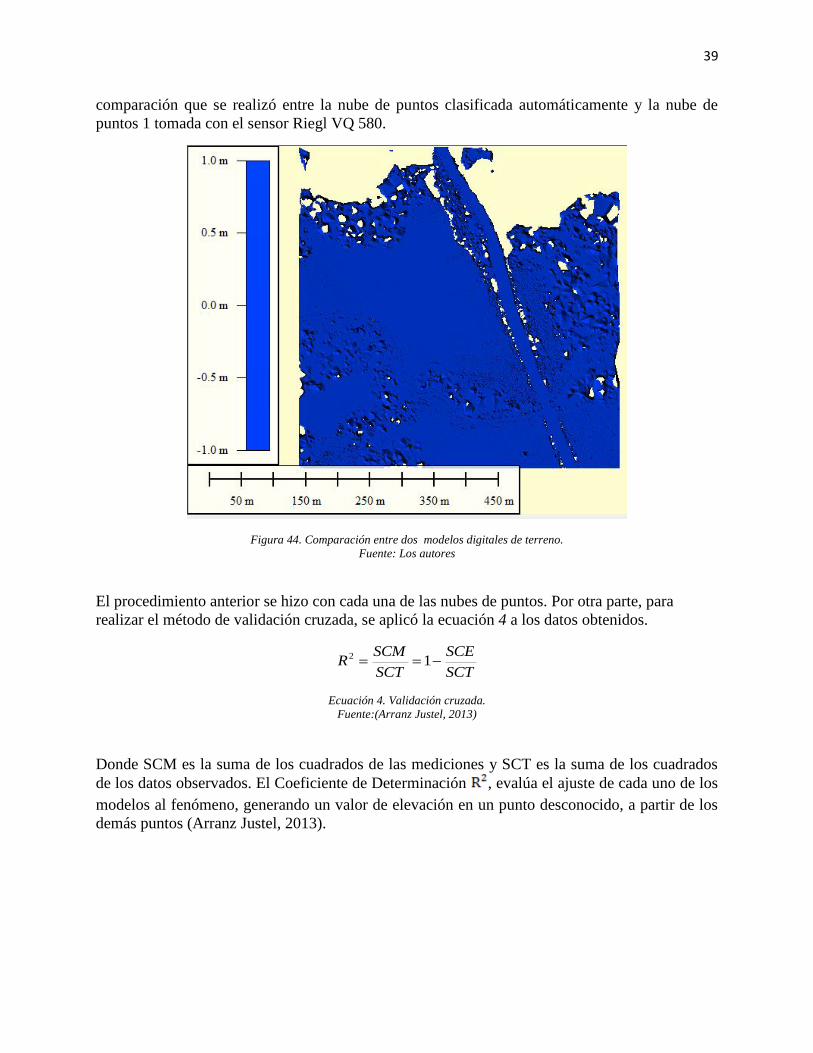
39
comparación que se realizó entre la nube de puntos clasificada automáticamente y la nube de
puntos 1 tomada con el sensor Riegl VQ 580.
Figura 44. Comparación entre dos modelos digitales de terreno.
Fuente: Los autores
El procedimiento anterior se hizo con cada una de las nubes de puntos. Por otra parte, para
realizar el método de validación cruzada, se aplicó la ecuación 4 a los datos obtenidos.
SCT
SCE
SCT
SCMR 12
Ecuación 4. Validación cruzada.
Fuente:(Arranz Justel, 2013)
Donde SCM es la suma de los cuadrados de las mediciones y SCT es la suma de los cuadrados
de los datos observados. El Coeficiente de Determinación , evalúa el ajuste de cada uno de los
modelos al fenómeno, generando un valor de elevación en un punto desconocido, a partir de los
demás puntos (Arranz Justel, 2013).

40
8. Resultados
En este capítulo se presentan los resultados obtenidos, luego de llevar a cabo la metodología
explicada anteriormente, estos se muestran de manera gráfica y mediante de tablas, las cuales
revelan los valores logrados en las pruebas realizadas.
8.1 Clasificación nube de puntos 1 A continuación, se pueden observar los resultados de cada una de la macros de clasificación,
aplicadas a cada nube de puntos, con sus respectivas zonas (densidad de vegetación alta, baja y
altas pendientes).
8.1.1Baja vegetación. A continuación se observan los resultados obtenidos después de aplicar las cinco macros de
clasificación a la nube de puntos 1, tomada con un sensor topográfico Riegl VQ 580, cuya
densidad es de 22 puntos por metro cuadrado. En las figuras 45, 46, 47, 48 y 49, se pueden
interpretar el comportamiento de cada una de estas, al clasificar el terreno y en la figura 50, se
visualiza la nube de puntos clasificada manualmente.
Figura 45. Resultado Macro de clasificación 1
Fuente: los autores.
Figura 46. Resultado Macro de clasificación 2
Fuente: los autores.

41
Figura 47. Resultado Macro de clasificación 3
Fuente: los autores.
Figura 48. Resultado Macro de clasificación 4
Fuente: los autores.
Figura 49. Resultado Macro de clasificación 5
Fuente: los autores.
Figura 50. Resultado clasificación manual
Fuente: los autores.
8.1.2Alta vegetación
Se aplican las cinco macros de clasificación para la nube de puntos 1 seleccionada, que presenta
una alta densidad de vegetación como se muestra en las figuras 51, 52, 53, 54,55, 56.
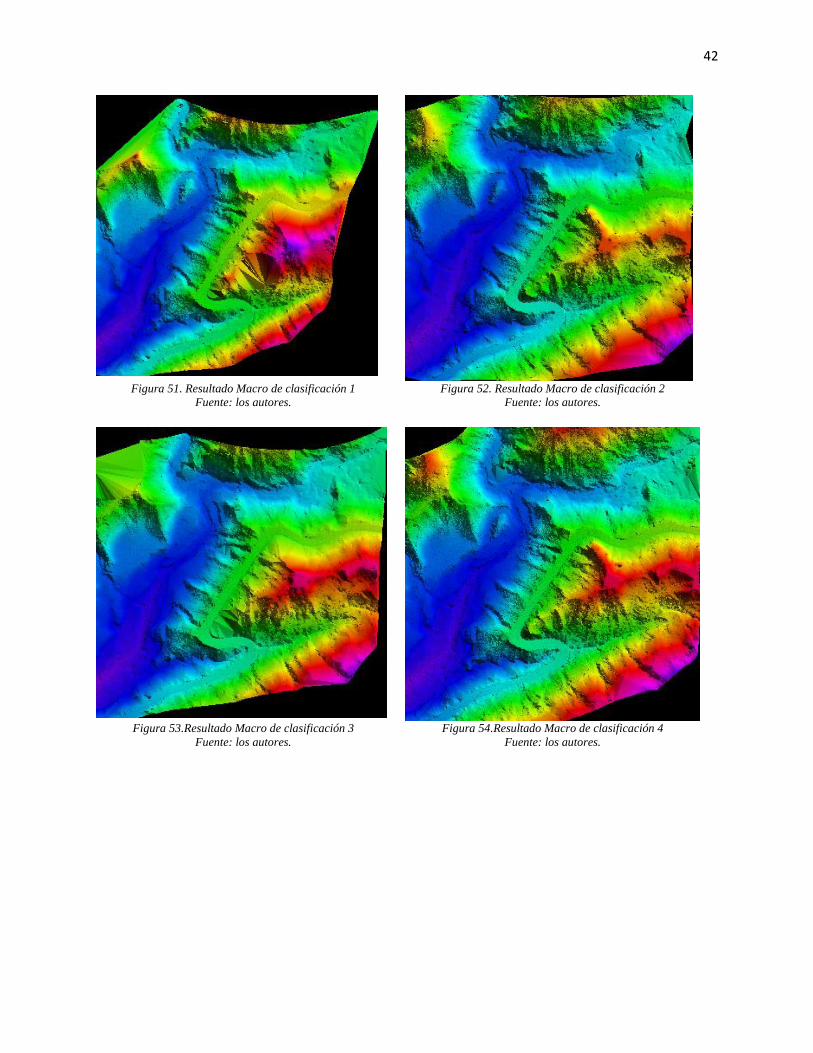
42
Figura 51. Resultado Macro de clasificación 1
Fuente: los autores.
Figura 52. Resultado Macro de clasificación 2
Fuente: los autores.
Figura 53.Resultado Macro de clasificación 3
Fuente: los autores.
Figura 54.Resultado Macro de clasificación 4
Fuente: los autores.

43
Figura 55. Resultado Macro de clasificación 5
Fuente: los autores.
Figura 56. Resultado clasificación manual
Fuente: los autores.
8.1.3Altas pendientes
Al igual que con las zonas anteriores, se corren las cinco macros de clasificación para la zona
seleccionada que presenta características de altas pendientes, como se muestra en las figuras 57,
58, 59, 60, 61, 62.
Figura 57. Resultado Macro de clasificación 1
Fuente: los autores.
Figura 58 .Resultado Macro de clasificación 2
Fuente: los autores.
44
Figura 59. Resultado Macro de clasificación 3
Fuente: los autores.
Figura 60. Resultado Macro de clasificación 4
Fuente: los autores.
Figura 61. Resultado Macro de clasificación 5
Fuente: los autores.
Figura 62. Resultado clasificación manual
Fuente: los autores.
8.2 Clasificación nube de puntos 2
8.2.1 Baja vegetación.
El procedimiento anteriormente mostrado se realizó de igual manera para la nube de puntos 2,
tomada con un sensor topográfico aerotransportado Leica ALS 70, con una densidad de cuatro
puntos por metro cuadrado. En las figuras 63, 64, 65, 66, 67, se muestra el resultado de la
aplicación de cada macro.

45
Figura 63.Resultado Macro de clasificación 1
Fuente: los autores.
Figura 64. Resultado Macro de clasificación 2
Fuente: los autores.
Figura 65. Resultado Macro de clasificación 3
Fuente: los autores.
Figura 66. Resultado Macro de clasificación 4
Fuente: los autores.

