Cap 3 Sólido rígido - Sistemas equivalentes de fuerzas (2013)
17
Definición sólido rígido › Se define como sólido rígido a todo cuerpo que no presenta deformaciones al ser sometido a cualquier combinación de fuerzas › Se destaca que tal consideración es una aproximación. Realmente todos los cuerpos son deformables, en mayor en menor medida, dependiendo de los materiales y las solicitaciones a la que son sometidos. Fuerzas que actúan sobre un sólido rígido › 1) Fuerzas externas: representan la acción de otros cuerpos sobre el sólido rígido considerado. Son las responsables del estado de movimiento o equilibrio del componente bajo estudio › 2) Fuerzas internas: son las que mantiene unidas las partículas que conforman el cuerpo bajo estudio. Si el sólido está compuesto por varias partes, las fuerzas que las mantienen unidas también son consideradas como internas.
Transcript of Cap 3 Sólido rígido - Sistemas equivalentes de fuerzas (2013)

� Definición sólido rígido
› Se define como sólido rígido a todo cuerpo que no presenta deformaciones al ser sometido a cualquier combinación de fuerzas
› Se destaca que tal consideración es una aproximación. Realmente todos los cuerpos son deformables, en mayor en menor medida, dependiendo de los materiales y las solicitaciones a la que son sometidos.
� Fuerzas que actúan sobre un sólido rígido› 1) Fuerzas externas:
representan la acción de otros cuerpos sobre el sólido rígido considerado. Son las responsables del estado de movimiento o equilibrio del componente bajo estudio
› 2) Fuerzas internas: son las que mantiene unidas las partículas que conforman el cuerpo bajo estudio. Si el sólido está compuesto por varias partes, las fuerzas que las mantienen unidas también son consideradas como internas.
� Principio de
transmisibilidad:
› “Las condiciones de
equilibrio o de movimiento de
un sólido rígido se
mantendrán inalteradas si
una fuerza F que actúa en un
punto dado del sólido se
sustituye por una fuerza F´
de igual módulo, dirección y
sentido, pero que actúa en
un punto diferente, siempre
que las dos fuerzas tengan la
misma recta soporte”
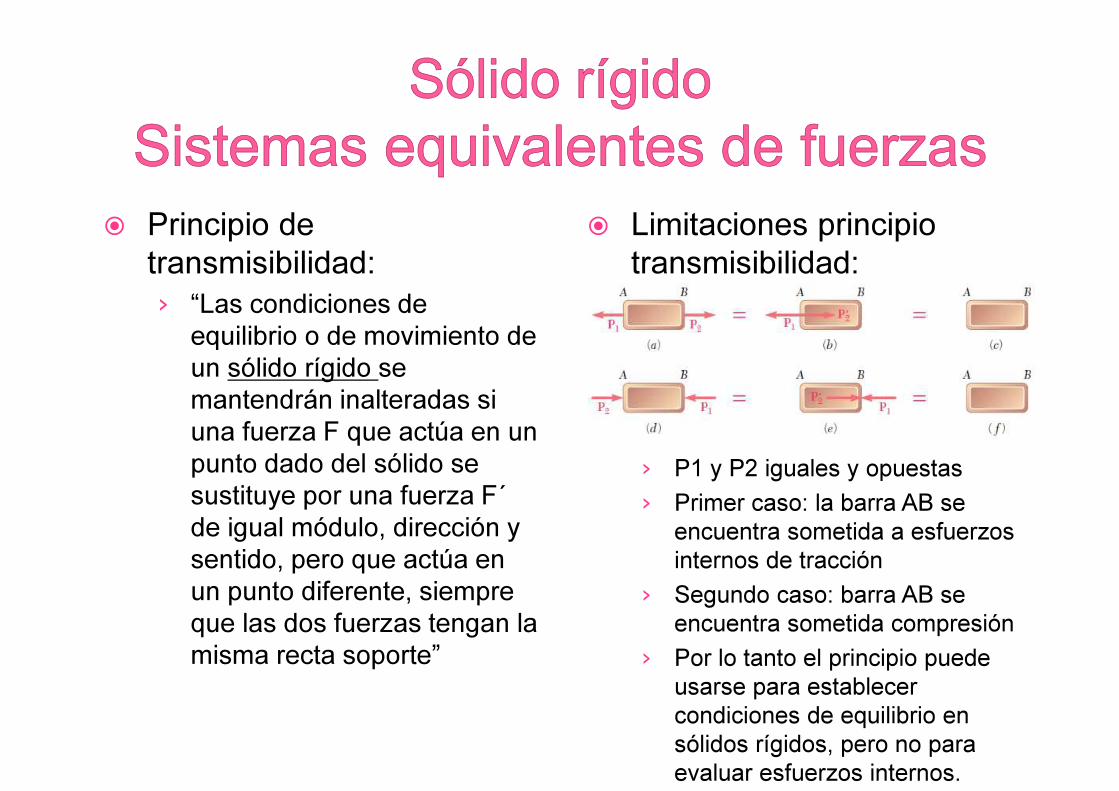
� Limitaciones principio
transmisibilidad:
› P1 y P2 iguales y opuestas
› Primer caso: la barra AB se
encuentra sometida a esfuerzos
internos de tracción
› Segundo caso: barra AB se
encuentra sometida compresión
› Por lo tanto el principio puede
usarse para establecer
condiciones de equilibrio en
sólidos rígidos, pero no para
evaluar esfuerzos internos.
