Calculo Vectorial
370
Mikhail Malakhaltsev José Ricardo Arteaga Bejarano Cálculo vectorial
-
Upload
vladimir-acori-flores -
Category
Documents
-
view
1.111 -
download
26
Transcript of Calculo Vectorial
-
Mikhail MalakhaltsevJos Ricardo Arteaga Bejarano
Clculo vectorial
Portada_Arteaga.indd 1 04/06/13 10:19
-
Clculo vectorialM. A. Malakhaltsev
J. R. Arteaga B.
Bogot, 2013
00-Vectorial-OK.indd i 03/06/13 02:51 p.m.
-
00-Vectorial-OK.indd ii 03/06/13 02:51 p.m.
-
14.2 Ejemplo segundo parcial iii14.2 Ejemplo segundo parcial iii
Clculo vectorialM. A. Malakhaltsev
J. R. Arteaga B.
Bogot, 2013
Australia Brasil Corea Espaa Estados Unidos Japn Mxico Reino Unido Singapur
00-Vectorial-OK.indd iii 03/06/13 02:51 p.m.
-
D.R. 2013 por Cengage Learning Editores, S.A. de C.V., una Compaa de Cengage Learning, Inc.Corporativo Santa FeAv. Santa Fe nm. 505, piso 12Col. Cruz Manca, Santa FeC.P. 05349, Mxico, D.F.Cengage Learning es una marca registrada usada bajo permiso.
DERECHOS RESERVADOS. Ninguna parte de este trabajo amparado por la Ley Federal del Derecho de Autor, podr ser reproducida, transmitida, almacenada o utilizada en cualquier forma o por cualquier medio, ya sea grfico, electrnico o mecnico, incluyendo, pero sin limitarse a lo siguiente: fotocopiado, reproduccin, escaneo, digitalizacin, grabacin en audio, distribucin en Internet, distribucin en redes de informacin o almacenamiento y recopilacin en sistemasde informacin a excepcin de lo permitidoen el Captulo III, Artculo 27 de la Ley Federal del Derecho de Autor, sin el consentimiento por escrito de la Editorial.
Datos para catalogacin bibliogrfica:Malakhaltsev, Mikhail/Jos Ricardo Arteaga BejaranoClculo vectorial, 1a. ed.ISBN: 978-607-519-028-0
Visite nuestro sitio en:http://latinoamerica.cengage.com
Este libro es publicado por Cengage Learning de Colombia, S.A., en coedicin con la UNIVERSIDAD DE LOS ANDES en la Carrera 1 No. 19-27 Edificio Aulas 6 de Bogot, D.C.
Clculo vectorial Mikhail Malakhaltsev/Jos Ricardo Arteaga Bejarano
Presidente de Cengage LearningLatinoamrica:Fernando Valenzuela Migoya
Director Editorial, de Produccin y de Plataformas Digitales para Latinoamrica:Ricardo H. Rodrguez
Gerente de Procesos para Latinoamrica:Claudia Islas Licona
Gerente de Manufactura para Latinoamrica:Ral D. Zendejas Espejel
Gerente Editorial de Contenidos en Espaol:Pilar Hernndez Santamarina
Gerente de Proyectos Especiales:Luciana Rabuffetti
Coordinador de Manufactura:Rafael Prez Gonzlez
Editores: Sergio R. Cervantes GonzlezTimoteo Eliosa Garca
Diseo de portada: Ediciones OVA
Imagen de portada: vic927/Shutterstock
Composicin tipogrfica:Ediciones OVA
Impreso en Mxico1 2 3 4 5 6 7 16 15 14 13
00-Vectorial-OK.indd iv 03/06/13 02:51 p.m.
-
A mis padres y mis hijosMikhail
A Svetlana y DavidJos Ricardo
00-Vectorial-OK.indd v 03/06/13 02:51 p.m.
-
00-Vectorial-OK.indd vi 03/06/13 02:51 p.m.
-
1 Curvas y super cies . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1 Coordenadas en el plano 2 . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1.1 Coordenadas cartesianas (x, y) . . . . . . . . . . . . . . . . . . . . . . . 1
1.1.2 Coordenadas polares (r, U) . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Coordenadas en el espacio 3 . . . . . . . . . . . . . . . . . . . . . . . 3
1.2.1 Coordenadas cilndricas (r, U, z) . . . . . . . . . . . . . . . . . . . . . . 4
1.2.2 Coordenadas esfricas (R, F, U) . . . . . . . . . . . . . . . . . . . . . . 7
1.3 Rectas y planos en el espacio 3 . . . . . . . . . . . . . . . . . . . . . . 11
1.4 Super cies de revolucin . . . . . . . . . . . . . . . . . . . . . . . . . . 13
1.5 Super cies cilndricas . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
1.6 Super cies cudricas . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
1.7 Ejercicios del captulo 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2 Funciones vectoriales . . . . . . . . . . . . . . . . . . . . . . . . 27
2.1 Funciones vectoriales de una variable . . . . . . . . . . . . . . . . . . . . 27
2.1.1 Defi nicin de funcin vectorial . . . . . . . . . . . . . . . . . . . . . . 27
2.1.2. Operaciones entre funciones vectoriales . . . . . . . . . . . . . . . . . . 27
2.1.3 Continuidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
2.1.4 Derivadas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
2.1.5 Recta tangente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
2.1.6 Integral . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
2.2 Curvas parametrizadas . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
2.2.1 Cmo podemos dibujar una curva? . . . . . . . . . . . . . . . . . . . . 33
2.2.2 Reparametrizacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
2.2.3 Longitud de arco . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
14.2 Ejemplo segundo parcial vii14.2 Ejemplo segundo parcial vii
Contenido general
00-Vectorial-OK.indd vii 03/06/13 02:51 p.m.
-
viii Clculo vectorial
2.2.4 Parmetro natural s. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
2.2.5 Curvatura . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
2.3 Ejercicios del captulo 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
3 Funciones escalares . . . . . . . . . . . . . . . . . . . . . . . . . 45
3.1 Campos escalares en varias variables . . . . . . . . . . . . . . . . . . . . 45
3.2 Derivadas parciales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
3.2.1 Plano tangente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
3.2.2 Recta normal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
3.3 Ejercicios del captulo 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
4 Gradiente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
4.1 Funciones derivables . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
4.2 Regla de la cadena . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
4.3 Teorema de la funcin implcita . . . . . . . . . . . . . . . . . . . . . . . 69
4.4 Derivacin implcita . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
4.5 Derivadas direccionales y el vector gradiente . . . . . . . . . . . . . . . 72
4.6 Recta tangente a una curva y plano tangente a una super cie . . . . . . . 76
4.7 Ejercicios del captulo 4 . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
5 Optimizacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
5.1 Extremos libres . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
5.1.1 Extremos locales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
5.1.2 Puntos crticos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
5.2 Extremos restringidos . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
5.3 Ejercicios del captulo 5 . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
6 Integrales dobles . . . . . . . . . . . . . . . . . . . . . . . . . . 109
6.1 Integral doble sobre rectngulos . . . . . . . . . . . . . . . . . . . . . . 109
6.1.1 Defi nicin y propiedades de la integral doble . . . . . . . . . . . . . . . 109
00-Vectorial-OK.indd viii 03/06/13 02:51 p.m.
-
Contenido general ix
6.2 Integral iterada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
6.3. Aplicaciones de la integral doble . . . . . . . . . . . . . . . . . . . . . . 117
6.3.1 Volumen de un slido debajo de una grfi ca. . . . . . . . . . . . . . . . 118
6.3.2 Valor promedio de una funcin . . . . . . . . . . . . . . . . . . . . . . 118
6.4 Ejercicios del captulo 6 . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
7 Integrales dobles: regiones generales . . . . . . . . . . . . . . . 127
7.1 Integrales dobles sobre regiones: tipos I, II, III . . . . . . . . . . . . . . . . 127
7.1.1 Aplicaciones de la integral doble . . . . . . . . . . . . . . . . . . . . . 132
7.2 Cambio de variables en integrales dobles: jacobiano . . . . . . . . . . . . 135
7.2.1 Coordenadas curvilneas . . . . . . . . . . . . . . . . . . . . . . . . . . 135
7.3 Ejercicios del captulo 7 . . . . . . . . . . . . . . . . . . . . . . . . . . . 142
8 rea de super cies e integrales triples . . . . . . . . . . . . . . 147
8.1 El rea de una super cie . . . . . . . . . . . . . . . . . . . . . . . . . . 147
8.1.1 Una frmula del lgebra lineal . . . . . . . . . . . . . . . . . . . . . . . 147
8.1.2 El rea de una superfi cie . . . . . . . . . . . . . . . . . . . . . . . . . . 148
8.2 Integrales triples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151
8.2.1 Defi nicin de la integral triple . . . . . . . . . . . . . . . . . . . . . . . 151
8.2.2 Clculo de la integral triple sobre regiones slidas
tipos i, ii y iii . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154
8.2.3 Aplicaciones de la integral triple . . . . . . . . . . . . . . . . . . . . . 162
8.3 Ejercicios del captulo 8 . . . . . . . . . . . . . . . . . . . . . . . . . . . 165
9 Cambio de variables en integrales triples . . . . . . . . . . . . . 169
9.1 Cambio de variables . . . . . . . . . . . . . . . . . . . . . . . . . . . . 169
9.1.1 Frmula para cambio de variables de coordenadas cartesianas
a coordenadas cilndricas en una integral triple . . . . . . . . . . . . . . 171
9.1.2 Frmula para cambio de variables de coordenadas cartesianas
a coordenadas esfricas . . . . . . . . . . . . . . . . . . . . . . . . . . 174
9.2 Ejercicios del captulo 9 . . . . . . . . . . . . . . . . . . . . . . . . . . . 176
00-Vectorial-OK.indd ix 03/06/13 02:51 p.m.
-
x Clculo vectorial
10 Campos vectoriales e integral de lnea . . . . . . . . . . . . . . 183
10 .1 Campos vectoriales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183
10.1.1 Representacin grfi ca de un campo vectorial . . . . . . . . . . . . . . . 184
10.1.2 Lneas de campo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 187
10.2 Integral de lnea . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 190
10.2.1 Integral de lnea de un campo escalar a lo largo de una curva . . . . . . . 190
10.2.2 Integral de lnea de un campo vectorial a lo largo de una curva . . . . . . 191
10.2.3 Algunas aplicaciones de la integral de lnea . . . . . . . . . . . . . . . . 193
10.3 Ejercicios del captulo 10 . . . . . . . . . . . . . . . . . . . . . . . . . . 195
11 Clculo vectorial . . . . . . . . . . . . . . . . . . . . . . . . . . 203
11.1 Teorema fundamental del clculo . . . . . . . . . . . . . . . . . . . . . . 203
11.1.1 Campo vectorial conservativo . . . . . . . . . . . . . . . . . . . . . . . 203
11.1.2 Independencia de la trayectoria . . . . . . . . . . . . . . . . . . . . . . 203
11.2 Teorema de Green . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 206
11.3 Rotacional de un campo vectorial . . . . . . . . . . . . . . . . . . . . . 208
11.4 Primera forma vectorial del teorema de Green . . . . . . . . . . . . . . 209
11.5 Divergencia de un campo vectorial . . . . . . . . . . . . . . . . . . . . . 212
11.6 Segunda forma vectorial del teorema de Green . . . . . . . . . . . . . . 213
11.7 rea de una regin plana . . . . . . . . . . . . . . . . . . . . . . . . . . 215
11.8 Ejercicios del captulo 11 . . . . . . . . . . . . . . . . . . . . . . . . . . 217
12 Integral de super cie . . . . . . . . . . . . . . . . . . . . . . . . 225
12.1 Super cies paramtricas . . . . . . . . . . . . . . . . . . . . . . . . . . 225
12.2 rea de una super cie paramtrica . . . . . . . . . . . . . . . . . . . . . 230
12.3 Integrales de super cie . . . . . . . . . . . . . . . . . . . . . . . . . . . 233
12.3.1 Integrales de superfi cie de una funcin . . . . . . . . . . . . . . . . . . 233
12.4 Integral de super cie de un campo vectorial . . . . . . . . . . . . . . . . 235
12.4.1 Orientacin de una superfi cie . . . . . . . . . . . . . . . . . . . . . . . 235
12.4.2 Integral de superfi cie de un campo vectorial . . . . . . . . . . . . . . . 236
12.5 Ejercicios del captulo 12 . . . . . . . . . . . . . . . . . . . . . . . . . . 239
00-Vectorial-OK.indd x 03/06/13 02:51 p.m.