46
Figura 67. Resultado Macro de clasificación 5
Fuente: los autores.
8.2.2 Alta vegetación.
A continuación se muestra el resultado arrojado, luego de utilizar las cinco macros de
clasificación en la zona seleccionada, con condiciones de alta pendiente para la nube de puntos 2,
como se puede observar en las figuras 68, 69, 70, 71 y 72.
Figura 68. Resultado Macro de clasificación 1
Fuente: los autores.
Figura 69. Resultado Macro de clasificación 2
Fuente: los autores.

47
Figura 70. Resultado Macro de clasificación 3
Fuente: los autores.
Figura 71. Resultado Macro de clasificación 4
Fuente: los autores.
Figura 72. Resultado Macro de clasificación 5
Fuente: los autores.
8.2.3 Altas pendientes.
En las figuras 72, 73, 74, 75 y 76 se observan los resultados de las cinco macros de clasificación
aplicadas para la nube de puntos 2, en la zona que presenta altas pendientes.
48
Figura 73. Resultado Macro de clasificación 1
Fuente: los autores.
Figura 74. Resultado Macro de clasificación 2
Fuente: los autores.
Figura 75. Resultado Macro de clasificación 3
Fuente: los autores.
Figura 76. Resultado Macro de clasificación 4
Fuente: los autores.

49
Figura 77. Resultado Macro de clasificación 5
Fuente: los autores.
8.3 Análisis de macros de clasificación
Con el fin de analizar el porcentaje de puntos de terreno, que una macro de clasificación puede
adicionar a una nube de puntos, se realizó una comparación entre las áreas de estudio 1, 2 y 3
para cada tipo de zona (alta, baja densidad de vegetación y alta pendiente). Para esto se midió la
densidad de puntos de terreno que se obtuvo por cada macro. (Ver tabla 4)
Tabla 4. Análisis de densidades de puntos de terreno, por macro de clasificación
Fuente: los autores
Al analizar la nube de puntos 1, el dato que más resalta por su baja densidad de información es el
de la macro 3, en los tres tipos de cobertura tuvo el porcentaje menor de clasificación del terreno.
(Ver tabla5)
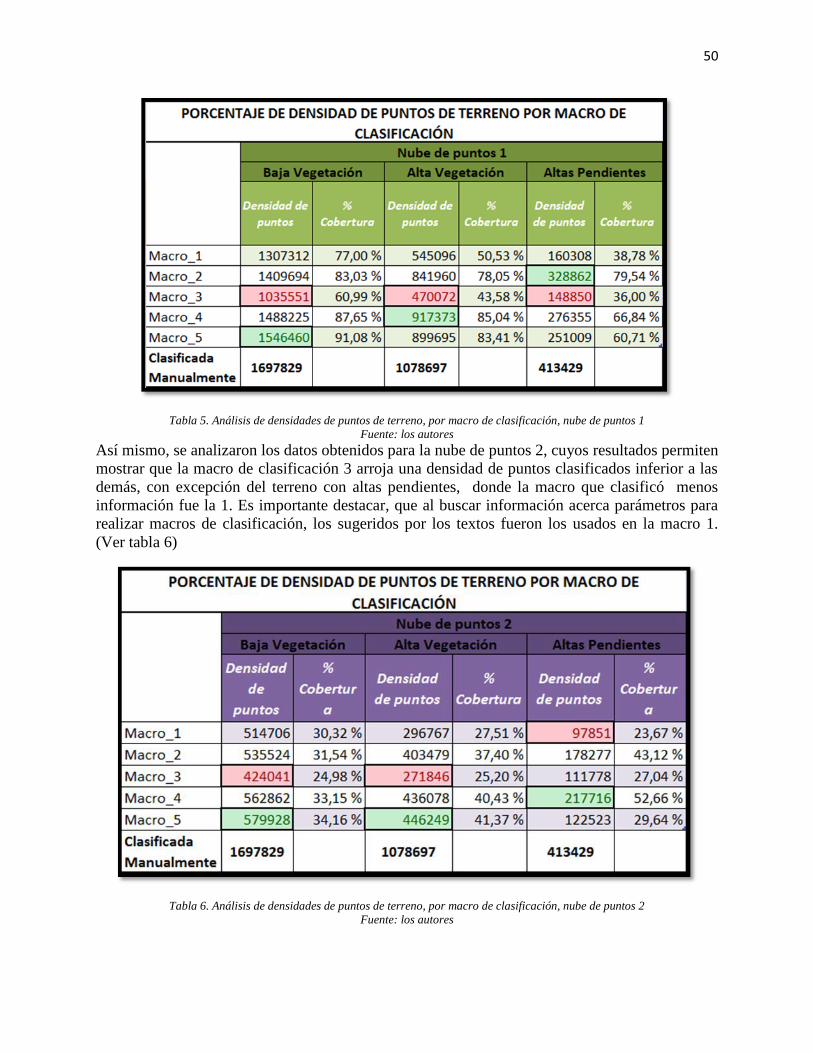
50
Tabla 5. Análisis de densidades de puntos de terreno, por macro de clasificación, nube de puntos 1
Fuente: los autores
Así mismo, se analizaron los datos obtenidos para la nube de puntos 2, cuyos resultados permiten
mostrar que la macro de clasificación 3 arroja una densidad de puntos clasificados inferior a las
demás, con excepción del terreno con altas pendientes, donde la macro que clasificó menos
información fue la 1. Es importante destacar, que al buscar información acerca parámetros para
realizar macros de clasificación, los sugeridos por los textos fueron los usados en la macro 1.
(Ver tabla 6)
Tabla 6. Análisis de densidades de puntos de terreno, por macro de clasificación, nube de puntos 2
Fuente: los autores

51
A continuación, en la tabla 7 se observan las macros que clasificaron la mayor y menor densidad
de información, al ser aplicadas a las nubes de puntos, tenido en cuenta el tipo de terreno.
Tabla 7. Comportamiento de macros por tipo de terreno y nubes puntos
Fuente: los autores
En la nube de puntos 1, las macros que obtuvieron una mayor cantidad de información
clasificada, fueron las macros 4, 5 y 2. Como se mencionó anteriormente la macro 3, en las
coberturas estudiadas presentó los resultados más bajos al momento de clasificar los puntos de
terreno. (Ver tabla 8)
Tabla 8. Comportamiento de macros por tipo de terreno, nube de puntos 1
Fuente: los autores
Por otra parte la nube de puntos 2 presentó un porcentaje mayor de clasificación con el manejo
de las macros 5 y 4. Al igual que en la nube de puntos 1, las características de la macro 3 no
arroja resultados mayores en las áreas de trabajo que presentan baja y alta densidad de
vegetación. (Ver tabla 9)

52
Tabla 9. Comportamiento de macros por tipo de terreno, nube de puntos 2
Fuente: los autores
8.4 Análisis con curvas de nivel
Luego de aplicarles las diferentes macros, se hicieron comparaciones con las curvas de nivel
generadas en cada tipo de terreno analizados en el proyecto. Estas se llevaron a cabo con el fin
de observar su comportamiento en una misma superficie, con 3 nubes de puntos diferentes.
Como se observa en las siguientes figuras, las curvas generadas con la nube de puntos 3
sobresalen respecto a las curvas obtenidas a partir de la 1 y 2. La razón, es que este SET de datos
tiene más puntos, sin embargo, estos no solo corresponden al terreno real, sino que incluyen
elementos de la superficie que no corresponden al mismo.
A continuación se puede apreciar los resultados obtenidos al realizar las curvas de nivel de las
tres nubes de puntos, siendo divididos por los tipos de zonas de trabajo escogidas.
8.4.1 Baja vegetación
En la figura 78 Y 79 se observan, las curvas de nivel obtenidas de las tres nubes de puntos,
representando con color azul la nube de puntos 1, magenta la 2 y amarillo la 3.

53
Figura 78.Comparación curvas de nivel Baja vegetación
Fuente: los autores.
8.4.2Alta vegetación
En la figura 79 se observa las curvas de nivel, para la zona que presenta alta densidad de
vegetación, representando con color azul la nube de puntos 1, magenta la 2 y amarillo la 3.

54
Figura 79. Comparación curvas de nivel Alta vegetación
Fuente: los autores.
8.4.3 Alta Pendiente
En la figura 80 se observa las curvas de nivel para la zona de altas pendientes, en esta se puede
evidenciar las zonas en las que no hay información tomada por el sensor Leica ALS 70 para la
nube de puntos 2.

55
Figura 80.Comparación curvas de nivel Altas Pendientes
Fuente: los autores.
8.5 Perfiles de comparación
Con el fin de observar detalladamente, el comportamiento de las zonas de estudio, en las tres
nubes de puntos, se realizan perfiles de comparación entre los modelos digitales de terreno.
Este tipo de comparación se realiza con dos fines:
Comprobar mediante dicho método, que tipo de macro tiene una mejor clasificación,
respecto a la nube de puntos que se clasifico manualmente.
Analizar el comportamiento de cada uno de los tipos de terreno, en cada una de las nubes
de puntos.

56
8.5.1 Comprobar mediante perfiles, que tipo de macro tiene una mejor clasificación,
respecto a la nube de puntos que se clasifico manualmente.
En el siguiente perfil se observa, que todos los modelos tienen comportamiento similar. Por tal
razón no se podría elegir por este método cual es la macro que tiene la mejor clasificación.
En la figura 80 se visualiza las cinco macros aplicadas, adicionalmente aparece una macro 6 que
hace referencia a la nube de puntos clasificada manualmente, siendo esta el punto de referencia
para este proyecto.
Figura 81. Comparacion entre perfiles de baja vegetación en la nube 1
Fuente: los autores.

57
En el siguiente perfil (figura 82) se observa que la macro 5, se acerca mucho al perfil de la nube
clasificada.
Figura 82. Comparacion entre perfiles de alta vegetación en la nube 1
Fuente: los autores.
Como se ve en la figura 83, el perfil de la macro 5 (Línea magenta) se acerca en muchos de sus
tramos al perfil de la nube de puntos clasificada manualmente.

