Cursito de Motores electricos basico y practico.pdf
27
1 MÓDULO Nº 3: MOTORES ASINCRÓNICOS TRIFÁSICOS 3.1. PRINCIPIO DE FUNCIONAMIENTO El motor Trifásico a inducción es un mecanismo eléctrico-mecánico en el cual ingresa energía eléctrica bajo la forma de un conjunto trifásico de tensiones y corrientes; que se convierte en energía mecánica, bajo la forma de un movimiento giratorio de velocidad ligeramente variable con la carga aplicada al eje. A pesar de ser una de las maquinas más simples que se han inventado para este fin, ha alcanzado un alto grado de perfeccionamiento y normalización. Para explicar el principio de funcionamiento acudimos a la siguiente figura, donde se observa un corte transversal del estator de un alternador: Procedemos de esta forma porque el estator de los motores a inducción trifásicos es similar al de los alternadores. Existen pequeñas diferencias que están en función del diseño y la optimización, pero que no implica realizar comentarios distintos. En las canaletas del estator del motor asincrónico de la figura anterior, supondremos la existencia de corrientes provenientes de un sistema trifásico simétrico y equilibrado; todas en un mismo instante. Este sistema de corrientes provoca un campo rotante o campo giratorio, que se establece en el estator mismo y cruza el espacio que se destinará al rotor. Si pudiéramos desplegar el motor sobre un plano observaríamos la siguiente gráfica; y será mas visible la obtención del sentido de las corrientes en un determinado instante. Dado dicho instante T, en el mismo las corrientes tendrán un valor como se indica en la grafica de las derecha; donde se muestra el valor instantáneo para cada una de las corrientes. Trasladando los valores a los respectivos bobinados, podemos ver los sentidos de las corrientes en ese instante. Observamos que se agrupan en dos sentidos hacia arriba y hacia abajo en sectores bien definidos. Esta distribución deja perfectamente establecidos los dos polos del campo rotante como señala la figura.
-
Upload
monra-enrique -
Category
Documents
-
view
27 -
download
2
Transcript of Cursito de Motores electricos basico y practico.pdf

1
MÓDULO Nº 3: MOTORES ASINCRÓNICOS TRIFÁSICOS
3.1. PRINCIPIO DE FUNCIONAMIENTO
El motor Trifásico a inducción es un mecanismo eléctrico-mecánico en el cual ingresa energía eléctrica bajo la forma de un conjunto trifásico de tensiones y corrientes; que se convierte en energía mecánica, bajo la forma de un movimiento giratorio de velocidad ligeramente variable con la carga aplicada al eje.
A pesar de ser una de las maquinas más simples que se han inventado para este fin, ha alcanzado un alto grado de perfeccionamiento y normalización. Para explicar el principio de funcionamiento acudimos a la siguiente figura, donde se observa un corte transversal del estator de un alternador:
Procedemos de esta forma porque el estator de los motores a inducción trifásicos es similar al de los alternadores. Existen pequeñas diferencias que están en función del diseño y la optimización, pero que no implica realizar comentarios distintos.
En las canaletas del estator del motor asincrónico de la figura anterior, supondremos la existencia de corrientes provenientes de un sistema trifásico simétrico y equilibrado; todas en un mismo instante. Este sistema de corrientes provoca un campo rotante o campo giratorio, que se establece en el estator mismo y cruza el espacio que se destinará al rotor.
Si pudiéramos desplegar el motor sobre un plano observaríamos la siguiente gráfica; y será mas visible la obtención del sentido de las corrientes en un determinado instante. Dado dicho instante T, en el mismo las corrientes tendrán un valor como se indica en la grafica de las derecha; donde se muestra el valor instantáneo para cada una de las corrientes.
Trasladando los valores a los respectivos bobinados, podemos ver los sentidos de las corrientes en ese instante. Observamos que se agrupan en dos sentidos hacia arriba y hacia abajo en sectores bien definidos. Esta distribución deja perfectamente establecidos los dos polos del campo rotante como señala la figura.

2
A medida que pasa el tiempo los grupos de corrientes de igual sentido se van desplazando, lo que es otro camino para mostrar objetivamente la existencia del campo rotante producido por un bobinado trifásico.
A través de la siguiente ecuación de los alternadores se ve que la velocidad de rotación de ese campo se encuentra vinculada con la frecuencia, como ser:
p
fNS
60=
Donde NS : Velocidad sincrónica del campo rotante, en revoluciones por minuto (RPM) f: Frecuencia de las corrientes aplicadas al estator, en Hertz (Hz) p: Número de pares de polos generados por el bobinado de estator.
A la velocidad del campo rotante NS se la llama velocidad sincrónica o simplemente velocidad del campo rotante.
Supongamos que en el espacio afectado por el campo rotante colocamos un conductor rectangular cerrado sobre si mismo, o sea en cortocircuito; y vinculado mecánicamente a un eje coincidente con el eje del estator, como se puede observar en la siguiente figura. Cabe destacar que al campo rotante se lo ha representado por medio de algunas de sus líneas verticales.
Dentro del área encerrada por esa espira en cortocircuito, el flujo magnético varía a causa de que el campo giratorio cambia constantemente de dirección. Dicha variación de flujo ocasiona una fuerza electromotriz inducida y como la espira constituye un circuito cerrado se genera una corriente.

