Cuaderno de prácticas robotica con Picaxe 08M2
58
1 | GRUPO DE TRABAJO PROYECTO CANTABROBOTS 3.0: Ana Núñez, Marta Gutiérrez, Didio Sordo, María Guijarro y José Andrés Echevarría MANUAL DE PRÁCTICAS CON PICAXE CONTRUCCIÓN DE UN ROBOT RASTREADOR
-
Upload
cantabrobots30 -
Category
Education
-
view
1.699 -
download
22
description
Cuaderno de prácticas de electrónica y robótica de la placa Picaxe 08M2
Transcript of Cuaderno de prácticas robotica con Picaxe 08M2

1 | GRUPO DE TRABAJO PROYECTO CANTABROBOTS 3.0: Ana Núñez, Marta Gutiérrez, Didio Sordo, María Guijarro y José Andrés Echevarría
MANUAL DE PRÁCTICAS CON PICAXE
CONTRUCCIÓN DE UN ROBOT RASTREADOR

2 | GRUPO DE TRABAJO PROYECTO CANTABROBOTS 3.0: Ana Núñez, Marta Gutiérrez, Didio Sordo, María Guijarro y José Andrés Echevarría
INDICE:
1. Definición de Robot.
1.1.- Sistemas de control programado.
2.- El sistema PICAXE.
2.1.- Tipos de chips PICAXE.
2.2.- PICAXE 08-M2.
3.- Placa Rastreador PICAXE 08-M2.
3.1.- Circuito de alimentación.
3.2.- Sensores.
3.3.- Circuito de alimentación de motores.
3.4.- Comunicación con el ordenador.
3.5.- Circuito de control.
3.6.- Control de servomotores.
3.7.- Esquema completo.
4.- Proceso de construcción del Robot.
4.1.- Montaje del circuito electrónico.
4.2.- Construcción del chasis.
5.- Software de programación.

3 | GRUPO DE TRABAJO PROYECTO CANTABROBOTS 3.0: Ana Núñez, Marta Gutiérrez, Didio Sordo, María Guijarro y José Andrés Echevarría
6.- PRÁCTICAS:
PRÁCTICA 1: ENCENDIDO Y APAGADO DEL PIN 5, OUT 2 EN BASIC.
PRÁCTICA 2: ENCENDIDO Y APAGADO DEL PIN 5, OUT 2 EN FLOWCHART.
PRÁCTICA 3: S.O.S. PROGRAMADO EN BASIC Y EN FLOWCHART.
PRÁCTICA 4: UTILIZACIÓN DEL PROGRAMA LOGICATOR FOR PICAXE.
PRÁCTICA 5: ENCENDIDO/APAGADO MOTOR IZQUIERDO.
PRÁCTICA 6: SIRENAS DE POLICIA. MOTORES IZQUIERDO/DERECHO.
PRÁCTICA 7: SIRENAS DE POLICIA. FUNCIÓN OUTPUTS.
PRÁCTICA 8: FUNCIÓN DECISION.
PRÁCTICA 9: ACTIVACIÓN MOTORES. FUNCIÓN DECISION.
PRÁCTICA 10: ESTUDIO DEL CONTROL DE UN PEQUEÑO ROBOT
SEGUIDOR DE LÍNEA.
PRÁCTICA 11: SEGUIDOR DE LINEA (2) USO DE CABECERAS.
ACTIVIDAD 12: LECTURA DE UNA ENTRADA DIGITAL (BASIC Y DIAGRAMA
DE FLUJO).
PRÁCTICA 13: SEGUIDOR DE LINEA SIMPLE CON SIMBOLOS. (UTILIZANDO
EL PROGRAMMING EDITOR).
PRÁCTICA 14: CONTROL POR INFRAROJOS.
PRÁCTICA 15: CONTROL DE TEMPERATURA.
PRACTICA 16: CONTROL DE SUBIDA-BAJADA DE UNA BARRERA CON UN
SERVO.

4 | GRUPO DE TRABAJO PROYECTO CANTABROBOTS 3.0: Ana Núñez, Marta Gutiérrez, Didio Sordo, María Guijarro y José Andrés Echevarría
1. DEFINICIÓN DE ROBOT.
Según Wikipedia (http://es.wikipedia.org/wiki/Robot), un robot es una entidad virtual o
mecánica artificial. En la práctica, esto es por lo general un sistema electromecánico que, por su
apariencia o sus movimientos, ofrece la sensación de tener un propósito propio. La independencia
creada en sus movimientos hace que sus acciones sean la razón de un estudio razonable y profundo
en el área de la ciencia y tecnología. La palabra robot puede referirse tanto a mecanismos físicos
como a sistemas virtuales de software, aunque suele aludirse a los segundos con el término de bots.
2.- EL SISTEMA PICAXE
El sistema "PICAXE" es un sistema de microcontrolador fácil de programar que utiliza un
lenguaje BASIC muy simple. El sistema PICAXE explota las
características únicas de la nueva generación de
microcontroladores de bajo costo FLASH. La ventaja de esta
memoria es que no pierde el programa descargado cuando
la fuente de alimentación (baterías) es desconectada del
circuito – cuando las baterías son reconectadas el programa
se inicia nuevamente. Sin embargo, cuando se desee
reprogramar el PICAXE, se puede descargar un nuevo
programa; esta acción borra el viejo programa almacenado en la memoria y almacena el nuevo
programa en la memoria. La memoria sólo permite el almacenamiento de un programa a la vez. No
es posible sacar el programa fuera de la memoria del PICAXE. Para “leerlo” debe guardarlo en su
ordenador antes de descargarlo al PICAXE.

5 | GRUPO DE TRABAJO PROYECTO CANTABROBOTS 3.0: Ana Núñez, Marta Gutiérrez, Didio Sordo, María Guijarro y José Andrés Echevarría
2.1.- PICAXE 08M2
El chip 8M2 tiene un procesador, memoria donde
guardar el programa y memoria RAM. Los pines 3, 4, 5, y 6 son
polivalentes y pueden servir como entradas digitales o
analógicas, salidas digitales o analógicas o muchas otras
funciones más. Los pines 1 y 8 sirven para alimentar el chip con
una tensión de 5 voltios y los 2 y 7 para comunicar el chip con el
ordenador y poder programarlo.
El circuito de alimentación y comunicación del chip es el siguiente:
¡¡¡Alimentación de los chips
PICAXE!!!
Los últimos chips PICAXE (M2 y
X2) se pueden conectar a 3V, 4.5V o 5V.
La mayoría de las personas suelen utilizar
4.5V (3xAA ó 3xAAA) . “Nunca conectar una batería de 9V PP3 directamente a un chip PICAXE”

6 | GRUPO DE TRABAJO PROYECTO CANTABROBOTS 3.0: Ana Núñez, Marta Gutiérrez, Didio Sordo, María Guijarro y José Andrés Echevarría
3.- CONCEPTOS DE ELECTRICIDAD Y ELECTRÓNICA
3.1.- ¿QUÉ ES LA ELECTRICIDAD?
La electricidad es el conjunto de fenómenos físicos relacionados con la presencia y flujo de
cargas eléctricas. Se manifiesta en una gran variedad de fenómenos como los rayos, la electricidad
estática, la inducción electromagnética o el flujo de corriente eléctrica.
(http://es.wikipedia.org/wiki/Electricidad)
3.2.- ¿QUÉ ES LA CARGA ELÉCTRICA.
La carga eléctrica es una propiedad física intrínseca de
algunas partículas subatómicas que se manifiesta mediante
fuerzas de atracción y repulsión entre ellas. La materia cargada
eléctricamente es influida por los campos electromagnéticos,
siendo a su vez, generadora de ellos.
(http://es.wikipedia.org/wiki/Carga_el%C3%A9ctrica).
3.3.- ¿QUÉ ES EL VOLTAJE?
El voltaje o la tensión o la diferencia de potencial es una magnitud física que cuantifica la diferencia
de potencial eléctrico entre dos puntos. Es decir, es la “fuerza” que hace que se muevan las cargas
en un circuito eléctrico. Su unidad es el voltio (v).
3.3.1.- ¿QUÉ ES UNA PILA ELÉCTRICA?
Una pila eléctrica es un dispositivo que convierte energía química en energía eléctrica por un
proceso químico transitorio, tras lo cual cesa su
actividad y han de renovarse sus elementos
constituyentes, puesto que sus características resultan
alteradas durante el mismo.
Se trata de un generador
primario. Esta energía resulta
accesible mediante dos terminales que tiene la pila, llamados polos,
electrodos o bornes. Uno de ellos es el polo negativo o ánodo y el otro es
el polo positivo o cátodo.

7 | GRUPO DE TRABAJO PROYECTO CANTABROBOTS 3.0: Ana Núñez, Marta Gutiérrez, Didio Sordo, María Guijarro y José Andrés Echevarría
Su símbolo es el siguiente:
RESUELVE:
1.- ¿Cuántas pilas necesita tu Robot para funcionar?
2.- ¿De qué tipo?
3.- ¿Cuál es el voltaje total?
4.- ¿Cómo están asociadas; en serie o en paralelo?, ¿Se pueden conseguir diferentes
voltajes asociando las pilas de diferentes formas? Razona estas respuestas y dibuja los esquemas
correspondientes con cada tipo de asociación.
5.- Según el ejercicio anterior; ¿podrías obtener una fórmula para calcular el voltaje total
de un conjunto de pilas asociadas en serie y otra para las pilas asociadas en paralelo?

