Caracteristicas de los instrumentos
25
-
Upload
lilo-rojas -
Category
Documents
-
view
169 -
download
0
Transcript of Caracteristicas de los instrumentos


Los instrumentos no son ideales sino reales, y por lo tanto tiene una serie de limitaciones que se deben tomar en cuenta.
Existen dos características importantes en los sistemas de medición


Describen el comportamiento de un sensor o sistema de medida cuando la magnitud a medir permanece o se considera constante en el tiempo.
Algunas características son:

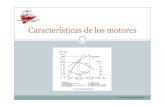
Es la gráfica que se produce de la salida conrespecto a las variaciones de la entrada delsistema de medida. Esta sirve para efectuarcalibraciones sencillas y de esta maneta corregirlas lecturas que se hagan con el instrumento.Algunos parámetros de la curva de calibración:

• Margen de medida:Es el conjunto de valores comprendidos entre los límites superior e inferior entre los cuales se puede efectuar la medida.• Fondo de escala:Es la diferencia entre los límites superior e inferior de medida.• Salida a fondo de escala:Es la diferencia entre los límites superior e inferior de medida.

Es la razón de cambio de la señal de salida con respecto al cambio de la señal de entrada.
O bien, también se dice que es la capacidad de un instrumento de registrar los pequeños cambios o variaciones que se presente en la señal de entrada.

No linealidad:
Es un error producto de la máxima desviación de la curva de calibración con respecto a la curva linealizada por la que se ha aproximado.

Zona muerta:
Es aquella donde la sensibilidad del instrumento es nula lo que hace que no cambie su indicación y señal de salida.

Histéresis: Es similar a la repetibilidad, solo que en este caso el proceso de medición se efectuara en dos direcciones diferentes y la histéresis es la diferencia entre las dos mediciones.
Ejemplo:Hallar la histéresis de un termómetro de 49°C en un objeto de 50°C cuando el objeto pasa de más frio a más caliente y 51°C cuando pasa de caliente a más frio.En este caso la histéresis es ±1°C.
Deriva de instrumento de medición: Es la máxima variación experimentada a la salida, durante un periodo de tiempo determinado, cuando la variable medida se mantiene en un valor constante durante es periodo.

Saturación:
Es el área de valores de la variable medida, donde el instrumento ha sobrepasado su capacidad máxima de operación, por lo que se presenta un comportamiento distinto a la operación normal, y, por lo tanto, no confiable.

Resolución:
Es el mínimo intervalo entre dos valores adyacentes que pueden ser distinguidos el uno del otro.Ej: La regla milimetrada que se muestra, tiene una resolución igual a 0.5mm.

Precisión:
Es la capacidad de un instrumento de dar el mismo resultado en mediciones diferentes. La precisión se cuantifica a partir de dos términos denominados repetibilidad y reproducibilidad.

Repetibilidad:
Establece la precisión de un instrumento cuando el conjunto de medidas de la misma magnitud se realiza de forma repetitiva y utilizando las mismas condiciones de medida. Las condiciones de repetibilidad incluyen:
- El mismo procedimiento de medida. - El mismo criterio de lectura. - El mismo instrumento de medida utilizando las mismas condiciones. - El mismo sistema.
- El mismo observador. - Medidas sucesivas con poco intervalo de tiempo entre ellas.
Reproducibilidad:
Establece la precisión del proceso de medida cuando el conjunto de medidas se realiza bajo condiciones de medida cambiantes.

Exactitud:Es la capacidad de un instrumento de acercarse al valor de la magnitud real, es decir, la cercanía del valor experimental obtenido con el valor exacto de una medida.

A diferencia de las características estáticas las características dinámicas de un sensor o sistema de medida describen su comportamiento ante una entrada variable.

Dicha entrada puedeser transitoria (impulso,escalón, rampa),periódica senoidal) oaleatoria (ruido). Laelección de una u otradepende del tipo desensor.

En el ámbito de la instrumentación es importantetener en cuenta las diferentes respuestas al escalónde los sistemas; dichas respuestas dependen delorden del numerador y el denominador de su funciónde transferencia.
La mayoría de los casos, la respuesta es similar a laque presentaría un sistema de orden cero, primerorden o de segundo orden (en el denominador).

Son aquellos que en su ecuación diferencial no hay derivadas, su respuesta temporal y frecuencial no experimentara cambios.Algunos sensores con sistema de orden cero son:Potenciómetro lineal y galgas extensiométricas

El parámetro dinámico que representa un sistema de primer orden es su constante de tiempo, tiempo de levantamiento y tiempo de asentamiento
Tiempo de asentamiento: Es el tiempo que tarda una respuesta en estabilizarse en un valor.
Tiempo de levantamiento: Es el tiempo requerido para que la respuesta pase del 10 al 90%, del 5 al 95% o del 0 al 100% de su valor final.

Los sistemas de primer orden tienen un elemento que almacena energía y otro que la disipa. Ejemplo: filtro pasa altas pasivo

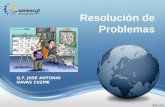
Los sistemas de segundo orden responden dediferentes formas ante una entrada escalón unitario,es decir dependiendo el amortiguamiento quetengan, los sistemas son más lentos o más rápidos, acontinuación se citan los tipos de amortiguamientodel más lento al más rápido.

1. sistema sobreamortiguado2. Sistema críticamente amortiguado3. Sistema subamortiguado

Los sistemas de segundo orden tienen dos elementos que almacenan energía y dos que la disipan. A continuación un ejemplo:

Consideraciones que se deben tener en cuenta a la hora de elegir un sensor:• Magnitud a medir.• Características de entrada/salida.• Características de alimentación.• Características ambientales.• Otros factores como: peso, dimensiones, coste de
mantenimiento y de sustitución entre otros.