-
Contenido general xi
13 Teorema de Stokes y teorema de Gauss . . . . . . . . . . . . . 247
13.1 Teorema de Stokes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 247
13.1.1 Independencia de la superfi cie S . . . . . . . . . . . . . . . . . . . . . . 248
13.2 Teorema de Gauss-Ostrogradsky . . . . . . . . . . . . . . . . . . . . . . 252
13.3 Ejercicios del captulo 13 . . . . . . . . . . . . . . . . . . . . . . . . . . 256
14 Apndices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 263
14.1 Ejemplo de primer parcial . . . . . . . . . . . . . . . . . . . . . . . . . 263
14.2 Ejemplo de segundo parcial . . . . . . . . . . . . . . . . . . . . . . . . . 265
14.3 Ejemplo de examen nal . . . . . . . . . . . . . . . . . . . . . . . . . . 268
14.4 Ejemplo de tarea 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 270
14.5 Ejemplo de tarea 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 274
14.6 Ejemplo de tarea 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 277
15 Soluciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 287
15.1 Ejercicios del captulo 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . 287
15.2 Ejercicios del captulo 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . 289
15.3 Ejercicios del captulo 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . 300
15.4 Ejercicios del captulo 4 . . . . . . . . . . . . . . . . . . . . . . . . . . . 304
15.5 Ejercicios del captulo 5 . . . . . . . . . . . . . . . . . . . . . . . . . . . 308
15.6 Ejercicios del captulo 6 . . . . . . . . . . . . . . . . . . . . . . . . . . . 311
15.7 Ejercicios del captulo 7 . . . . . . . . . . . . . . . . . . . . . . . . . . . 314
15.8 Ejercicios del captulo 8 . . . . . . . . . . . . . . . . . . . . . . . . . . . 316
15.9 Ejercicios del captulo 9 . . . . . . . . . . . . . . . . . . . . . . . . . . . 319
15.10 Ejercicios del captulo 10 . . . . . . . . . . . . . . . . . . . . . . . . . . 321
15.11 Ejercicios del captulo 11 . . . . . . . . . . . . . . . . . . . . . . . . . . 323
15.12 Ejercicios del captulo 12 . . . . . . . . . . . . . . . . . . . . . . . . . . 326
15.13 Ejercicios del captulo 13 . . . . . . . . . . . . . . . . . . . . . . . . . . 327
15.14 Ejemplo de primer parcial . . . . . . . . . . . . . . . . . . . . . . . . . 330
15.15 Ejemplo de segundo parcial . . . . . . . . . . . . . . . . . . . . . . . . . 332
00-Vectorial-OK.indd xi 03/06/13 02:51 p.m.
-
xii Clculo vectorial
15.16 Ejemplo de examen nal . . . . . . . . . . . . . . . . . . . . . . . . . . 334
15.17 Ejemplo de tarea 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 337
15.18 Ejemplo de tarea 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 340
15.19 Ejemplo de tarea 3 ( nal) . . . . . . . . . . . . . . . . . . . . . . . . . . 343
Bibliografa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 347
ndice de materias . . . . . . . . . . . . . . . . . . . . . . . . . 349
00-Vectorial-OK.indd xii 03/06/13 02:51 p.m.
-
El libro es un texto gua para el curso Clculo Vectorial para los estudiantes de las carreras de ingeniera. Est basado en las notas de clase del cur-so usadas durante muchos aos en la Universidad de los Andes (Bogot, Colombia).
Como prerrequisitos para estudiar los temas de este libro son necesarios un curso bsico en lgebra lineal y los dos cursos introductorios al clculo infi nitesimal: Clculo Diferencial y Clculo Integral.
El objetivo principal del libro es acompaar al estudiante a entender de manera rpida y efectiva cul es el corazn de cada tema del curso. Est escrito de manera corta; sin embargo, contiene los temas sufi cientes para aprender el curso, en particular incluye las defi niciones y los teoremas fundamentales. Los ejemplos representan los patrones como los estudian-tes deben responder a un ejercicio o situacin problemtica. Los ejercicios y problemas que son su corazn fueron escogidos de manera cuidadosa.
La estructura del libro est adaptada a un semestre acadmico de quince semanas. Cada captulo tiene una lista de ejercicios recomendados que signifi ca una coleccin mnima de ejercicios necesarios para entender el tema. Adems el libro contiene una seleccin de tareas y exmenes que fueron usados en 2011.
Para la preparacin de este libro elegimos los mejores ejemplos y ejerci-cios de varios libros, en particular de [1]-[5].
Prefacio
00-Vectorial-OK.indd xiii 03/06/13 02:51 p.m.
-
00-Vectorial-OK.indd xiv 03/06/13 02:51 p.m.
-
Contenido general xv
Mikhail Malakhaltsev
Ph. D. (1987, Universidad de Kazan, Rusia). Profesor de Universidad de los Andes (Bogot, Colombia). Autor de ms de treinta artculos en el rea de geometra diferencial. Dictaba varios cursos de servicio y electivas en las universidades de Kazan y de los Andes. Es coautor de textos de gua de geometra y topologa, y de un libro sobre tecnologas web para matemticos.
Jos Ricardo Arteaga Bejarano
Ph. D. (1988, Universidad de Kazan, Rusia). Profesor asociado de Univer-sidad de los Andes (Bogot, Colombia) desde 1990. Director del Depar-tamento de Matemticas de la Universidad de los Andes. Autor de varios artculos en el rea de geometra diferencial. Adjunct Professor ofMathe-matical, Computational & Modeling Sciences Center (MCMSC),Arizona State University (USA). Codirector del Research Group in Mathematical and Computational Biology (BIOMAC) de la Universidad de los Andes.
Contenido general xv
Acerca de los autores
00-Vectorial-OK.indd xv 03/06/13 02:51 p.m.
-
00-Vectorial-OK.indd xvi 03/06/13 02:51 p.m.
-
1.1 Coordenadas en el plano 2
1.1.1 Coordenadas cartesianas (x, y)
El plano bidimensional 2 es el conjunto de parejas ordenadas de nmeros reales,
2 = {(x, y) | x, y }. (1.1)
Los elementos del conjunto 2 se llaman puntos en 2. Si A = (x, y) es un punto en 2, los nmeros x y y se llaman coordenadas cartesianas del punto A, y se escriben A(x, y).
Las rectas OX = {(x, 0) | x } y OY = {(0, y) | y } se llaman ejes coordenados.
Segn estas coordenadas, dividiremos el plano en cuatro cuadrantes del plano 2, fig. 1.1
Notacin Nombre x y
I Primer cuadrante x > 0 y > 0
II Segundo cuadrante x < 0 y > 0
III Tercer cuadrante x < 0 y < 0
IV Cuarto cuadrante x > 0 y < 0
Las coordenadas del sistema cartesiano (x, y) son rectas x = a y y = b, donde a y b son constantes.
La orientacin positiva cannica del plano 2 est dada por el convenio que la rotacin ms corta desde el semieje positivo x hasta el semieje positivo y es en sentido antihorario.
1.1.2 Coordenadas polares (r, U)
En el plano 2 fijamos un punto O y un rayo OA. Para cada punto M 2 dife-rente del punto O tomemos una pareja ordenada de nmeros reales (r, u), donde r = OA, r > 0, y u, 0 u < 2p, es el ngulo entre los rayos OA y OM en sentido antihorario.
1 Curvas y superficiesCAPTULO
1
Figura 1.1. Ejes coordenados cartesianos y cuadrantes
2
1
1 2
1
12
2
0
II
III IV
I
01-Vectorial-OK.indd 1 31/05/13 12:11 a.m.
-
2 CAPTULO 1 Curvas y superficies
Ejemplo 1.1. Hallar las coordenadas polares del punto A(1, 1) R2.
Tenemos que r (1)2 12 ,2w w y el nico ngulo u tal que 0 u < 2p y cos u cos u 1y 2, senu 1y 2, es u 3py4w w (v. figura 1.3a).
Ejemplo 1.2. Hallar las coordenadas cartesianas del punto A R2 que tiene las coordena-das polares (2, py3).
Para este punto el radio polar es r = 2 y el ngulo polar es u = py3, luego x = 2 cos (py3) = 1, y = 2 sen (py3) = w3, y el punto es wA (1, 3) (v. figura 1.3b).
El nmero r se llama el radio polar, el ngulo u ngulo polar y la pareja (r, u) se llama coordenadas polares del punto M. El punto O se llama polo y el rayo OA el eje polar, fig. 1.2
Figura 1.2. Coordenadas polares
u
M (r, u)
r
O Aeje polar
polo
Las coordenadas del sistema de coordenadas polares son las circunferencias r = a y los rayos u = b, donde a > 0 y 0 u < 2p son constantes.
En el plano 2 hay una manera especial para elegir las coordenadas polares, escogiendo el polo O = (0, 0) y el eje polar el semieje positivo OX = {(x, 0)|x 0}. En este caso la relacin entre las coordenadas cartesianas (x, y) y las coorde-nadas polares (r, u) del mismo punto est dada por las frmulas:
e ex r cos uy r sen u ,, r wx 2 y2cos u xyr, senu yyr, 0 u 2p (1.2)
Figura 1.3. Ejemplos 1.1 y 1.2
12
43p
y
x1
1
10
w
3
y
x1
0
w
Fig. 1.3a Fig. 1.3b
01-Vectorial-OK.indd 2 31/05/13 12:11 a.m.
-
1.2 Coordenadas en el espacio 3 3
Segn estas coordenadas polares los cuadrantes del plano 2 son:
Notacin Nombre r u
I Primer cuadrante r > 0 0 < u 0 p2
< u < p
III Tercer cuadrante r > 0 p < u < 3p2
IV Cuarto cuadrante r > 0 3p2
< u < 2p
Nota 1.1. Algunas veces es conveniente tomar el radio polar igual a cero. El punto correspondiente a r = 0 es el polo O, y el ngulo polar de O es inde-terminado. Tambin algunas veces es conveniente admitir que el ngulo polar de un punto es un nmero arbitrario real, en este caso tomamos este ngulo con mdulo 2p, por ejemplo, el ngulo polar de A(1, 3p) es p.
Ejemplo 1. 3. La espiral de Arqumedes se escribe con respecto a coordenadas polares como r = t, u = t, t 0 (v. figura 1.4). El punto correspondiente a t = 15py4 tiene las coordenadas polares r = 15py4 y u = 7py4.
Figura 1.4. Espiral de Arqumedes para 0 t 6p
5
5
40
5
51015 10 15
10
15
1.2 Coordenadas en el espacio 3
El espacio tridimensional 3 es el conjunto de las ternas ordenadas de nmeros reales,
3 = {(x, y, z) | x, y, z }. (1.3)
01-Vectorial-OK.indd 3 31/05/13 12:11 a.m.
-
4 CAPTULO 1 Curvas y superficies
Los elementos del conjunto 3 se llaman puntos en 3. Si A = (x, y, z) es un punto en 3, los nmeros x, y y z se llaman coordenadas cartesianas del punto A, y se escriben como A(x, y, z).
