Calculo Vectorial La geometr´ıa del espacio · Coordenadas rectangulares Un punto en el espacio...
193
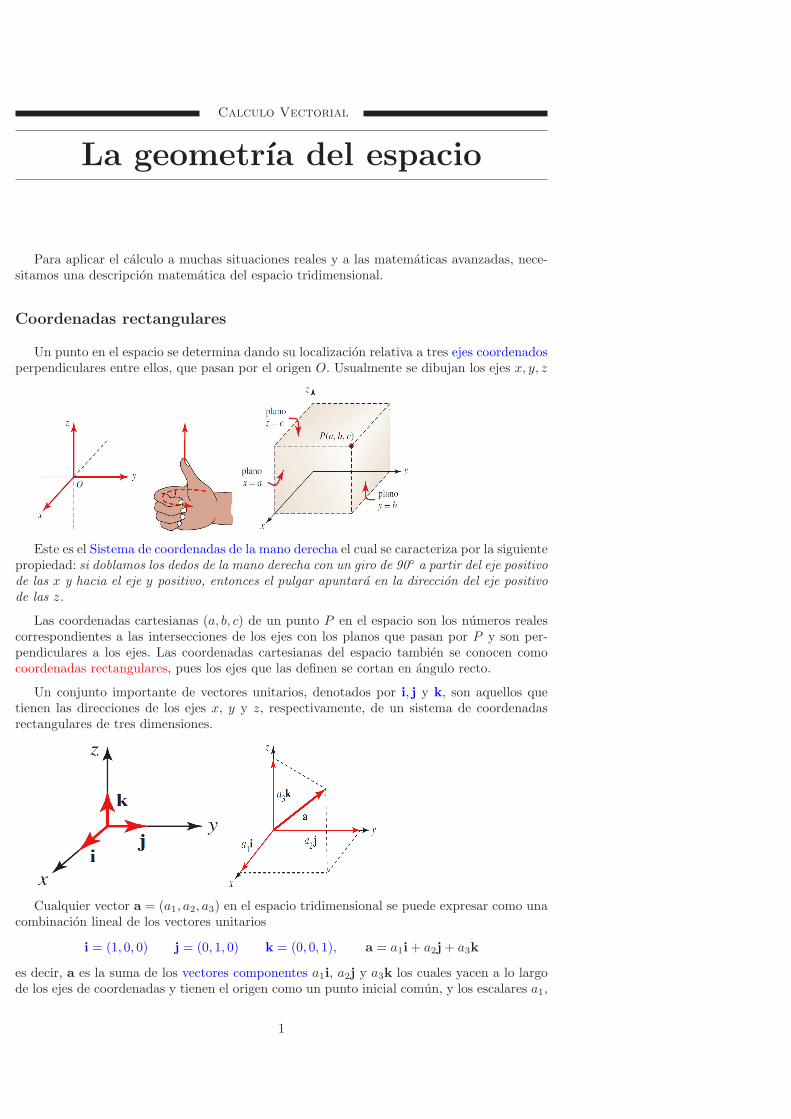
Calculo Vectorial La geometr´ ıa del espacio Para aplicar el c´alculo a muchas situaciones reales y a las matem´aticas avanzadas, nece- sitamos una descripci´ on matem´atica del espacio tridimensional. Coordenadas rectangulares Un punto en el espacio se determina dando su localizaci´ on relativa a tres ejes coordenados perpendiculares entre ellos, que pasan por el origen O. Usualmente se dibujan los ejes x,y,z Este es el Sistema de coordenadas de la mano derecha el cual se caracteriza por la siguiente propiedad: si doblamos los dedos de la mano derecha con un giro de 90 ◦ a partir del eje positivo de las x y hacia el eje y positivo, entonces el pulgar apuntar´ a en la direcci´ on del eje positivo de las z. Las coordenadas cartesianas (a,b,c) de un punto P en el espacio son los n´ umeros reales correspondientes a las intersecciones de los ejes con los planos que pasan por P y son per- pendiculares a los ejes. Las coordenadas cartesianas del espacio tambi´ en se conocen como coordenadas rectangulares, pues los ejes que las definen se cortan en ´ angulo recto. Un conjunto importante de vectores unitarios, denotados por i, j y k, son aquellos que tienen las direcciones de los ejes x, y y z, respectivamente, de un sistema de coordenadas rectangulares de tres dimensiones. Cualquier vector a =(a 1 ,a 2 ,a 3 ) en el espacio tridimensional se puede expresar como una combinaci´on lineal de los vectores unitarios i = (1, 0, 0) j = (0, 1, 0) k = (0, 0, 1), a = a 1 i + a 2 j + a 3 k es decir, a es la suma de los vectores componentes a 1 i, a 2 j y a 3 k los cuales yacen a lo largo de los ejes de coordenadas y tienen el origen como un punto inicial com´ un, y los escalares a 1 , 1
Transcript of Calculo Vectorial La geometr´ıa del espacio · Coordenadas rectangulares Un punto en el espacio...
Calculo Vectorial
La geometrıa del espacio
Para aplicar el calculo a muchas situaciones reales y a las matematicas avanzadas, nece-sitamos una descripcion matematica del espacio tridimensional.
Coordenadas rectangulares
Un punto en el espacio se determina dando su localizacion relativa a tres ejes coordenadosperpendiculares entre ellos, que pasan por el origen O. Usualmente se dibujan los ejes x, y, z
Este es el Sistema de coordenadas de la mano derecha el cual se caracteriza por la siguientepropiedad: si doblamos los dedos de la mano derecha con un giro de 90◦ a partir del eje positivode las x y hacia el eje y positivo, entonces el pulgar apuntara en la direccion del eje positivode las z.
Las coordenadas cartesianas (a, b, c) de un punto P en el espacio son los numeros realescorrespondientes a las intersecciones de los ejes con los planos que pasan por P y son per-pendiculares a los ejes. Las coordenadas cartesianas del espacio tambien se conocen comocoordenadas rectangulares, pues los ejes que las definen se cortan en angulo recto.
Un conjunto importante de vectores unitarios, denotados por i, j y k, son aquellos quetienen las direcciones de los ejes x, y y z, respectivamente, de un sistema de coordenadasrectangulares de tres dimensiones.
Cualquier vector a = (a1, a2, a3) en el espacio tridimensional se puede expresar como unacombinacion lineal de los vectores unitarios
i = (1, 0, 0) j = (0, 1, 0) k = (0, 0, 1), a = a1i+ a2j+ a3k
es decir, a es la suma de los vectores componentes a1i, a2j y a3k los cuales yacen a lo largode los ejes de coordenadas y tienen el origen como un punto inicial comun, y los escalares a1,
1

a2 y a3 se denominan componentes de a en las direcciones x, y y z, respectivamente.
Considere un punto P(x, y, z) en el espacio. El vector r que parte del origen O hacia elpunto P se llama vector de posicion (o radio vector). Entonces, podemos escribir
r = xi+ yj+ zk, |r| =√
x2 + y2 + z2
Ejemplo 1. Interpretacion geometrica de ecuaciones y desigualdades.
Ejemplo 2. Interpretacion geometrica de ecuaciones y desigualdades.
1. x2 + y2 + z2 < 4
2. x2 + y2 + z2 ≤ 4
3. x2 + y2 + z2 = 4, z ≤ 0
4. x2 + y2 + z2 + 3x− 4z + 1 = 0
Rectas y planos en el espacio En el plano R2, una recta queda determinada por un
punto P0 y la pendiente m. En el espacio Rn, una recta queda determinada por un punto
P0 y un vector director que indica la direccion de la recta.Suponga que L es una recta en el espacio que pasa por un punto P0(x, y, z) y que es paralelaa un vector v = v1i+ v2j+ v3k. Entonces
L ={
X : P0X es paralelo a v} ={
X : P0X = tv}
El valor de t depende de la posicion del punto X a lo largo de la recta, y el dominio de t es(−∞,∞). Observe que
P0X = tv ⇒ (x− x0)i+ (y − y0)j+ (z − z0)k = t(v1i+ v2j+ v3k)
¿Cuales son las ecuaciones parametricas de una recta L?
¿Cuales son las ecuaciones simetricas de una recta L?
¿Cuando dos rectas L1 y L2 son paralelas? Ortogonales?
2
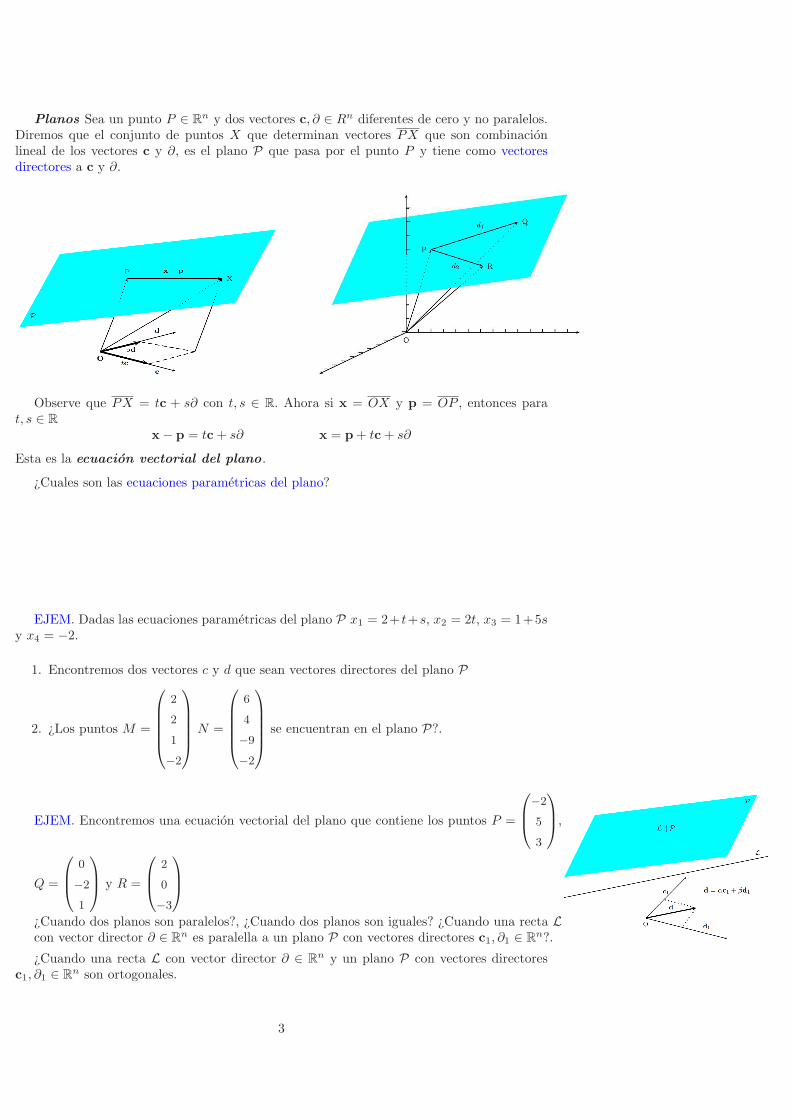
Planos Sea un punto P ∈ Rn y dos vectores c, ∂ ∈ Rn diferentes de cero y no paralelos.
Diremos que el conjunto de puntos X que determinan vectores PX que son combinacionlineal de los vectores c y ∂, es el plano P que pasa por el punto P y tiene como vectoresdirectores a c y ∂.
Observe que PX = tc + s∂ con t, s ∈ R. Ahora si x = OX y p = OP , entonces parat, s ∈ R
x− p = tc+ s∂ x = p+ tc+ s∂
Esta es la ecuacion vectorial del plano.
¿Cuales son las ecuaciones parametricas del plano?
EJEM. Dadas las ecuaciones parametricas del plano P x1 = 2+ t+s, x2 = 2t, x3 = 1+5sy x4 = −2.
1. Encontremos dos vectores c y d que sean vectores directores del plano P
2. ¿Los puntos M =
2
2
1
−2
N =
6
4
−9
−2
se encuentran en el plano P?.
EJEM. Encontremos una ecuacion vectorial del plano que contiene los puntos P =
−2
5
3
,
Q =
0
−2
1
y R =
2
0
−3
¿Cuando dos planos son paralelos?, ¿Cuando dos planos son iguales? ¿Cuando una recta Lcon vector director ∂ ∈ R
n es paralella a un plano P con vectores directores c1, ∂1 ∈ Rn?.
¿Cuando una recta L con vector director ∂ ∈ Rn y un plano P con vectores directores
c1, ∂1 ∈ Rn son ortogonales.
3
Coordenadas Cilindricas
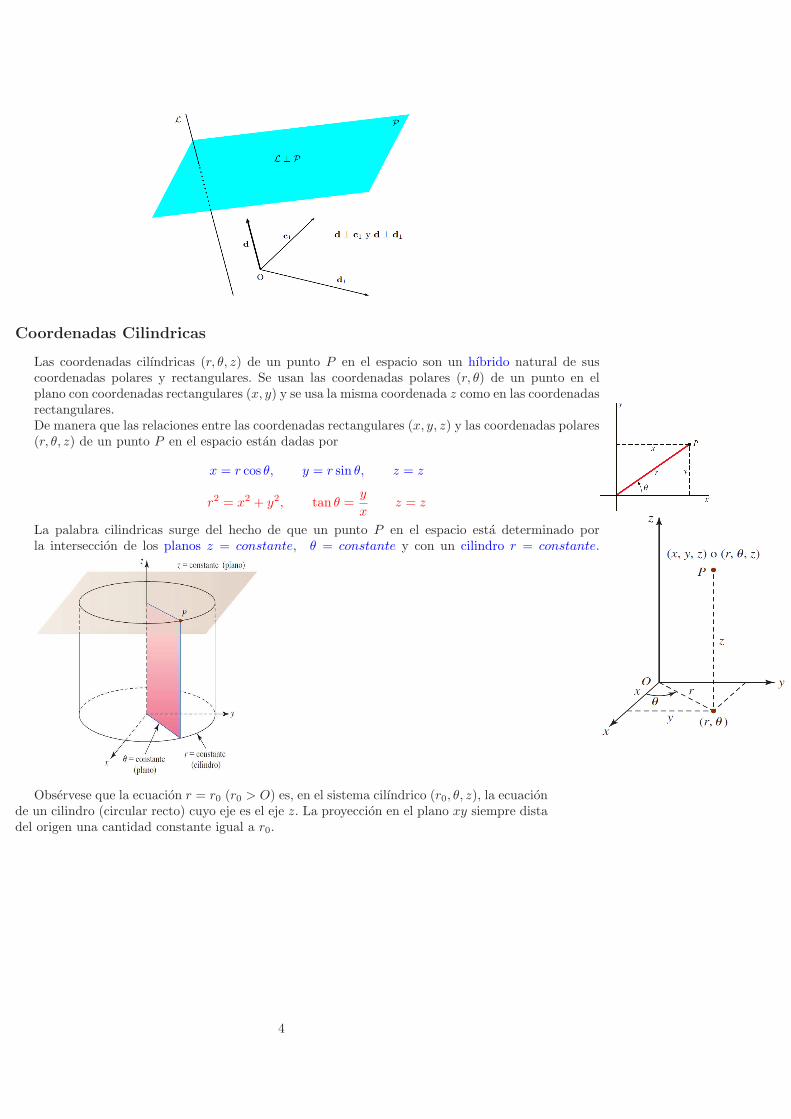
Las coordenadas cilındricas (r, θ, z) de un punto P en el espacio son un hıbrido natural de suscoordenadas polares y rectangulares. Se usan las coordenadas polares (r, θ) de un punto en elplano con coordenadas rectangulares (x, y) y se usa la misma coordenada z como en las coordenadasrectangulares.De manera que las relaciones entre las coordenadas rectangulares (x, y, z) y las coordenadas polares(r, θ, z) de un punto P en el espacio estan dadas por
x = r cos θ, y = r sin θ, z = z
r2 = x2 + y2, tan θ =y
xz = z
La palabra cilindricas surge del hecho de que un punto P en el espacio esta determinado porla interseccion de los planos z = constante, θ = constante y con un cilindro r = constante.
Observese que la ecuacion r = r0 (r0 > O) es, en el sistema cilındrico (r0, θ, z), la ecuacionde un cilindro (circular recto) cuyo eje es el eje z. La proyeccion en el plano xy siempre distadel origen una cantidad constante igual a r0.
4
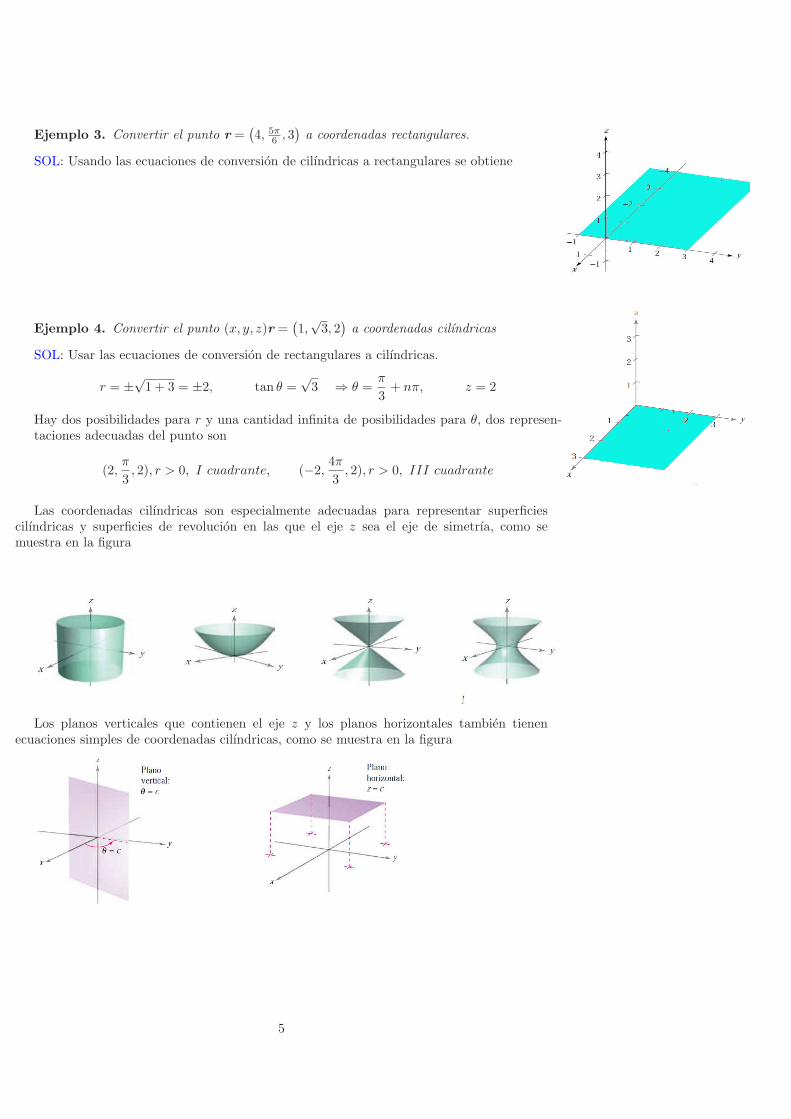
Ejemplo 3. Convertir el punto r =(
4, 5π6 , 3)
a coordenadas rectangulares.
SOL: Usando las ecuaciones de conversion de cilındricas a rectangulares se obtiene
Ejemplo 4. Convertir el punto (x, y, z)r =(
1,√3, 2)
a coordenadas cilındricas
SOL: Usar las ecuaciones de conversion de rectangulares a cilındricas.
r = ±√1 + 3 = ±2, tan θ =
√3 ⇒ θ =
π
3+ nπ, z = 2
Hay dos posibilidades para r y una cantidad infinita de posibilidades para θ, dos represen-taciones adecuadas del punto son
(2,π
3, 2), r > 0, I cuadrante, (−2,
4π
3, 2), r > 0, III cuadrante
Las coordenadas cilındricas son especialmente adecuadas para representar superficiescilındricas y superficies de revolucion en las que el eje z sea el eje de simetrıa, como semuestra en la figura
Los planos verticales que contienen el eje z y los planos horizontales tambien tienenecuaciones simples de coordenadas cilındricas, como se muestra en la figura
5

Ejemplo 5. Hallar una ecuacion en coordenadas cilındricas para la superficie representada porcada ecuacion rectangular, a) x2 + y2 = 4z2, y b) y2 = x
SOL: a) la grafica de la superficie x2 + y2 = 4z2 es un cono de dos hojas, con su eje a lo largo deleje z, como se muestra en la figura. Luego,
x2 + y2 = 4z2 Ecuacion rectangular r2 = 4z2 Ecuacion cilindrica
SOL b) La grafica de la superficie es un cilindro parabolico con rectas generatrices paralelas al ejez. Observe que,
Hay que observar que esta ecuacion comprende un punto en el que por lo cual nada se pierde aldividir cada lado entre el factor r
Ejemplo 6. Hallar una ecuacion en coordenadas rectangulares de la superficie representada porla ecuacion cilındrica, r2 cos 2θ + z2 + 1 = 0
SOL:
Es un hiperboloide de dos hojas cuyo eje se encuentra a lo largo del eje y.
6

Coordenadas Esfericas
En el sistema de coordenadas esfericas, cada punto se representa por una terna ordenada:la primera coordenada es una distancia, la segunda y la tercera coordenadas son angulos.Un punto P en el espacio se representa por medio de una terna ordenada (ρ, φ, θ).
1. ρ es la distancia entre P y el origen, ρ ≥ 0.
2. θ es el mismo angulo utilizado en coordenadas cilındricas para r ≥ 0.
3. φ es el angulo entre el eje z positivo y el segmento de recta OP , 0 ≤ φ ≤ π
El nombre coordenadas esfericas se utiliza porque la ecuacion ρ = const es una esfera conmas precision, una superficie esferica de radio c centrada en el origen. La ecuacion φ = Constdescribe (una parte de) un cono si 0 < c < π
2 o si π2 < c < π. La ecuacion esferica del plano
xy es φ = π2 .
Por tanto un punto P en el espacio esta determinado por la interseccion de un cono φ =const, un plano θ = const y una esfera ρ = const; de ahı surge el nombre de coordenadasesfericas. La relacion entre coordenadas rectangulares y esfericas es dada por:Esfericas a rectangulares:
x = ρ sinφ cos θ, y = ρ sinφ sin θ, z = ρ cosφ
Rectangulares a esfericas:
ρ2 = x2 + y2 + z2, tan θ =y
x, arc cos
( z√
x2 + y2 + z2
)
Para cambiar entre los sistemas de coordenadas cilındricas y esfericas, usar lo siguiente.Esfericas a rectangulares r ≥ 0:
r2 = ρ2 sin2, θ = θ, z = ρ cosφ
Cilindricas a esfericas (r ≥ 0)
ρ =√
r2 + z2, θ = θ, arc cos( z√
r2 + z2
)
Ejemplo 7. Hallar una ecuacion en coordenadas esfericas para la superficie representada por cadauna de las ecuaciones rectangulares a) Cono x2 + y2 = z2 b) Esfera x2 + y2 + z2 − 4z = 0
SOLa) Haciendo las sustituciones apropiadas de x, y y z
x2 + y2 = z2
ρ2 sin2 φ cos2 θ + ρ2 sin2 φ sin θ = ρ2 cos2 φ
ρ2 sin2 φ = ρ2 cos2 φ ρ ≥ 0
tan2 φ = 1 φ = π/4, o φ = 3π/4
La ecuacion φ = π/4 representa el semicono superior, y la ecuacion φ = 3π/4 representa el semiconoinferior.b) Como ρ2 = x2 + y2 + z2 y z = ρ cosφ entonces tenemos que
ρ2 − 4ρ cosφ = 0, ⇒ ρ(ρ− 4 cosφ) = 0
Descartando por el momento la posibilidad de que ρ = 0, se obtiene la ecuacion esferica
ρ = 4 cosφ
Hay que observar que el conjunto solucion de esta ecuacion comprende un punto en el cual ρ = 0de manera que no se pierde nada al eliminar el factor ρ.
7
EJERCICIO I: Convierta las coordenadas esfericas (6, π/4, π/3) en coordenadas: (a)Coordenadas rectangulares. (b) Coordenadas cilindricas. SOL : (a) ( 32
√2, 32
√6, 3
√2) (b)
(3√2, π/3, 3
√2)
EJERCICIO II: a) Encuentre las coordenadas rectangulares del punto P que tiene coor-denadas esfericas (8, 5π/6, π/3)
b) Encuentre las coordenadas esfericas aproximadas del punto Q con coordenadas rectan-gulares (−3,−4,−12).
c) Encuentre la ecuacion en coordenadas esfericas del paraboloide con ecuacion en coor-denadas rectangulares z = x2 + y2.
d) Determine la grafica de la ecuacion en coordenadas esfericas ρ = 2 cosφ.
e) Determine la grafica de la ecuacion en coordenadas esfericas ρ = sinφ sen θ.
1.1. Superficies en el espacio
La grafica de una ecuacion f(x, y) = 0 es por lo general una curva en el plano xy, la graficade una ecuacion F (x, y, z) = 0 es generalmente una superficie en el espacio. De manera que,una funcion F de tres variables asocia un numero real F (x, y, z) con cada tercia ordenada(x, y, z) de numeros reales. La grafica (dibujo) de la ecuacion
F (x, y, z) = 0
es el conjunto de todos los puntos cuyas coordenadas (x, y, z) satisfacen esta ecuacion y recibeel nombre de superficie. Por ejemplo,
Esferas : (x− x0)2 + (y − y0)
2 + (z − z0)2 = r2
Planos : ax+ by + cz + d = 0
Un tercer tipo de superficies que estudiaremos en el espacio son las llamadas superficiescilındricas, superficies cuadradicas y superficies de revolucion.
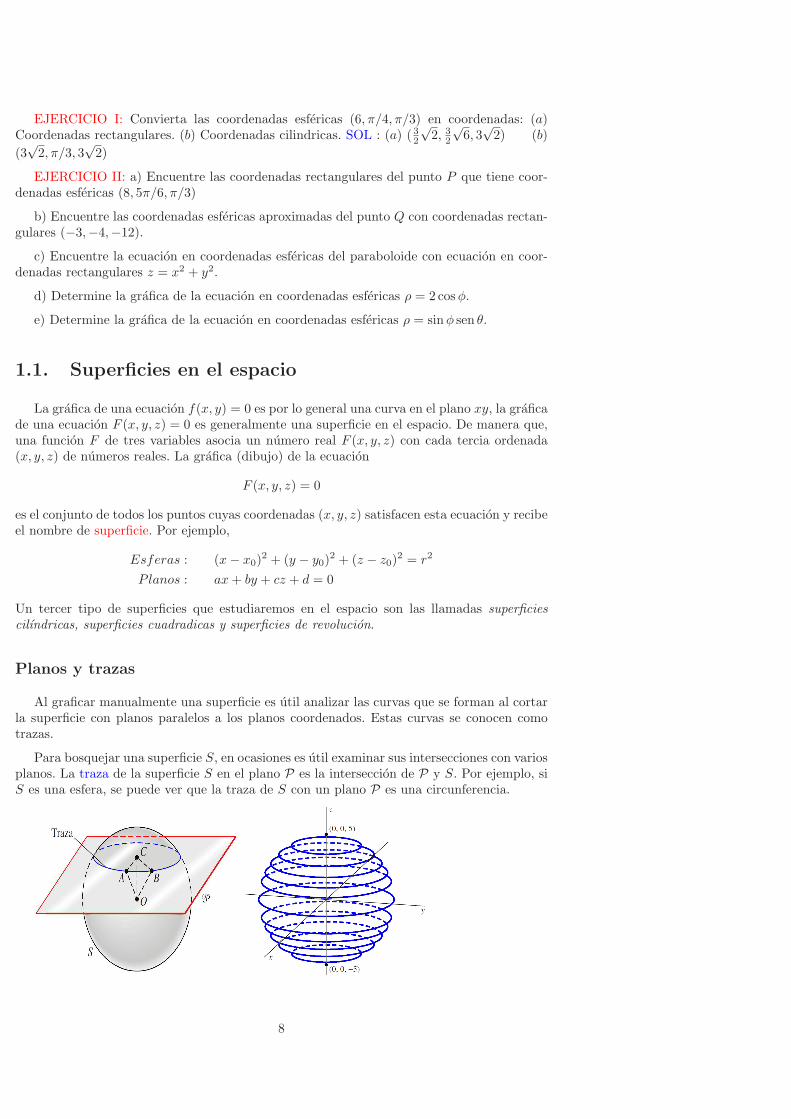
Planos y trazas
Al graficar manualmente una superficie es util analizar las curvas que se forman al cortarla superficie con planos paralelos a los planos coordenados. Estas curvas se conocen comotrazas.
Para bosquejar una superficie S, en ocasiones es util examinar sus intersecciones con variosplanos. La traza de la superficie S en el plano P es la interseccion de P y S. Por ejemplo, siS es una esfera, se puede ver que la traza de S con un plano P es una circunferencia.
8

Cuando queremos visualizar una superficie especıfica en el espacio, suele ser suficienteanalizar sus trazas en los planos coordenados y posiblemente unos cuantos planos paralelosa ellos
Ejemplo 8. Bosqueje el plano con ecuacion 3x+ 2y + 2z = 6.
SOL: Para hallar la traza en el eje xy hacemos z = 0. La ecuacion se reduce a la ecuacion 3x+2y = 6de una recta en el plano xy. De manera similar, con y = 0 obtenemos la recta 3x + 2z = 6 comola traza del plano dado en el plano xz. Para encontrar la traza en el plano yz, hacemos x = 0 yobtenemos la recta y+z = 3. La figura muestra las porciones de estas tres trazas que se encuentranen el primer octante. Todas juntas dan una buena idea de como esta situado el plano 3x+2y+2z = 6en el espacio.
Superfices Cilindricas
En el espacio bidimensional la grafica de la ecuacion x2 + y2 = 1 es una circunferenciacentrada en el origen del plano xy. Sin embargo, en el espacio tridimensional es posibleinterpretar la grafica del conjunto
{(x, y, z) : x2 + y2 = 1, z arbitraria}
como una superficie que es el cilindro circular recto ver grafica
De modo similar, la grafica de una ecuacion tal como y+2z = 2 es una recta en el espaciobidimensional (el plano yz), pero en el espacio tridimensional la grafica del conjunto
{(x, y, z) : y + 2z = 2, x arbitraria}
es el plano perpendicular al plano yz.
Las superficies de este tipo reciben un nombre especial cilindros. Usamos el termino cilin-dro en un sentido mas general que el de un cilindro circular recto. Especıficamente, si C esuna curva en un plano y L es una recta no paralela al plano, entonces el conjunto de todoslos puntos (x, y, z) generado al mover una lınea que recorra a C paralela a L se denominacilindro. En palabras mas coloniales, un cilindro se genera al deslizar la curva C en la mismadireccıon de la recta L, donde la recta L es representada por la variable que falta en suecuacion. La curva C recibe el nombre de generatriz del cilindro.
9
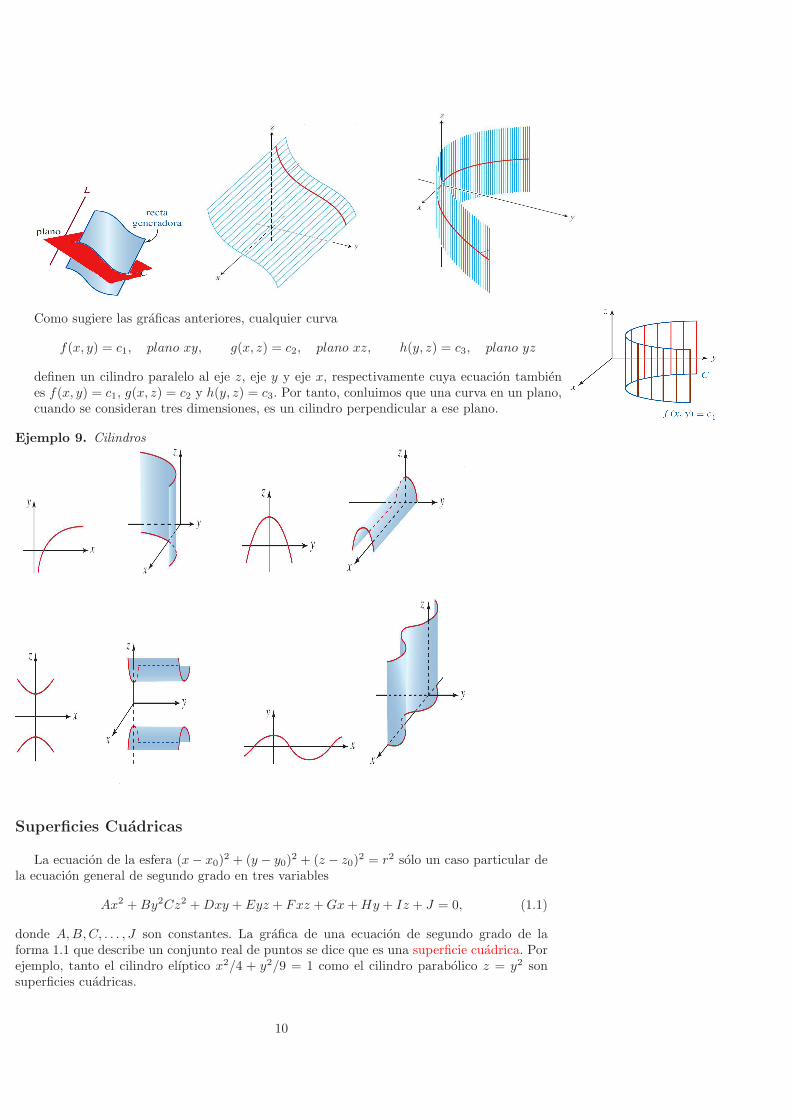
Como sugiere las graficas anteriores, cualquier curva
f(x, y) = c1, plano xy, g(x, z) = c2, plano xz, h(y, z) = c3, plano yz
definen un cilindro paralelo al eje z, eje y y eje x, respectivamente cuya ecuacion tambienes f(x, y) = c1, g(x, z) = c2 y h(y, z) = c3. Por tanto, conluimos que una curva en un plano,cuando se consideran tres dimensiones, es un cilindro perpendicular a ese plano.
Ejemplo 9. Cilindros
Superficies Cuadricas
La ecuacion de la esfera (x− x0)2 + (y − y0)
2 + (z − z0)2 = r2 solo un caso particular de
la ecuacion general de segundo grado en tres variables
Ax2 +By2Cz2 +Dxy + Eyz + Fxz +Gx+Hy + Iz + J = 0, (1.1)
donde A,B,C, . . . , J son constantes. La grafica de una ecuacion de segundo grado de laforma 1.1 que describe un conjunto real de puntos se dice que es una superficie cuadrica. Porejemplo, tanto el cilindro elıptico x2/4 + y2/9 = 1 como el cilindro parabolico z = y2 sonsuperficies cuadricas.
10

Hay seis tipos basicos de superficies cuadricas: elipsoide, hiperboloide de una hoja, hiper-boloide de dos hojas, cono elıptico, paraboloide elıptico y paraboloide hiperbolico.
Elipsoide: La grafica de cualquier ecuacion de la forma
x2
a2+y2
b2+z2
c2= 1,
corta a los ejes coordenados en (±a, 0, 0), (0,±b, 0) y (0, 0,±c) los numeros reales positivosa, b y c se llaman semiejes del elipsoide. La superficie es simetrica con respecto a cada unode los planos coordenados, ya que en la ecuacion que la define, cada variable esta elevada alcuadrado.
Cono elıptico: La grafica de una ecuacion de la forma
x2
a2+y2
b2=z2
c2,
recibe el nombre de cono elıptico (o circular si el cono a = b)
Paraboloide elıptico: La grafica de una ecuacion de la forma
x2
a2+y2
b2=z
c,
es simetrico con respecto a los planos x = 0 y y = 0. La unica interseccion con los ejes esel origen. Excepto por este punto, la superficie esta completamente por arriba (si c > 0) ocompletamente debajo (si c < 0 ) del plano xy, segun el signo de c.
11
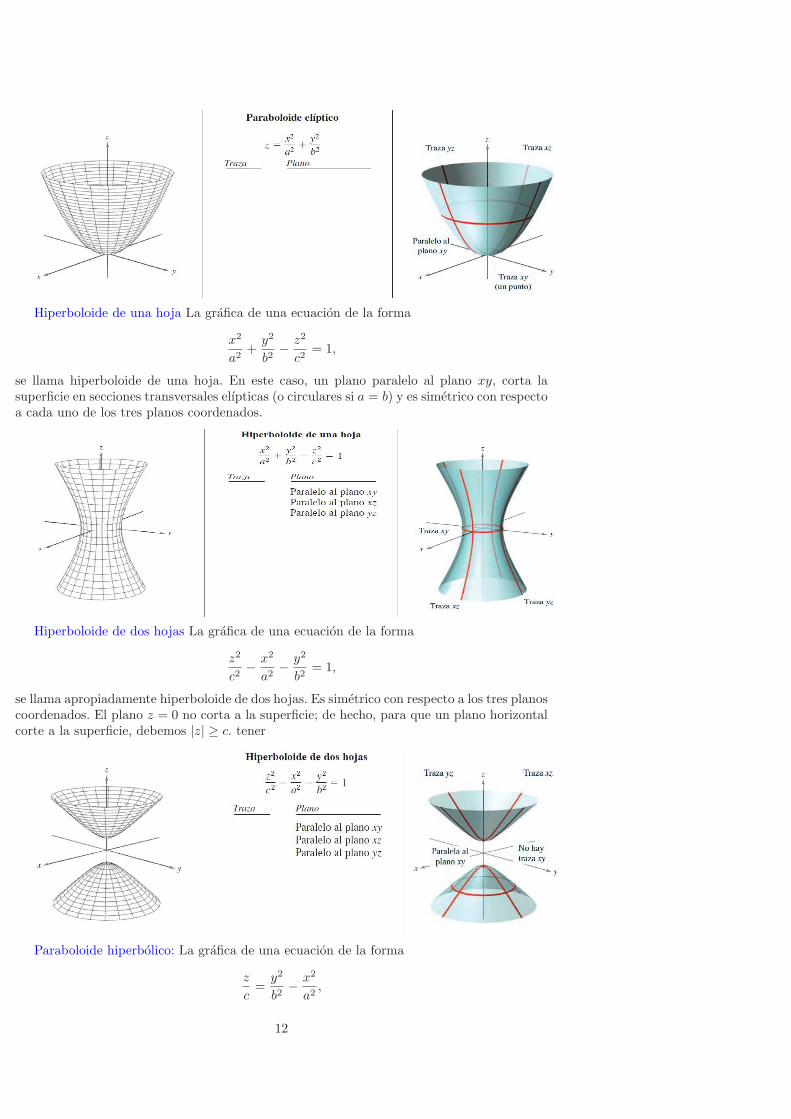
Hiperboloide de una hoja La grafica de una ecuacion de la forma
x2
a2+y2
b2− z2
c2= 1,
se llama hiperboloide de una hoja. En este caso, un plano paralelo al plano xy, corta lasuperficie en secciones transversales elıpticas (o circulares si a = b) y es simetrico con respectoa cada uno de los tres planos coordenados.
Hiperboloide de dos hojas La grafica de una ecuacion de la forma
z2
c2− x2
a2− y2
b2= 1,
se llama apropiadamente hiperboloide de dos hojas. Es simetrico con respecto a los tres planoscoordenados. El plano z = 0 no corta a la superficie; de hecho, para que un plano horizontalcorte a la superficie, debemos |z| ≥ c. tener
Paraboloide hiperbolico: La grafica de una ecuacion de la forma
z
c=y2
b2− x2
a2,
12

se conoce como paraboloide hiperbolico y tiene forma de una silla de montar.Su traza en elplano horizontal z = z0 es una hiperbola (o dos rectas que se cruzan si z0 = 0).
Para clasificar una superficie cuadrica, se empieza por escribir la superficie en la formacanonica o estandar. Despues, se determinan varias trazas en los planos coordenados o enplanos paralelos a los planos coordenados.
Ejemplo 10. Clasificar y dibujar la superficie dada por 4x2 − 3y2 + 12z2 + 12 = 0
SOL: Se empieza por escribir la ecuacion en forma canonica
4x2 − 3y2 + 12z2 + 12 = 0
y2
4− x2
3− z2
1= 1
se puede concluir que la superficie es un hiperboloide de dos hojas con el eje y como su eje.Para esbozar la grafica de esta superficie, conviene hallar las trazas en los planos coordenados.
Traza xy (z = 0)y2
4− x2
3= 1 Hiperbola
Traza xz (y = 0)x2
3+z2
1= −1 No hay traza
Traza yz (x = 0)y2
4− z2
1= 1 Hiperbola
Ejemplo 11. Clasificar y dibujar la superficie dada por x− y2 − 4z2 = 0
SOL: Como x esta elevada solo a la primera potencia, la superficie . Eleje del es el eje x. En la forma canonica es x = y2 + 4z2. Estudiemosalgunas trazas,
La superficie es un .
13
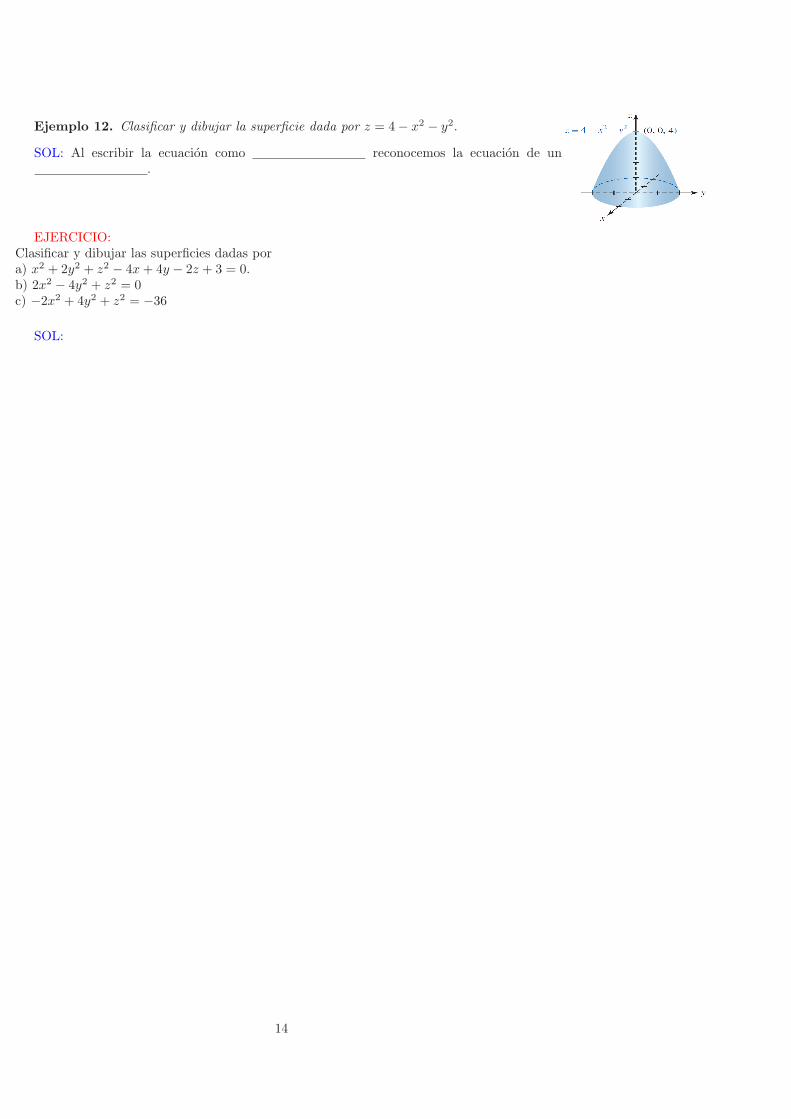
Ejemplo 12. Clasificar y dibujar la superficie dada por z = 4− x2 − y2.
SOL: Al escribir la ecuacion como reconocemos la ecuacion de un.
EJERCICIO:Clasificar y dibujar las superficies dadas pora) x2 + 2y2 + z2 − 4x+ 4y − 2z + 3 = 0.b) 2x2 − 4y2 + z2 = 0c) −2x2 + 4y2 + z2 = −36
SOL:
14

Superficies de Revolucion:
En Calculo integral vimos que una superficie S podrıa generarse rotando una curva plana Calrededor de un eje. En la discusion que sigue se encontraran ecuaciones de superficies de revolucioncuando C es una curva en un plano de coordenadas y el eje de revolucion es un eje de coordenadasAhora veamos un procedimiento para hallar su ecuacion. Consideremos la grafica de la funcionradio
y = r(z), Curva generadora o directriz.
en el plano yz. Si esta grafica se gira sobre el eje z, forma una superficie de revolucion, como semuestra en la figura. La traza de la superficie en el plano z = z0 es un cırculo cuyo radio es r(z0)y cuya ecuacion es
x2 + y2 = [r(z0)]2
Sustituyendo z0 por z se obtiene una ecuacion que es valida para todos los valores de z. Demanera similar, se pueden obtener ecuaciones de superficies de revolucion para los otros dos ejes,y los resultados se resumen como sigue.
Superficie de Revolucion: Si la grafica de una funcion radio r se gira sobre uno de losejes coordenados, la ecuacion de la superficie de revolucion resultante tiene una de las formassiguientes.1.) Girada sobre el eje x: y2 + z2 = [r(x)]2
2.) Girada sobre el eje y: x2 + z2 = [r(y)]2
3.) Girada sobre el eje z: x2 + y2 = [r(z)]2
Ejemplo 13. Hallar una ecuacion para la superficie de revolucion generada al girar la grafica
de y =1
zen torno al eje z.
SOL: Como el giro es en el eje z entonces la ecuacion de la superficie es de la formar(z) = x2 + y2 y como la funcion radio es r(z) = 1
z . entonces la ecuacion de la superficie es:
x2 + y2 =(1
z
)2
Ejemplo 14. Hallar una ecuacion para la superficie de revolucion generada al girar la graficade 9x2 = y3 en torno al eje y.
SOL: Como el giro es en el eje y entonces la ecuacion de la superficie es de la formar(y) = x2 + z2 y como la funcion radio es r(y) = 1
3y3/2. Entonces la ecuacion de la superficie
es:
x2 + z2 =1
9y3
OBS La curva generadora o directriz de una superficie de revolucion NO es unica. Porejemplo, la superficie
x2 + z2 = e−2y
puede generarse al girar la grafica de x = e−y en torno al eje y o la grafica de z = e−y sobre el
eje y.
15

Ejemplo 15. Hallar una curva generadora y el eje de revolucion de la superficie de revolucionHallar una directriz y el eje de revolucion de la superficie dada por x2 + 3y2 + z2 = 9
SOL: Sabemos que una superficie de revolucion tiene una de las siguientes ecuaciones
x2 + y2 = [r(z)]2 girada en torno al eje z
y2 + z2 = [r(x)]2 girada en torno al eje x
x2 + z2 = [r(y)]2 girada en torno al eje y
Como los coeficientes de x2 y z2 son iguales, se debe elegir la tercera forma y escribir x2+z2 =9− 3y2. Entonces el eje y es el eje de revolucion. Se puede elegir una directriz de las trazassiguientes
x2 = 9− 3y2, traza en el plano xy, z2 = 9− 3y2, traza en el plano yz
usando la primer traza, la directriz es la semielipse dada por x =√
9− 3y2
NOTA IMPORTANTE: En aras de la discusion mas general, se va a suponer que f(y, z) = 0 esuna ecuacion de una curva C en el plano yz y que C se rota en torno al eje z de modo que segenera una superficie S. Si (x, y, z) denota un punto general sobre S que resulta de rotar el punto(0, y0, z) en C, entonces
d[(0, 0, z), (x, y, z)] = d[(0, 0, z), (0, y0, z)], por tanto y0 =√
x2 + y2
Pero como f(y0, z) = 0 llegamos a una ecuacion para S dada por
f(√
x2 + y2, z) = 0
De manera que una ecuacion de una superficie generada al rotar una curva en un plano de coor-denadas alrededor de
EJERCICIOS1) Escriba una ecuacion del elipsoide de revolucion que se obtiene al girar la elipse 4y2+z2 = 4alrededor del eje z2) Determine la grafica de la ecuacion z2 = x2 + y2.3) La grafica 4x2 + y2 = 16 de se rota en torno al eje x. Encuentre una ecuacion de lasuperficie de revolucion. 4) La grafica z = y, y ≥ 0 de se rota en torno al eje z. Encuentreuna ecuacion de la superficie de revolucion.
16
1.2. Funciones de varias variables
Hasta ahora en este texto, solo se han visto funciones de una sola variable (independiente).Sin embargo, muchos problemas comunes son funciones de dos o mas variables. Por ejemplo,
1. Area de un rectangulo A = xy
2. Volumen de un cilindro circular V = πr2h
3. Volumen de un cono circular V = 13πr
2h
4. Perımetro de un rectangulo P = 2x+ 2y
5. La funcion f(x, y) = x2 + y2 calcula la altura del paraboloide z = x2 + y2.
6. La temperatura T de un punto sobre la superficie terrestre depende de su latitud x ysu longitud y, lo que se expresa escribiendo T = f(x, y).
7. El volumen V y el area de la superficie S de una caja rectangular son funciones poli-nomiales de tres variables:
V = xyz, S = 2xy + 2xz + 2yz
Nota: Puesto que se requieren cuatro dimensiones, no es posible graficar una funcionde tres variables.
Definition 1. Una funcion de dos variables, definida en el dominio D en el plano,es una regla f que asocia a cada punto (x, y) en D un numero real unico, denotadopor f(x, y). Una funcion de tres variables, definida en el dominio D en el espacio,es una regla f que asocia a cada punto (x, y, z) en D un numero real unico f(x, y, z).
OBS:
1. En la funcion dada por z = f(x, y), x y y son las variables independientes y z es lavariable dependiente.
2. En caso de que el dominio D de f no se especifique en forma explıcita, se toma comoaquel que consiste en todos los puntos para los que la formula dada es significativa.
3. Una funcion de dos variables suele escribirse z = f(x, y) y se lee “f de x, y.”
4. Una ecuacion de un plano ax + by + cz = d, c 6= 0, describe una funcion cuando seescribe como
z =d
c− a
cx− b
cy, f(x, y) =
d
c− a
cx− b
cy
Puesto que z es un polinomio en x y y, el dominio de la funcion consiste en el plano xycompleto.
Dominios e imagenes
Para definir una funcion de mas de una variable, seguimos la practica usual de excluir lasentradas que conducen a numeros complejos o a la division entre cero.
17
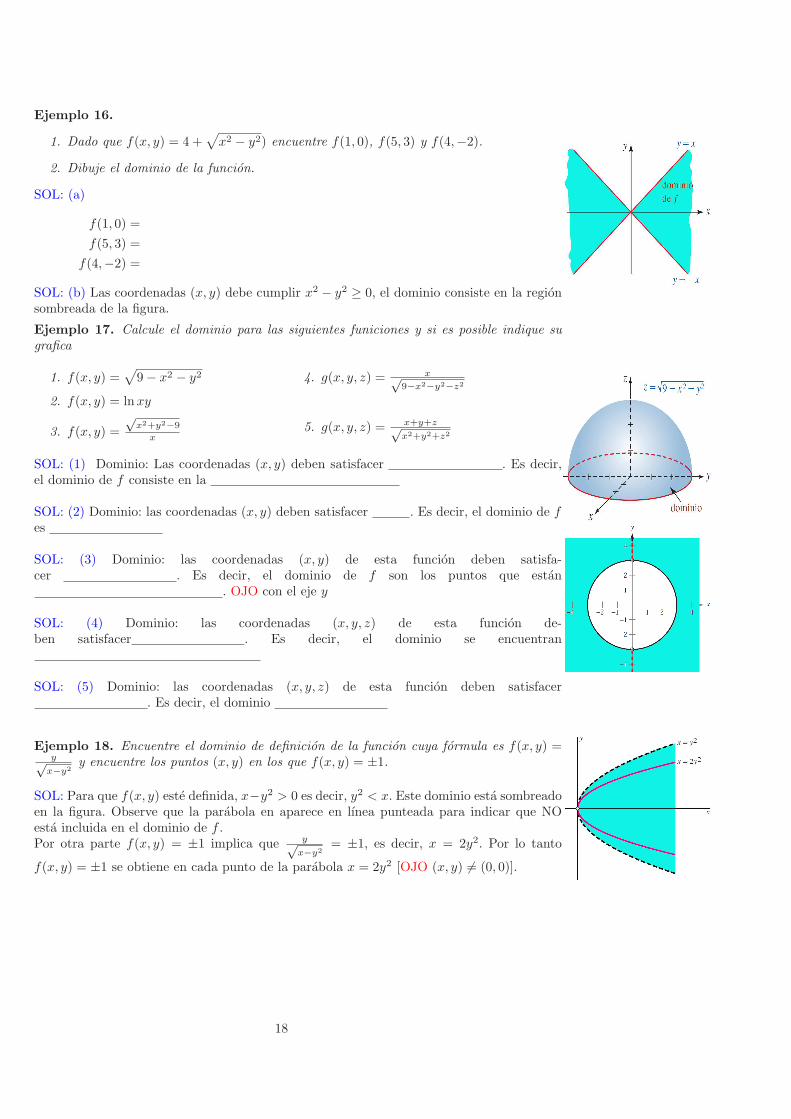
Ejemplo 16.
1. Dado que f(x, y) = 4 +√
x2 − y2) encuentre f(1, 0), f(5, 3) y f(4,−2).
2. Dibuje el dominio de la funcion.
SOL: (a)
f(1, 0) =
f(5, 3) =
f(4,−2) =
SOL: (b) Las coordenadas (x, y) debe cumplir x2 − y2 ≥ 0, el dominio consiste en la regionsombreada de la figura.
Ejemplo 17. Calcule el dominio para las siguientes funiciones y si es posible indique sugrafica
1. f(x, y) =√
9− x2 − y2
2. f(x, y) = lnxy
3. f(x, y) =
√x2+y2−9
x
4. g(x, y, z) = x√9−x2−y2−z2
5. g(x, y, z) = x+y+z√x2+y2+z2
SOL: (1) Dominio: Las coordenadas (x, y) deben satisfacer . Es decir,el dominio de f consiste en la
SOL: (2) Dominio: las coordenadas (x, y) deben satisfacer . Es decir, el dominio de fes
SOL: (3) Dominio: las coordenadas (x, y) de esta funcion deben satisfa-cer . Es decir, el dominio de f son los puntos que estan
. OJO con el eje y
SOL: (4) Dominio: las coordenadas (x, y, z) de esta funcion de-ben satisfacer . Es decir, el dominio se encuentran
SOL: (5) Dominio: las coordenadas (x, y, z) de esta funcion deben satisfacer. Es decir, el dominio
Ejemplo 18. Encuentre el dominio de definicion de la funcion cuya formula es f(x, y) =y√x−y2
y encuentre los puntos (x, y) en los que f(x, y) = ±1.
SOL: Para que f(x, y) este definida, x−y2 > 0 es decir, y2 < x. Este dominio esta sombreadoen la figura. Observe que la parabola en aparece en lınea punteada para indicar que NOesta incluida en el dominio de f .Por otra parte f(x, y) = ±1 implica que y√
x−y2= ±1, es decir, x = 2y2. Por lo tanto
f(x, y) = ±1 se obtiene en cada punto de la parabola x = 2y2 [OJO (x, y) 6= (0, 0)].
18
Graficas
Como en el caso de las funciones de una sola variable, se puede saber mucho acerca delcomportamiento de una funcion de dos variables dibujando su grafica. La grafica de unafuncion f de dos variables es el conjunto de todos los puntos (x, y, z) para los que z = f(x, y)y (x, y) esta en el dominio de f .
1. La grafica puede interpretarse geometricamente como una superficie en el espacio.
2. la grafica de z = f(x, y) es una superficie cuya proyeccion sobre el plano xy es D, eldominio de f .
3. A cada punto (x, y) en D corresponde un punto (x, y, z) de la superficie y, viceversa,a cada punto (x, y, z) de la superficie le corresponde un punto (x, y) en D.
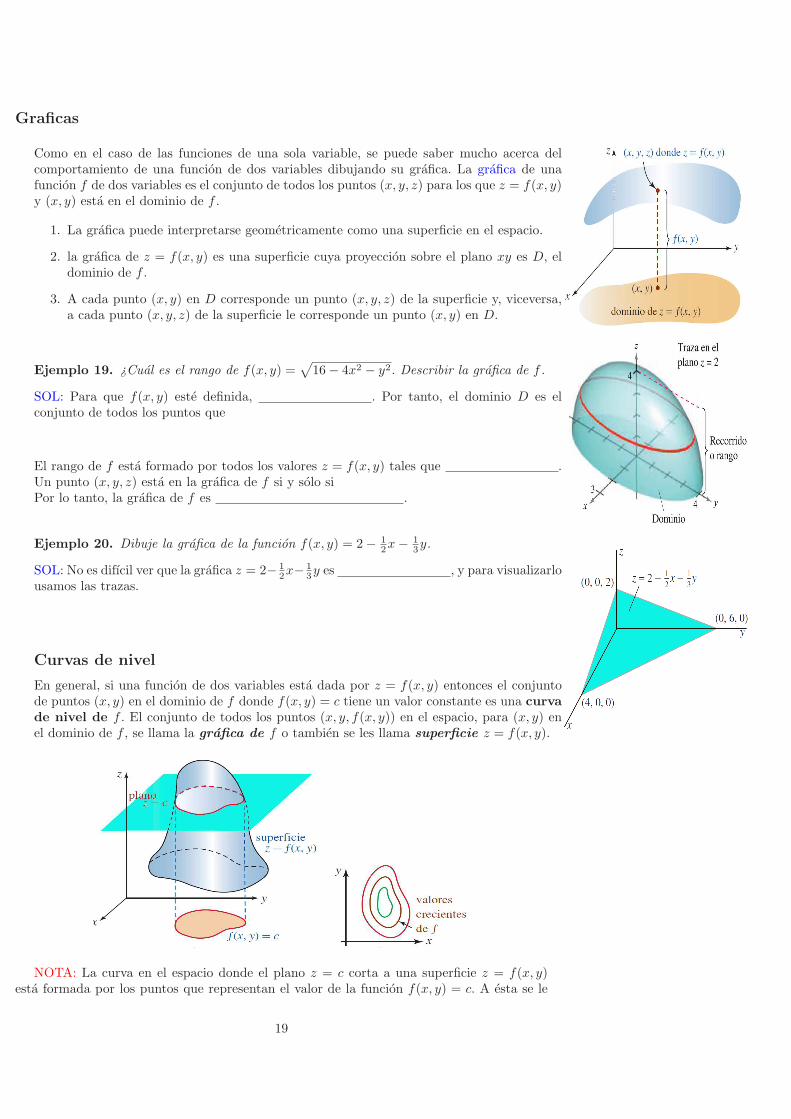
Ejemplo 19. ¿Cual es el rango de f(x, y) =√
16− 4x2 − y2. Describir la grafica de f .
SOL: Para que f(x, y) este definida, . Por tanto, el dominio D es elconjunto de todos los puntos que
El rango de f esta formado por todos los valores z = f(x, y) tales que .Un punto (x, y, z) esta en la grafica de f si y solo siPor lo tanto, la grafica de f es .
Ejemplo 20. Dibuje la grafica de la funcion f(x, y) = 2− 12x− 1
3y.
SOL: No es difıcil ver que la grafica z = 2− 12x− 1
3y es , y para visualizarlousamos las trazas.
Curvas de nivel
En general, si una funcion de dos variables esta dada por z = f(x, y) entonces el conjuntode puntos (x, y) en el dominio de f donde f(x, y) = c tiene un valor constante es una curva
de nivel de f . El conjunto de todos los puntos (x, y, f(x, y)) en el espacio, para (x, y) enel dominio de f , se llama la grafica de f o tambien se les llama superficie z = f(x, y).
NOTA: La curva en el espacio donde el plano z = c corta a una superficie z = f(x, y)esta formada por los puntos que representan el valor de la funcion f(x, y) = c. A esta se le
19
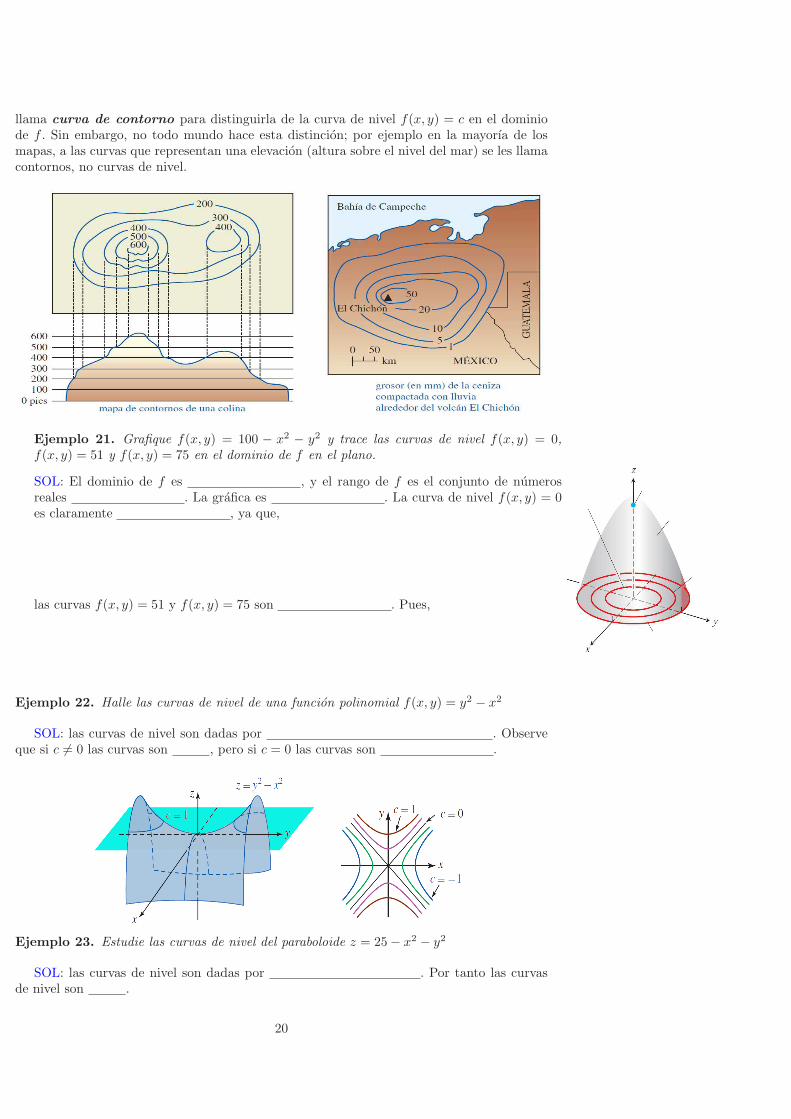
llama curva de contorno para distinguirla de la curva de nivel f(x, y) = c en el dominiode f . Sin embargo, no todo mundo hace esta distincion; por ejemplo en la mayorıa de losmapas, a las curvas que representan una elevacion (altura sobre el nivel del mar) se les llamacontornos, no curvas de nivel.
Ejemplo 21. Grafique f(x, y) = 100 − x2 − y2 y trace las curvas de nivel f(x, y) = 0,f(x, y) = 51 y f(x, y) = 75 en el dominio de f en el plano.
SOL: El dominio de f es , y el rango de f es el conjunto de numerosreales . La grafica es . La curva de nivel f(x, y) = 0es claramente , ya que,
las curvas f(x, y) = 51 y f(x, y) = 75 son . Pues,
Ejemplo 22. Halle las curvas de nivel de una funcion polinomial f(x, y) = y2 − x2
SOL: las curvas de nivel son dadas por . Observeque si c 6= 0 las curvas son , pero si c = 0 las curvas son .
Ejemplo 23. Estudie las curvas de nivel del paraboloide z = 25− x2 − y2
SOL: las curvas de nivel son dadas por . Por tanto las curvasde nivel son .
20
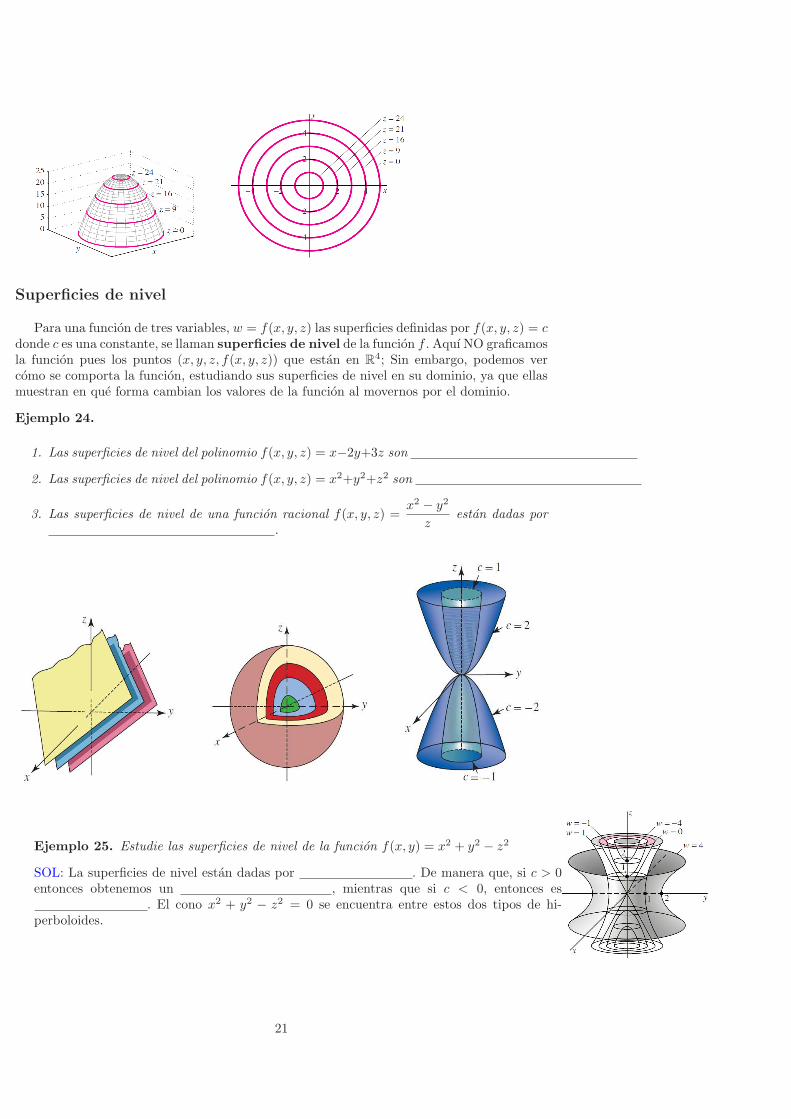
Superficies de nivel
Para una funcion de tres variables, w = f(x, y, z) las superficies definidas por f(x, y, z) = cdonde c es una constante, se llaman superficies de nivel de la funcion f . Aquı NO graficamosla funcion pues los puntos (x, y, z, f(x, y, z)) que estan en R
4; Sin embargo, podemos vercomo se comporta la funcion, estudiando sus superficies de nivel en su dominio, ya que ellasmuestran en que forma cambian los valores de la funcion al movernos por el dominio.
Ejemplo 24.
1. Las superficies de nivel del polinomio f(x, y, z) = x−2y+3z son
2. Las superficies de nivel del polinomio f(x, y, z) = x2+y2+z2 son
3. Las superficies de nivel de una funcion racional f(x, y, z) =x2 − y2
zestan dadas por
.
Ejemplo 25. Estudie las superficies de nivel de la funcion f(x, y) = x2 + y2 − z2
SOL: La superficies de nivel estan dadas por . De manera que, si c > 0entonces obtenemos un , mientras que si c < 0, entonces es
. El cono x2 + y2 − z2 = 0 se encuentra entre estos dos tipos de hi-perboloides.
21