3
El sentido de dicha corriente inducida se determina fácilmente recordando la regla de la mano derecha, teniendo en cuenta los sentidos relativos del movimiento.
Si tomamos en cuenta el tramo A-B de la espira y consideramos por el momento a la espira quieta, el campo tiene líneas que van de izquierda a derecha en el dibujo. Esto equivale a que, si el campo estuviese quieto, el conductor se movería de derecha a izquierda. Considerándolo así, la fuerza electromotriz inducida se produce de atrás hacia delante; es decir, hacia el observador. En el tramo inferior de la espira identificado como C-D; el sentido de movimiento relativo es opuesto y los efectos ocurren al revés.
En los tramos A-C y D-B no hay fuerza electromotriz inducida porque esos tramos de conductor no cortan líneas de campo, ya que se mueven en un plano concordante con las líneas.
Como el circuito es cerrado, las fuerzas electromotrices producidas en los dos lados activos se suman, y producen una corriente cuyo sentido se ha indicado en el dibujo con i, concordante con el sentido de la fuerza electromotriz inducida e. Al estar a su vez los dos tramos conductores, A-B y C-D dentro de un campo magnético (el del campo rotante), aparecen sendas fuerzas, cuyo sentido se determina fácilmente con la ayuda de la regla de la mano izquierda.
De acuerdo a la anterior figura se pueden observar las fuerzas generadas sobre cada lado activo, y la cupla resultante.
Es importante notar que la cupla generada tiende a llevar la espira en la misma dirección de giro que el campo rotante. O sea que hay una tendencia de la espira a acompañar al campo, asunto que tiene perfecta explicación desde el punto de vista físico.
Al producirse una variación del flujo dentro de la bobina, por inercia la espira tiende a conservar su estado original; es decir a seguir girando para evitar la variación de flujo y por el principio de acción y reacción, a tratar de conservar su configuración de carácter electromagnético inicial.
De esta forma hemos establecido el principio de funcionamiento del motor asincrónico con rotor en cortocircuito.
3.2. RESBALAMIENTO
Una opción práctica de verificar si el rotor llegase a girar con la misma velocidad que el campo rotante, es decir si el rotor alcanzase la velocidad sincrónica NS, es que no habría variación de flujo en la espira. En consecuencia no se generaría fuerza electromotriz inducida en la espira, no circularía corriente y consecuentemente al no haber cupla, no habría movimiento.
Con todo lo enunciado anteriormente, el rotor tendería a detenerse, disminuyendo su velocidad. Pero al hacerlo, aparecería una diferencia de velocidad entre el campo rotante que gira a velocidad constante y el rotor; lo que daría lugar a una fuerza electromotriz inducida y consecuentemente una cupla.
Por lo tanto la base de la existencia de la cupla motora es la diferencia de velocidad entre el campo rotante y el rotor, lo que expresado en porcentaje sería:
S
S
N
NNporcentajeS
100)(%)(
×−=
La variable N esta referida a la velocidad del rotor, y S es la diferencia porcentual que denominaremos resbalamiento, y que en nuestro caso es una de las variables más importante.
Pero aun así podemos inferir que la esencia de la existencia de la cupla radica en que la velocidad del campo rotante sea siempre superior a la velocidad de rotación; es decir.
NS>N

4
Sobre la base de las expresiones anteriores se deduce que:
)1(60
)1( Sp
fSNSNNN SSS −=−=−=
Ahora bien si tomamos en cuenta la velocidad relativa como la diferencia entre NS y N
p
fSNSNNN SSR
60×=×=−=
Siendo f la frecuencia de la red y p el número de polos del bobinado del estator, que estará en función de los aspectos constructivos de cada motor.
De acuerdo a las normas IRAM se denomina a esta cantidad como Deslizamiento.
El resbalamiento S puede tomar una gama de valores, conforme las diversas exigencias de operación de los motores. En los motores con rotor en cortocircuito puede oscilar entre el 1% y el 15% y en los de rotor bobinado al ser variable puede llegar incluso hasta el 50%.
Se debe tener en cuenta que los valores limites de S son:
1 S = 1 Para el caso de que a velocidad del rotor es nula, o lo que sería que el rotor esta detenido
2 S = 0 Para el caso en que la velocidad del rotor alcanza la velocidad del campo rotante, o sea cuando NS = N
De lo mencionado anteriormente podemos concluir que, para que exista cupla en estos motores, es necesario que la velocidad del rotor sea inferior a la de sincronismo del campo rotante y por ello se los denomina asincrónicos en contraposición con los del tipo sincrónico.
3.3. CUPLA Y POTENCIA MECÁNICA
Las máquinas rotantes están constituidas por: parte fija llamada estator y una parte móvil llamada rotor, esta última sujeta a un eje.
][746,0550][1
][735,075][1
kwsg
piélibrasHP
kwsg
kgmCV
=
−=
=
=
3.4. FLUJO DE POTENCIA EN LA MÁQUINA DE INDUCCIÓN
Una máquina de asincrónica requiere solamente tres conexiones entre la fuente y los terminales de su bobinado estatórico. La gran simplicidad del circuito eléctrico hace que resulte dificultoso investigar el flujo de potencia a través de la máquina. Las transferencias de potencia para el funcionamiento como motor.
En el caso de una máquina de inducción: cuando el resbalamiento es positivo la máquina funciona como motor y convierte la potencia eléctrica en potencia mecánica. La fuente entrega a la máquina tres veces la potencia absorbida por una fase, o sea:

5
Potencia eléctrica absorbida: 3 Us I s cos φ, donde cos φ es el factor de potencia de entrada.
No toda esta potencia se transforma en potencia en el campo magnético rotante, porque una parte se pierde en forma de calor: en las resistencias de los tres bobinados del estator, esto es:
Pérdida resistiva en el estator: 3 IS2 . RS
y en el núcleo del estator, debido a las corrientes parásitas y a la histéresis, esto es: Phs
Luego, la potencia transferida por el campo magnético rotante es:
Cs nrs = 3 U IS cos φ – 3 IS2 R –- P hS
La potencia CS.nrS se convierte en la potencia mecánica del rotor Cr . nrR, que se reduce por la pérdida rotacional Pm debida al rozamiento en los rodamientos y en el aire.
La potencia eléctrica debida a la pérdida resistiva 3 IRs2 RR, se disipa en forma de calor en la
resistencia del devanado del rotor y una muy pequeña pérdida PhR en el núcleo del rotor, producido por la histéresis y las corrientes vagabundas.
Si la cupla obtenible en el eje del rotor es CM, la ecuación de la potencia para el rotor es:
CM .nrR = CS nrR - 3 I 2Rs RR - PhR - Pm
El diagrama de bloque de la figura siguiente, demuestra claramente el flujo de potencia y la conversión de la forma eléctrica a la mecánica vía el enlace magnético.
Generador de inducción: Cuando el resbalamiento es negativo, el rotor de la máquina de inducción está impulsado a la velocidad nrR mayor que la velocidad nrS de su campo magnético. Esto se logra mediante un motor primario que entrega potencia mecánica a la máquina, la cual, a su vez, la convierte en potencia eléctrica con la que alimenta una red de distribución. La máquina se denomina generador de inducción.

