Capítulo 7 Funciones analíticas
16
APUNTES DE VARIABLE COMPLEJA PARA INGENIEROS DE TELECOMUNICACION Elaborados por Jos´ e Manuel Rodr´ ıguez Versi´ on abreviada de Dmitry Yakubovich (2011) 1. INTRODUCCI ´ ON A LOS N ´ UMEROS COMPLEJOS Se define el conjunto de los n´ umeros complejos como C = {x + iy : x, y ∈ R} , donde i = √ −1. Si z = x + iy, diremos que x es la parte real de z y que y es la parte imaginaria de z, y lo denotaremos por Re z = x e Im z = y. Conviene destacar que tanto la parte real como la parte imaginaria son n´ umeros reales, y que los n´ umeros reales son tambi´ en n´ umeros complejos (de hecho, son los n´ umeros complejos con parte imaginaria 0). Los n´ umeros complejos con parte real 0 se denominan imaginarios puros. El ´ unico n´ umero real que es tambi´ en imaginario puro es el 0. Si identificamos el n´ umero complejo x + iy con el par ordenado (x, y), podemos representar el conjunto de los n´ umeros complejos como el plano R 2 . En adelante llamaremos eje real al eje de abscisas (el eje horizontal) y eje imaginario al eje de ordenadas (el eje vertical). A partir de esta identificaci´ on podemos hablar del plano complejo y de sus coordenadas polares r = |z|, θ = arg z, el m´odulo y el argumento, relacionadas con z = x + iy ̸= 0 de la siguiente forma x = r cos θ, y = r sen θ. Obs´ ervese que r 2 = x 2 + y 2 . Como es bien conocido, el argumento θ no est´a definido de manera ´ unica, ya que θ +2π, θ +4π y en general θ +2kπ, con k cualquier n´ umero entero, representan el mismo ´angulo que θ. Por tanto, a la hora de hablar de argumento hay que elegir uno de ellos; las elecciones m´as habituales son θ ∈ [0, 2π)´o θ ∈ (−π,π]. Si z = x + iy es un n´ umero complejo, denotaremos habitualmente su m´odulo por r = |z| y su argumento por θ = arg z. Est´a claro que no existe una determinaci´on continua de la funci´on arg z en C \{0}. Sin embargo, si S es una semirrecta cualquiera en el plano complejo que comienza en el origen de coordenadas, entonces existe una determinaci´on continua de la funci´on arg z en C \ S. Definici´on. Se definen la suma y el producto de los n´ umeros complejos z 1 = x 1 + iy 1 y z 2 = x 2 + iy 2 respectivamente como z 1 + z 2 = x 1 + iy 1 + x 2 + iy 2 =(x 1 + x 2 )+ i(y 1 + y 2 ) , z 1 · z 2 =(x 1 + iy 1 )(x 2 + iy 2 )= x 1 x 2 + ix 1 y 2 + ix 2 y 1 + i 2 y 1 y 2 =(x 1 x 2 − y 1 y 2 )+ i(x 1 y 2 + x 2 y 1 ) . La interpretaci´ on geom´ etrica de la suma de n´ umeros complejos es sencilla: si identificamos un n´ umero complejo z con el vector de R 2 que tiene como origen el origen de coordenadas y por extremo el punto z, el n´ umero complejo z 1 + z 2 es el extremo del vector suma de z 1 y z 2 . La interpretaci´ on geom´ etrica del producto de n´ umeros complejos es un poco m´as complicada: z 1 z 2 es el n´ umero complejo cuyo m´odulo es el producto de los m´odulos de z 1 y z 2 , y cuyo argumento es la suma de los argumentos de z 1 y z 2 . Definici´on. Se define el conjugado z del n´ umero complejo z = x + iy como z = x − iy. Desde el punto de vista geom´ etrico, z es el punto sim´ etrico de z con respecto al eje real. Es evidente que |z| 2 = x 2 + y 2 =(x + iy)(x − iy)= z z. Por tanto, el inverso de z ̸= 0 con respecto a la multiplicaci´ on es z −1 = 1 z = z z z = z |z| 2 . Es f´acil probar que el conjunto de los n´ umeros complejos con las operaciones de suma y producto tiene estructura de cuerpo. 1
Transcript of Capítulo 7 Funciones analíticas

APUNTES DE VARIABLE COMPLEJA
PARA INGENIEROS DE TELECOMUNICACION
Elaborados por Jose Manuel Rodrıguez
Version abreviada de Dmitry Yakubovich (2011)
1. INTRODUCCION A LOS NUMEROS COMPLEJOS
Se define el conjunto de los numeros complejos como
C = x+ iy : x, y ∈ R ,
donde i =√−1. Si z = x + iy, diremos que x es la parte real de z y que y es la parte imaginaria de z, y lo
denotaremos por Re z = x e Im z = y. Conviene destacar que tanto la parte real como la parte imaginaria son
numeros reales, y que los numeros reales son tambien numeros complejos (de hecho, son los numeros complejos
con parte imaginaria 0). Los numeros complejos con parte real 0 se denominan imaginarios puros. El unico
numero real que es tambien imaginario puro es el 0.
Si identificamos el numero complejo x+ iy con el par ordenado (x, y), podemos representar el conjunto de
los numeros complejos como el plano R2. En adelante llamaremos eje real al eje de abscisas (el eje horizontal)
y eje imaginario al eje de ordenadas (el eje vertical). A partir de esta identificacion podemos hablar del
plano complejo y de sus coordenadas polares r = |z|, θ = arg z, el modulo y el argumento, relacionadas con
z = x+ iy = 0 de la siguiente forma
x = r cos θ , y = r sen θ .
Observese que r2 = x2 + y2.
Como es bien conocido, el argumento θ no esta definido de manera unica, ya que θ + 2π, θ + 4π y en
general θ + 2kπ, con k cualquier numero entero, representan el mismo angulo que θ. Por tanto, a la hora de
hablar de argumento hay que elegir uno de ellos; las elecciones mas habituales son θ ∈ [0, 2π) o θ ∈ (−π, π].Si z = x + iy es un numero complejo, denotaremos habitualmente su modulo por r = |z| y su argumento por
θ = arg z. Esta claro que no existe una determinacion continua de la funcion arg z en C \ 0. Sin embargo, si
S es una semirrecta cualquiera en el plano complejo que comienza en el origen de coordenadas, entonces existe
una determinacion continua de la funcion arg z en C \ S.Definicion. Se definen la suma y el producto de los numeros complejos z1 = x1 + iy1 y z2 = x2 + iy2respectivamente como
z1 + z2 = x1 + iy1 + x2 + iy2 = (x1 + x2) + i(y1 + y2) ,
z1 · z2 = (x1 + iy1) (x2 + iy2) = x1x2 + ix1y2 + ix2y1 + i2y1y2
= (x1x2 − y1y2) + i(x1y2 + x2y1) .
La interpretacion geometrica de la suma de numeros complejos es sencilla: si identificamos un numero
complejo z con el vector de R2 que tiene como origen el origen de coordenadas y por extremo el punto z, el
numero complejo z1 + z2 es el extremo del vector suma de z1 y z2.
La interpretacion geometrica del producto de numeros complejos es un poco mas complicada: z1z2 es el
numero complejo cuyo modulo es el producto de los modulos de z1 y z2, y cuyo argumento es la suma de los
argumentos de z1 y z2.
Definicion. Se define el conjugado z del numero complejo z = x+ iy como z = x− iy.
Desde el punto de vista geometrico, z es el punto simetrico de z con respecto al eje real. Es evidente que
|z|2 = x2 + y2 = (x+ iy)(x− iy) = z z. Por tanto, el inverso de z = 0 con respecto a la multiplicacion es
z−1 =1
z=
z
z z=
z
|z|2.
Es facil probar que el conjunto de los numeros complejos con las operaciones de suma y producto tiene
estructura de cuerpo.
1

