Diseño de osciladores caóticos integrados › jspui › ... · El mercado de los circuitos...
197
Instituto Nacional de Astrofísica, Óptica y Electrónica Diseño de osciladores caóticos integrados por M. C. Hugo De León Hidalgo Tesis sometida al departamento de Electrónica del Instituto Nacional de Astrofísica, Óptica y Electrónica, como requisito parcial para obtener el grado de DOCTOR EN CIENCIAS EN LA ESPECIALIDAD DE ELECTRÓNICA Supervisada por: Dr. Alejandro Díaz Sánchez Marzo, 2008 Tonantzintla, Puebla © INAOE, 2008 Derechos reservados El autor otorga al INAOE el permiso de reproducir y distribuir copias de esta tesis por medios electrónicos o en papel, en su totalidad o en partes.
Transcript of Diseño de osciladores caóticos integrados › jspui › ... · El mercado de los circuitos...

Instituto Nacional de Astrofísica, Óptica y Electrónica
Diseño de osciladores caóticos integrados
por
M. C. Hugo De León Hidalgo
Tesis sometida al departamento de Electrónica del
Instituto Nacional de Astrofísica, Óptica y Electrónica,
como requisito parcial para obtener el grado de
DOCTOR EN CIENCIAS EN LA ESPECIALIDAD DE ELECTRÓNICA
Supervisada por:
Dr. Alejandro Díaz Sánchez
Marzo, 2008 Tonantzintla, Puebla
© INAOE, 2008
Derechos reservados
El autor otorga al INAOE el permiso de reproducir y distribuir copias de
esta tesis por medios electrónicos o en papel, en su totalidad o en partes.

Agradecimientos
Expreso mi agradecimiento profundo al Dios misericordioso y amante, fuente de fortaleza, paz y gozo para mi vida, Guia, Director y Corrector de mis pasos, Dios perdonador, Padre amante y Amigo paciente. A él honra y gloria.
A dos extraordinarias instituciones, El INAOE y Conacyt por darme la oportunidad de estudiar y por suplir las condiciones necesarias para realizarlo.
A mis profesores, por verter pródigamente sus conocimientos sin
limitaciones egoístas. Principalmente a mi asesor, el Dr. Alejandro Díaz Sánchez por su dirección y enseñanza y por su entusiasta y cálida amistad.
A mis padres, Román De León Morales y Eva Hidalgo Pérez, por
la visión amplia que siempre han tenido y el gran entusiasmo que han sabido transmitir. Por que siempre han ido más allá de su responsabilidad, y por que convirtieron su amor en hechos abnegados y en un esfuerzo perseverante, entregando con ello vida y salud, fuerza y bienestar, por el gozo divino de ver a un hijo realizado y feliz. Gracias.
A familiares y amigos por el apoyo brindado, por su amistad y
cariño, y por satisfacer la imperiosa necesidad de mi vida de ser aceptado y amado.
A todos aquellos que contribuyeron con palabras, conocimiento o
disciplina, en la construcción de mi vida, que hoy florece en el alcance de uno de mis objetivos.
A todos, GRACIAS
Hugo De León Hidalgo

Dedicatorias
Con cariño a mis padres
ii

Resumen
Los osciladores caóticos continuos en el tiempo son un tipo especial de circuitos
no lineales que se comportan de manera aperiódica, por lo que presentan un
banda continua, extendida en un amplio rango del espectro de frecuencias. Esta
característica parece ser atractiva en algunas aplicaciones, sobre todo en el área
de comunicaciones de espectro extendido.
Desde los primeros descubrimientos de este comportamiento hasta nuestro días,
ha habido una amplia investigación de estos circuitos tratando de comprender su
dinámica y mecanismo de funcionamiento, introduciendo nuevos esquemas de
circuitos que presenten el comportamiento, formas nuevas de controlarlo, etc.
Debido a que las aplicaciones de los osciladores caóticos continuos en el tiempo
se realizan a través de circuitos integrados, este trabajo se enfoca al tema del
desarrollo de circuitos osciladores caóticos integrados en chip. Se han realizado
algunos esfuerzos por integrar este tipo de circuitos. Sin embargo, la mayoría de
ellos los implementa a través del método de variables de estado, que transforma el
circuito en una forma diferente, usando integradores, sumadores, multiplicadores,
etc. Esto tiene muchas desventajas por que incrementa el número de dispositivos
necesarios para realizarlo y con ello incrementa el área, consumo de potencia,
ruido y por consiguiente el costo. Por el otro lado, la realización directa de estos
circuitos presenta muchos desafíos pues algunos de ellos reducen su robustez al
llevar el valor de sus elementos dinámicos a la región de integración, y otros
simplemente no presentan comportamiento caótico en esta región. Esto, aunado a
los problemas inherentes de los circuitos integrados, como parásitas y no
linealidades, hace casi imposible la realización directa de los osciladores caóticos
en circuitos integrados.
En este trabajo se presenta una técnica que permite integrar osciladores caóticos
de manera directa. La técnica consiste en la inclusión de un oscilador periódico
dentro de la resistencia no lineal. Esto tiene el efecto de incrementar el mezclado
de las trayectorias en el espacio de fase y de robustecer al circuito contra las
iii

variaciones de los valores de los elementos y las parásitas del mismo, lo que
permite la realización de circuitos caóticos integrados robustos.
Se presentan tres casos específicos de circuitos para ejemplificar la técnica. En
ellos las resistencias no lineales se realizan con modelos con diferentes niveles de
abstracción y también a través de una nueva arquitectura de “Current Conveyor”
de Segunda Generación (CCII) que se propone en este trabajo, el cual presenta
comportamiento periódico y permite demostrar la funcionalidad del método.
El conocimiento generado en este trabajo permitió la concepción de un nuevo
oscilador caótico que se fabricó. Los resultados de las mediciones son
presentados y comparados con las simulaciones.
iv

Abstract
Continuous time chaotic oscillators are a special type of nonlinear systems that
shows an aperiodic behavior and a continuous wide band. This characteristic is
very attractive in some applications like spread spectrum communications.
Since first discoveries of this behavior until nowadays, there has been a wide
searching in trying to understand its dynamics and functioning, in looking for new
schemes of chaotic circuits and trying to control it.
Because of continuous time chaotic oscillators applications are realized through
integrated circuits, this work focuses to the development of integrated circuits
chaotic oscillators. It has been realized some efforts in the matter of integrating
chaotic oscillators. However, most of them are implemented through the state
variable method that shows that transforms the circuit in a different form using
integrators, multipliers and other devices additional to the circuit. This has the
disadvantage that increases the area, power consumption, noise and cost. On the
other hand, the direct realization of the circuit shows some challenges like the
reduced robustness of some chaotic oscillators when their dynamic elements are
taken to the range of integration values or the lack of chaotic behavior in this range
of their parameters. This, added to the inherent problems of integrated circuits
such as parasitic elements and nonlinearities make almost impossible the direct
realization of chaotic oscillators on integrated circuits.
This work introduces a new technique that allows the direct integration of chaotic
circuits. The technique consists in the introduction of a periodic oscillator inside the
nonlinear resistance of the chaotic oscillator. The resulting effect is the increasing
in the mixing of the trajectories in the phase space description and of the
robustness of the circuit against the variation on the element values and parasitic.
All these, allows the realization of robust integrated chaotic circuits.
They are shown three cases of chaotic circuits in order to exemplify the technique.
Nonlinear resistances are realized through models of different levels of abstraction
and through a new architecture of second generation “current conveyor” proposed
v

in this work that shows a periodic behavior and allows us to demonstrate the
method.
The knowledge generated by this work was traduced in the conception of a new
chaotic oscillator that was fabricated. Results of measurements of the circuit are
compared with simulations.
vi

Prefacio
El mercado de los circuitos integrados con aplicaciones en las comunicaciones es
uno de los más grandes y más extendidos de la actualidad. Sus ventas ascienden
a los miles de millones de dólares al año y está en constante crecimiento. Entre
las aplicaciones más típicas se encuentran las móviles, como los teléfonos
celulares y las redes inalámbricas. El crecimiento en el número de usuarios
impulsa a subir las frecuencias de operación de estos sistemas de comunicación e
incrementa la interferencia entre ellos. Existe, además, una gran demanda de
enlaces de comunicación más, rápidos, más eficientes, con mayor ancho de
banda y más seguros contra intercepción de la información. Todo esto produce
una intensa búsqueda de nuevos métodos de comunicación, circuitos que
ofrezcan mejores características y técnicas diferentes que permitan satisfacer las
necesidades cada vez más rigurosas de los usuarios. Entre las técnicas de
comunicación más importantes, las de espectro extendido ofrecen muy buenas
características, tales como inmunidad a múltiples trayectorias, degradación suave,
acceso de un gran número de usuarios y comunicaciones seguras. Por ello el uso
de estas técnicas se extiende rápidamente.
La característica única de los osciladores caóticos de poseer un espectro continuo
y amplio, los hace buenos candidatos en estas aplicaciones, ya sea en la
generación de secuencias seudo aleatorias, en aplicaciones tales como CDMA; o
en esquemas de modulación en los que las funciones base son segmentos de
señales caóticas.
Sin embargo, aún se presentan muchos problemas para que los sistemas caóticos
puedan pasar a ser parte real de las aplicaciones. Entre ellas se encuentran el
control de sus características estadísticas, la robustez de estos circuitos a
interferencias externas y la capacidad de ser integrados en chip junto con el resto
de los circuitos con los que interactúa. En este trabajo se trata el problema de la
integración de los circuitos caóticos en chip y su robustez a la variación de sus
parámetros.
vii

viii

CONTENIDO 1. Introducción 1
1.1. MOTIVACIÓN 1
1.1.1. Sistemas dinámicos no lineales y caos 1
1.1.2. Un poco de historia 3
1.1.3. Aplicaciones de los circuitos caóticos 4
1.1.3.1. CBDS-CDMA 4
1.1.3.2. Esquemas de modulación caóticos 5
1.2. OSCILADORES CAOTICOS INTEGRADOS 7
1.2.1. Circuitos integrados 7
1.2.2. Variables de estado contra realización directa 8
de un circuito
1.2.2.1. Ventajas y desventajas del método de variables de estado 9
1.2.2.2. Ventajas y desventajas de la realización
directa de un circuitos 11
1.3. JUSTIFICACION 12
1.4. PROBLEMAS RELACIONADOS CON LA INTEGRACIÓN
DE CIRCUITOS OSCILADORES CAÓTICOS 12
1.5. ANTECEDENTES 17
1.6. OBJETIVOS DE LA TESIS 18
1.7. ORGANIZACION DE LA TESIS 18
2. Consideraciones generales 20 2.1. “CURRENT CONVEYORS” DE SEGUNDA GENERACIÓN 22
2.2. RESISTENCIAS NO LINEALES 24
2.3. HISTERESIS EN RESISTENCIAS NO LINEALES 25
2.4. MACRO MODELOS DE CIRCUITOS 27
2.5. INDUCTORES INTEGRADOS 28
2.6. CIRCUITOS OSCILADORES CAÓTICOS 31
ix

2.7. METODOS NUMERICOS POR COMPUTADORA 32
2.7.1. ¿Caos o error del método numérico? 33
2.7.2. Errores en los métodos numéricos 34
2.7.3. Métodos de integración en el análisis transitorio en SPICE 36
2.7.3.1. Método trapezoidal 36
2.7.3.2. Método Gear2 o de diferencias hacia atrás
de segundo orden 37
2.7.4. Reducción de errores en la simulación en tiempo de circuitos 37
2.8. TESIS 38
3. Nueva arquitectura de CCII 39 3.1. CIRCUITO BASICO 40
3.1.1. Descripción del funcionamiento 40
3.1.2. Características y ventajas ofrecidas por el CCII 42
3.1.3. Características adicionales 44
3.1.4. Análisis en DC, AC y tiempo 46
3.2. EL CCII- 52
3.3. CCII CON CRACTERISTICA DE TRANSFERENCIA SIMÉTRICA 55
3.4. CCII CON MAYORES VOLTAJES DE POLARIZACION 56
3.4.1. Descripción del circuito 56
3.4.2. Análisis del circuito 58
3.4.3. Oscilación periódica autónoma 60
3.5. MACRO MODELO DEL CCII 65
3.5.1. Descripción del circuito 65
3.5.2. Análisis del circuito 66
3.5.3. Oscilación periódica autónoma 68
4. Diseño de osciladores caóticos 71 4.1. PRIMERA ESTRUCTURA DE OSCILADOR CAÓTICO 72
4.1.1. Transformación de la Resistencia No Lineal a transistores MOS. 75
4.1.2. El oscilador caótico completo con transistores MOS 78
x

4.1.3. Inclusión del oscilador periódico en la resistencia no lineal 81
4.1.4. Realización del circuito con el CCII real 87
4.2. SEGUNDA ESTRUCTURA DE OSCILADO CAÓTICO 91
4.2.1. Circuito caótico con la resistencia no lineal ideal 92
4.2.1.1. Resistencia no lineal ideal 92
4.2.1.2. Oscilación periódica autónoma de la resistencia no lineal 94
4.2.1.3. Oscilador caótico completo 95
4.2.2. Oscilador caótico que incluye un oscilador periódico
en la resistencia no lineal 98
4.2.3. Oscilador caótico con resistencia no lineal realizada
con el CCII macro modelado 103
4.2.3.1. Resistencia no lineal 103
4.2.3.2. Oscilación periódica de la resistencia no lineal 106
4.2.3.3. Oscilador Caótico 107
4.2.4. Oscilador caótico con resistencia no lineal realizada
con el CCII real 111
4.2.4.1. Resistencia no lineal 111
4.2.4.2. Oscilación periódica 112
4.2.4.3. Oscilador caótico 113
4.3. TERCERA ESTRUCTUA DE OSCILADOR CAÓTICO:
EL CIRCUITO DE CHUA 117
4.3.1. Oscilador caótico con resistencia no lineal con elementos ideales 117
4.3.1.1. Resistencia no lineal con elementos ideales 118
4.3.1.2. Oscilador caótico 118
4.3.2. Oscilador caótico con resistencia no lineal con CCII
macro modelado 120
4.3.2.1. Resistencia no lineal 120
4.3.2.2. Oscilación periódica de la resistencia no lineal 122
4.3.2.3. Oscilador caótico 123
4.3.3. Oscilador caótico con resistencia no lineal con CCII real 131
4.3.3.1. Resistencia no lineal. 131
xi

xii
4.3.3.2. Oscilador periódico. 131
4.3.3.3. Circuito caótico 131
5. Fabricación 139 5.1. OSCILADOR DE ANILLO 140
5.2. OSCILADOR CAÓTICO 145
5.3. DISPOSICION DE LAS MEDICONES DEL CHIP 155
6. Conclusiones 157 Apéndices 163
A Parámetros de la tecnología AMI Semiconductor 0.5µm 163
B Parámetros de los transistores BJTs Q2N2222 y QBC559 165
C Geometrías y simulaciones postgeometría de los osciladores 166
caóticos
Bibliografía 172 Índice de figuras 178 Índice de tablas 184

Capítulo 1
Introducción
1.1 MOTIVACION
1.1.1 Sistemas dinámicos no lineales y caos Los sistemas dinámicos no lineales pueden ser encontrados en casi todas las
áreas de la ciencia, tales como astrofísica, biología y electrónica. Estos sistemas
se caracterizan, como su nombre lo indica, por presentar un comportamiento no
lineal y no siguen todas las sencillas leyes y métodos de análisis usados en
sistemas lineales.
Los circuitos caóticos son un tipo especial de sistemas dinámicos no lineales que
muestran un comportamiento en estado estable que no es un punto de operación
ni una oscilación periódica, que resulta en una densidad espectral de potencia
continua. Su comportamiento está regido por un mecanismo sencillo de
estiramiento y doblamiento del conjunto de trayectorias, lo que produce una
extrema sensibilidad a las condiciones iniciales por que las trayectorias divergen
con una rapidez que se incrementa exponencialmente. Las formas de onda
desarrolladas por estos circuitos siguen patrones recurrentes y regulares aunque
nunca se repiten exactamente por lo cual su comportamiento no es periódico. En
el diagrama de fase, desarrolla patrones bien definidos llamados atractores. Su
comportamiento puede ser considerado errático, complejo o extraño y su conjunto
de trayectorias puede ser caracterizado por índices estadísticos a pesar de que su
comportamiento es descrito por ecuaciones determinísticas.
Desde que se desarrollaron los primeros análisis del comportamiento de sistemas
dinámicos no lineales, se ha realizado una intensiva y exhaustiva investigación

para comprender y caracterizar este comportamiento, y para encontrar
aplicaciones convenientes en muchas áreas de la ciencia.
La investigación de fenómenos físicos y sociales como movimientos planetarios,
crecimiento poblacional, pronostico del tiempo, y la comprensión y control de
circuitos no lineales fueron los que originalmente motivaron el establecimiento de
los fundamentos del análisis de los sistemas non lineales.
En nuestros días, son también las aplicaciones la principal motivación para
comprender mejor estos sistemas, obtener mayor conocimiento de su
funcionamiento, encontrar otras regiones de comportamiento complejo de sus
respectivas ecuaciones diferenciales, proponer nuevas configuraciones de
sistemas que operen en su región no lineal, y a concebir mejores formas de
controlar este comportamiento.
En el área de la electrónica, han sido principalmente dos cosas las que han
motivado la intensa investigación y análisis de circuitos no lineales. Primero, el
simple hecho de que la mayor parte de los elementos de circuito son no lineales
por naturaleza y, por lo tanto, influyen en el comportamiento de los circuitos reales,
sin importar lo indeseables que puedan ser en muchas ocasiones. Por otro lado,
para algunos de los circuitos más comunes, este comportamiento no es
indeseable. Tal es el caso de los circuitos osciladores que utilizan la no linealidad
para fijar la amplitud de su oscilación o de los circuitos moduladores, que
aprovechan la característica no lineal de algunos dispositivos para ubicar una
señal específica en una banda diferente a la que se encuentra originalmente. En
segundo lugar, y más importante aún, debido a las potenciales aplicaciones en
áreas prometedoras y de gran crecimiento, tales como son las comunicaciones.
Esto ha atraído la atención y ha permitido un enorme desarrollo en esta área del
conocimiento. Esto se refleja claramente en la investigación reciente que ha sido
reportada en los circuitos caóticos. Se han descubierto nuevas estructuras de
generación de señales caóticas [1-9], se han clasificado los osciladores caóticos
[10, 11], propuesto métodos de diseño [12], controlado sus características
estadísticas (principalmente en circuitos de tiempo discreto y digitales) [13, 14],
buscado formas de integración en chip [15-18], etc. Esto ha generado una enorme
2

cantidad de conocimiento que se ha tratado de capitalizar en circuitos que puedan
ser usados en la industria.
1.1.2 Un poco de historia.
Henri Poincaré (1890) estableció los fundamentos teóricos del estudio de los
sistemas dinámicos no lineales y la estructura topológica a través del espacio de
fase motivados por problemas en mecánica celeste y sistemas Hamiltonianos
conservativos. Además, encontró dependencia sensible a las condiciones iniciales
en un caso particular del problema de los tres cuerpos (three-body problem). Lord
Rayleigh (1896) introdujo la ecuación de Ryleigh – van der Pol que fue estudiada
teórica y experimentalmente por Balthazar Van der Pol. Este último notó que los
osciladores de relajación (descritos por la ecuación de Rayleigh – van der Pol) son
muy sensibles a sincronizarse con la frecuencia de forzamiento y que el mismo
oscilador forzado puede presentar diferentes comportamientos subarmónicos
dependiendo de los valores iniciales. Un análisis matemático detallado de la
ecuación de Van der Pol realizado por Cartwright y Littlewood (1945) y Levinson
(1949) reveló otro aspecto importante de este fenómeno: en el caso de que sean
posibles dos comportamientos finales en la ecuación mencionada, el transitorio de
arranque puede oscilar entre ambos por un largo tiempo antes de establecerse en
uno o en el otro. Steve Smale (1963) realizó una representación geométrica en el
espacio de fase de este comportamiento transitorio complicado y mostró que, a
pesar de su aspecto aleatorio, estos transitorios vacilantes son gobernados por un
comportamiento relativamente simple de estiramiento y doblamiento de las
trayectorias en el espacio de fase. Por otro lado, algunos físicos aplicados
empezaron a descubrir otros ejemplos de comportamiento caótico en modelos
disipativos simples. Edward Lorentz (1963), motivado por el problema
meteorológico de predicción del tiempo estudió un modelo muy simplificado de la
ecuación de Rayleigh – Bénard de convección en fluidos, que proveyó el primer
ejemplo de dinámica caótica persistente en todo el tiempo, el atractor caótico. En
Japón, el trabajo pionero por Hayashi (1964, 1975) con circuitos eléctricos no
3

lineales proveyó la primer descripción topológica detallada de osciladores forzados
usando el mapeo de Poincaré. Esto guió a Ueda (1980) a estudiar el
comportamiento caótico en estado estable de la ecuación de Duffing. A partir de
este tiempo, el estudio de osciladores caóticos recibió un gran impulso por los
científicos aplicados que vieron en este comportamiento muchas aplicaciones
potenciales en la industria.
1.1.3 Aplicaciones de los circuitos caóticos.
Las principales aplicaciones de los circuitos caóticos pueden ser encontradas en el
campo de las telecomunicaciones, principalmente en las comunicaciones de
espectro extendido [13, 19-21]. En este método de comunicación, 1) el ancho de
banda transmitido es mucho más grande que el de la señal de información y 2)
alguna otra función, diferente de la información que se envía, es empleada para
determinar el ancho de banda de la señal modulada resultante.
La estrategia óptima en este método de comunicación, en el cual cada usuario
aparece como interferencia para algún otro, es que cada señal de comunicación
se vea como ruido gausiano con un espectro tan amplio como sea posible.
Hay dos formas en las cuales una señal de comunicación pueda verse como ruido
de banda ancha: ampliando el ancho de banda de cada símbolo de información
usando una secuencia seudo-aleatoria con un ancho de banda mucho mayor, o
representando cada símbolo por una pieza de forma de onda de tipo ruido.
1.1.3.1 CBDS-CDMA La técnica Acceso Múltiple por División de Código con Secuencia Directa (DS-
CDMA, por sus siglas en inglés) usa el primer método. En este, la señal de
información es multiplicada por una señal de dispersión (spreading signal, en
inglés), formada por secuencias seudo-aleatorias con un ancho de banda que es
N veces más grande que el ancho de banda de la señal de información. Si N es
suficientemente grande, el ancho de banda de la señal resultante es el mismo que
el de la señal de dispersión y la potencia es reducida por el mismo factor. En el
4

receptor, la señal de entrada es re-multiplicada con una réplica de la señal de
entrada, cuyos símbolos han sido escogidos de tal manera que el cuadrado de sus
valores sea siempre la unidad. Un filtro pasa bajas o un correlacionador es
suficiente para extraer la señal de información con ancho de banda reducido. El
acceso múltiple se realiza asignando secuencias de dispersión mutuamente
ortogonales a los diferentes usuarios.
Si se usan circuitos caóticos para generar las secuencias de símbolos discretas en
el tiempo que formen las señales seudo-aleatorias se obtiene el método conocido
como Acceso Múltiple por División de Código con Secuencia Directa Basada en
Caos (CBDS-CDMA, por sus siglas en inglés) [13].
Un problema asociado con DS-CDMA es que la ortogonalidad de las secuencias
de dispersión requiere la sincronización de todas las secuencias usadas en el
mismo ancho de banda. Esto es, el sistema completo debe estar sincronizado.
Debido a los diferentes tiempos de propagación para los diferentes usuarios, la
sincronización perfecta no se puede lograr en sistemas reales. El uso de
secuencias caóticas de dispersión ofrece la capacidad de tener sistemas CDMA
asíncronos y un gran número de códigos ortogonales. Esto es así por el hecho de
que la función de autocorrelación de una señal caótica tiene un gran pico en cero y
decae rápidamente. Puede ser demostrado que esto resulta en sistemas de
comunicación que superan el desempeño de los sistemas clásicos [23-25].
1.1.3.2 Esquemas de modulación caóticos En esquemas de modulación convencional, la señal modulada consiste de
segmentos de forma de onda periódicos correspondientes a los símbolos
individuales. Cuando se usan funciones base sinusoidales, la señal transmitida es
una señal de banda angosta. Consecuentemente, la propagación a través
múltiples trayectorias puede ser vista como regiones de frecuencia nulas en
diferentes partes de la banda útil. Esto puede causar una gran atenuación o la
eliminación completa de la señal de banda angosta recibida. Si, por el otro lado, el
flujo de bits de información es mapeado a funciones base caóticas, la naturaleza
amplia del espectro de estas señales hace que la comunicación sea
5

potencialmente más resistente a la propagación a través de múltiples trayectorias,
que una basada en señales sinusoidales.
Además, en contraste con las señales periódicas, las señales caóticas se
decorrelacionan rápidamente con ellas mismas y, las señales caóticas generadas
por diferentes circuitos caóticos son casi ortogonales. Esto significa que la
correlación y, por tanto, la interferencia entre dos señales caóticas generadas por
circuitos caóticos no sincronizados o arrancados con diferentes condiciones
iniciales o teniendo diferentes parámetros de circuito es bajo.
Han sido propuestas muchas arquitecturas que usan señales caóticas como
funciones base moduladoras, la mayoría de ellas son modificaciones del método
“Chaos Shift Keying”, este método, con una función base moduladora, es
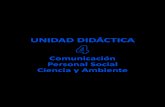
presentado en la Figura 1-1.
0
T . dt Decisioncircuit
channelMOD DEM
chaotic basissignal g(t)
Information tobe transmitted s (t)m
chaoticsignal g(t)
m (t)n m *(t)n
Figura 1-1. Esquema de modulación “Chaos shift keying”
La figura 1 muestra este esquema de comunicación. En él, la información digital a
ser transmitida, es representada por la variable sm(t), y puede tomar diferentes
formas dependiendo del método particular usado. En el caso más simple s1=1 y
s2=0. La señal de información “1” es entonces representada por m1=g(t) y “0” por
m2=0. La señal es transmitida a través del canal después de haber sido trasladada
en frecuencia por el modulador. En el receptor, la señal es primero demodulada y
luego multiplicada por una copia local de la función base caótica, g(t). La señal
resultante es integrada durante un periodo de tiempo, después del cual el bit de
información esperado es identificado por un circuito de decisión. El bit de
información puede ser detectado considerando que las funciones base caóticas
son ortonormales en la media, esto es,
6

=
=
∫ otherwise
jldttgjtglE
T
01
)()(0
(1-1)
Donde denota el operador esperanza, lo que implica que las señales
caóticas pueden ser modeladas por procesos estocásticos.
][ ⋅E
Variaciones de esta técnica puede ser, que los bits de información sean
representados por s1=1, s2=-1 o cuando son usadas más de una función base
(g1(t), g2(t), …). Además, se pueden establecer diferencias por el método de
detección que puede ser síncrono o asíncrono. Estas y otras diferencias han sido
propuestas con el fin de superar algunos problemas presentados por este método.
1.2 OSCILADORES CAOTICOS INTEGRADOS.
1.2.1 Circuitos integrados Las aplicaciones mencionadas en la sección anterior tienen la característica
común de pertenecer al mundo de las comunicaciones móviles. Este tipo de
aplicaciones establece restricciones en el área, consumo de potencia, costo, etc.
Una de las grandes panaceas contemporáneas que ayuda a satisfacer estas
restricciones es el circuito integrado (IC, por sus siglas en inglés). Los circuitos
integrados permiten tener un gran número de elementos de circuito incluidos en
dimensiones mucho más pequeñas que las que se pueden tener con circuitos
discretos. Esta tecnología ofrece la capacidad de producción en masa,
confiabilidad y la aproximación a la construcción por bloques en el diseño de
circuitos.
Las principales ventajas de los circuitos integrados sobre los discretos son el costo
y el desempeño. El costo es pequeño por que los chips, con todos sus
componentes, son impresos como una unidad y no construidos uno a uno. El
desempeño es alto ya que los componentes pueden trabajar a muy altas
7

frecuencias y consumir muy poca potencia por que los componentes son
pequeños y están muy cercanos entre sí.
Además, es imperativo que un oscilador caótico, que será parte de un sistema
mayor realizado con circuitos integrados, esté también incluido en el mismo y no
sea un elemento externo a él.
1.2.2 Variables de estado contra realización directa de un circuito.
El principal problema al integrar circuitos osciladores caóticos continuos en el
tiempo, consiste en que los valores de los elementos dinámicos (capacitores e
inductores) son, la mayor parte de las veces, más grandes que los que se pueden
integrar en un chip. Esto es así por que las frecuencias de oscilación de los
circuitos caóticos reportados en la literatura son normalmente muy bajas, de tal
forma que los elementos dinámicos que determinan la frecuencia de oscilación del
circuito son grandes. La literatura muestra dos líneas de acción utilizadas cuando
se trata de integrar en un chip circuitos caóticos continuos en el tiempo. El
primero es tomar la ecuación diferencial que modela el circuito, en su forma de
variables de estado e implementarla a través de integradores, sumadores,
multiplicadores, etc. [15-18, 26, 27]. Normalmente, estas ecuaciones son primero
transformadas y normalizadas con el fin de tener ecuaciones más simples (con
menos parámetros y éstos, menos dispersos). La segunda forma, es una
realización directa del circuito, esto es, el circuito es integrado en el chip con la
misma topología original. En este caso, los elementos dinámicos que están fuera
del rango de integración son emulados a través de elementos activos como
Amplificadores Operacionales (Opamps), Amplificadores de Transconductancia
(OTAs), “Current Conveyors” (CCIIs), etc. O sus valores son multiplicados también
con elementos activos. Esto permite integrar valores con elementos muy grandes
[28, 29].
La primera metodología de realización de circuitos (el método de variables de
estado) ofrece algunas ventajas y desventajas descritas a continuación
8

