Ecuaciones Diferenciales Ijacobi.fis.ucm.es/metodos/pdf/PIE/Notas de clase/Ecuaciones... · (donde...
114
Ecuaciones Diferenciales I Artemio Gonz´ alez L´ opez Madrid, octubre de 2003
Transcript of Ecuaciones Diferenciales Ijacobi.fis.ucm.es/metodos/pdf/PIE/Notas de clase/Ecuaciones... · (donde...

Ecuaciones Diferenciales I
Artemio Gonzalez Lopez
Madrid, octubre de 2003

Indice general
1. Introduccion 1
1.1. Preliminares . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2. Tecnicas elementales de integracion . . . . . . . . . . . . . . . . . . . . . 2
1.2.1. y′ = f(x) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.2.2. Ecuaciones con variables separadas . . . . . . . . . . . . . . . . . 31.2.3. Ecuaciones homogeneas . . . . . . . . . . . . . . . . . . . . . . . 61.2.4. Ecuaciones lineales . . . . . . . . . . . . . . . . . . . . . . . . . . 71.2.5. Ecuacion de Bernoulli . . . . . . . . . . . . . . . . . . . . . . . . 91.2.6. Ecuacion de Riccati . . . . . . . . . . . . . . . . . . . . . . . . . 101.2.7. Ecuaciones exactas y factores integrantes . . . . . . . . . . . . . 12
1.3. Existencia y unicidad de soluciones . . . . . . . . . . . . . . . . . . . . . 161.3.1. Funciones lipschitzianas . . . . . . . . . . . . . . . . . . . . . . . 19
2. Ecuaciones y sistemas lineales 27
2.1. Estructura del espacio de soluciones . . . . . . . . . . . . . . . . . . . . 282.2. Wronskiano . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
2.2.1. Formula de Abel–Liouville . . . . . . . . . . . . . . . . . . . . . 322.2.2. Metodo de variacion de constantes de Lagrange . . . . . . . . . . 33
2.3. Sistemas con coeficientes constantes . . . . . . . . . . . . . . . . . . . . 342.4. Calculo de la exponencial de una matriz . . . . . . . . . . . . . . . . . . 36
2.4.1. Polinomio interpolador de Lagrange . . . . . . . . . . . . . . . . 412.5. Ecuaciones de orden n . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
2.5.1. Ecuaciones lineales . . . . . . . . . . . . . . . . . . . . . . . . . . 462.6. Ecuaciones lineales con coeficientes constantes . . . . . . . . . . . . . . . 52
2.6.1. Solucion de la ecuacion inhomogenea . . . . . . . . . . . . . . . . 542.7. Estabilidad de sistemas y ecuaciones lineales . . . . . . . . . . . . . . . . 57
2.7.1. Criterio de Routh–Hurwitz . . . . . . . . . . . . . . . . . . . . . 62
3. Soluciones en forma de serie 65
3.1. Puntos regulares . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 653.1.1. La ecuacion de Hermite . . . . . . . . . . . . . . . . . . . . . . . 70
3.2. Puntos singulares regulares . . . . . . . . . . . . . . . . . . . . . . . . . 773.2.1. La ecuacion de Bessel . . . . . . . . . . . . . . . . . . . . . . . . 843.2.2. El punto del infinito . . . . . . . . . . . . . . . . . . . . . . . . . 91
4. Sistemas dinamicos en el plano 96
4.1. Resultados generales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 964.2. Sistemas dinamicos lineales en R2 . . . . . . . . . . . . . . . . . . . . . 102
i

INDICE GENERAL ii
4.3. Sistemas dinamicos no lineales en R2 . . . . . . . . . . . . . . . . . . . . 106

Capıtulo 1
Introduccion
1.1. Preliminares
• En general, una ecuacion diferencial es una expresion que relaciona el valor de unafuncion (o funciones) incognita(s) en cada punto con el de sus derivadas parciales en elmismo punto. Por ejemplo, la expresion
∂u
∂x(x, y) +
∂u
∂y(x, y) = 0 (1.1)
es una ecuacion diferencial. Las soluciones de la ecuacion anterior, es decir las funcionesu(x, y) para las cuales dicha ecuacion se verifica identicamente (en todos los puntos (x, y)pertenecientes a un abierto D ⊂ R2), son las funciones de la forma
u(x, y) = f(x− y) ,
donde f es una funcion derivable arbitraria.
Ejemplo 1.1. La ecuacion
∂u
∂x(x, y) +
∂u
∂y(y, x) = 0
no es una ecuacion diferencial, ya que las derivadas parciales de u no estan evaluadasen el mismo punto.
Una ecuacion como (1.1), en la que la funcion incognita u depende de mas de unavariable, se denomina ecuacion en derivadas parciales. Por el contrario, si u es unafuncion de una variable la ecuacion diferencial se dice ordinaria. Son estas ecuaciones lasque nos interesaran fundamentalmente en este curso, por lo que daremos a continuacionuna definicion mas cuidadosa de ellas.
Definicion 1.2. Un sistema de ecuaciones diferenciales ordinarias (EDOs) es unsistema de ecuaciones del tipo
F(x, y, y′, . . . , y(n)
)= 0 , (1.2)
donde F = (F1, . . . , Fp) : R × Rm × · · · × Rm︸ ︷︷ ︸
n+1 veces
→ Rp es una funcion definida en un
abierto U . Una solucion de (1.2) es una funcion u : R → Rm n veces derivable en unintervalo abierto D ⊂ R que verifica
F(x, u(x), u′(x), . . . , u(n)(x)
)= 0 , ∀x ∈ D .
1

CAPITULO 1. INTRODUCCION 2
Notacion:
• u(k) = dkudxk
• p = numero de ecuaciones del sistema (el sistema F = 0 es equivalente a las p ecua-ciones F1 = · · · = Fp = 0, donde Fi es la i-esima componente de F ).
• m = numero de funciones incognitas (la funcion incognita vectorial y : R → Rm esequivalente a las m funciones incognitas escalares y1, . . . , ym : R → R, donde yi es lai-esima componente de y). Generalmente, p = m .
• n = orden del sistema. Se supone que alguna derivada parcial ∂Fi
∂y(n)j
no es identica-
mente cero, para que alguna derivada n-esima de y aparezca en el sistema.
Ejemplo 1.3.
y1′′ = B(y1, y2) y2
′
y2′′ = −B(y1, y2) y1
′
(donde B(y1, y2) es una funcion dada) es un sistema de dos ecuaciones de orden 2(describe el movimiento de una partıcula de carga unidad en el plano (y1, y2) bajo laaccion de un campo magnetico de intensidad B(y1, y2) perpendicular a dicho plano).
1.2. Tecnicas elementales de integracion
Comenzaremos estudiando el caso mas sencillo de una ecuacion escalar de primer
orden (n = m = p = 1)
F (x, y, y′) = 0 .
Muchas veces es posible despejar y′ en funcion de (x, y) de la ecuacion anterior, obte-niendose ası la ecuacion escalar de primer orden en forma normal
y′ = f(x, y) .
1.2.1. y′ = f(x)
Si f es continua en un intervalo abierto D, la ecuacion se resuelve integrando ambosmiembros a partir de un punto cualquiera x0 ∈ D:
y =
∫ x
x0
f(s) ds+ c ,
donde c = y(x0) es una constante arbitraria.
• La solucion general de la ecuacion anterior depende de una constante arbitraria c ∈ R
(el punto x0 se fija de antemano).
• El problema de valor inicial
y′ = f(x) , y(x0) = y0
tiene la solucion unica y =∫ xx0f(s) ds+ y0.

CAPITULO 1. INTRODUCCION 3
1.2.2. Ecuaciones con variables separadas
y′ =f(x)
g(y), (1.3)
con f, g continuas en sendos intervalos abiertos U, V , y g(y) 6= 0 para todo y ∈ V .Solucion. Toda solucion y(x) satisface
g(y(s)
)y′(s) = f(s) =⇒
∫ x
x0
g(y(s)
)y′(s) ds =
∫ x
x0
f(s) ds .
Haciendo el cambio de variable t = y(s) en la primera integral se obtiene
∫ y(x)
y(x0)g(t) dt =
∫ x
x0
f(s) ds .
Si y0 es un punto arbitrario (pero fijo) de V , vemos que toda solucion y(x) ha de satisfacerla ecuacion implıcita
∫ y
y0
g(s) ds =
∫ x
x0
f(s) ds+ c , (1.4)
donde c =∫ y(x0)y0
g(s) ds es una constante arbitraria. Recıprocamente, derivando (1.4)
(considerando a y como funcion de x) se comprueba que toda funcion y(x) que verifique(1.4) es solucion de (1.3). Se dice que la expresion (1.4) es la solucion general de (1.3).
• Estudiemos mas detenidamente la solucion general (1.4). Es de la forma
φ(x, y) = c , con φ(x, y) =
∫ y
y0
g(s) ds −∫ x
x0
f(s) ds . (1.5)
La ecuacion (1.5) define implıcitamente una familia a un parametro de curvas planas.Cada curva de la familia (que se obtiene fijando el valor del parametro c) tiene lapropiedad de que su pendiente y′ en un punto cualquiera (x, y) de la curva satisfacela ecuacion (1.3), es decir y′ = f(x)/g(y). Este tipo de curvas se denominan curvas
integrales de la ecuacion (1.3). Notese que una solucion de (1.3) no es mas que unafuncion cuya grafica esta contenida en una curva integral.
Sea (a, b) ∈ U × V un punto del plano, por el que pasa la curva de la familia (1.5)con c = φ(a, b). Por el teorema de la funcion implıcita, la relacion (1.5) define en unentorno del punto (a, b) una funcion y(x) tal que y(a) = b si
∂φ
∂y(a, b) = g(b) 6= 0 ,
condicion que se cumple por la hipotesis hecha sobre g. (Notese que φ es de clase C1(U×V ), por lo que el teorema es aplicable.) Esta funcion es solucion de la ecuacion diferencial(1.3) (ya que satisface la relacion implıcita (1.5)) con la condicion inicial y(a) = b. Elteorema de la funcion implıcita garantiza que esta solucion es unica localmente (enun entorno de a), ya que dicho teorema garantiza la unicidad local de la funcion y(x)que satisface la relacion implıcita (1.5) junto con la condicion y(a) = b. Por tanto, elproblema de valor inicial asociado a la ecuacion (1.3) tiene solucion unica local si losdatos iniciales estan en el abierto U × V .

CAPITULO 1. INTRODUCCION 4
–3
–2
–1
0
1
2
3
y
–3 –2 –1 1 2 3x
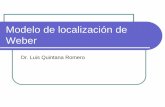
Figura 1.1: Curvas integrales de la ecuacion y′ = −x/y.
Ejemplo 1.4. Consideremos la ecuacion
y′ = −xy, (1.6)
que es del tipo anterior con f(x) = −x, U = R, g(y) = y. Como g se anula en 0, comointervalo V podemos tomar o bien V+ = R+ (numeros reales positivos) o bien V− = R−,pero no V = R. La integracion de esta ecuacion es inmediata, siendo la solucion general
y2 + x2 = c , (1.7)
con c > 0 una constante arbitraria. Las curvas integrales son pues circunferencias deradio
√c (fig. 1.4). Si hemos tomado V = R+, entonces y > 0, y por tanto de (1.7) se
sigue quey =
√
c− x2 , (1.8)
que esta definida (y es derivable) en el intervalo abierto (−√c,√c). Por el contrario, si
tomamos V = R− entonces y < 0, y la solucion general es entonces
y = −√
c− x2 , −√c < x <
√c . (1.9)
Ası, en este caso cada curva integral (1.7) da lugar a dos soluciones (tiene dos ramas).Utilizando las expresiones (1.8) y (1.9) es facil probar que el problema de valor inicial
y(x0) = y0 para la ecuacion (1.6) tiene solucion unica para todo (x0, y0) con y0 6= 0.La ecuacion diferencial (1.6) no tiene sentido en el eje horizontal, ya que ahı se anula eldenominador del miembro derecho. En cuanto a las soluciones (1.8)–(1.9), ambas tienenlımite cero cuando x→ ±√
c∓, pero su derivada tiende a infinito en estos puntos.
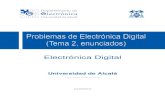
Ejemplo 1.5. Sea ahora la ecuacion con variables separadas
y′ = y2 cos x . (1.10)
Ahora f(x) = cos2 x, U = R, g(y) = 1y2 , V = R+ o V = R−. Sin embargo, notese que
ahora el miembro derecho de la ecuacion tiene sentido (es continuo, de hecho C∞) en

CAPITULO 1. INTRODUCCION 5
–4
–2
0
2
4
y
–10 –8 –6 –4 –2 2 4 6 8 10x
Figura 1.2: Soluciones de la ecuacion y′ = y2 cos x.
todo el plano (x, y). De hecho, en este caso y(x) = 0 es obviamente solucion de (1.10).Si y 6= 0 la ecuacion se integra de la forma usual (dividiendo por y2):
y′
y2= cos x =⇒ −1
y= senx− c ⇐⇒ y =
1
c− senx, (1.11)
con c ∈ R constante arbitraria. Notese que la solucion y = 0 no esta contenida en laexpresion anterior para ningun valor de finito de c (formalmente, se obtendrıa haciendoc→ ±∞). Tambien es evidente que ninguna de las soluciones (1.11) corta a la soluciony = 0.
El comportamiento de las soluciones (1.11) depende de que |c| ≤ 1 o |c| > 1. Eneste ultimo caso el denominador de (1.11) nunca se anula, por lo que las soluciones con|c| > 1 estan definidas en todo R (fig. 1.5). Sin embargo, si |c| ≤ 1 entonces
c = senx ⇐⇒ x = arc sen c+ 2kπ o x = − arc sen c+ (2k + 1)π , k ∈ Z ,
por lo que el denominador se anula infinitas veces, y la solucion y = (c − senx)−1
tiene infinitas asıntotas verticales (cf. fig. 1.5). Mas propiamente, si |c| ≤ 1 la expresion(1.11) define infinitas soluciones, cada una de ellas con intervalo de definicion (xi, xi+1)limitado por dos ceros sucesivos de la ecuacion senx = c. En este caso tanto la solucioncomo sus(s) derivada(s) tienden a infinito cuando nos aproximamos a los lımites de dichointervalo.
Notese que tanto en este ejemplo (para |c| ≤ 1) como en el anterior las solucionesno estan definidas en toda la recta real. En el ejemplo anterior, esto era debido a queeventualmente toda solucion se aproxima a la recta y = 0, en que el miembro derecho dela ecuacion (1.6) es discontinuo (tiende a infinito, si x 6= 0). Sin embargo, en este casolas soluciones tienen singularidades en puntos en que el miembro derecho de la ecuaciondiferencial es continuo (en este caso, el miembro derecho de (1.10) es continuo, de hechoC∞, en todo el plano). Dicho de otro modo, no es posible averiguar la existencia yla posicion de estas singularidades estudiando las singularidades del miembro derechode (1.10). Estas singularidades aparecen no porque el miembro derecho de (1.10) seadiscontinuo, sino porque la derivada de la solucion crece cada vez mas rapido, de formaque la solucion “explota” en un tiempo finito.

CAPITULO 1. INTRODUCCION 6
Ejercicio. Probar que el problema de valor inicial y(x0) = y0 para la ecuacion (1.10)tiene solucion unica para todo (x0, y0), dada por
y =y0
1 + y0(sen x0 − senx) .
Notese que esta expresion contiene a la solucion y = 0 (se obtiene para y0 = 0).
1.2.3. Ecuaciones homogeneas
Se trata de ecuaciones de primer orden
y′ = f(x, y) , (1.12)
en que la funcion f es continua en un abierto U ⊂ R2 y homogenea de grado cero, esdecir
f(tx, ty) = f(x, y) , ∀x, y ∈ U , t ∈ R , t 6= 0 .
Este tipo de ecuaciones se resuelven transformandolas en una ecuacion de variablesseparadas mediante el cambio
y = x z , (1.13)
valido para x 6= 0. En efecto,
y′ = x z′ + z = f(x, xz) = f(1, z) =⇒ z′ =f(1, z) − z
x. (1.14)
La ecuacion anterior tiene soluciones constantes z = λ para toda raız λ de la ecuacion
λ = f(1, λ) .
En la variable y estas son soluciones lineales y = λx, mientras que las demas solucionesse obtienen integrando (1.14), es decir son de la forma
log |x| + c =
∫ y/x dz
f(1, z) − z.
Ejemplo 1.6.
y′ =3xy + 2y2
x2 + xy. (1.15)
Es una ecuacion homogenea (tanto el numerador como el denominador son homogeneosde grado 2), con
f(1, z) =3z + 2z2
1 + z=⇒ f(1, z) − z =
z(z + 2)
z + 1.
Las soluciones lineales son por tanto y = 0 e y = −2x. Las demas soluciones estan dadaspor
log |x| + c =
∫z + 1
z(z + 2)dz =
∫1
2
(1
z+
1
z + 2
)
dz =1
2log |z(z + 2)| ,
de dondez(z + 2) = Cx2

CAPITULO 1. INTRODUCCION 7
–6
–4
–2
2
4
6
–2 –1 1 2
y = −x− x√
1 + x2
y = −2x
y = −x+ x√
1 + x2
y = −x+ x√
1 − x2
y = −x− x√
1 − x2
Figura 1.3: Soluciones de la ecuacion (1.15).
con C = ±e2c constante no nula. Resolviendo esta ecuacion cuadratica en z y sustitu-yendo z = y/x obtenemos finalmente
y = −x± x√
1 + Cx2 . (1.16)
Esta solucion esta definida para todo x si C > 0, y para |x| < 1/√
|C| si C < 0(cf. fig. 1.3). En este caso f es singular en las rectas x = 0 y x + y = 0, por lo queel abierto U estara contenido en una de las cuatro regiones abiertas determinadas porla interseccion de estas rectas. En cada una de estas regiones el signo del radical en laformula anterior esta bien determinado: por ejemplo, si x < 0 y x+y > 0 debera tomarseel signo “−”. Finalmente, notese que haciendo C = 0 en la formula (1.16) obtenemoslas dos soluciones lineales de la ecuacion (1.15).
1.2.4. Ecuaciones lineales
y′ = a(x) y + b(x) , (1.17)
donde a y b son funciones continuas en un intervalo abierto U . La ecuacion se dicehomogenea si b ≡ 0, e inhomogenea (o completa) en caso contrario. La ecuacion linealhomogenea
y′ = a(x) y (1.18)
es de variables separadas, y por tanto se resuelve facilmente. En efecto, y = 0 es solucion,y si y 6= 0 se tiene
y′
y= a(x) =⇒ log |y| =
∫ x
x0
a(s) ds+ c0 =⇒ y = c e
∫ xx0a(s) ds
,
donde c = ±ec0 es una constante real arbitraria (si c = 0 obtenemos la solucion particulary = 0 excluida al principio). Observese que el conjunto de todas las soluciones de laecuacion homogenea (1.18) es un espacio vectorial de dimension uno.

CAPITULO 1. INTRODUCCION 8
Para hallar la solucion de la ecuacion completa utilizaremos el metodo de variacion
de las constantes, debido a Lagrange, que consiste en expresar la solucion en la forma
y = c(x) e
∫ xx0a(s) ds
, (1.19)
evidentemente basada en la solucion general de la homogenea. Sustituyendo en la ecua-cion diferencial se obtiene
y′ − a(x) y − b(x) = c′(x) eR x
x0a(s) ds
+ c(x) a(x) eR x
x0a(s) ds − a(x) c(x) e
R x
x0a(s) ds − b(x)
= 0 ⇐⇒ c′(x) = b(x) e−∫ xx0a(s) ds
,
de donde se obtiene
c(x) = c+
∫ x
x0
b(t) e−∫ tx0a(s) ds
dt ,
donde c ∈ R es una constante arbitraria. Utilizando la ecuacion (1.19) llegamos a lasiguiente expresion para la solucion general de la ecuacion lineal completa (1.17):
y = c e
∫ xx0a(s) ds
+ e
∫ xx0a(s) ds
∫ x
x0
b(t) e−∫ tx0a(s) ds
dt ,
o, equivalentemente,
y = c e
∫ xx0a(s) ds
+
∫ x
x0
b(t) e
∫ xt a(s) ds dt . (1.20)
De nuevo, la solucion depende del parametro arbitrario c.
• Notese que la expresion anterior tiene la estructura
y = c e
∫ xx0a(s) ds
+ yp(x) ,
donde el primer termino es la solucion general de la ecuacion homogenea e yp(x) esuna solucion particular de la ecuacion completa. Recıprocamente, si se conoce cualquiersolucion particular y1(x) de la ecuacion completa entonces y − y1(x) es solucion de laecuacion homogenea para toda solucion y de la ecuacion completa, por lo que
y = c e
∫ xx0a(s) ds
+ y1(x) .
• De (1.20) se deduce que una solucion particular y1(x) de la ecuacion completa puedecalcularse a partir de una solucion cualquiera no trivial (no identicamente nula) yH(x)de la ecuacion homogenea mediante la formula
y1(x) = yH(x)
∫ x
x0
b(t)
yH(t)dt ,
por lo que la solucion general de (1.17) se puede escribir como sigue:
y = c yH(x) + yH(x)
∫ x
x0
b(t)
yH(t)dt .

CAPITULO 1. INTRODUCCION 9
Ejemplo 1.7.
y′ =x+ 2y
x. (1.21)
Esta ecuacion (que tiene sentido solo si x 6= 0, es decir en las semirrectas R+ o R−)es lineal (inhomogenea), ya que se puede escribir
y′ =2
xy + 1 .
La ecuacion anterior es homogenea, por lo que podrıa resolverse utilizando el proce-dimiento explicado en la Seccion 1.2.3; sin embargo, en esta seccion la resolveremostratandola como una ecuacion lineal.Solucion general de la homogenea:
y′
y=
2
x=⇒ log |y| = 2 log |x| + c0 =⇒ y = c x2 , c ∈ R .
Solucion particular de la completa:
yp(x) = x2
∫ x dt
t2= x2 (−x−1) = −x .
Por tanto, la solucion general de la ecuacion (1.21) es
y = c x2 − x
(familia de parabolas tangentes a la recta y = −x en el origen). Notese que, aunque laecuacion es singular en x = 0, las funciones anteriores son C∞ en el origen.
1.2.5. Ecuacion de Bernoulli
y′ = a(x) y + b(x) yr , r ∈ R , r 6= 0, 1 , (1.22)
con a, b continuas en un intervalo abierto U (los valores r = 0 y r = 1 correspondena ecuaciones lineales, ya resueltas). (Notese que, en general, yr solo tiene sentido paray > 0.) Esta ecuacion se integra reduciendola a una ecuacion lineal mediante un cambiode variable dependiente del tipo
z = yp ,
con p 6= 0 escogido apropiadamente. En efecto, sustituyendo y = z1/p en la ecuacion(1.22) y operando se obtiene la siguiente ecuacion para z:
z′ = p[
a(x) z + b(x) z1+ r−1
p
]
,
que es lineal si
1 +r − 1
p= 0, 1 .
El ultimo caso hay que descartarlo (ya que r 6= 1), por lo que queda p = 1 − r , y laecuacion anterior se convierte en la ecuacion lineal
z′ = (1 − r)[a(x) z + b(x)
](y = z
11−r ) .

CAPITULO 1. INTRODUCCION 10
Ejemplo 1.8.
y′ =2xy − y2
x2. (1.23)
Se trata de una ecuacion de Bernoulli con r = 2, ya que puede escribirse
y′ =2
xy − 1
x2y2 .
Haciendo el cambio z = 1/y se obtiene por la ecuacion lineal en z
z′ = −2
xz +
1
x2. (1.24)
La solucion general de la ecuacion homogenea es
z =c
x2.
Una solucion particular de la ecuacion (1.24) es
zp(x) =1
x2
∫ x
dt =1
x.
Por tanto, la solucion general de (1.24) es
z =x+ c
x2,
y la de la ecuacion propuesta (1.23)
y =x2
x+ c.
Ejercicio. Resolver la ecuacion (1.23) considerandola como una ecuacion homogenea.
1.2.6. Ecuacion de Riccati
y′ = a(x) + b(x) y + c(x) y2 , (1.25)
con a, b, c continuas en un intervalo abierto U . (Si c ≡ 0 la ecuacion de Riccati se reducea una ecuacion lineal, y si a ≡ 0 a una de Bernoulli.)
Esta ecuacion, de gran importancia en Fısica Matematica, en general no se puederesolver por cuadraturas (es decir, no es posible obtener una expresion explıcita para lasolucion general de la ecuacion en terminos de los coeficientes a, b, c y sus primitivas). Sinembargo, si conocemos una solucion particular y0(x) de la ecuacion podemos reducirlamediante el cambio de variable
u =1
y − y0(x)
a una ecuacion lineal, que ya hemos visto como resolver en la seccion 1.2.4. En efecto,efectuando el cambio anterior obtenemos
u′ = − y′ − y0′(x)
(y − y0(x)
)2 = −b(x)(y − y0(x)
)+ c(x)
(y2 − y0(x)
2)
(y − y0(x)
)2 = −b(x)u− c(x)y + y0(x)
y − y0(x)
= −[b(x) + 2c(x)y0(x)
]u− c(x) . (1.26)

CAPITULO 1. INTRODUCCION 11
Ejemplo 1.9.
y′ = cosx− y − senx
cos2 xy2 .
Es una ecuacion de Riccati, con solucion particular y0(x) = cos x. Efectuando el cambiode variable
u =1
y − cos x
obtenemos
u′ = − y′ + senx
(y − cos x)2= u2
[
− senx− cos x+ y +senx
cos2 xy2]
= u2
[
− senx+1
u+
senx
cos2 x
(1
u2+
2cos x
u+ cos2 x
)]
,
y por tanto u verifica la ecuacion lineal
u′ = (1 + 2 tan x)u+senx
cos2 x. (1.27)
La solucion general de la ecuacion homogenea es
u = cex
cos2 x,
con c constante. Una solucion particular de la ecuacion completa es
ex
cos2 x
∫ x
e−t sen t dt = −1
2
ex
cos2 x· e−x(sen x+ cos x) = −senx+ cos x
2 cos2 x.
Por tanto la solucion de la ecuacion lineal (1.27) es
u = cex
cos2 x− senx+ cos x
2 cos2 x,
y la de la ecuacion de partida
y = cos x+2cos2 x
Cex − senx− cos x,
donde C = 2c es una constante arbitraria.
• Si c no es identicamente nula, la ecuacion de Riccati (1.25) se linealiza mediante elcambio de variable
y = − 1
c(x)
z′
z,
que la transforma en una ecuacion lineal de segundo orden en z. En efecto,
y′ = − 1
c(x)
z′′
z+c′(x)c(x)2
z′
z+
1
c(x)
z′2
z2= a(x) − b(x)
c(x)
z′
z+
1
c(x)
z′2
z2
y por tanto z es solucion de
z′′ −[
b(x) +c′(x)c(x)
]
z′ + a(x)c(x)z = 0 . (1.28)

CAPITULO 1. INTRODUCCION 12
Veremos en el capıtulo siguiente que la solucion general de esta ecuacion puede expresarseen la forma
z = k1z1(x) + k2z2(x) ,
con k1, k2 ∈ R y z1, z2 dos soluciones particulares linealmente independientes. Si con-seguimos hallar explıcitamente la solucion general de la ecuacion lineal (1.28), la de laecuacion de Riccati de partida esta dada por
y = − 1
c(x)
k1z′1(x) + k2z
′2(x)
k1z1(x) + k2z2(x).
Notese que esta solucion depende de una sola constante arbitraria (el cociente k1/k2
o k2/k1).
Ejercicio. La solucion general de la ecuacion de Riccati
y′ = x+y
x+y2
x.
esy = x tan(x− c) , c ∈ R .
Obtener esta solucion linealizando la ecuacion dada y resolviendo la ecuacion linealcorrespondiente. [Ayuda: la solucion general de la ecuacion z′′ + z = 0 es z = k1 cos x+k2 senx.]
• La estrecha relacion entre la ecuacion de Riccati (1.25) y la ecuacion lineal (1.28) dalugar a multitud de importantes propiedades de las soluciones de la ecuacion de Riccati.Ası, por ejemplo, si yi(x) (1 ≤ i ≤ 4) son cuatro soluciones de la ecuacion de Riccatientonces puede probarse que la razon cuadruple
(y4 − y2)(y3 − y1)
(y4 − y1)(y3 − y2)(1.29)
es constante. En particular, si se conocen tres soluciones particulares distintas y1, y2, y3
de la ecuacion de Riccati (1.25) entonces su solucion general y(x) se obtiene despejandoy de la ecuacion
(y − y2)(y3 − y1)
(y − y1)(y3 − y2)= c , c ∈ R . (1.30)
1.2.7. Ecuaciones exactas y factores integrantes
Una ecuacion diferencial de primer orden de la forma
P (x, y) +Q(x, y) y′ = 0 , (1.31)
con P,Q funciones continuas en un abierto U ⊂ R2 y Q(x, y) 6= 0 para todo (x, y) ∈ U ,se dice exacta si existe una funcion f : U → R tal que
P (x, y) = fx(x, y) , Q(x, y) = fy(x, y) , ∀(x, y) ∈ U . (1.32)
En otras palabras, la ecuacion (1.31) es exacta si
(P,Q) = ∇f en U .

CAPITULO 1. INTRODUCCION 13
Por tanto, una ecuacion exacta (1.31) puede escribirse
fx(x, y) + fy(x, y) y′ = 0 .
Si y(x) es una solucion cualquiera de dicha ecuacion entonces
0 = fx
(x, y(x)
)+ fy
(x, y(x)
)y′(x) = 0 =⇒ d
dx
[f(x, y(x)
)]= 0 .
De esto se deduce que la solucion general de la ecuacion exacta (1.31)–(1.33) esta dadaimplıcitamente por
f(x, y)
= c .
Por el teorema de la funcion implıcita, la ecuacion anterior define localmente a y comofuncion de x en un entorno de cada punto de U (ya que fy(x, y) = Q(x, y) no se anulaen U por hipotesis).
Observese que si (1.31) es una ecuacion exacta y P,Q son de clase C1(U) entonces
Py(x, y) = Qx(x, y) , ∀(x, y) ∈ U , (1.33)
ya que (lema de Schwarz) ambos miembros son iguales a fxy(x, y). Recıprocamente, pue-de probarse que si se cumple la condicion (1.33) en un abierto simplemente conexo
U entonces la ecuacion es exacta. (Un abierto de R2 es conexo si dos puntos cuales-quiera de dicho abierto se pueden unir por una curva continua enteramente contenidaen el abierto. Un abierto conexo es simplemente conexo si toda curva cerrada continuacontenida en el abierto puede deformarse de forma continua a un punto sin salirse delabierto. Intuitivamente, un abierto es simplemente conexo si es conexo (consta “de unasola pieza”) y no tiene “agujeros”. Ejemplos de abiertos conexos son el conjunto R2, undisco abierto, un rectangulo abierto, un triangulo abierto, etc. Los abiertos estrelladosy, en particular, convexos de R2 son simplemente conexos. Un abierto no simplementeconexo es, por ejemplo, R2 menos un punto, un disco abierto menos uno de sus puntos,o un anillo.)
Probemos que la condicion (1.33) es suficiente para que la ecuacion (1.31) sea exactasi U = (a, b) × (c, d) es un rectangulo abierto (en particular, si U = R2). En efecto, sea(x0, y0) un punto fijo de U . Integrando la ecuacion fx = P respecto de x obtenemos
f(x, y) =
∫ x
x0
P (s, y) ds + g(y) ,
donde la funcion g solo puede depender de y. (Notese que los puntos de la forma (s, y)pertenecen a U si y ∈ (c, d) y s ∈ (a, b).) Imponiendo la segunda ecuacion fy = Q yaplicando la relacion (1.33) obtenemos una ecuacion diferencial para g:
fy(x, y) = g′(y) +
∫ x
x0
Py(s, y) ds = g′(y) +
∫ x
x0
Qx(s, y) ds = g′(y) +Q(x, y) −Q(x0, y)
= Q(x, y) ⇐⇒ g′(y) = Q(x0, y) .
Por tanto,
g(y) =
∫ y
y0
Q(x0, s) ds + c ,
y
f(x, y) =
∫ x
x0
P (s, y) ds +
∫ y
y0
Q(x0, s) ds+ c . (1.34)

CAPITULO 1. INTRODUCCION 14
a b
c
d
U
γ0
γ0γ
(x0, y0)
(x, y)(x0, y)
Figura 1.4: Caminos que unen (x0, y0) con (x, y) en U .
(De nuevo, el segmento horizontal (x0, s) con s ∈ (c, d) esta contenido en U .)La funcion f esta definida a menos de una constante arbitraria. Notese que la formula
(1.34) se puede escribir como la integral de lınea
f(x, y) =
∫
γ0
(P,Q) · d~r ≡∫
γ0
[P (x, y) dx +Q(x, y) dy] ,
donde γ0 es el camino quebrado de la fig. 1.4. Como la condicion (1.33) garantizala independencia del camino de la integral de lınea
∫
γ(Pdx + Qdy), para toda curvacontinua a trozos γ ⊂ U , tambien podemos escribir
f(x, y) =
∫
γ[P (x, y) dx +Q(x, y) dy] ,
donde γ es cualquier curva contenida en U que una el punto fijo (x0, y0) ∈ U con elpunto variable (x, y) ∈ U . Por ejemplo, si γ es el segmento que une (x0, y0) con (x, y),es decir
γ(t) = (x0, y0) + t(x− x0, y − y0) , t ∈ [0, 1] ,
entonces dx = (x− x0) dt, dy = (y − y0) dt, y por tanto
f(x, y) =
∫1
0
[(x− x0)P
(x0 + t(x− x0), y0 + t(y − x0)
)+ (y − y0)Q
(x0 + t(x− x0), y0 + t(y − x0)
)]dt .
Ejemplo 1.10.
12x+ 5y − 9 + (5x+ 2y − 3)y′ = 0 . (1.35)
Se trata de una ecuacion exacta, ya que
P = 12x+ 5y − 9 , Q = 5x+ 2y − 3 =⇒ Py = Qx = 5 .
La funcion f tal que ∇f = (P,Q) se encuentra facilmente:
fx = 12x+ 5y − 9 =⇒ f = 6x2 + 5xy − 9x+ g(y) ;
fy = 5x+ g′(y) = 5x+ 2y − 3 ⇐⇒ g′(y) = 2y − 3
⇐⇒ g(y) = y2 − 3y + const.
Por tanto, la solucion general de la ecuacion propuesta esta dada implıcitamente por laecuacion
6x2 + 5xy + y2 − 9x− 3y = c .

