Cuaderno del Conductor 7 - Inicio - :: CEAC :: Cámara de ... · Posee una punta hecha de...
54
La electrónica embarcada 1-54 Cuaderno del Conductor Guía de reflexión para el conductor profesional 7 La electrónica embarcada
Transcript of Cuaderno del Conductor 7 - Inicio - :: CEAC :: Cámara de ... · Posee una punta hecha de...
La electrónica embarcada
1-54
Cuaderno del Conductor
Guía de reflexión para el conductor profesional 7
La electrónica embarcada

La electrónica embarcada
2-54

La electrónica embarcada
3-54
La electrónica embarcada Indice Introducción general… ………………………………………………………………………………………………………………………………4 Sensores…………………………………………………………………………………………………………………………………………………………6 Unidades de control electrónico (ECU)..……………………………………………………………………………………… ……….8 Actuadores ………………………………………………………………………………………………………………………………………………....11 Sistemas de asistencia para la seguridad en la conducción……………………………………………………………….12 Sistemas para mejorar el rendimiento de la planta motriz y reducir la contaminación…….………..19 Sistemas de control de emisiones de escape para reducir la contaminación por combustión..…25 Sistemas de comunicaciones……………………………………………………………………………………………………………………32 Sistema de navegación terrestre satelital GNSS……………………………………………………………………………..39 Gestión de transporte de cargas o gestión de flotas…………………………………………………….………………….41 Conclusión……………………………………………………………………………………………………………………………………………………53
La electrónica embarcada
4-54
I. Introducción general El crecimiento demográfico y económico demanda más capacidad de transporte y los caminos se poblaron de automotores de todo tipo. Se hizo imperativo, reducir el consumo de los motores, sin perder su capacidad de entrega de potencia al mismo tiempo que ofrecer mayores niveles de seguridad en el tránsito. Gradualmente se sumó, además, la conciencia del impacto ambiental que produce la combustión. Para aumentar el rendimiento de los motores y la seguridad en el manejo, reduciendo a la vez la emisión de contaminantes, se diseñaron dispositivos que integraban propiedades mecánicas, eléctricas, hidráulicas y neumáticas. Recién en los últimos veinte años fue posible controlar el funcionamiento de los camiones y sus motores con niveles de rapidez y precisión impensables poco antes, gracias a la aplicación de las tecnologías electrónicas digitales de la información y de la comunicación, materializadas en las computadoras, la fibra óptica, los satélites artificiales e Internet. Tras su aparición y difusión se hizo realidad utilizarlas en la llamada “electrónica embarcada”, es decir, sistemas de comunicaciones y procesamiento de la información, puestos al servicio del transporte de cargas y su gestión. Hoy en día, la “electrónica embarcada”, sinónimo de una verdadera convergencia tecnológica, ya de plena aplicación en el mercado de los automóviles, se está difundiendo en forma gradual y sostenida en las principales marcas de camiones. Esto se traducirá en mayores niveles de torque, menores emisiones contaminantes, reducción en el consumo de combustible y aumento de los niveles de confort y seguridad en el manejo, al mismo tiempo que el desarrollo general de la eficiencia en la gestión del transporte de cargas. II. Qué es la electrónica embarcada. Prestaciones 1. Concepto También llamada “informática embarcada”, se trata de un conjunto de sistemas de obtención y procesamiento de datos, que combina tecnologías mecánicas, eléctricas, de comunicaciones electrónicas y de computación, puesto a disposición del conductor para controlar el funcionamiento de los vehículos automotores y la operación de transporte. 2. Prestaciones Podemos hablar de dos grandes conjuntos de prestaciones que nos brinda la electrónica embarcada en los vehículos automotores:
a. Brindar mayor seguridad y confort en la conducción, mejorar el rendimiento de los motores y reducir la contaminación producida por la combustión
La electrónica embarcada
5-54
b. Administrar más eficientemente el transporte de cargas A continuación, vamos a describir los sistemas utilizados para obtener estos dos grandes conjuntos de prestaciones.
III. Sistemas y Tecnologías para incrementar la seguridad, el confort y el rendimiento y reducir la contaminación 1. Introducción Para el primer gran conjunto de prestaciones, podemos hablar de:
- Sistemas de apoyo al conductor para brindarle mayor seguridad y confort en la conducción
- Sistemas para mejorar el rendimiento de los motores y reducir la contaminación
- Sistemas de control de emisiones de escape para reducir la contaminación producida por la combustión
Nota: Es necesario aclarar que esta agrupación se ha hecho considerando las prestaciones principales buscadas con cada sistema y para simplificar el enfoque del tema. Veremos más adelante que un mismo sistema podrá brindar, por ejemplo, no sólo posibilidades de control sobre el funcionamiento del motor para lograr más economía, sino que al mismo tiempo brindará menores niveles de contaminación y mayor seguridad en el manejo y confort del conductor. Estos sistemas:
- Miden las condiciones ambientales y/o funcionamiento de los vehículos, para esto utilizan sensores
- Reciben los datos que envían los sensores, los elaboran y obtienen resultados, para esto se utilizan las unidades de control electrónico1 o ECUs, verdaderos “cerebros” de cada sistema. Las unidades de control electrónico reciben los datos que toman los sensores, los procesan y obtienen resultados para ser aplicados en la utilización del vehículo.
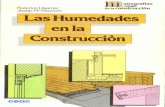
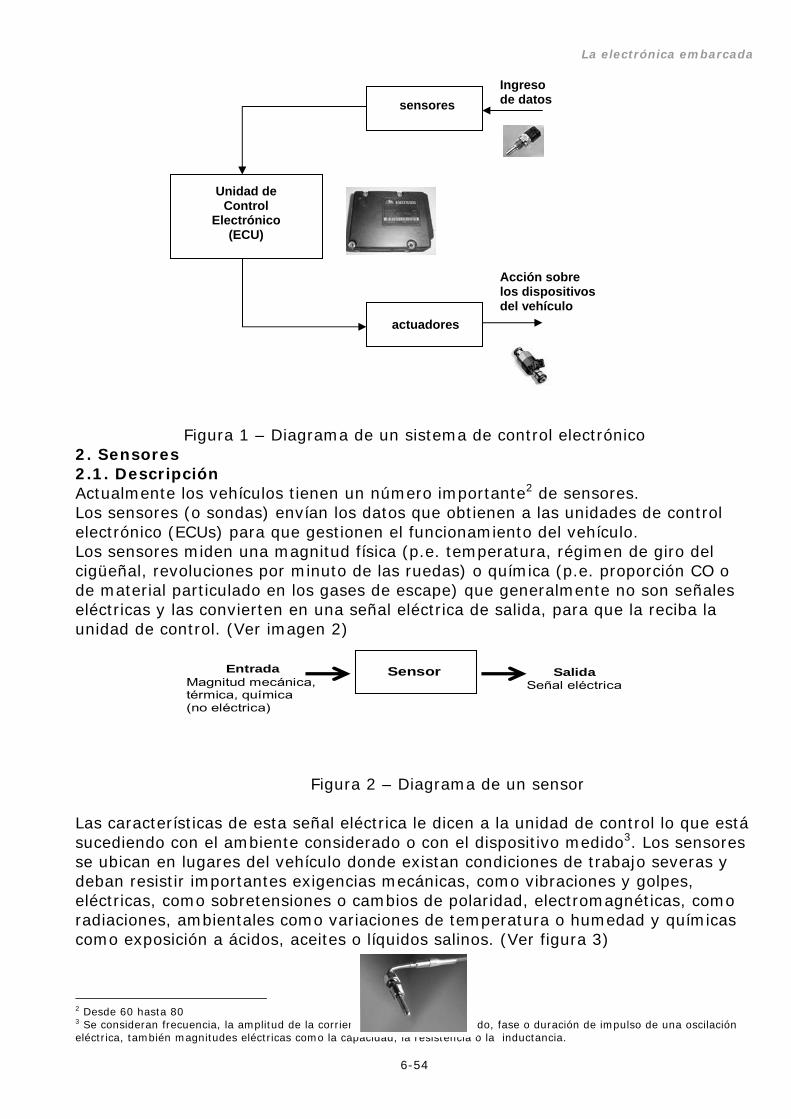
- Convierten los resultados de las unidades de control en alertas para el conductor o en comandos para el vehículo, esto se realiza a través de actuadores que regulan el funcionamiento de las distintas partes del vehículo, motor, caja de cambios, frenos, luces, etc. (ver figura 1)
1 Unidad de Control Electrónico (en inglés Electronic Control Unit, ECU y en alemán Steuergeraet, SG). También denominadas Electronic Control Module, ECM; Central Control Module, CCM; Control Unit o Control Module.
La electrónica embarcada
6-54
Figura 1 – Diagrama de un sistema de control electrónico
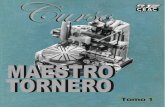
2. Sensores 2.1. Descripción Actualmente los vehículos tienen un número importante2 de sensores. Los sensores (o sondas) envían los datos que obtienen a las unidades de control electrónico (ECUs) para que gestionen el funcionamiento del vehículo. Los sensores miden una magnitud física (p.e. temperatura, régimen de giro del cigüeñal, revoluciones por minuto de las ruedas) o química (p.e. proporción CO o de material particulado en los gases de escape) que generalmente no son señales eléctricas y las convierten en una señal eléctrica de salida, para que la reciba la unidad de control. (Ver imagen 2)
Figura 2 – Diagrama de un sensor Las características de esta señal eléctrica le dicen a la unidad de control lo que está sucediendo con el ambiente considerado o con el dispositivo medido3. Los sensores se ubican en lugares del vehículo donde existan condiciones de trabajo severas y deban resistir importantes exigencias mecánicas, como vibraciones y golpes, eléctricas, como sobretensiones o cambios de polaridad, electromagnéticas, como radiaciones, ambientales como variaciones de temperatura o humedad y químicas como exposición a ácidos, aceites o líquidos salinos. (Ver figura 3) 2 Desde 60 hasta 80 3 Se consideran frecuencia, la amplitud de la corriente o/y la tensión, periodo, fase o duración de impulso de una oscilación eléctrica, también magnitudes eléctricas como la capacidad, la resistencia o la inductancia.
sensores Ingreso de datos
Unidad de Control
Electrónico (ECU)
actuadores
Acción sobre los dispositivos del vehículo
SensorEntrada Magnitud mecánica, térmica, química (no eléctrica)
Salida Señal eléctrica
La electrónica embarcada
7-54
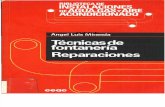
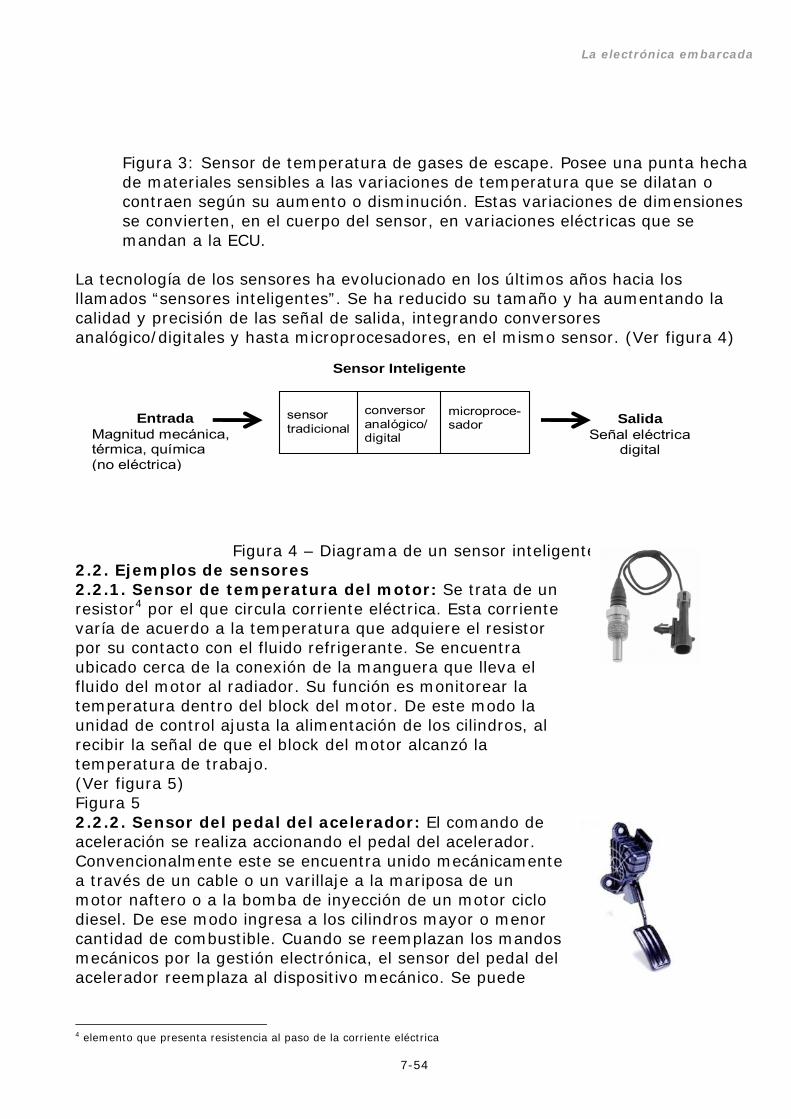
Figura 3: Sensor de temperatura de gases de escape. Posee una punta hecha de materiales sensibles a las variaciones de temperatura que se dilatan o contraen según su aumento o disminución. Estas variaciones de dimensiones se convierten, en el cuerpo del sensor, en variaciones eléctricas que se mandan a la ECU.
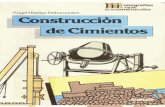
La tecnología de los sensores ha evolucionado en los últimos años hacia los llamados “sensores inteligentes”. Se ha reducido su tamaño y ha aumentando la calidad y precisión de las señal de salida, integrando conversores analógico/digitales y hasta microprocesadores, en el mismo sensor. (Ver figura 4)
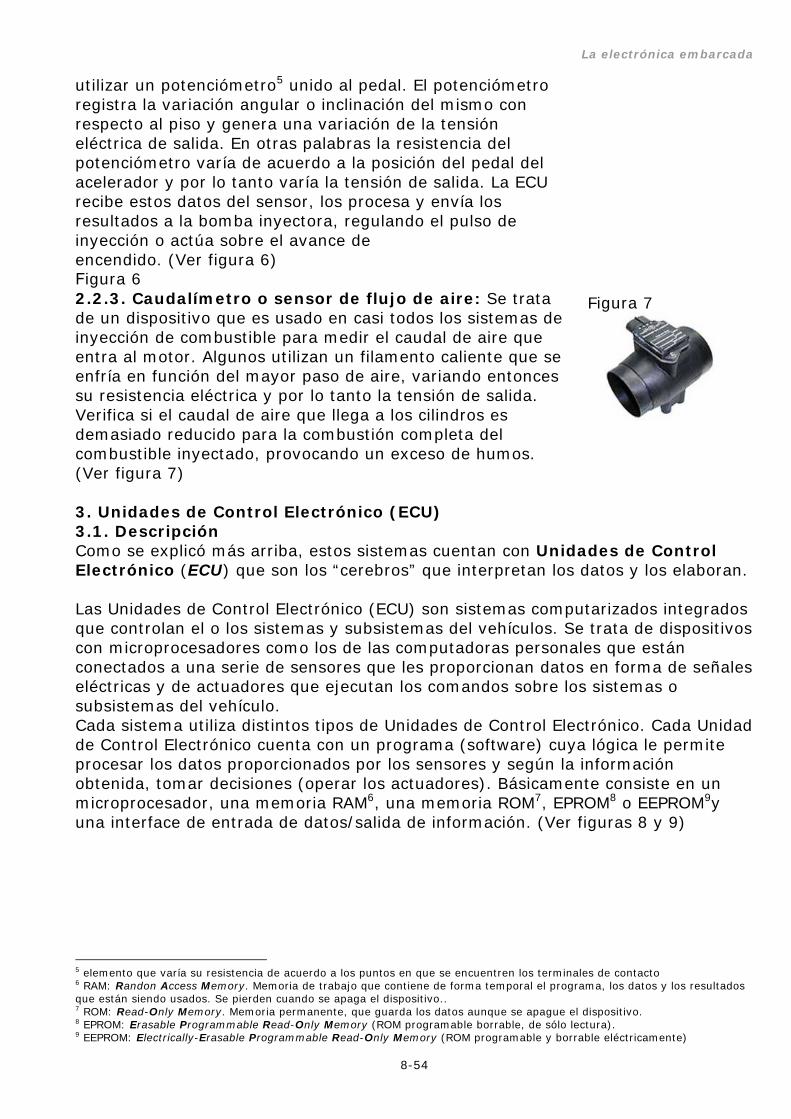
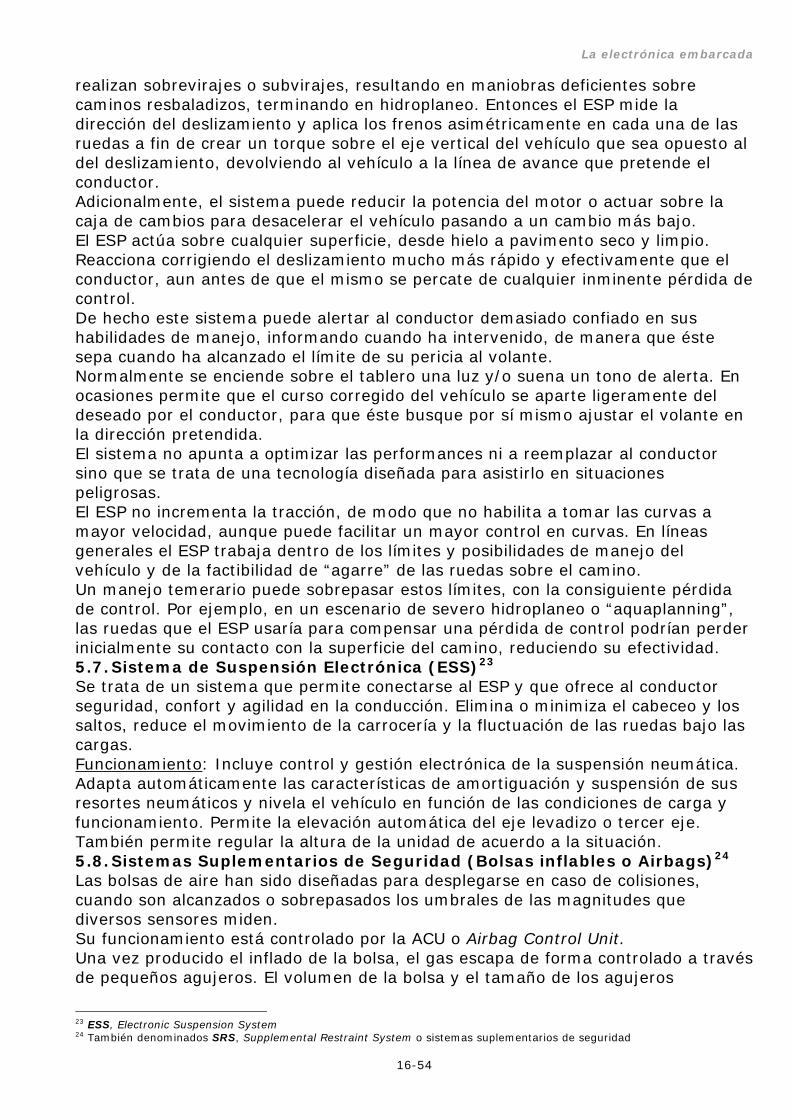
Figura 4 – Diagrama de un sensor inteligente 2.2. Ejemplos de sensores 2.2.1. Sensor de temperatura del motor: Se trata de un resistor4 por el que circula corriente eléctrica. Esta corriente varía de acuerdo a la temperatura que adquiere el resistor por su contacto con el fluido refrigerante. Se encuentra ubicado cerca de la conexión de la manguera que lleva el fluido del motor al radiador. Su función es monitorear la temperatura dentro del block del motor. De este modo la unidad de control ajusta la alimentación de los cilindros, al recibir la señal de que el block del motor alcanzó la temperatura de trabajo. (Ver figura 5) Figura 5 2.2.2. Sensor del pedal del acelerador: El comando de aceleración se realiza accionando el pedal del acelerador. Convencionalmente este se encuentra unido mecánicamente a través de un cable o un varillaje a la mariposa de un motor naftero o a la bomba de inyección de un motor ciclo diesel. De ese modo ingresa a los cilindros mayor o menor cantidad de combustible. Cuando se reemplazan los mandos mecánicos por la gestión electrónica, el sensor del pedal del acelerador reemplaza al dispositivo mecánico. Se puede
4 elemento que presenta resistencia al paso de la corriente eléctrica
sensor tradicional
Entrada Magnitud mecánica, térmica, química (no eléctrica)
SalidaSeñal eléctrica
digital
conversor analógico/digital
microproce-sador
Sensor Inteligente
La electrónica embarcada
8-54
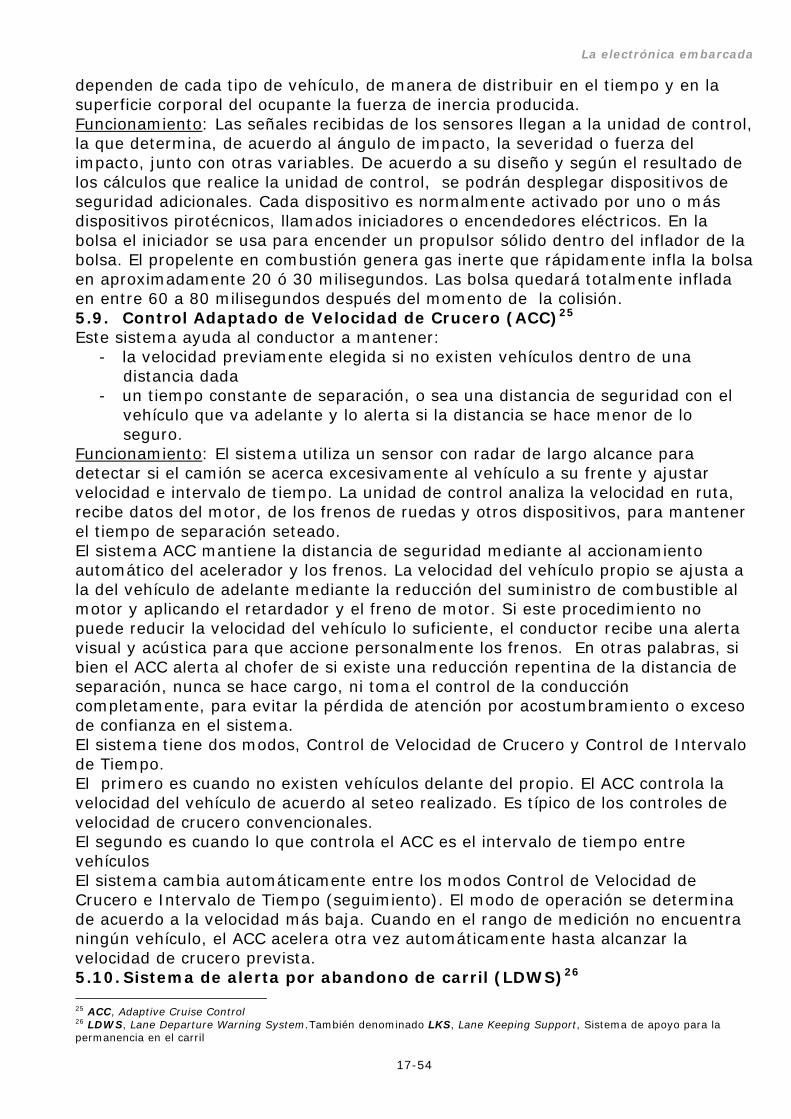
utilizar un potenciómetro5 unido al pedal. El potenciómetro registra la variación angular o inclinación del mismo con respecto al piso y genera una variación de la tensión eléctrica de salida. En otras palabras la resistencia del potenciómetro varía de acuerdo a la posición del pedal del acelerador y por lo tanto varía la tensión de salida. La ECU recibe estos datos del sensor, los procesa y envía los resultados a la bomba inyectora, regulando el pulso de inyección o actúa sobre el avance de encendido. (Ver figura 6) Figura 6 2.2.3. Caudalímetro o sensor de flujo de aire: Se trata de un dispositivo que es usado en casi todos los sistemas de inyección de combustible para medir el caudal de aire que entra al motor. Algunos utilizan un filamento caliente que se enfría en función del mayor paso de aire, variando entonces su resistencia eléctrica y por lo tanto la tensión de salida. Verifica si el caudal de aire que llega a los cilindros es demasiado reducido para la combustión completa del combustible inyectado, provocando un exceso de humos. (Ver figura 7) 3. Unidades de Control Electrónico (ECU) 3.1. Descripción Como se explicó más arriba, estos sistemas cuentan con Unidades de Control Electrónico (ECU) que son los “cerebros” que interpretan los datos y los elaboran. Las Unidades de Control Electrónico (ECU) son sistemas computarizados integrados que controlan el o los sistemas y subsistemas del vehículos. Se trata de dispositivos con microprocesadores como los de las computadoras personales que están conectados a una serie de sensores que les proporcionan datos en forma de señales eléctricas y de actuadores que ejecutan los comandos sobre los sistemas o subsistemas del vehículo. Cada sistema utiliza distintos tipos de Unidades de Control Electrónico. Cada Unidad de Control Electrónico cuenta con un programa (software) cuya lógica le permite procesar los datos proporcionados por los sensores y según la información obtenida, tomar decisiones (operar los actuadores). Básicamente consiste en un microprocesador, una memoria RAM6, una memoria ROM7, EPROM8 o EEPROM9y una interface de entrada de datos/salida de información. (Ver figuras 8 y 9)
5 elemento que varía su resistencia de acuerdo a los puntos en que se encuentren los terminales de contacto 6 RAM: Randon Access Memory. Memoria de trabajo que contiene de forma temporal el programa, los datos y los resultados que están siendo usados. Se pierden cuando se apaga el dispositivo.. 7 ROM: Read-Only Memory. Memoria permanente, que guarda los datos aunque se apague el dispositivo. 8 EPROM: Erasable Programmable Read-Only Memory (ROM programable borrable, de sólo lectura). 9 EEPROM: Electrically-Erasable Programmable Read-Only Memory (ROM programable y borrable eléctricamente)
Figura 7