1.2.2.1 Ventajas y desventajas del método de variables de estado
(+) Realización de ecuaciones diferenciales. La técnica de variables de
estado puede ser aplicada directamente a cualquier ecuación diferencial sin
importar el tipo de comportamiento. Algunos ejemplos de ecuaciones
diferenciales que se comportan caóticamente son la de Rossler y la de
Lorentz [30]. Las ecuaciones diferenciales pueden ser obtenidas de
observaciones de fenómenos naturales, de tal forma que la realización en
un circuito con variables de estado que emule su comportamiento puede
ayudar a comprender mecanismos implicados en la dinámica del fenómeno
o de la ecuación diferencial. Además, la técnica de variables de estado es
organizada y estructurada, lo que puede dar una mejor comprensión de la
dinámica.
(+) No hay problemas de resistencias parasitas en inductores. Las
resistencias parásitas en la realización de variables de estado tienen
valores insignificantes dados por las impedancias de salida de los
amplificadores operacionales y, por lo tanto, no afectan el comportamiento
del circuito. De hecho, en este método todas las variables son censadas por
voltajes y, por lo tanto, no hay una expresión explícita de las corrientes en
los inductores ni de las resistencias parásitas de éstos.
(-) Se rompe la simplicidad de la estructura. El método de variables de
estado reorganiza la estructura completa del circuito usando elementos de
circuito adicionales y disponiéndolos en una forma diferente, más
organizada y explícita. Además, muchos osciladores caóticos mezclan
funciones internas, principalmente en la parte de la resistencia no lineal
donde, algunas veces, los dispositivos activos son mezclados con
capacitancias. De esta forma, un circuito reducido, aunque complejo, es
transformado, por el método de variables de estado, en un circuito grande,
9

aunque organizado. Un ejemplo clásico de esto es el oscilador caótico de
Colpits [2].
(+) Independencia de las etapas en el diseño. El hecho de que cada
dimensión de la ecuación diferencial sea realizada con un integrador da
independencia a las diferentes etapas, ya que cada una de ellas no carga a
la otra. Esto da mayor grado de libertad en el diseño del circuito.
(-) Incremento en la complejidad, consumo de potencia, consumo de área,
ruido, etc. El método usa tantos integradores como sea el orden de la
ecuación diferencial que modela el circuito. Cada integrador requiere al
menos un elemento activo. Además, otros dispositivos son necesarios tales
como sumadores, multiplicadores y convertidores de corriente a
voltaje/voltaje a corriente. Este gran número de elementos implica un
incremento en el tiempo de diseño, consumo de potencia, consumo de
ruido, área y, por lo tanto, costo. Todo esto es indeseable, sobre todo en
aplicaciones tales como comunicaciones móviles.
(-) Limitación en frecuencia. La limitación en frecuencia en un oscilador
caótico con una realización directa es establecida, frecuentemente, por la
resistencia no lineal. En el caso del método de variables de estado, los
elementos activos de los integradores y de los otros bloques suman
restricciones adicionales a la frecuencia del oscilador. Además, técnicas
como la propuesta en este trabajo en la cual la frecuencia del oscilador
caótico es incrementada al incluir un oscilador periódico en el elemento no
lineal del circuito no pueden ser trasladadas directamente a la realización
en variables de estado.
Por otro lado, el método de realización de circuitos de manera directa ofrece
también ciertas ventajas y desventajas que son enumeradas a continuación.
10

1.2.2.2 Ventajas y desventajas de la realización directa de circuitos
(+) Se conserva la estructura del circuito. El método de realización directa
no requiere modificar la estructura del circuito ni añadir elementos
adicionales.
(-) Interdependencia entre etapas. Es común en un circuito con realización
directa que las diferentes etapas estén relacionadas y que se carguen
mutuamente, esto reduce las opciones de diseñar las etapas de manera
independiente con especificaciones precisas y luego unirlas. En cambio, el
diseño debe ser realizado considerando varias etapas a la vez, lo que
complica el diseño.
(+) Consumo de área y potencia moderados, bajo ruido, etc. Un buen
diseño del circuito realizado directamente permitirá tener bajos consumos
de potencia y área, con sus ventajas resultantes en cuanto a reducción de
ruido introducido al circuito y bajo costo del mismo.
(+) Mayores frecuencias de operación. Debido a que no se requieren
elementos adicionales de circuito, la realización directa ofrecerá mayor
capacidad de frecuencia de oscilación.
(-) Difícil realización de ecuaciones diferenciales. Es un trabajo un tanto
arduo, si no imposible, encontrar un circuito que realice una ecuación
diferencial no lineal.
No hacemos referencia a desventajas de la realización directa con respecto a la
resistencia parásita de inductores por que consideramos que en este método los
inductores pueden ser realizados con giradores que ofrecen la capacidad de
emular inductores con valores grandes y resistencias parásitas insignificantes.
Desafortunadamente este tipo de realización de elementos dinámicos adolece de
11

los mismos defectos presentado por el método de variables de estado, esto es,
incremento de elementos de circuito, de consumo de potencia, de área y limitación
en frecuencia.
1.3 JUSTIFICACION
Sin importar sus desventajas, el hecho de que el método de realización directa de
circuitos ofrezca la capacidad de reducir costos y mejorar su desempeño en
consumo de área y potencia y reducción de ruido la coloca como candidato
indiscutible en la realización de osciladores caóticos en circuitos integrados. Por
lo cual, en este trabajo de tesis, se utilizará el método de realización directa para
llevar a integración los osciladores caóticos. Sin embargo, en lugar de la
emulación de los elementos dinámicos, cuando éstos sean muy grandes, se
reducirán hasta llevarlos a valores que puedan ser integrables en chip. Los
máximos valores de los capacitores integrados están en el orden de unos cuantos
picofarads, y el de los inductores integrados en decenas de nanohenrios. Los
límites mínimos para estos valores los establecen, al menos para los capacitores,
los elementos parásitos que presentan los circuitos adjuntos a estos, y su valor es
comúnmente de decenas o cientos de femtofaradios. La reducción en los valores
de los elementos dinámicos, sin embargo, produce un incremento en la frecuencia
de oscilación del circuito que lo ubica desde el rango de unos cientos de Mega
Hertz hasta unos cuantos Gigaherts (para la tecnología usada en este trabajo).
1.4 PROBLEMAS RELACIONADOS CON LA INTEGRACION DE CIRCUITOS OSCILADORES CAÓTICOS.
Sin embargo, la integración de circuitos que se comportan caóticamente y que
incluyen elementos dinámicos muy pequeños (en el rango de integración)
conlleva algunos problemas y desafíos. Estos son enumerados a continuación
12

a) Circuitos poco robustos. Muchos de los circuitos caóticos se vuelven poco
robustos cuando sus elementos dinámicos son reducidos a valores muy
pequeños. Otros casos de circuitos caóticos presentan baja robustez
incluso para valores grandes de sus elementos. Cuando sus valores son
reducidos, esta baja robustez no es suficiente debido a que los rangos de
error en los valores de los elementos de un circuito integrado son grandes.
En cualquiera de los casos, el circuito oscilador integrado puede ser
fácilmente llevado fuera de su región de comportamiento caótico.
b) Dispersión de parámetros. Conforme los valores de los elementos
dinámicos son llevados al rango de integración, puede suceder que algunos
de ellos sean muy pequeños, mientras que otros sean aún muy grandes, de
tal forma que los primeros pueden ser comparables con los elementos
parásitos del circuito, mientras que los otros estén aún muy arriba del límite
de integración. En el método de variables de estado se usa una
transformación de variables y una normalización que reduce la dispersión
entre sus valores. Sin embargo, esta transformación, o alguna otra, no es
posible en el método de realización directa del circuito.
c) Resistencias parásitas de inductores integrados. Las resistencias parásitas
de los inductores discretos son muy pequeñas. Esto permite tener
inductores en circuitos caóticos discretos sin muchos problemas. Sin
embargo, las resistencias parásitas de inductores integrados, debido a las
dimensiones muy pequeñas del alambre con que se realiza el inductor,
pueden ser tan grandes que saquen fácilmente de operación a los circuitos
caóticos. En el capítulo 2 se hará una estimación rápida del valor de la
resistencia parásita de un inductor.
d) Desapareamiento, elementos parásitos, no linealidades, etc. Los problemas
en la integración de un circuito caótico se incrementan cuando se
13

consideran las no idealidades de los elementos, que estarán naturalmente
presentes en el circuito. Algunos de los problemas más comunes son el
desapareamiento entre los elementos (transistores), elementos parásitos
(resistencias y capacitancias), asimetría de los elementos no lineales
(resistencias no lineales), etc. Estos efectos serán aún más significativos si
el circuito está trabajando a muy alta frecuencia (cientos de Mega Hertz o
algunos Giga Hertz). Todos estos problemas pueden hacer que el atractor
(descripción en el espacio de fases de la seña) de un circuito caótico se vea
muy diferente de lo esperado, distorsionado y asimétrico; o incluso puede
ser que el circuito sea llevado fuera del rango de comportamiento caótico.
Para ser más objetivos, a continuación se dará un ejemplo que presenta algunos
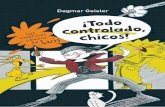
de los problemas mencionados arriba. El circuito de Chua se muestra en la figura
1-2.a
Este es un circuito autónomo de tercer orden en donde RN es una resistencia no
lineal cuya función característica es la que se muestra en la Figura 1-2.b. El
circuito posee tres elementos dinámicos (L, C1 y C2), y una resistencia (R1).
Obsérvese además que el circuito contempla la existencia de la resistencia
parásita del inductor (RLpar).
L
Rlpar R1
C2 C1 RNvc1
+
-
inr
vc1
inr
Ga
Gb
E
a) b) Figura 1-2. Circuito de Chua, a) diagrama esquemático, b) función característica de la resistencia no
lineal
14

En la Tabla 1-1 se muestra listado con los valores de los elementos dinámicos en
los que se encuentra comportamiento caótico en este circuito para Ga=-757uS,
Gb=-409uS y R1=1770 ohms.
Tabla 1-1. Valores de los elementos dinámicos del circuito de Chua para los que
hay caos
L C2 C1 18mH 100nF 10nF
1mH 6nF 0.6nF
1µH 6pF 0.6pF
470nH 2.5pF 0.25pF
30nH 150fF 15fF
Se puede observar que, conforme se desciende en la tabla, los valores de los
elementos se reducen hasta que se encuentran en el rango de integración (en el
último renglón de la tabla). Las simulaciones fueron realizadas con la resistencia
no lineal de manera ideal.
Del penúltimo renglón de la tabla se observa que el valor de C1 (250fF) está cerca
del valor de la capacitancia parásita (un valor moderado puede ser de 100fF)
ofrecida por la resistencia no lineal que está en paralelo con esta C1 (ver Fig. 2.a).
Es importante considerar que el valor de esta capacitancia parásita tiene una
dependencia no lineal con el voltaje entre sus terminales y, por lo tanto, no tendrá
un valor fijo si no que será variante. Por otro lado, el valor de L está todavía muy
lejos del rango de integración (470nH). Por tanto, se necesitará reducir aún más
su valor si se requiere tenerlo integrado en el chip. Pero al reducirlo, se reducirán
también los valores de C1 y C2 haciendo que sus valores sean menores que los de
los elementos parásitos. Esto puede observarse del último renglón de la tabla, en
donde el valor del inductor ya se encuentra en la región de integración (30nH), sin
embargo, los capacitores C1 y C2 se han vuelto muy pequeños. Esto provocará
15

que los valores reales de estos capacitores sean más grandes que los diseñados,
y peor aún, variables con el voltaje en sus terminales.
En la Tabla 2-2a se muestra el rango de los valores de los elementos dinámicos
del primer renglón de la tabla 1 para los que se mantiene el comportamiento
caótico cuando los otros valores de los parámetros son mantenidos fijos.
Tabla 1-2a. Rango de valores de L, C1 y C2 para los que hay caos, correspondiente al primer
de la tabla 1-1
L C2 C1
Rango de valores 16mH—20mH 80nF—130nF 9.5nF—11nF
Porcentaje 22% 50% 14.6%
Para el penúltimo renglón de la misma tabla, los valores son los siguientes
Tabla 1-2b. Rango de valores de L, C1 y C2 para los que hay caos, correspondiente al
penúltimo renglón de la tabla 1-1
L C2 C1
Rango de valores 400nH—500nH 1.8pF—3.3pF 0.23pF—0.27pF
Porcentaje 22% 60% 16%
Se puede observar que la robustez del circuito se mantiene cuando los valores
son reducidos, esto puede verse de los porcentajes muy semejantes en ambos
casos. Sin embargo aunque esta tolerancia podría ser aceptable para circuitos
discretos, no es suficiente para circuitos integrados y menos aún cuando sus
valores son comparables con las parásitas de los elementos adjuntos. Esto es aún
más cierto, en este circuito, para el capacitor C1, para el cual se tiene una
tolerancia al error de 16% que es demasiado pequeña en circuitos integrados.
Por otro lado, las simulaciones muestran que la resistencia parásita del inductor no
puede ser mayor que 30 ohms si se quiere mantener el comportamiento caótico y
16

no mayor a 20 ohms si se quiere tener doble “scroll”1. Sin embargo, los inductores
integrados pueden presentar una resistencia mucho mayor que esta. En el
capítulo 2 se hará una estimación de la resistencia parásita del inductor.
Obsérvese que todos estos efectos presentados en el circuito de Chua al reducir
el valor de sus elementos dinámicos se dan aún cuando las simulaciones se han
realizado con elementos ideales, sin incluir parásitas, desapareamiento entre
elementos, no linealidades, asimetrías en funciones de transferencia, etc. Sin
embargo, en el circuito real estos efectos si estarán presentes y afectarán
profundamente la forma del atractor y el correcto funcionamiento del circuito. Aún
más, la Transformada Rápida de Fourier (FFT, por sus siglas en inglés) de la
señal “vc1” muestra que la frecuencia del oscilador caótico, para los valores de los
elementos en el último renglón de la tabla, se extiende hasta aproximadamente
5GHz. Esto provocará que el circuito real presente otros efectos parásitos no
contemplados a frecuencias bajas.
1.5 ANTECEDENTES
Se han reportado algunos trabajos sobre circuitos caóticos continuos en el tiempo
que se han llevado a integración en chip [15-18]. Sin embargo en todos ellos se
usa el método de variables de estado. Por otro lado, se han reportado circuitos en
los que el objetivo fue el incremento en la frecuencia de los circuitos osciladores.
En [31, 32] el circuito de Chua es realizado usando como resistencia no lineal un
diodo túnel, sin embargo, estos diodos no están disponibles en circuitos
integrados. La frecuencia del circuito alcanza los 100MHz. En [32] se propone un
circuito cuya banda se extiende hasta el rango de algunos Giga Hertz. El circuito
requiere un solo transistor BJT y varios subcircuitos resonantes. Sin embargo, el
circuito es muy complejo, requiere el uso de muchos inductores y no se reporta si
es factible de ser integrado en chip.
1 Durante el trabajo se usará el nombre en inglés “scroll” para referenciar el atractor formado por el circuito de Chua.
17

1.6 OBJETIVOS DE LA TESIS.
El objetivo de la tesis es el establecimiento de una técnica que permita superar los
problemas que presenta la integración en chip de los osciladores caóticos, esto es,
que permita llevar los valores de los elementos dinámicos al rango de integración
de estos, y que el circuito caótico sea suficientemente robusto a las variaciones en
los valores de sus elementos, a las parásitas del circuito, en especial a la
resistencia parásita del inductor, y a otros efectos no ideales que inevitablemente
estarán presentes y más aún a la frecuencia que estará oscilando el circuito
debido a los valores muy pequeños de los elementos dinámicos. La realización del
circuito será directa debido a las ventajas que ofrece este método.
I.7 ORGANIZACION DE LA TESIS.
En el capítulo 1 se presenta una introducción general a los osciladores caóticos y
sus aplicaciones. Se justifica su integración en chip y se describen los problemas
que muestran al ser integrados. Por último se establecen los objetivos del trabajo.
En el capítulo 2 se describen los conceptos generales que serán usados durante
la realización del trabajo de tesis o que subyacen como parte de la teoría
necesaria para la comprensión de los resultados. Además se establece la tesis del
trabajo.
En el capítulo 3 se presenta una nueva configuración de CCII y sus
características. Se muestran dos variantes del circuito que son, la configuración
con característica de transferencia simétrica y la configuración de alto voltaje.
En el capítulo 4 se desarrolla la parte central del trabajo donde, a través de
simulaciones de circuitos caóticos, se demuestra la tesis de este trabajo. Se
presentan tres estructuras de osciladores caóticos que son modificadas para
llevarse a integración.
18

En el capítulo 5 se muestran resultados de fabricación de un circuito que resulta
del trabajo de la tesis. Las mediciones son compradas con las simulaciones del
mismo circuito.
Por último, en el capítulo 6 se dan las conclusiones de todo el trabajo de tesis.
19

20

Capítulo 2
Consideraciones generales
En este capítulo se presentarán algunos conceptos generales que se usarán
comúnmente en capítulos posteriores o que subyacen como parte de la teoría
necesaria para la comprensión de los resultados que serán presentados en
capítulos posteriores. Algunos de los puntos más importantes a tocar serán los
siguientes. Se definirá el “Current Conveyor de Segunda Generación” y sus
característica más importantes, se describirán las Resistencia No Lineales, su
clasificación y algunas otras características. A partir de esto se hablará del
fenómeno de histéresis que se presenta en resistencias no lineales no
monotónicas, y se dará una breve explicación del mecanismo que la produce.
Debido a que en este trabajo se usan algunos dispositivos macro modelados,
éstos se definirán y se enlistarán los principales elementos con los que se
realizan. Se describirán algunas características de los inductores integrados, se
darán ecuaciones de diseño de éstos y se hará un cálculo ligero del valor de la
resistencia parásita para una inductancia específica. Se introducirán los conceptos
básicos de los osciladores caóticos y sus características principales.
Posteriormente se discutirá el problema de los errores en las simulaciones de
circuitos y se demostrará que un circuito con comportamiento de único de punto
de operación y/o oscilación periódica no puede presentar caos por errores en el
método numérico. Sin embargo se establece que un oscilador caótico sí puede
presentar erróneamente comportamiento periódico o de punto de operación, aún
cuando sus parámetros estén en la región de caos, por los errores del método
numérico, y viceversa, presentar caos cuando sus parámetros ubican a la
ecuación diferencial en un comportamiento diferente. Se presentan los conceptos
básicos de errores y métodos numéricos usados en el trabajo y se dan reglas
21

rápidas usadas en simulación para evitar comportamientos erróneos en los
resultados.
Por último se establece la tesis que sirvió de guía en la realización de este trabajo.
2.1 “CURRENT CONVEYORS” DE SEGUNDA GENERACION
Un “Current Conveyor”2 es un bloque de construcción de circuitos genérico muy
versátil en la generación de funciones analógicas. Originalmente propuesto por
Sedra [33], el circuito posee tres terminales, “X”, “Y” y “Z”. Básicamente, un
“Current Conveyor” de Segunda Generación (CCII) está definido por dos
operaciones de seguimiento, uno de voltaje y el otro de corriente. El seguimiento
de voltaje se da desde la terminal “Y” a la “X” y el de corriente desde la terminal
“X” a la “Z”. Su funcionamiento puede describirse matemáticamente de la siguiente
manera
±=
z
x
y
z
x
y
viv
ivi
010001000
(2-1)
Donde el signo “+” es aplicado si la corriente entra al nodo “Z” y el “-” si sale de él.
Tabla 2-1. Parámetros más importantes de un CCII.
PARAMETRO SIMBOLO VALOR IDEAL
Resistencia de salida en “X” Xr 0
Ganancia de voltaje de “Y” to “X” VA 1
Ganancia de corriente de “X” to “Z” iA ±1
Resistencia de salida en “Y” Yr ∞
Resistencia de salida en “Z” Zr ∞
2 En este trabajo se conservará el nombre de “currrent conveyors” para estos dispositivos por ser la forma más común de llamarlos.
22

En el primer caso, el CCII es conocido como “current conveyor” positivo, en el
segundo caso como “current conveyor” negativo. Los parámetros más importantes
de un CCII son listados en la Tabla 2-1.
El CCII representa una alternativa para la generación de funciones de circuito tales
como osciladores, amplificadores, filtros, multiplicadores, convertidores de
impedancia negativa, etc. [33-39].
Las principales ventajas ofrecidas por este dispositivo que justifican su uso son las
siguientes
1) Funcionamiento en modo corriente. El CCII es clasificado como un
dispositivo en modo corriente [40]. Esto ofrece (teóricamente) la capacidad
de trabajar con voltajes de polarización más bajos que las configuraciones
en voltaje debido a que la información se transfiere a través de la corriente.
La señal de voltaje será reducida si se usan circuitos cuyos nodos sean de
baja impedancia.
2) Mayor ancho de banda. Los CCIIs desacoplan el producto Ganancia-Ancho
de Banda [9]. Esto les permite poseer un mayor ancho de banda que los
dispositivos que operan en voltaje. El desacoplamiento se da por que la
amplificación de la señal con este dispositivo no involucra una
retroalimentación general, como sucede con los Opamps y OTAs. Además,
el seguimiento en voltaje, que sí usa retroalimentación local, por ser de
ganancia unitaria, aprovecha al máximo el ancho de banda [33].
3) Versatilidad. El CCII puede ser visto como una caja negra al que se le
conectan elementos externos para realizar una función específica. De
hecho, el circuito realiza una fuente de voltaje controlada por voltaje (VCVS
por sus siglas en inglés) y una fuente de corriente controlada por corriente
(CCCS), los cuales, interconectados, forman una fuente de corriente
controlada por voltaje (VCCS). Estos dispositivos pueden ser usados para
23

realizar muchas funciones, con una configuración correcta de los elementos
externos.
Muchas configuraciones de CCII han sido propuestas para una gran variedad de
aplicaciones. El seguidor de voltaje utilizado para la realización de estos circuitos
es, normalmente, una modificación del par diferencial con ganancia unitaria [42-
44]. Algunas de estas configuraciones presentan algunos problemas tales como
desvío de voltaje en DC, no linealidad, alta impedancia de entrada en el nodo “X”,
impedancias finitas en las terminales “Y” o “Z”, etc.[41, 45] En el capítulo 3 de este
trabajo, una nueva configuración de CCII, con características superiores a las
previamente propuestas en la literatura, será descrita.
2.2 RESISTENCIAS NO LINEALES.
Una resistencia no lineal es un circuito o un elemento de circuito cuya
característica de voltaje es no lineal en la región de trabajo de éste. Una
resistencia no lineal puede ser un diodo, un interruptor, un transistor que opera en
su región no lineal, o cualquier otro circuito compuesto que se comporte de
manera no lineal. En la Figura 2-1.a se muestra una resistencia no lineal típica
hecha con un amplificador operacional
vNR
iNR
+
-
RF
R2R1
vNR
iNR
Isat
Ga
Gb
E+
-
a) b)
Figura 2-1. Resistencia no lineal, a) diagrama esquemático, b) función característica.
24

Estos dispositivos han sido frecuentemente utilizados en aplicaciones como redes
neuronales [46], osciladores periódicos no lineales [47, 48] y osciladores caóticos
[49], usando la descripción lineal a tramos (PWL por sus siglas en inglés) en su
realización. Esto permite usar, de manera local, algunos métodos de análisis que
se utilizan para circuitos lineales, los cuales son mucho más sencillos de aplicar
que los usados para circuitos no lineales. Una resistencia PWL se muestra en la
Figura 2-1.b. Además, este tipo de resistencias pueden ser programables, esto es,
los parámetros que caracterizan a la resistencia, tales como sus puntos de quiebre
y pendientes son controlables por los valores de los elementos que las componen
y corrientes y voltajes de polarización.
Las resistencias no lineales pueden ser clasificadas como controladas por voltaje,
controladas por corriente, controladas por voltaje y corriente, y no controladas.
Una resistencia es controlada por voltaje (corriente) si su característica, con el
voltaje (corriente) como variable dependiente, es uni-valuada. Si la resistencia es
monotónica, entonces es controlada por ambas variables. Si la característica no es
uni-valuada cuando la variable dependiente es voltaje o corriente, entonces, no es
controlada por ninguna de las variables.
Se han propuesto muchas configuraciones de resistencia no lineal y se han usado
diferentes métodos y dispositivos activos para realizarlas [50-54].
2.3 HISTERESIS EN RESISTENCIAS NO LINEALES.
Una resistencia no lineal controlada por corriente exhibe histéresis si la señal que
controla sus terminales es el voltaje. La histéresis se da de la siguiente manera.
Ya que la resistencia es controlada por corriente, entonces, es multi-valuada
cuando la señal de control es el voltaje, esto es, para un valor de voltaje
corresponden más de un valor de corriente. Pensemos en una resistencia que sea
tri-valuada con el voltaje. De [51], toda resistencia con una característica no
monotónica siempre presenta al menos un punto “impasse” y, en una resistencia
tri-valuada, existen dos. En cada punto “impasse” la resistencia realiza un “salto” a
25

otro valor de corriente de la función característica tri-valuada, conservando el
mismo valor de voltaje. Ya que hay dos puntos impasse, se realizan dos saltos en
la resistencia en direcciones diferentes. De esta forma, la resistencia usa una
trayectoria para moverse de un punto de su característica a otro, y usa una
trayectoria diferente para regresar al punto original, estableciendo de así la
histéresis. Esto puede comprenderse mejor de la Figura 2-2.
El salto es posible por que siempre hay un inductor parásito en serie con una
resistencia no lineal controlada por corriente, como parte de un buen modelado de
ésta [51].
Las resistencias controladas por voltaje son duales a las controladas por corriente
vNR
iNR
Impasse point
Jump
Impasse point
Jump
trajectory 1
trajectory 2 Figura 2-2. Histéresis en una resistencia controlada por corriente.
y, por tanto, también exhiben histéresis cuando la señal entre sus terminales es
una corriente. Un modelo correcto de estas resistencias incluye un capacitor
parásito paralelo a las terminales de entrada.
26

2.4 MACRO MODELOS DE CIRCUITOS.
La complejidad creciente de sistemas integrados en tecnologías CMOS
nanométricas requiere diferentes métodos de diseño para manejar la complejidad
durante la exploración de sistemas y verificación del diseño. En este contexto, el
uso de macro modelos y modelos comportamentales se está convirtiendo en una
práctica estándar en la industria hoy. Estos modelos son usados durante la etapa
de exploración del diseño, en donde modelos con diferentes niveles de
abstracción pueden ser combinados con el fin de probar el correcto
funcionamiento de un circuito. Modelos de rendimiento pueden ser usados en
síntesis de circuitos y para análisis de factibilidad de diseños analógicos. Sin
embargo, los macro modelos y modelos comportamentales de circuitos son
necesarios para reducir el tiempo de simulación durante la verificación detallada
del diseño de un sistema entero [55].
Un macro modelo es una simplificación de un dispositivo, circuito o sistema más
complejo y computacionalmente más intensivo que incluye las principales
características de éste último. Estos modelos más abstractos emulan la
característica de transferencia de los elementos de circuito que reemplazan con
mayor eficiencia, guiando a reducciones substanciales de tiempo respecto a las
realizadas a nivel dispositivo.
El macro modelado de un sistema es realizado a través de elementos ideales de
pasivos, fuentes controladas (VCCS, CCCS, VCVS, CCVS), diodos, retardos,
interruptores, resistencias controladas, capacitores controlados, transformadores,
etc. Las fuentes dependientes pueden ser definidas algebraicamente, utilizando
polinomios, por representaciones lineales a tramos (PWL por sus siglas en inglés)
o de cualquier otra forma definida por el usuario.
Las principales herramientas de diseño y simulación proveen al usuario elementos
para el modelado de casi cualquier circuito o sistema.
En este trabajo se proponen macro modelos con diferentes niveles de abstracción
para diferentes circuitos como un CCII y una resistencia no lineal. Ellos nos darán
una forma rápida de corroborar el correcto funcionamiento de alguna función,
27

ayudando a determinar los principales mecanismos detrás del comportamiento
particular de algún circuito.
2.5 INDUCTORES INTEGRADOS.
Los inductores en espiral planares son los inductores más frecuentemente usados
en tecnologías integradas. Aunque ellos ofrecen valores del factor de calidad
bajos, sus inductancias están bien definidas sobre un amplio rango de las
variaciones del proceso. Estos inductores se han convertido en elementos
esenciales de bloques de circuitos de comunicación, tales como osciladores
controlados por voltaje, amplificadores de bajo ruido, mezcladores y filtros de
frecuencia intermedia. Muchas configuraciones reportadas en literatura usan
también inductores para la realización de osciladores caóticos.
Los inductores en espiral cuadrados son populares por la sencillez de su
realización. Ellos son generados fácilmente aún con simples herramientas de
“layout” del estilo “Manhattan”. Sin embargo, espirales poligonales son algunas
veces preferidos por que ofrecen factores de calidad mayores sobre las
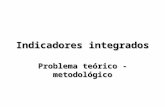
cuadradas. En la Figura 2-3 se muestra un inductor en espiral cuadrado y un
octagonal.
Figura 2-3. Inductores integrados a) en espiral cuadrado. b) octagonal.
28

En la Figura 2-4 se muestra el modelo completo de un inductor integrado.
Cox/2
Rsi Csi Rsi Csi
Cox/2
L Rs
Cp
Figura 2-4. Modelo de un inductor integrado.
L es el valor de la inductancia, RS es la resistencia parásita en serie del inductor
dado por la resistividad del metal que lo forma. CP es la capacitancia que forma el
cruce de la terminal interna del inductor con cada uno de los espirales del mismo
cuando se lleva esta terminal hacia alguna conexión externa a través de un nivel
de metal diferente. COX es la capacitancia formada por el metal del inductor con el
sustrato. RSi representa las pérdidas del sustrato debido a la corriente que fluye a
éste a través de COX. CSi es la capacitancia del sustrato.
Debido a sus muy reducidas dimensiones, los inductores integrados ofrecen
valores de resistencia parásita en serie que en muchos casos es muy grande para
ser tolerado. Debido a esto en algunas ocasiones se usan configuraciones
alternativas de circuitos que evitan el uso de inductores o que los realizan con
elementos activos cuya resistencia parásita puede ser mantenida muy baja, como
se mencionó en el capítulo anterior.
Con el fin de diseñar inductores integrados se han propuesto algunas figuras de
mérito [56] que relacionan las dimensiones del inductor, el número de vueltas,
parámetros dependientes del proceso y algunos otros parámetros, con el valor de
la inductancia. Algunas de estas ecuaciones son más simples que otras y
proporcionan diferentes márgenes de error. En [57] se proponen dos expresiones
muy simples que poseen márgenes de error (según los autores) muy pequeños,
29

menores al 5%. Debido a que estas expresiones se usaron durante este trabajo,
se presentaran a continuación.
ρµ
2
2
01 1 Kdn
KL avg
+= (2-2)
( 2432
12
)/ln(2
ρρρµ
ccccdn
L avg ++= ) (2-3)
Donde ( )inoutavg ddd += 5.0 y ( ) ( )inoutinout dddd +−= /ρ
Los parámetros k1 y k2 para la primer ecuación y c1-c4 para la segunda ecuación
son los siguientes Tabla 2-2. Parámetros empíricos de la ecuación (2)
Layout k1 k2
Cuadrado 2.34 2.75
Octagonal 2.25 3.55
Tabla 2-3. Parámetros empíricos de la ecuación (3)
Layout c1 c2 c3 c4
Cuadrado 1.27 2.07 0.18 0.13
Octagonal 1.07 2.29 0.00 0.19
Debido a que las resistencias parásitas de inductores son un punto esencial en
este trabajo, se hará un cálculo ligero de su valor, para determinar el rango de
éste.
Un inductor cuadrado con valor de L=3.9nH, con dimensiones, W=7u, S=2.1u y
din=70u, y un número de vueltas n=5, realizado para un proceso de fabricación
AMI 0.5 µm. El número de cuadros requerido para su realización es de 350.
Suponiendo que el inductor se realiza con el segundo nivel de metal disponible en
este proceso, que tiene una resistencia por cuadro de 0.09 ohms, la resistencia en
serie ofrecida por el inductor es de 31.5 ohms.
30

