
Ayudantia rii
60
Ayudantías Mecánica Racional II Univerdidad Austral de Chile Facultad de Ciencias de la Ingeniería Mecánica Racional II Dinámica DMIL 233 Ayudante Johan Muñoz Profesor Sr. Rolando Ríos Rodríguez Valdivia, Chile 5 de julio de 2012
-
Upload
patricio-cuevas-aburto -
Category
Health & Medicine
-
view
301 -
download
8
Transcript of Ayudantia rii

AyudantíasMecánica Racional II
Univerdidad Austral de ChileFacultad de Ciencias de la Ingeniería
Mecánica Racional II
Dinámica DMIL 233
Ayudante Johan Muñoz
Profesor Sr. Rolando Ríos Rodríguez
Valdivia, Chile5 de julio de 2012

Índice General
Índice General . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
Índice de Figuras . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1. Cinemática Plana de Cuerpo Rígido . . . . . . . . . . . . . . . . . . . . . . . . . 51.1. Movimiento plano general (ejes en traslación) . . . . . . . . . . . . . . . . . . . . . . . 5
1.1.1. Problema 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.1.2. Problema 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.2. Movimiento relativo a ejes en rotación . . . . . . . . . . . . . . . . . . . . . . . . . . . 101.2.1. Problema 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101.2.2. Problema 4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.3. Consideraciones al momento de realizar los ejercicios . . . . . . . . . . . . . . . . . . . 14
2. Cinética plana de cuerpo rígido . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152.1. Traslación en dos dimensiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.1.1. Problema 5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152.2. Movimiento plano general en dos dimensiones . . . . . . . . . . . . . . . . . . . . . . . 17
2.2.1. Problema 6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3. Ejercicios resueltos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193.1. Cinemática . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3.1.1. Problema 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193.1.2. Problema 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.2. Cinética . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 243.2.1. Problema 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
4. Cinemática Cuerpo rígido en el Espacio . . . . . . . . . . . . . . . . . . . . . . . 264.1. Rotación en torno a un eje fijo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 264.2. Rotación en torno a un punto fijo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 284.3. Movimiento general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
5. Cinética de Cuerpo rígido en el Espacio . . . . . . . . . . . . . . . . . . . . . . . 325.1. Momento cinético y Energía cinética . . . . . . . . . . . . . . . . . . . . . . . . . . . . 325.2. Ecuaciones cinéticas del movimientos en el espacio . . . . . . . . . . . . . . . . . . . . 35
5.2.1. Problema 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 355.2.2. Problema 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 375.2.3. Problema 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
6. Vibraciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 416.1. Oscilación libre sin amortiguamiento . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
2

§ ÍNDICE GENERAL 3
6.1.1. Problema 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 416.1.2. Problema 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 436.1.3. Problema 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
6.2. Oscilación forzada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 466.2.1. Problema 4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 466.2.2. Problema 5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 486.2.3. Problema 6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
6.3. Oscilaciones de un cuerpo rígido . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 516.3.1. Problema 7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 516.3.2. Problema 8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 526.3.3. Problema 9 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
6.4. Métodos energéticos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 556.4.1. Problema 101 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 556.4.2. Problema 11 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 576.4.3. Problema 12 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
1Problema resuelto en el libro Meriam Dinámica, el objetivo de este ejercicio es ver que método le es más conveniente.
Ayudantías de Mecánica Racional II,5 de julio de 2012
Universidad Austral de ChileJohan Muñoz

Índice de Figuras
1.1.1. Problema 5.141 del Meriam Vol. 3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.1.2. Problema 5.128 del Meriam Vol. 3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81.2.1. Problema 5.174 del Meriam Vol. 3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101.2.2. Problema 5.178 del Meriam Vol. 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.2.1. Ejercicio 6.117 del Meriam Vol. 3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172.2.2. Diagrama cinético. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.1.1. Problema 1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193.1.2. Problema 5.203 del Meriam 6ta ed. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 213.2.1. Problema 6.94 del Meriam 3 Ed. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 243.2.2. Diagrama cinético. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
4.1.1. Problema 7.7 del Merial 3 Ed. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 264.1.2. Ángulos de los respectivos cosenos directores. . . . . . . . . . . . . . . . . . . . . . . . 274.2.1. Problema 7.27 del Meriam 6 Ed. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 284.3.1. Problema 7.39 del Meriam 3 Ed. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
5.1.1. Problema 7.55 del Meriam 6 Ed. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 325.2.1. Problema 7.80 del Meriam 3 ed. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 355.2.2. Problema 7.85 Meriam 7 Ed. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 375.2.3. Problema 7.81 del Meriam 3 Ed. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
6.1.1. Problema 8.12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 416.1.2. Problema 8.15. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 436.1.3. Problema 8.25. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 446.2.1. Problema 8.59. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 466.2.2. Problema 8.65. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 486.2.3. Problema 8.61. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 496.3.1. Problema 8.76. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 516.3.2. Problema 8.78. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 526.3.3. Problema 8.81. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 546.4.1. Problema tipo 8.10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 556.4.2. Problema 8.96. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 576.4.3. Problema 8.102. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
4

1 Cinemática Plana de Cuerpo Rígido
1.1 Movimiento plano general (ejes en traslación)
1.1.1. Problema 1
Fig. 1.1.1: Problema 5.141 del Meriam Vol. 3.
La manivela de arrastre OB lleva una velocidad angular horaria constante ωOB de 0, 5r/s al cruzarla vertical. Hallar la aceleración angular −→α CA del brazo en la posición representada, para la quetan θ = 4/3.
5

§ CAPÍTULO 1. CINEMÁTICA PLANA DE CUERPO RÍGIDO 6
Datos:
ωOB = 0, 5(r/s) (cte)αCA(tan(θ) = 4/3) =?
Tipo de movimiento
Movimiento relativo a ejes en traslación o pano general (porque los ejes de referencia no rotan,sólo se trasladan).
Ecuación de Velocidad:
−→v CA = −→v OB + −→v A/B (1.1.1)
−→v CA = −→ω CA × −→r CA =
∣∣∣∣∣∣i j k0 0 ωCA
120 160 0
∣∣∣∣∣∣ = −160ωCAi + 120ωCAj (mm/s)
−→v OB = −→ω OB × −→r OB =
∣∣∣∣∣∣i j k0 0 0, 50 120 0
∣∣∣∣∣∣ = −60i (mm/s)
−→v A/B = −→ω BA × −→r BA =
∣∣∣∣∣∣i j k0 0 ωBA
240 40 0
∣∣∣∣∣∣ = −40ωBAi + 240ωBAj (mm/s)
igualando componentes:
i : −160ωCA = −60 − 40ωBA
j : 120ωCA = 240ωBA
por lo tanto, las velocidades angulares son:
ωBA = 0, 214 (r/s)ωCA = 0, 429 (r/s)
Ecuación de Aceleración:
Ayudantías de Mecánica Racional II,5 de julio de 2012
Universidad Austral de ChileJohan Muñoz

§ CAPÍTULO 1. CINEMÁTICA PLANA DE CUERPO RÍGIDO 7
−→a CA = −→a OB + −→a A/B
−→a CA = (−→a t)CA + (−→a n)CA = −→α CA × −→r CA + −→ω CA × (−→ω CA × −→r CA)
=
∣∣∣∣∣∣i j k0 0 αCA
120 160 0
∣∣∣∣∣∣+
∣∣∣∣∣∣i j k0 0 0, 429
−68, 64 51, 48 0
∣∣∣∣∣∣= −160αCAi + 120αCAj − 22, 08i − 29, 44j (mm/s2)
−→a OB =*0−→α OB ωOB =cte × −→r OB + −→ω OB × (−→ω OB × −→r OB)
=
∣∣∣∣∣∣i j k0 0 0, 5
−60 0 0
∣∣∣∣∣∣ = −30j (mm/s2)
−→a A/B = −→α BA × −→r BA + −→ω BA × (−→ω BA × −→r BA)
=
∣∣∣∣∣∣i j k0 0 αBA
240 40 0
∣∣∣∣∣∣+
∣∣∣∣∣∣i j k0 0 0, 214
−8, 56 51, 36 0
∣∣∣∣∣∣= −40αBAi + 240αBAj − 11i − 1, 832j (mm/s2)
igualando componentes:
i : −160αCA − 22, 08 = −40αBA − 11j : 120αCA − 29, 44 = −30 + 240αBA − 1, 832
por lo tanto, las aceleraciones angulares son:
αCA = −0, 0763 (r/s2)αBA = −0, 0282 (r/s2)
∴−→α CA−→α CA−→α CA = −0, 0763k (r/s2)= −0, 0763k (r/s2)= −0, 0763k (r/s2)
Por consiguiente, la aceleración angular del brazo CA es de 0,0763 (r/s2
r/s2
r/s2) en sentido anti-horario.
Ayudantías de Mecánica Racional II,5 de julio de 2012
Universidad Austral de ChileJohan Muñoz
§ CAPÍTULO 1. CINEMÁTICA PLANA DE CUERPO RÍGIDO 8
1.1.2. Problema 2
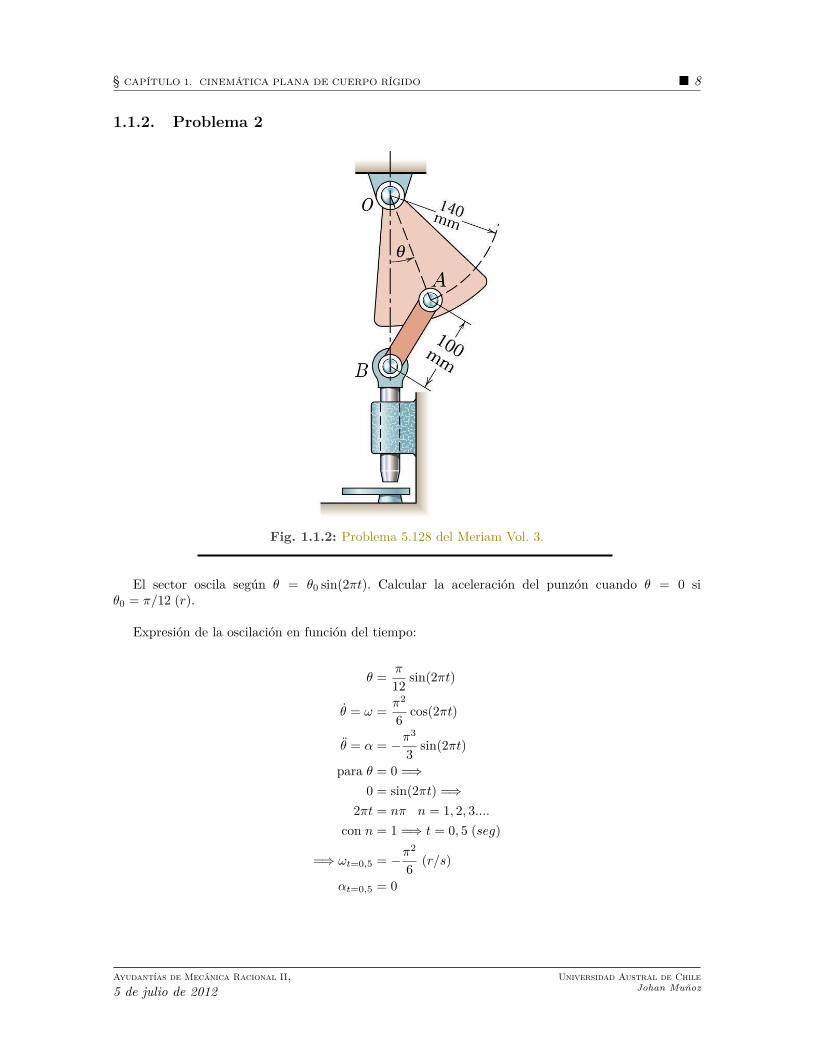
Fig. 1.1.2: Problema 5.128 del Meriam Vol. 3.
El sector oscila según θ = θ0 sin(2πt). Calcular la aceleración del punzón cuando θ = 0 siθ0 = π/12 (r).
Expresión de la oscilación en función del tiempo:
θ = π
12sin(2πt)
θ = ω = π2
6cos(2πt)
θ = α = −π3
3sin(2πt)
para θ = 0 =⇒0 = sin(2πt) =⇒
2πt = nπ n = 1, 2, 3....
con n = 1 =⇒ t = 0, 5 (seg)
=⇒ ωt=0,5 = −π2
6(r/s)
αt=0,5 = 0
Ayudantías de Mecánica Racional II,5 de julio de 2012
Universidad Austral de ChileJohan Muñoz

