CCÁÁLLCCUULLOO II NNTTEEGGRRAALL - … · Hemos visto que, por el cálculo diferencial o proceso...
70
Análisis Matemático I - Página 1 C C Á Á L L C C U U L L O O I I N N T T E E G G R R A A L L I I N N T T E E G G R R A A L L I I N N D D E E F F I I N N I I D D A A Hemos visto que, por el cálculo diferencial o proceso de derivación es posible definir con precisión, recta tangente a una curva en un punto. Por el cálculo integral o proceso de integración, veremos más adelante, que va a ser posible hallar áreas de figuras planas limitadas por gráficos de funciones continuas, utilizando el concepto de Integral Definida. Si bien ambos problemas se resuelven por procesos independientes, se vinculan entre sí, porque el cálculo de áreas se reduce al cálculo de primitivas o antiderivadas. Veremos que el teorema fundamental del cálculo integral relaciona el con- cepto de derivada con el de integral definida. Aunque deberíamos estudiar en principio lo mencionado, nos dedicaremos primero al cálculo de pri- mitivas, es decir definiremos la Integral Indefinida. Recordemos antes una consecuencia, ya vista, del teorema de Lagrange: si y g son continuas en [a , b] y derivables en (a , b) y (x) = g (x) x (a , b) entonces (x) = g(x) + k, x [a,b]. Es decir, existe k R tal que (x) = g(x) + k, x [a,b]. Dada una función (x) continua en [a , b] nos propondremos, entonces, encontrar una F(x) tam- bién continua en el mismo conjunto, tal que su derivada sea (x) . Es decir F (x) = (x). En cierta forma estaremos haciendo el camino inverso de la derivación, con la condición de que (x) sea continua, y diremos que: La función F es una primitiva de , si F es derivable en [a , b] y es su derivada. Por ejemplo: F(x) = 2 1 x 2 es una primitiva de (x) = x en (continua en , en particular en cualquier intervalo [a , b] ), por que F (x) = 2 1 . 2 x = (x) x . Observemos que F , es una primitiva de pues, de acuerdo a la consecuencia del teorema de La- grange, existen infinitas funciones diferentes cuya derivada es . Así es que g(x) = 2 1 x 2 + 1 , es también una primitiva de pues es g (x) = (x). Es decir que si F es una primitiva de en un conjunto D, entonces toda otra primitiva tiene la forma (sin especificar la constante): g(x) = F(x) + k k expresión que indica una familia infinita de primitivas, dado que se cumple que
Transcript of CCÁÁLLCCUULLOO II NNTTEEGGRRAALL - … · Hemos visto que, por el cálculo diferencial o proceso...
Análisis Matemático I - Página 1
CCCÁÁÁLLLCCCUUU LLLOOO III NNN TTT EEEGGGRRRAAALLL
III NNN TTT EEEGGGRRRAAALLL III NNN DDDEEEFFFIII NNN III DDDAAA
Hemos visto que, por el cálculo diferencial o proceso de derivación es posible definir con precisión, recta tangente a una curva en un punto. Por el cálculo integral o proceso de integración, veremos más adelante, que va a ser posible hallar áreas de figuras planas limitadas por gráficos de funciones continuas, utilizando el concepto de Integral Definida. Si bien ambos problemas se resuelven por procesos independientes, se vinculan entre sí, porque el cálculo de áreas se reduce al cálculo de primitivas o antiderivadas. Veremos que el teorema fundamental del cálculo integral relaciona el con-cepto de derivada con el de integral definida.
Aunque deberíamos estudiar en principio lo mencionado, nos dedicaremos primero al cálculo de pri-mitivas, es decir definiremos la Integral Indefinida.
Recordemos antes una consecuencia, ya vista, del teorema de Lagrange: si
y g son continuas en
[a , b] y derivables en (a , b) y (x) = g (x)
x
(a , b) entonces (x) = g(x) + k, x [a,b].
Es decir, existe k
R tal que (x) = g(x) + k, x [a,b].
Dada una función (x) continua en [a , b] nos propondremos, entonces, encontrar una F(x) tam-
bién continua en el mismo conjunto, tal que su derivada sea (x) . Es decir F (x) = (x).
En cierta forma estaremos haciendo el camino inverso de la derivación, con la condición de que (x) sea continua, y diremos que:
La función F es una primitiva de , si F es derivable en [a , b] y es su derivada.
Por ejemplo: F(x) = 2
1 x2 es una primitiva de (x) = x en
(continua en , en particular en
cualquier intervalo [a , b] ), por que F (x) = 2
1 . 2 x = (x) x
.
Observemos que F , es una primitiva de
pues, de acuerdo a la consecuencia del teorema de La-
grange, existen infinitas funciones diferentes cuya derivada es . Así es que g(x) = 2
1 x2 + 1 , es
también una primitiva de
pues es g (x) = (x). Es decir que si F es una primitiva de
en un conjunto D, entonces toda otra primitiva tiene la forma (sin especificar la constante): g(x) = F(x) + k
k
expresión que indica una familia infinita de primitivas, dado que se cumple que

Análisis Matemático I - Página 2
g (x) = (x) x D . En el ejemplo, la familia infinita de primitivas es g(x) = 2
1
x2 + k , k
.
Para designar este conjunto infinito de primitivas se utiliza el símbolo , que se lee integral inde-
finida de
. A
se la llama integrando o función subintegral. Es más común utilizar el símbolo
(x) dx (siendo esta notación debida a Leibniz).
Sintetizando, ¿qué significa calcular la integral indefinida de ?.
Calcular la integral indefinida de , (x) dx , significa encontrar todas las primitivas de
.
Simbolizaremos esto con (x) dx = F(x) + k , F (x) = (x) , k
.
En el ejemplo visto será x dx = 1
2 x2 + k .
Análogamente, dada (x) = x2 , entonces una primitiva de es F(x) = 1
3 x3 pues
F (x)= 1
3 3x2 = (x) En símbolos el conjunto infinito de primitivas es x2 dx =
1
3x3 + k.
En general cuando es de la forma xa , a
y a
- 1 es:
Propiedad 1 : xa dx = x
a + 1
a+1
+ k .
Así es que dx = x + k , con a = 0
Integración Inmediata
En algunos casos es muy sencillo encontrar primitivas, por ejemplo:
ex dx = ex + k pues (ex) = ex
sen x dx = - cos x + k pues (-cos x) = -(-sen x) = sen x
cos x dx = sen x + k pues (sen x) = cos x
1
x dx = ln x + k ó ln x + k pues (ln x ) =
1
x
y (ln x) = 1
x
1
1 - x
2 dx = arcsen x + k pues (arcsen x) =
1
1 - x
2

Análisis Matemático I - Página 3
1
1 + x
2 dx = arctg x + k pues (arctg x) =
1
1 + x
2
ch x dx = sh x + k pues (sh x) = ch x
1
x - 1 ch x + k = ln ( x + x 1
2
2 dx karg )
Así podríamos hacer una tabla de integrales, ayudándonos con la tabla de derivadas. Pero como no siempre es sencillo realizar el cálculo de primitivas, deberemos hallar métodos que faciliten la resolu-ción de este problema.
Veamos primero dos propiedades que ayudan al cálculo de integrales indefinidas.
Propiedad 2: Si
y g son dos funciones continuas en un dominio D, F es una primitiva de
y
G es una primitiva de g en D, entonces F ± G es una primitiva de ± g en D; en símbolos
( ± g) = F ± G + k . = g
Se extiende el razonamiento a un número finito de funciones.
Propiedad 3 : Si es una función continua en un dominio D, c un número real y F una primitiva
de en D, entonces c F es una primitiva de c en D; en símbolos c = c F + k = c
Integración por Descomposición
Son integrales que se resuelven empleando las propiedades vistas.
Ejemplo 1 : (x6 + sen x - 2 ex ) dx = x6 dx + sen x dx + - 2 ex dx
= x6 dx + sen x dx - 2 ex dx
= x
7
7
- cos x - 2 ex + k
Ejemplo 2 : (x1/4 + x7/2 )2 dx = [ (x1/4 )2 + 2 x1/4 x7/2 + (x7/2 )2 ] dx
= (x1/2 + 2 x15/4 + x7 ) dx
= x1/2 dx + 2 x15/4 dx + x7 dx

Análisis Matemático I - Página 4
= x 1
2
+ 1
+ 2 x 15
4
+ 1
+ x
8 + k
+ 1 + 18
1
2
15
4
= 2
3 x +
19 x +
1
8 x + k19/4 83/2 8
Ejemplo 3 :
x-
2
x dx
3
=
x-
x +
2
x dx
3
=
x- + 2
x dx2
= x-2 dx + 2 1
x dx = - x-1 + 2 ln x + k
Método de sustitución
Si es derivable en su dominio, entonces para todo número real a
-1 es:
a . =
a + 1
a+1f + k
Para comprobarlo, veamos cómo se obtiene el integrando aplicando la regla de la cadena al resulta-
do:
a + 1 a + 1
a+1 af f + k =
(a +1) '
. = a .
Ejemplo 1 : dx 5) + x (2 x)5 + (x
'
52
5
= (x + 5x)
6
2 6
+ k
En la práctica se acostumbra a hacer un cambio de variable, llamando u = (x) (función más inter-
na), y hallar du para reemplazar el dx , o toda la expresión (x) dx (es indistinto). u = x2 + 5 x du = (2 x + 5) dx (1)
Si reemplazamos en la integral, queda u5 du , o si despejamos dx de (1), es:
dx = du
2 x + 5 , entonces reemplazando es u5 . (2x + 5) .
du
2 x + 5 =
1
6 u6 + k . Volviendo a la
variable original es I = 1
6 (x2 + 5 x)6 + k
Este método de integración, que se apoya en la regla de la cadena para derivar funciones compues-tas, puede utilizarse en la integración de otros productos.de funciones.
Ejemplo 2 : sen (ln x) 1
x dx

Análisis Matemático I - Página 5
En este caso el primer factor sen (ln x) indica una función compuesta ( g(x) ) , y el segundo factor 1
x
es la derivada de ln x , que es la función más interna, siendo la función seno la más externa.
Como esta función tiene a la función (- coseno) como una primitiva inmediata es: sen ( ln x ) 1
x
dx = -cos ( ln x ) + k pues (-cos (ln x) + k) = - [- sen ( ln x)
1
x] = sen ( ln x)
1
x .
En general es [ g(x) ] . g (x) dx = F[ g(x)] + k donde F = .
Para comprobarlo: (F[ g(x) ] +k) = F [ g(x) ] . g (x) = [ g(x) ] . g (x) .
En la práctica se procede haciendo el cambio de variable, llamando u a la función más interna u
= g(x) = ln x du = 1
x dx reemplazando tenemos sen u du = - cos u + k = - cos (ln x) + k
Ejemplo 3 : e
x
1/x
2 dx
Cambio de variable u = 1
x = g(x) du = -
1
x2 dx (1)
Basta multiplicar y dividir el integrando por (-1) para tener
- e
x
1/x
2 dx = - - e
x
1/x
2 dx = - eu du
o despejar dx de (1) (repetimos que es indistinto): dx = - x2 du y reemplazar en la integral:
e
x
u
2 . (- x2) du = - eu du
I = - eu + k = - e1/x + k
Ejemplo 4 : 3 x + 2
x + 2 x+ 3
2
3 dx
Hacemos u = x3 + 2 x + 3 du = (3 x2 + 2) dx entonces du
u= ln u + k = ln (x3 + 2 x + 3) + k
Recordemos que si y = ln ( (x))
y = 1
(x)
. (x) (derivada logarítmica) es por eso que
1
(x) . (x) = ln + k
Siguiendo con el método de sustitución, pueden presentarse diversos casos:
Integración de funciones racionales de la forma dx
a x + b x + c 2
En este caso también empleamos el método de sustitución. No analizaremos si el polinomio a x2 + b x + c con a, b, c en R tiene raíces reales o complejas, sólo observaremos si es completo o no.
i) Si no es completo, en particular nos interesan las integrales del tipo dx
a x
+ c 2
con c
0.
Veamos cómo procederemos.

Análisis Matemático I - Página 6
Ejemplo 1 : dx
2 x
+ 3 2
Como sabemos que la
dx
1 + x
2
tiene a arctg x como primitiva inmediata, trataremos de llevar
a esta forma, la integral dada, haciendo un cambio de variable.
Entonces I = dx
2 x
+ 3 2 =
1 + x3
2
dx
3
1 =
1 + 3
x2 3
dx22
Si u = 2
3 x du =
2
3 dx dx =
3
2 du , reemplazando tenemos:
I = 1
3
3
2 du
u + 1 =
1
3
3
2
du
u + 1 =
1
3 .
1
2 Arctg u + k =
1
6 Arctg
2
3 x + k 2 2
ii) Incompleto de la forma a x2 + b x ó completo.
Ejemplo 2: dx
x
+ x2
Utilizando el método de completar cuadrados tenemos: x2 + x = x + 1
2 -
1
4
2
dx
x + 1
2 -
1
4
= dx
1
4
x + 1
21
4
- 1
= 4 dx
x + 1
21
2
- 1
2 22
Ahora hacemos x +
1
21
2
= 2 x + 1
2 = 2 x + 1 = u
entonces 2 dx = du
dx = du
2
.
Volviendo a la integral tenemos:
I=4
du
2
u - 1 =
4
2
du
u - 1 = - 2
du
1 - u 2 2 2= -2 Argth u + k = -2 Argth (2 x +1)+ k
Si el polinomio es completo, se procede de la misma forma.

Análisis Matemático I - Página 7
Las integrales de la forma
dx
a x + b x + c 2
tienen como primitivas inmediatas, previo cambio
de variables, a la función trigonométrica inversa arcotangente o a la función hiperbólica inversa argumento tangente hiperbólica.
Integración de funciones irracionales de la forma
dx
a x
+ b x + c 2
Aquí también observamos previamente si el radicando a x2 + b x + c es o no completo.
i) Si no es completo, nos interesan en particular las integrales de la forma
dx
a x
+ c 2 con c 0.
Ejemplo 1 : Consideremos la dx
2 x
+ 3 2 .
El polinomio cuadrático, el radicando (2 x2 + 3), es el que trabajamos en el caso anterior. El hecho
de que ahora el denominador sea 2 x
+ 3 2 , no impide utilizar el mismo método de sustitución. Así tenemos:
dx
2 x + 3 =
dx
3 2
3 x + 1
= 1
3
dx
2
3 x + 1
22
2
haciendo u = 2
3x llegamos a
1
3
3
2
du
u + 1 =
1
2 2Argsh u + k =
1
2 Argsh
2
3x+k
ii) Si es incompleto de la forma a x2 + x o si es completo, se utiliza el método de completar cua-drados.
Ejemplo 2 : dx
- x - + 1 2 2 x
Completación de cuadrados - x2 - 2x + 1 = - [(x + 1)2 - 1 - 1] = - (x + 1)2 + 2, entonces la:
I = dx
- x - + 1 =
dx
- (x + 1) + =
dx
2 - (x + 1)
2 + 1
=2 2 22 x 2
= 1
2
dx
1 - x + 1
2
2 . Sustitución:
x + 1
2 = u
1
2 dx = du dx = 2 du

Análisis Matemático I - Página 8
I = 1
2. 2
du
1 - u2 = arcsen u + k = arcsen
x + 1
2 + k
Las integrales de la forma dx
a x
+ b x + c 2
tienen como primitiva inmediata (previo cambio de
variable) a las funciones trigonométricas inversas arcsen, arcos o a las funciones hiperbólicas in-versas argsh ó argch.
Integrales de la forma A x + B
a x + b x + c dx2 ,
A x + B
a x
+ b x + c dx
2
(con a 0 y b 0)
Según lo que hemos visto en el método de sustitución, las integrales planteadas se resolverían fácil-mente si la función lineal (A x + B), fuera la derivada primera de la función cuadrática (ax2 +b x +c) Pero esto, en general, no es así. Veamos con ejemplos, cómo resolverlo.
Ejemplo 1 : 2 x + 1
x + 3 x - 2 dx2 .
La derivada del denominador es (x2 + 3 x - 2) = 2x + 3 . Para lograr tener en el numerador esta expresión, basta sumar y restar al mismo el número 3, para que la expresión no se altere.
2 x + 1 + 3 - 3
x + 3 x - 2 dx =
(2 x + 3) + (1 - 3)
x + 3 x - 2 dx =
2 x + 3
x + 3 x - 2 dx -
2
x + 3 x - 2 dx2 2 2 2
1I I2
Cálculo de I1 :
I1 = 2 x + 3
x + 3 x - 2 dx2 . Sustitución: u = x2 + 3x - 2 du = (2x + 3) dx
du
2 x + 3 = dx
I1 = 2 x + 3
u .
du
2 x + 3
= du
u = ln u = ln (x2 + 3 x - 2)
Cálculo de I2 :
I2 = dx
x + 3 x - 2 2
Completando cuadrados: x2 + 3 x - 2 = x + 3
2 -
9
4
2
- 2 = x + 3
2 -
17
4
2
i = 2 dx
x + 3
2 -
17
4
= 2 dx
17
4
x + 3
217
4
- 1
2 2 2I