Octantes
En el espacio 3 se introducen los siguientes conjuntos, llamados octantes:
Notacin Nombre x y z
I Primer octante x > 0 y > 0 z > 0
II Segundo octante x < 0 y > 0 z > 0
III Tercer octante x < 0 y < 0 z > 0
IV Cuarto octante x > 0 y < 0 z > 0
V Quinto octante x > 0 y > 0 z < 0
VI Sexto octante x < 0 y > 0 z < 0
VII Sptimo octante x < 0 y < 0 z < 0
VIII Octavo octante x > 0 y < 0 z < 0
Superficies elementales
Si a, b, c son constantes diferentes de cero, entonces:
Ecuacin Descripcin cartesiana
x = 0 Plano coordenado yz
y = 0 Plano coordenado xz
z = 0 Plano coordenado xy
x = a Plano paralelo al plano yz
y = b Plano paralelo al plano xz
z = c Plano paralelo al plano xy
1.2.1 Coordenadas cilndricas (r, U, z)
En el espacio 3 fijamos un punto O y un rayo OZ . Sea el plano ortogonal al rayo OZ que pasa por el punto O y OA un rayo en el plano . Sean (r, u) las coordenadas polares en el plano determinadas por el polo O y eje polar OA.
Para cada punto M 3 OZ, sea M' la proyeccin de M sobre el plano (v. figura 1.5). Entonces, las coordenadas cilndricas del punto M son la terna ordenada (r, u, z) donde (r, u) son las coordenadas polares del punto M' en el plano y z es la longitud del segmento orientado MM'. Por la definicin
r > 0, 0 u < 2p, z .
01-Vectorial-OK.indd 4 31/05/13 12:11 a.m.
-
1.2 Coordenadas en el espacio 3 5
Ejemplo 1.4. Hallar las coordenadas cilndricas del punto A(1, 1, 3) 3.
Tenemos que r = (1)2 +(1)2 = ,2w w y el nico ngulo u tal que 0 u < 2p, cos u = 1y 2 y sen u = 1y 2w w es u = 5p/4. Como z = 3, entonces, el punto A tiene las coordenadas cilndricas 2, 5py4, 3).(w
En el espacio 3 hay una manera especial para elegir las coordenadas ciln-dricas escogiendo O en el punto (0, 0, 0), el rayo OZ, en el semieje coordenado z, y el eje polar en el semieje coordenado x. En este caso las coordenadas cilndricas, fig. 1.6, estn relacionadas con las coordenadas cartesianas por las ecuaciones:
x = r cos uy = r sen uz = z
r = x 2 + y2
cos u = xyr, sen u= yyr, 0 u 2pz = z.
w <
Figura 1.5. Coordenadas cilndricas del punto M 3
Figura 1.6. Relacin entre las coordenadas cartesianas y las coordenadas cilndricas
Z
Z
M
Ar
Ou M
z
y
x
O
M(r, u)
M(x, y, z)
Z
u
(1.4)
01-Vectorial-OK.indd 5 31/05/13 12:11 a.m.
-
6 CAPTULO 1 Curvas y superficies
Ejemplo 1.5. Hallar las coordenadas cartesianas del punto A 3 que tiene las coordenadas cilndricas (2, 2p/3, 4).
Las coordenadas cartesianas del punto A 3 son x = 2 cos (2p/3) = 1, y = 2 sen (2p/3) = 3w y z = 4.
Ejemplo 1.6. Escribir la ecuacin x2 + y2 = 1 del cilindro con eje en el eje z y radio 1 en coordenadas cilndricas.
Reemplazamos x, y, z en la ecuacin por x = r cos u, y = r sen u, z = z , enton-ces obtenemos que r2 = 1, y luego r = 1 porque r > 0. Entonces, la ecuacin del cilindro con respecto a las coordenadas cilndricas es r = l.
Ejemplo l.7. Expresar la ecuacin x2 + y2 + z2 = 4 de la esfera con el centro (0, 0, 0) y radio 2en coordenadas cilndricas.
Reemplazamos x, y, z en la ecuacin por x = r cos u, y = r sen u, z = z , entonces obtenemos que r2 + z2 = 4. Esta expresin es la ecuacin de la esfera con res-pecto a las coordenadas cilndricas.
Octantes
En trminos de las coordenadas cilndricas, los octantes son:
Notacin Nombre r U z
I Primer octante r > 0 0 < u < p
2z > 0
II Segundo octante r > 0 p2
< u < p z > 0
III Tercer octante r > 0 p < u < 3p2
z > 0
IV Cuarto octante r > 0 3p2
< u < 2p z > 0
V Quinto octante r > 0 0 < u < p
2z < 0
VI Sexto octante r > 0 p2
< u < p z < 0
VII Sptimo octante r > 0 p < u < 3p2
z < 0
VIII Octavo octante r > 0 3p2
< u < 2p z < 0
01-Vectorial-OK.indd 6 31/05/13 12:11 a.m.
-
1.2 Coordenadas en el espacio 3 7
Superficies elementales
Si a, b, c son constantes diferentes de cero, fig. 1.7, entonces:
Ecuacin Descripcin cartesiana
r = 0 Origen de coordenadas
u = 0 Semiplano xz, con x > 0
u = p Semiplano xz, con x < 0
z = 0 Plano coordenado xy
r = a Cilindro x2 + y2 = a2
u = bSemiplano perpendicular al plano xy y que lo
intercepta en el rayo u = b
z = c Plano paralelo al plano xy
22
2
00
0
11
1
2
22
11
1
y x
Figura 1.7. Coordenadas cilndricas 3D (r, u, z): r es constante (cilindro), u es constante (semiplano vertical),
z es constante (plano horizontal)
1.2.2 Coordenadas esfricas (R, F, U)
Sea O un punto en el espacio 3 y fijamos una recta orientada OZ que pasa por O y un semiplano a pasando por OZ. Adems tomemos el plano p que pasa porO y ortogonal al rayo OZ (v. figura 1.8a). Para cada punto M que no pertenece a la recta OZ, sea M la proyeccin de M sobre el plano . Entonces el punto M tiene por coordenadas esfricas la terna (r, f, u) donde r = |OM|, f es el ngulo entre la direccin positiva OZ y el vector OM (0 < f < p), y u es el ngulo polar de M en el plano , donde 0 < u < 2p (v. figura 1.8b).
01-Vectorial-OK.indd 7 31/05/13 12:11 a.m.
-
8 CAPTULO 1 Curvas y superficies
En el espacio 3 hay una manera especial para elegir las coordenadas esfri-cas, se escoge O en el punto (0, 0, 0), el rayo OZ, en el semieje coordenado z, y el plano a en el plano xz (v. figura 1.9).
Figura 1.9. Coordenadas esfricas y cartesianas del punto M
z
r
r
yx
M
M(r, f, u)
Q
O
a
f
u
El tringulo OMM es rectngulo en M. La recta MM es paralela al eje z, lo que hace que el ngulo f = OMM . Por lo tanto r = r sen f. Reemplazando estas ecuaciones en (1.2.1) obtenemos que las coordenadas esfricas estn rela-cionadas con las coordenadas cartesianas por las ecuaciones:
x = r senf cos u,y = r senf sen u,z = r cos f,
r = x 2 + y2 + z 2
senf= x2 +y 2
r, cosf= z
r, 0 0 0 < f < p
20 < u <
p
2
II Segundo octante r > 0 0 < f < p
2
p
2 < u < p
III Tercer octante r > 0 0 < f < p
2p < u <
3p2
IV Cuarto octante r > 0 0 < f < p
23p2
< u < 2p
01-Vectorial-OK.indd 9 31/05/13 12:11 a.m.
-
10 CAPTULO 1 Curvas y superficies
V Quinto octante r > 0 p2
< f < p 0 < u < p
2
VI Sexto octante r > 0 p2
< f < pp
2 < u < p
VII Sptimo octante r > 0 p2
< f < p p < u < 3p2
VIII Octavo octante r > 0 p2
< f < p 3p2
< u < 2p
Superficies elementales
Si a, b, c constantes diferentes de cero, entonces:
Ecuacin Descripcin cartesiana
u = 0 Semiplano xz, con x > 0
u = p Semiplano xz, con x < 0
f = p
2Plano coordenado xy
r = a Esfera x2 + y2 + z2 = a2
u = bSemiplano perpendicular al plano xy y que lo inter-
cepta en el rayo u = b
f = c p2
Semicono recto de revolucin x2 + y2 d2 z2 = 0, con d = tan c
Nota 1.2. Por la definicin, adicionalmente supongamos que:1) para el origen de coordenadas O(0, 0, 0), el radio r = 0 y los ngulos u
y f son indefinidos;2) los puntos del semieje z con z > 0 tienen el ngulo f = 0 y el ngulo u
es indefinido;3) los puntos del semieje z con z < 0 tienen el ngulo f = p y el ngulo u
es indefinido.
Figura 1.10. Coordenadas esfricas 3D (r, u, f): r es constante (esfera), u es constante (semiplano vertical), f es constante (semicono)
2
0
1
2
1.7
0.3
1.3
0.7
0.31.3
0.71.7
1
01-Vectorial-OK.indd 10 31/05/13 12:11 a.m.
-
1.3 Rectas y planos en el espacio 3 11
1.3 Rectas y planos en el espacio 3
Definicin 1.1. Una recta en el espacio 3 es el conjunto de puntos dado por la llamada ecua-cin vectorial de la recta:
rS(t) x 0 , y0 , z0) + t (a, b, c),= ( (1.6)
donde el punto P(x0, y0, z0 ) est en la recta , y S = (a, b, c) es un vector en
direccin de la recta llamado director de y t (v. figura 1.11).
Figura 1.11. Una recta , el punto P est en , vS es un vector director de
P(x0, y
0, z
0)
v=(a, b, c)S
Ejemplo 1.12. Hallar las ecuaciones paramtricas de la recta que pasa por los puntos A(1, 2, 1) y B(0, 2, 3) del espacio 3.
El vector AB = OB OA =
(1, 4, 4) es un vector director de la recta , y como punto inicial tomamos el punto A. Entonces, las ecuaciones paramtri-cas de son:
x = 1 t,y = 2 4 t,z = 1 + 4t.
(1.8)
Las ecuaciones paramtricas de la recta son:
x = x 0 + at,y = y0 + bt,z = z0 + ct.
Nota 1.3. Para una recta el vector director no es nico, sin embargo, si
y wvS S son vectores directores de una recta , entonces vS wS= l , dondel R y l 0.
Definicin 1.2. Un plano a en 3 es el conjunto de puntos dado por la llamada ecuacin vectorial del plano:
(s, t ) = (x 0 , y0 , z0) + s (a1 , b1 , c1) + t (a2 , b2, c2),rS (1.9)
donde el punto P(x0, y0, z0) est en a, 1vS = (a1, b1, c1) y 2v
S = (a2, b2, c2) son vec-tores que generan el plano a y s, t (v. figura 1.12).
01-Vectorial-OK.indd 11 31/05/13 12:11 a.m.
-
12 CAPTULO 1 Curvas y superficies
Las ecuaciones paramtricas del plano a son:
x = x 0 + a1s + a2 t,y = y0 + b1s + b2t,z = z0 + c1s + c2 t.
(1.10)Si N
S = (N1, N2, N3) es un vector normal al plano a y un punto P(x0, y0, z0)
est en a, entonces para cada punto M(x, y, z) de a los vectores y NS
PM
son ortogonales. Por lo tanto,
NS
PM
= (x x0, y y0, z z0) (N1, N2, N3) = 0. (1.11)
Entonces, tenemos la ecuacin del plano que pasa por el punto P(x0, y0, z0) y tiene el vector normal N
S = (N1, N2, N3):
N1(x x0) + N2 (y y0) + N3 (z z0) = 0. (1.12)
Luego obtenemos la ecuacin lineal del plano a,
N1x + N2y + N3z = d, (1.13)
donde d = N1x0 + N2y0 + N3z0 (v. figura 1.13).