58
Figura 83. Comparacion entre perfiles de altas pendientes en la nube 1
Fuente: los autores.
8.5.2 Analizar el comportamiento de cada uno de los tipos de terreno, en cada una de
las nubes de puntos.
En la figura 84 se observan los perfiles de las nubes de puntos, para el terreno con condiciones
de baja densidad de vegetación, visualizando con color azul el SET de datos 1, la 2 con color
verde, la 3 con rojo y la clasificada manualmente con amarillo.
El perfil de la nube de puntos 3 tiene un comportamiento disperso respecto al perfil de la nube de
puntos clasificada manualmente, debido a que la información obtenida por métodos

59
fotogramétricos, puede clasificar elementos de la superficie como terreno, que no corresponden a
este.
Figura 84.Comparacion entre perfiles de baja vegetación
Fuente: los autores.
En la figura 85 se muestran los perfiles generados a partir de la información obtenida con los
sensores RIEGL VQ 580, Leica ALS 70, la nube de puntos tomada como referencia y la obtenida
por métodos fotogramétricos, representándose con colores azul, verde, amarillo y rojo
respectivamente, para la zona con que presenta alta densidad de vegetación.

60
Figura 85.Comparacion entre perfiles de alta vegetación
Fuente: los autores.
A continuación en la figura 86 se muestra los perfiles correspondientes a la zona de trabajo con
altas pendientes de las nubes de puntos 1, 2, 3 y la clasificada manualmente, donde se observa
que la información obtenida por métodos fotogramétricos, se aleja de la clasificación manual
(tomada como referencia).

61
Figura 86. Comparacion entre perfiles de altas pendientes
Fuente: los autores.

62
8.6 Control de cotas
Cuando se tiene un SET de datos es importante conocer la desviación que estos presentan en la
distribución respecto a la media aritmética. Teniendo en cuenta lo anterior, como se observa en
las siguientes tablas el control de cotas que se realizó con la nube de puntos 3, presenta
desviación estándar superiores a los 3 metros respecto a la nube de puntos 1, lo cual indica que
esta no es confiable.
El control de cotas que se observa en la nube de puntos 2, es inferior a los 50 centímetros, sin
embargo no es un dato del cual se tenga certeza ya que el valor que presenta en la desviación
estándar es muy alto.
El error medio cuadrático, por su parte es útil para interpretar que tan apropiado es un modelo
determinado para la información, es decir, que tanto se pude confiar del modelo propuesto para
comparar la realidad de los datos. Al analizar los resultados de los datos, se observa que el error
medio cuadrático de la nube 3 es superior a los 4.5 metros, con lo que se pude concluir una vez
más que dicha nube de puntos no presenta una información confiable. (Ver figuras 87, 88, 89,
90, 91 y 92)
Figura 87. Resultado control de cotas
01_Nube2_Baja_Vegetacion
Fuente: los autores.
Figura 88. Resultado control de cotas
02_Nube2_Alta_Vegetacion
Fuente: los autores.
Figura 89. Resultado control de cotas
03_Nube2_Altas_Pendientes
Fuente: los autores.
Figura 90. Resultado control de cotas
04_Nube3_Baja_Vegetacion
Fuente: los autores.
Figura 91. Resultado control de cotas
05_Nube3_Alta_Vegetacion
Fuente: los autores.
Figura 92. Resultado control de cotas
06_Nube3_Altas_Pendientes
Fuente: los autores.
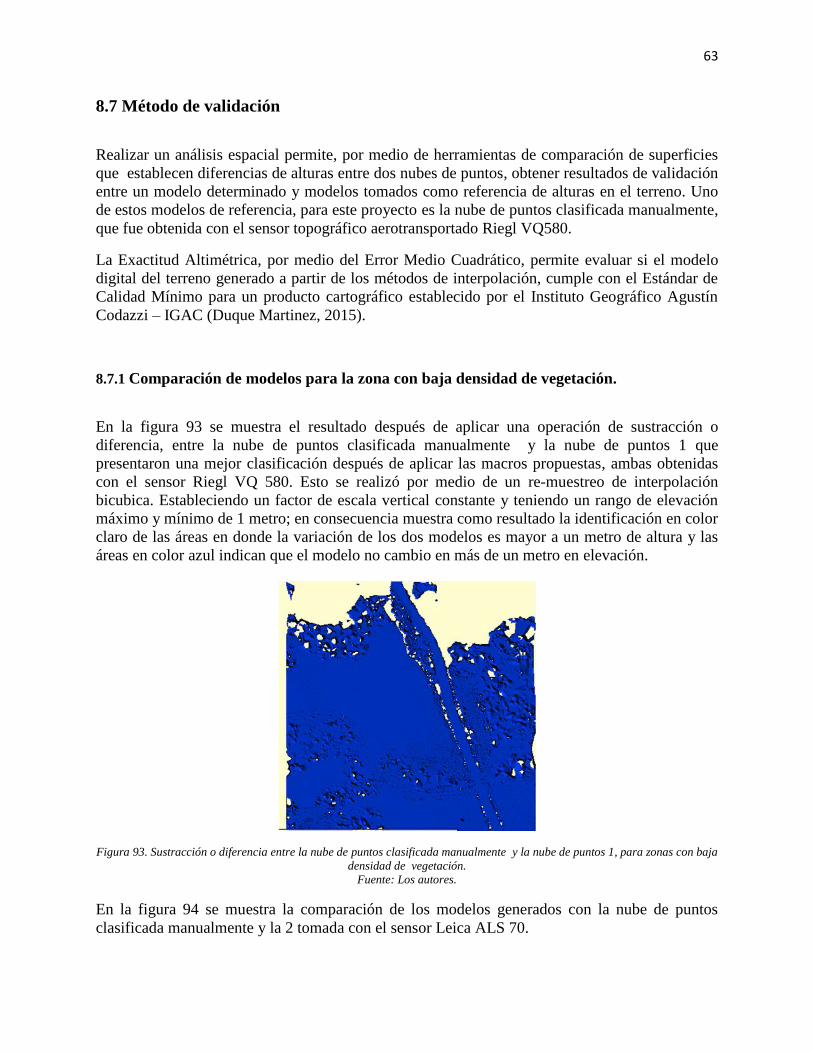
63
8.7 Método de validación
Realizar un análisis espacial permite, por medio de herramientas de comparación de superficies
que establecen diferencias de alturas entre dos nubes de puntos, obtener resultados de validación
entre un modelo determinado y modelos tomados como referencia de alturas en el terreno. Uno
de estos modelos de referencia, para este proyecto es la nube de puntos clasificada manualmente,
que fue obtenida con el sensor topográfico aerotransportado Riegl VQ580.
La Exactitud Altimétrica, por medio del Error Medio Cuadrático, permite evaluar si el modelo
digital del terreno generado a partir de los métodos de interpolación, cumple con el Estándar de
Calidad Mínimo para un producto cartográfico establecido por el Instituto Geográfico Agustín
Codazzi – IGAC (Duque Martinez, 2015).
8.7.1 Comparación de modelos para la zona con baja densidad de vegetación.
En la figura 93 se muestra el resultado después de aplicar una operación de sustracción o
diferencia, entre la nube de puntos clasificada manualmente y la nube de puntos 1 que
presentaron una mejor clasificación después de aplicar las macros propuestas, ambas obtenidas
con el sensor Riegl VQ 580. Esto se realizó por medio de un re-muestreo de interpolación
bicubica. Estableciendo un factor de escala vertical constante y teniendo un rango de elevación
máximo y mínimo de 1 metro; en consecuencia muestra como resultado la identificación en color
claro de las áreas en donde la variación de los dos modelos es mayor a un metro de altura y las
áreas en color azul indican que el modelo no cambio en más de un metro en elevación.
Figura 93. Sustracción o diferencia entre la nube de puntos clasificada manualmente y la nube de puntos 1, para zonas con baja
densidad de vegetación.
Fuente: Los autores.
En la figura 94 se muestra la comparación de los modelos generados con la nube de puntos
clasificada manualmente y la 2 tomada con el sensor Leica ALS 70.

64
Figura 94. Sustracción o diferencia entre la nube de puntos clasificada manualmente y la nube de puntos 2, para zonas con
baja densidad de vegetación.
Fuente: Los autores
En la figura 95 se muestra la comparación de los modelos generados con la nube de puntos
clasificada manualmente y la 3 obtenida por métodos fotogramétricos.
Figura 95. Sustracción o diferencia entre la nube de puntos clasificada manualmente y la nube de puntos 3, para zonas con baja
densidad de vegetación.
Fuente: Los autores

