
COMPORTAMIENTO CAÓTICO EN SISTEMAS MECÁNICOS, CLÁSICOS: UN PARADIGMA PARA LA CIENCIA
24
1996
description
La teoría del caos se ha desarrolladosignificativamente en las últimas décadas y se considera como latercera revolución de la física del siglo XX, junto con la relatividad y la teoría cuántica. Dentro de este contexto los sistemas mecánicos, clásicos, juegan un papel especial. Su clasificación enintegrables y no integrables, al igual que el teorema KAM y conceptos como exponentes de Lyapunov, entropía-K, superficie de Poincaré son fundamentales para entender lo que es el comportamiento caótico.
Transcript of COMPORTAMIENTO CAÓTICO EN SISTEMAS MECÁNICOS, CLÁSICOS: UN PARADIGMA PARA LA CIENCIA
1996

COMPORTAMIENTO CAÓTICO ENSISTEMAS MECÁNICOS, CLÁSICOS:UN PARADIGMA PARA LA CIENCIA
Diógenes Campos, Departamento de FísicaUniversidad Nacional de Colombia, Santafé Bogotá
En el libro "El Maestro de Ciencias", Facultad de Ciencias, UniversidadNacional de Colombia, Bogotá, 121-143(1996). Volumen conmemorativo delos 30 años de la Facultad. ISBN. 958-608-121-4.
R E S U M E N .La teoría del caos se ha desarrolladosignificativamente en las últimas décadas y se considera como latercera revolución de la física del siglo XX, junto con la relatividady la teoría cuántica. Dentro de este contexto los sistemasmecánicos, clásicos, juegan un papel especial. Su clasificación enintegrables y no integrables, al igual que el teorema KAM yconceptos como exponentes de Lyapunov, entropía-K, superficiede Poincaré son fundamentales para entender lo que es elcomportamiento caótico.
INTRODUCCIÓN
“Coexistían en el seno del Caos1 la noche (Nyx) y las Tinieblas (Erebo),quienes, separándose del Caos, hicieron surgir a Urano (el cielo) y Gea (latierra)”. Caos es una palabra que desde los tiempos antiguos sugiere misterio,incertidumbre, complejidad, confusión, desorden. Hoy en día, comoconsecuencia de trabajos de investigación de las últimas décadas, la teoría delcaos se ha convertido en la tercera revolución de la física del siglo XX, juntocon las de la relatividad y la teoría cuántica [1]. Su campo de acción cobija lamatemática, la física, la química, la biología, la ingeniería, la economía; engeneral, todas aquellas ciencias que requieran ecuaciones diferenciales nolineales para la descripción de fenómenos o procesos.
En lo que sigue nos restringimos a caos en sistemas mecánicos, clásicos. Lasleyes de la mecánica clásica son deterministas pero, para ciertas condiciones
1 Teogonía de Hesíodo. Ver la palabra caos en la Nueva Enciclopedia Larousse, EditorialPlaneta, Bogotá.
iniciales y para ciertos valores de los parámetros de control, surgenmovimientos caóticos inevitables. El término clásico es importante dentro deeste contexto, pues nuestro mundo es cuántico2. Necesariamente estamosconfrontados con la pregunta de si la naturaleza mecánico cuántica de lossistemas destruye o preserva el comportamiento de los sistemas clásicamentecaóticos.
El objetivo es presentar conceptos básicos que permitan tener una visióngeneral del tema, sin tratar casos específicos. La idea es ver el bosque en suconjunto sin perderse dentro de él con detalles técnicos. Al autor le gustaríaque el presente trabajo sirviera al lector que se está iniciando en el tema, por locual incluirá unas pocas ecuaciones que ayuden a precisar conceptos. Lasecuaciones no deberían preocupar al lector, pues la matemática es el lenguajede la física.
ANTECEDENTES HISTÓRICOS
La mecánica clásica —desarrollada por Newton, Lagrange, Poisson, Hamilton,Jacobi— es un prototipo de las teorías físicas. Sus principios, su estructura,sus métodos son puntos de referencia obligados para otras disciplinas queestudian fenómenos naturales. En particular, el desarrollo del método deperturbaciones y su aplicación al movimiento del planeta Urano condujo a lapredicción de la existencia de Neptuno por parte de Adams en 1845 y deLeverrier en 1846.
Las ideas de Laplace3 (1749–1827), el teorema de unicidad de la solución deecuaciones diferenciales ordinarias para condiciones iniciales dadas, los éxitosde la mecánica clásica condujeron a una imagen del mundo en la cual laevolución de un sistema físico era predecible y seguía un curso regular.Pasado y futuro se podían determinar con el simple conocimiento de lasecuaciones de movimiento y del estado del sistema en un instante de tiempodado. El determinismo se convirtió en un elemento fundamental: los sistemas
2 De acuerdo con el principio de correspondencia, la mecánica cuántica es una teoría másgeneral que la mecánica clásica y la primera se debe reducir a la última en el límite enel cual la constante de Planck tiende a cero.
3 “Debemos pues considerar el estado presente del universo como el efecto de su estadoanterior y como la causa del que debe seguirlo. Una inteligencia que en un instantedado conociera todas las fuerzas que animan a la naturaleza y la situación respectiva delos seres que la componen, y que, por otra parte, fuera suficientemente amplia comopara someter estos datos al análisis, abarcaría en la misma fórmula los movimientosde los cuerpos más grandes del universo y los de los átomos más ligeros; nada le seríaincierto, y tanto el futuro como el pasado estarían presentes ante ella”. Citado en [2],pg. 18.

mecánicos tenían un comportamiento bien determinado y si no se conocíaperfectamente sólo era debido a errores experimentales en las condicionesiniciales.
Henri Poincaré fue el primero en observar a fines del siglo XIX que estemodelo determinista, idealizado, no era siempre correcto. Al tratar de manerasistemática el problema gravitacional de muchos cuerpos Poincaré encontróque el método de perturbaciones usado por los astrónomos para el estudio delsistema solar fallaba debido al problema de pequeños denominadores, tambiénconocido con el nombre de resonancias [3], y a la no convergencia de lasseries empleadas. Sus trabajos mostraron que el saber que una solución existeno significa que se puede determinar y que una evolución temporaldeterminista no garantiza que el futuro distante se pueda predecir.
Con la excepción de los astrónomos, la comunidad científica prestó pocaatención a los resultados de Poincaré durante su vida (1854–1912) y sustrabajos permanecieron prácticamente ignorados en el campo de la mecánica,hasta que Kolmogorov hacia 1954 y sus seguidores (Arnold y Moser) haciacomienzos de la década de 1960 le dieron un nuevo impulso. Lasinvestigaciones de estos autores condujeron a lo que hoy en día se conoce conel nombre de Teorema de Kolmogorov–Arnold–Moser (Teorema KAM),pieza fundamental dentro de la investigación moderna de sistemas dinámicosno lineales [4].
La indiferencia de los físicos respecto a los trabajos de Poincaré se vióacrecentada posiblemente por el surgimiento hacia la década de 1920 de otrateoría que revolucionó la física: la mecánica cuántica formulada porHeisenberg, Schrödinger y Dirac. En efecto, gran parte del interés de lacomunidad científica se centró en esta teoría.
Las ecuaciones de Hamilton de la mecánica clásica y la ecuación deSchrödinger de la mecánica cuántica son ecuaciones deterministas; esto es, elconocimiento exacto del estado del sistema en un instante de tiempo t0
determina el estado del sistema para cualquier otro tiempo t, pasado4 o futuro.Desde el punto de vista práctico, la capacidad de predecir la evolución delsistema depende del grado de precisión con el que conozcamos el estadoinicial (estado presente). Sin embargo, en algunos sistemas, a pesar de que lasecuaciones de movimiento son deterministas, la dinámica del sistema puede
4 En sistemas cuánticos, la evolución temporal es determinista sólo en un intervalotemporal abierto comprendido entre dos mediciones. En sistemas clásicos elcomportamiento determinista se cumple desde el infinito pasado hasta el infinitofuturo.