Nota 1.4. Para obtener un vector normal se puede tomar el producto cruz =N
S 1 2.v
S vS
Figura 1.12. Los vectores 1 y 2vS vS generan el plano a
Pv
1
v2
a
O
Figura 1.13. En el plano a, PM a es ortogonal a NS
PM
N a
O
S
01-Vectorial-OK.indd 12 31/05/13 12:11 a.m.
-
1.4 Superficies de revolucin 13
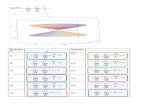
Ejemplo 1.13 (ejercicio resuelto). Graficar en el primer octante (v. seccin 1.2) el plano cuya ecuacin es, fig. 1.14
x + y + z = 1. (1.14)
Encuentre tres puntos no colineales sobre l y muestre que efectivamente el vector N
S = (1, 1, 1) es un vector
normal al plano dado.
Dada una ecuacin lineal en tres variables, tenemos dos grados de libertad, por lo tanto, encontrar tres puntos no colineales es dar valores, por ejemplo, a x y y, y encon-trar z que satisfaga la ecuacin. Luego verificar que los dos vectores formados con estos tres puntos no son uno mltiplo del otro. Por ejemplo P1(0, 0, 1), P2(0, 1, 0), P3(1, 0, 0). Ahora el producto vectorial es:
P3P1 P3P2 = (1, 1, 1). (1.15)
Efectivamente y P3P1 P3P2NS
son paralelos y por tanto N
S es un vector normal, al plano.
Ejemplo 1.14 (ejercicio resuelto). Dados los puntos A(1, 2, 0), B(6, 0, 1) y C (0, 3, 1), encontrar la ecuacin del plano a que los contiene.
Encontramos los vectores yAB
AC
,
= (7,2, 1), = (1, 1, 1)AB
AC
y el vector normal
= =NS
AB
AC
(7, 2, 1) (1, 1, 1) = (3, 6, 9) = 3(1, 2, 3).
Como punto inicial P, tomamos el punto A. Entonces la ecuacin del plano es x + 2y 3z = 3.
Figura 1.14. Plano x + y + z = 1
0.0
1.0
0.5uv 0.5
1.0
0.00.0
0.5
0.75
1.0
0.25
1.4 Superficies de revolucin
Definicin 1.3. Una superficie de revolucin en el espacio 3 es una superficie generada al rotar una curva plana C alrededor de un eje que est en el plano de la curva.
Supongamos el espacio tridimensional 3 dotado del sistema de coordenadas (x, y, z). Un caso particular es cuando el eje de rotacin es alguno de los ejes coor-denados y la curva C est sobre alguno de los planos coordenados.
01-Vectorial-OK.indd 13 31/05/13 12:11 a.m.
-
14 CAPTULO 1 Curvas y superficies
Ejemplo 1.15. Supongamos que el eje de rotacin es el eje z y la curva plana C est sobre el plano xz con ecuacin:
z = f (x), (1.16)
tal que f es una funcin positiva definida slo para x 0. En el proceso de movi-miento cada punto (a, 0, f (a)) de la curva C describe una circunferencia con centro (0, 0, f (a)) y radio a en el plano horizontal z = f (a) (v. figura 1.15).
Figura 1.15. Superficie de revolucin
x
a
z = f (x)
(a, 0, f (a))
x2 + y2 = a2
z = f (a)
y
z
(0, 0, f (a))
Esta circunferencia satisface las ecuaciones
x2 + y2 = a2, z = f (a), donde a 0,
entonces la ecuacin de la superficie de rotacin tiene ecuacin:
z = f ( x 2 + y2).w (1.17)
Ejemplo 1.16. Si el eje de rotacin es el eje x y la curva plana C est sobre el plano xz con ecuacin:
z = f (x), (1.18)
tal que f es una funcin positiva definida slo para x 0, entonces la ecuacin de la superficie de rotacin tiene ecuacin:
(f(x))2 = y2 + z2. (1.19)
Ejemplo 1.17. El catenoide es una superficie de revolucin obtenida al rotar sobre el eje x la curva z = cosh x, y la ecuacin que la representa es: y2 + z2 = cosh2 x. Una parametrizacin del catenoide es: x = u, y = cosh u cos v, z = cosh u sen v, con valores de los parmetros 2 u 2 y 0 v 2p.
01-Vectorial-OK.indd 14 31/05/13 12:11 a.m.
-
1.5 Superficies cilndricas 15
El catenoide, superficie de revolucin obtenida al girar la curva catenaria z = cosh x, sobre el plano xz, alrededor del eje x (fig 1.16)
Figura 1.16. Catenoide
2.4
0.4
0
2
0.4
1.6
3.63.6
2
Ejemplo 1.18. Encontremos la ecuacin de la superficie al rotar la recta x = 3y alrededor del eje x. Un punto de la recta genera una circunferencia sobre un plano ortogonal al eje x con centro (a, 0, 0) y radio ay3, entonces la ecuacin de la circunferen-cia es x = a, y2 + z2 = a2y9, luego la ecuacin de la superficie es x2 9y2 9z2 = 0 (v. figura 1.17).
Figura 1.17. Cono
y
z
x = 3y
x
1.5 Superficies cilndricas
Definicin 1.4. Dada una recta , llamada generatriz, y una curva plana C en el espacio 3, una superficie cilndrica es una superficie generada por una familia de rectas paralelas a y que tienen un punto en C.
Un caso particular es cuando la recta es alguno de los ejes coordenados cartesianos y la curva C est sobre alguno de los planos coordenados.
01-Vectorial-OK.indd 15 31/05/13 12:11 a.m.
-
16 CAPTULO 1 Curvas y superficies
Ejemplo 1.19. Consideremos como recta generatriz cualquier recta paralela al eje z y que pasa por la curva f (x, y) = k, en el plano xy, donde k es una constante. El cilindro
obtenido no necesariamente es una superficie de revolucin, por ejemplo si la
curva C es la elipse x 2
4+
y2
9= 1.
La ecuacin de la superficie cilndrica en 3 en este caso es:
f (x, y) = k. (1.20)
Un cilindro elptico recto es una superficie cilndrica generada por una familia de rectas paralelas a una recta (en este caso eje z) y que pasan por una curva
plana C (en este caso la elipse x 2
4+
y2
9= 1), ubicada sobre un plano xy. La
ecuacin que define esta superficie cilndrica es: = 1.x 2
4+
y2
9 Observemos
que no aparece la variable z, precisamente es el eje paralelo a la recta genera-triz, fig. 1.18.
Figura 1.18. Cilindro elptico x2
4 + = 19y2
2
0
23
1
1
3 2
0
2
Ejemplo 1.20. Consideremos la curva C sobre el plano xz, z = sen x. La superficie cilndrica generada por la familia de rectas paralelas al eje y tiene como ecuacin que la representa:
z = sen x. (1.21)
Nota 1.5. Si la familia de rectas que genera una superficie cilndrica son paralelas a uno de los ejes coordenados y la curva plana C est sobre el plano coordenado perpendicular a la familia de rectas, entonces la ecuacin de la superficie cilndrica no tiene la variable del eje. Esto no significa que en general las ecuaciones de las superficies cilndricas no tengan una o dos variables. Un plano podra ser considerado como una superficie cilndrica.
01-Vectorial-OK.indd 16 31/05/13 12:11 a.m.
-
1.6 Superficies cudricas 17
Un cilindro sinusoidal es una superficie cilndrica generada por una familia de rectas paralelas a una recta (en este caso el eje y) y que pasan por una curva plana C (en este caso el grfico de la funcin z = sen x) ubicada sobre un pla-no xz. La ecuacin que define esta superficie cilndrica es la ecuacin z = sen x. Observemos que no aparece la variable x, precisamente es el eje paralelo a la recta generatriz.
Figura 1.19. Cilindro sinusoidal z = sen x
10
10
1.8
13
1.6 Superficies cudricas
Definicin 1.5. Supongamos el espacio tridimensional 3 dotado del sistema de coordenadas (x, y, z). Una superficie cilndrica en este espacio es una superficie asociada a una ecuacin de segundo grado en las variables x, y, z, es decir una superficie cudrica tiene como ecuacin que la representa una ecuacin del tipo:
Ax2 + By2 + Cz2 + 2Dxy + 2Exz + 2Fyz + 2Gx + 2Hy + 2Iz + J = 0. (1.22)
Los ejemplos principales de las superficies cudricas son los siguientes:
Un paraboloide elptico, fig. 1.20, es una superficie cuya ecuacin en forma cannica es:
zc
=x 2
a2+
y2
b2, (1.23)
donde a, b, c son nmeros reales diferentes de cero. En el caso de que a = b, se llama un paraboloide circular y es adems una superficie de revolucin. La orientacin del paraboloide elptico depende del valor de c, si c > 0 est orientado hacia arriba, y si c < 0 hacia abajo.
2
10
00.7
0.3
1.3
Figura 1.20. Paraboloide elptico a b, c = 1
01-Vectorial-OK.indd 17 31/05/13 12:11 a.m.
-
18 CAPTULO 1 Curvas y superficies
Un paraboloide hiperblico, fig. 1.21, o comnmente llamado silla de montar, es una superficie cuya ecuacin en forma cannica es:
zc
=x 2
a2
y2
b2, (1.24)
donde a, b, c son nmeros reales diferentes de cero.
4
2
0
2
42
1 01
22
1
Figura 1.21. Paraboloide hiperblico a = b, c = 1
Un hiperboloide elptico de un solo manto, fig. 1.21, o comnmente llamado hiperboloide de una hoja, es una superficie cuya ecuacin en forma cannica es:
x2
a2+
y2
b2
z 2
c2= 1, (1.25)
donde a, b, c son nmeros reales diferentes de cero.
4
2
0
2
4
3.4
0.22.2
0.60.6
Figura 1.22. Hiperboloide elptico de un manto
01-Vectorial-OK.indd 18 31/05/13 12:11 a.m.
-
1.6 Superficies cudricas 19
Un hiperboloide elptico de dos mantos, fig. 1.23, o comnmente llamada hiper-boloide de dos hojas, es una superficie cuya ecuacin en forma cannica es:
x 2
a2+
y2
b2
z 2
c2= 1, (1.26)
donde a, b, c son nmeros reales diferentes de cero.
4.0
1.5
1.5
3.5
6.06
14
1
6
4
Figura 1.23. Hiperboloide elptico de dos mantos
Un elipsoide, fig. 1.24, es una superficie cuya ecuacin en forma cannica es:
x 2
a2+
y2
b2+
z 2
c2= 1, (1.27)
donde a, b, c son nmeros reales diferentes de cero. En el caso de que a = b, es una superficie de revolucin y si a = b = c = R, entonces tendremos una esfera de radio R.
Figura 1.24. Elipsoide
2
0
0.5 10
1
21.5 1
1
01-Vectorial-OK.indd 19 31/05/13 12:11 a.m.
-
20 CAPTULO 1 Curvas y superficies
Un cono, fig. 1.25, es una superficie cuya ecuacin en forma cannica es:
x 2
a2+
y2
b2
z 2
c2= 0, (1.28)
donde a, b, c son nmeros reales diferentes de cero. En el caso de que a = b es una superficie de revolucin.
Figura 1.25. Cono
1.5
0.5
0.5
1.51.4
0.40.6
1.5
0.50.5
1.5
Las formas cannicas de las cudricas son la simplificacin al mximo de la ecuacin (1.22) usando rotaciones y traslaciones apropiadas.
01-Vectorial-OK.indd 20 31/05/13 12:11 a.m.
-
1.7 Ejercicios del captulo 1 21
1.7 Ejercicios del captulo 1
Ejercicios recomendados: 1-7, 10-14, 17-32, 34-40.