1.3. Lımites y continuidad
Para poder abordar adecuadamente el estudio de la diferenciabilidad de funciones de variasvariables es necesario tener algunos conceptos sobre limites y continuidad de estas funciones.Aunque en estas notas de clase no voy hacer un acercamiento riguroso y exhaustivo sobrelimites y continuidad, debido a que a que se requiere un trabajo previo con la topologıa delespacio R
n (en el curso de analisis, exijan esta rigurosidad)
En el estudio de los lımites de las funciones de varias variables, se ponen al descubierto lasgrandes dificultades de pasar del calculo de una variable al de varias variables: para funcionesde una variable sus dominios son “pedazos de la recta”, muchas veces intervalos. Para unafuncion de n variables, su dominio es un “pedazo de R
n”, y... aquı empiezan los problemas.¿Como son los subconjuntos de Rn .equivalentes.a los subconjuntos de R? La respuesta la en-contramos en la matematica llamada “topologıa”. Nosotros solamente estudiaremos aquellosconceptos ”topologicos”que nos hagan la vida mas eficiente para comprender los conceptosde lımite y continuidad para una funcion f : U ⊂ R
n → R.
En el caso de funciones de una variable, en muchos casos es factible hacer un juicio acercade la existencia de lım
x→af(x) a partir de la grafica de y = f(x). Tambien se aprovecha que
lımx→a
f(x) existe si y solo si lımx→a−
f(x) y lımx→a+
f(x) existe y son iguales al mismo numero L,
en cuyo caso lımx→a
f(x) = L. En esta seccion veremos que la situacion es mas DIFICIL en la
consideracion de lımites de funciones de dos variables.
El estudio del lımite de una funcion de dos variables inicia definiendo el analogo bidi-mensional de un intervalo en la recta real. Utilizando la formula para la distancia entre dospuntos (x, y) y (x0, y0) en el plano, se puede definir el entorno de (x0, y0) como el disco conradio δ > 0 centrado en (x0, y0)
D ={
(x, y) :√
(x− x0)2 + (y − y0)2 < δ}
Cuando esta formula contiene el signo de desigualdad menor que, <, al disco se le llamaabierto, y cuando contiene el signo de desigualdad menor o igual que, ≤ al disco se le llamacerrado.
Definition 2. Un conjunto V ⊂ Rn se dice que es abierto si para cada x ∈ V
existe r > 0 tal que B(x, r) ⊂ V . Un conjunto F ⊂ Rn se dice que es cerrado si su
complemento F c = Rn − F es un conjunto abierto.
1. Un punto (x0, y0) en una region R del plano es un punto interior de R si existe unentorno δ de (x0, y0) que este contenido completamente R.
2. Si todo punto de R es un punto interior, entonces es una region abierta.
3. Un punto (x0, y0) es un punto frontera de R si todo disco abierto centrado (x0, y0)en contiene puntos dentro de R y puntos fuera de R
4. Si una region contiene todos sus puntos frontera, la region es cerrada.
5. Una region que contiene algunos pero no todos sus puntos frontera no es ni abierta nicerrada.
6. La region R esta acotada si puede estar contenida en un rectangulo o disco suficiente-mente grande en el plano.
22
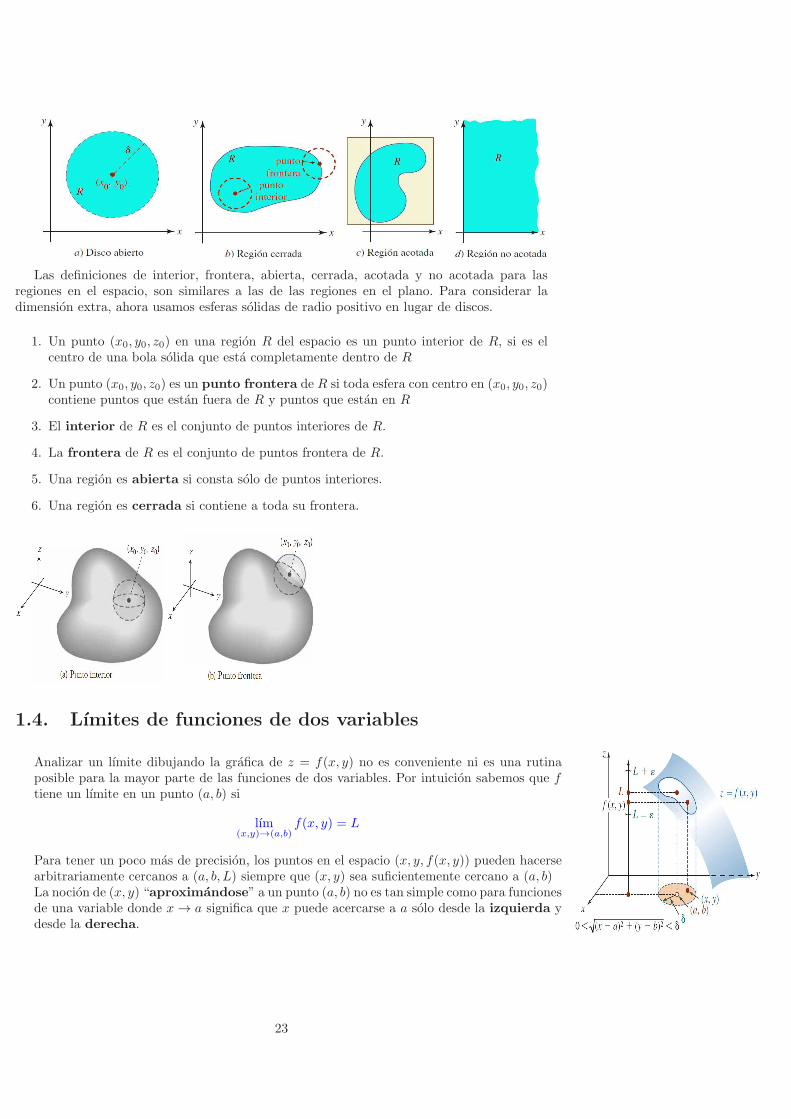
Las definiciones de interior, frontera, abierta, cerrada, acotada y no acotada para lasregiones en el espacio, son similares a las de las regiones en el plano. Para considerar ladimension extra, ahora usamos esferas solidas de radio positivo en lugar de discos.
1. Un punto (x0, y0, z0) en una region R del espacio es un punto interior de R, si es elcentro de una bola solida que esta completamente dentro de R
2. Un punto (x0, y0, z0) es un punto frontera de R si toda esfera con centro en (x0, y0, z0)contiene puntos que estan fuera de R y puntos que estan en R
3. El interior de R es el conjunto de puntos interiores de R.
4. La frontera de R es el conjunto de puntos frontera de R.
5. Una region es abierta si consta solo de puntos interiores.
6. Una region es cerrada si contiene a toda su frontera.
1.4. Lımites de funciones de dos variables
Analizar un lımite dibujando la grafica de z = f(x, y) no es conveniente ni es una rutinaposible para la mayor parte de las funciones de dos variables. Por intuicion sabemos que ftiene un lımite en un punto (a, b) si
lım(x,y)→(a,b)
f(x, y) = L
Para tener un poco mas de precision, los puntos en el espacio (x, y, f(x, y)) pueden hacersearbitrariamente cercanos a (a, b, L) siempre que (x, y) sea suficientemente cercano a (a, b)La nocion de (x, y) “aproximandose” a un punto (a, b) no es tan simple como para funcionesde una variable donde x→ a significa que x puede acercarse a a solo desde la izquierda ydesde la derecha.
23
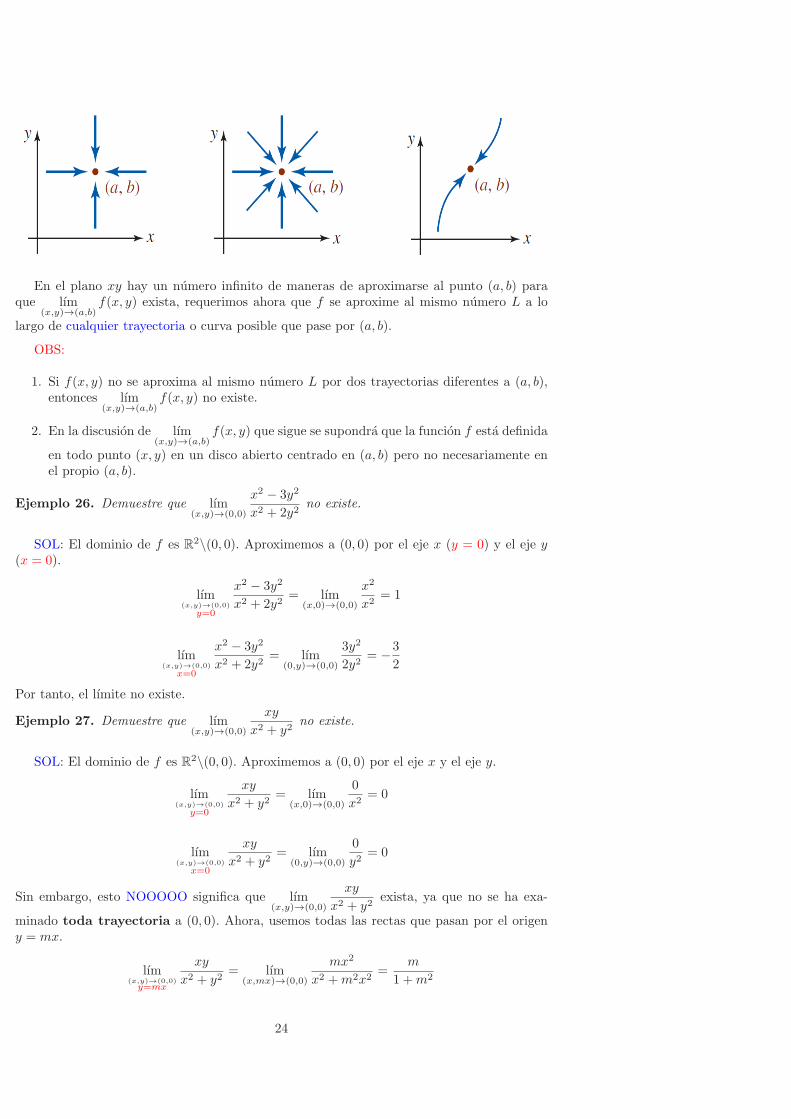
En el plano xy hay un numero infinito de maneras de aproximarse al punto (a, b) paraque lım
(x,y)→(a,b)f(x, y) exista, requerimos ahora que f se aproxime al mismo numero L a lo
largo de cualquier trayectoria o curva posible que pase por (a, b).
OBS:
1. Si f(x, y) no se aproxima al mismo numero L por dos trayectorias diferentes a (a, b),entonces lım
(x,y)→(a,b)f(x, y) no existe.
2. En la discusion de lım(x,y)→(a,b)
f(x, y) que sigue se supondra que la funcion f esta definida
en todo punto (x, y) en un disco abierto centrado en (a, b) pero no necesariamente enel propio (a, b).
Ejemplo 26. Demuestre que lım(x,y)→(0,0)
x2 − 3y2
x2 + 2y2no existe.
SOL: El dominio de f es R2\(0, 0). Aproximemos a (0, 0) por el eje x (y = 0) y el eje y
(x = 0).
lım(x,y)→(0,0)
y=0
x2 − 3y2
x2 + 2y2= lım
(x,0)→(0,0)
x2
x2= 1
lım(x,y)→(0,0)
x=0
x2 − 3y2
x2 + 2y2= lım
(0,y)→(0,0)
3y2
2y2= −3
2
Por tanto, el lımite no existe.
Ejemplo 27. Demuestre que lım(x,y)→(0,0)
xy
x2 + y2no existe.
SOL: El dominio de f es R2\(0, 0). Aproximemos a (0, 0) por el eje x y el eje y.
lım(x,y)→(0,0)
y=0
xy
x2 + y2= lım
(x,0)→(0,0)
0
x2= 0
lım(x,y)→(0,0)
x=0
xy
x2 + y2= lım
(0,y)→(0,0)
0
y2= 0
Sin embargo, esto NOOOOO significa que lım(x,y)→(0,0)
xy
x2 + y2exista, ya que no se ha exa-
minado toda trayectoria a (0, 0). Ahora, usemos todas las rectas que pasan por el origeny = mx.
lım(x,y)→(0,0)
y=mx
xy
x2 + y2= lım
(x,mx)→(0,0)
mx2
x2 +m2x2=
m
1 +m2
24

Ahora el limite depende de la pendiente m de la recta, concluimos que el lımite no existe.Por ejemplo, tomando las rectas y = x y en y = 2x tenemos,
lım(x,y)→(0,0)
y=x
xy
x2 + y2= lım
(x,x)→(0,0)
x2
x2 + x2=
1
2
lım(x,y)→(0,0)
y=2x
xy
x2 + y2= lım
(x,2x)→(0,0)
2x2
x2 + 4x2=
2
5
Ejemplo 28. Demuestre que lım(x,y)→(0,0)
x3y
x6 + y2no existe.
SOL: El dominio de f es . Aproximemos a (0, 0) por el eje x, el eje yy por rectas y = mx
lım(x,y)→(0,0)
y=0
x3y
x6 + y2=
lım(x,y)→(0,0)
x=0
x3y
x6 + y2=
lım(x,y)→(0,0)
y=mx
x3y
x6 + y2=
Si bien esto constituye verdaderamente un numero infinito de trayectorias al origen, ellımite sigue sin existir, ya que tomando la trayectoria dada por y = x3
lım(x,y)→(0,0)
y=x3
x3y
x6 + y2=
Por tanto, concluimos que el lımite no existe.
Ejemplo 29. Demuestre que lım(x,y)→(0,0)
(x2 − y2
x2 + y2
)2
no existe.
SOL: El dominio de f es . Aproximemos a (0, 0) por el eje x, el eje y ypor rectas y = x
lım(x,y)→(0,0)
y=0
(x2 − y2
x2 + y2
)2
=
lım(x,y)→(0,0)
x=0
(x2 − y2
x2 + y2
)2
=
lım(x,y)→(0,0)
y=x
(x2 − y2
x2 + y2
)2
= =
Por tanto, NO tiene lımite en (0, 0).
Ejemplo 30 (Uso de coordenadas polares). Evalue lım(x,y)→(0,0)
10xy2
x2 + y2.
25

SOL: Usando las coordenadas polares x = r cos θ y y = r sen θ tenemos
10xy2
x2 + y2=
10r3 cos θ sen2 θ
r2= 10r cos θ sin2 θ
Por tanto,
lım(x,y)→(0,0)
10xy2
x2 + y2= lım
r→010r cos θ sin2 θ = 0
Observe, que el limite es independiente del valor de θ. De ahi que el limite exista.
Definicion formal de un lımite
Definition 3. Suponga que una funcion f de dos variables se define en cualquierpunto en un disco abierto centrado en (a, b) salvo posiblemente en (a, b). Entonces
lım(x,y)→(a,b)
f(x, y) = L
significa que para toda ǫ > 0, existe un numero δ > 0 tal que
|f(x, y)− L| < ǫ, siempre que 0 <√
(x− a)2 + (y − b)2 < δ
Ejemplo 31. Demuestre que lım(x,y)→(0,0)
10xy2
x2 + y2= 0.
SOL: Sea ǫ > 0 fijo, deseamos encontrar un δǫ > 0 tal que
∣
∣
∣f(x, y)− 0∣
∣
∣ =∣
∣
∣
10xy2
x2 + y2− 0∣
∣
∣ < ǫ, siempre que |(x, y)− (0, 0)| =√
x2 + y2 < δǫ
Observe que
∣
∣
∣
10xy2
x2 + y2− 0∣
∣
∣= 10|x| y2
x2 + y2
≤ 10|x|y2
y2= 10|x| = 10
√x2 ≤ 10
√
x2 + y2
< 10δǫ.
De modo que si se elige δǫ =ǫ10 , logramos tener
∣
∣
∣
10xy2
x2+y2 − 0∣
∣
∣ < 10δǫ = ǫ. Esto demuestra que
lım(x,y)→(0,0)
10xy2
x2 + y2= 0
Ejemplo 32. Demuestre que lım(x,y)→(0,0)
5x2y
x2 + y2= 0.
SOL: Dado ǫ > 0 fijo, debemos encontar un δǫ > 0 tal que, si |(x, y)−(0, 0)| =√
x2 + y2 <δǫ entonces |f(x, y)− 0| < ǫ Observe que
|f(x, y)− f(0, 0)| = | 5x2y
x2 + y2| = 5|y| x2
x2 + y2
≤ 5|y|x2
x2= 5|y| = 5
√
y2 ≤ 5√
x2 + y2
= 5δǫ.
26

Por tanto, se puede elegir δǫ =ǫ5 y concluir que si |(x, y)−(0, 0)| < ǫ
5 entonces |f(x, y)−0| < ǫ
es decir, lım(x,y)→(0,0)
5x2y
x2 + y2= 0.
Ejemplo 33. Demuestre usando la definicion) que lım(x,y)→(1,2)
3x2 + y = 5 .
SOL: Debemos demostrar que para cualquier ǫ > 0 existe un δ > 0 tal que si ‖(x, y) −(1, 2)‖ =
√
(x− 1)2 + (y − 2)2 < δ entonces |(3x2 + y)− 5| < ǫ
Primero observe que
|(3x2 + y)− 5| = |3x2 − 3 + y − 2| ≤ 3|x2 − 1|+ |y − 2| = 3|x− 1||x+ 1|+ |y − 2|Ahora el objetivo es usar δ para controlar los terminos |x− 1|, |x+ 1| y |y − 2|. No es dificilver que
|x− 1| =√
(x− 1)2 ≤√
(x− 1)2 + (y − 2)2 < δ
|y − 2| =√
(y − 1)2 ≤√
(x− 1)2 + (y − 2)2 < δ
Para controlar el termino |x+1| debemos imponer una restriccion sobre el δ. Dicha restriccionconsiste en elegir un valor para δ por ejemplo δ = 1. De manera que el δ que estamos buscandodebera cumplir dos condiciones
√
(x− 1)2 + (y − 2)2 < δ, y δ ≤ 1
Usando la segunda condicion podemos decir que el termino
|x− 1| < δ = 1, ⇒ −1 < x− 1 < 1, ⇒ 1 < x+ 1 < 3, ⇒ |x+ 1| < 3
Por tanto
|(3x2 + y)− 5| ≤ 3|x− 1||x+ 1|+ |y − 2| < (3δ)(3) + δ = 10δ
Como nuestro objetivo final es que |(3x2+y)−5| < ǫ entonces el δ que buscamos debe cumplir,10δ < ǫ, es decir δ ≤ 1
10ǫ. Esto significa que hemos impuesto dos restricciones sobre el δ;δ ≤ 1 y δ ≤ 1
10ǫ. Para que ambas restricciones sean validas debemos tomar δ = mın{1, 110ǫ}
con es δ tenemos demostrado que para cualquier ǫ > 0 elegimos a δ = mın{1, 110ǫ} y entonces
si√
(x− 1)2 + (y − 2)2 < δ entonces |(3x2 + y)− 5| < 10δ = ǫ.
Esto demuestra que lım(x,y)→(1,2)
3x2 + y = 5.
Ejemplo 34. Demuestre que lım(x,y)→(0,0)
sen(x2 + y2)
x2 + y2= 1.
SOL: Dado ǫ > 0 debemos encontrar un valor δ > 0 tal que∣
∣
∣
sen(x2 + y2)
x2 + y2− 1∣
∣
∣ < ǫ, siempre que 0 <√
x2 + y2 < δ
Observe que si h = x2 + y2 entonces lımh→0
senh
h= 1, esto implica que dado ǫ > 0 podemos
hallar un δ1 > 0 con 0 < δ1 < 1 tal que∣
∣
∣
sen(h)
h− 1∣
∣
∣< ǫ, siempre que 0 < |h− 0| < δ1
Observe que, si 0 < |t| < δ1 entonces 0 < t < δ21 < δ1, sacando raiz a ambos lados,0 <
√t <
√δ1. Deshaciendo el reemplazo h = x2 + y2, y tomando como δ =
√δ1 logramos
concluir que
Si 0 <√
x2 + y2 < δ entonces∣
∣
∣
sen(x2 + y2)
x2 + y2− 1∣
∣
∣ < ǫ
Esto demuestra que el lım(x,y)→(0,0)
sen(x2 + y2)
x2 + y2= 1.
27
1.4.1. Continuidad
Definition 4. Una funcion z = f(x, y) es continua en (a, b) si
lım(x,y)→(a,b)
f(x, y) = f(a, b)
Si f no es continua en (a, b) se afirma que es discontinua.
1. La grafica de una funcion continua es una superficie sin quiebres.
2. Una funcion z = f(x, y) es continua sobre un region R del plano xy si f es continuaen cualquier punto en R.
3. La suma y el producto de dos funciones continuas tambien son continuas.
4. El cociente de dos funciones continuas es continuo, excepto en el punto donde eldenominador es cero.
5. Si g es una funcion de dos variables continuas en (a, b) y F es una funcion de unavariable continua en g(a, b) entonces la composicion f(x, y) = F ◦ g(x, y) es continuaen (a, b).
Ejemplo 35. Demuestre que la funcion f(x, y) =x4 − y4
x2 + y2es discontinua en (0, 0), pero
F (x, y) =
x4 − y4
x2 + y2(x, y) 6= (0, 0)
0 (x, y) = (0, 0)
es continua en (0, 0).
SOL: Claramente la funicion f(x, y) es discontinua en (0, 0), ya que f(0, 0) no esta definida.
Por otra parte, F (0, 0) = 0 y
lım(x,y)→(0,0)
x4 − y4
x2 + y2= lım
(x,y)→(0,0)
(x2 − y2)(x2 + y2)
x2 + y2= 0
Por consiguiente, advertimos que lım(x,y)→(0,0)
F (x, y) = F (0, 0)
Ejemplo 36. Sea f una funcion definida por f(x, y) =
x2 + y2 x2 + y2 ≤ 1
0 x2 + y2 > 1Determi-
nar la continuidad de f . ¿Cual es la region de continuidad?
SOL Claramente la funcion f(x, y) es continua en todos puntos (x, y) que verifican x2 +y2 6= 1. En efecto, considere los puntos (x0, y0) que verifican x20 + y20 6= 1
lım(x,y)→(x0,y0)
x20+y2
0<1
f(x, y) = lım(x,y)→(x0,y0)
x2 + y2 = x20 + y20 = f(x0, y0)
lım(x,y)→(x0,y0)
x20+y2
0>1
f(x, y) = lım(x,y)→(x0,y0)
0 = 0 = f(x0, y0)
28
Ahora estudiemos el caso en que (x0, y0) que verifican x20+y
20 = 1 y veamos si lım
(x,y)→(x0,y0)f(x, y)
existe Sea S1 ={
(x, y) : x2 + y2 ≤ 1}
y S2 ={
(x, y) : x2 + y2 > 1}
lım(x,y)→(x0,y0)
P∈S1
f(x, y) = lım(x,y)→(x0,y0)
x2 + y2 = x20 + y20 = 1
lım(x,y)→(x0,y0)
P∈S2
f(x, y) = lım(x,y)→(x0,y0)
0 = 0
Como los limites no coinciden entonces f es discontinua en todos los puntos (x, y) que verificanx2+y2 = 1. De manera que la region de continuidad es todo R2 menos la circuferencia unitariax2 + y2 = 1.
APENDICE: Conjuntos abiertos y cerrados
Ejemplo 37. Demuestre que el conjunto (a, b) ={
x ∈ (a, b) : a < x < b}
es abierto.
SOL: Sea x ∈ (a, b) y consideremos la distancia L = mın{
x− a, b− x}
> 0 entonces
B(x, L) = (x− L, x+ L) ⊂ (a, b)
esto es x es un punto interior de (a, b) y como x es arbitrario, entonces todo punto de (a, b)es interior. Por tanto (a, b) es un conjunto abierto de R
Ejemplo 38. La bola abierta con centro en x0 y radio R > 0, es el conjunto abierto:
B(x0, R) ={
x ∈ Rn : ‖x− x0‖ < R
}
SOL: Sea x ∈ B(x0, R), luego por definicion ‖x − x0‖ < R. De aquı podemos decir quer := R− ‖x− x0‖ > 0 y ası considerar la bola B(x, r).
Nuestro objetivo es demostrar que B(x, r) ⊂ B(x0, R), para ello tomemos un y ∈ B(x, r)el cual verifica, (‖y − x‖ < r) Ahora observe que
‖y − x0‖ = ‖y − x+ x− x0‖ ≤ ‖y − x‖+ ‖x− x0‖ ≤ r + ‖x− x0‖ = R
Es decir, ‖y − x0‖ < R por lo tanto y ∈ B(x0, R)
Ejemplo 39. Probar que A ={
(x, y) ∈ R2 : x > 0
}
SOL: Sea (x, y) ∈ A, entonces x > 0. Por tanto, si tomaremos como radio r = x. Si(x1, y1) ∈ B((x, y), r) tenemos
|x1 − x| =√
(x1 − x)2 =√
(x1 − x)2 + (y1 − y)2 < r = x
y ası x1 − x < x, es decir x1 > 0 por tanto (x1, y1) ∈ A. entonces B((x, y), r) ⊂ A, y portanto A es abierto.
Ejemplo 40. Si A1 y A2 son conjuntos abiertos de R entonces el rectangulo
A1 ×A2 ={
(a1, a2) : a1 ∈ R, y a2 ∈ R
}
, es abierto
SOL: Sea (a1, a2) ∈ A1 × A2 tenemos que demostrar que existe un 2-bola B(a1, a2; r) ⊂A1 × A2. Puesto que A1, y A2 son abiertos en R existe una 1-bola B(a1, r) en A1, y una
29
1-bola B(a2, r2) en A2. Sea r = mın{r1, r2}. Podemos facilmente demostrar que la 2-bola(B(a1, a2; r) ⊂ A1×A2. En efecto, si (x1, x2) es un punto cualquiera de B((a1, a2), r) entonces
‖(x1, y1)− (a1, a2)‖ < r, ası que |x1 − a1| < r1, y |x2 − a2| < r2.
Luego x1 ∈, B(a1, r) y x2 ∈ B(a2, r2). Por consiguiente x1 ∈ A1, y x2 ∈ A2 ası que (x1, x2) ∈A1×A2. Esto demuestra que todo punto de B((a1, a2), r) esta en A1×A2. Por lo tanto todoA1 ×A2 es abierto.
Ejemplo 41. La bola cerrada con centro x0 y radio r ≥ 0 es el conjunto cerrado dado por:
B(x0, r) ={
x ∈ Rn : ‖x− x0‖ ≤ r
}
SOL: : Sea x0 ∈ Rn y r ≥ 0. Probaremos que la bola cerrada B(x0, r) es un conjunto
cerrado, es decir, que su complemento Rn −B(x0, r) es un conjunto abierto.
Sea pues x ∈ Rn − B(x0, r). Mostraremos que existe una bola abierta B(x,R) ⊂ R
n −B(x0, r). Como x no esta en la bola cerrada B(x0, r), se tiene entonces que ‖x− x0‖ > r.
Definamos R = ‖x − x0‖ − r > 0, esto equivale a r = ‖x − x0‖ − R. Veamos queB(x,R) ⊂ R
n − B(x0, r). En efecto, sea y ∈ B(x,R) se tiene entonces ‖y − x‖ < R. Por lotanto,
‖x− x0‖ = ‖x− y + y − x0‖ = ‖x− y‖+ ‖y − x0‖ ≤ R+ ‖y − x0‖Luego, ‖x− x0‖ < R+ ‖y − x0‖. Por tanto, ‖x− x0‖ −R < ‖y − x0‖, es decir r < ‖y − x0‖.Esto significa que y /∈ B(x0, r), es decir, y ∈ R
n −B(x0, r)
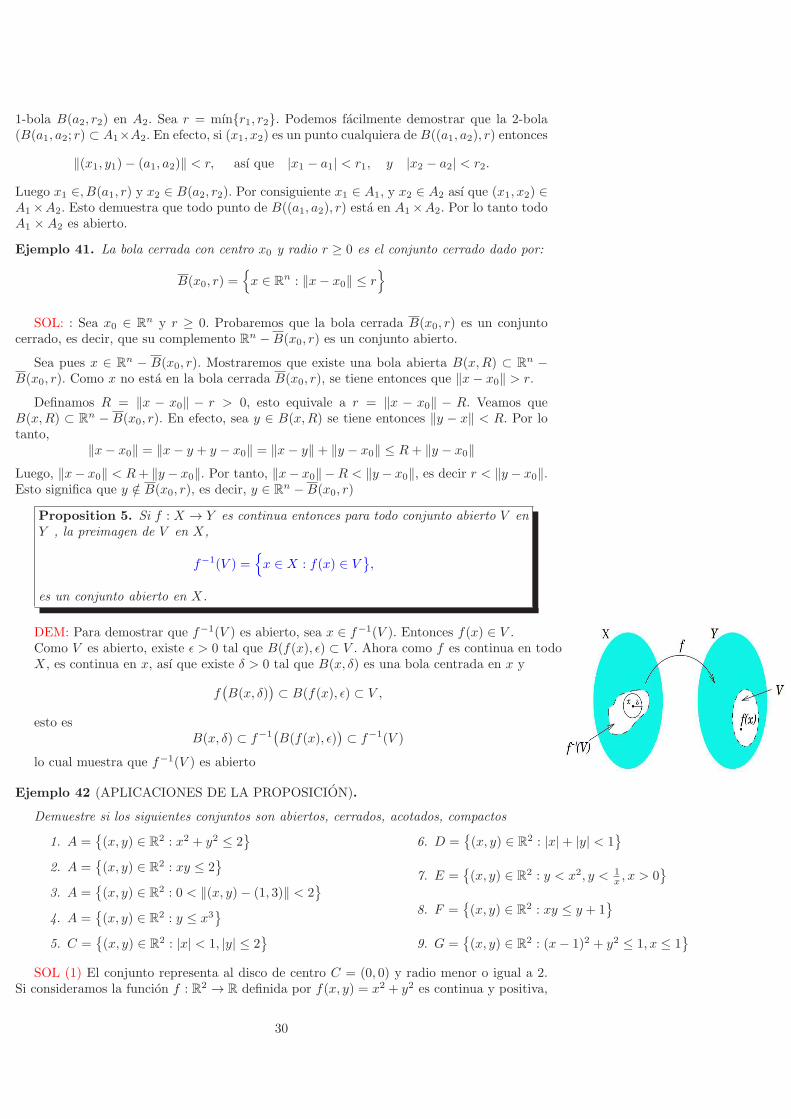
Proposition 5. Si f : X → Y es continua entonces para todo conjunto abierto V enY , la preimagen de V en X,
f−1(V ) ={
x ∈ X : f(x) ∈ V}
,
es un conjunto abierto en X.
DEM: Para demostrar que f−1(V ) es abierto, sea x ∈ f−1(V ). Entonces f(x) ∈ V .Como V es abierto, existe ǫ > 0 tal que B(f(x), ǫ) ⊂ V . Ahora como f es continua en todoX, es continua en x, ası que existe δ > 0 tal que B(x, δ) es una bola centrada en x y
f(
B(x, δ))
⊂ B(f(x), ǫ) ⊂ V ,
esto esB(x, δ) ⊂ f−1
(
B(f(x), ǫ))
⊂ f−1(V )
lo cual muestra que f−1(V ) es abierto
Ejemplo 42 (APLICACIONES DE LA PROPOSICION).
Demuestre si los siguientes conjuntos son abiertos, cerrados, acotados, compactos
1. A ={
(x, y) ∈ R2 : x2 + y2 ≤ 2
}
2. A ={
(x, y) ∈ R2 : xy ≤ 2
}
3. A ={
(x, y) ∈ R2 : 0 < ‖(x, y)− (1, 3)‖ < 2
}
4. A ={
(x, y) ∈ R2 : y ≤ x3
}
5. C ={
(x, y) ∈ R2 : |x| < 1, |y| ≤ 2
}
6. D ={
(x, y) ∈ R2 : |x|+ |y| < 1
}
7. E ={
(x, y) ∈ R2 : y < x2, y < 1
x , x > 0}
8. F ={
(x, y) ∈ R2 : xy ≤ y + 1
}
9. G ={
(x, y) ∈ R2 : (x− 1)2 + y2 ≤ 1, x ≤ 1
}
SOL (1) El conjunto representa al disco de centro C = (0, 0) y radio menor o igual a 2.Si consideramos la funcion f : R2 → R definida por f(x, y) = x2 + y2 es continua y positiva,
30
el conjunto A se puede escribir como
A ={
(x, y) ∈ R2 : x2 + y2 ≤ 2
}
={
(x, y) ∈ R2 : 0 ≤ f(x, y) ≤ 2
}
={
(x, y) ∈ R2 : f(x, y) ∈ [0, 2]
}
= f−1(
[0, 2])
Como el intervalo [0, 2] ⊂ R es cerrado, y f es continua entonces A = f−1(
[0, 2]))
es cerrado.Como tambien esta acotado, el conjunto A es compacto.
SOL (2) Para este conjunto podemos definir la funcion g : R2 → R dada por g(x, y) = xyclaramente es continua, el conjunto A se puede escribir como
A ={
(x, y) ∈ R2 : xy ≤ 2
}
={
(x, y) ∈ R2 : g(x, y) ≤ 2
}
={
(x, y) ∈ R2 : g(x, y) ∈ (−∞, 2]
}
= g−1(
(−∞, 2])
Como el intervalo (∞, 2] ⊂ R es cerrado, y g es continua entonces A = g−1(
(∞, 2]))
escerrado. Pero A no es acotado, por lo tanto A no es compacto.
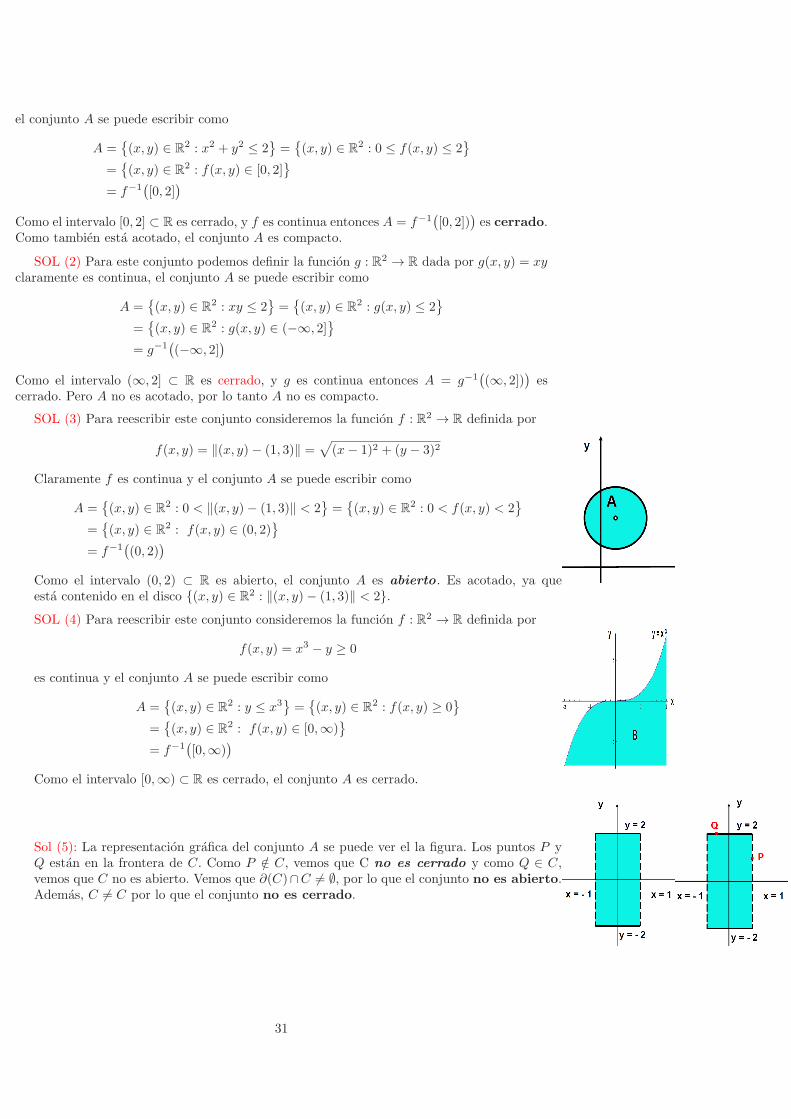
SOL (3) Para reescribir este conjunto consideremos la funcion f : R2 → R definida por
f(x, y) = ‖(x, y)− (1, 3)‖ =√
(x− 1)2 + (y − 3)2
Claramente f es continua y el conjunto A se puede escribir como
A ={
(x, y) ∈ R2 : 0 < ‖(x, y)− (1, 3)‖ < 2
}
={
(x, y) ∈ R2 : 0 < f(x, y) < 2
}
={
(x, y) ∈ R2 : f(x, y) ∈ (0, 2)
}
= f−1(
(0, 2))
Como el intervalo (0, 2) ⊂ R es abierto, el conjunto A es abierto. Es acotado, ya queesta contenido en el disco {(x, y) ∈ R
2 : ‖(x, y)− (1, 3)‖ < 2}.SOL (4) Para reescribir este conjunto consideremos la funcion f : R2 → R definida por
f(x, y) = x3 − y ≥ 0
es continua y el conjunto A se puede escribir como
A ={
(x, y) ∈ R2 : y ≤ x3
}
={
(x, y) ∈ R2 : f(x, y) ≥ 0
}
={
(x, y) ∈ R2 : f(x, y) ∈ [0,∞)
}
= f−1(
[0,∞))
Como el intervalo [0,∞) ⊂ R es cerrado, el conjunto A es cerrado.
Sol (5): La representacion grafica del conjunto A se puede ver el la figura. Los puntos P yQ estan en la frontera de C. Como P /∈ C, vemos que C no es cerrado y como Q ∈ C,vemos que C no es abierto. Vemos que ∂(C)∩C 6= ∅, por lo que el conjunto no es abierto.Ademas, C 6= C por lo que el conjunto no es cerrado.
31

SOL (6) Para reescribir este conjunto D consideremos las funciones definidas de R2 en R
f1(x, y) = y− x− 1 f2(x, y) = y− 1+ x f3(x, y) = y+ x+1 f4(x, y) = y− x+1
Claramente cada fi es continuas y el conjunto D se puede escribir como
D ={
(x, y) ∈ R2 : f1(x, y) < 0, f2(x, y) < 0, f3(x, y) > 0, f(x, y) > 0
}
={
(x, y) ∈ R2 : f1(x, y) < 0
}
∩{
(x, y) ∈ R2 : f2(x, y) < 0,
}
∩{
(x, y) ∈ R2 : f3(x, y) > 0
}
∩{
(x, y) ∈ R2 : f4(x, y) > 0
}
= f−11
(
−∞, 0))
∩ f−12
(
−∞, 0))
∩ f−13
(
0,∞))
∩ f−14
(
0,∞))
Como los intervalos (−∞, 0), (0,∞) ⊂ R son abiertos y cada fi es continua entonces afirma-mos que, el conjunto A es abierto. Observe que D es acotado porque esta contenido en labola de centro (0, 0) y radio 1, y como ∂D ∩D = ∅, el conjunto es abierto.
SOL (7) Para reescribir este conjunto E consideremos las funciones definidas de R2 en R
f1(x, y) = y − x2 f2(x, y) = y − 1
xf3(x, y) = x
Claramente cada fi es continuas y el conjunto E se puede escribir como
E ={
(x, y) ∈ R2 : y < x2, y <
1
x, x > 0
}
={
(x, y) ∈ R2 : f1(x, y) < 0, f2(x, y) < 0, f3(x, y) > 0,
}
={
(x, y) ∈ R2 : f1(x, y) < 0
}
∩{
(x, y) ∈ R2 : f2(x, y) < 0,
}
∩{
(x, y) ∈ R2 : f3(x, y) > 0
}
= f−11
(
−∞, 0))
∩ f−12
(
−∞, 0))
∩ f−13
(
0,∞))
Como los intervalos (−∞, 0), (0,∞) ⊂ R son abiertos y cada fi es continua entonces afir-mamos que, el conjunto E es abierto. Observe que E no es acotado y como ∂E ∩ E = ∅, elconjunto es abierto.
Sol (8) Para este conjunto podemos definir la funcion g : R2 → R dada por g(x, y) = xy− yclaramente es continua, el conjunto F se puede escribir como
F ={
(x, y) ∈ R2 : xy ≤ y + 1
}
={
(x, y) ∈ R2 : g(x, y) ≤ 1
}
={
(x, y) ∈ R2 : g(x, y) ∈ (−∞, 1]
}
= g−1(
(−∞, 1])
Como el intervalo (∞, 1] ⊂ R es cerrado, y g es continua entonces F = g−1(
(∞, 1]))
escerrado. Pero F no es acotado, por lo tanto F no es compacto. Como ∂(F ) ⊂ F , el conjuntoF es cerrado.
32
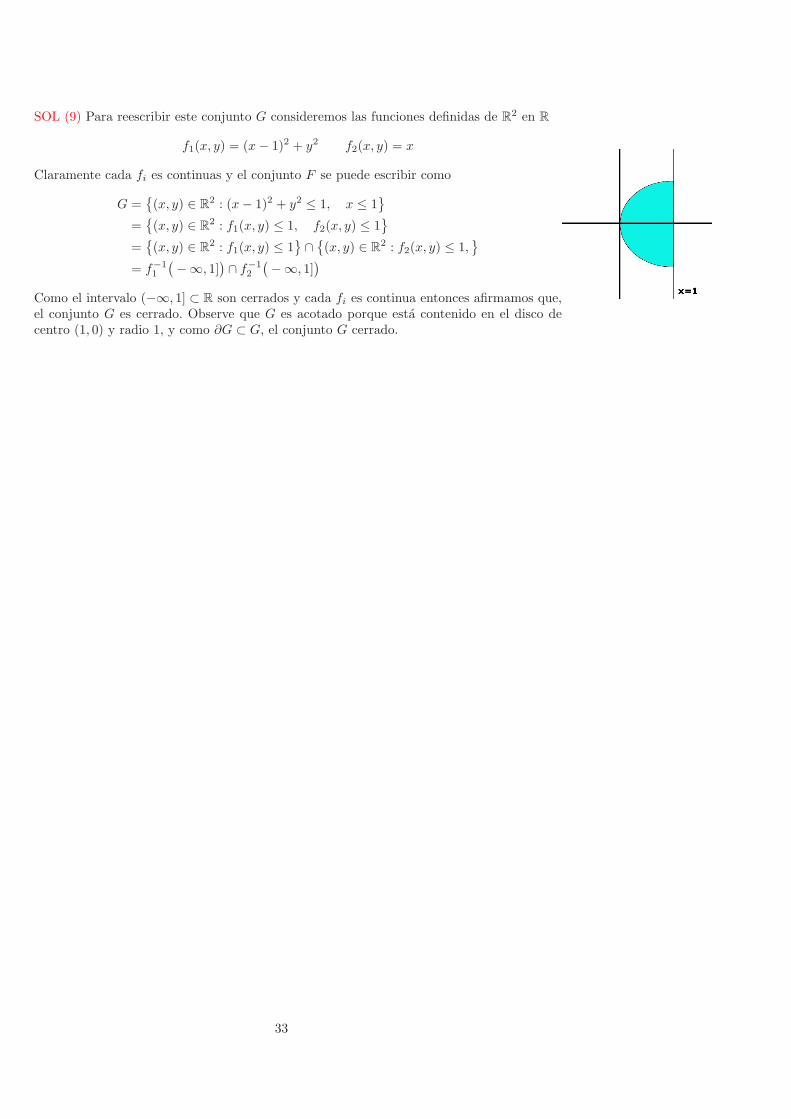
SOL (9) Para reescribir este conjunto G consideremos las funciones definidas de R2 en R
f1(x, y) = (x− 1)2 + y2 f2(x, y) = x
Claramente cada fi es continuas y el conjunto F se puede escribir como
G ={
(x, y) ∈ R2 : (x− 1)2 + y2 ≤ 1, x ≤ 1
}
={
(x, y) ∈ R2 : f1(x, y) ≤ 1, f2(x, y) ≤ 1
}
={
(x, y) ∈ R2 : f1(x, y) ≤ 1
}
∩{
(x, y) ∈ R2 : f2(x, y) ≤ 1,
}
= f−11
(
−∞, 1])
∩ f−12
(
−∞, 1])
Como el intervalo (−∞, 1] ⊂ R son cerrados y cada fi es continua entonces afirmamos que,el conjunto G es cerrado. Observe que G es acotado porque esta contenido en el disco decentro (1, 0) y radio 1, y como ∂G ⊂ G, el conjunto G cerrado.
33

Calculo Vectorial
Diferenciacion Vectorial
Recordemos que para una funcion de una variable f : I ⊂ R → R definida en el intervaloabierto I de R, se define la derivada de f en x0 ∈ I, denotada por f ′(x0), como el valor dellımite
f ′(x0) = lımh→0
f(x0 + h)− f(x0)
h
cuando este existe (en cuyo caso decimos que f es diferencıable en x0).
1. Si f ′(x0) existe, su valor nos da la pendiente de la recta tangente a la grafica de lafuncion y = f(x) en el punto (x0, f(x0)).
2. Las funciones importantes a estudiar, bajo la optica del calculo, son las funciones dife-renciables.
3. Cuando se tiene una funcion diferenciable, lo importante es obtener informacion de lafuncion a partir de su derivada (la informacion que se obtiene de f a partir del valorde f ′(x0) es local, alrededor de x0).
4. El simple hecho de la existencia de f ′(x0) nos habla del comportamiento suave de lagrafica de la funcion en los alrededores del punto (x0, f(x0));
5. El signo de f ′(x0) nos habla del crecimiento y/o decrecimiento de la funcion alrededordel punto, etc. Este es,
6. En realidad, uno de los objetivos principales del calculo: obtener informacion de unafuncion diferenciable a partir de su derivada.
Resulta deseable, por tanto, disponer de un concepto de “diferenciabilidad”para funcionesde varias variables semejante a aquel que conocemos para funciones de una variable.
Definition 6. Sea f : U ⊂ R2 → R una funcion definida en el abierto U de R
2.entonces la derivada parcial con respecto a x en un punto (x, y) es
∂f
∂x(x, y) = lım
h→0
f(x+ h, y)− f(x, y)
h
y la derivada parcial con respecto a y es
∂f
∂y(x, y) = lım
h→0
f(x, y + h)− f(x, y)
h
siempre que exista el lımite.
Observe que el la definicion∂f
∂y(x, y) la variable y no cambia en el proceso del lımite,
en otras palabras, y se mantiene fija.
Obverse que el la definicion de∂f
∂y(x, y) la variable x no cambia en el proceso del lımite,
en otras palabras, y se mantiene fija.
34

En un nivel practico
• Para calcular∂f
∂x, hay que tomar a y como constante y derivar respecto a x.
• Para calcular∂f
∂y, hay que tomar a x como constante y derivar respecto a y.
Las derivadas parciales son conceptos “puntuales”, es decir, se habla de la derivadaparcial de una funcion en un punto dado (de su dominio).
En general, se debe hacer explıcito el punto (x0, y0) donde estan evaluados∂f
∂xy∂f
∂y
escribiendo∂f
∂x(x0, y0) y
∂f
∂y(x0, y0).
Muchas veces calculamos las derivadas parciales “en un punto cualquiera (x, y) de
su dominio”. En tal caso, basta escribir∂f
∂xy∂f
∂y(fx y fy, o D1f y D2f , respectiva-
mente).
Ejemplo 43. Sea f : U ⊂ R2 → R, f(x, y) = x2y3. Entonces
∂f
∂x= lım
h→0
f(x+ h, y)− f(x, y)
h
=
∂f
∂y= lım
h→0
f(x, y + h)− f(x, y)
h
=
En este ejemplo se observa que, como era de esperarse, las derivadas parciales de unafuncion z = f(x, y) se obtienen “derivando parcialmenteccada una de las variables, y conser-vando la otra como constante (es decir, pensando en la funcion f como dependiente solo dex o de y)
Ejemplo 44. Calcular las derivadas parciales, de las siguientes funciones
1. f(x, y) = x2 + 2xy2 − y3.
2. z = (x2 + y2)exy.
3. z = 4x3y − 24x2 + y6 + 1,
NOTA Sımbolos como ∂∂x y ∂
∂y se denominan operadores de diferenciacion parcial
y denotan la operacion de tomar una derivada parcial, en este caso con respecto a x y y. Porejemplo,
∂
∂x(x3y2 − sin y) =
∂
∂x(x3y2)− ∂
∂x(sin y)
∂
∂y(ex
4y5 − sinxy) =∂
∂x(ex
4y5
)− ∂
∂y(sinxy)
Ejemplo 45. Encuentre fx y fy (o zx y zy) de las siguientes funciones
1. f(x, y) = x4y6 cos(x3y2 − y3).
2. z = (ln(x2y) + tan(xy2)
35

3. z = sin(√
4x3y − 24x2y6 + 1),
Retomando el interes de llegar a establecer una nocion de diferenciabilidad equivalente ala de (simplısima) para funciones de una variable (en cuyo caso diferenciabilidad equivale aexistencia de la derivada), nos podrıamos preguntar
¿La sola existencia de las derivadas parciales de una funcion f :U ⊂ R
n → R en un punto x0 ∈ U nos puede dar un concepto dediferenciabilidad?.
Es decir, si establecemos la definicion:
“la funcion f : U ⊂ Rn → R definida en el conjunto abierto U de
Rn es diferenciable en el punto x0 ∈ U si las derivadas parciales
∂y∂xi
(x0), i = 1, 2, . . . , n existen”,
No podemos negar que esta “definicion”de diferenciabilidad para funciones de varias va-riables goza de una gran simplicidad. Serıa bueno que esta fuera en verdad la definicionque buscamos. Sin embargo, este anhelo pronto se viene abajo pues es facil convencerseque la existencia de las derivadas parciales de una funcion, (siendo una condicion necesaria)esta muy lejos de ser una condicion suficiente para que la funcion sea diferenciable en elsentido buscado.
Ejemplo 46. Considere la funcion f : R2 → R definida por f(x, y) =
xy
x2 + y2(x, y) 6= (0, 0)
0 (x, y) = (0, 0)
Calculemos ∂f∂x (0, 0) y
∂f∂y (0, 0). Segun la definicion de derivadas parciales, tenemos
∂f
∂x(0, 0) =
∂f
∂y(0, 0) =
de modo que la funcion tiene ambas derivadas parciales iguales a en el origen. Sinembargo, no es difıcil demostrar que esta funcion NOOOOO es continua en (0, 0). (VerEjemplo 27)
Como conclusion tenemos que para funciones de varias variables la diferenciabilidadNOOOO implica la continuidad.
Ejemplo 47. Dada f(x, y) =
xy(x2 − y2)
x2 + y2(x, y) 6= (0, 0)
0 (x, y) = (0, 0)
Muestre que
(a) fx(0, y) = −y para toda y (b) fy(x, 0) = x para toda x
SOL: Para y 6= 0, se tiene
fx(0, y) =∂f
∂x(0, y) =
=
Luego, para y = 0 resulta fx(0, 0) = 0
36
SOL: Para x 6= 0, se tiene
fy(x, 0) =∂f
∂y(x, 0) =
=
Luego, para x = 0 resulta fy(0, 0) = 0
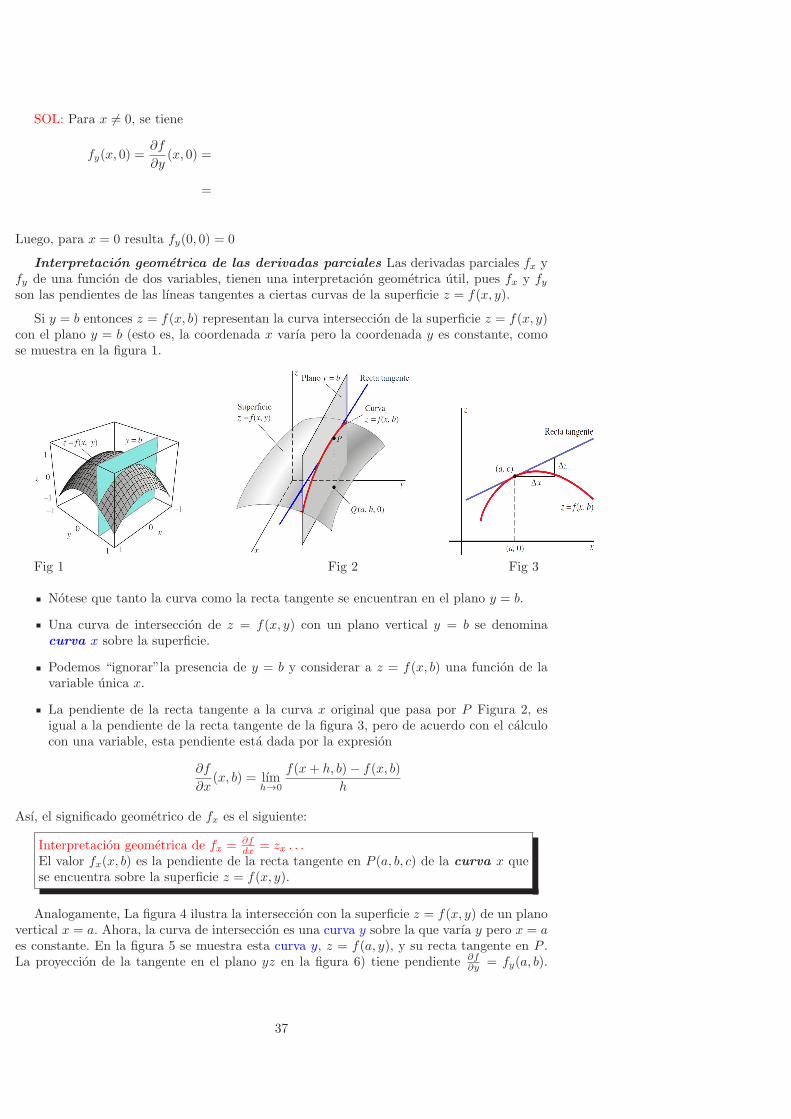
Interpretacion geometrica de las derivadas parciales Las derivadas parciales fx yfy de una funcion de dos variables, tienen una interpretacion geometrica util, pues fx y fyson las pendientes de las lıneas tangentes a ciertas curvas de la superficie z = f(x, y).
Si y = b entonces z = f(x, b) representan la curva interseccion de la superficie z = f(x, y)con el plano y = b (esto es, la coordenada x varıa pero la coordenada y es constante, comose muestra en la figura 1.
Fig 1 Fig 2 Fig 3
Notese que tanto la curva como la recta tangente se encuentran en el plano y = b.
Una curva de interseccion de z = f(x, y) con un plano vertical y = b se denominacurva x sobre la superficie.
Podemos “ignorar”la presencia de y = b y considerar a z = f(x, b) una funcion de lavariable unica x.
La pendiente de la recta tangente a la curva x original que pasa por P Figura 2, esigual a la pendiente de la recta tangente de la figura 3, pero de acuerdo con el calculocon una variable, esta pendiente esta dada por la expresion
∂f
∂x(x, b) = lım
h→0
f(x+ h, b)− f(x, b)
h
Ası, el significado geometrico de fx es el siguiente:
Interpretacion geometrica de fx = ∂fdx = zx . . .
El valor fx(x, b) es la pendiente de la recta tangente en P (a, b, c) de la curva x quese encuentra sobre la superficie z = f(x, y).
Analogamente, La figura 4 ilustra la interseccion con la superficie z = f(x, y) de un planovertical x = a. Ahora, la curva de interseccion es una curva y sobre la que varıa y pero x = aes constante. En la figura 5 se muestra esta curva y, z = f(a, y), y su recta tangente en P .La proyeccion de la tangente en el plano yz en la figura 6) tiene pendiente ∂f
∂y = fy(a, b).
37
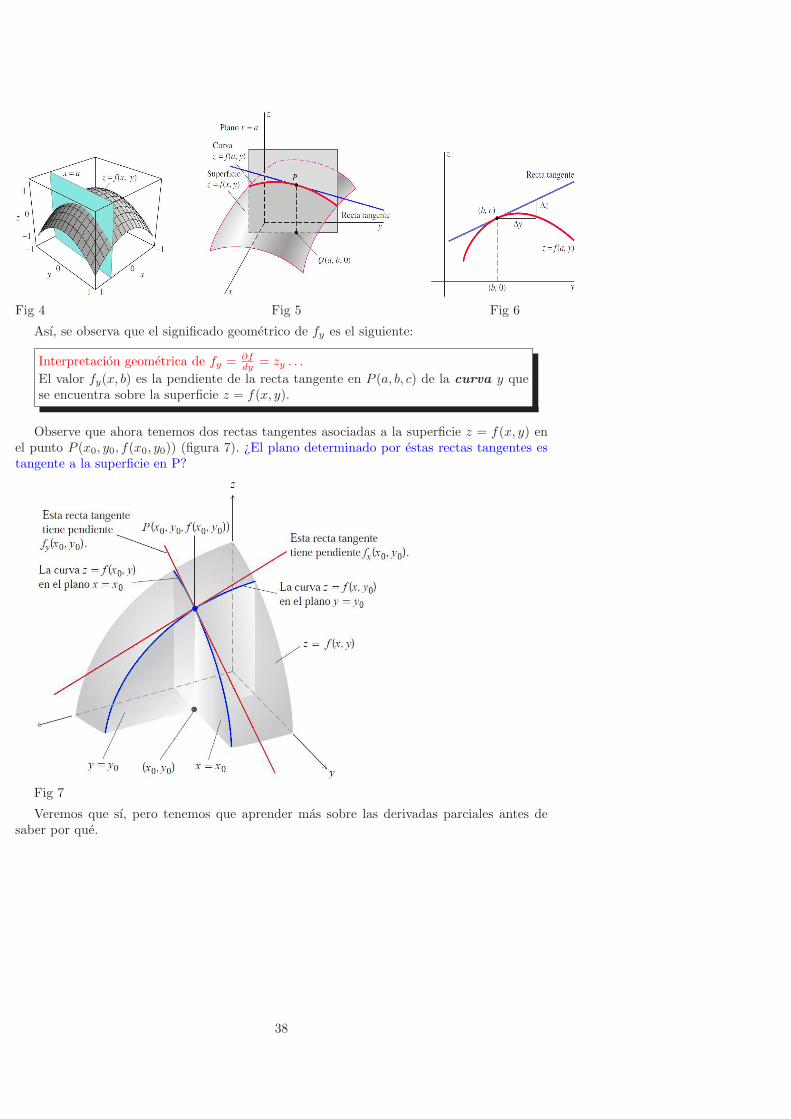
Fig 4 Fig 5 Fig 6
Ası, se observa que el significado geometrico de fy es el siguiente:
Interpretacion geometrica de fy = ∂fdy = zy . . .
El valor fy(x, b) es la pendiente de la recta tangente en P (a, b, c) de la curva y quese encuentra sobre la superficie z = f(x, y).
Observe que ahora tenemos dos rectas tangentes asociadas a la superficie z = f(x, y) enel punto P (x0, y0, f(x0, y0)) (figura 7). ¿El plano determinado por estas rectas tangentes estangente a la superficie en P?
Fig 7
Veremos que sı, pero tenemos que aprender mas sobre las derivadas parciales antes desaber por que.
38

Ejemplo 48. Considere un plano x = 1 el cual corta al paraboloide z = x2 + y2 en unaparabola. Determine la pendiente de la tangente a la parabola en (1, 2, 5)
SOL: La pendiente es el valor de la derivada parcial∂z
∂yen (1, 2):
∂z
∂y
∣
∣
∣
∣
∣
(1,2)
=
Ejemplo 49. Hallar las pendientes en las direcciones de x y de y de la superficie dada por
f(x, y) = −x2
2 − y2 + 258 en el punto ( 12 , 1, 2).
SOL: Las derivadas parciales de f con respecto a x y a y en ( 12 , 1, 2):
∂f
∂x
∣
∣
∣
∣
∣
( 12 ,1)
=
∂f
∂y
∣
∣
∣
∣
∣
( 12 ,1)
=
Ejemplo 50. Hallar las pendientes de la superficie dada por f(x, y) = 1−(x−1)2−(y−2)2
en el punto (1, 2, 1), en las direcciones de x y de y.
SOL: Las derivadas parciales de f con respecto a x y a y en (1, 2, 1):
∂f
∂x
∣
∣
∣
∣
∣
(1,2)
=
∂f
∂y
∣
∣
∣
∣
∣
(1,2)
=
Sin importar cuantas variables haya, las derivadas parciales se pueden interpretar comotasas, velocidades o razones de cambio.
Ejemplo 51. El area de un paralelogramo con lados adyacentes a y b entre los que se formaun angulo θ esta dada por A = ab sen θ,
1. Hallar la tasa o la razon de cambio de A respecto de a si a = 10, b = 20 y θ = π/6
2. Hallar la tasa o la razon de cambio de A respecto de θ si a = 10, b = 20 y θ = π/6
39

SOL (1): Para hallar la tasa o la razon de cambio del area respecto de a, se mantienen by θ constantes y se deriva respecto de a para obtener:
∂A
∂a
∣
∣
∣
∣
∣
(10,20,π6 )
=
SOL (2): Para hallar la tasa o la razon de cambio del area respecto de θ, se mantienen a y bconstantes y se deriva respecto de a para obtener:
∂A
∂θ
∣
∣
∣
∣
∣
(10,20,π6 )
=
Ejemplo 52. Halle la ecuacion vectorial de la recta tangente a la curva de interseccion dela superficie z = f(x, y) =
√
64− 5x2 − 7y2 y el plano x = −2, en el punto P (−2, 2, 4).
SOL: No es dificil ver que la interseccion de estas superficies es la traza de la superficiecon el plano x = 2 y su ecuacion es dada por z =
√
44− 7y2 ahora si parametrizamos estatraza C con y = t entonces sus coordenadas estan dadas por
x(t) = 2, y(t) = t, z(t) =√
44− 7t2
de manera que C ′(t) es un vector tangente a esta traza, observe que c′(t) = (0, 1, z′(t)), luegola recta tangente en P (−2, 2, 4) es
l(s) = (−2, 2, 4) + sC ′(2) =
Derivadas parciales de una funcion de tres o mas variables:
El concepto de derivada parcial puede extenderse de manera natural a funciones de treso mas variables. Por ejemplo, una funcion w = f(x, y, z) tiene tres derivadas parciales, quese definen como
∂f
∂x= lım
h→0
f(x+ h, y, z)− f(x, y, z)
haquı y, z son constantes
∂f
∂y= lım
h→0
f(x, y + h, z)− f(x, y, z)
haquı x, z son constantes
∂f
∂z= lım
h→0
f(x, y, z + h)− f(x, y, z)
haquı x, y son constantes
Las derivadas parciales de las funciones con aun mas variables se definen de manera analoga.Una funcion f(x1, x2, . . . , xn) de n variables tiene n derivadas parciales, una respecto a cadauna de sus variables independientes. Por ejemplo,
∂f
∂xi= lım
h→0
f(x1, . . . , xi−1, xi + h, xi+1, . . . , xn)− f(x1, . . . , xn)
haquı xi son constantes
∂f
∂xi= lım
h→0
f(
(x1, . . . , xi, . . . , xn) + (0, . . . , h, . . . , 0))
− f(x1, . . . , xn)
h
∂f
∂xi= lım
h→0
f(
(x1, . . . , xn) + h(0, . . . , 1, . . . , 0))
− f(x1, . . . , xn)
h
∂f
∂xi= lım
h→0
f(
x+ hei
)
− f(x)
hdonde x = (x1 . . . , xn)
40

