
D:/R/LaT File/Vibraciones Rescate de …...3 An´alisis de un Sistema Vibratorio de un Grado de...
22
Sistemas Vibratorios de un Grado de Libertad Sujetos a Vibraci´ on Libre No Amortiguada. Jos´ e Mar´ ıa Rico Mart´ ınez Departamento de Ingenier´ ıaMec´anica Facultad de Ingenier´ ıa Mec´anica El´ ectrica y Electr´onica Universidad de Guanajuato Salamanca, Gto. 38730, M´ exico email: [email protected] 1 Introducci´ on En estas notas se presentan los fundamentos te´ oricos de los sistemas vibratorios de un grado de libertad sujetos a vibraci´on libre no amortiguada. El objetivo de estas notas es su empleo como un auxiliar did´ actico en los cursos de vibraciones mec´anicas. 2 Sistemas Vibratorios Discretos y Continuos, Gra- dos de Libertad de un Sistema Vibratorio. En su forma m´ as general, un sistema vibratorio est´a constituido por elementos que tienen propiedades m´ asicas o de inercia, el´asticas y de disipaci´on de energ´ ıa. A´ un cuando las propiedades de disipaci´on de energ´ ıa est´an siempre presentes en cualquier sistema vi- bratorio, desde un punto de vista matem´ atico, un sistema capaz de vibrar puede existir sin que el sistema disipe energ´ ıa; estos sistemas se denominan como no amortigua- dos. Tambi´ en, en general, las propiedades m´ asicas o de inercia, el´asticas y de disipaci´on de energ´ ıa est´an distribuidas de manera continua a lo largo del sistema vibratorio, de manera que todos los sistemas vibratorios son continuos, las herramientas matem´ aticas necesarias para abordar este tipo de sistemas son las ecuaciones diferenciales parciales y, para aproximaciones num´ ericas, el m´ etodo del elemento finito o alguna de sus varia- ciones. Afortunadamente, es posible modelar, con ´ exito, sistemas vibratorios en los que se asume que las propiedades m´ asicas o de inercia, el´asticas y de disipaci´on de energ´ ıa est´an distribuidas de manera discreta; es decir, en estos sistemas se supone que algunos elementos del sistema ´ unicamente tiene propiedades m´ asicas o de inercia, otros elementos del sistema ´ unicamente tienen propiedades el´asticas y algunos otros m´ as ´ unicamente disi- pan energ´ ıa. Debe ser evidente, que estos sistemas vibratorios, denominados discretos, constituyen una abstracci´on o aproximaci´on de los sistemas vibratorios reales; sin em- bargo, por un lado, las herramientas matem´ aticas necesarias para abordar estos sistemas son las ecuaciones diferenciales ordinarias —bastante menos demandantes que las ecua- ciones diferenciales parciales— y por otro lado, un buen modelo discreto de un sistema vibratorio real proporciona resultados suficientemente cercanos al comportamiento real del 1
Transcript of D:/R/LaT File/Vibraciones Rescate de …...3 An´alisis de un Sistema Vibratorio de un Grado de...

Sistemas Vibratorios de un Grado de Libertad Sujetos
a Vibracion Libre No Amortiguada.
Jose Marıa Rico MartınezDepartamento de Ingenierıa Mecanica
Facultad de Ingenierıa Mecanica Electrica y ElectronicaUniversidad de Guanajuato
Salamanca, Gto. 38730, Mexicoemail: [email protected]
1 Introduccion
En estas notas se presentan los fundamentos teoricos de los sistemas vibratorios de ungrado de libertad sujetos a vibracion libre no amortiguada. El objetivo de estas notas essu empleo como un auxiliar didactico en los cursos de vibraciones mecanicas.
2 Sistemas Vibratorios Discretos y Continuos, Gra-
dos de Libertad de un Sistema Vibratorio.
En su forma mas general, un sistema vibratorio esta constituido por elementos que tienenpropiedades masicas o de inercia, elasticas y de disipacion de energıa. Aun cuando laspropiedades de disipacion de energıa estan siempre presentes en cualquier sistema vi-bratorio, desde un punto de vista matematico, un sistema capaz de vibrar puede existirsin que el sistema disipe energıa; estos sistemas se denominan como no amortigua-
dos. Tambien, en general, las propiedades masicas o de inercia, elasticas y de disipacionde energıa estan distribuidas de manera continua a lo largo del sistema vibratorio, demanera que todos los sistemas vibratorios son continuos, las herramientas matematicasnecesarias para abordar este tipo de sistemas son las ecuaciones diferenciales parcialesy, para aproximaciones numericas, el metodo del elemento finito o alguna de sus varia-ciones. Afortunadamente, es posible modelar, con exito, sistemas vibratorios en los quese asume que las propiedades masicas o de inercia, elasticas y de disipacion de energıaestan distribuidas de manera discreta; es decir, en estos sistemas se supone que algunoselementos del sistema unicamente tiene propiedades masicas o de inercia, otros elementosdel sistema unicamente tienen propiedades elasticas y algunos otros mas unicamente disi-pan energıa. Debe ser evidente, que estos sistemas vibratorios, denominados discretos,constituyen una abstraccion o aproximacion de los sistemas vibratorios reales; sin em-bargo, por un lado, las herramientas matematicas necesarias para abordar estos sistemasson las ecuaciones diferenciales ordinarias —bastante menos demandantes que las ecua-ciones diferenciales parciales— y por otro lado, un buen modelo discreto de un sistemavibratorio real proporciona resultados suficientemente cercanos al comportamiento real del
1