65
8.7.2 Comparación de modelos para la zona con alta densidad de vegetación
A continuación en las figuras 96, 97 y 98 se muestra comparación de los modelos generados
entre la nube de puntos manual y las tres restantes.
Figura 96. Sustracción o diferencia entre la nube de puntos clasificada manualmente y la nube de puntos 1, zona de alta
densidad de vegetación.
Fuente: Los autores
Figura 97. Sustracción o diferencia entre la nube de puntos clasificada manualmente y la nube de puntos 2, zona de alta
densidad de vegetación.
Fuente: Los autores
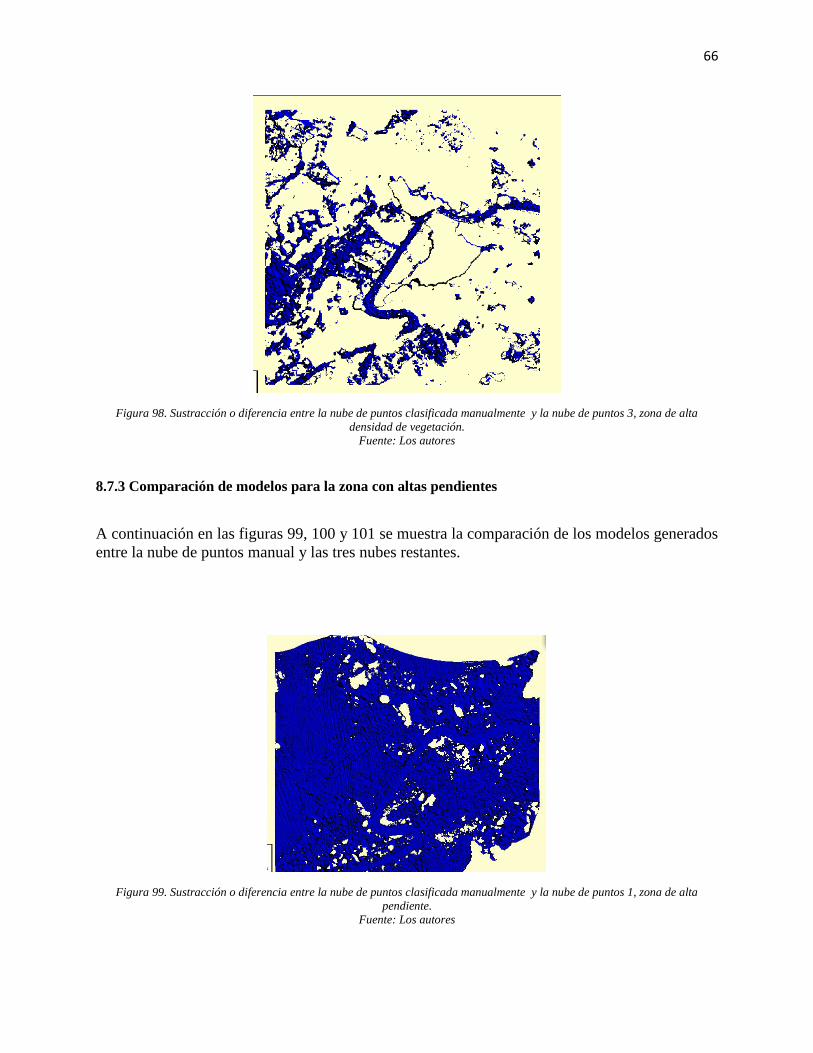
66
Figura 98. Sustracción o diferencia entre la nube de puntos clasificada manualmente y la nube de puntos 3, zona de alta
densidad de vegetación.
Fuente: Los autores
8.7.3 Comparación de modelos para la zona con altas pendientes
A continuación en las figuras 99, 100 y 101 se muestra la comparación de los modelos generados
entre la nube de puntos manual y las tres nubes restantes.
Figura 99. Sustracción o diferencia entre la nube de puntos clasificada manualmente y la nube de puntos 1, zona de alta
pendiente.
Fuente: Los autores

67
Figura 100. Sustracción o diferencia entre la nube de puntos clasificada manualmente y la nube de puntos2, zona de alta
pendiente.
Fuente: Los autores
Figura 101. Sustracción o diferencia entre la nube de puntos clasificada manualmente y la nube de puntos 3, zona de alta
pendiente.
Fuente: Los autores
Al realizar la comparación entre la nube de puntos clasificada manualmente (tomada como
referencia) con las tres restantes, se tiene como resultado que la nube de puntos 1 tiene mayor
cantidad de puntos en común con esta, teniendo en cuenta que los puntos que se muestran se
encuentran en color azul, presentan diferencias en alturas no mayores a un metro por encima o
por debajo de la nube de puntos tomada como referencia.
Por otra parte la nube de puntos obtenida por metros fotogramétricos presenta un alto porcentaje
de puntos que se encuentra por fuera del rango establecido, mostrando como resultado
condiciones poco confiables.

68
8.8Método de validación cruzada
En el software Surfer, se observa el metadato de cada uno de los modelos digitales del terreno
(Ver anexo 3). Una vez conocida esta información se realizó el método de la validación cruzada.
Para ello se evalúo el coeficiente de determinación , en donde se analizóel ajuste de cada uno
de los modelos, de esta manera se generó un valor de elevación en un punto desconocido, a partir
de sus puntos vecinos.
Cuando el valor del contrario, cuando el dato tiende a (0) la incertidumbre del modelo propuesto
es mayor.
En la tabla 10, se analiza el coeficiente de determinación generado a partir de la validación entre
la nube de puntos clasificada manualmente y la nube de puntos 1 (obtenida con el sensor Riegl
VQ 580), para las zonas con alta y baja densidad y altas pendientes.
Tabla 10. Método de validación cruzada con los datos de la nube de puntos 1 vs la nube de puntos clasificada
Fuente: los autores
En la tabla 11, se analiza el coeficiente de determinación generado a partir de la validación entre
la nube de puntos clasificada manualmente y el SET de datos 2 (obtenida a partir del sensor
Leica ALS70).
Tabla 11. Método de validación cruzada con los datos de la nube de puntos 2 vs la nube de puntos clasificada
Fuente: los autores

69
En la tabla 12, se analiza el coeficiente de determinación generado a partir de la validación entre
la nube de puntos clasificada manualmente y el SET de datos 3 (obtenida a partir de métodos
fotogramétricos).
Los valores obtenidos para R2, de la comparación de la correlación de los datos de la nube
clasificada manualmente vs el modelo de la nube obtenida por métodos fotogramétricos, tienen a
“0”, por lo cual se interpreta, de acuerdo a la teoría del coeficiente de determinación, que los
datos comparados por el método de validación no son equivalentes, por lo tanto presentan un
grado de incertidumbre alto.
Tabla 12. Método de validación cruzada con los datos de la nube de puntos 3 vs la nube de puntos clasificada
Fuente: los autores

70
9. Conclusiones
La variación de los parámetros de clasificación en los diferentes tipos de cobertura (Baja
y alta densidad de vegetación así como en altas pendientes) tuvo diferencias notorias, las
cuales se pudieron observar en los resultados de los modelos digitales del terreno. Así
mismo, otras de las técnicas usadas para determinar cuál de las macros daba resultados
satisfactorios, fue mediante la medición de densidades, es decir, determinar cuántos
puntos de terreno se logran clasificar al aplicar cada una de estas. Teniendo en cuenta los
métodos de observación anteriormente mencionados, se concluye, que las macros con
mejores resultados fueron la 4 y la 5 (ver tabla 7). La característica en común que tienen
es el ángulo de iteración (8º y 9º respectivamente), cuyo valor es el más alto respecto a
las otras, donde un ángulo de iteración mayor, generara mejores resultados.
De acuerdo a las pruebas realizadas con las macros, para terrenos montañosos (o de altas
pendientes), el ángulo de iteración debe ser cercano a diez; Este parámetro es el que
controla la cantidad de puntos que se clasifican como terreno, entre menor sea el ángulo,
la macro va a notar en menor proporción las variaciones de nivel del suelo. Por esta
razón, a medida que el ángulo sea más grande, los cambios en el terreno son percibidos (y
por ende clasificados) más fácilmente. Como se observa en los resultados de clasificación
de la macro 5, al visualizar los modelos de terreno generados, se observa que estos tienen
un aspecto más cercano a la realidad que las otras macros, esto se debe a que el ángulo de
iteración que se manejo es de 9.
Al realizar el proceso iterativo y comparativo de las diferentes macros de clasificación, es
importante resaltar que la macro 1 fue tomada de diferentes citas bibliográficas, que la
muestran como ejemplo para realizar macros de clasificación, los parámetros usados en
esta macro no muestran resultados óptimos que permitan tener una clasificación adecuada
del terreno.
Por otra parte, la macro 3 no generó resultados satisfactorios, los parámetros usados en
esta rutina fueron los siguientes: Terrain Angle: 100°, Iteración Angle: 4°. Iteración
distance: 1,5. Se estima que los valores usados no son suficientes para obtener una
clasificación óptima, en la tabla 7 “comportamientos de las macros por tipo de terreno y
nube de puntos”, la macro 3 en la mayoría de casos (con excepción de la nube de puntos
2, en terreno de altas pendientes) obtuvo porcentajes menores al momento de generar
densidades. Al visualizar los modelos digitales de terreno, productos de las nubes de
puntos a las que se les corrió dicha macro, se observa que el nivel de detalle del terreno
tiene una calidad inferior que los demás modelos, generados a partir de las otras macros.
La generación de perfiles como método de comparación entre modelos es una opción
rápida pero poco precisa, sin embargo, es importante resaltar que al visualizar estos, se

71
hace notoria la diferencia entre la nube de puntos obtenida con métodos fotogramétricos
y las tomadas con los sensores Riegl VQ580 y Leica ALS70, además las diferencias de
alturas en algunos tramos es alta respecto a la información clasificada manualmente
(tomada como referencia).
En los cálculos realizados para el control de cotas, con los cuales se obtuvieron los
valores del error medio cuadrático, permitieron estimar que la nube de puntos obtenida
por métodos fotogramétricos no es confiable, puesto que el error que presenta es superior
a 4.5 metros.
El coeficiente de determinación R2 calculado en los métodos de validación, indica que si
los valores de este son cercanos a 1, los modelos comparados son equivalentes, si por el
contrario tiende a 0, los modelos no se pueden catalogar como semejantes, lo anterior
permite concluir que la nube de puntos obtenida por métodos fotogramétricos no es
preciso respecto al set de datos clasificado manualmente, puesto que los valores hallados
para dicho coeficiente oscilan entre -0.00275 y -0.00924.

72
10. Recomendaciones
Para toma de decisiones sobre los modelos del terreno, no es recomendable trabajar con
nubes de puntos obtenidas a partir de fotogrametría, ya que las precisiones que arrojan los
datos varían respecto al modelo real del terreno.
En proyectos realizados con tecnología LIDAR se recomienda conocer las
especificaciones del sensor, con el fin de obtener la mayor cantidad de puntos sobre el
terreno. Lo cual ofrece más detalle en los elementos que conforman el terreno.
Teniendo en cuenta que un buen resultado de clasificación en el terreno, depende de las
características de la zona en la que se está trabajando; se recomienda tener un previo
conocimiento del área de trabajo, identificando el tipo de cobertura que tenga y su nivel
de pendiente. De esta manera se aplicara a los datos una macro de clasificación con los
parámetros más adecuados para nube de puntos.
Independientemente de la rutina que se use, es recomendable realizar una clasificación
manual, para garantizar la confiabilidad cualitativa de los datos. El aplicar una macro con
los parámetros adecuados, ayuda a que el proceso manual sea mucho más rápido, ya que
los datos en su mayoría tendrán un buen nivel de clasificación.

