
con... · Web viewGuía Conceptual de Matemática Tema: Álgebra vectorial. Montoya Conceptos...
39
Operatoria con vectores Al igual que la fuerza, el desplazamiento es un vector, ya que es la diferencia entre la posición inicial y la posición final, luego tiene una magnitud, dirección y sentido. En cambio la trayectoria tiene solo magnitud. Para sumar dos trayectorias basta con sumar sus magnitudes. Pero para sumar dos desplazamientos, su suma depende de la dirección de los desplazamientos. Hay dos formas de sumar vectores libres. El método del paralelogramo, y método del triángulo o polígono. Propiedades del algebra vectorial: Conmutativa: a+ b= b + a Asociativa: a+( b+ c ) =( a+ b) + c Elemento neutro: a+ 0= o + a= a Guía Conceptual de Matemática Guía Conceptual de Matemática Tema: Álgebra vectorial. Tema: Álgebra vectorial. Montoy Montoy a a Conceptos previos Conceptos previos
Transcript of con... · Web viewGuía Conceptual de Matemática Tema: Álgebra vectorial. Montoya Conceptos...

Operatoria con vectores
Al igual que la fuerza, el desplazamiento es un vector, ya que es la diferencia entre la posición inicial y la posición final, luego tiene una magnitud, dirección y sentido. En cambio la trayectoria tiene solo magnitud. Para sumar dos trayectorias basta con sumar sus magnitudes. Pero para sumar dos desplazamientos, su suma depende de la dirección de los desplazamientos.
Hay dos formas de sumar vectores libres.
El método del paralelogramo, y método del triángulo o polígono.
Propiedades del algebra vectorial:
Conmutativa: a⃗+ b⃗= b⃗+a⃗
Asociativa: a⃗+ (b⃗+c⃗ )=(a⃗+ b⃗ )+c⃗
Elemento neutro: a⃗+ 0⃗= o⃗+a⃗=a⃗
El módulo del vector resultante es menor o igual que la suma de los módulos de los vectores. Es igual solo cuando los sumandos tienen la misma dirección y el mismo sentido.
Dado un vector a⃗ , existe un vector opuesto -a⃗ , de igual modulo y dirección, pero sentido contrario, de forma que al sumarlos se obtiene el vector nulo, esto es:
a⃗±a⃗=o⃗
Guía Conceptual de Matemática Guía Conceptual de Matemática Tema: Álgebra vectorial.Tema: Álgebra vectorial.
Montoya Montoya
Conceptos previos Conceptos previos
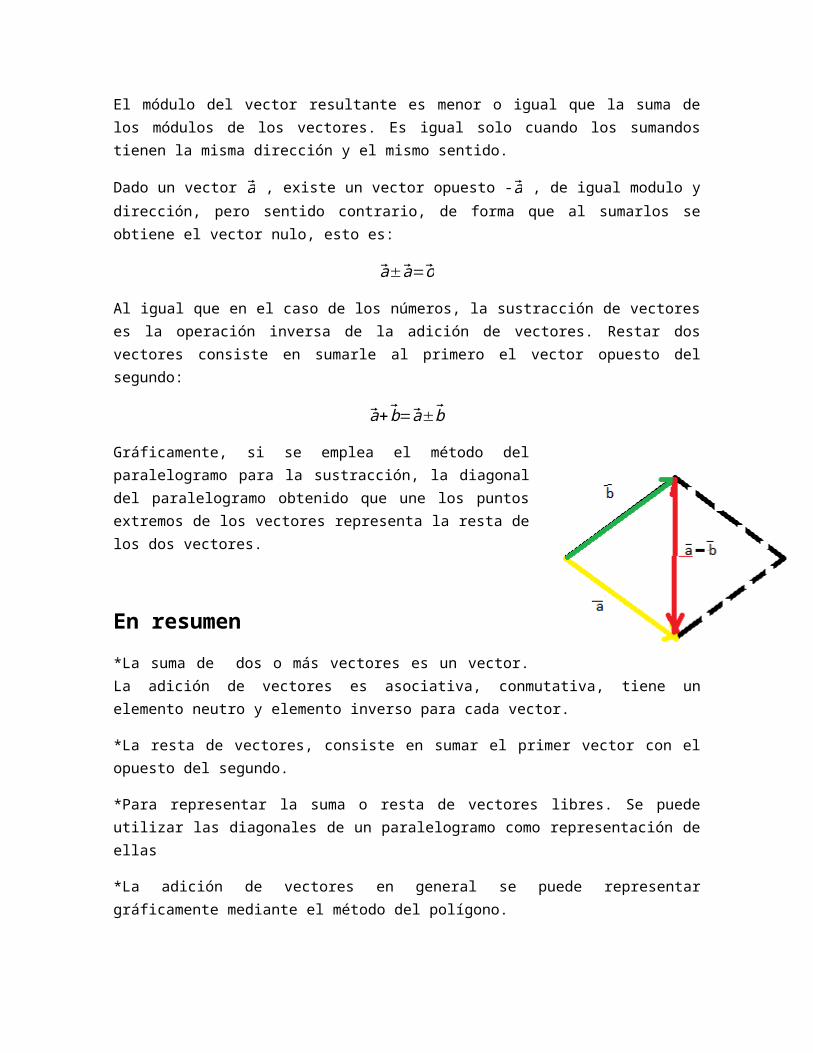
Al igual que en el caso de los números, la sustracción de vectores es la operación inversa de la adición de vectores. Restar dos vectores consiste en sumarle al primero el vector opuesto del segundo:
a⃗+ b⃗= a⃗±b⃗
Gráficamente, si se emplea el método del paralelogramo para la sustracción, la diagonal del paralelogramo obtenido que une los puntos extremos de los vectores representa la resta de los dos vectores.
En resumen
*La suma de dos o más vectores es un vector. La adición de vectores es asociativa, conmutativa, tiene un elemento neutro y elemento inverso para cada vector.
*La resta de vectores, consiste en sumar el primer vector con el opuesto del segundo.
*Para representar la suma o resta de vectores libres. Se puede utilizar las diagonales de un paralelogramo como representación de ellas
*La adición de vectores en general se puede representar gráficamente mediante el método del polígono.
Resuelve los siguientes problemas:
1.- el minutero de un reloj mide 5cm. si el minutero parte de 0, representa gráficamente el vectro desplazamiento de su punta o extremo después de
1.1.- quince minutos.
1.2.-media hora
1.3.-tres cuartos de hora-
1.4.-una hora.
2.- dos vectores de desplazamiento centrados en el origen tienen módulos iguales a 6cm y 8cm ¿Cuál debe ser la dirección y sentido de cada uno de ellos para que la resultante tenga modulo igual a:
2.1.- 14cm 2.2.-2cm 2.3.-6cm
3.- Representa cada una de estas situaciones anteriores.

