
Desarrollo de un método de contacto elástico para la...
115
PROYECTO FIN DE CARRERA DESARROLLO DE UN MÉTODO DE CONTACTO ELÁSTICO PARA LA SIMULACIÓN DINÁMICA DE EJES FERROVIARIOS. X Z Y R u u wL wR w w w P Q N F F M N F F M NOMBRE : Juan Antonio Ballesteros Gallardo 5º Curso de Ingeniería Industrial ( Esp. Mecánica-Máquinas)
Transcript of Desarrollo de un método de contacto elástico para la...

PROYECTO FIN DE CARRERA
DESARROLLO DE UN MÉTODO DE
CONTACTO ELÁSTICO PARA LA
SIMULACIÓN DINÁMICA DE EJES
FERROVIARIOS.
X
Z
Y
R uuwL wR
w
w w
P Q
N
F
FM
NF
F
M
NOMBRE : Juan Antonio Ballesteros Gallardo
5º Curso de Ingeniería Industrial
( Esp. Mecánica-Máquinas)


“Que Dios me conceda serenidad para aceptar
las cosas que no puedo cambiar, el valor para
cambiar las cosas que sí puedo, y la sabiduría
para apreciar la diferencia”.

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 3
0. Índice
0. ÍNDICE ................................................................................................................................. 3
0.1. LISTA DE FIGURAS ............................................................................................................ 5
0.2. LISTA DE TABLAS ............................................................................................................. 8
1. INTRODUCCIÓN................................................................................................................ 9
2. DESCRIPCIÓN Y GEOMETRÍA DE UN VEHÍCULO FERROVIARIO.................. 10
2.1. INTRODUCCIÓN............................................................................................................... 10
2.2. DESCRIPCIÓN DE UN VEHÍCULO FERROVIARIO ................................................................ 10
2.3. MOVIMIENTOS RELATIVOS DE UN VEHÍCULO FERROVIARIO ............................................ 11
2.4. DESCRIPCIÓN GEOMÉTRICA DEL WHEELSET Y DEL RAÍL.................................................. 12
2.4.1. Posición y orientación de un sólido ( Parámetros de Euler ). ............................... 12
2.4.2. Geometría del eje ferroviario................................................................................. 14
2.4.3. Geometría de la vía ................................................................................................ 16
3. DESARROLLO DE LA TEORÍA DINÁMICA DE FERROCARRILES ................... 18
3.1. INTRODUCCIÓN............................................................................................................... 18
3.2. PUNTOS DE CONTACTO ENTRE LA SUPERFICIE DE LA RUEDA Y EL RAÍL ........................... 18
3.2.1. Distancia mínima entre dos sólidos ....................................................................... 18
3.2.2. Puntos de máxima indentación .............................................................................. 21
3.3. CÁLCULO DE LAS FUERZAS DE CONTACTO...................................................................... 23
3.3.1. Fuerzas normales de contacto................................................................................ 24
3.3.2. Fuerzas de Creep ................................................................................................... 26
3.3.2.1. Coeficientes de Creep...................................................................................... 27
3.3.2.2. Método No-Lineal de Kalker .......................................................................... 34
3.4. APLICACIÓN DE FUERZAS DE CONTACTO SOBRE EL WHEELSET ....................................... 36
3.5. ECUACIONES DE MOVIMIENTO ........................................................................................ 38
3.5.1. Método de los multiplicadores de Lagrange.......................................................... 38
3.5.2. Método de Estabilización del Penalty.................................................................... 40
3.5.5. Ecuaciones analíticas del movimiento del ‘hunting’ ............................................. 42
4. RESOLUCIÓN DEL PROBLEMA.................................................................................. 47
4.1. INTRODUCCIÓN............................................................................................................... 47
4.2. CONSTANTES E HIPÓTESIS DEL PROBLEMA...................................................................... 48

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 4
4.3. FASES DE LA RESOLUCIÓN ............................................................................................. 51
4.4. MODELADO DEL PERFIL DE LAS RUEDAS Y DEL RAÍL ...................................................... 53
4.5. EVALUACIÓN DE LOS PUNTOS DE CONTACTO Y MÁXIMA INDENTACIÓN.......................... 57
4.6. MODIFICACIONES REALIZADAS SOBRE LOS CÁLCULOS TEÓRICOS ................................... 64
4.7. RESULTADOS OBTENIDOS DE LA SIMULACIÓN................................................................. 70
4.7.1. Análisis de un wheelset con velocidad de avance de 4 m/s.................................... 71
4.7.1.1. Magnitudes físicas........................................................................................... 72
4.7.1.2. Comparación entre el movimiento de ‘hunting’ obtenido y el teórico ........... 89
4.7.1.3. Influencia del desplazamiento lateral en el ‘hunting’ ..................................... 92
4.7.1.4. Influencia de la velocidad lateral inicial en el ‘hunting’ ................................. 95
4.7.2. Influencia de la velocidad de avance en el ‘hunting’........................................... 100
5. CONCLUSIONES............................................................................................................ 112
6. LÍNEAS DE INVESTIGACIÓN ABIERTAS ............................................................... 113
6.REFERENCIAS ................................................................................................................ 114
Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 5
0.1. Lista de figuras
Figura 1. Elementos generales de un vehículo ferroviario...................................................... 10
Figura 2. Dirección de los movimientos relativos en un vehículo ferroviario. ....................... 12
Figura 3. Parametrización espacial de un sólido rígido. ........................................................ 12
Figura 4. Esquema básico de un wheelset. .............................................................................. 14
Figura 5. Coordenadas locales de la rueda y el raíl. .............................................................. 15
Figura 6. Sistemas de referencias de la rueda......................................................................... 16
Figura 7. Sistema de referencia de la vía. ............................................................................... 17
Figura 8. Distancia mínima entre dos superficies. .................................................................. 19
Figura 9. Distancia máxima y mínima entre dos sólidos......................................................... 21
Figura 10. Puntos de máxima identación para sólidos que se intersecan............................... 22
Figura 11. Tipos de contacto. a) Sin contacto b) Puntual c) Sin indentación. ........................ 23
Figura 12. Métodos de contacto: a) con restricciones b) elástico c) configuración real........ 24
Figura 13. Fuerzas normales con ciclo de histéresis............................................................... 26
Figura 14. Elipse de contacto de Hertz.................................................................................... 28
Figura 15 Correlación del parámetro m.................................................................................. 31
Figura 16 Correlación del parámetro n. ................................................................................. 32
Figura 17. Fuerzas, momentos y velocidades de creep. .......................................................... 33
Figura 18. Evolución fuerzas de creep. ................................................................................... 35
Figura 19. Dirección de las velocidades de creep................................................................... 37
Figura 20. Fuerzas de contacto que actúan sobre las ruedas. ................................................ 37
Figura 21. Modelo simplificado de un wheelset. ..................................................................... 43
Figura 22. Velocidades de deslizamiento y fuerzas de creep. ................................................. 44
Figura 23. Evolución del ‘hunting’ (constantes arbitrarias)................................................... 46
Figura 24. Medidas del wheelset y la vía................................................................................. 49
Figura 25. Condiciones iniciales y posible evolución del wheelset......................................... 50
Figura 26. Diagrama de flujo del método de resolución......................................................... 52
Figura 27. Perfil de la rueda. .................................................................................................. 54
Figura 28. Derivada primera de la función interpolación de la rueda. .................................. 55
Figura 29. Derivada segunda de la función interpolación de la rueda................................... 55
Figura 30.Función interpolante del raíl. ................................................................................. 56
Figura 31.Derivada primera de la función interpolante del raíl............................................. 56
Figura 32.Derivada segunda de la función interpolante del raíl. ........................................... 57

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 6
Figura 33. Geometría de una rueda indentando...................................................................... 58
Figura 34. Posición inicial de la rueda y raíl para el test....................................................... 61
Figura 35. Puntos de contacto finales (Rueda izquierda). ...................................................... 62
Figura 36. Puntos de contacto finales (Rueda derecha).......................................................... 62
Figura 37. Ángulo entre las tangentes transversales y el vector distancia. ............................ 63
Figura 38. Indentación obtenida mediante el test.................................................................... 63
Figura 39. Correlación de m (θ) mediante funciones ‘splines’. .............................................. 65
Figura 40. Métodos alternativos para calcular m(θ). ............................................................. 66
Figura 41. Suma de los parámetros de Euler con un coeficiente de penalización. ................. 69
Figura 42. Error en el cálculo geométrico con un coeficiente de penalización...................... 69
Figura 43. Suma de los parámetros de Euler con dos coeficientes de penalización............... 70
Figura 44. Error en el cálculo geométrico con dos coeficientes de penalización................... 70
Figura 45. Desplazamiento lateral. V = 4 m/s, y (0) = 1mm................................................... 72
Figura 46. Evolución de ws1 . V = 4 m/s, y (0) = 1mm. ........................................................... 73
Figura 47. Evolución de S2w. V = 4 m/s, y (0) = 1mm. ............................................................ 73
Figura 48. Evolución de S1r. V = 4 m/s, y (0) = 1mm.............................................................. 74
Figura 49. Evolución de S2r . V = 4 m/s, y (0) = 1mm........................................................... 74
Figura 50. Indentación. V = 4 m/s, y (0) = 1mm. .................................................................... 76
Figura 51. Componente Z de las fuerzas normales. V = 4 m/s, y (0) = 1mm......................... 76
Figura 52. Componente Y de las fuerzas normales. V = 4 m/s, y (0) = 1mm......................... 77
Figura 53. Fuerza tangencial de Creep (Rueda izquierda). .................................................... 77
Figura 54. Fuerza tangencial de Creep (Rueda derecha). ...................................................... 78
Figura 55. Momentos totales (Rueda izquierda). .................................................................... 78
Figura 56. Momentos totales (Rueda izquierda). .................................................................... 79
Figura 57. Valor residual en la restricción de los parámetros de Euler................................. 80
Figura 58. Equilibrio de fuerzas durante el Hunting............................................................... 81
Figura 59. Velocidades lineales.V = 4 m/s, y (0) = 1mm. ....................................................... 83
Figura 60. Velocidades angulares . V = 4 m/s, y (0) = 1mm.................................................. 83
Figura 61. Velocidades angulares. V = 4 m/s, y (0) = 1mm. (Transitorio)............................. 84
Figura 62. Velocidades lineales. V = 4 m/s, y (0) = 1mm. (Transitorio) ................................ 85
Figura 63. Indentación. V = 4 m/s, y (0) = 1mm. (Transitorio) .............................................. 85
Figura 64. Fzas Tangenciales de Creep (Rueda izq). V = 4 m/s y (0) = 1mm. (Transitorio) . 86
Figura 65. Fzas Tangenciales de Creep (Rueda der). V = 4 m/s, y (0) = 1mm. (Transitorio) 86

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 7
Figura 66. Momentos (Rueda izq). V = 4 m/s, y (0) = 1mm. (Transitorio) ............................. 87
Figura 67. Momentos (Rueda izq). V = 4 m/seg, y (0) = 1mm. (Transitorio). ........................ 87
Figura 68. ‘Hunting’ analítico y obtenido. V = 4 m/s, y (0) = 1mm. ..................................... 90
Figura 69. Longitudes de onda. V = 4 m/s, y (0) = 1mm......................................................... 90
Figura 70. Longitudes de onda adimensionada. V = 4 m/s, y (0) = 1mm. .............................. 91
Figura 71. Desfase de la ecuación del ‘hunting’ ..................................................................... 92
Figura 72. ‘Hunting’ analítico y obtenido. V = 4 m/s, y (0) = 3 mm. ..................................... 93
Figura 73. ‘Hunting’ analítico y obtenido. V = 4 m/s, y (0) =6 mm ....................................... 94
Figura 74. Longitudes de onda adimensionada. V = 4 m/seg, y (0) = 3mm. .......................... 94
Figura 75. Longitudes de onda adimensionada. V = 4 m/s, y (0) = 6 mm. ............................. 95
Figura 76. Hunting analítico y obtenido. V = 4 m/s, Vy (0) =1 mm/s. .................................... 96
Figura 77. Hunting analítico y obtenido. V = 4 m/s, Vy (0) =2 mm/s. .................................... 97
Figura 78. Hunting analítico y obtenido. V = 4 m/s, Vy (0) =5 mm/s. .................................... 97
Figura 79. Longitudes de onda adimensionada. V = 4 m/s, Vy (0) = 1 mm/s. ........................ 98
Figura 80. Longitudes de onda adimensionada. V = 4 m/s, Vy (0) = 2 mm/s. ........................ 98
Figura 81. Longitudes de onda adimensionada. V = 4 m/seg, Vy (0) = 5 mm/seg. ................ 99
Figura 82. Evolución inicial del ‘hunting’. V = 4 m/s, Vy (0) = 5 mm/s............................... 100
Figura 83. Frecuencia analítica en función de la velocidad de avance. ............................... 102
Figura 84. Constante de crecimiento exponencial en función de la velocidad de avance. ... 102
Figura 85. Frecuencia analítica y ajustada........................................................................... 103
Figura 86. Constante de crecimiento exponencial analítico y ajustado................................ 104
Figura 87. Longitud de onda para distintas velocidades de avance. .................................... 106
Figura 88. Longitud de onda para distintas velocidades de avance. (Valores promedios). . 106
Figura 89. Frecuencia para distintas velocidades de avance. .............................................. 107
Figura 90. Constante exponencial para distintas velocidades de avance. ............................ 107
Figura 91. Movimiento de ‘hunting’ para V= 2 m/s.............................................................. 108
Figura 92. Movimiento de ‘hunting’ para V= 3 m/s.............................................................. 108
Figura 93. Movimiento de ‘hunting’ para V= 4 m/s.............................................................. 109
Figura 94. Movimiento de ‘hunting’ para V= 5 m/s.............................................................. 109
Figura 95. Diagrama de fase desplazamiento lateral velocidad lateral. .............................. 111
Figura 96. Detalle de los anillos del diagrama de fases. ...................................................... 111

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 8
0.2. Lista de Tablas
Tabla 1. Definición de los movimientos relativos en un vehículo ferroviario. ........................ 11
Tabla 2. Constantes m y n en función del ángulo auxiliar....................................................... 30
Tabla 3. Tabla de coeficientes para las expresiones de correlación m y n. ............................ 31
Tabla 4. Constantes utilizadas para definir el problema......................................................... 49
Tabla 5. Constantes de la ecuación del Hunting. V = 4 m/s, y (0) = 1mm.............................. 92
Tabla 6. Constantes de la ecuación del ‘hunting’ para distintas posiciones iniciales. ........... 93
Tabla 7. Ecuaciones para distintos desplazamientos iniciales. V=4m/s. ................................ 93
Tabla 8. Constantes del ‘hunting’ para distintas velocidades laterales iniciales. .................. 96
Tabla 9. ‘Hunting’ para distintas velocidades transversales iniciales. V = 4 m / s. ............. 100
Tabla 10. Parámetros analíticos y obtenidos para V=2 m/s ................................................. 104
Tabla 11. Parámetros analíticos y obtenidos para V=3 m/s. ................................................ 104
Tabla 12. Parámetros analíticos y obtenidos para V=4 m/s. ................................................ 105
Tabla 13. Parámetros analíticos y obtenidos para V=5 m/s ................................................. 105
Tabla 14. Ecuaciones del ‘hunting’ para distintas velocidades. ........................................... 110

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 9
1. Introducción En el problema de simulación dinámicas de vehículos ferroviarios es esencial modelar el
contacto de la rueda y el carril, así como los puntos de aplicación y dirección de las fuerzas de
contacto entre uno y otro, a partir del cual se pueda obtener el movimiento del vehículo.
En este proyecto se utilizará el Método Elástico [5], en el que considera la rueda y el
carril como sólidos rígidos que interpenetran, evaluándose las fuerzas de contacto en función
de dicha indentación. La posición de los puntos de contacto es calculada a partir de un sistema
de ecuaciones no lineales en función de las tangentes y normales de las superficies de ambos
sólidos, que son definidas mediante funciones ‘splines’ a partir de las coordenadas de ciertos
puntos llamados nodos. Para su resolución, se ha desarrollado un algoritmo numérico capaz
de determinar simultáneamente las coordenadas de los puntos de aplicación de las fuerzas y el
valor de la indentación, a partir de las cuales se calculan las fuerzas de contacto normales y de
creep, según la Teoría de Kalker [1].
Los resultados obtenidos de la simulación son comparados con los resultados que se
derivan de los métodos analíticos simplificados [2], que consideran dos variables, el ángulo
de ‘Yaw’ y el desplazamiento lateral. En este estudio se analiza principalmente el movimiento
lateral, también llamado ‘hunting’, determinándose las principales variables que lo
caracterizan, y analizando la influencia de las condiciones iniciales y la velocidad de avance
en dicho movimiento.

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 10
2. Descripción y geometría de un vehículo ferroviario
2.1. Introducción
En este capítulo se describirá brevemente los mecanismos de los que se compone un vehículo
de ferrocarril, centrándose principalmente en el wheelset. En la segunda parte de este capítulo,
se explica los sistemas de coordenadas utilizados para describir los perfiles de la rueda y del
carril, así como las expresiones algebraicas que permiten localizar cualquier punto
perteneciente a estas superficies respecto a un sistema global de referencia.
2.2. Descripción de un vehículo ferroviario
La figura 1 muestra el esquema general de los elementos del que está compuesto un vehículo
ferroviario [1]:
CUERPO DEL VAGÓN
SUSPENSIÓN SECUNDARIA
BOGIE
SUSPENSIÓN PRIMARIA
EJEFERROVIARIO
VEHÍCULO N
UNIÓN
VEHICULON-1
SUSPENSIÓNDELANTERA
SUSPENSIÓN TRASERA
EJEFERROVIARIO
Figura 1. Elementos generales de un vehículo ferroviario
En esta figura puede verse como un ferrocarril está compuesto por varios vehículos
individuales conectados por una unión, que cumple además la función de permitir los posibles
movimientos relativos que puedan surgir entre ellos. Cada vehículo de los que se compone un
ferrocarril está compuesto a su vez por un cuerpo o “caja” que es la encargada de transportar
en su interior la mercancía o pasajeros. Este cuerpo descansa sobre dos o más ejes, dotados
cada uno de ellos de una suspensión propia formada por varios ejes de ruedas (generalmente

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 11
dos), denominados también “wheelset”, a los que se une una suspensión primaria, compuesta
por una serie de muelles y amortiguadores. En la mayoría de los vehículos ferrocarriles, sobre
todo en los de pasajeros, es muy común encontrar también una suspensión secundaria
acoplada en la parte superior de la suspensión primaria, separada de esta por medio de una
plataforma metálica, denominada ‘bogie’, ya que esta configuración se caracteriza por
disminuir notablemente las vibraciones que se transmiten a la caja. Las suspensiones que
incluyen únicamente la suspensión primaria son utilizadas con frecuencia en los vehículos
destinados al transporte de mercancías, debido a que el problema de confortabilidad no es
muy importante, además de ser suspensiones más ligeras, baratas y fáciles de montar.
2.3. Movimientos relativos de un vehículo ferroviario
En el estudio dinámico de ferrocarriles se asociará a cada sólido un sistema de coordenadas
cartesianas unidos rígidamente a ellos, lo que supondrá un sistema local de referencia, que
facilitará la localización de cualquier punto del sólido al cual dicho sistema se encuentra
ligado. Por otro lado, conocer la posición exacta del vagón, permitirá predecir cómo va a ser
el contacto particular entre la rueda y el raíl, o situaciones tan importantes como cuándo
puede descarrilar un vagón. En dinámica de ferrocarriles, los diferentes desplazamientos y
giros que se producen respecto a los ejes del sistema de referencia local, reciben un nombre
particular, que se detallan en la Tabla 1:
Movimiento relativo Símbolo Definición
Translación longitudinal x Longitudinal
Translación transversal y Lateral
Translación vertical z Vertical
Rotación sobre el eje longitudinal φ Roll
Rotación sobre el eje transversal χ Pitch
Rotación sobre el eje perpendicular ψ Yaw
Tabla 1. Definición de los movimientos relativos en un vehículo ferroviario.
La figura 2, muestra la orientación del sistema de referencia local descrito
anteriormente, así como los ejes a los que están asociadas las diferentes rotaciones expuestas
en la tabla anterior:

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 12
X
YZ
f
Figura 2. Dirección de los movimientos relativos en un vehículo ferroviario.
2.4. Descripción geométrica del wheelset y del raíl
En este apartado se describirá el método que se ha utilizado para describir la geometría de la
superficie de la rueda y la superficie exterior de raíl, así como las expresiones que permiten
conocer la posición exacta de un punto cualquiera de los elementos anteriormente citados.
2.4.1. Posición y orientación de un sólido ( Parámetros de Euler ).
La figura 3 representa un sólido rígido general i con un sistema de referencia local (ξ,η,ζ)i
unido solidariamente a él. La posición de este sólido en el espacio respecto a un sistema de
referencia global (X,Y,Z) puede ser definida mediante un vector ri = x, y, zTi , que expresa el
desplazamiento sufrido por el origen del sistema de referencia local respecto al sistema de
referencia global. Para determinar la orientación que se ha producido en el sólido, se utilizará
un vector formado por cuatro coordenadas pi = e0, e1, e2, e3Ti , llamados parámetros de
Euler [11].
(i)P
O
Z
X Y
s
r
r
i
P
i
i
P
i
ii
Figura 3. Parametrización espacial de un sólido rígido.

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 13
Cada uno de los parámetros de Euler se calcula de la siguiente forma:
e0 = cos (θi / 2)
e1 = v1 sen (θi / 2) (1)
e2 = v2 sen (θi / 2)
e3 = v3 sen (θi / 2)
donde v = v1, v2, v3 es un vector unitario que indica el eje entorno al cual se produce el
giro del sólido, mientras que θi es el ángulo de rotación que se ha producido. Puesto que para
indicar cualquier rotación espacial de un sólido son necesario sólo tres parámetros, indica que
los cuatro parámetros de Euler no son independientes entre sí, existiendo pues una relación
entre ellos. Esta relación es la que se indica en la ecuación (2):
e02 + e1
2 + e22 + e3
2 = 1; (2)
La matriz de giro Ai, puede ser calculada a partir de los parámetros de Euler de la siguiente
manera [11]:
Ai = I + 2βs(e0I + βs) (3)
donde βs es la matriz que se define de la siguiente forma:
βs =⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−
−
00
0
12
13
23
eeee
ee (4)
llamada también en algunos textos matriz “skew” [11], asociada al vector βs = [e1 , e2 , e3 ].
Por otro lado, la posición de un punto cualquiera del sólido respecto al sistema de
referencia local (ξ,η,ζ)i , puede expresarse mediante un vector de posición de tres
componentes spi. Así pues, la posición de un punto cualquiera del sólido parametrizado de esta
forma puede calcularse mediante la siguiente expresión:

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 14
rip = ri + Ai sp
i (5)
2.4.2. Geometría del eje ferroviario
Normalmente un eje ferroviario está compuesto por dos ruedas unidas solidariamente a un
mismo eje (wheelset), tal y como se muestra en la figura 4, por lo que los tres elementos que
forman el wheelset, las dos ruedas y el eje, van a tener las mismas velocidades angulares. En
este trabajo se considera que estos elementos son sólidos rígidos, lo que implica que la
distancia entre cualquier pareja de puntos que pertenezcan al wheelset se mantendrá
constante.
Figura 4. Esquema básico de un wheelset.
El perfil de la rueda se divide en dos partes, la llanta y el flanco. La llanta de la rueda
es la parte de la rueda que se apoya sobre la cabeza del raíl, siendo su principal función la de
soportar todo el peso vertical del vagón. Esta parte de la rueda poseen una conicidad que
normalmente es de 1/20 o 1/40, lo que provoca que durante los desplazamientos laterales, el
radio de rodadura no se mantenga constante, ni sean iguales en ambas ruedas. El flanco
también llamado pestaña de la rueda, consiste en una protuberancia por la parte interior de
ambas ruedas, cuya función principal consiste en evitar el descarrilamiento del wheelset
debido a desplazamientos laterales excesivos.
Para describir la geometría de la superficie de la rueda se utilizarán dos parámetros de
superficie s1w y s2
w, donde el superíndice ‘w’ indica que está referido a la rueda [5]. El
parámetro s1w define el perfil de la rueda, mientras que el parámetro s2
w representa la
coordenada angular, tal y como se muestra en la figura 5.
Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 15
Zw
Yw
s2r
f ( )r s2r
f ( )w s1w
s1w
Yr
Zr
P s1r
Zw
Xw
s2w
Zr
Xr
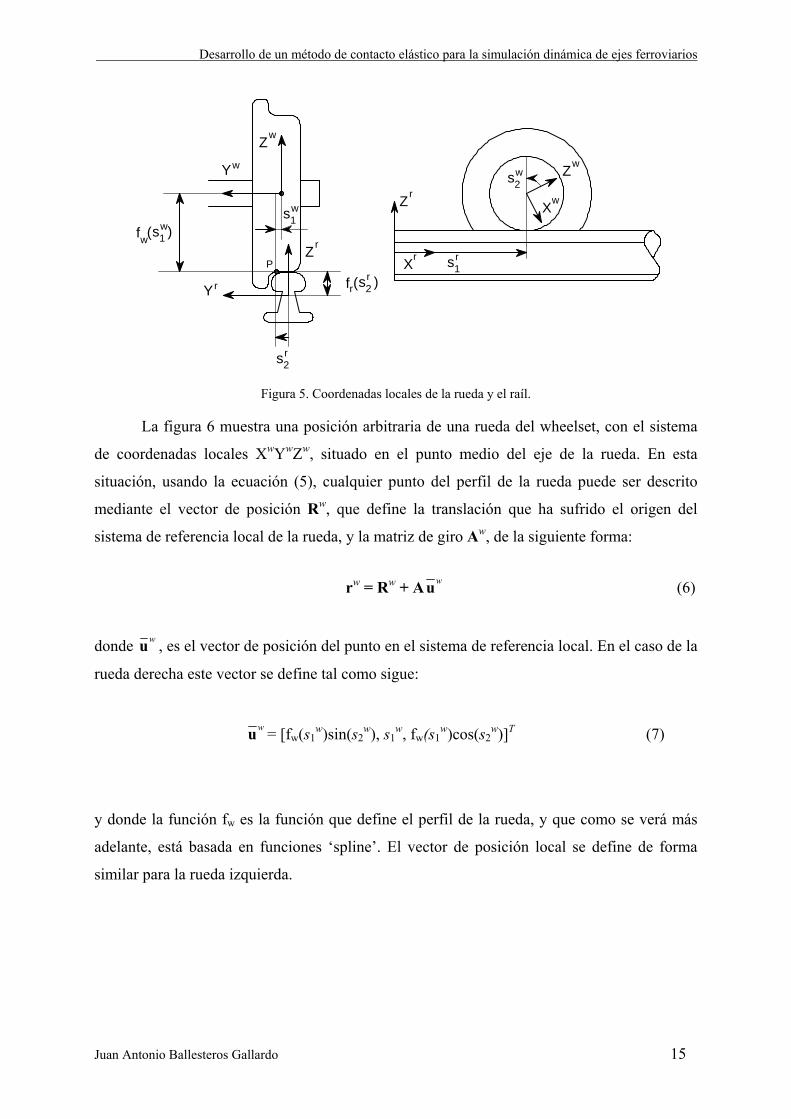
Figura 5. Coordenadas locales de la rueda y el raíl.
La figura 6 muestra una posición arbitraria de una rueda del wheelset, con el sistema
de coordenadas locales XwYwZw, situado en el punto medio del eje de la rueda. En esta
situación, usando la ecuación (5), cualquier punto del perfil de la rueda puede ser descrito
mediante el vector de posición Rw, que define la translación que ha sufrido el origen del
sistema de referencia local de la rueda, y la matriz de giro Aw, de la siguiente forma:
rw = Rw + A wu (6)
donde wu , es el vector de posición del punto en el sistema de referencia local. En el caso de la
rueda derecha este vector se define tal como sigue:
wu = [fw(s1w)sin(s2
w), s1w, fw(s1
w)cos(s2w)]T (7)
y donde la función fw es la función que define el perfil de la rueda, y que como se verá más
adelante, está basada en funciones ‘spline’. El vector de posición local se define de forma
similar para la rueda izquierda.