§ CAPÍTULO 1. CINEMÁTICA PLANA DE CUERPO RÍGIDO 9
Ecuación de velocidad:−→v B = −→v OA + −→v B/A (1.1.2)
−→v B = vBj (mm/s)
−→v OA = −→ω OA × −→r OA = −π2
6k × −140j = −70
3π2i (mm/s)
−→v B/A = −→ω AB × −→r AB = ωABk × −100j = 100ωAB (mm/s)
igualando componentes:
i : 0 = − 703 π2 + 100ωAB
j : vB = 0
por lo tanto, los valores son:
ωAB = 2, 3 (r/s)vB = 0 (mm/s)
Ecuación de aceleración:−→a B = −→a OA + −→a B/A (1.1.3)
−→a B = aBj (mm/s2)
−→a OA =*0−→α OA × −→r OA + −→ω OA × (−→ω OA × −→r OA)
= −π2
6k × −70
3π2i = 378, 8j (mm/s2)
−→a B/A = −→α AB × −→r AB + −→ω AB × (−→ω AB × −→r AB)= αABk × −100j + 2, 3k × 230i
= 100αABi + 529j
igualando componentes:
i : 0 = 100αAB
j : aB = 378, 8 + 529 = 907, 8 (mm/s2)
Por consiguiente, la aceleración del punzón es de 0, 908 (m/s2)0, 908 (m/s2)0, 908 (m/s2) hacia arriba cuando θ = 0.
Ayudantías de Mecánica Racional II,5 de julio de 2012
Universidad Austral de ChileJohan Muñoz

§ CAPÍTULO 1. CINEMÁTICA PLANA DE CUERPO RÍGIDO 10
1.2 Movimiento relativo a ejes en rotación
1.2.1. Problema 3
Fig. 1.2.1: Problema 5.174 del Meriam Vol. 3.
La manivela OA gira con una velocidad angular horaria constante de 10r/s dentro de un arcolimitado de su movimiento. Para la posición θ = 30 hallar la velocidad angular de la barra ranuradaCB y la aceleración de A medida respecto a la ranura de CB.
Ecuación de velocidad:
−→v A =
−→v p︷ ︸︸ ︷−→ω × −→r +−→v rel (1.2.1)
−→v OA = −→ω OA × −→r OA = −10k × (−100i + 173, 2j)= 1000j + 1732i (mm/s)
−→ω P × −→r P = −→ω CA × −→r CA = ωCAk × (−300i + 173, 2j)= −300ωCAj − 173, 2ωCAi (mm/s)
−→v rel = −vrel cos 30i + vrel sin 30j (mm/s)
igualando componentes:
i : 1732 = −173, 2ωCA − vrel cos 30j : 1000 = −300ωCA + vrel sin 30
=⇒ vrel = −1000 (mm/s)ωCA = −5 (r/s)
Ayudantías de Mecánica Racional II,5 de julio de 2012
Universidad Austral de ChileJohan Muñoz

§ CAPÍTULO 1. CINEMÁTICA PLANA DE CUERPO RÍGIDO 11
Ecuación de aceleración:
−→a A =
−→a P︷ ︸︸ ︷−→ω × −→r + −→ω × (−→ω × −→r ) +2−→ω × −→v rel + −→a rel (1.2.2)
−→a OA = −→ω OA × (−→ω OA × −→r OA)= −10k × (1732i + 1000j)= −17320j + 10000i (mm/s2)
−→α CA × −→r CA = αCAk × (−300i + 173, 2j)= −300αCAj − 173, 2αCAi (mm/s2)
−→ω CA × (−→ω CA × −→r CA) = −5k × (866i + 1500j)= −4330j + 7500i (mm/s2)
2−→ω CA × −→v rel = 2 · −5k × (866i − 500j)= −8660j − 5000i (mm/s2)
−→a rel = −arel cos 30i + arel sin 30j (mm/s2)
igualando componentes:
i : 10000 = −173, 2αCA + 7500 − 5000 − arel cos 30j : −17320 = −300αCA − 4330 − 8660 + arel sin 30
Por lo tanto, la velocidad angular de la barra ranurada CB es de 5 (r/s) en sentido horario y laaceleración relativa arel es de −8660 (mm/s2)−8660 (mm/s2)−8660 (mm/s2).
Ayudantías de Mecánica Racional II,5 de julio de 2012
Universidad Austral de ChileJohan Muñoz

§ CAPÍTULO 1. CINEMÁTICA PLANA DE CUERPO RÍGIDO 12
1.2.2. Problema 4
Fig. 1.2.2: Problema 5.178 del Meriam Vol. 3
Hallar la aceleración angular de la barra EC en la posición representada, con ω = β = 2 (r/s) yβ = 6 (r/s2) cuando θ = β = 60. La clavija A es solidaria de la barra EC. La ranura circular dela manivela DO tiene un radio de curvatura de 150 mm. En la posición dela figura, la tangente a laranura en el punto de contacto es paralela a AO.
Ecuación de velocidad:
−→v A =
−→v p︷ ︸︸ ︷−→ω × −→r +−→v rel (1.2.3)
−→v CA = −→ω CA × −→r CA = ωCAk × (75i + 129, 9j)= 75ωCAj − 129, 9ωCAi (mm/s)
−→v P = −→ω OA × −→r OA = −2k × (−75i + 129, 9j)= 150j + 259, 8i (mm/s)
−→v rel = −→ω rel × −→r rel = ωrelk × (129, 9i + 75j)= 129, 9ωrelj − 75ωreli (mm/s)
igualando componentes:
i : −129, 9ωCA = 259, 8 − 75ωrel
j : 75ωCA = 150 + 129, 9ωrel
=⇒ ωCA = −4 (r/s)ωrel = −3, 46 (r/s)
Ayudantías de Mecánica Racional II,5 de julio de 2012
Universidad Austral de ChileJohan Muñoz

§ CAPÍTULO 1. CINEMÁTICA PLANA DE CUERPO RÍGIDO 13
Ecuación de aceleración:
−→a A =
−→a P︷ ︸︸ ︷−→ω × −→r + −→ω × (−→ω × −→r ) +2−→ω × −→v rel + −→a rel (1.2.4)
−→a CA = −→α CA × −→r CA + −→ω CA × (−→ω CA × −→r CA)= αCAk × (75i + 129, 9j) − 4k × (−300j + 519, 6i)= 75αCAj − 129, 9αCAi − 1200i − 2078, 4j (mm/s2)
−→α OA × −→r OA = −6k × (−75i + 129, 9j)= 450j + 779, 4i (mm/s2)
−→ω OA × (−→ω OA × −→r OA) = −2k × (150j + 259, 8i)= 300i − 519, 6j (mm/s2)
2−→ω OA × −→v rel = 2 · −2k × (−449, 5j + 259, 5i)= −1798i − 1038j (mm/s2)
−→a rel = −→α rel × −→r rel + −→ω rel × (−→ω rel × −→r rel)= αrelk × (129, 9i + 75j) − 3, 46k × (−449, 5j + 259, 5i)= 129, 9αrelj − 75αreli − 1555, 3i − 897, 87j (mm/s2)
igualando componentes:
i : −129, 9αCA − 1200 = 779, 4 + 300 − 1798 − 75αrel − 1555, 3j : 75αCA − 2078, 4 = 450 − 519, 6 − 1038 + 129, 9αrel − 897, 87
De esta manera, la aceleración angular de la barra EC (αCE) es de 12 (r/s2)12 (r/s2)12 (r/s2), en sentidoanti-horario.
Ayudantías de Mecánica Racional II,5 de julio de 2012
Universidad Austral de ChileJohan Muñoz

§ CAPÍTULO 1. CINEMÁTICA PLANA DE CUERPO RÍGIDO 14
1.3 Consideraciones al momento de realizar los ejercicios
Leer y releer el enunciado.
Tener en cuenta y acatar la dirección y el sentido de los ejes coordenados que se establecen en elproblema.
Fijarse si variables como velocidad son constantes.
No es lo mismo, por ejemplo, −→r AB que −→r BA, por tratarse de un vector.
Difieren en concepto −→v A/B que −→v B/A. Además,−→v A/B = −→v BA = −→v AB .
El sentido de las velocidades y aceleraciones angulares se pueden asignar de manera arbitraría,el signo del resultado escalar determina si la orientación que se señalo está correcta.
Los ejercicios donde se vean involucrados aceleraciones y velocidades relativas –casi siempre– seidentifican cuando están compuesto por un pasador.
Para mejor entendimiento de estos ejercicios, (mov. rel. a ejes en rotación) vale introducir unpunto P que sea solidario a la pieza ranurada y que coincida con el pasador.
Ayudantías de Mecánica Racional II,5 de julio de 2012
Universidad Austral de ChileJohan Muñoz

2 Cinética plana de cuerpo rígido
2.1 Traslación en dos dimensiones
2.1.1. Problema 5
Una varilla delgada y uniforme AB de 4 Kg se mantiene fija mediante dos cuerdas y el eslabónCA cuyo peso puede ignorarse. Después de cortar la cuerda BD, el ensamble gira en un plano verticalbajo el efecto combinado de la gravedad y un par M de 6 Nm aplicado al eslabón CA en la forma quese muestra. Determine, inmediatamente después de que ha sido cortada la cuerda BD, a) laaceleración de la varilla AB, b) la tensión en la cuerda EB.
15

§ CAPÍTULO 2. CINÉTICA PLANA DE CUERPO RÍGIDO 16
∑MC = I0α ⇒ 6 − At · 0, 45 = 0
At = 13, 33 N
realizando sumatoria de fuerzas tangenciales∑Ft = mat ⇒
13, 33 − 4 · 9, 81 cos θ = 4at
donde
at = rα
∴ at = −1, 572 (m/s2)
como la barra parte del reposo
⇒ ω = 0 ⇒ an = rω2 = 0
Por lo tanto, la aceleración de la barilla AB es de 1, 572 (m/s2).
∑MA = I0α + mad ⇒
4 · −1, 572 · 0, 3 cos 60 = −4 · 9, 81 · 0, 3 + T · 0, 6 sin 60=⇒ T = 20, 84 (N)
Ayudantías de Mecánica Racional II,5 de julio de 2012
Universidad Austral de ChileJohan Muñoz

§ CAPÍTULO 2. CINÉTICA PLANA DE CUERPO RÍGIDO 17
2.2 Movimiento plano general en dos dimensiones
2.2.1. Problema 6
Fig. 2.2.1: Ejercicio 6.117 del Meriam Vol. 3.
La pieza en T de masa m se compone de dos barras esbeltas iguales soldadas. Si el cuerpo seabandona en reposo desde la posición representada, hallar la aceleración inicial del punto A. Sedesprecian la pequeña masa del rodillo y el rozamiento de él.
Fig. 2.2.2: Diagrama cinético.
La aceleración aA es producto de la traslación por la ranura, Ft = mrα es la fuerza tangencial yFn = mrω2 es la fuerza normal. Siendo ésta última nula debido a que la pieza parte del reposo.
Ayudantías de Mecánica Racional II,5 de julio de 2012
Universidad Austral de ChileJohan Muñoz

§ CAPÍTULO 2. CINÉTICA PLANA DE CUERPO RÍGIDO 18
Procedimiento:
Hallar el centro de gravedad del conjunto desde la posición A:
r =∑
m · x∑m
=
m
2l + m
2l
2m
= 34
l
Calcular la inercia de masa del sistema medida desde el centro de masas:
I =
[112
m
2l2 + m
2
(l
4
)2]
+
[112
m
2l2 + m
2
(l
4
)2]
= 2
[112
m
2l2 + m
2
(l
4
)2]
= 748
ml2
realizando sumatoria de fuerzas en el eje x∑Fx = max =⇒
mg cos 60 = maA
+ mrα cos 60
mg12
=maA
+m34
lα12
g
2= aA + 3
8lα
=⇒ α = 83l
(g
2− a
A
)realizando sumatoria de momentos en sentido anti-horario en A∑
MA = Iα +∑
mad =⇒
mg34
l = 748
ml2α + maA
(34
l cos 60)
+ m34
lα
(34
l
)mg
34
l = 748
ml 2α + 38
mlaA + 916
ml 2α
34
g = 748
lα + 38
aA
+ 916
lα
34
g = 1724
lα + 38
aA
reemplazando α en la anterior expresión
34
g = 1724
l · 83l
(g
2− a
A
)+ 3
8a
A
finalmente se obtiene:
aA
= 14109
g
Ayudantías de Mecánica Racional II,5 de julio de 2012
Universidad Austral de ChileJohan Muñoz