Vectores en el plano cartesiano.
Recuerde que en los cursos anteriores conociste el plano cartesiano., que permite la ubicación de puntos en el plano mediante sus coordenadas.
Analicemos:
Si el vector a⃗ se trasladara , de modo que su origen se situara en (0,0).¿En que punto se ubicaría su extremo?
¿Cómo se representa en sus coordenadas el vector a⃗ ¿Por qué?
a⃗=⟨12−2 ,9−3¿ ⟩
¿Cómo se puede calcular el módulo de a⃗:
‖a⃗‖=√(12−2)2+(9−3)2
En general como se representa un vector en función de sus coordenadas extremas?
Existen varias formas de representar analíticamente un vector:
Utilizaremos: ⟨ x , y ⟩
Y le modulo como: ‖a⃗‖
Cuando el punto de aplicación de un vector está en el origen de un sistema de coordenadas, su extremo coincidirá con un punto del plano y se representa utilizando ese punto, por ejemplo:
v⃗=⟨ x , y ⟩
En este caso se puede determinar el modulo aplicando el teorema de Pitágoras:
‖v⃗‖=√x2+ y2
En general si un vector tiene su origen en ⟨ x , y ⟩ y su extremo en ⟨ x , y ⟩
Entonces:
v⃗=⟨ x −x , y − y ⟩
Y su módulo está dado por:
‖v⃗‖=√¿¿
La adición de vectores en forma analítica se efectúa en términos de sus coordenadas:
v⃗+ v⃗ = ⟨ x , y ⟩+⟨ x , y ⟩=⟨ x+x , y+ y ⟩
Actividades:
1.- Dibuja y luego calcula el módulo de los siguientes vectores centrados en el origen del plano y cuyo extremo es el punto:
1,1,. A(3,4) 1.2.-B(-7,12) 1.3.-C(-9,-12)
1.4.-E(-1,0) 1.5.-F(-13,12) 1.6.-F(0,-4)
2.- Si : v⃗1=⟨−4,5 ⟩ ; v⃗2=⟨6 ,−3 ⟩ y v⃗3=⟨−2 ,−2 ⟩, grafica y determine las componentes del vector resultante y el módulo en cada uno de los casos siguientes:
2.1.- v⃗1−v⃗2 + v⃗3 2.2.- 2⃗v1−3⃗ v2 + v⃗3 2.3.- v⃗1−v⃗2 − v⃗3
2.4.- v⃗1+ v⃗2 − v⃗3 2.5.- v⃗1+ v⃗2 + v⃗3 2.6.- v⃗1−3 v⃗2 +4 v⃗3
3.- Dados los vectores:v⃗1=⟨3 ,−2 ⟩ ; v⃗2=⟨−1,5 ⟩ y v⃗3=⟨ 4,6 ⟩. Determine:
3.1.- v⃗1+ v⃗2 + v⃗3 3.2.- 2⃗ v1−3⃗v2 +2 v⃗3 3.3.- 2 v⃗1−v⃗2 −3 v⃗3
3.4.- v⃗1+ 4⃗v2 −5 v⃗3 3.5. - −⃗2v1+v⃗2 + v⃗3 3.6.- -3 v⃗1−3 v⃗2 +4 v⃗3
4.- Sobre un cuerpo actúan las fuerzas:F⃗1=⟨6,8 ⟩ ; F⃗2=⟨−15,20 ⟩ y F⃗3=⟨−4 ,−16 ⟩. Calcule:
4.1.-La magnitud del vector resultante.
4.2.-La dirección del vector resultante.
Traslación de figuras planas:
Observe la figura
Compare las medidas de los trazos AA` BB` CC` DD` ¿Qué se puede concluir?

¿Corresponde a una transformación isométrica?
¿Esta transformación se puede representar utilizando vectores?
si se conocen las coordenadas de ABCD: ¿Cómo se pueden obtener las coordenadas de A`B`C`D`
Recuerde que: una traslación es una transformación isométrica que desplaza todos los puntos de una figura en igual magnitud, dirección y sentido. Luego tal como las fuerzas y los desplazamientos, se puede utilizar un vector para representarlas ç
Para obtener la imagen de una figura bajo una transformación, basta con sumar el vector de traslación, en este caso, a cada uno de los vértices de la figura, coordenada a coordenada.
Ejemplo, la traslación del triángulo cuyos vértices son:
A⃗=⟨−4,4 ⟩ ; B⃗= ⟨−2,2 ⟩ y C⃗=⟨−3,6 ⟩ ,según el vector v⃗=⟨2,1 ⟩
Analíticamente:
A⃗=⟨−4,4 ⟩ +⟨2,1 ⟩ = ⟨−2,5 ⟩
B⃗= ⟨−2,2 ⟩+⟨2,1 ⟩ = ⟨0,3 ⟩
C⃗=⟨−3,6 ⟩+⟨2,1 ⟩ = ⟨−1,7 ⟩
La traslación anterior se denota como: T⃗ ⟨2,1 ⟩ de los puntos del triángulo
ABC.
Es decir:
A⃗ =¿ ⟨−2,5 ⟩ ; B⃗ =¿ ⟨0,3 ⟩ ; C⃗ = ⟨−1,7 ⟩´

Composición de traslaciones:
Si al resultado de una traslación se le aplica una nueva traslación, se habla de composición de traslaciones.
Si al triangulo anterior se aplica ahora T⃗ ⟨4 ,−6 ⟩, se obtiene:
A⃗ =¿ ⟨−2,5 ⟩ + ⟨4 ,−6 ⟩= ⟨2 ,−1 ⟩
B⃗ =⟨ 0,3 ⟩+⟨4 ,−6 ⟩= ⟨4 ,−3 ⟩
C⃗ =¿ ⟨−1,7 ⟩+⟨4 ,−6 ⟩= ⟨3,1 ⟩
En resumen:
*La traslación de una figura en el plano cartesiano da origen a una nueva figura, que es congruente con la anterior; es decir, mantiene la forma y sus medidas.
*Una composición de traslaciones resulta de aplicar una traslación a otra traslación ya realizada.
*Si T⃗ ⟨ x , y ⟩ es una traslación en el plano cartesiano, entonces T⃗−1 ⟨ x , y ⟩ es su traslación inversa, y
corresponde a la trasformación que tiene la misma magnitud y dirección, pero sentido contrario, O
sea, T⃗−1 ⟨ x , y ⟩=T⃗ ⟨−x ,− y ⟩
Actividades:
1.- Los vértices de un cuadrilátero son A(1,0) , B(0,2) ; C(-3,0) y D(0,-1) ¿Cuáles son los vértices del cuadrilátero si se le aplica una traslación de vector (3,-2)?
Resp. (A`( 4,-2) ; B`( 3,0) ; C`( 0,-2) ; D`( 3,-3)
2.-Considera dos circunferencias de igual radio, una con centro O (-2,3) y la otra con centro
A (-1-1).determina el vector que permite trasladar la circunferencia de centro O a la posición con centro en A. Luego determina el vector de la traslación opuesta a la realizada. ¿Qué puedes concluir?
3.- Determina las traslaciones inversas de cada una de las siguientes traslaciones:
3.1.-T⃗ 1 ⟨2,3 ⟩ 3.2.-T⃗ 2 ⟨−3,4 ⟩ 33.-T⃗ 3 ⟨−6 ,−7 ⟩ 3.4.- T⃗4−1 ⟨ 0 ,−4 ⟩