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 16
Q
Z
X
YX
Y
Z
L
w
w
w
Figura 6. Sistemas de referencias de la rueda.
2.4.3. Geometría de la vía
La geometría del carril, puede describirse al igual que el caso de la rueda mediante dos
parámetros de superficie, s1r y s2
r [5]. El primer parámetro s1r, representa la longitud de arco
de la curva espacial del carril, mientras que s2r es el parámetro que sirve para describir el
perfil de la cabeza del raíl, tal y como se muestra en la figura 5. Este último parámetro está
referido a un sistema local de referencia Xr Yr Zr ligado a la sección de perfil que se quiere
describir, que vendrá dada por un determinado valor del parámetros s1w.
La figura 7 muestra la geometría de una vía arbitraria. En esta situación, la posición y
orientación del origen del sistema de referencia local unido al perfil del carril puede definirse
mediante un vector de posición Rr, que localiza el origen del sistema de referencia, y la matriz
de giro Ar, que es la que determina su orientación en el espacio respecto al sistema de
referencia global que se haya tomado.
Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 17
YX
Z
Y
XZ rp
rp
rp
rRr
r
s1r
urp
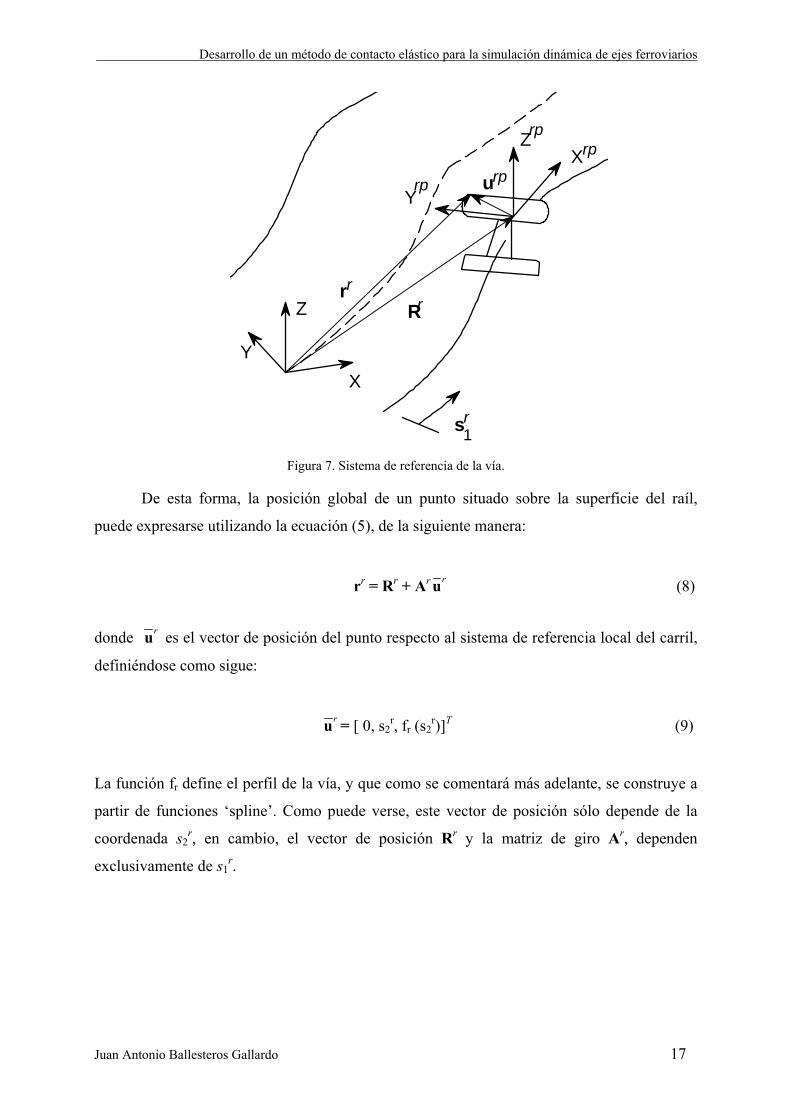
Figura 7. Sistema de referencia de la vía.
De esta forma, la posición global de un punto situado sobre la superficie del raíl,
puede expresarse utilizando la ecuación (5), de la siguiente manera:
rr = Rr + Ar ru (8)
donde ru es el vector de posición del punto respecto al sistema de referencia local del carril,
definiéndose como sigue:
ru = [ 0, s2r, fr (s2
r)]T (9)
La función fr define el perfil de la vía, y que como se comentará más adelante, se construye a
partir de funciones ‘spline’. Como puede verse, este vector de posición sólo depende de la
coordenada s2r, en cambio, el vector de posición Rr y la matriz de giro Ar, dependen
exclusivamente de s1r.

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 18
3. Desarrollo de la teoría dinámica de ferrocarriles
3.1. Introducción
En este apartado se desarrolla la teoría general que se aplica al estudio dinámico de
ferrocarriles. El primer apartado está dedicado al cálculo geométrico de los puntos de
contacto, hecho fundamental ya que el cálculo preciso de estos puntos permite obtener las
fuerzas de contacto, y por tanto, soluciones numéricas satisfactorias. A continuación, se
desarrolla la teoría de creep que se ha utilizado para el cálculo de las fuerzas de contacto, y
finalmente se expone el método que se utiliza para obtener las ecuaciones de movimiento del
sistema. En este caso, cobra especial importancia las ecuaciones que describen el movimiento
lateral de un wheelset, también llamado ‘hunting’, y las frecuencias y longitudes de ondas con
la que esta oscilación se produce.
3.2. Puntos de contacto entre la superficie de la rueda y el raíl
En este apartado se comenta la teoría geométrica en la que se basa este proyecto para el
cálculo de los puntos de contacto y la indentación que se produce entre la rueda y el carril. No
obstante, las ecuaciones que se presentan a continuación y que permiten resolver el problema
de contacto, matemáticamente son muy difíciles de resolver. Una de las originalidades de este
proyecto consiste en la modificación de estas ecuaciones de partida, para obtener un sistema
de ecuaciones equivalentes al anterior más fácil de resolver e implementar por procedimientos
numéricos, como se verá más adelante en el apartado 4.6.
3.2.1. Distancia mínima entre dos sólidos
La figura 8 se representan dos superficies arbitrarias, la superficie i y la superficie j,
parametrizadas por las funciones p(u,w) y q(s,t) respectivamente, y donde u, w, s, t son los
parámetros de superficies que se han utilizado para definirlas.
En esta figura se representan también los vectores normales a cada superficie (ni , nj) ,
los vectores tangentes (ti , tj ) y el vector distancia, para dos puntos genéricos P y Q situados
sobre cada una de las superficies.

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 19
X Y
Z
(i)
(j)
d
Q
P
p(u,w)
q(s,t)
n
nt
t
tt i
j
j
i
j
u
w
s
t
Figura 8. Distancia mínima entre dos superficies.
El vector distancia entre dos puntos cualesquiera perteneciente a dos superficies, viene
dado, en el sistema de referencia global, por la siguiente expresión:
d = rpq = ( Rj + uqj ) – ( Ri + up
i ) = Rij + uqj - up
i (10)
Donde Ri y Rj, son los vectores que expresan la posición global del origen del sistema de
referencia local de las superficies i y j, respecto al sistema de referencia global. Rij es el vector
que en coordenadas globales une los dos orígenes de los sistemas de referencia locales. Así
mismo, los vectores upi y uq
j, representan los vectores de posición locales de los puntos P y Q,
expresados en coordenadas globales. Estos dos últimos vectores pueden obtenerse a partir de
los mismos vectores referidos al sistema de referencia local, utilizando la matriz de giro, de la
siguiente manera:
upi = Ai u p
i (11)
uqj = Aj u q
j
Para conocer aquellos puntos situados en cada superficie que hace que la distancia
entre ambas superficies sea mínima, habrá que realizar un proceso de minimización del
módulo del vector distancia. Este valor vendrá dado por la siguiente ecuación:

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 20
( ) ( )
jQ
TiP
jQ
TijiP
TijjQ
TjQ
iP
TiP
ijTij
iP
jQ
ijTiP
jQ
ijPQ
TPQPQ
uuuRuRuuuuRR
uuRuuRrrr
222
2
−+−++
=−+−+== (12)
Los puntos de distancia mínima entre ambas superficies deberán cumplir que las
derivadas parciales del respecto a los cuatro parámetros de superficie u, w, s y t sean nulas.
Realizando estas operaciones se tienen los siguientes resultados:
( )[ ] ( )
( )[ ] ( )
( )[ ] ( )
( )[ ] ( ) PQTj
tjP
jQ
ij
TjQ
PQ
PQTj
sjP
jQ
ij
TjQ
PQ
PQTi
wjP
jQ
ij
TiP
PQ
PQTi
ujP
jQ
ij
T
i
iP
PQ
td
t
sd
s
wd
w
ud
u
rtuuRu
rtuuRu
rtuuRu
rtuuRu
22
,22
,22
,22
2
2
2
2
=−+⎟⎟⎠
⎞⎜⎜⎝
⎛
∂∂
=∂∂
=−+⎟⎟⎠
⎞⎜⎜⎝
⎛
∂∂
=∂∂
−=−+⎟⎟⎠
⎞⎜⎜⎝
⎛
∂∂
−=∂∂
−=−+⎟⎟⎠
⎞⎜⎜⎝
⎛
∂∂
−=∂∂
(13)
donde tui y tw
i son dos vectores tangentes a la superficie i en el punto P, y tsj y tt
j son los
vectores tangentes a la superficie j en el punto Q, referidos todos ellos al sistema de referencia
global. Su cálculo a partir de los vectores tangentes referidos al sistema de referencia local es
como sigue:
l
k
lkl
kkl ∂
∂==
uAtAt l = u,w para k = i ; l = s,t para k = j (14)
Igualando a cero las cuatros derivadas parciales del sistema de la ecuación 13, se
obtiene que los puntos que definen la distancia mínima entre las dos superficies deben
cumplir las siguientes restricciones:
0=PQTk
l rt l = u,w para k = i ; l = s,t para k = j (15)
Esta ecuación indica que para que dos puntos puedan ser candidatos a dar la distancia
mínima entre dos superficies, los vectores tangentes a cada una de ellas en los puntos
Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 21
considerados, deben de ser perpendiculares al vector que une ambos puntos. La ecuación 15,
puede ser expresada de diferente forma si se hace uso de las normales a la superficie. De esta
manera, la condición de mínima distancia puede ser escrita como sigue:
TPQr tu
i = 0
PQr × ni = 0
TPQr tw
i = 0
(16)
TPQr ts
j = 0
PQr × nj = 0
TPQr tt
j = 0
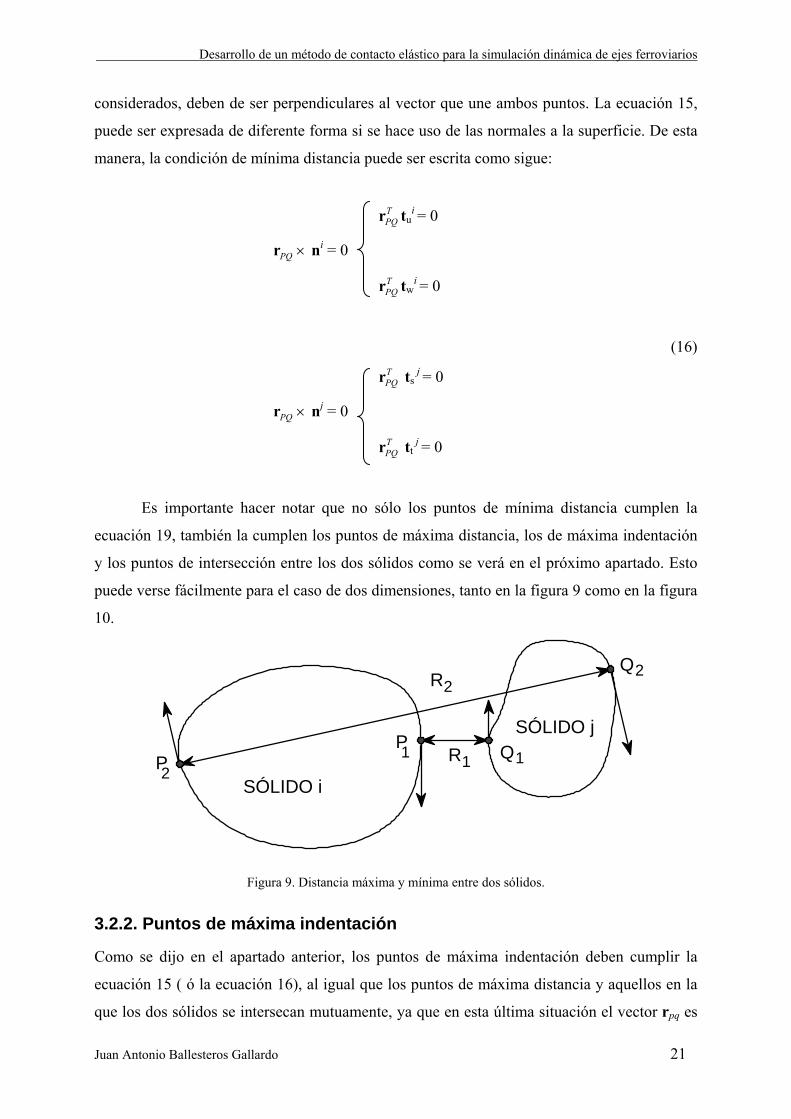
Es importante hacer notar que no sólo los puntos de mínima distancia cumplen la
ecuación 19, también la cumplen los puntos de máxima distancia, los de máxima indentación
y los puntos de intersección entre los dos sólidos como se verá en el próximo apartado. Esto
puede verse fácilmente para el caso de dos dimensiones, tanto en la figura 9 como en la figura
10.
SÓLIDO i
SÓLIDO jP QR1 11P2
Q2R2
Figura 9. Distancia máxima y mínima entre dos sólidos.
3.2.2. Puntos de máxima indentación
Como se dijo en el apartado anterior, los puntos de máxima indentación deben cumplir la
ecuación 15 ( ó la ecuación 16), al igual que los puntos de máxima distancia y aquellos en la
que los dos sólidos se intersecan mutuamente, ya que en esta última situación el vector rpq es

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 22
nulo. Por ello, el único cumplimiento de las ecuaciones 15 o 16 no garantizan que los puntos
hallados sean de mínima distancia o de máxima indentación. La figura 10 muestra tres parejas
de puntos que cumplen las dos ecuaciones anteriores, pero sólo una de las parejas, la PQ, es la
que proporciona el valor máximo de la indentación entre ambos sólidos. Es por ello necesario
establecer otras relaciones que permitan distinguir entre uno u otro caso, en concreto buscar
unas restricciones que lo satisfagan sólo los puntos de mínima distancia y los de máxima
indentación.
PQ
SÓLIDO i
SÓLIDO j
N
N
MM
i
j
ij
Figura 10. Puntos de máxima identación para sólidos que se intersecan.
Observando la figura 10, puede verse que en los puntos de máxima indentación P y Q,
los vectores normales a la superficie de ambos sólidos son colineales al vector que une a
ambos puntos, no cumpliéndose esta restricción para las parejas de puntos donde los dos
sólidos se intersecan. Por tanto, la restricciones de máxima indentación o mínima distancia
queda de la siguiente forma:
0=PQTk
l rt l = u,w para k = i ; l = s,t para k = j (17)
0=jTkl nt l = u,w para k = i ; l = s,t para k = j
Para distinguir entre el caso de mínima distancia o de máxima indentación, habrá que
evaluar el producto entre el vector rpq y el vector normal hacia el exterior de cada superficie,
teniéndose el siguiente criterio.
a) Si rpq nj > 0, entonces no existe penetración entre los sólidos, y los puntos calculados son
de mínima distancia.

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 23
b) Si rpq nj = 0, sólo existe contacto puntual entre los dos sólidos.
c) Si rpq nj < 0 , hay indentación entre ambos sólidos. Por tanto, es posible encontrar un punto
de máxima indentación.
Los tres casos explicados pueden verse gráficamente en la figura (11):
(i)(i)
(i)
(j)(j)
(j)
nijn
jnjn
jnjn
ni ni ni ni
dd=0
d=0d=0
d
A) B) C)
Figura 11. Tipos de contacto. a) Sin contacto b) Puntual c) Sin indentación.
El procedimiento descrito es muy eficiente en la búsqueda de puntos de contacto entre
dos sólidos cuya superficie esté descrita mediante funciones continuas y derivables en todo su
contorno, sobre todo si la búsqueda de dicho punto empieza a hacerse a partir del punto
calculado correctamente en el instante anterior.
3.3. Cálculo de las fuerzas de contacto
En este apartado se explicará el método utilizado para calcular las fuerzas y momentos de
contacto así como sus puntos y direcciones de aplicación en los sólidos considerados. Estas
magnitudes se calcularán considerando la Teoría Elástica de Contacto [5], en la que se
considera que los sólidos pueden indentarse pero sin deformarse. Una idea gráfica de los
distintos procedimientos para el cálculo de las fuerzas se muestra en la figura (12):

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 24
Rueda Rueda Rueda
RailRail Rail
Fc
r
w Fcw
FcrFc
A) B) C)
Figura 12. Métodos de contacto: a) con restricciones b) elástico c) configuración real.
3.3.1. Fuerzas normales de contacto
El valor de las fuerza normal elástica se calculará por medio de la fórmula de Johnson [1], que
establece que la fuerza normal de contacto es función de las características geométricas de las
superficies en el punto de contacto, como los radios de curvatura, las propiedades elásticas de
los materiales así como del valor de la indentación entre los dos sólidos que intervienen en el
problema. Esta fórmula establece que el valor de la fuerza normal elástica (Fe) puede
calcularse a partir de la siguiente ecuación:
23
)·(··34 δeee RE=F (18)
donde las distintas variables que intervienen en la fórmula se definen como sigue:
a) Módulo elástico equivalente (Ee). Para dos materiales con igual módulo elástico esta
magnitud puede calcularse mediante la siguiente ecuación [1]:
)1·(2 2ν−
=EEe (19)
donde E es el módulo elástico de los materiales, y ν el módulo de Poisson.
b) Radio de curvatura equivalente de la zona de contacto (Re). Se obtiene a partir de la
curvatura que tiene la superficie exterior de cada sólido en el punto de contacto. Su valor se
calcula mediante la ecuación siguiente [9]:

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 25
)·( jcurv
icurve RRR = (20)
donde icurvR y j
curvR son los radios de curvatura equivalente de ambos sólidos en el punto de
contacto. Estos valores se calculan a través de las siguientes fórmulas [9] evaluadas en el
punto de contacto de cada superficie:
iw
iu
iw
iui
curv KKKKR+
=· (21)
jt
js
jt
jsj
curv KKKKR+
=· (22)
donde nlK son los radios de curvatura en la dirección l del sólido n.
c) Indentación máxima (δ): Es la penetración máxima que existe entre los dos sólidos de
acuerdo con el método expuesto en el apartado 2.2. Su valor es siempre mayor o igual a cero.
La fórmula de Johnson [1] escrita en la forma de la ecuación 18, modela únicamente la
fuerzas elásticas de contacto, pero si las fuerzas normales entre dos sólidos que chocan entre
sí se comportaran exclusivamente de esta forma implicaría que en el choque no se perdería
ninguna energía. En la realidad, cuando se produce un choque entre dos cuerpos, existe una
cantidad de energía que se pierde en forma de deformación plástica, calor, etc. Por eso es
necesario modificar la fórmula de Johnson para considerar esta pérdida de energía que se
produce durante la colisión de los dos sólidos. Esto se consigue introduciendo un término que
depende de la velocidad de indentación, denominada fuerza normal de amortiguamiento [1] y
cuyo valor nominal puede ser escrito de la siguiente manera:
·δDa =F (23)
donde D es una constante denominada coeficiente de amortiguamiento y ·δ es la velocidad de
indentación que se evalúa a partir de las velocidades relativas que poseen los dos sólidos entre
sí. El valor de D generalmente debe ser tanteado, ya que las propiedades de amortiguamiento
de los choques no dependen exclusivamente de las propiedades físicas de los sólidos que

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 26
entran en contacto, sino también de la naturaleza y de la forma en la que se produce el
choque.
Por otro lado, el asumir que existen fuerzas de amortiguamiento en el choque de la
forma escrita en la ecuación 23, hace que se asuma también que las fuerzas normales poseen
un ciclo de histéresis [1], en la que la forma de dicho ciclo y la energía pérdida dependerá del
valor de la constante de amortiguamiento. Gráficamente, el comportamiento de las fuerzas
normales de contacto frente al valor de la indentación se representa en la figura (13):
N
N
Fuerza elástica
Descarga
Carga
Energía Pérdida
max
max
N
N
Fuerza elástica
Descarga
Carga
Energía Pérdida
max
max
Figura 13. Fuerzas normales con ciclo de histéresis.
Finalmente el módulo de la fuerza normal de contacto puede calcularse como suma de
la fuerza normal elástica y la fuerza normal amortiguada como sigue:
·
23
34 δδ DRE eeae +=+= FFN (24)
3.3.2. Fuerzas de Creep
En este apartado se explicará el procedimiento para el cálculo de las fuerzas de creep [1], que
implican el cálculo de fuerzas tangenciales y momentos. El fenómeno de creep aparece
cuando las velocidades de los sólidos en el punto en el que entran en contacto son distintas,
bien en módulo, bien en dirección o bien en ambas. A continuación se desarrolla la forma en
la que han sido calculadas estas magnitudes.