Si suponemos una resistencia de los contactos de metal 2 a metal 1 de 10 ohms
por cada lado, se tendrá una resistencia total de
RS=31.5+20=51.5 ohms.
Este es sólo un cálculo aproximado, la resistencia puede ser mucho mayor
dependiendo del valor y dimensiones del inductor.
2.6 CIRCUITOS OSCILADORES CAOTICOS.
Un oscilador caótico es un circuito no lineal cuyo comportamiento en estado
estable no es periódico y tampoco es un punto de operación. Su comportamiento
en el espacio de fase puede ser identificado por que el conjunto de trayectorias
sufre un proceso de estiramiento y doblamiento hacia sí mismas. Esto resulta en
un mezclado de sus trayectorias así como en la divergencia exponencial de sus
estados cercanos, que a su vez produce una extrema sensibilidad a las
condiciones iniciales.
Una gráfica de la densidad espectral de potencia de una señal caótica en estado
estable muestra una banda amplia tipo ruido que es continua en todo el intervalo
del espectro en que se desenvuelve. Esto es debido a su comportamiento no
periódico y a su contribución en todas las frecuencias de este intervalo. De esta
forma, el comportamiento caótico en estado estable posee propiedades
estadísticas bien definidas.
Es importante notar que el comportamiento caótico se da en el estado estable y,
por lo tanto, no es un periodo transitorio de arranque.
A pesar de su comportamiento errático y complejo, en una forma de onda caótica
se pueden identificar patrones regulares y recurrentes. Sin embargo, nunca hay
una repetición exacta de éstas y el movimiento es realmente no periódico.
Los osciladores pueden ser clasificados como forzados y autónomos. Los
osciladores forzados o no autónomos poseen una señal externa al circuito que
31

controla su comportamiento. Los osciladores autónomos, por otra parte, son
circuitos que oscilan por sí mismos sin necesidad de alguna excitación externa.
Para que un circuito autónomo que consiste en resistores, capacitores e
inductores pueda exhibir caos [58], debe contener por lo menos
a) 3 elementos dinámicos o elementos de almacenamiento de energía que
sean independientes.
b) Un elemento no lineal.
c) Un resistor activo localmente.
La independencia en el primer punto indica que no se formen lazos del mismo
elemento y, por tanto, que no puedan ser reducidos en número al ser sumados en
serie o en paralelo.
En el caso de circuitos forzados, son necesarios únicamente 2 elementos de
almacenamiento de energía.
Durante el presente trabajo se verá que las modificaciones propuestas a los
osciladores caóticos con el fin de que presenten un comportamiento más robusto a
las variaciones de los parámetros nos llevará a transformar osciladores caóticos
autónomos a no autónomos.
Un circuito oscilador puede ser modelado por medio de su ecuación diferencial,
que en el caso de un oscilador caótico autónomo, debe ser por lo menos de tercer
orden. Sin embargo, existen muchas ecuaciones diferenciales que no surgen del
proceso de aplicar las leyes de Kircchoff y las relaciones que definen a cada
elemento. Muchas de ellas han surgido de la observación de fenómenos naturales.
2.7 METODOS NUMERICOS POR COMPUTADORA.
Las ecuaciones diferenciales no lineales, en su gran mayoría, no tienen soluciones
cerradas o analíticas. Para ello, los métodos numéricos por computadora
representan una gran ayuda ya que permiten obtener soluciones numéricas
32

aproximadas durante un intervalo de tiempo. Además, en el diseño y simulación
de circuitos la herramienta más importante es la computadora. Ella usa algoritmos
numéricos para resolver las ecuaciones no lineales obtenidas de los circuitos que
se simulan. Por ello en esta sección se describirán algunos aspectos básicos
relacionados con el tema.
2.7.1 ¿Caos o error del método numérico? La primera pregunta que surge al realizar simulaciones de circuitos caóticos por
computadora es si el comportamiento caótico es correcto o es el resultado de los
errores en las aproximaciones realizadas en la integración de las ecuaciones
diferenciales por algún método numérico. Esto es, para la simulación de algún
circuito particular ¿se puede presentar comportamiento caótico en alguna región
donde no exista realmente? La respuesta a esta pregunta la comenzaremos
reconociendo que los algoritmos numéricos, efectivamente, introducen errores en
la solución y que, es factible que un oscilador caótico pueda presentar
comportamiento caótico en una región de sus parámetros donde debiera
comportarse periódicamente (o como punto de operación), o que presente
comportamiento periódico o punto de operación en una región de sus parámetros
donde debiera ser caótico. Sin embargo, a pesar de los errores que pueda
introducir, el método numérico, éste no puede modificar la dinámica de un sistema,
que es establecida únicamente por la ecuación diferencial que modela su
comportamiento. De tal forma que, un sistema que sólo puede presentar un
comportamiento de punto de operación o uno periódico no puede, por errores
introducidos en la solución numérica, mostrar un comportamiento caótico. Los
sistemas reales son sistemas estructuralmente estables, lo que significa que
cualquier variación pequeña de sus parámetros no modificará significativamente la
topología de su comportamiento en el espacio de fase. Si el sistema estuviera
cerca de algún punto de bifurcación de tal forma que el error de aproximación
numérica lo llevara a otro tipo de comportamiento, este último sería también
determinado por la ecuación diferencial que sólo puede presentar o punto de
33

operación o comportamiento periódico. Por lo tanto el sistema no podrá ser
caótico.
Sin embargo, todavía permanece latente el hecho de que se presente un
comportamiento erróneo en un oscilador caótico cuando sus parámetros estén
muy cerca de este comportamiento pero no en él. La solución a este problema
sólo la puede dar la experiencia del diseñador y el conocimiento de algunos
conceptos fundamentales de los errores en los métodos numéricos, que serán
presentados brevemente a continuación.
2.7.2 Errores en los métodos numéricos Los métodos numéricos presentan dos tipos de errores llamados: error de
redondeo y error de truncamiento.
Los errores de redondeo se originan debido a que la computadora puede guardar
un número fijo de cifras significativas durante el cálculo y que su representación
binaria no les permite representar exactamente números decimales. Esto es
aunado al hecho de que los números irracionales son expresados por un número
infinito de cifras significativas. Esta diferencia en el valor del número real con el
representado en la computadora, por la omisión de cifras significativas, se conoce
como error de redondeo.
Este tipo de error se relaciona directamente con la forma como la computadora
almacena los números. La computadora guarda los números de manera discreta,
de tal forma que los números intermedios son redondeados o truncados al valor
más cercano que pueda ser representado.
Los errores de truncamiento son aquellos que resultan al usar una aproximación
de un procedimiento matemático exacto. Esta aproximación es necesaria debido a
que permite la realización de algunas expresiones matemáticas como derivadas,
integrales y solución de ecuaciones diferenciales por medio de la computadora.
Cuanto más exacta sea esta aproximación mayor será el número de operaciones
básicas (sumas, restas y multiplicaciones, etc.) que se requerirán y, entonces,
mayor tiempo de cómputo ocupará la simulación. Por lo tanto, existe un
34

compromiso entre exactitud y tiempo de cómputo en la solución de ecuaciones por
la computadora.
El error numérico total es la suma de los errores de truncamiento y redondeo. En
general el único camino para minimizar los errores de redondeo es incrementando
el número de cifras significativas en la computadora. Sin embargo, las operaciones
con longitudes de palabras más grandes requieren también mayores tiempos de
cómputo. Además, el error de redondeo se incrementará con el incremento en el
número de cálculos. Por otro lado, el error de truncamiento puede reducirse con
un tamaño de paso más pequeño, sin embargo, esto provocaría un incremento en
el error de redondeo. De hecho el comportamiento del error numérico total es
como se muestra en la Figura 2-5. [60]
Log del tamaño de paso
Log
del e
rror
Error total
Error de
truncamientoError de redondeo
Figura 2-5. Error numérico total en un método numérico.
De acuerdo a la figura, un tamaño de paso muy pequeño reduce el error de
truncamiento pero incrementa el error de redondeo. Por el otro lado, un tamaño de
paso grande reduce el error de redondeo pero incrementa el de truncamiento.
Existe un punto en el que el error numérico total es mínimo. Lo óptimo al realizar la
simulación de algún circuito o la integración numérica de una ecuación diferencial
es usar el tamaño de paso que produzca el mínimo error. Desafortunadamente
esto no es fácil por que no hay una ecuación que prediga este punto para una
35

situación particular. Se debe seleccionar un tamaño de paso largo con el fin de
disminuir la cantidad de cálculos y errores de redondeo sin penalizar demasiado
los errores de truncamiento. El reto es identificar el punto en donde los errores de
redondeo empiezan a negar los beneficios de la reducción del tamaño de paso.
2.7.3 Métodos de integración en el análisis transitorio en SPICE. El reemplazo del operador de derivación en tiempo con una aproximación en
tiempo discreta y la solución de la ecuación de diferencias finitas resultante, un
punto en el tiempo a la vez empezando desde alguna condición inicial, se conoce
como Integración Numérica de la ecuación diferencial. La aproximación en tiempo
discreto se conoce como Método de Integración. Los métodos de integración más
usados en la simulación de circuitos en SPICE en todo este trabajo fueron, el
método Trapezoidal y el de Gear2. A continuación se describirán las
características más importantes de estos dos métodos.
2.7.3.1 Método trapezoidal. La ecuación que lo describe es la siguiente
ddtv t
hv t v t d
dtv tK K K( ) ( ) ( ) (+ +≈ − −1 1
2K ) (2-7)
Para un tamaño de paso fijo este método es el más exacto [61]. Además, por ser
un método de un solo paso, se adapta más rápidamente a los cambios abruptos
en la señal. Requiere tiempos de simulación más cortos pues permite usar los
tamaños de paso más grandes para cierto grado de exactitud.
Desafortunadamente este método es demasiado sensible a errores cometidos en
tiempos de simulación previos y no es la mejor elección cuando la opción de
simulación “toleracia al error relativo” (reltol) de SPICE es muy grande.
Cuando se considera el análisis en frecuencia de un circuito con este método, el
semiplano izquierdo del plano S es mapeado al interior del círculo unitario al
36

discretizar el tiempo, y el semiplano derecho es mapeado al exterior del círculo
unitario. Por lo tanto, el método trapezoidal preserva la estabilidad del circuito. Las
ecuaciones diferenciales estables son mapeadas a ecuaciones de diferencia
estables y viceversa.
2.7.3.2 Método de Gear2 o de diferencias hacia atrás de segundo orden. La ecuación que describe este método de integración es la siguiente
ddtv t
hv t
hv t
hv tK K K( ) ( ) ( ) (+ +≈ − +1 1
32
2 12 K )−1 (2-8)
El método Gear2 es un método de dos pasos por que necesita el valor de dos
pasos previos para el cálculo del valor actual. Es menos eficiente que el método
trapezoidal cuando los cambios en la señal son abruptos, pero es mejor cuando
las formas de onda que calcula son suaves, como en el caso de circuitos con
formas de onda sinusoidales o cercanas a éstas. Mapea el semiplano izquierdo
del plano S a una región del interior del círculo unitario. Por lo cual cualquier
ecuación diferencial estable es transformada en una ecuación de diferencias
estable. Sin embargo, parte del semiplano derecho del plano S también es
mapeado al interior del círculo unitario. Esto significa que algunas ecuaciones
diferenciales inestables son transformadas en ecuaciones de diferencias estables
por este método. Además, el eje imaginario del plano S es mapeado al interior del
círculo unitario lo que implica que este método añade pérdidas a un resonador sin
pérdidas. Por último, este método transforma algunos polos reales en el plano S a
un par de polos complejos conjugados en el plano Z, por ello, un polo real puede
causar sobretiro al usar este método.
2.7.4 Reducción de errores en la simulación en tiempo de circuitos.
Para garantizar que la solución de algún circuito obtenida por medio de el
simulador HSPICE fuera correcta, esto es, que el circuito no exhibiera
37

comportamiento caótico cuando no lo hubiera y viceversa, se usó un tamaño de
paso máximo que fuera lo suficientemente pequeño para reducir el error de
truncamiento, pero lo suficientemente grande para que el error de redondeo se
mantuviera bajo. Para ello se probó con un valor grande de tamaño de paso y
luego se redujo paulatinamente hasta que se observó que el error de redondeo
empezó a influir en el resultado o que los tiempos de simulación fueron demasiado
grandes. Se usó, frecuentemente, la opción de simulación .accurate que, entre
otras cosas, establece automáticamente un tamaño de paso bastante pequeño
para garantizar exactitud; establece el método Trapezoidal como método de
integración; reduce el cambio aceptable en el voltaje absoluto en cada nodo del
paso anterior al actual a 0.2; reduce el cambio aceptable en el voltaje relativo de
cada nodo del paso anterior al actual a 0.2. En estos dos últimos casos, cuando el
cambio es mayor al establecido, reduce el tamaño de paso y recalcula el valor. A
este proceso se le conoce como retroceso en el tiempo. Sin embargo, la opción de
simulación .accurate incrementa bastante el tiempo de simulación, por lo que se
usó cuando se quería garantizar mucha exactitud.
Cuando se tenían dudas acerca del resultado, o cuando no hubo convergencia
con un método, se usaron ambos métodos de integración.
2. 8 TESIS La inclusión de un oscilador periódico dentro de la resistencia no lineal de un
oscilador caótico continuo en el tiempo modifica las características de este último
realizando un mayor mezclado entre sus trayectorias, incrementando la robustez
del circuito a las variaciones de sus parámetros y a las parásitas del mismo y
permitiendo que los valores de los elementos dinámicos del circuito puedan ser
llevados al rango de integración en chip. Todo esto resulta en que el oscilador
caótico completo es factible de ser integrado.
38

Capítulo 3
Nueva arquitectura de CCII
En este capítulo se presentará una nueva arquitectura de CCII. Debido a que este
circuito es parte central del trabajo, se usará el capítulo completo para describir su
comportamiento. El circuito presenta características muy atractivas que superan a
otras configuraciones reportadas en la literatura, tales como bajos voltajes de
polarización, buen acoplamiento entre fuentes de corriente, gran ancho de banda,
simetría en la excursión de la señal, etc. Sin embargo, la compensación en
frecuencia del circuito es particularmente sensible a las variaciones en los valores
de sus elementos, por lo cual requiere de un diseño cuidadoso. Por otro lado, el
circuito puede ser configurado para que presente comportamiento periódico. a
muy alta frecuencia.
Se presenta el circuito básico y se describe su comportamiento. Se discuten sus
ventajas sobre otras configuraciones así como sus desventajas. Posteriormente se
muestran dos modificaciones a este circuito básico, una para realizar una
característica de transferencia simétrica y la otra para tener una estructura que
permita mayores voltajes de polarización. Además, se configura y diseña el
circuito para tener comportamiento periódico.
Se presenta un macro modelo de este CCII, tomando cada transistor como un
amplificador de transconductancia lineal y teniendo como única no linealidad la
saturación de su corriente de salida. El macro modelo resulta ser correcto en el
sentido de que su respuesta es muy semejante al del circuito real en la mayoría de
los análisis realizados. Todas las simulaciones se realizaron con los parámetros
de la tecnología AMI Semiconductor 0.5µm que se muestran en el apéndice A. El
simulador utilizado para el análisis y diseño de los circuitos fue HSPICE operando
con el modelo Bsim3v.2 nivel 49.
39

3. 1 CIRCUITO BASICO
3.1.1 Descripción del funcionamiento del CCII En la Figura 3-1 se muestra el circuito básico de CCII que se propone. La figura 3-
1.a muestra el CCII+ y la Figura 3-1b el CCII-. El circuito está compuesto por dos
Espejos de Sansen acoplados en la terminal de fuente del transistor MOS
superior.
MN1 MN2
MN3 MN4MN5 MN6
IB1 IB2IB3 IB4
Z XY
(2) (4)
(3)
VDD
VSS a)
MN1 MN2
MN3 MN4MN5 MN6
IB1 IB2IB3 IB4
Z XY
(2) (4)
(3)
VDD
VSS
b) Figura 3-1. Circuito básico CCII, a) CCII+, b) CCII-
40

El circuito incluye dos ramas adicionales, una que establece la retroalimentación
general, que forma la terminal “X” del CCII, y la otra rama que forma la terminal
“Y”. El funcionamiento del circuito se explica a continuación.
Cada espejo de Sansen establece un seguimiento de voltaje desde la terminal de
compuerta de su transistor superior (MN1 y MN2) a su terminal fuente (nodo 3). Si
se hace IB1=I B2, entonces Vgs1=V gs2 (donde V gs es el voltaje entre la compuerta y
la fuente del transistor respectivo) y, debido a que existe una conexión directa
(misma fase) desde el nodo “Y” al nodo “X” a través del transistor MN6, entonces,
hay un seguimiento de voltaje entre estas dos terminales.
Otra forma de visualizar el seguimiento de voltaje en este circuito es desde el
punto de vista de la Teoría de Retroalimentación. Supongamos que
desconectamos la terminal de compuerta del transistor MN2 de la terminal “X”.
Entonces, siguiendo el flujo de señal, podemos ver fácilmente que el circuito es un
amplificador con “Y” como terminal de entrada positiva, la compuerta de MN2
como la terminal de entrada negativa y “X” como salida. Si ahora conectamos
directamente la salida (terminal “X”) con la terminal de entrada negativa
(compuerta del transistor MN2), establecemos una retroalimentación negativa con
ganancia unitaria y, por lo tanto, el circuito se convierte en un seguidor de voltaje
desde la terminal “Y” a la terminal “X”. En estas circunstancias, las corrientes a
través de MN3 y MN4 son iguales. Si conectamos una resistencia desde la
terminal “X” a tierra entonces, habrá un flujo de corriente a través de esta
resistencia cuando el voltaje en la terminal “Y” y, por tanto, en la terminal “X” sea
diferente de cero. Esto hace que la corriente a través de MN6 se reduzca y que el
voltaje en “X” se reduzca también. La retroalimentación trata de mantener el
voltaje en “X” muy semejante al de “Y”. Para ello reduce el voltaje en el nodo (2) y
lo logra, finalmente, cuando la corriente en MN3 es igual a la de MN6.
Para el CCII+, si las dimensiones de los transistores MN3, MN5 y MN6 son las
mismas, sus corrientes serán muy semejantes (el desapareamiento de estas
corrientes se debe únicamente a que el voltaje entre el drenaje y la fuente de
estos transistores no es la misma) y si se conecta una resistencia entre la terminal
“Z” y tierra del mismo valor que la conectada entre “X” y tierra, habrá un
41

seguimiento de la corriente que pasa a través de esta resistencia dada por la
corriente que pasa a través de la resistencia conectada en “Z”.
3.1.2 Características y ventajas ofrecidas por el CCII. A continuación se analizan los parámetros que más generales (mostrados en la
tabla 2-1) ofrecidas por el circuito CCII propuesto.
La impedancia de entrada en “Y” se puede considerar de valor infinito debido a
que esta terminal está compuesta por la compuerta del transistor MN1. La
impedancia de salida en la terminal “X” ( ) es pequeña. De la Teoría de
Retroalimentación [62] sabemos que, debido a que es una salida de voltaje
retroalimentada a la entrada, su impedancia está dada por la impedancia de la
terminal en conexión de lazo abierto ( ), dividida por la ganancia de
transferencia directa también en lazo abierto (la llamaremos ) o
Xr
zoabieZla rto
Alazoabierto
Z ZAnodolazoabierto
lazoabierto
= (3.1)
La impedancia del nodo en lazo abierto es aproximadamente (la
impedancia de salida del transistor MN6). Por otro lado, la ganancia de
transferencia directa en lazo abierto está dado por
Z rlazoabierto ds= 6
A g r g r g g rlazoabierto m ds m ds m m ds ds= r=( * ) *( * )1 1 6 6 1 6 1 6 ). Haciendo = = y r = r = r ,
se tiene una impedancia en el nodo “X” de
gm1 gm6 gm ds1 ds6 ds
rX rA g r
ds
lazoabierto m ds
= =12 (3.2)
Para =200uS y r =100K, el nodo “X” presenta una impedancia alrededor
=0.5K ohms.
gm ds
Xr
42

Si se requiere un valor aún más pequeño debe incrementarse la
transconductancia de los transistores MN1 y MN6.
La impedancia de salida de la terminal “Z” ( ) está dado por el paralelo de la
impedancia de salida de la fuente de corriente IB3 con la impedancia de salida del
transistor MN5. Suponiendo que la impedancia de salida de IB3 es mucho mayor
que la del transistor MN5, entonces la impedancia de salida de la terminal “Z” está
dada aproximadamente por la del transistor MN5. Esta impedancia esta en
decenas o cientos de kilo ohms y puede ser considerada suficiente para los
circuitos que estamos utilizando.
Zr
La ganancia de voltaje está dado por
Af AAlazoabierto
lazoabierto
=+1 β
(3.3)
Donde β es el factor de retroalimentación, que en este caso es igual a β=1.
Entonces, la ganancia del seguidor de voltaje está dado por
Af g rg rm ds
m ds
=+
≈( )
( )
2
211 para ( ) (3.4) g rm ds
2 1>>
Por último, la ganancia de corriente del circuito está dada por el seguimiento en
corriente del transistor MN5 de la corriente que fluye por MN6. Este seguimiento
de corriente lo establece la red retroalimentación del circuito, y es afectado,
principalmente, por la diferencia en los voltajes vds (voltaje entre el drenaje y la
fuente) de los transistores MN3, MN5 y MN6. Una forma de mejorar este
seguimiento en corriente es igualando estos voltajes. Un esquema que realiza esto
es el que se muestra en la figura 3-9 de esta misma sección.
43

3. 1.3 Características adicionales. Sin embargo hay otras características que hacen que este circuito ofrezca
mayores ventajas sobre otras configuraciones. Estas se enumeran a continuación
a) Solamente transistores NMOS en la trayectoria de la señal. La trayectoria
de la señal está compuesta solamente de transistores NMOS y, por lo tanto,
el circuito es capaz de operar a mayores frecuencias que las estructuras
que poseen transistores PMOS en la trayectoria de la señal, por el hecho
de que la movilidad de los portadores de los transistores PMOS es mucho
menor que la de los transistores NMOS.
b) Operación a bajo voltaje. Ya que el CCII está basado en el circuito “flipped
voltaje”, las características de éste último son heredadas por CCII
completo. Por tanto, el CCII también opera a muy bajos voltajes de
polarización. El circuito necesita solamente un Vgs (de MN1 o MN2) y un Vds
(de MN3 o MN4) para operar. Sin embargo, cuando se usan fuentes de
polarización simétricas con respecto al voltaje de modo común se
requerirán 2Vgs+2Vds.
c) Fácil realización del CCII-. Con sólo cambiar la conexión de la compuerta
del transistor MN5 del nodo (2) al nodo (4) se obtiene el CCII- (fig. 1.b).
Esto difiere de otras estructuras de CCII convencionales que requieren de
una rama adicional para implementarlo [40], lo que introduce desvíos de
voltaje en DC, reduce la respuesta en frecuencia y hace asimétrica la
operación del circuito.
d) Buen acoplamiento entre fuentes de corriente. La estructura propuesta
requiere únicamente un solo tipo de fuentes de corriente, lo que ofrece la
ventaja de que permite un buen acoplamiento entre ellas en la fabricación.
Esto puede ser comparado con otras estructuras de CCII [40] en las que se
44

requieren fuentes de corriente en ambas direcciones (introduciendo
corriente al nodo y extrayendo de él), lo que añade el problema potencial de
desapareamiento entre ambos tipos de fuentes de corriente cuando se
requiere que se mantenga alguna relación entre ellas.
e) Simetría en el funcionamiento. Debido a que la estructura está formada por
dos circuitos iguales acoplados, la señal viaja por trayectorias casi idénticas
cuando se encuentra en su región lineal. Además, la saturación de corriente
en las ramas que contienen las terminales “X” y “Z” están dadas,
teóricamente, por las fuentes de corriente IB1 e IB2 y no por IB3 e IB4, como
ocurre en los circuitos convencionales. Esto es así por que la corriente a
través de MN5 y MN6 siguen a la corriente a través de MN3, que está
determinada a la vez por I B1 e I B2. Por tanto, cuando la corriente a
través de MN3 se satura, también lo hace la de MN5 y MN6. la simetría en
la operación de un circuito es importante por que, dos trayectorias
diferentes establecen constantes de tiempo diferentes, lo que provoca que
haya histéresis dinámica3 que, en un circuito caótico, introduce distorsión
en la señal y puede modificar significativamente la forma del atractor en el
espacio de fase y su respuesta en frecuencia [18]. Además, un circuito con
funcionamiento asimétrico presenta una característica de transferencia
asimétrica, que contribuye a tener distorsión de la segunda componente
armónica [63].
Sin embargo, las simulaciones muestran que el circuito presenta cierto grado de
dificultad en su compensación en frecuencia y que esta compensación es bastante
dependiente de la resistencia y la capacitancia, conectados al nodo “X” (CX y RX),
y a la capacitancia de compensación misma (Ccomp, mostrada en la figura 3-3).
Esto es, variaciones pequeñas en alguno de estos tres elementos produce un
cambio significativo en la compensación del circuito. Esto se debe, principalmente,
3 El nombre histéresis dinámica hace referencia a la bifurcación entre las trayectorias de subida y bajada de la señal, presente en un circuito a partir de cierta frecuencia de operación.
45

a que existen al menos tres trayectorias de retroalimentación en el circuito que
acercan y mezclan las frecuencias naturales del mismo. Una forma rápida de
compensación del circuito se logra colocando una capacitancia desde el nodo (2)
a tierra (Ccomp). Sin embargo, el valor de esta capacitancia es relativamente
elevado. Esto obliga a ser cuidadosos en el diseño cuando la estabilidad es
importante. Con todo, la inestabilidad de un circuito no siempre es inconveniente,
sobre todo en el diseño de circuitos osciladores, tal como se demostrará en este
trabajo.
3. 1.4. Análisis en DC, AC y tiempo. A continuación se presentan resultados de los diferentes análisis realizados al
circuito. Las simulaciones se realizaron sobre el circuito con fuentes de corriente
reales cuyo diagrama se muestra en la Figura 3-2.
Mn1 Mn2
Mn3 Mn4Mn5 Mn6
Z XY
(2) (4)
(3)
VSS
Ibias1 Ibias2
Mp16
Mp17
Mp18
Mp19
Mp20
Mp21
Mp22
Mp23
Mp24
Mp25
Mp26
(9)
(11)
(12)
(15) (17) (18) (20)
VDD
Figura 3-2. Circuito básico CCII con fuentes de corriente reales.
De las simulaciones se encontró que, efectivamente, el circuito puede ser
polarizado con voltajes tan bajos como 1.1v para aplicaciones que no requieren
46

fuentes de alimentación simétricas con respecto al voltaje de modo común, y con
VDD=-VSS=1.1v para aplicaciones que si lo requieren.
Para realizar las simulaciones al circuito, éste se configuró de la forma que se
muestra en la Figura 3-3. Al circuito se le agregaron algunos elementos de carga
con el objeto de emular las condiciones de funcionamiento real, estos son RX, RZ,
CX. No se incluye una capacitancia en el nodo “Z” por que no afecta el
comportamiento del circuito. Además, se utiliza una capacitancia de compensación
(Ccomp) conectada al nodo (2) del circuito.
(2)
X
YZCCII
Rn CX
vy Ccomp
Figura 3-3. Configuración del circuito para las simulaciones.
Las dimensiones de los transistores se muestran en la Tabla 3-I.
Tabla 3-1. Valores de los transistores del CCII básico
Parámetro Valor
L (todos los transistores) 0.9µm
W1,2 35 µm
W3,4 20 µm
W5,6 17.7 µm
W16 9 µm
W17,26 40 µm
47

La excursión de la señal fue de 0.32v en el seguidor de voltaje cuando se elimina
la resistencia. Observe que si se coloca RX, esta excursión se reduce porque la
limitación en la señal de entrada lo establecerá el valor de las fuentes de corriente
y la resistencia RX.
En la Figura 3-4 se muestra el barrido en DC del circuito. La simulación se realizó
con RX= RZ =10K, CX=0.15pF. Los voltajes de polarización fueron de VDD=-
VSS=1.1v, y la corriente de polarización fue de Ibias=10uA. La figura 3-4a muestra el
seguimiento de voltaje. La curva sólida es el voltaje en el nodo “Y” y la curva
punteada el voltaje en el nodo “X”. La Figura 3-4b muestra el seguimiento en
corriente
Figura 3-4. Barrido en DC del circuito del circuito CCII básico, a) voltaje “Y” (curva sólida) y
en “X” (curva punteada), b) corriente en “X” (curva sólida) y en “Z” (curva punteada).
La curva sólida es la corriente a través del nodo “X” y la curva punteada es la
corriente a través del nodo “Z”. Un buen seguimiento (en voltaje o corriente) es
48

mantenido en el rango de +-100mv. Como se mencionó arriba, este rango es
establecido por el valor de las fuentes de corriente (Ibias=10uA) y el valor de los
resistores (RX y RZ) de forma que el máximo valor posible del voltaje de entrada
está dado por
v I R min bias Xmax * V= = 100 (3.5)
La Figura 3-4 muestra que la característica de transferencia del circuito no es
simétrica. La razón de esto es que, aunque el circuito se comporta de manera
simétrica mientras se encuentra en la región lineal, cuando entra a la región no
lineal de los transistores, el circuito presenta efectos asimétricos. Uno de estos
efectos es la saturación del voltaje en el nodo (3) cuando el voltaje de entrada va
hacia abajo del voltaje de modo común, pero no cuando va hacia arriba del mismo.
Sin embargo, el circuito puede ser modificado con el fin de mejorar la simetría de
su característica de transferencia.
En la Figura 3-5 se muestra la respuesta en frecuencia del circuito. La figura 3-5.a
muestra el voltaje en el nodo “X” y la Figura 3-5.b muestra la corriente en el nodo
“X” (curva sólida) y la corriente en el nodo “Z” (curva punteada). La frecuencia de -
3dB está alrededor de 57MHz. El circuito quedó compensado con una
capacitancia de Ccomp=1.5pF.
Se realizó el análisis transitorio del circuito. Este se muestra en la Figura 3-6.
Para la realización de este análisis, se introdujo una señal de 50mV de amplitud a
10MHz de frecuencia en la terminal “Y” del circuito. La Figura 3-6.a muestra dos
curvas, la curva sólida es para el voltaje en el nodo “Y” y la curva punteada
muestra el voltaje en el nodo “X”. La Figura 3-6.b muestra las corrientes en el nodo
“X” (curva sólida) y la curva punteada la corriente en el nodo “Z”.
49