8 | GRUPO DE TRABAJO PROYECTO CANTABROBOTS 3.0: Ana Núñez, Marta Gutiérrez, Didio Sordo, María Guijarro y José Andrés Echevarría
3.3.2.- CIRCUITO DE ALIMENTACIÓN
Tal como muestra el esquema, el circuito se puede alimentar directamente con un pack de
pilas AA de 6 voltios (4x1, 5V) o bien con una tensión superior si incorporamos un regulador de
voltaje LM7805.
Después del pack de baterías, existe el diodo D1 destinado a que en caso de inversión
accidental de la polaridad
de las pilas, el circuito
quede protegido, ya que
este diodo sólo conduce si
el positivo de las baterías se
encuentra en su ánodo.
A continuación del
diodo, está instalado el
interruptor S1 para poder
detener y poner en marcha
el Robot.
3.4.- ¿QUÉ ES LA INTENSIDAD DE CORRIENTE?
La intensidad de corriente eléctrica o
corriente eléctrica es la cantidad de electrones que
circulan por una sección de un conductor por
unidad de tiempo. Su unidad es el Amperio (A) y su símbolo es I. 1 Amperio =
Hay dos tipos de corriente eléctrica, la Corriente Continua (DC) y la Corriente Alterna (AC).
La corriente continua es aquella en la que los electrones circulan a través del conductor
siempre en la misma dirección, es decir que los polos positivo y negativo son siempre los mismos.
Un ejemplo de DC son las pilas y baterías.

9 | GRUPO DE TRABAJO PROYECTO CANTABROBOTS 3.0: Ana Núñez, Marta Gutiérrez, Didio Sordo, María Guijarro y José Andrés Echevarría
En la corriente alterna los electrones cambian periódicamente de sentido con cierta
frecuencia, es decir que los polos varían. Este tipo de corriente es el que tenemos en nuestros
hogares (220 v - 50 Hz).
3.5.- ¿QUÉ ES LA RESISTENCIA ELÉCTRICA?
La Resistencia eléctrica es la mayor o menor oposición que ofrece un cuerpo al paso de la
corriente eléctrica. Su símbolo es R y su unidad en el sistema internacional es
el Ohmio (Ω). Su símbolo es:
Las Resistencias se utilizan en los circuitos electrónicos para limitar el valor de la corriente o
para fijar el valor de la tensión.
Existen diferentes tipos de resistencias y las podemos clasificar en tres grandes grupos:
FIJAS, VARIABLES (POTENCIÓMETROS) y DEPENDIENTES.
Las resistencias FIJAS tienen un valor constante y se identifican
por un código de colores (son las que tenemos en nuestro Robot).
Las resistencias VARIABLES o POTENCIÓMETROS pueden variar
su valor ya que disponen de una parte móvil que se
puede cambiar. Un ejemplo de su uso es en
reguladores de sonido.
Las resistencias DEPENDIENTES cambian su
valor en función de un parámetro físico como la
temperatura, la luz,.. Un ejemplo típico de estas resistencias son las LDR
(Light Depender Resistor o Resistencias Dependientes de la LUZ) que
varían su valor en función de la luz que reciben. Otro ejemplo
típico con los Termistores (NTC, PTC,…)
10 | GRUPO DE TRABAJO PROYECTO CANTABROBOTS 3.0: Ana Núñez, Marta Gutiérrez, Didio Sordo, María Guijarro y José Andrés Echevarría
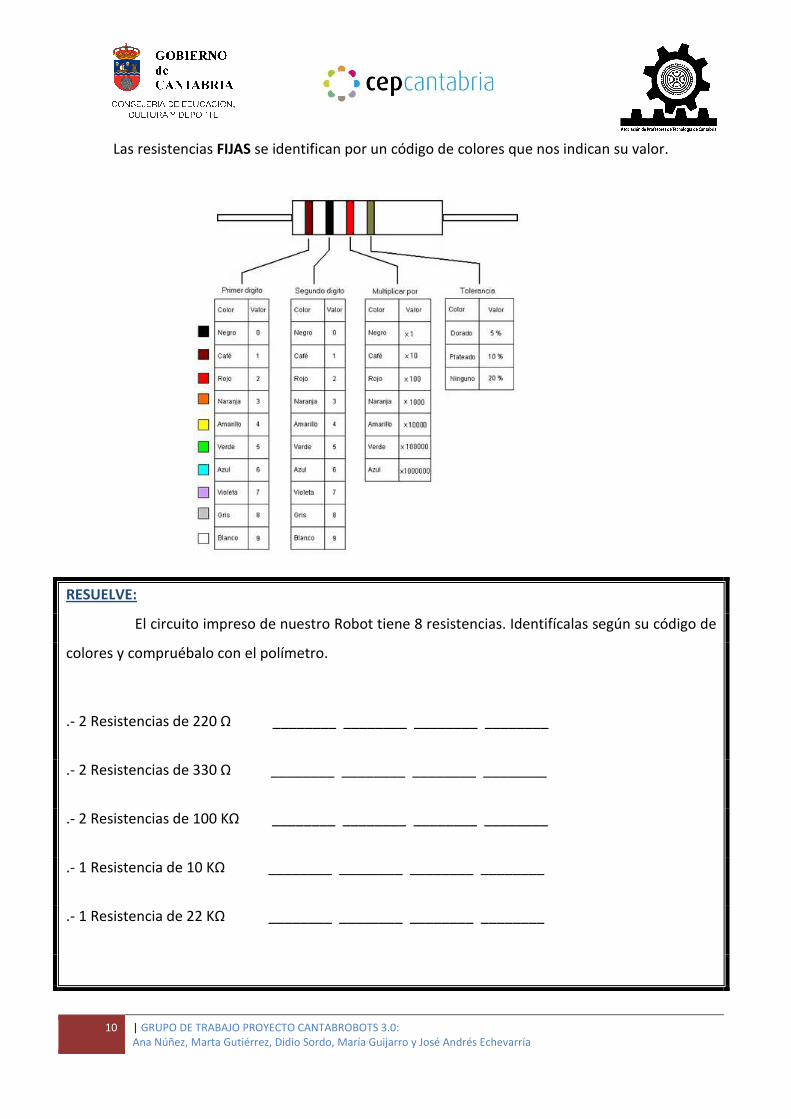
Las resistencias FIJAS se identifican por un código de colores que nos indican su valor.
RESUELVE:
El circuito impreso de nuestro Robot tiene 8 resistencias. Identifícalas según su código de
colores y compruébalo con el polímetro.
.- 2 Resistencias de 220 Ω ________ ________ ________ ________
.- 2 Resistencias de 330 Ω ________ ________ ________ ________
.- 2 Resistencias de 100 KΩ ________ ________ ________ ________
.- 1 Resistencia de 10 KΩ ________ ________ ________ ________
.- 1 Resistencia de 22 KΩ ________ ________ ________ ________

11 | GRUPO DE TRABAJO PROYECTO CANTABROBOTS 3.0: Ana Núñez, Marta Gutiérrez, Didio Sordo, María Guijarro y José Andrés Echevarría
3.5.1.- ASOCIACIÓN DE RESISTENCIAS.
Nos podemos encontrar con tres tipos de asociaciones de resistencias, estas son: Asociación
en Serie, Asociación en Paralelo y Asociación Mixta.
.- ASOCIACIÓN EN SERIE:
.- ASOCIACIÓN EN PARALELO:
.- ASOCIACIÓN MIXTA:
3.5.2.-EJEMPLO DE RESISTENCIAS EN NUESTRO
ROBOT.
El led va alimentado con 5 V. y tiene una
resistencia en serie de 220 Ω para no quemarlo.
La resistencia de 220 Ω situada en serie con el
diodo, sirve para limitar la corriente de éste, ya que
hacer circular mucho más de 20 mA, no aumentaría su
nivel de luz, y si se conecta directamente quemaríamos
el diodo LED.
RT= R1+R2+R3+…
Se va resolviendo el circuito
por partes (en serie y en
paralelo) y simplificándolo.

12 | GRUPO DE TRABAJO PROYECTO CANTABROBOTS 3.0: Ana Núñez, Marta Gutiérrez, Didio Sordo, María Guijarro y José Andrés Echevarría
3.6.- ¿QUÉ ES LA LEY DE OHM?
La LEY DE OHM es una fórmula matemática que relaciona las tres magnitudes básicas entre
sí (Intensidad (A), Resistencia (R) y Voltaje (V)) y dice así; “La intensidad que recorre un circuito
eléctrico es directamente proporcional al voltaje que la genera e inversa a la resistencia que ofrece
el circuito”.
TABLA RESUMEN:
MAGNITUD NOMBRE UNIDAD
I Intensidad AMPERIO (A)
R Resistencia OHMIO (Ω)
V Voltaje VOLTAJE(V)
RESUELVE:
1.- El led del sensor CNY70 está alimentado con 5 V y tiene colocado en serie una
resistencia de 220 Ω. Calcula cuanta intensidad recorrerá dicho led.
2.- Calcula el valor de una resistencia para colocar en serie con un led para que circule
por este una intensidad de corriente de 15,15 mA con un voltaje de 5 V.
3.- Sabiendo que la resistencia interna de un motor es de 25 Ω y consume 200 mA,
calcula el voltaje al que está alimentado.