73
11. Bibliografía
A. Ruiz, W. K. (2012). EXPERIENCIAS Y APLICACIONES DEL LIDAR. Cataluña: Parc de Montjuïc, s/n.
Adjouadi, M., & Candocia, F. (1994). A Stereo Matching Paradigm Based on the Walsh Transformation.
IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, 7.
Arranz Justel, J. J. (2013). Diseño, optimización y análisis de sistemas basados en técnicas láser, para el
modelado geométrico, registro y documentación, aplicados a entidades de interés
patrimonial.Madrid.
Binaghi, E., Gallo, I., Marino, G., & Raspanti, M. (2004). Neural adaptive stereo matching. Pattern
Recognition Letters, 16.
Bishop, C. M. (1995). Neural Networks for Pattern Recognition. Birmingham, UK: CLARENDON PRESS •
OXFORD.
Blog sobre GIS, T. p. (3 de Abril de 2012). Blog sobre GIS, TIC, programación, diseño 3D y nuevas
tecnologías aplicadas al medio natural. Recuperado el 12 de Marzo de 2015, de
http://www.tecnicayterritorio.com/2012/04/lo-mas-basico-que-deberias-saber-sobre.html
Buitrago Aguilar, P. (1997). Fotogrametria digital, su estado y su futuro. revista CIAF, 23.
Cai, X., Zhou, D., Li, G., & Zhuang, Z. (2005). A Stereo Matching Algorithm Based on Color Segments. 6.
Chen, Z., Devereux, B., Gao, B., & Amable, G. (2012). Upward-fusion urban DTM generating method
using airborne Lidar data. ISPRS Journal of Photogrammetry and Remote Sensing(72), 121-130.
CHONG, M. M., GAY, R. K., NGEE TAN, H., & LIU, J. (2000). GEOMETRIC KNOWLEDGE-BASED SYSTEMS
FRAMEWORK FOR STEREO IMAGE MATCHING. In N. T. University. Singapore: Academic Press.
Dueñas Ramirez, J., & Soto Trujillo, M. (Octubre de 2014). Procesamiento de archivos Lidar Áereo para
obtener Modelos Digitales de Terreno a traves de diferentes software y comparar con MDT
generados con datos capturados por métodos convencionales. Trabajo de Grado. Bogotá D.C.,
Colombis: UD.
Duque Martinez, J. S. (2015). Comparación Estadística de Métodos Interpolación Determinísticos y
Estocásticos para la generación de Modelos Digitales del Terreno a partir de datos LIDAR, en la
parroquia de Tumbabiro, cantón San Miguel de Urcuquí, provincia de Imbabura.Quito.
Durgham, M., Habit, A., Kersting , A., & Quackenbush, P. (2008). ERROR BUDGET OF LIDAR SYSTEMS AND
QUALITY CONTROL OF THE DERIVED POINT CLOUD. Calgary.
El Garouani, A., Alobeid, A., & El Garouani, S. (2014). Digital surface model based on aerial image stereo
pairs for 3D building. International Journal of Sustainable Built Environment, 8.

74
Gallo, I., Binaghi, E., & Raspanti, M. (2008). Neural disparity computation for dense two-frame stereo
correspondence. Pattern Recognition Letters, 15.
Geman, D., & Gidas, B. (1991). Spatial Statistics and Digital Image Analysis. Washington, D.C.: National
Academy of Sciences.
Gruen, A. (2012). Development and Status of Image Matching in Photogrammetry. The Photogrammetric
Record, 22.
Gruen, A. W. (1985). ADAPTIVE LEAST SQUARES CORRELATION: A POWERFUL IMAGE MATCHING
TECHNIQUE. S Afr J of Photogrammetry, Remote Sensing and Cartography, 13.
Hannah, M. (1988). Digital Stereo Image Matching Techniques. International Archives of
Photogrammetry and Remote Sensing , 14.
Harlyn Baker, H. (1982). Depth from Edge and Intensity Based Stereo. 100.
Hsieh, Y. C., Perlant, F., & McKeown, D. M. (1990). Recovering 3D Information from Complex Aerial
Imagery. IEEE, 11.
IDEAM, IGAC y CORMAGDALENA. (2008). Mapa de Cobertura de la Tierra Cuenca Magdalena-Cauca:
Metodología CORINE Land Cover adaptada para Colombia a escala 1:100.000. Instituto de
Hidrología, Meteorología y Estudios Ambientales. Bogotá, D.C.: Instituto Geográfico Agustín
Codazzi y Corporación Autónoma Regional del río Grande de La Magdalena.
Jancso, T., & Melykuti, G. (2011). Comparison of Digital Terrain Models Gained by Different
Technologies. Spatial Data Mining and Geographical Knowledge Services (ICSDM), 6.
Javernick, L., Brasington, J., & Caruso, B. (2014). Modeling the topography of shallow braided rivers
using Structure-from-Motion photogrammetry. Geomorphology(213), 166-182.
Jiang, L., Xie, H., & Pan, B. (2014). Speeding updigital image correlation computation using the integral
image technique. OpticsandLasersinEngineering, 6.
Jin, S. (2012). Geotecnologías Cartográficas en Ingeniería y Arquitectura. España: Universidad de
Salamanca.
Laurie, R., & Ellsworth, L. (2006). Remote Sensing of Aquatic Coastal Ecosystem Processes. Dordrecht:
Springer.
Lee, H.-Y., Kim, T., Park, W., & Lee, H. K. (2003). Extraction of digital elevation models from satellite
stereo images through stereo matching based on epipolarity and scene geometry. Image and
Vision Computing, 8.
Lizana, C. (2008). Catedra de fotogrametria. En J. A. Perez Alvares, Apuntes de FOTOGRAMETRIA II (pág.
20).

75
Maune, D. F. (2011). Digital Elevation Model (DEM) Whitepaper NRCS High Resolution Elevation Data.
Texas.
McKeown, J. D., & Hsieh, Y. C. (1992). Hierarchical Waveform Matching:A New Feature-Based Stereo
Technique. IEEE, 7.
Minetto, Rodrigo;Nicolas Thome;Matthieu Cord. (2014 йил 19-10). A text detection system for
automatic indexing of urban. (elsevier, Ed.) Computer Vision and Image Understanding, 122(92-
104), 92.
Muller, J.-P., Mandanayake, A., Moroney, C., Davies, R., Diner, D. J., & Paradise, S. (2002). MISR
Stereoscopic Image Matchers: Techniques and Results. IEEE TRANSACTIONS ON GEOSCIENCE
AND REMOTE SENSING, 13.
Sarría, F. A. (s.f.). Temario Sistemas de Información Geográfica. Murcia: Universidad de Murcia.
SIGLA. (2014). SIGLA. Recuperado el 12 de Marzo de 2015, de www.sigla-sas.com
Sohn, G., & Dowman, I. (2007). Data fusion of high-resolution satellite imagery and LiDAR data for
automatic building extraction. ScienceDirect, 21.
survey, O. (2015). TerraScan User´s guide . Intergraph corporation.
Vogiatzis, G., Torr, P. H., Seitz, S. M., & Cipolla, R. (2008). Reconstructing relief surfaces. Image and
Vision Computing, 8.
Zhong, X., Peng, X., Zhong, X., & Dong, X. (2012). Multi-Channel with RBF Neural Network Aggregation
Based on Disparity Space for Color Image Stereo Matching. IEEE fifth International Conference
on Advanced Computational Intelligence(ICACI), 6.
Zhou, G., Song, C., Simmers, J., & Cheng, P. (2004). Urban 3D GIS From LiDARand digital aerial images.
Computers & Geosciences, 9.
Zhou, Y., Sun, C., & Chen, J. (2014). Adaptive subset offset for systematic error reduction in incremental
digital imagecorrelation. OpticsandLasersinEngineering, 7.
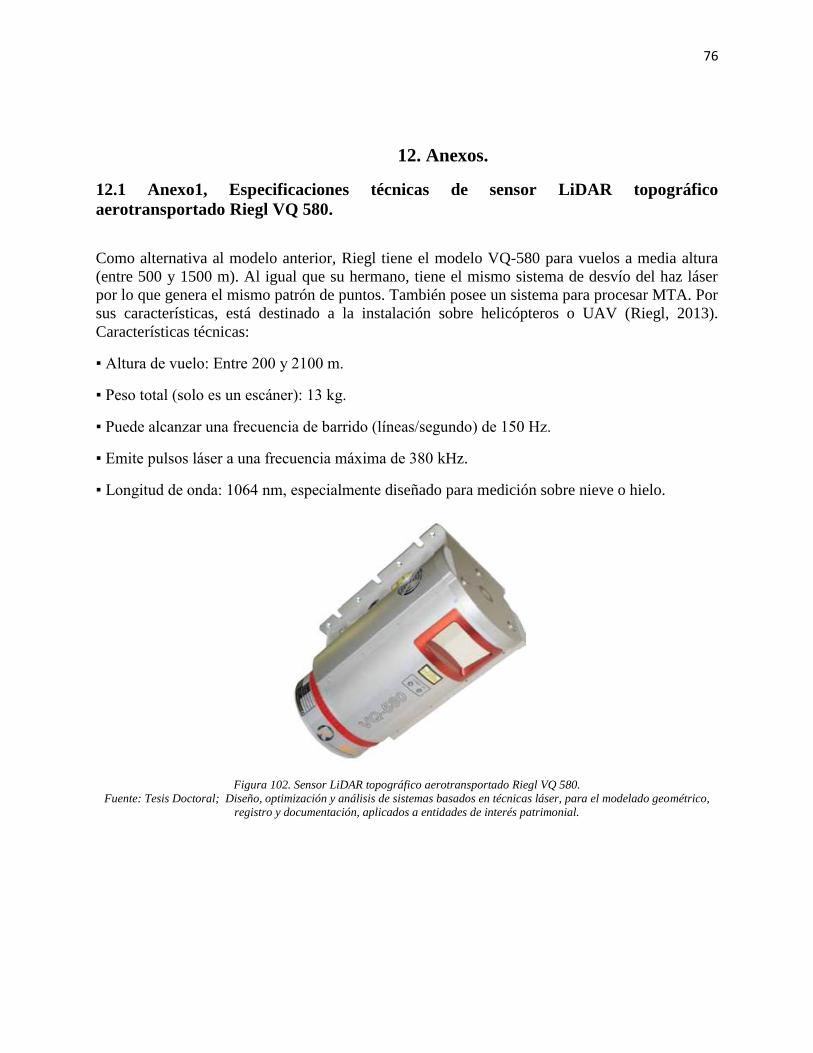
76
12. Anexos.
12.1 Anexo1, Especificaciones técnicas de sensor LiDAR topográfico
aerotransportado Riegl VQ 580.
Como alternativa al modelo anterior, Riegl tiene el modelo VQ-580 para vuelos a media altura
(entre 500 y 1500 m). Al igual que su hermano, tiene el mismo sistema de desvío del haz láser
por lo que genera el mismo patrón de puntos. También posee un sistema para procesar MTA. Por
sus características, está destinado a la instalación sobre helicópteros o UAV (Riegl, 2013).
Características técnicas:
▪ Altura de vuelo: Entre 200 y 2100 m.
▪ Peso total (solo es un escáner): 13 kg.
▪ Puede alcanzar una frecuencia de barrido (líneas/segundo) de 150 Hz.
▪ Emite pulsos láser a una frecuencia máxima de 380 kHz.
▪ Longitud de onda: 1064 nm, especialmente diseñado para medición sobre nieve o hielo.
Figura 102. Sensor LiDAR topográfico aerotransportado Riegl VQ 580.
Fuente: Tesis Doctoral; Diseño, optimización y análisis de sistemas basados en técnicas láser, para el modelado geométrico,
registro y documentación, aplicados a entidades de interés patrimonial.

