Diseño y Fabric de Prototipo Para El Estudio de Esfuerzos de Cadenas Cinematicas FEM

of 8
Transcript of Diseño y Fabric de Prototipo Para El Estudio de Esfuerzos de Cadenas Cinematicas FEM
-
8/18/2019 Diseño y Fabric de Prototipo Para El Estudio de Esfuerzos de Cadenas Cinematicas FEM
1/8
Encuentro de Investigación en IE, 28 — 30 de Marzo, 2007 175
Resumen — El prototipo de este banco experimentalprovino de la necesidad de realizar un estudio sobre elcomportamiento elástico de los brazos robóticosconocidos como robot seriales. De las etapas de diseño seha pasado a la fabricación del modelo físico que seráutilizado como una cadena cinemática experimental,para generalizar resultados obtenidos por modelosteóricos usando Método de Elemento Finito (FEM) y devalores experimentales de esfuerzo usandoextensiometría.El desarrollo experimental de análisis de vibración y deesfuerzo/deformación ha sido implementadoseleccionando tecnología de NI™ para la adquisición,acondicionamiento de señal y procesamiento de datos.Se presentan los resultados preliminares de simulaciónde una cadena cinemática reconfigurable usandoanálisis, de elemento finito obteniendo una simulación desu estado esfuerzo/deformación. Aplicando teoría delmedio continuo , se proponen dos tipos de deformaciónelástica para caracterizar la deformación de eslabones yarticulaciones que producen el cambio de posición final
que difiere del previsto utilizando el modelo de cuerporígido.
Abstract — This Prototype was developed from a needto understand experimentally deformation behavior inserial in kinematic chains known as serial robot togeneralize results obtained with theoretical elasticmodeling using finite element analysis and fromexperimental values of strain using extensiometry gages.Experimental work of vibration and strain/deformationanalysis has been developed selecting technology of NI™for the acquisition, signal conditioning and dataprocessing.
We present initial simulation results of a reconfigurablekinematics chain using finite element analysis, obtaininga recreation of its effort-deformation state. Applyingtheory of continuous media, two types of elasticdeformations are proposed to characterize links and
joints deformation which produce a position change thatdiffers from position calculated with a rigid body model.Virtual models of the reconfigurable chain were made incomputer software packages MechanicalDesktop™,SolidWorks™ and ANSYS™.
Descriptores — elasticidad, cadena cinemática,
eslabón, articulación, flexión, torsión.
I. INTRODUCCIÓN
Se empieza a detectar mucha actividad deinvestigación a mediados de los años 1980 sobre lanaturaleza elástica que presentan los sistemasmecánicos, especialmente mecanismos usados enrobots. Inicialmente se proponen los procedimientospara resolver la dinámica del robot, incluyendo tanto ala dinámica directa como la dinámica inversa [1].Incluso se han desarrollado aproximaciones dedinámica para el diseño de manipuladores sencillosconsistente en sólo dos eslabones flexibles y dosarticulaciones rotatorias. Sin embargo, las ecuacionesfueron simplificadas despreciando muchos fenómenospresentes cuyos efectos en la práctica son no deseables[2]. Al igual que en la literatura, se hace uso de la
simulación, herramienta alternativa más accesible.
Diseño y Fabricación de Prototipo para elEstudio de Esfuerzos en Cadenas Cinemáticas
Carlos Humberto Saucedo Zárate1, , Carlos Sánchez López , Jorge Huerta Ruelas1
1CICATA-Qro IPN, Querétaro. Qro. CP-76047
2Metal Mecánica, Instituto Tecnológico de Aguascalientes,
Aguascalientes, Ags. CP-20256
TEL: +(449) 9105002 Ext. 104, correo-e: [email protected] ,
-
8/18/2019 Diseño y Fabric de Prototipo Para El Estudio de Esfuerzos de Cadenas Cinematicas FEM
2/8
Encuentro de Investigación en IE, 28 — 30 de Marzo, 2007 176
Las cadenas cinemáticas siempre han manifestadoen mayor o menor grado las propiedades elásticas delo elementos que la componen; tanto en eslabones
como en los elementos usados para articularlos.Cuando estas cadenas cinemáticas son diseñadas paraser utilizadas como soporte estructural vertical conmovimiento relativo entre sus eslabones porarticulación tipo revoluta, surge la arquitectura clásicaRRR o robot serial para funcionar como un brazomecánico manipulador generalmente con 5 o 6 DOF.