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 27
3.3.2.1. Coeficientes de Creep
En la Teoría de Creep se dice que dos cuerpos son conformes [1] si sus superficies al entrar en
contacto encajan perfectamente o casi perfectamente al una con la otra, en cambio, se dice que
dos cuerpos son no conformes si las superficies que entran en contacto tienen diferente forma,
siendo este último caso el que se produce con mayor frecuencia en la naturaleza. De acuerdo
con esta definición, se tendrá que el contacto entre la rueda y el carril será de tipo no
conforme, ya que las superficies de la rueda y del carril son totalmente diferente, es por ello
que a partir de ahora se explicará este tipo de contacto.
El contacto entre dos sólidos de superficies exteriores no conforme empieza en un
punto o a la sumo en una línea. Si la carga normal a la superficie continúa incrementando, la
Teoría de Contacto de Hertz [1] predice que la deformación plástica se produce sobre un área
elíptica. La tensión de contacto se concentra en dicha área, alrededor del punto central de
contacto, decreciendo rápidamente con la distancia a dicho punto, siendo su intensidad casi
independiente de la forma de las superficies que interactúan. Según la Teoría de Hertz [1], los
sólidos que se indentan pueden considerarse sólidos semi-infinitos, además esta Teoría
predice a través de sus expresiones el tamaño de la elipse y las fuerzas que se transmiten entre
los sólidos a través de la zona de contacto. Las principales hipótesis en los que se basa la
Teoría de Hertz [1] son los siguientes:
a) La superficie de los cuerpos que entran en contacto son no conformes.
b) La superficie de contacto que se forma es independiente del valor de las fuerzas de
fricción.
c) Cada sólido es considerado como semi-infinito.
d) La curvatura de los cuerpos que se indentan es constante a lo largo del área de la
superficie de contacto.
e) La deformación en la superficie de contacto es sólo elástica.
Como puede verse, el postulado e) no es cierto para la gran mayoría de contactos, pero
los resultados finales sobre las fuerzas de creep que se obtienen de la aplicación de la Teoría
de Hertz [1] suele ser muy buena aproximación a lo que sucede en la realidad.
La figura 14 muestra gráficamente la forma de la elipse de contacto entre dos sólidos:

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 28
Rueda
Raíl
a
b
P
P
w
r
D < 0
Figura 14. Elipse de contacto de Hertz.
Como puede observarse la elipse de contacto se define dentro de un sistema de
coordenadas locales (η, ξ, ζ ) unidos a ella. El eje η coincide con el eje principal de la elipse
de contacto, mientras que el eje ξ está contenido dentro del eje secundario de dicha elipse,
finalmente el eje η se define perpendicular a los dos ejes, y por tanto perpendicular a la
superficie de contacto de manera que el triedro así formado sea dextrógiro.
De acuerdo con la Teoría de Hertz [1], la superficie de contacto es plana y elíptica,
definida mediante la siguiente ecuación:
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
=≤⎟⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛= 0,1:),,(
22
ζηξζηξba
C (25)
donde a y b son los semiejes mayores y menores de la elipse de contacto, y que se calculan a
partir de los radios de curvatura de los sólidos en la zona de contacto. Existen varias formas y
métodos para calcular estos ejes, pero aquí se da la forma presentada por Garg y Dukkipati
[4,9]:

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 29
3
1
3
21
4)(3⎟⎟⎠
⎞⎜⎜⎝
⎛ +=
KKKNma π (26)
31
3
21
4)(3⎟⎟⎠
⎞⎜⎜⎝
⎛ +=
KKKNnb π
donde N es el valor del módulo de la fuerza normal, K1 y K2 [9] son constantes que dependen
de las propiedades del material y que para materiales con las mismas propiedades físicas
puede ser calculado como sigue:
E
KKπν 2
211−
== (27)
siendo E y ν el módulo de Young y el módulo de Poisson del material respectivamente.
El parámetro K3 [9] depende de los radios de curvatura en el punto de contacto de los
sólidos que se están indentando, definiéndose a través de la expresión siguiente:
)·(5.03j
tj
siw
iu KKKKK +++= (28)
siendo nlK son los radios de curvaturas del sólido n respectivamente en la dirección l.
Los parámetros m y n se evalúan a partir de la tabla 2 [4], entrándose con el siguiente
ángulo auxiliar [4]:
⎟⎟⎠
⎞⎜⎜⎝
⎛=
3
4arccosKKθ (29)
La constante K4 se evalúa a partir de los radios de curvatura en las direcciones
principales y del la posición relativa entre los sólidos de la siguiente forma:
))2)·cos(·)(·(2)()(5.0 224 ψj
tj
siw
iu
jt
js
iw
iu KKKKKKKKK −+−+−= (30)
En esta ecuación se define una nueva variable, el ángulo ψ [9], que es el que define la
posición relativa que adoptan los dos sólidos entre sí en la zona de contacto. Este ángulo se

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 30
define a partir de las tangentes de ambos sólidos, que aplicado a la rueda y el carril se calcula
a partir de la siguiente expresión:
ψ = acos ( twlt ·tt
r) (31)
donde twlt es la tangente longitudinal de la rueda y tt
r es la tangente transversal al raíl.
La tabla 2 [4] recoge los valores de las constantes m y n en función del valor del
ángulo auxiliar:
θ (deg) m n θ (deg) m n θ (deg) m n
0 ∞ 0 8.0 7.860 0.2850 55.0 1.611 0.6780
0.5 61.400 0.1018 10.0 6.604 0.3112 60.0 1.486 0.7170
1.0 36.890 0.1314 20.0 3.813 0.4123 65.0 1.378 0.7590
1.5 27.480 0.1522 30.0 2.731 0.4930 70.0 1.284 0.8020
2.0 22.260 0.1691 35.0 2.397 0.5300 75.0 1.202 0.8460
3.0 16.500 0.1964 40.0 2.136 0.5670 80.0 1.128 0.8930
4.0 13.310 0.2188 45.0 1.926 0.6040 85.0 1.061 0.9440
6.0 9.790 0.2552 50.0 1.754 0.6410 90.0 1.000 1.000
Tabla 2. Constantes m y n en función del ángulo auxiliar.
Estos datos pueden aproximarse mediante las siguientes fórmulas [4]:
mCm
m DBAmm++−=
θπθθ )2/tan()(
(32)
)sin(1)2/tan(
1)( θθπθ
θ nC
nn
DBA
n n +++−
=
En estas dos ecuaciones el ángulo θ se encuentra dado en radianes, al contrario que en
los valores de la tabla, donde se encuentra dado en grados. Las diferentes constantes que
aparecen en cada una de las fórmulas se recogen en la tabla 3:

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 31
Coeficiente Valor Coeficiente Valor
Am -1.086419052477 An -0.773444080706
Bm -0.106496432832 Bn 0.256695354565
Cm 1.350000000000 Cn 0.200000000000
Dm 1.057885958251 Dn -0.280958376499
Tabla 3. Tabla de coeficientes para las expresiones de correlación m y n.
La exactitud de las ecuaciones dadas puede verse gráficamente en las figuras 15 y 16.
Es importante hacer notar que la expresión que aproxima el parámetro m es capaz de captar el
comportamiento asintótico de dicho parámetro cuando θ se aproxima a cero.
0 2 0 4 0 6 0 8 00
1 0
2 0
3 0
4 0
5 0
6 0
7 0P u n t o s A p r o x i m a c i ó n
m(θ
)
θ ( g r a d o s )
Figura 15 Correlación del parámetro m.

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 32
0 2 0 4 0 6 0 8 00 , 0
0 , 2
0 , 4
0 , 6
0 , 8
1 , 0 P u n t o s A p r o x i m a c i ó n .
n(θ
)
θ ( g r a d o s )
Figura 16 Correlación del parámetro n.
Normalmente, el fenómeno de creep, se produce cuando dos cuerpos elásticos son
presionados entre sí y obligados a deslizar uno sobre el otro. Entonces aparece una zona de
contacto elíptica entre ambos sólidos descrita más arriba, en la que coexisten partes de
adhesión y partes de deslizamiento entre los dos sólidos. Debido a este deslizamiento relativo
entre los dos sólidos como consecuencia de velocidades lineales diferentes, aparecen fuerzas
tangenciales en dicha zona, y en el caso de que las velocidades angulares fuesen diferentes
aparecen momentos denominados spin o de pivotamiento. En los vehículos de ferrocarriles, se
producen tanto fuerzas tangenciales como momentos de creep ya que la rueda tendrá
normalmente diferentes valores de velocidades lineales y angulares en el punto de contacto
que los del carril puesto que este permanece inmóvil. El cálculo de los valores y dirección de
estas fuerzas, depende de la teoría que se haya escogido para modelarlas, en este caso se ha
tomado la Teoría no-lineal de Kalker [1], que es la que se expone a continuación.
Según la Teoría no-lineal de Kalker [1], las velocidades de deslizamientos entre la
rueda y el carril en el punto de contacto, son definidas a partir de tres coeficientes llamados
coeficientes de creep. Estos tres coeficientes definen el creep en dirección longitudinal, lateral
y angular, este último alrededor de un eje perpendicular al plano de contacto. La figura 17
muestra el área de contacto al que se le ha asociado un sistema de coordenadas (ξQ, ηQ, ζQ) y
en la que vienen representadas las velocidades de deslizamiento según cada dirección y las
fuerzas y momentos que se producen.

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 33
N
M
F F
Q
Q
Q
Figura 17. Fuerzas, momentos y velocidades de creep.
El coeficiente de creep longitudinal ( ξ ) [1], a lo largo del eje ξQ, se define como
cociente de la velocidad de deslizamiento en el área de contacto ( νξ ) y la velocidad de
avance del wheelset (V), de la siguiente forma:
Vξν
ξ = (33)
De la misma forma puede definirse el coeficiente de creep lateral ( η ) [1], a lo largo del eje
ηQ, tal como sigue:
Vηνη = (34)
donde νη es la velocidad de deslizamiento lateral. El coeficiente de creep η generalmente está
asociado al desalineamiento del wheelset respecto a su posición estable de equilibrio sobre la
vía.
Por otro lado, debido a que las ruedas son cónicas en el punto de contacto con el rail,
hace que la velocidad angular que posee la rueda no sea totalmente perpendicular al vector
normal a la superficie de la rueda en dicho punto. La consecuencia, es que se obtiene una
velocidad angular de pivotamiento en el punto de contacto que hacen aparecer momentos
alrededor del eje normal a la superficie de contacto. Así el coeficiente de creep angular [1], se

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 34
define como la componente de la velocidad angular según la normal a la superficie dividida
por la velocidad de avance del wheelset de la siguiente manera:
V
·nωT
=φ (35)
donde ω es el vector de rotación del wheelset, y n es el vector normal a la superficie.
Obsérvese que el coeficiente de creep angular tiene dimensiones de m-1, al contrario que los
dos coeficientes de creep anteriores, que son adimensionales.
3.3.2.2. Método No-Lineal de Kalker
En la Teoría Lineal de Kalker [1], las fuerzas que se producen en la zona de contacto son
calculadas, en principio, a partir de los coeficientes de creep de acuerdo al siguiente sistema
de ecuaciones:
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
φνν
η
ξ
φ
η
ξ
3323
2322
11
'
'
'
00
00
abccabcabc
cGab
MFF
(36)
donde G es una combinación de los módulos de cortaduras de los materiales, que depende del
módulo de Young (E) y de Poisson (νps) de los materiales que entran en contacto, y que para
materiales similares, este coeficiente viene dado por la siguiente expresión [1]:
)1·(2 ps
EGν+
= (37)
‘a’ es el valor del semieje mayor de la elipse ,‘b’ el valor del semieje menor, y cij son
constantes que se imponen a partir de la Teoría exacta de Kalker [9], y dependen
exlusivamente de los módulos de Poisson de los materiales y de la relación a/b de la elipse.
Estos coeficientes son válidos mientras se asuma rozamiento seco entre las superficie, que
Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 35
aproximadamente se corresponde con un valor de dicho coeficiente de 0.6. Para más
información sobre dichos coeficientes que pueden consultarse la bibliografía de Garg y
Dukipatti [9].
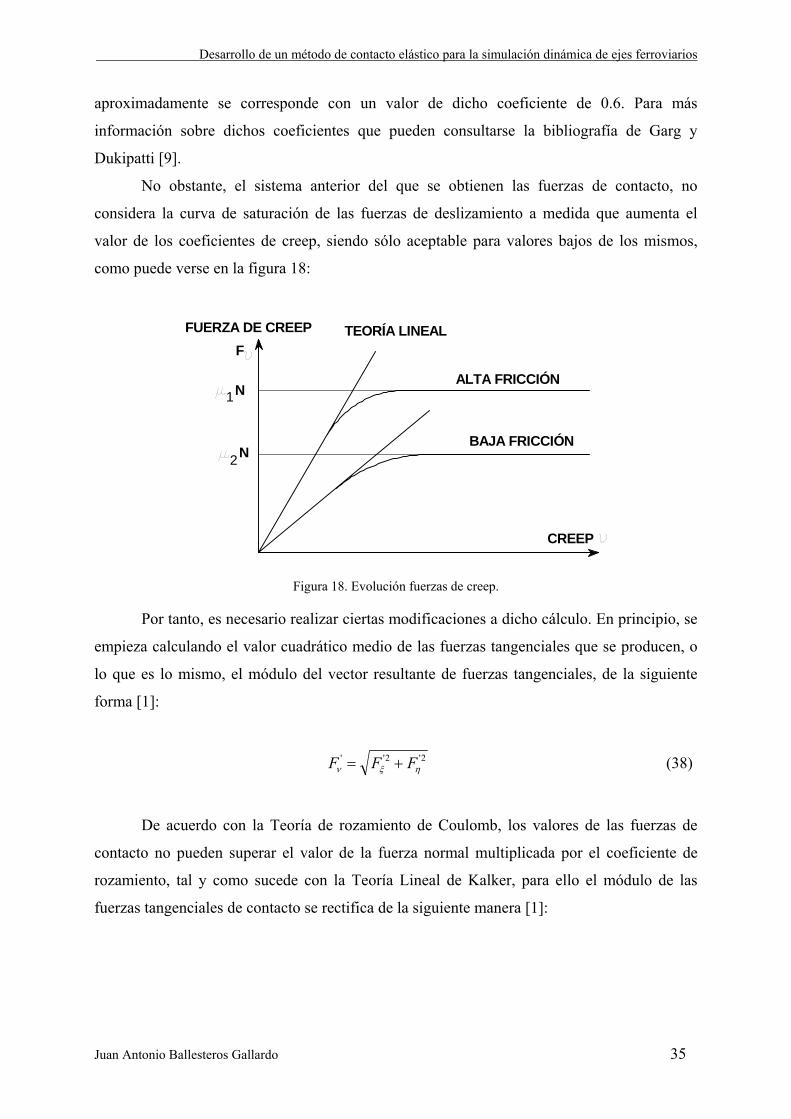
No obstante, el sistema anterior del que se obtienen las fuerzas de contacto, no
considera la curva de saturación de las fuerzas de deslizamiento a medida que aumenta el
valor de los coeficientes de creep, siendo sólo aceptable para valores bajos de los mismos,
como puede verse en la figura 18:
BAJA FRICCIÓN
ALTA FRICCIÓN
TEORÍA LINEALFUERZA DE CREEP
CREEP
F
N
N
1
2
Figura 18. Evolución fuerzas de creep.
Por tanto, es necesario realizar ciertas modificaciones a dicho cálculo. En principio, se
empieza calculando el valor cuadrático medio de las fuerzas tangenciales que se producen, o
lo que es lo mismo, el módulo del vector resultante de fuerzas tangenciales, de la siguiente
forma [1]:
2'2''ηξν FFF += (38)
De acuerdo con la Teoría de rozamiento de Coulomb, los valores de las fuerzas de
contacto no pueden superar el valor de la fuerza normal multiplicada por el coeficiente de
rozamiento, tal y como sucede con la Teoría Lineal de Kalker, para ello el módulo de las
fuerzas tangenciales de contacto se rectifica de la siguiente manera [1]:

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 36
⎪⎩
⎪⎨
⎧
>
≤⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛−⎟⎟
⎠
⎞⎜⎜⎝
⎛=
NFN
NFN
FN
FN
FNF
µµ
µµµµ
µ
ν
νννν
ν
3 ;
3 ; 271
31
'
3'2''
(39)
De la relación entre F ´ν y Fν se obtiene un nuevo coeficiente, denominado coeficiente de
reducción ( ε ) [1], que se define como sigue:
'ν
νεFF
= (40)
Finalmente, la Teoría No-Lineal de Kalker [1] establece que las fuerzas tangenciales
de contacto tienen el siguiente valor:
⎪⎩
⎪⎨⎧
==
'
'
ηη
ξξ
εεFFFF
(41)
3.4. Aplicación de fuerzas de contacto sobre el wheelset
Este apartado tiene como objetivo definir los puntos de aplicación y la dirección de las
fuerzas de contacto centrándose en el wheelset. Por sencillez, esto se expondrá
preferentemente de forma gráfica. La siguiente figura (20), muestra un wheelset en el que se
ha representado las dos zonas de contacto y la dirección de las velocidades de creep, junto con
las coordenadas que definen el wheelset. Es importante hacer notar, que aunque en la gráfica
no se vea correctamente, los vectores ti, son vectores tangentes al perfil de las ruedas, tanto en
sentido longitudinal como transversal.
La figura 21, muestra en cambio, la dirección y sentido de las fuerzas de creep en cada
rueda. Como puede verse sobre cada rueda actúan dos fuerzas de creep, Fξ y Fη, actuando
sobre los ejes ξ y η respectivamente. Además, se representa los momentos de pivotamiento
Mφ ,actuando sobre el eje normal a la superficie de contacto.

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 37
N
M
F F
Q
Q
Q
N
M
F F
Q
Q
Q
X
Z
Y
R uu t
t
t
t wR
wL
wL
wRwL wRL
T
L
T
w
w w
P R
Figura 19. Dirección de las velocidades de creep.
X
Z
Y
R uuwL wR
w
w w
P Q
N
F
FM
NF
F
M
Figura 20. Fuerzas de contacto que actúan sobre las ruedas.

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 38
Cabe mencionar también, que si las fuerzas están dadas en el sistema de referencia del
wheelset, para definirlas en el sistema global de referencia, basta con multiplicar por la matriz
de giro de dicho sistema respecto al sistema global, de la siguiente forma:
Fi = Ai iF (42)
donde iF es el vector de fuerzas o momentos expresados en el sistema local de referencia y Ai
es la matriz de giro del sistema local de referencia al sistema global. Como se dijo ya en el
apartado dedicado a la descripción geométrica del wheelset, la matriz Ai se construirá a partir
de los parámetros de Euler [11]. Puede verse dicho apartado para obtener más información
sobre como se construye la misma.
3.5. Ecuaciones de movimiento
Este apartado, es especialmente importante, ya que en él se expone el procedimiento para
obtener las ecuaciones de movimiento que rigen la dinámica del wheelset. El método con el
que se ha trabajado en este proyecto (Método de Penalización o Método del Penalty [10])
parte de la Teoría de los Multiplicadores de Lagrange [10] y tiene como finalidad estabilizar
la integración numérica de dichas ecuaciones diferenciales. La validez, rapidez y precisión de
este método de integración depende del problema a analizar y de las restricciones de
movimiento que sirven para definirlo .
3.5.1. Método de los multiplicadores de Lagrange
El movimiento de cualquier sólido en el espacio puede describirse mediante una serie de
ecuaciones de restricción que puestas en forma matricial abreviada se puede expresar como
sigue [10]:
Φ(q,t) = 0 (43)
Esta ecuación puede ser derivada dos veces respecto al tiempo, para obtener la
siguiente expresión [10]:
Φq q&&= - tΦ&& - qΦ &&&&q = c (44)

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 39
donde Φq se denomina Jacobiano de las ecuaciones de movimiento. El Teorema de Lagrange
[10], establece que el movimiento de un cuerpo en el espacio sometido a ciertas restricciones,
puede ser descrito a través de las siguientes ecuaciones:
M q&& + TqΦ λ = Q (45)
donde M es la matriz de masa, λ son los multiplicadores de Lagrange, y Q el vector de
fuerzas externas. Uniendo en un único sistema las ecuaciones 44 y 45, se obtiene la
formulación matricial del Teorema de Lagrange [10]:
⎥⎦
⎤⎢⎣
⎡=
⎥⎥⎦
⎤
⎢⎢⎣
⎡
⎥⎥⎦
⎤
⎢⎢⎣
⎡
cQ
λq
0ΦΦM &&
q
Tq (46)
Estas ecuaciones son utilizadas para analizar multitud de mecanismos, pero en muchos
casos, la integración de estas ecuaciones resulta ser inestable. La ecuación 44, puede ser
escrita de diferente forma:
Φ&&(q,t) = Φq q&& + tΦ& + qΦ &&q = 0 (47)
que puede ser integrada respecto al tiempo, obteniéndose como solución general la siguiente
expresión:
Φ(q,t) = a1t + a2 (48)
donde a1 y a2 son dos vectores que dependen de las condiciones iniciales del problema. Si las
posiciones y velocidades en el instante inicial satisfacen las ecuaciones de restricción,
entonces estos dos vectores son idénticamente nulos, en cambio, si las posiciones y
velocidades no satisfacen dicho sistema, los vectores a1 y a2 son no nulos, y por tanto la
solución general de la ecuación 48, no tiene límite, y por la integración se hace inestable.
También las ecuaciones de restricción no pueden cumplirse durante el proceso de integración,
aún incluso cuando se cumplan las restricciones en el instante inicial, debidos a procesos de

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 40
redondeos, lo que provoca también que la integración del sistema pueda acabar siendo
inestable.
Existen varios métodos para estabilizar las ecuaciones de movimiento, pero en este
proyecto se ha tomado el Método de Estabilización del Penalty [10], para resolver el
problema dinámico planteado.
3.5.2. Método de Estabilización del Penalty
Este método fue propuesto por Bayo en 1988 [10], y pretende eliminar las incógnitas de los
multiplicadores de Lagrange de la ecuación 46, dejando como únicas incógnitas las
aceleraciones de las coordenadas que se han tomado, de esta manera el coste de tiempo a la
hora de realizar operaciones es menor. Por otro lado, el Método de Estabilización del Penalty
[10] incorpora las ecuaciones de restricción al sistema a resolver, (que deberían ser nulas,
pero que realmente no lo son, como se vio anteriormente), multiplicado por un factor muy
grande, del orden de 105 o mayor [10]. De esta forma se consigue penalizar el error de no
cumplir con exactitud las ecuaciones de restricción.
Las ecuaciones del Método del Penalty [10] se obtienen de aplicar el Teorema de
Lagrange a las energías potenciales, de Rayleigh y energía cinética [10], modificadas como
sigue:
Según el Método del Penalty [10], la energía potencial de un sistema se define a través
de la siguiente expresión [10]:
V* = ∑ Φk
kkk22
21 ωα =
21 ΦT α Ω2 Φ (49)
de la misma forma la energía de Rayleigh se expresa a través de la siguiente ecuación [10]:
Gk = - 2 αk ωk µk dtdφ = - 2 α Ω µ Φ& (50)
y la energía cinética [10] como:
T* = ∑ =⎟⎠
⎞⎜⎝
⎛ Φ
k
Tk
k dtd
ΦαΦ &&21
21 2
α (51)

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 41
En estas ecuaciones αk son los valores de penalización y ωk y µk representa las
frecuencias y el coeficiente de amortiguamiento correspondientes a las ecuaciones de
restricción Φk = 0. Las matrices α, Ω, µ, son matrices diagonales que contienen los valores de
los coeficientes de penalización, frecuencias naturales y coeficientes de amortiguamiento
asociado a cada ecuación. Si se utilizan los mismos valores para cada ecuación de restricción,
estas matrices resultan ser la matriz identidad multiplicada por los coeficientes de
penalización.
A las ecuaciones anteriores se les puede aplicar la ecuación de Lagrange L* = T* - V*
dando los siguientes resultados [10]:
ΦΩαΦΦαΦq qq
2*L T
T
−=∂∂ && (52)
ΦαΦq
q &&&
&
TL
=∂
∂ *
(53)
ΦαΦΦαΦq
qq &&&&&
TT
Ldtd
+=⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
∂
∂ *
(54)
ΦµΩαΦq q&TT
RW δδ 2−= (55)
Aplicando la igualdad del Teorema de Lagrange se obtiene la siguiente ecuación en
forma matricial [10]:
QΦ)ΩΦµΩ2Φ(αΦqM q =+++ 2&&&&& T (56)
donde M es la matriz de masa y Q = Qext +Lq - qM && son el vector de fuerzas virtuales.
En la ecuación 56, el término )( 2ΦΩΦµΩ2Φ ++ &&& representan las fuerzas virtuales
que son generadas por el Método del Penalty cuando las ecuaciones de restricción de posición
y velocidad no se satisfacen. Comparando la ecuación 56 con la ecuación 45 puede verse
como el término Φ)ΩΦµΩΦ(α 22 ++ &&& es una aproximación a los multiplicadores de
Lagrange.