sistema que, en muchos casos, hace innecesario la formulacion continua del mismo sistema.
Uno de los conceptos fundamentales en el estudio de cualquier sistema, es el conceptode grados de libertad, de manera muy simple, el numero de grados de libertad de unsistema vibratorio es el numero mınimo y suficiente de variables que es necesario conocerpara determinar el estado del sistema. En el caso de sistema mecanicos, conocer el es-tado del sistema es sinonimo de conocer la posicion del sistema; es decir, la posicion detodos y cada uno de los elementos del sistema. Un sistema vibratorio continuo, como unaviga, tiene un numero infinito de grados de libertad, esto en virtud de que la posicion deuna viga se determina por una funcion continua y diferenciable, al menos hasta la cuartaderivada, y esta funcion es equivalente a conocer la posicion de un continuo de partıculasde la viga. A diferencia de los sistema continuos, un sistema vibratorio discreto tiene unnumero finito, que en algunos casos, como en la aproximacion mediante el metodo delelemento finito, puede ser muy elevado.
En estas notas, se tratara exclusivamente con sistemas discretos de un unico grado delibertad, es decir, en los sistemas considerados, es necesario conocer una unica variablepara determinar la posicion del sistema vibratorio. Un ejemplo de esta clase de sistemasse muestra en las figura 2, donde la variable que determina la posicion del sistema sedenomina y y es en general una funcion del tiempo, denotada por y(t). En estos sistemas,existe un elemento masico o de inercia que se supone que es totalmente rıgido y que nodisipa energıa, existen tambien un elemento elastico, un resorte, que se supone de masadespreciable y que tampoco no disipa energıa, finalmente, en el sistema ilustrado en lafigura 1, existe un elemento disipador de energıa, un amortiguador, que se supone demasa despreciable y totalmente rıgido. Este es un ejemplo de la discretizacion de laspropiedades continuas de un sistema vibratorio real.
Figure 1: Sistema Vibratorio de un Grado de Libertad Amortiguado.
3 Analisis de un Sistema Vibratorio de un Grado
de Libertad Sujeto a Vibracion Libre No Amor-
tiguada.
El modelo mas simple y probablemente uno de los mas importantes en el estudio de lasvibraciones mecanicas es el de un sistema vibratorio de un grado de libertad sujeto avibracion libre no amortiguada. Vea la figura 2.
2

Figure 2: Sistema Vibratorio de un Grado de Libertad No Amortiguado.
El sistema esta formado por una masa y un resorte, la masa permite almacenar energıapotencial y energıa cinetica mientras que el resorte permite almacenar energıa potencialdebida a la deformacion del resorte, la vibracion libre de este sistema vibratorio puedeinterpretarse como el resultado del intercambio de la energıa entre estos dos elementos.
Las suposiciones de este modelo son:
1. La masa del sistema es constante y totalmente rıgida, se denomina M .
2. El resorte es lineal y de masa despreciable, por lo tanto es posible describir el resortemediante una unica constante, denominada la constante del resorte, k. De maneraque la relacion entre la fuerza y la deformacion del resorte esta dada por
F = k δ, (1)
donde F es la fuerza del resorte y δ es la deformacion del resorte.
3. No hay amortiguamiento presente en el sistema.
4. El movimiento de la masa es translacion rectilınea.
A fın de lograr que la traslacion de la masa sea rectilınea, es frecuente que el sistemaemplee guıas, en cuyo caso debe suponerse que las guıas estan completamente libres defriccion.
Es conveniente mostrar las diferentes etapas de la formacion de este sistema vibratorio,vea la figura 3. En una primera etapa, el resorte y la masa estan separados y la longitud delresorte en esta posicion se denomina la longitud libre del resorte l0. En una segunda etapa,el resorte y la masa ya estan unidos y en una posicion de equilibrio estatico. Entonces,es posible recurrir a las ecuaciones de la estatica para determinar la deformacion estaticadel resorte, δest, para tal fın
ΣFy = 0 −M g + k δest = 0,
por lo tanto,
δest =M g
k(2)
La longitud del resorte en esta posicion, esta dada por l0+ δest. Es importante senalarque existen dos diferentes maneras para transitar de la primera a la segunda etapa.
3

Figure 3: Tres Etapas en la Formacion de un Sistema Vibratorio de un Grado de LibertadNo Amortiguado.
1. Una primer manera, consiste en conectar la masa al resorte y dejarlos vibrar hastaque el sisteme encuentre su posicion de equilibrio estatico. Este argumento enfrentauna contradiccion, si el modelo asume que el sistema no tiene amortiguamiento al-guno, el sistema vibrara indefinidamente y nunca obtendra su posicion de equilibrioestatico. En realidad este argumento expone las deficiencias del modelo, el amor-tiguamiento esta siempre presente en todo sistema, de manera que tarde o temprano,la energıa del sistema se transforma en ruido o calor y el sistema alcanza su posicionde equilibrio estatico.
2. Una segunda manera, consiste en conectar la masa y al resorte y lentamente per-mitir que el resorte soporte una parte creciente del peso de la masa, en un procesocuasiestatico semejante al que ocurre en una prueba de tension.
Finalmente, en una tercera etapa es posible encontrar la ecuacion de movimiento delsistema. Suponga que el sistema se separa de su posicion de equilibrio una distancia y(t)comprimiendo el resorte. Entonces, aplicando la segunda ley de Newton, se tiene que1
ΣFy = Md2 y(t)
d t2−M g + k (δest − y(t)) = M
d2 y(t)
d t2,
o
−M g + k δest − k y(t) = Md2 y(t)
d t2.
Por lo tanto, sustituyendo la ecuacion (2) que determina la deformacion estatica delresorte, se obtiene la ecuacion de movimiento del sistema vibratorio
Md2 y(t)
d t2+ k y(t) = 0. (3)
Donde, M es la masa del sistema, k es la constante del resorte, y es la variable querepresenta el movimiento de la partıcula y t es el tiempo. Esta es una ecuacion diferenciallineal de segundo orden homogenea.
1Ademas se supondra que y(t) < δest, de manera que el resorte esta sujeto a tension, esta suposcion noes necesaria para obtener la ecuacion del movimiento del sistema, pero si lo es para evitar ambiguedadesdurante la derivacion de la ecuacion de movimiento del sistema.
4

El proceso de solucion de las ecuaciones diferenciales lineales, se basa en un resultadodel algebra lineal: La funcion y(t) = eλ t es una eigenfuncion de la derivada, una transfor-macion lineal del espacio de funciones continuamente diferenciables sobre si mismo. Esfacil notar que, efectivamente,
d eλ t
d t= λ eλ t.
Por lo tanto si se propone como solucion de la ecuacion diferencial dada por la ecuacion(3) a la funcion
y(t) = C eλ t, (4)
se tiene que la primera y segunda derivada de la funcion estan dadas por
d y(t)
d t=
dC eλ t
d t= C λ eλ t,
d2 y(t)
d t2=
dC λ eλ t
d t= C λ2 eλ t (5)
Sustituyendo las ecuaciones (4) y (5) en la ecuacion (3), la condicion necesaria ysuficiente para que y(t) = C eλ t sea solucion de la ecuacion diferencial (3) esta dada por
M C λ2 eλ t + k C eλ t ≡ 0 ∀t ≥ 0.
Rearreglando la ecuacion, se tiene que
C eλ t(
M λ2 + k)
≡ 0 ∀t ≥ 0.
Es importante notar que este proceso convierte una ecuacion diferencial en una ecuacionalgebraica, mucho mas simple de resolver. Es necesario considerar tres posibles casos
1. C = 0, este caso es matematicamente posible, pero conduce a que la solucion de laecuacion esta dada por
y(t) = Ceλ t = 0 eλ t ≡ 0 ∀t ≥ 0.
Este resultado fisicamente significa que el sistema continua en reposo, una solucionperfectamente factible pero que no es interesante.
2. eλ t ≡ 0 ∀t ≥ 0, esta solucion es matematicamente imposible pues para t = 0, setiene que
y(0) = eλ 0 = e0 = 1 6= 0.
3. La ultima condicion es la interesante y conduce a la ecuacion caracterıstica del
sistema.M λ2 + k = 0 (6)
Las soluciones de la ecuacion caracterıstica del sistema, (6), λ estan dadas por
λ = ±√
−k
M= ±i
√
k
M. (7)
donde i representa la unidad imaginaria. Ası pues, las dos soluciones de la ecuaciondiferencial estan dadas por
y1(t) = C1 e+i√
kM
t y y2(t) = C2 e−i√
kM
t
5