Conforme los efectos elásticos son más apreciablesen el desempeño de manipuladores menos rígidos ymás esbeltos y la relación entre la carga útil y el pesoestructural del manipulador se incrementa, losparámetros de Denavit Hartenberg [3], solo sirven enel papel, pues tales “parámetros” en realidad varían. Y
la tecnología de control se avoca al derroche dehardware y software en el interés en tratar decontrolar esos efectos perjudiciales o indeseablessuprimiéndolos o eliminándolos en tiempo real através de técnicas nuevas de control.
I. INTRODUCCION
Experimentalmente se ha demostrado que los efectoselásticos han provocado desviaciones que los modelosde cuerpo estrictamente rígido no predicen conexactitud. Lo que se ahorro en complejidadmatemática con la introducción de la simplificacióndel cuerpo “rígido”, hoy lo pagamos conformesolicitamos desempeños mas rápidos y repetibles delos manipuladores industriales.Más aun, si bien otras causas imputables al error deposicionamiento existen, entre ellas errores propios delos servo sistemas tales como errores en encoders, lavariación en el valor de la carga útil con respecto a lacarga usada en la programación implica variacionesde posicionamiento. Aun más, Starr et al. [4] haencontrado que casi la mitad de fallas del robot en lasplantas automotores es debido a los errores de la
posición.Sin embargo, detectar los defectos en el productodespués de que ellos ocurren o se han acumulado escostoso. La calibración regular, a manera demantenimiento preventivo adolece de las mismasdesventajas que este método implica, es decir, hacerlocuando no se requiere, o cuando no necesitó, tambiénes caro, e introduce incluso errores humanos que setraducen en falla después de la intervención. Larecalibración de un solo robot puede alcanzar 6 h omás [5]. El tiempo de la mano de obra invertido es uncosto innecesario.
La implementación de sensores en línea se hapropuesto y analizado desde 1999, tecnologías entremedios ópticos y visión de maquina [4], y tecnología
basada en el efecto doppler de microondas [6].Una de las fuentes mecánicas de error deposicionamiento es la naturaleza elástica de suspiezas. En general la importancia del posicionamientoexacto es alta al día de hoy en robots industrialesrobustos y la exigencia a este respecto continuaracreciendo al mismo tiempo que se observa ya desdela pasada década, una tendencia hacia el diseño derobots más esbeltos con la intención de compaginarun amplio volumen de trabajo y menor peso“parasito”. Lo que generalmente implica fenómenoselásticos más evidentes. La relación de peso respectoa la máxima carga útil es un parámetro de diseño a
considerar que cobra importancia desde hace yavarios años [6].
Con la teoría mecánica clásica, aunada a la teoría deelasticidad, y la posibilidad de aplicar actualmentecon facilidad el método de elementos finitos (MEF)para simulación estructural y con disponibilidad de laexperimentación extensiométrica, se manifiesta laposibilidad de construir un modelo matemático quedescriba o contemple los fenómenos de deformaciónelástica provocada por el peso de los propioselementos constituyentes de el mecanismo abierto, susposiciones relativas y la carga útil a mover. De
manera que este modelo permita auxiliar el diseño deeste tipo de mecanismos y permita mejorar el controlde los mismos.