Ejercicio 1.1. Encuentre las coordenadas rectangulares del punto (3, py2, 5) dado en coordena-das cilndricas.
Ejercicio 1.2. Encuentre las coordenadas cilndricas del punto (7, 7, 3) dado en coordenadas rectangulares.
Ejercicio 1.3. Encuentre las coordenadas cilndricas del punto (2 6, 6, 4)w w2 dado en coorde-nadas cartesianas.
Ejercicio 1.4. Exprese la ecuacin 9x2 + 9y2 + z2 = 13 en coordenadas cilndricas.
Ejercicio 1.5. Exprese la ecuacin 8x2 + 8y2 4z2 = 18 en coordenadas esfricas.
Ejercicio 1.6. Exprese la ecuacin x2 + y2 = 18 en coordenadas esfricas.
Ejercicio 1.7. Exprese la ecuacin z = 4x2 4y2 en coordenadas cilndricas.
Ejercicio 1.8. El sistema coordenado que mejor describe una simetra rotacional con respecto al eje z, es:
A. El sistema cilndrico;
B. El sistema esfrico;
C. El sistema cartesiano.
Ejercicio 1.9. El slido E est arriba del cono z = x 2 + y2w y debajo de la esfera x2 + y2 + z2 = 6z. Describa este slido en coordenadas esfricas.
Ejercicio 1.10. Encuentre el ngulo entre los planos x + y = 1 y y + z = 1.
Ejercicio 1.11. Considere las rectas en 3,
x = 1 3ty = 2 + tz = t
x = 1 +sy = sz = 4 +s
,, ,,; .
Decida si se intersectan o no. Si lo hacen, halle el punto P de interseccin.
Ejercicio 1.12. Halle la ecuacin del plano que pasa por el origen y es paralelo al plano 10x + 2y 5z = 10.
01-Vectorial-OK.indd 21 31/05/13 12:11 a.m.
-
22 CAPTULO 1 Curvas y superficies
Ejercicio 1.13. Halle la ecuacin del plano que pasa por los puntos A(0, 3, 3),
B(3, 0, 3) y C (3, 3, 0).
Ejercicio 1.14. Halle la ecuacin del plano que pasa por los puntos A(1, 0, 2),
B(1, 3, 1) y C (0, 3, 0).
Ejercicio 1.15. Sea una recta que pasa por los puntos Q y . Sea P un punto que no pertenece a . Demuestre que la distancia desde el punto P a la recta se puede expresar segn la siguiente la frmula:
d = ba
,
S
aS
S
donde
= =aS bS
QR,
QP.
Ejercicio 1.16. Halle la distancia del punto P(2, 5, 5) a la recta
x = 1 + t, y = 4 3t, z = 5t.
Ejercicio 1.17. Halle la ecuacin del plano que pasa por el punto P(3, 0, 3) y que contiene la recta
x = 10 7t, y = 1 + 2t, z = 1 + 10t.
Ejercicio 1.18. Sea ax + by + cz = d un plano a y P un punto en 3. Demuestre que la distancia de P al plano a se puede expresar segn la siguiente frmula:
d =
cS N
S
NS ,
con =cS QP,
donde Q a es un punto cualquiera y NS es un vector normal al
plano a.
Ejercicio 1.19. Halle la distancia del punto P(4, 3, 7) al plano
8x 7y 2z = 9.
Ejercicio 1.20. Halle la ecuacin del plano que pasa por la interseccin de los planos,
x z = 3,
y + 2z = 5,
01-Vectorial-OK.indd 22 31/05/13 12:11 a.m.
-
1.7 Ejercicios del captulo 1 23
y es perpendicular al plano
3x + 5y 3z = 10.
Ejercicio 1.21. Halle la ecuacin del plano que pasa por el origen y es paralelo al plano
9x + 9y 3z = 9.
Ejercicio 1.22. Halle la distancia entre los planos paralelos,
6x + 3y 2z = 7 y 12x + 6y 4z = 48.
Ejercicio 1.23. Halle las coordenadas del punto P de interseccin entre la recta
x = 9 + 5t,y = 3,z = 4 t,
y el plano
3x + 10y 2z = 53.
Ejercicio 1.24. Halle la ecuacin vectorial de la recta que pasa por el punto A(10, 8, 4) y es paralela al vector, = (2, 4,7).vS
Ejercicio 1.25. Identifique el par de planos que son perpendiculares.
A. x = 2x + 6y, 6x 18y + 3z = 10;B. 9x + 8y = 3, 6y + 8z = 10;C. x + 9y z = 6, 10x y 19z = 2.
Ejercicio 1.26. Halle la ecuacin vectorial de la recta que pasa por el punto P(9, 0, 6) y es per-pendicular al plano
3x + 3y 4z = 4.
Ejercicio 1.27. Halle la ecuacin del plano que tiene,
x intercepto = 2, y intercepto = 8, z intercepto = 2.
Ejercicio 1.28. Halle la ecuacin vectorial de la recta que pasa por los puntos A(6, 2, 8) y B(10, 8, 6).
01-Vectorial-OK.indd 23 31/05/13 12:11 a.m.
-
24 CAPTULO 1 Curvas y superficies
Ejercicio 1.29. Encuentre las ecuaciones paramtricas de la recta que pasa por el punto A(8, 1, 10), es paralela al plano x + y + z = 6 y es perpendicular a la recta
x = 5 + t, y = 13 t, z = 4t.
Ejercicio 1.30. Cul de las rectas es paralela a la recta dada?
x = 8 + t, y = t, z = 7 10t.
A. r = (5, 9, 10) + t (2, 2, 20);
B. x = 10 + t, y = 10 + t, z = 1 t;C. la recta de interseccin de los planos x + 3 = y 8 y x + 3 = 1 z.
Ejercicio 1.31. Encuentre las trazas de la superficie
x2 y2 + z2 = 1,
con los planos x = k, y = k, z = k.
Ejercicio 1.32. Identifique la superficie con ecuacin
100y2 + x2 = 25 + 25z2.
Ejercicio 1.33. Halle la ecuacin de la superficie formada por todos los puntos P tales que la distancia desde P al eje x es cuatro veces la distancia de P al plano yz.
Ejercicio 1.34. La ecuacin de un paraboloide hiperblico es:
A. x 2
4+
y2
7=
z10
;
B. x 2
5+
y2
10=
z 2
4;1
C. x 2
7+
y2
10=
z 2
4;
D. x 2
9
y2
7=
z5
.
Ejercicio 1.35. La superficie cuya ecuacin est dada por
y2 + 100z2 x = 0
es un:
A. hiperboloide de un solo manto con eje el eje x;
B. paraboloide elptico con eje el eje x y vrtice en el origen;
C. hiperboloide de dos mantos con eje el eje y,
01-Vectorial-OK.indd 24 31/05/13 12:11 a.m.
-
1.7 Ejercicios del captulo 1 25
Ejercicio 1.36. La reduccin de la ecuacin
z2 = 6x2 + 5y2 30
a su forma cannica es:
A. x 2 + y2 z 2
5= 1;
B. x 2
5+
y2
6
z 2
30=1;
C. (x 1)2 + +y2
(1y5)2z 2 =1.
Ejercicio 1.37. La ecuacin
4x2 + y2 z2 8y + 8z = 0
es de:
A. un hiperboloide de un solo manto con centro en (2, 4, 1) y eje paralelo al eje z,
B. un cono con eje paralelo al eje z y vrtice en (0, 4, 4),C. un paraboloide circular con vrtice en (0, 4, 1) y eje el eje z.
Ejercicio 1.38. Halle la ecuacin para la superficie que se obtiene al rotar la parbola y = x2 alrededor del eje y.
Ejercicio 1.39. Encuentre la ecuacin para la superficie que se obtiene al rotar la recta z = 5y alrededor del eje z.
Ejercicio 1.40. Encuentre la ecuacin para la superficie que consiste en todos los puntos P que equidistan del punto (0, 5, 0) y el plano y = 5.
01-Vectorial-OK.indd 25 31/05/13 12:11 a.m.
-
01-Vectorial-OK.indd 26 31/05/13 12:11 a.m.
-
2 Funciones vectoriales
27
2.1 Funciones vectoriales de una variable
2.1.1 Definicin de funcin vectorial
Una funcin vectorial de variable real es una aplicacin : ,D S RnrS donde D 8 y se llama el dominio de rS.
Denotaremos la funcin vectorial (t) como (t) = (f 1(t), . . . , f n (t)),rS rS
donde f1(t), . . . , fn (t) son funciones reales de variable real llamadas componentes o coordenadas de la funcin.
Geomtricamente una funcin vectorial (t)rS es una trayectoria de un punto mvil en n. Para cada valor del parmetro t obtenemos el vector de posicin (t)rS asociado al valor de t.
CAPTULO
Ejemplo 2.1. Sea (t) = t , t2rS una funcin vectorial. Su dominio es y la funcin toma valores en el plano 2. Para t = 2 obtenemos el vector de posicin (2, 4).
Teorema 2.1. El dominio D de una funcin vectorial (t) = ( f 1(t), . . . , f n (t))rS es D =
D1 D 2 Dn , donde Di es el dominio de la funcin f i (t).
Ejemplo 2.2. Sea (t) =1
1 t, t2rS
u( ) una funcin vectorial. Entonces f1(t) = 1
1 tu
y D 1 = ( , 1), f 2(t) = t2 y D 2 = ( , ) = . Por lo tanto,
D = D 1 D 2 = ( , 1).
2.1.2. Operaciones entre funciones vectoriales
Las operaciones entre funciones vectoriales se definen, si las funciones toman valores en el mismo espacio vectorial n.
Definicin 2.1. Sean (t) f 1(t), . . . , f n (t)), r (t) = (g1(t), . . . , gn (t)),rS S= ( entonces definimos:
1) La suma de dos funciones vectoriales yrS rS, = +uS rS rS es una funcin vec-torial (t) = (t) + (t) = ( f 1(t) + g1(t), , f n (t) + gn (t)).u
S rS rS
02-Vectorial.indd 27 31/05/13 12:20 a.m.
-
28 CAPTULO 2 Funciones vectoriales
2) La multiplicacin de una funcin vectorial rS por un escalar c es una funcin vectorial = crSrS tal que (t) = (t) = ( cf1(t), . . . , cf n (t)).crSrS
3) La multiplicacin de una funcin vectorial rS por una funcin real f (t) es una funcin vectorial = f rSrS tal que (t) = f (t) (t) = ( f (t)f 1(t), . . . ,r
SrS
f (t)f n (t)).
4) El producto escalar, o producto punto, de dos funciones vectoriales yrS rS es una funcin real u =rS rS tal que u(t) = (t) (t) = f 1(t)g1(t)+ +r
SrS
+ f n (t)gn (t).
5) El producto vectorial, o producto cruz, de dos funciones vectoriales (t)rS y (t)rS se define de manera anloga. Entonces,
a) Si las funciones vectoriales (t) y ( )trS rS tienen valores en 2, es decir (t) = ( f 1(t), f 2(t)) y (t) = ( g1(t), g2(t)),r
SrS entonces el producto
cruz (t) (t)rS rS es una funcin escalar y
(t) (t) = f1(t) f 2(t)g1(t) g2(t)
= f 1(t)g2(t) f 2(t)g1(t).rS
rS ` ` (2.1)
b) Si las funciones vectoriales (t) y (t)rS rS tienen valores en 3, es decir (t) =rS (f 1(t), f 2(t), f 3(t)) y (t) = (g1(t), g2(t), g3(t)),rS entonces el pro -
ducto cruz (t) (t)rS rS es una funcin vectorial y
(t) (t) = =f 1(t) f 2(t) f 3(t)g1(t) g2(t) g3(t)
( f 2(t)g3(t) f 3(t)g2(t); f 3(t)g1(t) f1(t)g3(t); f 1(t)g2(t) f 2(t)g1(t)) .
iS S S
j krS rS p p
(2.2)
Ejemplo 2.3. Sean (t) = (1, t) y (t) = (cos t 2, 2t)rS rS dos funciones vectoriales, enton-ces
(2.3)
2 (t) + = 2 (1, t) + (cos t 2, 2t)= (2, 2t) + (cos t 2, 2t)= (2 + cos t 2, 2t 2t) = (cos t, 0) ;
(t) (t) = (1, t) (cos t 2, 2t)
= 1 tcos t 2 2t =1( 2t) t(cos t 2)
= 2t t cos t + 2 t = t cos t.
rS
rS rS ` `
(t)rS
(2.4)
02-Vectorial.indd 28 31/05/13 12:20 a.m.