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 42
La ecuación 56, puede ser escrita de otra forma, sustituyendo en ella el valor de Φ&&de
la ecuación 47, y asumiendo que los coeficientes no nulos de las matrices α, µ y Ω son
iguales para cada restricción, dando lugar a la siguiente ecuación [10]:
( )⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛+++−=+ ΦΦΦqΦΦQqΦΦM qqqq
22 ΩµΩαα tTT &&&&&& (57)
Cuando el valor del Penalty tiende a infinito en la ecuación 57, se cumplen
exactamente las ecuaciones de restricción, pero en cambio empiezan a aparecer problemas de
mal condicionamiento de matrices, sobre todo, en el primer término de la igualdad anterior.
También se tiene el problema de elegir correctamente los valores de α, µ y Ω, que se suele
realizar mediante tanteo. En general, un valor del coeficiente del Penalty de 107 veces el valor
mayor de la matriz de masa [10] empieza a producir en la mayoría de los casos buenos
resultados. Para los valores de µ y Ω no suele haber regla fija, por lo que se añade la dificultad
de ir tanteándolos.
3.5.5. Ecuaciones analíticas del movimiento del ‘hunting’
En este apartado se hará un estudio analítico del movimiento de cabalgadura o movimiento de
‘hunting’. Este movimiento consiste en el desplazamiento lateral que sufre un wheelset
cuando no se encuentra centrado y que está provocado por la conicidad de la ruedas, y
gobernado por las fuerzas de creep que se producen entre éstas y la cabeza del raíl. Para
analizar este movimiento, se utilizará el modelo simplificado del estudio del movimiento del
‘hunting’ [2], consistente en dos grados de libertad, el desplazamiento lateral y el ángulo de
lazo θ, también llamado ángulo de ‘yaw’.
Para empezar, supongamos un wheelset que avanza con velocidad constante V a lo
largo de una vía recta, tal y como se ve en la figura 21, donde además se representa los puntos
de contacto y las coordenadas que se han tomado como independientes.

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 43
X
V
y
Y
P
R
Figura 21. Modelo simplificado de un wheelset.
Para velocidades pequeñas las fuerzas laterales de creep pueden ser aproximadas
mediante la siguiente fórmula [2]:
Fcreep = -f VdeslV (58)
donde f es una constante de proporcionalidad, deslV es la velocidad de deslizamiento lateral
en el punto de contacto, y V la velocidad de avance. Si además se supone que los ángulos de
lazo son pequeños, las velocidades de deslizamiento en el punto de contacto se pueden
calcular tal y como sigue [2]:
θγ &Lyr
Vvv li
ld +==
0
(59)
θVyvv ti
td −== & (60)
donde vi y vd son las velocidades en el punto de contacto de la rueda izquierda y derecha,
respectivamente, los superíndices l y t, indica la componente longitudinal y transversal, L es
la distancia del centro del eje del wheelset al centro de la rueda, r0 es el radio de rodadura en
el punto de contacto y γ es la conicidad de las ruedas. Estas magnitudes pueden verse
representadas en la figura 22:

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 44
X
V
y
Y
P
R
X
V
y
Y
P
RV
V
V
V
L
L
D
D
l
l
t
t
FDt
FDl
FLt
FLl
Figura 22. Velocidades de deslizamiento y fuerzas de creep.
Calculando las fuerzas y los momentos sobre el wheelset simple y linealizando las
ecuaciones, se obtiene el siguiente sistema de ecuaciones diferenciales [2]:
⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡ −+
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡
⎥⎦
⎤⎢⎣
⎡+
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡
⎥⎦
⎤⎢⎣
⎡00
02201
20021
00 0
02 θγθθ
yLf
frr
yfL
fV
yI
m
&
&
&&
&& (61)
o de forma abreviada:
⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡+
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡+
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡
00
θθθ
yyy KCM&
&
&&
&& (62)
donde m es la masa del wheelset e I es el momento principal de inercia respecto al eje Z. En
estas ecuaciones se ha supuesto que los radio de rodadura en ambas ruedas cambian
linealmente respecto al desplazamiento lateral, de la siguiente forma [2]:
ri = r0 + γ y , rd = r0 - γ y (63)
donde ri y rd son los radios de rodadura izquierdo y derecho, que para mayor claridad se
representa en la figura 19.

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 45
Para obtener una solución analítica del sistema de ecuaciones diferenciales anterior, es
necesario obtener los autovalores de la siguiente matriz:
A* = ⎥⎦
⎤⎢⎣
⎡−− −− CMKM
I011
(64)
La matiz A* es una matriz 4 x 4, que posee por tanto cuatro autovalores. De estos
cuatro autovalores, dos de ellos son reales, y otros dos son complejos conjugados, con parte
real y parte imaginaria distinta de cero siempre que la velocidad de avance sea no nula. La
parte real de los autovalores complejos asociados a la matriz A*, es siempre positiva e iguales
en ambos casos, mientras que la parte imaginaria son iguales en módulo pero con signo
distinto.
La solución para el desplazamiento lateral del wheelset de la ecuación 61, puede
expresarse teóricamente de la forma siguiente:
y(t) = Q · exp(kt·t) cos (ω·t + φ) (65)
donde Q es una constante que depende de las condiciones iniciales, φ es el ángulo de desfase
que también depende de las condiciones iniciales, kt es una constante que se corresponde con
la parte real de los autovectores imaginarios de la matriz A* y ω es la parte imaginaria en
valor absoluto de los autovectores complejos. Teóricamente, la ecuación 65, corresponde a un
movimiento oscilatorio en el tiempo de frecuencia ω limitado sus máximos por la exponencial
de índice kt. También se puede concluir que el movimiento de ‘hunting’ de un wheelset
simple es siempre inestable, ya que kt es siempre positivo, y por tanto, la matriz exponencial
no se encuentra acotada, tendiendo a infinito con el tiempo. Esto puede verse en la figura 23,

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 46
donde se ha representado la función y(t), para valores arbitrarios de sus constantes, y las
funciones exponenciales que limitan sus máximos.
0 2 0 4 0 6 0 8 0 1 0 0 1 2 0 1 4 0- 1 , 5
- 1 , 0
- 0 , 5
0 , 0
0 , 5
1 , 0
1 , 5 Y ( t ) E x p o n e n c i a l
y
t i e m p o ( s )
Figura 23. Evolución del ‘hunting’ (constantes arbitrarias).
Por otro lado, la longitud de cada una de las ondas de y(t), en teoría es una constante
denominada longitud de onda de Klingel, que puede ser calculada mediante la siguiente
fórmula [7]:
)sin(
)(2 0
αρρρρ
γπλ
rw
rw
bbbr
+−
= (66)
donde γ = tan (α) es la conicidad de las ruedas, b es la mitad de la distancia entre los dos
puntos de contacto, r0 es el radio de rodadura, ρr es el radio de curvatura del raíl, y ρw es el
radio de curvatura de la rueda en el plano meridiano. Esta fórmula puede ser simplificada
asumiendo que el radio de rodadura en el punto de contacto puede aproximarse por el radio de
curvatura de la rueda en dicho punto, y que el radio de curvatura del raíl en este punto es
prácticamente nulo. De esta forma se tiene que la longitud de onda de Klingel, puede
simplificarse a la siguiente expresión:

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 47
γ
πλ 02 br= (67)
Además, esta expresión puede simplificarse aún más sin cometer grandes errores si se
supone que la mitad de la distancia entre los puntos de contacto es aproximadamente igual a
la distancia entre el centro del eje del wheelset al centro de cada rueda.
Como puede verse, la longitud de onda exacta sólo depende de las características
geométricas de la rueda y del carril, mientras que la simplificada sólo depende de las
características geométricas de la rueda
Por otro lado, la frecuencia del movimiento del ‘hunting’, puede ser calculado partir
de la ecuación anterior de la siguiente forma:
00
22br
VbrV
VT
γ
γλππω ==⎟⎠⎞
⎜⎝⎛
== (68)
donde T es el periodo de oscilación, y V la velocidad de avance.
4. Resolución del problema
4.1. Introducción
En este capítulo se exponen los resultados numéricos obtenidos para el movimiento que se
produce en un wheelset simple cuando se desplaza a lo largo de una vía de ferrocarril recta.
Esta simulación se ha basado en las diferentes teorías expuestas anteriormente, como son las
teorías geométricas, las de las fuerzas de contacto y el Método de Estabilización del Penalty,
implementándose dicha simulación en el programa comercial Matlab 6.1.
El objetivo principal que se persigue con esta simulación es comprobar que los
resultados obtenidos por los métodos numéricos de integración son similares a los calculados
mediante el estudio analítico del problema, en particular, centrándose en las características del
movimiento del ‘hunting’ y de la longitud de onda de Klingel, aunque también se expondrán
otras magnitudes calculadas durante el proceso de integración, como la evolución de fuerzas y
velocidades entre otras.
El capítulo comienza definiendo el problema a analizar, las constantes del problema
(masa de wheelset, inercia, longitudes, etc...) así como las distintas teorías y procedimientos

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 48
por la que se han calculado los puntos de contacto, las fuerzas de creep y las ecuaciones de
movimiento.
En primer lugar se muestran los diferentes pasos de los que consta el método numérico
empleado, explicándose en qué consiste cada uno de ellos.
En segundo lugar, se comenta las características del perfil de la rueda modeladas
mediante las funciones ‘spline’ a partir de los puntos experimentales.
A continuación, se exponen el comportamiento de la función que permite calcular los
puntos de contacto, ya que esta función es la pieza clave de todo el proceso de simulación
dinámica, puesto que el valor de las fuerzas y momentos de contacto entre la rueda y el raíl es
muy sensible a la precisión con la que se calcula la indentación y los puntos de contacto.
Debido a esta importancia, se ha dedicado un apartado a su comportamiento.
Seguidamente se comentan las decisiones más importantes que se han tomado durante
el proceso de simulación, como por ejemplo, las que implican a las modificaciones realizadas
en la ecuación del Método del Penalty y del cálculo de las fuerzas de creep.
Finalmente, se exponen los resultados obtenidos de la simulación del wheelset,
comentando aquellos aspectos relevantes de cada una de las gráficas, haciendo especial
hincapié en la comparación con los resultados analíticos del método simplificado para el
movimiento de ‘hunting’ [2].
4.2. Constantes e hipótesis del problema
Este apartado está dedicado a definir el problema que se va a simular, sus constantes y los
diferentes procedimientos utilizados para su resolución.
Como se dijo anteriormente, el problema que se pretende estudiar, es el
comportamiento que posee un wheelset compuesto por un eje y una rueda a cada lado, cuando
se traslada a través de una vía de raíles rectos durante un espacio de tiempo suficiente como
para poder obtener conclusiones coherentes.
Las constantes de la Tabla 4 definen la geometría y las variables que intervienen en el
problema. Para mayor claridad sobre la geometría de las ruedas y de la vía, se muestra la
figura 24 donde se puede ver el valor de cada una de las longitudes:

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 49
Parámetro Símbolo Valor
Coeficiente de Poisson ν 0.3
Coeficiente de rozamiento µ* 0.5
Conicidad del perfil de las ruedas γ 0.02559
Distancia entre los ejes de simetría
de los raíles Lr 1.510 m
Gravedad g 9.81 m/s2
Inercia respecto al eje X Ix 656 Kg m2
Inercia respecto al eje Y Iy 168 Kg m2
Inercia respecto al eje Z Iz 656 Kg m2
Longitud entre centros de la rueda Lw 1.500 m
Masa del wheelset m 1568 Kg
Módulo de Young E 2.1·1011 N/m2
Perfil del raíl --- Tipo AREA
Radio nominal de la rueda Rw 0.457 m
Coeficiente de amortiguamiento Cr 70 000 N·seg/m
Constante de proporcionalidad entre
las fuerzas de creep y la relación
entre velocidades de creep y
velocidad de avance.
f 2 245 000 N
Tabla 4. Constantes utilizadas para definir el problema.
1500 mm
1432 mm
1510 mm
457
mm
XZ
Y
Figura 24. Medidas del wheelset y la vía.

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 50
En todos los casos simulados se forzará a que el wheelset se desplace con velocidad
lineal constante a lo largo de las vías (esto se consigue mediante una ecuación de restricción
que se expondrá más adelante), partiendo de una configuración inicial en el que el wheelset
no se encuentra centrado lateralmente (como muestra la figura 25), pero en la que cada rueda
sólo poseen un único punto de contacto con el carril sin existir indentación. Además, se
supondrá que en el instante inicial, el wheelset no posee velocidad angular de giro, por lo que
a lo largo de la simulación este parámetro deberá ir creciendo de acuerdo a las leyes de
movimiento hasta alcanzar la velocidad angular de equilibrio. La figura 25 muestra una vista
superior del wheelset, empezando por su posición inicial desplazada lateralmente, y los
posibles movimientos que pueden producirse durante la simulación:
Figura 25. Condiciones iniciales y posible evolución del wheelset.
Por otro lado, se supondrá que sólo existe un único punto de contacto en cada rueda y
este se produce en la parte cónica de cada una de ellas, no existiendo por tanto contacto
alguno en las pestañas. La justificación de esto se debe a que los desplazamientos laterales y
angulares que se producen durante el movimiento de ‘hunting’ durante el tiempo de
simulación, son lo suficientemente pequeños como para que no exista contacto en la pestaña
de la rueda, aunque si bien es cierto que si se simulara el wheelset durante un rango de tiempo
mayor este contacto si llegaría a producirse, debido a que la amplitud de las ondas del
movimiento de ‘hunting’ crecen con el tiempo. Teóricamente, y para una posición en la que
no hay desequilibrios angulares en el wheelset, el contacto en la pestaña de las ruedas
empieza a producirse cuando existen desplazamientos laterales del eje del wheelset superiores
a 1 cm.
Las coordenadas utilizadas son las expuestas en el capítulo segundo, de esta forma se
asociará siete coordenadas al wheelset, tres de ellas son los desplazamientos a lo largo de la
dirección de cada uno de los ejes globales, y los cuatro restantes se corresponden con los
parámetros de Euler [11], que son los que proporcionan el giro que se ha producido.

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 51
El cálculo de los puntos de contacto y de la indentación se realizará de acuerdo con la
Teoría Elástica de Contacto [5], que presupone que durante el contacto puede existir
penetración entre ambos (indentación), pero sin deformación alguna en la superficie. Aunque
esto no es del todo cierto, es un buen método para el cálculo de las fuerzas de reacción que se
producen entre ellos.
El valor de las fuerzas de contacto de creep se realizará según la Teoría No-Lineal de
Creep, a partir de una tabla diseñada en el programa FORTRAN. Para ello, será necesario
calcular antes las velocidades de deslizamiento y los coeficientes de creep asociados a cada
una de las fuerzas y momentos.
Para la descripción de las ecuaciones de movimiento se ha utilizado el Método del
Penalty, obteniéndose los valores de los coeficientes de penalización por tanteo, quedándonos
con aquellos en los que los resultados finales son coherentes con la experiencia y la realidad.
Finalmente, la integración se ha llevado a cabo mediante el programa Matlab 6.1, con
la orden ‘ode113’, que utiliza el método predicción-corrección de Adams-Bashforth-Moulton,
y que suele ser más eficiente que la ‘ode45’ en aquellos casos en los que la integración de las
ecuaciones diferenciales presente problemas de inestabilidad numérica, aunque normalmente
tiene que utilizar muchos más pasos intermedios para avanzar en el tiempo, lo que le hace ser
algo más lenta que la ‘ode45’.
4.3. Fases de la resolución
En este apartado, se expondrá las etapas más significativas del que consta el método
seguido para resolver el problema del movimiento del wheelset, que se recoge en el diagrama
de flujo de la figura 26:

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 52
CondicionesIniciales
t=tq(t
q(t
0
0
0
)
)·
Estimars1
r(t 0)
s2r(t 0)
s1w(t 0)
s2r(t 0)
Resolver el Sistemade Ecuaciones
No Lineales
Obteners1
r(t 0)
s2r(t 0)
s1w(t 0)
s2w(t 0)
Condicionesglobales de los
Puntos de Contacto
Fuerzas Normalesde Contacto
Dimensiones delÁrea de Contacto
Cálculo de loscoeficientes
de Creep
Teoría deContactoNo Lineal
Fuerzas y Momentosde Creep
FORMULACIÓNDINÁMICA
Obtenerq t+ t( )q t+ t( )·
t+ t( ) > t FIN
Actualizart = t+ t
FIN
NO
SI
Figura 26. Diagrama de flujo del método de resolución.
El método puede resumirse en las siguientes etapas:
a) Se empiezan imponiendo las condiciones iniciales en cuanto a posición y velocidad
del wheelset, respecto al sistema global de referencia y estimando las coordenadas locales de
los puntos de contacto en el raíl, y la rueda. La posición de partida del wheelset es aquella en
la que cada rueda tiene un único punto de contacto con el raíl sin existir indentación entre
ellos. Para calcular esta posición del wheelset y las coordenadas locales de los puntos de
contacto en esta situación, se resuelve el sistema de ecuaciones 70 para distintos valores de la
coordenada Zw dejando fijos el resto de coordenadas locales, como por ejemplo, Xw = 0 m ,
Yw = 0.001 m, t0 = 1, t1 = t2 = t3 = 0. La solución de partida buscada se producirá cuando el
valor de la indentación en cada rueda para un cierto valor de Zw sea igual a cero.

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 53
c) Se resuelve el sistema de ecuaciones no lineales que permiten obtener los puntos de
contacto en coordenadas locales y la indentación entre la rueda y el carril, por el método de
Newton-Raphson, partiendo de la solución del instante anterior.
d) Se calculan las coordenadas de los puntos de contacto en el sistema de referencia
asociado al wheelset, para permitir calcular los puntos donde actúan las fuerzas y momentos.
e) Con los resultados obtenidos en el apartado c) se calculan las fuerzas normales
contacto.
f) A través de la Teoría de Contacto No-Lineal [5], se calculan los coeficientes de
creep y las fuerzas tangenciales y momentos de pivotamiento que se producen en el área de
contacto.
g) Se calculan las aceleraciones que se producen en el wheelset a partir de la
formulación de la Teoría Dinámica basada en el Método de Estabilización del Penalty. Para
obtener las velocidades y posiciones de los mismos es necesario recurrir a una integración
numérica basada en la función ‘ode113’ que se incluye en el programa Matlab 6.1.
h) Con las velocidades y posiciones obtenidas en el paso anterior se avanza en el
tiempo, por medio de una integración numérica. En este caso, si el tiempo obtenido al dar el
paso es mayor que el tiempo final predeterminado para la simulación, el proceso termina; en
el caso de que el nuevo tiempo sea menor al tiempo final se debe ir al apartado c) para volver
a calcular los puntos de contacto y la indentación a partir de los mismos datos obtenidos en el
punto anterior.
4.4. Modelado del perfil de las ruedas y del raíl
En este apartado se muestra el método seguido para modelar tanto el perfil de la rueda como
el perfil del raíl. En el proceso de simulación, este paso es muy importante, ya que el cálculo
correcto de los puntos de contacto y de la indentación dependen de la precisión con la que se
consigue obtener el perfil de estos cuerpos.
En el apartado dedicado a la descripción geométrica del rueda y del raíl, se dijo que
cualquier punto situado sobre la superficie de los mismos podían obtenerse a partir de una
función matemática, cuya representación coincidía con sus perfiles, aunque esta función debe
obtenerse a partir de las coordenadas de un conjunto de puntos obtenidos por vía
experimental. De esta forma, es necesario recurrir a técnicas de interpolación para poder
localizar con precisión adecuada cualquier punto que se encuentre sobre la superficie exterior
de cada uno de los perfiles. Además, se debe exigir que la derivada primera y segunda de la

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 54
función interpolante sea continua, puesto que durante el proceso de simulación es necesario el
cálculo de los vectores tangentes y normales y los radios de curvatura en el punto de contacto.
Para alcanzar el objetivo anterior, se ha decidido recurrir a las funciones de
interpolación llamadas ‘spline’. Estas funciones matemáticas están basadas en funciones
polinómicas de orden tres, que permiten obtener un trazo suave y continuo que pasa por cada
uno de los puntos experimentales tomados. Esto se consigue dividiendo los puntos
experimentales tomados en grupos de tres, calculando la función polinómica cúbica que pasa
por ellos, y que su vez su derivada en el primer punto, es igual a la derivada de la función que
interpola en el conjunto anterior en el último punto. De esta forma, se consigue obtener una
función ‘a trozos’ que pasa de forma exacta y suave por cada uno de los puntos. Para obtener
el valor imagen de cualquier punto, basta con evaluar la función anterior en dicho punto, sea o
no experimental.
Para describir el perfil de la rueda se han tomado 90 puntos experimentales. La figura
27 muestra los puntos experimentales y la función de interpolación para la parte superior de la
rueda derecha.
- 0 , 0 8 - 0 , 0 6 - 0 , 0 4 - 0 , 0 2 0 , 0 0 0 , 0 2 0 , 0 4 0 , 0 6 0 , 0 8
0 , 4 4 5
0 , 4 5 0
0 , 4 5 5
0 , 4 6 0
0 , 4 6 5
0 , 4 7 0
0 , 4 7 5
0 , 4 8 0
0 , 4 8 5 P u n t o s F u n c i ó n i n t e r p o l a n t e
Z(m
)
s 1w ( m )
Figura 27. Perfil de la rueda.
Como se observa, la función interpolante se adapta perfectamente al conjunto de
puntos experimentales, además de ser una función continua y suave. En las figuras 28 y 29 se
representa la derivada primera y la derivada segunda del perfil respecto a la coordenada s1w.
Puede verse que ambas funciones son continuas, y donde se puede notar como la función

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 55
interpolante es capaz de captar los importantes cambios de curvatura que existe en el perfil
sobre la coordenada s1w = -0.04 m. Aunque este hecho es importante para evaluar la curvatura
en los puntos de contacto, la zona donde se debe de comportar bien la función es en el
intervalo (-0.02 m < s1w
< 0.05 m) que es donde se van a localizar los puntos de contacto.
- 0 , 0 8 - 0 , 0 6 - 0 , 0 4 - 0 , 0 2 0 , 0 0 0 , 0 2 0 , 0 4 0 , 0 6 0 , 0 8
- 3
- 2
- 1
0
1
2
3
s 1w ( m )
Figura 28. Derivada primera de la función interpolación de la rueda.
- 0 , 0 8 - 0 , 0 6 - 0 , 0 4 - 0 , 0 2 0 , 0 0 0 , 0 2 0 , 0 4 0 , 0 6 0 , 0 8
- 6 0 0
- 4 0 0
- 2 0 0
0
2 0 0
4 0 0
6 0 0
8 0 0
s 1w ( m )
Figura 29. Derivada segunda de la función interpolación de la rueda.

