ar_05agh seth th hsteth
18
1 Sociedad Mexicana de Ingeniería Estructural Sociedad Mexicana de Ingeniería Estructural EJEMPLO DIDÁCTICO DEL ANÁLISIS DINÁMICO ESTRUCTURAL DE UN MODELO REAL A ESCALA Juan Pablo Hidalgo Toxqui 1 , Tómas Castillo Cruz 1 , Eduardo Ismael Hernández 2 , Edgar Iram Villagram Arroyo 3 RESUMEN Se presenta un experimento didáctico donde se somete un modelo de una estructura de tres grados de libertad a un barrido de excitaciones en su base con funciones senoidales. A partir de los resultados obtenidos, se determinan experimentalmente frecuencias modales y desplazamientos máximos de cada excitación. Dichos resultados se comparan contra la respuesta calculada de manera analítica en un análisis paso a paso. Se comparan tanto las formas modales como las configuraciones deformadas de la estructura para cada excitación. Para llevar a cabo el análisis, se determinó experimentalmente el porcentaje de amortiguamiento crítico del modelo y mediante ensayes de laboratorio se determinó el módulo de elasticidad del material con el que fue construido, a partir del cual se obtuvieron la matriz de masas y de rigidez. Los resultados aquí presentados pueden descargarse en formato de video a través de una página de internet diseñada expresamente para este artículo, en la dirección http://eeri-unam.blogspot.com . ABSTRACT A didactic experiment is presented which we built a scale model from a three-freedom-degree structure; this model was submitted to several sinusoidal functions at its base. With the results, we could determinate the modal frequencies and the maximum displacements of the model. These results are compared with the analytical response of the structure calculated by a step- by-step analysis. The modal forms and the deformed configuration of the model are compared for every excitation signal. In order to execute the analysis, it was necessary to determinate the damping of the model and the elasticity modulus of the material for which the model was made. The presented results will be able to download trough a page designed specifically for this work, this one is http://eeri-unam.blogspot.com . INTRODUCCIÓN Hoy en día podemos encontrar múltiples textos que abordan a la dinámica estructural desde diversos puntos de vista. Textos como “Dynamics of Structures” de Anil K. Chopra (2007) o “Dinámica Estructural” de Mario Paz (1992), ahondan en la materia tanto con planteamientos teóricos como con ejemplos prácticos. Sin embargo, existen deficiencias en alumnos a nivel licenciatura, en cuyas universidades, este tipo de temas se imparten ya sea como subtema de alguna otra materia o bien como materia optativa, y en algunos casos ni siquiera se contemplan dentro del plan de estudios. Así pues, el presente trabajo pretende servir como una guía introductoria a la Dinámica Estructural tanto para alumnos como para profesores que imparten la materia. 1 Estudiante de Posgrado. Instituto de Ingeniería, Universidad Nacional Autónoma de México, Circuito Escolar s/n, CU, Insurgentes Sur 3000, C.P. 04510, DF. Tel 56233600 ext. 8480 [email protected] ; [email protected] . 2 Estudiante de Posgrado. Instituto de Ingeniería, Universidad Nacional Autónoma de México, Circuito Escolar s/n, CU, Insurgentes Sur 3000, C.P. 04510, DF. Tel 56233600 ext. 8479 [email protected] 3 Profesor, Benemérita Universidad Autónoma de Puebla, Ciudad Universitaria, Col San Manuel, Puebla, Pue. C.P. 72570, [email protected]
description
aervaer gegr ethg eth sreth th g taseegh th h tes db bstrb t
Transcript of ar_05agh seth th hsteth

1
Sociedad Mexicana de Ingeniería EstructuralSociedad Mexicana de Ingeniería Estructural
EJEMPLO DIDÁCTICO DEL ANÁLISIS DINÁMICO ESTRUCTURAL DE UN MODELO REAL A ESCALA
Juan Pablo Hidalgo Toxqui1, Tómas Castillo Cruz1,
Eduardo Ismael Hernández2 , Edgar Iram Villagram Arroyo3
RESUMEN Se presenta un experimento didáctico donde se somete un modelo de una estructura de tres grados de libertad a un barrido de excitaciones en su base con funciones senoidales. A partir de los resultados obtenidos, se determinan experimentalmente frecuencias modales y desplazamientos máximos de cada excitación. Dichos resultados se comparan contra la respuesta calculada de manera analítica en un análisis paso a paso. Se comparan tanto las formas modales como las configuraciones deformadas de la estructura para cada excitación. Para llevar a cabo el análisis, se determinó experimentalmente el porcentaje de amortiguamiento crítico del modelo y mediante ensayes de laboratorio se determinó el módulo de elasticidad del material con el que fue construido, a partir del cual se obtuvieron la matriz de masas y de rigidez. Los resultados aquí presentados pueden descargarse en formato de video a través de una página de internet diseñada expresamente para este artículo, en la dirección http://eeri-unam.blogspot.com.
ABSTRACT
A didactic experiment is presented which we built a scale model from a three-freedom-degree structure; this model was submitted to several sinusoidal functions at its base. With the results, we could determinate the modal frequencies and the maximum displacements of the model. These results are compared with the analytical response of the structure calculated by a step- by-step analysis. The modal forms and the deformed configuration of the model are compared for every excitation signal. In order to execute the analysis, it was necessary to determinate the damping of the model and the elasticity modulus of the material for which the model was made. The presented results will be able to download trough a page designed specifically for this work, this one is http://eeri-unam.blogspot.com.
INTRODUCCIÓN Hoy en día podemos encontrar múltiples textos que abordan a la dinámica estructural desde diversos puntos de vista. Textos como “Dynamics of Structures” de Anil K. Chopra (2007) o “Dinámica Estructural” de Mario Paz (1992), ahondan en la materia tanto con planteamientos teóricos como con ejemplos prácticos. Sin embargo, existen deficiencias en alumnos a nivel licenciatura, en cuyas universidades, este tipo de temas se imparten ya sea como subtema de alguna otra materia o bien como materia optativa, y en algunos casos ni siquiera se contemplan dentro del plan de estudios. Así pues, el presente trabajo pretende servir como una guía introductoria a la Dinámica Estructural tanto para alumnos como para profesores que imparten la materia.
1 Estudiante de Posgrado. Instituto de Ingeniería, Universidad Nacional Autónoma de México, Circuito Escolar s/n, CU, Insurgentes Sur 3000, C.P. 04510, DF. Tel 56233600 ext. 8480 [email protected]; [email protected]. 2 Estudiante de Posgrado. Instituto de Ingeniería, Universidad Nacional Autónoma de México, Circuito Escolar s/n, CU, Insurgentes Sur 3000, C.P. 04510, DF. Tel 56233600 ext. 8479 [email protected] 3 Profesor, Benemérita Universidad Autónoma de Puebla, Ciudad Universitaria, Col San Manuel, Puebla, Pue. C.P. 72570, [email protected]
XVI Congreso Nacional de Ingeniería Estructural Veracruz, Ver. 2008.
