Control Electrónico
15
UNIVERSIDAD DE SANTIAGO DE CHILE FACULTAD DE INGENIERÍA Departamento de Ingeniería Mecánica HMR/hmr. INGENIERIA DE EJECUCIÓN EN MECANICA PLAN 2001 GUIA DE LABORATORIO ASIGNATURA 15065 AUTOMATIZACIÓN NIVEL 07 EXPERIENCIA ATM-L02 “SISTEMAS DE CONTROL DE PRIMER ORDEN EN ATRASO” HORARIO: JUEVES : 9-10-11-12
-
Upload
pablo-andres-gomez-neira -
Category
Documents
-
view
225 -
download
1
description
Sistemas de primer Orden
Transcript of Control Electrónico
UNIVERSIDAD DE SANTIAGO DE CHILEFACULTAD DE INGENIERÍA
Departamento de Ingeniería MecánicaHMR/hmr.
INGENIERIA DE EJECUCIÓN EN MECANICA
PLAN 2001
GUIA DE LABORATORIO
ASIGNATURA
15065 AUTOMATIZACIÓN
NIVEL 07
EXPERIENCIA ATM-L02
“SISTEMAS DE CONTROL DE PRIMER ORDEN EN
ATRASO”
HORARIO: JUEVES : 9-10-11-12MARTES: 9-10-11-12

UNIVERSIDAD DE SANTIAGO DE CHILEFACULTAD DE INGENIERÍA
Departamento de Ingeniería MecánicaHMR/hmr.
SISTEMAS DE CONTROL DE PRIMER ORDEN EN ATRASO
1. OBJETIVO GENERAL:
Familiarizar al alumno en el análisis y la síntesis de un sistema de control en lazo cerrado de primer orden en atraso, excitado con diferentes perturbaciones y con distintas ganancias.
2. OBJETIVOS ESPECÍFICOS:
a) Implementar un sistema de control de primer orden en atraso y excitarlo mediante las perturbaciones Impulso, escalón y rampa. En estas condiciones determinar la ganancia y el tiempo de respuesta de la función transferencia global para diferentes ganancias del filtro de control.
b) Con el filtro de control implementado en el punto “a” realizar el ensayo de respuesta en frecuencia y dibujar los diagramas de Bode de amplitud y fase.
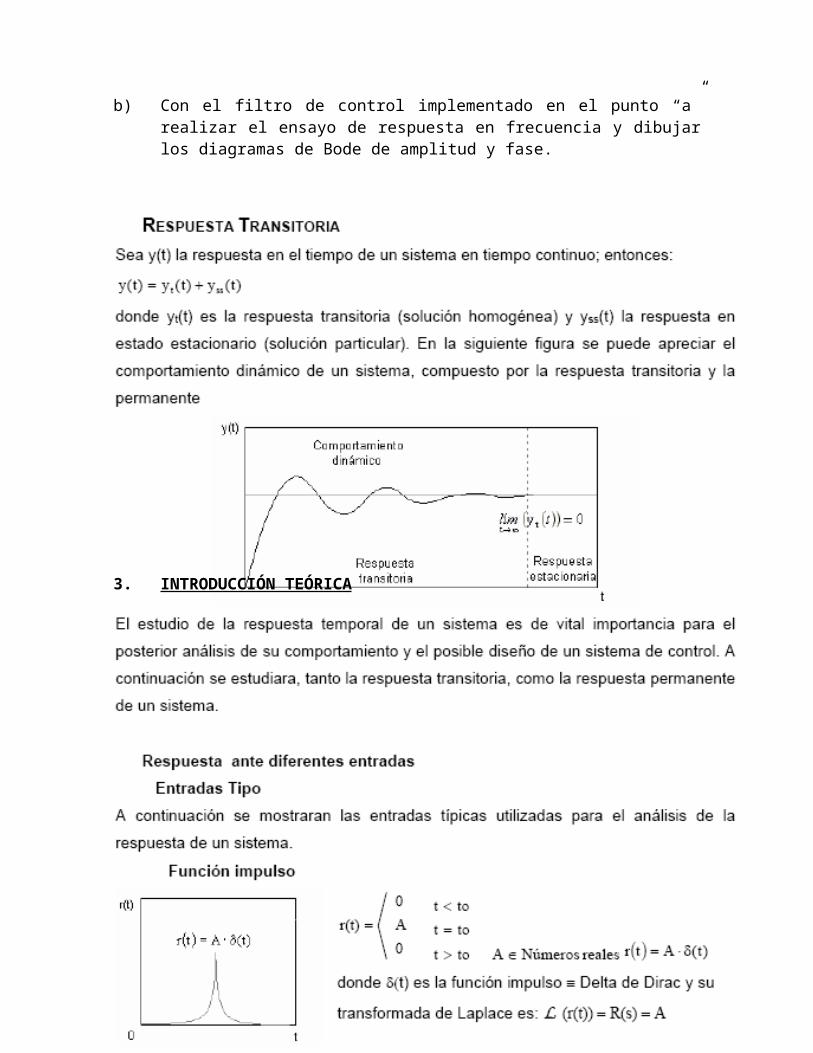
3. INTRODUCCIÓN TEÓRICA