6
3.5. DIAGRAMA VECTORIAL DE UN MOTOR
Para construir el diagrama de un motor estacionario (con rotor bloqueado) se procede de igual manera que un transformador, a partir del fasor del flujo magnético principal del campo rotante, Φ.
3.6. PÉRDIDAS EN LAS MÁQUINAS DE INDUCCIÓN
En la sección anterior han sido identificadas las pérdidas que ocurren en la máquina de inducción. Estas pueden agruparse bajo dos títulos:
Pérdidas fijas, que consisten de:
1111 Pérdidas en el núcleo del estator, PhS
2222 Pérdidas por fricción y ventilación, Pm
Pérdidas variables, que comprenden:
1111 Pérdida Resistiva en el estator 3 RS IS2
2222 Pérdida Resistiva en el rotor 3 RR IRs2
3333 Pérdidas por la deformación del flujo, que incluyen la pérdida en el núcleo del rotor PhR
La máquina de inducción normalmente funciona conectada a una fuente de tensión y frecuencia constantes. Como la pérdida en el núcleo del estator, PhS depende de la frecuencia y de la inducción magnética máxima, permanece invariable en condiciones de carga variable, porque el flujo magnético rotante es proporcional a la tensión de alimentación ( V= 4,44 Φ f N )
Asimismo, la velocidad de rotación varía muy poco entre vacío y plena carga, como se aprecia los valores típicos del resbalamiento de los motores. Por consiguiente, la pérdida por fricción y ventilación es casi constante, ya que depende de la velocidad de rotación.
Por el contrario, las pérdidas b(1) y b(2) varían entre amplios valores, ya que las corrientes del estator y del rotor son diferentes para cada valor de la carga, mecánica o eléctrica. La pérdida b(3) aunque variable, es muy pequeña y suele despreciarse. Esto se justifica porque en carga la

7
frecuencia de las corrientes en el bobinado del rotor es muy baja y la deformación del flujo, que induce corrientes parásitas en la carcasa del estator y los escudos no es de magnitud apreciable.
Las pérdidas fijas se obtienen mediante un ensayo en vacío. La máquina gira sin carga, conectada a la fuente a la tensión y frecuencia nominales y se mide la potencia absorbida. Como la máquina no entrega potencia, las corrientes en el rotor y el estator son muy pequeñas y por lo tanto las pérdidas IS
2. RS e IRs
2 RR pueden despreciarse y la totalidad de las pérdidas a (1) y (2) constituyen la potencia absorbida.
La pérdida resistiva en el estator puede calcularse para varios valores de la corriente IS, medida con un amperímetro conectado en un conductor de la línea conectada al estator. La resistencia RS
se obtiene por cualquiera de los métodos normales de medida, como el de amperímetro y voltímetro o un óhmetro. Sin embargo, RS debería medirse en caliente, después que la máquina ha funcionado a plena carga durante cierto lapso.
Si el rotor tiene un bobinado de fase conectado a anillos rozantes, debe también medirse la resistencia de dicho devanado. En el caso del rotor de tipo jaula se utiliza el siguiente recurso.
Recordemos que:
Por lo tanto:
o sea que la pérdida resistiva en el rotor es igual al resbalamiento multiplicado por la potencia en el campo magnético CS nrS.
3.7. RENDIMIENTO DE UNA MÁQUINA DE INDUCCIÓN
El rendimiento puede calcularse a partir de las ecuaciones:
Rendimiento η = Potencia entregada = Potencia Absorbida - Pérdidas
Potencia absorbida Potencia absorbida
Rendimiento η = 1 - __ Pérdidas _
Potencia absorbida
Rendimiento η = 1 - __ Pérdidas _
Potencia Entregada + Pérdidas
La potencia absorbida o entregada en el eje, se toma como: )/( sNmnC RM CM nr (Nm/S)
Donde: CM = cupla en el eje (Nm) y nr = velocidad de rotación (rad/S)
La potencia entregada en los terminales del estator es =:
donde: UL = tensión de línea (V) IL = corriente de línea (A) cos φ = factor de potencia
Cuando la máquina funciona como motor el factor de potencia siempre atrasa y cuando funciona como generador de inducción siempre adelante. La razón para que el factor de potencia adelante en el último caso es que la máquina no provee su propia excitación, sino que la toma de la fuente a la que está conectada.
Luego el rendimiento del motor η =
ϕcos3 ×××
×
LL
RM
IU
nC
RSSR
SR nCS
RI =×× 23
RSSRSR nCSRI ××=×× 23
)(cos3cos3 WIUIU LlSS ϕϕ ×××=×××

8
3.8. MONTAJE DE MOTORES ELÉCTRICOS
Las posibilidades de montaje de los motores eléctricos pueden ser las siguientes:
• Por los pies o base
• Por la brida
• Por los pies y brida
• Por el empleo de agujeros roscados
Es muy importante que la base donde apoyará el motor sea a su vez perfectamente plana, y en lo posible obtenida por mecanizado. Bases irregulares pueden traer inconvenientes tales como roturas de pies o deformación en la estructura del motor, con la secuela de ruido en los rodamientos.
En la ultima página se puede observar un esquema de las distintas configuraciones referidas a las normas NEMA.
3.9. MANTENIMIENTO DE MOTORES ELECTRICOS - GENERALI DADES
Los motores eléctricos de corriente alterna trifásicos asincrónicos con rotor de jaula son, entre las máquinas que transforman y transmiten energía; las más sencillas, por ende, las más confiables. En efecto: salvo la limitación que imponen la vida útil de los aislantes y la de los rodamientos, no existen en estas máquinas otros componentes que requieran mayor cuidado o pongan término a un prolongado servicio.
En comparación con otras máquinas rotantes, los motores eléctricos asincrónicos con rotor de jaula, son las que ofrecen mayor confiabilidad y expectativa de funcionamiento por largo tiempo, sin declinación de su eficiencia.
Como queda dicho, los principales factores limitantes son:
• El envejecimiento de los aislantes
• El comportamiento de los rodamientos
3.9.1. Envejecimiento de los aislantes
Trabajando los motores con temperaturas en sus arrollamientos que no excedan su Clase Térmica, el envejecimiento de los aislantes es muy lento. Para tener una idea de la duración de sus propiedades en función del tiempo, se puede decir que 25 años no es un lapso exagerado.
Pero si la temperatura admisible de trabajo del motor se excede, sea por sobrecarga o por descuido en la vigilancia de su ventilación, el envejecimiento de los aislantes se acelera según una curva exponencial.
Como consecuencia pocos grados de exceso sobre la temperatura máxima permitida por la Clase Térmica, se refleja en una degradación drástica de las propiedades aislantes. Y cuanto más se exceda la temperatura máxima admisible tanto más rápido se alteran los materiales aislantes.
Otros factores tales como la presencia de humedad, polvillo, ambientes corrosivos, aceites y solventes, también atentan contra la duración de los aislantes en la constancia de sus propiedades normales.

