Dinámica de Sistemas Físicos - T1 · Dinámica de Sistemas Físicos - T1 Contenido 1 Concepto de...
111
Dinámica de Sistemas Físicos - T1 (T 1, ) n m N Profesora: Dra. Lizeth Torres [email protected] http://lizeth-torres.info/ 9th September 2019 Facultad de Ingeniería, Universidad Nacional Autónoma de México.
Transcript of Dinámica de Sistemas Físicos - T1 · Dinámica de Sistemas Físicos - T1 Contenido 1 Concepto de...
Dinámica de Sistemas Físicos - T1(Tema 1, 2018)nmN
Profesora: Dra. Lizeth Torres
http://lizeth-torres.info/
9th September 2019
Facultad de Ingeniería, Universidad Nacional Autónoma de México.
Dinámica de Sistemas Físicos - T1
Contenido
1 Concepto de Modelado
2 Variables generalizadas, esfuerzo (e) y ujo (f )
3 Restricciones necesarias para la obtención de modelos.
4 Caracterización de variables asociadas a los sistemasmecánicos,hidráulicos, térmicos e híbridos.
Modelado de sistemas mecánicosModelado de sistemas eléctricosModelado de sistemas hidráulicosModelado de sistemas hidráulicosModelado de sistemas híbridos
5 Enfoque energético en el modelado de sistemas físicos
Lizeth Torres | 9th September 2019 2 / 111
Dinámica de Sistemas Físicos - T1 | Concepto de Modelado
Sistemas y clasicación de sistemas
Un sistema es un grupo de unidades que interactúan regularmente o soninterdependientes y que forman un todo integrado. Cada sistema está delineado porsus límites espaciales y temporales, rodeado e influenciado por su entorno, descritopor su estructura y propósito y expresado en su funcionamiento.
Un sistema es ente que relaciona las señales de entrada (excitaciones) al sistemacon sus señales de salida (respuestas).
Un sistema es un manipulador de energía que interactúa con las entradas y salidasa través de los puertos de energía
Lizeth Torres | 9th September 2019 3 / 111

Dinámica de Sistemas Físicos - T1 | Concepto de Modelado
Sistemas y clasicación de sistemas
Lizeth Torres | 9th September 2019 4 / 111
Dinámica de Sistemas Físicos - T1 | Concepto de Modelado
Sistema: entradas, salidas y modelo
Si u y y son las señales de entrada y de salida respectivamente, de un sistema,entonces el sistema se considera como una transformación de u en y. Estarepresentación (modelo) se denota por
y = T(u)
donde T es el operador que representa alguna regla bien definida mediante lacual la excitación u es transformada en la respuesta y.
Lizeth Torres | 9th September 2019 5 / 111
Dinámica de Sistemas Físicos - T1 | Concepto de Modelado
¿Qué es un modelo?
Es una representación abstracta, conceptual, gráfica o visual, física defenómenos, sistemas o procesos a fin de analizar, describir, explicar, simular(en general, explorar, controlar y predecir) esos fenómenos o procesos. Unmodelo permite determinar un resultado final a partir de unos datos deentrada.
Lizeth Torres | 9th September 2019 6 / 111
Dinámica de Sistemas Físicos - T1 | Concepto de Modelado
Calisicación de modelos (Perspectiva ingenieril)
1 Modelo físico: Es una representación o copia —generalmente a escala,ya sea mayor o menor— de algún sistema o proceso de interés quepermite su estudio en diferentes circunstancias.
2 Modelos matemáticos: Describe el comportamiento de un sistema oun fenómeno utilizando conceptos y lenguaje matemáticos.
3 Modelos numéricos: Es un programa informático que simulanuméricamente el comportamiento de un sistema. Tal programa estábasado en el modelo matemático de dicho sistema y puede ejecutarse enuna computadora o en una red de computadoras.
Nota:Los modelos numéricos resultaron de utilizar las computadoras con el propósito de resolver lasecuaciones que gobiernan un sistema no de forma analítica sino numérica.
Lizeth Torres | 9th September 2019 7 / 111
Dinámica de Sistemas Físicos - T1 | Concepto de Modelado
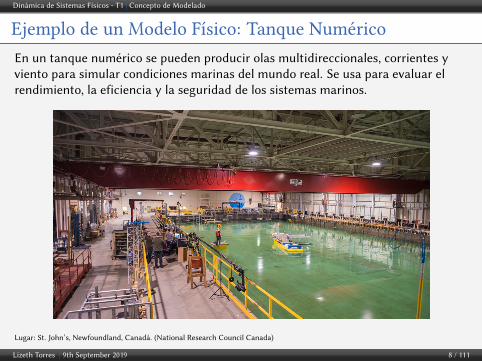
Ejemplo de un Modelo Físico: Tanque NuméricoEn un tanque numérico se pueden producir olas multidireccionales, corrientes yviento para simular condiciones marinas del mundo real. Se usa para evaluar elrendimiento, la eficiencia y la seguridad de los sistemas marinos.
Lugar: St. John’s, Newfoundland, Canadá. (National Research Council Canada)
Lizeth Torres | 9th September 2019 8 / 111
Dinámica de Sistemas Físicos - T1 | Concepto de Modelado
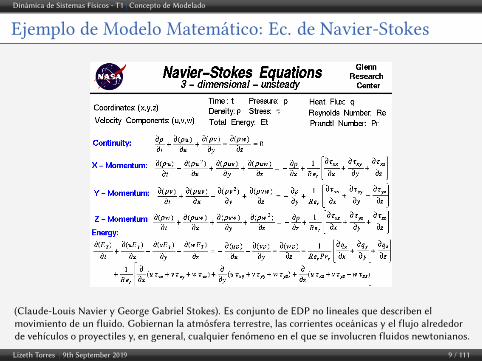
Ejemplo de Modelo Matemático: Ec. de Navier-Stokes
(Claude-Louis Navier y George Gabriel Stokes). Es conjunto de EDP no lineales que describen elmovimiento de un fluido. Gobiernan la atmósfera terrestre, las corrientes oceánicas y el flujo alrededorde vehículos o proyectiles y, en general, cualquier fenómeno en el que se involucren fluidos newtonianos.
Lizeth Torres | 9th September 2019 9 / 111
Dinámica de Sistemas Físicos - T1 | Concepto de Modelado
Ejemplo de Modelo Matemático: La ecuación de onda
Es una ecuación diferencial en derivadas parciales lineal de 2° orden quedescribe la propagación de una variedad de ondas: sonoras, de luz, ondas enel agua, etc.
∂2u∂t2 = c2∆u
donde ∆ : ∇2 es el laplaciano y donde c es una constante equivalente a lavelocidad de propagación de la onda. Para una onda sonora en el aire a 20 °C,esta constante es de cerca de 343 [m/s].
¿é es ∇2?
Lizeth Torres | 9th September 2019 10 / 111

Dinámica de Sistemas Físicos - T1 | Concepto de Modelado
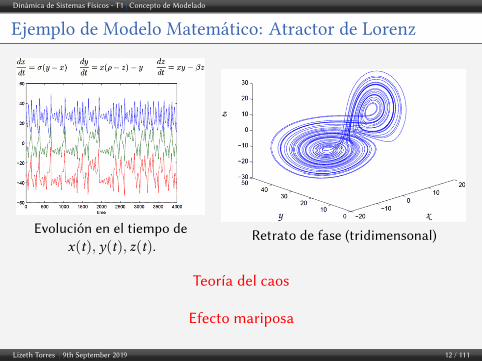
Ejemplo de Modelo Matemático: Atractor de Lorenz
El sistema de Lorenz es un sistema de ecuaciones diferenciales ordinariasestudiadas por primera vez por Edward Lorenz.
dx(t)dt
= a(x(t)− y(t))
dy(t)dt
= x(t)(b − z(t))− y(t)
dz(t)dt
= x(t)y(t)− cz(t)
Las ecuaciones de Lorenz forman un modelo simplificado para láseres,dinamos, termosifones, motores DC sin escobillas, circuitos eléctricos,reacciones químicas y ósmosis directa. Es un conjunto de ecuaciones nolineal, no periódico, tridimensional y determinista.
Lizeth Torres | 9th September 2019 11 / 111
Dinámica de Sistemas Físicos - T1 | Concepto de Modelado
Ejemplo de Modelo Matemático: Atractor de Lorenz
Evolución en el tiempo dex(t), y(t), z(t).
Retrato de fase (tridimensonal)
Teoría del caos
Efecto mariposa
Lizeth Torres | 9th September 2019 12 / 111
Dinámica de Sistemas Físicos - T1 | Concepto de Modelado
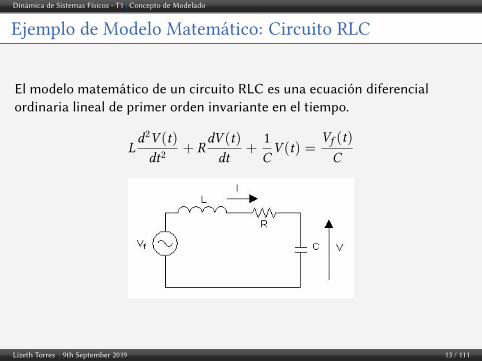
Ejemplo de Modelo Matemático: Circuito RLC
El modelo matemático de un circuito RLC es una ecuación diferencialordinaria lineal de primer orden invariante en el tiempo.
Ld2V (t)dt2 + R
dV (t)dt
+1CV (t) =
Vf (t)C
Lizeth Torres | 9th September 2019 13 / 111
Dinámica de Sistemas Físicos - T1 | Concepto de Modelado
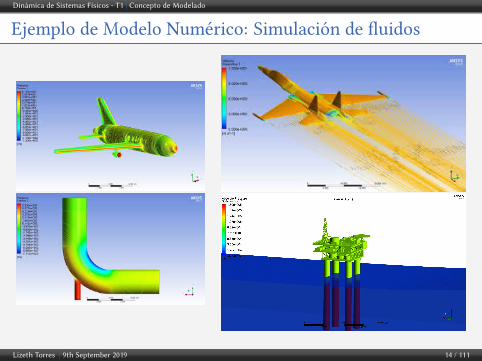
Ejemplo de Modelo Numérico: Simulación de uidos
Lizeth Torres | 9th September 2019 14 / 111
Dinámica de Sistemas Físicos - T1 | Concepto de Modelado
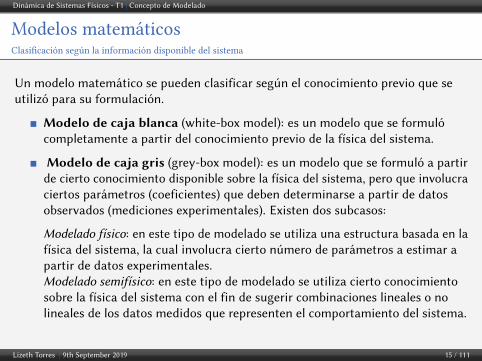
Modelos matemáticosClasicación según la información disponible del sistema
Un modelo matemático se pueden clasificar según el conocimiento previo que seutilizó para su formulación.
Modelo de caja blanca (white-box model): es un modelo que se formulócompletamente a partir del conocimiento previo de la física del sistema.
Modelo de caja gris (grey-box model): es un modelo que se formuló a partirde cierto conocimiento disponible sobre la física del sistema, pero que involucraciertos parámetros (coeficientes) que deben determinarse a partir de datosobservados (mediciones experimentales). Existen dos subcasos:
Modelado físico: en este tipo de modelado se utiliza una estructura basada en lafísica del sistema, la cual involucra cierto número de parámetros a estimar apartir de datos experimentales.Modelado semifísico: en este tipo de modelado se utiliza cierto conocimientosobre la física del sistema con el fin de sugerir combinaciones lineales o nolineales de los datos medidos que representen el comportamiento del sistema.
Lizeth Torres | 9th September 2019 15 / 111