77
12.2 Anexo2, Especificaciones técnicas de sensor LiDAR topográfico
aerotransportado Leica ALS70. Último modelo de la casa suiza que actualiza sus anteriores modelos: ALS40, ALS50 y ALS60.
El sistema incorpora el escáner láser (LS70-LP) con tres posibles patrones de muestreo, sistema
GNSS con soporte para GPS y GLONASS, sistema inercial propio (IPAS20), una cámara digital
(1280 x 1024 píxeles) y controladores y software para el manejo de todo el equipo en vuelo y en
post-proceso. Además, tiene la opción de incorporarle el módulo WDM65 para el registro “full-
waveform” a 120 kHz. En esta familia de productos, Leica ofrece un producto para el registro de
ciudades y franjas de terreno (ALS70-CM), uno para cartografía de propósito general (ALS70-
HP) y uno para vuelos de grandes alturas (ALS70-HA). El Leica ALS70 utiliza un espejo
oscilante en dos direcciones, presentándose los datos en forma sinusoidal. Su precio aproximado
oscila entre 975000 € y 1135000 € (Leica, 2013).
Características técnicas:
▪ Altura de vuelo: Entre 200 y 5000 m.
▪ FOV: 0º a 75º.
▪ Puede alcanzar una frecuencia de barrido de 200 Hz (200 líneas por segundo).
▪ Emite pulsos láser a una frecuencia máxima de 500 kHz.
▪ Para un vuelo de menos de 3500 m altura y 40º de FOV, el sistema tiene una precisión lateral
entre 5 y 38 cm y vertical entre 7 y 16 cm.
▪ Peso total (escáner y electrónica): 88 kg.
Figura 103. Sensor LiDAR topográfico aerotransportado Leica ALS70.
Fuente: Tesis Doctoral; Diseño, optimización y análisis de sistemas basados en técnicas láser, para el modelado geométrico,
registro y documentación, aplicados a entidades de interés patrimonial.

78
12.3Anexo3, Metadato de los modelos de terreno usados en las comparaciones La información estadística que se presenta a continuación fue obtenida a partir del software Surfer.
Descripción Valores Descripción Valores
Grid Size: 1003 rows x 1001 columns Geometric Mean: 1101,034998
Total Nodes: 1004003 Harmonic Mean: 1100,901633
Filled Nodes: 955964 Root Mean Square: 1101,299958
Blanked Nodes: 48039 Trim Mean (10%%): 1101,41713
Blank Value: 1,70E+38 Interquartile Mean: 1103,589169
X Minimum: 876500,25 Midrange: 1092,48999
X Maximum: 877000,25 Winsorized Mean: 1100,960832
X Spacing: 0,5 TriMean: 1103,084991
Y Minimum: 979499,75 Variance: 291,1287614
Y Maximum: 980000,75 Standard Deviation: 17,06249576
Y Spacing: 0,5 Interquartile Range: 24,44006348
Count: 955964 Range: 108,6000977
1%%-tile: 1064,400024 Mean Difference: N/A
5%%-tile: 1070,920044 Median Abs, Deviation: 11,32995605
10%%-tile: 1074,72998 Average Abs, Deviation: 13,92631122
25%%-tile: 1089,939941 Quartile Dispersion: 0,011087349
50%%-tile: 1104,01001 Relative Mean Diff,: N/A
75%%-tile: 1114,380005 Standard Error: 0,017451059
90%%-tile: 1118,810059 Coef, of Variation: 0,01549491
95%%-tile: 1123,25 Skewness: -0,404042468
99%%-tile: 1137,670044 Kurtosis: 2,642613299
Minimum: 1038,189941 Sum: 1052676751
Maximum: 1146,790039 Sum Absolute: 1052676751
Mean: 1101,167775 Sum Squares: 1,16E+12
Median: 1104,01001 Mean Square: 1212861,597
Nube 1 Baja Vegetaciòn
Tabla 13. Información estadística de nube de puntos 1, baja vegetación
Fuente: los autores
Descripción Valores Descripción Valores
Grid Size: 1000 rows x 863 columns Geometric Mean: 1096,469058
Total Nodes: 863000 Harmonic Mean: 1096,370528
Filled Nodes: 666093 Root Mean Square: 1096,664821
Blanked Nodes: 196907 Trim Mean (10%%): 1097,119838
Blank Value: 1,70E+38 Interquartile Mean: 1097,963268
X Minimum: 876568,75 Midrange: 1078,845032
X Maximum: 876999,75 Winsorized Mean: 1096,966951
X Spacing: 0,5 TriMean: 1097,704987
Y Minimum: 979500,25 Variance: 214,2000959
Y Maximum: 979999,75 Standard Deviation: 14,63557638
Y Spacing: 0,5 Interquartile Range: 22,94006348
Count: 666093 Range: 80,15002441
1%%-tile: 1062,51001 Mean Difference: N/A
5%%-tile: 1071,699951 Median Abs, Deviation: 11,4699707
10%%-tile: 1074,98999 Average Abs, Deviation: 12,14464206
25%%-tile: 1086,209961 Quartile Dispersion: 0,01044934
50%%-tile: 1097,72998 Relative Mean Diff,: N/A
75%%-tile: 1109,150024 Standard Error: 0,017932564
90%%-tile: 1115,069946 Coef, of Variation: 0,013346721
95%%-tile: 1116,089966 Skewness: -0,475037937
99%%-tile: 1117,77002 Kurtosis: 2,512731919
Minimum: 1038,77002 Sum: 730415707,3
Maximum: 1118,920044 Sum Absolute: 730415707,3
Mean: 1096,567157 Sum Squares: 8,01093E+11
Median: 1097,72998 Mean Square: 1202673,73
Nube de puntos 2 Baja Vegetaciòn
Tabla 14. Información estadística de nube de puntos 2, baja vegetación
Fuente: los autores