Pueden deducirse las siguientes propiedades:
|z1 + z2| ≤ |z1|+ |z2| ,∣∣|z1| − |z2|
∣∣ ≤ |z1 − z2| , |Re z| ≤ |z| , |Im z| ≤ |z| ,
Re z =z + z
2, Im z =
z − z
2i,
z1 + z2 = z1 + z2 , z1z2 = z1z2 , (zn) = zn ,(z1z2
)=z1z2
,
|z| = |z| , arg z = − arg z ,
|z1z2| = |z1| |z2| ,∣∣∣z1z2
∣∣∣ = |z1||z2|
, |zn| = |z|n ,∣∣ n√z ∣∣ = n
√|z| .
Dado que si θ es un argumento de un numero complejo, θ + 2kπ tambien lo es para cualquier k ∈ Z, las
siguientes formulas deben ser entendidas en cualquiera de los dos siguientes sentidos: a) arg(z1z2) = arg z1 +
arg z2 significa que para cualquier eleccion de arg z1 y arg z2, se tiene que arg z1+arg z2 es un argumento de z1z2;
b) las formulas son igualdades entre conjuntos si se considera arg z como el conjunto de todos los argumentos
de z.
arg(z1z2) = arg z1 + arg z2 , arg(1z
)= arg z = − arg z ,
arg(z1z2
)= arg z1 − arg z2 , arg(zn) = n arg z ,
arg( n√z ) =
arg z
n=
φ+ 2kπ
n: φ ∈ arg z , k ∈ Z
.
Tambien es destacable la formula de De Moivre (cos θ + i sen θ)n = cosnθ + i sennθ. Si definimos eiθ =
cos θ + i sen θ, la formula anterior resulta mas “familiar”: (eiθ)n = einθ. Esta sugerente notacion se justificara
en los dos proximos capıtulos.
Ahora podemos calcular raıces de orden n de numeros complejos de forma sencilla, teniendo en cuenta que
θ y θ + 2kπ representan el mismo angulo para cualquier k ∈ Z:
n√z =
n√r eiθ =
n√r ei(θ+2kπ) = n
√r ei(θ+2kπ)/n , k ∈ Z .
Si damos los valores k = 0, 1, . . . , n− 1 se obtienen las n raıces n-esimas de z
n√r eiθ/n , n
√r ei(θ+2π)/n , . . . , n
√r ei(θ+2(n−1)π)/n ,
y es facil probar que para cualquier valor de k ∈ Z se obtiene uno de estos n numeros complejos. En particular,
todo numero real tiene n raıces complejas. Por ejemplo, si consideramos el caso n = 2 (las raıces cuadradas),
se obtienen dos raıces cuadradas√r eiθ/2 ,
√r ei(θ+2π)/2
=
√r eiθ/2 ,
√r eiθ/2+iπ
= ±
√r eiθ/2 .
2. FUNCIONES HOLOMORFAS
Definiciones previas. Por D(z0, ε) = z ∈ C : |z − z0| < ε denotaremos el disco de centro z0 y radio ε.
Las nociones de un subconjunto abierto o cerrado en C coinciden con las correspondientes nociones para
subconjuntos de R2.
Dado Ω ⊆ C decimos que:
(1) Un conjunto abierto Ω es conexo si para todo z1, z2 ∈ Ω, existe una curva continua γ : [a, b] −→ Ω
uniendo z1 con z2, es decir, tal que γ(a) = z1, γ(b) = z2 .
(2) Ω es una region o dominio si es un abierto conexo.
(3) Ω es simplemente conexo si es conexo y toda curva cerrada γ (es decir, tal que γ(a) = γ(b)) contenida
en Ω puede deformarse continuamente dentro de Ω en un punto. Esto es equivalente a que Ω sea conexo y que
no exista ninguna curva cerrada contenida en Ω que rodee algun punto que no pertenezca a Ω (es decir, Ω no
tiene “agujeros”).
2