Esta ultima ecuacion es conocida como la Derivada Direccional de la funcion f en la direcciondel vector ei.
Ejemplo 53. Si f(x, y, t) = e−3πt cos(4x) sen(6y), entonces las derivadas parciales con res-pecto a x, y y t son:,
SOL:
∂f
∂x=
∂f
∂y=
∂f
∂t=
Ejemplo 54. Si g(x, y, u, v) = eux cos(vy), entonces las derivadas parciales con respecto ax, y, u y v son:,
SOL:
∂f
∂x=
∂f
∂y=
∂f
∂u=
∂f
∂v=
Derivadas parciales de orden superior Las derivadas parciales de primer orden, fxy fy, son en sı mismas funciones de x y y, por lo que se pueden derivar respecto de x o dey. Las derivadas parciales de fx(x, y) y fy(x, y) se denominan derivadas parciales de segundoorden de f . Existen cuatro de ellas porque hay cuatro posibilidades en el orden de derivacion:
(fx)x = fxx =∂fx∂x
=∂
∂x
(∂f
∂x
)
=∂2f
∂x2
(fx)y = fxy =∂fx∂y
=∂
∂y
(∂f
∂x
)
=∂2f
∂y∂x
(fy)x = fyx =∂fy∂x
=∂
∂x
(∂f
∂y
)
=∂2f
∂x∂y
(fy)y = fyy =∂fy∂y
=∂
∂y
(∂f
∂y
)
=∂2f
∂y2
Si se escribe z = f(x, y), entonces se puede reemplazar cada ocurrencia del sımbolo f por z.
1. La funcion fxy es la derivada parcial de segundo orden de f respecto a x primero ydespues respecto a y;
2. fyx es el resultado de derivar respecto a y primero y posteriormente respecto a x.
3. Aunque fxy y fyx no son necesariamente iguales, en el calculo avanzado se demuestraque estas dos derivadas parciales “mixtas”de segundo orden son iguales si ambas soncontinuas.
41
4. El orden de los sımbolos en los subındices de las parciales mixtas es justamente loopuesto al orden de los sımbolos cuando se usa la notacion de operador de diferenciacionparcial:
(fx)y = fxy =∂fx∂y
=∂
∂y
(∂f
∂x
)
=∂2f
∂y∂x
(fy)x = fyx =∂fy∂x
=∂
∂x
(∂f
∂y
)
=∂2f
∂x∂y
Ejemplo 55. Hallar las derivadas parciales de segundo orden de f(x, y) = 2xy2−3x+3x2y2
y determinar el valor de fxy(1,−2)
Ejemplo 56. Si f(x, y) = x sin y + yex determine fxx, fxy, fyy y fyx.
Aunque no se demostrara, el siguiente teorema enuncia que bajo ciertas condiciones esirrelevante el orden en el cual se efectua una derivada parcial de segundo orden mixta; estoes, las derivadas parciales mixtas fxy y fyx son iguales.
Teorema 7. Sea f una funcion de dos variables. Si las derivadas parciales fx, fy,fxy y son continuas en algun disco abierto, entonces
fxy = fyx
en cada punto sobre el disco.
Ejemplo 57. Encuentre∂2w
∂x∂yy∂2w
∂y∂xsi w = xy+
ey
y2 + 1. Que opinas de estos dos calculos?
SOL:
Aunque trabajaremos principalmente con derivadas parciales de primer y segundo orden,pues estas aparecen con mayor frecuencia en las aplicaciones, no hay lımite teorico para el
42
numero de veces que se pueda derivar una funcion, siempre que las derivadas implicadasexistan. Ası, podemos obtener derivadas de tercer y cuarto orden, denotadas por sımboloscomo
∂3w
∂x∂y2= fyyx,
∂4w
∂x2∂y2= fyyxx
etcetera. Como con las derivadas de segundo orden, el orden de derivacion no importa, mien-tras todas las derivadas hasta el orden en cuestion sean continuas.
Ejemplo 58. Si f(x, y, z) =√
x2 + y4 + z6 determine fyzz
SOL:
Ejemplo 59. Mostrar que fxz = fzx y fxzz = fzxz = fzzx para la funcion dada porf(x, y, z) = yex + x ln z
SOL:
43
Diferenciabilidad de z = f(x, y)
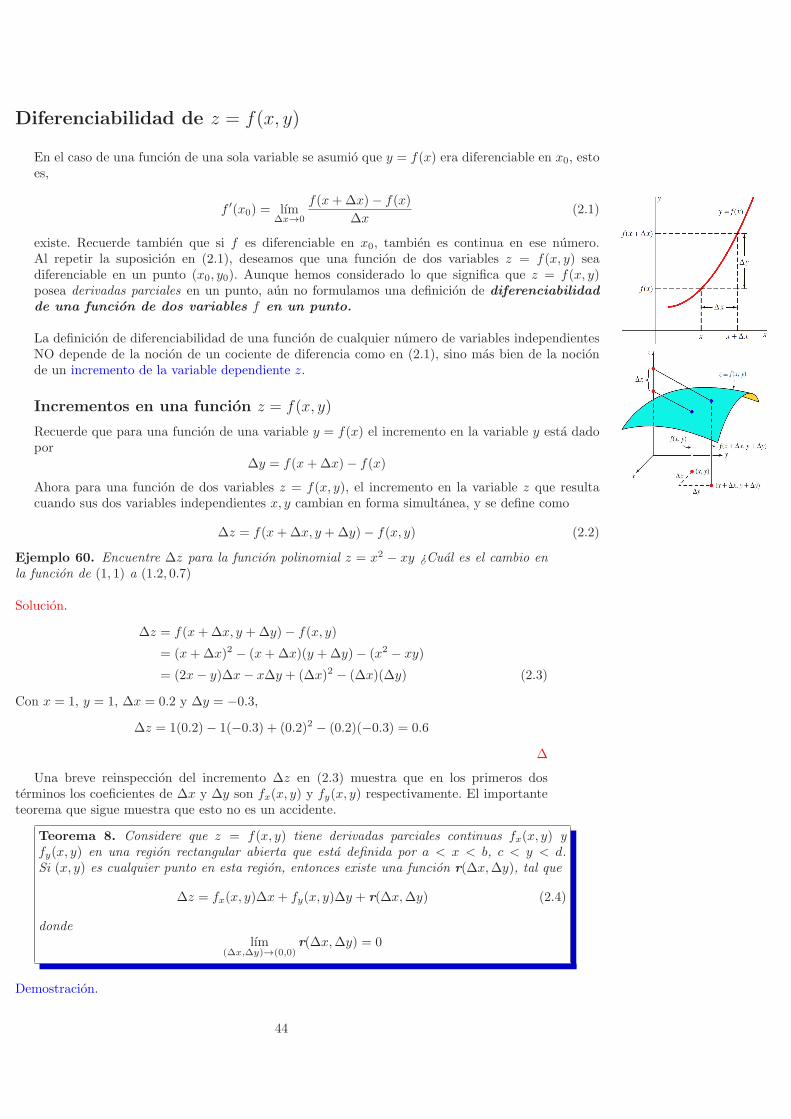
En el caso de una funcion de una sola variable se asumio que y = f(x) era diferenciable en x0, estoes,
f ′(x0) = lım∆x→0
f(x+∆x)− f(x)
∆x(2.1)
existe. Recuerde tambien que si f es diferenciable en x0, tambien es continua en ese numero.Al repetir la suposicion en (2.1), deseamos que una funcion de dos variables z = f(x, y) seadiferenciable en un punto (x0, y0). Aunque hemos considerado lo que significa que z = f(x, y)posea derivadas parciales en un punto, aun no formulamos una definicion de diferenciabilidad
de una funcion de dos variables f en un punto.
La definicion de diferenciabilidad de una funcion de cualquier numero de variables independientesNO depende de la nocion de un cociente de diferencia como en (2.1), sino mas bien de la nocionde un incremento de la variable dependiente z.
Incrementos en una funcion z = f(x, y)
Recuerde que para una funcion de una variable y = f(x) el incremento en la variable y esta dadopor
∆y = f(x+∆x)− f(x)
Ahora para una funcion de dos variables z = f(x, y), el incremento en la variable z que resultacuando sus dos variables independientes x, y cambian en forma simultanea, y se define como
∆z = f(x+∆x, y +∆y)− f(x, y) (2.2)
Ejemplo 60. Encuentre ∆z para la funcion polinomial z = x2 − xy ¿Cual es el cambio enla funcion de (1, 1) a (1.2, 0.7)
Solucion.
∆z = f(x+∆x, y +∆y)− f(x, y)
= (x+∆x)2 − (x+∆x)(y +∆y)− (x2 − xy)
= (2x− y)∆x− x∆y + (∆x)2 − (∆x)(∆y) (2.3)
Con x = 1, y = 1, ∆x = 0.2 y ∆y = −0.3,
∆z = 1(0.2)− 1(−0.3) + (0.2)2 − (0.2)(−0.3) = 0.6
∆
Una breve reinspeccion del incremento ∆z en (2.3) muestra que en los primeros dosterminos los coeficientes de ∆x y ∆y son fx(x, y) y fy(x, y) respectivamente. El importanteteorema que sigue muestra que esto no es un accidente.
Teorema 8. Considere que z = f(x, y) tiene derivadas parciales continuas fx(x, y) yfy(x, y) en una region rectangular abierta que esta definida por a < x < b, c < y < d.Si (x, y) es cualquier punto en esta region, entonces existe una funcion r(∆x,∆y), tal que
∆z = fx(x, y)∆x+ fy(x, y)∆y + r(∆x,∆y) (2.4)
dondelım
(∆x,∆y)→(0,0)r(∆x,∆y) = 0
Demostracion.
44
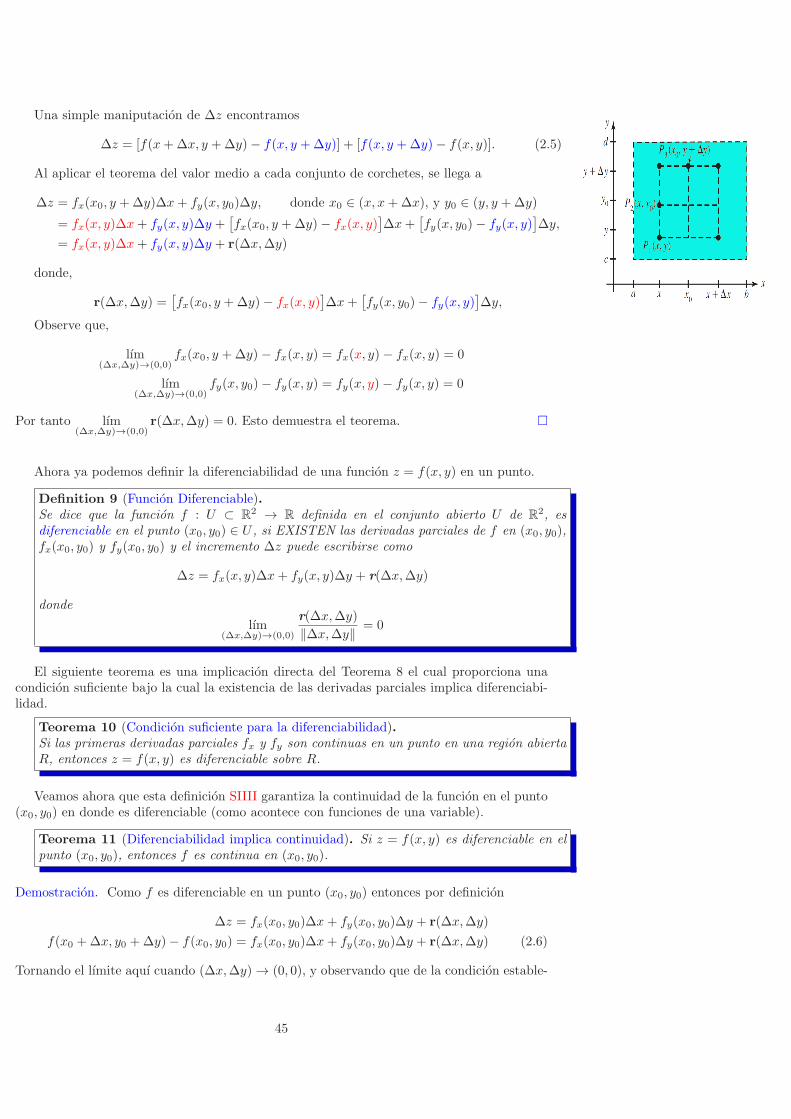
Una simple maniputacion de ∆z encontramos
∆z = [f(x+∆x, y +∆y)− f(x, y +∆y)] + [f(x, y +∆y)− f(x, y)]. (2.5)
Al aplicar el teorema del valor medio a cada conjunto de corchetes, se llega a
∆z = fx(x0, y +∆y)∆x+ fy(x, y0)∆y, donde x0 ∈ (x, x+∆x), y y0 ∈ (y, y +∆y)
= fx(x, y)∆x+ fy(x, y)∆y +[
fx(x0, y +∆y)− fx(x, y)]
∆x+[
fy(x, y0)− fy(x, y)]
∆y,
= fx(x, y)∆x+ fy(x, y)∆y + r(∆x,∆y)
donde,
r(∆x,∆y) =[
fx(x0, y +∆y)− fx(x, y)]
∆x+[
fy(x, y0)− fy(x, y)]
∆y,
Observe que,
lım(∆x,∆y)→(0,0)
fx(x0, y +∆y)− fx(x, y) = fx(x, y)− fx(x, y) = 0
lım(∆x,∆y)→(0,0)
fy(x, y0)− fy(x, y) = fy(x, y)− fy(x, y) = 0
Por tanto lım(∆x,∆y)→(0,0)
r(∆x,∆y) = 0. Esto demuestra el teorema. �
Ahora ya podemos definir la diferenciabilidad de una funcion z = f(x, y) en un punto.
Definition 9 (Funcion Diferenciable).Se dice que la funcion f : U ⊂ R
2 → R definida en el conjunto abierto U de R2, es
diferenciable en el punto (x0, y0) ∈ U , si EXISTEN las derivadas parciales de f en (x0, y0),fx(x0, y0) y fy(x0, y0) y el incremento ∆z puede escribirse como
∆z = fx(x, y)∆x+ fy(x, y)∆y + r(∆x,∆y)
donde
lım(∆x,∆y)→(0,0)
r(∆x,∆y)
‖∆x,∆y‖ = 0
El siguiente teorema es una implicacion directa del Teorema 8 el cual proporciona unacondicion suficiente bajo la cual la existencia de las derivadas parciales implica diferenciabi-lidad.
Teorema 10 (Condicion suficiente para la diferenciabilidad).Si las primeras derivadas parciales fx y fy son continuas en un punto en una region abiertaR, entonces z = f(x, y) es diferenciable sobre R.
Veamos ahora que esta definicion SIIII garantiza la continuidad de la funcion en el punto(x0, y0) en donde es diferenciable (como acontece con funciones de una variable).
Teorema 11 (Diferenciabilidad implica continuidad). Si z = f(x, y) es diferenciable en elpunto (x0, y0), entonces f es continua en (x0, y0).
Demostracion. Como f es diferenciable en un punto (x0, y0) entonces por definicion
∆z = fx(x0, y0)∆x+ fy(x0, y0)∆y + r(∆x,∆y)
f(x0 +∆x, y0 +∆y)− f(x0, y0) = fx(x0, y0)∆x+ fy(x0, y0)∆y + r(∆x,∆y) (2.6)
Tornando el lımite aquı cuando (∆x,∆y) → (0, 0), y observando que de la condicion estable-
45
cida en la definicion para el residuo r(∆x,∆y), se deduce que
lım(∆x,∆y)→(0,0)
r(∆x,∆y)
‖(∆x,∆y)‖ = 0 ⇒ lım(∆x,∆y)→(0,0)
r(∆x,∆y) = 0
Por tanto,
lım(∆x,∆y)→(0,0)
[f(x0+∆x, y0+∆y) = lım(∆x,∆y)→(0,0)
f(x0, y0)+fx(x0, y0)∆x+fy(x0, y0)∆y+r(∆x,∆y) = f(x0, y0)
Si se considera x = x0 +∆x, y = y0 +∆y, entonces el ultimo resultado es equivalente a
lım(x,y)→(x0,y0)
f(x, y) = f(x0, y0)
Por tanto f es continua en (x0, y0). �
Ejemplo 61. Considere la funcion f : R2 → R definida por f(x, y) =
xy
x2 + y2(x, y) 6= (0, 0)
0 (x, y) = (0, 0)
no puede ser diferenciable en el origen.
SOL: Del Ejemplo 46 sabemos que f no es continua en (0, 0) por tanto NOOOOO esdiferenciable en (0, 0). Otra forma de ver la no diferenciabilidad (0, 0) es usando la propiadefinicion de ser diferenciable, primero que todo las derivadas parciales SI existen fx(0, 0) =fy(0, 0) = 0 (Ejemplo 46). Ahora veamos incremento en ∆z en puntos cercanos de (0, 0)
∆z = fx(0, 0)∆x+ fy(0, 0)∆y + r(∆x,∆y)
f(
(0, 0) + (∆x,∆y))
− f(0, 0) = (0)∆x+ (0)∆y + r(∆x,∆y)
de donde
r(∆x,∆y) =∆x∆y
(∆x)2 + (∆y)2
y
lım(∆x,∆y)→(0,0)
r(∆x,∆y)
‖(∆x,∆y)‖ = lım(∆x,∆y)→(0,0)
∆x∆y(
(∆x)2 + (∆y)2)3/2
= lım(∆x,∆y)→(0,0)
∆x=∆y
(∆x)2
23/2|∆x|3 = ∞ (NO EXISTE)
Ejemplo 62. Verifiquemos que la funcion f(x, y) = xy2 es diferenciable en punto (0, 0).
SOL: No es difıcil ver que existen. Ahora veamos el in-cremento cerca del (0, 0)
∆z = fx(0, 0)∆x+ fy(0, 0)∆y + r(∆x,∆y)
=
de donder(∆x,∆y) =
y
lım(∆x,∆y)→(0,0)
r(∆x,∆y)
‖(∆x,∆y)‖ = =
Por tanto es diferenciable en (0, 0)
46

OBSERVACIONES
1. A medida que (∆x,∆y) tiende a cero, r(∆x,∆y) tambien tiende a cero (r sera llamadoerror o residuo, pensando en que es “lo que le falta al plano tangente para describir ala superficie z = f(x, y) en los alrededores de (x0, y0)”).
2. OJO la condicion delım
(∆x,∆y)→(0,0)r(∆x,∆y) = 0,
NO es el punto importante en la definicion de diferenciabilidad, pues este hecho loUNICO que nos dice es que la funcion es continua en (x0, y0) (vease demostracion deTeorema (11).
3. Lo importante, cuando se estudia la diferenciabilidad de funciones, es que el residuor(∆x,∆y) tiende a cero mas rapido de lo que ‖(∆x,∆y)‖ lo hace. Esta condicionesta expresada en la parte de la definicion que dice que
lım(∆x,∆y)→(0,0)
r(∆x,∆y)
‖∆x,∆y‖ = 0
Intuitivamente, podemos pensar que la unica manera como se puede dar esta condiciondel residuo, es cuando el plano tangente se “embarra” con la superficie en los alrededoresde (x0, y0). En otras palabras, la superficie tiene que ser “suave.en (x0, y0), para que“se pueda ver localmente como un plano tangente”.
4. Esta es en realidad la idea geometrica tras el concepto de diferenciabilidad de unafuncion en un punto p: el buen comportamiento de la funcion en torno al punto (x0, y0)para que en se pueda aproximar por un comportamiento lineal (pano tangente).
5. Si z = f(x, y) la funcion es diferenciable en cada punto en una region R del plano xy,entonces se dice que f es diferenciable en R.
6. Si f es diferenciable sobre plano xy completo, entonces f es diferenciable.
7. Es interesante notar que las derivadas parciales fx y fy quizas existan en un punto(x0, y0) e incluso f NO sea diferenciable en ese punto.
8. Si fx y fy no existen en un punto (x0, y0) entonces f no es diferenciable en ese punto.
Ejemplo 63. Mostrar que la funcion dada por f(x, y) = x2 + 3y es diferenciable en todopunto del plano.
Solucion. Haciendo z = f(x, y) el incremento de z en un punto arbitrario (x, y) en el planoes
∆z = f(x+∆x, y +∆y)− f(x, y)
= (x2 + 2x∆x+∆x2) + 3(y +∆y)− (x2 + 3y)
= 2x(∆x) + 3(∆y) + ∆x(∆x) + 0(∆y)
= fx(x, y)∆x+ fy(x, y)∆ + r(∆x,∆y)
donde r(∆x,∆y) = ∆x(∆x) + 0(∆y). Obviamente, lım(∆x,∆y)→(0,0)
r(∆x,∆y)
‖∆x,∆y‖ = 0. Por tanto
f es diferenciable en todo punto en el plano.
∆
47
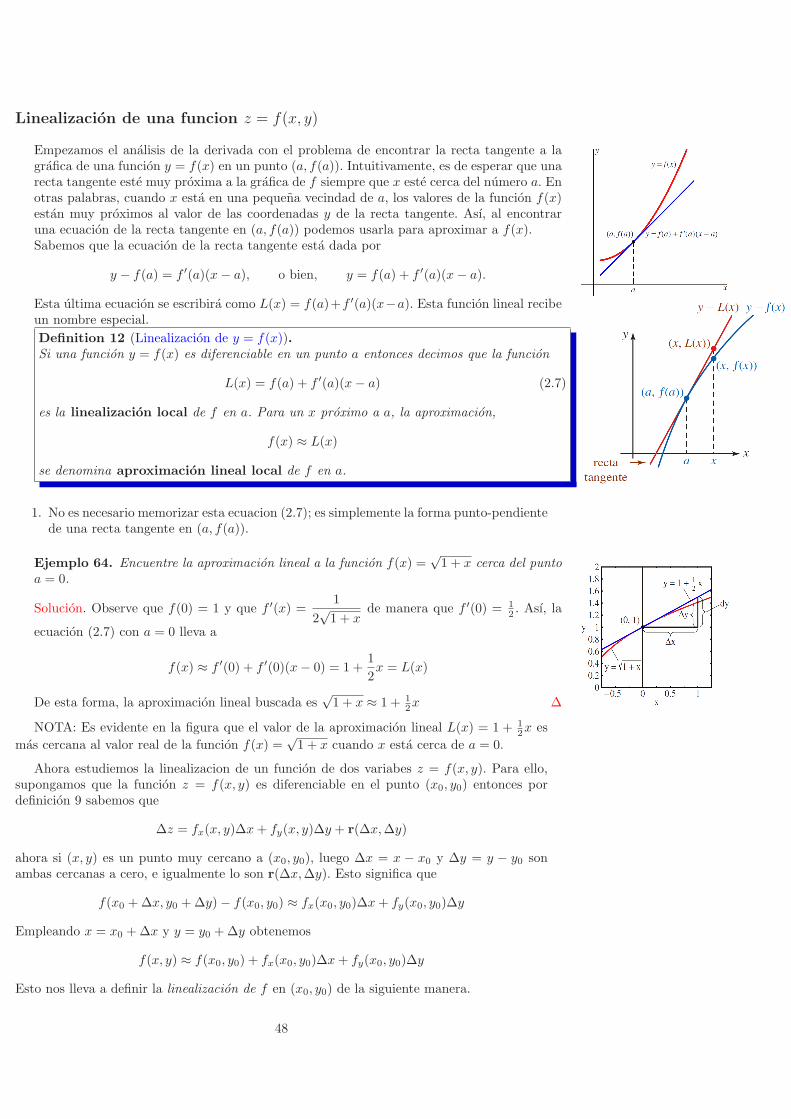
Linealizacion de una funcion z = f(x, y)
Empezamos el analisis de la derivada con el problema de encontrar la recta tangente a lagrafica de una funcion y = f(x) en un punto (a, f(a)). Intuitivamente, es de esperar que unarecta tangente este muy proxima a la grafica de f siempre que x este cerca del numero a. Enotras palabras, cuando x esta en una pequena vecindad de a, los valores de la funcion f(x)estan muy proximos al valor de las coordenadas y de la recta tangente. Ası, al encontraruna ecuacion de la recta tangente en (a, f(a)) podemos usarla para aproximar a f(x).Sabemos que la ecuacion de la recta tangente esta dada por
y − f(a) = f ′(a)(x− a), o bien, y = f(a) + f ′(a)(x− a).
Esta ultima ecuacion se escribira como L(x) = f(a)+f ′(a)(x−a). Esta funcion lineal recibeun nombre especial.
Definition 12 (Linealizacion de y = f(x)).Si una funcion y = f(x) es diferenciable en un punto a entonces decimos que la funcion
L(x) = f(a) + f ′(a)(x− a) (2.7)
es la linealizacion local de f en a. Para un x proximo a a, la aproximacion,
f(x) ≈ L(x)
se denomina aproximacion lineal local de f en a.
1. No es necesario memorizar esta ecuacion (2.7); es simplemente la forma punto-pendientede una recta tangente en (a, f(a)).
Ejemplo 64. Encuentre la aproximacion lineal a la funcion f(x) =√1 + x cerca del punto
a = 0.
Solucion. Observe que f(0) = 1 y que f ′(x) =1
2√1 + x
de manera que f ′(0) = 12 . Ası, la
ecuacion (2.7) con a = 0 lleva a
f(x) ≈ f ′(0) + f ′(0)(x− 0) = 1 +1
2x = L(x)
De esta forma, la aproximacion lineal buscada es√1 + x ≈ 1 + 1
2x ∆
NOTA: Es evidente en la figura que el valor de la aproximacion lineal L(x) = 1 + 12x es
mas cercana al valor real de la funcion f(x) =√1 + x cuando x esta cerca de a = 0.
Ahora estudiemos la linealizacion de un funcion de dos variabes z = f(x, y). Para ello,supongamos que la funcion z = f(x, y) es diferenciable en el punto (x0, y0) entonces pordefinicion 9 sabemos que
∆z = fx(x, y)∆x+ fy(x, y)∆y + r(∆x,∆y)
ahora si (x, y) es un punto muy cercano a (x0, y0), luego ∆x = x − x0 y ∆y = y − y0 sonambas cercanas a cero, e igualmente lo son r(∆x,∆y). Esto significa que
f(x0 +∆x, y0 +∆y)− f(x0, y0) ≈ fx(x0, y0)∆x+ fy(x0, y0)∆y
Empleando x = x0 +∆x y y = y0 +∆y obtenemos
f(x, y) ≈ f(x0, y0) + fx(x0, y0)∆x+ fy(x0, y0)∆y
Esto nos lleva a definir la linealizacion de f en (x0, y0) de la siguiente manera.
48

Definition 13 (Linealizacion de z = f(x, y)).Si una funcion z = f(x, y) es diferenciable en un punto (x0, y0) entonces la funcion
L(x, y) = f(x0, y0) + fx(x0, y0)(x− x0) + fy(x0, y0)(y − y0) (2.8)
se dice que es una linealizacion de f en (x0, y0). Para un punto (x, y) cercano a (x0, y0)la aproximacion
f(x, y) ≈ L(x, y)
se denomina una aproximacion lineal local de f en (x0, y0).
OBSERVACIONES:
Suponga que se deja z = L(x, y) y se reescribe (2.8) como
fx(x0, y0)(x− x0) + fy(x0, y0)(y − y0)− (z − f(x0, y0)) = 0
Esto demuestra que la formula de linealizacion z = L(x, y) es una ecuacion del planotangente a la grafica de z = f(x, y) en el punto (x0, y0, f(x0, y0)) y tiene como vectornormal a
(
fx(x0, y0), fy(x0, y0),−1)
Cuando fx y fy son continuas y cuando (∆x,∆y) → (0, 0), entonces dz es una apro-ximacion de ∆z esto es, dz = ∆z.
Ejemplo 65. Encuentre una linealizacion de f(x, y) =√
x2 + y2 en (4, 3)
Solucion. Las primeras derivadas parciales de f son
fx(x, y) =x
√
x2 + y2y fy(x, y) =
y√
x2 + y2
Utilizando los valores f(4, 3) = 5 y fx(4, 3) =45 y fy(4, 3) =
35 . Luego una linealizacion de f
en (4, 3) es
L(x, y) = 5 +4
5(x− 4) +
3
5(y − 3).
∆
Diferencial de una funcion z = f(x, y)
Suponga que y = f(x) es una funcion diferenciable en el punto a, suponemos que x cambiade su valor original al nuevo valor a+∆x. El cambio en el valor de y es el incremento ∆y,calculado restando el nuevo valor de y menos su valor anterior, esto es,
∆y = f(a+∆x)− f(a) (2.9)
Los incrementos ∆x y ∆y se representan geometricamente. Observe que el cociente de losincrementos en x y y nos lleva a
∆y
∆x=f(a+∆x)− f(a)
∆x
49
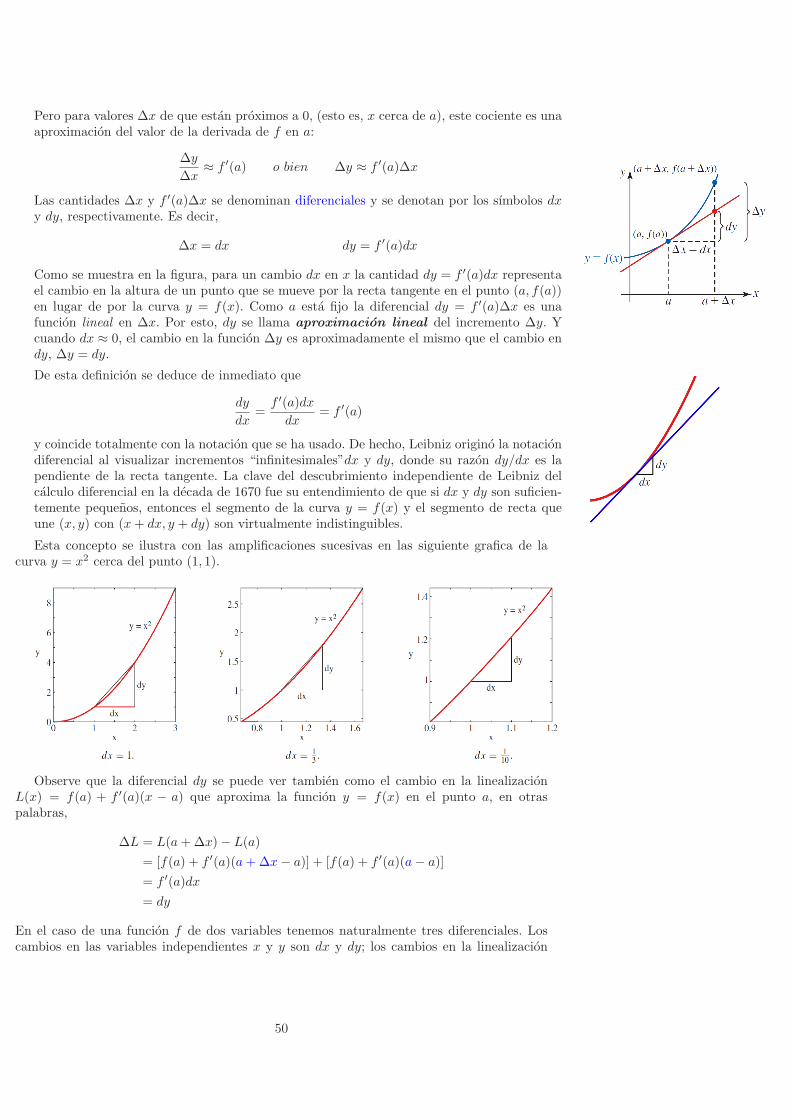
Pero para valores ∆x de que estan proximos a 0, (esto es, x cerca de a), este cociente es unaaproximacion del valor de la derivada de f en a:
∆y
∆x≈ f ′(a) o bien ∆y ≈ f ′(a)∆x
Las cantidades ∆x y f ′(a)∆x se denominan diferenciales y se denotan por los sımbolos dxy dy, respectivamente. Es decir,
∆x = dx dy = f ′(a)dx
Como se muestra en la figura, para un cambio dx en x la cantidad dy = f ′(a)dx representael cambio en la altura de un punto que se mueve por la recta tangente en el punto (a, f(a))en lugar de por la curva y = f(x). Como a esta fijo la diferencial dy = f ′(a)∆x es unafuncion lineal en ∆x. Por esto, dy se llama aproximacion lineal del incremento ∆y. Ycuando dx ≈ 0, el cambio en la funcion ∆y es aproximadamente el mismo que el cambio endy, ∆y = dy.
De esta definicion se deduce de inmediato que
dy
dx=f ′(a)dx
dx= f ′(a)
y coincide totalmente con la notacion que se ha usado. De hecho, Leibniz origino la notaciondiferencial al visualizar incrementos “infinitesimales”dx y dy, donde su razon dy/dx es lapendiente de la recta tangente. La clave del descubrimiento independiente de Leibniz delcalculo diferencial en la decada de 1670 fue su entendimiento de que si dx y dy son suficien-temente pequenos, entonces el segmento de la curva y = f(x) y el segmento de recta queune (x, y) con (x+ dx, y + dy) son virtualmente indistinguibles.
Esta concepto se ilustra con las amplificaciones sucesivas en las siguiente grafica de lacurva y = x2 cerca del punto (1, 1).
Observe que la diferencial dy se puede ver tambien como el cambio en la linealizacionL(x) = f(a) + f ′(a)(x − a) que aproxima la funcion y = f(x) en el punto a, en otraspalabras,
∆L = L(a+∆x)− L(a)
= [f(a) + f ′(a)(a+∆x− a)] + [f(a) + f ′(a)(a− a)]
= f ′(a)dx
= dy
En el caso de una funcion f de dos variables tenemos naturalmente tres diferenciales. Loscambios en las variables independientes x y y son dx y dy; los cambios en la linealizacion
50

L(x, y) se denotan por medio de dz. En el punto (x0, y0) el cambio en la linealizacion es
∆L = L(x0 +∆x0, y0 +∆y)− L(x0, y0)
= [f(x0, y0) + fx(x0, y0)(x0 +∆x− x0) + fy(x0, y0)(y0 +∆y − y0)]
− f(x0, y0) + fx(x0, y0)(x0 − x0) + fy(x0, y0)(y0 − y0)]
= fx(x0, y0)∆x+ fy(x0, y0)∆y
Empleando este resultado definimos a continuacion la diferencial dz de una funcion f enun punto arbitrario en el plano xy. Si (x, y) denota el punto, entonces un punto cercano es(x,∆x, y+∆y) o (x+ dx, y+ dy). La diferencial dz se llama comunmente diferencial total dela funcion.
Definition 14 (Diferencial de z = f(x, y)).Sea z = f(x, y) una funcion para la cual las primeras derivadas parciales fx y fy existen.Entonces las diferenciales de x y y son dx = ∆x y dy = ∆y. La diferencial de z,
dz = fx(x, y)dx+ fy(x, y)dy =∂f
∂xdx+
∂f
∂ydy (2.10)
tambien se denomina diferencial total de z.
Ejemplo 66. Encuentre la diferencial dz de la funcion z = f(x, y) = x2+3xy− 2y2. Poste-riormente, compare dz y el incremento real ∆z cuando (x, y) cambia de P (3, 5) a Q(3.2, 4.9).
Solucion. La diferencial de z, como se da en la ecuacion (??), es
dz =∂f
∂x∆x+
∂f
∂y∆y = (2x+ 3y)∆x+ (3x− 4y)∆y
En el punto P (3, 5), esta diferencial es dz = 21∆x − 11∆y. Con ∆x = 0.2 y ∆y = −0.1,correspondiente al cambio de P (3, 5) a Q(3.2, 4.9), se obtiene
dz = 21(0.2)− 11(−0.1) = 5.3
El cambio real en el valor de z de P a Q es el incremento
∆z = f(3.2, 4.9)− f(3, 5) = 5.26
por lo que en este ejemplo la diferencial parece ser una buena aproximacion al incremento.
∆
Diferenciabilidad en varias variables
Las definiciones, ası como los teoremas visto para funciones de una variable y = f(x), y dosvariables z = f(x, y) se generalizan de la manera esperada a funciones de tres o mas variables.A continuacion mencionare algunos puntos importantes para una funcon w = f(x, y, z).
1. El incremento ∆w esta dado por
∆w = f(x+∆x, y +∆y, z +∆z)− f(x, y, z).
2. Si f es diferenciable en un punto (x0, y0, z0) entonces ∆w puede escribirse como
∆w = fx∆x+ fy∆y + fz∆z + r(∆x,∆y,∆z)
donde
lım∆x,∆y,∆z)→(0,0,0)
r(∆x,∆y,∆z)
‖(∆x,∆y,∆z)‖ = 0.
51

3. Si f es diferenciable en (x0, y0, z0) entonces la linealizacion de f se define como
L(x, y, z) = f(x0, y0, z0)+fx(x0, y0, z0)(x−x0)+fy(x0, y0, z0)(y−y0)+fz(x0, y0, z0)(z−z0)
4. La diferencial total de f es
dw =∂f
∂xdx+
∂f
∂y+∂f
∂zdz
Por ultimo, expreso la definicion de diferenciabilidad de una funcion f : Rn → R.
Definition 15 (Diferenciabilidad en n variables).Sea f : Rn → R una funcion de n variables evaluada en los reales. Si f es diferenciable enx = (x1, . . . , xn) entonces existe una funcion r(h) tal que el incremento en su altura estadado por
f(x+ h)− f(x) =df
dx(∆x1) + . . .+ · · ·+ df
dxn(∆xn) + r(h)
f(x+ h) = f(x) +∇f(x) · h+ r(h)
donde
lımh→0
r(h)
‖h‖ = 0
(aquı h := (∆x1, . . . ,∆xn), ∇f := ( ∂f∂x1
, . . . ∂f∂xn
)).
1. Se dice que la funcion f de n variables es derivable continuamente en un puntoa = (x1, . . . , xn), si se demuestra que sus derivadas parciales de primer orden ∂f
∂xi(a)
no solo existen sino que son continuas en ese punto.
2. la funcion f es derivable continuamente en el entorno especificado del punto a.
Regla de la cadena, funiones compuestas
Comencemos pues por estudiar como se hace la composicion de funciones de varias
variables. Componer funciones significa “sustituir una funcion en otra”. Por ejemplo, sitenemos la funcion y = f(x), y la funcion x = g(u), entonces y = f(g(u)). Esto es, la funcionmanda u a y y esto se le llama composicion de f con g y se denota por f ◦ g.
Pasemos al caso de funciones de dos variables z = f(x, y). Siguiendo con la misma idea,para “componer.esta funcion tendremos que sustituir las dos variables x y y por dos funciones,Supongamos entonces que
x = g1(u, v) y = g2(u, v)
luego tenemos la funcion compuesta z = f(g1(u, v), g2(u, v))
Ejemplo 67. Considere la funcion f(x.y) = x2y + sen(xy). Si x = u2 + v2, y y = uv3
SOL: La funcion compuesta f con x y y esta dada por
52

Ejemplo 68. Considere la funcion f(x, y, z) = 2x3y2z + cos2(x + y + z) y sean x = et,v = cos t, y z = t2
SOL: La funcion compuesta f con x, y z esta dada por
En general, los conjuntos de n funciones reales, cada una de ellas dependiendo de mvariables, digamos
x1 =g1(u1, u2, . . . , um)
x2 =g2(u1, u2, . . . , um)
...
xn =gn(u1, u2, . . . , um)
se puede ver como una funcion g : Rm → R
n que toma al punto (u1, u2, . . . , um) ∈ Rm
y le asocia el punto (x1, x2, . . . , xn) ∈ Rn, a las funciones gi reciben el nombre funciones
coordenadas de g ya que g = (g1, g2, . . . , gn).
Ejemplo 69. La funcion g : R2 → R3, dada por g(u, v) = (u2 − v2, u + v, u − v) tiene por
funciones coordenadas a g1, g2, g3 : R2 → R dadas por
g1(u, v) = u2 − v2, g2(u, v) = u+ v, g3(u, v) = u− v.
Los conceptos de continuidad y diferenciabilidad para funciones g : U ⊂ Rn → R
m,m > 1,se establecen en terminos de las funciones coordenadas de la funcion g. De modo mas preciso,se dira que la funcion g = (g1, g2, . . . , gm) es continua (respectivamente, diferenciable) en elpunto x0 ∈ U , si y solo si todas y cada una de las funciones coordenadas fi : U ⊂ R
n → R,i = 1, 2, . . . ,m, lo son.
Ejemplo 70. La funcion f : R2 → R2, dada por
f(x, y) = (x, |y|)
es continua en todo su dominio, pues las funciones coordenadas f1, f2 : R2 → R, f1(x, y) = x,f2(x, y) = |y| lo son. Esta funcion no es diferenciable en el origen, pues la funcion f2(x, y) =|y| no lo es.
Ejemplo 71. La funcion f : R3 → R4, dada por
f(x, y, z) = (x+ y + z, senx+ cos y, ex+z, arctan(xz2))
es diferenciable en todo su dominio, pues las funciones coordenadas f1, f2, f3, f4 : R3 → R,f1(x, y, z) = x+ y+ z, f2(x, y, z) = senx+cos y, f3(x, y, z) = ex+z, f4(x, y, z) = arctan(xz2)lo son.
Ahora estudiaremos la relacion entre la diferenciabilidad y las derivadas parciales deuna funcion compuesta, con la diferenciabilidad y las derivadas parciales de sus funcionescomponentes
Recordemos que la regla de la cadena para funciones de una sola variable indica que siy = f(x) es una funcion diferenciable de x, y x = g(t) es una funcion diferenciable de t,entonces la derivada de la funcion compuesta es
∂y
∂t=∂y
∂x
∂x
∂t
53
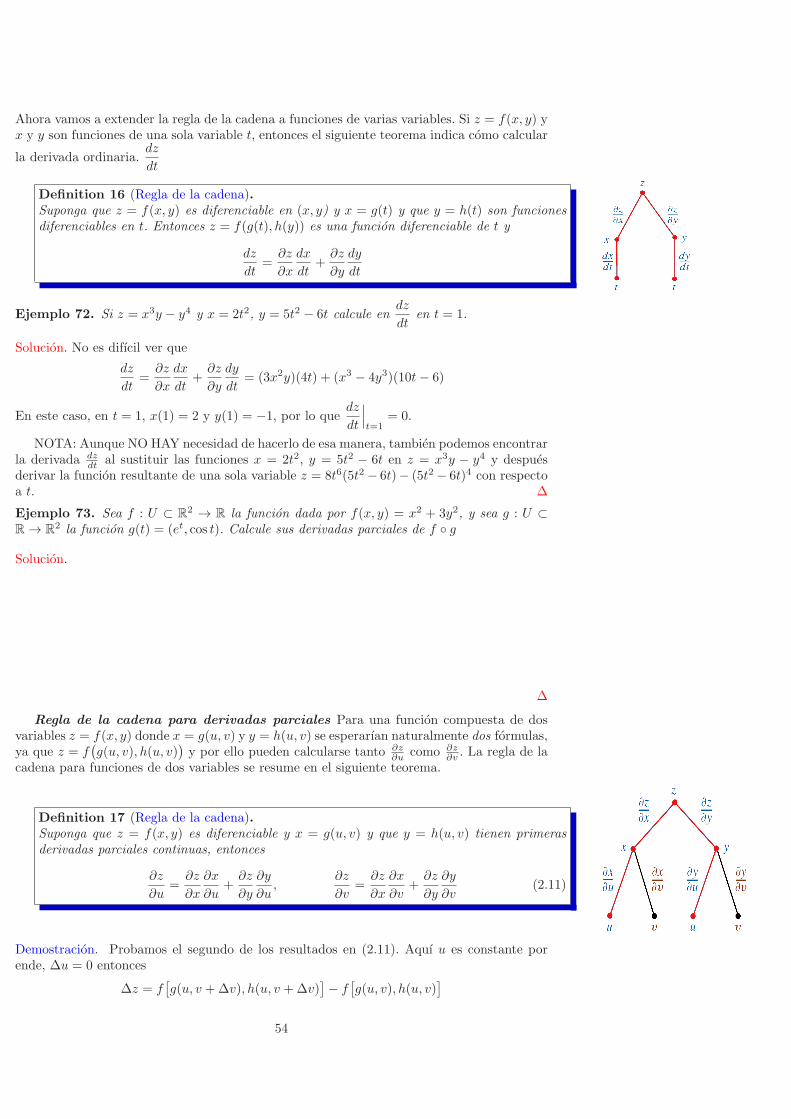
Ahora vamos a extender la regla de la cadena a funciones de varias variables. Si z = f(x, y) yx y y son funciones de una sola variable t, entonces el siguiente teorema indica como calcular
la derivada ordinaria.dz
dt
Definition 16 (Regla de la cadena).Suponga que z = f(x, y) es diferenciable en (x, y) y x = g(t) y que y = h(t) son funcionesdiferenciables en t. Entonces z = f(g(t), h(y)) es una funcion diferenciable de t y
dz
dt=∂z
∂x
dx
dt+∂z
∂y
dy
dt
Ejemplo 72. Si z = x3y − y4 y x = 2t2, y = 5t2 − 6t calcule endz
dten t = 1.
Solucion. No es difıcil ver que
dz
dt=∂z
∂x
dx
dt+∂z
∂y
dy
dt= (3x2y)(4t) + (x3 − 4y3)(10t− 6)
En este caso, en t = 1, x(1) = 2 y y(1) = −1, por lo quedz
dt
∣
∣
∣
t=1= 0.
NOTA: Aunque NO HAY necesidad de hacerlo de esa manera, tambien podemos encontrarla derivada dz
dt al sustituir las funciones x = 2t2, y = 5t2 − 6t en z = x3y − y4 y despuesderivar la funcion resultante de una sola variable z = 8t6(5t2 − 6t)− (5t2 − 6t)4 con respectoa t. ∆
Ejemplo 73. Sea f : U ⊂ R2 → R la funcion dada por f(x, y) = x2 + 3y2, y sea g : U ⊂
R → R2 la funcion g(t) = (et, cos t). Calcule sus derivadas parciales de f ◦ g
Solucion.
∆
Regla de la cadena para derivadas parciales Para una funcion compuesta de dosvariables z = f(x, y) donde x = g(u, v) y y = h(u, v) se esperarıan naturalmente dos formulas,ya que z = f
(
g(u, v), h(u, v))
y por ello pueden calcularse tanto ∂z∂u como ∂z
∂v . La regla de lacadena para funciones de dos variables se resume en el siguiente teorema.
Definition 17 (Regla de la cadena).Suponga que z = f(x, y) es diferenciable y x = g(u, v) y que y = h(u, v) tienen primerasderivadas parciales continuas, entonces
∂z
∂u=∂z
∂x
∂x
∂u+∂z
∂y
∂y
∂u,
∂z
∂v=∂z
∂x
∂x
∂v+∂z
∂y
∂y
∂v(2.11)
Demostracion. Probamos el segundo de los resultados en (2.11). Aquı u es constante porende, ∆u = 0 entonces
∆z = f[
g(u, v +∆v), h(u, v +∆v)]
− f[
g(u, v), h(u, v)]
54

Ahora bien, si
∆x = g(u, v +∆v)− g(u, v) y ∆y = h(u, v +∆v)− h(u, v),
entonces como x = g(u, v) y y = h(u, v) tenemos que g(u, v+∆v) = x+∆x y h(u, v+∆v) =y +∆y al reemplazar en ∆z obtenemos que
∆z = f(x+∆x, y +∆y)− f(x, y)
Puesto que f es diferenciable, entonces su incremento ∆z puede escribirse como
∆z =∂z
∂x∆x+
∂z
∂y∆y + ǫ1∆x+ ǫ2∆y
donde ǫ1, ǫ2, son funciones de ∆x y ∆y con la propiedad de que ǫ1, ǫ2 → 0 cuando (∆u,∆v) →(0, 0). Por tanto,
∆z
∆v=∂z
∂x
∆x
∆v+∂z
∂y
∆y
∆v+ ǫ1
∆x
∆v+ ǫ2
∆y
∆v
Ahora, tomando el lımite de la ultima lınea cuando ∆v → 0 obtenemos
∂z
∂v=∂z
∂x
∂x
∂v+∂z
∂y
∂y
∂v+ 0
∂x
∂v+ 0
∂y
∂v=∂z
∂x
∂x
∂v+∂z
∂y
∂y
∂v
puesto que ∆x y ∆y se aproximan a cero cuando ∆v → 0. �
Ejemplo 74. Si z = x2 − y3 y x = e2u−3v, y = sen(u2 − v2), determine ∂z∂u y ∂z
∂v
Solucion.
1.∂z
∂x=
2.∂z
∂y=
3.∂x
∂u=
4.∂x
∂v=
5.∂y
∂u=
6.∂y
∂v=
Por tanto,
∂z
∂x=
∂z
∂y=
∆
Ejemplo 75. Sea u = 3x2y2z2+6 sen(xyz), donde x = 4vw2 y = 5v2+10w3 z = v3. Calcule∂u∂v ,
∂u∂w
Solucion. ∆
55
Ejemplo 76. Consideremos la funcion z = f(x2 + y3, 2x2 − y2) y hallemos ∂z∂x y ∂z
∂y
Solucion. Observese que esta funcion f ya se presenta como la composicion de de funiones,para ello considere z = f(u, v) con las funciones u = x2 + y3, v = 2x2 − y2. Por tanto
∂z
∂x=∂f
∂u
∂u
∂x+∂f
∂v
∂v
∂x=
∂z
∂y=∂z
∂u
∂u
∂y+∂f
∂v
∂v
∂y=
∆
Ejemplo 77. Consideremos la funcion z = f(xy ) y hallemos ∂z∂x y ∂z
∂y
Solucion.
∆
Generalizaciones regla de la cadena: Si z = f(x1, x2 . . . , xn) es diferenciable en(x1, x2, . . . , xn) y si xi, i = 1, . . . , n son funciones diferenciables de una sola variable t, enton-ces
dz
dt=
∂z
∂x1
dx1dt
+∂z
∂x2
dx2dt
+ · · ·+ ∂z
∂xn
dxndt
De manera similar, si z = f(x1, x2 . . . , xn) y si cada xi, i = 1, . . . , n en una funcion de kvariables u1, u2, . . . , uk entonces
dz
dui=
∂z
∂x1
dx1dui
+∂z
∂x2
dx2dui
+ · · ·+ ∂z
∂xn
dxndui
donde i = 1, 2, . . . , k
56

Ejemplo 78. Si r = x2 + y5z3 y x = uve2s, y = u2 − v2s z = sen(uvs2), encuentre∂r
∂uy
∂r
∂s
Solucion. En este caso r es una funcion de tres variables x, y y z, y cada una es en sı mismauna funcion de tres variables u, y y s.
∂r
∂u=
∂r
∂s=
∆
Ejemplo 79. Si z = u2v3w4 y u = t2, v = 5t− 8 y w = t3 + t, determinedz
zt.
Solucion. Siguiendo el diagrama de arbol tenemos
∂z
∂t=
∆
Diferenciacion implıcita
En el calculo de funciones de una variable, se consideraron expresiones del tipo F (x, y) = 0,preguntandonos si podıamos despejar a y en terminos de x, y dejar establecida una funciondel tipo y = f(x) (por ejemplo si F (x, y) = x2 + y2 − 1 = 0 NO se puede obtener de ella unafuncion y = f(x); y de F (x, y) = x2 − y = 0 SI se puede obtener la funcion y = f(x) = x2 )Cuando de F (x, y) = 0 podemos despejar la variable y, y escribir y = f(x), decimos que estaultima funcion esta dada implıcitamente en F (x, y) = 0
Dada la grafica de la funcion y = f(x), se puede ver como una curva de nivel, cones-pondiente al nivel cero, de una funcion z = F (x, y) = y − f(x), de modo que su nivel ceroesta constituido por los puntos (x, y) tales que F (x, y) = y − f(x) = 0, o sea, de modo que
57

y = f(x). Esta misma observacion la habıamos hecho con superficies z = f(x, y), las cualespueden ser vistas como el nivel cero de la funcion w = F (x, y, z) = z − f(x, y).
El punto que llama nuestro interes ante estas consideraciones es el planteamiento recıprocode ellas: por ejemplo, dada la funcion z = F (x, y), ¿es su nivel cero una curva que se puedaver como la grafica de una funcion y = f(x)?, o de otra manera, de la expresion F (x, y) = 0(que da el nivel cero de F ) ¿podemos despejar a y en terminos de x y dejar ası establecidala funcion y = f(x)? Ahora nuestra pregunta es, de hecho, mas especıfica: se quiere saber siel nivel cero de z = F (x.y) es la grafica de una funcion y = f(x) Al pensar en la simplefuncion F (x, y) = x2 + y2 − 1, vemos que la respuesta a la pregunta anterior es NO. De laexpresion x2+l−1 = 0 no podemos establecer una funcion y = f(x) despejando y en terminosde x. Es bien sabido que x2 + y2 = 1 define dos funciones, a saber, y1 = f1(x) =
√1− x2 y
y = f2(x) = −√1− x2.
Si la ecuacion F (x, y) = 0 define a una funcion y = f(x) de manera implıcita, F (x, f(x)) =0 entonces para toda x en el dominio de f . El siguiente teorema demuestra que la derivadadydx tambien puede determinarse de la regla de la cadena.
Teorema 18 (Diferenciacion implıcita).
i) Si w = F (x, y) es diferenciable y y = f(x) es una funcion diferenciable de x definidaimplıcitamente por F (x, y) = 0 entonces
dy
dx= −Fx(x, y)
Fy(x, y), donde Fy(x, y) 6= 0
ii) Si w = F (x, y, z) es diferenciable y z = f(x, y) es una funcion diferenciable de x y ydefinida implıcitamente por F (x, y, z) = 0 entonces
∂z
∂x= −Fx(x, y, z)
Fz(x, y, z)
∂z
∂y= −Fy(x, y, z)
Fz(x, y, z)
donde Fz(x, y, z) 6= 0
Demostracion. (i) Si w = F (x, y) y y = f(x) son funciones diferenciables, entonces no esdificil ver que
dw
dx=∂w
∂x
dx
dx+∂w
∂y
dy
dx= Fx(x, y)
dx
dx+ Fy(x, y)
dy
dx
Puesto que w = F (x, y) = 0 y dxdx = 1 implica
0 = Fx(x, y) + Fy(x, y)dy
dx, o bien
dy
dx= −Fx(x, y)
Fy(x, y)
siempre que Fy(x, y) 6= 0.
(ii) Si w = F (x, y, z) es una funcion diferenciable y z = f(x, y) es diferenciable en x y y,entonces no es dificil ver que
dw
dx=∂w
∂x
dx
dx+∂w
∂y
dy
dx+∂w
∂z
dz
dx
= Fx(x, y)dx
dx+ Fy(x, y)
dy
dx+ Fz(x, y)
dz
dx
Puesto que w = F (x, y, z) = 0, ∂x∂x = 1 y ∂y
∂x = 0 implica
0 = Fx(x, y) + Fz(x, y)dz
dx, o bien
dz
dx= −Fx(x, y, z)
Fz(x, y, z)
siempre que Fz(x, y, z) 6= 0. La derivada parcial ∂z∂y puede obtenerse de manera similar �
Ejemplo 80.
58

a) Encuentredy
dxsi x2 − 4xy − 3y2 = 10 b) Encuentre
∂z
∂ysi x2y − 5xy2 = 2yz − 4z3.
Solucion. (a) Consideremos la funcion F (x, y) = x2 − 4xy − 3y2 − 10. Entonces definimos ycomo una funcion de x por medio F (x, y) = 0. Es decir F depende solo de una variable x.Luego derivamos respecto a x. De la regla de la cadena tenenos
dF
dx
dx
dx+dF
dy
dy
dx= 0
De aqui deducimos quedy
dx= −Fx(x, y)
Fy(x, y)=
2x− 4y
−4x− 6y=
x− 2y
2x+ 3y
(b) Consideremos la funcion G(x, y, z) = x2y − 5xy2 − 2yz + 4z3. Entonces definimos zcomo una funcion de x y y mediante el uso de F (x, y, z) = 0. Es decir F depende solo delas variables x, y. Luego podemos derivar respecto a x o y. En nuestro caso vamos a derivarrespecto a y. Usando la regla de la cadena encontramos que
dF
dy
dy
dy+dF
dx
dx
dy+dF
dz
dz
dy= 0
Como ∂y∂y = 1, ∂x
∂y = 0 entonces∂z
∂y= −Fy(x, y, z)
Fz(x, y, z)= −x
2 − 10xy − 2z
−2y + 12z2∆
Ejemplo 81.
Suponga que la ecuacion z2 = x2 + xyz2 define a z implıcitamente como una funcion de x yy. Encuentre ∂z
∂x y ∂z∂x .
SOL:
59
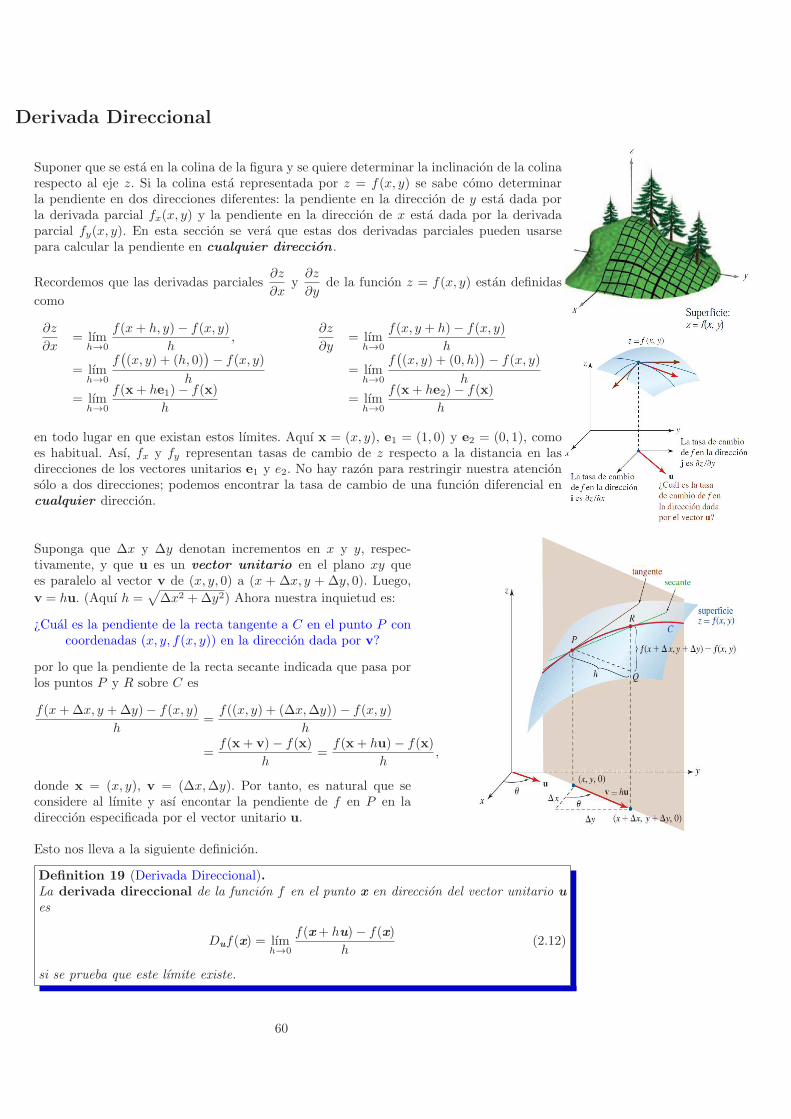
Derivada Direccional
Suponer que se esta en la colina de la figura y se quiere determinar la inclinacion de la colinarespecto al eje z. Si la colina esta representada por z = f(x, y) se sabe como determinarla pendiente en dos direcciones diferentes: la pendiente en la direccion de y esta dada porla derivada parcial fx(x, y) y la pendiente en la direccion de x esta dada por la derivadaparcial fy(x, y). En esta seccion se vera que estas dos derivadas parciales pueden usarsepara calcular la pendiente en cualquier direccion .
Recordemos que las derivadas parciales∂z
∂xy∂z
∂yde la funcion z = f(x, y) estan definidas
como
∂z
∂x= lım
h→0
f(x+ h, y)− f(x, y)
h,
∂z
∂y= lım
h→0
f(x, y + h)− f(x, y)
h
= lımh→0
f(
(x, y) + (h, 0))
− f(x, y)
h= lım
h→0
f(
(x, y) + (0, h))
− f(x, y)
h
= lımh→0
f(x+ he1)− f(x)
h= lım
h→0
f(x+ he2)− f(x)
h
en todo lugar en que existan estos lımites. Aquı x = (x, y), e1 = (1, 0) y e2 = (0, 1), comoes habitual. Ası, fx y fy representan tasas de cambio de z respecto a la distancia en lasdirecciones de los vectores unitarios e1 y e2. No hay razon para restringir nuestra atencionsolo a dos direcciones; podemos encontrar la tasa de cambio de una funcion diferencial encualquier direccion.
Suponga que ∆x y ∆y denotan incrementos en x y y, respec-tivamente, y que u es un vector unitario en el plano xy quees paralelo al vector v de (x, y, 0) a (x + ∆x, y + ∆y, 0). Luego,
v = hu. (Aquı h =√
∆x2 +∆y2) Ahora nuestra inquietud es:
¿Cual es la pendiente de la recta tangente a C en el punto P concoordenadas (x, y, f(x, y)) en la direccion dada por v?
por lo que la pendiente de la recta secante indicada que pasa porlos puntos P y R sobre C es
f(x+∆x, y +∆y)− f(x, y)
h=f((x, y) + (∆x,∆y))− f(x, y)
h
=f(x+ v)− f(x)
h=f(x+ hu)− f(x)
h,
donde x = (x, y), v = (∆x,∆y). Por tanto, es natural que seconsidere al lımite y ası encontar la pendiente de f en P en ladireccion especificada por el vector unitario u.
Esto nos lleva a la siguiente definicion.
Definition 19 (Derivada Direccional).La derivada direccional de la funcion f en el punto x en direccion del vector unitario u
es
Duf(x) = lımh→0
f(x+ hu)− f(x)
h(2.12)
si se prueba que este lımite existe.
60

La derivada direccional de f en el punto (x0, y0) ∈ D en la direccion del vector unitariou = (u1, u2), esto es, Duf(x0, y0) mide la razon (o velocidad) de cambio instantaneodel valor de la variable dependiente z = f(x, y) con respecto a la distancia en el planoXY , medida en la direccion del vector unitario u.
La funcion f en la ecuacion (2.12) puede ser una funcion de dos, tres o mas variables.
las derivadas parciales de una funcion de dos variables x y y se escriben como
fx(x, y) = De1f(x, y) = Dif(x, y) fy(x, y) = De2
f(x, y) = Dıf(x, y)
El lımite en la ecuacion (2.12) tendrıa sentido si u no fuera un vector unitario.
El significado de las derivadas direccionales es mas facil de entender cuando u es unvector unitario, y este es el porque definimos Duf(x) solo cuando |u| = 1.
Podemos escribir en general el vector unitario u ∈ R2 como
u = (cos θ, sin θ), 0 ≤ θ ≤ 2π
de modo que la derivada direccional de f en el punto x = (x, y) en la direccion de u y severıa como
Duf(x) = lımh→0
f(x+ hu)− f(x)
h= lım
h→0
f(
(x, y) + h(cos θ, sin θ))
− f(x, y)
h
= lımh→0
f(x+ h cos θ, y + h sin θ)− f(x, y)
h
Observamos que si θ = 0, o bien si u = i = (1, 0), entonces Duf(x, y) = ∂f∂x . Mientras si
θ = π/2, o bien, si u = j = (0, 1), entonces Duf(x, y) =∂f∂y
Hay una cantidad infinita de derivadas direccionales en un punto dado de una superficiez = f(x, y), una para cada direccion especificada por u, (ver figura). Dos de estas son lasderivadas parciales fx y fy.
Definition 20 (Calculo de las derivadas direccionales).Sea f : Rn → R una funcion derivable en x, y u es un vector unitario, entonces la derivadadireccional Duf(x) existe y esta dada por
Duf(x) = ∇f(x) · u = ‖∇f‖ cos θ (2.13)
donde θ es el angulo formado por el vector ∇f y u
Demostracion. Recordemos que de (??) tenemos que si f(x1, x2, . . . , xn) es derivable enx = (x1, x2, . . . , xn), entonces sus derivadas parciales existen ahı; ademas,
lımh→0
f(x+ h)− f(x)−∇f(x) · h|h| = 0
donde ∇f(x) = (D1f(x), D2f(x), . . . , Dnf(x) es el vector gradiente de f en x. Si se sustituyeh = hu, donde u es un vector unitario y h > 0 (de modo que |h| = h), entonces encontramosque
0 = lımh→0
f(x+ h)− f(x)−∇f(x) · hu|h| = lım
h→0
f(x+ h)− f(x)
h−∇f(x) · u
= Duf(x)−∇f(x) · u
En decir,Duf(x) = ∇f(x) · u = ‖∇f‖‖u‖ cos θ = ‖∇f‖ cos θ
61

�
Propiedades de la Derivada Direccional:
La funcion f crece mas rapidamente cuando cos θ = 1, es decir, cuando u esta enla misma direccion del ∇f . Es decir, en cada punto P de su dominio, f crece masrapidamente en la direccion del vector gradiente∇f en P . La derivada en esta direcciones
Duf = ∇f · u = ‖∇f‖ cos(0) = ‖∇f‖
De manera similar, f decrece mas rapidamente en la direccion de −∇f , (θ = −π). laderivada en esta direccion es Duf = ‖∇f‖ cos(π) = −‖∇f‖
Cualquier direccion u ortogonal a un gradiente ∇f 6= 0 es una direccion de cambionulo en f , pues en ese caso θ = π/2 y Duf = ‖∇f‖ cos(π/2) = 0
Anteriormente mencionamos de manera informal el vector gradiente como herramienta denotacion para simplificar la expresion de ciertas formulas con varias variables. Ahora vamosa analizar el significado e interpretacion geometrica de los vectores gradiente, sobre todo endos y tres dimensiones. Comencemos con la definicion formal.
Definition 21 (Vector Gradiente).El gradiente de la funcion derivable, f : R
n → R es la funcion de variable vectorial∇f : Rn → R
n definida por
∇f(x) =( ∂f
∂x1,∂f
∂x2, . . . ,
∂f
∂xn
)
∇f se lee como “nabla”. Otra notacion para el gradiente es gradf(x, y). OOJOO para cada(x, y) el gradiente ∇f(x, y) es un vector en el plano (no un vector en el espacio).
Nota: El sımbolo ∇ no tiene ningun valor. Es un operador de la misma manera que ddx es
un operador. Cuando ∇ opera sobre f(x, y) produce el vector ∇f(x, y)
Ejemplo 82. Sea f(x, y) = exy − y2. Halle la derivada direceional de f en cualquier punto(x, y) ∈ Df , en la direccion del vector unitario u = ( 1√
2,− 1√
2)
Solucion. Primero debemos calcular el gradiente de f , ∇f = (fx, fy) no es dificil ver que
∇f(x, y) =
Por tanto, la derivada direccional de f en el punto (x, y) en la direccion u esta dada por
Duf(x, y) = ∇f(x, y) · u =
∆
Ejemplo 83. Calcule la derivada direccional de la funcion f(x, y, z) = ln(x2 + y2 + z2) enel punto P0(2, 2,−4) en la direccion que va de P1(2, 2,−4) a Q1(3, 1,−5)
Solucion. Primero hallemos el vector en la direccion indicada
u =P1Q1
‖P1Q1‖
Ahora hallemos el gradiente de f , ∇f = (fx, fy, fz) no es dificil ver que
62

∇f(x, y, z) =
∇f(2, 2,−4) =
Por tanto, la derivada direccional de f en (2, 2,−4) en la direccion u esta dada por
Duf(2, 2,−4) = ∇f(2, 2,−4) · u =
∆
Ejemplo 84. Determine las direcciones en que f(x, y) = (x2/2)+(y2/2), crece mas rapida-mente, decrece mas rapidamente en el punto (1, 1) y ¿Cuales son las direcciones de cambionulo de f en (1, 1)?
Solucion. Como sabemos cualquier funcion f(x, y) crece mas rapidamente en la direccion de
su ∇f , es decir u =∇f(x, y)|∇f(x, y)| en nuestro caso, ∇f(x, y) = y por tanto,
∇f(1, 1) = u =∇f(1, 1)|∇f(1, 1)| =
Adicionalmente la funcion decrece mas rapidamente en la direccion de en −∇f en (1, 1), esdecir −u =Por otra parte, las direcciones de cambio nulo en (1, 1) son las direcciones ortogonales a ∇f .es son:
n = −n =
∆
Ejemplo 85. ¿Cual es el valor del angulo θ para el cual la derivada direccional de f(x, y) =√
25− x2 − y2 en el punto (1, 2) es mınimo y cual es este valor mınimo?
Solucion. Aquı tenemos que usar usar el vector unitario u = (cos θ, sen θ), y el gradiente def esta dado por
∇f(x, y) = ∇f(1, 2) =
Observe que la derivada Duf(1, 2) dependera necesariamente de θ. Luego
g(θ) = Duf(1, 2) · u =
Ahora hallemos el angulo minimo usando calculo 1,
g′(θ) =
g′′(θ) =
Al hacer g′(θ) = 0, el punto crıtico de g es θ =
g′′( ) =
Ası, θ = corresponde a un valor mınimo de g. Por tanto, el valor mınimo de laderivada direccional de f es
63

Duf(1, 2) =
∆
Interpretacion geometrica del gradiente
Teorema 22.
Si f(x, y) = c es la curva de nivel de una funcion diferenciable de dos variables z = f(x, y)que pasa por un punto especificado (x0, y0) entonces ∇f(x0, y0) es normal (ortogonal) a lacurva de nivel que pasa por (x0, y0).
Demostracion. Suponga que la curva de nivel α(t) se parametriza mediante las funcionesdiferenciables
x = g(t), y = h(t) tal que (x0, y0) = (g(t0), h(t0)),
entonces por la regla de la cadena, la derivada de f(α(t)) = f(g(t), h(t)) = c con respecto at esta dada por
∂f
∂x
dg
dt+∂f
∂y
dh
dt= 0 ⇔
(∂f
∂x,∂f
∂y
)
·(dg
dt,dh
dt
)
= 0, ⇔ ∇f · α′(t) = 0
∇f es normal al vector tangente α′(t), de modo que es normal a la curva de nivel α. �
NOTA La ecuaciones de las rectas tangentes de la curva de nivel de una funcion f , estadada por
fx(x, y)(x− x0) + fy(x, y)(y − x0) = 0
Hasta ahora las superficies en el espacio se han representado principalmente por mediode ecuaciones de la forma
z = f(x, y), Ecuacion de una superficie S
Sin embargo, en el desarrollo que sigue, es conveniente utilizar la representacion mas generalF (x, y, z) Una superficie S dada por z = f(x, y) se puede convertir a la forma generaldefiniendo F como
F (x, y, z) = f(x, y)− z
Puesto que f(x, y)− z = 0, se puede considerar S como la superficie de nivel de F dada por
F (x, y, z) = 0 Ecuacion alternativa de la superficie S
Teorema 23.
Si F (x, y, z) = c es la superficie de nivel de una funcion diferenciable de tres variablesw = F (x, y, z) que pasa por un punto especificado (x0, y0, z0) entonces ∇F (x0, y0, z0) esnormal (ortogonal) a la superficie de nivel que pasa por (x0, y0, z0).
Demostracion. Consideremos una curva C(t) derivable en esta superficie, con ecuacionesparametricas x = x(t), y = y(t), y z = z(t) para las cuales C(t0) = (x0, y0, z0) y C
′(t) 6= 0,entonces por la regla de la cadena, la derivada de F (C(t)) = F (x(t), y(t), z(t)) = c conrespecto a t esta dada por
∂F
∂x
dx
dt+∂F
∂y
dy
dt+∂F
∂z
dz
dt= 0 ⇔
(∂F
∂x,∂F
∂y,∂F
∂z
)
·(dx
dt,dy
dt,dz
dt
)
= 0,
En particular, en t = t0,∇F (x0, y0, z0) · C ′(t0) = 0.
Puesto que este argumento se cumple para cualquier curva C diferenciable que pasa por(x0, y0, z0) sobre la superficie, concluimos que: ∇f es normal a la superficie de nivel en(x0, y0, z0). �
64
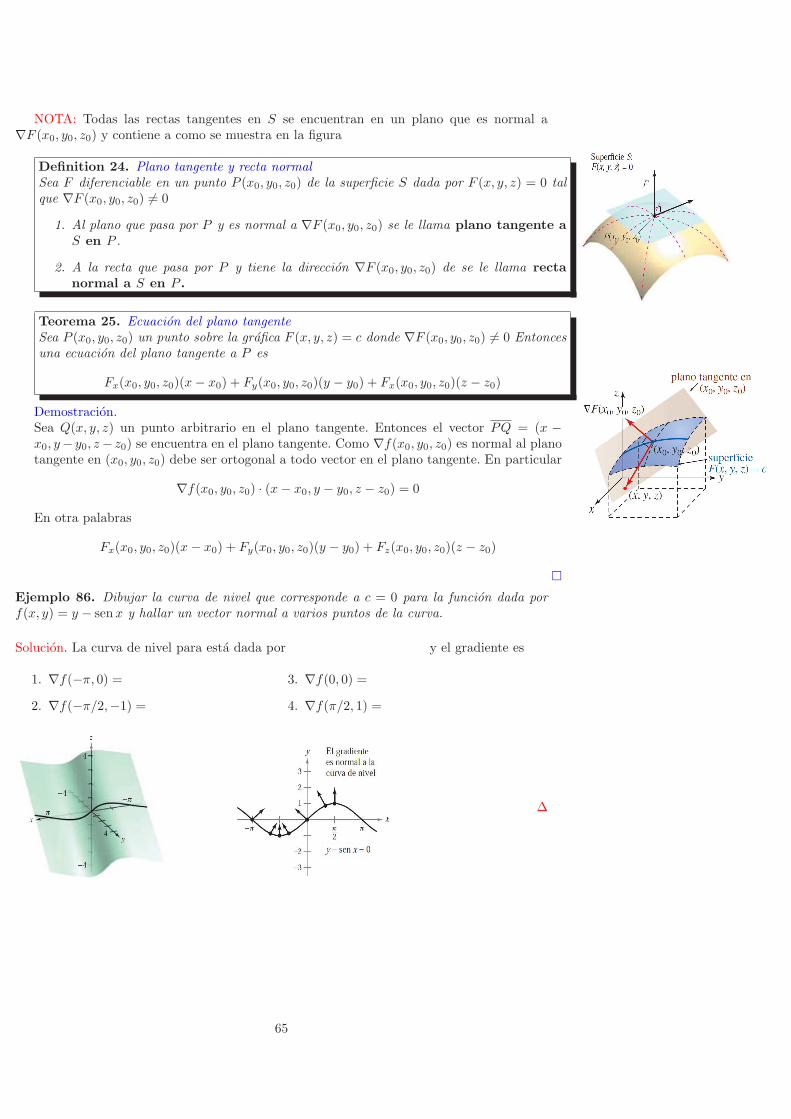
NOTA: Todas las rectas tangentes en S se encuentran en un plano que es normal a∇F (x0, y0, z0) y contiene a como se muestra en la figura
Definition 24. Plano tangente y recta normalSea F diferenciable en un punto P (x0, y0, z0) de la superficie S dada por F (x, y, z) = 0 talque ∇F (x0, y0, z0) 6= 0
1. Al plano que pasa por P y es normal a ∇F (x0, y0, z0) se le llama plano tangente a
S en P .
2. A la recta que pasa por P y tiene la direccion ∇F (x0, y0, z0) de se le llama recta
normal a S en P .
Teorema 25. Ecuacion del plano tangenteSea P (x0, y0, z0) un punto sobre la grafica F (x, y, z) = c donde ∇F (x0, y0, z0) 6= 0 Entoncesuna ecuacion del plano tangente a P es
Fx(x0, y0, z0)(x− x0) + Fy(x0, y0, z0)(y − y0) + Fx(x0, y0, z0)(z − z0)
Demostracion.Sea Q(x, y, z) un punto arbitrario en el plano tangente. Entonces el vector PQ = (x −x0, y− y0, z− z0) se encuentra en el plano tangente. Como ∇f(x0, y0, z0) es normal al planotangente en (x0, y0, z0) debe ser ortogonal a todo vector en el plano tangente. En particular
∇f(x0, y0, z0) · (x− x0, y − y0, z − z0) = 0
En otra palabras
Fx(x0, y0, z0)(x− x0) + Fy(x0, y0, z0)(y − y0) + Fz(x0, y0, z0)(z − z0)
�
Ejemplo 86. Dibujar la curva de nivel que corresponde a c = 0 para la funcion dada porf(x, y) = y − senx y hallar un vector normal a varios puntos de la curva.
Solucion. La curva de nivel para esta dada por y el gradiente es
1. ∇f(−π, 0) =
2. ∇f(−π/2,−1) =
3. ∇f(0, 0) =
4. ∇f(π/2, 1) =
∆
65