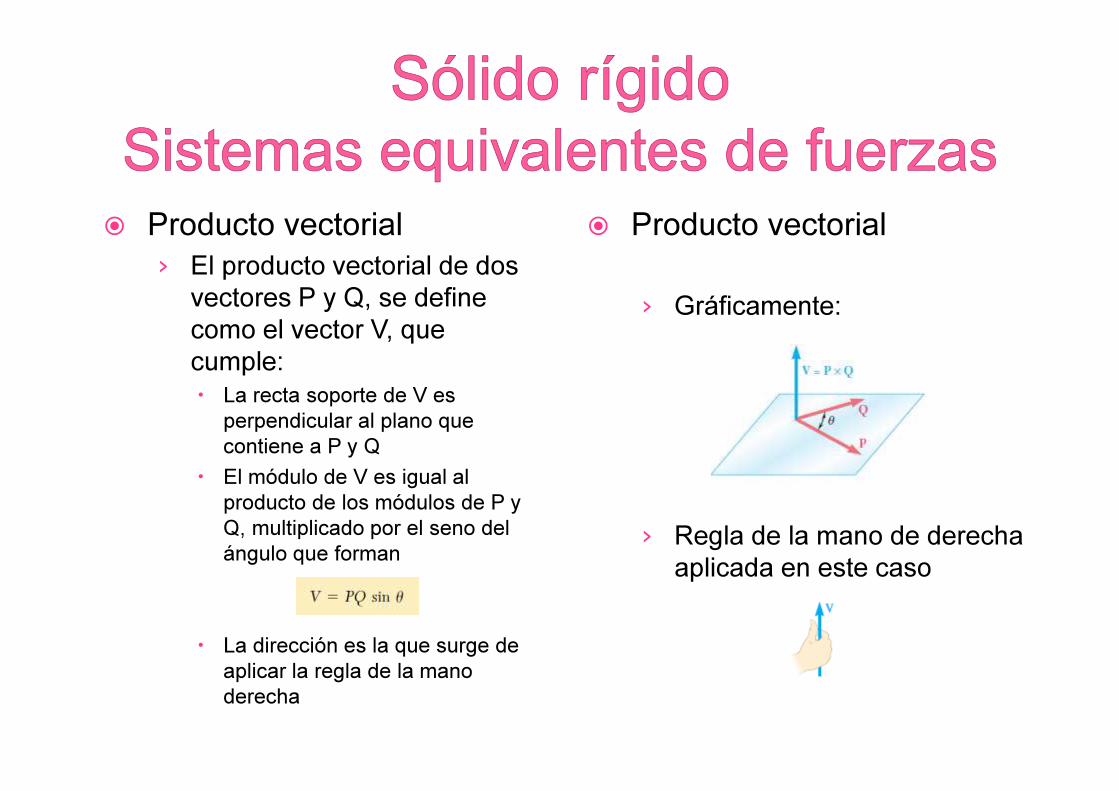
� Producto vectorial
› El producto vectorial de dos
vectores P y Q, se define
como el vector V, que
cumple:
� La recta soporte de V es
perpendicular al plano que
contiene a P y Q
� El módulo de V es igual al
producto de los módulos de P y
Q, multiplicado por el seno del
ángulo que forman
� La dirección es la que surge de
aplicar la regla de la mano
derecha
� Producto vectorial
› Gráficamente:
› Regla de la mano de derecha
aplicada en este caso
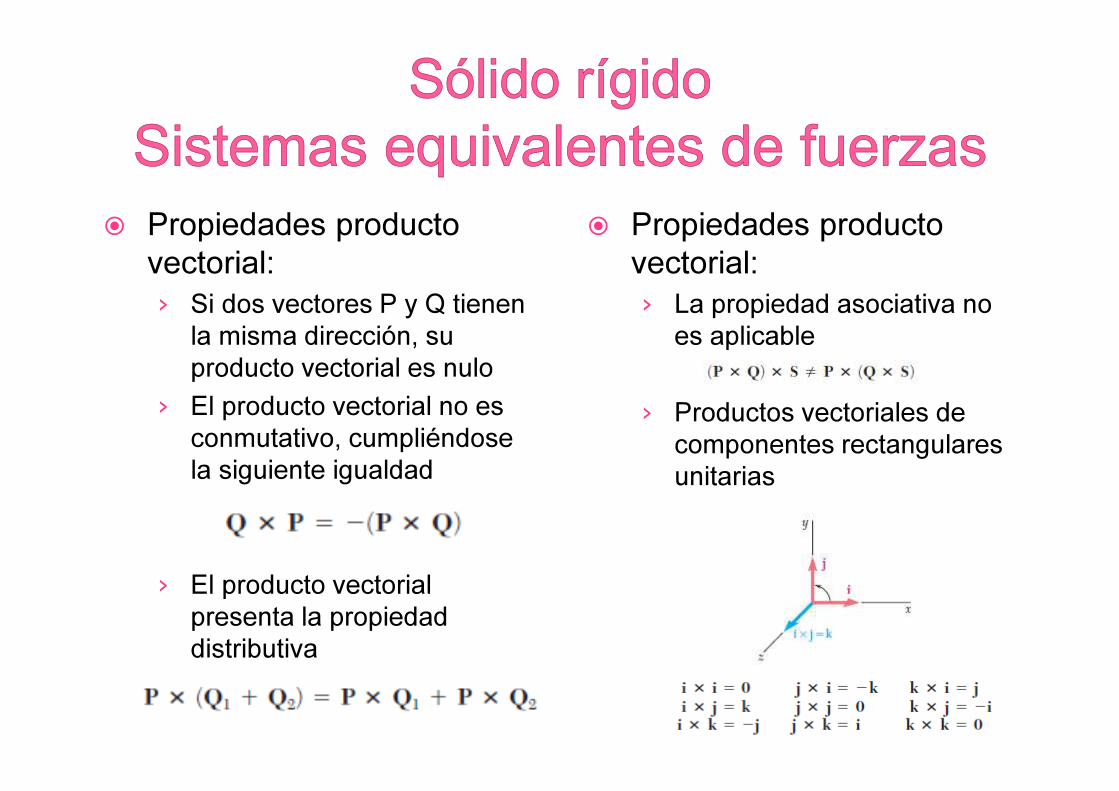
� Propiedades producto
vectorial:
› Si dos vectores P y Q tienen
la misma dirección, su
producto vectorial es nulo
› El producto vectorial no es
conmutativo, cumpliéndose
