
ELECCIÓN, IMPLEMENTACIÓN Y EVALUACIÓN DE UN …
165
1 ELECCIÓN, IMPLEMENTACIÓN Y EVALUACIÓN DE UN MÉTODO PARA LA MEDICIÓN DEL MOVIMIENTO DE ABDUCCIÓN Y ADUCCIÓN DE LA ARTICULACIÓN ESCAPULO HUMERAL Por Nicolás Barrera Bateman Profesor Asesor Juan Carlos Briceño Profesor Co Asesor Daniel Suarez Venegas Tesis presentada a la Universidad de Los Andes en cumplimiento del requerimiento de tesis para el título de Ingeniero Mecánico Universidad de Los Andes, Bogotá, Colombia, 2013 ©Nicolás Barrera Bateman 2013
Transcript of ELECCIÓN, IMPLEMENTACIÓN Y EVALUACIÓN DE UN …

1
ELECCIÓN, IMPLEMENTACIÓN Y EVALUACIÓN DE UN MÉTODO PARA LA MEDICIÓN DEL
MOVIMIENTO DE ABDUCCIÓN Y ADUCCIÓN DE LA ARTICULACIÓN ESCAPULO HUMERAL
Por
Nicolás Barrera Bateman
Profesor Asesor
Juan Carlos Briceño
Profesor Co Asesor
Daniel Suarez Venegas
Tesis presentada a la Universidad de Los Andes
en cumplimiento del requerimiento
de tesis para el título de
Ingeniero Mecánico
Universidad de Los Andes, Bogotá, Colombia, 2013
©Nicolás Barrera Bateman 2013

2
DECLARACIÓN DEL AUTOR
Por medio de la presente declaro que soy el único autor de esta tesis. Esta es una copia fiel de
la tesis, incluyendo cualquier revisión final aceptada por mis Asesores.
Entiendo que mi tesis puede digitalizarse para estar disponible para el público.

3
ABSTRACT
El análisis de miembros superiores es un tema de investigación que en la actualidad aún se
encuentra en desarrollo. La complejidad del tema radica en que el hombro constituye un
complejo de múltiples articulaciones: Escapulohumeral, Acriomioclavicular, Esternoclavicular,
Escapulotorácica y Subacromial. Es debido a esto que el hombro constituye el complejo
articular con más grados de libertad del cuerpo humano. El movimiento del brazo está dado
principalmente por las articulaciones Escapulohumeral y Escapulotorácica, por lo que poder
medir el comportamiento de los cuerpos que constituyen estas articulaciones se hace
importante para comprender el correcto movimiento del brazo.
El estudio presentado en esta tesis está enfocado en la articulación escapulo humeral en el
movimiento de abducción y aducción del húmero. Específicamente se estudiará el aporte del
movimiento de la articulación, correspondiente al ángulo de inclinación humero escapular. La
estimación de las orientaciones de los huesos de la articulación es un requerimiento para el
desarrollo de modelos biomecánicos los cuales pueden ser usados como indicadores de
anomalías y disconfort en pacientes.
Las orientaciones de la escápula son difíciles de medir por la ubicación subcutánea de éste
hueso. En esta tesis se evaluarán dos métodos invivo para para predecir estas orientaciones en
función del movimiento de abducción y aducción del húmero: Método del palpador (Bull, 2011)
de escápula y modelo biomecánico desarrollado en la Universidad de Stanford (Holzbaur,
Murray, & Delp, 2005), ( Ajay, Sherman, Reinbolt, & Delp, 2011). Se midieron ocho personas sanas
en el rango de 18 a 25 años, a los cuales se les realizaron pruebas estáticas en el rango de 0° a
175° de elevación del ángulo axial humeral sin rotación axial (movimiento de abducción y
aducción).
En los dos métodos se utilizó el sistema de adquisición de datos “phaseEspace Image
Caputure”. Para el método del palpador se utilizaron 3 marcadores activos ubicados sobre el
palpador para medir la posición de los puntos anatómicos: raíz de la espina escapular, ángulo
inferior y ángulo acromial. A partir de la información cinemática se calcularon las orientaciones
escapulares usando métodos de algebra lineal.
Para el modelo biomecánico se usaron 6 marcadores activos ubicados en cinco puntos
anatómicos del brazo. A partir de la información cinemática se obtuvieron las posiciones
anatómicas de los 3 puntos escapulares directamente del programa, y con esta información se
calcularon las orientaciones con el mismo método del palpador. Se compararon los resultados
obtenidos con información reportada de estudios similares en la literatura.
Con el método del modelo biomecánico se obtuvieron modelos lineales para las 3
orientaciones escapulares en función del ángulo de elevación humero torácico y predicciones
de orientaciones en posición de descanso muy similares a los reportados en la literatura en todo
el rango del movimiento.

4
Con el método del palpador, se obtuvieron resultados con bastante error después de los 40° de
inclinación del húmero respecto al tórax. Las inconsistencias obtenidas por el método del
palpador aumentaron significativamente con mayores grados de inclinación, sin embargo las
orientaciones en posición de descanso obtenidas si fueron similares a las reportadas en estudios
similares.
Para detectar las inconsistencias obtenidas usando el método del palpador, se planteó una
hipótesis la cual sugería que los errores obtenidos se debían en su mayoría a errores asociados a
la palpación física de la escápula. Por eso se realizó una toma adicional de datos en donde se
midió 5 veces al mismo participante con el objetivo de identificar el error asociado a la precisión
de cada modelo. En este caso la palpación física la llevo a cabo un estudiante de medicina a
diferencia de las primeras, en dónde la palpación la realicé yo mismo. Los resultados
permitieron identificar el error de precisión asociado a cada modelo y adicionalmente
permitieron corroborar la hipótesis que planteaba que los errores del método del palpador se
debían en su mayoría a error de la toma de datos en sí.
La información obtenida a partir del modelo biomecánico predijo satisfactoriamente las
orientaciones escapulares de descanso y en todo el rango de movimiento, sin embargo
presenta leves diferencias entre los resultados de los diferentes individuos medidos.
En cuanto a la protracción y retracción escapular, el modelo biomecánico reporta 32° +/- 3° en
la posición de descanso en comparación con valores reportados en entre 30° y 35°, y reporta
un rango de 10° de protracción escapular cuando el húmero se eleva desde 0° a 180°, igual al
reportado en la literatura.
En la rotación lateral y medial escapular el modelo reporta 0° +/- 2° en la posición de descanso
en comparación con valores entre -5° y 0° y reporta un rango de rotación medial de 45° +/- 3°
cuando el húmero se eleva desde 0° a 180°, en comparación con rangos reportados entre 35°
y 40°.
Y en la inclinación posterior y anterior escapular el modelo reporta -8° +/- 3° en la posición de
descanso en comparación con valores reportados de -10° y reporta un rango de movimiento
de 57° +/- 2°, cuando el húmero se eleva desde 0° a 180°, en comparación con rangos
reportados entre 45° y 55°.
Esta información puede ser incorporada en los modelos actuales para mejorar sus predicciones.
5
AGRADECIMIENTOS
Quiero agradecer a mis asesores por su ayuda en el desarrollo del proyecto ya que con su
experiencia profesional me guiaron durante todo el proceso.
Quiero agradecer también a las personas voluntarias por su ayuda y durante las pruebas
realizadas.
Y ante todo quiero agradecer a mi padre y abuelo ya que con su ayuda y paciencia
incondicional me aportaron significativamente en el desarrollo del proyecto y durante toda mi
carrera.
A mis padres y hermana por ser una fuente constante de apoyo, y por su sacrificio día a día. Sin
ustedes, esto no hubiera sido posible.

6
TABLA DE CONTENIDO
DECLARACIÓN DEL AUTOR ..................................................................................................................................... 2
ABSTRACT ..................................................................................................................................................................... 3
AGRADECIMIENTOS ................................................................................................................................................... 5
LISTA DE FIGURAS ...................................................................................................................................................... 10
LISTA DE TABLAS ........................................................................................................................................................ 12
LISTA DE GRÁFICAS .................................................................................................................................................. 13
1.1. JUSTIFICACIÓN DEL PROBLEMA ............................................................................................................ 14
1.2. RITMO ESCAPULOHUMERAL .................................................................................................................. 14
1.3. APLICACIONES DEL RITMO ESCAPULOHUMERAL ............................................................................ 15
1.4. MEDICIÓN DEL RITMO ESCAPULOHUMERAL ..................................................................................... 15
1.5. OBJETIVOS .................................................................................................................................................. 15
1.6. HIPÓTESIS .................................................................................................................................................... 16
2. MARCO TEÓRICO ............................................................................................................................................ 17
2.1. ANATOMÍA DEL HOMBRO ...................................................................................................................... 17
2.1.1. HUESOS ................................................................................................................................................ 17
2.1.1.1. Clavícula .................................................................................................................................... 18
2.1.1.2. Escápula ..................................................................................................................................... 18
2.1.1.3. Húmero ....................................................................................................................................... 19
2.1.2. ARTICULACIONES ............................................................................................................................. 20
2.1.3. MOVIMIENTO DEL HOMBRO .......................................................................................................... 20
2.1.3.1. Flexión y extensión ................................................................................................................... 20
2.1.3.2. Abducción y Aducción ......................................................................................................... 21
2.1.3.3. Rotación Externa e Interna ................................................................................................... 21
2.1.3.4. Ángulo Húmero Torácico ...................................................................................................... 22
2.2. ARTICULACIÓN ESCAPULOHUMERAL ................................................................................................. 22
2.2.1. HUESOS ................................................................................................................................................ 23
2.2.2. EJES LOCALES .................................................................................................................................... 23
2.2.3. MOVIMIENTO DE LA ARTICULACIÓN ........................................................................................... 24
2.2.3.1. Protracción y Retracción ....................................................................................................... 24

7
2.2.3.2. Rotación Medial y Lateral ..................................................................................................... 25
2.2.3.3. Inclinación Posterior y Anterior ............................................................................................. 26
2.3. MÉTODOS DE MEDICIÓN DE LA CINEMÁTICA ESCÁPULAR .......................................................... 26
2.3.1. MÉTODOS INVIVO Y CADAVÉRICOS ........................................................................................... 26
2.3.2. MÉTODOS INVASIVOS ..................................................................................................................... 26
2.3.3. MÉTODOS NO INVASIVOS .............................................................................................................. 27
2.4. LITERATURA DEL MOVIMIENTO ESCAPULOHUMERAL ...................................................................... 27
2.4.1. MODELOS MATEMÁTICOS .............................................................................................................. 27
2.4.2. CINEMÁTICA ESCAPULAR .............................................................................................................. 28
2.4.2.1. Protracción/Retracción ......................................................................................................... 28
2.4.2.1.1. Rango de Movimiento ....................................................................................................... 28
2.4.2.1.2. Posición de Descanso ........................................................................................................ 28
2.4.2.2. Rotación Lateral/Medial ........................................................................................................ 29
2.4.2.2.1. Rango de Movimiento ....................................................................................................... 29
2.4.2.2.2. Posición de descanso ........................................................................................................ 29
2.4.2.3. Inclinación Posterior/anterior ................................................................................................ 29
2.4.2.3.1. Rango de Movimiento ....................................................................................................... 29
2.4.2.3.2. Posición de descanso ........................................................................................................ 30
3. MÉTODOS ........................................................................................................................................................... 31
3.1. PARTICIPANTES .......................................................................................................................................... 31
3.2. INSTRUMENTACIÓN .................................................................................................................................. 31
3.2.1. EQUIPO DE ADQUISISCIÓN DE DATOS PHASESPACE .............................................................. 31
3.2.2. PALPADOR ESCAPULAR .................................................................................................................. 32
3.2.2.1. CRITERIOS DE DISEÑO .............................................................................................................. 32
3.2.2.2. RENDERS DEL MECANISMO.................................................................................................... 33
3.2.2.3. PROCESO DE MANUFACTURA .............................................................................................. 34
3.2.3. MECANISMO DE POSTURAS ESTÁTICAS DEL BRAZO ................................................................ 35
3.2.3.1. CRITERIOS DE DISEÑO .............................................................................................................. 36
3.2.3.2. PROTOTIPO 1.............................................................................................................................. 36
3.2.3.3. PROTOTIPO 2.............................................................................................................................. 37
3.2.3.4. PROTOTIPO FINAL ..................................................................................................................... 39

8
3.2.3.5. PROCESO DE MANUFACTURA .............................................................................................. 40
3.2.4. MODELO BIOMECÁNICO ............................................................................................................... 42
3.2.4.1. DESCRIPCIÓN ............................................................................................................................ 42
3.2.4.2. AMBIENTE DE PROGRAMACIÓN E INTERFAZ ..................................................................... 44
3.2.5. OPENSIM ............................................................................................................................................. 44
3.2.5.1. Descripción ................................................................................................................................ 44
3.2.5.2. Requerimientos técnicos ....................................................................................................... 44
3.2.5.3. Herramientas de Análisis ........................................................................................................ 45
3.2.5.3.1. Escalamiento del Modelo ................................................................................................. 45
3.2.5.3.2. Herramienta de Cinemática Inversa ............................................................................. 48
3.2.5.3.3. Otras herramientas de interés ......................................................................................... 48
3.3. PROTOCOLO EXPERIMENTAL ................................................................................................................ 49
3.3.1. POSICIONAMIENTO DE CAMARAS .............................................................................................. 49
3.3.2. CONEXIÓN DEL EQUIPO ................................................................................................................. 49
3.3.3. CALIBRACIÓN DEL SISTEMA ........................................................................................................... 50
3.3.4. POSICIONAMIENTO DE MARCADORES ...................................................................................... 52
3.3.4.1. MARCADORES ANATÓMICOS .............................................................................................. 52
3.3.4.2. MARCADORES PALPADOR ESCAPULAR ............................................................................ 54
3.3.5. MONTAJE DEL BRAZO AL MECANISMO DE POSTURAS ESTÁTICAS ...................................... 54
3.3.6. TOMA DE DATOS .............................................................................................................................. 55
3.3.6.1. PRUEBAS DE PRECISIÓN .............................................................................................................. 55
3.3.6.2. PRUEBAS EXPERIMENTALES ......................................................................................................... 56
3.4. PROCESAMIENTO DE DATOS ................................................................................................................. 57
3.4.1. REQUERIMIENTOS DEL FORMATO PARA OPENSIM ................................................................... 59
3.4.2. PROGRAMAS DE TRATAMIENTO DE DATOS ............................................................................... 60
3.5. OBTENCIÓN DE ORIENTACIONES ESCAPULARES ............................................................................. 64
4. PRESENTACIÓN DE RESULTADOS .................................................................................................................. 66
4.1. ORIENTACIONES ESCAPULARES ............................................................................................................ 66
4.1.1. MODELO BIOMECÁNICO ................................................................................................................... 66
4.1.2. MÉTODO DEL PALPADOR ................................................................................................................... 69
4.2. DIFERENCIAS .............................................................................................................................................. 70

9
4.3. ERROR DE PRECISIÓN .............................................................................................................................. 71
4.3.1. MODELO BIOMECÁNICO ............................................................................................................... 72
4.3.2. MÉTODO DEL PALPADOR ............................................................................................................... 74
5. DISCUSIÓN DE RESULTADOS .......................................................................................................................... 79
5.1. ORIENTACIONES ESCAPULARES ............................................................................................................ 79
5.1.1. MODELO BIOMECÁNICO ............................................................................................................... 79
5.1.2. MÉTODO DEL PALPADOR ............................................................................................................... 81
5.2. DIFERENCIAS .............................................................................................................................................. 82
5.3. ERROR DE PRECISIÓN .............................................................................................................................. 82
5.4. DISMINUCIÓN DEL ERROR HUMANO EN LA PALPACIÓN .............................................................. 83
5.5. SELECCIÓN DEL MODELO A VALIDAR ................................................................................................ 83
5.6. VALIDACIÓN DEL MODELO ................................................................................................................... 84
6. CONCLUSIONES ................................................................................................................................................ 89
7. REFERENCIAS BIBLIOGRÁFICAS ..................................................................................................................... 90
8. APÉNDICES ......................................................................................................................................................... 92
8.1. CÓDIGO DE LOS PROGRAMAS DE TRATAMIENTO DE DATOS ..................................................... 92
8.2. PLANOS DE CONSTRUCCIÓN DEL PALPADOR ESCAPULAR ....................................................... 154
8.3. PLANOS DE CONTRSUCCIÓN PROTOTIPO POSTURAS ESTÁTICAS ............................................. 154

10
LISTA DE FIGURAS
Figura 1 Planos anatómicos del cuerpo humano ......................................................................................... 17
Figura 2 Clavícula .................................................................................................................................................... 18
Figura 3 Escápula ..................................................................................................................................................... 19
Figura 4 Húmero ....................................................................................................................................................... 19
Figura 5 Ubicación anatómica de los huesos del hombro ......................................................................... 20
Figura 6 Movimiento de Flexión y Extensión Humeral ................................................................................... 21
Figura 7 Movimiento de Abducción y Aducción Humeral ......................................................................... 21
Figura 8 Movimiento de Rotación Externa e Interna ..................................................................................... 22
Figura 9 Corte Transversal de la Articulación Escapulohumeral ................................................................ 23
Figura 10 Puntos Anatómicos Escapulares ....................................................................................................... 23
Figura 11 Ejes Locales Escapulares ..................................................................................................................... 24
Figura 12 Movimiento de Protracción/Retracción vista en el plano transversal (vista superior) ..... 25
Figura 13 Movimiento de Rotación Medial/Lateral vista en el plano coronal (vista anterior) ......... 25
Figura 14 Movimiento de Inclinación Posterior y Anterior visto en el plano Sagital (vista derecha)
....................................................................................................................................................................................... 26
Figura 15 Render del Mecanismo Palpador Escapular ................................................................................ 33
Figura 16 Mecanismo Palpador Escapular presentado por (Bull, 2011) .................................................. 34
Figura 17 Nivelación de los Pines del Palpador Escapular .......................................................................... 35
Figura 18 Palpador Terminado ............................................................................................................................. 35
Figura 19 Render Prototipo 1 ................................................................................................................................ 36
Figura 20 Render 2 Prototipo 1 Ranuras para ajuste de altura................................................................... 37
Figura 21 Render 3 Prototipo 1 Manija de para diferentes ángulos de inclinación ............................. 37
Figura 22 Render 1 del segundo prototipo propuesto ................................................................................ 38
Figura 23 Render 2 del segundo prototipo. Sistema para Ajuste de diferentes Ángulos de
Elevación .................................................................................................................................................................... 38
Figura 24 Render del Prototipo Final ................................................................................................................. 39
Figura 25 Render de los cambios realizados sobre el segundo prototipo .............................................. 39
Figura 26 Prototipo Final Terminado ................................................................................................................... 40
Figura 27 Detalles 1 del prototipo Final Terminado ........................................................................................ 41
Figura 28 Detalles 2 del prototipo Final terminado ........................................................................................ 41
Figura 29 Detalles 3 del prototipo Final Terminado ........................................................................................ 42
Figura 30 Interfaz del Modelo Biomecánico en diferentes posturas ........................................................ 43
Figura 31 Diferentes tipos de modelos de libre descarga disponibles para la comunidad SIMTK .. 44
Figura 32 Protocolo de Marcadores Experimentales para movimiento del tren superior .................. 46
Figura 33 Error de posicionamiento entre el set virtual y el experimental ............................................... 47
Figura 34 Reposicionamiento del set de marcadores virtual ..................................................................... 48
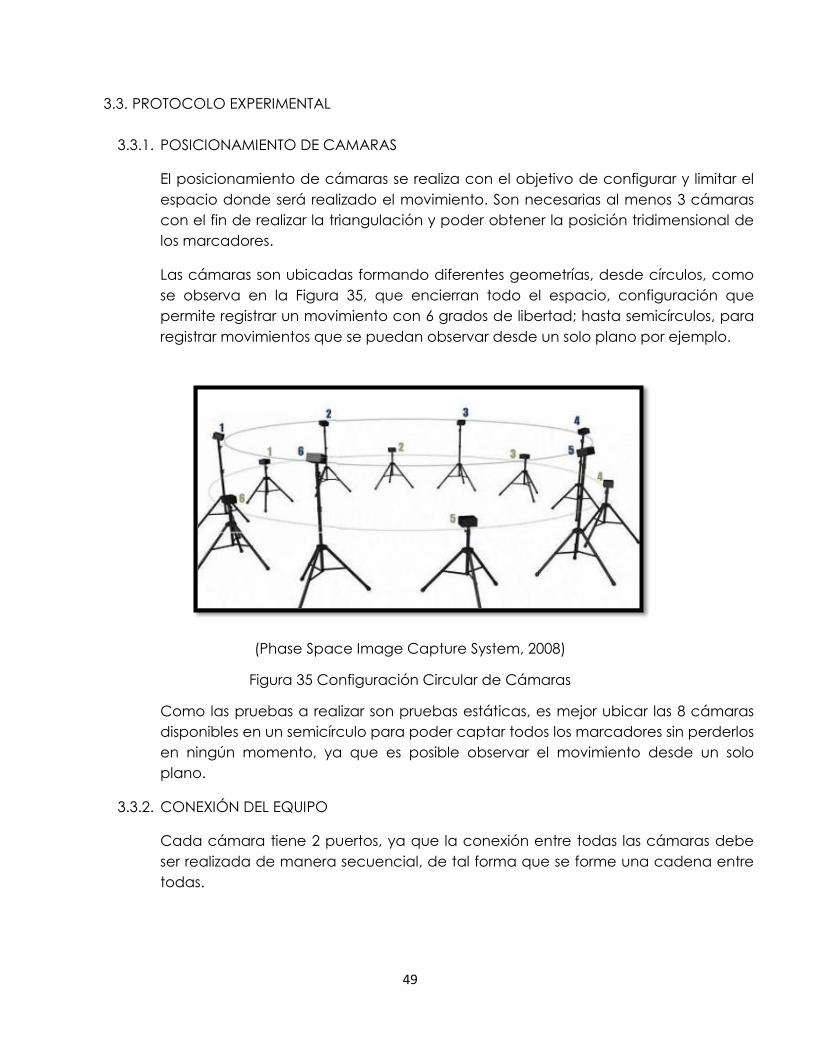
Figura 35 Configuración Circular de Cámaras ............................................................................................... 49
Figura 36 Cámaras del sistema Phase Space ................................................................................................. 50

11
Figura 37 Conexión entre las cámaras y el servidor ...................................................................................... 50
Figura 38 Espacio de Muestreo Captado por un sistema de 30 cámaras ............................................. 51
Figura 39 Captación de los sensores de la barra para la calibración de las cámaras...................... 51
Figura 40 Espacio correctamente calibrado .................................................................................................. 52
Figura 41 Posicionamiento de los marcadores anatómicos ....................................................................... 53
Figura 42 Posicionamiento de los marcadores sobre el palpador ........................................................... 54
Figura 43 Posicionamiento del brazo al mecanismo de posturas estáticas en una de las tomas .. 54
Figura 44 Posicionamiento del brazo al mecanismo de posturas estáticas en una de las tomas .. 55
Figura 45 Palpación Escapular para las pruebas de precisión .................................................................. 56
Figura 46 Interfaz del programa "RECAP" ......................................................................................................... 57
Figura 47 Exportación del archivo a formato de texto plano *.OWL ....................................................... 58
Figura 48 Archivo en Formato *.OWL ................................................................................................................. 58
Figura 49 Descripción de cada uno de los campos del archivo *.OWL ................................................. 59
Figura 50 Estructura del Archivo *.TRC requerido por el programa OpenSim ...................................... 59
Figura 51 Interfaz del programa de concatenación de archivos ............................................................ 61
Figura 52 Finalización del proceso de Concatena ....................................................................................... 61
Figura 53 Relación de los dos sistemas de referencia a partir de un marcador .................................. 63
Figura 54 Interfaz del programa "Conversor OWL's" ...................................................................................... 64
12
LISTA DE TABLAS
Tabla 1 Secuencias de Rotación Estándar para la predicción cinemática de diferentes cuerpos
....................................................................................................................................................................................... 28
Tabla 2 Características de los individuos que realizaron las pruebas ...................................................... 31
Tabla 3 Características de la población que realizó las pruebas ............................................................. 31
Tabla 4 Características técnicas del sistema PhaseSpace Image Motion Capture ........................... 32
Tabla 5 Características Mecánicas del Palpador Escapular ...................................................................... 33
Tabla 6 Marcadores Propuestos .......................................................................................................................... 46
Tabla 7 Set de Marcadores Usados .................................................................................................................... 52
Tabla 8 Descripción del set de marcadores anatómicos usados ............................................................. 53
Tabla 9 Regresiones de Movimiento Escapulares y Posiciones de Descanso ....................................... 68
Tabla 10 Regresión de Movimientos Escapulares Promedio ....................................................................... 68
Tabla 11 Rangos de Movimiento......................................................................................................................... 68
Tabla 12 Incertidumbres de precisión de cada modelo para cada orientación escapular ........... 76
Tabla 13 Tabla Comparativa de Resultados ................................................................................................... 88

13
LISTA DE GRÁFICAS
Gráfica 1 Resultado de trasladar realizar una suma vectorial sobre un set de marcadores ........... 62
Gráfica 2 Rotación Medial/Lateral en función del Ángulo de Inclinación Húmero Torácico
obtenidas con el modelo ...................................................................................................................................... 66
Gráfica 3 Protracción/Retracción en función del Ángulo de Inclinación Húmero Torácico
obtenidas con el modelo ...................................................................................................................................... 67
Gráfica 4 Inclinación Posterior/Interior en función del Ángulo de Inclinación Húmero Torácico
obtenidas con el modelo ...................................................................................................................................... 67
Gráfica 5 Rotación Medial/Lateral en función del Ángulo de Inclinación Húmero Torácico
obtenidas con método del palpador. .............................................................................................................. 69
Gráfica 6 Protracción/Retracción en función del Ángulo de Inclinación Húmero Torácico
obtenidas con el método del palpador ........................................................................................................... 69
Gráfica 7 Inclinación Posterior/Interior en función del Ángulo de Inclinación Húmero Torácico
obtenidas con el método del palpador. ......................................................................................................... 70
Gráfica 8 Diferencias entre los dos métodos de las rotaciones laterales y mediales de la
escápula .................................................................................................................................................................... 70
Gráfica 9 Diferencias entre los dos métodos de la protracción y retracción escapular................... 71
Gráfica 10 Diferencias entre los dos métodos de las inclinaciones posterior y anterior de la
escápula .................................................................................................................................................................... 71
Gráfica 11 Resultados de precisión de las rotaciones mediales y laterales de la escápula
obtenidas por el modelo biomecánico ........................................................................................................... 72
Gráfica 12 Resultados de precisión de la protracción y retracción escapular obtenidas por el
modelo biomecánico ............................................................................................................................................ 73
Gráfica 13 Resultados de precisión de las inclinaciones posterior y anterior de la escápula
obtenidas por el modelo biomecánico ........................................................................................................... 73
Gráfica 14 Resultados de precisión de las rotaciones mediales y laterales de la escápula
obtenidas por el método del palpador............................................................................................................ 74
Gráfica 15 Resultados de precisión de la protracción y retracción escapular obtenidas por el
método del palpador. ........................................................................................................................................... 75
Gráfica 16 Resultados de precisión de las inclinaciones posterior y anterior de la escápula
obtenidas por el método del palpador............................................................................................................ 75
Gráfica 17 Diferencias entre los dos métodos de las rotaciones laterales y mediales de la
escápula; palpación llevada a cabo por un estudiante de medicina. ................................................. 77
Gráfica 18 Diferencias entre los dos métodos de la protracción y retracción escapular;
palpación llevada a cabo por un estudiante de medicina ...................................................................... 77
Gráfica 19 Diferencias entre los dos métodos de las inclinaciones posterior y anterior de la
escápula; palpación llevada a cabo por un estudiante de medicina .................................................. 78
Gráfica 20 Orientaciones Escapulares Comparativas ................................................................................. 84
Gráfica 21 Inclinaciones Posterior/Anterior Comparativas. ........................................................................ 85
Gráfica 22 Rotaciones Lateral/Medial Comparativas ................................................................................. 85
Gráfica 23 Protracción y Retracción Escapular Comparativas. ............................................................... 86

14
1. INTRODUCCIÓN
1.1. JUSTIFICACIÓN DEL PROBLEMA
Entender el comportamiento del sistema músculo esquelético del hombro del cuerpo
humano es de vital importancia en el campo de la medicina para poder predecir e
identificar de manera adecuada anomalías en las personas. Para esto es necesario
identificar el correcto funcionamiento de la articulación; es decir que se requiere de
evidencia experimental para poder desarrollar modelos que presenten de manera
acertada las relaciones de movimiento de la articulación. En las últimas décadas se
han desarrollado diversos métodos para medir el movimiento de la articulación del
hombro, cada uno con sus ventajas y desventajas.
Los factores más importantes en el momento de analizar los diferentes métodos
existentes son el costo, la precisión y exactitud de los datos obtenidos y si el método es
invasivo o no. Actualmente no existe un método que obtenga un buen resultado en
todas las variables mencionadas, por lo que dependiendo de los recursos disponibles o
del tipo de estudio a realizar se podrá elegir aquel que sea de mejor conveniencia.
Actualmente se cuenta con poca evidencia estadística del ritmo escapulo humeral,
sin embargo ya existen algunos patrones bien definidos para algunos movimientos.
Como se mencionó anteriormente, el problema principal radica en la obtención de los
datos y de cómo una mala interpretación de resultados puede conllevar a decisiones
perjudícales para un paciente a la hora de ser sometido a alguna intervención o
tratamiento.
1.2. RITMO ESCAPULOHUMERAL
En el complejo articular del hombro intervienen varias articulaciones y es de interés
conocer cómo el movimiento de cada una de estas incide sobre el movimiento del
brazo.
El ritmo Escapulohumeral hace referencia a la relación que existe entre el movimiento
de la articulación, la cual une la escápula y el húmero, y el movimiento del húmero
relativo al tórax. El movimiento de esta articulación es descrito completamente en el
momento de identificar las rotaciones tridimensionales de ésta. Estas rotaciones son
llamadas orientaciones escapulares, ya que los rangos de traslación de la articulación
son muy bajas para ser tenidos en cuenta.
15
1.3. APLICACIONES DEL RITMO ESCAPULOHUMERAL
Una vez se conoce la cinemática de la articulación es posible desarrollar modelos
cinéticos para predecir las fuerzas requeridas por la articulación para producir el
movimiento. Así entonces la información cinética proporciona información acerca de
las fuerzas musculares, donde estas últimas son un factor decisivo para identificar
problemas de disconfort y cansancio excesivo de las personas.
Además de predecir las fuerzas musculares, las diferencias el ritmo Escapulohumeral de
una persona, y en general el ritmo de cualquier otra articulación, con los modelos de
cinemática “correcta”, son herramientas potenciales para diagnosticar terapias o
procedimientos médicos a las personas.
1.4. MEDICIÓN DEL RITMO ESCAPULOHUMERAL
El problema de la medición de la cinemática escapular, y en general de las demás
articulaciones del hombro, es que debido a su ubicación anatómica, la cual presenta
una cantidad substancial de tejido suave cubriéndola, y su rango de movimiento,
obtener información con métodos convencionales como goniometría por ejemplo, se
hacen muy difíciles. La escápula tiene un movimiento de rotación tridimensional, y a
partir de los 40° de inclinación del húmero respecto al tórax aproximadamente, ésta
no solo rota en el plano frontal, sino que empieza a rotar con mayor incidencia en los
planos sagital y transversal, haciendo que captar la información con métodos no
invasivos o métodos de rayos x, electromagnéticos o termografías sea una tarea
bastante difícil.
1.5. OBJETIVOS
El objetivo general es poder seleccionar al menos un método que pueda ser
implementado en las condiciones disponibles, (presupuestales y disponibilidad de
equipos), para poder medir el movimiento articular en función del movimiento de
abducción y aducción del brazo. Se realizará una comparación de los rangos de
movimiento obtenidos del modelo seleccionado, con información proporcionado por
otros autores disponibles en la bibliografía.
La variable más importante a tener en cuenta en cuanto a la elección del método
será la facilidad de implementación, ya que el problema está siendo abordado desde
la perspectiva de un proyecto de pregrado, cuya restricción presupuestal es de 1
salario mínimo vigente en Colombia en el año 2013, el cual es de 589.500 Pesos
Colombianos, según lo ha establecido el gobierno nacional mediante decreto 2738
de diciembre 28 de 2012.
16
Además de la restricción presupuestal, no podrán seleccionarse métodos invasivos, ya
que estos constituyen métodos con posibles consecuencias legales. Una vez
seleccionado el método, o los métodos a usar, se realizará una validación de éstos,
utilizando información reportada en la literatura con el fin de establecer si este o estos
presentan resultados acertados.
1.6. HIPÓTESIS
Es posible medir con buena exactitud y precisión el movimiento escapular sin usar
métodos invasivos y con métodos invivo de baja complejidad y sin equipos altamente
sofisticados.

17
2. MARCO TEÓRICO
2.1. ANATOMÍA DEL HOMBRO
El hombro constituye el complejo articular que más grados de libertad tiene en el
cuerpo humano. Es gracias a este que se producen los movimientos del brazo relativos
al tórax. Los movimientos se catalogan como: flexión/extensión, abducción/ aducción
y rotación externa/interna. Para poder entender de forma adecuada estos 3 sentidos
de movimiento, se hará referencia a los planos anatómicos del cuerpo: Plano coronal
o frontal, plano sagital y plano transversal o axial, de acuerdo con la Figura 1.
(Jota, 2012)
Figura 1 Planos anatómicos del cuerpo humano
2.1.1. HUESOS
El hombro está conformado por tres huesos distales: la clavícula, la escápula y el
húmero. Estos huesos se mueven relativamente entre ellos para producir los 3
rangos de movimiento humero torácicos, mencionados anteriormente.