El Objetivo es desarrollar un modelo simbólico conMEF, sobre la Dinámica de cadenas cinemáticasabiertas eslabonadas con articulaciones tipo revoluta,que incluya fenómenos de deformación elástica tantoen sus elementos de articulación, como en suselementos de interconexión, y contemple suspropiedades cinemáticas bajo Campo Gravitacional.
Los Parámetros de estudio a incluir son: Fuerzasestáticas, deformación de elementos y de conjunto,posición espacial relativa de elementos del
mecanismo abierto. De aquí nace la necesidad de unbanco experimental de esfuerzos en cadenasreconfigurables que cumpla también funcionesdidácticas en este campo poco explorado, dondepuedan introducirse de manera controlada variablesde estudio tales como carga útil, sección transversal,momento de inercia, posiciones y orientacionesrelativas entre los elementos eslabón que permitanretroalimentar los modelos analíticos propuestos.Finalmente la posición espacial del efector final de lacadena podría corroborarse mediante alguna de lastecnologías disponibles tales como metrologia ópticaláser, digitalización de imágenes o efecto doppler.
-
8/18/2019 Diseño y Fabric de Prototipo Para El Estudio de Esfuerzos de Cadenas Cinematicas FEM
3/8
Encuentro de Investigación en IE, 28 — 30 de Marzo, 2007 177
El Banco experimental se considera indispensable, yaque permitirá el estudio de la naturaleza deleslabonamiento, incrementando paulatinamente la
complejidad del mismo agregando elementos una vezque sean conocidas las interacciones de lasconfiguraciones más sencillas; es decir se estudiará ensecuencia:
a) Una revoluta en la base con un solo eslabónmóvil.
b) Dos revolutas con dos eslabones móviles.c) Tres revolutas con tres eslabones móviles.
El Banco experimental de cadenas cinemáticastendrá la función de permitir ensamblar ydesensamblar cadenas cinemáticas con un número nde eslabones móviles (posiblemente un máximo de 5).Además la cadena debe poder estabilizarse en
diferentes posiciones de estudio en forma manual.Las revolutas deben ser tipo pasador lo massencillas posibles tales que la cadena se puedaconsiderar plana (una vez fija la base; bastidor, seconvertiría en un mecanismo plano)
El diseño de la cadena experimental tiene comoobjetivo simplificar su construcción y geometría de talmanera que los pasadores solo estén sometidos atorsión principalmente (en una segunda etapa),despreciando otros esfuerzos presentes mediante suminimización, y los eslabones estén sometidos aflexión de igual manera principalmente. En estediseño preliminar se ha controlado la flexibilidad a
torsión de los pasadores de las revolutasrigidizandolos al extremo, para estudiar en primerainstancia solo la deformación por flexión en loseslabones. Se continuará posteriormente en otra etapacon la versión de la cadena con articulación flexible atorsión y elementos “rígidos” a flexión, para suestudio por separado de ambas contribucioneselásticas.
II. DISEÑO DE ESLABONES YARTICULACIONES.
Dentro de esta fase el primer paso es efectuarmodelos de piezas y ensambles de manipuladoreshaciendo uso del diseño asistido por computadora(CADD). El fin es realizar tantas propuestas comosean necesarias para definir las geometrías yconfiguraciones que mejor se adapten al proyecto.Aquí se definieron las especificaciones de taleselementos, las relaciones mínimas de forma ydimensión que en fases posteriores constituirían lascaracterísticas de diseño críticas y/o mayores de losplanos correspondientes, es decir el ciclo cerrado deSíntesis y Análisis en el Diseño Mecánico hasta laoptimización [1].
Los Objetivos del diseño son:
a)
Realizar propuestas de eslabones intercambiablesde configuraciones geométricas sencillas a fin deevitar zonas de concentración de esfuerzosdebidas a aprietes, cambios de sección, etc., quefinalmente distorsionen las líneas de esfuerzoelástico, y contribuyan como “ruido” a las zonasde estudio, donde se requiere explorar señales deesfuerzo debidas a elasticidad pura.
b) Proponer articulaciones para tales eslabones deltipo revoluta los cuales deben contar con algúnmecanismo de sujeción para fijar (y liberarfácilmente) estáticamente la posición relativadeseada entre cada par cinemático y así poder
realizar mediciones experimentales de lasdeformaciones presentes en tales componentespara cada configuración de la cadena.