ser lo suficientemente irregular, de tal manera que la evolución del sistema sehace impredecible. Se dice que el sistema tiene un comportamiento caótico oirregular.
Poincaré en 1892 descubrió el caos en sistemas conservativos. EdwardLorentz lo hizo para sistemas disipativos en un trabajo de 1963 en el cualanalizó un modelo del clima con base en tres ecuaciones diferenciales nolineales.
La gran revolución se dió en la década de 1970 [5], cuando la comunidadcientífica se confrontó con el hecho extraño de que sistemas mecánicos muysimples –sistemas de pocos grados de libertad– podían presentar uncomportamiento caótico. Hasta ese entonces, tener un movimiento irregular,caótico, en sistemas complicados era lo natural. Lo nuevo, lo extraño, lorevolucionario era que sistemas simples presentaran también un movimientocomplicado y caótico.
En efecto, el caos tiene su origen en la naturaleza no lineal de las ecuacionesde movimiento. Este tipo de comportamiento se puede presentar en sistemasde un grado de libertad cuyo Hamiltoniano incluya un término de interaccióndependiente del tiempo, o en sistemas autónomos (Hamiltonianosindependientes del tiempo) con dos o más grados de libertad. Por otro lado,un mismo conjunto de ecuaciones dinámicas puede dar origen a movimientoregular y a comportamiento caótico, dependiendo de las condiciones inicialeso de los parámetros de control5 asignados al sistema.
Caos es un concepto bién definido en matemática [6], pero no hay unadefinición clara universalmente aceptada en física [7]. Frecuentemente se diceque un sistema dinámico es caótico si él tiene soluciones asintóticas acotadasque son altamente sensitivas a cambios en las condiciones iniciales, de talmanera que una modificación arbitrariamente pequeña en el estado inicialconduce a grandes cambios en el estado futuro. En sistemas de esta naturaleza,pequeños errores en nuestro conocimiento de las condiciones iniciales seincrementan de manera exponencial con el tiempo y se hace imposiblepredecir el comportamiento futuro del sistema sobre grandes intervalos detiempo. Esta propiedad es intrínseca a tales sistemas y no es consecuencia defalta de poder computacional o de habilidad intelectual. Adicionalmente, para
5 La masa de las partículas, su carga, las constantes de resorte, la intensidad del campoeléctrico aplicado son ejemplos típicos de parámetros de control. Estas variables sirvenpara identificar completamente el sistema bajo estudio, sus características yparticularidades.

que el sistema sea caótico se requiere que el conjunto de las solucionesperiódicas del sistema dinámico sea denso en el espacio de fase.
Con el fin de sentar las bases para el entendimiento de lo que es uncomportamiento caótico, en la siguiente sección se describirán aquellaspropiedades genéricas que caracterizan los sistemas mecánicos cuyocomportamiento es regular. Restringiremos nuestras consideraciones asistemas mecánicos clásicos.
SISTEMAS INTEGRABLES
La descripción de un sistema mecánico clásico, de f grados de libertad6 sehace en el espacio de fase; esto es, en un espacio de 2 f dimensiones cuyosejes coordenados son ortogonales entre si y que se rotulan por lascoordenadas y los impulsos generalizados, q = (q1, q2, …, qf )
y p = (p1, p2, …, pf ). El estado del sistema en el instante de tiempo t se
representa por un punto (q(t), p(t)) en el espacio de fase. A medida que
transcurre el tiempo, el punto representativo asociado con una cierta condicióninicial describe en el espacio de fase una curva llamada trayectoria o línea deflujo7. La trayectoria es la historia del sistema (figura 1).
q
p Estado inicial
Figura 1. Ilustración de los conceptos de espacio de fase–qp,
estado inicial y trayectoria.
Cada sistema mecánico clásico tiene asociada una función H(q, p, t) que
depende de las posiciones, de los impulsos y del tiempo, la cual recibe elnombre de Hamiltoniano. Esta función es “mágica” en el sentido de que
6 Número de variables independientes que son necesarias para describir de maneracompleta la configuración del sistema.
7 Se denomina flujo al conjunto de todas las posibles trayectorias originadas encondiciones iniciales diferentes. Este término se usa para enfatizar la analogía con elmovimiento del flujo de un fluido real.

contiene toda la información necesaria sobre el sistema; en particular, pormedio de las ecuaciones de Hamilton,
dqdt
= ∂∂p
H(q, p, t),
d pdt
= – ∂∂q
H(q, p, t) ,
se determina la manera como el estado del sistema cambia con el tiempo. Estasecuaciones definen un flujo en el espacio de fase, ya que nos dicen ladirección y la rapidez con la cual cambian la configuración y los impulsos encada punto del espacio de fase.
Una característica importante de muchos sistemas físicos consiste en tenerciertas propiedades de simetría que se manifiesta por la existencia decantidades que no cambian con el tiempo y que reciben el nombre deconstantes de movimiento. En otras palabras, una constante de movimiento esuna función cuyo valor es constante a lo largo de una trayectoria dada en elespacio de fase, I(q(t), p(t)) = C .
Los sistemas mecánicos conservativos son aquellos para los cuales elHamiltoniano no depende explícitamente del tiempo, de tal manera que laenergía E es una constante de movimiento: H(q(t), p(t)) = E . Esta relación
define una superficie en el espacio de fase, la cual tiene dimensión 2f–1 y sebautiza con el nombre de hipersuperficie de energía. Los sistemasconservativos se dividen en dos grupos: integrables y no integrables.
Por definición8 [9, 10] un sistema Hamiltoniano con f grados de libertad es unsistema integrable si existen f constantes de movimiento independientes entresi que estén en involución. Los sistemas Hamiltonianos integrables tienen unmovimiento bien ordenado y regular. Esto significa que las trayectorias estáneternamente confinadas a regiones bien definidas del espacio de fase y quepequeños cambios en las condiciones iniciales generan cambios pequeños enla evolución del sistema.
La existencia de f constantes de movimiento restringe la trayectoria del sistemaa una hipersuperficie dentro del espacio de fase 2f-dimensional, la cual tiene laforma de un toroide f-dimensional (figura 2) [8]. Este toroide es invariante
8 Liouville demostró que, para un sistema de f grados de libertad, si se conocen fconstantes de movimiento independientes y en involución, el sistema es integrablepor cuadraturas [8]. A propósito, dos constantes de movimiento están en involuciónsi el corchete de Poissson entre ellas se anula.