Dinámica de Sistemas Físicos - T1 | Concepto de Modelado
Clasicación según la información disponible del sistemaClasicación según la información disponible del sistema
Modelo de caja negra (black-box model): para formular este tipo de modelono se dispone de ninguna información sobre la física del sistema. La estructuradel modelo se basa en familias de funciones que tienen buena flexibilidad y quehan tenido "éxito en el pasado" (e.g. polinomios).
Lizeth Torres | 9th September 2019 16 / 111
Dinámica de Sistemas Físicos - T1 | Concepto de Modelado
Clasicación de sistemas por número de entradas y salidas
Sistemas SISO
Sistemas MIMO
Sistemas SIMO
Sistemas MISO
Lizeth Torres | 9th September 2019 17 / 111
Dinámica de Sistemas Físicos - T1 | Concepto de Modelado
Sistemas en tiempo continuo y en tiempo discretoUn sistema en tiempo continuo es un sistema cuyas entradas y salidas son detiempo continuo.
Si las entradas y salidas son de tiempo discreto, entonces el sistema sellama sistema en tiempo discreto.
u(t)→ y(t)
u[n]→ y[n]
Modelo de un sistema continuo:dy(t)dt
+ ay(t) = bu(t)
en la cual u(t) es la entrada y y(t) es la salida y a, b son constantes. Modelode un sistema discreto:
y[n] + ay[n− 1] = bu[n]Lizeth Torres | 9th September 2019 18 / 111
Dinámica de Sistemas Físicos - T1 | Concepto de Modelado
Sistemas con y sin memoria
Se dice que un sistema es instantáneo o sin memoria si su salida en cualquierinstante depende de su excitación en ese instante, no de ningún valor pasadoo futuro de la entrada.
Si esto no es así, se dice que el sistema tiene memoria.
Modelo de un sistema sin memoriaUn ejemplo de un sistema sin memoria es un resistor R; con la corriente u(t)tomada como entrada y el voltaje tomado como la salida y(t), la relación deentrada-salida (modelo) para el resistor es:
y(t) = Ru(t)
Lizeth Torres | 9th September 2019 19 / 111
Dinámica de Sistemas Físicos - T1 | Concepto de Modelado
Sistemas con y sin memoriaUn sistema que no es instantáneo se dice dinámico y que tiene memoria
Modelo de un sistema con memoriaUn capacitor C con la corriente como la entrada u(t) y el voltaje como la salida y(t); entonces,
y(t) =1C
∫ t
0u(τ)dτ
Modelo de un sistema con memoria: Acumulador
y[n] =n∑−∞
u[k]
Modelo de un sistema con memoria: Retardoy[n] = u[n− 1]
Lizeth Torres | 9th September 2019 20 / 111

Dinámica de Sistemas Físicos - T1 | Concepto de Modelado
Invertibilidad, sistemas invertibles y sistemas inversos
Se dice que un sistema es invertible si excitaciones distintas producenrespuestas distintas.
Si un sistema es invertible, entonces existe un sistema inverso, el cual, al serexcitado con la salida del sistema invertible, reproduce la entrada; i.e , en unsistema invertible siempre es posible recuperar la entrada si se conoce lasalida.
Modelos de un sistema invertible y no invertibley(t) = 2u(t), y(t) = u2(t)
Invertible, No invertible.
Lizeth Torres | 9th September 2019 21 / 111

Dinámica de Sistemas Físicos - T1 | Concepto de Modelado
Sistemas causales
El término causalidad connota la existencia de una relación causa-efecto.
Se dice que un sistema es causal si su salida en cualquier instante detiempo arbitrario depende solamente de los valores de la entrada en eseinstante y en el pasado.
A estos sistemas también se les refiere como no anticipativos, ya que elsistema no anticipa, ni depende de valores furturos de la entrada.
Modelo de un sistema no causal
y(t) = u(t + 1)
Lizeth Torres | 9th September 2019 22 / 111
Dinámica de Sistemas Físicos - T1 | Concepto de Modelado
Sistemas estables
Un sistema estable es aquél en el cual pequeñas excitaciones producenrespuestas que no divergen (no aumentan sin límite).
EstabilidadUn sistema es estable si para una entrada acotada, la salida correspondientetambién está acotada. Es decir, si la entrada está definida por
|u| ≤ k1
entonces las salida está definida por
|y| ≤ k2
donde k1 y k2 son constantes reales finitas.
Lizeth Torres | 9th September 2019 23 / 111
Dinámica de Sistemas Físicos - T1 | Concepto de Modelado
Invariabilidad en el tiempo
Un sistema es invariable en el tiempo si un desplazamiento en el tiempo (retraso o avance) en laentrada resulta en un desplazamiento igual en la salida.
u(t − t0)→ y(t − t0)
u[n− n0]→ y[n− n0]
Ejemplosy(t) = sin (u(t)) ==> Invariantey[n] = nu[n] ==> Variante
Los sistemas invariantes tienen parámetros/coeficientes constantes (e.g. R: Resistencia, C:Capacitancia, k: Rigidez). Los sistemas variantes tienen al tiempo como coeficiente o coeficientesdepedientes del tiempo.
Lizeth Torres | 9th September 2019 24 / 111
Dinámica de Sistemas Físicos - T1 | Concepto de Modelado
Sistemas lineales
Un sistema lineal, en tiempo continuo o discreto, es aquél que posee laimportante propiedad de la superposición. Entonces un sistema es lineal si
1 La respuesta a u1(t) + u2(t) es y1(t) + y2(t). Propiedad de aditividad.
2 La respuesta a αu1(t) es αy1(t), donde α es cualquier constante.Propiedad de homogeneidad o escalamiento.
Ejemploy = au + b
donde a y b son constantes. Si b 6= 0, el sistema es no lineal porque u = 0 implica que y = b 6= 0(propiedad de homogeneidad). Si b = 0, el sistema es lineal.
Lizeth Torres | 9th September 2019 25 / 111

Dinámica de Sistemas Físicos - T1 | Concepto de Modelado
Un sistema conservativo es un sistema en el que la energía se conserva, i.e.la energía total del sistema es constante en cualquier instante de tiempo.Un sistema disipativo es un sistema en el que una parte de la energía sedisipa en forma de calor (i.e. se transforma en energía térmica).
Lizeth Torres | 9th September 2019 26 / 111
Dinámica de Sistemas Físicos - T1 | Concepto de Modelado
Sistemas lineales
EjerciciosDiga si las siguientes ecuaciones, fungiendo como modelos de sistemas, sonlineales o no, causales o no, variables en el tiempo o no, tienen memoria ono.
1 y(t) = tu(t)
2 y[n] = u2[n]
3 y(t) = u(t − a)
4 y(t) + ay(t) = bu(t)
5 y(t) + ay2(t) = bu(t)
6 y(t) =1T
∫ t+T/2
t−T/2u(τ)dτ
Lizeth Torres | 9th September 2019 27 / 111
Dinámica de Sistemas Físicos - T1 | Concepto de Modelado
Sistemas lineales
Determine cuáles de las siguientes ecuaciones, fungiendo como modelos desistemas, son invertibles y cuáles no los son.
Ejercicios1 y(t) = un(t)
2 y(t) = u(3t − 6)
3 y(t) = cos [u(t)]
Lizeth Torres | 9th September 2019 28 / 111
Dinámica de Sistemas Físicos - T1 | Variables generalizadas, esfuerzo (e) y flujo (f )
Variables generalizadas, esfuerzo (e) y ujo (f )
Un simple ejemplo de transmisión de energía es una fuente eléctrica (la cualpuede ser una batería o una fuente de poder de laboratorio) conectada a unacarga resistiva.
La fuente de poder es una fuente de energía, el resistor es el sistema y elpuerto de energía conectándolos es el par de cables conductores.
La transmisión de potencia al resistor está dada como el producto de lasvariables del sistema, voltaje v y corriente i:
Potencia entregada al resistor= vi
La energía entregada al resistor entre los instantes t = 0 y t1 es laintegral de la potencia
Energía entregada al resistor=∫ t1
0vidt
Lizeth Torres | 9th September 2019 29 / 111
Dinámica de Sistemas Físicos - T1 | Variables generalizadas, esfuerzo (e) y flujo (f )
Variables generalizadas, esfuerzo (e) y ujo (f )
Un concepto unificador adecuado para modelar sistemas es la energía.
La idea de ver a los sistemas como manipuladores de energía queinteractuan con entradas y salidas a través de puertos es un modeloconceptual que abarca un rango amplio de sistemas físicos.
Para desarrollar esta noción sin embargo es necesario examinar elmecanismo de las interacciones energéticas en términos de variables delsistema,las cuales determinan cómo y en qué sentido se trasnmite laenergía.
Lizeth Torres | 9th September 2019 30 / 111
Dinámica de Sistemas Físicos - T1 | Variables generalizadas, esfuerzo (e) y flujo (f )
Variables generalizadas, esfuerzo (e) y ujo (f )
En un sistema de fluidos la transmisión de energía puede ilustrarse por unesquema de generación hidro-eléctrica.
El reservorio es una fuente de hidro-energía conectada por un puerto deenergía (tubería) a un sistema (la estación de generación dehidro-energía).
La transmisión de potencia a la estación está dada como el producto delas variables del sistema, gasto Q y la presión medida en la toma conrespecto a una presión de referencia.
Potencia entregada a la estación= PQ
La energía entregada a la estación entre los instantes t = 0 y t1 es laintegral de la potencia
Energía entregada a la estación=
∫ t1
0PQdt
Lizeth Torres | 9th September 2019 31 / 111
Dinámica de Sistemas Físicos - T1 | Variables generalizadas, esfuerzo (e) y flujo (f )
Variables generalizadasEl acto de entregar energía está asociado con una variable intensiva (e. g. i, Q): unavariable de flujo (f ) y con una variable extensiva (e.g. v, P): una variable deesfuerzo (e).
Estas variables generalizadas satisfacen el siguiente postulado de potencia:
Postulado de potenciaLa potencia Pj(t) del j-ésimo componente en un sistema es el producto de dosvariables, un esfuerzo ej(t) y un flujo fj(t), donde t es el tiempo, de modo que lapotencia total del sistema P(t) está dada por
P(t) :=∑j
Pj(t) =∑j
ej(t)fj(t) = e(t)f (t).
Lizeth Torres | 9th September 2019 32 / 111