la siguiente igualdad
› El producto vectorial
presenta la propiedad
distributiva
� Propiedades producto
vectorial:
› La propiedad asociativa no
es aplicable
› Productos vectoriales de
componentes rectangulares
unitarias
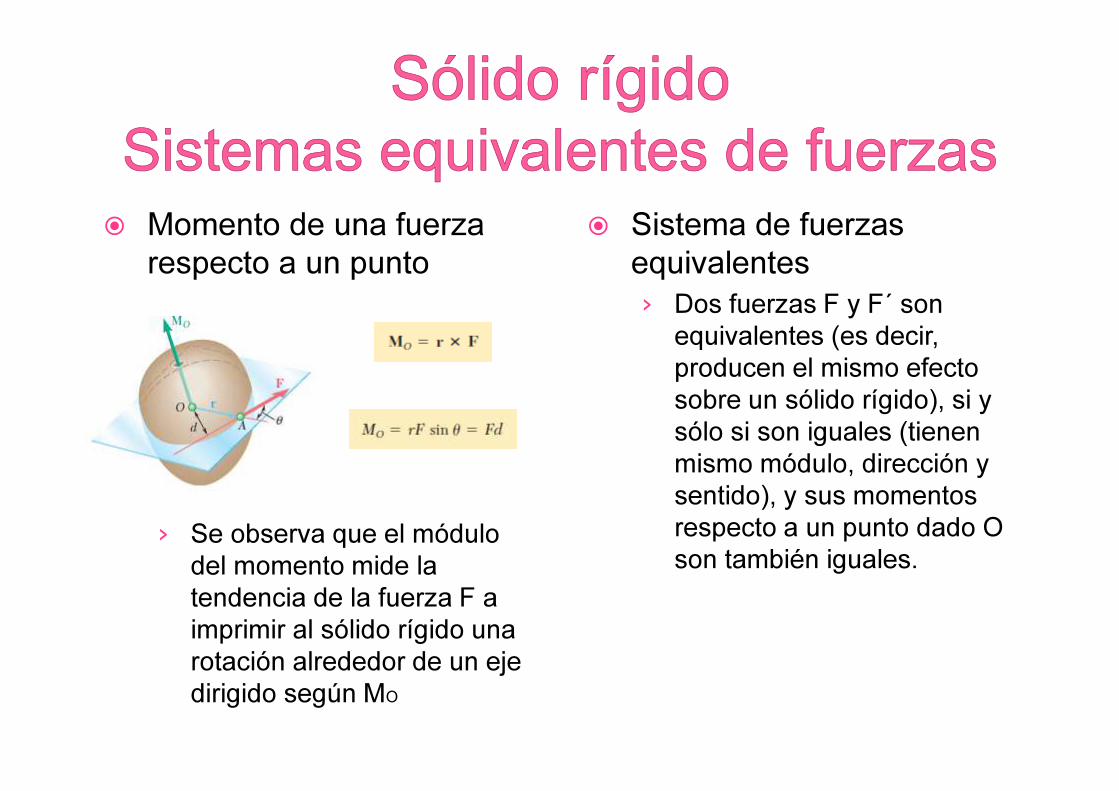
� Momento de una fuerza
respecto a un punto
› Se observa que el módulo
del momento mide la
tendencia de la fuerza F a
imprimir al sólido rígido una
rotación alrededor de un eje
dirigido según MO
� Sistema de fuerzas
equivalentes
› Dos fuerzas F y F´ son
equivalentes (es decir,
producen el mismo efecto
sobre un sólido rígido), si y
sólo si son iguales (tienen
mismo módulo, dirección y
sentido), y sus momentos
respecto a un punto dado O
son también iguales.