CAPITULO 1. INTRODUCCION 15
(Se trata de una familia de hiperbolas.)Observese que si µ(x, y) es una funcion no nula en U la ecuacion (1.31) es equivalente
a la ecuacionµ(x, y)P (x, y) + µ(x, y)Q(x, y)y′ = 0 . (1.36)
A toda funcion µ tal que la ecuacion anterior sea exacta se le llama un factor integrante
para la ecuacion de partida (1.31). La ecuacion que ha de cumplir el factor integrante µes por tanto (si U es, de nuevo, un abierto simplemente conexo del plano)
(µP )y = (µQ)x ,
que se puede escribir como la siguiente ecuacion lineal en derivadas parciales de primerorden para µ:
P (x, y)µy −Q(x, y)µx +[Py(x, y) −Qx(x, y)
]µ = 0 . (1.37)
Si se conoce un factor integrante cualquiera de la ecuacion (1.31) dicha ecuacion seresuelve integrando la ecuacion exacta (1.36). Se puede probar que la ecuacion (1.37)tiene (localmente) infinitas soluciones si P,Q son, por ejemplo, de clase C1 en U . Portanto, toda ecuacion de la forma (1.31) posee un factor integrante. El problema es que,en general, no hay ninguna forma practica para encontrar dicho factor integrante, ya quela ecuacion en derivadas parciales (1.37) es casi siempre mucho mas difıcil de resolver quela ecuacion diferencial ordinaria de partida (1.31). Solo si Py − Qx es particularmentesencillo se puede dar alguna regla practica para calcular el factor integrante µ. Porejemplo, si
Py −Qx
Q≡ g(x)
solo depende de x entonces (1.31) admite un factor integrante µ(x) funcion solo de x, yaque en este caso haciendo µy = 0 en la ecuacion (1.37) se obtiene la ecuacion diferencialordinaria en x
µ′(x) = g(x)µ(x) =⇒ µ(x) = c e∫ x
g(t) dt .
Analogamente, si
Py −Qx
P≡ h(y)
la ecuacion (1.31) posee el factor integrante funcion de y unicamente
µ(y) = c e−∫ yh(t) dt .
Ejercicio. Probar que la ecuacion (1.31) posee un factor integrante µ(r) funcion der =
√
x2 + y2 si y solo si
Py −Qx
yP − xQ= g(r) ,
y que en tal caso µ puede calcularse por la formula
µ(r) = c e−∫ rt g(t) dt .

CAPITULO 1. INTRODUCCION 16
Ejemplo 1.11. Consideremos la ecuacion
y2(x2 + y3)y′ − x = 0 . (1.38)
Aquı
Py = 0 , Qx = 2xy2 , =⇒ Py −Qx
P= 2y2 = h(y) .
La ecuacion posee por tanto el factor integrante
µ(y) = e−∫ y
2t2dt = e−23y3.
Para integrar la ecuacion hallamos una funcion f tal que ∇f = e−23y3
(P,Q), es decir
fx = −x e−23y3
=⇒ f = −1
2x2 e−
23y3
+ g(y) ;
fy = x2y2 e−23y3
+ g′(y) = (x2y2 + y5) e−23y3
=⇒ g′(y) = y5 e−23y3.
Por tanto (omitiendo la constante arbitraria)
g(y) =
∫
y5 e−23y3dy =
1
3
∫ y3
t e−23tdt = −1
4
(2y3 + 3
)e−
23y3,
de donde
f(x, y) = −[1
2x2 +
1
4
(2y3 + 3
)]
e−23y3.
La solucion general de la ecuacion de partida es pues
x2 + y3 = c e23y3 − 3
2.
(Notese que en este caso puede despejarse x en funcion de y.)
Ejercicio. Resolver la ecuacion (1.38) convirtiendola en una de variables separadas me-diante el cambio z = x2 + y3.
1.3. Existencia y unicidad de soluciones
Hemos visto en la seccion anterior que el problema de valor inicial
y′ = f(x, y) (1.39)
y(x0) = y0 (1.40)
asociado a la ecuacion diferencial de primer orden (1.39) tenıa solucion unica, salvo paradatos iniciales (1.40) en que la funcion f no era suficientemente regular. En esta seccionvamos a estudiar en detalle el problema de la existencia y unicidad de soluciones delproblema (1.39)–(1.40), intentando precisar bajo que condiciones sobre la funcion f ylos datos iniciales (x0, y0) la solucion es unica. Consideraremos el caso mas general enque la variable dependiente (funcion incognita) y toma valores en Rn:
y = (y1, . . . , yn) ∈ Rn , (1.41)

CAPITULO 1. INTRODUCCION 17
por lo que la funcion f ha de ser una funcion vectorial que tome valores en Rn y definidaen un abierto U de Rn+1:
f = (f1, . . . , fn) : U ⊂ Rn+1 → Rn , U abierto . (1.42)
La ecuacion (1.39) es por tanto un sistema de n ecuaciones diferenciales de primer ordenen forma normal
y1′ = f1(x, y1, . . . , yn)
...
yn′ = fn(x, y1, . . . , yn) ,
y el dato inicial (1.40) es equivalente a las n condiciones
y1(x0) = y01, . . . , yn(x0) = y0n ,
si y0 =(y01, . . . , y0n
).
La ventaja de considerar a y como una funcion vectorial es que la solucion delproblema (1.39)–(1.40) implica la solucion de otros problemas interesantes. En efecto,consideremos la ecuacion escalar mas general de orden n en forma normal
u(n) = F(x, u, u′, . . . , u(n−1)
), (1.43)
donde u : R → R. Esta ecuacion se puede escribir como un sistema de primer ordenintroduciendo (por ejemplo) las variables
yi = u(i−1) , 1 ≤ i ≤ n , (1.44)
(u(0) ≡ u) convirtiendose entonces en la ecuacion vectorial (1.39) con
f(x, y) =(y2, . . . , yn, F (x, y1, . . . , yn)
). (1.45)
(Mas precisamente, y(x) es solucion de la ecuacion (1.39)–(1.45) si y solo si y(x) =(u(x), u′(x), . . . , u(n−1)(x)
), con u(x) solucion de (1.43).) La condicion inicial (1.40) se
escribe en terminos de la funcion incognita original u como sigue:
u(i)(x0) = y0,i+1 , 0 ≤ i ≤ n− 1 .
En otras palabras, en este caso se asignan valores iniciales (en x = x0) a la funcion uy a sus primeras n − 1 derivadas. La solucion del problema (1.39)–(1.40) conlleva portanto la solucion del problema de valor inicial para una ecuacion normal de orden n
u(n) = F(x, u, u′, . . . , u(n−1)
)(1.46)
u(i)(x0) = u0i , 0 ≤ i ≤ n− 1 . (1.47)
La existencia local de soluciones del problema de valor inicial (1.39)–(1.40) esta ga-rantizada si la funcion f es continua en su abierto de definicion, segun afirma el siguienteteorema, debido al matematico italiano G. Peano (1858–1932):

CAPITULO 1. INTRODUCCION 18
Teorema de existencia de Peano. Sea f : U → Rn continua en el abierto U , ysea (x0, y0) ∈ U . Entonces el problema (1.39)–(1.40) tiene (al menos) una soluciony(x) definida en un intervalo de la forma (x0 − h, x0 + h), para h > 0 suficientementepequeno.
(El numero h se puede estimar explıcitamente, y depende esencialmente de lo grandeque sea el valor de ‖f(x, y)‖ en U .)
Es facil convencerse de que la continuidad de f en U no garantiza la unicidad (nisiquiera local) del problema de valor inicial (1.39)–(1.40) con datos iniciales en U . Unejemplo muy sencillo es el de la ecuacion
y′ = 3 y2/3 , (1.48)
para la cual f(x, y) = 3 y2/3 es continua en U = R2. El teorema de Peano garantiza portanto la existencia de por lo menos una solucion del problema de valor inicial asociado ala ecuacion (1.48) para cualquier dato inicial (x0, y0). Notese, sin embargo, que no existela derivada parcial de primer orden de f respecto de y en el eje horizontal y = 0. (Enparticular, f no es derivable en dicho eje.)
Una solucion de (1.48) es la funcion y(x) = 0, definida en todo R. Si y 6= 0, integrandola ecuacion (es de variables separadas) obtenemos
y = (x+ c)3 , (1.49)
funcion tambien definida en toda la recta real (fig. 1.5). (Se demuestra que la solucion
–10
–8
–6
–4
–2
0
2
4
6
8
10
–2 –1 1 2
Figura 1.5: Soluciones de la ecuacion y′ = 3 y2/3.
particular y = 0, que no se obtiene de (1.49) para ningun valor de c ∈ R, es la envolventede la familia de parabolas cubicas (1.49).) Es facil ver que el problema de valor inicialpara la ecuacion (1.48) con la condicion inicial
y(x0) = 0 (1.50)
no tiene solucion unica, ni siquiera localmente. Por ejemplo, las funciones y(x) = 0 ey(x) = (x − x0)
3 son dos soluciones de dicho problema que no coinciden en ningunintervalo abierto centrado en x0.

CAPITULO 1. INTRODUCCION 19
En este caso, es facil ver que el problema de valor inicial (1.48)–(1.50) tiene de hechoinfinitas soluciones. Por ejemplo, si h ≥ 0 las funciones yh definidas por
yh(x) =
{
0 , x < x0 + h
(x− x0 − h)3 , x ≥ x0 + h
(fig. 1.6) claramente verifican la condicion inicial (1.50) (por ser h > 0), y son soluciones
x0 x0 + h
yh(x)
Figura 1.6: Grafica de la solucion yh(x) (h ≥ 0).
de la ecuacion diferencial para todo x ∈ R. (Verifıquese que yh es derivable en el puntode empalme x = x0 +h, con derivada nula.) Otras soluciones son las funciones y−h (conh ≥ 0) definidas por (fig. 1.7)
yh(x) =
{
(x− x0 + h)3 , x < x0 − h
0, x ≥ x0 − h
(Notese, sin embargo, que si h > 0 tanto yh como y−h coinciden localmente con y = 0
x0x0 − h
y−h(x)
Figura 1.7: Grafica de la solucion y−h(x) (h ≥ 0).
en un entorno de x0.)
1.3.1. Funciones lipschitzianas
Introduciremos a continuacion una condicion sobre la funcion f mas fuerte que lacontinuidad, que sera suficiente para que el problema de valor inicial (1.39)–(1.40) tengasolucion unica local. Comenzaremos con el caso sencillo de funciones de una variable.
Definicion 1.12. Una funcion f : I → R (siendo I un intervalo) es lipschitziana siexiste una constante positiva L > 0 (constante de Lipschitz ) tal que
|f(x1) − f(x2)| ≤ L |x1 − x2| , ∀x1, x2 ∈ I . (1.51)

CAPITULO 1. INTRODUCCION 20
• f lipschitziana en I =⇒ f uniformemente continua en I.
• Sin embargo, f lipschitziana en I 6=⇒ f derivable en I. Por ejemplo, f(x) = |x| eslipschitziana en cualquier intervalo (con constante de Lipschitz igual a 1), ya que de ladesigualdad triangular se deduce que
||x1| − |x2|| ≤ |x1 − x2| .
• La derivabilidad de f no implica en general su lipschitzianidad. Por ejemplo, la funcionf(x) = x2 no es lipschitziana en I = R. En efecto, si lo fuera existirıa L > 0 tal que
∣∣x2
1 − x22
∣∣ = |x1 + x2| |x1 − x2| ≤ L |x1 − x2| , ∀x1, x2 ∈ R ,
lo que implicarıa el resultado absurdo
|x1 + x2| ≤ L , ∀x1 6= x2 .
• Sin embargo, f de clase C1 en un intervalo compacto I =⇒ f lipschitziana en I. Estoes consecuencia de la siguiente proposicion:
Proposicion 1.13. Si f es derivable en un intervalo I y f ′ esta acotada en I, entoncesf es lipschitziana en I.
Demostracion. En efecto, si |f ′(x)| ≤ L para todo x ∈ I aplicando el teorema del valormedio se obtiene
|f(x1) − f(x2)| =∣∣f ′(ξ)
∣∣ |x1 − x2| ≤ L |x1 − x2| ,
ya que ξ ∈(mın(x1, x2),max(x1, x2)
)⊂ I. Q.E.D.
Si f ∈ C1(I) con I intervalo compacto, f ′ es continua en el intervalo compacto I, porlo que f ′ es necesariamente acotada en dicho conjunto (alcanza, de hecho, sus valoresmaximo y mınimo en I). La proposicion anterior implica entonces que f es lipschitzianaen I.
• Sea ahora f : I ×D → Rn, siendo I ⊂ R un intervalo y D ⊂ Rn. Diremos que f eslipschitziana en la segunda variable (o en el segundo argumento) en I ×D si existeL > 0 (de nuevo llamada constante de Lipschitz) tal que
∥∥f(x, y1) − f(x, y2)
∥∥ ≤ L
∥∥y1 − y2
∥∥ , ∀x ∈ I , ∀y1, y2 ∈ D . (1.52)
En la formula anterior, ‖·‖ denota la norma euclidiana en Rn, es decir
v = (v1, . . . , vn) ∈ Rn =⇒ ‖v‖ =√
v21 + · · · + v2
n .
La definicion (1.52) es analoga a la (1.51), considerando a la variable x como un parame-tro y cambiando el valor absoluto por la norma.
Proposicion 1.14. Sea f : I × D → Rn, con D abierto convexo. Si las derivadasparciales ∂fi
∂yj(1 ≤ i ≤ n) existen, son continuas y estan acotadas en I ×D, entonces f
es lipschitziana en I ×D.

CAPITULO 1. INTRODUCCION 21
Demostracion. Sean (x, y1), (x, y2) ∈ I × D. Aplicando el teorema del valor medio acada componente fi de f obtenemos
fi(x, y1) − fi(x, y
2) = ∇fi(x, ηi) · (y1 − y2) ,
para algun punto ηi del segmento que une y1 con y2 (contenido en D por ser dichoconjunto convexo), donde el gradiente esta tomado respecto de las variables (y1, . . . , yn).Por la desigualdad de Cauchy–Schwarz,
∣∣fi(x, y
1) − fi(x, y2)∣∣ ≤
∥∥∇fi(x, ηi)
∥∥∥∥y1 − y2
∥∥ ≤
√nM ·
∥∥y1 − y2
∥∥
siendo M una cota superior de los valores absolutos de las derivadas parciales ∂fi
∂yjen
I ×D. De esta desigualdad se sigue que
∥∥f(x, y1) − f(x, y2)
∥∥ ≤ nM ·
∥∥y1 − y2
∥∥
Por tanto, f es lipschitziana en I ×D, y se puede tomar L = nM . Q.E.D.
Notas:
• La acotacion de las derivadas parciales ∂fi
∂yjen I×D esta garantizada si dichas derivadas
existen y son continuas en algun subconjunto compacto de Rn+1 que contenga a I ×D.
• En particular, si las derivadas parciales de f(x, y) respecto de las variables yi soncontinuas en algun abierto U ⊂ Rn+1 entonces f es localmente lipschitziana en cadapunto de U . Esto quiere decir que para todo (x0, y0) ∈ U f es lipschitziana en cualquierconjunto de la forma [x0 − ε, x0 + ε] ×Br(y0) ⊂ U , donde
Br(y0) = {y ∈ Rn : ‖y − y0‖ < r} , Br(y0) = {y ∈ Rn : ‖y − y0‖ ≤ r} .
Repasemos a continuacion algunos resultados relativos a la nocion de convergenciauniforme, que seran fundamentales para la demostracion del teorema de Picard–Lindelof.
• Una sucesion de funciones gk : Rm → Rn (k ∈ N) se dice uniformemente conver-
gente a la funcion g en U ⊂ Rm si para todo ε > 0 existe N ∈ N tal que
k ≥ N =⇒ ‖g(x) − gk(x)‖ < ε , para todo x ∈ U .
Notese que N solo puede depender de ε, no del punto x ∈ U .
• Analogamente, la serie de funciones∑∞
k=1 gk converge uniformemente en U si paratodo ε > 0 existe N ∈ N tal que
∥∥∥∥∥
∞∑
k=N+1
gk(x)
∥∥∥∥∥< ε , para todo x ∈ U .
• Obviamente, la convergencia uniforme de una funcion (o serie de funciones) en Uimplica su convergencia puntual en cada punto de U , pero el recıproco no tiene porque ser cierto.
• Criterio M de Weierstrass: si ‖gk(x)‖ ≤ Mk para todo x ∈ U ⊂ Rm y k ∈ N, y laserie numerica
∑∞k=1Mk es convergente, entonces la serie de funciones
∑∞k=1 gk converge
uniformemente en U .

CAPITULO 1. INTRODUCCION 22
• Si la sucesion de funciones gk : Rm → Rn (k ∈ N) converge uniformemente enU ⊂ Rm, y cada gk es continua en U , entonces el lımite de la sucesion g = lımk→∞ gn
es una funcion continua en U . Un resultado analogo vale para la suma de una serieuniformemente convergente de funciones continuas (enunciarlo).
• Si la sucesion de funciones gk : [a, b] ⊂ R → R (k ∈ N) converge uniformementeen [a, b], y cada gk es una funcion integrable en [a, b], entonces lım
k→∞gk es integrable en
[a, b], y se tiene
lımk→∞
∫ b
agk(t) dt =
∫ b
a
(
lımk→∞
gk(t)
)
dt .
Un resultado analogo vale para series uniformemente convergentes de funciones integra-bles en un intervalo.
Teorema de Picard–Lindelof. Sea f : A ≡ [x0−a, x0+a]×Bb(y0) ⊂ R×Rn → Rn
(con a > 0, b > 0) continua y lipschitziana con respecto a la segunda variable en elconjunto A. Entonces el problema de valor inicial (1.39)–(1.40) tiene una solucionunica y(x) definida en el intervalo [x0 − α, x0 + α], siendo
α = mın(a, b/M)
y M el supremo de ‖f(t, s)‖ con (s, t) ∈ A.
Demostracion. (Notese, antes de empezar, que la existencia de M esta garantizada porser f continua en el conjunto compacto A.) La demostracion esta basada en un argu-mento muy sencillo de aproximaciones sucesivas (de Picard) a la solucion del problema(1.39)–(1.40). Por sencillez, nos restringiremos al caso n = 1 (ecuacion escalar), en queA es un rectangulo cerrado
A = [x0 − a, x0 + a] × [y0 − b, y0 + b]
y ‖f(x, y)‖ = |f(x, y)|.i) En primer lugar, podemos transformar el problema de valor inicial en una ecuacion
integral integrando la ecuacion diferencial entre x0 y x (con x ∈ [x0 − a, x0 + a]),obteniendo
y(x) = y0 +
∫ x
x0
f(t, y(t)
)dt . (1.53)
Mas precisamente, la funcion y(x) es solucion del problema de valor inicial (1.39)–(1.40)si y solo si y(x) es una solucion continua de la ecuacion integral (1.53). (Ejercicio:pruebese esto en detalle.)
ii) A continuacion construımos recursivamente una familia de funciones yk : [x0−α, x0+α] → [y0 − b, y0 + b] (k = 0, 1, . . . ) diferenciables en el intervalo [x0 − α, x0 + α] de laforma siguiente. En primer lugar, definimos
y0(x) = y0 , ∀x ∈ [x0 − α, x0 + α] .
A continuacion definimos
y1(x) = y0 +
∫ x
x0
f(t, y0
)dt , ∀x ∈ [x0 − α, x0 + α] .

CAPITULO 1. INTRODUCCION 23
La funcion y1 esta claramente definida y es diferenciable en [x0 − α, x0 + α] (por lacontinuidad de f en A). Ademas, se tiene
|y1(x) − y0| ≤∣∣∣∣
∫ x
x0
∣∣f(t, y0
)∣∣ dt
∣∣∣∣≤M |x− x0| ≤M α ≤ b , ∀x ∈ [x0 − α, x0 + α] .
(1.54)Procediendo recursivamente, supongamos que hemos definido las funciones diferenciablesy0, . . . , yk : [x0 − α, x0 + α] → [y0 − b, y0 + b]. Entonces se define
yk+1(x) = y0 +
∫ x
x0
f(t, yk(t)
)dt , ∀x ∈ [x0 − α, x0 + α] . (1.55)
Como yk es diferenciable (por hipotesis de induccion) en [x0 − α, x0 + α], f(t, yk(t)
)es
continua si t ∈ [x0−α, x0 +α] (notese que yk(t) ∈ [y0−b, y0 +b] para t ∈ [x0−α, x0 +α],de nuevo por hipotesis de induccion). De esto se sigue (teorema fundamental del Calculo)que yk+1 es diferenciable en [x0−α, x0+α]. Utilizando de nuevo la hipotesis de induccion(yk(t) ∈ [y0 − b, y0 + b]) se obtiene
|yk(x) − y0| ≤∣∣∣∣
∫ x
x0
∣∣f(t, yk(t)
)∣∣ dt
∣∣∣∣≤M |x− x0| ≤M α ≤ b , ∀x ∈ [x0 − α, x0 + α] .
iii) Probaremos a continuacion por induccion la importante desigualdad
|yk+1(x) − yk(x)| ≤M Lk |x− x0|k+1
(k + 1)!, ∀x ∈ [x0 − α, x0 + α] , k = 0, 1, . . . ,
(1.56)donde L > 0 es una constante de Lipschitz de f en A. En efecto, para k = 0 la de-sigualdad ya esta probada (vease (1.54)). Supuesta la desigualdad anterior cierta parak = 0, 1, . . . ,m− 1 con m ≥ 1, utilizando la hipotesis de induccion y la lipschitzianidadde f en la variable y obtenemos
|ym+1(x) − ym(x)| =
∣∣∣∣
∫ x
x0
[f(t, ym(t)
)− f
(t, ym−1(t)
)]dt
∣∣∣∣
≤∣∣∣∣
∫ x
x0
∣∣f(t, ym(t)
)− f
(t, ym−1(t)
)∣∣ dt
∣∣∣∣
≤ L
∣∣∣∣
∫ x
x0
|ym(t) − ym−1(t)| dt∣∣∣∣≤ L · M Lm−1
m!
∣∣∣∣
∫ x
x0
|t− x0|m dt
∣∣∣∣
=M Lm
m!
∣∣∣∣
∫ x
x0
(t− x0)m dt
∣∣∣∣=M Lm
m!· |x− x0|m+1
(m+ 1)
=M Lm |x− x0|m+1
(m+ 1)!.
Esto prueba la desigualdad (1.56) para k = m, completando ası el proceso de induccion.
iv) Probemos a continuacion que la sucesion de funciones yk (k ∈ N) converge unifor-memente en [x0 − α, x0 + α] a una funcion continua y. En efecto, consideremos la serietelescopica
y0 +
∞∑
k=0
[yk+1 − yk] , (1.57)

CAPITULO 1. INTRODUCCION 24
cuya convergencia uniforme es equivalente a la de la sucesion de funciones yk (k ∈ N)(ejercicio). Utilizando la desigualdad (1.56) se obtiene
x ∈ [x0 − α, x0 + α] =⇒ |yk+1(x) − yk(x)| ≤M Lk αk+1
(k + 1)!=M
L
(αL)k+1
(k + 1)!.
Como la serie numerica ∞∑
k=0
(αL)k+1
(k + 1)!= eαL − 1
es convergente, la serie (1.57) y, por tanto, la sucesion yk, converge uniformemente en[x0 − α, x0 + α] (criterio M de Weierstrass). Al ser las funciones yk continuas en elintervalo [x0−α, x0 +α] y uniformemente convergentes a y en dicho intervalo, la funciony es continua en [x0 − α, x0 + α].
v) Probaremos a continuacion que la funcion y(x) definida por
y(x) = lımk→∞
yk(x) , x ∈ [x0 − α, x0 + α] . (1.58)
es solucion del problema de valor inicial. En efecto, pasando al lımite cuando k → ∞ enla desigualdad |yk(x) − y0| ≤ b se obtiene |y(x) − y0| ≤ b, para todo x ∈ [x0 −α, x0 +α].La convergencia uniforme de la sucesion yk (k ∈ N) a la funcion y en [x0 − α, x0 + α]tambien garantiza que la sucesion de funciones gk : [x0 − α, x0 + α] → R definida por
gk(t) = f(t, yk(t)
)
converge uniformemente a la funcion g(t) = f(t, y(t)
)para t ∈ [x0 − α, x0 + α], ya que
(aplicando de nuevo la lipschitzianidad de f)
|g(t) − gk(t)| =∣∣f(t, y(t)
)− f
(t, yk(t)
)∣∣ ≤ L |y(t) − yk(t)|
De esto se deduce que
lımk→∞
∫ x
x0
f(t, yk(t)
)dt =
∫ x
x0
f(t, y(t)
)dt .
Tomando por tanto el lımite cuando k → ∞ en la igualdad (1.55) vemos que y es solucionde la ecuacion integral (1.53). Como y es continua en [x0−α, x0 +α], esto implica que yes solucion del problema de valor inicial (1.39)–(1.40). (Notese que el teorema de Peanogarantizaba la existencia de por lo menos una solucion de dicho problema.)
vi) Probemos, por ultimo, la unicidad. A tal efecto, supongamos que z : [x0−α, x0+α] →[y0 − b, y0 + b] es solucion del problema de valor inicial (1.39)–(1.40). Demostremos porinduccion que si yk (k ∈ N) es una de las funciones construıdas anteriormente entoncesse tiene la importante desigualdad
|z(x) − yk(x)| ≤M Lk |x− x0|k+1
(k + 1)!, ∀x ∈ [x0 − α, x0 + α] , k = 0, 1, 2, . . . . (1.59)
En efecto, la desigualdad es claramente cierta para k = 0, ya que al ser z solucion de laecuacion integral (1.53) se tiene:
|z(x) − y0| =
∣∣∣∣
∫ x
x0
f(t, z(t)
)dt
∣∣∣∣≤M |x− x0| .

CAPITULO 1. INTRODUCCION 25
Supongamos la desigualdad cierta para k = 0, . . . ,m − 1 (con m ≥ 1). Entonces ladesigualdad para k = m se obtiene como obtuvimos (1.56) para k = m, sin mas quereemplazar ym+1 por z, ya que
z(x) − ym(x) =
∫ x
x0
[f(t, z(t)
)− f
(t, ym−1(t)
)]dt .
Esto prueba por induccion las desigualdades (1.59). Finalmente, tomando el lımite cuan-do k → ∞ en (1.59) se obtiene
|z(x) − y(x)| ≤ lımk→∞
M
L
(L |x− x0|)k+1
(k + 1)!= 0 , ∀x ∈ [x0 − α, x0 + α] ,
lo cual implica que z = y en [x0 − α, x0 + α]. (Recuerdese que para todo t ∈ R se tienelım
m→∞tm/m! = 0.) Esto concluye la demostracion. Q.E.D.
Comentarios
• Las funciones yk(x) (k ∈ N) construıdas en la demostracion del teorema de Picard–Lindelof, cuyo lımite es la solucion y(x) del problema de valor inicial (1.39)–(1.40), sedenominan aproximantes de Picard de la solucion y(x). De (1.59) con z = y se obtieneuna estimacion del error cometido al aproximar y(x) por su k-esimo aproximante:
‖y(x) − yk(x)‖ ≤ M Lk |x− x0|k+1
(k + 1)!, ∀x ∈ [x0 − α, x0 + α] , k = 0, 1, 2, . . . . (1.60)
Notese que, aunque para x fijo el miembro derecho tiende a cero cuando k → ∞, para kfijo la aproximacion (1.60) solo es buena si |x− x0| es suficientemente pequeno. Ademas,el calculo del aproximante yk requiere calcular k integrales definidas. Esto hace que, enla practica, los aproximantes de Picard no tengan excesiva utilidad, aunque su valorteorico es indudable.
• Si f : A = I × Rn → Rn (con I ⊂ R un intervalo) es continua y lipschitzianarespecto de la segunda variable en A, entonces para todo x0 ∈ I el problema de valorinicial (1.39)–(1.40) tiene una solucion unica en el intervalo I.
En efecto, repasando la demostracion del teorema de Picard–Lindelof se observa quela restriccion α ≤ b/M solo es necesaria para asegurar que yk(x) ∈ Bb(y0). Al reemplazarBb(y0) por Rn, esta condicion deja de ser necesaria.
• Si f : U → Rn (con U ⊂ R × Rn abierto) es de clase C1(U), entonces para todo(x0, y0) ∈ U el problema de valor inicial (1.39)–(1.40) tiene una solucion unica en unintervalo de la forma
(x0 − α(x0, y0), x0 + α(x0, y0)
), con α(x0, y0) > 0.
En efecto, basta tomar a, b > 0 lo suficientemente pequenos para que el compactoA = [x0 − a, x0 + a] × Bb(y0) este contenido en U . Al ser f continua y lipschitziana enA (por los comentarios que siguen a la Proposicion 1.14), podemos aplicar el teoremade Picard–Lindelof a f en dicho conjunto.
• Ni la continuidad ni la lipschitzianidad de f son condiciones necesarias para la existen-cia o la unicidad de soluciones del problema de valor inicial (1.39)–(1.40). Por ejemplo,la funcion
f(x, y) =
{
−2y
x+ 4x , x 6= 0
0 , x = 0

CAPITULO 1. INTRODUCCION 26
es discontinua en el eje vertical x = 0. La solucion general de la ecuacion lineal y′ =f(x, y) se calcula facilmente, y es igual a
y(x) = x2 +c
x2.
Por tanto, el problema de valor inicial para la ecuacion y′ = f(x, y) con la condicioninicial y(0) = 0 tiene la solucion unica y(x) = x2. Notese, sin embargo, que si la condicioninicial es y(0) = y0 6= 0 entonces el problema (1.39)–(1.40) no tiene solucion, ya que launica solucion de la ecuacion diferencial definida en x = 0 es y(x) = x2.
Ejemplo 1.15. Hallemos los aproximantes de Picard para el problema
y′ = x y , y(0) = 1 , (1.61)
cuya solucion exacta esy(x) = ex2/2 . (1.62)
En este caso la funcion f(x, y) = xy es C∞ y lipschitziana respecto de la segunda variableen todo J×R para todo intervalo compacto J ⊂ R, por lo que los aproximantes de Picardestan definidos (y convergen a la solucion) en todo R (ver los comentarios anteriores).Como y0 = 1 se tiene
y1(x) = 1 +
∫ x
0t dt = 1 +
x2
2
y2(x) = 1 +
∫ x
0t
(
1 +t2
2
)
dt = 1 +x2
2+x4
8,
y, en general,
yk(x) =k∑
n=0
x2n
2n n!. (1.63)
En efecto, asumiendo esta formula cierta para k = 0, 1, . . . ,m− 1 (m ≥ 1) y aplicandola definicion de ym se obtiene
ym(x) = 1 +
∫ x
0t
m−1∑
n=0
t2n
2n n!dt = 1 +
m−1∑
n=0
x2n+2
2n (2n+ 2)n!= 1 +
m−1∑
n=0
x2(n+1)
2n+1 (n+ 1)!,
que es (1.63) con k = m. Esto prueba (1.63) por induccion.Notese que en este caso yk no es otra caso que el polinomio de Taylor de orden
2k de la solucion exacta. Esto, sin embargo, no es general; por ejemplo, considerese elproblema y′ = y2, y(0) = 1.

Capıtulo 2
Ecuaciones y sistemas lineales
Un sistema lineal de primer orden es un sistema de n ecuaciones diferencialesordinarias en n funciones incognitas (y1, . . . , yn) ≡ y de la forma
y′ = A(x) y + b(x) , (2.1)
donde b = (b1, . . . , bn) : R → Rn es una funcion vectorial (el termino inhomogeneo
de la ecuacion (2.1)) y A : R → Mn(R) es una funcion matricial. En otras palabras,para cada x
A(x) =
a11(x) . . . a1n(x)...
. . . . . .
an1(x)... ann(x)
(2.2)
es una matriz n× n con coeficientes reales aij(x) (1 ≤ i, j ≤ n). Si b ≡ 0 diremos que elsistema (2.1) es homogeneo, e inhomogeneo en caso contrario.
Nota: El conjunto Mn(R) es un espacio vectorial real de dimension n2. Una base dedicho espacio es la formada por las matrices Eij (1 ≤ i, j ≤ n) cuyo unico elemento dematriz no nulo es un 1 en la posicion ij. En el espacio vectorial Mn(R) se suele definirla norma del supremo
‖A‖ = max {‖Av‖ : ‖v‖ = 1} , ∀A ∈Mn(R) ,
en terminos de la cual
‖Aw‖ ≤ ‖A‖ ‖w‖ , ∀w ∈ Rn .
Un calculo sencillo muestra que si ‖v‖ = 1 entonces ‖Av‖2 ≤∑ni,j=1 a
2ij , por lo que
‖A‖ ≤ n max {|aij| : 1 ≤ i, j ≤ n} .
Notese, finalmente, que una funcion matricial A : R →Mn(R) es continua en x ∈ R siy solo si sus n2 elementos de matriz aij : R → R (1 ≤ i, j ≤ n) son funciones continuasen x.
Utilizando el teorema de Picard-Lindelof es inmediato probar el siguiente teorema deexistencia y unicidad para el problema de valor inicial asociado al sistemas lineal (2.1):
Teorema 2.1. Si b : I → Rn y A : I → Rn son continuas en el intervalo I ⊂ R,entonces para todo x0 ∈ I y para todo y0 ∈ Rn el problema de valor inicial (2.1) con lacondicion inicial y(x0) = y0 tiene una unica solucion en el intervalo I.
27

CAPITULO 2. ECUACIONES Y SISTEMAS LINEALES 28
Demostracion. Basta probar (¿por que?) la existencia y unicidad del problema planteadoen todo intervalo compacto J ⊂ I. Por uno de los comentarios al teorema de Picard–Lindelof, es suficiente probar que la funcion f : J × Rn → Rn definida por
f(x, y) = A(x) y + b(x)
es continua y lipschitziana respecto de la segunda variable en J × Rn. La continuidadde f en J ×Rn es inmediata a partir de la de las funciones A y b en J ⊂ I, ya que paratodo (x1, y1) ∈ J ×Rn se tiene
f(x2, y2) − f(x1, y1) = A(x2)(y2 − y1) +[A(x2) −A(x1)
]y1 + b(x2) − b(x1) → 0
si (x2, y2) → (x1, y1). La lipschitzianidad de f respecto de la variable y es tambieninmediata de establecer, ya que si (x, y1), (x, y2) ∈ J se tiene
‖f(x, y2) − f(x, y1)‖ = ‖A(x)(y2 − y1)‖ ≤ ‖A(x)‖ ‖y2 − y1)‖ ≤ nM ‖y2 − y1‖ ,
siM = max {|aij(x)| : 1 ≤ i, j ≤ n , x ∈ J} .
(La existencia de M se deduce de la continuidad de las n2 funciones aij en el compactoJ .) Q.E.D.
En particular, las soluciones de un sistema lineal (2.1) con coeficientes constantes
estan definidas en toda la recta real.
2.1. Estructura del espacio de soluciones
Llamaremos espacio de soluciones del sistema lineal (2.1) al conjunto S formadopor todas sus soluciones, es decir
S ={y : I ⊂ R → Rn
∣∣ y′(x) = A(x) y + b(x) , ∀x ∈ I
}⊂ C1(I) .
(Ejercicio: justifıquese esta ultima inclusion.) Una de las propiedades fundamentales delos sistemas lineales homogeneos
y′ = A(x) y , y ∈ Rn , (2.3)
es que si ϕ1 y ϕ2 son soluciones del sistema, entonces λϕ1 + µϕ2 es solucion para todoλ, µ ∈ R, ya que
(λϕ1+µϕ2)′(x) = λϕ1′(x)+µϕ2′(x) = λA(x)ϕ1(x)+µA(x)ϕ2(x) = A(x)(λϕ1(x)+µϕ2(x)
).
En otras palabras:
Teorema 2.2. El espacio de soluciones de un sistema homogeneo es un espacio vectorialreal.
Para sistemas lineales inhomogeneos el resultado anterior admite una generalizacioninmediata. En efecto, si yp es una solucion particular fija del sistema e y es cualquiersolucion entonces y − yp es solucion del sistema homogeneo (2.3) asociado a (2.1). Sillamamos S0 al espacio de soluciones del sistema homogeneo (2.3) entonces y− yp ∈ S0,o equivalentemente y ∈ yp +S0. Recıprocamente, si yH es cualquier solucion del sistema

CAPITULO 2. ECUACIONES Y SISTEMAS LINEALES 29
homogeneo (2.3) entonces yp + yH es claramente una solucion de (2.1). Esto prueba queel espacio de soluciones S del sistema (2.1) es el espacio afın
S = yp + S0 . (2.4)
Hemos probado por tanto el siguiente
Teorema 2.3. El espacio de soluciones del sistema lineal inhomogeneo (2.1) es unespacio afın paralelo al espacio de soluciones del sistema homogeneo asociado.
Estudiemos a continuacion cual es la dimension del espacio de soluciones del sistemahomogeneo (2.3). Para ello, llamemos Y i(x) a la solucion del problema de valor inicial
Y i′ = A(x)Y i , Y i(x0) = ei ,
siendo x0 ∈ I un punto fijo pero arbitrario, y ei el i-esimo vector de la base canonicade Rn (de hecho, para el razonamiento que sigue podrıamos tomar cualquier otra base).Sea ahora y(x) una solucion cualquiera del sistema lineal homogeneo, y llamemos
y0 = y(x0) ≡ (y01, . . . , y0n) =
n∑
i=1
y0iei .
Entonces la funcion
y(x) =
n∑
i=1
y0iYi(x)
es solucion del sistema (2.3) (por ser combinacion lineal de soluciones) y verifica lacondicion inicial
y(x0) =n∑
i=1
y0iei = y0 = y(x0) .
Por el teorema de unicidad, y = y en I. En otras palabras, toda solucion del sistemahomogeneo (2.3) puede expresarse como una combinacion lineal
y =
n∑
i=1
y0iYi
de las n soluciones Y i. Esto prueba, en particular, que
dimS0 ≤ n .
Para probar que, de hecho, la dimension del espacio de soluciones del sistema (2.3) esexactamente igual a n basta probar que las n soluciones Y i (1 ≤ i ≤ n) son linealmenteindependientes. Para ello, supongamos que existieran n constantes reales λi (1 ≤ i ≤ n)tales que
n∑
i=1
λi Yi = 0 .
Esta igualdad es equivalente a
n∑
i=1
λi Yi(x) = 0 , ∀x ∈ I .