Dinámica de Sistemas Físicos - T1 | Variables generalizadas, esfuerzo (e) y flujo (f )
Esfuerzo e Flujo f Potencia ef
Fuerza F (N) Velocidad v (m/s) Fv (W)Par τ (Nm) Velocidad angular ω (rad/s) τω (W)Voltaje v (V) Corriente i (A) vi (W)Presión P (N/m2) Gasto Q (m3/s) PQ (W)Temperatura T (K) Tasa de entropía S (J/Ks) TS (W)
Lizeth Torres | 9th September 2019 33 / 111
Dinámica de Sistemas Físicos - T1 | Variables generalizadas, esfuerzo (e) y flujo (f )
Potencia y Energía
Potencia total entregada a un sistema= e(t)f (t)
Energía total entregada a un sistema=
∫ t
0e(t)f (t)dt
Las magnitudes físicas que pueden ser representadas por e(t) y f (t), lascuales satisfacen el postulado de potencia, se conocen como variables depotencia.
Lizeth Torres | 9th September 2019 34 / 111
Dinámica de Sistemas Físicos - T1 | Variables generalizadas, esfuerzo (e) y flujo (f )
Cantidad de movimiento (momentum) y desplazamiento
p(t) :=
∫e(t)dt ==> Acumulación de esfuerzo ==> Cantidad de movimiento
q(t) :=
∫f (t)dt ==> Acumulación de flujo ==> Desplazamiento
p(t) y q(t) son conocidas como variables de (almacenamiento oacumulación) energía.
p(t) := e(t)q(t) := f (t)
e(t), f (t), p(t) y q(t) forman un conjunto natural que describe la dinámica deun sistema pues especifican la historia del flujo de energía dentro éste.
Lizeth Torres | 9th September 2019 35 / 111

Dinámica de Sistemas Físicos - T1 | Variables generalizadas, esfuerzo (e) y flujo (f )
Acumulación de esfuerzo y energía
Un sistema con dinámica o un sistema dinámico es un sistema conmemoria cuya respuesta es una función de los valores presentes ypasados de sus entradas. Estos sistemas almacenan informaciónconcerniente a su pasado.
El almacenamiento de información es sinónimo del almacenamiento deenergía.
Lizeth Torres | 9th September 2019 36 / 111

Dinámica de Sistemas Físicos - T1 | Variables generalizadas, esfuerzo (e) y flujo (f )
Esfuerzo e Momentum p
Fuerza F Momentum lineal pPar τ Momentum angular HVoltaje v Enlace de flujo λPresión P Momentum de presión pfTemperatura T -
Flujo f Desplazamiento q
Velocidad v Posición xVelocidad angular ω Ángulo θCorriente i Carga qGasto Q Volumen VTasa de entropía S Entropía S
Lizeth Torres | 9th September 2019 37 / 111
Dinámica de Sistemas Físicos - T1 | Variables generalizadas, esfuerzo (e) y flujo (f )
Elementos básicos de un sistema
¿Cuántos elementos manipuladores de energía existen en un sistema?
1 Fuentes de energía: Dos tipos de fuentes de energía generalizadasexisten: (a) fuentes de esfuerzo y (b) fuentes de flujo.
2 Almacenadores de energía: Existen dos tipos: (a) almacenadores deesfuerzo (almacenadores de potencial) y (b) almacenadores de flujo(almacenadores cinéticos).
3 Disipadores de energía: Sólo existe un tipo: disipador de energíageneralizado.
Nota: Aunque el tipo de elementos puede estadarizarse, el desempeño de cadacomponente de tipos similares puede diferir marcadamente. Por ejemplo, un diodoeléctrico y un resistor de carbón son ambos disipadores de energía, pero ellos secomportan de manera diferente por propiedades fundamentales en su naturalezafísica.
Lizeth Torres | 9th September 2019 38 / 111

Dinámica de Sistemas Físicos - T1 | Variables generalizadas, esfuerzo (e) y flujo (f )
Los almacenadores cinéticos se caracterizan por leyes constitutivas (oestado) que relacionan el flujo y el momento (cantidad de movimientos),esto es f (p) o p(f ).
Los almacenadores de potencial se caracterizan por leyesconstitutivas que relacionan el esfuerzo y el desplazamiento, esto es e(q)o q(e).
Nota: Las leyes constitutivas pueden ser lineales (ideales) o no lineales.
Lizeth Torres | 9th September 2019 39 / 111
Dinámica de Sistemas Físicos - T1 | Variables generalizadas, esfuerzo (e) y flujo (f )
Ejemplos almacenadores cinéticos
Ejemplo 1Una masa m en translación es un almacenador cinético con la leyconstitutiva v = p/m, donde velocidad v es un flujo y el momento lineal pes una cantidad de movimiento.
Ejemplo 2Un inductor eléctrico con una inductancia constante L es un almacenadorcinético con una ley constitutiva i = λ/L, donde i es flujo y el enlace deflujo λ es la cantidad de movimiento.
Lizeth Torres | 9th September 2019 40 / 111
Dinámica de Sistemas Físicos - T1 | Variables generalizadas, esfuerzo (e) y flujo (f )
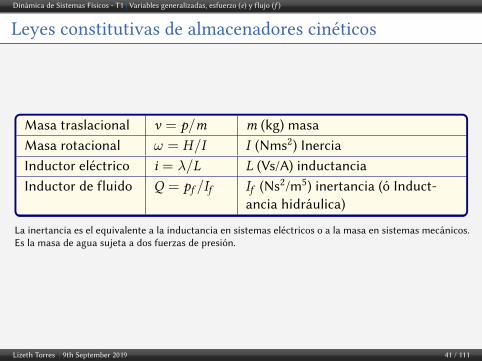
Leyes constitutivas de almacenadores cinéticos
Masa traslacional v = p/m m (kg) masaMasa rotacional ω = H/I I (Nms2) InerciaInductor eléctrico i = λ/L L (Vs/A) inductanciaInductor de fluido Q = pf /If If (Ns2/m5) inertancia (ó Induct-
ancia hidráulica)
La inertancia es el equivalente a la inductancia en sistemas eléctricos o a la masa en sistemas mecánicos.Es la masa de agua sujeta a dos fuerzas de presión.
Lizeth Torres | 9th September 2019 41 / 111

Dinámica de Sistemas Físicos - T1 | Variables generalizadas, esfuerzo (e) y flujo (f )
Energía y coenergía de almacenadores cinéticos
Sabemos que la energía se define como: E =
∫efdt. Así que sustituyendo
dp = edt, se tiene
E =
∫fdp
Cuando el integrando es el flujo f (p) del almacenador cinético, la energía esuna función de p. Esta energía, almacenada por virtud de su momento p, esllamada energía cinética T(p) definida por
T(p) :=
∫f (p)dp,
donde el integrando f (p) es la ley constitutiva.
Lizeth Torres | 9th September 2019 42 / 111