9
Para obtener una buena medida de cómo se encuentra la aislación es necesario referenciar las lecturas respecto de una temperatura de 40°C, tal como lo muestra la siguiente grafica:

10
3.9.2. Vida útil de los rodamientos
Para evitar factores externos que pudieran afectar su marcha o su vida útil, tales como es la contaminación de la grasa se utilizan en motores de protección IP44 o superiores, y rodamientos con doble obturación y engrasados por vida útil en fábrica.
Los motores de tamaños mayores llevan rodamientos abiertos, lubricados con grasa de base sintética, apta para soportar muy bajas y también elevadas temperaturas. En estos casos, los rodamientos llevan un sistema de obturación y reengrase, que permite el engrase durante la marcha sin riesgo de sobreengrase.
El cálculo para el dimensionamiento de los rodamientos no sólo tiene en cuenta la capacidad dinámica de carga de los mismos, sino también otros factores que inciden en su comportamiento y duración. Tales factores son: Diámetro de las pistas; diámetro y cantidad de elementos rotantes; velocidad periférica para las pistas y elementos rotantes, etc. No necesariamente el rodamiento de mayor capacidad de carga es garantía de mayor duración o más prolongada vida útil.
Merece particular mención, como factor decisivo en la duración de los rodamientos, la ausencia de vibraciones.
Cualquier elemento externo, incorporado al motor o no, pero que transmita vibraciones al mismo, causará indefectiblemente a corto o a mediano plazo, la salida de servicio de la unidad; incluso con acuse de serias averías.
3.9.3. Capacidad de Sobrecarga
Las maquinas construidas para servicio continuo o servicio permanente, pueden suministrar por tiempo indefinido su potencia nominal sin sobrepasar la temperatura limite. Aun así, si se las somete a servicio temporario, es posible obtener de ellas potencias superiores a la nominal sin que se perjudiquen a si mismas.
En la siguiente figura podemos observar varias curvas de elevación de temperatura, correspondientes a diferentes estados de carga.
La curva inferior de trazo más grueso es la correspondiente al funcionamiento nominal, es decir a la potencia nominal del 100%. La elevación máxima de temperatura θmx es aproximadamente la elevación limite δL en toda la máquina correctamente dimensionada y construida, donde todos los materiales están bien aprovechados y para las aislaciones se espera una vida útil normal.
Si la máquina es obligada a funcionar a una potencia superior a la nominal; la elevación final de temperatura será mayor de acuerdo al siguiente razonamiento simple:
PU
U
PP
P
+=η

11
Expresando las pérdidas como:
De estas forma podemos obtener la expresión de las elevaciones de temperatura θmx, como:
−××=−
1110239,0 3
ηθ UMX P
Sh
Aquí se puede ver que dichas elevaciones de temperatura sobre la del medio ambiente δ, son función de la potencia útil, PU y el rendimiento η.
Por lo tanto si hacemos trabajar a la máquina con sobrecarga o lo que es lo mismo a una potencia superior a la nominal; alcanzará una elevación de temperatura máxima superior a θmx= δL.
De acuerdo a esto último es que se realizaron las curvas de la figura anterior para las elevaciones de temperatura según diferentes estados de carga; concluyendo que cuanto mayor es la carga de trabajo, mayor será la elevación de temperatura sobre la del medio ambiente δa que alcanzará la máquina.
Con cualquier potencia superior al 100% se sobrepasará la elevación límite δL, no pudiéndose por ello trabajar en servicio permanente, pero sí en servicio temporario.
Ejemplificando esto último, si aplicamos una sobrecarga del 10%, o sea si trabajamos a una potencia del 110%, la maquina alcanzará la elevación de temperatura límite o máxima recomendable, en el tiempo indicado con t10. Hasta ese momento, la elevación no da lugar a una temperatura que comprometa a los aislantes, ya que en todo momento se cumple que θ<δL. Si llegamos al tiempo t10 detenemos la maquina y la dejamos enfriar conforme alcance la temperatura ambiente, podremos repetir dicha operación o ciclo, tantas veces como se requiera, sin riesgo para los aislantes.
Igual razonamiento podemos hacer para una sobrecarga del 20%, es decir una potencia del 120% de la nominal, y veremos que podemos trabajar hasta cumplir el tiempo t20 en que se alcanzará la temperatura límite.
En la siguiente figura se representaron los tiempos de funcionamiento para las diversas cargas. Para valores por debajo de la potencia nominal PN, el tiempo de funcionamiento puede ser indefinido. Para sobrecargas, los tiempos disminuyen a medida que aumentamos la sobrecarga
−= 11
ηUP PP

12
3.10. TIPOS DE SERVICIOS
El tipo de trabajo que realiza la máquina operadora, determina el servicio al cual está sometido el motor que la acciona.
En los casos que el servicio no sea continuo, es de fundamental importancia conocer la cantidad de conexiones por hora, a fin de determinar el tiempo de duración de cada ciclo de trabajo.
Un motor que deba cumplir por ejemplo un servicio con 20 arranques por hora, en cada hora cumplirá 20 ciclos cuyo tiempo de duración será para cada uno de:
segundosT 18020
3600==
Durante el tiempo de duración de cada ciclo, el motor podrá a su vez estar un tiempo conectado por ejemplo 72 segundos y un tiempo desconectado por ejemplo 108 segundos. Dicha situación se contempla definiendo un “Factor De Marcha” o “Tiempo De Conexión” que lo expresamos con las letras “ED” : Para el ejemplo referido será,
100sin
%4010010872
72
×+
=
=×+
=
corrientepausadeTiempostrabajodetiemposdeSuma
trabajodetiemposdeSumaED
generalEn
ED
En lo que a tipo de servicio se refiere, un motor que trabaje según las condiciones del ejemplo precedente deberá especificarse:
20 arranques/hora; 40% ED
Durante el tiempo en el cual el motor permanece conectado, el mismo puede estar sometido a conexiones de arranque, frenado eléctrico, marcha a carga constante, marcha en vacío, etc.; por lo que es necesario encuadrar el tipo de servicio de acuerdo a la siguiente clasificación:
S1: Servicio continúo: Servicio que consiste en un funcionamiento a régimen constante de una duración suficiente para que sea obtenido un equilibrio térmico.
S2: Servicio temporario: Servicio a régimen constante un tiempo determinado, menor que el requerido para alcanzar el equilibrio térmico, seguido de un periodo de reposo y desenergización hasta alcanzar el equilibrio térmico con el medio de enfriamiento.
S3: Servicio intermitente periódico: Servicio compuesto de una serie de ciclos idénticos, comprendiendo cada uno de un tiempo de funcionamiento a un régimen y un tiempo de reposo: este periodo es insuficiente para obtener el equilibrio térmico durante la duración del ciclo.
En este tipo de servicio la detención del motor se obtiene por desaceleración natural luego de la desconexión de la fuente de suministro o por medio de frenado mecanico que no causa calentamiento adicional de los bobinados.
S4: Servicio intermitente periódico con arranque.