Estas soluciones son matematicamente correctas, excepto que es deseable que la solucionde una ecuacion diferencial real sea una solucion real. De hecho, de la teorıa de las ecua-ciones diferenciales lineales, se sabe que la solucion general de una ecuacion diferenciallineal de segundo orden constituye un espacio vectorial de dimension 2 en el espacio vec-torial de funciones reales continuamente diferenciables. De manera que si se encuentrandos funciones reales, que sean:
1. Soluciones de la ecuacion diferencial dada por la ecuacion (3), digamos yr1(t) yyr2(t),
2. Que las funciones sean linealmente independiente.
Entonces la solucion general de la ecuacion (3), yG(t), estara dada por una combinacionlineal de las dos soluciones, es decir
yG(t) = C1 yr1(t) + C2 yr2(t).
La pista para encontrar estas soluciones reales esta dada por la identidad de Euler, queindica que
e+i√
kM
t = Cos
√
k
Mt
+ i Sen
√
k
Mt
e−i√
kM
t = Cos
√
k
Mt
− i Sen
√
k
Mt
Por lo tanto, dos candidatos naturales de las soluciones reales de la ecuacion (3) son
yr1(t) = Cos
√
k
Mt
y yr2(t) = Sin
√
k
Mt
,
es facil probar que ambas funciones candidatas son soluciones de la ecuacion diferencial,de manera que la solucion general de la ecuacion (3) esta dada por
yG(t) = ACos
√
k
Mt
+ B Sen
√
k
Mt
(8)
donde A y B son constantes arbitrarias. Es facil probar que la ecuacion (8) puede ree-scribirse como
yG(t) = C Sen
√
k
Mt+ φ
(9)
donde
C =√A2 + B2 y φ = tan−1A
B.
A partir de la ecuacion (9), es evidente que la solucion de la ecuacion diferencial es unavibracion periodica y armonica de frecuencia
f =1
2 π
√
k
M
6

La frecuencia circular de esta vibracion, se denomina la frecuencia natural del sistema
vibratorio, se denota por ωn, y esta dada por
ωn = 2 π f =
√
k
M. (10)
Este es la caracterıtica mas importante de un sistema vibratorio y es una propiedad delsistema. Por lo tanto, la solucion general, ecuacion (8) y ecuacion (9), pueden escribirsecomo
yG(t) = ACos (ωn t) + B Sen (ωn t) (11)
yyG(t) = C Sen (ωn t+ φ) (12)
Finalmente, un sistema vibratorio sujeto a vibracion libre requiere de una excitacionmomentanea para que pueda vibrar. Desde el punto de vista matematico, esta excitacionmomentanea se traduce en las condiciones iniciales del sistema vibratorio. Suponga quelas condiciones iniciales son:
Para t = 0, y(0) = y0 yd y
d t(0) = y(0) = y0. (13)
Derivando la ecuacion (11) respecto al tiempo
d yG(t)
d t= −AωnSen (ωn t) + B ωnCos (ωn t) (14)
y sustituyendo las condiciones iniciales en las ecuaciones (13) conduce al sistema de ecua-ciones
y0 = ACos (ωn 0) + B Sen (ωn 0) = A (15)
y0 = −AωnSen (ωn 0) + B ωnCos (ωn 0) = Bωn (16)
Por lo tanto
A = y0 y B =y0ωn
(17)
De aquı que, la solucion particular de la ecuacion (3) que satisface las condicionesiniciales dadas por (13), esta dada por
yP (t) = y0 Cos (ωn t) +y0ωn
Sen (ωn t) (18)
Esta ecuacion permite analizar el comportamiento de cualquier sistema vibratorio deun grado de libertad sujeto a vibracion libre y bajo condiciones iniciales arbitrarias.
Es importante notar que este modelo predice que la vibracion dura de manera in-definida. La realidad nos indica que todos los sistemas vibratorios sujetos a vibracionlibre dejan de vibrar despues de un intervalo de tiempo. La magnitud de ese intervalode tiempo puede ser pequeno o largo dependiendo de las caracterısticas de disipacion deenergıa del sistema. Es necesario, por lo tanto, estudiar modelos que incluyan disipacionde energıa para proveer de predicciones mas exactas acerca del comportamiento de lossistemas vibratorios.
Ejemplo. Considere el disco de masa M y radio r. El disco esta empotrado a lapared, por el lado izquierdo mediante un eje formado por dos secciones, la primera de
7

longitud L1 y diametro d1, la segunda de longitud L2 y diametro d2, por el lado derechomediante un eje de longitud L3 y diametro d3; el material de todos los ejes es el mismoy su modulo de elasticidad al cortante es igual a G. Determine la frecuencia natural delsistema.
Solucion. Primeramente determinaremos las constantes de los resortes torsionalesconstituidos por las diferentes secciones de los ejes. Si cualquiera de los ejes, se sujeta aun torque de magnitud T , se tiene que el angulo de torsion esta dado por
θi =T Li
GJi
donde
Ji =π d4i32
Por lo tanto
θi =32T Li
π Gd4iLa constante del resorte torsional asociado a esta seccion, esta dada por
ki =T
θi=
T32T Li
πGd4i
=π Gd4i32Li
Entonces, el angulo de torsion asociado al lado izquierdo del sistema, esta dado por
θ1+2 = θ1 + θ2 =32T L1
π Gd41+
32T Li
π Gd41
Puesto que el torque es comun a ambas secciones, se tiene que la constante equivalentedel resorte torsional esta dado por
k1+2 =T
θ1+2
=T
T(
32Li
πGd41+ 32L2
πGd42
) =1
32Li
πGd41+ 32L2
πGd42
=1
1k1
+ 1k2
Este resultado verifica que estas dos secciones actuan como dos resortes, torsionales, enserie.
De manera semejante, la constante del resorte del lado derecho del sistema esta dadopor
k3 =π Gd4332L3
Separe el sistema de su posicion de equilibrio girandolo un angulo θ en la direccionpositiva cuando se ve el sistema desde el lado derecho. Recuerde que el momento deinercia del disco respecto a un eje perpendicular al disco que pasa por el centro de masadel disco esta dada por
IG =1
2M r2.
Aplicando las ecuaciones de Newton-Euler se tiene que
IGd2 θ
d t2= −k1+2 θ − k3 θ.
o, sustituyendo el momento de inercia
1
2M r2
d2 θ
d t2+ [k1+2 + k3] θ = 0
8