Ejemplo 87. Un rastreador termico se encuentra en el punto (2,−3) sobre una placa metali-ca cuya temperatura en (x, y) es T (x, y) = 20−4x2−y2. Hallar la trayectoria del rastreador,si este se mueve continuamente en direccion de maximo incremento de temperatura.
Solucion. Denotamos por r(t) = (x(t), y(t)) la posicion del rastreador. Como el rastreadorbusca el maximo incremento de temperatura, este se encuentra en la direccion del ∇f(x, y).Por tanto, las direcciones de r′(t) = y ∇f(x, y) =son iguales en todo punto de la trayectoria.
La solucion de esta ecuacion diferencial es
Por tanto, la trayectoria del rastreador del calor es x = ∆
Ejemplo 88. Determine una ecuacion para la tangente a la elipsex2
4+ y2 = 2 en el punto
(−2,−1)
Solucion. La elipse es una curva de nivel de la funcion f(x, y) = x2
4 + y2 (para c = 2) Luegoel gradiente ∇f(x, y) = es un vector normal a la recta tangente, luego laecuacion de la recta tangente en elpunto (−2−1) (dada como hiperplano o ecuacion general)es:
∆
Ejemplo 89. Encuentre la superficie de nivel de F (x, y, z) = x2+y2+z2 y una ecuacion delplano tangente que pasa por (1, 1, 1). Grafique el gradiente y el plano tangente en el punto.
Solucion. Puesto que F (1, 1, 1) = 3 la superficie de nivel que pasa por (1, 1, 1) es la esferax2 + y2 + z2 = 3. El gradiente de la funcion es ∇f = y por ello
∇F (1, 1, 1) =
∆
66
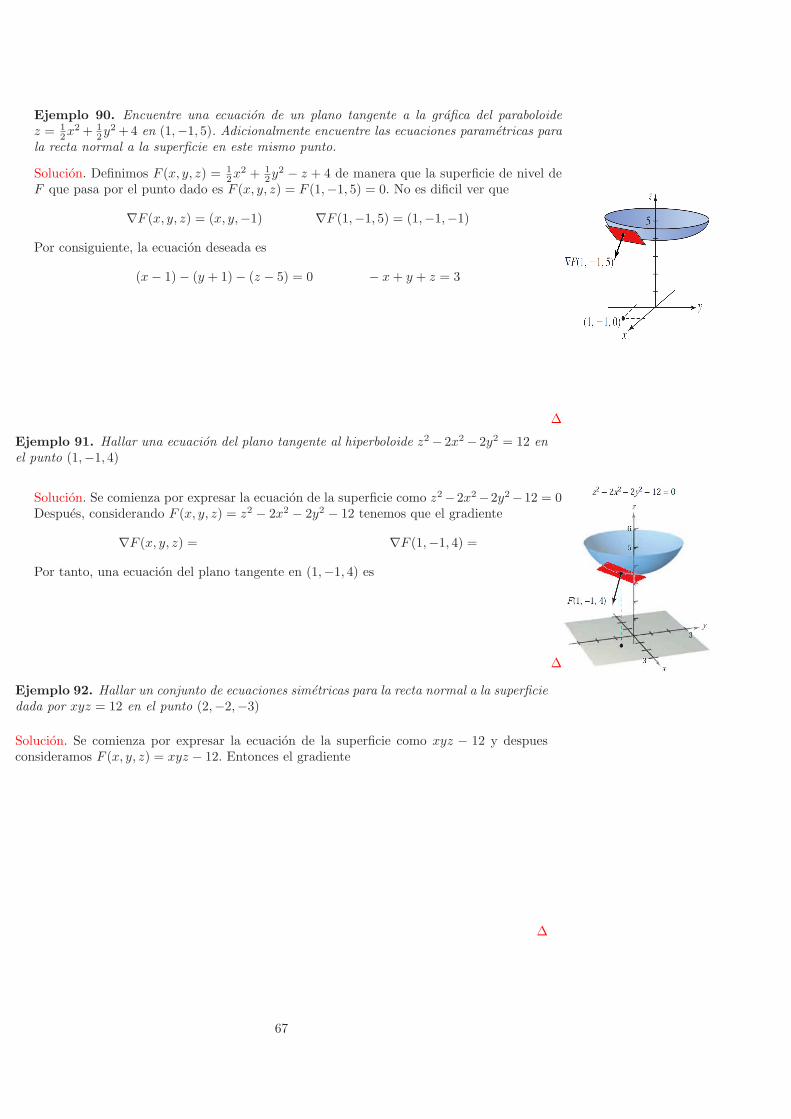
Ejemplo 90. Encuentre una ecuacion de un plano tangente a la grafica del paraboloidez = 1
2x2+ 1
2y2+4 en (1,−1, 5). Adicionalmente encuentre las ecuaciones parametricas para
la recta normal a la superficie en este mismo punto.
Solucion. Definimos F (x, y, z) = 12x
2 + 12y
2 − z + 4 de manera que la superficie de nivel deF que pasa por el punto dado es F (x, y, z) = F (1,−1, 5) = 0. No es dificil ver que
∇F (x, y, z) = (x, y,−1) ∇F (1,−1, 5) = (1,−1,−1)
Por consiguiente, la ecuacion deseada es
(x− 1)− (y + 1)− (z − 5) = 0 − x+ y + z = 3
∆
Ejemplo 91. Hallar una ecuacion del plano tangente al hiperboloide z2 − 2x2 − 2y2 = 12 enel punto (1,−1, 4)
Solucion. Se comienza por expresar la ecuacion de la superficie como z2−2x2−2y2−12 = 0Despues, considerando F (x, y, z) = z2 − 2x2 − 2y2 − 12 tenemos que el gradiente
∇F (x, y, z) = ∇F (1,−1, 4) =
Por tanto, una ecuacion del plano tangente en (1,−1, 4) es
∆
Ejemplo 92. Hallar un conjunto de ecuaciones simetricas para la recta normal a la superficiedada por xyz = 12 en el punto (2,−2,−3)
Solucion. Se comienza por expresar la ecuacion de la superficie como xyz − 12 y despuesconsideramos F (x, y, z) = xyz − 12. Entonces el gradiente
∆
67

Recta tangente en interseccion de superficies
Si F y G son funciones de tres variables derivables continuamente, entonces la interseccionde las superficies
F (x, y, z) = 0 G(x, y, z) = 0 (2.14)
por lo general sera alguna clase de curva C en el espacio, pues las ecuaciones en (2.14)pueden “resolverse de manera implicita para dos de las variables en terminos de la tercera”.(2 ecuaciones 3 incognitas). En cualquier caso, C es una curva suave que pasa por P . Comoesta curva se localiza en ambas superficies, su vector tangente en P es perpendicular a ambosvectores normales ∇F (P ) y ∇G(P ). Si estos vectores NOOOO son colineales, entonces elvector
T = ∇F (P )×∇G(P )es tangente a P en la curva C de la interseccion de las dos superficies F (x, y, z) = 0 yG(x, y, z) = 0
Ejemplo 93. Describir la recta tangente a la curva de interseccion de las superficies x2 +2y2 + 2z2 = 20 y x2 + y2 + z = 4 en el punto (0, 1, 3)
Solucion.Los gradientes de ambas superficies en el punto (0, 1, 3).
El producto vectorial de estos dos gradientes es un vector tangente a ambas superficiesen el punto (0, 1, 3).
∇F (0, 1, 3)×∇G(0, 1, 3) =
∣
∣
∣
∣
∣
∣
∣
∣
i j k∣
∣
∣
∣
∣
∣
∣
∣
Por tanto, la recta tangente a la curva de interseccion de las dos superficies en el punto(0, 1, 3) es
∆
Ejemplo 94. El punto P (1,−1, 2) queda tanto en el paraboloide x2 + y2 = z como en elelipsoide 2x2 +3y2 + z2 = 9 Escriba una ecuacion del plano que pasa por P y que es normala la curva de la interseccion de estas dos superficies
Solucion. Los gradientes de ambas superficies en el punto (1,−1, 2).
Elipsoide
∇F (x, y, z) =
∇F (1,−1, 2) =
Paraboloide
∇G(x, y, z) =
∇G(1,−1, 2) =
68

El producto vectorial de estos dos gradientes es un vector tangente a ambas superficies enel punto (1,−1, 2).
∇F (1,−1, 2)×∇G(1,−1, 2) =
∣
∣
∣
∣
∣
∣
∣
∣
i j k∣
∣
∣
∣
∣
∣
∣
∣
Por tanto, la recta tangente a la curva de interseccion de las dos superficies en el punto(1,−1, 2) es
∆
Perspectiva general
Hasta este momento no se ha definido el concepto de derivada de una funcion f : U ⊂R
n → R. Hemos definido a que se refieren los terminos “derivadas parciales”, “derivadasdireccionales”, “gradiente” y “diferenciales”para funciones de varias variables, PERONUNCA hemos dicho que es “la derivada”para este tipo de funciones y...este es un buenmomento para hacerlo
Trabajaremos con funciones f : U ⊂ Rn → R
m definidas en el conjunto abierto U deR
n y tomando valores en Rm. Entonces f = (f1, f2, . . . , fm) donde fi : U ⊂ R
n → R,i = 1, 2, . . . ,m, son las funciones coordenadas de f .
Para definir la derivada de esta funcion en un punto x0 ∈ U , recordemos que se habıadicho que f es diferenciable en x0 (lo cual querra decir que “la derivada”de la funcion existeen x0) si y solo si todas y cada una de sus funciones componentes fi, lo eran. En este momentotendremos que establecer esta misma idea de una manera diferente, un poco mas sofisticada,pero de mayor utilidad para nuestras intenciones
Definition 26. . Considere la funcion f : U ⊂ Rn → R
m definida en el conjunto abiertoU de R
n y sea x0 ∈ U . Se dice que esta funcion es diferenciable en x0 si existe unatransformacion lineal
Df(x0) : Rn → R
m,
llamada derivada de f en x0, tal que
f(x0 + h) = f(x0) +Df(x0)(h) + r(h), donde lımh→0
r(h)
‖h‖ = 0
(para h ∈ Rn tal que x0 + h ∈ U)
NOTA: Siendo r una funcion que toma valores en Rm, la interpretacion del lımite anterior
serıa de que todas sus funciones componentes tenderan a cero cuando, al dividirlas por ‖h‖,h tiende a cero.
En esta definicion aparece ya el termino “transformacion lineal de Rn en R
m, quese estudia en los cursos de Algebra Lineal. Sabemos que las transformaciones lineales tienenrepresentaciones concretas por medio de matrices. De hecho, la transformacion lineal T :R
n → Rm tiene asociada una matriz de orden m×n que la representa, la cual esta construida
de la forma siguiente:
AT =[
[T (e1)]BRm
[T (e2)]BRm
· · · [T (en)]BRm
]
aquı {e1, e2, . . . , en} es la base canonica de Rn y BRm es la base canonica de R
m.
69

Sea f : U ⊂ Rn → R
m una funcion diferenciable en x0 ∈ U (Aqui, f = (f1, f2, . . . , fm).Luego existe una transformacion lineal Df(x0) : R
n → Rm, tal que
f(x0 + h) = f(x0) +Df(x0)(h) + r(h), donde lımh→0
r(h)
‖h‖ = 0
(para h ∈ Rn tal que x0 + h ∈ U) No es dificil ver que
Df(x0)(h) = f(x0 + h)− f(x0)− r(h), esto es un vector en Rm
Nuestro objetivo aquı es caracterizar la matriz ADf(x0) asociada a la transformacion Df(x0),
es decir, vamos a calcular la columna j-esima de ADf(x0) (esto es,[
Df(x0)(ej)]
BRm).
Consideremos el vector h = tej , t ∈ R, con t suficientemente pequeno podemos tenerx0 + h ∈ U . Observe que ‖h‖ = t. Por tanto,
Df(x0)(tej) = f(x0 + tej)− f(x0)− r(tej)
lımt→0
Df(x0)(ej) = lımt→0
f(x0 + tej)− f(x0)
t− r(tej)
‖h‖
Df(x0)(ej) = lımt→0
f(x0 + tej)− f(x0)
t
= lımt→0
f1(x0 + tej)− f1(x0)
t, lımt→0
f2(x0 + tej)− f2(x0)
t, · · · , lım
t→0
fm(x0 + tej)− fm(x0)
t
=(∂f1∂xj
(x0),∂f2∂xj
(x0), . . . ,∂fm∂xj
(x0))
Por tanto
[
Df(x0)(ej)]
BRm=
∂f1∂xj
(x0)
∂f2∂xj
(x0)
...
,∂fm∂xj
(x0)
De aquı deducimos que la matriz que representa a la transformacion Df(x0) : Rn → R
m
es
ADf(x0) =
(
[
Df(x0)(e1)]
BRm
[
Df(x0)(e2)]
BRm· · ·
[
Df(x0)(en)]
BRm
)
=
∂f1∂x1
(x0)∂f1∂x2
(x0) · · · ,∂f1∂xn
(x0)
∂f2∂x1
(x0)∂f2∂x2
(x0) · · · ,∂f2∂xn
(x0)
...... · · ·
...
∂fm∂x1
(x0)∂fm∂x2
(x0) · · · ,∂fm∂xn
(x0)
= Jf(x0)
A esta matriz m× n, se le llama matriz Jacobianade la funcion f en x0 y se denota Jf(x0).Esta es entonces la Derivada de la funcion diferenciable f en x0 (identificando, como siempre,a la transformacion lineal Df(x0) : R
n → Rm con la matriz que la representa Jf(x0)).
Veamos, por ejemplo,
70

m = 1. f : U ⊂ Rn → R Df(x0) : R
n → R Jf(x0) =
(
∂f
∂x1(x0),
∂f
∂x2(x0), · · · ,
∂f
∂xn(x0)
)
:= ∇f(x0)
m = 2. f : U ⊂ Rn → R
2 Df(x0) : Rn → R
2 Jf(x0) =
∂f1∂x1
(x0)∂f1∂x2
(x0) · · · ,∂f1∂xn
(x0)
∂f2∂x1
(x0)∂f2∂x2
(x0) · · · ,∂f2∂xn
(x0)
Ejemplo 95. Calcule la matriz Jacobiana de la funcion f : R2 → R2 dada por f(x, y) =
(x2 + 3y2, 5x3 + 2y6)
Solucion.
∆
Ejemplo 96. Calcule la matriz Jacobiana en el punto (0, 0) de la funcion f : R2 → R3 dada
por f(x, y) = (sin(x+ y), xex+y, x+ y)
Solucion.
∆
Regla de la cadena, mas general
Supongamos que la funcion g : Rm → Rn es diferenciable en x0 y la funcion f : Rn → R
p
es diferenciable en g(x0). Lo que dice la regla de la cadena es que la funcion compuestaf ◦ g : Rm → R
p sera diferenciable en x0 y que
D(f ◦ g)(x0) = Df(g(x0)(Dg(x0))
71
o bien, en terminos matriciales
J(f ◦ g)(x0) = Jf(
g(x0))
Jg(x0)
el lado derecho de esta ultima expresion es una multiplicacion de matrices. Observese queJg(x0) es una matriz n × mn y Jf(g(x0)) una matriz p × n, de modo que el productoJf(
g(x0))
Jg(x0) esta bien determinado y da por resultado una matriz p×m, como debe serla derivada de J(f ◦ g)(x0)
Ejemplo 97. Consideremos las funciones diferenciables g : R2 → R3 y f : R3 → R
2, dadaspor
g(x, y) = (xy, 5x, y3) f(x, y, z) = (3x2 + y2 + z2, 5xyz)
Halle explicitamente (f ◦ g)(x, y), Jf(x, y, z) y Jg(x, y), luego verifique que J(f ◦ g)(x, y) =Jf(
g(x, y))
Jg(x, y)
Solucion.
∆
Ejemplo 98. Sea f : R3 → R2 y g : R3 → R
3 las funciones f(x, y, z) = (x2+2, x+ y2+ z3),g(x, y, z) = (x+ y + z, xyz, x2 + y3). Calcule la derivada de f ◦ g : R3 → R
2 en (1, 1, 1).
Solucion. No es difıcil ver que J(f◦g)(1, 1, 1) = Jf(
g(1, 1, 1))
Jg(1, 1, 1) = Jf(3, 1, 2)Jg(1, 1, 1).Entonces
∆
72
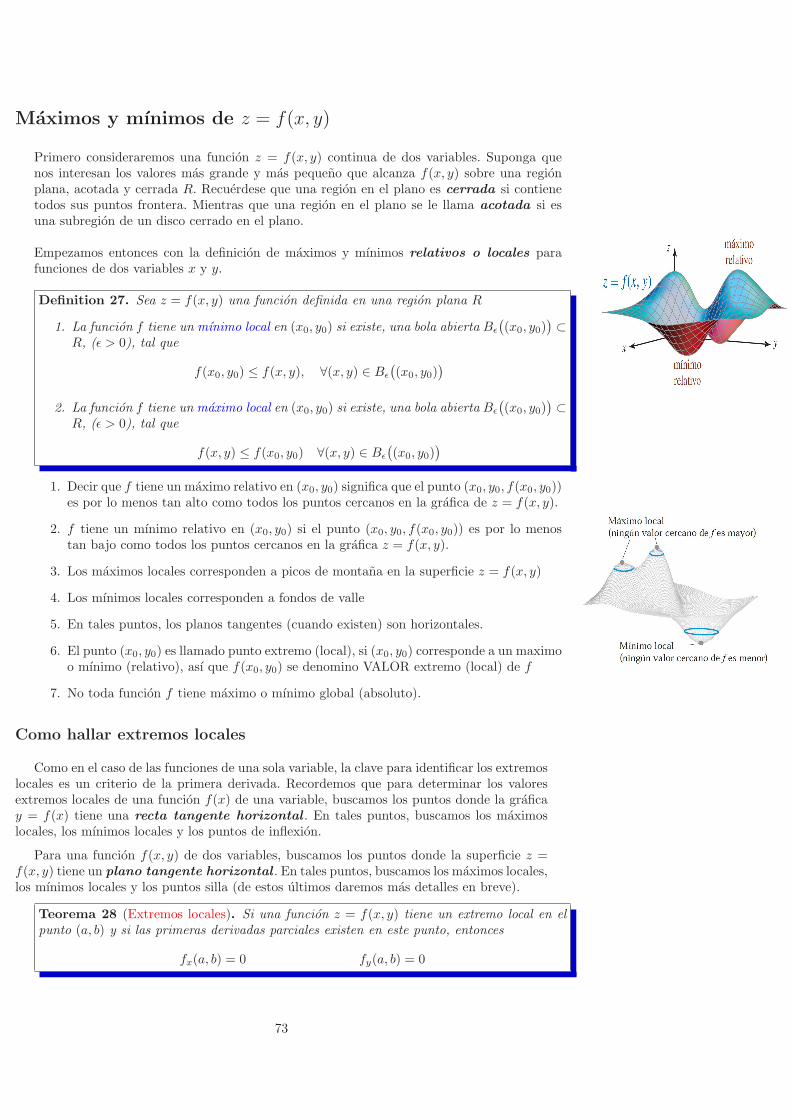
Maximos y mınimos de z = f(x, y)
Primero consideraremos una funcion z = f(x, y) continua de dos variables. Suponga quenos interesan los valores mas grande y mas pequeno que alcanza f(x, y) sobre una regionplana, acotada y cerrada R. Recuerdese que una region en el plano es cerrada si contienetodos sus puntos frontera. Mientras que una region en el plano se le llama acotada si esuna subregion de un disco cerrado en el plano.
Empezamos entonces con la definicion de maximos y mınimos relativos o locales parafunciones de dos variables x y y.
Definition 27. Sea z = f(x, y) una funcion definida en una region plana R
1. La funcion f tiene un mınimo local en (x0, y0) si existe, una bola abierta Bǫ
(
(x0, y0))
⊂R, (ǫ > 0), tal que
f(x0, y0) ≤ f(x, y), ∀(x, y) ∈ Bǫ
(
(x0, y0))
2. La funcion f tiene un maximo local en (x0, y0) si existe, una bola abierta Bǫ
(
(x0, y0))
⊂R, (ǫ > 0), tal que
f(x, y) ≤ f(x0, y0) ∀(x, y) ∈ Bǫ
(
(x0, y0))
1. Decir que f tiene un maximo relativo en (x0, y0) significa que el punto (x0, y0, f(x0, y0))es por lo menos tan alto como todos los puntos cercanos en la grafica de z = f(x, y).
2. f tiene un mınimo relativo en (x0, y0) si el punto (x0, y0, f(x0, y0)) es por lo menostan bajo como todos los puntos cercanos en la grafica z = f(x, y).
3. Los maximos locales corresponden a picos de montana en la superficie z = f(x, y)
4. Los mınimos locales corresponden a fondos de valle
5. En tales puntos, los planos tangentes (cuando existen) son horizontales.
6. El punto (x0, y0) es llamado punto extremo (local), si (x0, y0) corresponde a un maximoo mınimo (relativo), ası que f(x0, y0) se denomino VALOR extremo (local) de f
7. No toda funcion f tiene maximo o mınimo global (absoluto).
Como hallar extremos locales
Como en el caso de las funciones de una sola variable, la clave para identificar los extremoslocales es un criterio de la primera derivada. Recordemos que para determinar los valoresextremos locales de una funcion f(x) de una variable, buscamos los puntos donde la graficay = f(x) tiene una recta tangente horizontal . En tales puntos, buscamos los maximoslocales, los mınimos locales y los puntos de inflexion.
Para una funcion f(x, y) de dos variables, buscamos los puntos donde la superficie z =f(x, y) tiene un plano tangente horizontal . En tales puntos, buscamos los maximos locales,los mınimos locales y los puntos silla (de estos ultimos daremos mas detalles en breve).
Teorema 28 (Extremos locales). Si una funcion z = f(x, y) tiene un extremo local en elpunto (a, b) y si las primeras derivadas parciales existen en este punto, entonces
fx(a, b) = 0 fy(a, b) = 0
73
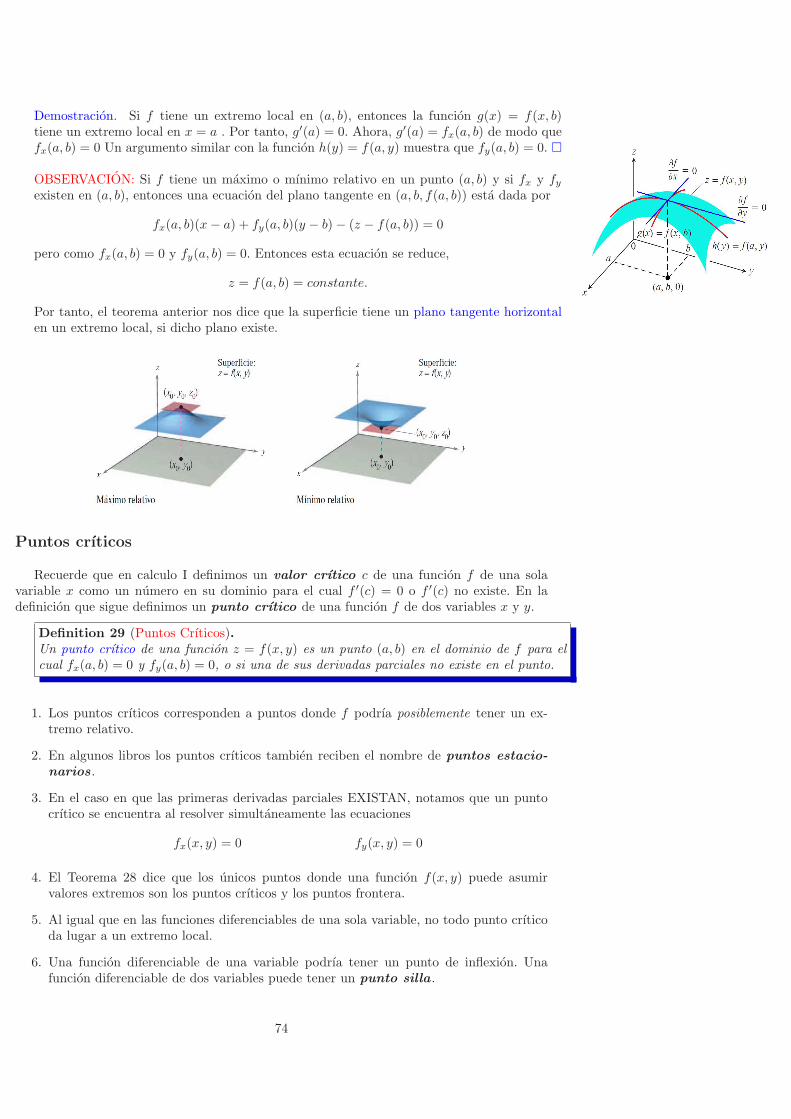
Demostracion. Si f tiene un extremo local en (a, b), entonces la funcion g(x) = f(x, b)tiene un extremo local en x = a . Por tanto, g′(a) = 0. Ahora, g′(a) = fx(a, b) de modo quefx(a, b) = 0 Un argumento similar con la funcion h(y) = f(a, y) muestra que fy(a, b) = 0. �
OBSERVACION: Si f tiene un maximo o mınimo relativo en un punto (a, b) y si fx y fyexisten en (a, b), entonces una ecuacion del plano tangente en (a, b, f(a, b)) esta dada por
fx(a, b)(x− a) + fy(a, b)(y − b)− (z − f(a, b)) = 0
pero como fx(a, b) = 0 y fy(a, b) = 0. Entonces esta ecuacion se reduce,
z = f(a, b) = constante.
Por tanto, el teorema anterior nos dice que la superficie tiene un plano tangente horizontalen un extremo local, si dicho plano existe.
Puntos crıticos
Recuerde que en calculo I definimos un valor crıtico c de una funcion f de una solavariable x como un numero en su dominio para el cual f ′(c) = 0 o f ′(c) no existe. En ladefinicion que sigue definimos un punto crıtico de una funcion f de dos variables x y y.
Definition 29 (Puntos Crıticos).Un punto crıtico de una funcion z = f(x, y) es un punto (a, b) en el dominio de f para elcual fx(a, b) = 0 y fy(a, b) = 0, o si una de sus derivadas parciales no existe en el punto.
1. Los puntos crıticos corresponden a puntos donde f podrıa posiblemente tener un ex-tremo relativo.
2. En algunos libros los puntos crıticos tambien reciben el nombre de puntos estacio-
narios.
3. En el caso en que las primeras derivadas parciales EXISTAN, notamos que un puntocrıtico se encuentra al resolver simultaneamente las ecuaciones
fx(x, y) = 0 fy(x, y) = 0
4. El Teorema 28 dice que los unicos puntos donde una funcion f(x, y) puede asumirvalores extremos son los puntos crıticos y los puntos frontera.
5. Al igual que en las funciones diferenciables de una sola variable, no todo punto crıticoda lugar a un extremo local.
6. Una funcion diferenciable de una variable podrıa tener un punto de inflexion. Unafuncion diferenciable de dos variables puede tener un punto silla .
74

Definition 30 (Punto Silla).Un punto crıtico (a, b) de una funcion z = f(x, y) es un punto silla si para toda bola B
(
(a, b))
existen puntos (x, y) ∈ B tal que f(x, y) > f(a, b) y puntos (x, y) ∈ B tal que f(x, y) <f(a, b).
Ejemplo 99. Hallar los extremos locales de f(x, y) = 2x2 + y2 + 8x− 6y + 20
Solucion. El dominio de f es todo el plano R2 (no hay puntos frontera). Ahora hallemos los
puntos crıticos de f estudiando fx y fy,
fx(x, y) = fy(x, y) =
estan definidas en todo R2. Por tanto, los puntos extremos locales pueden ocurrir solamente
cuando , es decir,
Luego el punto crıtico es , y su valor crıtico es . Ahora observeque,
f(x, y) = 2x2 + y2 + 8x− 6y + 20 > 3 =
Por tanto, f tiene un mınimo local en . ∆
Ejemplo 100. Hallar los extremos locales de f(x, y) = 1− (x2 + y2)1/3
Solucion. El dominio de f es todo el plano R2 (no hay puntos frontera). Ahora hallemos los
puntos crıticos de f estudiando las fx y fy
fx(x, y) = fy(x, y)
estan definidas en todo R2 salvo en (0, 0). Observe que aquı las derivadas fx = fy = 0 no
pueden ser ambas 0. Ası que, buscamos el punto crıtico en los (x, y) donde fx o fy NOexistan. Es por esto que (0, 0) es el unico punto crıtico de f . No es dificil ver que f(0, 0) = 1y que
f(x, y) = 1− (x2 + y2)1/3 < 1 = f(0, 0)
Por tanto, f tiene un maximo relativo en (0, 0) ∆
Nota: Recuerdese que una de las derivadas parciales debe no existir o las dos deben ser 0para tener un punto crıtico.
75

Ejemplo 101. Hallar los extremos locales (si existen) de f(x, y) = y2 − x2
Solucion. El dominio de f es todo el plano R2 (no hay puntos frontera). Ahora hallemos los
puntos crıticos de f estudiando las fx y fy,
fx(x, y) = fy(x, y) =
claramente existen en todas partes. Por tanto, los puntos extremos locales pueden ocurrirsolamente cuando , es decir, solo cuando x = y y =Luego el punto crıtico es . y su valor crıtico es . Ahora observeque,
f(x, 0) = −x2 < 0, f(0, y) = y2 > 0
Es decir, f(x, y) es positiva y es negativa en puntos cercanos de , por esoconcluimos que f tiene un punto silla en . Observe que f la funcion NO tienevalores extremos locales. ∆
Ejemplo 102. Hallar los puntos crıticos de f(x, y) = xy(3− x− y) definida en el conjuntoD =
{
(x, y) ∈ R2 : x > 0, y > 0, x+ y < 3}
Solucion. El dominio de f es la region de la figura, (no hay puntos frontera). Ahora hallemoslos puntos crıticos de f estudiando fx y fy,
fx(x, y) = fy(x, y) =
estan definidas en todo R2. Por tanto, los puntos extremos locales pueden ocurrir solamente
cuando , es decir,
Luego, el punto crıtico es . y su valor crıtico es . ∆
En las funciones de los ejemplos anteriores, fue relativamente facil determinar los extremoslocales, porque cada una de las funciones estaba dada, o se podıa expresar, en forma decuadrado perfecto. Con funciones mas complicadas, los argumentos algebraicos son menosadecuados y es mejor emplear los medios analıticos presentados en el siguiente criterio de lassegundas derivadas parciales. Es el analogo, para funciones de dos variables, del criteriode las segundas derivadas para las funciones de una variable.
Pero antes, definamos la matriz hessiana de una funcion de varias variables.
Definition 31 (Matriz Hessiana).Sea f : D ⊂ R
n → R una funcion de n variables con dominio el conjunto abierto D tal quefxi
(p) y fxixj(p) existen ∀i, i = 1, 2, . . . , n y ∀p ∈ D Se denomina matriz hessiana de la
funcion f en el punto p ∈ D, a la matriz dada por
Hess(f(p)) =
fx1x1(p) fx1x2
(p) · · · fx1xn(p)
fx2x1(p) fx2x2
(p) · · · fx2xn(p)
......
. . ....
fxnx1(p) fxnx2
(p) · · · fxnxn(p)
Ejemplo 103. Halle la matriz hessiana de las siguientes funciones: a) f(x, y) = x3 + y3 −9xy + 4 y b) g(x, y, z) = x2 + y2 + z2 − xy + 2z
Solucion. a) Las derivadas parciales de primer orden y de segundo orden de f son
76
fx(x, y) =
fy(x, y) =
fxx(x, y) =
fyx(x, y) =
fxy(x, y) =
fyy(x, y) =
Luego, la matriz hessiana de f es
Hess(f(p)) =
fxx(x, y) fxy(x, y)
fyx(x, y) fyy(x, y)
=
b) Las derivadas parciales de primer orden y de segundo orden de g son
gx =
gy =
gz =
gxx =
gxy =
gxz =
gyy =
gyx =
gyz =
gzx =
gzy =
gzz =
Luego, la matriz hessiana de f es
Hess(g(x, y, z)) =
∆
OBS: Las menores principales de la matriz hessiana Hess(f(p)) son los determinantesdados por
H1(f(p)) = fx1x1(p) H2(f(p)) =
∣
∣
∣
∣
∣
∣
fx1x1(p) fx1x2
(p)
fx2x1(p) fx2x2
(p)
∣
∣
∣
∣
∣
∣
, H3(f(p)) =
∣
∣
∣
∣
∣
∣
∣
∣
fx1x1(p) fx1x2
(p) fx1x3(p)
fx2x1(p) fx2x2
(p) fx2x3(p)
fx3x1(p) fx3x2
(p) fx3x3(p)
∣
∣
∣
∣
∣
∣
∣
∣
Hess(f(p)) =
∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
fx1x1(p) fx1x2
(p) · · · fx1xn(p)
fx2x1(p) fx2x2
(p) · · · fx2xn(p)
......
. . ....
fxnx1(p) fxnx2
(p) · · · fxnxn(p)
∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
77

Teorema 32. Sea f : D ⊂ Rn → R una funcion de n variables con dominio el conjunto
abierto D ⊂ Rn, tal que fxi
(p) y fxixj(p) existen ∀i, j = 1, 2, . . . , n y ∀p ∈ D. Sea x0 ∈ D
un punto crıtico de la grafica de f , entonces se tiene:
1. Si la matriz hessiana Hess(f(x0)) es definida positiva, esto es, las menores
H1(f(x0)) > 0, H2(f(x0)) > 0, H3(f(x0)) > 0, . . . Hn(f(x0)) > 0
entonces f(p) es un valor mınimo local de f .
2. Si la matriz hessiana Hess(f(x0)) es definida negativa, esto es, las menores
H1(f(x0)) < 0, H2(f(x0)) > 0, H3(f(x0)) < 0, H4(f(x0)) > 0 . . .
(es decir, los menores principales de orden impar son negativas y los de orden parpositivos), entonces f(x0) es un valor maximo local de f .
3. Si no se cumple ninguna de las dos primeras condiciones y Hn(f(x0)) 6= 0, entoncesx0 corresponde a un punto de silla de la grafica de f .
4. Si no se cumple ninguna de las dos primeras condiciones y Hn(f(x0)) = 0 , enton-ces nada se puede concluir con respecto al punto crıtico x0; puede corresponder a unextremo relativo, a un punto de silla o ninguna de estas caracterısticas.
Ejemplo 104. Determine los extremos relativos de f(x, y) = x3+y3+9x2−3y2+15x−9y+20
Solucion. Las derivadas parciales de primer orden de f son
fx(x, y) = 3x2 + 18x+ 15 = 3(x+ 1)(x+ 5)
fy(x, y) = 3y2 − 67− 9 = 3(y + 1)(y − 3)
Al igualar a cero estas derivadas parciales, se obtiene los puntos crıticos
(−1,−1) (−1, 3), (−5,−1), (−5, 3)
La matriz hessiana de f en un punto generico (x, y) es
Hess(f(p)) =
fxx(x, y) fxy(x, y)
fyx(x, y) fyy(x, y)
=
6x+ 18 0
0 6y − 6
Para el punto (−1,−1), se tiene
Hess(f(−1,−1)) =
12 0
0 −12
, y como
H1(f(−1,−1)) = 12 > 0
H2(f(−1,−1)) = −144 < 0,
entonces (−1,−1) corresponde a un punto de silla. El punto de silla de la grafica de f es(−1,−1, f(−1,−1)) = (−1,−1, 18).
Para el punto (−1, 3), se tiene
Hess(f(−1, 3)) =
12 0
0 −12
, y como
H1(f(−1, 3)) = 12 > 0
H2(f(−1, 3)) = 144 > 0,
entonces (−1, 3) corresponde a un mınimo local. El valor mınimo local es f(−1, 3)) = −14
78

Para el punto (−5,−1), se tiene
Hess(f(−5,−1)) =
−12 0
0 −12
, y como
H1(f(−5,−1)) = −12 < 0
H2(f(−5,−1)) = 144 > 0,
entonces (−5,−1) corresponde a un maximo local. El valor maximo local es f(−5,−1)) = 50
Para el punto (−5, 3), se tiene
Hess(f(−5, 3)) =
−12 0
0 12
, y como
H1(f(−5, 3)) = −12 < 0
H2(f(−1, 3)) = −144 < 0,
entonces (−5, 3) corresponde a un punto de silla. El punto de silla d ela grafica de f es(−5, 3, f(−1, 3)) = (−5, 3, 18) ∆
OBSERVACION:
1. Con el criterio de las segundas derivadas parciales pueden no hallarse los extremoslocales si alguna de las primeras derivadas parciales no existe, no se puede aplicar elcriterio.
2. Cuado el metodo no funciona se pueden tratar de hallar los extremos mediante la graficao mediante algun otro metodo.
Ejemplo 105. Determine los extremos relativos de f(x, y) = x2y2
Solucion. Las derivadas parciales de primer orden de f son
Por tanto, es un punto crıtico. La matriz hessianade f en un punto generico (x, y) es
Hess(f(x, y)) =
fxx(x, y) fxy(x, y)
fyx(x, y) fyy(x, y)
=
Para el punto , se tiene
Hess( ) =
, y como
H1( ) =
H2( ) =
entonces en el criterio NO decide. Sin embargo, como f(x, y) = 0 para todopunto en y f(x, y) = x2y2 > 0 en todos los otrospuntos, se puede concluir que cada uno de estos puntos crıticos son un mınimo global, ∆
Ejemplo 106. Determine los extremos relativos de f(x, y, z) = x3 + y3 + z3 − 3xy− 3z2 +2
Solucion. Las derivadas parciales de primer orden de f son
79

Al igualar a cero estas derivadas parciales, se obtiene los puntos crıticos
La matriz hessiana de f en un punto generico (x, y, z) es
Hess(f(x, y, z)) =
fxx(x, y, z) fxy(x, y, z) fxz(x, y, z)
fyx(x, y, z) fyy(x, y, z) fyz(x, y, z)
fzx(x, y, x) fzy(x, y, z) fzz(x, y, z)
=
Para el punto , se tiene
Hess( ) =
, y como
H1( ) =
H2( ) =
H3( ) =
,
entonces corresponde a un punto de silla.
Para el punto , se tiene
Hess(f ) =
, y como
H1( ) =
H2( ) =
H3( ) =
,
entonces corresponde a un punto de silla.
Para el punto , se tiene
Hess(f ) =
, y como
H1( ) =
H2( ) =
H3( ) =
,
entonces corresponde a un punto de silla.
Para el punto , se tiene
Hess(f ) =
, y como
H1( ) =
H2(( )) =
H3( )) =
,
entonces corresponde a un mınimo local. El valor mınimo local es .∆
Ejemplo 107. Supongase que x e y representan las cantidades (en kilos) de los complementosdiferentes mezclados en un alimento balanceado para pollos. Los pesos resultantes (en kilos)para vender los gallos y las gallinas se estiman por p = 6x−3y y q = 3y−9 respectivamente.La utilidad (en miles pesos) obtenido de un lote de pollos se modela por la funcion
U(p, q) = 10− 2(p− 15)2 − (q − 12)2
(se supone que el numero de gallos y gallinas en cada lote no varıa). Determine las cantidadesx e y de cada complemento alimentario que maximiza la utilidad.
80

Solucion. Al aplicar la regla de la cadena, las derivadas parciales de la funcion utilidad conrespecto a x e y son
∂U
∂x=
∂U
∂y=
Al igualar a cero estas derivadas parciales, se obtiene un unico punto crıtico Lamatriz hessiana de f en un punto generico (x, y) es
Hess(f(p)) =
fxx(x, y) fxy(x, y)
fyx(x, y) fyy(x, y)
=
Para el punto , se tiene
Hess( ) =
, y como
H1( ) =
H2( ) =,
entonces corresponde a un . Por consiguiente, las can-tidades de x = kilos e y = kilos maximizan la utilidad. ∆
Ejemplo 108. Una caja rectangular descansa sobre el plano xy con un vertice en el origencoordenado. Halle el volumen maximo de la caja si el vertice opuesto esta situado en el planoQ : 2x+ 2y + z = 12.
Solucion.Sean a, b y c las longitudes de las aristas de la caja, tal que P (a, b, c) es el vertice (opuesto alorigen) de la caja situado en el plano Q (ver figura). Como P (a, b, c) ∈ Q, entonces Luego,
el volumen de la caja en funcion de a y b es
V = abc
Las derivadas parciales de primer orden de la funcion volumen son
Va(a, b) =
Vb(a, b) =
Al igualar a cero estas derivadas parciales, se obtiene un unico punto crıticoLa matriz hessiana de f en un punto generico (x, y) es
Hess(V (p)) =
Vaa(a, b) Vab(a, b)
Vba(a, b) Vbb(a, b)
=
Para el punto ( , ), se tiene
Hess(V ( , ) =
, y como
H1(V ( , )) = < 0
H2(V ( , )) = > 0,
entonces corresponde a un maximo local. Por tanto, el volumen maximo de lacaja es . ∆
81

Extremos en conjuntos acotados cerrados
Recuerde que si una funcion f de una variable x es continua en un intervalo cerrado [a, b]entonces f posee siempre un maximo global o absoluto y un mınimo global o absoluto en elintervalo [a, b]. Tambien vimos que estos extremos globales sobre [a, b] ocurren en un puntofrontera x = a o x = b del o en un numero crıtico c ∈ (a, b).
A continuacion se presenta el teorema del valor extremo para una funcion f de dosvariables x y y que es continua sobre un conjunto R cerrado y acotado en el plano xy.
Teorema 33. Una funcion f de dos variables x y y que es continua sobre un conjunto Rcerrado y acotado tiene siempre un maximo absoluto y un mınimo absoluto sobre R.
OBS: Los valores maximo o mınimo globales o absolutos de f(x, y) sobre un conjuntoR cerrado y acotado se encuentran como sigue:
1. Encuentre los puntos crıticos interiores.
2. Encuentre los posibles valores extremos de f sobre la frontera de R.
3. Compare los valores de f en los puntos hallados en los pasos 1 y 2 .
Ejemplo 109. Determine los valores maximos y mınimos globales o absolutos de f(x, y) =2+2x+2y−x2−y2 en la region triangular del primer cuadrante acotada por las rectas x = 0y y = 0, y = 9− x
Solucion. Como f es diferenciable, los unicos lugares donde f puede asumir estos valores sonlos puntos interiores del triangulo donde fx = fy = 0 y los puntos en la frontera.
(i) Puntos interiores: Las derivadas parciales de primer orden de f son
fx(x, y) = 2− 2x fy(x, y) = 2− 2y
Al igualar a cero estas derivadas parciales, se obtiene un unico punto crıtico (1, 1) y elvalor de f ahı es f(1, 1) = 4.
(ii) Puntos frontera : Consideramos un lado del triangulo a la vez.
a) Sobre el segmento OA, y = 0. La funcion
f(x, y)∣
∣
∣
y=0= 2 + 2x− x2 := g(x)
donde g(x) es un funcıon diferenciable definida en 0 ≤ x ≤ 9. Ahora hallemos los valoresextremos de ginteriores de g. Como g es diferencialbe en estos puntos, entonces hacemos g′(x) = 2−2x =0 y obtenemos un unico punto critico x = 1 y el valor de f ahi es
f(1, 0) = g(1) = 3.
frontera de g: los unicos valores frontera de g son
x = 0 donde f(0, 0) = g(0) = 2
x = 9 donde f(9, 0) = g(9) = −61
82

b) Sobre el segmento OB, x = 0. La funcion
f(x, y)∣
∣
∣
x=0= 2 + 2y − y2 := h(y)
donde h(y) es un funcıon diferenciable definida en 0 ≤ y ≤ 9. Por el analisisanterior sabemos que los candidatos a valores extremos en este segmento son
f(0, 0) = h(0) = 2, f(0, 9) = h(9) = −61, f(0, 1) = h(1) = 3
c) Sobre el segmento AB, y = 9− x. La funcion
f(x, y)∣
∣
∣
y=9−x= −61 + 18x− 2x2 = m(x)
donde m(x) es un funcıon diferenciable definida en 0 ≤ x ≤ 9. Ahora hallemos losvalores extremos de m
Puntos interiores de g. Como m es diferencialbe en estos puntos, entonceshacemos m′(x) = 18−4x = 0 y obtenemos un unico punto critico x = 9
2 y el valorde f ahi es
f(9
2,9
2) = m(
9
2) = −41
2.
Puntos frontera de g: los unicos valores frontera de m son
x = 0 donde f(0, 9) = m(0) = −61
x = 9 donde f(9, 0) = m(9) = −61
En resumen, los valores extremos encontrados son: 4, 2,−61, 3,−41/2. El maximo es 4,y f lo asume en (1, 1). El mınimo es −61 y f lo asume en (0, 9) y (9, 0).
∆
Ejemplo 110. Determine los valores maximos y mınimos globales o absolutos de f(x, y) =6x2 − 8x+ 2y2 − 5 en la region cerrada R definido por x2 + y2 ≤ 1,
Solucion. Como f es diferenciable, los unicos lugares donde f puede asumir estos valores sonlos puntos interiores del circulo x2 + y2 < 1 donde fx = fy = 0 y los puntos en la fronterax2 + y2 = 1.
(a) Puntos interiores: Las derivadas parciales de primer orden de f son
fx(x, y) = 12x− 8 fy(x, y) = 4y
Al igualar a cero estas derivadas parciales, se obtiene un unico punto crıtico ( 23 , 0). Como(
23
)2
+ 02 < 1, el punto esta en el interior de R y el valor de f ahı es f( 23 , 0) = − 233 .
(b) Puntos frontera : La frontera es un circunferencia x2+ y2 = 1. Usando las ecuacionesparametricas dadas por x = cos t y y = sen t. La funcion
f(x, y) = f(cos t, sen t) = 6 cos2 t− 8 cos t+ 2 sen2 t− 5 := g(t)
donde g(t) es un funcion diferenciable definida en 0 ≤ t ≤ 2π. Ahora hallemos losvalores extremos de g
interiores de g. Como g es diferenciable en 0 < t < 2π, entonces hacemos g′(t) =8 sin t(− cos t+1) y obtenemos un unico punto critico en 0 < t < 2π es t = π. Por tantoel punto correspondiente es (−1, 0) y el valor de f ahi es
f(−1, 0) = g(π) = 9.
83

frontera de g: los unicos valores frontera de g son
t = 0 donde = g(0) = f(1, 0) = −7
t = 2π donde = g(2π) = f(1, 0) = −7
En
resumen tenemos los valores extremos de la funcion f : f( 23 , 0) = − 233 , f(−1, 0) = 9 y
f(1, 0) = −7. Por tanto, el maximo global de f es f(−1, 0) = 9 y el mınimo global esf( 23 , 0) = − 23
3 .
∆
Multiplicadores de Lagrange
En ocasiones es necesario determinar los valores extremos de una funcion cuyo dominioesta restringido a cierto subconjunto particular del plano (por ejemplo, un disco, una regiontriangular cerrada, o a lo largo de una curva). Tales restricciones tienden a complicar losproblemas de optimizacion porque la solucion optima puede presentarse en un punto fronteradel dominio. En esta seccion exploraremos un poderoso metodo para determinar los valoresextremos de funciones restringidas: el metodo de multiplicadores de Lagrange .
Teorema 34 (Teorema de Lagrange).Sean f y g funciones con primeras derivadas parciales continuas, y tales que f tiene unextremo en un punto (x0, y0) sobre la curva suave de restriccion g(x, y) = 0 Si ∇g(x0, y0) 6= 0entonces existe un numero real λ tal que
∇f(x0, y0) = λ∇g(x0, y0).
Demostracion. La restriccion g(x, y) = 0 es un curva de nivel cero de la funcion g(x, y). ypor teorema sabemos que ∇g es un vector normal a esta curva de nivel. llamenos C a lacurva de nivel cero de g, claramente esta curva C pertenence al dominio de f . Esta curva lapodemos parametrizar por C(t) = (x(t), y(t)), Definamos por h(t) = f(C(t)) = f(x(t), y(t)).Como (x0, y0) es un valor extremo de f entonces
h(t0) = f(x(t0), y(t0)) = f(x0, y0)
es un valor extremo de h. Esto implica que h′(t0) = 0 y, por la regla de la cadena,
dh
dt=∂f
∂x
dx
dt+∂f
∂y
dy
dt= ∇f(x0, y0) · C ′(t0) = 0
Ası, ∇f(x0, y0) es ortogonal a C ′(t0). Pero sabemos tambien que ∇g, tambien es ortogonalC ′(t). Por consiguiente, los gradientes ∇f(x0, y0) y ∇g(x0, y0) y son paralelos y debe existirun escalar λ tal que
∇f(x0, y0) = λ∇g(x0, y0).�
OBSERVACION:
1. Una interpretacion geometrica interesante del teorema 35. En las figuras se observa la
84

curva de restriccion g(x, y) = 0 junto con curvas de nivel comunes de la funcion f(x, y).Como los vectores gradiente ∇f y ∇g son normales a las curvas de nivel de las funcionesf y g, respectivamente, se sigue que las curvas f(x, y) = c y g(x, y) = 0 son tangentesuna con otra en puntos donde los dos vectores gradiente son colineales y f toma suvalor maximo (o mınimo), c.
2. El criterio de los multiplicadores de Lagrange sirve para seleccionar, de entre las curvasde nivel de f , aquella que es tangente a la curva de restriccion.
3. El metodo de los multiplicadores de Lagrange NO tiene un indicador integrado quesenale MAX o MIN cuando se encuentra un extremo.
4. El numero real λ para el cual ∇f = λ∇g recibe el nombre de multiplicador de
Lagrange .
5. Al aplicar el metodo de los multiplicadores de Lagrange, en realidad no estamos intere-sados en determinar los valores de λ que satisfacen el sistema ∇f = λ∇g.
6. La ecuacion ∇f = λ∇g es equivalente a
fx(x, y) = λgx(x, y) fy(x, y) = λgy(x, y)
Metodo para determinar los extremos con restricciones
Para encontrar los extremos de z = f(x, y) sujetos a la restriccion g(x, y) = 0 resuelvael sistema de ecuaciones
fx(x0, y0) =λgx(x0, y0) fy(x0, y0) =λgy(x0, y0) g(x0, y0) =0 (2.15)
Entre las soluciones (x, y, λ) del sistema (2.15) estaran los puntos donde f tiene unextremo. Cuando f tiene un maximo (mınimo), este sera el numero mas grande (o maspequeno) en la lista de los valores de la funcion f(xi, yi).
Ejemplo 111. Encuentre los puntos de la hiperbola rectangular xy = 1 que sean los mascercanos al origen (0, 0).
Solucion. Se necesita minimizar la distancia d =√
x2 + y2 que hay del origen a un puntoP (x, y) sobre la curva xy = 1. Pero el algebra es mas sencilla si en lugar de eso se minimizael cuadrado de esta distancia, es decir,
f(x, y) = x2 + y2 sujeta a la restriccion g(x, y) = xy − 1
Luego, ∇f(x, y) = (2x, 2y) y ∇g(x, y) = (y, x). Por tanto, la ecuacion ∇f = λ∇g nos llevaa
(i) 2x = λx ⇒ 2x2 = λxy
(ii) 2y = λy ⇒ 2y2 = λxy
(iii) xy − 1 = 0
Pero como xy = 1 > 0 implica que x y y tienen el mismo signo. Entonces, el hecho de quex2 = y2 implica que x = y. Al sustituir xy = 1 se obtiene x2 = 1, por lo que se siguefinalmente que x = y = 1 o x = y = −1. Los dos resultados posibles (1, 1) y (−1,−1) estanindicados en la figura.
Fig. 1∆
En la figura 1 se observa que la circunferencia x2 + y2 = 2 y la hiperbola xy = 1 son,en realidad, tangentes a los dos puntos (1, 1) y (−1,−1) donde la distancia al cuadradof(x, y) = x2 + y2 es mınima y esta sujeta a la restriccion g(x, y) = xy − 1
85

Ejemplo 112. Determine los extremos f(x, y) = y2 − 4x sujetos a x2 + y2 = 9
Aquı la restriccion esta dada por g(x, y) = x2 + y2 − 9 = 0. Luego, ∇f(x, y) = (−4, 2y) y∇g(x, y) = (2x, 2y). Por tanto, la ecuacion ∇f = λ∇g nos lleva a
(i) − 4 = 2xλ
(ii) 2y = 2yλ ⇒ y(1− λ) = 0
(iii) x2 + y2 − 9 = 0
Si y = 0, de (iii) tenemos x2 = 9 o x = ±3. Por consiguiente, (−3, 0) y (3, 0) son solucionesdel sistema.
Si λ = 1, entonces de (i) tenemos x = −2. Al sustituir este valor en (iii) obtenemos y2 = 5o y = ±
√5. luego tenemos dos o soluciones mas del sistema (−2,−
√5) y (−2,
√5). De la
lista de valores de la funcion
f(−3, 0) = 12 f(3, 0) = −12, f(−2,−√5) = 13, f(−2,
√5) = 13
De manera que f tiene un mınimo con restricciones en (3, 0) y un maximo con restriccionesen (−2,
√5)
Los cuatro puntos que encontramos yacen en el plano xy sobre el cırculo de radio 3; lostres extremos con restricciones corresponden a los puntos (3, 0,−12), (−2,−
√5, 13) en el
espacio tridimensional sobre la curva de interseccion de la superficie del cilindro circular.
Aquı la grafica muestra tres curvas de nivel de y2− 4x = c. Dos de las curvas de nivel sontangentes al cırculo x2 + y2 = 9.
Ejemplo 113. Determine los extremos f(x, y, z) = x2 + y2 + z2 sujetos a 2x+ 2y − z = 5
Solucion. Aquı la restriccion esta dada por . Luego,∇f(x, y, z) =y ∇g(x, y) = . Por tanto, la ecuacion ∇f = λ∇g nos lleva a
De tal manera, un extremo con restricciones es f( 109 ,109 ,− 5
9 ) ∆
Ejemplo 114. Considera el tronco elıptico de la figura, con semiejes de longitudes a = 2y b = 1. ¿Cual es el area maxima de seccion transversal de una viga rectangular, como seindica, a partir de este tronco elıptico?
86
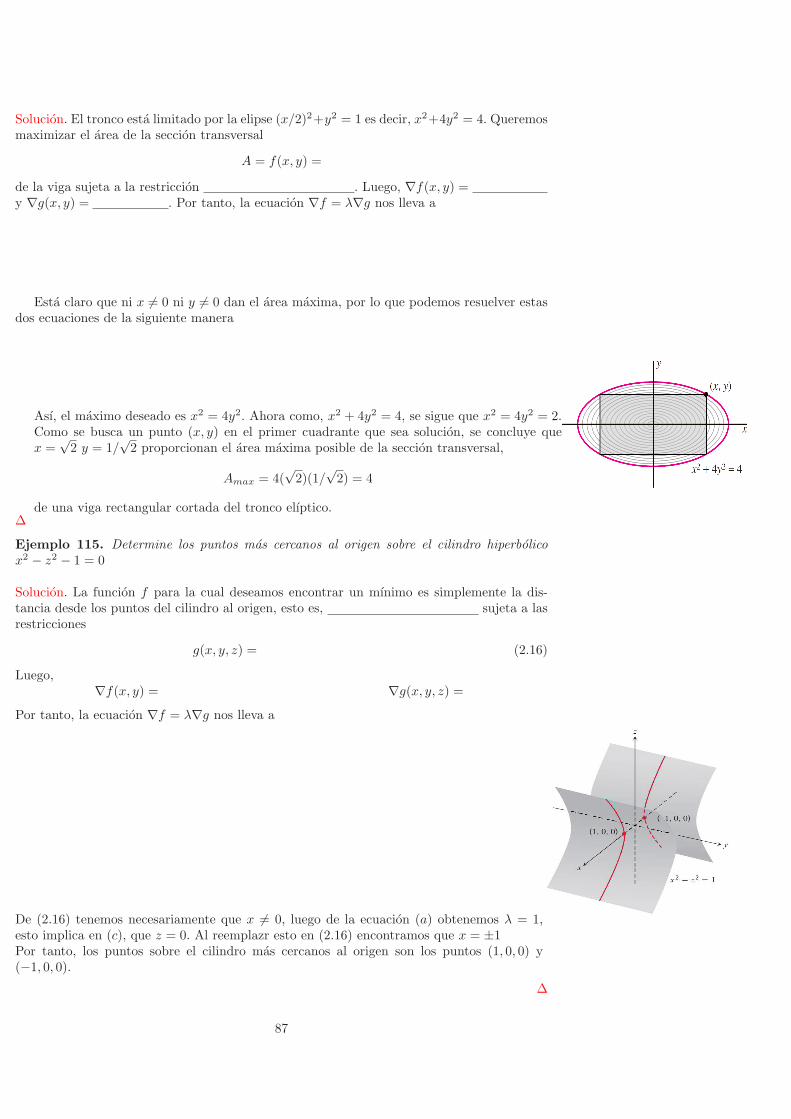
Solucion. El tronco esta limitado por la elipse (x/2)2+y2 = 1 es decir, x2+4y2 = 4. Queremosmaximizar el area de la seccion transversal
A = f(x, y) =
de la viga sujeta a la restriccion . Luego, ∇f(x, y) =y ∇g(x, y) = . Por tanto, la ecuacion ∇f = λ∇g nos lleva a
Esta claro que ni x 6= 0 ni y 6= 0 dan el area maxima, por lo que podemos resuelver estasdos ecuaciones de la siguiente manera
Ası, el maximo deseado es x2 = 4y2. Ahora como, x2 + 4y2 = 4, se sigue que x2 = 4y2 = 2.Como se busca un punto (x, y) en el primer cuadrante que sea solucion, se concluye quex =
√2 y = 1/
√2 proporcionan el area maxima posible de la seccion transversal,
Amax = 4(√2)(1/
√2) = 4
de una viga rectangular cortada del tronco elıptico.∆
Ejemplo 115. Determine los puntos mas cercanos al origen sobre el cilindro hiperbolicox2 − z2 − 1 = 0
Solucion. La funcion f para la cual deseamos encontrar un mınimo es simplemente la dis-tancia desde los puntos del cilindro al origen, esto es, sujeta a lasrestricciones
g(x, y, z) = (2.16)
Luego,∇f(x, y) = ∇g(x, y, z) =
Por tanto, la ecuacion ∇f = λ∇g nos lleva a
De (2.16) tenemos necesariamente que x 6= 0, luego de la ecuacion (a) obtenemos λ = 1,esto implica en (c), que z = 0. Al reemplazr esto en (2.16) encontramos que x = ±1Por tanto, los puntos sobre el cilindro mas cercanos al origen son los puntos (1, 0, 0) y(−1, 0, 0).
∆
87

Multiplicadores de Lagrange con dos restricciones
Muchos problemas nos piden determinar los valores extremos de una funcion diferenciablef(x, y, z) cuyas variables estan sujetas a dos restricciones. Si las restricciones son
g1(x, y, z) = 0 g2(x, y, z) = 0
g1 y g2 son diferenciables, con ∇g1 no paralelo a ∇g2 encontramos los maximos y mınimoslocales con una restriccion de f , introduciendo dos multiplicadores de Lagrange λ1 y λ2.
Teorema 35 (Teorema de Lagrange dos restriciones).Sean f , g1 y g2 funciones con primeras derivadas parciales continuas, y tales que f tiene unextremo en un punto (x0, y0, z0) sobre la curva interseccion de las dos superficies
g1(x, y, z) = 0 g2(x, y, z) = 0
Si ∇g1(x0, y0, z0),∇g2(x0, y0, z0) 6= 0 y no-paralelos entonces existen λi ∈ R tal que
∇f(x0, y0, z0) = λ1∇g1(x0, y0, z0) + λ2∇g2(x0, y0, z0).
Las siguientes ecuaciones
∇f = λ1∇g1 + λ2∇g2, g1(x, y, z) = 0, g2(x, y, z) = 0 (2.17)
tienen una agradable interpretacion geometrica. Las superficies g1 = 0 y g2 = 0 secortan (por lo general) en una curva regular, digamos C. A lo largo de esta curva,buscamos los puntos donde f tiene valores maximos y mınimos locales con respecto a susotros valores sobre la curva. Estos son los puntos donde ∇f es normal a C. Pero ∇g1 y∇g2 tambien son normales a C en estos puntos, pues C esta en las superficies g1 = 0 y g2 = 0.
Por tanto, ∇f esta en el plano determinado por ∇g1 y ∇g2, lo que significa que
∇f = λ1∇g1 + λ2∇g2, para algunas λ1 y λ2.
Como los puntos que buscamos estan en ambas superficies, sus coordenadas tambien debensatisfacer las ecuaciones g1(x, y, z) = 0 y g(x, y, z) = 0 que son los requisitos restantes de lasecuaciones (2.17).
Ejemplo 116. El plano x+ y+ z = 1 corta al cilindro x2+ y2 = 1 en una elipse. Determinelos puntos, sobre la elipse, mas cercanos y mas lejanos del origen.
Solucion. Encontramos los valores extremos de f(x, y, z) = x2 + y2 + z2 (el cuadrado de ladistancia de (x, y, z) al origen) sujeta a las restricciones
g1(x, y, z) = x2 + y2 − 1 = 0 g2(x, y, z) = x+ y + z − 1 = 0 (2.18)
88

Luego,
∇f(x, y) = (2x, 2y, 2z), ∇g1(x, y, z) = (2x, 2y, 1), ∇g2(x, y, z) = (1, 1, 0).
Por tanto, la ecuacion ∇f = λ1∇g1 + λ2∇g2 nos lleva a
2x = 2λ1x+ λ2, 2y = 2λ1y + λ2, 2z = λ2
No es dificil ver que
2x = 2λ1x+ 2z ⇒ (1− λ1)x = z
2y = 2λ1y + 2z ⇒ (1− λ1)y = z
Ahora, si λ1 = 1 entonces z = 0, al reemplazar esto en (2.18) encontramos dos puntos(1, 0, 0) y (0, 1, 0). Por otra parte si λ1 6= 1 entonces x = y = z
1−λ = 0, usando esto esto en(2.18) encontramos que
x2 + x2 − 1 = 0 x+ x+ z − 1 = 0
x = ±√2
2z = 1∓
√2
Luego los puntos correspondientes sobre la elipse son P1(√22 ,
√22 , 1−
√2) y P2(−
√22 ,−
√22 , 1+√
2). Sin embargo, debemos tener CUIDADO. Aunque P1 y P2 dan maximos locales de fsobre la elipse, P2 esta mas alejado del origen que P1.
Los puntos sobre la elipse mas cercanos al origen son (1, 0, 0) y (0, 1, 0). El punto sobre laelipse mas lejano del origen es P2.
∆
Ejemplo 117. Encuentre el punto sobre la curva C de interseccion de la esfera x2+y2+z2 =9 y el plano x − y + 3z = 6 que esta mas alejada del plano xy. Luego determine el puntosobre C que esta mas cercano al plano xy.
Solucion. Basandonos en las grafica, sugiere que existen dos de tales puntos P1 y P2 concoordenadas z no negativas. La funcion f para la cual deseamos encontrar un maximo y unmınimo es simplemente la distancia desde cada uno de estos puntos al plano xy, esto es,f(x, y, z) = z. (distancia del plano xy a la curva intersecion) sujeta a las restricciones
g1(x, y, z) = x2 + y2 + z2 − 9 = 0 g2(x, y, z) = x− y + 3z − 6 = 0 (2.19)
89