Producto de un escalar por un vector.
Sobre un cuerpo se aplican dos fuerzas, una se representa por el vector F⃗ (2,-3), y la otra por el vector g⃗ (-6,9)
Analicemos...
Representa en el plano cartesiano los vectores F⃗ y g⃗. A partir del origen ¿Qué tienen en común?
Representa en el mismo plano una fuerza que sea el triple de la fuerza F⃗ .¿Cual es su representación analítica?
¿Cuál es el valor de α tal que se cumpla que : g⃗=∝ F⃗
En general cuando se calcula el producto por un escalar de un vector, se obtiene un nuevo vector, que conserva la dirección del vector original, pero cuya magnitud y sentido cambian según el valor por el cual fue multiplicado.
Propiedades del producto de un escalar por un vector:
Dados los escalares: α y β , y los vectores : a⃗ y b⃗ , se cumplen las siguientes propiedades:
1.- α (a⃗ + b⃗ )= α a⃗ + α⃗ b
2.- (α + β)a⃗ = αa⃗ + βa⃗
3.- α (βa⃗ )= (αβ¿⃗a
4.- 1a⃗ = a⃗
5.- 0a⃗ = 0⃗
En resumen:
*El producto de un escalar por un vector es otro vector dado por α a⃗ = α (x,y) = =( α x, α y). se dice que el vector α a⃗ es un vector ponderado de a⃗ .
*Dos vectores paralelos se pueden expresar como uno ponderado del otro:
Es decir: α a⃗ = b⃗ , O BIEN b⃗ = β a⃗
*El vector ponderado tiene las siguientes características:
1.- mantiene la dirección del vector original

2.-‖α a⃗‖ = |α|‖a⃗‖
3.- Si el escalar es positivo el vector ponderado mantiene el sentido
4,. Si el escalar es negativo, el vector ponderado cambia de sentido.
5.- si el escalar es nulo, entonces el vector se anula.
Actividades:
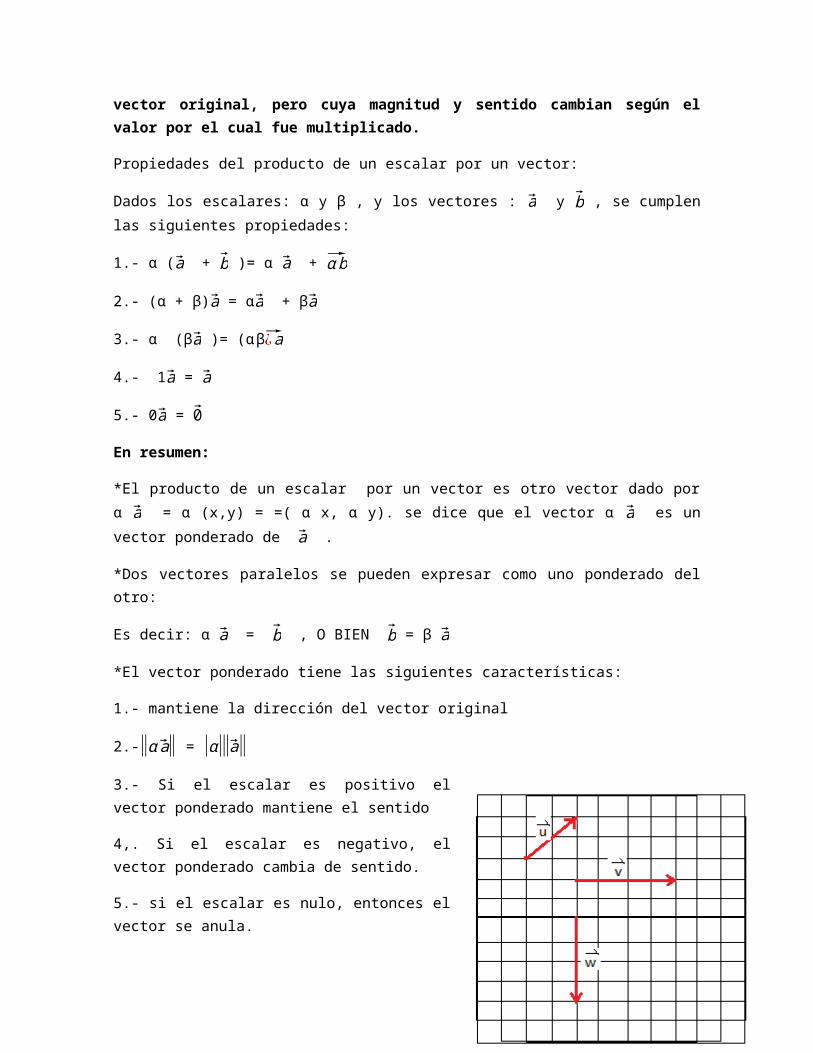
1.- Copia en tu cuaderno los vectores que se indican en el gráfico y determina:
1.1-u⃗+v⃗1.2-3 u⃗+v⃗ 1.3.- 2 u⃗-3v⃗
1.4.- u⃗+v⃗+ w⃗ 1.5.-3 u⃗-2v⃗+4 w⃗
2.- Calcula el resultado de las siguientes operaciones:
2.1.- 3 ⟨−4,4 ⟩ -2⟨2,1 ⟩ +4 ⟨−2,5 ⟩
2.2.- -2⟨−2,2 ⟩+5⟨0,1 ⟩ +3 ⟨0,3 ⟩
2.3.- 2⟨−2,5 ⟩-⟨3,1 ⟩ +2 ⟨0,6 ⟩ 2.4.- 4⟨−2,3 ⟩-4⟨1,1 ⟩ -3 ⟨1,3 ⟩
3.- Dado el producto de α a⃗ , con a⃗ ≠0¿Qué característica cumple el producto , en cada caso?:Justifique representando gráficamente.
3.1.- si α >1 3.2.- si α =1 3.3.- si. 0< α <1 3.4.- si, α =0 3.5.-si α =-1 3.6.- si, α <-1
Homotecia:
Las transformaciones isométricas son trasformaciones geométricas que preservan la forma y el tamaño de las figuras; sin embargo, no todas las trasformaciones geométricas son así. Por ejemplo en la figura que se indica se puede apreciar que el cuadrilátero ABCD, de vértices.
A(10,-2) ; B(4,-8) ; C(12,-12) ; D(14,-6) y sus respectivas imágenes en el cuadrilátero: A`B`C`D`y el cuadrilátero A`` B`` C`` D`` .
Analicemos:
¿Cómo describirías los cuadriláteros obtenidos, respecto del original?
¿Corresponde en cada caso, la imagen a una trasformación isométrica?¿porque?
¿Existe una proporción entre los lados?
*Se puede establecer que en esta transformación, la figura mantiene los ángulos, tiene la misma forma original, pero no así las medidas de sus lados, en consecuencia las figuras son semejantes.
*La razón entre los lados correspondientes corresponde al módulo o razón de semejanza, y este valor es una constante.
*Cuando esto ocurre se dice que una de las figuras es la imagen de la otra bajo una HOMOTECIA. La homotecia está definida por el punto O, que es el centro de la homotecia, y un número K, que es la razón entre el módulo de los vectores correspondientes a esa transformación,
*Se representa como H(O, K) , el número K es siempre distinto de cero, y puede ser positivo o negativo.
*Si la homotecia tiene una razón K, se concluye que la magnitud del vector O⃗A es K veces la magnitud del vector O⃗A .

