máquinas máquinas de elevación y de elevación y transporte ...
ELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINASELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINAS
J
.M.J
imén
ez B
asco
nes
J.M
.Jim
énez
Bas
cone
s
TEMA 4TEMA 4Teoría de Contacto MecanismosTeoría de Contacto Mecanismos
de Fricción y Adherenciade Fricción y AdherenciaObjetivos: Introducir los conceptos básicos que gobiernan el contacto entre dos superficies; describir los
mecanismos que rigen el comportamiento de la fricción seca y la adherencia entre superficies; descripción deelementos de máquinas que hacen uso de los mecanismos de fricción: frenos de tambor, frenos de disco,
embragues de disco, embragues cónicos, cintas, tornillos de transmisión de potencia, etc.
Problemas: cálculo y diseño de elementos de máquinas que hagan uso de mecanismos de fricción: frenos detambor, frenos de disco, embragues de disco, embragues cónicos, cintas, tornillos de transmisión de potencia, etc.
ObjetivosObjetivos: Introducir los conceptos básicos que gobiernan el contacto entre dos superficies; describir losmecanismos que rigen el comportamiento de la fricción seca y la adherencia entre superficies; descripción de
elementos de máquinas que hacen uso de los mecanismos de fricción: frenos de tambor, frenos de disco,embragues de disco, embragues cónicos, cintas, tornillos de transmisión de potencia, etc.
ProblemasProblemas: cálculo y diseño de elementos de máquinas que hagan uso de mecanismos de fricción: frenos detambor, frenos de disco, embragues de disco, embragues cónicos, cintas, tornillos de transmisión de potencia, etc.
ELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINASELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINAS - 4.- 4.22 - -
J
.M. J
imén
ez B
asco
nes
J.M
. Jim
énez
Bas
cone
s
Tema 4TEORÍA DE CONTACTO
Tema 4Tema 4TEORÍA DE CONTACTOTEORÍA DE CONTACTO
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
IndiceIndice
q Teoría de contactoðContacto normalðContacto tangencialðRozamiento y desgaste
q Elementos de máquinasðTornillos de transmisión de potenciaðFrenos de zapataðFrenos y embragues cónicosðFrenos y embragues de discoðFrenos de cinta
ELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINASELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINAS - 4.- 4.33 - -
J
.M. J
imén
ez B
asco
nes
J.M
. Jim
énez
Bas
cone
s
Tema 4TEORÍA DE CONTACTO
Tema 4Tema 4TEORÍA DE CONTACTOTEORÍA DE CONTACTO
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Teoría de Contacto (I)Teoría de Contacto (I)
q La teoría de contacto estudia fenómenos macroscópicosresultantes de la interacción entre superficies de sólidos encontacto:ðRozamientoðDesgasteðAdhesión
q Son fenómenos importantes porque producen:ðFallos de maquinaríaðPérdidas energéticasðCostes de mantenimiento
ELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINASELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINAS - 4.- 4.44 - -
J
.M. J
imén
ez B
asco
nes
J.M
. Jim
énez
Bas
cone
s
Tema 4TEORÍA DE CONTACTO
Tema 4Tema 4TEORÍA DE CONTACTOTEORÍA DE CONTACTO
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