13 | GRUPO DE TRABAJO PROYECTO CANTABROBOTS 3.0: Ana Núñez, Marta Gutiérrez, Didio Sordo, María Guijarro y José Andrés Echevarría
4.- PLACA Y COMPONENTES DEL ROBOT CON PICAXE-08M2.
Esta placa tiene las siguientes
características técnicas:
-1 Chip PICAXE 08M2.
-2 entradas digitales para detectores de
línea CNY70.
-2 salidas digitales para el control
unidireccional de 2 motores mediante
transistores monitorizadas por LED.
-1 salida para control servomotor.
-1 regulador de tensión 7805 (opcional).
-1 conector jack estéreo para la
programación del PICAXE vía serie.
4.1.- ¿QUÉ ES UN DIODO?
Un Diodo es un componente electrónico que tiene como característica más importante, el
permitir el paso de la corriente eléctrica en un solo sentido. Nuestro Robot tiene un Diodo D1
situado en la cabeza del circuito, cuya función es la
de proteger el resto de componentes electrónicos en
caso de conectar las baterías de forma inversa.

14 | GRUPO DE TRABAJO PROYECTO CANTABROBOTS 3.0: Ana Núñez, Marta Gutiérrez, Didio Sordo, María Guijarro y José Andrés Echevarría
Un Diodo LED es un tipo especial de Diodo que emite luz, su
funcionamiento se basa en que algunas sustancias semiconductoras,
producen un efecto luminoso al ser recorridas por una corriente
eléctrica. Existen de diferentes colores; verde, rojo, amarillo, azul,
multicolor,… y necesitan ser polarizados directamente para que funcionen.
La tensión máxima que soportan los Diodos LED es de unos 2 V. si
se alimentan con mayor tensión es recomendable utilizar una resistencia
en serie para proteger el LED ya que podría sufrir daños.
4.2.-¿QUÉ ES UN TRANSISTOR?
Un transistor es un dispositivo electrónico semiconductor utilizado para producir una señal
de salida en respuesta a otra señal de entrada. Cumple funciones de amplificador, oscilador,
conmutador o rectificador. El término «transistor» es la contracción en inglés de transfer resistor
(«resistencia de transferencia»). Actualmente se encuentran prácticamente en todos los aparatos
electrónicos de uso diario: radios, televisores, reproductores de audio y video, relojes de cuarzo,
computadoras, lámparas fluorescentes, smartphones, etc.
Los transistores constan de 3 terminales: emisor, colector y base. Hay diferentes tipos de
transistores, pero nos centraremos en los bipolares. Dentro de ellos, según como sea la conexión de
sus componentes, hay dos tipos, los NPN y los
PNP. Se simbolizan de la siguiente manera:
El de arriba es un transistor NPN y el de
abajo un transistor PNP. En el NPN la flecha que
indica el sentido de la corriente sale hacia fuera
(la corriente irá de colector a emisor) mientras
que en el PNP la flecha entra (la corriente irá de
emisor a colector).
Para más información ver:
http://recursostic.educacion.es/secundaria/edad/4esotecnologia/quincena4/4q2_centro.htm
15 | GRUPO DE TRABAJO PROYECTO CANTABROBOTS 3.0: Ana Núñez, Marta Gutiérrez, Didio Sordo, María Guijarro y José Andrés Echevarría
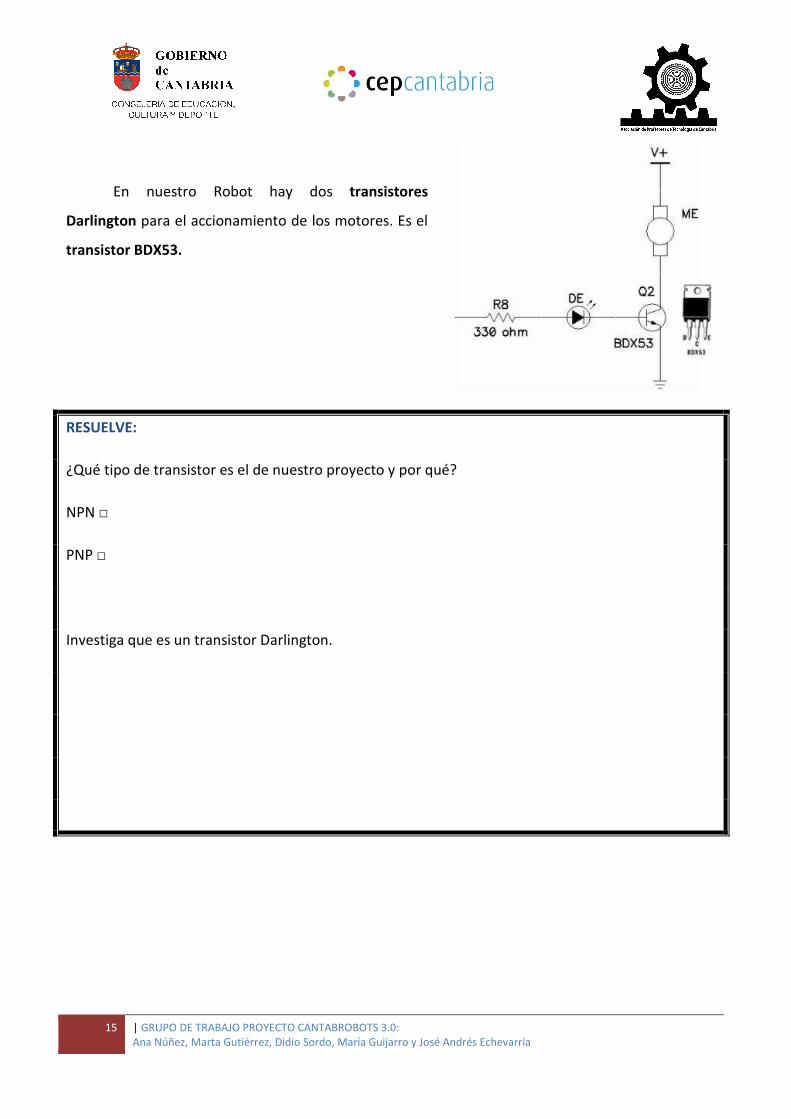
En nuestro Robot hay dos transistores
Darlington para el accionamiento de los motores. Es el
transistor BDX53.
RESUELVE:
¿Qué tipo de transistor es el de nuestro proyecto y por qué?
NPN
PNP
Investiga que es un transistor Darlington.

16 | GRUPO DE TRABAJO PROYECTO CANTABROBOTS 3.0: Ana Núñez, Marta Gutiérrez, Didio Sordo, María Guijarro y José Andrés Echevarría
4.3.- MOTORES, MOTORREDUCTORES Y SERVOMOTORES.
Un motor eléctrico es un dispositivo que transforma la energía
eléctrica en energía mecánica por medio de la acción de los campos
magnéticos generados en sus bobinas.
Son máquinas eléctricas rotatorias compuestas por un estator y un rotor.
Un Motorreductor es un motor al cual se le ha añadido a la salida de su eje un conjunto de
engranajes que lo que hacen es disminuir su velocidad y aumentar su par.
Motor eléctrico cc.
Reductora

17 | GRUPO DE TRABAJO PROYECTO CANTABROBOTS 3.0: Ana Núñez, Marta Gutiérrez, Didio Sordo, María Guijarro y José Andrés Echevarría
Un Servomotor (también llamado servo) es un dispositivo similar a un motor de corriente
continua que tiene la capacidad de ubicarse en
cualquier posición dentro de su rango de
operación, y mantenerse estable en dicha
posición. Puede ser controlado tanto en
velocidad como en posición. Está conformado
por un motor, una caja reductora y un circuito
de control.
5.- ESQUEMAS ELÉCTRICOS DE LA PLACA DEL ROBOT RASTREADOR
5.1.- CIRCUITO DE ALIMENTACIÓN
Tal como muestra el esquema, el circuito se puede alimentar directamente con un pack de
pilas AA de 6 voltios (4x1, 5V) o bien con una tensión superior si incorporamos un regulador de
voltaje LM7805.
Después del pack de baterías, existe el diodo D1 destinado a que en caso de inversión
accidental de la polaridad
de las pilas, el circuito
quede protegido, ya que
este diodo sólo conduce si
el positivo de las baterías se
encuentra en su ánodo.
A continuación del
diodo, está instalado el
interruptor S1 para poder
detener y poner en marcha
el robot.