Análisis Matemático I - Página 9
= 2 4
17
dx
x + 3
217
4
- 1
= 8
17
dx
2
17 x +
3
2 - 1
2 2
Sustitución: u = 2
17
x + 3
2 du =
2
17 dx dx =
17
2 du
I2 = 8
17
17
2
du
u
- 1 = - 4
17
17
du
1 - u 2 2 = - 4 17
17 Argth u
I2 = - 4 17
17 Argth
2
17
x + 3
2 por lo tanto
I = I1 + I2 I = ln ( x2 + 3 x - 2) +
- 4 17
17 Argth
2
17
x + 3
2
+ k
I = ln ( x2 + 3 x - 2) + 4 17
17 Argth
2
17
x + 3
2 + k
Recordemos que la constante k de integración la agregamos recién al finalizar los cálculos.
Si la integral a resolver es de la forma A x + B
a x
+ b x + c dx
2 y si (ax2 + bx + c) Ax + B, se procede
de la misma forma.
Ejemplo 2 : 5 x - 1
3 x
- x + 1 dx
2
Antes de descomponer la integral dada en dos integrales, se trata de obtener en el numerador de una de ellas la derivada de (3 x2 - x + 1) , es decir: (6 x - 1) .
Para ello procedemos así:
5 x - 1 = 5 x - 1
5 = 5 .
6
6 x -
1
5 =
5
6 6 x -
6
5 + 1 - 1 =
= 5
6 6 x - 1 -
1
5
Entonces tenemos:
5
6 6x -1 -
1
5
3 x - x+1 dx =
5
6 6x -1 -
1
6
3 x - x+1 dx
2 2= - dx
1+x- x3
1 - x 6
6
5
1I
2
2I
2 1+x- x3
dx
6
1

Análisis Matemático I - Página 10
Cálculo de I1 = dx 1+x- x3
1 - x 6
6
5
2 3 x2 - x + 1 = u
(6 x - 1) dx = du dx = du
6 x - 1
I1 =
du u
6
5 =
1 - x 6
du .
u
1 - x 6
6
5 1/2 - = 5
6
2 u1/2 =
56
3 x - x + 1 2
Cálculo de I2 = -
1+x- x3
dx
6
1
2
3 x2 - x + 1 = 3 x - x
3 +
1
3 = 3 x -
1
6-
1
36 +
1
3 = 3 x -
1
6 +
11
6 2
2 2
I2 = - 16
dx
3 x - 16
+ 1136
= - 16
1
3
dx
1136
x - 16
+ 1
2 2
116
=
= - 16
1
3
3611
dx
3611
x - 16
+ 1
2
Sustitución: 3611
x - 16
= u 3611
dx = du dx = 1136
du
I2 =16
1
3
36 . 1111 . 36
du
u + 1 = -
1
6 3 Argsh u = -
1
6 3 Argsh
3611
x -162
= - 1
6 3 Argsh
3611
x - 16
I = I1 + I2
I = 5
3 3 x - x + 1 -
1
6 3 Argsh
6
11 x -
1
62 + k

Análisis Matemático I - Página 11
Integración por partes
Vimos en el método anterior que el integrando está formado por el producto de dos funciones, uno de los factores corresponde a una función compuesta y el otro a la derivada de la función interior de dicha composición.
Hay casos en los que se presenta la integral de un producto pero no se cumplen las condiciones an-teriores. Por lo tanto no se puede recurrir a la regla de la cadena. Pero si una de las funciones es integrable en forma inmediata, se recurre el método de integración por partes, utilizando el cálculo inverso al de la diferenciación de un producto de dos funciones.
Sabemos que la diferencial del producto de las funciones u(x) y v(x) es: d(u . v) = v du + u dv
d(u . v) = v du + u dv (integrando m.a.m.)
u . v = v du + u dv
entonces u dv = u . v - v du ( )
Resolvamos algunos ejemplos para ver cómo funciona este método:
Ejemplo 1 : ex x dx
En este caso los factores x y ex son integrables en forma inmediata, veamos qué ocurre si llamamos:
u = x y dv = ex dx , tendríamos u dv = x ex dx . Para aplicar la fórmula ( ), necesitamos
tener v y du, entonces: si u = x , es du = dx y
si dv = ex dx , es dv = ex dx v = ex
x . ex dx = x . ex - ex . dx = = x ex - ex + k
Observación : Para abreviar, agregamos la constante k recién al finalizar los cálculos.
Al aplicar este método, estamos reemplazando la integral dada por u . v - v du . Obviamente la
v du ha de ser no más complicada que la integral original. De lo contrario no es bueno el camino
elegido.
Si hubiéramos llamado a ex = u tendríamos u dv = ex x dx ; al querer hallar v y du ,
veamos cómo se complica el ejercicio: si u = ex du = ex dx
si dv = x dx dv = x dx v = 1
2 x2
ex x dx = ex . 1
2x2 -
1
2x2 ex dx
En este caso la v du es de mayor grado de dificultad que la integral original, puesto que se ha
incrementado el grado de x , lo cual indica que se ha elegido mal al hacer ex = u . Por lo tanto, debemos ser cuidadosos en la elección de u .
Ejemplo 2 : x ln x dx
Conviene hacer: u = ln x du = 1
x dx
dv = x dx dv = x dx v = 1
2 x2

Análisis Matemático I - Página 12
u dv = ln x . x dx = ln x . 1
2
x2 -
1
2 x2
1
x
dx
= 1
2 x2 . ln x -
1
2
x dx =
1
2 x2 ln x -
1
2
.
x
2
2
+ k
= 1
2 x2 ln x -
1
2 + k
Ejemplo 3 : sen (ln x) dx
En este caso se hace
u sen ( ln x ) du = cos (ln x) 1
x dx
dv dx dv = dx v = x
u . dv = sen (ln x) dx = sen (ln x) . x - x . cos (ln x) 1
x dx
1I
Para resolver I1 , integramos nuevamente por partes, tomando
u cos ( ln x ) du = - sen (ln x) 1
x dx
dv dx dv = dx v = x
I1 = cos (ln x) . x - x . (- sen (ln x)) . 1
x
dx reemplazando tenemos:
sen (ln x) dx = sen (ln x) - cos (ln x) . x -
2I
dx (ln x)sen
Observemos que si continuamos empleando la integración por partes, para resolver I2 , entraríamos en un círculo vicioso. La solución es pasar el último término I2 = I, al primer miembro y despejar
I = sen (ln x) dx .
sen (ln x) dx + sen (ln x) dx = x . sen (ln x) - x . cos (ln x)
2 sen (ln x) dx = x . [ sen (ln x) - cos (ln x) ]
sen (ln x) dx = 1
2 x [ sen (ln x) - cos (ln x) ] + k
Integración de funciones racionales
Ya hemos visto integrales de algunas funciones racionales (integrando formado por el cociente de polinomios en x a coeficientes reales), las que hemos resuelto por sustitución. Como esto no siem-pre es factible, ahora veremos un método que sirve para resolver la integral de cualquier función ra-cional, al que llamamos descomposición en fracciones simples.

Análisis Matemático I - Página 13
Dada P(x)
Q(x) dx puede suceder:
i) grado P(x) grado Q(x) ( P(x)
Q(x) es una función racional no propia)
ii) grado P(x) < grado Q(x) ( P(x)
Q(x) es una función racional propia)
Caso i)
Se realiza la división de los polinomios (esto es importante), de manera que P(x)
Q(x) = C(x) +
R(x)
Q(x) ,
donde el polinomio C(x) es el cociente, R(x) es el resto y R(x)
Q(x) es una fracción racional pro-
pia.
Ejemplo 1:
x - 1
x + 2 dx
2
. Al realizar la división queda x - 1
x + 2 = (x - 2) +
3
x + 2
2 C(x)
Q(x)
R(x)
I =
x - 2 + 3
x+ 2 dx =
1
2 x2
- 2 x + 3 ln (x + 2) + k
En este ejemplo, integrar R(x)
Q(x) es inmediato. En caso de que no suceda, se aplica a la integral
R(x)
Q(x) dx lo que veremos en el caso ii).
Caso ii)
Expresamos a P(x)
Q(x) en una suma de funciones racionales simples (cocientes sencillos que serán
de fácil integración). Esta descomposición depende del tipo de raíces que tiene el denominador Q(x): raíces reales simples, raíces reales múltiples, raíces complejas simples, raíces complejas múltiples o una combinación de las raíces mencionadas.
Caso I: Denominador con raíces reales simples
Aplicaremos el método directamente en un ejemplo.
Ejemplo 2: Calcular
x + 2
2 x
+ 2 x - 12 dx2
. El denominador tiene raíces reales simples y se
puede expresar, factoreando, como: 2 x2 + 2 x - 12 = 2 (x + 3)(x - 2).
Entonces la integral se puede escribir:
x + 2
2 x
+ 2 x - 12 dx =
x + 2
2 (x + 3)(x - 2) dx =
1
2
x + 2
(x + 3)(x - 2) dx2
Así, queda el denominador de la forma (x - x0) (x - x1) . Ahora el integrando se puede escribir:

Análisis Matemático I - Página 14
x + 2(x + 3)(x - 2)
= A
x + 3 +
Bx - 2
= A(x - 2) + B (x + 3)
(x 3)(x 2) x
-3 y x 2
Como los denominadores son iguales se puede lograr siempre la identidad de los polinomios del nu-merador: x + 2 = A(x - 2) + B(x + 3) (1) y determinar los coeficientes A y B. Veamos las alternativas para encontrarlos:
1)Damos a x cualquier valor real en la identidad (1) (inclusive el de las raíces). Así obtenemos dos ecuaciones con dos incógnitas, A y B. Tomando x el valor de las raíces tenemos:
Si x = - 3
Si x = 2
entonces
-3 + 2 = A(-3 - 2) + B(-3+ 3)
2 2 A(2 2) + B(2 + 3)
Es decir
- 1 = A (-5)
4 = B (5)
A = 1 5
B = 4 5
Si no le damos a x el valor de las raíces, quedará el sistema para resolver por cualquier método de los conocidos. Por ejemplo, si:
x = 0
y
x = 1
entonces
0 + 2 = A(0 - 2) + B(0 + 3)
1 2 A(1 2) + B(1 + 3)
es decir 2 = - 2 A + 3 B
3 = - A + 4 B
al resolverlo, es claro que obtendremos los mismos valores para A y B (hacerlo)
2) Aplicando en (1) la propiedad distributiva, igualamos los coeficientes pensando en la identidad de los polinomios
x + 2 = A x - 2 A + B x + 3 B x + 2 = (A + B) x + (- 2 A + 3 B)
Así tenemos: 1 = A + B
2 = - 2 A + 3 B
Se obtiene un sistema de dos ecuaciones con dos incógnitas donde A = 1 5
y B = 4 5
Entonces la
x + 22 x + 2 x - 12
dx = 12
15
x + 3 +
45
x - 2 dx
2 =
= 15
dx
x + 3
+ 45
dx x - 2
= 15
ln (x + 3) + 45
ln (x - 2) + k
Análisis Matemático I - Página 15
Es decir, si P(x)
Q(x) es una función racional propia y si Q(x) tiene raíces reales a, b, ..., l
distintas y todas ellas de multiplicidad 1, entonces se pueden determinar constantes A,
B,..., L tales que: P(x)Q(x)
= A
x - a +
Bx - b
+ ... + L
x - l
P(x)Q(x)
dx = A
x - a dx +
Bx - b
dx + ... + L
x - l dx
siendo las integrales del
segundo miembro, inmediatas y cuyos resultados son logaritmos naturales.
Caso II: Denominador con raíces reales múltiples:
Ejemplo 3: Queremos calcular
x + 2
x
- 2 x + 1 dx2
El integrando se puede escribir x + 2
x - 2 x + 1 =
x + 2
(x - 1) 2 2 y descomponerlo en fracciones simples
de la siguiente forma:
x + 2
(x - 1) =
A
(x - 1) +
B (x - 1)
= A + B (x - 1)
(x - 1)2 2 2
Como los denominadores son iguales se puede lograr la identidad de los numeradores x + 2 = A + B (x - 1) y encontrar los valores de A y B procediendo como en el primer caso.
Hacemos x + 2 = A + B x - B = B x + (A - B) y, si igualamos coeficientes, tenemos:
1 = B
2 = A - B A = 3
Entonces la:
x + 2
x - 2 x + 1 dx =
(x - 1) +
1x - 1
dx = 3
(x - 1) dx +
dx x - 1 2 2 2
1
3
I I2
Cálculo de I1 : u = x - 1 du = dx
I1 = 3
du
u
= - 3
x - 12 e I2 = ln (x - 1)
Por lo tanto I = - 3
x - 1 + ln (x - 1) + k
En general, dada P(x)
Q(x) dx , si Q(x) tiene raíces reales a , b , ..., l de multiplicidad n, m, ...,
k respectivamente, tendríamos: P(x)
Q(x) =
P(x)
(x - a) (x - b) ... (x - l) n m k
Entonces este cociente se puede descomponer de la siguiente manera:
P(x)
Q(x) =
A
x - a +
A
x - a + ... +
A
x - a +
B
x - b +
B
x - b + ... +
B
x - b 0
n1n 1
n-1 0m
1m 1
m-1 +
n cocientes m cocientes

Análisis Matemático I - Página 16
+ ... + L
x - l +
L
x - l + ... +
L
x - l0
k1k 1
k-1
k cocientes
sacar común denominador y proceder de la forma ya indicada.
Observación : Algunos de los exponentes n , m , ... , k que indican el orden de multiplicidad, pue-den ser iguales a uno (raíces simples).
Ejemplo 4: Calcular la
x + 2
(x + 1) (x - 2) dx
2
2
x + 2
(x + 1) (x - 2) =
A
(x + 1) +
A
(x + 1) +
C(x - 2)
2
20
21 =
= A (x - 2) + A (x + 1)(x - 2) + C (x + 1)
(x + 1) (x - 2)0 1
2
2
x2 + 2 = A0 (x - 2) + A1 (x + 1)(x - 2) + C (x + 1)2
Si x = - 1
1 + 2 = A0 (- 3) + 0 + 0 A0 = - 1
Si x = 2
6 = 0 + 0 + C . 9 C = 2
3
Si x = 0 2 = (-1)(-2) + A1 (1) (-2) + 2
3 . 1 A1 =
1
3
x + 2
(x + 1) (x - 2) dx =
-1
(x + 1) +
13
(x + 1) +
23
(x - 2) dx
2
2 2 =
- dx
(x + 1) +
13
dxx + 1
+ 23
dxx - 2
= 1
x + 1 +
13
ln (x + 1) + 23
ln (x - 2) + k2
Caso III: Denominador con raíces complejas conjugadas simples
Aquí Q(x) está formado por n expresiones cuadráticas a x2 + b x + c (puede ser b = 0) de raíces complejas conjugadas. Además cada una de estas expresiones tiene como exponente la unidad. O sea, Q(x) tiene raíces complejas simples.
Hemos visto que la
dx
x + 1
2
es inmediata, su solución es I = Arctg x + k y también que es
fácil resolver la integral
x + 1
x + 1 dx
2
descomponiéndola en dos integrales, y se obtuvo como solu-
ción I = 1
2 ln (x2 + 1) + Arctg x + k .

Análisis Matemático I - Página 17
Observemos que estas integrales responden. a la forma
A x + B
a x + b x + c dx
2 . Por lo cual, para
resolver integrales con n expresiones cuadráticas en el denominador, conviene realizar una des-
composición del integrando en n fracciones simples de la forma A x + B
a x + b x + c2 .
Ejemplo 5: Calculemos la
x + 1
(x + 1)(x + 2) dx
2 2
x + 1
(x + 1)(x + 2) =
A x + B
x + 1 +
C x + D
x + 2 =
(A x + B)(x + 2) + (C x +D)(x + 1)
(x + 1)(x + 2) 2 2 2 2
2 2
2 2
x + 1 = (Ax + B)(x2 + 2) + (Cx + D)(x2 + 1) = A x3 + 2 Ax + Bx2 + 2 B + C x3 + Cx + Dx2 + D
= (A + C) x3 + (B + D) x2 + (2 A + C) x + (2 B + D)
igualando coeficientes tenemos:
reemplazando en (3), es -2 C + C = 1
C = -1 por lo tanto A = 1
trabajando en forma análoga con (2) y (4) obtenemos D = - 1 y B = 1
entonces:
x + 1
(x + 1)(x + 2) dx =
x + 1
x + 1 -
x + 1
x + 2 dx =
x + 1
x + 1 dx -
x + 1
x + 2 dx2 2 2 2 2 2 =
= 1
2 ln(x2 + 1) + arctg x -
1
2 ln(x2 + 2) -
2
2 arctg
x
2 + k
En forma general, si Q(x) está formado por n expresiones cuadráticas de raíces com-plejas simples, la integral se descompone:
P(x)
Q(x) dx =
A x+ B
a x + b x + c +
A x+ B
a x + b x + c + ... +
A x+ B
a x + b x + c dx 1 1
12
1 1
2 2
22
2 2
n n
n2
n n
y la solución tendrá logaritmos y arcotangentes.
Caso IV: Denominador con raíces complejas múltiples
Es decir Q(x) está formado por expresiones cuadráticas a x2 + b x + c de raíces complejas y estas expresiones tienen exponentes mayores a la unidad.
La descomposición del cociente P(x)
Q(x) en fracciones simples es similar a la del segundo caso.
Ejemplo 6: Calculemos
2 x + x + 8
(x + 4) dx
2
2 2
A + C = 0 (1) A = - C
B + D = 0 (2)
2 A + C = 1 (3)
2 B + D = 1 (4)