3 Ejercicios resueltos
3.1 Cinemática
3.1.1. Problema 1
Fig. 3.1.1: Problema 1.
En el instante en que θ = β = 60, el cilindro hidráulico comunica a A una velocidadvA = 1, 2 (m/s) que aumenta a razón de 0, 9 (m/s) cada segundo. Hallar la aceleración angular de labarra BC en ese instante.
Solución:
En primer lugar conviene identificar qué tipo de movimiento es. Según mi criterio, como no haypasadores que se desplacen dentro de una ranura y que ésta, además, no se traslade o rote, cae dentrodel movimiento relativo a ejes en traslación.
19

§ CAPÍTULO 3. EJERCICIOS RESUELTOS 20
Por ende, se utiliza la siguiente ecuación para la velocidad:
−→v B = −→v A + −→v B/A (3.1.1)
−→v CB = −→ω CB × −→r CB = ωCBk × (−250 cos 60i + 250 sin 60j)= −125ωCBj − 216, 5ωCBi (mm/s)
−→v A = −1200i (mm/s)−→v B/A = −→ω AB × −→r AB = ωABk × (500 cos 60i + 500 sin 60j)
= 250ωABj − 433ωABi (mm/s)
igualando componentes:
i : −216, 5ωCB = 1200 − 433ωAB
j : −125ωCB = 250ωAB
=⇒ ωCB = 2, 77 (r/s)ωAB = −1, 38 (r/s)
Ecuación de aceleración:−→a B = −→a A + −→a B/A (3.1.2)
−→a CB = −→α CB × −→r CB + −→ω CB × (−→ω CB × −→r CB)= αCBk × (−125i + 216, 5j) + 2, 77k × (−346, 25j − 599, 7i)= −125αCBj − 216, 5αCBi + 959, 11i − 1661, 17k (mm/s2)
−→a A = −900i (mm/s2)−→a CB = −→α CB × −→r CB + −→ω CB × (−→ω CB × −→r CB)
= αCBk × (−125i + 216, 5j) + 2, 77k × (−346, 25j − 599, 7i)= −125αCBj − 216, 5αCBi + 959, 11i − 1661, 17j
−→a B/A = −→α AB × −→r AB + −→ω AB × (−→ω AB × −→r AB)= αABk × (250i + 433j) − 1, 38k × (−345j + 597, 54i)= 250αABj − 433αABi − 476, 1i − 824, 6j
igualando componentes:
i : −216, 5αCB + 959, 11 = −900 − 433αAB − 476, 1j : −125αCB − 1661, 17 = 250αAB − 824, 6
=⇒ αCB = 2, 05 (r/s2)αAB = −4, 37 (r/s2)
Por lo tanto, la aceleración angular de la barra BC es de 2, 05 (r/s2) en sentido anti-horario (AH).
Ayudantías de Mecánica Racional II,5 de julio de 2012
Universidad Austral de ChileJohan Muñoz
§ CAPÍTULO 3. EJERCICIOS RESUELTOS 21
3.1.2. Problema 2
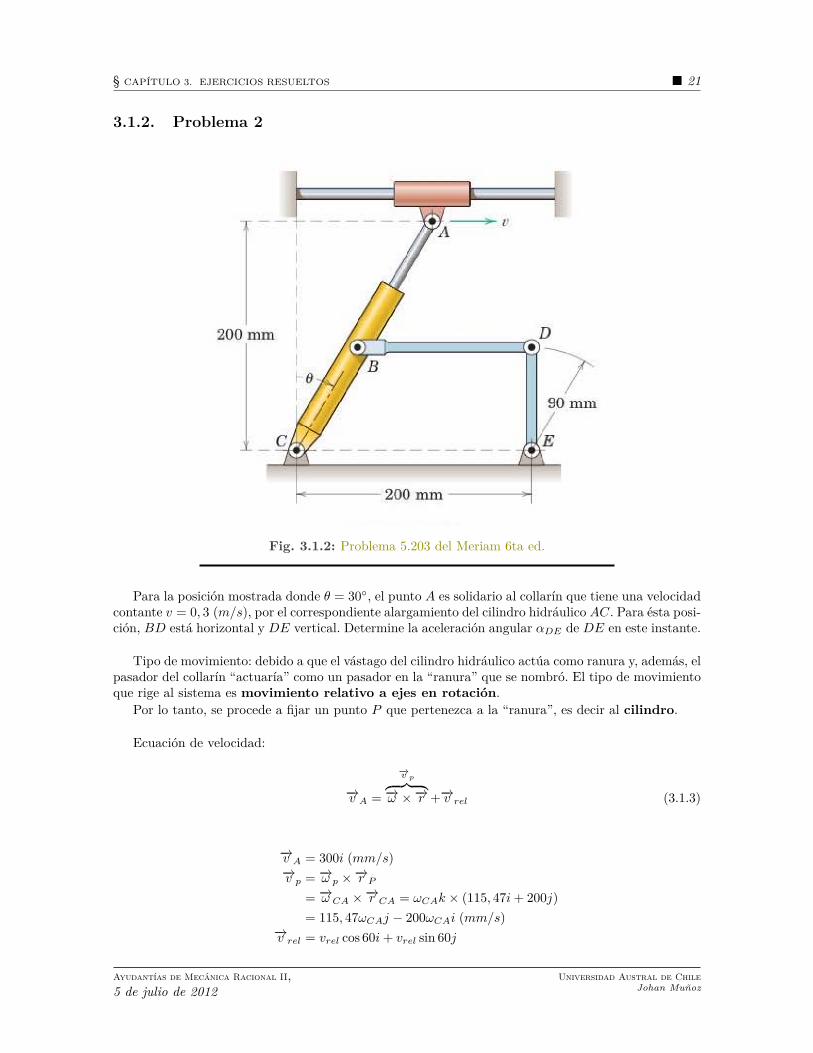
Fig. 3.1.2: Problema 5.203 del Meriam 6ta ed.
Para la posición mostrada donde θ = 30, el punto A es solidario al collarín que tiene una velocidadcontante v = 0, 3 (m/s), por el correspondiente alargamiento del cilindro hidráulico AC. Para ésta posi-ción, BD está horizontal y DE vertical. Determine la aceleración angular αDE de DE en este instante.
Tipo de movimiento: debido a que el vástago del cilindro hidráulico actúa como ranura y, además, elpasador del collarín “actuaría” como un pasador en la “ranura” que se nombró. El tipo de movimientoque rige al sistema es movimiento relativo a ejes en rotación.
Por lo tanto, se procede a fijar un punto P que pertenezca a la “ranura”, es decir al cilindro.
Ecuación de velocidad:
−→v A =
−→v p︷ ︸︸ ︷−→ω × −→r +−→v rel (3.1.3)
−→v A = 300i (mm/s)−→v p = −→ω p × −→r P
= −→ω CA × −→r CA = ωCAk × (115, 47i + 200j)= 115, 47ωCAj − 200ωCAi (mm/s)
−→v rel = vrel cos 60i + vrel sin 60j
Ayudantías de Mecánica Racional II,5 de julio de 2012
Universidad Austral de ChileJohan Muñoz

§ CAPÍTULO 3. EJERCICIOS RESUELTOS 22
igualando componentes:
i : 300 = −200ωCA + vrel cos 60j : 0 = 115, 47ωCA + vrel sin 60
=⇒ vrel = 150 (mm/s)ωCA = −1, 125 (r/s)
Ecuación de aceleración:
−→a A =
−→a P︷ ︸︸ ︷−→ω × −→r + −→ω × (−→ω × −→r ) +2−→ω × −→v rel + −→a rel (3.1.4)
−→a A = 000 (va = cte, enunciado)−→ω P × −→r P = −→α P × −→r p
= −→α CA × −→r CA = αCAk × (115, 47i + 200j)= 115, 47αCAj − 200αCAi (mm/s2)115, 47αCAj − 200αCAi (mm/s2)115, 47αCAj − 200αCAi (mm/s2)
−→ω P × (−→ω P × −→r P ) = −→ω CA × (−→ω CA × −→r CA)= −1, 125k × (−129, 36j + 225i)= −145, 53i − 253, 125j (mm/s2)−145, 53i − 253, 125j (mm/s2)−145, 53i − 253, 125j (mm/s2)
2−→ω P × −→v rel = 2 · −1, 125k × (75i + 129, 9j)= −168, 75j + 292, 27i (mm/s2)−168, 75j + 292, 27i (mm/s2)−168, 75j + 292, 27i (mm/s2)
−→a rel = are cos 60i + arel sin 60jare cos 60i + arel sin 60jare cos 60i + arel sin 60j
igualando componentes:
i : 0 = −200αCA − 145, 53 + 292, 27 + arel cos 60j : 0 = 115, 47αCA − 253, 125 − 168, 75 + arel sin 60
=⇒ arel = 292 (mm/s)αCA = 1, 464 (r/s2)
Con los datos obtenidos anteriormente, procedemos a calcular las velocidades y aceleraciones delas barras BD y DE.
El punto B pertenece al cilindro, esto implica que el punto B posee la velocidad y aceleraciónangular de éste.
Ecuación de velocidad:
−→v B = −→v D + −→v B/D (3.1.5)
−→v CB = −→ω CB × −→r CB
= ωCBk × (51, 96i + 90j)= 51, 96ωCBj − 90ωCBi
Ayudantías de Mecánica Racional II,5 de julio de 2012
Universidad Austral de ChileJohan Muñoz

§ CAPÍTULO 3. EJERCICIOS RESUELTOS 23
como ωCA = ωCB = −1, 125 (r/s)
= −58, 45j + 101, 25i−58, 45j + 101, 25i−58, 45j + 101, 25i−→v ED = −→ω ED × −→r ED
= ωEDk × 90j
= −90ωEDi−90ωEDi−90ωEDi−→v B/D = −→ω DB × −→r DB
= ωDBk × −148, 04i
= −148, 04ωDBj−148, 04ωDBj−148, 04ωDBj
igualando componentes:
i : 101, 25 = −90ωED
j : −58, 45 = −148, 04ωDB
=⇒ ωED = −1, 125 (r/s2)ωDB = 0, 3948 (r/s2)
Ecuación de aceleración:
−→a B = −→a D + −→a B/D (3.1.6)
−→a CB = −→α CB × −→r CB + −→ω CB × (−→ω CB × −→r CB)
como αCA = αCB = 1, 464 (r/s2)
= 1, 464k × (51, 96i + 90j) − 1, 125k × (−58, 45j + 101, 25i)= 76, 07j − 131, 76i − 65, 76i − 113, 9j
= −37, 83j − 197, 52i−37, 83j − 197, 52i−37, 83j − 197, 52i−→a ED = αEDk × 90j + −→ω ED × (−→ω ED × −→r ED)
= −90αEDi − 1, 125k × (101, 25i)= −90αEDi − 113, 9j
−→a B/D = αDBk × (−148, 04i) + 0, 3948k × −58, 45j
= −148, 04αDBj + 23, 07i
igualando componentes:
i : −197, 52 = −90αED + 23, 07j : −37, 83 = −113, 9 − 148, 04αDB
=⇒ αED = 2, 45 (r/s2)
Por lo tanto, la aceleración angular de la barra ED es de 2, 45 (r/s2)2, 45 (r/s2)2, 45 (r/s2) en sentido anti-horario.
Ayudantías de Mecánica Racional II,5 de julio de 2012
Universidad Austral de ChileJohan Muñoz

§ CAPÍTULO 3. EJERCICIOS RESUELTOS 24
3.2 Cinética
3.2.1. Problema 1
Fig. 3.2.1: Problema 6.94 del Meriam 3 Ed.
El extremo A de la barra uniforme de 5 kg está articulado al collarín cuya aceleración es a =4 (m/s2) en la dirección del eje horizontal fijo. Si la barra está animada de una velocidad angularhoraria ω = 2 (r/s) cuando pasa por la posición vertical, hallar las componentes de la fuerza que actúasobre la barra en dicho instante.
Diagrama Cinético
Fig. 3.2.2: Diagrama cinético.
Ayudantías de Mecánica Racional II,5 de julio de 2012
Universidad Austral de ChileJohan Muñoz