La electrónica embarcada
9-54
Figura 8 – Diagrama de una Unidad de Control Electrónico (ECU)
Figura 9 – Apariencia exterior de una ECU, en este caso para el control de
funcionamiento de un motor Nota: Una ECU contiene un hardware10 y un software11. El hardware consiste en los componentes electrónicos montados sobre un circuito impreso12 (ver figura 10).
Figura 10 – Circuito impreso donde los dispositivos electrónicos se sostienen
mecánicamente y conectan eléctricamente El principal componente de este circuito impreso es un circuito integrado o chip microcontrolador13que incluye desde centenas de miles a centenas de millones de 10 Hardware: componentes materiales directamente comprometidos con el procesamiento de datos o la comunicación. 11 Software: Los programas, rutinas y lenguajes simbólicos que controlan el funcionamiento del hardware y dirigen la operación. Conjunto de instrucciones que hace que la computadora ejecute unas o más tareas. Las computadoras no pueden realizar ninguna tarea sin las instrucciones de un software. 12 Circuito impreso: placa donde se sostienen mecánicamente y conectan eléctricamente dispositivos electrónicos, unidos por pistas de material conductor, grabados desde hojas de cobre laminadas sobre una base no conductora. 13 Microcontrolador: incluye las tres unidades funcionales de una computadora: 1. unidad central de procesamiento o CPU, que interpreta las instrucciones y procesa los datos contenidos en los programas de la computadora, 2. Memoria, que retiene o almacena datos informáticos y 3. Unidades de entrada/salida, las entradas son las señales recibidas por la unidad, mientras que las salidas son las señales enviadas por ésta
Memoria de trabajo que no guarda los datos cuando se apaga el dispositivo (Memoria RAM)
Memoria permanente, guarda el programa (Memoria ROM, EPROM o EEPROM)
Inte
rfac
e de
entr
ada
/sal
ida
Comandos al actuador
Datos tomados por el sensor

La electrónica embarcada
10-54
pequeñísimos dispositivos individuales de procesamiento informático. Se puede decir que un microcontrolador es una microcomputadora completa montada en un circuito integrado (ver figura 11). Así, por ejemplo, el control de un sistema de frenos ABS (Antilock Brake System) se basa normalmente en un microcontrolador de 16 bits.
Figura 11 – Imagen y diagrama de un microcontrolador
El software o programa se guarda en el microcontrolador u otros chips del circuito impreso. Estos dispositivos de memoria guardan los programas en forma permanente o funcionan de forma parecida a las memorias flash14 de los pen-drives15 de modo que se les puede cargar y descargar los programas a través de códigos de acceso. Los actuales ECUs pueden procesar las entradas (inputs) llegadas desde los sensores, en forma instantánea. A medida que crecieron las necesidades y posibilidades de control, se fueron desarrollando distintos tipos de ECUs, una por cada sistema a controlar. 3.2. Ejemplos de unidades de control electrónico 3.2.1. Unidad de Control del Motor (ECU)16 (No confundir con Unidad de Control Electrónico que se abrevia de la misma manera). Este dispositivo controla varios aspectos de la combustión. Se trata básicamente de una pequeña computadora, que recibe las lecturas de una considerable cantidad de sensores distribuidos en todo el vehículo. Usa la información obtenida para controlar los sistemas de inyección de combustible o de encendido del motor. Antes de la existencia de esta Unidad de Control la inyección de combustible o los tiempos de la ignición y la marcha en punto muerto eran directamente controlados
14 Memorias flash: dispositivo de almacenamiento que conserva la información que le ha sido almacenada aunque se apague el dispositivo igual que las memorias EPROM o EEPROM, pero que trabaja con mucha mayor rapidez. 15 Pen-drive: pequeño dispositivo de almacenamiento que utiliza memoria flash para guardar información 16ECU, Engine Control Unit, unidad de control del motor
Memorias permanentes tipo ROM, EPROM EEPROM o FLASH
Memorias temporales tipo RAM
Unidad de Procesamiento Central o CPU (microprocesador)
Dispositivos periféricos de entrada y salida de las señales
Otros dispositivos periféricos
DIAGRAMA DE UN MICROCONTROLADOR

La electrónica embarcada
11-54
por sensores y actuadores mecánicos y neumáticos. La cantidad de combustible por ciclo en un cilindro estaba determinada por el carburador o por la bomba de inyección. Este sistema permite controlar en detalle el funcionamiento del motor, logrando un aumento en la eficiencia del consumo de combustible, mayor potencia, mayor respuesta y menores niveles de contaminación que las generaciones anteriores de motores. Las más simples sólo controlan la cantidad de combustible inyectado en cada cilindro en cada ciclo de motor. Las más avanzadas controlan el punto de ignición, los tiempos de apertura y cierre de las válvulas, el impulso mantenido por el turbocompresor y el desempeño de otros periféricos. Debido a que la ECU recibe las mediciones sobre el motor milisegundo a milisegundo y que las procesa al mismo tiempo que las recibe, puede compensar el efecto de muchas variables que los sistemas tradicionales no están en capacidad de hacer, tales como temperatura ambiente, humedad o presión atmosférica, comparándolas con lo que el chofer le pide al motor. Además puede compensar en gran medida el desgaste natural del motor por el uso, lo que en la práctica permite extender su vida hasta dos y tres veces en relación con los motores de hace veinte años. 3.2.2. Unidad de control de la bolsa de aire (ACU)17 La unidad de control recibe los datos de sensores distribuidos en el vehículo, tales como acelerómetros, medidores de impacto, medidores de presión sobre estructura, velocidades de las ruedas, giróscopos, presión de frenado, verificación de ocupación de asiento. Cuando el umbral admitido para cada dimensión es alcanzado o sobrepasado, la unidad de control dispara el inflado de una bolsa de nylon. 4. Actuadores 4.1. Descripción Se denominan actuadores aquellos dispositivos que ejecutan los comandos de la ECU sobre los sistemas o subsistemas del vehículo. Transforman las señales eléctricas de salida de la ECU en magnitudes mecánicas. Estos elementos reciben los comandos que la ECU imparte a partir de los datos de los sensores y del contenido de su memoria. El microprocesador de la ECU realiza millones de cálculos por segundo y envía las órdenes correspondientes a los actuadores, por ejemplo, del sistema de inyección para que dosifique cantidades precisas de gasoil para cada condición de funcionamiento del motor, o de la entrada de aire en la admisión para que entre el caudal de aire que el motor necesite en un momento determinado 4.2. Ejemplos de actuadores 4.2.1. Válvula reguladora de presión del “common rail” Cuando el chofer actúa sobre el pedal del acelerador los sensores envían a la ECU este movimiento. La ECU calcula la presión de inyección de combustible requerida del rail o magazine de acuerdo a la acción del pie del chofer y la alcanza a través de la válvula reguladora de presión. Si la presión es demasiado baja, se activa la válvula reguladora de presión, un electroimán presiona un émbolo inducido contra el asiento estanco y la válvula cierra. El lado de alta
17ACU, Airbag Control Unit, unidad de control de la bolsa de aire

La electrónica embarcada
12-54
presión queda cerrado contra el lado de baja presión y aumenta la presión en el rail. Si la presión es demasiado alta en el rail, la válvula Figura 12-Válvula reguladora de presión reguladora de presión se abre de manera que una parte del combustible vuelve al depósito, desde el rail a través de una tubería colectora. (Ver figura 12) 4.2.1. Válvula reguladora del aire a la admisión En un sistema de recirculación de los gases de escape (EGR) la válvula regula la entrada de aire en la admisión del motor Diesel mediante un motor eléctrico. Deben contar con electrónica de regulación integrada para realizar su tarea con la alta precisión que las estrictas normativas sobre emisiones contaminantes exigen. (Ver figura 13) Figura 13-Válvula de control de aire 4.3. Conclusión Hemos presentado los dispositivos fundamentales, sensores, unidades de control electrónico y actuadores que los sistemas del primer gran conjunto:
- Sistemas de apoyo al conductor para brindar mayor seguridad y confort en la conducción
- Sistemas para mejorar el rendimiento de los motores y reducir la contaminación
- Sistemas de control de emisiones de escape para reducir la contaminación producida por la combustión
Pasaremos, a continuación a describirlos con mayor detalle. 5. Sistemas de asistencia para la seguridad en la conducción 5.1. Introducción Integrando el denominado módulo del chasis, estos sistemas alertan al conductor de un peligro inminente, lo asisten en forma activa a evitar un accidente o a reducir la gravedad de sus consecuencias. Es necesario puntualizar que estos sistemas no reemplazan al conductor, sino que lo ayudan en su actividad haciendo más segura la conducción. 5.2. Sistema de Frenos Antibloqueo (ABS)18 El frenado más eficiente se produce mientras las ruedas mantienen su condición de giro. Durante un frenado puede producirse el bloqueo de una o varias ruedas por exceso de acción del conductor sobre el pedal de freno. En consecuencia, el vehículo perderá gobernabilidad porque las ruedas pierden su adherencia sobre el camino. El ABS es un sistema computarizado creado para evitar que las ruedas se bloqueen cuando el freno se aplica con demasiada fuerza. En otras palabras, su finalidad es evitar el bloqueo de las ruedas durante condiciones severas de frenado, sobre prácticamente cualquier tipo de superficies. Este sistema no necesariamente reduce la distancia de frenado, aunque sí ayuda a mantener el vehículo bajo control cuando se frena demasiado. Sólo se activa cuando las ruedas están a punto de bloquearse. Previene que los neumáticos pierdan adherencia con el suelo durante el frenado, reduciendo la probabilidad de
18ABS, Antilock Braking System o sistema antibloqueo de freno

La electrónica embarcada
13-54
ocurrencia de accidentes o haciendo que sus consecuencias sean menos graves, en caso de producirse. Tiene como función adaptar la presión que los dispositivos de freno, hidráulicos o neumáticos, realizan sobre cada rueda con el fin de evitar su bloqueo y obtener la estabilidad del vehículo, control de la dirección y una menor distancia de detención (ver figura 12) Funcionamiento: El ABS es un agregado al sistema de frenado convencional y funciona en conjunto con el mismo. Consiste en dispositivos de control de freno neumático o hidráulico y en sensores que verifican la condición de giro de cada una de las ruedas. Los sensores detectan el posible bloqueo de las ruedas. Si en una frenada brusca una o varias ruedas reducen repentinamente sus revoluciones, el ABS lo detecta e interpreta que las ruedas están a punto de quedar bloqueadas sin que el vehículo se haya detenido. Esto quiere decir que el vehículo comenzará a patinar, y por lo tanto, a deslizarse sin control sobre el suelo. Para que esto no ocurra, los sensores envían una señal a la ECU del sistema ABS, que reduce la presión realizada sobre los frenos, sin que intervenga en ello el conductor, evitando el bloqueo de las ruedas y la pérdida de condición de giro de las mismas. La presión de los frenos se ajusta para proporcionar el frenado máximo sin peligro de que las ruedas se bloqueen. Cuando la situación se ha normalizado y las ruedas giran de nuevo correctamente, el sistema permite que la presión sobre los frenos vuelva a actuar con normalidad. El ABS controla nuevamente el giro de las ruedas y actúa otra vez si éstas están a punto de bloquearse por la fuerza del freno. En el caso de que este sistema intervenga, el procedimiento se repite de forma muy rápida, unas 50 a 100 veces por minuto, lo que nota el conductor percibe como una vibración en el pedal del freno. Este sistema permite que el conductor siga teniendo el control sobre la trayectoria del vehículo y de poder esquivar el obstáculo causante de una situación de riesgo.

La electrónica embarcada
14-54
Figura 12 – Diagrama de un ABS
5.3. Servofreno de emergencia (BAS)19 Complementarios del ABS Este sistema compensa la falta de efectividad del chofer en la acción de frenado. Funcionamiento: Ante una situación de peligro, un sensor detecta que el chofer ha pisado rápidamente y con fuerza el freno. En ese momento actúa el servofreno adicional aumentando al máximo la presión de frenado y reduciendo la distancia recorrida. Se verifica que ante una frenada de emergencia, la reacción del conductor en un primer momento es frenar menos de lo que el vehículo permite. Luego el chofer va aumentando la presión sobre el freno a medida que se acerca al punto de impacto. En consecuencia aumenta la distancia de detención. Para reducir esta distancia, el sistema verifica cuándo se produce una frenada de emergencia. Entonces frena con la mayor fuerza posible, aunque el conductor no lo estuviera haciendo. Cuando se produce la frenada de emergencia, el BAS mide la velocidad con la que el conductor suelta el acelerador y pisa el freno. Según la rapidez de esta acción y la presión sobre el pedal del freno, el sistema determina si se trata o no de una frenada de emergencia o no. Actúa siempre combinado con el ABS 5.4. Distribución electrónica de frenada (EBV o EBD)20 Complementarios del ABS La distribución o reparto electrónico de frenada (llamado EBV o EBD) es un sistema electrónico de asignación de capacidad de frenada que determina cuánta fuerza aplicar a cada rueda para detener al vehículo en un distancia mínima y sin que se descontrole. Funcionamiento: El distribuidor electrónico de frenada reparte la presión evitando el bloqueo del eje trasero, en caso de frenada brusca. A través de un sensor, se regula la frenada entre el eje delantero y trasero según el peso de cada uno, enviando más o menos presión a las ruedas. El reparto de pesos tiende a ir hacia delante por lo que el eje queda 'suelto'. El sistema calcula si el reparto es adecuado a partir de los mismos sensores del ABS. Ambos sistemas en conjunto actúan mejor que el ABS solo. Este último regula la fuerza de frenado de cada rueda según que se esté bloqueando o no, mientras que la asignación electrónica reparte la fuerza de frenado entre los ejes, ayudando a que el freno de una rueda no se sobrecargue (esté continuamente bloqueando y desbloqueando) y el de otra permanezca subutilizado. 5.5. Sistema de Frenos controlado Electrónicamente (EBS)21 Los reducidos tiempos de respuesta de este sistema brindan una sensación de frenado bien equilibrada y definida, independientemente de la carga que lleve el camión. Por otra parte los frenos de disco presentan una elevada capacidad de frenado, una gran resistencia al calentamiento y un mantenimiento simple. Funcionamiento: Al accionar el pedal de freno, el conductor determina la necesidad de frenado. La unidad de control del EBS transmite electrónicamente esta entrada a todos los componentes del sistema de frenos.
19 BAS, Brake Assist System, sistema de soporte del freno. 20 EBV, Electronic Brake Variation System, sistema electrónico de variación del freno o EBD, Electronic Brake Distribution System, sistema electrónico de distribución del freno 21 EBS, Electronically controlled Brake System, sistema de frenos controlado electrónicamente)