Análisis Matemático I - Página 18
2 x + x + 8
(x + 4)
2
2 2 = A x+B
(x + 4) +
C x + D
x + 4 2 2 2 . Por cada raíz compleja conjugada se efectúan tantos
cocientes como orden p de multiplicidad tiene la misma. y los denominadores de estos cocientes tendrán exponentes p, p-1, ... hasta llegar a la unidad y luego se procede como en los casos ante-riores. En este ejemplo es p = 2.
2 x + x + 8
(x + 4)
2
2 2 = A x + B + (C x + D) (x + 4)
(x + 4)
2
2 2
2 x2 + x + 8 = A x + B + C x3 + C 4 x + D x2 + 4 D
2 x2 + x + 8 = C x3 + D x2 + (A + 4 C) x + (B + 4 D)
Entonces igualando coeficientes:
4 D = 8 B + 4 . 2 = 8 B = 0
C = 0
D = 2
A + 4 C = 1 A = 1
B + 4 D = 8 B + 4 . 2 = 8 B = 0
Reemplazando tenemos:
2 x + x + 8
(x + 4) dx
2
2 2 =
x
(x + 4) +
2
x + 4 dx =
x
(x + 4) dx + 2
dx
x + 4 2 2 2 2 2 2
Ambas integrales se resuelven por sustitución y se llega a:
I = - 1
2
1
x
42 + arctg x
2 + k
No siempre las integrales que hemos resuelto en estos cuatro casos, se presentan con el denomina-dor factoreado.
Ejemplo 7: Calculemos
x + 2
(x - 1) dx3
. Al factorear el denominador, nos encontramos con una
raíz real y raíces complejas conjugadas. Por lo tanto la descomposición se realiza haciendo una combinación de fracciones simples, según corresponda.
Tenemos
x + 2
(x - 1)(x + x + 1) dx2
x + 2
(x - 1)(x + x + 1) =
A
x - 1 +
B x + C
x + x + 1 =
A(x + x + 1) + (x - 1)(B x + C)
(x - 1)(x + x + 1)2 2
2
2
x + 2 = A x2 + A x + A + B x2 + C x - B x - C
x + 2 = (A + B) x2 + (A - B + C) x + (A - C)

Análisis Matemático I - Página 19
Igualando coeficientes
A + B = 0 (1)
A + C B = 1 (2)
A - C = 2 (3)
De la expresión (1), B = - A y reemplazamos en (2)
A + C - (- A) = 1
A - C = 2
2 A + C = 1
A - C = 2
Sumando m.a.m. es: 3 A = 3 A = 1 ; B = - 1 y C = -1 . Por lo tanto
x + 2
x - 1 dx =
1
x - 1 +
- x - 1
x + x + 1 dx =
dx
x - 1 -
x + 1
x + x + 1 dx
3 2 2
21I I
I1 = ln (x - 1) Cálculo de I2 : transformación del numerador
x + 1 = 2
2 (x + 1) =
1
2 (2 x + 2) =
1
2 (2 x + 1 + 1)
x + 1
x
+ x + 1 dx
2 =
1
2 2 x + 1 + 1
x
+ x + 1 dx2 =
=
1
2
2 x + 1
x
+ x + 1 dx +
1
2
1
x
+ x + 1 dx
2 2
Si resolvemos la primera integral por sustitución y en la segunda primero completamos cuadrados, y luego empleamos el método de sustitución, tenemos:
I2 = 1
2 ln (x2 + x + 1) +
3
3 arctg
2
3 x +
1
3
Finalmente
I = ln (x - 1) - 1
2 ln (x2 + x + 1) -
3
3 arctg
2
3 x +
1
3 + k
Integración de funciones irracionales algebraicas
Hemos visto casos de expresiones irracionales con radicando lineal y cuadrático que integramos, en forma inmediata o utilizando los métodos mencionados.
Veamos ahora algunos ejemplos que se resuelven por sustitución donde la potencia de la nueva va-riable es el mínimo común múltiplo (M.C.M.) de los denominadores de las potencias fraccionarias, a las que se encuentran elevada x , o el radicando donde figura x .

Análisis Matemático I - Página 20
Calcular
x
1 + x 4
Sustitución x = t4 , siendo 4 el MCM (2 , 4), entonces dx = 4 t3 dt y x 4 = t reemplazando en la integral es
( t )
1 + ( t ) . 4 t dt
4
4 1/43
1 2/
= 4 t . t
1 + t . dt = 4
t
1 + t dt
2 53
resolviendo la división de polinomios es
t
t + 1
5
= t4 - t3 + t2 - t + 1 - 1
t + 1
4 t - t + t - t + 1 - 1
t + 1 dt = 4
t
5 -
t
4 +
t
3 -
t
2 + t - ln (t + 1) + k4 3 2
5 4 3 2
= 4
5 x - x +
4
3 x - 2 x + 4 x - 4 ln x + 1 + k5/4 3/4 1/2 1/4 4
Calcular
x + 2 + 2
x + 2 - 2 dx
hacemos x + 2 = t2 dx = 2 t dt t = x + 2
entonces
( t ) + 2
( t ) - 2 2 t dt = 2
t + 2 t
t - 2 dt
2 1/2
2 1/2
2
t + 2 tt - 2
= t + 4 + 8
t - 2
2
2 t + 4 + 8
t - 2 dt = 2 (
t
2
2
+ 4 t + 8 ln (t - 2) ) + k
= ( x + 2 )2 + 8 x + 2 + 16 ln( x + 2 - 2 ) + k
= x + 2 + 8 x + 2 + 16 ln ( x + 2 -2 ) + k
III NNN TTT EEEGGGRRRAAALLL DDDEEEFFFIII NNN III DDDAAA
Vamos a estudiar ahora el concepto de Integral Definida, que junto con el de derivada forman el núcleo del Cálculo Diferencial e Integral. Veremos que dicho concepto será definido por motivos to-talmente diferentes a los que llevaron a definir la derivada. Ya hemos mencionado que ambos con-ceptos están íntimamente relacionados y dicha relación se manifiesta en el Teorema Fundamental del Cálculo Integral.
Análisis Matemático I - Página 21
Aunque la integral se define de manera un tanto complicada, viene a formalizar un concepto sencillo e intuitivo: el de área de una figura plana.
En geometría elemental se deducen fórmulas para calcular el área de ciertas figuras particulares (triángulos, rectángulos, círculos, etc.), pero si reflexionamos un poco, veremos que rara vez se da un definición aceptable del área.
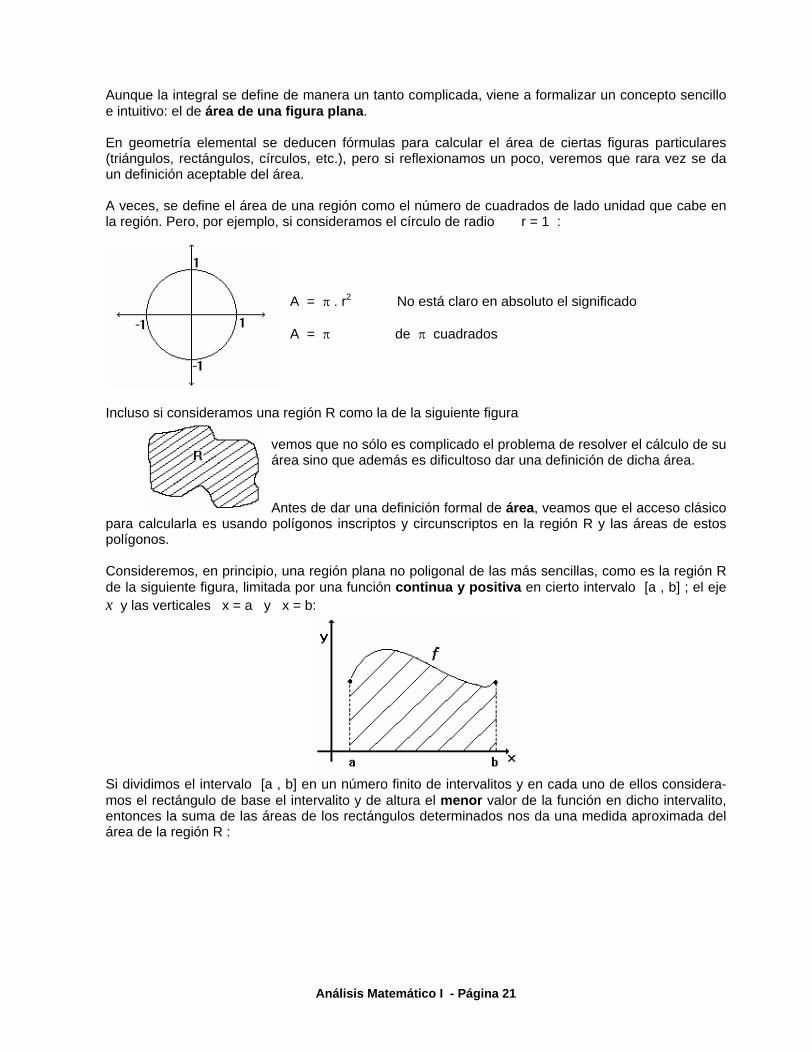
A veces, se define el área de una región como el número de cuadrados de lado unidad que cabe en la región. Pero, por ejemplo, si consideramos el círculo de radio r = 1 :
A = . r2 No está claro en absoluto el significado
A = de cuadrados
Incluso si consideramos una región R como la de la siguiente figura
vemos que no sólo es complicado el problema de resolver el cálculo de su área sino que además es dificultoso dar una definición de dicha área.
Antes de dar una definición formal de área, veamos que el acceso clásico para calcularla es usando polígonos inscriptos y circunscriptos en la región R y las áreas de estos polígonos.
Consideremos, en principio, una región plana no poligonal de las más sencillas, como es la región R de la siguiente figura, limitada por una función continua y positiva en cierto intervalo [a , b] ; el eje x y las verticales x = a y x = b:
Si dividimos el intervalo [a , b] en un número finito de intervalitos y en cada uno de ellos considera-mos el rectángulo de base el intervalito y de altura el menor valor de la función en dicho intervalito, entonces la suma de las áreas de los rectángulos determinados nos da una medida aproximada del área de la región R :

Análisis Matemático I - Página 22
esta aproximación es por defecto ya que es menor que el área de R.
Análogamente, si en los mismos intervalitos consideramos los rectángulos cuya base es el intervalito y cuya altura es el mayor valor de la función en él, entonces la suma de las áreas de los rectángulos que quedan determinados también nos da una medida aproximada del área de la región R. Esta aproximación es por exceso ya que su valor es mayor que el área de la región R:
Observación : Los intervalos no tienen que tener necesariamente la misma longitud.
Ahora, si aumentamos sucesivamente la cantidad de intervalitos, de manera que éstos sean cada vez más chicos, veremos que las aproximaciones por defecto van creciendo y siendo mejores, y que las aproximaciones por exceso van decreciendo y también siendo mejores.
Se puede hacer una visualización de gráficos dinámicos de esta situación, utilizando el software Geogebra u otro similar.
En el caso de que las aproximaciones por defecto y las aproximaciones por exceso se aproximen a un mismo número, dicho número es la medida del área de la región R.
Decimos en el caso , pues esto no siempre sucede. En el caso particular que hemos considerado,
continua y positiva en [a , b] , sí sucede.
Ahora bien, todas estas nociones geométricas y procedimientos que hemos indicado para tratar de definir el área de una región plana hemos de ponerlos en términos más precisos. Y definiremos la Integral Definida según Riemann, quien fue el primero que desvinculó la idea de integral de su in-terpretación geométrica. Entonces, debe quedar claro que la Integral Definida es un concepto mate-mático y que, si bien se define para formalizar el concepto de área de una región plana, no hay que confundir ambos conceptos. Más adelante y también en otros cursos Uds. tendrán oportunidad de ver que la Integral Definida es una herramienta importante para calcular volúmenes, longitudes de arco, momentos de inercia, trabajo, etc.
Para definir la Integral Definida no nos vamos a limitar a funciones contínuas y positivas, sino que
vamos a considerar funciones : [a , b]
acotadas en [a , b].

Análisis Matemático I - Página 23
Definición: Sea [a , b] un intervalo cerrado de
. Una partición de [a , b] es una familia
= { t0 , t1 , ... , tn } de puntos tales que a = t0 < t1 < ... < tn-1 < tn = b
Para cada partición = { t0 , t1 , ... , tn } de [a , b] quedan determinados los intervalitos [ t0 , t1 ] , [ t1 , t2 ] , ... , [ tn-1 , tn ].
o, más brevemente, [ ti-1 , ti ] con 1
i
n . Es decir que la cantidad de intervalitos y sus longitu-des depende de la partición que se efectúe al [a , b] .
Como dijimos que no nos vamos a limitar a funciones continuas, sino sólo acotadas en [a , b] , ya
no tenemos asegurada la existencia de los mínimos y máximos absolutos de
en los intervalitos
( menor y mayor valor de
en los intervalitos, respectivamente). Pero como
es acotada en
cada intervalito, sabemos que sí existe el ínfimo y el supremo de las imágenes de en ellos.
Definición: Sea : [a , b] acotada. Sea = { t0 , t1 , ... , tn } una partición de [a , b], sean
Mi = Sup { (x) : x [ ti-1 , ti ] } , 1 i n
mi = Inf { (x) : x [ ti-1 , ti ] } , 1 i n
llamaremos suma inferior de respecto a la partición , a la suma :
s ( ) = m1 (t1 - t0) + m2 (t2 - t1) + ... + mn (tn - tn-1) = i = 1
n
mi (ti - ti-1)
y suma superior de
respecto a la partición , a la suma :
S ( ) = M1 (t1 - t0) + M2 (t2 - t1) + ... + Mn (tn - tn-1) = i = 1
n
Mi (ti - ti-1)
M3 = Sup { (x) : x [t2 , t3] }
m3 = Inf { (x) : x [t2 , t3] }

Análisis Matemático I - Página 24
M4 = Sup { (x) : x [t3 , t4] }
m1 = Inf { (x) : x [t0 , t1] }
M4 = Sup { (x) : x [t3 , t4] }
m4 = Inf { (x) : x [t3 , t4] }
Observación 1 : Como es sólo acotada, puede ser continua ó no y positiva ó no.
Observación 2 : Precisemos la existencia de los Mi y mi . Como
es acotada en [a,b], lo es en
cada [ti-1 , ti] , 1
i
n . Y esto significa que el conjunto imagen de
es acotado en cada subinter-
valo. Este conjunto imagen es { (x) : x [ti-1 , ti] } , 1 i n . Obviamente, si está definida en [a , b] , este conjunto es distinto de vacío. Y, por definición, tiene supremo Mi e ínfimo mi , para cada i, 1 i n.
Observación 3 : Si
0 en [a , b] , entonces los ínfimos mi y los supremos Mi son mayores o iguales a cero. Y, como cada diferencia ( ti - ti-1 ) es positiva porque es la longitud de cada intervali-
to, entonces los productos mi ( ti - ti-1 ) y Mi ( ti - ti-1 ) son las áreas de los rectángulos y las s
( ) y S
( ) son las aproximaciones por defecto y por exceso de los que hablábamos en la intro-ducción.
Precisemos ahora el hecho de subdividir al [a , b] en cada vez más cantidad de intervalitos. Esto se llama afinar las particiones.
Definición : Una partición es más fina que otra partición
si tiene otros puntos adicionales además de los puntos de .
Ejemplo : Sea el intervalo cerrado [0 , 1] y sean las particiones de [0 , 1] siguientes
= { 0 , 1
2 , 1 }
subdivide al [0 , 1] en los intervalitos [ 0 , 1
2 ] y [
1
2 , 1 ] .

Análisis Matemático I - Página 25
= { 0 , 1
3 ,
1
2 , 1 }
es más fina que
pues tienen los puntos de
y además el punto
1
3
. En realidad, la relación
que existe es
.
Si = { 0 , 1
3 ,
1
2 ,
2 3
, 1 } , entonces es más fina que y que .
Considerando siempre que : [a , b]
R es acotada veamos, sin demostrar :
Algunas propiedades de las sumas inferiores y superiores
P1) Como mi Mi , 1 i n , entonces s ( ) S ( ) para cualquier partición de [a , b] .
P2) Sean y dos particiones de [a , b] tales que es mas fina que , entonces:
s ( )
s ( ) y S ( )
S ( ). Es decir, las sumas inferiores crecen y las sumas superiores decrecen, a medida que se afina la partición.
P3) Si y son dos particiones cualesquiera de [a , b] , entonces para toda : [a , b]
R acotada es:
s ( ) S ( ) O sea, ninguna suma inferior supera a alguna suma superior.
Supongamos ahora que tenemos una
: [a , b]
R acotada y fija. Como
está definida en [a , b] ,
entonces el conjunto I
(I : conjunto imagen de ).
Si pensamos en todas las particiones posibles del [a , b] , para cada una de ellas podremos obtener siempre la suma inferior y la suma superior correspondiente.
Formemos un conjunto A , con todas las sumas inferiores:
A = { s ( ) : es partición de [a , b] }
y un conjunto B , con todas las sumas superiores:
B = { S ( ) : es partición de [a , b] }
Puesto que, como dijimos antes, siempre existirá al menos una suma inferior y una suma superior, los conjuntos A y B son no vacíos.
Si representamos algunas sumas en la recta numérica, la situación es la siguiente:
* más fina que y es más fina que
* las sumas inferiores crecen y las sumas superiores decrecen * ninguna suma inferior supera a alguna suma superior
* s ( ) , s ( ) , s ( ) pertenecen a A y S ( ) , S ( ) , S ( ) pertenecen a B
Como A
y acotado superiormente (por cualquier suma superior), entonces A tiene supremo, al que indicaremos con:

Análisis Matemático I - Página 26
a
b(x) dx = Sup { s
( ) :
es partición de [a , b] }
y lo llamaremos integral inferior de sobre [a , b].
Análogamente, como B
y acotado inferiormente (por cualquier suma inferior), entonces B tiene
ínfimo, al que indicamos con:
a
b(x) dx = Inf { S ( ) : es partición de [a , b] }
y lo llamaremos integral superior de sobre [a , b].
Observación : De ser : [a , b] R acotada, hemos afirmado antes que A
y B
. Y de la relación de orden entre las sumas inferiores y superiores, se deduce que siempre existen
a
b(x) dx y
a
b(x) dx. Además
a
b(x) dx
a
b(x) dx .
Definición : Sea : [a , b]
R acotada. Decimos que es integrable sobre [a , b] si, y sólo si,
a
b(x) dx =
a
b(x) dx . En caso de que así suceda, a este valor común se lo llama
Integral Definida de sobre [a , b] , según Riemann, y se lo indica a
b (x) dx =
a
b(x) dx =
a
b(x) dx
el símbolo es el signo de integral y en su origen era una S alargada, por suma .
a y b son los extremos inferior y superior de integración.
x : variable de integración
Observación 1 : Si : [a , b]
es acotada, ya dijimos que a
b(x) dx = Sup A y
a
b(x) dx = Inf B siempre existen. Pero que no siempre son iguales.
Si a
b(x) dx =
a
b(x) dx , entonces existe
a
b (x) dx y
es integrable sobre [a , b] . Por
el contrario, si a
b(x) dx <
a
b(x) , entonces no existe
a
b (x) dx y
no es integrable so-
bre [a , b] .
Observación 2 : Si : [a , b]
R es continua o bien discontinua en un número finito del pun-
tos pero acotada en [a , b], siempre existe a
b (x) dx .
Observación 3 : La integral definida a
b (x) dx , si existe, es un número real ( positivo, negativo
ó cero) y debe discriminarse claramente de la integral indefinida
(x) dx que es la familia infinita
de funciones F(x) + k , k
R / F (x) = (x) .