Luego,
∇f(x, y) = (0, 0, 1), ∇g1(x, y, z) = (2x, 2y, 2z), ∇g2(x, y, z) = (1,−1, 3).
Por tanto, la ecuacion ∇f = λ1∇g1 + λ2∇g2 nos lleva a
a) 0 = 2λ1x+λ2, b) 0 = 2λ1y−λ2, c) 1 = 2λ1z+3λ2
Sumamndo (a) + (b) obtenemos 2λ1(y + z) = 0. Ahora, si λ1 = 0, entonces (a) nos lleva aλ2 = 0 usando esto en (c) encontramos que 0 = 1. Ahora bien, y = −x y reemplazando estoen (2.19) encontramos que
x2 + x2 + z2 − 9 = 0 x+ x+ 3z − 6 = 0
2x2 + z2 = 9 2x+ 3z = 6 (2.20)
Al resolver el sistema (2.20), obtenemos
x =6
11± 9
22
√14 z =
18
11∓ 3
11
√14
Entonces, los puntos en C que estan mas alejado y mas cercano al plano xy son, respectiva-mente P1(−0.99, 0.99, 2.66) y P2(2.08,−2.08, 0.62)
∆
90
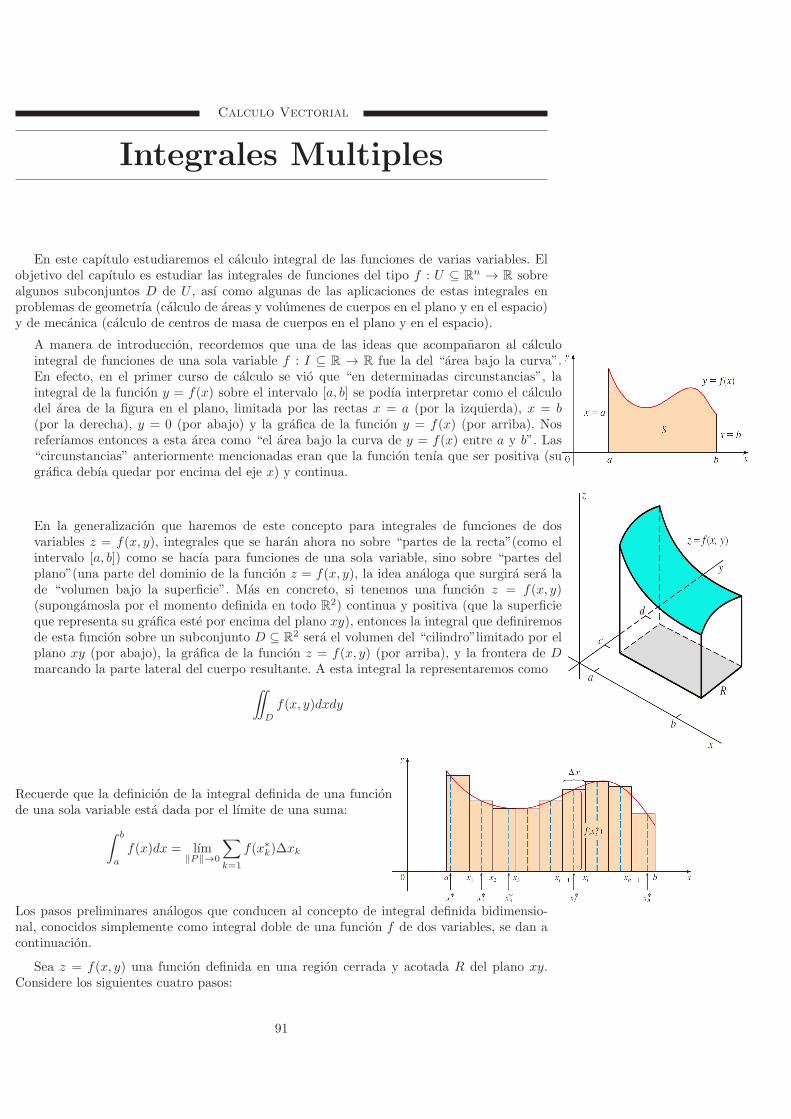
Calculo Vectorial
Integrales Multiples
En este capıtulo estudiaremos el calculo integral de las funciones de varias variables. Elobjetivo del capıtulo es estudiar las integrales de funciones del tipo f : U ⊆ R
n → R sobrealgunos subconjuntos D de U , ası como algunas de las aplicaciones de estas integrales enproblemas de geometrıa (calculo de areas y volumenes de cuerpos en el plano y en el espacio)y de mecanica (calculo de centros de masa de cuerpos en el plano y en el espacio).
A manera de introduccion, recordemos que una de las ideas que acompanaron al calculointegral de funciones de una sola variable f : I ⊆ R → R fue la del “area bajo la curva”.En efecto, en el primer curso de calculo se vio que “en determinadas circunstancias”, laintegral de la funcion y = f(x) sobre el intervalo [a, b] se podıa interpretar como el calculodel area de la figura en el plano, limitada por las rectas x = a (por la izquierda), x = b(por la derecha), y = 0 (por abajo) y la grafica de la funcion y = f(x) (por arriba). Nosreferıamos entonces a esta area como “el area bajo la curva de y = f(x) entre a y b”. Las“circunstancias” anteriormente mencionadas eran que la funcion tenıa que ser positiva (sugrafica debıa quedar por encima del eje x) y continua.
En la generalizacion que haremos de este concepto para integrales de funciones de dosvariables z = f(x, y), integrales que se haran ahora no sobre “partes de la recta”(como elintervalo [a, b]) como se hacıa para funciones de una sola variable, sino sobre “partes delplano”(una parte del dominio de la funcion z = f(x, y), la idea analoga que surgira sera lade “volumen bajo la superficie”. Mas en concreto, si tenemos una funcion z = f(x, y)(supongamosla por el momento definida en todo R
2) continua y positiva (que la superficieque representa su grafica este por encima del plano xy), entonces la integral que definiremosde esta funcion sobre un subconjunto D ⊆ R
2 sera el volumen del “cilindro”limitado por elplano xy (por abajo), la grafica de la funcion z = f(x, y) (por arriba), y la frontera de Dmarcando la parte lateral del cuerpo resultante. A esta integral la representaremos como
¨
D
f(x, y)dxdy
Recuerde que la definicion de la integral definida de una funcionde una sola variable esta dada por el lımite de una suma:
ˆ b
a
f(x)dx = lım‖P‖→0
∑
k=1
f(x∗k)∆xk
Los pasos preliminares analogos que conducen al concepto de integral definida bidimensio-nal, conocidos simplemente como integral doble de una funcion f de dos variables, se dan acontinuacion.
Sea z = f(x, y) una funcion definida en una region cerrada y acotada R del plano xy.Considere los siguientes cuatro pasos:
91
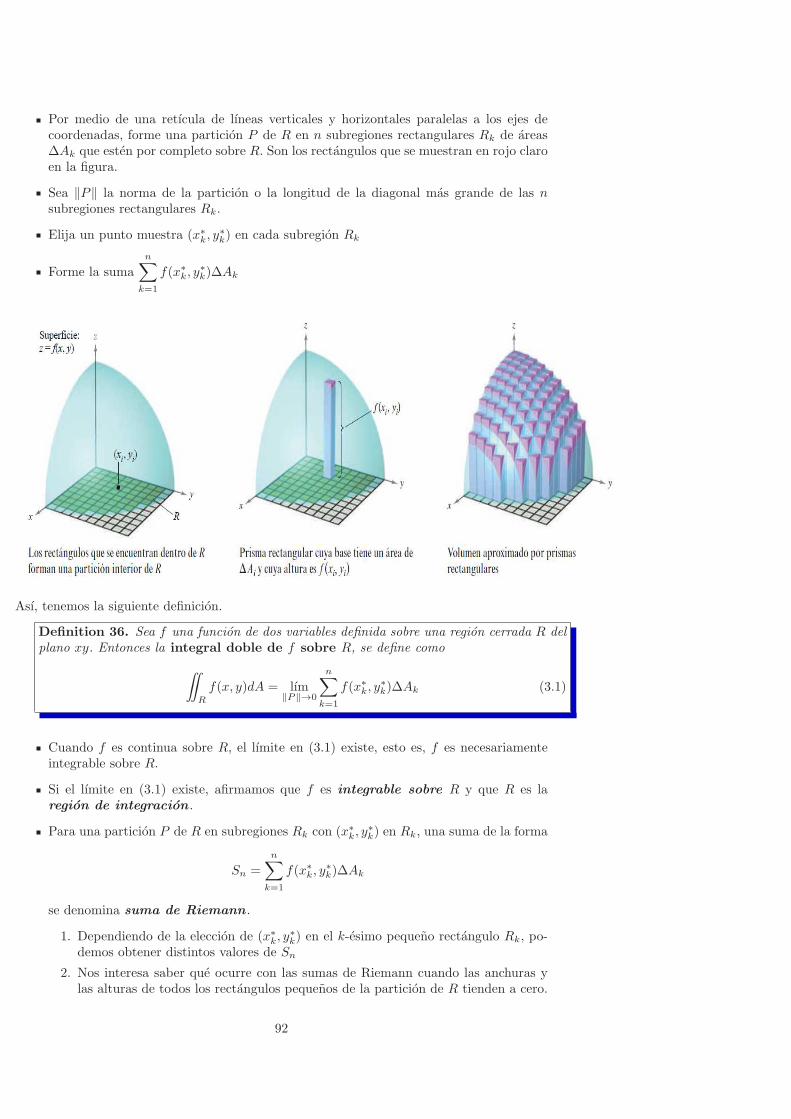
Por medio de una retıcula de lıneas verticales y horizontales paralelas a los ejes decoordenadas, forme una particion P de R en n subregiones rectangulares Rk de areas∆Ak que esten por completo sobre R. Son los rectangulos que se muestran en rojo claroen la figura.
Sea ‖P‖ la norma de la particion o la longitud de la diagonal mas grande de las nsubregiones rectangulares Rk.
Elija un punto muestra (x∗k, y∗k) en cada subregion Rk
Forme la suma
n∑
k=1
f(x∗k, y∗k)∆Ak
Ası, tenemos la siguiente definicion.
Definition 36. Sea f una funcion de dos variables definida sobre una region cerrada R delplano xy. Entonces la integral doble de f sobre R, se define como
¨
R
f(x, y)dA = lım‖P‖→0
n∑
k=1
f(x∗k, y∗k)∆Ak (3.1)
Cuando f es continua sobre R, el lımite en (3.1) existe, esto es, f es necesariamenteintegrable sobre R.
Si el lımite en (3.1) existe, afirmamos que f es integrable sobre R y que R es laregion de integracion .
Para una particion P de R en subregiones Rk con (x∗k, y∗k) en Rk, una suma de la forma
Sn =
n∑
k=1
f(x∗k, y∗k)∆Ak
se denomina suma de Riemann .
1. Dependiendo de la eleccion de (x∗k, y∗k) en el k-esimo pequeno rectangulo Rk, po-
demos obtener distintos valores de Sn
2. Nos interesa saber que ocurre con las sumas de Riemann cuando las anchuras ylas alturas de todos los rectangulos pequenos de la particion de R tienden a cero.
92
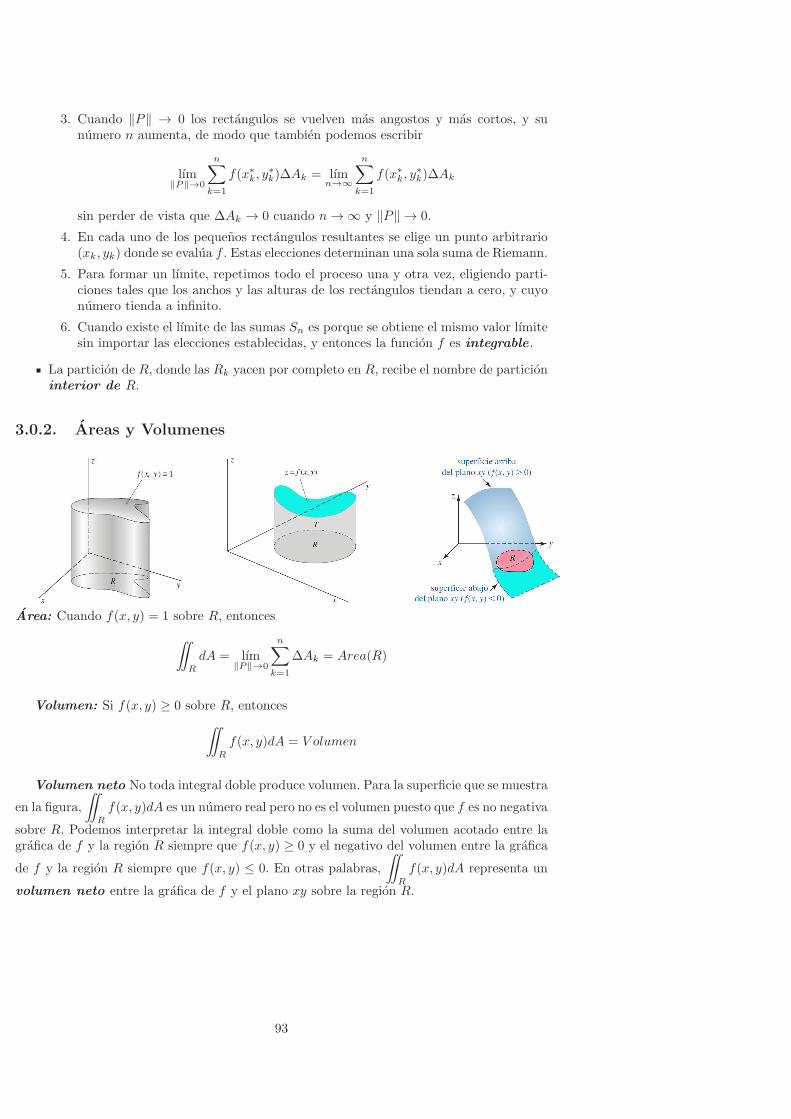
3. Cuando ‖P‖ → 0 los rectangulos se vuelven mas angostos y mas cortos, y sunumero n aumenta, de modo que tambien podemos escribir
lım‖P‖→0
n∑
k=1
f(x∗k, y∗k)∆Ak = lım
n→∞
n∑
k=1
f(x∗k, y∗k)∆Ak
sin perder de vista que ∆Ak → 0 cuando n→ ∞ y ‖P‖ → 0.
4. En cada uno de los pequenos rectangulos resultantes se elige un punto arbitrario(xk, yk) donde se evalua f . Estas elecciones determinan una sola suma de Riemann.
5. Para formar un lımite, repetimos todo el proceso una y otra vez, eligiendo parti-ciones tales que los anchos y las alturas de los rectangulos tiendan a cero, y cuyonumero tienda a infinito.
6. Cuando existe el lımite de las sumas Sn es porque se obtiene el mismo valor lımitesin importar las elecciones establecidas, y entonces la funcion f es integrable .
La particion de R, donde las Rk yacen por completo en R, recibe el nombre de particioninterior de R.
3.0.2. Areas y Volumenes
Area: Cuando f(x, y) = 1 sobre R, entonces
¨
R
dA = lım‖P‖→0
n∑
k=1
∆Ak = Area(R)
Volumen: Si f(x, y) ≥ 0 sobre R, entonces
¨
R
f(x, y)dA = V olumen
Volumen neto No toda integral doble produce volumen. Para la superficie que se muestra
en la figura,
¨
R
f(x, y)dA es un numero real pero no es el volumen puesto que f es no negativa
sobre R. Podemos interpretar la integral doble como la suma del volumen acotado entre lagrafica de f y la region R siempre que f(x, y) ≥ 0 y el negativo del volumen entre la grafica
de f y la region R siempre que f(x, y) ≤ 0. En otras palabras,
¨
R
f(x, y)dA representa un
volumen neto entre la grafica de f y el plano xy sobre la region R.
93

Teorema 37 (Propiedades). Sean f y g funciones de dos variables que son integrables sobreuna region cerrada R del plano xy. Entonces
1.
¨
R
kf(x, y)dA = k
¨
R
f(x, y)dA
2.
¨
R
[f(x, y)± g(x, y)]dA =
¨
R
f(x, y)dA±¨
R
g(x, y)dA
3.
¨
R
f(x, y) =
¨
R1
f(x, y)dA +
¨
R2
f(x, y)dA donde R1 y R2 son subregiones que no
se traslapan y R = R1 ∪R2
4. Si f(x, y) ≥ g(x, y) sobre R entonces
¨
R
f(x, y)dA ≥¨
R
g(x, y)dA
Ejemplo 118. Considere la region de integracion R en el primer cuadrante acotado por las
graficas de x+y = 2, y = 0 y x = 0. Aproxime la integral doble
¨
R
(5−x−2y)dA utilizando
una suma de Riemann, las Rk que se muestran en la Figura y los puntos muestra (x∗k, y∗k)
en el centro geometrico de cada Rk.
Solucion. De la figura vemos que ∆Ak = 1212 = 1
4 , k = 1, 2, . . . , 6 y las (x∗k, y∗k) en las Rk
para k = 1, 2, . . . , 6 son a su vez, ( 14 ,14 ), (
34 ,
14 ), (
54 ,
14 ), (
34 ,
34 ), (
14 ,
34 ), (
14 ,
54 ). Por consiguiente,
la suma de Riemman es
n∑
k=1
f(x∗k, y∗k) = f(
1
4,1
4)1
4+ f(
3
4,1
4)1
4+ f(
5
4,1
4)1
4+ f(
3
4,3
4)1
4+ f(
1
4,3
4)1
4+ f(
1
4,5
4)1
4
=17
16+
15
16+
13
16+
11
16+
13
16+
9
16= 4.875
∆
3.0.3. Integrales Iteradas
De manera similar al proceso de la diferenciacion parcial podemos definir la integracionparcial. El concepto de la integracion parcial es la clave para un metodo practico de evalua-cion de una integral doble. Por ejemplo, dada la derivada parcial fx(x, y) = 2xy entonces,considerando y constante, se puede integrar con respecto a x para obtener
f(x, y) =
ˆ
fx(x, y)dx =
ˆ
2xydx = 2y
ˆ
xdx = yx2 + C(y)
La “constante”de integracion, C(y), es una funcion de y. En otras palabras, al integrar conrespecto a x, se puede recobrar f(x, y) solo parcialmente.
Definition 38. Integracion parcial indefinida:Si F (x, y) es una funcion con derivada parcial con respecto a y, igual a Fy(x, y) = f(x, y)entonces la integral parcial de f con respecto a y es
ˆ
f(x, y)dy =
ˆ
Fy(x, y)dy = F (x, y) + C1(x) (3.2)
donde la funcion C1(x) desempena la parte de la “constante de integracion”. De manerasimilar, Si F (x, y) es una funcion con derivada parcial respecto a x igual a Fy(x, y) = f(x, y)entonces la integral parcial de f con respecto a x es
ˆ
f(x, y)dx =
ˆ
Fx(x, y)dx = F (x, y) + C1(y) (3.3)
94
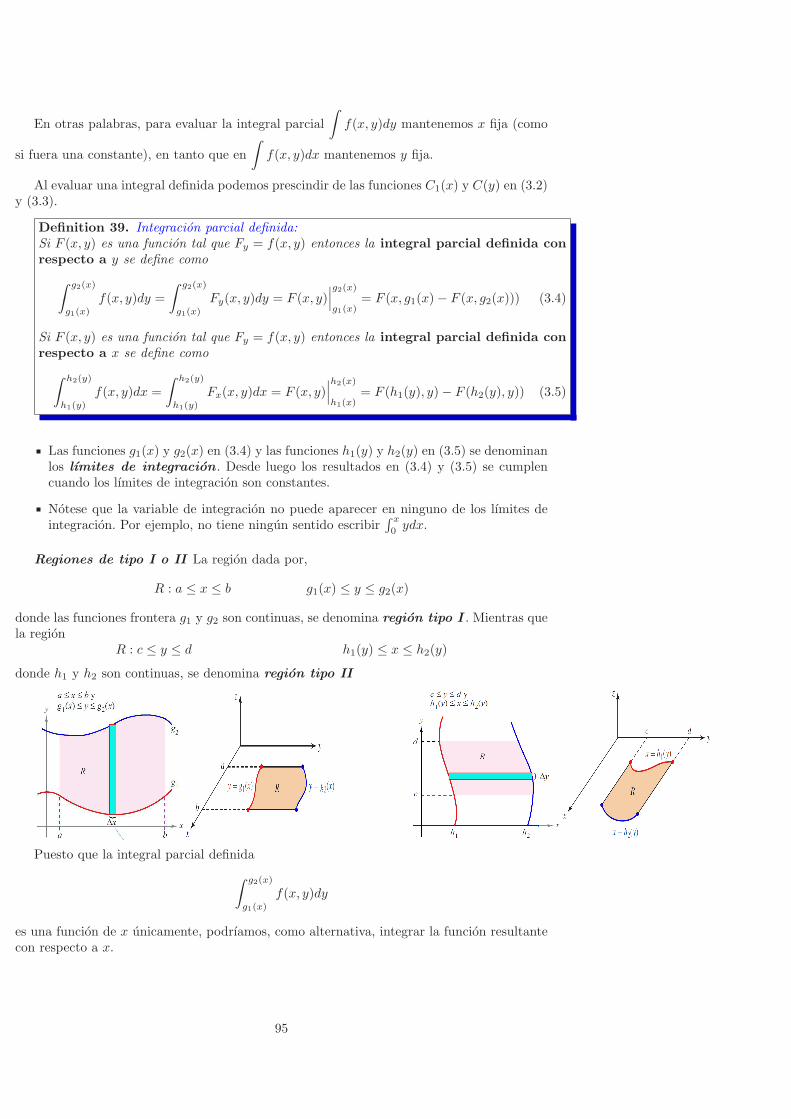
En otras palabras, para evaluar la integral parcial
ˆ
f(x, y)dy mantenemos x fija (como
si fuera una constante), en tanto que en
ˆ
f(x, y)dx mantenemos y fija.
Al evaluar una integral definida podemos prescindir de las funciones C1(x) y C(y) en (3.2)y (3.3).
Definition 39. Integracion parcial definida:Si F (x, y) es una funcion tal que Fy = f(x, y) entonces la integral parcial definida con
respecto a y se define como
ˆ g2(x)
g1(x)
f(x, y)dy =
ˆ g2(x)
g1(x)
Fy(x, y)dy = F (x, y)∣
∣
∣
g2(x)
g1(x)= F (x, g1(x)− F (x, g2(x))) (3.4)
Si F (x, y) es una funcion tal que Fy = f(x, y) entonces la integral parcial definida con
respecto a x se define como
ˆ h2(y)
h1(y)
f(x, y)dx =
ˆ h2(y)
h1(y)
Fx(x, y)dx = F (x, y)∣
∣
∣
h2(x)
h1(x)= F (h1(y), y)− F (h2(y), y)) (3.5)
Las funciones g1(x) y g2(x) en (3.4) y las funciones h1(y) y h2(y) en (3.5) se denominanlos lımites de integracion . Desde luego los resultados en (3.4) y (3.5) se cumplencuando los lımites de integracion son constantes.
Notese que la variable de integracion no puede aparecer en ninguno de los lımites deintegracion. Por ejemplo, no tiene ningun sentido escribir
´ x
0ydx.
Regiones de tipo I o II La region dada por,
R : a ≤ x ≤ b g1(x) ≤ y ≤ g2(x)
donde las funciones frontera g1 y g2 son continuas, se denomina region tipo I . Mientras quela region
R : c ≤ y ≤ d h1(y) ≤ x ≤ h2(y)
donde h1 y h2 son continuas, se denomina region tipo II
Puesto que la integral parcial definida
ˆ g2(x)
g1(x)
f(x, y)dy
es una funcion de x unicamente, podrıamos, como alternativa, integrar la funcion resultantecon respecto a x.
95
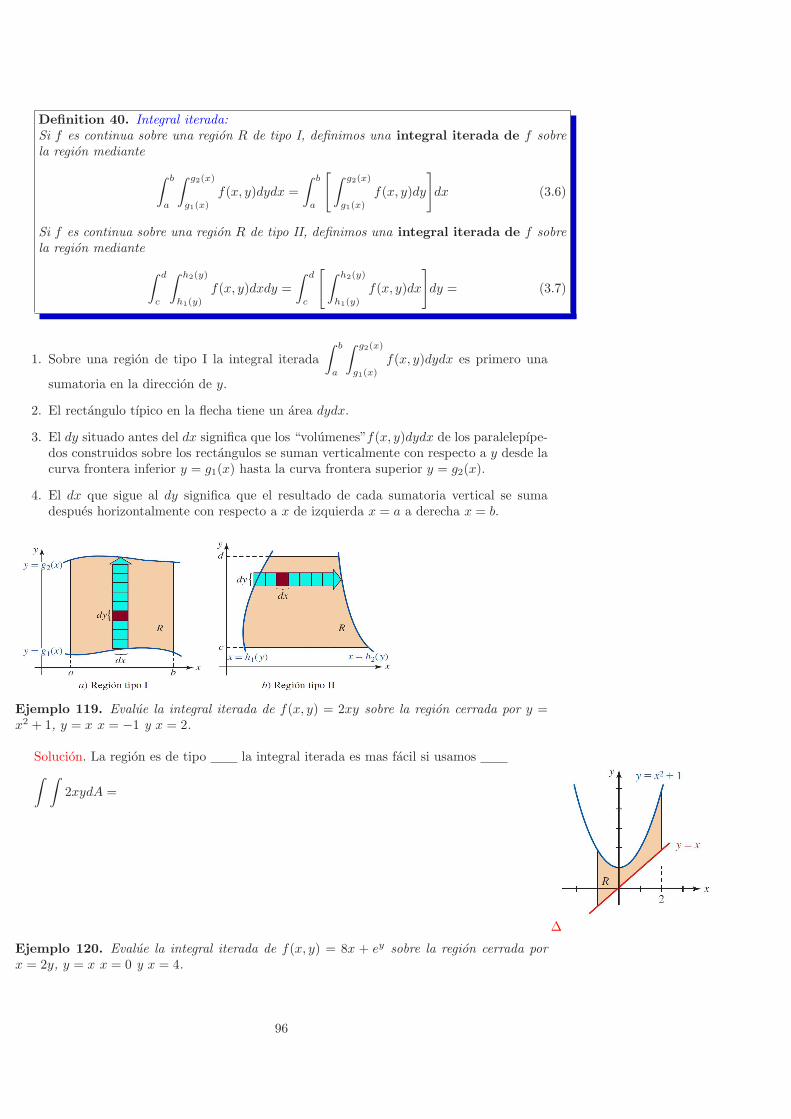
Definition 40. Integral iterada:Si f es continua sobre una region R de tipo I, definimos una integral iterada de f sobrela region mediante
ˆ b
a
ˆ g2(x)
g1(x)
f(x, y)dydx =
ˆ b
a
[
ˆ g2(x)
g1(x)
f(x, y)dy
]
dx (3.6)
Si f es continua sobre una region R de tipo II, definimos una integral iterada de f sobrela region mediante
ˆ d
c
ˆ h2(y)
h1(y)
f(x, y)dxdy =
ˆ d
c
[
ˆ h2(y)
h1(y)
f(x, y)dx
]
dy = (3.7)
1. Sobre una region de tipo I la integral iterada
ˆ b
a
ˆ g2(x)
g1(x)
f(x, y)dydx es primero una
sumatoria en la direccion de y.
2. El rectangulo tıpico en la flecha tiene un area dydx.
3. El dy situado antes del dx significa que los “volumenes”f(x, y)dydx de los paralelepıpe-dos construidos sobre los rectangulos se suman verticalmente con respecto a y desde lacurva frontera inferior y = g1(x) hasta la curva frontera superior y = g2(x).
4. El dx que sigue al dy significa que el resultado de cada sumatoria vertical se sumadespues horizontalmente con respecto a x de izquierda x = a a derecha x = b.
Ejemplo 119. Evalue la integral iterada de f(x, y) = 2xy sobre la region cerrada por y =x2 + 1, y = x x = −1 y x = 2.
Solucion. La region es de tipo la integral iterada es mas facil si usamos
ˆ ˆ
2xydA =
∆
Ejemplo 120. Evalue la integral iterada de f(x, y) = 8x + ey sobre la region cerrada porx = 2y, y = x x = 0 y x = 4.
96

Solucion. La region es de tipo la integral iterada es mas facil si usamos
ˆ ˆ
8x+ eydA =
∆
Ejemplo 121. Evalue la integral doble
¨
R
ex+3y sobre la region acotada por las graficas de
y = 1, y = 2 y = x y y = −x+ 5.
Solucion. Al dibujar la region dada concluimos que la region es de tipo II la integral iteradaes mas facil si usamos dxdy
ˆ ˆ
ex+3ydA =
∆
Ejemplo 122. Emplee la integral doble para determinar el area de la region acotada por lasgraficas de y = x2 y y = 8− x2
Solucion. Primero que todo f(x, y) = 1. Ahora al dibujar la region dada concluimos que laregion es de tipo I, luego la doble integral usaremos
A =
ˆ ˆ
dA =
∆
NOTA: Usted debe reconocer
A =
ˆ b
a
[
g2(x)− g1(x)]
dx =
ˆ b
a
[
y∣
∣
∣
g2(x)
g1(x)
]
dx =
ˆ b
a
ˆ g2(x)
g1(x)
dydx =
¨
R
dA
Ejemplo 123. Emplee la integral doble para determinar el volumen V del solido en el primeroctante que es que esta acotado por los planos de coordenadas y las graficas del plano z =3− x− y y el cilindro x2 + y2 = 1.
97

Solucion. De las figuras vemos que el volumen esta dado por V =
¨
R
zdA y la region de
integracion R es tipo I, luego,
V =
ˆ ˆ
zdA =
ˆ 1
0
ˆ
√1−x2
0
(3− x− y)
∆
Ejemplo 124. Evalue
¨
R
(x + y)dA sobre la region acotada por las graficas de x = y2 y
y = 12x− 3
2
Solucion. Al dibujar la region vemos que puede escribirse como la union R = R1
⋃
R2 delas dos regiones tipo I. o interpretarla de tipo II, calculemos la doble integral usando laregion tipo I y tipo II
I.
¨
R
(x+ y)dA =
¨
R1
(x+ y)dA+
¨
R2
(x+ y)dA
II.
¨
R
(x+ y)dA =
∆
Pregunta: ¿Porque la respuesta en este ejemplo 4 NOOOO representa el volumen delsolido sobre R y debajo del plano z = x+ y?
Ejemplo 125. Evalue
¨
R
xey2
dA sobre la region R en el primer cuadrante acotado por las
graficas de y = x2, x = 0, y = 4.
98

Solucion: Al dibujar la region vemos que puede considerarse de tipo I o II
I.
¨
R
(x+ y)dA =
II.
¨
R
(x+ y)dA =
Ejemplo 126. Hallar el volumen de la region solida R acotada superiormente por el para-boloide z = 1− x2 − y2 e inferiormente por el plano z = 1− y ver figura
Solucion. Lo primero es saber la region de integracion es decir la region “base”que tiene encomun las dos superficies. No es dıficil ver que la interseccion en un cilindro circular rectodado por x2 = y − y2
El Volumen es la diferencia entre el volumen bajo el parabolide y el volumen bajo el plano,
V =
¨
R
zsup − zinfdA =
∆
Ejemplo 127. Encuentre el volumen V del solido T limitado por los planos z = 6 y z = 2y,y por los cilindros parabolicos y = x2 y y = 2− x2. Este solido se ilustra en la figura
Solucion. T La region R plana xy esta limitada por las parabolas y = x2 y y = 2 − x2. las
99

cuales se intersecan en los puntos (−1, 1) y (1, 1).
V =
¨
R
zsup − zinfdAdA =
∆
Sustitucion en integrales Multiples
Una de las tecnicas poderosas que conocemos de nuestro primer curso de calculo paracalcular integrales, es la tecnica del cambio de variables simple, el objetivo de la sustituciones reemplazar las integrales complicadas por otras mas faciles de evaluar. Las sustitucioneslogran esto simplificando el integrando, los lımites de integracion o ambos.
El objetivo de esta seccion es estudiar una sustitucion para integrales dobles de funcionesf(x, y) sobre regiones R del plano R
2
La problematica en este caso sera mas complicada que en el caso de funciones de una solavariable, pues, por ejemplo, ahora se trata de cambiar las variables x, y en la funcion f(x, y)por dos nuevas variables, digamos u, v.
Suponga que queremos evaluar la integral doble
¨
R
f(x, y)dxdy
Un cambio de variables para esta integral esta determinado por una transformacion T deri-vable continuamente, del plano uv al plano xy -es decir, una funcion T que asocia al punto(u, v) un punto (x, y) = T (u, v) dado por ecuaciones de la forma
x = g(u, v) y = h(u, v) (3.8)
El punto (x, y) se denomina la imagen del punto (u, v) con la transformacion T . Se diceque una transformacion T es uno a uno si cada punto en R es la imagen bajo T del puntounico en S. Dicho de otro modo, ningun par de puntos en S tiene la misma imagen en R.En este caso T tiene una transformacion inversa T−1 tal que
T−1(x0, y0) = (u0, v0)
Esto es, (u0, v0) es la imagen bajo T−1(x0, y0)
Con frecuencia resulta conveniente visualizar la transformacion T geometricamente enterminos de sus
curvas u=T(rectas horizontales) y curvas v=T(rectas verticales).
100
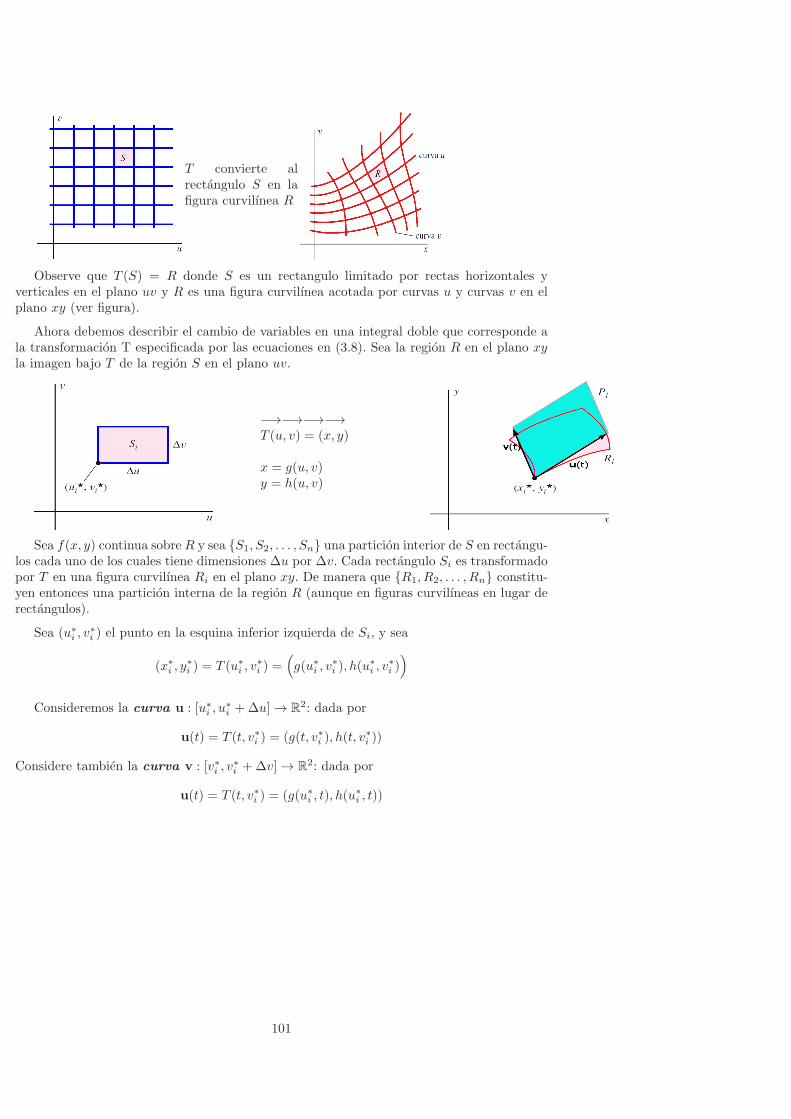
T convierte alrectangulo S en lafigura curvilınea R
Observe que T (S) = R donde S es un rectangulo limitado por rectas horizontales yverticales en el plano uv y R es una figura curvilınea acotada por curvas u y curvas v en elplano xy (ver figura).
Ahora debemos describir el cambio de variables en una integral doble que corresponde ala transformacion T especificada por las ecuaciones en (3.8). Sea la region R en el plano xyla imagen bajo T de la region S en el plano uv.
−→−→−→−→T (u, v) = (x, y)
x = g(u, v)y = h(u, v)
Sea f(x, y) continua sobre R y sea {S1, S2, . . . , Sn} una particion interior de S en rectangu-los cada uno de los cuales tiene dimensiones ∆u por ∆v. Cada rectangulo Si es transformadopor T en una figura curvilınea Ri en el plano xy. De manera que {R1, R2, . . . , Rn} constitu-yen entonces una particion interna de la region R (aunque en figuras curvilıneas en lugar derectangulos).
Sea (u∗i , v∗i ) el punto en la esquina inferior izquierda de Si, y sea
(x∗i , y∗i ) = T (u∗i , v
∗i ) =
(
g(u∗i , v∗i ), h(u
∗i , v
∗i ))
Consideremos la curva u : [u∗i , u∗i +∆u] → R
2: dada por
u(t) = T (t, v∗i ) = (g(t, v∗i ), h(t, v∗i ))
Considere tambien la curva v : [v∗i , v∗i +∆v] → R
2: dada por
u(t) = T (t, v∗i ) = (g(u∗i , t), h(u∗i , t))
101

Los vectores velocidad de estas curvas son
u′(t) = Tu(t, v∗i ) =
(
gu(t, v∗i ), hu(t, v
∗i ))
v′(t) = Tu(u∗i , t) =
(
gv(u∗i , t), hv(u
∗i , t)
)
Podemos aproximar la imagen de la region R = T (S) por medio del paralelogramo formadopor los vectores secante,
a = T (u∗i +∆u, v∗i )− T (u∗i , v∗i ) ≈ Tu(u
∗i , v
∗i )∆u
b = T (u∗i , v∗i +∆v)− T (u∗i , v
∗i ) ≈ Tv(u
∗i , v
∗i )∆v
El area del paralelogramo curvilıneo Ri es entonces aproximadamente igual al area del para-lelogramo Pi generado por los vectores a y b, es decir , ∆Ai ≈ area(Pi). Esta aproximacionsera tanto mejor en cuanto ∆u y ∆v sean pequenos. Entonces
∆Ai ≈ area(Pi) = |a× b| = |Tu∆u× Tv∆v| = |Tu × Tv|∆u∆v
pero,
Tu × Tv =
∣
∣
∣
∣
∣
∣
∣
∣
i j k
gu hv 0
gv hv 0
∣
∣
∣
∣
∣
∣
∣
∣
=
∣
∣
∣
∣
∣
∣
gu hu
gv hv
∣
∣
∣
∣
∣
∣
k =
∣
∣
∣
∣
∣
∣
gu gv
hu hv
∣
∣
∣
∣
∣
∣
k
El determinante de 2×2 en el lado derecho de la ultima ecuacion se denomina Jacobiano dela transformacion T : R2
uv → R2xy, en honor del matematico aleman Carl Jacobi (1804-1851),
quien fue el primero que investigo los cambios generales de variables en las integrales dobles.
Definition 41. El Jacobiano de la transformacion derivable continuamente T : R2uv → R
2xy
es la funcion (de variable real) JT : R2uv → R definida por
J(u, v) =
∣
∣
∣
∣
∣
∣
xu(u, v) xv(u, v)
yu(u, v) yv(u, v)
∣
∣
∣
∣
∣
∣
:=∂(x, y)
∂(u, v)
Recuerde que comenzamos con una particion interior {S1, S2, . . . , Sn} de la region Sen el plano uv, con las imagenes de estos rectangulos que forman una particion curvilınea{R1, R2, . . . , Rn} de la region R = T (S) en el plano xy. Ahora, sabemos que el area ∆Ai deRi esta dada aproximadamente por
∆Ai ≈ |JT (u∗i , v∗i )|∆u∆v
Por tanto, cuando planteamos sumas de Riemann para aproximar integrales dobles, encon-tramos
¨
R
f(x, y)dxdy ≈n∑
i=1
f(x∗i , y∗i )∆Ai
≈n∑
i=1
f(
g(u∗i , v∗i ), h(u
∗i , v
∗i ))
|JT (u∗i , v∗i )|∆u∆v
Ŭ
S
f(
g(u, v), h(u, v)|JT (u, v)|dudv.
102

Este analisis es, en realidad, un bosquejo de una demostracion del siguiente teorema
general del cambio de variables. Para asegurar la existencia de las integrales doblesindicadas, aceptamos que las fronteras de ambas regiones R y S consisten en un numerofinito de elementos curvos suaves.
Teorema 42. Suponga que la transformacion derivable continuamente T : R2uv → R
2xy toma
la region limitada S en el plano uv en la region limitada R en el plano xy, y es uno a unodel interior de S al interior de R. Si F (x, y) es continua sobre R, entonces
¨
R
f(x, y)dxdy =
¨
S
f(
T (u, v))
|JT (u, v)|dudv
OBSERVACION: Dada una integral doble particular
ˆ
R
f(x, y)dxdy, ¿como encontra-
mos un cambio provechoso de variables? . Un enfoque estandar consiste en escoger unatransformacion T tal que la frontera de R consiste en curvas u y curvas v. En caso de que seamas conveniente expresar u y v en terminos de x y y, primero se calcula en forma explıcitaJ(u, v) y despues se encuentra el Jacobiano necesario J(x, y) con la formula
J(u, v)J(x, y) = 1
Esta ecuacion es una consecuencia de aplicar la regla de la cadena a T (T−1(x, y)) = (x, y).
Ejemplo 128. Halle
¨
R
(x2+y2)dxdy donde R es la region plana limitada por las hiperbolas
xy = 1, xy = 3, x2 − y2, x2 − y2 = 4.
Solucion. Las hiperbolas que limitan a R son curvas u y v si u = xy y v = x2 − y2, observeque de aquı NOOOO es facil despejar x y y en terminos de u y v.
−→−→−→−→T (u, v) = (x(u, v), y(u, v))
T−1(x, y) = (u(x, y), v(x, y))
u = xyv = x2 + y2
Sin embargo podemos calcular sin problema el Jacobiano J(u, v) para lograr una buenasustitucion,
J(u, v) =∂(u, v)
∂(x, y)=
J(x, y) =∂(x, y)
∂(u, v)= .
Observe que,
(x2 + y2)2 = (x4 + 2x2y2 + y4) = 4x2y2 + (x2 − y2)2 = 4u2 + v2.
Ahora estamos listos para aplicar el teorema del cambio de variables, con las regiones S y R¨
R
(x2 + y2)dxdy =
ˆ 4
1
ˆ 3
1
∆
103

Ejemplo 129. Halle
¨
R
3xydA donde R es la region plana limitada por las x − 2y = 0,
x− 2y = −4, x+ y = 4, x+ y = 1.
Solucion. Las rectas que limitan a R son curvas u y v si u = x+ y y v = x− 2y , Observeque aquı si es facil despejar x, y
x =1
3(2u+ v) y y =
1
3(u− v)
Por tanto, el Jacobiano J(u, u) esta dado por,
J(u, v) =∂(x, y)
∂(u, v)=
Ahora estamos listos para aplicar el teorema del cambio de variables,
¨
R
3xydA =
∆
Ejemplo 130. Halle
ˆ 4
0
ˆ y/2+1
y/2
2x− y
2dxdy.
Solucion. Trazamos la region de integracion R en el plano xy para ello observe que los limitesde x son x = y
2 y x = y2 + 1 y los lımites de y son y = 0 y y = 4. Luego las rectas que
limitan a R son curvas u = x − y2 y v = y (aquı podemos tomar tambien v = y
2 ), Observeque aquı es facil despejar x, y
x = u+ v y y = 2v
Por tanto, el Jacobiano J(u, u) esta dado por,
J(u, v) =∂(x, y)
∂(u, v)=
Ahora estamos listos para aplicar el teorema del cambio de variables,
ˆ 4
0
ˆ y/2+1
y/2
2x− y
2dxdy =
∆
Ejemplo 131. Halle
ˆ 1
0
ˆ 1−x
0
√x+ y(y − 2x)2dydx.
104

Solucion. Trazamos la region de integracion R en el plano xy para ello observe que los limitesde x son x = 0 y x = 1 y los lımites de y son y = 0 y y = 1− x esto implica que la fronteraesta limitada por las rectas x = 0, y = 0 y x+y = 0. El integrando sugiere la transformacionu = x+ y y v = y − 2x. Observe que aquı es facil despejar x, y
x =u
3− v
3y y =
2u
3+v
3(3.9)
Por tanto, el Jacobiano J(u, u) esta dado por,
J(u, v) =∂(x, y)
∂(u, v)=
Ahora hallemos la NUEVA region donde vamos a integrar, para ello usaremos la fronteraoriginal x = 0, y = 0 y x + y = 0 y las ecuaciones (3.9), si x = 0 entonces v = u, si y = 0entonces v = −2u y si x+ y = 1 entonces u = 1. Una vez dibujada nos damos cuenta que laNueva region es tipo I.Ahora estamos listos para aplicar el teorema del cambio de variables,
ˆ 1
0
ˆ 1−x
0
√x+ y(y − 2x)2dydx =
∆
Ejemplo 132. Halle
ˆ 1
0
ˆ
√1−x2
0
(x2 + y2)dydx.
Solucion. Si intragamos directamente obtenemos
ˆ 1
0
(
x2√
1− x2 +(1− x2)3/2
3
)
dx
y ahora a . Esto nos motiva a buscar una buena sustitucion para mejorar elintegrando, nos es difıcil que es una excelente opcion,
x = y =
Por tanto, el Jacobiano J(u, u) esta dado por,
J(u, v) =∂(x, y)
∂(u, v)=
La NUEVA region esta descrita mediante desigualdades sencillas 0 ≤ r ≤ 1 y 0 ≤ θ ≤ π2 .
Ahora estamos listos para aplicar el teorema del cambio de variables,
ˆ 1
0
ˆ
√1−x2
0
(x2 + y2)dydx =
∆
NOTA: La transformacion a coordenadas polares es muy eficaz en este caso pues x2 + y2
se se simplifica como r2 y otra razon es que los lımites de integracion se vuelven cosntantes.
Ejemplo 133. Halle
¨
R
ex2+y2
dydx donde R es la region semicircular acotada por el eje x
105

y la curva y =√1− x2.
Solucion. Dado que la integrando tiene el factor x2+ y2, entonces usaremos las coordenadaspolares
x = r cos θ y = r sin θ
Por tanto, el Jacobiano J(u, u) esta dado por,
J(u, v) =∂(x, y)
∂(u, v)=
La NUEVA region esta descrita mediante desigualdades sencillas 0 ≤ r ≤ 1 y 0 ≤ θ ≤ π.Ahora estamos listos para aplicar el teorema del cambio de variables,
¨
R
ex2+y2
dydx =
∆
Ejemplo 134. Halle el volumen de la region solida limitada superiormente por el hemisferioz =
√
16− x2 − y2 e inferiormente por la region circular R dada por x2 + y2 ≤ 4.
Solucion. No es difıcil ver que el volumen del solido esta dado por
¨
R
zdA donde R esta
dado por x2 + y2 ≤ 4. Dado que la base contiene el factor x2 + y2, entonces usaremos lascoordenadas polares
x = r cos θ y = r sin θ
Por tanto, el Jacobiano J(u, u) esta dado por,
J(u, v) =∂(x, y)
∂(u, v)=
La NUEVA region esta descrita mediante desigualdades sencillas 0 ≤ r ≤ 2 y 0 ≤ θ ≤ 2π.Ahora estamos listos para aplicar el teorema del cambio de variables,
¨
R
zdA =
∆
EJER:
1. Calcule
¨
D
ey−x
y+x dxdy, donde D es el triangulo limitado por la recta x + y = 2 y los
ejes coordenados.
2. Halle el area de la region limitada por las curvas xy = 1, xy = 3, x−xy = 1, x−xy = 3.
106
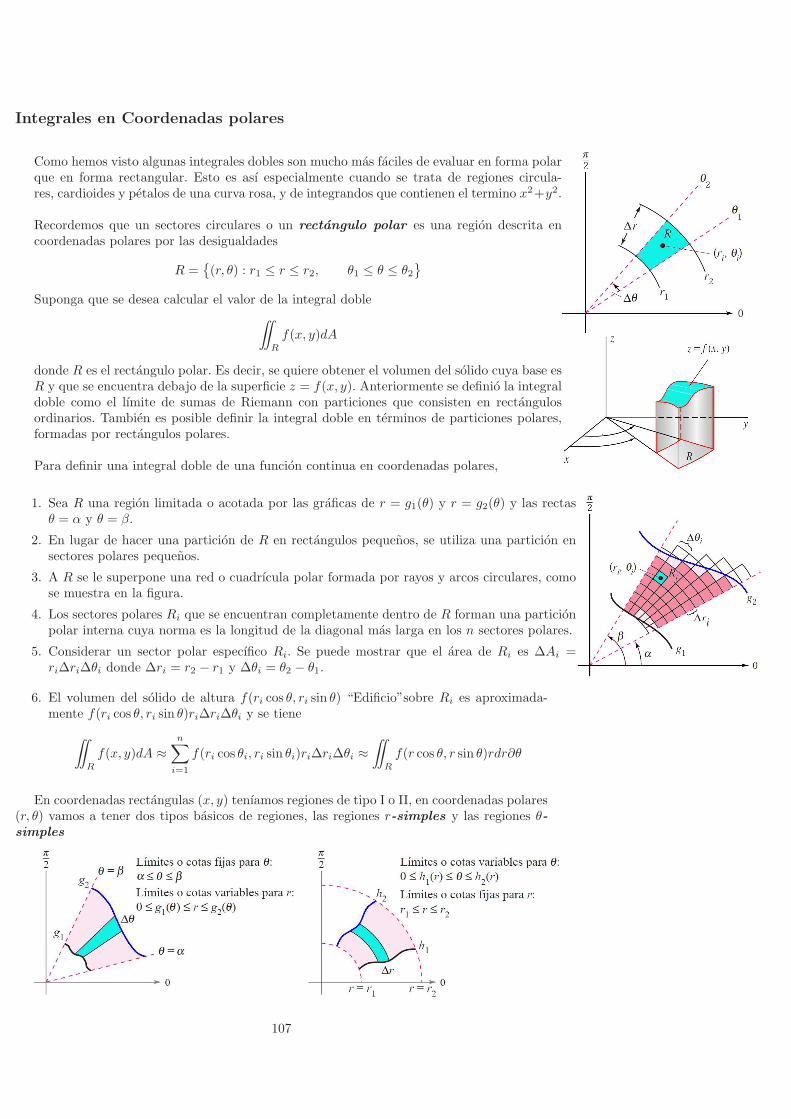
Integrales en Coordenadas polares
Como hemos visto algunas integrales dobles son mucho mas faciles de evaluar en forma polarque en forma rectangular. Esto es ası especialmente cuando se trata de regiones circula-res, cardioides y petalos de una curva rosa, y de integrandos que contienen el termino x2+y2.
Recordemos que un sectores circulares o un rectangulo polar es una region descrita encoordenadas polares por las desigualdades
R ={
(r, θ) : r1 ≤ r ≤ r2, θ1 ≤ θ ≤ θ2}
Suponga que se desea calcular el valor de la integral doble
¨
R
f(x, y)dA
donde R es el rectangulo polar. Es decir, se quiere obtener el volumen del solido cuya base esR y que se encuentra debajo de la superficie z = f(x, y). Anteriormente se definio la integraldoble como el lımite de sumas de Riemann con particiones que consisten en rectangulosordinarios. Tambien es posible definir la integral doble en terminos de particiones polares,formadas por rectangulos polares.
Para definir una integral doble de una funcion continua en coordenadas polares,
1. Sea R una region limitada o acotada por las graficas de r = g1(θ) y r = g2(θ) y las rectasθ = α y θ = β.
2. En lugar de hacer una particion de R en rectangulos pequenos, se utiliza una particion ensectores polares pequenos.
3. A R se le superpone una red o cuadrıcula polar formada por rayos y arcos circulares, comose muestra en la figura.
4. Los sectores polares Ri que se encuentran completamente dentro de R forman una particionpolar interna cuya norma es la longitud de la diagonal mas larga en los n sectores polares.
5. Considerar un sector polar especıfico Ri. Se puede mostrar que el area de Ri es ∆Ai =ri∆ri∆θi donde ∆ri = r2 − r1 y ∆θi = θ2 − θ1.
6. El volumen del solido de altura f(ri cos θ, ri sin θ) “Edificio”sobre Ri es aproximada-mente f(ri cos θ, ri sin θ)ri∆ri∆θi y se tiene
¨
R
f(x, y)dA ≈n∑
i=1
f(ri cos θi, ri sin θi)ri∆ri∆θi ≈¨
R
f(r cos θ, r sin θ)rdr∂θ
En coordenadas rectangulas (x, y) tenıamos regiones de tipo I o II, en coordenadas polares(r, θ) vamos a tener dos tipos basicos de regiones, las regiones r-simples y las regiones θ-simples
107

Ejemplo 135. Utilizar una integral doble para hallar el area encerrada por la grafica der = 3 cos(3θ)
Solucion. No es difıcil ver que la region es r-simple y los lımites de un petalo de la curva sonπ6 ≤ θ ≤ π
6 y 0 ≤ r ≤ 3 cos(3θ). Por tanto, el area de un petalo es
1
3A =
¨
R
dA =
∆
Ejemplo 136. Hallar el area de la region acotada superiormente por la espiral r = π3θ e
inferiormente por el eje polar, entre r = 1 y r = 2
Solucion. No es difıcil ver que la region es θ-simple y los lımites polares son 0 ≤ θ ≤ π3r y
1 ≤ r ≤ 2. Por tanto, el area de la region es
A =
¨
R
dA =
∆
Ejemplo 137. Halle la region R limitada en su interior por la circunferencia r = 1 y en elexterior por la curva conocida como “caracol de Pascal”r = 2 + cos θ.
Solucion. No es difıcil ver que la region es r-simple y los lımites polares son 0 ≤ θ ≤ 2π y0 ≤ r ≤ 1. Por tanto, el area de la region es
A =
¨
R
dA =
∆
108

Ejemplo 138. Encuentre el volumen de la region solida que es interior tanto a la esferax2+y2+z2 = 4 de radio 2, como al cilindro (x−1)2+y2 = 1. Halle la region R limitada ensu interior por la circunferencia r = 1 y en el exterior por la curva conocida como “caracolde Pascal”r = 2 + cos θ.
Solucion. No es difıcil ver que el volumen del solido esta dado por
V =
¨
R
(zsup − zinf )dA = 2
¨
R
zsup =
¨
R
√
4− x2 − y2dA.
donde R esta dado por (x− 1)2 + y2 ≤ 1. Pero esta integral serıa muy difıcil de evaluar encoordenadas rectangulares, por lo que la cambiamos a coordenadas polares. x = r cos θ yy = r sin θEn este caso polar la region es r-simple y los lımites polares son 0 ≤ r ≤ 2 cos θ con−π/2 ≤ θ ≤ π/2. Por tanto, el volumen de la region es
V = 2
¨
R
√
4− x2 − y2dA =
∆
Aplicaciones de Integrales dobles
Masa
Si la lamina que corresponde a la region R, que se muestra en la figura, tiene una densidadconstante ρ entonces la masa de la lamina esta dada por
Masa = ρA = ρ
¨
R
dA =
¨
R
ρdA Densidad Constante
Si no se especifica otra cosa, se supone que una lamina tiene densidad constante. Las inte-grales dobles pueden usarse para calcular la masa de una lamina de densidad variable, dondela densidad en (x, y) esta dada por la funcion de densidad ρ
Definition 43. Si ρ es una funcion de densidad continua sobre la lamina que correspondea una region plana R, entonces la masa m de la lamina esta dada por
m =
¨
R
ρ(x, y)dA Densidad Variable
NOTA: La densidad se expresa normalmente como masa por unidad de volumen. Sin embar-go, en una lamina plana la densidad es masa por unidad de area de superficie.
Ejemplo 139. Hallar la masa de la lamina triangular con vertices (0, 0), (0, 3) y (2, 3), dadoque la densidad en (x, y) es ρ(x, y) = 2x+ y
Solucion. No es difıcil ver que la region es de tipo . Luego la masa de la lamina es
m =
¨
R
ρdA =
109
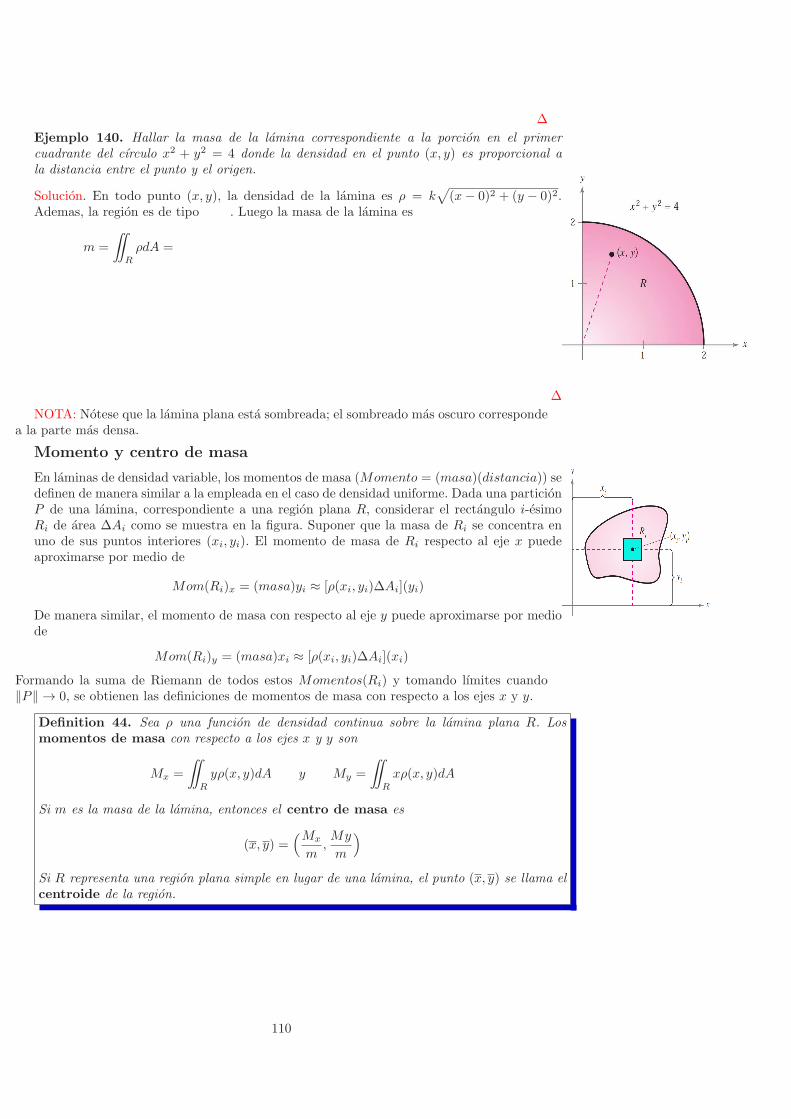
∆
Ejemplo 140. Hallar la masa de la lamina correspondiente a la porcion en el primercuadrante del cırculo x2 + y2 = 4 donde la densidad en el punto (x, y) es proporcional ala distancia entre el punto y el origen.
Solucion. En todo punto (x, y), la densidad de la lamina es ρ = k√
(x− 0)2 + (y − 0)2.Ademas, la region es de tipo . Luego la masa de la lamina es
m =
¨
R
ρdA =
∆
NOTA: Notese que la lamina plana esta sombreada; el sombreado mas oscuro correspondea la parte mas densa.
Momento y centro de masa
En laminas de densidad variable, los momentos de masa (Momento = (masa)(distancia)) sedefinen de manera similar a la empleada en el caso de densidad uniforme. Dada una particionP de una lamina, correspondiente a una region plana R, considerar el rectangulo i-esimoRi de area ∆Ai como se muestra en la figura. Suponer que la masa de Ri se concentra enuno de sus puntos interiores (xi, yi). El momento de masa de Ri respecto al eje x puedeaproximarse por medio de
Mom(Ri)x = (masa)yi ≈ [ρ(xi, yi)∆Ai](yi)
De manera similar, el momento de masa con respecto al eje y puede aproximarse por mediode
Mom(Ri)y = (masa)xi ≈ [ρ(xi, yi)∆Ai](xi)
Formando la suma de Riemann de todos estos Momentos(Ri) y tomando lımites cuando‖P‖ → 0, se obtienen las definiciones de momentos de masa con respecto a los ejes x y y.
Definition 44. Sea ρ una funcion de densidad continua sobre la lamina plana R. Losmomentos de masa con respecto a los ejes x y y son
Mx =
¨
R
yρ(x, y)dA y My =
¨
R
xρ(x, y)dA
Si m es la masa de la lamina, entonces el centro de masa es
(x, y) =(Mx
m,My
m
)
Si R representa una region plana simple en lugar de una lamina, el punto (x, y) se llama elcentroide de la region.
110

Ejemplo 141. Hallar el centro de masa de la lamina que corresponde a la region parabolica0 ≤ y ≤ 4 − x2 donde la densidad en el punto (x, y) es proporcional a la distancia entre(x, y) y el eje x,
Solucion. En todo punto (x, y), la densidad de la lamina es ρ(x, y) = ky. Ademas, la regiones de tipo . Como la lamina es simetrica con respecto al eje y, x = 0. Para hallar yprimero debemos calcular la masa de la lamina.
m =
¨
R
ρdA =
Ahora, el momento con respecto al eje x.
Mx =
¨
R
yρdA =
Ası y = Mx
m = . y el centro de masa es (0, ). ∆
Ejemplo 142. Una lamina ocupa la region acotada por la recta y = x + 2 y la parabolay = x2. La densidad de la lamina en el punto P (x, y) es proporcional al cuadrado de ladistancia de P a partir del eje y. Encuentre la masa y centroide de la lamina.
Solucion. En todo punto (x, y), la densidad de la lamina es ρ(x, y) = ky. Ademas, la regiones de tipo , donde sus limites estan dados por
m =
¨
R
ρ(x, y)dA =
Ahora, el momento con respecto al eje x.
Mx =
¨
R
yρ(x, y)dA =
111

My =
¨
R
xρ(x, y)dA =
Ası, la lamina tiene una masa de 63k20 , y su centroide se localiza en el punto ( 87 ,
11849 )
∆
Ejemplo 143. Una lamina tiene la forma de la region R acotada por la grafica de la elipsex2
4 + y2
16 = 1, 0 ≤ y ≤ 4 y y = 0. Encuentre su centro de masa si la densidad es ρ(x, y) = |x|y.
Solucion. vemos que la region es simetrica con respecto al eje y, Ademas, puesto queρ(−x, y) = ρ(x, y), la densidad ρ es simetrica alrededor del eje y. Por tanto x = 0. Pa-ra hallar y primero hallemos la masa integrando en la region tipo II
m =
¨
R
ρ(x, y)dA =
Ahora, el momento con respecto al eje x.
Mx =
¨
R
yρ(x, y)dA =
Ası, la lamina tiene una masa de 16, y su centroide se localiza en el punto (0, 3215 ) ∆
Observacion: Para que el centro de masa este sobre un eje de simetrıa de una lamina, noregion debe ser simetrica y la funcion de densidad tambien debe ser simetrica con respecto aese eje.
Ejemplo 144. Encuentre el centro de masa de la lamina que corresponde a la region acotadapor la curva llamada petalo de rosa r = 2 sin(2θ) en el primer cuadrante si la densidad en elpunto P en la lamina es directamente proporcional a la distancia desde el origen polar.
Solucion. La distancia desde el origen polar es d(0, P ) = |r|. Por tanto, la densidad de lalamina es ρ(r, θ) = k|r|.
Ahora hallemos, la masa de la lamina
m =
¨
R
ρ(x, y)dA =
¨
R
k‖r|dA =
112
Ahora, el momento con respecto al eje y.
My =
¨
R
xρ(r, θ)dA =
De manera similar, el momento con respecto al eje x.
Mx =
¨
R
yρ(r, θ)dA =
Ası, la lamina tiene una masa de 169 k, y su centroide se localiza en el punto ( 3235 ,
3235 ) ∆
Momentos de inercia
Los momentos Mx y My utilizados en la determinacion del centro de masa de una laminase suelen llamar primeros momentos con respecto a los ejes x y y. En cada uno de loscasos, el momento es el producto de una masa por una distancia.
Ahora se introducira otro tipo de momento, el segundo momento o momento de
inercia de una lamina respecto de una recta. Del mismo modo que la masa es una medidade la tendencia de la materia a resistirse a cambios en el movimiento rectilıneo, el momentode inercia respecto de una recta es una medida de la tendencia de la materia a resistirse acambios en el movimiento de rotacion. Por ejemplo, si una partıcula de masa m esta a unadistancia d de una recta fija, su momento de inercia respecto de la recta se define como
I = md2 = (masa)(distancia)2
113
Igual que ocurre con los momentos de masa, se puede generalizar este concepto para obtenerlos momentos de inercia de una lamina de densidad variable respecto de los ejes x y y. Estossegundos momentos se denotan por Ix e Iy y en cada caso el momento es el producto deuna masa por el cuadrado de una distancia.
A la suma de los momentos Ix e Iy se le llama el momento polar de inercia y se denotapor I0.
Ejemplo 145. Hallar el momento de Inercia respecto del eje x de la lamina que correspondea la region parabolica 0 ≤ y ≤ 4− x2 donde la densidad en el punto (x, y) es proporcional ala distancia entre (x, y) y el eje x,
Solucion. En todo punto (x, y), la densidad de la lamina es ρ(x, y) = ky, la region es de tipoI, y de acuerdo con la definicion de momento de inercia, se tiene
Ix =
¨
R
(y2)ρdA =
∆
Ejemplo 146. Calcule Ix para una lamina de densidad constante ρ = 1 que ocupa la regionlimitada por las curvas x = ±y4, −1 ≤ y ≤ 1. Adicionalmente halle el area de la region
Solucion. En todo punto (x, y), la densidad de la lamina es ρ(x, y) = 1, la region es de tipo, y de acuerdo con la definicion de momento de inercia, se tiene
Ix =
¨
R
(y2)ρ(x, y)dA =
∆
Resistencia de columna: Se sabe que la rigidez, de una columna horizontal es proporcionalal momento de inercia de su seccion transversal respecto a un eje horizontal a traves delcentroide de la seccion transversal de la columna.
114
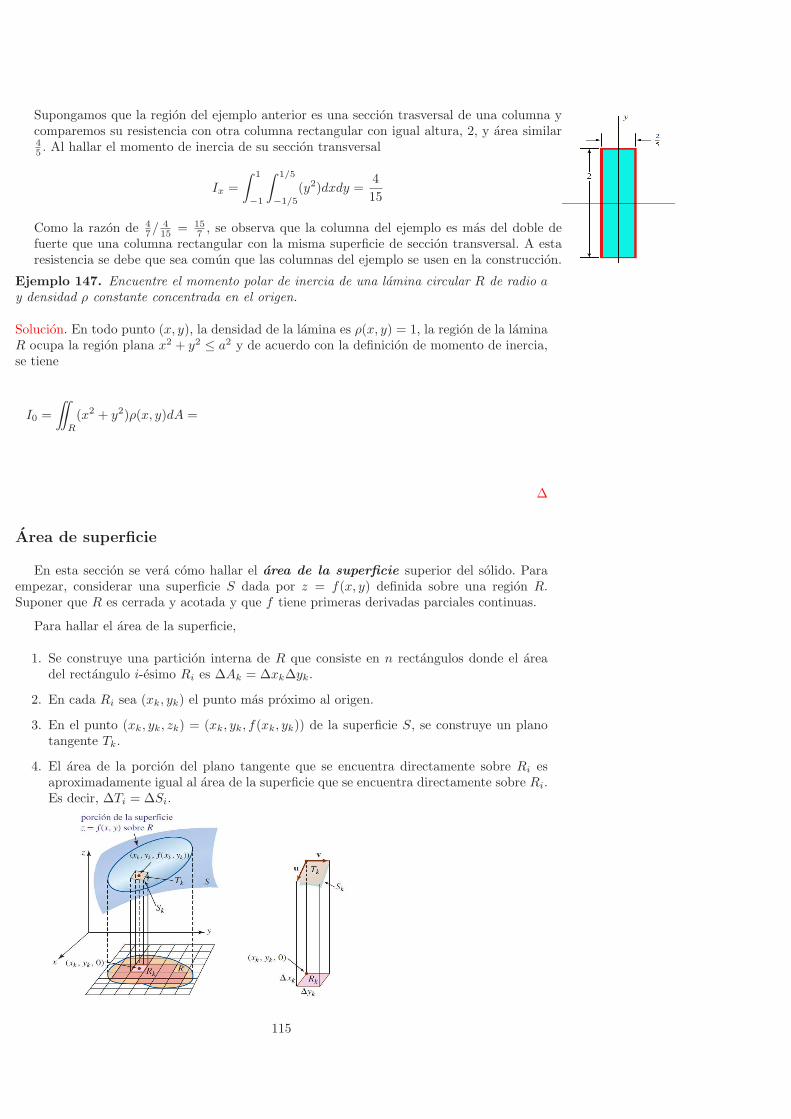
Supongamos que la region del ejemplo anterior es una seccion trasversal de una columna ycomparemos su resistencia con otra columna rectangular con igual altura, 2, y area similar45 . Al hallar el momento de inercia de su seccion transversal
Ix =
ˆ 1
−1
ˆ 1/5
−1/5
(y2)dxdy =4
15
Como la razon de 47/
415 = 15
7 , se observa que la columna del ejemplo es mas del doble defuerte que una columna rectangular con la misma superficie de seccion transversal. A estaresistencia se debe que sea comun que las columnas del ejemplo se usen en la construccion.
Ejemplo 147. Encuentre el momento polar de inercia de una lamina circular R de radio ay densidad ρ constante concentrada en el origen.
Solucion. En todo punto (x, y), la densidad de la lamina es ρ(x, y) = 1, la region de la laminaR ocupa la region plana x2 + y2 ≤ a2 y de acuerdo con la definicion de momento de inercia,se tiene
I0 =
¨
R
(x2 + y2)ρ(x, y)dA =
∆
Area de superficie
En esta seccion se vera como hallar el area de la superficie superior del solido. Paraempezar, considerar una superficie S dada por z = f(x, y) definida sobre una region R.Suponer que R es cerrada y acotada y que f tiene primeras derivadas parciales continuas.
Para hallar el area de la superficie,
1. Se construye una particion interna de R que consiste en n rectangulos donde el areadel rectangulo i-esimo Ri es ∆Ak = ∆xk∆yk.
2. En cada Ri sea (xk, yk) el punto mas proximo al origen.
3. En el punto (xk, yk, zk) = (xk, yk, f(xk, yk)) de la superficie S, se construye un planotangente Tk.
4. El area de la porcion del plano tangente que se encuentra directamente sobre Ri esaproximadamente igual al area de la superficie que se encuentra directamente sobre Ri.Es decir, ∆Ti = ∆Si.
115