2
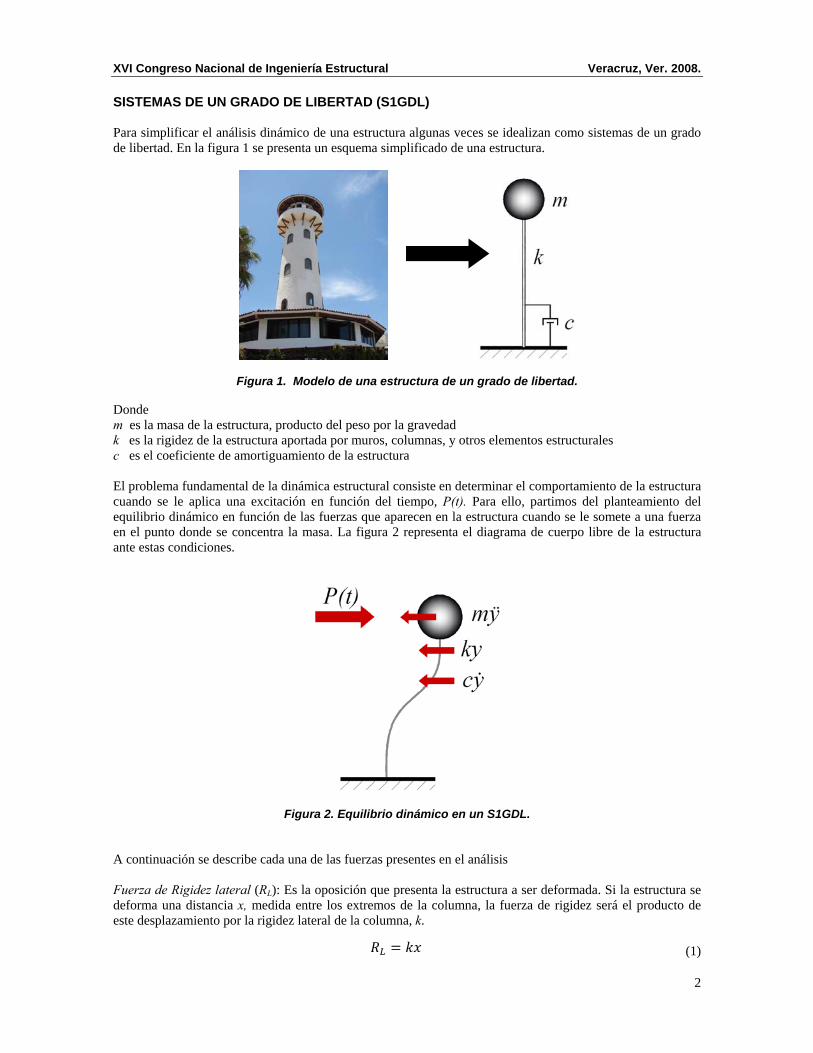
SISTEMAS DE UN GRADO DE LIBERTAD (S1GDL) Para simplificar el análisis dinámico de una estructura algunas veces se idealizan como sistemas de un grado de libertad. En la figura 1 se presenta un esquema simplificado de una estructura.
Figura 1. Modelo de una estructura de un grado de libertad.
Donde m es la masa de la estructura, producto del peso por la gravedad k es la rigidez de la estructura aportada por muros, columnas, y otros elementos estructurales c es el coeficiente de amortiguamiento de la estructura
El problema fundamental de la dinámica estructural consiste en determinar el comportamiento de la estructura cuando se le aplica una excitación en función del tiempo, P(t). Para ello, partimos del planteamiento del equilibrio dinámico en función de las fuerzas que aparecen en la estructura cuando se le somete a una fuerza en el punto donde se concentra la masa. La figura 2 representa el diagrama de cuerpo libre de la estructura ante estas condiciones.
Figura 2. Equilibrio dinámico en un S1GDL. A continuación se describe cada una de las fuerzas presentes en el análisis Fuerza de Rigidez lateral (RL): Es la oposición que presenta la estructura a ser deformada. Si la estructura se deforma una distancia x, medida entre los extremos de la columna, la fuerza de rigidez será el producto de este desplazamiento por la rigidez lateral de la columna, k.
(1)

3
Sociedad Mexicana de Ingeniería EstructuralSociedad Mexicana de Ingeniería Estructural
Fuerza de Inercia (FI): Esta es el resultado del producto de la masa por su aceleración, y es la que se opone al movimiento cuando se rompe el reposo.
(2) Fuerza de amortiguamiento (FA): Es el producto del amortiguamiento de la estructura, c, por la velocidad de la masa, .
(3) Para diferentes materiales existen diferentes niveles de amortiguamiento. El equilibrio dinámico se logra igualando la fuerza de excitación a la suma de las fuerzas internas de la estructura. Así la ecuación de movimiento que describe el comportamiento de un sistema de un grado de libertad es:
(4)
Si dividimos entre m esta ecuación se tiene:
(5) Se definen entonces las siguientes propiedades de la estructura:
y
Donde: ζ es la fracción del amortiguamiento crítico Ω es la frecuencia natural del sistema Cuando la estructura se somete a un movimiento en su base la ecuación de movimiento resulta:
(6) Donde es la aceleración en la base, el signo negativo aparece debido a que la aceleración del tiempo tiene la misma dirección que las fuerzas internas de la estructura. En la práctica la función (t) puede ser registros acelerográficos con los que se desea analizar la estructura o bien señales analíticas discretizadas. La solución de la ec. 6 está dada tanto por una solución particular, que depende de los valores que tome la excitación, como de una solución homogénea que depende únicamente de las propiedades de la estructura. Resolviendo esta ecuación se puede describir el comportamiento de estructuras de un grado de libertad, así, es posible establecer la historia en el tiempo tanto de los desplazamientos como de las velocidades y aceleraciones que se presentan en la estructura. Para su solución, existen en la literatura diversos métodos numéricos (método de Newmark, de las Ocho Constantes, análisis de Fourirer, etc), este tipo de análisis se conoce como análisis paso a paso.
XVI Congreso Nacional de Ingeniería Estructural Veracruz, Ver. 2008.
4
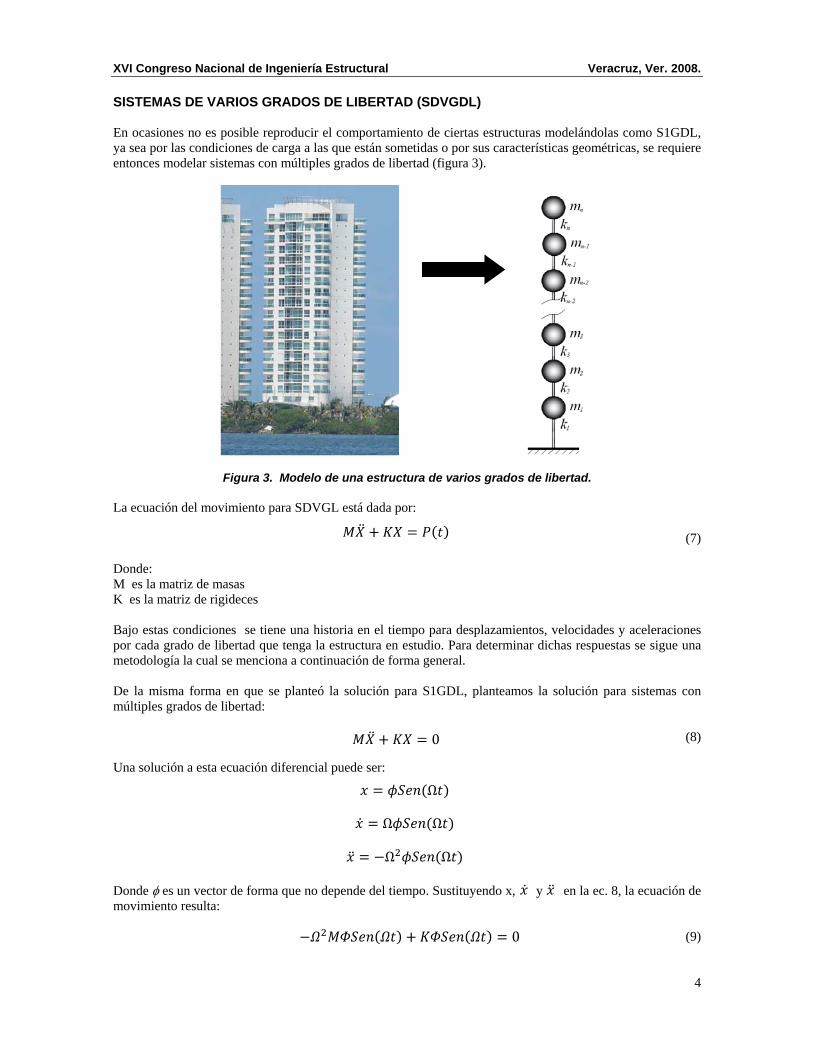
SISTEMAS DE VARIOS GRADOS DE LIBERTAD (SDVGDL) En ocasiones no es posible reproducir el comportamiento de ciertas estructuras modelándolas como S1GDL, ya sea por las condiciones de carga a las que están sometidas o por sus características geométricas, se requiere entonces modelar sistemas con múltiples grados de libertad (figura 3).