La electrónica embarcada
15-54
La activación electrónica de los componentes del EBS reduce drásticamente los tiempos de respuesta. La distancia de frenado se ve reducida considerablemente, lo que puede ser decisivo en muchas situaciones. Tiene integrada una función ABS que asegura la estabilidad y el dominio de la dirección durante el proceso de frenado. Posee un control diferencial de deslizamiento (DSR, differential slip control) que permite la distribución automática de la fuerza de frenado entre los ejes delanteros y traseros de acuerdo a la situación de carga del momento. Para el caso de configuración tractor-semirremolque, queda asegurada la óptima alineación de la unidad, Ambas partes frenan de acuerdo a sus masas relativas, optimizando el torque producido. 5.6. Programas de Estabilidad Electrónica (ESP)22 El sistema ESP favorece una acción de frenado segura y estable redistribuyendo la fuerza de frenado entre las ruedas según sea necesario. Corriente en los automóviles de alta gama, el sistema toma automáticamente el control del vehículo ante una situación de pérdida de estabilidad, ayudando a corregir su trayectoria, mediante la necesaria reducción de torque del motor y el frenado selectivo, aplicado sobre cada rueda, según la necesidad y el grado de peligro detectado. Se trata de una tecnología computarizada capaz de reducir en más de un 60% el riesgo de vuelcos al permitir mantener la estabilidad del vehículo detectando posibles deslizamientos o “patinadas” y previniéndolas. El Programa de Estabilidad ESP reúne las funciones de los sistemas ABS, EBD y del Control de Caja de Cambios (TCU). El sistema consta de una unidad de control electrónico, una unidad de control hidráulico, una bomba hidráulica controlada eléctricamente y un conjunto de sensores:
- de la velocidad en cada rueda, - del volante, - de movimientos laterales de la parte delantera del vehículo respecto de un
eje vertical y de aceleración lateral. Funcionamiento: Durante la conducción normal el EPS monitorea continuamente la conducción y la dirección del vehículo. Compara la dirección que trata de llevar el conductor (tomando en cuenta el ángulo de giro del volante) con la real del vehículo (midiendo la aceleración lateral, la tendencia del vehículo a rotar sobre sí mismo (yaw) y las velocidades de cada una de las ruedas. Cuando el ESP detecta la pérdida del control del volante y por lo tanto de la dirección, aplica los frenos, de modo automático, individual y selectivamente, sobre la rueda que lo necesite. Así, frenará la rueda direccional exterior para compensar un sobreviraje. Por el contrario, frenará las ruedas tractoras interiores para compensar un subviraje. De esta manera ayudará a mantener el vehículo en la dirección que el conductor pretenda. El ESP sólo actúa cuando detecta pérdida de control del manejo, cuando el vehículo no va hacia donde el conductor quiere dirigirlo. Esto puede suceder, por ejemplo, cuando las ruedas patinan al realizar cambios de dirección en una emergencia. Se
22 ESP, Electronic Stability Program, Programa Electrónico de Estabilidad"; también llamado ESC, Electronic Stability Control, control electrónico de estabilidad. Se han desarrollado sistemas similares con otros nombres, como VDC, Vehicle Dynamic Control, control dinámico del vehículo; DSC, Dynamic Stability Control, control dinámico de estabilidad o VSC, Vehicle Stability Control, control de estabilidad del vehículo.
La electrónica embarcada
16-54
realizan sobrevirajes o subvirajes, resultando en maniobras deficientes sobre caminos resbaladizos, terminando en hidroplaneo. Entonces el ESP mide la dirección del deslizamiento y aplica los frenos asimétricamente en cada una de las ruedas a fin de crear un torque sobre el eje vertical del vehículo que sea opuesto al del deslizamiento, devolviendo al vehículo a la línea de avance que pretende el conductor. Adicionalmente, el sistema puede reducir la potencia del motor o actuar sobre la caja de cambios para desacelerar el vehículo pasando a un cambio más bajo. El ESP actúa sobre cualquier superficie, desde hielo a pavimento seco y limpio. Reacciona corrigiendo el deslizamiento mucho más rápido y efectivamente que el conductor, aun antes de que el mismo se percate de cualquier inminente pérdida de control. De hecho este sistema puede alertar al conductor demasiado confiado en sus habilidades de manejo, informando cuando ha intervenido, de manera que éste sepa cuando ha alcanzado el límite de su pericia al volante. Normalmente se enciende sobre el tablero una luz y/o suena un tono de alerta. En ocasiones permite que el curso corregido del vehículo se aparte ligeramente del deseado por el conductor, para que éste busque por sí mismo ajustar el volante en la dirección pretendida. El sistema no apunta a optimizar las performances ni a reemplazar al conductor sino que se trata de una tecnología diseñada para asistirlo en situaciones peligrosas. El ESP no incrementa la tracción, de modo que no habilita a tomar las curvas a mayor velocidad, aunque puede facilitar un mayor control en curvas. En líneas generales el ESP trabaja dentro de los límites y posibilidades de manejo del vehículo y de la factibilidad de “agarre” de las ruedas sobre el camino. Un manejo temerario puede sobrepasar estos límites, con la consiguiente pérdida de control. Por ejemplo, en un escenario de severo hidroplaneo o “aquaplanning”, las ruedas que el ESP usaría para compensar una pérdida de control podrían perder inicialmente su contacto con la superficie del camino, reduciendo su efectividad. 5.7. Sistema de Suspensión Electrónica (ESS)23 Se trata de un sistema que permite conectarse al ESP y que ofrece al conductor seguridad, confort y agilidad en la conducción. Elimina o minimiza el cabeceo y los saltos, reduce el movimiento de la carrocería y la fluctuación de las ruedas bajo las cargas. Funcionamiento: Incluye control y gestión electrónica de la suspensión neumática. Adapta automáticamente las características de amortiguación y suspensión de sus resortes neumáticos y nivela el vehículo en función de las condiciones de carga y funcionamiento. Permite la elevación automática del eje levadizo o tercer eje. También permite regular la altura de la unidad de acuerdo a la situación. 5.8. Sistemas Suplementarios de Seguridad (Bolsas inflables o Airbags)24 Las bolsas de aire han sido diseñadas para desplegarse en caso de colisiones, cuando son alcanzados o sobrepasados los umbrales de las magnitudes que diversos sensores miden. Su funcionamiento está controlado por la ACU o Airbag Control Unit. Una vez producido el inflado de la bolsa, el gas escapa de forma controlado a través de pequeños agujeros. El volumen de la bolsa y el tamaño de los agujeros
23 ESS, Electronic Suspension System 24 También denominados SRS, Supplemental Restraint System o sistemas suplementarios de seguridad
La electrónica embarcada
17-54
dependen de cada tipo de vehículo, de manera de distribuir en el tiempo y en la superficie corporal del ocupante la fuerza de inercia producida. Funcionamiento: Las señales recibidas de los sensores llegan a la unidad de control, la que determina, de acuerdo al ángulo de impacto, la severidad o fuerza del impacto, junto con otras variables. De acuerdo a su diseño y según el resultado de los cálculos que realice la unidad de control, se podrán desplegar dispositivos de seguridad adicionales. Cada dispositivo es normalmente activado por uno o más dispositivos pirotécnicos, llamados iniciadores o encendedores eléctricos. En la bolsa el iniciador se usa para encender un propulsor sólido dentro del inflador de la bolsa. El propelente en combustión genera gas inerte que rápidamente infla la bolsa en aproximadamente 20 ó 30 milisegundos. Las bolsa quedará totalmente inflada en entre 60 a 80 milisegundos después del momento de la colisión. 5.9. Control Adaptado de Velocidad de Crucero (ACC)25 Este sistema ayuda al conductor a mantener:
- la velocidad previamente elegida si no existen vehículos dentro de una distancia dada
- un tiempo constante de separación, o sea una distancia de seguridad con el vehículo que va adelante y lo alerta si la distancia se hace menor de lo seguro.
Funcionamiento: El sistema utiliza un sensor con radar de largo alcance para detectar si el camión se acerca excesivamente al vehículo a su frente y ajustar velocidad e intervalo de tiempo. La unidad de control analiza la velocidad en ruta, recibe datos del motor, de los frenos de ruedas y otros dispositivos, para mantener el tiempo de separación seteado. El sistema ACC mantiene la distancia de seguridad mediante al accionamiento automático del acelerador y los frenos. La velocidad del vehículo propio se ajusta a la del vehículo de adelante mediante la reducción del suministro de combustible al motor y aplicando el retardador y el freno de motor. Si este procedimiento no puede reducir la velocidad del vehículo lo suficiente, el conductor recibe una alerta visual y acústica para que accione personalmente los frenos. En otras palabras, si bien el ACC alerta al chofer de si existe una reducción repentina de la distancia de separación, nunca se hace cargo, ni toma el control de la conducción completamente, para evitar la pérdida de atención por acostumbramiento o exceso de confianza en el sistema. El sistema tiene dos modos, Control de Velocidad de Crucero y Control de Intervalo de Tiempo. El primero es cuando no existen vehículos delante del propio. El ACC controla la velocidad del vehículo de acuerdo al seteo realizado. Es típico de los controles de velocidad de crucero convencionales. El segundo es cuando lo que controla el ACC es el intervalo de tiempo entre vehículos El sistema cambia automáticamente entre los modos Control de Velocidad de Crucero e Intervalo de Tiempo (seguimiento). El modo de operación se determina de acuerdo a la velocidad más baja. Cuando en el rango de medición no encuentra ningún vehículo, el ACC acelera otra vez automáticamente hasta alcanzar la velocidad de crucero prevista. 5.10. Sistema de alerta por abandono de carril (LDWS)26 25 ACC, Adaptive Cruise Control 26 LDWS, Lane Departure Warning System.También denominado LKS, Lane Keeping Support, Sistema de apoyo para la permanencia en el carril

La electrónica embarcada
18-54
Se trata de un dispositivo diseñado para alertar al conductor cuando el vehículo comienza a desplazarse fuera de su carril en autopistas o carreteras, en condiciones de circulación monótonas. Se trata de un verdadero apoyo cuando el conductor está cansado o pierde la concentración. El sistema comenzó a utilizarse en 2000, en Europa, por el Mercedes Actros. Existen dos variantes principales:
- Sistemas que alertan al chofer si el vehículo está abandonando el carril. - Sistemas que alertan al chofer y si éste no toma acción alguna,
automáticamente el sistema ejecuta comandos que aseguran la permanencia del vehículo en su carril.
Funcionamiento: En todos estos sistemas el chofer es alertado de un desplazamiento fuera de su carril por un tono de tamborileo audible y sensible por el cuerpo. La alarma cesa si el conductor activa la señal de giro. Actualmente los sistemas más efectivos combinan la prevención con el informe de riesgos, debidos fundamentalmente al cansancio y a la distracción, a fin de eliminar comportamientos riesgosos en el transporte. 5.11. Sistema de respaldo durante cambio de carril (LCS)27 El sistema vigila el ángulo muerto de la parte trasera del lado del acompañante que los espejos retrovisores no cubren y lo alerta de posibles colisiones laterales Funcionamiento: Cuando el conductor acciona la luz de giro para cambiar de carril, el radar del LCS comprueba si hay algún vehículo en el sector que cae en el ángulo muerto de los espejos del camión. Si es así, alerta al conductor mediante una señal luminosa. 5.12. Alerta de Cansancio del Conductor (DAS)28 Si el conductor comienza a zigzaguear, el DAS lo alerta con una señal sonora y una indicación intermitente aparece en el panel de mando del conductor invitándolo a tomar un descanso. Funcionamiento: El sistema DAS controla variables como los movimientos del volante y de los pedales. Una pequeña cámara de video dentro del parabrisas registra las señales horizontales del centro y borde de la carretera. Una unidad de control compara los movimientos del volante con las líneas sobre el piso. 5.13. Control de ascenso en Pendientes (HHC)29 Esta función mantiene el vehículo frenado mientras el conductor desplaza el pie del pedal del freno al acelerador. Esta característica mejora la seguridad además de resultar muy útil y cómoda. La HHC aprovecha los recursos del programa de estabilidad electrónica del vehículo (ESP). Proporciona a los vehículos con transmisión manual una capacidad de arranque en pendiente similar a la de los vehículos con transmisión automática. Funcionamiento: La función HHC impide que el vehículo se mueva involuntariamente, tanto en subida como en descenso. El sistema se encarga de suministrar el par de frenado suficiente como para mantener inmovilizado el vehículo durante el tiempo que transcurre desde que el conductor suelta el pedal del freno hasta que se completó el embragado. El torque suministrado por el motor será el apropiado para que el vehículo pueda iniciar el ascenso. 5.14. Dirección asistida electrónicamente (EPS)30
27 LCS, Lane Changing Support, Sistema de respaldo durante cambio de carril 28 DAS, Driver Alert Support, alerta de cansancio del conductor 29 HHC, Hill Hold Control, control de agarre en subida 30 EPS, Electronic Power Steering, dirección electrónica potenciada

La electrónica embarcada
19-54
La EPS amplifica el par de giro que realiza el conductor sobre el volante del vehículo para accionar la dirección Funcionamiento: la EPS utiliza un motor eléctrico unido al rack del volante a través de un mecanismo de engranajes. Una unidad de control gestiona la dinámica de la dirección y el esfuerzo del conductor. Los sensores toman la velocidad del vehículo y su dirección, el torque de las ruedas, posición angular de la misma y su tasa de giro. 5.15. Sistema de Control de Tracción (ASR)o(TCS)31 Es un sistema de diseñado para prevenir la pérdida de adherencia cuando el conductor se excede en la aceleración del vehículo y el torque producido no alcanza dadas las condiciones de la superficie del camino. Normalmente se trata de sistemas electro-hidráulicos. Es similar al ESP pero con menor nivel de prestaciones. Funcionamiento: Empleando los mismos sensores y accionamientos que emplea el ABS, verifica si en la aceleración una de las ruedas del eje motriz del automóvil patina. En tal caso, el sistema actúa con el fin de reducir el par de giro y así recuperar la adherencia entre la rueda y el suelo, realizando una (o más de una a la vez) de las siguientes acciones:
- Reducir la inyección de combustible a uno o más cilindros. - Frenar la rueda que ha perdido adherencia. - Reducir la entrada de aire a través del turbocompresor y por lo tanto
reduciendo la potencia del motor. 5.16. Toma de fuerza con gestión electrónica La toma de fuerza es un eje en rotación que trasmite energía para el accionamiento de las máquinas acopladas a la unidad. Transmiten la potencia del motor a los equipos que acciona (cisternas, grúa, etc.). Funcionamiento: gestión electrónica de la toma de fuerza a través de la regulación del régimen del motor, para mayor seguridad. 5.17. Sistema de gestión de la producción de aire (APM)32 Es el sistema gestión electrónica de todo el sistema de producción y de distribución de aire. Funcionamiento: Aumenta la seguridad y fiabilidad en la conducción y simplifica el mantenimiento: es mayor el ciclo de la vida del cartucho en el que está incorporado el filtro de aceite. Comparando con la producción mecánica tradicional de aire, el APM economiza combustible, se suprime un depósito de aire, se recargan automáticamente los depósitos, se da prioridad al inflado para los frenos, el sistema da aviso y permite regenerar el cartucho oportunamente. 5.18. Sistema de Monitorización de Presión de Neumáticos (TPMS)33 Sistema electrónico que permite monitorear en tiempo real y desde el interior del vehículo, la presión en cada uno de los neumáticos. Permite la detección de pinchaduras y evita que se pierda la presión de los neumáticos. Alertan al conductor sobre el panel de instrumentos con un indicador luminoso o un pictograma. Funcionamiento: Existen tipos de monitoreo, uno es conocido como método indirecto, que estima la presión a partir los sensores del ABS o del ESP. Toman en
31 ASR, Anti-Slip Regulation, regulación anti-deslizamiento. También llamada TCS, Traction Control System, sistema de control de tracción 32 APM, Air Production Management 33 TPMS, Tire-Pressure Monitoring System. Conocido también como TPIS, Tire-Pressure Indication System. Calibradores Electrónicos de Neumáticos

La electrónica embarcada
20-54
cuenta velocidades de giro y otros datos que dan una referencia indirecta de lo que sucede dentro de la rueda. Su principal ventaja es el bajo costo de implementación, dado que utiliza dispositivos existentes en el vehículo. Tiene el inconveniente de ofrecer lecturas no muy exactas. El otro se llama método directo. Emplea los sensores de presión propios situados en las válvulas de los neumáticos para enviar los valores tomados al panel de instrumentos. Este sistema puede identificar la pérdida de presión, en forma simultánea, en todas las ruedas. Los sensores utilizados verifican aumentos de presión por calentamiento producidos por el ambiente o por la fricción con el piso. Los valores obtenidos son transferidos por radiofrecuencia o por acoplamiento electromagnético hasta la unidad de control del vehículo, donde son procesados. Las ventajas de este sistema son un valor más exacto de la presión y la posibilidad de medir la temperatura de los neumáticos. La desventaja es su mayor costo. 6. Sistemas para mejorar el rendimiento de la planta motriz y reducir la contaminación 6.1. Introducción Estos sistemas forman parte del módulo motor y están unidos al block de la planta motriz. Al mismo tiempo, este módulo motor está relacionado con los sistemas de seguridad que constituyen el llamado módulo del chasis. A través de las unidades de control correspondientes estos módulos reciben los datos de los sensores, distribuidos en todo el vehículo, los procesan y envían diagnósticos o alertas y/o generan comandos en forma de señales eléctricas sobre los actuadores repartidos en todo el automotor. Ambos están al servicio del conductor, la seguridad, el rendimiento del vehículo y las restricciones en las emisiones contaminantes La actividad del transporte genera impacto El transporte automotor de cargas utiliza principalmente motores ciclo Diesel porque estos motores tienen un alto rendimiento energético y una mayor vida útil. Sin embargo, debido a las altas temperaturas que se alcanzan durante la combustión y a que en estos motores se trabaja con oxígeno en exceso, debido a la sobrealimentación realizada para asegurar la máxima combustión, se generan muy altos niveles de óxidos de nitrógeno (NOx), altamente contaminante y componente importante del smog. Por otra parte toda vez que se quema material orgánico se produce dióxido de carbono (CO2), compuesto que favorece la producción del efecto invernadero y el calentamiento global. El compromiso actual está entre los mayores rendimientos que ofrecen los motores Diesel y el aporte inevitable que hacen de NOx al ambiente. De manera que las tecnologías que ofrezcan mayores rendimientos no sólo generan mayor economía sino que colaboran en la reducción del CO2 y con una menor producción de contaminantes. 6.2. Turbocompresor de geometría variable (VGT)34 controlado
electrónicamente Un turbocompresor es un sistema de sobrealimentación que usa una turbina y un compresor para enviar aire al sistema de admisión del motor. Este dispositivo permite mayor entrega de aire y por lo tanto de oxígeno a los cilindros, con lo que se obtiene mayor nivel de torque y potencia. Al mismo tiempo se logra menor
34 VGT, Variable geometry turbocharger, turbocompresor de geometría variable. Otras denominaciones son, VTG, Variable Turbine Geometry, VGT, Variable Geometry Turbo y VVT, Variable Vane Turbine.

La electrónica embarcada
21-54
producción de CO, combustible sin quemar y MP. Esto se traduce en una importante economía de combustible y menor contaminación del ambiente. Los gases de la combustión impulsan una turbina que comparte el mismo eje con el compresor que envía al múltiple de admisión el aire que toma del exterior. Sin embargo se presentaban inconvenientes en la entrada de aire a los cilindros por las diferencias de caudal de gases en bajas y en altas revoluciones del cigüeñal. Se diseñó entonces la válvula “wastegate” que compensaba reumáticamente las diferencias de caudal de los gases de escape. Más adelante se diseño el turbocompresor de geometría variable que tiene la capacidad de comprimir el aire con mucha mayor eficacia tanto a altas revoluciones como a bajas. Funcionamiento: El turbocompresor presenta un mecanismo de "aletas" o álabes móviles que se abren y cierran haciendo variar la velocidad de los gases de escape al entrar en la turbina, a menor caudal de gases de la combustión (bajas revoluciones) se estrecha el paso entre los álabes haciendo, por efecto Venturi, que los gases aumenten la velocidad al entrar en la turbina, a mayor caudal (altas revoluciones) no se necesita reducir el paso y se abren los álabes. Esto permite tener una presión de trabajo muy parejo en todo el rango de revoluciones del motor. La ventaja del VGT sobre el turbo controlado por “wastegate es que todo el flujo de gases se aprovecha sobre la turbina e incrementa la potencia que la misma entrega. El control mecánico de la VGT es muy elaborado y no se pueden obtener todas las posibilidades del turbocompresor. Su control electrónico ofrece una alternativa superior. En este caso una válvula electro neumática modifica el ángulo de ajuste de los alabes para variar la velocidad de los gases de escape que inciden en la turbina del turbo. De esa manera el control electrónico permite controlar mucho mejor el caudal de aire entregado al motor para máxima performance, a través de un conjunto de sensores y de actuadores, obteniéndose mayores valores de potencia con alto torque, manteniendo un mejor balance entre las emisiones de MP y NOx y el consumo de combustible. Al ser monitoreado y gobernado electrónicamente, el flujo de aire puede ser controlado en un amplio rango de temperatura y presión atmosférica. Esto implica también compensar electrónicamente el envejecimiento del motor a lo largo de todo su ciclo de vida. 6.3. Inyección electrónica de combustible (EFI)35 Estos sistemas utilizan inyectores controlados por microprocesador para inyectar combustible dentro de los cilindros. El inyector es básicamente una válvula y una boquilla o tobera, su capacidad de inyectar combustible proviene una bomba que genera presión sobre el combustible que deberá inyectarse atomizado en los cilindros. El proceso de determinar la cantidad necesaria de combustible y su introducción en el motor se conoce como suministro de combustible. Casi todos los sistemas actuales de inyección Diesel son electrónicos. Un conjunto de sensores envía datos a la unidad de control. La unidad de control del motor calcula la masa de combustible a inyectar y los inyectores realizan el suministro de combustible a los cilindros. Funcionamiento: Los sensores registran las condiciones operativas del motor y la informan a la unidad de control electrónico.
35 EFI, Electronic Fuel Injection