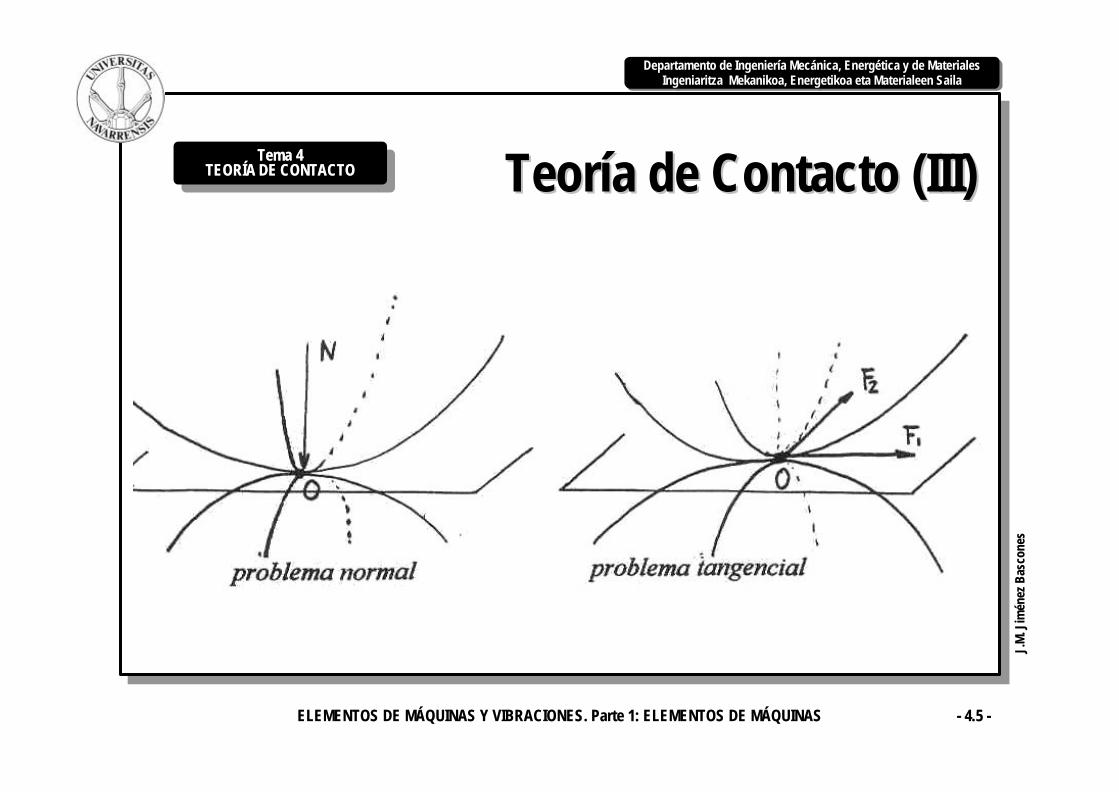
Teoría de Contacto (II)Teoría de Contacto (II)q La teoría de contacto trata dos problemas:ðEstudio geométrico (cinemático) del contactoðEstudio de las fuerzas presentes en el contacto:ù Fuerzas normales: problema normal
– Las deformaciones en los materiales se deben a las fuerzas normales– Estudiado por Hertz
ù Fuerzas tangenciales: problema tangencial– Las deformaciones en el contacto se deben a fuerzas tangenciales– Se debe tener en consideración el rozamiento; se trata de un problema no lineal– Teorías para casos particulares desarrolladas por: Carter, Johnson y Haines y
Ollertonù Ambos problemas se abordan de forma independienteù Teoría general del contacto desarrollada por Kalker
ELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINASELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINAS - 4.- 4.55 - -
J
.M. J
imén
ez B
asco
nes
J.M
. Jim
énez
Bas
cone
s
Tema 4TEORÍA DE CONTACTO
Tema 4Tema 4TEORÍA DE CONTACTOTEORÍA DE CONTACTO
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Teoría de Contacto (III)Teoría de Contacto (III)
ELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINASELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINAS - 4.- 4.66 - -
J
.M. J
imén
ez B
asco
nes
J.M
. Jim
énez
Bas
cone
s
Tema 4TEORÍA DE CONTACTO
Tema 4Tema 4TEORÍA DE CONTACTOTEORÍA DE CONTACTO
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
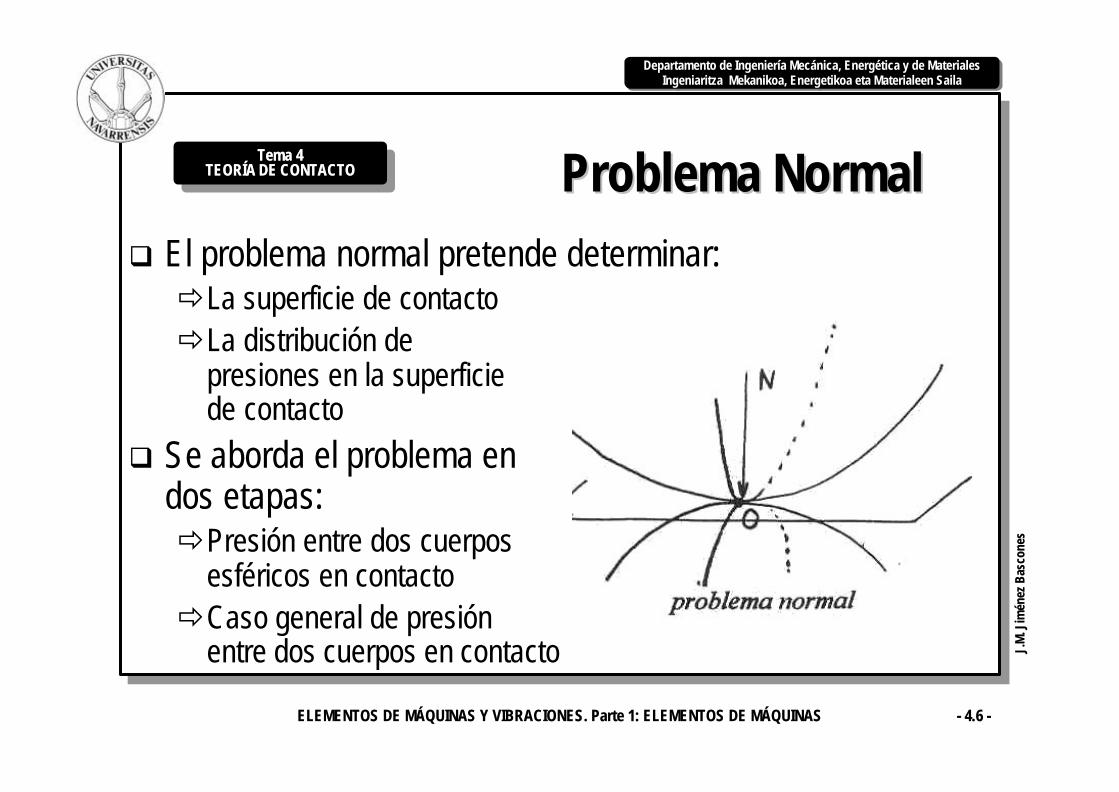
Problema NormalProblema Normalq El problema normal pretende determinar:ðLa superficie de contactoðLa distribución de
presiones en la superficiede contacto
q Se aborda el problema endos etapas:ðPresión entre dos cuerpos
esféricos en contactoðCaso general de presión
entre dos cuerpos en contacto
ELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINASELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINAS - 4.- 4.77 - -
J
.M. J
imén
ez B
asco
nes
J.M
. Jim
énez
Bas
cone
s
Tema 4TEORÍA DE CONTACTO
Tema 4Tema 4TEORÍA DE CONTACTOTEORÍA DE CONTACTO
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
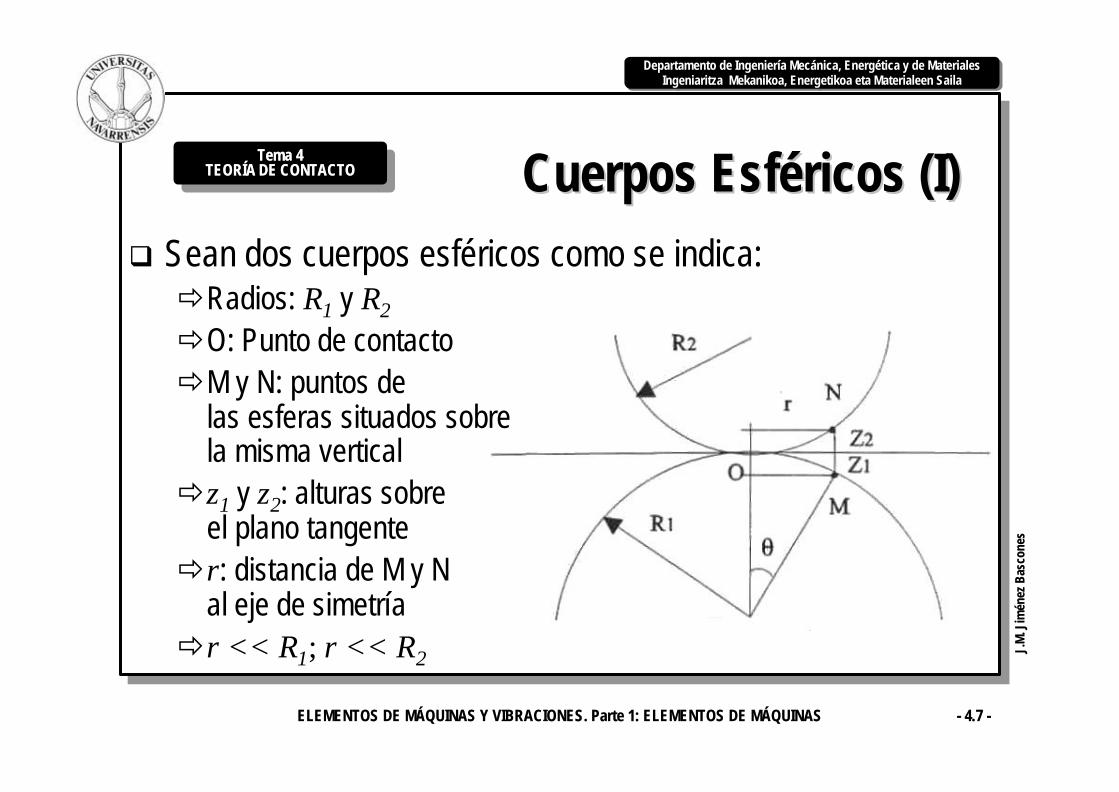
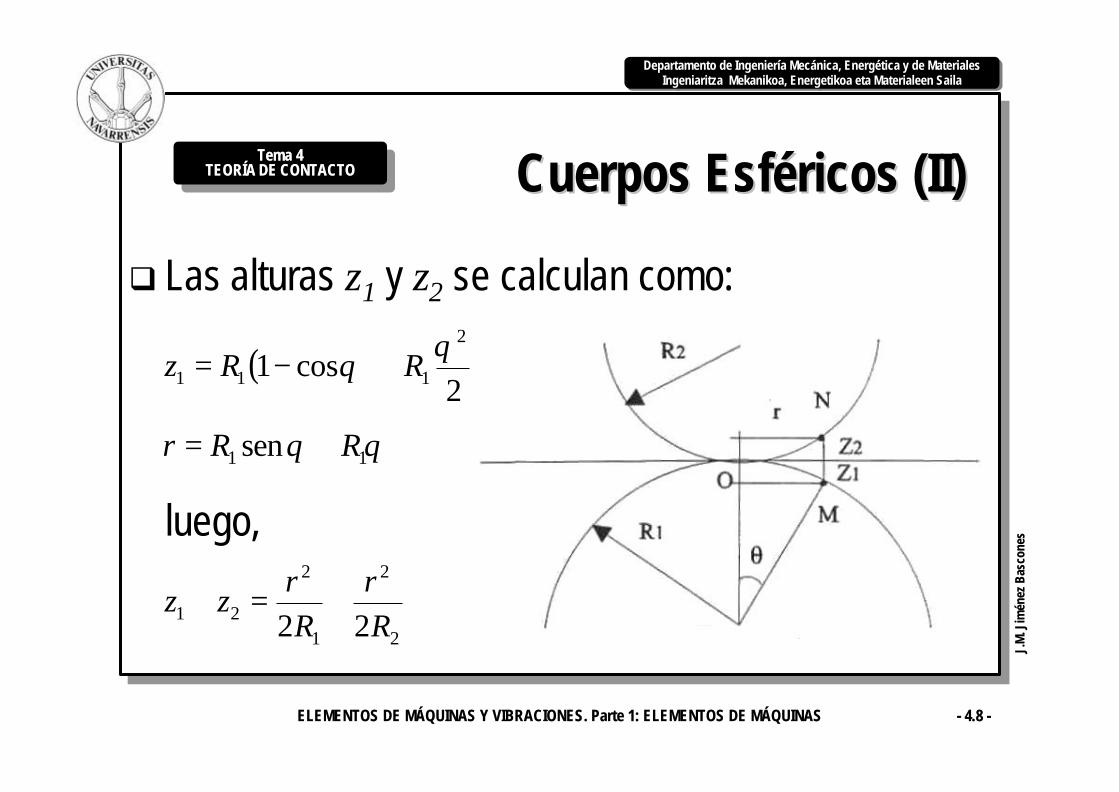
Cuerpos Esféricos (I)Cuerpos Esféricos (I)q Sean dos cuerpos esféricos como se indica:ðRadios: R1 y R2
ðO: Punto de contactoðM y N: puntos de
las esferas situados sobrela misma verticalðz1 y z2: alturas sobre
el plano tangenteðr: distancia de M y N
al eje de simetríaðr << R1; r << R2
ELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINASELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINAS - 4.- 4.88 - -
J
.M. J
imén
ez B
asco
nes
J.M
. Jim
énez
Bas
cone
s
Tema 4TEORÍA DE CONTACTO
Tema 4Tema 4TEORÍA DE CONTACTOTEORÍA DE CONTACTO
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Cuerpos Esféricos (II)Cuerpos Esféricos (II)
q Las alturas z1 y z2 se calculan como:
luego,
( )2
cos12
111θ
θ RRz ≅−=
θθ 11 sen RRr ≅=
2
2
1
2
21 22 Rr
Rr
zz +=+
ELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINASELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINAS - 4.- 4.99 - -
J
.M. J
imén
ez B
asco
nes
J.M
. Jim
énez