*En el caso que la homotecia tiene una razón negativa ( K<0 ) , vector O⃗A está en la misma dirección , pero en sentido contrario al vector O⃗A .
Ejemplo:
Considere el triángulo ABC , de coordenadas A( 2,-4) ; B(0,-2) y C(6,3) , y el origen O(0,0) . Encuentre su imagen bajo la homotecia H(O,-2)
Para aplicar una homotecia es necesario determinar primero los vectores desde el centro de la homotecia O a cada uno de los puntos.
En este caso , ya que el centro de homotecia está en el origen O(0,0) , los vectores son O⃗A (2,-4) ; O⃗B (0 ,−2) ;O⃗C(6,3).
A estos vectores se le aplica la homotecia; luego,
O⃗A =-2 (2,-4 ) = (-4,8)
O⃗B =-2 (0,-2) = (0,4)
O⃗C =-2 (6,3) = (-12,-6)
Entonces su imagen es el triángulo A`B`C` observa que la proporción que existe entre los lados de los triángulos corresponde a la razón o módulo de homotecia.
Se puede verificar que dos figuras son homotéticas si, al unir mediante rectas los puntos o vértices correspondientes de ellas, estas rectas concurren en un único punto que es el cetro de homotecia.

Composición de homotecias.
Al igual que con las traslaciones, se puede realizar una composición de homotecias; es decir, se puede aplicar una homotecia a la imagen de la homotecia de la figura.
La composición de homotecias, cuando su centro de homotecia es el mismo, es una homotecia con igual centro, y cuya razón corresponde al producto de las razones de las homotecias originales.
Aplicaciones:
11.-dados los puntos A(3,7) y O (2,5) y H 1(0 ,−2) y H 2(0 ,−1,5) , determinar el Homotetico de A respecto de la composición de homotecias: H 2o H 1
Respuesta:
Se obtiene el vector
O⃗A=(3−2,7−5 )=(1,2 ) seaplica primerola homotecia H 1
Luego: O⃗A =−2 (1,2 )=(−2 ,−4)
Luego se aplica la homotecia H 2 al vector O⃗A , se obtiene:
O⃗A = -1,5(-2,-4) = (3,6)
Luego A`` se obtiene: O⃗+O⃗A =(2,5 )+ (3,6 )=(5,11). Es decir, el homotético de A es el punto (5,11)
Resumen:
*Una homotecia es una trasformación geométrica que no afecta a la forma de la figura, pero si puede cambiar su tamaño y orientación.
*Una homotecia de centro O y razón k , con k≠0 , transforma un vectr O⃗P en un vector O⃗P , tal que O⃗P =k . O⃗P
*se escribe H(O,k). Algunas de sus características son:
*Las figuras generadas mediante una homotecia son semejantes a las figuras originales.
Los lados correspondientes entre dos figuras homotéticas son paralelos.
*Si la razón es positiva, la homotecia preserva el sentido de las figuras. Si la razón es negativa, la homotecia invierte las figuras.

*La composición de homotecias de centro C es otra homotecia de centro C.
Actividades:
1.- Considere un cuadrilátero ABCD de coordenadas; A (3,-3); B (6,-6); C (10,1); D (4,3) y el origen O(o, o). Encuentre su figura homotética, respecto de:
1.1.- H(O,-1) 1.2.- H(O; 3/2)
2.- Considere un cuadrado ABCD, tal que el punto de intersección de sus diagonales es E. Construya el grafico de las siguientes transformaciones homotéticas:
2.1.-H 1o H 2 , con H 1(E ,3) y H 2=( E ,1/2 )
2.2.- H 3o H 4 , con H 3( A ,2) y H 4=( A ,−3 /2 )
3.- Verifica que el arrea de una figura homotética es igual al producto del área de la figura original por el cuadrado de la razón de homotecia.
Producto punto:
En física se define el trabajo mecánico como el producto entre la fuerza aplicada a un cuerpo y su desplazamiento. Mientras mayor sea la fuerza aplicada y/o el desplazamiento logrado, mayor será el trabajo realizado.
Ya que tanto la fuerza, como el desplazamiento son vectores, el trabajo depende de las direcciones en que se aplica la fuerza y en que se produce el desplazamiento; en particular, depende del ángulo que forman estos vectores entre sí. El trabajo mecánico se calcula de acuerdo al modelo matemático:
W =‖F⃗‖.‖d⃗‖. cosα
Analicemos:
Considerando la expresión que define el trabajo mecánico ¿W es un escalar o un vector?
Dada la fuerza aplicada a un cuerpo y su correspondiente desplazamiento ¿Qué condiciones deben cumplirse para que el trabajo mecánico sea máximo?
¿Es posible que se aplique fuerza sobre un cuerpo y este cuerpo se desplace, pero que el trabajo sea nulo?