� Momento de una fuerza
respecto a un eje
� Significado físico de
momento respecto a un eje
› El momento de F respecto al
eje OL mide la tendencia de
la fuerza F a imprimir al
sólido rígido una rotación
alrededor del eje OL
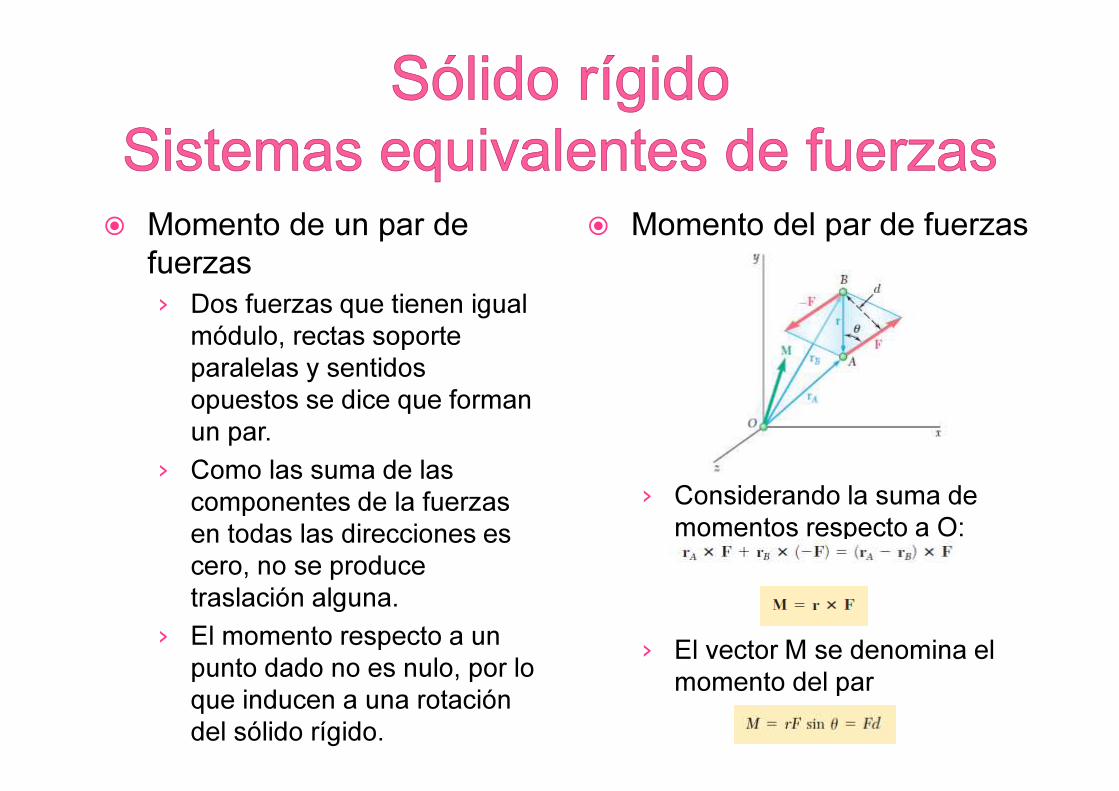
� Momento de un par de
fuerzas
› Dos fuerzas que tienen igual
módulo, rectas soporte
paralelas y sentidos
opuestos se dice que forman
un par.
› Como las suma de las
componentes de la fuerzas
en todas las direcciones es
cero, no se produce
traslación alguna.
› El momento respecto a un
punto dado no es nulo, por lo
que inducen a una rotación
del sólido rígido.
� Momento del par de fuerzas
› Considerando la suma de
momentos respecto a O:
› El vector M se denomina el
momento del par
� Observaciones:
› Al ser el vector r
independiente del punto O,
se observa que se hubiera
llegado al mismo resultado si
se hubieran tomados
momentos respecto a otro
punto cualquiera. Por lo tanto
el momento de un par es un
vector libre que puede
aplicarse en cualquier punto
� Equivalencia entre los pares
› Dos sistemas de fuerzas son
equivalentes, si pueden
transformarse el uno en el otro
mediante las siguientes