con respecto al flujo; esto es, cada trayectoria que comience en un punto sobreel toroide permanecerá eternamente confinada sobre él. Nótese que el espaciode fase de un sistema integrable está lleno en todas partes de toroidesinvariantes y que al especificar una condición inicial la trayectoriacorrespondiente se sitúa sobre uno y sólo uno de los toroides.
La existencia de un toroide en el espacio de fase permite definir, a su vez,sobre el toroide un conjunto de f curvas cerradas {�k , k = 1, 2, …, f } ,
topológicamente independientes, donde ninguna de las �k se puede deformar
continuamente en otra o reducirse a cero. Nos referiremos a la curva cerrada �k como el anillo �k . A cada anillo �k se le puede asociar un par de
variables adecuadas, �k → (θk, Ik) , canónicamente conjugadas entre si, las
cuales reciben el nombre de variables ángulo-acción. Para ser más precisos,las acciones se definen como la integral de línea
Ik = 1
2π p dqΣ= 1
f
�k
.
I
I1
2
θ
θ
1
2
Figura 2. En un sistema integrable con dos grados de
libertad las variables de acción (I1, I2) se pueden visualizar
como los radios del toroide, mientras que los ángulos θ1, θ2 definen la posición de un punto sobre el toroide.
El conjunto de acciones I := (I1, I2, …, I f ) identifica completamente el toroide,
mientras que un punto sobre el toroide –esto es, un punto de la trayectoria– seespecifica por los ángulos θ := (θ1, θ2, …, θ f ) canónicamente conjugados a
las acciones. El ángulo θk cambia en 2π cada vez que la trayectoria le da una
vuelta completa al anillo �k .

En el caso de sistemas con un grado de libertad, I = constante define uncírculo. En la figura 2 se esquematiza el caso de un sistema de dos grados delibertad, en el cual el toroide se encuentra dentro de un espacio de fase decuatro dimensiones (no dentro del espacio físico tridimensional).
A la luz de lo anterior, en los sistemas integrables siempre se puede encontrarun conjunto de 2f variables convenientes, (θ, I) = (θ1, θ2, …, θ f , I1, I2, …, I f ) .
Esto es, existe una transformación de coordenadas (q, p) ↔ (θ, I) en el
espacio de fase, la cual permite que el Hamiltoniano dependa sólo de lasacciones y que, en consecuencia, las ecuaciones de Hamilton adopten unaforma extremadamente sencilla [8]:
ddt
θk = ∂∂Ik
H(I) = ωk(I) ,
ddt
Ik = – ∂∂θk
H(I) = 0 .
Estas ecuaciones se pueden integrar para dar
Ik(t) = Ik(t0) , θk = ωk (t – t0) + δk ,
donde δk son fases iniciales arbitrarias y ω = (ω1, ω2, …, ωf ) son
frecuencias naturales de oscilación que se obtienen derivando elHamiltoniano con respecto a las variables de acción. El valor del vector deacción I = (I1, I2, …, I f ) especifica la posición del toroide en el espacio de
fase y los correspondientes ángulos θ = (θ1, θ2, …, θ f ) determinan la
posición sobre el toroide del punto representativo que describe la trayectoriadel sistema en el espacio de fase.
La existencia de un conjunto de frecuencias naturales para los sistemasintegrables trae importantes consecuencias. En especial, dependiendo de lascondiciones iniciales { I(0)}, las frecuencias pueden estar relacionadas entre si
por números racionales y llegar a ser linealmente dependientes,
nk ωkΣ
k = 1
f
= 0 ,
donde nk son números enteros. Cuando esto ocurre se dice que el toroide es
racional o resonante. En este caso, si el sistema se somete a una pequeñaperturbación, él puede dejar de ser integrable y cambiar radicalmente sucomportamiento debido a la existencia de un fenómeno conocido como

resonancia no lineal. El término no lineal se refiere a que las frecuencias sonfunción de las acciones; esto es, ω = ω(I) depende del toroide y varía de
toroide a toroide. La existencia de resonancias es una de las propiedadescaracterísticas de un sistema no lineal. Cuando las frecuencias
ω = (ω1, ω2, …, ωf ) que caracterizan un toroide están relacionadas entre si
por medio de número irracionales se dice que el toroide es irracional o noresonante.
En el caso de sistemas de dos grados de libertad sólo existen dos frecuenciasy se puede definir un número característico α dado por la razón de ellas [11]:
α =
ω1
ω2.
Cuando α es racional α = n/m, n y m enteros, el toroide se cubre con una
familia de órbitas cerradas. Si el número α es irracional la trayectoria nunca secierra o se intercepta con si misma, ya que lo prohibe el teorema de unicidadpara ecuaciones diferenciales. Por definición, se dice que el movimiento delpunto representativo del sistema en el espacio de fase es periódico ocuasiperiódico dependiendo de si la razón de las dos frecuencias es unnúmero racional o irracional. En este último caso, la trayectoria puede llegar aser muy complicada; en principio, recorrerá el toroide de manera progresivahasta cubrirlo densamente.
Los números irracionales constituyen la gran mayoría de los números reales.Sin embargo, las resonancias son abundantes ya que los números racionalesson densos en el conjunto de los números reales. Esto implica que, porpequeño que sea un elemento de volumen en el espacio de fase, siempreexistirá un número infinito de puntos representativos del sistema en los cualesse satisface la condición de resonancia. Las resonancias serán responsablespor el surgimiento del movimiento caótico cuando el sistema se someta aperturbaciones arbitrariamente pequeñas, 0 < ε << 1.
SISTEMAS NO INTEGRABLES
La introducción de una pequeña perturbación a un sistema integrable puedecausar cambios dramáticos en la dinámica del sistema, destruyendo el toroidey dando origen a un movimiento altamente irregular, denominado tambiéncaótico. Las trayectorias permanecen sobre la hipersuperficie de energíaconstante pero pueden volverse altamente sensitivas a pequeños cambios enlas condiciones iniciales y comportarse de manera errática. El efecto de una