4 Aplicacion del Metodo de Trabajo y Energıa en
el Analisis de Sistemas de Un Grado de Libertad
Sujetos a Vibracion Libre No Amortiguada.
En esta parte de las notas, se mostrara que el metodo de trabajo y energıa puede aplicarseen la determinacion de las ecuaciones de movimiento de un sistema vibratorio de un gradode libertad sujeto a vibracion libre no amortiguada y a la determinacion de la frecuencianatural del sistema. En algunos casos, es un poco mas sencillo determinar la frecuencianatural de un sistema vibratorio de un grado de libertad empleando los metodos de tra-bajo y energıa que aplicando la segunda Ley de Newton, o las ecuaciones de Newton-Euler.
En una primera situacion, se mostrara como el metodo de trabajo y energıa puedeemplearse para determinar la ecuacion de movimiento de un sistema vibratorio. Considereel sistema vibratorio de un grado de libertad sujeto a vibracion libre no amortiguada,mostrado en la Figura 2 y repetido en la Figura 4. El sistema se encuentra en la posicionde equilibrio estable, de manera que la deformacion estatica del resorte esta dada por
δEst =M g
k(19)
Figure 4: Sistema Vibratorio de un Grado de Libertad No Amortiguado.
Suponga que el sistema se mueve, en un instante arbitrario, con una velocidad dadapor y(t) y esta en una posicion dada por y(t).2 La energıa total del sistema, ET (t), comofuncion del tiempo t, esta dada por la suma de la energıa cinetica del sistema, T (t), y laenergıa potencial del sistema, V (t). De manera que
ET (t) = T (t) + V (t) =1
2M [y(t)]2 +
1
2k [y(t)− δEst]
2 +M g y(t). (20)
Puesto que el sistema es conservativo, la energıa total del sistema es constante y suderivada, con respecto al tiempo t, debe ser igual a 0. De manera que
0 =dET (t)
d t=
1
2M 2y(t)y(t) +
1
2k 2 [y(t)− δEst] y(t) +M g y(t)
0 = y(t) [M y(t) + k y(t)− k δEst +M g] . (21)
2Por simplicidad, el lector puede suponer que y(t) y y(t) son positivas y que y(t) ≥ δest.
9

Sustituyendo el valor de la deformacion estatica, vea la ecuacion (19) en la ecuacion(21), se tiene que,
y(t) [M y(t) + k y(t)] = 0. (22)
Existen dos posibilidades para la solucion de esta ecuacion
1. La primera opcion es quey(t) = 0. (23)
integrando esta condicion, se tiene que
y(t) =∫
y(t) dt =∫
0 dt = C.
la posicion del sistema es constante y debe corresponder a la posicion de equilibrioestatico del sistema. Esta solucion no es de interes.
2. La segunda opcion es queM y(t) + k y(t) = 0. (24)
Que representa, precisamente, la ecuacion de movimiento de un sistema vibratoriode un grado de libertad, sujeto a vibracion libre no amortiguada.
En una segunda situacion se mostrara como el metodo de trabajo y energıa puedeemplearse para determinar, exclusivamente, la frecuencia natural del sistema vibratoriode un grado de libertda sujeto a vibracion libre no amortiguada. En este caso, la aplicaciondel metodo de trabajo y energıa requiere suponer que el movimiento del sistema vibratorioes armonico simple, es decir
y(t) = y0 Sen (ωn t+ φ) (25)
donde, y0 es la amplitud de la vibracion, ωn es la frecuencia natural del sistema y φ es elangulo de fase. Por lo tanto, la velocidad del sistema esta dada por
y(t) = y0 ωnCos (ωn t+ φ) (26)
Denomine 1 la posicion del sistema vibratorio donde la energıa cinetica del sistemaes mınima y 2 la posicion del sistema vibratorio donde la energıa cinetica del sistema esmaxima. Entonces, la ley de conservacion de la energıa indica que
T1 + V1 = T2 + V2. (27)
La energia cinetica del sistema es mınima cuando la velocidad de la masa es cero yesta situacion ocurre cuando el desplazamiento es maximo, hacia arriba, o mınimo, haciaabajo, por lo tanto, suponiendo que el desplazamiento es maximo,3 se tiene que
T1 = 0 y V1 =1
2k (y0 − δEst)
2 +M g y0.
donde, nuevamente, la energıa potencial debida al peso del cuerpo, se ha medido desde laposicion de equilibrio estatico.
Por otro lado, la energıa cinetica del sistema es maxima cuando la velocidad es maximay la aceleracion, que es la derivada de la velocidad, es cero. Esto ocurre en la posicion deequilibrio estatico, por lo tanto
T2 =1
2M (y0 ωn)
2 y V2 =1
2k δ2Est
3El mismo resultado se obtiene cuando se considera la posicion en la que el desplazamiento es mınimo.
10

