
Control Digital
16
Control Digital • Ing. Lorenzo Bertín Cruz López
-
Upload
bertin-cruz-lopez -
Category
Documents
-
view
12 -
download
2
description
Breve descripción del Control Digital algo de historia...
Transcript of Control Digital

Control DigitalControl Digital
• Ing. Lorenzo Bertín Cruz López• Ing. Lorenzo Bertín Cruz López

Fundamentos matemáticos de
sistemas discretos
Fundamentos matemáticos de
sistemas discretos
• 1.1 Introducción a Sistemas de Control Digital
• Control por computadora
• Controladores Digitales
• Robots Industriales
Ventajas• Oportuna
toma de decisiones
• Flexibilidad

1.1 Introducción a Sistemas de Control Digital
De la información de y(k) solo se dispone en algunos instantes discretos de tiempo denominados instantes de muestreo, es decir, k es una variable que toma valores discretos k = 0,1,2,3,... , y por lo tanto y(k) es una variable muestreada. u(t) se mantiene constante cada instante de muestreo. El muestreo es uniforme y los instantes de muestreo están dados por :
(1.1)
Donde Ts , es el período de muestreo que se mantiene constante.. Así
sk kTt
][][],[][ ss kTkukTyky

Historia del control por computadora
• Periodo Pionero (fines de los 50’s)• Período del Control Digital Directo (inicios de los 60’s)• Periodo de la minicomputadoras (fines de los 60’s)• Periodo de las microcomputadoras (inicios de los 70’s)• Uso Generalizado del control por computadora (1980 hasta nuestro días)• Control distribuido (1990)
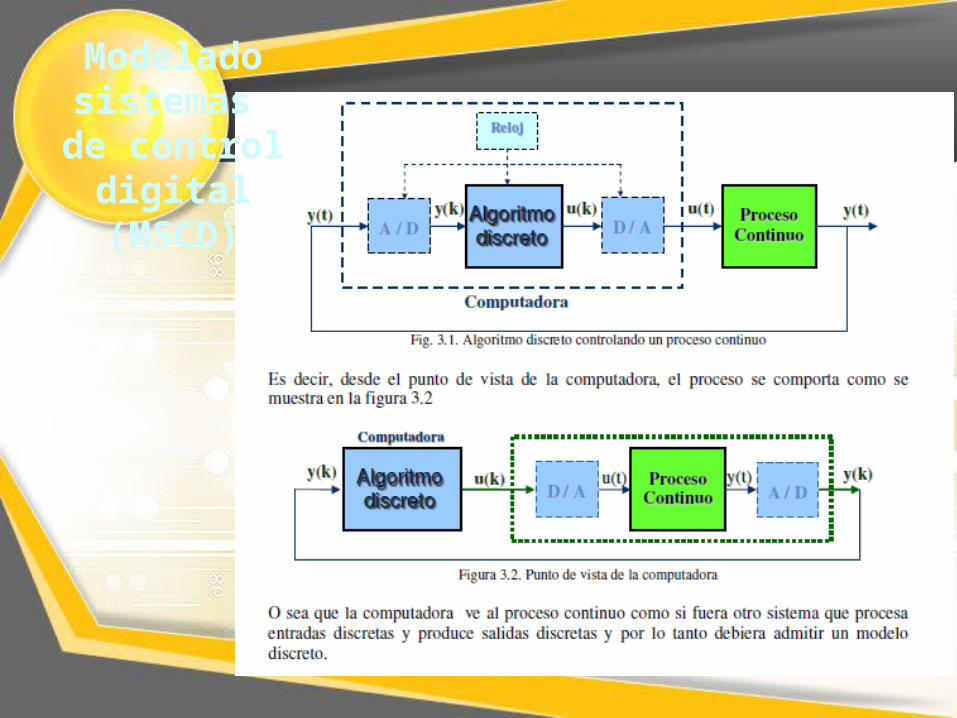
Modelado sistemas
de control digital(MSCD)