-
2.1 Funciones vectoriales de una variable 29
2.1.3 Continuidad
Definicin 2.2. Sea : D S RnrS una funcin vectorial tal que (t) =rS (f1 (t), . . . , fn (t)). Entonces
limt S S S Sa
( RQt) = limt a
(f1(t), . . . , f n (t)) = limt a
f1(t), . . . , limt a
f n (t) .rS (2.5)
Por lo tanto, el lmite existe si y slo si todos los lmites S
limt a
f 1(t), i = 1, . . . , n, existen.
Ejemplo 2.4. Si (t) = Qlog(1 + t), sen tt
, cos t 2R,rS entoncesRQlim
t S S S S0(t) = lim
t 0log(1 + t), lim
t 0
sen tt
, limt 0
cos t 2 = (0, 1, 1).rS (2.6)
Definicin 2.3. Una funcin vectorial es continua en un dominio D, si cada una de sus compo-nentes es continua en D.
Ejemplo 2.5. Consideremos la funcin vectorial RQ(t) = 11 t
,1
1 + trS que est definida
en D = 1, 1y es continua aqu, porque cada una de sus componentes 1
1 ty
11 + t son continuas en D.
Ejemplo 2.6. La funcin vectorial
(t) =t , t2 t 0,
(
( ),
1, t), t < 0.rS
tiene dominio pero no es continua en porque su primera componente
f1(t) =t, t 0,1, t < 0.
no es continua, sin embargo su segunda componente
f 2(t) =t ,2 t 0,t, t < 0.
s es continua (v. figura 2.1).
02-Vectorial.indd 29 31/05/13 12:20 a.m.
-
30 CAPTULO 2 Funciones vectoriales
Ejemplo 2.7. Sea (t) = tan( t2 1), et2
rS RQ . La derivada de en t = 0, (0)rS rS la calculamos hallando primero la derivada en general y luego reemplazando el valor de t en cero:
(t) = 2t sec (t2 1), 2te t2
S (0) = (0, 0) .rS rSRQ (2.7) Teorema 2.2. Sean (t) = ( f1(t), . . . , f n (t)), (t) = ( g1(t), . . . , gn (t))rS rS funciones vectoria-
les derivables en D, c una constante, c , y f(t) una funcin real, entonces:
1)
2)
3)
( (t) + (t)) = (t) + (t);
(c (t)) = c (t);
(f (t) (t)) = f (t) (t) + f (t) (t);
rS rSrS
rS
rS
rS
rS
rS
rS
4)
5)
6)
( (t) (t))
= (t) (t) + (t) (t);
( (t) (t)) = (t) (t) + (t) (t);
( (f (t))) = f (t) (f (t)).
rS
rS
rS rS
rS
rS
rS
rSrS
rS
rS
rS
rS
rS
Figura 2.1. Ejemplo 2.6
2 1 1 2 3
x
y
4
3
2
1
1
2
3
4
0
2.1.4 Derivadas
Definicin 2.4. Dada una funcin vectorial (t) = ( f1(t), . . . , f n (t)),rS su derivada es la funcin
vectorial (t) =ddt
(t) = ( f 1(t), . . . , f n (t)).rS rS
02-Vectorial.indd 30 31/05/13 12:20 a.m.
-
2.1 Funciones vectoriales de una variable 31
2.1.5 Recta tangente
Geomtricamente la derivada de una funcin vectorial (t) en t = t0 ,rS el vec-
tor (t0)rS , es un vector tangente a la trayectoria determinada por (t)rS en el punto
(t0)rS . Si el vector tangente (t0) 0,rS
S entonces la ecuacin vectorial de la recta
tangente es
r(s) = (t0) + s (t0).S rS rS (2.8)
Nota 2.2. En el caso de que (t0) = 0,S
rS la recta tangente no existe.
Nota 2.1. a) Las frmulas (2), (3), (4) y (5) del teorema anterior se conocen como frmulas de Leibniz.
b) En la frmula 5 las funciones vectoriales toman valores en 2 y 3.
Ejemplo 2.8. La recta tangente a la trayectoria definida por (t) = t3 , trS en t = 1 tiene ecua-cin (s) = (t0) + s (t0) = (1, 1) + s (3, 1) = (1 + 3s , 1 + s).rS rS rS
2.1.6 Integral
Definicin 2.5. Dada una funcin vectorial (t) = ( f1(t), . . . , f n (t))rS la integral definida de (t)rS es
el vector (t) dt = f1(t) dt , . . . ,b
ab
ab
a f n (t) dt .rS
Ejemplo 2.9. Dada la funcin vectorial (t) = sen t cos t ,t
t2 4rS la integral definida es
py2
0(t) dt =
py2
0sen t cos t dt ,
py2
0
tt2 4 dt
=12
sen2 t py20 ,12
ln(4 t2)py20 =12
1, ln16
16 p2.
rS
Hasta ahora hemos definido los lmites, las derivadas y las integrales de funciones vectoriales de una variable real,
02-Vectorial.indd 31 31/05/13 12:20 a.m.
-
32 CAPTULO 2 Funciones vectoriales
2.2 Curvas parametrizadas
Definicin 2.6. Supongamos el espacio tridimensional 3 dotado del sistema de coordenadas (x, y, z). Una curva C parametrizada en este espacio es la representacin grfica de una funcin vectorial:
= ( x (t), y(t), z (t))(t)rS (2.10)
donde t se denomina el parmetro de una curva, t I . La estructura de la curva depender de las funciones x(t), y(t) y z(t). Diremos que C es de clase C r(I ), si su parametrizacin (t)rS lo es, es decir si las funciones componentes x(t), y(t) y z(t) son de clase C r(I ), donde I es cualquier intervalo abierto.1
1 Una funcin real de variable real se dice que es de clase Cr en algn intervalo abierto I = (a, b), si sus primeras r derivadas son funciones continuas en I.
(t) = ( f1(t), , f n (t ))rS (2.9)
como los lmites, derivadas e integrales de cada una de sus componentes en caso de que todas ellas existan. En este captulo usaremos la primera y segunda derivada de una funcin vectorial de variable real (2.9) para definir nuevos conceptos. Dependiendo del tipo de problema la funcin vectorial (t)rS se puede interpretar desde el punto de vista simplemente geomtrico, como una trayec-toria, o desde el punto de vista fsico, como la posicin de una partcula que se mueve por la accin de alguna fuerza. Igualmente su derivada (t)rS puede interpretarse como el vector tangente (punto de vista geomtrico) o como la velocidad (punto de vista fsico) de una partcula.
Ejemplo 2.10. Consideremos la curva con ecuaciones paramtricas,
x (t) = ty(t) = t ,2
z (t) = t3 1 t 1. (2.11)
Dado que y(t) no toma valores negativos, la grfica no puede estar en los octan-tes III, IV ni de los que estn debajo de stos, VII y VIII. Cuando eliminamos el parmetro t y relacionamos dos coordenadas de los puntos, estamos obteniendo la proyeccin de la curva sobre el plano generado por esas dos variables. Por ejemplo, de las ecuaciones paramtricas dadas obtenemos que y = x2, lo cual significa que la proyeccin de la curva dada sobre el plano xy es una parbola.
02-Vectorial.indd 32 31/05/13 12:20 a.m.
-
2.2 Curvas parametrizadas 33
2.2.1 Cmo podemos dibujar una curva?
Una tcnica para graficar manualmente sobre el papel una curva C en el espacio sebasa en el conocimiento previo de superficies. Al eliminar el parmetro entre dos coordenadas, obtenemos una ecuacin en dos variables, por ejemplo f (x, y) = 0. Esta ecuacin se puede interpretar de dos maneras diferentes. La primera como la curva sobre el plano coordenado xy que es la proyeccin ortogonal de la curva dada C. La otra manera es que la curva C est sobre una superficie cilndrica con ecuacin f (x, y) = 0. As podemos graficar la curva C conociendo una o varias superficies en las cuales est.
Nota 2.3. En muchos casos nos valemos de una superficie a la cual perte-nece la curva dada C pero a veces es necesario tener informacin de dos superficies a las cuales pertenece. En general, no es cierto que podemos gra-ficar la curva C habiendo encontrado dos superficies cilndricas a las cuales pertenece, pues la interseccin de las dos superficies encontradas puede ser que tenga ms informacin que la que necesitamos, es decir describa curvas adicionales a la curva C. Lo que s es cierto es que la curva es la interseccin de las tres superficies cilndricas perpendiculares a los planos coordenados cuando eliminamos el parmetro t por parejas de coordenadas, pero es ms difcil de visualizar la situacin.
De la misma manera la proyeccin de la curva dada sobre el plano xz es una parbola cbica z = x3, y sobre el plano yz es la curva con ecuacin y3 = z2. La curva x(t) = t, y(t) = t2, z(t) = t3 , 1 t 1 tiene como proyeccin sobre el plano xy la parbola y = x2 y sobre el plano xz la parbola cbica z = x3, fig. 2.2.
10.5
1.0
1.0
0.5
0.0
0.0 0.25 0.5 0.75 1.01
0
Figura 2.2. Una curva en 3
A continuacin veremos algunas tcnicas para graficar curvas que tienen ciertas caractersticas.
02-Vectorial.indd 33 31/05/13 12:20 a.m.
-
34 CAPTULO 2 Funciones vectoriales
Ejemplo 2.11. En el ejemplo 2.11 la curva x(t) = t, y(t) = t2, z(t) = t3, 1 t 1 est sobre las superficies cilndricas 1: y = x 2 , 2: z = x 3. En este caso es suficiente esta informacin, la curva es la interseccin de este par de superficies cilndri-cas. La primera superficie cilndrica 1 se dibuja, dibujando primero la curva y = x2 sobre el plano xy, luego un deslizamiento de esta curva a lo largo del eje z en ambas direcciones. Similarmente la segunda superficie cilndrica 2 se dibuja, dibujando primero la curva z = x3 sobre el plano xz, luego un desliza-miento de esta curva a lo largo del eje y slo en la direccin positiva.
Ejemplo 2.12. Consideremos la curva C con ecuaciones paramtricas,
x (t) = cos ty(t) = sen tz (t) = t
, 2p t 2p. (2.12)La curva C est sobre el cilindro 1: x 2 + y2 = 1 y tambin sobre la super- ficie cilndrica 2: x = cos z . Con slo esta informacin no podemos graficar la curva, aunque s lo podramos hacer mirando la interseccin de las tres su- perficies cilndricas, lo cual puede resultar un poco complicado. Para este caso, podramos simplemente pensar de la siguiente manera: a medida que t recorre el intervalo I = [2p, 2p], las coordenadas x y y del punto sobre la curva C recorren la circunferencia x2 + y2 = 1 sobre el plano xy en sentido positivo (visto desde arriba), mientras que z recorre el intervalo I = [2p, 2p] sobre el eje z. Por lo tanto, se forma una hlice circular, la cual est sobre el cilindro 1 y hace parte de la interseccin entre las dos superficies 1 2y , pero la inter-seccin contiene puntos que no estn en C.