donde, nuevamente, la energıa potencial debida al peso del cuerpo, se ha medido desde laposicion de equilibrio estatico.
Sustituyendo estos resultados en la ecuacion (27), se tiene que
0 +1
2k (y0 − δEst)
2 +M g y0 = T1 + V1 = T2 + V2 =1
2M (y0 ωn)
2 +1
2k δ2Est
1
2k y20 − k y0 δEst +M g y0 +
1
2k δ2Est =
1
2My20 ω
2n +
1
2k δ2Est (28)
Eliminando, de ambos lados de la ecuacion, los terminos 12k δ2Est y recordando que
δEst =M g
k,
se tiene finalmente que1
2k y20 =
1
2My20 ω
2n, (29)
Es evidente que es posible eliminar el termino y20, desde el punto de vista fısico, estaeliminacion indica que la frecuencia natural no depende de la amplitud de la vibracion,una caracterıstica tıpica de los sistemas vibratorios lineales, y que la frecuencia naturalesta dada por
ωn =
√
k
M(30)
5 El Metodo de Rayleigh. Aproximacion de la Fre-
cuencia Natural de Sistemas Continuos.
En esta seccion, se muestra como se puede aplicar el metodo de Rayleigh para la aprox-imacion de la frecuencia natural de sistemas continuos. Debe recordarse que un sistemacontinuo, es aquel en el cual las propiedades masicas o de inercia, elasticas y de disipacionde energia, o amortiguamiento, estan distribuidas de manera continua a traves de todoel sistema. En esta seccion se analizaran sistemas en los cuales la masa o la elasticidadesta distribuida de manera continua.
Figure 5: Sistema Vibratorio de un Grado de Libertad No Amortiguado.
Considere el sistema vibratorio masa-resorte analizado previamente y mostrado nue-vamente en la Figura 5. En el analisis previo, se asumio que la masa del resorte era
11

inexistente. En la practica, la masa del resorte puede ser una fraccion pequena de la masaM , de manera que esta suposicion no tiene mayor efecto; sin embargo, en algunos casos,la masa del resorte puede ser una fraccion considerable de la masa M , de manera que sise calcula la frecuencia natural, de la manera indicada en la ecuacion (10), repetida aquı,
ωn =
√
k
M.
incurrira en un error apreciable, respecto al resultado experimental. El metodo de Rayleighpuede emplearse para realizar una aproximacion, mas certera, de la frecuencia natural delsistema. Suponga que la masa del resorte esta dada por m y que su masa se distribuyeuniformemente a lo largo de la longitud del resorte4 que, en la posicion de equilibrioestable, esta dada por
l = l0 + δEst.
donde l0 es la longitud libre del resorte y δEst es la deformacion estatica del resorte. Elmetodo de Rayleigh consiste en aplicar el metodo de trabajo y energıa para determinarla frecuencia natural del sistema como se indica en la parte final de la seccion 4, peroahora tomando en cuenta la contribucion de la masa del resorte a la energıa cineticadel sistema. Recordando la aplicacion del metodo de trabajo y energıa, al sistema masaresorte, requiere suponer que el movimiento del sistema vibratorio es armonico simple, esdecir
y(t) = y0 Sen (ωn t+ φ) (31)
donde, y0 es la amplitud de la vibracion, ωn es la frecuencia natural del sistema y φ es elangulo de fase. Por lo tanto, la velocidad del sistema esta dada por
y(t) = y0 ωnCos (ωn t+ φ) (32)
Denomine 1 la posicion del sistema vibratorio donde la energıa cinetica del sistemaes mınima y 2 la posicion del sistema vibratorio donde la energıa cinetica del sistema esmaxima. Entonces, la ley de conservacion de la energıa indica que
T1 + V1 = T2 + V2.
La energıa cinetica del sistema es mınima cuando la velocidad de la masa es cero yesta situacion ocurre cuando el desplazamiento es maximo, hacia arriba, o mınimo, haciaabajo, por lo tanto, suponiendo que el desplazamiento es maximo, se tiene que
T1 = 0 y V1 =1
2k (y0 − δEst)
2 +M g y0.
donde, nuevamente, la energıa potencial debida al peso del cuerpo, se ha medido desde laposicion de equilibrio estatico.
Por otro lado, la energıa cinetica del sistema es maxima cuando la velocidad es maximay la aceleracion, que es la derivada de la velocidad, es cero. Esto ocurre en la posicion deequilibrio estatico, por lo tanto
T2 =1
2M (y0 ωn)
2 + TRes y V2 =1
2k δ2Est
4Suponer que la masa se distribuye uniformemente a lo largo de la longitud del resorte no es ex-acta, pero, a falta de informacion detallada de la geometrıa del resorte, constituye un punto de partidarazonable.
12

donde, nuevamente, la energıa potencial debida al peso del cuerpo, se ha medido desdela posicion de equilibrio estatico y TRes representa la energıa cinetica del resorte. Ahoraes necesario estimar la energıa cinetica del resorte, se sabe que la velocidad del extremosuperior del resorte es nula, pues ese extremo esta pegado a la base y la velocidad del ex-tremo inferior del resorte es igual a la velocidad de la masa, supondremos que la velocidadde la diferencial de masa de resorte es proporcional a su distancia respecto al extremo fijodel resorte, vea la Figura 6, sujeto a las condiciones
Para z = 0, v = 0 para z = l, v = y0 ωn
Figure 6: Variables asociadas a la determinacion de la energıa cinetica del resorte.
Entonces, la ecuacion de la velocidad de la diferencial de masa de resorte esta dada,como funcion de z, por
v(z) =y0 ωn z
l
entonces, la energıa cinetica del resorte esta dada por
TRes =∫ l
0
1
2
(
y0 ωn z
l
)2
dm =y20 ω
2n
2 l2
∫ l
0z2m
ldz =
y20 ω2nm
2 l3
∫ l
0z2 dz
=y20 ω
2n m
2 l31
3z3∣
∣
∣
l
0=
y20 ω2nm
6 l3l3 =
my20 ω2n
6(33)
Sustituyendo estos resultados en la ley de conservacion de energıa, se tiene que
T1 + V1 = 0 +1
2k (y0 − δEst)
2 +M g y0 (34)
T2 + V2 =1
2M (y0 ωn)
2 +1
2k δ2Est +
my20 ω2n
6(35)
Por lo tanto
1
2k y20 − k y0 δEst +M g y0 +
1
2k δ2Est =
1
2My20 ω
2n +
1
2k δ2Est +
my20 ω2n
6
Eliminando, de ambos lados de la ecuacion, los terminos 12k δ2Est y recordando que
δEst =M g
k,
se tiene finalmente que1
2k y20 =
1
2My20 ω
2n +
my20 ω2n
6
Por lo tanto, se tiene que finalmente
1
2k y20 =
1
2y20 ω
2n
(
M +m
3
)
, (36)
13