operaciones:
1. Sustituyendo dos fuerzas que
actúan en una partícula por su
resultante
2. Descomponiendo una fuerza en
componentes
3. Anulando fuerzas iguales y
opuestas que actúan sobre una
partícula
4. Aplicando a una partícula dos
fuerzas iguales y opuestas
5. Moviendo una fuerza a lo largo de
su recta soporte
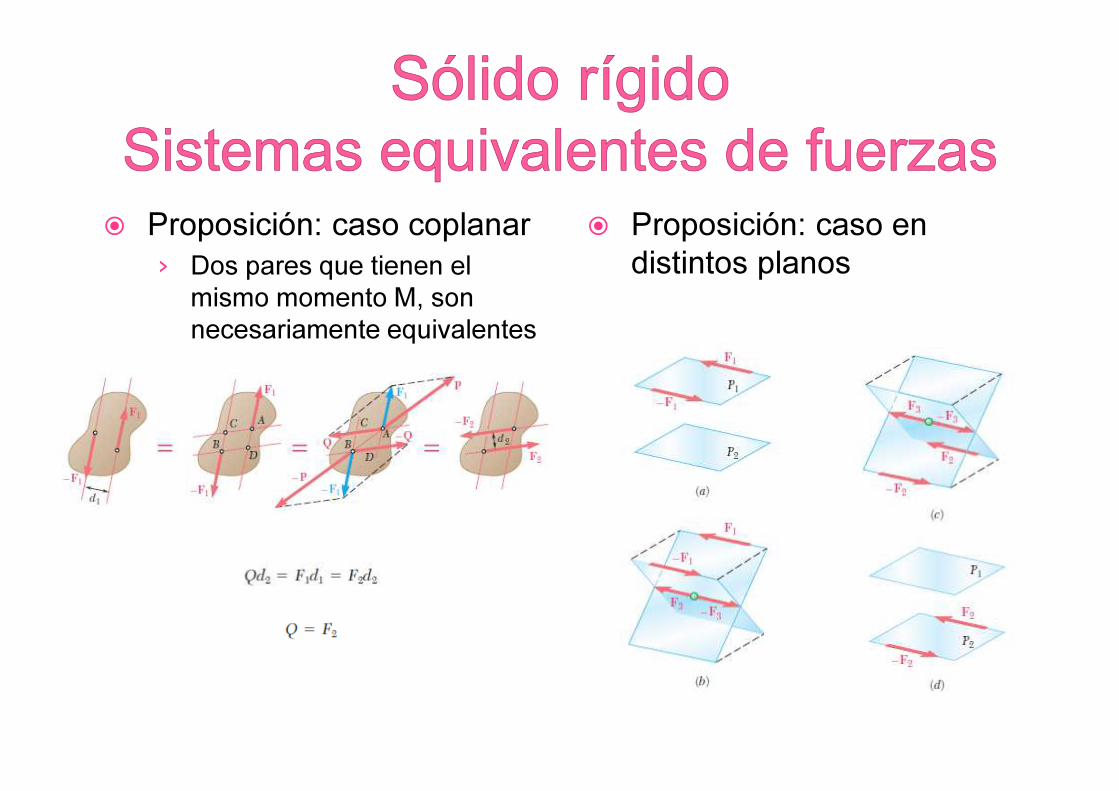
� Proposición: caso coplanar
› Dos pares que tienen el
mismo momento M, son
necesariamente equivalentes
� Proposición: caso en
distintos planos
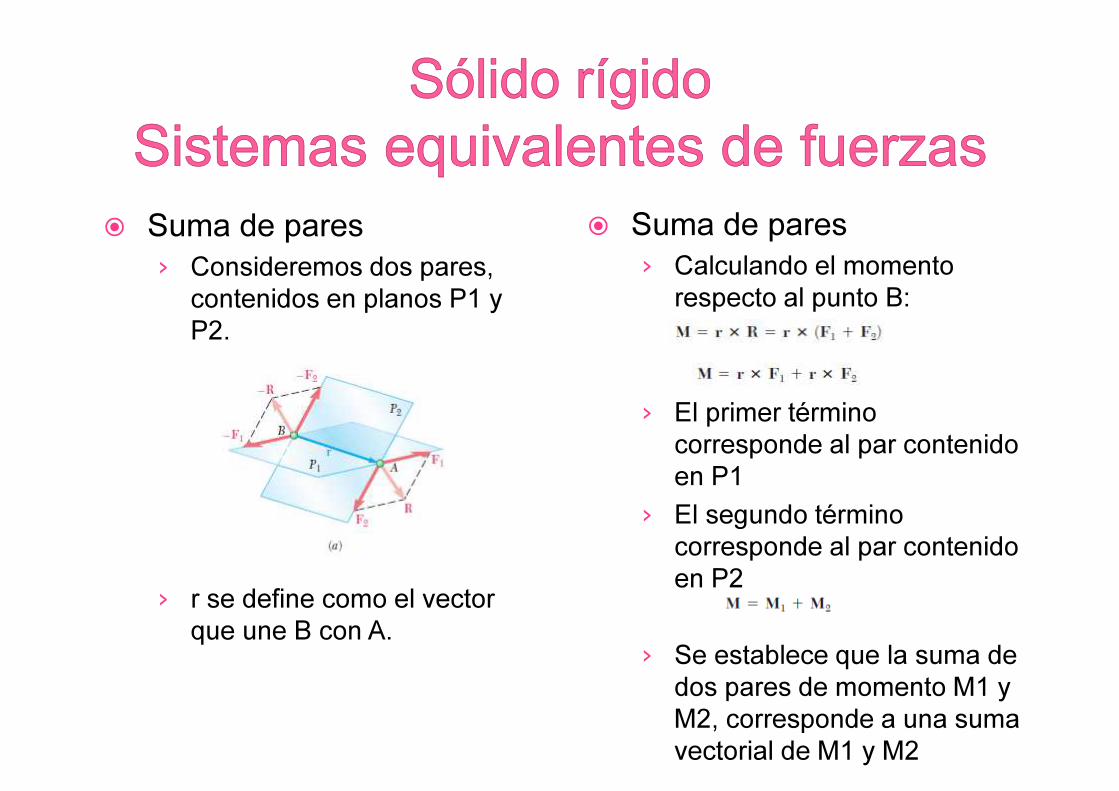
� Suma de pares
› Consideremos dos pares,
contenidos en planos P1 y
P2.
› r se define como el vector
que une B con A.
� Suma de pares
› Calculando el momento
respecto al punto B:
› El primer término
corresponde al par contenido
en P1
› El segundo término
corresponde al par contenido
en P2
› Se establece que la suma de
dos pares de momento M1 y
M2, corresponde a una suma
vectorial de M1 y M2
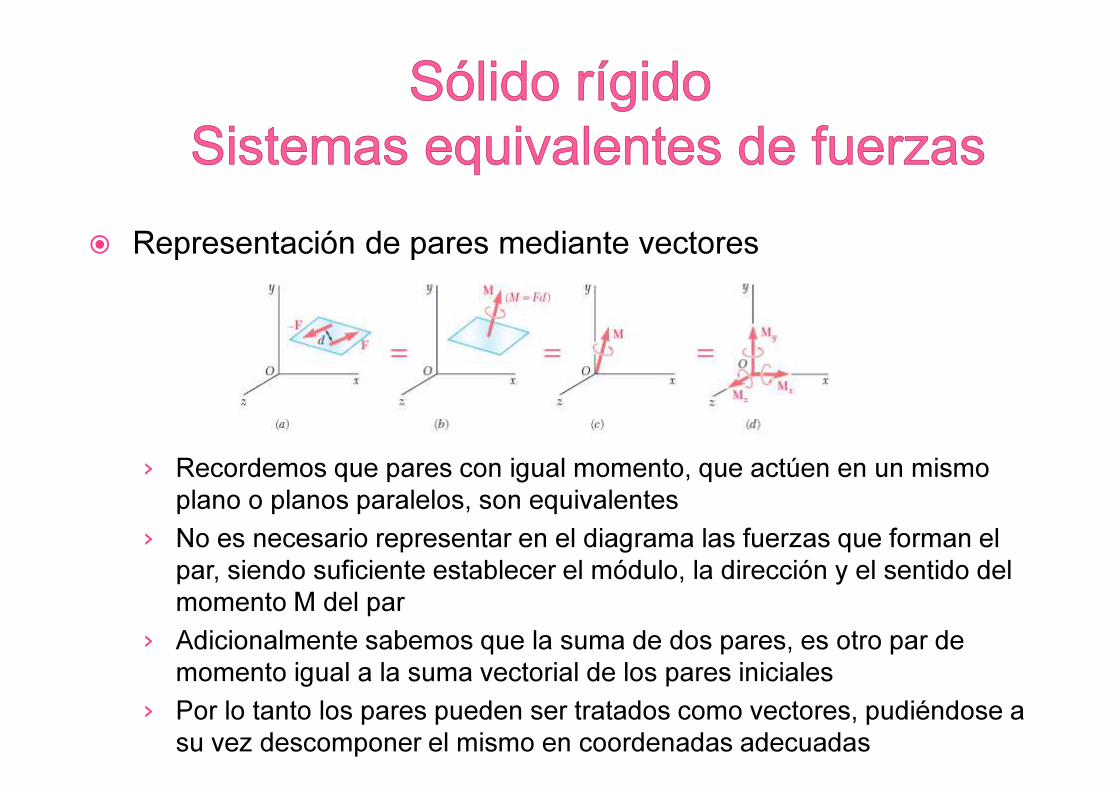
� Representación de pares mediante vectores
› Recordemos que pares con igual momento, que actúen en un mismo
plano o planos paralelos, son equivalentes
