ENERGÍA Vibraciones mecánicas Vibraciones electromagnéticas SONIDOLUZ.
Upload
alonso-ramirezCategory
view
212download
0
5/13/2018 ELEMENTOS DE VIBRACIONES - slidepdf.com
http://slidepdf.com/reader/full/elementos-de-vibraciones 1/9
INTRODUCCIÓNEn general son tres los elementos que forman un sistema vibratorio: i) elementos de inercia, ii)
elementos de rigidez, y iii) elementos de disipación. Además se debe considerar las fuerzas y
momentos aplicados externamente y las alteraciones externas provenientes de desplazamientosiniciales prescritos, velocidades iniciales, o ambos.
El elemento de inercia almacena y libera energía cinética, el elemento de rigidez almacena y libera
energía potencial, y el elemento de disipación o de amortiguamiento se utiliza para expresar la
pérdida de energía en un sistema. Cada uno reacciona diferente a una excitación (la forma de una
fuerza o de un momento) y respuesta (que está en la forma de un desplazamiento, velocidad o
aceleración).
Los elementos se caracterizan de la siguiente forma:
Elementos de inercia. Se caracterizan por una relación entre una fuerza aplicada (omomento y la correspondiente respuesta de aceleración.
Elementos de rigidez. Se caracterizan por una relación entre una fuerza aplicada (o
momento) y el desplazamiento correspondiente (o rotación).
Elementos de disipación. Su característica es la relación entre una fuerza aplicada (o
momento) la respuesta correspondiente de velocidad.
1 ELEMENTOS DE INERCIALa propiedad de inercia de una masa que está sujeta a movimientos de rotación es una función de
la distribución de la masa, en especial del momento de inercia de la masa, el cual se define conrespecto a su centroide o un punto fijo O. Cuando la masa oscila con respecto a un punto fijo O o
un punto pivote O, la inercia rotatoria JO es:
Donde m es la masa del elemento, JG es el momento de inercia de la masa con respecto al
centroide y d es la distancia desde el centro de gravedad hasta el punto 0. Los momentos de
inercia JG y JO son definidos en la ecuación (1) con respecto a los ejes normales al plano de la masa.
Esta relación entre el momento de inercia de la masa con respecto a un eje que pasa por el
centroide G y un eje paralelo a través de otro punto O, se deduce del teorema de los ejes
paralelos. En la TABLA 1.1 se proporcionan los momentos de inercia de la masa de algunos
cuerpos comunes.

5/13/2018 ELEMENTOS DE VIBRACIONES - slidepdf.com
http://slidepdf.com/reader/full/elementos-de-vibraciones 2/9
TABLA 1.1 Momentos de inercia de la masa con respecto al eje z normal al plano xy que pasa por el
centroide.
En el caso del movimiento de traslación, la propiedad de inercia m es la relación de la fuerza y la
aceleración, esto se representa como:
La energía cinética de la masa m se expresa como:
Según (3) la energía cinética del movimiento de traslación es linealmente proporcional a la masa .
Asimismo, la energía cinética es proporcional al cuadrado de la magnitud de la velocidad.
En el caso de un cuerpo rígido que sólo está sometido a rotación en el plano con una velocidad
angular , se puede mostrar a partir de la cantidad de movimiento angular que
Donde M es el momento que actúa con respecto al centroide G o un punto fijo O, como se
muestra en la FIG 1.1, en la dirección normal al plano de movimiento y J es el momento de inercia
de la masa. De (4) se deduce que en caso del movimiento de rotación, la propiedad de inercia J es
la relación del momento y la aceleración angular. Además la energía cinética del sistema es:
Por lo tanto, la energía cinética del movimiento en rotación sólo es linealmente proporcional a la
propiedad de inercia J, el momento de inercia de la masa. Por otro lado, la energía cinética es
proporcional al cuadrado de la magnitud de la velocidad angular.

5/13/2018 ELEMENTOS DE VIBRACIONES - slidepdf.com
http://slidepdf.com/reader/full/elementos-de-vibraciones 3/9
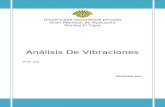
FIG 1.1 a) Disco uniforme articulado en un punto sobre su perímetro, y b) barra de masa uniforme
articulado en un extremo.
2 ELEMENTOS DE RIGIDEZLos elementos de rigidez almacenan y liberan la energía potencial de un sistema. Observe la FIG
1.2. La fuerza F S trata de restablecer el elemento de rigidez a su configuración no deformada, se le
llama fuerza restauradora. A medida que el elemento de rigidez se deforma, la energía se
almacena en él, y conforme el elemento de rigidez regresa a su configuración inicial se libera la
energía. La energía potencial V se define como el trabajo efectuado para llevar al elemento de
rigidez desde la posición deformada hasta la posición sin deformación; es decir, el trabajo
necesario para llevar al elemento hasta su forma original .
FIG 1.2 a) Elemento de rigidez con una fuerza que actúa en él, y b) su diagrama de cuerpo libre.
Lo anterior se expresa como:

5/13/2018 ELEMENTOS DE VIBRACIONES - slidepdf.com
http://slidepdf.com/reader/full/elementos-de-vibraciones 4/9
∫ ∫ ∫
La relación entre la deformación que experimenta un resorte y una fuerza aplicada externamente
puede ser lineal o no lineal.
2.1 Resortes linealesResortes de traslación
Si se aplica una fuerza F a un resorte lineal (FIG 1.3a), esta fuerza produce una deflexión x tal que:
Donde el coeficiente k se denomina constante de resorte y existe una relación lineal entre la
fuerza y el desplazamiento. Con base a esto, la energía potencial V almacenada en el resorte se
expresa como:
∫ ∫ ∫
De aquí que, para un resorte lineal, la energía potencial asociada guarda una proporción lineal con
la rigidez del resorte k y proporcional a la segunda potencia de la magnitud del desplazamiento.
FIG 1.3 Varias configuraciones de resortes: a) resorte simple, b) dos resortes en paralelo yc) dos
resortes en serie