CAPITULO 2. ECUACIONES Y SISTEMAS LINEALES 30
En particular, haciendo x = x0 en la igualdad anterior obtenemos
0 =
n∑
i=1
λi ei =⇒ λ1 = · · · = λn = 0 ,
por la independencia lineal de los vectores de la base canonica. Hemos probado por tantoel siguiente resultado fundamental:
Teorema 2.4. El espacio de soluciones del sistema homogeneo y′ = A(x) y (cony : R → Rn) es un espacio vectorial real de dimension n.
2.2. Wronskiano
Llamaremos sistema fundamental de soluciones del sistema homogeneo (2.3) atoda base de su espacio de soluciones, es decir a todo conjunto de n soluciones linealmenteindependientes y1, . . . , yn. (Por ejemplo, las n soluciones Y 1, . . . , Y n forman un sistemafundamental de soluciones.) Por definicion, toda solucion de (2.3) es una combinacionlineal de las soluciones y1, . . . , yn. En otras palabras, si y(x) es solucion de (2.3) entonces
y(x) =n∑
i=1
ci yi(x) , ∀x ∈ I ,
para ciertas constantes reales c1, . . . , cn. Igualando la k-esima componente de ambosmiembros obtenemos las n igualdades escalares
yk(x) =
n∑
i=1
yik(x) ci , 1 ≤ k ≤ n ,
equivalentes a la igualdad matricial
y(x) = Y (x)c (2.5)
con c = (c1 · · · cn)t y
Y (x) =(y1(x) y2(x) . . . yn(x)
)≡
y11(x) . . . yn
1 (x)...
. . ....
y1n(x) . . . yn
n(x)
.
Definicion 2.5. Una matriz fundamental del sistema (2.3) es cualquier funcion ma-tricial x 7→ Y (x) ∈ Mn(R) cuyas columnas forman un sistema fundamental de solucio-nes.
En general, dadas n soluciones ϕ1, . . . , ϕn del sistema homogeneo (2.3) (no necesa-riamente independientes), consideremos la matriz
Φ(x) =(ϕ1(x) ϕ2(x) . . . ϕn(x)
)
asociada a dichas soluciones. Notese que la matriz Φ(x) es solucion de la ecuacion ma-tricial
Φ′(x) = A(x)Φ(x) . (2.6)

CAPITULO 2. ECUACIONES Y SISTEMAS LINEALES 31
En efecto, operando con matrices columna se tiene
Φ′(x) =(ϕ1 ′(x) ϕ2 ′(x) . . . ϕn ′(x)
)=(A(x)ϕ1(x) A(x)ϕ2(x) . . . A(x)ϕn(x)
)
= A(x)Φ(x) .
De la misma forma se demuestra que si la matriz n× n Φ(x) satisface la ecuacion (2.6)entonces cada una de las n columnas de Φ es solucion del sistema (2.3).
Definicion 2.6. Llamaremos wronskiano de las soluciones ϕ1, . . . , ϕn al determinantede la matriz Φ(x), es decir
W [ϕ1, . . . , ϕn](x) = detΦ(x) =
∣∣∣∣∣∣∣
ϕ11(x) . . . ϕn
1 (x)...
. . ....
ϕ1n(x) . . . ϕn
n(x)
∣∣∣∣∣∣∣
.
Escribiremos a partir de ahora W (x) cuando quede claro del contexto a que solucionesϕi (1 ≤ i ≤ n) nos estamos refiriendo.
Si las soluciones ϕk (1 ≤ k ≤ n) son linealmente dependientes (como funciones)entonces los vectores
{ϕ1(x), . . . , ϕn(x)
}son linealmente dependientes en cada punto
x ∈ I, por lo que el determinante de la matriz Φ(x) cuyas columnas son dichos vectoreses identicamente nulo. En otras palabras,
{ϕ1, . . . , ϕn
}linealmente dependientes =⇒W [ϕ1, . . . , ϕn](x) = 0 , ∀x ∈ I .
Recıprocamente, si el wronskiano de las soluciones{ϕ1, . . . , ϕn
}se anula identicamente
entonces dichas soluciones son linealmente dependientes. En efecto, tomemos cualquierpunto x0 ∈ I y consideremos los vectores
ϕk0 = ϕk(x0) , 1 ≤ k ≤ n .
La anulacion de W (x0) implica que dichos vectores son linealmente dependientes, esdecir que existen constantes λk (1 ≤ k ≤ n) tales que
n∑
k=1
λk ϕk0 = 0 .
Pero entonces la funcion
y(x) =
n∑
k=1
λk ϕk(x)
es solucion del sistema homogeneo (2.3) con dato inicial y(x0) = 0. Por la unicidad desoluciones de (2.3), de esto se deduce que y(x) = 0 para todo x ∈ I, lo cual prueba ladependencia lineal de las soluciones
{ϕ1, . . . , ϕn
}. Hemos pues demostrado el siguiente
resultado fundamental:{ϕ1, . . . , ϕn
}linealmente dependientes ⇐⇒ W [ϕ1, . . . , ϕn](x) = 0 , ∀x ∈ I . (2.7)
• Si ϕk (1 ≤ k ≤ n) son soluciones del sistema homogeneo (2.3), entonces o bienW (x) = 0 para todo x ∈ I, o bien W (x) 6= 0 para todo x ∈ I.
En efecto, si las soluciones son linealmente dependientes entonces su wronskiano seanula identicamente, mientras que si son independientes de la demostracion del resultadoanterior se deduce que el wronskiano no se puede anular en ningun punto.
• Una funcion matricial Φ : I → Mn(R) es una matriz fundamental del sistema (2.3)si y solo si

CAPITULO 2. ECUACIONES Y SISTEMAS LINEALES 32
i) Φ′(x) = A(x)Φ(x), para todo x ∈ I
ii) det Φ(x) 6= 0, para todo x ∈ I.
• Observese que si{ϕ1, . . . , ϕn
}son funciones (diferenciables) arbitrarias la anulacion
de su wronskiano en todos los puntos no implica la dependencia lineal. Por ejemplo, lasfunciones
ϕ1(x) = (senx, x) , ϕ2(x) = (x senx, x2)
son linealmente independientes, aunque su wronskiano se anula para todo x ∈ R.
Ejercicio. ¿Son las funciones
ϕ1(x) = (1, x) , ϕ2(x) = (x, 1 − x2)
solucion de algun sistema lineal homogeneo (con coeficientes continuos) en I = R?
Solucion. El wronskiano de las funciones{ϕ1, ϕ2
}es igual a
W (x) =
∣∣∣∣
1 xx 1 − x2
∣∣∣∣= 1 − 2x2 .
Dicho wronskiano se anula en los puntos x = ±1/√
2, y es distinto de cero en los demaspuntos. Como W ni es identicamente nulo ni tampoco es distinto de cero en R, lasfunciones dadas no pueden ser solucion de ningun sistema lineal homogeneo en R.
El wronskiano de ϕ1 y ϕ2 no se anula en los intervalos (−∞,−1/√
2), (−1/√
2, 1/√
2)y (1/
√2,∞), por lo que no esta descartado que dichas funciones puedan ser solucion de
algun sistema lineal homogeneo si nos restringimos a estos intervalos. De hecho, puedeprobarse que en dichos intervalos ϕ1 y ϕ2 son soluciones (linealmente independientes)del sistema homogeneo
y′ =1
1 − 2x2
(−x 1
1 + x2 −3x
)
y .
2.2.1. Formula de Abel–Liouville
Sean, de nuevo, ϕk(x) (1 ≤ k ≤ n) soluciones del sistema homogeneo (2.3). Derivandosu wronskiano W (x) respecto de x obtenemos
W ′(x) =
n∑
i=1
∣∣∣∣∣∣∣∣∣∣
ϕ11(x) . . . ϕn
1 (x). . . . . . . . . . . . . . . . . . .ϕ1
i′(x) . . . ϕn
i′(x)
. . . . . . . . . . . . . . . . . . .ϕ1
n(x) . . . ϕnn(x)
∣∣∣∣∣∣∣∣∣∣
. (2.8)
Dado que
ϕki′(x) =
n∑
j=1
aij(x)ϕkj (x) , ∀x ∈ I , 1 ≤ i, k ≤ n ,
la i-esima fila del i-esimo determinante en (2.8) es igual a
aii(x)Φi(x) +n∑
j=1j 6=i
aij(x)Φj(x)

CAPITULO 2. ECUACIONES Y SISTEMAS LINEALES 33
(donde Φj denota la j-esima fila de Φ). De esto se sigue que el i-esimo determinante queaparece en (2.8) es igual a
aii(x)W (x) ,
puesto que un determinante no varıa al anadir a una fila cualquier combinacion linealde las restantes. Obtenemos ası la igualdad
W ′(x) = W (x)
n∑
i=1
aii(x) ≡ trA(x) ·W (x) .
Integrando esta ecuacion diferencial lineal ordinaria de primer orden en W (x) obtenemosla formula de Abel–Liouville
W (x) = W (x0) e
∫ xx0
trA(t) dt, ∀x ∈ I , (2.9)
donde x0 es un punto cualquiera de I. De esta formula se sigue inmediatamente elresultado sobre el wronskiano probado anteriormente (W (x) = 0 para todo x ∈ Io W (x) 6= 0 para todo x ∈ I).
2.2.2. Metodo de variacion de constantes de Lagrange
Los resultados de esta seccion se refieren al sistema homogeneo (2.3). Sin embargo,si se conoce una matriz fundamental de dicho sistema homogeneo podemos hallar lasolucion general del sistema inhomogeneo (2.1) aplicando el metodo de variacion deconstantes de Lagrange. En efecto, la formula (2.5) para la solucion general del sistemahomogeneo sugiere expresar una solucion cualquiera del sistema inhomogeneo mediante
y(x) = Y (x)z(x) ,
con z : I → Rn la nueva funcion incognita. Sustituyendo en (2.1) se obtiene
y′ = Y (x) z′ + Y ′(x) z = Y (x) z′ +A(x)Y (x) z = A(x)y + b(x) ⇐⇒ z′ = Y (x)−1b(x) .
(Notese que Y (x) es invertible en cada punto, ya que su determinante es el wronskianode n soluciones linealmente independientes de la ecuacion homogenea (2.3), y por tantono se anula en ningun punto.) Integrando esta ecuacion entre x0 ∈ I y x obtenemos
z(x) =
∫ x
x0
Y (t)−1b(t) dt + c ,
(con c ∈ Rn constante) de donde se obtiene la siguiente formula para la solucion generaldel sistema inhomogeneo (2.1):
y(x) = Y (x) c+ Y (x)
∫ x
x0
Y (t)−1b(t) dt = Y (x) c+
∫ x
x0
Y (x)Y (t)−1b(t) dt . (2.10)
Notese que el primer termino (Y (x) c) es una solucion general del sistema homogeneoasociado, mientras que el termino restante proporciona una expresion explıcita de unasolucion particular del sistema inhomogeneo en terminos de la matriz fundamental Y (x)y el termino inhomogeneo b(x).

CAPITULO 2. ECUACIONES Y SISTEMAS LINEALES 34
2.3. Sistemas con coeficientes constantes
En general (a diferencia de lo que ocurre para una ecuacion lineal escalar) no esposible dar un metodo general para hallar una matriz fundamental de un sistema linealhomogeneo en funcion de sus coeficientes. De hecho, solo en muy contados casos enque dichos coeficientes son funciones particularmente sencillas de x es posible calcularexplıcitamente una matriz fundamental del sistema (2.3) (y, por variacion de constantes,obtener ası la solucion general del sistema inhomogeneo (2.1)).
Un caso muy importante en que se puede calcular la matriz fundamental del sistemalineal (2.3) es aquel en que la matriz de coeficientes del sistema es constante. En otraspalabras, en este caso el sistema (2.3) adopta la forma sencilla
y′ = Ay , A ∈Mn(R) . (2.11)
Formalmente, la solucion de este sistema con la condicion inicial y(x0) = y0 es
y = exA y0 .
Pero ¿que sentido tiene la exponencial de la matriz xA en esta formula?Para responder a esta pregunta, recuerdese que para todo t ∈ R se define et como
la suma de la serie de potencias
et =
∞∑
k=0
tk
k!.
Se demuestra que la serie anterior es absolutamente convergente para todo t ∈ R, siendola convergencia uniforme en cada intervalo compacto de la recta real. Guiados por loanterior, definamos
eB =
∞∑
k=0
Bk
k!, ∀B ∈Mn(R) , (2.12)
donde B0 = 1 denota la matriz identidad. Para que la definicion tenga sentido, debemosprobar que la serie anterior converge en el espacio vectorial Mn(R) para toda matrizB ∈Mn(R). Para probar este resultado, notese primero que
∥∥∥Bk
∥∥∥ ≤ ‖B‖k , ∀k ∈ N ,
puesto que si v ∈ Rn con ‖v‖ = 1 por definicion de la norma del supremo se tiene∥∥∥Bkv
∥∥∥ ≤ ‖B‖
∥∥∥Bk−1v
∥∥∥ ≤ ‖B‖2
∥∥∥Bk−2v
∥∥∥ ≤ · · · ≤ ‖B‖k ‖v‖ = ‖B‖k .
La convergencia (absoluta) de la serie (2.12) para toda matriz B ∈ Mn(R) se deducedel criterio de Cauchy. En efecto, si N > m se verifica
∥∥∥∥∥
N∑
k=m+1
Bk
k!
∥∥∥∥∥≤
N∑
k=m+1
∥∥Bk
∥∥
k!≤
N∑
k=m+1
‖B‖k
k!−−−−−→m,N→∞
0 ,
en virtud de la convergencia de la serie numerica de e‖B‖. En particular, por lo queacabamos de demostrar la serie de potencias (con coeficientes matriciales)
exA =
∞∑
k=0
xkAk
k!(2.13)

CAPITULO 2. ECUACIONES Y SISTEMAS LINEALES 35
converge para todo x ∈ R, para cualquier matriz A ∈Mn(R). Ademas, la convergenciade esta serie es uniforme en todo intervalo compacto por el criterio M de Weierstrass,ya que si x ∈ [a, b] se tiene
∥∥∥∥
xkAk
k!
∥∥∥∥≤ |x|k ‖A‖k
k!≤ (M ‖A‖)k
k!
(M = max(|a| , |b|)
),
siendo la serie numerica ∞∑
k=0
(M ‖A‖)kk!
= eM ‖A‖
convergente. Derivando termino a termino la serie (2.13) se obtiene la serie
∞∑
k=1
k xk−1Ak
k!=
∞∑
k=1
xk−1Ak
(k − 1)!= A
∞∑
k=0
xkAk
k!=
( ∞∑
k=0
xkAk
k!
)
A .
Esta ultima serie es uniformemente convergente en todo intervalo compacto, por lo vistoanteriormente. Por tanto, en todo intervalo compacto de la recta real la funcion matricialexA es derivable, siendo su derivada la serie anterior. En definitiva, hemos probado laformula
d
dxexA = A exA = exAA , ∀x ∈ R . (2.14)
Esta formula demuestra que las n columnas de la matriz exA son soluciones delsistema (2.11). Estas soluciones son linealmente independientes, ya que su wronskianoen x = 0 es igual a
det(e0) = det1 = 1 6= 0 .
Hemos probado por tanto el siguiente resultado:
Teorema 2.7. La matriz exA es una matriz fundamental del sistema homogeneo concoeficientes constantes y′ = Ay.
En otras palabras, la solucion general del sistema (2.11) esta dada por
y(x) = exAc , (2.15)
con c ∈ Rn un vector constante. (Notese que, como ya sabıamos por uno de los corolariosdel teorema de Picard–Lindelof, las soluciones de (2.11) estan definidas para todo x ∈ R.)En particular, dado que e0 es la matriz identidad, la solucion del problema de valor inicial
y′ = Ay , y(0) = y0
es simplemente
y(x) = exAy0 .
La funcion exponencial matricial verifica las siguientes propiedades:
i) e(s+t)A = esAetA , ∀s, t ∈ R
ii) eA es invertible, siendo (eA)−1 = e−A
iii) Para toda matriz invertible P se tiene P eAP−1 = ePAP−1

CAPITULO 2. ECUACIONES Y SISTEMAS LINEALES 36
En efecto, la primera propiedad se deduce (como para la funcion exponencial en R)manipulando adecuadamente la serie de e(s+t)A, lo cual es posible dado que esta serieconverge absolutamente. La segunda propiedad es consecuencia de la primera y de laidentidad e0 = 1. Por ultimo,
P eAP−1 = P
( ∞∑
k=0
Ak
k!
)
P−1 =
∞∑
k=0
PAkP−1
k!=
∞∑
k=0
(PAP−1)k
k!= ePAP−1
.
En relacion con la propiedad i), notese que si A,B ∈ Mn(R) son dos matrices queconmutan, es decir satisfacen la igualdad
[A,B] ≡ AB −BA = 0 ,
entonces se puede probar que
eA+B = eA eB = eB eA .
Sin embargo, esta ultima igualdad no es cierta, en general, para matrices A y B arbi-trarias
Por lo dicho en la seccion anterior, la solucion general del problema de valor inicialpara el sistema homogeneo
y′ = Ax+ b(x) (2.16)
es
y = exA c+
∫ x
x0
e(x−t)A b(t) dt , (2.17)
con c ∈ Rn un vector constante. La solucion de (2.16) con la condicion inicial y(x0) = y0
se calcula resolviendo la ecuacion matricial
y0 = ex0A c ⇐⇒ c = e−x0Ay0.
Utilizando la propiedad ii) se obtiene
y = e(x−x0)Ay0 +
∫ x
x0
e(x−t)A b(t) dt .
Ejercicio. Pruebese la formula det(eA) = etr A , valida para toda matriz A ∈Mn(R).
Solucion. Al ser las columnas de exA solucion del sistema lineal (2.11), det(exA) es elwronskiano de dichas soluciones. Aplicando la formula de Abel–Liouville obtenemos
det(exA) = det(e0) eR x
0tr A dt = ex tr A .
Haciendo x = 1 se obtiene la formula propuesta.
2.4. Calculo de la exponencial de una matriz
Estudiaremos en esta seccion algunos metodos practicos para calcular la exponencialde una matriz. Por lo visto en la seccion anterior, esto nos permitira encontrar la soluciongeneral de un sistema homogeneo con coeficientes constantes via la formula (2.15) (o,mas generalmente, la solucion del sistema inhomogeneo (2.16) via la ecuacion (2.17)).

CAPITULO 2. ECUACIONES Y SISTEMAS LINEALES 37
Recordemos, en primer lugar, que toda matriz A ∈Mn(R) es semejante a una matrizdiagonal por bloques (en general con elementos de matriz complejos)
J = P−1AP =
J1
J2
. . .
Jm
,
donde cada bloque de Jordan Ji es de la forma
Ji = λi 1 +Ni ,
siendo Ni una matriz nilpotente del tipo
Ni =
N [ni]N [n′i]
. . .
N[n
(si−1)i
]
.
En esta formula ni ≥ n′i ≥ · · · ≥ n(si−1)i , y N [k] ∈ Mk(R) denota la matriz nilpotente
elemental de orden k
N [k] =
01 0
1. . .. . .
. . .
1 0
.
De la igualdad
det(J − t1) = det(P−1AP − t1) = det[P−1(A− t1)P ] = det(A− t1)
se deduce que
det(A− t1) = (λ1 − t)r1 · · · (λm − t)rm ,
donde los enteros ri = ni+n′i+ · · ·+n(si−1)
i son las multiplicidades algebraicas de losautovalores λi. Los m numeros distintos λ1, . . . , λm ∈ C, denominados los autovalores
de la matriz A, son por tanto las m raıces distintas de la ecuacion
pA(t) ≡ det(A− t1) = 0 .
Al polinomio (de grado n) pA(t) se le denomina polinomio caracterıstico de la matrizA.
La matriz N [k] es una matriz nilpotente de orden k, es decir N [k]j se anula si y solosi j ≥ k. De esto se deduce que las matrices Ni son matrices nilpotentes de orden ni (elındice del autovalor λi), es decir
Nni−1i 6= 0, Nni
i = 0 , 1 ≤ i ≤ m. (2.18)
A la matriz J ∈ Mn(C) (que es unica salvo por el orden de los bloques) se le llama laforma canonica de Jordan de la matriz A. Notese que N [1] = 0, y por tanto queJ es una matriz diagonal (cuyos elementos de matriz diagonales son los autovalores de

CAPITULO 2. ECUACIONES Y SISTEMAS LINEALES 38
la matriz A, repetidos tantas veces cuanta sea su multiplicidad algebraica) si y solo sin1 = . . . nm = 1.
El calculo de la exponencial de la matriz xA se reduce a la de xJ , ya que
exA = eP (xJ)P−1= P exJP−1 .
(Notese que, aunque J y P pueden ser complejas, exA es real si A es real.) Para calcularla exponencial de xJ , observese que de las igualdades
Jk =
Jk1
Jk2
. . .
Jkm
, ∀k ∈ N ,
se deduce que
exJ =
exJ1
exJ2
. . .
exJm
.
El problema se reduce por tanto a calcular la exponencial de cada bloque xJi. Pero estoes inmediato, ya que al conmutar las matrices λi1 y Ni se tiene
exJi = exλi1 exNi = eλix exNi .
Por ultimo, de la nilpotencia de Ni (ec. (2.18)) se deduce que la serie de exNi se reducea la suma finita
exNi =
ni−1∑
k=0
xk
k!Nk
i .
Notese que exNi se puede calcular por bloques mediante la formula
exNi =
exN [ni]
exN [n′
i]
. . .
exN[n
(si−1)i
]
, (2.19)
donde
exN [k] =
1x 1x2
2! x 1x3
3!x2
2! x 1...
.... . .
. . .. . .
xk−1
(k−1)!xk−2
(k−2)! . . . x2
2! x 1
. (2.20)
En definitiva, la exponencial de la matriz xA ∈ Mn(R) esta dada por la siguienteformula:
exA = P
eλ1xexN1
eλ2xexN2
. . .
eλmxexNm
P−1 ,

CAPITULO 2. ECUACIONES Y SISTEMAS LINEALES 39
donde exNi se calcula utilizando las ecuaciones (2.19) y (2.20).Las columnas de la matriz P forman una base de Cn respecto de la cual la matriz
del operador lineal v 7→ Av adopta su forma canonica J (base de Jordan de A).Notese que la matriz P exJ (que es mas facil que calcular que exA = P exJP−1, ya quepara su calculo no se necesita conocer la inversa de la matriz P ) es tambien una matrizfundamental del sistema lineal homogeneo (2.11). En efecto, de las igualdades
(P exJ
)ei =
(P exJP−1
)(Pei) = exA(Pei) , 1 ≤ i ≤ n ,
se deduce que las columnas de P exJ son soluciones del sistema. Ademas, el wronskianode estas soluciones es no nulo, ya que
det(P exJ
)= detP · det
(exJ)6= 0 ,
al ser P y exJ matrices invertibles. Sin embargo (a diferencia de exA, que es siemprereal si A es real) la matriz P exJ puede ser compleja, por lo que para obtener a partir deella una matriz fundamental real habra que tomar, en general, combinaciones linealesadecuadas de sus columnas.
• Si λ es un autovalor de A y v un autovector correspondiente a este autovalor, eλxves una solucion del sistema (2.11), ya que
d
dx
(
eλxv)
= eλx(λv) = eλx(Av) = A(
eλxv)
.
Si λ ∈ R la solucion eλxv es real (pues el autovector v se puede tomar real). Si λ = a+i bcon b 6= 0, al ser la matriz A real posee tambien el autovalor λ con autovector v. Sumandoy restando las dos soluciones eλxv y eλxv ≡ eλxv se obtienen las dos soluciones realesRe(eλxv
)e Im
(eλxv
), dadas respectivamente por
eax[cos(b x)Re v − sen(b x) Im v
], eax
[cos(b x) Im v + sen(b x)Re v
]. (2.21)
Si A es diagonalizable entonces
J =
µ1
µ2
. . .
µn
(donde ahora no suponemos que los numeros µi son distintos dos a dos) y por tanto
P exJ =(P1 P2 . . . Pn
)
eµ1x
eµ2x
. . .
eµnx
=(eµ1x P1 eµ2x P2 . . . eµnx Pn
).
En otras palabras, si A es diagonalizable las funciones
eµix Pi , 1 ≤ i ≤ n , (2.22)
donde µi es un autovalor de A y Pi es un autovector correspondiente a este autovalor,son soluciones fundamentales del sistema homogeneo (2.11). Si alguno de los autovalores

CAPITULO 2. ECUACIONES Y SISTEMAS LINEALES 40
µi es complejo, por lo visto anteriormente podemos reemplazar las soluciones eµix Pi yeµix P i por dos soluciones reales del tipo (2.21) (con a = Reµi, b = Imµi, v = Pi).
• Sean ahora {Pl+1, . . . , Pl+k} ≡ {v1, . . . , vk} los vectores de la base canonica de Cn
correspondientes al bloque de Jordan elemental
λ1k +N [k] .
Entonces las columnas l + 1, . . . , l + k de la matriz P exJ estan dadas por
(v1 . . . vk
)eλxexN [k] = eλx
(v1 . . . vk
)
1x 1x2
2! x 1x3
3!x2
2! x 1...
.... . .
. . .. . .
xk−1
(k−1)!xk−2
(k−2)! . . . x2
2! x 1
.
Por tanto las k funciones vectoriales
eλxj∑
i=0
xi
i!vk−j+i , 0 ≤ j ≤ k − 1 , (2.23)
son solucion del sistema homogeneo (2.11). Estas soluciones son todas reales si el auto-valor λ ∈ R (ya que en una matriz real los autovectores propios generalizados corres-pondientes a un autovalor real se pueden siempre escoger reales). Si el autovalor λ escomplejo, al ser la matriz A real el complejo conjugado λ de λ es tambien autovalorde A. Se demuestra en el curso de Algebra Lineal que la matriz A tiene un bloque deJordan asociado a este autovalor λ de la forma
λ1k +N [k] ,
pudiendose tomar como vectores de la base canonica de Jordan asociados a este autovalorlos vectores {v1, . . . , vk}. Por tanto el sistema (2.11) posee en este caso junto con (2.23)las s soluciones
eλxj∑
i=0
xi
i!vk−j+i , 0 ≤ j ≤ k − 1 (2.24)
complejas conjugadas de las anteriores. Si λ = a+i b (con a, b ∈ R), sumando y restandolas soluciones (2.23) y (2.24) se obtienen las 2k soluciones reales
eaxj∑
i=0
xi
i!
[cos(b x)Re vk−j+i − sen(b x) Im vk−j+i
],
eaxj∑
i=0
xi
i!
[cos(b x) Im vk−j+i + sen(b x)Re vk−j+i
], 0 ≤ j ≤ k − 1 .
(2.25)
Estas observaciones demuestran el siguiente teorema:
Teorema 2.8. Las soluciones del sistema homogeneo con coeficientes constantes y′ =Ay (A ∈ Mn(R)) son combinaciones lineales (con coeficientes en Rn) de funcionesde la forma
xj eax cos(b x) , xk eax sen(b x) . (2.26)
En esta formula a+ i b (con b ≥ 0) recorre todos los autovalores de la matriz A, y losexponentes j, k han de ser menores que el ındice del autovalor a+ i b.

CAPITULO 2. ECUACIONES Y SISTEMAS LINEALES 41
2.4.1. Polinomio interpolador de Lagrange
Uno de los metodos mas efectivos para el calculo de la exponencial de una matriz(o, en general, de una funcion matricial) es el basado en el polinomio interpolador deLagrange, que describiremos a continuacion. El metodo es consecuencia del teorema deCayley–Hamilton, segun el cual
pA(A) = 0 , ∀A ∈Mn(R) .
Por definicion, el polinomio mınimo de la matriz A es el polinomio monico de gradomınimo φA que anula a la matriz A, es decir tal que
φA(A) = 0 . (2.27)
Se demuestra que tal polinomio es unico, y esta dado por
φA(t) = (t− λ1)n1(t− λ2)
n2 · · · (t− λm)nm , (2.28)
siendo de nuevo ni el ındice del autovalor λi de A. Es tambien facil probar que si P esun polinomio que anula a A entonces P es divisible por φA.
Sea ahora f : R → R una funcion analıtica real definida por la serie de potencias
f(t) =∞∑
k=0
aktk , |t| < R ,
donde R > 0 es el radio de convergencia de la serie (R = ∞ en el caso de la exponencial).Igual que se hizo al principio de este capıtulo con la funcion exponencial, se demuestraque la serie matricial
f(X) =
∞∑
k=0
akXk , X ∈Mn(R) ,
es convergente si ‖X‖ < R. Para calcular f(A) para una matriz concreta A ∈ Mn(R)con ‖A‖ < R, observese que la igualdad (2.27) permite expresar cualquier potencia dela matriz A de exponente mayor o igual al grado
d(A) = n1 + · · · + nm
del polinomio mınimo de A en terminos de potencias con exponentes menores que d(A).Esto demuestra que existe un polinomio P (dependiente de f y de A) de grado menoro igual que d(A) − 1 tal que
f(A) = P (A) . (2.29)
Tal polinomio es unico, ya que si f(A) = Q(A) con degQ ≤ d(A) − 1 entonces P − Qes un polinomio de grado menor o igual a d(A) − 1 que anula a la matriz A, y portanto deberıa ser divisible por el polinomio de grado d(A) φA. Esto solo es posible siP − Q = 0. Al polinomio P de grado ≤ d(A) − 1 definido por (2.29) se le denominael polinomio interpolador de Lagrange de la matriz A para la funcion f . Para elcalculo de P se suele utilizar en la practica el siguiente resultado:

CAPITULO 2. ECUACIONES Y SISTEMAS LINEALES 42
Proposicion 2.9. El polinomio interpolador P de la matriz A para la funcion analıticaf esta unıvocamente determinado por las d(A) ecuaciones lineales en los coeficientesde P
P (k)(λi) = f (k)(λi) , 0 ≤ k ≤ ni − 1 , i = 1, . . . ,m , (2.30)
siendo ni el ındice del autovalor λi de A (es decir, la dimension del mayor bloqueelemental de Jordan correspondiente al autovalor λi).
Aunque no intentaremos dar una demostracion rigurosa de este resultado, es facildar una justificacion heurıstica del mismo observando que f(A) = P (A) si y solo sif(A) v = P (A) v para todo v perteneciente a la base de Jordan de A. Esta ultimacondicion es equivalente a las ecuaciones (2.30), ya que si vk es un vector de la basecanonica de Jordan de A correspondiente al autovalor λi entonces
(A− λ)jvk = vk+j , 0 ≤ j ≤ s− 1 ; (A− λ)svk = 0
para algun numero natural s ≤ ni. Escribiendo
f(t) − P (t) =∞∑
j=0
bj(t− λi)j
(la serie es convergente para |t| suficientemente pequeno) se tendra
[f(A) − P (A)
]vk =
∞∑
j=0
bj(A− λi)jvk =
s−1∑
j=0
bj vk+j ,
que es cero si y solo si
bj =1
j!(f − P )(j)(λi) = 0 , 0 ≤ j ≤ s− 1 .
Ejemplo 2.10. Calculemos por el metodo anterior exA, siendo A ∈M3(R) la matriz
A =
−3 9 −7−4 9 −6−4 8 −5
.
El polinomio caracterıstico de A es
pA(t) =
∣∣∣∣∣∣
−3 − t 9 −7−4 9 − t −6−4 8 −5 − t
∣∣∣∣∣∣
= −(t− 1)2(t+ 1) .
Los autovalores son por tanto λ1 = −1 y λ2 = 1 (doble), y la forma canonica de Jordande A es
J =
−1 0 00 1 00 ε 1
.
En esta formula ε = 0 si n2 = 1 (es decir, hay dos bloques elementales de Jordande dimension 1 correspondientes al autovalor λ2 = 1) o ε = 1 si n2 = 2 (hay ununico bloque elemental de dimension 2 correspondiente a dicho autovalor). Notese queel numero total de bloques elementales de Jordan de una matriz cualquiera A ∈Mn(R)

CAPITULO 2. ECUACIONES Y SISTEMAS LINEALES 43
correspondientes a un autovalor λ es igual a la dimension de ker(A−λ), que a su vez esigual a n− rank(A− λ). Por tanto,
ε = 0 ⇐⇒ dim ker(A− 1) = 2 ⇐⇒ rank(A− 1) = 1
ε = 1 ⇐⇒ dim ker(A− 1) = 1 ⇐⇒ rank(A− 1) = 2 .
Como
A− 1 =
−4 9 −7−4 8 −6−4 8 −6
∼(−4 9 −7−4 8 −6
)
∼(−4 9 −7
0 −1 1
)
tiene rango 2, concluımos que n2 = 2, y
J =
−1 0 00 1 00 1 1
.
El ındice n1 es claramente igual a 1, por ser λ1 autovalor simple. El polinomio mınimode la matriz A es por tanto
φA(t) = (t+ 1)(t− 1)2 ,
siendo su grado d(A) = 3. Por lo visto anteriormente, llamando f(t) = ex t (donde x setrata como un parametro y t es la variable independiente) se tiene
exA = P (A) ,
siendo P (t) = α+ β t+ γ t2 un polinomio de grado menor o igual que 2. Las ecuacionesque determinan este polinomio son:
f(−1) = P (−1)
f(1) = P (1)
f ′(1) = P ′(1) .
Sustituyendo en estas ecuaciones f(t) = ex t y la expresion para P se obtiene
e−x = α− β + γ
ex = α+ β + γ
x ex = β + 2γ .
La solucion de este sistema es
α =1
2(senhx+ 2cosh x− x ex) , β = senhx , γ =
1
2(x ex − senhx) .
Por tanto
exA =1
2(senhx+ 2cosh x− x ex)1 + senhxA+
1
2(x ex − senhx)A2 =
=
2e−x − ex −5e−x + (5 − x)ex 4e−x + (x− 4)ex
2e−x − 2ex −5e−x + 2(3 − x)ex 4e−x + 2(x− 2)ex
2e−x − 2ex −5e−x + (5 − 2x)ex 4e−x + (2x− 3)ex
.