Dada una funcion f : Ω −→ C, los conceptos de lımite y continuidad coinciden con los estudiados a
principios del curso para funciones reales sin mas que considerar f : Ω ⊆ R2 −→ R2. Ademas, se tienen los
mismos resultados para sumas, restas, productos y cocientes de funciones.
Ejercicio. Probar que si existe limz→z0 f(z) = w, entonces
(a) limz→z0 f(z) = w , (b) limz→z0 Re f(z) = Rew ,
(c) limz→z0 Im f(z) = Imw , (d) limz→z0 |f(z)| = |w| ,es decir, que las funciones z, Re z, Im z y |z| son continuas. Sin embargo, la funcion argumento no es continua
en C, aunque sı es continua en C menos una semirrecta que comience en 0.
Ejercicio. Probar que limz→z0 f(z) = w si y solo si limz→z0 Re f(z) = Rew y limz→z0 Im f(z) = Imw.
Dada una funcion f : Ω −→ C, a la hora de definir el concepto de derivada podemos adoptar para tal fin la
definicion de funcion diferenciable f : R2 −→ R2 que ya se estudio anteriormente en este curso. Sin embargo, es
mas adecuado adoptar la estrategia aparentemente inocente de definir la derivada de forma “uni-dimensional”
(como en el caso de funciones f : R −→ R) aprovechando la estructura de cuerpo de C:
Definicion. Sean Ω abierto, f : Ω −→ C, z0 ∈ Ω. Decimos que f es derivable (o derivable en el sentido complejo)
en z0 si existe el lımite (donde z, z0, h ∈ C)
f ′(z0) = limz→z0
f(z)− f(z0)
z − z0= lim
h→0
f(z0 + h)− f(z0)
h.
Se tienen las mismas reglas para el calculo de derivadas con las mismas demostraciones.
Teorema 1. Sean f, g funciones derivables en z0, y sean α, β ∈ C. Entonces:
(1) αf + βg es derivable en z0, y se tiene
(αf + βg)′(z0) = α f ′(z0) + β g′(z0) .
(2) fg es derivable en z0, y
(fg)′(z0) = f ′(z0) g(z0) + f(z0) g′(z0) .
(3) Si g(z0) = 0, f/g es derivable en z0, y(fg
)′(z0) =
f ′(z0) g(z0)− f(z0) g′(z0)
g(z0)2.
Teorema 2. Si f es derivable en z0 y g lo es en f(z0), entonces g f es derivable en z0, y se verifica la regla
de la cadena:
(g f)′(z0) = g′(f(z0)) f′(z0) .
Teorema 3. Si f es derivable en z0, entonces f es continua en z0.
Teorema 4. Sea f = u+ iv, donde u = Re f , v = Im f . Entonces son equivalentes las siguientes afirmaciones:
(1) f es derivable en z0.
(2) f es diferenciable (en sentido real) en z0, y ademas fy(z0) = ifx(z0).
(3) u, v son diferenciables en z0 y se cumplen las ecuaciones de Cauchy-Riemann en z0ux = vy ,
uy = −vx .
Ademas, si f es derivable en z0, entonces f′(z0) = fx(z0).
Demostracion (de algunas partes).
(1) =⇒ (2) fx(z0) = f ′(z0)∂z
∂x= f ′(z0) ; fy(z0) = f ′(z0)
∂z
∂y= if ′(z0) = ifx(z0) .
(2) ⇐⇒ (3) fy = ifx ⇐⇒ uy + ivy = i(ux + ivx). ♯
Ejemplos. Las funciones racionales, es decir, los cocientes de polinomios, son derivables (excepto en los ceros
del denominador).
Ejemplo. La derivada de f(z) = z2/(z + 1) es f ′(z) = (z2 + 2z)/(z + 1)2.
3

Ejemplo. Para comprobar la derivabilidad de la funcion exp(z), podemos comprobar directamente las condi-
ciones de Cauchy-Riemann:
exp(z) = u(z) + iv(z), u(z) = ex cos(y), v(z) = exsen (y), z = x+ iy;
ux = ex cos(y) = vy, uy = −exsen (y) = −vx.
Ejemplo. A cambio, por ejemplo, poniendo f(z) = z = u + iv, vemos que u(x, y) = Re f(z) = x, v(x, y) =
Im f(z) = −y, ası queux = 1, vy = −1.
Por lo tanto, la funcion f(z) = z no es derivable en ningun punto del plano complejo.
Ejemplo. Las funciones Re z y |z| tienen la misma propiedad. Es importante observar que las funciones z,
Re z son infinitamente derivables en el sentido real.
Un comentario sobre el sentido geometrico de la derivada compleja. Suponiendo que existe
f ′(z0) = 0, escribimos
∆f(z0, h) = f(z0) + f ′(z0)h+ o(h), h→ 0,
f ′(z0)h = ei arg f ′(z0) · |f ′(z0)|h.
Estas formulas significan que la aplicacion que lleva el incremento h = (z0+h)−z0 de la variable independiente
en el incremento ∆f(z0, h) = f(z0+h)−f(z0) de la funcion en la primera aproximacion consiste en la dilatacion
|f ′(z0)| veces con la posterior rotacion al angulo arg f ′(z0). En particular, podemos afirmar que la funcion f
conserva los angulos entre las curvas que empiezan en z0, mantiene la orientacion del plano y que todas estas
curvas se dilatan en un numero igual de veces en z0 (es decir, en |f ′(z0)| veces).
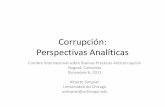
Definicion. La funcion f : G → Ω se llama aplicacion conforme de G a Ω si es biyectiva y derivable en el
sentido complejo.
Se puede demostrar que en este caso, f ′(z) no se anula en G. Por tanto, una aplicacion conforme conserva
la orientacion y conserva los angulos entre las curvas.
Ver Figs. 1 y 2, donde se ve que se conserva la ortogonalidad de lıneas.
−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
Fig. 1: Un mallado del disco unidad utilizando cırculos concentricos
cırculos concentricos y radios
4

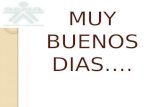
Segun el Teorema de Riemann (que no se demuestra en este curso), dadas dos regiones simplemente
conexas cualesquiera Ω1, Ω2 que no coinciden con C y puntos z1 ∈ Ω1, z2 ∈ Ω2, siempre existe una unica
aplicacion conforme f : Ω1 → Ω2 tal que f(z1) = z2 y f ′(z1) ∈ (0,+∞).
−50 0 50 100 150 200 250
−150
−100
−50
0
50
100
150
Fig. 2: El correspondiente mallado de la imagen del disco unidad
por una aplicacion conforme
Definicion. Decimos que f es holomorfa en un abierto Ω si es derivable en todos los puntos de Ω. Tambien
decimos que f es holomorfa en z0 si lo es en algun disco centrado en z0.
Ejemplos. Si Ω es un dominio y f : Ω −→ R es derivable en z0 ∈ Ω, se tiene que f ′(z0) = 0; si ademas f
es derivable en todos los puntos de Ω, entonces f ′ ≡ 0 en Ω. Consecuentemente, las constantes son las unicas
funciones holomorfas en un dominio que solo toman valores reales. Por tanto, funciones como Re z, Im z, |z|,arg z no son holomorfas en ningun abierto. La funcion |z|2 solo es derivable en 0, y por tanto, no es holomorfa
en ningun abierto.
Ejemplo. f(z) = ez/(z2+1) es holomorfa en C \ −i, i.
Teorema 5. Si f es holomorfa en un abierto Ω, entonces f ′ es holomorfa en Ω.
Demostracion (si f es de clase C2 en sentido real). La funcion f ′ es de clase C1 en Ω y, por tanto,
es diferenciable en Ω (en sentido real). Por otro lado, como f es derivable en Ω verifica las ecuaciones de
Cauchy-Riemann (en Ω) con lo que f ′ tambien las verifica, puesto que
f ′ = U + iV = ux + ivx =⇒
Ux =
(ux
)x=
(vy)x=
(vx)y= Vy ,
Uy =(ux
)y=
(uy
)x= −
(vx)x= −Vx . ♯
Corolario. Para toda funcin holomorfa f : Ω → C, las derivadas f (n) : Ω → C (en el sentido complejo) estan
definidas para todo n ∈ N (y todas son holomorfas).
Definicion. Si Ω es un abierto de R2, una funcion u : Ω −→ R de clase C2 es armonica en Ω si
∆u = uxx + uyy = 0 en Ω .
Teorema 6. Si f es holomorfa en el abierto Ω y es de clase C2 en Ω, entonces Re f e Im f son armonicas en
Ω.
5