Figura 3. Modelo de una estructura de varios grados de libertad. La ecuación del movimiento para SDVGL está dada por:
(7) Donde: M es la matriz de masas K es la matriz de rigideces Bajo estas condiciones se tiene una historia en el tiempo para desplazamientos, velocidades y aceleraciones por cada grado de libertad que tenga la estructura en estudio. Para determinar dichas respuestas se sigue una metodología la cual se menciona a continuación de forma general. De la misma forma en que se planteó la solución para S1GDL, planteamos la solución para sistemas con múltiples grados de libertad:
(8) Una solución a esta ecuación diferencial puede ser: Donde φ es un vector de forma que no depende del tiempo. Sustituyendo x, y en la ec. 8, la ecuación de movimiento resulta:
(9)

5
Sociedad Mexicana de Ingeniería EstructuralSociedad Mexicana de Ingeniería Estructural
Ω Ω 1 Ω 2, ...Ω n, = ...Ω n...Ω n
Simplificando: (10)
La ec. 10 representa un problema de vectores característicos. Para encontrar los valores escalares de Ω con su respectivo vector Φ. Al resolver la ec. 10, se encuentran las siguientes propiedades de la estructura:
Donde: Ωi son las frecuencias modales Φ se conoce como la matriz de amplitudes o formas modales n es el número de grados de libertad de la estructura Una vez conocidos los parámetros anteriores, se puede obtener los factores de participación modal (Fpi) mediante:
(11) Los factores de participación representan el porcentaje de participación que cada modo aporta a la respuesta total del sistema. Haciendo el cambio de variable para el desplazamiento x=Φ y, y sustituyendo en la ec. 7 se tiene un sistema desacoplado debido a la forma de la matriz de masas, la cual, es diagonal. Se puede además fijar la fracción del amortiguamiento crítico para cada modo. De esta forma la ecuación de movimiento para SVGDL queda:
(12) Esta ecuación se resuelve considerando cada masa de la estructura como un S1GDL. Finalmente la respuesta para SVGDL se encuentra regresando a la variable original, x.
(13)
(14)
(15)

XVI Congreso Nacional de Ingeniería Estructural Veracruz, Ver. 2008.
6
DESARROLLO DEL EXPERIMENTO Los ensayes experimentales fueron realizados en una pequeña mesa vibradora, en la cual solo es posible realizar ensayes en una sola dirección horizontal bajo el régimen de una función senoidal. Tanto los desplazamientos como la frecuencia de los ciclos senoidales son controlables, teniendo una carrera máxima para los desplazamientos de ±5cm y periodos desde 0.1 hasta 3 s para las frecuencias de excitación. La mesa cuenta con un área útil de 0.5m2 en la superficie de la plataforma y funciona a base de un motor eléctrico. La respuesta de la estructura durante las pruebas experimentales se obtuvo de forma analógica a través de un registro grafico que grabó en papel milimétrico tanto el desplazamiento de cada masa como la excitación que actuaba en ese instante a través de un bolígrafo sujeto a cada masa. La velocidad tangencial con la funciona el registro es de 1.276 ciclos por segundo (c.p.s.). La parte esencial del modelo experimental es la estructura a escala que se ensayó en la mesa vibratoria, la cual se fabricó de tal manera que emulara la geometría de una estructura real. La base del modelo son marcos ortogonales y masas concentradas en los niveles de cada piso, a diferencia de una estructura real el modelo ensayado es altamente flexible, lo cual ayudó a acentuar las formas modales durante los ensayes. El modelo contó con una altura de entrepiso de 40 cm resultando un total de 120 cm de altura, la sección en planta fue de 40x25cm. Se llevó un control estricto en la construcción del modelo a fin de obtener el mejor comportamiento posible. Las columnas del modelo fueron hechas de aluminio, con secciones a base de solera de 3/4” por 1/16”, las trabes de cada entrepiso se fabricaron con secciones LI de 3/4” por 1/16” (figura 7). Para simular la condición de diafragma rígido en cada entrepiso, se utilizaron piezas de madera, cuya dimensión fue tal que ajustara perfectamente dentro del marco de aluminio formado por las trabes. Así mismo se buscó garantizar las condiciones nudo rígido en las uniones viga-columna y de empotramiento en la base, a través de pernos y pasadores.
Figura 4. Vista de la mesa vibradora Figura 5.Vista de la consola para registro analógico de datos
Figura 6. Vista del modelo a escala
7
Sociedad Mexicana de Ingeniería EstructuralSociedad Mexicana de Ingeniería Estructural
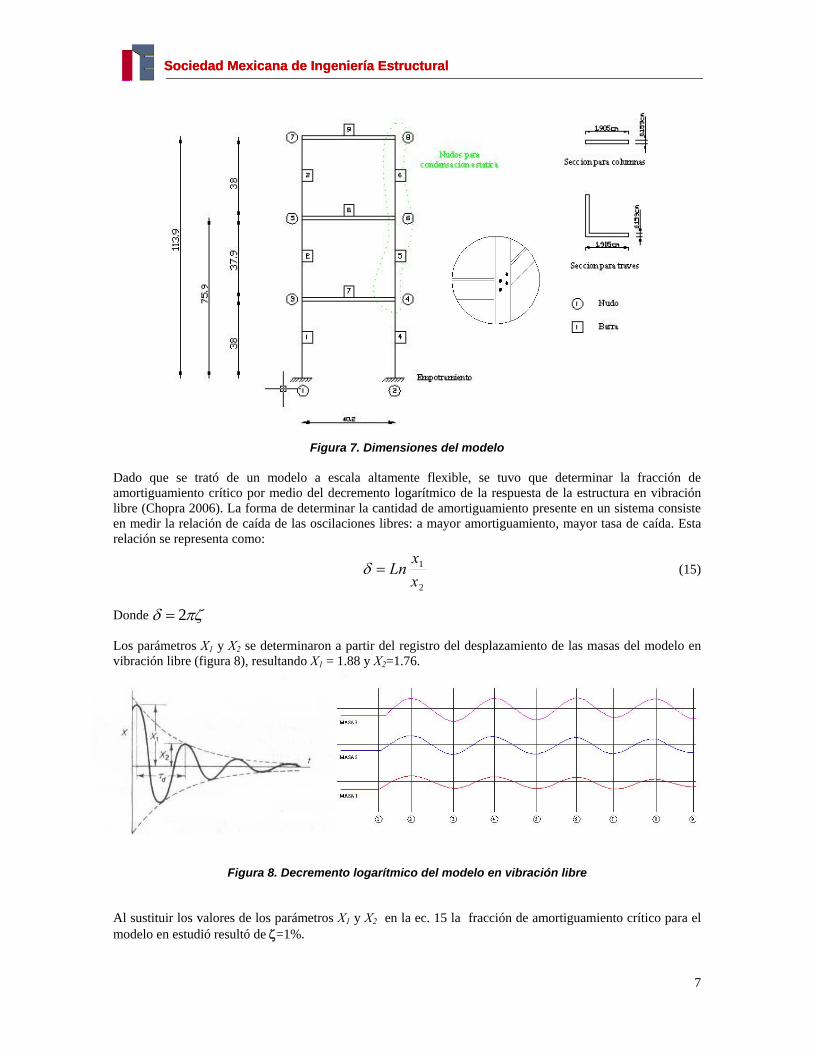
Figura 7. Dimensiones del modelo Dado que se trató de un modelo a escala altamente flexible, se tuvo que determinar la fracción de amortiguamiento crítico por medio del decremento logarítmico de la respuesta de la estructura en vibración libre (Chopra 2006). La forma de determinar la cantidad de amortiguamiento presente en un sistema consiste en medir la relación de caída de las oscilaciones libres: a mayor amortiguamiento, mayor tasa de caída. Esta relación se representa como:
(15) Donde Los parámetros X1 y X2 se determinaron a partir del registro del desplazamiento de las masas del modelo en vibración libre (figura 8), resultando X1 = 1.88 y X2=1.76.