CAPITULO 2. ECUACIONES Y SISTEMAS LINEALES 44
Un sistema fundamental de soluciones del sistema y′ = Ay es el dado por las columnasde esta matriz, es decir
y1 = e−x (2, 2, 2) + ex (−1,−2,−2)
y2 = e−x (−5,−5,−5) + ex (5, 6, 5) + x ex (−1,−2,−2)
y3 = e−x (4, 4, 4) + ex (−4,−4,−3) + x ex (1, 2, 2) .
La solucion general del sistema es una combinacion lineal arbitraria c1y1+c2y
2+c3y3 de
estas soluciones fundamentales. Notese que, de acuerdo con el Teorema 2.8, las solucionesdel sistema y′ = Ay son combinaciones lineales con coeficientes en R3 de las funciones
e−x , ex , x ex .
Por ejemplo, la solucion del problema de valor inicial
y′ = Ay , y(0) = (0, 1, 1)
es
y(x) = exA
011
=
−e−x + ex
−e−x + 2ex
−e−x + 2ex
= e−x (−1,−1,−1) + ex (1, 2, 2) .
Ejercicio. Hallar la solucion del problema
x′ = −x− y
y′ = 2x− y
x(0) = 1 , y(0) = 2 .
Solucion. En este caso las variables dependientes son (x, y), por lo que la variable inde-pendiente sera denotada por t. El sistema de ecuaciones que hay que resolver es linealhomogeneo con coeficientes constantes, ya que se puede escribir en la forma
(x′
y′
)
= A
(xy
)
con
A =
(−1 −1
2 −1
)
.
Los autovalores de la matriz A se hallan facilmente:
pA(λ) =
(−1 − λ −1
2 −1 − λ
)
= (1 + λ)2 + 2 = 0 ⇐⇒ λ = −1 ± i√
2 .
Por tanto en este caso la matriz A es diagonalizable, y
φA(λ) = pA(λ) = (1 + λ)2 + 2 .
La matriz etA es igual al polinomio interpolador de primer grado P (λ) = α + β λ parala funcion f(λ) = et λ, donde los coeficientes α y β se calculan a partir de las ecuaciones
f(−1 ± i√
2) = e−t e±i√
2 t = P (−1 ± i√
2) = α+ β(−1 ± i√
2) .

CAPITULO 2. ECUACIONES Y SISTEMAS LINEALES 45
La solucion de estas ecuaciones es
α = e−t cos(√
2t) +e−t
√2
sen(√
2 t) , β =e−t
√2
sen(√
2 t) .
Por tanto la matriz fundamental del sistema es
etA = e−t
[
cos(√
2t) +1√2
sen(√
2 t)
]
1 +e−t
√2
sen(√
2 t)A
= e−t
(
cos(√
2 t) − 1√2sen(
√2 t)√
2 sen(√
2 t) cos(√
2 t)
)
. (2.31)
Finalmente, la solucion del problema propuesto es
(x(t)y(t)
)
= e−t
(
cos(√
2 t) − 1√2
sen(√
2 t)√2 sen(
√2 t) cos(
√2 t)
)(12
)
= e−t
(cos(
√2 t) −
√2 sen(
√2 t)
2 cos(√
2 t) +√
2 sen(√
2 t)
)
.
2.5. Ecuaciones de orden n
En general, una ecuacion escalar de orden n en forma normal es una expresionde la forma
u(n) = F(x, u, u′, . . . , u(n−1)
), (2.32)
donde x ∈ R, u : R → R y F : R×Rn → R. Una ecuacion de este tipo siempre se puedereescribir como un sistema de n ecuaciones de primer orden mediante la introduccionde la variable
y =(u, u′, . . . , u(n−1)
)∈ Rn .
En efecto, la ecuacion (2.32) es equivalente al sistema
y′ = f(x, y)
conf(x, y) =
(y2, . . . , yn, F (x, y)
). (2.33)
Notese que las condiciones iniciales adecuadas para el sistema (2.33)
y(x0) = y0
se traducen en las condiciones
u(k)(x0) = uk0 , 0 ≤ k ≤ n− 1 , (2.34)
sobre las derivadas de orden ≤ n− 1 de la funcion escalar u en el punto x0. La funcionf es continua, derivable, de clase C1, etc. si y solo si la funcion F lo es. En cuanto a lacondicion de Lipschitz, notese que, al ser
∥∥f(x, y1) − f(x, y2)
∥∥
2=
n∑
i=2
(y1i − y2
i )2 +
[F (x, y1) − F (x, y2)
]2,
≤∥∥y1 − y2
∥∥
2+[F (x, y1) − F (x, y2)
]2.

CAPITULO 2. ECUACIONES Y SISTEMAS LINEALES 46
si la funcion F es lipschitziana respecto al segundo argumento en un conjunto tambienlo sera f , pues de la ecuacion anterior y
∣∣F (x, y1) − F (x, y2)
∣∣ ≤M
∥∥y1 − y2
∥∥
se deduce que∥∥f(x, y1) − f(x, y2)
∥∥ ≤
√
M2 + 1∥∥y1 − y2
∥∥ .
Por tanto, son validos todos los teoremas de existencia y unicidad que dedujimos en elCapıtulo 1 sin mas que sustituir la funcion f por F y los datos iniciales y(x0) = y0 porlas condiciones (2.34) sobre las derivadas de u en x0. Los resultados que aplicaremosmas a menudo son los siguientes:
Teorema 2.11. Si F : U ⊂ R × Rn → R es continua en el abierto U , entonces
para todo (x0, u0, . . . , u(n−1)0 ) ∈ U el problema de valor inicial (2.32)–(2.34) tiene al
menos una solucion u(x) definida en un intervalo de la forma (x0 − α, x0 + α), con
α ≡ α(x0, u0, . . . , u
(n−1)0
)> 0.
Teorema 2.12. Si F : U → R (con U ⊂ R × Rn abierto) es de clase C1(U),
entonces para todo (x0, u0, . . . , u(n−1)0 ) ∈ U el problema de valor inicial (2.32)–
(2.34) tiene una solucion unica en un intervalo de la forma (x0 − α, x0 + α), con
α ≡ α(x0, u0, . . . , u
(n−1)0
)> 0.
Teorema 2.13. Si F : A = I × Rn → R (con I ⊂ R un intervalo) es continuay lipschitziana respecto del segundo argumento en A, entonces para todo x0 ∈ I elproblema de valor inicial (2.32)–(2.34) tiene una solucion unica en el intervalo I.
2.5.1. Ecuaciones lineales
Consideraremos a continuacion el caso en que la funcion F es lineal (o, hablando conmas propiedad, afın) en u y sus derivadas. La ecuacion (2.32) se puede entonces escribircomo sigue:
u(n) + an−1(x)u(n−1) + · · · + a1(x)u
′ + a0(x)u = b(x) , (2.35)
donde las funciones ai : R → R (0 ≤ i ≤ n − 1) y b : R → R se suponen continuas enun intervalo I ⊂ R. La ecuacion (2.35) se dira homogenea si b(x) = 0 para todo x ∈ I,e inhomogenea (o completa) en caso contrario. El sistema de primer orden asociado ala ecuacion (2.35) es tambien lineal, ya que puede escribirse en la forma
y′ = A(x) y + b(x) en (2.36)
con
A(x) =
0 1 0 . . . 00 0 1 . . . 0...
......
. . ....
0 0 0... 1
−a0(x) −a1(x) −a2(x) . . . −an−1(x)
. (2.37)

CAPITULO 2. ECUACIONES Y SISTEMAS LINEALES 47
A la matriz n× n (2.37) se le llama matriz companera de la ecuacion lineal de ordenn (2.35). Notese, en particular, que
trA(x) = −an−1(x) , ∀x ∈ I . (2.38)
Al ser continuos en el intervalo I los coeficientes del sistema lineal (2.36) (por lahipotesis hecha sobre las funciones ai y b), el problema de valor inicial asociado a dichosistema posee una unica solucion en I para todo dato inicial en I × Rn. Por tanto:
Teorema 2.14. Si las funciones ai : I → R (1 ≤ i ≤ n) y b : I → R son continuas enun intervalo I, para todo x0 ∈ I el problema de valor inicial (2.34)–(2.35) posee unaunica solucion en I.
Es evidente que si u1 y u2 denotan dos soluciones de la ecuacion homogenea
u(n) + an−1(x)u(n−1) + · · · + a1(x)u
′ + a0(x)u = 0 , (2.39)
entonces cualquier combinacion lineal λu1 + µu2 (con λ, µ ∈ R) es tambien solucionde dicha ecuacion. El espacio de soluciones de la ecuacion homogenea (2.39) es portanto un subespacio vectorial del espacio Cn(I). Ademas, si {ϕ1, . . . , ϕm} son solucioneslinealmente independientes de (2.39) entonces las m soluciones del sistema lineal deprimer orden asociado a (2.39)
yi =(ϕi, ϕ
′i, . . . , ϕ
(n−1)i
), 1 ≤ i ≤ m,
son obviamente linealmente independientes. Recıprocamente, si las funciones{y1, . . . , ym
}
son linealmente independientes tambien lo son las soluciones {ϕ1, . . . , ϕm}, ya que deri-vando n− 1 veces la igualdad
λ1 ϕ1 + · · · + λm ϕm = 0 (λi ∈ R , 1 ≤ i ≤ m)
se deduce queλ1 y
1 + · · · + λm ym = 0 ,
de donde se sigue que λi = 0 para 1 ≤ i ≤ m por la independencia lineal de{y1, . . . , ym
}.
Utilizando este hecho y las propiedades de los sistemas lineales de primer orden sededucen facilmente los siguientes resultados:
• El espacio S0 de las soluciones u(x) de la ecuacion lineal homogenea (2.39) es unsubespacio vectorial de dimension n del espacio Cn(I).
• El espacio S de las soluciones u(x) de la ecuacion lineal completa (2.35) es un subes-pacio afın paralelo al subespacio vectorial S0. En otras palabras, las soluciones de (2.35)son de la forma
u(x) = u0(x) + up(x) ,
donde up es una solucion particular arbitraria (pero fija) de (2.35), y u0 ∈ S0 es cualquiersolucion del sistema homogeneo asociado.
Ejemplo 2.15. Consideremos la ecuacion de segundo orden
u′′ + ω2 u = 0 , (2.40)

CAPITULO 2. ECUACIONES Y SISTEMAS LINEALES 48
con ω > 0. El sistema de primer orden asociado es
y′ =
(0 1
−ω2 0
)
y ≡ Ay
siendo y = (u, u′). Los autovalores de la matriz A son las soluciones de la ecuacion
∣∣∣∣
−λ 1−ω2 −λ
∣∣∣∣= λ2 + ω2 = 0 ⇐⇒ λ = ±iω .
Por lo visto anteriormente, dos soluciones reales linealmente independientes de la ecua-cion estan dadas por
y1 = Re(eiωxv) , y2 = Im(eiωxv) ,
siendo v un autovector correspondiente al autovalor iω. Tomando v = (1, iω) se obtiene
y1 =(cos(ωx),−ω sen(ωx)
), y2 =
(sen(ωx), ω cos(ωx)
).
Por tanto un sistema fundamental de soluciones de la ecuacion (2.40) es el formada porlas funciones
cos(ωx) , sen(ωx) .
Si ϕ1, . . . , ϕn son n soluciones de la ecuacion homogenea de orden n (2.39), el wrons-
kiano W [ϕ1, . . . , ϕn](x) de dichas soluciones es por definicion el wronskiano de las so-luciones correspondientes del sistema lineal de primer orden asociado a (2.39), es decir
W [ϕ1, . . . , ϕn](x) =
∣∣∣∣∣∣∣∣
ϕ1(x) . . . ϕn(x)ϕ′
1(x) . . . ϕ′n(x)
. . . . . . . . . . . . . . . . . . . . . . . . . .
ϕ(n−1)1 (x) . . . ϕ
(n−1)n (x)
∣∣∣∣∣∣∣∣
. (2.41)
Muchas veces escribiremos abreviadamente W (x) en lugar de W [ϕ1, . . . , ϕn](x). Diremosque {ϕ1, . . . , ϕn} forman un sistema fundamental de soluciones de (2.39) si sonlinealmente independientes, y por lo tanto forman una base del espacio de soluciones dedicha ecuacion. Si {ϕ1, . . . , ϕn} forman un sistema fundamental de soluciones de (2.39)entonces cualquier solucion u(x) de dicha ecuacion puede expresarse en la forma
u(x) =
n∑
i=1
ci ϕi(x)
para ciertas constantes reales ci (1 ≤ i ≤ n).Si {ϕ1, . . . , ϕn} son linealmente independientes entonces las n soluciones del sistema
lineal de primer orden asociado a (2.39){y1, . . . , yn
}tambien son linealmente indepen-
dientes, por lo que
W [ϕ1, . . . , ϕn](x) = W [y1, . . . , yn](x) 6= 0 , ∀x ∈ I .
Recıprocamente, siW [ϕ1, . . . , ϕn](x0) 6= 0 para algun x0 ∈ I entoncesW [y1, . . . , yn](x0) 6=0, por lo que las funciones
{y1, . . . , yn
}, y por tanto tambien {ϕ1, . . . , ϕn}, son lineal-
mente independientes. Hemos probado por tanto el siguiente resultado:
{ϕ1, . . . , ϕn} linealmente independientes ⇐⇒ W [ϕ1, . . . , ϕn](x0) 6= 0 para algun x0 ∈ I⇐⇒ W [ϕ1, . . . , ϕn](x) 6= 0 para todo x ∈ I.

CAPITULO 2. ECUACIONES Y SISTEMAS LINEALES 49
De nuevo, notese que estas equivalencias solo son ciertas, en general, si {ϕ1, . . . , ϕn}son soluciones de una ecuacion lineal homogenea de orden n (2.39).
Sean, como antes, {ϕ1, . . . , ϕn} soluciones (no necesariamente independientes) de laecuacion homogenea (2.39). Aplicando la formula de Abel–Liouville y teniendo en cuentala formula (2.38) se obtiene la identidad
W (x) = W (x0) e−∫ xx0an−1(t) dt . (2.42)
En particular, el wronskiano es constante si an−1 es identicamente cero.Veamos ahora como construir la solucion general de la ecuacion inhomogenea de or-
den n (2.35) a partir de un sistema fundamental de soluciones de la ecuacion homogenea{ϕ1, . . . , ϕn}. Para ello, consideremos una matriz fundamental
Φ(x) =
ϕ1(x) . . . ϕn(x)ϕ′
1(x) . . . ϕ′n(x)
. . . . . . . . . . . . . . . . . . . . . . . . . .
ϕ(n−1)1 (x) . . . ϕ
(n−1)n (x)
del sistema de primer orden asociado a la ecuacion homogenea (2.39). La solucion generaldel sistema lineal (2.36) asociado a (2.35) es (por variacion de constantes)
y(x) = Φ(x)c+
∫ x
x0
b(t)Φ(x)Φ(t)−1en dt . (2.43)
La primera componente del miembro derecho es por tanto la solucion general de (2.35).Para escribir esta solucion mas explıcitamente, notese que la primera componente deΦ(x)Φ(t)−1en es igual a
n∑
i=1
Φ1i(x)[Φ(t)−1(t)
]
in=
n∑
i=1
ϕi(x)(−1)i+nMni(t)
W (t)
=1
W (t)
∣∣∣∣∣∣∣∣∣∣
ϕ1(t) . . . ϕn(t)ϕ′
1(t) . . . ϕ′n(t)
. . . . . . . . . . . . . . . . . . . . . . . . .
ϕ(n−2)1 (t) . . . ϕ
(n−2)n (t)
ϕ1(x) . . . ϕn(x)
∣∣∣∣∣∣∣∣∣∣
,
donde Mni(t) denota el menor asociado al elemento de matriz ni de la matriz Φ(t).Sustituyendo esta formula en (2.43) se obtiene finalmente la siguiente expresion para lasolucion general de la ecuacion (2.35):
u(x) =n∑
i=1
ci ϕi(x) +
∫ x
x0
∣∣∣∣∣∣∣∣
ϕ1(t) ... ϕn(t)ϕ′
1(t) ... ϕ′
n(t)
......
...ϕ
(n−2)1 (t) ... ϕ
(n−2)n (t)
ϕ1(x) ... ϕn(x)
∣∣∣∣∣∣∣∣
b(t)
W (t)dt . (2.44)
Por ejemplo, para la ecuacion lineal de segundo orden
u′′ + a1(x)u′ + a0(x)u = b(x) (2.45)

CAPITULO 2. ECUACIONES Y SISTEMAS LINEALES 50
se tiene
u(x) = c1 ϕ1(x) + c2 ϕ2(x) +
∫ x
x0
∣∣∣
ϕ1(t) ϕ2(t)ϕ1(x) ϕ2(x)
∣∣∣b(t)
W (t)dt . (2.46)
En otras palabras, la funcion
up(x) =
∫ x
x0
∣∣∣∣
ϕ1(t) ϕ2(t)ϕ1(x) ϕ2(x)
∣∣∣∣
b(t)
W (t)dt (2.47)
es una solucion particular de la ecuacion inhomogenea (2.45). Notese que esta solucionparticular tiene como condiciones iniciales en x0
up(x0) = u′p(x0) = 0 .
Ejemplo 2.16. Consideremos la ecuacion de segundo orden
u′′ + ω2 u = F (x) , ω > 0 , (2.48)
que describe el movimiento de un oscilador armonico sometido a una fuerza externaF (x) (movimiento forzado). Tomando
ϕ1(x) = cos(ωx) , ϕ2(x) = sen(ωx)
se tiene
W (x) =
∣∣∣∣
cos(ωx) sen(ωx)−ω sen(ωx) ω cos(ωx)
∣∣∣∣= ω .
(Notese que W (x) es constante; esto es consecuencia de la formula de Abel–Liouville(2.42), ya que en este caso an−1 ≡ a1 = 0.) Como
∣∣∣∣
ϕ1(t) ϕ2(t)ϕ1(x) ϕ2(x)
∣∣∣∣=
∣∣∣∣
cos(ωt) sen(ωt)cos(ωx) sen(ωx)
∣∣∣∣= senω(x− t)
la solucion general de (2.48) es
u(x) = c1 cos(ωx) + c2 sen(ωx) +1
ω
∫ x
0senω(x− t)F (t) dt
que tambien se puede escribir
u(x) = c1 cos(ωx) + c2 sen(ωx) +1
ω
∫ x
0sen(ωs)F (x− s) ds .
Supongamos, por ejemplo, que la fuerza externa es de tipo sinusoidal:
F (x) = F0 sen(λx) , λ > 0 .
Entonces∫ x
0sen(ωs)F (x− s) ds = F0
∫ x
0sen(ωs) senλ(x− s) ds
=F0
2
∫ x
0
[cos((ω + λ)s − λx
)− cos
((ω − λ)s+ λx
)]ds
=F0
2(ω + λ)
(sen(ωx) + sen(λx)
)− F0
2
∫ x
0cos((ω − λ)s+ λx
)ds .

CAPITULO 2. ECUACIONES Y SISTEMAS LINEALES 51
Si λ 6= ω (es decir, la frecuencia de la fuerza externa no es igual a la frecuencia naturaldel sistema) entonces
∫ x
0cos((ω − λ)s+ λx
)ds =
1
ω − λ
[sen(ωx) − sen(λx)
].
Por tanto la solucion general de la ecuacion (2.48) es en este caso de la forma
u = C1 cos(ωx) + C2 sen(ωx) +F0
ω2 − λ2sen(λx) ,
con C1, C2 constantes. Todas las soluciones de (2.48), aunque no son periodicas a menosque ω/λ ∈ Q, son en este caso acotadas. Por el contrario, si λ = ω se tiene
∫ x
0cos((ω − λ)s + λx
)ds =
∫ x
0cos(ω x) ds = x cos(ωx) ,
y por tanto en este caso la solucion de (2.48) es
u = C1 cos(ωx) + C2 sen(ωx) − F0
2ωx cos(ωx) .
En particular, en este caso ninguna solucion esta acotada cuando x → ±∞, debido alultimo termino. Este es el conocido fenomeno de la resonancia.
En general, no es posible expresar la solucion general de una ecuacion lineal deorden n en terminos de sus coeficientes y de las primitivas de dichos coeficientes. Sinembargo, en el caso de la ecuacion de segundo orden (2.45) si se conoce una solucion(no identicamente nula) de la ecuacion homogenea se puede hallar la solucion generalde la ecuacion de partida. En efecto, si ϕ(x) es una solucion particular de la ecuacionhomogenea asociada a (2.45), y denotamos por u(x) a una solucion cualquiera de dichaecuacion, entonces la formula de Abel–Liouville proporciona la identidad
ϕ(x)u′ − ϕ′(x)u = k e−∫ xx0a1(t) dt
siendo k = W [ϕ, u](x0). Integrando esta ecuacion diferencial de primer orden para uobtenemos facilmente
u(x) = cϕ(x) + k ϕ(x)
∫ x
x0
1
ϕ2(t)e−∫ tx0a1(s) ds dt .
Esta es la solucion general de la ecuacion homogenea asociada a (2.45). En particular,notese que ϕ(x) y
ψ(x) = ϕ(x)
∫ x
x0
1
ϕ2(t)e−∫ tx0a1(s) ds dt (2.49)
forman un sistema fundamental de soluciones de dicha ecuacion, ya que (por construc-cion) W [ϕ,ψ](x0) = 1 6= 0.
En el caso de una ecuacion homogenea (2.39) de orden n > 2, el conocimiento de unasolucion particular ϕ(x) permite reducir la ecuacion a otra ecuacion lineal homogeneade orden n− 1 mediante el cambio de variable dependiente
z =
(u
ϕ(x)
)′.
En este caso, tambien se puede probar que si se conocen n − 1 soluciones linealmenteindependientes de la ecuacion entonces se puede hallar la solucion general de la misma.

CAPITULO 2. ECUACIONES Y SISTEMAS LINEALES 52
2.6. Ecuaciones lineales con coeficientes constantes
Veremos en esta seccion como hallar la solucion general de la ecuacion lineal (2.35)cuando los coeficientes ai (0 ≤ i ≤ n − 1) son constantes. Para ello, consideremos enprimer lugar la ecuacion homogenea
u(n) + an−1 u(n−1) + · · · + a1 u
′ + a0 u = 0 , (2.50)
donde a0, . . . , an−1 son n constantes reales. La matriz companera de esta ecuacion es lamatriz constante
A =
0 1 0 . . . 00 0 1 . . . 0...
......
. . ....
0 0 0... 1
−a0 −a1 −a2 . . . −an−1
. (2.51)
El polinomio caracterıstico de la matriz A se calcula facilmente desarrollando el deter-minante de A− λ por la ultima fila, obteniendose
pA(λ) = (−1)n (λn + an−1 λn−1 + · · · + a1 λ+ a0) = 0 . (2.52)
Por definicion, al polinomio
p(λ) = λn + an−1 λn−1 + · · · + a1 λ+ a0 (2.53)
se le llama polinomio caracterıstico de la ecuacion (2.50). Los autovalores de la matrizA son por tanto las raıces del polinomio caracterıstico p(λ). Sean λ1, . . . , λm dichosautovalores (distintos dos a dos), y sea ri la multiplicidad algebraica del autovalor λi,es decir
p(λ) = (λ− λ1)r1 · · · (λ− λm)rm , r1 + · · · + rm = n .
Es facil ver que el ındice ni del autovalor λi de la matriz A es igual en este caso a sumultiplicidad algebraica ri. En efecto, notese que la igualdad ni = ri es equivalente aque el bloque de Jordan del autovalor λi conste de un solo bloque de Jordan elemental
Ji =
λi
1 λi
. . .. . .
1 λi
∈Mri(C).
A su vez, esta ultima condicion equivale a que dimker(A − λi) = 1. Pero esto es evi-dente dada la forma de la matriz A, puesto que la ecuacion (A − λi)v = 0 determinacompletamente las componentes v2, . . . , vn de v en terminos de v1. En efecto,
ker(A− λi) = R ·(1, λi, . . . , λ
n−1i
). (2.54)
Por tanto, el sistema lineal y′ = Ay asociado a la ecuacion (2.50) tiene un sistemafundamental de soluciones (complejas, en general) de la forma
eλi xk∑
j=0
xj viri−k+j , 0 ≤ k ≤ ri − 1 , 1 ≤ i ≤ m,

CAPITULO 2. ECUACIONES Y SISTEMAS LINEALES 53
donde los n vectores constantes (en general complejos) vil (1 ≤ l ≤ ri, 1 ≤ i ≤ m) forman
una base de Jordan de la matriz A, siendo ademas viri
un autovector de A de autovalorλi. Tomando la primera componente de cada una de las funciones anteriores obtenemosun sistema fundamental de soluciones de la ecuacion (2.50) de la forma
eλi xk∑
j=0
xj ciri−k+j , 0 ≤ k ≤ ri−1 , 1 ≤ i ≤ m. (2.55)
donde la constante cil es la primera componente del vector vil . Notese que ninguna de
las constantes ciripuede anularse, en virtud de (2.54). Utilizando esta propiedad es facil
demostrar por induccion a partir de (2.55) que las n funciones
xk eλi x , 0 ≤ k ≤ ri−1 , 1 ≤ i ≤ m , (2.56)
forman un sistema de generadores del espacio de soluciones de (2.50). Al ser la dimensionde dicho espacio tambien igual a n, las funciones (2.56) forman un sistema fundamentalde soluciones de la ecuacion homogenea (2.50).
Si λi ∈ R, las ri soluciones de la forma anterior correspondientes a este autovalorson reales. Si λi = ai + i bi con bi 6= 0, podemos sustituir las 2ri soluciones complejasasociadas a los autovalores λi y λi por la parte real y la parte imaginaria de las solucionescorrespondientes al autovalor λi, obteniendose ası las soluciones
xk eai x cos(bix) , xk eai x sen(bix) , 0 ≤ k ≤ ri − 1 . (2.57)
En resumen, hemos probado el siguiente resultado:
La ecuacion (2.50) tiene un sistema fundamental de soluciones reales formado porfunciones de la forma (2.56) si λi es una raız real de multiplicidad ri del polinomiocaracterıstico (2.53), o de la forma (2.57) si ai + i bi (con bi > 0) es una raız complejadel polinomio caracterıstico, tambien de multiplicidad ri.
Este resultado se puede probar directamente observando que la ecuacion (2.50) se puedeescribir en la forma
p(D)u = 0 ,
siendo D el operador derivada:
D =d
dx.
De la igualdad(D − λ)
(f(x) eλ x
)= f ′(x) eλ x
se sigue que
(D − λ)k(f(x) eλ x
)= f (k)(x) eλ x .
Si λi es una raız de p de multiplicidad ri entonces
p(λ) = q(λ) (λ− λi)ri ,
siendo q(λ) un polinomio de grado n−ri con q(λi) 6= 0. Entonces p(D) = q(D)(D−λi)ri ,
y por tanto
p(D)(xk eλi x) = q(D)
[
eλi x dri(xk)
dxri
]
= 0 , 0 ≤ k ≤ ri − 1 ,

CAPITULO 2. ECUACIONES Y SISTEMAS LINEALES 54
lo que prueba que las funciones (2.56) son soluciones de la ecuacion (2.50). La indepen-dencia lineal de las soluciones (2.56)–(2.57) tambien se puede probar directamente deforma sencilla.
Ejemplo 2.17. Hallemos la solucion general de la ecuacion de tercer orden con coefi-cientes constantes
u(IV ) + u′′′ + u′ + u = 0 . (2.58)
El polinomio caracterıstico asociado a esta ecuacion es
p(λ) = λ4 + λ3 + λ+ 1 = (λ+ 1)2(λ2 − λ+ 1) .
Los autovalores son por tanto λ1 = −1 (de multiplicidad r1 = 2) y las raıces de laecuacion
λ2 − λ+ 1 = 0 ,
es decir
λ2,3 =1
2
(1 ± i
√3),
de multiplicidad r2 = r3 = 1. La solucion general de la ecuacion (2.58) es por tanto
u(x) = e−x (c1 + c2 x) + ex2
[
c3 cos(√
32 x)
+ c4 sen(√
32 x)]
, (2.59)
con c1, . . . , c4 constantes arbitrarias.
2.6.1. Solucion de la ecuacion inhomogenea
Consideremos a continuacion la ecuacion inhomogenea con coeficientes constantes
u(n) + an−1 u(n−1) + · · · + a1 u
′ + a0 u = b(x) . (2.60)
Por supuesto, una vez hallada la solucion general de la ecuacion homogenea (2.50) por elprocedimiento que acabamos de explicar, la solucion general de la ecuacion homogenea(2.60) se puede calcular cualquiera que sea el termino inhomogeneo b(x) utilizandola formula (2.44). Sin embargo, para ciertas formas sencillas, pero que se presentanfrecuentemente en la practica, del miembro derecho de la ecuacion (2.60), el metodo delos coeficientes indeterminados que describiremos a continuacion permite calcular unasolucion particular de (2.60) de manera mas sencilla. La solucion general de (2.60) sehalla entonces sumando a esta solucion particular la solucion general de la ecuacionhomogenea.
Supongamos, en primer lugar, que
b(x) = q(x) eµ x , (2.61)
donde q(x) es un polinomio. Si r es la multiplicidad de µ como raız del polinomiocaracterıstico (2.53) de la ecuacion homogenea (2.50) (r = 0 si p(µ) 6= 0), entonces
p(λ) = p0(λ− µ)r + p1(λ− µ)r+1 + · · · + (λ− µ)n ,
con pi ∈ R (o C, si µ es complejo) para i = 0 . . . , n− r − 1 y p0 6= 0. Por tanto
p(D)(q(x) eµ x
)=[
p0 q(r)(x) + p1 q
(r+1)(x) + · · · + q(n)(x)]
eµ x .

CAPITULO 2. ECUACIONES Y SISTEMAS LINEALES 55
Luego en este caso la ecuacion (2.60)–(2.61) tiene una solucion particular de la forma
up(x) = xr Q(x) eµ x , (2.62)
conQ(x) = Q0 +Q1 x+ · · · +Qd x
d , d = gr q (2.63)
un polinomio de grado igual al grado de q cuyos coeficientes se calculan igualando loscoeficientes de las potencias de x en la ecuacion
p0 (xr Q)(r) + p1 (xr Q)(r+1) + · · · + (xr Q)(n) = q .
En efecto, la ecuacion anterior proporciona un sistema lineal de d ecuaciones en losd coeficientes de Q, que puede demostrarse siempre es compatible. En la practica noes preciso recordar la ecuacion anterior, ya que el polinomio Q se calcula simplementesustituyendo (2.62) en la ecuacion (2.60).
Ejemplo 2.18. Hallemos una solucion particular de la ecuacion
u(IV ) + u′′′ + u′ + u = x e−x . (2.64)
Aquı µ = −1 es un autovalor del polinomio caracterıstico de la ecuacion homogeneade multiplicidad 2, y q(x) = x es un polinomio de grado 1. Buscamos por tanto unasolucion particular de la forma
up(x) = x2(a+ b x) e−x .
Para calcular p(D)up es conveniente desarrollar p(D) en potencias de D + 1, ya que(D + 1)k
(f(x) e−x
)= f (k)(x) e−x. Utilizando la formula de Taylor se obtiene
p(λ) = (λ+ 1)2[3 − 3(λ+ 1) + (λ+ 1)2
].
Por tanto
p(D)up =[3(2a + 6bx) − 3 · 6b
]e−x = x e−x ⇐⇒ 3(2a+ 6bx) − 18b = x ,
lo que conduce a las ecuaciones
6a− 18b = 0 , 18b = 1 .
La solucion particular buscada es por tanto
up(x) =1
18(x3 + 3x2) e−x . (2.65)
La solucion general de la ecuacion (2.64) es la suma de esta solucion particular y lasolucion (2.59) de la ecuacion homogenea.
Ejemplo 2.19. Hallemos ahora una solucion particular de la ecuacion
u(IV ) + u′′′ + u′ + u = x+ cos2 x . (2.66)
Aparentemente, no se puede aplicar el metodo de los coeficientes indeterminados a estaecuacion. Sin embargo, podemos escribir el miembro derecho de la misma como
x+1
2
(1 + cos(2x)
).