3. SERIES NUMERICAS COMPLEJAS
Definiciones y resultados previos.
1. Si ωn = an + ibn, ω = a+ ib,
limn→∞
ωn = ω ⇔ ∀ε > 0 , ∃N tal que |ωn − ω| < ε , ∀n ≥ N
⇔ limn→∞
an = a y limn→∞
bn = b .
2. ωn se dice convergente si tiene lımite finito.
3. Decimos que limn→∞ ωn = ∞ si limn→∞ |ωn| = ∞.
Ejemplos. e−n + i(n+ 1)/n, (−1)nn, in.
4. La serie∑∞
n=1 ωn es, por definicion, el lımite limN→∞∑N
n=1 ωn, y se dice que es convergente si dicho lımite
es finito.
5. Si∑∞
n=1 ωn converge, entonces limn→∞ ωn = 0. Es decir, si limn→∞ ωn es distinto de 0 o no existe, la serie
diverge. (El recıproco es falso).
6. La serie∑∞
n=1 ωn se dice absolutamente convergente si∑∞
n=1 |ωn| converge.
7. Si∑∞
n=1 |ωn| converge, entonces∑∞
n=1 ωn converge. (El recıproco es falso).
8. Sea an ≥ 0.
(1) Si existe limn→∞ a1/nn = r, entonces
r > 1 =⇒∞∑
n=1
an diverge,
0 ≤ r < 1 =⇒∞∑
n=1
an converge.
(2) Si an > 0 y existe limn→∞an+1
an=r, entonces r=limn→∞ a
1/nn y se concluye lo mismo que en (1).
Ejemplo.∞∑
n=1
1 + i2n
3n + in.
9. Sean fn : Ω −→ C. Decimos que fn converge (puntualmente) a f en Ω, si
limn→∞
fn(z) = f(z) , ∀ z ∈ Ω ,
es decir, si
∀ z ∈ Ω , ∀ ε > 0 , ∃N = N(z, ε) tal que |fn(z)− f(z)| < ε , ∀n ≥ N .
10. Dada una sucesion bn ⊂ R, el lımite superior de bn es el supremo del conjunto formado por todos los
lımites de subsucesiones de bn. Por tanto, lim supn→∞ bn existe siempre (aunque pueda ser infinito). Ademas,
se tiene que:
(a) ∃ limn→∞ bn =⇒ lim supn→∞ bn = limn→∞ bn.
(b) lim supn→∞(an + bn) ≤ lim supn→∞ an + lim supn→∞ bn.
(c) Si an ≥ 0 y existe limn→∞ an ∈ (0,+∞) =⇒ lim supn→∞ anbn = (limn→∞ an) (lim supn→∞ bn).
(d) Si an, bn ≥ 0, lim supn→∞ anbn ≤ (lim supn→∞ an) (lim supn→∞ bn).
(e) Si an ≥ 0 y α > 0, entonces lim supn→∞ aαn = (lim supn→∞ an)α.
(f) Si f es una funcion continua y creciente, entonces lim supn→∞ f(an) = f(lim supn→∞ an).
Ejemplos. lim supn→∞
n
n+ 1= 1, lim sup
n→∞(−1)n = 1, lim sup
n→∞
n
n+ ino tiene sentido.
6

4. SERIES DE POTENCIAS
Definicion. Una serie de potencias centrada en z0 es una serie de la forma
(1) φ(x) :=
∞∑n=0
an(z − z0)n .
Teorema 1. La serie (1)
(a) converge absolutamente en D(z0, R) = z : |z−z0| < R, donde R viene dado por la formula de Cauchy
-Hadamard
0 ≤ R :=1
lim supn→∞ |an|1/n≤ ∞ .
(b) diverge para todo z tal que |z − z0| > R.
(c) Si el radio R no es nulo, la suma φ(z) de la serie (1) es holomorfa en D(z0, R).
(d) La serie derivada
(1′) ψ(z) :=∞∑
n=1
nan(z − z0)n−1
converge en el mismo disco D(z0, R). Si R = 0, la derivada compleja de φ es igual a ψ:
φ′(z) = ψ(z), ∀z ∈ D(z0, R).
El numero R se llama el radio de convergencia de la serie y el disco D(z0, R) se llama el disco de convergencia
de la misma.
Si R = 0, la serie (1) solo converge para z = z0. Si R = +∞, la serie (1) converge para todo z en el plano
complejo (que se toma por el disco de convergencia de la serie en este caso).
Se dice que la serie (1′) se obtiene de la serie (1) derivando termino a termino.
El siguiente teorema permite calcular con facilidad el radio de convergencia en muchos casos:
Teorema 2. Si existe limn→∞ |an+1|/|an|, entonces el radio de convergencia R de (1) verifica que
1
R= lim
n→∞
|an+1||an|
.
Ejemplos.∑∞
n=0 zn/n!,
∑∞n=0(−1)nz2n/(2n)!,
∑∞n=0 n
7zn.
Habitualmente, cuando los coeficientes de una serie son comparables con nα (para algun α ∈ R), el radio
de convergencia “suele ser” 1.
El Teorema 1 nos permite asegurar la convergencia de (1) en el interior del disco de convergencia. La
convergencia en la frontera de dicho disco es mucho mas delicada, puesto que, en general, puede ocurrir cualquier
cosa.
Definicion. Una funcion f : Ω → C es analıtica en z0 si existe un disco D(z0, r) ⊂ Ω tal que f se representa
como la suma de una serie de potencias centrada en z0, que converge en D(z0, r).
Una funcion es analıtica en un dominio Ω si es analıtica en todos los puntos de Ω.
¿Por que la serie real de la funcion f(x) =1
1 + x2=
∞∑n=1
(−1)nx2n converge solo si |x| < 1, siendo f una
funcion de clase C∞ (y de hecho analıtica) en todo el eje real? ¿Cuando una funcion real es analıtica?
Ya hemos visto que las funciones analıticas son holomorfas. El siguiente teorema, conocido como Teorema
de Taylor infinito, nos dice que el recıproco tambien es cierto. Es decir, responde a la pregunta ¿que funciones
son analıticas?; ademas, tambien responde a la pregunta ¿cual es el radio de convergencia de la serie?
7