pequeña perturbación sobre un sistema integrable se ha formalizado en elteorema de KAM que constituye un enunciado sobre la estabilidad delsistema.
El teorema de KAM establece lo siguiente [8, 12, 13]: supongamos que unsistema integrable con Hamiltoniano H0(I) se somete a una pequeña
perturbación no integrable ε H1(θ, I) , de tal manera que el Hamiltoniano del
sistema perturbado es dado por
H(θ, I) := H0(I) + ε H1(θ, I) ,
donde ε es un pequeño parámetro adimensional que caracteriza la perturbación( ε << 1 ) y el sistema no perturbado es no degenerado, esto es, se satisface
det
∂ωn∂Im
= det∂2H0(I)∂In ∂Im
≠ 0 .
Entonces para ε suficientemente pequeños ( ε < ε0 ) gran cantidad de toroides
no resonantes son preservados, aunque experimentan pequeñas deformacionesrespecto al toroide no perturbado. Las trayectorias en el espacio de fasepermanecen confinadas sobre estos toroides y describen un movimientocondicionalmente periódico con f frecuencias. Una pequeña fracción de lostoroides son destruidos, y su medida tiende a cero cuando ε → 0 .
Un valor suficientemente pequeño de ε es en efecto increiblemente pequeño
[14], tal como 10– 48 , aunque hay evidencia numérica de que el toroide se
preserva bajo perturbaciones mayores que las establecidas por el teorema. Elhecho de que un toroide se preserve, así sea con pequeñas distorsiones,significa que existen f constantes de movimiento ligeramente perturbadas.Cuando la perturbación destruye un toroide, el número de constantes demovimiento del sistema disminuye y las trayectorias que emanan de estasregiones del espacio de fase se comportan de manera altamente irregular ocaótica explorando grandes regiones de la hipersuperficie de energía.
Entre los toroides que se destruyen como consecuencia de la perturbaciónestán los toroides resonantes y los situados en su vecindad. En particular, en elcaso de dos grados de libertad, desaparecen aquellos toroides que tienen unnúmero característico α racional y los toroides vecinos intermedios entre ellos[11]. El movimiento cuasiperiódico del sistema integrable persistirá sólo si lasfrecuencias del sistema no perturbado están relacionadas de una manera

“suficientemente” irracional, en el sentido de que el número característico αdebe ser suficientemente diferente de un número racional [15]:
ω1ω2
– nm > c
mν ,
donde c es un número pequeño que se anula en ausencia de la perturbación yν es suficientemente grande (por ejemplo, 2.5).
A la luz del teorema KAM, el sistema Hamiltoniano tiene ciertas característicasglobales, independientes de las condiciones iniciales, y el movimiento caóticopuede aparecer cuando un sistema integrable se somete a una perturbación queexcede un valor crítico o cuando el número característico del toroide esracional (condición de resonancia). El concepto de caos dentro de estecontexto extiende la idea arriba enunciada sobre la alta sensibilidad de lastrayectorias a pequeñas modificaciones de las condiciones iniciales. El caossurge como consecuencia de la destrucción de constantes de movimiento y delos toroides asociados con éllas. Entre más constantes de movimiento sedestruyan más caótico será el comportamiento del sistema.
Figura 3. En el caso de sistemas Hamiltonianos con dosgrados de libertad, los toroides que se destruyen estánubicados entre toroides estables.
La topología de los sistemas Hamiltonianos es una propiedad fundamental quetiene profundas consecuencias en el comportamiento caótico. En sistemasHamiltonianos con dos grados de libertad, toroides diferentes están unodentro de otro, sin interceptarse; esto es, los toroides dividen el espacio defase. Como consecuencia, cuando un toroide se destruye la trayectoria quedaconfinada entre toroides estables [12] –figura 3– y, por lo tanto, la desviación

de la trayectoria perturbada con respecto a la no perturbada tiende a cerocuando ε → 0 .
Para sistemas con tres o más grados de libertad los toroides no dividen elespacio de fase y se interceptan unos con otros. En consecuencia, las regionesdonde se han destruido toroides se pueden unir y penetrar la totalidad delespacio de fase. De esta manera se forman canales que permiten que latrayectoria se aleje arbitrariamente a partir del punto inicial alcanzandoregiones distantes en el espacio de fase (figura 4). Este fenómeno se conocecon el nombre de difusión de Arnold. En este caso, las trayectoriasperturbadas se diferencian significativamente de las trayectorias noperturbadas aun en el caso en que ε → 0 .
Veamos las razones [12] por las cuales el toroide divide el espacio de fasesólo en sistemas de uno o dos grados de libertad, f ≤ 2. En un espacio de fasede dimensión 2 f, la hipersuperficie de energía constante es de dimensión 2 f –1 y las fronteras que la dividen en dos regiones distintas son de dimensión 2 f– 2. Si el toroide divide el espacio, su dimensión f debe satisfacer la condiciónf ≥ 2 f – 2, lo cual sólo se cumple para f ≤ 2.
Figura 4. Estructura de regiones del espacio de fase en las cuales
la perturbación ha destruido constantes de movimiento, aunque
persisten islas de estabilidad. La figura de la izquierda
corresponde a f = 2 y la de la derecha a f ≥ 3. En la zona
sombreada las trayectorias son caóticas.

UN EJEMPLO ILUSTRATIVO
El objetivo de esta sección es presentar un ejemplo que facilite la comprensiónde algunos conceptos introducidos en las secciones anteriores. El sistemaobjeto de interés es una partícula (luna) de masa m1 que orbita alrededor deuna partícula (planeta) de masa m2 . Como se trata de un problema de fuerzas
centrales, hay conservación del momentum angular orbital y el movimientotiene lugar en un plano. El sistema es de dos grados de libertad y suHamiltoniano se puede escribir en coordenadas polares
H0 r, φ, pr, pφ = 12 µ pr
2 + 12 µ r2 pφ
2 – kr = E ,
o en variables ángulo-acción [16, 17]
H0 I1, I2 = –
µ k2
2 I1 + I22 = E ,
donde µ es la masa reducida del sistema, E su energía, k = G m1 m2 , y G es la
constante gravitacional. La solución de las ecuaciones de Hamilton es
I 1 = C1 , I 2 = C2 ,
θ1 = ω1 t + δ1 , θ2 = ω2 t + δ2 ,
donde C1, C2, δ1 , δ2 son constantes determinadas por las condiciones
iniciales. Las frecuencias ω1 y ω2 dependen de las variables de acción y, por
lo tanto, de la energía del sistema. A medida que transcurre el tiempo, lastrayectorias (órbitas de Kepler) evolucionan sobre el toroide. La trayectoriaserá periódica y se repetirá si las frecuencias ω1 y ω2 son conmensurables;
esto es, si existen números enteros n y m tales que m ω1 = n ω2 . Si las
frecuencias son inconmensurables —esto es, si ellas son múltiplosirracionales una de otra—la trayectoria sobre el toroide nunca se repetirá yposiblemente cubrirá la superficie total del toroide.
Si aparece en escena una tercera partícula (un planeta, por ejemplo) queperturbe el sistema, bajo la suposición de que la perturbación actúa en el planode movimiento, se tendrá un nuevo Hamiltoniano
H = H0(I1, I2) + ε V(θ1, θ2, I1, I2) ,
= H0(I1, I2) + ε Σn = – ∞∞
Vn m(I1, I2) cos (n θ1 + m θ2)Σm = – ∞∞
,