5/13/2018 ELEMENTOS DE VIBRACIONES - slidepdf.com
http://slidepdf.com/reader/full/elementos-de-vibraciones 5/9
Resorte de torsión
Si se considera un resorte lineal de torsión y se aplica un momento al resorte en uno de sus
extremos, mientras el otro extremo del resorte se mantiene fijo, entonces>
Donde k l es la constante del resorte y es la deformación del mismo. La energía potencial
almacenada en este resorte es:
∫ ∫
Combinaciones de resortes lineales
Cuando hay dos resortes en paralelo (FIG 1.3b), y la barra sobre la cual actúa la fuerza F
permanece paralela a su posición original, entonces los desplazamientos de ambos resortes soniguales, y por tanto, la fuerza total es:
Donde F J(x) es la resultante en el resorte k j , j=1,2, y k e es la constante equivalente del resorte para
los dos resortes en paralelo dada por:
Cuando hay dos resortes en serie (FIG 1.3c), la fuerza sobre cada resorte es la misma y el
desplazamiento total es:
( )
Donde la constante equivalente del resorte k e es:
( )
En general, para N resortes en paralelo se tiene:
∑
Y para N resortes en serie:
[∑
]

5/13/2018 ELEMENTOS DE VIBRACIONES - slidepdf.com
http://slidepdf.com/reader/full/elementos-de-vibraciones 6/9
Para dos resortes de torsión en combinaciones en serie y en paralelo, la rotación de cada resorte
es la misma y, por consiguiente:
Donde
es el momento resultante en el resorte
, j=1,2, y
es la rigidez equivalente de
torsión dada por:
Para los resortes de tensión en serie, el par de torsión en cada resorte es el mismo, pero las
rotaciones son desiguales. Entonces:
( )
Donde la rigidez equivalente
es:
( )
Constantes equivalentes de resorte para elementos estructurales más comunes en los modelos
vibratorios.

5/13/2018 ELEMENTOS DE VIBRACIONES - slidepdf.com
http://slidepdf.com/reader/full/elementos-de-vibraciones 7/9
3 ELEMENTOS DE DISIPACIÓNSe supones que los elementos de amortiguamiento no tienen inercia, ni medios de almacenar o
liberar energía potencial El movimiento mecánico impartido a estos elementos se convierte en
calor o sonido y, por tanto se les denomina no conservativos o disipativos porque el sistema
mecánico no puede recuperar esta energía.
Hay cuatro tipos comunes de mecanismos de amortiguamiento que se usan para modelar los
sistemas vibratorios: i) amortiguamiento viscoso, ii) amortiguamiento de Coulomb o de fricción
seca, iii) amortiguamiento material o sólido o histerético, y iv) amortiguamiento por fluido. En
todos los casos, la fuerza amortiguadora se expresa como una función de la velocidad.

5/13/2018 ELEMENTOS DE VIBRACIONES - slidepdf.com
http://slidepdf.com/reader/full/elementos-de-vibraciones 8/9
3.1 Amortiguamiento viscosoCuando un líquido viscoso fluye a través de una ranura o alrededor de un émbolo en un cilindro, la
fuerza de amortiguamiento que se genera es proporcional a la velocidad relativa entre los dos
límites que confinan al líquido. La magnitud de la fuerza del amortiguador F siempre actúa en la
dirección opuesta a la de la velocidad. La magnitud de la fuerza del amortiguador
es una
función no lineal de la velocidad o puede ser aproximadamente una función no lineal de la
velocidad o puede ser aproximadamente una función lineal de la velocidad, lo cual depende de la
construcción del amortiguador y del rango de la velocidad. En el caso lineal, a relación se expresa
como:
Donde la constante de proporcionalidad denotada por c se denomina coeficiente de
amortiguamiento. Las unidades de este coeficiente N/(m/s). El amortiguamiento viscoso de la
forma dada por la ecuación (19) también recibe el nombre de amortiguamiento hidráulico lento.
En el caso de un amortiguador viscoso no lineal descrito por una función , el
amortiguamiento viscoso lineal equivalente alrededor de una velocidad de operación se
determina como se indica a continuación:

5/13/2018 ELEMENTOS DE VIBRACIONES - slidepdf.com
http://slidepdf.com/reader/full/elementos-de-vibraciones 9/9
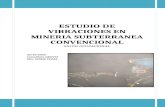
ROBODACTA
Acelerómetro 3 ejes analógico
Marca: Freescale semiconductor
Modelo: MMA7361L
Especificacione
- Dimensiones: 0.5”x0.9”x0.09”(1.2x2.3x0.23 cm)
- Voltaje de operación: 2.2-16 v
- Suministro de corriente: 0.5 mA
- Formato de salida: 3 voltajes analógicos (una señal por cada eje) centrado en la mitad del
voltaje.
- Rango de sensibilidad +/- 1.5g(default)
- Peso sin terminales de cabecera: 0.025 oz (0.7g)
- Respuesta: Eje XY 400 Hz, eje Z 300 Hz
Costo:
MXN $270.00
Envía estándar:
$100.00. Tiempo de entrega 3 o 4 días