Teorema 3. f es holomorfa en el abierto Ω si y solo si f es analıtica en Ω. Ademas, si a ∈ Ω y r es la mınima
distancia de ∂Ω al punto a, se verifica que
(2) f(z) =∞∑
n=0
f (n)(a)
n!(z − a)n, para todo z ∈ D(a, r) .
En el enunciado de este Teorema, se entiende que r = +∞ si Ω coincide con todo el plano complejo C. En
este caso, D(a,+∞) = C, y la serie en (2) converge para todo z.
Este resultado permite extraer algunas importantes consecuencias:
Corolario 4. Si f es holomorfa en la region Ω, y existe un punto a ∈ Ω tal que
0 = f ′(a) = · · · = f (n)(a) = · · · , para todo n ≥ 1 ,
entonces f es constante en Ω.
Corolario 5 (Ceros de funciones holomorfas). Si f es holomorfa y no constante en Ω, y a ∈ Ω es un cero
de f , (es decir, f(a) = 0), entonces existe un mınimo entero k > 0 tal que
f(z) = (z − a)kg(z) ,
donde g es holomorfa en Ω, y g(a) = 0.
Definicion. En las condiciones del corolario anterior, se dice que f tiene en a un cero de orden k.
Corolario 6. Si f es holomorfa en la region Ω y existe una sucesion an∞n=1 contenida en Ω con todos los andistintos, y tal que
∃ limn→∞
an = a ∈ Ω , y f(an) = 0 , n ≥ 1 ,
entonces f(z) = 0 para todo z ∈ Ω.
5. FUNCIONES ELEMENTALES
La funcion exponencial. La definimos mediante la serie de potencias (que tiene radio de convergencia infinito)
(1) ez := f(z) =∞∑
n=0
zn
n!, z ∈ C .
Con esta definicion es facil verificar las principales propiedades de la funcion exponencial:
1. Si x ∈ R, f(x) = ex, es decir f(x) coincide con la funcion exponencial real. En efecto, usando el Teorema
del valor medio tenemos que
ex −N∑
n=0
xn
n!= f (n+1)(ξ)
xn+1
(N + 1)!≡ EN (x) , 0 < ξ < x , (o x < ξ < 0) ,
y la propiedad es una consecuencia de que
|EN (x)| ≤ e|x||x|N+1
(N + 1)!-→
N→∞0 .
2. f(z) f(w) = f(z + w), ∀ z, w ∈ C. En efecto
f(z) f(w) =( ∞∑
k=0
zk
k!
)( ∞∑m=0
wm
m!
)=
∞∑k=0
∞∑m=0
zkwm
k!m!
=∞∑
n=0
n∑j=0
zj
j!
wn−j
(n− j)!=
∞∑n=0
1
n!
n∑j=0
(n
j
)zjwn−j
=∞∑
n=0
(z + w)n
n!= f(z + w) .
8

3. Si y ∈ R, entonces f(iy) = cos y + i sen y = eiy puesto que
cos y =∞∑
n=0
(−1)ny2n
(2n)!=
∞∑n=0
(iy)2n
(2n)!,
i sen y = i∞∑
n=0
(−1)ny2n+1
(2n+ 1)!=
∞∑n=0
(iy)2n+1
(2n+ 1)!,
por lo que, sumando
cos y + i sen y =
∞∑n=0
(iy)n
n!= eiy .
4. Si z = x+ iy ∈ C, entonces f(x+ iy) = f(x) f(iy) = exeiy = ex(cos y + i sen y), lo que justifica la definicion
de (1) como la funcion exponencial.
5. La funcion exponencial tiene perıodo 2πi, puesto que ez+2πi = eze2πi = ez(cos 2π + i sen 2π) = ez.
6. Segun el Teorema 1 de la seccin anterior, la funcin ez es holomorfa en todo el plano complejo.
7. Derivando la serie (1) termino a termino obtenemos que (ez)′ = ez.
8. |ez| = eRe z, arg ez = Im z.
9. ez = ez.
La funcion logaritmo. Decimos que
w = log z ⇐⇒ z = ew .
Poniendo w = log z = u+ iv, z = reiθ, tenemos que
z = reiθ = ew = eueiv =⇒r = eu ,
θ = v .=⇒
u = log r ,
v = θ .
Por tanto,
log z = log |z|+ i arg z .
Para que log z sea una funcion univaluada (una autentica funcion) hay que elegir un intervalo de argumentos
de longitud 2π. La rama principal del logaritmo se obtiene al tomar arg z ∈ (−π, π].Por otra parte, las ecuaciones de Cauchy-Riemann nos dicen que log z es una funcion holomorfa en la region
en que es una funcion continua. Ası pues, log z es holomorfa en C \ (−∞, 0] si se toman los argumentos en el
intervalo (−π, π).Es facil comprobar que (log z)′ = 1/z, hallando la derivada parcial de log z con respecto a x, o bien usando
que el logaritmo es la funcion inversa de la exponencial.
La funcion potencial. Si a ∈ C, la funciones f(z) = az y g(z) = za se definen como
az = ez log a (a = 0) , za = ea log z .
Por tanto, az es holomorfa en todo C, mientras que za es holomorfa en C \ (−∞, 0]; si a ∈ Z, za es holomorfa
en C \ 0, y si a ∈ N, za es holomorfa en todo C.
Las funciones trigonometricas. Las funciones seno y coseno se definen por medio de las siguientes series de
potencias que tienen radio de convergencia infinito,
cos z =∞∑
n=0
(−1)nz2n
(2n)!, sen z =
∞∑n=0
(−1)nz2n+1
(2n+ 1)!.
Con las mismas manipulaciones que en el caso z = y ∈ R, se tiene entonces que
(2) eiz = cos z + i sen z , ∀z ∈ C .
Por simple inspeccion de las series que definen sen z y cos z, vemos que cos(−z) = cos z y que sen (−z) = −sen z,
por lo que
(3) e−iz = cos z − i sen z .
9