18 | GRUPO DE TRABAJO PROYECTO CANTABROBOTS 3.0: Ana Núñez, Marta Gutiérrez, Didio Sordo, María Guijarro y José Andrés Echevarría
5.2.- SENSORES
La placa dispone de dos sensores
tipo reflexivo CNY70. Estos sensores
disponen de un led emisor de luz y un
fototransistor que conduce cuando
recibe la luz del led rebotada en algún
objeto claro.
El led va alimentado con 5 V. y una
resistencia de 220 Ω para no quemarlo
y el transistor lleva un inversor de
tensión que da 5 V. cuando el sensor
no detecta blanco y 0 V. cuando lo
detecta.
La resistencia de 220 Ω situada en serie con el diodo, sirve para limitar la corriente de éste,
ya que hacer circular mucho más de 20 mA, no aumentaría su nivel de luz, y si se conecta
directamente quemaríamos el diodo LED.
Cuando el fototransistor conduce, se comporta como un interruptor cerrado, y por tanto
libera 0 V. (negativo) en el PICAXE. La resistencia de 100 kΩ conectada al fototransistor, sirve para
proporcionar 5 V. (positivo) al microcontrolador
cuando el fototransistor no recibe luz.
5.3.- CIRCUITO DE ALIMENTACIÓN DE LOS
MOTORES
La salida del PICAXE-08M2, no alimenta
directamente el motor, ya que el consumo de este
sería excesivo para la poca corriente que esta
salida podría entregar.
Para solucionar este inconveniente, se utiliza

19 | GRUPO DE TRABAJO PROYECTO CANTABROBOTS 3.0: Ana Núñez, Marta Gutiérrez, Didio Sordo, María Guijarro y José Andrés Echevarría
un Transistor BDX53, que permite que a partir de una pequeña corriente que le llega a su base,
haga circular una corriente más elevada que alimenta el motor.
En este caso, el transistor trabaja como interruptor, es decir, poniendo en marcha o parando
el motor en función de si llega o no corriente a su base.
Los diodos LED situados en la base de los transistores, sirven precisamente para que
podemos ver de una forma didáctica cuando hay circulación de corriente por la base. La resistencia
de 330 Ω situada en serie con este led, permite para limitar su intensidad y la de la base del
transistor.
5.4.- COMUNICACIÓN CON EL ORDENADOR
La comunicación del chip con el ordenador, se realiza mediante los pines 7 y 2 del PICAXE-
08M2. Este recibe del ordenador el programa que
hará funcionar el circuito. La recepción del
programa se hace por la entrada Ser_in (entrada
de comunicación serie). Las resistencias de 22KΩ y
10 KΩ sirven para ajustar el voltaje que entrega el
ordenador al que necesita el microcontrolador.
También es posible enviar datos desde el
PICAXE-08M2 hacia el ordenador. En este caso, el
chip envía los datos directamente desde la salida
Sout (salida de comunicación serie).
5.5.- CIRCUITO DE CONTROL
El control del sistema lo hace el PICAXE-
08M2. Este se alimenta directamente con la
tensión proveniente de las baterías. El
condensador de 100 nF (100 nanofaradios)
nF

20 | GRUPO DE TRABAJO PROYECTO CANTABROBOTS 3.0: Ana Núñez, Marta Gutiérrez, Didio Sordo, María Guijarro y José Andrés Echevarría
sirve para filtrar la tensión de alimentación. Si no instaláramos este condensador, el circuito
funcionaría igualmente, pero sería más vulnerable a las interferencias eléctricas.
5.6.- CONTROL DE SERVOMOTORES
En una de las salidas del
microcontrolador hay conectado un terminal
llamado "servo". Este, sirve por si se deseara
instalar un "servomotor" de los utilizados en
radiocontrol con el fin de dotar al robot de un
sistema de dirección.
5.7.- ESQUEMA COMPLETO

21 | GRUPO DE TRABAJO PROYECTO CANTABROBOTS 3.0: Ana Núñez, Marta Gutiérrez, Didio Sordo, María Guijarro y José Andrés Echevarría
6.- PROCESO DE CONSTRUCCIÓN DEL ROBOT.
6.1.- MONTAJE DEL CIRCUITO ELECTRÓNICO
.- Soldar la placa picaxe08M2 siguiendo las instrucciones del siguiente video:
http://www.youtube.com/watch?v=w737-K42VZk
6.1.1.- HERRAMIENTAS NECESARIAS:
.- Soldador de estaño de punta fina 30 W.
.- Alicates de corte pequeños.
6.1.2.- PREPARACIÓN DE LOS COMPONENTES:
Tendremos a mano todo los componentes que deben ir situados sobre la placa. Deberemos
tener especial cuidado en la soldadura de los elementos semiconductores (diodos, transistores, leds
y sensores), ya que estos son sensibles a un exceso de
calor.
El circuito integrado también es un
semiconductor, pero no va soldado directamente
sobre la placa, sino que se inserta en una base o
zócalo previsto para esta función.

22 | GRUPO DE TRABAJO PROYECTO CANTABROBOTS 3.0: Ana Núñez, Marta Gutiérrez, Didio Sordo, María Guijarro y José Andrés Echevarría
6.1.3.- INSERCIÓN Y SOLDADURA DE LOS COMPONENTES:
Recordar que:
• Insertaremos los componentes por la cara serigrafiada.
• Soldaremos el componente en el punto de soldadura correspondiente. Hay que tener en
cuenta que la limpieza de los elementos a soldar (placa y terminales del componente) así
como de la propia punta del soldador, son un factor importantísimo a la hora de tener éxito
en las soldaduras. Es por ello que hay que tener en cuenta en todo momento estos factores.
La punta del soldador será limpiada de manera asidua con una esponja húmeda.
• Hay que evitar la formación de " bolitas "de estaño en la soldadura, síntoma de suciedad en
los componentes que puede provocar que ésta no funcione.
• También hay que evitar que el estaño de la soldadura quede "pastoso" en vez de líquido.
Esto ocurre cuando el tiempo en el que aplicamos el soldador es demasiado pequeño, o
estamos utilizando un soldador de poca potencia.
• Cortaremos por la base los terminales sobrantes, con la ayuda de unos alicates de corte
adecuadas.
• Hay que recordar que algunos componentes como las resistencias no tienen polaridad, es
decir, que se pueden insertar en el circuito en un sentido u otro.
• Otros, en cambio si tienen polaridad. Es el caso del Diodos y Leds, que se debe distinguir
entre el ánodo y el cátodo, los Transistores, que tienen tres terminales diferentes, los
circuitos integrados, que tienen pines con funciones específicas asignadas, etc. En estos
casos, se absolutamente indispensable asegurarnos de que insertamos el componente en la
placa en el sentido correcto.

23 | GRUPO DE TRABAJO PROYECTO CANTABROBOTS 3.0: Ana Núñez, Marta Gutiérrez, Didio Sordo, María Guijarro y José Andrés Echevarría
.- En primer lugar montaremos las
resistencias.
Recordar el código de colores.
Cuando estén soldadas, recortaremos
las patillas sobrantes.
.- Con dos de las patillas cortadas
haremos los puentes como se indica
en la foto.
.- Soldamos el Diodo. ¡¡¡OJO!!! Este sí
tiene POLARIDAD.
No conviene calentarlo mucho.
.- Soldar el zócalo del chip. Hay que
fijarse en la muesca redonda.
.- Antes de soldar el conector Jack es
muy importante cortar las patillitas de
plástico.
.- Cortamos con la mano la pestaña de
los sensores CNY70.

24 | GRUPO DE TRABAJO PROYECTO CANTABROBOTS 3.0: Ana Núñez, Marta Gutiérrez, Didio Sordo, María Guijarro y José Andrés Echevarría
.- Soldamos los portasensores y los
pines de los dos motores.
.- Soldamos los Didos LED. Estos
diodos tienen polaridad. Nos
fijaremos en las muescas para que
coincidan con las de la placa. No
introducir los diodos más que la
marca que tienen en la patilla.
.- Soldamos el condensador.
Cuidado con la POLARIDAD.
.- Soldamos los transistores,
colocando cada patilla en su sitio.
No conviene calentarlos demasiado.

25 | GRUPO DE TRABAJO PROYECTO CANTABROBOTS 3.0: Ana Núñez, Marta Gutiérrez, Didio Sordo, María Guijarro y José Andrés Echevarría
.- Una vez soldados todos los
componentes de la placa colocaremos
el chip Picaxe 08M2.
Nos fijaremos en la muesca
semicircular al colocarlo sobre su
zócalo.
.- Colocaremos los sensores CNY70
haciendo coincidir la cara escrita con
la flecha de la placa, tal y como se
muestra en la figura.
Una vez realizada la soldadura de los componentes, sólo habrá que soldar los hilos
correspondientes a las pilas. Respetaremos la codificación de colores de los hilos, es decir,
utilizaremos el rojo para el positivo y el negro para el negativo.

26 | GRUPO DE TRABAJO PROYECTO CANTABROBOTS 3.0: Ana Núñez, Marta Gutiérrez, Didio Sordo, María Guijarro y José Andrés Echevarría
4.2.- CONSTRUCCIÓN DEL CHASIS.
.- Pegar las plantillas encima de la lámina
de plástico con cola de barra.
.- Mecanizar las dos piezas (A y B) según
los planos.
La lámina de plástico se puede cortar con
una sierra de marquetería.
.- Con la ayuda de la plegadora de
plástico, hacer los pliegues indicados en
los planos.
*Si no se dispone de plegadora, se puede
utilizar un soplador de aire caliente
protegiendo las zonas que no se quieren
calentar con un par de listones de
madera.
.- Soldar los cables a los dos motores.
Poner fundas termoretráctiles para
proteger las soldaduras y evitar
cortocircuitos.

27 | GRUPO DE TRABAJO PROYECTO CANTABROBOTS 3.0: Ana Núñez, Marta Gutiérrez, Didio Sordo, María Guijarro y José Andrés Echevarría
.- Sujetar los dos motores con tornillos
M3x30mm.
Poner 4 arandelas y una tuerca
intermedia en cada tornillo.
*Hay que tener la precaución de no
apretar excesivamente la tuerca
intermedia, ya que se bloquearían los
engranajes de la caja reductora,
disminuiría la velocidad de rotación del
eje y podría comportar que el motor se
quemara.
.- Colocar la placa Picaxe 08M2 a la pieza
B con tornillos M3X12mm con sus
respectivas arandelas en su parte
superior y dos tonillos M3x16mm en la
inferior.
.- Unir las piezas de plástico A y B según la
foto adjunta y atornillar el tornillo
autoroscante en su parte inferior (este
tornillo hará la función de rueda loca).