Figura 3-5. Respuesta en frecuencia del cto. CCII básico, a) voltaje “X”, b) corriente en “X” (curva sólida) y en “Z” (curva punteada).
Figura 3-6. Respuesta en tiempo del cto. CCII básico, a) voltaje “Y” (curva sólida) y en “X” (curva punteada), b) corriente en “X” (curva sólida) y en “Z” (curva punteada).
50

Se puede observar un buen desempeño del circuito a esta frecuencia. Si la
frecuencia se incrementa aún más, se necesita reducir el valor del voltaje de
entrada. Esto es así por que, a mayor frecuencia, tienen mayor relevancia otros
elementos parásitos.
Tal como se mencionó, el circuito es muy sensible a variaciones en RX, CX y Ccomp.
Para ver esto, se realizó un barrido del valor de CX desde 100fF hasta 250fF en
una simulación de AC. El resultado se muestra en la Figura 3-7.
Figura 3-7. Respuesta en frecuencia barriendo CX en el cto. CCII básico, a) voltaje “X”, b) corriente en “X” (curva sólida) y en “Z” (curva punteada).
La figura muestra una variación en la ganancia de 2dB para una pequeña
variación en la capacitancia CX de 150fF. Un comportamiento similar se da cuando
se varía RX o Ccomp. Por lo tanto, es necesario realizar un diseño cuidadoso para
evitar pérdidas de compensación en la fabricación.
Las simulaciones también muestran que, para el circuito propuesto, conforme se
reduce el valor de RX, las variaciones en CX, Ccomp o la misma RX, tienen un menor
51

impacto en la compensación del circuito. Además, para valores pequeños de RX,
la compensación se realiza para valores más pequeños de Ccomp. Sin embargo, si
se utilizan valores muy pequeños de RX, voltajes de entrada menores son posibles
tal como lo muestra la ecuación 3.5).
Si se incrementa la corriente de polarización del circuito, la respuesta en
frecuencia también se incrementa. Sin embargo, se requieren voltajes de
polarización mayores con el fin de mantener los transistores en saturación.
Además, la capacitancia de compensación necesita ser mayor aún. Por ejemplo,
para Ibias=150uA, VDD=-VSS=1.5v, RX=RZ=5K, CX=0.15pF, Ccomp=7pF se tiene una
respuesta en frecuencia e 150MHz.
3. 2 EL CCII-.
La forma negativa del CCII es mostrado en la Figura 3-1b. Las simulaciones con
fuentes de corriente reales utilizando la configuración mostrada en la Figura 3-3 se
describen a continuación.
El circuito fue polarizado con VDD=-VSS=1.1v, Ibias=10uA, RX=RZ=10K, CX=0.15fF.
Las dimensiones de los transistores son los mismos que se muestran en la tabla 1.
Se realizó un análisis de DC que se muestra en la Figura 3-8. La Figura 3-8.a
muestra el seguimiento de voltaje de la terminal “Y” (curva sólida) por el voltaje de
la terminal “X”.
La Figura 3-8b muestra el seguimiento de corriente inverso de la corriente que
fluye por la terminal ”X” por la corriente que fluye por la terminal “Z”. Como en el
caso del CCII+, se puede observar un correcto seguimiento de las señales de
ambos seguidores (el de voltaje y el de corriente) en la región de operación lineal
del circuito y una característica no simétrica en la región de saturación.
52

Figura 3-8. Barrido en DC el CCII-, a) voltaje “Y” (curva sólida) y en “X” (curva
punteada), b) corriente en “X” (curva sólida) y en “Z” (curva punteada).
La respuesta en frecuencia del circuito se muestra en la Figura 3-9. Para esta
simulación RX=4K. Con valores mayores de RX la corriente en el nodo “Z” muestra
problemas para ser compensado. El circuito quedó compensado con Ccomp=0pF,
para este circuito en particular.
La frecuencia de -3dB está arriba de 100MHz. Sin embargo, debido a que se está
usando un valor más pequeño de RX que el usado para el CCII+, deben ser
usados valores más pequeños del voltaje de entrada.
En la Figura 10 se muestra la respuesta en tiempo del circuito cuando se introduce
en la terminal “Y” una señal sinusoidal de 25mV de amplitud a 10MHz de
frecuencia.
La Figura 3-10a muestra el seguimiento de voltaje de la terminal “Y” (curva sólida)
por la terminal “X” (curva punteada). La Figura 3-10b muestra el seguimiento
inverso de la corriente que fluye por la terminal “X” (curva sólida) por la corriente
53

que fluye por la terminal “Z”. Puede observarse el correcto seguimiento de las
señales.
Figura 3-9. Respuesta en frecuencia del CCII-, a) voltaje “X”, b) corriente en “X” (curva sólida) y en “Z” (curva punteada).
Figura 3-10. Respuesta en tiempo del CCII-, a) voltaje “Y” (curva sólida) y en “X” (curva punteada), b) corriente en “X” (curva sólida) y en “Z” (curva punteada).
54

3.3 CCII CON CARACTERISTICA DETRANSFERENCIA SIMETRICA.
Para mejorar la característica de transferencia de forma que sea simétrica en su
región no lineal, el circuito puede ser modificado como se muestra en la Figura 3-
11.
MN1 MN2
MN3 MN4MN5
MN6
IB1 IB2IB3 IB4
Z XY
(2) (4)
(3)
VDD
VSS
K+-
MN8MN7
(6)(5)
Figura 3-11. Circuito CCII con característica de transferencia simétrica
El circuito mejora la característica de transferencia al igualar las corrientes que
fluyen a través de los transistores MN3, MN5 y MN6. Para ello hace que los nodos
(3), (5) y (6) posean el mismo voltaje. Esto se logra por medio de una red de
retroalimentación negativa a través del amplificador con ganancia K y utilizando
transistores en cascada.
A continuación se realiza un análisis en DC del circuito. Este se muestra en la
figura 3-12.
Las dimensiones de las corrientes, de los transistores y de los voltajes de
polarización usados para este circuito son los mismos que en los casos anteriores.
La Figura 3-12a muestra los seguimientos de voltaje y la Figura 3-12b los de
corriente. De la figura pueden observarse dos cosas. Primero, que la característica
de transferencia ha sido mejorada tomando una gran simetría. Segundo, el
seguimiento en voltaje es casi perfecto aún en la región no lineal.
55

Las simulaciones se realizaron usando un amplificador ideal y fuentes reales. La
ganancia del amplificador no requiere ser muy grande. Valores tan pequeños
como K=20 probaron ser suficientes para lograr la característica mostrada. De
esta forma, este amplificador puede ser un simple par diferencial o alguna otra
configuración sencilla de amplificador. Además, su respuesta en frecuencia debe
ser al menos la ofrecida por el CCII, para que pueda responder a los cambios de
voltaje en los nodos (3) y (6).
Figura 3-12. Barrido en DC del CCII con característica de transferencia simétrica, a) voltaje
“Y” (curva sólida) y en “X” (curva punteada), b) corriente en “X” (curva sólida) y en “Z” (curva punteada).
3.4 CCII CON MAYORES VOTAJES DE POLARIZACION
3.4.1 Descripción del circuito
El circuito CCII básico que se ha venido usando no funciona para voltajes de
polarización mayores a cierto valor (alrededor de VDD=-VSS=1.8 volts). Esto se
56

debe a que, conforme se incrementan los niveles de polarización, el voltaje en el
nodo (2) va reduciendo su valor porque el voltaje Vgs del transistor MN3 se
mantiene fijo, ya que su corriente no cambia. Sin embargo, el voltaje en el nodo (3)
se mantiene constante porque el la terminal “Y” se mantiene amarrada al voltaje
de modo común. Por tanto, eventualmente, MN1 y MN2 saldrán de saturación.
Por ello, si los niveles de polarización usados son mayores que cierto valor, los
transistores MN1 y MN2 del circuito saldrán de operación lineal y entrarán a triodo.
Por lo tanto, el circuito requerirá ser modificado para funcionar correctamente. El
circuito modificado se muestra en la Figura 3-13.
MN1 MN2
MN3 MN4
MN7 MN8
MN5 MN6
IB1 IB2IB3 IB4
IB5 IB6
ZX
Y
(2) (4)
(3)
(7) (8)
VDD
VSS
Figura 3-13. Circuito CCII para altos voltajes de polarización
El circuito incluye dos seguidores de fuente, uno en cada trayectoria de
retroalimentación de los espejos de Sansen. De esta forma, los nodos (2) y (4)
ahora están a 2Vgs (el Vgs de MN1 y el de MN7 para el espejo de Sansen de la
izquierda) por encima de VSS, en lugar de uno solo (Vgs de MN3).
Por lo tanto, los niveles de polarización pueden ser mucho mayores y la excursión
de la señal también será mayor.
Se puede observar que el circuito contiene fuentes de corriente en ambas
direcciones, (IB1- IB4 introducen corriente a sus nodos; IB1- IB4 extraen corriente de
sus nodos). Sin embargo, los valores de estos dos tipos de fuentes de corriente no
57

están relacionados en ninguna manera, de tal forma que alguna variación entre
estos dos tipos de fuentes de corriente no tiene consecuencias en el correcto
funcionamiento del circuito.
El circuito completo con fuentes de corriente reales se muestra en la siguiente
Figura 3-14.
3.4.2 Análisis del circuito
Este circuito se estará usando en el resto del trabajo de tesis. Por ello, se
realizarán nuevamente simulaciones en DC, tiempo y frecuencia para este circuito.
En las simulaciones, se hará VDD=VSS=-2.5v, Ibias1=Ibias2=150uA, CX=0.15pF,
RX=RZ=10K. Las dimensiones de los transistores son los que se muestran en la
Tabla 3-2.
Mn1 Mn2
Mn3 Mn4
Mn7 Mn8
Mn5 Mn6
Z X
(2) (4)
(3)
(7) (8)
Ibias1 Ibias2
Mn9Mn10
Mn11
Mn12
Mn13
Mn14
Mn15
Mp16
Mp17
Mp18
Mp19
Mp20
Mp21
Mp22
Mp23
Mp24
Mp25
Mp26
(9)
(10)
(11)
(12)
(13)
(14)
(15)
(16)
(17) (18)
(19)
(20)
VSS
VDD
Y
Figura 3-14. Circuito CCII para altos voltajes de polarización con fuentes reales.
Se realizó el análisis en DC del circuito. Este se muestra en la Figura 3-15. Como
en el caso del CCII básico, la característica de transferencia no es simétrica
aunque el seguimiento de voltaje en la región lineal es correcto. La excursión está
alrededor de + -0.8V.
58

El análisis de AC del circuito se muestra en la figura 3-16. La frecuencia de -3dB
está alrededor de 55MHz. El circuito quedó compensado con una capacitancia
Ccomp=34pF. Aunque la respuesta en frecuencia podría ser mucho más grande, la
enorme capacitancia de compensación la limita. De nuevo, la compensación en
frecuencia del circuito es muy sensible a la variación de los
Tabla 3-2. Dimensiones de los transistores del CCII con mayor voltaje de polarización
Parámetro Dimensión
L (todos los transistores) 0.9µm
W1,2 35 µm
W3, 4, 7, 8, 10-15 20 µm
W5,6 18.9 µm
W9 4uµm
W16 9 µm
W17-26 40 µm
Figura 3-15. Barrido en DC del CCII con altos voltajes de polarización, a) voltaje “Y” (curva sólida) y en “X” (curva punteada), b) corriente en “X” (curva sólida) y en “Z” (curva punteada).
59

parámetros RX, CX y Ccomp. Sin embargo, si se reduce el valor de la resistencia RX,
el circuito se vuelve mucho menos sensible y permite ser compensado con valores
más pequeños de Ccomp.
El análisis transitorio del circuito introduciendo una señal sinusoidal a la terminal
“Y” con una amplitud de 0.35v a una frecuencia de 10MHz se muestra en la Figura
3-17.
Figura 3-16. Respuesta en frecuencia del CCII con altos voltaje de polarización, a) voltaje
“X”, b) corriente en “X” (curva sólida) y en “Z” (curva punteada).
La figura muestra el correcto funcionamiento del circuito. Para frecuencias
mayores, la amplitud de la señal debe ser más pequeña para mantener bajo el
nivel de distorsión.
3. 4.3 Oscilación periódica autónoma.
Como se mencionó arriba, el circuito CCII puede ser llevado a oscilación periódica
ubicando el valor de sus elementos en cierto rango. A continuación se muestra
este comportamiento para el CCII de la figura 3-12.
60

Figura 3-17. Respuesta en tiempo del CCII con altos voltajes de polarización, a) voltaje “Y” (curva sólida) y en “X” (curva punteada), b) corriente en “X” (curva sólida) y en “Z” (curva
punteada).
Se establece la configuración del circuito mostrado en la Figura 3-3 con la terminal
“Y” conectada a tierra. Con VDD=-VSS=2.5, Ibias=150uA, RX=RZ=10K, CX=0, Ccomp=0
se obtiene la forma de onda del voltaje en la terminal “X” como se muestra en la
Figura 3-18.
La frecuencia de oscilación está alrededor de 300MHz y se incrementa conforme
el valor de RX se reduce, aunque la amplitud también se reduce. Para RX=1K la
frecuencia de oscilación es de 560MHz.
El comportamiento oscilatorio se mantiene cuando se incrementa el valor de CX.
Sin embargo, cuando éste alcanza el valor de CX=9pF, se pierde el
comportamiento oscilatorio y se tiene solamente punto de operación. También,
cuando se incrementa el valor de Ccomp, el comportamiento oscilatorio se mantiene
hasta que Ccomp =4pF. Valores mayores de Ccomp producen punto de operación en
el circuito.
61

Figura 3-18. Oscilación periódica del CCII con altos voltajes de polarización.
a)
62

b)
Figura 3-19. Respuesta resonante del oscilador periódico, a) frec. 10X-1GHz b) acercamiento, frec. 100X-150X
Es evidente que la forma de onda está lejos de ser una sinusoidal pura. Sin
embargo, el circuito posee una característica resonante cuando es ubicado en una
región específica de sus parámetros. Si se diseña para esta región se tendrá una
señal mucho más pura que la mostrada anteriormente.
Para CX=0.5p, Ccomp=3pF, RX=RZ=10K. Si se barre el valor de la corriente de
polarización Ibias1=Ibias2 desde 250uA hasta 300uA en intervalos de 5uA en un
análisis de AC se obtiene el siguiente comportamiento.
La Figura 3-19b es un acercamiento de la Figura 3-19a.
Si se escoge un valor de la corriente Ibias1=Ibias2=280uA, el circuito genera una
señal más pura como lo muestra la Figura 3-20.
La forma de onda, a simple vista, se ve mucho más parecida a la sinusoidal que la
mostrada en la Figura 3-18. La transformada de Fourier de esta señal realizada
63

con 65536 puntos se muestra en la figura 3-21. Hay 33 dB de diferencia en
amplitud entre la fundamental y la segunda armónica. Para otros valores de
corriente de polarización la pureza de la señal generada puede ser mayor aún.
Por ejemplo, para Ibias=275uA, la diferencia entre las amplitudes de la fundamental
y la segunda armónica es de 45dB.
Figura 3-20. Oscilación periódica del CCII con Ibias=280uA.
Figura 3-21. FFT de la señal periódica generada por el circuito.
64

3.5 MACRO MODELO DEL CCII.
3.5.1 Descripción del circuito
Se realizó el macro modelo del circuito CCII básico (Fig.3-1), considerando cada
transistor que se encuentra en la trayectoria de flujo de señal como un
amplificador de transconductancia (OTA, por sus siglas en inglés), en donde la
compuerta, la fuente y el drenaje del transistor son la entrada positiva, la entrada
negativa y la salida del OTA, respectivamente. La corriente positiva de salida del
OTA se define como entrante al él. El macro modelo se muestra en la Figura 3-22.
El macro modelo incluye una constante RC en cada nodo del circuito. Con esto se
modela a cada transistor como un amplificador de un solo polo. Se observa que
los nombres de los transistores se corresponden con los de cada OTA, así como
los de los nodos en ambos circuitos, esto hace más legible el macro modelo.
gmgm
Y XOTA1
OTA3 OTA4OTA2
OTA6
(2)(3)
(4)
Rp2Cp2 Rp4 Cp4
Rp3 Cp3
RpX CpX
Z
RpZ CpZ
OTA5
gm
gm gm
gm
Figura 3-22. Macro modelo del CCII básico.
La transconductancia (gm) se hace igual para todos OTAs. Observe que este
modelo es a nivel de señal únicamente, esto es, es un modelo de la región lineal
65

de operación de los transistores y no incluye la mayoría de las no linealidades del
transistor. La única no linealidad, incluida al modelo es una corriente de saturación
máxima y mínima que se añade a cada OTA. Los valores de las constante RC
estarán fijos en todo el trabajo. Estos serán de RP=100K y CP=100fF para todos
los nodos del modelo. La tranconductancia (gm) y los valores para la corriente de
saturación máxima y mínima de cada OTA (Imaxmin) serán establecidos en cada
análisis o sección.
3.5.2 Análisis del circuito
A continuación se aplicarán los diferentes análisis a este modelo con el objeto de
probar su comportamiento. Se hace gm=250uS (transconductancia de cada OTA) y
Imaxmin=150uA. Primero se realiza un barrido en DC de la señal de voltaje en el
nodo de entrada (nodo “Y”) y se observan sus salidas (nodos “X” y “Z”). Para ello
se establece la configuración que se ha venido usando para realizar estos análisis
y que se muestra en la Figura 3-3. El resultado de esta simulación se muestra en
la Figura 3-23. Para ello se hizo RX=RZ=10K. Debido a que es un modelo ideal, los
resultados son muy simétricos y sin distorsión. Sin embargo, si se observa
detenidamente la Figura 3-23a, el seguimiento de voltaje no es exacto. Esto se
debe a que la transconductancia de los OTAs es relativamente bajo. Para valores
mayores de gm, se tiene un mejor seguimiento de voltaje. Esto se puede explicar
de la ecuación 3.3. Según esta ecuación, cuanto mayor es la transconductancia de
los OTAs más cercano a uno es la ganancia de voltaje de retroalimentación.
La respuesta en frecuencia del modelo se muestra en la Figura 3-24. Para esta
simulación se hizo CX=0.15pF. El circuito quedó compensado con Ccomp=1.75pF.
Nótese que el valor de Ccomp es bastante grande, como sucedió en el caso del
CCII real. La compensación de este circuito resulta ser, también, muy sensible a
las variaciones de RX, CX y Ccomp. En la Figura 3-25 se muestra un análisis en el
que se barre CX 150fF, desde CX =150 hasta CX =300fF en un análisis de AC.
La variación en el seguimiento de voltaje (Fig.3-25a) está alrededor de 1dB, y el
de corriente (alrededor de 2dB para la corriente a través del nodo “Z” (Fig. 3-25b).
66

Figura 3-23. Barrido en DC del macro modelo del CCII, a) voltaje “Y” (curva sólida) y en “X” (curva punteada), b) corriente en “X” (curva sólida) y en “Z” (curva punteada).
Figura 3-24. Respuesta en frecuencia del macro modelo, a) voltaje “X”, b) corriente en “X”
(curva sólida) y en “Z” (curva punteada)
67

Además, como sucedió en el caso del CCII realizado con transistores MOS,
conforme se reduce la resistencia RX, la compensación se realiza con valores más
pequeños de Ccomp y muestra una menor dependencia a variaciones en CX, Ccomp y
en RX .
Se realizó un análisis transitorio introduciendo una señal de voltaje sinusoidal en la
terminal “Y” del circuito con una amplitud de 0.5v a una frecuencia de 10MHz. El
resultado se muestra en la Figura 3.26.
El seguimiento es correcto tanto en voltaje (Fig. 3-26a) como en corriente (Fig. 3-
26b) a pesar de que la señal de entrada es grande. Este resultado es obvio del
hecho que el modelo es ideal.
Figura 3-25. Respuesta en frecuencia del macro modelo barriendo CX,a) voltaje “X”, b)
corriente en “X” (curva sólida) y en “Z” (curva punteada)
3.5.3 Oscilación periódica autónoma.
Por último, el modelo también puede ser llevado a oscilación periódica autónoma
cuando sus parámetros se ubican en cierta región de su espacio. Se establece
nuevamente la configuración de la Figura 3-3 y se fija el nodo “Y” a tierra. El
68

comportamiento oscilatorio periódico se presenta para CX=Ccomp=0, RX=1K–65K y
se muestra en la Figura 3-27. La frecuencia de oscilación para RX=1K es de
Figura 3-26. Respuesta en tiempo del macro modelo, a) voltaje “Y” (curva sólida) y en “X”
(curva punteada), b) corriente en “X” (curva sólida) y en “Z” (curva punteada).
450MHz y de 300MHz para RX=65K. Valores más grandes o más pequeños de RX
producen la pérdida de comportamiento periódico. Además, cuando CX o Ccomp
son incrementados por arriba de 25fF también se pierde el comportamiento
periódico y el circuito cae a punto de operación. Existen también otras regiones
angostas de los parámetros en donde se encuentra comportamiento periódico.
De estos resultados podemos observar que el modelo se comporta de manera
muy semejante al circuito en los diferentes análisis realizados y emula
correctamente el mecanismo de funcionamiento básico de éste. Por tanto, se
usará este macro modelo para probar el comportamiento correcto de los diferentes
circuitos caóticos analizados en el capitulo 4.
69

Figura 3-27. Oscilación periódica del CCII macro modelado.
70

Capítulo 4
Diseño de osciladores caóticos
Como se describió en el capítulo 2 de este trabajo, la inclusión de un oscilador
periódico dentro de un oscilador caótico cambia las características de éste,
haciéndolo robusto a las variaciones en sus parámetros. Se presentarán tres
estructuras básicas para probar esta teoría. En los tres casos se realiza la
resistencia no lineal a través del CCII propuesto.
En el primer caso se tiene un oscilador caótico cuyo atractor en el espacio de fase
tiene forma de sombrero, se toma la resistencia no lineal original realizada con
transistores BJT y se transforma a su contraparte con transistores MOS. A
continuación se reducen los valores de sus elementos dinámicos y se intentan
llevar al rango de integración. Sin embargo, este proceso no es completado por
que el circuito pierde su comportamiento caótico antes de haberlo logrado.
Posteriormente se aplica una fuente sinusoidal ideal dentro de la resistencia no
lineal y se llevan sus elementos al rango de integración. Se demuestra el
incremento en la robustez del circuito caótico completo obteniendo el rango en sus
parámetros para los que se comporta caóticamente. Se sustituye después la
fuente sinusoidal ideal por el CCII ubicándolo en la misma posición y se llega a
resultados muy similares. En ambos casos se encuentra que el circuito caótico
puede ser reducido a una estructura más sencilla, que elimina el inductor y uno de
los capacitores.
En la segunda estructura se usa el mismo oscilador caótico, pero se cambia la
resistencia no lineal por una característica de transferencia diferente a la anterior
que también produce caos. En primer lugar se implementa un modelo que realiza
la característica de transferencia propuesta. Se demuestra que el oscilador caótico
con la resistencia no lineal macro modelada produce caos. Se intenta llevar los
71

valores de los elementos dinámicos a la región de integración. Nuevamente el
proceso se interrumpe por la pérdida de comportamiento caótico del circuito
cuando los valores de sus elementos llegan a cierto límite. Se incluye un oscilador
periódico sinusoidal dentro de la resistencia no lineal y se llevan los elementos
dinámicos del circuito completo a la región de integración. Se demuestra que el
circuito caótico es muy robusto a las variaciones de sus parámetros encontrando
los intervalos de éstos para los que se tiene comportamiento caótico. A
continuación se sustituye el modelo de la característica no lineal por un circuito
que se propone y que usa el CCII macro modelado propuesto. Se reducen de los
valores de los elementos dinámicos y se llevan a integración y se demuestra la
robustez del circuito. Por último, se realiza todo el mismo proceso pero ahora
sustituyendo el CCII macro modelado por el real que incluye transistores MOS.
En la tercera estructura se realiza el Circuito de Chua. En primer lugar se modela
la resistencia no lineal con un circuito con el mayor nivel de abstracción posible.
Debido a que el proceso de reducción de los elementos dinámicos y los problemas
inherentes se describieron en el capítulo 2, no se realiza nuevamente en esta
sección. A continuación se sustituye el modelo por un circuito realizado con dos
CCIIs, los cuales usan el macro modelo del CCII real propuesto. Con esta
resistencia no lineal se obtiene comportamiento caótico del circuito y se muestra el
proceso de reducción de los valores de los elementos dinámicos hasta llevarlos a
la región de integración. Se obtiene la región de los valores de los elementos para
los que el circuito se comporta caóticamente y se demuestra el incremento en la
robustez del circuito. Por último se realiza todo el proceso anterior pero ahora
usando el CCII real con transistores MOS.
4.1 PRIMERA ESTRUCTURA DE OSCILADOR CAOTICO.
La primera estructura de oscilador caótico que se analizará en este capítulo se
muestra en la Figura 4-1. Este circuito se reporta en [9] y está compuesto por tres
elementos dinámicos, dos resistencias lineales y dos transistores BJTs.
72

La ecuación diferencial 4.1 es la que gobierna el comportamiento del circuito
R2(5) (6)
VDD
R1
C2
L(1)
(4)
C1
QP1
QN2
RLpar(2) (3) Lo
Figura 4-1. Circuito oscilador caótico con transistores BJTs
R CV VCC V R IC C1 1 1 1 1& = − − L
L0
C V I IC L2 2& = −
LI V VL C&
C= −1 2
N
(4.1)
L I V VL C0 0 2& = −
Donde L0 es el inductor parásito que se encuentra en serie con la resistencia no
lineal, como parte de su modelo, y VN es el voltaje generado por la resistencia no
lineal. El punto, arriba del la variable V significa derivación en tiempo. Si se
eliminan L y C
C1
2 del circuito, éste implementa un oscilador de relajación. La
inclusión de L pareciera provocar una perturbación severa al circuito que resulta
en el comportamiento caótico [9].
Se simuló el circuito con los siguientes valores, L=1mH, C1=100pF, C2=50pF,
R1=65K, R2=5.5K, usando los parámetros del modelo del transistor BC559 para el
QP1 y los del 2N2222 para el QN2. Estos se muestran en el Apéndice B.
73

Los valores de los elementos del circuito se escogieron así para compararlos con
simulaciones posteriores. El circuito desarrolla el comportamiento mostrado en la
Figura 4-2. En ella también se muestran las proyecciones en dos dimensiones del
atractor tridimensiones, con el objetivo de visualizar mejor la forma del atractor.
Figura 4-2 Descripción de fase del circuito con transistores BJTs
La proyección en VC1-VC2 tiene la forma de tres sombreros encimados por lo cual
es circuito es conocido como oscilador de tres sombreros.
La función característica de la resistencia no lineal se muestra en la Figura 4-3.
Esta es una resistencia no lineal controlada por corriente, su característica es
similar a la de un tiristor. Para obtenerla se realizó un barrido en DC aplicando una
corriente a la entrada de la resistencia no lineal y midiendo su voltaje.
74

Figura 4-3. Función característica de la resistencia no lineal del cto. con transistores BJTs
4.1.1 Transformación de la Resistencia No Lineal a transistores MOS.
Se transformó esta resistencia a su contraparte MOS. La transformación, sin
embargo, no es directa por que la resistencia no lineal con transistores BJTs
utiliza mecanismos que no están presentes en el transistor MOS. A continuación
se describe el funcionamiento de la resistencia no lineal.
La carga que llega a la entrada de la resistencia no lineal incrementa (ver Fig. 4-1)
el voltaje del nodo (4) y eventualmente enciende el transistor QP1. La carga fluye
por colector de este transistor incrementando los voltajes en los nodos (5) y (6). En
este punto el transistor QP1 se encuentra en la región de amplificación lineal en el
cual su ganancia de corriente (β) es muy grande. El flujo de carga incrementa el
voltaje en los nodos (4), (5) y (6) hasta que el voltaje en el nodo (6) es
suficientemente grande para encender el transistor QN2. En este punto el voltaje
del nodo (5) cae por que se establece una diferencia de potencial en la resistencia
R2 por el flujo de corriente a través de ella y del colector de QN2 a tierra. Debido a
esta caída de potencial, el voltaje emisor-base de QP1 se incrementa y con ello su
corriente de colector. Esta corriente incrementa el voltaje en el nodo (6) lo que a
75

su vez produce una mayor caída de potencial en el nodo (5). Como resultado de
este mecanismo, se establece un lazo de retroalimentación positiva que origina
que la resistencia no lineal tenga una región de resistencia negativa. En este
punto, ambos transistores están en la región de triodo en la cual las ganancias de
corriente caen a valores más bajos incluso que la unidad, permitiendo el flujo de
corriente a través de los diodos base-emisor de ambos transistores. De esta
forma, el voltaje de entrada se incrementa lentamente cuando la corriente de
entrada es incrementada aún más.
La reducción de la ganancia de corriente de los transistores permite un flujo de
corriente a través sus bases. Este mecanismo no se presenta en los transistores
MOS por que la compuerta de estos transistores está aislada y por tanto no puede
haber un flujo de corriente en DC a trasvés de ellas. Por ello el concepto de
ganancia de corriente en estos dispositivos no existe. Debido a esto, no puede
haber una transformación directa de la resistencia a su contraparte MOS y una
circuitería adicional tiene que agregarse para compensar esta carencia. Se ideó
una modificación al circuito que permite tener una función característica muy
semejante, esta se muestra en la figura 4-4.
(5)(6)
(4)
MP1
MN2
MN3
MN4
R2
VDD
VC2
+
-
Figura 4-4. Resistencia no lineal con transistores MOS
76