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 56
Para el raíl, se ha tomado al igual que para la rueda 90 puntos experimentales a lo
largo de su perfil, obteniéndose los resultados de las figuras 30, 31 y 32 para la función
interpolante.
- 0 , 0 4 - 0 , 0 2 0 , 0 0 0 , 0 2 0 , 0 4
- 0 , 0 2 5
- 0 , 0 2 0
- 0 , 0 1 5
- 0 , 0 1 0
- 0 , 0 0 5
0 , 0 0 0
P u n t o s F u n c i ó n i n t e r p o l a n t e
Z(
m)
s r2 ( m )
Figura 30.Función interpolante del raíl.
- 0 , 0 4 - 0 , 0 2 0 , 0 0 0 , 0 2 0 , 0 4
- 6
- 4
- 2
0
2
4
6
s 2r ( m )
Figura 31.Derivada primera de la función interpolante del raíl

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 57
- 0 , 0 4 - 0 , 0 2 0 , 0 0 0 , 0 2 0 , 0 4- 1 6 0 0
- 1 4 0 0
- 1 2 0 0
- 1 0 0 0
- 8 0 0
- 6 0 0
- 4 0 0
- 2 0 0
0
s 2r ( m )
Figura 32.Derivada segunda de la función interpolante del raíl.
Es importante destacar también que la función de curvatura de la rueda y del carril,
cambian muy bruscamente. La derivada segunda de la rueda se mueve en el intervalo de
[-600,600], mientras que la derivada segunda del raíl lo hace en el [-1500,0]. Este hecho es
muy importante de tenerlo en cuenta cuando se calculan los radios de curvatura equivalentes
para el cálculo de fuerzas normales, ya que un pequeño error en la coordenada local, provoca
mucha variación en la fuerza normal de contacto.
4.5. Evaluación de los puntos de contacto y máxima indentación
En este apartado se expondrán el método que se ha utilizado para obtener los puntos de
contacto y la máxima indentación (cuando la haya) entre la rueda y el carril. El procedimiento
que se muestra está basado en las ecuaciones que se expusieron con anterioridad en el
apartado 3.2. Aunque aquellas ecuaciones son desde el punto de vista perfectamente válidas
para el cálculo de lo puntos donde se localiza la máxima indentación, no son un sistema fácil
de resolver por el método de Newton-Raphson, quedando este ‘atrapado’ en puntos que no
son solución exacta del problema. Aún cuando se parten de puntos muy cercanos a la solución
exacta de las misma, el algoritmo de Newton - Raphson falla también. Este hecho se produce
cuando la serie de valores que genera el método de Newton - Raphson, en lugar de converger
a la solución exacta del problema, converge hacia un valor que no es la solución del mismo.
Por ello, es necesario volver a formular las ecuaciones de una forma distinta a como estaban
escritas en el apartado 3.2, con la finalidad de que el algoritmo de resolución sea más efectivo

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 58
además mejorar el tiempo de procesado. La figura 33 muestra la geometría de una rueda
indentando sobre el raíl:
nr
p
p
q
nw
qrtrt
twt
Figura 33. Geometría de una rueda indentando.
Según lo expuesto en el apartado 3.2, para hallar la máxima indentación entre la rueda
y el raíl debía resolverse el siguiente sistema:
0=PQTk
l rt l = u,w para k = i ; l = s,t para k = j (69)
0=jTkl nt l = u,w para k = i ; l = s,t para k = j
donde i y j representan los sólidos que entran en contacto, y (u,w) y (s,t), son los parámetros
de superficie sobre el sólido i y j respectivamente. Estas ecuaciones indican que los vectores
tangentes en los puntos de contacto sobre cada uno de los sólidos debe de ser perpendicular al
vector que los une, y además perpendiculares al vector normal en el punto de contacto en el
sólido contrario. Como puede comprobarse además, forman un sistema de 8 ecuaciones no
lineales, pero algunas de ellas son redundantes entre sí, es decir, la información de ciertas
ecuaciones ya está contenida implícitamente en otras. Esto se debe a que sólo existen cuatro
incógnitas en el problema, que se corresponden con los dos parámetros de superficie de la
rueda y los dos parámetros de superficie correspondientes al raíl. Por tanto, de las ocho
ecuaciones anteriores únicamente cuatro son linealmente independientes entre sí.
El nuevo sistema de ecuaciones que se va a resolver en lugar del anterior, basa su idea
en que en los puntos de máxima indentación el vector que une los dos puntos de contacto rPQ,
debe ser colineal con los vectores normales en cada superficie, como se observa en la figura

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 59
33, y puede deducirse de la primer grupo de 4 ecuaciones del sistema anterior. De esta forma,
se puede escribir el siguiente sistema de ecuaciones, para cada una de las ruedas:
Rr + λ nr – Rw = 0
nw · tlr = 0 (70)
nw · ttr = 0
Donde Rr y Rw son los vectores de posición en coordenadas globales de los puntos
sobre el raíl y rueda respectivamente, λ es un escalar, ttr y tl
r son las tangentes transversales y
longitudinales al raíl, y nw el vector normal a la superficie de la rueda.
Puede observarse que el sistema de ecuaciones anterior, está compuesto por una
ecuación vectorial y dos ecuaciones no lineales. La ecuación vectorial, puede ser
descompuesta en tres ecuaciones, correspondientes a las igualdades que dan lugar cada una de
sus componentes, obteniéndose en total cinco ecuaciones no lineales con cinco incógnitas
(los dos parámetros de superficie de la rueda (s1w
, s2w), los dos del raíl (s1
r, s2
r), y el parámetro
λ). Por otro lado, es posible obtener otros sistemas alternativos intercambiando los subíndices
que indican que el vector está referido a la rueda o el raíl (en el caso de que se cambie la
ecuación segunda del sistema de ecuaciones 70, es necesario cambiar también la ecuación
primera de dicho sistema).
Cabe explicar que el sistema de ecuaciones 70 es equivalente al sistema 69.
Formalmente, el sistema 69 dice que los vectores normales a cada superficie en el punto de
contacto y el vector que une dichos puntos deben de estar situados sobre la misma recta. El
sistema 70 impone que los vectores normales a cada superficie son colineales mediante las
dos últimas ecuaciones, mientras que la primera ecuación garantiza que el vector PQr se
encuentra sobre la recta que posee la dirección de los vectores normales, siendo por tanto,
equivalentes los dos planteamientos.
El sistema 70, además de ser mucho más fácil de resolver por el método de Newton-
Raphson, reduce el número de ecuaciones, ya que ahora no existe ecuaciones redundantes
entre sí. Además, permite identificar si existe o no indentación, o si se trata de un contacto
puntual a través del parámetro λ. Para las orientaciones de los vectores dados en la figura 33,
se puede decidir fácilmente cuál es el caso de la siguiente forma:

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 60
a) Si λ < 0 : Existe indentación entre los sólidos, y su valor viene dado por el valor absoluto
del parámetro λ.
b) Si λ = 0 : Entonces existe un contacto puntual.
c) Si λ > 0 : En este caso no existe solución, y los puntos obtenidos de resolver el sistema son
los puntos de mínima distancia entre la superficie de la rueda y del raíl, siendo el valor del
parámetro λ, la mínima distancia entre ambas superficies.
Así pues, el sistema alternativo dado anteriormente, puede ser implementado
fácilmente mediante un programa informático.
Para resolver el problema se utilizó la función ‘fsolve’ que se incluye en el programa
Matlab 6.1, con una tolerancia de 10-10 para la precisión con la que debe ser calculada cada
variable y la misma precisión para la tolerancia residual de cada una de las ecuaciones. Esto
quiere decir que el sistema se parará cuando el resto de cada ecuación sea inferior a la
tolerancia anterior, y la diferencia entre los parámetros calculados en dos iteraciones
consecutivas sea también menor a la tolerancia utilizada. Como punto de partida se empieza
siempre en el instante inicial con la solución exacta, introduciéndose en los instantes
posteriores la solución obtenida en el instante anterior.
A continuación se muestra un pequeño test para ver el comportamiento de la función
cuando se trata de resolver el problema de contacto en la pista. Para ello, se ha partido del
wheelset centrado ( Yw = 0 m), y con 0.5 mm por encima de aquella altura que empieza a
producir el contacto puntual sobre el carril correspondiente a Zw = 0.457092689 m. Esta
posición inicial se representa en la figura 34:

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 61
0 , 6 8 0 , 7 0 0 , 7 2 0 , 7 4 0 , 7 6 0 , 7 8 0 , 8 0 0 , 8 2- 0 , 0 3 0
- 0 , 0 2 5
- 0 , 0 2 0
- 0 , 0 1 5
- 0 , 0 1 0
- 0 , 0 0 5
0 , 0 0 0
0 , 0 0 5
0 , 0 1 0
Z(m
)
Y ( m )
Figura 34. Posición inicial de la rueda y raíl para el test.
A continuación, se ha dado diez pasos en cada uno de los cuales se ha bajado la
coordenada Z del wheelset 0.2 mm, desde Zw = 0.457142689 m hasta Zw = 0.455792689 m.
Las figuras 35 y 36 representan los puntos de máxima indentación encontrados para el
último paso, tanto para el contacto en la rueda izquierda como en la rueda derecha. La tercera
figura se muestra el ángulo que forma las tangentes transversales de la rueda y del raíl con el
vector rPQ. Para que se cumplan las ecuaciones del sistema 70, este ángulo necesariamente
debe de ser 90 grados, ya que en este caso el vector normal a cada superficie es colineal con el
vector rPQ. Se ha elegido la representación del ángulo que forman estos dos vectores porque
matemáticamente es el más difícil de satisfacer, ya que las restricciones de las tangentes
longitudinales ( perpendiculares al papel en este caso) se cumplen más fácilmente. Por último,
se muestra el valor de la indentación ( si es positiva, hay indentación, y si es negativa, no hay
indentación, y por tanto, el valor que se muestra es de mínima distancia).

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 62
- 0 , 8 2 - 0 , 8 0 - 0 , 7 8 - 0 , 7 6 - 0 , 7 4 - 0 , 7 2 - 0 , 7 0 - 0 , 6 8
- 0 , 0 2
- 0 , 0 1
0 , 0 0
0 , 0 1
0 , 0 2C o n t a c t o R a i lC o n t a c t o R u e d a
Z (
m)
Y ( m )
Figura 35. Puntos de contacto finales (Rueda izquierda).
0 , 6 8 0 , 7 0 0 , 7 2 0 , 7 4 0 , 7 6 0 , 7 8 0 , 8 0 0 , 8 2
- 0 , 0 3 0
- 0 , 0 2 5
- 0 , 0 2 0
- 0 , 0 1 5
- 0 , 0 1 0
- 0 , 0 0 5
0 , 0 0 0
0 , 0 0 5
0 , 0 1 0
C o n t a c t o R u e d a C o n t a c t o R a í l
Z(m
)
Y ( m )
Figura 36. Puntos de contacto finales (Rueda derecha).

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 63
0 , 4 5 6 0 0 , 4 5 6 5 0 , 4 5 7 0 0 , 4 5 7 58 5
8 6
8 7
8 8
8 9
9 0
9 1
9 2
9 3
9 4
9 5
T T ( i z ) - R P Q T T ( d e r ) - R P Q
Án
gu
lo(g
rad
os
)
Z w ( m )
Figura 37. Ángulo entre las tangentes transversales y el vector distancia.
0 , 4 5 6 0 0 , 4 5 6 5 0 , 4 5 7 0 0 , 4 5 7 5
- 0 , 0 0 0 6
- 0 , 0 0 0 4
- 0 , 0 0 0 2
0 , 0 0 0 0
0 , 0 0 0 2
0 , 0 0 0 4
0 , 0 0 0 6
0 , 0 0 0 8
0 , 0 0 1 0
0 , 0 0 1 2
0 , 0 0 1 4 I z q u i e r d a D e r e c h a
Ind
en
tac
ión
(m
)
Z w ( m )
Figura 38. Indentación obtenida mediante el test.
En estas dos últimas gráficas puede verse el sistema ha sido resuelto
satisfactoriamente, ya que los ángulos que se forman son de 90 grados. Además, puede
observarse como la indentación y distancia es prácticamente lineal con la coordenada Zw para
el caso en el que el wheelset se encuentre centrado.

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 64
4.6. Modificaciones realizadas sobre los cálculos teóricos
Como se ha visto con anterioridad, en ciertas circunstancias es necesario volver a replantear
las ecuaciones teóricas, debido a las dificultades que implican calcularlas por el método que
indican, al coste que supone evaluarlas o bien debido a que en ciertas condiciones, estas no
llegan a cumplirse. A continuación se exponen las principales modificaciones realizadas a las
ecuaciones y métodos teóricos expuestos en el capítulo anterior, por qué se han llevado a cabo
y la ventaja que se obtienen.
En el apartado dedicado a la obtención de la fuerzas de creep (3.3.2), se comentó que
la longitud de los semiejes de la elipse de contacto dependían de dos constantes ‘m’ y ‘n’,
cuyos valores venían tabulados en función del ángulo auxiliar de contacto. También se
expuso, que dichos valores podían ser calculados a partir de dos ecuaciones teóricas 29 y 32
[4] de la siguiente forma:
mCm
m DBAmm++−=
θπθθ )2/tan()(
)sin(1)2/tan(
1)( θθπθ
θ nC
nn
DBA
n n +++−
=
⎟⎟⎠
⎞⎜⎜⎝
⎛=
3
4arccosKKθ
donde K4 y K3 se calculan a partir de las ecuaciones 28 y 30 y el resto de constantes son las
que aparecen en la tabla 2.
El problema que presenta estas ecuaciones es que el valor de la relación K4 / K3 puede
llegar a ser mayor que la unidad, y por la tanto, al calcular el valor de θ matemáticamente se
obtiene un ángulo imaginario, con parte real e imaginaria. En el caso de que sucediese esto,
los valores de los ejes de la elipse de contacto serían también números imaginarios y por
consiguiente, los coeficientes de creep y las fuerzas de contacto también lo serían. El
resultado final es que al integrador que se utiliza en Matlab 6.1 le están llegando variables
imaginarias, por lo que al no poder utilizar este tipo de variables en la integración, la
simulación acaba fallando en este paso.
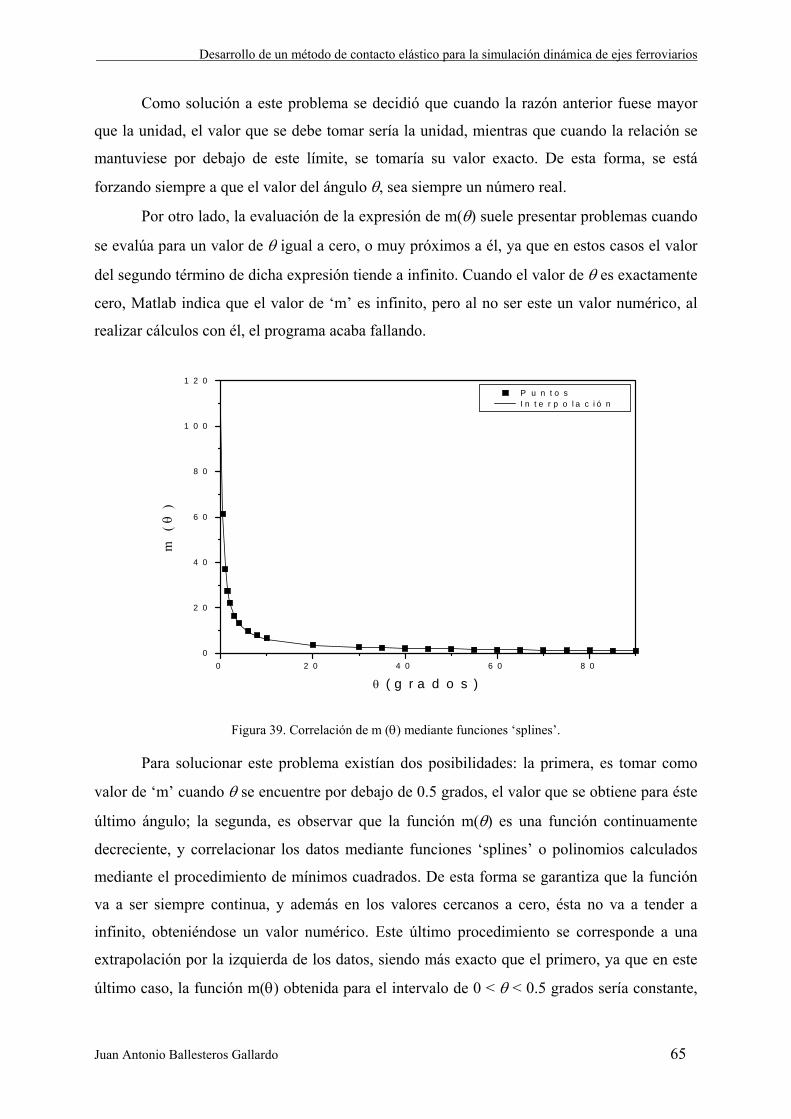
Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 65
Como solución a este problema se decidió que cuando la razón anterior fuese mayor
que la unidad, el valor que se debe tomar sería la unidad, mientras que cuando la relación se
mantuviese por debajo de este límite, se tomaría su valor exacto. De esta forma, se está
forzando siempre a que el valor del ángulo θ, sea siempre un número real.
Por otro lado, la evaluación de la expresión de m(θ) suele presentar problemas cuando
se evalúa para un valor de θ igual a cero, o muy próximos a él, ya que en estos casos el valor
del segundo término de dicha expresión tiende a infinito. Cuando el valor de θ es exactamente
cero, Matlab indica que el valor de ‘m’ es infinito, pero al no ser este un valor numérico, al
realizar cálculos con él, el programa acaba fallando.
0 2 0 4 0 6 0 8 00
2 0
4 0
6 0
8 0
1 0 0
1 2 0 P u n t o s I n t e r p o l a c i ó n
m(θ
)
θ ( g r a d o s )
Figura 39. Correlación de m (θ) mediante funciones ‘splines’.
Para solucionar este problema existían dos posibilidades: la primera, es tomar como
valor de ‘m’ cuando θ se encuentre por debajo de 0.5 grados, el valor que se obtiene para éste
último ángulo; la segunda, es observar que la función m(θ) es una función continuamente
decreciente, y correlacionar los datos mediante funciones ‘splines’ o polinomios calculados
mediante el procedimiento de mínimos cuadrados. De esta forma se garantiza que la función
va a ser siempre continua, y además en los valores cercanos a cero, ésta no va a tender a
infinito, obteniéndose un valor numérico. Este último procedimiento se corresponde a una
extrapolación por la izquierda de los datos, siendo más exacto que el primero, ya que en este
último caso, la función m(θ) obtenida para el intervalo de 0 < θ < 0.5 grados sería constante,

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 66
mientras que con la extrapolación esto no sucede así, resultando una curva decreciente, por lo
que se ha elegido esta segunda opción. El resultado de la interpolación se representa en la
figura 40.
0 1 2 3 4 5 6 70
2 0
4 0
6 0
8 0
1 0 0
1 2 0 P r i m e r M é t o d o S e g u n d o M é t o d o
m(θ
)
θ ( g r a d o s )
Figura 40. Métodos alternativos para calcular m(θ).
La segunda modificación está relacionadas con los valores de penalización utilizados
para implementar el Método del Penalty. En el apartado 3.5.3 se expuso que las aceleraciones
se pueden calcular mediante la siguiente expresión:
( )⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛Ω+Ω++−=+ ΦΦΦqΦΦQqΦΦM qq
22 &&&&& µαα tTqq
T
donde Φ es el jacobiano que contiene las ecuaciones de restricción debidas a la distancia
recorrida por el wheelset y a los parámetros de Euler [11]. Estas dos ecuaciones son las que se
escriben más abajo:
Φ(1) = t02 + t1
2 + t22 + t3
2 – 1 (71)
Φ(2) = Xw – V · t (72)

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 67
donde t0, t1, t2 y t3 son los cuatro parámetros de Euler [11], Xw es la coordenada longitudinal
del wheelset ( la que define la distancia recorrida sobre la vía), V es la velocidad lineal
absoluta que permanece constante con el tiempo en sentido longitudinal y t el tiempo
transcurrido.
Para que el sistema sea resuelto satisfactoriamente, las ecuaciones de restricción
anteriores deben ser cero. Generalmente, y más durante el proceso de integración numérica,
esto no suele ser cierto, debido a que las expresiones anteriores están afectadas por los errores
numéricos y de redondeos, que se producen durante las operaciones anteriores al cálculo
definitivo de cada uno de las variables. Por esta razón, es necesario introducir el coeficiente
de penalización α , que corrige en gran medida las desviaciones producidas en el valor
residual de las ecuaciones de restricción. No obstante, si observamos la posición que ocupa el
coeficiente de penalización α en la ecuación que permite calcular las aceleraciones, se
observa que este afecta de igual medida a todos los elementos del término independiente,
excepto al término de las fuerzas exteriores y de Coriolis Q. De esta forma, si se quiere
disminuir el valor residual de las ecuaciones de restricción para obtener mayor precisión en
los cálculos, teóricamente se debería aumentar el valor del coeficiente de penalización α,
pero esto provocaría un aumento del determinante y del número de condición de otras
matrices que por lo general con valores pequeños del coeficiente de penalización suelen estar
calculadas con un rango de precisión muy aceptables. Como consecuencia, de este aumento
del determinante y del número de condición de las matrices, los errores numéricos en las
multiplicaciones y divisiones de matrices suele aumentar, además del tiempo invertido para su
cálculo y el coste de evaluación de las mismas. Por lo tanto, existe un límite para el valor del
parámetro de penalización a partir del cual la precisión en los cálculos no mejora, incluso a
veces llega a ser aún peor, y los tiempos de ejecución de las operaciones y el coste de
evaluación suele aumentar considerablemente. Así pues, es necesario modificar el
planteamiento de las ecuaciones para que un aumento del coeficiente de penalización, no
provoque un estancamiento en la precisión de los resultados. Para ello, se ha multiplicado
cada una de las ecuaciones de restricciones anteriores por un segundo coeficiente de
penalización α2, permitiendo escribir estas ecuaciones de la siguiente forma:
Φ(1) = α2 · (t02 + t1
2 + t22 + t3
2 – 1) (73)
Φ(2) = α2 · (Xw – V · t) (74)

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 68
El motivo de que se multiplique únicamente estas dos ecuaciones se debe que son las
dos únicas ecuaciones en las que sus valores se calculan a partir de variables que dependen
con el tiempo. Así por ejemplo, no es necesario multiplicar las ecuaciones de restricción del
raíl porque en ellas se fuerza automáticamente a que su valor sea cero, para que permanezcan
inmóviles en el tiempo.
Puede verse, que matemáticamente la ecuaciones de restricción escritas de esta nueva
forma son equivalentes a las originales, puesto que los valores residuales que deben tener
estas expresiones deben ser cero. La ventaja fundamental que presenta este nuevo
planteamiento estriba en que permite aumentar la penalización con las que se calculan algunas
de las ecuaciones, sin tener que modificar el determinante o condición de otras matrices. Por
tanto, este segundo coeficiente permite aumentar la penalización, pero de forma local, incluso,
se podría llegar a multiplicar individualmente las ecuaciones de restricción por coeficientes de
penalización diferentes, según los valores residuales sean mayores o menores. Esto permite
mejorar significativamente la precisión con la que se calculan los parámetros de Euler
[11] y la coordenada Xw, aumentando la penalización sin producirse errores significativos en
las operaciones con matrices. Durante el proceso de simulación, se ha usado un valor del
coeficiente de penalización α de 109 y de α2 de 103.
Las figuras 41, 42, 43 y 44 muestran el valor de la suma de los cuadrados de los
parámetros de Euler y los errores que se producen en el módulo de un vector unitario y
constante en la dirección Z local al multiplicarlo por la matriz construida a partir de los
parámetros de Euler. En las figuras 41 y 42 se ha utilizado únicamente el factor de
penalización α con un valor de 109, mientras que en las figuras 43 y 44 se han utilizados los
dos factores de penalización, α con un valor de 109 y α2 con un valor de 103, para una
velocidad del wheelset de 4 m/s.
Puede verse, como en el primer caso el proceso acaba fallando debido a que los errores
en el cálculo geométrico de posiciones es muy grande porque los parámetros de Euler se han
calculado con bastante error al no cumplirse la primera de las restricciones. En el segundo
caso, el valor residual de la restricción de los parámetros de Euler es a lo sumo del orden de
10-4, produciendo errores en el cálculo de posiciones que se mantienen en la banda de 10-5
unidades por unidad de longitud para cada instante de tiempo, siendo este resultado aceptable,
además de no fallar el programa de simulación.
Por otro lado, puede observarse que en ambas gráficas, el error geométrico que se
produce está estrechamente relacionado con el valor residual que se obtiene de la restricción

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 69
de los parámetros de Euler, debido que la forma que presentan ambas gráficas, tanto en uno
como en otro caso, son prácticamente similares.
0 , 0 0 , 2 0 , 4 0 , 6 0 , 8 1 , 01 , 0 0 0
1 , 0 0 1
1 , 0 0 2
1 , 0 0 3
1 , 0 0 4
1 , 0 0 5
Su
ma
T i e m p o ( s )
Figura 41. Suma de los parámetros de Euler con un coeficiente de penalización.
0 , 0 0 , 2 0 , 4 0 , 6 0 , 8 1 , 0 1 , 20 , 0 0 0
0 , 0 0 2
0 , 0 0 4
0 , 0 0 6
0 , 0 0 8
0 , 0 1 0
De
sv
ío e
n e
l m
ód
ulo
T i e m p o ( s )
Figura 42. Error en el cálculo geométrico con un coeficiente de penalización.

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 70
0 3 0 6 0 9 0 1 2 0 1 5 0
- 4 x 1 0 - 5
- 2 x 1 0 - 5
0
2 x 1 0 - 5
4 x 1 0 - 5
Su
ma
T i e m p o ( s )
Figura 43. Suma de los parámetros de Euler con dos coeficientes de penalización.
0 3 0 6 0 9 0 1 2 0 1 5 0
- 2 x 1 0 - 5
0
2 x 1 0 - 5
4 x 1 0 - 5
De
sv
ío e
n e
l m
ód
ulo
(u
nid
ad
es
)
T i e m p o ( s )
Figura 44. Error en el cálculo geométrico con dos coeficientes de penalización.
4.7. Resultados obtenidos de la simulación
En este apartado se mostrarán y comentarán los resultados obtenidos de la simulación
numérica. La primera parte está dedicada al análisis de un caso particular, aquella en el que el

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 71
wheelset se desplaza a una velocidad lineal y constante de 4 m/s a lo largo de las vías. Para
este caso, se analizan qué efectos tienen sobre el movimiento del wheelset diferentes valores
del desplazamiento lateral y la velocidad transversal inicial. También se muestran para este
caso, como evolucionan algunas las magnitudes dinámicas y cinemáticas más importantes y
significativas que intervienen en el problema. La segunda parte, está dedicada a analizar la
longitud de onda y la frecuencia del movimiento de ‘hunting’, también llamado frecuencia de
Klingel, para el intervalo de velocidades de 1 m/s a 5 m/s, con un desplazamiento lateral de
1mm sobre la posición centrada. Para valores de la velocidad de avance por encima de los 5
m/s la integración empieza a ser inestable por el método de integración utilizado, tanto
cuando se utiliza un factor de penalización como cuando se utilizan los dos, con los valores
señalados en al apartado anterior, produciendo resultados insatisfactorios para la evolución de
las magnitudes con el tiempo.
Los resultados obtenidos para el rango de velocidades en la que la integración es
estable se compararán con los resultados que se derivan del análisis analítico del problema
[2], comprobando si la velocidad de avance o el desplazamiento lateral influyen en la
frecuencia de Klingel o en el movimiento de ‘hunting’.
4.7.1. Análisis de un wheelset con velocidad de avance de 4 m/s
Con este caso se pretende mostrar cómo evolucionan algunas de las variables más relevantes
que intervienen en el movimiento del wheelset, bajo las condiciones de simulación que se han
impuesto y que pueden consultarse en los apartados anteriores. En este caso, se ha simulado
un wheelset que parte con una velocidad de avance de 4 m/seg., pero con velocidad angular
nula. Por tanto, las velocidades angulares no han llegado a una situación de equilibrio con la
velocidad de avance, debiendo existir un transitorio donde la velocidad angular empiece a
crecer debido a las fuerzas de creep con el raíl, hasta llegar a un equilibrio con la velocidad de
avance. Por otro lado, todas las simulaciones se han realizado de acuerdo con el Método del
Penalty con dos coeficientes de penalización y las fuerzas han sido calculadas según la Teoría
Elástica [5] en la que se permite la indentación pero sin deformación en la superficie de los
sólidos. Las fuerzas normales entre las ruedas y el raíl están compuestas por una parte elástica
y otra de amortiguamiento.
Aplicando la teoría del apartado 3.5.5 y sustituyendo valores de las diferentes
constantes en la ecuación 65, se llega a que la ecuación que define el movimiento de
‘hunting’ para este caso viene dada por la siguiente ecuación:

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 72
y(t) = Q · exp(0.0009846·t) · cos(1.08934·t + φ) m (75)
donde Q y φ son constantes que dependen de las condiciones iniciales. Como puede verse, se
obtiene una frecuencia de oscilación de 1.08934 rad / seg y un factor de crecimiento
exponencial de 0.0009846 s-1. También puede calcularse la longitud de onda que predice la
ecuación de Klingel simplificada ( ecuación 78 ), que sustituyendo los valores se obtiene una
longitud de onda λ = 23.07152 m. La longitud de onda del movimiento de ‘hunting’ al
depender exclusivamente de las características geométricas de la rueda y del raíl, y no de la
velocidad de avance, será la misma para cualquiera de los casos de simulación, ya que en
todos los casos simulados las características del wheelset y los raíles de la vía son idénticos.
Puede comprobarse además, que los valores de la longitud de onda, de la frecuencia del
movimiento de ‘hunting’ y de la velocidad de avance son valores congruentes entre sí.
4.7.1.1. Magnitudes físicas
Las figuras 45-49 muestran la evolución de las coordenadas locales para un wheelset que
avanza a velocidad de avance de 4 m/s y con un desplazamiento lateral respecto a su posición
de equilibrio de 1mm.
0 5 0 1 0 0 1 5 0- 1 , 5 x 1 0 - 3
- 1 , 0 x 1 0 - 3
- 5 , 0 x 1 0 - 4
0 , 0
5 , 0 x 1 0 - 4
1 , 0 x 1 0 - 3
1 , 5 x 1 0 - 3
Y(m
)
T i e m p o ( s )
Figura 45. Desplazamiento lateral. V = 4 m/s, y (0) = 1mm.