donde ε es un parámetro mucho menor que uno, la segunda línea surge deexpandir la perturbación en series de Fourier y Vn m son los coeficientes de la
expansión. El sistema deja de ser integrable y su solución requiere hacer usode teoría de perturbaciones, la cual conduce a nuevas variables de acción dadaspor (a primer orden en ε )
�1 = I1 + ε Σn = – ∞
∞Vn m(I1, I2)
n cos (n θ1 + m θ2)n ω1 + m ω2
Σm = – ∞∞
+ O(ε2)
�2 = I2 + ε Σn = – ∞
∞Vn m(I1, I2)
m cos (n θ1 + m θ2)n ω1 + m ω2
Σm = – ∞∞
+ O(ε2) .
Para que estas expresiones tengan significado y podamos despreciar
corrrecciones de segundo orden y superiores se debe cumplir n ω1 + m ω2
>> ε Vn m . Sin embargo, esta condición deja de satisfacerse cuando sepresentan resonancias ( n ω1 + m ω2 se hace igual a cero o muy pequeño)
que generan a su vez la divergencia de las series citadas en las ecuacionesanteriores. En este caso, la perturbación del sistema destruye el toroide y daorigen a un comportamiento caótico del sistema.
En general, la presencia de resonancias son una señal inequívoca de que elmétodo de perturbaciones falla y sugiere que debe presentarse un cambiocualitativo radical en el comportamiento del sistema. Como resultado de unapequeña perturbación el sistema modifica abruptamente la naturaleza de sumovimiento, pasando de trayectorias regulares a caóticas. Esta es unapropiedad extraordinaria de los sistemas no lineales.
INDICADORES DE CAOS
Para que se presente un comportamiento caótico es necesario que el sistemaobjeto de estudio se describa por un sistema dinámico no lineal, esto es, queno se cumpla el principio de superposición característico de los sistemaslineales. Uno u otro tipo de sistema se caracteriza por un modelo matemáticoque contiene la información necesaria para describir la manera como algúnconjunto de cantidades cambia con el tiempo. En el caso de los sistemasHamiltonianos, las ecuaciones de Hamilton son las reglas que rigen laevolución temporal y las cantidades de interés son las coordenadas y losimpulsos generalizados asociados con el sistema.
La naturaleza no lineal del modelo puede ser una propiedad intrínseca delsistema o haberse introducido de manera deliberada para cumplir un propósitoespecífico; por ejemplo, diseñar un sistema de control para un fin tecnológico.

Este es el caso de muchos circuitos electrónicos sujetos a una perturbaciónexterna dependiente del tiempo9.
La exigencia de que el modelo sea no lineal es condición necesaria, aunque nosuficiente, para que se presente comportamiento caótico. La selección de lacondición inicial es el segundo ingrediente que desempeña un papelfundamental. En esta sección se introducen algunas cantidades básicas quesirven como indicadores de la presencia, o ausencia, de caos: exponentes deLyapunov, entropía–K, superficie de Poincaré.
Exponentes de Lyapunov
Desde el punto de vista práctico el caos se define comparando elcomportamiento dinámico de trayectorias acotadas10 que se encuentraninicialmente muy cercanas entre si en el espacio de fase. Se dice que el flujo escaótico si las trayectorias se separan exponencialmente, pero permanecenacotadas. Los exponentes de Lyapunov [17, 18] permiten medir la rata dedivergencia exponencial de dos trayectorias acotadas originalmente vecinas.
q
p
D = D eλ t
0
Figura 5. Trayectorias vecinas que divergen exponencialmente.
Vamos a considerar dos puntos, X0 y Y0 , inicialmente vecinos en el espacio
de fase que pertenecen a sendas trayectorias acotadas11. La evolución de estos
9 Proceedings of the IEEE, 75 (Agosto 1987). Fascículo dedicado al tema de caos encircuitos electrónicos.
10 Una trayectoria x(t) es acotada si existe una región finita del espacio de fase, | x(t) | <R < ∞, en la cual siempre permanece.
11 La restricción a trayectorias acotadas evita la identificación de casos triviales comosituaciones de comportamiento caótico. En efecto, las trayectorias no acotadas pueden
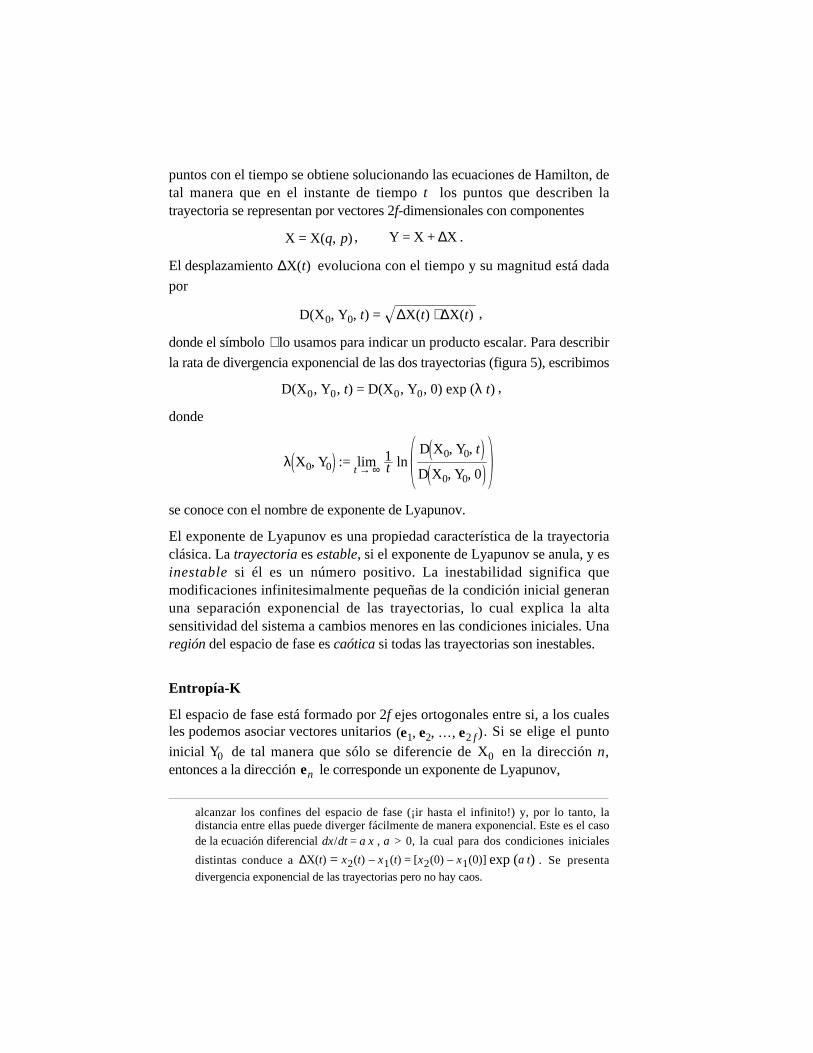
puntos con el tiempo se obtiene solucionando las ecuaciones de Hamilton, detal manera que en el instante de tiempo t los puntos que describen latrayectoria se representan por vectores 2f-dimensionales con componentes
X = X(q, p) , Y = X + ∆X .
El desplazamiento ∆X(t) evoluciona con el tiempo y su magnitud está dada
por
D(X0, Y0, t) = ∆X(t) ⋅ ∆X(t) ,
donde el símbolo ⋅ lo usamos para indicar un producto escalar. Para describir
la rata de divergencia exponencial de las dos trayectorias (figura 5), escribimos
D(X0, Y0, t) = D(X0, Y0, 0) exp (λ t) ,
donde
λ X0, Y0 := lim
t → ∞1t ln
D X0, Y0, t
D X0, Y0, 0
se conoce con el nombre de exponente de Lyapunov.
El exponente de Lyapunov es una propiedad característica de la trayectoriaclásica. La trayectoria es estable, si el exponente de Lyapunov se anula, y esinestable si él es un número positivo. La inestabilidad significa quemodificaciones infinitesimalmente pequeñas de la condición inicial generanuna separación exponencial de las trayectorias, lo cual explica la altasensitividad del sistema a cambios menores en las condiciones iniciales. Unaregión del espacio de fase es caótica si todas las trayectorias son inestables.
Entropía-K
El espacio de fase está formado por 2f ejes ortogonales entre si, a los cualesles podemos asociar vectores unitarios (e1, e2, …, e2 f ). Si se elige el punto
inicial Y0 de tal manera que sólo se diferencie de X0 en la dirección n,entonces a la dirección en le corresponde un exponente de Lyapunov,
alcanzar los confines del espacio de fase (¡ir hasta el infinito!) y, por lo tanto, ladistancia entre ellas puede diverger fácilmente de manera exponencial. Este es el casode la ecuación diferencial dx/dt = a x , a > 0, la cual para dos condiciones iniciales
distintas conduce a ∆X(t) = x2(t) – x1(t) = [x2(0) – x1(0)] exp (a t) . Se presenta
divergencia exponencial de las trayectorias pero no hay caos.