Análisis Matemático I - Página 27
Observación 4 : a
b (x) dx =
a
b (t) dt =
a
b (z) dz = ... Es decir, la integral definida de-
pende sólo de (x) y de los extremos a y b . Por lo tanto, su valor no cambia si le cambiamos el nombre a la variable de integración.
Observación 5 : En el caso de que (x)
0 en [a , b], la integral definida
a
b (x) dx mide el
área AR de la región R encerrada por (x) , el eje x y las verticales x = a y x = b:
AR = a
b (x) dx , si (x) 0 en [a , b]
Al introducir el concepto de Integral Definida, hemos supuesto que a < b . Veamos las siguientes definiciones:
Definición : Si a
y es una función con a perteneciente a su dominio, a
a
(x)dx = 0.
Definición : Si a < b y es integrable sobre el [a , b] , se define b
a
(x)dx =a
b
(x)dx.
Propiedades de la Integral Definida
P1) Sean a , b , c
R , a < c < b y sea : [a , b]
R acotada
es integrable sobre [a , b] si, y
sólo si, es integrable sobre [a , c] y sobre [c , b] . En este caso
a
b (x) dx =
a
c
(x) dx + c
b(x) dx
P2) Si y g son funciones integrables sobre [a , b] , entonces
g es integrable sobre [a , b] y además:
a
b [ (x) dx g(x) ] dx =
a
b (x) dx
a
b g(x) dx
P3) Si
es integrable sobre [a , b] y c
R cualquiera, entonces c
es integrable sobre [a , b] y además:
a
b c (x) dx = c
a
b (x) dx
(en particular a
b - (x) dx = -
a
b (x) dx ).
P2 y P3 valen también si a b

Análisis Matemático I - Página 28
P4) Si es integrable sobre [a , b] , entonces
a
b (x) dx
a
b
(x) dx
P5) Sean y g integrables sobre [a , b] tales que (x) g(x) en [a , b] , entonces
a
b (x) dx
a
b g(x) dx
(en particular: si (x) 0 en [a , b] a
b (x) dx 0 )
P6) Si es integrable sobre [a , b] , entonces es integrable sobre cualquier [c , d] tal que [c , d] [a , b] .
P7) Si
es integrable sobre [a , b] y m
(x)
M
x
[a , b] , entonces m (b - a)
a
b (x) dx
M (b - a) (en particular: m y M pueden ser ínfimo y supremo de
en [a , b]. Ade-
más si es continua, m y M pueden ser el mínimo y el máximo de en [a , b] .
Otras definiciones de Integral Definida
Definición: Sea f una función continua en un intervalo cerrado [a , b] . Haciendo una partición = { t0 , t1 , ... , tn } de este intervalo, donde a = t0 < t1 < ... < tn-1 < tn = b y los subintervalos tienen
igual longitud, llamemos a esta longitud x = n
a-b (se tienen n intervalos de longitud x).
Eligiendo en cada subintervalo [ t i -1 , ti ] , 1 i n , un punto muestra *ix se puede forma la suma
xxf i .)(n
1 = i
* . Se define la Integral Definida de f sobre [a , b] como el siguiente límite :
a
b f (x) dx = xxflím in
.)(n
1 = i
*
Como hemos considerado que f es continua, se puede probar que este límite existe y da siempre el
mismo valor, independientemente de cuáles puntos muestra *ix se elijan.
Notas: La suma xxf i .)(n
1 = i
* se llama suma de Riemann, en honor al matemático alemán
Bernhard Riemann.
Para cualquier suma de Riemann, cuando n tiende a , x tiende a 0.
Si se eligieran como puntos muestra a aquéllos en que se encuentra el ínfimo im de f en el subin-
tervalo [ t i -1 , ti ] , como f es continua im ,es la imagen de cierto *ix y la suma de Riemann es una
suma inferior s ( ). De manera análoga, eligiendo *ix como los puntos en que se encuentra el su-
premo iM de f en cada subintervalo, la suma de Riemann es una suma superior S ( ) .

Análisis Matemático I - Página 29
Si (x) 0 en [a , b], la suma xxf i .)(n
1 = i
* es el área del polígono formado por los rectángulos de
base x y altura )( *ixf y a la vez es una aproximación del área de la región R encerrada por la grá-
fica de f , el eje x y las verticales x=a y x=b:
El símbolo
introducido por Leibniz es una S alargada y fue elegida debido a que la Integral Defi-nida en un límite de sumas.
Hay situaciones en que es más apropiado subdividir al intervalo cerrado [a , b] en subintervalos de longitudes distintas. Si designamos con x1, x2, x3, x4 , . . . , xn las longitudes de estos subinter-valos, debemos asegurarnos que, en el límite, estas longitudes tiendan a 0. Esto se consigue si el ancho más grande, que es máx xi , tiende a 0. En este caso la definición de Integral Definida queda:
a
b f (x) dx = ixxflím i
xmáxi
.)(n
1 = i
*
0
Integrabilidad de Funciones Continuas
Aunque no lo hemos hecho, podemos intuir que calcular una Integral Definida haciendo sumas infe-riores y superiores y repitiendo el proceso de la definición inicial es generalmente difícil. Lo mismo va a pasar si lo queremos hacer con la definición de límite de sumas de Riemann. Sin embargo, como veremos más adelante, la Integral Definida de muchas funciones puede calcularse fácilmente.
Primero enunciemos un teorema, que nos brinda una infinidad de funciones integrables sobre un [a , b].
Teorema : Si : [a , b]
R es continua, entonces es integrable sobre [a , b]
Ejemplo : (x) = x es continua en [0 , 1] , entonces (x) = x es integrable sobre [0 , 1]. Calcular esta integral por definición no es tan fácil, pero avancemos un poco y encontraremos una forma sen-cilla para calcularla.
Propiedad : Si
es continua en [a , b] y m y M son el mínimo y el máximo de
en [a , b], en-tonces:
m (b - a) a
b (x) dx M (b - a)
Esto es obvio, pues m (b - a) y M (b - a) son una suma inferior s ( ) y una suma superior

Análisis Matemático I - Página 30
S ( ) en particular, donde
es la partición menos fina de [a , b]. Es decir = {a , b}, m es
además el ínfimo de en [a , b] y M es el supremo de en [a , b] .
Teorema del Valor Medio del Cálculo Integral para Funciones Continuas: Si una función es continua en cierto intervalo [a , b] , entonces existe un c (a , b) tal que:
a
b (x) dx = (c) (b - a) ó (c) =
1
b - a
a
b (x) dx
A = (c) se lo llama valor medio de en [a , b].
Demostración: Como
es continua en [a , b] entonces
alcanza su mínimo absoluto m y su máximo absoluto M en [a , b].
Además, también por ser continua
en [a , b],
es integrable sobre [a , b]. Es decir, existe
a
b (x) dx .
Ahora bien, como la integral definida a
b (x) dx tiene la propiedad de ser mayor ó igual que cual-
quier s
( ) , en particular se cumple que m (b - a)
a
b (x) dx (1) (m (b - a) es una suma
inferior).
Análogamente a
b (x) dx M (b - a) (2) (siendo M (b - a) una suma superior).
De (1) y (2) : m (b - a) a
b (x) dx < M (b - a)
Dividiendo miembro a miembro por b - a > 0 :
m 1
b - a (x) dx
a
b
M
El miembro central de la doble desigualdad, , es un valor numérico comprendido entre el mínimo y
el máximo absoluto de
en [a , b] . Como
es continua en [a ,b] , entonces
es la imagen de
algún c . Es decir, existe c (a , b) / (c) = .
O sea: c (a , b) / (c) = 1
b - a
a
b (x) dx , que es lo que queremos demostrar.
Este teorema tiene una interesante interpretación geométrica si
0 en [a, b]:

Análisis Matemático I - Página 31
Analicemos la igualdad (c) (b - a) = a
b (x) dx
Como
0 en [a , b] , el miembro de la derecha representa el
área encerrada por , el eje x y las verticales x = a y x = b .
Por otro lado, el miembro de la izquierda representa el área de un
rectángulo de base (b - a) y altura (c) .
En definitiva el Teorema afirma que, si
es continua en [a , b] y en particular mayor ó igual que
cero en [a , b] , existe un c (a , b) tal que su imagen (c) es la altura de un rectángulo de base
(b - a) cuya área es igual a la encerrada por , el eje x y las verticales x = a y x = b .
Observación : aunque en el gráfico pareciera que c equidista de a y de b , esto sucede sólo a veces y depende de la función en particular.
Función Integral
Hasta ahora, el concepto de Integral Definida ha aparecido desvinculado del concepto de derivada. Ya hemos comentado que si bien existe una íntima conexión entre ambos conceptos, históricamente ambos aparecieron por caminos diferentes, buscando resolver problemas diferentes. Newton y Leibniz fueron los primeros en relacionar estos conceptos fundamentales, lo cual se pone de manifiesto en el llamado Teorema Fundamental del Cálculo Integral. Antes de ver este teorema, consideremos la siguiente situación:
Sea una función continua en cierto [a , b] . Entonces, sabemos que existe a
b (x) dx
Consideremos ahora que el límite inferior de integración, a, es fijo y que el límite superior b es va-riable en [a , b] . Entonces la integral es función de su límite superior. Designemos a este límite su-
perior con x (que para nosotros denota generalmente una magnitud variable), y pongamos (t) dt
en vez de (x) dx para evitar confusiones.
Queda así definida la función:
F(x) = a
x(t) dt , x [a , b]
y no hay dudas de que es una función cuyo dominio es [a , b] , pues x [a , b] , existe a
x(t) dt
(pues
es integrable sobre el [a , b] ) y este valor es único. A F(x) la llamaremos función inte-gral.
Teorema Fundamental del Cálculo Integral : Si es una función continua en un inter-
valo [a , b] y F(x) = a
x
(t) dt , se verifica que F (x) = (x) para todo x [a , b].
(Es decir: si es continua en [a , b] , entonces F(x) es primitiva de (x) ).

Análisis Matemático I - Página 32
Demostración: Por lo visto antes del Teorema la continuidad de en [a , b] asegura la existencia
de la función integral F(x) = a
x(t) dt .
Para calcular la derivada de F(x) , en cierto x [a , b] (en a y b se consideran derivadas laterales),
busquemos primero su cociente incremental F
x y luego calculemos su límite cuando x 0
Sea, entonces, x
[a , b] . Demos a partir de él, un incremento x (el cual puede ser positivo o
negativo).
F(x + x) = a
x x+(t) dt
Entonces F(x + x) = a
x(t) dt +
x
x x+ (t) dt , para x > 0 ó x < 0 .
F(x + x) - F(x) = a
x(t) dt +
x
x x+(t) dt -
a
x(t) dt
F = x
x x+(t) dt
Como
es continua en [a , b]
es continua en cualquier intervalo [x , x + x] ó [x + x, x] (según sea x > 0 ó x < 0 )
se verifica el Teorema del Valor Medio del Cálculo Integral. Es decir, existe un c (x , x + x) (ó c (x + x , x) ) tal que:
(c) = 1
x +
x - x
x
x x+
(t) dt (verifica que esta expresión no cambia si x >0 ó x < 0 ).
(c) = 1x
(t) dt
Fx
x x+ , para algún c entre x y x + x
(c) = F
x, para algún c entre x y x + x
Aplicando límite cuando x 0 en ambos miembros de la igualdad:
x 0lím
F
x =
x 0lím
(c) (1)
Aunque ya sabemos que un gráfico no forma parte de una demostración, ubiquémonos en la recta numérica para clarificar la situación:
Independientemente de que x > 0 ó x < 0 , sucede que, cuando x 0 , c x . Lo cual nos hace ver que, cuando x 0 , c es variable y
(c) también. Entonces el límite (1) se puede expresar:
x 0lím
F
x =
c xlím
(c) (1 )

Análisis Matemático I - Página 33
Como es continua en todo x [a , b] , entonces el límite del segundo miembro de la igualdad (1 )
es el número (x) . En consecuencia el límite del primer miembro es también un número y es, a la vez, la derivada de F en x :
F (x) = (x) , x [a , b]
Corolario( Regla de Barrow ): Si es una función continua en [a , b] y G es una primiti-
va de en [a , b] , entonces : a
b (x) dx = G(b) - G(a)
Demostración: Si G es una primitiva de
en [a , b] , entonces G (x) = (x) ,
x
[a , b] . Por
otro lado, como es continua en [a , b] , admite función integral
F(x) = a
x(t) dt (1)
para la cual se verifica (por el teorema anterior): F (x) = (x) , x [a , b] .
Sabiendo que dos funciones F y G que tienen igual derivada, se diferencian en una constante, entonces:
F(x) = G(x) + k , x [a , b] (2)
Calculemos F(a) y F(b) usando (1):
F(a) = a
a(x) dx = 0 (3)
F(b) = a
b (x) dx (4)
de (2) y (3) : F(a) = G(a) + k = 0 k = - G(a) (5)
de (2) y (4) : F(b) = a
b (x) dx = G(b) + k
Y sustituyendo (5) en la igualdad anterior , tenemos: a
b (x) dx = G(b) - G(a)
La regla de Barrow nos indica que, para evaluar la integral definida a
b (x) dx basta encontrar
una primitiva G cualquiera de en [a , b] y hacer la cuenta G(b) - G(a) .
Ejemplo : Evaluemos las integrales:

Análisis Matemático I - Página 34
a) -1
0x3 dx , una primitiva de x3 es G(x) =
x
4
4
. Entonces -1
0x3 dx =
x4
4
-1
0
(este símbolo
expresa la cuenta G(0) - G(-1) ). De manera que -1
0x3 dx =
04
-
(-1)4
= -
14
4 4
b) 0
/2 cos x dx = sen x
0
/2 = sen
2 - sen 0 = 1
c) 2
sen x dx = - cos x 0
2 = - cos 2
- (- cos 0) = -1 + 1 = 0
Observación : Es fácil ver que - cos x0
2
= - cos x0
2
, por lo que podríamos haber resuelto:
2sen x dx = - cos x
0
2
= - cos x0
2
= - ( cos 2 - cos 0) = 0
Con la regla de Barrow, el problema de calcular áreas usando la integral definida, se simplifica. Re-
cordemos que si 0 en [a , b] , entonces a
b (x) dx mide el área de la región R encerrada por
la curva de ecuación y = (x) , el eje x y las verticales x = a y x = b :
AR = a
b (x) dx
Entonces, si G es una primitiva de
en [a , b] (G (x) = (x) , x [a , b]), el área buscada es:
AR = a
b (x) dx = G(b)-G(a)
Ejemplo 1 : Calcular el área de la figura plana encerrada por:
a) (x) = 2 x , el eje x entre x = 1 y x = 3
A = 1
32 x dx y una primitiva de (x) es G(x) = x2 .
Entonces A = x2
1
3 = 32 - 12 = 8

Análisis Matemático I - Página 35
Observación : Se entiende este resultado como 8 unidades de área, independientemente de la unidad utilizada.
b) (x) = sen x , eje x en [0 , ]
A = 0
sen x dx = - cos x = - cos x
0 0
A = - [ cos
- cos 0 ] = - [- 1 - 1] = 2
Supongamos ahora que (x) 0 para todos los números x en [a , b] ; si hacemos - (x) , ten-
dremos que - (x) 0 en [a , b] , como se ve en la figura:
El área entre el eje de abscisas y la función (x) en [a , b] igual al área determinada por la función
(- (x) ) y el eje x en [a , b] . Luego
A = a
b - (x) dx = -
a
b (x) dx
Esto sugiere la siguiente definición:
Definición : Si y = (x) es continua en [a , b] , entonces el área A limitada por su gráfica y el eje
x en el intervalo está dada por: A = a
b
(x) dx
Observación : Tengamos en cuenta que si (x)
0 en [a , b] , continua, el número a
b (x) dx
es negativo, lo cual se deduce claramente de la definición de integral definida. Por esto, la definición dada subsana el problema de querer calcular el área de la figura plana encerrada por una función y
= (x) , el eje x y las verticales x = a y x = b, cuando esta función es positiva en algunas partes del [a , b] y negativa en otras.
Ejemplo 2 : Calcular el área limitada por la gráfica de y = x2 + 2 x , el eje x , y las rectas x = - 2 y x = 2.
Grafiquemos para determinar las zonas donde
es positiva y donde
es negativa. Para ello, cal-
culemos primero las raíces de . x2 + 2 x = 0 x (x + 2) = 0
x = 0 , x = - 2