Bas
cone
s
Tema 4TEORÍA DE CONTACTO
Tema 4Tema 4TEORÍA DE CONTACTOTEORÍA DE CONTACTO
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Cuerpos Esféricos (III)Cuerpos Esféricos (III)
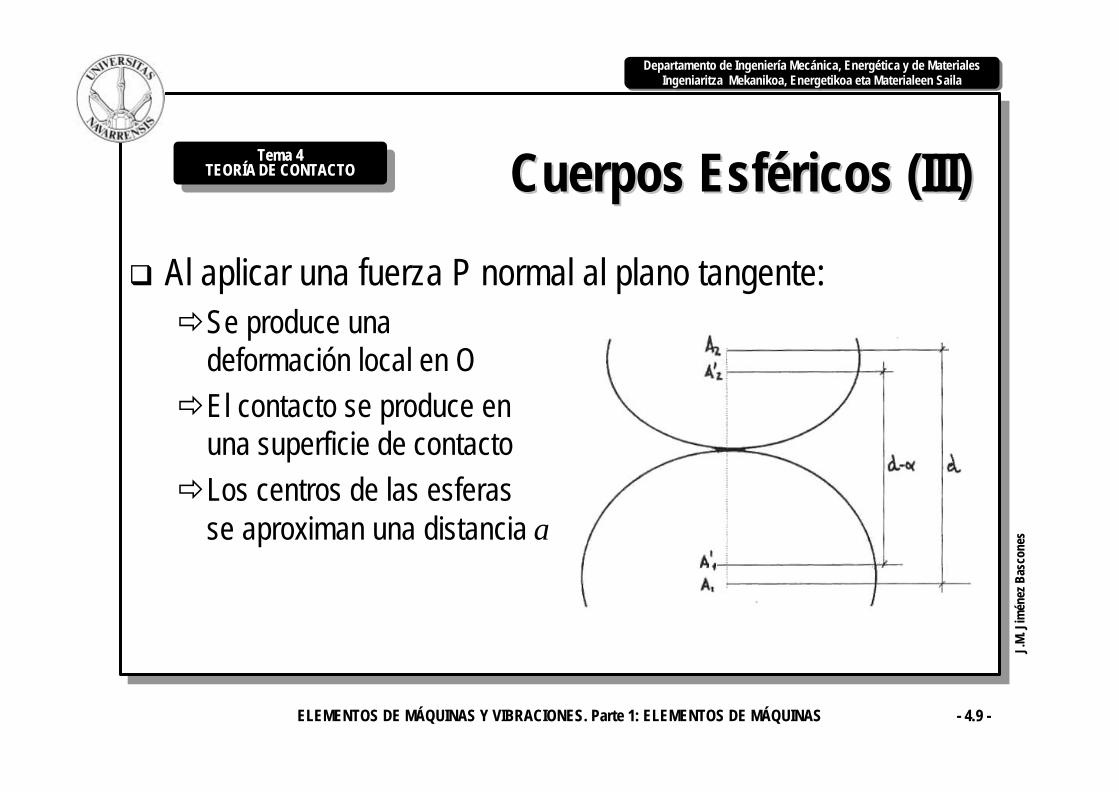
q Al aplicar una fuerza P normal al plano tangente:ðSe produce una
deformación local en OðEl contacto se produce en
una superficie de contactoðLos centros de las esferas
se aproximan una distancia α
ELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINASELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINAS - 4.- 4.1010 - -
J
.M. J
imén
ez B
asco
nes
J.M
. Jim
énez
Bas
cone
s
Tema 4TEORÍA DE CONTACTO
Tema 4Tema 4TEORÍA DE CONTACTOTEORÍA DE CONTACTO
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Cuerpos Esféricos (IV)Cuerpos Esféricos (IV)
q Los puntos M y N se aproximanðSi los puntos M y N están en la superficie de contacto,
sufren deformaciones locales ω1 y ω2.ðSe verifica la relación:
luego, se cumple la relación2121 )( zz +=+− ωωα
22
21
212121 2)( rr
RRRR
zz βαααωω −=+
−=+−=+
ELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINASELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINAS - 4.- 4.1111 - -
J
.M. J
imén
ez B
asco
nes
J.M
. Jim
énez
Bas
cone
s
Tema 4TEORÍA DE CONTACTO
Tema 4Tema 4TEORÍA DE CONTACTOTEORÍA DE CONTACTO
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Cuerpos Esféricos (V)Cuerpos Esféricos (V)
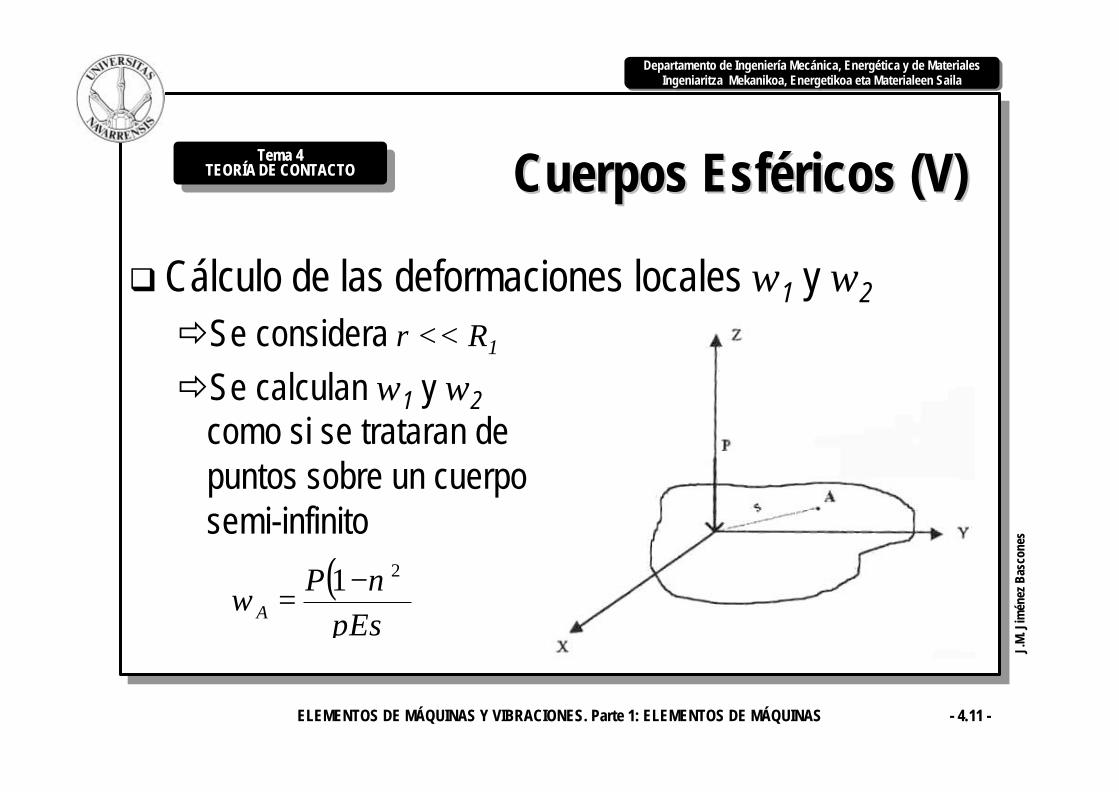
qCálculo de las deformaciones locales ω1 y ω2
ðSe considera r << R1
ðSe calculan ω1 y ω2como si se trataran depuntos sobre un cuerposemi-infinito
( )Es
PA π
νω
21−=
ELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINASELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINAS - 4.- 4.1212 - -
J
.M. J
imén
ez B
asco
nes
J.M
. Jim
énez
Bas
cone
s
Tema 4TEORÍA DE CONTACTO
Tema 4Tema 4TEORÍA DE CONTACTOTEORÍA DE CONTACTO
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Cuerpos Esféricos (VI)Cuerpos Esféricos (VI)
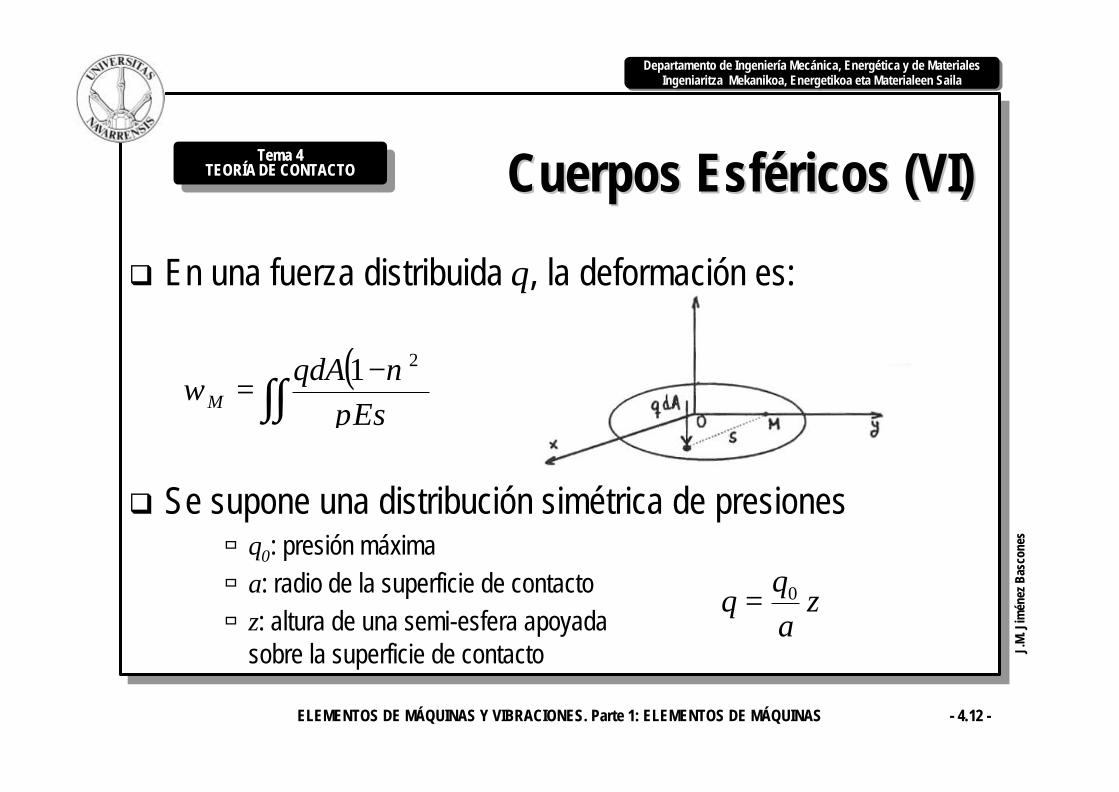
q En una fuerza distribuida q, la deformación es:
q Se supone una distribución simétrica de presionesù q0: presión máximaù a: radio de la superficie de contactoù z: altura de una semi-esfera apoyada
sobre la superficie de contacto
( )∫∫
−=
EsqdA
M πν
ω21
zaq
q 0=
ELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINASELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINAS - 4.- 4.1313 - -
J
.M. J
imén
ez B
asco
nes
J.M
. Jim
énez
Bas
cone
s
Tema 4TEORÍA DE CONTACTO
Tema 4Tema 4TEORÍA DE CONTACTOTEORÍA DE CONTACTO
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
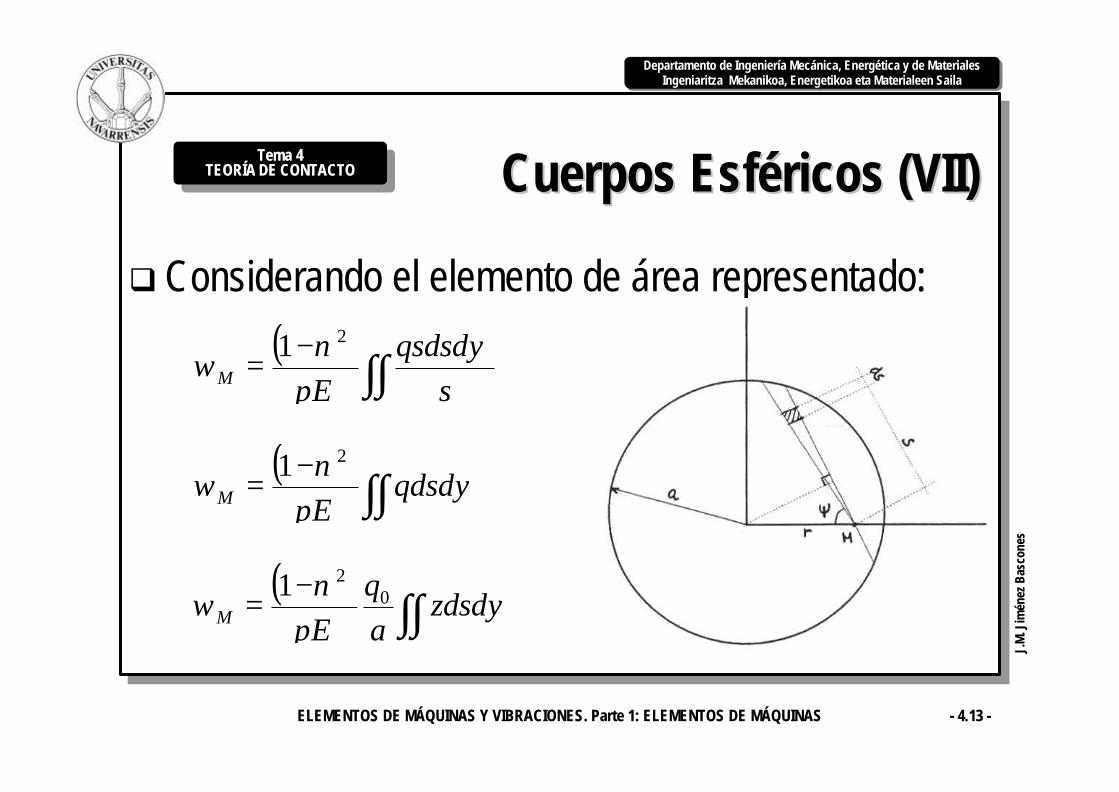
Cuerpos Esféricos (VII)Cuerpos Esféricos (VII)
qConsiderando el elemento de área representado:( )
∫∫−
=s
qsdsdEM
ψπ
νω
21
( )∫∫
−= ψ
πν
ω qdsdEM
21
( )∫∫
−= ψ
πν
ω zdsdaq
EM0
21
ELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINASELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINAS - 4.- 4.1414 - -
J
.M. J
imén
ez B
asco
nes
J.M
. Jim
énez
Bas
cone
s
Tema 4TEORÍA DE CONTACTO
Tema 4Tema 4TEORÍA DE CONTACTOTEORÍA DE CONTACTO
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