Figura 8. Decremento logarítmico del modelo en vibración libre Al sustituir los valores de los parámetros X1 y X2 en la ec. 15 la fracción de amortiguamiento crítico para el modelo en estudió resultó de ζ=1%.
2
1
xx
Ln=δ
πζδ 2=
XVI Congreso Nacional de Ingeniería Estructural Veracruz, Ver. 2008.
8
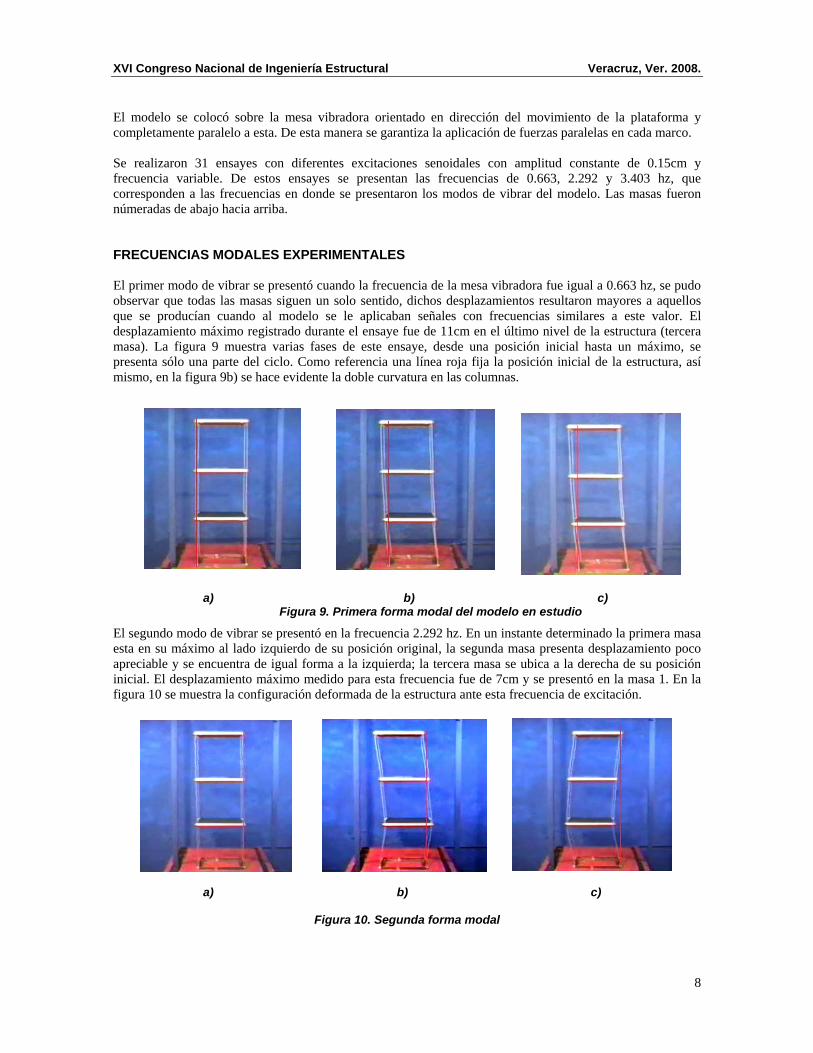
El modelo se colocó sobre la mesa vibradora orientado en dirección del movimiento de la plataforma y completamente paralelo a esta. De esta manera se garantiza la aplicación de fuerzas paralelas en cada marco. Se realizaron 31 ensayes con diferentes excitaciones senoidales con amplitud constante de 0.15cm y frecuencia variable. De estos ensayes se presentan las frecuencias de 0.663, 2.292 y 3.403 hz, que corresponden a las frecuencias en donde se presentaron los modos de vibrar del modelo. Las masas fueron númeradas de abajo hacia arriba. FRECUENCIAS MODALES EXPERIMENTALES El primer modo de vibrar se presentó cuando la frecuencia de la mesa vibradora fue igual a 0.663 hz, se pudo observar que todas las masas siguen un solo sentido, dichos desplazamientos resultaron mayores a aquellos que se producían cuando al modelo se le aplicaban señales con frecuencias similares a este valor. El desplazamiento máximo registrado durante el ensaye fue de 11cm en el último nivel de la estructura (tercera masa). La figura 9 muestra varias fases de este ensaye, desde una posición inicial hasta un máximo, se presenta sólo una parte del ciclo. Como referencia una línea roja fija la posición inicial de la estructura, así mismo, en la figura 9b) se hace evidente la doble curvatura en las columnas.
a) b) c)
Figura 9. Primera forma modal del modelo en estudio
El segundo modo de vibrar se presentó en la frecuencia 2.292 hz. En un instante determinado la primera masa esta en su máximo al lado izquierdo de su posición original, la segunda masa presenta desplazamiento poco apreciable y se encuentra de igual forma a la izquierda; la tercera masa se ubica a la derecha de su posición inicial. El desplazamiento máximo medido para esta frecuencia fue de 7cm y se presentó en la masa 1. En la figura 10 se muestra la configuración deformada de la estructura ante esta frecuencia de excitación. a) b) c)