Sumando y restando (2) y (3) obtenemos que
(4) cos z =eiz + e−iz
2, sen z =
eiz − e−iz
2i.
Las restantes funciones trigonometricas se definen a partir de ellas:
tan z =sen z
cos z, cotan z =
cos z
sen z, sec z =
1
cos z, cosec z =
1
sen z,
y son holomorfas en todo C salvo en los ceros de los denominadores respectivos.
Utilizando las relaciones (4) es sencillo obtener muchas de las relaciones conocidas para el caso real, por
ejemplo,
cos2z + sen2z = 1 , sen 2z = 2 sen z cos z , cos 2z = cos2z − sen2z .
Las funciones hiperbolicas. Como en el caso real se definen como
(5) senh z =ez − e−z
2, cosh z =
ez + e−z
2,
que son holomorfas en todo C, y
tanh z =senh z
cosh z, cotanh z =
cosh z
senh z, sech z =
1
cosh z, cosech z =
1
senh z,
que son holomorfas en todo C salvo en los ceros de los denominadores respectivos.
Es interesante conocer las relaciones con las funciones trigonometricas que se siguen de (4) y (5)
cos z = cosh(iz) , sen z = −i senh (iz) ,cosh z = cos(iz) , senh z = −i sen (iz) ,
y que implican las relaciones
cosh2z − senh2z = 1 , senh 2z = 2 senh z cosh z , cosh 2z = cosh2z + senh2z .
5. SERIES DE LAURENT Y RESIDUOS
Teorema 1 (Teorema de Laurent). (a) Si f es holomorfa en Ω = z : r < |z − a| < R (0 ≤ r < R ≤ ∞),
entonces existe una sucesion de numeros complejos cn∞n=−∞ tal que
f(z) =∞∑
n=−∞cn(z − a)n , ∀ z ∈ Ω .
La serie converge en cualquier punto de Ω.
(b) Supongamos que f no se extiende como funcion holomorfa de Ω a ningun anillo mas grande
Ω′ = z : r′ < |z − a| < R′ ⊃ Ω, con r′ < r o R′ > R. Entonces se tiene que
r = lim supn→∞
|c−n|1/n ,1
R= lim sup
n→∞|cn|1/n .
Ejemplo. Desarrollar en serie de Laurent f(z) = 1/(z2 − 4z + 3), en las regiones |z| < 1, 1 < |z| < 3 y
|z| > 3.Definicion. Sea f : D(f) → C. Un punto a es una singularidad aislada de f , si f esta definida y es
holomorfa en D(a, ε) \ a para algun radio ε > 0, donde el disco perforado D(a, ε) \ a se contiene en el
dominio de definicon D(f) de f .
Definicion. Sea a una singularidad aislada de f . Por el desarrollo de f en serie de Laurent en torno de z = a
se entiende el el desarrollo de f en una serie de Laurent en un disco perforado D(a,R) \ z, donde el radio R
es positivo (este disco perforado es un caso particular del anillo z : r < |z − a| < R, cuando el radio interior
r es nulo).
10

Definicion. Si a es una singularidad aislada de f , el residuo de f en z = a es el coeficiente c−1 de su
desarrollo en serie de Laurent en torno de z = a. Se escribe Res (f, a) = c−1.
Sea a es una singularidad aislada de f y sea
(1) f(z) =∞∑
n=−∞cn(z − a)n , ∀ z, 0 < |z − a| < ϵ
un desarrollo de Laurent de f en torno de z = a.
Entonces puede ocurrir una de las tres siguientes posibilidades:
(1) Que a sea una singularidad evitable de f , es decir, existe el lımite de f cuando z tiende al punto a, y
si se define
f(a) := limz→a
f(z) ,
entonces f es holomorfa en un entorno de a (incluyendo el punto a).
Teorema. Sean Ω un abierto y a ∈ Ω. Sea f una funcion holomorfa en Ω \ a. Entonces son equivalentes las
siguientes afirmaciones:
1) f esta acotada en un entorno de a;
2) Existe un lımite limz→a f(z) ∈ C;
3) a es una singularidad evitable de f .
(2) Que a sea un polo de f . Por definicion, esto ocurre si
limz→a
f(z) = ∞ .
Proposicion. Sean Ω un abierto, a ∈ Ω y f una funcion holomorfa en Ω \ a. Entonces, a es un polo de f
si y solo si existe un numero entero k ≥ 1 (k se denomina el orden del polo de f en a) tal que
f(z) =g(z)
(z − a)k,
con g holomorfa en Ω, y g(a) = 0.
(3) Que a sea una singularidad esencial de f . Por definicion esto ocurre si no ocurre ni (1) ni (2).
El famoso Teorema grande de Picard, dice que a es una singularidad esencial de f si y solo si, para todo
ε > 0, f(D(a, ε) \ a) es todo C salvo, a lo sumo, un punto. En particular, para todo w ∈ C, existe una
sucesion an −→ a con f(an) −→ w.
La relacion entre la serie de Laurent y el tipo de singularidad aislada
1) Si a es una singularidad evitable de f , entonces f admite un desarrollo de Taylor
f(z) =
∞∑n=0
cn(z − a)n
en un cierto disco D(a, r).
2) Si f tiene en a un polo de orden k, entonces f admite un desarrollo de Laurent del tipo
f(z) =c−k
(z − a)k+ · · ·+ c−1
z − a+
∞∑n=0
cn(z − a)n =
∞∑n=−k
cn(z − a)n, c−k = 0 ,
en un disco perforado D(a, r) \ a.3) Por ultimo, si f tiene en a una singularidad esencial, entonces f admite un desarrollo de Laurent
del tipo
f(z) =∞∑
n=−∞cn(z − a)n,
con infinitos c−n (n ∈ N) distintos de cero.
11