18
2.1.1.1. Clavícula
La clavícula es un hueso en forma de “S” situado en la parte anterosuperior
del Tórax y junto con la escápula forman la cintura escapular. Su extensión
va desde el esternón hasta el acromion de la escápula, ( Rockwood Jr. &
Frederich A., 2004), como se observa en la Figura 2.
La funcionalidad de éste hueso es proporcionar un lugar de sujeción
muscular. 6 músculos están sujetos a este hueso.
(Salamanca, 2013)
Figura 2 Clavícula
2.1.1.2. Escápula
La escápula es un hueso triangular situado en la parte dorso lateral del
tórax. En el cuerpo humano se encuentra localizada entre la segunda y la
séptima costilla. La escápula articula con la cabeza del húmero, con la
clavícula y con el tórax. Tiene 18 músculos que actúan sobre ésta (
Rockwood Jr. & Frederich A., 2004).
La escápula presenta 3 grados de rotación: Inclinación posterior/anterior,
protracción/retracción y rotación Lateral/medial. Junto con el húmero
conforma la articulación escapulohumeral; junto con la clavícula conforma
la articulación acriomioclavicular y con el junto con el tórax conforma la

19
articulación escapulotorácica. La Figura 3 presenta una imagen de la
escápula.
(Bridgeman, 2010)
Figura 3 Escápula
2.1.1.3. Húmero
La Figura 4 muestra la anatomía del húmero. Este hueso es el más largo de
las extremidades superiores. Está articulado en la parte superior con la
escápula en la articulación escapulo humeral y en la parte inferior con el
cúbito y el radio en la articulación humero radio ulnar ( Rockwood Jr. &
Frederich A., 2004).
(Gray, 1918)
Figura 4 Húmero
20
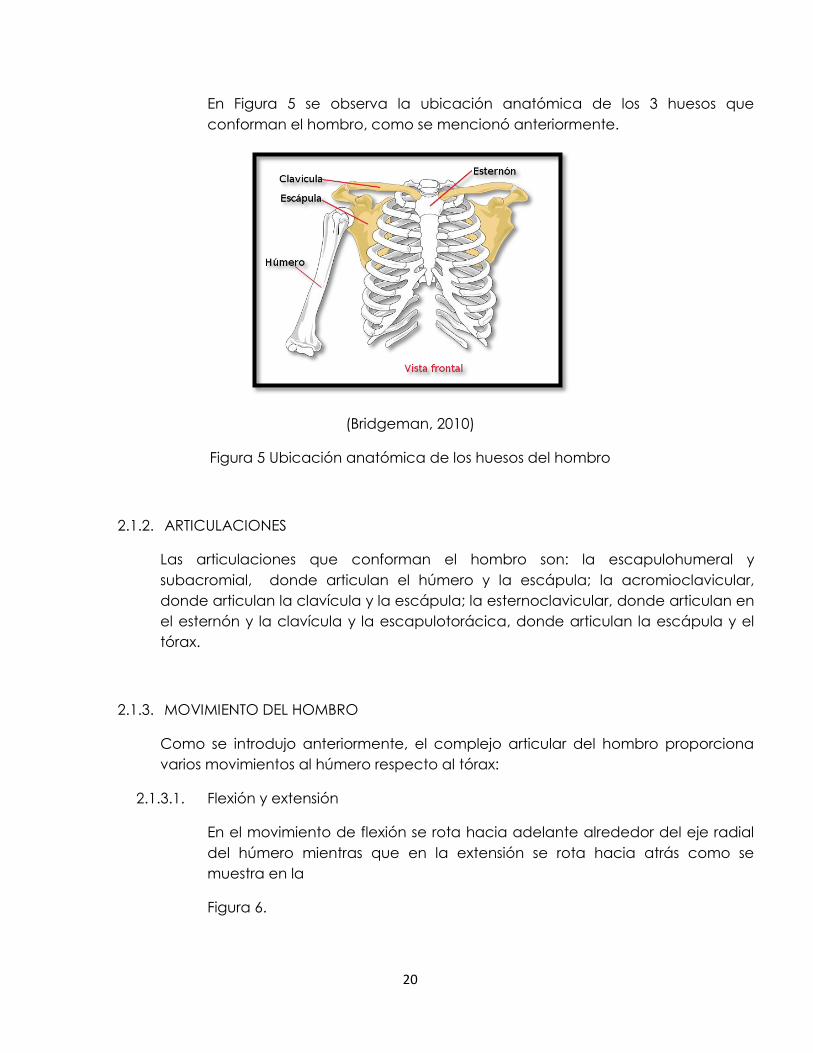
En Figura 5 se observa la ubicación anatómica de los 3 huesos que
conforman el hombro, como se mencionó anteriormente.
(Bridgeman, 2010)
Figura 5 Ubicación anatómica de los huesos del hombro
2.1.2. ARTICULACIONES
Las articulaciones que conforman el hombro son: la escapulohumeral y
subacromial, donde articulan el húmero y la escápula; la acromioclavicular,
donde articulan la clavícula y la escápula; la esternoclavicular, donde articulan en
el esternón y la clavícula y la escapulotorácica, donde articulan la escápula y el
tórax.
2.1.3. MOVIMIENTO DEL HOMBRO
Como se introdujo anteriormente, el complejo articular del hombro proporciona
varios movimientos al húmero respecto al tórax:
2.1.3.1. Flexión y extensión
En el movimiento de flexión se rota hacia adelante alrededor del eje radial
del húmero mientras que en la extensión se rota hacia atrás como se
muestra en la
Figura 6.

21
(Nordin, 2001)
Figura 6 Movimiento de Flexión y Extensión Humeral
2.1.3.2. Abducción y Aducción
En el movimiento de abducción se rota alrededor del eje radial del humero
hacia afuera mientras que en la aducción se rota hacia adentro como se
muestra en la Figura 7.
(Nordin, 2001)
Figura 7 Movimiento de Abducción y Aducción Humeral
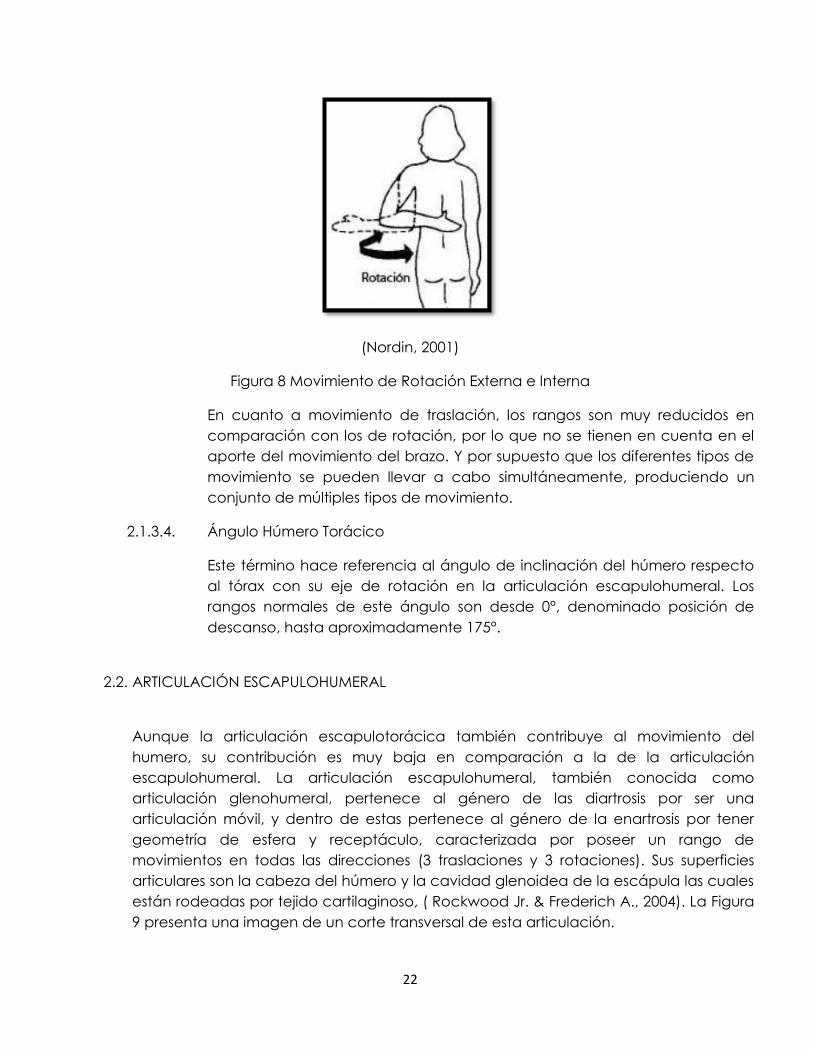
2.1.3.3. Rotación Externa e Interna
En el movimiento de rotación externa se gira hacia afuera alrededor del eje
longitudinal del húmero mientras que en la interna se gira hacia adentro
como se observa en Figura 8.
22
(Nordin, 2001)
Figura 8 Movimiento de Rotación Externa e Interna
En cuanto a movimiento de traslación, los rangos son muy reducidos en
comparación con los de rotación, por lo que no se tienen en cuenta en el
aporte del movimiento del brazo. Y por supuesto que los diferentes tipos de
movimiento se pueden llevar a cabo simultáneamente, produciendo un
conjunto de múltiples tipos de movimiento.
2.1.3.4. Ángulo Húmero Torácico
Este término hace referencia al ángulo de inclinación del húmero respecto
al tórax con su eje de rotación en la articulación escapulohumeral. Los
rangos normales de este ángulo son desde 0°, denominado posición de
descanso, hasta aproximadamente 175°.
2.2. ARTICULACIÓN ESCAPULOHUMERAL
Aunque la articulación escapulotorácica también contribuye al movimiento del
humero, su contribución es muy baja en comparación a la de la articulación
escapulohumeral. La articulación escapulohumeral, también conocida como
articulación glenohumeral, pertenece al género de las diartrosis por ser una
articulación móvil, y dentro de estas pertenece al género de la enartrosis por tener
geometría de esfera y receptáculo, caracterizada por poseer un rango de
movimientos en todas las direcciones (3 traslaciones y 3 rotaciones). Sus superficies
articulares son la cabeza del húmero y la cavidad glenoidea de la escápula las cuales
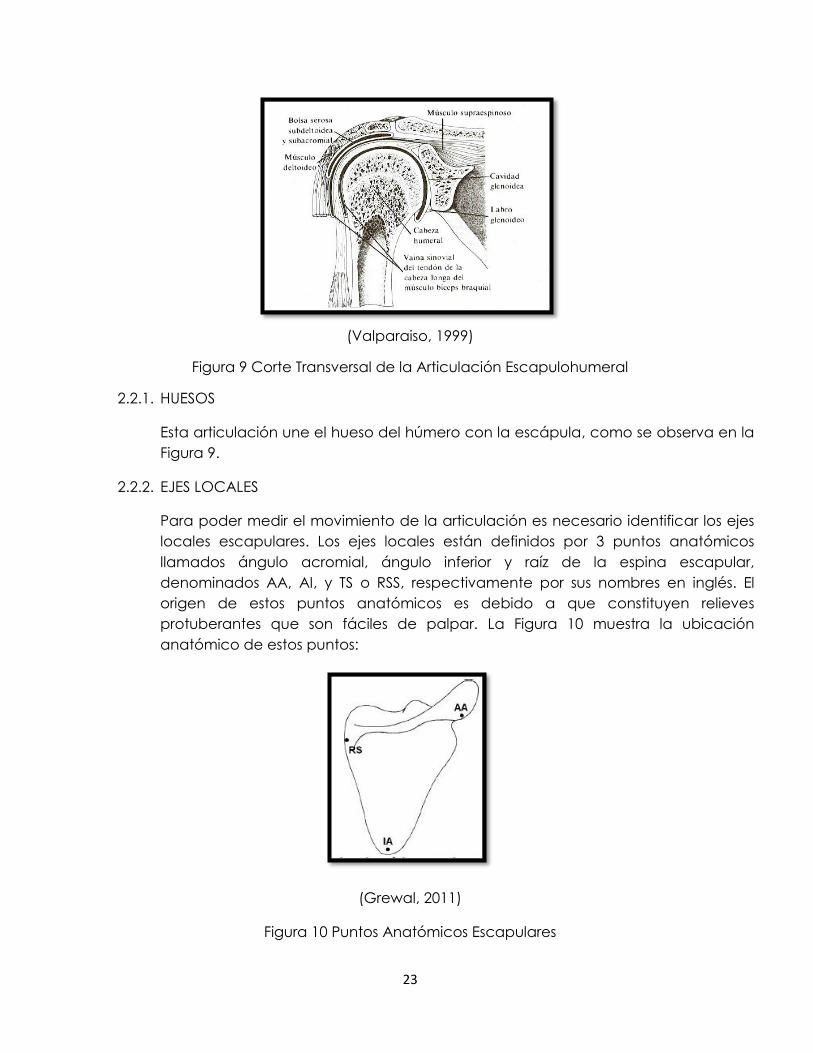
están rodeadas por tejido cartilaginoso, ( Rockwood Jr. & Frederich A., 2004). La Figura
9 presenta una imagen de un corte transversal de esta articulación.
23
(Valparaiso, 1999)
Figura 9 Corte Transversal de la Articulación Escapulohumeral
2.2.1. HUESOS
Esta articulación une el hueso del húmero con la escápula, como se observa en la
Figura 9.
2.2.2. EJES LOCALES
Para poder medir el movimiento de la articulación es necesario identificar los ejes
locales escapulares. Los ejes locales están definidos por 3 puntos anatómicos
llamados ángulo acromial, ángulo inferior y raíz de la espina escapular,
denominados AA, AI, y TS o RSS, respectivamente por sus nombres en inglés. El
origen de estos puntos anatómicos es debido a que constituyen relieves
protuberantes que son fáciles de palpar. La Figura 10 muestra la ubicación
anatómico de estos puntos:
(Grewal, 2011)
Figura 10 Puntos Anatómicos Escapulares

24
A partir de estos 3 puntos se conforman los ejes de referencia locales de la
escápula, cuyo origen está situado generalmente sobre el ángulo acromial. Sin
embargo diversos autores sitúan el origen en cualquiera de estos puntos por lo que
es necesario usar algún estándar para definir los ejes locales. Van der Helm
propone usar la estandarización de ejes locales, aceptada por el “International
Shoulder Group”, (Van der Helm, 2010). De acuerdo a este estándar el origen está
situado en el ángulo acromial. El vector unitario que une el ángulo acromial y el
ángulo inferior constituyen el eje Z’. El vector unitario que une el ángulo acromial
con la raíz de la espina escapular conforman el eje X’. Y un vector ortogonal a
estos dos últimos constituyen el eje Y’. La Figura 11, muestra como estarán definidos
los ejes locales escapulares en el presente documento de acuerdo al estándar
dado por el grupo internacional del hombro (ISG). El plano formado por el eje X’ y
el eje Z’ es un plano coronal; el plano conformado por el eje X’ y el eje Y’ es un
plano transversal y el plano formado por el eje Z’ y el eje Y’ es un plano sagital.
(Van der Helm, 2010)
Figura 11 Ejes Locales Escapulares
2.2.3. MOVIMIENTO DE LA ARTICULACIÓN
A partir del eje de referencia local escapular (Figura 11), se definen las 3 rotaciones
escapulares.
2.2.3.1. Protracción y Retracción
Se le denomina protracción y retracción escapular a la rotación de la
escápula en el eje Z’ (rotación en el plano transversal), como se observa en
la Figura 12. La protracción también es conocida con el nombre de rotación
interna y hace referencia al giro en sentido negativo sobre el eje Z’ definido

25
en la Figura 11. Por otro lado la retracción es también conocida con el
nombre de rotación externa, y hace referencia al giro en sentido positivo
sobre el eje Z’ escapular.
(Grewal, 2011)
Figura 12 Movimiento de Protracción/Retracción vista en el plano transversal (vista superior)
2.2.3.2. Rotación Medial y Lateral
Se le denomina rotación medial y lateral a la rotación escapular en el eje Y’,
(rotación en el plano coronal), del sistema local mostrado en la Figura 11. A
la rotación medial también se le conoce como rotación descendente y
hace referencia a rotar en el sentido positivo del eje Y’ local escapular. Por
otro lado la rotación lateral, también llamada con el nombre de rotación
ascendente hace referencia al sentido de giro de la escapula en el sentido
negativo del eje local Y’, como se observa en la Figura 13.
(Grewal, 2011)
Figura 13 Movimiento de Rotación Medial/Lateral vista en el plano coronal (vista anterior)
26
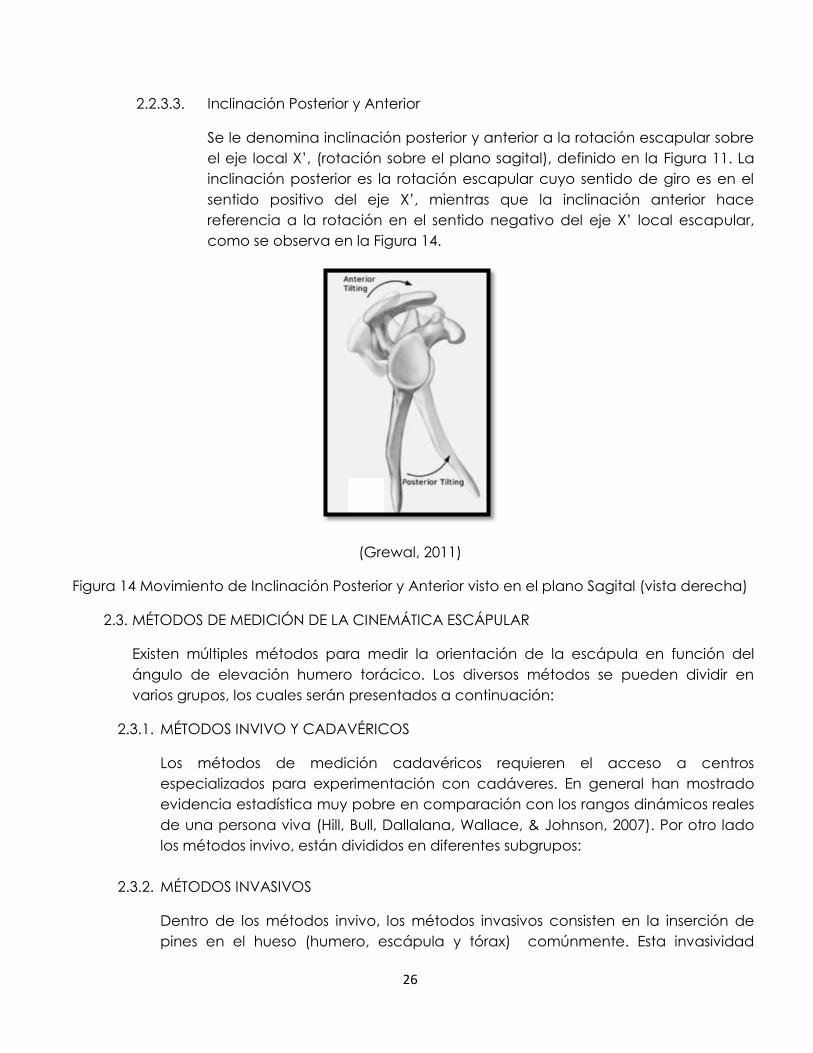
2.2.3.3. Inclinación Posterior y Anterior
Se le denomina inclinación posterior y anterior a la rotación escapular sobre
el eje local X’, (rotación sobre el plano sagital), definido en la Figura 11. La
inclinación posterior es la rotación escapular cuyo sentido de giro es en el
sentido positivo del eje X’, mientras que la inclinación anterior hace
referencia a la rotación en el sentido negativo del eje X’ local escapular,
como se observa en la Figura 14.
(Grewal, 2011)
Figura 14 Movimiento de Inclinación Posterior y Anterior visto en el plano Sagital (vista derecha)
2.3. MÉTODOS DE MEDICIÓN DE LA CINEMÁTICA ESCÁPULAR
Existen múltiples métodos para medir la orientación de la escápula en función del
ángulo de elevación humero torácico. Los diversos métodos se pueden dividir en
varios grupos, los cuales serán presentados a continuación:
2.3.1. MÉTODOS INVIVO Y CADAVÉRICOS
Los métodos de medición cadavéricos requieren el acceso a centros
especializados para experimentación con cadáveres. En general han mostrado
evidencia estadística muy pobre en comparación con los rangos dinámicos reales
de una persona viva (Hill, Bull, Dallalana, Wallace, & Johnson, 2007). Por otro lado
los métodos invivo, están divididos en diferentes subgrupos:
2.3.2. MÉTODOS INVASIVOS
Dentro de los métodos invivo, los métodos invasivos consisten en la inserción de
pines en el hueso (humero, escápula y tórax) comúnmente. Esta invasividad
27
puede crear movimientos que no son anatómicamente naturales y predecir
patrones de comportamiento muy diferentes a los reales. Generalmente este tipo
de métodos tiene un alto costo y no son viables para la medición del ritmo
escapulo humeral en el momento de un examen de control. (Hill, Bull, Dallalana,
Wallace, & Johnson, 2007). Y dentro de los métodos no invasivos se pueden dividir
en más subgrupos:
2.3.3. MÉTODOS NO INVASIVOS
En esta clase es donde se encuentra la mayor cantidad de métodos. Dentro de
los más comunes se encuentran métodos de marcadores en la piel, métodos de
goniometría convencional, métodos de análisis estático y extrapolación dinámica
(fotografía), métodos usando radiación y métodos usando equipos
electromagnéticos y métodos de termografía, (Hill, Bull, Dallalana, Wallace, &
Johnson, 2007)
Generalmente existe una relación entre el la precisión requerida y el costo, ya que
una mayor precisión, indica una mayor sofisticación, en la mayoría de los casos,
del método a utilizar. Para evaluar la efectividad de un método se utiliza
generalmente la relación precisión/costo, la cual es un indicador más objetivo del
método utilizado.
2.4. LITERATURA DEL MOVIMIENTO ESCAPULOHUMERAL
2.4.1. MODELOS MATEMÁTICOS
Dentro de la literatura sobre la medición del ritmo escapulohumeral se encuentran
diversos modelos matemáticos que predicen las orientaciones escapulares en
función del ángulo de inclinación humero torácico. En general la mayoría de los
métodos existentes, usan matrices de rotación de Euler para encontrar los ángulos
de rotación. Michener publicó una artículo sobre la implicación de alterar las
rotaciones de Euler sobre la cinemática escapular. (Michener, 2000). En este
artículo se concluye que el orden de secuencia de las rotaciones influye de
manera significativa en la predicción cinemática del movimiento. Debido a esto se
ha estandarizado la secuencia de rotación a tener en cuenta en el momento de
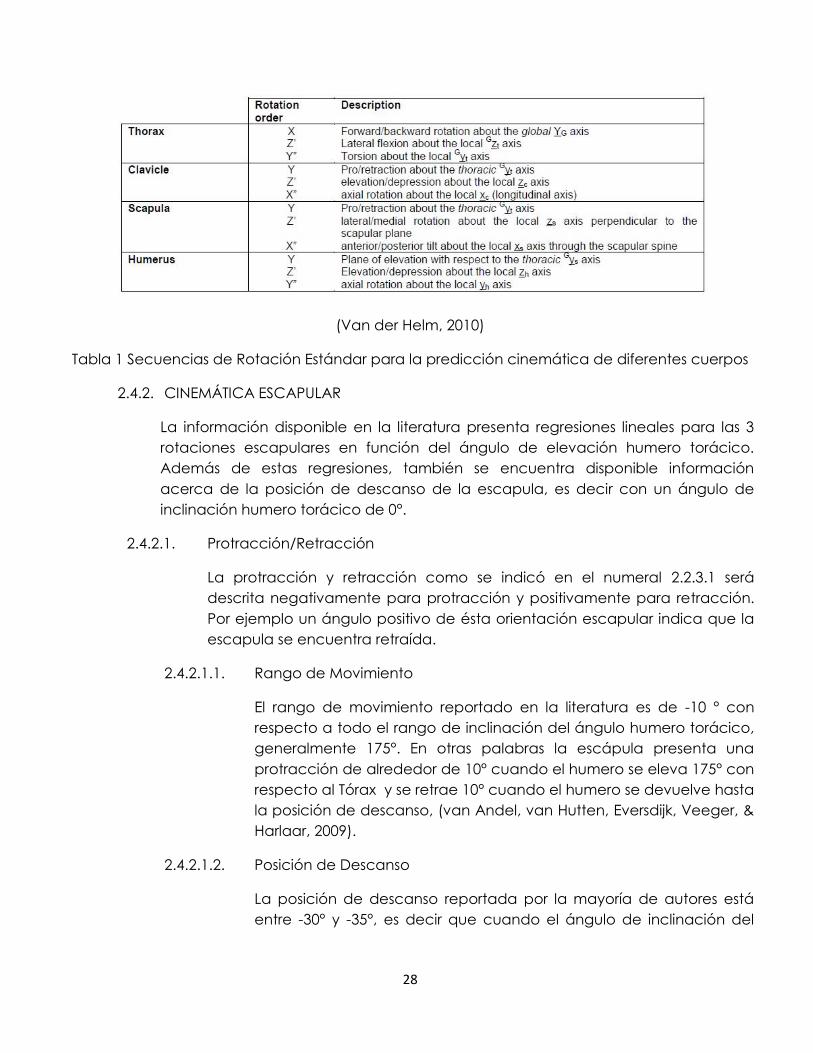
realizar modelos que predigan la cinemática escapular. La Tabla 1 presenta las
secuencias estandarizadas por el grupo internacional del hombro (ISG) para
diferentes cuerpos.
28
(Van der Helm, 2010)
Tabla 1 Secuencias de Rotación Estándar para la predicción cinemática de diferentes cuerpos
2.4.2. CINEMÁTICA ESCAPULAR
La información disponible en la literatura presenta regresiones lineales para las 3
rotaciones escapulares en función del ángulo de elevación humero torácico.
Además de estas regresiones, también se encuentra disponible información
acerca de la posición de descanso de la escapula, es decir con un ángulo de
inclinación humero torácico de 0°.
2.4.2.1. Protracción/Retracción
La protracción y retracción como se indicó en el numeral 2.2.3.1 será
descrita negativamente para protracción y positivamente para retracción.
Por ejemplo un ángulo positivo de ésta orientación escapular indica que la
escapula se encuentra retraída.
2.4.2.1.1. Rango de Movimiento
El rango de movimiento reportado en la literatura es de -10 ° con
respecto a todo el rango de inclinación del ángulo humero torácico,
generalmente 175°. En otras palabras la escápula presenta una
protracción de alrededor de 10° cuando el humero se eleva 175° con
respecto al Tórax y se retrae 10° cuando el humero se devuelve hasta
la posición de descanso, (van Andel, van Hutten, Eversdijk, Veeger, &
Harlaar, 2009).
2.4.2.1.2. Posición de Descanso
La posición de descanso reportada por la mayoría de autores está
entre -30° y -35°, es decir que cuando el ángulo de inclinación del
29
húmero respecto al Tórax es de 0°, la escápula presenta una
protracción entre 30° y 35°.
2.4.2.2. Rotación Lateral/Medial
La rotación Lateral/medial, como se indicó en el numeral 2.2.3.2, será
descrita positivamente para la rotación medial y negativamente para la
rotación lateral. Es decir que un valor negativo de ésta rotación indicará
que la escápula se encuentra rotada lateralmente.
2.4.2.2.1. Rango de Movimiento
El rango de movimiento reportado en la literatura esta entre -35° y -
40° con respecto a todo el rango de inclinación del ángulo humero
torácico. En otras palabras la escápula presenta una rotación lateral
entre 35° y 40° cuando el humero se eleva 175° con respecto al Tórax
y rota medialmente entre 35° y 45° cuando el humero se devuelve
hasta la posición de descanso, (van Andel, van Hutten, Eversdijk,
Veeger, & Harlaar, 2009).
2.4.2.2.2. Posición de descanso
La posición de descanso reportada por la mayoría de autores está
entre -0° y -5°, es decir que cuando el ángulo de inclinación del
húmero respecto al Tórax es de 0°, la escápula presenta una rotación
lateral entre 0° y 5°.
2.4.2.3. Inclinación Posterior/anterior
La inclinación posterior/anterior, como se indicó en el numeral 2.2.3.3, será
descrita positivamente para la inclinación posterior y negativamente para la
inclinación anterior. Es decir que un valor negativo de ésta rotación indicará
que la escápula se encuentra inclinada en el sentido anterior, mientras que
un valor positivo indica que la escápula se encuentra inclinada en el sentido
posterior.
2.4.2.3.1. Rango de Movimiento
El rango de movimiento reportado en la literatura está entre 40° y 55°
con respecto a todo el rango de inclinación del ángulo humero
torácico. En otras palabras la escápula se inclina posteriormente
entre 40° y 55° cuando el humero se eleva 175° con respecto al Tórax
y se inclina anteriormente entre 40° y 55° cuando el humero se
devuelve hasta la posición de descanso, (van Andel, van Hutten,
Eversdijk, Veeger, & Harlaar, 2009).

30
2.4.2.3.2. Posición de descanso
La posición de descanso reportada por la mayoría de autores es de -
10°, es decir que cuando el ángulo de inclinación del húmero
respecto al Tórax es de 0°, la escápula presenta una inclinación
anterior de 10°.

31
3. MÉTODOS
3.1. PARTICIPANTES
8 personas derechas participaron en este estudio. Todos los individuos que participaron
en el estudio nunca habían tenido ningún accidente o dolor crónico del hombro
derecho en el último año. Todos los participantes dieron su consentimiento informado
para realizar las pruebas. Las características de cada individuo se muestran en la Tabla
2 y las características de la población medida se presentan en la Tabla 3.
Tabla 2 Características de los individuos que realizaron las pruebas
Tabla 3 Características de la población que realizó las pruebas
3.2. INSTRUMENTACIÓN
3.2.1. EQUIPO DE ADQUISISCIÓN DE DATOS PHASESPACE
El sistema PhaseSpace Image Motion Capture, de la universidad de los Andes es un
equipo de adquisición de datos cinemáticos perteneciente al laboratorio “Colibri”
de análisis de movimiento.
Dentro de sus características principales se encuentra que el sistema permite la
captura de movimientos realizados en tiempo real en un computador. Las
Individuo Género Edad [Años] Peso [kg] Estatura [m]
1 Masculino 24 73 1.72
2 Femenino 18 54 1.56
3 Femenino 19 57 1.54
4 Masculino 23 68 1.78
5 Femenino 22 61 1.7
6 Femenino 21 61 1.73
7 Femenino 20 62 1.65
8 Femenino 21 54 1.65
Edad [Años] Peso [kg] Estatura [m]
21 61.25 1.67
Edad [Años] Peso [kg] Estatura [m]
2 6.63 0.08
Promedios
Desv. Est

32
cámaras que captan los marcadores tienen una frecuencia variable que va desde
los 30 fps hasta los 480 fps, lo que permite la adquisición de diferentes tipos de
movimientos dependiendo de la aplicación requerida. Por ejemplo una frecuencia
alta de muestreo permite el análisis de movimientos rápidos como movimientos
deportivos, por ejemplo un golpe, una patada o un swing de golf. Por otro lado
una frecuencia baja será la más adecuada para pruebas estáticas y cuasi
estáticas como las realizadas en el presente estudio. La Tabla 4 presenta las
características principales del sistema:
Tabla 4 Características técnicas del sistema PhaseSpace Image Motion Capture
El sistema consta de unas cámaras marca “impulse” que pueden ser conectadas
en diferentes configuraciones para proporcionar una área de muestreo de hasta
7.5 metros por 7.5 metros.
Este sistema puede adquirir la señal de un máximo de 72 marcadores activos “LED”
al mismo tiempo, lo que proporciona una herramienta de medición para casi
cualquier tipo de movimiento imaginable.
Esta herramienta utiliza un servidor en línea y un programa que permite la
digitalización de los datos en tiempo real a un computador. El programa
mencionado anteriormente proporciona una interfaz gráfica que permite la
visualización de los marcadores en la pantalla del computador.
3.2.2. PALPADOR ESCAPULAR
El palpador escapular es un mecanismo que permite la palpación física de los
puntos anatómicos escapulares (AI, AA y RSS), (Bull, 2011)
3.2.2.1. CRITERIOS DE DISEÑO
El mecanismo debe permitir el posicionamiento de 3 marcadores
activos.
El mecanismo debe poder ajustarse para diferentes tamaños
escapulares.
El mecanismo debe poder manipularse fácilmente por una persona
para la ubicación en tiempo real de los puntos anatómicos
mencionados.
33
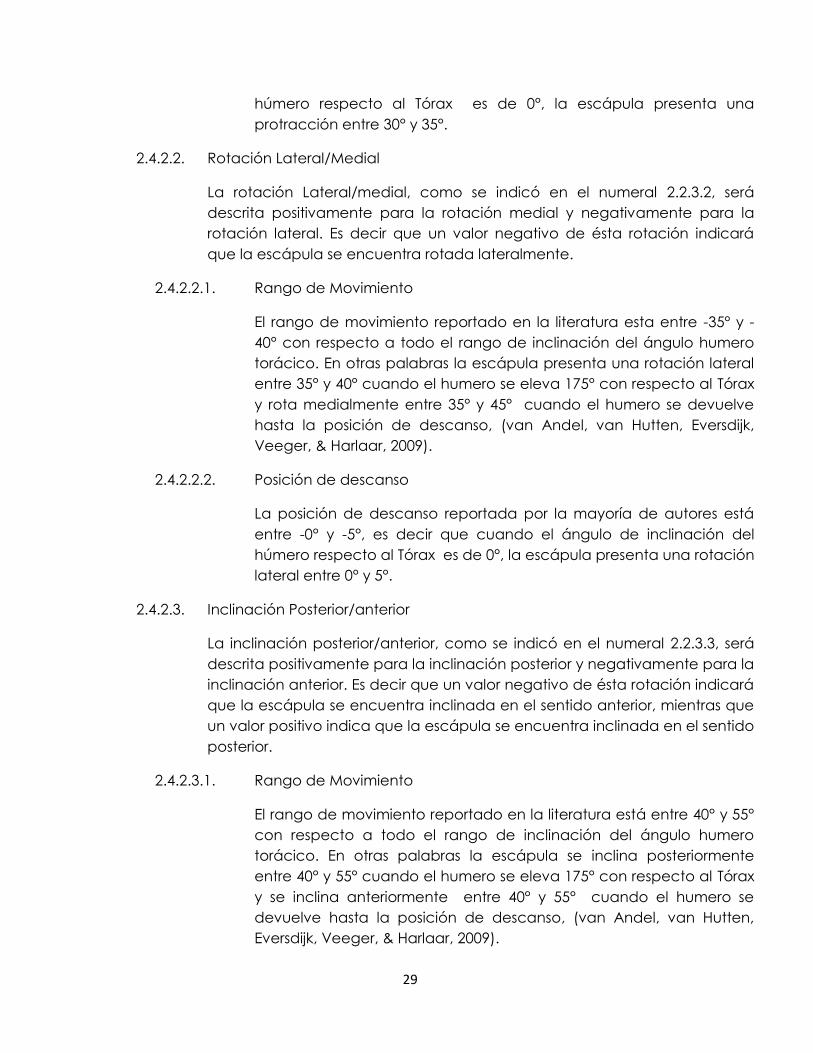
3.2.2.2. RENDERS DEL MECANISMO
La Figura 15 presenta el render del mecanismo que se utilizará para la
palpación escapular. Este mecanismo se diseñó en base al mecanismo
presentado por (Bull, 2011).
Figura 15 Render del Mecanismo Palpador Escapular
Tabla 5 Características Mecánicas del Palpador Escapular
La Figura 16 muestra el mecanismo original presentado por (Bull, 2011).
Tipo de Mecanismo
Traslación del pin 1 Traslación Pin 2 Rotación Eje RSS
Características Mecánicas del Palpador Escapular
Rangos de Movimiento
Descripción
Permite la ubicación
del marcador AI en
diferentes posiciones
Permite la ubicación
del marcador AA en
diferentes posiciones
Permite la apertura del
mecanimos para diferentes
anatomías escapulares
Mecanismo de
Ranuras Articulado

34
(Bull, 2011)
Figura 16 Mecanismo Palpador Escapular presentado por (Bull, 2011)
3.2.2.3. PROCESO DE MANUFACTURA
Se compraron dos platinas de aluminio de 3 milímetros de espesor por 25 cm
de largo y 5 centímetros de ancho. A cada una de éstas se le perforaron las
ranuras utilizando una fresadora y se les realizaron los radios de curvatura en
las esquinas usando el esmeril. Posteriormente se abrió un agujero en cada
una para posicionar el pin que permitiría la ubicación del marcador RSS y la
unión entre las dos platinas.
Se compraron los 3 pines y 6 tuercas que permitieran ajustar los pines AI, RSS
y AA en diferentes posiciones de las ranuras. Para la unión de todas las
piezas era indispensable que los pines quedaran a nivel. La Figura 17 y
Figura 18 muestra el palpador terminado con los pines a nivel:

35
Figura 17 Nivelación de los Pines del Palpador Escapular
Figura 18 Palpador Terminado
Los planos de construcción se encuentran anexos en el Apéndice 8.2
3.2.3. MECANISMO DE POSTURAS ESTÁTICAS DEL BRAZO
El desarrollo de un mecanismo que permitiera la acomodación del brazo en
diferentes posiciones estáticas era indispensable para permitir tomas con baja
incertidumbre experimental.