λ n X0, en := lim
t → ∞1t ln
D X0, en, t
D X0, en, 0.
Esto es, para un sistema de f grados de libertad existe un conjunto de 2fexponentes de Lyapunov, λ 1 ≥ λ 2 ≥ … ≥ λ 2 f , que caracterizan la estabilidad
del movimiento en el espacio de fase.
La existencia de por lo menos un exponente positivo de Lyapunov es la causade la alta sensitividad de las trayectorias al cambio de condiciones iniciales, locual es característico del caos. Por lo tanto, una cantidad de interés es laentropía de Krylov–Kolmogorov–Sinai o entropía–K, la cual se definesumando los exponentes positivos de Lyapunov [19, 20],
K := λ nΣn = 1
, λ n ≥ 0 .
La entropía–K es cero si no hay exponentes positivos de Lyapunov. Estacantidad sirve para caracterizar la divergencia exponencial de las trayectorias.En efecto, se dice que el flujo de trayectorias en una región del espacio de fasees caótico, si él tiene una entropía–K positiva [17]. Al igual que en un fluidoordinario (agua, por ejemplo), si el sistema está ejecutando un movimientoregular, el flujo es laminar y K = 0. La aparición de una entropía positiva K >0 está asociada con el cambio de flujo laminar a turbulento, es decir, el flujoen el espacio de fase pasa de un comportamiento regular a uno caótico.
Observese que en la entropía-K sólo se usan las propiedades de lastrayectorias del sistema sin emplear el concepto de función de distribución, elcual se requiere en la mecánica estadística clásica para introducir la definiciónusual de entropía.
Superficie de Poincaré
En el caso de sistemas de dos grados de libertad es posible analizarnuméricamente si un sistema es caótico usando para ello el concepto desuperficie de Poincaré [17, 21]. Para explicar este término consideraremos unsistema conservativo con Hamiltoniano H(q1, q2, p1, p2)y una condición
inicial (q1(0), q2
(0), p1(0), p2
(0)) que define una trayectoria acotada en el espacio de
fase. En relación a la naturaleza del movimiento consideraremos dos
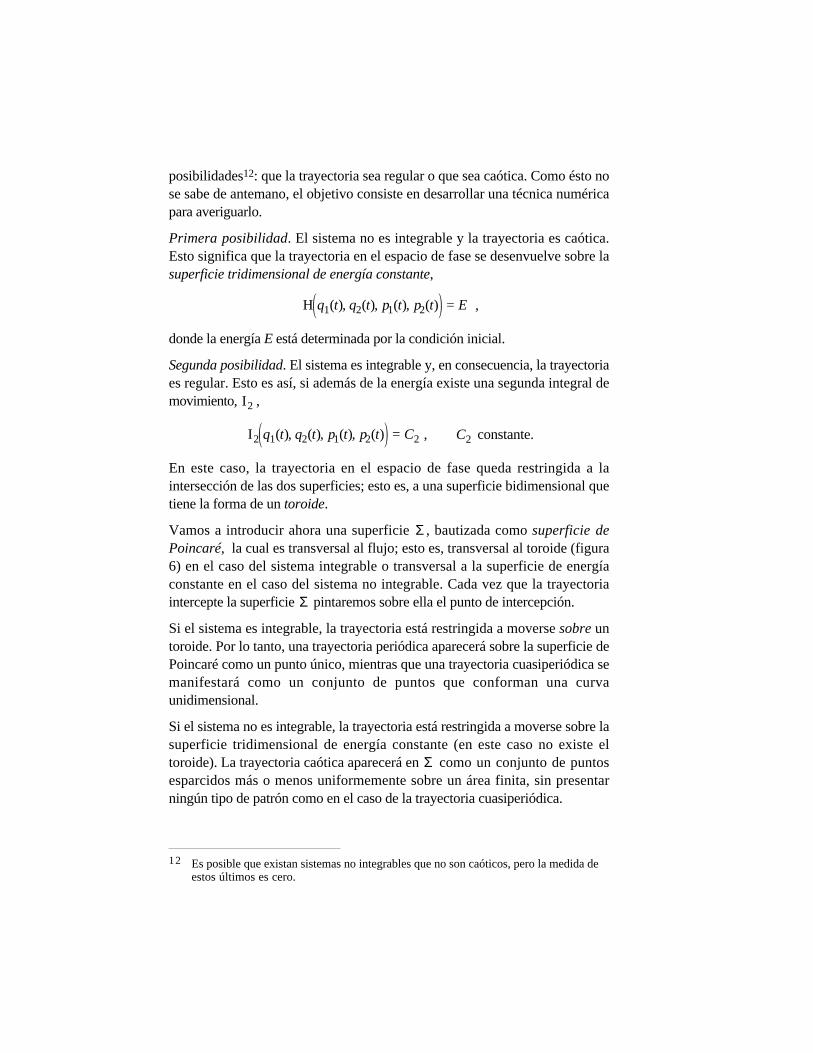
posibilidades12: que la trayectoria sea regular o que sea caótica. Como ésto nose sabe de antemano, el objetivo consiste en desarrollar una técnica numéricapara averiguarlo.
Primera posibilidad. El sistema no es integrable y la trayectoria es caótica.Esto significa que la trayectoria en el espacio de fase se desenvuelve sobre lasuperficie tridimensional de energía constante,
H q1(t), q2(t), p1(t), p2(t) = E ,
donde la energía E está determinada por la condición inicial.
Segunda posibilidad. El sistema es integrable y, en consecuencia, la trayectoriaes regular. Esto es así, si además de la energía existe una segunda integral demovimiento, I2 ,
I2 q1(t), q2(t), p1(t), p2(t) = C2 , C2 constante.
En este caso, la trayectoria en el espacio de fase queda restringida a laintersección de las dos superficies; esto es, a una superficie bidimensional quetiene la forma de un toroide.
Vamos a introducir ahora una superficie Σ , bautizada como superficie dePoincaré, la cual es transversal al flujo; esto es, transversal al toroide (figura6) en el caso del sistema integrable o transversal a la superficie de energíaconstante en el caso del sistema no integrable. Cada vez que la trayectoriaintercepte la superficie Σ pintaremos sobre ella el punto de intercepción.
Si el sistema es integrable, la trayectoria está restringida a moverse sobre untoroide. Por lo tanto, una trayectoria periódica aparecerá sobre la superficie dePoincaré como un punto único, mientras que una trayectoria cuasiperiódica semanifestará como un conjunto de puntos que conforman una curvaunidimensional.
Si el sistema no es integrable, la trayectoria está restringida a moverse sobre lasuperficie tridimensional de energía constante (en este caso no existe eltoroide). La trayectoria caótica aparecerá en Σ como un conjunto de puntosesparcidos más o menos uniformemente sobre un área finita, sin presentarningún tipo de patrón como en el caso de la trayectoria cuasiperiódica.
12 Es posible que existan sistemas no integrables que no son caóticos, pero la medida deestos últimos es cero.