La electrónica embarcada
22-54
- Un sensor montado sobre el inyector toma el movimiento de la aguja en el comienzo de la inyección.
- La presión de la masa de aire que ingresa por el múltiple de admisión es medida por un sensor de presión aire.
- El sensor del régimen del motor y posición, de tipo inductivo, manda los datos a la unidad de control.
- La medida de la masa de aire aspirado se toma con un caudalímetro. - Un sensor de líquido refrigerante informa de la temperatura del motor. - Otro sensor mide la posición del pedal del acelerador, que también informa de
la posición de marcha en punto muerto. - Una sonda de temperatura del combustible la mide en la bomba de
combustible, otro sensor mide el caudal. La unidad de control recibe los datos, los procesa y se preparan las instrucciones para los actuadores. Toda la actividad queda registrada y se envía al tablero del conductor (...). En caso de falla la unidad de control establece un funcionamiento de emergencia que permite que el vehículo llegue hasta el lugar donde se le pueda hacer mantenimiento. La unidad de control del motor es el cerebro que controla el funcionamiento del motor. Su microprocesador controla el sistema de inyección de acuerdo a los datos que recibe de los sensores. Reacciona ante cualquier cambio en ele motor en tiempo real, compensando y adaptándose a los factores que puedan afectar el rendimiento del motor, logrando una mejor respuesta del motor, mayor kilometraje y menores emisiones Los actuadores reciben los comandos de la unidad de control y transforman las señales eléctricas en acción sobre los subsistemas. Los más importantes son:
- La válvula de recirculación de los gases de escape (EGR). En caso de existir este sistema.
- La válvula de control de presión del turbocompresor - La válvula de corte de suministro de combustible, caudal de inyección y
corrección del avance la inyección en la bomba de combustible. La regulación del caudal y del avance de la inyección se gobierna electrónicamente, optimizándose la cantidad de combustible inyectada, de acuerdo a las necesidades de marcha del motor. Los dispositivos de control electrónico a las bombas de inyección han permitido reducir notablemente los consumos de combustible y la emisión de gases contaminantes. 6.3.1. Sistema de inyección “Common Rail” El sistema “Common Rail” (CRS) es un sistema de inyección con un Acumulador o Riel Común. Su diferencia con otros tipos de sistemas de inyección está en la presurización y en los procesos de inyección los cuales son completamente independientes el uno del otro. El sistema tiene la capacidad de realizar múltiples inyecciones y flexibilidad para modificar cada inyección según los requerimientos. Con esto se logra un rendimiento mayor del motor en cuanto a economía de combustible, respuesta dinámica y suavidad de marcha. Funcionamiento: La estructura del sistema de inyección es, básicamente, como sigue, existe un sensor de masa de aire o sensor de presión absoluta en la entrada del múltiple de admisión y mide la masa de aire que entra, dándole a la computadora una medida precisa del la masa de aire que entra en el motor.
La electrónica embarcada
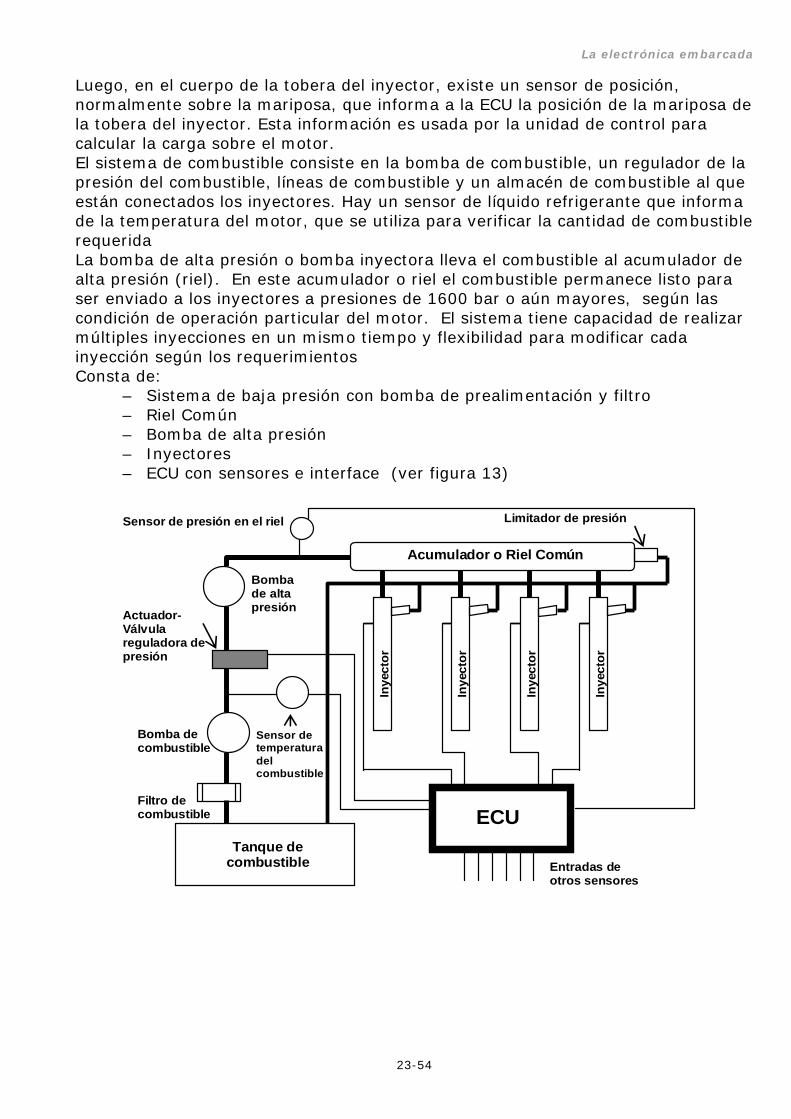
23-54
Luego, en el cuerpo de la tobera del inyector, existe un sensor de posición, normalmente sobre la mariposa, que informa a la ECU la posición de la mariposa de la tobera del inyector. Esta información es usada por la unidad de control para calcular la carga sobre el motor. El sistema de combustible consiste en la bomba de combustible, un regulador de la presión del combustible, líneas de combustible y un almacén de combustible al que están conectados los inyectores. Hay un sensor de líquido refrigerante que informa de la temperatura del motor, que se utiliza para verificar la cantidad de combustible requerida La bomba de alta presión o bomba inyectora lleva el combustible al acumulador de alta presión (riel). En este acumulador o riel el combustible permanece listo para ser enviado a los inyectores a presiones de 1600 bar o aún mayores, según las condición de operación particular del motor. El sistema tiene capacidad de realizar múltiples inyecciones en un mismo tiempo y flexibilidad para modificar cada inyección según los requerimientos Consta de:
– Sistema de baja presión con bomba de prealimentación y filtro – Riel Común – Bomba de alta presión – Inyectores – ECU con sensores e interface (ver figura 13)
ECUTanque de
combustible
Acumulador o Riel Común
Inye
ctor
Inye
ctor
Inye
ctor
Inye
ctor
Limitador de presión
Actuador-Válvula reguladora de presión
Sensor de presión en el riel
Sensor de temperatura del combustible
Bomba de alta presión
Bomba de combustible
Filtro de combustible
Entradas de otros sensores

La electrónica embarcada
24-54
Figura 13 - Diagrama de un sistema de inyección “Common Rail”
6.3.2. Inyectores electrónicos La ECU controla electrónicamente la inyección de combustible. Calcula la duración de la inyección (definiendo la cantidad de combustible a introducir en cada cilindro) determinando para cada inyector los puntos de apertura y cierre de las toberas, determinando comienzo y fin de la inyección. La cantidad óptima de combustible inyectado depende de condiciones tales como rapidez de giro del cigüeñal, temperatura ambiente, esfuerzo requerido al motor, etc. El inyector controlado electrónicamente se encuentra normalmente cerrado. Un émbolo metálico que regula la apertura y cierre de la tobera del inyector, se encuentra envuelto por un bobinado. Figura 14-Inyector electrónico Cuando circula corriente eléctrica por el bobinado, se genera un campo magnético que atrae el émbolo, que permite la apertura de la tobera. El combustible es expelido a altísima presión, la duración de esta operación, llamada ancho de pulso, determina la cantidad de combustible inyectado. (Ver figura 14). La duración de esta operación es proporcional a la cantidad de combustible deseada. La velocidad de operación es tan grande que en un mismo tiempo de inyección se pueden realizar varios suministros parciales de combustible. Existen actualmente motores Diesel que poseen inyectores llamados “piezoeléctricos” que permiten aun mayor precisión en la operación, necesaria para cumplir con las mayores exigencias con respecto a consumo y contaminación. Los recientemente desarrollados inyectores piezoeléctricos pueden suministrar microinyecciones de entre cientos y miles de veces por segundo, entregando muy pequeñas cantidades, precisamente controladas por la ECU, de gasoil. Esto permite un extremadamente exacto control del proceso de combustión. Estos nuevos inyectores precisan del control por computadora y pueden ser conectados a otros dispositivos electrónicos del vehículo que pueden dar información sobre el modo de conducción, posición de las válvulas, temperatura ambiente y otra mediciones, que combinadas pueden aumentar la eficiencia de los motores y la administración del combustible. Pequeñas cantidades de gasoil pueden ser inyectadas previamente, encabezando la combustión principal, generando ciclos más suaves, eliminando los golpeteos y cabeceos de los antiguos motores Diesel y reduciendo las vibraciones. 6.3. Módulo de Control de Caja de Cambios (TCM)36 Se trata de un dispositivo que controla el funcionamiento de las cajas de cambio automáticas. La caja automática se controla electro-hidráulicamente. Utiliza una Unidad de control de la caja de cambios (TCU)37. Funcionamiento: la TCU toma los datos de los sensores en los engranajes de la caja y los entregados por la Unidad de Control de Motor para calcular cómo y cuándo
36 TCM, Transmission Control Module, módulo de control de la caja de cambios 37 TCU, Transmision Control Unit, unidad de control de la caja de cambios
La electrónica embarcada
25-54
realizar los cambios para obtener el óptimo desempeño del vehículo, economía de combustible y definiendo el cambio a colocar. La integración y el desarrollo de las cajas automáticas y los controles electrónicos han producido grandes mejoras en los últimos años. Las cajas de cambios automáticas han pasado de ser únicamente de control hidráulico a poseer control electrónico desde fines de la década de 1980. Existen controles electrónicos en varios niveles de diseño. Desde entonces su evolución ha sido constante. El componente clave de estas Unidades de Control es el Solenoide de Transmisión, que es una válvula que controla la presión del fluido que circula dentro de la caja de engranajes y del convertidor de torque. Los solenoides están normalmente abiertos o cerrados y operan a partir de las señales eléctricas recibidas del microcontrolador. Las actuales cajas de cambios automáticas permiten optimizar la conducción, son más confiables en su funcionamiento, permiten realizar cambios más suaves y rápidos, brindan mayor economía de combustible y menores emisiones contaminantes. 6.4. Módulo de Control del Tren de Potencia (PCM)38 A veces las funciones de la unidades de control del motor (ECU) y de control de la caja de cambios (TCU) van combinadas y se las conoce como Módulo del Tren de Potencia (Powertrain Control Module, PCM). Funcionamiento: el PCM controla,
- el sistema de inyección de combustible, - los tiempos de ignición en los motores ciclo Otto, - el funcionamiento del motor en punto muerto, - el aire acondicionado, - la capacidad ociosa de entrega de potencia, - el funcionamiento de la caja de velocidades, - el relay de control de entrega de combustible, - la recirculación de los gases de escape, - la inyección del combustible, - el régimen de revoluciones del cigüeñal, - la presión de la bomba de combustible, - los tiempos del motor y - la proporción entre aire y combustible que ingresan a los cilindros.
Su microprocesador funciona según un programa con las especificaciones y rangos para determinados parámetros. Si se modifica esta información, las instrucciones cambiarán. De tal modo es posible cambiar las performances deseadas.
7. Sistemas de control de emisiones de escape para reducir la
contaminación producida por la combustión 7.1. Introducción La actividad de los motores de combustión interna contribuyen a la emisión de contaminantes en el aire, los más importantes son:
- Monóxido de carbono, (CO). - Hidrocarburos no quemados. - Partículas sólidas o material particulado, (MP)39, también conocido como
“humo negro” u hollín. 38 PCM, Powertrain Control Module 39 MP: Partículas micrométricas con compuestos de hidrocarburos y aceites lubricantes resultantes de la combustion incompleta de los hidrocarburos.

La electrónica embarcada
26-54
- Óxidos de nitrógeno, (NO y NO2, se los denomina NOx). A los que podemos agregar, importantes compuestos sulfurosos si los combustibles no han recibido los tratamientos correspondientes y el dióxido de carbono (CO2), que si bien no es contaminante contribuye significativamente al efecto invernadero. A medida creció en todo el mundo la preocupación por preservar el medio ambiente, se trazaron políticas de mediano y largo plazo para desarrollar comportamientos y tecnologías orientadas a disminuir el impacto sobre la contaminación por la utilización de los motores de combustión interna. Los motores Diesel, debido a su alto rendimiento energético y su larga vida útil, son de amplia difusión en el transporte de cargas. Pero las altas temperaturas que se generan durante la combustión y a que al ser estos motores sobrealimentados, ingresa gran cantidad de oxígeno para asegurar la máxima combustión. Se generan en consecuencia muy altos niveles de de óxidos de nitrógeno (NOx). Si bien los motores Diesel producen bajos niveles de hidrocarburos no quemados y de monóxido de carbono (CO) sus emisiones de óxidos de nitrógeno (NOx) y material particulado (MP) son de considerable importancia40. Existe un compromiso entre la emisión de NOx y MP de modo que los dispositivos creados para reducir las emisiones de NOx llevan al aumento de emisiones de MP. El mismo compromiso existe entre las emisiones de NOx y la eficiencia en el consumo de combustible, lo que no sólo implica un impacto económico sino que aumenta la emisión de CO2 con su consiguiente influencia en el calentamiento global. Los standards europeos, americanos y japoneses sobre emisiones, cada vez más exigentes, son aceptados mundialmente y apuntan a reducir año a año la producción de contaminantes. Las terminales de fabricación de camiones agregan distintos dispositivos a la salida del múltiple de admisión (aftertreatment) fin de cumplir con las normativas vigentes y futuras. Estos dispositivos logran reducir la producción de contaminantes aunque aportan inconvenientes en aspectos como el consumo, merma de potencia y mayor mantenimiento mecánico. Es en este punto donde la incorporación de las nuevas tecnologías en la forma de electrónica embarcada cobra gran importancia y juega un rol preponderante en el equilibrio entre las exigencias ambientales y la necesidad económica de obtener cada vez mayor rendimiento de los vehículos. 7.2. Recirculación de gases de escape (EGR)41en los motores Diesel El sistema EGR fue diseñado para reducir la generación de óxidos de nitrógeno (NOx) en los gases de la combustión. Se utiliza en motores ciclos Otto y Diesel. Dentro de los cilindros se quema el combustible a temperaturas muy altas42, esta circunstancia hace que se produzca una muy alta emisión de NOx. Un procedimiento para reducir esta importante emisión contaminante es disminuir la temperatura de combustión dentro de los cilindros. Funcionamiento: Para disminuir la temperatura se reintroducen parte de los gases de escape (de un 5 a un 15% y no más de un 30 %) en el múltiple de admisión. Estos diluyen la mezcla de aire y combustible dentro de la cámara y reducen su temperatura, limitando la combinación del nitrógeno con el oxígeno. En 40 A la inversa que los motores nafteros o ciclo Otto. 41 EGR,Exhaust Gas Recirculation 42 Aproximadamente 800oC
La electrónica embarcada
27-54
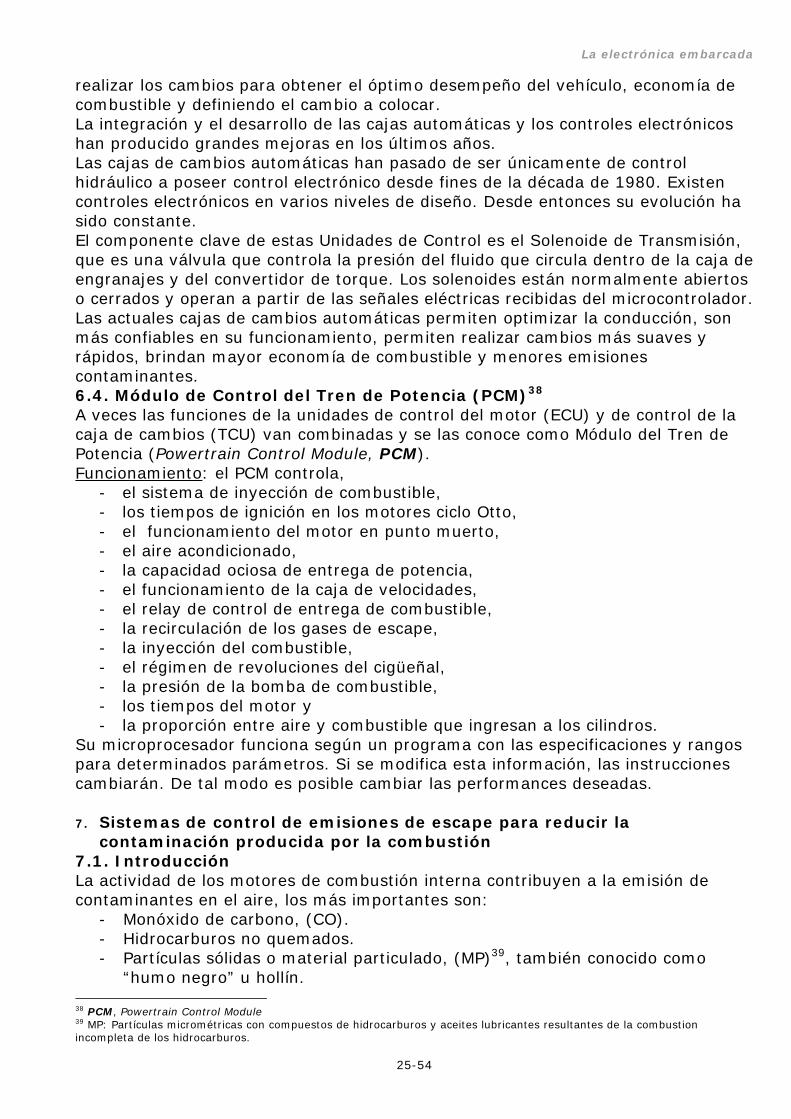
consecuencia cae la generación de NOx. La tasa de reducción está en alrededor de más del 50%. La proporción de gases de escape reintroducidos se gobierna a través de una unidad de control (ECU) que recibe los datos de sensores de sobrepresión a la salida del intercooler y de un medidor de masa de aire. El sistema también toma en cuenta el régimen motor, la masa de combustible inyectado, la temperatura del motor y la presión atmosférica. La ECU comanda una electroválvula de control de vacío que gobierna la válvula EGR, que toma parte de los gases de la combustión y que los dosifica a la salida del intercooler sobre el múltiple de admisión. (Ver figura 15) Mediante el uso de la recirculación de los gases de escape se consigue reducir las emisiones de NOx pero, por otro lado, se incrementan las de monóxido de carbono, combustible sin quemar y material particulado (incrementado ligeramente el consumo). Para corregir estos inconvenientes se emplean conversores catalíticos. Éstos cuentan con una cámara cerámica recubierta de una serie de substancias químicas que hacen posible compensar estos incrementos. También se recurre, como lo hace la empresa Volvo, a complementar la acción de la recirculación de gases con el uso de turbo de geometría variable (VGT), integrado al sensor de sobrepresión y a la válvula EGR. Los nuevos motores Diesel con EGR, los gases de la combustión son enfriados a través de un intercambiador de calor para permitir la introducción de mayor cantidad de gases recirculados.
Intercooler
turbocompresor
medidor de masa de aire
aireunidad de control
presiónatmosférica
gases de la combustión
vacío generado por la bomba de vacío
Electroválvula de control de vacío
válvula EGR
sensor de sobrepresióndel turbo
Diagrama esquemático EGR
Intercooler
turbocompresor
medidor de masa de aire
aireunidad de control
presiónatmosférica
gases de la combustión
vacío generado por la bomba de vacío
Electroválvula de control de vacío
válvula EGR
sensor de sobrepresióndel turbo
Diagrama esquemático EGR
La electrónica embarcada
28-54
Figura 15 - Diagrama esquemático de un sistema EGR
7.3. Convertidores catalíticos Un catalizador acelera las reacciones químicas sin sufrir éste ningún cambio permanente. La función de estos catalizadores es convertir las emisiones contaminantes producidas en el motor en emisiones menos dañosas antes de que abandonen el sistema de escape del vehículo. Los convertidores catalíticos empleados en los vehículos automotores consisten en estructuras de material cerámico, cubiertas de finas capas de platino, rodio y/o paladio y aun oro. Estas estructuras toman la forma de panal de abejas (tubos hexagonales), ya que de este modo se consigue que los gases de escape encuentren una superficie lo más grande posible de material catalizador. Se colocan en los sistemas de escape y actúan sobre los gases producidos en la combustión. Se busca con su acción reducir los niveles de contaminantes lo más posible, obteniendo en cambio CO2 y agua. En los motores Diesel se emplean sistemas de conversión catalítica como se describen a continuación. 7.3.1. Convertidores catalíticos de oxidación (o de dos vías) Este tipo de convertidores catalíticos son ampliamente usados en motores Diesel (ver figura 16). Funcionamiento: Los convertidores catalíticos de oxidación se utilizan para oxidar el CO el MP (residuos de aceites lubricantes y combustibles, producto formado por combustión incompleta de los hidrocarburos). Apunta a oxidar los hidrocarburos unidos a las micropartículas, reduciendo de esta manera la masa total de MP, es decir de humo negro u hollín.
- Oxidación de monóxido de carbono a dióxido de carbono: 2CO + O2 → 2CO2 - Oxidación de hidrocarburos no quemados y parcialmente quemados a dióxido
de carbono y agua: CxH2x+2 + 2xO2 → xCO2 + 2xH2O (reacción de combustión)
Muy eficaces en su función, eliminan virtualmente el olor a combustible y gran parte del humo, sin embargo no son capaces de reducir las emisiones de NOx debido al exceso de oxígeno llevado a los cilindros. Para reducir estas emisiones se han diseñado los sistemas de recirculación de gases (EGR), los de Reducción catalítica selectiva (SCR) y últimamente los adsorbedores de NOx (tecnologías creadas en 2006). Por otra parte, estos convertidores dejan aún partículas de carbono puro (restantes de la oxidación del MP). Estás partículas se limpian a través de trampas de hollín de
La electrónica embarcada
29-54
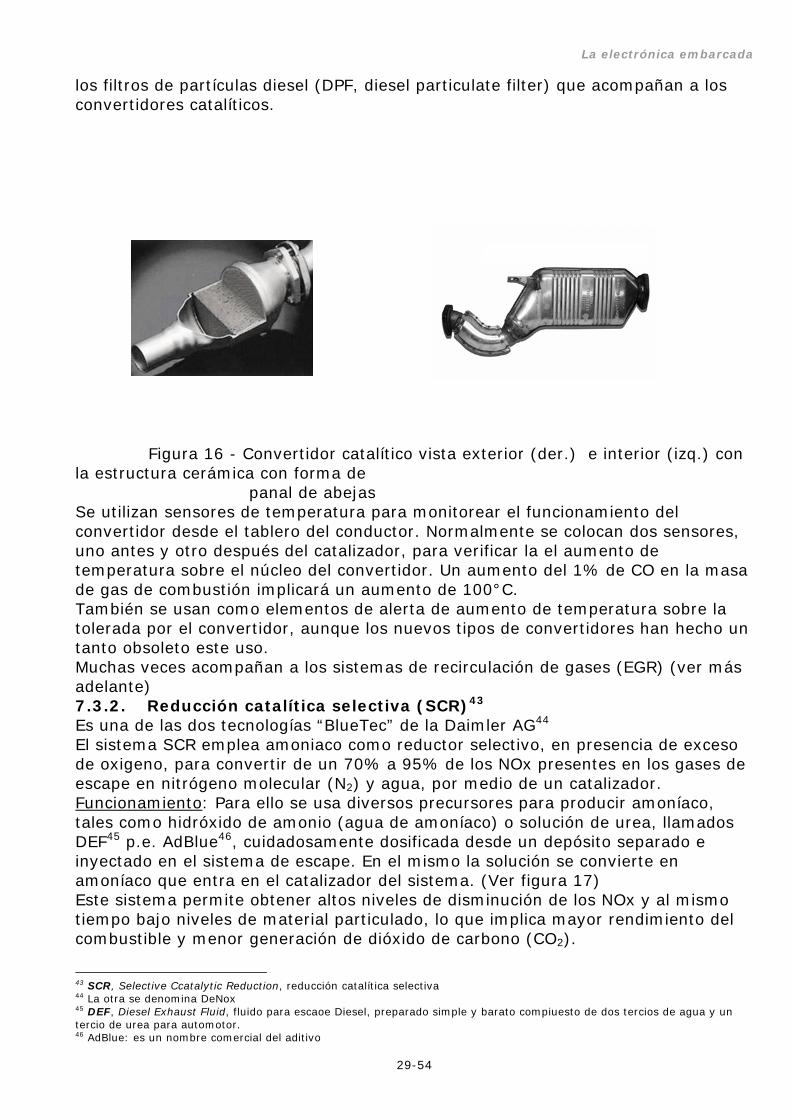
los filtros de partículas diesel (DPF, diesel particulate filter) que acompañan a los convertidores catalíticos. Figura 16 - Convertidor catalítico vista exterior (der.) e interior (izq.) con la estructura cerámica con forma de panal de abejas Se utilizan sensores de temperatura para monitorear el funcionamiento del convertidor desde el tablero del conductor. Normalmente se colocan dos sensores, uno antes y otro después del catalizador, para verificar la el aumento de temperatura sobre el núcleo del convertidor. Un aumento del 1% de CO en la masa de gas de combustión implicará un aumento de 100°C. También se usan como elementos de alerta de aumento de temperatura sobre la tolerada por el convertidor, aunque los nuevos tipos de convertidores han hecho un tanto obsoleto este uso. Muchas veces acompañan a los sistemas de recirculación de gases (EGR) (ver más adelante) 7.3.2. Reducción catalítica selectiva (SCR)43 Es una de las dos tecnologías “BlueTec” de la Daimler AG44 El sistema SCR emplea amoniaco como reductor selectivo, en presencia de exceso de oxigeno, para convertir de un 70% a 95% de los NOx presentes en los gases de escape en nitrógeno molecular (N2) y agua, por medio de un catalizador. Funcionamiento: Para ello se usa diversos precursores para producir amoníaco, tales como hidróxido de amonio (agua de amoníaco) o solución de urea, llamados DEF45 p.e. AdBlue46, cuidadosamente dosificada desde un depósito separado e inyectado en el sistema de escape. En el mismo la solución se convierte en amoníaco que entra en el catalizador del sistema. (Ver figura 17) Este sistema permite obtener altos niveles de disminución de los NOx y al mismo tiempo bajo niveles de material particulado, lo que implica mayor rendimiento del combustible y menor generación de dióxido de carbono (CO2).
43 SCR, Selective Ccatalytic Reduction, reducción catalítica selectiva 44 La otra se denomina DeNox 45 DEF, Diesel Exhaust Fluid, fluido para escaoe Diesel, preparado simple y barato compiuesto de dos tercios de agua y un tercio de urea para automotor. 46 AdBlue: es un nombre comercial del aditivo