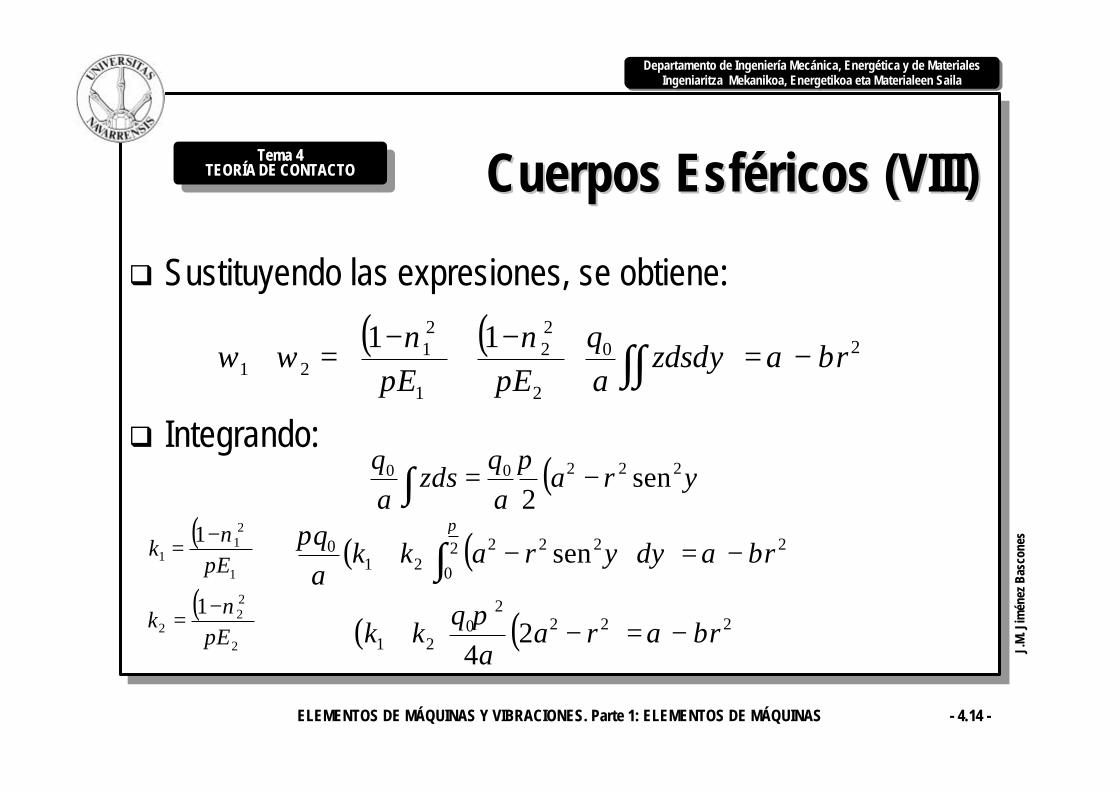
Cuerpos Esféricos (VIII)Cuerpos Esféricos (VIII)
q Sustituyendo las expresiones, se obtiene:
q Integrando:
( ) ( ) 20
2
22
1
21
2111
rzdsdaq
EEβαψ
πν
πν
ωω −=
−+
−=+ ∫∫
( )ψπ 22200 sen2
raaq
zdsaq
−=∫
( ) ( ) 220
22221
0 sen rdrakkaq
βαψψπ π
−=−+ ∫
( ) ( ) 2222
021 2
4rra
aq
kk βαπ
−=−+
( )1
21
11
Ek
πν−
=
( )2
22
21
Ek
πν−
=
ELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINASELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINAS - 4.- 4.1515 - -
J
.M. J
imén
ez B
asco
nes
J.M
. Jim
énez
Bas
cone
s
Tema 4TEORÍA DE CONTACTO
Tema 4Tema 4TEORÍA DE CONTACTOTEORÍA DE CONTACTO
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
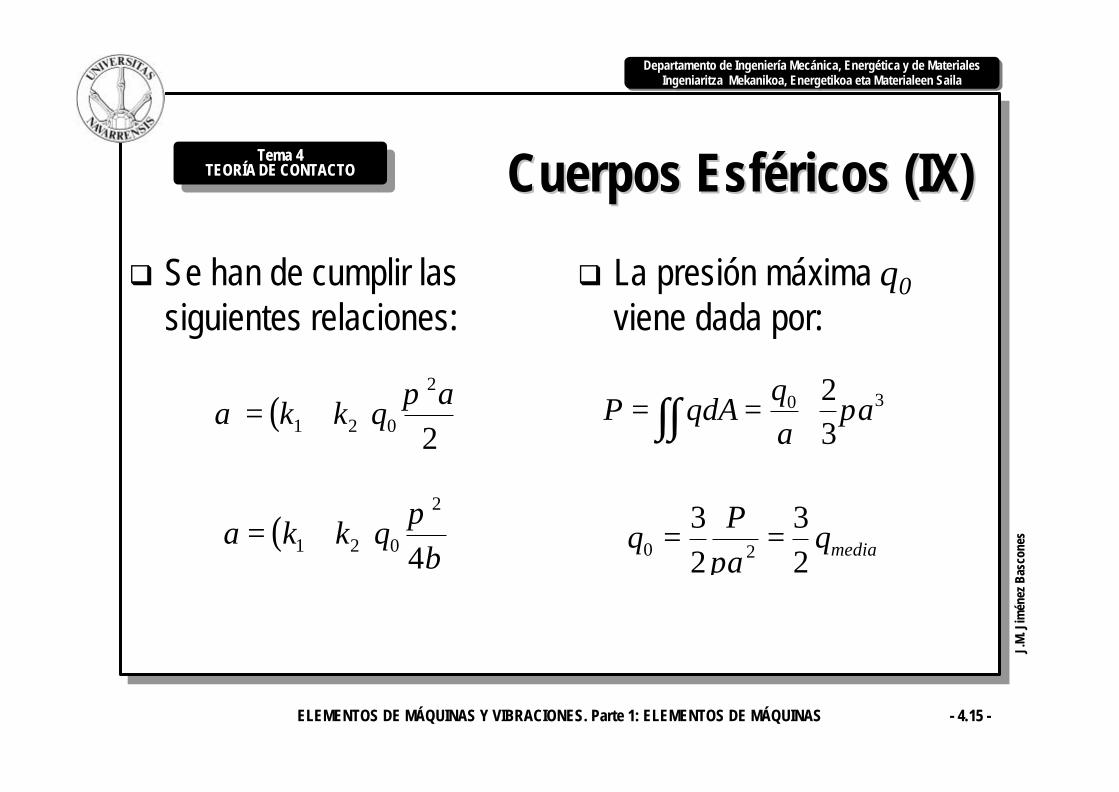
Cuerpos Esféricos (IX)Cuerpos Esféricos (IX)
q Se han de cumplir lassiguientes relaciones:
q La presión máxima q0viene dada por:
( )2
2
021a
qkkπ
α +=
( )β
π4
2
021 qkka +=
== ∫∫ 30
32
aaq
qdAP π
mediaqaP
q23
23
20 ==π
ELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINASELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINAS - 4.- 4.1616 - -
J
.M. J
imén
ez B
asco
nes
J.M
. Jim
énez
Bas
cone
s
Tema 4TEORÍA DE CONTACTO
Tema 4Tema 4TEORÍA DE CONTACTOTEORÍA DE CONTACTO
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Cuerpos Esféricos (X)Cuerpos Esféricos (X)
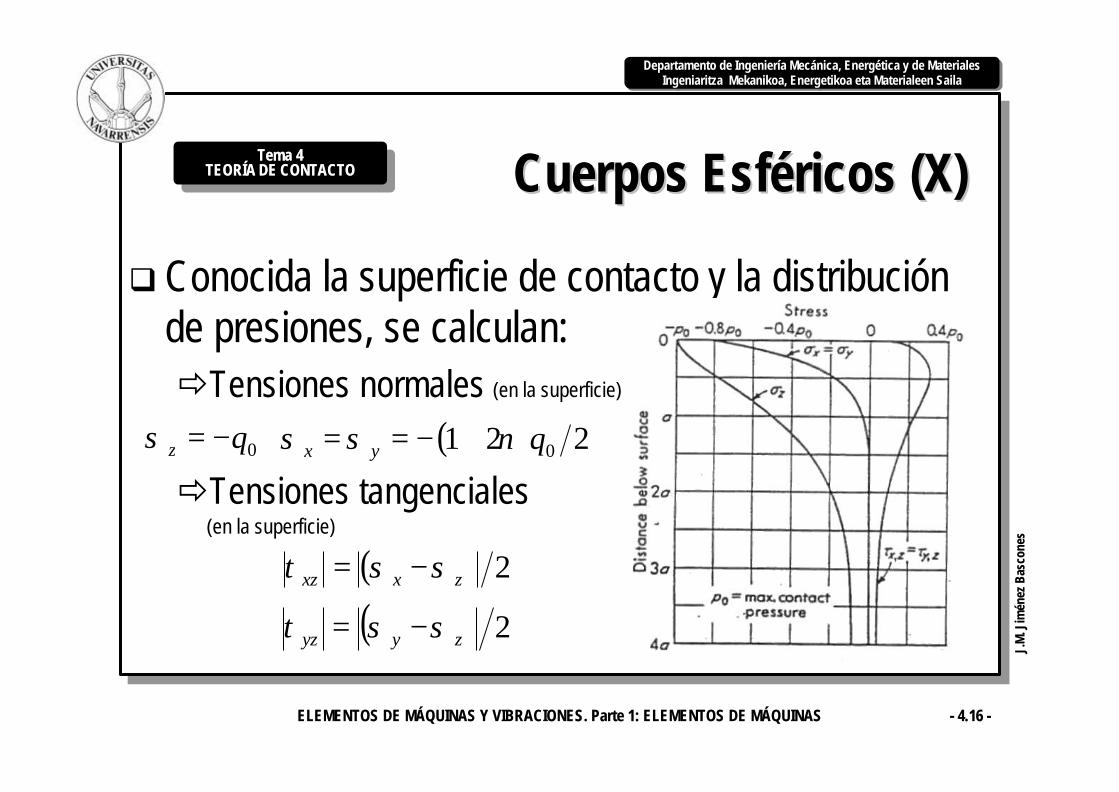
qConocida la superficie de contacto y la distribuciónde presiones, se calculan:ðTensiones normales (en la superficie)
ðTensiones tangenciales(en la superficie)
0qz −=σ ( ) 221 0qyx νσσ +−==
( ) 2zyyz σστ −=
( ) 2zxxz σστ −=
ELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINASELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINAS - 4.- 4.1717 - -
J
.M. J
imén
ez B
asco
nes
J.M
. Jim
énez
Bas
cone
s
Tema 4TEORÍA DE CONTACTO
Tema 4Tema 4TEORÍA DE CONTACTOTEORÍA DE CONTACTO
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Caso General (I)Caso General (I)
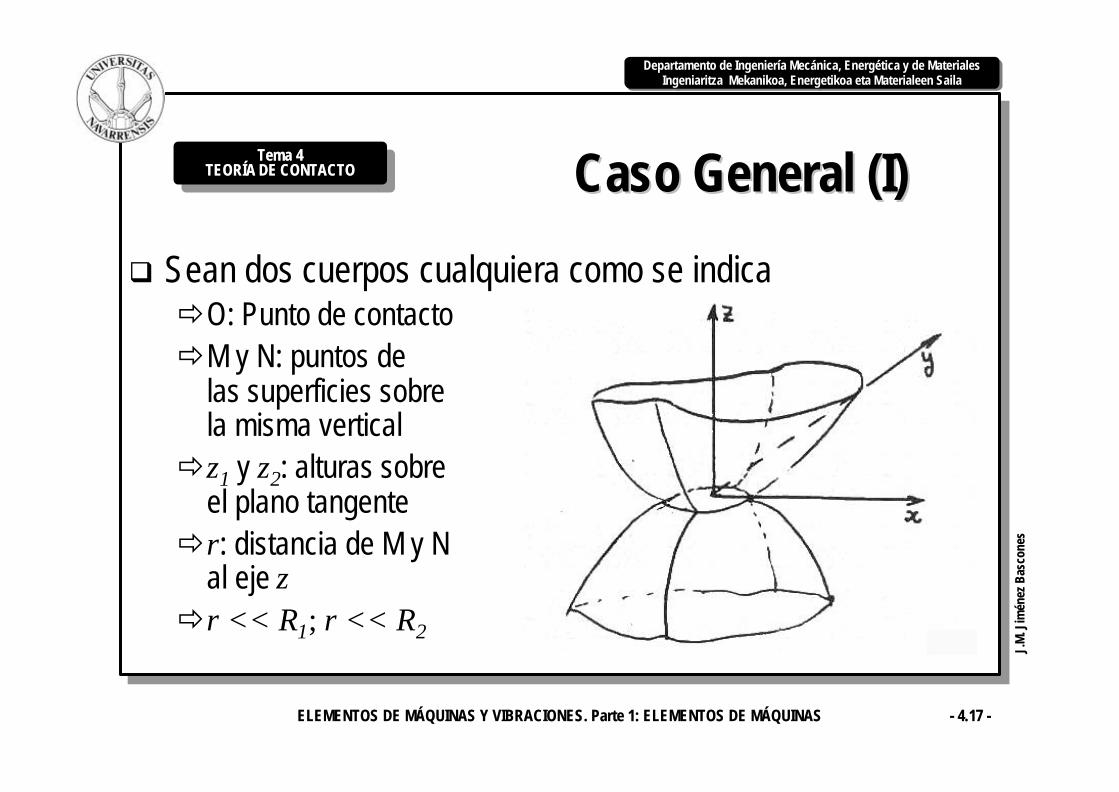
q Sean dos cuerpos cualquiera como se indicaðO: Punto de contactoðM y N: puntos de
las superficies sobrela misma verticalðz1 y z2: alturas sobre
el plano tangenteðr: distancia de M y N
al eje zðr << R1; r << R2
ELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINASELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINAS - 4.- 4.1818 - -
J
.M. J
imén
ez B
asco
nes
J.M
. Jim
énez
Bas
cone
s
Tema 4TEORÍA DE CONTACTO
Tema 4Tema 4TEORÍA DE CONTACTOTEORÍA DE CONTACTO
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Caso General (II)Caso General (II)
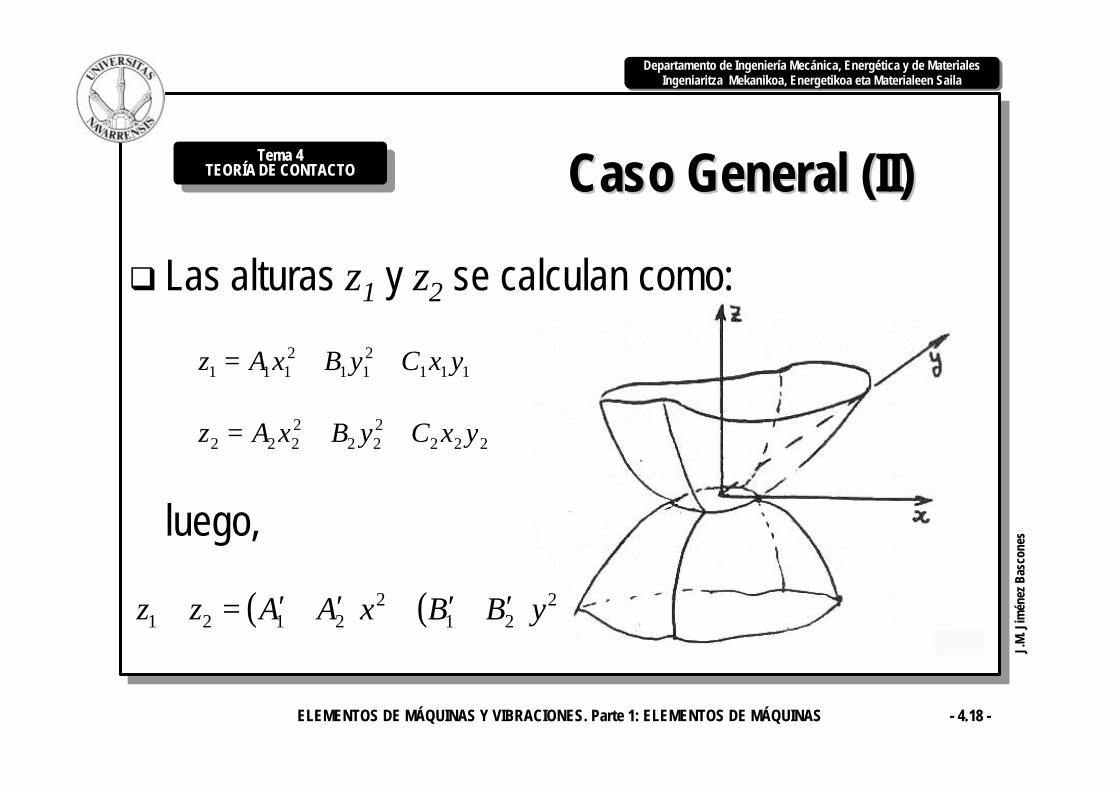
q Las alturas z1 y z2 se calculan como:
luego,
111211
2111 yxCyBxAz ++=
( ) ( ) 221
22121 yBBxAAzz ′+′+′+′=+
222222
2222 yxCyBxAz ++=
ELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINASELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINAS - 4.- 4.1919 - -
J
.M. J
imén
ez B
asco
nes
J.M
. Jim
énez
Bas
cone
s
Tema 4TEORÍA DE CONTACTO
Tema 4Tema 4TEORÍA DE CONTACTOTEORÍA DE CONTACTO
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Caso General (III)Caso General (III)