13
Tipo de Servicio S1
Tipo de Servicio S3
Tipo de Servicio S2
Tipo de Servicio S4

14
S5: Servicio intermitente periódico con arranque y frenado eléctrico.
S6: Servicio ininterrumpido con carga intermitente. Es la operación constituida por una secuencia de ciclos idénticos en que cada ciclo incluye un tiempo de operación a carga constante y un periodo de operación en vacío siendo ambos demasiados breves para alcanzar el equilibrio térmico durante cada ciclo.
S7: Servicio ininterrumpido con arranque y frenado eléctrico.
S8: Servicio ininterrumpido con cambios periódicos de velocidad.

15
3.11. POSIBLES ANOMALIAS DE FUNCIONAMIENTO EN LOS M OTORES TRIFASICOS
A veces por motivos ajenos al motor pueden presentarse ciertas anomalías en el funcionamiento del motor, por lo general imputables a las condiciones de servicio o de suministro de energía. Indicamos a continuación las causas más frecuentes de anomalías, a fin de que tengamos una orientación de cómo prevenir averías que puedan conducir a la Salida de servicio de motores en uso.
3.11.1. Tensión de Servicio distinta a la nominal.
La tensión nominal del motor debe coincidir con la tensión de servicio de la red. En los casos de desviaciones puede suceder lo siguiente,
a) Tensión de servicio superior a la nominal: Disminuye el factor de potencia y aumenta el valor de la corriente absorbida, se incrementan las pérdidas provocando un calentamiento anormal.
b) Tensión de servicio inferior a la nominal: Disminuyen los valores de cupla, aumenta el deslizamiento y los valores de las corrientes del estator y del rotor, de este modo se incrementan las pérdidas provocando un calentamiento anormal.
3.11.2. Frecuencia de servicio distinta a la nominal.
Al igual que la tensión, la frecuencia constituye una característica fija del motor. Cuando no coincide la frecuencia de servicio con la nominal, puede suceder,
a) Frecuencia de servicio mayor que la nominal: El motor ofrece menor par de arranque, mientras que su velocidad se ve incrementada. El menor par de arranque produce generalmente un retardo en el embalamiento, periodo en el cual está presente la sobrecorriente de arranque. Como consecuencia tiene lugar un aumento anormal de la temperatura del motor, particularmente en los casos de arranques repetidos.
En cuanto a la velocidad, puede darse el caso en que la maquina accionada absorba mayor potencia en función de la mayor velocidad, produciéndose por lo tanto una sobrecarga en el motor de impulso.
b) Frecuencia de servicio menor que la nominal: Se hacen menores los valores de velocidad, rendimiento y factor de potencia. Crecen los valores de las corrientes de arranques y de plena carga, sobre calentándose el motor en razón de mayores perdidas debido a la menor eficiencia en la ventilación.
3.11.3. Potencia exigida mayor a la nominal (sobrecarga)
Se produce un aumento de corriente absorbida por el estator, lo que provoca un aumento de corriente en el rotor. Se incrementan por tal motivo las pérdidas, originándose el calentamiento.
16
3.11.4. Defectos de ventilación
Los motores normalmente presentan una sobreelevación admisible de la temperatura de sus partes la cual es compatible con la clase aislante utilizado en su construcción y con el tipo de lubricante de sus rodamientos. En condiciones normales la temperatura del medio refrigerante (aire) no debe superar los 40°C y su paso por el motor debe estar libre de obstrucciones. A veces, depósitos involuntarios de polvillo o cuerpos extraños que pueden obstruir el libre paso del aire refrigerante, o restar eficiencia al intercambio de calor entre el mismo con las partes interesadas del motor.
Merece particular atención el caso de instalación de motores en recintos cerrados donde no se produce una renovación del aire, y por lo tanto, el aire caliente de salida es nuevamente aspirado por el ventilador del motor.
Anormalidades como las señaladas suelen causar un incremento de la temperatura de las partes del motor, sobrepasándose la sobreelevación admisible, con riesgo de producir averías serias.
3.11.5. Conexión equivocada
Es el caso de error en la conexión por parte del instalador. Por ejemplo, a un motor diseñado para prestar servicio con conexión triángulo se lo conecta en estrella. Se observa entonces deficiente cupla de arranque y aumento notable de la corriente absorbida, lo que conduce a un calentamiento anormal.
3.11.6. Interrupción del suministro en una de las fases de alimentación
Es el conocido inconveniente de “falta de fase”. Puede producirse ya sea en la red distribuidora de la empresa de suministro o en la red inte4rna de la instalación. Si no existen elementos de protección en la instalación para este tipo de fallas, estando el motor en servicio, este sigue en funcionamiento, produciéndose una fuerte absorción de corriente de las fases que aun siguen conectadas, con el consecuente sobre calentamiento de las mismas y su probable deterioro a breve plazo.
3.11.7. Presencia de cortocircuitos
Esta anomalía se presenta cuando se produce un contacto directo (conexión conductora) entre espiras de los arrollamientos, o entre espiras y núcleo (masa) Distintos pueden ser los motivos de esta falla; entre los más comunes se encuentran: prematuro envejecimiento de las aislaciones, provocado por sobretemperaturas anormales; ataque de las aislaciones por productos químicos agresivos; sobretensiones eléctricas en el suministro de energía depósito de polvo conductor sobre las bobinas; Alto grado de humedad.
Con relación a esto último, es aconsejable cuando se deban mantener motores en depósitos, hacerlo en ambientes secos. Si los motores han permanecido largo tiempo depositados, previo a su instalación es conveniente efectuar un control del estado de aislación de sus arrollamientos, efectuando un secado si fuera necesario.
La consecuencia inmediata de la presencia de un cortocircuito en un motor, es un excesivo consumo de corriente en la sección afectada, con fuerte generación de calor y elevadísima temperatura en la zona de falla. Generalmente se observa un funcionamiento ruidoso (zumbido) y la presencia de vibraciones.