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 73
0 5 0 1 0 0 1 5 0- 3 x 1 0 - 3
- 2 x 1 0 - 3
- 1 x 1 0 - 3
0
1 x 1 0 - 3
2 x 1 0 - 3
3 x 1 0 - 3
D e r e c h a I z q u i e r d a
S1
w(m
)
T i e m p o ( s )
Figura 46. Evolución de ws1 . V = 4 m/s, y (0) = 1mm.
0 5 0 1 0 0 1 5 0- 1 4 0 0
- 1 2 0 0
- 1 0 0 0
- 8 0 0
- 6 0 0
- 4 0 0
- 2 0 0
0
2 0 0 D e r e c h a
s2
w(r
ad
)
T i e m p o ( s e g )
Figura 47. Evolución de S2w. V = 4 m/s, y (0) = 1mm.
(La representación de s2w de la rueda izquierda coincide con la de s2
w de la rueda derecha).
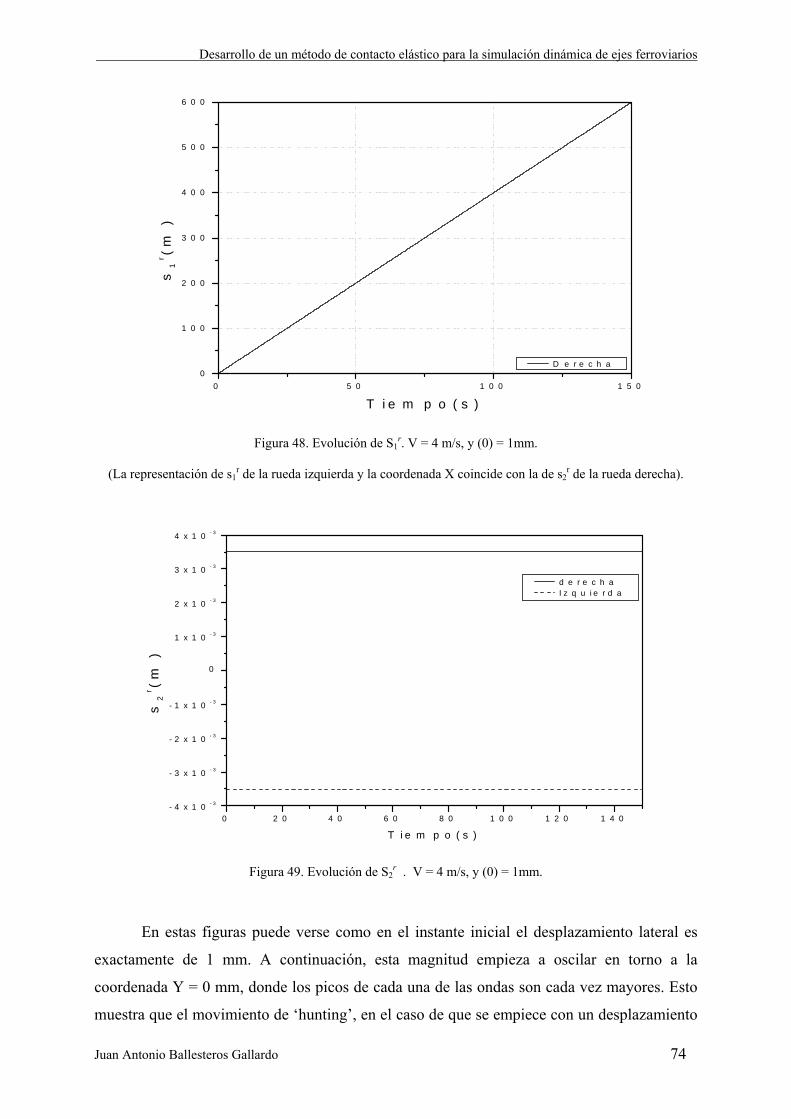
Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 74
0 5 0 1 0 0 1 5 00
1 0 0
2 0 0
3 0 0
4 0 0
5 0 0
6 0 0
D e r e c h a
s1
r (m)
T i e m p o ( s )
Figura 48. Evolución de S1r. V = 4 m/s, y (0) = 1mm.
(La representación de s1r de la rueda izquierda y la coordenada X coincide con la de s2
r de la rueda derecha).
0 2 0 4 0 6 0 8 0 1 0 0 1 2 0 1 4 0- 4 x 1 0 - 3
- 3 x 1 0 - 3
- 2 x 1 0 - 3
- 1 x 1 0 - 3
0
1 x 1 0 - 3
2 x 1 0 - 3
3 x 1 0 - 3
4 x 1 0 - 3
d e r e c h a I z q u i e r d a
s2
r (m)
T i e m p o ( s )
Figura 49. Evolución de S2r . V = 4 m/s, y (0) = 1mm.
En estas figuras puede verse como en el instante inicial el desplazamiento lateral es
exactamente de 1 mm. A continuación, esta magnitud empieza a oscilar en torno a la
coordenada Y = 0 mm, donde los picos de cada una de las ondas son cada vez mayores. Esto
muestra que el movimiento de ‘hunting’, en el caso de que se empiece con un desplazamiento

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 75
lateral inicial impuesto, será un movimiento simétrico respecto a la posición centrada y de
equilibrio. Además, se puede ver como es un movimiento ondulatorio inestable, ya que los
máximos son cada vez mayores. Si se dejara avanzar aún más el tiempo, los desplazamientos
laterales serían lo suficientemente grandes como para las pestañas de las ruedas acabasen por
tocar con el raíl. Más adelante, se comentarán las diferencias y similitudes con los resultados
del análisis analítico.
La coordenada s1w de cada una de las ruedas sufre una evolución a lo largo del tiempo
similar a la coordenada global Y del wheelset. Puede verse las coordenadas oscilan en torno a
una línea media ( 1.5 mm para la izquierda, y –1.5 mm para la derecha, aproximadamente),
que son los valores que se obtienen cuando el wheelset pasa por la posición centrada respecto
a los raíles. Además, las gráficas de una de las coordenadas es la imagen respecto al eje
s1w = 0 mm, debido a la simetría que muestra esta coordenada al parametrizar las ruedas. La
frecuencia con la que oscilan estas coordenadas es justamente la frecuencia con la que oscila
la coordenada Y ( frecuencia de ‘hunting’), y como puede notarse, los máximos de cada una
de las gráficas van creciendo con el tiempo. Por otro lado, la diferencia entre cada punto de la
gráfica y la línea sobre la que oscila, es justamente, la diferencia que existe entre el punto
correspondiente para ese instante de tiempo en la gráfica del desplazamiento lateral y su
posición de equilibrio.
La coordenada local s2w de cada una de las ruedas muestra un comportamiento lineal
con el tiempo, exceptuando un transitorio inicial que debido a su escaso tiempo de duración
no llega a ser percibido. Además, puede comprobarse que la velocidad con la que aumenta
esta coordenada radial se corresponde con la velocidad angular de giro de equilibrio para el
wheelset que se desplaza a lo largo de los raíles con una velocidad de 4 m/s sin deslizar. Este
hecho hace pensar que la coordenada angular de los puntos de contacto en cada una de las
ruedas van a estar situados formando un ángulo de Pi radianes respecto a la coordenda Z
global.
La coordenada s1r muestra una tendencia lineal a lo largo del tiempo, con una
velocidad de crecimiento correspondiente a la velocidad de avance del wheelset ( 4 m / s).
Debido a esto, las gráficas correspondientes a este parámetro en cada uno de los raíles
coincide con la gráfica del desplazamiento longitudinal respecto al tiempo. Esto viene a
indicar que la posición de los puntos de contacto están siempre contenidos en el plano de
simetría vertical del wheelset.
La figuara 49 muestra la evolución de la coordenada transversal del punto de contacto
en los raíles, s2r. Esta figura muestra como estas coordenadas se mantienen constantes en el

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 76
tiempo, sin sufrir prácticamente ningún tipo de oscilación, siendo además simétricas respecto
al eje s2r = 0 m. Este hecho viene a indicar que los puntos de contacto se sitúan sobre la línea
longitudinal trazada con esas coordenadas locales sobre cada uno de los raíles, permaneciendo
estas líneas inmóviles respecto al tiempo, ya que los raíles carecen de movimiento.
Las figuras 50 – 56 muestran las fuerzas y momentos que aparecen en las ruedas,
referidas al sistema global de referencia.
0 5 0 1 0 0 1 5 00 , 0 0 1 1 5
0 , 0 0 1 1 6
0 , 0 0 1 1 7
0 , 0 0 1 1 8
D e r e c h a I z q u i e r d a
Ind
en
tac
ión
(m
)
T i e m p o ( s )
Figura 50. Indentación. V = 4 m/s, y (0) = 1mm.
0 5 0 1 0 0 1 5 07 5 0 0
7 6 0 0
7 7 0 0
7 8 0 0
7 9 0 0
I z q u i e r d a D e r e c h a
Fu
erz
a (
N)
T i e m p o ( s )
Figura 51. Componente Z de las fuerzas normales. V = 4 m/s, y (0) = 1mm.

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 77
0 5 0 1 0 0 1 5 0
- 2 0 0
- 1 0 0
0
1 0 0
2 0 0
I z q u i e r d a d e r e c h a
Fu
erz
a (
N)
T i e m p o ( s )
Figura 52. Componente Y de las fuerzas normales. V = 4 m/s, y (0) = 1mm.
0 5 0 1 0 0 1 5 0- 5 0 0
- 4 0 0
- 3 0 0
- 2 0 0
- 1 0 0
0
1 0 0
2 0 0
C o m p o n e n t e X C o m p o n e n t e Y
Fu
erz
a (
N)
T i e m p o ( s )
Figura 53. Fuerza tangencial de Creep (Rueda izquierda).
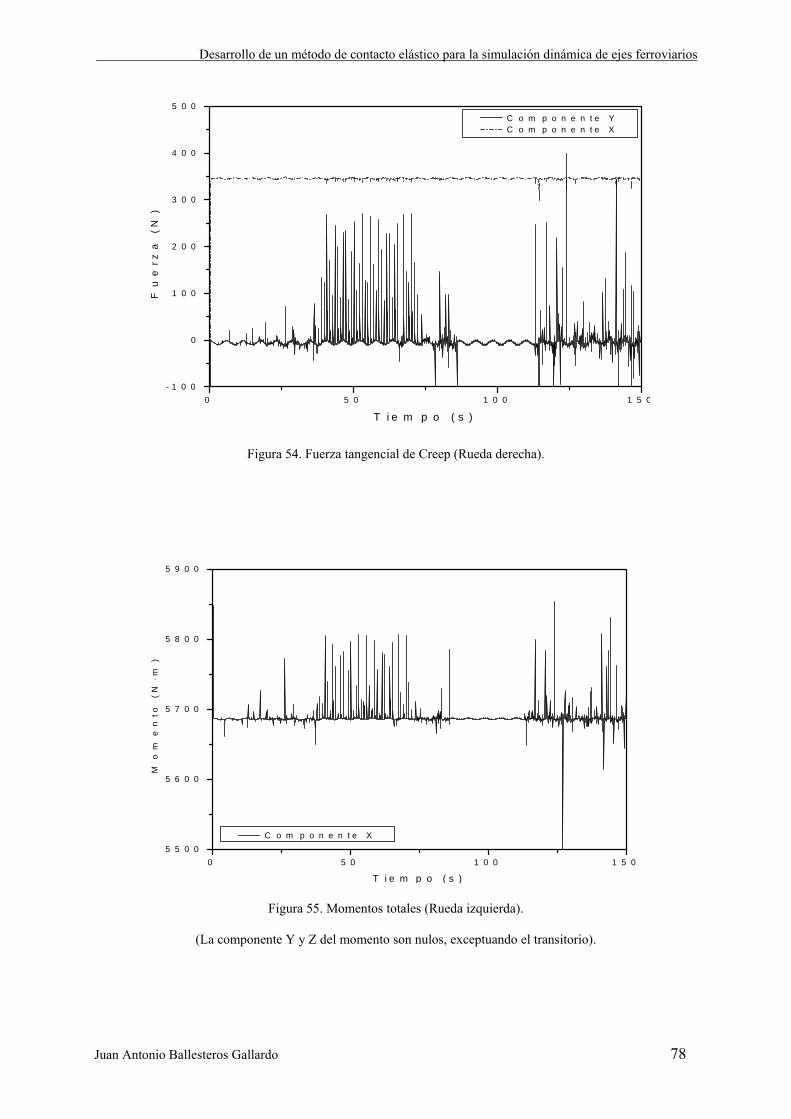
Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 78
0 5 0 1 0 0 1 5 0- 1 0 0
0
1 0 0
2 0 0
3 0 0
4 0 0
5 0 0 C o m p o n e n t e Y C o m p o n e n t e X
Fu
erz
a (
N)
T i e m p o ( s )
Figura 54. Fuerza tangencial de Creep (Rueda derecha).
0 5 0 1 0 0 1 5 05 5 0 0
5 6 0 0
5 7 0 0
5 8 0 0
5 9 0 0
C o m p o n e n t e X
Mo
me
nto
(N
·m)
T i e m p o ( s )
Figura 55. Momentos totales (Rueda izquierda).
(La componente Y y Z del momento son nulos, exceptuando el transitorio).

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 79
0 5 0 1 0 0 1 5 0- 5 9 0 0
- 5 8 0 0
- 5 7 0 0
- 5 6 0 0
- 5 5 0 0
C o m p o n e n t e X
Mo
me
nto
(N
·m)
T i e m p o ( s )
Figura 56. Momentos totales (Rueda izquierda).
(La componente Y y Z del momento son nulos, exceptuando el transitorio). Las figuras 50 y 51 muestran el valor de la indentación que se está produciendo entre
la rueda y el carril en cada rueda, y la componente Z de la fuerza normal obtenida a partir de
dicha indentación. Ambas figuras están afectadas por un ruido que se localiza en ciertos
intervalos de tiempo, producidos quizás por los errores que se producen al calcular los
parámetros de Euler [11], ya que la ecuación de restricción correspondiente a los mismos, no
se satisface con la suficiente precisión, lo que produce errores en el cálculo de los vectores de
posición, y consecuentemente, en el cálculo de la indentación entre los sólidos. La figura 57
muestra el valor residual que se produce en dicha ecuación, es decir, la suma de los cuadrados
de los parámetros de Euler menos la unidad. Puede comprobarse por simple inspección visual,
que las zonas en donde las gráficas están afectadas por este ruido o errores se corresponde con
los intervalos de tiempo donde el valor residual de la ecuación de restricción es mayor.
Aproximadamente esto ocurre sobre los 50 segundos y en la parte final de la simulación.

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 80
0 5 0 1 0 0 1 5 0- 4 x 1 0 - 5
- 3 x 1 0 - 5
- 2 x 1 0 - 5
- 1 x 1 0 - 5
0
1 x 1 0 - 5
2 x 1 0 - 5
3 x 1 0 - 5
4 x 1 0 - 5
Va
lor
res
idu
al.
T i e m p o ( s )
Figura 57. Valor residual en la restricción de los parámetros de Euler..
La figuras 50 y 51 muestran que la indentación y de las fuerzas normales son
funciones que oscilan en torno al valor de equilibrio que se correspondería con el valor que
tendrían estas variables cuando el wheelset se mantiene estable sobre su posición de
equilibrio. Para el caso en el que las fuerzas normales se proyecten sobre el eje Z global, este
valor se correspondería con la mitad del peso del wheelset, 7683.2 Nw. Los errores máximos
que se producen en la indentación son del orden de 15 µm, que se traducen en un error en las
fuerzas normales de unos 15 Kg. Estos errores generalmente no repercuten con importancia
en la evolución que tienen a lo largo del tiempo las coordenadas locales, ya que como se vio,
estas funciones son continuas, sin ningún tipo de cambio brusco en sus valores. Esto también
puede decirse de las coordenadas y velocidades globales del wheelset como se verá más
adelante.
Por otro lado puede observarse, que las figuras que representan la evolución de la
indentación y la fuerza normal del lado izquierdo y derecho ( figuras 51 y 52) oscilan con la
misma amplitud, pero desfasadas 90 grados.
Para dar explicación al hecho anterior se ha representado en la figura 58 la
localización de las fuerzas de contacto entre la rueda y el carril, la figura A, cuando el
wheelset está centrado y la figura B, cuando el wheelset sufre un desplazamiento lateral hacia
la derecha de ‘y’ metros, como consecuencia del movimiento de ‘hunting’

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 81
L+h L-h
Y Y
X XZ Z
F1F1F2
F2
y
Figura 58. Equilibrio de fuerzas durante el Hunting.
Haciendo equilibrios de momentos sobre el centro de gravedad según el eje X para el
caso B, se obtienen las siguientes ecuaciones:
F1 ( L + h) – F2 (L – h) = 0
(76)
2
1
FF = ⎟
⎠⎞
⎜⎝⎛
+−
hLhL
De esta relación puede concluirse que la relación entre fuerzas es una función
oscilante, ya que ‘h’ es una función oscilante, y por tanto, la razón entre sus longitudes
también lo serán. Además, cuando ‘h’ alcanza su valor máximo la razón entre las longitudes
alcanzarán su valor mínimo, y consecuentemente F1 se encontrará en un mínimo, y F2 en un
máximo, por lo que las gráficas de las fuerzas deberán estar desfasadas 90 grados como
sucede realmente durante la simulación.
La figura 52 se representa la componente sobre el eje Y de la fuerza de reacción
elástica entre la rueda y el raíl. El que la fuerza de reacción tenga componente sobre el eje Y,
es debido a la conicidad de las ruedas. Estas magnitudes oscilarán en torno al valor que
vendrá dado de multiplicar la fuerza normal proyectada sobre el eje Z, por la conicidad de las
ruedas, esto es, 7683.2 · 0.02559 = 196.6 N, como sucede realmente en la gráficas durante la
simulación. Al igual que como sucede con las fuerzas normales, ambas gráficas se encuentran
desfasadas 90 grados una respecto a la otra, por lo que sobre el wheelset actuará una fuerza
sobre el eje Y no compensada, como consecuencia del desfase anterior. Este hecho es muy

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 82
importante, ya que dichas fuerzas provocan aceleraciones laterales responsables en parte, del
movimiento de ‘hunting’.
Las figuras 53 y 54 muestran las fuerzas tangenciales de creep que se generan en las
dos ruedas. Puede observarse que las componentes Z y X de dichos valores son nulos, aunque
se ven afectados por los ruidos que se producen durante la simulación, aproximadamente de la
misma forma. De estas dos figuras puede concluirse que la fuerza lateral de creep se dirige a
lo largo del eje X, con un valor aproximadamente constante de 350 N, aunque realmente
oscilan con la frecuencia de ‘hunting’ con una amplitud sobre este valor de 2.3 N. Las suma
de fuerzas tangenciales de creep de las ruedas, se encuentran también desfasadas 90 grados,
con una amplitud de aproximadamente 4.6 N respecto al valor cero, por lo que existirá una
fuerza neta actuando sobre el wheelset debido a este desequilibrio, influyendo también sobre
el movimiento de ‘hunting’.
Las figuras 55 y 56 representan los momentos sobre el centro de gravedad que
provocan sobre el wheelset cada rueda. Como puede verse, el momento más importante es el
que se produce sobre el eje X, debido a la acción de las fuerzas normal y tangencial de
contacto. Su valor teórico vendrá dado por la suma de multiplicar cada fuerza por la longitud
existente entre su punto de aplicación y el centro de gravedad. Para el caso de la rueda
izquierda este valor se puede calcular como sigue:
Fn · Lw + (Ftc + Ft ) · Rw = 7683.2 · 0.750 + ( 350-196.6) · 0.457= 5832.5 Nw · m (77)
que es aproximadamente el valor que se obtiene de la simulación numérica. En esta expresión
Fn es el módulo de la fuerza normal de contacto, Ftc es la fuerza de creep, Lw la mitad de la
distancia entre los centros de las ruedas, Ft es la componente Y de la fuerza normal y Rw es el
radio nominal de cada ruedas.
Las figuras 59 y 60 muestran las velocidades lineales y angulares que posee el
wheelset respecto a los ejes globales:

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 83
0 5 0 1 0 0 1 5 0- 0 , 5
0 , 0
0 , 5
1 , 0
1 , 5
2 , 0
2 , 5
3 , 0
3 , 5
4 , 0
4 , 5
C o m p o n e n t e X C o m p o n e n t e Y
Ve
loc
ida
d (
m/s
)
T i e m p o ( s )
Figura 59. Velocidades lineales.V = 4 m/s, y (0) = 1mm.
0 5 0 1 0 0 1 5 0
0
2
4
6
8
1 0
C o m p o n e n t e Y C o m p o n e n t e X
Ve
loc
ida
d A
ng
ula
r (r
ad
/s)
T i e m p o ( s )
Figura 60. Velocidades angulares . V = 4 m/s, y (0) = 1mm.
En la figura 59 se comprueba, que efectivamente la velocidad de avance del wheelset,
que se corresponde con la coordenada X, es de 4 m / s, tal y como se había impuesto. Las
velocidades de las coordenadas Y no es del todo nula, aunque en la gráfica parezca que sí,
debido a la escala elegida, ya que su valor es muy pequeño. Esta coordenada debe tener
velocidad, ya que a lo largo de su eje se produce el movimiento de ‘hunting’. La velocidad de

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 84
esta coordenada, es una función que oscila entorno al valor cero con la frecuencia de
‘hunting’, y con valores máximos que se encuentran sobre 1 mm / s.
La gráfica 60 representa las velocidades angulares, observándose que el valor de la
componente X es nulo, mientras que la componente del eje Y es constante. Puesto que se ha
alcanzado ya el equilibrio cinemático entre la velocidad lineal y la velocidad angular de giro,
el valor de esta debe de ser la relación entre el la velocidad de avance y el radio de rodadura,
que es aproximadamente igual al radio nominal de la rueda. De esta forma se tiene que la
velocidad angular debe ser de (4 / 0.457 ) = 8.753 rad / s que es lo que prácticamente sucede.
A continuación se va a analizar lo que sucede en el transitorio de la simulación,
refiriéndose con este término al periodo que transcurre desde el instante inicial hasta que la
velocidad angular con la que rueda el wheelset alcanza el valor anteriormente señalado. Las
figuras 61- 67 muestran lo que sucede durante este instante de tiempo:
0 , 0 0 , 2 0 , 4 0 , 6 0 , 8 1 , 0 1 , 2 1 , 4 1 , 6
0
2
4
6
8
1 0
C o m p o n e n t e X C o m p o n e n t e Y
Ve
loc
ida
d a
ng
ula
r (r
ad
/s)
T i e m p o ( s )
Figura 61. Velocidades angulares. V = 4 m/s, y (0) = 1mm. (Transitorio)

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 85
0 , 6 0 , 8 1 , 0 1 , 2 1 , 4 1 , 6
0 , 0
0 , 5
1 , 0
1 , 5
2 , 0
2 , 5
3 , 0
3 , 5
4 , 0
C o m p o n e n t e X C o m p o n e n t e Y
Ve
loc
ida
d (
m/s
)
T i e m p o ( s )
Figura 62. Velocidades lineales. V = 4 m/s, y (0) = 1mm. (Transitorio)
0 , 0 0 , 2 0 , 4 0 , 6 0 , 8 1 , 00 , 0 0 0 0
0 , 0 0 0 3
0 , 0 0 0 6
0 , 0 0 0 9
0 , 0 0 1 2
0 , 0 0 1 5 I z q u i e r d a D e r e c h a
Ind
en
tac
ión
(m
)
T i e m p o ( s )
Figura 63. Indentación. V = 4 m/s, y (0) = 1mm. (Transitorio)