La operación que permite obtener el trabajo mecánico W a partir de una fuerza y el desplazamiento, se conoce como producto punto o producto escalar.
El producto punto de dos vectores es un número y dicho producto será un número positivo, nulo o negativo, según sea el ángulo que formen los vectores.
También el producto punto es nulo, si algunos de los factores son nulos.
Actividades:
1.-Calcule el producto punto entre los vectores, considerando los datos que se indican:
1.1.- ‖a⃗‖=5;‖b⃗‖=7 ;α=30 º
1.2.-‖a⃗‖=7 ;‖b⃗‖=7 ; α=90º
1.3.-‖a⃗‖=3/5 ;‖b⃗‖=1 ;α=45 º
1.4.-‖a⃗‖=10;‖b⃗‖=3 ;α=180 º
2.- para cada par de vectores que se indican, calcule ‖a⃗‖‖b⃗‖ Y |a⃗. b⃗| . Luego verifica que se
cumple que : |a⃗. b⃗|≤‖a⃗‖‖b⃗‖ , en cada caso. ¿Qué debe ocurrir para que se cumpla que que:
|a⃗. b⃗|=‖a⃗‖‖b⃗‖
2.1.- a⃗=(3,2 ) y b⃗=(5,1)
2.2,.a⃗=(4,7 ) y b⃗=(3 ,−1)
2.3.-a⃗=(−2,0 ) y b⃗=(8,2)
2.4.-a⃗=( 12 , 23 ) y b⃗=(−2,3)
3.- analiza lo que ocurre con el producto punto de a⃗ y b⃗ si:
3.1.- a⃗ aumenta y b⃗ se mantiene constante.λ
3.2.- a⃗ y b⃗ aumentan.
3.3.-a⃗ y b⃗ son perpendiculares.
3.4.-a⃗ y b⃗ son paraleleos.

Producto cruz y vectores en el espacio.
Cuando una fuerza actúa sobre un cuerpo, y `producto de esta acción el cuerpo gira, se dice que se ha producido una torque sobre el cuerpo. Un ejemplo es la fuerza que se aplica para abrir una puerta, otro es la fuerza que aplicamos al pedal de la bicicleta.
El torque sobre un cuerpo se puede calcular como el producto cruz entre la fuerza aplicada y la posición del punto de aplicación de la fuerza respecto del eje de giro del cuerpo: τ⃗=F⃗ × r⃗
El producto cruz o vectorial entre : a⃗ y b⃗ entre dos vectores en el espacio , se define como un tercer vectro : p⃗ , perpendicular a ambos
El módulo de p⃗= a⃗ ×b⃗ corresponde al área del paralelogramo formado por los vectores a⃗ y b⃗
Entonces:
‖p⃗‖=‖a⃗‖.‖b⃗‖senα Donde α es el angulo agudo formado por los vectores a⃗ y b⃗
El vector resultado del producto punto se obtiene a partir del producto denominado “caja” , disponiendo los vectores de la forma:
Dados u⃗=( x , y , z ) y v⃗=(x , y , z )
‖u⃗ × v⃗‖=| i j kx y zx y z |=ai+bj+ck
i| y zy z |− j|x z
x z |+k|x yx y |
Datos claves:
1.-Para calcular la superficie de un paralelogramo en el espacio:
‖u⃗ × v⃗‖=| i j kx y zx y z |=ai+bj+ck
De donde, la superficie está dada por:

√a2+b2+c2
2.- Para calcular el volumen de un cuerpo en el espacio:
U=(x,y,z) , v=(x`, y`, z`) , w=(x`` , y`` , z`` )
Volumen = | x y zx y zx y z |
3.- Área del triángulo que se determina por los extremos de dos vectores y el origen.
A=12‖u × v‖
‖u × v‖=| i j kx y zx y z |=ai+bj+ck
A=12‖u × v‖=√a2+b2+c2
4.- Para probar que tres vectores son coplanares:
( Está explicado más adelante).

5.-Para Hallar el área del triángulo formado por los extremos de tres vectores en el espacio esta dado por:
U⃗ =(x , y , z) , V⃗=(x , y , z ) , W⃗ =(x , y , z )
U⃗V =V⃗−U⃗ =(x −x , y − y , z −z )
U⃗W=W⃗ −U⃗=(x −x , y − y , z −z)
A=12‖U⃗V × U⃗W‖
‖U⃗V × U⃗W‖=(|x−x y− zx−x y−z |,|z−z x−x
z−z x−x |,|x−x y− yx−x y− y |)
Modelo para determinar la ecuación del plano.
U= (X1 , Y 1 , Z1 ), V= (X2 , Y 2 , Z2 ) , W= (X3 ,Y 3 , Z3 )
Ecuación del plano en función de los segmentos que interceptan a los ejes.
La ecuación del plano que corta a los ejes x, y, z en los puntos: a, b y c respectivamente es:
xa+ y
b+ z
c=1
Distancia de un punto a un plano:
P0=(X 0 , Y 0 , Z0 ) al plano:ax+by+cz+d=0
d=|ax0+b y0+c z0√a2+b2+c2 |
Angulo con que se cortan dos planos en el espacio:

Dados los planos:
π1: ax1+b y1+c z1+d1
π2: a x2+b y2+c z2+d2
cosθ=| a1a2+b1b2+c1c2√a1
2+b12+c1
2.√a22+b2
2+c22|
Ejercicios misceláneos de aplicación:
1.- Dados Los vectores V (1,45º) y V’ (2,180º).determine el producto escalar.
2.- Con los vectores V (1,2); V’ (2,-1) y V’’ (-1,1). Calcule:
2.1.-V*V’ (escalar)
2.2.- V’*V’’ (escalar)
3.- repita los ejercicios anteriores, ahora con producto cruz.
4.- ¿Qué ángulo forman los vectores del ejercicio 1.-
5.- ¿Qué ángulo forman los vectores del ejercicio 2?
6.-dados los vectores (2,30º) y (2,5), multiplíquelos en producto cruz y escalar
7.- ¿Qué ángulo forman los vectores del ejercicio anterior?