36
3.2.3.1. CRITERIOS DE DISEÑO
El mecanismo debe permitir el ajuste del brazo derecho en diferentes
ángulos de inclinación del húmero respecto al tórax.
El mecanismo debe dar soporte al brazo de la persona de tal forma que
ésta no pueda mover el brazo durante la toma de datos.
El mecanismo debe poder ajustarse para diferentes alturas y anatomías
de las personas a medir
3.2.3.2. PROTOTIPO 1
El primero prototipo propuesto era un tubo doblado con una ranura que por
medio de una manija les permitiera a las personas ubicar el brazo en
diferentes ángulos de inclinación del húmero respecto al tórax. La Figura 19,
Figura 20 y Figura 21 muestran los Renders del primer prototipo propuesto.
Figura 19 Render Prototipo 1

37
Figura 20 Render 2 Prototipo 1 Ranuras para ajuste de altura
Figura 21 Render 3 Prototipo 1 Manija de para diferentes ángulos de inclinación
El problema principal de éste prototipo es que solo cuenta con un único
radio de giro, por lo que personas con diferentes longitudes del brazo
tendrían problemas para usar el dispositivo. Además de esto, el mecanismo
como tal no proporciona un sistema que asegure que la persona no mueva
el brazo durante la toma de datos.
3.2.3.3. PROTOTIPO 2
Para solucionar el problema de un único radio de giro, se diseñó un
segundo prototipo en base al mecanismo de un reloj. La Figura 22 y Figura
23 muestran los Renders del segundo prototipo propuesto:
38
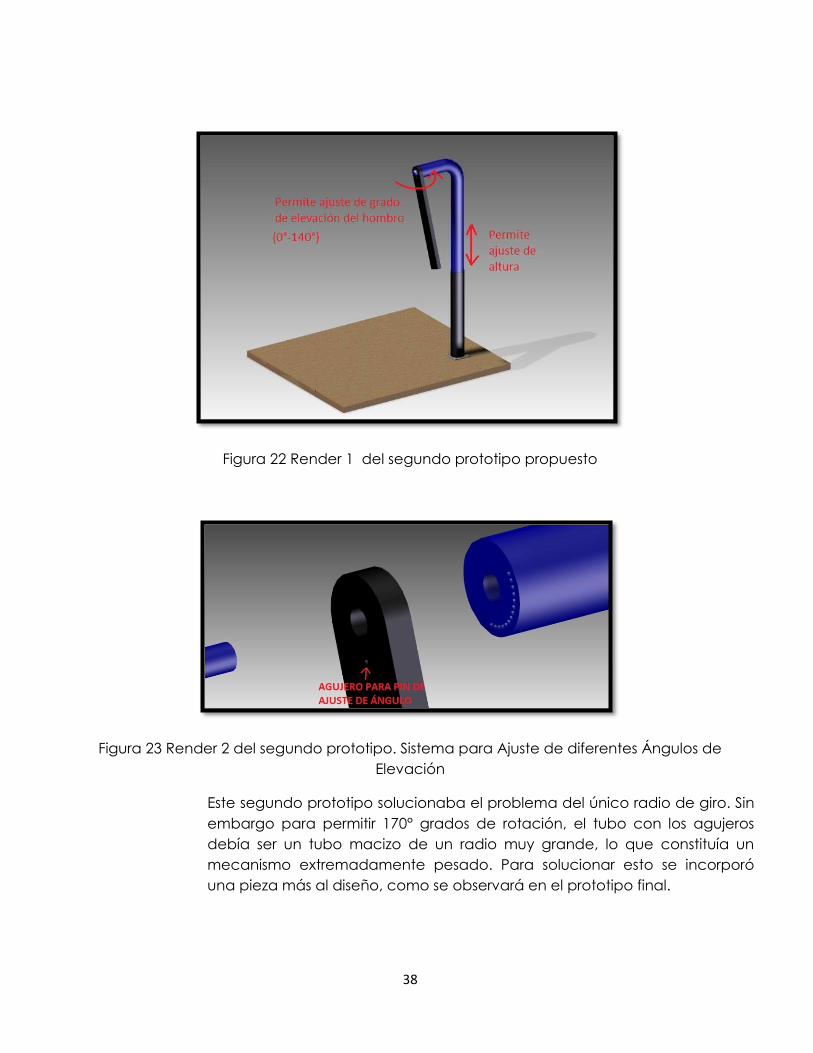
Figura 22 Render 1 del segundo prototipo propuesto
Figura 23 Render 2 del segundo prototipo. Sistema para Ajuste de diferentes Ángulos de
Elevación
Este segundo prototipo solucionaba el problema del único radio de giro. Sin
embargo para permitir 170° grados de rotación, el tubo con los agujeros
debía ser un tubo macizo de un radio muy grande, lo que constituía un
mecanismo extremadamente pesado. Para solucionar esto se incorporó
una pieza más al diseño, como se observará en el prototipo final.
39
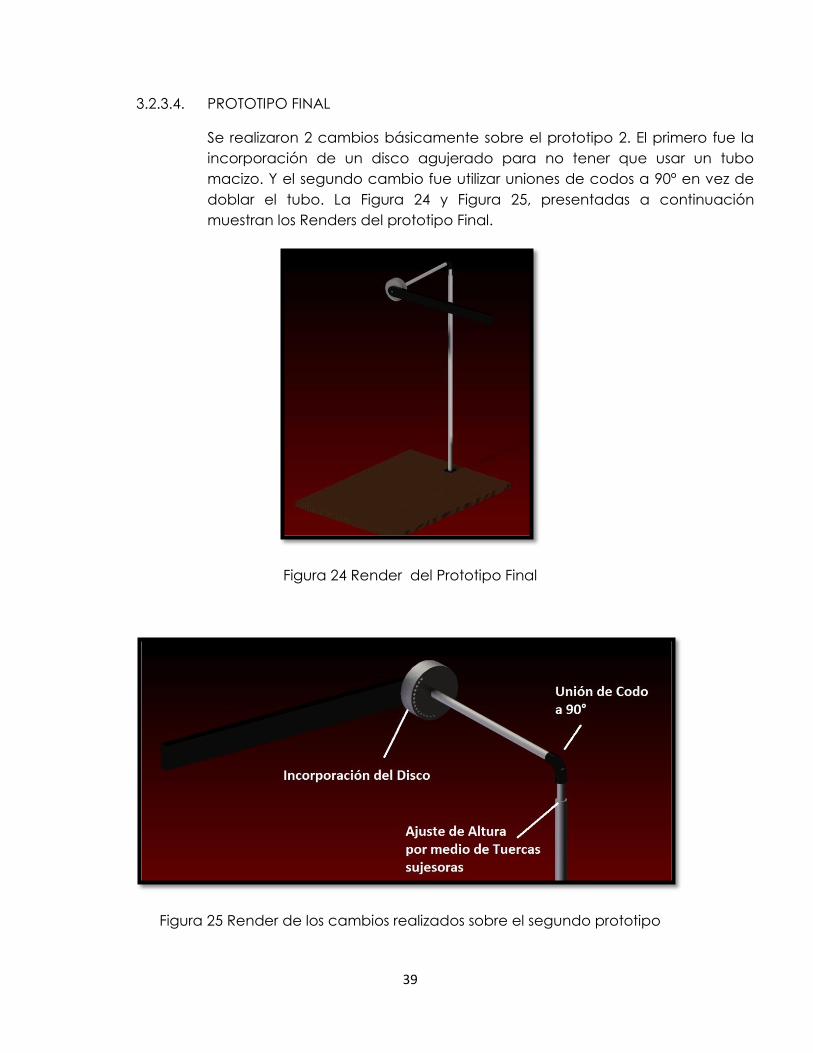
3.2.3.4. PROTOTIPO FINAL
Se realizaron 2 cambios básicamente sobre el prototipo 2. El primero fue la
incorporación de un disco agujerado para no tener que usar un tubo
macizo. Y el segundo cambio fue utilizar uniones de codos a 90° en vez de
doblar el tubo. La Figura 24 y Figura 25, presentadas a continuación
muestran los Renders del prototipo Final.
Figura 24 Render del Prototipo Final
Figura 25 Render de los cambios realizados sobre el segundo prototipo

40
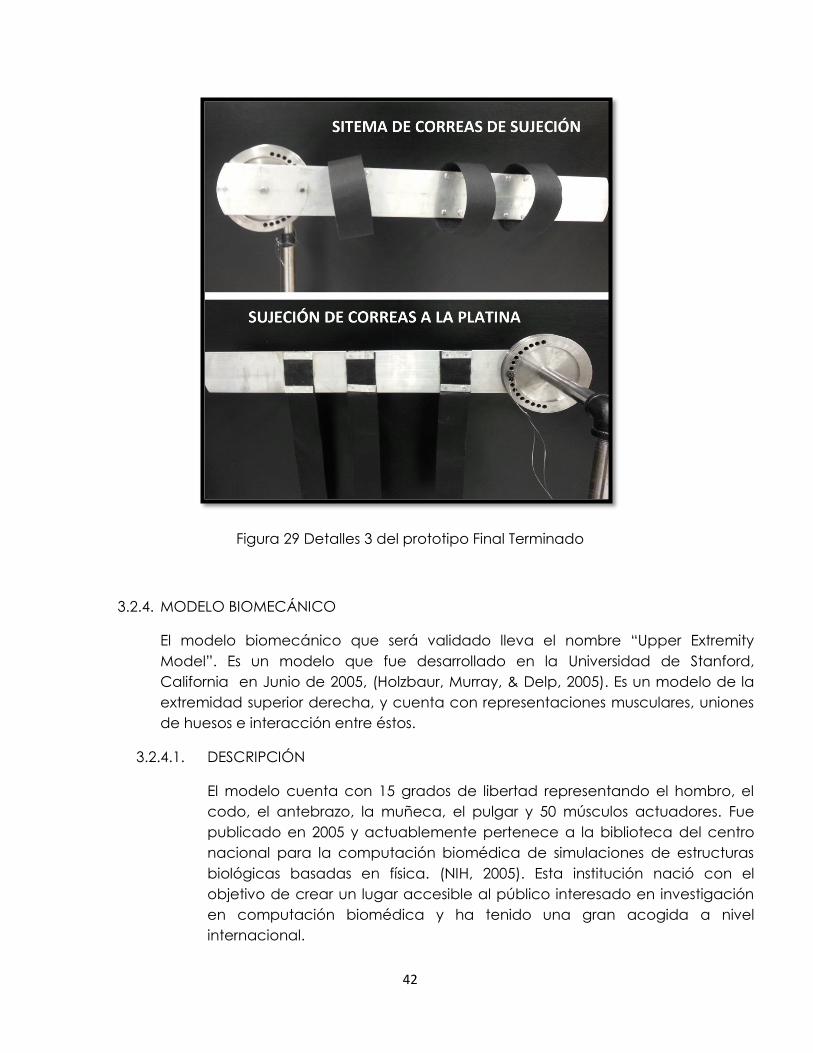
3.2.3.5. PROCESO DE MANUFACTURA
Para el proceso de manufactura se utilizaron tubos de acero galvanizado
de 1 pulgada y media, una unión de codo de 90°, una platina de acero
para la sujeción del mecanismo a una base, una platina de aluminio para la
sujeción del brazo derecho de las personas al mecanismo, correas de velcro
para la inmovilización del brazo a la platina de aluminio y se mandó a
manufacturar el disco. Los planos de construcción del mecanismo se
presentan en el apéndice 8.3.
A continuación se presentan las ilustraciones del mecanismo terminado:
Figura 26 Prototipo Final Terminado

41
Figura 27 Detalles 1 del prototipo Final Terminado
Figura 28 Detalles 2 del prototipo Final terminado
42
Figura 29 Detalles 3 del prototipo Final Terminado
3.2.4. MODELO BIOMECÁNICO
El modelo biomecánico que será validado lleva el nombre “Upper Extremity
Model”. Es un modelo que fue desarrollado en la Universidad de Stanford,
California en Junio de 2005, (Holzbaur, Murray, & Delp, 2005). Es un modelo de la
extremidad superior derecha, y cuenta con representaciones musculares, uniones
de huesos e interacción entre éstos.
3.2.4.1. DESCRIPCIÓN
El modelo cuenta con 15 grados de libertad representando el hombro, el
codo, el antebrazo, la muñeca, el pulgar y 50 músculos actuadores. Fue
publicado en 2005 y actuablemente pertenece a la biblioteca del centro
nacional para la computación biomédica de simulaciones de estructuras
biológicas basadas en física. (NIH, 2005). Esta institución nació con el
objetivo de crear un lugar accesible al público interesado en investigación
en computación biomédica y ha tenido una gran acogida a nivel
internacional.

43
El modelo tiene incorporado las soluciones de las ecuaciones diferenciales
que gobiernan la cinemática del tren superior, además de solución a las
ecuaciones que gobiernan la cinética muscular y de las articulaciones.
Entre los objetivos con los cuales el modelo fue creado, se encuentran:
Incorporar los músculos principales en la interacción del movimiento del
tren superior.
Proveer información precisa sobre los momentos de fuerza musculares.
Derivar propiedades cinéticas a partir de datos experimentales.
Representar la máxima capacidad de momento de fuerza muscular.
Representar la interacción de los diferentes huesos en las articulaciones.
Estar disponible al público para experimentación.
(Holzbaur, Murray, & Delp, 2005)
En cuanto al hombro (tema de interés del presente estudio), el modelo
cuenta con 3 grados de libertad: plano de Elevación, ángulo de elevación,
rotación del hombro.
En cuanto al modelado de la articulación Escapulohumeral, esta fue
modelada como una unión de esfera receptáculo, al igual que lo es en la
vida real, y las ecuaciones utilizadas para solucionar la cinemática
escapular son las presentadas por Groot y Brand en 2001, (Groot & Brand,
2001).
A continuación se presenta algunas imágenes de la interfaz del modelo:
(Holzbaur, Murray, & Delp, 2005)
Figura 30 Interfaz del Modelo Biomecánico en diferentes posturas

44
3.2.4.2. AMBIENTE DE PROGRAMACIÓN E INTERFAZ
El modelo fue diseñado para poder ser utilizado originalmente para la
plataforma SIMM. Sin embargo en 2007 se desarrolló la herramienta
OpenSim (Delp, y otros, 2007), la cual presentaba una interfaz mucho más
amable con el usuario.
3.2.5. OPENSIM
3.2.5.1. Descripción
OpenSim provee una plataforma donde la comunidad de investigación
biomédica puede crear bibliotecas de simulaciones, las cuales pueden ser
intercambiadas, probadas y analizadas a través de la colaboración de los
diferentes usuarios. (Delp, y otros, 2007). El desarrollo del programa pretendía
crear una comunidad donde cualquier persona pueda tener acceso a los
modelos pertenecientes a la comunidad.
3.2.5.2. Requerimientos técnicos
El software es de libre descarga y se encuentra disponible para descargar
por cualquier persona en el sitio web de la comunidad SIMTK. La dirección
del sitio web está disponible en la referencia (NIH, 2005).
Los modelos también se encuentran disponibles para descargar. Existen
modelos biológicos de todo tipo, no únicamente humanos.
La Figura 31 muestra imágenes de algunos de los modelos disponibles de
libre descarga:
Figura 31 Diferentes tipos de modelos de libre descarga disponibles para la comunidad SIMTK

45
Una vez descargados los modelos y el programa, los usuarios pueden usar
información experimental captada a través de algún sistema de captura de
movimiento para analizar los comportamientos del modelo.
Aunque el uso de algún tipo de sistema de captura de movimiento
específico no es un requerimiento, el formato de los datos que recibe el
programa si es algo de vital importancia.
La guía disponible para el usuario, también disponible en el sitio web (NIH,
2005), proporciona toda la información necesaria para comprender los
requerimientos exigidos por el programa para su correcto uso.
3.2.5.3. Herramientas de Análisis
El programa tiene varias herramientas de análisis de datos, donde para la
utilización de todas se requiere de datos experimentales y la creación de un
set de marcadores virtuales.
3.2.5.3.1. Escalamiento del Modelo
El escalamiento del modelo es una herramienta que se utiliza para
modificar las relaciones anatómicas del modelo original y poder
ajustarlo al individuo del que se obtuvieron los datos experimentales.
A partir del set de marcadores virtuales creado en el programa y la
información experimental en una pose estática, el modelo realiza un
proceso minimización de error de las distancias entre marcadores
variando las relaciones anatómicas del modelo.
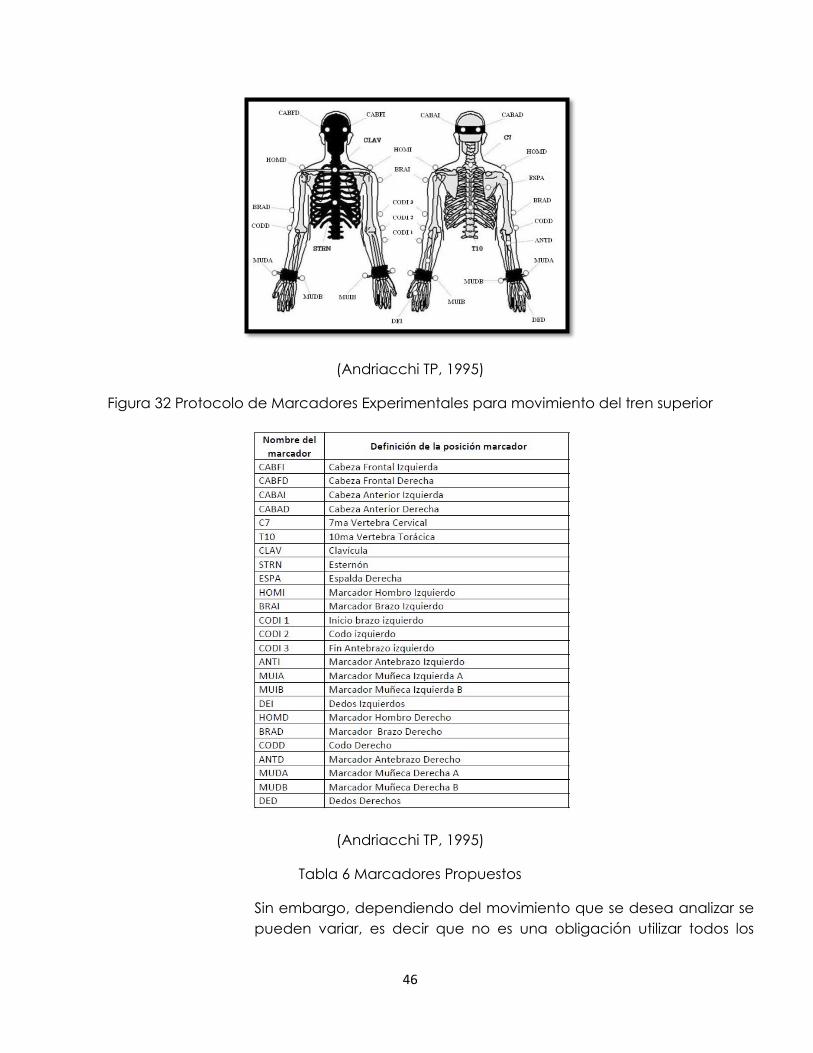
El set de marcadores a utilizar puede ser cualquiera, sin embargo
existe un protocolo para construir el set de marcadores para algunos
movimientos estándar. La Figura 32 y la Tabla 6 muestran el set
propuesto para mediciones de movimiento del tren superior.
46
(Andriacchi TP, 1995)
Figura 32 Protocolo de Marcadores Experimentales para movimiento del tren superior
(Andriacchi TP, 1995)
Tabla 6 Marcadores Propuestos
Sin embargo, dependiendo del movimiento que se desea analizar se
pueden variar, es decir que no es una obligación utilizar todos los

47
marcadores presentados en la Tabla 6 ni tampoco incluir aquellos
que el experimentador considere necesarios.
Una vez el programa termina de realizar este procedimiento, arroja el
resultado del error máximo encontrado. La guía del usuario
recomiendo que este error sea de máximo 2 puntos en la escala
mostrada. (NIH, 2005). Si el error máximo supera este valor se debe
reposicionar el marcador virtual para ajustarlo con el marcador
experimental (ambos mostrados en la interfaz).
La Figura 33 muestra un ejemplo de un set de marcadores (esferas
rosadas) y el set de marcadores experimentales (esferas azules), en
una de las pruebas estáticas realizadas. Se puede observar la
diferencia de posición de los dos sets de marcadores. En este
momento se modifica la posición del set virtual. La Figura 34 muestra
el reposicionamiento de los marcadores virtuales para la minimización
del error reportado.
Figura 33 Error de posicionamiento entre el set virtual y el experimental

48
Figura 34 Reposicionamiento del set de marcadores virtual
3.2.5.3.2. Herramienta de Cinemática Inversa
La herramienta de cinemática inversa se usa una vez se terminó el
escalamiento del modelo a el individuo específico. Esta herramienta
utiliza la información experimental dinámica y utiliza el mismo
procedimiento de disminución de error que el utilizado en el
escalamiento. Sin embargo en este caso, el programa no minimiza la
distancia entre marcadores modificando las relaciones anatómicas
del modelo, sino ajustando la pose del modelo que mejor ajuste la
posición de todos los marcadores en cada instante produciendo al
final un modelo dinámico, en otras palabras al finalizar el proceso de
cinemática inversa, el modelo produce un movimiento en el modelo.
3.2.5.3.3. Otras herramientas de interés
En el estudio presente, las dos herramientas mencionadas
anteriormente permiten la obtención de las orientaciones
escapulares. Sin embargo existen otras herramientas de interés como
lo son: la herramienta de control muscular, la herramienta de
dinámica directa, la herramienta de optimización estática y la
herramienta de reducción de residuos. Cada una de estas
herramientas, requieren el uso previo del escalamiento del modelo y
de la cinemática inversa. En el manual del usuario, disponible en
línea, se encuentra la descripción detallada de cada una de éstas.
49
3.3. PROTOCOLO EXPERIMENTAL
3.3.1. POSICIONAMIENTO DE CAMARAS
El posicionamiento de cámaras se realiza con el objetivo de configurar y limitar el
espacio donde será realizado el movimiento. Son necesarias al menos 3 cámaras
con el fin de realizar la triangulación y poder obtener la posición tridimensional de
los marcadores.
Las cámaras son ubicadas formando diferentes geometrías, desde círculos, como
se observa en la Figura 35, que encierran todo el espacio, configuración que
permite registrar un movimiento con 6 grados de libertad; hasta semicírculos, para
registrar movimientos que se puedan observar desde un solo plano por ejemplo.
(Phase Space Image Capture System, 2008)
Figura 35 Configuración Circular de Cámaras
Como las pruebas a realizar son pruebas estáticas, es mejor ubicar las 8 cámaras
disponibles en un semicírculo para poder captar todos los marcadores sin perderlos
en ningún momento, ya que es posible observar el movimiento desde un solo
plano.
3.3.2. CONEXIÓN DEL EQUIPO
Cada cámara tiene 2 puertos, ya que la conexión entre todas las cámaras debe
ser realizada de manera secuencial, de tal forma que se forme una cadena entre
todas.

50
(Phase Space Image Capture System, 2008)
Figura 36 Cámaras del sistema Phase Space
Además de las cámaras, el sistema cuenta con un servidor, el cual debe ser
conectado a la primera cámara, como se ilustra en la Figura 37.
(Phase Space Image Capture System, 2008)
Figura 37 Conexión entre las cámaras y el servidor
3.3.3. CALIBRACIÓN DEL SISTEMA
Una vez realizada la conexión entre las cámaras y el servidor en la configuración
deseada se procede a calibrar el sistema. La calibración consiste en captar la
información de 8 sensores conectados a una barra, denominada “calibration
Wand”, en el espacio deseado. Además en el proceso de calibración se deben
definir el origen de referencia y la dirección de los ejes. Todo el proceso de
calibración se realiza a través de la interfaz del programa visto desde la pantalla
del computador que accede al servidor. El programa muestra primero el espacio
detectado por las cámaras, como se ilustra en la Figura 38:

51
(Phase Space Image Capture System, 2008)
Figura 38 Espacio de Muestreo Captado por un sistema de 30 cámaras
Posteriormente, al usar la barra de calibración se empieza a detectar el área por
todas las cámaras:
(Phase Space Image Capture System, 2008)
Figura 39 Captación de los sensores de la barra para la calibración de las cámaras
Como se puede ver en la Figura 39. Los recuadros verdes indican el espacio
captado. Una vez cada recuadro negro se vuelve verde se procede a identificar
el eje de referencia y las direcciones de sus ejes. Para hacer esto se usa la barra de
calibración y se debe desplazar en el sentido que se desea cuando en el
momento que el programa indica para cada uno de los ejes.
Al terminar esto se puede observar el proceso de calibración del sistema en la
pantalla de computador, como se observa en la Figura 40:
52
(Phase Space Image Capture System, 2008)
Figura 40 Espacio correctamente calibrado
En este momento se guarda la configuración y el sistema se encuentra listo para
registrar los movimientos.
3.3.4. POSICIONAMIENTO DE MARCADORES
Una vez se calibró el sistema se deben posicionar los marcadores requeridos para
la toma de datos.
3.3.4.1. MARCADORES ANATÓMICOS
De acuerdo al protocolo presentado en la sección 3.2.5.3.1, se definió el
siguiente set de marcadores a utilizar:
Tabla 7 Set de Marcadores Usados
Nombre Segmento Real Segmento Modelo
HOMBD Acromion Escapular Derecho Escápula
CODD Cabeza superior de la Ulna (cúbito) derecha Ulna
RADMD Radio derecho Radius
MUDMD Cabeza inferior del radio derecho Radius
CUBMD Inicio antebrazo Cúbiro
NUDMD Nudillo Medio Derecho 3proxph
Set de Marcadores Utilizado
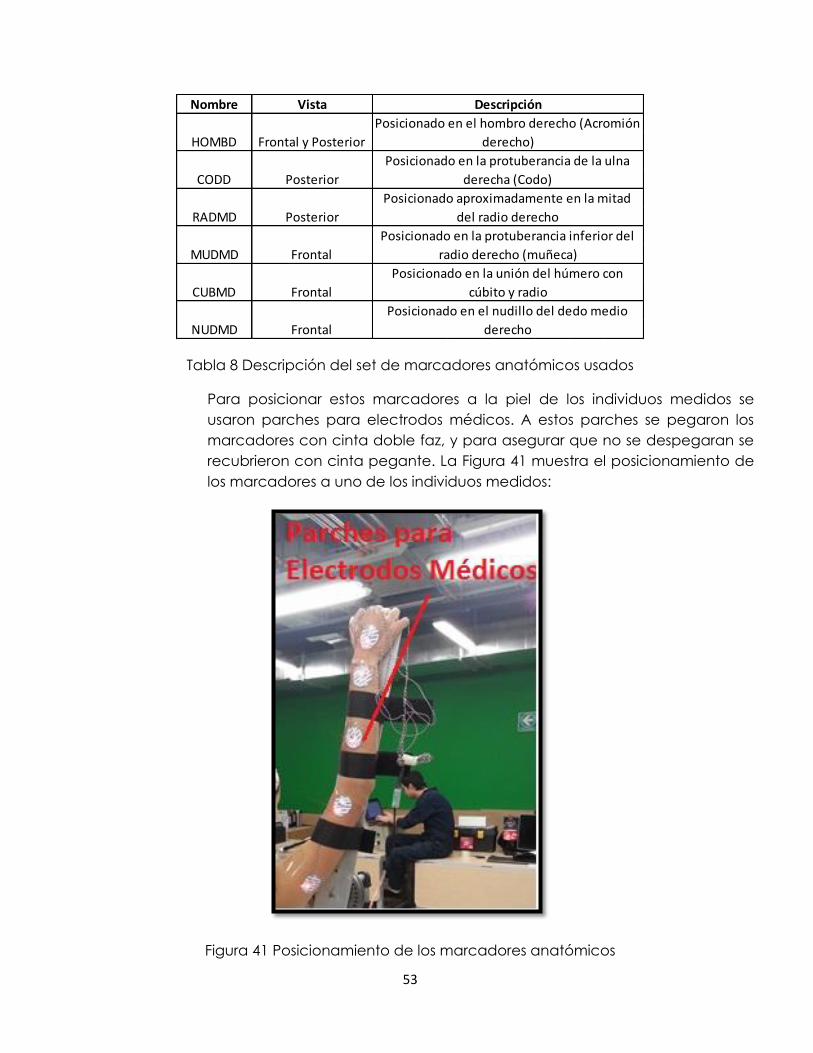
53
Tabla 8 Descripción del set de marcadores anatómicos usados
Para posicionar estos marcadores a la piel de los individuos medidos se
usaron parches para electrodos médicos. A estos parches se pegaron los
marcadores con cinta doble faz, y para asegurar que no se despegaran se
recubrieron con cinta pegante. La Figura 41 muestra el posicionamiento de
los marcadores a uno de los individuos medidos:
Figura 41 Posicionamiento de los marcadores anatómicos
Nombre Vista
Frontal y PosteriorHOMBD
PosteriorCODD
Posicionado aproximadamente en la mitad
del radio derechoPosteriorRADMD
Posicionado en el nudillo del dedo medio
derechoFrontalNUDMD
Posicionado en la unión del húmero con
cúbito y radioFrontalCUBMD
Posicionado en la protuberancia inferior del
radio derecho (muñeca)FrontalMUDMD
Descripción
Posicionado en la protuberancia de la ulna
derecha (Codo)
Posicionado en el hombro derecho (Acromión
derecho)
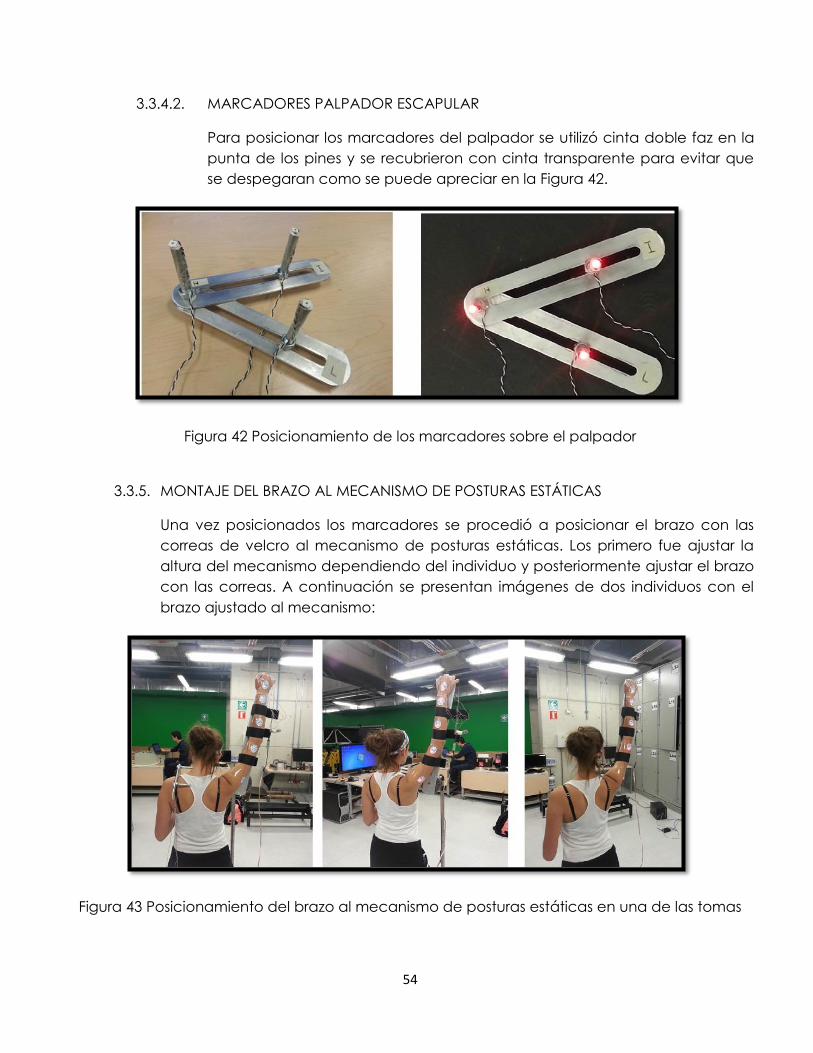
54
3.3.4.2. MARCADORES PALPADOR ESCAPULAR
Para posicionar los marcadores del palpador se utilizó cinta doble faz en la
punta de los pines y se recubrieron con cinta transparente para evitar que
se despegaran como se puede apreciar en la Figura 42.
Figura 42 Posicionamiento de los marcadores sobre el palpador
3.3.5. MONTAJE DEL BRAZO AL MECANISMO DE POSTURAS ESTÁTICAS
Una vez posicionados los marcadores se procedió a posicionar el brazo con las
correas de velcro al mecanismo de posturas estáticas. Los primero fue ajustar la
altura del mecanismo dependiendo del individuo y posteriormente ajustar el brazo
con las correas. A continuación se presentan imágenes de dos individuos con el
brazo ajustado al mecanismo:
Figura 43 Posicionamiento del brazo al mecanismo de posturas estáticas en una de las tomas

55
Figura 44 Posicionamiento del brazo al mecanismo de posturas estáticas en una de las tomas
3.3.6. TOMA DE DATOS
3.3.6.1. PRUEBAS DE PRECISIÓN
Para determinar el error de precisión de cada modelo se realizaron 5
pruebas al mismo individuo. Los datos obtenidos en estas 5 pruebas se
usaron en los dos modelos con el fin de determinar la diferencia de
resultados arrojados por cada modelo. En el caso del palpador escapular, la
palpación fue realizada por un estudiante de medicina de la Universidad
Javeriana de Bogotá con ayuda de un profesor de biomédica de la
Universidad de los Andes de Bogotá.

56
Figura 45 Palpación Escapular para las pruebas de precisión
3.3.6.2. PRUEBAS EXPERIMENTALES
Se realizaron 18 tomas estáticas para cada individuo. Cada toma consistía
en registrar la posición de los marcadores para cada uno de los ángulos
ajustados por medio del pin del disco del mecanismo de posturas estáticas.
Como se especifica en los planos de manufactura del mecanismo de
posturas estáticas (apéndice 8.2), los orificios debían presentar aumentos de
10° entre uno y otro, sin embargo en el momento de recibir la pieza
manufacturada se encontró que estaban espaciados 9.7° entre uno y otro.
Por falta de tiempo no se exigió volver a manufacturar toda la pieza.
Por lo tanto para cada individuo se extrajeron 18 archivos para su posterior
procesamiento, cada uno correspondiente a la posición cinemática de los
marcadores del brazo y los marcadores del palpador para cada 10° grados
de elevación del húmero con respecto al tórax, comenzando en 0°.
La razón para realizar tomas estáticas fue por la utilización del palpador, ya
que poder ubicar los puntos escapulares en un toma dinámica con el
palpador era una tarea imposible, ya que el palpador es manipulado por
una persona externa a la que realiza la prueba y se toma alrededor de 40

57
segundos y 2 minutos ubicar correctamente los puntos anatómicos en una
posición estática.
3.4. PROCESAMIENTO DE DATOS
La información extraída del programa de captura de movimiento es una archivo
codificado de extensión *C3D. Este archivo debe ser exportado a un archivo de texto
plano para poder realizar la conversión al formato requerido por el programa
OpenSim.
Para realizar esta exportación se requiere el uso del software “RECAP II” el cual, es un
programa que permita la visualización de los marcadores, como se ve en la Figura 46.
El programa fue proporcionado por el técnico del laboratorio.
Figura 46 Interfaz del programa "RECAP"
En la Figura 46 se observa la posición de los marcadores en una de las tomas. A partir del
programa se usa la opción exportar en la pestaña “file” y selecciona exportar como
archivo de extensión *.owl como se puede apreciar en la Figura 47.