Figura 10. Segunda forma modal
9
Sociedad Mexicana de Ingeniería EstructuralSociedad Mexicana de Ingeniería Estructural
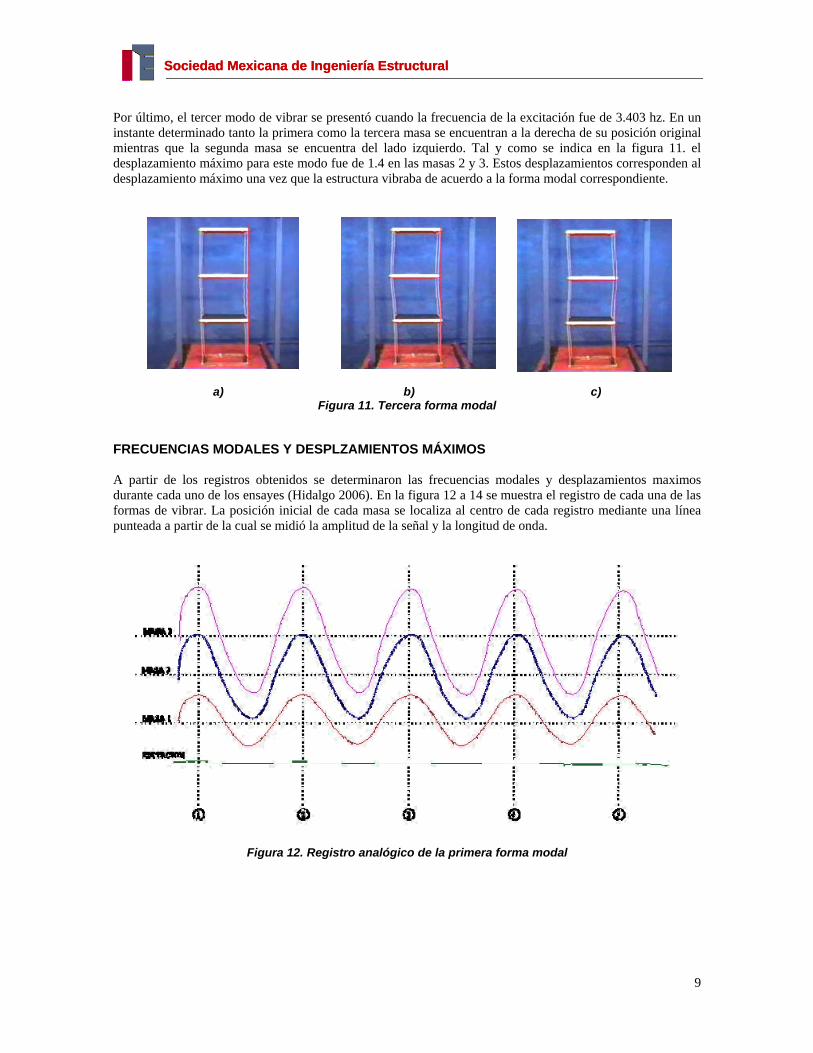
Por último, el tercer modo de vibrar se presentó cuando la frecuencia de la excitación fue de 3.403 hz. En un instante determinado tanto la primera como la tercera masa se encuentran a la derecha de su posición original mientras que la segunda masa se encuentra del lado izquierdo. Tal y como se indica en la figura 11. el desplazamiento máximo para este modo fue de 1.4 en las masas 2 y 3. Estos desplazamientos corresponden al desplazamiento máximo una vez que la estructura vibraba de acuerdo a la forma modal correspondiente. a) b) c)
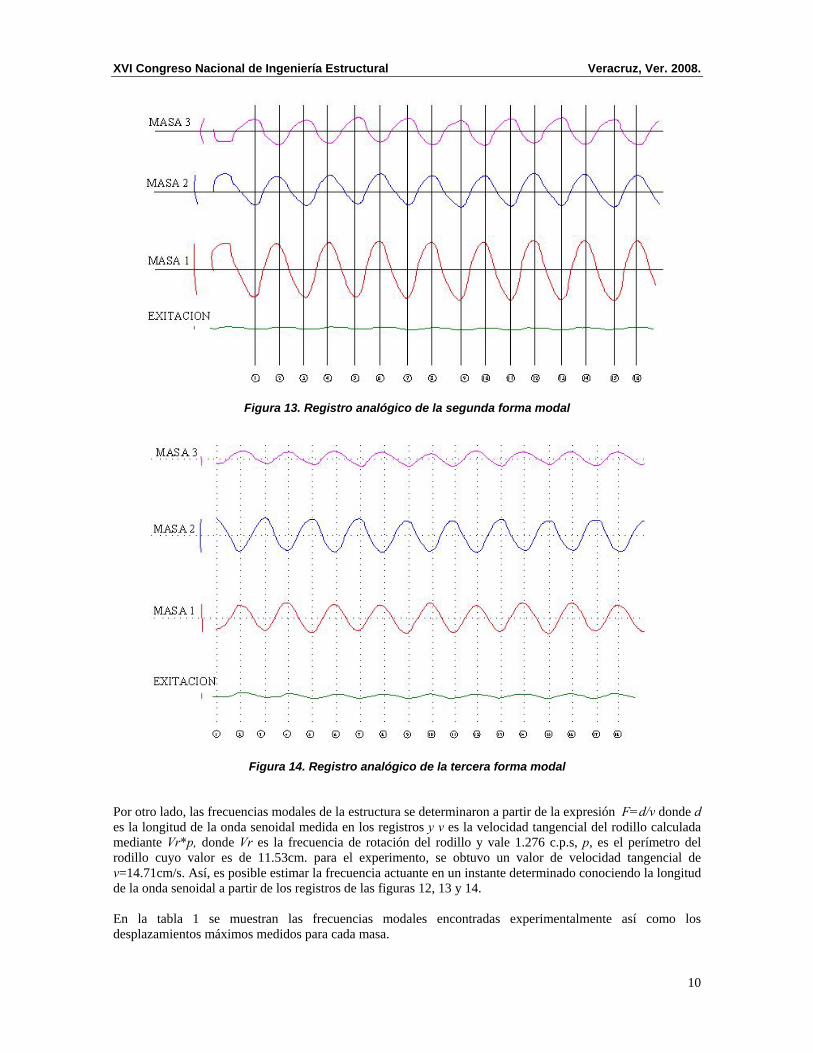
Figura 11. Tercera forma modal FRECUENCIAS MODALES Y DESPLZAMIENTOS MÁXIMOS A partir de los registros obtenidos se determinaron las frecuencias modales y desplazamientos maximos durante cada uno de los ensayes (Hidalgo 2006). En la figura 12 a 14 se muestra el registro de cada una de las formas de vibrar. La posición inicial de cada masa se localiza al centro de cada registro mediante una línea punteada a partir de la cual se midió la amplitud de la señal y la longitud de onda.
Figura 12. Registro analógico de la primera forma modal
XVI Congreso Nacional de Ingeniería Estructural Veracruz, Ver. 2008.
10
Figura 13. Registro analógico de la segunda forma modal
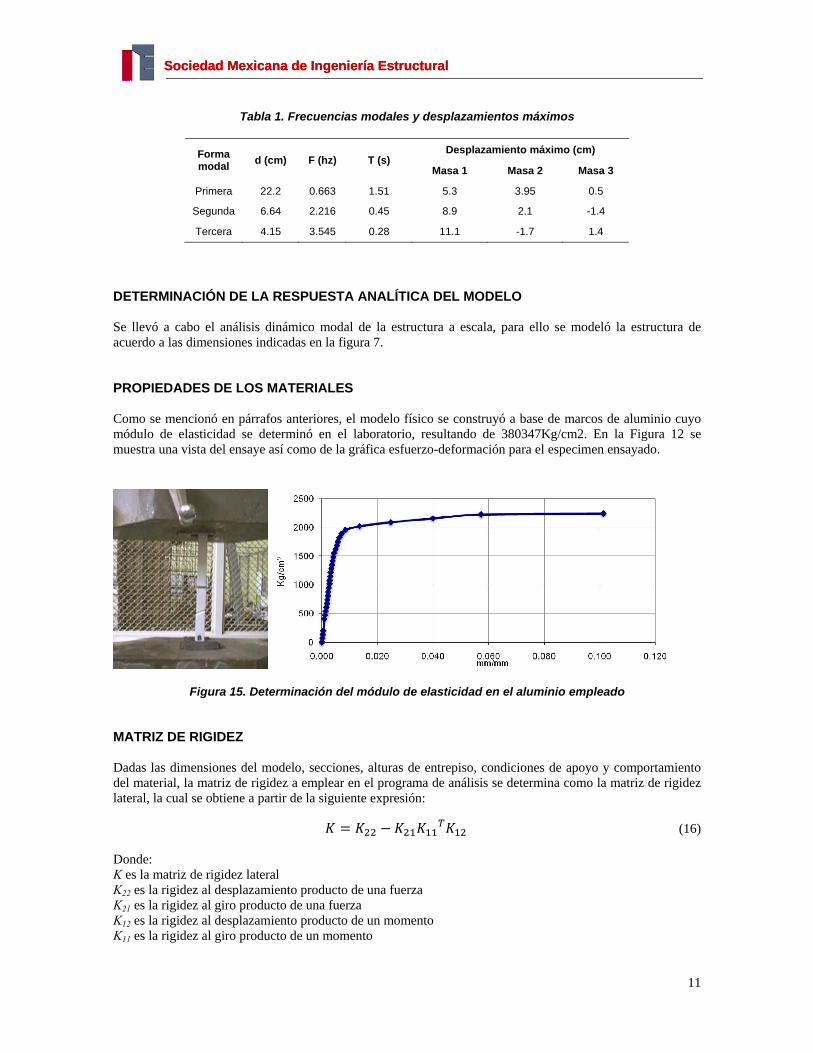
Figura 14. Registro analógico de la tercera forma modal Por otro lado, las frecuencias modales de la estructura se determinaron a partir de la expresión F=d/v donde d es la longitud de la onda senoidal medida en los registros y v es la velocidad tangencial del rodillo calculada mediante Vr*p, donde Vr es la frecuencia de rotación del rodillo y vale 1.276 c.p.s, p, es el perímetro del rodillo cuyo valor es de 11.53cm. para el experimento, se obtuvo un valor de velocidad tangencial de v=14.71cm/s. Así, es posible estimar la frecuencia actuante en un instante determinado conociendo la longitud de la onda senoidal a partir de los registros de las figuras 12, 13 y 14. En la tabla 1 se muestran las frecuencias modales encontradas experimentalmente así como los desplazamientos máximos medidos para cada masa.