Dinámica de Sistemas Físicos - T1 | Variables generalizadas, esfuerzo (e) y flujo (f )
Energía y coenergía de almacenadores cinéticos
Una función complementaría, la coenergía cinética, expresa la energíaalmacenada por virtud de su flujo f . La coenergía cinética T∗(f ) se define
T∗(f ) :=
∫p(f )df ,
donde el integrando p(f ) es la ley constitutiva p(f ) = [f (p)]−1.
Lizeth Torres | 9th September 2019 43 / 111
Dinámica de Sistemas Físicos - T1 | Variables generalizadas, esfuerzo (e) y flujo (f )
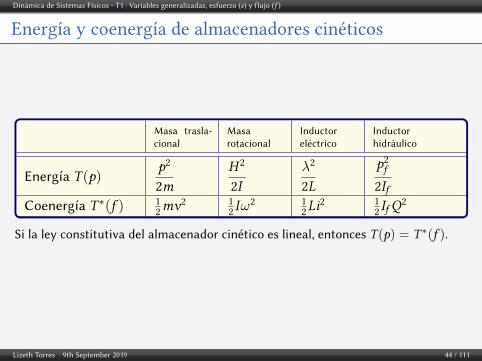
Energía y coenergía de almacenadores cinéticos
Masa trasla-cional
Masarotacional
Inductoreléctrico
Inductorhidráulico
Energía T(p)p2
2mH 2
2Iλ2
2Lp2f
2IfCoenergía T∗(f ) 1
2mv2 12 Iω
2 12Li
2 12 IfQ
2
Si la ley constitutiva del almacenador cinético es lineal, entonces T(p) = T∗(f ).
Lizeth Torres | 9th September 2019 44 / 111
Dinámica de Sistemas Físicos - T1 | Variables generalizadas, esfuerzo (e) y flujo (f )
Energía y coenergía de almacenadores potenciales
Sustituyendo dq = fdt en la ecuación de la energía E =
∫efdt se tiene
E =
∫edq.
Cuando el integrando es el esfuerzo e(q) de un almacenador de potencia, laenergía es una función de q. Esta función representa el trabajo que elalmacenador potencial es capaz de hacer en virtud del desplazamiento q. Elnegativo de esta función de trabajo se llama energía potencial V (q) que sedefine
V (q) :=
∫e(q)dq,
Lizeth Torres | 9th September 2019 45 / 111
Dinámica de Sistemas Físicos - T1 | Variables generalizadas, esfuerzo (e) y flujo (f )
Energía y coenergía de almacenadores potenciales
La coenergía potencial expresa la energía almacenada en virtud del esfuerzo.Se define
V ∗(e) :=
∫q(e)de,
Lizeth Torres | 9th September 2019 46 / 111
Dinámica de Sistemas Físicos - T1 | Variables generalizadas, esfuerzo (e) y flujo (f )
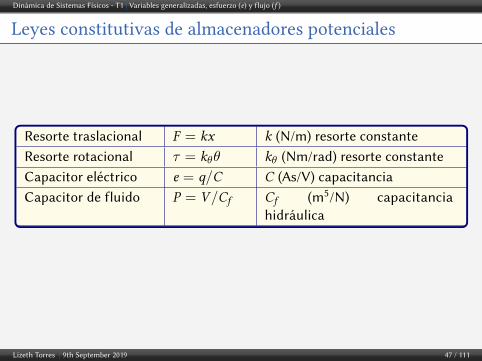
Leyes constitutivas de almacenadores potenciales
Resorte traslacional F = kx k (N/m) resorte constanteResorte rotacional τ = kθθ kθ (Nm/rad) resorte constanteCapacitor eléctrico e = q/C C (As/V) capacitanciaCapacitor de fluido P = V/Cf Cf (m5/N) capacitancia
hidráulica
Lizeth Torres | 9th September 2019 47 / 111
Dinámica de Sistemas Físicos - T1 | Variables generalizadas, esfuerzo (e) y flujo (f )
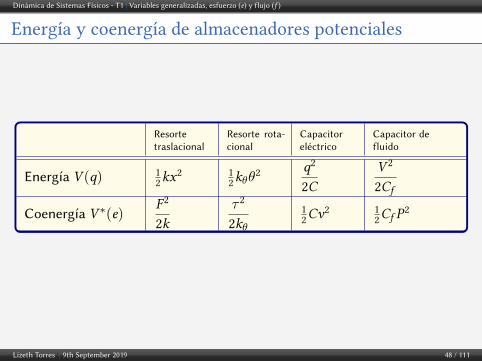
Energía y coenergía de almacenadores potenciales
Resortetraslacional
Resorte rota-cional
Capacitoreléctrico
Capacitor defluido
Energía V (q) 12kx
2 12kθθ
2 q2
2CV 2
2Cf
Coenergía V ∗(e)F2
2kτ 2
2kθ12Cv
2 12Cf P2
Lizeth Torres | 9th September 2019 48 / 111
Dinámica de Sistemas Físicos - T1 | Variables generalizadas, esfuerzo (e) y flujo (f )
Disipadores ideales
Los disipadores ideales son caracterizados por leyes constitutivas querelacionan esfuerzo y flujo, i.e., e(f ) o f (e).
EjemploUn amortiguador lineal con un coeficiente de amortiguamiento b es undisipador lineal con la ley constitutiva F = bv, donde la fuerza F es unesfuerzo aplicado y la velocidad v es un flujo.
Lizeth Torres | 9th September 2019 49 / 111

Dinámica de Sistemas Físicos - T1 | Variables generalizadas, esfuerzo (e) y flujo (f )
Disipadores ideales
Elemento Ley constitutiva Variable-Unidad
Amortiguadortraslacional
F = bv b (Ns/m) Coef. de amortiguami-ento
Amortiguadorrotacional
τ = bθω bθ (Nms) Coef. de amortiguami-ento
Resistor eléc-trico
e = Ri R (Ω) Resistencia
Resistor defluido
P = RfQ Rf (Ns/m5) Resistencia de fluido
Lizeth Torres | 9th September 2019 50 / 111
Dinámica de Sistemas Físicos - T1 | Variables generalizadas, esfuerzo (e) y flujo (f )
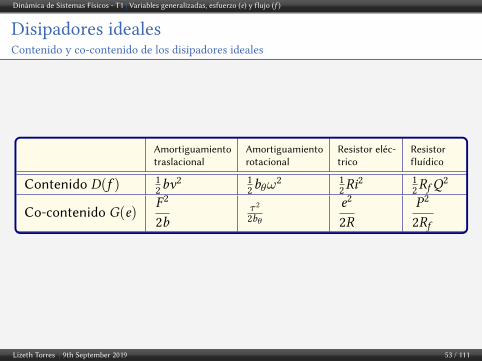
Disipadores idealesContenido y co-contenido de los disipadores ideales
La disipación de potencia de un disipador ideal por virtud de flujo f serepresenta por una función de disipación, o contenido D(f ) definida por
D(f ) :=
∫e(f )df ,
EjemploLa fuerza ejercida por un amortiguador lineal como una función de lavelocidad está dada por F = bv. El contenido es la integral de F(v):
D(v) =
∫F(v)dv =
∫bvdv =
12bv2.
Lizeth Torres | 9th September 2019 51 / 111

Dinámica de Sistemas Físicos - T1 | Variables generalizadas, esfuerzo (e) y flujo (f )
Disipadores idealesContenido y co-contenido de los disipadores ideales
El co-contenido expresa la potencia disipada por un disipador ideal por virtudde su esfuerzo e. El co-contenido G(e) está definido por
G(e) :=
∫f (e)de,
EjemploLa velocidad de un amortiguador lineal como una función de la fuerza queel amortiguador ejerce está dado por v = F/b. El co-contenido es la integral
de v(F) dado por G(F) =
∫v(F)dF =
∫FbdF =
F2
2b.
Lizeth Torres | 9th September 2019 52 / 111
Dinámica de Sistemas Físicos - T1 | Variables generalizadas, esfuerzo (e) y flujo (f )
Disipadores idealesContenido y co-contenido de los disipadores ideales
Amortiguamientotraslacional
Amortiguamientorotacional
Resistor eléc-trico
Resistorfluídico
Contenido D(f ) 12bv
2 12bθω
2 12Ri
2 12RfQ
2
Co-contenido G(e)F2
2bτ 2
2bθe2
2RP2
2Rf
Lizeth Torres | 9th September 2019 53 / 111
Dinámica de Sistemas Físicos - T1 | Variables generalizadas, esfuerzo (e) y flujo (f )
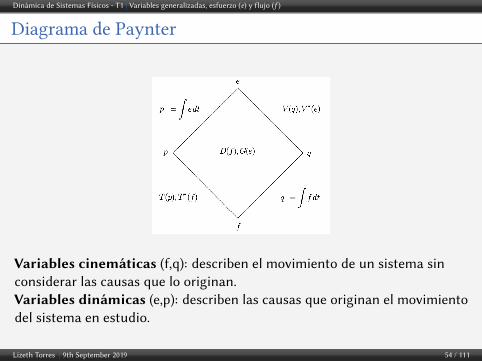
Diagrama de Paynter
Variables cinemáticas (f,q): describen el movimiento de un sistema sinconsiderar las causas que lo originan.Variables dinámicas (e,p): describen las causas que originan el movimientodel sistema en estudio.
Lizeth Torres | 9th September 2019 54 / 111
Dinámica de Sistemas Físicos - T1 | Variables generalizadas, esfuerzo (e) y flujo (f )
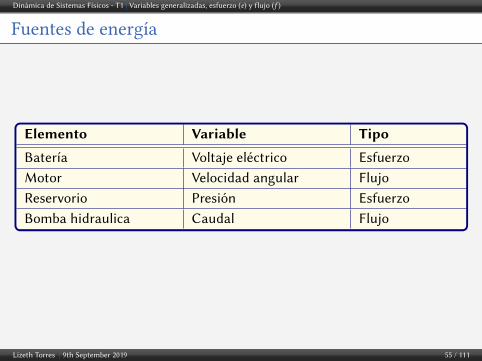
Fuentes de energía
Elemento Variable Tipo
Batería Voltaje eléctrico EsfuerzoMotor Velocidad angular FlujoReservorio Presión EsfuerzoBomba hidraulica Caudal Flujo
Lizeth Torres | 9th September 2019 55 / 111
Dinámica de Sistemas Físicos - T1 | Variables generalizadas, esfuerzo (e) y flujo (f )
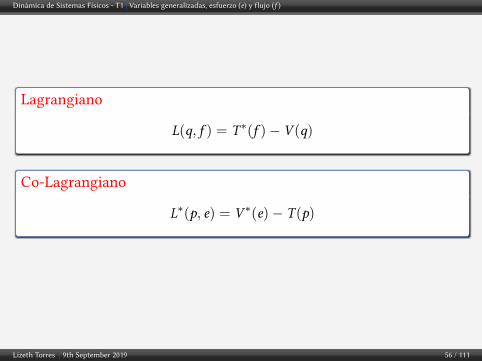
Lagrangiano
L(q, f ) = T∗(f )− V (q)
Co-Lagrangiano
L∗(p, e) = V ∗(e)− T(p)
Lizeth Torres | 9th September 2019 56 / 111
Dinámica de Sistemas Físicos - T1 | Variables generalizadas, esfuerzo (e) y flujo (f )
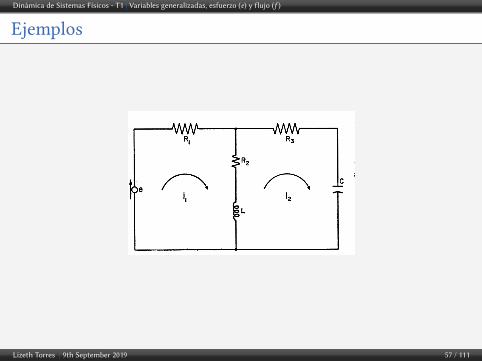
Ejemplos
Lizeth Torres | 9th September 2019 57 / 111
Dinámica de Sistemas Físicos - T1 | Variables generalizadas, esfuerzo (e) y flujo (f )
Puertos
Los puertos son los puntos de interconexión entre elementos ysubsistemas.
La fuentes de energía, los almacenadores y los disipadores sonelementos de un puerto, transformadores de potencia y transductoresson elementos con dos puertos.
Lizeth Torres | 9th September 2019 58 / 111
Dinámica de Sistemas Físicos - T1 | Variables generalizadas, esfuerzo (e) y flujo (f )
Elementos de dos puertos
Los transformadores y transductores son dispositivos que acoplan dossubsistemas (o sistemas) dinámicos.
Los transformadores acoplan subsistemas (o sistemas) del mismodominio de energía.
Los transductores acoplan subsistemas (o sistemas) de diferentesdominios de energía.
El acoplamiento característico de estos dispositivos se expresa por leyesconstitutivas (o restricciones) que relacionan las variables del sistema (osubsistema) en el puerto 1 (e1, f1, p1, q1) del dispositivo con las variablesdel sistema (o subsistema) en el puerto 2 (e2, f2, p2, q2).
Las leyes constitutivas pueden ser funciones de variables del mismo tipo,e.g. e1 = gcl(e2), f1 = gcl(f2).
Las leyes constitutivas pueden ser funciones de variables de diferentetipo, e.g. e1 = gcl(f2).
Lizeth Torres | 9th September 2019 59 / 111