› No es necesario representar en el diagrama las fuerzas que forman el
par, siendo suficiente establecer el módulo, la dirección y el sentido del
momento M del par
› Adicionalmente sabemos que la suma de dos pares, es otro par de
momento igual a la suma vectorial de los pares iniciales
› Por lo tanto los pares pueden ser tratados como vectores, pudiéndose a
su vez descomponer el mismo en coordenadas adecuadas
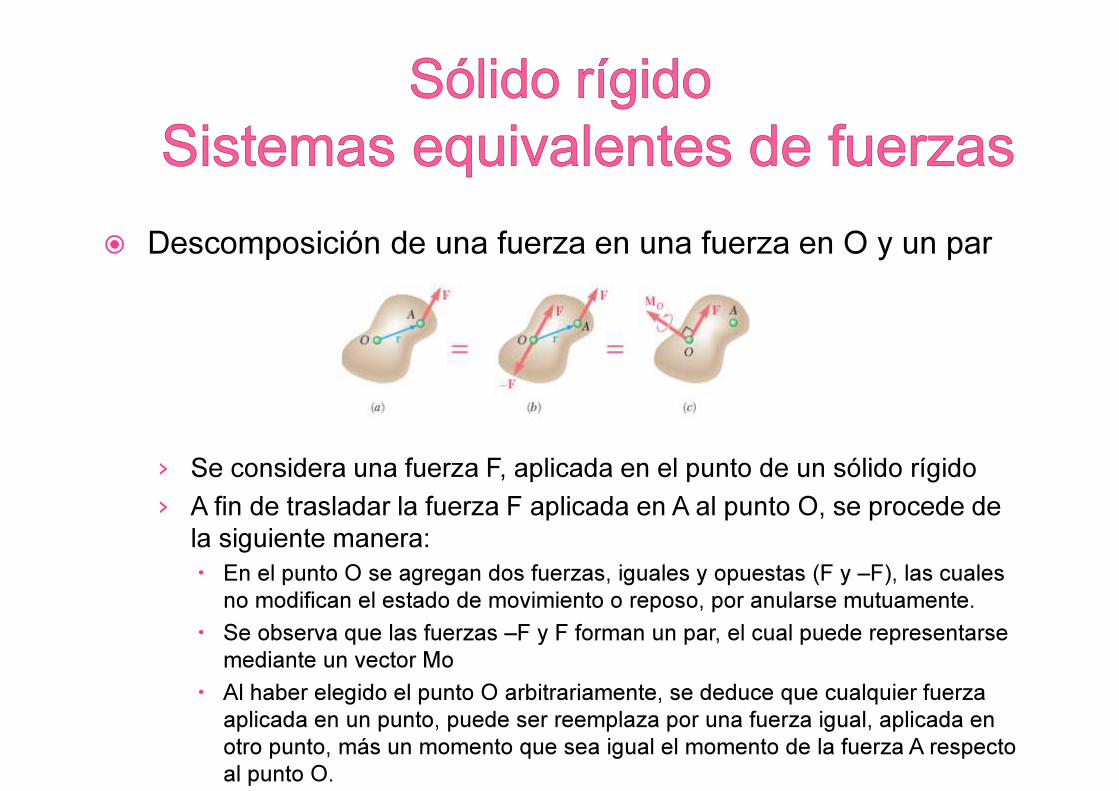
� Descomposición de una fuerza en una fuerza en O y un par
› Se considera una fuerza F, aplicada en el punto de un sólido rígido
› A fin de trasladar la fuerza F aplicada en A al punto O, se procede de
la siguiente manera:
� En el punto O se agregan dos fuerzas, iguales y opuestas (F y –F), las cuales
no modifican el estado de movimiento o reposo, por anularse mutuamente.
� Se observa que las fuerzas –F y F forman un par, el cual puede representarse
mediante un vector Mo
� Al haber elegido el punto O arbitrariamente, se deduce que cualquier fuerza
aplicada en un punto, puede ser reemplaza por una fuerza igual, aplicada en
otro punto, más un momento que sea igual el momento de la fuerza A respecto
al punto O.