28 | GRUPO DE TRABAJO PROYECTO CANTABROBOTS 3.0: Ana Núñez, Marta Gutiérrez, Didio Sordo, María Guijarro y José Andrés Echevarría
.- Atornillar los motores al chasis con
tuercas y aranderas.
.- Construcción de las ruedas. Unir las
piezas cilíndricas de madera con los CDs
utilizando 4 tornillos de 2,9x6,5 mm. Las
piezas de madera se entregan taladradas
a 5,10mm de diámetro para que encajen
perfectamente en el eje de los motores.
Para que el CD no patine, colocar cinta
“vulcanizable” en todo su perímetro. Para
ello, quitar el precinto y alargar la cinta
tirando de sus dos extremos.
.- Poner en cada rueda un tornillo de
2,9x6,5mm (DIN7981) con una arandela,
para evitar que la rueda se salga del eje.
.- Colocar “velcro” al porta pilas y al
chasis.

29 | GRUPO DE TRABAJO PROYECTO CANTABROBOTS 3.0: Ana Núñez, Marta Gutiérrez, Didio Sordo, María Guijarro y José Andrés Echevarría
.- Conectar los motores y las baterías a la
placa Picaxe. Poner en marcha el robot y
comprobar el sentido de giro de los
motores. En caso de giren hacia atrás,
cambiar la polaridad.
.- Llegados a este punto el Robot
rastreador ya está a punto para su uso.
30 | GRUPO DE TRABAJO PROYECTO CANTABROBOTS 3.0: Ana Núñez, Marta Gutiérrez, Didio Sordo, María Guijarro y José Andrés Echevarría
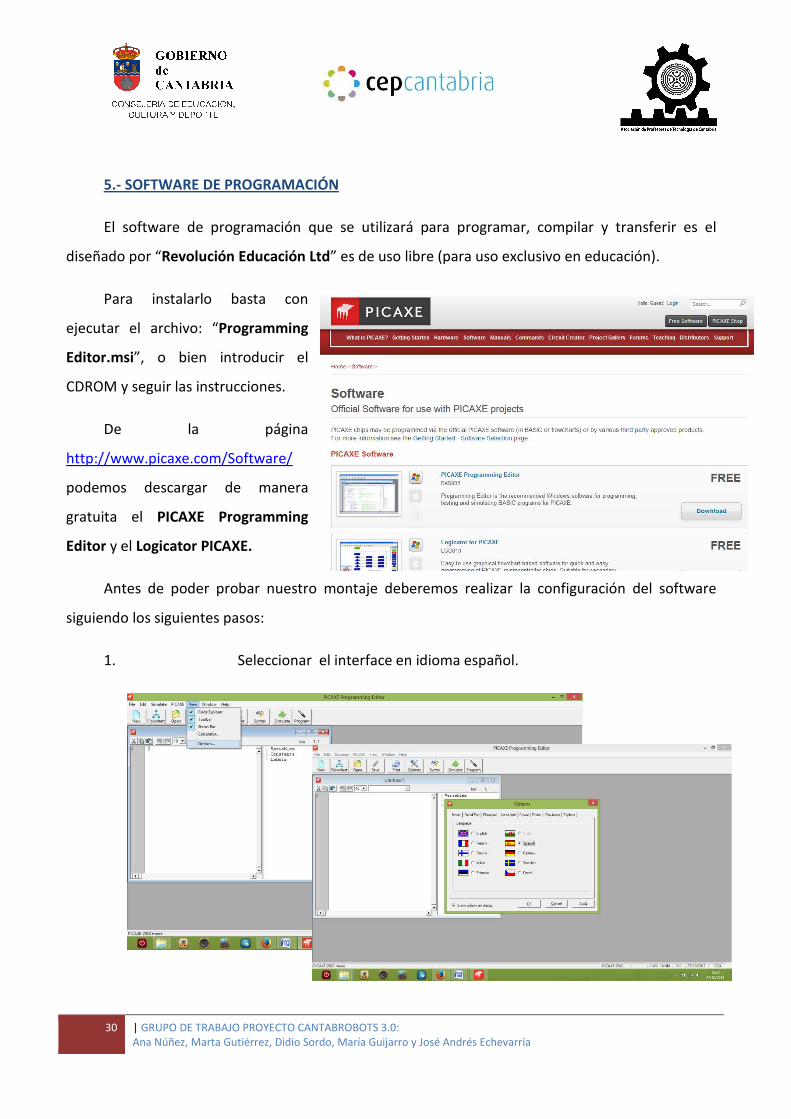
5.- SOFTWARE DE PROGRAMACIÓN
El software de programación que se utilizará para programar, compilar y transferir es el
diseñado por “Revolución Educación Ltd” es de uso libre (para uso exclusivo en educación).
Para instalarlo basta con
ejecutar el archivo: “Programming
Editor.msi”, o bien introducir el
CDROM y seguir las instrucciones.
De la página
http://www.picaxe.com/Software/
podemos descargar de manera
gratuita el PICAXE Programming
Editor y el Logicator PICAXE.
Antes de poder probar nuestro montaje deberemos realizar la configuración del software
siguiendo los siguientes pasos:
1. Seleccionar el interface en idioma español.

31 | GRUPO DE TRABAJO PROYECTO CANTABROBOTS 3.0: Ana Núñez, Marta Gutiérrez, Didio Sordo, María Guijarro y José Andrés Echevarría
2. Configurar el puerto de conexión.
3. Seleccionar el tipo de microcontrador (en nuestro caso PICAXE- 08M2).
4. Conectaremos en cable de programación entre PC y Entrenador.
5. Escribiremos el código del programa de prueba y se lo enviaremos al microcontrolador.

32 | GRUPO DE TRABAJO PROYECTO CANTABROBOTS 3.0: Ana Núñez, Marta Gutiérrez, Didio Sordo, María Guijarro y José Andrés Echevarría
Ahora corresponde realizar la edición del código, compilación y programación. Para poder
comunicar “nuestras intenciones” al microcontrolador debemos hacerlo siguiendo el siguiente
protocolo:
.- Edición del código del programa; se puede realizar de dos métodos diferentes:
Mediante Diagramas de Flujo: es un método más sencillo pero bastante
limitado en sus posibilidades de programación. No cabe la posibilidad de reutilizar
parte de los Diagramas de Flujo en otros programas.
Mediante código de alto nivel como BASIC. El sistema PICAXE utiliza
código BASIC. La ventaja de este tipo de programación es su potencia de programación
y la posibilidad de reutilizar parte del código de un programa en otro, dado que
muchas rutinas son válidas para muchas aplicaciones.
Una vez editado el código del programa, bien utilizando comandos o bien flujogramas,
deberemos codificarlo al lenguaje que utilizan los microcontroladores, o sea “1” y “0”. La aplicación
encargada de realizar esa transformación recibe el nombre de compilador.
Por último deberemos enviar esa información a la memoria de programa del
microcontrolador, el dispositivo encargado de realizar esa operación recibe el nombre de
programador o loader.
La ventaja del software y la “BIOS” que contienen los microcontroladores PIC del sistema
PICAXE es que las operaciones anteriormente mencionadas las realizan la misma aplicación y de
una forma sencilla sin tener que tener grandes conocimientos de ensamblador ni conocer y saber
manejarlos diferentes dispositivos que permiten realizar la programación del PIC.
6. Vamos a empezar a realizar nuestras primeras programaciones y a comprobar su correcto
funcionamiento con unos sencillos programas, se trata de encender y apagar diferentes led de
forma intermitente conectados a la salida de nuestra placa. El programa lo realizaremos
primeramente en código BASIC y posteriormente mediante Diagrama de Flujo.

33 | GRUPO DE TRABAJO PROYECTO CANTABROBOTS 3.0: Ana Núñez, Marta Gutiérrez, Didio Sordo, María Guijarro y José Andrés Echevarría
PRÁCTICA 1: ENCENDIDO Y APAGADO DEL PIN 5, OUT 2 EN BASIC.
Este programa encendería y apagaría un led conectado a la salida Nº 2 indefinidamente con
un intervalo de 1 seg.
Realiza este mismo ejercicio con el resto de los pines posibles.
¿Qué ocurre?
¿Has podido realizarlo con todos o sólo con los pines 3, 5, 6 y 7? ¿Por qué?