La electrónica embarcada
30-54
Figura 17 - Diagrama del SCR En el sistema SCR puede haber uno o dos sensores de NOx. Cuando hay uno se ubica antes del catalizador, cuando existe un segundo sensor se ubica después del catalizador para verificar los niveles de NOx. La computadora de a bordo compara las lecturas de los dos sensores para verificar el funcionamiento del catalizador. Al SCR se le puede agregar un filtro de material particulado (DPF)47 lo que aumenta la eliminación de contaminantes. 7.3.3. Trampas de NOx, Lean Nox Traps (LNT)48 o DeNox Es una de las dos tecnologías “BlueTec” de la Daimler AG49 Estos dispositivos han sido diseñados para cumplimentar con las crecientes restricciones impuestas con relación a las emisiones de NOx presentes en los gases de combustión de los motores Diesel y como alternativa o complemento de los sistemas de recirculación de gases (EGR) y de reducción catalítica selectiva (SCR). (Ver figura 18) Funcionamiento: Básicamente consiste en una trampa de materiales como la zeolita50 estructurados de similar manera que el revestimiento de los conversores catalíticos de oxidación Diesel (DOC, diesel oxidation catalyst). Este material atrapa los NOx como lo hace una esponja con el agua. Una vez que la trampa se embebe, del mismo modo que una esponja, no puede atrapar más NOx y éste sigue de largo hacia la atmósfera. Se han ideado varias soluciones para “purgar” o “regenerar” el adsorbedor. Una es la inyección de gasoil, la otra es el empleo de hidrógeno. Ambas han dado buenos resultados, obteniéndose agua y nitrógeno en la salida del escape. Un sensor ubicado después de la trampa de NOx verifica repetidamente el nivel de NOx durante la fase de regeneración o purgado de la trampa. El sensor está comunicado con la unidad de control electrónico que compara las mediciones con un programa que corta el proceso una vez que se ha realizado el purgado.
47 DPF, Diesel Particulate Filter 48 LNT, Lean NOx Traps, Trampas de NOx de motores Diesel o NOx Adsorbers, adsorbedores de NOx 49 La otra se denomina DeNox 50 Zeolitas: silicatos de aluminio muy porosos
NO NO2
NH3
O2 Catalizador
SCR H2O N2
gases de la combustión antes de la reacción
gases de escape después de la reacción
Inyección de urea para producir amoníaco
óxidos de nitrógeno oxígeno nitrógeno agua
La electrónica embarcada
31-54
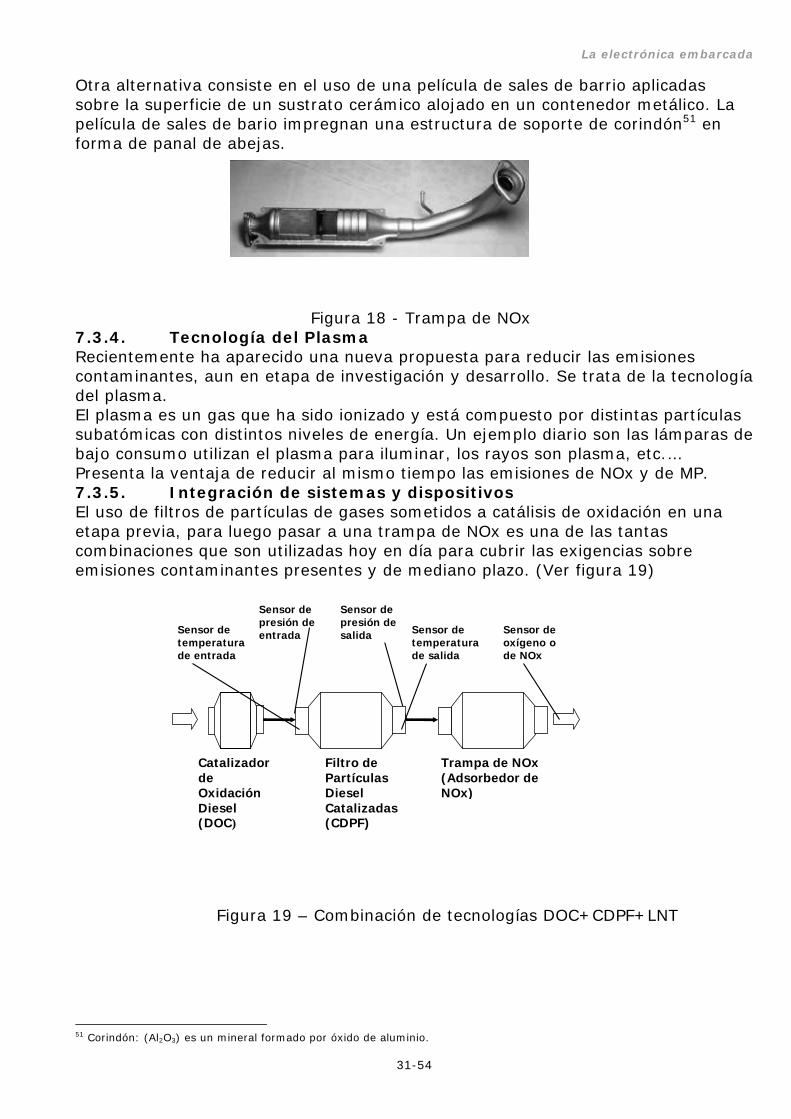
Otra alternativa consiste en el uso de una película de sales de barrio aplicadas sobre la superficie de un sustrato cerámico alojado en un contenedor metálico. La película de sales de bario impregnan una estructura de soporte de corindón51 en forma de panal de abejas.
Figura 18 - Trampa de NOx 7.3.4. Tecnología del Plasma Recientemente ha aparecido una nueva propuesta para reducir las emisiones contaminantes, aun en etapa de investigación y desarrollo. Se trata de la tecnología del plasma. El plasma es un gas que ha sido ionizado y está compuesto por distintas partículas subatómicas con distintos niveles de energía. Un ejemplo diario son las lámparas de bajo consumo utilizan el plasma para iluminar, los rayos son plasma, etc.… Presenta la ventaja de reducir al mismo tiempo las emisiones de NOx y de MP. 7.3.5. Integración de sistemas y dispositivos El uso de filtros de partículas de gases sometidos a catálisis de oxidación en una etapa previa, para luego pasar a una trampa de NOx es una de las tantas combinaciones que son utilizadas hoy en día para cubrir las exigencias sobre emisiones contaminantes presentes y de mediano plazo. (Ver figura 19)
Figura 19 – Combinación de tecnologías DOC+CDPF+LNT
51 Corindón: (Al2O3) es un mineral formado por óxido de aluminio.
Filtro de Partículas Diesel Catalizadas (CDPF)
Trampa de NOx (Adsorbedor de NOx)
Sensor de oxígeno o de NOx
Catalizador de Oxidación Diesel (DOC)
Sensor de temperatura de entrada
Sensor de presión de entrada
Sensor de presión de salida Sensor de
temperatura de salida
La electrónica embarcada
32-54
IV. Sistemas y tecnologías para administrar más eficientemente el transporte de cargas 1. Introducción La administración del transporte de cargas consiste en:
- gestionar la utilización de rutas y vehículos - mantener comunicados a los vehículos entre sí y con sus cabeceras - gestionar la documentación vinculada con las cargas
En otras palabras, se trata de utilizar dispositivos para facilitar la gestión y las comunicaciones. Existe una variedad de sistemas que integran las tecnologías de las comunicaciones radioeléctricas y ópticas (receptores y transmisores, conductores, antenas y satélites) y de la información digitalizada (computadoras y programas) al servicio de estas prestaciones. Podemos hablar de:
- Sistemas de comunicaciones - Sistemas de navegación terrestre satelital - Sistemas de gestión del transporte (gestión de flotas) - Sistemas de gestión de la carga
Los equipos vinculados con estas tecnologías, en sus comienzos, estaban casi exclusivamente montados fijos sobre los vehículos. Dada su vertiginosa evolución y permanente actualización, los fabricantes tienden a hacer propuestas de vehículos con sistemas portátiles agregados a los mismos y los presentan en forma conjunta. Los dispositivos de gestión y comunicaciones resultan más fáciles de actualizar y mucho más económicos. Por otra parte, es necesario puntualizar que la división de sistemas expresada más arriba es sobre todo conceptual. Hoy en día existe tal convergencia de tecnologías y servicios que un mismo dispositivo, como veremos, puede materializar las posibilidades de más de un sistema. 2. Sistemas de comunicaciones Se trata de un conjunto de redes individuales, sistemas de transmisión, estaciones repetidoras, estaciones tributarias y equipos terminales de datos52 capaces de interconectarse e interoperar para formar un conjunto integrado. Los componentes de un sistema de comunicaciones deben servir a un solo propósito, ser técnicamente compatibles, usar procedimientos comunes, responder a los controles y operar en unísono. Las telecomunicaciones son las tecnologías para realizar transmisión y recepción de datos e información, lo que incluye, imágenes y sonidos, a través de la distancia con el propósito de realizar la comunicación. En los primeros tiempos se usaron el humo, el fuego, las banderas, los tambores y la luz del sol. Actualmente se trata de los sistemas basados en dispositivos de funcionamiento electromagnético (lo que incluyen los sistemas ópticos) como la radio, la telegrafía, la televisión, la telefonía o Internet. Los sistemas de comunicaciones están formados por estos subsistemas. 2.1. La radio
52 Dispositivos de telecomunicaciones que interactúan con las computadoras
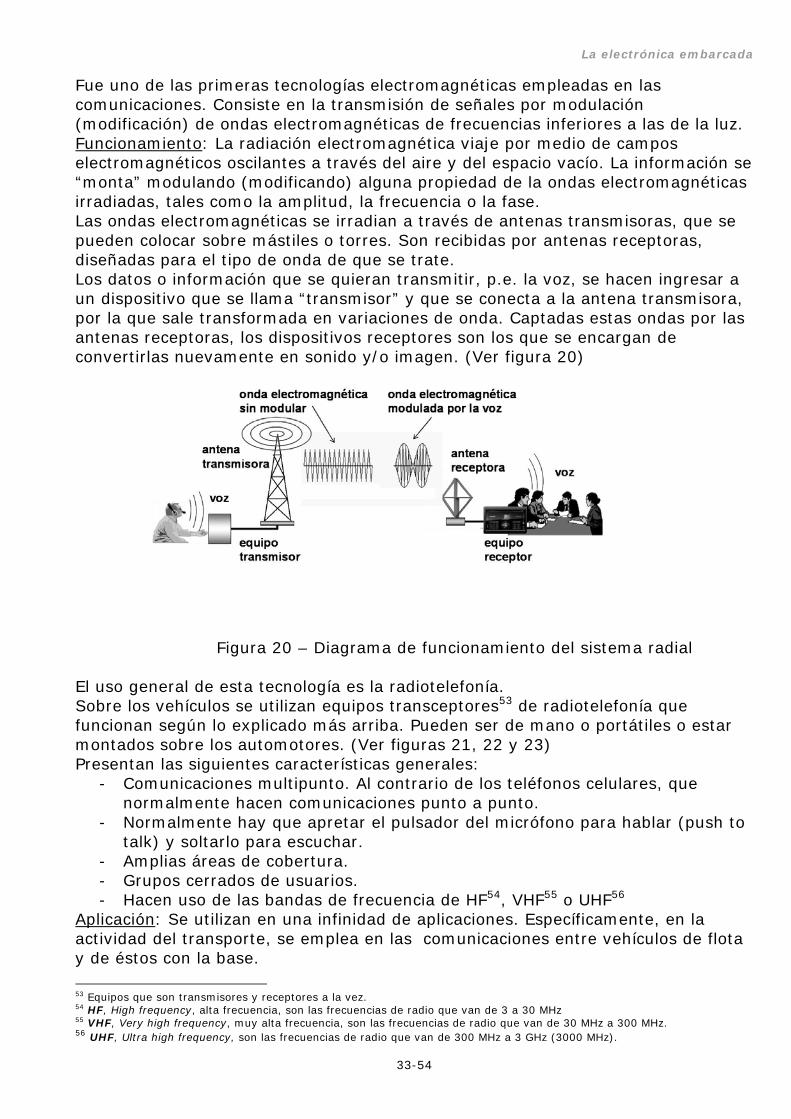
La electrónica embarcada
33-54
Fue uno de las primeras tecnologías electromagnéticas empleadas en las comunicaciones. Consiste en la transmisión de señales por modulación (modificación) de ondas electromagnéticas de frecuencias inferiores a las de la luz. Funcionamiento: La radiación electromagnética viaje por medio de campos electromagnéticos oscilantes a través del aire y del espacio vacío. La información se “monta” modulando (modificando) alguna propiedad de la ondas electromagnéticas irradiadas, tales como la amplitud, la frecuencia o la fase. Las ondas electromagnéticas se irradian a través de antenas transmisoras, que se pueden colocar sobre mástiles o torres. Son recibidas por antenas receptoras, diseñadas para el tipo de onda de que se trate. Los datos o información que se quieran transmitir, p.e. la voz, se hacen ingresar a un dispositivo que se llama “transmisor” y que se conecta a la antena transmisora, por la que sale transformada en variaciones de onda. Captadas estas ondas por las antenas receptoras, los dispositivos receptores son los que se encargan de convertirlas nuevamente en sonido y/o imagen. (Ver figura 20)
Figura 20 – Diagrama de funcionamiento del sistema radial
El uso general de esta tecnología es la radiotelefonía. Sobre los vehículos se utilizan equipos transceptores53 de radiotelefonía que funcionan según lo explicado más arriba. Pueden ser de mano o portátiles o estar montados sobre los automotores. (Ver figuras 21, 22 y 23) Presentan las siguientes características generales:
- Comunicaciones multipunto. Al contrario de los teléfonos celulares, que normalmente hacen comunicaciones punto a punto.
- Normalmente hay que apretar el pulsador del micrófono para hablar (push to talk) y soltarlo para escuchar.
- Amplias áreas de cobertura. - Grupos cerrados de usuarios. - Hacen uso de las bandas de frecuencia de HF54, VHF55 o UHF56
Aplicación: Se utilizan en una infinidad de aplicaciones. Específicamente, en la actividad del transporte, se emplea en las comunicaciones entre vehículos de flota y de éstos con la base.
53 Equipos que son transmisores y receptores a la vez. 54 HF, High frequency, alta frecuencia, son las frecuencias de radio que van de 3 a 30 MHz 55 VHF, Very high frequency, muy alta frecuencia, son las frecuencias de radio que van de 30 MHz a 300 MHz. 56 UHF, Ultra high frequency, son las frecuencias de radio que van de 300 MHz a 3 GHz (3000 MHz).
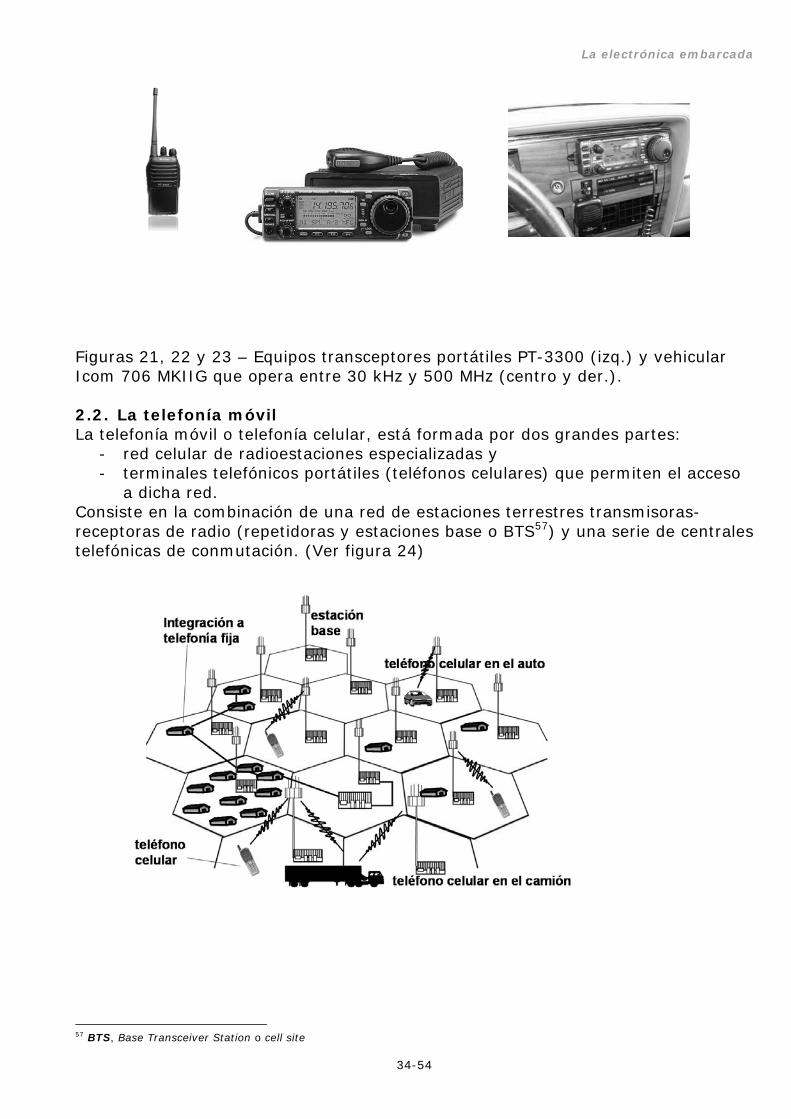
La electrónica embarcada
34-54
Figuras 21, 22 y 23 – Equipos transceptores portátiles PT-3300 (izq.) y vehicular Icom 706 MKIIG que opera entre 30 kHz y 500 MHz (centro y der.).
2.2. La telefonía móvil La telefonía móvil o telefonía celular, está formada por dos grandes partes:
- red celular de radioestaciones especializadas y - terminales telefónicos portátiles (teléfonos celulares) que permiten el acceso
a dicha red. Consiste en la combinación de una red de estaciones terrestres transmisoras-receptoras de radio (repetidoras y estaciones base o BTS57) y una serie de centrales telefónicas de conmutación. (Ver figura 24)
57 BTS, Base Transceiver Station o cell site

La electrónica embarcada
35-54
Figura 24 - Diagrama de una red celular Funcionamiento: La red celular es una red radioeléctrica constituida por una determinada cantidad de radio celdas o simplemente celdas. Cada una servida al menos por una estación terrestre transceptora fija conocida como Estación Base. Estas celdas cubren diferentes áreas suministrando cobertura radial sobre superficies de mayor amplitud que el área correspondiente a una sola celda. De este modo los terminales telefónicos portátiles (teléfonos celulares) pueden ser usados en cualquier celda del sistema y desplazarse entre las celdas durante la transmisión. Las redes celulares ofrecen un número de ventajas sobre otras alternativas:
- Gran capacidad de transferencia de datos e información - Reducida demanda de potencia eléctrica - Gran cobertura territorial - Reducida interferencia con otras señales electromagnéticas - Al contrario de la radiotelefonía, el celular ofrece comunicación en “full
duplex”58, llamada automática entre celulares y con teléfonos fijos, beeper y manos libres.
Aplicación: Uso general en telefonía. Esta tecnología posibilita la comunicación de gran alcance entre teléfonos celulares con otros celulares o con la telefonía fija para comunicaciones de voz, intercambiar mensajes de texto (SMS), email, conmutación de paquetes para acceder a Internet, juegos, Bluetooth59, comunicación por frecuencia infrarroja, cámara con grabador de video y MMS para recibir fotos y video, reproductores MP3 y MP4, radio y GPS. 2.3. Los enlaces satelitales. Los componentes básicos de un enlace satelital son los siguientes:
- Estación terrena transmisora - Estación terrena receptora - Satélite (con transponder satelital)
(Ver figura 25)
Figura 25- Diagrama de un enlace satelital 58 Capacidad de mantener una comunicación bidireccional, enviando y recibiendo mensajes de forma simultánea. 59 Bluetooth: protocolo de comunicaciones diseñado especialmente para dispositivos de bajo consumo, con rango de alcance entre 1m a 100m.