Superficie de Poincaré
Σ
Figura 6. Toroide asociado con un sistema integrable y una
superficie de Poincaré.
Como aplicación práctica podemos desarrollar el siguiente procedimiento. (a)Integrar numéricamente las ecuaciones de Hamilton y organizar los resultadosen pares de coordenadas canónicamente conjugadas, (q1, p1) y (q2, p2). (b)Definir [3] la superficie de Poincaré Σ como el plano q1 = 0 en la superficiede energía H = E. El par de variables (q2, p2) conforman las coordenadas
naturales en Σ . (c) Cada vez que la trayectoria pase a través del plano q1 = 0con p1 ≥ 0 pintamos en Σ el punto correspondiente, (q2, p2). (d) Después de
repetir la operación anterior muchas veces surgirá uno de los siguientespatrones: un punto (trayectoria regular), una curva unidimensional (trayectoriacuasiperiódica) o una mancha de puntos (trayectoria caótica). El patrón que seobserva nos permite concluir si la trayectoria es regular o caótica.
Un ejemplo: sistema de Hénon–Heiles
Como ilustración concreta consideraremos el sistema de Hénon–Heiles, elcual consta de dos osciladores acoplados no linealmente, descritos por elHamiltoniano [3]
H = 1
2mp1
2 + p22 + 1
2m ω2 q1
2 + q22 + 1
a m ω2 q12 q2 – 1
3q2
3 ,
donde m, ω y a son parámetros físicos del sistema. Este Hamiltoniano fueutilizado por primera vez por Hénon y Heiles en 1964 como un modelo paraestudiar el movimiento de estrellas en el campo gravitacional de la galaxia. Lastrayectorias de las estrellas en una galaxia típica pueden ser regulares ocaóticas dependiendo de las condiciones iniciales. Con su trabajo losastrónomos, Hénon y Heiles, incorporaron en la física el tema de caos. Hoy
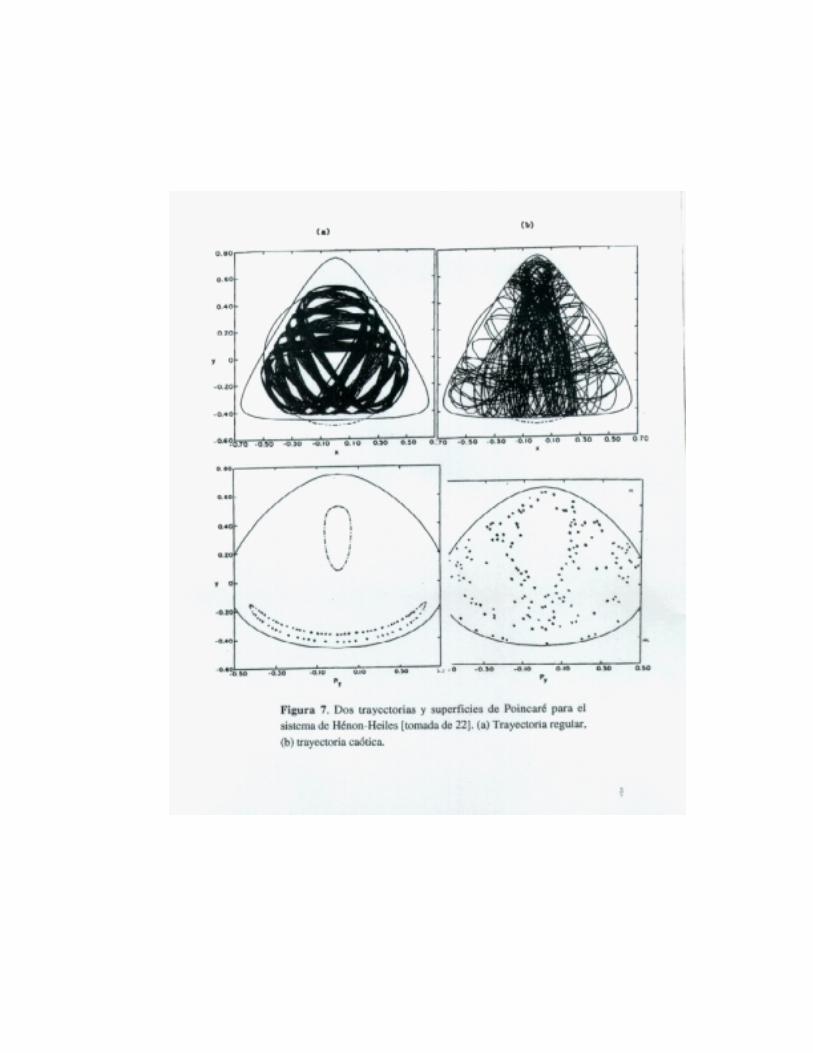