Es evidente que es posible eliminar el termino y20 y la frecuencia natural esta dada por
ωn =
√
√
√
√
k
M + m3
(37)
En este caso, el metodo de Rayleigh nos indica que la frecuencia natural del sistemamasa resorte, tomando en cuenta la distribucion continua de masa en el resorte, puedeaproximarse anadiendo a la masa, M , del cuerpo 1
3de la masa m del resorte.
En el resto de esta seccion, se mostrara la aplicacion del metodo de Rayleigh para laaproximacion de la primera frecuencia natural de una viga sujeta a vibracion libre.5
Figure 7: Sistema Vibratorio de un Grado de Libertad No Amortiguado Formado por unaViga en Voladizo y una Masa en su Extremo Libre.
Considere la viga en voladizo mostrada en la figura 7, supondremos que la viga es delongitud L, masa uniformemente distribuida de masam, en cuyo extremo libre soporta unamasa concentrada de valor m1. Empezaremos nuestro analisis determinando la ecuacionde la curva elastica de la viga. La misma figura 7 presenta una seccion de la viga quepermite determinar la ecuacion del momento flector.
M(x) = −F x (38)
De la mecanica de materiales se tiene que la ecuacion de la curva elastica esta dado por
d2y(x)
d x2=
M(x)
E I= −F x
E I(39)
donde E es el modulo de elasticidad del material de la viga e I es el segundo momentode area de la seccion transversal de la viga. Las condiciones frontera de la viga son
Para x = L,d y(L)
d x= 0 y, para x = L, y(L) = 0.
Por lo tantod y
d x= − F x2
2E I+ C1
5Debe recordarse que una viga es un sistema vibratorio continuo, de modo que tiene un numero infinitode frecuencias naturales, el metodo de Rayleigh permite aproximar la primera frecuencia natural de laviga.
14

por lo tanto, sustituyendo la primera condicion frontera, se tiene que
0 = −F L2
2E I+ C1 y C1 =
F L2
2E I.
De aquı qued y
d x= − F x2
2E I+
F L2
2E IVolviendo a integrar, se tiene que
y(x) = − F x3
6E I+
F L2 x
2E I+ C2
sustituyendo la segunda condicion frontera, se tiene que
0 = −F L3
6E I+
F L3
2E I+ C2 y C2 = −F L3
3E I
De aquı que
y(x) = − F x3
6E I+
F L2 x
2E I− F L3
3E I= F
−x3 + 3L2 x− 2L3
6E I
Por lo tanto, la deflexion de la viga en el extremo libre; es decir, para x = 0, se tiene que
ymax = y(0) = −F L3
3E I
De manera que la viga puede considerarse como un resorte lineal cuya constante esta dadopor
k =F
y(0)=
FF L3
3E I
=3E I
L3.
Ahora aplicaremos el metodo de trabajo y energıa para aproximar la primera frecuencianatural de la viga en voladizo mostrada en la figura 7. Para tal fin, denomine 1 la posiciondel sistema vibratorio donde la energıa cinetica del sistema es mınima y 2 la posicion delsistema vibratorio donde la energıa cinetica del sistema es maxima. Entonces, la ley deconservacion de la energıa indica que
T1 + V1 = T2 + V2.
La energıa cinetica del sistema es mınima cuando la velocidad de la masa es ceroy esta situacion ocurre cuando el desplazamiento es maximo, hacia arriba, o mınimo,hacia abajo, por lo tanto, suponiendo que el desplazamiento es maximo, se tiene que,despreciando la deformacion inicial de la viga y el peso de la propia viga y de la masaconcentrada en el extremo libre,
T1 = 0 y V1 =1
2k y20 =
1
2
3E I
L3y20
donde, nuevamente, la energıa potencial debida al peso del cuerpo, se ha medido desde laposicion de equilibrio estatico, y y0 es la deformacion de la viga.
Por otro lado, la energıa cinetica del sistema es maxima cuando la velocidad es maximay la aceleracion, que es la derivada de la velocidad, es cero. Esto ocurre en la posicion deequilibrio estatico, por lo tanto
T2 =1
2m1 (y0 ωn)
2 + TV iga y V2 = 0.
15