La electrónica embarcada
36-54
Funcionamiento: Un satélite de comunicaciones se puede entender como una estación repetidora de radiofrecuencia (microondas) ubicada en el espacio, orbitando alrededor de la tierra. Su estructura física y energética está concebida para las comunicaciones. Contiene varios transponders60, cada uno de los cuales reciben y amplifica una señal entrante en una frecuencia determinada y responde en otra frecuencia para evitar interferencia con la señal que entra y adecuarse a las necesidades de la estación receptora en tierra. (Ver figuras 26 y 27) Cuanto mayor sea el ancho del haz61 que emita el transponder tanta mayor será la superficie que cubra al llegar a tierra. Los enlaces por satélite se diferencian de los enlaces punto a punto terrestres en lo siguiente:
- Los retardos por la distancia a cubrir están en el orden de un cuarto de segundo. Bastante considerables comparados con los de los enlaces por microondas, del coaxil o la fibra óptica.
- Son sensibles a efectos atmosféricos y a eclipses. - Los costos de transmisión son independientes de la distancia. - Presentan una tasa de error de recepción y transmisión bajísima. - Tienen gran ancho de banda, en otras palabras pueden encauzar enormes
masas de datos en poco tiempo y en un mismo canal de transmisión62. - Excelentes para comunicar puntos distantes y poco accesibles. - Muy eficientes en servicios de acceso múltiple a un gran número de puntos. - Usuarios distantes pueden comunicarse sin recurrir a las redes telefónicas
fijas o celulares. Aplicación:
- Telefonía, el sistema de telefonía pública conmuta las llamadas por línea telefónica hacia una estación terrestre, desde donde son transmitidas a un satélite geoestacionario63. El camino de descenso hacia tierra sigue un camino similar. Los avances en los cables submarinos de comunicaciones y el uso de la fibra óptica64, ha causado la declinación en el uso de satélites para telefonía fija. Sin embargo sigue siendo de utilidad en localidades remotas donde no llegan estas facilidades. Los teléfonos satelitales se conectan a una determinada constelación satelital y la llamada es llevada hacia un telepuerto conectado a un conmutador de telefonía fija o a otro sistema de telefonía satelital.
- Televisión satelital, en aplicación en EEUU y Europa, este servicio es suministrado por satélites geosincrónicos.
- Servicio satelital fijo, se aplica en videoconferencias, redes de enseñanza a distancia, telecomunicaciones comerciales en general y para distribución canales de cable.
- Tecnologías satelitales móviles, Se han desarrollado antenas especiales para recepción móvil. Apoyándose en el sistema GPS, estas antenas se reorientan
60 Dispositivo de telecomunicaciones que realiza la transmisión y recepción. Deriva de Transmitter, Transmisor y Responder, Respondedor. Alguna de sus abreviaturas son XPDR, XPNDR, TPDR o TP 61 Se puede decir que es la apertura angular en la que la densidad de potencia emitida es igual a la mitad de la máxima. 62 e.g.: un canal de unos 50 Mbps, pueden generar unos 800 subcanales de 64 Kbps 63 Se trata de una órbita geosincrónica directamente encima del ecuador terrestre. 64 Es un medio de transmisión muy utilizado en redes de datos. Por un hilo muy fino de material transparente de vidrio o plástico se envían pulsos de luz que representan los datos en transmisión. Muy utilizadas en telecomunicaciones, ya que permiten enviar gran cantidad de datos a grandes distancias, con velocidades similares a las de radio y/o cable. Son inmunes a las interferencias electromagnéticas.
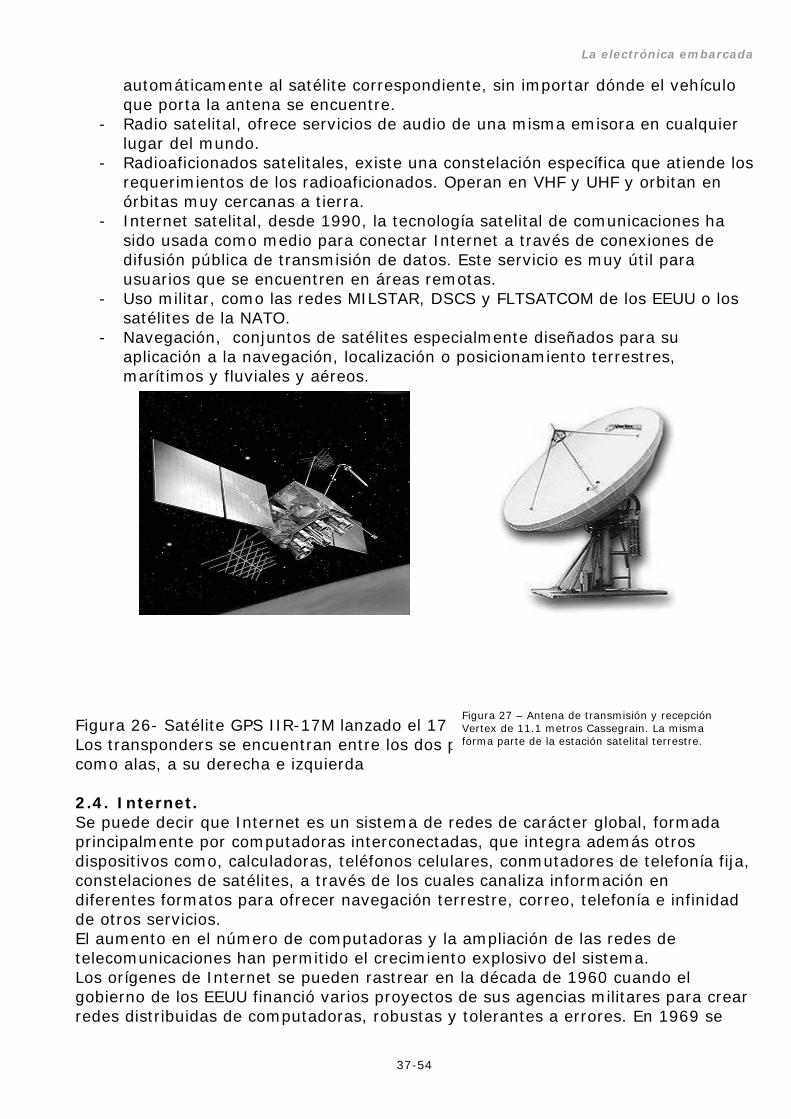
La electrónica embarcada
37-54
automáticamente al satélite correspondiente, sin importar dónde el vehículo que porta la antena se encuentre.
- Radio satelital, ofrece servicios de audio de una misma emisora en cualquier lugar del mundo.
- Radioaficionados satelitales, existe una constelación específica que atiende los requerimientos de los radioaficionados. Operan en VHF y UHF y orbitan en órbitas muy cercanas a tierra.
- Internet satelital, desde 1990, la tecnología satelital de comunicaciones ha sido usada como medio para conectar Internet a través de conexiones de difusión pública de transmisión de datos. Este servicio es muy útil para usuarios que se encuentren en áreas remotas.
- Uso militar, como las redes MILSTAR, DSCS y FLTSATCOM de los EEUU o los satélites de la NATO.
- Navegación, conjuntos de satélites especialmente diseñados para su aplicación a la navegación, localización o posicionamiento terrestres, marítimos y fluviales y aéreos.
Figura 26- Satélite GPS IIR-17M lanzado el 17 de octubre de 2007. Los transponders se encuentran entre los dos paneles solares, como alas, a su derecha e izquierda 2.4. Internet. Se puede decir que Internet es un sistema de redes de carácter global, formada principalmente por computadoras interconectadas, que integra además otros dispositivos como, calculadoras, teléfonos celulares, conmutadores de telefonía fija, constelaciones de satélites, a través de los cuales canaliza información en diferentes formatos para ofrecer navegación terrestre, correo, telefonía e infinidad de otros servicios. El aumento en el número de computadoras y la ampliación de las redes de telecomunicaciones han permitido el crecimiento explosivo del sistema. Los orígenes de Internet se pueden rastrear en la década de 1960 cuando el gobierno de los EEUU financió varios proyectos de sus agencias militares para crear redes distribuidas de computadoras, robustas y tolerantes a errores. En 1969 se
Figura 27 – Antena de transmisión y recepción Vertex de 11.1 metros Cassegrain. La misma forma parte de la estación satelital terrestre.
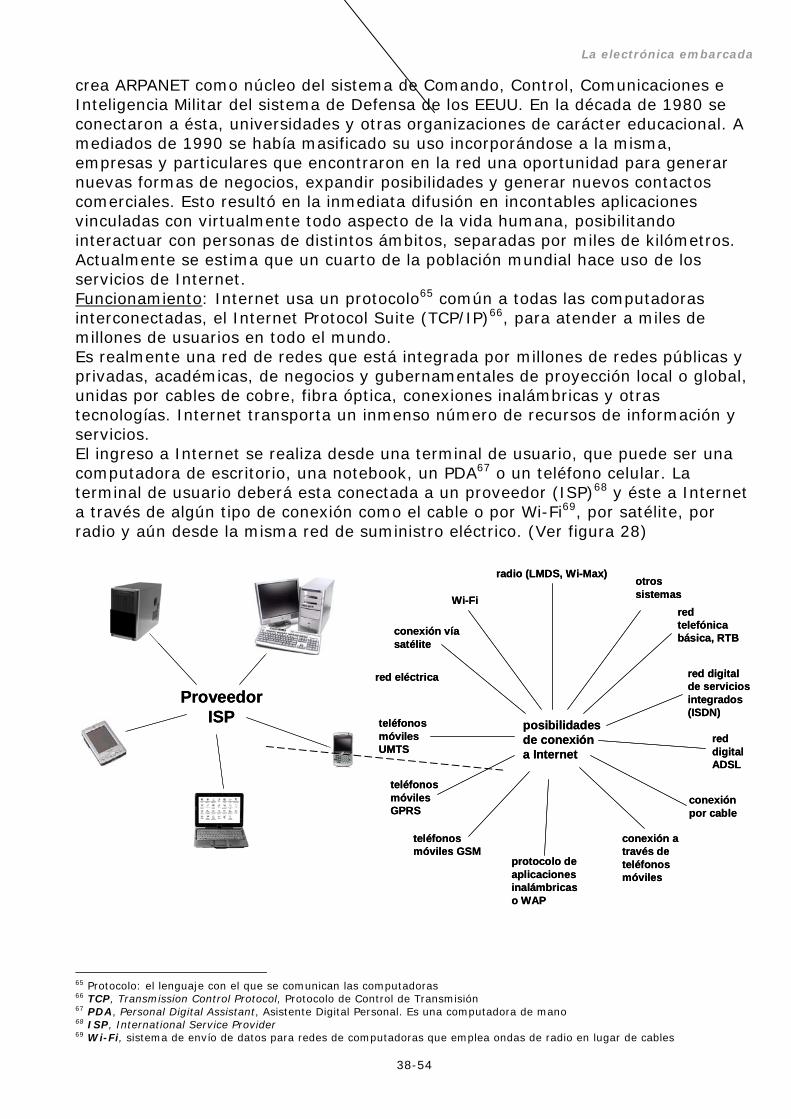
La electrónica embarcada
38-54
crea ARPANET como núcleo del sistema de Comando, Control, Comunicaciones e Inteligencia Militar del sistema de Defensa de los EEUU. En la década de 1980 se conectaron a ésta, universidades y otras organizaciones de carácter educacional. A mediados de 1990 se había masificado su uso incorporándose a la misma, empresas y particulares que encontraron en la red una oportunidad para generar nuevas formas de negocios, expandir posibilidades y generar nuevos contactos comerciales. Esto resultó en la inmediata difusión en incontables aplicaciones vinculadas con virtualmente todo aspecto de la vida humana, posibilitando interactuar con personas de distintos ámbitos, separadas por miles de kilómetros. Actualmente se estima que un cuarto de la población mundial hace uso de los servicios de Internet. Funcionamiento: Internet usa un protocolo65 común a todas las computadoras interconectadas, el Internet Protocol Suite (TCP/IP)66, para atender a miles de millones de usuarios en todo el mundo. Es realmente una red de redes que está integrada por millones de redes públicas y privadas, académicas, de negocios y gubernamentales de proyección local o global, unidas por cables de cobre, fibra óptica, conexiones inalámbricas y otras tecnologías. Internet transporta un inmenso número de recursos de información y servicios. El ingreso a Internet se realiza desde una terminal de usuario, que puede ser una computadora de escritorio, una notebook, un PDA67 o un teléfono celular. La terminal de usuario deberá esta conectada a un proveedor (ISP)68 y éste a Internet a través de algún tipo de conexión como el cable o por Wi-Fi69, por satélite, por radio y aún desde la misma red de suministro eléctrico. (Ver figura 28)
65 Protocolo: el lenguaje con el que se comunican las computadoras 66 TCP, Transmission Control Protocol, Protocolo de Control de Transmisión 67 PDA, Personal Digital Assistant, Asistente Digital Personal. Es una computadora de mano 68 ISP, International Service Provider 69 Wi-Fi, sistema de envío de datos para redes de computadoras que emplea ondas de radio en lugar de cables
ored telefónica básica, RTB
red digital de servicios integrados(ISDN)
ored digital ADSL
conexión por cable
oconexión a través de teléfonos móviles
protocolo de aplicaciones inalámbricaso WAP
oteléfonos móviles GSM
oteléfonos móviles GPRS
oteléfonos móviles UMTS
ored eléctrica
oconexión vía satélite
oWi-Fi
radio (LMDS, Wi-Max) ootros sistemas
•posibilidades de conexión a Internet
ored telefónica básica, RTB
red digital de servicios integrados(ISDN)
ored digital ADSL
conexión por cable
oconexión a través de teléfonos móviles
protocolo de aplicaciones inalámbricaso WAP
oteléfonos móviles GSM
oteléfonos móviles GPRS
oteléfonos móviles UMTS
ored eléctrica
oconexión vía satélite
oWi-Fi
radio (LMDS, Wi-Max) ootros sistemas
•posibilidades de conexión a Internet
ProveedorISP
ProveedorISP
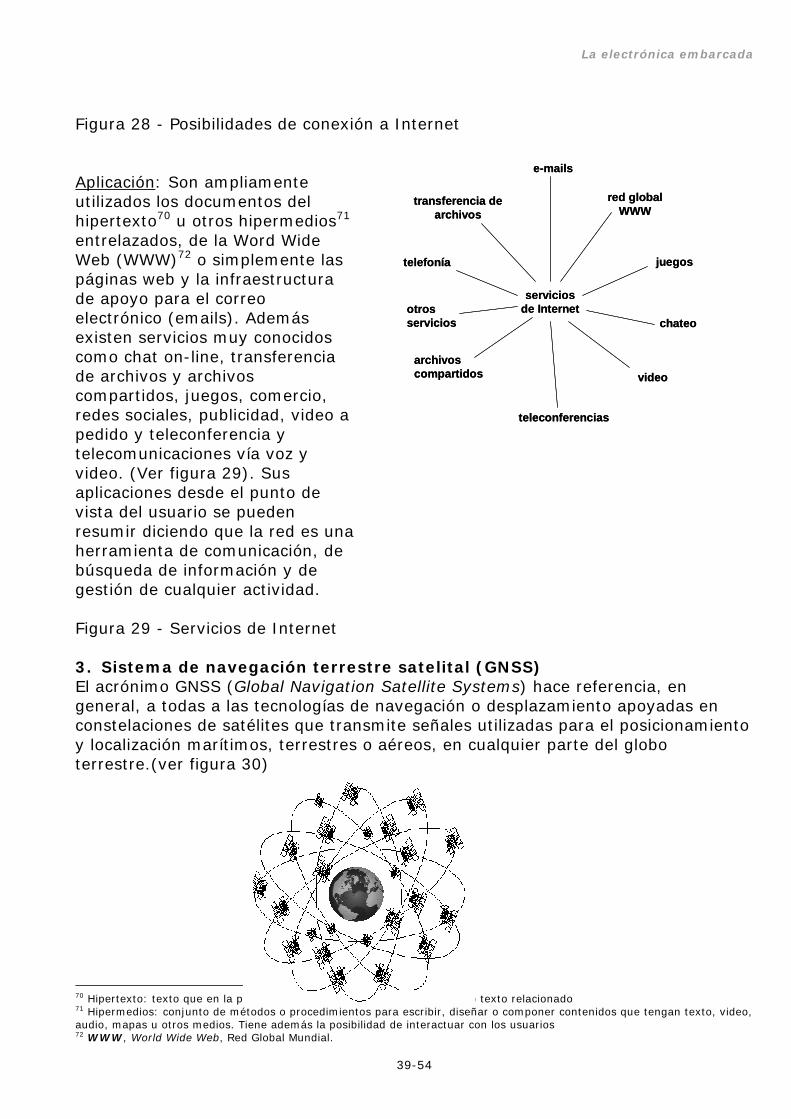
La electrónica embarcada
39-54
Figura 28 - Posibilidades de conexión a Internet Aplicación: Son ampliamente utilizados los documentos del hipertexto70 u otros hipermedios71 entrelazados, de la Word Wide Web (WWW)72 o simplemente las páginas web y la infraestructura de apoyo para el correo electrónico (emails). Además existen servicios muy conocidos como chat on-line, transferencia de archivos y archivos compartidos, juegos, comercio, redes sociales, publicidad, video a pedido y teleconferencia y telecomunicaciones vía voz y video. (Ver figura 29). Sus aplicaciones desde el punto de vista del usuario se pueden resumir diciendo que la red es una herramienta de comunicación, de búsqueda de información y de gestión de cualquier actividad. Figura 29 - Servicios de Internet 3. Sistema de navegación terrestre satelital (GNSS) El acrónimo GNSS (Global Navigation Satellite Systems) hace referencia, en general, a todas a las tecnologías de navegación o desplazamiento apoyadas en constelaciones de satélites que transmite señales utilizadas para el posicionamiento y localización marítimos, terrestres o aéreos, en cualquier parte del globo terrestre.(ver figura 30)
70 Hipertexto: texto que en la pantalla de una computadora conduce a otro texto relacionado 71 Hipermedios: conjunto de métodos o procedimientos para escribir, diseñar o componer contenidos que tengan texto, video, audio, mapas u otros medios. Tiene además la posibilidad de interactuar con los usuarios 72 WWW, World Wide Web, Red Global Mundial.
e-mails
red global WWW
juegos
chateo
video
teleconferencias
transferencia de archivos
archivoscompartidos
telefonía
otrosservicios
serviciosde Internet
e-mails
red global WWW
juegos
chateo
video
teleconferencias
transferencia de archivos
archivoscompartidos
telefonía
otrosservicios
serviciosde Internet