11
Sociedad Mexicana de Ingeniería EstructuralSociedad Mexicana de Ingeniería Estructural
Tabla 1. Frecuencias modales y desplazamientos máximos
Forma modal d (cm) F (hz) T (s)
Desplazamiento máximo (cm)
Masa 1 Masa 2 Masa 3
Primera 22.2 0.663 1.51 5.3 3.95 0.5
Segunda 6.64 2.216 0.45 8.9 2.1 -1.4
Tercera 4.15 3.545 0.28 11.1 -1.7 1.4
DETERMINACIÓN DE LA RESPUESTA ANALÍTICA DEL MODELO Se llevó a cabo el análisis dinámico modal de la estructura a escala, para ello se modeló la estructura de acuerdo a las dimensiones indicadas en la figura 7. PROPIEDADES DE LOS MATERIALES Como se mencionó en párrafos anteriores, el modelo físico se construyó a base de marcos de aluminio cuyo módulo de elasticidad se determinó en el laboratorio, resultando de 380347Kg/cm2. En la Figura 12 se muestra una vista del ensaye así como de la gráfica esfuerzo-deformación para el especimen ensayado.
Figura 15. Determinación del módulo de elasticidad en el aluminio empleado MATRIZ DE RIGIDEZ Dadas las dimensiones del modelo, secciones, alturas de entrepiso, condiciones de apoyo y comportamiento del material, la matriz de rigidez a emplear en el programa de análisis se determina como la matriz de rigidez lateral, la cual se obtiene a partir de la siguiente expresión:
(16)
Donde: K es la matriz de rigidez lateral K22 es la rigidez al desplazamiento producto de una fuerza K21 es la rigidez al giro producto de una fuerza K12 es la rigidez al desplazamiento producto de un momento K11 es la rigidez al giro producto de un momento

XVI Congreso Nacional de Ingeniería Estructural Veracruz, Ver. 2008.
12
El lector puede obtener más información acerca de la obtención de la matriz de rigidez lateral consultando la literatura al respecto. La matriz de rigidez lateral empleada en el análisis del modelo se muestra a continuación.
K
0.2120
0.1065−
0.0002
0.1065−
0.2118
0.1055−
0.0002
0.1055−
0.1053
⎛⎜⎜⎝
⎞⎟⎟⎠
=
MATRIZ DE MASAS La matriz de masas del modelo es una matriz diagonal cuyos valores corresponden a la masa concentrada de cada entrepiso. En la tabla 2 se muestra la obtención del peso de cada entrepiso, tomando en cuenta los elementos que gravitan sobre él.
Tabla 2. Determinación del peso de cada entrepiso, valores en gramos
Entrepiso Marco de aluminio Columnas
Tornillos y
tuercas Piso
Brazos y bolígrafos
para registro
wi wi (kg)
1 160 32.9 27.2 1128 59 1407.1 1.407
2 157 32.9 27.2 1069.8 108 1394.9 1.395
3 157 16.45 27.2 2776 147 3123.6 3.123
Para obtener la masa de cada entrepiso debe dividirse el peso correspondiente entre el valor de la aceleración de la gravedad. La matriz de masa empleada en el análisis se muestra a continuación.
M
0.00143527
0
0
0
0.00142100
0
0
0
0.00318858
⎛⎜⎜⎝
⎞⎟⎟⎠
=
GENERACIÓN DE LAS SEÑALES DE EXCITACIÓN A partir de las señales captadas en cada experimento se generó la señal de excitación de manera analítica. Como se mencionó anteriormente, los registros corresponden a desplazamientos, por lo que fue necesario derivar dos veces la señal analítica respecto al tiempo a fin de obtener la aceleración en la base. La señal del desplazamiento se puede representó como: Derivando dos veces respecto al tiempo se obtiene:
(17) Donde: A es la amplitud de la señal de excitación igual a 0.15 cm para nuestro experimento Ω es la frecuencia de excitación
13
Sociedad Mexicana de Ingeniería EstructuralSociedad Mexicana de Ingeniería Estructural
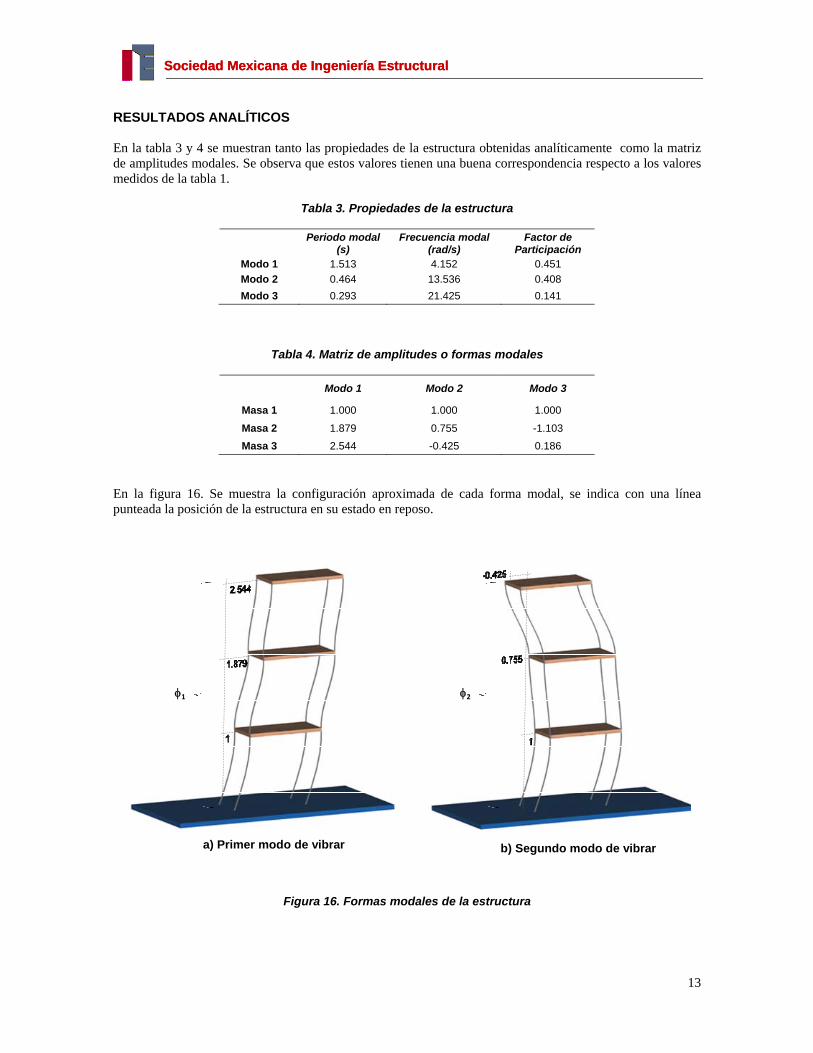
RESULTADOS ANALÍTICOS En la tabla 3 y 4 se muestran tanto las propiedades de la estructura obtenidas analíticamente como la matriz de amplitudes modales. Se observa que estos valores tienen una buena correspondencia respecto a los valores medidos de la tabla 1.
Tabla 3. Propiedades de la estructura
Periodo modal
(s) Frecuencia modal
(rad/s) Factor de
Participación Modo 1 1.513 4.152 0.451 Modo 2 0.464 13.536 0.408 Modo 3 0.293 21.425 0.141
Tabla 4. Matriz de amplitudes o formas modales
Modo 1 Modo 2 Modo 3
Masa 1 1.000 1.000 1.000
Masa 2 1.879 0.755 -1.103
Masa 3 2.544 -0.425 0.186
En la figura 16. Se muestra la configuración aproximada de cada forma modal, se indica con una línea punteada la posición de la estructura en su estado en reposo.
φ1
φ2
Figura 16. Formas modales de la estructura
a) Primer modo de vibrar b) Segundo modo de vibrar

XVI Congreso Nacional de Ingeniería Estructural Veracruz, Ver. 2008.
14
φ3
Figura 16 (continuación). Formas modales de la estructura
A continuación se muestra la respuesta del modelo ante cada señal de excitación analizada. DESPLAZAMIENTOS DE LA ESTRUCTURA CALCULADOS ANALÍTICAMENTE Señal 1 En la tabla 5 se indican los valores analíticos máximos de desplazamiento una vez que se presenta la primera forma modal. Estos desplazamientos se comparan con los valores medidos indicados en la tabla 1.