Ahora es necesario estimar la energıa cinetica de la viga, se sabe que la velocidad delextremo empotrado de la viga es nula, pues ese extremo esta empotrado a la pared yla velocidad del extremo libre de la viga es igual a y0 ω
2n, supondremos que la velocidad
de la diferencial de masa de la viga es proporcional a la deflexion de la viga en el puntocorrespondiente. Por lo tanto se tiene la ecuacion
y0 ωn
−F L3
3E I
=vx
F −x3+3L2 x−2L3
6E I
Entonces, la ecuacion de la velocidad de la diferencial de masa de resorte esta dada,como funcion de x, por
vx = y0 ωn F−x3 + 3L2 x− 2L3
6E I
[
−3E I
F L3
]
=y0 ωn
2L3
(
−x3 + 3L2 x− 2L3)
entonces, la energıa cinetica de la viga esta dada por
TV iga =∫ L
0
1
2
[
y0 ωn
2L3
(
−x3 + 3L2 x− 2L3)
]2
dm
=y20 ω
2n
8L6
∫ L
0
(
−x3 + 3L2 x− 2L3)2 m
Ldx
=my20 ω
2n
8L7
∫ L
0
(
x6 + 9L4 x2 + 4L6 − 6L2 x4 + 4L3 x3 − 12L5 x)
dx
=my20 ω
2n
8L7
[
1
7x7 + 3L4 x3 + 4L6 x− 6
5L2 x5 + L3 x4 − 6L5 x2
]x=L
x=0
=my20 ω
2n
8
[
1
7+ 3 + 4− 6
5+ 1− 6
]
=my20 ω
2n
8
5 + 70− 42
35
=my20 ω
2n
8
33
35(40)
Por lo tanto, se tiene que
0 +1
2
3E I
L3y20 = T1 + V1 = T2 + V2 =
1
2m1 (y0 ωn)
2 +my20 ω
2n
8
33
35+ 0
y, reduciendo las ecuaciones, se tiene que
1
2
3E I
L3y20 =
1
2y20ω
2n
[
m1 +33
140m]
. (41)
Por lo tanto, la frecuencia natural esta dada por
ωn =
√
√
√
√
3E I[
m1 +33140
m]
L3(42)
La conclusion es que para aproximar la frecuencia natural del sistema vibratorio debeanadirse a la masa m1 localizada en el extremo libre 33
140de la masa de la viga, m1.
6 Simulacion de sistemas vibratorios de un grado de
libertad sujetos a vibracion libre no amortiguada
En esta seccion se mostrara que el comportamiento de un sistema vibratorio de un gradode libertad no amortiguado sujeto a vibracion libre puede simularse de manera muy simple
16
empleando Simulink c©. Sin embargo, para propositos de simulacion conviene escribir laecuacion de movimiento del sistema, (3), en la forma
d2y
dt2= − k
My.
Ademas es necesario seleccionar las condiciones iniciales del sistema. Es decir, se requiereespecificar la posicion y velocidad inicial del sistema
Para t = 0, y(0) = y0, ydy
dt(0) = y0.
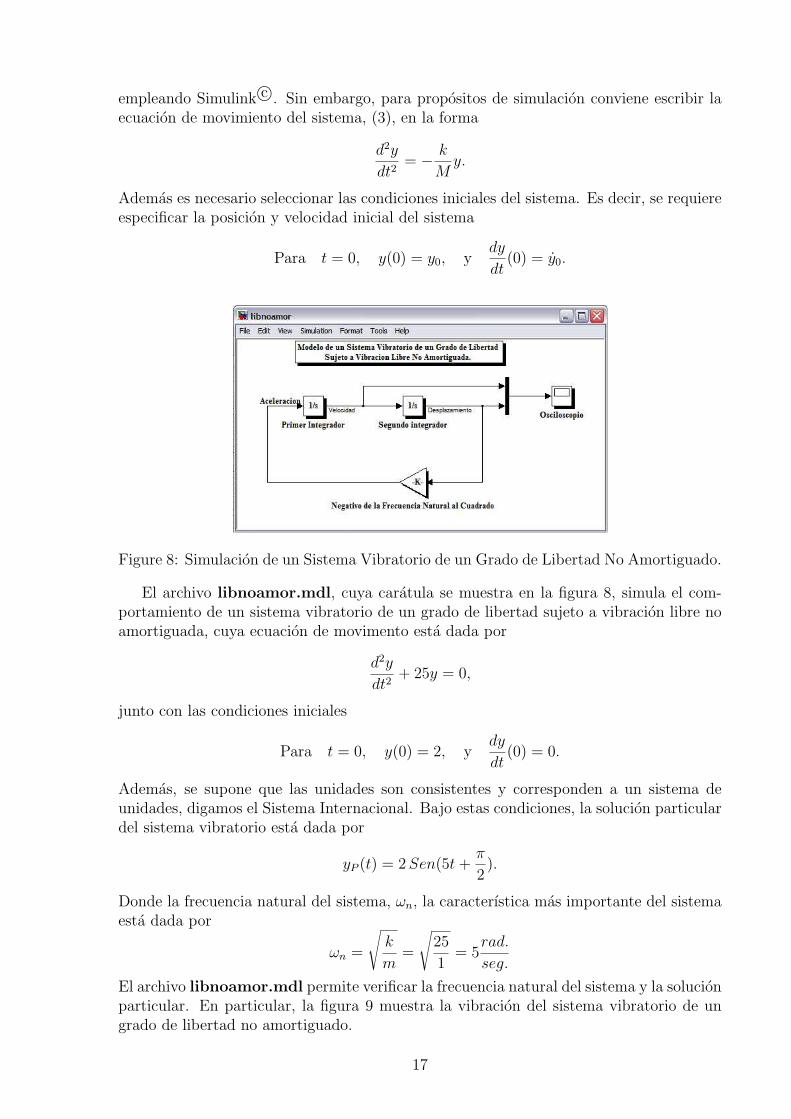
Figure 8: Simulacion de un Sistema Vibratorio de un Grado de Libertad No Amortiguado.
El archivo libnoamor.mdl, cuya caratula se muestra en la figura 8, simula el com-portamiento de un sistema vibratorio de un grado de libertad sujeto a vibracion libre noamortiguada, cuya ecuacion de movimento esta dada por
d2y
dt2+ 25y = 0,
junto con las condiciones iniciales
Para t = 0, y(0) = 2, ydy
dt(0) = 0.
Ademas, se supone que las unidades son consistentes y corresponden a un sistema deunidades, digamos el Sistema Internacional. Bajo estas condiciones, la solucion particulardel sistema vibratorio esta dada por
yP (t) = 2Sen(5t+π
2).
Donde la frecuencia natural del sistema, ωn, la caracterıstica mas importante del sistemaesta dada por
ωn =
√
k
m=
√
25
1= 5
rad.
seg.
El archivo libnoamor.mdl permite verificar la frecuencia natural del sistema y la solucionparticular. En particular, la figura 9 muestra la vibracion del sistema vibratorio de ungrado de libertad no amortiguado.
17

0 1 2 3 4 5 6 7 8 9 10−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
Tiempo, segundos
Des
plaz
amie
nto,
u.l.
Desplazamiento Versus Tiempo en un Sistema No Amortiguado
Figure 9: Vibracion Resultante de un Sistema Vibratorio de un Grado de Libertad NoAmortiguado.
7 Problemas Resueltos
En esta seccion se presenta una coleccion de los problemas mas representativos de sistemasde un grado de libertad sujetos a vibracion libre no amortiguada.
Problema 1. Derive la ecuacion diferencial que rige el movimiento del sistema deun grado de libertad empleando la forma necesaria de las ecuaciones de Newton-Euler.Use la coordenada generalizada indicada en la figura 10. Linealize el sistema bajo la su-posicion de pequenos desplazamientos y determine la frecuencia natural no amortiguadadel sistema.6
Figure 10: Modelo del sistema vibratorio por analizar.
Como se indica en la figura 11, se ha escogido el angulo de rotacion de la doble polea,denominada θ como la variable generalizada que permite describir el estado del sistema.Este resultado determina que el sistema tiene, como era de esperarse un grado de libertad.Es importante notar que existen otras alternativas igualmente razonables, por ejemplo el
6Este problema esta adaptado del problema 2.2 del libro Fundamentals of Mechanical Vibration, 2nd.
Edition de Kelly, G. S. Boston: McGraw Hill
18