en día, este modelo se ha adaptado para describir diferentes situaciones, comovibraciones moleculares. En la figura 7 se muestran dos trayectorias y lascorrespondientes superficies de Poincaré [22, 23]. Las trayectoriascorresponden a la misma energía pero se inician en regiones diferentes delespacio de fase. Una es regular, la otra es caótica.
CONCLUSIÓN
Los sistemas mecánicos integrables son la excepción. Lo común, lo general, estener sistemas que presenten comportamiento caótico en virtud de sunaturaleza no lineal y de las condiciones iniciales asignadas. Esto significa quela imagen física de un mundo completamente regular y ordenado es obsoleta.Esa visión de un mundo predecible —generada por los éxitos primeros de lamecánica clásica al describir, por ejemplo, movimientos planetarios, estables yperiódicos— ha dejado de existir.
La mecánica (la de Newton, Lagrange, Poisson, Hamilton, Jacobi) muestra quepara un mismo sistema físico existen trayectorias que presentan diversoscomportamientos, desde los periódicos hasta los caóticos. En este último caso,la evolución futura del sistema, en particular para las épocas lejanas, no sepuede establecer con certeza y no existe previsibilidad cierta, aunque se sigancumpliendo las leyes deterministas de la mecánica. Dos condiciones inicialesmuy próximas entre si en dos experimentos separados, regidos por lasmismas leyes, pueden originar estados finales radicalmente diferentes. Eldescubrimiento de la existencia de este comportamiento caótico cambióradicalmente la imagen física del mundo y nuestro modo de pensamiento.Algunos autores consideran que el caos es la tercera revolución de la física delsiglo XX, después de la mecánica cuántica y la relatividad (especial y general).
El limitarnos en este trabajo a sistemas Hamiltonianos ha permitido presentaralgunos conceptos básicos dentro de la teoría de sistemas caóticos. Sinembargo, conceptos análogos o generalizaciones de estos se aplican a sistemasdinámicos más generales [13]. De esta manera, el comportamiento de lossistemas mecánicos clásicos sirve de paradigma para ilustrar lo que se esperaen sistemas no lineales fuera del domino de la mecánica. El comportamientocaótico es la regla y no la excepción en la naturaleza.
Finalmente, como nuestro mundo es cuántico y en esta teoría no existe elconcepto de trayectoria, quedan problemas abiertos por discutir. En particular,se deben clarificar las implicaciones de la naturaleza mecánico–cuántica de los

sistemas físicos sobre el comportamiento caótico de los sistemas clásicos.¡Pero este tema es objeto de otra historia!
AGRADECIMIENTOS
El autor agradece a los profesores Eduardo Brieva, Hernán Estrada y JoséFernando Isaza las diversas observaciones y recomendaciones que permitieronpreparar la versión final del presente trabajo.
BIBLIOGRAFÍA
[1] Rañada, A.F., ed. Movimiento caótico. Libros de Investigación yCiencia, Scientific American: Orden y Caos, ed. A.F. Rañada. 1990,Prensa Científica: Barcelona.
[2] Février, P., Determinismo e Indeterminismo. 1957, México:Universidad Nacional Autónoma de México.
[3] Gutzwiller, M.C., Chaos in Classical and Quantum Mechanics. 1990,New York: Springer-Verlag.
[4] Abraham, R., Foundations of Mechanics. 1967, New York: ConsultantsBureau.
[5] Hao, B.-L., ed. Chaos. 1985, World Scientific: Singapore.[6] Wiggins, S., Introduction to Applied Nonlinear Dynamical Systems and
Chaos. 1990, New York: Springer.[7] Chen, L. and A.E. Kaloyeros, Chaotic behavior of channeling particles.
Chaos, 1994. 4(1): p. 85.[8] Arnold, V.I., Mathematical Methods of Classical Mechanics. 1980, New
York: Springer.[9] Tabor, M., Chaos and Integrability in Nonlinear Dynamics. 1989, New
York: Wiley.[10] Hasegawa, H., M. Robnik, and G. Wunner, Classical and Quantal
Chaos in the Diamagnetic Problem. Prog. Theor. Phys. Suppl., 1989.98.
[11] Tabor, M., The Nonlinear Dynamics of the Classical few problem.Nucl. Phys. A, 1981. 353: p. 353c.
[12] Zaslavsky, G.M., Chaos in Dynamical Systems. 1987, London:Harwood Academic Publishers.
[13] Ott, E., Chaos in Dynamical Systems. 1994, New York: CambridgeUniversity Press.
[14] Tabor, M., The onset of chaotic motion in dynamical systems, inAdvances in Chemical Physics, I. Prigogine and S.A. Rice, Editor. 1981,Wiley: New York.
[15] Nicolis, G. and I. Prigogine, Exploring Complexity. 1989, New York:W. H. Freeman.
[16] Goldstein, H., Classical Mechanics. 1959, Reading: Addison-Wesley.[17] Reichl, L.E., The Transition to Chaos In Conservative Classical
Systems: Quantum Manifestations. 1992, New York: Springer-Verlag.[18] Earnshaw, J.C. and D. Haughey, Lyapunov exponents for pedestrian.
Am. J. Phys., 1993. 61(5): p. 401.[19] Klimontovich, Y.L., Turbulent Motion and the Structure of Chaos: A
New Approach to the Statistical Theory of Open Systems. 1991,Dordrecht: Kluwer Academic.
[20] Cross, M.C. and P.C. Hohenberg, Pattern formation outside ofequilibrium. Rev, Mod. Phys., 1993. 65(3): p. 851.
[21] Svirastava, N., C. Kaufman, and G. Müller, Hamiltonian Chaos. Comp.Phys., 1990. (sep/oct.): p. 549.
[22] Jaffé, C. and W.P. Reinhardt, Uniform semiclassical quantization ofregular and chaotic classical dynamics on the Hénon-Heiles surface. J.Chem. Phys., 1982. 77(10): p. 5191.
[23] Shirts, R.B. and W.P. Reinhardt, Approximate constants of motion forclassically chaotic vibrational dynamics: Vague tori, semiclassicalquantization, and classical intramolecular energy flow. J. Chem. Phys.,1982. 77(10): p. 5204.







![11- CAOS DETERMINISTA - Hezkuntza Saila - Eusko ... · 2. UN EJEMPLO DE SISTEMA CAÓTICO. EL SISTEMA DE LORENZ Utilizaremos el sistema caótico de Lorenz, [1], como un ejemplo representativo](https://static.fdocuments.es/doc/165x107/5b5d0b5d7f8b9ac6028d7d35/11-caos-determinista-hezkuntza-saila-eusko-2-un-ejemplo-de-sistema.jpg)