Ejemplo. El origen es una singularidad esencial de la funcion f(z) = e1/z, pues
e1/z =
∞∑m=0
1
m!
(1z
)m
=
0∑n=−∞
zn
(−n)!, z = 0 .
Ejemplo. El origen es una singularidad esencial de la funcion f(z) = e1/z, pues
e1/z =∞∑
m=0
1
m!
(1z
)m
=0∑
n=−∞
zn
(−n)!, z = 0 .
Un ejemplo de calculo de residuos. Consideremos la funcion racional
f(z) =1
z2(z2 + 1).
Su descomposicion en fracciones simples es
f(z) =1
z2+
i/2
z − i− i/2
z + i.
Sus singularidades evitables son los puntos a = 0, a = i y a = −i. Las estudiamos por separado.
1. La singularidad aislada a = 0 de f . La funcion i/2z−i −
i/2z+i es holomorfa en el disco D(0, 1). Segun el
Teorema 1 de la Seccion 4, la serie de Laurent de la funcion f centrada en a = 0 converge en 0 < |z| < 1 y tiene
la forma
f(z) =1
z2+
∞∑n=0
anzn,
donde∑∞
n=0 anzn es la serie de Taylor de la funcion i/2
z−i −i/2z+i centrada en a = 0. (Se dice que
1
z2es la parte
principal de la serie de Laurent de f en el punto a = 0). Por tanto, a = 0 es un polo doble de f , y
Res (f, 0) = 0.
2. Las singularidades aisladas a = ±i. De la misma manera, vemos que la parte principal de la serie de
Laurent de f en el punto a = i es i/2z−i , mientras que la parte principal de la serie de Laurent de f en el punto
−i es i/2z+i . Los puntos i, −i son polos simples de f , y
Res (f, i) =i
2, Res (f,−i) = − i
2.
Formulas de calculo de residuos
(1) Si f tiene en a un polo de orden 1 (es decir, un polo simple), entonces
Res (f, a) = limz→a
(z − a)f(z) ,
(2) Si f tiene en a un polo de orden k, entonces
Res (f, a) =1
(k − 1)!limz→a
dk−1
dzk−1
((z − a)kf(z)
).
(3) Si f tiene en a una singularidad esencial, NO existe una formula para el residuo de f en a; la forma
de hallar el residuo es encontrar el coeficiente c−1 de la potencia (z − a)−1 del desarrollo en serie Laurent de f
(este metodo tambien es valido si a es un polo de f).
Si f tiene una singularidad aislada en a y limz→a(z − a)f(z) = l existe y es distinto de 0 y de ∞, entonces
f tiene en a un polo de orden 1 y su residuo es l.
Definicion. f es meromorfa en Ω si solo tiene singularidades aisladas en Ω, y estas son o bien evitables, o
bien son polos.
Teorema 2. f es meromorfa en el abierto Ω si y solo si f = g/h con g, h funciones holomorfas en Ω y h no
es identicamente nula.
12

6. INTEGRACION COMPLEJA
Integracion a lo largo de curvas. Todas las curvas γ : [a, b] −→ C que se consideren de ahora en adelante
seran de clase C1 a trozos.
Si f : [a, b] −→ C, es una funcion con valores complejos, f = u+ iv, y sus partes real e imaginaria u, v son
integragles en [a, b], la integral de f en [a, b] se define como∫ b
a
f(t) dt =
∫ b
a
u(t) dt+ i
∫ b
a
v(t) dt .
Las propiedades de la integral de Riemann de funciones reales de variable real implican inmediatamente que:
(1)
∫ b
a
(αf + βg) = α
∫ b
a
f + β
∫ b
a
g, ∀α, β ∈ C.
(2)∣∣∣ ∫ b
a
f∣∣∣ ≤ ∫ b
a
|f |.
Recordemos que si γ : [a, b] −→ C es una curva, γ(t) = (x(t), y(t)) = x(t) + iy(t), la integral a lo largo de
γ de una 1-forma P dx+Qdy (o del campo vectorial (P,Q)) se define mediante∫γ
P dx+Qdy =
∫ b
a
(P (x(t), y(t))x′(t) +Q(x(t), y(t)) y′(t)
)dt .
Vamos a usar esta definicion en el caso de funciones P,Q complejas.
Si f esta definida sobre γ, es decir f : γ([a, b]) −→ C y, por ejemplo, es continua, entonces tiene sentido
definir ∫γ
f(z) dz =
∫γ
f dx+ if dy .
Por tanto, ∫γ
f(z) dz =
∫ b
a
(f(γ(t))x′(t) + if(γ(t)) y′(t)
)dt =
∫ b
a
f(γ(t)) (x′(t) + iy′(t)) dt ,
y como x′(t) + iy′(t) = γ′(t), tenemos que∫γ
f(z) dz =
∫ b
a
f(γ(t)) γ′(t) dt .
Ejemplos.∫γz dz, donde γ(t) = t+ 2ti para t ∈ [0, 1];
∫|z|=1
dz/z.
Reparametrizaciones. Si t = t(s) es una reparametrizacion de γ, es decir, t : [c, d] −→ [a, b] es C1 y creciente,
entonces γ(t) es tambien una funcion de clase C1 a trozos que describe la curva γ([a, b]), y se tiene que∫ b
a
f(γ(t)) γ′(t) dt =
∫ d
c
f(γ(t(s))) γ′(t(s)) t′(s) ds =
∫ d
c
f((γ t)(s)) (γ t)′(s) ds ,
es decir, que la definicion de∫γf no depende de la parametrizacion elegida de la curva γ, siempre que consid-
eremos parametrizaciones con la misma orientacion.
Cambio de orientacion. El arco opuesto a γ : [a, b] −→ C es el arco γ : [−b,−a] −→ C dado por γ−(t) = γ(−t)y, por tanto, se tiene que∫
γ−f(z) dz =
∫ −a
−b
f(γ(−t)) (−γ′(−t)) dt = −∫ b
a
f(γ(t)) γ′(t) dt = −∫γ
f(z) dz ,
y, por tanto, un cambio de orientacion en la curva a lo largo de la cual se integra, produce un cambio de signo
en la integral.
Integracion respecto a la longitud de arco. Definimos la integral de f respecto a la longitud de arco en γ
como ∫γ
f(z) |dz| =∫ b
a
f(γ(t)) |γ′(t)| dt =∫γ
f ds ,
13