El transistor MP1 sustituye al QP1 y el MN2 al QN2 y se introducen dos
transistores adicionales, MN3 y MN4. Además, se conecta intencionalmente el
sustrato del transistor MP1 a VDD.
Los transistores MN3 y MN4 emulan el efecto de caída de ganancia de corriente y
el flujo de corriente a través de la base de los transistores BJTs. La conexión del
sustrato de MP1 a VDD produce efecto de cuerpo en este transistor, lo que reduce
su transconductancia y contribuye a emular la caída de ganancia de corriente de
este transistor.
La función característica de la resistencia no lineal MOS se muestra en la Figura
4-5.
Figura 4-5. Función característica de la resistencia no lineal con transistores MOS
Aunque existen algunas diferencias entre las características de ambas
resistencias no lineales, la forma básica es la misma. Estas diferencias afectarán
la forma del atractor caótico, pero no evitarán su existencia [64]. El valor de la
resistencia fue de R2=25K. Las dimensiones usadas en los transistores son las
que se muestran en la Tabla 4-1.
77

Tabla 4-1. Dimensiones de los transistores de la resistencia no lineal con transistores MOS
Parámetro Valor
L (todos los transistores) 0.9um
Wp1 90um
Wn2-4 300um
Estos valores de las dimensiones de los transistores serán usados durante el resto
del trabajo, a menos que se especifique lo contrario para algún caso particular. Lo
mismo sucederá con los voltajes de polarización, VDD=-VSS=2.5.
4.1.2 El oscilador caótico completo con transistores MOS. El circuito caótico completo se muestra en la Figura 4-6. Se observa que
únicamente se reemplazó la resistencia no lineal con transistores BJTs por su
contraparte con transistores MOS.
(5)(6)
(4)
MP1
MN2
MN3
MN4
R2
VDD
VDD
R1
C2
L(1)
C1
RLpar(2)
Figura 4-6. Oscilador caótico completo
78

Se simuló el circuito caótico completo con los siguientes valores de sus elementos
L=1mH, C1=100pF, C2=50pF, R1=40K ohms, RLpar=0. El atractor resultante se
muestra en la Figura 4-7.
Figura 4-7. Diagrama de fase del oscilador caótico con transistores MOS.
El atractor es ligeramente diferente de su contraparte con BJTs pero conserva la
forma básica. Además, el circuito es muy robusto a las variaciones de sus
parámetros. Esto puede verse de la Tabla 4-2. En ella se da el intervalo de cada
parámetro para el que se tiene comportamiento caótico cuando los demás
parámetros se mantienen fijos.
A continuación se reduce el valor de los elementos dinámicos del circuito con el
fin de llevarlos al rango de integración. Los valores más pequeños para los que se
pudo obtener caos fueron C1=C2=10pF, L=50nH. Claramente, esos valores aún
son demasiado grandes para ser integrados en un chip. Valores más pequeños
79

Tabla 4-2. Región de comportamiento caótico del circuito de la estructura 1
Parámetro Límite mínimo Límite Máximo
C1 1pF 500pF
RLpar 0 10K ohms
C2 4pF 500pF
L 1uH (o menos) 20mH
produjeron solamente ciclo límite. El atractor desarrollado por el circuito con estos
valores de sus elementos dinámicos, y con R1=40K, R2=25K, RLpar=0 ohms,
cambia sustancialmente. Sin embargo, conserva su comportamiento caótico, como
se muestra en la Figura 4-8.
Figura 4-8. Diagrama de fase de circuito con transistores MOS, con valores reducidos
80

El atractor pierde completamente su robustez a variaciones en los valores de sus
elementos. Un ejemplo de ello lo da la resistencia parásita. Cuando es
incrementada ligeramente a RLpar=5 ohms, el circuito pierde completamente el
comportamiento caótico y cae a ciclo límite. La forma del ciclo límite se muestra en
la Figura 4-9.
Figura 4-9. Ciclo límite en el circuito con transistores MOS, con valores reducidos
4.1.3 Inclusión del oscilador periódico en la resistencia no lineal. A continuación se procede a incluir un oscilador periódico en la resistencia no
lineal del oscilador caótico, como se propuso en el capítulo 2, con el objetivo de
mejorar la robustez del circuito. Esta modificación se muestra en la Figura 4-10.
El circuito incluye una fuente de voltaje sinusoidal flotante en la compuerta del
transistor MP1. El oscilador periódico se incluyó en esa posición por que el
objetivo era perturbar la resistencia no lineal completa y, con ello, el oscilador
caótico completo, por ello, el oscilador periódico controla el transistor de entrada
de la resistencia no lineal. El circuito completo se muestra en Figura 4-11.
Se simuló el circuito con los valores que se usaron cuando se obtuvo ciclo límite
(R1=40K, R2=25K, C1=C2=10pF, L=50nH) pero ahora con RLpar=50 ohms. Además,
81

la amplitud del oscilador periódico fue de A=0.5v, y su frecuencia fue de
f=100MHz. El comportamiento del circuito se muestra en la Figura 4-12.
(5)(6)
MP1
MN2
MN3
MN4
R2
VDD
+- vx
VC2
+
-
Figura 4-10. Resistencia no lineal que incluye el oscilador periódico ideal
(5)(6)
(4)
MP1
MN2
MN3
MN4
R2
VDD
+- vx
VDD
R1
C2
L(1)
C1
RLpar(2)
Figura 4-11. Circuito oscilador caótico completo con resistencia no lineal con oscilador
periódico ideal.
82

De la figura se observa que, la inclusión del oscilador periódico en el circuito,
provocó que éste último retomara su comportamiento caótico a pesar del valor de
la resistencia parásita del inductor. En el atractor, el efecto fue que la sección
“tubular” de éste se redujo a casi cero y la sección que une cada extremo del
“tubo” fue incrementado. Esto se puede ver claramente al comparar las
proyecciones sobre IL contra VC1 en las Figuras 4-8 y 4-12.
Figura 4-12. Diagrama de fase del circuito caótico con resistencia no lineal con oscilador
periódico ideal.
Se procedió a reducir el valor de los elementos dinámicos aún más, los valores
finales fueron R1=40K ohms, R2=25K Ohms, C1=C2=2pF, L=5nH. Se simuló con
estos valores y RLpar=50 Ohms, A=0.5v y f=100MHz. El atractor obtenido se
muestra en la Figura 4-13.
83

Nuevamente se observa que el atractor es caótico por la falta de periodicidad
entre sus trayectorias y que éstas cubren el espacio en que se desarrollan.
Es importante hacer notar en este punto que los valores de los elementos del
circuito caótico son completamente integrables. Sin embargo, el atractor cambió
radicalmente su forma a la original. Esto se debe principalmente a que el
comportamiento de la resistencia no lineal, a esta frecuencia, es muy diferente a
su característica en DC, ya que han entrado en juego muchos elementos
parásitos, lo que modifica la forma de la histéresis y las trayectorias por donde la
señal circula. También la fuente de señal periódica ha modificado la forma del
atractor.
Figura 4-13. Diagrama de fase del circuito caótico con resistencia no lineal con oscilador
periódico ideal, completamente integrable
84

El valor de la corriente que circula a través del inductor está alrededor de 300uA,
este valor es relativamente pequeño y ayuda a realizar el inductor con gruesos de
metal reducidos.
Sin embargo, el resultado más importante de esta modificación del circuito es que
la robustez a la variación de sus parámetros se incrementó sustancialmente. Para
probarlo, en la Tabla 4-3 se muestran los rangos de los parámetros para los que el
circuito se comporta caóticamente. Las simulaiones se hicieron para R1=40K
Ohms, R2=25K Ohms, C1=C2=2pF, L=5nH, RLpar=50 Ohms, A=0.5v y f=100MHz.
Los demás parámetros se dejaron fijos al barrer paulatinamente uno a la vez.
De la tabla se observa que el circuito se comporta caóticamente aún cuando la
variación de los valores de sus elementos es muy grande. Además, muestra que
el inductor puede ser eliminado, de tal forma que el circuito final será el que se
muestra en la Figura 4-14.
Tabla 4-3. Rango de los parámetros en los que hay comportamiento caótico en el circuito de
la estructura 1 con fuente de voltaje ideal en la resistencia no lineal
Parámetro Límite mínimo Límite máximo
C1=C2 1.25pF 10pF (o más)
R1 3K 90K
R2 15K 100K (o más)
L 0 50nH (o más)
Al eliminar el inductor también se eliminó su resistencia parásita, y los capacitares
C1 y C2 quedaron en paralelo formando uno solo con valor igual a la suma de
ambos.
Se encontró que la forma de onda del oscilador periódico no afecta el
comportamiento del circuito. Para ello, se reemplazó la forma de onda sinusoidal
por una forma pulso como se muestra en la Figura 4-15.
85

(5)(6)
(4)
MP1
MN2
MN3
MN4
R2
VDD
+- vx
VDD
R1
C
Figura 4-14. Forma final del circuito caótico con resistencia no lineal con oscilador periódico
ideal
2nS 3nS
0.5v
10nS Figura 4-15. Forma de onda tipo pulso aplicada al circuito
La simulación con esta forma de onda periódica, con los mismos valores de los
elementos que en la última simulación, dieron como resultado el atractor mostrado
en la Figura 4-16.
86

Figura 4-16. Diagrama de fase del circuito con resistencia no lineal ideal con señal periódica
tipo pulso
La forma del atractor se modificó ligeramente, sin embargo, no hubieron mayores
cambios. Además, la robustez del circuito se mantuvo.
4.1.4 Realización del circuito con el CCII real. Se sustituyó la fuente de señal periódica por el CCII real con transistores MOS de
la forma como se muestra en la Figura 4-17.
87

(5)(6)
(4)
MP1
MN2
MN3
MN4
R2
VDD
CCIIY X
VC2
+
-
R3
(5)(6)
(4)
MP1
MN2
MN3
MN4
R2
VDD
CCIIY X
VC2
+
-
a) b)
Figura 4-17. Resistencia no lineal que incluye el CCII real
Obsérvese que en lugar de la fuente ideal se colocó el CCII en la configuración de
oscilador periódico (Fig. 4-17a) tal como se describe en el capítulo 3. Sin embargo,
se observó que se podía obviar la resistencia R3, por lo cual se realizaron las
simulaciones con la resistencia no lineal de la Figura 4-17b. El circuito completo se
muestra en la Figura 4-18.
VDD
R1
C2
L(1)
C1
RLpar(2)
(5)(6)
(4)
MP1
MN2
MN3
MN4
R2
VDD
CCIIY X
Figura 4-18. Circuito oscilador caótico completo con CCII en la resistencia no lineal
88

Obsérvese que al introducir el CCII se está transformando la resistencia no lineal
pasiva a activa ya que el CCII requiere de polarización a los rieles de alimentación.
Este proceso ya sucedía al conectar el sustrato de MP1 a VDD para reducir la
transconductancia de MP1. No se usa la terminal “Z” del CCII por que es suficiente
con la terminal “X” que, además, es una salida de voltaje. La corriente de
polarización del CCII fue de Ibias=110uA y su capacitancia de compensación fue de
Ccomp=0.
Se simuló el circuito con los siguientes valores R1=40K ohms, R2=25K ohms,
C1=C2=1pF, L=5nH, RLpar=50 Ohms. El comportamiento del circuito se muestra en
la Figura 4-19. La forma del atractor es muy semejante al caso cuando se usó la
fuente de señal periódica ideal y es claramente caótica.
A continuación se muestra su densidad espectral de potencia de la señal VC1 con
524288 puntos. Esta se muestra en la Figura 4-20.
Figura 4-19. Diagrama de fase del circuito caótico con CCII en la resistencia no lineal
89

a) b)
Figura 4-20. FFT de la señal caótica generada por el cto. con CCII en la resistencia no lineal
La Figura 4-20b es un acercamiento de la Figura 4-20a en la región de interés. Se
observa una fuerte contribución de una componente de frecuencia y de sus
armónicas alrededor de 10MHz al espectro de la señal caótica. Se atribuye esta
componente a la región del atractor con menor amplitud en donde la señal realiza
muchas oscilaciones, todas con un periodo de tiempo muy cercano. Sin embargo,
el circuito claramente es caótico.
De nuevo, el circuito caótico es muy robusto a las variaciones de sus parámetros.
En la Tabla 4-4 se da la región de cada parámetro para el que el circuito se
comporta caóticamente. Al barrer uno de los parámetros, los demás fueron
mantenidos fijos.
Tabla 4-4. Rango de los parámetros en los que hay comportamiento caótico en el circuito de
la estructura 1 con un CCII en la resistencia no lineal
Parámetro Límite mínimo Límite máximo
C1=C2 0.8pF 5pF (o más)
R1 38K 100K
R2 15K 26K (o más)
L 0 50nH (o más)
RLpar 0 150 ohms
Ibias 30µA 110uA
90

El rango de los parámetros es muy grande y suficiente para garantizar que el
circuito se comportará caóticamente. El uso de valores fuera del rango mostrado
por la tabla provoca que el circuito presente un comportamiento de ciclo límite. De
nuevo, el inductor puede ser eliminado de tal forma que el circuito final quedará
como en la Figura 4-21.
Por último, de los valores con que se simuló el circuito es claro que los valores se
encuentran en la región de integración de tal forma que el circuito es
completamente integrable en chip, y robusto a las variaciones de sus parámetros.
Obsérvese que la forma del oscilador caótico final de la figura es el mismo que el
de la Figura 4-14 para el caso ideal.
VDD
R1
C(5)
(6)
(4)
MP1
MN2
MN3
MN4
R2
VDD
CCIIY X
Figura 4-21. Forma final del circuito caótico con CCII en la resistencia no lineal
91

4.2 SEGUNDA ESTRUCTURA DE OSCILADOR CAÓTICO
4.2.1 Circuito caótico con la resistencia no lineal ideal.
La segunda estructura de oscilador caótico contiene el mismo circuito básico. Sin
embargo, se propone una resistencia no lineal con una función característica
diferente. El circuito se muestra en la Figura 4-22. La Figura 4-22b es la función
característica de la resistencia no lineal. Esta es característica es controlada por
corriente y simétrica.
4.2.1.1 Resistencia no lineal ideal. Se realizará la resistencia no lineal con un modelo muy general que servirá
únicamente para probar el comportamiento caótico del circuito. Este modelo se
muestra en la Figura 4-23.
VDD
R1
C2
L(1)
C1
RLpar(2)
RN
irn
VC2
+
-
(4)
gbga
isatirn
VC2
a) b)
Figura 4-22. Segunda estructura de circuito caótico, a) diagrama esquemático, b) función característica
Básicamente, el modelo está compuesto de dos resistencias en serie, una de ellas
es lineal (Rn1) y la otra es no lineal (H). H(vx1) es una fuente de voltaje controlada
por corriente (CCVS, por sus siglas en inglés) en la cual la corriente de control es
la que pasa a través de sus terminales, (censada por la fuente de voltaje
92

Loinr(4) (5)
(6)
(7)
Rn1=8K
vx1
H(vx1)
VC2
+
-
v =1.8vMAX
R=-9K
v =-1.8vMIN
Figura 4-23. Macro modelo de la resistencia no lineal ideal
de valor cero, vx1). Esta fuente controlada es usada porque ofrece la capacidad de
añadir puntos de quiebre a su función característica, tal como se muestra en la
figura. Además, se incluye un inductor parásito en serie con estas resistencias tal
como es requerido por un modelo correcto de una resistencia controlada por
corriente [51]. En la figura también se muestran los valores que se dieron a los
elementos de la resistencia no lineal.
La función característica de la resistencia completa se muestra en la Figura 4-24.
Figura 4-24. Función característica del macro modelo de la resistencia no lineal.
93

4.2.1.2 Oscilación periódica autónoma de la resistencia no lineal. La resistencia no lineal forma un oscilador de relajación cuando es conectada en
paralelo con una capacitancia. El circuito se muestra en la Figura 4-25.
Lo(4) (5)
(6)
(7)
Rn1=8K
vx1
H(vx1)
v =1.8vMAX
R=-9K
v =-1.8vMIN
C2
Figura 4-25. Oscilador de relajación con la resistencia no lineal ideal
Con C2=100fF, la resistencia no lineal desarrolla un comportamiento periódico tipo
carga y descarga característico de un oscilador de relajación. Este se muestra en
la Figura 4-26.
Figura 4-26. Forma de onda del oscilador de relajación con resistencia no lineal ideal
94

Se muestra el voltaje del capacitor (Fig. 4-26a ) y la corriente que pasa a través
del inductor(Fig. 4-26b). La frecuencia de oscilación es de 2.2GHz debido a que
los valores usados son muy pequeños y a que el modelo no incluye elementos
parásitos.
4.2.1.3 Oscilador caótico completo. El oscilador caótico que usa la resistencia no lineal descrita en la sección anterior
se muestra en la Figura 4-27.
VDD
R1
C2
L(1)
C1
RLpar(2) (4) Lo (5)
(6)
(7)
Rn1=8K
vx1
H(vx1)
v =1.8vMAX
R=-9K
v =-1.8vMIN
Figura 4-27. Oscilador caótico completo con resistencia no lineal ideal
Se simuló este circuito con L=100uH, C1=100pF, C2=20pF, Lo=10nH, RLpar=0, y se
barrió el valor de R1 desde R1=10K hasta R1=150K en intervalos de 10K. El
oscilador se comportó caóticamente para R1=40K-50K , 120K-140K. La forma del
atractor se muestra en la Figura 4-28.
El atractor es claramente caótico. Además el valor de la corriente del inductor es
relativamente pequeño, lo que permitirá tener dimensiones de metal reducidas en
95

su geometría. Es interesante observar que la forma del atractor no se parece en
nada al de la estructura caótica anterior, a pesar de que lo único que se modificó
fue la resistencia no lineal.
Se obtuvo la densidad espectral de potencia de las señal VC1 a través de su FFT
con 2097152 puntos. Esta se muestra en la Figura 4-29.
La Figura 4-29b es un acercamiento de la Figura 29a. La FFT muestra claramente
el comportamiento caótico del circuito debido a la contribución de una gran banda
de frecuencias continuas al espectro. Además, hay una contribución más fuerte a
la densidad espectral de potencia por una componente de frecuencia alrededor de
Figura 4-28. Descripción de fase del oscilador caótico de la fig. 4-27
96

a) b)
Figura 4-29. FFT de la señal caótica de la fig. 4-27
1.5MHz. Se atribuye este pico de frecuencia a que el periodo de tiempo que tardan
algunas trayectorias en realizar una oscilación completa se repite muchas veces,
debido a la falta de un mayor mezclado del conjunto de trayectorias. Otra razón
podría ser la oscilación periódica de la resistencia no lineal.
A continuación se redujeron los valores de los elementos dinámicos para llevarlos
a la región de integración. Los mínimos valores para los que el circuito se
comportó caóticamente fueron L=0.5uH, C1=C2=50fF, R1=40K ohms, RLpar=0.
Estos valores aún no están en la región de integración y claramente están muy
dispersos, por que las capacitancias C1 y C2 tienen valores muy bajos, mientras
que el valor del inductor es muy grande aún y muy por encima del rango de
integración. La forma del atractor se muestra en la Figura 4-30.
97

Figura 4-30. Descripción de fase del circuito de la fig. 4-27 con valores reducidos
El atractor ha perdido mucho el mezclado de sus trayectorias y su forma ha
cambiado radicalmente. Si el valor del inductor se reduce aún más o se
incrementan los valores de los capacitores, el circuito pierde completamente el
comportamiento caótico y cae a ciclo límite. Además, si se incrementa ligeramente
el valor de la resistencia parásita del inductor el circuito pierde nuevamente su
comportamiento caótico.
4.2.2 Oscilador caótico que incluye un oscilador periódico en la resistencia no lineal. Se convirtió la fuente de voltaje de valor cero, vx1, incluida en la resistencia no
lineal, de la sección anterior, en una fuente variante con el tiempo con forma de
onda sinusoidal. Se simuló el circuito caótico completo para los siguientes valores
L=0.5uH, C1=C2=400fF, R1=40K ohms, RLpar=0 y con una amplitud de la oscilación
del oscilador periódico de A=0.5v y frecuencia de oscilación F=50MHz. Se barrió el
valor de R1 y se encontró comportamiento caótico para R1=30K-150K. La forma
del atractor se muestra en la Figura 4-31.
La fuente de voltaje sinusoidal ha permitido, de esta forma, obtener nuevamente el
comportamiento caótico en el circuito. Aún más, el mezclado de las trayectorias es
mucho mayor. El valor de los capacitores se incrementó de f=50fF en la simulación
anterior a C1=C2=400fF (o más), lo que produce una reducción en la dispersión en
los valores de los elementos dinámicos. Se observa también que la forma del
atractor ha cambiado completamente.
98

Figura 4-31. Descripción de fase del cto. de la fig. 4-27 con un oscilador periódico ideal
Se obtuvo la FFT de la señal VC1 con 524288 puntos. Esta se muestra en la Figura
4-32.
Figura 4-32. FFT de la señal caótica del cto. de la fig. 4-27 con oscilador periódico ideal
99

La densidad espectral muestra claramente el comportamiento caótico de la señal.
Se observa que las frecuencias de oscilación van desde DC hasta alrededor de
1GHz. Además, al igual que en la sección anterior se tiene una componente de
frecuencia con un valor de potencia muy superior a las demás frecuencias. En
este caso, el pico de potencia lo produce la fuente de señal periódica cuya
frecuencia es de 50MHz, que es la frecuencia donde se encuentra el pico de
potencia.
Cuando se añadió la resistencia parásita del inductor, RLpar=50 Ohms, el circuito
continuó mostrando el comportamiento caótico sin cambiar la forma ni el mezclado
del atractor.
Se barrió la frecuencia del oscilador periódico y se encontró comportamiento
caótico para f=20MHz-75Mhz. Arriba de f=75MHz, el circuito mostró solamente
ciclo límite. Para frecuencias menores también hubo ciclo límite. Además, se
encontró un comportamiento tipo modulación para cierta región de los parámetros
del circuito. La señal periódica de la fuente voltaje es modulada por la oscilación
periódica del circuito autónomo, formada por el resto del circuito. Este
comportamiento se presentó para un rango de frecuencias de la fuente de señal
periódica alrededor de f=10MHz con C1=C2=50fF y los demás valores iguales a los
de la última simulación (L=0.5uH, R1=40K ohms, RLpar=0, A=0.5v). El atractor se
muestra en la Figura 4-33.
100

Figura 4-33. Descripción de fase de la señal modulada del circuito de la figura 4-27 con
oscilador periódico ideal
Aunque, a primera vista, el atractor pareciera ser caótico, sin embargo, no exhibe
mezclado entre sus trayectorias ni divergencia exponencial entre ellas, que es
característico del comportamiento caótico. Contrario a esto, las trayectorias
cercanas fluyen paralelas todo el tiempo.
En la Figura 4-34 se muestra la FFT de la señal VC1 realizada con 131072 puntos.
Figura 4-34. FFT de la señal modulada del circuito de la figura 4-27 con oscilador periódico
ideal
La figura muestra un pico de potencia en la frecuencia de la señal periódica y la
contribución de agrupaciones de frecuencias espaciadas a distancias constantes.
A continuación, se procedió a reducir aún más los valores de los elementos
dinámicos del circuito para llevarlos al rango de integración. Los valores finales
101

fueron L=20nH, C1=C2=200fF, RLpar=0, A=0.5, F=60MHz, R1=30K-150K. La forma
del atractor se muestra en la Figura 4-35.
Figura 4-35. Descripción de fase del circuito de la fig. 4-27 con valores en el rango de
integración y con oscilador periódico ideal
Figura 4-36. FFT de la señal caótica del circuito de la fig. 4-27 con valores en el rango de
integración y con oscilador periódico ideal
102

La FFT de VC1 con 528288 puntos se muestra en la Figura 4-36.
La FFT muestra claramente el comportamiento caótico del circuito. Además, se
puede observar que el espectro se extiende hasta aproximadamente 4GHz.
Nuevamente, la técnica ayuda a robustecer el comportamiento del circuito a
variaciones en los valores de sus elementos. Para comprobar esto, la Tabla 4-5
muestra los rangos de los elementos para los que el circuito se comporta
caóticamente. Los demás valores se mantienen fijos al variar uno de ellos.
Tabla 4-5. Rango de los parámetros en los que hay comportamiento caótico para el circuito
de la estructura 2 con resistencia no lineal macro modelada
Parámetro Límite mínimo Límite máximo
L 5nH 500nH
C1=C2 100fF 500fF
R1 30K ohms 150K ohms
RLpar 0 100 ohms
F 30MHz 100MHz
La tabla muestra, en primer lugar, la gran variación que pueden sufrir los valores
de los elementos sin impedir el comportamiento caótico del circuito. Además, se
puede observar que la gran dispersión en los valores de los elementos dinámicos
antes de incluir el oscilador periódico se ha reducido enormemente al incluirlo, de
tal forma que todos los elementos se encuentran en la región de integración. Por
último, la resistencia parásita del inductor puede ser tan grande como 100 ohms.
4.2.3 Oscilador caótico con resistencia no lineal realizada con el CCII macro modelado.
4.2.3.1 Resistencia no lineal. En esta sección se realizará la resistencia no lineal usando una configuración que
proponemos en este trabajo y que usa un CCII como elemento activo. El CCII se
hará macro modelado.
103

En la figura 4-37a se muestra la resistencia no lineal.
isatirn
VC2
X
YZCCII
RN1=RRN2=R
RN3=2R
VC2
+
-
RN1+RN2+RN3
-(RN1RN3)/(2RN2+RN3)
a) b)
Figura 4.37. Resistencia no lineal con un CCII
La función característica de la resistencia no lineal se muestra en la Figura 4-37b.
La resistencia es simétrica y la forma de su función característica es la misma que
la de la sección 4.2.1. El punto de quiebre “isat” es establecido por las corrientes de
saturación de los OTAs del CCII.
El funcionamiento de la resistencia no lineal es de la siguiente forma. Cuando el
CCII está operando en la región lineal, el circuito realiza una resistencia negativa
con valor g R R R Ra N N N N= − +1 2 2 32/ ( )
g R R Rb N N= +
, que forma la sección interna de la función
característica. Cuando la corriente del CCII, cuya salida forma la terminal “Z”, se
satura en alguna de sus posibles direcciones, el circuito realiza una resistencia
positiva con valor N+1 2 3 que forma alguna de las secciones externas
de la función característica.
Como forma de simplificar el diseño se propuso RN1=RN2=RN3/2=RN con lo que
y . g Ra N= − / 2 g Rb N= 4
La resistencia no lineal completa, utilizando el macro modelo del CCII, se muestra
en la Figura 4-38. Está compuesta del macro modelo del CCII y de las resistencias
RN1, RN2 y RN3 que forman la resistencia no lineal.
La función característica de esta resistencia no lineal se muestra en la Figura 4-39.
Para ello se hizo la transconductancia de los OTAs, gm=250uS, y su corriente de
saturación, Imaxmin=270uA. RN1=RN2=2K y RN3=4K.
104

gmgm
Y XOTA1
OTA3 OTA4OTA2
OTA6
(2)(3)
(4)
Rp2Cp2 Rp4 Cp4
Rp3 Cp3
RpX CpX
Z
RpZCpZ
OTA5
gm
gm gm
gm
+
-+
-
+
-
+
-
+
-
RN1
RN2
RN3
Figura 4-38. Resistencia no lineal con el macro modelo del CCII.
Figura 4-39. Función característica de la resistencia no lineal con CCII macro modelado
Los valores de las pendientes obtenidas fueron de ga=-0.65K y gb=7.28K . Estos
difieren de los valores esperados (ga=-1K y gb=8K). Las diferencias se dieron por
la pequeña transconductancia de los OTAs.
105

4.2.3.2 Oscilación periódica de la resistencia no lineal. La resistencia no lineal oscila periódicamente de manera autónoma al conectar un
capacitor en paralelo con sus terminales. En la Figura 4-40 se muestra el circuito.
X
YZCCII
RN1=RRN2=R
RN3=2R
C
(2)
Ccomp
Figura 4-40. Oscilador periódico con la resistencia no lineal con CCII
El circuito incluye un capacitancia de compensación (Ccomp) en el nodo (2) del
CCII. Para C=0, Ccomp=0 el circuito oscila una frecuencia de f=135MHz como se
muestra en la Figura 4-41.
Figura 4-41. Oscilación periódica de la resistencia no lineal con CCII
106

La señal que se muestra es el voltaje en la terminal “X”. La oscilación se pierde
cuando se incrementa Ccomp>0.75pF. El circuito vuelve a oscilar cuando se
incremente C>3pF. Si se incrementa aún más Ccomp, se necesita incrementar
también C para que el comportamiento periódico se mantenga.
4.2.3.3 Oscilador Caótico. El circuito oscilador caótico completo se muestra en la figura 4-42.
VDD
R1
C2
L(1)
C1
RLpar(2)
gmgm
X
OTA1OTA3 OTA4
OTA2
OTA6
(2)(3)
(4)
Rp2Cp2 Rp4 Cp4
Rp3 Cp3
RpX CpXRpZCpZ
OTA5
gm
gm gm
gm
+
-+
-
+
-
+
-
+
-
RN1
RN2
RN3
Figura 4-42. Oscilador caótico completo con CII macro modelado
Se simuló este circuito para los valores L=100uH, C1=100pF, C2=25pF y RLpar=0,
RN1=RN2=2K, RN3=4K, gm=250uS, Imaxmin=270uA. Se barrió el valor de R1 desde
R1=10K hasta R1=150K y se obtuvo comportamiento caótico para R1=30K-150K.
La forma del atractor se muestra en la Figura 4-43 para R1=150K.
Este atractor tiene cierta similitud con el de la figura 4-28 para el caso
completamente ideal. Se obtuvo la FFT de VC1 con 131072 puntos. Esta se
muestra en la Figura 4-44.
107

Figura 4-43 Descripción de fase del oscilador caótico con CCII macro modelado
a) b)
Figura 4-44. FFT de la señal caótica del circuito con CCII macro modelado
108