79
Descripción Valores Descripción Valores
Grid Size: 1000 rows x 1000 columns Geometric Mean: 1105,041349
Total Nodes: 1000000 Harmonic Mean: 1104,929959
Filled Nodes: 999998 Root Mean Square: 1105,26317
Blanked Nodes: 2 Trim Mean (10%%): 1105,350943
Blank Value: 1,70E+38 Interquartile Mean: 1106,436784
X Minimum: 876500,25 Midrange: 1099,690002
X Maximum: 876999,75 Winsorized Mean: 1105,173556
X Spacing: 0,5 TriMean: 1105,897522
Y Minimum: 979500,25 Variance: 244,805825
Y Maximum: 979999,75 Standard Deviation: 15,64627192
Y Spacing: 0,5 Interquartile Range: 21,05004883
Count: 999998 Range: 109,4801025
1%%-tile: 1068,939941 Mean Difference: N/A
5%%-tile: 1077,060059 Median Abs, Deviation: 10,25
10%%-tile: 1083,540039 Average Abs, Deviation: 12,54731995
25%%-tile: 1094,719971 Quartile Dispersion: 0,009522798
50%%-tile: 1106,550049 Relative Mean Diff,: N/A
75%%-tile: 1115,77002 Standard Error: 0,015646288
90%%-tile: 1123,180054 Coef, of Variation: 0,014157569
95%%-tile: 1128,76001 Skewness: -0,273354763
99%%-tile: 1139,930054 Kurtosis: 3,010815391
Minimum: 1044,949951 Sum: 1105150209
Maximum: 1154,430054 Sum Absolute: 1105150209
Mean: 1105,152419 Sum Squares: 1,22E+12
Median: 1106,550049 Mean Square: 1221606,676
Nube de puntos 3 Baja Vegetaciòn
Tabla 15. Información estadística de nube de puntos 3, baja vegetación
Fuente: los autores
Descripción Valores Descripción Valores
Grid Size: 1003 rows x 1001 columns Geometric Mean: 1101,063888
Total Nodes: 1004003 Harmonic Mean: 1100,932371
Filled Nodes: 997937 Root Mean Square: 1101,325084
Blanked Nodes: 6066 Trim Mean (10%%): 1101,514387
Blank Value: 1,70E+38 Interquartile Mean: 1103,343724
X Minimum: 876500,25 Midrange: 1092,48999
X Maximum: 877000,25 Winsorized Mean: 1101,117218
X Spacing: 0,5 TriMean: 1102,879974
Y Minimum: 979499,75 Variance: 286,968452
Y Maximum: 980000,75 Standard Deviation: 16,94014321
Y Spacing: 0,5 Interquartile Range: 24,92004395
Count: 997937 Range: 108,6000977
1%%-tile: 1059,060059 Mean Difference: N/A
5%%-tile: 1072,22998 Median Abs, Deviation: 11,61999512
10%%-tile: 1076,060059 Average Abs, Deviation: 13,86663764
25%%-tile: 1089,47998 Quartile Dispersion: 0,011307351
50%%-tile: 1103,819946 Relative Mean Diff,: N/A
75%%-tile: 1114,400024 Standard Error: 0,016957644
90%%-tile: 1118,859985 Coef, of Variation: 0,015383421
95%%-tile: 1123,180054 Skewness: -0,426486245
99%%-tile: 1137,390015 Kurtosis: 2,830116527
Minimum: 1038,189941 Sum: 1098923028
Maximum: 1146,790039 Sum Absolute: 1098923028
Mean: 1101,194793 Sum Squares: 1,21E+12
Median: 1103,819946 Mean Square: 1212916,941
Nube clasificada manualmente - Baja Vegetaciòn
Tabla 16. Información estadística de nube de puntos clasificada manualmente, baja vegetación
Fuente: los autores
80
Descripción Valores Descripción Valores
Grid Size: 1002 rows x 1003 columns Geometric Mean: 1270,083574
Total Nodes: 1005006 Harmonic Mean: 1269,73525
Filled Nodes: 883087 Root Mean Square: 1270,785921
Blanked Nodes: 121919 Trim Mean (10%%): 1269,583798
Blank Value: 1,70E+38 Interquartile Mean: 1267,511677
X Minimum: 866499,25 Midrange: 1281,22998
X Maximum: 867000,25 Winsorized Mean: 1269,917544
X Spacing: 0,5 TriMean: 1267,362457
Y Minimum: 978999,75 Variance: 894,7523542
Y Maximum: 979500,25 Standard Deviation: 29,91241137
Y Spacing: 0,5 Interquartile Range: 47,34997559
Count: 883087 Range: 125,3200684
1%%-tile: 1223,26001 Mean Difference: N/A
5%%-tile: 1228,27002 Median Abs, Deviation: 23,26989746
10%%-tile: 1233,079956 Average Abs, Deviation: 25,05092114
25%%-tile: 1245,099976 Quartile Dispersion: 0,018659722
50%%-tile: 1265,949951 Relative Mean Diff,: N/A
75%%-tile: 1292,449951 Standard Error: 0,031830956
90%%-tile: 1314,910034 Coef, of Variation: 0,023545037
95%%-tile: 1324,219971 Skewness: 0,370812422
99%%-tile: 1334,48999 Kurtosis: 2,145426886
Minimum: 1218,569946 Sum: 1121903596
Maximum: 1343,890015 Sum Absolute: 1121903596
Mean: 1270,433826 Sum Squares: 1,43E+12
Median: 1265,949951 Mean Square: 1614896,858
Nube 1 Alta Vegetaciòn
Tabla 17. Información estadística de nube de puntos 1, alta vegetación
Fuente: los autores
Descripción Valores Descripción Valores
Grid Size: 1000 rows x 1000 columns Geometric Mean: 1268,969141
Total Nodes: 1000000 Harmonic Mean: 1268,642382
Filled Nodes: 876348 Root Mean Square: 1269,628218
Blanked Nodes: 123652 Trim Mean (10%%): 1268,3735
Blank Value: 1,70E+38 Interquartile Mean: 1266,69641
X Minimum: 866500,25 Midrange: 1282,515015
X Maximum: 866999,75 Winsorized Mean: 1268,650318
X Spacing: 0,5 TriMean: 1266,432495
Y Minimum: 979000,25 Variance: 838,9727801
Y Maximum: 979499,75 Standard Deviation: 28,96502684
Y Spacing: 0,5 Interquartile Range: 44,81005859
Count: 876348 Range: 127,7299805
1%%-tile: 1223,300049 Mean Difference: N/A
5%%-tile: 1228,25 Median Abs, Deviation: 22,31005859
10%%-tile: 1233,01001 Average Abs, Deviation: 24,07627684
25%%-tile: 1244,829956 Quartile Dispersion: 0,017680248
50%%-tile: 1265,630005 Relative Mean Diff,: N/A
75%%-tile: 1289,640015 Standard Error: 0,030941092
90%%-tile: 1312,030029 Coef, of Variation: 0,022819726
95%%-tile: 1322,329956 Skewness: 0,398489114
99%%-tile: 1334,339966 Kurtosis: 2,278806882
Minimum: 1218,650024 Sum: 1112346566
Maximum: 1346,380005 Sum Absolute: 1112346566
Mean: 1269,297774 Sum Squares: 1,41E+12
Median: 1265,630005 Mean Square: 1611955,812
Nube de puntos 2 Alta Vegetaciòn
Tabla 18. Información estadística de nube de puntos 2, alta vegetación.
Fuente: los autores
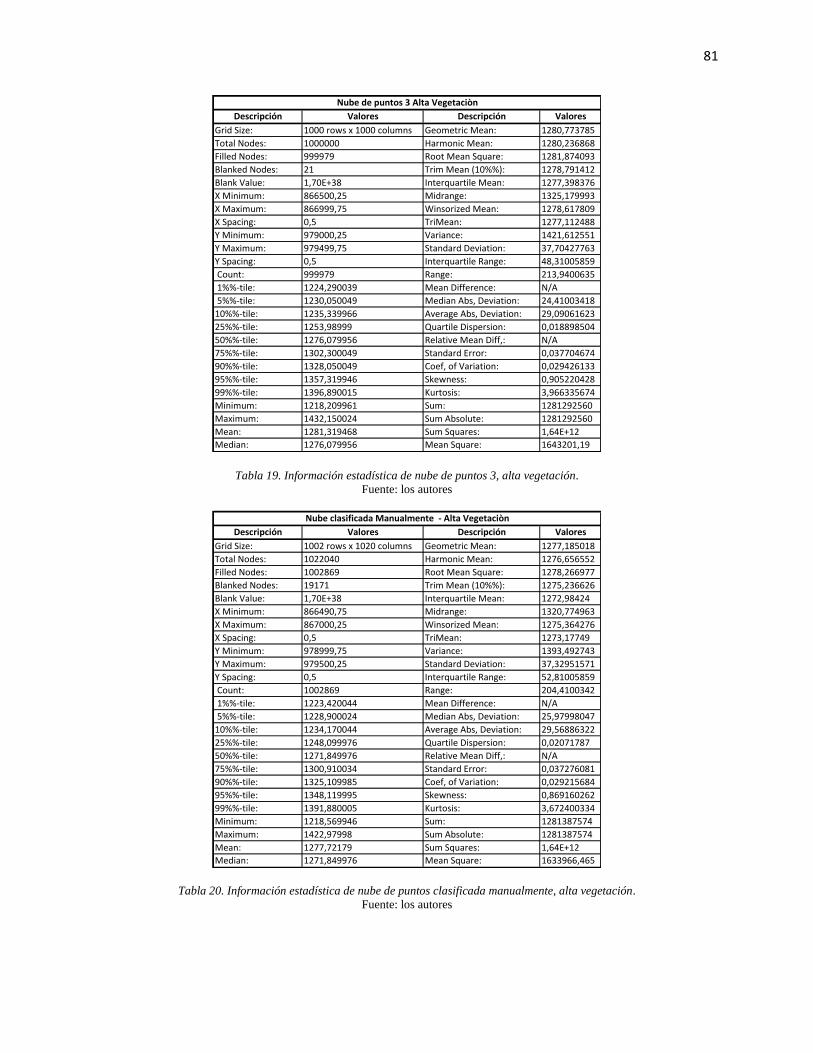
81
Descripción Valores Descripción Valores
Grid Size: 1000 rows x 1000 columns Geometric Mean: 1280,773785
Total Nodes: 1000000 Harmonic Mean: 1280,236868
Filled Nodes: 999979 Root Mean Square: 1281,874093
Blanked Nodes: 21 Trim Mean (10%%): 1278,791412
Blank Value: 1,70E+38 Interquartile Mean: 1277,398376
X Minimum: 866500,25 Midrange: 1325,179993
X Maximum: 866999,75 Winsorized Mean: 1278,617809
X Spacing: 0,5 TriMean: 1277,112488
Y Minimum: 979000,25 Variance: 1421,612551
Y Maximum: 979499,75 Standard Deviation: 37,70427763
Y Spacing: 0,5 Interquartile Range: 48,31005859
Count: 999979 Range: 213,9400635
1%%-tile: 1224,290039 Mean Difference: N/A
5%%-tile: 1230,050049 Median Abs, Deviation: 24,41003418
10%%-tile: 1235,339966 Average Abs, Deviation: 29,09061623
25%%-tile: 1253,98999 Quartile Dispersion: 0,018898504
50%%-tile: 1276,079956 Relative Mean Diff,: N/A
75%%-tile: 1302,300049 Standard Error: 0,037704674
90%%-tile: 1328,050049 Coef, of Variation: 0,029426133
95%%-tile: 1357,319946 Skewness: 0,905220428
99%%-tile: 1396,890015 Kurtosis: 3,966335674
Minimum: 1218,209961 Sum: 1281292560
Maximum: 1432,150024 Sum Absolute: 1281292560
Mean: 1281,319468 Sum Squares: 1,64E+12
Median: 1276,079956 Mean Square: 1643201,19
Nube de puntos 3 Alta Vegetaciòn
Tabla 19. Información estadística de nube de puntos 3, alta vegetación.
Fuente: los autores
Descripción Valores Descripción Valores
Grid Size: 1002 rows x 1020 columns Geometric Mean: 1277,185018
Total Nodes: 1022040 Harmonic Mean: 1276,656552
Filled Nodes: 1002869 Root Mean Square: 1278,266977
Blanked Nodes: 19171 Trim Mean (10%%): 1275,236626
Blank Value: 1,70E+38 Interquartile Mean: 1272,98424
X Minimum: 866490,75 Midrange: 1320,774963
X Maximum: 867000,25 Winsorized Mean: 1275,364276
X Spacing: 0,5 TriMean: 1273,17749
Y Minimum: 978999,75 Variance: 1393,492743
Y Maximum: 979500,25 Standard Deviation: 37,32951571
Y Spacing: 0,5 Interquartile Range: 52,81005859
Count: 1002869 Range: 204,4100342
1%%-tile: 1223,420044 Mean Difference: N/A
5%%-tile: 1228,900024 Median Abs, Deviation: 25,97998047
10%%-tile: 1234,170044 Average Abs, Deviation: 29,56886322
25%%-tile: 1248,099976 Quartile Dispersion: 0,02071787
50%%-tile: 1271,849976 Relative Mean Diff,: N/A
75%%-tile: 1300,910034 Standard Error: 0,037276081
90%%-tile: 1325,109985 Coef, of Variation: 0,029215684
95%%-tile: 1348,119995 Skewness: 0,869160262
99%%-tile: 1391,880005 Kurtosis: 3,672400334
Minimum: 1218,569946 Sum: 1281387574
Maximum: 1422,97998 Sum Absolute: 1281387574
Mean: 1277,72179 Sum Squares: 1,64E+12
Median: 1271,849976 Mean Square: 1633966,465
Nube clasificada Manualmente - Alta Vegetaciòn
Tabla 20. Información estadística de nube de puntos clasificada manualmente, alta vegetación.
Fuente: los autores