Dinámica de Sistemas Físicos - T1 | Variables generalizadas, esfuerzo (e) y flujo (f )
TransformadoresLos transformadores acoplan subsistemas (o sistemas) del mismo dominio deenergía.
Figure: "Dadme un punto de apoyo y moveré el mundo"- Arquímedes
EjemploUna palanca ideal, es rígida, sin masa y sin fricción. Las variables de potenciaasociadas con los dos puertos de este dispositivo son las cupletas (F1, x1) y (F2, x2).
Lizeth Torres | 9th September 2019 60 / 111
Dinámica de Sistemas Físicos - T1 | Variables generalizadas, esfuerzo (e) y flujo (f )
Transformadores
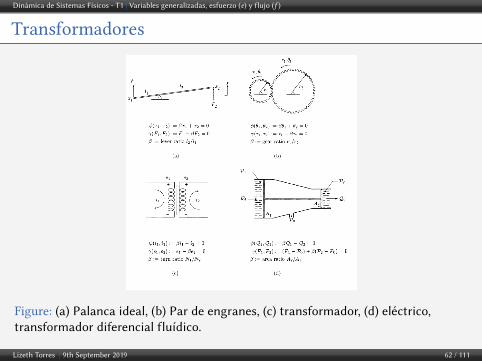
♠ Asumiendo eficiencia perfecta, la conservación de potencia requiere queF1x1 + F2x2 = 0.
♠ Para pequeños desplazamientos, la ley constitutiva de la palanca estadada por
φ(x1, x2) :=x1
l1+
x2
l2= 0,
φ(x1, x2) := βx1 + x2 = 0,
donde β = l2/l1 es el radio de transformación o modulo deltransformador y φ denota la restricción de desplazamiento.
♠ La derivada de la restricción de desplazamiento es: x2 = −βx1, la cual sesustituye en la ecuación de la conservación de potencia para obtener
γ(F1, F2) := F1 − βF2 = 0,
donde γ denota la restricción de esfuerzo.
Lizeth Torres | 9th September 2019 61 / 111
Dinámica de Sistemas Físicos - T1 | Variables generalizadas, esfuerzo (e) y flujo (f )
Transformadores
Figure: (a) Palanca ideal, (b) Par de engranes, (c) transformador, (d) eléctrico,transformador diferencial fluídico.
Lizeth Torres | 9th September 2019 62 / 111