Tabla 5. Comparación de desplazamientos obtenidos en la primera forma modal
Desplazamiento máximo de la forma modal (cm)
Desplazamiento máximo medido (cm)
MASA 1 4.508 5.3 MASA 2 8.468 8.9
MASA 3 11.469 11.1
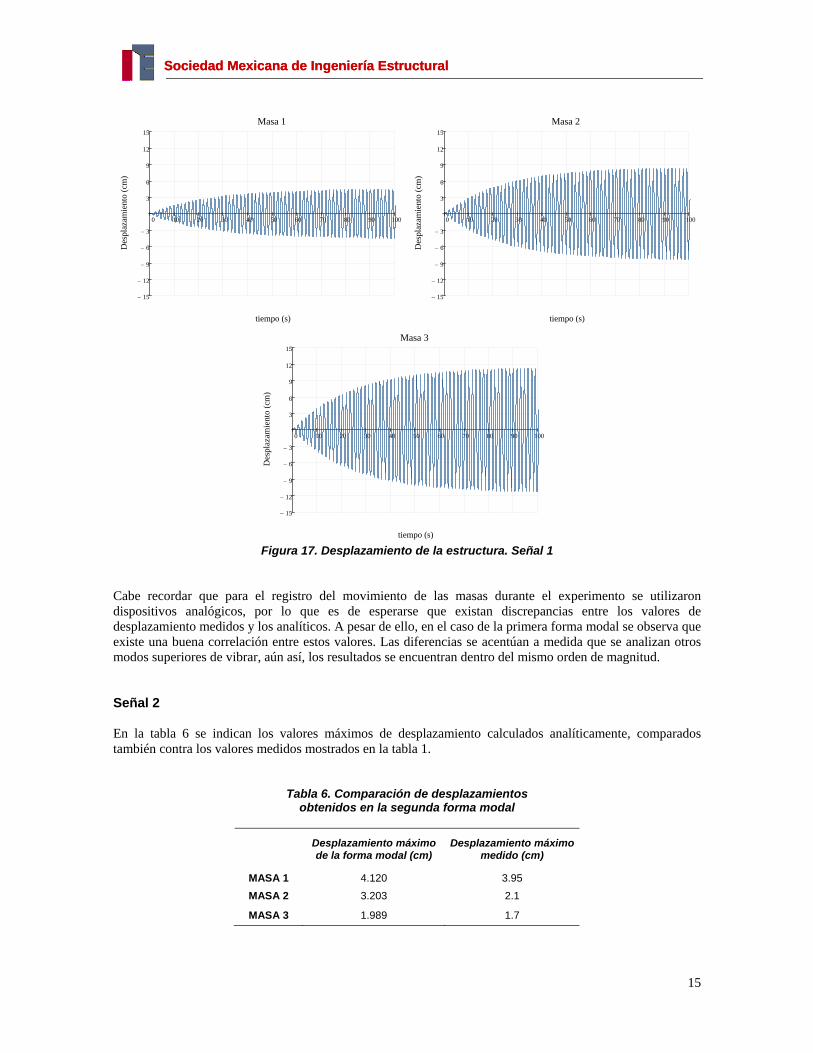
En la figura 17 se presenta la historia en el tiempo del desplazamiento para cada entrepiso ante esta señal de excitación. Se puede observar que la respuesta de la estructura corresponde al primer modo de vibrar. Como se indica en la Figura 16 a), las masas se desplazan proporcionalmente, siendo menor el desplazamiento en la primer masa incrementándose respecto a la altura de la estructura.
c) Tercer modo de vibrar
15
Sociedad Mexicana de Ingeniería EstructuralSociedad Mexicana de Ingeniería Estructural
0 10 20 30 40 50 60 70 80 90 100
15−
12−
9−
6−
3−
3
6
9
12
15Masa 1
tiempo (s)
Des
plaz
amie
nto
(cm
)
0 10 20 30 40 50 60 70 80 90 100
15−
12−
9−
6−
3−
3
6
9
12
15Masa 2
tiempo (s)
Des
plaz
amie
nto
(cm
)
0 10 20 30 40 50 60 70 80 90 100
15−
12−
9−
6−
3−
3
6
9
12
15Masa 3
tiempo (s)
Des
plaz
amie
nto
(cm
)
Figura 17. Desplazamiento de la estructura. Señal 1
Cabe recordar que para el registro del movimiento de las masas durante el experimento se utilizaron dispositivos analógicos, por lo que es de esperarse que existan discrepancias entre los valores de desplazamiento medidos y los analíticos. A pesar de ello, en el caso de la primera forma modal se observa que existe una buena correlación entre estos valores. Las diferencias se acentúan a medida que se analizan otros modos superiores de vibrar, aún así, los resultados se encuentran dentro del mismo orden de magnitud. Señal 2 En la tabla 6 se indican los valores máximos de desplazamiento calculados analíticamente, comparados también contra los valores medidos mostrados en la tabla 1.
Tabla 6. Comparación de desplazamientos obtenidos en la segunda forma modal
Desplazamiento máximo de la forma modal (cm)
Desplazamiento máximo medido (cm)
MASA 1 4.120 3.95
MASA 2 3.203 2.1
MASA 3 1.989 1.7
XVI Congreso Nacional de Ingeniería Estructural Veracruz, Ver. 2008.
16
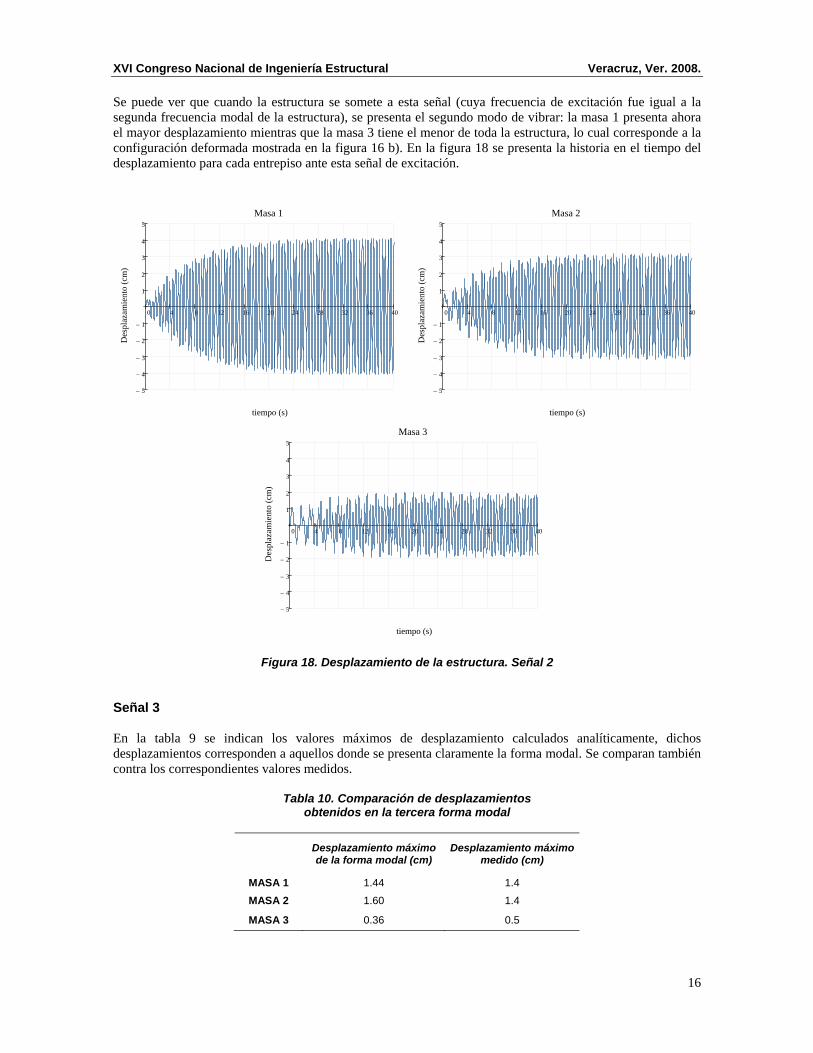
Se puede ver que cuando la estructura se somete a esta señal (cuya frecuencia de excitación fue igual a la segunda frecuencia modal de la estructura), se presenta el segundo modo de vibrar: la masa 1 presenta ahora el mayor desplazamiento mientras que la masa 3 tiene el menor de toda la estructura, lo cual corresponde a la configuración deformada mostrada en la figura 16 b). En la figura 18 se presenta la historia en el tiempo del desplazamiento para cada entrepiso ante esta señal de excitación.