donde s denota el parametro arco. Es sencillo comprobar que este tipo de integracion es no solo independiente
respecto a los cambios de parametrizacion, sino tambien de orientacion:∫γ
f(z) |dz| =∫γ
f(z) |dz| .
Teorema 1. Sean γ, γi curvas, α, β ∈ C, y f, g funciones continuas. Si long γ =∫γ|dz| denota la longitud de
γ, entonces:
(1)
∫γ
(α f + β g) dz = α
∫γ
f dz + β
∫γ
g dz,
(2)
∫γ1∪···∪γn
f dz =
∫γ1
f dz + · · ·+∫γn
f dz, si long (γi ∩ γj) = 0 para i = j,
(3)∣∣∣ ∫
γ
f(z) dz∣∣∣ ≤ ∫
γ
|f(z)| |dz|,
(4) si |f | ≤M sobre γ, entonces∣∣∣ ∫γ f dz∣∣∣ ≤M long γ.
Teorema 2. Si f : Ω −→ C es continua en el abierto Ω y f tiene primitiva en Ω, es decir, si existe una funcion
F holomorfa en Ω tal que f(z) = F ′(z) para todo z ∈ Ω, entonces, dada cualquier curva γ : [a, b] −→ Ω, se
tiene
(1)
∫γ
f(z) dz = F (γ(b))− F (γ(a)),
(2)
∫γ
f(z) dz = 0, si γ es cerrada (es decir, si γ(a) = γ(b)).
Demostracion. (1) es una consecuencia de la reglas de Barrow y de la cadena:∫γ
f(z) dz =
∫ b
a
f(γ(t)) γ′(t) dt =
∫ b
α
F ′(γ(t)) γ′(t) dt =
∫ b
a
(F γ)′(t) dt = F (γ(b))− F (γ(a)) .
La parte (2) es una consecuencia inmediata de (1). ♯
Ejemplo 1. Para toda curva cerrada γ,
∫γ
ezdz = 0.
Ejemplo 2.
∫γ
dz
z2= 0, para toda curva cerrada γ que no pase por el origen.
6. EL TEOREMA DE CAUCHY, EL TEOREMA DE LOS RESIDUOS Y SUS APLICACIONES
Teorema 1 (Teorema integral de Cauchy). Si f : Ω −→ C es holomorfa en el abierto simplemente conexo
Ω, se tiene que ∫γ
f = 0 , para toda curva cerrada γ ⊂ Ω .
Demostracion (si f ′ es continua). Si γ es una curva cerrada simple, sea S el dominio encerrado por γ. Por
el Teorema de Green con P (x, y) = f(z), Q(x, y) = i f(z), se tiene que∫γ
f(z) dz =
∫∂S
f(z) dx+ i f(z) dy =
∫∫S
(∂Q∂x
− ∂P
∂y
)dx dy =
∫∫S
(ifx − fy) dx dy = 0 ,
donde la ultima igualdad es consecuencia de las ecuaciones de Cauchy-Riemann.
Si γ no es simple, es union de curvas cerradas simples y la integral a lo largo de cada una de ellas es cero
por lo anterior. ♯
Ejemplos. Si γ es cualquier curva cerrada, se tiene∫γ
ez2
dz = 0 .
Si γ es cualquier curva cerrada contenida en el semiplano superior, se tiene∫γ
ez2
+ ecos z
z + 1dz = 0 .
De hecho, no es difıcil generalizar el teorema anterior a funciones holomorfas con un numero finito de
singularidades.
14

Si γ es una curva cerrada simple, el conocido teorema de la curva de Jordan, nos asegura que γ divide al
plano complejo en dos regiones: Ext γ (que contiene un entorno del punto del infinito) e Int γ (que es simplemente
conexa).
Observacion: Siempre que no se diga explıcitamente lo contrario, supondremos que las curvas cerradas
simples estan orientadas positivamente, es decir, en sentido contrario al movimiento de las agujas del reloj.
Se tiene la siguiente maravillosa formula:
Teorema 2 (Formula integral de Cauchy). Sea Ω un dominio simplemente conexo en el plano complejo. Sea
f : Ω −→ C una funcin holomorfa. Si γ es una curva cerrada simple contenida en Ω, orientada positivamente,
entonces1
2πi
∫γ
f(z)
z − adz =
f(a) , si a ∈ Int γ ,
0 , si a ∈ Ext γ .
En particular, si γ es la frontera de un disco, se tiene lo siguiente.
Corolario. Si f es holomorfa en el abierto Ω, y D es un disco tal que D ⊂ Ω, entonces
f(z) =1
2πi
∫∂D
f(w)
w − zdw , ∀ z ∈ D .
La Formula Integral de Cauchy nos dice que los valores en Int γ de las funciones holomorfas estan prescritos
por sus valores sobre γ.
De hecho, las demostraciones completas de los Teoremas de Secciones 2 y 3 se basan en la formula integral
de Cauchy.
Teorema 3 (Teorema de los residuos) Sean Ω un abierto simplemente conexo, f una funcion holomorfa en Ω
salvo en un conjunto aj de singularidades aisladas. Sea D un dominio tal que D ⊂ Ω y cuya frontera γ no
contiene a ningun aj. Entonces ∫γ
f(z) dz = 2πi∑aj∈D
Res (f, aj)
(se elige la orientacion positiva de γ).
Corolario. Si z1, . . . , zn son numeros complejos distintos y P (z) es un polinomio de grado menor que n, se
tiene la descomposicion en fracciones simples
Q(z) =P (z)
(z − z1) · · · (z − zn)=
Res (Q, z1)
(z − z1)+ · · ·+ Res (Q, zn)
(z − zn), con Res (Q, zj) = lim
z→zj(z − zj)Q(z) .
Teorema 4 (Desigualdad de Cauchy).
Si f es holomorfa en D(a, r) = z ∈ C : |z − a| ≤ r, y si
Mr = max|f(z)| : |z − a| = r,
entonces
|f (n)(a)| ≤ Mr n!
rn.
Demostracion.
|f (n)(a)| ≤ n!
2π
∫Dr
|f(z)||z − a|n+1
|dz| ≤ n!
2π
∫Dr
Mr
rn+1|dz| = Mr n!
rn. ♯
Consecuencias sencillas de esta desigualdad son los conocidos resultados siguientes:
Corolario 1 (Teorema de Liouville). Si f es entera (holomorfa en C) y acotada, entonces es constante.
Corolario 2 (Teorema fundamental del Algebra). Todo polinomio (con coeficientes complejos) de grado
n tiene n raıces complejas (contado su multiplicidad ).
15

Aplicacion: Transformada de Laplace. Si f : [0,∞) −→ C es continua a trozos y verifica que
limx→∞ f(x) e−ax = 0 para algun a ∈ R, entonces la funcion (la transformada de Laplace de f)
Lf(z) =
∫ ∞
0
f(x) e−zx dx
es holomorfa en el semiplano z ∈ C : Re z > a.Ejemplo. Descomponer en fracciones simples
1
z3 − z.
Proposicion 1.∫ 2π
0
R(cos θ, sen θ) dθ =
∫ 2π
0
R(eiθ + e−iθ
2,eiθ − e−iθ
2i
) ieiθdθieiθ
=
∫|z|=1
R(12
(z +
1
z
),1
2i
(z − 1
z
)) dziz
.
Introducimos la notacion
v.p.
∫ ∞
−∞f(x) dx
def= lim
R→+∞
∫ R
−R
f(x) dx.
Proposicion 2. Sea f una funcion que es analıtica en un dominio que contenga a la clausura del semiplano
superior H = z ∈ C : Im z > 0, salvo en un numero finito de singularidades, que no estan sobre el eje real.
(1) Si limz→∞ z f(z) = 0, tenemos que
v.p.
∫ ∞
−∞f(x) dx = 2πi
∑a∈Sing(f)Im a>0
Res (f, a)
(2) Si limz→∞ f(z) = 0, y c > 0, entonces
v.p.
∫ ∞
−∞f(x) eicx dx = 2πi
∑a∈Sing(f)Im a>0
Res(f(z) eicz, a
)
Se afirma, en particular, que los valores principales de estas integrales existen.
16