8.- ¿Qué v vector multiplicado en producto escalar a (1,2) dará como resultado 0?, ¿Qué ángulo formaran?
10.- Dados los vectores V (4,30º), V’ (3,0º) y V’’ (2,1). Determine:
10.1.-(VxV’’)*V’’
10.2.-(VxV’’)*V’
10.3.- (V’*V)xV’’
11.- dados los vectores:
A=i-j+k
B=2i+3j-2k
C=-i+3j-k
Calcule el volumen del paralelepípedo que tiene por lados A, B y C respectivamente.
13.- Dados los vectores:
A= 3i-3j+2k
B= (3,4,0)
Calcule:
13.1.-AxB y BxA
13.2.-el área del paralelogramo formado por ambos vectores.
13.3.-Un vector de módulo 3 perpendicular al plano formado por A y B
13.4.- (A+B)x(A-B)
14.- Dados A(5,3,4) y B= 6i-j+2k. Calcular:
14.1.- Su producto escalar
14.2.-El ángulo que forman

14.3.-Los cosenos directores del vector B
(35, 30º, 0.94, -0.16, 0.31)
15.- Siendo los vectores A=(x, 5,3) y B=(y,1,0) y sabiendo que A-B=4j+3k y que el modulo de su suma vale 9 . Determinar x, y
(±3)
16.- Calcule el producto escalar de los vectores V=3i+5j-k y W=(-2,0,4)
(10)
17.- Hallar el vector unitario perpendicular a los vectores V(1,2,3) y W(-1,0,2)
(
13√5
(4 i−5 j+2k ))
18.- Un vector A tiene componentes (1, 2,3). Otro vector B, tiene modulo √3 y su componente x (BxA) vale 1. Determine B para que sea perpendicular a A
( (1,1,1) , (1, -17/13 , 7/13)
19.- dados los: A=(0,0,1) , B=(0,1,1) , C=(1,2,1) .
Hallar el área del triángulo ABC.
(12 √2)
20:- Hallar el área del triángulo cuyos vértices son las intersecciones del plano x+2y+3z=1. Con los ejes coordenados.
(112 √14)

21.- Calcular el volumen del tetraedro determinado por los puntos:
A=(-1,0-1) , B=(2,-4,0) , C=(1,1,1) , D=(-3,0,0)
(32 )
22.- Dados los vectores:
U=(3,-2,5), v=(-4,1,6) , w=(2,0,-1) . Calcular el volumen del tetraedro que determinan los vértices.
(296 )
23.- Dados los vectores: u=(3,2,5) , v=(4,1,6) . Hallar el área del triángulo que se determina.
(12 √78)
24.- Probar si los vectores: A=(1,2,-1) , B=(1,3,0) , C=(0,2,4) son coplanares.
(4x-y+z=0, recta en R3)
25.- Dados .os vectores: A=(1,2,0) , B=(0,3,-1) , C=(1,0,1) y D=-1,2,m) . Hallar el valor de m para que los vectores sean coplanares.
(m=-1)
26.- dados los: A=(0,0,1) , B=(0,1,-1) , C=(-1,2,1) .
Hallar el área del triángulo ABC.
20:- Hallar el área del triángulo cuyos vértices son las intersecciones del plano
- x+2y+3z=1. Con los ejes coordenados.
21.- Calcular el volumen del tetraedro determinado por los puntos:
A=(-1,0-1) , B=(2,-4,0) , C=(1,1,1) , D=(-3,-1,0)
22.- Dados los vectores:
U=(3,-2,5), v=(-4,1,6) , w=(-2,0,-1) . Calcular el volumen del tetraedro que determinan los vértices.
23.- Dados los vectores: u=(3,-2,5) , v=(4,2,6) . Hallar el área del triángulo que se determina.
24.- Probar si los vectores: A=(1,2,-1) , B=(1,3,0) , C=(0,2,4) son coplanares.
(Recta en R3)
25.- Dados los vectores: A=(1,2,0) , B=(0,3,-2) , C=(2,0,1) y D=(-1,2,m) . Hallar el valor de m para que los vectores sean coplanares.
Ecuación vectorial de la recta en el plano.
Representa los siguientes vectores en el plano:
(-2,1) ; (2,-1) ;(0,1) ; (4,-2) ; (1,-0,5) ; ( 3,1,5)
Se observa que los, en algunos casos, los vectores están sobre una misma recta.
Si uno o más vectores pueden escribirse como un vector ponderado de otro, entonces pertenecen a la misma recta.
La colinealidad de puntos se puede expresar y verificar vectorialmente por medio de la ponderación.
Si M , N y P son tres puntos colineales, entonces existe algún número real λ , tal que: M⃗P=¿ λ M⃗N
En un plano cartesiano, se puede representar una recta L , que pasa por el origen O(0,0) y con un vector director d⃗= (d1 , d2 ) paralelo a la recta L. Si P es un punto que pertenece a la recta L, por ejemplo P(x,y) , entonces siempre existe un numero real λ, tal que:O⃗P=¿ λ d⃗ . Observa:

Luego la ecuación de la recta expresada en coordenadas cartesianas es:
( x , y )=λ (d1 , d2)
Ahora cuando la recta no pasa por el origen, además del vector director es necesario determinar un vector que indique la ubicación de la recta en el plano.
En este caso, pera representar la recta L con vector director d⃗ , pero que pasa por el punto P0(x0 , y0) , se considerea que si P es un punto cualquiera de la recta, de coordenadas P(x,y) ,
existe un numero real λ , tal que : P⃗0 P=λ d⃗ y por lo tanto :
O⃗P=O⃗ P0+λ d⃗
Utilizando el vector p⃗0de Po y considerando el vector p⃗ de P , resulta:
p⃗= p⃗0+ λ d⃗
Además, si d1 y d2 son las componentes del vector d⃗ , la ecuación
vectorial de la recta, expresada en coordenadas cartesianas esta dada por:
( x , y )=(x0 , y0)+ λ ( d1 , d2 )
Ejemplo: dados los puntos A (2,3) y B (5,2), determinar la ecuación vectorial de la recta que pasa por ellos.

Se utiliza el vector b⃗ como vector posición de la recta. Luyego, se calcula su vector director, que
corresponde al vectro A⃗B , entonces d⃗=a⃗−b⃗=(2,3 )− (5,2 )=(−3,1)
De esta manera, se puede escribir la ecuación vectorial de la recta como
( x , y )=(5,2)+ λ (−3,1 )
Nota: también se puede usar el vector a⃗ como vector posición.
Veamos ahora que sucede cuando λ=12 . Al reemplazar en la ecuación:
( x , y )=(5,2)+ 12
(−3,1 )=(72
, 52)
Que coincide con el punto medio del trazo AB en el plano.
Observación:
*Una recta que pasa por el origen , L: p⃗= p⃗0+ λ d⃗ , es una traslación en el vector p⃗0 de la recta
p⃗= λ d⃗
*Una ventaja importante de una ecuación vectorial de una recta es que permite obtener ecuaciones para un segmento específico de la recta por medio de una restricción del parámetro λ
Por ejemplo, la ecuación: ( x , y )=(2 ,−1)+ λ (1,2 ), con 1≤ λ ≤3
Describe el segmento de recta que une los puntos (3,1) y (5,5) (obtenidos al reemplazar por el mínimo y el máximo valor del parámetro lambda.
Actividades:
1.- Determina la ecuación vectorial de la recta que pasa por los puntos dados.
1.1.- A(-4,6) y B(4,-2) 1.2.- A(-4,2) y B(4,-6)
1.3.- A(--2, 6) y B(4,-4) 1.4.- A(3,-1) y B(0,2)
1.5.- A(-4,6) y el origen 1.6.- A(0,6) y el origen.
2.- ¿Se puede determinar la ecuación vectorial de la recta a partir de los puntos (1,1) y (4,4) . en caso afirmativo. ¿Cuál es su ecuación vectorial?
3.- Dado el punto P(2,-2) y el punto Q(-4,4) ¿Cuál es el punto medio del segmento PQ.
4.- Dada la ecuación vectorial de la recta L1=( x , y )=(1+2 λ ,−1+3 λ)