La electrónica embarcada
40-54
Figura 30 - Diagrama de una constelación de satélites orbitando alrededor de la tierra. Estas constelaciones de satélites artificiales permiten determinar las coordenadas geográficas, la altitud de un punto cualquiera y la hora correspondiente como resultado de la recepción de sus señales.
Se puede hablar de tres partes o segmentos del sistema:
- Segmento espacial, la constelación de satélites - Segmento de control, las estaciones de monitoreo y las antenas de control
terrestres. Cerebro del sistema. Su función es el seguimiento y control de los satélites, el cálculo de los datos sobre el movimiento del satélite y su posterior transmisión a los usuarios a través de satélites propios. Se ubican cercanas al plano ecuatorial.
- Segmento del usuario, los receptores, que registran las señales transmitidas por los satélites para el cálculo de su posición.(ver figura 31)
Figura 31 - Diagrama representando los tres segmentos Este sistema permite que pequeños receptores electrónicos determinen su posicionamiento (longitud, latitud y altitud) en un rango de pocos metros utilizando las señales emitidas por satélites en su línea visual. Estas señales también pueden ser usadas por una estación fija sobre el terreno para calcular el horario en forma precisa. En otras palabras, un sistema de navegación basado en satélites puede proporcionar información sobre la posición y la hora con gran precisión, en cualquier parte del mundo, durante todo el día y en todas las condiciones de

La electrónica embarcada
41-54
tiempo. Se utilizan en navegación aérea, marítima y fluvial y terrestre, posicionamiento, transferencia de tiempo y geodesia Existen varios sistemas de navegación terrestre satelital, empleadas tanto de forma combinada como aislada el NAVSTAR-GPS73, GLONASS74, EGNOS75, MSAS76, GALILEO77, QZSS78 y el Twinstar79. 3.1. El Sistema de Posicionamiento Global (GPS). El más conocido en el país es el NAVSTAR-GPS, conocido comúnmente como GPS. Se trata de un sistema de 24 satélites (más algunos de reserva) en órbita geosincrónica80 alrededor de la tierra, y una red de estaciones de control terrestres, con computadoras y receptores en superficie capaces de determinar la longitud y latitud de un receptor en tierra, calculando las diferencias en tiempo en que señales de diferentes satélites del sistema alcanzan al receptor. Los satélites transmiten constantemente un flujo de señales codificadas a bajos niveles de potencia. Pequeños receptores electrónicos GPS están programados con la posición general de los satélites de la constelación y sus datos de identificación, a fin de mantenerse enlazados con los mismos. Informan de la ubicación y la hora, la velocidad y la dirección de un vehículo. Proveen la ubicación actual, en cualquier momento y en cualquier parte, muestran el itinerario que se ha seguido y lo almacenan, guardan gran cantidad de ubicaciones conocidas (waypoints) y ofrece estimas en tiempo real del progreso de un viaje, es decir tiempo y distancia que faltaría para llegar a un destino. Estas posibilidades, por su gran utilidad, son aprovechadas por el transporte terrestre de cargas en muchos de sus dispositivos de navegación y seguimiento. 4. Gestión del transporte de cargas o gestión de flotas Podemos considerar la gestión del transporte de cargas abarcando varias áreas:
- un área consiste en lo que tiene que ver con la navegación de las unidades, de la elección dinámica de los trayectos a cumplir para llegar en los plazos previstos a los destinos previstos,
- la otra con el rastreo o seguimiento de las unidades y de sus cargas desde las áreas de control de las empresas, velocidades, verificación del cumplimiento de las entregas, horarios, paradas, eventos especiales, vigilancia, etc.
- tratando al mismo tiempo de reducir el consumo de combustible y otras variables a través del monitoreo asistido por computadora del empleo de la unidad y del estilo de conducción del chofer.
- finalmente se puede hablar de lo que tiene que ver con el papeleo de las cargas, del sistema de control y elaboración de remitos y facturas
73 NAVSTAR-GPS, NAVigation System with Timing And Ranging-Global Positioning System, Sistema de Posicionamiento Global. Concebido para fines principalmente militares. Tiene uso de carácter civil, aunque el control de su operación se mantiene bajo el Departamento de Defensa de los EEUU (DOD) 74 GLONASS, Global Navigation Satellite System. Concebido inicialmente para fines principalmente militares. Tiene uso de carácter civil, aunque el control de su operación se mantiene bajo control militar.(Rusia). 75 EGNOS, European Geostationary Navigation Overlay Service.(Unión Europea). Sistema desarrollado por la Agencia Espacial Europea (ESA), la Comisión Europea y Eurocontrol. Complementario de las redes GPS, GLONASS y GALILEO cuando entre en operación. Diseñado para proporcionar una mayor precisión y seguridad en las señales. 76 MSAS, Multi-functional Satellite Augmentation System). Sistema basado en el satélite MTSAT. Diseñado para mejorar la precisión de la señal del sistema GPS. Opera en Asia, principalmente en Japón 77 GALILEO, complementario del GPS. Iniciado en 2003 aún no opera plenamente. Cuenta con la adhesion de varios países del medio y lejano oriente. (Unión Europea). 78 QZSS, Quasi-Zenith Satellite System. Sistema regional.(Japón). 79 Twinstar, Twinstar Rapid Positioning System o Beidou Navigation System. Compatible con GALILEO y el NAVSTAR-GPS.(China). 80 Órbita circular con un un radio de 42164.2 km desde el centro de la tierra con un periodo de un día sideral.
La electrónica embarcada
42-54
Para cubrir estas áreas existen sistemas y programas informáticos a propósito. Los equipos, dispositivos o conjuntos pueden ser clasificados: De acuerdo a su portabilidad,
- de mano o portátiles - montados sobre vehículos, fijos o semifijos
De acuerdo a sus prestaciones, - dedicados: realizan una única función. Por ejemplo equipos diseñados para
ser únicamente navegadores - multifunción: cubren varias funciones, tendencia actual, dadas las
posibilidades que ofrece la convergencia de tecnologías. Por ejemplo, navegación, seguimiento y consumo de combustible. Al mismo tiempo, muchos, ofrecen telefonía móvil, reproductor MP3, etc.
A continuación pasaremos a describir lo que las tecnologías actuales ponen a nuestra disposición. 4.1. Navegador GPS Un dispositivo de navegación GPS o simplemente navegador GPS es el que recibe señales del Sistema de Posicionamiento Global (GPS) con el fin de determinar su posición en tiempo real y poder elegir la mejor ruta. El sistema permite hacer seguimiento de cronogramas y hojas de ruta. Puede desplegar sobre una pantalla todos los datos necesarios para un viaje, evitando papeleo y simplificando el control. Pueden planear un viaje, proponiendo el camino a seguir contando con el punto de destino. Pueden sugerir alternativas a medida que se desarrolla un viaje. Estos dispositivos GPS cuentan con software preinstalado en memoria ROM81. Los softwares incluyen mapas interactivos de calles y rutas, pueden mostrar puntos de interés, información del trayecto y encaminamiento paso a paso en un itinerario. Todos presentan en su operación las siguientes pantallas básicas:
- Pantallas de inicio de sistema y de navegación. - Identificación de satélites de los que se recibe señal en el punto. - Indicaciones de calidad de señal. - Ubicación. - Rastreo. - Navegación. - Representación de mapa del recorrido - Sincronización del viaje.
4.1.1. Navegadores de mano Como su nombre lo indican, son equipos que pueden ser llevados en la mano. Veamos, como ejemplo, las posibilidades que brinda un dispositivo GPS de mano, el GARMIN eTrex Legend. (Ver figura 32) En la pantalla que aparece en la figura 33 se puede observar la identificación de satélites de la constelación GPS de los cuales recibe señal el navegador. La pantalla advierte cuándo hay suficientes satélites encontrados para navegar. Habiéndose ubicado el satélite, el mismo puede determinar las coordenadas en longitud, latitud y con cierta aproximación la elevación de la ubicación. El margen de error de este equipo está entre los 6 y 12 m.
81 Memoria ROM: Instrucciones que residen permanentemente en una memoria ROM en un chip de memoria flash. El software permanente puede estar disponible para la CPU o para ejecución más rápida puede ser transferido primero a la memoria RAM y después ejecutado. Se diferencia de la aplicaciones de software común, que primero son almacenadas en un disco y luego cargadas en la memoria RAM para ser ejecutadas.
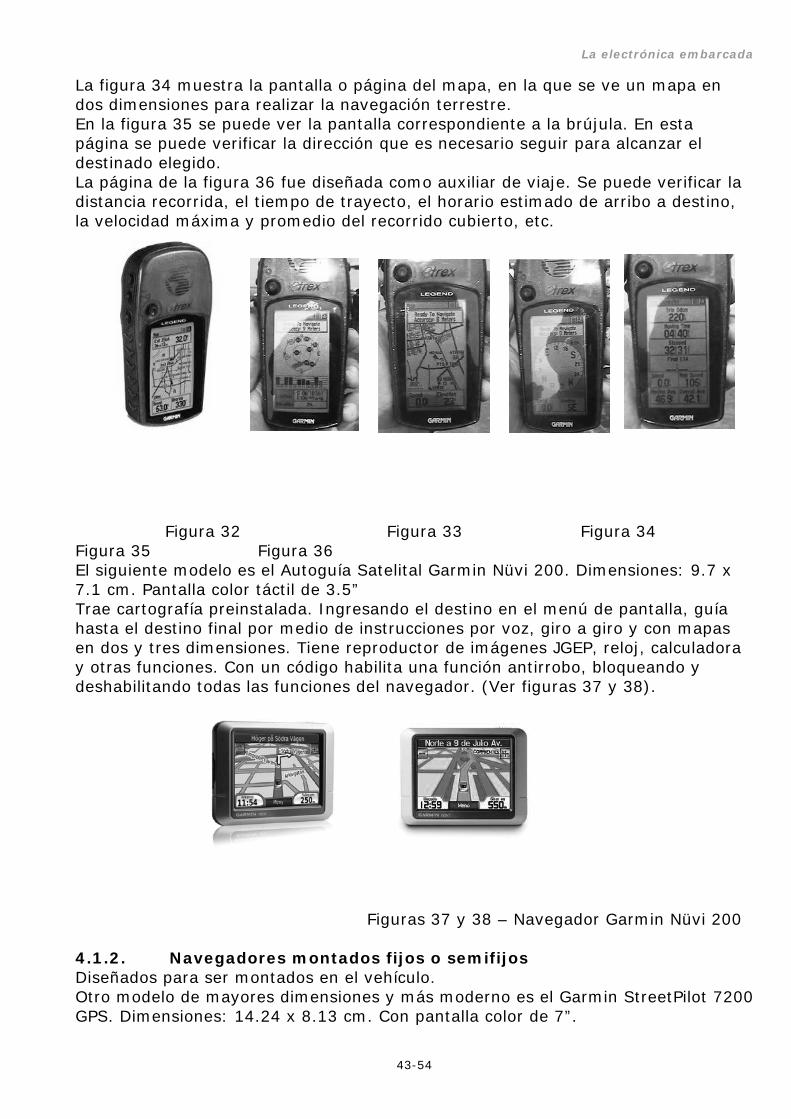
La electrónica embarcada
43-54
La figura 34 muestra la pantalla o página del mapa, en la que se ve un mapa en dos dimensiones para realizar la navegación terrestre. En la figura 35 se puede ver la pantalla correspondiente a la brújula. En esta página se puede verificar la dirección que es necesario seguir para alcanzar el destinado elegido. La página de la figura 36 fue diseñada como auxiliar de viaje. Se puede verificar la distancia recorrida, el tiempo de trayecto, el horario estimado de arribo a destino, la velocidad máxima y promedio del recorrido cubierto, etc. Figura 32 Figura 33 Figura 34 Figura 35 Figura 36 El siguiente modelo es el Autoguía Satelital Garmin Nüvi 200. Dimensiones: 9.7 x 7.1 cm. Pantalla color táctil de 3.5” Trae cartografía preinstalada. Ingresando el destino en el menú de pantalla, guía hasta el destino final por medio de instrucciones por voz, giro a giro y con mapas en dos y tres dimensiones. Tiene reproductor de imágenes JGEP, reloj, calculadora y otras funciones. Con un código habilita una función antirrobo, bloqueando y deshabilitando todas las funciones del navegador. (Ver figuras 37 y 38). Figuras 37 y 38 – Navegador Garmin Nüvi 200 4.1.2. Navegadores montados fijos o semifijos Diseñados para ser montados en el vehículo. Otro modelo de mayores dimensiones y más moderno es el Garmin StreetPilot 7200 GPS. Dimensiones: 14.24 x 8.13 cm. Con pantalla color de 7”.
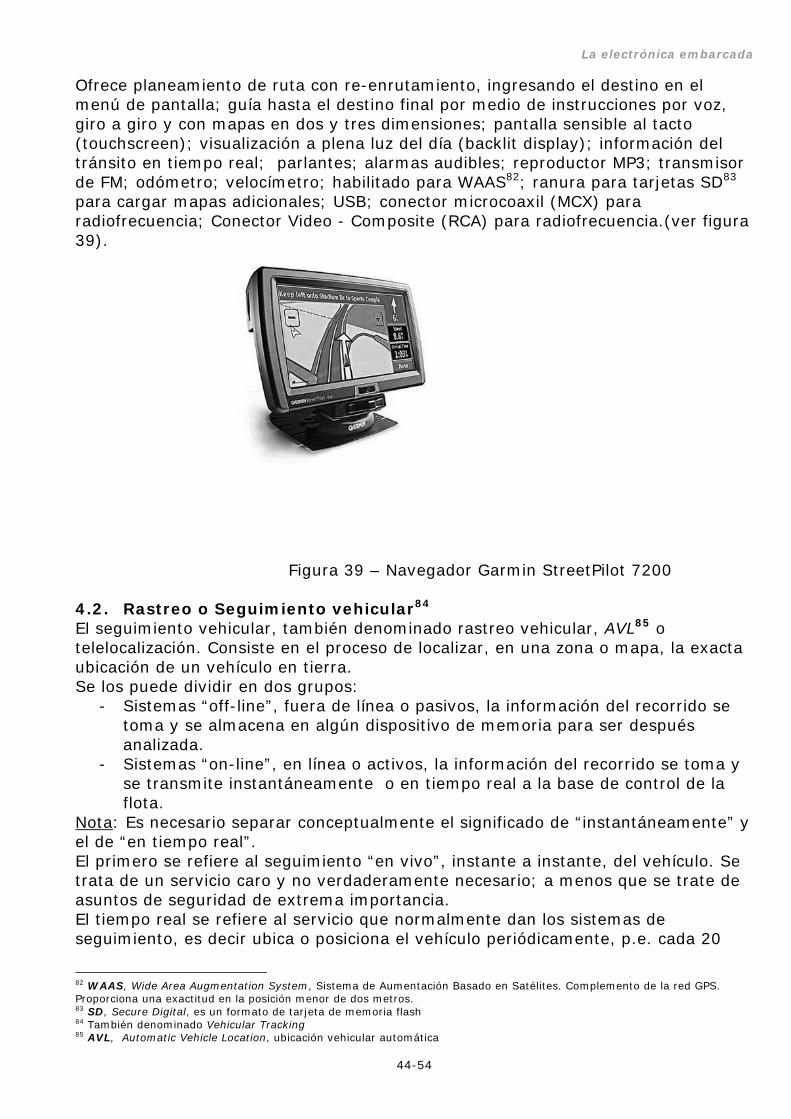
La electrónica embarcada
44-54
Ofrece planeamiento de ruta con re-enrutamiento, ingresando el destino en el menú de pantalla; guía hasta el destino final por medio de instrucciones por voz, giro a giro y con mapas en dos y tres dimensiones; pantalla sensible al tacto (touchscreen); visualización a plena luz del día (backlit display); información del tránsito en tiempo real; parlantes; alarmas audibles; reproductor MP3; transmisor de FM; odómetro; velocímetro; habilitado para WAAS82; ranura para tarjetas SD83 para cargar mapas adicionales; USB; conector microcoaxil (MCX) para radiofrecuencia; Conector Video - Composite (RCA) para radiofrecuencia.(ver figura 39). Figura 39 – Navegador Garmin StreetPilot 7200 4.2. Rastreo o Seguimiento vehicular84 El seguimiento vehicular, también denominado rastreo vehicular, AVL85 o telelocalización. Consiste en el proceso de localizar, en una zona o mapa, la exacta ubicación de un vehículo en tierra. Se los puede dividir en dos grupos:
- Sistemas “off-line”, fuera de línea o pasivos, la información del recorrido se toma y se almacena en algún dispositivo de memoria para ser después analizada.
- Sistemas “on-line”, en línea o activos, la información del recorrido se toma y se transmite instantáneamente o en tiempo real a la base de control de la flota.
Nota: Es necesario separar conceptualmente el significado de “instantáneamente” y el de “en tiempo real”. El primero se refiere al seguimiento “en vivo”, instante a instante, del vehículo. Se trata de un servicio caro y no verdaderamente necesario; a menos que se trate de asuntos de seguridad de extrema importancia. El tiempo real se refiere al servicio que normalmente dan los sistemas de seguimiento, es decir ubica o posiciona el vehículo periódicamente, p.e. cada 20
82 WAAS, Wide Area Augmentation System, Sistema de Aumentación Basado en Satélites. Complemento de la red GPS. Proporciona una exactitud en la posición menor de dos metros. 83 SD, Secure Digital, es un formato de tarjeta de memoria flash 84 También denominado Vehicular Tracking 85 AVL, Automatic Vehicle Location, ubicación vehicular automática