Análisis Matemático I - Página 36
Ahora se observan claramente los intervalos en que es positiva y en los que es negativa:
Luego:
(x) = - ( x + 2 x) si - 2 x < 0
(x + 2 x) si 0 x 2
2
2
Debemos calcular A = 2
2(x) dx
A = 2
0- (x2 + 2 x) dx +
0
2(x2 + 2 x) dx
A = - 2
0x2 dx - 2
2
0x dx +
0
2x2 dx + 2
0
2x dx
Integrando: A = - 1
3 x3
-2
0
- 2 x
2
2
-2
0
+ 1
3 x3
0
2
+ 2 x
2
2
0
2
Aplicando la regla de Barrow :
A = - 1
3 [ 03 - (- 2)3 ] - [ 02 - (- 2)2 ] +
1
3 [ 23 - 03 ] + [ 22 - 02 ] =
A = 1
3 (- 8) + 4 +
1
3 8 + 4 = 8 A = 8 unidades de área
Ejemplo 3 : Calcular el área limitada por la gráfica de y = x3 - x y el eje x en [-1 , 1].
Debemos calcular: -1
1 x3 - x dx , para ello, en primera instancia realizamos el gráfico de la fun-
ción.
Ahora se observa claramente que
es posi-tiva en [-1 , 0] y que es negativa en [0 , 1] .
Luego, para determinar el área, será necesa-
rio transformar en positiva a
en [0 , 1] , como se ve en la figura :

Análisis Matemático I - Página 37
(x) = x - x si -1 x 0
- (x - x) si 0 < x 1
3
3
A =
-1
1(x) dx =
-1
0(x3 - x) dx +
0
1- (x3 - x) dx
A = -1
0x3 dx -
-1
0x dx -
0
1x3 dx +
0
1x dx
A = 14
x4
-1
0
- 1
2 x2
-1
0
- 14
x4
0
1
+ 1
2 x2
0
1
A = 14
(0 - (- 1)4 ) - 1
2 (0 - (-1)2 ) -
14
(1 - 0) + 1
2 (1 - 0)
A = - 14
+ 1
2
- 14
+ 1
2 =
1
2 unidades de área
Observación : teniendo en cuenta que
es una función impar, por esta simetría es claro que las
áreas de las regiones determinadas por (x) y el eje de absisas en [-1 , 0] y en [0 , 1] son iguales, luego es lícito calcular el área buscada como:
A = 2 0
1- (x3 - x) dx = - 2
0
1x3 dx + 2
0
1x dx
A = - 2 14
x4
0
1
+ 2 1
2 x2
0
1
= - 1
2 (12 - 0) + (12 - 0) = -
1
2 + 1 =
1
2
O hacer A = 2 0
1 - (x3 - x) dx
Área de una región comprendida entre curvas
Lo visto antes es un caso particular del problema más general de determinar el área de una región comprendida entre dos curvas. El área bajo la curva de una función no negativa y continua,
y = (x) en [a , b] , es el área de la región comprendida entre su propia gráfica, la gráfica de la
función y = 0 (el eje x ) y las rectas verticales x = a , x = b .
Estudiemos los siguientes casos particulares:
A) Supongamos que
y g son continuas en [a , b] y que (x)
g(x)
0 para todo x
[a , b]. Graficando:

Análisis Matemático I - Página 38
Si calculamos separadamente A1 = a
b (x) dx y
A2 = a
b g(x) dx, ellas son las áreas de las regiones que se pue-
den observar en los siguientes gráficos:
Claramente puede deducirse que el área A , que se pretende determinar está dada por la diferencia
entre A1 y A2 , A = A1 - A2 = a
b (x) dx -
a
b g(x) dx ; por la propiedad P2 de la integral defini-
da, y puesto que
y g son continuas en [a , b] , entonces también lo es (
- g) en [a , b] , luego
A = a
b ( (x) - g(x) ) dx (1)
Ejemplo 1 : Determinar el área de la región comprendida entre las curvas correspondientes a y = x2 e y = x.
Los puntos de intersección de las curvas están dados en la solución del sistema y = x
y = x
2
por método de igualación: x2 = x x2 - x = 0 x (x - 1) = 0 x1 = 0, x2 = 1
S = {(0 , 0) , (1 , 1)}
El gráfico es:
A = 0
1(x - x2) dx =
0
1x dx -
0
1x2 dx
A = 1
2 x2
0
1
- 1
3 x3
0
1
= 1
2 (1 - 0) -
1
3 (1 - 0)
A = 1
6 unidades de área
B) Supongamos que y = (x) y y = g(x) son continuas en [a , b] y que (x)
g(x) con g(x) <0 para todo x [a , b] . Gráficamente la situación es:

Análisis Matemático I - Página 39
Si separamos en dos gráficos a las funciones y g :
A1 = a
b (x) dx A2 =
a
b - g(x) dx
Podemos escribir, ahora que
A = A1 + A2 = a
b (x) dx +
a
b (- g(x) ) dx
por propiedad P2 de la integral definida y puesto que
y g son continuas (
- g) también lo es,
luego A = a
b [ (x) dx - g(x) ] dx (2)
Ejemplo 2 : determinar el área de la región comprendida por las curvas y = - x2 + 1 y y = 2 x2 - 2 Hallemos los puntos de intersección de las parábolas:
1 - x2 = 2 x2 - 2 1 - x2 - 2 x2 + 2 = 0 -3 x2 + 3 = 0 x1 = 1 ; x2 = -1
- 3 (x2 - 1) = 0 (x2 - 1) = 0 x1 = 1 ; x2 = -1
Gráficamente tenemos:
A = -1
1[(1 - x2) - (2x2 - 2)] dx
A = -1
1(1 - x2 - 2 x2 + 2) dx
A = -1
1(3 - 3 x2) dx
A = 3 -1
1 dx - 3
-1
1 x2 dx
A = 3 x-1
1
- 3 1
3 x3
-1
1
= 3 [1 - (-1)] - [(1)3 - (-1)3] = 3 . 2 - (1 + 1)
A = 4 unidades de área
C) Estudiemos el caso más general: sean
y g dos funciones continuas en [a , b] y tales que
(x)
g(x) para todo x [a , b] .
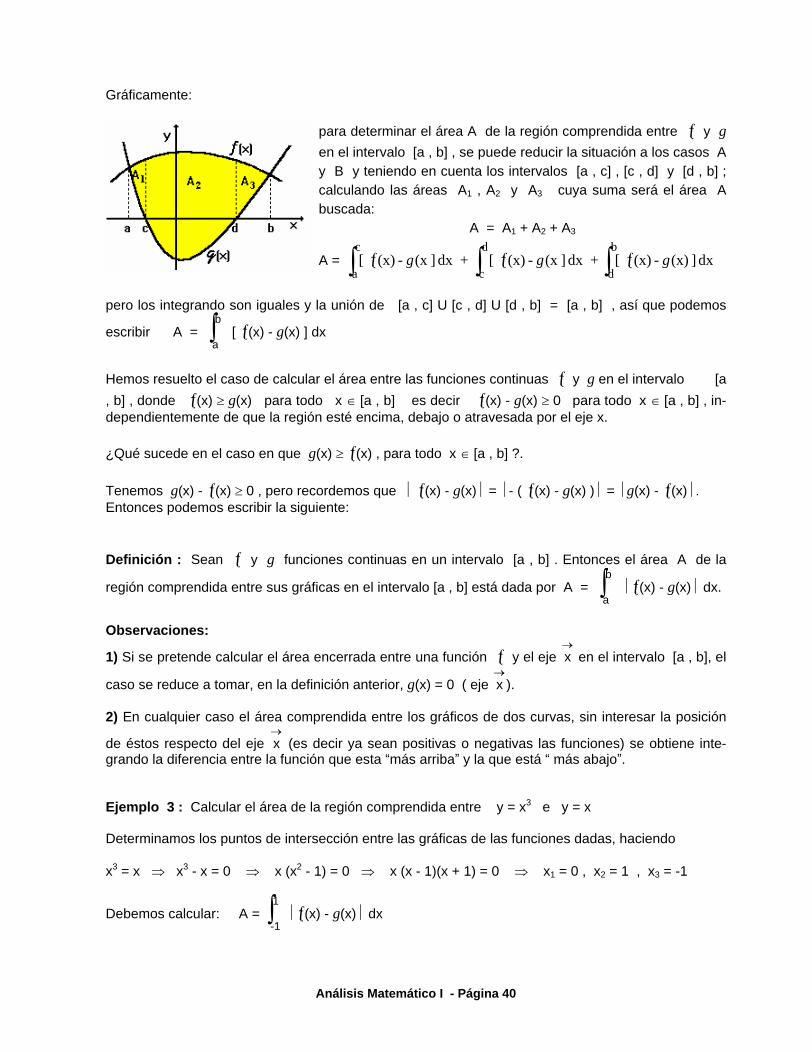
Análisis Matemático I - Página 40
Gráficamente:
para determinar el área A de la región comprendida entre
y g
en el intervalo [a , b] , se puede reducir la situación a los casos A y B y teniendo en cuenta los intervalos [a , c] , [c , d] y [d , b] ; calculando las áreas A1 , A2 y A3 cuya suma será el área A buscada:
A = A1 + A2 + A3
A = d
c
b
d
c
adx ] (x) - (x) [ +dx ](x - (x) [ +dx ](x - (x) [ ggg
pero los integrando son iguales y la unión de [a , c] U [c , d] U [d , b] = [a , b] , así que podemos
escribir A = a
b [ (x) - g(x) ] dx
Hemos resuelto el caso de calcular el área entre las funciones continuas y g en el intervalo [a
, b] , donde (x)
g(x) para todo x
[a , b] es decir (x) - g(x) 0 para todo x [a , b] , in-dependientemente de que la región esté encima, debajo o atravesada por el eje x.
¿Qué sucede en el caso en que g(x)
(x) , para todo x [a , b] ?.
Tenemos g(x) - (x) 0 , pero recordemos que
(x) - g(x) = - ( (x) - g(x) ) = g(x) - (x) . Entonces podemos escribir la siguiente:
Definición : Sean
y g funciones continuas en un intervalo [a , b] . Entonces el área A de la
región comprendida entre sus gráficas en el intervalo [a , b] está dada por A = a
b (x) - g(x) dx.
Observaciones:
1) Si se pretende calcular el área encerrada entre una función
y el eje x
en el intervalo [a , b], el
caso se reduce a tomar, en la definición anterior, g(x) = 0 ( eje x ).
2) En cualquier caso el área comprendida entre los gráficos de dos curvas, sin interesar la posición
de éstos respecto del eje x
(es decir ya sean positivas o negativas las funciones) se obtiene inte-grando la diferencia entre la función que esta más arriba y la que está más abajo .
Ejemplo 3 : Calcular el área de la región comprendida entre y = x3 e y = x
Determinamos los puntos de intersección entre las gráficas de las funciones dadas, haciendo
x3 = x x3 - x = 0 x (x2 - 1) = 0 x (x - 1)(x + 1) = 0 x1 = 0 , x2 = 1 , x3 = -1
Debemos calcular: A = -1
1(x) - g(x) dx

Análisis Matemático I - Página 41
(x) - g(x) = x - x si -1 x 0
x - x si 0 < x 1
3
3
luego A =
-1
0(x3 - x) dx +
0
1(x - x3) dx
A = -1
0x3 dx -
-1
0x dx +
0
1x dx -
0
1x3 dx
A = 1
4 x4
-1
0
- 1
2 x2
-1
0
+ 1
2 x2
0
1
- 1
4 x4
0
1
A = 1
4 [04 - (-1)4] -
1
2 [0 - (-1)2] +
1
2 [(1)2 - 0] -
1
4 [1 - 0]
A = - 1
4 +
1
2 +
1
2
- 1
4 =
1
2 unidades de área
Observemos que por simetría, en este caso es posible determinar el área buscada, haciendo:
A = 20
1 (x - x3) dx = 2
0
1x dx - 2
0
1x3 dx = 2
x
2
2
0
1
- 2 1
4 x4
0
1
A = (12 - 02) - 1
2 (14 - 04) = 1 -
1
2 =
1
2 unidades de área
Ejemplo 4 : Cálcular el área de la región encerrada por (x) = x
- 2 y g(x) = x
2
2
- 2
Podemos expresar a (x) = x - 2 si x > 0
- x - 2 si x 0 .
Las raíces de (x) son x = 2 y x = - 2 .
Por otra parte las raíces de g(x) se obtienen haciendo x
2
2
- 2 = 0 x2 = 4 x = 2 ; x = - 2
Gráficamente tenemos:
(x) - g(x) = - x -
x
2 si - 2 x < 0
x - x
2 si 0 x 2
2
2

Análisis Matemático I - Página 42
luego A = 2
0( - x -
x
2
2
) dx + 0
2 ( x -
x
2
2
) dx
A = - 2
0x dx -
1
2
2
0x2 dx +
0
2x dx -
1
2
0
2x2 dx
A = - 1
2 x2
-2
0
- 1
2
1
3 x3
-2
0
+ 1
2 x2
0
2
- 1
2
1
3 x3
0
2
A = - 1
2 [0 - (-2)2 ] -
1
6 [ 0 - (-2)3 ] +
1
2 [22 - 02 ] -
1
6 [23 - 03 ]
A = 2 - 4
3 + 2 -
4
3 =
4
3 unidades de área
Ejemplo 5 : Sean (x) = x3 - x y g(x) = 3 x determinar el área de la región encerrada por ellas. Las raíces de g son : x3 - x = 0 x (x2 - 1) = x (x - 1) (x + 1) = 0 , luego x = 0 , x = 1 , x = -1
Y los puntos de intersección de y g : x3 - x = 3 x x3 - 4 x = 0 x (x2 - 4) = x (x - 2) (x + 2) , luego x = 0 , x = 2 , x = -2
Grafiquemos y g :
A = 2
2(x) - g(x) dx
(x) - g(x) = x - 4x si - 2 x 0
- x + 4x si 0 < x 2
3
3
A = 2
0(x3 - 4x) dx +
0
2(- x3 + 4x) dx
A = x
4
4
-2
0
- 4 x
2
2
-2
0
- x
4
4
0
2
+ 4 x
2
2
0
2
A = 1
4 [0 - (-2)4] - 2 [0 -(-2)2] -
1
4 [24 - 0] + 2 [22 - 0]
A = 1
4 (-16) - 2 . 4 -
1
4 16 + 2 . 4 = - 8 = 8 unidades de área
Hasta aquí hemos calculado áreas de regiones entre curvas o, lo que es lo mismo, hemos obtenido el valor numérico asociado a una región R del plano, limitada (por ejemplo) por las funciones
)(xfy e )(xgy para los valores de x entre x =a y x =b.
Completemos esta idea para el caso de tener como dato las ecuaciones explícitas )(yfx y
)(ygx
y determinemos el valor del área de la región R para los valores de y, entre y = c e

Análisis Matemático I - Página 43
y = d. Esta situación se ilustra en los siguientes gráficos, en los cuales cada región está acotada por curvas dadas en función de y :
En todos los casos se tiene que el área de la región es A(R) = dyygyfd
c
)()( .
Observación : En esta integral definida, que calcula el área de la región plana R sombreada: f siempre expresa la curva que está a la derecha y g la que está a la izquierda. Con lo cual el inte-grando [ f(y) g(y) ] es mayor o igual que cero. En realidad, si giramos los ejes coordenados y los colocamos de acuerdo a la convención usual ( en el eje horizontal, la variable independiente y y en el eje vertical la variable dependiente x ), podemos decir que la curva dada por f(y) está por encima de la curva dada por g(y).
Ejemplo: Hallar el área de la región del plano acotada por la recta dada por 1xy y la parábo-
la dada por 23 yx , integrando respecto a y.
Observemos en el gráfico que la cota derecha de la región es la parábola de ecuación 23)( yyfx
y la cota izquierda es la recta de ecuación 1)( yygx :
Resolviendo el sistema 23 yx ; 1yx hallamos los límites de integración, que son valores de y . Es claro que estos valores son las abscisas de los puntos de intersección de f(y) y g(y) . Entonces de 0213 22 yyyy obtenemos que el límite inferior de integración es y = - 2 y el límite superior de integración es y = 1.
Por otro lado, el integrando es igual a 2)1(3)()( 22 yyyyygyf .
Finalmente, el área pedida es el resultado de la integral definida:
A(R) = dyygyfd
c
)()( = dyyy1
2
2 2 =
1
2
23
223
yyy
2
942
3
82
2
1
3
1u.a.