58
Figura 47 Exportación del archivo a formato de texto plano *.OWL
El formato extensión *.OWL es un formato de texto plano que contiene la información
captada para cada marcador. La Figura 48 muestra el archivo obtenido y la Figura 49
muestra la descripción de cada uno de los campos.
Figura 48 Archivo en Formato *.OWL
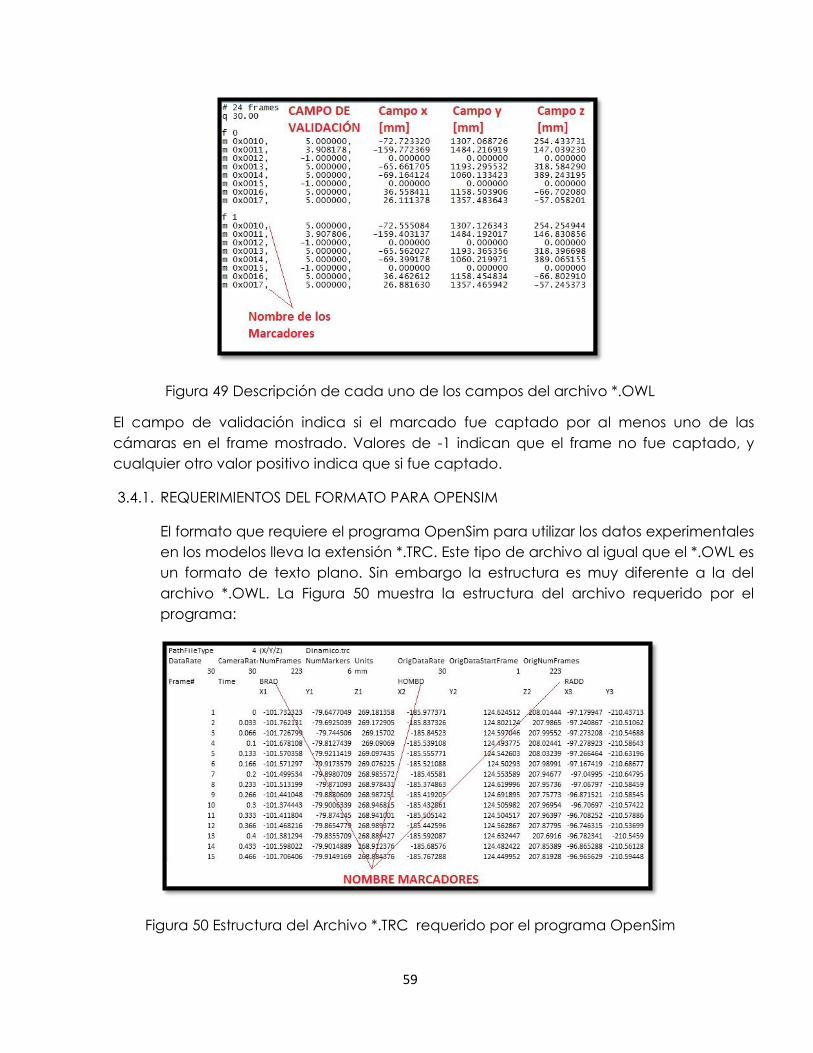
59
Figura 49 Descripción de cada uno de los campos del archivo *.OWL
El campo de validación indica si el marcado fue captado por al menos uno de las
cámaras en el frame mostrado. Valores de -1 indican que el frame no fue captado, y
cualquier otro valor positivo indica que si fue captado.
3.4.1. REQUERIMIENTOS DEL FORMATO PARA OPENSIM
El formato que requiere el programa OpenSim para utilizar los datos experimentales
en los modelos lleva la extensión *.TRC. Este tipo de archivo al igual que el *.OWL es
un formato de texto plano. Sin embargo la estructura es muy diferente a la del
archivo *.OWL. La Figura 50 muestra la estructura del archivo requerido por el
programa:
Figura 50 Estructura del Archivo *.TRC requerido por el programa OpenSim
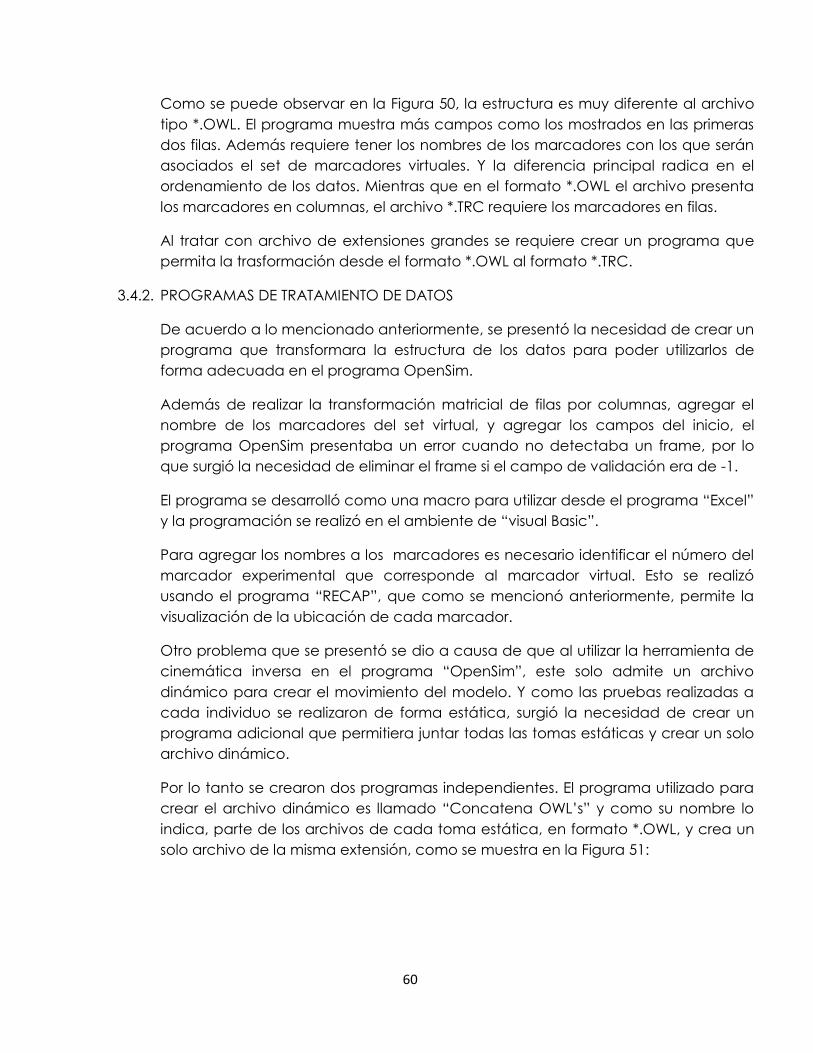
60
Como se puede observar en la Figura 50, la estructura es muy diferente al archivo
tipo *.OWL. El programa muestra más campos como los mostrados en las primeras
dos filas. Además requiere tener los nombres de los marcadores con los que serán
asociados el set de marcadores virtuales. Y la diferencia principal radica en el
ordenamiento de los datos. Mientras que en el formato *.OWL el archivo presenta
los marcadores en columnas, el archivo *.TRC requiere los marcadores en filas.
Al tratar con archivo de extensiones grandes se requiere crear un programa que
permita la trasformación desde el formato *.OWL al formato *.TRC.
3.4.2. PROGRAMAS DE TRATAMIENTO DE DATOS
De acuerdo a lo mencionado anteriormente, se presentó la necesidad de crear un
programa que transformara la estructura de los datos para poder utilizarlos de
forma adecuada en el programa OpenSim.
Además de realizar la transformación matricial de filas por columnas, agregar el
nombre de los marcadores del set virtual, y agregar los campos del inicio, el
programa OpenSim presentaba un error cuando no detectaba un frame, por lo
que surgió la necesidad de eliminar el frame si el campo de validación era de -1.
El programa se desarrolló como una macro para utilizar desde el programa “Excel”
y la programación se realizó en el ambiente de “visual Basic”.
Para agregar los nombres a los marcadores es necesario identificar el número del
marcador experimental que corresponde al marcador virtual. Esto se realizó
usando el programa “RECAP”, que como se mencionó anteriormente, permite la
visualización de la ubicación de cada marcador.
Otro problema que se presentó se dio a causa de que al utilizar la herramienta de
cinemática inversa en el programa “OpenSim”, este solo admite un archivo
dinámico para crear el movimiento del modelo. Y como las pruebas realizadas a
cada individuo se realizaron de forma estática, surgió la necesidad de crear un
programa adicional que permitiera juntar todas las tomas estáticas y crear un solo
archivo dinámico.
Por lo tanto se crearon dos programas independientes. El programa utilizado para
crear el archivo dinámico es llamado “Concatena OWL’s” y como su nombre lo
indica, parte de los archivos de cada toma estática, en formato *.OWL, y crea un
solo archivo de la misma extensión, como se muestra en la Figura 51:

61
Figura 51 Interfaz del programa de concatenación de archivos
Al correr el programa, este muestra una ventana que pide la ubicación de la
carpeta donde se encuentran los archivos que se desean juntar.
Una vez seleccionada la carpeta, el programa comienza a procesar los archivos y
al final muestra la información total y crea un archivo dinámico, en la misma
carpeta donde se seleccionaron los archivos a unir, como se puede observar en la
Figura 52.
Figura 52 Finalización del proceso de Concatena
Una vez terminado este proceso se usa el programa llamado “Conversor OWL”.
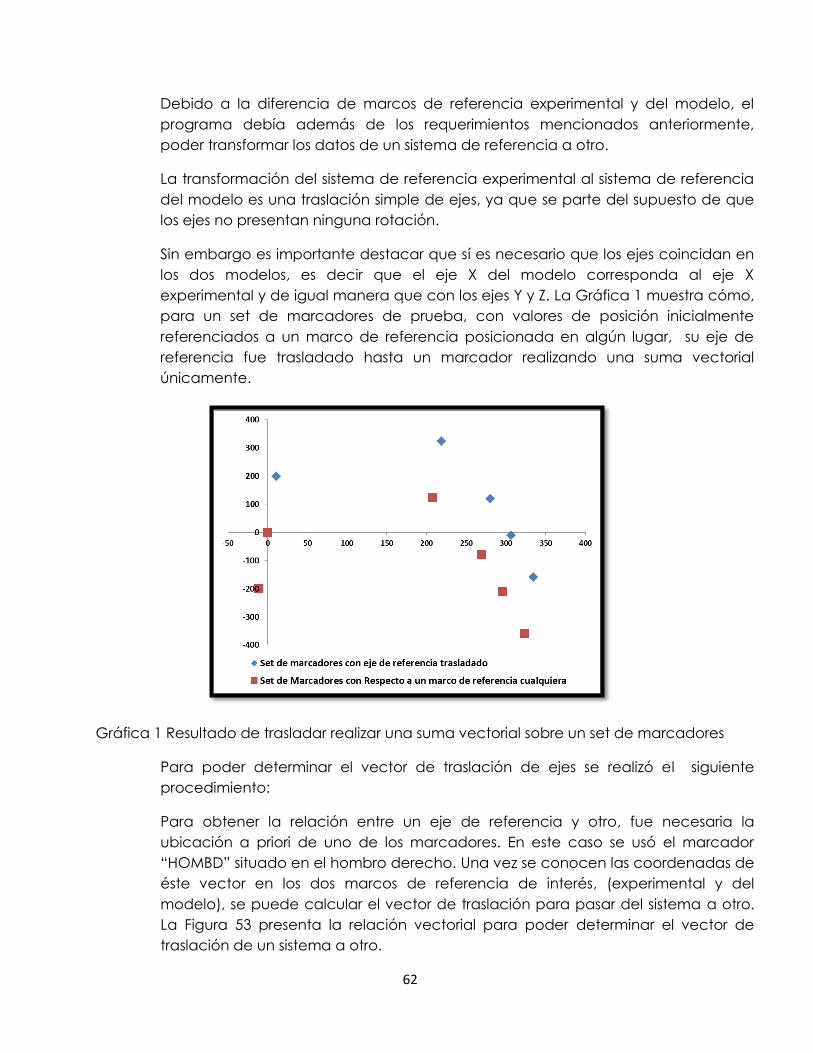
62
Debido a la diferencia de marcos de referencia experimental y del modelo, el
programa debía además de los requerimientos mencionados anteriormente,
poder transformar los datos de un sistema de referencia a otro.
La transformación del sistema de referencia experimental al sistema de referencia
del modelo es una traslación simple de ejes, ya que se parte del supuesto de que
los ejes no presentan ninguna rotación.
Sin embargo es importante destacar que sí es necesario que los ejes coincidan en
los dos modelos, es decir que el eje X del modelo corresponda al eje X
experimental y de igual manera que con los ejes Y y Z. La Gráfica 1 muestra cómo,
para un set de marcadores de prueba, con valores de posición inicialmente
referenciados a un marco de referencia posicionada en algún lugar, su eje de
referencia fue trasladado hasta un marcador realizando una suma vectorial
únicamente.
Gráfica 1 Resultado de trasladar realizar una suma vectorial sobre un set de marcadores
Para poder determinar el vector de traslación de ejes se realizó el siguiente
procedimiento:
Para obtener la relación entre un eje de referencia y otro, fue necesaria la
ubicación a priori de uno de los marcadores. En este caso se usó el marcador
“HOMBD” situado en el hombro derecho. Una vez se conocen las coordenadas de
éste vector en los dos marcos de referencia de interés, (experimental y del
modelo), se puede calcular el vector de traslación para pasar del sistema a otro.
La Figura 53 presenta la relación vectorial para poder determinar el vector de
traslación de un sistema a otro.

63
Figura 53 Relación de los dos sistemas de referencia a partir de un marcador
Por lo tanto cada marcador tendrá las siguientes coordenadas en el sistema de
referencia del modelo:
Donde el subíndice SRM hace referencia al sistema de referencia del modelo
mientras que el subíndice SRE hace referencia al sistema de referencia
experimental. Consecuentemente el vector de traslación que debe ser sumado a
los datos de los marcadores en el sistema de referencia experimental es:
Una vez determinado el vector de traslación, habiendo identificado las
equivalencias de los nombres de los marcadores y habiendo creado el archivo
dinámico, usando el programa de concatena de archivos estáticos, se puede usar
el programa “conversor OWL’s”.
Al iniciar el programa, este muestra una opción para modificar la tabla de
equivalencias de los marcadores y la tabla para agregar el vector de traslación de
ejes como se observa en la Figura 54.
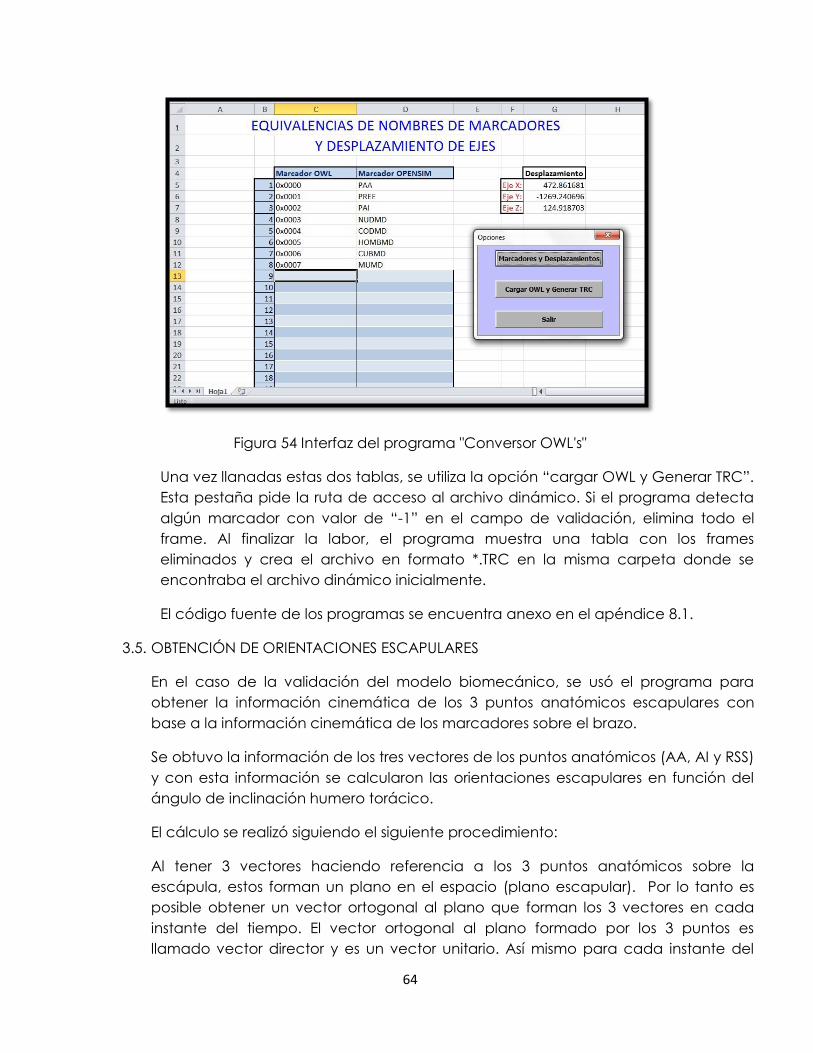
64
Figura 54 Interfaz del programa "Conversor OWL's"
Una vez llanadas estas dos tablas, se utiliza la opción “cargar OWL y Generar TRC”.
Esta pestaña pide la ruta de acceso al archivo dinámico. Si el programa detecta
algún marcador con valor de “-1” en el campo de validación, elimina todo el
frame. Al finalizar la labor, el programa muestra una tabla con los frames
eliminados y crea el archivo en formato *.TRC en la misma carpeta donde se
encontraba el archivo dinámico inicialmente.
El código fuente de los programas se encuentra anexo en el apéndice 8.1.
3.5. OBTENCIÓN DE ORIENTACIONES ESCAPULARES
En el caso de la validación del modelo biomecánico, se usó el programa para
obtener la información cinemática de los 3 puntos anatómicos escapulares con
base a la información cinemática de los marcadores sobre el brazo.
Se obtuvo la información de los tres vectores de los puntos anatómicos (AA, AI y RSS)
y con esta información se calcularon las orientaciones escapulares en función del
ángulo de inclinación humero torácico.
El cálculo se realizó siguiendo el siguiente procedimiento:
Al tener 3 vectores haciendo referencia a los 3 puntos anatómicos sobre la
escápula, estos forman un plano en el espacio (plano escapular). Por lo tanto es
posible obtener un vector ortogonal al plano que forman los 3 vectores en cada
instante del tiempo. El vector ortogonal al plano formado por los 3 puntos es
llamado vector director y es un vector unitario. Así mismo para cada instante del
65
tiempo el vector director va cambiando su dirección, por lo tanto es posible
calcular los ángulos que determinan su dirección en cada instante.
Las siguientes fórmulas fueron usadas para el cálculo del vector director y de sus
direcciones para cada instante del tiempo:
Dados los vectores anatómicos AA, AI y RS de coordenadas
, respectivamente, se forman los
vectores que forman el plano, llamados V1 y V2 de la forma:
Estos dos vectores se encuentran sobre el plano formado por los 3 puntos
anatómicos, llámese plano escapular. Por lo tanto es posible calcular un vector
ortogonal, (vector director), a éste plano como el producto cruz del vector V1 y el
vector V2. Este vector director tiene las siguientes coordenadas:
Estas son las coordenadas del vector director, y para hacerlo unitario, cada una
de sus coordenadas se divide por su magnitud, definida como:
√
Una vez divididas sus coordenadas por su magnitud se obtiene el vector director
unitario .
Y para encontrar las orientaciones, basta encontrar las direcciones del vector
director unitario, en cada instante del tiempo las cuales se pueden obtener como:
Para la obtención de las orientaciones usando el método del palpador, se usa el
mismo procedimiento, ya que se cuenta con la información cinemática de los
puntos anatómicos directamente.

66
4. PRESENTACIÓN DE RESULTADOS
4.1. ORIENTACIONES ESCAPULARES
Esta sección presenta las orientaciones escapulares que fueron obtenidas por medio de
los dos métodos y las diferencias entre ambos.
4.1.1. MODELO BIOMECÁNICO
La Gráfica 2, Gráfica 3 y Gráfica 4 presentan las orientaciones escapulares
obtenidas a partir de la información de los puntos anatómicos:
Gráfica 2 Rotación Medial/Lateral en función del Ángulo de Inclinación Húmero Torácico
obtenidas con el modelo

67
Gráfica 3 Protracción/Retracción en función del Ángulo de Inclinación Húmero Torácico
obtenidas con el modelo
Gráfica 4 Inclinación Posterior/Interior en función del Ángulo de Inclinación Húmero Torácico
obtenidas con el modelo
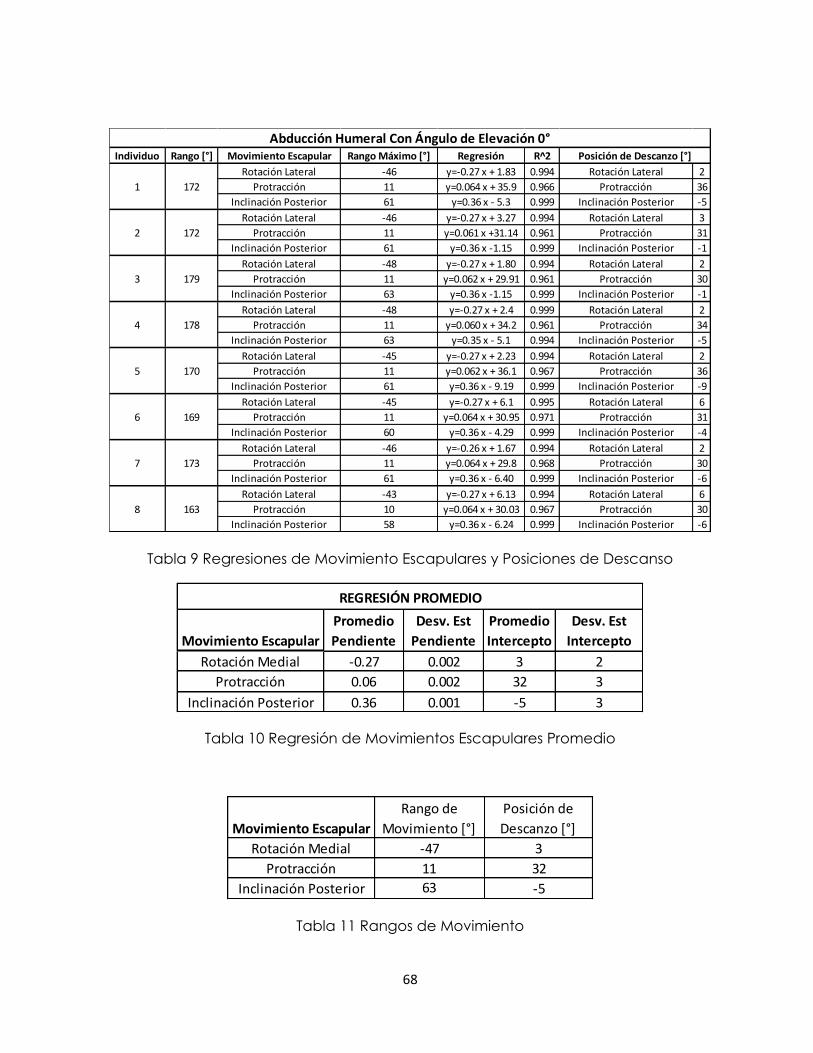
68
Tabla 9 Regresiones de Movimiento Escapulares y Posiciones de Descanso
Tabla 10 Regresión de Movimientos Escapulares Promedio
Tabla 11 Rangos de Movimiento
Individuo Rango [°] Movimiento Escapular Rango Máximo [°] Regresión R^2
Rotación Lateral -46 y=-0.27 x + 1.83 0.994 Rotación Lateral 2
Protracción 11 y=0.064 x + 35.9 0.966 Protracción 36
Inclinación Posterior 61 y=0.36 x - 5.3 0.999 Inclinación Posterior -5
Rotación Lateral -46 y=-0.27 x + 3.27 0.994 Rotación Lateral 3
Protracción 11 y=0.061 x +31.14 0.961 Protracción 31
Inclinación Posterior 61 y=0.36 x -1.15 0.999 Inclinación Posterior -1
Rotación Lateral -48 y=-0.27 x + 1.80 0.994 Rotación Lateral 2
Protracción 11 y=0.062 x + 29.91 0.961 Protracción 30
Inclinación Posterior 63 y=0.36 x -1.15 0.999 Inclinación Posterior -1
Rotación Lateral -48 y=-0.27 x + 2.4 0.999 Rotación Lateral 2
Protracción 11 y=0.060 x + 34.2 0.961 Protracción 34
Inclinación Posterior 63 y=0.35 x - 5.1 0.994 Inclinación Posterior -5
Rotación Lateral -45 y=-0.27 x + 2.23 0.994 Rotación Lateral 2
Protracción 11 y=0.062 x + 36.1 0.967 Protracción 36
Inclinación Posterior 61 y=0.36 x - 9.19 0.999 Inclinación Posterior -9
Rotación Lateral -45 y=-0.27 x + 6.1 0.995 Rotación Lateral 6
Protracción 11 y=0.064 x + 30.95 0.971 Protracción 31
Inclinación Posterior 60 y=0.36 x - 4.29 0.999 Inclinación Posterior -4
Rotación Lateral -46 y=-0.26 x + 1.67 0.994 Rotación Lateral 2
Protracción 11 y=0.064 x + 29.8 0.968 Protracción 30
Inclinación Posterior 61 y=0.36 x - 6.40 0.999 Inclinación Posterior -6
Rotación Lateral -43 y=-0.27 x + 6.13 0.994 Rotación Lateral 6
Protracción 10 y=0.064 x + 30.03 0.967 Protracción 30
Inclinación Posterior 58 y=0.36 x - 6.24 0.999 Inclinación Posterior -6
1638
7
6
5
4
Abducción Humeral Con Ángulo de Elevación 0°
172
179
178
170
169
173
3
1 172
2
Posición de Descanzo [°]
Rotación Medial -0.27 0.002 3 2
Protracción 0.06 0.002 32 3
Inclinación Posterior 0.36 0.001 -5 3
REGRESIÓN PROMEDIO
Desv. Est
Intercepto
Promedio
Intercepto
Desv. Est
Pendiente
Promedio
PendienteMovimiento Escapular
Rotación Medial -47 3
Protracción 11 32
Inclinación Posterior 63 -5
Movimiento Escapular
Rango de
Movimiento [°]
Posición de
Descanzo [°]

69
4.1.2. MÉTODO DEL PALPADOR
A partir de la información cinemática de los marcadores posicionados sobre el
palpador escapular se hallaron las orientaciones escapulares en los 3 planos de
movimiento. La Gráfica 5, Gráfica 6 y Gráfica 7presentan los resultados:
Gráfica 5 Rotación Medial/Lateral en función del Ángulo de Inclinación Húmero Torácico
obtenidas con método del palpador.
Gráfica 6 Protracción/Retracción en función del Ángulo de Inclinación Húmero Torácico
obtenidas con el método del palpador

70
Gráfica 7 Inclinación Posterior/Interior en función del Ángulo de Inclinación Húmero Torácico
obtenidas con el método del palpador.
4.2. DIFERENCIAS
En esta sección se presentan las diferencias obtenidas entre los dos métodos para
cada una de las 3 orientaciones escapulares.
Gráfica 8 Diferencias entre los dos métodos de las rotaciones laterales y mediales de la
escápula
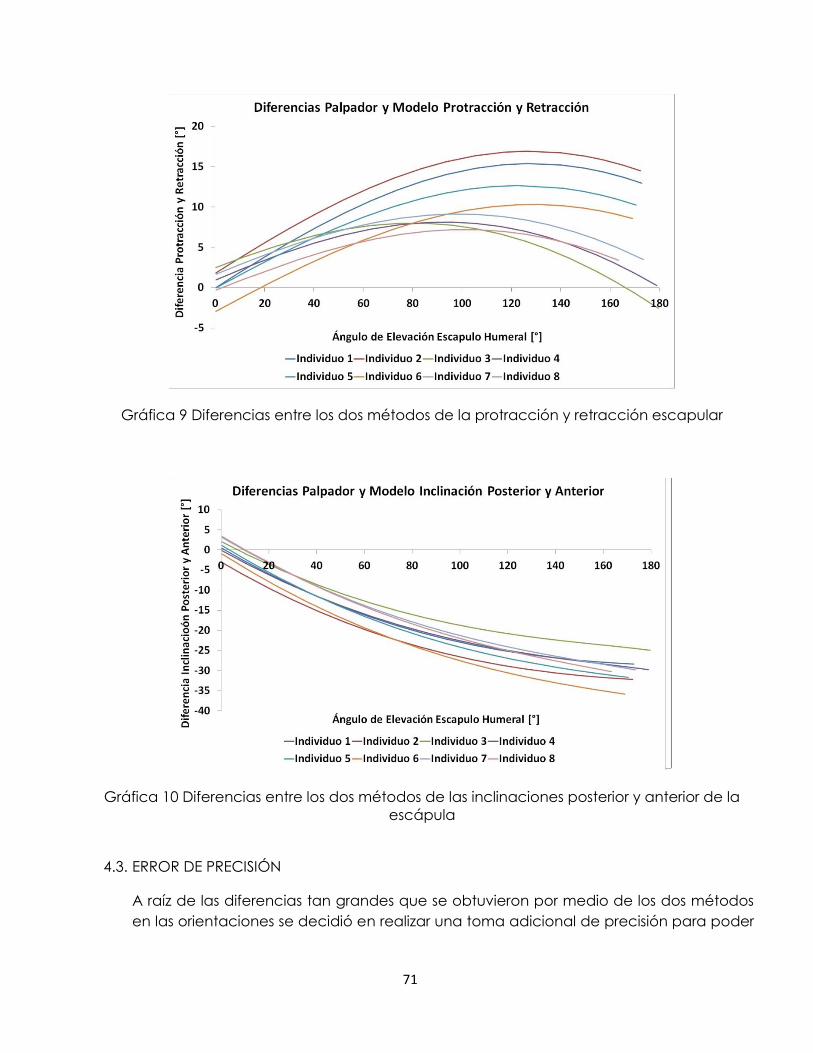
71
Gráfica 9 Diferencias entre los dos métodos de la protracción y retracción escapular
Gráfica 10 Diferencias entre los dos métodos de las inclinaciones posterior y anterior de la
escápula
4.3. ERROR DE PRECISIÓN
A raíz de las diferencias tan grandes que se obtuvieron por medio de los dos métodos
en las orientaciones se decidió en realizar una toma adicional de precisión para poder
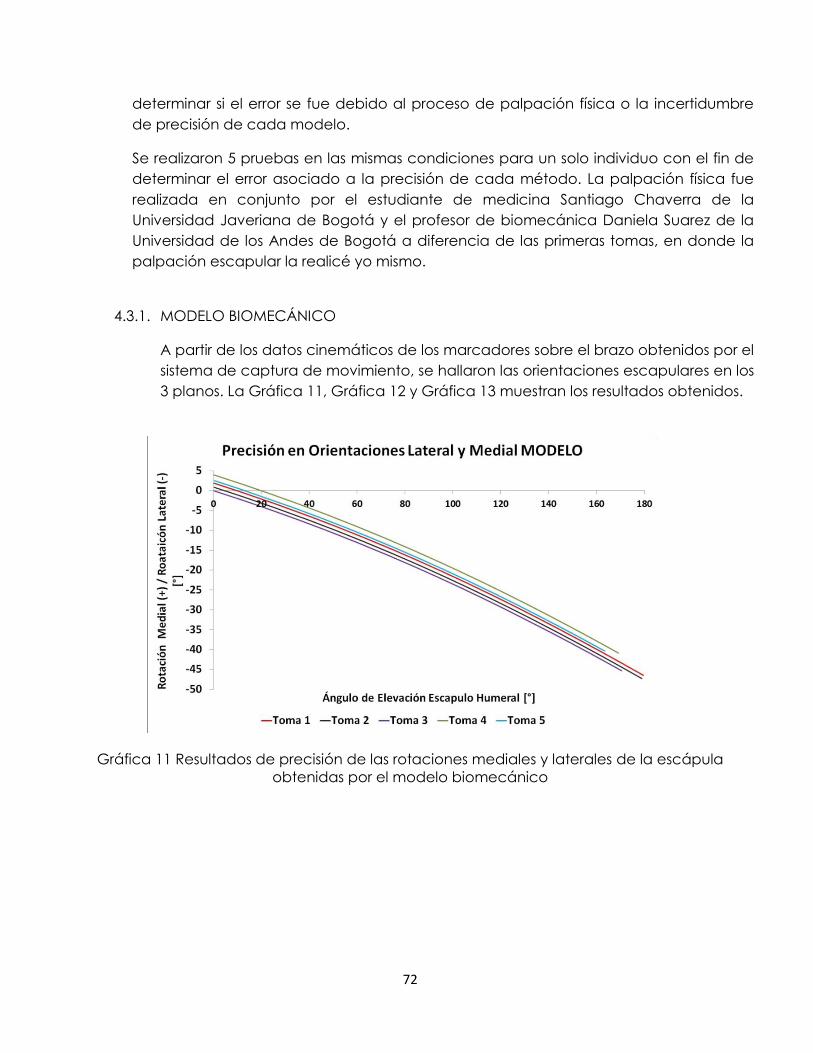
72
determinar si el error se fue debido al proceso de palpación física o la incertidumbre
de precisión de cada modelo.
Se realizaron 5 pruebas en las mismas condiciones para un solo individuo con el fin de
determinar el error asociado a la precisión de cada método. La palpación física fue
realizada en conjunto por el estudiante de medicina Santiago Chaverra de la
Universidad Javeriana de Bogotá y el profesor de biomecánica Daniela Suarez de la
Universidad de los Andes de Bogotá a diferencia de las primeras tomas, en donde la
palpación escapular la realicé yo mismo.
4.3.1. MODELO BIOMECÁNICO
A partir de los datos cinemáticos de los marcadores sobre el brazo obtenidos por el
sistema de captura de movimiento, se hallaron las orientaciones escapulares en los
3 planos. La Gráfica 11, Gráfica 12 y Gráfica 13 muestran los resultados obtenidos.
Gráfica 11 Resultados de precisión de las rotaciones mediales y laterales de la escápula
obtenidas por el modelo biomecánico

73
Gráfica 12 Resultados de precisión de la protracción y retracción escapular obtenidas por el
modelo biomecánico
Gráfica 13 Resultados de precisión de las inclinaciones posterior y anterior de la escápula
obtenidas por el modelo biomecánico

74
4.3.2. MÉTODO DEL PALPADOR
A partir de los datos cinemáticos de los marcadores ubicados sobre el palpador,
obtenidos por medio del sistema de captura de movimiento, se calcularon las
orientaciones de la escápula en los tres planos para encontrar la precisión de éste
método. La Gráfica 14, Gráfica 15 y Gráfica 16 muestran los resultados obtenidos:
Gráfica 14 Resultados de precisión de las rotaciones mediales y laterales de la escápula
obtenidas por el método del palpador.