§ CAPÍTULO 3. EJERCICIOS RESUELTOS 25
tomando momento respecto al punto A∑A
= Iα +∑
m · a · d
0 = 112
ml2α + m · aA · 0, 4 − m · at · 0, 4
−5 · 4 · 0, 4 = 112
· 5 · 0, 82 · α − 5 · 0, 4 · α · 0, 4
=⇒ α = 15 (r/s2)
realizando sumatoria de fuerzas en el eje x∑Fx = m · ax
=⇒ Ax = m · (aA − at)= 5(4 − 0, 4 · 15) = −10 (N)∑
Fy = m · ay
=⇒ Ay − W = 5(22 · 0, 4)Ay = 57, 05 (N)
Por lo tanto, las reacciones en el punto A son: Ax = −10 (N) y Ay = 57, 05 (N).
Ayudantías de Mecánica Racional II,5 de julio de 2012
Universidad Austral de ChileJohan Muñoz

4 Cinemática Cuerpo rígido en el Espacio
4.1 Rotación en torno a un eje fijo
Fig. 4.1.1: Problema 7.7 del Merial 3 Ed.
El ventilador de cuatro palas rota alrededor del eje fijo OB con una velocidad angular constanteN = 1200 rpm. Escribir las expresiones vectoriales de la velocidad −→v y de la aceleración −→a de la puntaA de la pala para el instante en que sus coordenadas x−y−z son 0, 260; 0, 240; 0, 473, respectivamente.
Solución
ωOB = 1200 · 2π
60= 40π (r/s)
Obteniendo los cosenos directores para poder descomponer la velocidad angular en sus componentesi, j y k.
26

§ CAPÍTULO 4. CINEMÁTICA CUERPO RÍGIDO EN EL ESPACIO 27
Fig. 4.1.2: Ángulos de los respectivos cosenos directores.
α = cos− 1(
0, 20, 538
)= 68, 17
β = cos− 1(
0, 40, 538
)= 41, 97
γ = cos− 1(
0, 30, 538
)= 56, 1
Utilizando la expresión de velocidad usada en dos dimensiones:
−→v OA = −→ω OA × −→r OA
donde
−→ω OA = 40π(i cos 68, 17 + j cos 41, 97 + k cos 56, 1)
=⇒ −→v OA =
∣∣∣∣∣∣i j k
46, 73 93, 43 700, 26 0, 24 0, 473
∣∣∣∣∣∣∴ −→v OA
−→v OA−→v OA = 27, 4i − 3, 9j − 13, 07k27, 4i − 3, 9j − 13, 07k27, 4i − 3, 9j − 13, 07k
Utilizando la ecuación de aceleración usada en dos dimensiones:
−→a OA =−→α OA0 × −→r OA + −→ω OA × (−→ω OA × −→r OA)
−→a OA =
∣∣∣∣∣∣i j k
46, 73 93, 43 7027, 4 −3, 4 −13, 07
∣∣∣∣∣∣∴ −→a OA
−→a OA−→a OA = −948, 1i + 2528j − 2742, 2k−948, 1i + 2528j − 2742, 2k−948, 1i + 2528j − 2742, 2k
Ayudantías de Mecánica Racional II,5 de julio de 2012
Universidad Austral de ChileJohan Muñoz

§ CAPÍTULO 4. CINEMÁTICA CUERPO RÍGIDO EN EL ESPACIO 28
Fig. 4.2.1: Problema 7.27 del Meriam 6 Ed.
4.2 Rotación en torno a un punto fijo
El péndulo oscila sobre el eje x acorde a θ = π6 sin 3πt radianes, donde t está en segundos, el brazo
OA gira en torno al eje vertical z con una velocidad angular constante ωz = 2π (r/s). Determine lavelocidad −→v y la aceleración −→a del centro B del péndulo, además las aceleración angular −→α , para elinstante cuando t = 0.
Solución:
La posición del brazo AB está dada por la siguiente expresión:
θp = π
6sin 3πt =⇒
θp = ωp = π2
2cos 3πt
θp = αp = −32
π3 sin 3πt
para el tiempo t = 0 se tiene:
θp = 0
ωp = π2
2αp = 0
Si se desarrolla mediante los cono del cuerpo y del espacio se tiene:
Ayudantías de Mecánica Racional II,5 de julio de 2012
Universidad Austral de ChileJohan Muñoz

§ CAPÍTULO 4. CINEMÁTICA CUERPO RÍGIDO EN EL ESPACIO 29
−→ω = −→ω z + −→ω p
= 2πk − π2
2i (r/s)
la velocidad del punto B es la siguiente:
−→v AB = −→ω × −→r AB
=
∣∣∣∣∣∣i j k
− π2
2 0 2π4 0 −8
∣∣∣∣∣∣−→v AB−→v AB−→v AB = −14, 35j (in/s)= −14, 35j (in/s)= −14, 35j (in/s)
La aceleración angular en el espacio no sólo mide la razón de cambio en magnitud, si no también lavariación de la posición. Por lo tanto:
−→ω =
−→ω z
0 + −→ω p
como ωp varia en su posición, entonces:
−→ω = −→ω z × −→ω p
= 2πk × −π2
2i = −31, 0j (r/s2)
∴ −→α∴ −→α∴ −→α = −31, 0j(r/s2)= −31, 0j(r/s2)= −31, 0j(r/s2)−→a AB = −→α × −→r AB + −→ω × (−→ω × −→r AB)
=
∣∣∣∣∣∣i j k0 −31 04 0 −8
∣∣∣∣∣∣+
∣∣∣∣∣∣i j k
− π2
2 0 2π0 −14, 35 0
∣∣∣∣∣∣= 248i + 124k + 90, 16i + 70, 8k
−→a AB−→a AB−→a AB = 338, 16i + 194, 8k (in/s2)= 338, 16i + 194, 8k (in/s2)= 338, 16i + 194, 8k (in/s2)
Ayudantías de Mecánica Racional II,5 de julio de 2012
Universidad Austral de ChileJohan Muñoz

§ CAPÍTULO 4. CINEMÁTICA CUERPO RÍGIDO EN EL ESPACIO 30
4.3 Movimiento general
Fig. 4.3.1: Problema 7.39 del Meriam 3 Ed.
El disco circular de 100 mm de radio gira en torno a su eje z con una celeridad constante p =240 (rpm) y el brazo OCB gira en torno al eje y con una celeridad constante N = 30 (rpm). Hallarla velocidad −→v del punto A del disco cuando passa por la posición que se muestra. Emplear x − y − zsolidarios del brazo OCB.
Solución:
N = 30 · 2π
60= π (r/s)
p = 240 · 2π
60= 8π (r/s)
Ecuación de velocidad:
−→v A = −→v C + −→v P + −→v rel
−→v C =−→Ω × −→r OC
= πj × −180i = 180πk (mm/s)−→v P =
−→Ω × −→r CP
= πj × (100i + 100k) = −100πk + 100πi (mm/s)−→v rel = −→p × 100i = 8ki × 100i
= 800πj (mm/s)−→v A = 180πk − 100πk + 100πj + 800πj−→v A−→v A−→v A = π(100i + 800j + 80k) (mm/s)= π(100i + 800j + 80k) (mm/s)= π(100i + 800j + 80k) (mm/s)
Ayudantías de Mecánica Racional II,5 de julio de 2012
Universidad Austral de ChileJohan Muñoz

§ CAPÍTULO 4. CINEMÁTICA CUERPO RÍGIDO EN EL ESPACIO 31
Otra alternativa es pasar por el punto C al medir la velocidad del punto A. Por lo tanto, laoperatoria se reduce a:
−→v A = −→v P + −→v rel
−→v P =−→Ω × −→r OP
= πj × (−80i + 100k) (mm/s)−→v rel = −→p × 100i = 8πk × 100i = 800πj (mm/s)−→v A−→v A−→v A = π(100i + 800j + 80k) (mm/s)= π(100i + 800j + 80k) (mm/s)= π(100i + 800j + 80k) (mm/s)
Ecuación de aceleración:
−→a A = −→a P + 2−→Ω × −→v rel + −→a rel
−→a P = −→Ω 0 × −→r P +
−→Ω P × (
−→Ω P × −→r P )
= πj × (80πk + 100πi)= 80π2i − 100π2k (mm/s2)
2−→Ω × −→v rel = 2 · πj × (800πj)
= 0−→a rel =
−→p 0 × −→r p + −→p × (−→p × −→r p)
= 8πk × (800πj)= −6400π2i (mm/s2)
−→a A−→a A−→a A = −π2(6320i + 100k) (mm/s2)= −π2(6320i + 100k) (mm/s2)= −π2(6320i + 100k) (mm/s2)
Ayudantías de Mecánica Racional II,5 de julio de 2012
Universidad Austral de ChileJohan Muñoz
5 Cinética de Cuerpo rígido en el Espacio
5.1 Momento cinético y Energía cinética
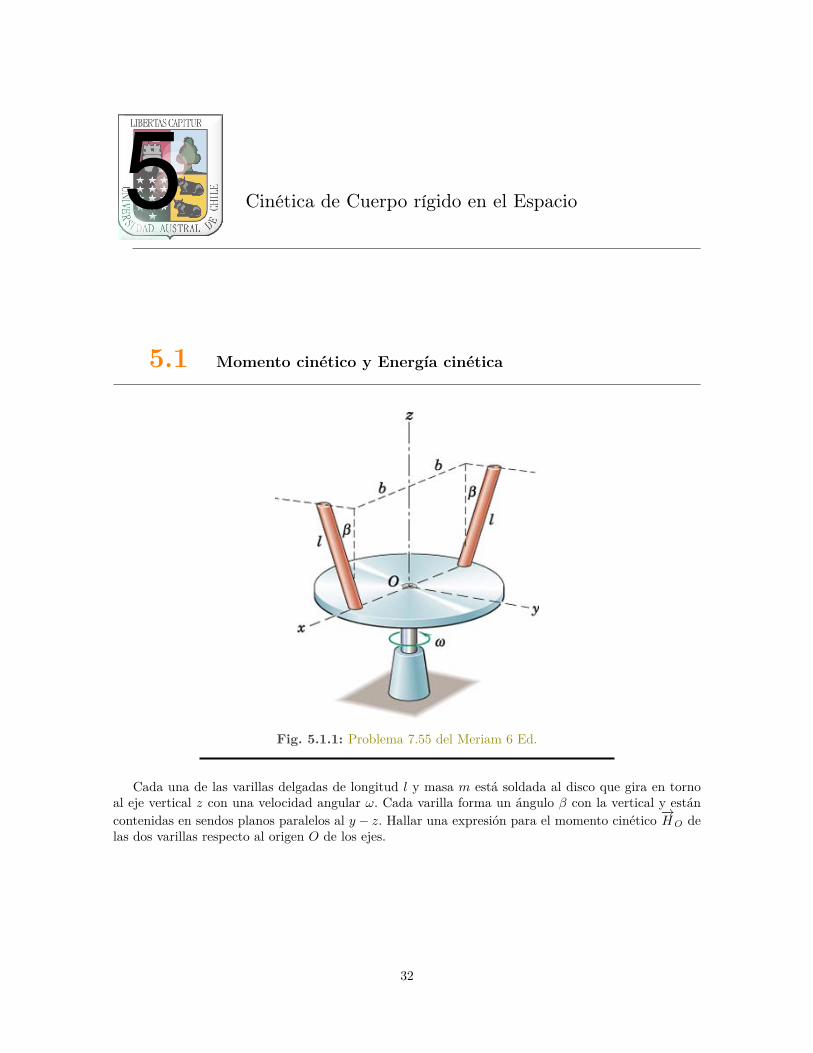
Fig. 5.1.1: Problema 7.55 del Meriam 6 Ed.
Cada una de las varillas delgadas de longitud l y masa m está soldada al disco que gira en tornoal eje vertical z con una velocidad angular ω. Cada varilla forma un ángulo β con la vertical y estáncontenidas en sendos planos paralelos al y − z. Hallar una expresión para el momento cinético
−→H O de
las dos varillas respecto al origen O de los ejes.
32

§ CAPÍTULO 5. CINÉTICA DE CUERPO RÍGIDO EN EL ESPACIO 33
Solución:
Ecuación de momento cinético:
−→H =(Ixxωx − Ixyωy − Ixzωz)i
+(−Iyxωx + Iyyωy − Iyzωz)j(−Izxωx − Izyωy + Izzωz)k
como ωy = ωx = 0
=⇒ −→H =(−Ixzωzi − Iyzωzj + Izzωzk
Momentos y Productos de inercia:
Plano x − z:
Izx(1) =Ixz0 + m · d(x) · d(z)
= m(−b)( l cos β
2) = −mlb
2cos β
Izx(2) =Ixz0 + m · d(x) · d(z)
= m(b)( l cos β
2) = mlb
2cos β
∴ Ixz = 0
Esto se puede concluir en un principio cuando uno de los ejes suelen coincidir con los ejesprincipales de la proyección de la pieza.
Ayudantías de Mecánica Racional II,5 de julio de 2012
Universidad Austral de ChileJohan Muñoz