Análisis Matemático I - Página 44
Observemos a continuación, lo que sucede si calculamos el área de la región integrando respecto a x . Se puede comprobar que dicho área se calcula mediante:
A(R) =3
2
2
1
33 31 dxxxdxxx = u.a. 2
9
Vemos que el resultado obtenido es el mismo, pero ciertamente el trabajo realizado es mayor que en la primer resolución, ya que tuvimos que calcular dos integrales definidas. A menudo puede ocurrir esto cuando realizamos cálculo de áreas con integrales definidas. Entonces es conveniente tomar el camino más sencillo!. Es decir, es conveniente elegir previamente si hemos de integrar respecto a y o respecto a x.
Integrales Impropias
En la definición de la integral definida a
b (x) dx se ha considerado que:
i) los límites de integración a y b son números reales.
ii) la función
es continua en [a , b] o bien, si es discontinua (en un número finito de discontinui-dades) ella es acotada en [a , b].
Cuando se elimina alguna de estas dos condiciones, se dice que la integral resultante es una inte-gral impropia.
1) Integrales impropias sobre intervalos no acotados:
Denominaremos de esta forma a las integrales en las que el intervalo de integración es no acota-do o infinito. Es decir, queremos integrar funciones sobre intervalos de la forma [a,+ ) , (- ,b] o (- ,+ ) . Estas integrales se definen de la siguiente manera:
Definición 1: Sea
: [a , + )
R una función con la siguiente propiedad: para todo t
[a , + ),
es integrable sobre [a , t] . Definimos entonces:
a(x) dx =
t +lím
a
t(x) dx
si este límite existe y es finito se dice que la integral impropia a
(x) dx converge.
En cualquier otro caso se dice que la integral impropia no converge. En particular, si el límite men-cionado es infinito se dice que la integral impropia diverge y si el límite no existe se dice que la inte-gral impropia es oscilante.
Ejemplo 1 : Evaluar 1
x2 dx , si es posible.
Como
es continua en [1 , ), es integrable sobre [a , t] por lo tanto podemos aplicar la definición 1 :

Análisis Matemático I - Página 45
1x2 dx =
t +lím
1
t
x2 dx =
t +lím
1
3 x3
1
t
] = t +lím
1
3(t3 - 1) = +
concluimos que la integral diverge.
Definición 2 : Sea :(- , b]
R una función con la siguiente propiedad: y (- , b] es inte-
grable sobre [y , b] definimos entonces -
b
(x) dx =
y -lím
y
b(x) dx , si este límite existe y es
finito se dice que la integral impropia -
b
(x) dx converge.
En cualquier otro caso se dice que la integral impropia no converge. En particular, si el límite men-cionado es infinito se dice que la integral impropia diverge y si el límite no existe se dice que la inte-gral impropia es oscilante.
Ejemplo 2 : Evaluar, si es posible -
-2
dx
x
3
(x) = 1
x3 es continua en (-
, -2] , por lo tanto es integrable sobre [y , -2] , luego aplicamos la
definición 2
-
-2
dx
x
3 = y -lím
y
-2 dx
x
3 = y -lím
1
4x4 y
-2
= y -lím
- 1
4
1
- 2 -
1
y 44
y -lím
- 1
4
1
16 -
1
y = -
1
644 , luego la integral converge
Ejemplo 3 : Determinar, si es posible -
0 cos x dx
(x) = cos x es continua en (-
, 0] , por lo tanto es integrable sobre [y , 0] , luego aplicando la definición 2
-
0cos x dx =
y -lím
y
0cos x dx =
y -lím
sen xy
0
= y -lím
(sen 0 - sen y) = y -lím
(- sen y)
este límite no existe, por lo que concluimos que la integral impropia es oscilante.
Definición 3: Sea : R
R una función con la siguiente propiedad: existe a
R tal que si con-
vergen las integrales -
a(x) dx y
a(x) dx se define entonces:
-
+(x) dx =
-
a(x) dx +
a(x) dx , la integral impropia
-
+(x) dx converge si y solo si las dos integrales del segundo
miembro convergen.
En cualquier otro caso diremos solamente que la integral no converge.
Ejemplo 4: Determinar, si es posible -
+e-x dx

Análisis Matemático I - Página 46
(x) = e-x es continua para todo x
R, aplicando la definición 3 con a = 0 , tenemos.
-
+e-x dx =
-
0 e-x dx +
0
+ e-x dx
Evaluemos por separado cada una de las integrales del segundo miembro; recurriendo a las defini-ciones 1 y 2 respectivamente.
0
+e-x dx =
t +lím
0
t e-x =
t +lím
(- e-x)
0
t
=
t +lím
- (e- t - e0 ) =
t +lím
-
1
et + 1 = 1
luego, esta integral converge.
Veamos que sucede con la otra integral:
-
0e-x dx =
y -lím
y
0e-x dx =
y -lím
- e-x
y
0
= y -lím
- (e0 - e-y ) = y -lím
- 1+ e-y = +
luego, esta integral diverge.
Si miramos atentamente en la definición: las dos integrales del 2do miembro deben ser convergentes para que la integral dada sea convergente. Por lo tanto, concluimos que, la integral dada no es con-vergente.
2) Integrales Impropias de funciones no acotadas
Denominaremos de este modo a las integrales de funciones no acotadas en un intervalo [a , b].
Recordemos que si es continua en [a , b] , entonces existe la integral definida a
b (x) dx .
Además sabemos que, si es continua en [a , b] y existe una función g tal que g (x) = (x) en [a , b], entonces se puede evaluar esta integral haciendo:
a
b (x) dx = g(b) - g(a)
Sin embargo, no se puede resolver una integral tal como -2
1 1
x2 dx por el camino anterior, puesto
que y = 1
x2 no está acotada en un entorno reducido centrado en cero. En consecuencia no lo
está en [-2 , 1] . Entonces la integral planteada es impropia.
Definición 4: Sea
: [a , b)
R una función con la siguiente propiedad:
t
[a , b),
es inte-
grable sobre [a , c] . Definimos entonces a
b (x) dx =
t blím
a
t
(x) dx . Si este límite existe y
es finito se dice que la integral impropia a
b (x) dx converge. En cualquier otro caso la integral
impropia no converge (diverge u oscila según el límite sea infinito o no exista).
Ejemplo 5: Evaluar -1
0
dx
x2

Análisis Matemático I - Página 47
Si graficamos y = 1
x2 , observamos que es con
tinua en [-1 , 0) entonces es integrable sobre [-1 , t] para todo t [-1 , 0) y también que no es acotada en [-1 , 0] pues no lo es en algún entorno de x = 0 . Por lo tanto, usando la definición 4:
-1
0
dx
x2 = tlím
0
-1
t
dx
x2 = tlím
0
- 1
x -1
t
=
tlím
0
[ - ( 1
t -
1
(-1) ) ] =
tlím
0
( - 1
t
- 1 ) = + , luego, la integral impropia diverge.
Definición 5: Sea
: (a , b]
R una función con la siguiente propiedad:
z
(a , b],
es inte-
grable sobre [z , b] . Definimos entonces: a
b (x) dx =
z alím
z
b(x) dx . Si este límite existe y
es finito se dice que la integral impropia converge. En cualquier otro caso se dice que la integral im-propia no converge (diverge u oscila según el límite sea infinito o no exista).
Ejemplo 6: Evaluar 0
4 dx
x
Observemos que (x) = 1
x + cuando
x 0+ , entonces no está acotada en [0 , 4].
0
4
dx
x =
z 0lím
z
4
dx
x =
z 0lím 2 x1/2
z
4
=
= z 0lím (4 - 2 z1/2 ) = 4, luego la integral impropia
converge.
Definición 6 : Sea : [a , b]
R una función con la siguiente propiedad: existe x0 (a , b) tal
que
y
[a, x0) ,
es integrable sobre [a , y] , y
z
(x0 , b] ,
es integrable sobre [z , b] Definimos entonces
a
b (x) dx =
y x a
y
0
lím (x) dx + z x z
b
0
lím (x) dx , si ambos límites son finitos la integral impro-
pia converge. En cualquier otro caso sólo se puede afirmar que la integral impropia no converge.
Ejemplo 7: Evaluar 1
4 dx
(x - 2)1/3

Análisis Matemático I - Página 48
El integrando tiene una discontinuidad no evitable en x = 2 y, en particular, no está acotado en algún entorno de este punto, por lo tanto no está acotado en [1 , 4]
En virtud de la definición 6: 1
4 dx
(x - 2)1/3 = 1
2 dx
(x - 2)1/3 + 2
4 dx
(x - 2)1/3
Como las integrales del segundo miembro se ajustan a los casos de las definiciones 4 y 5:
1
4
dx
(x - 2)1/3 = y 2lím
1
y dx
(x - 2)1/3 + z 2lím
z
4 dx
(x - 2)1/3
y 2lím
[ 3
2 (x - 2)2/3 ]
1
y
+ ,z 2lím
[ 3
2 (x - 2)2/3 ]
z
4
=
= y 2lím
3
2 [ (y - 2)2/3 - (-1)2/3 ] +
z 2lím
3
2 [ 22/3 - (z - 2)2/3 ] =
3
2 (-1) +
3
2 22/3
1
4 dx
(x - 2)1/3 = 3
2 ( 4 3 -1 ) . Por lo tanto la integral impropia es convergente.
Observaciones:
1) Es posible que una integral tenga límites de integración infinitos y un integrando con una disconti-
nuidad infinita. Para determinar si converge una integral tal como: 1
x dx
x - 1 2 en este caso se
secciona la integración en algún punto de continuidad del integrando que sea conveniente, por ejem-plo x = 2
1
x dx
x - 1 2 =
1
2 x dx
x - 1 2 +
2
x dx
x - 1 2
Si convergen las dos integrales impropias del segundo miembro de la igualdad, entonces la integral del primer miembro es convergente.
2) El integrando a
b (x) dx también puede tener discontinuidades infinitas tanto en x = a como
en x = b , como por ejemplo -1
1
dx
x
-12 . En este caso se secciona la integral dada en algún punto
de continuidad del integrando que sea conveniente. Por ejemplo x = 0 :
-1
1
dx
x
-12 = -1
0
dx
x
-12 + 0
1
dx
x
-12

Análisis Matemático I - Página 49
si convergen las dos integrales impropias del segundo miembro de la igualdad, entonces la integral dada es convergente.
3) El integrando a
b (x) dx puede tener más de una discontinuidad infinita en [a , b], entonces la
integral impropia se define mediante una extensión natural de la definición 6. Por ejemplo, en
-2
2
dx
x (x -1)2 el integrando tiene discontinuidades infinitas en x = -1 , x = 0 y x = 1 ; luego sec-
cionaremos en tres integrales:
-2
2
dx
x (x -1)2 =
-2
-1
dx
x (x -1)2 +
-1
0
dx
x (x - 1)2 +
0
1
dx
x (x -1)2
Donde cada una de las integrales del segundo miembro ha sido estudiada con anterioridad. Si las tres integrales impropias del segundo miembro son convergentes, entonces la integral original es convergente.
Otras Aplicaciones Geométricas de la Integral Definida
Longitud de Arco
Queremos hallar aquí, una manera de calcular la longitud de una curva de ecuación )(xfy desde
un punto de abscisa a hasta uno de abscisa b . Para ello consideraremos que la derivada ´ es continua en el intervalo cerrado [a , b]. Hagamos una partición = { t0 , t1 , ... , tn } de este intervalo, donde a = t0 < t1 < ... < tn-1 < tn = b y los subintervalos tienen igual longitud, dada por
x = n
a-b .
Si consideramos los segmentos que unen los puntos )(,)(, 11 iiii tftytft , ni1 , la unión
de todos ellos es la poligonal que se muestra en la figura, donde también se observa que la longitud de la poligonal es una aproximación de la longitud de la curva entre ax y bx :
La longitud del segmento que une los puntos )(,)(, 11 iiii tftytft en cada subintervalo es:
l i = 21
21 )()() iiii tftftt .

Análisis Matemático I - Página 50
Ahora, aplicando el Teorema del Valor Medio del Cálculo diferencial para funciones continuas en el intervalo genérico ii tt ,1 , existirá un punto iii ttc ,1 tal que
)()()(.´ 11 iiiii tftfttcf
Por lo que, sustituyendo, tenemos:
l i = 21
21 )(.´) iiiii ttcftt
l i = 21 ´1. iii cftt
Como para todo i es 1ii ttx :
l i = 2´1. icfx
entonces, la longitud L de la poligonal, que es la suma de las longitudes de todos los segmentos, queda:
L = n
iicfx
1
2´1.
Es obvio que para cada n se puede hacer una partición de ba , en la que la longitud de sus
subintervalos estará dada por 1ii ttx = n
a-b . En consecuencia, para cada n
se genera una poligonal que tendrá su correspondiente longitud L.
Ahora bien, se puede considerar que para cada n , L es una suma de Riemann para la función 2´1)( xfxg ya que g es continua en ba , , por ser composición de funciones de ese tipo
en ba , . Entonces existe y es finito el límite de estas sumas de Riemann (que es el límite de las longitudes de las poligonales) y, por la segunda definición de integral definida, este límite es:
n
in
b
a icfxdxxg lím1
2´1..)(
Por otro lado, geométricamente parece claro que cuando n las longitudes de las poligonales
tienden a la longitud de la curva de ecuación )(xfy , la que indicaremos con abL .
Entonces, se define como longitud abL de arco de curva, de ecuación )(xfy desde el punto
de abscisa a hasta el punto de abscisa b, con derivada ´continua en b,a , a la integral:
abL =
b
adx.x´f1 2 (1)
Observación: Se desprende de esta definición que la idea de que cualquier arco de curva tiene lon-gitud o es medible, es falsa: no siempre un límite, en este caso el límite de las sumas de Riemann consideradas, existe y es finito.
Aunque las integrales que hay que resolver no son del todo sencillas, veamos algunos ejemplos.
Ejemplo 1: Calcular la longitud de la curva dada por 13
24)( 2/3xxf desde el punto x=0 hasta
el punto x=1.

Análisis Matemático I - Página 51
La derivada de es 2/1
2
3.
3
24´ xxf por lo que su
cuadrado queda:
xxxf 822)´(22/12 . Usando la fórmula (1) :
10L =
1
0dx.8x1 , haciendo la sustitución
8dxdu 8x),u 1( tenemos
10L =
9
1du.u
8
1 = 9
12/3u
12
1= =
6
131)9( 2/3
12
1
lEjemplo 2: Calcular la longitud de la curva de ecuación 2/32 )2(3
1xy en el intervalo 3,0 .
La derivada de y es 2´ 2xxy , entonces la longitud pedida está dada por :
30L =
3
0dx.xx1
22 2 =
3
0dx.xx1 2 22
30L =
3
0dx.xx4 12 2 =
3
0dx.x 2 2
1
30L =
3
0dx.x 2 1 =
3
0
3
3x
x=12 unidades de longitud
Ejemplo 3: Calcular la longitud del arco de la parábola dada por xxy 52 2
que se encuentra
debajo del eje x.
El arco mencionado se encuentra en el intervalo cerrado dado por las raíces de la función )52(52 2 xxxxy ,
las cuales son 2
50 21 xyx .
La derivada de la función es 54´ xy y su cuadrado 22 )54()´( xy entonces la integral que calcula la longitud
pedida es:
L0
25-
= 0
- 5dx.54x1 2
2
. Sustituyamos dxdz
xz
.4
54
De manera que si x varía entre 23
y 0, la sustitución dice
que z varía entre -6 y 5. Entonces:
L0
25-
= 5
-dz.z1 2
6 4
1=
5
-dz.z1 2
64
1
Utilizando la tabla de integrales:

Análisis Matemático I - Página 52
L0
25-
= 5
6
5
622
21 1arg
8
11arg
4
1zzzshzzzsh
222 )6(1)6()6(arg5155arg8
11arg
8
1 5
6 shshzzzsh
= 376)6(arg2655arg8
1shsh
Aproximando los valores de los arg sh y de las raíces:
L0
25-
= 0828,6.6)4917,2(099,5.53124,28
1= 66,79 u.l.
Ejemplo 4: Calcular la longitud del arco de curva dada por 32 41 xy
desde 0x hasta 1x .
Trabajando algebraicamente,se puede concluir que la expresión dada define implícitamente las funciones 12 2/3
1 xy e
12 2/32 xy cuyas gráficas son las ramas que se ven en la
figura. Hallemos la derivada y ´ derivando implícitamente:
212´.12 xyy 1
6´
2
y
xy entonces la longitud buscada
es:
10L =
1
0dx.
y
x1
2
1
6 2
=1
0dx.
y
x1
2
4
1
36.
Recordemos que, tanto y1 como y2 verifican 32 41 xy . Entonces podemos reemplazar 21y
por 34x y con la integral de arriba estaremos calculando la longitud de cualquiera de ellas(es decir, ambas tienen igual longitud):
10L =
1
0dx.
x
x1
3
4
4
36 =
1
0dx.x1 9 = 1
02/391
3
2.
9
1x = 1
02/391
27
2x
10L = 1
02/391
27
2x = 110
27
2 2/3 u.l.
Volumen de un Sólido de Revolución
Definición: Se llaman sólidos de revolución a aquellos sólidos que se generan al girar una región plana alrededor de un eje (eje de simetría o eje de revolución). En todos los casos el cuerpo que se obtiene es una porción del espacio de tres dimensiones ( 3 ).
Son ejemplos de sólidos de revolución: el cono, que resulta de girar un triángulo rectángulo alrede-dor de uno de sus catetos; el cilindro, que surge al girar un rectángulo alrededor de uno de sus la-