CAPITULO 2. ECUACIONES Y SISTEMAS LINEALES 56
Por linealidad, una solucion particular de (2.66) es la suma de una solucion particularde cada una de las ecuaciones
u(IV ) + u′′′ + u′ + u = x+1
2. (2.67)
y
u(IV ) + u′′′ + u′ + u =1
2cos(2x) . (2.68)
El miembro derecho de la ecuacion (2.67) es de la forma (2.61), con µ = 0, r = 0 (yaque 0 no es raız del polinomio caracterıstico de (2.58)) y q(x) = x+ 1
2 . Debemos buscarpor tanto una solucion particular de la forma
u1(x) = a+ b x ,
lo que conduce a la ecuacion
b+ (a+ bx) = x+1
2⇐⇒ a = −1
2, b = 1 .
Por tanto, la primera solucion particular es
u1(x) = x− 1
2.
Para encontrar una solucion particular de (2.68), observese que si u(x) es una solucionde
u(IV ) + u′′′ + u′ + u =1
2e2ix . (2.69)
entonces u2 = Re u es una solucion de (2.68). El miembro derecho de (2.69) es de nuevode la forma (2.61), con µ = 2 i, r = 0 y q(x) = 1
2 . Esta ecuacion posee por tanto unasolucion particular de la forma
u(x) = c e2ix .
Sustituyendo en la ecuacion se obtiene
(16 − 8i + 2i + 1)c =1
2,
de donde
c =1
2(17 − 6i)=
17 + 6i
650.
Por tanto
u(x) =17 + 6i
650e2ix
y
u2(x) = Re u(x) =1
650
[17 cos(2x) − 6 sen(2x)
].
Una solucion particular de la ecuacion (2.66)es por tanto
up(x) = u1(x) + u2(x) = x− 1
2+
1
650
[17 cos(2x) − 6 sen(2x)
].
Esta claro, en definitiva, que aplicando el metodo de los coeficientes indeterminadosse puede hallar de manera sencilla una solucion particular de (2.60) si b(x) es de la forma
b(x) =N∑
i=1
[qi(x) eµix + ri(x) eaix cos(bix) + si(x) ecix sen(dix)
],
siendo µi, ai, bi, ci, di constantes reales y qi, ri, si polinomios.

CAPITULO 2. ECUACIONES Y SISTEMAS LINEALES 57
2.7. Estabilidad de sistemas y ecuaciones lineales
Consideraremos en esta seccion el problema de valor inicial para un sistema deecuaciones diferenciales de primer orden (no necesariamente lineal)
y′ = f(x, y)
y(x0) = η(2.70)
Supongamos que para η = y0 el problema (2.70) tiene una solucion unica Y (x; y0) en lasemirecta [x0,∞). Diremos que dicha solucion es estable si:
i) Existe un R > 0 tal que si ‖η − y0‖ < R el problema (2.70) tiene una solucionunica Y (x; η) en el intervalo [x0,∞)
ii) Para todo ε > 0 existe 0 < δ < R tal que
‖η − y0‖ < δ =⇒ ‖Y (x; η) − Y (x; y0)‖ < ε , ∀x ≥ x0 . (2.71)
ε
ε
y0 + δ
y0 − δ
y0
Y (x; y0)
x0 x
Figura 2.1: Estabilidad de la solucion Y (x; y0).
La solucion Y (x; y0) se dice asintoticamente estable si es estable, y ademas existe0 < r < R tal que
‖η − y0‖ < r =⇒ lımx→∞
‖Y (x; η) − Y (x; y0)‖ = 0 . (2.72)
Nota. En general, la condicion (2.72) por si sola no basta para garantizar la estabilidadasintotica de la solucion Y (x; y0), ya que (2.72) no implica en general (2.71) (exceptosi f es una funcion afın de y, o si y ∈ R y f es continua y lipschitziana respecto de lasegunda variable).
Aunque la definicion de estabilidad es valida para un sistema de ecuaciones diferen-ciales de primer orden arbitrario, las propiedades de estabilidad de las soluciones de lossistemas lineales son particularmente sencillas, y por ello merecen un estudio especial.
La propiedad fundamental de los sistemas lineales es que todas sus soluciones tienenel mismo tipo de estabilidad:

CAPITULO 2. ECUACIONES Y SISTEMAS LINEALES 58
ε
ε
y0 + δ
y0 − δ
y0
Y (x; y0)
x0 x
Figura 2.2: Estabilidad asintotica (δ ≤ r).
Proposicion 2.20. Una solucion cualquiera del sistema lineal
y′ = A(x) y + b(x) (2.73)
(con A : I → Mn(R), b : I → Rn continuas en el intervalo I = [x0,∞)) es estable(resp. asintoticamente estable) si y solo si la solucion trivial y(x) = 0 del sistemahomogeneo asociado es estable (resp. asintoticamente estable).
Demostracion. En primer lugar, la continuidad de A y b en el intervalo [x0,∞) garantizala existencia y unicidad de soluciones del problema de valor inicial asociado al sistema(2.73) para todo dato inicial y(x0) = η. Sea Y (x; η) la solucion de (2.73) con dato inicialY (x0; η) = η, y denotemos por Y0(x; η) la solucion del problema de valor incial parael sistema homogeneo correspondiente a (2.73) con la condicion inicial Y0(x0; η) = η.Entonces Y (x; η) − Y (x; y0) es una solucion del sistema homogeneo asociado a (2.73)con dato inicial
Y (x0; η) − Y (x0; y0) = η − y0 .
Por unicidad,
Y (x; η) − Y (x; y0) = Y0(x; η − y0) ,
de donde se sigue el enunciado. Q.E.D.
Debido a este resultado, diremos que un sistema lineal es estable (resp. asintoti-camente estable) si todas sus soluciones son estables (resp. asintoticamente estables)o, equivalentemente, si la solucion trivial del sistema homogeneo asociado es estable(resp. asintoticamente estable). Notese, en particular, que un sistema lineal tiene elmismo tipo de estabilidad que el sistema homogeneo asociado.
Proposicion 2.21. El sistema lineal homogeneo
y′ = A(x) y (2.74)
es estable si y solo si todas sus soluciones son acotadas en [x0,∞).
Demostracion.=⇒) Si el sistema es estable, la solucion trivial es estable, y por tanto existe δ > 0
tal que (por ejemplo)
‖Y0(x; η)‖ < 1 , ∀x ≥ x0 , ‖η‖ < δ .

CAPITULO 2. ECUACIONES Y SISTEMAS LINEALES 59
Entonces para todo x ≥ x0 se tiene
‖Y0(x; y0)‖ =
∥∥∥∥Y0
(
x;δ y0
1 + ‖y0‖1 + ‖y0‖
δ
)∥∥∥∥
=1 + ‖y0‖
δ
∥∥∥∥Y0
(
x;δ y0
1 + ‖y0‖)∥∥∥∥<
1 + ‖y0‖δ
.
⇐=) Si todas las soluciones son acotadas para todo x ≥ x0 se tiene
‖Y0(x; ei)‖ < Mi , 1 ≤ i ≤ n .
Pero entonces se tiene
‖Y0(x; η)‖ =
∥∥∥∥∥
n∑
i=1
ηi Y0(x; ei)
∥∥∥∥∥≤
n∑
i=1
|ηi| Mi ≤( n∑
i=1
Mi
)
‖η‖ .
Esto implica facilmente que la solucion trivial del sistema, y por tanto dicho sistema, esestable. Q.E.D.
Nota. Si el sistema homogeneo (2.74) es estable y sus coeficientes son continuos en R,de modo que las soluciones de dicho sistema estan definidas en todo R, dichas solucionesno tienen por que estar acotadas en el intervalo (−∞, x0].
Ejercicio. Probar que un sistema lineal con coeficientes continuos es asintoticamenteestable si y solo si toda solucion y(x) del sistema homogeneo asociado tiende a 0 cuandox→ ∞.
La Proposicion 2.21 no es cierta para sistemas mas generales, ni siquiera para sis-temas lineales inhomogeneos (2.73). Las propiedades de estabilidad del sistema linealinhomogeneo (2.73) se pueden resumir en los siguientes enunciados:
i) La estabilidad de (2.73) no implica la acotacion de sus soluciones. Sin embargo, si(2.73) es estable entonces o bien todas sus soluciones son acotadas, o bien todasellas son no acotadas.
ii) Si todas las soluciones de (2.73) son acotadas, entonces el sistema es estable.
Estos resultados se prueban facilmente teniendo en cuenta que cualquier solucion de(2.73) es la suma de una solucion particular mas una solucion arbitraria del sistemahomogeneo asociado (2.74).
Estudiemos a continuacion la estabilidad de un sistema lineal con matriz de coefi-cientes constante
y′ = Ay + b(x) . (2.75)
La estabilidad de este sistema depende, por la Proposicion 2.20, de la estabilidad de lasolucion trivial del sistema homogeneo con coeficientes constantes
y′ = Ay . (2.76)
Por los resultados de la seccion 2.6 (cf. la ecuacion (2.57)), la solucion general de (2.76)se puede escribir
y(x) =
m∑
i=1
ni−1∑
k=0
vik xk eλix , (2.77)
donde λ1 , . . . , λm ∈ C son los autovalores de la matriz A, ni es el ındice del autovalorλi, y vik ∈ Cn. Los vectores vik con 0 ≤ k ≤ ni − 1 son reales si el autovalor λi es real, y

CAPITULO 2. ECUACIONES Y SISTEMAS LINEALES 60
vik = vjk para k = 0 , . . . , ni − 1 = nj − 1 si λi = λj es un par de autovalores complejosconjugados. Aplicando la desigualdad triangular se obtiene
‖y(x)‖ ≤m∑
i=1
ni−1∑
k=0
‖vik‖ |x|k e(Re λi)x . (2.78)
En esta formula ‖ · ‖ denota la norma en Cn, definida por
‖z‖ =( n∑
i=1
|zi|2)1/2
,
donde z = (z1, . . . , zn) ∈ Cn y |zi| es el modulo de zi. De (2.78) se sigue que si
Reλi < 0 , ∀i = 1, . . . ,m ,
entonces todas las soluciones de (2.76) son acotadas para x ≥ x0, y ademas se tiene
lımx→∞
‖y(x)‖ = 0 .
Esto implica que la solucion trivial de (2.76), y por tanto el sistema (2.75), es asintoti-camente estable.
Supongamos a continuacion que
Reλi > 0 , para algun i = 1, . . . ,m .
Entonces (2.76) tiene una solucion de la forma
y(x) = v eλix , si λi ∈ R ,
oy(x) = e(Re λi)x
(v cos(Imλi x) + w sen(Imλi x)
), si Imλi 6= 0
(con v,w ∈ Rn, v2 +w2 6= 0). Como y(x) no esta acotada en [x0,∞) (al ser Reλi > 0),el sistema homogeneo (2.76), y por tanto tambien (2.75), es inestable.
Supongamos ahora que
Reλi = 0 para i = 1, . . . , j y Reλi < 0 para i = j + 1, . . . ,m .
Sini = 1 , ∀i = 1, . . . , j ,
entonces (2.78) se reduce a
‖y(x)‖ ≤j∑
i=1
‖vi0‖ +m∑
i=j+1
ni−1∑
k=0
‖vik‖ |x|k e(Re λi)x . (2.79)
Esto muestra que toda solucion de (2.76) esta acotada, y por tanto el sistema (2.75) esestable. Sin embargo, (2.75) no es asintoticamente estable, ya que si i = 1, . . . , j poseesoluciones de la forma
v cos(Imλi x) +w sen(Imλi x) (v,w ∈ Rn, v2 + w2 6= 0)

CAPITULO 2. ECUACIONES Y SISTEMAS LINEALES 61
(esta solucion se reduce a una constante si Imλi = 0), que no tienden a 0 si x → ∞.Por el contrario, si
ni > 1 para algun i = 1, . . . , j
entonces el sistema (2.75) es inestable. En efecto, en este caso el sistema homogeneo(2.76) posee alguna solucion no acotada de la forma
ni−1∑
k=0
xk
k!
[uik cos(Imλi x) +wik sen(Imλi x)
](uik, wik ∈ Rn, u2
ik + w2ik 6= 0)
(i = 1, . . . , j), en virtud de la ecuacion (2.25). (Notese que u2ik+w2
ik 6= 0 porque wik+iuik
pertenece a la base de Jordan de A.)Esto prueba por tanto el siguiente resultado:
i) Si todos los autovalores de la matriz A tienen parte real negativa, el sistema(2.75) es asintoticamente estable
ii) Si algun autovalor de A tiene parte real positiva, el sistema (2.75) es inestable
iii) Si todos los autovalores de A tienen parte real no positiva, el sistema (2.75) esestable (pero no asintoticamente estable) si los ındices de todos los autovalorescon parte real nula son iguales a uno, e inestable en caso contrario.
Nota. Observese que la condicion ni = 1 es equivalente a que la multiplicidad algebraicadel autovalor λi sea igual a su multiplicidad geometrica (es decir, a que Ji = λi1).
Se define la estabilidad de las soluciones de una ecuacion escalar de orden n enterminos de las correspondientes soluciones del sistema de primer orden asociado. Enparticular, para la ecuacion lineal
u(n) + an−1(x)u(n−1) + · · · + a1(x)u
′ + a0(x)u = b(x)
(con ai, b : I → R continuas en I = [x0,∞)) una solucion es estable (resp. asintoticamen-te estable) si y solo si lo es la solucion trivial del sistema homogeneo correspondiente.Podemos hablar por tanto de ecuaciones lineales estables, asintoticamente estables, oinestables. Si todos los coeficientes ai (0 ≤ i ≤ n − 1) son constantes, el resultado queacabamos de probar para un sistema lineal de primer orden con matriz de coeficientesconstante implica que en este caso la ecuacion es asintoticamente estable si todas lasraıces del polinomio caracterıstico tienen parte real negativa, estable (pero no asintoti-camente estable) si todas las raıces tienen parte real no positiva, y los que tienen partereal cero son simples, e inestable en cualquier otro caso (en particular, si alguna raıztiene parte real positiva). En efecto, hemos visto en la Seccion 2.6 que el ındice de losautovalores del sistema lineal de primer orden asociado a una ecuacion lineal homogeneacon coeficientes constantes de orden n es igual a la multiplicidad de dichos autovalorescomo raıces del polinomio mınimo.
Ejemplo 2.22. Estudiemos la estabilidad del sistema
y′1 = −y2
y′2 = y1
y′3 = −y4
y′4 = 2y1 + y3 .
(2.80)

CAPITULO 2. ECUACIONES Y SISTEMAS LINEALES 62
La matriz de coeficientes es en este caso
A =
0 −1 0 01 0 0 00 0 0 −12 0 1 0
.
El polinomio caracterıstico es
pA(λ) =
∣∣∣∣∣∣∣∣
−λ −1 0 01 −λ 0 00 0 −λ −12 0 1 −λ
∣∣∣∣∣∣∣∣
=
∣∣∣∣
−λ −11 −λ
∣∣∣∣
∣∣∣∣
−λ −11 −λ
∣∣∣∣= (λ2 + 1)2 ,
por tanto los autovalores son
λ1 = i , λ2 = −i ,
ambos de multiplicidad algebraica 2. El sistema no puede ser asintoticamente esta-ble (ningun autovalor tiene parte real negativa), y sera estable solo si la multiplicidadgeometrica de cada uno de los autovalores es 2, es decir si
dim ker(A± i) = 2 ,
o, equivalentemente, si y solo si
rank(A± i) = 4 − 2 = 2 ,
Como (por ejemplo)
A− i =
−i −1 0 01 −i 0 00 0 −i −12 0 1 −i
∼
−i −1 0 00 0 0 00 0 −i −10 2i 1 −i
∼
−i −1 0 00 2i 1 −i0 0 −i −1
,
la matriz A− i tiene rango 3, y por tanto el sistema (2.80) es inestable.
2.7.1. Criterio de Routh–Hurwitz
El criterio de estabilidad de un sistema o ecuacion lineal con coeficientes constantesque acabamos de deducir requiere conocer las raıces del polinomio caracterıstico del sis-tema o ecuacion considerado. Aunque el calculo aproximado de estas raıces no presentaningun problema, el calculo exacto es difıcil para polinomios de grado 3 y 4, y en generalimposible para polinomios de grado superior. Serıa por tanto deseable disponer de alguncriterio de estabilidad formulado exclusivamente en terminos de los coeficientes del sis-tema o ecuacion, particularmente cuando dichos coeficientes dependen de parametros.El caso mas interesante en la practica, y por tanto el mas estudiado, es el de estabi-lidad asintotica. Diremos por tanto que un polinomio es estable si todas sus raıcestienen parte real negativa. En lo que queda de seccion solo consideraremos polinomiosmonicos, lo que no supone ninguna perdida de generalidad y simplifica los criterios queformularemos a continuacion.

CAPITULO 2. ECUACIONES Y SISTEMAS LINEALES 63
Es facil deducir una condicion necesaria para que un polinomio sea estable. En efecto,si las raıces (no necesariamente distintas) son −µ1, . . . ,−µr y −α1 ± iβ1, . . . ,−αs ± iβs
con µi > 0, αi > 0, βi ∈ R y r + s = n, entonces el polinomio se puede escribir
p(t) = (t+ µ1) · · · (t+ µr)[(t+ α1)2 + β2
1 ] · · · [(t+ αs)2 + β2
s ]
= (t+ µ1) · · · (t+ µr)(t2 + 2α1t+ α2
1 + β21) · · · (t2 + 2αst+ α2
s + β2s ) . (2.81)
Es evidente de esta formula que todos los coeficientes de p son estrictamente positivos.Por tanto, una condicion necesaria para que el polinomio
p(t) = tn + an−1tn−1 + · · · + a1t+ a0 (2.82)
sea estable es queai > 0 , ∀i = 0, 1, . . . , n − 1 .
Esta condicion no es, en general, suficiente, excepto para polinomios de grado 2. El cri-terio que formularemos a continuacion proporciona una condicion necesaria y suficientepara la estabilidad del polinomio (2.82):
Criterio de Routh–Hurwitz. Una condicion necesaria y suficiente para que el poli-nomio (2.82) sea estable es que todos los menores principales del siguiente determinantesean positivos:
∣∣∣∣∣∣∣∣∣∣∣∣
an−1 1 0 0 . . . 0 0an−3 an−2 an−1 1 . . . 0 0an−5 an−4 an−3 an−2 . . . 0 0. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
0 0 0 0 . . . a1 a2
0 0 0 0 . . . 0 a0
∣∣∣∣∣∣∣∣∣∣∣∣
. (2.83)
Ademas, si alguno de dichos menores es negativo el polinomio (2.82) tiene alguna raızcon parte real positiva.
El criterio de Routh–Hurwitz proporciona condiciones necesarias y suficientes deestabilidad muy sencillas para valores pequenos de n. Por ejemplo, para n = 2 dichascondiciones se reducen a
a1 > 0 ,
∣∣∣∣
a1 10 a0
∣∣∣∣= a0 a1 > 0 ,
es decira0 > 0 , a1 > 0 .
Para n = 3 el determinante (2.83) es
∣∣∣∣∣∣
a2 1 0a0 a1 a2
0 0 a0
∣∣∣∣∣∣
,
y por tanto el criterio de Routh–Hurwitz proporciona las condiciones
a2 > 0 , a1 a2 − a0 > 0 , a0(a1 a2 − a0) > 0 ,
o biena0 > 0 , a2 > 0 , a1 a2 − a0 > 0 . (2.84)

CAPITULO 2. ECUACIONES Y SISTEMAS LINEALES 64
Es claro que estas condiciones implican que a1 > 0. Finalmente, para n = 4 hay queconsiderar el determinante ∣
∣∣∣∣∣∣∣
a3 1 0 0a1 a2 a3 10 a0 a1 a2
0 0 0 a0
∣∣∣∣∣∣∣∣
,
y las condiciones de Routh–Hurwitz son por tanto
a3 > 0 , a2 a3 − a1 > 0 , H ≡ a1(a2 a3 − a1) − a0 a23 > 0 , a0H > 0
o biena0 > 0 , a3 > 0 , a2 a3 − a1 > 0 , a1 a2 a3 − a2
1 − a0 a23 > 0 .
De nuevo, es facil ver que estas condiciones implican que a1, a2 > 0.
Ejemplo 2.23. Consideremos el sistema lineal
x′ = −2x+ y
y′ = −zz′ = ax− 5z ,
(2.85)
donde (x, y, z) son las variables dependientes, a ∈ R es un parametro, y denotaremospor t a la variable independiente. El polinomio caracterıstico del sistema es
∣∣∣∣∣∣
−2 − λ 1 00 −λ −1a 0 −5 − λ
∣∣∣∣∣∣
= −λ3 − 7λ2 − 10λ− a .
Para determinar la estabilidad del sistema (2.85), debemos por tanto estudiar el polino-mio
p(λ) = λ3 + 7λ2 + 10λ+ a . (2.86)
Una condicion necesaria para que haya estabilidad asintotica es por tanto que el parame-tro a sea positivo. Las condiciones de Routh–Hurwitz (2.84), necesarias y suficientes parala estabilidad asintotica del sistema, son en este caso
0 < a < 70 . (2.87)
La region de estabilidad (asintotica) en el espacio de parametros (la recta real) es portanto el intervalo (0, 70). Del criteriro de Routh–Hurwitz tambien se sigue que si a < 0o a > 70 el sistema es inestable. Si a = 0 el polinomio (2.86) tiene una raız simpleigual a 0 y 2 raıces reales negativas, y por tanto el sistema (2.85) es estable (perono asintoticamente estable). Si a = 70, ha de haber alguna raız de p con parte realnula. En efecto, si no fuera este el caso habrıa alguna raız con parte real positiva, yaque el sistema no puede ser asintoticamente estable para a = 70 por no cumplirse lascondiciones necesarias y suficientes de estabilidad asintotica (2.87). Dicha raız tendrıaentonces parte real negativa para a < 70 y positiva para a = 70, por lo que serıa unafuncion discontinua de a para a = 70, lo cual es imposible. En efecto, se demuestra quelas raıces de un polinomio son funciones continuas de los coeficientes de dicho polinomiopara todos los valores de dichos coeficientes para los cuales las raıces son simples (teoremade la funcion implıcita). (Notese que para a = 70 las raıces de p son todas simples, yaque p y p′ no tienen raıces comunes para dicho valor de a.) Como 0 no es raız de p paraa = 70, en este caso p tiene dos raıces complejas conjugadas ±iω y una raız real µ < 0(µ no puede ser positiva por el razonamiento anterior). Por tanto, para a = 70 el sistema(2.85) es estable (pero no asintoticamente estable).

Capıtulo 3
Soluciones en forma de serie
3.1. Puntos regulares
Nos dedicaremos en este capıtulo al estudio de la ecuacion lineal homogenea desegundo orden
u′′ + a1(x)u′ + a0(x)u = 0 , (3.1)
aunque los metodos que vamos a introducir a continuacion se generalizan sin dificultada ecuaciones lineales homogeneas de orden n > 2. En general, salvo en casos muyparticulares (por ejemplo, si los coeficientes ai son constantes), es imposible resolverexactamente la ecuacion (3.1), es decir expresar su solucion general en terminos de suscoeficientes y las primitivas de dichos coeficientes.
Ejemplo 3.1. La ecuacion de Schrodinger (independiente del tiempo) para una partıcu-la cuantica unidimensional de masa m sometida a un potencial V (s) en un estado esta-cionario de energıa E es
− ~2
2mψ′′(s) +
(V (s) − E
)ψ(s) = 0 , (3.2)
siendo ~ ≈ 1,055 · 10−34J s la constante de Planck reducida y ψ(s) la amplitud de ladensidad de probabilidad (en general compleja) de la partıcula. (En otras palabras, la
probabilidad de encontrar la partıcula en el intervalo [a, b] es∫ ba |ψ(s)|2 ds.) La ecuacion
anterior es una ecuacion lineal homogenea de segundo orden, que se puede escribir en laforma reducida
ψ′′(s) +(ε− U(s)
)ψ(s) = 0 , (3.3)
siendo
ε =2mE
~2, U(s) =
2m
~2V (s) . (3.4)
Supongamos, en primer lugar, que la partıcula se mueve en un campo de fuerzas cons-tante F > 0. Entonces V (s) = −Fs, y por tanto
U(s) = −U0s , U0 =2mF
~2.
Efectuando el cambio de variable
x = −U−2/30 (ε+ U0s) , u(x) = ψ(s)
65

CAPITULO 3. SOLUCIONES EN FORMA DE SERIE 66
(el signo menos se debe a razones historicas) se obtiene la ecuacion de Airy
u′′ − xu = 0 . (3.5)
Esta ecuacion no se puede resolver en terminos de funciones elementales. De hecho, susolucion general se expresa en terminos de funciones de Airy (que a su vez se puedenescribir en terminos de funciones de Bessel).
Consideremos ahora el oscilador armonico cuantico, para el cual el potencial es
V (s) =1
2mω2s2 .
La ecuacion de Schrodinger reducida es por tanto
ψ′′ +
[
ε−(mω
~
)2s2]
ψ = 0 .
Efectuando el cambio
x =
√mω
~s , u(x) = ψ(s)
se obtiene la ecuacion de Weber
u′′ + (λ− x2)u = 0 , (3.6)
siendo
λ =~ε
mω=
2E
~ω.
De nuevo, para valores arbitrarios de λ la solucion general de la ecuacion anterior no esexpresable en terminos de funciones elementales, sino a traves de funciones cilındricasparabolicas. Sin embargo, si λ = 2m + 1 con m = 0, 1, 2, . . . entonces la ecuacion (3.6)tiene una solucion particular de la forma
u(x) = e−x2
2 Pm(x) ,
siendo Pm un polinomio de gradom llamado elm-esimo polinomio de Hermite. Observeseque si λ = 2m+ 1 entonces
E =
(
m+1
2
)
~ω
es la energıa del (m+ 1)-esimo estado ligado (de energıa bien definida) del oscilador.
En las ecuaciones de Airy y Hermite, los coeficientes de la ecuacion son polinomiosen la variable independiente. En general, diremos que x0 ∈ R es un punto regular dela ecuacion (3.1) si los coeficientes a0(x) y a1(x) son funciones analıticas en el puntox0. Esto quiere decir que tanto a0 como a1 admiten desarrollos en serie de potencias dex− x0
ak(x) =∞∑
i=0
ak,i (x− x0)i , k = 0, 1 ,
con radios de convergencia positivos R0 y R1, respectivamente. Tomando, por tanto,R = mın(R0, R1) > 0 ambas series convergen simultaneamente para |x− x0| < R.Recuerdese que una serie de potencias converge absolutamente dentro de su intervalode convergencia, y que la convergencia es ademas uniforme dentro de cada intervalocompacto contenido en el intervalo de convergencia. Ademas, las series de potencias (y,por tanto, las funciones analıticas) son de clase C∞ en su intervalo de convergencia, ysus derivadas se pueden calcular derivando termino a termino la serie.

CAPITULO 3. SOLUCIONES EN FORMA DE SERIE 67
Ejemplo 3.2. Estudiemos cuales son los puntos regulares de la ecuacion lineal ho-mogenea de segundo orden
(ex − 1)u′′ + x2u′ + senxu = 0 . (3.7)
Para ello, debemos primero escribir la ecuacion en la forma (3.1), es decir
u′′ +x2
ex − 1u′ +
senx
ex − 1u = 0 .
Los coeficientes de la ecuacion son por tanto
a0(x) =senx
ex − 1, a1(x) =
x2
ex − 1.
En primer lugar, ambas funciones son C∞ en R − {0}, ya que si x ∈ R ex − 1 solo seanula en x = 0. Como el numerador y el denominador que definen a a0 y a1 son funcionesanalıticas en todo punto, y el cociente de funciones analıticas es una funcion analıticaen los puntos donde no se anula el denominador, concluımos que a0 y a1 son analıticasen cualquier punto x0 6= 0. Por tanto x0 6= 0 es un punto regular de la ecuacion (3.7).
En cuanto al punto x = 0, aunque el denominador ex − 1 se anula en este punto,ocurre lo mismo con los numeradores senx y x2. De hecho, definiendo (como es habitual)
a0(0) = lımx→0
a0(x) = lımx→0
cos x
ex= 1 , a1(0) = lım
x→0a1(x) = lım
x→0
2x
ex= 0 ,
los coeficientes ak son funciones analıticas en x = 0. En efecto,
a0(x) =
∞∑
i=0
(−1)ix2i+1
(2i+ 1)!
∞∑
i=1
xi
i!
=
∞∑
i=0
(−1)ix2i
(2i+ 1)!
∞∑
i=0
xi
(i+ 1)!
,
siendo tanto el numerador como el denominador funciones analıticas en R (series con-vergentes de potencias de x con radio de convergencia infinito; aplıquese, por ejemplo, elcriterio del cociente). Como la serie en el denominador no se anula (vale 1) para x = 0,el cociente a0(x) es analıtico en x = 0. Analogamente,
a1(x) =x2
∞∑
i=1
xi
i!
=x
∞∑
i=0
xi
(i+ 1)!
,
es de nuevo el cociente de dos series de potencias de x convergentes en toda la rectareal, con denominador distinto de cero en el origen. Luego tambien el origen es unpunto regular de la ecuacion (3.7), y por tanto todos los puntos son regulares para estaecuacion.
¿Cual es el radio de convergencia de las series de Taylor de a0 y a1 centradas enel punto x0? En principio parece difıcil responder a esta pregunta, ya que no es facilobtener la expresion general de los coeficientes en estos desarrollos. Sin embargo, paracalcular el radio de convergencia lo mejor es considerar a las funciones a0 y a1 en elplano complejo, es decir
a0(z) =sen z
ez − 1, a1(z) =
z2
ez − 1, z ∈ C ,

CAPITULO 3. SOLUCIONES EN FORMA DE SERIE 68
ya que puede probarse que el radio de convergencia de una serie de potencias en R novarıa cuando se considera dicha serie en el plano complejo. Las funciones a0 y a1 (cona0(0) y a1(0) definidos como antes) son analıticas en todo el plano complejo excepto enlos puntos
zk = 2kπi , k ∈ Z − {0} ,pues en estos puntos se anula el denominador en las expresiones que definen a0 y a1,mientras que el numerador es distinto de cero. El radio de convergencia del desarrollode ak(z) en serie de potencias de z − z0 (k = 0, 1, z0 ∈ C) es la distancia de z0 a lasingularidad mas proxima de la funcion ak (ya que ak no esta acotada en un entorno dedicha singularidad). Aplicando este resultado a un punto x0 ∈ R obtenemos facilmentelas formulas
R0 = R1 =√
4π2 + x20 ,
ya que las singularidades mas proximas de las funciones a0 o a1 a un punto del eje realson los puntos ±2πi. Por tanto en este caso R = mın(R0, R1) esta dado por la formulaanterior. En particular, para x0 = 0 obtenemos R = 2π.
Teorema 3.3. Si x0 es un punto regular de la ecuacion (3.1), toda solucion de dichaecuacion es una funcion analıtica en el punto x0, siendo el radio de convergencia desu serie de Taylor centrada en el punto x0 mayor o igual que el mınimo de los radiosde convergencia de las series de Taylor centradas en x0 para a0 y a1.
En otras palabras, si x0 es un punto regular para la ecuacion (3.1) y R es el mınimode los radios de convergencia de las series de Taylor centradas en x0 de los coeficientesde dicha ecuacion, toda solucion u(x) admite un desarrollo en serie de potencias
u(x) =
∞∑
i=0
ci (x− x0)i (3.8)
convergente para |x− x0| < R. Los coeficientes ci ∈ R (i = 0, 1, . . . ) de este desarrollose calculan sustituyendo la serie anterior en la ecuacion diferencial e igualando a cero loscoeficientes de las potencias de x en la expresion resultante. Notese que para calcular u′′
y u′ podemos derivar la serie (3.8) termino a termino, por las propiedades de las seriesde potencias. Por ejemplo, el teorema anterior permite asegurar que las soluciones de laecuacion (3.7) son analıticas en el origen con radio de convergencia 2π, es decir puedenrepresentarse por una serie de Maclaurin
u(x) =∞∑
i=0
ci xi
convergente para |x| < 2π.
Ejemplo 3.4. Consideremos la ecuacion con coeficientes constantes
u′′ − u = 0 . (3.9)
Todo punto x0 ∈ R es regular para esta ecuacion, con radio de convergencia R = ∞ (yaque los coeficientes son funciones constantes). Por tanto las soluciones de esta ecuacion

CAPITULO 3. SOLUCIONES EN FORMA DE SERIE 69
son funciones analıticas en todo R. Desarrollemos, por ejemplo, alrededor de x0 = 0.Sustituyendo la serie (3.8) (con x0 = 0) en la ecuacion (3.9) obtenemos
∞∑
i=2
i(i − 1)ci xi−2 −
∞∑
i=0
ci xi =
∞∑
i=0
[(i+ 2)(i + 1)ci+2 − ci]xi = 0 .
Igualando a cero el coeficiente de xi en esta expresion obtenemos la siguiente relacionde recurrencia que han de satisfacer los coeficientes ci:
(i+ 2)(i + 1)ci+2 = ci , i = 0, 1, 2, . . . . (3.10)
La relacion anterior determina los coeficientes pares en terminos de c0 y los imparesen terminos de c1, ya que relaciona ci con ci+2 (notese que el coeficiente de ci+2 en(3.10) no se anula para ningun i = 0, 1, . . . ). Los coeficientes c0 = u(0) y c1 = u′(0)quedan completamente indeterminados por la relacion de recurrencia (3.10), lo cual esrazonable, dado que la ecuacion (3.9) debe tener una solucion para todo valor de lascondiciones iniciales u(0) = c0 y u′(0) = c1. La relacion de recurrencia (3.10) se resuelvefacilmente. En efecto, si c0 6= 0 podemos escribir
c2k
c0=
c2k
c2k−2
c2k−2
c2k−4. . .
c2c0
=1
2k(2k − 1)
1
(2k − 2)(2k − 3). . .
1
2 · 1 =1
(2k)!
=⇒ c2k =c0
(2k)!,
expresion que es obviamente valida tambien si c0 = 0. Analogamente, si c1 6= 0 entonces
c2k+1
c1=c2k+1
c2k−1
c2k−1
c2k−3. . .
c3c1
=1
(2k + 1)(2k)
1
(2k − 1)(2k − 2). . .
1
3 · 2 =1
(2k + 1)!
=⇒ c2k+1 =c1
(2k + 1)!,
que de nuevo vale tambien para c1 = 0 en virtud de (3.10). La solucion general de laecuacion (3.10) es por tanto
u(x) = c0
∞∑
k=0
x2k
(2k)!+ c1
∞∑
k=0
x2k+1
(2k + 1)!= c0 cosh x+ c1 senhx .
Ejemplo 3.5. Consideremos a continuacion la ecuacion de Airy (3.5), para la cual todoslos puntos son regulares y con radio de convergencia infinito (pues los coeficientes sonpolinomios). Desarrollando de nuevo alrededor de x0 = 0 obtenemos la ecuacion
∞∑
i=2
i(i− 1)ci xi−2 −
∞∑
i=0
ci xi+1 = 2c2 +
∞∑
i=1
[(i+ 2)(i + 1)ci+2 − ci−1]xi = 0 .
Igualando a cero los coeficientes de las potencias de x obtenemos
c2 = 0 (3.11)
junto con la relacion de recurrencia
(i+ 2)(i+ 1)ci+2 = ci−1 , i = 1, 2, . . . . (3.12)