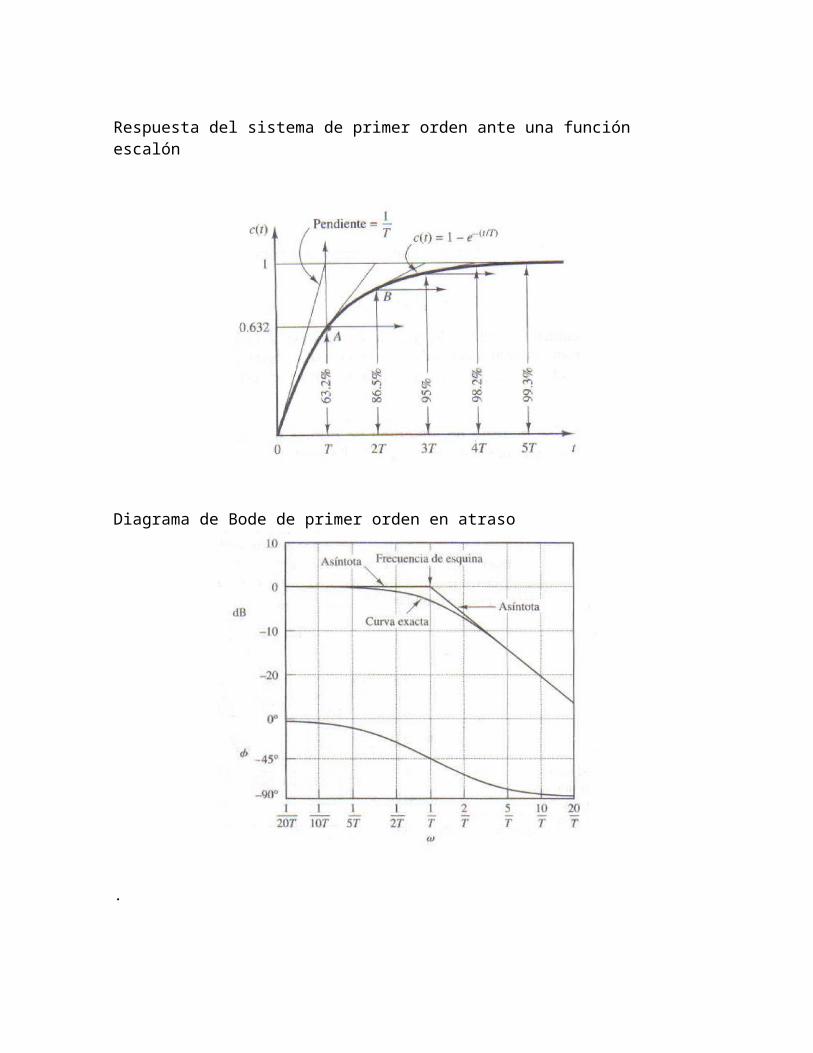
Respuesta del sistema de primer orden ante una función escalón
Diagrama de Bode de primer orden en atraso
.

