AUTOMATIZACIÓN DE PROCESOS PRÁCTICA 2 GIRO · PDF filePRÁCTICA 2 GIRO DE...
6
UNIVERSIDAD AUTÓNOMA DE LA CIUDAD DE MÉXICO AUTOMATIZACIÓN DE PROCESOS PRÁCTICA 2 GIRO DE MOTOR DE PASOS CONTROLADO POR PUSH BOTÓN MARTÍNEZ PÉREZ JOSE ALFREDO PÉREZ GACHUZ VICTOR JIMÉNEZ OSORIO HÉCTOR ALONSO
Transcript of AUTOMATIZACIÓN DE PROCESOS PRÁCTICA 2 GIRO · PDF filePRÁCTICA 2 GIRO DE...
UNIVERSIDAD AUTÓNOMA DE LA CIUDAD DE MÉXICO
AUTOMATIZACIÓN DE PROCESOS
PRÁCTICA 2
GIRO DE MOTOR DE PASOS CONTROLADO POR PUSH BOTÓN
MARTÍNEZ PÉREZ JOSE ALFREDO
PÉREZ GACHUZ VICTOR JIMÉNEZ OSORIO HÉCTOR ALONSO
UNIVERSIDAD AUTÓNOMA DE LA CIUDAD DE MÉXICO
INTRODUCCIÓN El siguiente trabajo fue realizado con el fin de mostrar el control de giro de un motor de pasos con un
microcontrolador y un push botón, para este control se utilizo un Microcontrolador PIC16F887, el
software PIC C Compiler en donde se estructuro el código para el microcontrolador y además se
utilizo el simulador Proteus en el cual se hizo una simulación del circuito a controlar. A continuación
se presenta algunos conceptos necesarios para el desarrollo de este trabajo practico.
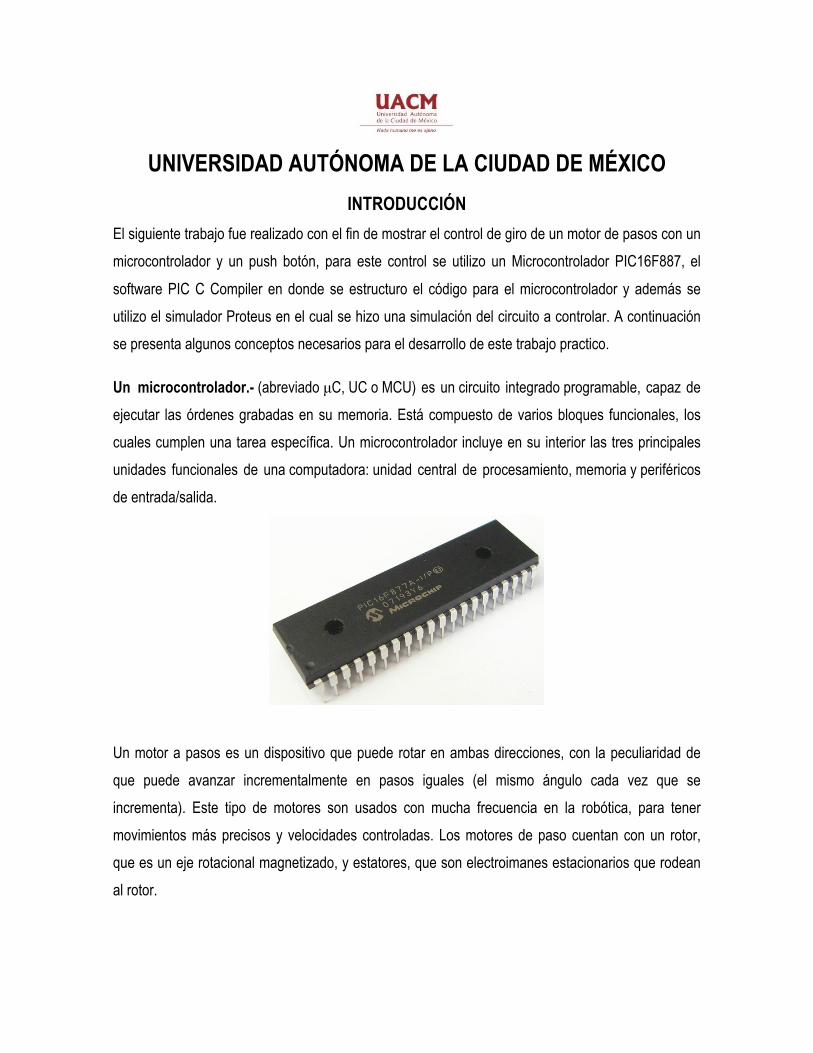
Un microcontrolador.- (abreviado µC, UC o MCU) es un circuito integrado programable, capaz de
ejecutar las órdenes grabadas en su memoria. Está compuesto de varios bloques funcionales, los
cuales cumplen una tarea específica. Un microcontrolador incluye en su interior las tres principales
unidades funcionales de una computadora: unidad central de procesamiento, memoria y periféricos
de entrada/salida.
Un motor a pasos es un dispositivo que puede rotar en ambas direcciones, con la peculiaridad de
que puede avanzar incrementalmente en pasos iguales (el mismo ángulo cada vez que se
incrementa). Este tipo de motores son usados con mucha frecuencia en la robótica, para tener
movimientos más precisos y velocidades controladas. Los motores de paso cuentan con un rotor,
que es un eje rotacional magnetizado, y estatores, que son electroimanes estacionarios que rodean
al rotor.