§ CAPÍTULO 5. CINÉTICA DE CUERPO RÍGIDO EN EL ESPACIO 34
Plano y − z:
Lo mismo que el anterior, los ejes y − z coinciden con los ejes principales. Por lo tanto:
Iyz = 0
Eje z:
Izz = 2[
13
ml2 sin2 β + mb2]
∴ −→H O∴ −→H O∴ −→H O = 2m
(13
l2 sin2 β + b2)
ωk= 2m
(13
l2 sin2 β + b2)
ωk= 2m
(13
l2 sin2 β + b2)
ωk
Ayudantías de Mecánica Racional II,5 de julio de 2012
Universidad Austral de ChileJohan Muñoz
§ CAPÍTULO 5. CINÉTICA DE CUERPO RÍGIDO EN EL ESPACIO 35
5.2 Ecuaciones cinéticas del movimientos en el espacio
5.2.1. Problema 1
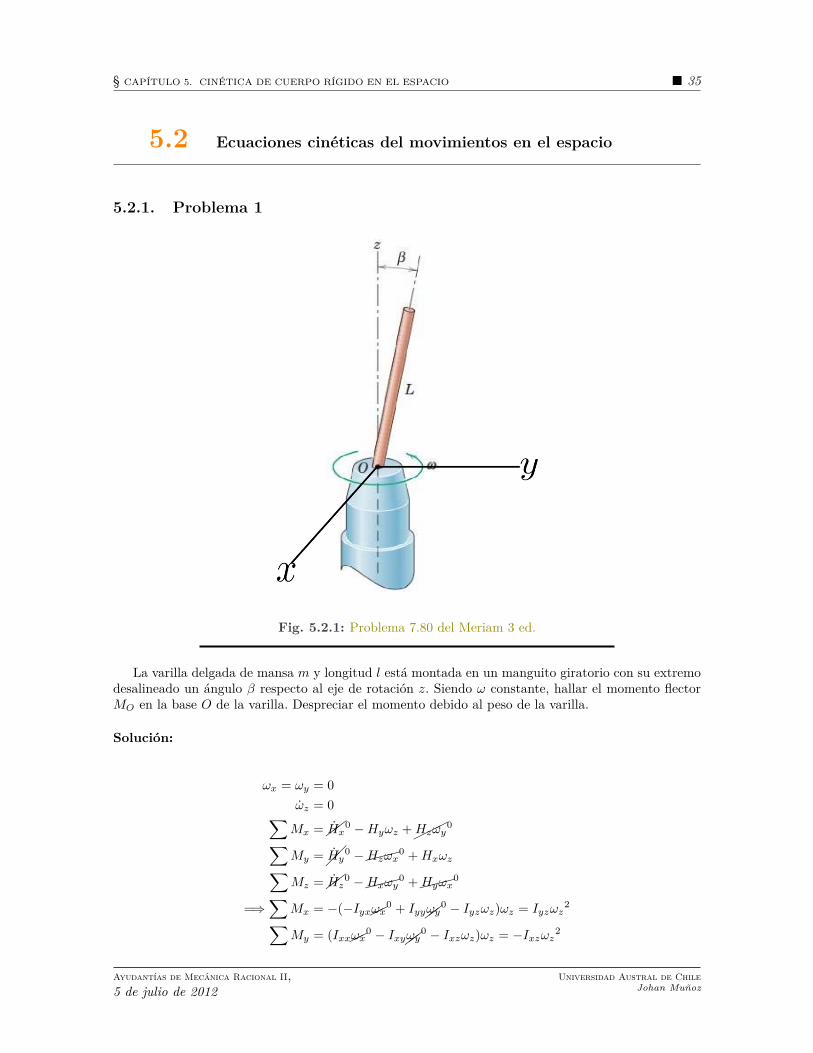
Fig. 5.2.1: Problema 7.80 del Meriam 3 ed.
La varilla delgada de mansa m y longitud l está montada en un manguito giratorio con su extremodesalineado un ángulo β respecto al eje de rotación z. Siendo ω constante, hallar el momento flectorMO en la base O de la varilla. Despreciar el momento debido al peso de la varilla.
Solución:
ωx = ωy = 0ωz = 0∑
Mx =Hx0 − Hyωz +Hzωy
0∑My =Hy
0 −Hzωx0 + Hxωz∑
Mz =Hz0 −Hxωy
0 +Hyωx0
=⇒∑
Mx = −(−Iyxωx0 + Iyyωy
0 − Iyzωz)ωz = Iyzωz2∑
My = (Ixxωx0 − Ixyωy
0 − Ixzωz)ωz = −Ixzωz2
Ayudantías de Mecánica Racional II,5 de julio de 2012
Universidad Austral de ChileJohan Muñoz

§ CAPÍTULO 5. CINÉTICA DE CUERPO RÍGIDO EN EL ESPACIO 36
Cálculos de productos de inercia
Plano x − z
Ixz = 0
=⇒∑
My = 0
Plano yz
tan β = y
z
⇒ z = y
tan β
dm = ρdy
Iyz =∫
yz dm =∫ l sin β
0y
y
tan βρdy
donde: ρ = m
y= m
l sin β
= ρ
tan β
y3
3
∣∣∣∣l sin β
0= m cos β
l sin2 β· 1
3l3sin3 β
= 16
ml2 sin(2β)
∴ MO∴ MO∴ MO = 16
ml2ω2 sin(2β)= 16
ml2ω2 sin(2β)= 16
ml2ω2 sin(2β)
Ayudantías de Mecánica Racional II,5 de julio de 2012
Universidad Austral de ChileJohan Muñoz

§ CAPÍTULO 5. CINÉTICA DE CUERPO RÍGIDO EN EL ESPACIO 37
5.2.2. Problema 2
Fig. 5.2.2: Problema 7.85 Meriam 7 Ed.
Cada uno de los dos discos tiene una masa de 1,2 kg y está soldado al eje soportado por rodamientosen A y B, como se muestra en la figura. Calcular la fuerza en el eje debida a los rodamientos paraceleridad de N = 200 (rev/min). Despreciar las fuerzas estáticas de equilibrio.
Solución
ωx = ωy = 0ωz = 0∑
Mx = Iyzωz2∑
My = −Ixzωz2
Cálculos de productos de inercia:
Plano y − z
Iyz = 0
Plano x − z
Ayudantías de Mecánica Racional II,5 de julio de 2012
Universidad Austral de ChileJohan Muñoz