34 | GRUPO DE TRABAJO PROYECTO CANTABROBOTS 3.0: Ana Núñez, Marta Gutiérrez, Didio Sordo, María Guijarro y José Andrés Echevarría
PRÁCTICA 2: ENCENDIDO Y APAGADO DEL PIN 5, OUT 2 EN FLOWCHART.
Los organigramas (también llamados flujogramas o diagramas de flujo) son una herramienta
muy útil que permiten representar gráficamente (dibujar) los programas para hacerlos más fáciles
de entender. El software Editor de Programación incluye un editor de organigramas que permite
dibujar organigramas en la pantalla del ordenador. Estos organigramas se pueden convertir luego
en código BASIC para descargarlos en el PICAXE. Los organigramas también pueden imprimirse y
exportarse como figuras para incluirlos
dentro de diagramas en la descripción de
proyectos.
Para realizar esta práctica pincha sobre el icono de Flowchart.
Esta es la interface que presenta el Flowchart:

35 | GRUPO DE TRABAJO PROYECTO CANTABROBOTS 3.0: Ana Núñez, Marta Gutiérrez, Didio Sordo, María Guijarro y José Andrés Echevarría
Solución práctica 2:
*NOTA: El comando PAUSE esta en milisegudos mientras que el comando wait está en seg. PAUSE
1000 =WAIT 1.
36 | GRUPO DE TRABAJO PROYECTO CANTABROBOTS 3.0: Ana Núñez, Marta Gutiérrez, Didio Sordo, María Guijarro y José Andrés Echevarría
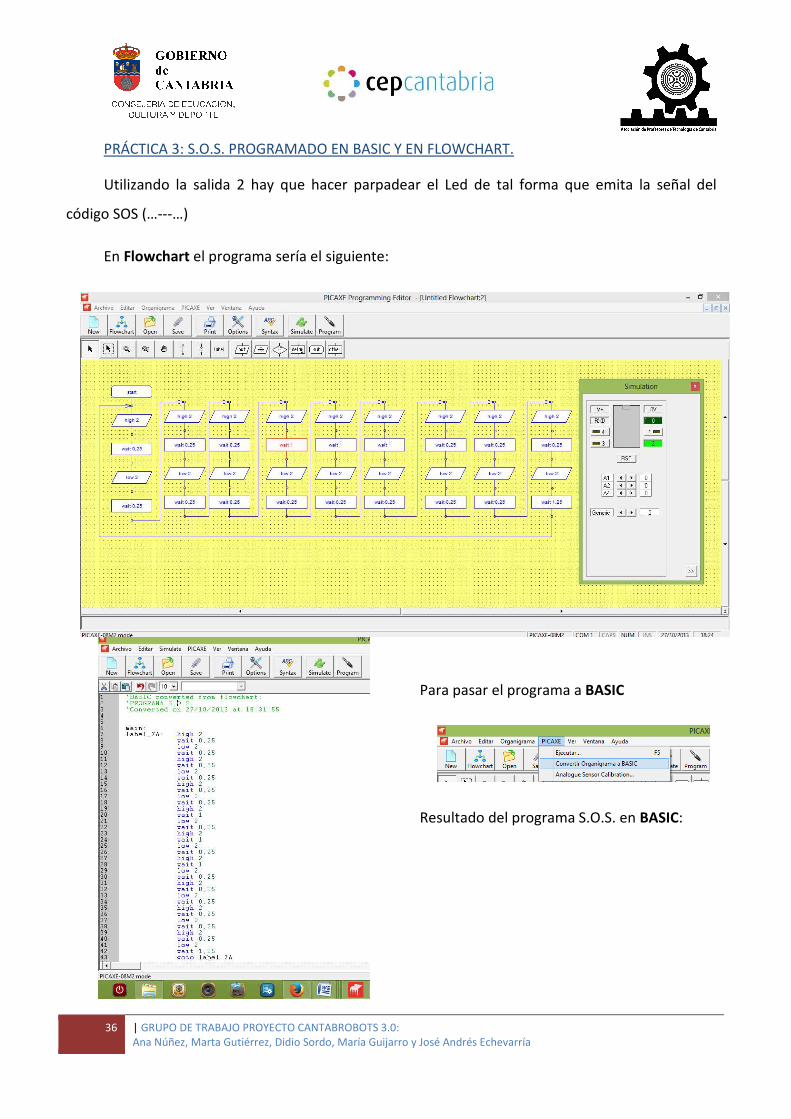
PRÁCTICA 3: S.O.S. PROGRAMADO EN BASIC Y EN FLOWCHART.
Utilizando la salida 2 hay que hacer parpadear el Led de tal forma que emita la señal del
código SOS (…---…)
En Flowchart el programa sería el siguiente:
Para pasar el programa a BASIC
Resultado del programa S.O.S. en BASIC:

37 | GRUPO DE TRABAJO PROYECTO CANTABROBOTS 3.0: Ana Núñez, Marta Gutiérrez, Didio Sordo, María Guijarro y José Andrés Echevarría
PRÁCTICA 4: UTILIZACIÓN DEL PROGRAMA LOGICATOR FOR PICAXE.
Hay otro programa más fácil de utilizar que es el Logicator for PIC and PICAXE. Este programa
utiliza la lógica de los bloques para funcionar, cada bloque da una instrucción al chip sobre el que
debe actuar y el chip ejecuta los bloques uno a uno, de forma ordenada, siguiendo la flecha que
nosotros dibujamos.
Los bloques rectangulares realizan operaciones internas dentro del chip.
Los bloques romboides alteran el estado de las salidas del chip y los rombos
leen entradas o valores y sacan una respuesta afirmativa o negativa, por tanto,
tienen una entrada y dos salidas.
Antes de empezar a programar con Logicator for PIC and PICAXE recordemos lo siguiente:

38 | GRUPO DE TRABAJO PROYECTO CANTABROBOTS 3.0: Ana Núñez, Marta Gutiérrez, Didio Sordo, María Guijarro y José Andrés Echevarría
Núm.
PIN NOMBRE PICAXE ENTRADA SALIDA
1 V+
2 Serial In/ C.5
3 pin4/ C.4 MOTOR DERECHO
4 pin3 ( Entrada)/ C.3 SENSOR DERECHO x
5 pin2 /C.2 MOTOR IZQUIERDO
6 pin1/ C.1 SENSOR IZQUIERDO
7 pin 0 (Salida)/ C.O X (SERVOMOTOR)
8 0V
X Opción no disponible

39 | GRUPO DE TRABAJO PROYECTO CANTABROBOTS 3.0: Ana Núñez, Marta Gutiérrez, Didio Sordo, María Guijarro y José Andrés Echevarría
PRÁCTICA 5: ENCENDIDO/APAGADO MOTOR IZQUIERDO.
La intermitencia con el motor
izquierdo se hace como en esta ilustración.
Antes de poder escribir nada hay que ir a
opciones e informar al programa que
tenemos un chip PICAXE 8M2.
Para poner el HIGH, el
LOW y el WAIT vamos al apartado
COMMON de la parte derecha de
la pantalla donde están las herramientas más comunes. El HIGH activa una salida, el LOW la para y
el WAIT espera un tiempo que nosotros decidimos.
Debemos poner los bloques unidos uno tras otro después del START y unir el último con el
primero para hacer el bucle sin necesidad de cabeceras. Los valores numéricos de los bloques
deben ponerse en la parte inferior izquierda de la pantalla. No hay que poner nombres a los pines.
Podemos hacer las flechas con el lápiz que hay en la parte superior de la pantalla.

40 | GRUPO DE TRABAJO PROYECTO CANTABROBOTS 3.0: Ana Núñez, Marta Gutiérrez, Didio Sordo, María Guijarro y José Andrés Echevarría
PRÁCTICA 6: SIRENAS DE POLICIA. MOTORES IZQUIERDO/DERECHO.
Ahora hay que hacer las sirenas de la policía con los motores derecho e izquierdo. A la hora de
simular podemos seleccionar la opción SHOW del DIGITAL PANEL para ver el estado de las salidas
en un esquema.
Lo que queremos es que el
motor derecho esté medio
segundo encendido y luego el
motor izquierdo medio segundo
más.

41 | GRUPO DE TRABAJO PROYECTO CANTABROBOTS 3.0: Ana Núñez, Marta Gutiérrez, Didio Sordo, María Guijarro y José Andrés Echevarría
PRÁCTICA 7: SIRENAS DE POLICIA. FUNCIÓN OUTPUTS.
Con la herramienta OUTPUTS del MENÚ COMMON podemos activar y desactivar las salidas
que queremos de un solo golpe poniendo un (1) a las que queremos activar, un (0) a las que
queremos desactivar y un (-) a las que
queremos dejar como estaban. Con
sólo dos WAITS y dos OUTPINS
podremos hacer las sirenas de la
policía con los motores.

42 | GRUPO DE TRABAJO PROYECTO CANTABROBOTS 3.0: Ana Núñez, Marta Gutiérrez, Didio Sordo, María Guijarro y José Andrés Echevarría
PRÁCTICA 8: FUNCIÓN DECISION.
Para poner en marcha el motor derecho cuando se activa el sensor derecho tenemos que
poner la instrucción DECISION y una condición en el interior.
En este caso que el pin3 must be on. A la salida YES y
ponemos un OUTPUTS que active el motor derecho y el la
salida NO un OUTPUTS que lo pare.
Recordar que siempre tenemos que volver a la START
para que el programa continúe funcionando.

43 | GRUPO DE TRABAJO PROYECTO CANTABROBOTS 3.0: Ana Núñez, Marta Gutiérrez, Didio Sordo, María Guijarro y José Andrés Echevarría
PRÁCTICA 9: ACTIVACIÓN MOTORES. FUNCIÓN DECISION.
Hacer un programa que active el motor derecho cuando el sensor derecho esté activado y lo
mismo con el motor izquierdo.
Para hacer esto hace falta la función OUTPUTS y DECISION, en concreto cuatro OUTPUTS ya
que podemos encender los dos motores, encender el derecho y parar la izquierda, encender la
izquierda y parar el derecho y parar los dos motores.