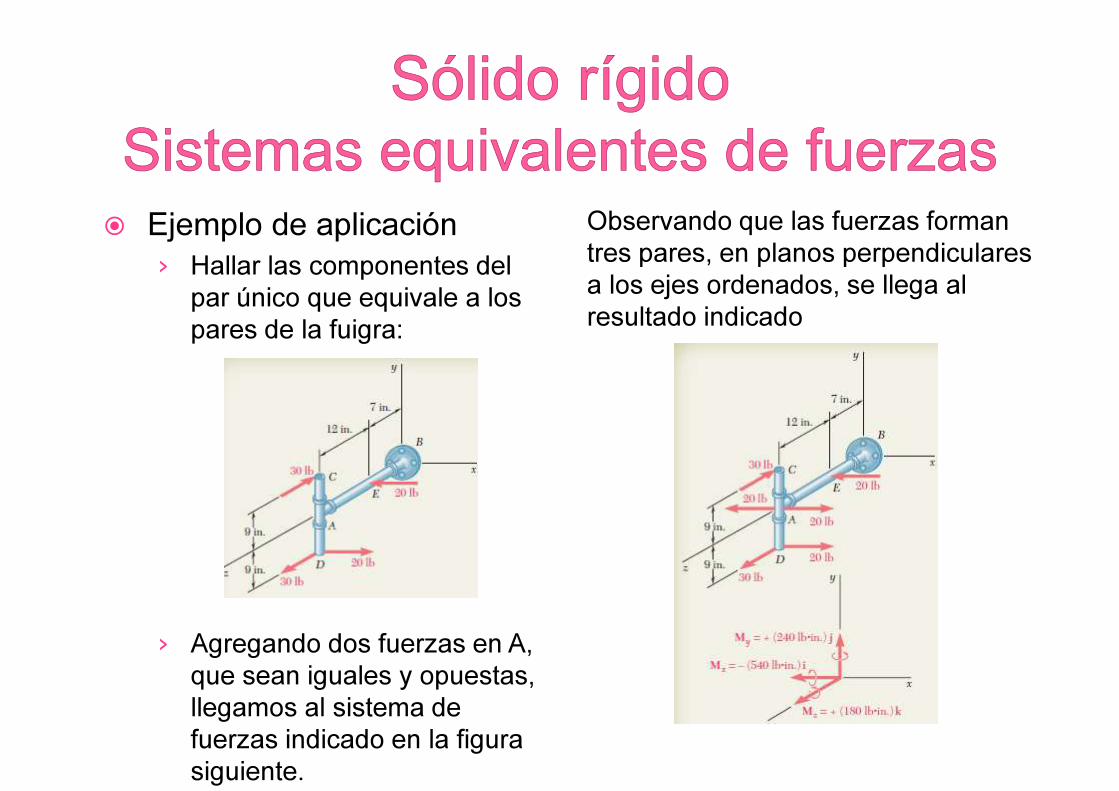
� Ejemplo de aplicación
› Hallar las componentes del
par único que equivale a los
pares de la fuigra:
› Agregando dos fuerzas en A,
que sean iguales y opuestas,
llegamos al sistema de
fuerzas indicado en la figura
siguiente.
Observando que las fuerzas forman
tres pares, en planos perpendiculares
a los ejes ordenados, se llega al
resultado indicado
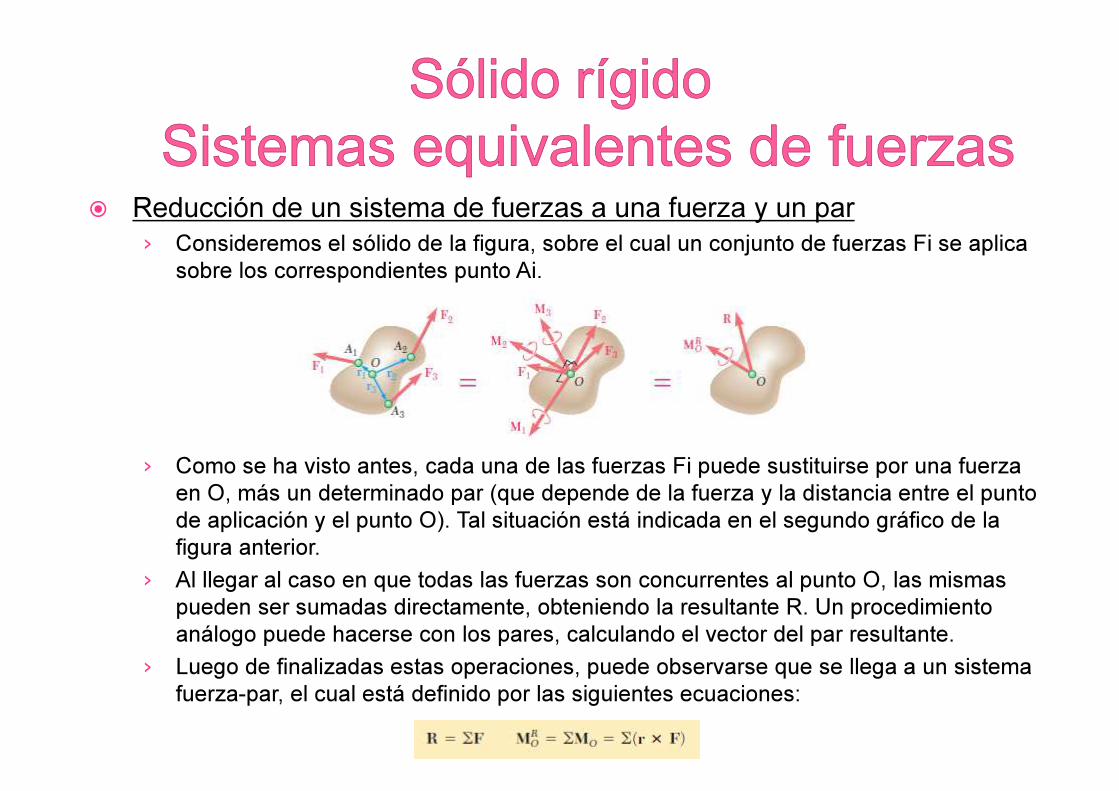
� Reducción de un sistema de fuerzas a una fuerza y un par
› Consideremos el sólido de la figura, sobre el cual un conjunto de fuerzas Fi se aplica
sobre los correspondientes punto Ai.