§ CAPÍTULO 5. CINÉTICA DE CUERPO RÍGIDO EN EL ESPACIO 38
Ixz1 =Ixz0 + m · d(x) · d(z)
= m
(− 4r
3π
)(−l) = 4mrl
3π
Ixz2 =Ixz0 + m · d(x) · d(z)
= m
(4r
3π
)(l) = 4mrl
3π
∴ Ixz = 83
mrl
π
Luego: ∑Fy = Ay + By = 0
Ay = −By∑Mx = 0 =⇒
0, 08Ay − 0, 08By = 0=⇒ Ay = −By = 0∑
Fx = 0 =⇒
Ax − Bx = 0Ax = Bx = F∑My = 8
3mrl
π· ω2
−F · 0, 08 − F · 0, 08 = −83
1, 2 · 0, 1 · 0, 16π
· (40π)2
=⇒ F = 1608, 5 (N)
∴ −→Ax−→Ax−→Ax = 1608, 5i (N)= 1608, 5i (N)= 1608, 5i (N)−→Bx−→Bx−→Bx = −1608, 5i (N)= −1608, 5i (N)= −1608, 5i (N)
Ayudantías de Mecánica Racional II,5 de julio de 2012
Universidad Austral de ChileJohan Muñoz
§ CAPÍTULO 5. CINÉTICA DE CUERPO RÍGIDO EN EL ESPACIO 39
5.2.3. Problema 3
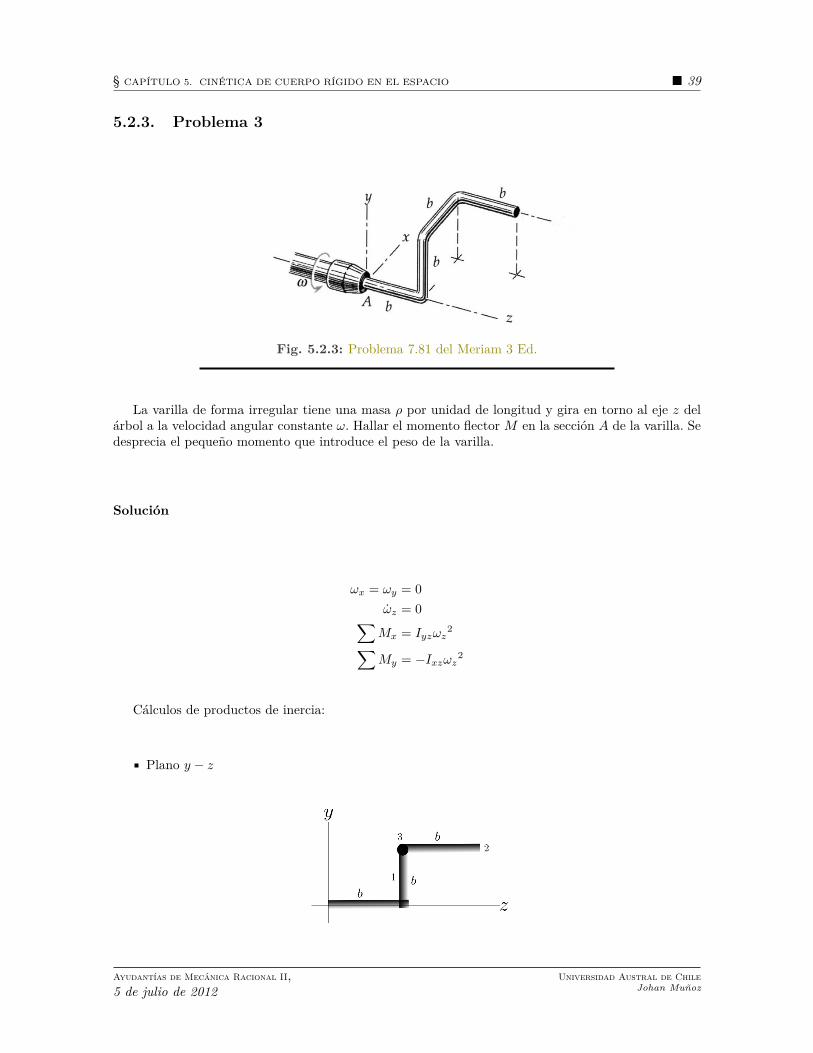
Fig. 5.2.3: Problema 7.81 del Meriam 3 Ed.
La varilla de forma irregular tiene una masa ρ por unidad de longitud y gira en torno al eje z delárbol a la velocidad angular constante ω. Hallar el momento flector M en la sección A de la varilla. Sedesprecia el pequeño momento que introduce el peso de la varilla.
Solución
ωx = ωy = 0ωz = 0∑
Mx = Iyzωz2∑
My = −Ixzωz2
Cálculos de productos de inercia:
Plano y − z
Ayudantías de Mecánica Racional II,5 de julio de 2012
Universidad Austral de ChileJohan Muñoz
§ CAPÍTULO 5. CINÉTICA DE CUERPO RÍGIDO EN EL ESPACIO 40
Iyz1 =Iyz
0 + m · d(y) · d(z)
= ρb · b · b
2= ρb3
2Iyz2 =
Iyz0 + m · d(y) · d(z)
= ρb · 32
b · b = 32
ρb3
Iyz3 =Iyz
0 + m · d(y) · d(z)= ρb · b · b = ρb3
∴ Iyz = 3ρb3
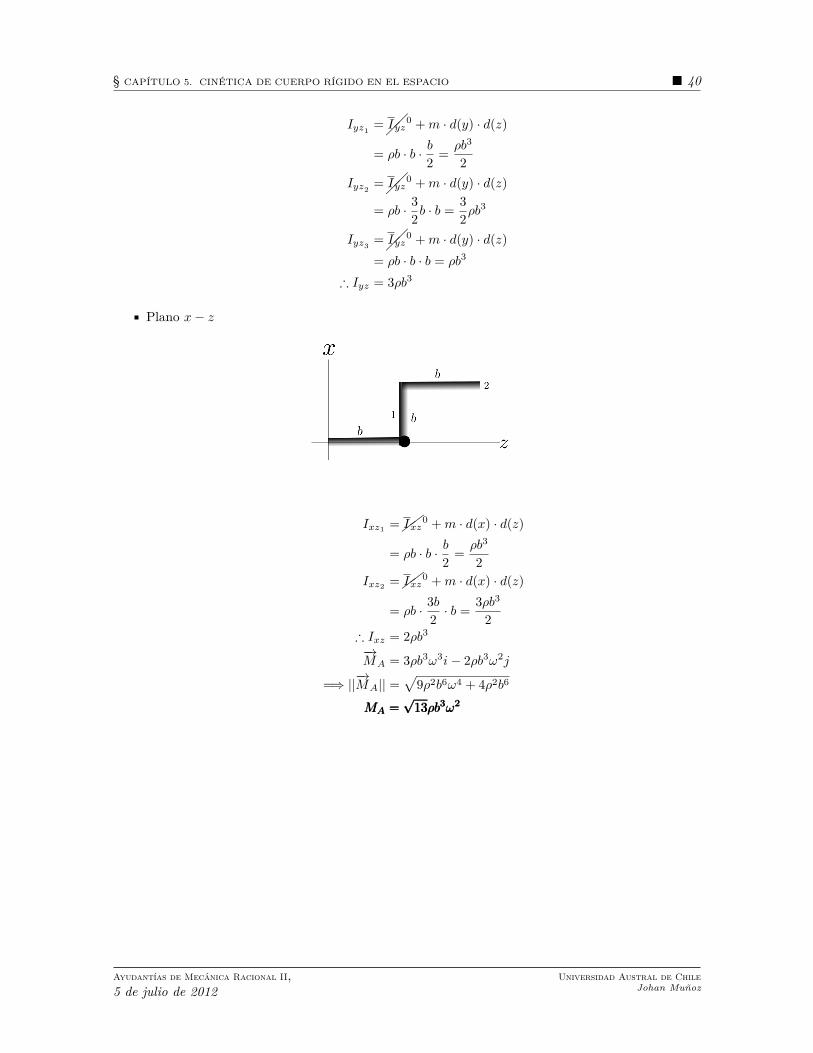
Plano x − z
Ixz1 =Ixz0 + m · d(x) · d(z)
= ρb · b · b
2= ρb3
2Ixz2 =Ixz
0 + m · d(x) · d(z)
= ρb · 3b
2· b = 3ρb3
2∴ Ixz = 2ρb3
−→MA = 3ρb3ω3i − 2ρb3ω2j
=⇒ ||−→MA|| =√
9ρ2b6ω4 + 4ρ2b6
MAMAMA =√
13ρb3ω2=√
13ρb3ω2=√
13ρb3ω2
Ayudantías de Mecánica Racional II,5 de julio de 2012
Universidad Austral de ChileJohan Muñoz
6 Vibraciones
6.1 Oscilación libre sin amortiguamiento
6.1.1. Problema 1
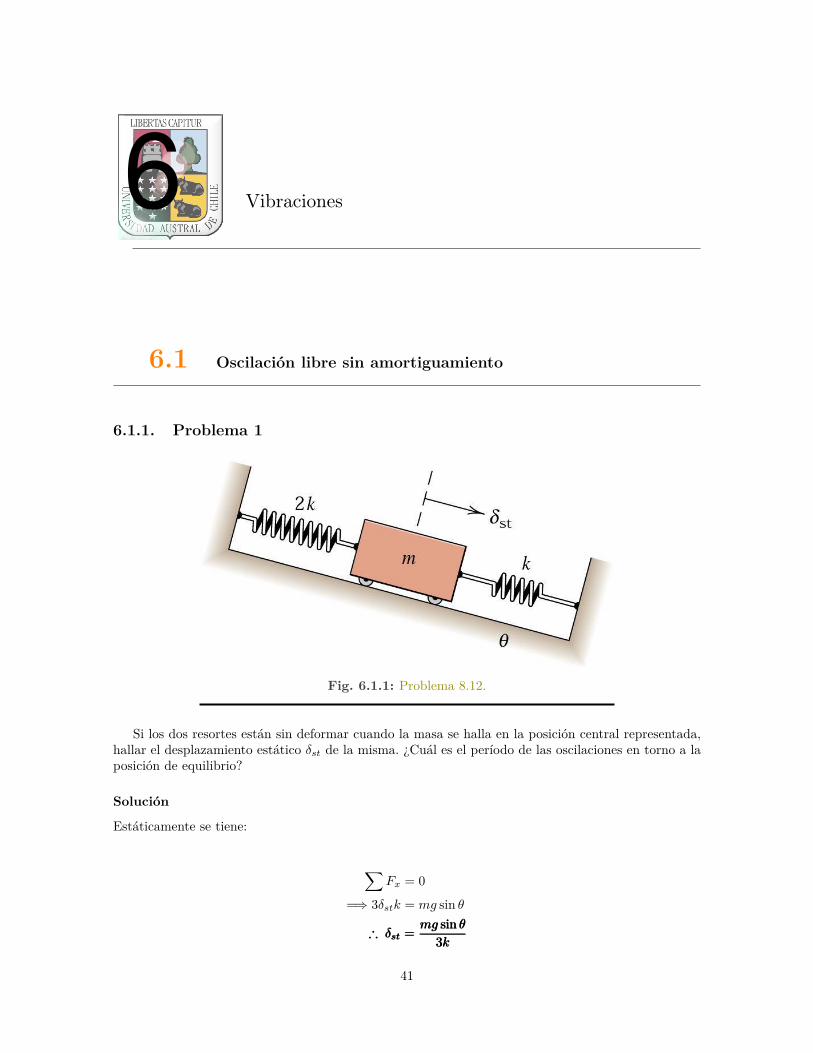
Fig. 6.1.1: Problema 8.12.
Si los dos resortes están sin deformar cuando la masa se halla en la posición central representada,hallar el desplazamiento estático δst de la misma. ¿Cuál es el período de las oscilaciones en torno a laposición de equilibrio?
Solución
Estáticamente se tiene:
∑Fx = 0
=⇒ 3δstk = mg sin θ
∴ δst∴ δst∴ δst = mg sin θ
3k= mg sin θ
3k= mg sin θ
3k
41

§ CAPÍTULO 6. VIBRACIONES 42
Dinámicamente se tiene:
∑Fx = ma
=⇒ −3kx = ma = mx
x + 3k
mx = 0
se sabe que:
3k
m= ωn
2
=⇒ ωn =√
3k
m
=⇒ fn = 12π
·√
3k
m
=⇒ τττ = 2π
√m
3k= 2π
√m
3k= 2π
√m
3k
Ayudantías de Mecánica Racional II,5 de julio de 2012
Universidad Austral de ChileJohan Muñoz
§ CAPÍTULO 6. VIBRACIONES 43
6.1.2. Problema 2
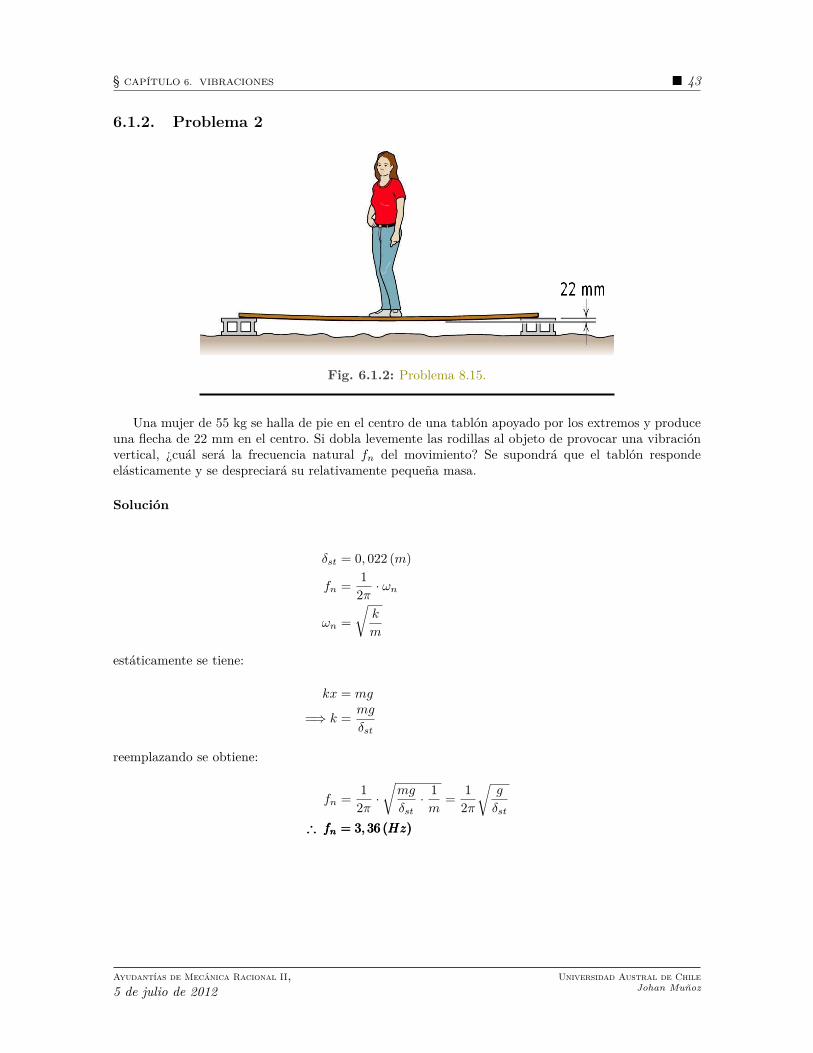
Fig. 6.1.2: Problema 8.15.
Una mujer de 55 kg se halla de pie en el centro de una tablón apoyado por los extremos y produceuna flecha de 22 mm en el centro. Si dobla levemente las rodillas al objeto de provocar una vibraciónvertical, ¿cuál será la frecuencia natural fn del movimiento? Se supondrá que el tablón respondeelásticamente y se despreciará su relativamente pequeña masa.
Solución
δst = 0, 022 (m)
fn = 12π
· ωn
ωn =√
k
m
estáticamente se tiene:
kx = mg
=⇒ k = mg
δst
reemplazando se obtiene:
fn = 12π
·√
mg
δst· 1
m= 1
2π
√g
δst
∴ fn∴ fn∴ fn = 3, 36 (Hz)= 3, 36 (Hz)= 3, 36 (Hz)
Ayudantías de Mecánica Racional II,5 de julio de 2012
Universidad Austral de ChileJohan Muñoz
§ CAPÍTULO 6. VIBRACIONES 44
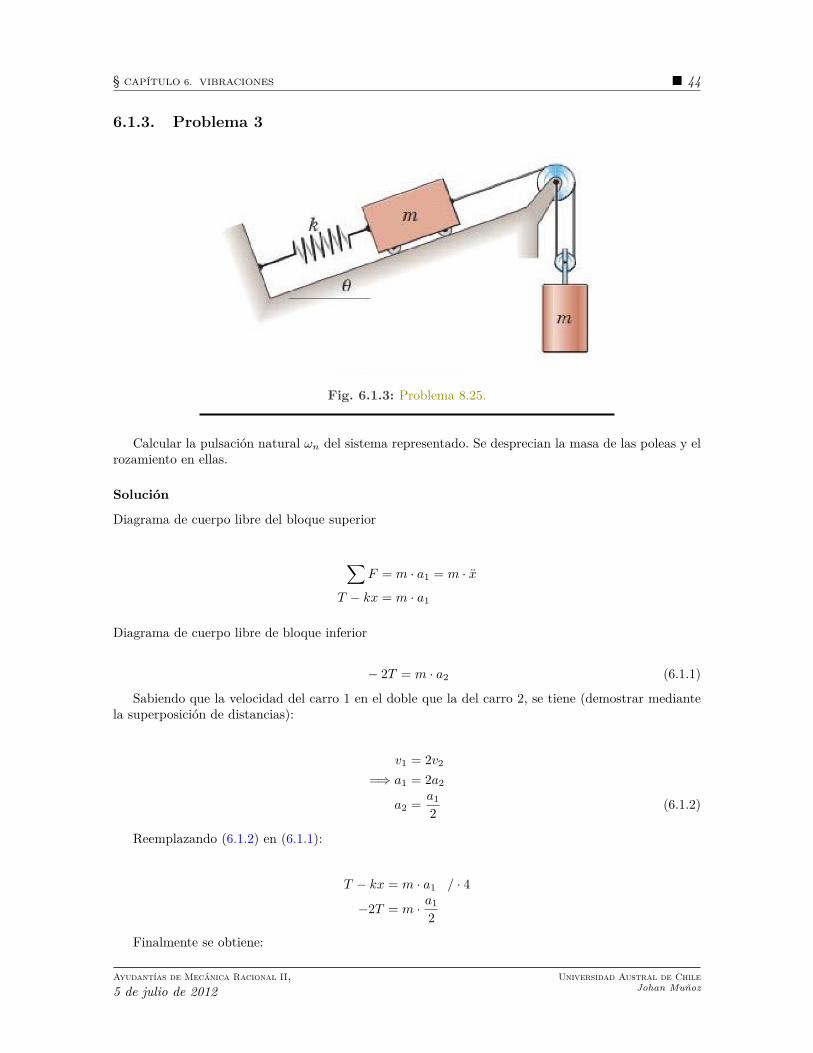
6.1.3. Problema 3
Fig. 6.1.3: Problema 8.25.
Calcular la pulsación natural ωn del sistema representado. Se desprecian la masa de las poleas y elrozamiento en ellas.
Solución
Diagrama de cuerpo libre del bloque superior
∑F = m · a1 = m · x
T − kx = m · a1
Diagrama de cuerpo libre de bloque inferior
− 2T = m · a2 (6.1.1)
Sabiendo que la velocidad del carro 1 en el doble que la del carro 2, se tiene (demostrar mediantela superposición de distancias):
v1 = 2v2
=⇒ a1 = 2a2
a2 = a1
2(6.1.2)
Reemplazando (6.1.2) en (6.1.1):
T − kx = m · a1 / · 4
−2T = m · a1
2
Finalmente se obtiene:
Ayudantías de Mecánica Racional II,5 de julio de 2012
Universidad Austral de ChileJohan Muñoz