44 | GRUPO DE TRABAJO PROYECTO CANTABROBOTS 3.0: Ana Núñez, Marta Gutiérrez, Didio Sordo, María Guijarro y José Andrés Echevarría
PRÁCTICA 10: ESTUDIO DEL CONTROL DE UN PEQUEÑO ROBOT SEGUIDOR DE LÍNEA.
A continuación realizaremos el estudio de automatización y control de un pequeño robot
seguidor, el cual debe seguir una línea negra sobre un fondo blanco. Este robot dispone de dos
sensores (SIz) y (SD) y dos motores (MIz) y (MD), para realizar el control y el movimiento
respectivamente.
Podemos explicar su funcionamiento teniendo en cuenta que la línea negra deberá
encontrarse, en todo momento, entre los dos sensores, de forma que los dos capten la señal de la
línea y así el robot pueda ir siguiendo o rectificando su trayectoria. A partir de aquí, se pueden dar
las siguientes condiciones de captación de los sensores y funcionamiento de los motores:
Sensor Izquierdo
(SIz)
Sensor Derecho
(SD)
PICAXE 08M2
Motor Izquierdo
(MIz)
Motor Derecho
(MD)
Fondo Blanco
Línea Negra

45 | GRUPO DE TRABAJO PROYECTO CANTABROBOTS 3.0: Ana Núñez, Marta Gutiérrez, Didio Sordo, María Guijarro y José Andrés Echevarría
Caso A) Cuando detectan la línea los dos sensores, el robot debe seguir una trayectoria
recta. Esto implica que tanto el motor derecho como el izquierdo deben girar de forma simultánea
en sentido de avance.
Caso B) Cuando la línea es detectada solamente por el sensor de la izquierda, lo que
quiere decir que se ha desviado a la derecha, el robot debe girar hacia la izquierda, por lo tanto, el
motor de la derecha es el que deberá de girar en sentido de avance y el de la izquierda se parará.
Caso C) Cuando el único sensor que detecta es el derecho, lo cual quiere decir que se ha
desviado a la izquierda, el robot deberá girar hacia la derecha, es decir, el motor izquierdo avanzará
y el derecho se parará.
Caso D) Cuando ninguno de los dos señores detecta línea, en cuyo caso el robot deberá
seguir con la última orden dada hasta encontrar línea.
46 | GRUPO DE TRABAJO PROYECTO CANTABROBOTS 3.0: Ana Núñez, Marta Gutiérrez, Didio Sordo, María Guijarro y José Andrés Echevarría
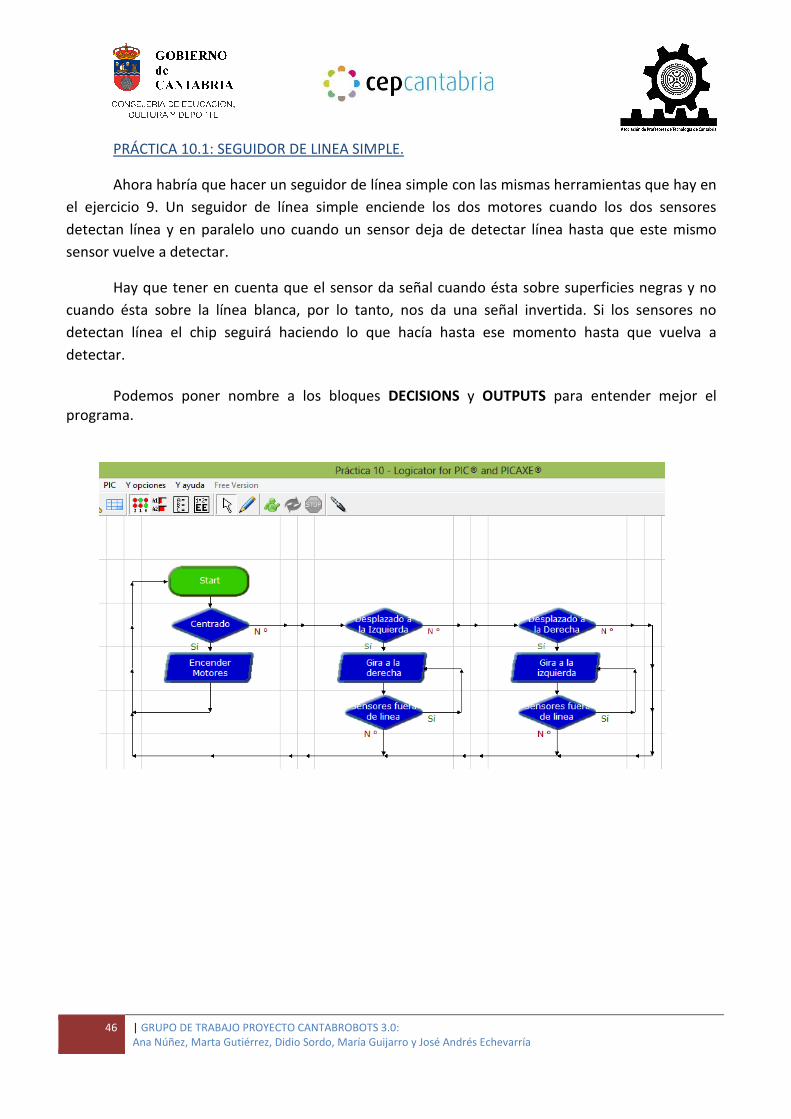
PRÁCTICA 10.1: SEGUIDOR DE LINEA SIMPLE.
Ahora habría que hacer un seguidor de línea simple con las mismas herramientas que hay en
el ejercicio 9. Un seguidor de línea simple enciende los dos motores cuando los dos sensores
detectan línea y en paralelo uno cuando un sensor deja de detectar línea hasta que este mismo
sensor vuelve a detectar.
Hay que tener en cuenta que el sensor da señal cuando ésta sobre superficies negras y no
cuando ésta sobre la línea blanca, por lo tanto, nos da una señal invertida. Si los sensores no
detectan línea el chip seguirá haciendo lo que hacía hasta ese momento hasta que vuelva a
detectar.
Podemos poner nombre a los bloques DECISIONS y OUTPUTS para entender mejor el programa.

47 | GRUPO DE TRABAJO PROYECTO CANTABROBOTS 3.0: Ana Núñez, Marta Gutiérrez, Didio Sordo, María Guijarro y José Andrés Echevarría
PRÁCTICA 11: SEGUIDOR DE LINEA (2) USO DE CABECERAS.
También podemos hacer el mismo programa con las CABECERAS, para crear una
cabecera vamos al apartado PROCEDURES y seleccionamos la herramienta PROCEDURE, ponemos
un nombre a la cabecera y con la herramienta GOTO podemos acceder a la
subrutina que queramos.
Un programa para seguidor de línea con cabeceras es más
grande que uno sin ellas pero si se hacen programas más grandes el
programa se hace más fácil de entender.

48 | GRUPO DE TRABAJO PROYECTO CANTABROBOTS 3.0: Ana Núñez, Marta Gutiérrez, Didio Sordo, María Guijarro y José Andrés Echevarría
ACTIVIDAD 12: LECTURA DE UNA ENTRADA DIGITAL (BASIC Y DIAGRAMA DE FLUJO).
El circuito impreso dispone de dos sensores CNY70 conectados a los PIN1
y PIN3. Este sensor dispone de un diodo de color azul que emite luz infrarroja y
un fototransistor que la capta. Cuando el sensor está sobre una superficie blanca,
la luz emitida rebota, la capta y pone 0 voltios a su correspondiente entrada del
microcontrolador. (Ver el esquema de la placa).
Se puede activar el sensor poniendo un dedo delante del sensor
aproximadamente a medio centímetro. Por tanto a la hora de hacer la práctica que ahora se le
propondrá es como si dispusierais de dos pulsadores pero con lógica negativa, es decir, que se
comportan como dos pulsadores NC (normalmente cerrados, activados dan 0 y desactivados 1
lógico).
1. - La práctica consiste en hacer que se encienda el LED conectado a la salida PIN2, cuando
se ponga el dedo delante del sensor "SIz" (sensor izquierdo), conectado a la entrada PIN1. Al quitar
el dedo queremos que el LED se apague.
2. - Introduzca el siguiente programa escrito en BASIC y guárdelo como LECTURA DE
ENTRADA DIGITAL BASIC:

49 | GRUPO DE TRABAJO PROYECTO CANTABROBOTS 3.0: Ana Núñez, Marta Gutiérrez, Didio Sordo, María Guijarro y José Andrés Echevarría
3. - Simula el programa y compruebe el funcionamiento.
4. - Modifique el programa para que el otro LED (pin4) se encienda cuando se active a 0 el
sensor derecho SD (pin3). Simularlo y guárdelo como LECTURA DE ENTRADA DIGITAL BASIC V2.
5. - Hacer lo mismo pero con el entorno gráfico del diagrama de flujo. Simula el
funcionamiento del programa y guárdelo como LECTURA DE ENTRADA DIGITAL FLUJO.

50 | GRUPO DE TRABAJO PROYECTO CANTABROBOTS 3.0: Ana Núñez, Marta Gutiérrez, Didio Sordo, María Guijarro y José Andrés Echevarría
PRÁCTICA 13: SEGUIDOR DE LINEA SIMPLE CON SIMBOLOS. (UTILIZANDO EL PROGRAMMING
EDITOR).
Cuando se realizan programas de control con múltiples entradas y salidas, a la hora de editar
el programa, puede ser muy difícil de entender su funcionamiento si nos referimos a cada una de las
entradas y salidas por su nombre original, es decir, inpu1, output 0, etc. Para hacer mucho más
comprensible el programa y su seguimiento, es habitual dar un nombre más adecuado a las
entradas y salidas, habitualmente relacionado con la función que éstas hacen. A este nuevo nombre
se le llama símbolo. Así por ejemplo, el pin donde conectamos el sensor derecho, en vez de llamarle
PIN1 o input 1, lo llamaremos SD.
1. Crear un nuevo archivo del tipo diagrama de flujo
2. Ve a organigrama a tabla de símbolos de organigrama y edita la tabla con lo de la figura.