5. El area de la superficie de S esta dada por
A(S) =
n∑
i=1
∆Si ≈n∑
i=1
∆Ti
6. El area del paralelogramo esta dado por ∆Tk = |u× v| dondeu = (∆xk, 0, fx(xk, yk)∆xk) v = (0,∆yk, fy(xk, yk)∆yk)
u× v =
∣
∣
∣
∣
∣
∣
∣
∣
i j k
∆xk 0 fx(xk, yk)∆xk
0 ∆yk fy(xk, yk)∆yk
∣
∣
∣
∣
∣
∣
∣
∣
=[
− fx(xk, yk)i− fy(xk, yk)j+ k]
∆xk∆yk
Por tanto, ∆Tk =√
[fx(xk, yk)]2 + [fy(xk, yk)]2 + 1∆xk∆yk.
7. El area de la superficie es aproximadamente
A(S) ≈n∑
k=1
√
[fx(xk, yk)]2 + [fy(xk, yk)]2 + 1∆xk∆yk
8. Al tomar el lımite de la suma anterior cuando ‖P‖ → 0 se llega a la siguiente definicion.
Definition 45. Sea f una funcion para la cual las primeras derivadas parciales fx y fy soncontinuas sobre una region cerrada R. Entonces el area de la superficie z = f(x, y) sobreR esta dada por
A(S) =
¨
R
√
1 + [fx(x, y)]2 + [fy(x, y)]2 dA =
¨
R
√
1 + [∂z
∂x]2 + [
∂z
∂y]2 dA
1. Si fuera mas comodo proyectar la superficie S sobre el plano xz, es decir, y = f(x, z)se usa la formula
A(S) =
¨
R
√
1 + [fx]2 + [fz]2 dA
donde R es la region cerrada en el plano xz.
2. Si la proyeccion de la superficie S esta sobre el plano yz, es decir, x = f(y, z) se usa laformula
A(S) =
¨
R
√
1 + [fy]2 + [fz]2 dA
donde R es la region cerrada en el plano yz
Ejemplo 148. Determine el area de la superficie de la porcion de la esfera x2+y2+z2 = a2
que esta sobre el plano xy y dentro del cilindro x2 + y2 = b2, 0 < b < a.
Solucion. Si se define z = f(x, y) por f(x, y) =√
a2 − x2 − y2 entonces ∆
116

Ejemplo 149. Determine el area de la superficie de la porcion de la esfera x2+y2+ z2 = 4que estan dentro del cilindro (x− 1)2 + y2 = 1.
Solucion. El area de superficie en cuestion consiste en las dos regiones sombreadas y oscurasde la superficie de la figura. Observe que f(x, y) =
√
4− x2 − y2 luego
∆
Ejemplo 150. Hallar el area de la superficie de la porcion del plano z = 2 − x − y que seencuentra sobre el cırculo x2 + y2 ≤ 1 en el primer cuadrante.
Solucion. Observe que f(x, y) = 2− x− y luego fx = y fy = . Por tanto, el area dela superficie esta dada por
A(S) =
¨
R
√
1 + [fx(x, y)]2 + [fy(x, y)]2dA =
∆
Ejemplo 151. Hallar el area de la porcion de la superficie f(x, y) = 1 − x2 + y que seencuentra sobre la region triangular cuyos vertices son (1, 0, 0) (0,−1, 0) y (0, 1, 0).
Solucion. Aquı fx(x, y) = y fy = . Ahora al dibujar la region de integracion vemosque que la region es de tipo . El area de la superficie esta dada por
117

A(S) =
¨
R
√
1 + [fx(x, y)]2 + [fy(x, y)]2dA =
∆
Ejemplo 152. Hallar el area de la superficie del paraboloide z = 1+x2+y2 que se encuentrasobre el cırculo unidad.
Solucion. Aquı fx(x, y) = y fy = . Ahora al dibujar la region de integracion vemosque que la region es de tipo . El area de la superficie esta dada por
A(S) =
¨
R
√
1 + [fx(x, y)]2 + [fy(x, y)]2dA =
∆
Integrales triples
Los pasos que conducen a la definicion de la integral triple , son bastante similares a losde la integral doble.
118
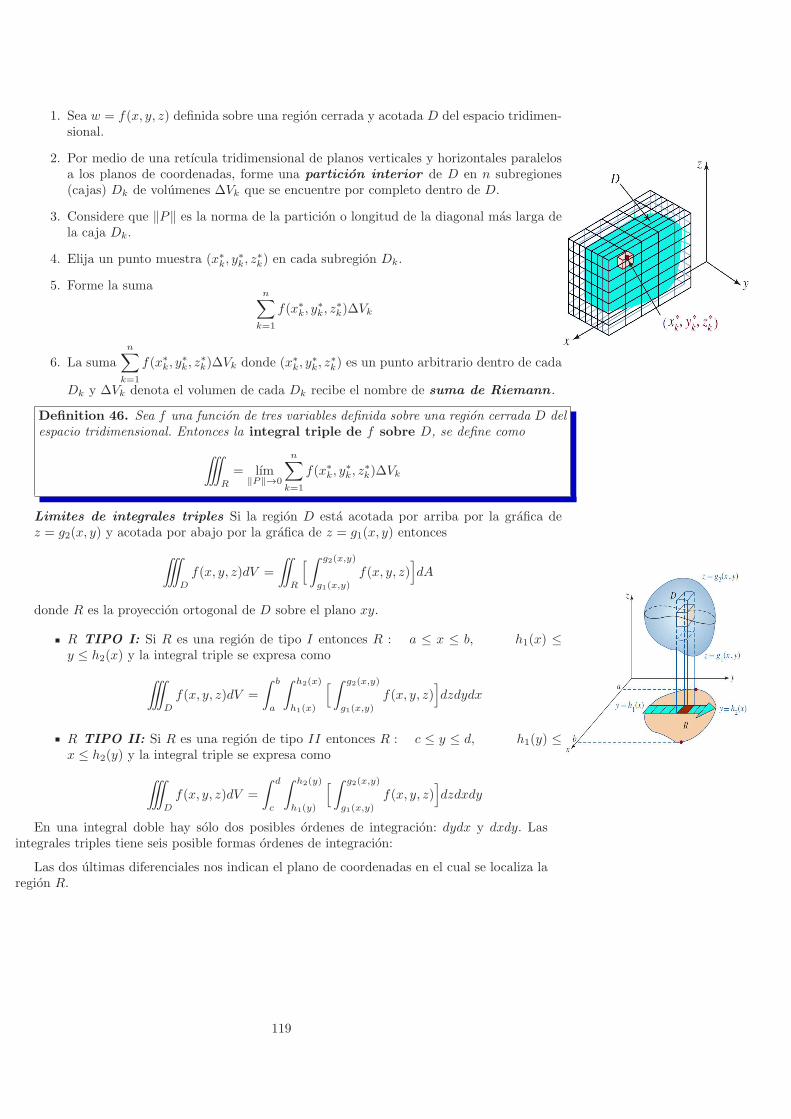
1. Sea w = f(x, y, z) definida sobre una region cerrada y acotada D del espacio tridimen-sional.
2. Por medio de una retıcula tridimensional de planos verticales y horizontales paralelosa los planos de coordenadas, forme una particion interior de D en n subregiones(cajas) Dk de volumenes ∆Vk que se encuentre por completo dentro de D.
3. Considere que ‖P‖ es la norma de la particion o longitud de la diagonal mas larga dela caja Dk.
4. Elija un punto muestra (x∗k, y∗k, z
∗k) en cada subregion Dk.
5. Forme la suman∑
k=1
f(x∗k, y∗k, z
∗k)∆Vk
6. La suma
n∑
k=1
f(x∗k, y∗k, z
∗k)∆Vk donde (x∗k, y
∗k, z
∗k) es un punto arbitrario dentro de cada
Dk y ∆Vk denota el volumen de cada Dk recibe el nombre de suma de Riemann .
Definition 46. Sea f una funcion de tres variables definida sobre una region cerrada D delespacio tridimensional. Entonces la integral triple de f sobre D, se define como
˚
R
= lım‖P‖→0
n∑
k=1
f(x∗k, y∗k, z
∗k)∆Vk
Limites de integrales triples Si la region D esta acotada por arriba por la grafica dez = g2(x, y) y acotada por abajo por la grafica de z = g1(x, y) entonces
˚
D
f(x, y, z)dV =
¨
R
[
ˆ g2(x,y)
g1(x,y)
f(x, y, z)]
dA
donde R es la proyeccion ortogonal de D sobre el plano xy.
R TIPO I: Si R es una region de tipo I entonces R : a ≤ x ≤ b, h1(x) ≤y ≤ h2(x) y la integral triple se expresa como
˚
D
f(x, y, z)dV =
ˆ b
a
ˆ h2(x)
h1(x)
[
ˆ g2(x,y)
g1(x,y)
f(x, y, z)]
dzdydx
R TIPO II: Si R es una region de tipo II entonces R : c ≤ y ≤ d, h1(y) ≤x ≤ h2(y) y la integral triple se expresa como
˚
D
f(x, y, z)dV =
ˆ d
c
ˆ h2(y)
h1(y)
[
ˆ g2(x,y)
g1(x,y)
f(x, y, z)]
dzdxdy
En una integral doble hay solo dos posibles ordenes de integracion: dydx y dxdy. Lasintegrales triples tiene seis posible formas ordenes de integracion:
Las dos ultimas diferenciales nos indican el plano de coordenadas en el cual se localiza laregion R.
119
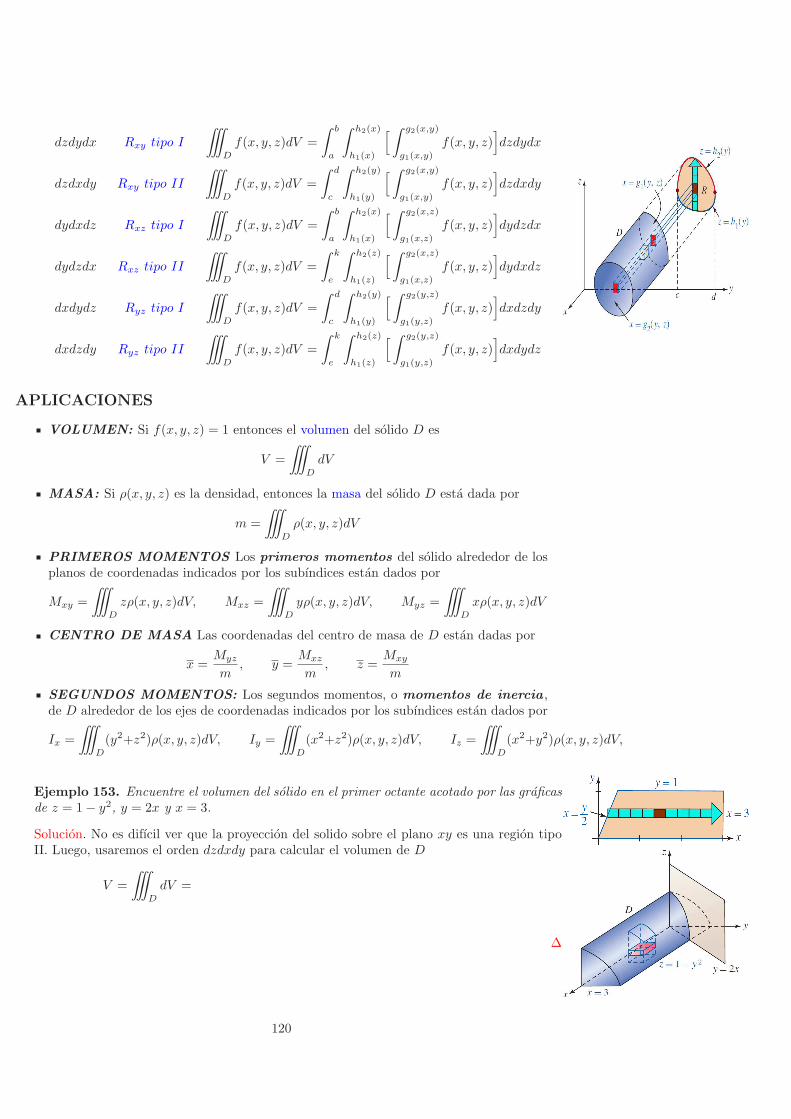
dzdydx Rxy tipo I
˚
D
f(x, y, z)dV =
ˆ b
a
ˆ h2(x)
h1(x)
[
ˆ g2(x,y)
g1(x,y)
f(x, y, z)]
dzdydx
dzdxdy Rxy tipo II
˚
D
f(x, y, z)dV =
ˆ d
c
ˆ h2(y)
h1(y)
[
ˆ g2(x,y)
g1(x,y)
f(x, y, z)]
dzdxdy
dydxdz Rxz tipo I
˚
D
f(x, y, z)dV =
ˆ b
a
ˆ h2(x)
h1(x)
[
ˆ g2(x,z)
g1(x,z)
f(x, y, z)]
dydzdx
dydzdx Rxz tipo II
˚
D
f(x, y, z)dV =
ˆ k
e
ˆ h2(z)
h1(z)
[
ˆ g2(x,z)
g1(x,z)
f(x, y, z)]
dydxdz
dxdydz Ryz tipo I
˚
D
f(x, y, z)dV =
ˆ d
c
ˆ h2(y)
h1(y)
[
ˆ g2(y,z)
g1(y,z)
f(x, y, z)]
dxdzdy
dxdzdy Ryz tipo II
˚
D
f(x, y, z)dV =
ˆ k
e
ˆ h2(z)
h1(z)
[
ˆ g2(y,z)
g1(y,z)
f(x, y, z)]
dxdydz
APLICACIONES
VOLUMEN: Si f(x, y, z) = 1 entonces el volumen del solido D es
V =
˚
D
dV
MASA: Si ρ(x, y, z) es la densidad, entonces la masa del solido D esta dada por
m =
˚
D
ρ(x, y, z)dV
PRIMEROS MOMENTOS Los primeros momentos del solido alrededor de losplanos de coordenadas indicados por los subındices estan dados por
Mxy =
˚
D
zρ(x, y, z)dV, Mxz =
˚
D
yρ(x, y, z)dV, Myz =
˚
D
xρ(x, y, z)dV
CENTRO DE MASA Las coordenadas del centro de masa de D estan dadas por
x =Myz
m, y =
Mxz
m, z =
Mxy
m
SEGUNDOS MOMENTOS: Los segundos momentos, o momentos de inercia ,de D alrededor de los ejes de coordenadas indicados por los subındices estan dados por
Ix =
˚
D
(y2+z2)ρ(x, y, z)dV, Iy =
˚
D
(x2+z2)ρ(x, y, z)dV, Iz =
˚
D
(x2+y2)ρ(x, y, z)dV,
Ejemplo 153. Encuentre el volumen del solido en el primer octante acotado por las graficasde z = 1− y2, y = 2x y x = 3.
Solucion. No es difıcil ver que la proyeccion del solido sobre el plano xy es una region tipoII. Luego, usaremos el orden dzdxdy para calcular el volumen de D
V =
˚
D
dV =
∆
120

Ejemplo 154. Un solido tiene la forma determinada por las graficas del cilindro |x|+ |y| = 1y los planos z = 2 y z = 4.
1. Encuentre su centro de masa si la densidad esta dada por ρ(x, y, z) = kz, con k unaconstante.
2. Determine el momento de inercia del solido alrededor del eje z.
Solucion. (a) No es difıcil ver que el dominio del solido esta contenido en el plano xy.
Observese que la proyeccion del solido sobre el plano xy es la region dada por |x|+ |y| = 1.Esta region es equivalente a 4 rectas,
x+ y = 1, x > 0, y > 0, −x+ y = 1, x < 0, y > 0
x− y = 1, x > 0, y < 0, −x− y = 1, x < 0, y < 0,
Puesto que la funcion de densidad ρ(x, y, z) = kz es simetrica sobre R, concluimos que elcentro de masa yace sobre el eje z; esto es, necesitamos calcular solo m y Mxy. Tomando Rcomo region es tipo I
m =
˚
D
ρ(x, y, z)dzdydx = 4
ˆ ˆ ˆ
kzdzdydz
Mxy =
˚
D
zρ(x, y, z)dzdydx = 4
ˆ 1
0
ˆ 1−x
0
ˆ 4
2
kz2dzdydz
Por consiguiente, z =Mxy
m = 289 . Las coordenadas del centro de masa son entonces
(0, 0, 289 )
∆
(b) Sabemos que el momento de inercia
Iz =
˚
D
z(x2 + y2)ρ(x, y, z)dzdydx = 4k
ˆ 1
0
ˆ 1−x
0
ˆ 4
2
(x2 + y2)zdzdydz
121

Ejemplo 155. Cambie el orden de integracion en
ˆ 6
0
ˆ 4−2x/3
0
ˆ 3−x/2−3y/4
0
f(x, y, z)dzdydx
a dydxdz
Solucion. Debemos hallar los limites de la region de integracion
˚
D
f(x, y, z)dzdydx =
∆
Ejemplo 156. Evaluarˆ
√π/2
0
ˆ
√π/2
x
ˆ 3
1
sin(y2)dzdydx
Solucion. Una integracion directa nos lleva a 2
¨
sin(y2)dydx la cual no es elemental. Ası que
debemos cambiar el orden de integracion. La region esta acotada por las rectas x = 0,x =
√
π/2, y = x, y =√
π/2, z = 1 y z = 3
ˆ
√π/2
0
ˆ
√π/2
x
ˆ 3
1
sin(y2)dzdydx =
∆
Integrales triples en otros sistemas de coordenadas
A partir de la geometrıa de una region en el espacio tridimensional, la evaluacion de unaintegral triple sobre la region puede a menudo facilitarse al utilizar un nuevo sistema decoordenadas.
Coordenadas Cilındricas
122
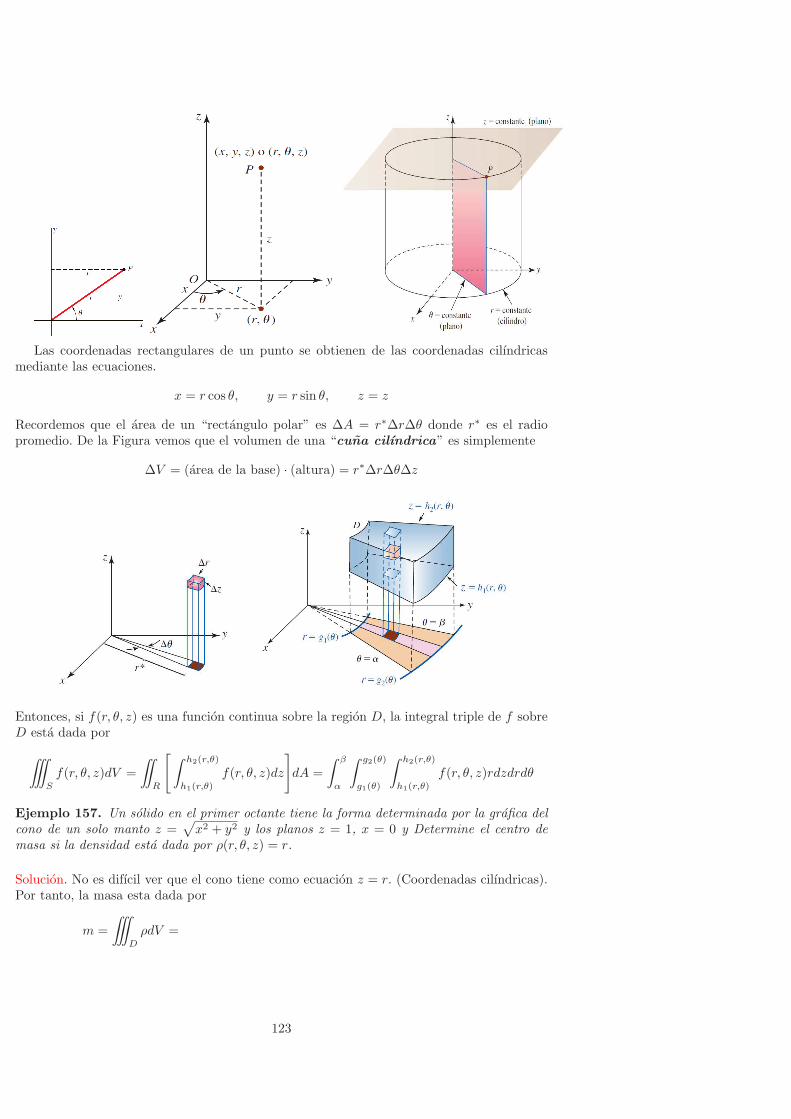
Las coordenadas rectangulares de un punto se obtienen de las coordenadas cilındricasmediante las ecuaciones.
x = r cos θ, y = r sin θ, z = z
Recordemos que el area de un “rectangulo polar” es ∆A = r∗∆r∆θ donde r∗ es el radiopromedio. De la Figura vemos que el volumen de una “cuna cilındrica” es simplemente
∆V = (area de la base) · (altura) = r∗∆r∆θ∆z
Entonces, si f(r, θ, z) es una funcion continua sobre la region D, la integral triple de f sobreD esta dada por
˚
S
f(r, θ, z)dV =
¨
R
[
ˆ h2(r,θ)
h1(r,θ)
f(r, θ, z)dz
]
dA =
ˆ β
α
ˆ g2(θ)
g1(θ)
ˆ h2(r,θ)
h1(r,θ)
f(r, θ, z)rdzdrdθ
Ejemplo 157. Un solido en el primer octante tiene la forma determinada por la grafica delcono de un solo manto z =
√
x2 + y2 y los planos z = 1, x = 0 y Determine el centro demasa si la densidad esta dada por ρ(r, θ, z) = r.
Solucion. No es difıcil ver que el cono tiene como ecuacion z = r. (Coordenadas cilındricas).Por tanto, la masa esta dada por
m =
˚
D
ρdV =
123

Mxy =
˚
D
zρdV =
Mxz =
˚
D
yρdV =
Myz =
˚
D
xρdV =
De manera que x =Myz
m = 0.38 y = Mxz
m = 0.38 z =Mxy
m = 0.8. El centro de masa tiene lascoordenadas aproximadas (0.38, 0.38, 0.8).
∆
Ejemplo 158. Calcule la integral triple que produce el volumen del solido que tiene la formadeterminada por el cono de un manto x =
√
y2 + z2 y el paraboloide x = 6− y2 − z2.
Solucion. Primero debemos hallar la interseccion de las dos superficies para luego proyectarlaa un plano coordenado Observe que al sustituir y2+z2 = x2 en y2+z2 = 6−x encontramosque x2 = 6− x o (x+ 3)(x− 2) = 0. Ası, las dos superficies se intersecan en el plano x = 2.La proyeccion del solido sobre el plano yz de la curva de interseccion es y2 + z2 = 4. Luegoesta regıon es tipo I o II
V =
˚
D
dxdzdy = 4
ˆ 2
0
ˆ
√4−y2
0
ˆ 6−y2−z2
√y2+z2
dxdzdy
Usando coordenadas polares en el plano yz mediante y = r cos θ, z = r sen θ, encontramosque la NUEVA REGION es tipo θ o r, y las coordenadas cilındricas aquı son (r, θ, x)
V =
˚
D
dxdzdy = 4
ˆ ˆ ˆ
rdxdrdθ
∆
Ejemplo 159. Use coordenadas cilındricas para hallar el volumen de la region solida Q quecorta en la esfera x2 + y2 + z2 = 4 el cilindro r = 2 sen θ.
Solucion. Como x2+y2+z2 = r2+z2 = 4 los lımites z son z = ±√4− r2 Sea R la proyeccion
circular del solido sobre el plano rθ. Los lımites de R son 0 ≤ r ≤ 2 sin θ y 0 ≤ θ ≤ π. Porlo tanto,
V =
˚
Q
dV =
ˆ ˆ ˆ
rdzdrdθ
∆
124

Coordenadas Esfericas
Las
coordenadas rectangulares de un punto se obtienen de las coordenadas esfericas mediante lasecuaciones.
x = ρ sinφ cos θ, y = ρ sinφ sin θ, z = ρ cosφ
Las cuales verifican
ρ2 = x2 + y2 + z2, tan θ =y
x, φ = arc cos
( z√
x2 + y2 + z2
)
De la Figura vemos que el volumen de una “cuna esferica” esta dado por la aproximacion
∆V ≈ ρ2 sinφ ∆ρ∆φ∆θ
De tal modo, en una integral triple de una funcion continua en coordenadas esfericas f(ρ, θ, φ)la diferencial de volumen dV es
∆V = ρ2 sinφ dρdφdθ
Por consiguiente, una integral triple comun en coordenadas esfericas tiene la forma
˚
S
f(ρ, φ, θ)dV =
¨
R
[
ˆ h2(ρ,θ)
h1(ρ,θ)
f(ρ, φ, θ)dρ
]
dA =
ˆ β
α
ˆ g2(θ)
g1(θ)
ˆ h2(ρ,θ)
h1(ρ,θ)
f(ρ, φ, θ)dρdφdθ
Ejemplo 160. Un solido en el primer octante tiene la forma determinada por la grafica delcono de un solo manto z =
√
x2 + y2 y los planos z = 1, x = 0. Determine en coordenadasesfericas para determinar el volumen del solido.
Solucion. Usando las ecuaciones. x = ρ sinφ cos θ, y = ρ sinφ sin θ, z = ρ cosφ. Encontramosque
z = 1 implica que ρ cosφ = 1 ⇔ ρ = secφ
z =√
x2 + y2 implica que ρ cosφ = ρ sinφ ⇔ φ =π
4
Ahora hallemos el Volumen
V =
˚
D
dV =
∆
125

Ejemplo 161. Hallar el volumen del elipsoide dado por 4x2 + 4y2 + z2 = 16
Solucion. Como en la ecuacion x, y y z juegan papeles similares, el orden de integracionpuede ser cualquiera. Usaremos el orden dzdydx. Por tanto la altura de D esta dada porz = ±
√
16− 4x2 − 4y2 y la base de D esta dada por la region R tipo . Por tanto elVolumen
V =
˚
D
dV =
∆
Ejemplo 162. Determine el momento de inercia en torno al eje z del solido homogeneoacotado entre las esferas x2 + y2 + z2 = a2 y x2 + y2 + z2 = b2, a < b.
Solucion. Como el solido es homogeneo entonces la densidad δ(ρ, ψ, θ) = k, teneiendo enmente la grafica vemos que
Iz =
˚
D
(x2 + y2)dV =
∆
Ejemplo 163. Hallar el volumen en coordenadas esfericas de la region solida D limitadainferiormente por la hoja superior del cono z2 = x2 + y2 y superiormente por la esferax2 + y2 + z2 = 9.
Solucion. En coordenadas esfericas, la ecuacion de la esfera es ρ = 9. La esfera y el cono secortan cuando x2 + y2 + z2 = z2 + z2 = 9 entonces z = 3√
2y como z = ρ cosφ entonces
φ = π/4. Por consiguiente,
V =
˚
D
dV =
∆
Sustitucion en integrales triples
Para cambiar variables en una integral triple, consideremos
x = x(u, v, w), y = y(u, v, w), z = z(u, v, w)
126
como una transformacion T uno a uno de la region E en el espacio uvw a la region D en elespacio xyz. Adicionalmente, el Jacobiano de T esta dado por
JT (u, v, w) =∂(x, y, v)
∂(u, v, w)=
∣
∣
∣
∣
∣
∣
∣
∣
xu xv xw
yu yv yw
zu zv zw
∣
∣
∣
∣
∣
∣
∣
∣
Teorema 47. Si x = x(u, v, w), y = y(u, v, w), z = z(u, v, w) es una transformacion quemapea una region E en el espacio uvw hacia una region D en el espacio xyz y f es unafuncion continua sobre E, entonces
˚
D
f(x, y, z)dV =
˚
E
f(
x(u, v, w), y(u, v, w), z(u, v, w))
|J(u, v, w)|dV ′
127

Cuatro
Calculo Vectorial
Hasta este punto en nuestro estudio del calculo, hemos encontrado tres tipos de integrales:la integral definida, la integral doble y la integral triple. En este capıtulo se presentan dosnuevos tipos de integrales: las integrales de lınea y las integrales de superficie.
Suponga que C es una curva parametrizada por x = x(y), y = y(t) a ≤ t ≤ b, y queA = (x(a), y(a)) y B(x(a), y(a)) son los puntos inicial y terminal,respectivamente. Afirmamosque:
1. C es una curva suave si x′(t) y y′(t) son continuas sobre el intervalo cerrado [a, b] yno son simultaneamente cero sobre el intervalo abierto (a, b)
2. C es una curva suave por partes si consiste en un numero finito de curvas suavesc1, C2, . . . , Cn unidas extremo por extremo; esto es, C = C1 ∪ C2 ∪ · · · ∪ Cn.
3. C es una curva cerrada si A = B.
4. C es una curva simple si no se cruza a sı misma entre A y B.
5. C es una curva cerrada simple si A = B y la curva no se cruza a sı misma.
6. Si C no es una curva cerrada, entonces la orientacion impuesta sobre C es la direccionque corresponde a los valores crecientes de t.
7. Esta misma terminologıa lleva de manera natural a las curvas en espacio tridimensionalC(t) = (x(y), y(t), z(t))
Integrales de Linea en el Plano: Sea z = f(x, y) una funcion definida en alguna regionbidimensional que contiene a la curva suave C definida por C(t) =
(
x(t), y(t))
, a ≤ t ≤ b.Los siguientes pasos conducen a las definiciones de tres integrales de lınea en el plano.
1. Seaa = t0 < t1 < t2 < · · · < tn = b
una particion del intervalo [a, b]
2. Considere que los puntos correspondientes sobre la curva C, o puntos de particion, son
A = P0, P1, P2, . . . , Pn = B
3. Los puntos de particion Pk = (x(tk), y(tk)) k = 0, 1, 2, . . . , n dividen a C en n subarcos delongitudes ∆sk.
4. Considere que la proyeccion de cada subarco sobre los ejes x y y tienen longitudes ∆xky ∆yk respectivamente.
128

5. Sea ‖P‖ la longitud del subarco mas largo.
6. Escoja un punto muestra (x∗k, y∗k) sobre cada subarco ∆sk como se ilustra en la FIG.
7. Observe que existe t∗k ∈ [tk−1, tk] tal que C(t∗k) = (x∗k, y
∗k).
8. Forme las sumas
n∑
k=1
f(x∗k, y∗k)∆xk
n∑
k=1
f(x∗k, y∗k)∆yk,
n∑
k=1
f(x∗k, y∗k)∆sk
9. Tomamos el lımite de estas tres sumas cuando ‖P‖ → 0. Las integrales que resultan seresumen a continuacion.
Definition 48. Sea f una funcion de dos variables x y y definida en una region del planoque contiene una curva suave C.
La integral de lınea de f con respecto a x a lo largo de C de A a B es
ˆ
C
f(x, y)dx = lım‖P‖→0
n∑
k=1
f(x∗k, y∗k)∆xk
La integral de lınea de f con respecto a y a lo largo de C de A a B es
ˆ
C
f(x, y)dy = lım‖P‖→0
n∑
k=1
f(x∗k, y∗k)∆yk
La integral de lınea de f con respecto a la longitud de arco s lo largo de C deA a B es
ˆ
C
f(x, y)ds = lım‖P‖→0
n∑
k=1
f(x∗k, y∗k)∆sk
Interpretacion Geometrica
1. El producto f(x∗k, y∗k)∆sk es el area de un rectangulo vertical de altura f(x∗k, y
∗k) y
ancho ∆sk.
2. La integral
ˆ
C
f(x, y)ds representa entonces el area de un lado de una “cortina” que
se extiende a partir de la curva C en el plano xy hacia arriba de la grafica de f(x, y)y que corresponde a los puntos (x, y) sobre C.
Como Evaluar integrales de linea La idea basica es convertir la integral de lınea en unaintegral definida de una sola variable. Para ello nos enfocaremos en como esta definida lacurva C (parametricamente o ecuacion explıcita).
Integrales de lınea en el plano
Si C es una curva suave parametrizada por C(t) = (x(t), y(t)), a ≤ t ≤ b entoncesdx = x′(t)dt y dy = y′(t)dt, y por ello tenemos,
ˆ
C
f(x, y)dx =
ˆ b
a
f(x(t), y(t))x′(t)dt,
ˆ
C
f(x, y)dy =
ˆ b
a
f(x(t), y(t))y′(t)dt
129

Ademas, recordando el hecho de que ds =√
dx2 + dy2 y que C esta parametrizada, encon-tramos que
ds =√
(x′(t)dt)2 + (y′(t)dt)2 =√
x′(t)2 + y′(t)2dt
Por consiguiente, podemos concluir que
ˆ
C
f(x, y)ds =
ˆ b
a
f(x(t), y(t))√
x′(t)2 + y′(t)2dt =
ˆ b
a
f(C(t))‖C ′(t)‖dt,
OBS: Si Si f(x1, . . . , xn) = 1, la integral de lınea proporciona la longitud de arco de la curvaC. Esto es,
L(C) :=
ˆ
C
1ds =
ˆ b
a
‖C ′(t)‖dt =ˆ b
a
√
x′1(t)2 + · · ·+ x′n(t)
2dt
Curva “Ingeniero” Si la curva C esta definida por una funcion explıcita y = g(x),a ≤ x ≤ b (o x = h(y), c ≤ y ≤ d) es posible utilizar x o (y) como un parametro. Luego lasintegrales de lınea son mas facilesˆ
Cx
f(x, y)dx = ,
ˆ
Cx
f(x, y)dy = ,
ˆ
Cx
f(x, y)ds =
ˆ
Cy
f(x, y)dx = ,
ˆ
Cy
f(x, y)dy = ,
ˆ
Cy
f(x, y)ds =
Una integral de lınea a lo largo de una curva C suave por partes se define como la sumade las integrales sobre las distintas curvas suaves cuya union compone a C.
ˆ
C
f(x, y)ds =
ˆ
C1
f(x, y)ds+
ˆ
C2
f(x, y)ds
Integrales de lınea en el espacio Suponga que C es una curva suave en espaciotridimensional definida por las ecuaciones parametricas C(t) = (x(t), y(t), z(t)), a ≤ t ≤ b.Si f es una funcion de tres variables definida en alguna region del espacio tridimensional quecontiene a C, podemos definir cuatro integrales de lınea a lo largo de la curva:
ˆ
C
f(x, y, z)dx =
ˆ b
a
f(x(t), y(t), z(t))x′(t)dt,
ˆ
C
f(x, y, z)dy =
ˆ b
a
f(x(t), y(t), z(t))y′(t)dt
ˆ
C
f(x, y, z)dx =
ˆ b
a
f(x(t), y(t), z(t))z′(t)dt,
ˆ
C
f(x, y, z)ds =
ˆ b
a
f(x(t), y(t), z(t))√
x′(t)2 + y′(t)2 + z′(t)2dt
En el espacio tridimensional a menudo estamos interesados en integrales de lınea de la formade una suma:
ˆ
C
P (x, y, z)dx+
ˆ
C
Q(x, y, z)dy +
ˆ
C
R(x, y, z)dz
NOTA:
1. Es importante advertir que una integral de lınea es independiente de la parametrizacionde la curva C siempre que a C se le de la misma orientacion por medio de todos losconjuntos de ecuaciones parametricas que definen la curva.
2. Recuerde que la direccion positiva de una curva parametrizada C corresponde a valorescrecientes del parametro t.
3. El sımbolo −C denota la curva que tiene los mismos puntos pero la orientacion opuestade C.
ˆ
−C
Pdx+Qdy = −ˆ
C
Pdx+Qdy
130

Ejemplo 164. Sea C una curva que da vuelta alrededor de la circunferencia x2 + y2 = 1 en
sentido contrario a las manecillas del reloj. Calcule
ˆ
C
1 + xds
Solucion. La parametrizacion del cırculo unitario C: x2 + y2 = 1 esta dada por
Entonces, C(t) = y C ′(t) = .ˆ
C
(1 + x)ds =
∆
Ejemplo 165. Calcule
ˆ
C
xy2zds donde C es la curva interseccion de las superficies x2 +
y2 + z2 = 16 y x2 + y2 = 4 en el primer octante.
Solucion. La interseccion de las superficies en el primer octante, es la curva
C : y z = 2√3
Entonces, C(t) = y C ′(t) = y ‖C ′(t)‖ = . Portanto,
ˆ
C
xy2zds =
∆
4.0.4. Campos vectoriales
Un campo vectorial sobre una region T en el espacio es una funcion de variable vectorialF que asocia con cada punto (x, y, z) de T un vector
F(x, y, z) = P (x, y, z)i+Q(x, y, z)j+R(x, y, z)k := (P,Q,R)
Observe que las componentes P , Q y R de una funcion vectorial son funciones escalares(de variable real). Un campo vectorial en el plano es similar, excepto que no se involucrancomponentes z ni coordenadas z. Ası, un campo vectorial en la region plana R es una funcionF de variable vectorial que asocia un vector a cada punto (x, y) de R
F(x, y) = P (x, y)i+Q(x, y)j := (P,Q).
Es util visualizar un campo vectorial F dado. Una forma comun de hacerlo es dibujandoun conjunto de vectores comunes F (x, y), cada uno de los cuales esta representado por unaflecha de longitud ‖F (x, y)‖ y se localiza con (x, y) como su punto inicial.
131

Ejemplo 166. Describa el campo vectorial F(x, y) = xi+ yj.
Solucion. Para cada punto (x, y) en el plano coordenado, F(x, y) = (x, y) es decir, es sim-plemente su vector de posicion r. Apunta directamente hacia afuera del origen y tiene unalongitud de
‖F (x, y)‖ = ‖xi+ yj‖ =√
x2 + y2 = r,
igual a la distancia desde el origen (x, y). ∆
OBSERVACION: Entre los campos vectoriales mas importantes debido a sus aplicaciones,se hallan los campos vectoriales de velocidad. Imagine el flujo estable de un fluido, como elagua de un rıo o el viento solar. Por flujo estable queremos decir que el vector de velocidadv(x, y, z) del fluido que pasa a traves de cada punto (x, y, z) es independiente del tiempo(aunque no necesariamente independiente de x, y y z), por lo que el patron del flujo permanececonstante. Por lo tanto, v(x, y, z) es el campo vectorial de la velocidad del movimiento delfluido.
Ejemplo 167. Suponga que el plano horizontal xy esta cubierto por una lamina delgadade agua en movimiento giratorio (como en un remolino) alrededor del origen con velocidadangular constante de ω radianes por segundo en direccion contraria a la del movimiento delas manecillas del reloj. Describa el campo vectorial de la velocidad asociado.
Solucion. En este caso se tiene un campo vectorial de dos dimensiones v(x, y). El agua semueve en cada punto (x, y) con velocidad v = rω y en forma tangencial a la circunferencia
de radio r =√
x2 + y2. El campo vectorial
v(x, y) = ω(−yi+ xj)
tiene longitud rω y apunta de manera general en direccion contra el movimiento de lasmanecillas del reloj, y
v · r = ω(−yi+ xj) · (xi+ yj) = 0
por lo que v es tangente a la circunferencia mencionada. ∆
OBSERVACION: En las aplicaciones fısicas tienen igual importancia los campos de fuerza.Suponga que ciertas circunstancias (quiza de caracter gravitacional o electrico) ocasionan queuna fuerza F(x, y, z) actue sobre una partıcula cuando esta situada en el punto (x, y, z). Ası,se tiene un campo de fuerzas F .
Ejemplo 168. Suponga que una masa M esta fija en el origen en el espacio. Cuando unapartıcula de masa unitaria se coloca en el punto (x, y, z) distinto del origen, esta sujeta auna fuerza F(x, y, z) de atraccion gravitacional dirigida hacia la masa M en el origen. Deacuerdo con la ley de Newton del inverso del cuadrado, la magnitud de F es F = MG/r2,
donde r =√
x2 + y2 + z2 es la longitud del vector de posicion r = xi+ yı + zk. Se sigue, deinmediato, que
F(x, y, z) = −krr3
donde k =MG. Observe que F(x, y, z) no esta definido en el origen y que |F | → +∞ cuandor → 0+.
132

El campo vectorial gradiente
El vector gradiente de la funcion derivable de variable real f(x, y, z). El vector ∇f sedefine como sigue:
∇f =∂f
∂xi+
∂f
∂yj+
∂f
∂zk := grad f
recordemos que el vector ∇f(x, y, z) apunta en la direccion en la que se obtiene la maximaderivada direccional de f en (x, y, z). Por ejemplo, si f(x, y, z) es la temperatura en el punto(x, y, z) en el espacio, entonces hay que moverse en la direccion ∇f(x, y, z) a fin de calentarselo mas rapido.En el caso de una funcion de dos variables, f(x, y), se suprime la tercera componente de laecuacion, por lo que ∇f = (fx, fy) = fxi+ fyj define un campo vectorial plano.
Ejemplo 169. Con f(x, y) = x2 − y2, el campo vectorial gradiente ∇f = 2xi− 2yj, recuerde las curvas de nivel, cerca de un punto silla
Ejemplo 170. Dadas las funciones derivables f(x, y, z) y g(x, y, z), demuestre que
∇(fg) = f∇g + g∇f
Solucion. Aplicamos la definicion del gradiente y la regla del producto para la derivacionparcial. encontramos que,
∇(fg) =
∆
Integrales de lınea y campos vectoriales
Ahora suponga que F = P i+Qj+Rk es un campo de fuerza definido sobre una region quecontiene a la curva C del punto A al B. Tambien suponga que C tiene una parametrizacion
r(t) = x(t)i+ y(t)j+ z(t)k, t ∈ [a, b]
con un vector de velocidad diferente de cero
v = C ′(t) = x′(t)i+ y′(t)j+ z′(t)k,
La velocidad asociada con este vector de velocidad es
v = ‖v‖ =√
(x′)2 + (y′)2 + (z′)2
recuerde que el vector unitario tangente a la curva C es
T =v
‖v‖ =1
v
(
x′(t)i+ y′(t)j+ z′(t)k)
Queremos aproximar el trabajo W realizado por el campo de fuerzas F cuando una partıculase mueve a lo largo de la curva C, de A a B.
133

1. Subdivida C.
2. Piense que F mueve la partıcula de Pi−1 a Pi, dos puntos consecutivos de la divisionde C.
3. El trabajo ∆Wi realizado por F sobre el subarco i-esimo es aproximadamente
∆Wi ≈(
‖F‖‖T‖ cos θ)
∆si (4.1)
= F(x(t∗), y(t∗), z(t∗)) ·T(x(t∗), y(t∗), z(t∗))∆si (4.2)
4. Por lo que el trabajo total,
W ≈n∑
i=1
F(x(t∗), y(t∗), z(t∗)) ·T(x(t∗), y(t∗), z(t∗))∆si
5. Esta aproximacion sugiere que definamos el trabajo W como
W =
ˆ
C
F ·T ds
6. Ası, el trabajo es la integral respecto a la longitud de arco de la componente
tangencial de la fuerza.
OBSERVACION: De manera intuitiva se considera dW = F · T ds como el elementoinfinitesimal de trabajo hecho por la componente tangencial F · T de la fuerza al moverla partıcula a lo largo del elemento de longitud de arco ds. Entonces la integral de lınea
W =
ˆ
C
F ·T ds es, entonces, la “suma”de todos estos elementos infinitesimales de trabajo.
Se acostumbra escribir
r = xi+ yj+ zk y dr = dxi+ dyj+ dzk
De esta manera, T =v
‖v‖ =v
vy ds = vdt (porque v = ds/dt). De ahı que
Tds =v
v· vdt = vdt =
(dx
dt,dy
dt,dz
dt
)
dt = dxi+ dyj+ dzk = dr
Por lo que,Tds = dr
Con esta notacion, tenemos que
W =
ˆ
C
F ·T ds =
ˆ
C
F · dr
que es comun en los textos de ingenierıa y fısica.
OBSERVACION Para evaluar la integral de lınea
ˆ
C
F · T ds =
ˆ
C
F · dr, se expresa su
integrando y lımites de integracion en terminos del parametro t, como es habitual. Ası,
W =
ˆ
C
F ·T ds
=
ˆ b
a
(P i+Qj+Rk) · 1v
(dx
dti+
dy
dtj+
dz
dtk)
vdt
=
ˆ b
a
(Pdx
dt+Q
dy
dt+R
dz
dt)dt
134

Por lo tanto
W =
ˆ
C
Pdx+Qdy +Rdz
Este calculo revela una relacion importante entre los dos tipos de integrales de lınea que sehan definido aquı.
Teorema 49. Suponga que el campo vectorial F = P i+Qj+Rk tiene funciones componentescontinuas y que T es el vector unitario tangente a la curva suave C. Por lo cual
W =
ˆ
C
F ·Tds =ˆ
C
Pdx+Qdy +Rdz =
ˆ
C
F · dr (4.3)
OBSERVACION Si la orientacion de la curva C se invierte, el signo de la integraldel lado derecho de la ecuacion (4.3) cambia pues
´
−C= −
´
C, mientras que el signo de la
integral del lado izquierdo cambia porque T es reemplazada por −T.
Ejemplo 171. El trabajo efectuado por el campo de fuerzas F = yi+ zj+ xk al mover unapartıcula de (0, 0, 0) a (1, 1, 1) a lo largo del cubo deformado x = t, y = t2, z = t3,
Solucion. No es difıcil ver que dx = dt, dy = 2tdt, y dz = 3t2dt, la sustitucion en terminosde t produce
W =
ˆ
C
F · dr =
ˆ
C
F ·Tds =ˆ
C
ydx+ zdy + xdz =
ˆ 1
0
∆
Ejemplo 172. Evalue
ˆ
C
xydx+ x2dy, donde C esta dada por y = x3. −1 ≤ x ≤ 2.
Solucion. Como la curva C es una curva funcion en x entonces usaremos a x como el parame-tro. Luegoˆ
C
xydx+ x2dy =
∆
Ejemplo 173. Evalue
ˆ
C
y2dx− x2dy, sobre la curva cerrada C que se muestra en la fig 1.
Solucion. Como la curva C es suave por partes, simbolicamente, escribimos´
C=´
C1+´
C2+´
C3
donde C1, C2 y C3 son las curvas, y = 0, x = 2 y y = x2 respectivamente.
En C1, usamos x como parametro, luegoˆ
C
y2dx− x2dy =
En C2, usamos y como parametro, luegoˆ
C
y2dx− x2dy =
En C3, usamos x como parametro, luegoˆ
C
y2dx− x2dy =
135

∆
Ejemplo 174. Evalue
ˆ
C
ydx+xdy+zdz, donde C es la helice x = 2 cos t, y = 2 sen t, z = t
0 ≤ t ≤ 2π.
Solucion. No es difıcil ver dx = −2 sen tdt, dy = 2 cos tdt y dz = dt. Luego,
ˆ
C
ydx+ xdy + zdz =
∆
Ejemplo 175. Evalue
ˆ
C
F · dr donde F(x, y) = xyi+ y2j y C esta definida por la funcion
vectorial r(t) = e−tı + etj, −1 ≤ t ≤ 1.
Solucion. Recordemos que
ˆ
C
F · dr =
ˆ
C
F(r(t)) · r′(t)dt, Ahora observemos que
F(r(t) = r′(t)dt =
Luego,
ˆ
C
F · dr =
ˆ
C
F(r(t)) · r′(t)dt =
∆
Rotacional y Divergencia
Hemos visto que si un campo vectorial de fuerza F es conservativo, entonces puede escri-birse como el gradiente de una funcion potencial φ:
F = ∇φ =∂φ
∂xi+
∂φ
∂yj+
∂φ
∂xk.
El operador diferencial vectorial, u operador nabla
∇ = i∂
∂x+ j
∂
∂x+ k
∂
∂x
combinarse con un campo vectorial
F(x, y, z) = P (x, y, z)i+Q(x, y, z)j+R(x, y, z)k
de dos modos diferentes: en un caso produciendo otro campo vectorial llamado Rotacional
de F y en el otro caso produciendo una funcion escalar llamada la Divergencia de F.
Definition 50 (Rotacional de un campo vectorial).El rotacional de un campo vectorial F = P i+Qj+Rk es el campo vectorial
rot F =(∂R
∂y− ∂Q
∂z
)
i+(∂P
∂z− ∂R
∂x
)
j+(∂Q
∂x− ∂P
∂y
)
k
OBSERVACION: NOOO es necesario memorizar los complicados componentes del campo ro-tacional de F, basta con interpretar el rotacional F como el producto cruz de ∇ y el vector
136
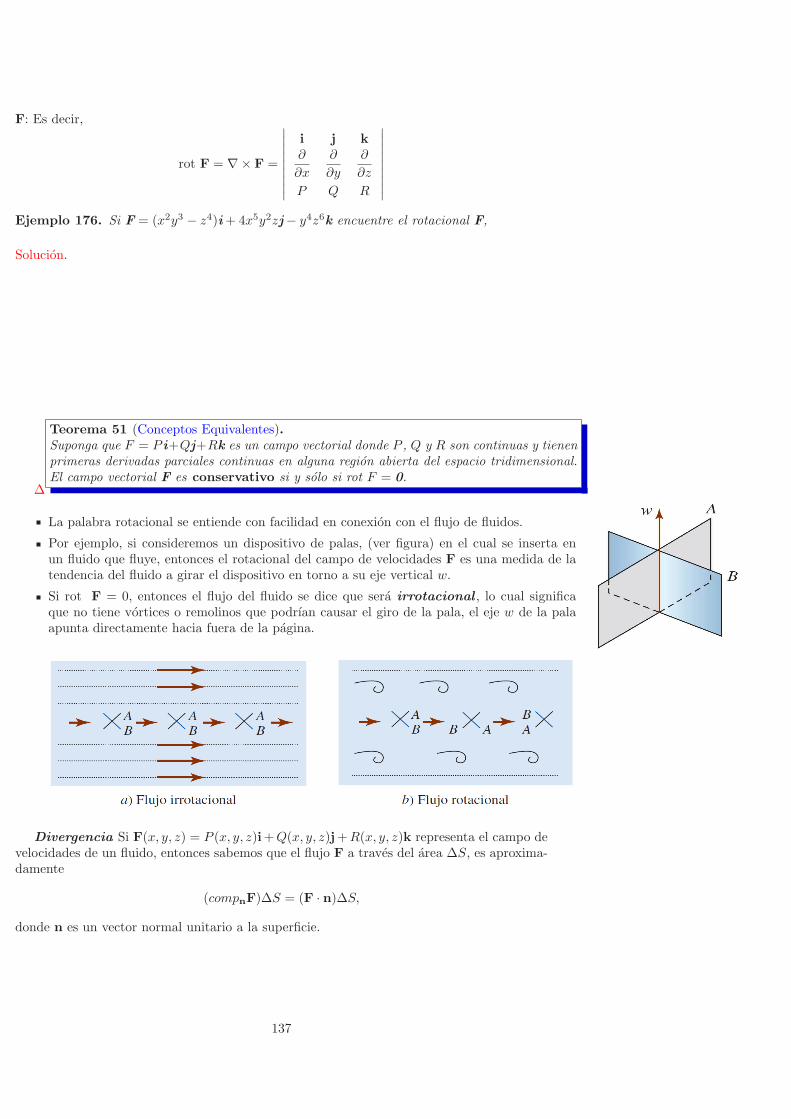
F: Es decir,
rot F = ∇× F =
∣
∣
∣
∣
∣
∣
∣
∣
∣
i j k
∂
∂x
∂
∂y
∂
∂z
P Q R
∣
∣
∣
∣
∣
∣
∣
∣
∣
Ejemplo 176. Si F = (x2y3 − z4)i+ 4x5y2zj− y4z6k encuentre el rotacional F,
Solucion.
∆
Teorema 51 (Conceptos Equivalentes).Suponga que F = P i+Qj+Rk es un campo vectorial donde P , Q y R son continuas y tienenprimeras derivadas parciales continuas en alguna region abierta del espacio tridimensional.El campo vectorial F es conservativo si y solo si rot F = 0.
La palabra rotacional se entiende con facilidad en conexion con el flujo de fluidos.
Por ejemplo, si consideremos un dispositivo de palas, (ver figura) en el cual se inserta enun fluido que fluye, entonces el rotacional del campo de velocidades F es una medida de latendencia del fluido a girar el dispositivo en torno a su eje vertical w.
Si rot F = 0, entonces el flujo del fluido se dice que sera irrotacional , lo cual significaque no tiene vortices o remolinos que podrıan causar el giro de la pala, el eje w de la palaapunta directamente hacia fuera de la pagina.
Divergencia Si F(x, y, z) = P (x, y, z)i+Q(x, y, z)j+R(x, y, z)k representa el campo develocidades de un fluido, entonces sabemos que el flujo F a traves del area ∆S, es aproxima-damente
(compnF)∆S = (F · n)∆S,
donde n es un vector normal unitario a la superficie.
137

Calculemos el flujo total de F a traves de sus seis lados de un paralelepıpedo rectangularen la direccion hacia fuera ,
Calculamos primero el flujo total hacia el exterior de dos caras paralelas.
El area de la cara F1 es ∆x∆z, y la normal unitaria hacia fuera es −j, luego el flujo de F atraves de F1 es
(F · (−j))∆x∆z = −Q(x, y, z)∆x∆z
El flujo hacia fuera de la cara F2, cuya normal hacia fuera es j, esta dado por
(F · (j))∆x∆z = Q(x, y +∆y, z)∆x∆z
El flujo total hacia fuera de estas caras paralelas es
Q(x, y +∆y, z)∆x∆z + (−Q(x, y, z)∆x∆z) = [Q(x, y +∆y, z)−Q(x, y, z)]∆x∆z.
=[Q(x, y +∆y, z)−Q(x, y, z)]∆x∆y∆z
∆y
≈ ∂Q
∂y∆x∆y∆z
De manera analoga, vemos que las contribuciones al flujo total hacia fuera del para-lelepıpedo desde las dos caras paralelas al plano yz, y desde las dos caras paralelas alplano xy, originan
∂P
∂x∆x∆y∆z
∂R
∂z∆x∆y∆z
Al sumar estos resultados, vemos que el flujo total de F hacia fuera del paralelepıpedoes aproximadamente
(∂P
∂x+∂Q
∂y+∂R
∂z
)
∆x∆y∆z
Dividiendo la ultima expresion entre ∆x∆y∆z obtenemos el flujo hacia fuera de F porunidad de volumen:
∂P
∂x+∂Q
∂y+∂R
∂z
Esta combinacion de derivadas parciales es una funcion escalar y recibe el nombreespecial de divergencia de F.
Definition 52 (Divergencia).La divergencia de un campo vectorial F = P i+Qj+Rk es la funcion escalar
divF =∂P
∂x+∂Q
∂y+∂R
∂z
OBS: La funcion escalar divF tambien puede escribirse en terminos del operador ∇ comoun producto punto:
divF = ∇ · F =∂
∂xP (x, y, z) +
∂
∂yQ(x, y, z) +
∂
∂zR(x, y, z)
138

la divergencia de un campo de velocidades F cerca de un punto P (x, y, z) es el flujo porunidad de volumen.
Si divF > 0 se dice que P es una fuente para F, ya que hay un flujo neto hacia fuera delfluido cerca de P .
Si divF > 0, se afirma entonces que P es un sumidero para F, puesto que hay un flujoneto hacia dentro del fluido cerca de P .
Si divF = 0 no hay fuentes o sumideros cerca de P .
El producto punto de∇ consigo mismo obtenemos un importante operador diferencial escalarde segundo orden llamado Laplaciano:
∇2 = ∇ · ∇ =∂2
∂x2+
∂2
∂y2+
∂2
∂z2
Cuando este operador actua sobre una funcion escalar f(x, y, z) el resultado se denominalaplaciano tridimensional,
∇2f =∂2f
∂x2+∂2f
∂y2+∂2f
∂z2
y aparece en matematicas aplicadas en muchas ecuaciones diferenciales parciales. Unade las ecuaciones diferenciales parciales mas famosas,
∂2f
∂x2+∂2f
∂y2+∂2f
∂z2= 0
recibe el nombre de ecuacion de Laplace en tres dimensiones.
Ejemplo 177. Si F = xz2i+ 2xy2zj− 5yzk encuentre div F.
Solucion.
div F = ∇ · F =
=
∆
APENDICE
Funciones Vectoriales
Definition 53. Una funcion f : I ⊂ R → Rn cuya regla de correspondencia es
f (t) =(
f1(t), f2(t), . . . , fn(t))
se denomina funcion vectorial de una variable real t.
1. El nombre de funcion vectorial viene dado porque, f asigna a cada t ∈ I un vector enel espacio R
n.
2. Las n funciones reales fi, (i = 1, 2, . . . , n) se llaman funciones componentes de la funcionvectorial f .
3. El dominio de la funcion vectorial f es el conjunto
Dom(f ) = Dom(f1) ∩Dom(f2) ∩ . . . ∩Dom(fn)
139
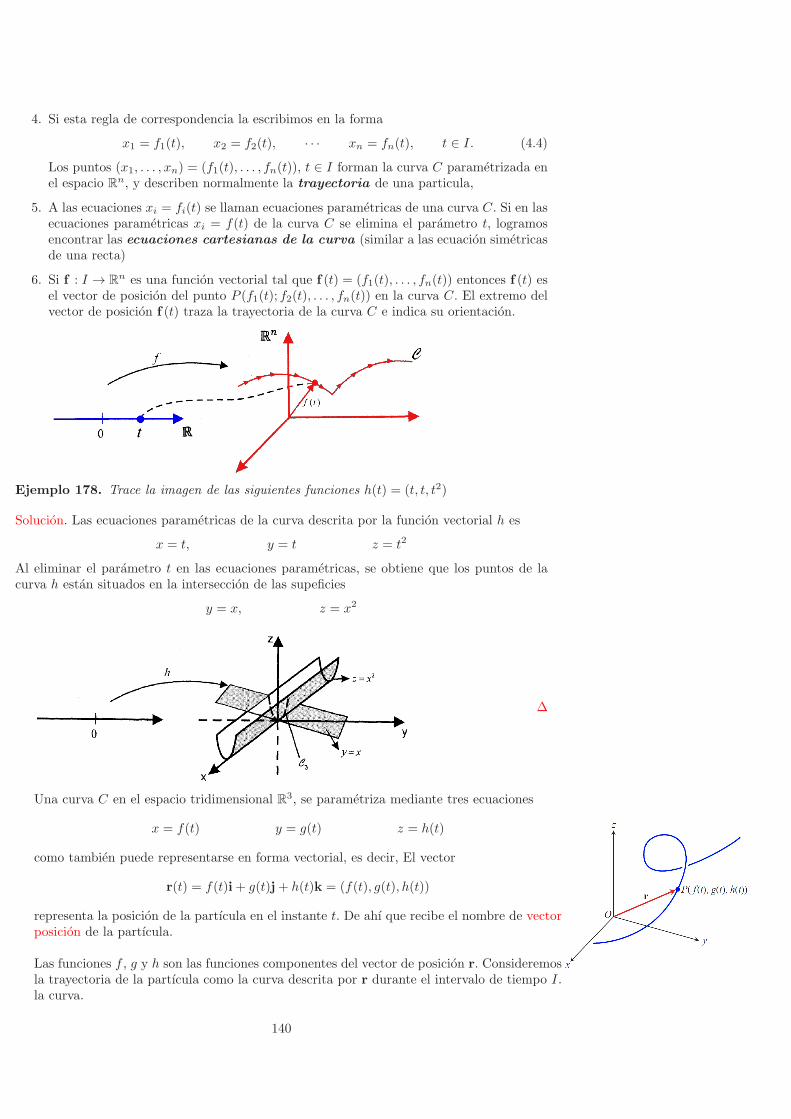
4. Si esta regla de correspondencia la escribimos en la forma
x1 = f1(t), x2 = f2(t), · · · xn = fn(t), t ∈ I. (4.4)
Los puntos (x1, . . . , xn) = (f1(t), . . . , fn(t)), t ∈ I forman la curva C parametrizada enel espacio R
n, y describen normalmente la trayectoria de una particula,
5. A las ecuaciones xi = fi(t) se llaman ecuaciones parametricas de una curva C. Si en lasecuaciones parametricas xi = f(t) de la curva C se elimina el parametro t, logramosencontrar las ecuaciones cartesianas de la curva (similar a las ecuacion simetricasde una recta)
6. Si f : I → Rn es una funcion vectorial tal que f (t) = (f1(t), . . . , fn(t)) entonces f (t) es
el vector de posicion del punto P (f1(t); f2(t), . . . , fn(t)) en la curva C. El extremo delvector de posicion f (t) traza la trayectoria de la curva C e indica su orientacion.
Ejemplo 178. Trace la imagen de las siguientes funciones h(t) = (t, t, t2)
Solucion. Las ecuaciones parametricas de la curva descrita por la funcion vectorial h es
x = t, y = t z = t2
Al eliminar el parametro t en las ecuaciones parametricas, se obtiene que los puntos de lacurva h estan situados en la interseccion de las supeficies
y = x, z = x2
∆
Una curva C en el espacio tridimensional R3, se parametriza mediante tres ecuaciones
x = f(t) y = g(t) z = h(t)
como tambien puede representarse en forma vectorial, es decir, El vector
r(t) = f(t)i+ g(t)j+ h(t)k = (f(t), g(t), h(t))
representa la posicion de la partıcula en el instante t. De ahı que recibe el nombre de vectorposicion de la partıcula.
Las funciones f , g y h son las funciones componentes del vector de posicion r. Consideremosla trayectoria de la partıcula como la curva descrita por r durante el intervalo de tiempo I.la curva.
140
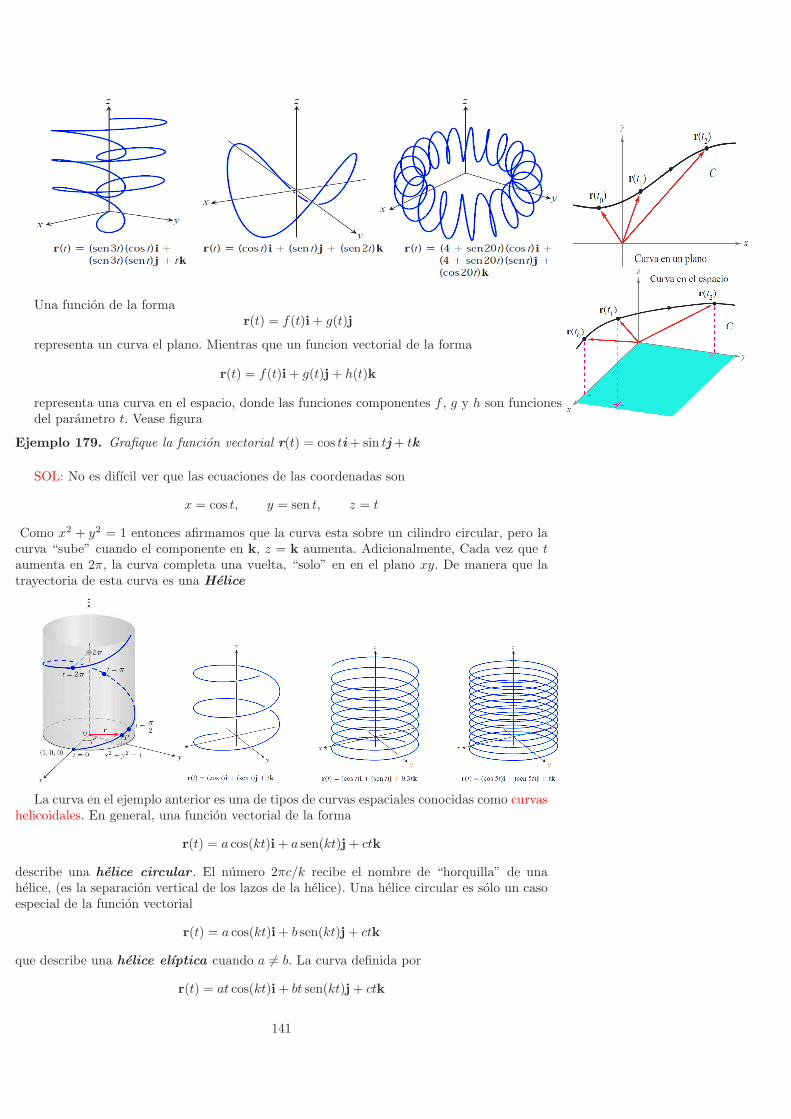
Una funcion de la formar(t) = f(t)i+ g(t)j
representa un curva el plano. Mientras que un funcion vectorial de la forma
r(t) = f(t)i+ g(t)j+ h(t)k
representa una curva en el espacio, donde las funciones componentes f , g y h son funcionesdel parametro t. Vease figura
Ejemplo 179. Grafique la funcion vectorial r(t) = cos ti+ sin tj+ tk
SOL: No es difıcil ver que las ecuaciones de las coordenadas son
x = cos t, y = sen t, z = t
Como x2 + y2 = 1 entonces afirmamos que la curva esta sobre un cilindro circular, pero lacurva “sube” cuando el componente en k, z = k aumenta. Adicionalmente, Cada vez que taumenta en 2π, la curva completa una vuelta, “solo” en en el plano xy. De manera que latrayectoria de esta curva es una Helice
La curva en el ejemplo anterior es una de tipos de curvas espaciales conocidas como curvashelicoidales. En general, una funcion vectorial de la forma
r(t) = a cos(kt)i+ a sen(kt)j+ ctk
describe una helice circular . El numero 2πc/k recibe el nombre de “horquilla” de unahelice, (es la separacion vertical de los lazos de la helice). Una helice circular es solo un casoespecial de la funcion vectorial
r(t) = a cos(kt)i+ b sen(kt)j+ ctk
que describe una helice elıptica cuando a 6= b. La curva definida por
r(t) = at cos(kt)i+ bt sen(kt)j+ ctk
141

se denomina helice conica . Por ultimo, una curva dada por
r(t) = a sin(kt) cos(t)i+ a sin(kt) sin(t)j+ a cos(kt)k
se llama helice esferica .En estas ecuaciones se supone que a, b, c y k son constantes posi-tivas.
Ejemplo 180. Encuentre una funcion vectorial para el segmento de recta del punto P0(3, 2, 1)al punto P1(1, 4, 5).
SOL: No es dificil ver que los vectores de posicion correspondientes a los puntos dadosson r0 = (3, 2− 1) y r1 = (1, 4, 5). Entonces, una funcion vectorial para el segmento de rectaes:
Ejemplo 181. Grafique la curva trazada por la funcion vectorial r(t) = 2 cos ti+2 sen tj+3k
SOL: Las ecuaciones parametricas de la curva son las componentes de la funcion vectorialson
x = 2 cos t, y = 2 sen t, z = 3
.
Ejemplo 182. Determine la funcion vectorial que describe la curva C de interseccion delplano y = 2x y el paraboloide z = 9− x2 − y2
SOL: Primero parametrizamos la curva C de interseccion haciendo, x = t, de donde sededuce que y = 2t y z = 9− t2 − (2t)2 = 9− 5t2. Por tanto las ecuaciones parametricas son
x = t, y = 2t, z = 9− 5t2,
y por tanto una funcion vectorial que describe el trazo del paraboloide en el plano y = 2xesta dada por
r(t) = ti+ 2tj+ (9− 5t2)k.
Ejemplo 183. Encuentre la funcion vectorial que describe la curva C de interseccion de loscilindros y = x2 y z = x3
SOL: En R2, y = x2 es una parabola en el plano xy y por tanto en R
3 es un cilindroparabolico cuya generatriz es paralela al eje z. Por otro lado, z = x3 es un cilindro cubicocuya generatriz es paralelo al eje y.
Ahora, la opcion mas natural para parametrizar es usar a x = t entonces y = t2 y z = t3.Por tanto, una funcion vectorial que describe a la curva C generada por interseccion de losdos cilindros es entonces
r(r) = ti+ t2j+ t3k
142

Ejemplo 184. Dibujar la grafica C representada por la interseccion del semielipsoide x2
12 +y2
24 + z2
4 = 1, z ≥ 0 y el cilindro parabolico y = x2. Despues, hallar una funcion vectorialque represente la grafica.
SOL: Una opcion natural para el parametro es: x = t, luego y = t2. Entonces
z2
4= 1− t2
12+t4
24=
(6 + t2)(4− t2)
24,
Como la curva se encuentra sobre el plano xy, hay que elegir para z la raız cuadrada positiva.Por tanto, la funcion vectorial resultante es:
r(t) = ti+ t2j+
√
(6 + t2)(4− t2)
6k, −2 ≤ t ≤ 2
Muchas de las tecnicas y definiciones utilizadas en el calculo de funciones reales se puedenaplicar a funciones vectoriales. Por ejemplo, las funciones vectoriales se pueden sumar yrestar, multiplicar por un escalar, tomar su lımite, derivarlas, integrarlas y ası sucesivamente.
La estrategia basica consiste en aprovechar la linealidad de las operaciones vectoriales yextender las definiciones, componente por componente.
(f + g)(t) = f (t) + g(t), t ∈ Df ∩Dg
(f − g)(t) = f (t)− g(t), t ∈ Df ∩Dg
(φf )(t) = φ(t)f (t) = φ(t)(f1(t), . . . , fn(t)), φ : R → R, t ∈ Dφ ∩Df
(f · g)(t) = f (t) · g(t) =∑ni=1 fi(t)gi(t), t ∈ Df ∩Dg
(f × g)(t) = f (t)× g(t), f ,g : R → R3, t ∈ Dφ ∩Df
Esta extension, componente por componente, de las operaciones con funciones reales afunciones vectoriales se ilustra mas ampliamente en la definicion siguiente del lımite de unafuncion vectorial.
143