17
3.11.8. Anomalías en los rodamientos
La principal causa de eventuales averías en los rodamientos es una deficiente lubricación, sea por no haberse cumplido los períodos de reengrase aconsejados o por haberse utilizado lubricante en cantidad o de la calidad inadecuada. A veces también suelen deteriorarse los rodamientos al estar solicitados por un esfuerzo mecánico exageradamente mayor que el previsto por los cálculos.
La avería de los rodamientos puede permitir el rozamiento entre los núcleos del estator y rotor, con gran generación de calor y ulterior daño de los arrollamientos.
3.11.9. Acoplamientos y poleas
En los acoples directos, los ejes deben alinearse de manera tal que no solamente sean paralelos, sino que además sus ejes geométricos sean coincidentes. En caso de usar poleas, éstas deberán ser normalizadas a efecto de no sobrepasar los valores admisibles de las fuerzas que actúan sobre el extremo libre del eje.
Importante: Como se desprende de cuanto queda establecido relativo a las posibles anormalidades de funcionamiento en los motores trifásicos, es de fundamental importancia el comportamiento térmico de un motor en servicio.
Comúnmente, debido a la falta de instrumentos adecuados para efectuar mediciones en los lugares de instalación de los motores, el usuario suele estimar el estado térmico de los mismos mediante el contacto de su mano con las carcasas, dicha apreciación puede conducir a equivocaciones de importancia. En efecto: la temperatura de la carcasa no es un índice de la calidad de un motor o de las condiciones de su funcionamiento.
Un motor exteriormente frío puede tener en sus arrollamientos una temperatura superior a un motor exteriormente caliente.
Solamente mediante mediciones apropiadas podrá juzgarse si el régimen térmico de un motor es el correcto, o si por el contrario es anormal, indicando de ese modo una probable anomalía.
3.12. CARACTERÍSTICAS DE LAS MÁQUINAS DE INDUCCIÓN
La máquina de inducción, ya sea que funcione como motor o como generador, está siempre conectada a una red de suministro. La tensión y la frecuencia de la red son por lo tanto constantes y no son cambiadas por el comportamiento de una máquina de inducción.
La cupla de una máquina de inducción se encuentra influenciada por los otros factores de la máquina.
Variación de la cupla con el resbalamiento. Si se considera que la impedancia del bobinado del estator es despreciable se tendrá que para una tensión dada de alimentación constante y frecuencia constante, Φ y ER0 permanecerán constantes. Luego, podemos deducir que:
La cupla es proporcional a (ver gráfico)
El valor de XRO es generalmente mucho mayor que la resistencia del bobinado del rotor; para simplificar, supóngase que R= 1 Ω y XR0= 8 Ω y calcúlese el valor de para varios valores del resbalamiento entre 1 y 0 . Los resultados están representados por la curva A, en la figura siguiente:

18
Curvas cupla/resbalamiento para un motor de inducción
Puede verse que para valores pequeños del resbalamiento, la cupla es casi directamente proporcional al resbalamiento; mientras que para resbalamientos entre 0,2 y 1 la cupla es casi inversamente proporcional al resbalamiento. Estas relaciones pueden deducirse fácilmente de la expresión anterior.
Así, en el caso del rotor de jaula, RR es pequeña comparada con XR0 , pero para valores del resbalamiento menores que aproximadamente 0,1 , s2 X 2R0 es muy pequeña comparada con R 2
R,
así que: Cupla, es proporcional s.RR / RR2 o s/RR
Es decir que la cupla es directamente proporcional al resbalamiento cuando éste es muy pequeño.
Para valores grandes del resbalamiento, R 2R es muy pequeña, comparada con s 2 X 2R0 para el
rotor de jaula y para el rotor con anillos rozantes sin resistencias externas. Por lo tanto: Cupla es proporcional a RR / S
Ya que XR0 es constante para un motor dado; es decir que la cupla es inversamente proporcional al resbalamiento, cuando éste es grande.
3.13. EFECTO DE LA RESISTENCIA DEL ROTOR SOBRE LA RELACIÓN CUPLA/RESBALAMIENTO:
De la expresión anterior se deduce que cuando RR es pequeña comparada con s. XR0 la cupla para un resbalamiento dado es directamente proporcional al valor de RR; se deduce que cuando RR es grande comparada con s XR0, la cupla para un resbalamiento dado es inversamente proporcional al valor de RR. El método más simple para demostrar este efecto es repetir el cálculo de s RR/ (R2R + S2 X2R0) con RR = 2Ω; RR -4 Ω y RR = 8 Ω.
Los resultados están representados por las curvas B,C, y D respectivamente, de la anterior figura. Se puede ver que para un resbalamiento de, por ejemplo 0,005, el efecto resultante de la duplicación de RR es reducir la cupla en alrededor de 0,45 , mientras que para un resbalamiento de 1, la cupla es casi duplicada cuando la resistencia aumenta de 1 Ω a 2 Ω . Por consiguiente, si se requiere una gran cupla de arranque, el rotor debe tener una resistencia relativamente alta.
En la figura también puede verse que el valor máximo de la cupla es el mismo para los cuatro valores de RR y que cuanto más grande es la resistencia, mayor es el resbalamiento a la cupla máxima.