82
Descripción Valores Descripción Valores
Grid Size: 959 rows x 1001 columns Geometric Mean: 1279,777643
Total Nodes: 959959 Harmonic Mean: 1278,066979
Filled Nodes: 835143 Root Mean Square: 1283,220236
Blanked Nodes: 124816 Trim Mean (10%%): 1280,335063
Blank Value: 1,70E+38 Interquartile Mean: 1278,558242
X Minimum: 863999,75 Midrange: 1303,494995
X Maximum: 864499,75 Winsorized Mean: 1280,743613
X Spacing: 0,5 TriMean: 1278,927521
Y Minimum: 979021,25 Variance: 4421,086031
Y Maximum: 979500,25 Standard Deviation: 66,49124778
Y Spacing: 0,5 Interquartile Range: 122,8699951
Count: 835143 Range: 236,2900391
1%%-tile: 1187,189941 Mean Difference: N/A
5%%-tile: 1191,420044 Median Abs, Deviation: 61,42004395
10%%-tile: 1195,640015 Average Abs, Deviation: 58,72490278
25%%-tile: 1217,560059 Quartile Dispersion: 0,048033804
50%%-tile: 1278,859985 Relative Mean Diff,: N/A
75%%-tile: 1340,430054 Standard Error: 0,072758554
90%%-tile: 1375,640015 Coef, of Variation: 0,051885629
95%%-tile: 1385,48999 Skewness: 0,148709824
99%%-tile: 1402,050049 Kurtosis: 1,676802515
Minimum: 1185,349976 Sum: 1070232770
Maximum: 1421,640015 Sum Absolute: 1070232770
Mean: 1281,496427 Sum Squares: 1,38E+12
Median: 1278,859985 Mean Square: 1646654,173
Nube 1 Altas pendientes
Tabla 21. Información estadística de nube de puntos 1, altas pendientes.
Fuente: los autores
Descripción Valores Descripción Valores
Grid Size: 1000 rows x 1001 columns Geometric Mean: 1320,271203
Total Nodes: 1001000 Harmonic Mean: 1319,036014
Filled Nodes: 665109 Root Mean Square: 1322,715059
Blanked Nodes: 335891 Trim Mean (10%%): 1322,461017
Blank Value: 1,70E+38 Interquartile Mean: 1324,826739
X Minimum: 864000,25 Midrange: 1311,160034
X Maximum: 864500,25 Winsorized Mean: 1322,062428
X Spacing: 0,5 TriMean: 1325,659973
Y Minimum: 979000,25 Variance: 3218,32967
Y Maximum: 979499,75 Standard Deviation: 56,73032408
Y Spacing: 0,5 Interquartile Range: 95,58007813
Count: 665109 Range: 229,1999512
1%%-tile: 1209,560059 Mean Difference: N/A
5%%-tile: 1225,449951 Median Abs, Deviation: 47,30993652
10%%-tile: 1239,780029 Average Abs, Deviation: 48,47142137
25%%-tile: 1275,589966 Quartile Dispersion: 0,036112106
50%%-tile: 1327,939941 Relative Mean Diff,: N/A
75%%-tile: 1371,170044 Standard Error: 0,069561486
90%%-tile: 1394,660034 Coef, of Variation: 0,042928803
95%%-tile: 1403,430054 Skewness: -0,212256367
99%%-tile: 1414,790039 Kurtosis: 1,945913192
Minimum: 1196,560059 Sum: 878940172,8
Maximum: 1425,76001 Sum Absolute: 878940172,8
Mean: 1321,497939 Sum Squares: 1,16E+12
Median: 1327,939941 Mean Square: 1749575,128
Nube de puntos 2 Altas pendientes
Tabla 22. Información estadística de nube de puntos 2, altas pendientes.
Fuente: los autores

83
Descripción Valores Descripción Valores
Grid Size: 1000 rows x 1000 columns Geometric Mean: 1298,600792
Total Nodes: 1000000 Harmonic Mean: 1296,602289
Filled Nodes: 999955 Root Mean Square: 1302,605882
Blanked Nodes: 45 Trim Mean (10%%): 1299,804129
Blank Value: 1,70E+38 Interquartile Mean: 1299,153948
X Minimum: 864000,25 Midrange: 1313,700012
X Maximum: 864499,75 Winsorized Mean: 1299,711239
X Spacing: 0,5 TriMean: 1299,917511
Y Minimum: 979000,25 Variance: 5213,184596
Y Maximum: 979499,75 Standard Deviation: 72,20238636
Y Spacing: 0,5 Interquartile Range: 130,8900146
Count: 999955 Range: 262,4200439
1%%-tile: 1188,869995 Mean Difference: N/A
5%%-tile: 1195,410034 Median Abs, Deviation: 65,56005859
10%%-tile: 1202,790039 Average Abs, Deviation: 62,94471181
25%%-tile: 1234,119995 Quartile Dispersion: 0,050359164
50%%-tile: 1300,27002 Relative Mean Diff,: N/A
75%%-tile: 1365,01001 Standard Error: 0,072204011
90%%-tile: 1397,859985 Coef, of Variation: 0,055514535
95%%-tile: 1411,089966 Skewness: 0,073931407
99%%-tile: 1435,589966 Kurtosis: 1,75233557
Minimum: 1182,48999 Sum: 1300544757
Maximum: 1444,910034 Sum Absolute: 1300544757
Mean: 1300,603285 Sum Squares: 1,70E+12
Median: 1300,27002 Mean Square: 1696782,083
Nube de puntos 3 Altas pendientes
Tabla 23. Información estadística de nube de puntos 3, altas pendientes.
Fuente: los autores
Descripción Valores Descripción Valores
Grid Size: 1002 rows x 1002 columns Geometric Mean: 1294,354724
Total Nodes: 1004004 Harmonic Mean: 1292,29971
Filled Nodes: 999737 Root Mean Square: 1298,475537
Blanked Nodes: 4267 Trim Mean (10%%): 1295,379408
Blank Value: 1,70E+38 Interquartile Mean: 1295,082412
X Minimum: 863999,75 Midrange: 1313,340027
X Maximum: 864500,25 Winsorized Mean: 1295,295398
X Spacing: 0,5 TriMean: 1294,940002
Y Minimum: 978999,75 Variance: 5347,566836
Y Maximum: 979500,25 Standard Deviation: 73,12705954
Y Spacing: 0,5 Interquartile Range: 133,2399902
Count: 999737 Range: 255,9000244
1%%-tile: 1187,339966 Mean Difference: N/A
5%%-tile: 1192,189941 Median Abs, Deviation: 66,68994141
10%%-tile: 1197,160034 Average Abs, Deviation: 63,90618393
25%%-tile: 1227,969971 Quartile Dispersion: 0,051460305
50%%-tile: 1295,290039 Relative Mean Diff,: N/A
75%%-tile: 1361,209961 Standard Error: 0,073136678
90%%-tile: 1395,599976 Coef, of Variation: 0,056407149
95%%-tile: 1409 Skewness: 0,083072893
99%%-tile: 1433,73999 Kurtosis: 1,733974423
Minimum: 1185,390015 Sum: 1296073775
Maximum: 1441,290039 Sum Absolute: 1296073775
Mean: 1296,414732 Sum Squares: 1,69E+12
Median: 1295,290039 Mean Square: 1686038,72
Nube clasificada Manualmente - Altas pendientes
Tabla 24. Información estadística de nube de puntos clasificada manualmente, altas pendientes.
Fuente: los autores












![- [1 3] · Use el metodo iterativo de Punto Fijo para encontrar una aproximaci6n de . m . con una precisi6n de por 10 menos tres cifras decimales exactas. 12. Use el metodo iterativo](https://static.fdocuments.es/doc/165x107/5f2fd65c4134e02179089793/1-3-use-el-metodo-iterativo-de-punto-fijo-para-encontrar-una-aproximaci6n-de-.jpg)