75
Gráfica 15 Resultados de precisión de la protracción y retracción escapular obtenidas por el
método del palpador.
Gráfica 16 Resultados de precisión de las inclinaciones posterior y anterior de la escápula
obtenidas por el método del palpador.
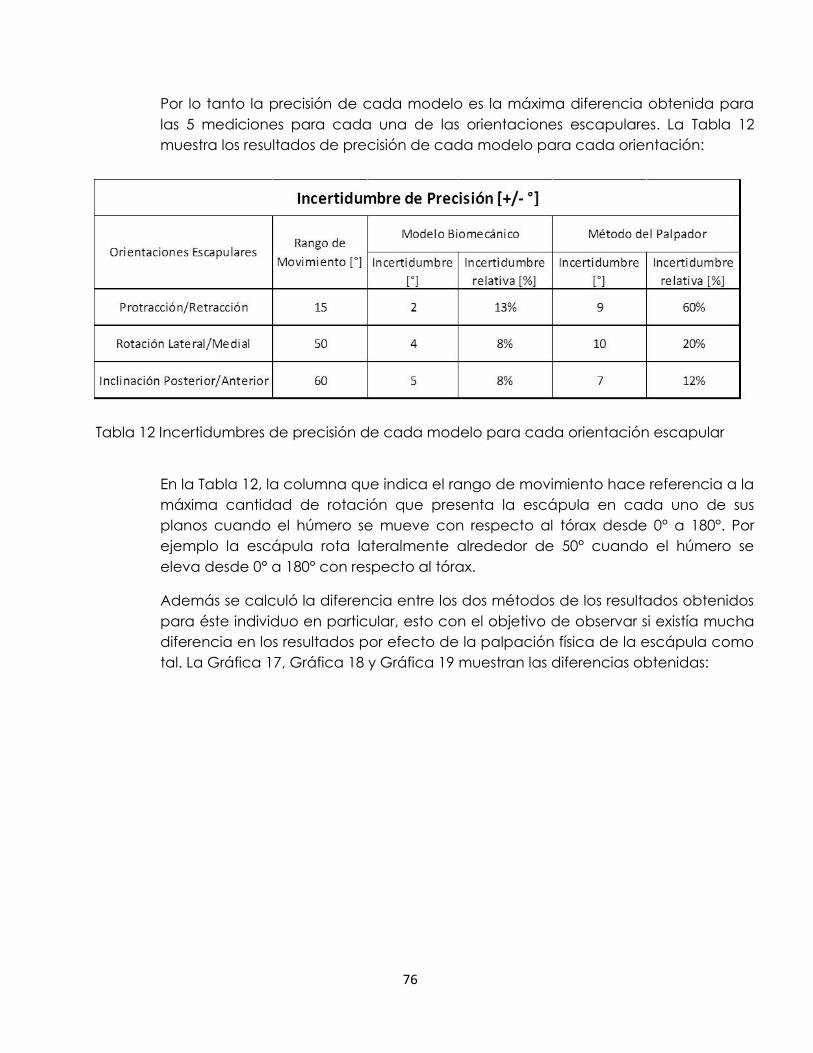
76
Por lo tanto la precisión de cada modelo es la máxima diferencia obtenida para
las 5 mediciones para cada una de las orientaciones escapulares. La Tabla 12
muestra los resultados de precisión de cada modelo para cada orientación:
Tabla 12 Incertidumbres de precisión de cada modelo para cada orientación escapular
En la Tabla 12, la columna que indica el rango de movimiento hace referencia a la
máxima cantidad de rotación que presenta la escápula en cada uno de sus
planos cuando el húmero se mueve con respecto al tórax desde 0° a 180°. Por
ejemplo la escápula rota lateralmente alrededor de 50° cuando el húmero se
eleva desde 0° a 180° con respecto al tórax.
Además se calculó la diferencia entre los dos métodos de los resultados obtenidos
para éste individuo en particular, esto con el objetivo de observar si existía mucha
diferencia en los resultados por efecto de la palpación física de la escápula como
tal. La Gráfica 17, Gráfica 18 y Gráfica 19 muestran las diferencias obtenidas:

77
Gráfica 17 Diferencias entre los dos métodos de las rotaciones laterales y mediales de la
escápula; palpación llevada a cabo por un estudiante de medicina.
Gráfica 18 Diferencias entre los dos métodos de la protracción y retracción escapular;
palpación llevada a cabo por un estudiante de medicina
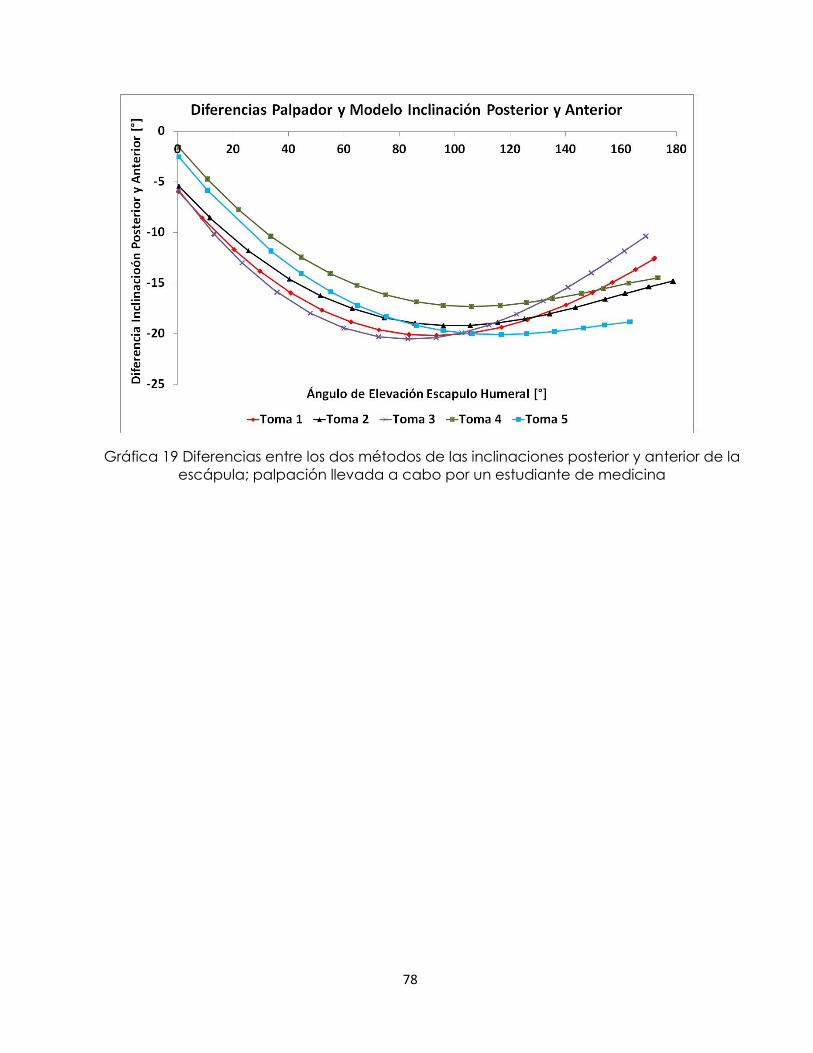
78
Gráfica 19 Diferencias entre los dos métodos de las inclinaciones posterior y anterior de la
escápula; palpación llevada a cabo por un estudiante de medicina

79
5. DISCUSIÓN DE RESULTADOS
Esta sección estará dividida en los mismos numerales presentados en la sección 4 y una
sección adicional de comparación de resultados con la literatura.
5.1. ORIENTACIONES ESCAPULARES
Todas las gráficas presentadas presentan la información con respecto a los ejes de
referencia globales del modelo. Es necesario tener presente que por facilidad, los
ejes llamados X, Y y Z en las gráficas hacen referencia a los ejes anatómicos como se
muestra en la Figura 11.
5.1.1. MODELO BIOMECÁNICO
La Gráfica 2,
Gráfica 3, y Gráfica 4 muestran las orientaciones escapulares que se obtuvieron
usando el modelo biomecánico.
Adicionalmente se observa que el modelo predijo satisfactoriamente el ángulo de
inclinación húmero torácico en base a la información cinemática de los
marcadores de los brazos. En todos los casos el rango observado del ángulo de
inclinación del húmero con respecto al Tórax está entre 0° y 175°.
En cuanto a la información presentada en la Gráfica 2, se observa una tendencia
bien definida para todos los individuos. La Gráfica 2, presenta una tendencia
inversamente proporcional. Sin embargo hay que tener en cuenta que valores

80
negativos, como lo indica el eje Y de la gráfica, indican valores positivos de
rotación lateral. Por lo tanto, la gráfica indica que la escápula rota lateralmente en
un rango entre 0° y 45° cuando el húmero se eleva desde 0° a 175° grados
aproximadamente y de forma lineal.
La presenta la información de la protracción y retracción escapular. Al igual que
con las rotaciones laterales y mediales, se puede observar una tendencia en todos
los individuos medidos. Como lo indica el eje Y de la gráfica, valores positivos
indican protracción, esto quiere decir que la escápula se protrae aproximadamente
10° cuando el húmero rota desde 0° hasta 175° y se retrae la misma cantidad en el
momento de devolver el brazo a la posición de descanso. Los datos presentan un
buen ajuste lineal, no tan bueno como en el caso de las rotaciones laterales y
mediales, pero igual sigue siendo muy bueno, como se puede observar en la Tabla
9.
En el caso de las inclinaciones posterior e interior, la Gráfica 4 permite observar una
tendencia lineal directamente proporcional entre la inclinación posterior escapular
y el ángulo de elevación humero torácico. Se observa que el rango de orientación
posterior predicho por el modelo es de aproximadamente 55° con respecto a todo
el rango de movimiento del húmero (de 0° a 175°).
La Tabla 9, resume los valores importantes de estas 3 gráficas. Muestra las
regresiones halladas para cada serie de datos junto con su coeficiente de
correlación. Además también muestra las posiciones de descanso escapulares, que
son el valor del intercepto con el Y observaros en la Gráfica 2,

81
Gráfica 3 y Gráfica 4.
La Tabla 10 muestra los valores promedio de las regresiones y las posiciones de
descanso obtenidos a partir de la información de los 8 individuos. Se puede ver que
para la rotación lateral, la escápula tiene una pendiente de -0.27 grados de
rotación medial con respecto al ángulo de inclinación humero torácico y una
orientación medial promedio de 3° +/-2° en su posición de descanso.
En cuanto a la protracción y retracción escapular, la Tabla 10 indica una pendiente
de 0.06 ° de protracción con respecto al rango de movimiento del ángulo del
húmero con respecto al Tórax . Además indica una protracción promedio de 32° +/-
3° en la posición de descanso del húmero.
Y por el lado de las orientaciones posteriores e interiores, la Tabla 10 muestra una
pendiente de 0.36° con respecto al rango de movimiento del húmero con respecto
al Tórax y una posición de descanso de 5° +/- 3 de inclinación anterior.
5.1.2. MÉTODO DEL PALPADOR
La Gráfica 5, Gráfica 6 y Gráfica 7 muestran las orientaciones escapulares de los 8
individuos obtenidas por medio del método del palpador escapular.
La Gráfica 5 muestra la relación entre las rotaciones laterales y mediales de la
escápula en función del ángulo de elevación del húmero con respecto al Tórax . Es
posible notar que al igual que lo predicho por el modelo, existe una relación
inversamente proporcional entre las dos variables mencionadas. Se puede ver que
los resultados obtenidos por la palpación física muestran que la escápula rota
medialmente desde 0° hasta 35° cuando el húmero se eleva desde 0° hasta180°
aproximadamente.
La Gráfica 6 muestra la relación entre la protracción y retracción escapular y el
ángulo de elevación del húmero con respecto al tórax. Al igual que los resultados
obtenidos por el modelo biomecánico, se observa una relación positiva entre la
protracción de la escápula y el movimiento del húmero. En este caso no es posible
observar una relación lineal, ya que las curvas se asemejan más a relaciones
potenciales. Las curvas muestran un rango de protracción de alrededor de 15°, es
decir que el método de la palpación muestra que la escápula se protrae
aproximadamente 15° cuando el húmero se eleva desde 0° a 180°
aproximadamente.
La Gráfica 7 muestra la relación entre las inclinaciones posteriores y anteriores de la
escápula en función del movimiento del húmero. En este gráfica, al igual que en los
resultados obtenidos por el método del modelo biomecánico, se puede observar
82
una tendencia positiva entre la inclinación posterior de la escápula y el movimiento
ascendente del húmero. El rango de movimiento de las inclinaciones posterior y
anterior está entre los 30° y 45°, es decir que la escápula se inclina posteriormente
entre 30° y 45° cuando el húmero se eleva desde 0° a 180° con respecto al Tórax .
5.2. DIFERENCIAS
La Gráfica 8, Gráfica 9 y Gráfica 10 muestran las diferencias obtenidas por cada
método para cada una de las orientaciones escapulares. Este error tiende a aumentar
a medida que el humero asciende. Esto sucede que a medida que el brazo se eleva,
la escapula rota hasta hacia posiciones donde la dificultad de la palpación aumenta.
Por su parte la Gráfica 8 presenta una diferencia máxima de alrededor de 23° para la
rotación lateral/medial de la escápula, obtenida en las pruebas del individuo 5. Estos
23° en comparación con el rango de movimiento de rotación lateral y medial de la
escápula constituye un error de aproximadamente 50% de precisión.
La gráfica 9 presenta una diferencia máxima de alrededor de 15°, en la
protracción/retracción de la escápula, obtenida en las pruebas del individuo 2. Con
respecto al rango de movimiento de ésta orientación (protracción/retracción) un error
de 15° constituye un error de más del 100°. Esto se debe a que el rango de movimiento
en este plano escapular es bastante pequeño.
La Gráfica 10 muestra una diferencia máxima de aproximadamente 35° en la
inclinación posterior/anterior de la escápula, obtenida en las pruebas del individuo 6.
Con respecto al rango de movimiento en este plano, un error de 35° constituye un error
de aproximadamente 60%.
Estas diferencias tan marcadas son evidencia que posiblemente la palpación de la
escápula no fue llevada a cabo de la mejor manera.
5.3. ERROR DE PRECISIÓN
La Gráfica 11, Gráfica 12 y Gráfica 13 muestran los resultados obtenidos por el modelo
biomecánico para el mismo individuo. Es posible ver que el modelo arrojó resultados
diferentes para cada una de las 5 tomas en cada una de las orientaciones de la
escápula.
Así mismo la Gráfica 14, Gráfica 15 y Gráfica 16 muestran los resultados obtenidos
usando el palpador escapular para un mismo individuo. Al igual que las 3 gráficas
anteriores, se observa que para cada una de las 5 mediciones los resultados variaron.
La Tabla 12 muestra las diferencias máximas entre las 5 mediciones para cada una de
las rotaciones escapulares para cada modelo. En esta tabla se puede observar que el
83
modelo biomecánico tiene una precisión más alta que la palpación física como tal. En
otras palabras, la palpación física es mucho más susceptible a errores pequeños.
El error relativo se calculó como la magnitud del error, con respecto al rango de
movimiento de la variable que se quiere medir. Ya que no es lo mismo un error de 2° en
un movimiento de 60° a un error de 2° en un movimiento de 10°.
La Tabla 12 muestra que el modelo biomecánico tiene un error de precisión máximo
del 13% en el cálculo de la protracción y retracción escapular. Y por otro lado, el
método de la palpación tiene un error de precisión máximo de 60% en este mismo
movimiento.
Se puede decir entonces que el palpador no es un método adecuado para calcular
la protracción y retracción escapular por su baja precisión en este rango de
movimiento. Sin embargo el error de precisión en las otras 2 orientaciones (rotaciones
lateral/medial e inclinación posterior/anterior) si puede ser llegar a ser un método
adecuado.
5.4. DISMINUCIÓN DEL ERROR HUMANO EN LA PALPACIÓN
Aunque lo discutido en la sección anterior indica que el método del palpador tiene
una incertidumbre de precisión muy baja para el rango de movimiento que se desea
medir, al mejorar la forma de llevar a cabo la palpación física, las diferencias
disminuyeron hasta en un 50%.
La Gráfica 17 muestra una diferencia máxima de 7° en la rotación lateral/medial de la
escápula, en comparación con la diferencia de 23° obtenida en la primera toma. Es
decir que el error disminuyó en un 70% al incorporar una persona con experiencia en el
momento de palpar la escápula de los individuos.
La Gráfica 18 muestra una diferencia máxima de alrededor de 8° en la
protracción/retracción de la escápula, en contraste con los 15° obtenidos en las
primeras mediciones. En otras palabras el error disminuyó un 50% al incorporar una
persona con experiencia en el momento de palpar la escápula de los individuos.
Y por último, la Gráfica 19 muestra una diferencia máxima de aproximadamente 21°
en la inclinación posterior/anterior de la escápula, en comparación con la diferencia
de 35°, obtenida en las primeras mediciones. En este caso el error disminuyó un 40% al
incorporar una persona con experiencia en el momento de palpar la escápula de los
individuos.
5.5. SELECCIÓN DEL MODELO A VALIDAR

84
Por todo lo mencionado en las secciones anteriores, el modelo del palpador no será
validado con la literatura. En cambio el modelo computacional sí. Para esto se
compararán los resultados de las orientaciones escapulares obtenidas con resultados
de la literatura.
5.6. VALIDACIÓN DEL MODELO
Para validar el modelo, se compararán los resultados obtenidos en este documento,
con los presentados por (van Andel, van Hutten, Eversdijk, Veeger, & Harlaar, 2009) y
por (Grewal, 2011). Cada de ellos usó diferentes métodos. A continuación se presentan
sus resultados:
(Grewal, 2011)
Gráfica 20 Orientaciones Escapulares Comparativas
“Ilustra las rotaciones Medidas Usad el AMC (Rosado) y el localizador de escápula
(Azul) durante el presente estudio”1
"Las medidas obtenidas usando el STYLUS (Rojo), AMC (Azul) y el localizador (verde) son
graficados en 0°, 45° y 90° planos de elevación con el húmero rotado axialmente 45°
externo (ER), Neutro y 45° Interno (IR)2
1 (Grewal, 2011)
2 (van Andel, van Hutten, Eversdijk, Veeger, & Harlaar, 2009)
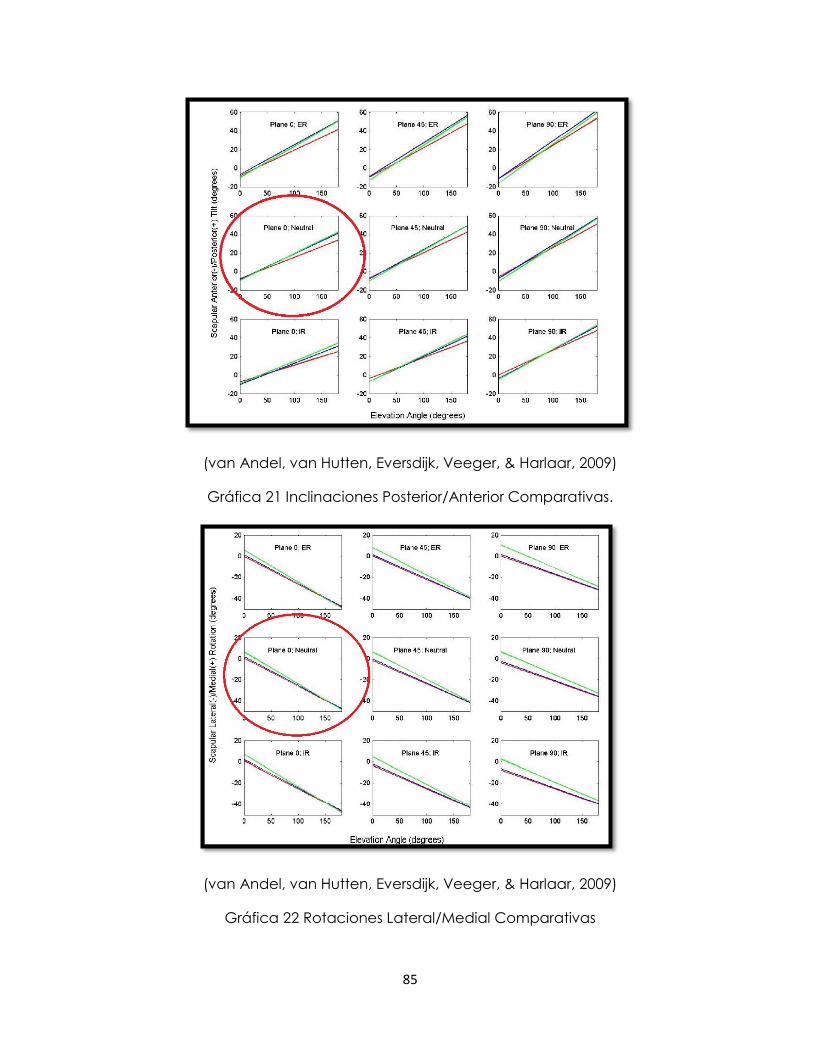
85
(van Andel, van Hutten, Eversdijk, Veeger, & Harlaar, 2009)
Gráfica 21 Inclinaciones Posterior/Anterior Comparativas.
(van Andel, van Hutten, Eversdijk, Veeger, & Harlaar, 2009)
Gráfica 22 Rotaciones Lateral/Medial Comparativas

86
(van Andel, van Hutten, Eversdijk, Veeger, & Harlaar, 2009)
Gráfica 23 Protracción y Retracción Escapular Comparativas.
Resultados Presentados (Grewal, 2011):
Protracción/Retracción:
Rango de Movimiento del Ángulo Humero Torácico: 180°
Rango de Movimiento de Protracción (+)/Retracción (-): 5°-8° (Protracción)
Posición de Descanso: 30°-38°
Rotación Lateral/Medial:
Rango de Movimiento del Ángulo Humero Torácico: 180°
Rango de Movimiento Lateral (+)/Medial (-): 40°-45°
Posición de Descanso: (-10°)-(3°)

87
Inclinación Posterior/Interior:
Rango de Movimiento del Ángulo Humero Torácico: 180°
Rango de Movimiento Posterior (+)/Anterior(-): 50°-55°
Posición de Descanso: (-10°): Inclinación Anterior
Resultados Presentados por (van Andel, van Hutten, Eversdijk, Veeger, & Harlaar,
2009):
Protracción/Retracción:
Rango de Movimiento del Ángulo Humero Torácico: 180°
Rango de Movimiento de Protracción (+)/Retracción (-): 5°-10° (Protracción)
Posición de Descanso: 30°-35°
Rotación Lateral/Medial:
Rango de Movimiento del Ángulo Humero Torácico: 180°
Rango de Movimiento Lateral (+)/Medial (-): 45°-50°
Posición de Descanso: (-10°)-(0°)
Inclinación Posterior/Interior:
Rango de Movimiento del Ángulo Humero Torácico: 180°
Rango de Movimiento Posterior (+)/Anterior (-): 45°-50°
Posición de Descanso: (-5°)-(-10°): Inclinación Anterior
La Tabla 11 muestra los rangos de movimiento y posiciones de descanso halladas.
Es posible ver que los resultaos obtenidos en el presente estudio son muy similares a
los reportados por los autores citados.

88
La siguiente tabla resume los resultados obtenidos en el presente estudio y trabajos
comparativos:
Tabla 13 Tabla Comparativa de Resultados
Con respecto a las rotaciones laterales y mediales, la orientación en la posición de
descanso se encuentra dentro del rango reportado por las Grewal (2011) pero se
pasa por 3° del rango reportado por Van Andel (2011). El rango de movimiento
está dentro del rango reportado por Van Andel (2011) pero en comparación con
Grewal (2011) lo sobreestima por 2°.
En la protracción/retracción la posición de descanso se encuentra dentro del
rango reportado por ambos autores, sin embargo el rango de movimiento es sobre
estimado 3° con respecto a Grewal (2011) y 1° con respecto a Van Andel (2009).
Y finalmente en las inclinaciones Posterior e interior, la posición de descanso se
encuentra dentro del rango reportado por van Andel (2011) pero se subestima por
5 ° con respecto a los rangos reportados por Grewal (2011).
Aunque los datos no se encuentran dentro del rango en todos los casos, las
diferencias son muy bajas, por lo que se puede decir que el modelo si predice las
orientaciones escapulares de manera efectiva.
Movimiento Escapular Rango de Movimiento [°] Posición de Descanso [°]
Rotación Medial -47 3
Protracción 11 32
Inclinación Posterior 63 -5
Rotación Medial (40-45) (-10/3)
Protracción (5 /8) (30 /38)
Inclinación Posterior (50/ 55) -10
Rotación Medial -47 3
Protracción 11 32
Inclinación Posterior 63 -5
Estudio Actual
Grewal (2011)
(van Andel, van Hutten, Eversdijk, Veeger, & Harlaar, 2009)
Comparación de Resultados

89
6. CONCLUSIONES
El método del palpador escapular es muy poco preciso, sobre todo en ángulo de inclinación
humero torácicos donde la escápula rota en los planos sagital y transversal. Además fue
posible validar con éxito el modelo computacional desarrollado en Universidad de Stanford
(Holzbaur, Murray, & Delp, 2005). Además se pudo ver que si es posible medir las
orientaciones escapulares con buena precisión sin usar métodos invasivos o métodos no
invasivos muy sofisticados como métodos electromagnéticos, de rayos x o termografías.
Aunque el modelo predice de forma adecuada las orientaciones escapulares, es necesario
un conocimiento previo para manejar el programa y poder obtener la información
cinemática escapular. En el ámbito de un examen de protocolo, el método no proporciona
la información directamente, ya que es necesario manipular la información obtenida
(extraerla del programa) y tratarla para poder hallar las orientaciones con métodos
matemáticos. Esto hace que el método sea poco productivo en el ámbito de un examen de
rutina, pero funciona muy bien para propósitos de investigación.
El modelo sin embargo requiere el uso de algún sistema de captura de imágenes. Estos
equipos no son tan caros como equipos que electromagnéticos, sin embargo si constituyen
una fuerte inversión por las cámaras, sensores y demás equipo necesario. El método de la
palpación física permite medir con buena precisión la rotación lateral/medial y la inclinación
posterior/anterior de la escápula. Sin embargo no es un método adecuado para medir la
protracción/retracción escapular, ya que el rango de movimiento de la escápula en este
plano es muy bajo.
Los errores entre los dos métodos disminuyeron significativamente al incorporar un estudiante
de medicina para llevar a cabo la palpación de la escápula, se recomienda fuertemente,
que para trabajos futuros, la palpación la lleve a cabo una persona con experiencia en
palpación física.
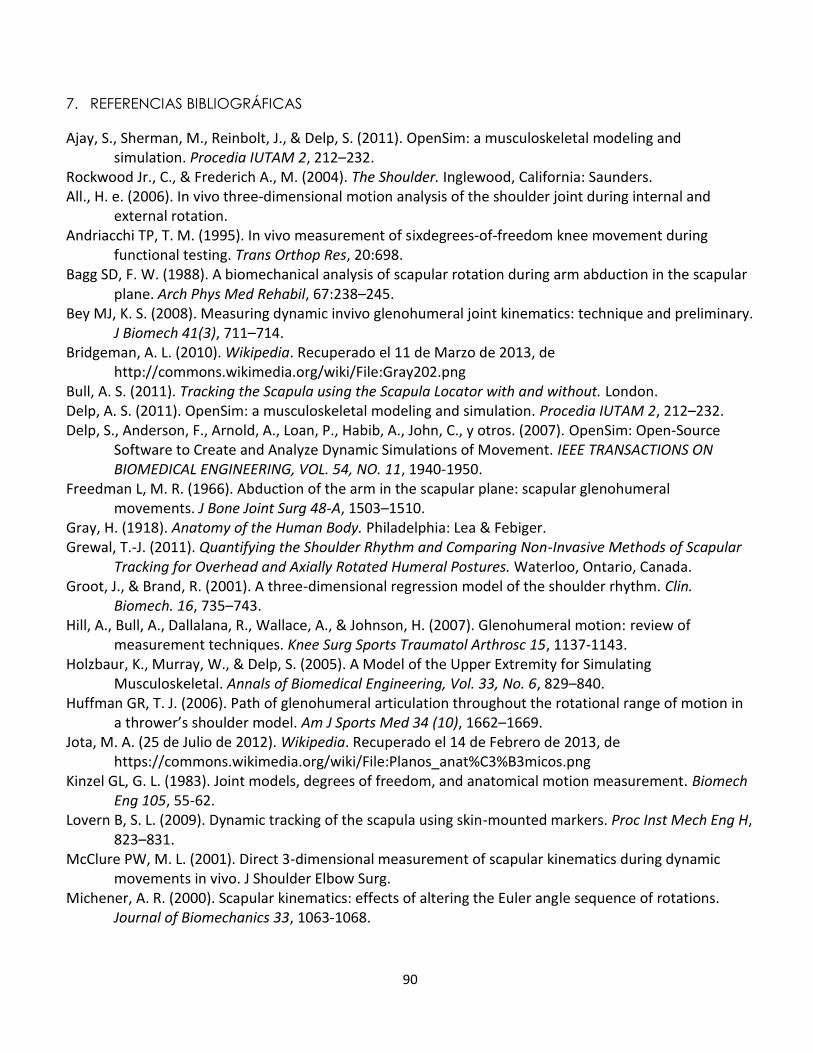
90
7. REFERENCIAS BIBLIOGRÁFICAS
Ajay, S., Sherman, M., Reinbolt, J., & Delp, S. (2011). OpenSim: a musculoskeletal modeling and simulation. Procedia IUTAM 2, 212–232.
Rockwood Jr., C., & Frederich A., M. (2004). The Shoulder. Inglewood, California: Saunders. All., H. e. (2006). In vivo three-dimensional motion analysis of the shoulder joint during internal and
external rotation. Andriacchi TP, T. M. (1995). In vivo measurement of sixdegrees-of-freedom knee movement during
functional testing. Trans Orthop Res, 20:698. Bagg SD, F. W. (1988). A biomechanical analysis of scapular rotation during arm abduction in the scapular
plane. Arch Phys Med Rehabil, 67:238–245. Bey MJ, K. S. (2008). Measuring dynamic invivo glenohumeral joint kinematics: technique and preliminary.
J Biomech 41(3), 711–714. Bridgeman, A. L. (2010). Wikipedia. Recuperado el 11 de Marzo de 2013, de
http://commons.wikimedia.org/wiki/File:Gray202.png Bull, A. S. (2011). Tracking the Scapula using the Scapula Locator with and without. London. Delp, A. S. (2011). OpenSim: a musculoskeletal modeling and simulation. Procedia IUTAM 2, 212–232. Delp, S., Anderson, F., Arnold, A., Loan, P., Habib, A., John, C., y otros. (2007). OpenSim: Open-Source
Software to Create and Analyze Dynamic Simulations of Movement. IEEE TRANSACTIONS ON BIOMEDICAL ENGINEERING, VOL. 54, NO. 11, 1940-1950.
Freedman L, M. R. (1966). Abduction of the arm in the scapular plane: scapular glenohumeral movements. J Bone Joint Surg 48-A, 1503–1510.
Gray, H. (1918). Anatomy of the Human Body. Philadelphia: Lea & Febiger. Grewal, T.-J. (2011). Quantifying the Shoulder Rhythm and Comparing Non-Invasive Methods of Scapular
Tracking for Overhead and Axially Rotated Humeral Postures. Waterloo, Ontario, Canada. Groot, J., & Brand, R. (2001). A three-dimensional regression model of the shoulder rhythm. Clin.
Biomech. 16, 735–743. Hill, A., Bull, A., Dallalana, R., Wallace, A., & Johnson, H. (2007). Glenohumeral motion: review of
measurement techniques. Knee Surg Sports Traumatol Arthrosc 15, 1137-1143. Holzbaur, K., Murray, W., & Delp, S. (2005). A Model of the Upper Extremity for Simulating
Musculoskeletal. Annals of Biomedical Engineering, Vol. 33, No. 6, 829–840. Huffman GR, T. J. (2006). Path of glenohumeral articulation throughout the rotational range of motion in
a thrower’s shoulder model. Am J Sports Med 34 (10), 1662–1669. Jota, M. A. (25 de Julio de 2012). Wikipedia. Recuperado el 14 de Febrero de 2013, de
https://commons.wikimedia.org/wiki/File:Planos_anat%C3%B3micos.png Kinzel GL, G. L. (1983). Joint models, degrees of freedom, and anatomical motion measurement. Biomech
Eng 105, 55-62. Lovern B, S. L. (2009). Dynamic tracking of the scapula using skin-mounted markers. Proc Inst Mech Eng H,
823–831. McClure PW, M. L. (2001). Direct 3-dimensional measurement of scapular kinematics during dynamic
movements in vivo. J Shoulder Elbow Surg. Michener, A. R. (2000). Scapular kinematics: effects of altering the Euler angle sequence of rotations.
Journal of Biomechanics 33, 1063-1068.
91
NIH, S. &. (2005). National Center for Biomedical Computing focusing on Physics-based Simulation of Biological Structures. Recuperado el 15 de Diciembre de 2013, de https://simtk.org/xml/index.xml
Nordin, M. &. (2001). Basic Biomechanics of the MusculoEskeletal System. Baltimore, Maryland, U.S.: Lippincot Williams & Wilkins.
Phase Space Image Capture System. (2008). Phase Space User's Manual. Salamanca, U. d. (25 de Enero de 2013). Universidad de Salamanca Dicciomed. Recuperado el 25 de Enero
de 2013, de http://dicciomed.eusal.es/palabra/clavicula Scott L. Delp. Frank C. Anderson, A. S. (2007). OpenSim: Open-Source Software to Create and Analyze
Dynamic Simulations of Movement. IEEE TRANSACTIONS ON BIOMEDICAL ENGINEERING, VOL. 54, NO. 11, 1940-1951.
Valparaiso, P. U. (1999). Pontificia Universidad Católica de Valparaiso. Recuperado el 10 de Marzo de 2013, de http://www.anatomiahumana.ucv.cl/kine1/top8.html
van Andel, C., van Hutten, K., Eversdijk, M., Veeger, D., & Harlaar, J. (2009). Recording scapular motion using an acromion marker cluster. Gait & Posture, 123-128.
Van der Helm, F. (2010). A standardized protocol for the description of shoulder motions. International Shoulder Group.
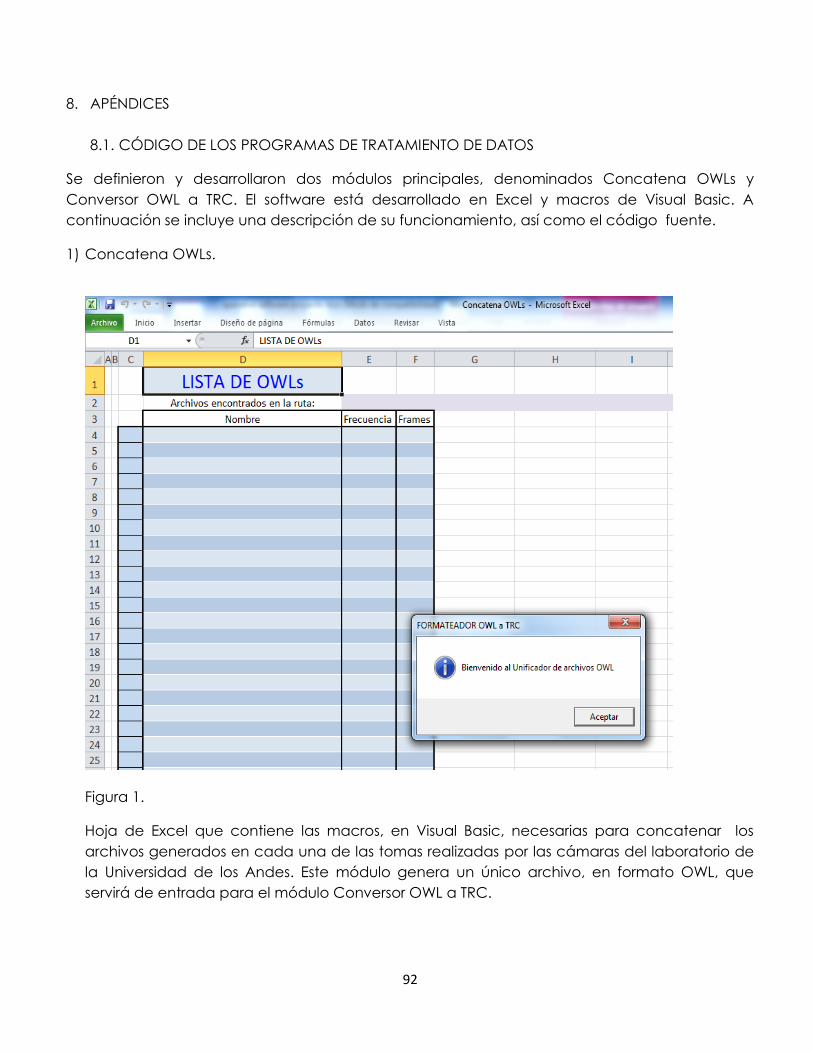
92
8. APÉNDICES
8.1. CÓDIGO DE LOS PROGRAMAS DE TRATAMIENTO DE DATOS
Se definieron y desarrollaron dos módulos principales, denominados Concatena OWLs y
Conversor OWL a TRC. El software está desarrollado en Excel y macros de Visual Basic. A
continuación se incluye una descripción de su funcionamiento, así como el código fuente.
1) Concatena OWLs.
Figura 1.
Hoja de Excel que contiene las macros, en Visual Basic, necesarias para concatenar los
archivos generados en cada una de las tomas realizadas por las cámaras del laboratorio de
la Universidad de los Andes. Este módulo genera un único archivo, en formato OWL, que
servirá de entrada para el módulo Conversor OWL a TRC.
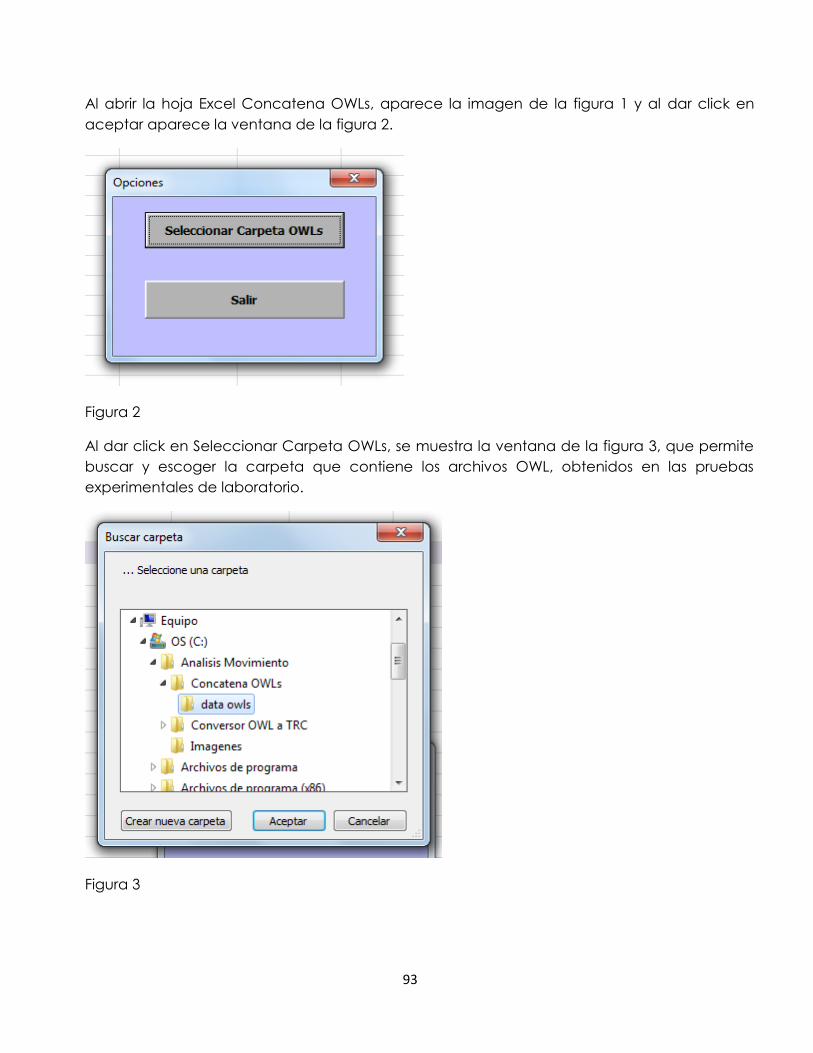
93
Al abrir la hoja Excel Concatena OWLs, aparece la imagen de la figura 1 y al dar click en
aceptar aparece la ventana de la figura 2.
Figura 2
Al dar click en Seleccionar Carpeta OWLs, se muestra la ventana de la figura 3, que permite
buscar y escoger la carpeta que contiene los archivos OWL, obtenidos en las pruebas
experimentales de laboratorio.
Figura 3