Si r(t) tiende al vector L cuando t → a, la longitud del vector r(t) − L tiende a 0. Esdecir,
‖r(t)− L‖ → 0 Cuando t→ a
Ejemplo 185. Calcule lımt→t0
f (t) (en caso exista) de las siguientes funciones vectoriales
1. f (t) =
(
1−√t+ 1
t+ 2,
t
t+ 1, 2
)
, para t0 = 0 R/ (0, 0, 2)
2. f (t) =
(
et − e
t− 1,ln t
1− t,sen(t− 1)
t− 1
)
, para t0 = 1 R/ (e,−1, 1)
3. f (t) =
(
1− cos(sen t)
sen2 t,cos t− cos(sen t)
t2,
1
t− π
)
, para t0 = 0 R/ ( 12 , 0,1π )
4. f (t) =
(
(2− t)tan(π2 t),
sen( 5√t− 1)
tan( 5√t− 1)
,
√t− 1
t− 1
)
, para t0 = 1 R/ (e2/π, 1, 12 )
La definicion siguiente extiende la nocion de continuidad a funciones vectoriales.
Definition 54. una funcion vectorial f es continua en el numero a si
f (a) esta definido lımt→a
f (t) existe lımt→a
f (t) = f (a)
De acuerdo con esta definicion, una funcion vectorial
f (t) =(
f1(t), f2(t)), . . . , fn(t))
es continua en t = a si y solo si las funciones componentes fi, son continuas en t = a.
Ejemplo 186. 1. Dada la funcion vectorial f (t) =
(
t2 − 1
t+ 1,sen(πt)
cos(πt),ln t+ 1
t+ 2
)
Determi-
ne si la funcion vectorial es continua en t = 1. R/: SI
144

2. Dada la funcion vectorial f (t) =
(
sen t
t,ln(1 + t)
1− t,cos t− 1
t
)
Determine si la funcion
vectorial es continua en t = 0. R/: NO
La definicion de la derivada de una funcion vectorial es paralela a la dada para funcionesreales.
Definition 55. La derivada de una funcion vectorial f es
f ′(t) = lımt→a
f (t+ h)− f (t)
h
para todo t para el cual existe el lımite.
Si f ′(t) existe, entonces f es derivable en t.
Si f ′(t) existe para toda t en un intervalo abierto I, entonces f es derivable en I.
La derivabilidad de funciones vectoriales puede extenderse a intervalos cerrados consi-derando lımites unilaterales.
NOTA: Ademas de la notacion f ′(t) otras notaciones para la derivada de una funcionvectorial son
Dt[f (t)],d
dt[f (t)],
df
dt
Velocidad y aceleracıon
Si una partıcula se mueve a lo largo de una curva C en el espacio Rn, de modo que suvector posicion en el tiempo t es f (t) = (f1(t), f2(t), . . . , fn(t)) entonces, el vector velocidadv(t) y el vector aceleracion a(t) de la partıcula en el instante t son dadas por
v(t) = f ′(t) =(
f ′1(t), f′2(t), . . . , f
′n(t)
)
a(t) = v′(t) = f ′′(t) =(
f ′′1 (t), f′′2 (t), . . . , f
′′n (t)
)
El vector velocidad v(t) tiene la direccion del vector tangente a la curva C en el punto f (t)y el vector aceleracion a(t) apunta hacia el lado concavo de la curva C (lado hacia donde sedoble la curva).
145

Reglas de Derivacion de funciones vectoriales: Sean f ,g : I → Rn funciones
vectoriales derivables de t, c una constante real y α : I → R una funcion real derivablede t. Entonces se tiene:
1. [f ± g]′(t) = f ′(t)± g′(t)
2. [cf (t)]′ = cf ′(t)
3. [α(t)f(t)] = α′(t)f (t) + α(t)f ′(t)
4. [f (t) · g(t)]′ = f ′(t) · g(t) + f (t) · g′(t)
5. [f (t)× g(t)]′ = f ′(t)× g(t) + f (t)× g′(t), (valido solo en R3)
6. ‖f(t)‖′ = f (t) · f ′(t)‖f (t)‖ si f (t) 6= 0)
El modulo del vector velocidad v(t), esto es,
‖v(t)‖ = ‖f ′(t)‖ =√
[f ′1(t)]2 + [f ′2(t)]
2 + · · ·+ [f ′n(t)]2 (4.5)
es la rapidez de la partıcula en el instante t. Si una partıcula se mueve con una rapidezconstante c, entonces su vector de aceleracion es perpendicular al vector de velocidad v. Enefecto,
‖v‖ = c, ⇒ ‖v‖2 = c2 ⇒ v · v = c2
Diferenciamos ambos lados con respecto a t,
0 =d
dt(v · v) = 2v · dv
dt= 2v · a Entonces, v(t) · a(t) = 0 para todo t.
Ejemplo 187. Si f (t) = (t, t2; 3 + t), g(t) = (cos t, sen t, ln(t+ 1)) y α(t) = e−4t, calcule
(αf )′(0) (f + g)′(0) (f · g)′(0) (f × g)′(0)
146

Ejemplo 188. Considere la curva C dada por r(t) = cos(2t)i + sin(t)j, −π/2 ≤ t ≤ π/2.Encuentre la derivada r′(t) y grafique los vectores r′(0) y r′(π/6)
SOL: La curva C es suave Porque? R/:
r′(t) = −2 sen(2t)i+ cos tj
en concecuencia
r′(0) = j, r′(π/6) = −√3i+
1
2
√3j
Como graficamos la curva? R/:
Ejemplo 189. Encuentre las ecuaciones parametricas de la recta tangente a la curva Ccuyas ecuaciones parametricas son x = t2, y = t2 − t, z = −7t en el punto correspondientea t = 3.
SOL: La funcion vectorial posicion es r(t) = , y por tanto punto encuestion e r(3) = . Luego los vectores tangentes a C estan dados por
r′(0) = y r′(3) =
De manera que las ecuaciones parametricas de la recta tangente son
Integrales de funciones Vectoriales
Definition 56.
Si f : [a, b] → Rn es una funcion vectorial continua en el intervalo [a, b] tal que
f (t) = (f1(t), f2(t), . . . , fn(t)) entonces la integral indefinida de f es
ˆ
f (t)dt =
(
ˆ
f1(t)dt,
ˆ
f2(t)dt, . . . ,
ˆ
fn(t)dt
)
y la integral definida de f es
ˆ b
a
f (t)dt =
(
ˆ b
a
f1(t)dt,
ˆ b
a
f2(t)dt, . . . ,
ˆ b
a
fn(t)dt
)
Ejemplo 190. 1. Halle la integral indefinida de la funcion vectorial f (t) =(
cos t,1
1 + t, tet
)
2. Calcule la integral
ˆ 1
0
f (t)dt, donde f (t) = (2t,1
1 + t, tet)
147

Teorema 57 (Teorema Fund. del Calculo). Sea f : [a, b] → Rn es una funcion
vectorial continua en [a, b] entonces
La funcion F definida por F(t) =
ˆ t
a
f (u)du, a ≤ t ≤ b es derivable y F′(t) =
f (t), ∀t ∈ [a, b]
ˆ b
a
f (u)du = F(b)− F(a),
Ejemplo 191. Calcule
ˆ π/4
0
f (t)dt× h(0) , donde
f (t) =
(
√tan t sec4 t, sen3(2t) cos2 t− sen3(2t) sen2 t,
1
π
√
t
π
)
y
h(t) =
(
ˆ 1
−1
et2−1dt,
ˆ 1
0
(t2 − t)dt,
ˆ 1
0
t3dt
)
, R : (5
288,−5
2,−10
63)
Curvas regulares
Definition 58.
Se dice que una curva C ⊂ Rn es una curva parametrizada, si existe una fun-
cion vectorial α : [a, b] → Rn tal que a α([a, b]) = C A la funcion vectorial
α(t) =(
α1(t), α2(t), . . . , αn(t))
se llama parametrizacion de la curva C.
Ejemplo 192. la curva C : x2 + y2 = 1 tiene como parametrizacion a la funcion vectorialα : [0, 2π] → R
2 definida por α(t) = (cos(t), sen(t))
Ejemplo 193. Halle una parametrizacion para la curva C : y = f(x) =
x x ≤ 0
x2 x > 0
Solucion. : No es difıcil ver la funcion vectorial α : R → R2 definida por
α(t) =
(t, t) t ≤ 0
(t, t2) t > 0
es una parametrizacion para la curva C. ∆
PROPIEDADES
148
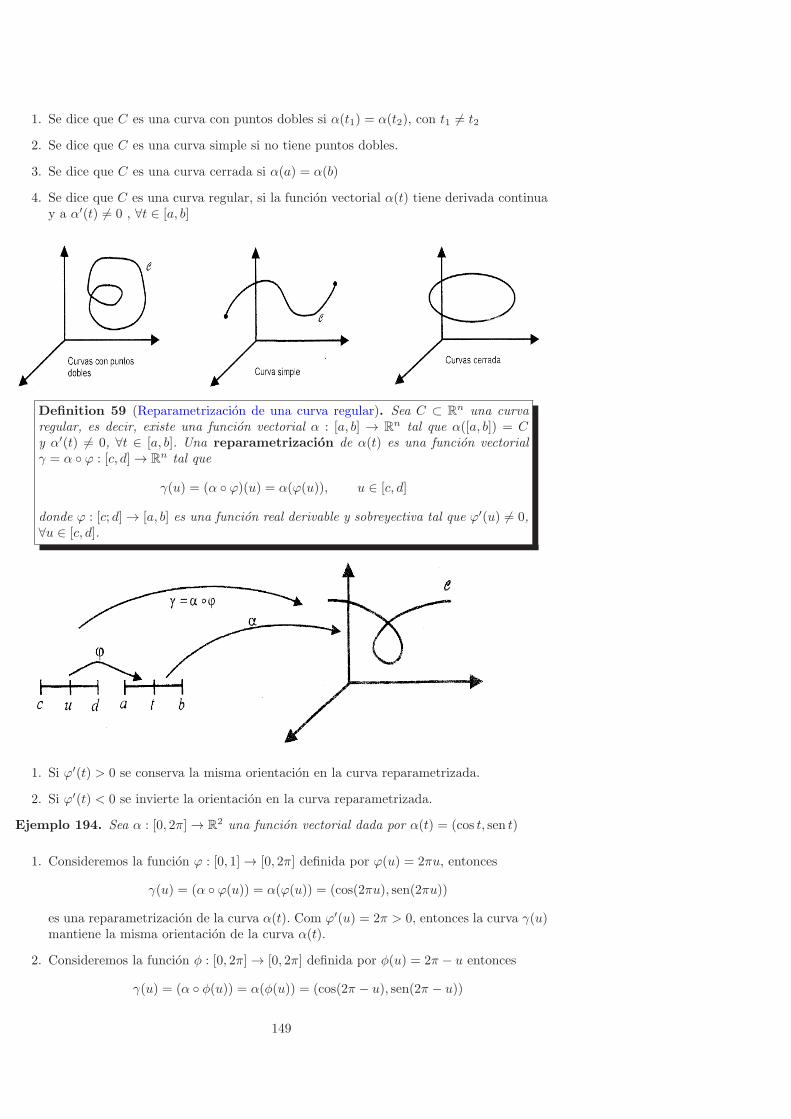
1. Se dice que C es una curva con puntos dobles si α(t1) = α(t2), con t1 6= t2
2. Se dice que C es una curva simple si no tiene puntos dobles.
3. Se dice que C es una curva cerrada si α(a) = α(b)
4. Se dice que C es una curva regular, si la funcion vectorial α(t) tiene derivada continuay a α′(t) 6= 0 , ∀t ∈ [a, b]
Definition 59 (Reparametrizacion de una curva regular). Sea C ⊂ Rn una curva
regular, es decir, existe una funcion vectorial α : [a, b] → Rn tal que α([a, b]) = C
y α′(t) 6= 0, ∀t ∈ [a, b]. Una reparametrizacion de α(t) es una funcion vectorialγ = α ◦ ϕ : [c, d] → R
n tal que
γ(u) = (α ◦ ϕ)(u) = α(ϕ(u)), u ∈ [c, d]
donde ϕ : [c; d] → [a, b] es una funcion real derivable y sobreyectiva tal que ϕ′(u) 6= 0,∀u ∈ [c, d].
1. Si ϕ′(t) > 0 se conserva la misma orientacion en la curva reparametrizada.
2. Si ϕ′(t) < 0 se invierte la orientacion en la curva reparametrizada.
Ejemplo 194. Sea α : [0, 2π] → R2 una funcion vectorial dada por α(t) = (cos t, sen t)
1. Consideremos la funcion ϕ : [0, 1] → [0, 2π] definida por ϕ(u) = 2πu, entonces
γ(u) = (α ◦ ϕ(u)) = α(ϕ(u)) = (cos(2πu), sen(2πu))
es una reparametrizacion de la curva α(t). Com ϕ′(u) = 2π > 0, entonces la curva γ(u)mantiene la misma orientacion de la curva α(t).
2. Consideremos la funcion φ : [0, 2π] → [0, 2π] definida por φ(u) = 2π − u entonces
γ(u) = (α ◦ φ(u)) = α(φ(u)) = (cos(2π − u), sen(2π − u))
149

es una reparametrizacion de α(t). Como φ′(u) = −1 < 0, entonces la curva γ(u) inviertela orientacion de la curva α(t).
Definition 60 (Longitud de arco de una funcion regular). Sea α : [a, b] → Rn una
curva regular en [a, b], tal que
C : α(t) = (α1(t), α2(t), . . . , αn(t))
La longitud de arco de la curva medida desde t = a hasta t = b es
L(C) =
ˆ b
a
‖α′(t)‖dt =ˆ b
a
√
[α′1(t)]
2, . . . , [α′n(t)]
2dt
La funcion longitud de arco de la curva α(t) es dada por
s(t) = l(t) =
ˆ t
a
‖α′(u)‖du, t ∈ [a, b] (4.6)
Ejemplo 195. Halle la longitud de arco de las siguientes curvas
1. α(t) = (a cos t, a sen t, bt), desde t = 0 hasta t = 2π. R/ 2π√a2 + b2
2. α(t) = (t, 1,1
6t3 +
1
2t), desde t = 1 hasta t = 3. R/ 14
3
150
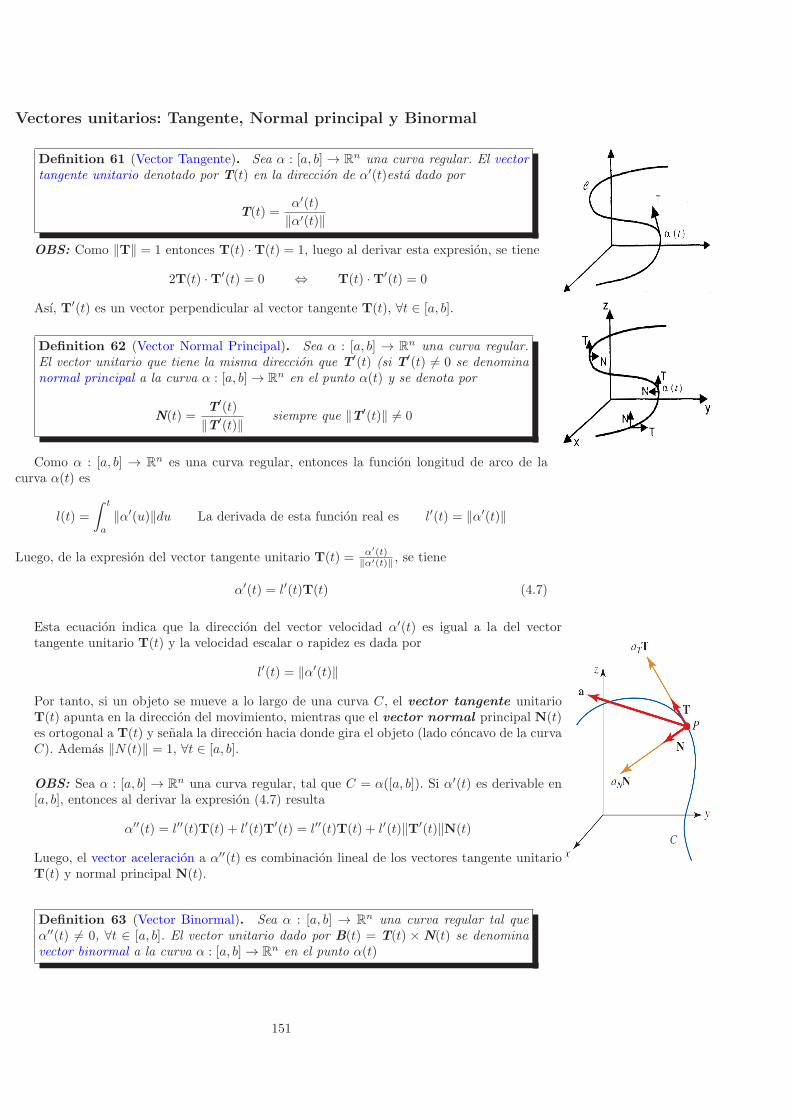
Vectores unitarios: Tangente, Normal principal y Binormal
Definition 61 (Vector Tangente). Sea α : [a, b] → Rn una curva regular. El vector
tangente unitario denotado por T(t) en la direccion de α′(t)esta dado por
T(t) =α′(t)
‖α′(t)‖
OBS: Como ‖T‖ = 1 entonces T(t) ·T(t) = 1, luego al derivar esta expresion, se tiene
2T(t) ·T′(t) = 0 ⇔ T(t) ·T′(t) = 0
Ası, T′(t) es un vector perpendicular al vector tangente T(t), ∀t ∈ [a, b].
Definition 62 (Vector Normal Principal). Sea α : [a, b] → Rn una curva regular.
El vector unitario que tiene la misma direccion que T′(t) (si T′(t) 6= 0 se denominanormal principal a la curva α : [a, b] → R
n en el punto α(t) y se denota por
N(t) =T′(t)
‖T′(t)‖ siempre que ‖T′(t)‖ 6= 0
Como α : [a, b] → Rn es una curva regular, entonces la funcion longitud de arco de la
curva α(t) es
l(t) =
ˆ t
a
‖α′(u)‖du La derivada de esta funcion real es l′(t) = ‖α′(t)‖
Luego, de la expresion del vector tangente unitario T(t) = α′(t)‖α′(t)‖ , se tiene
α′(t) = l′(t)T(t) (4.7)
Esta ecuacion indica que la direccion del vector velocidad α′(t) es igual a la del vectortangente unitario T(t) y la velocidad escalar o rapidez es dada por
l′(t) = ‖α′(t)‖
Por tanto, si un objeto se mueve a lo largo de una curva C, el vector tangente unitarioT(t) apunta en la direccion del movimiento, mientras que el vector normal principal N(t)es ortogonal a T(t) y senala la direccion hacia donde gira el objeto (lado concavo de la curvaC). Ademas ‖N(t)‖ = 1, ∀t ∈ [a, b].
OBS: Sea α : [a, b] → Rn una curva regular, tal que C = α([a, b]). Si α′(t) es derivable en
[a, b], entonces al derivar la expresion (4.7) resulta
α′′(t) = l′′(t)T(t) + l′(t)T′(t) = l′′(t)T(t) + l′(t)‖T′(t)‖N(t)
Luego, el vector aceleracion a α′′(t) es combinacion lineal de los vectores tangente unitarioT(t) y normal principal N(t).
Definition 63 (Vector Binormal). Sea α : [a, b] → Rn una curva regular tal que
α′′(t) 6= 0, ∀t ∈ [a, b]. El vector unitario dado por B(t) = T(t) × N(t) se denominavector binormal a la curva α : [a, b] → R
n en el punto α(t)
151

Los tres vectores unitarios T, N y B forman un conjunto de mano derecha de vectoresmutuamente ortogonales denominado triedro movil.
El plano de T y N se denomina plano osculante. La ecuacion cartesiana del planoosculador es
PO : ((x, y, z)− (x0, y0, z0)) ·B(t0) = 0
El plano de N y B se dice que es el plano normal. La ecuacion cartesiana del planonormal prinicpla es
PN : ((x, y, z)− (x0, y0, z0)) ·T(t0) = 0
El plano de T y B es el plano de rectificacion. La ecuacion cartesiana del planoosculador es
PR : ((x, y, z)− (x0, y0, z0)) ·N(t0) = 0
Los tres vectores unitarios mutuamente ortogonales T,N,B pueden considerarse comoun sistema de coordenadas de mano derecha movil, ya que
B(t) = T(t)×N(t), N(t) = B(t)×T(t), T (t) = N(t)×B(t)
Este sistema de coordenadas movil se conoce como marco TNB.
OBSERVACION CASO R3: Sea α : I → R
3 una funcion vectorial cuyas funcionescoordenadas tienen derivadas continuas hasta el segundo orden. Las expresiones de T(t),N(t) y B(t) en terminos de la funcion α(t) y sus derivadas son
T =α′
‖α′‖ , B =α′ × α′′
‖α′ × α′′‖ , N =[α′ × α′′(t)]× α′
[α′ × α′′(t)]× α′
Si B(t) = b (b vector constante) ∀t ∈ I, entonces la curva es plana. Ası, la curva esta en elplano osculador.
Ejemplo 196. Halle los vectores tangente unitario, normal principal y binormal de la espiralconica α(t) = et(cos t, sent, 1) en un punto arbitrario.
Ejemplo 197. Sea C la curva interseccion entre las superficies
y = (x− 2)2 z = (x− 2)2
Halle la ecuacion cartesiana del plano osculador a la curva C en los puntos (2, 0, 0), (3, 1, 1)y (x0, y0, z0) R/: PO : y − z = 0, B(t) es const
152
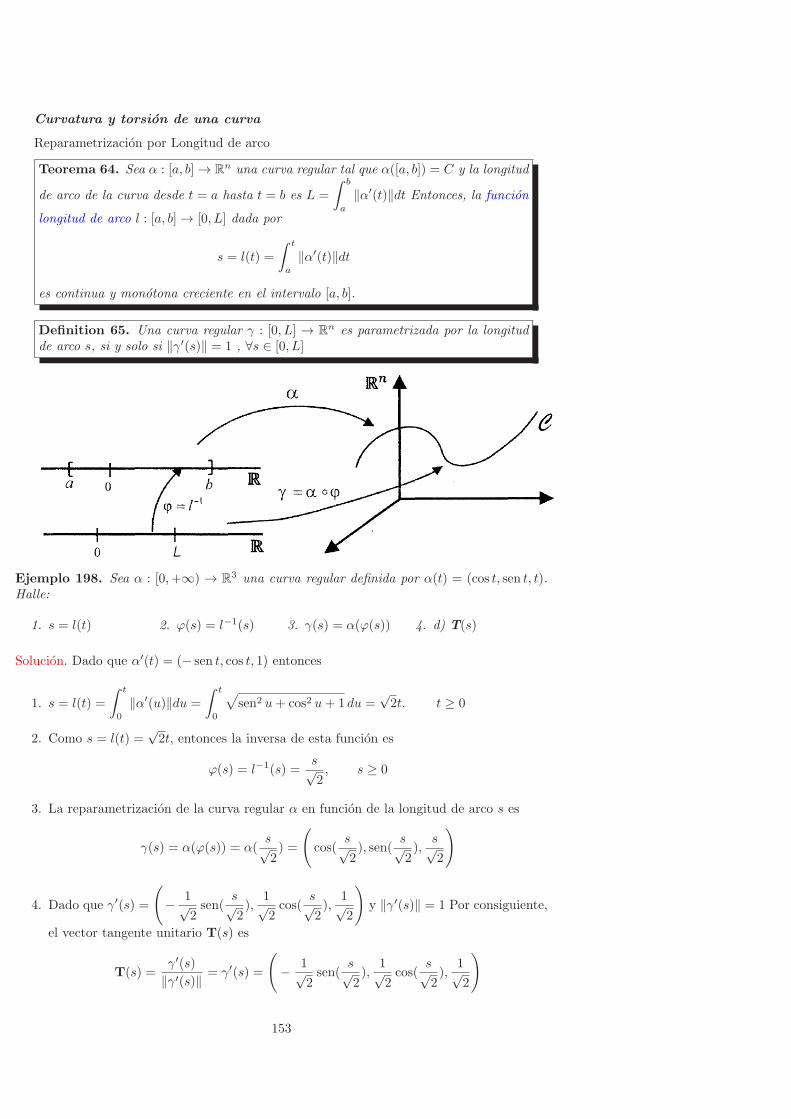
Curvatura y torsion de una curva
Reparametrizacion por Longitud de arco
Teorema 64. Sea α : [a, b] → Rn una curva regular tal que α([a, b]) = C y la longitud
de arco de la curva desde t = a hasta t = b es L =
ˆ b
a
‖α′(t)‖dt Entonces, la funcion
longitud de arco l : [a, b] → [0, L] dada por
s = l(t) =
ˆ t
a
‖α′(t)‖dt
es continua y monotona creciente en el intervalo [a, b].
Definition 65. Una curva regular γ : [0, L] → Rn es parametrizada por la longitud
de arco s, si y solo si ‖γ′(s)‖ = 1 , ∀s ∈ [0, L]
Ejemplo 198. Sea α : [0,+∞) → R3 una curva regular definida por α(t) = (cos t, sen t, t).
Halle:
1. s = l(t) 2. ϕ(s) = l−1(s) 3. γ(s) = α(ϕ(s)) 4. d) T(s)
Solucion. Dado que α′(t) = (− sen t, cos t, 1) entonces
1. s = l(t) =
ˆ t
0
‖α′(u)‖du =
ˆ t
0
√
sen2 u+ cos2 u+ 1 du =√2t. t ≥ 0
2. Como s = l(t) =√2t, entonces la inversa de esta funcion es
ϕ(s) = l−1(s) =s√2, s ≥ 0
3. La reparametrizacion de la curva regular α en funcion de la longitud de arco s es
γ(s) = α(ϕ(s)) = α(s√2) =
(
cos(s√2), sen(
s√2),
s√2
)
4. Dado que γ′(s) =
(
− 1√2sen(
s√2),
1√2cos(
s√2),
1√2
)
y ‖γ′(s)‖ = 1 Por consiguiente,
el vector tangente unitario T(s) es
T(s) =γ′(s)
‖γ′(s)‖ = γ′(s) =
(
− 1√2sen(
s√2),
1√2cos(
s√2),
1√2
)
153
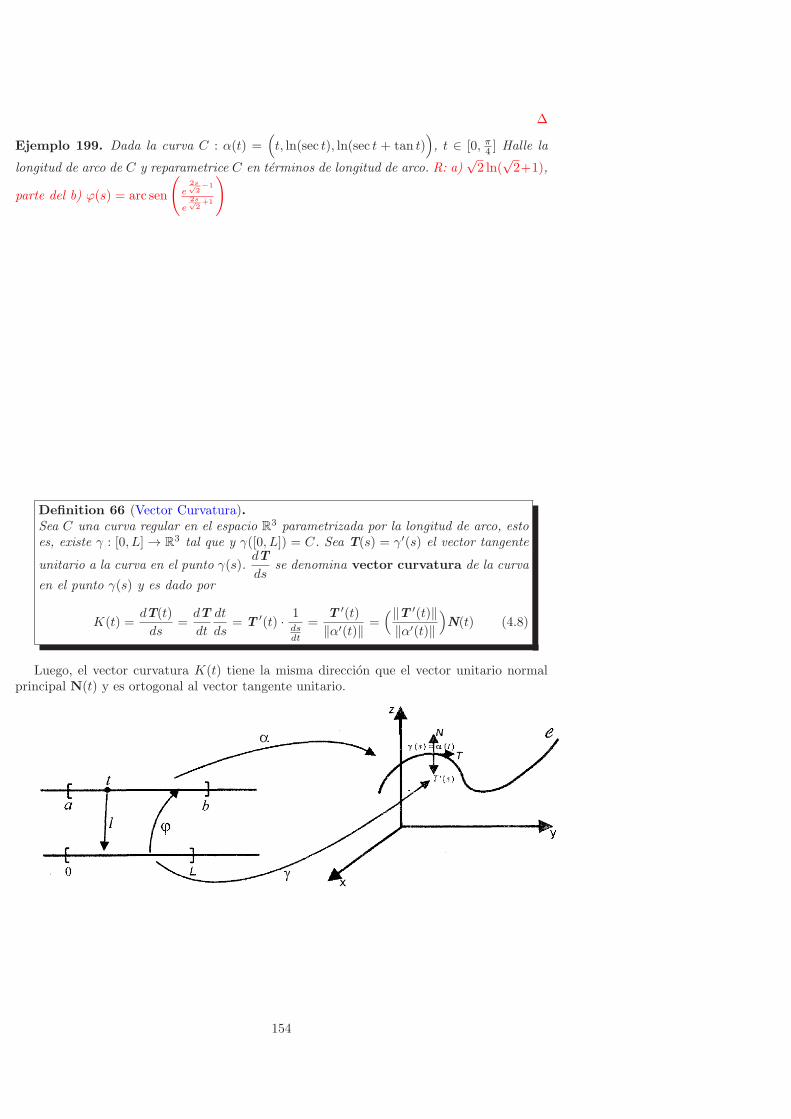
∆
Ejemplo 199. Dada la curva C : α(t) =(
t, ln(sec t), ln(sec t + tan t))
, t ∈ [0, π4 ] Halle la
longitud de arco de C y reparametrice C en terminos de longitud de arco. R: a)√2 ln(
√2+1),
parte del b) ϕ(s) = arc sen
(
e2s√2−1
e2s√2+1
)
Definition 66 (Vector Curvatura).Sea C una curva regular en el espacio R
3 parametrizada por la longitud de arco, estoes, existe γ : [0, L] → R
3 tal que y γ([0, L]) = C. Sea T(s) = γ′(s) el vector tangente
unitario a la curva en el punto γ(s).dT
dsse denomina vector curvatura de la curva
en el punto γ(s) y es dado por
K(t) =dT(t)
ds=dT
dt
dt
ds= T ′(t) · 1
dsdt
=T ′(t)
‖α′(t)‖ =(‖T ′(t)‖‖α′(t)‖
)
N(t) (4.8)
Luego, el vector curvatura K(t) tiene la misma direccion que el vector unitario normalprincipal N(t) y es ortogonal al vector tangente unitario.
154

Definition 67 (Curvatura).La funcion escalar que multiplica a N(t) en (4.8) se denomina curvatura de la curvaC en el punto α(t) y se denota por
k(t) =‖T ′(t)‖‖α′(t)‖
La curvatura k(t) es un numero real que nos indica que tanto se tuerce (o se dobla)la curvatura C en el punto α(t).
Ejemplo 200. Encuentre la curvatura de un cırculo de radio a.
Solucion. Funcion vectorial de un circulo es α(t) = a cos ti+ a sen tj.luego α′(t) = y ‖α′(t)‖ = y
T(t) = T′(t) =
Por consiguiente, la curvatura es
k(t) =‖T′(t)‖‖r′(t)‖ =
∆
Ejemplo 201. En el espacio tridimensional la posicion de una partıcula en movimientoesta dada por la funcion vectorial r(t) = 2 cos tı + 2sentj+ 3tk. Encuentre los vectores T(t),N(t) y B(t). Determine la curvatura κ(t).
Solucion. Puesto que r′(t) = , ‖r′(t)‖ = . Luego encon-tramos que
T(t) =r′(t)
‖r′(t)‖para hallar N necesitamos hallar
T′(t) = ‖T′(t)‖ = N(t) =
Ahora el binormal es
B(t) = T(t)×N(t) =
Por ultimo encontramos la curvatura k(t) =T′(t)‖‖r′(t)‖ = ∆
OBSERVACIONES:
1. La curvatura de una recta es igual a cero.
2. La curvatura de una circunferencia de radio a es k(t) =1
a
3. La curvatura de una curva plana en su punto de inflexion es igual a cero.
155

4. Si C : α : I → R3 es una curva regular, entonces la curvatura de la curva C en punto
α(t) en terminos de sus derivadas es dado por
k(t) =‖α′(t)× α′′(t)‖
‖α′(t)‖3 , solo en R3
Ejemplo 202. Sea C la curva de interseccion del cilindro x2 + y2 + 2(y − x)− 2 = 0 con elplano x− y − 2z − 2 = 0 Determine la curvatura de C en el punto (3,−1, 1).
Solucion. No es difıcil ver que x2 + y2 + 2(y − x)− 2 = 0, es igual a (x− 1)2 + (y + 1)2 = 4.Luego, al parametrizar la curva se obtiene
C : α(t) = (1 + 2 cos t, 2 sen t− 1, cos t− sen t), α(0) = (3,−1, 1)
De donde resulta
α′(t) = (−2 sen t, 2 cos t,− sen t− cos t), α′(0) = (0, 2,−1)
α′′(t) = (−2 cos t,−2 sen t,− cos t+ sen t), α′′(0) = (−2, 0,−1)
α′(0)× α′′(0) = (−2, 2, 4)
Por tanto, la curvatura de la curva C en el punto α(0) = (3,−1, 1) es
k(0) =‖α′(0)× α′′(0)‖
‖α′(0)‖3 =2√6
5√5
∆
Ejemplo 203. Sea la curva C : α(t) =( t2
2+ t,
t2
2− t,
√2
2ln t)
Halle la curvatura de la
curva 0 en el punto donde la curva corta al plano xy. R: k(1) = 2√2
9
Definition 68 (Radio de Curvatura).Sea α : l → R
3 una curva regular, y sea k(t) la curvatura de la curva C en el puntoα(t) donde k(t) 6= 0, ∀t ∈ I. El radio de curvatura de la curva C en el punto α(t) esdado por
R(t) =1
k(t)
1. A la circunferencia que tiene como radio R(t) se denomina circunferencia de cur-
vatura o cırculo de curvatura en el punto α(t0) de la curva C con k(t) 6= 0.
2. El centro de la circunferencia de curvatura se encuentra sobre la recta normal a la curvaC en el punto α(t0).
156

3. Como los vectores T y N estan en el plano osculador, entonces la circunferencia decurvatura se encuentra tambien sobre el plano osculador.
4. La circunferencia de curvatura (C1) esta en el lado concavo o interior de la curva C ytiene la mism a curvatura que C en α(t0).
5. El centro de curvatura de la curva C en el punto α(t0) es ei centro de ia circunferenciade curvatura (C1) y es dado por
C0(t0) = α(t0) +R(t0)N(t0)
Ejemplo 204. Dada la curva C : α(t) =(1− 2t
2,
ˆ t
2π
esenudu, t)
. Halle la ecuacion de la
circunferencia de curvatura de la curva C en el punto donde C corta al plano x+ y+ z = 12 .
Solucion. Como la curva interseca al plano dado, entonces las componentes de la funcionvectorial α(t) satisface la ecuacion del plano, esto es,
1− 2t
2+
ˆ t
2π
esenudu+ t =1
2, ⇔
ˆ t
2π
esenudu = 0, ⇔ t = 2π
Luego, la curva C corta al plano dado en el punto α(2π) = P0
(
1−4π2 , 0, 2π) Por otro lado, se
tiene
α′(t) = (−1, esen t, 1), α′(2π) = (−1, 1, 1)
α′′(t) = (0, esen t cos t, 0), α′′(2π) = (0, 1, 0)
α′(2π)× α′′(2π) = (−1, 0,−1)[
α′(2π)× α′′(2π)]
× α′(2π) = (1, 2,−1)
N(2π) =
[
α′(2π)× α′′(2π)]
× α′(2π)
‖[
α′(2π)× α′′(2π)]
× α′(2π)‖=
1√6(1, 2,−1)
R(2π) =‖α′(2π)‖3
‖α′(2π)× α′′(2π)‖ =3√6
2
Ası, el centro de curvatura de la curva C en el punto α(2π) es
C0(2π) = α(2π) +R(2π)N(2π)
=(1− 4π
2, 0, 2π) +
3√6
2
[ 1√6(1, 2,−1)
]
=(
2− 2π, 3,4π − 3
2
)
La ecuacion del plano osculador de la curva C que pasa por el punto α(2π) es
P0 :
[
(x, y, z)−(1− 4π
2, 0, 2π)
]
· (−1, 0,−1) = 0, ⇔ P0 : x+ z =1
2
Como las coordenadas del centro de curvatura satisfacen la ecuacion del plano osculador,entonces la circunferencia de curvatura se encuentra sobre el plano osculador. ∆
Definition 69 (Torsion).Sea α : [a, b] → R
3 una curva regular parametrizada por longitud de arco. Existe unafuncion real τ(t) que satisface
dB
ds= τ(t)N(t)
Al numero real τ(t) se llama torsion de la curva C en el punto α(t).
157

Supongamos que
α(t) = (α1(t), α2(t), α3(t)) y s = l(t) =
ˆ t
0
‖α′(u)‖du, t ∈ [a, b]
dB
dsdetermina el grado de torsion de la curva C en el punto α(t). Para los vectores unitarios,
se tiene
B(t) = T(t)×N(t), B′(t) = T(t)×N ′(t)
N(t)×B′(t) = N(t)×[
T(t)×N′(t)]
=[
N(t) ·N′(t)]
T(t)]−[
N(t) ·T(t)]
N′(t)] = 0
Luego, los vectores N(t) y B′(t) son paralelos. Al derivar el vector binormal con respecto alparam etro longitud de arco, se obtiene
dB
ds=dB(t)
dt
dt
ds=
1
‖α′(t)‖dB(t)
dt=
1
‖α′(t)‖B′(t)
Como los vectores N(t) y B′(t) son paralelos, entonces se tiene
dB
ds= τ(t)N(t)
OBSERVACIONES:
1. τ(t) = 0 , ∀t ∈ I si y solo si C es una curva plana.
2. La torsion τ(t) mide como se esta torciendo la curva C con relacion al plano osculador.
3. Si α : [a, b] → R3 es una curva regular parametrizada, tal que α′(t), α′′(t) y α′′′(t)
existen en [a, b], entonces se tiene
τ =
[
α′(t)× α′′(t)]
· α′′′(t)
‖α′(t)× α′′(t)‖2
Ejemplo 205. Sea una curva dada por α(t) =(
2t+1t−1 ,
t2
t−1 , t+ 2)
1. Halle la torsion de la curva C para todo t 6= 1. R: τ = 0
2. Halle la ecuacion del plano osculador en la que se encuentra la curva dada ∀t 6= 1. R:P0 : x− 3y + 3z − 5 = 0
158
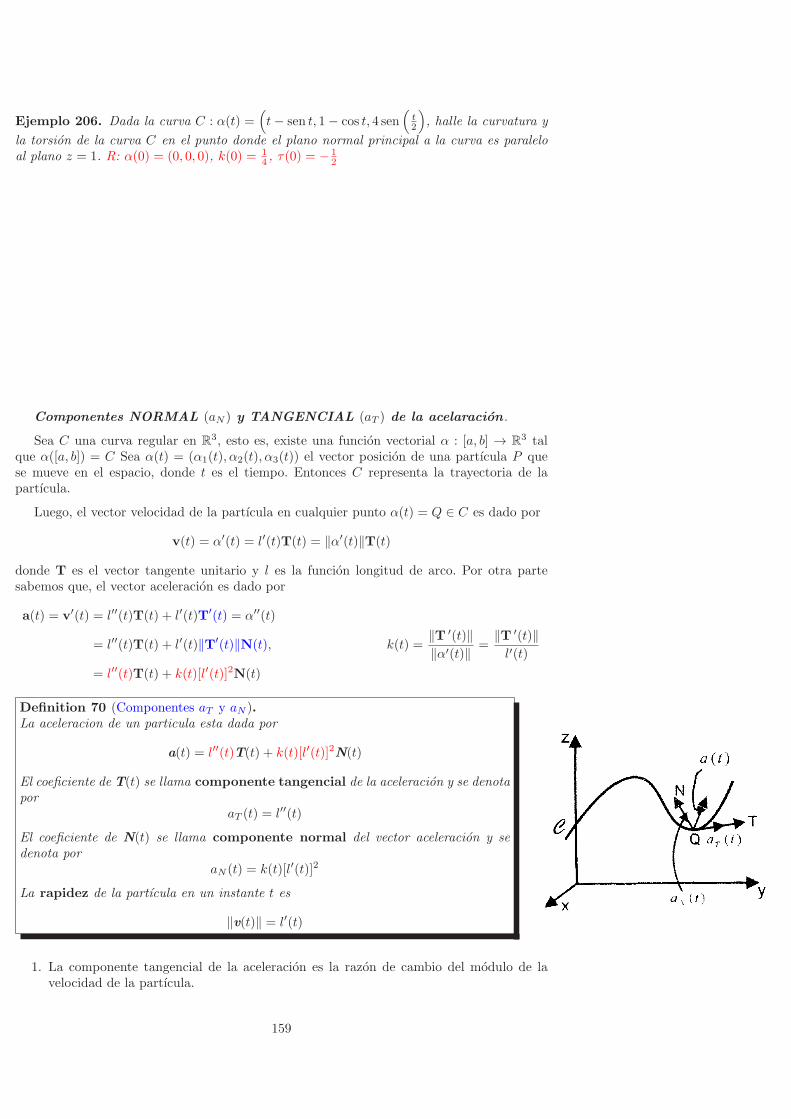
Ejemplo 206. Dada la curva C : α(t) =(
t− sen t, 1− cos t, 4 sen(
t2
)
, halle la curvatura y
la torsion de la curva C en el punto donde el plano normal principal a la curva es paraleloal plano z = 1. R: α(0) = (0, 0, 0), k(0) = 1
4 , τ(0) = − 12
Componentes NORMAL (aN ) y TANGENCIAL (aT ) de la acelaracion .
Sea C una curva regular en R3, esto es, existe una funcion vectorial α : [a, b] → R
3 talque α([a, b]) = C Sea α(t) = (α1(t), α2(t), α3(t)) el vector posicion de una partıcula P quese mueve en el espacio, donde t es el tiempo. Entonces C representa la trayectoria de lapartıcula.
Luego, el vector velocidad de la partıcula en cualquier punto α(t) = Q ∈ C es dado por
v(t) = α′(t) = l′(t)T(t) = ‖α′(t)‖T(t)
donde T es el vector tangente unitario y l es la funcion longitud de arco. Por otra partesabemos que, el vector aceleracion es dado por
a(t) = v′(t) = l′′(t)T(t) + l′(t)T′(t) = α′′(t)
= l′′(t)T(t) + l′(t)‖T′(t)‖N(t), k(t) =‖T ′(t)‖‖α′(t)‖ =
‖T ′(t)‖l′(t)
= l′′(t)T(t) + k(t)[l′(t)]2N(t)
Definition 70 (Componentes aT y aN ).La aceleracion de un particula esta dada por
a(t) = l′′(t)T(t) + k(t)[l′(t)]2N(t)
El coeficiente de T(t) se llama componente tangencial de la aceleracion y se denotapor
aT (t) = l′′(t)
El coeficiente de N(t) se llama componente normal del vector aceleracion y sedenota por
aN (t) = k(t)[l′(t)]2
La rapidez de la partıcula en un instante t es
‖v(t)‖ = l′(t)
1. La componente tangencial de la aceleracion es la razon de cambio del modulo de lavelocidad de la partıcula.
159

2. La componente normal de la aceleracion es siempre positiva.
3. Si el modulo de la velocidad es constante, entonces la componente normal aumenta alaumentar la curvatura.
4. Esto explica por que un automovil que toma una curva cerrada a velocidad moderada o auna curva suave a gran velocidad exige, en ambos casos, una fuerza normal (rozamientode los neumaticos) de gran magnitud para que el vehıculo no se salga de la carretera.
Ejemplo 207. Una partıcula se mueve segun la ley
α(t) = (t, ln(sec t+ tan t), ln(sec t))
Halle sus vectores velocidad y aceleracion, su velocidad escalar, los vectores unitarios T y N.y los componentes normal y tangencial del vector aceleracion, todo para t = π/3.
Solucion.
v(t) = α′(t) = (1, sec t, tan t), v(π
3) = (1, 2,
√3)
a(t) = α′′(t) = (0, sec t tan t, sec2 t), a(π
3) = (0, 2
√3, 4)
l′(t) = ‖α′(t)‖ =√2 sec t, l′(
π
3) = 2
√2
l′′(t) =√2 sec t tan t, l′′(
π
3) = 2
√6
La velocidad escalar, el vector tangente unitario y la curvatura en t = π/3 son
v = ‖α(π3)‖ = l′(
π
3) = 2
√2
T(π
3) =
α′(π3 )
‖α′(π3 )‖=
1
2√2(1, 2,
√3)
k(π
3) =
α′(π3 )× α′′(π3 )
‖α′(π3 )‖3=
1
4
Como a = l′′(π3 )T+ k[
l′(π3 )]2N entonces N = (−
√32 , 0,
12 ) y
aT (π
3) = l′′(
π
3) = 2
√6, aN (
π
3) = k
[
l′(π
3)]2
= 2
∆
160
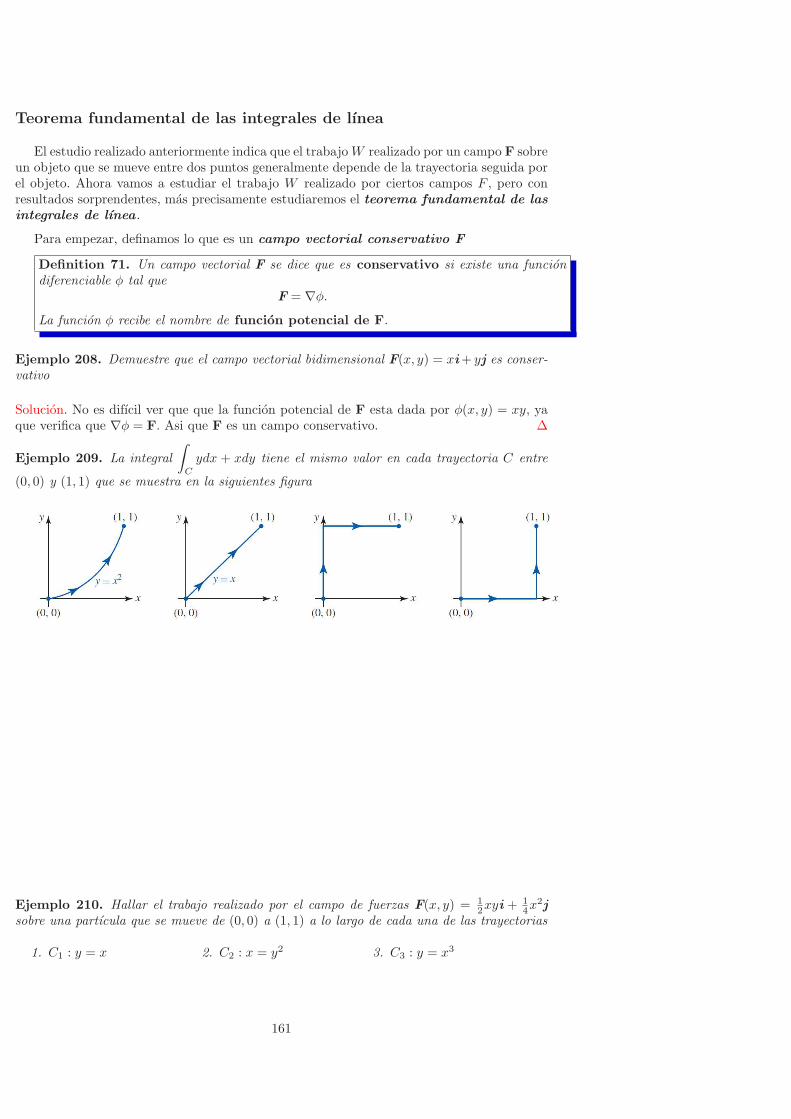
Teorema fundamental de las integrales de lınea
El estudio realizado anteriormente indica que el trabajoW realizado por un campo F sobreun objeto que se mueve entre dos puntos generalmente depende de la trayectoria seguida porel objeto. Ahora vamos a estudiar el trabajo W realizado por ciertos campos F , pero conresultados sorprendentes, mas precisamente estudiaremos el teorema fundamental de las
integrales de lınea .
Para empezar, definamos lo que es un campo vectorial conservativo F
Definition 71. Un campo vectorial F se dice que es conservativo si existe una funciondiferenciable φ tal que
F = ∇φ.La funcion φ recibe el nombre de funcion potencial de F.
Ejemplo 208. Demuestre que el campo vectorial bidimensional F(x, y) = xi+ yj es conser-vativo
Solucion. No es difıcil ver que que la funcion potencial de F esta dada por φ(x, y) = xy, yaque verifica que ∇φ = F. Asi que F es un campo conservativo. ∆
Ejemplo 209. La integral
ˆ
C
ydx + xdy tiene el mismo valor en cada trayectoria C entre
(0, 0) y (1, 1) que se muestra en la siguientes figura
Ejemplo 210. Hallar el trabajo realizado por el campo de fuerzas F(x, y) = 12xyi +
14x
2j
sobre una partıcula que se mueve de (0, 0) a (1, 1) a lo largo de cada una de las trayectorias
1. C1 : y = x 2. C2 : x = y2 3. C3 : y = x3
161
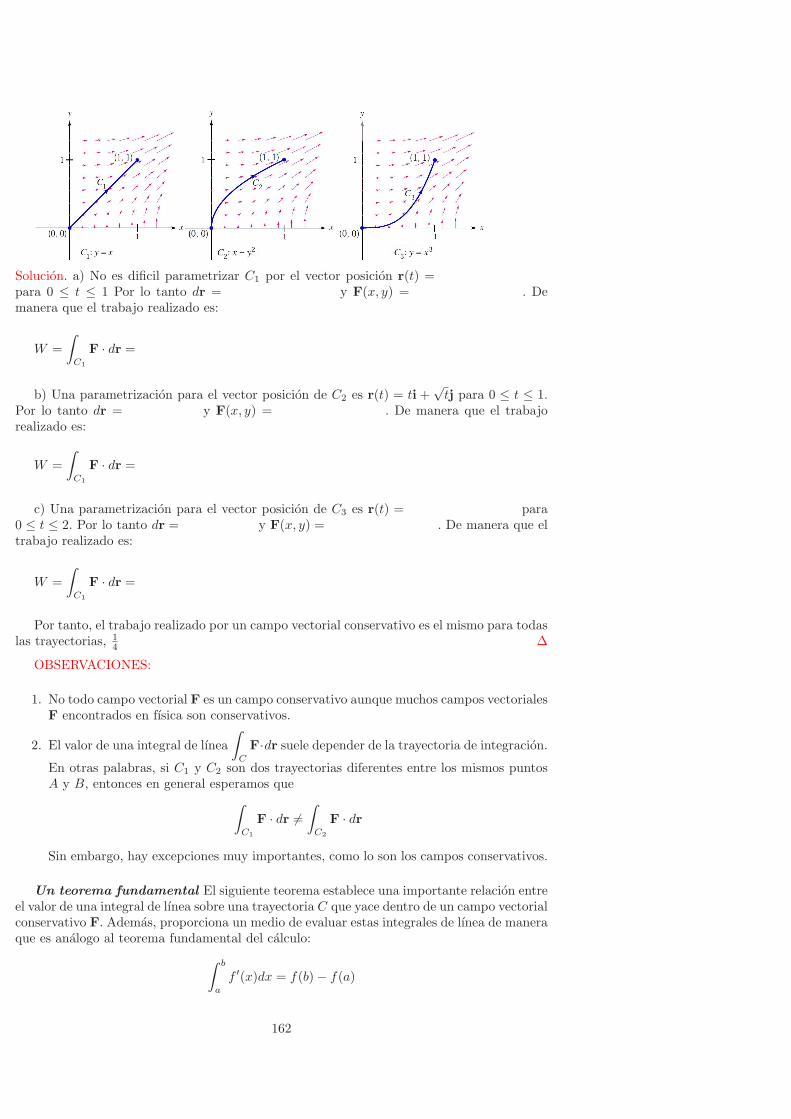
Solucion. a) No es dificil parametrizar C1 por el vector posicion r(t) =para 0 ≤ t ≤ 1 Por lo tanto dr = y F(x, y) = . Demanera que el trabajo realizado es:
W =
ˆ
C1
F · dr =
b) Una parametrizacion para el vector posicion de C2 es r(t) = ti +√tj para 0 ≤ t ≤ 1.
Por lo tanto dr = y F(x, y) = . De manera que el trabajorealizado es:
W =
ˆ
C1
F · dr =
c) Una parametrizacion para el vector posicion de C3 es r(t) = para0 ≤ t ≤ 2. Por lo tanto dr = y F(x, y) = . De manera que eltrabajo realizado es:
W =
ˆ
C1
F · dr =
Por tanto, el trabajo realizado por un campo vectorial conservativo es el mismo para todaslas trayectorias, 1
4 ∆
OBSERVACIONES:
1. No todo campo vectorial F es un campo conservativo aunque muchos campos vectorialesF encontrados en fısica son conservativos.
2. El valor de una integral de lınea
ˆ
C
F·dr suele depender de la trayectoria de integracion.En otras palabras, si C1 y C2 son dos trayectorias diferentes entre los mismos puntosA y B, entonces en general esperamos que
ˆ
C1
F · dr 6=ˆ
C2
F · dr
Sin embargo, hay excepciones muy importantes, como lo son los campos conservativos.
Un teorema fundamental El siguiente teorema establece una importante relacion entreel valor de una integral de lınea sobre una trayectoria C que yace dentro de un campo vectorialconservativo F. Ademas, proporciona un medio de evaluar estas integrales de lınea de maneraque es analogo al teorema fundamental del calculo:
ˆ b
a
f ′(x)dx = f(b)− f(a)
162

donde f(x) es una antiderivada de f ′(x). En el siguiente teorema, conocido como teorema
fundamental para integrales de lınea ,
Teorema 72. Suponga que C es la trayectoria en una region abierta R del plano xy dadapor r(t) = x(t)i + y(t)j, a ≤ t ≤ b. Si F(x, y) = P (x, y)i + Q(x, y)j es un campo vectorialconservativo en R y φ es una funcion potencial para F, entonces
ˆ
C
F · dr =
ˆ
C
∇φ · dr = φ(B)− φ(A)
donde A = (x(a), y(a)) y B = (x(b), y(b)).
Demostracion. Consideraremos un trayectoria suave C. Puesto que φ es una funcion potencialpara F tenemos
F = ∇φ =
Usando despues r′(t) =dx
dti +
dy
dtj es posible escribir la integral de lınea de F a lo largo
de la trayectoria C comoˆ
C
F · dr =
ˆ
C
F · r′(t)dt =
=
ˆ b
a
regla de la cadena
=
= φ(B)− φ(A)
NOTA: Para curvas suaves por partes, la prueba anterior debe modificarse considerandocada arco suave de la curva C.
1. Si el valor de una integral de lınea es el mismo para cada trayectoria en una regionque conecta el punto inicial A y el punto terminal B, entonces se dice que la integralsera independiente de la trayectoria .
2. Una integral de lınea
ˆ
C
F·dr es independiente de la trayectoria si
ˆ
C1
F·dr =
ˆ
C2
F·drpara cualesquiera dos trayectorias C1 y C2 entre A y B.
3. Si F es un campo vectorial conservativo en una region abierta en el espacio, entoncesˆ
C
F · dr depende solo de los puntos inicial y terminal A y B, y no de la trayectoria C.
4. Las integrales de lınea de campos vectoriales conservativos F son independientes dela trayectoria. Dichas integrales a menudo se escriben
ˆ B
A
F · dr =
ˆ B
A
∇φ · dr
Ejemplo 211. Hallar el trabajo realizado por el campo de fuerzas F(x, y) = 12xyi +
14x
2j
sobre una partıcula que se mueve de (0, 0) a (1, 1) a lo largo de cada una de las trayectorias
163
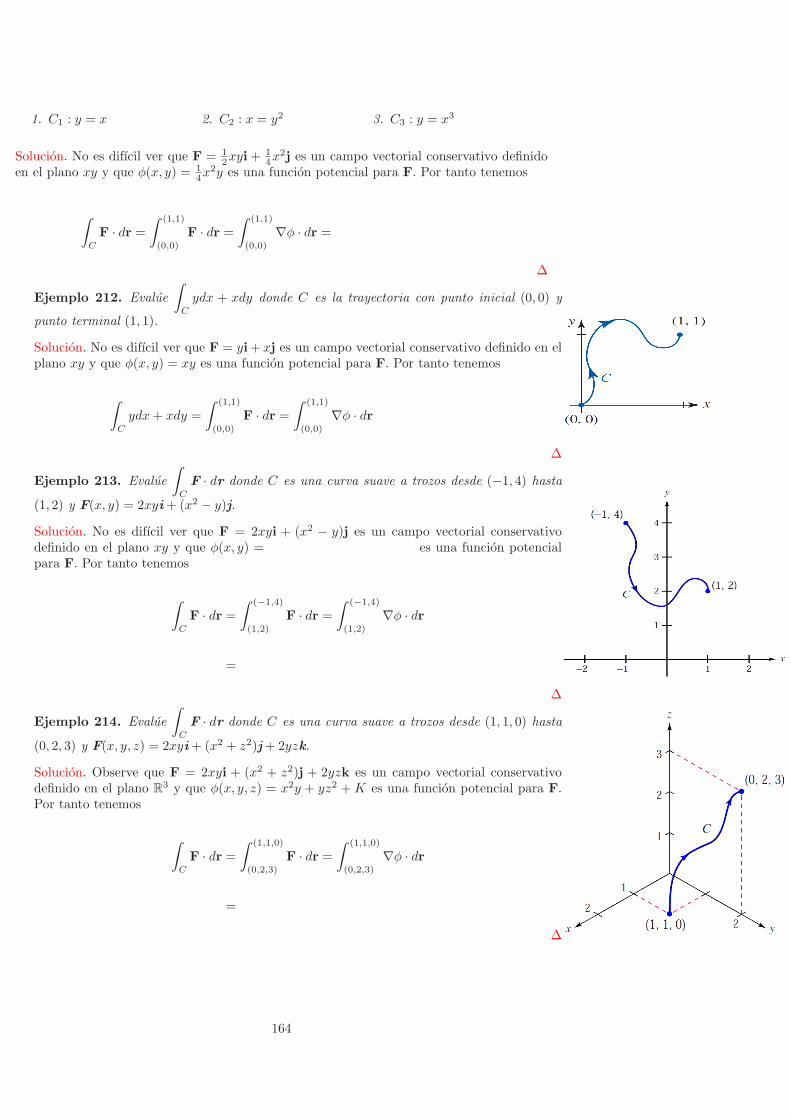
1. C1 : y = x 2. C2 : x = y2 3. C3 : y = x3
Solucion. No es difıcil ver que F = 12xyi+
14x
2j es un campo vectorial conservativo definidoen el plano xy y que φ(x, y) = 1
4x2y es una funcion potencial para F. Por tanto tenemos
ˆ
C
F · dr =
ˆ (1,1)
(0,0)
F · dr =
ˆ (1,1)
(0,0)
∇φ · dr =
∆
Ejemplo 212. Evalue
ˆ
C
ydx + xdy donde C es la trayectoria con punto inicial (0, 0) y
punto terminal (1, 1).
Solucion. No es difıcil ver que F = yi+ xj es un campo vectorial conservativo definido en elplano xy y que φ(x, y) = xy es una funcion potencial para F. Por tanto tenemos
ˆ
C
ydx+ xdy =
ˆ (1,1)
(0,0)
F · dr =
ˆ (1,1)
(0,0)
∇φ · dr
∆
Ejemplo 213. Evalue
ˆ
C
F · dr donde C es una curva suave a trozos desde (−1, 4) hasta
(1, 2) y F(x, y) = 2xyi+ (x2 − y)j.
Solucion. No es difıcil ver que F = 2xyi + (x2 − y)j es un campo vectorial conservativodefinido en el plano xy y que φ(x, y) = es una funcion potencialpara F. Por tanto tenemos
ˆ
C
F · dr =
ˆ (−1,4)
(1,2)
F · dr =
ˆ (−1,4)
(1,2)
∇φ · dr
=
∆
Ejemplo 214. Evalue
ˆ
C
F · dr donde C es una curva suave a trozos desde (1, 1, 0) hasta
(0, 2, 3) y F(x, y, z) = 2xyi+ (x2 + z2)j+ 2yzk.
Solucion. Observe que F = 2xyi + (x2 + z2)j + 2yzk es un campo vectorial conservativodefinido en el plano R
3 y que φ(x, y, z) = x2y + yz2 +K es una funcion potencial para F.Por tanto tenemos
ˆ
C
F · dr =
ˆ (1,1,0)
(0,2,3)
F · dr =
ˆ (1,1,0)
(0,2,3)
∇φ · dr
=
∆
164

Conceptos equivalentes
1. Una region (en el plano o en el espacio) es conexa si cada par de puntos A y B en laregion puede unirse mediante una curva suave por partes que yace por completo en laregion.
2. Una region R en el plano es simplemente conexa si es conexa y toda curva cerradasimple C que yace del todo dentro de la region puede reducirse, o contraerse, hasta unpunto sin abandonar R.
3. Si C es cualquier curva cerrada simple que yace por completo en R, entonces la regionen el interior de C tambien yace por completo en R.
4. Poniendolo en terminos practicos, una region simplemente conexa NOOOOO tienehoyos en ella.
5. Si la curva representativa C rodea a uno de los hoyos, entonces NO puede contraersehasta un punto sin dejar la region. Esta ultima region se dice que es multiplemente
conexa .
Teorema 73 (Conceptos Equivalentes).
En una region conexa abierta R,
ˆ
C
F · dr es independiente de la trayectoria C si y solo si
el campo vectorial F es conservativo en R.
Conexa
No conexa
Multiplemente conexa
Demostracion (⇐) Si F es conservativo en R, entonces ya hemos visto que
ˆ
C
F · dr =
φ(A)− φ(B), es decir, la integral es independiente de la trayectoria C. ver Teorema 72
(⇒) Suponga que
ˆ
C
F · dr es independiente de la trayectoria en la region R y que (x0, y0)
y (x1, y1) son puntos arbitrarios en la region R. Sea la funcion definida como
φ(x, y) =
ˆ (x,y)
(x0,y0)
F · dr
donde C es una trayectoria arbitraria en R de (x0, y0) a (x, y) y F = P i+Qj. Ahora elegimosun punto (x1, y), x1 6= x de manera que el segmento de recta de (x1, y) a (x, y) este en R.Luego por la independencia de la trayectoria podemos escribir
φ(x, y) =
ˆ (x1,y)
(x0,y0)
F · dr+ˆ (x,y)
(x1,y)
F · dr
En este caso,
∂φ
∂x= 0 +
∂
∂x
ˆ (x,y)
(x1,y)
Pdx+Qdy =∂
∂x
ˆ (x,y)
(x1,y)
Pdx = P (x, y)
puesto que la primera integral no depende de x. Sin embargo, sobre el segmento de rectaentre (x1, y) y (x, y) y es constante de manera que dy = 0. De manera similar es posible
demostrar que∂φ
∂y= Q(x, y). En consecuencia, de
∇φ =∂φ
∂xi+
∂φ
∂yj = P i+Qj = F(x, y)
concluimos que F es conservativo.
165
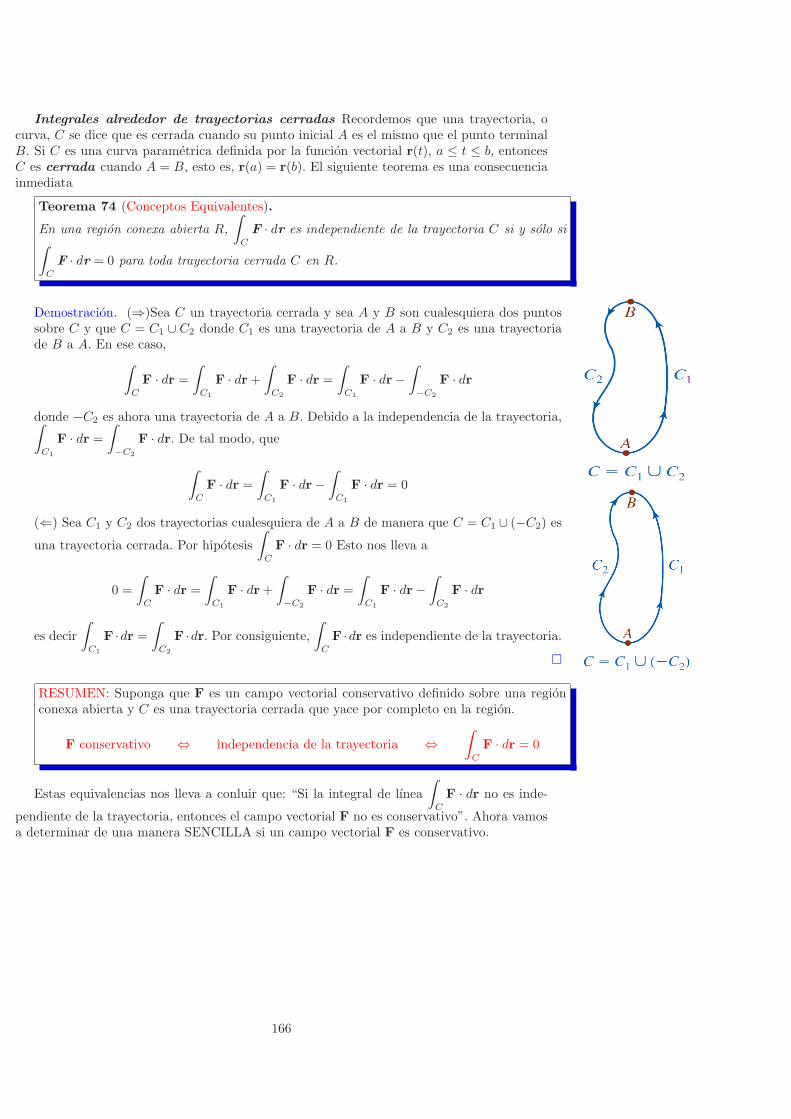
Integrales alrededor de trayectorias cerradas Recordemos que una trayectoria, ocurva, C se dice que es cerrada cuando su punto inicial A es el mismo que el punto terminalB. Si C es una curva parametrica definida por la funcion vectorial r(t), a ≤ t ≤ b, entoncesC es cerrada cuando A = B, esto es, r(a) = r(b). El siguiente teorema es una consecuenciainmediata
Teorema 74 (Conceptos Equivalentes).
En una region conexa abierta R,
ˆ
C
F · dr es independiente de la trayectoria C si y solo siˆ
C
F · dr = 0 para toda trayectoria cerrada C en R.
Demostracion. (⇒)Sea C un trayectoria cerrada y sea A y B son cualesquiera dos puntossobre C y que C = C1 ∪ C2 donde C1 es una trayectoria de A a B y C2 es una trayectoriade B a A. En ese caso,
ˆ
C
F · dr =
ˆ
C1
F · dr+ˆ
C2
F · dr =
ˆ
C1
F · dr−ˆ
−C2
F · dr
donde −C2 es ahora una trayectoria de A a B. Debido a la independencia de la trayectoria,ˆ
C1
F · dr =
ˆ
−C2
F · dr. De tal modo, que
ˆ
C
F · dr =
ˆ
C1
F · dr−ˆ
C1
F · dr = 0
(⇐) Sea C1 y C2 dos trayectorias cualesquiera de A a B de manera que C = C1 ∪ (−C2) es
una trayectoria cerrada. Por hipotesis
ˆ
C
F · dr = 0 Esto nos lleva a
0 =
ˆ
C
F · dr =
ˆ
C1
F · dr+ˆ
−C2
F · dr =
ˆ
C1
F · dr−ˆ
C2
F · dr
es decir
ˆ
C1
F ·dr =
ˆ
C2
F ·dr. Por consiguiente,ˆ
C
F ·dr es independiente de la trayectoria.
�
RESUMEN: Suponga que F es un campo vectorial conservativo definido sobre una regionconexa abierta y C es una trayectoria cerrada que yace por completo en la region.
F conservativo ⇔ independencia de la trayectoria ⇔ˆ
C
F · dr = 0
Estas equivalencias nos lleva a conluir que: “Si la integral de lınea
ˆ
C
F · dr no es inde-
pendiente de la trayectoria, entonces el campo vectorial F no es conservativo”. Ahora vamosa determinar de una manera SENCILLA si un campo vectorial F es conservativo.
166