La Figura 4-44b es un acercamiento de la Figura 4-44a en la región de baja
frecuencia. La forma del atractor y la FFT muestran claramente el comportamiento
caótico del circuito.
Nuevamente los valores de los elementos se llevaron al rango de integración. Los
valores finales fueron L=10nH, C1=C2=250fF, gm=400uS, Imaxmin=270uA, RLpar=0.
Se simuló el circuito con estos valores y se obtuvo el diagrama de fase que se
muestra en la Figura 4-45.
Figura 4-45. Descripción de fase del circuito con valores en el rango de ICs y con CCII
macro modelado
La forma del atractor ha cambiado completamente, sin embargo el
comportamiento es caótico, tal como lo muestra la FFT de VC1 con 524288 puntos
de la Figura 4-46.
109

a) b)
Figura 4-46. FFT de la señal caótica del circuito con valores en el rango de ICs, con resistencia no lineal con CCII macro modelado
De nuevo, la figura 4-46b) es un acercamiento de la 4-46a) en la región de interés.
Al igual que en los casos anteriores hay una componente de frecuencia junto con
sus armónicas cuya potencia predomina sobre las otras. Esta se encuentra en
f=125MHz.
El circuito es muy robusto a las variaciones de sus parámetros. En la tabla se
muestra el rango de sus parámetros para los que el circuito se comporta
caóticamente. Los valores del circuito son todos integrables y su rango es
bastante amplio garantizando el correcto funcionamiento del oscilador caótico en
circuitos integrados. El inductor también puede ser eliminado quedando el circuito
como en Figura 4-47.
Tabla 4-6. Rango de los parámetros en los que hay comportamiento caótico en el circuito de
la estructura 1 con resistencia no lineal con CCII macro modelado.
Parámetro Límite mínimo Límite máximo
L 0 150nH
C1=C2 100fF 500fF
R1 30K ohms 110K ohms
RLpar 0 500 ohms
gm 350µS 500µS
110

C1
X
YZCCII
RN1=RRN2=R
RN3=2RR1
VDD
Figura 4-47. Forma final del oscilador caótico con CCII macro modelado
Nuevamente, la resistencia parásita del inductor se elimina y los capacitores C1 y
C2 se suman. Reduciendo la dimensión del circuito en dos órdenes. Eso no implica
que el circuito sea de orden uno. La reducción en la dimensión la suple el
oscilador periódico.
4.2.4 Oscilador caótico con resistencia no lineal realizada con el CCII real.
4.2.4.1 Resistencia no lineal. En esta sección se realizará la resistencias no lineal de la misma forma que en la
sección anterior pero usando el CCII real con transistores MOS. La configuración
de la resistencia no lineal usada es la que se muestra en la Figura 4-37 de la
sección anterior. El CCII usado se vuelve a mostrar en la Figura 4-48.
Se hizo un barrido en DC de la resistencia con Ibias=1=Ibias2=150uA, RN1=RN2=2K,
RN3=4K. La función característica de la resistencia no lineal es muestra en la
Figura 4-49.
Es interesante observar que, a pesar de que la característica del CCII es
asimétrica, la función característica de la resistencia no lineal es muy simétrica.
Las pendientes obtenidas fueron ga=0.95K, gb=7.8K, que son muy semejantes a
las esperadas
111

Mn1 Mn2
Mn3 Mn4
Mn7 Mn8
Mn5 Mn6
Z X
(2) (4)
(3)
(7) (8)
Ibias1 Ibias2
Mn9Mn10
Mn11
Mn12
Mn13
Mn14
Mn15
Mp16
Mp17
Mp18
Mp19
Mp20
Mp21
Mp22
Mp23
Mp24
Mp25
Mp26
(9)
(10)
(11)
(12)
(13)
(14)
(15)
(16)
(17) (18)
(19)
(20)
VSS
VDD
Y
Figura 4-48. CCII real usado en la realización de la resistencia no lineal.
Figura 4-49. Función característica de la resistencia no lineal con CCII real
4.2.4.2 Oscilación periódica. La resistencia oscila periódicamente cuando se le coloca una capacitancia entre
su terminal de entrada y tierra. La configuración completa se muestra en la figura
112

4-40. Para Ccomp=0 y C=0 el circuito oscila a una frecuencia de 200MHz. La forma
de la señal de voltaje en su terminal “X” y de su corriente a través de la terminal
“Z” se muestra en la Figura 4-50.
El circuito pierde el comportamiento periódico cuando Ccomp se incrementa a
Ccomp=2pF. Para valores mayores el circuito muestra comportamiento de punto de
operación. Con Ccomp=2pF, si CX se incrementa a CX=0.5pF se obtiene
nuevamente comportamiento periódico.
4.2.4.3 Oscilador caótico. Se realizó el oscilador caótico con esta resistencia no lineal con la configuración
de circuito mostrada en la Figura 4-22a. Se simuló para L=100µH, C1=60pF,
C2=10pF, Ccomp=5pF, R1=70K, el atractor obtenido se muestra en la Figura 4-51.
Figura 4-50. Oscilación periódica del circuito con resistencia no lineal con CCII real
Se observa una gran similitud entre este atractor y el mostrado en la Figura 4-43
para el CCII macro modelado, con valores muy semejantes de sus elementos.
Además, el atractor muestra cierta semejanza con el desarrollado por el circuito
ideal y mostrado en la Figura 4-28.
113

Figura 4-51. Descripción de fase del circuito con CCII real
Se realizó una FFT de la señal VC1 con 131072 puntos. Esta es mostrada en la
Figura 4-52.
La FFT muestra que el comportamiento es caótico. Como en los casos anteriores,
existe una componente de frecuencia que prevalece sobre las demás en f=2MHz.
Se atribuye ese pico de potencia a que las trayectorias del atractor se acumulan
alrededor de una sección reducida del espacio de fase, lo que les permite tener
periodos de oscilación muy semejantes.
Se procedió a reducir el valor de los elementos dinámicos hasta llevarlos a la
región de integración. Los valores finales fueron L=10nH, C1=C2=250fF, R1=70K,
Ccomp=0, Ibias=150uA y RLpar=0, el atractor obtenido se muestra en la Figura 4-53.
114

Figura 4-52. FFT de la señal caótica del circuito con CII real
Figura 4-53. Descripción de fase del circuito con el CCII real y elementos integrables
115

El atractor se modificó sustancialmente para estos valores de los elementos muy
reducidos. Esto mismo sucedió en el caso del CCII macro modelado. Sin embargo
el atractor todavía conserva su forma caótica. Se realizó la FFT de la señal VC1
con 524288 puntos. El resultado se muestra en la Figura 4-54.
La FFT muestra que el atractor es efectivamente caótico. Su frecuencia se
extiende hasta 1GHz. También hay una contribución fuerte de una componente de
frecuencia en 200MHz que se debe a la acumulación de las trayectorias alrededor
de una región reducida del espacio de fase y a que no hay mucho mezclado entre
las trayectorias. La inclusión de RLpar=50 ohms no provocó modificaciones en el
comportamiento del circuito.
Figura 4-54. FFT de la señal caótica del circuito con CCII real y elementos integrables
De hecho, tal como en las secciones anteriores, el circuito fue muy robusto a las
variaciones de sus parámetros. Esto se muestra en la Tabla 4-7, en donde se
muestran las regiones de los parámetros para los que el circuito se comporta
caóticamente. Los demás parámetros se mantuvieron fijos al variar uno de ellos.
Tabla 4-7. Rango de los parámetros en los que hay comportamiento caótico en el circuito de la estructura 2 con resistencia no lineal con CCII real.
Parámetro Límite mínimo Límite máximo
L 0 200nH
C1=C2 200fF 2pF
R1 30K ohms 150K ohms
RLpar 0 1000 ohms
116

Nuevamente, el inductor puede ser eliminado y con ello la resistencia parásita, y
los capacitares C1 y C2 sumados.
4.3 TERCERA ESTRUCTURA DE OSCILADOR CAOTICO: EL CIRCUITO DE CHUA
4.3.1 Oscilador caótico con resistencia no lineal con elementos ideales
El circuito de Chua es uno de los circuitos más simples que exhibe
comportamiento caótico con una rica variedad de bifurcaciones. Es considerado
como un paradigma de caos y ha sido comúnmente usado para estudiar el
comportamiento no lineal.
Este circuito usa una resistencia no lineal, simétrica, monotónica, lineal a tramos
con tres secciones, conocida como diodo de Chua [58]. El circuito completo se
muestra en la Figura 4-55a. La Figura 4-55b muestra la función característica de la
resistencia no lineal. Las simulaciones con este circuito se harán realizando la
resistencia no lineal de tres maneras. Primero, la resistencia no lineal se hará con
elementos ideales muy abstractos para probar su funcionamiento. La segunda
forma usará el CCII macro modelado incluido en una estructura conocida para la
realización del diodo de Chua. Por último, se usará la misma estructura pero con
el CCII con transistores MOS.
L
Rlpar R1
C2 C1 RNvc1
+
-
(1)(2)(3)
inr
vc1
inr
Isat
Ga
Gb
E
a) b)
Figura 4-55. Circuito de Chua
117

4.3.1.1 Resistencia no lineal con elementos ideales. En esta realización del diodo de Chua se usan dos elementos. El primero es una
fuente de corriente controlada por voltaje (VCCS, por sus siglas en inglés) en
donde sus terminales de control son las mismas que las controladas. Ya que
SPICE permite establecer valores máximos y mínimos de la corriente en un
elemento VCCS, se pueden introducir puntos de quiebre a la resistencia no lineal.
Este elemento forma la sección interna de la resistencia no lineal con pendiente
Ga. Un segundo elemento es usado, esta es una resistencia lineal negativa que
forma las secciones externas de la resistencia no lineal con pendientes Gb. El
circuito de resistencia no lineal se muestra en la Figura 4-56a
vc1
inr
-R
Gm
IsatGa
Gb
E-Rvc1
+
-
Gm*vc1
inr (1)
a) b)
Figura 4-56. Resistencia no lineal macro modelada, a) modelo, b) función característica
La resistencia no lineal resulta de la suma de ambos componentes, el lineal y el no
lineal. Se puede observar que Ga=Gb=Gm-1/R. Para Gm=-348uS y R=-2445 se
tiene Ga=-757uS y Gb=-409uS. La corriente de saturación Isat=-348uS. Las
simulaciones posteriores se realizarán utilizando estos valores.
4.3.1.2 Oscilador caótico. El oscilador caótico completo es el que se muestra en la Figura 4-57. El circuito es
de tercer orden debido a que se tienen tres elementos dinámicos. Además, la
única no linealidad del circuito está dada por la saturación de voltaje de Gm.
118

-R Gm*vc1L
Rlpar R1
C2 C1
(1)(2)(3)
Figura 4-57. Circuito de Chua con resistencia no lineal macro modelada
Se simuló el oscilador caótico completo con los siguientes valores: L=18mH,
C2=100nF, C1=C2/10=10nF, R1=1770 ohms, RLpar=0 ohms. El diagrama de fase
resultante se muestra en la Figura 4-58.
Figura 4-58. Diagrama de fase del circuito de chua con resistencia no lineal macro modelada
La forma del atractor es conocida como “doble scroll”. La amplitud de los voltajes y
corrientes desarrollados por el circuito son establecidos por la corriente de
saturación de la resistencia no lineal, Isat y pueden ser reducidos dando valores
más pequeños para éste último.
Se realizó una FFT de vc1 con 65536 puntos que es mostrada en la Figura 4-59.
La FFT establece el comportamiento caótico del circuito. Se observa que el
espectro no muestra picos predominantes en frecuencias únicas.
119

Figura 4-59. FFT de la señal caótica del circuito de Chua con resistencia no lineal macro
modelada
En la Tabla 1-1 se muestra un listado de valores de los elementos dinámicos para
los que el circuito se comporta caóticamente. Además, en el capítulo 1, se
presentaron una serie de problemas que presenta este circuito cuando intenta a
llevarse a integración. Estos problemas son, una gran dispersión de sus elementos
dinámicos que impide que algunos de ellos estén en la región de integración, muy
poca robustez del circuito a las variaciones de sus parámetros y parásitas que
sacan al circuito del comportamiento caótico, principalmente la resistencia parásita
del inductor. Esté último efecto se presenta ya sea que los valores de los
elementos dinámicos sean muy grandes o muy reducidos. Por tanto puede
decirse que, a menos que se realice una transformación de algún tipo o
normalización de los valores de los elementos dinámicos, como sucede en el
método de variables de estado, el circuito no es integrable.
4.3.2 Oscilador caótico con resistencia no lineal con CCII macro modelado. 4.3.2.1 Resistencia no lineal. En esta sección y en la siguiente se realizará la resistencia no lineal con un
circuito que incluye dos CCIIs como parte de su estructura. En esta sección el
CCII será macro modelado.
El mecanismo de funcionamiento de la resistencia no lineal es muy parecido al de
la sección anterior en el sentido que se suman dos funciones características una
120

lineal y la otra no lineal para formar la resultante. Esta estructura se ha usado con
otros elementos activos como OTAs y CFOAs. El circuito esquemático se muestra
en la Figura 4-60.
La resistencia no lineal está compuesta por dos CCIIs y dos resistencias no
lineales. Cada CCII y una resistencia no lineal, conectada a su terminal “X”, forma
un convertidor de impedancia negativa (NIC, por sus siglas en inglés) con valor
igual a –Rn1 y –Rn2. Ambos NICs muestran puntos de quiebre en los valores
X
YCCII1
Rn1
X
YZCCII2
Rn2
Z
inr
vc1
+
-
Figura 4-60. Resistencia no lineal con CCII macro modelado
correspondientes a las corrientes de saturación de los OTAs del macro modelo de
su CCII correspondiente. Sin embargo, las corrientes de saturación del CCII1 son
menores a las del CCII2, de tal forma que en la región de trabajo del circuito
completo sólo operan los puntos de quiebre del CCII1 . Así, la resistencia no lineal
completa puede ser vista como el paralelo de dos resistencias negativas, una no
lineal (CCII1) y la otra lineal (CCII2). Los puntos de quiebre los establece el voltaje
correspondiente a la corriente de saturación del CCII1.
Para Rn1=2873 ohms y Rn2=2445 ohms , gm=500uS (transconductancia de los
OTAS de ambos CCIIs), Imaxmin1=100uA (corriente de saturación de los OTAs del
CCII1), Imaxmin2=500uA (corriente de saturación de los OTAs del CCII2), se obtuvo
la función característica que se muestra en la Figura 4-61.
Los valores obtenidos de los parámetros de la resistencia no lineal fueron
Ga=734uS y Gb=386uS, E=0.3v (puntos de quiebre). Estos valores difieren
121

moderadamente de los esperados. La diferencia se reduce al incrementar las
transconductancias de los OTAs de los CCIIs. Los valores usados para la
resistencia no lineal en esta sección serán usados en las siguientes.
4.3.2.2 Oscilación periódica de la resistencia no lineal. En el proceso de encontrar comportamiento caótico en el circuito de Chua con la
configuración de resistencia no lineal de la sección anterior a diferentes valores de
Figura 4-61 Función característica de la resistencia no lineal con CCII macro modelado
sus elementos dinámicos, se requerirá mover la compensación de los CCIIs. Para
ello, la resistencia no lineal incluirá los capacitores CX1 y CX2 en las terminales “X”
de los CCIIs y Ccomp1 y Ccomp2 en los nodos (2) de los mismos. Sin embargo, esta
configuración de resistencia no lineal exhibe comportamiento periódico cuando se
conecta una resistencia desde la terminal de entrada de la resistencia no lineal a
tierra. El circuito se muestra en la Figura 4-62.
Lo interesante de este comportamiento periódico es que la resistencia no lineal por
si sola no manifiesta comportamiento periódico cuando se conecta entre su
terminal de entrada y tierra un capacitor, por que su característica es monotónica y
por lo tanto no hay histéresis ni comportamiento periódico.
122

X
YCCII1
Rn1Z
CX1
Ccomp1
(2)
X
YCCII2
Rn2Z
CX2 (2)
Ccomp2
Rosc
(x1)
(x2)
(yin)
Figura 4-62. Oscilador periódico con resistencia no lineal con CCIs macro modelados
El comportamiento periódico lo está provocando entonces la descompensación en
frecuencia de los CCIIs que los lleva a retroalimentación positiva. La resistencia
Rosc se usa por que la resistencia no lineal tendrá una trayectoria a tierra a través
de la resistencia R1 y el inductor L cuando el circuito de Chua completo sea
conectado.
Para los siguientes valores, CX1=CX2=0.25pF, Ccomp1=Ccomp2=0, Rosc=1770 ohms el
circuito presenta comportamiento periódico como se ve en el diagrama de fase de
la Figura 4-63.
La figura muestra los voltajes en los nodos (X1) contra (X2). La frecuencia de
oscilación fue de 500MHz.
4.3.2.3 Oscilador caótico. Se conectó la resistencia no lineal de la sección anterior al circuito de Chua para
formar el oscilador de caótico completo. Este se muestra en la Figura 4-64.
El circuito no incluye Rosc por que esta resistencia se utilizó para emular a la
resistencia R1 que se encuentra en la trayectoria a tierra de la resistencia no lineal
a través del circuito de Chua. Se simuló este circuito para los valores L=18mH,
C2=100nF, C1=C2/10=10nF, R1=1770 y RLpar=0 ohms, Ccomp1=Ccomp2=0,
CX1=CX2=0.25pF. El diagrama de fase se muestra en la Figura 4-65.
123

Figura 4-63. Oscilación periódica del circuito con resistencia no lineal con CCIIs macro
modelados
L
Rlpar R1
C2 C1
(2)(3)
X
YCCII1
Rn1Z
CX1
Ccomp1
(2)
X
YCCII2
Rn2Z
CX2 (2)
Ccomp2
(x1)
(x2)
(1)
Figura 4-64. Circuito de Chua con resistencia no lineal con CCIIS macro modelados
El circuito es claramente caótico y desarrolla el atractor de doble “scroll”. Es
interesante observar que, para esta región de los valores de los elementos del
circuito, la oscilación periódica de la resistencia no lineal no afecta el
comportamiento del circuito caótico completo.
De hecho la, robustez del circuito a variaciones de sus parámetros no se ve
afectada. Una posible causa de esto es la diferencia en la frecuencia a la que
124

oscila la resistencia no lineal y la frecuencia de resonancia del circuito de Chua,
que se puede establecer de la siguiente manera
Figura 4-65. Diagrama de fase del circuito con resistencia no lineal con CCIIs macro
modelados
fLCres =
12 2π
La frecuencia de la resistencia no lineal está alrededor de 500MHz y la frecuencia
de resonancia del circuito es de fres=3.7KHz. Conforme los valores de los
elementos dinámicos del circuito se reducen, el circuito es más afectado por la
oscilación periódica de la resistencia no lineal.
Se realizó el proceso de reducir los valores de los elementos dinámicos para
llevarlos a integración. A continuación se mostrarán los diagramas de fase del
circuito, conforme se reducen los valores de los elemento dinámicos.
El circuito presenta un comportamiento de doble “scroll” exacto hasta L=15uH,
C2=87pF, C1=C2/10=8.7pF. Valores más pequeños que estos mostraron un
atractor doble “scroll” distorsionado. Para L=940nH, C2=7pF, C1=C2/10=0.7pF,
R1=1770 ohms, RLpar=0 ohms, Ccomp1=Ccomp2=0, CX1=CX2=0.5pF el circuito se
comporta caóticamente. Su diagrama de fase se muestra en la Figura 4-66
125

.
Figura 4-66. Diagrama de fase del circuito con resistencia no lineal con CCIIs macro
modelados con valores reducidos, 1
La forma de los “scrolls” se distorsionó y se volvió irregular. Además, el espacio
que se encuentra entre ellos, que comúnmente es sólo una región de transición,
ahora pareciera haberse eliminado de tal forma que los “scrolls” están casi
traslapados y pareciera desarrollarse cierta oscilación en la unión de ambos.
Para L=117uH, C2=650fF, C1=65fF, R1=1770 ohms, RLpar=0, Ccomp1=Ccomp2=0,
CX1=CX2=0.5pF el circuito se comporta caóticamente y muestra un atractor con
cuatro ”scrolls” como se muestra en la Figura 4-67.
En este caso se conserva la región de transición. De hecho los “scrolls” se han
distanciado aún más y han permitido la existencia de otros dos, que son más
126

pequeños y están más cercanos entre ellos. Desafortunadamente los “scrolls” se
han distorsionado aún más.
Figura 4-67. Diagrama de fase del circuito con resistencia no lineal con CCII macro
modelado con valores reducidos, 2
La razón para el surgimiento de dos “scrolls” adicionales consiste en lo siguiente.
Pareciera ser que cada CCII está generando un par de “scrolls” en su relación con
el circuito de Chua adicional. La relación entre las señales generadas por ambos
CCIIs produce que la señal final esté más mezclada, pero esta relación no es lo
suficientemente fuerte como para hacer que los “scrolls” se fundan un uno solo o
127

en una forma de atractor diferente. Esto puede verse claramente cuando se simula
el circuito excluyendo algunos de los CCIIs. Se muestra el diagrama de fase del
circuito cuando se excluye el CCII2 en la Figura 4-68a y cuando se excluye el
CCII1 en la Figura 4-68b.
Se observa entonces que el par de “scrolls” que se encuentra más internamente,
en el diagrama de fase que incluye a ambos CCIIs, está formado por el CCII1 y los
“scrolls” más externos los forma el CCII2. La relación entre ambos CCIIs produce
el atractor de la Figura 4-67 en donde se observa que los “scrolls” se han
modificado (por ejemplo, la región de transición se ha ampliado) pero conservan
su forma.
a)
b)
Figura 4-68. Diagrama de fase del circuito con resistencia no lineal con CCII macro modelado con valores reducidos, 3
128

Por último, los valores de los elementos dinámicos fueron llevados a sus valores
finales, que fueron: L=30nH, C1=C2=0.25pF, R1=1770 ohms, RLpar=0, Ccomp=0,
CX=0.75pF. Se observa que estos valores son completamente integrables y que
no hay dispersión entre ellos. La simulación en tiempo con estos valores resultó en
la forma del atractor mostrada en la Figura 4-69.
Figura 4-69. Diagrama de fase del circuito con resistencia no lineal con CCIIs macro
modelados y valores en el rango de integración.
La forma del atractor se ha distorsionado completamente. La razón principal de
esto consiste en que al reducir los valores de los elementos dinámicos, la
frecuencia de resonancia del circuito se incrementa, y pareciera ser que la
oscilación periódica de la resistencia no lineal afecta más al circuito conforme sus
frecuencias están más cercanas. En este caso, la frecuencia de resonancia del
circuito es de f=1.8GHz que es 3.7 veces más grande que la frecuencia del
oscilador periódico (500MHz). Sin duda, esta relación entre ambas frecuencias (la
del oscilador periódico dado por la resistencia no lineal y la frecuencia de
resonancia del circuito) no se puede establecer completamente de esta forma ya
que los circuitos no son independientes y también por que la frecuencia del
oscilador periódico se obtuvo colocando una resistencia a la entrada de valor
Rosc=1770. Sin embargo, la resistencia que ve el oscilador periódico es mucho
129

mayor por que el inductor a esta frecuencia ofrece una impedancia muy grande
que no se está contemplando.
La segunda razón para la modificación de la forma del atractor se debe a que se
cambió la razón entre los valores de los capacitores C1 y C2. El capacitor C1 es
frecuentemente muy pequeño comparado con C2 y permite la transición entre las
regiones externas a una frecuencia muy alta. Por otro lado, el capacitor C2 junto
con L forma un circuito tanque que desarrolla los “scrolls” en las regiones externas
de la resistencia no lineal. En este caso los valores de ambos capacitores se han
hecho iguales cambiando así la relación de frecuencias de oscilación y de
transición a través de la región interna, contribuyendo de esta forma a la
modificación de la forma del atractor.
A pesar de todo, el atractor es caótico. Esto se puede establecer de la FFT de VC1
con 262144 que se muestra en la Figura 4-70. En la figura se observa que el
espectro es continuo, lo que establece el carácter caótico del circuito. Además, se
observa que el espectro se extiende hasta alrededor de 1GHz.
Por último, en la Tabla 4-8 se muestra el rango de los valores de los elementos del
circuito para los que se presenta comportamiento caótico. La tabla muestra una
gran robustez del circuito a variaciones de sus parámetros.
Figura 4-70. FFT de la señal caótica del circuito con resistencia no lineal con CCIIs macro
modelados y valores en el rango de integración.
130

Tabla 4-8. Rango de los parámetros en los que hay comportamiento caótico para el circuito de la estructura 3 con resistencia no lineal con CCIIs macro modelados
Parámetro Límite mínimo Límite máximo
L 5nH 100nH (o más)
C1=C2 10fF 400fFF
R1 400 ohms 1800 ohms
RLpar 0 100 ohms
4.3.3 Oscilador caótico con resistencia no lineal con CCII real. En esta sección la resistencia no lineal se realizará de la misma manera que en la
sección 4.3.2 con la diferencia de que el CCII se realizará con transistores MOS,
con el circuito de la Figura 4-48.
4.3.3.1 Resistencia no lineal. La estructura de la resistencia no lineal se muestra en la Figura 4-60. Los valores
de la corriente de polarización del CCII son Ibias1=100uA, Ibias2=300uA y los de las
resistencias Rn1=2873 y Rn2=2445. Estos valores serán usados durante el diseño
del oscilador caótico en la sección posterior. La función característica de la
resistencia no lineal, obtenida de un barrido en DC, se muestra en la Figura 4-71.
Los valores de sus pendientes son Ga=-748uS (sección interna) y Gb1=-414uS
(sección externa izquierda) y Gb2=-400uS (sección externa derecha). Los errores
en las pendientes con respecto a los deseados (Ga=--757uS y Gb=-409uS) se
pueden considerar despreciables. Sin embargo, la función característica no es
completamente simétrica lo que afectará la forma del atractor.
4.3.3.2 Oscilador periódico. Tal como sucedió con el CCII macro modelado, la resistencia no lineal oscila
periódicamente cuando se configura como en la Figura 4-62.
131

Figura 4-71. Función característica de la resistencia no lineal con CCIIs reales
A la resistencia no lineal se le agregaron los capacitores Ccomp1, Ccomp2, CX1 y CX2 y
el resistor Rosc.
El circuito oscila periódicamente para Rosc=1K, Ccomp1=Ccomp2=0, CX1=CX2=0. El
diagrama de fase se muestra en la Figura 4-72. La figura muestra el voltaje en el
nodo (X1) contra el voltaje en el nodo (X2). La frecuencia de oscilación del circuito
fue de 450MHz.
4.3.3.3 Circuito caótico. El circuito caótico completo se muestra en la Figura 4-64. Se observa que la
configuración del oscilador caótico es la misma ya que se han agregado al circuito
los capacitores CX1, CX2, Ccomp1 y Ccomp2. Se simuló el circuito con estos valores y
con L=18mH, C2=110nF, C1=11nF, R1=1720 ohms, Ccomp=0, CX=1pF y RLpar=0. El
diagrama de fase se muestra en la Figura 4-73. La forma del atractor es el doble
“scroll” como se esperaba. De nuevo, la descompensación en los CCIIs no
provoca ningún efecto en la forma del atractor para estos valores relativamente
grandes de los elementos dinámicos.
132

Figura 4-72. Oscilación periódica de la resistencia no lineal con CCIIs reales
Figura 4-73. Diagrama de fase del circuito de Chua con resistencia no lineal con CCIIs reales
Se realizó el proceso de reducción de los valores de estos elementos para
llevarlos a integración. El circuito mostró comportamiento de doble “scroll” bien
formado conforme se redujeron los valores. Sin embargo, para valores menores
que L=10uH, C2=40pF y C1=C2/10=4pF el atractor empezó a distorsionarse hasta
que se obtuvo únicamente un único doble “scroll”. Posteriormente, al hacer menor
la relación entre los capacitores C1 y C2, la forma del atractor se modificó
133

completamente. Esto se puede ver para L=1uH, C2=5pF, C1=1pF, CX=0, Ccomp=0,
RLpar=0, cuyo atractor se muestra en la Figura 4-74. En ella también se muestran
las proyecciones en dos dimensiones del mismo atractor para visualizar mejor la
forma de este. Aunque es claro que el atractor es caótico, éste ha perdido
completamente su forma de doble “scroll”. De nuevo, una de las razones para esto
es el efecto que causa la oscilación periódica de la resistencia no lineal en el
circuito completo.
Figura 4-74. Diagrama de fase del circuito de Chua con valores reducidos y resistencia no
lineal con CCIIs reales
134

Figura 4-75. FFT de la señal caótica del circuito de Chua con valores reducidos y resistencia
no lineal con CCIIs reales
La FFT del voltaje VC1 con 65536 puntos se muestra en la Figura 4-75.
Ella muestra el comportamiento caótico del circuito y cómo este comportamiento
se extiende hasta el rango de los Giga Hertz.
A continuación se obtendrán las regiones de los valores de los elementos en los
que el circuito opera caóticamente. Esto se muestra en la Tabla 4-9.
Claramente, las regiones de los valores para los que se presenta comportamiento
caótico se han extendido.
A continuación, los valores de los elementos dinámicos se redujeron aún más
hasta llevarlos a su región de integración, los cuales fueron: L=5nH, C1=C2=100fF,
R1=1770 ohms, RLpar=0, Ccomp1=Ccomp2=0, CX1=CX2=0. El comportamiento del
circuito para estos valores se muestra en la figura 4-76.
Tabla 4-9. Rango de los parámetros en los que hay comportamiento caótico para el circuito
de la estructura 3 con valores medianos, con resistencia no lineal con CCIIs reales
Parámetro Límite mínimo Límite máximo
L 0.75µH 2.5µH (o más)
C2 4pF 50pF (o más)
C1 1pF 5pF (o más)
R1 1500 ohms 1800 ohms
RLpar 0 70 ohms
135

Figura 4-76. Diagrama de fase del circuito de Chua con valores integrables y resistencia no
lineal con CCIIs reales
La forma del atractor se ha modificado nuevamente y el mezclado se ha reducido.
Sin embargo el comportamiento sigue siendo caótico. Esto puede verse de la FFT
aplicado a VC1 con 2 097 152 puntos que se muestra en la Figura 4-77.
Esta FFT muestra el comportamiento caótico del atractor y su espectro se
extiende hasta varios Giga Hertz.
Es interesante observar además que, al igual que en los casos anteriores, hay
picos de potencia en componentes de frecuencia específicos que, en este caso,
como en algunas ocasiones anteriores, se atribuye a que el atractor se desarrolla
en una sección relativamente estrecha del espacio de fase y a que no hay mucho
mezclado de sus trayectorias.
136