19
3.14. ARRANQUE DE MOTORES
Existen tres métodos básicos para el arranque de un motor tipo jaula:
1 Directo a Línea
2 Estrella – Triángulo
3 Autotransformador
3.14.1. Directo a Línea
El primer método consiste en conectar el motor directamente a la tensión total de la línea de alimentación mediante un contactor o un simple interruptor.
Inicialmente la máquina desarrolla hasta dos veces su cupla de plena carga y absorbe una corriente muy grande, hasta diez veces su valor nominal. La corriente disminuye rápidamente mientras el motor acelera rápidamente hasta cerca de la velocidad sincrónica.
Debido a este aumento impetuoso de la corriente, este método se encuentra restringido a motores de no más de 10 kW de potencia inicial, alimentados desde una red de consumidores generales.
No obstante, en muchas industrias pesadas alimentadas con alta tensión y que disponen de sus propios transformadores de distribución, suelen arrancarse máquinas mucho más grandes, de muchos cientos de kW de potencia nominal.
La limitación de la potencia para arranque directo de motores conectados a redes generales, tiene el objeto de evitar las fluctuaciones de tensión y sus efectos dañinos sobre otras plantas.
3.14.2. Estrella - Triángulo
El arranque estrella-triángulo (Y-∆) se usa para máquinas con potencia nominal desde 5 kW aproximadamente con el propósito de disminuir la comente de arranque. En este método los bobinados del estator se conectan en estrella para el arranque y cuando la máquina está girando a velocidad estable se reconecta a triángulo para el funcionamiento normal.
Para utilizar este sistema los motores deben estar preparados para funcionar en forma continua en la conexión triangulo de los bobinados del estator. Así los motores aptos para ser conectados a una red de 3 X 220 V deberán estar construidos para 220/380 V y los que deben ser conectados a una red de 380 V, deberán estar construidos para 380/660 V. Estas indicaciones deberán figurar en la chapa de características de la máquina.
Otro ejemplo para ejemplificar lo mencionado anteriormente es el que sigue:, donde la primera etapa en este tipo de arranque es en estrella recibiendo el motor 1/v3 veces la tensión de línea. Como consecuencia de ello la corriente se reduce a 1/v3 mientras que la cupla de arranque resulta una tercera parte, cuestión que hay que tener en cuenta porque es una disminución importante.

20
El motor debe estar preparado para trabajar normalmente en triángulo y cada fase es construida para esa tensión. Por ejemplo, un motor para red de 3x380 y arranque estrella – triángulo su chapa indicará 3x380/3x660, luego del arranque en estrella y que el motor tomo su velocidad estable se pasa a triángulo.
3.14.3. Autotransformador.
El motor es alimentado con tensión reducida mediante un autotransformador el cual se pone fuera de servicio cuando el arranque termina; esto tambien reduce la cupla inicial y la corriente absorbida por la fuente
El arranque se efectúa en tres tiempos a saber.
Primer tiempo: Puesta en estrella del autotransformador, después del cierre del contactor de línea, el motor arranca ahora con tensión reducida.
Segundo tiempo: Apertura del punto neutro, una fracción del bobinado del autotransformador insertado en serie con cada fase del estator se comporta como una inductancia.
Tercer tiempo: Un tercer contactor acopla el motor a plena tensión de red y provoca la apertura de los dos primeros contactores de arranque transitorios.
Con este dispositivo el motor nunca está separado de la red de alimentación por lo que la corriente no se interrumpe y los fenómenos transitorios son suprimidos. A su vez la ventaja de este método consiste en que la reducción de la corriente puede ajustarse al valor requerido, eli-giendo la salida correcta del autotransformador, a diferencia del método previo, donde la reducción de la corriente está fija a 1/3 de su valor normal.

21
3.14.4. Arranque con Resistencias en el Rotor
Ya hemos visto que los motores trifásicos con rotor bobinado (con anillos) pueden arrancar en forma gradual, por medio de resistores intercalados en el circuito del rotor. En la siguiente figura tenemos el esquema de conexiones para este tipo de arranque.
En este caso se dispone de un contactor, el cual nos permite conectar el bobinado del estator a la red de alimentación. Las tres fases del rotor, a través de los anillos rozantes, se unen a tres resistores de arranque conectados en conexión estrella. En la parte superior derecha de la figura tenemos graficadas cuatro características de la corriente en función del resbalamiento I=(fs) que pueden corresponder a cuatro escalones de la resistencia de arranque. En la parte inferior derecha de la misma figura se ven las cuatro curvas de cupla correspondientes a las mismas fracciones de la resistencia de puesta en marcha.
Si la resistencia de puesta en marcha ha sido correctamente dimensionada, al conectar el valor RA1 el motor se pone en marcha con una característica de cupla que hace máximo su valor a velocidad nula, en el momento del arranque. Esto quiere decir a resbalamiento máximo.
Si la cupla resistente del mecanismo arrastrado vale CR la velocidad se estabilizara en N1. Si en esas condiciones cambiamos la resistencia, cambia también en valor a otro RA2, se producirá un aumento de velocidad hasta N2 y así sucesivamente llegaremos a la resistencia RA4, en que el valor debería ser nulo, para que el motor alcance su velocidad final de marcha.
Se observa que el equilibrio dinámico ha pasado sucesivamente por los puntos 1, 2, 3 y 4. Si la resistencia de puesta en marcha está correctamente dimensionada, los valores de la cupla oscilarán entre el valor máximo CMAX , que puede suministrar el motor y el valor mínimo de la cupla resistente CR. Con la corriente absorbida I ocurrirá algo similar, como se puede observar en la figura.

22
3.15. Control de Velocidad
El perfeccionamiento de los sistemas de rectificación, introdujo importantes cambios en la forma de encarar este tema. Aun así hoy en día podemos ver todavía sistemas antiguos entre mezclados con sistemas nuevos; por o que haremos una revisación general de los métodos mas usados.
3.15.1. Control por variación de resistencia rotórica
Método reservado únicamente a motores con rotor bobinado (con anillos), se muestra en la siguiente figura:
De configuración similar a la empleada en los sistemas de arranque, donde el acoplamiento del estator del motor a la rede de alimentación se hace mediante contactores. La explicación de este sistema de regulación de velocidad tiene su fundamento a partir de la siguiente expresión de potencia.
( )SAIRRS
SPm 2
22´
13 +−=
Ordenándola y separando de manera de expresarla como función de S nos queda:
( ) ( ) SAAS
IRRS
RRIPm 2
22
222
´3´3
+−+
=
El segundo sumando del segundo miembro es l apotencia perdida por efecto Joule en todo el circuito del rotor, en tanto que el primer miembro es la potencia transferida por el estator al rotor. Se aprecia que a medida que baja la velocidad sube el resbalamiento y disminuye el primer sumando.
Por lo tanto la regulación de la velocidad se hace a expensas de una perdida de energía en el circuito del rotor. El método no es conveniente para regular bajas velocidades.