M S C DM S C DCaracterísticas propias de los sistemas muestreados.
Dependencia del tiempo.Consideremos la respuesta en eltiempo de un sistema continuo y uno digital bajo la misma entrada(escalón unitario u(t)) mostrada enLa figura 1.8.
hora veamos qué ocurre si el Escalón se retarda 0.5 segundos(u(t-.5)). La respuesta de ambos sistemas Se muestra en la figura 1.9.
Tiempo continuoPara u(t) la respuesta es y(t) Tiempo DiscretoPara u(t-0.5) la respuesta es y(t-0.5) Para u[k] la respuesta es y[k]
Para u(k-.5) la respuesta es y[k-1] enlugar del esperado y(k-.5].

Armónicos de alto orden
Considerando los mismos sistemas (caso anterior), las respuestas a una entrada senoidal de 0.25 hz, con periodo de muestreo T de 1.9 s, se pueden ver en la figura 1.10.
Vemos que el sistema continuo tiene un estado estacionario senoidal con frecuencia agual a la de la señal de entrada, la salida del sistema discreto es un tren de pulsos cuadrados, el cual contiene una gama de frecuencias muy grande, por supuesto no presente en la entrada.

Transitorio de tiempo finito (tiempo de asentamiento finito)
Consideremos el sistema doble integrador
ÿ = u(t) (1.3)
También el controlador analógico por retroalimentación de estado:
u(t) = k1 y + k2ý (1.4)con k1 = k2 = -1
Fig. 1.11 respuesta del controlador analógico está en azul y su versión discretizada está en rojo con periodo de muestreo de Ts =1.0s.
Fig 1.12 acciones de control necesarias para obtener la respuesta de la fig. 1.11.

Transitorio de tiempo finito (tiempo de asentamiento finito)
La ley de control se s de muestreo se calcula en los instantes de muestreo simplemente como
u(k Ts) = = k1 y (k Ts) + k2ý(k Ts) (1.5)
Y se mantiene cte. entre un instante de muestreo y el siguiente, por eso la gráfica de u(k) presenta la forma de escalonada típica mostrada en la fig. 1.12.
1.5 corresponde a un controlador “deadbeat”, que tiene tiempo de asentamiento de n* Ts y las ganancia se eligen como
k1 = - 1/Ts 2 , k2 = - 3/ 2Ts (1.6)

Procesos inherentemente muestreados
Algoritmos ejecutados en computadora. (Métodos numéricos): Muestreo gobernadopor el reloj de la computadora.
Sistemas de medición muestreados
o Radar: muestras cada revolución de la antenao Instrumentos analíticos (espectrógrafos, cromatógrafos): Muestras de la sustancia procesadas fuera de líneao Sistemas económicos: muestras cada periodo de corte.
Electrónica de potencia: muestreo debido a la conmutación de los tiristores
Sistemas biológicos: transmisión de señales en el sistema nervioso basadas enpulsos.
Motores de combustión interna: están sincronizados por el proceso de explosiónrepetitiva.

2 Modelado del proceso de Muestreo
2.1 Introducción
Muestreo de señales eléctricas (muestrear): significa reemplazar una señal continua por sus valores numéricos o muestras tomadas en ciertos instantes de tiempo denominados instantes de muestreo. Es parte del proceso de conversión Analógico a Digital.
Reconstrucción de señales: proceso inverso al muestreo y consiste en convertir una secuencia de valores numéricos (muestras) a una señal continua. Este proceso inverso es realizado en los convertidores de Digital a analógico.
2.2 Descripción del proceso de muestreo y definiciones
1.2 y 1.3 Transf Zy Ec´s en
Diferencias Transformada Z
ECUACIONES EN DIFERENCIAS

Sistemas DiscretosSistemas Discretos

Sistemas DiscretosSistemas Discretos

Sistemas DiscretosSistemas Discretos
PÁGINA DE TRANSICIÓNPÁGINA DE TRANSICIÓN


