A. Evolución del Diseño:
Primera propuesta
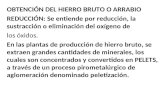
Esta primera propuesta supone usar formas dematerial de línea buscando simplificar lamanufactura.En el caso de los eslabones se puede observar que la
sección transversal de éstos es tubular cuadrado decédula delgada; por la relación entre ambos lados deeste tipo de perfil (casi igual) y tomando longitudesvariables respecto a estas mismas se puede estudiar suelasticidad en flexión (ver Figura 1).
Figura 1. Primera propuesta para la cadena cinemática del bancoexperimental.
De hecho los robots industriales, cuentan consecciones huecas donde la transmisión de potencia se
-
8/18/2019 Diseño y Fabric de Prototipo Para El Estudio de Esfuerzos de Cadenas Cinematicas FEM
4/8
Encuentro de Investigación en IE, 28 — 30 de Marzo, 2007 178
lleva hasta el efector final traduciéndose enmovimientos tipo “roll”, “pitch” y “yaw”.
Las articulaciones propuestas son tubos de acerousados comercialmente en bicicletas; se proponen doseslabones distintos: unos “macho” con los tubossoldados a sus extremos y otros “hembra” conhorquillas en los extremos que cuentan con barrenoscon pequeñas secciones de tubo de mayor diámetro alos del otro eslabón que cuentan con ranuraslongitudinales para que se puedan deformar para elapriete: la forma de sujeción es mediante un espárragoroscado con una palanca en el extremo que permiterealizar el apriete manualmente para localizar laposición deseada. Aquí se busca que los esfuerzos de
apriete no distorsionen los esfuerzos de flexión queson los que realmente se quieren estudiar porextensiometría.
La fase de análisis arroja los siguientesinconvenientes:- Las articulaciones de tubo son susceptibles a
sufrir grandes deformaciones y por lo tantoesfuerzos de torsión por ser huecos y de pareddelgada.
- La geometría irregular de los eslabones conhorquilla conduce a grandes concentraciones deesfuerzos.
-
Dado a que todos los elementos son huecos existeel peligro de deformación plástica fácilmente.
Todo ello conduce a la necesidad de realizar otrapropuesta cuidando los aspectos negativos delanterior:-
Usar elementos sólidos en las articulaciones(mayor resistencia a la torsión).
- Cuidar la uniformidad de las formas de loseslabones para evitar concentración de esfuerzos
que distorsionen los esfuerzos a flexión.Segunda propuesta
Tomando en cuenta los inconvenientes anteriores,ahora se idearon tres tipos de eslabones, una flechapara las articulaciones y dos piezas que hacen lafunción de roldanas. A continuación se da unadescripción de cada una de ellas (ver Figura 2).
Fig.2. - Segunda propuesta para la cadena cinemática del bancoexperimental.
Eslabón con doble horquilla.
Es una pieza de sección rectangular sólida conextremos en forma de horquilla que cuentan conbarrenos concéntricos pasados para el ensamble de laflecha de revoluta. Todos sus vértices tienen ampliosradios para el alivio de esfuerzos. La forma esconstante sin cambios abruptos. Inicialmente seconsidera un diámetro estándar de 0.750 plg dediámetro nominal para barrenos y flecha.
La saliente de sujeción adyacente a los barrenos setomó en relación al espesor de la horquilla buscando
lograr la mayor resistencia en esta parte siguiendo larecomendación de Shigley [1], para reducir en lamedida de lo posible la concentración de esfuerzos yque sugiere una relación de diámetro de muesca yancho de cara de eslabón de 0.483.Se planea que el diámetro de los agujeros tenga unajuste deslizante con la flecha para permitir elmovimiento relativo entre ambas piezas
Eslabón simple.