4. METODO A SEGUIR:
4.1 El profesor prepara el equipo para que el sistema global resultante sea uno de primer orden en atraso.
4.2 Orientados por el profesor, los alumnos deben reconocer la acción funcional de los elementos constitutivos del equipo disponible para el desarrollo de la experiencia.
4.3 Los alumnos modelan matemáticamente el sistema propuesto por el profesor identificando los parámetros presentes en cada subsistema y generando el diagrama de bloques general.
4.4 Para diferentes ganancias del filtro de control, los alumnos realizan el ensayo de respuesta ante una perturbación impulso registrando los valores dinámicos obtenidos.
4.5 Con la metodología indicada en el punto 4.4, se excita el sistema mediante una perturbación escalón y se registra la respuesta dinámica resultante.
4.6 Para una perturbación rampa, se repite el punto anterior.
4.7 Para distintas ganancias del filtro de control, se somete el sistema a una excitación sinusoidal a diferentes frecuencias, registrando las respuestas dinámicas correspondientes, (respuesta en frecuencia).
5.- VARIABLES A CONSIDERAR
5.1. Parámetros de un sistema de control de primer orden en atraso.
5.2. Respuesta dinámica del sistema de control proporcional ante cambios en la ganancia del filtro de control.
5.3 Ganancia y frecuencia de corte del diagrama de Bode para un sistema de primer orden en atraso.
6.- TEMAS DE INTERROGACIÓN
6.1. Función transferencia de un sistema de primer orden en atraso.
6.2. Curva característica del diagrama de Bode de un sistema de primer orden.
6.3 Determinación experimental de la función transferencia de un sistema físico,
(ganancia y tiempo de respuesta).
6.4 Respuesta dinámica de un sistema de primer orden en atraso ante perturbaciones típicas, (impulso, escalón, rampa y sinusoidal).
6.5 Efecto de la ganancia del filtro de control en: El tiempo de respuesta, la ganancia global y el error final
7.- EQUIPOS E INSTRUMENTOS A UTILIZAR
7.1 Pneumatic Control Teaching, marca Feedback, modelo, Mechanism PCM 140, conectado a la red de aire comprimido
7.2 Osciloscopio.7.3 Multitesters.7.4 Huincha de medir Stanley de 3m, resolución 1mm
7.5 Fuentes en 5vcc, 12vcc, -12vcc7.6 Papel contínuo para el tablero de control neumático 7.7 Cronómetro, marca Casio, resolución 0.01s
LO QUE SE PIDE EN EL INFORME:
8.1 Las características técnicas de los equipos e instrumentos empleados en el laboratorio.
8.2 Realizar un esquema de la instalación, mostrando los subsistemas y la función transferencia correspondiente a la acción funcional para cada caso.
8.3 Resumen con los parámetros característicos y las curvas teóricas y experimentales correspondiente a cada tipo de ensayo.
8.4. Un análisis de los resultados obtenidos, tanto de los tipos de excitaciones como de las distintas ganancias experimentadas como; comentarios y conclusiones personales.
8.5. La referencia bibliográfica.
8.6 El apéndice con:
a.1. Desarrollo del diagrama de bloques general del sistema y deducir la función transferencia global, identificando los parámetros característicos representativos de cada subsistema.

a.2 Presentación de las curvas experimentales y el desarrollo para la determinación de los parámetros característicos de la función transferencia para cada tipo de ensayo.
a.3. Gráficos teóricos representativos de cada ensayo realizado.
9.- BIBLIOGRAFÍA
Guías de laboratorios ATM-L01 y ATM-L03, de la asignatura de
Automatización (15065). Profesor Héctor Muñoz R. DIMEC-USACH.
Apuntes de cátedra de la asignatura de Automatización (15065). Profesor
Héctor Muñoz R. DIMEC-USACH.
Ingeniería de Control Moderna. Katsuhiko Ogata. Cuarta Edición. Editorial
Prentice Hall.













![Control electrónico detroit diesel ddec III[1].doc](https://static.fdocuments.es/doc/165x107/55cf9c5e550346d033a99ccc/control-electronico-detroit-diesel-ddec-iii1doc.jpg)