94
Una vez seleccionada la carpeta y dar click en aceptar, aparece la figura 4, con la lista de
los archivos encontrados en la carpeta escogida. En caso de no existir archivos OWL en la
carpeta, el software mostrará un mensaje informándolo.
Figura 4

95
Figura 5
Al seleccionar la respuesta afirmativa, aparece la figura 5, donde se muestra el total de
frames del nuevo archivo OWL, la ruta y el nombre del archivo unido y generado.
A continuación se incluye el código correspondiente a cada uno de los módulos, formularios
y subrutinas que componen el programa Concatena OWLs.
1.1 Módulo AutoOpen.
Contiene la subrutina Auto_Open que se inicia de manera automática al abrir la hoja de
Excel Concatena OWLs y muestra las imágenes de las figuras 1 y 2.

96
1.2 Módulo SeleccionaCarpeta.
Contiene la función Buscar_Carpeta, que muestra la ventana de la figura 3.
Esta función es invocada desde el formulario FrmCmd, que corresponde a la figura 2.
Attribute VB_Name = "AutoOpen"
'
' Subrutina que se ejecuta automáticamente al abrir la hoja de excel
(Concatena OWLs)
' Muestra el menú de opciones (formulario FrmCmd)
'Option Private Module
Option Explicit
Public ct As String, clf As String, cr As String, ruta As String
Sub Auto_Open()
' ct = Chr(9)
clf = Chr(10)
cr = Chr(13)
' MsgBox "Bienvenido al Unificador de archivos OWL", _
vbInformation, "FORMATEADOR OWL a TRC"
FrmCmd.show
'End Sub

97
Attribute VB_Name = "SeleccionaCarpeta"
'
' Función para abrir ventana de dialogo y retornar la ruta de la
carpeta seleccionada
'
Option Private Module
Option Explicit
'
Function Buscar_Carpeta(Optional Titulo As String, _
Optional Path_Inicial As Variant) As String
On Local Error GoTo errFunction
Dim objShell As Object
Dim objFolder As Object
Dim o_Carpeta As Object
'
Set objShell = CreateObject("Shell.Application")
'
On Error Resume Next
'Abre el cuadro de diálogo para seleccionar
Set objFolder = objShell.BrowseForFolder( _
0, _

98
Titulo, _
0, _
Path_Inicial)
' Devuelve solo el nombre de carpeta
Set o_Carpeta = objFolder.Self
' Devuelve la ruta completa seleccionada en el diálogo
Buscar_Carpeta = o_Carpeta.Path
Exit Function
'Error
errFunction:
MsgBox Err.Description, vbCritical
Buscar_Carpeta = vbNullString
End Function
1.3 Módulo ListaOWLs.
Contiene las subrutinas Listar_Archivos, Ordena_Lista, Procesa_Primero y Procesa_Resto,
encargadas de ordenar la lista de archivos OWL encontrados, mostrarlos en la pantalla,
procesarlos, calcular el número total de frames y generar un archivo temporal
concatenado.
La subrutina Listar_archivos es invocada desde el formulario FrmCmd. Las demás son
invocadas dentro del módulo.

99
Attribute VB_Name = "ListaOWLs"
'
Public PathRuta As String, nombre As String
Public resp As Variant
Public n As Long, nc As Long, nb As Long
Public lenmax As Integer
'
Public Array_Archivos() As String
Public Array_len() As Integer
'
Public El_Archivo As String
'
Public crclf As String
Public nframes As Integer, nf As Integer
Public Freq_Fin As String, freq As String, cpr As String
Public NombreCarpeta As String, filetmp As String, fileout As String
Public rec As String, sp As String, nho As String
'
Option Private Module
Option Explicit
'Subrutinas que buscan, retornan la lista de archivos OWLs ordenados y los
procesan.
'*****************************************************************************
Sub Listar_Archivos()

100
'
' cpr: control de proceso correcto de todos los owls
' n: Numero de archivos encontrados
' Array_archivos: lista de archivos encontrados
' Array_len: longitudes de los nombres de archivos encontrados
' lenmax longitud maxima de los nombres de archivos encontrados
' el_archivo: Cada archivo encontrado
' nombre: nombre de archivo alineado a la derecha con blancos a la
izquierda _
con la longitud ajustada a la longitud maxima de los nombres.
' nframes: Contador de total de frames.
' Utilizado para generar el número de frame correcto _
' de los registros individuales en el archivo unido y para _
' el número de frames del encabezado
' freq: frecuancia extraida de cada archivo owl
' Freq_Fin: Frecuencia utilizada para controlar que todos los owls _
' contengan la misma frecuencia y es la generada en el archivo
concatenado
' filetmp: nombre de archivo temporal
' fileout: nombre de archivo concatenado
'
If Right$(ruta, 1) <> "\" Then
ruta = ruta & "\"
End If
PathRuta = ruta
'
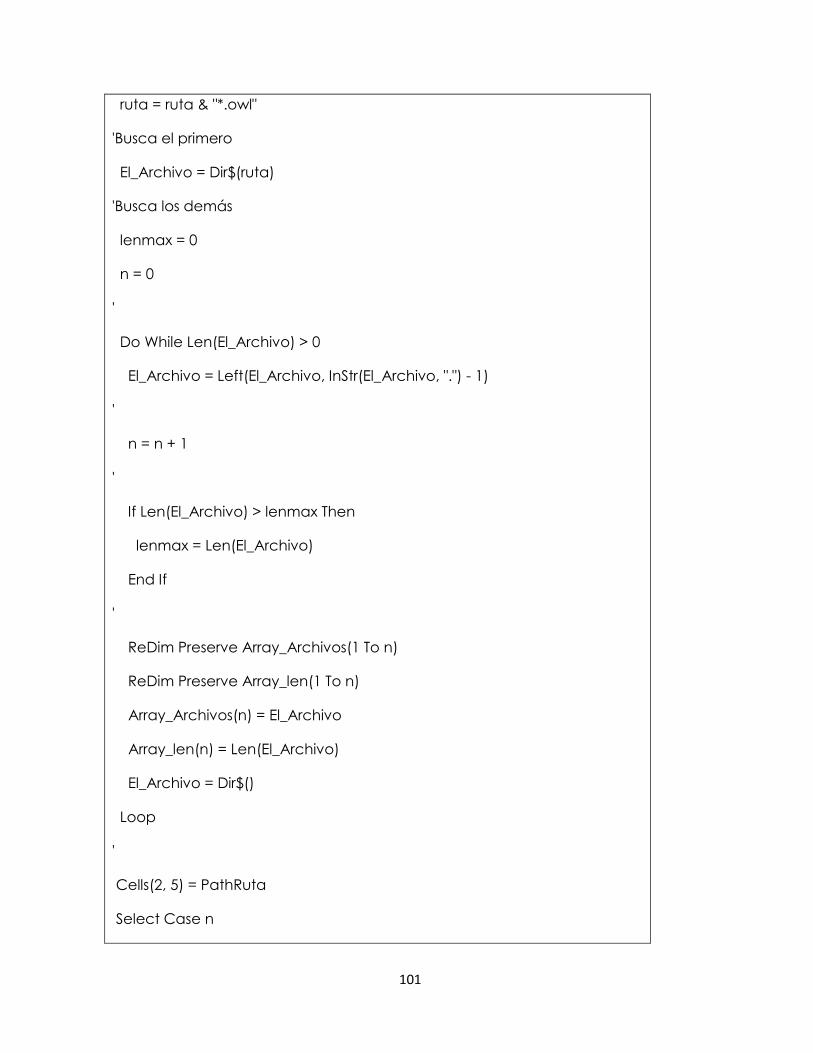
101
ruta = ruta & "*.owl"
'Busca el primero
El_Archivo = Dir$(ruta)
'Busca los demás
lenmax = 0
n = 0
'
Do While Len(El_Archivo) > 0
El_Archivo = Left(El_Archivo, InStr(El_Archivo, ".") - 1)
'
n = n + 1
'
If Len(El_Archivo) > lenmax Then
lenmax = Len(El_Archivo)
End If
'
ReDim Preserve Array_Archivos(1 To n)
ReDim Preserve Array_len(1 To n)
Array_Archivos(n) = El_Archivo
Array_len(n) = Len(El_Archivo)
El_Archivo = Dir$()
Loop
'
Cells(2, 5) = PathRuta
Select Case n
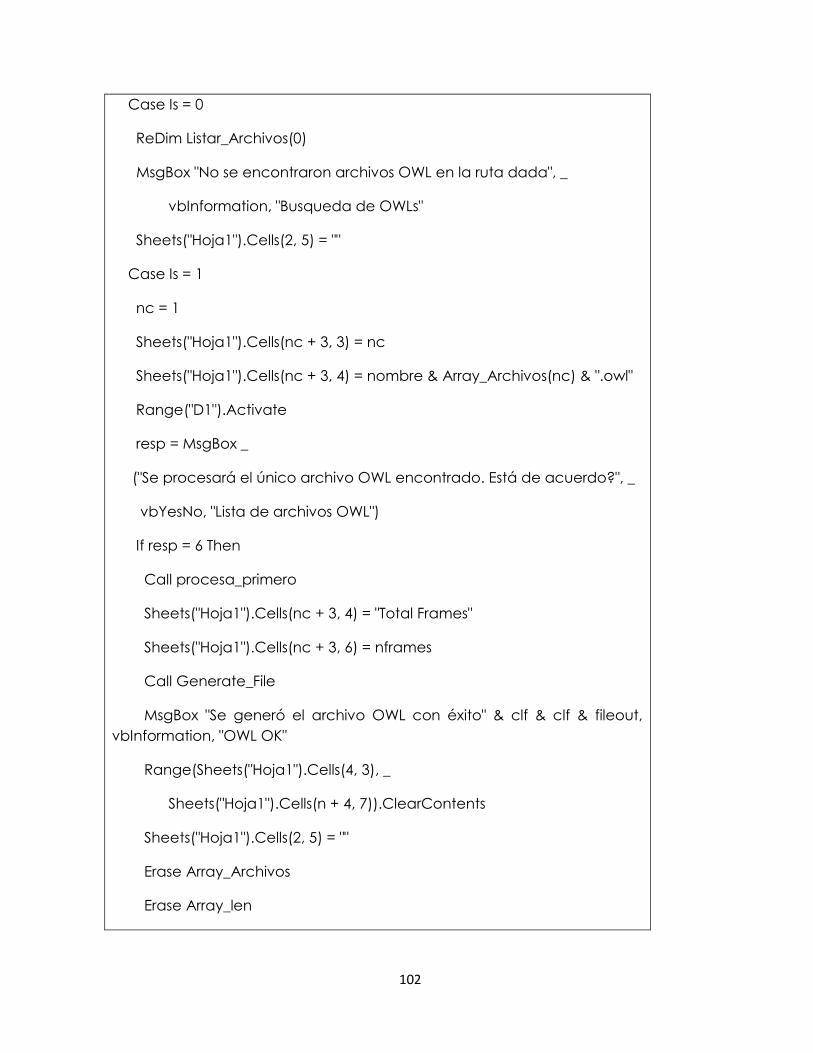
102
Case Is = 0
ReDim Listar_Archivos(0)
MsgBox "No se encontraron archivos OWL en la ruta dada", _
vbInformation, "Busqueda de OWLs"
Sheets("Hoja1").Cells(2, 5) = ""
Case Is = 1
nc = 1
Sheets("Hoja1").Cells(nc + 3, 3) = nc
Sheets("Hoja1").Cells(nc + 3, 4) = nombre & Array_Archivos(nc) & ".owl"
Range("D1").Activate
resp = MsgBox _
("Se procesará el único archivo OWL encontrado. Está de acuerdo?", _
vbYesNo, "Lista de archivos OWL")
If resp = 6 Then
Call procesa_primero
Sheets("Hoja1").Cells(nc + 3, 4) = "Total Frames"
Sheets("Hoja1").Cells(nc + 3, 6) = nframes
Call Generate_File
MsgBox "Se generó el archivo OWL con éxito" & clf & clf & fileout,
vbInformation, "OWL OK"
Range(Sheets("Hoja1").Cells(4, 3), _
Sheets("Hoja1").Cells(n + 4, 7)).ClearContents
Sheets("Hoja1").Cells(2, 5) = ""
Erase Array_Archivos
Erase Array_len

103
nombre = ""
Else
Range(Sheets("Hoja1").Cells(4, 3), _
Sheets("Hoja1").Cells(n + 3, 4)).ClearContents
Sheets("Hoja1").Cells(2, 5) = ""
End If
Range("D1").Activate
Case Else
Call ordena_lista
End Select
End Sub
Sub ordena_lista()
nc = 1
While nc <= n
nombre = ""
If lenmax > Array_len(nc) Then
nb = Array_len(nc)
Do Until nb = lenmax
nombre = nombre & " "
nb = nb + 1
Loop
End If
Sheets("Hoja1").Cells(nc + 3, 3) = nc
Sheets("Hoja1").Cells(nc + 3, 4) = nombre & Array_Archivos(nc) & ".owl"
nc = nc + 1

104
Wend
Sheets("Hoja1").Range(Cells(4, 4), Cells(n + 3, 4)).Select
Selection.Sort key1:=Range("d4"), Order1:=xlAscending, _
Header:=xlGuess, OrderCustom:=1, MatchCase:=False, _
Orientation:=xlTopToBottom
Range("D1").Activate
'
resp = MsgBox _
("Se procesará la lista de OWLs en el orden mostrado. Está de
acuerdo?", _
vbYesNo, "Lista de archivos OWL")
' retorna en resp 6 o 7 dependiendo de la respuesta afirmativa o negativa
If resp = 6 Then
Call procesa_primero
cpr = "OK"
Call procesa_resto
If cpr = "OK" Then
Sheets("Hoja1").Cells(nc + 3, 4) = "Total Frames"
Sheets("Hoja1").Cells(nc + 3, 6) = nframes
Call Generate_File
MsgBox "Se generó el archivo OWL con éxito" & clf & clf & fileout,
vbInformation, "OWL OK"
' Range(Sheets("Hoja1").Cells(4, 3), _
' Sheets("Hoja1").Cells(n + 4, 7)).ClearContents
' Sheets("Hoja1").Cells(2, 5) = ""
' Erase Array_Archivos

105
' Erase Array_len
' nombre = ""
Else
Close #3
Kill filetmp
End If
Range(Sheets("Hoja1").Cells(4, 3), _
Sheets("Hoja1").Cells(n + 4, 7)).ClearContents
Sheets("Hoja1").Cells(2, 5) = ""
Erase Array_Archivos
Erase Array_len
nombre = ""
Else
Range(Sheets("Hoja1").Cells(4, 3), Sheets("Hoja1").Cells(n + 3,
4)).ClearContents
Sheets("Hoja1").Cells(2, 5) = ""
Range("D1").Activate
End If
End Sub
'
' Subrutina que procesa el primer o único archivo OWL encontrado.
'
Sub procesa_primero()
'
Dim yy As String, mm As String, dd As String, ho As String
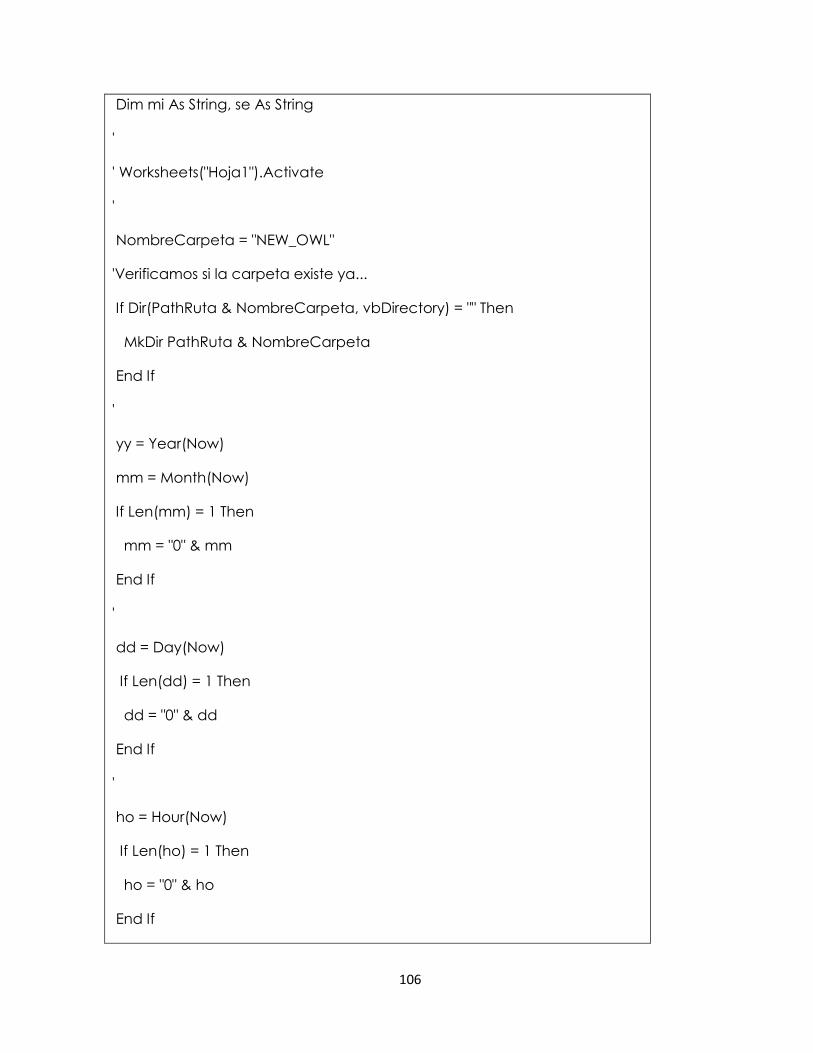
106
Dim mi As String, se As String
'
' Worksheets("Hoja1").Activate
'
NombreCarpeta = "NEW_OWL"
'Verificamos si la carpeta existe ya...
If Dir(PathRuta & NombreCarpeta, vbDirectory) = "" Then
MkDir PathRuta & NombreCarpeta
End If
'
yy = Year(Now)
mm = Month(Now)
If Len(mm) = 1 Then
mm = "0" & mm
End If
'
dd = Day(Now)
If Len(dd) = 1 Then
dd = "0" & dd
End If
'
ho = Hour(Now)
If Len(ho) = 1 Then
ho = "0" & ho
End If

107
'
mi = Minute(Now)
If Len(mi) = 1 Then
mi = "0" & mi
End If
'
se = Second(Now)
If Len(se) = 1 Then
se = "0" & se
End If
'
sp = " "
filetmp = PathRuta & NombreCarpeta & _
"\concat_" & yy & mm & dd & "_" & ho & mi & se & ".tmp"
fileout = PathRuta & NombreCarpeta & _
"\concat_" & yy & mm & dd & "_" & ho & mi & se & ".owl"
'
Open filetmp For Output As #3
'
' ColNdx = 1
' RowNdx = 1
'
nc = 1
nframes = 0
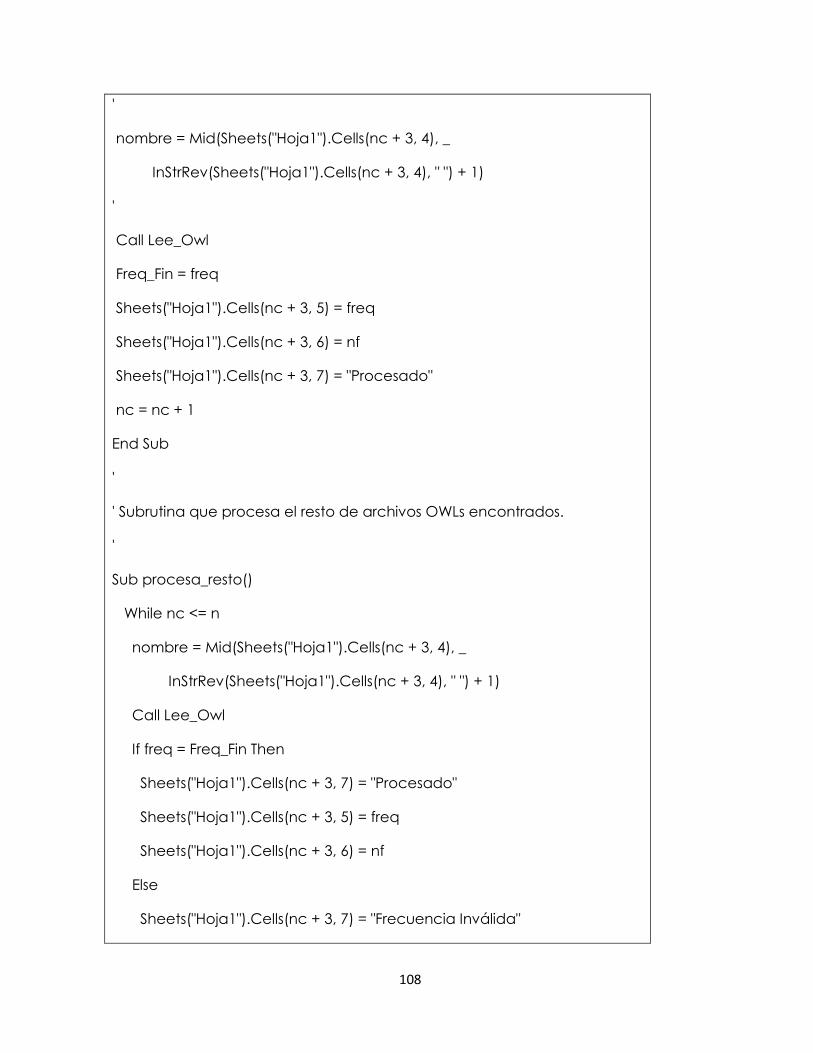
108
'
nombre = Mid(Sheets("Hoja1").Cells(nc + 3, 4), _
InStrRev(Sheets("Hoja1").Cells(nc + 3, 4), " ") + 1)
'
Call Lee_Owl
Freq_Fin = freq
Sheets("Hoja1").Cells(nc + 3, 5) = freq
Sheets("Hoja1").Cells(nc + 3, 6) = nf
Sheets("Hoja1").Cells(nc + 3, 7) = "Procesado"
nc = nc + 1
End Sub
'
' Subrutina que procesa el resto de archivos OWLs encontrados.
'
Sub procesa_resto()
While nc <= n
nombre = Mid(Sheets("Hoja1").Cells(nc + 3, 4), _
InStrRev(Sheets("Hoja1").Cells(nc + 3, 4), " ") + 1)
Call Lee_Owl
If freq = Freq_Fin Then
Sheets("Hoja1").Cells(nc + 3, 7) = "Procesado"
Sheets("Hoja1").Cells(nc + 3, 5) = freq
Sheets("Hoja1").Cells(nc + 3, 6) = nf
Else
Sheets("Hoja1").Cells(nc + 3, 7) = "Frecuencia Inválida"

109
Sheets("Hoja1").Cells(nc + 3, 5) = freq
Sheets("Hoja1").Cells(nc + 3, 6) = nf
MsgBox _
"Archivo OWL con diferente FRECUENCIA del primero. NO puedo
continuar." _
& clf & "Las frecuencias de todos los OWLs debe ser la misma.", _
vbCritical, "OWL inválido."
cpr = "ERROR"
nc = n
End If
nc = nc + 1
Wend
End Sub
1.4 Módulo LeeOWL.
Contiene las subrutinas Lee_Owl e ImportOWL, encargadas de leer cada uno de los
archivos OWL encontrados y generar el archivo temporal unido.
La subrutina Lee_Owl es llamada desde el módulo ListaOWLs.
Attribute VB_Name = "LeeOWL"
' Subrutina para leer cada uno de los archivos OWL encontrados y
generar un OWL sin encabezados.
'
Option Private Module
Option Explicit
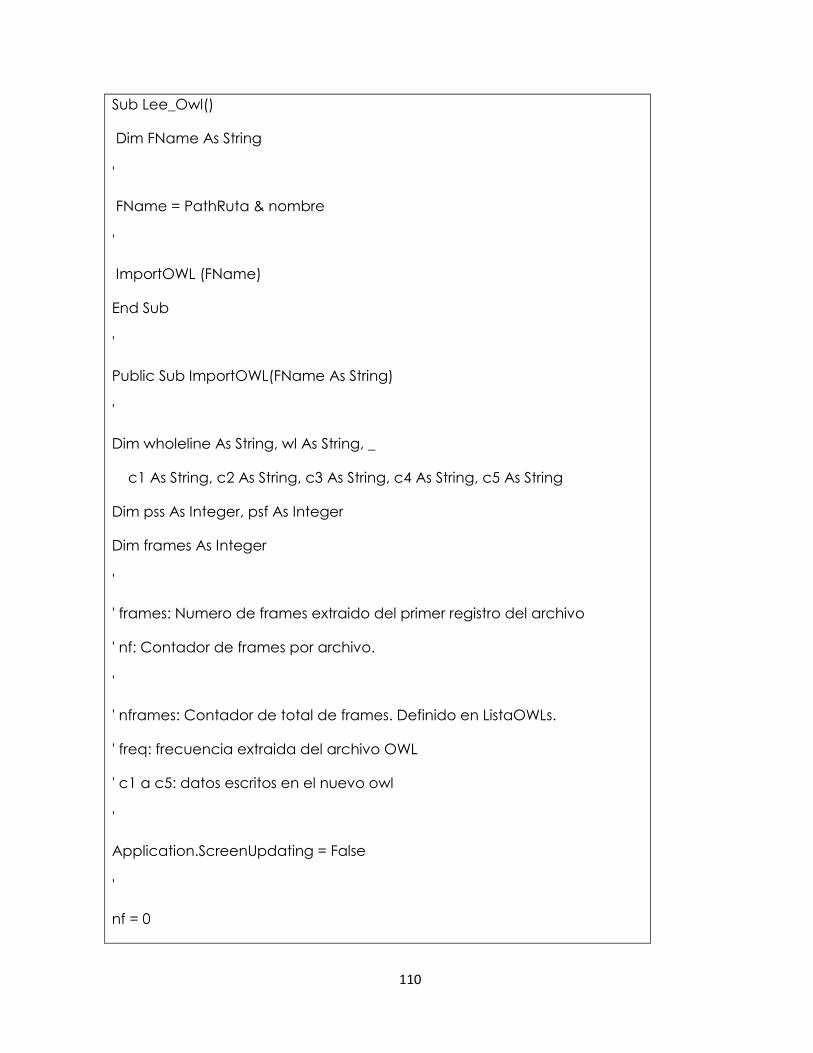
110
Sub Lee_Owl()
Dim FName As String
'
FName = PathRuta & nombre
'
ImportOWL (FName)
End Sub
'
Public Sub ImportOWL(FName As String)
'
Dim wholeline As String, wl As String, _
c1 As String, c2 As String, c3 As String, c4 As String, c5 As String
Dim pss As Integer, psf As Integer
Dim frames As Integer
'
' frames: Numero de frames extraido del primer registro del archivo
' nf: Contador de frames por archivo.
'
' nframes: Contador de total de frames. Definido en ListaOWLs.
' freq: frecuencia extraida del archivo OWL
' c1 a c5: datos escritos en el nuevo owl
'
Application.ScreenUpdating = False
'
nf = 0
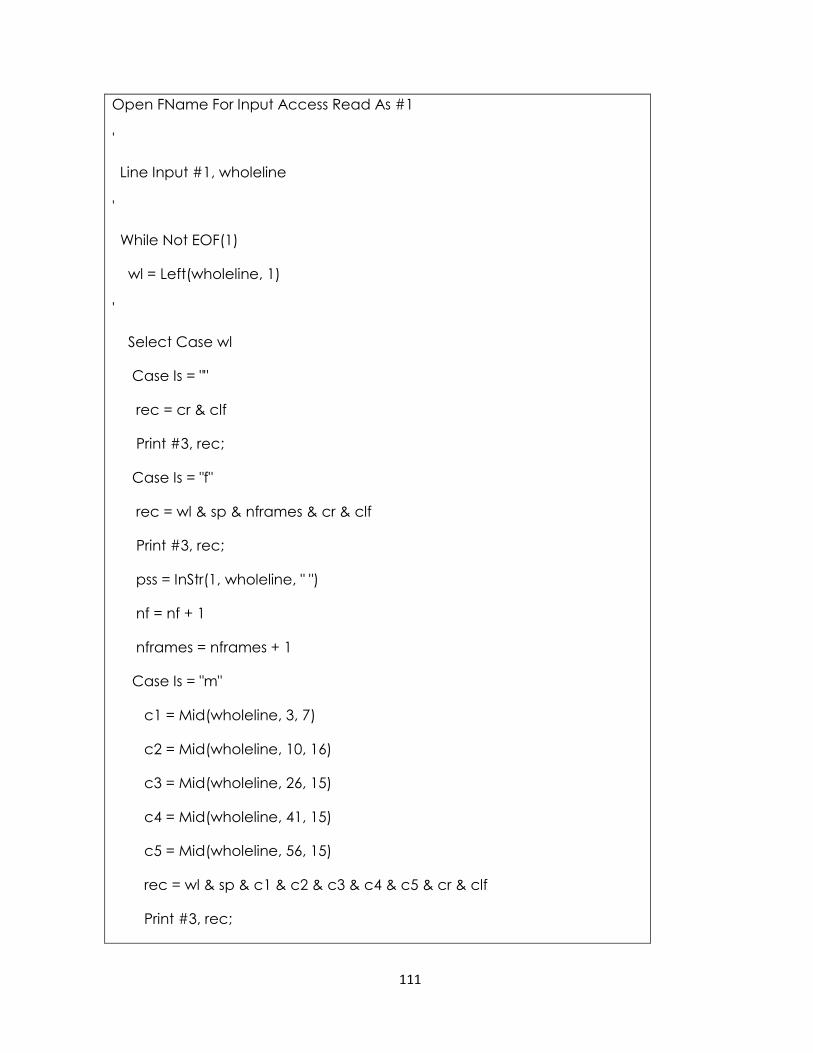
111
Open FName For Input Access Read As #1
'
Line Input #1, wholeline
'
While Not EOF(1)
wl = Left(wholeline, 1)
'
Select Case wl
Case Is = ""
rec = cr & clf
Print #3, rec;
Case Is = "f"
rec = wl & sp & nframes & cr & clf
Print #3, rec;
pss = InStr(1, wholeline, " ")
nf = nf + 1
nframes = nframes + 1
Case Is = "m"
c1 = Mid(wholeline, 3, 7)
c2 = Mid(wholeline, 10, 16)
c3 = Mid(wholeline, 26, 15)
c4 = Mid(wholeline, 41, 15)
c5 = Mid(wholeline, 56, 15)
rec = wl & sp & c1 & c2 & c3 & c4 & c5 & cr & clf
Print #3, rec;