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 86
0 , 0 0 , 2 0 , 4 0 , 6 0 , 8 1 , 0 1 , 2 1 , 4- 5 0 0 0
- 4 0 0 0
- 3 0 0 0
- 2 0 0 0
- 1 0 0 0
0
1 0 0 0
C o m p o n e n t e X C o m p o n e n t e Y
Fu
erz
a (
N)
T i e m p o ( s )
Figura 64. Fzas Tangenciales de Creep (Rueda izq). V = 4 m/s y (0) = 1mm. (Transitorio)
0 , 0 0 , 2 0 , 4 0 , 6 0 , 8 1 , 0 1 , 2 1 , 4- 5 0 0 0
- 4 0 0 0
- 3 0 0 0
- 2 0 0 0
- 1 0 0 0
0
1 0 0 0
C o m p o n e n t e X C o m p o n e n t e Y
Fu
erz
a (
N)
T i e m p o ( s )
Figura 65. Fzas Tangenciales de Creep (Rueda der). V = 4 m/s, y (0) = 1mm. (Transitorio)

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 87
0 , 0 0 , 2 0 , 4 0 , 6 0 , 8 1 , 0 1 , 2 1 , 4- 1 0 0 0
0
1 0 0 0
2 0 0 0
3 0 0 0
4 0 0 0
5 0 0 0
6 0 0 0
7 0 0 0 C o m p o n e n t e X C o m p o n e n t e Y C o m p o n e n t e Z
Mo
me
nto
(N
·m)
T i e m p o ( s )
Figura 66. Momentos (Rueda izq). V = 4 m/s, y (0) = 1mm. (Transitorio)
0 , 0 0 , 2 0 , 4 0 , 6 0 , 8 1 , 0 1 , 2
- 6 0 0 0
- 4 0 0 0
- 2 0 0 0
0
2 0 0 0
C o m p o n e n t e X C o m p o n e n t e Y C o m p o n e n t e Z
Mo
me
nto
(N
·m)
T i e m p o ( s )
Figura 67. Momentos (Rueda izq). V = 4 m/seg, y (0) = 1mm. (Transitorio).
De la figura 61 se deduce que la velocidad angular de rodamiento se estabiliza sobre
los 0.420 segundos, tiempo durante el cual dicha velocidad ha estado aumentando de forma
casi lineal con el tiempo. La aceleración angular de dicha velocidad será por tanto,
aproximadamente igual a la velocidad angular de giro cuanto se ha estabilizado dividido por
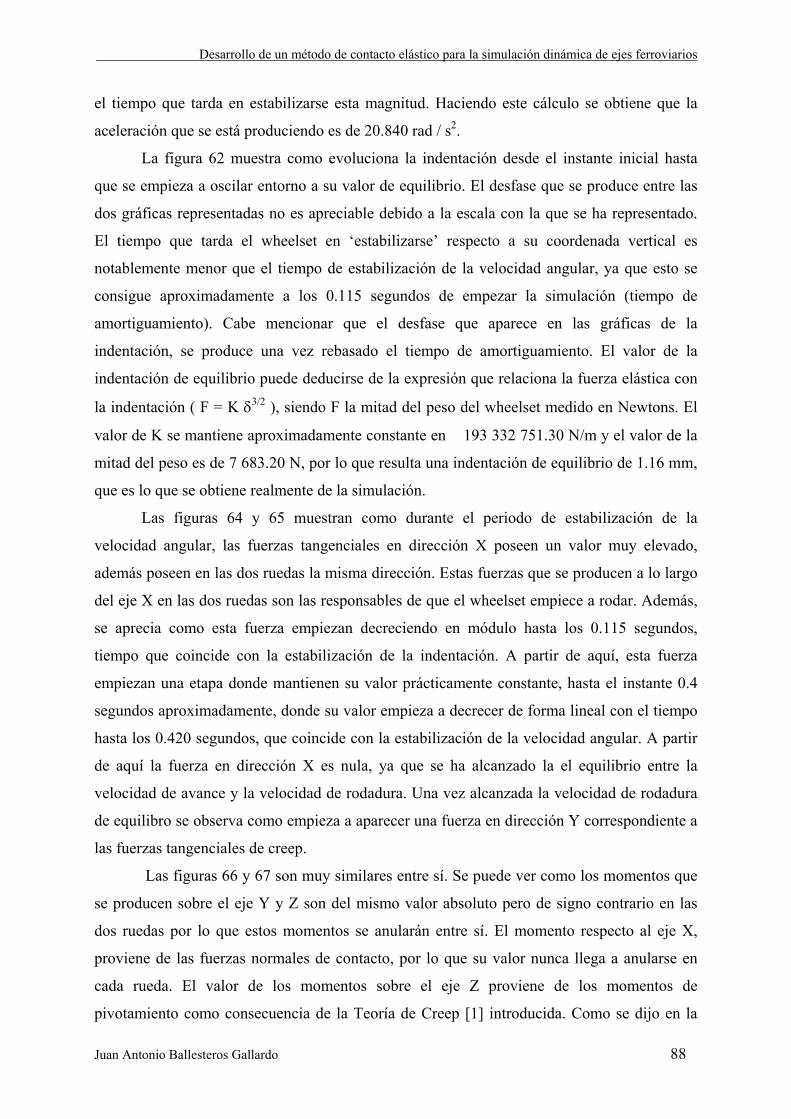
Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 88
el tiempo que tarda en estabilizarse esta magnitud. Haciendo este cálculo se obtiene que la
aceleración que se está produciendo es de 20.840 rad / s2.
La figura 62 muestra como evoluciona la indentación desde el instante inicial hasta
que se empieza a oscilar entorno a su valor de equilibrio. El desfase que se produce entre las
dos gráficas representadas no es apreciable debido a la escala con la que se ha representado.
El tiempo que tarda el wheelset en ‘estabilizarse’ respecto a su coordenada vertical es
notablemente menor que el tiempo de estabilización de la velocidad angular, ya que esto se
consigue aproximadamente a los 0.115 segundos de empezar la simulación (tiempo de
amortiguamiento). Cabe mencionar que el desfase que aparece en las gráficas de la
indentación, se produce una vez rebasado el tiempo de amortiguamiento. El valor de la
indentación de equilibrio puede deducirse de la expresión que relaciona la fuerza elástica con
la indentación ( F = K δ3/2 ), siendo F la mitad del peso del wheelset medido en Newtons. El
valor de K se mantiene aproximadamente constante en 193 332 751.30 N/m y el valor de la
mitad del peso es de 7 683.20 N, por lo que resulta una indentación de equilibrio de 1.16 mm,
que es lo que se obtiene realmente de la simulación.
Las figuras 64 y 65 muestran como durante el periodo de estabilización de la
velocidad angular, las fuerzas tangenciales en dirección X poseen un valor muy elevado,
además poseen en las dos ruedas la misma dirección. Estas fuerzas que se producen a lo largo
del eje X en las dos ruedas son las responsables de que el wheelset empiece a rodar. Además,
se aprecia como esta fuerza empiezan decreciendo en módulo hasta los 0.115 segundos,
tiempo que coincide con la estabilización de la indentación. A partir de aquí, esta fuerza
empiezan una etapa donde mantienen su valor prácticamente constante, hasta el instante 0.4
segundos aproximadamente, donde su valor empieza a decrecer de forma lineal con el tiempo
hasta los 0.420 segundos, que coincide con la estabilización de la velocidad angular. A partir
de aquí la fuerza en dirección X es nula, ya que se ha alcanzado la el equilibrio entre la
velocidad de avance y la velocidad de rodadura. Una vez alcanzada la velocidad de rodadura
de equilibro se observa como empieza a aparecer una fuerza en dirección Y correspondiente a
las fuerzas tangenciales de creep.
Las figuras 66 y 67 son muy similares entre sí. Se puede ver como los momentos que
se producen sobre el eje Y y Z son del mismo valor absoluto pero de signo contrario en las
dos ruedas por lo que estos momentos se anularán entre sí. El momento respecto al eje X,
proviene de las fuerzas normales de contacto, por lo que su valor nunca llega a anularse en
cada rueda. El valor de los momentos sobre el eje Z proviene de los momentos de
pivotamiento como consecuencia de la Teoría de Creep [1] introducida. Como se dijo en la
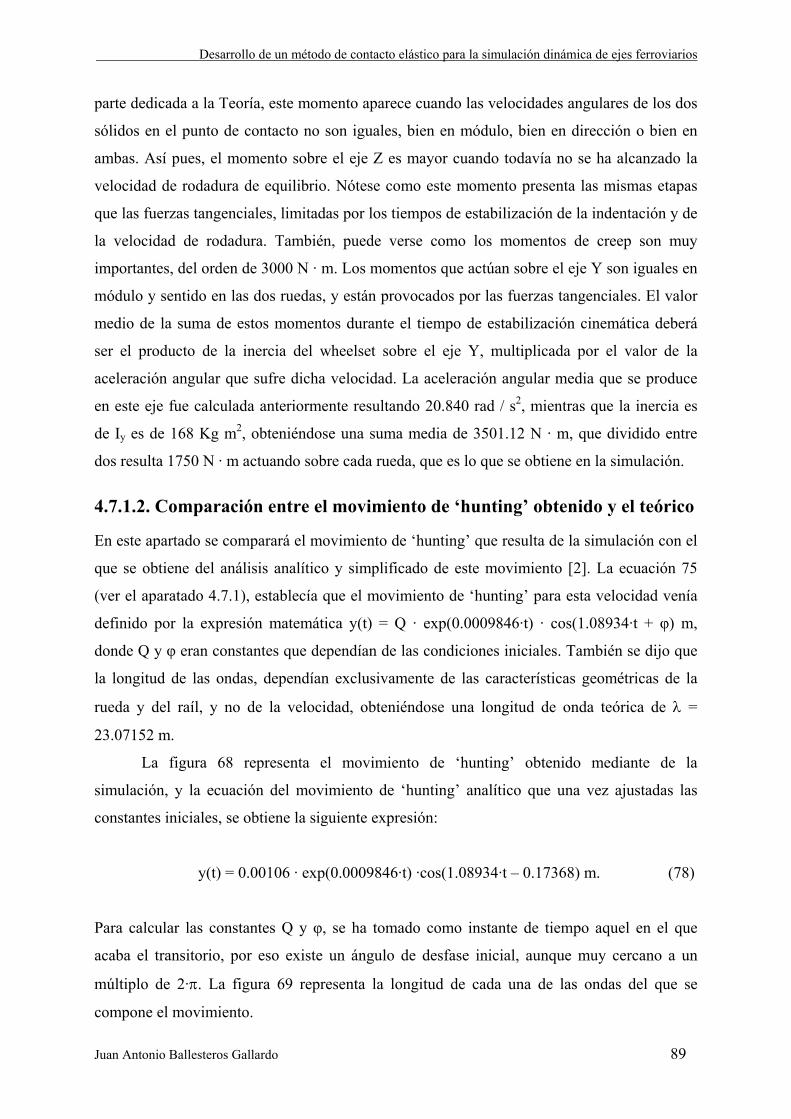
Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 89
parte dedicada a la Teoría, este momento aparece cuando las velocidades angulares de los dos
sólidos en el punto de contacto no son iguales, bien en módulo, bien en dirección o bien en
ambas. Así pues, el momento sobre el eje Z es mayor cuando todavía no se ha alcanzado la
velocidad de rodadura de equilibrio. Nótese como este momento presenta las mismas etapas
que las fuerzas tangenciales, limitadas por los tiempos de estabilización de la indentación y de
la velocidad de rodadura. También, puede verse como los momentos de creep son muy
importantes, del orden de 3000 N · m. Los momentos que actúan sobre el eje Y son iguales en
módulo y sentido en las dos ruedas, y están provocados por las fuerzas tangenciales. El valor
medio de la suma de estos momentos durante el tiempo de estabilización cinemática deberá
ser el producto de la inercia del wheelset sobre el eje Y, multiplicada por el valor de la
aceleración angular que sufre dicha velocidad. La aceleración angular media que se produce
en este eje fue calculada anteriormente resultando 20.840 rad / s2, mientras que la inercia es
de Iy es de 168 Kg m2, obteniéndose una suma media de 3501.12 N · m, que dividido entre
dos resulta 1750 N · m actuando sobre cada rueda, que es lo que se obtiene en la simulación.
4.7.1.2. Comparación entre el movimiento de ‘hunting’ obtenido y el teórico
En este apartado se comparará el movimiento de ‘hunting’ que resulta de la simulación con el
que se obtiene del análisis analítico y simplificado de este movimiento [2]. La ecuación 75
(ver el aparatado 4.7.1), establecía que el movimiento de ‘hunting’ para esta velocidad venía
definido por la expresión matemática y(t) = Q · exp(0.0009846·t) · cos(1.08934·t + φ) m,
donde Q y φ eran constantes que dependían de las condiciones iniciales. También se dijo que
la longitud de las ondas, dependían exclusivamente de las características geométricas de la
rueda y del raíl, y no de la velocidad, obteniéndose una longitud de onda teórica de λ =
23.07152 m.
La figura 68 representa el movimiento de ‘hunting’ obtenido mediante de la
simulación, y la ecuación del movimiento de ‘hunting’ analítico que una vez ajustadas las
constantes iniciales, se obtiene la siguiente expresión:
y(t) = 0.00106 · exp(0.0009846·t) ·cos(1.08934·t – 0.17368) m. (78)
Para calcular las constantes Q y φ, se ha tomado como instante de tiempo aquel en el que
acaba el transitorio, por eso existe un ángulo de desfase inicial, aunque muy cercano a un
múltiplo de 2·π. La figura 69 representa la longitud de cada una de las ondas del que se
compone el movimiento.

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 90
0 5 0 1 0 0 1 5 0- 0 , 0 0 1 5
- 0 , 0 0 1 0
- 0 , 0 0 0 5
0 , 0 0 0 0
0 , 0 0 0 5
0 , 0 0 1 0
0 , 0 0 1 5
A n a l í t i c o C a l c u l a d o
Y(m
)
T i e m p o ( s )
Figura 68. ‘Hunting’ analítico y obtenido. V = 4 m/s, y (0) = 1mm.
0 2 0 4 0 6 0 8 0 1 0 0 1 2 0 1 4 02 2 , 0
2 2 , 4
2 2 , 8
2 3 , 2
2 3 , 6
2 4 , 0
C a l c u l a d o s K l i n g e l
Lo
ng
itu
d (
m)
T i e m p o ( s )
Figura 69. Longitudes de onda. V = 4 m/s, y (0) = 1mm.

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 91
0 2 0 4 0 6 0 8 0 1 0 0 1 2 0 1 4 00 , 9 7
0 , 9 8
0 , 9 9
1 , 0 0
1 , 0 1
1 , 0 2
1 , 0 3
C a l c u l a d o s K l i n g e l
T i e m p o ( s )
Figura 70. Longitudes de onda adimensionada. V = 4 m/s, y (0) = 1mm.
En la figura 69 puede verse como el movimiento de ‘hunting’ que se deduce del
estudio analítico simplificado coincide totalmente con el que se obtiene de la simulación del
wheelset. De hecho, la gráfica responde a una ecuación del tipo
y(t) = Q · exp (kt · t) · cos (ω ·t +φ) m, como se observa en la siguiente ecuación:
y(t) = 0.00105 · exp(0.0008780 · t) · cos(1.08839 · t - 6.45687) m (79)
El valor de Q no es exactamente 0.001 porque se ha prescindido de la parte del
transitorio. Kt ha sido obtenido de correlacionar logarítmicamente los máximos de cada onda,
mientras que ω se ha calculado como la frecuencia correspondiente al valor medio de las
longitudes de onda. Además existe un valor no nulo del ángulo de desfase porque el ajuste se
produce a partir de un tiempo diferente al inicial, en el que se ha obtenido el equilibrio
cinemático y las ecuaciones anteriores pueden ser válidas tal y como se aprecia en la figura
71.
Respecto a la longitud de onda se observa que los máximos se encuentran
aproximadamente sobre la longitud que predice Klingel [7], aunque las longitudes de cada de
ellas no son siempre las mismas. Esto puede ser debido a que los pasos de tiempo de la
integración son discretos además de los pequeños errores que puedan existir, aunque como se
comprueba en la figura que representa la frecuencia adimensionada, los errores no superan el
1 % sobre el que predice Klingel.

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 92
La tabla 5, muestra los valores analíticos para los diferentes parámetros que
intervienen en la ecuación y los calculados a partir de la simulación del wheelset, así como la
diferencia entre ambos. ( Los resultados dados son valores medios).
Parámetro Analítico Simulación Diferencia
λ 23.07152 m 23.09157 m 0.02005 m
kt 0.0009846 s-1 0.0008780 s-1 0.0001066 s-1
ω 1.08934 rad/s 1.08839 rad/s 0.00094 rad/s
Tabla 5. Constantes de la ecuación del Hunting. V = 4 m/s, y (0) = 1mm.
0 , 0 0 , 5 1 , 0 1 , 5
5 , 0 x 1 0 - 4
1 , 0 x 1 0 - 3
1 , 5 x 1 0 - 3
I n s t a n t e a p a r t i r d e lc u a l p u e d e t o m a r s e e l a j u s t e
C a l c u l a d o A n a l í t i c o
Y(m
)
T i e m p o ( s )
Figura 71. Desfase de la ecuación del ‘hunting’
4.7.1.3. Influencia del desplazamiento lateral en el ‘hunting’
Con anterioridad se vio que la longitud de onda sólo dependía de las características
geométricas de la rueda y del carril, y por lo tanto la frecuencia de oscilación sólo dependerá
de dicha longitud y de la velocidad de avance del wheelset.
En este apartado se discute si el desplazamiento lateral inicial influye en el
movimiento de ‘hunting’. Para ello, se ha ejecutado el programa para tres desplazamientos
laterales iniciales distintos correspondientes a 1, 3 y 6 milímetros. Los resultados se recogen
en la Tabla 6:

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 93
Parámetro Analítico y(0)= 1mm y(0)= 3mm y(0)= 6mm
λ 23.07152 m 23.09157 m 22.99139 m 23.02995 m
kt 0.0009846 s-1 0.0008780 s-1 0.0008732 s-1 0.0008761 s-1
ω 1.08934 rad/s 1.08839 rad/s 1.09314 rad/s 1.09131 rad/s
Tabla 6. Constantes de la ecuación del ‘hunting’ para distintas posiciones iniciales.
Como se deduce de la tabla 6, los tres parámetros permanecen prácticamente
invariables con la posición inicial que se adopta. Por tanto, en las ecuaciones de movimiento
solo cambiará las constantes que dependan de las ecuaciones iniciales, es decir, Q y φ. La
tabla 7 muestra las ecuaciones que se ajustan al movimiento del ‘hunting’ para cada caso.
y(0) Ecuación obtenida para el Hunting
1 mm y(t) = 0.00105 · exp(0.0008780 · t) · cos(1.08839 · t – 0.17368) m
3 mm y(t) =0.00304 · exp(0.0008732 · t) · cos(1.09314 · t - 0.39133) m
6 mm y(t) = 0.00603 · exp(0.0008761· t) · cos(1.09131 · t – 0.26935) m
Tabla 7. Ecuaciones para distintos desplazamientos iniciales. V=4m/s.
Las gráficas del movimiento de ‘hunting’ y la longitud de onda de Klingel
adimensionada se representa en las figuras 31-34:
0 5 1 0 1 5 2 0 2 5 3 0 3 5 4 0 4 5 5 0- 0 , 0 0 4
- 0 , 0 0 3
- 0 , 0 0 2
- 0 , 0 0 1
0 , 0 0 0
0 , 0 0 1
0 , 0 0 2
0 , 0 0 3
0 , 0 0 4 C a l c u l a d o A n a l í t i c o
Y(m
)
T i e m p o ( s )
Figura 72. ‘Hunting’ analítico y obtenido. V = 4 m/s, y (0) = 3 mm.

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 94
0 1 0 2 0 3 0 4 0- 0 , 0 0 8
- 0 , 0 0 6
- 0 , 0 0 4
- 0 , 0 0 2
0 , 0 0 0
0 , 0 0 2
0 , 0 0 4
0 , 0 0 6
0 , 0 0 8 C a l c u l a d o A n a l í t i c o
Y (
m)
T i e m p o ( s )
Figura 73. ‘Hunting’ analítico y obtenido. V = 4 m/s, y (0) =6 mm
0 5 1 0 1 5 2 0 2 5 3 0 3 5 4 0
0 , 9 6
0 , 9 8
1 , 0 0
1 , 0 2
1 , 0 4 C a l c u l a d o s K l i n g e l
T i e m p o ( s )
Figura 74. Longitudes de onda adimensionada. V = 4 m/seg, y (0) = 3mm.

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 95
0 1 0 2 0 3 0 4 00 , 9 6
0 , 9 7
0 , 9 8
0 , 9 9
1 , 0 0
1 , 0 1
1 , 0 2
1 , 0 3
1 , 0 4
C a l c u l a d o K l i n g e l
T i e m p o ( s )
Figura 75. Longitudes de onda adimensionada. V = 4 m/s, y (0) = 6 mm.
De las figuras anteriores puede extraerse que la longitud de onda no depende de la
velocidad, debido a que el error máximo que se comete se encuentra sobre un 2 % de la
longitud de onda que se obtiene de aplicar la fórmula de Klingel simplificada [7]. También
permanece invariable el aumento que sufre los máximos de cada onda respecto a la anterior,
ya que la exponencial que los limita es prácticamente la misma. Donde sí influye el
desplazamiento inicial es en la amplitud de la onda, ya que todos los picos son mayores o
iguales al desplazamiento inicial.
4.7.1.4. Influencia de la velocidad lateral inicial en el ‘hunting’
Al igual que en el caso anterior, en el que se discutía si existía alguna influencia en el
movimiento de ‘hunting’ al variar el desplazamiento inicial dado, en este apartado se hará un
estudio similar. En este caso, se ha simulado el movimiento del wheelset partiendo desde su
posición centrada ( y(0) = 0 m), cambiando la velocidad lateral inicial a tres valores distintos,
1 mm/s, 2 mm/s, y 5 mm/s, dejando la velocidad de avance constante en 4 m/s. Los resultados
para la longitud de onda, frecuencia y la constante de la exponencial que limita los máximos
se dan en la Tabla 8, donde los resultados son los valores promedio:

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 96
Parámetro Analítico Vy(0)= 1mm/s Vy(0)= 2mm/s Vy(0)= 5mm/s
λ 23.07152 m 23.09282 m 23.06874 m 23.05062 m
kt 0.0009846 s-1 0.0009107 s-1 0.0007403 s-1 0.0006865 s-1
ω 1.08934 rad/s 1.08834 rad/s 1.08947 rad/s 1.09033 rad/s
Tabla 8. Constantes del ‘hunting’ para distintas velocidades laterales iniciales.
En esta tabla se observa como la velocidad lateral apenas influye en la longitud de
onda de Klingel y la frecuencia de oscilación. En cambio, para la constante de la exponencial
que limita los máximos ( kt ), se aprecia que a medida que se aumenta la velocidad lateral
inicial, este valor va decreciendo sensiblemente.
Las figuras 76-81 representan el movimiento de ‘hunting’ y la longitud de onda
adimensionada con la longitud de onda teórica que predice Klingel.
0 2 0 4 0 6 0 8 0 1 0 0 1 2 0 1 4 0- 0 , 0 0 1 5
- 0 , 0 0 1 0
- 0 , 0 0 0 5
0 , 0 0 0 0
0 , 0 0 0 5
0 , 0 0 1 0
0 , 0 0 1 5 C a l c u l a d o O b t e n i d o
Y (
m)
T i e m p o ( s )
Figura 76. Hunting analítico y obtenido. V = 4 m/s, Vy (0) =1 mm/s.

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 97
0 3 0 6 0 9 0 1 2 0 1 5 0
- 0 , 0 0 2
- 0 , 0 0 1
0 , 0 0 0
0 , 0 0 1
0 , 0 0 2
C a l c u l a d o A n a l í t i c o
Y(m
)
T i e m p o ( s )
Figura 77. Hunting analítico y obtenido. V = 4 m/s, Vy (0) =2 mm/s.
0 1 0 2 0 3 0 4 0 5 0
- 0 , 0 0 4
- 0 , 0 0 2
0 , 0 0 0
0 , 0 0 2
0 , 0 0 4
0 , 0 0 6 C a l c u l a d o A n a l í t i c o
Y (
m)
T i e m p o ( s )
Figura 78. Hunting analítico y obtenido. V = 4 m/s, Vy (0) =5 mm/s.