› Como se ha visto antes, cada una de las fuerzas Fi puede sustituirse por una fuerza
en O, más un determinado par (que depende de la fuerza y la distancia entre el punto
de aplicación y el punto O). Tal situación está indicada en el segundo gráfico de la
figura anterior.
› Al llegar al caso en que todas las fuerzas son concurrentes al punto O, las mismas
pueden ser sumadas directamente, obteniendo la resultante R. Un procedimiento
análogo puede hacerse con los pares, calculando el vector del par resultante.
› Luego de finalizadas estas operaciones, puede observarse que se llega a un sistema
fuerza-par, el cual está definido por las siguientes ecuaciones:
� Sistemas equivalentes de fuerzas
› “Dos sistemas de fuerzas son equivalentes si pueden reducirse al
mismo sistema fuerza-par en un punto dado O.”
› “Dos sistemas de fuerzas, que actúan sobre un sólido rígido son
equivalentes si, y sólo si, las sumas de las fuerzas y las sumas de los
momentos respecto a un punto dado O de las fuerzas de los dos
sistemas son iguales.”
› Expresando esta condición en ecuaciones vectoriales:
› Se destaca que para demostrar la equivalencia entre dos sistemas,
necesita establecerse la segunda ecuación indicada en la figura
anterior respecto a un solo punto. Si los dos sistemas son
equivalentes se cumplirá para todo punto del rígido

� Sistemas equivalentes de fuerzas
› Descomponiendo según coordenadas las ecuaciones vectoriales
presentadas anteriormente, se llega a:
› Las cuales expresan que los sistemas de fuerzas son equivalentes si
tienden a imprimir al sólido rígido 1) la misma traslación en las
direcciones x,y,z, como también 2) la misma rotación según los ejes
x,y,z
› En general cuando dos sistemas de vectores cumplen las igualdades
antes indicadas, o sea, cuando sus resultantes y sus momentos
resultantes respecto a un mismo punto O son respectivamente iguales,
de ellos se dice que son equipolentes. Por lo tanto, si dos sistemas de
fuerzas que actúan sobre un sólido rígido son equipolentes, son
asimismo equivalentes.
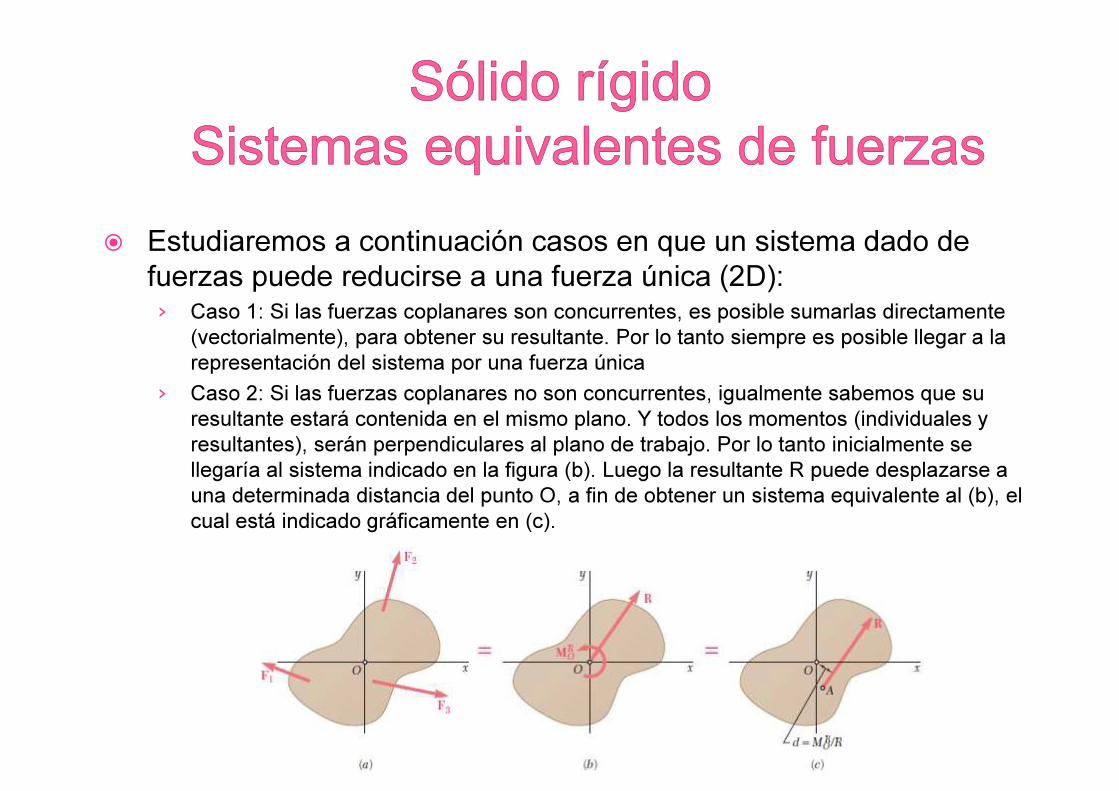
� Estudiaremos a continuación casos en que un sistema dado de
fuerzas puede reducirse a una fuerza única (2D):› Caso 1: Si las fuerzas coplanares son concurrentes, es posible sumarlas directamente
(vectorialmente), para obtener su resultante. Por lo tanto siempre es posible llegar a la
representación del sistema por una fuerza única
› Caso 2: Si las fuerzas coplanares no son concurrentes, igualmente sabemos que su
resultante estará contenida en el mismo plano. Y todos los momentos (individuales y
resultantes), serán perpendiculares al plano de trabajo. Por lo tanto inicialmente se
llegaría al sistema indicado en la figura (b). Luego la resultante R puede desplazarse a
una determinada distancia del punto O, a fin de obtener un sistema equivalente al (b), el
cual está indicado gráficamente en (c).