CAPITULO 3. SOLUCIONES EN FORMA DE SERIE 70
Notese que ahora la relacion de recurrencia relaciona ck con ck+3. De esta propiedad yla ecuacion (3.11) se sigue que
c3k+2 = 0 , k = 0, 1, 2, . . . . (3.13)
Ahora c0 determina todos los coeficientes de ındice multiplo de 3, mientras que c1 de-termina los coeficientes c3k+1 con k = 0, 1, 2 . . . . Mas concretamente, para calcular c3k
reescribamos la relacion de recurrencia (3.12) en la forma
32 k(
k − 1
3
)
c3k = c3k−3 .
Entonces se tiene
c3k
c0=
c3k
c3k−3
c3k−3
c3k−6. . .
c3c0
=3−2
k(k − 1
3
)3−2
(k − 1)(k − 4
3
) · · · 3−2
1 · 23
=⇒ c3k =3−2k c0
k! 23 · 5
3 · · ·(k − 1
3
) .
Analogamente, de (3.12) se sigue que
32 k(
k +1
3
)
c3k+1 = c3k−2 ,
y por tanto
c3k+1
c1=c3k+1
c3k−2
c3k−2
c3k−5. . .
c4c1
=3−2
k(k + 1
3
)3−2
(k − 1)(k − 2
3
) · · · 3−2
1 · 43
=⇒ c3k+1 =3−2k c1
k! 43 · 7
3 · · ·(k + 1
3
) .
Por tanto la solucion general de la ecuacion de Airy esta dada por
u(x) = c0
∞∑
k=0
x3k
3kk! 2 · 5 · · · (3k − 1)+ c1x
∞∑
k=0
x3k
3kk! 4 · 7 · · · (3k + 1). (3.14)
Como los coeficientes de la ecuacion de Airy son funciones analıticas en todo R (poli-nomios), el radio de convergencia de las series (3.14) que definen a u(x) es infinito.
3.1.1. La ecuacion de Hermite
Si en la ecuacion de Weber
ψ′′ + (λ− x2)ψ = 0
efectuamos el cambio de variable dependiente
ψ(x) = e−x2
2 u(x)
obtenemos la ecuacion de Hermite
u′′ − 2xu′ + 2µu = 0 , (3.15)

CAPITULO 3. SOLUCIONES EN FORMA DE SERIE 71
donde 2µ = λ− 1 es un parametro real. Como los coeficientes de esta ecuacion sonpolinomios, todo punto es regular, y el radio de convergencia de la serie de Taylorcentrada en cualquier punto de las soluciones de la ecuacion es infinito. Desarrollandoalrededor del origen
u(x) =∞∑
i=0
ci xi
y sustituyendo en la ecuacion obtenemos la identidad
∞∑
i=2
i(i− 1)ci xi−2 − 2
∞∑
i=1
i ci xi + 2µ
∞∑
i=0
ci xi = 0
que podemos reescribir como sigue:
∞∑
i=0
[(i+ 2)(i+ 1) ci+2 + 2(µ− i) ci]xi = 0 .
De esta ecuacion se obtiene la relacion de recurrencia
(i+ 2)(i + 1) ci+2 = 2(i − µ) ci , i = 0, 1, . . . . (3.16)
Como el coeficiente de ci+2 no se anula para ningun i = 0, 1, . . . , la relacion anteriordetermina todos los coeficientes pares (impares) en terminos de c0 (c1). Para calcularlos coeficientes pares escribimos (3.16) para i = 2k − 2 (k = 1, 2, . . . ), obteniendo
2k(2k − 1) c2k = −2(µ− 2k + 2) c2k−2 , k = 1, 2, . . . . (3.17)
Por tanto (suponiendo que c0 6= 0, ya que si c0 = 0 todos los coeficientes pares se anulan)
c2n
c0=
c2n
c2n−2
c2n−2
c2n−4· · · c2
c0=
−2(µ− 2n + 2)
2n(2n − 1)
−2(µ− 2n + 4)
(2n − 2)(2n − 3)· · · −2µ
2 · 1
=(−2)n
(2n)!µ(µ− 2) . . . (µ− 2n+ 2)
y
c2n =(−2)n
(2n)!µ(µ− 2) . . . (µ− 2n+ 2) c0 , n = 0, 1, . . . . (3.18)
Analogamente, para los coeficientes impares c2k+1 la relacion de recurrencia se escribe
(2k + 1)(2k) c2k+1 = −2(µ− 2k + 1) c2k−1 , k = 1, 2, . . . ,
por lo que (si c1 6= 0)
c2n+1
c1=c2n+1
c2n−1
c2n−1
c2n−3· · · c3
c1=
−2(µ− 2n+ 1)
(2n + 1)(2n)
−2(µ− 2n+ 3)
(2n− 1)(2n − 2)· · · −2(µ− 1)
3 · 2
=(−2)n
(2n + 1)!(µ− 1)(µ− 3) . . . (µ− 2n+ 1) .
Por tanto
c2n+1 =(−2)n
(2n + 1)!(µ− 1)(µ− 3) . . . (µ− 2n+ 1) c1 , n = 0, 1, . . . , (3.19)

CAPITULO 3. SOLUCIONES EN FORMA DE SERIE 72
expresion obviamente valida tambien si c1 = 0. Por tanto la solucion general de laecuacion de Hermite (3.15) es
u(x) = c0 u0(x) + c1 u1(x) ,
donde
u0(x) =
∞∑
n=0
µ(µ− 2) . . . (µ− 2n+ 2)(−2)n
(2n)!x2n (3.20)
y
u1(x) =
∞∑
n=0
(µ− 1)(µ− 3) . . . (µ− 2n+ 1)(−2)n
(2n+ 1)!x2n+1 , (3.21)
siendo estas series convergentes para todo x ∈ R. Las funciones uk(x) (k = 0, 1) sonambas soluciones de la ecuacion de Hermite (3.15), siendo u0 una funcion par y u1 impar,es decir
uk(−x) = (−1)kuk(x) , k = 0, 1 . (3.22)
Las condiciones iniciales satisfechas por las funciones uk(x) son
u0(0) = 1, u′(0) = 0 ; u1(0) = 0, u′1(0) = 1 . (3.23)
Las funciones u0 y u1, que como hemos visto anteriormente forman un sistema fun-damental de soluciones de la ecuacion de Hermite, se reducen a polinomios para ciertosvalores del parametro µ que aparece en la ecuacion. En efecto, la solucion par u0(x) sereduce a un polinomio si se anula el coeficiente c2n para algun valor de n = 1, 2, . . . , esdecir si
µ(µ− 2) . . . (µ− 2n+ 2) = 0
para algun n. Esto solo es posible si µ = 2N (N = 0, 1, . . . ) es igual a un entero par nonegativo. En tal caso c2N+2 es proporcional a
µ(µ− 2) . . . (µ− 2N) = 0
y todos los coeficientes pares c2k con k ≥ N + 1 se anulan, ya que contienen el factorµ − 2N . Por tanto si µ = 2N (con N = 0, 1, . . . ) la solucion u0 se reduce al polinomiode grado 2N
P2N (x) =N∑
n=0
(−1)nN !
(N − n)!
(2x)2n
(2n)!(µ = 2N) .
Notese que ninguno de los coeficientes en este desarrollo se anula. Por el contrario, siµ = 2N la solucion impar u1 no es polinomica, ya que
(2N − 1)(2N − 3) . . . (2N − 2n+ 1) 6= 0 , n = 1, 2, . . . .
La solucion u1 sera sin embargo polinomica si µ = 2N + 1 (N = 0, 1, . . . ) es igual a unentero impar ya que entonces
c2N+3 ∝ (µ− 1)(µ− 3) . . . (µ− 2N − 1) = 0 ,
lo cual implica (por la relacion de recurrencia) que c2k+3 = 0 para k ≥ N . En este casola solucion u1 se reduce al polinomio de grado 2N + 1
P2N+1(x) =1
2
N∑
n=0
(−1)nN !
(N − n)!
(2x)2n+1
(2n + 1)!(µ = 2N + 1) .

CAPITULO 3. SOLUCIONES EN FORMA DE SERIE 73
De nuevo, para estos valores de µ la solucion par u0 no se reduce a un polinomio.Puede probarse que si µ no es un entero no negativo, en cuyo caso ninguna de las
soluciones uk(x) se reduce a un polinomio, cualquier solucion no nula de la ecuacion deHermite se comporta como ex2
para x → ∞ o x → −∞. Ello se debe, esencialmente, aque las funciones uk(x) verifican
ci+2
ci∼
i→∞2
i,
mientras que
ex2=
∞∑
i=0
x2i
i!≡
∞∑
j=0
b2j x2j
cumplebi+2
bi
i=2j=
1/(j + 1)!
1/j!=
1
j + 1∼
j→∞1
j=
2
i.
Esto implica (teniendo en cuenta la paridad de uk) que si µ no es un entero no negativose tiene
u0(x) ∼|x|→∞
A0 ex2, u1(x) ∼
|x|→∞A1 sig x ex2
,
para ciertas constantes no nulas A0 y A1, y por tanto el comportamiento de cualquiersolucion no nula de la ecuacion de Hermite para µ distinto de un entero no negativo escomo ex2
en +∞ o en −∞. Pero entonces el comportamiento de una solucion no nulade la ecuacion de Weber ψ(x) = e−x2/2u(x) cuando x→ +∞ o x→ −∞ es como ex2/2.En particular, para estos valores de µ ninguna solucion no nula de la ecuacion de Weberverifica la condicion ∫ ∞
−∞ψ(x)2 dx <∞ . (3.24)
Por tanto, si µ no es un entero no negativo el oscilador cuantico no puede tener unestado ligado de energıa
E =~ω
2λ =
(
µ+1
2
)
~ω .
Por el contrario, si µ = m es un entero no negativo, la ecuacion de Hermite tiene unasolucion polinomica Pm(x), y por tanto la ecuacion de Weber para λ = 2m + 1 tieneuna solucion de la forma
ψ(x) = Pm(x) e−x2
2
que verifica obviamente la condicion de normalizacion (3.24). De esto se deduce quelas energıas de los estados ligados del oscilador armonico cuantico estan dadas por laformula
E =
(
m+1
2
)
~ω . m = 0, 1, . . . .
Esta formula fue deducida empıricamente por Planck en 1900 para explicar la distri-bucion de frecuencias del espectro de radiacion de un cuerpo negro, y con ella puededecirse que comenzo la Mecanica Cuantica.
Los polinomios de Hermite Hk(x) (k = 0, 1, . . . ) son proporcionales a los polino-mios Pk(x) que acabamos de introducir. En la practica, los polinomios de Hermite se

CAPITULO 3. SOLUCIONES EN FORMA DE SERIE 74
suelen definir mediante las formulas
H2m(x) = (−1)m(2m)!
m!P2m(x) =
m∑
n=0
(−1)n+m (2m)!
(2n)! (m − n)!(2x)2n
=m∑
i=0
(−1)i(2m)!
i! (2m− 2i)!(2x)2m−2i
y
H2m+1(x) = 2(−1)m(2m+ 1)!
m!P2m+1(x) =
m∑
n=0
(−1)n+m (2m+ 1)!
(2n+ 1)! (m − n)!(2x)2n+1
=
m∑
i=0
(−1)i(2m+ 1)!
i! (2m+ 1 − 2i)!(2x)2m+1−2i .
Ambas formulas se pueden englobar en la siguiente:
Hk(x) =
[k/2]∑
i=0
(−1)ik!
i! (k − 2i)!(2x)k−2i , k = 0, 1, . . . , (3.25)
donde [x] denota la parte entera de x (mayor entero menor o igual que x). Al ser Hk
proporcional a Pk para todo k = 0, 1, . . . , Hk es solucion de la ecuacion de Hermite conµ = k, es decir
H ′′k − 2xH ′
k + 2kHk = 0 , k = 0, 1, . . . . (3.26)
Los primeros polinomios de Hermite son:
H0(x) = 1
H1(x) = 2x
H2(x) = 4x2 − 2
H3(x) = 8x3 − 12x
H4(x) = 16x4 − 48x2 + 12 .
Se define la funcion generatriz de los polinomios de Hermite como la funcion
F (x, z) =
∞∑
k=0
Hk(x)
k!zk . (3.27)
Procediendo formalmente se obtiene
F (x, z) =
∞∑
k=0
[k/2]∑
i=0
(−1)i
i! (k − 2i)!(2x)k−2i zk =
∞∑
j=0
∞∑
i=0
(−1)i
i! j!(2x)j zj+2i
=∞∑
j=0
(2xz)j
j!
∞∑
i=0
(−z2)i
i!= e2xz e−z2
= e2xz−z2. (3.28)
Como, por definicion de F ,
Hk(x) =∂k
∂zkF (x, z)
∣∣∣∣z=0
,

CAPITULO 3. SOLUCIONES EN FORMA DE SERIE 75
utilizando la formula anterior para F (x, z) se obtiene
Hk(x) =∂k
∂zk
[
e−(z−x)2 ex2]
z=0= ex2 ∂k
∂zke−(z−x)2
∣∣∣∣z=0
= ex2 dk
dwke−w2
∣∣∣∣w=−x
= (−1)kex2 dk
dske−s2
∣∣∣∣s=x
,
es decir
Hk(x) = (−1)k ex2 dk
dxke−x2
. (3.29)
La identidad anterior es la llamada formula de Rodrigues para los polinomios de Hermite.Derivando la definicion (3.27) de la funcion generatriz respecto de z y x y utilizando
(3.28) se obtienen propiedades importantes de los polinomios de Hermite. En efecto,derivando parcialmente respecto de z se obtiene
∂
∂ze2xz−z2
= 2(x− z) e2xz−z2=
∞∑
k=0
2xHk(x)
k!zk −
∞∑
k=0
2Hk(x)
k!zk+1
=
∞∑
j=0
[2xHj(x) − 2j Hj−1(x)
]zj
j!,
que por (3.27) ha de ser igual a
∞∑
k=1
Hk(x)
(k − 1)!zk−1 =
∞∑
j=0
Hj+1(x)zj
j!.
Igualando los coeficientes de zj en ambas expresiones se obtiene la identidad
Hj+1(x) = 2xHj(x) − 2j Hj−1(x) , j = 0, 1, . . . , (3.30)
que puede ser utilizada para calcular recursivamente los polinomios de Hermite a partirde H0(x) = 1. Analogamente, derivando la funcion generatriz respecto de x se obtiene
∂
∂xe2xz−z2
= 2z e2xz−z2=
∞∑
k=0
2Hk(x)
k!zk+1 =
∑
j=0
2 jHj−1(x)zj
j!=
∞∑
j=0
H ′j(x)
zj
j!,
de donde se deduce la relacion
H ′j(x) = 2j Hj−1(x) , j = 0, 1, . . . . (3.31)
Notese que combinando las relaciones (3.30) y (3.31) se deduce facilmente que el poli-nomio Hj es solucion de la ecuacion de Hermite con µ = j, ya que
H ′′j (x) = 2jH ′
j−1(x) =d
dx
[2xHj(x) −Hj+1(x)
]= 2xH ′
j(x) + 2Hj(x) −H ′j+1(x)
= 2xH ′j(x) + 2Hj(x) − 2(j + 1)Hj(x) = 2xH ′
j(x) − 2j Hj(x) .
Otra de las propiedades importantes de los polinomios de Hermite es su ortogona-
lidad en la recta real respecto de la funcion peso e−x2, es decir
∫ ∞
−∞Hn(x)Hm(x) e−x2
dx = 0 , m 6= n . (3.32)

CAPITULO 3. SOLUCIONES EN FORMA DE SERIE 76
Para probar esta relacion, basta recordar que las funciones ψk(x) = Hk(x) e−x2
2 verificanla ecuacion de Weber
ψ′′k(x) + (2k + 1 − x2)ψk(x) = 0 , k = 0, 1, . . . .
De esta ecuacion se deduce que
0 = ψn
[ψ′′
m+(2m+1−x2)ψm
]−ψm
[ψ′′
n+(2n+1−x2)ψn
]= ψn ψ
′′m−ψm ψ′′
n−2(n−m)ψn ψm ,
es decird
dx
(ψn ψ
′m − ψm ψ′
n
)= 2(n −m)ψn ψm .
Integrando esta igualdad entre −∞ y +∞ se obtiene (3.32), ya que
lımx→±∞
ψn(x)ψ′m(x) = lım
x→±∞
(H ′
m(x) − xHm(x))Hn(x) e−x2
= 0 .
En Mecanica Cuantica es tambien de gran interes el calculo de la integral (3.32) param = n. Para evaluar dicha integral, multipliquemos (3.30) por Hj+1 e−x2
e integremosentre −∞ y +∞. Aplicando las relaciones de ortogonalidad (3.32) se obtiene∫ ∞
−∞H2
j+1(x) e−x2dx = −
∫ ∞
−∞
d
dx
(
e−x2)
Hj(x)Hj+1(x) dx
= −[e−x2
Hj(x)Hj+1(x)]∞−∞ +
∫ ∞
−∞e−x2 d
dx
[Hj(x)Hj+1(x)
]dx .
Utilizando de nuevo las relaciones de ortogonalidad (3.32) y la identidad (3.31) queda∫ ∞
−∞H2
j+1(x) e−x2dx =
∫ ∞
−∞e−x2[
H ′j(x)Hj+1(x) +Hj(x)H
′j+1(x)
]dx
=
∫ ∞
−∞
[2j Hj−1(x)Hj+1(x) + 2(j + 1)H2
j (x)]e−x2
dx
= 2(j + 1)
∫ ∞
−∞H2
j (x) e−x2dx , j = 0, 1, . . . .
De esta igualdad se deduce facilmente que∫ ∞
−∞H2
n(x) e−x2dx = 2nn!
∫ ∞
−∞H2
0 (x) e−x2dx = 2nn!
∫ ∞
−∞e−x2
dx .
Como la ultima integral es igual a√π, se tiene finalmente
∫ ∞
−∞H2
n(x) e−x2dx = 2nn!
√π . (3.33)
Ejercicio.
i) Probar que si a0 es una funcion par y a1 es impar (y ambas son continuas), entonces±u(−x) es solucion de la ecuacion (3.1) si u(x) es solucion.
ii) Deducir que las soluciones uk(x) de la ecuacion (3.1) definidas por las condicionesiniciales (3.23) tienen la paridad de (−1)k, es decir satisfacen (3.22).
iii) Concluir que, si el punto x = 0 es regular y u(x) es solucion de la ecuacion (3.1)con las condiciones iniciales u(0) = c0, u
′(0) = c1, entonces u admite un desarrolloen serie de potencias de la forma
u(x) = c0
∞∑
i=0
αi x2i + c1
∞∑
i=0
βi x2i+1 .

CAPITULO 3. SOLUCIONES EN FORMA DE SERIE 77
3.2. Puntos singulares regulares
Consideremos de nuevo la ecuacion lineal homogenea de segundo orden
u′′ + a1(x)u′ + a0(x)u = 0. (3.34)
Estudiaremos en esta seccion el comportamiento de las soluciones de (3.34) en las proxi-midades de un punto x0 que no es regular para dicha ecuacion. Diremos en tal caso quex0 es un punto singular para la ecuacion (3.34). En estas notas solo vamos a considerarun tipo especial (aunque muy importante) de puntos singulares de la ecuacion (3.34),las llamadas singularidades aisladas.
Definicion 3.6. Diremos que el punto x0 ∈ R es una singularidad aislada de lafuncion f : R → R si f no es analıtica en x0, pero existe r > 0 tal que f es analıticasi 0 < |x− x0| < r. El punto x0 es una singularidad aislada de la ecuacion (3.34) si esuna singularidad aislada de uno de sus coeficientes a0 o a1, siendo singularidad aisladao punto regular del otro coeficiente.
Por ejemplo, las funciones 1/x,√
|x|, log |x| y e1/x2tienen una singularidad aislada
en x = 0, y la ecuacionu′′ + log |x| u′ + senxu = 0
tiene una singularidad aislada en x = 0.Las definiciones anteriores tienen sentido si x es una variable compleja, sin mas que
interpretar |x− x0| como el modulo del numero complejo x− x0. Sin embargo, si x ∈ C
es una variable compleja las funciones log x y xr ≡ er log x con r /∈ Z no tienen unasingularidad aislada en x = 0, ya que son ambas discontinuas en una semirecta queparte del origen. Se suele decir que log x y xr (r /∈ Z) tienen un punto de ramificacionen el origen.
Supongamos que x0 es una singularidad aislada de la ecuacion (3.34). En tal caso elpunto x0 no es regular para la ecuacion (3.34), por lo que no es aplicable el Teorema 3.3.Para tener una idea aproximada acerca de que tipos de comportamiento cabe esperarpara las soluciones de la ecuacion (3.34) en las proximidades del punto x0, empezaremosestudiando una ecuacion muy sencilla para la cual x0 = 0 es una singularidad aislada:la ecuacion de Euler
x2 u′′ + p0 xu′ + q0 u = 0 , (3.35)
donde p0, q0 ∈ R son constantes. Esta ecuacion se resuelve facilmente mediante el cambiode variable dependiente
t = log |x| , x 6= 0.
En efecto, si hacemosy(t) = u(x)
entoncesdx
dt= x para todo t, por lo que
dy
dt= u′(x)
dx
dt= xu′(x) ,
d2y
dt2= x2u′′(x) + xu′(x) ,
y por tanto y(t) satisface la ecuacion lineal homogenea de coeficientes constantes
d2y
dt2+ (p0 − 1)
dy
dt+ q0 y = 0 . (3.36)

CAPITULO 3. SOLUCIONES EN FORMA DE SERIE 78
Notese que el polinomio caracterıstico de esta ecuacion es
p(r) = r2 + (p0 − 1) r + q = r(r − 1) + p0 r + q0 . (3.37)
Si ri (i = 1, 2) son las dos raıces (posiblemente complejas) del polinomio caracterıstico,la solucion general de la ecuacion (3.36) esta dada por
y(t) =
c1 er1t + c2 er2t , si r1 6= r2 , r1, r2 ∈ R
(c1 + c2 t) ert , si r1 = r2 ≡ r ∈ R(c1 cos(β t) + c2 sen(β t)
)eαt , si r1,2 = α± iβ ∈ C .
Por tanto, la solucion general de la ecuacion de Euler (3.35) es
u(x) =
c1 |x|r1 + c2 |x|r2 , si r1 6= r2 , r1, r2 ∈ R
(c1 + c2 log |x|) |x|r , si r1 = r2 ≡ r ∈ R(c1 cos(β log |x|) + c2 sen(β log |x|)
)|x|α , si r1,2 = α± iβ ∈ C .
(3.38)
Observese que para ciertos valores de las raıces r1 y r2 (o, lo que es lo mismo, de loscoeficientes p0 y q0), algunas o incluso todas las soluciones de la ecuacion de Euler (3.35)pueden ser analıticas en x = 0, aunque los coeficientes de la ecuacion no lo sean. Masconcretamente, si r1 6= r2 son enteros no negativos entonces todas las soluciones sonanalıticas en x = 0, mientras que si r1 = r2 ≡ r es un entero no negativo entonces hayuna sola solucion linealmente independiente que es analıtica en x = 0, a saber u(x) = xr.(¿Por que se puede sustituir |x|ri por xri en (3.38) si ri es un entero?) Ademas, cualquieraque sean r1 y r2 es evidente que existe una constante M suficientemente grande tal que
lımx→0
(|x|M u(x)
)= 0
para toda solucion u(x) de (3.35). De hecho, puede probarse que esta condicion siguesiendo cierta incluso si interpretamos x en la formula anterior como una variable com-pleja. El matematico aleman L. Fuchs probo en 1868 que una ecuacion lineal homogenea(3.34) (con x ∈ C) con una singularidad aislada en x0 ∈ C tiene la propiedad de quetoda solucion suya u(x) definida en las proximidades de x0 satisface la condicion
lımx→x0
(|x− x0|M u(x)
)= 0 (3.39)
para alguna constante M si y solo si los coeficientes de la ecuacion son de la forma
a1(x) =p(x)
x− x0, a0(x) =
q(x)
(x− x0)2, x 6= x0 , (3.40)
con p y q funciones analıticas en x0.
Definicion 3.7. Diremos que una singularidad aislada x0 de la ecuacion (3.34) es unpunto singular regular de dicha ecuacion si los coeficientes de la ecuacion satisfacen(3.40), siendo p y q funciones analıticas en x0.
En otras palabras, para que una singularidad aislada x0 sea un punto singular regularlas funciones p y q definidas por
p(x) = (x− x0) a1(x) , q(x) = (x− x0)2a0(x) (3.41)

CAPITULO 3. SOLUCIONES EN FORMA DE SERIE 79
para x 6= x0 y
p(x0) = lımx→x0
[(x− x0)a1(x)
], q(x0) = lım
x→x0
[(x− x0)
2a0(x)]
deben ser analıticas en x0. Por ejemplo, cualesquiera que sean p0, q0 ∈ R la ecuacionde Euler (3.35) tiene un punto singular regular en el origen. De hecho, en este caso lasfunciones p y q se reducen a las constantes p0 y q0, respectivamente. En general, si x0
es un punto singular regular de la ecuacion (3.34) definiremos p0 y q0 mediante
p0 = p(x0) = lımx→x0
[(x− x0)a1(x)
], q0 = q(x0) = lım
x→x0
[(x− x0)
2a0(x)]. (3.42)
Se define tambien el polinomio indicial de la ecuacion (3.34) como el polinomio (3.43),con p0 y q0 dados por la formula anterior, es decir
F (r) = r(r − 1) + p0 r + q0 . (3.43)
Ejemplo 3.8. Consideremos la ecuacion
xu′′ + u′ + log |x| u = 0 . (3.44)
Todo punto x0 6= 0 es un punto regular de la ecuacion (3.44), ya que los coeficientes dela ecuacion
a1(x) =1
x, a0(x) =
log |x|x
son funciones analıticas en x0 6= 0. En efecto,
1
x=
1
(x− x0) + x0=
1
x0
1
1 + x−x0x0
=
∞∑
k=0
(−1)k
xk+10
(x− x0)k , |x− x0| < |x0| .
Por otra parte, log|x|x es analıtica en x0 6= 0, al ser el producto de dos funciones analıticas
en x0 (1/x y log |x|). Recuerdese que log |x| es analıtica en todo punto x0 6= 0, ya que
log |x| = log |x0| + log
∣∣∣∣1 +
x− x0
x0
∣∣∣∣
|x−x0|<|x0|= log |x0| + log
(
1 +x− x0
x0
)
= log |x0| +∞∑
k=1
(−1)k+1
k xk0
(x− x0)k , |x− x0| < |x0| .
El punto x0 = 0 es una singularidad aislada de la ecuacion (3.44), ya que es singularidadaislada de ambos coeficientes de la ecuacion. Para que dicho punto sea un punto singularregular de la ecuacion, las funciones
p(x) = x a1(x) = 1 , q(x) = x2 a0(x) = x log |x|
han de ser analıticas en 0. Pero esto es falso, ya que aunque p es analıtica (constante)en R, y existe
lımx→0
q(x) = 0 ,
q no es ni siquiera una vez derivable en el origen. Por tanto, 0 es un punto singularirregular de la ecuacion (3.44).

CAPITULO 3. SOLUCIONES EN FORMA DE SERIE 80
El siguiente teorema, debido a G. Frobenius (1874), es de gran importancia practica,ya que describe con gran precision el comportamiento de las soluciones de la ecuacionlineal homogenea (3.34) en las proximidades de un punto singular regular x0. Por sen-cillez, supondremos que x0 = 0 (lo que siempre puede conseguirse con el cambio devariable independiente t = x − x0), y por tanto escribiremos la ecuacion (3.34) en laforma
x2 u′′ + x p(x)u′ + q(x)u = 0 , (3.45)
con
p(x) =
∞∑
i=0
pi xi , q(x) =
∞∑
i=0
qi xi , |x| < R . (3.46)
Teorema de Frobenius. Sean r1 y r2 las raıces del polinomio indicial (3.43) de(3.45), numeradas de forma que
Re r1 ≥ Re r2 . (3.47)
Entonces se tiene:
i) Si r1 6= r2 y r1 − r2 /∈ N, la ecuacion (3.45) tiene un sistema fundamental desoluciones de la forma
ui(x) = |x|ri vi(x) , i = 1, 2 , (3.48)
con vi analıtica en 0, y vi(0) = 1.
ii) Si r1 = r2 ≡ r, (3.45) admite un sistema fundamental de soluciones
u1(x) = |x|r v1(x) , u2(x) = u1(x) log |x| + |x|r v2(x) , (3.49)
con vi analıtica en 0, v1(0) = 1 y v2(0) = 0.
iii) Si r1 − r2 ≡ n ∈ N, (3.45) posee el sistema fundamental de soluciones
u1(x) = |x|r1 v1(x) , u2(x) = c u1(x) log |x| + (sig x)n |x|r2 v2(x) , (3.50)
con vi analıtica en 0, vi(0) = 1 y c ∈ R constante (posiblemente nula).
En todos los casos, el radio de convergencia de la serie de Maclaurin de vi (i = 1, 2)es mayor o igual que R.
Notese que en el caso i) las raıces pueden ser complejas, es decir r1,2 = α±iβ. En tal casoes conveniente reemplazar las soluciones complejas (3.48) por el sistema fundamental desoluciones reales
|x|α[w1(x) cos(β log |x|) + xw2(x) sen(β log |x|)
],
|x|α[w1(x) sen(β log |x|) − xw2(x) cos(β log |x|)
],
(3.51)
donde de nuevo wi es (real) y analıtica con radio de convergencia al menos R en 0, yw1(0) = 1.
Demostracion. Nos limitaremos a dar a continuacion una justificacion heurıstica delteorema de Frobenius, evitando entrar en detalles tecnicos (como, por ejemplo, la verifi-cacion de la convergencia de las series que utilizaremos). La idea de la prueba es ensayar

CAPITULO 3. SOLUCIONES EN FORMA DE SERIE 81
una solucion del tipo
u(x) = |x|r∞∑
i=0
ci xi , con c0 6= 0 (3.52)
e intentar calcular el exponente r y los coeficientes ci sustituyendo (3.52) en la ecuacion(3.45). Para fijar ideas, supondremos en lo que sigue que x > 0. Sustituyendo entonces(3.52) en (3.45) se obtiene
∞∑
i=0
(i+r)(i+r−1) ci xi+r +
( ∞∑
j=0
pj xj)( ∞∑
i=0
(i+r) ci xi+r)
+( ∞∑
j=0
qj xj)( ∞∑
i=0
ci xi+r)
=
∞∑
i=0
[
(i+ r)(i+ r − 1) ci +
i∑
k=0
((k + r)pi−k + qi−k
)ck
]
xi+r = 0 .
Igualando a cero los coeficientes de las potencias de x se deduce la relacion de recurrencia
(i+ r)(i+ r − 1) ci +
i∑
k=0
[(k + r)pi−k + qi−k
]ck = 0 , i = 0, 1, . . . . (3.53)
Haciendo i = 0 se obtiene la ecuacion
[r(r − 1) + p0 r + q0
]c0 = F (r) c0 = 0 ,
de donde se sigue que
F (r) = 0 . (3.54)
La ecuacion (3.54) implica que r solo puede ser igual a una de las dos raıces r1,2 delpolinomio indicial. Si i = 1, 2, . . . reescribimos (3.53) como
[(i+ r)(i+ r − 1) + (i+ r) p0 + q0
]ci = −
i−1∑
k=0
[(k + r)pi−k + qi−k
]ck , i = 1, 2, . . . .
Teniendo en cuenta la definicion del polinomio indicial (3.43) queda finalmente
F (r + i) ci = −i−1∑
k=0
[(k + r)pi−k + qi−k
]ck , i = 1, 2, . . . . (3.55)
Si r = r1, es facil ver que la ecuacion anterior determina todos los coeficientes ci coni = 1, 2, . . . en terminos de c0. En efecto, la condicion necesaria y suficiente para queesto ocurra es que ci se pueda despejar de (3.55) en terminos de c0, . . . , ci−1 para todoi = 1, 2, . . . . A su vez, esto es equivalente a que
F (r1 + i) 6= 0 , i = 1, 2, . . . .
Si esto no se cumpliera para algun i = 1, 2, . . . entonces F tendrıa la raız r2 = r1 + icon Re r2 = Re r1 + i > Re r1, en contra de la definicion (3.47) de r1. Esto demuestraque la ecuacion (3.45) siempre posee una solucion no trivial de la forma
u1(x) = xr1 v1(x) (x > 0) (3.56)

CAPITULO 3. SOLUCIONES EN FORMA DE SERIE 82
con
v1(x) =
∞∑
i=0
ci xi ,
donde los coeficientes ci se determinan en funcion de c0 mediante la relacion de recu-rrencia (3.55). Se demuestra que la serie de potencias que define a v1 tiene radio deconvergencia mayor o igual que R, y que por tanto v1 es analıtica en 0. Ademas, pode-mos suponer sin perdida de generalidad que c0 = 1, es decir v(0) = 1. Si r1 − r2 /∈ N, secumple tambien la condicion
F (r2 + i) 6= 0 , i = 1, 2, . . . .
Por tanto la ecuacion (3.45) posee tambien una solucion de la forma
u2(x) = xr2 v2(x) (x > 0)
con v2 analıtica en 0 y v2(0) = 1. Si r2 6= r1 es obvio que esta solucion es linealmenteindependiente de la anterior, ya que el cociente de ambas soluciones no es constante (esde la forma xr2−r1 por una funcion analıtica que vale 1 en el origen). Con esto quedapor tanto probado el primer apartado.
Supongamos a continuacion que
r1 − r2 = n con n = 0, 1, . . . .
Utilizando la solucion (3.56) podemos construir una segunda solucion linealmente inde-pendiente de la ecuacion aplicando la formula (2.49), es decir
u2(x) = u1(x)
∫ x t−2r1
v21(t)
e−R t a1(s) ds dt . (3.57)
Al ser el origen un punto singular regular de la ecuacion (3.45) se tiene
∫ t
a1(s) ds =
∫ t p(s)
sds = p0 log t+ ϕ(t)
siendo
ϕ(t) =
∫ t ∞∑
i=1
pi si−1 ds =
∞∑
i=1
pi
iti
una funcion analıtica en el origen. Sustituyendo en la formula (3.57) se obtiene
u2(x) = u1(x)
∫ x
t−p0−2r1e−ϕ(t)
v21(t)
dt ≡ u1(x)
∫ x
t−p0−2r1 ψ(t) dt , (3.58)
con
ψ(t) =e−ϕ(t)
v21(t)
≡∞∑
i=0
bi ti
analıtica en el origen (cociente de dos funciones analıticas con denominador no nulo en0) y
b0 = ψ(0) = e−ϕ(0) = 1 6= 0 .
De la definicion (3.43) del polinomio indicial F (r) se sigue que
r1 + r2 = 1 − p0 =⇒ −p0 − 2r1 = r2 − r1 − 1 = −n− 1 .