Figura 4-77. FFT de la señal caótica del circuito de Chua con valores integrables y
resistencia no lineal con CCIIs reales
Por último se obtuvo la región de sus parámetros para los que el circuito se
comporta caóticamente. Este se muestra en la Tabla 4-10. Para obtenerla, se
mantuvieron fijos los valores de los demás parámetros al variar uno de ellos.
La tabla muestra nuevamente que el circuito es muy robusto a las variaciones de
sus parámetros, por lo cual se concluye que el circuito se completamente
integrable en circuito integrado. Se observa que el inductor puede ser muy
pequeño y, por lo tanto, su resistencia parásita será muy pequeña también.
Además, se encontró que se puede eliminar C2 o R1, pero no ambos a la vez. Por
lo cual el circuito puede reducirse de la manera que se muestra en la Figura4-78.
Tabla 4-10. Rango de los parámetros en los que hay comportamiento caótico para el circuito
de la estructura 3 con valores integrables, con resistencia no lineal con CCIIs reales
Parámetro Límite mínimo Límite máximo
L 0.1nH 50nH (o más)
C2 0pF 4pF
C1 10fF 4pF
R1 0 ohms 1.8K ohms
Rn1 2.85K ohms 4.5K ohms
Rn2 2.4K ohms 3.4K ohms
RLpar 0 90 ohms
137

RNC1
R1
L
Figura 4-78. Forma final del circuito caótico con resistencia no lineal con CCIIs reales
Ya que se redujo la dimensión del circuito, las capacitancias parásitas de la
resistencia no lineal pasan a formar parte del mecanismo que da origen al
comportamiento caótico.
138

Capítulo 5
Fabricación
La histéresis en DC de un resistencia no lineal es muy diferente a la histéresis de
este mismo a una frecuencia elevada. Esto se debe a que en DC no se toman en
cuenta todos los efectos parásitos presentados por el circuito a altas frecuencias,
tales como capacitancias, inductancias y resistencias parásitas. Sin embargo,
conforme se incrementa la frecuencia de operación del circuito, estos efectos
empiezan a dominar su comportamiento, estableciendo nuevas trayectorias de
flujo de las señales a través de los elementos parásitos. Además, si el circuito no
es simétrico, las constantes RC de las trayectorias de subida y bajada serán
diferentes y los efectos parásitos introducidos también serán muy diferentes. Todo
esto redundará en que la histéresis del circuito será completamente modificada.
Es más, un circuito que no posea histéresis en DC, mostrará histéresis en alta
frecuencia. A esta histéresis le llamamos “histéresis dinámica”.
Durante el trabajo se estableció que la inclusión de un oscilador periódico dentro
de la resistencia no lineal de un oscilador caótico robustece el comportamiento del
circuito a las variaciones de sus parámetros y permite llevar el circuito a
integración.
En este capítulo aplicamos estos conceptos a la generación de caos en un circuito
que no presenta histéresis en DC pero que es llevado a presentar histéresis
dinámica. El circuito es un oscilador de anillo con tres etapas; al circuito se le
agrega otro oscilador de anillo inmerso en el primero y que, junto con los
elementos parásitos de los pines de alimentación presentan comportamiento
caótico.
139

El circuito se fabricó con la tecnología AMI semiconductor 0.5um y se corroboró
que su comportamiento es efectivamente caótico. Además se fabricó un circuito
periódico para comparar los resultados.
Se presentará el circuito periódico con los resultados de sus simulaciones y las
mediciones en el chip. Posteriormente se presentará el circuito caótico completo y
también se presentarán resultados de las simulaciones del circuito y de las
mediciones, y se mostrará su comportamiento caótico.
Es importante observar que en esta sección se usará un resultado de [65] en el
que se demuestra que el comportamiento caótico de una señal se manifiesta en la
caída exponencial de su espectro en frecuencia.
5.1 OSCILADOR DE ANILLO
El circuito que se modificará para que presente comportamiento caótico se
muestra en la Figura 5-1. Este circuito es un oscilador de anillo de tres etapas
inversoras y una resistencia en su trayectoria de retroalimentación. Se simuló el
circuito con las dimensiones mostradas en la Tabla 5-1. El valor de la resistencia
fue R2=12K ohms. Los resultados de las simulaciones se muestran en la figura 5-
2. La Figura 5-2 muestra el voltaje en el nodo (3) del circuito y la corriente que
fluye por la fuente de voltaje de valor cero, v0. El circuito oscila a una frecuencia de
200MHz.
Mp1 Mp3 Mp5
Mn2 Mn4
R2
Vo
(2) (3) (4) (5)(1)
Mn6
Figura 5-1. Circuito oscilador de anillo de tres etapas
140

Los valores de los transistores PMOS se hicieron mucho más grandes que los de
los NMOS con el objetivo de que el circuito muestre histéresis dinámica en una
frecuencia no muy alta. Para visualizar la histéresis en el circuito, se graficó la
corriente la corriente a través de la fuente de voltaje v0 contra el voltaje en el nodo
(3). El resultado se muestra en la Figura 5-3.
Tabla 5-1. Dimensiones de los transistores del circuito oscilador de anillo
Parámetro Valor
Ls (de todos los transistores) 0.9µm
Wn2,4,6 40µm
Wp1,3,5 600µ
Figura 5-2 Simulación en tiempo del circuito oscilador de anillo
141

Figura 5-3. Histéresis en el oscilador de anillo
El circuito se fabricó. Su diseño geométrico se muestra en la Figura 5-4.
Figura 5-4. Diseño geométrico del circuito oscilador de anillo
La salida se conectó a un “pad” interno.
Se hizo la medición en tiempo con un osciloscopio HP Agilent. Los parámetros de
control del circuito fueron los voltajes de polarización. Para VDD=-VSS=1.5v se
obtuvo la forma de onda que se muestra en la Figura 5-5.
142

Figura 5-5 Medición de la forma de onda del circuito de anillo.
La frecuencia de la señal se encuentra alrededor de 70MHz y su amplitud fue de
25mV. Las diferencias de estos valores con los simulados los establecen los
elementos parásitos de los pines externos que alimentan el circuito las
capacitancia del “pad” interno de medición y la punta de medición.
La Figura 5-6 muestra el espectro de la señal.
Figura 5-6. Espectro de la señal medida
143

Figura 5-7 Espectro acercado a la frecuencia fundamental de la señal
Para visualizar mejor el espectro se hace un acercamiento a la frecuencia que
contiene la mayor energía. Este acercamiento se muestra en la Figura 5-7.
La frecuencia fundamental se encuentra alrededor de 75 MHz y tiene un pico de
potencia de alrededor de 50dB.
De las mediciones, se tomó un listado electrónico de los de 32768 datos en un
disco, que se usaron para ver la forma de onda y su espectro en formato
electrónico y no por fotografías. La forma de onda de la señal se muestra en la
figura
Figura 5-8. Forma de onda de la señal obtenida de la captura de datos
144

De los datos, se obtuvo también la FFT. Esta se muestra en la Figura 5-9.
Figura 5-9 Espectro de la señal obtenida de la captura de datos
Estos resultados son muy parecidos a los mostrados por las fotografías y nos
ayudan a corroborar los resultados.
5.2 OSCILADOR CAOTICO
A continuación se modificó el circuito oscilador de anillo de la sección anterior de
la forma mostrada en la Figura 5-10.
Inv1 Inv2 Inv3
Inv4
Inv5
(2) (3) (4)
(9)
(1)(5)
R2
Vo
Figura 5-10. Oscilador de anillo anidado
145

La idea al realizar esta modificación fue incluir un oscilador dentro del primero,
con el objeto de introducir mayor perturbación al circuito forzándolo de esta forma
a que junto con los elementos parásitos de los pines se comportara caóticamente.
El circuito completo, que incluye los elementos parásitos de los pines que
conectan el circuito con los voltajes de polarización, y los elementos parásitos del
pad de medición se muestran en la Figura 5-11.
Puede notarse que el circuito sigue la estructura de los circuitos que se han venido
estudiando en este trabajo. Esto es, se tiene una resistencia no lineal (con
histéresis dinámica) que oscila periódicamente que está conectada a una
circuitería de elementos pasivos dinámicos. Además, interno a la resistencia no
lineal se coloca un oscilador periódico que modifica sus características.
(2) (3)
(4)
(9)
(1)
(5)
R2 Vo
(Vdl)
(Vsl)
Cpvsl
Cpvdl
VddLpbondingvdd
Lpbondingvss
Cppad
Rvdr
Rvsr
(Vdr)
(Vsr)
Inv2 Inv3
Inv4
Inv5
Inv1
Vss
Figura 5-11. Circuito oscilador caótico que incluye las parásitas de los “bondings”
Se realizaron simulaciones del circuito con los valores mostrados en la Tabla 5-2.
146

Tabla 5-2. Dimensiones de los transistores del oscilador de anillo caótico
Parámetro Valor
Ls (de todos los transistores) 0.9µm
Wn (inversores Inv1-Inv3) 30µm
Wp (inversores Inv1-Inv3) 600µm
Wn (inversores Inv4,Inv5) 6µm
Wp (inversores Inv4,Inv5) 6µm
Se observa que el inversor anidado tiene dimensiones muy pequeñas comparadas
con las del inversor original.
Los valores de los otros elementos fueron R2=12K ohms, Cppad=10pF,
Cpvdl=Cpvsl=5p, Lpbondingvdd=Lpbondingvss=5nH, Rvdr=Rvsr=0, VDD=-VSS=1.65v.
La simulación del circuito dio como resultado el comportamiento mostrado en el
diagrama de fase de la Figura 5-12.
147

Figura 5-12 Diagrama de fase y proyecciones del oscilador caótico.
El comportamiento del circuito es caótico como la figura muestra. El atractor no es
semejante a ninguno reportado en la literatura y muestra un alto grado de
mezclado en sus trayectorias.
Debido a que en la fabricación solo se obtuvo la señal en el nodo (5), en la Figura
5-13 continuación se muestra esta señal con respecto al tiempo.
Desafortunadamente se encontró que este comportamiento no es robusto a las
variaciones en los valores de los elementos del circuito y cae a ciclo límite cuando
se modifican moderadamente. Sin embargo, en las regiones adyacentes de los
parámetros del circuito, donde es periódico, se tienen transitorios caótico bastante
prolongados lo que indica su cercanía al comportamiento caótico aún en estas
regiones donde su comportamiento es periódico.
Figura 5-13. Forma de onda caótica del nodo (5) del circuito.
148

Se obtuvo la FFT de esta señal con 131072 puntos la cual se muestra en la Figura
5-14.
Figura 5-14 Espectro de la señal caótica
El espectro claramente muestra el comportamiento caótico del circuito. Se fabricó
el circuito. Geometrías del diseño se muestran en la Figura 5-15.
Figura 5-15. Geometría del circuito caótico.
149

Se midió el circuito. Los resultados de las mediciones se muestran a continuación.
Las Figuras 5-16, 5-17 y 5-18 muestran la forma de onda de la señal caótica con
divisiones de tiempo distintas (200uS, 20uS y 10nS, respectivamente). La amplitud
de la señal es pequeña, alrededor de 15mV. En las figura se puede observar que
a pesar de su característica recurrente, la señal no se repite, y por lo tanto no es
periódica. Se observa, además, que la señal caótica presenta dos rangos de
frecuencia en los que se desenvuelve, un rango de valor bajo y otro muy alto.
El espectro se muestra también con varias figuras (Figura 5-19 a la Figura 5-22)
con el objeto de entender mejor el comportamiento. En ellas la frecuencia se va
reduciendo para poder observar lo que sucede en bajas frecuencias. En valores
relativamente altos de frecuencia se pueden observar agrupaciones de
frecuencias que poseen mayor energía que las que se encuentran contiguas a
ellas. Estas agrupaciones de frecuencias en una banda más elevada explica que
hayan formas de onda a mayor frecuencia. Por otro lado, en bajas frecuencias el
espectro sufre una caída exponencial alrededor de 1MHz. Lo que corrobora el
comportamiento caótico de la señal.
Sin embargo, es evidente que la señal está a mucho menor frecuencia y menor
amplitud que la esperada. Ello se debe a las muchas capacitancias parasitas
anexadas al circuito de manera natural en la medición. Estas parásitas son, las de
la placa impresa, las de los pines, la de la punta, que son de mucho más valor que
el considerado en las simulaciones.
150

Figura 5-16. Medición de la Forma de onda de la señal caótica, 200uS/div.
Figura 5-17. Medición de la forma de onda de la señal caótica, 20uS/div.
151

Figura 5-18. Medición de la forma de onda de la señal caótica, 10nS/div.
Figura 5-19. Medición del espectro de la señal caótica, fmax=50MHz.
152

Figura 5-20. Medición del espectro de la señal caótica, fmax=12.5MHz.
Figura 5-21. Medición del espectro de la señal caótica, fmax=5MHz.
153

Figura 5-22. Medición del espectro de la señal caótica, fmax=2.5MHz.
Se tomó una lista electrónica de 32768 puntos del osciloscopio y se obtuvo la
forma de onda que se muestra en la Figura 5-23.
Figura 5-23 Forma de onda de la señal obtenida de la captura de datos
154

se obtuvo la FFT de los datos. Estos se muestran en la Figura 5-24
Figura 5-24 Espectro de la señal obtenida de la captura de datos
Nuevamente, se puede ver la caída exponencial en esta figura corroborando el
comportamiento caótico del circuito.
5.3 DISPOSICION DE LAS MEDICONES DEL CHIP.
Figura 5-25 Medición del chip
155

En la Figura 5-25 se muestra la estación de pruebas y la disposición del chip en la
medición.
Por último, se muestra una fotografía del chip fabricado en la Figura 5-26.
Figura 5-26. Fotografía del chip.
156

Capítulo 6
Conclusiones La conclusión más importante de este trabajo es la siguiente.
La inclusión de un oscilador periódico dentro de la resistencia no lineal de un
oscilador caótico continuo en el tiempo modifica las características de este último,
realizando un mayor mezclado entre sus trayectorias, incrementando la robustez
del circuito a las variaciones de sus parámetros y a las parásitas del mismo, y
permitiendo que los valores de los elementos dinámicos del circuito puedan ser
llevados al rango de integración en chip. Todo esto resulta en un oscilador caótico
factible de realizarse en circuitos integrados. La forma de onda del oscilador
periódico no es determinante en el oscilador caótico y basta que su frecuencia se
encuentre dentro de un rango que es, frecuentemente, mucho menor que la
frecuencia de oscilación del circuito caótico.
Elwakil [10] demostró un interesante resultado que dice textualmente: “En
cualquier oscilador caótico continuo en el tiempo, que es capaz de exhibir un
comportamiento de ciclo límite, existe un oscilador periódico motor que provee un
par de autovalores complejos conjugados inestables. De acuerdo con esto, se
puede obtener al menos un oscilador caótico de un oscilador sinusoidal. El
proceso de obtención requiere una no linealidad que no es necesariamente
activa”. Además, demuestra que el oscilador periódico produce el mecanismo de
estiramiento de las trayectorias, característico de los osciladores caóticos, y que la
resistencia no lineal produce el doblamiento de ellas. Al final, establece una
clasificación de los osciladores caóticos continuos en el tiempo de la siguiente
manera
157

1) Oscilador Lineal – Compuesto No Lineal
2) Oscilador Lineal – Compuesto No Lineal – Oscilador Lineal
3) Oscilador Lineal – Filtro – Compuesto no lineal
El término Oscilador Lineal se refiere a un oscilador periódico sinusoidal, sin la red
intrínseca no lineal que limita su amplitud. En el primer caso están incluidos la
mayoría de los osciladores caóticos continuos en el tiempo de tercer orden. El
segundo y tercer tipo corresponden a osciladores caóticos de mayor orden, que
pueden presentar hipercaos.
El método propuesto en este trabajo modifica los osciladores caóticos del primer
tipo agregándoles un oscilador periódico no lineal (el oscilador incluye la no
linealidad que limita su amplitud). De esta forma, la técnica podría considerarse
como una nueva clasificación, esto se ve de la siguiente forma.
4) Oscilador Lineal – Compuesto no Lineal – Oscilador no Lineal
La clasificación 4 es muy semejante a la 2, sin embargo, los circuitos son
diferentes, primero por que con la técnica planteada en este trabajo se considera
que el oscilador del tipo 1 ya es caótico y que se le agrega el oscilador no lineal
como un método de robustecer su comportamiento y no para generarlo. Segundo,
el oscilador que se agrega en nuestra técnica se incluye dentro de la resistencia
no lineal y en el tipo 2 la resistencia no lineal solo sirve de acoplamiento entres los
dos osciladores. Tercero, el oscilador que se adiciona en nuestra técnica es no
lineal y el del tipo 2 es lineal.
En el mismo artículo se establece un método de diseño en el que se propone que
la resistencia no lineal sea realizada de manera pasiva y que el elemento activo
sea parte del oscilador lineal. Sin embargo, la técnica que se propone en este
trabajo transforma las resistencias no lineales pasivas en activas ya que introduce
una excitación externa a la resistencia no lineal.
158

Además, es interesante observar que el método también transforma los
osciladores caóticos autónomos en no autónomos o forzados. Esta transformación
de circuitos caóticos autónomos a forzados explica el hecho de que los circuitos
que estudiamos fueron reducidos en orden al eliminar uno o más de sus
elementos dinámicos. Sin embargo, los circuitos pueden ser vistos como circuitos
autónomos, debido a que el oscilador periódico no tiene que estar explícito en el
circuito, si no que puede estar inmerso en su estructura. Un claro ejemplo de esto
es el circuito de Chua en el que no se incluyó un oscilador periódico dentro de la
resistencia no lineal, si no que se descompensaron en frecuencia los elementos
activos que la forman (CCIIs), llevando el circuito a retroalimentación positiva y
obligando a la resistencia no lineal a oscilar. Esto fue así, aunque la resistencia no
debía oscilar por si sola por cuanto no posee histéresis. Esto también se vio en la
segunda estructura de oscilador caótico del capítulo 4.
De las simulaciones se observó, además, que, en algunos casos, no es necesario
que el elemento inmerso en la resistencia no lineal o formando parte de ella oscile.
Con sólo ser un elemento muy inestable o descompensado en frecuencia basta
para que la técnica funcione. Esto se observó de la primera estructura de oscilador
caótico del capítulo 4 en donde, la inclusión del seguidor de voltaje del CCII a la
resistencia no lineal (fig. 4-17b), provocó el mismo efecto que cuando se colocó la
fuente de voltaje ideal en las mismas terminales. Sin embargo, el CCII conectado
en esta manera no presenta oscilación periódica por que necesita una resistencia
entre la terminal “X” y tierra, como en la figura 3-3, para oscilar, como se presentó
en el capítulo 3. Este mismo fenómeno se observó en ciertas regiones de los
parámetros de las otras estructuras.
La eliminación del inductor en la primera y segunda estructuras llevó al circuito a
reducir el orden de su ecuación diferencial. Sin embargo, si se considera al
oscilador periódico como un circuito de segundo orden, entonces, el circuito
caótico mantuvo el orden requerido en un oscilador para presentar
comportamiento caótico. Se observa que, con la eliminación del inductor en estas
estructuras, se eliminó también el problema de la resistencia parásita.
159

Se observó además que la forma del atractor es modificada completamente al ser
llevado el circuito a integración. Sin embargo, la razón principal para esto no es
precisamente la técnica presentada en este trabajo, pues en algunos casos en
donde no se aplicó el método, con solo reducir los valores de los elementos
dinámicos, el atractor se modificó completamente y el circuito perdió su
comportamiento caótico. Las razones por las que el atractor se modificó son las
siguientes. Primero, algunos circuito caóticos pierden robustez al reducirse el valor
de sus elementos dinámicos o, simplemente, no presentan comportamiento
caótico para esa región de sus parámetros. Segundo, el método presentado
también contribuye a modificar la forma del atractor. Un tercer factor es el cambio
en las relaciones de los valores de sus elementos dinámicos. En algunos casos
estos valores están muy dispersos entre sí, y la técnica propuesta reduce esta
dispersión, de tal forma que las relaciones entre los valores de sus elementos
dinámicos cambia, y con esto, la forma del atractor. La razón de esto puede estar
en que los elementos dinámicos juegan un papel diferente entre ellos, permitiendo
o produciendo ciertas regiones en el espacio de fase, por lo que, al cambiar las
relaciones entre los valores de los elementos dinámicos, cambia también su
topología y con ello su comportamiento, lo que resulta en atractores modificados.
Un último factor que contribuyó a la modificación de la forma del atractor en el
diagrama de fase fueron los efectos parásitos del circuito, principalmente las
capacitancias parasitas asociadas a los nodos y a los elementos del circuito que, a
cierta frecuencia, establecen trayectorias hacia adelante, de retroalimentación y
hacia tierra, lo que modifica la histéresis del circuito, y por lo tanto, la forma del
atractor. Esto es aún más cierto cuando los circuitos activos usados para la
realización del oscilador caótico son asimétricos en su funcionamiento lo que
establece constantes de tiempo diferentes en las trayectorias de subida y bajada
de la señal, por encima y abajo del voltaje de modo común. Esto también
contribuye a modificar la histéresis del circuito.
Del conocimiento obtenido de la realización de este trabajo se propuso un nuevo
oscilador caótico que usa las parásitas asociadas a los pines del circuito integrado.
El circuito es un anillo doble anidado, que junto con los inductores y capacitores
160

parásitos realiza un nuevo oscilador caótico con muy buen mezclado de sus
trayectorias. El circuito no muestra una gran robustez a las variaciones de los
parámetros. Sin embargo, el transitorio mantiene su forma caótica, lo que permite
la realización de un oscilador caótico con buena robustez al realizar un reinicio del
circuito antes que el transitorio de paso al estado estable.
En el trabajo se propuso también una nueva estructura de CCII con
características muy atractivas para el diseño de circuitos de procesamiento de
señal analógica. Se mostraron varias modificaciones al circuito que mejoran
características particulares. Además se propuso un macro modelo del mismo que
permitió aligerar las simulaciones y comprobar el correcto funcionamiento del
circuito. El macro modelo puede ser visto también como una forma diferente de
realizar el CCII.
Se realizó también la transformación de la resistencia no lineal de [64] de su
realización con transistores BJTs a su contraparte con transistores MOS.
Se propuso un a nueva resistencia no lineal controlada por corriente (fig. 4-37a)
que es viable para ser usada con circuitos con función de transferencia simétrica
como el CCII propuesto.
161

162

Apéndices
Apéndice A
Parámetros de la tecnología AMI Semiconductor 0.5µm .MODEL NMOS NMOS ( LEVEL = 49 +VERSION = 3.1 TNOM = 27 TOX = 1.41E-8 +XJ = 1.5E-7 NCH = 1.7E17 VTH0 = 0.6795992 +K1 = 0.870626 K2 = -0.0939965 K3 = 23.4975898 +K3B = -7.8000465 W0 = 1E-8 NLX = 1E-9 +DVT0W = 0 DVT1W = 0 DVT2W = 0 +DVT0 = 2.7945006 DVT1 = 0.4459835 DVT2 = -0.1384558 +U0 = 459.1610261 UA = 1E-13 UB = 1.586168E-18 +UC = 1.639206E-11 VSAT = 1.534879E5 A0 = 0.6247677 +AGS = 0.1371681 B0 = 2.471996E-6 B1 = 5E-6 +KETA = -3.631201E-3 A1 = 2.995809E-4 A2 = 0.3860677 +RDSW = 1.701857E3 PRWG = 0.0223451 PRWB = 0.0242948 +WR = 1 WINT = 2.555219E-7 LINT = 3.153327E-8 +XL = 0 XW = 0 DWG = -1.497091E-8 +DWB = 5.367592E-8 VOFF = -0.012142 NFACTOR = 1.0603283 +CIT = 0 CDSC = 2.4E-4 CDSCD = 0 +CDSCB = 0 ETA0 = 0.0132351 ETAB = -8.282298E-4 +DSUB = 0.186173 PCLM = 2.5512314 PDIBLC1 = -0.1628025 +PDIBLC2 = 2.275694E-3 PDIBLCB = -0.0316505 DROUT = 0.5281588 +PSCBE1 = 5.762695E8 PSCBE2 = 7.047432E-5 PVAG = 0 +DELTA = 0.01 RSH = 81.8 MOBMOD = 1 +PRT = 0 UTE = -1.5 KT1 = -0.11 +KT1L = 0 KT2 = 0.022 UA1 = 4.31E-9 +UB1 = -7.61E-18 UC1 = -5.6E-11 AT = 3.3E4 +WL = 0 WLN = 1 WW = 0 +WWN = 1 WWL = 0 LL = 0 +LLN = 1 LW = 0 LWN = 1 +LWL = 0 CAPMOD = 2 XPART = 0.5 +CGDO = 2.13E-10 CGSO = 2.13E-10 CGBO = 1E-9 +CJ = 4.165632E-4 PB = 0.977458 MJ = 0.4429069 +CJSW = 3.33276E-10 PBSW = 0.1 MJSW = 0.1125721 +CJSWG = 1.64E-10 PBSWG = 0.1 MJSWG = 0.1125721 +CF = 0 PVTH0 = 0.0492376 PRDSW = 33.5953701 +PK2 = -0.0337349 WKETA = -0.0246828 LKETA = 1.370459E-3 ) * .MODEL PMOS PMOS ( LEVEL = 49 +VERSION = 3.1 TNOM = 27 TOX = 1.41E-8 +XJ = 1.5E-7 NCH = 1.7E17 VTH0 = -0.9433079 +K1 = 0.5500357 K2 = 0.011186 K3 = 6.3695706
163

+K3B = -0.8022113 W0 = 1E-8 NLX = 5.385214E-8 +DVT0W = 0 DVT1W = 0 DVT2W = 0 +DVT0 = 2.8147497 DVT1 = 0.5898133 DVT2 = -0.0919044 +U0 = 223.2407784 UA = 3.183017E-9 UB = 1.462234E-21 +UC = -5.55087E-11 VSAT = 1.808029E5 A0 = 0.97785 +AGS = 0.1593762 B0 = 6.160226E-7 B1 = 5E-6 +KETA = -3.03996E-3 A1 = 0 A2 = 0.3 +RDSW = 3E3 PRWG = -2.63542E-3 PRWB = -4.148561E-3 +WR = 1 WINT = 3.172164E-7 LINT = 4.649292E-8 +XL = 0 XW = 0 DWG = -2.366498E-8 +DWB = 1.924995E-8 VOFF = -0.0900314 NFACTOR = 0.785208 +CIT = 0 CDSC = 2.4E-4 CDSCD = 0 +CDSCB = 0 ETA0 = 0.3203392 ETAB = -0.0801254 +DSUB = 1 PCLM = 2.1495188 PDIBLC1 = 0.0423023 +PDIBLC2 = 4.048428E-3 PDIBLCB = -0.0543501 DROUT = 0.2331815 +PSCBE1 = 5.127082E9 PSCBE2 = 5E-10 PVAG = 0 +DELTA = 0.01 RSH = 102.2 MOBMOD = 1 +PRT = 0 UTE = -1.5 KT1 = -0.11 +KT1L = 0 KT2 = 0.022 UA1 = 4.31E-9 +UB1 = -7.61E-18 UC1 = -5.6E-11 AT = 3.3E4 +WL = 0 WLN = 1 WW = 0 +WWN = 1 WWL = 0 LL = 0 +LLN = 1 LW = 0 LWN = 1 +LWL = 0 CAPMOD = 2 XPART = 0.5 +CGDO = 2.27E-10 CGSO = 2.27E-10 CGBO = 1E-9 +CJ = 7.317849E-4 PB = 0.9527461 MJ = 0.4993533 +CJSW = 2.651515E-10 PBSW = 0.99 MJSW = 0.2767151 +CJSWG = 6.4E-11 PBSWG = 0.99 MJSWG = 0.2767151 +CF = 0 PVTH0 = 5.98016E-3 PRDSW = 14.8598424 +PK2 = 3.73981E-3 WKETA = 4.908567E-3 LKETA = -5.652877E-3 ) *
164

Apéndice B
Parámetros de los transistores BJTs Q2N2222 y QBC559 .Model Q2N2222 NPN IS=14.34F XTI=3 EG=1.11 VAF=74.03 BF=255.9 NE=1.307 ISE=14.34F + IKF=.2847 XTB=1.5 BR=6.092 NC=2 ISC=0 IKR=0 RC=1 CJC=7.306P MJC=.3416 VJC=.75 +FC=.5 CJE=22.01P MJE=.377 VJE=.75 TR=46.91N TF=411.1P ITF=.6 VTF=1.7 XTF=3 RB=10 .model QBC559 PNP IS=11.49E-15 BF=330 NF=.9872 VAF=84.56 IKF=.1 ISE=50.0E-15 +NE=1.4 BR=13 NR=.996 VAR=8.15 IKR=.012 ISC=14.300000E-15 NC=1.1 RB=.2 +RBM=.2 RE=.4 RC=.95 CJE=16.000000E-12 CJC=10.500000E-12 VJC=.565 MJC=.415 +TF=493.000000E-12 TR=73.550000E-09
165

Apéndice C
GEOMETRÍAS Y SIMULACIONES POSTGEOMETRÍA DE LOS OSCILADORES CAÓTICOS En este apéndice se anexan las geometrías (“layouts” en inglés) y los resultados de las simulaciones de los archivos extraídos de estas geometrías. C.1 PRIMERA ESTRUCTURA DE OSCILADOR CAÓTICO En la Figura C-1 se muestra la geometría (“layout” en inglés) del circuito completo oscilador caótico 1. Los valores de los elementos con los que se realizó esta geometría son: L=5nH, C1=C2=1.5pF, R1=50K, R2=25K.
Figura C-1 Geometría del circuito oscilador caótico 1.
166

De esta geometría se hizo la extracción del circuito subyacente y se realizó la simulación del mismo. El atractor en el espacio de fase obtenido se muestra en la Figura C-2.
Figura C-2. Atractor formado por el circuito oscilador caótico 1.
Se obtuvo la densidad espectral de potencia del circuito, la que se muestra en la Figura C-3. C.2 SEGUNDA ESTRUCTURA DE OSCILADOR CAÓTICO En la Figura C-4 se muestra la geometría del circuito oscilador caótico 2. Los valores de los elementos con los que se realizó esta geometría son: RXZ=4K, RYZ=RY0=2K, R1=25K, C1=C2=4pF, L=120nH.
167

Figura C-3. Espectro de la señal Vc1 del circuito oscilador caótico 1.
Figura C-4 . Geometría del circuito oscilador caótico 2.
168