La curva x(t) = cos t, y(t) = sen t, z(t) = t, 2p t 2p est sobre la superficie cilndrica x2 + y2 = l, fig. 2.3.
0.5
0.5
1.00.50.0
1.0
1.06.5
4.0
1.5
1.0
3.5
6.0
0.00.5
1.0
Figura 2.3. Una curva helicoidal en 3
02-Vectorial.indd 34 31/05/13 12:20 a.m.
-
2.2 Curvas parametrizadas 35
2.2.2 Reparametrizacin
Definicin 2.7. Dada una curva C con ecuacin vectorial
1rS (t) = (x(t), y(t), z(t)), t I
1 , (2.13)
y una funcin derivable f (s), f : I2 S I
1, donde I
2 , tal que f(s) 0. Nota-
remos que f es biyectiva, y por lo tanto invertible, y la funcin inversa es tambin derivable. Podemos reparametrizar la curva y dar una expresin en trminos de s definiendo r2(s)
S como sigue:
r2(s) = (r
1 f )(s) = r
1 (f (s)) = r
1(t).S S S S (2.14)
Nota 2.4. Debe ser claro que s = f 1(t).
Ejemplo 2.13. Sea C definida mediante la funcin vectorial
SS S S
r1(t) = sen t i + exp t j 1 t k, t s I
1 = (, 1]. (2.15)
Ahora consideremos la funcin
t = f (s) = 1 s3, (2.16)
la cual es biyectiva en todo el conjunto de los nmeros reales, . Pero para construir la reparametrizacin en trminos de s debemos estar seguros de que la funcin t = f(s) tiene la propiedad f (s) 0 y que la funcin compuesta est bien definida. Notaremos que f (s) 0, para s 0. Luego debemos encontrar el dominio correcto para s tal que el rango de la funcin f sea I1 = (,1]. Este proceso se hace usando la expresin para la funcin inversa,
s = f 1(t) = 3w1 t. (2.17)
Por lo tanto, el dominio de f lo debemos restringir a I2 = (0, ) para que su rango sea exactamente I1 = (,1). Los extremos del intervalo I2 se encuen tran evaluando los extremos del intervalo I1 en (2.17).
2.2.3 Longitud de arco
Sea una curva en n, n = 2, 3, definida por una funcin vectorial = r (t),SrS a t b. Un arco de curva es una parte de la curva dada por la misma funcin con t0 t t1, donde a t0 t1 b.
Definicin 2.8. El nmero
rL =
t 1
t 0
(t)dtS (2.18)
es llamado longitud de arco.
02-Vectorial.indd 35 31/05/13 12:20 a.m.
-
36 CAPTULO 2 Funciones vectoriales
Ejemplo 2.14 (ejercicio resuelto). La funcin vectorial (t) =r S (t cos t, t sen t), 0 < t < , determina la espiral de Arqumedes (v. figura 2.4). Encuentre la longitud de arco entre los puntos A (0, 0) = (0) y B (2p, 0) = (2p)rS rS .
Tenemos
(t) = (cos t t sen t , sen t + t cos t),r S
(2.19)
entonces
(t)2 = (cos t t sen t)2 + (sen t + t cos t)2 = 1 + t2 ,rS (2.20)
y luego
(t) =w1 + t2 .rS (2.21)
La longitud de arco es
2p
0 (t)dtrS
w
w
w
w
w
=2p
01 + t2 dt
=12Q
Qt 1 + t2 + ln(t + 1 + t2)2p0 R
R= p 1 + 4p2 + 12
ln 2p+ 1 + 4p2 .
(2.22)
5
5
5
5
10
10
15
15
10
10
15
Figura 2.4. Espiral de Arqumedes
02-Vectorial.indd 36 31/05/13 12:20 a.m.
-
2.2 Curvas parametrizadas 37
2.2.4 Parmetro natural s
De la definicin 2.8 definimos la funcin,
s(t) =t
a (u)durS ; a t b (2.23)
Esta funcin indica un cambio del parmetro t al parmetro s, el cual es llamado parmetro longitud de arco o parmetro natural.
Teorema 2.3. Supongamos que ( )srS es una curva parametrizada en trminos del parmetro natural s, entonces
(s) = 1r S (2.24)
2.2.5 Curvatura
Las palabras curvatura y curva provienen de la misma raz, es decir se habla de una curva si sta tiene curvatura. La curvatura es un nmero que se puede calcular en cada punto P de una curva g y la denotaremos con la letra griega ( )P (lase kappa). Por ejemplo en la figura 2.5, la curvatura en los puntos P1 g y P2 g es diferente, (P1) > ( )P2 . Si en un punto P observamos que la curva no tiene curvatura, escribiremos (P ) = 0. Una recta tiene curvatura cero en todos sus puntos.
Definicin 2.9. Sea s el parmetro longitud del arco de una curva ( )srS . Entonces la curvatura en el punto (s0)r
S es
(s0) = (s0).rS (2.25)
P2
P1
Figura 2.5. Curvatura en puntos diferentes
02-Vectorial.indd 37 31/05/13 12:20 a.m.
-
38 CAPTULO 2 Funciones vectoriales
Ejemplo 2.15 (ejercicio resuelto). Encuentre la curvatura de la circunferencia de radio R. Una ecuacin de una circunferencia centrada en el origen y radio R en trminos del parmetro de longitud del arco es,
(s) = (R cos(syR), R sen(syR)) .rS (2.26)
Por lo tanto tenemos,
(s) = 1R
cos(syR ),1R
sen(syR ) ,rS RQ (2.27)entonces
(s) = 1R
. (2.28)
Ejemplo 2.16 (ejercicio resuelto). Encuentre la curvatura de una recta.
Una ecuacin de una recta en trminos del parmetro de longitud del arco es,
(s) = (x 0 + cos(a)s , y0 + sen(a)s).rS (2.29)
Por lo tanto tenemos, (s) = 0rSS, entonces N(s) = 0.
Teorema 2.4. Sea (t)aS una funcin vectorial con magnitud constante, (t) = caS , entonces su derivada (t)aS es otra funcin vectorial tal que los vectores (t)aS y (t)aS son ortogonales para cada valor de t.
Demostracin.
(t) = c (t)2 = c2 (t) (t) = c2aS aS aS aS , (2.30)
derivando (regla de Leibniz) tenemos que (t) (t) = 0aS aS
Teorema 2.5. Sea (t)rS una curva suave ( (t) 0).rS La curvatura de (t)rS se calcula median-te la siguiente frmula:
(t) = (t) (t)
(t)3.
rS
rSrS (2.31)
Sea (s) = (s)TS
rS el vector tangente unitario en el punto (s).rS El vector
normal unitario a la curva, (s) =1
(s)(s .)N
STS
TS Las siguientes frmulas se
llaman las frmulas de Frenet para una curva plana:
(s) = (s) (s),(s) = (s) (s).
TS
NS
TS
NS
(2.32)
02-Vectorial.indd 38 31/05/13 12:20 a.m.
-
2.3 Ejercicios del captulo 2 39
2.3 Ejercicios del captulo 2
Ejercicios recomendados: 1-11, 13-18, 23, 24, 26, 28.
Ejercicio 2.1. Halle el dominio de la funcin vectorial
1) (t) = QQQ
RR
R
1t
, t + 1 .
(t) = ln( t2 1), 2t ,1
t + 2.
(t) =ln t
t,
3t 1
, t .
(t) = t9 , t 4, 10 t .)(
rS
rS
rS
rS
u
u u
u
2)
3)
4)
Ejercicio 2.2. Dadas la funciones vectoriales Q R1(t) = 1t , t , 2 (t) = 3 t + 1, cos t ,Q RrS rS u encuen-tre la funcin resultante y su dominio de definicin,
1) 1(t) 2 2(t);
1(t) 2(t);
1(t) 2(t).
rS
rS
rS rS
rS
rS
2)
3)
Ejercicio 2.3. Haga un bosquejo de la grfica de las siguientes funciones.
1) (t) = (t , t).
(t) = (2t , t + 1).
(s) = s( )3 , s .
(t) = (cos t , sen t).
rS
rS
rS
rS
2)
3)
4)
5) ( ( )t) = t2 , t3 .rS
Ejercicio 2.4. Haga un bosquejo de la grfica de las siguientes funciones.
1) (t) = (t , t , t).
(t) = (2 t , t + 1, 2).
(s) = s( )3 , s , s2 .
(t) = (cos t , sen t , t).
( ( )t) = t , t2 , sen t .
rS
rS
rS
rS
rS
2)
3)
4)
5)
02-Vectorial.indd 39 31/05/13 12:20 a.m.
-
40 CAPTULO 2 Funciones vectoriales
Ejercicio 2.5. Encuentre el dominio de continuidad. En los puntos donde la funcin no es con-tinua justifique por qu no lo es. Haga un bosquejo de la grfica.
1) (t) = (t , sen t).
(t) =(1, , ,t) t 0(1, ,t) t < 0.
(t) =(t , , ,t) t 0(t , , .t) t < 0
rS
rS
rS
ee
2)
3)
Ejercicio 2.6. Calcule,
1) (t), donde ( ( )t) = t , t2 , sen t ;
(t), donde (t) =t
t2 1, ln
1t
.
rS rS
rS
rS RRQ Qu
2)
Ejercicio 2.7. Dadas la funciones vectoriales 1( Q Rt) = 1t , t , 2 (t) = 3 t + 1, cos t ,rS rSRQ u1) compruebe la frmulas (1), (4) y (5) del teorema 2.2,
2) calcule la derivada de: 1(t) 2 2(t);
1(t) t 2(t);
1(t2) + t3 2(t).
rS
rS
rS rS
rS
rS
3) calcule la derivada de:
4) calcule la derivada de:
Ejercicio 2.8. Calcule las integrales indicadas,
1) (t)dt , donde (t) =1
t + 1, sen t .
3
0et te t
2dt .
rS rS RQA B
u
iS
jS
2)
Ejercicio 2.9. Entre los puntos A, B, C, encuentre un punto que no est en la curva dada por la ecuacin = (t),rS rS donde
1) = (2 + t, 4t, t) y A(4, 8, 2), B(3, 4, 1), C(4, 8, 3);
2) = (t2, 1 8t, 1 + t3) y A(49, 55, 350), B(36, 47, 217), C(1, 7, 2)
(t)rS
(t)rS
Ejercicio 2.10. Encuentre la ecuacin paramtrica de la recta tangente, si existe, a la curva dada en el punto indicado. Haga un bosquejo de la grfica.
S
S1) r(t) = (cos 2t, sen 2t) en t = 3p/4.
2) r(t) = (4t2, t) en P(4, 1).
02-Vectorial.indd 40 31/05/13 12:20 a.m.
-
2.3 Ejercicios del captulo 2 41
S
S
S3) r(t) = (t2, t3) en t = 0.
4) r(t) = (cos3 t, sen3 t) en t = p/4.
5) r(t) = (cos t, t, sen t) en t = 0.
Ejercicio 2.11. Determine la ecuacin del plano normal a la curva dada por la ecuacin Sr = r(t)
en el punto A, donde
1) r(t) = (t, t2, t3) y A(3, 9, 27);
2) r(t) = (t, t + 1, sen t) y A(0, 1, 0).S
S
Ejercicio 2.12. En qu punto de la curva
x = t3, y = 3t, z = t4
es el plano normal paralelo al plano 6x + 6y 8z = 5?
Ejercicio 2.13. Encuentre la funcin vectorial que representa la curva de interseccin entre:
1) el cilindro x2 + y2 = 4 y el paraboloide hiperblico z = xy,
2) el cono z = x2 + y2 y el plano z = 11 + y,
3) el paraboloide z = 9x2 + y2 y el cilindro parablico y = x2,
4) el cilindro x2 + y2 = 25 y el cilindro parablico z = x2.