Éste consiste de una pieza de sección rectangular con
extremos redondeados concéntricos con barrenos endonde ensambla el perno de unión revoluta, cuyaunión es fija mediante un ajuste de localización. Deesta forma las dimensiones de la Figura 3 tambiénaplican para esta pieza. Así se puede decir que lapieza anterior (de dobles horquilla) está conformadapor dos eslabones simples unidos por una secciónsólida de menor longitud.
Eslabón compuesto.
Se realizó el modelo de un tercer elemento móvil que
resulta de la combinación de los dos anteriores (ver
-
8/18/2019 Diseño y Fabric de Prototipo Para El Estudio de Esfuerzos de Cadenas Cinematicas FEM
5/8
Encuentro de Investigación en IE, 28 — 30 de Marzo, 2007 179
figura 3). Dado que uno de los objetivos es permitir laíntercambiabilidad de eslabones con este es posibleunir eslabones iguales consecutivos, ya que la unión
de eslabones simples con eslabones de doble horquillaqueda limitada a intercalarlos uno después del otro.Por otro lado la forma más irregular del elemento encuestión puede ser una limitante para su construcción.
Fig. 3.- De izquierda a derecha eslabón simple, eslabón compuesto yeslabón de doble horquilla.
El perno eje de resoluta es una pieza cilíndrica desección constante de longitud ligeramente inferior alancho del eslabón de doble horquilla (ver Figuras 4 y5). Ensambla de forma permanente con el eslabónsimple y gira dentro de los barrenos del eslabón dedoble horquilla. En los extremos cuenta con barrenosciegos roscados donde se acoplan tornillos axialmentey éstos mediante roldanas permiten fijar la posiciónrelativa de los eslabones.
Fig. 4.- Se muestra el eje de revoluta dentro del ensamble de articulacióny los eslabones
Fig. 5.- Detalle de sub-ensamble de eslabón de doble herradura (azul),eslabón simple (café claro) y flecha. La flecha color púrpura indica la
dirección de movimiento o rotación relativo entre los eslabones.
Tornillos de flecha y roldanas.
Los tornillos (de cabeza allen) ensamblan en lasflechas axialmente que junto con las roldanasproporcionan un empuje de afuera hacia adentro sobrelas horquillas. Las roldanas tienen un diámetroexterior igual al ancho de la cara lateral de loseslabones de horquilla buscando tener la mayor áreaposible para inmovilizar la unión. Se proponen dosformas: una de sección exterior constante y otra deforma cónica con un ángulo respecto a su eje de 30°ya que según estudios referidos por Shigley [1]indican que aproximadamente dentro de este ángulo
se crea un cono de distribución de la presióntransmitida por la cabeza del tornillo (ver Figuras 6 y7).
Inconvenientes:El principal argumento para desechar este modeloradica en los mecanismos usados en los parescinemáticos de revoluta: La flecha en su interior tienecambios abruptos de forma lo que originará grandesconcentraciones de esfuerzo.
Fig. 6.- Manera de inmovilizar las articulaciones de revoluta: El apriete delos tornillos empuja las roldanas contra las paredes exteriores, impidiendo
el deslizamiento entre tales superficies.