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 98
0 2 0 4 0 6 0 8 0 1 0 0 1 2 0 1 4 00 , 9 8 0
0 , 9 8 5
0 , 9 9 0
0 , 9 9 5
1 , 0 0 0
1 , 0 0 5
1 , 0 1 0
1 , 0 1 5
1 , 0 2 0
C a l c u l a d o s K l i n g e l
T i e m p o ( s )
Figura 79. Longitudes de onda adimensionada. V = 4 m/s, Vy (0) = 1 mm/s.
0 2 0 4 0 6 0 8 0 1 0 0 1 2 0 1 4 00 , 9 8 0
0 , 9 8 5
0 , 9 9 0
0 , 9 9 5
1 , 0 0 0
1 , 0 0 5
1 , 0 1 0
1 , 0 1 5
1 , 0 2 0
C a l c u l a d o s K l i n g e l
T i e m p o ( s )
Figura 80. Longitudes de onda adimensionada. V = 4 m/s, Vy (0) = 2 mm/s.

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 99
0 5 1 0 1 5 2 0 2 5 3 0 3 5 4 0 4 50 , 9 8 0
0 , 9 8 5
0 , 9 9 0
0 , 9 9 5
1 , 0 0 0
1 , 0 0 5
1 , 0 1 0
1 , 0 1 5
1 , 0 2 0 C a l c u l a d o s K l i n g e l
T i e m p o ( s )
Figura 81. Longitudes de onda adimensionada. V = 4 m/seg, Vy (0) = 5 mm/seg.
De las figuras 76 - 81 puede concluirse que el movimiento de ‘hunting’ analítico y
obtenido coinciden en la frecuencia, aunque hay pequeñas diferencias en el valor de los picos
de cada onda. Para la longitudes de onda, se puede apreciar que existe un error máximo
relativo respecto a la que predice la ecuación de Klingel simplificada [2] de 0.5 %, lo que
resulta ser casi exacta.
En general, la velocidad inicial afecta a la amplitud de las ondas, ya que una velocidad
lateral mayor desestabiliza más el wheelset, provocando amplitudes mayores. Además, el
transitorio a partir del cual el movimiento de ‘hunting’ se puede ajustar a las ecuaciones del
tipo que se han expuesto, suele ser menor que el tiempo de estabilización cinemática entre la
velocidad de rodadura y la velocidad lineal de avance. Para esta parte inicial, la evolución del
‘hunting’ no responde a una ecuación del tipo de las vistas anteriormente, sólo una vez
alcanzado el tiempo en la que la velocidad transversal deja de tener efecto, la curva del
desplazamiento lateral responde a una ecuación exponencial multiplicada por una función
armónica. En este caso, al tomarse las condiciones iniciales en un tiempo distinto al inicial, la
ecuación deberá se corregida mediante un desfase, teniendo esta la forma
y(t) = Q · exp(kt · t) · cos (ω · (t-t*)) metros, donde t* es el instante a partir del cual la ecuación
es válida, coincidiendo con el tiempo a partir del cual, los efectos de la velocidad transversal
inicial han desaparecido.

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 100
El tiempo que tarda en dejar de tener efecto la velocidad lateral se puede apreciar en la
figura 82, tomada para la velocidad transversal inicial de 5 mm/s, ya que es en la que mejor se
aprecia esta peculiaridad. Puede verse que a partir del instante en que la velocidad deja de
tener efecto la evolución de la velocidad se ajusta a la ecuación analítica.
0 , 0 0 , 5 1 , 0 1 , 5 2 , 0 2 , 5 3 , 0- 0 , 0 0 2
0 , 0 0 0
0 , 0 0 2
0 , 0 0 4
I n s t a n t e a p a r t i r d e l c u a l e s v á l i d o e l a j u s t e
C a l c u l a d o K l i n g e l
Y (
m)
T i e m p o ( s )
Figura 82. Evolución inicial del ‘hunting’. V = 4 m/s, Vy (0) = 5 mm/s.
Las ecuaciones obtenidas para cada uno de los casos se muestran en la Tabla 9:
Vy(0) Ecuación obtenida para el ‘hunting’
1 mm / s y(t) = 0.00088 · exp(0.0009107 · t) · cos(1.08834 · t- 1.72463) m
2 mm / s y(t) = 0.00174 · exp(0.0007403 · t) · cos(1.08947 · t-1.70861) m
5 mm / s y(t) = 0.00408 · exp(0.0006865 · t) · cos(1.09033 · t-1.66690) m
Tabla 9. ‘Hunting’ para distintas velocidades transversales iniciales. V = 4 m / s.
4.7.2. Influencia de la velocidad de avance en el ‘hunting’
En este apartado se discute como influye la velocidad de avance del wheelset, en el
movimiento de ‘hunting’. Para ello, se ha simulado el wheelset con distintas velocidades de
avance con un desplazamiento lateral inicial de 1 mm. y una velocidad lateral nula.
En el apartado 3.5.5 se explicó que el movimiento de ‘hunting’ puede ser calculado de
la forma analítica a partir de dos ecuaciones diferenciales [2]. Estas ecuaciones se presentan a

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 101
continuación como recordatorio ( véase el apartado 3.5.5, para detallar las definiciones de
cada una de las constantes y sus valores):
⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡ −+
⎥⎥⎦
⎤
⎢⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡+
⎥⎥⎦
⎤
⎢⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡00
02201
20021
00 0
0·
·
2··
··
θγθθ
yLf
frr
yfL
fV
yI
m
o de forma abreviada
⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡+
⎥⎥⎦
⎤
⎢⎢⎣
⎡+
⎥⎥⎦
⎤
⎢⎢⎣
⎡
00
·
·
··
··
θθθ
yyy KCM
De esta forma, los valores de la frecuencia de ‘hunting’ (ω) y de la constante del crecimiento
exponencial de los máximos ( kt ), pueden ser obtenidos a partir de la parte imaginaria y de la
parte real respectivamente de los autovalores complejos de la matriz A*:
A* = ⎥⎦
⎤⎢⎣
⎡−− −− CMKM
I01··1
En estas expresiones puede verse como la matriz de rigidez del sistema diferencial (K)
depende de la velocidad de avance, y por tanto, los autovalores que se obtengan de la matriz
A* dependen también de dicha velocidad.
La figuras 83 y 84, muestran los valores de la frecuencia del ‘hunting’ (ω) y de la
constante del crecimiento exponencial ( kt), obtenidos a partir de los autovalores de la matriz
A* en función de la velocidad de avance del wheelset, para el rango de velocidades ensayados.
Puede verse como la frecuencia de oscilación que se deduce del análisis analítico [2]
es lineal con la velocidad de avance, mientras que la constante de crecimiento exponencial de
los máximos depende logarítmicamente con la velocidad.

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 102
0 1 2 3 4 5 60 , 0
0 , 2
0 , 4
0 , 6
0 , 8
1 , 0
1 , 2
1 , 4
1 , 6
1 , 8
Fre
cu
en
cia
(ra
d/s
)
V e l o c i d a d ( m / s )
Figura 83. Frecuencia analítica en función de la velocidad de avance.
0 1 2 3 4 5 60 , 0 0 0 0
0 , 0 0 0 5
0 , 0 0 1 0
0 , 0 0 1 5
0 , 0 0 2 0
0 , 0 0 2 5
0 , 0 0 3 0
0 , 0 0 3 5
Kt
(s-1
)
V e l o c i d a d ( m / s )
Figura 84. Constante de crecimiento exponencial en función de la velocidad de avance.
De hecho, la ecuación que poseen las dos magnitudes han sido ajustadas para este
intervalo, a una recta para la frecuencia y a una curva logarítmica para la constante de
crecimiento. Estas dos ecuaciones se presentan a continuación en función de la velocidad de
avance:

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 103
ω (V) = 0.27233V+0.0000 rad / s (80)
log [kt (V)] = 3.0000 · log(V)-11.0822. (81)
Es importante destacar que el primer coeficiente de la expresión que aproxima la
frecuencia de oscilación, es decir , la pendiente de la gráfica, debe tener un valor teórico de
[(2·π) / λ] (tal y como predice la ecuación 68), donde λ es la amplitud de onda, que según la
expresión de Klingel es de 23.07152 m. Haciendo esta operación, se obtiene un valor de
0.27233 rad / m, que coincide con el valor de la ecuación de ajuste.
La figura 85 y 86 muestran las gráficas de la frecuencia y del crecimiento exponencial
analíticas junto con las que han sido obtenidas mediante ajuste.
0 1 2 3 4 5 60 , 0
0 , 2
0 , 4
0 , 6
0 , 8
1 , 0
1 , 2
1 , 4
1 , 6
1 , 8
A n a l í t i c o A j u s t e
Fre
cu
en
cia
(ra
d/s
)
V e l o c i d a d ( m / s )
Figura 85. Frecuencia analítica y ajustada.

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 104
0 1 2 3 4 5 60 , 0 0 0 0
0 , 0 0 0 5
0 , 0 0 1 0
0 , 0 0 1 5
0 , 0 0 2 0
0 , 0 0 2 5
0 , 0 0 3 0
0 , 0 0 3 5
A n a l í t i c o A j u s t e
Kt
(s-1
)
V e l o c i d a d ( m / s )
Figura 86. Constante de crecimiento exponencial analítico y ajustado.
Como se observa las ecuaciones de ajuste son prácticamente exactas para el rango de
velocidades analizados.
Las Tablas 10-13 exponen los valores de la frecuencia y de la constante exponencial
obtenidos mediante la simulación dinámica, junto a los que se obtienen del estudio analítico
para las distintas velocidades:
Parámetro Analítico Obtenido
Longitud de onda (λ) 23.07152 m 23.21832 m
Frecuencia (ω) 0.54467 rad/s 0.54123 rad/s
Constante Exponencial (kt) 0.0001231 s-1 0.0000528 s-1
Tabla 10. Parámetros analíticos y obtenidos para V=2 m/s
Parámetro Analítico Obtenido
Longitud de onda (λ) 23.07152 m 23.17683 m
Frecuencia (ω) 0.81700 rad/s 0.81329 rad/s
Constante Exponencial (kt) 0.0004154 s-1 0.0003416 s-1
Tabla 11. Parámetros analíticos y obtenidos para V=3 m/s.

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 105
Parámetro Analítico Obtenido
Longitud de onda (λ) 23.07152 m 23.09157 m
Frecuencia (ω) 1.08934 rad/s 1.08839 rad/s
Constante Exponencial (kt) 0.0009846 s-1 0.0008780 s-1
Tabla 12. Parámetros analíticos y obtenidos para V=4 m/s.
Parámetro Analítico Obtenido
Longitud de onda (λ) 23.07152 m 22.89838 m
Frecuencia (ω) 1.36167 rad/s 1.37197 rad/s
Constante Exponencial (kt) 0.0019230 s-1 0.0016906 s-1
Tabla 13. Parámetros analíticos y obtenidos para V=5 m/s
La frecuencia y la constante exponencial obtenidas han sido ajustadas, por polinomios
y logarítmos respectivamente, en función de la velocidad de avance, dando lugar a las
siguientes expresiones matemáticas:
ωcalc (V) = 0.2767V-0.0148 rad / s (82)
log [ktcalc (V)] = 1.3463 · log(V)3-6.1879 · log(V)2+12.3952 · log(V)-15.9161 (83)
Las figuras 87-89 representan los valores de los distintos parámetros obtenidos a partir
de la simulación representados junto con los valores que predicen las ecuaciones analíticas
[2].
La frecuencia se ajusta bastante muy bien a los resultados analíticos. En cambio, para
los valores de la constante exponencial que rige el crecimiento de los máximos, los valores
que se obtiene de la simulación son sensiblemente inferiores a los que se deducen del estudio
analítico, siendo la diferencia mayor a medida que aumenta la velocidad. Para la longitud de
onda, se puede ver que el error máximo no supera el 0.8 %, existiendo una relación
satisfactoria entre la longitud de onda de Klingel [7], y las obtenidas mediante simulación.

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 106
1 , 5 2 , 0 2 , 5 3 , 0 3 , 5 4 , 0 4 , 5 5 , 0 5 , 52 2 , 6
2 2 , 7
2 2 , 8
2 2 , 9
2 3 , 0
2 3 , 1
2 3 , 2
2 3 , 3
2 3 , 4
2 3 , 5 T e ó r i c o s C a l c u l a d o s
Lo
ng
itu
d (
m)
T i e m p o ( s )
Figura 87. Longitud de onda para distintas velocidades de avance.
2 3 4 50 , 9 8 0
0 , 9 8 5
0 , 9 9 0
0 , 9 9 5
1 , 0 0 0
1 , 0 0 5
1 , 0 1 0
1 , 0 1 5
1 , 0 2 0 C a l c u l a d o s T e ó r i c o s
V e l o c i d a d ( m / s )
Figura 88. Longitud de onda para distintas velocidades de avance. (Valores promedios).

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 107
0 1 2 3 4 50 , 0
0 , 2
0 , 4
0 , 6
0 , 8
1 , 0
1 , 2
1 , 4
1 , 6
1 , 8 O b t e n i d o s A n a l í t i c o s
Fre
cu
en
cia
(ra
d/s
)
V e l o c i d a d ( m / s )
Figura 89. Frecuencia para distintas velocidades de avance.
0 1 2 3 4 50 , 0 0 0 0
0 , 0 0 0 5
0 , 0 0 1 0
0 , 0 0 1 5
0 , 0 0 2 0
0 , 0 0 2 5
0 , 0 0 3 0
0 , 0 0 3 5
A j u s t e C a l c u l a d o s A n a l í t i c a
kt
(s-1
)
V e l o c i d a d ( m / s )
Figura 90. Constante exponencial para distintas velocidades de avance.
Las figuras 91- 94 muestran el movimiento de ‘hunting’ obtenido mediante simulación
numérica junto con las obtenidas del análisis analítico para las distintas velocidades de
ensayo.

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 108
0 2 0 4 0 6 0 8 0 1 0 0 1 2 0 1 4 0- 0 , 0 0 1 5
- 0 , 0 0 1 0
- 0 , 0 0 0 5
0 , 0 0 0 0
0 , 0 0 0 5
0 , 0 0 1 0
0 , 0 0 1 5 C a l c u l a d o A n a l í t i c o
Y (
m)
T i e m p o ( s )
Figura 91. Movimiento de ‘hunting’ para V= 2 m/s
0 2 0 4 0 6 0 8 0 1 0 0 1 2 0 1 4 0- 0 , 0 0 1 5
- 0 , 0 0 1 0
- 0 , 0 0 0 5
0 , 0 0 0 0
0 , 0 0 0 5
0 , 0 0 1 0
0 , 0 0 1 5 C a l c u l a d o E x p e r i m e n t a l
Y (
m)
T i e m p o ( s )
Figura 92. Movimiento de ‘hunting’ para V= 3 m/s

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 109
0 2 0 4 0 6 0 8 0 1 0 0- 0 , 0 0 1 5
- 0 , 0 0 1 0
- 0 , 0 0 0 5
0 , 0 0 0 0
0 , 0 0 0 5
0 , 0 0 1 0
0 , 0 0 1 5 C a l c u l a d o A n a l í t i c o
Y (
m)
T i e m p o ( s )
Figura 93. Movimiento de ‘hunting’ para V= 4 m/s.
0 2 0 4 0 6 0 8 0 1 0 0- 0 , 0 0 8
- 0 , 0 0 6
- 0 , 0 0 4
- 0 , 0 0 2
0 , 0 0 0
0 , 0 0 2
0 , 0 0 4
0 , 0 0 6
0 , 0 0 8 C a l c u l a d o A n a l í t i c o
Y (
m)
T i e m p o ( s )
Figura 94. Movimiento de ‘hunting’ para V= 5 m/s.
Puede verse como los resultados analíticos y obtenidos discrepan sensiblemente en el
valor de la frecuencia y en la amplitud de cada onda, exceptuando el caso donde la velocidad
de avance es de 4 m/s. El error en la frecuencia de oscilación puede verse también en la
longitud de onda que se obtiene, ya que si la frecuencia conseguida del programa de
simulación es menor que la frecuencia analítica, la longitud de onda que se obtenga mediante

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 110
simulación numérica será mayor, como sucede para una velocidad de avance de 2 y 3 m/s. En
el caso de que la frecuencia obtenida sea mayor que la analítica, la longitud de onda deberá
ser menor, como resulta para una velocidad de avance de 5 m/seg.
La amplitud de onda que se consigue de los resultados numéricos son ligeramente
inferiores a los obtenidos del estudio analítico, si bien esta diferencia no suele ser muy
significativa en el intervalo de tiempo de simulación, puesto que el coeficiente de la
exponencial es del orden de 1·10-3 s-1.
Las ecuaciones ajustadas para cada una de las velocidades de avance una vez
alcanzado el equilibrio cinemático, se presentan en la Tabla 14:
V Ecuación obtenida para el ‘hunting’.
2 m/s y(t) = 0.00100 · exp(0.0000528 · t) · cos(0.54123·t-0.17686) m.
3 m/s y(t) = 0.00101 · exp(0.0003416 · t) · cos(0.81329 · t-0.24807) m.
4 m/s y(t) = 0.00105 · exp(0.0008780 · t) · cos(1.08839 · t-0.17368) m.
5 m/s y(t) = 0.00487 · exp(0.0016906 · t) · cos(1.37197 · t-5.58129) m.
Tabla 14. Ecuaciones del ‘hunting’ para distintas velocidades.
Finalmente, en la figura 95 representa el diagrama de fases de la velocidad lateral
respecto al desplazamiento lateral, que a modo de ejemplo se representará para la velocidad
de avance de 5 m/s, siendo las gráficas para el resto de velocidades similares.
Como se aprecia en la figura 95, la gráfica el diagrama de fases es una espiral,
formada por tantos anillos como ondas completas existan en el movimiento de ‘hunting’. La
línea central de la gráfica representa el transitorio que existe en el movimiento de ‘hunting’,
que se corresponde con el intervalo de tiempo en el que el wheelset parte de las condiciones
iniciales establecidas donde no se ajusta a un movimiento ondulatorio, hasta que finalmente se
mueve según las ecuaciones vistas anteriormente.

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 111
- 0 , 0 0 6 - 0 , 0 0 4 - 0 , 0 0 2 0 , 0 0 0 0 , 0 0 2 0 , 0 0 4 0 , 0 0 6- 0 , 0 1 0
- 0 , 0 0 8
- 0 , 0 0 6
- 0 , 0 0 4
- 0 , 0 0 2
0 , 0 0 0
0 , 0 0 2
0 , 0 0 4
0 , 0 0 6
0 , 0 0 8
0 , 0 1 0
Vy
(m
/s)
Y ( m )
Figura 95. Diagrama de fase desplazamiento lateral velocidad lateral.
Por otro lado, el corte de cada anillo con el origen de coordenadas de la velocidad
lateral, se corresponde con un máximo o un mínimo de una de las ondas, dependiendo si es
por el lado derecho o izquierdo. Por lo tanto, la diferencia de anchura entre dos anillos
consecutivos a lo largo del eje anterior, representará el incremento producido entre dos
máximos consecutivos. En la figura 96 se puede ver un detalle de esta zona:
0 , 0 0 4 8 0 , 0 0 5 2 0 , 0 0 5 6 0 , 0 0 6 0 0 , 0 0 6 4- 0 , 0 0 3
- 0 , 0 0 2
- 0 , 0 0 1
0 , 0 0 0
0 , 0 0 1
0 , 0 0 2
0 , 0 0 3
Vy
(m
/s)
Y ( m )
Figura 96. Detalle de los anillos del diagrama de fases.

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 112
5. Conclusiones En este proyecto se pone de manifiesto que el movimiento lateral estacionario de un wheelset
desequilibrado puede describirse mediante un movimiento ondulatorio del tipo y(t) = Q ·
exp(kt · t) · cos(ωt + φ) m, observándose que este movimiento, conocido también como
movimiento de ‘hunting’, es inestable, ya que la función exponencial es siempre creciente con
el tiempo. Además, una gran parte de magnitudes físicas como fuerzas, momentos y puntos
de contacto, están afectadas por esta frecuencia de oscilación. Caso excepcional lo presenta la
coordenada longitudinal del punto de contacto sobre el raíl, cuya evolución es prácticamente
constante con el tiempo.
Por otro lado, se ha concluido que la amplitud de las ondas de este movimiento es
independiente de las condiciones iniciales del sistema, siendo exclusivamente dependientes de
las características geométricas de las rueda y del carril. El único factor que afecta al
movimiento de ‘hunting’ es la velocidad de avance. La frecuencia de oscilación del sistema
varía de forma directamente proporcional con esta velocidad, mientras que para la constante
de la exponencial existe una relación logarítmica. Esto puede ser deducido además del estudio
analítico del ‘hunting’ [2] donde se consideran dos variables independientes, el
desplazamiento lateral y el ángulo de Yaw, presentando gran similitud con los resultados
numéricos.
También se ha comentado que el origen del movimiento de ‘hunting’ se deben a
fuerzas laterales descompensadas, como consecuencia de las fuerzas de creep y de la
conicidad de las ruedas del wheelset.
En las condiciones de simulación, en la que el wheelset parte con una velocidad finita
y velocidad angular nula, se ha observado la existencia de un transitorio durante el cual las
fuerzas tangenciales de creep son bastantes importantes, sobre todo las que se produce a lo
largo del eje X, ya que esta fuerza es la que provoca el momento necesario para que el
wheelset comience a rodar. Estas fuerzas durante el periodo de estabilización son constantes,
provocando por tanto, una aceleración angular de rodadura constante. Una vez que la
velocidad angular de giro está en equilibrio con la velocidad de avance, estas fuerzas son
nulas, ajustándose a partir de entonces, el movimiento de ‘hunting’ a la ecuación teórica
señalada.
Respecto a las ecuaciones dinámicas utilizadas para resolver el problema (Método del
Penalty) [10] se ha demostrado las ventajas de utilizar un segundo coeficiente de penalización
que afecte únicamente a las ecuaciones de restricción. De esta forma se consigue tener una

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 113
precisión aceptable en los resultados, sin cometer grandes errores de redondeos que conlleven
a resultados inadmisibles.
6. Líneas de investigación abiertas Las posibles líneas de investigación que deja abiertas este proyecto se centran
fundamentalmente en la estabilización de las ecuaciones de movimientos para velocidades
mayores a 6 m/seg y la eliminación del ruidos sobre las graficas de la indentación y de los
esfuerzos que se producen en el wheelset.
Por otro lado, se podría realizar un estudio para diferentes configuraciones de los
carriles, como por ejemplo, en tramos curvos, ascendentes, en pendiente, o la influencia de
pequeñas ondulaciones sobre la vía en el movimiento del wheelset, comparándolos con los
resultados obtenidos.
También podría ensayarse el wheelset por diferentes procedimientos de cálculo de las
fuerzas de creep o mediante ecuaciones dinámicas distintas, comparando los resultados con
los que se dan en este proyecto. Además, se podría simular el wheelset en el caso de que
existiese dos puntos de contacto, uno en la pista y otro en el flanco, determinando cuáles son
sus efectos sobre el movimiento de ‘hunting’.
Finalmente, cabría la posibilidad de mejorar aún más el procedimiento numérico que
se lleva a cabo para determinar los puntos de contacto, sobre todo en cuanto a velocidad de
cálculo se refiere, probando a resolver el sistema de ecuaciones no lineales mediante otras
funciones de Matlab o mediante un planteamiento diferente de estas ecuaciones.

Desarrollo de un método de contacto elástico para la simulación dinámica de ejes ferroviarios
Juan Antonio Ballesteros Gallardo 114
6.Referencias [1]. Pombo, J. A. (2004) “Multibody methodology for railway dynamics applications”, Tésis,
Universidade Técnica de Lisboa (Instituto Superior Técnico).
[2]. Escalona, J.L. (2005) “Movimiento estacionario de ejes ferroviarios en vías curvas con
contacto en el flanco”, Trabajo de investigación para la Prueba Nacional de Habilitación para
profesores Titulares de Universidad, Área de Ingeniería Mecánica, Valladolid.
[3]. Shabana, A., Tobaa, M., Sugiyama, H., Zaazaa, K. (2004) “On the computer
formulations of the Wheel/Rail Contact Problem”, Technical Report, Department of
Mechanical Engineering, University of Illinois, Chicago.
[4]. Shabana, A., Berzeri, M., Sany, J.R. (2001) “Numerical procedure for simulation of the
wheel/rail contact dynamics”, Journal of Dynamic System, Measurement, and Control.
[5]. Shabana, A., Zaazaa, K., Escalona, J.L., Sany, J.R. (2002) “Devolopment of elastic force
model for wheel/rail contact problems”, Journal of Sound and Vibration.
[6]. Shabana, A., Sany, J.R. (2001) “A survey of rail vehicle track simulations and flexible
multibody dynamics”, Technical Report, Department of Mechanical Engineering, University
of Illinois, Chicago.
[7]. Schwab, J.P., Meijard, J.P. (2002) “Two special finite elements for modelling Rolling
Contact in a multibody environment”, Proceedings of Asian Conference on Multibody
Dynamics, Fukushima, Japan, July 31-August 2.
[8]. Pombo, J., Ambrósio, J. (2003) “A wheel-rail contact model for rail guided vehicles
dynamics”, Technical Report, Instituto de Engenharia Mecânica, Lisboa, Portugal.
[9]. Garg, V.K., Dukkipati, R.V. (1984) “Dynamics of railways vehicle system”. Academic
Press, New York.
[10]. Jalón, J., Bayo, E. (1987) “Kinematic and Dynamic simulation of multibody system –
The Real-time Challenge”, New York.
[11]. Shabana, A. (1984) “Computational Dynamics”, Wiley-Interscience Publication, New
York.


