q Los puntos M y N se aproximanðSi los puntos M y N están en la superficie de contacto,
sufren deformaciones locales ω1 y ω2.ðSe verifica la relación:
luego, se cumple la relación2121 )( zz +=+− ωωα
222121 )( ByAxzz −−=+−=+ ααωω
ELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINASELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINAS - 4.- 4.2020 - -
J
.M. J
imén
ez B
asco
nes
J.M
. Jim
énez
Bas
cone
s
Tema 4TEORÍA DE CONTACTO
Tema 4Tema 4TEORÍA DE CONTACTOTEORÍA DE CONTACTO
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
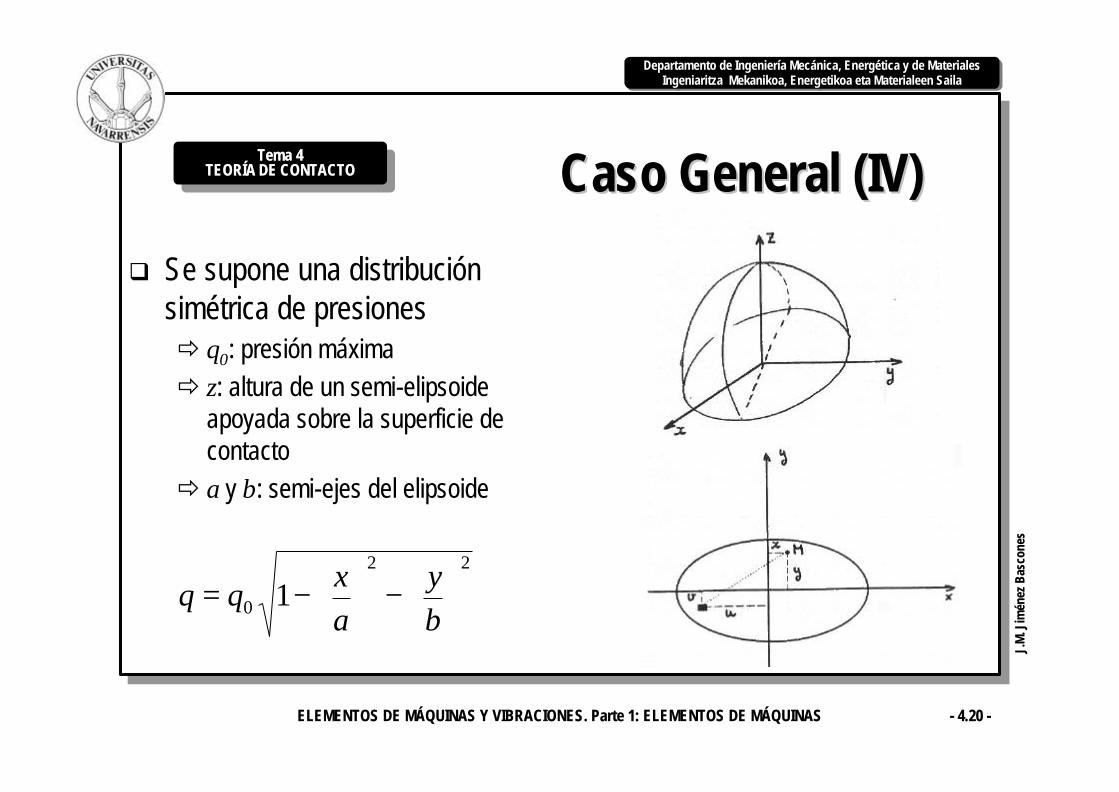
Caso General (IV)Caso General (IV)
q Se supone una distribuciónsimétrica de presionesð q0: presión máximað z: altura de un semi-elipsoide
apoyada sobre la superficie decontacto
ð a y b: semi-ejes del elipsoide
22
0 1
−
−=
by
axqq
ELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINASELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINAS - 4.- 4.2121 - -
J
.M. J
imén
ez B
asco
nes
J.M
. Jim
énez
Bas
cone
s
Tema 4TEORÍA DE CONTACTO
Tema 4Tema 4TEORÍA DE CONTACTOTEORÍA DE CONTACTO
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Caso General (V)Caso General (V)
q La presión máxima q0 viene dada por:
q La deformación en un punto de la superficie decontacto se calcula como:
=== ∫∫∫∫ abqzdAqqdAP π
32
00
mediaqabP
q23
23
0 ==π
( )∫∫
−=
EsqdA
M πν
ω21
ELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINASELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINAS - 4.- 4.2222 - -
J
.M. J
imén
ez B
asco
nes
J.M
. Jim
énez
Bas
cone
s
Tema 4TEORÍA DE CONTACTO
Tema 4Tema 4TEORÍA DE CONTACTOTEORÍA DE CONTACTO
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Caso General (VI)Caso General (VI)
q Sustituyendo las expresiones anteriores, se obtiene:
q Integrando:
( )( ) ( )
2222
22
021
1
23
ByAxdudvvyux
bv
au
abq
kk −−=−+−
−
−
+ ∫∫ απ
( )( )
3/1
21
43
++
=BAkkP
maπ
( )( )
3/1
21
43
++
=BAkkP
nbπ
ELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINASELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINAS - 4.- 4.2323 - -
J
.M. J
imén
ez B
asco
nes
J.M
. Jim
énez
Bas
cone
s
Tema 4TEORÍA DE CONTACTO
Tema 4Tema 4TEORÍA DE CONTACTOTEORÍA DE CONTACTO
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
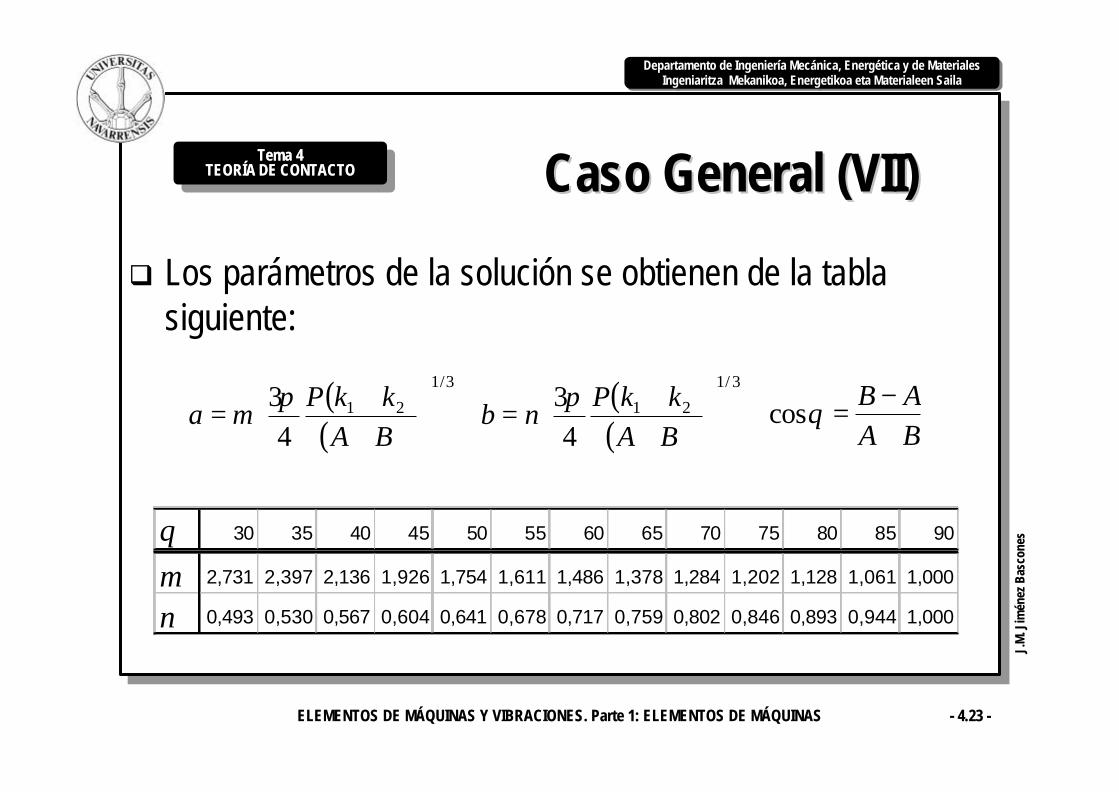
Caso General (VII)Caso General (VII)
q Los parámetros de la solución se obtienen de la tablasiguiente:
( )( )
3/1
21
43
++
=BAkkP
maπ ( )
( )
3/1
21
43
++
=BAkkP
nbπ
θ 30 35 40 45 50 55 60 65 70 75 80 85 90
m 2,731 2,397 2,136 1,926 1,754 1,611 1,486 1,378 1,284 1,202 1,128 1,061 1,000
n 0,493 0,530 0,567 0,604 0,641 0,678 0,717 0,759 0,802 0,846 0,893 0,944 1,000
BAAB
+−
=θcos
ELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINASELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINAS - 4.- 4.2424 - -
J
.M. J
imén
ez B
asco
nes
J.M
. Jim
énez
Bas
cone
s
Tema 4TEORÍA DE CONTACTO
Tema 4Tema 4TEORÍA DE CONTACTOTEORÍA DE CONTACTO
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Caso General (VIII)Caso General (VIII)
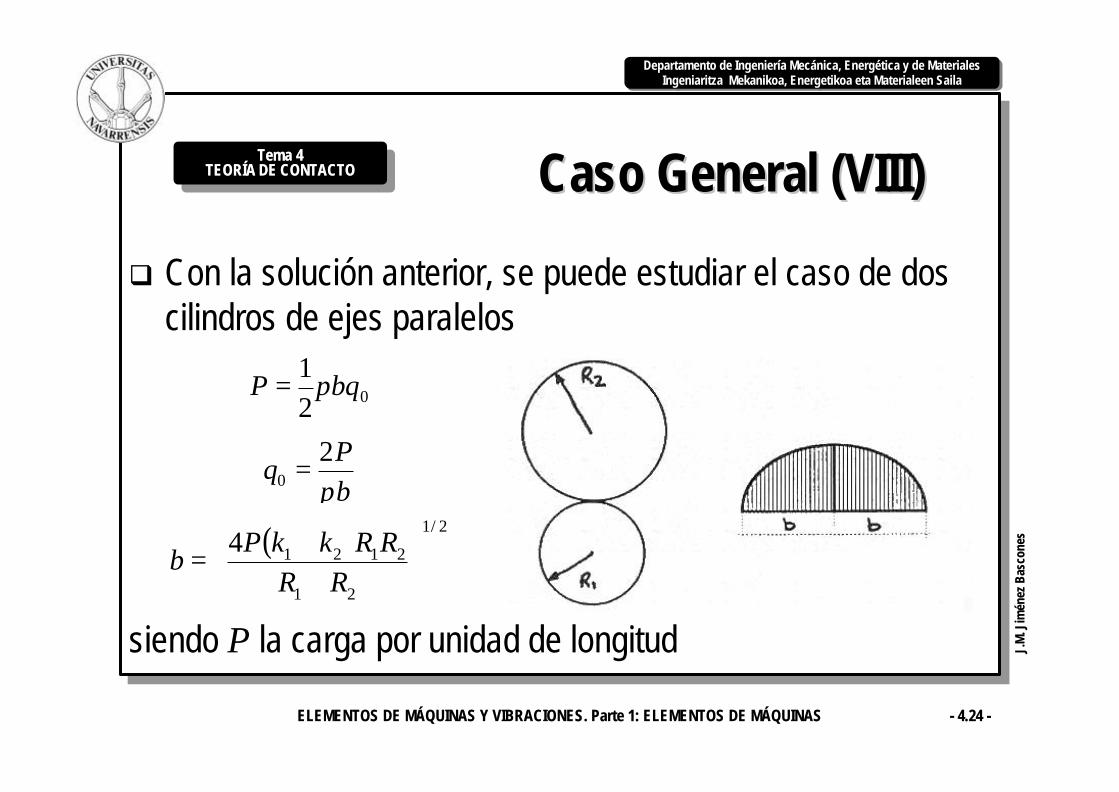
q Con la solución anterior, se puede estudiar el caso de doscilindros de ejes paralelos