La electrónica embarcada
45-54
minutos. Esta información se envía a la base de control en tiempos programados, a requerimiento o en determinadas circunstancias. Los equipos que realizan estas operaciones reciben el nombre de “tacógrafos”. 4.2.1. Rastreo fuera de línea (off-line) o pasivos. El rastreo pasivo tiene que ver con los registros de los caminos seguidos y de los eventos relacionados. Es otra manera de hablar de la trazabilidad de la unidad y su carga. Realizan registros en memoria de las actividades cumplidas por el chofer y las operaciones de la unidad automotor, tales como:
- Identificación de choferes y autorización selectiva - Intervalos de conducción y descanso del chofer - Uso del cinto de seguridad - Distancia cubiertas, parciales y acumulativas. - Velocidades de la unidad en forma continua y/o en intervalos programados,
ubicación, fechas y horas. - Velocidades promedio y de crucero - Superación de velocidad máxima, período, fecha y hora, ubicación. - Régimen del motor - Intervalos de arranque y parada de motor - Períodos del motor en ralentí, funcionando, apagado y remolcado. - Aceleraciones y desaceleraciones bruscas. - Apertura de puertas, desenganche de semi o acoplado. - Oportunidades de conexiones y desconexiones del equipo de rastreo
Pueden almacenar desde días a meses de información sobre el recorrido realizado Las dimensiones de los son comparables con las de un teléfono celular. La información guardada se puede bajar a través de una interface USB86, con tecnología Bluetooth, o cualquier conectividad standard. Los formatos usuales son los de las Planillas de Cálculo Excel (XLS), Páginas Web con gráficos y mapas (HTML) o archivos de Google Earth (KML). (Ver figuras 40 y 41).
Figura 40 - Tacógrafo TS-101 Figura 41 - Tacógrafo Ful-Mar DG-128
4.2.2. Rastreo en línea (on-line)87 o activos. El rastreo activo, es con propiedad, el seguimiento de la unidad y su carga. Los sistemas en línea u “on-line” hacen factible a la empresa:
- rastrear directamente y casi siempre en tiempo real, el kilometraje de las unidades, su velocidad, dirección y las paradas,
86 USB, Universal Serial Bus, es una interface entre p.e. una computadora y otros dispositivos. 87 Sistema en línea es el que siempre se encuentra encendido y disponible.
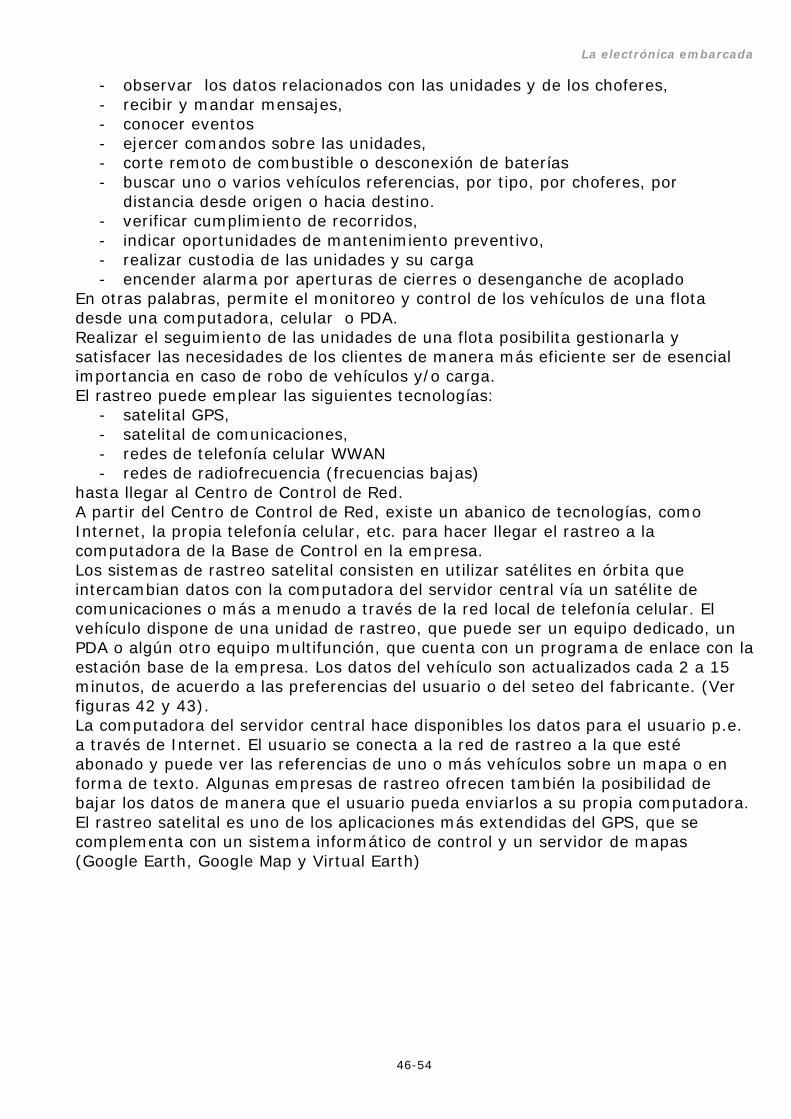
La electrónica embarcada
46-54
- observar los datos relacionados con las unidades y de los choferes, - recibir y mandar mensajes, - conocer eventos - ejercer comandos sobre las unidades, - corte remoto de combustible o desconexión de baterías - buscar uno o varios vehículos referencias, por tipo, por choferes, por
distancia desde origen o hacia destino. - verificar cumplimiento de recorridos, - indicar oportunidades de mantenimiento preventivo, - realizar custodia de las unidades y su carga - encender alarma por aperturas de cierres o desenganche de acoplado
En otras palabras, permite el monitoreo y control de los vehículos de una flota desde una computadora, celular o PDA. Realizar el seguimiento de las unidades de una flota posibilita gestionarla y satisfacer las necesidades de los clientes de manera más eficiente ser de esencial importancia en caso de robo de vehículos y/o carga. El rastreo puede emplear las siguientes tecnologías:
- satelital GPS, - satelital de comunicaciones, - redes de telefonía celular WWAN - redes de radiofrecuencia (frecuencias bajas)
hasta llegar al Centro de Control de Red. A partir del Centro de Control de Red, existe un abanico de tecnologías, como Internet, la propia telefonía celular, etc. para hacer llegar el rastreo a la computadora de la Base de Control en la empresa. Los sistemas de rastreo satelital consisten en utilizar satélites en órbita que intercambian datos con la computadora del servidor central vía un satélite de comunicaciones o más a menudo a través de la red local de telefonía celular. El vehículo dispone de una unidad de rastreo, que puede ser un equipo dedicado, un PDA o algún otro equipo multifunción, que cuenta con un programa de enlace con la estación base de la empresa. Los datos del vehículo son actualizados cada 2 a 15 minutos, de acuerdo a las preferencias del usuario o del seteo del fabricante. (Ver figuras 42 y 43). La computadora del servidor central hace disponibles los datos para el usuario p.e. a través de Internet. El usuario se conecta a la red de rastreo a la que esté abonado y puede ver las referencias de uno o más vehículos sobre un mapa o en forma de texto. Algunas empresas de rastreo ofrecen también la posibilidad de bajar los datos de manera que el usuario pueda enviarlos a su propia computadora. El rastreo satelital es uno de los aplicaciones más extendidas del GPS, que se complementa con un sistema informático de control y un servidor de mapas (Google Earth, Google Map y Virtual Earth)
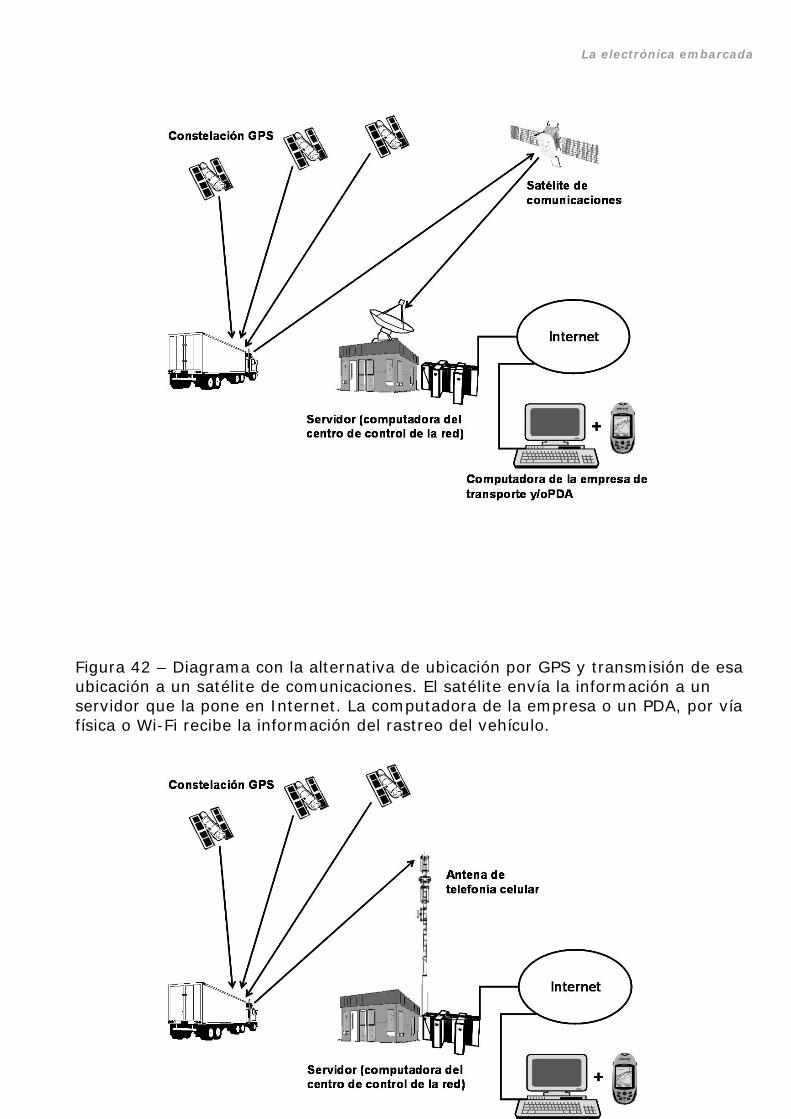
La electrónica embarcada
47-54
Figura 42 – Diagrama con la alternativa de ubicación por GPS y transmisión de esa ubicación a un satélite de comunicaciones. El satélite envía la información a un servidor que la pone en Internet. La computadora de la empresa o un PDA, por vía física o Wi-Fi recibe la información del rastreo del vehículo.
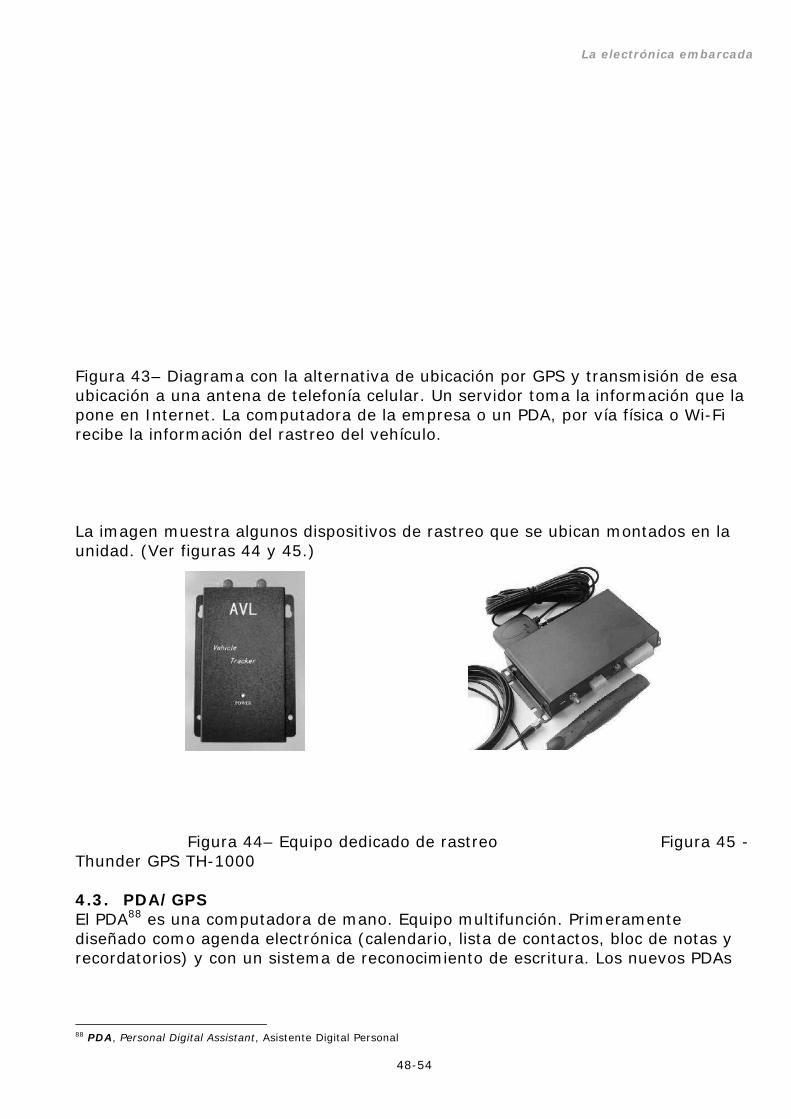
La electrónica embarcada
48-54
Figura 43– Diagrama con la alternativa de ubicación por GPS y transmisión de esa ubicación a una antena de telefonía celular. Un servidor toma la información que la pone en Internet. La computadora de la empresa o un PDA, por vía física o Wi-Fi recibe la información del rastreo del vehículo. La imagen muestra algunos dispositivos de rastreo que se ubican montados en la unidad. (Ver figuras 44 y 45.) Figura 44– Equipo dedicado de rastreo Figura 45 - Thunder GPS TH-1000 4.3. PDA/GPS El PDA88 es una computadora de mano. Equipo multifunción. Primeramente diseñado como agenda electrónica (calendario, lista de contactos, bloc de notas y recordatorios) y con un sistema de reconocimiento de escritura. Los nuevos PDAs
88 PDA, Personal Digital Assistant, Asistente Digital Personal

La electrónica embarcada
49-54
presentan pantallas en color, capacidades de audio y están habilitados para operar como teléfonos celulares (smartphones89). Pueden grabar y pasar fotos, videos y sonidos (mediaplayers) y navegar en la Web (Web browsers). Muchos PDAs pueden ingresar en Internet, red de computadoras privadas (intranets) o red privada virtual con protocolos de Internet (extranets) a través de Wi-Fi 90 o WWANs91. También ofrecen pantallas táctiles o touchscreen technology92. Actualmente están preparados también para utilizar GPS y por lo tanto ofrecen navegación terrestre en tiempo real al mismo tiempo que enlace con las estaciones base de la empresa. Muchos pueden mostrar las condiciones de tránsito en dos y tres dimensiones y hacer una selección dinámica del mejor recorrido a realizar. Poco a poco se han convertido en un auxiliar común en los vehículos. La figura 46 muestra el Apple-iPhone93 3GS Figura 46 - Apple-iPhone 3GS 4.4. Computadoras de abordo La computadora de abordo ofrece al conductor la información necesaria para desarrollar una conducción eficiente. (Ver figura 47) Algunas de las funciones básicas de la computadora de abordo, pueden ser:
- Sistema de diagnostico (lectura de códigos de falla), - Indicador de consumo de combustible, - Control de distancia recorrida, - Tiempo del recorrido, - Carga de la batería, - Velocidades instantáneas y promedio, - Datos del vehículo, - Alertas de mantenimiento, - Temperatura ambiente, - Temperatura del aceite de los ejes, - Temperatura del aceite de la caja de cambios, - Temperatura del motor,
En algunos casos la computadora de abordo viene incorporada a la unidad motriz, en otros se ofrece como sistema separado. Asimismo existen sistemas adicionales que complementan el funcionamiento de la computadora de abordo:
- capacidad de rastreo, - alarmas en velocidades límite,
89 Smartphone, teléfono inteligente, Dispositivo electrónico que funciona como un teléfono celular y como computadora. 90 Wi-Fi, sistema de envío de datos para redes de computadoras que emplea ondas de radio en lugar de cables 91 WWANs, Wireless Wide Area Networks, redes inalámbricas de área extendida. Tienen el alcance más amplio de todas las redes inalámbricas. Toda la telefonía celular está conectada a una WWAN. Las tecnologías principales son: GSM, Global System for Mobile Communication, GPRS, General Packet Radio Service y UMTS, Universal Mobile Telecommunication System. 92 El término generalmente se refiere a activar comandos en pantalla del PDA tocando con los dedos. 93 El iPhone, de Apple Inc., es un teléfono inteligente multimedia con conexión a Internet, pantalla táctil. Teclado virtual en pantalla.

La electrónica embarcada
50-54
- medición de condiciones de carga sobre varias partes del tractor y del semi-remolque
- funciones de tacógrafo digital - calibrador automático de presión en neumáticos - detención del motor por disminución de presión de aceite o aumento de
temperatura - acceso a la empresa por medios inalámbricos, al control de determinadas
funciones, en tiempo real. Todo esto para que resulte en economía de combustible y lubricantes, mayor vida del motor, de los neumáticos y componentes en general, auxiliando a los choferes en su actividad y vigilando la integridad de vehículos y cargas. Figura 47 – Pantalla de la computadora de abordo del Mercedes Benz Axor 2640 4.5. Gestión electrónica de documentación de la carga Esta gestión se apoya en sistemas que consisten en:
- dispositivos portátiles que acompañan al chofer y su unidad y carga desde origen a destino y mantienen enlace inalámbrico con la estación base de la empresa,
- equipos de comunicaciones y computadoras de la estación base - programas de procesamiento de la documentación electrónica de carga
Si bien los PDA pueden cumplir muchas funciones de asistencia en la gestión administrativa de la carga, hoy en día existe un tipo especial de PDA dirigidos especialmente a la actividad del transporte de cargas y su logística. Se trata de los Terminales de Datos Portátiles o PDTs94 o también Asistentes Digitales de Empresa o EDA95s Y son verdaderas computadoras portátiles de mano, livianas, de reducidas dimensiones, resistentes a golpes y caídas, a la humedad y a temperaturas extremas, que cuentan básicamente con:
- potentes microprocesadores y sistemas operativos Windows compatibles, - micrófono, auriculares y manos libres, - acceso seguro a la red informática de una compañía (LAN/Intranet), - capacidad de banda ancha celular de última generación, lo que permite
intercambiar con elevada rapidez no sólo textos y voz sino fotos y videos, - rastreabilidad vía GPS, - conectividad Wi-Fi - conectividad Bluetooth e infrarroja
94 PDT, Portable Data Terminal, Terminal de Datos Portátil 95 EDA, Enterprise Digital Assistant, Asistente Digitale de Empresa
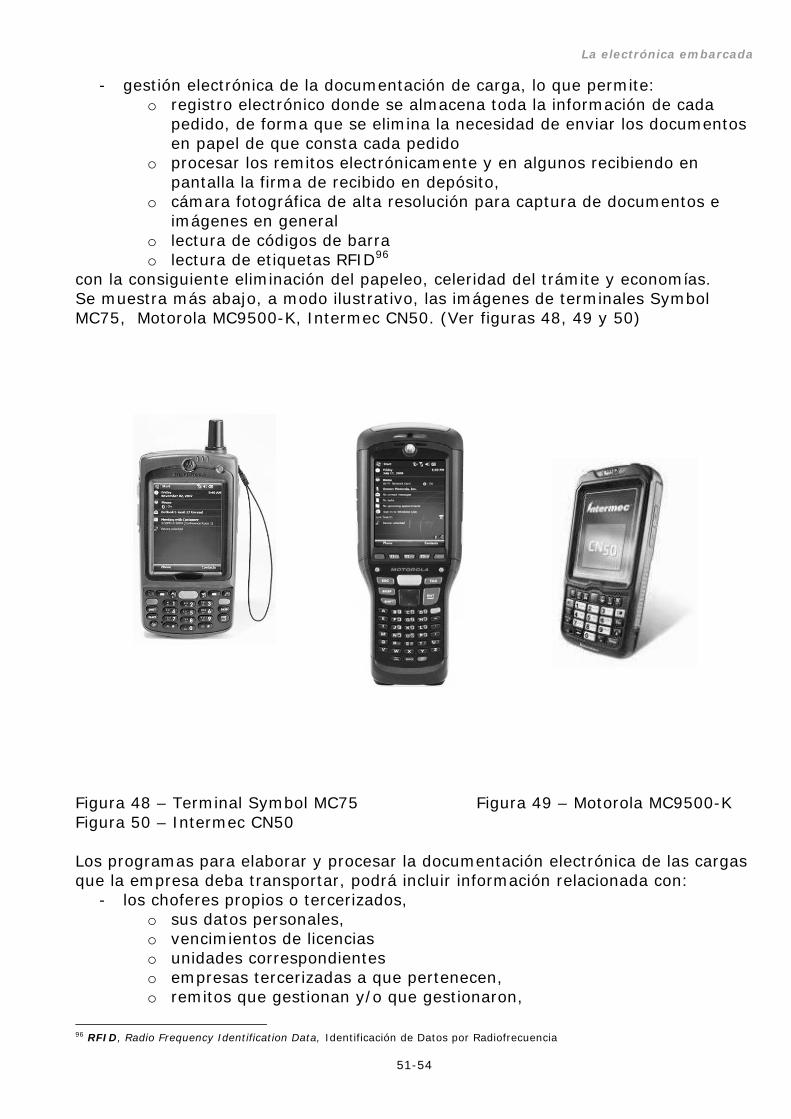
La electrónica embarcada
51-54
- gestión electrónica de la documentación de carga, lo que permite: o registro electrónico donde se almacena toda la información de cada
pedido, de forma que se elimina la necesidad de enviar los documentos en papel de que consta cada pedido
o procesar los remitos electrónicamente y en algunos recibiendo en pantalla la firma de recibido en depósito,
o cámara fotográfica de alta resolución para captura de documentos e imágenes en general
o lectura de códigos de barra o lectura de etiquetas RFID96
con la consiguiente eliminación del papeleo, celeridad del trámite y economías. Se muestra más abajo, a modo ilustrativo, las imágenes de terminales Symbol MC75, Motorola MC9500-K, Intermec CN50. (Ver figuras 48, 49 y 50) Figura 48 – Terminal Symbol MC75 Figura 49 – Motorola MC9500-K Figura 50 – Intermec CN50 Los programas para elaborar y procesar la documentación electrónica de las cargas que la empresa deba transportar, podrá incluir información relacionada con:
- los choferes propios o tercerizados, o sus datos personales, o vencimientos de licencias o unidades correspondientes o empresas tercerizadas a que pertenecen, o remitos que gestionan y/o que gestionaron,
96 RFID, Radio Frequency Identification Data, Identificación de Datos por Radiofrecuencia

La electrónica embarcada
52-54
o estadísticas o pagos, etc.
- las unidades (automotores y sus acoplados) o sus características o empresas tercerizadas a que pertenecen o choferes correspondientes o oportunidades de mantenimiento o vencimientos de documentación, etc.
- los clientes o lugares de carga o/y descarga, fechas y horas, referencias, imágenes,
comentarios o remitos correspondientes o choferes asignados a cada remito o confección de facturas o estadísticas o pagos, etc.
- los remitos o contenidos o choferes asignados o clientes asignados o facturas y sus referencias o montos, etc.
- hojas de ruta o formato tabla o formato diagrama o vinculación y actualización vía navegador, etc.
Toda esta información se podrá vincular recíprocamente y producir planillas de control e informes por períodos determinados a fin de llevar una supervisión general de la actividad Aplicación: Pongamos un ejemplo aclaratorio de las posibilidades de estos sistemas: PDTs como los mostrados más arriba se puede proveer a cada chofer de la empresa. Cada equipo llevará incorporado un programa (un software) de carga determinado que comparte y es de las mismas características que el programa que la empresa de transporte tiene en su estación base. La empresa introduce la información vinculada con los clientes, los pedidos, las unidades y los choferes en la computadora de la estación base que está en capacidad de remitir a los PDT (terminales de datos portátiles) de los conductores la información que ellos deben gestionar. Llegada la oportunidad de realizar un viaje con pedidos a entregar, se podrá seguir la siguiente secuencia:
- El chofer recibe inalámbricamente en su PDT la información vinculada con el pedido:
o Nro de remito o Descripción de la carga o Datos del lugar o lugares de carga, p.e. lugar y fecha y hora y
referencias de los clientes que pueden incluir alguna imagen.

La electrónica embarcada
53-54
o Datos del lugar o lugares de descarga, p.e. lugar y fecha y hora y referencias de los clientes, que pueden incluir alguna imagen
o Datos para el recorrido, que puede ser una hoja de ruta electrónica con mapa interactivo vinculado un navegador propio o externo.
- Iniciada la marcha el chofer mantendrá comunicación on-line con la estación base y/o con otros conductores y podrá utilizar el navegador para verificar a la factibilidad de la ruta prevista y proponer a la estación base alguna alternativa a través del análisis de la hoja de ruta electrónica
- Llegado a un destino de entrega, el chofer realizará la descarga de mercadería y podrá recibir la firma del encargado de depósito sobre la mima pantalla del PDT si éste tuviera reconocimiento de firmas. Llegado el caso podrá imprimir el remito si el cliente lo solicitara. (ver figura 51).
Figura 51 – Diagrama con ejemplo de gestión de documentación electrónica de carga Si el caso fuera realizar una carga de mercaderías, el chofer podrá hacer la incorporación del listado de las mismas al remito, leyendo con el PDT los códigos de barras o los dispositivos de RFDI ubicados sobre los embalajes correspondientes. De la misma manera podrá gestionar vía PDT, reclamos de clientes, eventos de última hora o requerimientos especiales. V. Conclusión El crecimiento de la economía global depende del transporte. Somos testigos de su creciente demanda.

La electrónica embarcada
54-54
Sin embargo no será posible atenderla sin hacer del mismo una actividad sustentable. Los desafíos que enfrenta el mundo del transporte tienen que ver con el rendimiento del combustible, el impacto ambiental, la congestión de las vías terrestres, la seguridad en el manejo y la calidad de la gestión. La electrónica embarcada es una de las respuestas y también un campo de múltiples nuevas posibilidades para la actividad.