Análisis Matemático I - Página 53
dos; el toro, que se obtiene de la rotación de un círculo alrededor de un eje vertical, entre otros. Mos-tramos aquí algunos sólidos de revolución:
toro paraboloide cono
Así como de una región del plano nos interesa calcular el área de dicha región, es particularmente importante calcular el volumen de un sólido de revolución dado. Veremos que también este cálculo se puede hacer a través de una integral definida. El problema que se presenta ahora es análogo al de cálculo de área y al de cálculo de longitud de arco. Hagamos uso de la idea intuitiva que tenemos de volumen y veamos el procedimiento mediante el cual obtendremos la integral conveniente para su cálculo.
Dado un sólido de revolución S, si procedemos a cortar el mismo con un plano Px , perpendicular al eje x y que pase por un determinado valor de x, obtenemos una sección transversal plana de S, la cual tiene un área determinada A(x), que depende del punto x elegido. Esta situación se ilustra en la siguiente figura:
Si tomamos una partición ={ x0 , x1 , ... , xn } del intervalo [a, b], con a = x0 < x1 <... < xn-1< xn= b
en la que los subintervalos tienen igual longitud x = n
a-b , podemos pensar en aproximar el vo-
lumen del sólido de revolución S por medio de una suma de volúmenes de sólidos más elemen-tales como son los cilindros. Es decir, si rebanamos al sólido S con los planos Px1 , Px2 ,.., P x n
trazados por cada punto de la partición
a lo largo del intervalo [a, b] , al volumen de cada reba-nada Si lo aproximaremos mediante el volumen de un cilindro. Para ello, en cada subintervalo elegi-mos un punto muestra x*
i [xi - 1 ,xi ] , i = 1,2 .,n , como se ve en la figura de la izquierda:
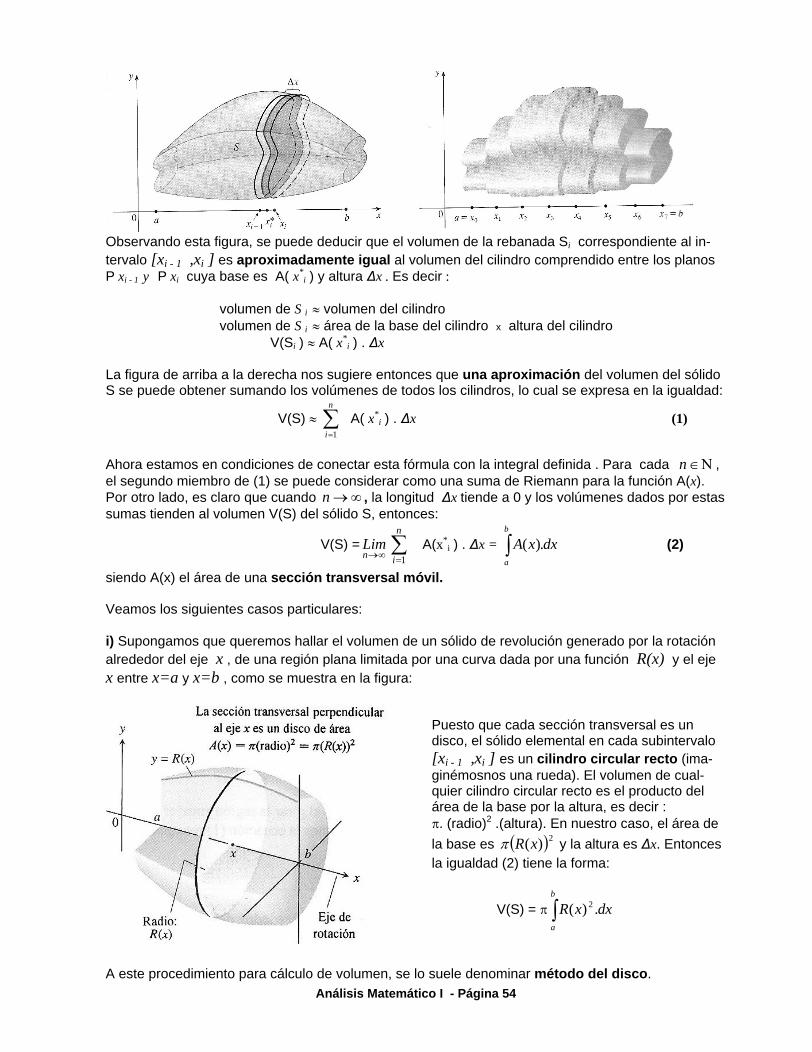
Análisis Matemático I - Página 54
Observando esta figura, se puede deducir que el volumen de la rebanada Si correspondiente al in-tervalo [xi - 1 ,xi ] es aproximadamente igual al volumen del cilindro comprendido entre los planos P xi - 1 y P xi cuya base es A( x*
i ) y altura x . Es decir :
volumen de S i volumen del cilindro volumen de S i área de la base del cilindro x altura del cilindro V(Si )
A( x*i ) . x
La figura de arriba a la derecha nos sugiere entonces que una aproximación del volumen del sólido S se puede obtener sumando los volúmenes de todos los cilindros, lo cual se expresa en la igualdad:
V(S)
n
i 1
A( x*i ) . x (1)
Ahora estamos en condiciones de conectar esta fórmula con la integral definida . Para cada n , el segundo miembro de (1) se puede considerar como una suma de Riemann para la función A(x). Por otro lado, es claro que cuando n , la longitud x tiende a 0 y los volúmenes dados por estas sumas tienden al volumen V(S) del sólido S, entonces:
V(S) =nLim
n
i 1 A(x*
i ) . x = dxxAb
a
.)( (2)
siendo A(x) el área de una sección transversal móvil.
Veamos los siguientes casos particulares:
i) Supongamos que queremos hallar el volumen de un sólido de revolución generado por la rotación alrededor del eje x , de una región plana limitada por una curva dada por una función R(x) y el eje x entre x=a y x=b , como se muestra en la figura:
Puesto que cada sección transversal es un disco, el sólido elemental en cada subintervalo [xi - 1 ,xi ] es un cilindro circular recto (ima-ginémosnos una rueda). El volumen de cual-quier cilindro circular recto es el producto del área de la base por la altura, es decir : . (radio)2 .(altura). En nuestro caso, el área de
la base es 2)(xR y la altura es x. Entonces la igualdad (2) tiene la forma:
V(S) = dxxRb
a
.)( 2
A este procedimiento para cálculo de volumen, se lo suele denominar método del disco.

Análisis Matemático I - Página 55
Ejemplo 1: La región del plano limitada por la curva y = x y el eje x , que gira alrededor del eje x, con 40 x , genera un sólido de revolución. Hallar su volumen.
En la figura de la derecha se muestra la región que ha de rotar alrededor del eje x , en la figura cen-tral se muestra el sólido generado por la rotación de esta región y un cilindro elemental del mismo, y en la figura de la derecha otra imagen de este sólido.
Aquí el radio es R(x) = f(x) . Luego el volumen está dado por la integral definida V = dxxfb
a
.)(2
V= dxx .24
0
dxx.4
0
=8 u.v.
Ejemplo 2: Hallar el volumen del sólido generado cuando la región limitada por las gráficas de 0 y ,0 xxy
, 2 , gira alrededor del eje x .
En la figura de la izquierda se muestra la representación gráfica del sólido de revolución y en la de la derecha la de una región elemental(un rectángulo), cuya rotación alrededor del eje x generará un sólido elemental(un cilindro):
Si xxfxR 2)()( , entonces el volumen del sólido está dado por:
V = dxx .22
0
2
2
0
323
x =3
8 u.v.

Análisis Matemático I - Página 56
Ejemplo 3: Hallar el volumen del sólido generado por y = x entre x=1 y x=4, al girar alrededor del eje x .
V = dxxf
b
a
.)(2
V = dxx .24
1
dxx .4
1
=2
15 u.v.
Ejemplo 4: Hallar el volumen de una esfera de radio a.
Tal esfera se puede considerar engendrada por la rotación de la región plana limitada por la semicir-cunferencia que está por encima del eje x , de centro 0,0) y radio a y el eje x , entre - a y a :
Sabemos que la ecuación de esta semicircunferencia
es 22)( xaxfy . La cuestión es que el radio es
R(x ) = f(x) = 22 xa . Entonces el volumen buscado está dado por:
V= dxxadxxfa
a
a
a
..)(2
22
2
Pero hagamos las cosas más sencillas todavía: podemos considerar la rotación de la región, pero entre 0 y a y al volumen del sólido generado por esta rotación, multiplicarlo por 2:
V= dxxadxxadxxfaaa
.2.2.)(2000
22
2
22
2
3
0 3
4
32
32V
32
32 a
aaa
xxa
a
u.v.
Observación: A veces la región del plano gira alrededor del eje y , entonces hay que considerar la partición en un intervalo [c,d ] del eje y e integrar respecto de y. En este caso la sección trans-versal móvil es A(y) y el volumen del sólido en cuestión se calcula mediante la integral definida:
V(S) = dyyAd
c
.)( . Si, en particular, la sección transversal móvil es un círculo, será

Análisis Matemático I - Página 57
V(S) = dyyRd
c
.)( 2 ).
Ejemplo 5: Hallar el volumen de una esfera de radio a , considerando que la misma es generada por la rotación de una región alrededor del eje y .
Ya sabemos que de la ecuación de la circunferencia 222 ayx
podemos despejar x en función
de y y así obtener la función 22)( yaygx que es la ecuación de la semicircunferencia que
se encuentra a la derecha del eje y :
Entonces podemos considerar que la esfera está generada por la rotación alrededor del eje y de la región limitada por g(y) y el eje y entre - a y a .
Por lo tanto, su volumen está dado por
V(S) = dyygdyyRa
a
a
a
.(.)( 22
Otra vez, hagamos más sencillas las cosas y consideremos la rotación de la región alrededor del eje y pero entre 0 y a . Luego, al volumen del sólido generado, multipliquémoslo por 2:
V(S) = dyyadyyadyygaaa
.)(2.2.(2000
222
222
V(S) = 33
33
2
3
4
32
32
0
aa
ay
yaa
u.v.
ii) Supongamos ahora que cierta región plana, limitada por dos curvas dadas por )(xRy
e
)(xry
en cierto intervalo [a, b], gira alrededor del eje x pero no está pegada al eje x :
Vemos en la figura de la izquierda que el sólido generado es hueco y en consecuencia, las rebana-das S i , son huecas. En este caso, el sólido elemental cuyo volumen aproximará al volumen de Si , es un cilindro circular hueco o arandela o anillo circular. En la figura de la derecha se muestra la arandela extraída del sólido y se la ha dispuesto acostada . Deducimos que el volumen de la misma

Análisis Matemático I - Página 58
se puede calcular restando convenientemente los volúmenes de los cilindros de radios r1 (radio interior) y r2(radio exterior) :
Volumen de la arandela = . (r2) 2. x - . (r1 ) 2. x
Volumen de la arandela = . [(r2) 2 -. (r1 )
2] . x
Repitiendo los razonamientos hechos al principio del tema, el volumen de la rebanada S i se puede aproximar con el volumen de la arandela:
V(Si )
. [(r2)
2 -. (r1 ) 2] . x
Luego el volumen V(S) del sólido considerado es la suma de los volúmenes de todas las arandelas:
V(S)
.n
i 1
[(r2) 2 -. (r1 )
2] . x
Pero r2 y r1 para cada arandela vienen dados por R(x) y r(x) respectivamente, entonces este volumen viene dado por:
V(S) = dxxrxRb
a
.))(( - ))(( 22
A este procedimiento para calcular el volumen de un sólido de las características tratadas, se lo sue-le llamar método de la arandela.
Observación : Si r (x) =0 a lo largo del intervalo [a, b] , se ve que el método del disco es un caso particular del método de la arandela.
Ejemplo 6: Hallar el volumen del sólido engendrado al girar, alrededor del eje x, la superficie plana
comprendida entre las parábolas con ecuaciones 2)( xxgy , xxfy )( .
La figura muestra la representación gráfica de ambas curvas, de las que se puede verificar que se intersectan en 0x y 1x . La región que gira alrededor del eje x es la que se encuentra entre ellas y la zona sombreada es el i-ésimo rectángulo que engendrará la i-arandela:
Aquí R(x)= x y r(x)= 2x , entonces la
fórmula: V(S) = dxxrxRb
a
.))(( - ))(( 22
Queda: dxxxSV .)()(222
1
0
1
052)(
521
0
4 xxdxxxSV
10
3
5
1
2
1)(SV u.v.
Ejemplo 7: Hallar el volumen del sólido engendrado al girar, alrededor del eje x, la superficie plana comprendida entre las rectas 4)(xfy , 1)(xgy desde 2x hasta 5x .
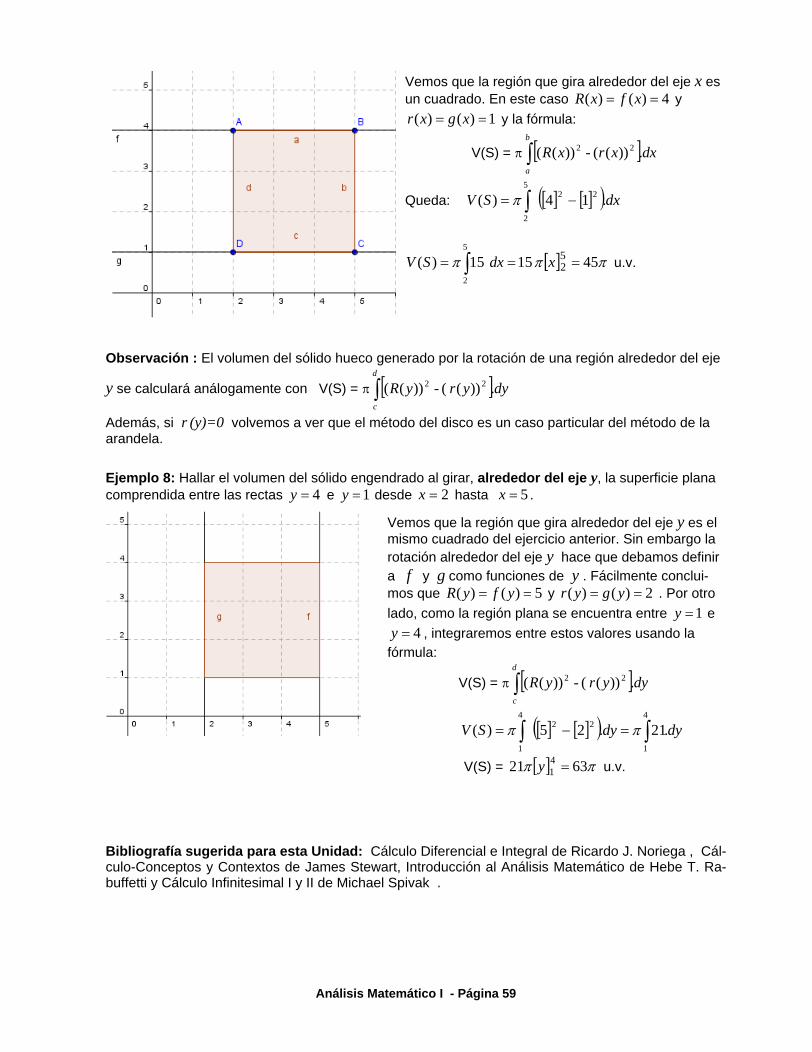
Análisis Matemático I - Página 59
Vemos que la región que gira alrededor del eje x es un cuadrado. En este caso 4)()( xfxR y
1)()( xgxr y la fórmula:
V(S) = dxxrxRb
a
.))(( - ))(( 22
Queda: dxSV .14)( 22
5
2
451515)( 52
5
2
xdxSV u.v.
Observación : El volumen del sólido hueco generado por la rotación de una región alrededor del eje
y se calculará análogamente con V(S) = dyyryRd
c
.))( ( - ))(( 22
Además, si r (y)=0 volvemos a ver que el método del disco es un caso particular del método de la arandela.
Ejemplo 8: Hallar el volumen del sólido engendrado al girar, alrededor del eje y, la superficie plana comprendida entre las rectas 4y e 1y desde 2x hasta 5x .
Vemos que la región que gira alrededor del eje y es el mismo cuadrado del ejercicio anterior. Sin embargo la rotación alrededor del eje y hace que debamos definir a f y g como funciones de y . Fácilmente conclui-mos que 5)()( yfyR y 2)()( ygyr . Por otro
lado, como la región plana se encuentra entre 1y e
4y , integraremos entre estos valores usando la fórmula:
V(S) = dyyryRd
c
.))( ( - ))(( 22
dydySV .21.25)(4
1
224
1
V(S) = 6321 41y u.v.
Bibliografía sugerida para esta Unidad: Cálculo Diferencial e Integral de Ricardo J. Noriega , Cál-culo-Conceptos y Contextos de James Stewart, Introducción al Análisis Matemático de Hebe T. Ra-buffetti y Cálculo Infinitesimal I y II de Michael Spivak .

Análisis Matemático I - Página 60
APÉNDICE
INTEGRACIÓN DE FUNCIONES TRIGONOMÉTRICAS
En la tabla de integrales inmediatas e incluso en integrales que hemos resuelto por sustitución, ya han aparecido integrales de funciones trigonométricas. Otras expresiones más complicadas pue-den llevarse (en general) a integrales de funciones racionales, mediante sustituciones apropiadas.
Aquí nos dedicaremos a la resolución de integrales de funciones trigonométricas en las cuales figu-ran cos x y sen x afectadas únicamente por operaciones racionales (suma, resta, producto y cociente). Por ejemplo:
sen3 x . cos2 x dx ; dx
tg x ;
sen x
2 + cos x dx ;
sen x
cos x dx3
3
6
Es oportuno aclarar que cualquier integral de este tipo, puede resolverse mediante una cierta sustitu-ción, llamada sustitución trigonométrica universal. Sin embargo, esta sustitución conduce muchas veces a funciones racionales muy complicadas de resolver. Por esto veremos, además de ella, otras sustituciones que en ciertos casos, simplifican la integral.
A) Supongamos que tenemos una expresión del tipo cosn x dx , donde n es impar natural.
I = cosn x dx = cosn-1 x . cos x dxd(sen x)
donde n-1 es par.
La sustitución que se sugiere es u = sen x
du = cos x dx
Además, como cos2 x = 1 - sen2 x cos2 x = 1 - u2 cosn-1 x = (cos2 x)(n-1)/2 = (1 - u2)(n -1)/2
donde (n 1)
2 es una potencia natural.
Por lo tanto nos queda I = (1 - u2)(n-1)/2 du , que es la integral de una función racional entera en
la variable u (polinomio en u que se obtiene desarrollando la potencia (n 1)
2 de 1 - u2 y cuya
integración es inmediata).
Ejemplo 1 : I = cos5 x dx
I = cos4 x . cos x dx
u = sen x
du = cos x dx
cos x = 1 - sen x = 1 - u
cos x = (1 - u )
2 2 2
4 2 2
I= (1 - u2)2 du = (1 - 2 u2 + u4) du = du - 2 u2 du + u4 du = u - 2
3 u3 +
1 5
u5 + k
Y volviendo a la variable original:

Análisis Matemático I - Página 61
I = sen x - 2
3 sen3 x -
1 5
sen5 x + k
Análogamente se resuelve la integral del tipo senn x dx , con n natural impar.
I = senn x dx = senn-1 x . sen x dxd(- cos x)
donde n-1 es par.
Ahora: d(- cos x) = (- cos x) dx = - (- sen x) dx = - (cos x) dx = - d(cos x)
O sea d(- cos x) = - d(cos x).
Entonces, la sustitución sugerida es t = cos x
dt = - sen x dx - dt = sen x dx
Además, sen2 x = 1 - cos2 x = 1 - t2
senn-1 x = (sen2 x)(n-1)/2 = (1 - t2)(n-1)/2 donde (n 1)
2
es una potencia entera. Y la integral
(1 - t2)(n-1)/2 dt es integral del mismo tipo que la del caso
anterior.
B) Consideremos la expresión senm x . cosn x dx donde m y n son enteros positivos y por lo
menos uno de ellos impar.
Supongamos que m es impar. El procedimiento es análogo al del caso A: se desdobla la potencia impar senm x en senm-1 x . sen x .
I = senm x . cosn x dx = senm-1 . sen x . cosn x dx
Veámoslo directamente en un ejemplo.
Ejemplo 2 : sen5 x . cos2 x dx
I = sen4 x . cos2 x . sen x dx = (1 - cos2 x)2 . cos2 x [- d(cos x)]
t = cos x
dt = - sen x dx
- dt = sen x dx
I = (1 - t2)2 . t2 . (- dt) = - (1 - 2 t2 + t4) . t2 dt =
= - (t2 - 2 t4 + t6) dt = (- t2 + 2 t4 - t6) dt = - t
3
3
+ 2
5 t5 -
1
7 t7 + k
= - 1
3 cos3 x +
2
5 cos5 x -
1
7 cos7 x + k
Observación : Tanto en A como en B, el diferencial es el que orienta a la sustitución apropiada.