siendo P la carga por unidad de longitud
021
bqP π=
bP
qπ2
0 =
( ) 2/1
21
21214
+
+=
RRRRkkP
b
ELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINASELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINAS - 4.- 4.2525 - -
J
.M. J
imén
ez B
asco
nes
J.M
. Jim
énez
Bas
cone
s
Tema 4TEORÍA DE CONTACTO
Tema 4Tema 4TEORÍA DE CONTACTOTEORÍA DE CONTACTO
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
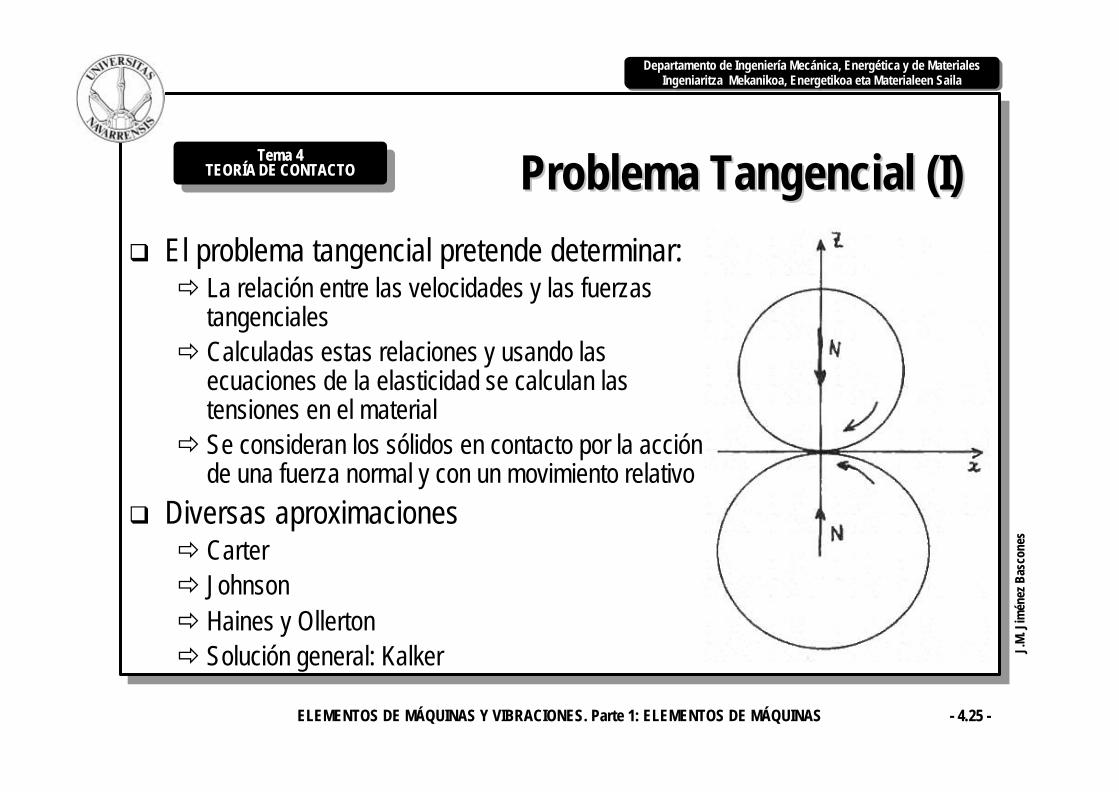
Problema Tangencial (I)Problema Tangencial (I)q El problema tangencial pretende determinar:ð La relación entre las velocidades y las fuerzas
tangencialesð Calculadas estas relaciones y usando las
ecuaciones de la elasticidad se calculan lastensiones en el material
ð Se consideran los sólidos en contacto por la acciónde una fuerza normal y con un movimiento relativo
q Diversas aproximacionesð Carterð Johnsonð Haines y Ollertonð Solución general: Kalker
ELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINASELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINAS - 4.- 4.2626 - -
J
.M. J
imén
ez B
asco
nes
J.M
. Jim
énez
Bas
cone
s
Tema 4TEORÍA DE CONTACTO
Tema 4Tema 4TEORÍA DE CONTACTOTEORÍA DE CONTACTO
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
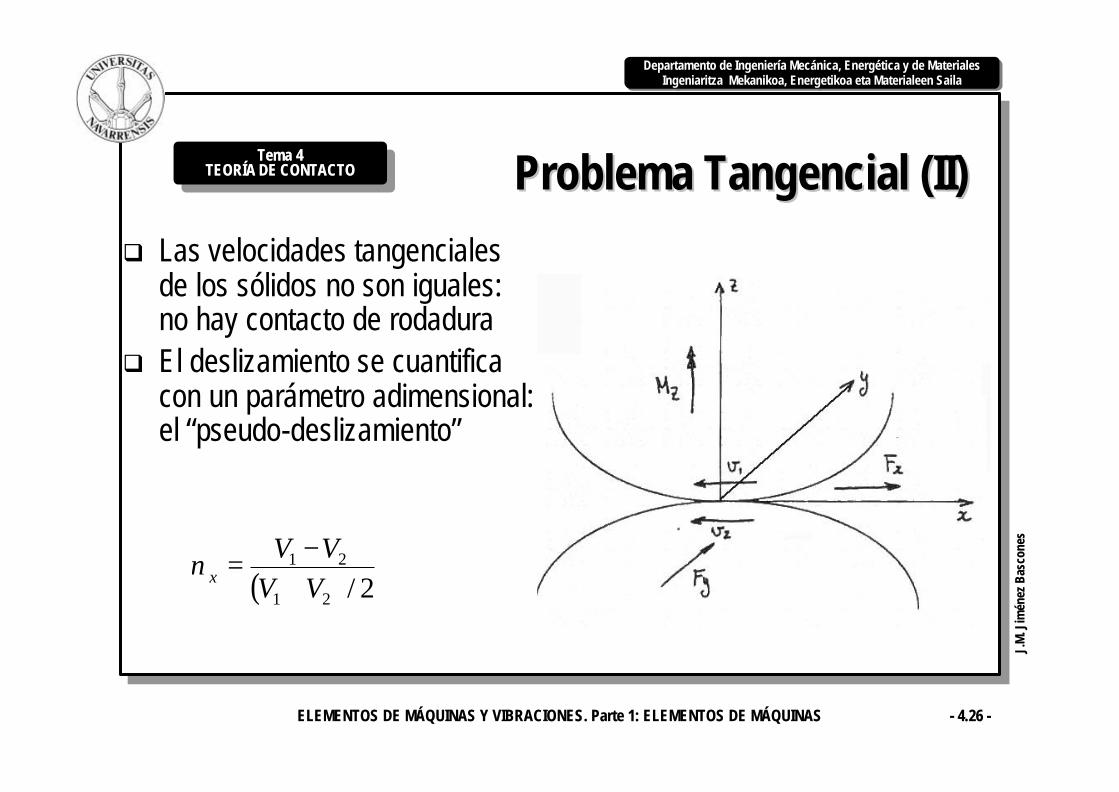
Problema Tangencial (II)Problema Tangencial (II)q Las velocidades tangenciales
de los sólidos no son iguales:no hay contacto de rodadura
q El deslizamiento se cuantificacon un parámetro adimensional:el “pseudo-deslizamiento”
( ) 2/21
21
VVVV
x +−=ν
ELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINASELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINAS - 4.- 4.2727 - -
J
.M. J
imén
ez B
asco
nes
J.M
. Jim
énez
Bas
cone
s
Tema 4TEORÍA DE CONTACTO
Tema 4Tema 4TEORÍA DE CONTACTOTEORÍA DE CONTACTO
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
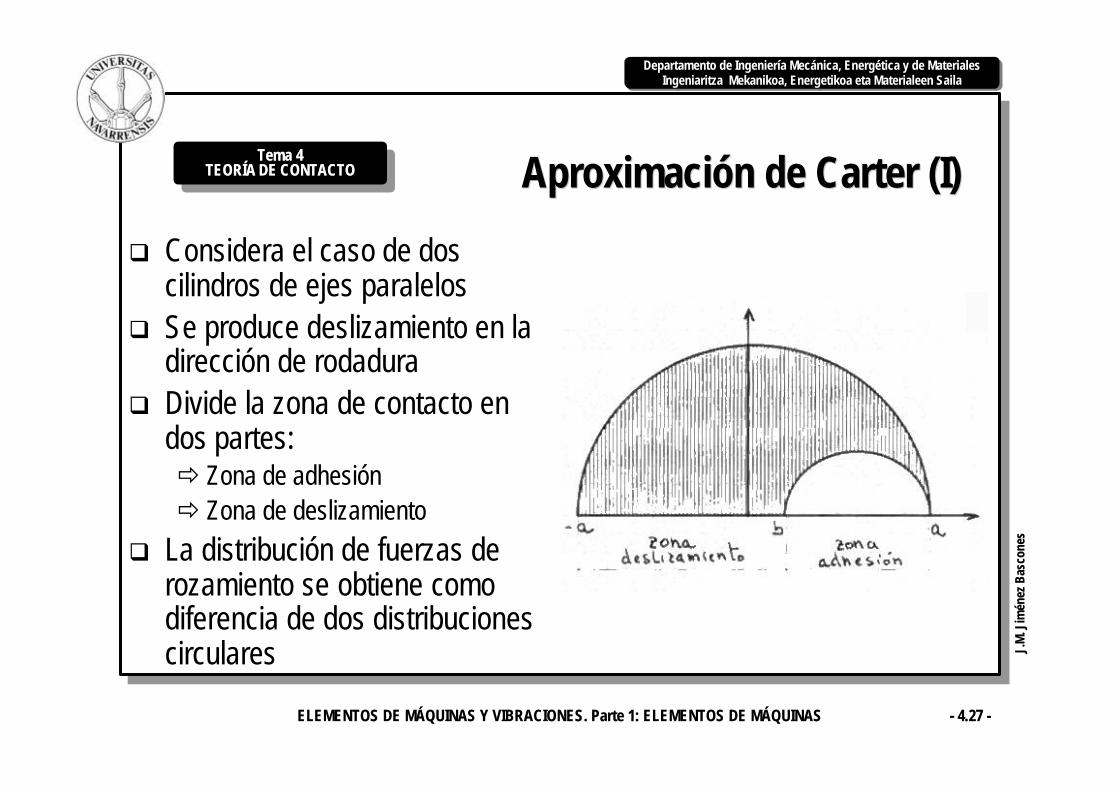
Aproximación de Aproximación de Carter Carter (I)(I)
q Considera el caso de doscilindros de ejes paralelos
q Se produce deslizamiento en ladirección de rodadura
q Divide la zona de contacto endos partes:ð Zona de adhesiónð Zona de deslizamiento
q La distribución de fuerzas derozamiento se obtiene comodiferencia de dos distribucionescirculares

ELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINASELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINAS - 4.- 4.2828 - -
J
.M. J
imén
ez B
asco
nes
J.M
. Jim
énez
Bas
cone
s
Tema 4TEORÍA DE CONTACTO
Tema 4Tema 4TEORÍA DE CONTACTOTEORÍA DE CONTACTO
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Aproximación de Aproximación de Carter Carter (II)(II)
qDimensiones de las zonas de deslizamiento yadhesión
siendo
µ es el coeficiente de rozamiento y a el semiancho de la zona de contacto
( ) 2/21
21
VVVV
x +−=ν
12
−=aa
b x
µρν
+=
21
11411
RRρ
ELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINASELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINAS - 4.- 4.2929 - -
J
.M. J
imén
ez B
asco
nes
J.M
. Jim
énez
Bas
cone
s
Tema 4TEORÍA DE CONTACTO
Tema 4Tema 4TEORÍA DE CONTACTOTEORÍA DE CONTACTO
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