desplazamiento del bloque que se desplaza verticalmente; sin embargo, es importantesenalar que la frecuencia natural del sistema es independiente de esa relacion.
Figure 11: Modelo del sistema vibratorio separado de su posicion de equilibrio.
Si se selecciona el angulo θ como variable generalizada, el desplazamiento del bloqueesta dado por 2 r θ y las direcciones de los desplazamientos son consistentes entre sı. Parasimplificar la complejidad del problema se supondra que en la posici
El primer paso consiste en determinar la deformacion inicial del resorte; es decir ladeformacion que el resorte sufre para alcanzar la posicion de equilibrio inicial. Un sencilloanalisis de la doble polea permite llegar a la siguiente ecuacion (43)
ΣTO = 0 −mg 2 r + k δest r = 0 δest =2mg
k(43)
El segundo paso consiste en determinar la deformacion del resorte cuando el sistemase separa de su posicion de equilibrio inicial un angulo θ. Como se indica la figura 11, elpunto localizado sobre la polea de radio r inicialmente localizada exactamente arriba delpunto O se mueve a la posicion indicada por el punto P . Las coordenadas de los puntosP y Q respecto al punto O estan dadas por
~rP/O = −r S θ i+ r C θ j ~rQ/O = L i+ r j
Por lo tanto~rQ/P = (L+ r S θ) i+ r (1− C θ) j
La distancia QP is given by
QP2
= L2 + 2L r S θ + r2 S2 θ + r2 − 2 r2 C θ + r2 C2 θ = L2 + 2L r S θ + 2 r2 − 2 r2 C θ
= L2 + 2L r S θ + 2 r2 (1− C θ) = L2 + 2L r S θ + 4 r2 S2 (θ/2) (44)
Por lo tanto, la deformacion del resorte en la posicion separada de su posicion deequilibrio, esta dada por
δ =√
QP2+ δest =
√
L2 + 2L r S θ + 4 r2 S2 (θ/2) + δest − L
La magnitud de la fuerza del resorte en la posicion separada de la posicion de equilibrioesta dada por
F = k δ = k(
√
L2 + 2L r S θ + 4 r2 S2 (θ/2) + δest − L)
19

Un vector unitario a lo largo de la fuerza del resorte esta dado por
u =(L+ r S θ) i+ (r − r C θ) j√
L2 + 2L r S θ + 4 r2 S2 (θ/2)
Por lo tanto la fuerza del resorte en la posicion separada de su posicion de equilibrio enforma de vector esta dada por
~F = F u = k(
√
L2 + 2L r S θ + 4 r2 S2 (θ/2) + δest − L)
(L+ r S θ) i+ (r − r C θ) j√
L2 + 2L r S θ + 4 r2 S2 (θ/2)
= k
1 +δest − L
√
L2 + 2L r S θ + 4 r2 S2 (θ/2)
[
(L+ r S θ) i+ (r − r C θ) j]
(45)
Una vez terminados estos pasos es posible determinar la ecuacion de movimiento delsistema, el punto de partida son los diagramas de cuerpo rıgido mostrados en la figura 12
Figure 12: Diagramas de cuerpo libre del sistema vibratorio.
Unicamente se muestran las ecuaciones necesarias para obtener las ecuaciones demovimiento del sistema. Para el bloque se tiene que
ΣFy = may T −mg = −m 2 r θ De manera que T = m(
g − 2 r θ)
Para la doble polea se tiene que
ΣTO = IO θ T 2 r + ~rP/O × ~F = IO θ
De manera que
2m(
g − 2 r θ)
r+
∣
∣
∣
∣
∣
∣
i j k−r S θ r C θ 0
k
(
1 + δest−L√
L2+2L r S θ+4 r2 S2 (θ/2)
)
(L+ r S θ) k
(
1 + δest−L√
L2+2Lr S θ+4 r2 S2 (θ/2)
)
(r − r C θ) 0
∣
∣
∣
∣
∣
∣
= IO θ
Expandiendo el determinante, se tiene que
2mg r+k
(
1 +δest − L
√
L2 + 2Lr S θ + 4 r2 S2 (θ/2)
)
[(−r S θ) (r − r C θ)− (r C θ) (L+ r S θ)] =(
IO + 4mr2)
θ
20

Por lo tanto la ecuacion de movimiento esta dada por
(
IO + 4mr2)
θ = 2mg r+k
(
1 +δest − L
√
L2 + 2Lr S θ + 4 r2 S2 (θ/2)
)
(
−r2 S θ + r2 S θ C θ − Lr C θ − r2 S θ C θ)
o simplificando
(
IO + 4mr2)
θ = 2mg r + k
1 +δest − L
√
L2 + 2L r S θ + 4 r2 S2 (θ/2)
(
−r2 S θ − L r C θ)
o
(
IO + 4mr2)
θ + k r2 S θ = 2mg r − k L r C θ +
(
k 2mgk
− k L)
(−r2 S θ − L r C θ)√
L2 + 2L r S θ + 4 r2 S2 (θ/2)
= 2mg r − k L r C θ +(2mg r − k L) (−r S θ − LC θ)√
L2 + 2L r S θ + 4 r2 S2 (θ/2)
= 2mg r
1− r S θ + LC θ√
L2 + 2L r S θ + 4 r2 S2 (θ/2)
k L
r S θ + LC θ√
L2 + 2L r S θ + 4 r2 S2 (θ/2)− 1
(46)
Como puede facilmente observarse, la ecuacion (46) es altamente no lineal y segura-mente es imposible obtener una solucion en forma cerrada de la ecuacion diferencial. Demanera que la parte final del problema es linealizar la ecuacion, el proceso mas sencilloconsiste en encontrar la aproximacion lineal del termino
f(θ) =r S θ + LC θ
√
L2 + 2L r S θ + 4 r2 S2 (θ/2)
Usando Maple c© puede probarse que esta funcion puede aproximarse por
f(θ) = 1− 0 θ − 1
6θ3 + · · ·
De manera semejante, ya se ha probado que la funcion sen θ puede aproximarse mediante
sin θ = θ + 0 θ2 − 1
6θ3 + · · ·
Por lo tanto, si se emplea la aproximacion lineal —lo mismo ocurrirıa si se emplearala aproximacion cuadratica— la ecuacion diferencial (46) se simplifica a
(
IO + 4mr2)
θ + k r2 θ = 0 (47)
De esta ecuacion es muy sencillo obtener la frecuencia natural del sistema como
ωn =
√
k r2
IO + 4mr2
Ahora se resolvera empleando el metodo simplificado, a partir de la ecuaciones deNewton-Euler de los cuerpos involucrados en el sistema, como ya se ha mostrado que la
21

Figure 13: Diagramas de cuerpo libre del sistema vibratorio.
deformacion estatica del resorte compensa el peso del bloque, por lo que no se consideraranambas fuerzas. Para el cuerpo que cuelga de la polea
ΣFy = may T = −m 2 r θ De manera que T = −m 2 r θ
Para la doble polea se tiene que
ΣTO = IO θ T 2 r − r k r θ = IO θ
Sustituyendo la tension de la cuerda se tiene que
−m 2 r θ 2 r − r k r θ = IO θ
De manera que la ecuacion de movimiento del sistema es(
IO + 4mr2)
θ + k r2 θ
De manera que la frecuencia natural del sistema esta dada por
ωn =
√
k r2
IO + 4mr2
22


