Dinámica de Sistemas Físicos - T1 | Variables generalizadas, esfuerzo (e) y flujo (f )
Transductores
Los transductores acoplan subsistemas (o sistemas) de diferentes dominios deenergía.
? Transductores transformadores.
? Giradores.
? Transductores de señal.
? Transactores.
Lizeth Torres | 9th September 2019 63 / 111
Dinámica de Sistemas Físicos - T1 | Variables generalizadas, esfuerzo (e) y flujo (f )
Transductores transformadores
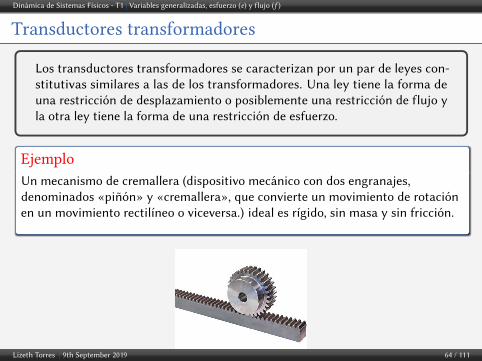
Los transductores transformadores se caracterizan por un par de leyes con-stitutivas similares a las de los transformadores. Una ley tiene la forma deuna restricción de desplazamiento o posiblemente una restricción de flujo yla otra ley tiene la forma de una restricción de esfuerzo.
EjemploUn mecanismo de cremallera (dispositivo mecánico con dos engranajes,denominados «piñón» y «cremallera», que convierte un movimiento de rotaciónen un movimiento rectilíneo o viceversa.) ideal es rígido, sin masa y sin fricción.
Lizeth Torres | 9th September 2019 64 / 111
Dinámica de Sistemas Físicos - T1 | Variables generalizadas, esfuerzo (e) y flujo (f )
Transductores transformadoresMecanismo de cremallera
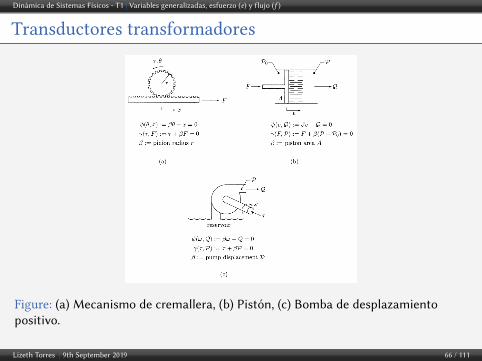
♥ Las dos variables de potencia asociadas con los dos puertos de estedispositivo son las cupletas (F , x) y (τ, θ).
♥ Asumiendo eficiencia perfecta la conservación de la potencia requiereque Fx + τ θ = 0.
♥ La ley constitutiva está dada por x = rθ. Esta relación tiene la siguienteforma
φ(θ, x) := βθ − x = 0,
donde el modulo β es el radio del engrane r .
♥ La derivada de la restricción de movimiento es x = βθ, la cual essubstituida en la ecuación de la conservación de potencia para obtenerla restricción de esfuerzo:
γ(τ, F) := τ + βF = 0.
Lizeth Torres | 9th September 2019 65 / 111
Dinámica de Sistemas Físicos - T1 | Variables generalizadas, esfuerzo (e) y flujo (f )
Transductores transformadores
Figure: (a) Mecanismo de cremallera, (b) Pistón, (c) Bomba de desplazamientopositivo.
Lizeth Torres | 9th September 2019 66 / 111
Dinámica de Sistemas Físicos - T1 | Variables generalizadas, esfuerzo (e) y flujo (f )
Giradores
Se caracterizan por un par de leyes constitutivas donde ambas leyestienen la forma de restricciones de esfuerzo en las que el esfuerzo enun puerto está relacionado con el flujo en el otro puerto.
EjemploUn motor de CD ideal.
z Las variables de potencia asociadas con los dos puertos de estedispositivo son los dos pares de esfuerzo-flujo (e, i) y (τ, ω).
z Las leyes constitutivas del motor DC están dadas por τ = Kii y e = Kbω,donde Ki es una constante de torsión y Kb es la constante de la fuerzacontraelectromotriz. Estas constantes son idénticas en unidades SI, asíque en adelante serán represenatadas sólo por K .
Lizeth Torres | 9th September 2019 67 / 111
Dinámica de Sistemas Físicos - T1 | Variables generalizadas, esfuerzo (e) y flujo (f )
Giradores
z Las leyes constitutivas del motor de CD se expresan
γ1(τ, i) := τ − βi = 0,
γ2(e, ω) := e − βω = 0,
donde β es la constante K .
Lizeth Torres | 9th September 2019 68 / 111
Dinámica de Sistemas Físicos - T1 | Variables generalizadas, esfuerzo (e) y flujo (f )
Giradores
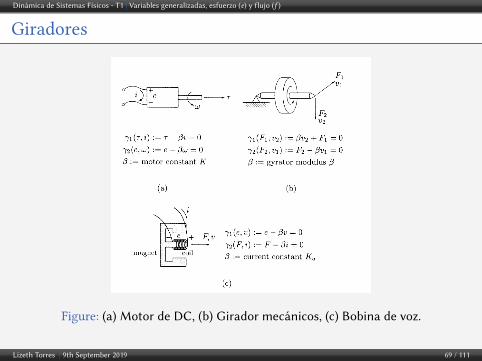
Figure: (a) Motor de DC, (b) Girador mecánicos, (c) Bobina de voz.
Lizeth Torres | 9th September 2019 69 / 111
Dinámica de Sistemas Físicos - T1 | Variables generalizadas, esfuerzo (e) y flujo (f )
Transductores de señal
Los transductores de señal típicamente están representados por unaúnica relación constitutiva.
EjemploUn transductor piezoeléctrico genera una carga q es proporcional aldesplazamiento x.
La relación entre x y q está dada por una restricción de movimiento:
φ(q, x) := q − Kqx = 0.
NOTA: Tanto un termopar como un detector de temperatura de resistencia (RTD) generan un voltaje enrespuesta a la temperatura. Como la temperatura y el voltaje son esfuerzos, tales relacionesconstitutivas son restricciones de esfuerzo, γ(e).
Lizeth Torres | 9th September 2019 70 / 111
Dinámica de Sistemas Físicos - T1 | Variables generalizadas, esfuerzo (e) y flujo (f )
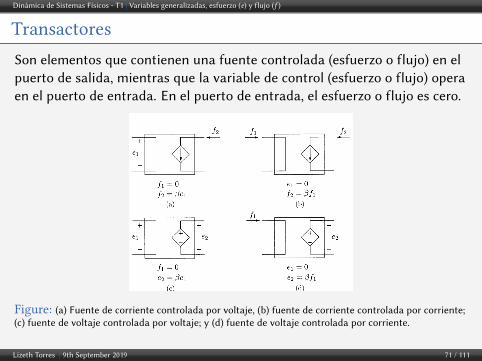
TransactoresSon elementos que contienen una fuente controlada (esfuerzo o flujo) en elpuerto de salida, mientras que la variable de control (esfuerzo o flujo) operaen el puerto de entrada. En el puerto de entrada, el esfuerzo o flujo es cero.
Figure: (a) Fuente de corriente controlada por voltaje, (b) fuente de corriente controlada por corriente;(c) fuente de voltaje controlada por voltaje; y (d) fuente de voltaje controlada por corriente.
Lizeth Torres | 9th September 2019 71 / 111
Dinámica de Sistemas Físicos - T1 | Restricciones necesarias para la obtención de modelos.
Restricciones
♣ Físicamente, las restricciones son limitaciones en el comportamientodinámico del sistema, típicamente debido al comportamientoconstitutivo, las interconexiones de componentes y las condiciones decontorno.
♣ En términos de un modelo matemático, las restricciones son condicionesque las variables de estado deben cumplir además de las ecuacionesdiferenciales de movimiento.
Lizeth Torres | 9th September 2019 72 / 111
Dinámica de Sistemas Físicos - T1 | Restricciones necesarias para la obtención de modelos.
Restricciones de desplazamiento
♣ Una restricción holonómica es una condición algebraica impuesta aun sistema que puede expresarse como una función del desplazamientoy del tiempo con la siguiente forma
φ(q, t) = 0,
donde q = (q1, ..., qn).♣ Las condiciones holonómicas expresadas como en la ecuación anterior
(forma estándar) se designan como restricciones de desplazamientoφ. Las condiciones holonómicas que no están en forma estándar seexpresan típicamente como restricciones de flujo.
♣ Un conjunto de restricciones desplazamiento se denota por el vector Φdado por
Φ(q, t) :=
φ1(q, t)
φm1(q, t)
= 0.
Lizeth Torres | 9th September 2019 73 / 111
Dinámica de Sistemas Físicos - T1 | Restricciones necesarias para la obtención de modelos.
Restricciones de ujo
La derivada con respecto al tiempo de la k−ésima restricción está dada por
dφkdt
=
n∑j=1
∂φk∂qj
q +∂φk∂t
= 0
Una restricción de esta forma, que puede integrarse para obtener unarestricción de desplazamiento, se llama restricción de flujo holonómica ointegrable.
Lizeth Torres | 9th September 2019 74 / 111
Dinámica de Sistemas Físicos - T1 | Restricciones necesarias para la obtención de modelos.
Restricciones
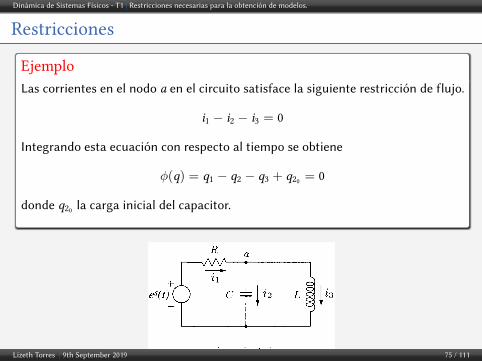
EjemploLas corrientes en el nodo a en el circuito satisface la siguiente restricción de flujo.
i1 − i2 − i3 = 0
Integrando esta ecuación con respecto al tiempo se obtiene
φ(q) = q1 − q2 − q3 + q20 = 0
donde q20 la carga inicial del capacitor.
Lizeth Torres | 9th September 2019 75 / 111
Dinámica de Sistemas Físicos - T1 | Restricciones necesarias para la obtención de modelos.
Restricciones de esfuerzo
Las restricciones de esfuerzo son condiciones algebraicas que implicanesfuerzo, una variable cinemática y posiblemente el tiempo. Estasrestricciones surgen principalmente debido a las leyes constitutivaselementales que no se incluyen en las funciones de energía
Lizeth Torres | 9th September 2019 76 / 111
Dinámica de Sistemas Físicos - T1 | Restricciones necesarias para la obtención de modelos.
Grados de libertad
Grados de libertad=Número de coordenadas - Número de restricciones
Lizeth Torres | 9th September 2019 77 / 111
Dinámica de Sistemas Físicos - T1 | Restricciones necesarias para la obtención de modelos.
Ecuaciones de equilibrioEcuaciones de equilibrio para sistemas eléctricos
Ley de corrientes de KirchhoPara cualquier circuito eléctrico con n número de nodos y m número de ramas, lasuma algebraica de corrientes en cualquiera de sus nodos es igual a cero.
m∑j=1
akjij = 0; k = 1, 2, ..., n.
akj = +1, si la rama j está conectada al nodo k y la corriente ij sale del nodo k.akj = −1, si la rama j está conectada al nodo k y la corriente ij entra al nodo k.akj = 0, si la rama j no está conectada al nodo k.
Lizeth Torres | 9th September 2019 78 / 111
Dinámica de Sistemas Físicos - T1 | Restricciones necesarias para la obtención de modelos.
Ecuaciones de equilibrioEcuaciones de equilibrio para sistemas eléctricos
Ley de voltajes de KirchhoPara cualquier circuito eléctrico con m número de ramas y ` número de mallas, lasuma algebraica de voltajes en cualquiera de sus mallas es igual a cero, así la ley devoltajes de Kirchhof puede ser expresada como:
m∑j=1
bkjvj = 0; k = 1, 2, ..., `.
bkj = +1, si la rama j forma parte de la malla k y en el trazo a través de la rama jse encuentra al principio el signo positivo.bkj = −1, si la rama j forma parte de la malla k y en el trazo a través de la rama jse encuentra al principio el signo negativo.bkj = 0, si la rama j no forma parte de la malla k.
Nota: El sentido de las corrientes y la polaridad de los voltajes se estable arbitrariamente.
Lizeth Torres | 9th September 2019 79 / 111
Dinámica de Sistemas Físicos - T1 | Restricciones necesarias para la obtención de modelos.
Ecuaciones de equilibrioEcuaciones de equilibrio para sistemas mecánicos
Tercera ley de NewtonA toda reacción siempre existe una reacción igual y de sentido contrario.
Principio D’AlembertLas fuerzas aplicadas a un elemento, junto con las fuerzas de inercia forman unsistema en equilibrio.
Lizeth Torres | 9th September 2019 80 / 111
Dinámica de Sistemas Físicos - T1 | Restricciones necesarias para la obtención de modelos.
Ecuaciones de equilibrioEcuaciones de equilibrio para sistemas mecánicos traslacionales
Tercera ley de NewtonSi un elemento A ejerce una fuerza sobre otro elemento B, éste ejercerá una fuerzade igual magnitud pero en sentido contrario al elemento A.
Principio D’Alembert∑fi = 0
Lizeth Torres | 9th September 2019 81 / 111