-
8/18/2019 Diseño y Fabric de Prototipo Para El Estudio de Esfuerzos de Cadenas Cinematicas FEM
6/8
Encuentro de Investigación en IE, 28 — 30 de Marzo, 2007 180
Fig..7- Sub-ensamble de segundo modelo propuesto
Por otro lado la manera en que se inmoviliza elconjunto implica muy probablemente una flexión delas horquillas hacia adentro, ya que al apretar lostornillos empujan las roldanas en dirección de laflecha y éstas a su vez a las salientes de las horquillasya que no tienen ninguna restricción física exteriorque impida este tipo de deformación. De esta forma elárea de contacto entre roldanas y eslabón no seríauniforme proporcionando menor superficie de frenoentre éstas y por tanto menos capacidad deinmovilización además de que se somete al eslabón dedoble horquilla a esfuerzos no deseados. Un aspectomuy obvio que no se consideró a primera instancia;una interferencia de ensamble, la forma de ensamblarla flecha con este eslabón, implica forzosamente de
abrir las “patas” del eslabón para colocar la flecha, serequiere facilidad de sujeción y de liberación de larevoluta, ya sea para intercambiar eslabones de otrascaracterísticas mecánicas, o bien solo para cambiar laposición relativa (orientación o posición angular)entre los eslabones de la cadena.
Además existe el problema para el estudio de otrassecciones transversales tales como la circularmaciza/hueca, rectangular maciza/hueca.
Tercera propuesta
El siguiente paso en la evolución del modelo demanipulador fue usar un diseño muy similar alanterior buscando corregir su punto débil, para ello seideó un par cinemático que impida la flexión de losextremos de los eslabones de horquilla (ver Figura 8).En consecuencia los cambios son mínimos respecto ala idea anterior.Sin embargo las prestaciones en cuanto a laeliminación de interferencia de los esfuerzos deapriete sobre de los esfuerzos debidos al fenómeno deflexión pura a estudiar son muy superiores con este
Fig. 8.- Tercera Propuesta aquí se resuelve el problema para articular conpasador formando una sencilla revoluta. Los eslabones de diferentes
medidas en longitud y geometría, podrán intercambiarse en la posición dela cadena de n eslabones.
prototipo virtual como puede observarse bajo elanálisis de su estado de esfuerzos en ANSYS™,recordando que el diseño experimental tiene como
factor critico el aislar le fenómeno de esfuerzo debidoa deformación elástica, aislando otro tipo de esfuerzospresentes en el mecanismo.
B. Análisis de esfuerzo
Como muestra visual a continuación se presentan losprocesos de mallado, y postprocesado en deformacióny solución de intensidad de esfuerzos para un caso decondiciones a la frontera particular de un eslabónaislado.
Estas superficies pueden ser entonces monitoreadas
experimentalmente por extensiometría, medición de lareflectividad o dispersión de luz polarizada, análisisde imágenes o efecto doopler. El objetivo es la lecturade las micro deformaciones debidas a fenómenoselásticos puros en los eslabones para unaconfiguración dada de la cadena (posición angular delas revolutas) y carga útil (variables de control).
Fig. 9.- Vista oblicua y lateral del eslabón, donde la forma del elementodescargado, y el elemento cargado puede simularse
-
8/18/2019 Diseño y Fabric de Prototipo Para El Estudio de Esfuerzos de Cadenas Cinematicas FEM
7/8
Encuentro de Investigación en IE, 28 — 30 de Marzo, 2007 181
Fig. 10.- Se puede observar como la concentración de esfuerzos quedaaislada en zona cercana a la articulación básicamente en el contacto con el
perno y que entonces una extensa zona central del elemento presenta mejorgrado de homogeneidad para el estudio de los esfuerzos debidos a flexiónpura.
Prototipo
Se construyó el prototipo de la tercera propuesta enaluminio y acero, ver figura 11.
Fig.11.- Elementos de ensamble de prototipo basado en la tercerapropuesta.