Determine tres puntos que pertenezcan a la recta.
5.- ¿A qué recta pertenecen los puntos A(-1,-4) , B(1,1) y C(0,5)? Justifique analíticamente.
a) L1=( x , y )=(1+2 λ ,−1+3 λ)
b) L2=( x , y )=(−1+2λ ,3−2 λ)
c) L3=( x , y )=(2−λ ,−1+2λ)
d) L4=( x , y )=(−2− λ ,−3+2λ)
e) A ninguna de las rectas.
6.- Determina la ecuación vectorial de una recta paralela a: ( x , y )=(2 ,−5 )+λ (1 ,−4)
Luego grafica ambas rectas.
Ecuación vectorial de una recta y su ecuación cartesiana.
Como ya sabemos la ecuación vectorial de una recta está determinada por un punto contenido en ella y una dirección: por consiguiente, por un punto de la recta y un vector paralelo a ella.
Consideremos una recta L en el plano, cuyo vector directos es d⃗=(6,4) y A(5,7) un punto contenido en ella.
Analice:
¿Cuál es su ecuación vectorial?
¿Cómo se obtiene un punto B que pertenece a ella?
¿Cómo se obtiene la ecuación cartesiana de la recta?
¿Conocidos los puntos A y B se puede graficar la recta?
En general ¿Cómo se grafica una recta en el plano, a partir de su ecuación vectorial?
Resumen:
*Se escribe la ecuación vectorial de la recta:
( x , y )=(5,7 )+λ (6,4)
*Para determinar el punto B, se asigna un valor arbitrario al parámetro. λ=2 , se obtiene B(17,15)

*Se escribe la ecuación punto pendiente: 2x-3y+11=0
Otra forma es:
( x , y )=(5+6 λ ,7+4 λ)
Es decir:
x=5+6 λ
y=7+4 λ
λ= x−56
λ= y−74
λ= x−56
= y−74
4 ( x−5 )=6( y−7) , de donde se obtiene: 2 x−3 y−11=0
Ejemplo 2: ecuación vectorial a partir de la ecuación cartesiana:
Dada la recta: 4 x+3 y+7=0
Se determina un punto arbitrario de la recta:
Si x= -1 , entonces y=-1 , luego un punto es (-1,-1)
Para obtener el vector director, se determina la pendiente de la recta, esto es: m=−43
Luego el vector director es: m=d2d1
, entonces (d1 , d2) corresponde al vector director.
En este caso, un vector director es: (3,-4)
Por lo tanto una ecuación vectorial de la recta será: ( x , y )=(−1 ,−1 )+λ (3 ,−4)
Resumen:

*La ecuación de la recta en el plano, se puede representar como: ax+by+c=0
*La ecuación vectorial de la recta: : ( x , y )=p⃗0+λ d⃗=( x0 , y0 )+λ (d1, d2) , donde d⃗ es el vector
director de la recta, p⃗0 ( x0 , y0 ) es el vector posición y λ su parámetro.
*Si d⃗ es un vector director cuyas coordenadas son (d1 , d2) , la pendiente “m” de la recta
correspondiente esta dada por: m=d2d1
Actividades:
1.- Dada la ecuación vectorial de la recta: ( x , y )=(1,2 )+ λ(4,8) , determine la ecuación cartesiana correspondiente.
2.- Encuentre la ecuación cartesiana correspondiente a la recta que pasa po el punto (5,-2) y es paralela al vector d⃗= (−2,3 )
3.- Encuentre la ecuación vectorial de la recta que pasa por el punto (-3,2) y es paralela a la recta de ecuación: y=3x-2
4.- Decida si los puntos (0,0) , (0,11) y (-3,0) pertenecen a la recta anterior.
5.- Determine la ecuación vectorial para cada recta.
5.1.- 4x+2=3y-3 5.2.- 2x-5y+1=0
6.- Indica cual es la posición relativa entre las rectas dadas:
L1: x− y−2=0 y L2: (x , y )=(1,2 )+λ (2,2)
7.- De la recta ( x , y )=(2 ,−3 )+λ (1,2) y el punto P(2,1) , obtenga la recta .
7.1.- paralela a la dada que pasa por P
7.2.- Perpendicular a la dada y que pasa por P
8.- Obtenga la recta que pasa por el punto A(2,-1) y tiene la misma pendiente que:
8.1.- ( x , y )=(0,3 )+λ (1,1) 8.2.- 2x-3y=6
Ecuación de la recta en el espacio.
Para representar la ecuación vectorial de una recta en el espacio, podemos generalizar a partir de la ecuación vectorial en el plano, es decir, dado un punto: P(x0 , y0 , z0) que esta contenido en

una recta L , cuyo vector director tiene coordenadas d⃗= (d1 , d2 , d3 ). Entonces la ecuación de la
recta en el espacio estará dada por:
( x , y , z )=(x0 , y0 , z0)+ λ ( d1 , d2 ,d3 )
La forma paramétrica de esta recta se obtiene al despejar las coordenadas, es decir:
x=x0+λd1
y= y0+ λ d2
z=z0+λ d3
Ejemplo: consideremos la reta que pasa por los puntos: P(1,3,-2) y Q(2,1,-2). En este caso, el vector director está dado por: d⃗=P⃗Q=(1 ,−2,0) , luego la ecuación vectorial es:
( x , y , z )=(1,3 ,−2)+ λ (1 ,−2,0 )
Ejemplo2. ¿Cómo podemos determinar si tres puntos son colineales y por lo tanto que pertenecen a una misma recta?
Dados los puntos: P(1,1,1) ; Q(1,0,-1) y R(1,2,3) . Debemos probar que los vectores P⃗Q y Q⃗R son paralelos:
P⃗Q=(0,-1,-2) y Q⃗R=(0,2,4 )
Ahora debemos comprobar que existe un número real λ , tal que: Q⃗R=λ P⃗Q
Veamos si se cumple:
(0,2,4 )=λ (0 ,−1 ,−2 ) , de donde λ=−2 . Por lo tanto los puntos P, Q y R son efectivamente colineales.
1.- Pruebe si se puede determinar la ecuación vectorial de la recta a partir de los puntos P(1,1) y Q(4,4)
Ecuación vectorial de un plano en el espacio:
Un plano queda determinado por:
*Tres puntos no colineales