§ CAPÍTULO 6. VIBRACIONES 45
−4kx = 5m · a1
dónde:
a1 = x
=⇒ x + 4k
5m= 0
∴ ωn∴ ωn∴ ωn =√
4k
5m=√
4k
5m=√
4k
5m
Ayudantías de Mecánica Racional II,5 de julio de 2012
Universidad Austral de ChileJohan Muñoz

§ CAPÍTULO 6. VIBRACIONES 46
6.2 Oscilación forzada
6.2.1. Problema 4
Fig. 6.2.1: Problema 8.59.
Deducir la expresión del coeficiente de transmisión T del sistema de la figura. El coeficiente detransmisión es, por definición, el cociente de la fuerza máxima que se transmite a la base divididapor la amplitud F0 de la función fuerza. Expresar la solución en función de ξ, ω, ωn y del factor deamplificación M .
Solución:
T = Ftrmax
F0
Ftr = k · xp + c · xp
dónde:
xp = X sin(ωt − ϕ)=⇒ Ftr = kX sin(ωt − ϕ) + cωX cos(ωt − ϕ)
como nos interesa la amplitud máxima:
∴ Ftrmax =√
(kX)2 + (cωX)2
= X√
k2 + c2ω2
Ayudantías de Mecánica Racional II,5 de julio de 2012
Universidad Austral de ChileJohan Muñoz

§ CAPÍTULO 6. VIBRACIONES 47
se sabe que: ξ = c
2mωn
= X√
k2 + 4m2ωn2ω2ξ2
ωn2 = k
m
= X√
k2 + 4m2kω2ξ2
= Xk
√1 + 4m
1k
ω2ξ2
= Xk
√1 + 4 ω2
ωn2 ξ2
pero X = F0
k· M
=⇒ T = Xk
F0
√1 +
(2 ω
ωnξ
)2
TTT = M
√1 +
(2ξ
ω
ωn
)2= M
√1 +
(2ξ
ω
ωn
)2
= M
√1 +
(2ξ
ω
ωn
)2
Ayudantías de Mecánica Racional II,5 de julio de 2012
Universidad Austral de ChileJohan Muñoz

§ CAPÍTULO 6. VIBRACIONES 48
6.2.2. Problema 5
Fig. 6.2.2: Problema 8.65.
El sismógrafo está montado sobre una estructura animada de una vibración vertical de frecuencia5 Hz y una doble amplitud de 18 mm. El sensor tiene una masa m = 2 kg y la rigidez del resortees k = 1, 5 kN/m. El movimiento de la masa respecto a la base del instrumento se registra en untambor rotatorio y muestra una doble amplitud de 24 mm durante la situación estacionaria. Calcularla constante de amortiguamiento viscoso c.
Solución:
Cuando la vibración provocada es debida a la excitación de la base:
X
b=
(ω
ωn
)2
√√√√[1 −(
ω
ωn
)2]2
+[2ξ
ω
ωn
]2
dónde:
X : amplitud de la respuesta relativa (a la base)b : amplitud producida por la excitación de la base
=⇒ 129
=
(5 · 2π√1500/2
)2
√√√√√1 −
(5 · 2π√1500/2
)22
+ 4ξ2
(5 · 2π√1500/2
)2
43
= 1, 316√(1 − 1, 316)2 + 5, 44ξ2
Ayudantías de Mecánica Racional II,5 de julio de 2012
Universidad Austral de ChileJohan Muñoz
§ CAPÍTULO 6. VIBRACIONES 49
despejando ξ
ξ = 0, 4
ξ = c
2mωn
∴ c∴ c∴ c = 43, 9 (N · s/m)= 43, 9 (N · s/m)= 43, 9 (N · s/m)
6.2.3. Problema 6
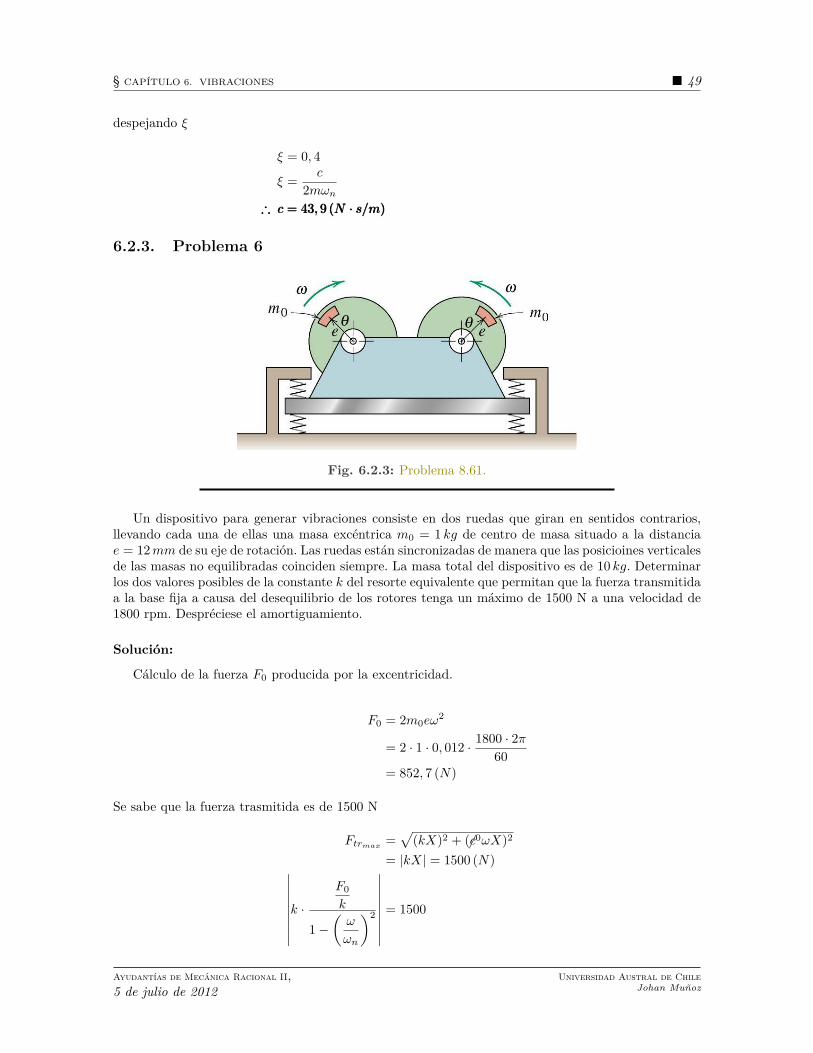
Fig. 6.2.3: Problema 8.61.
Un dispositivo para generar vibraciones consiste en dos ruedas que giran en sentidos contrarios,llevando cada una de ellas una masa excéntrica m0 = 1 kg de centro de masa situado a la distanciae = 12 mm de su eje de rotación. Las ruedas están sincronizadas de manera que las posicioines verticalesde las masas no equilibradas coinciden siempre. La masa total del dispositivo es de 10 kg. Determinarlos dos valores posibles de la constante k del resorte equivalente que permitan que la fuerza transmitidaa la base fija a causa del desequilibrio de los rotores tenga un máximo de 1500 N a una velocidad de1800 rpm. Despréciese el amortiguamiento.
Solución:
Cálculo de la fuerza F0 producida por la excentricidad.
F0 = 2m0eω2
= 2 · 1 · 0, 012 · 1800 · 2π
60= 852, 7 (N)
Se sabe que la fuerza trasmitida es de 1500 N
Ftrmax =√
(kX)2 + (c0ωX)2
= |kX| = 1500 (N)∣∣∣∣∣∣∣∣∣k ·
F0
k
1 −(
ω
ωn
)2
∣∣∣∣∣∣∣∣∣ = 1500
Ayudantías de Mecánica Racional II,5 de julio de 2012
Universidad Austral de ChileJohan Muñoz

§ CAPÍTULO 6. VIBRACIONES 50
Caso 1:
852, 7
1 −(
ω
ωn
)2 = 1500
=⇒(
ω
ωn
)2
= 0, 432
ωn2 = k
m= ω2
0, 432
k1 = mω2
0, 432∴ k1∴ k1∴ k1 = 822 (kN/m)= 822 (kN/m)= 822 (kN/m)
Caso 2:
− 852, 7
1 −(
ω
ωn
)2 = 1500
=⇒(
ω
ωn
)2
= 1, 568
∴ k2∴ k2∴ k2 = 227 (kN/m)= 227 (kN/m)= 227 (kN/m)
Ayudantías de Mecánica Racional II,5 de julio de 2012
Universidad Austral de ChileJohan Muñoz
§ CAPÍTULO 6. VIBRACIONES 51
6.3 Oscilaciones de un cuerpo rígido
6.3.1. Problema 7
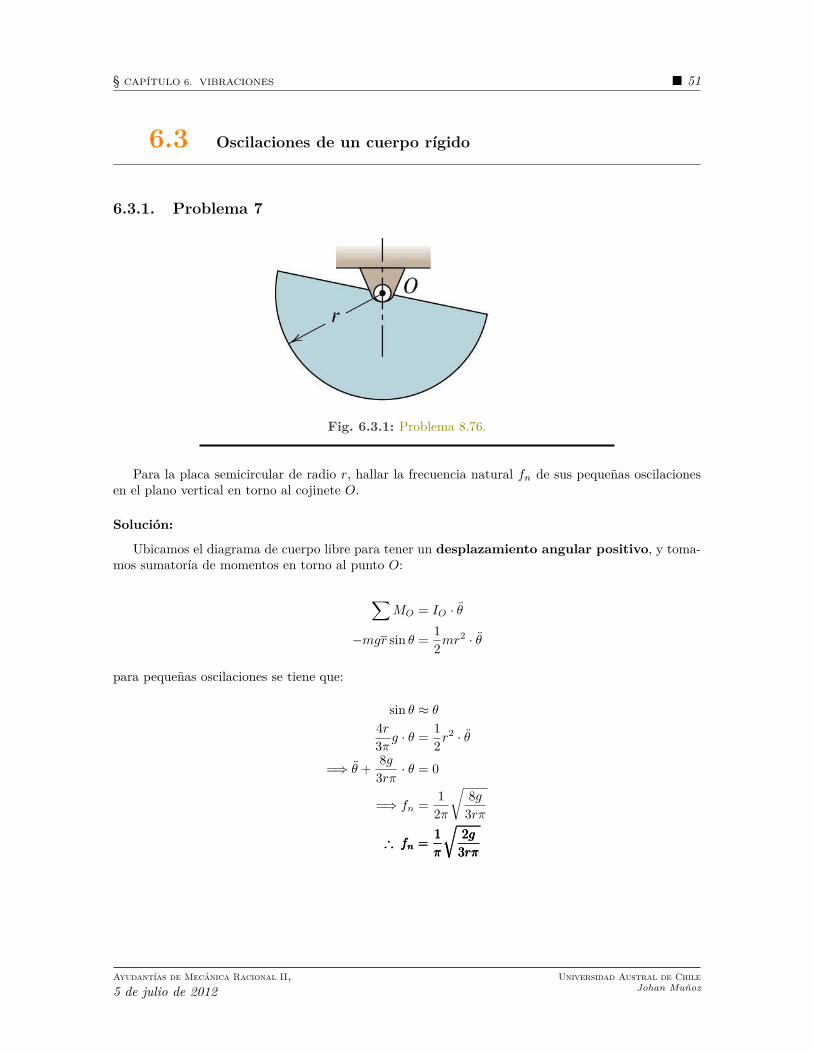
Fig. 6.3.1: Problema 8.76.
Para la placa semicircular de radio r, hallar la frecuencia natural fn de sus pequeñas oscilacionesen el plano vertical en torno al cojinete O.
Solución:
Ubicamos el diagrama de cuerpo libre para tener un desplazamiento angular positivo, y toma-mos sumatoría de momentos en torno al punto O:
∑MO = IO · θ
−mgr sin θ = 12
mr2 · θ
para pequeñas oscilaciones se tiene que:
sin θ ≈ θ
4r
3πg · θ = 1
2r2 · θ
=⇒ θ + 8g
3rπ· θ = 0
=⇒ fn = 12π
√8g
3rπ
∴ fn∴ fn∴ fn = 1π
√2g
3rπ= 1
π
√2g
3rπ= 1
π
√2g
3rπ
Ayudantías de Mecánica Racional II,5 de julio de 2012
Universidad Austral de ChileJohan Muñoz