51 | GRUPO DE TRABAJO PROYECTO CANTABROBOTS 3.0: Ana Núñez, Marta Gutiérrez, Didio Sordo, María Guijarro y José Andrés Echevarría
3.- Una vez editada la tabla de símbolos, realiza el siguiente diagrama de flujo.

52 | GRUPO DE TRABAJO PROYECTO CANTABROBOTS 3.0: Ana Núñez, Marta Gutiérrez, Didio Sordo, María Guijarro y José Andrés Echevarría
PRÁCTICA 14: CONTROL POR INFRAROJOS.
En esta práctica vamos a controlar nuestro robot con un mando de TV Estándar de Sony y un
receptor LED 020.
El receptor LED020 tiene 3 patas (de izquierda a derecha 123) y la placa 08M2 tiene marcados
para cada CNY70 (A-ánodo, K-cátodo, y una fecha que señala la
referencia CNY70). El procedimiento consiste en quitar uno de los dos
CNY70 (el del PIN1) y conectar el receptor de infrarrojos LED020 en el
mismo zócalo tal como:
LED020 --->ZÓCALO 1 FLECHA 2 A 3 K
El protocolo de comunicación
de infrarrojo de Sony trabaja en la frecuencia modulada de 38kHz y consiste en un bit de Start de
2,4 ms seguido de 12 bits de información (7 bits de datos y 5 bits de identificación de dispositivos).
Para transmitir un 1 lógico envía un impulso de 1,2 ms y para enviar un 0 lógico envía un impulso
de 0,6 ms. Cada bit está separado por un período de 0,6 ms.
PICAXE tiene la limitación de que sólo permite recibir 128 códigos diferentes
(7bits), es decir, del 0 al 127.
Para realizar esta práctica es necesario un mando a distancia, que puede ser el original de PICAXE o
uno del tipo universal configurado previamente como Sony.
Para configurar el mando:
.- 1º Pulsar SET y TV1 a la vez (se activa el LED rojo).
.- 2º Pulsar 0126

53 | GRUPO DE TRABAJO PROYECTO CANTABROBOTS 3.0: Ana Núñez, Marta Gutiérrez, Didio Sordo, María Guijarro y José Andrés Echevarría
.- 3º Finalmente pulsar TV1.
Lo primero realizaremos un DEBUG para conocer los valores que envía el mando a distancia.
Haz el mismo programa con LOGICATOR.

54 | GRUPO DE TRABAJO PROYECTO CANTABROBOTS 3.0: Ana Núñez, Marta Gutiérrez, Didio Sordo, María Guijarro y José Andrés Echevarría
Una vez obtenidos los valores en b0 de los enviados por el mando hacemos un programa que
al dar el botón de arriba el robot avance recto, botón derecha el robot va a la derecha, botón
izquierda robot va a la izquierda y atrás o stop el robot para.
El comando inc b0 hace que se incremente en una unidad el código recibido, ya que recibe un
número menos del que se ha pulsado.

55 | GRUPO DE TRABAJO PROYECTO CANTABROBOTS 3.0: Ana Núñez, Marta Gutiérrez, Didio Sordo, María Guijarro y José Andrés Echevarría
PRACTICA 16: CONTROL DE SUBIDA-BAJADA DE UNA BARRERA CON UN SERVO.
Un servomotor es un motorreductor que va acompañado de una pequeña placa electrónica
que permite controlar el posicionamiento de su eje de rotación.
Los servos disponen de un conector hembra con tres
cables:
.- el marrón (o negro) se conecta a masa GND.
.- el rojo alimentación positiva + VCC (4,5-6V).
.- y el naranja (o blanco) es la señal de CONTROL.
Estos colores pueden variar según el fabricante del
servo.
El control interno del motorreductor del servo es del
tipo lazo cerrado.
La placa electrónica que incorpora el
servo continuamente está comparando la
consigna (valor deseado) con la posición real
del eje que le da el potenciómetro. Si esta
comparación es diferente, se produce una
señal de error que se envía al bloque de
activación del motor para que corrija el
error de posición del eje.
56 | GRUPO DE TRABAJO PROYECTO CANTABROBOTS 3.0: Ana Núñez, Marta Gutiérrez, Didio Sordo, María Guijarro y José Andrés Echevarría
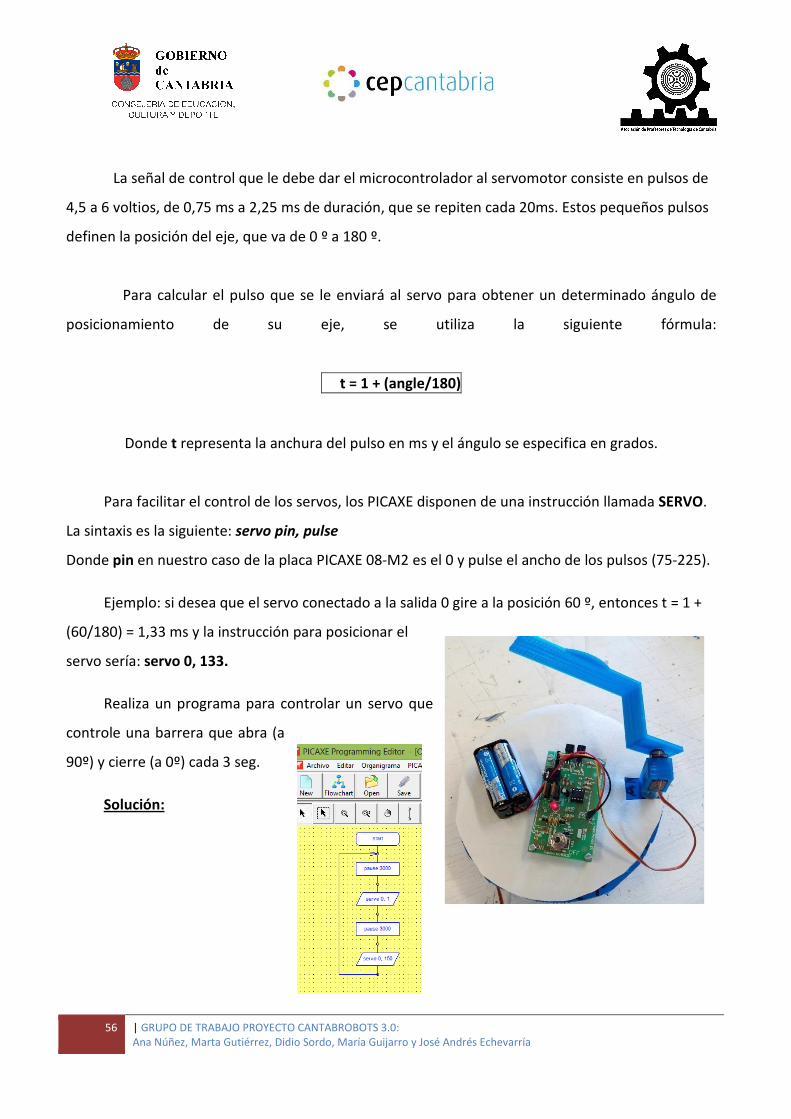
La señal de control que le debe dar el microcontrolador al servomotor consiste en pulsos de
4,5 a 6 voltios, de 0,75 ms a 2,25 ms de duración, que se repiten cada 20ms. Estos pequeños pulsos
definen la posición del eje, que va de 0 º a 180 º.
Para calcular el pulso que se le enviará al servo para obtener un determinado ángulo de
posicionamiento de su eje, se utiliza la siguiente fórmula:
t = 1 + (angle/180)
Donde t representa la anchura del pulso en ms y el ángulo se especifica en grados.
Para facilitar el control de los servos, los PICAXE disponen de una instrucción llamada SERVO.
La sintaxis es la siguiente: servo pin, pulse
Donde pin en nuestro caso de la placa PICAXE 08-M2 es el 0 y pulse el ancho de los pulsos (75-225).
Ejemplo: si desea que el servo conectado a la salida 0 gire a la posición 60 º, entonces t = 1 +
(60/180) = 1,33 ms y la instrucción para posicionar el
servo sería: servo 0, 133.
Realiza un programa para controlar un servo que
controle una barrera que abra (a
90º) y cierre (a 0º) cada 3 seg.
Solución:

57 | GRUPO DE TRABAJO PROYECTO CANTABROBOTS 3.0: Ana Núñez, Marta Gutiérrez, Didio Sordo, María Guijarro y José Andrés Echevarría
OTROS RASTREADORES:

58 | GRUPO DE TRABAJO PROYECTO CANTABROBOTS 3.0: Ana Núñez, Marta Gutiérrez, Didio Sordo, María Guijarro y José Andrés Echevarría
BIBLIOGRAFIA:
www.picaxe.es
www.picaxe.com
https://sites.google.com/site/robolot/
http://humanoideimagina.weebly.com/
Gracias a Joan Pellicer y Toni Moreno de Equipo ROBOLOT