Dinámica de Sistemas Físicos - T1 | Restricciones necesarias para la obtención de modelos.
Ecuaciones de equilibrioEcuaciones de equilibrio para sistemas mecánicos rotacionales
Tercera ley de NewtonSi un elemento A ejerce un par sobre otro elemento B, éste ejercerá un par de igualmagnitud pero en sentido contrario al elemento A.
Principio D’Alembert∑τi = 0
Lizeth Torres | 9th September 2019 82 / 111
Dinámica de Sistemas Físicos - T1 | Restricciones necesarias para la obtención de modelos.
Ecuaciones de equilibrioEcuaciones de equilibrio para sistemas hidráulicos
Ley de balance de presionesLa suma de las caídas de presión alrededor de una malla es igual a cero.∑
Pi = 0
Ley de conservación de la masaLa suma algebraica de gastos en un nodo es igual cero, o las variaciones devolumen con respecto al tiempo es igual a la suma de los gastos de entrada menosla suma de los gastos de salida.∑
qe −∑
qs =dVdt
Lizeth Torres | 9th September 2019 83 / 111
Dinámica de Sistemas Físicos - T1 | Restricciones necesarias para la obtención de modelos.
Ecuaciones de equilibrioEcuaciones de equilibrio para sistemas térmicos
Derivación de la primera ley de la termodinámicaEl calor absorbido por el sistema es la diferencia del calor que recibe menos el queemana.
CTdTdt
=∑
Qe −∑
Qs
donde T es temperatura y CT es capacitancia térmica.
Lizeth Torres | 9th September 2019 84 / 111
Dinámica de Sistemas Físicos - T1 | Caracterización de variables asociadas a los sistemas mecánicos,hidráulicos, térmicos e híbridos.
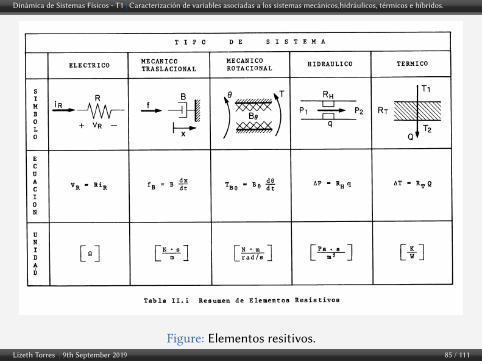
Figure: Elementos resitivos.Lizeth Torres | 9th September 2019 85 / 111
Dinámica de Sistemas Físicos - T1 | Caracterización de variables asociadas a los sistemas mecánicos,hidráulicos, térmicos e híbridos.
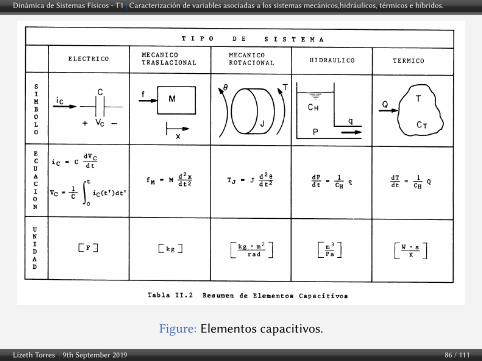
Figure: Elementos capacitivos.
Lizeth Torres | 9th September 2019 86 / 111
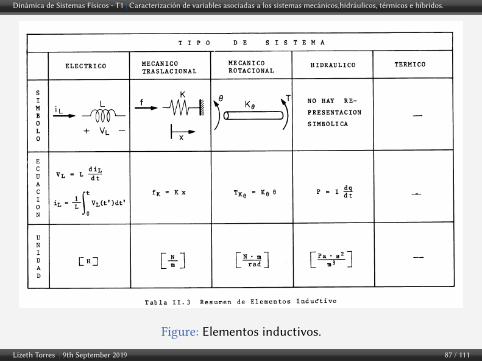
Dinámica de Sistemas Físicos - T1 | Caracterización de variables asociadas a los sistemas mecánicos,hidráulicos, térmicos e híbridos.
Figure: Elementos inductivos.
Lizeth Torres | 9th September 2019 87 / 111
Dinámica de Sistemas Físicos - T1 | Caracterización de variables asociadas a los sistemas mecánicos,hidráulicos, térmicos e híbridos.
Ecuaciones de movimiento de Euler-Lagrange
Sistemas conservativosddt
(∂L∂qi
)− ∂L∂qi
= Fi
Sistemas disipativosddt
(∂L∂qi
)− ∂L∂qi
+∂D∂qi
= Fi
Lizeth Torres | 9th September 2019 88 / 111
Dinámica de Sistemas Físicos - T1 | Caracterización de variables asociadas a los sistemas mecánicos,hidráulicos, térmicos e híbridos. | Modeladode sistemas mecánicos
Ejemplo: Sistema masa-resorte
Lagrangiano
L = T ∗(v)− V(x) = T ∗(x)− V(x) =12mx2 − 1
2kx2 =
12mv2 − 1
2kx2
Derivación∂L∂v
= mv = mx;ddt
(∂L∂x
)= mx;
∂L∂x
= −kx
Ecuación de Euler-Lagrangeddt
(∂L∂x
)− ∂L∂x
+∂D∂x
= mx + kx = 0
Lizeth Torres | 9th September 2019 89 / 111
Dinámica de Sistemas Físicos - T1 | Caracterización de variables asociadas a los sistemas mecánicos,hidráulicos, térmicos e híbridos. | Modeladode sistemas mecánicos
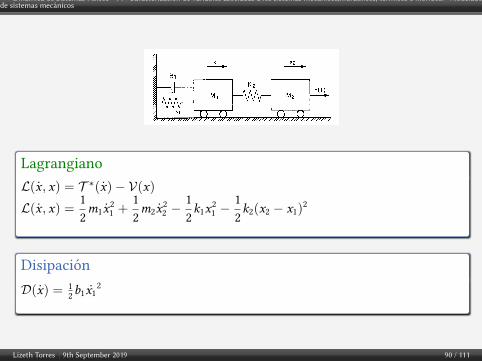
LagrangianoL(x, x) = T ∗(x)− V(x)
L(x, x) =12m1x2
1 +12m2x2
2 −12k1x2
1 −12k2(x2 − x1)
2
DisipaciónD(x) = 1
2b1x12
Lizeth Torres | 9th September 2019 90 / 111

Dinámica de Sistemas Físicos - T1 | Caracterización de variables asociadas a los sistemas mecánicos,hidráulicos, térmicos e híbridos. | Modeladode sistemas mecánicos
Derivación∂L(x, x)
∂x1= m1x1;
ddt
(∂L(x, x)
∂x1
)= m1x1;
∂L(x, x)
∂x1= −k1x1 − k2x1 + k2x2
Derivación∂L(x, x)
∂x2= m2x2;
ddt
(∂L(x, x)
∂x2
)= m2x2;
∂L(x, x)
∂x2= −k2x2 + k2x1
Derivación∂D(x)
∂x1= b1x1
Lizeth Torres | 9th September 2019 91 / 111
Dinámica de Sistemas Físicos - T1 | Caracterización de variables asociadas a los sistemas mecánicos,hidráulicos, térmicos e híbridos. | Modeladode sistemas mecánicos
Ecuación de Euler-Lagrange para (x1, x1)ddt
(∂L(x, x)
∂x
)− ∂L(x, x)
∂x+∂D(x)
∂x= m1x1 + k1x1 + k2(x1 − x2) + b1x1 = 0
Ecuación de Euler-Lagrange para (x2, x2)ddt
(∂L(x, x)
∂x
)− ∂L(x, x)
∂x+∂D(x)
∂x= m2x2 + k2(x2 − x1) = f (t)
Lizeth Torres | 9th September 2019 92 / 111
Dinámica de Sistemas Físicos - T1 | Caracterización de variables asociadas a los sistemas mecánicos,hidráulicos, térmicos e híbridos. | Modeladode sistemas eléctricos
Ejemplo: Circuito RLC
Lagrangiano
L = T ∗(i)− V(q) =12Li2 − 1
2Cq2 =
12q2 − 1
2Cq2
Disipación
D(q) =12Ri2 =
12Rq2
Derivación∂L∂q
= Lq;ddt
(∂L∂q
)= Lq;
∂L∂g
= − qC
;∂D∂q
= Rq
Lizeth Torres | 9th September 2019 93 / 111
Dinámica de Sistemas Físicos - T1 | Caracterización de variables asociadas a los sistemas mecánicos,hidráulicos, térmicos e híbridos. | Modeladode sistemas eléctricos
Ejemplo: Circuito RLC
Ecuación de Euler-Lagrangeddt
(∂L∂q
)− ∂L∂qi
+∂D∂qi
= Lq +qC
+ Rq = Lq + Rq +1Cq = 0
Ley de voltajes de Kirchho
Ldidt
+ Ri +1C
∫ t
0i(τ)dτ = 0
En términos del VC (q = CVC)
LCd2VC
dt2 + RCdVC
dt+ VC = 0
Lizeth Torres | 9th September 2019 94 / 111
Dinámica de Sistemas Físicos - T1 | Caracterización de variables asociadas a los sistemas mecánicos,hidráulicos, térmicos e híbridos. | Modeladode sistemas hidráulicos
Ejemplo: Tubería rígida
En una tubería:
La resitencia hidráulica se define: Rf =ρLfQ0
2φA2r
.
La inductancia hidráulica (inertancia) se define: Lf =ρLAr
.
La capacitancia hidráulica se define: Cf =Ar
ρg
ρ: densidad, L: longitud de la tubería, f : factor de fricción, φ diámetro, Ar : áreatrasversal, g: aceleración gravitacional y Q0 gasto volumétrico en un punto deoperación.
Lizeth Torres | 9th September 2019 95 / 111
Dinámica de Sistemas Físicos - T1 | Caracterización de variables asociadas a los sistemas mecánicos,hidráulicos, térmicos e híbridos. | Modeladode sistemas hidráulicos
Ejemplo: Tubería rígida
Lagrangiano
L = T ∗(Q)− V(V ) =12LfQ2 − V 2
2Cf
Q es gasto volumétrico y V es volúmen.
Disipación
D(Q) =12RfQ2
Derivación∂L∂Q
= LfQ;ddt
(∂L∂Q
)= Lf Q;
∂L∂V
= − VCf
;∂D∂Q
= RfQ
Lizeth Torres | 9th September 2019 96 / 111
Dinámica de Sistemas Físicos - T1 | Caracterización de variables asociadas a los sistemas mecánicos,hidráulicos, térmicos e híbridos. | Modeladode sistemas hidráulicos
Tubería rígida
Ecuación de movimiento
Lf Q +VCf
+ RfQ = 0
Dado que V = Ar∆H , entonces
Ecuación de movimiento
Lf Q +Ar∆HCf
+ RfQ = 0
∆H es carga de presión (columna de agua).
Lizeth Torres | 9th September 2019 97 / 111
Dinámica de Sistemas Físicos - T1 | Caracterización de variables asociadas a los sistemas mecánicos,hidráulicos, térmicos e híbridos. | Modeladode sistemas hidráulicos
Tubería rígida
Ecuación de movimientoρLAr
Q + ρg∆H +ρLfQ0
2φA2rQ = 0
Ecuación de movimiento
Q = −gAr
L∆H − fQ0
2φArQ
Lizeth Torres | 9th September 2019 98 / 111