0 4 8 12 16 20 24 28 32 36 40
5−
4−
3−
2−
1−
1
2
3
4
5Masa 1
tiempo (s)
Des
plaz
amie
nto
(cm
)
0 4 8 12 16 20 24 28 32 36 40
5−
4−
3−
2−
1−
1
2
3
4
5Masa 2
tiempo (s)D
espl
azam
ient
o (c
m)
0 4 8 12 16 20 24 28 32 36 40
5−
4−
3−
2−
1−
1
2
3
4
5Masa 3
tiempo (s)
Des
plaz
amie
nto
(cm
)
Figura 18. Desplazamiento de la estructura. Señal 2 Señal 3 En la tabla 9 se indican los valores máximos de desplazamiento calculados analíticamente, dichos desplazamientos corresponden a aquellos donde se presenta claramente la forma modal. Se comparan también contra los correspondientes valores medidos.
Tabla 10. Comparación de desplazamientos obtenidos en la tercera forma modal
Desplazamiento máximo de la forma modal (cm)
Desplazamiento máximo medido (cm)
MASA 1 1.44 1.4
MASA 2 1.60 1.4
MASA 3 0.36 0.5
17
Sociedad Mexicana de Ingeniería EstructuralSociedad Mexicana de Ingeniería Estructural
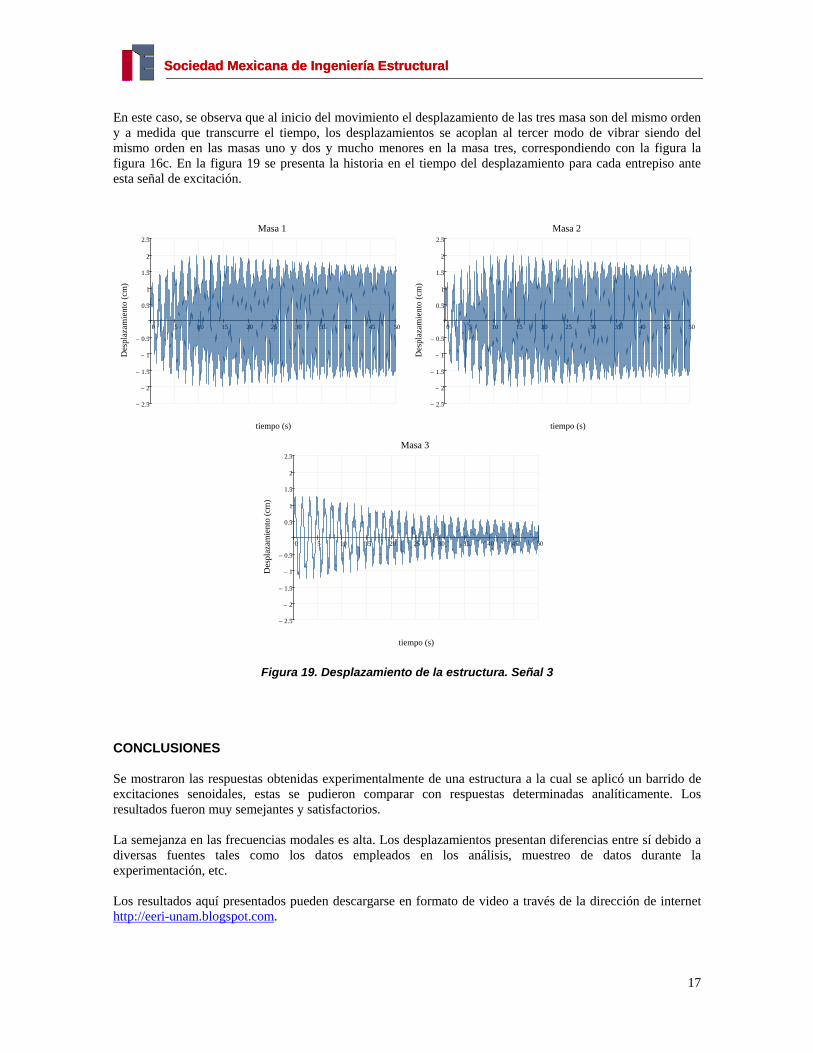
En este caso, se observa que al inicio del movimiento el desplazamiento de las tres masa son del mismo orden y a medida que transcurre el tiempo, los desplazamientos se acoplan al tercer modo de vibrar siendo del mismo orden en las masas uno y dos y mucho menores en la masa tres, correspondiendo con la figura la figura 16c. En la figura 19 se presenta la historia en el tiempo del desplazamiento para cada entrepiso ante esta señal de excitación.
0 5 10 15 20 25 30 35 40 45 50
2.5−
2−
1.5−
1−
0.5−
0.5
1
1.5
2
2.5Masa 1
tiempo (s)
Des
plaz
amie
nto
(cm
)
0 5 10 15 20 25 30 35 40 45 50
2.5−
2−
1.5−
1−
0.5−
0.5
1
1.5
2
2.5Masa 2
tiempo (s)D
espl
azam
ient
o (c
m)
0 5 10 15 20 25 30 35 40 45 50
2.5−
2−
1.5−
1−
0.5−
0.5
1
1.5
2
2.5Masa 3
tiempo (s)
Des
plaz
amie
nto
(cm
)
Figura 19. Desplazamiento de la estructura. Señal 3 CONCLUSIONES Se mostraron las respuestas obtenidas experimentalmente de una estructura a la cual se aplicó un barrido de excitaciones senoidales, estas se pudieron comparar con respuestas determinadas analíticamente. Los resultados fueron muy semejantes y satisfactorios. La semejanza en las frecuencias modales es alta. Los desplazamientos presentan diferencias entre sí debido a diversas fuentes tales como los datos empleados en los análisis, muestreo de datos durante la experimentación, etc. Los resultados aquí presentados pueden descargarse en formato de video a través de la dirección de internet http://eeri-unam.blogspot.com.
XVI Congreso Nacional de Ingeniería Estructural Veracruz, Ver. 2008.
18
REFERENCIAS
Chopra A. (2007), “Dynamics of Structures, Theory and applications to earthquake engineering”, third edition, ed. Pearson Prentice Hall, New Jersey. USA. Borréis, Arthur P y Richard J. Schmidt. “Ingeniería Mecánica Dinámica”, México:Thomson Learning, 1991. Baird, David Carr. “Experimentación”. México: Pretrentice-Hall Hispanoamérica, SA, 1991. Flores Salazar, Ruth. “Manual del Laboratorio de Concreto y Acero”, Puebla, BUAP, 1999. Hibbeler, Russel C. “Mecánica de materiales”. México: CECSA, 1994. Hidalgot Toxqui JP, “Mesa vibratoria a escala, de un grado de libertad como instrumentación didáctica”, Tesis de licenciatura, BUAP, Puebla, Mexico, 2006. Meli Piralla, Roberto. “Diseño Estructural”. México: Limusa Noriega Editores, 2000 Paz Mario, “Dinámica estructural. Teoría y cálculo” Editorial Reverté, 1992. Roca Vila, R y Juan León L. “Vibraciones Mecánicas”. México: Limusa Noriega, Editores, 1997. Shigley, Joseph Eduard y Charles R. Mischke. “Diseño en Ingeniería Mecánica”, México: Mc Graw Hill, 1990. Thomson, William Tyrrell. “Teoría de Vibraciones (Aplicaciones)”. México PHH Prentice Hall Hispanoamérica S. A., 1982. Timoshenko, Stephen P y James M Gere. “Mecánica de Materiales”. México: Internacional Thomson Editores, 1998. UCIST, “Small-Shake Table Experiments and Comparison to Analytical Predictions”, http://ucist.cive.wustl.edu/ , 03 de Octubre del 2005.