Teorema 75 (Prueba para un campo conservativo).Suponga que F(x, y) = P (x, y)i+Q(x, y)j es un campo vectorial conservativo en una regionabierta R y que P y Q son continuas y tienen primeras derivadas parciales continuas en R.Entonces
∂P
∂y=∂Q
∂x(4.9)
para todo (x, y) en R. Inversamente, si se cumple la igualdad (4.9) para todo (x, y) en unaregion R simplemente conexa, entonces F = P i+Qj es conservativo en R.
Demostracion. Probamos la primera mitad del teorema. Suponemos que las funciones P yQ del campo conservativo F = P i +Qj son continuas y tienen primeras derivadas parcialescontinuas en una region abierta R. Puesto que F es conservativo, existe una funcion potencialφ tal que ∇φ = F,
∂φ
∂xi+
∂φ
∂yj = ∇φ = F = P i+Qj
Ası, P =∂φ
∂xy Q =
∂φ
∂y. En este caso
∂P
∂y=
∂
∂y
(∂φ
∂x
)
=∂2φ
∂y∂xy
∂Q
∂x=
∂
∂x
(∂φ
∂y
)
=∂2φ
∂x∂y
Ahora como P y Q tienen primeras derivadas parciales continuas en una region abierta R.
Entonces las derivadas parciales mixtas de segundo orden son iguales y por ello∂P
∂y=∂Q
∂x.
�
Ejemplo 215. Demuestre que los siguientes campos son conservativos
1. F(x, y) = yi+ xj
2. F(x, y) = (x2 − 2y3)i+ (x+ 5y)j
3. F(x, y) = −ye−xyi− xe−xyj
Campos vectoriales conservativos tridimensionales
Para un campo vectorial conservativo tridimensional
F(x, y, z) = P (x, y, z)i+Q(x, y, z)j+R(x, y, z)k
167

y una curva espacial suave por partes r(t) = x(t)i + y(t)j + z(t)k, a ≤ t ≤ b, tenemosque
ˆ
C
F · dr =
ˆ
C
∇φ · dr = φ(B)− φ(A)
Si C es una curva en el espacio tridimensional, una integral de lınea
ˆ
C
F · dr es inde-
pendiente de la trayectoria siempre que el campo vectorial tridimensional
F(x, y, z) = P (x, y, z)i+Q(x, y, z)j+R(x, y, z)k
sea conservativo.
Si F es conservativo y P , Q y R son continuas y tienen primeras derivadas parcialescontinuas en alguna region abierta del espacio tridimensional, entonces
∂P
∂y=∂Q
∂x,
∂P
∂z=∂R
∂x,
∂Q
∂z=∂R
∂y(4.10)
Inversamente, si (4.10) se cumple en toda una region apropiada del espacio tridimen-sional, entonces F es conservativo.
Ejemplo 216.
a) Demuestre que la integral de lınea
ˆ
C
(y+ yz)dx+(x+3z3+xz)dy+(9yz2+xy− 1)dz
es independiente de la trayectoria entre (1, 1, 1) y (2, 1, 4).
b) Evalue
ˆ (2,1,4)
(1,1,1)
F · dr
Solucion. a) No es difıcil ver que F(x, y, z) = y que P =Q = y R . Ahora dado que
concluimos que F es conservativo y, por tanto, la integral es independiente de la trayec-toria.
b) Para evaluar la integral debemos encontrar una funcion potencial para F. En primerlugar sabemos que
= P, = Q, = R
168
Por tanto,φ =
Por tanto si C es cualquier trayectoria con puntos inicial (1, 1, 1) y terminal (2, 1, 4) encon-tramos que
ˆ
C
F · dr =
ˆ (2,1,4)
(1,1,1)
(y + yz)dx+ (x+ 3z3 + xz)dy + (9yz2 + xy − 1)dz
=
∆
Ejemplo 217. Calcule
ˆ
C
(x+ z,−y− z, x− y) ·dr , siendo C la curva de interseccion entre
la esfera x2 + y2 + z2 = 16 y el cilindro x2 + y2 = 4x
Solucion. No es difıcil ver que F(x, y, z) = y que P =Q = y R . Ahora dado que
concluimos que F es conservativo y como C es , entonces, la integral es cero.∆
Conclusiones:
En un campo de fuerza conservativo F, el trabajo W realizado por la fuerza sobre unapartıcula que se mueve de la posicion A a la posicion B es el mismo para todas las
trayectorias Ci entre estos puntos, esto es,
ˆ
C1
F · dr =
ˆ
C2
F · dr.
El trabajo W realizado por la fuerza F a lo largo de una trayectoria C cerrada es cero,ˆ
C
F · dr = 0
Por esta razon, un campo de fuerzas F de este tipo se dice que es conservativo.
En un campo conservativo F se cumple la ley de conservacion de la energıa mecanica:para una partıcula que se mueve a lo largo de una trayectoria en un campo conservativo,
energıa cinetica + energıa potencial = constante.
Teorema de Green
Vamos a examinar uno de los teoremas mas importantes del calculo integral vectorial.Este teorema relaciona una integral de lınea alrededor de una curva cerrada simple suave porpartes con una integral doble sobre la region acotada por la curva.
Suponga que C es una curva cerrada simple suave por partes que forma la frontera deuna region simplemente conexa R. Decimos que la orientacion positiva alrededor de C esla direccion en la que un punto sobre la curva debe moverse, o la direccion en la que unapersona debe caminar, para completar un solo recorrido de C manteniendo la region R a laizquierda.
169
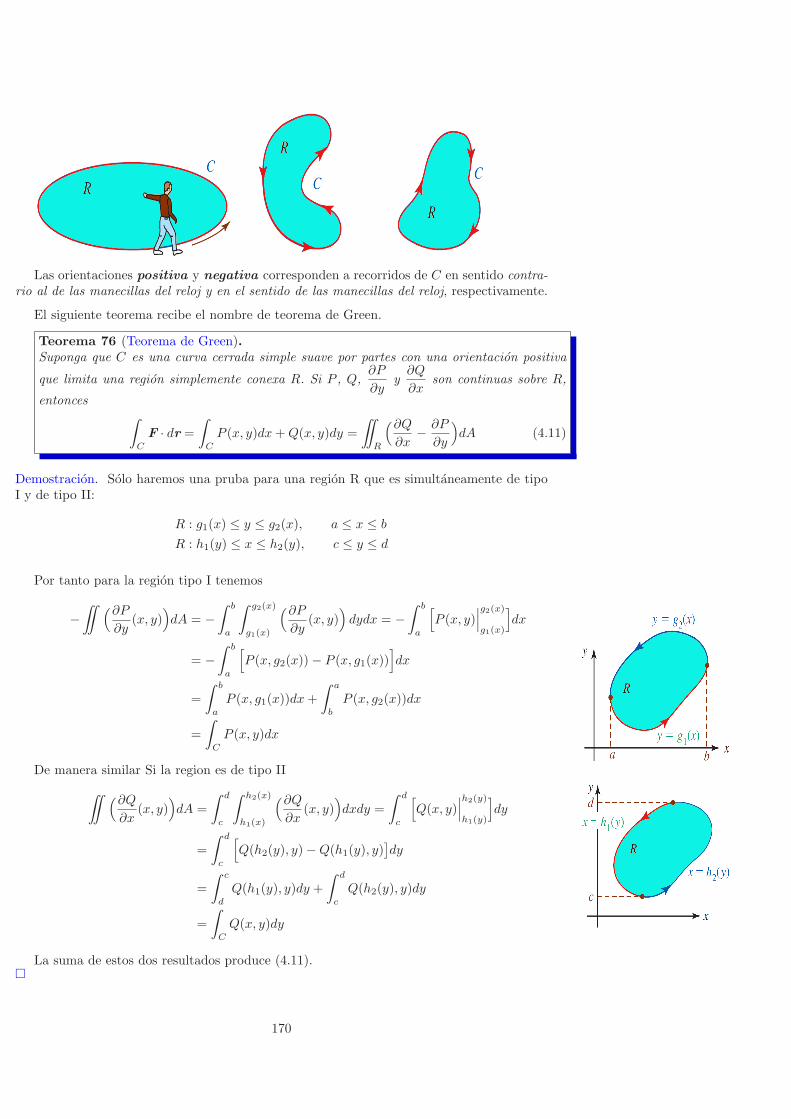
Las orientaciones positiva y negativa corresponden a recorridos de C en sentido contra-rio al de las manecillas del reloj y en el sentido de las manecillas del reloj, respectivamente.
El siguiente teorema recibe el nombre de teorema de Green.
Teorema 76 (Teorema de Green).Suponga que C es una curva cerrada simple suave por partes con una orientacion positiva
que limita una region simplemente conexa R. Si P , Q,∂P
∂yy∂Q
∂xson continuas sobre R,
entoncesˆ
C
F · dr =
ˆ
C
P (x, y)dx+Q(x, y)dy =
¨
R
(∂Q
∂x− ∂P
∂y
)
dA (4.11)
Demostracion. Solo haremos una pruba para una region R que es simultaneamente de tipoI y de tipo II:
R : g1(x) ≤ y ≤ g2(x), a ≤ x ≤ b
R : h1(y) ≤ x ≤ h2(y), c ≤ y ≤ d
Por tanto para la region tipo I tenemos
−¨
(∂P
∂y(x, y)
)
dA = −ˆ b
a
ˆ g2(x)
g1(x)
(∂P
∂y(x, y)
)
dydx = −ˆ b
a
[
P (x, y)∣
∣
∣
g2(x)
g1(x)
]
dx
= −ˆ b
a
[
P (x, g2(x))− P (x, g1(x))]
dx
=
ˆ b
a
P (x, g1(x))dx+
ˆ a
b
P (x, g2(x))dx
=
ˆ
C
P (x, y)dx
De manera similar Si la region es de tipo II
¨
(∂Q
∂x(x, y)
)
dA =
ˆ d
c
ˆ h2(x)
h1(x)
(∂Q
∂x(x, y)
)
dxdy =
ˆ d
c
[
Q(x, y)∣
∣
∣
h2(y)
h1(y)
]
dy
=
ˆ d
c
[
Q(h2(y), y)−Q(h1(y), y)]
dy
=
ˆ c
d
Q(h1(y), y)dy +
ˆ d
c
Q(h2(y), y)dy
=
ˆ
C
Q(x, y)dy
La suma de estos dos resultados produce (4.11).�
170
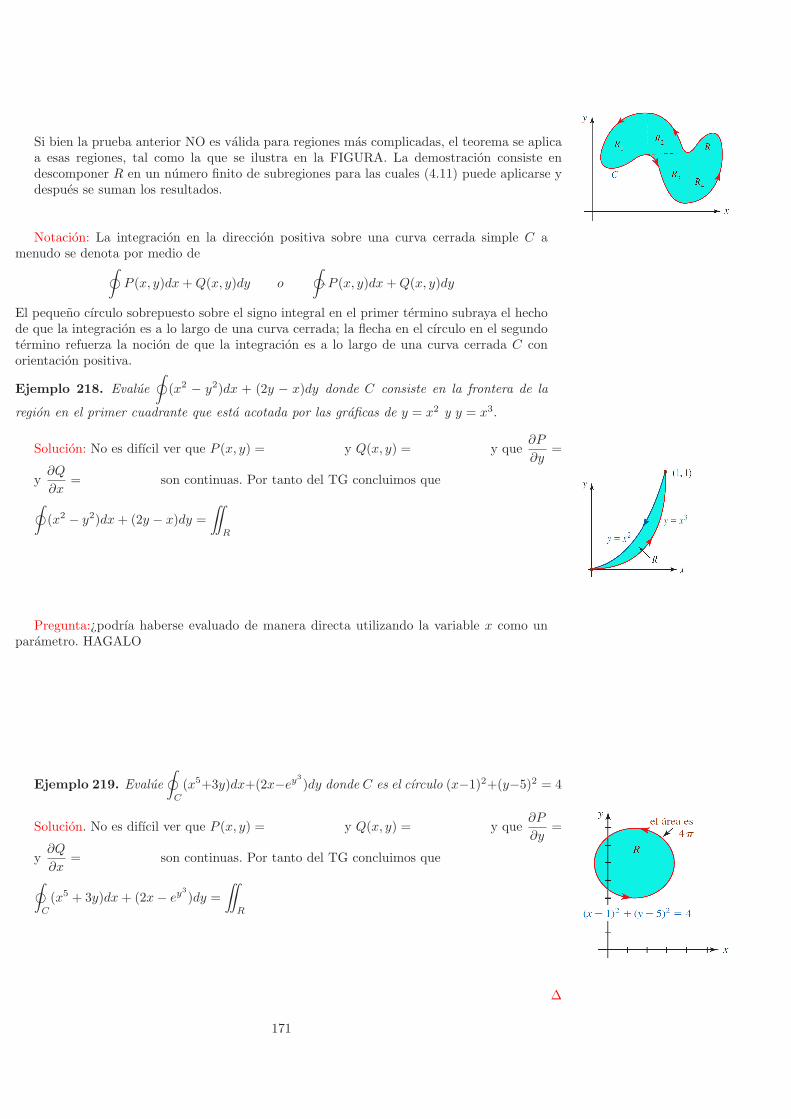
Si bien la prueba anterior NO es valida para regiones mas complicadas, el teorema se aplicaa esas regiones, tal como la que se ilustra en la FIGURA. La demostracion consiste endescomponer R en un numero finito de subregiones para las cuales (4.11) puede aplicarse ydespues se suman los resultados.
Notacion: La integracion en la direccion positiva sobre una curva cerrada simple C amenudo se denota por medio de
˛
P (x, y)dx+Q(x, y)dy o
‰
P (x, y)dx+Q(x, y)dy
El pequeno cırculo sobrepuesto sobre el signo integral en el primer termino subraya el hechode que la integracion es a lo largo de una curva cerrada; la flecha en el cırculo en el segundotermino refuerza la nocion de que la integracion es a lo largo de una curva cerrada C conorientacion positiva.
Ejemplo 218. Evalue
˛
(x2 − y2)dx + (2y − x)dy donde C consiste en la frontera de la
region en el primer cuadrante que esta acotada por las graficas de y = x2 y y = x3.
Solucion: No es difıcil ver que P (x, y) = y Q(x, y) = y que∂P
∂y=
y∂Q
∂x= son continuas. Por tanto del TG concluimos que
˛
(x2 − y2)dx+ (2y − x)dy =
¨
R
Pregunta:¿podrıa haberse evaluado de manera directa utilizando la variable x como unparametro. HAGALO
Ejemplo 219. Evalue
˛
C
(x5+3y)dx+(2x−ey3
)dy donde C es el cırculo (x−1)2+(y−5)2 = 4
Solucion. No es difıcil ver que P (x, y) = y Q(x, y) = y que∂P
∂y=
y∂Q
∂x= son continuas. Por tanto del TG concluimos que
˛
C
(x5 + 3y)dx+ (2x− ey3
)dy =
¨
R
∆
171

Ejemplo 220. Determine el trabajo realizado por el campo de fuerza F = (−16y+senx2)i+(4ey+3x2)j que actua a lo largo de una curva cerrada simple C que se muestra en la Figura
Solucion. Recordemos que el trabajo realizado por F esta dado por
W =
˛
C
F · dr =
˛
(−16y + senx2)dx+ (4ey + 3x2)dy
No es difıcil ver que P (x, y) = y Q(x, y) = y que∂P
∂y=
y∂Q
∂x= son continuas. Por tanto del TG concluimos que
W =
˛
C
(−16y + senx2)dx+ (4ey + 3x2)dy =
¨
R
En vista de la region R, la ultima integral se maneja mejor en:
W =
∆
OBSERVACION: Sea C la curva poligonal cerrada consistente en los cuatro segmentosde recta C1, C2, C3 y C4 que se muestran en la figura. El teorema de Green
NOOOOOO es aplicable a la integral de lınea
˛
C
−yx2 + y2
dx+x
x2 + y2dy
ya que P , Q,∂P
∂yy∂Q
∂xy no son continuas en el origen.
172

Teorema de Green para regiones multiplemente conexas:
El teorema de Green tambien puede extenderse a una region R con hoyos, esto es, unaregion que no es simplemente conexa. Recuerde que una region con hoyos se dice quees multiplemente conexa.
Observe que en la figura 1 se muestra una region R acotada por una curva C queconsiste en dos curvas cerradas simples C1 y C2 esto es C = C1 ∪ C2.
La curva C esta orientada positivamente, ya que si recorremos C1 en direccion contrariaa la de las manecillas del reloj y a C2 en la direccion de las manecillas, la region Rsiempre esta a la izquierda .
Si despues de esto introducimos cortes cruzados horizontales (ver figura 2) la region Rse divide en dos subregiones R1 y R2.
Al aplicar el Teorema de Green a R1 y R2, se obtiene
¨
R
(∂Q
∂x− ∂P
∂y
)
dA =
¨
R1
(∂Q
∂x− ∂P
∂y
)
dA+
¨
R2
(∂Q
∂x− ∂P
∂y
)
dA
=
˛
C1
Pdx+Qdy +
˛
C2
Pdx+Qdy (4.12)
=
˛
C1∪C2
Pdx+Qdy (4.13)
=
˛
C
Pdx+Qdy
El ultimo resultado sigue del hecho de que las integrales de lınea sobre los cortescruzados (trayectorias con orientaciones opuestas) se cancelaran entre sı.
Ejemplo 221. Evalue
˛
C
−yx2 + y2
dx +x
x2 + y2dy donde C = C1 ∪ C2 es la frontera de la
region sombreada R de la figura.
Solucion. No es difıcil ver que P (x, y) = y Q(x, y) =y que
∂P
∂y=
∂Q
∂x=
son continuas sobre R acotada por C. Por tanto del TG concluimos que˛
C
−yx2 + y2
dx+x
x2 + y2dy =
∆
OBSERVACION IMPORTANTE: Como consecuencia del ejemplo anterior, podemos es-tablecer un resultado para integrales de lınea que nos permite, en ciertas circunstancias,sustituir una trayectoria cerrada complicada por una trayectoria que es mas simple .
173

Suponga, como se muestra en la Figura que C1 y C2 son dos trayectorias cerradassimples suaves por partes que no se intersecan y que tienen la misma orientacionpositiva o contraria a la de las manecillas del reloj.
Suponga ademas que P y Q tienen primeras derivadas parciales continuas tales que∂P
∂y=
∂Q
∂xen la region R acotada entre C1 y C2. (F conservativo en esta region
acotada)
Entonces del TG y como
ˆ
C
= −ˆ
−C
se tiene
0 =
˛
C1∪−C2
F · dr =
˛
C1
Pdx+Qdy +
˛
−C2
Pdx+Qdy
=
˛
C1
Pdx+Qdy −˛
C2
Pdx+Qdy
Por tanto˛
C1
Pdx+Qdy =
˛
C2
Pdx+Qdy
Ejemplo 222. Evalue
˛
C
−yx2 + y2
dx+x
x2 + y2dy donde C la curva poligonal cerrada con-
sistente en los cuatro segmentos de recta C1, C2, C3 y C4 que se muestran en la figura.
Solucion. Directamente TG no aplica, pero un metodo para evaluar la integral de lınea esescribir
˛
C
=
ˆ
C1
+
ˆ
C1
+
ˆ
C2
+
ˆ
C3
+
ˆ
C4
y despues evaluar las cuatro integrales sobre los segmentos de recta Ci.
Ahora si consideramos un circulo C ′ : x2 + y2 = 1 contenido completamente en R. Entoncesno es difıcil ver que P (x, y) = y Q(x, y) = y que
∂P
∂y=
∂Q
∂x=
son continuas sobre la region acotada por C y C ′. Por consiguiente podemos acambiar decurva de integracion
˛
C
−yx2 + y2
dx+x
x2 + y2dy =
˛
C′
−yx2 + y2
dx+x
x2 + y2dy
=
∆
Superficies parametricas y areas
Una curva C en R2 pueden definirse por medio de una funcion y = f(x), una ecua-
cion implicita g(x, y) = 0 o parametricamente por medio de un conjunto de puntos(x(t), y(t)), a ≤ t ≤ b.
Una curva “ingeniero”C descrita por una funcion continua y = f(x) puede parametri-
174

zarse tomando como parametro a x = t de manera que las ecuaciones parametricas sonx = t y y = f(t).
Para parametrizar una superficie “ingeniero”S : z = g(x, y) necesitaremos dos variablesparametricas. Si x = u y y = v entonces las ecuaciones parametricas para S estan dadaspor
x = u y = v z = g(u, v)
En general, un conjunto de tres funciones de dos variables
x = x(u, v) y = y(u, v) z = z(u, v)
se llaman ecuaciones parametricas.
Las variables u y v reciben el nombre de parametros y el conjunto
S ={
(x, y, z) : x = x(u, v), y = y(u, v), z = z(u, v)}
recibe el nombre de superficie parametrica.
El par ordenado (u, v) proviene de una region R en el plano uy llamado dominio del
parametro.
Una superficie S tambien puede describirse mediante una funcion vectorial de dos variables
r(u, v) = x(u, v)i+ y(u, v)j+ z(u, v)k
Para (u0, v0) dado en R, el vector r(u0, v0) es el vector de posicion de un punto P sobre lasuperficie S. En otras palabras, cuando (u, v) varıa sobre la region R, se traza la superficieS a partir del movimiento de la punta de r(u, v).
De manera general, la funcion vectorial r : D ⊂ R2 → R
3 es diferenciable de claseCk (k ≥ 1) si sus funciones coordenadas x1, x2, x3 : D ⊂ R
2 → R poseen derivadasparciales continuas hasta el orden k.
Definition 77 (Parametrizacion Propia).Una funcion ψ : D ⊂ R
2 → R3 (D conjunto abierto) es una parametrizacion propia de
R3, si
1. ψ es uno a uno (inyectiva)
2. ψ es diferenciable de clase al menos C2 y ψu y ψv son vectores linealmente indepen-dientes (necesarios para la existencia de los planos tangentes)
Ejemplo 223. Encuentre ecuaciones parametricas para el cono de un manto z =√
x2 + y2
Solucion. No es difıcil darse cuenta que cono un manto es una funcion de dos variablesz =
√
x2 + y2. Por tanto el cono podemos parametrizarlos por las siguientes ecuacionesx = u, y = v y z =
√u2 + v2. Alternativamente, el cono se describe mediante la funcion
vectorialr(u, y) = ui+ yj+
√
u2 + v2k
o tambien podemos parametrizarlo usando coordenadas polares, la parametrizacion
x = r cos θ y = r sin θ z = r
∆
Ejemplo 224. Encuentre ecuaciones parametricas del cilindro circular y2 + z2 = 1 para3 ≤ x ≤ 8
175

Solucion.
∆
OBSERVACION: Resulta practicamente imposible identificar superficies cuando se danen forma parametrica o vectorial. Sin embargo, en algunos casos una superficie puede iden-tificarse al eliminar los parametros.
Ejemplo 225. Identifique la superficie con la funcion vectorial r(u, v) = (2u − v)i + (u +v + 1)j+ uk
Solucion. Primero identifiquemos las ecuaciones parametricas de la superficie
x = 2u− v y = u+ v + 1 z = u
∆
Plano tangente a una superficie parametrica Recordemos que una superficie para-metrica esta dada por
r(u, v) = x(u, v)i+ y(u, v)j+ z(u, v)k
Para generar un plano tangente en el punto (x0, y0, z0) de S, necesitamos o bien conocerdos vectores “directores” o bien, un vector n normal. Los vectores directores del plano quebuscamos son los vectores velocidades de las llamadas curvas u y curvas v,
r(u, v0) = x(u, v0)i+ y(u, v0)j+ z(u, v0)k Curva u
r(u0, v) = x(u0, v)i+ y(u0, v)j+ z(u0, v)k Curva v
Por este motivo las derivadas parciales de r con respecto a u y v nos definen los vectores queusaremos como vectores directores para generar cualquier plano en la superficie S
∂r
∂u=∂x
∂ui+
∂y
∂uj+
∂z
∂uk Vector velocidad de la Curva u
∂r
∂v=∂x
∂vi+
∂y
∂vj+
∂z
∂vk Vector velocidad de la Curva v
Observe que el plano tangente a S existe en (x0, y0, z0), si
∂r
∂u(x0, y0, z0) 6= 0
∂r
∂v(x0, y0, z0) 6= 0.
176

En muchas ocasiones es mejor encontrar el vector normal n a la superficie S y describirel plano tangente por medio de la ecuacion normal. Para ello calculamos el producto cruz∂r∂u × ∂r
∂v .
∂r
∂u× ∂r
∂v=
∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
i j k
∂x
∂u
∂y
∂u
∂z
∂u
∂x
∂v
∂y
∂v
∂z
∂v
∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
La condicion de que el vector∂r
∂u× ∂r
∂v6= 0 en (x0, y0, z0) asegura la existencia de un plano
tangente en el punto (x0, y0, z0). Una vez conocido el vector normal podemos describir laecuacion del plano
n · (x− p) = 0
Suponga que S es una superficie parametrica cuya ecuacion vectorial r(u, v) tiene pri-meras derivadas parciales continuas sobre una region R del plano uv.
Se dice que la superficie S es suave si los vectores tangentes∂r
∂uy∂r
∂vde las curvas u
y v satisfacen∂r
∂u× ∂r
∂v6= 0 en (u0, v0).
Se afirma que la superficie S es suave sobre R si∂r
∂u× ∂r
∂v6= 0 en todo R.
En terminos generales, una superficie suave no tiene esquinas, puntos afilados o inte-rrupciones.
Una superficie S suave por partes es una que puede escribirse como S = S1 ∪ S2 ∪· · · ∪ Sn donde las superficies Si son suaves.
Ejemplo 226. Encuentre una ecuacion del plano tangente a la superficie parametrica defi-nida por x = u2 + v y = v, z = u+ v2 en el punto correspondiente a u = 3 y v = 0.
Solucion. No es difıcil ver la superficie esta descrita por la funcion vectorial r(u, v) = u2 +vi + vj + (u + v2)k y que en u = 3 y v = 0 el punto sobre la superficie es .Entonces los vectores tangentes estan dados por
∆
177
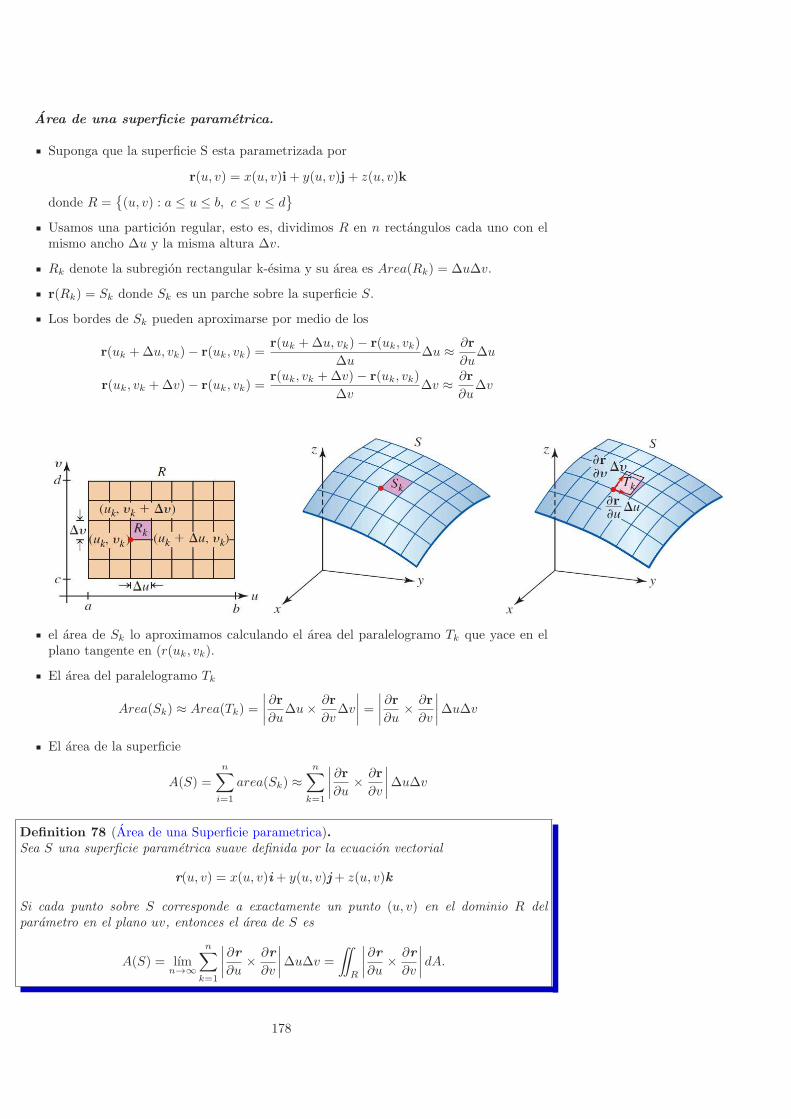
Area de una superficie parametrica.
Suponga que la superficie S esta parametrizada por
r(u, v) = x(u, v)i+ y(u, v)j+ z(u, v)k
donde R ={
(u, v) : a ≤ u ≤ b, c ≤ v ≤ d}
Usamos una particion regular, esto es, dividimos R en n rectangulos cada uno con elmismo ancho ∆u y la misma altura ∆v.
Rk denote la subregion rectangular k-esima y su area es Area(Rk) = ∆u∆v.
r(Rk) = Sk donde Sk es un parche sobre la superficie S.
Los bordes de Sk pueden aproximarse por medio de los
r(uk +∆u, vk)− r(uk, vk) =r(uk +∆u, vk)− r(uk, vk)
∆u∆u ≈ ∂r
∂u∆u
r(uk, vk +∆v)− r(uk, vk) =r(uk, vk +∆v)− r(uk, vk)
∆v∆v ≈ ∂r
∂u∆v
el area de Sk lo aproximamos calculando el area del paralelogramo Tk que yace en elplano tangente en (r(uk, vk).
El area del paralelogramo Tk
Area(Sk) ≈ Area(Tk) =
∣
∣
∣
∣
∂r
∂u∆u× ∂r
∂v∆v
∣
∣
∣
∣
=
∣
∣
∣
∣
∂r
∂u× ∂r
∂v
∣
∣
∣
∣
∆u∆v
El area de la superficie
A(S) =
n∑
i=1
area(Sk) ≈n∑
k=1
∣
∣
∣
∣
∂r
∂u× ∂r
∂v
∣
∣
∣
∣
∆u∆v
Definition 78 (Area de una Superficie parametrica).Sea S una superficie parametrica suave definida por la ecuacion vectorial
r(u, v) = x(u, v)i+ y(u, v)j+ z(u, v)k
Si cada punto sobre S corresponde a exactamente un punto (u, v) en el dominio R delparametro en el plano uv, entonces el area de S es
A(S) = lımn→∞
n∑
k=1
∣
∣
∣
∣
∂r
∂u× ∂r
∂v
∣
∣
∣
∣
∆u∆v =
¨
R
∣
∣
∣
∣
∂r
∂u× ∂r
∂v
∣
∣
∣
∣
dA.
178
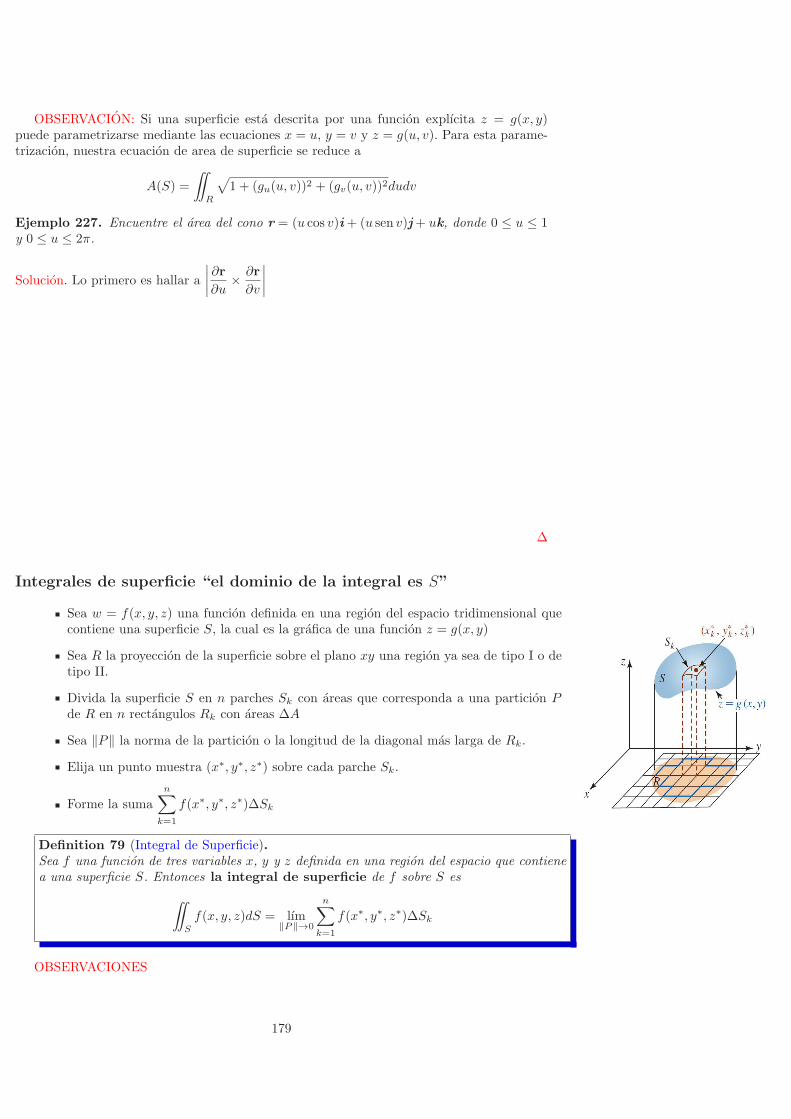
OBSERVACION: Si una superficie esta descrita por una funcion explıcita z = g(x, y)puede parametrizarse mediante las ecuaciones x = u, y = v y z = g(u, v). Para esta parame-trizacion, nuestra ecuacion de area de superficie se reduce a
A(S) =
¨
R
√
1 + (gu(u, v))2 + (gv(u, v))2dudv
Ejemplo 227. Encuentre el area del cono r = (u cos v)i+ (u sen v)j+ uk, donde 0 ≤ u ≤ 1y 0 ≤ u ≤ 2π.
Solucion. Lo primero es hallar a
∣
∣
∣
∣
∂r
∂u× ∂r
∂v
∣
∣
∣
∣
∆
Integrales de superficie “el dominio de la integral es S”
Sea w = f(x, y, z) una funcion definida en una region del espacio tridimensional quecontiene una superficie S, la cual es la grafica de una funcion z = g(x, y)
Sea R la proyeccion de la superficie sobre el plano xy una region ya sea de tipo I o detipo II.
Divida la superficie S en n parches Sk con areas que corresponda a una particion Pde R en n rectangulos Rk con areas ∆A
Sea ‖P‖ la norma de la particion o la longitud de la diagonal mas larga de Rk.
Elija un punto muestra (x∗, y∗, z∗) sobre cada parche Sk.
Forme la suma
n∑
k=1
f(x∗, y∗, z∗)∆Sk
Definition 79 (Integral de Superficie).Sea f una funcion de tres variables x, y y z definida en una region del espacio que contienea una superficie S. Entonces la integral de superficie de f sobre S es
¨
S
f(x, y, z)dS = lım‖P‖→0
n∑
k=1
f(x∗, y∗, z∗)∆Sk
OBSERVACIONES
179

Si z = g(x, y) es la ecuacion de una superficie S, entonces
¨
S
f(x, y, z)dS =
¨
S
f(x, y, g(x, y)√
1 + [gx(x, y)]2 + [gy(x, y)]2dA
Si y = g(x, z) es la ecuacion de una superficie S, entonces la integral de superficie de fsobre S esta dada por
¨
S
f(x, y, z)dS =
¨
S
f(x, g(x, z), z)√
1 + [gx(x, z)]2 + [gz(x, z)]2dA
Si y = g(x, z) es la ecuacion de una superficie S, entonces la integral de superficie de fsobre S esta dada por
¨
S
f(x, y, z)dS =
¨
S
f(g(y, z), y, z)√
1 + [gy(y, z)]2 + [gz(y, z)]2dA
Cuando f(x, y, z) = 1 la integral de superfice nos lleva a
¨
S
f(x, y, z)dS =
¨
S
dS = Area(S)
Suponga que ρ(x, y, z) representa la densidad de una superficie S en el punto (x, y, z),o la masa por unidad de area de superficie. Entonces la masa m de la superficie es
m =
¨
S
ρ(x, y, z)dS
Ejemplo 228. Determine la masa de la superficie del paraboloide z = 1 + x2 + y2 en elprimer octante para 1 ≤ z ≤ 5 si la densidad en el punto P sobre la superficie es directamenteproporcional a la distancia desde el plano xy.
Solucion. No es dificil ver que ρ(x, y, z) = y que la superficie en cuestion tiene unaecuacion de la forma z = g(x, y) = 1 + x2 + y2 Por tanto debemos calcular zx = yzy = . Por tanto,
m =
¨
S
ρ(x, y, z)dS =
∆
180
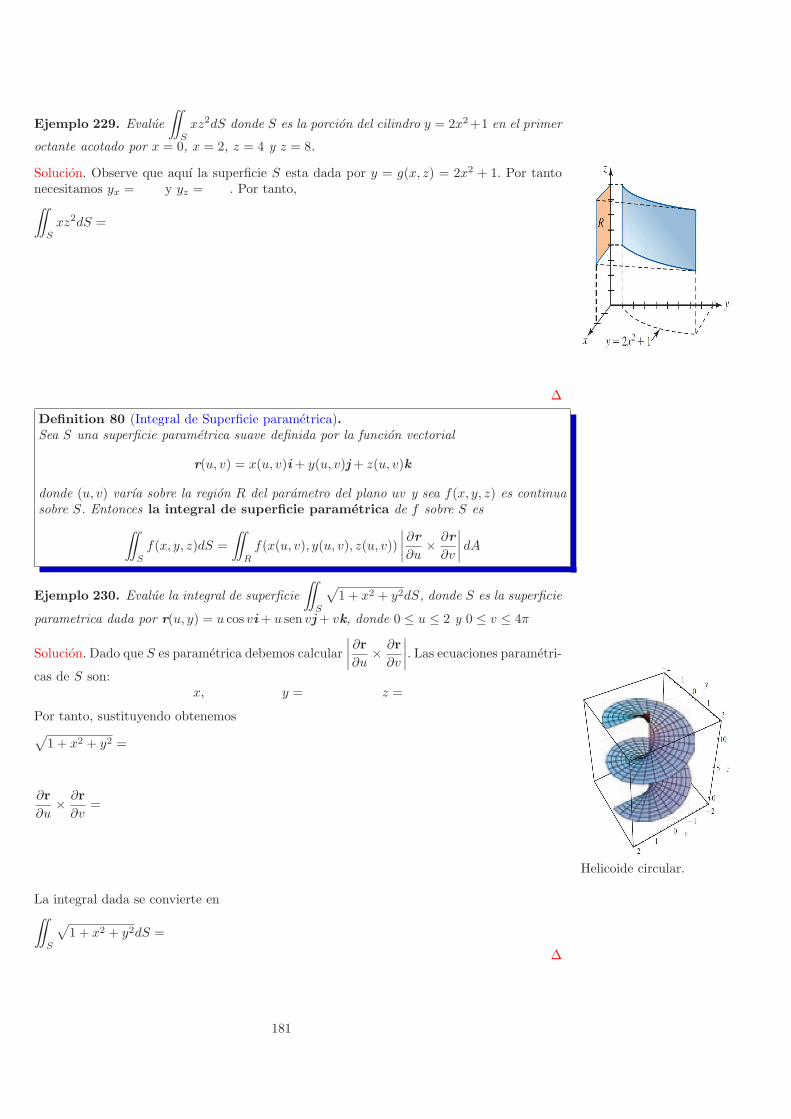
Ejemplo 229. Evalue
¨
S
xz2dS donde S es la porcion del cilindro y = 2x2+1 en el primer
octante acotado por x = 0, x = 2, z = 4 y z = 8.
Solucion. Observe que aquı la superficie S esta dada por y = g(x, z) = 2x2 + 1. Por tantonecesitamos yx = y yz = . Por tanto,¨
S
xz2dS =
∆
Definition 80 (Integral de Superficie parametrica).Sea S una superficie parametrica suave definida por la funcion vectorial
r(u, v) = x(u, v)i+ y(u, v)j+ z(u, v)k
donde (u, v) varıa sobre la region R del parametro del plano uv y sea f(x, y, z) es continuasobre S. Entonces la integral de superficie parametrica de f sobre S es
¨
S
f(x, y, z)dS =
¨
R
f(x(u, v), y(u, v), z(u, v))
∣
∣
∣
∣
∂r
∂u× ∂r
∂v
∣
∣
∣
∣
dA
Ejemplo 230. Evalue la integral de superficie
¨
S
√
1 + x2 + y2dS, donde S es la superficie
parametrica dada por r(u, y) = u cos vi+ u sen vj+ vk, donde 0 ≤ u ≤ 2 y 0 ≤ v ≤ 4π
Solucion. Dado que S es parametrica debemos calcular
∣
∣
∣
∣
∂r
∂u× ∂r
∂v
∣
∣
∣
∣
. Las ecuaciones parametri-
cas de S son:x, y = z =
Por tanto, sustituyendo obtenemos√
1 + x2 + y2 =
∂r
∂u× ∂r
∂v=
La integral dada se convierte en¨
S
√
1 + x2 + y2dS =
∆
Helicoide circular.
181

Orientacion de una Superfice:
Una superficie suave S es una superficie orientada si existe una funcion normal unitariacontinua n definida en cada punto sobre la superficie.
El campo vectorial n(x, y, z) recibe el nombre de orientacion de S.
El campo vectorial n a la superficie S en (x, y, z) puede tomar dos direcciones n(x, y, z)y −n(x, y, z)
Una superficie orientada tiene dos orientaciones.
La cinta de Mobius NOOOO es una superficie orientada porque si una normal unitaria n
empieza en P sobre la superficie y se mueve una vez alrededor de la cinta sobre la curvaC, termina en el lado opuesto de la cinta en P y por ello apunta en la direccion opuesta.
Una superficie S definida por z = g(x, y) tiene una orientacion hacia arriba cuandolas normales unitarias estan dirigidas hacia arriba y tiene una orientacion hacia abajo
cuando las normales unitarias estan dirigidas hacia abajo.
Si una superficie suave S esta definida implıcitamente por h(x, y, z) = 0 (es decir S esla superficie de nivel 0 de h) entonces un campo normal de S es
n =∇h‖∇h‖ =
1
‖∇h‖ (hx, hy, hz)
Si S esta definida por una funcion explıcita z = g(x, y) entonces podemos usar h(x, y, z) =z − g(x, y) o h(x, y, z) = g(x, y)− z dependiendo de la orientacion de S.
Una superficie cerrada se define como la frontera de un solido finito tal como lasuperficie de una esfera.
Integrales de flujo Una de las aplicaciones principales donde empleamos integralesde superficie es cuando estudiamos el flujo a traves de una superficie S. Supongase que unasuperficie S orientada por el campo n se sumerge en un fluido que tiene un campo de velocidadcontinua F. Sea ∆S el area de una pequena porcion de la superficie S sobre la cual F es “casiconstante”. Entonces la cantidad de fluido que atraviesa esta region por unidad de tiempo seaproxima estudiando la ProynF mas especificamente
(compnF)∆S = (F · n)∆S,
Definition 81 (Integral de Flujo).Si F (x, y, z) = P (x, y, z)i+Q(x, y, z)j+R(x, y, z)k donde P , Q y R tienen primeras derivadasparciales continuas sobre la superficie S orientada mediante un vector unitario normal n.La integral de flujo de F a traves de S esta dada por
Flujo =
¨
S
(F · n)dS (4.14)
182

En el caso de una superficie cerrada S, si n es la normal exterior (interior), entonces(4.14) produce el volumen del fluido que fluye hacia fuera (hacia dentro) a traves de Spor unidad de tiempo.
Para evaluar una integral de flujo de una superficie dada por z = f(x, y) nos apoyamosen una funcion G(x, y, z) = z− g(x, y) para la cual la superficie S es una curva de nivelcero de G. Esto implica que ∇G = (fx, fy, 1) es una campo normal a S. Entonces,
n dS =∇G(x, y, z)‖∇G(x, y, z)‖ dS
=∇G(x, y, z)
√
(fx)2 + (fy)2 + 1
√
(fx)2 + (fy)2 + 1 dA
= ∇G(x, y, z) dA
Para una superficie parametrizada S dada por la funcion vectorial
r(u, v) = x(u, v)i+ y(u, v)j+ z(u, v)k
definida sobre una region R del plano uv, se puede definir la integral de flujo de F atraves de S como
Flujo =
¨
S
F · n dS =
¨
R
F · ru × rv
‖ru × rv‖‖ru × rv‖ dA (4.15)
Ejemplo 231. Considere que F(x, y, z) = zj+zk representa el flujo de un lıquido. Determineel flujo de F a traves de la superficie S dada por la parte del plano z = 6 − 3x − 2y en elprimer octante orientado hacia arriba.
Solucion. Aquı la superficie (el plano) esta dado por por la superficie de nivel 0 de la funcionh(x, y, z) = 3x+ 2y + z − 6. Por tanto el campo normas a la superficie (plano) es
n =∇h
‖∇h‖ =
Luego
Flujo =
¨
S
(F.n)dS =
∆
183

Ejemplo 232. Sea S la porcion del paraboloide z = 4 − x2 − y2 que se encuentra sobre elplano xy, orientado por medio de un vector unitario normal dirigido hacia arriba. Un fluidode densidad constante ρ fluye a traves de la superficie S de acuerdo con el campo vectorialF(x, y, z) = xi+ yj+ zk. Hallar la tasa o ritmo de flujo de masa a traves de S.
Solucion. Aquı la superficie esta dado por la superficie de nivel 0 de la funcion G(x, y, z) =. Por tanto el campo normal a la superficie es
n = ∇G(x, y, z) =
Luego la tasa o el ritmo de flujo de masa a traves de la superficie S es
Flujo =
¨
S
ρ(F.n)dS = ρ
¨
R
F · ∇GdA = 24πρ
∆
Ejemplo 233. Hallar el flujo sobre la esfera S de radia a donde F es un campo cuadraticoinverso dado por
F(x, y, z) =r
‖r‖3
Supongase que S esta orientada hacia afuera.
SOL: La esfera esta parametrizada por
r(u, v) = a sinu cos vi+ a sinu sin vj+ a cosuk
donde 0 ≤ u ≤ π y 0 ≤ v ≤ 2π.
Por tanto el campo normal a la superficie es
n = ru × rv =
Flujo =
¨
S
(F.n)dS =
¨
R
F · (ru × rv) dA = 4π
184

Teorema de Stokes
Veamos que el teorema de Green podemos reescribirlo en forma vectorial tanto en R2
como en R3.
Teorema de Green en R2: Si F (x, y) = P (x, y)i + Q(x, y)j es un campo vectorial
bidimensional, entonces
rot F = ∇× F =
∣
∣
∣
∣
∣
∣
∣
∣
∣
i j k
∂
∂x
∂
∂y
∂
∂z
P Q 0
∣
∣
∣
∣
∣
∣
∣
∣
∣
=(∂Q
∂x− ∂P
∂y
)
k
Luego del Teorema de Green y usando notacion vectorial tenemos
˛
C
(F · T )ds =˛
C
F · dr =˛
C
P (x, y)dx+Q(x, y)dy (4.16)
=
¨
R
(∂Q
∂x− ∂P
∂y
)
dA =
¨
R
(
(rot F) · k)
dA. (4.17)
Esto es, la integral de lınea de la componente tangencial de F es la integral doble de lacomponente normal del rot F.
Teorema de Green en R3: La forma vectorial del Teorema de Green vista en (4.16)
relaciona una integral de lınea alrededor de una curva C cerrada simple suave que forma lafrontera de una region del plano R con una integral doble sobre R. es decir
˛
C
=
¨
R
Ahora vamos a ver que el Teorema de Green en R3 relaciona una integral de lınea alrededor
de una curva C cerrada simple suave que forma la frontera de una superficie S con una integralde superficie sobre S. es decir,
˛
C
=
¨
S
Suponga que z = f(x, y) es una funcion continua cuya grafica es una superficie orien-tada suave por partes sobre una region R en el plano xy
Considere que C forma la frontera de S y que la proyeccion de C sobre el plano xyforma la frontera de R.
La direccion positiva de C se induce mediante la orientacion de la superficie S; ladireccion positiva de C corresponde a la direccion que una persona tendrıa que caminarsobre C para tener su cabeza apuntando en la direccion de la orientacion de la superficiemientras mantiene la superficie a la izquierda.
Mas precisamente, la orientacion positiva de C concuerda con la regla de la manoderecha: si el pulgar de la mano derecha apunta en la direccion de la orientacion de lasuperficie, entonces de manera aproximada los dedos de la mano derecha se enrollanalrededor de la superficie en la direccion positiva.
Por ultimo, sea T un vector tangente unitario a C que apunta en la direccion positiva.
La forma tridimensional del teorema de Green, la cual se presenta a continuacion,recibe el nombre de Teorema de Stokes.
185

Teorema 82 (Teorema de Stokes).Sea S una superficie orientada suave por partes acotada por una curva C cerrada simplesuave por partes. Sea
F(x, y, z) = P (x, y, z)i+Q(x, y, z)j+R(x, y, z)k
un campo vectorial para el cual P , Q, y R son continuas y tienen primeras derivadas parcialescontinuas en una region abierta del espacio tridimensional que contiene a S. Si C se recorreen la direccion positiva, entonces
˛
C
F · dr =˛
C
(F · T )ds =¨
S
(rot F) · n dS. (4.18)
donde n es una normal unitaria a S en la direccion de la orientacion de S.
OBSERVACION: Si S1 y S2 dos superficies diferentes con la misma orientacion y con la mis-ma frontera C, entonces
˛
C
F · dr =
¨
S1
(rot F) · nds =¨
S2
(rot F) · nds
Demostracion. Suponga que la superficie S se orienta hacia arriba y esta definida por unafuncion z = f(x, y) que tiene segundas derivadas parciales continuas. De la definicion
rot F =(∂R
∂y− ∂Q
∂z
)
i+(∂P
∂z− ∂R
∂x
)
j+(∂Q
∂x− ∂P
∂y
)
k
Ademas, si escribimos h(x, y, z) = z − g(x, y) entonces S es la superficie de nivel 0 y camponora mal a S estada dado por
n =∇h‖∇h‖ =
−gxi− gyj+ k√
1 + g2x + g2y
Por consiguiente,
¨
S
(rot F) · n dS =
¨
R
[
−(∂R
∂y− ∂Q
∂z
)∂g
∂x−(∂P
∂z− ∂R
∂x
)∂g
∂y+(∂Q
∂x− ∂P
∂y
)
]
(4.19)
Nuestro objetivo ahora es demostrar que la integral de lınea
˛
C
F · dr se reduce a (4.19). Si
Cxy es la proyeccion de C sobre el plano xy y tiene las ecuaciones parametricas x = x(t),y = y(t), a ≤ t ≤ b entonces ecuaciones parametricas para C son x = x(t), y = y(t),
186

z = g(x(t), y(t)),a ≤ t ≤ b. De tal manera
˛
C
F · dr =
ˆ b
a
[
Pdx
dt+Q
dy
dt+R
dz
dt
]
dt
=
ˆ b
a
[
Pdx
dt+Q
dy
dt+R
(∂g
∂x
dx
dt+∂g
∂y
dy
dt
)
]
dt Regla de la cadena
=
ˆ
Cxy
(
P +R∂g
∂x
)
dx+(
Q+R∂g
∂y
)
dy
=
¨
R
[
∂
dx
(
Q+R∂g
∂y
)
− ∂
dy
(
P +R∂g
∂x
)
]
dA T. Green (4.20)
Ahora, por las reglas de la cadena y del producto,
∂
dx
(
Q+R∂g
∂y
)
=∂
dx
[
Q(x, y, g(x, y)) +R(x, y, g(x, y))∂g
∂y
]
=∂Q
∂x+∂Q
∂z
∂g
∂x+R
∂2g
∂x∂y+∂R
∂x
∂g
∂y+∂R
∂z
∂g
∂y
∂g
∂x(4.21)
Silimarmente,
∂
dy
(
P +R∂g
∂x
)
=∂
dy
[
P (x, y, g(x, y)) +R(x, y, g(x, y))∂g
∂x
]
=∂P
∂y+∂P
∂z
∂g
∂y+R
∂2g
∂y∂x+∂R
∂y
∂g
∂x+∂R
∂z
∂g
∂x
∂g
∂y(4.22)
Restando (4.22) de (4.21) y utilizando el hecho de que∂2g
∂x∂y=
∂2g
∂y∂xvemos que, despues de
rearreglar, (4.20) se convierte en
¨
R
[
−(∂R
∂y− ∂Q
∂z
)∂g
∂x−(∂P
∂z− ∂R
∂x
)∂g
∂y+(∂Q
∂x− ∂P
∂y
)
]
La ultima expresion es la misma que el lado derecho de (4.19), que era lo que se querıademostrar �
Ejemplo 234. Sea S la parte del cilindro z = 1−x2 para 0 ≤ x ≤ 1, −2 ≤ y ≤ 2. Verifiqueel teorema de Stokes para el campo vectorial F = xyi+ yzj+ xzk. Suponga que S se orientahacia arriba.
Sol: Nuestro objetivo sera comprobar que
˛
C
F · dr =¨
S
(rot F) · n dS, donde La superficie
S, la curva C (la cual esta compuesta por la union de C1, C2, C3 y C4), y la region R seilustran en la figura.
La integral de superficie: para F = xyi+ yzj+ xzk encontramos que
rot F =
∣
∣
∣
∣
∣
∣
∣
∣
∣
i j k
∂
∂x
∂
∂y
∂
∂z
xy yz xz
∣
∣
∣
∣
∣
∣
∣
∣
∣
= −yi− zj− xk
187

En este caso, si h(x, y, z) = z − x2 − 1 define el cilindro para el nivel 0, la normal es
n =∇h‖∇h‖ =
2xi+ k√4x2 + 1
Por tanto,
ˆ
S
(rot F · n)dS =
ˆ
S
−2xy − x√4x2 + 1
dS =
ˆ
R
(−2xy − x)dA =
ˆ 1
0
ˆ 2
−2
(−2xy − x)dydx = −2
La integral de lınea: La integral de lınea es
˛
C
F · dr =
˛
C
xydx+ yzdy + xzdz
Como C es suave por partes, escribimos
˛
C
=
ˆ
C1
+
ˆ
C2
+
ˆ
C3
+
ˆ
C4
Sobre C1 : x = 1, z = 0, dx = 0, dz = 0, y por ello
ˆ
C1
y(0) + y(0)dy + 0 = 0
Sobre C2 : y = 2, z = 1− x2, dy = 0, dz = −2xdx, y por ello
ˆ
C2
2xdx+ 2(1− x2)0 + x(1− x2)(−2xdx) =
ˆ 0
1
(2x− 2x2 + 2x4)dx = −11
15
Sobre C3 : x = 0, z = 1, dx = 0, dz = 0, y por ello
ˆ
C3
0 + ydy + 0 =
ˆ 2
−2
ydy = 0
Sobre C4 : y = −2, z = 1− x2, dy = 0, dz = −2xdx, y por ello
ˆ
C4
−2xdx− 2(1− x2)0 + x(1− x2)(−2xdx) =
ˆ 1
0
(−2x− 2x2 + 2x4)dx = −19
15
En consecuencia
˛
C
xydx+ yzdy + xzdz = 0− 11
15+ 0− 19
15= −2. lo cual concuerda perfec-
tamente.
188

Ejemplo 235. Evalue
˛
C
zdx+ xdy + ydz donde C es la traza del cilindro x2 + y2 = 1 en
el plano y + z = 2. Oriente C en el sentido contrario al de las manecillas del reloj cuandose observe desde arriba.
Solucion. Si F = zi+ xj+ yk entonces
rot F =
∣
∣
∣
∣
∣
∣
∣
∣
∣
i j k
∂
∂x
∂
∂y
∂
∂z
xy yz xz
∣
∣
∣
∣
∣
∣
∣
∣
∣
= i+ j+ k
En este caso definimos a h(x, y, z) = y+ z−2 define el plano para el nivel 0, con orientacionarriba y vector normal
n =∇h‖∇h‖ =
1√2j+
1√2k
Por tanto,
˛
C
F · dr =
¨
S
(rot F · n)dS =
¨
S
[
(i+ j+ k)( 1√
2j+
1√2k)
]
dS =√2
¨
S
dS =√2
¨
S
√2ds = 2π
∆
Interpretacion fısica del rotacional: Anteriormente vimos que si F es un campo develocidades de un fluido, entonces la circulacion de
¸
CF · dr de F alrededor de C es una
medida de la cantidad por medio de la cual el fluido tiende a girar la curva C circulandoalrededor de ella. La circulacion de F se relaciona estrechamente a rot F. Para ver esto,suponga que P0(x0, y0, z0) es cualquier punto en el fluido y Cr es un pequeno cırculo deradio r centrado en P0. Entonces por el teorema de Stokes,
˛
Cr
F · dr =
¨
S
(rot F) · ndS (4.23)
Ahora, en todos los puntos P (x, y, z) dentro del cırculo pequeno Cr, si tomamos rot F(P ) ≈rotF(P0), entonces (4.23) produce la aproximacion
˛
Cr
F · dr ≈¨
Sr
(rot F(P0)) · n(P0)dS
= (rot F(P0)) · n(P0))
¨
Sr
dS
= (rot F(P0)) · n(P0)Ar (4.24)
donde Ar es el area πr2 de la superficie circular Sr. Cuando dejamos r → 0, la aproximacionrot F(P ) ≈ rot F(P0) se vuelve mejor y encontramos que
(rot F(P0)) · n(P0) = lımr→0
1
Ar
˛
Cr
F · dr
189

De tal modo, vemos que la componente normal de rot F es el valor lımite del cociente entrela circulacion de F y el area de la superficie circular. Para un valor pequeno pero fijo de r,tenemos
(rot F(P0)) · n(P0) ≈1
Ar
˛
Cr
F · dr (4.25)
Entonces, en terminos generales, rot F es la circulacion de F por unidad de area. Sirot F(P0) 6= 0, entonces el lado izquierdo de (4.25) es un maximo cuando el cırculo Cr
se situa de manera que n(P0) apunte en la misma direccion que rot F(P0). En este caso, lacirculacion en el lado derecho de (4.25) tambien es un maximo. De tal modo, una rueda depaletas insertada en el fluido en P0 rotara mas rapido cuando su eje apunte en la direccion derot F(P0). Vea la Fig. Advierta, tambien, que la paleta no rotara si su eje es perpendiculara rot F(P0).
4.1. Teorema de la Divergencia
Vamos a examinar otra generalizacion del teorema de Green. Esta generalizacion tridi-mensional se basa en una segunda interpretacion vectorial del teorema que se presenta acontinuacion
Teorema de Green en R2 Sea F(x, y) = P (x, y)i + Q(x, y)j un campo vectorial bidi-
mensional y considere a T = (dx
ds)i+(
dy
ds)j como una tangente unitaria a una curva plana
cerrada simple C. Recordemos que˛
C
F · dr =
˛
C
F ·Tds =¨
R
(rot F) · kdA.
Similarmente, si n = (dy
ds)i − (
dx
ds)j es una normal unitaria a C (verifique T · n = 0),
entonces
˛
C
(F · n)ds puede expresarse en terminos de una integral doble que implique a
divF.
Del teorema de Green,˛
C
(F · n)ds =˛
C
Pdy −Qdx =
¨
R
[∂P
∂x−(
− ∂Q
∂dy
)]
dA =
¨
R
[∂P
∂x+∂Q
∂dy
]
dA
Esto es,˛
C
(F · n)ds =¨
R
div FdA
Teorema de Green en R3: Es generalizar la ecuacion anterior al espacio tridimensional R3
y esta generalizacion es lo que llamaremos Teorema de la divergencia o de Gauss.
Este importante teorema da la relacion entre una integraltriple sobre una region solida D (en clase la llamamos pa-pa) y una integral de superficie, donde la superficie S es lafrontera de D (frontera de D = S cascara de la papa). Enel enunciado del teorema, la superficie S es cerrada en elsentido de que forma toda la frontera completa del solidoD. Ejemplos de superficies cerradas surgen de las regioneslimitadas o acotadas por esferas, elipsoides, cubos, tetrae-dros, o combinaciones de estas superficies. Se supone queD es una region solida sobre la cual se evalua una integraltriple, y que la superficie cerrada S esta orientada mediantevectores normales unitarios dirigidos hacia el exterior, co-mo se muestra en la figura. Con estas restricciones sobre Sy D, el teorema de la divergencia es como sigue.
190

Teorema 83 (Teorema de la Divergencia).Suponga que D un solido acotado en el espacio tridimensional con una frontera suave porpartes S que esta orientada hacia arriba. Sea
F(x, y, z) = P (x, y, z)i+Q(x, y, z)j+R(x, y, z)k
un campo vectorial para el cual P , Q, y R son continuas y tienen primeras derivadas parcialescontinuas en una region abierta del espacio tridimensional que contiene a D. Entonces
‹
S
(F · n)dS =
˚
D
(div F)dV. (4.26)
donde n es una normal unitaria hacia fuera para S.
Demostracion. (Parcial) Probaremos (4.26) para la region especial D que se ilustra en laFigura cuya superficie S consiste en tres partes
(Fondo) S1 : z = g1(x, y), (x, y) ∈ R
(Parte Superior) S2 : z = g2(x, y), (x, y) ∈ R
(Lado) S3 : g1(x, y) ≤ z ≤ g2(x, y), (x, y) ∈ R
donde R es la proyeccion de D sobre el plano xy y C es la frontera de R. Puesto que
div F =∂P
∂x+∂Q
∂y+∂Q
∂zy F · n = P (i · n) +Q(j · n) +R(k · n)
es posible escribir
¨
S
(F · n)dS =
¨
S
P (i · n)dS +
¨
S
Q(j · n)dS +
¨
S
R(k · n)dS˚
D
div FdV =
˚
D
∂P
∂xdV +
˚
D
∂Q
∂ydV +
˚
D
∂R
∂zdV
Para
probar (4.26) solo necesitamos establecer que
A)
¨
S
P (i·n)dS =
˚
D
∂P
∂xdV B)
¨
S
Q(j·n)dS =
˚
D
∂Q
∂ydV C)
¨
S
R(k·n)dS =
˚
D
∂R
∂zdV
solo probamos la ecuacion C). Ahora
˚
D
∂R
∂zdV =
¨
R
[
ˆ g2(x,y)
g1(x,y)
∂R
∂zdz
]
dA =
¨
R
[
R(x, y, g2(x, y))−R(x, y, g1(x, y))]
dA
(4.27)
A continuacion escribimos¨
S
R(k · n)dS =
¨
S1
R(k · n)dS +
¨
S2
R(k · n)dS +
¨
S3
R(k · n)dS
Sobre S1: Puesto que la normal hacia fuera apunta hacia abajo, describimos la superficiecomo h(x, y, z) = g1(x, y)− z = 0. De tal modo
n =∇h‖∇h‖ =
∂g1∂x i+ ∂g1
∂y j− k√
1 +(
∂g1∂x
)2
+(
∂g1∂y
)2por lo que k · n =
−1√
1 +(
∂g1∂x
)2
+(
∂g1∂y
)2
De la definicion de dS tenemos entonces¨
S1
R(k · n)dS = −¨
R
R(x, y, g1(x, y))dA (4.28)
191

Sobre S2: Puesto que la normal hacia fuera apunta hacia abajo, describimos la superficiecomo h(x, y, z) = z − g2(x, y) = 0. Por tanto,
n =∇h‖∇h‖ =
−∂g2∂x
i− ∂g2∂y
j+ k
√
1 +(∂g2∂x
)2
+(∂g2∂y
)2por lo que k · n =
−1√
1 +(∂g1∂x
)2
+(∂g1∂y
)2
De la definicion de dS tenemos entonces¨
S2
R(k · n)dS =
¨
R
R(x, y, g2(x, y))dA (4.29)
Sobre S3: Como este lado es vertical, k es perpendicular a n. Consecuentemente, k · n = 0y
¨
S3
R(k · n)dS = 0 (4.30)
Finalmente, sumando (4.28), (4.29) y (4.30) obtenemos¨
R
[
R(x, y, g2(x, y))−R(x, y, g1(x, y))]
dA
que es lo mismo que (4.27). �
Aunque demostramos (4.26) para una region especial D que tiene un lado vertical,notamos que este tipo de region no se requiere en el teorema de l aDivergencia.
Una region acotada por una esfera o un elipsoide no tiene tampoco un lado vertical.
El teorema de la divergencia tambien se cumple para una region D acotada entre dossuperficies cerradas tal como las esferas concentricas Sa y Sb; la superficie frontera Sde D es la union de Sa y Sb En este caso,
ˆ
S
(F · n)dS =
˚
D
div FdV
se convierte en¨
Sb
(F · n)dS +
¨
Sa
(F · n)dS =
˚
D
div FdV
donde n apunta hacia fuera de D. En otras palabras, n apunta alejandose del origensobre Sb, pero n apunta hacia el origen sobre Sa.
Ejemplo 236. Sea D una region cerrada acotada por el hemisferio x2 + y2 + (z − 1)2 = 9,1 ≤ z ≤ 4, y el plano z = 1 Verifique el teorema de la divergencia para el campo vectorialF = xi+ yj+ (z − 1)k.
Solucion.
La integral triple: Puesto que F = xi+yj+(z−1)k vemos que divF = 3. En consecuencia,
˚
D
div FdV =
˚
D
3dV = 3
˚
D
dV = 54π (4.31)
En el ultimo calculo, aprovechamos el hecho de que
˚
D
dV produce el volumen del hemis-
ferio.
192

La integral de superficie: Escribimos
¨
S
=
¨
S1
+
¨
S2
donde S1 es el hemisferio y S2
es el plano z = 1. Si S1 es una superficie de nivel de h(x, y, z) = x2 + y2 + (z − 1)2 entoncesuna normal unitaria que apunta hacia arriba es
n =∇h‖∇h‖ =
xi+ yj+ (z − 1)k√
x2 + y2 + (z − 1)2=x
3i+
y
3j+
z − 1
3k
Ahora,F · n = 3
y por ello con la ayuda de coordenadas polares obtenemos
ˆ
S1
(F · n)dS =
¨
R
3( 3√
9− x2 − y2dA)
= 9
ˆ 2π
0
ˆ 3
0
(9− r2)−1/2rdrdθ = 54π
Sobre S2, tomamos n = −k de modo que F·n = −z+1. Pero, como z = 1,
¨
S2
(−z+1)dS = 0.
Por consiguiente, vemos que
ˆ
S
(F · n)dS = 54π + 0 = 54π
∆
Ejemplo 237. Evalue
¨
S
(F · n)dS, donde S es el cubo unitario definido por 0 ≤ x ≤ 1,
0 ≤ y ≤ 1, 0 ≤ z ≤ 1 y F = xyi+ y2zj+ z3k.
Solucion. En lugar de evaluar seis integrales de superficie, aplicamos el teorema de la diver-gencia. Puesto que divF = ∇ · F = y + 2yz + 3z2 luego,
¨
S
(F · n)dS =
˚
D
(y + 2yz + 3z2)dV =
ˆ 1
0
ˆ 1
0
ˆ 1
0
(y + 2yz + 3z2)dxdydz = 2
∆
Interpretacion fısica de la divergencia Vamos a suponer que P0(x0, y0, z0) es cualquierpunto en el fluido y Sr es una pequena esfera de radio r centrada en P0. Si Dr es la esferaSr y su interior, entonces el teorema de la divergencia produce
¨
Sr
(F · n)dS =
˚
Dr
divFdV (4.32)
Si tomamos la aproximacion divF(P ) ≈ divF(P0) en cualquier punto P (x, y, z) dentro de lapequena esfera, entonces (4.32) produce
¨
Sr
(F · n)dS ≈˚
Dr
divF(P0)dV = divF(P0)
˚
Dr
dV = divF(P0)Vr (4.33)
donde Vr es el volumen 43πr
3 de la region esferica Dr. Dejando que r → 0, vemos de (4.33)que la divergencia de F es el valor lımite del cociente del flujo de F y el volumen de la regionesferica:
divF(P0) = lımr→0
1
Vr
¨
Sr
(F · n)dS (4.34)
En consecuencia, la divergencia de F es el flujo por unidad de volumen.
193