Ejercicio 2.14. Encuentre el vector tangente unitario ST(t) para:
1) r(t) = (4t2, 8t, 4 ln t);
2) r(t) = ( 43 t3, 4t2, 8t),
3) r(t) = (2 sen t, 8t, 2 cos t).
S
S
S
Ejercicio 2.15. Halle la longitud de los siguientes arcos y haga un bosquejo de las grficas.
S1) r(t) = (t, ln cos t), 0 t p/6.
2) (t) = (a(t sen t), a(1 cos t), 4a cos(t /2)), 0 t 2p.
(t) = (a cosh t , a senh t , at ), 1 t 1.
(t) = (7 sen t , 10 t , 7 cos t), 18 t 18.
(t) = 2 t + et + et , 0 t 7.
rS
rS
rS
rS u iS
jS
kS
3)
4)
5)
02-Vectorial.indd 41 31/05/13 12:20 a.m.
-
42 CAPTULO 2 Funciones vectoriales
Ejercicio 2.16. Reparametrice la curva con respecto a la longitud de arco medida desde el pun-to t = 0 en la direccin en que incrementa t.
1)
2)
3)
(t) = 3 sen t + t + 3 cos t .
(t) = 2 et sen t + 2et cos t .
(t) = (4 + 3t) + (10 + 6 t) 9t .
iS
iS
iS
jS
kS
jS
jS
kS
rS
rS
rS
Ejercicio 2.17. Haga un bosquejo de la grfica de la curva dada por la ecuacin = (t)rS rS y calcule su curvatura N en los puntos A y B, donde
1)
2)
3)
(t) = t2 , t , A (0, 0) y B (1, 1);( )
(t) = (a(t sen t , a(1 cos t)), A (t = p/ p/4) y B (t = 2);
(t) = (et , et ), A (t = 0) y B (t =1).
rS
rS
rS
Ejercicio 2.18. Haga un bosquejo de la grfica de la curva dada por la ecuacin = (t),rS rS calcule su curvatura N(t) y dibuje la grfica de la N(t),
1)
2)
3)
(t) = 3 sen t + 3 cos t .
(t) = (a cosh t , a senh t).
(t) = t2 + 2 t .
rS
rS
rS iS
iS
jS
jS
Ejercicio 2.19. Para qu valor de x tiene la curva y = 3ex curvatura mxima?
Ejercicio 2.20. Demuestre la frmula del teorema 2.5.
Ejercicio 2.21. Demuestre el teorema 2.3. (Ayuda: Use regla de la cadena.)
Ejercicio 2.22. Demuestre las frmulas de Frenet.
Ejercicio 2.23. Calcule la rapidez de la partcula con la funcin de posicin dada por:
1) (t) = t + 4t2 + 6 t7 ;
( ( )t) = t , 3t2 , 5t4 ;
(t) = 3 2 t + e3t + e3t .
rS
rS
rS
iS
iS
jS
kS
jS
kS
u
2)
3)
Ejercicio 2.24. La funcin de posicin de una partcula est determinada por:
(t) = 2t2 , 3t , 2t2 16t .rS
Cundo obtiene la menor rapidez?
Ejercicio 2.25. Calcule la velocidad de la partcula con la funcin de posicin dada por:
t) = 2e11 t i + 20e11 t j.S S
(rS
02-Vectorial.indd 42 31/05/13 12:20 a.m.
-
2.3 Ejercicios del captulo 2 43
Ejercicio 2.26. Calcule la aceleracin de una partcula con la funcin de posicin dada por,
1) (t) = 6t2 , 2, 9t ;
2) (t) = 2 sen t i +10 t j 5 cos t k
rS
rSS S S
Ejercicio 2.27. Determine la velocidad (t)vS de una partcula que tiene la aceleracin y la veloci-dad inicial dada: (t) = 8 k , (0) = 10 i + 6 j .vS
S S SaS
Ejercicio 2.28. Determine el vector de posicin de una partcula que tiene la aceleracin dada y la velocidad y posicin iniciales dadas.
1) (t) = 10 k , (0) = i + j 7 k , (0) = 8 i + 4 j ;
(t) = 14 + 18 + 24 t , (0) = 0, (0) = 20 + 6 .
rS
rSS
vS
vS
aSS S
iS
S
jS
jS
S
kS
S
iS
S
aS
2)
Ejercicio 2.29. Calcule la componente tangencial del vector aceleracin con la funcin de posi-cin dada por:
(t) = (12 t 4t3 + 5) +12 t2rS j .S
iS
Ejercicio 2.30. Calcule la componente normal del vector aceleracin con la funcin de posicin dada por:
(t) = 8 cos t +8 sen t +8 trS jS
k .S
iS
Ejercicio 2.31. Qu fuerza se requiere para que una partcula de masa m tenga la siguiente fun-cin de posicin?
(t) = 5t3 +7 t2 +4 t3rS jS
iS
k .S
Ejercicio 2.32. Se arroja una pelota con un ngulo de 75 con respecto al suelo. Si la pelota ate-rriza a 98 m de distancia del lugar de lanzamiento. Cul fue la rapidez inicial de la pelota? Suponga que g = 9.8 m@s2.
Ejercicio 2.33. Una fuerza de magnitud de 80 N, acta en forma directa hacia arriba del plano xy sobre un objeto con una masa de 5 kg. El objeto parte del origen con una veloci-dad inicial (0) = 2 7 .j
SiS
vS Determine la funcin de posicin.
Ejercicio 2.34. Se dispara un proyectil con una rapidez inicial de 936 m/s y un ngulo de eleva-cin de 24. Encuentre el alcance del proyectil.
02-Vectorial.indd 43 31/05/13 12:20 a.m.
-
02-Vectorial.indd 44 31/05/13 12:20 a.m.
-
3 Funcionesescalares
45
3.1 Campos escalares en varias variables
Definicin 3.1. Una funcin en n variables es una aplicacin f : D S , donde D n es el dominio de f. La grfica de f es el conjunto
f = {(x1, x2, . . ., xn, f (x1, x2, . . ., xn)) (x1, . . ., xn) D}. (3.1)
CAPTULO
Ejemplo 3.1. La funcin f (x, y) = 2x + 3y 1 es una aplicacin de 2 a , entonces f: 2 S . El dominio de f es 2. La grfica de f es un plano (v. figura 3.1).
1.0
1.06.0
1.0
4.0
1.0
0.00.0
1.0
Figura 3.1. Grfica del plano, f (x, y) = 2x + 3y 1
Ejemplo 3.2. La funcin f (x, y) = 1 x 2 y2w es una aplicacin f : D S , donde D = {(x, y) x2 + y2 1} (crculo unitario centrado en el origen). La grfica de f es el hemisferio superior (v. figura 3.2).
03-Vectorial.indd 45 31/05/13 12:24 a.m.
-
46 CAPTULO 3 Funciones escalares
1.00
1.000.00
0.50
1.0
1.00
0.000.00
1.00
Figura 3.2. Grfica de f (x, y) = 1 x 2 y2w (hemisferio superior)
Definicin 3.2. Las superficies de nivel de una funcin f (x1, . . ., xn) de n variables son las superficies en el dominio de f, D n, dadas por la ecuacin f (x1, . . ., xn) = c, donde c es una constante que pertenece a la imagen de f (x1, . . ., xn). En el caso n = 2 si tenemos una funcin f : D 2 S , f = f (x, y) las curvas de nivel son aquellas curvas definidas en D tales que f (x, y) = c, donde c es una constante.
Ejemplo 3.3. Consideremos la funcin f (x, y) = 100 x2 y2 . El dominio es todo el plano 2 y el rango es (, 100]. Las curvas de nivel son las circunferencias en el plano
x2 + y2 = 100 c, (3.2)
donde c (, 100). Las figuras 3.3 y 3.4 muestran algunas de estas curvas de nivel
100
1010
La superficiez = f (x, y)
f (x, y) = 75
f (x, y) = 0x
y
z
f (x, y) = 51
= 100 x2 y2es la grfica de f.
(una curva denivel en el dominio de lafuncin)
Figura 3.3. Curvas de nivel de f (x, y) = 100 x2 y2; c = 0, 10, 75
03-Vectorial.indd 46 31/05/13 12:24 a.m.
-
3.1 Campos escalares en varias variables 47
y
z
x
Plano z = 75
La curva f (x, y) = 100 x2 y2 = 75 es lacircunferencia x2 + y2 = 25 en el plano z = 75.
La curva de nivel f (x, y) = 100 x2 y2 = 75es la circunferencia x2 + y2 = 25 en el plano xy.
0
100
75z = 100 x2 y2
Figura 3.4. Curva de nivel para c = 75
Ejemplo 3.4. Las curvas de nivel de la funcion f (x, y) = x + y son las rectas x + y = c, donde c .
Ejemplo 3.5. Las curvas de nivel de la funcion f (x, y) = x2 y2 son las hiprbolas x2 y2 = c cuando c > 0 y las hiprbolas y2 x2 = c cuando c < 0 (fig. 3.5).
c = 10
c = 5
c = 2
c = 1c = 5
Figura 3.5. Curvas de nivel de f (x, y) = x2 y2
03-Vectorial.indd 47 31/05/13 12:24 a.m.
-
48 CAPTULO 3 Funciones escalares
Ejemplo 3.6. Las curvas de nivel de la funcin f (x, y) = 1 x 2 y2w son las circunferen-cias x2 + y2 = c, donde 0 c 1.
Ejemplo 3.7. Las superficies de nivel de la funcin f (x, y, z) = x + y z son los planos x + y z = c donde c .
Ejemplo 3.8. Las superficies de nivel de la funcin f (x, y, z) = x2 + y2 z son los parabo-loides z = x2 + y2 c, donde c .
3.2 Derivadas parciales
Definicin 3.3. Un conjunto D de n se llama un conjunto abierto si para todo punto 0xS D
existe una bola abierta
Be ( 0) = eD 0 0S xS5 6 (3.3)
tal que sta est totalmente contenida en D, Be ( 0) ( D.xS
Definicin 3.4 (Derivadas parciales). Sea f : D n S , (x1, . . ., xn) f ((x1, . . ., xn)) unafuncin escalar en las variables x1, . . ., xn definida en un conjunto abierto D de n.
La derivada parcial de f respecto a xi en el punto (a1, . . ., an) D, la cual
denotaremos por fxi (a1 , . . . , a n ) o por fxi
(a1, . . ., an), se define como el lmite,
fxi (a1 , . . . , an ) = lim
h 0
f (a1 , . . . , ai + h, . . . , an ) f (a1 , . . . , an )hS
(3.4)
en el caso de que este lmite exista.
Ejemplo 3.9. Consideremos la funcin,
u = cos ( )x 21 + x22 + + x
2n (3.5)
para calcular por ejemplo la derivada ux1 ( )aS consideramos las variables x2, x3,
. . ., xn como constantes. Entonces,
ux1 ( ( )) = 2x1 sen x
21 + x
22 + + x
2n
= 2a1 sen ( )a21 + a22 + + a
2n .
aS aS
03-Vectorial.indd 48 31/05/13 12:24 a.m.
-
3.2 Derivadas parciales 49
De la misma forma para calcular uxi ( )aS se consideran las dems variables dife-
rentes a xi como constantes,
uxi ( ) = 2xi sen ( )x
21 + x
22 + + x
2n
= 2ai sen ( )a21 + a22 + + a
2n .
aSaS
En este captulo trataremos con detalle el caso n = 2. Por lo tanto tenemos:
1) La derivada parcial de f respecto a x en el punto (x0, y0) D, la cual deno-
taremos por fx (x0, y0) o por fx
(x0 + h,








![[Claudio.pita.Ruiz] Calculo Vectorial](https://static.fdocuments.es/doc/165x107/557211fd497959fc0b8fd7da/claudiopitaruiz-calculo-vectorial.jpg)