Se realizó la extracción del circuito y se simuló. El atractor obtenido se muestra en la Figura C-5.
Figura C-5. Atractor en el espacio de fase del circuito oscilador caótico 1.
Se obtuvo también su espectro en frecuencia que se muestra en la figura C-6.
Figura C-6 . Espectro de la señal Vc1 del circuito oscilador caótico 2.
169

C.2 TERCERA ESTRUCTURA DE OSCILADOR CAÓTICO En la Figura C-7 se muestra la geometría del circuito oscilador caótico 2. Los valores de los elementos con los que se realizó esta geometría son: C1=C2=1.5pF, L=5nH, Rn1=Rn2=2.5k, R1=0.5K.
Figura C-7 . Geometría del circuito oscilador caótico 3.
Se realizó la extracción del circuito y se simuló. El atractor obtenido se muestra en la Figura C-8.
170

Figura C-8. Atractor en el espacio de fase del circuito oscilador caótico 3.
Se obtuvo también su espectro en frecuencia que se muestra en la figura C-9.
Figura C-6 . Espectro de la señal Vc1 del circuito oscilador caótico 2.
171

Bibliografía
[1] R. W. Newcomb and S. Sathyan, “An RC Opamp chaos generator”, IEEE
transactions on circuits and systems, vol. CAS-30, NO.1, January 1983.
[2] Michael Peter Kennedy, “Chaos in the Colpitts Oscillator”, IEEE transactions
on circuits and systems—I: Fundamental theory and applications, vol. 41,
No. 11, November, 1994.
[3] A. Namajunas and A. Tamasevicius, “Modified Wien Bridge Oscillator for
Chaos”, Electronics Letters, vol. 31, No. 5, 2nd March, 1995.
[4] Cong-Kha Pham, Makoto Korehisa, and Mamoru Tanaka, “Chaotic behavior
and synchronization phenomena in a novel chaotic transistors circuit”, IEEE
Transactions on Circuits and Systems—I: Fundamental Theory and
Applications, vol. 43, no.12, pp. 1006-1011 December 1996.
[5] Shinji Nakagawa and Toshimichi Saito, “An RC OTA Hysteresis Chaos
Generator”, IEEE Transactions on Circuits and Systems—I: Fundamental
Theory and Applications, vol. 43, no.12, pp. 1019-1021, December 1996.
[6] A. S. Elwakil and A. M. Soliman, “Current Mode Chaos Generator”,
Electronics Letters, vol. 33, no. 20, 25th September 1997.
[7] M. Storace and M. Parodi, “Simple realization of hysteresis chaos
generator”, Electronics Letters, vol. 34, no. 1, 8th January 1998.
[8] A. S. Elwakil and M. P. Kennedy, “Chaotic oscillators derived from Saito’s
double screw hysteresis oscillator”, IEICE Transactions fundamentals, vol.
E82–A, No. 9, September 1999.
[9] Tetsuya Miyoshi, Takashi Nitanai and Naohiko Inaba, “Chaotic attractor with
a characteristic of Torus”, IEEE transactions on circuits and systems—I:
Fundamental theory and applications, vol. 47, No. 6, June, 2000.
[10] Ahmed S. Elwakiland Michael Peter Kennedy, “Construction of classes of
circuit-independent chaotic oscillators using passive-only nonlinear devices”,
IEEE Transactions on Circuits and Systems—I: Fundamental Theory and
Applications, vol. 48, No. 3, March 2001.
172

[11] Ute Feldmann and Wolfgang Schwarz, “Linear Conjugacy of n-Dimensional
Piecewise Linear Systems”, IEEE Transactions on Circuits and Systems—I:
Fundamental Theory and Applications, vol. 41, No. 2, February 1994.
[12] A. S. Elwakil and M. Peter Kennedy, “A semi-systematic procedure for
producing chaos from sinusoidal oscillators using diode-inductor and fet-
capacitor composites”, IEEE Transactions on Circuits and Systems—I:
Fundamental Theory and Applications, vol. 47, No. 4, April 2000.
[13] Michael Peter Kennedy, Ricardo Rovatti and Gianluca Setti, Chaotic
electronics in telecommunications, CRC Press, 2000.
[14] Nikolay Maximov, Andrea Panas and Sergey Starkov, “Chaotic oscillators
design with preassigned spectral characteristics”, European conference on
Circuit Theory and Design, August 28-31, 2001, Espoo, Finland.
[15] Manuel Delgado Restituto and Angel Rodriguez Vázquez, “Design
considerations for integrated continuous-time chaotic oscillators”, IEEE
Transactions on Circuits and Systems—I: Fundamental Theory and
Applications, vol. 45, no. 4, april 1998.
[16] A. R. Vázquez and M. D. Restituto, “CMOS Design of chaotic oscillators
using state variables: A Monolithic Chua’s Circuit”, IEEE Transactions on
Circuits and Systems, vol. 40, no. 10, pp. 596-613, October 1993.
[17] Kazuya Kotaka, Takahiro Inoue and Akio Tsuneda, “A design of CMOS
Chua-Type Analog Chaos Circuit Based on a signal flow graph”, IEICE
Trans. Fundamentals, vol. E81-A, no.7, July 1998.
[18] Joseph E. Barrientos and Edgar Sánchez Sinencio, “On the monolithic
design of hysteretic chaotic oscillators”, Department of Electrical
Engineering, Texas A&M university, 1996.
[19] Gianluca Setti, Ricardo Rovtti and Gianluca Mazzini, “Synchronization
Mechanism and optimization of spreading sequences in chaos based DS-
CDMA systems”, IEICE Transactions Fundamentals, Vol. E82–A, No. 9,
September, 1999.
[20] Daisaburo Yoshioka, Akio Tsuneda and Takahiro Inoue, “Maximal Period
Sequences with negative auto-correlations and their application to
173

asynchronous DS-CDMA systems”, IEICE Transactions Fundamentals, Vol.
E86–A, No. 6, June, 2003.
[21] Géza Kolumbán, Gábor Kis, Zoltán Jákó and Michael Peter Kennedy, “FM-
DCSK: A robust modulation sheme for chaotic communications”, IEICE
Transactions Fundamentals, Vol. E81–A, No. 9, September, 1998.
[22] R. C. Dixon, Spread Spectrum systems with commercial applications, John
Wiley and Sons, New York, 3rd edition, 1994.
[23] Mazzini, G., Setti, G., and Rovatti, R., “Chaotic complex spreading
sequences for asynchronous CDMA – Part I: System Modelling and
Results”, IEEE Transactions on Circuits and Systems – Part I, vol. 44, n. 10,
pp. 937-947,1997.
[24] Rovatti, R., Setti, G., and Mazzini, G., “Chaotic complex spreading
sequences for asynchronous CDMA – Part II: some Theoretical
Performance Bounds”, IEEE Transactions on Circuits and Systems – Part I,
vol. 45, n. 4, pp. 496-506, 1998.
[25] Setti, G., Mazzini, G. and Rovatti, R., “Chaos based spreading sequence
optimization for DS-CDMA synchronization”, IEICE Transactions on
Fundamentals of Electronics, Communications and Computer Sciences, vol.
E82-A, n. 9, pp. 1737-1746, 1999.
[26] J. M. Cruz and L. O. Chua, “An IC Chip of Chua’s Circuit”, IEEE Trans.
Circuits & Syst., vol. 40, pp. 614-625, Oct. 1993.
[27] John E. Neeley and John G. Harris, “A subthreshold CMOS Chaotic
oscillator”, IEEE international symposium on circuits and Systems, pp. 269-
271, Atlanta, May 1996.
[28] R. Senani and S. S Gupta, “Implementation of Chua´schaotic circuit using
current feedback op-amps”, Electronics Letters, Vol. 34, No. 9, 30 April,
1999.
[29] L. A. B. Torres and L. A. Aguirre, “Inductorless Chua’s circuit”, Electronics
Letters, Vol. 36, No. 23, 9 November, 2000.
[30] J. M. T. Thompson y H. B. Stewart, Nonlinear dynamics and chaos, John
Wiley and Sons, 1986.
174

[31] Iskren Abdomerovic, Andrzej G. Lozowski and Peter B. Aronhime, “High-
Frequency Chua’s Circuit”, Proc. 43rd IEEE Midwest Symp. On Circuits and
Systems, Lansing MI, August, 2000.
[32] Andrey Panas, Boris Kyarginsky and Nikolay Maximov, “Single–transistor
microwave chaotic oscillator”, Institute of Radio Engeeniring and electronics,
Russian academy of sciences
[33] A. Sedra, K. C. Smith, “A second generation current conveyor”, IEEE,
transactions on circuit theory, February 1970.
[34] Muhammad Taher Abuelma’atti, “New sinusoidal oscillators with fully
uncoupled control of oscillation frequency and condition using three CCII+s”,
Analog integrated circuits and signal processing, 24, 253–261, 2000.
[35] Ahmed M. Soliman, “Current mode CCII Oscillators using grounded
capacitors and resistors”, International Journal of Circuit Theory and
applications, 26, 431–438, 1998.
[36] Xiaoxing zhang, xiayu ni, masahiro iwahashi and Noriyoshi kambayashi,
“Realization of universal active complex filter using CCIIs and CFCCIIs”,
Analog integrated circuits and signal processing, 20, 129–137, 1999.
[37] Alain Fabre and Mustapha Alami, “Universal current mode Biquad
implemented from two second generation current conveyors”, IEEE
transactions on circuits and systems—I: Fundamental theory and
applications, vol. 42, no. 7, July 1995.
[38] Christophe Premont, Nacer Abouchi, Richard Grisel and Jean-Pierre
Chante, “A BICMOS current conveyor based four-quadrant analog
multiplier”, Analog integrated circuits and signal processing, 19, 159–162,
1999.
[39] G. Di Catalgo, G. Palumbo and S. Pennisi, “A schmitt trigger by jeans of a
CCII+”, International Journal of circuit theory and applications, vol. 23, 161–
165, 1995.
[40] C. Toumazou, F. J. Lidgey y D. G. Haigh, Analog IC design: the current
mode aproach, Peter peregrinus Ltd., 1990.
175

[41] Hyeong-Woo Cha, Satomi Ogawa and Kenzo Watanabe, “Class A CMOS
Current Conveyors”, IEICE Trans. Fundamentals, E81-A(6): 1164-1167,
June 1998.
[42] G. Palmisano and G. Palumbo, “A simple CMOS CCII+”, International
Journal of Circuit Theory and Applications, Vol. 23, 599-603, 1995.
[43] A. M. Ismail, A. M. Soliman, “Low power CMOS current conveyor”,
Electronics Letters, Vol. 36, No. 1, 6th January 2000.
[44] Sohrab Emami, Kazuyuki Wada, Shigetaka Takagi and Nobuo Fujii, “A
novel design strategy for class A CMOS second generation current
conveyors”, IEICE trans. fundamentals, Vol. E84–A, No. 2, February 2001.
[45] M. C. H. Cheng and C. Toumazou, “3V MOS current conveyor cell for VLSI
technology”, Electronics Letters, Vol. 29, No. 3, 4th February, 1993.
[46] Jacek M. Zurada, Introduction to artificial neural systems, West Publishing
Company, 1992.
[47] G. Mamola and M. Sannino, “Analysis of negative-resistance oscillators with
piece wise nonlinearity”, Circuit theory and applications, Vol. 5, 287-289,
1977.
[48] Toshimichi Saito, “On a coupled relaxation oscillator”, IEEE transactions on
circuits and systems, Vol. 35, No. 9, September 1988.
[49] A. S. Elwakil and M. P. Kennedy, “Systematic realization of a class of
hysteresis chaotic osillators”, International journal of circuit theory and
applications, 28, 319-334, Appril, 2000.
[50] Leon O. Chua, Juebang Yu and Youying Yu, “Negative resistance devices”,
Circuit theory and applications, Vol. 11, 161-186, 1983.
[51] Leon O. Chua, Charles A. Desoír, Ernest S. Kuh, Linear and nonlinear
circuits, Mc Graw Hill, 1987.
[52] Edgar Sánchez Sinencio, Jaime Ramirez Angulo, Bernabé Linares Barranco
and Angel Rodríguez Vázquez, “Operacional transconductance amplifier-
based nonlinear function syntheses”, IEEE journal of solid state circuits, Vol.
24, No. 6, December 1989.
176

[53] José M. Cruz and Leon O. Chua, “An IC diode for Chua’s circuit”,
International Journal of circuit theory and applications, Vol. 21, 309-316,
1993.
[54] Stanislaw Kuta, “Current mode circuit implementations of PWL functions”,
analog integrated circuits and signal processing, 16, 285-297, 1998.
[55] Star-Hspice Manual, Avant corporation,1998
[56] H. M. Greenhouse, “Design of planar rectangular microelectronic inductors”,
IEEE trans. parts.hybrids and packaging, v. PHP-10, no. 2, pp. 101-109,
Jun. 1974.
[57] Sunderajan S. Mohan, Maria del Mar Hershenson, Stephen P. Boyd and
Thomas H. Lee, “Simple accurate expressions for planar spiral
inductances”, IEEE journal of solid-state circuits, vol. 34, no. 10, October
1999.
[58] Michael Peter kennedy, “Three steps to chaos – part I: Evolution”, IEEE
Transactions on Circuits and Systems–I: Fundamental theory and
applications, vol. 40, No. 10, octuber 1993.
[59] J. M. T. Thompson and H. B. Stewart, Nonlinear dynamics and chaos, John
Wiley and Sons, 1986.
[60] Steven C. Chapra and Raymond P. Canale, Métodos numéricos para
ingenieros, tercera edición, Mc Graw Hill, 1999.
[61] Kenneth S. kundert, The designer’s Guide to Spice and Spectre, Kluwer
Academic Publishers, 1995.
[62] Katsuhiko Ogata, Ingeniería de control Moderna, Prentice Hall, Segunda
Edición.
[63] Piet Wambacq and Willy Sansen, Distorition analysis of analog integrated
circuits, Kluwer academic publishers, 1998.
[64] A. S. Elwakil, M. P. kennedy, “a low-voltage, low-power, chaotic oscillator,
derived from a relaxation oscillator”, Microelectronics Journal, Elsevier 31,
pp. 459-468, 1999.
[65] David E. Sigeti, “Exponential decay of power spectra at high frequency and
positive Lyapunov exponents”, Physica D, 82, pp. 136-153, 1995.
177

Índice de figuras
Figura 1-1. Esquema de modulación “Chaos shift keying” 6
Figura 1-2. Circuito de Chua, a) diagrama esquemático, b) función característica de la
resistencia no lineal 14
Figura 2-1. Resistencia no lineal, a) diagrama esquemático, b) función característica 24
Figura 2-2. Histéresis en una resistencia controlada por corriente 26
Figura 2-3. Inductores integrados a) en espiral cuadrado. b) octagonal 28
Figura 2-4. Modelo de un inductor integrado 29
Figura 2-5. Error numérico total de un método numérico 35
Figura 3-1. Circuito básico CCII. a) CCII+, b) CCII- 40
Figura 3-2. Circuito básico CCII con fuentes de corriente reales 46
Figura 3-3. Configuración del circuito para las simulaciones 47
Figura 3-4. Barrido en DC del circuito del circuito CCII básico. a) voltaje “Y”
(curva sólida) y en “X” (curva punteada), b) corriente en “X”
(curva sólida) y en “Z” (curva punteada) 48
Figura 3-5. Respuesta en frecuencia del cto. CCII básico a) voltaje “X”,
b) corriente en “X” (curva sólida) y en “Z” (curva punteada) 50
Figura 3-6. Respuesta en tiempo del cto. CCII básico. a) voltaje “Y”
(curva sólida) y en “X” (curva punteada), b) corriente en “X”
(curva sólida) y en “Z” (curva punteada) 50
Figura 3-7. Respuesta en frecuencia barriendo CX en el cto. CCII básico
a) voltaje “X”, b) corriente en “X” (curva sólida) y en “Z”
b) (curva punteada) 51
Figura 3-8. Barrido en DC el CCII- a) voltaje “Y” (curva sólida)
y en “X” (curva punteada), b) corriente en “X” (curva sólida)
y en “Z” (curva punteada) 53
Figura 3-9. Respuesta en frecuencia del CCII-. a) voltaje “X”, b) corriente
en “X” (curva sólida) y en “Z” (curva punteada) 54
Figura 3-10. Respuesta en tiempo del CCII- a) voltaje “Y” (curva sólida) y en “X” (curva punteada), b) corriente en “X” (curva sólida) y en “Z” (curva punteada) 54
Figura 3-11. Circuito CCII con característica de transferencia simétrica 55
Figura 3-12. Barrido en DC del CCII con característica de transferencia simétrica.
a) voltaje “Y” (curva sólida) y en “X” (curva punteada),
b) corriente en “X” (curva sólida) y en “Z” (curva punteada) 56
178

Figura 3-13. Circuito CCII para altos voltajes de polarización 57
Figura 3-14. Circuito CCII para altos voltajes de polarización con fuentes reales 58
Figura 3-15. Barrido en DC del CCII con altos voltajes de polarización
a) voltaje “Y” (curva sólida) y en “X” (curva punteada),
b) corriente en “X” (curva sólida) y en “Z” (curva punteada) 59
Figura 3-16. Respuesta en frecuencia del CCII con altos voltaje de polarización
a) voltaje “X”, b) corriente en “X” (curva sólida) y en “Z”
(curva punteada) 60
Figura 3-17. Respuesta en tiempo del CCII con altos voltajes de polarización.
a) voltaje “Y” (curva sólida) y en “X” (curva punteada),
b) corriente en “X” (curva sólida) y en “Z” (curva punteada) 61
Figura 3-18. Oscilación periódica del CCII con altos voltajes de polarización 63
Figura 3-19. Respuesta resonante del oscilador periódico a) frec. 10X-1GHz
b) acercamiento, frec. 100X-150X 63
Figura 3-20. Oscilación periódica del CCII con Ibias=280uA 64
Figura 3-21. FFT de las señal periódicas generadas por el circuito 64
Figura 3-22. Macro modelo del CCII básico 65
Figura 3-23. Barrido en DC del macro modelo del CCII a) voltaje “Y”
(curva sólida) y en “X” (curva punteada), b) corriente en “X”
(curva sólida) y en “Z” (curva punteada) 67
Figura 3-24. Respuesta en frecuencia del macro modelo a) voltaje “X”,
b) corriente en “X” (curva sólida) y en “Z” (curva punteada) 67
Figura 3-25. Respuesta en frecuencia del macro modelo barriendo CX.
a) voltaje “X”, b) corriente en “X” (curva sólida) y en “Z” (curva punteada) 68
Figura 3-26. Respuesta en tiempo del macro modelo. a) voltaje “Y” (curva sólida)
y en “X” (curva punteada), b) corriente en “X” (curva sólida)
y en “Z” (curva punteada) 69
Figura 3-27. Oscilación periódica del CCII macro modelado 70
Figura 4-1. Circuito oscilador caótico con transistores BJTs 73
Figura 4-2. Descripción de fase del circuito con transistores BJTs 74
Figura 4-3. Función característica de la resistencia no lineal del cto. con transistores BJTs 75
Figura 4-4. Resistencia no lineal con transistores MOS 76
Figura 4-5. Función característica de la resistencia no lineal con transistores MOS 77
Figura 4-6. Oscilador caótico completo 78
Figura 4-7. Diagrama de fase del oscilador caótico con transistores MOS 79
Figura 4-8. Diagrama de fase de circuito con transistores MOS, con valores reducidos 80
Figura 4-9. Ciclo límite en el circuito con transistores MOS con valores reducidos 81
Figura 4-10. Resistencia no lineal que incluye el oscilador periódico 82
179

Figura 4-11. Circuito oscilador caótico completo con resistencia no lineal con oscilador
periódico ideal 82
Figura 4-12. Diagrama de fase del circuito caótico con resistencia no lineal con
oscilador periódico ideal 83
Figura 4-13. Diagrama de fase del circuito caótico con resistencia no lineal con
oscilador periódico ideal, completamente integrable 84
Figura 4-14. Forma final del circuito caótico con resistencia no lineal con oscilador
periódico ideal 86
Figura 4-15. Forma de onda tipo pulso aplicada al circuito 86
Figura 4-16. Diagrama de fase del circuito con resistencia no lineal ideal con señal
periódica tipo pulso 87
Figura 4-17. Resistencia no lineal que incluye el CCII real 88
Figura 4-18. Circuito oscilador caótico completo con CCII en la resistencia no lineal 88
Figura 4-19. Diagrama de fase del circuito caótico con CCII en la resistencia no lineal 89
Figura 4-20. FFT de la señal caótica generada por el cto. con CCII en la resistencia no
lineal 90
Figura 4-21. Forma final del circuito caótico con CCII en la resistencia no lineal 91
Figura 4-22. Segunda estructura de circuito caótico. a) Diagrama esquemático,
b) Función característica 92
Figura 4-23. Macro modelo de la resistencia no lineal ideal 93
Figura 4-24. Función característica del macro modelo de la resistencia no lineal 93
Figura 4-25. Oscilador de relajación con la resistencia no lineal ideal 94
Figura 4-26. Forma de onda del oscilador de relajación con resistencia no lineal ideal 94
Figura 4-27. Oscilador caótico completo con resistencia no lineal ideal 95
Figura 4-28. Descripción de fase del oscilador caótico de la fig 4-27 96
Figura 4-29 FFT de la señal caótica de la fig. 4-27 97
Figura 4-30. Descripción de fase del cto. de la fig. 4-27 con valores reducidos 98
Figura 4-31. Descripción de fase del circuito de la fig. 4-27 con un oscilador periódico ideal 99
Figura 4-32. FFT de la señal caótica del cto. de la fig. 4-27 con oscilador periódico ideal 99
Figura 4-33. Descripción de fase de la señal modulada del circuito de la figura
4-27 con oscilador periódico ideal 101
Figura 4-34. FFT de la señal modulada del circuito. de la figura 4-27 con oscilador
periódico ideal 101
Figura 4-35. Descripción de fase del circuito de la fig. 4-27 con valores en el rango de
integración y con oscilador periódico ideal 102
Figura 4-36. FFT de la señal caótica del circuito de la fig. 4-27 con valores en el rango de
integración y con oscilador periódico ideal 102
Figura 4.37. Resistencia no lineal con un CCII 104
180

Figura 4-38. Resistencia no lineal con el macro modelo del CCII 105
Figura 4-39. Función característica de la resistencia no lineal con CCII macro modelado 105
Figura 4-40. oscilador periódico con la resistencia no lineal con CCII 106
Figura 4-41. Oscilación periódica de la resistencia no lineal con CCII 106
Figura 4-42. Oscilador caótico completo con CII macro modelado
Figura 4-43. Descripción de fase del oscilador caótico con CCII macro modelado 108
Figura 4-44. FFT de la señal caótica del circuito con CCII macro modelado 108
Figura 4-45. Descripción de fase del circuito con valores en el rango de ICs y con CCII
macro modelado 109
Figura 4-46. FFT de la señal caótica del circuito con valores en el rango de ICs con
resistencia no lineal con CCII macro modelado 109
Figura 4-47. Forma final del oscilador caótico con CCII macro modelado 111
Figura 4-48. CCII usado en la realización de la resistencia no lineal 112
Figura 4-48. CCII real usado en la realización de la resistencia no lineal 112
Figura 4-49. Función característica de la resistencia no lineal con CCII real 112
Figura 4-50. oscilación periódica del circuito con resistencia no lineal con CCII real 113
Figura 4-51. Descripción de fase del circuito con CCII real 114
Figura 4-52. FFT de la señal caótica del circuito con CII real 115
Figura 4-53. Descripción de fase del circuito con CCII real y elementos integrables 115
Figura 4-54. FFT de la señal caótica del circuito con CCII real y elementos integrables 116
Figura 4-55. Circuito de Chua 117
Figura 4-56. Resistencia no lineal macro modelada, a) modelo, b) función característica 118
Figura 4-57. Circuito de Chua con resistencia no lineal macro modelada 119
Figura 4-58. Diagrama de fase del circuito de Chua con resistencia no lineal macro
modelada 119
Figura 4-59. FFT de la señal caótica del circuito de Chua con resistencia no lineal
macro modelada 120
Figura 4-60. Resistencia no lineal con CCII macro modelado 121
Figura 4-61. Función característica de la resistencia no lineal con CCII macro modelado 122
Figura 4-62. Oscilador periódico. con resistencia no lineal con CCIIs macro modelados 123
Figura 4-63. Oscilación periódica del circuito con resistencia no lineal con CCIIs
macro modelados 123
Figura 4-64. Circuito de Chua con resistencia no lineal con CCIIs macro modelados 124
Figura 4-65. Diagrama de fase del circuito con resistencia no lineal con CCIIs macro
modelados 125
Figura 4-66. Diagrama de fase del circuito con resistencia no lineal con CCIIs macro
Modelados con valores reducidos, 1 126
Figura 4-67. Diagrama de fase del circuito con resistencia no lineal con CCII macro
181

modelado con valores reducidos, 2 127
Figura 4-68. Diagrama de fase del circuito con resistencia no lineal con CCII macro
modelado con valores reducidos, 3 128
Figura 4-69. Diagrama de fase del circuito con resistencia no lineal con CCIIs macro
modelados y valores en el rango de integración 129
Figura 4-70. FFT de la señal caótica del circuito con resistencia no lineal con CCIIs macro
modelados y valores en el rango de integración 130
Figura 4-71. Función característica de la resistencia no lineal con CCIIs reales 134
Figura 4-73. Diagrama de fase del circuito de Chua con resistencia no lineal
con CCIIs reales 133
Figura 4-74. Diagrama de fase del circuito de Chua con valores reducidos y resistencia
no lineal con CCIIs reales 134
Figura 4-75. FFT de la señal caótica del circuito de Chua con valores reducidos y
resistencia no lineal con CCIIs reales 135
Figura 4-76. Diagrama de fase del circuito de Chua con valores integrables y resistencia
no lineal con CCIIs reales 136
Figura 4-77. FFT de la señal caótica del circuito de Chua con valores integrables y
resistencia no lineal con CCIIs reales 137
Figura 4-78. Forma final del circuito caótico con resistencia no lineal con CCIIs reales 138
Figura 5-1. Circuito oscilador de anillo de tres etapas 140
Figura 5-2. Simulación en tiempo del circuito oscilador de anillo 141
Figura 5-3. Histéresis en el oscilador de anillo 142
Figura 5-4. Diseño geométrico del circuito oscilador de anillo 142
Figura 5-5. Medición de la forma de onda del circuito de anillo 143
Figura 5-6. Espectro de la señal medida 143
Figura 5-7. Espectro acercado a la frecuencia fundamental de la señal 144
Figura 5-8. Forma de onda de la señal obtenida de la captura de datos 144
Figura 5-9. Espectro de la señal obtenida de la captura de datos 145
Figura 5-10. Oscilador de anillo anidado 145
Figura 5-11. Circuito oscilador caótico que incluye las parásitas de los “bondings” 146
Figura 5-12. Diagrama de fase y proyecciones del oscilador caótico 148
Figura 5-13. Forma de onda caótica del nodo (5) del circuito 148
Figura 5-14. Espectro de la señal caótica 149
Figura 5-15. Geometría del circuito caótico 149
Figura 5-16. Medición de la forma de onda de la señal caótica, 200uS/div. 151
Figura 5-17. Medición de la forma de onda de la señal caótica, 20uS/div. 151
Figura 5-18. Medición de la forma de onda medida de la señal caótica, 10nS/div. 152
Figura 5-19. Medición del espectro de la señal caótica, fmax=50MHz 152
182

Figura 5-20. Medición del espectro de la señal caótica, fmax=12.5MHz 153
Figura 5-21. Medición del espectro de la señal caótica, fmax=5MHz 153
Figura 5-22. Medición del espectro de la señal caótica, fmax=2.5MHz 154
Figura 5-23. Forma de onda de la señal obtenida de la captura de datos 154
Figura 5-24. Espectro de la señal obtenida de la captura de datos 155
Figura 5-25. Medición del chip 155
Figura 5-26. Fotografía del chip 156
183

184
Índice de Tablas
Tabla 1-1. Valores de los elementos dinámicos del circuito de Chua para los que hay caos 15
Tabla 1-2a. Rango de valores de L, C1 y C2 para los que hay caos, correspondiente
al primer de la tabla 1-1 16
Tabla 1-2b. Rango de valores de L, C1 y C2 para los que hay caos, correspondiente
al penúltimo renglón de la tabla 1-1 16
Tabla 2-1. Parámetros más importantes de un CCII 22
Tabla 2-2. Parámetros empíricos de la ecuación (2) 30
Tabla 2-3. Parámetros empíricos de la ecuación (3) 30
Tabla 3-1. Valores de los transistores del CCII básico 47
Tabla 3-2. Dimensiones de los transistores del CCII con mayor voltaje de polarización 59
Tabla 4-1. Dimensiones de los transistores de la resistencia no lineal con transistores MOS 78
Tabla 4-2. Región de comportamiento caótico del circuito de la estructura 1 80
Tabla 4-3. Rango de los parámetros en los que hay comportamiento caótico en el circuito
de la estructura 1 con fuente de voltaje ideal en la resistencia no lineal 85
Tabla 4-4. Rango de los parámetros en los que hay comportamiento caótico en el circuito
de la estructura 1 con un CCII en la resistencia no lineal 90
Tabla 4-5. Rango de los parámetros en los que hay comportamiento caótico para el circuito
de la estructura 2 con resistencia no lineal macro modelada 103
Tabla 4-6. Rango de los parámetros en los que hay comportamiento caótico en el circuito
de la estructura 1 con resistencia no lineal con CCII macro modelado 110
Tabla 4-7. Rango de los parámetros en los que hay comportamiento caótico en el circuito
de la estructura 2 con resistencia no lineal con CCII real 116
Tabla 4-8. Rango de los parámetros en los que hay comportamiento caótico para el circuito
de la estructura 3 con resistencia no lineal con CCIIs macro modelados 131
Tabla 4-9. Rango de los parámetros en los que hay comportamiento caótico para el circuito
de la estructura 3 con valores medianos, con resistencia no lineal con CCIIs reales 135
Tabla 4-10. Rango de los parámetros en los que hay comportamiento caótico para el circuito
de la estructura 3 con valores integrables, con resistencia no lineal con CCIIs reales 137
Tabla 5-1. Dimensiones de los transistores del circuito oscilador de anillo 141
Tabla 5-2. Dimensiones de los transistores del oscilador de anillo caótico 147