UNIVERSIDAD AUTÓNOMA DE LA CIUDAD DE MÉXICO
Los motores de paso comerciales cuentan con mucha más precisión ya que emplean una serie de
mini polos en el estator y rotor, aumentando de forma considerable la resolución; los hay de 15°
grados por paso, 3° e inclusive 1° grado. Existen motores de paso de diferentes tipos; los
comerciales cuentan con 4 ó 6 líneas de conexión, las cuales deben ser energizadas con una
secuencia en particular para poder mover el rotor paso por paso hacia un lado o el otro.
DESARROLLO
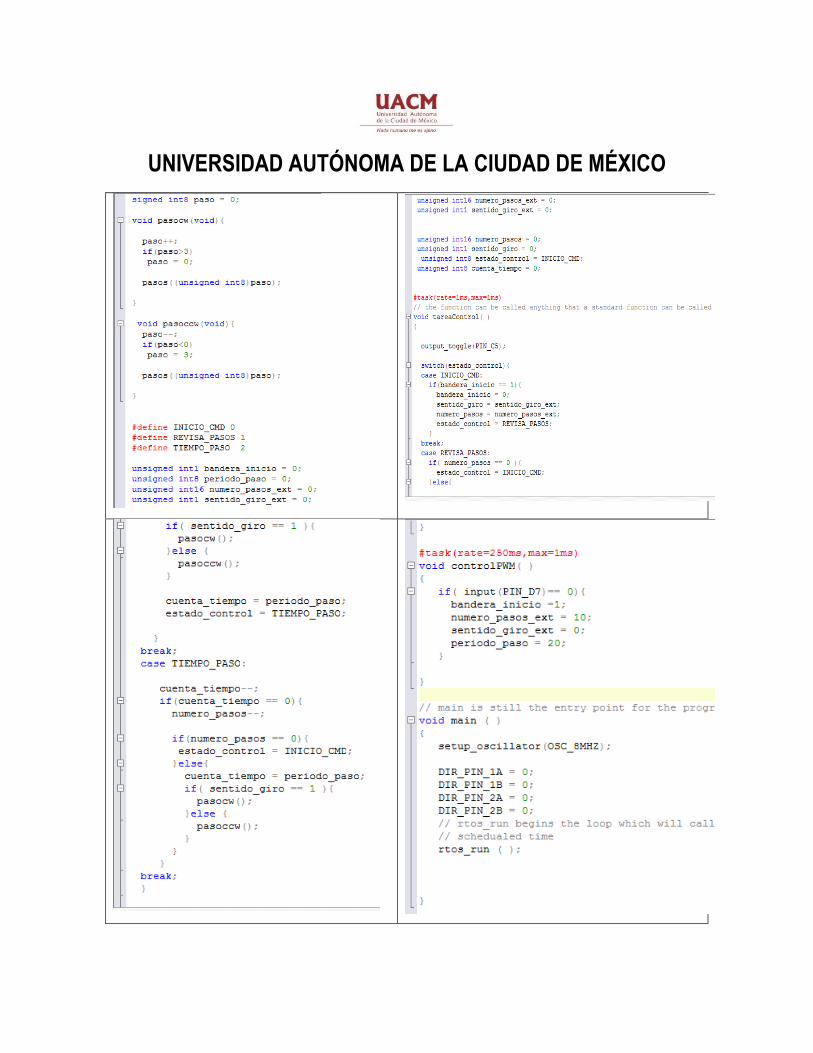
En esta práctica se utilizo el siguiente programa para controlar el motor a pasos, en la figura se
muestra el código en el software PIC C Compiler.
UNIVERSIDAD AUTÓNOMA DE LA CIUDAD DE MÉXICO

UNIVERSIDAD AUTÓNOMA DE LA CIUDAD DE MÉXICO
También se implemento un circuito en donde se conecto un motor a pasos unipolar, en la siguiente
imagen se presenta el circuito implementado, además se muestra la fotografía de implemento en el
protoboard. El funcionamiento de esta simulación fue que al presionar el push botón el motor gira de
sentido horaria y al presionar nuevamente el push botón el motor se apaga, en la implementación
real funciono correctamente.
En la fotografía se muestra el implemento de un microcontrolador (PIC16F887) y un driver puente H
(L293D) para el control del motor a pasos y para proteger el microcontrolador.

UNIVERSIDAD AUTÓNOMA DE LA CIUDAD DE MÉXICO
CONCLUSIONES
Finalmente, todo lo anterior me hace pensar que el controlar el motor a pasos es importante ya que
en la actualidad existen muchos circuitos en los que se implementan, estos tipos de motora
son mas precisos para la implementación y el control, como por ejemplo en las impresoras,
escáneres entre otros, además se pueden encontrar en la industria como en maquinas
eléctricas como son los de la industria refresquera.
REFERENCIAS
http://cs.mty.itesm.mx/lab/robotica/practicas/%28LRA%29Practica_-_05_-
_Motor%20de%20Pasos.pdf
http://es.wikipedia.org/wiki/Microcontrolador