( )
2
22
4a
baa
NFx π
πµ
−−
=
Aproximación de Aproximación de Carter Carter (III)(III)
q En el caso de rodadura pura, no hay zona dedeslizamiento (νx=0)
q En el caso de deslizamiento puro, la zona deadhesión desaparece por completo
q La fuerza total de rozamiento varía entre 0 y µN
40 <<a
x
µρνSi
ELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINASELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINAS - 4.- 4.3030 - -
J
.M. J
imén
ez B
asco
nes
J.M
. Jim
énez
Bas
cone
s
Tema 4TEORÍA DE CONTACTO
Tema 4Tema 4TEORÍA DE CONTACTOTEORÍA DE CONTACTO
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
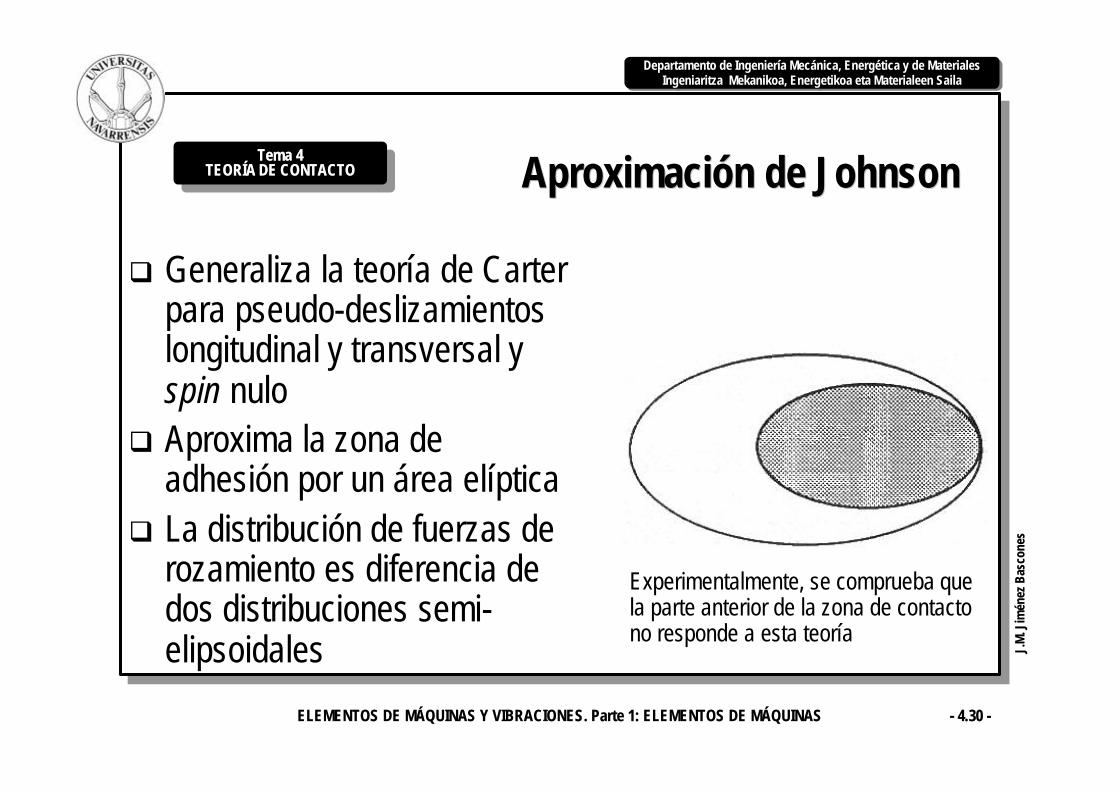
Aproximación de Aproximación de JohnsonJohnson
q Generaliza la teoría de Carterpara pseudo-deslizamientoslongitudinal y transversal yspin nulo
q Aproxima la zona deadhesión por un área elíptica
q La distribución de fuerzas derozamiento es diferencia dedos distribuciones semi-elipsoidales
Experimentalmente, se comprueba quela parte anterior de la zona de contactono responde a esta teoría
ELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINASELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINAS - 4.- 4.3131 - -
J
.M. J
imén
ez B
asco
nes
J.M
. Jim
énez
Bas
cone
s
Tema 4TEORÍA DE CONTACTO
Tema 4Tema 4TEORÍA DE CONTACTOTEORÍA DE CONTACTO
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
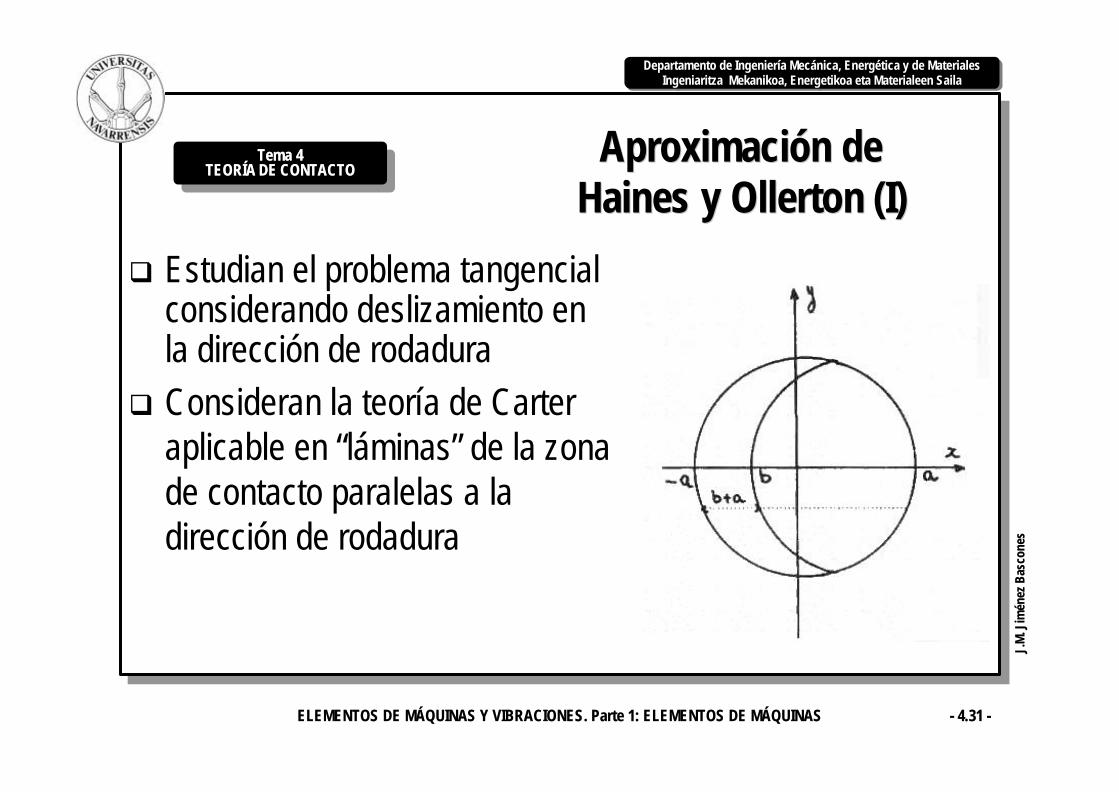
Aproximación deAproximación deHainesHaines y y Ollerton Ollerton (I)(I)
q Estudian el problema tangencialconsiderando deslizamiento enla dirección de rodadura
q Consideran la teoría de Carteraplicable en “láminas” de la zonade contacto paralelas a ladirección de rodadura
ELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINASELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINAS - 4.- 4.3232 - -
J
.M. J
imén
ez B
asco
nes
J.M
. Jim
énez
Bas
cone
s
Tema 4TEORÍA DE CONTACTO
Tema 4Tema 4TEORÍA DE CONTACTOTEORÍA DE CONTACTO
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Aproximación deAproximación deHainesHaines y y Ollerton Ollerton (II)(II)
q De la teoría de Carter
suponiendo constantes νx y ρ, se tiene
q El límite posterior de la zona de adhesión se mantiene adistancia constante del límite posterior de la zona decontacto
12
−=aa
b x
µρν
ab x −=µρν
2
constanteab x ==+µρν
2
ELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINASELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINAS - 4.- 4.3333 - -
J
.M. J
imén
ez B
asco
nes
J.M
. Jim
énez
Bas
cone
s
Tema 4TEORÍA DE CONTACTO
Tema 4Tema 4TEORÍA DE CONTACTOTEORÍA DE CONTACTO
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Teoría General de Teoría General de KalkerKalker (I) (I)
q La teoría general de Kalker pretende relacionar las pseudo-deslizamientos con las fuerzas tangenciales y el momentosegún z.
q La resolución del problema normal proporciona lasdimensiones de la superficie de contacto y la distribuciónnormal de presiones. Los problemas normal y tangencial sesuponen independientes.
q La compresión y la fricción producen deformaciones queafectan a las velocidades de deslizamiento.
ELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINASELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINAS - 4.- 4.3434 - -
J
.M. J
imén
ez B
asco
nes
J.M
. Jim
énez
Bas
cone
s
Tema 4TEORÍA DE CONTACTO
Tema 4Tema 4TEORÍA DE CONTACTOTEORÍA DE CONTACTO
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Teoría General de Teoría General de KalkerKalker (II) (II)
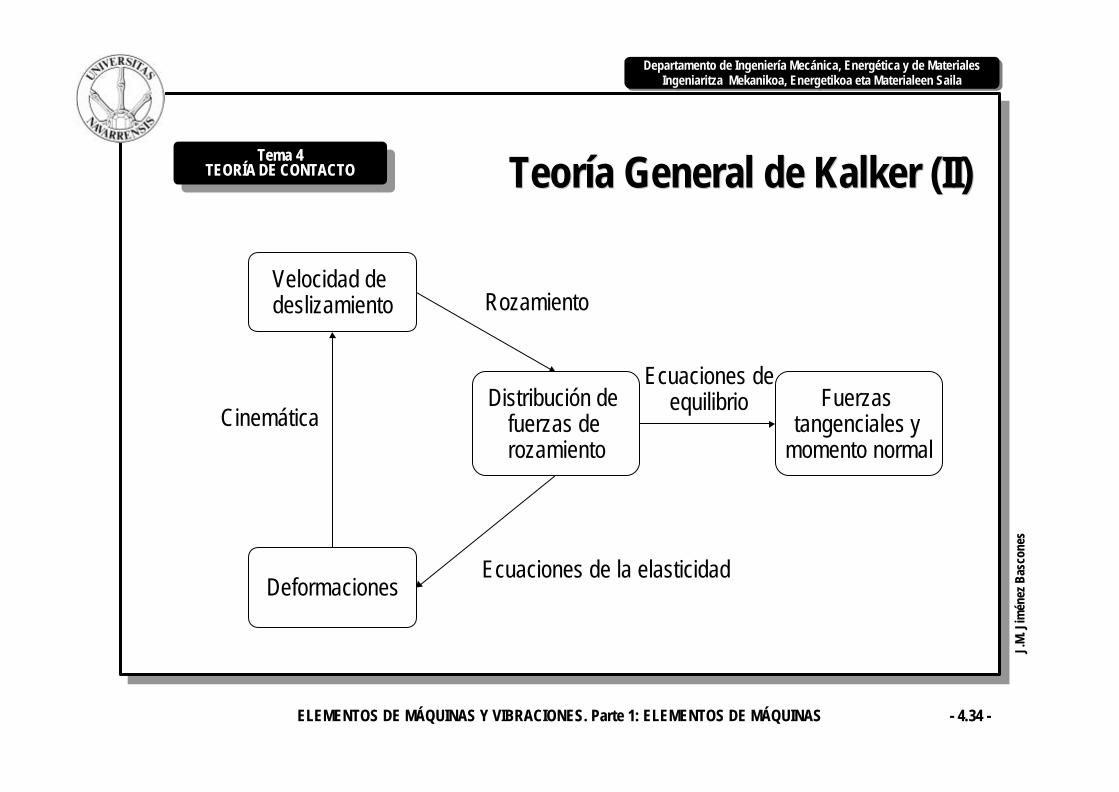
Velocidad de deslizamiento
Deformaciones
Distribución de fuerzas de rozamiento
Fuerzas tangenciales y
momento normal
Ecuaciones de la elasticidad
Cinemática
Rozamiento
Ecuaciones deequilibrio
ELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINASELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINAS - 4.- 4.3535 - -
J
.M. J
imén
ez B
asco
nes
J.M
. Jim
énez
Bas
cone
s
Tema 4TEORÍA DE CONTACTO
Tema 4Tema 4TEORÍA DE CONTACTOTEORÍA DE CONTACTO
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Teoría General de Teoría General de KalkerKalker (III) (III)
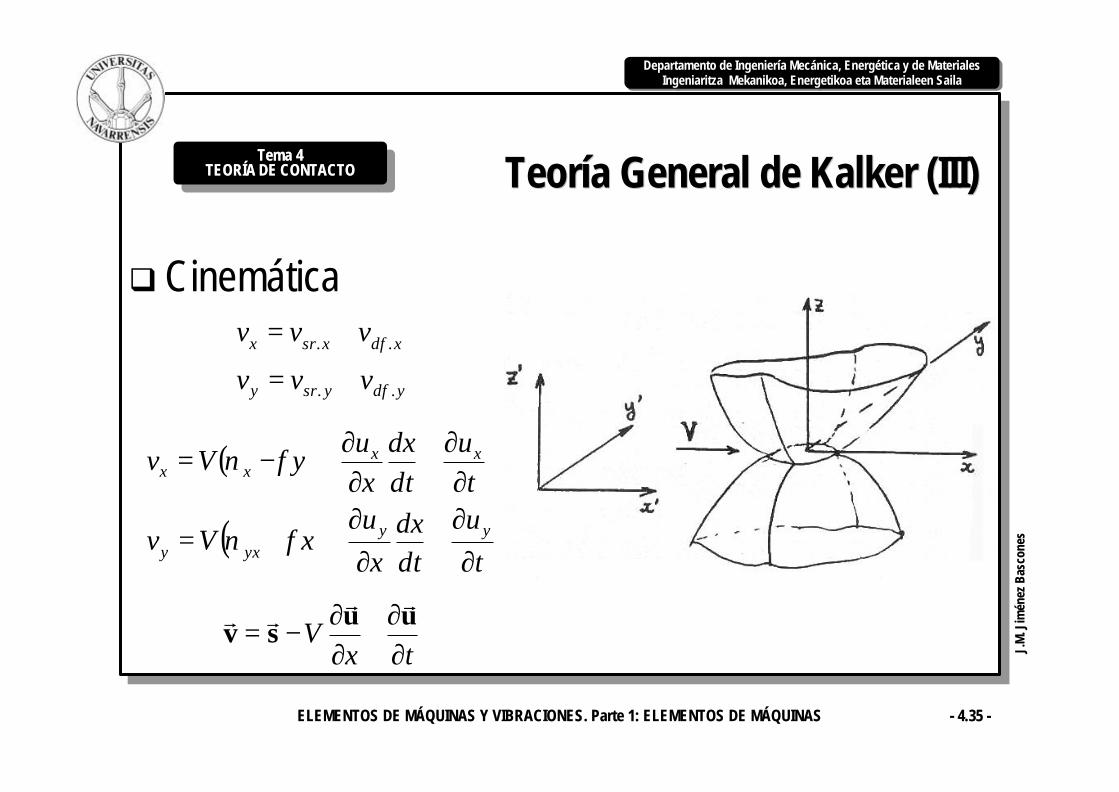
qCinemática
( )
( )t
udtdx
xu
xVv
tu
dtdx
xu
yVv
yyyxy
xxxx
∂∂
+∂
∂++=
∂∂
+∂∂
+−=
φν
φν
txV
∂∂
+∂∂
−=uu
svrrrr
ydfysry
xdfxsrx
vvv
vvv
..
..
+=
+=
ELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINASELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINAS - 4.- 4.3636 - -
J
.M. J
imén
ez B
asco
nes
J.M
. Jim
énez
Bas
cone
s
Tema 4TEORÍA DE CONTACTO
Tema 4Tema 4TEORÍA DE CONTACTOTEORÍA DE CONTACTO
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Teoría General de Teoría General de KalkerKalker (IV) (IV)
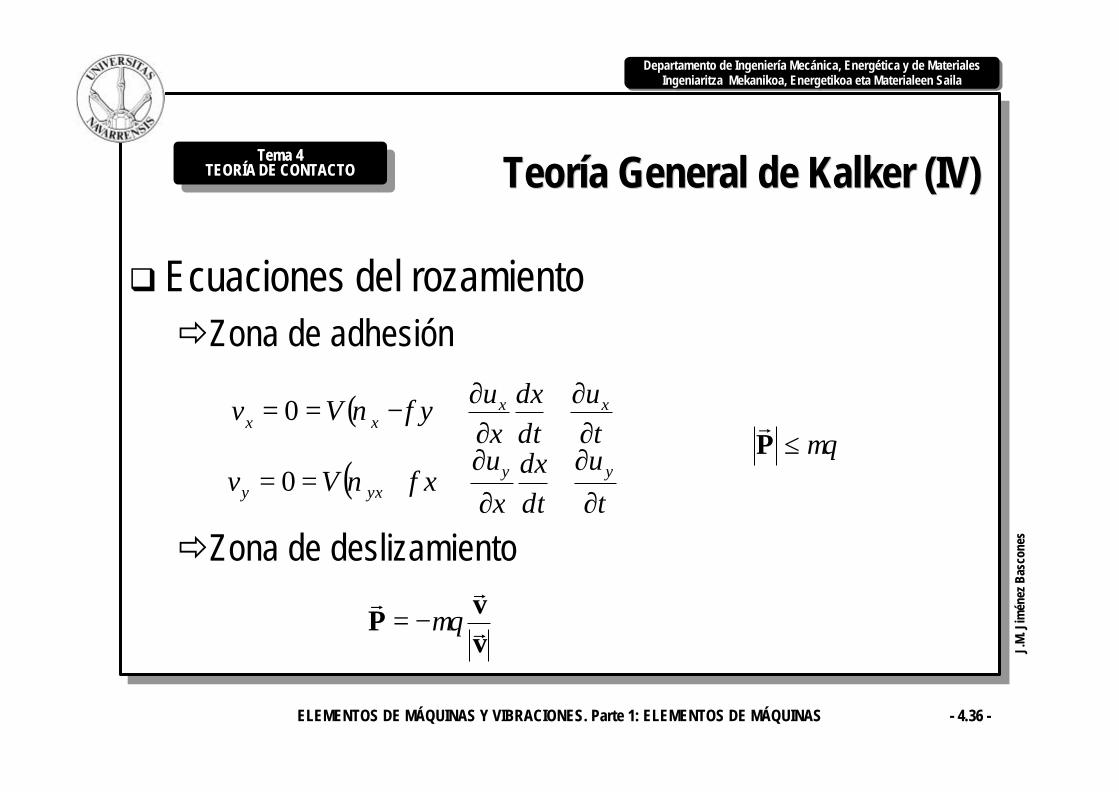
q Ecuaciones del rozamientoðZona de adhesión
ðZona de deslizamiento
( )
( )
∂∂
+∂∂
++==
∂∂+
∂∂+−==
tu
dtdx
xu
xVv
tu
dtdx
xuyVv
yyyxy
xxxx
φν
φν
0
0qµ≤P
r
vvP rrr
qµ−=
ELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINASELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINAS - 4.- 4.3737 - -
J
.M. J
imén
ez B
asco
nes
J.M
. Jim
énez
Bas
cone
s
Tema 4TEORÍA DE CONTACTO
Tema 4Tema 4TEORÍA DE CONTACTOTEORÍA DE CONTACTO
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Teoría General de Teoría General de KalkerKalker (V) (V)
q Ecuaciones de equilibrioðFuerzas tangenciales
ðMomento normal
Ω=
Ω=
∫∫∫∫
Ω
Ω
dpF
dpF
yy
xx
∫∫Ω
Ω×= dM z pr rr
ELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINASELEMENTOS DE MÁQUINAS Y VIBRACIONES. Parte 1: ELEMENTOS DE MÁQUINAS - 4.- 4.3838 - -
J
.M. J
imén
ez B
asco
nes
J.M
. Jim
énez
Bas
cone
s
Tema 4TEORÍA DE CONTACTO
Tema 4Tema 4TEORÍA DE CONTACTOTEORÍA DE CONTACTO
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
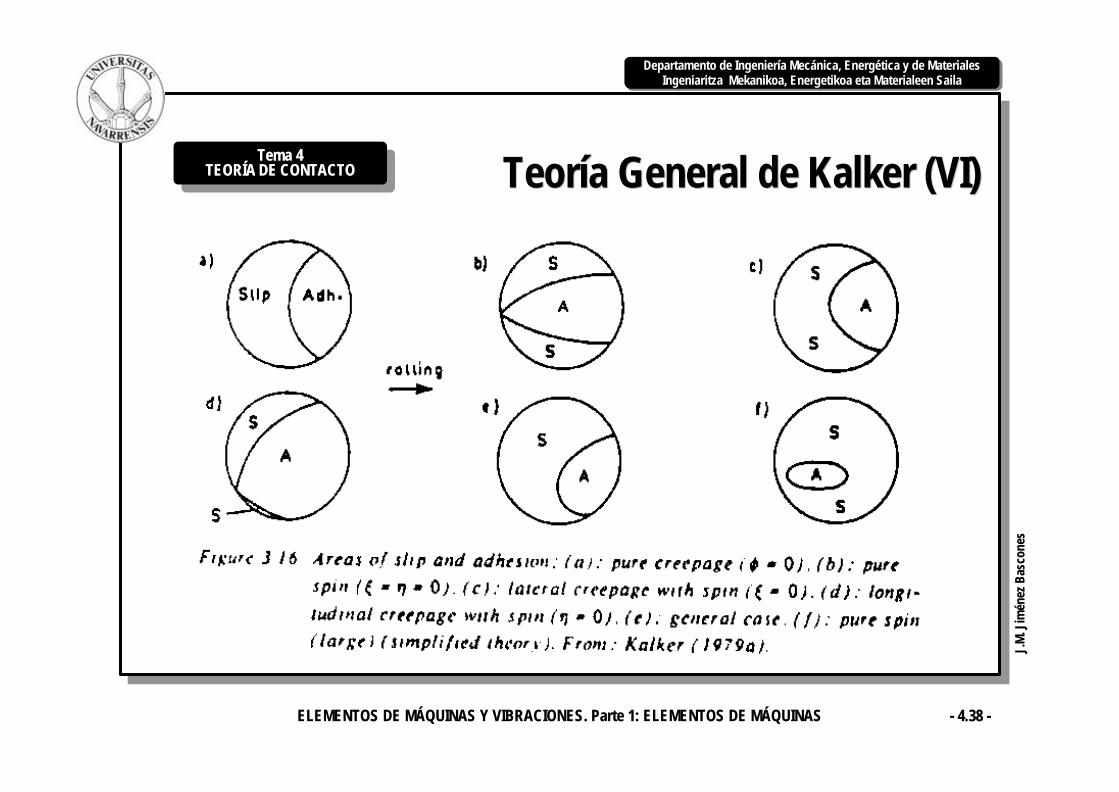
Teoría General de Teoría General de KalkerKalker (VI) (VI)