CAPITULO 3. SOLUCIONES EN FORMA DE SERIE 83
De (3.58) se deduce por tanto que
u2(x) = u1(x)
∫ x
t−n−1 ψ(t) dt = u1(x)
∫ x ∞∑
i=0
bi ti−n−1 dt
= bn u1(x) log x+ u1(x)∞∑
i=0i6=n
bii− n
xi−n ≡ bn u1(x) log x+ xr2 w(x) , (3.59)
con
w(x) = v1(x)
∞∑
i=0i6=n
bii− n
xi
una funcion analıtica en el origen, y
w(0) =
0 , n = 0
−b0n
= − 1
n6= 0 , n = 1, 2, . . . .
Esto demuestra los dos ultimos apartados del teorema de Frobenius, ya que si n = 0 elcoeficiente del termino u1(x) log x es b0 6= 0. Q.E.D.
Igual que en un punto regular, los coeficientes de las funciones analıticas vi queaparecen en el teorema de Frobenius se obtienen sustituyendo en la ecuacion diferencial(3.45) las expresiones (3.48)–(3.50). Sin embargo, si las raıces de la ecuacion indicialdifieren en un entero aparece la dificultad adicional de la posible presencia de un terminologarıtmico, que es segura si la ecuacion indicial tiene una raız doble.
Si r1 − r2 = n ∈ N , lo primero es determinar si aparece o no un termino logarıtmicoen la segunda solucion u2(x). Para ello lo mas eficiente es empezar asumiendo que dichotermino no aparece, y buscar por tanto una solucion del tipo
xr2
∞∑
i=0
ci xi (x > 0) (3.60)
con c0 6= 0. Como F (r2 + i) 6= 0 para i = 1, 2, . . . , n − 1, la relacion de recurrencia(3.55) determina los coeficientes c1, . . . , cn−1 en funcion de c0. Para i = n, sin embargo,F (r2 + n) = F (r1) = 0, y por tanto la relacion de recurrencia se reduce a la ecuacion
n−1∑
k=0
[(k + r)pi−k + qi−k
]ck = 0 . (3.61)
Si los coeficientes c0, . . . , cn−1 calculados precedentemente no verifican la ecuacion ante-rior, hemos llegado a una contradiccion, y por tanto ha de haber un termino logarıtmicoen la segunda solucion (c 6= 0 en (3.50)). Por el contrario, si se cumple (3.61) la relacionde recurrencia permite calcular ci con i > n, ya que F (r2 + i) 6= 0 para i > n. Notese queel coeficiente cn es arbitrario; pero esto es logico, ya que cn multiplica a xr2+n = xr1, y elcoeficiente de este termino se puede asignar a voluntad anadiendo un multiplo adecuadode la primera solucion (3.56). Por tanto, si se cumple la condicion (3.61) hay una segun-da solucion del tipo (3.60), es decir sin termino logarıtmico. Esto prueba que (3.61) esla condicion necesaria y suficiente para que no haya termino logarıtmico en la segundasolucion de (3.45).

CAPITULO 3. SOLUCIONES EN FORMA DE SERIE 84
Supongamos a continuacion que r1 = r2 ≡ r , por lo que la presencia del terminologarıtmico esta garantizada. Para calcular la segunda solucion en este caso, sean ci(s)(i = 1, 2, . . . ) los coeficientes determinados por la relacion de recurrencia
F (s+ i) ci(s) = −i−1∑
k=0
[(k + s)pi−k + qi−k
]ck(s) , i = 1, 2, . . . . (3.62)
junto con la condicion c0 = 1. Notese que esta relacion de recurrencia determina loscoeficientes ci(s) si r−s /∈ N, ya que F solo se anula en r; en particular, podemos tomar|s− r| < 1. Como s no tiene por que ser una raız del polinomio indicial, la funcion
u(x, s) = xs∞∑
i=0
ci(s)xi (x > 0)
no es solucion de la ecuacion (3.45). En efecto, teniendo en cuenta la forma en que seobtuvo la relacion de recurrencia (3.55) es facil ver que
L[u(x, s)
]≡ x2 u′′ + xp(x)u′ + q(x)u = F (s)xs .
Derivando esta ecuacion respecto de s y haciendo s = r se obtiene:
∂
∂s
∣∣∣∣s=r
L[u(x, s)
]= L
[∂
∂s
∣∣∣∣s=r
u(x, s)
]
= F ′(r)xr + F (r)xr log x = 0 ,
ya que r es por hipotesis una raız doble de F . Por lo tanto, la funcion
∂
∂s
∣∣∣∣s=r
u(x, s) = u(x, r) log x+ xr∞∑
i=0
c′i(r)xi ≡ u1(x) log x+ xr
∞∑
i=0
c′i(r)xi
es solucion de la ecuacion lineal homogenea (3.45).
3.2.1. La ecuacion de Bessel
La ecuacionx2u′′ + xu′ + (x2 − ν2)u = 0 , x > 0 , (3.63)
donde ν ≥ 0 es un parametro real, recibe el nombre de ecuacion de Bessel. El origenes un punto singular regular de esta ecuacion, ya que es de la forma (3.45) con
p(x) = 1 , q(x) = x2 − ν2 (3.64)
funciones analıticas en 0 (polinomios). En este caso
p0 = 1 , q0 = −ν2 , (3.65)
y por tanto el polinomio indicial es
F (r) = r(r − 1) + r − ν2 = r2 − ν2 . (3.66)
Las raıces del polinomio indicial son en este caso reales:
r1 = ν , r2 = −ν (3.67)

CAPITULO 3. SOLUCIONES EN FORMA DE SERIE 85
(recuerdese que r1 siempre designa a la raız de parte real mayor), siendo su diferencia
r1 − r2 = 2ν . (3.68)
Busquemos, en primer lugar, la solucion del tipo (3.52), que en este caso sera de laforma
u1(x) =∞∑
i=0
ci xi+ν (x > 0) .
Sustituyendo en la ecuacion de Bessel se obtiene
∞∑
i=0
[(i+ ν)(i+ ν − 1) + (i+ ν) − ν2)
]ci x
i+ν +
∞∑
i=0
cixi+ν+2
= (1 + 2ν)c1xν+1 +
∞∑
i=2
[i(i+ 2ν)ci + ci−2
]xi+ν = 0 .
Igualando a cero los coeficientes de las potencias de x obtenemos la ecuacion
c1 = 0 (3.69)
junto con la relacion de recurrencia
i(i+ 2ν)ci = −ci−2 , i = 2, 3, . . . . (3.70)
Como (3.70) relaciona el coeficiente ci con ci−2, los coeficientes pares (impares) sonproporcionales a c0 (c1), de donde se deduce que
c2k+1 = 0 , k = 0, 1, . . . . (3.71)
Llamandoc2k = bk , k = 0, 1, . . . ,
la relacion de recurrencia (3.70) se transforma en
4k(k + ν) bk = −bk−1 , k = 1, 2, . . . . (3.72)
Como el coeficiente de bk no se anula para ningun k > 0 (ya que ν ≥ 0), esta relacion derecurrencia determina todos los coeficientes bk con k = 1, 2, . . . en terminos de b0. Enefecto, de (3.72) se obtiene facilmente
bk =(−1)k
22k k! (ν + k)(ν + k − 1) · · · (ν + 1)b0 , k = 1, 2, . . . . (3.73)
Tomando b0 = 2−ν obtenemos la siguiente solucion de la ecuacion de Bessel:
u1(x; ν) =∞∑
n=0
(−1)n
n!(ν + n) · · · (ν + 2)(ν + 1)
(x
2
)2n+ν. (3.74)
Por el teorema de Frobenius, la serie que define esta funcion es convergente para todox ∈ R, ya que los coeficientes p y q son polinomios. (Esto tambien se puede comprobardirectamente en este caso utilizando el criterio del cociente.)

CAPITULO 3. SOLUCIONES EN FORMA DE SERIE 86
Para simplificar los coeficientes en la formula anterior utilizaremos la funcion gam-
ma de Euler, definida por
Γ(z) =
∫ ∞
0tz−1 e−t dt . (3.75)
El argumento z en esta formula es complejo, y la integral converge absolutamente (y, portanto, Γ(z) esta bien definida) si Re z > 0. Integrando por partes se prueba facilmentela relacion funcional fundamental satisfecha por la funcion Γ:
Γ(z + 1) = z Γ(z) . (3.76)
Como
Γ(1) =
∫ ∞
0e−t dt = 1 ,
de la relacion funcional se deduce inmediatamente que
Γ(n+ 1) = n! n = 0, 1, . . . .
Por tanto la funcion Γ es una generalizacion del factorial. La funcion Γ se extiendefacilmente al semiplano izquierdo utilizando la relacion funcional (3.76). Por ejemplo, si−1 < Re z < 0 entonces se define
Γ(z) =Γ(z + 1)
z.
De esta forma se obtiene una funcion analıtica en todo el plano complejo, excepto enlos puntos z = 0,−1,−2, . . . , donde se prueba que Γ tiene polos simples (es decir,diverge como (z + k)−1 cuando z → −k, con k = 0, 1, . . . ). Por ultimo, se demuestraque la funcion Γ no tiene ceros en el plano complejo. Por tanto, la funcion 1/Γ es entera(analıtica en todo el plano omplejo), y se anula solo en los enteros negativos y en elorigen.
Utilizando la relacion funcional (3.76) repetidamente se obtiene
Γ(ν + n+ 1) = (ν + n) · · · (ν + 2)(ν + 1)Γ(ν + 1) .
Multiplicando la solucion u1(x; ν) por la constante no nula (ya que ν ≥ 0) 1/Γ(ν + 1)se llega a la solucion
Jν(x) =
∞∑
n=0
(−1)n
n! Γ(ν + n+ 1)
(x
2
)2n+ν, (3.77)
que se denomina funcion de Bessel de primera especie y orden ν. Si
2ν 6= 0, 1, . . . , (3.78)
por el teorema de Frobenius la segunda solucion de la ecuacion de Bessel es
J−ν(x) =
∞∑
n=0
(−1)n
n! Γ(n− ν + 1)
(x
2
)2n−ν. (3.79)

CAPITULO 3. SOLUCIONES EN FORMA DE SERIE 87
Por tanto, si 2ν 6= 0, 1, . . . la solucion general de la ecuacion de Bessel esta dada por
u(x) = C1 Jν(x) + C2 J−ν(x) ,
con C1 y C2 constantes arbitrarias. Notese que J0(0) = 1, mientras que para ν > 0 lafuncion Jν(x) se anula en el origen:
Jν(0) = 0 , ν > 0 .
Sin embargo, si ν ≥ 0 Jν solo es analıtica en x = 0 si ν = 0, 1, . . . , ya que xν soloes analıtica en el origen para estos valores de ν. Ademas, si ν 6= 1, 2, . . . entonces1/Γ(1 − ν) 6= 0, y por tanto para estos valores de ν J−ν(x) diverge cuando x→ 0:
J−ν(x) ∼x→0
2ν
Γ(1 − ν)x−ν (ν 6= 1, 2, . . . ) . (3.80)
Si2ν = 0, 1, . . . ,
es necesario calcular la segunda solucion linealmente independiente u2(x) de la ecuacionde Bessel. En particular, si 2ν = 1, 2, . . . debemos determinar si aparece o no un terminologarıtmico (que debe aparecer forzosamente para ν = 0). Si
ν =1
2,3
2, . . .
(es decir, si ν es semientero), no hay termino logarıtmico. Esto se puede ver estudiando larelacion de recurrencia para la segunda raız (−ν) de la ecuacion indicial, o mas facilmenteobservando que en este caso J−ν sigue siendo solucion de la ecuacion de Bessel (ya quedicha ecuacion no cambia si se sustituye ν por −ν), y no es proporcional a Jν(x). Enefecto, ya hemos visto que Jν se anula en el origen para ν > 0, mientras que, al ser1/Γ(1 − ν) 6= 0 para ν = 1/2, 3/2, . . . , la solucion J−ν diverge en 0 como x−ν (vease laec. (3.80)). De hecho, se puede probar que si m ∈ Z entonces
Jm+ 12(x) = Am
(1√x
)
cos x+Bm
(1√x
)
senx , (3.81)
con Am y Bm polinomios. Por ejemplo,
J 12(x) =
√
2
πxsenx , J− 1
2(x) =
√
2
πxcos x . (3.82)
Por el contrario, siν = 1, 2, . . .
entonces la segunda solucion contiene un termino logarıtmico. Una indicacion de estehecho es que si ν ∈ N la funcion J−ν es proporcional a Jν . En efecto, en este caso
1
Γ(n− ν + 1)= 0 , n = 0, 1, . . . , ν − 1 .

CAPITULO 3. SOLUCIONES EN FORMA DE SERIE 88
Por tanto
J−ν(x) =∞∑
n=ν
(−1)n
n! Γ(n− ν + 1)
(x
2
)2n−ν=
∞∑
k=0
(−1)k+ν
(k + ν)! Γ(k + 1)
(x
2
)2k+ν
=
∞∑
k=0
(−1)k+ν
Γ(k + ν + 1) k!
(x
2
)2k+ν= (−1)ν Jν(x) , ν = 1, 2, . . . .
Para ver con mas detalle que en este caso (ν ∈ N) hay un termino logarıtmico, noteseque la relacion de recurrencia para la hipotetica solucion
u2(x) = x−ν∞∑
i=0
ci xi
es simplemente (3.69) y (3.70) con ν reemplazado por −ν, es decir
i(i− 2ν) ci = −ci−2 , i = 2, 3, . . . .
De nuevo, todos los coeficientes impares son cero, y los coeficientes pares bk = c2k sedeterminan por
4k(k − ν) bk = −bk−1 , k = 1, 2, . . . .
Esta relacion determina b1, . . . , bν−1 en terminos de b0, siendo todos estos coeficientesno nulos si b0 6= 0. Sin embargo, en este caso la relacion que deberıa determinar bν sereduce a
0 = bν−1 ,
que es contradictoria, ya que bν−1 6= 0 si b0 6= 0 .Calculemos a continuacion la segunda solucion linealmente independiente de la ecua-
cion de Bessel para ν = 0. De acuerdo con el teorema de Frobenius, escribimos
u2(x) = J0(x) log x+ v2(x) ≡ J0(x) log x+∞∑
i=1
ci xi
(notese que podemos tomar c0 = 0) y sustituimos esta expresion en la ecuacion de Besselpara ν = 0, obteniendo
(xJ ′′0 + J ′
0 + xJ0) log x+ 2J ′0 + x v′′2 + v′2 + x v2 = 0 ,
o bien, ya que J0 es solucion de la ecuacion de Bessel para ν = 0,
x v′′2 + v′2 + x v2 + 2J ′0 = 0 . (3.83)
Notese que en esta expresion no aparece ya ningun termino logarıtmico, lo que ocurretambien en el caso general. Sustituyendo el desarrollo en serie de potencias de v2 en estaultima ecuacion multiplicada por x se obtiene facilmente
∞∑
i=0
[i(i − 1) + i]ci x
i +
∞∑
i=0
ci xi+2 + 2x
∞∑
n=1
(−1)nn
n!2
(x
2
)2n−1= 0 ,
es decir
c1x+∞∑
i=2
[i2ci + ci−2]x
i + 4∞∑
n=1
(−1)nn
n!2
(x
2
)2n= 0 . (3.84)

CAPITULO 3. SOLUCIONES EN FORMA DE SERIE 89
De esta relacion se deduce en primer lugar que c1 = 0. Como la ultima serie no contienemas que potencias pares, la relacion de recurrencia para las potencias impares
(2k + 1)2c2k+1 + c2k−1 = 0 , k = 1, 2, . . .
implica que todos los coeficientes impares son nulos:
c2k+1 = 0 , k = 0, 1, . . . . (3.85)
Definiendo bn = c2n e igualando a cero el coeficiente de x2n en (3.84) se obtiene larelacion de recurrencia para los coeficientes pares:
−n2bn =1
4bn−1 +
(−1)nn
4n n!2, n = 1, 2, . . . . (3.86)
Multiplicando ambos miembros de esta relacion por (−4)n(n − 1)!2 y llamando βk =−(−4)kk!2 bk se obtiene
βn = βn−1 +1
n, n = 1, 2, . . . .
La solucion de esta relacion de recurrencia es inmediata:
βn =1
n+
1
n− 1+ · · · + 1 + β0 , n = 1, 2, . . . .
Al ser β0 = b0 = c0 = 0 se tiene finalmente
bn =(−1)n+1
4n n!2
(
1 +1
2+ · · · + 1
n
)
, n = 1, 2, . . . .
Hemos probado por tanto que la segunda solucion linealmente independiente de la ecua-cion de Bessel de orden 0 esta dada por
N0(x) = J0(x) log x−∞∑
n=1
(−1)n
n!2
(
1 +1
2+ · · · + 1
n
)(x
2
)2n. (3.87)
La funcion N0 se denomina funcion de Neumann de orden cero. Notese que la funcionN0, a diferencia de la otra solucion J0, no es analıtica en el origen, donde se comportacomo log x:
N0(x) ∼x→0
log x .
En la practica, en lugar de la funcion de Neumann N0 se suele escoger como segundasolucion linealmente independiente la combinacion lineal de J0 y N0 dada por
Y0(x) =2
π
[N0(x) − (log 2 − γ)J0(x)
],
donde
γ = lımn→∞
(
1 +1
2+ · · · + 1
n− log n
)
≈ 0,577216
es la llamada constante de Euler–Mascheroni. La funcion Y0 (que tambien diverge lo-garıtmicamente en el origen) se suele denominar funcion de Bessel de segunda especiede orden 0. La solucion general de la ecuacion de Bessel de orden 0 es por tanto
u(x) = C1J0(x) + C2 Y0(x) ,

CAPITULO 3. SOLUCIONES EN FORMA DE SERIE 90
con C1 y C2 constantes reales.Para ν ≡ m = 1, 2, . . . , un calculo parecido al anterior pero algo mas complicado
demuestra que una segunda solucion de la ecuacion de Bessel de orden m linealmenteindependiente de Jm esta dada por la funcion de Neumann de orden m
Nm(x) = Jm(x) log x− 1
2
m−1∑
n=0
(m− n− 1)!
n!
(x
2
)2n−m
− 1
2
∞∑
n=0
(−1)n
n!(n+m)!
(
1 +1
2+ · · · + 1
n+ 1 +
1
2+ · · · + 1
n+m
) (x
2
)2n+m(3.88)
(donde se sobreentiende que el sumatorio 1+ 12 + · · ·+ 1
n desaparece si n = 0). De nuevo,es mas habitual usar como segunda solucion de la ecuacion de Bessel de orden m lafuncion de Bessel de segunda especie y orden m definida por
Ym(x) =2
π
[Nm(x) − (log 2 − γ)Jm(x)
],
en terminos de la cual la solucion general de la ecuacion de Bessel de orden m = 0, 1, . . .esta dada por
u(x) = C1Jm(x) + C2 Ym(x) , C1, C2 ∈ R .
Nota: Si se define
Yν(x) =cos(νπ)Jν(x) − J−ν(x)
sen(νπ), ν 6= 0, 1, . . . ,
entonces Jν e Yν forman un sistema fundamental de soluciones de la ecuacion de Besselde orden ν tambien para ν 6= 0, 1, . . . . Se demuestra que
Ym(x) = lımν→m
Yν(x) , m = 0, 1, . . . .
El comportamiento asıntotico (para x → ∞) de las funciones de Bessel de primera ysegunda especie esta dado por la formula
Jν(x) ∼x→∞
√
2
πxcos(
x− νπ
2− π
4
)
,
Yν(x) ∼x→∞
√
2
πxsen(
x− νπ
2− π
4
)
.
En particular, las funciones de Bessel de primera y segunda especie tienen infinitosceros en el eje real positivo, y presentan un comportamiento oscilatorio amortiguadopara x→ ∞.
Las funciones de Bessel satisfacen ciertas relaciones de recurrencia, que se puedendeducir de las dos identidades
(xνJν)′ = xν Jν−1 (3.89)
(x−νJν)′ = −x−ν Jν+1 . (3.90)

CAPITULO 3. SOLUCIONES EN FORMA DE SERIE 91
Para probar la primera de estas identidades basta utilizar el desarrollo en serie (3.77)de Jν , que proporciona
(xνJν)′ =
d
dx
∞∑
n=0
(−1)n 2ν
n! Γ(n+ ν + 1)
(x
2
)2(n+ν)=
∞∑
n=0
(−1)n 2ν (n+ ν)
n! Γ(n+ ν + 1)
(x
2
)2n+2ν−1
= xν Jν−1 .
La identidad (3.90) se prueba de forma semejante. Las funciones de Bessel de segundaespecie Yν satisfacen tambien las identidades (3.89)–(3.90), aunque aquı no demostra-remos esta resultado. Sumando y restando las identidades (3.89)–(3.90) multiplicadaspor x−ν y xν , respectivamente, se obtienen las siguientes relaciones entre funciones deBessel de distintos ındices y sus derivadas:
Jν−1 − Jν+1 = 2J ′ν (3.91)
Jν−1 + Jν+1 =2ν
xJν . (3.92)
La segunda de estas identidades se puede utilizar para calcular de forma recursiva lasfunciones de Bessel de ındice ν+ k (k = 1, 2, . . . ) a partir de Jν y Jν−1. Por ejemplo, lasfunciones de Bessel de ındice entero positivo se pueden expresar en terminos de J0 y J1.Del mismo modo, la expresion (3.81) para las funciones de Bessel de orden semientero sededuce facilmente de la relacion (3.92) y la ecuacion (3.82). Notese, por ultimo, que lasfunciones de Bessel de segunda especie tambien satisfacen las relaciones (3.91)–(3.92).
3.2.2. El punto del infinito
Supongamos que los coeficientes de la ecuacion lineal homogenea (3.34) estan defini-dos para |x| > R. Para estudiar el comportamiento de las soluciones de esta ecuacion enel punto del infinito o, con mayor propiedad, para |x| → ∞, efectuamos en la ecuacionel cambio de variable
t =1
x
y estudiamos el comportamiento de la ecuacion resultante para
y(t) = u(x) ≡ u(1/t)
para t→ 0. Como u(x) = y(1/x) se tiene
u′(x) = − 1
x2y′(1/x) , u′′(x) =
1
x4y′′(1/x) +
2
x3y′(1/x) ,
sustituyendo en la ecuacion diferencial se obtiene la ecuacion lineal homogenea de se-gundo orden
y′′ +A1(t) y′ +A0(t) y = 0 , (3.93)
donde los coeficientes Ai(t) estan dados por
A1(t) =2
t− 1
t2a1(1/t), A0(t) =
1
t4a0(1/t) . (3.94)
Diremos que el punto del infinito es regular (resp. singular regular) para la ecuacionoriginal (3.34) si el origen es un punto regular (resp. singular regular) para la ecuacion

CAPITULO 3. SOLUCIONES EN FORMA DE SERIE 92
(3.93). Por ejemplo, si el punto del infinito es un punto regular para la ecuacion (3.34)entonces las funciones Ai(t) (i = 0, 1) son analıticas en el origen con series de MacLaurinconvergentes para |t| < r, y toda solucion y(t) de (3.93) admite por tanto el desarrollo
y(t) =
∞∑
i=0
bi ti , |t| < r .
Por consiguiente, cualquier solucion u(x) = y(1/x) de la ecuacion original (3.34) admiteun desarrollo en serie en potencias negativas de x
u(x) =∞∑
i=0
bixi, |x| > 1
r.
Analogamente, el punto del infinito sera un punto singular regular para la ecuacion(3.34) si no es un punto regular, pero las funciones t A1(t) y t2A0(t) son analıticas ent = 0, es decir si
1
ta1(1/t),
1
t2a0(1/t) (3.95)
son analıticas en el origen.
Ejemplo 3.9. Consideremos la ecuacion de Legendre
(1 − x2)u′′ − 2xu′ + α(α+ 1)u = 0 , (3.96)
donde α ≥ −12 es un parametro real. En este caso
a1(x) =2x
x2 − 1, a0(x) =
α(α + 1)
1 − x2,
y por tanto los coeficientes Ai estan dados por
A1(t) =2
t− 1
t2
2t
1t2 − 1
=2t
t2 − 1, A0(t) =
α(α+ 1)
t2(t2 − 1).
El coeficiente A0 es divergente en t = 0 si α 6= 0, por lo que el punto del infinito no esregular para la ecuacion de Legendre si α 6= 0. Sin embargo, las funciones
p(t) ≡ t A1(t) =2t2
t2 − 1, q(t) ≡ t2A0(t) =
α(α + 1)
t2 − 1
son analıticas en t = 0, siendo sus series de Maclaurin convergentes para |t| < 1 (distanciaa la singularidad mas proxima en el plano complejo). Por tanto, el origen es un puntosingular regular para la ecuacion de Legendre para α 6= 0 (y regular si α = 0). Paraestudiar el comportamiento de las soluciones de esta ecuacion para |x| → ∞, estudiamosla ecuacion (3.93), que en este caso se escribe
t2(t2 − 1)y′′ + 2t3y′ + α(α + 1)y = 0 , (3.97)
en t = 0. Para esta ecuacion,
p0 = 0 , q0 = −α(α + 1) ,

CAPITULO 3. SOLUCIONES EN FORMA DE SERIE 93
y por tanto el polinomio indicial es
F (r) = r(r − 1) − α(α + 1) = (r + α)(r − α− 1) .
Las raıces de la ecuacion indicial son por tanto
r1 = α+ 1 , r2 = −α .
Notese que la numeracion de las raıces es la correcta, ya que
r1 − r2 = 2α+ 1 ≥ 0 .
Por el teorema de Frobenius, si α ≥ −12 y 2α 6= −1, 0, 1, . . . la ecuacion de Legendre
(3.96) tiene una base de soluciones de la forma
u1(x) =1
|x|α+1
∞∑
k=0
ckxk
, u2(x) = |x|α∞∑
k=0
dk
xk, (3.98)
con c0 = d0 = 1, siendo las series anteriores convergentes para |x| > 1. Analogamente,si α = −1
2 un sistema fundamental de soluciones de la ecuacion de Legendre es de laforma
u1(x) =1
√
|x|
∞∑
k=0
ckxk
, u2(x) = u1(x) log |x| + 1√
|x|
∞∑
k=0
dk
xk, (3.99)
con c0 = 1 y d0 = 0, siendo de nuevo ambas series convergentes para |x| > 1.Si α = 0, el punto t = 0 es regular para la ecuacion (3.97), por lo que dicha ecuacion
posee una sistema fundamental de soluciones analıticas en (−1, 1). Este sistema se puedetomar de la forma
y1(t) = t∞∑
k=0
ck tk , y2(t) =
∞∑
k=0
dk tk .
Por tanto la ecuacion de Legendre para α = 0 posee dos soluciones linealmente inde-pendientes de la forma
u1(x) =1
x
∞∑
k=0
ckxk
, y2(t) =
∞∑
k=0
dk
xk,
siendo estas series convergentes para |x| > 1.
Nota. De hecho, la ecuacion de Legendre para α = 0 es una ecuacion lineal de primerorden en u′, y por tanto se integra facilmente. Su solucion general es
u(x) = C1 log
∣∣∣∣
1 − x
1 + x
∣∣∣∣+ C2 ,
con C1, C2 constantes arbitrarias.
Ejercicio. Probar que si α = 1, 2, . . . la ecuacion de Legendre tiene dos soluciones li-nealmente independientes de la forma (3.98), mientras que para α = 1/2, 3/2, . . . hayuna base de soluciones de la forma
u1(x) =1
|x|α+1
∞∑
k=0
ckxk
, u2(x) = c u1(x) log |x| + |x|α∞∑
k=0
dk
xk,
con c0 = d0 = 1 y c 6= 0.

CAPITULO 3. SOLUCIONES EN FORMA DE SERIE 94
Solucion.Sea 2α + 1 = n + 1 con n = 1, 2, . . . , de modo que las raıces de la ecuacion indicial
son r1 = n2 + 1 y r2 = −n
2 . El teorema de Frobenius garantiza entonces la existencia deuna solucion de la forma
y1(t) = tn2+1
∞∑
i=0
ci ti ,
donde hemos supuesto, por sencillez, que t > 0. Debemos ahora determinar si la ecuacion(3.97) posee una solucion de la forma
y2(t) =
∞∑
i=0
di ti−n
2
con d0 6= 0. Sustituyendo en la ecuacion diferencial (3.97) se obtiene inmediatamente
t2(t2−1)∞∑
i=0
di
(
i−n2
)(
i−n2−1)
ti−n2−2+2
∞∑
i=0
di
(
i−n2
)
ti−n2+2+
n
2
(n
2+1) ∞∑
i=0
di ti−n
2
= nd1 t1−n
2 +
∞∑
i=2
[
i(n − i+ 1)di +(
i− n
2− 1)(
i− n
2− 2)
di−2
]
ti−n2 = 0 .
De esta forma se obtiene la condicion
n d1 = 0 (3.100)
junto con la relacion de recurrencia
i(n− i+ 1)di = −(
i− n
2− 1)(
i− n
2− 2)
di−2 i = 2, 3, . . . . (3.101)
Si n = 2m es un entero positivo par la relacion de recurrencia tiene solucion. En efecto,si n = 2m con m = 1, 2, . . . entonces todos los coeficientes pares estan determinados porla relacion de recurrencia en funcion de d0, ya que 2m+ 1 − i no se anula para ningunentero par i. Ahora d1 = 0, y por tanto la relacion de recurrencia implica que
d3 = · · · = d2m−1 = 0 .
Haciendo i = 2m+ 1 en la relacion de recurrencia se obtiene
0 · d2m+1 = 0 ,
lo cual implica que d2m+1 no esta determinado. (Esto es razonable, ya que si anadimos ay2(t) un multiplo cualquiera de y1(t) seguimos teniendo una solucion.) Sin embargo, dadoque 2m+ 1 − i no se anula para i = 2m+ 3, 2m + 5, . . . , todos los coeficientes imparesa partir de d2m+1 estan determinados por este (en particular, se anulan si tomamosd2m+1 = 0).
Veamos ahora que ocurre si n = 2m − 1 con m = 1, 2, . . . . En este caso todos loscoeficientes impares son nulos, ya que d1 = 0 y 2m − i no es cero para i impar. Como2m − i tampoco se anula para i = 2, . . . , 2m − 2, los coeficientes pares d2, . . . , d2m−2
estan determinados por la relacion de recurrencia en funcion de d0. Ninguno de dichoscoeficientes se puede anular si d0 6= 0, ya que el factor
(i−m− 1
2
) (i−m− 3
2
)no

CAPITULO 3. SOLUCIONES EN FORMA DE SERIE 95
se anula para ningun entero i. Sin embargo, la relacion de recurrencia para i = 2mproporciona la ecuacion
0 = −(
m− 1
2
)(
m− 3
2
)
d2m−2 ,
que es contradictoria. Por tanto, la segunda solucion contiene en este caso un terminologarıtmico.

Capıtulo 4
Sistemas dinamicos en el plano
4.1. Resultados generales
Un sistema dinamico en Rn es un sistema autonomo de n ecuaciones diferencialesde primer orden
x = f(x) . (4.1)
Notese que la funcion vectorial f : Rn → Rn no depende del tiempo (variable indepen-diente) t. La notacion que utilizaremos en este capıtulo es la siguiente:
x = (x1, . . . , xn) , x =dx
dt.
Notese que un sistema arbitrario (es decir, no necesariamente autonomo)
dy
dt= g(t, y) (4.2)
puede convertirse facilmente en un sistema dinamico. En efecto, si x = (t, y) entoncesx = f(x), siendo
f(x) =(1, g(x)
).
Recıprocamente, las soluciones de este sistema con la condicion inicial t(0) = 0 son dela forma (t, y(t)), con y(t) solucion de (4.2).
Si la funcion f es de clase C1 en un abierto U ⊂ Rn entonces f , considerada comofuncion de R× Rn → Rn independiente de la variable t, es localmente lipschitziana enR×U respecto de la variable x. Por tanto, dado cualquier dato inicial x0 ∈ U localmentehay una unica solucion x(t; t0, x0) del sistema dinamico satisfaciendo dicho dato inicialen el instante t = t0:
x(t0; t0, x0) = x0 .
Si t0 = 0, escribiremos normalmente x(t;x0) en lugar de x(t; 0, x0).Historicamente, el primer ejemplo de sistema dinamico es el que describe el mo-
vimiento de un sistema clasico aislado de N partıculas. En efecto, si las coordenadasespaciales de la i-esima partıcula las denotamos por Xi =
(Xi1,Xi2,Xi3
)entonces las
ecuaciones de Newton del sistema son de la forma
Xi = Fi(X1, . . . ,XN , X1, . . . , XN ) , i = 1, 2, . . . , N , (4.3)
96

CAPITULO 4. SISTEMAS DINAMICOS EN EL PLANO 97
siendo Fi =(F1, F2, F3
)la fuerza por unidad de masa que actua sobre la i-esima partıcu-
la. Introduciendo la velocidad Pi = Xi y llamando
x =(X1, . . . ,XN , P1, . . . , PN
)∈ R6N ,
las ecuaciones de Newton (4.3) se convierten en el sistema dinamico (4.1) con f : R6N →R6N dada por
f(x) =(x3N+1, . . . , x6N , F1(x), . . . , FN (x)
).
Una trayectoria de un sistema dinamico es la grafica(t, x(t)
)de cualquier solucion
x(t) (t ∈ I, siendo I ⊂ R un intervalo). Notese por tanto que las trayectorias son curvasen R × U ⊂ Rn+1, parametrizadas ademas de una forma especial (es decir, utilizandola primera coordenada como parametro de la curva). Una orbita del sistema dinamico(4.1) es una curva γ ⊂ U ⊂ Rn (considerada como conjunto de puntos) que se puedeparametrizar con una solucion x(t) del sistema (4.1), es decir tal que
γ = {x(t) : t ∈ I} , (4.4)
para alguna solucion x(t) del sistema. Por lo tanto, la proyeccion de una trayectoria(t, x(t)) ∈ R × U sobre U ⊂ Rn es una orbita, y recıprocamente toda orbita se puedeparametrizar de modo que sea la proyeccion sobre U de una trayectoria. Se suele llamarespacio de fases del sistema dinamico n-dimensional (4.1) al abierto U ⊂ Rn en que festa definida (y es de clase C1), mientras que al cilindro R×U ⊂ Rn+1 se le denominaespacio de fases ampliado. Llamaremos tambien mapa de fases del sistema dinamico(4.1) al conjunto de todas sus orbitas.
Ejemplo 4.1. Consideremos el sistema dinamico plano (es decir, n = 2)
x1 = x2 , x2 = −x1 . (4.5)
Este es un sistema lineal homogeneo de coeficientes constantes x = Ax, siendo
A =
(0 1−1 0
)
.
La solucion general del sistema es por tanto
x(t) = etAx0 =
(cos t sen t
− sen t cos t
)(αβ
)
=(α cos t+ β sen t,−α sen t+ β cos t
),
con (α, β) ∈ R2. Las trayectorias del sistema son por tanto las helices
t 7→ (t, α cos t+ β sen t,−α sen t+ β cos t)∈ R3 , t ∈ R .
Notese que las trayectorias son curvas en R3. Las orbitas del sistema son las proyeccionesde las helices anteriores sobre las dos ultimas coordenadas, es decir las curvas planasparametrizadas por
t 7→(α cos t+ β sen t,−α sen t+ β cos t
).
Las ecuaciones parametricas de las orbitas son por tanto
x1 = α cos t+ β sen t , x2 = −α sen t+ β cos t .
Eliminando el parametro t obtenemos la ecuacion implıcita de las orbitas
x21 + x2
2 = α2 + β2 .
Se trata, por tanto, de circunferencias de centro el origen y radio√
a2 + β2.