§ CAPÍTULO 6. VIBRACIONES 52
6.3.2. Problema 8
Fig. 6.3.2: Problema 8.78.
Hallar la expresión de la frecuencia natural de las pequeñas oscilaciones en torno a O del brazo concontrapeso. La rigidez del resorte es k y su longitud se ajusta de modo que el brazo esté equilibradoen la posición horizontal representada. Despreciar la masa del resorte y el brazo en comparación conm.
Solución:
Tomamos momento respecto a Oen el diagrama de cuerpo libre cuando se está en equilibrioestático.
∑M0 = 0
=⇒ mg · l − p · b = 0
=⇒ p = mgl
b
Tomamos momento respecto a O en el diagrama de cuerpo libre asociado a un desplazamientoangular positivo θ:
∑MO = IO · θ
mg · lcos θ1 − (mgl
b+ kbsin θθ) · (bcos θ1) = ml2 · θ
Ayudantías de Mecánica Racional II,5 de julio de 2012
Universidad Austral de ChileJohan Muñoz

§ CAPÍTULO 6. VIBRACIONES 53
dónde ml2 se obtuvo como sigue:
radio de giro = ko = l =√
I0
m
=⇒ I0 = ml2
mgl − mgl − kb2 · θ = ml2 · θ
θ · ml2 + kb2θ = 0
θ +++ kb2
ml2 · θ = 0
=⇒ fn = 12π
√kb2
ml2
∴ fn∴ fn∴ fn = b
2lπ
√k
m= b
2lπ
√k
m= b
2lπ
√k
m
Ayudantías de Mecánica Racional II,5 de julio de 2012
Universidad Austral de ChileJohan Muñoz

§ CAPÍTULO 6. VIBRACIONES 54
6.3.3. Problema 9
Fig. 6.3.3: Problema 8.81.
La placa cuadrada uniforme está suspendida en un plano horizontal por cuatro cables sujetos a losvértices que bajan desde los puntos A y B situados en la misma recta horizontal a una distancia bpor encima de la placa. Hallar la expresión de la frecuencia fn de las pequeñas oscilaciones de la placaalrededor del eje AB.
Tomamos momento respecto a O en el diagrama de cuerpo libre asociado a un desplazamientoangular positivo θ:
∑MO = IO · θ
−mg · b sin θ =[
112
mb2 + mb2]
· θ
para pequeñas oscilaciones, sin θ ≈ θ
−mgb · θ = 1312
mb2 · θ
=⇒ θ +
ωn2︷︸︸︷
1213
g
b·θ = 0
=⇒ fn = 12π
√1213
g
b
∴ fn∴ fn∴ fn = 1π
√3g
13b= 1
π
√3g
13b= 1
π
√3g
13b
Ayudantías de Mecánica Racional II,5 de julio de 2012
Universidad Austral de ChileJohan Muñoz

§ CAPÍTULO 6. VIBRACIONES 55
6.4 Métodos energéticos
6.4.1. Problema 101
Fig. 6.4.1: Problema tipo 8.10.
El esfera de masa m está montada en la varilla liviana articulada en O y sujeta por el extremoA al resorte vertical de rigidez k. El extremo A se desplaza una pequeña distancia y0 por debajo dela posición de equilibrio horizontal y luego se suelta. Por el método de la energía deducir la ecuacióndiferencial del movimiento para pequeñas oscilaciones de la varilla y determinar la expresión de lapulsación ωn de sus oscilaciones naturales. El amortiguamiento es despreciable.
Solución:
Se va a utilizar el concepto de conservación de la energía. Por lo tanto:
E1 = E2 (6.4.1)
Energía en el estado 1 (E1):
E1 = V1 + T1
V1 = mgh10 + 1
2k(∆x2)2 = 1
2kδst
2
T1 = 0
Energía en el estado 2 (E2):
E2 = V2 + T2
V2 = mgh2 + 12
(∆x2)2 = −mgb
ly + 1
2k(δst + y)2
T2 = 12
m(b
ly)2
1Problema resuelto en el libro Meriam Dinámica, el objetivo de este ejercicio es ver que método le es más conveniente.
Ayudantías de Mecánica Racional II,5 de julio de 2012
Universidad Austral de ChileJohan Muñoz

§ CAPÍTULO 6. VIBRACIONES 56
Utilizando (6.4.1):
E1 = E2
1
2kδst
2 = −mgb
ly +
1
2kδst
2 + kδsty + 12
ky2 + 12
m(b
ly)2
buscamos el valor de kδst ∑MO = 0
kδst · l = mg · b
=⇒ kδst = mgb
l
0 = −mgb
ly + mg
b
ly + 1
2ky2 + 1
2m
b2
l2 y2 /d
dt
0 = k
2(2yy) + 1
2m
b2
l2 (2yy) /1y
0 = k · y + mb2
l2 · y
=⇒ y + k
m
l2
b2 · y = 0
=⇒ ωn = l
b
√k
m
Ayudantías de Mecánica Racional II,5 de julio de 2012
Universidad Austral de ChileJohan Muñoz

§ CAPÍTULO 6. VIBRACIONES 57
6.4.2. Problema 11
Fig. 6.4.2: Problema 8.96.
La rueda de rayos de radio r, masa m y radio de giro centroidal r rueda sin deslizamiento por elplano inclinado. Hallar la frecuencia de oscilación natural y analizar los casos límites de r = 0 y r = r.
Solución:
Se usará como nivel de referencia el centro de la rueda.
E1 = 0E2 = V2 + T2
V2 = 12
kx2
T2 = 12
mx2 + 12
Iω2
E1 = E2
la velocidad angular se obtiene como sigue:
ω = v
r= x
r
0 = 12
kx2 + 12
mx2 + 12
(r2m)(
x
r
)2
/d
dt
0 = k
m· 2xx + 2(1 + r2
r2 ) · xx /1
2x
=⇒ x + k
m
1
1 + r2
r2
· x = 0
=⇒ ωnr=0 =√
k
m
=⇒ ωnr=r=√
k
2m
Ayudantías de Mecánica Racional II,5 de julio de 2012
Universidad Austral de ChileJohan Muñoz
§ CAPÍTULO 6. VIBRACIONES 58
6.4.3. Problema 12
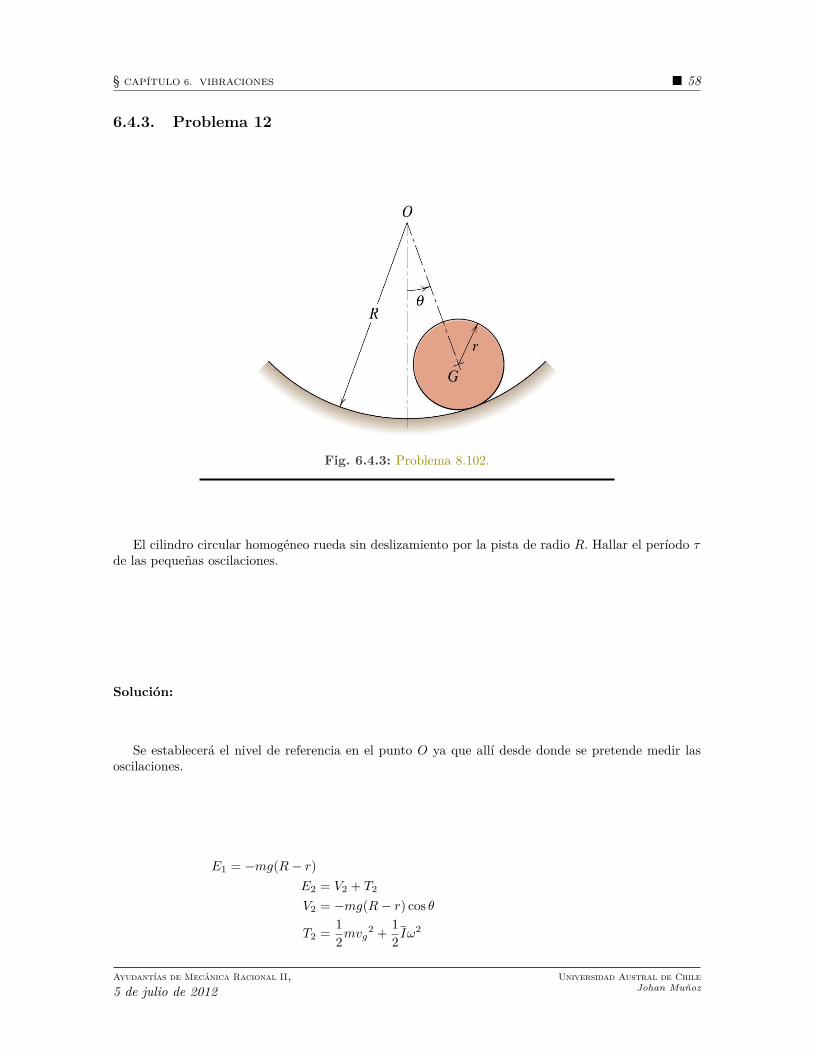
Fig. 6.4.3: Problema 8.102.
El cilindro circular homogéneo rueda sin deslizamiento por la pista de radio R. Hallar el período τde las pequeñas oscilaciones.
Solución:
Se establecerá el nivel de referencia en el punto O ya que allí desde donde se pretende medir lasoscilaciones.
E1 = −mg(R − r)E2 = V2 + T2
V2 = −mg(R − r) cos θ
T2 = 12
mvg2 + 1
2Iω2
Ayudantías de Mecánica Racional II,5 de julio de 2012
Universidad Austral de ChileJohan Muñoz

§ CAPÍTULO 6. VIBRACIONES 59
la velocidad (vg) y velocidad angular se obtiene como sigue:
θ = s
R − r⇒ s = vg = (R − r)θ
v = ωr ⇒ ω = vg
r= R − r
rθ
E1 = E2
−mg(R − r) = −mg(R − r) cos θ + 12
m[(R − r)θ]2 + 12
mr2
2
[R − r
rθ
]2
g(1 − cos θ) + 34
(R − r)θ2 = 0 /d
dt
g ·sin θθ · θ + 32
(R − r) · θθ = 0
=⇒ θ + 2g
3(R − r)· θ = 0
=⇒ τ = 2π
ωn= 2π
√3(R − r)
2g
∴ τ∴ τ∴ τ = π
√6(R − r)
g= π
√6(R − r)
g= π
√6(R − r)
g
Ayudantías de Mecánica Racional II,5 de julio de 2012
Universidad Austral de ChileJohan Muñoz

§ CAPÍTULO 6. VIBRACIONES 60
Ayudantías de Mecánica Racional II,5 de julio de 2012
Universidad Austral de ChileJohan Muñoz


