112
Case Is = "#"
pss = InStr(1, wholeline, " ")
psf = InStr(1, wholeline, "f") - 1
frames = Mid(wholeline, pss + 1, psf - pss)
Case Is = "q"
pss = InStr(1, wholeline, " ")
freq = Mid(wholeline, pss + 1, Len(wholeline) - pss)
End Select
Line Input #1, wholeline
Wend
'
EndMacro1:
Application.ScreenUpdating = True
Close #1
End Sub
1.5 Módulo Generatefile.
Contiene la subrutina Generate_file, la cual adiciona los encabezados al nuevo archivo
OWL y termina su generación. Esta subrutina es invocada desde el módulo listaOWLs.
Attribute VB_Name = "Generatefile"
' Subrutina que genera el OWL concatenado
'
Option Explicit
Option Private Module

113
Sub Generate_File()
Close #3
Dim rectmp As String
Open fileout For Output As #2
'
rec = "#" & sp & nframes & sp & "frames" & cr & clf
Print #2, rec;
rec = "q" & sp & Freq_Fin & cr & clf
Print #2, rec;
'
Open filetmp For Input Access Read As #3
While Not EOF(3)
Line Input #3, rectmp
rec = rectmp & cr & clf
Print #2, rec;
Wend
'
Close #2
Close #3
Kill filetmp
'
End Sub
1.6 Formulario FrmCmd.
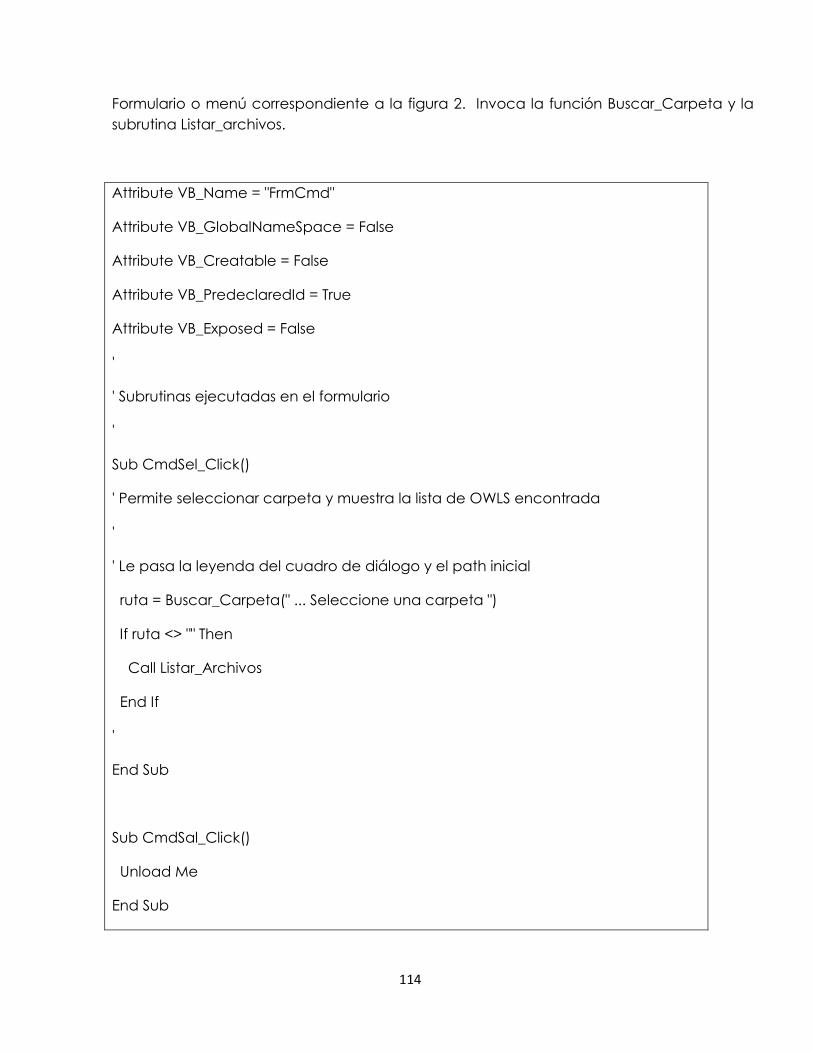
114
Formulario o menú correspondiente a la figura 2. Invoca la función Buscar_Carpeta y la
subrutina Listar_archivos.
Attribute VB_Name = "FrmCmd"
Attribute VB_GlobalNameSpace = False
Attribute VB_Creatable = False
Attribute VB_PredeclaredId = True
Attribute VB_Exposed = False
'
' Subrutinas ejecutadas en el formulario
'
Sub CmdSel_Click()
' Permite seleccionar carpeta y muestra la lista de OWLS encontrada
'
' Le pasa la leyenda del cuadro de diálogo y el path inicial
ruta = Buscar_Carpeta(" ... Seleccione una carpeta ")
If ruta <> "" Then
Call Listar_Archivos
End If
'
End Sub
Sub CmdSal_Click()
Unload Me
End Sub

115
Private Sub UserForm_Click()
'
End Sub
Private Sub UserForm_Deactivate()
'
End Sub
'
Private Sub UserForm_QueryClose(cancel As Integer, closemode As Integer)
'Cierra excel
'closemode: Es 0 si cierra el formulario con click sobre la x
' 1 si es con unload
'
' If closemode = 1 Then
If Workbooks.Count = 1 Then
Application.DisplayAlerts = False
Application.Quit
Else
ActiveWorkbook.Close (False)
End If
' End If
End Sub

116
2) Conversor OWL a TRC.
Figura 6
Hoja de Excel que contiene las macros, en Visual Basic, necesarias para convertir archivos en
formato OWL a formato TRC, tal como lo requiere el sistema OpenSim.
Al abrir la hoja Excel CONVERSOR OWL a TRC, aparece la imagen de la figura 6 y al dar click
en aceptar aparece la ventana de la figura 7.
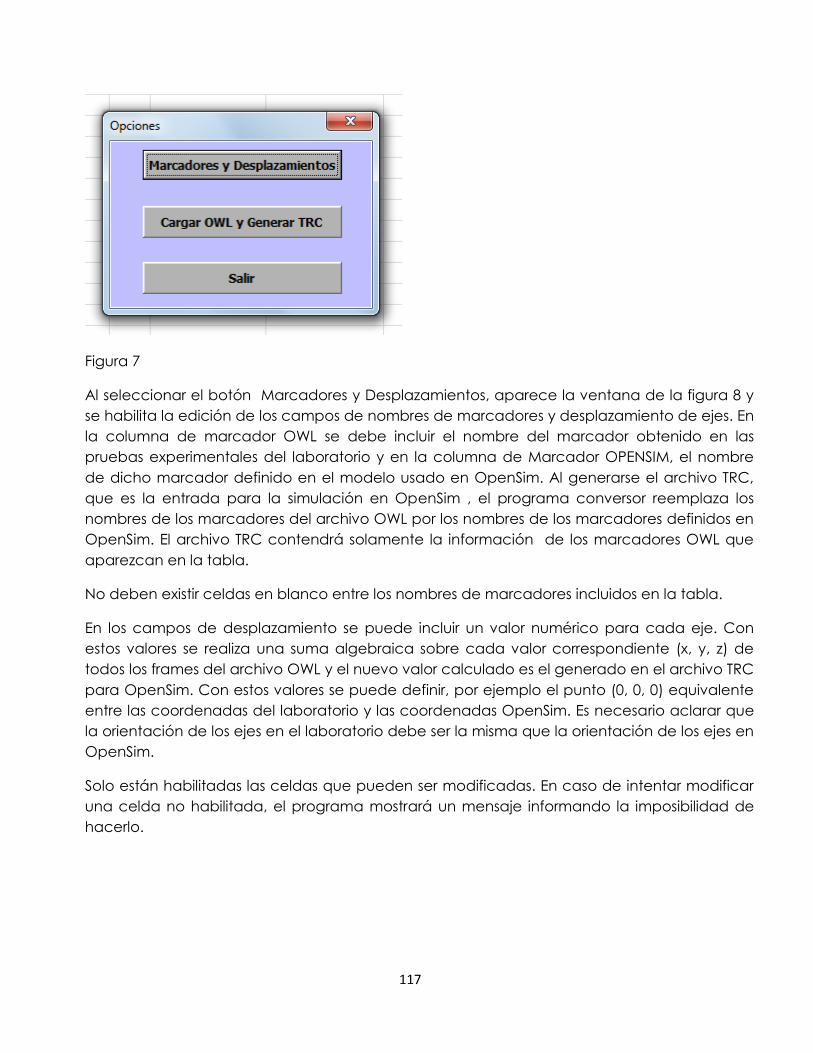
117
Figura 7
Al seleccionar el botón Marcadores y Desplazamientos, aparece la ventana de la figura 8 y
se habilita la edición de los campos de nombres de marcadores y desplazamiento de ejes. En
la columna de marcador OWL se debe incluir el nombre del marcador obtenido en las
pruebas experimentales del laboratorio y en la columna de Marcador OPENSIM, el nombre
de dicho marcador definido en el modelo usado en OpenSim. Al generarse el archivo TRC,
que es la entrada para la simulación en OpenSim , el programa conversor reemplaza los
nombres de los marcadores del archivo OWL por los nombres de los marcadores definidos en
OpenSim. El archivo TRC contendrá solamente la información de los marcadores OWL que
aparezcan en la tabla.
No deben existir celdas en blanco entre los nombres de marcadores incluidos en la tabla.
En los campos de desplazamiento se puede incluir un valor numérico para cada eje. Con
estos valores se realiza una suma algebraica sobre cada valor correspondiente (x, y, z) de
todos los frames del archivo OWL y el nuevo valor calculado es el generado en el archivo TRC
para OpenSim. Con estos valores se puede definir, por ejemplo el punto (0, 0, 0) equivalente
entre las coordenadas del laboratorio y las coordenadas OpenSim. Es necesario aclarar que
la orientación de los ejes en el laboratorio debe ser la misma que la orientación de los ejes en
OpenSim.
Solo están habilitadas las celdas que pueden ser modificadas. En caso de intentar modificar
una celda no habilitada, el programa mostrará un mensaje informando la imposibilidad de
hacerlo.

118
Figura 8
Al terminar la edición se debe dar click en regresar y se muestra de nuevo la figura 7.
Al seleccionar la opción Cargar OWL y Generar TRC, de la figura 7, aparece en pantalla la
ventana de la figura 9, que permite buscar y seleccionar el archivo OWL a convertir.
Figura 9
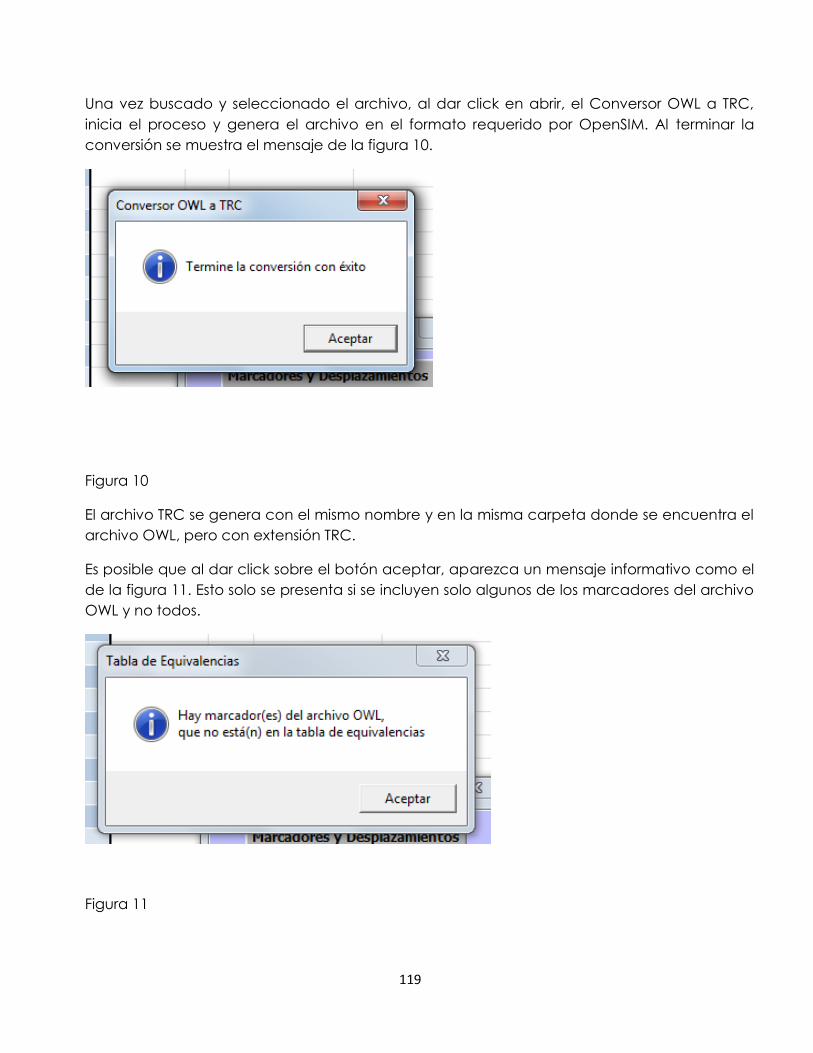
119
Una vez buscado y seleccionado el archivo, al dar click en abrir, el Conversor OWL a TRC,
inicia el proceso y genera el archivo en el formato requerido por OpenSIM. Al terminar la
conversión se muestra el mensaje de la figura 10.
Figura 10
El archivo TRC se genera con el mismo nombre y en la misma carpeta donde se encuentra el
archivo OWL, pero con extensión TRC.
Es posible que al dar click sobre el botón aceptar, aparezca un mensaje informativo como el
de la figura 11. Esto solo se presenta si se incluyen solo algunos de los marcadores del archivo
OWL y no todos.
Figura 11
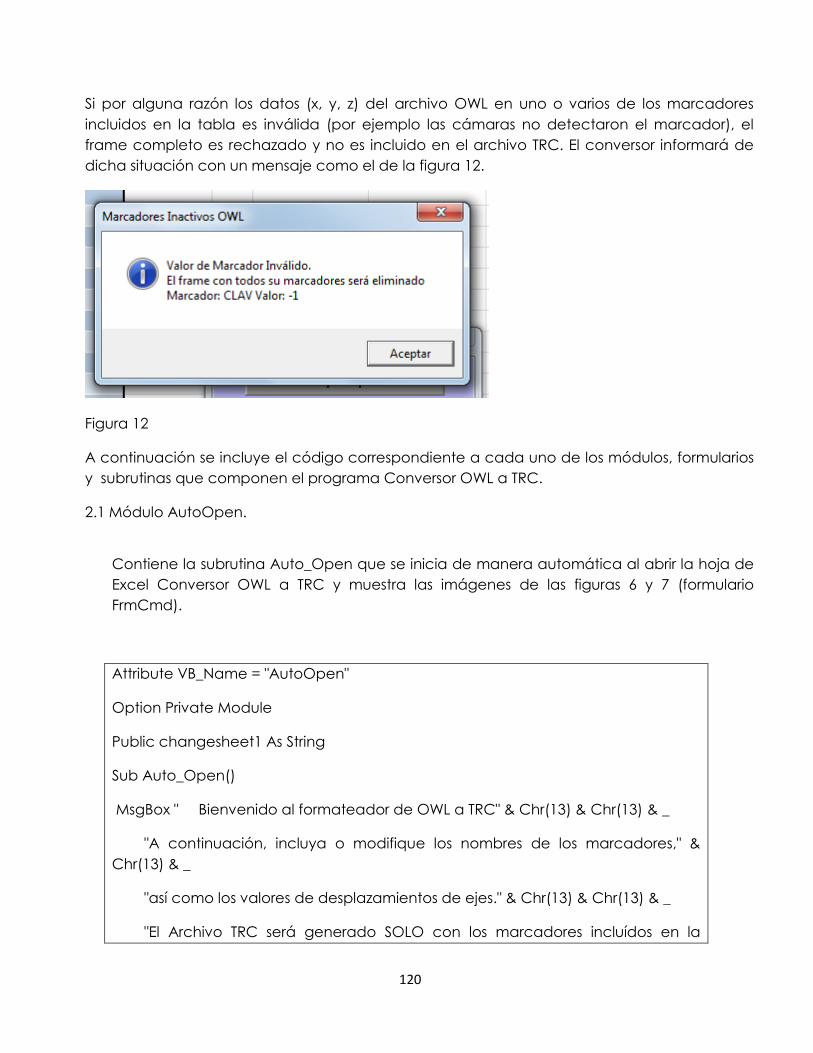
120
Si por alguna razón los datos (x, y, z) del archivo OWL en uno o varios de los marcadores
incluidos en la tabla es inválida (por ejemplo las cámaras no detectaron el marcador), el
frame completo es rechazado y no es incluido en el archivo TRC. El conversor informará de
dicha situación con un mensaje como el de la figura 12.
Figura 12
A continuación se incluye el código correspondiente a cada uno de los módulos, formularios
y subrutinas que componen el programa Conversor OWL a TRC.
2.1 Módulo AutoOpen.
Contiene la subrutina Auto_Open que se inicia de manera automática al abrir la hoja de
Excel Conversor OWL a TRC y muestra las imágenes de las figuras 6 y 7 (formulario
FrmCmd).
Attribute VB_Name = "AutoOpen"
Option Private Module
Public changesheet1 As String
Sub Auto_Open()
MsgBox " Bienvenido al formateador de OWL a TRC" & Chr(13) & Chr(13) & _
"A continuación, incluya o modifique los nombres de los marcadores," &
Chr(13) & _
"así como los valores de desplazamientos de ejes." & Chr(13) & Chr(13) & _
"El Archivo TRC será generado SOLO con los marcadores incluídos en la
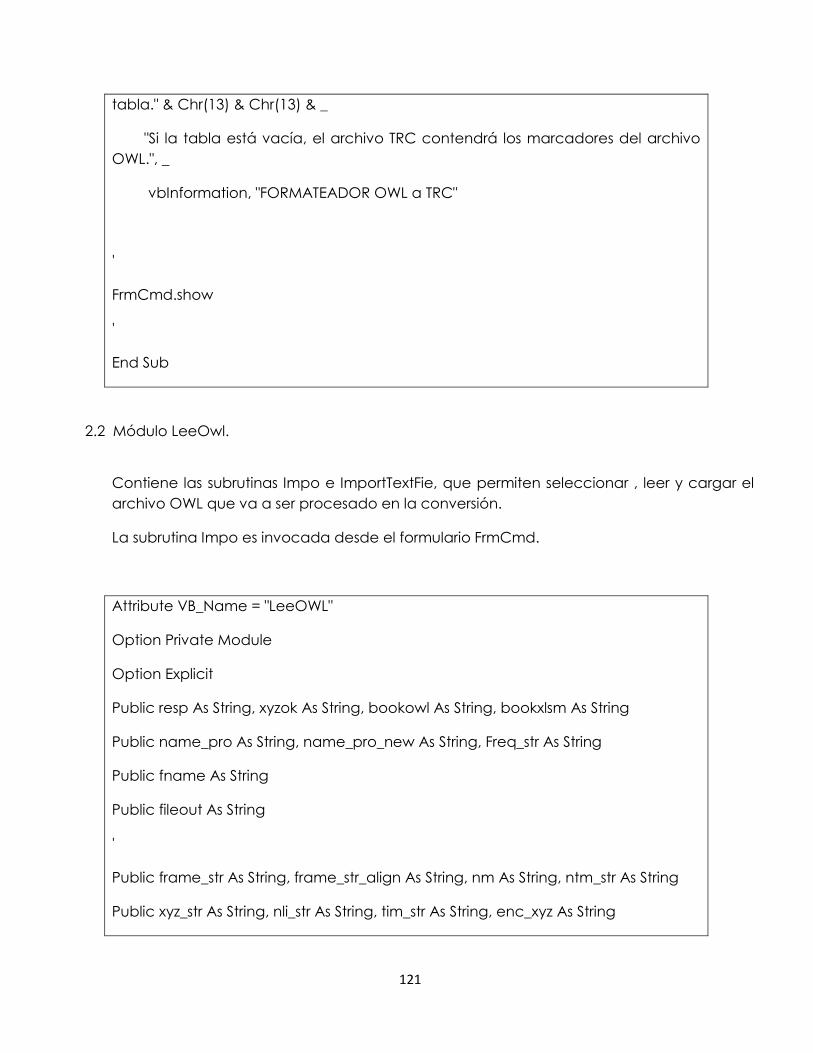
121
tabla." & Chr(13) & Chr(13) & _
"Si la tabla está vacía, el archivo TRC contendrá los marcadores del archivo
OWL.", _
vbInformation, "FORMATEADOR OWL a TRC"
'
FrmCmd.show
'
End Sub
2.2 Módulo LeeOwl.
Contiene las subrutinas Impo e ImportTextFie, que permiten seleccionar , leer y cargar el
archivo OWL que va a ser procesado en la conversión.
La subrutina Impo es invocada desde el formulario FrmCmd.
Attribute VB_Name = "LeeOWL"
Option Private Module
Option Explicit
Public resp As String, xyzok As String, bookowl As String, bookxlsm As String
Public name_pro As String, name_pro_new As String, Freq_str As String
Public fname As String
Public fileout As String
'
Public frame_str As String, frame_str_align As String, nm As String, ntm_str As String
Public xyz_str As String, nli_str As String, tim_str As String, enc_xyz As String

122
'
Public frame_int As Integer, nmd As Integer, nli As Integer, freq_int As Integer,
ctrl_nombre_marcador As Integer
Public existe As Integer
Public vxs As Double, vys As Double, vzs As Double
Public tim As Single
'
' ctrl_nombre_marcador: Indica si se encontro no, en la tabla de equivalencias de
nombre,
' el marcador que viene en el owl. Termina con el numero de marcadores
no encontrados
' en la tabla de equivalencias
'
' existe: controla si el marcador se encontro en la tabla y de esta manera tener en
cuenta los valores x, y, y z
' vxs, vys, vzs valores entrados para translacion de ejes X, Y y Z.
' xykok: Controla que los valores para translacion sean numericos
' bookowl: Nombre del libro correspondiente al archivo owl
' bookxlsm: Nombre del libro correspondiente al conversor
' name_pro_new: Para insertar el campo del nombre de archivo generado, en la
celda del archivo trc
' fileout: archivo trc generado
'
Public ct As String, clf As String, cr As String
Public nho As String, nhm As String
'
Sub impo()

123
'
ct = Chr(9)
clf = Chr(10)
cr = Chr(13)
'
nhm = ActiveSheet.Name
'
' Metodo para seleccionar archivo OWL
'
fname = Application.GetOpenFilename("Archivos OWL (*.owl),*.owl")
'
If fname <> "Falso" Then
Worksheets.Add
nho = ActiveSheet.Name
ImportTextFile (fname)
End If
'
End Sub
Sub ImportTextFile(fname As String)
Dim RowNdx As Long
Dim ColNdx As Integer
Dim TempVal As Variant
Dim WholeLine As String, car As String, wl As String, MarcadorOwl As String
Dim Pos As Integer, ps As Integer

124
Dim NextPos As Integer, i As Integer
Dim np As String, crclf As String
'
np = Mid(fname, InStrRev(fname, "\") + 1)
name_pro_new = Left(np, InStr(np, ".owl") - 1) & ".trc"
fileout = Left(fname, InStr(fname, ".owl") - 1) & ".trc"
'
crclf = cr & clf
'
Application.ScreenUpdating = False
'
ColNdx = 1
RowNdx = 1
Open fname For Input Access Read As #1
' lee encabezado
Line Input #1, WholeLine
Cells(RowNdx, ColNdx) = Left(WholeLine, 1)
ps = InStr(1, WholeLine, " ")
Cells(RowNdx, ColNdx + 1) = Mid(WholeLine, ps + 1, Len(WholeLine) - ps)
RowNdx = RowNdx + 1
'
Line Input #1, WholeLine

125
'
Cells(RowNdx, ColNdx) = Left(WholeLine, 1)
ps = InStr(1, WholeLine, " ")
Cells(RowNdx, ColNdx + 1) = Mid(WholeLine, ps + 1, Len(WholeLine) - ps)
RowNdx = RowNdx + 1
'
While Not EOF(1)
Line Input #1, WholeLine
wl = Left(WholeLine, 2)
'
Select Case wl
Case Is = "f "
Cells(RowNdx, ColNdx) = Left(wl, 1)
ps = InStr(1, WholeLine, " ")
Cells(RowNdx, ColNdx + 1) = Mid(WholeLine, ps + 1, Len(WholeLine) - ps)
Case Is = "m "
Cells(RowNdx, ColNdx) = Left(wl, 1)
MarcadorOwl = Mid(WholeLine, 3, 7)
ps = InStr(1, MarcadorOwl, ",")
If ps > 0 Then
Cells(RowNdx, ColNdx + 1) = Mid(MarcadorOwl, 1, ps - 1)
Else
Cells(RowNdx, ColNdx + 1) = MarcadorOwl
End If
'

126
Cells(RowNdx, ColNdx + 3) = Mid(WholeLine, 26, 15)
Cells(RowNdx, ColNdx + 4) = Mid(WholeLine, 41, 15)
Cells(RowNdx, ColNdx + 5) = Mid(WholeLine, 56, 15)
End Select
RowNdx = RowNdx + 1
Wend
'
EndMacro1:
Application.ScreenUpdating = True
Close #1
''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''
' END ImportTextFile
''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''
End Sub
2.3 Módulo Principal.
Contiene la subrutina proceso_generacion, invocada desde el formulario FrmCmd, que
realiza validaciones sobre la estructura del archivo OWl, cargar la tabla de equivalencias
e iniciar la generación del archivo TRC.
Attribute VB_Name = "Principal"
Option Private Module
Option Explicit
'Public resp As String, xyzok As String, bookowl As String, bookxlsm As String
'Public name_pro As String, name_pro_new As String, Freq_str As String
'Public frame_str As String, frame_str_align As String, nm As String, ntm_str As String
'Public xyz_str As String, nli_str As String, tim_str As String, enc_xyz As String

127
''
'Public frame_int As Integer, nmd As Integer, nli As Integer, freq_int As Integer,
ctrl_nombre_marcador As Integer
'Public existe As Integer
'Public vxs As Double, vys As Double, vzs As Double
'Public tim As Single
'
' ctrl_nombre_marcador: Indica si se encontro no, en la tabla de equivalencias de
nombre,
' el marcador que viene en el owl. Termina con el numero de marcadores
no encontrados
' en la tabla de equivalencias
'
' existe: controla si el marcador se encontro en la tabla y de esta manera tener en
cuenta los valores x, y, y z
' vxs, vys, vzs valores entrados para translacion de ejes X, Y y Z.
' xykok: Controla que los valores para translacion sean numericos
' bookowl: Nombre del libro correspondiente al archivo owl
' bookxlsm: Nombre del libro correspondiente al conversor
' name_pro_new: Para insertar el campo del nombre de archivo generado, en la
celda del archivo trc
'
Sub proceso_generacion()
'
Dim char1 As String, spaces As String
Dim mybook As Workbook
Dim posi As Long, lenf As Long

128
'
bookowl = ""
For Each mybook In Workbooks
If LCase(Mid(mybook.Name, InStr(mybook.Name, ".") + 1, 3)) = "owl" Then
bookowl = mybook.Name
name_pro_new = Left(bookowl, InStr(bookowl, ".") - 1) & ".trc"
Else
If LCase(Mid(mybook.Name, InStr(mybook.Name, ".") + 1, 4)) = "xlsm" Then
bookxlsm = mybook.Name
End If
End If
Next mybook
'
' nho = ActiveSheet.Name
posi = InStr(Worksheets(nho).Cells(1, 2), "f")
If posi > 0 Then
If Left(Worksheets(nho).Cells(1, 2), posi - 1) = " " Then
frame_str = Left(Worksheets(nho).Cells(1, 2), posi - 2)
Else
frame_str = Left(Worksheets(nho).Cells(1, 2), posi - 1)
End If
If IsNumeric(frame_str) Then
frame_int = frame_str
' spaces = " "
' lenf = Len(frame_str)

129
' frame_str_align = Left(spaces, 10 - lenf) & frame_str
'
If Left(Worksheets(nho).Cells(1, 1), 1) = "#" Then
If Left(Worksheets(nho).Cells(2, 1), 1) = "q" Then
If IsNumeric(Worksheets(nho).Cells(2, 2)) Then
Freq_str = Worksheets(nho).Cells(2, 2) & ".00"
freq_int = Freq_str
If Left(Worksheets(nho).Cells(4, 1), 1) = "f" Then
If Worksheets(nho).Cells(4, 2) = 0 Then
Call cargamarc
If xyzok = 1 Then
If resp = 1 Then
Call Inicialtab ' inicia generacion de archivo trc, con tabla de
equivalencias
If ctrl_nombre_marcador = 1 Then
MsgBox "Hay marcador(es) del archivo OWL, " & clf & _
"que no está(n) en la tabla de equivalencias", vbInformation, _
"Tabla de Equivalencias"
End If
End If
Else
resp = 7
End If
Else
MsgBox "Número de primer frame inválido: " _

130
& Worksheets(nho).Cells(4, 2), vbCritical, _
"Estructura de OWL inválida."
End If
Else
MsgBox "Indicador f de número de frame Inválido: " _
& Worksheets(nho).Cells(4, 1), vbCritical, _
"Estructura de OWL inválida."
End If
Else
MsgBox "Frecuencia Inválida : " & Worksheets(nho).Cells(2, 2), vbCritical, _
"Estructura de OWL inválida."
End If
Else
MsgBox "Indicador q de Frecuencia Inválida: " _
& Worksheets(nho).Cells(2, 1), vbCritical, _
"Estructura de OWL inválida."
End If
Else
MsgBox "Indicador # de cantidad de frames inválido: " _
& Worksheets(nho).Cells(1, 1), vbCritical, _
"Estructura de OWL inválida."
End If
Else
MsgBox "Cantidad de frames Inválido: " & frame_str, vbCritical, _
"Estructura de OWL inválida."
131
End If
Else
MsgBox "Celda de frames inválida." & clf & _
"La celda de cantidad de frames ha sido modificada de manera
incorrecta", vbCritical, _
"Estructura de OWL inválida."
End If
End Sub
Módulo CargaMarcadores.
Contiene la subrutina cargamarc que carga la tabla de marcadores y los valores de
desplazamiento en memoria. Es invocada desde el módulo Principal.
Attribute VB_Name = "CargaMarcadores"
Option Private Module
Public mar_owl(80) As String, mar_ope(80) As String
Public nmt As Integer
'
' nmt: numero de marcadores en la tabla de equivalencias
'
Sub cargamarc()
final_marc = 0
nmt = 1
'
' Workbooks(bookxlsm).Activate

132
Worksheets(nhm).Activate
Cells(5, 3).Select '( selecciona el inicio del rango)
Do While Not IsEmpty(ActiveCell.Value)
mar_owl(nmt) = ActiveCell.Value
mar_ope(nmt) = ActiveCell.Offset(0, 1)
ActiveCell.Offset(1, 0).Select ' busca por fila la primera celda vacia
nmt = nmt + 1
Loop
'
If nmt = 1 Then
MsgBox "Tabla con nombres de Marcadores VACÍA" & clf & _
"Incluya los nombres equivalentes de marcadores", vbInformation, "Tabla
de Equivalencias"
resp = 0
Else
resp = 1
End If
'
xyzok = 0
If Not IsNumeric(Cells(5, 7)) Then
MsgBox "Valor para desplazar eje X, es inválido: " & Cells(5, 7), _
vbCritical, "Desplazamiento de Ejes"
Else
If Not IsNumeric(Cells(6, 7)) Then
MsgBox "Valor para desplazar eje Y, es inválido: " & Cells(6, 7), _
133
vbCritical, "Desplazamiento de Ejes"
Else
If Not IsNumeric(Cells(7, 7)) Then
MsgBox "Valor dado para transladar eje Z, es inválido: " _
& Cells(7, 7), vbCritical, "Desplazamiento de Ejes"
Else
vxs = Cells(5, 7)
vys = Cells(6, 7)
vzs = Cells(7, 7)
xyzok = 1
End If
End If
End If
End Sub
2.4 Módulo InicioTab.
Este módulo inicia la generación del archivo TRC a través de la subrutina IncialTab,
invocada desde el módulo Principal, reemplazando los nombres de los marcadores OWL
por los nombres de los marcadores OpenSim.
Attribute VB_Name = "InicioTab"
Option Private Module
Option Explicit
Sub Inicialtab()
' Worksheets(nho).Activate
134
'
Dim tim_str_full As String, cms As String
Dim vxi As Double, vyi As Double, vzi As Double
Dim vxidec As String, vyidec As String, vzidec As String
Dim vxiok As String, vyiok As String, vziok As String
Dim framenumber As Long
Dim ind_marcador As String
Dim nh As Long
Dim MarcaInactivo As Long
Dim fef As Long, fm As Long, cim As Long, cnm As Long, cvm As Long, cxi As Long,
cyi As Long, czi As Long
Dim final As Integer
Dim xn As String, yn As String, zn As String
Dim con_mar As Long, pos_coma As Long
Dim lenx As Long
Dim spaces As String
'
' tim_str: Time frame para el archivo de salida (.trc)
' cms: numero de marcador para encabezado de Xn, Yn, Zn
' vxi, vyi, vzi: Valores en X, Y y Z del archivo owl
' vxidec, vyidec, vzidec string para conversion de notacion cientifica a decimal
' vxiok, vyiok, vziok valores x, y, z de salida con longitud máxima de decimales de
11, si el dato de entrada trae mas de 11 decimales.
' framenumber: Numero de frame activo
' ind_marcador: indicador del marcador del archivo owl.
'

135
' fef: fila de encabezado de frame
' fm: fila de los marcadores y frames
' cim: Columna indicador marcador
' cnm: Columna Nombre Marcador
' cvm: Columna de validez de marcador
' cxi: Columna eje x input
' cyi: Columna eje y input
' cyz: Columna eje z input
' ff: fila para los frames formateados horizontalmente
' cf: columna para los frames formateados horizontalmente
' ntm_str: string con el nombre de todos los marcadores, separados con tab
' nli, nli_str: Numero de linea de frame de salida (.trc)
' nm: nombre marcador
' ntm_str: string con el nombre de todos los marcadores, separados con tab
' usado para generar la linea en el archivo .trc
' xyz_str: string con numero de frame, tiempo y valores xyz ordenados
Horizontalmente
' vxyx_strt: string solo con los valores xyx ordenados horizontalmente
' vxidec, vyidec, vzidec valores en X, Y y Z en formato decimal, para evitar
notacion cientifica.
' vxiok, vyiok, vziok valores x, y, z de salida con longitud máxima de decimales de
11, si el dato de entrada trae mas de 11 decimales.
' ff: fila para los frames formateados horizontalmente
' cf: columna para los frames formateados horizontalmente
' nli, nli_str: Numero de linea de frame de salida (.trc)
' tim: Time frame calculado (.trc)

136
'
' num_mar: numero marcadores
' cms: numero de marcador para encabezado de Xn, Yn, Zn
'
fef = 4
fm = fef + 1
cim = 1
cnm = 2
cvm = 3
cxi = 4
cyi = 5
czi = 6
'
ntm_str = ""
nli = 1
tim_str = "0.000000"
nli_str = nli
xyz_str = nli_str & ct & tim_str & ct
'
framenumber = Worksheets(nho).Cells(fef, 2) + 1
'
ind_marcador = Left(Worksheets(nho).Cells(fm, cim), 1)
'
nmd = 0
MarcaInactivo = 0