23
3.15.2. Control por variación de tensión aplicada
Este método requiere un sistema auxiliar de regulación de tensión. Mediante el empleo de rectificadores de potencia controlados, es sencillo lograr este tipo de regulación. No obstante tiene el desfavorable efecto de incidir directamente sobre la cupla, como se puede apreciar fácilmente con la siguiente ecuación:
Al ser fuertemente dependientes de la tensión aplicada al estator, su empleo tiene limitaciones.
3.15.3. Control por variación de Frecuencia y tensión
Este método se funda en la regulación de la velocidad sincrónica del campo rotante, a través de la ecuación:
Sin embargo, un método que se base en la regulación de la velocidad a través de la regulación de la frecuencia, debe contemplar simultáneamente la regulación de la tensión. De no ser así, como la potencia útil es el producto de la velocidad por la cupla, el método implicaría la regulación de la potencia. Por esta causa la aplicación de este método debe estar precedida de un estudio de esta situación.
222
12
2
2 XSR
S
URKCm
+=
p
fNS
60=
24
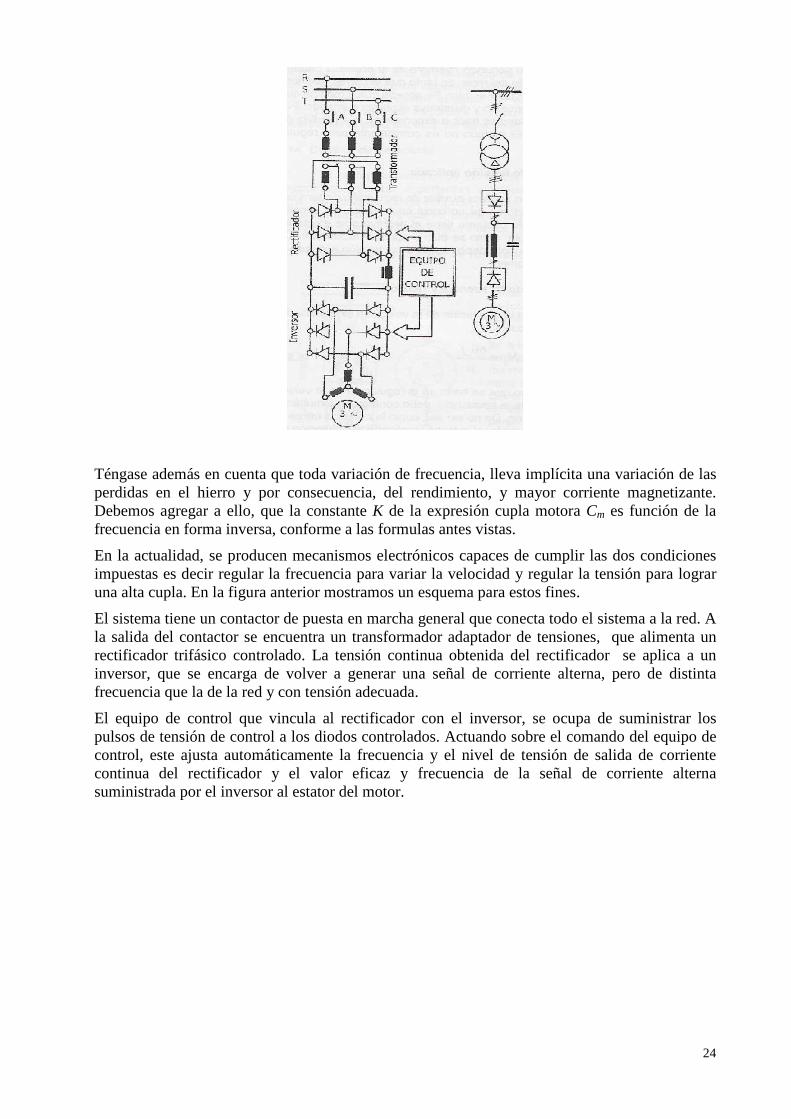
Téngase además en cuenta que toda variación de frecuencia, lleva implícita una variación de las perdidas en el hierro y por consecuencia, del rendimiento, y mayor corriente magnetizante. Debemos agregar a ello, que la constante K de la expresión cupla motora Cm es función de la frecuencia en forma inversa, conforme a las formulas antes vistas.
En la actualidad, se producen mecanismos electrónicos capaces de cumplir las dos condiciones impuestas es decir regular la frecuencia para variar la velocidad y regular la tensión para lograr una alta cupla. En la figura anterior mostramos un esquema para estos fines.
El sistema tiene un contactor de puesta en marcha general que conecta todo el sistema a la red. A la salida del contactor se encuentra un transformador adaptador de tensiones, que alimenta un rectificador trifásico controlado. La tensión continua obtenida del rectificador se aplica a un inversor, que se encarga de volver a generar una señal de corriente alterna, pero de distinta frecuencia que la de la red y con tensión adecuada.
El equipo de control que vincula al rectificador con el inversor, se ocupa de suministrar los pulsos de tensión de control a los diodos controlados. Actuando sobre el comando del equipo de control, este ajusta automáticamente la frecuencia y el nivel de tensión de salida de corriente continua del rectificador y el valor eficaz y frecuencia de la señal de corriente alterna suministrada por el inversor al estator del motor.

25
3.16. MOTORES MONOFÁSICOS
Problema: Calcular la sección que deberán tener los conductores de una línea trifásica a los efectos de alimentar a 150 lámparas de 60 watt y 220 volts, más un motor de 20 HP. Todo el conjunto se ubica a 270 mts. del tablero principal y la caída de tensión se considera como admisible hasta un 2%.
a) Esquema propuesto
Conectamos en estrella 50 lámparas por fase, resultando esto una potencia de 3000 w por fase, y calculamos la corriente total que circulará por la línea
AI
AI
ACosU
PI
CosIUP
AV
W
V
PI
IVP
T
T
LL
LL
6,41
6,4196,276,13
96,278,0380732,1
73620
3
3
6,13220
3000
==+=
=⋅⋅
⋅==
=
===
⋅=
ϕ
ϕ

26
Calculemos la caída de tensión
voltsV
voltsvoltsV
6,7
6,7380100
2
=∆
=⋅=∆
Con los 7,6 volts de caída de tensión buscamos de tabla la sección un cable que sea capaz de transportar esa corriente, a esa distancia y que no supere la caída de tensión calculada.
ϕϕ XSenRCoslIV T +=∆ 3
Problema: Para la siguiente caja de bornes de un motor eléctrico realizar una conexión
a) Estrella
b) Triángulo.

27