Dinámica de Sistemas Físicos - T1 | Caracterización de variables asociadas a los sistemas mecánicos,hidráulicos, térmicos e híbridos. | Modeladode sistemas hidráulicos
Modelo de una red de tuberías
Q1
Q2
Q3
Q4
H1
H2 H3
Hin
QD2 QD1
Ki =fi|Q0i|2φAr
, βi =gAr
Li, αi : factor de
estabilidad/convergencia numérica.
Ec. para cada tubería de la red.
Q1 = −K1Q1 + β1(Hin − H1)
Q2 = −K2Q2 + β2(H1 − H2)
Q3 = −K3Q3 + β3(H3 − H2)
Q4 = −K4Q4 + β4(H1 − H3)
Ec. para cada nodo de la red.
H1 = α1(Q1 − Q2 − Q4)
H2 = α2(Q2 + Q3 − QD1)
H3 = α3(Q4 − Q3 − QD2)
QD1 y QD2 son los flujos de demanda.
Lizeth Torres | 9th September 2019 99 / 111
Dinámica de Sistemas Físicos - T1 | Caracterización de variables asociadas a los sistemas mecánicos,hidráulicos, térmicos e híbridos. | Modeladode sistemas hidráulicos
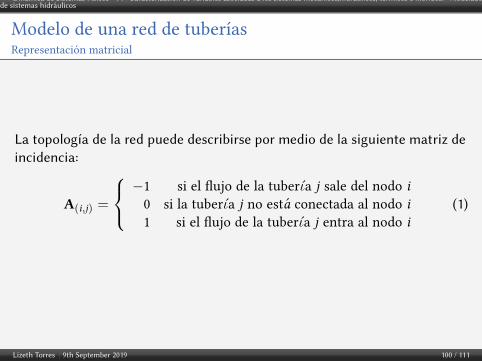
Modelo de una red de tuberíasRepresentación matricial
La topología de la red puede describirse por medio de la siguiente matriz deincidencia:
A(i,j) =
−1 si el ujo de la tuberιa j sale del nodo i
0 si la tuberιa j no esta conectada al nodo i1 si el ujo de la tuberιa j entra al nodo i
(1)
Lizeth Torres | 9th September 2019 100 / 111
Dinámica de Sistemas Físicos - T1 | Caracterización de variables asociadas a los sistemas mecánicos,hidráulicos, térmicos e híbridos. | Modeladode sistemas hidráulicos
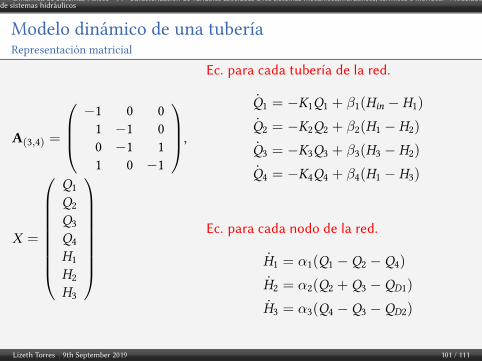
Modelo dinámico de una tuberíaRepresentación matricial
A(3,4) =
−1 0 0
1 −1 00 −1 11 0 −1
,
X =
Q1Q2Q3Q4H1H2H3
Ec. para cada tubería de la red.
Q1 = −K1Q1 + β1(Hin − H1)
Q2 = −K2Q2 + β2(H1 − H2)
Q3 = −K3Q3 + β3(H3 − H2)
Q4 = −K4Q4 + β4(H1 − H3)
Ec. para cada nodo de la red.
H1 = α1(Q1 − Q2 − Q4)
H2 = α2(Q2 + Q3 − QD1)
H3 = α3(Q4 − Q3 − QD2)
Lizeth Torres | 9th September 2019 101 / 111

Dinámica de Sistemas Físicos - T1 | Caracterización de variables asociadas a los sistemas mecánicos,hidráulicos, térmicos e híbridos. | Modeladode sistemas hidráulicos
Modelo dinámico de una tuberíaRepresentación matricial
A(3,4) =
−1 0 0
1 −1 00 −1 11 0 −1
,
X =
Q1Q2Q3Q4H1H2H3
dXdt
=
(−K ΨA
−ΠAT 0
)X +
(ΨBC1ΠBC2
)dondeK = diag(K1,K2,K3,K4),Ψ = diag(β1, β2, β3, β4),Π = diag(α1, α2, α3, α4),BC1 = (Hin, 0, 0, 0)T ,BC2 = (0,QD1,QD2)
T ,0: Matriz de ceros.
Lizeth Torres | 9th September 2019 102 / 111
Dinámica de Sistemas Físicos - T1 | Caracterización de variables asociadas a los sistemas mecánicos,hidráulicos, térmicos e híbridos. | Modeladode sistemas híbridos
Sistema Electromecánico
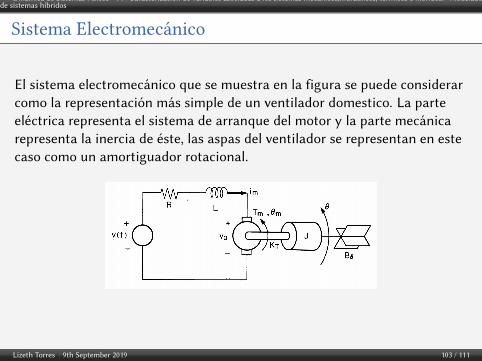
El sistema electromecánico que se muestra en la figura se puede considerarcomo la representación más simple de un ventilador domestico. La parteeléctrica representa el sistema de arranque del motor y la parte mecánicarepresenta la inercia de éste, las aspas del ventilador se representan en estecaso como un amortiguador rotacional.
Lizeth Torres | 9th September 2019 103 / 111
Dinámica de Sistemas Físicos - T1 | Caracterización de variables asociadas a los sistemas mecánicos,hidráulicos, térmicos e híbridos. | Modeladode sistemas híbridos
Sistema Electromecánico
Se puede identifica una parte eléctrica formada por la fuente de alimentación, unaresistencia y una inductancia; otra parte del sistema es la mecánica que estáformada por un resorte rotacional (KT ), una inercia (J) y un amortiguadorrotacional (Bθ). Ambas partes están interconectadas a través de un elementohíbrido (motor eléctrico ideal de corriente directa).
Leyes constitutivas (parte eléctrica)
VR = iRR; VL = LdiLdt
; Va = Kaωm (2)
Leyes constitutivas (parte mecánica)
TKT = KT (θm − θ); TJ = Jd2θ
dt2 ; TBθ = Bθdθdt
; Tm = Kf im; (3)
Lizeth Torres | 9th September 2019 104 / 111
Dinámica de Sistemas Físicos - T1 | Caracterización de variables asociadas a los sistemas mecánicos,hidráulicos, térmicos e híbridos. | Modeladode sistemas híbridos
Sistema Electromecánico
d3θ
dt3 +
[KT (RJ + LBθ) + Kf KaBθ
LJKT + Kf KaJ
]d2θ
dt2
+
[KT (RBθ + KaKf )
LJKT + KaKf J
]dθdt
=Kf KT
LJKT + KaKf Jv(t)
(4)
Haciendo ω = dθdt se tiene que el modelo matemático del sistema en función de la
velocidad angular a la que giran las aspas del ventilador es:
d2ω
dt2 +
[KT (RJ + LBθ) + Kf KaBθ
LJKT + Kf KaJ
]dωdt
+
[KT (RBθ + KaKf )
LJKT + KaKf J
]ω =
Kf KT
LJKT + KaKf Jv(t)
(5)
Lizeth Torres | 9th September 2019 105 / 111

Dinámica de Sistemas Físicos - T1 | Enfoque energético en el modelado de sistemas físicos
Energía Total - Sistemas Conservativos
Hamiltoniano: Energía Total
H∗(q, p) = T(p) + V (q)
Co-Hamiltoniano: Co-energía Total
H∗(f , v) = H∗(q, p) = T∗(f ) + V ∗(e) = T∗(q) + V ∗(p)
Lizeth Torres | 9th September 2019 106 / 111

Dinámica de Sistemas Físicos - T1 | Enfoque energético en el modelado de sistemas físicos
Energía Total - Sistemas disipativos
Energía Total
H(q, p) = T(p) + V (q) +
∫ t
0D(f )dt
Co-energía Total
H∗(f , v) = T∗(f ) + V ∗(e) +
∫ t
0G(e)dt
Lizeth Torres | 9th September 2019 107 / 111
Dinámica de Sistemas Físicos - T1 | Enfoque energético en el modelado de sistemas físicos
Circuito LC
¿Cuál es el Hamiltoniano de un circuito LC?
H(λ, q) =λ2
2L+
q2
2C
¿Cuál es el Co-Hamiltoniano de un circuito LC?
H∗(i, v) =12Li2 +
12Cv2
H(λ, q)
dt= 0.
Lizeth Torres | 9th September 2019 108 / 111
Dinámica de Sistemas Físicos - T1 | Enfoque energético en el modelado de sistemas físicos
Sistema masa-resorte
Hamiltoniano
H(p, x) =p2
2m+
12kx2
Lizeth Torres | 9th September 2019 109 / 111
Dinámica de Sistemas Físicos - T1 | Enfoque energético en el modelado de sistemas físicos
Circuito RLC
Energía total
H(λ, q, i) =λ2
2L+
q2
2C+
12Ri2∫ t
0dτ
H(λ, q, i)dt
=12Ri2
Lizeth Torres | 9th September 2019 110 / 111

Dinámica de Sistemas Físicos - T1 | Enfoque energético en el modelado de sistemas físicos
qatlho’
Danke谢谢Grazie
Спасибо
ขอบคณ
9C4#5$Ìشكرا Merçi
Gracias
நனறி
Obrigado
Ευχαριστώ
감사합니다ध यवाद
Terima kasih
Thank you
ありがとう
Tapadh leibhཐགས་ར་ཆ་།
Go raibh maith agaibh
Xin cảm ơn
estions? [email protected]
http://lizeth-torres.info
Lizeth Torres | 9th September 2019 111 / 111










![PIB6..T1.., PIA6..T1.., PIB8..T1.., PIC8..T1.., …media3.bsh-group.com/Documents/9000690446_A.pdf3 î Оглавление [ru]Ппоравильзон Правила техники](https://static.fdocuments.es/doc/165x107/5f3e7d74843a6c747e476dcc/pib6t1-pia6t1-pib8t1-pic8t1-3-ruoe.jpg)