CAPITULO 4. SISTEMAS DINAMICOS EN EL PLANO 98
La propiedad fundamental de un sistema autonomo (en el que la funcion f no de-pende explıcitamente del tiempo t) es la siguiente:
Proposicion 4.2. Si x(t) es una solucion de (4.1) y c ∈ R entonces x(t + c) siguesiendo solucion de (4.1).
Demostracion. Si y(t) = x(t+ c) entonces
y(t) = x(t+ c) = f(x(t+ c)
)= f
(y(t)
).
Q.E.D.
Por el teorema de unicidad, si f ∈ C1(U) dos trayectorias del sistema no se puedencortar, ya que en caso contrario las soluciones correspondientes a dichas trayectoriastendrıan ambas el mismo dato incial (el punto de corte). Este resultado es cierto tam-bien para sistemas no autonomos. Sin embargo, los sistemas autonomos satisfacen unacondicion mas fuerte:
Proposicion 4.3. Las orbitas del sistema dinamico (4.1) no se cortan.
Demostracion. Supongamos, en efecto, que dos orbitas distintas (localmente) γ1 y γ2 secortaran en el punto x0 ∈ U . Sean x1(t) y x2(t) dos soluciones del sistema correspon-dientes a dichas orbitas. entonces existiran dos tiempos t1 y t2 tales que
x1(t1) = x2(t2) = x0 . (4.6)
Por el resultado anterior, las funciones y1(t) = x1(t+ t1) e y2(t) = x2(t+ t2) son ambassolucion del sistema, y por (4.6) satisfacen la condicion inicial
y1(0) = y2(0) = x0 .
Por el teorema de unicidad, y1(t) = y2(t) en un entorno de t = 0, y por tanto las funcionesx1 y x2 parametrizan la misma curva en un entorno de x0 (pues x1(t) = x2(t+ t2 − t1)en un entorno de t = t1). Q.E.D.
De la demostracion anterior tambien se sigue que si γ es una orbita de (4.1) y x(t) esuna solucion del sistema que parametriza γ, entonces las unicas soluciones del sistemaque parametrizan a la orbita γ son de la forma x(t+ c) con c ∈ R constante. En otraspalabras, la parametrizacion de cualquier orbita de un sistema dinamico esta determina-da salvo por una traslacion temporal. (En lo anterior se sobreentiende que nos referimosa parametrizaciones de las orbitas con soluciones del sistema.) En particular, el sentidode recorrido (orientacion) de las orbitas esta bien determinado, ya que x(t) y x(t+ c)ambas determinan la misma orientacion.
Geometricamente, el sistema dinamico (4.1) admite la siguiente interpretacion sen-cilla. La funcion f : U ⊂ Rn → Rn que define el sistema es un campo de vectores
en U ⊂ Rn, ya que a cada punto x de U le asigna un vector f(x) ∈ Rn (piensese, porejemplo, en el caso n = 3). Si γ es una orbita del sistema y x0 es un punto cualquierade γ, el vector f(x0) es tangente a γ en x0, y su sentido coincide con la orientacion deγ. En efecto, si x(t) es una solucion de (4.1) que parametriza a γ entonces x0 = x(t0)para algun t0, y por tanto (al ser x(t) solucion del sistema) x(t0) = f
(x(t0)
)= f(x0).
Las orbitas cerradas de un sistema autonomo (de clase C1) han de ser necesariamentecurvas cerradas simples (sin autointersecciones). En efecto, si una orbita cerrada del

CAPITULO 4. SISTEMAS DINAMICOS EN EL PLANO 99
sistema (4.1) se autointersecara en un punto x0 entonces por dicho punto pasarıan enrealidad dos orbitas distintas del sistema.
Proposicion 4.4. Una orbita del sistema (4.1) es cerrada si y solo si las solucionesdel sistema que la parametrizan son funciones periodicas.
Demostracion. Notese que la condicion del enunciado tiene sentido, ya que acabamosde ver que las soluciones que parametrizan una orbita difieren en una traslacion en eltiempo. Si x(t) es una solucion de (4.1) de perıodo T > 0, la orbita γ que parametrizaes una curva cerrada, ya que obviamente
γ = {x(t)) : t0 ≤ t < t0 + T}
y x(t0) = x(t0 + T ). Recıprocamente, supongamos que γ es una orbita cerrada delsistema, y sea x(t) una solucion del sistema que parametrice γ. Si x(t) esta definida ent = a, por ser la curva γ cerrada existe un mınimo valor de b > a tal que x(a) = x(b).Entonces x(t) y x(t + b − a) son dos soluciones del sistema que verifican la mismacondicion inicial en t = a. Por el teorema de unicidad, x(t) = x(t+ b− a) para todo t,y por tanto la solucion x tiene perıodo b− a. Q.E.D.
Por definicion, el perıodo de una orbita cerrada del sistema (4.1) es el (menor)perıodo de cualquier solucion del sistema que parametrice dicha curva.
Ejemplo 4.5. Las curvas del sistema dinamico (4.5) se pueden escribir como sigue:
x(t) = r(cos(t− t0),− sen(t− t0)
)
siendo r =√
α2 + β2 yα = r cos t0 , β = r sen t0 .
Otra parametrizacion de la misma orbita es x(t) = r(cos t,− sen t). Las orbitas son portanto circunferencias centradas en el origen y orientadas en sentido horario. En este caso,todas las orbitas del sistema son cerradas y tienen el mismo perıodo (2π). En general, sinembargo, dos orbitas cerradas distintas de un sistema dinamico tienen distinto perıodo.
Es posible encontrar la ecuacion cartesiana (o implıcita) de las orbitas de un sistemasin hallar antes sus soluciones. Para ello parametrizamos la orbita γ utilizando comoparametro una de las coordenadas, por ejemplo la primera. Por el teorema de la funcioninversa, esto podremos hacerlo localmente en un entorno de cualquier punto en quex1 6= 0, es decir en que f1(x) 6= 0. La orbita vendra por tanto descrita localmente conuna parametrizacion de la forma x1 7→
(x1, x2(x1), . . . , xn(x1)
). Para determinar las
funciones xi(x1) (2 ≤ i ≤ n), observese que
dxi
dx1=xi
x1=fi(x1, x2, . . . , xn)
f1(x1, x2, . . . , xn), i = 2, 3, . . . , n .
La ecuacion diferencial de las orbitas en esta parametrizacion es por tanto el siguientesistema no autonomo de orden n− 1:
dxi
dx1=fi(x1, x2, . . . , xn)
f1(x1, x2, . . . , xn), i = 2, 3, . . . , n . (4.7)

CAPITULO 4. SISTEMAS DINAMICOS EN EL PLANO 100
Observese que esta parametrizacion solo tiene sentido en puntos en que f1(x) 6= 0. Porejemplo, en el caso de un sistema plano, que normalmente escribiremos
{
x = f(x, y)
y = g(x, y) ,(4.8)
las ecuaciones de las orbitas son
dy
dx=g(x, y)
f(x, y), si f(x, y) 6= 0 (4.9)
odx
dy=f(x, y)
g(x, y), si g(x, y) 6= 0 . (4.10)
Por ejemplo, para el sistema lineal{
x = y
y = −x
estudiado anteriormente, la ecuacion de las orbitas tomando a x como variable indepen-diente es
dy
dx= −x
y, y 6= 0 ,
que es de variables separadas y se integra facilmente:
x2 + y2 = c , c ≥ 0 ∈ R .
Como ya vimos anteriormente, las orbitas son circunferencias centradas en el origen.Los unicos puntos del espacio de fases en que no es posible parametrizar las orbi-
tas tomando como parametro alguna de las coordenadas son los puntos en que todaslas funciones fi se anulan. Estos puntos, de importancia fundamental para entender elcomportamiento cualitativo del sistema dinamico correspondiente, reciben el nombre depuntos crıticos o equilibrios del sistema:
Definicion 4.6. Un punto x0 ∈ Rn es un punto crıtico o equilibrio del sistema (4.1)
si f(x0) = 0 .
Si x0 es un punto crıtico del sistema (4.1), dicho sistema posee obviamente la solucionconstante x(t) = x0, para todo t ∈ R. Esta es la razon por la cual a los puntos crıticosde un sistema dinamico se les llama tambien equilibrios. Visto de otra forma, un puntocrıtico es una orbita del sistema dinamico (4.1) que se reduce a un punto. Por la Propo-sicion 4.3, ninguna orbita del sistema puede contener a un punto crıtico x0. Observese,sin embargo, que una orbita x(t) puede “entrar” en el equilibrio (si lım
t→∞x(t) = x0) o
“salir” de el (si lımt→−∞
x(t) = x0).
En un sistema dinamico, los equilibrios son los puntos mas interesantes. En efecto,si x0 ∈ Rn no es un equilibrio (f(x0) 6= 0) se puede probar que es posible realizar uncambio de variables local y = Y (x) de forma que en la variable y el sistema dinamico(4.1) se escriba
y1′ = 1 , y2
′ = · · · = yn′ = 0 .
En las nuevas coordenadas y1, . . . , yn, las orbitas del sistema en las proximidades delpunto y0 = Y (x0) son simplemente rectas paralelas al eje y1.

CAPITULO 4. SISTEMAS DINAMICOS EN EL PLANO 101
Definicion 4.7. Sea x0 un punto crıtico del sistema dinamico (4.1).
i) x0 es un punto crıtico aislado si el sistema no tiene ningun punto crıtico en elentorno perforado 0 < ‖x− x0‖ < ε, con ε > 0 suficientemente pequeno.
ii) x0 es un punto crıtico elemental (simple, no degenerado) si detDf(x0) 6= 0 .
iii) x0 es un punto crıtico hiperbolico si todos los autovalores de Df(x0) tienen partereal distinta de cero.
Proposicion 4.8. x0 punto crıtico hiperbolico =⇒ x0 punto crıtico elemental =⇒ x0
punto crıtico aislado.
Demostracion. La primera implicacion es trivial, ya que si detDf(x0) = 0 algun autova-lor deDf(x0) es igual a cero, y por tanto x0 no es un punto crıtico hiperbolico. En cuantoa la segunda, por el teorema de la funcion inversa existe un entorno V = Bε(x0) de x0
en que f es invertible. Por tanto, si x ∈ V y f(x) = 0 = f(x0) entonces x = x0. Q.E.D.
Ejemplo 4.9. Estudiemos como son los puntos crıticos del sistema dinamico lineal
x = Ax (4.11)
en terminos de la matriz A. En primer lugar, x0 es un punto crıtico de (4.11) si y solo siAx0 = 0. Por tanto, 0 es siempre un punto crıtico de (4.11), y es el unico punto crıtico siy solo si la matriz A es no degenerada (detA 6= 0). El origen es un punto crıtico aisladosi y solo si detA 6= 0. En efecto, si detA 6= 0 entonces 0 es el unico punto crıtico, y sidetA = 0 entonces las soluciones de Ax0 = 0 forman un subespacio lineal (en nucleo dela matriz A) que contiene a 0.
Como f(x) = Ax, se tiene que Df(x0) = A para todo x0. Por tanto, x0 es un puntocrıtico elemental de (4.11) si y solo si detA 6= 0. En otras palabras, si detA 6= 0 el unicopunto crıtico es 0, que es aislado y elemental, y si detA = 0 entonces hay infinitos puntoscrıticos, que forman un subespacio lineal y son no aislados (y, por tanto, no elementales).Por ultimo, si detA 6= 0 el origen es un punto crıtico hiperbolico si y solo si todos losautovalores de A tienen parte real no nula.
La importancia de los sistemas dinamicos lineales estriba en que un sistema dinamicoarbitario se puede aproximar por un sistema lineal apropiado en las proximidades decualquier equilibrio x0. En efecto, por definicion de derivada
f(x) = f(x0) +Df(x0) · (x− x0) + ε(x) = Df(x0) · (x− x0) + ε(x) ,
siendo ‖ε(x)‖ muy pequeno frente a ‖x− x0‖:
lımx→x0
‖ε(x)‖‖x− x0‖
= 0 .
Es razonable por tanto pensar que el sistema dinamico (4.1) se pueda “aproximar” (enun sentido que precisaremos a continuacion) en las proximidades del equilibrio x0 porel sistema lineal
y = Df(x0) · y , (4.12)
siendo y = x− x0 la desviacion del equilibrio. Diremos que (4.12) es la aproxima-
cion lineal de (4.1) en el punto crıtico x0. El mapa de fases de (4.1) en un entorno de

CAPITULO 4. SISTEMAS DINAMICOS EN EL PLANO 102
x0 y el de su aproximacion lineal (4.12) en un entorno del origen deberıan ser cualitati-vamente semejantes. En general, sin embargo, esto solo es cierto si el punto crıtico x0 eshiperbolico1. Por ejemplo, si x0 es un punto crıtico hiperbolico de (4.1) su estabilidadpuede determinarse estudiando la estabilidad de la aproximacion lineal en x0:
Teorema 4.10. Si x0 es un punto crıtico hiperbolico del sistema dinamico (4.1),entonces x0 tiene el mismo tipo de estabilidad para (4.1) que la aproximacion linealde (4.1) en x0.
En otras palabras, x0 es asintoticamente estable si todos los autovalores de Df(x0)tienen parte real negativa, e inestable si algun autovalor de Df(x0) tiene parte realpositiva.
4.2. Sistemas dinamicos lineales en R2
Consideremos el sistema dinamico lineal
(xy
)
= A
(xy
)
, A =
(a bc d
)
. (4.13)
Llamaremosτ = trA ≡ a+ d , δ = detA ≡ ad− bc . (4.14)
Supondremos que la matriz A es no degenerada, es decir δ 6= 0 , y por tanto el origen
es un punto crıtico elemental del sistema lineal (4.13). El polinomio caracterıstico de Aes
pA(λ) = λ2 − τ λ+ δ , (4.15)
con discriminante∆ = τ2 − 4δ . (4.16)
Sea X = (x, y), y efectuemos un cambio de variables dependientes real X = P Z , condetP 6= 0. Entonces
X = PZ = AX =⇒ Z = P−1AX =(P−1AP
)Z
y por tanto Z(t) es solucion del sistema lineal
Z =(P−1AP
)Z . (4.17)
Si los autovalores de la matriz A son ambos reales, se puede escoger P de modo que suscolumnas de P formen una base de Jordan de A, en cuyo caso
P−1AP = J =
(λ1 0ε λ2
)
, (4.18)
siendo λ1 ≤ λ2 los dos autovalores de A, y ε ∈ {0, 1}, con ε = 0 si λ1 6= λ2 o si Aes proporcional a la identidad. Notese que los mapas de fases de (4.13) y (4.17) son
1Intuitivamente, esto se debe a que si el punto crıtico es hiperbolico una pequena perturbacion del
sistema lo transformara en un punto crıtico hiperbolico. La hiperbolicidad de un punto crıtico es por
tanto generica.

CAPITULO 4. SISTEMAS DINAMICOS EN EL PLANO 103
linealmente equivalentes, ya que se pasa de uno al otro mediante el cambio de variablelineal X = P Z. Observese tambien que
τ = λ1 + λ2 , δ = λ1λ2 . (4.19)
Se pueden dar los siguientes casos:
I) Los autovalores de A son reales, es decir
τ2 − 4δ ≥ 0 . (4.20)
I.a) δ < 0
Notese que δ < 0 =⇒ τ2 − 4δ > 0. En este caso los dos autovalores tienen signosopuestos, es decir
λ1 < 0 < λ2 .
Si Z = (z1, z2), la solucion general del sistema en Z es
z1 = c1 eλ1t , z2 = c2 eλ2t , (4.21)
con c1 y c2 constantes arbitarias. La ecuacion cartesiana de las orbitas se deduce facil-mente de la anterior:
z2 = c |z1|λ2λ1 , c ∈ R , (4.22)
junto con z1 = 0 (en realidad, se trata de las dos orbitas {z1 = 0, z2 > 0} y {z1 = 0, z2 < 0}).Notese que las dos soluciones
Z(t) = ±(1, 0)eλ1t
parametrizan el eje z1 (menos el origen) y “entran” en el punto crıtico (el origen), al serλ1 negativo, mientras que las soluciones
Z(t) = ±(0, 1)eλ2t
parametrizan el eje z2 y “salen” del origen (λ2 > 0). Si efectuamos la transformacionlineal X = P Z para pasar a las variables originales X = (x, y), el mapa de fases essemejante. En particular, los ejes z1 y z2 se transforman en dos rectas, dirigidas en ladireccion de los dos autovectores linealmente independientes de la matriz A. En estecaso se dice que el origen es un punto de silla del sistema (4.13).
I.b) δ > 0
Notese que las desigualdades δ > 0 y τ2 − 4δ ≥ 0 implican que τ 6= 0. En este casolos dos autovalores tienen el mismo signo, igual al signo de τ . Es conveniente distinguirlos siguientes subcasos:
I.b.1) τ2 − 4δ > 0 , δ > 0
Los dos autovalores son distintos, y del mismo signo. La solucion del sistema y laecuacion de las orbitas todavıa estan dados por (4.21) y (4.22), respectivamente. Sinembargo, al ser los dos autovalores del mismo signo, todas las soluciones tienden alorigen para t → ∞ si τ < 0, y por tanto λ1 < λ2 < 0, o para t → −∞ si τ > 0 y0 < λ1 < λ2. Notese ademas que si τ > 0 y c1 6= 0
lımt→−∞
z2(t)
z1(t)= lım
t→−∞λ2c2λ1c1
e(λ2−λ1)t = 0 ,

CAPITULO 4. SISTEMAS DINAMICOS EN EL PLANO 104
Por tanto, si τ > 0 todas las orbitas menos la recta z1 = 0 salen del origen con pendientecero. Analogamente, si τ < 0 y c2 6= 0 todas las orbitas menos z2 = 0 entran en el origentangentes al eje z2.
En las coordenadas originales X = (x, y), todas las orbitas entran o salen del origensegun sea τ < 0 o τ > 0. Dichas orbitas entran o salen del origen tangentes a la rectaparalela al autovector correspondiente al menor autovalor en valor absoluto, excepto larecta paralela al otro autovector. Diremos que el origen es un nodo estable si τ < 0, yun nodo inestable si τ > 0.
I.b.2) τ2 − 4δ = 0 (⇒ δ > 0) , A = λ1
Las soluciones son las rectas X = v eλt, con v ∈ R2 y λ = τ/2. De nuevo, si τ > 0las orbitas salen del origen, y entran en el origen si τ < 0. Se dice en este caso que elorigen es un nodo propio (estable si τ < 0, inestable si τ > 0).
I.b.3) τ2 − 4δ = 0 (⇒ δ > 0) , A 6= λ1
En este caso la forma canonica de Jordan de A es
J =
(λ 01 λ
)
, λ =τ
2.
Notese que en este caso la matriz A tiene un solo autovector linealmente independiente,que esta dado por la segunda columna de P . La solucion del sistema (4.17) es ahora
z1 = c1 eλt , z2 = (c1t+ c2) eλt (c1, c2 ∈ R) .
La ecuacion de las orbitas es
z2 = z1
(1
λlog |z1| + c
)
, c ∈ R ,
junto con z1 = 0. De nuevo, todas las orbitas entran en el origen (resp. salen del origen)si τ < 0 (resp. τ > 0). Ademas, si c1 6= 0
z2(t)
z1(t)=λc1 t+ (c1 + λc2)
λc1= t+
(c2c1
+1
λ
)
−−−−→t→±∞
±∞ ,
por lo que todas las orbitas entran o salen del origen tangentes al eje z2. En las coor-denadas de partida x, las orbitas entran o salen del origen (segun sea τ < 0 o τ > 0)tangentes a la recta paralela al autovector de la matriz A. Se dira que el origen es unnodo de una tangente (estable si τ < 0, inestable si τ > 0).
II) τ2 − 4δ < 0
En este caso hay dos autovalores complejos conjugados λ1,2 = α ± iβ, con β > 0.Existe por tanto un vector v ∈ C2 tal que
Av = (α+ iβ)v .
Tomando la parte real e imaginaria de esta igualdad compleja obtebemos las dos igual-dades reales
A · Re v = αRe v − β Im v , A · Im v = α Im v + βRe v .

CAPITULO 4. SISTEMAS DINAMICOS EN EL PLANO 105
Por tanto, si P =(Re v Im v
)se tiene
P−1AP =
(α β−β α
)
Como la traza y el determinante son invariantes bajo transformaciones lineales se tiene
τ = 2α , δ = α2 + β2 . (4.23)
Efectuando el cambio X = P Z obtenemos el sistema en Z
z1 = αz1 + β z2
z2 = −β z1 + α z2 .(4.24)
Pasando a coordenadas polares
z1 = r cos θ , z2 = r sen θ
obtenemos:
r2 = z21 + z2
2 =⇒ r r = z1z1 + z2z2 = α r2
z1 = αz1 + β z2 = r cos θ − (r sen θ) θ = αz1 − z2 θ =⇒ θ = −β .
El sistema en coordenadas polares es
r = αr , θ = −β , (4.25)
con solucion general
r = r0 eαt , θ = θ0 − βt ; r0, θ0 ∈ R . (4.26)
La ecuacion de las orbitas es por tanto
r = r0 e−αβ
(θ−θ0) . (4.27)
Se trata de una familia de espirales logarıtmicas, si α 6= 0 (es decir, τ 6= 0), o circunfe-rencias centradas en el origen, si α = 0 (τ = 0). En el plano (x, y), las orbitas siguensiendo espirales para τ 6= 0, y son elipses centradas en el origen para τ = 0. En elprimer caso (τ 6= 0) se dice que el origen es un foco, estable para τ < 0 e inestable paraτ > 0, mientras que si τ = 0 el origen es un centro. Si τ > 0, las espirales tiendenal origen para t → −∞, mientras que si τ < 0 esto ocurre para t → ∞. El sentido degiro alrededor del origen de las espirales o las circunferencias se determina facilmenteobservando cual es la direccion del vector velocidad AX cuando la orbita cruza uno delos ejes. Por ejemplo, la componente x del vector velocidad para x = 0 es f(0, y) = b y.Por tanto, el sentido de giro es horario (antihorario) si b > 0 (b < 0). Del mismo modo,como g(x, 0) = c x el sentido de giro es horario si c < 0, y antihorario si c > 0. Noteseque
τ2 − 4δ = (a+ d)2 − 4(ad − bc) = (a− d)2 + 4bc < 0 =⇒ bc < 0 .
En el plano de los parametros (τ, δ), el conjunto τ2−4δ = 0 representa una parabola.El tipo de punto crıtico que el sistema lineal (4.13) tiene en el origen (punto de silla,nodo, foco o centro) esta determinado por la posicion del punto (τ, δ) en el espacio deparametros en relacion con esta parabola y con los ejes coordenados (fig. 4.1).

CAPITULO 4. SISTEMAS DINAMICOS EN EL PLANO 106
τ2 − 4δ = 0δ
FOCO INEST.
NODO INEST.
NODO INEST.
τ
PTO. DE SILLAPTO. DE SILLA
FOCO EST.
NODO EST.
NODO EST.
CENTRO
Figura 4.1: Tipos de puntos crıticos del sistema lineal (4.13).
4.3. Sistemas dinamicos no lineales en R2
Covnsideremos a continuacion el sistema dinamico plano
{
x = f(x, y)
y = g(x, y) ,(4.28)
donde las funciones f y g se supondran como mınimo de clase C1 en un abierto U ⊂ R2,y supongamos que (x0, y0) es un punto crıtico de (4.28). La aproximacion lineal delsistema (4.28) en el punto crıtico (x0, y0), es el sistema lineal
X = aX + b Y
Y = cX + dY ,(4.29)
siendo (X,Y ) = (x− x0, y − y0),
(a bc d
)
= D(f, g)(x0, y0) =
(fx(x0, y0) fy(x0, y0)gx(x0, y0) gy(x0, y0)
)
. (4.30)
El siguiente teorema relaciona el comportamiento del sistema no lineal (4.28) en lasproximidades de un punto crıtico elemental (x0, y0) con el de su aproximacion lineal(4.29) en un entorno del origen. Dicho teorema afirma esencialmente que si f y g sonsuficientemente regulares en (x0, y0), y dicho punto crıtico es hiperbolico, entonces elsistema original (4.28) y su aproximacion lineal (4.29) tienen el mismo tipo de puntocrıtico en (x0, y0) y en el origen, respectivamente.

CAPITULO 4. SISTEMAS DINAMICOS EN EL PLANO 107
Teorema 4.11. Sea (x0, y0) un punto crıtico elemental del sistema (4.28), es decir
f(x0, y0) = g(x0, y0) = 0 , detD(f, g)(x0, y0) =
∣∣∣∣
fx(x0, y0) fy(x0, y0)gx(x0, y0) gy(x0, y0)
∣∣∣∣6= 0 .
Entonces se verifica:
i) Si (f, g) ∈ C1 y la aproximacion lineal (4.29) tiene un foco o un punto de silla
en el origen, entonces el sistema (4.28) tiene resp. un foco del mismo tipo (esdecir, estable o inestable) o un punto de silla en (x0, y0).
ii) Si (f, g) ∈ C2 y la aproximacion lineal (4.29) tiene un nodo en el origen, en-tonces el sistema (4.28) tiene un nodo del mismo tipo (estable o inestable, deuna tangente) en (x0, y0).
iii) Si f y g son analıticas en (x0, y0) y la aproximacion lineal (4.29) tiene un centro
en el origen, entonces el sistema (4.28) puede tener un centro o un foco en(x0, y0).
Nota. Si la aproximacion lineal tiene un nodo en el origen y (f, g) solo es de clase C1,el sistema no lineal (4.28) puede tener un foco en (x0, y0). Por ejemplo, esto es lo queocurre para el sistema
x = −x− y
log r
y = −y +x
log r
en el origen. Analogamente, si la aproximacion lineal tiene un centro en el origen y (f, g)es de clase Ck (con 1 ≤ k < ∞), el sistema no lineal (4.28) puede tener un centro-focoen el origen. Considerese, por ejemplo, el sistema
{
x = −y + x rk+1 sen(1/r)
y = x+ y rk+1 sen(1/r)
en el origen.Segun el teorema anterior, si la aproximacion lineal (4.29) tiene un centro en el
origen el sistema original puede tener en dicho punto un centro o un foco (aun cuandolas funciones f y g sean analıticas en el punto crıtico). Para determinar en este casoque tipo de punto crıtico tiene el sistema (4.28) en (x0, y0) se pueden usar muchas vecesconsideraciones elementales de simetrıa. En efecto, si probamos que el mapa de fases delsistema (4.28) en un entorno de (x0, y0) es simetrico respecto de alguna recta que pasepor dicho punto entonces (x0, y0) ha de ser forzosamente un centro, ya que una curva detipo espiral no es simetrica respecto de ninguna recta.
La simetrıa mas facil de caracterizar es la simetrıa respecto de los ejes coordenados.Por ejemplo, determinemos una condicion suficiente para que las orbitas sean simetricasrespecto del eje x, suponiendo que (x0, y0) = (x0, 0) y que el origen es un centro de laaproximacion lineal en este punto. En primer lugar, para que el campo de vectores (f, g)sea continuo en el eje x las orbitas deben cortar dicho eje con tangente vertical, es decir
f(x, 0) = 0 (4.31)
para |x− x0| suficientemente pequeno. En segundo lugar, la simetrıa respecto del ejehorizontal implica que si
(x, y(x)
)es una orbita entonces (x,−y(x)) tambien lo es. Esto

CAPITULO 4. SISTEMAS DINAMICOS EN EL PLANO 108
significa que si la funcion y(x) es solucion de
y′ =g(x, y)
f(x, y)
tambien lo sera la funcion −y(x). Imponiendo esta condicion se obtiene
d
dx
(− y(x)
)= −y′(x) = − g
(x, y(x)
)
f(x, y(x)
) =g(x,−y(x)
)
f(x,−y(x)
)
para todo x. Esto se cumplira si
g(x,−y)f(x,−y) = − g(x,−y)
f(x,−y) .
Por tanto, una condicion suficiente para que las orbitas de (4.28) sean simetricas respectodel eje horizontal es
g(x,−y)f(x,−y) = − g(x,−y)
f(x,−y) , f(x, 0) = 0 . (4.32)
En particular, ambas condicione se cumpliran si
f(x,−y) = −f(x, y) , g(x,−y) = g(x, y) , (4.33)
es decir si f es impar en y y g es par en dicha variable. Analogamente, las orbitas de(4.28) son simetricas respecto del eje y si
g(−x, y)f(−x, y) = − g(−x, y)
f(−x, y) , g(0, y) = 0 (4.34)
o, en particular, si
f(−x, y) = f(x, y) , g(−x, y) = −g(−x, y) . (4.35)
Ejemplo 4.12. Consideremos el sistema
x = y
y = x− x3 .(4.36)
En este ejemplo, las funciones
f(x, y) = y , g(x, y) = x− x3
son analıticas en todo R2. Los puntos crıticos del sistema son las soluciones de lasecuaciones
y = x− x3 = 0 ,
es decir(0, 0), (1, 0), (−1, 0) . (4.37)
La matriz jacobiana de (f, g) es
D(f, g)(x, y) =
(0 1
1 − 3x2 0
)
.

CAPITULO 4. SISTEMAS DINAMICOS EN EL PLANO 109
Como el determinate de esta matriz, que es igual a 3x2 − 1, no se anula en ninguno delos puntos crıticos, todos ellos son elementales. En el origen, la aproximacion lineal de(4.36) es
(X
Y
)
= A
(XY
)
, A =
(0 11 0
)
. (4.38)
Al ser detA = −1 < 0, el origen es un punto de silla de la aproximacion lineal (4.38), ypor tanto del sistema original (4.36). Para estudiar el mapa de fases de dicho sistema enlas proximidades del origen, hacemos lo propio con el mapa de fases de la aproximacionlineal (4.38). Los autovalores de la matriz A son las soluciones de la ecuacion
∣∣∣∣
−λ 11 −λ
∣∣∣∣= λ2 − 1 = 0 ,
es decir λ = ±1. Los autovectores (X,Y ) correspondientes al autovalor λ = 1 son lassoluciones de (
−1 11 −1
)(XY
)
=
(00
)
.
Se trata, por tanto, de la recta Y = X. Analogamente se prueba que los autovectorescorrespondientes al autovalor λ = −1 estan sobre la recta Y = −X. El mapa de fasesdel sistema lineal (4.38) tiene por tanto el aspecto de la figura 4.2. Volviendo al sistemaoriginal (4.36) en el origen, las dos rectas Y = ±X se transforman en dos curvas llamadasseparatrices, que salen o entran del origen con pendiente respectivamente igual a 1 o−1 (figura 4.3).
–6
–4
–2
0
2
4
6
–6 –4 –2 2 4 6
x
y
Figura 4.2: Mapa de fases del sistema lineal (4.38).
En los dos puntos crıticos ±(1, 0), la matriz de la aproximacion lineal es igual a
(0 1
−2 0
)
.
La ecuacion de autovalores de esta matriz es λ2 +2 = 0, por lo que el origen es un centrode la aproximacion lineal de (4.36) tanto en (1, 0) como en (−1, 0). Al ser las funcionesf y g analıticas, el sistema (4.36) puede tener un centro o un foco en ±(1, 0). Pero en

CAPITULO 4. SISTEMAS DINAMICOS EN EL PLANO 110
este caso el mapa de fases es simetrico respecto del eje horizontal, ya que f(x, y) = y esimpar en y, y g(x, y) = x−x3 es par en dicha variable (al ser independiente de y). Comoambos puntos crıticos ±(1, 0) estan sobre el eje horizontal, dichos puntos son centros delsistema (4.36).
–1
–0.4
0
0.4
1
–1.6 –0.4 0.4 1 1.6–1
x
y
Figura 4.3: Mapa de fases del sistema (4.36).
El mapa de fases del sistema (4.36) tiene el aspecto de la figura 4.3. Esto se puedever facilmente, por ejemplo, teniendo en cuenta que x = y es siempre positivo en elsemiplano superior y negativo en el inferior. Por tanto, en el semiplano superior lasorbitas se recorren hacia la derecha, mientras que en el inferior el sentido de recorrido eshacia la izquierda. Por otra parte, y = x(1 + x)(1 − x) es negativa para x > 1, positivapara 0 < x < 1, negativa para −1 < x < 0, y positiva para x < −1. Por ejemplo, laseparatriz con pendiente 1 en el origen “se mueve” hacia la derecha y hacia arriba para0 < x < 1. Al llegar a x = 1 el signo de y cambia, por lo que el movimiento es haciaabajo y hacia la derecha hasta que esta orbita corta el eje x. Al pasar al semiplanoinferior x = y < 0, y el movimiento es hacia la izquierda y hacia abajo (ya que x > 1)hasta llegar a x = 1, en que de nuevo y se hace positiva. Entre este punto y el origen(al que esta orbita llega como la segunda separatriz, pues de otra forma cortarıa a otraorbita) el movimiento es hacia la izquierda y hacia arriba.
En este ejemplo, podemos hacer afirmaciones mas precisas sobre las orbitas resol-viendo su ecuacion diferencial
dy
dx=x− x3
y,
que es exacta y se integra facilmente:
1
2y2 +
1
4x4 − 1
2x2 = c1 , c1 ∈ R ,
o, equivalentemente,
(x2 − 1)2 + 2y2 = c , c ≥ 0 . (4.39)
De esta ecuacion se deduce que el mapa de fases es simetrico respecto de ambos ejes, ytodas las orbitas son acotadas y cerradas. (La simetrıa respecto del eje y del mapa defases se podrıa haber deducido sin necesidad de hallar la ecuacion de las orbitas, ya que

CAPITULO 4. SISTEMAS DINAMICOS EN EL PLANO 111
g es impar y f par en x, resp.) Los puntos crıticos, por ejemplo, se obtienen para c = 0.Las separatrices son las dos orbitas que “pasan” por el origen (en realidad, tienden alorigen para t → ±∞. Sustituyendo por tanto x = y = 0 en la ecuacion anterior seobtiene c = 1, por lo que las separatrices son las curvas
(x2 − 1)2 + 2y2 = 1 ⇐⇒ y = ±x√
1 − x2
2.