II. CONCLUSIÓN
Este prototipo permitirá estudiar dos modelos dedeformación estructural lineal isotrópica; Una de ellasde naturaleza torsional correspondiente a lasarticulaciones de revoluta eje/hueco, y una segundadeformación a flexión análoga a cantiliver en cadaeslabón de la cadena. El diseño experimentalpermitirá la creación de extensas bases de datos parael análisis del comportamiento de la deformación. Sinembargo la fase experimental prevé encontrar
problemas para realizar la medición de la deformaciónpor torsión a través de extensiometría por limitacionesde espacio físico de colocación y errores por el
procedimiento de medición, por lo que se estatrabajando en el diseño de un sistema óptico deespectroscopia de reflectividad anisotrópica inducidapor los esfuerzos como tecnología Óptica de nocontacto y muy sensible a esfuerzos microscópicos yque se ha probado es capaz de diferenciar entredeformaciones elásticas y plásticas [8]. Finalmente lacontribución total de ambos efectos de deformaciónpodría medirse directamente en el efector final yconcentrarse en un solo termino, por lo tanto lacontribución diferenciada de cada fenómeno no esactualmente el objetivo en si, sino la contribución
global de ambos fenómenos de deformación al cambiode posición, a este respecto para la validación delmétodo de caracterización elástica se utilizara una delas siguientes alternativas tecnológicas disponibles,tales como sistemas de visión digital como una de lasmas conocidas y explotadas comercialmente [4],sistemas de triangulación Láser [9], o una de ellas delas mas recientes basada en un radar detector demovimiento basado en efecto doppler de microondas[6], la selección estará supeditada a la disponibilidady aseguramiento del alcance de los objetivos.De acuerdo al plan de trabajo se ha alcanzado lacondición para la construcción del prototipo paracomenzar la etapa de experimentaciónextensiométrica para contrastar estos resultados conlos datos de simulación FEM deesfuerzo/deformación. El modelado analítico [10], seajustará en una siguiente etapa complementando elmodelo actual de D-H, proponiendo modelos de“corrección” por deformación.
III. AGRADECIMIENTOS
Se agradece la participación como tesista delicenciatura en Ingeniería Mecánica del ITA, al Ing.Francisco Larralde Calzada, estudiante destacadoquien participo entusiastamente. Carlos Saucedoagradece el apoyo como becario del CONACYT
REFERENCIAS:
[1] M. Farid, S. A. Lukasiewicz,. “On dynamicmodeling of multi-link spatial manipulators withflexible links and joints”. ASME Pressure VesselsPiping Div Publ Pvp. Vol. 369, pp. 211-220. ISSN
0277-027X. 1997.
-
8/18/2019 Diseño y Fabric de Prototipo Para El Estudio de Esfuerzos de Cadenas Cinematicas FEM
8/8
Encuentro de Investigación en IE, 28 — 30 de Marzo, 2007 182
[2] J. Denavit and R.S. Hartenberg. “A KinematicNotation for Lower-Pair Mechanisms Based onMatrices”. Journal of Applied Mechanics, pp.
215-221, June (1985).
[3] A.G. Starr, R.J. Wynne, I. Kennedy, “Failureanalysis of mature robots in automatedproduction”. Proc. Institution of Mechanical Engineers. 213(8):813–824. (1999)
[4] J. Owens, “Robotrak: calibration on a shoestring”. Ind Robot 21(6):10–13. (1994)
[5] Gregory C. Smith · Roger A. Smith, “A non-contact method for detecting on-line industrialrobot position errors using a microwave Dopplerradar motion detector”. Int J Adv Manuf Technol .DOI 10.1007/s00170-005-2543-y, (2005).
[6] J. R. Mayer, G. A. Parker, “A Portable Instrumentfor 3-D Dynamic Robot Measurements UsingTriangulation and Laser Tracking”, IEEEtransactions on robotics and automation, vol. 10,no. 4, august 1994.
[7] R. J. Cole, S. Kheradmand, D. Higgins, F.Madani, B. F. Macdonald, V. Koutsos and J. R.Blackford. “Stress-induced optical anisotropy in
polycrystalline copper studied by reflectionanisotropy spectroscopy”, Journal of Physics D:Applied Physics, 36, L115–L118 Oct 2003
[8] C. Sánchez, C. H. Saucedo. “Visual Simulator forSynthesis and Dynamic Analysis of ManipulatorRobot”. International Metal Mechanics Congress proceedings. Victoria de Durango, Dgo. Mexico.CD. November 2002.