Análisis Matemático I - Página 62
C) Si la expresión es de la forma senm x . cosn x dx donde m y n son enteros positivos pa-
res, se hace uso de las conocidas fórmulas:
(1)
(2)
Las cuales se obtienen respectivamente, de restar y sumar las identidades
cos2 x + sen2 x = 1 cos2 x - sen2 x = cos 2x
Luego se sustituyen en la integral.
Ejemplo 3 : sen4 x . cos2 x dx
I = (sen2 x)2 . cos2 x . dx = [ 1
2 (1 - cos 2x) ]2 . [ 1
2 (1 + cos 2x) ] dx
= 1
8
(1 - cos 2x)2 . (1 + cos 2x) dx
Desarrollando el cuadrado de binomio y haciendo distributiva, obtendremos una suma, con términos que contienen cos 2x con potencias pares o impares. Los términos que contienen las potencias impares, se integran como hemos hecho en el caso A). Los términos que contienen las potencias pares los reduciremos de nuevo, utilizando sucesivamente las fórmulas (1) y (2). Por supuesto que, al efectuar este procedimiento, nos encontraremos reiteradamente con la integral:
cos 2x dx = sen 2x
2
+ k (Inmediata, previa sustitución. Hacerla y mostrar que, en general,
cos cx dx = sen cx
c + k ).
Procedamos:
I = 1
8
(1 - 2 cos 2x + cos2 2x) . (1 + cos 2x) dx
I = 1
8 (1 + cos 2x - 2 cos 2x - 2 cos2 2x + cos2 2x + cos3 2x) dx
I = 1
8 [ dx - cos 2x dx - cos2 2x dx + cos3 2x dx ]
I = 1
8 [ x -
sen 2x
2
-
43 I
3
I
2 dx2x cos + dx2x cos ]
I3 = cos2 2x dx como tenemos una potencia par de cos 2x , utilicemos adecuadamente la
fórmula (2): cos2 2x = 1
2 (1 + cos 4x)
sen x = 1
2 (1 - cos 2x)
cos x = 1
2 (1 + cos 2x)
2
2

Análisis Matemático I - Página 63
I3 = 1
2 (1 + cos 4x) dx =
1
2
(1 + cos 4x) dx =
1
2
( x +
sen 4x
4
)
I4 = cos3 2x dx tenemos potencia impar de la función coseno. Emplearemos entonces, lo
visto en el caso A . Antes hagamos la sustitución:
z = 2 x
dz = 2 dxdz
2 dx
I4 = 1
2
cos3 z dz = 1
2
cos2 z . cos z dzd(sen z)
1
2
(1 - sen2 z) . cos z . dz t = sen z
dt = cos z dz
I4 = 1
2 (1 - t2) dt =
1
2 [ t - t
3
3
]
Volviendo a x :
I4 = 1
2 [ sen z -
sen z
3
3
]
I4 = 1
2 sen 2x -
1
6 sen3 2x
Por lo tanto, la integral dada es:
I = 1
8 [ x -
sen 2x
2 -
1
2 x -
1
8 sen 4 x +
1
2 sen 2x -
1
6 sen3 2x ] + k
I = 1
16 x -
1
64 sen 4 x -
1
48 sen 2 x3 + k
D) Si la expresión es de la forma senm x . cosn x dx donde m y n son enteros pa-
res y por lo menos uno de ellos es negativo, se hace la sustitución z = tg x
Ejemplos de estas integrales son sen x
cos x dx y
dx
cos x . sen x
4
2 2 2
Al hacer la sustitución z = tg x , obviamente estamos cambiando de variable y deberemos cambiar sen x , cos x y dx en base a ella. Para esto construyamos el siguiente triángulo rectángulo, de manera que responda a nuestra sustitución z = tg x :
sen x = z
1 + z
2 (1)
cos x = 1
1 + z
2 (2)

Análisis Matemático I - Página 64
Y, de z = tg x , x = arctg z dx = dz
1 + z2 (3)
Sustituyendo (1), (2) y (3) en la integral:
I = z
1 + z
1
1 + z
dz
1 + z2
m
2
n
2
I =
z dz
(1 + z ) . (1 + z ) . (1 + z )
m
2 m/2 2 n/2 2 que es una integral racional con
raíces complejas en el denominador ( m
2 y
n
2 son potencias enteras).
Ejemplo 4 :
sen x
cos x dx
z
1 + z
1 + z
dz
1 + z
2
6
2
22
26 3
21
I =
z . (1 + z )
1 + z .
dz
1 + z
= z (1 + z ) dz = (z + z ) dz 2 2 3
2 22 2 2 4
I = z
3
+ z3 5
5 + k I =
1
3 tg3 x +
1 5
tg5 x + k
E) Si la expresión es de la forma tgn x dx se realiza la sustitución z = tg x
y, operando igual que en D, se obtiene una integral racional de forma general
z
1 + z dz
n
2
Ejemplo 5 : tg3 x dx
I =
z3 dz
1 + z2 , realizando la dividisión tenemos:
I =
z - z
z + 1 dz =
z
2 +
z
z + 1 dz
2
2
2
1I
Cálculo de I1 : I1 =
z
z
+ 12
Sustitución: z2 + 1 = u 2 z dz = du dz = du
2 z

Análisis Matemático I - Página 65
I1 =
z
u
du
2 z =
1
2
du
u =
1
2 ln u =
1
2 ln (z2 + 1)
I = z
2
2
+ 1
2 ln (z2 + 1) + k
I = tg x
2
2
+ 1
2 ln (tg2 x + 1) + k
F) Sustitución trigonométrica universal: es la que fue nombrada al principio como la que resuelve todos los casos donde el integrando es función racional de sen x y cos x . No obstante, nosotros la utilizaremos para los casos que no son de ningún tipo de los anteriores.
La sustitución que se hace es z = tg x
2
(1)
Si construimos un triángulo rectángulo que responda a ella:
sen x
2
= z
1 + z
2 y
cos x
2 =
1
1 + z
2
Pero como los que figuran en la integral son sen x y cos x (y no sen x
2
y cos x
2
), usemos
otras dos fórmulas trigonométricas conocidas para obtenerlos:
sen x = 2 sen x
2 . cos
x
2 sen x = 2
z
1 + z
2
1
1 + z
2 sen x =
2 z
1 + z2 (2)
cos x = cos2 x
2 - sen2
x
2 cos x =
1
1 + z
2 - z
1 + z
2
2 cos x = 1 - z
1 + z
2
2 (3)
Además, de z = tg x
2 x = 2 arc tg z dx =
2 1 + z2 dz (4)
Sustituyendo (2), (3) y (4) en la integral, ésta se transforma por lo general en una integral racional fraccionaria cuyo denominador tiene raíces complejas.
Ejemplo 6 :
cos x1 + cos x
dx
I =
1 - z
1 + z
1 + 1 - z
1 + z
. 2 dz
1 + z = 2
1 - z
1 + z + 1 - z .
dz
1 + z
2
2
2
2
2
2
2 2 2
Análisis Matemático I - Página 66
I =
1 - z
1 + z . dz = -
z - 1
z
+ 1
. dz2
2
2
2 dividiendo queda
I = -
1 -
2
1 + z dz 2 = - z + 2 arc tg z + k
I = - tg x
2 + 2
x
2 + K I = - tg
x
2 + x + k
INTEGRACIÓN DE ALGUNAS FUNCIONES IRRACIONALES
Para integrar las funciones irracionales en general, se pueden intentar distintas sustituciones. Aquí
consideraremos en especial, integrales irracionales de la forma A x
+ B x + C 2 dx las cua-les se pueden resolver por cambio adecuado de variable, recurriendo preferentemente a fórmulas trigonométricas o a funciones hiperbólicas.
El radicando A x2 + B x + C , puede llevarse mediante completación de cuadrados a una las formas
siguientes: a2 - u2 , a2 + u2 ó u2 - a2 . Y así la integral A x
+ B x + C 2 dx quedará de alguna de las tres formas siguientes:
I) I =
a
- u
2 2 du
Para que la función a
- u
2 2 esté definida deberá ser a2 - u2 0 , o sea u2 a2 .
Entonces, para este caso, haremos la sustitución u = a sen t (1) puesto que
sen2 t 1 , t a2 sen2 t a2 , t (a sen t)2 a2 u2 a2 a2 - u2 0
Ahora, con la sustitución (1) u a sen t
du a cos t la integral queda :
I =
a - a sen t . a cos t dt = a a 1 - sen t . cos t dt2 2 2 2 2
I = a cos t . cos t dt = a cos t dt 2 2 2
1I
Para resolver I1 , debemos recordar la fórmula trigonométrica cos2 t = 1
2 (1 + cos 2 t) que sale de
sumar las identidades cos2 t + sen2 t = 1 y cos2 t - sen2 t = cos 2 t
Entonces:
I = a2 1
2 (1 + cos 2t) dt =
a
2
2
(1 + cos 2t) dt

Análisis Matemático I - Página 67
I = a
2
2
[ dt + cos 2t dt ] = a
2
2
[ t + cos 2t dt ]
Haciendo la sustitución
z 2 t
dz = 2 dtdz
2 = dt
I = a
2
2
t + cos z . dz
2
I = a
2
2
[ t + 1
2 sen z ] + k . Volvamos a la variable u de la cual partimos:
I = a
2
2
[ t + 1
2
sen 2t 2 sen t cos t
] + k = a
2
2
[ t + 1
2 2 sen t cos t ] + k
I = a
2
2
[ arc sen u
a +
u
a cos t ] + k
Sabiendo que cos t = 1 - sen t 2 y siendo por la sustitución (1) sen t = u
a
cos t = 1 - u
a =
a - u
a =
1
a a - u
2
2
2 2
22 2 el resultado de la integral es:
I = a
2
2
[ arc sen u
a +
u
a
1
a
a - u 2 2 ] + k
I = 1
2
[ a2 arc sen u
a + u a
- u
2 2 ] + k
Observación : También podría haberse resuelto la integral si se hubiera hecho la susti- tución
u = a cos t (2) ya que a2 cos2 t = (a cos t)2 a2 t . Lo cual se de
duce haciendo un análisis similar al de la sustitución (1): u = a sen t .
Ejemplo 1 : Calcular
- x
- 4x + 5 2 dx
Completación de cuadrados: - x2 - 4x + 5 = - [x2 + 4x - 5] = - [(x + 2)2 - 4 - 5] = 9 - (x + 2)2
9 - (x + 2) 2 dx , ahora podemos poner la expresión de la forma 3 - (x + 2) 2 2
y hacer
u = x + 2
du = dx
u = 3 sen t du = 3 cos t dt
como se indicó, con lo que se obtendría

Análisis Matemático I - Página 68
3
3
- 3 sen t 2 2 2 . cos t dt = 9
1 - sen t 2 . cos t dt = 9 cos2 t dt
Otra alternativa es escribir a la integral
9 - (x + 2) 2 dx =
9 1 -
(x + 2)
9 dx = 3 1 -
x + 2
3 dx
2 2
y hacer x + 2
3 = sen t (*) x + 2 = 3 sen t dx = 3 cos t dt
I = 3
1 - sen t 2
cos t
. 3 cos t dt = 9 cos2 t dt
Recordando la identidad cos2 t = 1
2 (1 + cos 2 t) , tenemos
I = 9
1
2 (1 + cos 2t) dt =
9
2 ( t +
1
2 sen 2 t ) + K =
9
2 ( t +
1
2 2 sen t . cos t ) + k
I = 9
2 ( t + sen t 1 - sen t 2 ) + k
Por (*) es x + 2
3 = sen t arc sen
x + 2
3 = t , entonces
I = 9
2 [ arc sen
x + 2
3 +
x + 2
3
1 - x + 2
3
2
] + k
II) I = u
+ a
2 2 du
En este caso, la función u
+ a
2 2 está definida para u2 + a2 0 , lo cual sucede u
R .
Entonces, la sustitución que haremos será u = a sh t (3) ya que Ish t = R .
Ahora, con la sustitución (3) u = a sh t
du = a ch t dt la integral queda:
I =
a sh t + a
2 2 2 a ch t dt = a
sh t + 1 2
ch t
a ch t dt = a2 ch t 2
1I
dt
Para calcular I1 usaremos la fórmula ch2 t = 1
2
(ch 2t + 1) la cual sale de sumar la identidades
ch t + sh t = ch 2t
ch t - sh t = 1
2 2
2 2
Entonces:
I = a2
1
2 (1 + ch 2t) dt =
a
2
2
[ dt + ch 2t dt ] = a
2
2
[ t + ch 2t dt ]
Haciendo la sustitución z = 2 t
dz = 2 dt dt = dz
2

Análisis Matemático I - Página 69
I = a
2
2
[ t + ch z dz
2
] =
a
2
2
[ t + 1
2 sh z ] + k
I = a
2
2
[ t + 1
2
sh 2t
2 sh t ch t
] + k =
a
2
2
[ t + sh t . ch t ] + k
Volvamos a la variable u sabiendo que ch t = 1 + sh t 2 y, siendo por la sustitución (3):
sh t = u
a entonces ch t = 1 +
u
a
2
2 = 1
a
a + u 2 2 y la integral será:
I = a
2
2
[ arg sh u
a +
u
a
1
a
a + u 2 2 ] + k
I = 1
2
[ a2 arg sh u
a + u a + u 2 2 ] + k
Ejemplo 2 :
5 + x
2 dx
I =
5 1 + x
5 dx = 5 1 +
x
5
22
Recordar que otra alternativa de solución es sacar factor común el término constante y hacer: x
5 = sh t
dx = 5 ch t dt
t = arg sh x
5
I = 5 5
1 + sh t 2 ch t dt = 5 ch t . ch t dt = 5 ch2 t dt
I = 5
1
2 (1 + ch 2 t) dt =
5
2
[ t + 1
2 sh 2t ] + k
Como sh 2t = 2 sh t . ch t entonces
I = 5
2
[ t + sh t . ch t ] + k = 5
2 [ t + sh t . 1 + sh t 2 ] + k
I = 5
2
[ arg sh x
5 +
x
5 1 +
x
5
2
] + k
III) I =
u
- a
2 2 du
Aquí deberá ser u2 - a2 0 , o sea u2 a2 . Por ello haremos la sustitución u = a ch t
(4)

Análisis Matemático I - Página 70
puesto que ch2 t
1 ,
t
a2 ch2 t
a2 ,
t
(a ch t)2
a2 ,
t
u2
a2 , que es lo
que queremos.
Entonces por la sustitución (4): u = a ch t
du = a sh t dt tenemos:
I =
a ch t - a
2 2 2 a sh t dt = a2 ch t - 1 2
sh t
sh t dt = a2 sh t 2
1I
dt
Para resolver I1 procedemos de forma similar a la resolución del caso anterior. Usamos la fórmula
sh2 t = 1
2 (-1 + ch 2 t) que resulta de restar las identidades allí dadas.
I = a2
1
2 (- 1 + ch 2 t) dt =
a
2
2
[ - dt + ch 2 t dt ]
I = a
2
2
[ - t + ch 2 t dt ]
Haciendo la sustitución z = 2 t
dz = 2 dt
I = a
2
2
[ - t + 1
2
ch z dz ] = a
2
2
[ - t + n 1
2 sh z ] + k
I = a
2
2
[ - t + 1
2
sh 2 t 2 sh t ch t
] + k = a
2
2
[ - t + sh t ch t ] + k
y volviendo a la variable u
I = a
2
2
[ - arg ch u
a + (sh t)
u
a
] + k
Por ser sh t = ch t - 1 2 =
u
a - 1
2
2 = 1
a
u
- a
2 2 , entonces
I = a
2
2
[ - arg ch u
a +
1
a
u
- a
2 2 u
a
] + k
I = - a
2
2
arg ch u
a +
u2
u - a 2 2 + k
Observación: En la práctica, los ejercicios de este caso, se resuelven en forma similar a los desarrollados en I y II.