137
ctrl_nombre_marcador = 0
final = 0
'
vxyz_str = ""
Do While ind_marcador = "m"
If MarcaInactivo = 0 Then
nm = Worksheets(nho).Cells(fm, cnm)
' busca equivalencia de nombre de marcador
Call Buscarmarca
If existe = 1 Then
If Worksheets(nho).Cells(fm, cvm) <> -1 Then
vxi = Worksheets(nho).Cells(fm, cxi)
vxidec = CDec(vxi + vxs)
If Len(vxidec) > 11 Then
vxiok = Mid(vxidec, 1, 11)
Else
vxiok = vxidec
End If
'
vyi = Worksheets(nho).Cells(fm, cyi)
vyidec = CDec(vyi + vys)
If Len(vyidec) > 11 Then
vyiok = Mid(vyidec, 1, 11)
Else
vyiok = vyidec

138
End If
'
vzi = Worksheets(nho).Cells(fm, czi)
vzidec = CDec(vzi + vzs)
If Len(vzidec) > 11 Then
vziok = Mid(vzidec, 1, 11)
Else
vziok = vzidec
End If
vxyz_str = vxyz_str & vxiok & ct & vyiok & ct & vziok & ct
'
' ntm_str = ntm_str & nm & ct & ct & ct
' nmd = nmd + 1
Else
MsgBox "Valor de Marcador Inválido. " & clf & _
"El frame con todos su marcadores será eliminado" & clf & _
"Marcador: " & nm & " Valor: " & Worksheets(nho).Cells(fm, cvm), _
vbInformation, "Marcadores Inactivos OWL"
MarcaInactivo = 1
End If
'
' Arma string con la lista de marcadores para Opensim
'
ntm_str = ntm_str & nm & ct & ct & ct

139
nmd = nmd + 1
End If
End If
'
fm = fm + 1
ind_marcador = Left(Worksheets(nho).Cells(fm, cim), 1)
Loop
'
Call abrir ' abre
If MarcaInactivo = 0 Then
'
xyz_str = xyz_str & vxyz_str
Call escribir ' escribe primer frame archivo .tmp
'
' calcula tiempo y siguiente frame (nli)
tim = nli / freq_int
tim_str_full = CDec(tim)
tim_str = Mid(tim_str_full, 1, 5) & "000"
nli = nli + 1
nli_str = nli
'
xyz_str = nli_str & ct & tim_str & ct
'
End If

140
'
Do Until final = 1
If framenumber < frame_int Then
fef = fm + 1
fm = fef + 1
If Left(Worksheets(nho).Cells(fef, 1), 1) = "f" Then
framenumber = Worksheets(nho).Cells(fef, 2) + 1
'
ind_marcador = Left(Worksheets(nho).Cells(fm, cim), 1)
'
MarcaInactivo = 0
vxyz_str = ""
Do While ind_marcador = "m"
If MarcaInactivo = 0 Then
pos_coma = InStr(Worksheets(nho).Cells(fm, cnm), ",")
If pos_coma > 0 Then
nm = Left(Worksheets(nho).Cells(fm, cnm), pos_coma - 1)
Else
nm = Worksheets(nho).Cells(fm, cnm)
End If
'
Call Buscarmarca
If existe = 1 Then
If Worksheets(nho).Cells(fm, cvm) <> -1 Then
vxi = Worksheets(nho).Cells(fm, cxi)
141
vxidec = CDec(vxi + vxs)
If Len(vxidec) > 11 Then
vxiok = Mid(vxidec, 1, 11)
Else
vxiok = vxidec
End If
'
vyi = Worksheets(nho).Cells(fm, cyi)
vyidec = CDec(vyi + vys)
If Len(vyidec) > 11 Then
vyiok = Mid(vyidec, 1, 11)
Else
vyiok = vyidec
End If
'
vzi = Worksheets(nho).Cells(fm, czi)
vzidec = CDec(vzi + vzs)
If Len(vzidec) > 11 Then
vziok = Mid(vzidec, 1, 11)
Else
vziok = vzidec
End If
'
vxyz_str = vxyz_str & vxiok & ct & vyiok & ct & vziok & ct
'

142
Else
MsgBox "Valor de Marcador Inválido. " & clf & _
"El frame con todos su marcadores será eliminado" & clf & _
"Marcador: " & nm & " Valor: " & Worksheets(nho).Cells(fm, cvm), _
vbInformation, "Marcadores Inactivos OWL"
' final = 1
MarcaInactivo = 1
End If
End If
End If
'
fm = fm + 1
ind_marcador = Left(Worksheets(nho).Cells(fm, cim), 1)
Loop
'
If MarcaInactivo = 0 Then
xyz_str = xyz_str & vxyz_str
Call escribir ' escribe registro en archivo .tmp
tim = nli / freq_int
tim_str_full = CDec(tim)
tim_str = Mid(tim_str_full, 1, 5) & "000"
nli = nli + 1
nli_str = nli
'
xyz_str = nli_str & ct & tim_str & ct
143
End If
'
Else
MsgBox _
"ERROR..No se encontraron los " & frame_str & _
" frames del encabezado del archivo OWL", vbCritical, _
"Estructura de OWL inválida."
Call cerrar
Kill filetmp
final = 1
End If
Else
Call cerrar ' cierra archivo .tmp
Call abrir_trc 'abre trc
xn = "X"
yn = "Y"
zn = "Z"
con_mar = 1
enc_xyz = ct & ct
'
Do Until con_mar > nmd
cms = con_mar
enc_xyz = enc_xyz & xn & cms & ct & yn & cms & ct & zn & cms & ct
con_mar = con_mar + 1
Loop

144
'
nli_str = nli - 1
lenx = Len(nli_str)
spaces = " "
frame_str_align = Left(spaces, 10 - lenx) & nli_str
Call EscribeEncabezado_trc ' genera encabezados archivo .trc
Call escribir_trc
'
Call cerrar_trc ' cierra archivo .tmp
MsgBox "Termine la conversión con éxito", vbInformation, _
"Conversor OWL a TRC"
final = 1
End If
Loop
End Sub
2.5 Módulo BuscaMarcadores.
Contiene la subrutina Buscamarca, encargada de buscar la equivalencia del marcador
OWL, con el marcador OpenSim. Invocada desde el módulo IncioTab
Attribute VB_Name = "BuscaMarcadores"
Option Private Module
Sub Buscarmarca()
'
' nmt: numero de marcadores en la tabla. Viene de cargamarc
'

145
iowl = 1
indfind = 0
existe = 0
Do Until indfind = 1
If iowl < nmt Then
If mar_owl(iowl) = nm Then
nm = mar_ope(iowl)
indfind = 1
existe = 1
Else
iowl = iowl + 1
End If
Else
indfind = 1
ctrl_nombre_marcador = 1
End If
Loop
'
End Sub
2.6 Módulo Generatefile.
Contiene las subrutinas abrir, escribir y cerrar, las cuales producen un archivo temporal
necesario para la generación completa del archivo TRC. Son invocadas desde el módulo
InicioTab.
146
Attribute VB_Name = "Generatefile"
Option Private Module
Sub abrir()
Open filetmp For Output As #1
End Sub
'
Sub escribir()
rec = xyz_str & clf
Print #1, rec;
End Sub
Sub cerrar()
Close #1
End Sub
2.7 Módulo Generatefiletrc.
Contiene las subrutinas abrir_trc, EscribeEncabezado_trc, escribir_trc y cerrar_trc,
encargadas de producir el archivo TRC final. Invocadas desde el módulo InicioTab.
Attribute VB_Name = "Generatefiletrc"
Option Private Module
Sub abrir_trc()
Open filetrc For Output As #2
End Sub
'
Sub EscribeEncabezado_trc()
Dim rec As String
147
Dim cuatro As Integer
'
cuatro = 4
'
rec = "PathFileType" & ct & cuatro & ct & "(X/Y/Z)" & ct & name_pro_new & clf
Print #2, rec;
rec = "DataRate" & ct & "CameraRate" & ct & "NumFrames" & ct & "NumMarkers" &
ct & "Units" & ct & "OrigDataRate" & ct & "OrigDataStartFrame" & ct &
"OrigNumFrames" & clf
Print #2, rec;
rec = Freq_str & ct & Freq_str & ct & frame_str_align & ct & nmd & ct & "mm" & ct &
Freq_str & ct & "1" & ct & frame_str_align & clf
Print #2, rec;
rec = "Frame#" & ct & "Time" & ct & ntm_str & clf
Print #2, rec;
rec = enc_xyz & clf
Print #2, rec;
rec = clf
Print #2, rec;
' rec = xyz_str & clf
' Print #1, rec;
End Sub
'
Sub escribir_trc()
Dim rectmp As String
Open filetmp For Input Access Read As #1

148
While Not EOF(1)
Line Input #1, rectmp
Print #2, rectmp;
Wend
Close #1
Kill filetmp
'
End Sub
'
Sub cerrar_trc()
Close #2
End Sub
2.8 Formulario FrmCmd y FrmOk.
Formularios o correspondientes a las figura 7 y 8. El formulario FrmCmd invoca a las
subrutinas Impo y proceso_generacion, así como al formulario FrmOk, utilizado para
habilitar la edición de la tabla de marcadores.
Attribute VB_Name = "FrmCmd"
Attribute VB_GlobalNameSpace = False
Attribute VB_Creatable = False
Attribute VB_PredeclaredId = True
Attribute VB_Exposed = False
Public Sub DisableXbutton(ByVal frmHwnd As Long)
Dim hMenu As Long
149
hMenu = GetSystemMenu(frmHwnd, 0&)
If hMenu Then
Call DeleteMenu(hMenu, SC_CLOSE, MF_BYCOMMAND)
DrawMenuBar (frmHwnd)
End If
End Sub
Sub CmdEqu_Click()
RFrmCmd = "B1"
Unload Me
FrmOk.show
End Sub
Sub CmdGen_Click()
Call impo
If fname <> "Falso" Then
Call proceso_generacion
If resp <> 7 Then
Application.DisplayAlerts = False
Sheets(nho).Delete
Application.DisplayAlerts = True
End If
End If
RFrmCmd = "B2"
' Unload Me
End Sub
150
Sub CmdSal_Click()
RFrmCmd = "B3"
Call closemode0
'
End Sub
Private Sub UserForm_Click()
'
End Sub
Private Sub UserForm_Deactivate()
'
End Sub
'
Private Sub UserForm_QueryClose(Cancel As Integer, CloseMode As Integer)
'closemode: Es 0 si cierra el formulario con click sobre la x
' 1 si es con unload
If CloseMode = 0 Then
Call closemode0
End If
End Sub
Sub closemode0()
If Workbooks.Count = 1 Then
If changesheet1 = "si" Then
rp = MsgBox("Desea Salvar los cambios de la tabla de equivalencias?", _
151
vbYesNo, "Tabla de Equivalencias")
If rp = 6 Then
ThisWorkbook.Save
Application.Quit
Else
Application.DisplayAlerts = False
Application.Quit
End If
Else
Application.DisplayAlerts = False
Application.Quit
End If
Else
If changesheet1 = "si" Then
rp = MsgBox("Desea Salvar los cambios de la tabla de equivalencias?", _
vbYesNo, "Tabla de Equivalencias")
If rp = 6 Then
ActiveWorkbook.Close (True)
Else
ActiveWorkbook.Close (False)
End If
Else
ActiveWorkbook.Close (False)
End If
End If

152
End Sub
Attribute VB_Name = "FrmOk"
Attribute VB_GlobalNameSpace = False
Attribute VB_Creatable = False
Attribute VB_PredeclaredId = True
Attribute VB_Exposed = False
Private Sub Cmdok_Click()
Unload Me
FrmCmd.show
'
End Sub
Private Sub UserForm_Activate()
' MsgBox "activate"
End Sub
Private Sub UserForm_Click()
' MsgBox "click en area diferente al boton"
End Sub
Private Sub UserForm_Deactivate()
' MsgBox "deact"
153
End Sub
Private Sub UserForm_QueryClose(Cancel As Integer, CloseMode As Integer)
Cancel = True
End Sub
Private Sub userform_terminate()
' MsgBox "term"
End Sub
Sub FrmOkclosemode0()
'
If Workbooks.Count = 1 Then
If changesheet1 = "si" Then
rp = MsgBox("Desea Salvar los cambios de la tabla de equivalencias?", _
vbYesNo, "Tabla de Equivalencias")
If rp = 6 Then
ThisWorkbook.Save
Application.Quit
Else
Application.DisplayAlerts = False
Application.Quit
End If
Else
Application.DisplayAlerts = False
154
Application.Quit
End If
Else
If changesheet1 = "si" Then
rp = MsgBox("Desea Salvar los cambios de la tabla de equivalencias?", _
vbYesNo, "Tabla de Equivalencias")
If rp = 6 Then
ActiveWorkbook.Close (True)
Else
ActiveWorkbook.Close (False)
End If
Else
ActiveWorkbook.Close (False)
End If
End If
End Sub
8.2. PLANOS DE CONSTRUCCIÓN DEL PALPADOR ESCAPULAR
8.3. PLANOS DE CONTRSUCCIÓN PROTOTIPO POSTURAS ESTÁTICAS
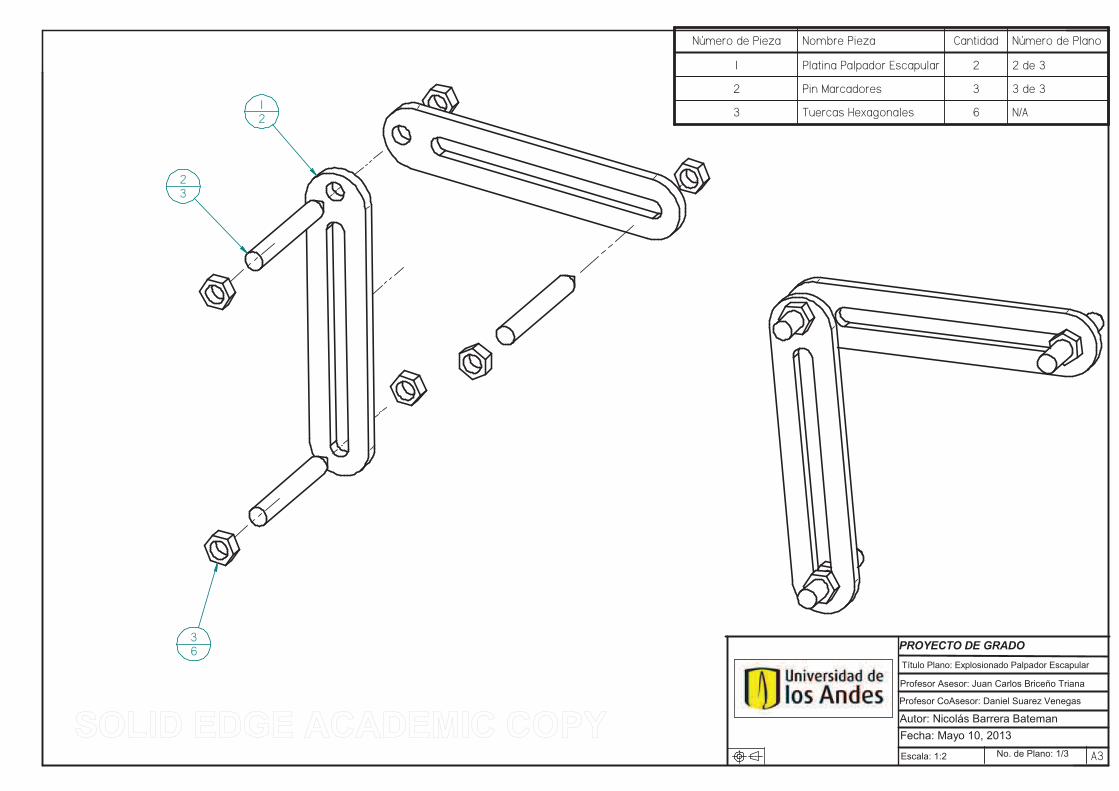
Título Plano: Explosionado Palpador Escapular
PROYECTO DE GRADO
Profesor Asesor: Juan Carlos Briceño Triana
Profesor CoAsesor: Daniel Suarez Venegas
Autor: Nicolás Barrera Bateman
��Escala: 1:2 No. de Plano: 1/3
Fecha: Mayo 10, 2013
��
��
��
����� ����� ��������� ����� � ����� ������
� ������������� ���������� � �� ��
� �������� �� � �� ��
� ��������� ����� � �!�

Título Plano: Platina Palpador Escapular
PROYECTO DE GRADO
Profesor Asesor: Juan Carlos Briceño Triana
Profesor CoAsesor: Daniel Suarez Venegas
Autor: Nicolás Barrera Bateman
��Escala: 1:1 No. de Plano: 2/3
Fecha: Mayo 10, 2013
Salvo indicación contrariacotas en milímetros,ángulos en grados ytolerancias 0.5 mm y
±1º
������������������� ������������������ �������������
������� ��� �����
�������������������
��
� ���
� ��
� ��
��������
��
��
���
���
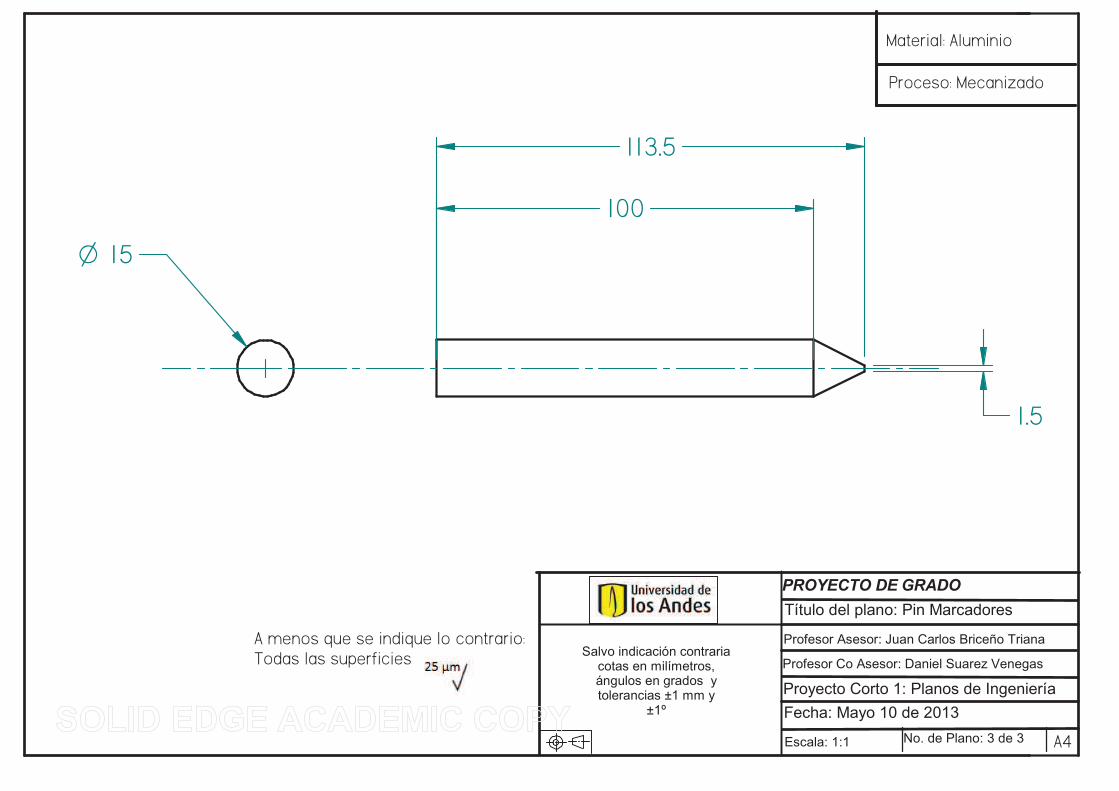
Título del plano: Pin Marcadores
PROYECTO DE GRADO
Profesor Asesor: Juan Carlos Briceño Triana
Profesor Co Asesor: Daniel Suarez Venegas
Proyecto Corto 1: Planos de Ingeniería
��Escala: 1:1 No. de Plano: 3 de 3
Fecha: Mayo 10 de 2013
Salvo indicación contrariacotas en milímetros,ángulos en grados ytolerancias ±1 mm y
±1º
����������� �����
��� �������� ��������� �������������������������
������������� ��
� ��
���
�����
���

Título
Pla
no:
Explo
sio
nad
o M
ecanis
mo B
razo E
stá
tico
Dis
eñ
o d
e S
iste
mas M
ecán
ico
s
Pro
fesor
Asesor:
Ju
an
Ca
rlo
s B
rice
ño
Tria
na
Pro
fesor
Co
Asesor:
Da
nie
l S
ua
rez V
en
eg
as
Auto
r: N
icolá
s B
arr
era
Bate
man
��E
sca
la:
1:6
.67
No
. d
e P
lan
o:
1 d
e 8
���������
�����
���
�
�
�
� �
�
�
� �
� �
� �
��������
�����
�������������
�� !����
��������
�"� �
#$��
����
�#$��
%���
�������
�& �'
����
�����(
�)�
�*�%��
����
�+,���-�!���'
�)�
��"�!� �.����
�����
��"�!� ���/$,���'
����
�.�%�
����
�#�
� �""�0�
1�2�
�"�%
��)����$"2���
��)�
�#$����0�1�2
� ���
)���
�$"2�
���
�)�

Tít
ulo
del pla
no:
Dis
co
PR
OY
EC
TO
DE
GR
AD
O
Pro
fesor
Ase
sor:
Ju
an
Carlo
s B
rice
ño
Tria
na
Pro
fesor
Co
Ase
sor:
Da
nie
l S
ua
rez V
en
eg
as
Auto
r: N
icolá
s B
arr
era
Bate
man
��E
sca
la:
1:1
No
. d
e P
lan
o:
2 d
e 8
Fecha:
Mayo 1
0 d
e 2
01
3
Salv
o in
dic
ació
n c
ontr
aria
cota
s e
n m
ilím
etr
os,
án
gulo
s e
n g
rad
os
yto
lera
ncia
s±1 m
m y
±1
º
������������������� ������������
������ �������������
������� ������������
���
�������������������
��
����
���
�
!�" ""
�#����$%�������� ���
���&��'��'�����������(
�������������� ��������� �)����
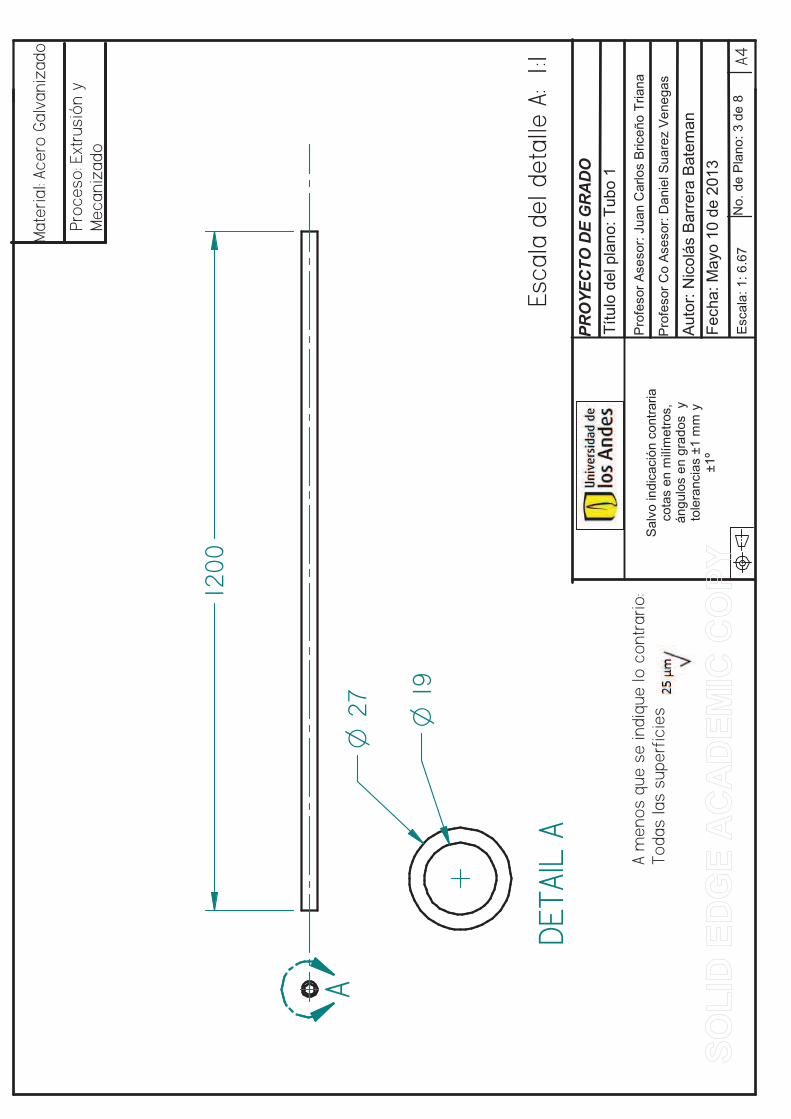
Tít
ulo
del pla
no:
Tub
o 1
PR
OY
EC
TO
DE
GR
AD
O
Pro
fesor
Ase
sor:
Ju
an
Carlo
s B
rice
ño
Tria
na
Pro
fesor
Co
Ase
sor:
Da
nie
l S
ua
rez V
en
eg
as
Auto
r: N
icolá
s B
arr
era
Bate
man
��E
sca
la:
1:
6.6
7N
o.
de
Pla
no
: 3
de
8
Fecha:
Mayo 1
0 d
e 2
01
3
Salv
o in
dic
ació
n c
ontr
aria
cota
s e
n m
ilím
etr
os,
án
gulo
s e
n g
rad
os
yto
lera
ncia
s±1 m
m y
±1
º
������������������� ������������
������ �������������
������� ���������� ��������
�������������������
����������
� !!
�
"���#$��
�
� % ��&
���� ���� ����� ���������

Tít
ulo
del pla
no:
Tub
o 2
PR
OY
EC
TO
DE
GR
AD
O
Pro
fesor
Ase
sor:
Ju
an
Carlo
s B
rice
ño
Tria
na
Pro
fesor
Co
Ase
sor:
Da
nie
l S
ua
rez V
en
eg
as
Auto
r: N
icolá
s B
arr
era
Bate
man
��E
sca
la:
1:1
No
. d
e P
lan
o:
4 d
e 8
Fecha:
Mayo 1
0 d
e 2
01
3
Salv
o in
dic
ació
n c
ontr
aria
cota
s e
n m
ilím
etr
os,
án
gulo
s e
n g
rad
os
yto
lera
ncia
s±1 m
m y
±1
º
������������������� ������������
������ �������������
������� ���������� ��������
�������������������
����������
�
�
!���"#��
�
�$%&'
�$(
���� ���� �!��� ������$�$

Tít
ulo
del pla
no:
Tub
o 3
PR
OY
EC
TO
DE
GR
AD
O
Pro
fesor
Ase
sor:
Ju
an
Carlo
s B
rice
ño
Tria
na
Pro
fesor
Co
Ase
sor:
Da
nie
l S
ua
rez V
en
eg
as
Auto
r: N
icolá
s B
arr
era
Bate
man
��E
sca
la:
1:1
No
. d
e P
lan
o:
5 d
e 8
Fecha:
Mayo 1
0 d
e 2
01
3
Salv
o in
dic
ació
n c
ontr
aria
cota
s e
n m
ilím
etr
os,
án
gulo
s e
n g
rad
os
yto
lera
ncia
s±1 m
m y
±1
º
������������������� ������������
������ �������������
������� ���������� ��������
�������������������
����������
��
��!"#
�$%
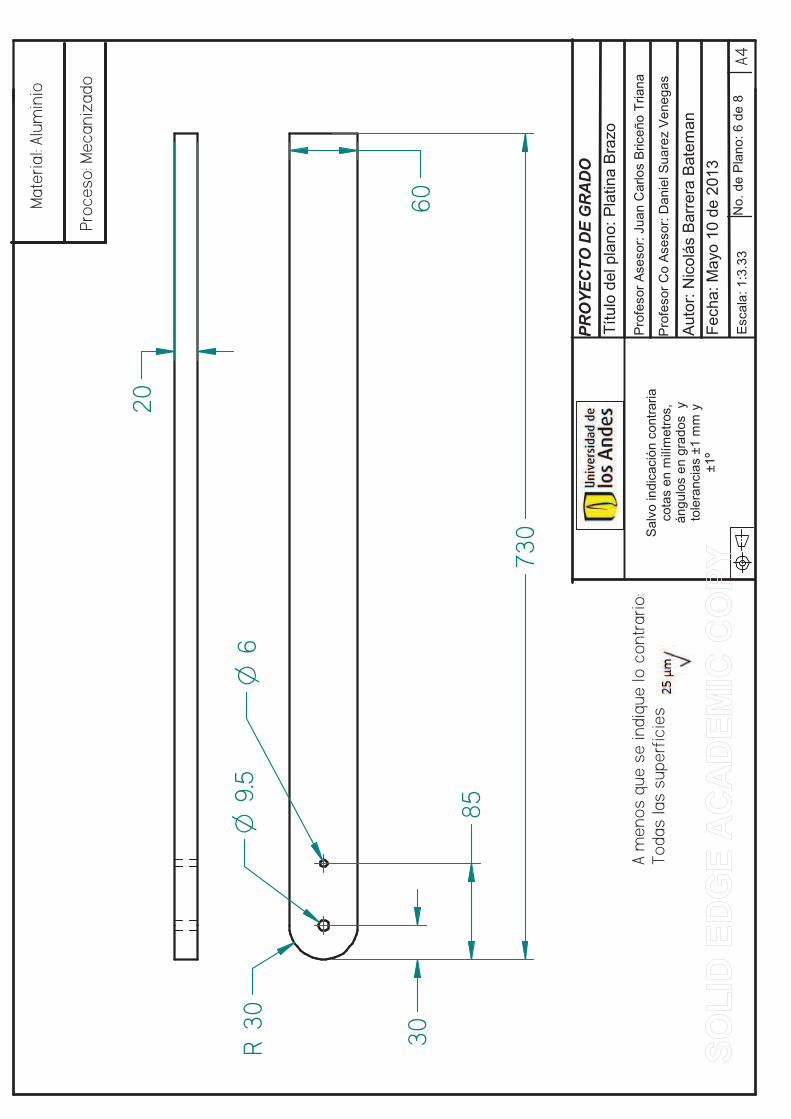
Tít
ulo
del pla
no:
Pla
tina B
razo
PR
OY
EC
TO
DE
GR
AD
O
Pro
fesor
Ase
sor:
Ju
an
Carlo
s B
rice
ño
Tria
na
Pro
fesor
Co
Ase
sor:
Da
nie
l S
ua
rez V
en
eg
as
Auto
r: N
icolá
s B
arr
era
Bate
man
��E
sca
la:
1:3
.33
No
. d
e P
lan
o:
6 d
e 8
Fecha:
Mayo 1
0 d
e 2
01
3
Salv
o in
dic
ació
n c
ontr
aria
cota
s e
n m
ilím
etr
os,
án
gulo
s e
n g
rad
os
yto
lera
ncia
s±1 m
m y
±1
º
������������������� �����
�������
������ �������������
������� ��� �
����
�������������������
��
��
��
��
��
���
� !�
"��
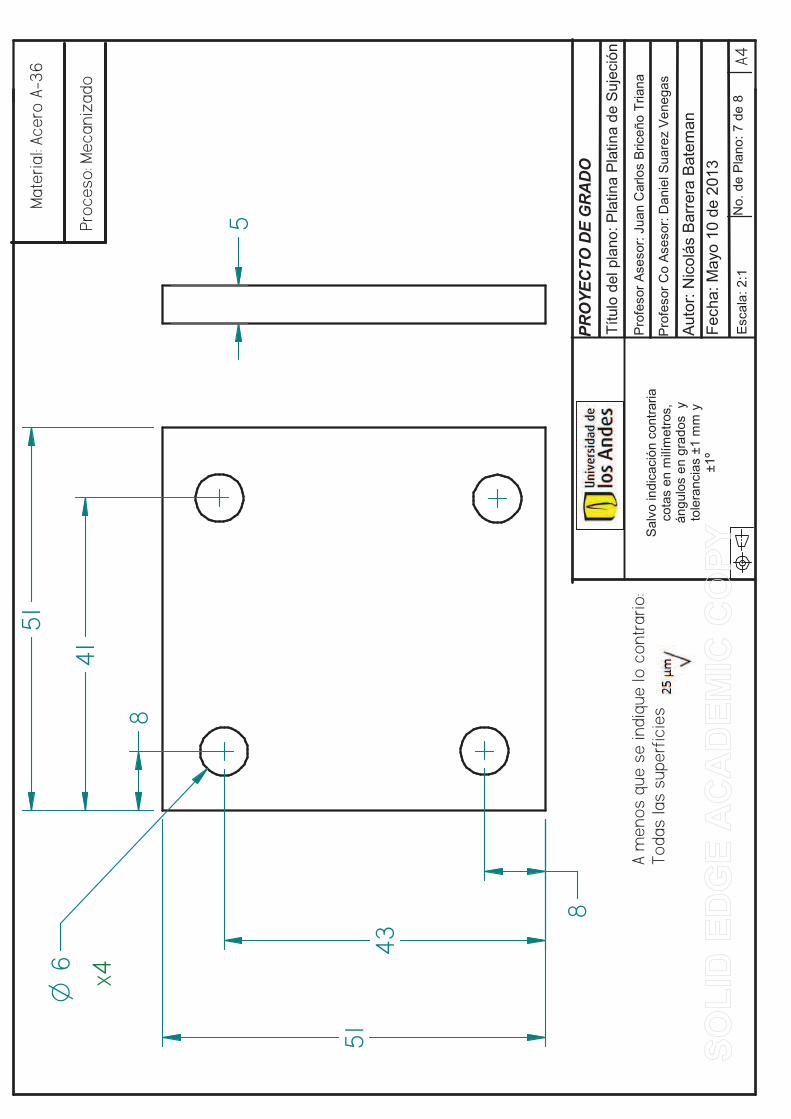
Título
del pla
no
: P
latina
Pla
tin
a d
e S
uje
ció
n
PR
OY
EC
TO
DE
GR
AD
O
Pro
fesor
Ase
sor:
Ju
an
Carlo
s B
rice
ño
Tria
na
Pro
fesor
Co
Ase
sor:
Da
nie
l S
ua
rez V
en
eg
as
Auto
r: N
icolá
s B
arr
era
Bate
man
��E
sca
la:
2:1
No
. d
e P
lan
o:
7 d
e 8
Fecha:
Mayo 1
0 d
e 2
01
3
Salv
o in
dic
ació
n c
ontr
aria
cota
s e
n m
ilím
etr
os,
án
gulo
s e
n g
rad
os
yto
lera
ncia
s±1 m
m y
±1
º
������������������� �����
�������
������ �������������
������� ������������
�������������������
��
��
�
��
��
�
��
��
�

Título
del pla
no
:Base
PR
OY
EC
TO
DE
GR
AD
O
Pro
fesor
Ase
sor:
Ju
an
Carlo
s B
rice
ño
Tria
na
Pro
fesor
Co
Ase
sor:
Da
nie
l S
ua
rez V
en
eg
as
Auto
r: N
icolá
s B
arr
era
Bate
man
��E
sca
la:
1:1
0N
o.
de
Pla
no
: 8
de
8
Fecha:
Mayo 1
0 d
e 2
01
3
Salv
o in
dic
ació
n c
ontr
aria
cota
s e
n m
ilím
etr
os,
án
gulo
s e
n g
rad
os
yto
lera
ncia
s±1 m
m y
±1
º
������������������� ������������
������ �������������
������� ��������
�������������������
��
���
���
���
���
��
���
�
!"��#$
���
��
%�


