*Dos rectas paralelas
*Una recta y un punto exterior a ella.
Completaremos lo anterior con algunas herramientas matemáticas:
Un plano en el espacio π , también puede estar determinado por un punto A(a1 , a2 , a3) y dos
vectores directores no paralelos,r⃗=(r1 ,r 2 , r3 ) y s⃗=(s1 , s2 , s3)
Observando la figura, para cualquier punto P(x,y,z) del plano π se cumpleque:
O⃗P=O⃗A+ λ r⃗+μ s⃗
Por lo que A⃗P es un vector que pertenece al plano π , entonces: A⃗P= λ r⃗+μ s⃗ , con λ y μ numeros reales, luego entonces:
O⃗P=O⃗A+ λ r⃗+μ s⃗
Entonces la ecuación vectorial del plano en el espacio queda determinada por:
p⃗= a⃗+λ r⃗+μ s⃗ , siendo p⃗ y a⃗
Los vectores posición de los puntos A y P , respectivamente , con λ y μ numeros reales.
Si la ecuación del plano se expresa en función de las coordenadas o componentes de los puntos , se tiene:
( x , y , z )=(a1 , a2 , a3 )+ λ ( r1 ,r2 , r3 )+μ(s1 , s2, s3)
Igualando componentes a componentes, se encuentra las ecuaciones paramétricas del plano:

x=a1+ λ r1+μ s1
y=a2+λ r2+μ s2
z=a3+ λ r3+μs3
Las ecuaciones paramétricas se pueden reescribir como sistemas de ecuaciones, par a ser eliminados los parámetros λ y μ , para así obtener la ecuación cartesiana de un plano.
Ejemplo:
Dados los puntos A(2,-2,1) , y los vectores directores: r⃗=(1,0 ,−1 ) y s⃗=(−2,3,2) . Determine la ecuación vectorial del plano.
Como: p⃗= a⃗+λ r⃗+μ s⃗ , entonces:
p⃗=(2 ,−2,1)+λ(1,0 ,−1)+μ (−2,3,2)
ejemplo 2: Escriba la ecuación vectorial y cartesiana del plano que contiene los puntos P(1,1,1) , Q(2,1,2) y R(0,2,-1).
Primero se encuentran LOS VECTORES DIRECTORES:
r⃗=Q⃗P= p⃗−q⃗=(1 , ,1,1 )−(2,1,2 )=(−1,0 ,−1)
s⃗=R⃗P= p⃗−r⃗=(1,1,1 )−(0,2 ,−1 )=(1 ,−1,2)
Por lo Tanto la ecuación vectorial del plano es:
π :(x , y , z)=(1,1,1)+ λ(−1,0 ,−1)+μ(1,−1,2)
Ejemplo 3: Dados tres puntos P(0,0,-1) , Q(1,2,1) y R(1,4,4) no colineales. Obtener un punto T , tal que los cuatro puntos formen un paralelogramo.
t⃗= p⃗+ P⃗Q+ P⃗R= p⃗+( q⃗− p⃗ )+( r⃗− p⃗ )=q⃗+r⃗− p⃗=(2,6,6)
Entonces T=(2,6,6)

Intersección de rectas y planos en el espacio.
Si consideramos una recta y un plano en el espacio, se pueden dar las siguientes situaciones o posiciones relativas:
Recta paralela al plano.
Ejemplo, consideremos el plano:
π : 4 x+3 y−z=2
Y la recta L {x=4+2hy=6+3h
z=−2 }Determine la intersección entre la recta y el plano?
Solución:
Consideremos que el punto: (x0 , y0 , z0) es un punto que pertenece tanto al plano como a la recta.. Entonces debe satisfacer:
π : 4 x0+3 y0−z0=2
L : x0+4+2h0
y0=6+3h0
z0=−2
Entonces se tiene cuatro ecuaciones y cuatro incógnitas.
Reemplazando las ecuaciones de la recta en la ecuación del plano , se obtiene:

4 (4+2h0)+3(6+3h0)−(−2)=2
De donde: h0=-2
Por lo tanto: x0=0 , yo=0 , z0=−2
El punto obtenido es entonces (0,0,-2). Este punto satisface la ecuación dl plano y de la recta, por lo tanto estamos en el caso en que la recta es secante al plano.
Caso2:
Si consideramos dos planos en el espacio, estos pueden ser paralelos, secantes o coincidentes.
Ejemplo:
Consideremos los planos: π1: 4 x+3 y+ z=6 y π2:3 x+4 y+4 z=12
Se grafican los planos revisando los puntos de intersección en cada eje.
Eje X Eje Y Eje z
π1 ( 32 ,0,0) (0,2,0 ) (0,0,6 )
π2 (4,0,0 ) (0,3,0 ) (0,0,3 )
Observamos en la gráfica que los puntos P y Q son los puntos de intersección de ambos planos.
Entonces:
El punto P se ubica en el plano XZ , por lo que su ordenada es ceroPor tanto , si y=0 , entonces el sistema se
El punto Q se ubica en el plano YZ , por lo que su abscisa es ceroPor tanto , si x=0 , entonces el sistema se
reduce a :4 x+z=63 x+4 z=12
Resolviendo este sistema se obtiene:
P=( 1213 ;0 ; 3013 )
reduce a :3 y+z=64 y+4 z=12
Resolviendo este sistema se obtiene:
Q=(0 ; 32
; 32 )
La intersección de los dos planos es una recta, ya que los planos son secantes.
Para determinar su ecuación. Consideramos que pasa por el punto: P=( 1213 ;0 ; 3013 )
Y que su vector director es:
d⃗=P⃗Q=q⃗− p⃗=(0 ; 32
; 32 )−(1213 ;0 ; 30
13 )=(−1213 ; 32
;−2126 )
Entonces la ecuación vectorial de la recta es:
( x , y , z )=( 1213 ;0 ; 3013 )+ λ(−1213 ; 3
2;−2126 )
Actividades:
1.- Obtenga el punto de intersección de la recta: x=2 t ; y=3t +1 ; z=t conel plano :3 x+2 y−11z−5=0
2.- ¿Cuál es la posición relativa del plano : : x+ y+z+1=0 y larectade ecuaciones::
x−1=2− y= z3?
3.- dados los siguientes planos:
x+ y=1 ;mz+z=0
Determina los valores de m para los cuales:
3.1.-Se cortan en un plano
3.2.-Se cortan en una recta
3.3.-No se cortan.


















